





Sprachen
Seiten
Rechtliche


Sphärische Geometrie
Proseminar Lineare Algebra & Elementargeometrie
WS 16/17
Technische Universität Dortmund
Prof. Dr. L. Schwachhöfer
von
Robert Büthe∗
20. Januar 2017

1 Vorbemerkung
Die sphärische Geometrie ist eine aus der Praxis heraus motivierte Geometrie, welche
sich womöglich aus der Fragestellung nach der kürzesten Verbindung zwischen zwei ver-
schiedenen Orten der Erde ergab. Diese Frage lässt sich für kleine Distanzen zwar noch
mit der allgemein bekannten euklidischen Strecke beantworten, doch wird diese bei zu-
nehmend gröÿeren Entfernungen unzweckmäÿig. Auch wenn sie räumlich gesehen immer
noch die kürzeste Verbindung bleibt, wächst der zeitliche Aufwand, der betrieben werden
muss, um sie zu durchlaufen, mit gröÿerwerdenden Entfernungen enorm an und ist ab
einem gewissen Punkt schlieÿlich auch technisch nicht mehr realisierbar. Da unsere Erde
näherungsweise aber eine Kugel darstellt, lässt sich mit dem Aufbau einer Geometrie auf
der Kugelober�äche einer normierten Kugel (d.h. Radius Eins) eine für die Luft- und
Seefahrt interessante Antwort �nden. Der Aufbau einer solchen Theorie geschieht in der
vorliegenden Ausarbeitung mit Begri�en aus der euklidischen Geometrie. Möchte man
jedoch daran festhalten, dass die kürzeste Verbindung zweier Punkte im Allgemeinen eine
Strecke ist, welche wiederum ein Teil einer Geraden ist, so führt dies dazu, dass in der
sphärischen Geometrie die Gerade ein Kreis (genauer ein Groÿkreis ) ist. Diese Au�as-
sung würde allerdings weitreichende Folgen haben, sodass die sphärische Geometrie als
eine nichteuklidische Geometrie angesehen werden muss, in der Parallelität zwischen zwei
Geraden nicht mehr möglich ist und in der sich zwei verschiedene Geraden in genau zwei
Punkten schneiden. Trotz dieser grundsätzlichen Unterschiede zur euklidischen Geome-
trie gibt es aber auch Gemeinsamkeiten, die sich beispielsweise in den Kongruenzsätzen
�www� oder �sss� �nden (siehe Satz 8).
2 Der Raum S2
Es sei E3 der dreidimensionale euklidische Raum. Wir betrachten die Kugelober�äche S2
(Sphäre) einer Kugel mit Radius Eins (auch genannt Einheitskugel). Wird der Ursprung
des kartesischen Koordinatensystems in den Mittelpunkt der Einheitskugel gelegt, so kann
die Sphäre S2 durch die Nullstellenmenge folgender quadratischen Gleichung beschrieben
werden
S2 :={(x, y, z) ∈ R3 : x2 + y2 + z2 − 1 = 0
}.
2

De�nition 1 (Groÿkreis, Kleinkreis) Ist E ⊂ E3 eine durch den Ursprung bzw.
Mittelpunkt O der Sphäre verlaufende Ebene, so bezeichnet man den Schnitt E ∩ S2 als
einen Groÿkreis.
Ist E eine nicht durch den Ursprung O verlaufende Ebene, die dennoch durch die Sphäre
S2 verläuft, so bezeichnet man den Schnitt E ∩ S2 als einen Kleinkreis.
De�nition 2 (diametrale Punkte) Zwei Punkte A,B ∈ S2 der Sphäre bezeichnet
man als diametral gegenüberliegend, falls−→OA = −
−−→OB gilt.
Proposition 1 Zwei verschiedene Groÿkreise schneiden sich in genau zwei Punkten und
zerlegen die Sphäre in vier Gebiete. Die Schnittpunkte liegen auf S2 diametral gegenüber.
Abbildung 1: Hilfsbild zu Proposition 1
Beweis:
Für zwei verschiedene Ebenen E1, E2, welche beide durch den Ursprung O verlaufen,
gilt, dass diese sich in einer euklidischen Gerade g schneiden, d.h. also, E1 ∩ E2 = g. Die
Gerade g durchstöÿt S2 in zwei Punkten A und B, d.h. also,
g∩S2 = {A,B}. g verläuft auÿerdem durch O . Das bedeuted aber, dass gilt−→OA = −
−−→OB.
A und B sind also diametral gegenüberliegend.
3

