A/D- und D/A-Wandler - Universität Paderborn -...
31
Universität Paderborn – Fakultät für Naturwissenschaften - Physikalisches Praktikum PM 1 A/D- und D/A-Wandler Modulpraktikum Messmethoden Versuch A/D- und D/A-Wandler © H. Suche, April 2000 angepasst für Praktikum Messmethoden Juli 2007 Version 20-07-2010
-
Upload
nguyenminh -
Category
Documents
-
view
220 -
download
0
Transcript of A/D- und D/A-Wandler - Universität Paderborn -...

Universität Paderborn – Fakultät für Naturwissenschaften - Physikalisches Praktikum
PM 1 A/D- und D/A-Wandler
Modulpraktikum Messmethoden
Versuch
A/D- und D/A-Wandler
© H. Suche, April 2000angepasst für Praktikum Messmethoden Juli 2007
Version 20-07-2010

PM 1 A/D- und D/A-Wandler Seite 2
Inhalt
1 Aufgabenstellung ................................................................................................................................................. 31.1 Messung an D/A-Konvertern ....................................................................................................................... 31.2 Messungen an AD-Konvertern..................................................................................................................... 3
2 Analog-Digital-Wandler ...................................................................................................................................... 42.1 Anwendung von Analog-Digital-Wandlern .................................................................................................. 42.2 Integrationsverfahren .................................................................................................................................... 4
2.2.1 Spannungs-Zeit-Verfahren (U/t-Verfahren) ........................................................................................... 42.2.2 Spannungs-Frequenz-Verfahren(U/f-Verfahren) ................................................................................... 52.2.3 Zweirampenverfahren ........................................................................................................................... 6
2.3 Abgleichverfahren......................................................................................................................................... 92.3.1 Zählmethode.......................................................................................................................................... 92.3.2 Folgezähler............................................................................................................................................102.3.3 Wägeprinzip ..........................................................................................................................................10
3 Digital-Analog-Wandler .....................................................................................................................................133.1 Anwendung von Digital-Analog-Wandlern .................................................................................................133.2 Digital-Analog-Wandler mit gewichteten Widerständen .............................................................................133.3 Digital-Analog-Wandler mit R-2R-Kettenleiter...........................................................................................143.4 Digital-Analog-Wandler mit gewichteten Strömen......................................................................................15
4 Repetitorium .......................................................................................................................................................155 Das Modulsystem................................................................................................................................................16
5.1 Methodisch-didaktische Konzeptionen ........................................................................................................165.2 Technische Konzeption................................................................................................................................16
5.2.1 Stromversorgung...................................................................................................................................165.2.2 Analoge Signale ....................................................................................................................................165.2.3 Digitale Steuersignale ...........................................................................................................................175.2.4 Digitale Datensignale ............................................................................................................................17
5.3 Beschreibung der Module ............................................................................................................................185.3.1 Modul Nr.1: Spannungs-Frequenzwandler ...........................................................................................185.3.2 Modul Nr.2: Zweirampen AD-Wandler (Dual-Slope) ..........................................................................185.3.3 Modul Nr.3: AD-Wandler nach der Zählmethode ................................................................................195.3.4 Modul Nr.4: Maximalwertzähler (Peak detecting)................................................................................205.3.5 Modul Nr.5: AD-Wandler nach dem Wägeprinzip ...............................................................................205.3.6 Modul Nr.6 : Digital-Analog-Wandler (Burr Brown) ...........................................................................215.3.7 Modul Nr.7 : Digital-Analog-Wandler (Hybrid Systems).....................................................................225.3.8 Modul Nr.8 : Digitale Dateneingabe (8bit) ...........................................................................................235.3.9 Modul Nr.9 : Digitale Datenanzeige (8bit)............................................................................................245.3.10 Modul Nr.10: Taktgenerator 50Hz......................................................................................................255.3.13 Modul Nr.13 : Stromversorgung .........................................................................................................26
6 Anwendung der Module......................................................................................................................................276.2 Messungen an Analog-Digitalwandlern.......................................................................................................27
6.2.1 Genauigkeit ...........................................................................................................................................276.2.2 Umsetzzeit.............................................................................................................................................276.2.3 Störverhalten .................................................................................. Fehler! Textmarke nicht definiert.
6.3 Messungen an Digital-Analog-Wandlern.....................................................................................................296.3.1 Genauigkeit ...........................................................................................................................................296.3.2 Qualitative Messung der diff. Linearität ...............................................................................................296.3.3 Settling Time; Slew Rate; Glitch ..........................................................................................................306.3.4 Digitale Rampe .....................................................................................................................................31