Da auÿerdem eine der beiden Ebenen die Sphäre in zwei Halbkugeln aufteilt, ergeben sich
wegen der Verschiedenheit der beiden Ebenen vier Gebiete. �
In der sphärischen Geometrie existieren im Gegensatz zur euklidischen Zweiecke. Ein sol-
ches Kugelzweieck ist ein von zwei halben Groÿkreisen berandetes Gebiet mit gemeinsa-
men Endpunkten. Die zu den Ebenen E1 und E2 im obigen Beweis gehörenden Groÿkreise
bilden zu den diametral gegenüberliegenden Punkten A und B also genau vier Zweiecke,
zerlegen S2 also in genau vier Gebiete, wobei o�enbar aber höchstens zwei Gebiete von
unterschiedlicher Fläche sein können.
4

Abbildung 2: Hilfsbild zu Proposition 2
Proposition 2 Sind A und B zwei nicht
diametral gegenüberliegende Punkte von
S2, so existiert genau ein Groÿkreis, wel-
cher durch A und B verläuft.
Beweis:
Sind A,B ∈ S2 nicht diametral, so sind die
Vektoren−→OA und
−−→OB linear unabhängig.
Die Ebene E, welche durch−→OA und
−−→OB
aufgespannt wird und durch O verläuft, ist
eindeutig und daher ist auch der Groÿkreis
E ∩ S2 eindeutig.
�
Ist durch eine Ebene E ⊂ E3 ein Groÿkreis
Abbildung 3: Hilfsbild zu Proposition 3
E∩S2 gegeben, so lassen sich die Groÿkrei-
se auch durch zwei zu der Ebene E gehö-
rende Normalenvektoren ±N E der Länge
Eins kennzeichnen (Zur Erinnerung : Ein
Normalenvektor einer Ebene ist orthogo-
nal zu dieser).Tragen wir nämlich ±N E
vom Ursprung O aus ab, so lässt sich NE
mit einem Vektor−→OA und -NE mit einem
Vektor−−→OB identi�zieren. Die Punkte A,B
werden in diesem Zusammenhang auch als
die Pole des Groÿkreises bezeichnet. Mit
anderen Worten gehört zu einem Groÿkreis
also ein eindeutiges Paar von diametral ge-
genüberliegenden Punkten, was in der fol-
genden Proposition nochmal festgehalten
wird.
5

Prosition 3 Die Groÿkreise stehen in bijektiver Beziehung zu den Paaren diametral
gegenüberliegenden Punkten der Sphäre.
De�nition 3 (orientierter Groÿkreis) Ein orientierter Groÿkreis ist ein Paar beste-
hend aus einem Groÿkreis E ∩ S2 und einem zu seinen Polen gehörenden Normalenvektor
±N E .
Sei nun wieder E eine Ebene durch den Ursprung, sodass E ∩ S2
Abbildung 4: Der TangentialvektorτA := (
−→OA×NE)
ein mit NE orientierter Groÿkreis ist. Be-
trachtet man einen beliebigen aber festen
Punkt A ∈ E ∩ S2, so ist−→OA ein Vektor,
der sich innerhalb der Ebene E be�ndet
und daher orthogonal zum Normalenvek-
tor NE ist. Das Vektorprodukt−→OA×NE,
welches orthogonal zu−→OA und NE ist, be-
�ndet sich folglich wieder in der Ebene E
und ist wegen der Beziehung
|−→OA × NE| = |
−→OA| · |NE| sin(^
−→OA,NE)
vom Betrag 1. Trägt man das Vektorpro-
dukt vom Punkt A aus ab, so stellt dieser
gerade den Tangentialvektor des orientier-
ten Groÿkreises am Punkt A dar. Mit Hil-
fe eines Winkelparameters ϕ für den gilt
0 ≤ ϕ ≤ 2π, erhält man für den Groÿ-
kreis die Parametrisierung des Einheits-
kreises innerhalb der Ebene E:
cos(ϕ) ·−→OA+ sin(ϕ) · τA.
Hierbei ist τA := (−→OA ×NE) ein bzw. der Tangentialvektor des Groÿkreises am Punkt
A ∈ E ∩ S2.
6

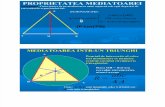
Proposition 4 Der Winkel zwischen zwei orientierten Groÿkreisen E1 ∩ S2 und E2 ∩ S2
ist gleich dem Winkel zwischen den zu ihren Polen gehörenden Normalenvektoren NE1
und NE2 .
Abbildung 5: Hilfsbild zu Proposition 4
Beweis:
Ist A der Schnittpunkt zweier orientierter Groÿkreise E1 ∩ S2 und E2 ∩ S2 , so ist der
Winkel zwischen beiden Kreisen im Punkt A gegeben durch die Tangentialvektoren τ (1)A
und τ (2)A der Kreise im Punkt A. Dann gilt aber nach De�nition von Winkeln im R3 der
7

folgende Zusammenhang zu Skalarprodukten:
cos(^(E1 ∩ S2, E2 ∩ S2)) = cos(^(τ (1)A , τ(2)A ))
=〈τ (1)A , τ
(2)A 〉
|τ (1)A | · |τ(2)A |
=〈−→OA×NE1 ,
−→OA×NE2〉
|−→OA×NE1 | · |
−→OA×NE2|
=〈−→OA×NE1 ,
−→OA×NE2〉
|−→OA|︸︷︷︸=1
· |NE1|︸ ︷︷ ︸=1
sin(^(−→OA,NE1)︸ ︷︷ ︸
=π2
) · |−→OA|︸︷︷︸=1
· |NE2|︸ ︷︷ ︸=1
sin(^(−→OA,NE2)︸ ︷︷ ︸
=π2
)
= 〈−→OA×NE1 ,
−→OA×NE2〉
= 〈NE1 ,NE2〉
=〈NE1 ,NE2〉|NE1| · |NE2|
= cos(^(NE1 ,NE2))
=⇒ ^(τ (1)A , τ(2)A ) = ^(NE1 ,NE2)
�
Satz 1 Ist γ : [a, b] −→ S2 die kürzeste Verbindung zwischen zwei Punkten der Sphäre,
so ist γ Teil eines Groÿkreises.
Wir verzichten auf den Beweis, benutzen den Satz aber bei der Überlegung einer expliziten
Formel für den sphärischen Astand. Dieser soll aber zunächst de�niert werden.
De�nition 4 (sphärischer Abstand) Seien A und B zwei Punkte der Sphäre. Die
minimale Länge aller diese Punkte verbindenden Kurven in S2 heiÿt sphärischer Abstand
und wird mit dS2(A,B) bezeichnet.
8

(a) der sphärische Abstand ist gegeben als Teil einesGroÿkreises
(b) Draufsicht
Abbildung 6: Der rote Kreisbogen entspricht dem sphärischen Abstand von A und B
Nach Satz 1 ist der sphärische Abstand gerade gegeben als Teil eines Groÿkreises, also als
Kreisbogen eines durch die Punkte A und B verlaufenden ebenen Kreises mit Mittelpunkt
in O. Da die Länge dieses Bogens aber im Bogenmaÿ gerade dem Winkel entspricht, gilt
wegen der De�nition von Winkeln in euklidischen Vektorräumen
cos(^(−→OA,−−→OB)) =
〈−→OA,−−→OB〉
|−→OA|︸︷︷︸=1
· |−−→OB|︸ ︷︷ ︸=1
= 〈−→OA,−−→OB〉 (1)
für den sphärischen Abstand die Formel
dS2(A,B) = ^(−→OA,−−→OB) = arccos(〈
−→OA,−−→OB〉). (2)
Insbesondere ist (S2, dS2) ein metrischer Raum. Um diese Behauptung einzusehen, führen
wir uns zunächst die De�nition eines metrischen Raumes vor Augen.
9

De�niton 5 (metrischer Raum) Sei X eine beliebige Menge und d : X ×X −→ Reine Abbildung. Besitzt d für alle x, y, z ∈ X die Eigenschaften
1. d(x, y) ≥ 0 und d(x, y) = 0 ⇔ x = y (positive De�nitheit)
2. d(x, y) = d(y, x) (Symmetrie)
3. d(x, z) ≤ d(x, y) + d(y, z) (Dreiecksungleichung),
so heiÿt (X, d) ein metrischer Raum.
Satz 2 (S2, dS2) ist ein metrischer Raum.
Beweis:
Die positive De�nitheit folgt aus der Tatsache, dass der Arkuskosinus nur positive Wer-
te annimmt. Die Symmetrie geht darauf zurück, dass im R3 das Skalarprodukt eine
symmetrisch positiv de�nite Bilinearform ist und die Dreiecksungleichung dS2(A,B) ≤dS2(A,C) + dS2(C,B) folgt schlieÿlich daraus, dass dS2(A,B) nach Satz 1 als Teil desje-
nigen Groÿkreises aufgefasst werden kann, auf denen sich die Punkte A und B be�nden
und dies gerade das Minimum der Längen aller Kurven ist, die durch A und B verlaufen.
Da das Maximum von Arkuskosinus π beträgt, ist dies auch der maximale sphärische
Abstand.
�
Satz 3 Zwei Punkte der Sphäre A,B ∈ S2 sind diametral gegenüberliegende Punkte
genau dann, wenn ihr sphärischer Abstand π beträgt.
Beweis:
�⇒� : Seien A,B ∈ S2 diametral. Dann gilt nach De�nition 2−→OA = −
−−→OB.
(2)=⇒ arccos(〈
−→OA,−−→OB〉) = arccos(〈−
−−→OB,
−−→OB〉)= arccos(−1 · 〈
−−→OB,
−−→OB〉︸ ︷︷ ︸
|−−→OB|·|
−−→OB|·cos(0)
)
= arccos(−1) = π = dS2(A,B).
10