PM 1 A/D- und D/A-Wandler Seite 3
1 Aufgabenstellung
1.1 Messung an D/A-Konvertern
a) Messen Sie Offset und Gainfehler der beiden DA-Konverter.b) Messen Sie den Beitrag jedes Bits und vergleichen Sie ihn mit dem Sollwert.c) Messen Sie die Höhe eines Einzelbitschrittes jeweils an der Übertragungsgrenze
(z.B.00111111-01000000).d) Bestimmen Sie für beide Konverter die absolute Genauigkeit, die Endpunktlinearität (Annah-
me: Gain und Offset sind abgeglichen) und die Abweichung von einer Geraden, die den ma-ximalen Fehlerbetrag minimiert.
e) Bestimmen Sie die Einschwingzeit der beiden Konverter mit dem Oszilloskop.
1.2 Messungen an AD-Konvertern
f) Messen Sie die Auflösung (Resolution).g) Messen Sie die Genauigkeit (Linearität) von verschiedenen AD-Konvertern (Dual-Slope,
Wägeprinzip, Folgezähler, Maximalwertzähler).h) Messen Sie die Genauigkeit (Linearität) des V/f-Wandlers mit dem Frequenzzähler.
Vorbereitung: Fehler von Messapparaturen, Kennlinien, Bauweisen und Funktion von D/A- und A/D-Wandlern, Zeit- und Frequenzmessung
Literatur: Manuskript zur Vorlesung „Messmethoden“Tietze-Schenk, Halbleiter-Schaltungstechnik
Ver. 20-07-2010

PM 1 A/D- und D/A-Wandler Seite 4
2 Analog-Digital-Wandler
2.1 Anwendung von Analog-Digital-Wandlern
Die meisten physikalischen Größen können nur indirekt mittels anderer physikalischer Größen gemessen wer-den. In der Regel werden dazu elektrische Größen verwendet, die zwei Vorteile gegenüber anderen möglichen Größen haben. Erstens können viele physikalische Größen durch entsprechende Messwertgeber (z.B. elektrome-chanische Wandler) in proportionale Spannungen umgeformt werden. Zweitens können die elektrischen Systeme zur Messwertverarbeitung und Übertragung benutzt werden. Dies bedeutet, dass die Erfassung und Auswertung physikalischer Größen automatisiert werden kann. Analog-Digital-Wandler haben in diesen Systemen die Auf-gabe, die von den Messwertgebern gelieferten analogen Signale in Digitalinformationen proportionaler Wertig-keit umzusetzen.Analog-Digital-Wandler mit elektrischen Eingangsgrößen arbeiten nach dem Vergleichsprinzip. Dabei wird eine unbekannte analoge Eingangsgröße mit einer zweiten analogen Größe verglichen, deren Digitalwert bekannt ist, bzw. gemessen werden kann.Die verschiedenen Verfahren der Analog-Digital-Wandlung werden allgemein in drei Gruppen eingeteilt:
1. indirekte oder Integrationsverfahren2. Abgleich- oder Iterationsverfahren3. direkte oder parallele Verfahren
In den folgenden Abschnitten werden jeweils die gebräuchlichsten Analog-Digital-Wandler der verschiedenen Verfahren beschrieben.
2.2 Integrationsverfahren
2.2.1 Spannungs-Zeit-Verfahren (U/t-Verfahren)
Analog-Digital-Wandler, die nach dem Spannungs-Zeit-Verfahren arbeiten, formen die zu messende Spannung in eine Zeitspanne um, deren Dauer zur Gewinnung der digitalen Ausgangsgröße benutzt wird (Zeitmessung).Die meisten nach dem U/t-Verfahren arbeitenden Wandler benutzen zur Erzeugung der Vergleichsspannung UV
einen Sägezahngenerator und werden deshalb auch als Sägezahnumsetzer bezeichnet. Am Beispiel eines Säge-zahnumsetzers soll das Prinzip des U/t-Verfahrens erläutert werden (Abb. 1).
Abb. 1 : Blockschaltbild eines AD-Wandlers nach dem U/t- Verfahren
Ein freilaufender oder getakteter Sägezahnumsetzer schaltet beim Nulldurchgang über ein Tor einen Taktgenera-tor mit der Messfrequenz fM auf einen Zähler. Der Komparator K2 vergleicht die Messspannung UM mit der Ver-gleichsspannung UV und stoppt den Zähler, wenn UM = UV ist. Der Zähler zeigt die Messzeit tM an, die aufgrund des zeitlinearen Zusammenhangs der Messspannung proportional ist. Abb. 2 zeigt den Verlauf der Vergleichspannung und die Öffnungszeit tM des Tores.