�⇐� : Sei dS2(A,B) = π(2)=⇒ arccos(〈
−→OA,−−→OB〉) = π. Da Arkuskosinus auf dem
kompakten Intervall [-1,1] de�niert ist und bei -1 sein Maximum annimmt,
d.h. arccos(−1) = π =⇒ 〈−→OA,−−→OB〉 = −1 = −1 · 〈
−→OA,−→OA〉 = 〈
−→OA,−
−→OA〉
=⇒−→OA = −
−−→OB =⇒ Behauptung.
�
3 Die Isometriegruppe von S2
De�nition 6 (Isometrie) Es seien (X, d1) und (Y, d2) zwei metrische Räume. Eine
Abbildung f : X −→ Y heiÿt Isometrie, falls sie abstandserhaltend ist. D.h., falls gilt
d2(f(x), f(y)) = d1(x, y) ∀x, y ∈ X.
Satz 4 und De�nition (Isometriegruppe) Sei (X, d) ein metrischer Raum. Die Men-
ge
Iso(X,d): = {f | f : X −→ X, f ist Isometrie & bijektiv}
bildet zusammen mit der Abbildungsverknüpfung eine Gruppe und wird als Isometrie-
gruppe bezeichnet.
Auf den Beweis dieses Satzes wird an dieser Stelle verzichtet. Da im Beweis von Satz 2
bereits gezeigt wurde, dass (S2, dS2) ein metrischer Raum ist, soll Satz 4 lediglich dazu
benutzt werden, um die Isometriegruppe von S2 einzuführen. Diese wird im weiteren
Verlauf mit I bezeichnet. Es gilt also I := Iso(S2, dS2). Ein Beweis von Satz 4 �ndet sich
im Skript von Rudolf Scharlau (TU Dortmund) im Abschnitt 5.4 Euklidische Räume und
ihre Isometrien.
3.1 Die orthogonale Gruppe O(3) und ihre Eigenschaften
Es stellt sich an späterer Stelle mit dem Beweis von Satz 6 heraus, dass die orthogonale
Gruppe O(3) der Isometriegruppe I der Sphäre entspricht. Die orthogonale Gruppe O(3)
11

ist die Gruppe der orthogonalen 3×3−Matrizen mit Koe�zienten aus R. Für orthogonaleMatrizen A ∈ Rn×n sind die folgenden Aussagen äquivalent:
• A ist eine orthogonale Matrix
• A · AT = In
• AT = A−1
• Die Zeilen von A bilden ein Orthonormalsystem.
• Die Spalten von A bilden ein Orthonormalsystem.
Insbesondere sind orthogonale Matrizen längenerhaltend und winkeltreu. Sind nämlich
x, y ∈ Rn und A ∈ Rn×n orthogonal, gilt
1. das Standardskalarprodukt ist invariant unter A :
〈Ax,Ay〉 = (Ax)TAy = xTATA︸︷︷︸=In
y = xTy = 〈x, y〉 (2)=⇒ Winkeltreue.
2. die euklidische Norm eines Vektors ist ebenfalls invariant unter A :
‖Ax‖22 = (Ax)T · Ax = xTATA︸︷︷︸=In
x = xTx = ‖x‖22(Def.)=⇒ Längenerhaltung.
Ist λ ein Eigenwert von A und x ein Eigenvektor zu λ, so gilt wegen der absoluten
Homogenität der Norm
‖Ax‖22 = ‖λx‖22 = |λ|2‖x‖22. (3)
Aus dem Vergleich von 2. und (3) folgt, dass für die Eigenwerte gilt
|λ|2 = 1.
Für komplexe Eigenwerte gilt, dass auch ihr komplex Konjugiertes ein Eigenwert ist, also
tauchen diese nur paarweise auf, was für reellwertige 3 × 3- Matrizen bedeutet, dass sie
entweder einen oder drei reelle Eigenwerte besitzen. Wegen |λ|2 = λ · λ = 1 folgt, da
die Determinante einer Matrix gleich das Produkt ihrer Eigenwerte ist, für orthogonale
Matrizen A , dass entweder det(A) = 1 oder det(A) = −1 ist.
12

Die orthogonalen Matrizen bilden, wie oben bereits beiläu�g erwähnt, eine Gruppe bzgl.
der Matrixmultiplikation. Für zwei orthogonale Matrizen A und B gilt also, dass auch das
Produkt AB orthogonal ist und ebenso, dass die Inverse A−1 es ist. Die Einheitsmatrix
In stellt das neutrale Element dar. Die Gruppe der orthogonalen n × n- Matrizen wird
mit O(n) bezeichnet. Die Elemente der Gruppe lassen sich je nach Determinante in
• Drehungen (det(A) = +1)
• Drehspiegelungen (det(A) = −1)
unterscheiden. Die Drehungen bilden wiederum für sich eine Gruppe (sind also eine Un-
tergruppe von O(n)) und werden kurz mit SO(n) bezeichnet. In diesem Sinne kann In als
eine Drehung aufgefasst werden. Die Drehspiegelungen sind Kombinationen aus Drehun-
gen und Spiegelungen. Eine einzelne Spiegelung ist also die Kombination aus der Identität
als Drehung und einer Spiegelung.
Zusammengefasst stellen im euklidischen Raum orthogonale Matrizen Spiegelungen, Dre-
hungen und Kombinationen daraus dar und da sie längen- und winkelerhaltend sind, sind
sie Darstellungsmatrizen von kongruenten Abbildungen.
Die Inklusion O(3) ⊂ I ist nach obigen Ausführungen also nicht allzu schwer einzusehen.
Da S2 ⊂ R3 ist und O(3) auf S2 die Längen von Vektoren erhält, werden auch die Längen
von Kurven erhalten. Der Nullvektor wird bei Anwendung einer Matrix A ∈ O(3) wiederauf den Nullvektor abgebildet und für jedes x ∈ S2 gilt, dass ‖Ax‖2 = ‖x‖2 = 1 ist und
somit eben für jedes x ∈ S2, dass auch Ax ∈ S2 ist, sofern x vom Nullpunkt aus abgetragen
wird.
13

3.2 Die Drehung als Verknüpfung von 2 Spiegelungen
Um I ⊂ O(3) zu zeigen, werden zunächst ein paar Vorüberlegungen getro�en, die ver-
anschaulichen sollen, dass jede Drehung D ∈ SO(3) das Resultat aus der Verknüpfung
von genau zwei Spiegelungen S1, S2 ∈ O(3) ist. Die folgenden Überlegungen sollen kein
Beweis im strengeren Sinne sein, sondern dienen eher dem anschaulichen Verständnis
und beschreiben daher eher die Konstruktion einer Drehung im R3. O.B.d.A. wird dazu
ein Teil der Sphäre betrachtet, der von drei Groÿkreisen begrenzt wird (Kugeldreieck).
O.B.d.A. heiÿt in diesem Zusammenhang, dass die folgenden Überlegungen nicht nur auf
S2 sondern allgemeiner im R3 statt�nden können.
Abbildung 7: Ein sphärisches Dreieck wirdum den Punkt A um den Winkel α gedreht.
Die drei Schnittpunkte von jeweils zwei
Groÿkreisen (d.h. die Eckpunkte dieses Ku-
geldreiecks) werden mit A,B,C bezeich-
net. Nun soll die Abbildung
D : R3 −→ R3 betrachtet werden, die eine
Drehung um den Punkt A um den Winkel
α realisiert, sodass durch diese Drehung,
dass Kugeldreieck in ein anderes überführt
wird, das die Eckpunkte A,B′, C ′ besitzt
und für das gilt
dS2(A,B) = dS2(A,B′)
dS2(A,C) = dS2(A,C′)
dS2(B,C) = dS2(B′, C ′).
Der Drehwinkel α entspricht hierbei dem Winkel zwischen den Normalenvektoren derjeni-
gen Ebenen E−→OA,−−→OB
und E−→OA,−−→OB′ , die durch
−→OA und
−−→OB bzw.
−→OA und
−−→OB′ aufgespannt
werden und die die Groÿkreise E−→OA,−−→OB∩ S2 und E−→
OA,−−→OB′ ∩ S2 erzeugen, auf welche die
Punkte A und B bzw. A und B′ liegen. Es soll nun eine Konstruktion von D mittels
zweier Spiegelungen S1 und S2 erfolgen.
14