PM 1 A/D- und D/A-Wandler Seite 5
Abb. 2a : Verlauf der Vergleichsspannung UV
Abb. 2b : Öffnungszeit des Tores tM
Die Messzeit tM ist abhängig von der Anstiegsgeschwindigkeit der Vergleichsspannung (Rampensteilheit).
dtdU
Ut
V
MM /
=
Die Anzahl der Impulse, die in den Zähler gelangen beträgt somit:
MV
MMM U
dtdU
UtfN ⋅=⋅=
/
Die Genauigkeit eines Wandlers nach dem U/t-Verfahren ist abhängig von der Konstanz der Messfrequenz fM
und der Linearität der Rampe.Die Auflösung wird von der Messfrequenz und der Rampensteilheit beeinflusst, die beide variiert werden kön-nen.Die Geschwindigkeit ist verknüpft mit der Auflösung und der Rampensteilheit, die die maximale Messzeit be-stimmt (tU ≈ ms).Beim U/t-Verfahren werden Momentanwerte gemessen, die bei verrauschter Messspannung systematisch zu niedrig sind.Vorteilhaft ist bei diesem Verfahren der geringe Aufwand, während die geringe Umsetzrate als Nachteil zu wer-ten ist.
2.2.2 Spannungs-Frequenz-Verfahren(U/f-Verfahren)
Analog-Digital-Wandler, die nach dem Spannungs-Frequenz-Verfahren arbeiten, formen die Messspannung in eine proportionale Frequenz um, die innerhalb einer konstanten Zeit mit einem Zähler gemessen wird (Fre-quenzmessung).Die Spannungs-Frequenz-Umwandlung kann verhältnismäßig einfach mit Multivibratoren erfolgen. Bei höheren Ansprüchen an die Genauigkeit werden vorwiegend Integrationsschaltungen verwendet. In Abb. 3 ist das Prinzip eines U/f-Wandlers dargestellt.
Abb. 3 : Aufbau eines AD-Wandlers nach dem U/f-Verfahren mit Integrationsschaltung