(a) Draufsicht (b)
Abbildung 8
Alle nachfolgend erwähnten Ebenen verlaufen durch den Mittelpunkt O der Sphäre und
werden von den indizierten Vektoren aufgespannt. Im ersten Schritt wird der Teil desje-
nigen Groÿkreises betrachtet, der die Punkte B und B′ verbindet. Auf genau der Hälfte
dieser Kurve wird nun der Punkt F de�niert.Zu betrachten ist nun die Ebene E−−→OF,−→OA
bzw. der von dieser Ebene erzeugte Groÿkreis. E−−→OF,−→OA
steht also senkrecht auf der Ebene
E−−→OB,−−→OB′ . Sei die Abbildung S1 : R3 −→ R3 die Spiegelung an der Ebene E−−→
OF,−→OA
, sodass
gilt
A 7−→ A B 7−→ B′ C 7−→ C1(Abb.8 (a)). Das entstehende sphärische Dreieck mit den
Eckpunkten A,B′, C1 wird nun mit der Abbildung S2 : R3 −→ R3 an der Ebene E−→OA,−−→OB′
gespiegelt, sodass für die Eckpunkte die ZuordnungA 7−→ A B 7−→ B′ C1 7−→ C ′ er-
reicht wird (Abb.8 (b)). Durch die Hintereinanderausführung der Spiegelungen wird also
die Drehung D erreicht. D.h. es gilt D = S2 ◦ S1.
Der folgende Satz besagt in einem allgemeineren Lemma, dass jede Isometrie des E3 mit
vier nicht in einer Ebene ligenden Fixpunkten die Identität ist.
15

Satz 5 Eine Isometrie der Sphäre mit drei nicht auf einem Groÿkreis liegenden Fix-
punkten ist die Identität.
Abbildung 9: Die Position des Punkts M aufder Kugelober�äche ist durch die Abstän-de dS2(M,A), dS2(M,B), dS2(M,C) eindeu-tig bestimmt.
Beweis:
Seien A, B und C drei nicht auf einem
Groÿkreis liegende Punkte der Sphäre S2,
so sind−→OA,
−−→OB und
−→OC drei linear un-
abhängige Vektoren und bilden damit eine
Basis des R3. Das heiÿt, dass jeder Vektor−−→OM eindeutig als Linearkombination dar-
gestellt werden kann:
−−→OM = α·
−→OA+β·
−−→OB+γ·
−→OC, α, β, γ ∈ R.
Dabei gilt im Falle einer Orthonormalbasis
für die Koe�zienten sogar α = 〈−→OA,−−→OM〉,
β = 〈−−→OB,
−−→OM〉 und γ = 〈
−→OC,−−→OM〉. Im
Allgemeinen gilt dies aber nicht, trotzdem
hängen die Koe�zienten von den Skalar-
produkten 〈−→OA,−−→OM〉, 〈
−−→OB,
−−→OM〉, 〈
−→OC,−−→OM〉 eindeutig ab:
Seien
g11 := 〈−→OA,−→OA〉; g22 := 〈
−−→OB,
−−→OB〉; g33 := 〈
−→OC,−→OC〉
g12 := 〈−→OA,−−→OB〉; g23 := 〈
−−→OB,
−→OC〉;
g13 := 〈−→OA,−→OC〉
(man beachte gii = 1 für i = 1, 2, 3) und sei weiter
b =
b1
b2
b3
:=
〈−→OA,−−→OM〉
〈−−→OB,
−−→OM〉
〈−→OC,−−→OM〉
.
16

Dann gilt b1
b2
b3
=
〈−→OA,α ·
−→OA+ β ·
−−→OB + γ ·
−→OC〉
〈−−→OB,α ·
−→OA+ β ·
−−→OB + γ ·
−→OC〉
〈−−→OB,α ·
−→OA+ β ·
−−→OB + γ ·
−→OC〉
=
g11 g12 g13
g12 g22 g23
g13 g23 g33
︸ ︷︷ ︸
=:G
·
α
β
γ
︸ ︷︷ ︸
=:a
.
Ist G nun invertierbar, so besitzt das Gleichungssystem für jedes a ∈ R3 genau eine
Lösung, nämlich G−1b = a. Nimmt man an, dass a ∈ Kern(G) ist, so muss der Vektor−−→OM die Gleichungen
〈−→OA,−−→OM〉 = 0, 〈
−−→OB,
−−→OM〉 = 0, 〈
−→OC,−−→OM〉 = 0
erfüllen. Da−→OA,
−−→OB,
−→OC, aber eine Basis des R3 bildet und die Vektoren damit linear
unabhängig sind, sind die obigen Gleichungen nur dann erfüllt, wenn α = β = γ = 0 und−−→OM damit der Nullvektor ist. D.h. es ist Kern(G)={
−→0 } und dies ist (aus der linearen
Algebra bekannt) äquivalent dazu, dass G invertierbar ist.
Wegen Formel (2) gilt, da Arkuskosinus eine bijektive Abbildung ist, dass jeder Punkt
M ∈ S2 eindeutig durch seine sphärischen Abstände zu den nicht auf einem Groÿkreis
liegenden Punkten A, B, C charakterisiert ist.
Wenn A, B, C die Fixpunkte einer Isometrie f : S2 −→ S2 sind, gilt zusammen mit (2)
für K ∈ {A, B, C}
^(−−→OK,
−−→OM) = dS2(K,M) = dS2(f(K), f(M)) = dS2(K, f(M)) = ^(
−−→OK,
−−−−→Of(M))
=⇒ f(M) =M.
Das bedeutet, dass f keinen Punkt M der Sphäre vermag zu bewegen. Es liegt also die
Identität vor. �
17

Satz 6 Die Isometriegruppe der Sphäre ist identi�zierbar mit der Gruppe der orthogo-
nalen 3× 3−Matrizen O(3).
Beweis:
Seien A, B, C drei Punkte der Sphäre, die nicht auf einen Groÿkreis liegen und für die
gilt
A := (1, 0, 0) , B := (0, 1, 0) , C := (0, 0, 1).
Weiter sei f : S2 −→ S2 eine Isometrie. Da A, B, C bzgl. des Standardskalarprodukts
orthogonal sind (d.h.,〈−→OA,−−→OB〉 = 〈
−→OA,−→OC〉 = 〈
−−→OB,
−→OC〉 = 0), gilt mit (2) für den
sphärischen Abstand dS2(A,B) = dS2(A,C) = dS2(B,C) =π2und folglich auch
dS2(f(A), f(B)) = dS2(f(A), f(C)) = dS2(f(B), f(C)) = π2. Das bedeutet, dass auch
f(A), f(B), f(C) orthogonal sein müssen und von der Länge Eins sind.
=⇒ Es existiert eine orthogonale Abbildung g mit Darstellungsmatrizen A ∈ O(3) für die
g(K) = f(K), K ∈ {A,B,C} . (4)
gilt. Wenden wir auf beiden Seiten von (4) die Umkehrabbildung g−1 : R3 −→ R3 an,
folgt, dass die Abbildung g−1 ◦ f gerade die drei Fixpunkte A, B, C haben muss und
somit nach Satz 5 die Identität ist.
=⇒ g = f =⇒ I ∼= O(3)
�
Der nachfolgende Satz ist eine Konsequenz aus den vorangegangenen Überlegungen über
orthogonale Matrizen und Satz 6. In diesem Sinne hat er also eher den Charakter eines
Korollars.
18

Satz 7 Jede Isometrie der Sphäre lässt sich als Verknüpfung maximal dreier Spiegelun-
gen an Groÿkreisen darstellen.
Beweis:
Sei f ∈ I eine beliebige Isometrie. Dann gilt nach Satz 6, dass f nur durch Matrizen
A ∈ O(3) dargestellt werden kann. D.h. nach den Vorüberlegungen aus Abschnitt 3.1,
dass für jede Darstellungsmatrix A von f gilt, dass sie entweder eine Drehung oder eine
Drehspiegelung ist.
Ist A ∈ SO(3) eine Drehung, so folgt mit den Überlegungen aus 3.2, dass zwei Matrizen
S1, S2 ∈ O(3) existieren, sodass gilt A = S1 ◦ S2.
Ist A eine Drehspiegelung, so ist A entweder eine reine Spiegelmatrix oder aber die Kombi-
nation aus einer Drehmatrix D ∈ SO(3) und einer Spiegelmatrix S3 ∈ O(3). In letzterem
Fall existieren wieder zwei Spiegelmatrizen S1, S2 ∈ O(3), sodass A = D◦S3 = S1 ◦S2 ◦S3
ist.
�
Satz 8 Sind A,B,C und A′, B′, C ′ jeweils drei Punkte der Sphäre und gilt
1. dS2(A,B) = dS2(A′, B′)
2. dS2(A,C) = dS2(A′, C ′)
3. dS2(B,C) = dS2(B′, C ′),
so existiert eine Isometrie φ mit φ(A) = A′, φ(B) = B′ und φ(C) = C ′
Beweis:
Seien A,B,C und A′, B′, C ′ jeweils drei Punkte der Sphäre mit den obigen drei Eigen-
schaften und f : S2 −→ S2 eine Isometrie mit der Eigenschaft f(A) = A′. Wenn nun
B1 := f(B) 6= B′ , C1 := f(C) 6= C ′ ist, sich also die Abbildungssituation
A 7−→ A′, B 7−→ B1, C 7−→ C1
19

ergibt, gilt, da f eine Isometrie ist, für die sphärischen Abstände
dS2(A′, B1) = dS2(A
′, B′)
dS2(A′, C1) = dS2(A
′, C ′).
Alle möglichen Punkte, die für B1 in Frage kommen, also Punkte P ∈ S2 mit selben
sphärischen Abstand dS2(A′, B1) = dS2(A′, P ) be�nden sich auf einem Kleinkreis, dessen
sphärischer Mittelpunkt A′ ist. Dies bedeuted, dass mittels einer geeigneten Rotation um
A′ der Punkt B1 auf B′ abgebildet werden kann. Sei g : S2 −→ S2 also eine Isometrie mit
der Eigenschaft g(B1) = B′ und g(C1) =: C2, sodass sich die folgende Abbildungssituation
ergibt
A′ 7−→ A′, B1 7−→ B′, C1 7−→ C2.
Abbildung 10
Dann folgt für die Abstände
dS2(A′, C2) = dS2(A
′, C ′)
dS2(B′, C2) = dS2(B
′, C ′).
D.h., dass die Kleinkreise um A′ und
B′, welche durch die sphärischen Abstän-
de dS2(A′, C ′) und dS2(B′, C ′) beschrieben
werden (Abb. 10) sich in genau zwei Punk-
ten schneiden, also für C2 nur die bei-
den Möglichkeiten bestehen, dass entweder
C2 = C ′ ist oder im Falle C2 6= C ′, dass
mittels einer Spiegelung an derjenigen Ebe-
ne, die durch−−→OA′ und
−−→OB′ aufgespannt
wird und durch O verläuft, C2 auf C abge-
bildet wird. Man wähle in diesem Fall also
eine weitere Isometrie h : S2 −→ S2 mit
h(C2) = C ′.
Das heiÿt, dass unter den gegebenen Voraussetzungen nach höchstens drei Schritten durch
20

die Hintereinanderausführung der in den einzelnen Schritten benutzten Isometrien eine
Isometrie gefunden werden kann, die der obigen Behauptung gerecht wird. Wir setzen also
je nach Situation
φ := f, φ := g ◦ f oder φ := h ◦ g ◦ f .
�
Anschaulich ist die obige Isometrie φ im ungünstigsten Fall, sich einfach vorzustellen:
Man spiegelt den Punkt A am geeigneten Groÿkreis auf den Punkt A′. Dreht dann um A′
bis der Punkt B1 auf B′ landet und spiegelt an dem Groÿkreis, der durch die Punkte A′
und B′ verläuft, sodass schlieÿlich C2 auf C ′ tri�t. Aus den Überlegungen aus Abschnitt
3.2 geht aber hervor, dass jede Drehung im euklidischen Raum, die Verknüpfung von
2 Spiegelungen an geeigneten Ebenen ist. Das bedeutet also, dass im Beweis zu Satz 8
eine Isometrie gefunden wurde, welche sich aus 4 Spiegelungen zusammen setzt. Da die
Existenz einer Isometrie, die die sphärischen Abstände aus Satz 7 erhält, damit aber
bewiesen ist, muss gemäÿ Satz 6 die selbe Isometrie, sich aber auch aus der Verknüpfung
von maximal 3 Spiegelungen zusammensetzen können. Seien also die Voraussetzungen
aus Staz 8 gegeben und φ : S2 −→ S2 die Isometrie aus dem Beweis von Satz 7 im
ungünstigsten Falle ( d.h. φ := h ◦ g ◦ f mit φ(A) = A′, φ(B) = B′,φ(C) = C ′). Es
soll nun mit den Überlegungen aus Abschnitt 3.2 drei Spiegelungen gefunden werden, die
verknüpft φ ergeben. Alle nachfolgend erwähnten Ebenen verlaufen durch den Ursprung
und werden wie in 3.2 durch die indizierten Vektoren aufgespannt.
21

Abbildung 11
• Ist A 6= A′, so spiegele man an dem Groÿkreis g (gestrichelt rote Gerade in Abb.11),
der senkrecht zur Ebene E−→OA,−−→OA′ ist mittels einer Isometrie S1
=⇒ S1(A) = A′
• Ist B1 := S1(B) 6= B′, so spiegele man an dem Groÿkreis r (gestrichelt grüne Gerade
in Abb.11), der senkrecht zur Ebene E−−→OB1,
−−→OB′ ist mittels einer Isometrie S2
=⇒ S2(A′) = A′, S2(B1) = B′
• Ist C2 := S2(S1(C)) 6= C ′, so spiegele man an dem Groÿkreis b (gestrichelt violette
Gerade in Abb.11), der senkrecht zur Ebene E−−→OC2,
−−→OC′ ist, mittels einer Isometrie S3
=⇒ S3(A′) = A′, S3(B
′) = B′,
S3(C2) = C ′. Damit gilt also tatsächlich φ = S3 ◦ S2 ◦ S1.
22

Benutzte Literatur
• lka Agricola, Thomas Friedrich, Elementargeometrie , Vieweg und Teubner (1. Auf-
lage)
• Andreas Filler, Euklidische und nichteuklidische Geometrie, Mathematische Texte,
Wissenschaftsverlag
• Rudolf Scharlau, Skript Abschnitt 5.4 Euklidische Räume und ihre Isometrien
23
Top Related