PM 1 A/D- und D/A-Wandler Seite 6
Die Messspannung UM wird vom Operationsverstärker I integriert. Die Ausgangsspannung UA des Integrators, die proportional zu UM ist, wird am Komparator K mit einer konstanten Vergleichsspannung UV verglichen. Ist UA = UV schaltet der Komparator, gibt einen Impuls ab and entlädt den Integrationskondensator C, so dass die Integration von neuem beginnt. Der prinzipielle Verlauf von UA ist in Abb. 4 dargestellt. Je größer UM ist, umso kleiner wird der Abstand der Impulse. Die Frequenz wird durch die Zählung der Impulse innerhalb der konstan-ten Messzeit tM bestimmt.
Abb. 4 : Verlauf der Spannung UA
Die Ausgangsspannung UA am Integrator ist
( )∫−=it
tMA dtURC
U0
1
Die Zeit die der Integrator braucht, UA=UV ist, ist die Integrationszeit ti.
M
Vi U
CRUt
⋅⋅=
Ist die Rückstellzeit tR des Integrators, die durch die Entladung des Kondensators entsteht, sehr viel kleiner als die Integrationszeit ti, so folgt aus ti, die Impulsfrequenz f.
MVi
UCRUt
f ⋅⋅⋅
==11
Die Anzahl N, der in den Zähler gelangten Impulse, ist
MMV
M tUCRU
tfN ⋅⋅⋅⋅
=⋅=1
Da die Messzeit tM sehr genau eingestellt werden kann, ist die Genauigkeit nur von der Konstanz der Vergleichs-spannung Uv und der Genauigkeit des RC-Gliedes abhängig. Durch zu große Rückstellzeiten des Integrators wird die Linearität verschlechtert.Eine Veränderung der Messzeit tM beeinflusst die Auflösung und die Umsetzrate.Das Störverhalten ist gut, da durch die Integration der Mittelwert der Messgröße über die Messzeit gebildet wird. Durch eine geschickte Wahl der Messzeit über eine Periode der Störspannung oder ein Vielfaches davon (tM = 20 ms bei 50Hz Netzeinstreuungen) wird erreicht, dass diese aus dem Messergebnis eliminiert wird.Wird der U/f-Wandler ohne Zähler betrieben, eignet er sich besonders für die serielle Datenübertragung in der Fernmesstechnik.
2.2.3 Zweirampenverfahren

PM 1 A/D- und D/A-Wandler Seite 7
Bei diesem Verfahren wird zuerst die Messspannung UM über eine konstante Zeitdauer t1 integriert und dann die Ausgangsspannung des Integrators in eine proportionale Zeit t2 umgesetzt, die mit Hilfe einer Messfrequenz bestimmt wird. Abb. 5 zeigt den grundsätzlichen Aufbau eines AD-Wandlers nach dem Zweirampenverfahren (engl. Dual-Slope-Converter).Der Eingangsintegrator I hat nach der konstanten Integrationszeit t1 eine Ausgangsspannung UA (Abb. 6) von
( ) ( )∫−=1
1
0
1t
tMtA dtURC
U (1)
( ) 11t
RC
UU M
tA ⋅−= (2)
MU ist der arithmetische Mittelwert vom UM über die Integrationszeit t1.
Abb. 5 : Prinzipieller Aufbau eines AD-Wandlers nach dem Zweirampenverfahren
Abb. 6a: Integrationszeit beim Zweirampenverfahren
Abb. 6b: Öffnungszeit des Tores
Die Integrationzeit t1 wird aus der Messfrequenz abgeleitet, in dem der Zähler mit seinem Überlauf den Eingang des Integrators steuert. Die Integrationszeit t1 ist dann
m
Max
f
Nt =1 (3)
Nach der konstanten Integrationszeit t1 wird der Kondensator C mit einem konstanten Strom entladen, in dem der Integratoreingang auf die entgegengesetzt gepolte Vergleichsspannung (UV) geschaltet wird. Die Ausgangs-spannung UA des Integrators soll nach der Entladung des Kondensators C Null sein.
( ) ( ) ( )∫+
−−==21
1
1
102
tt
t
VtAtA dtURC
UU (4)
PM 1 A/D- und D/A-Wandler Seite 8
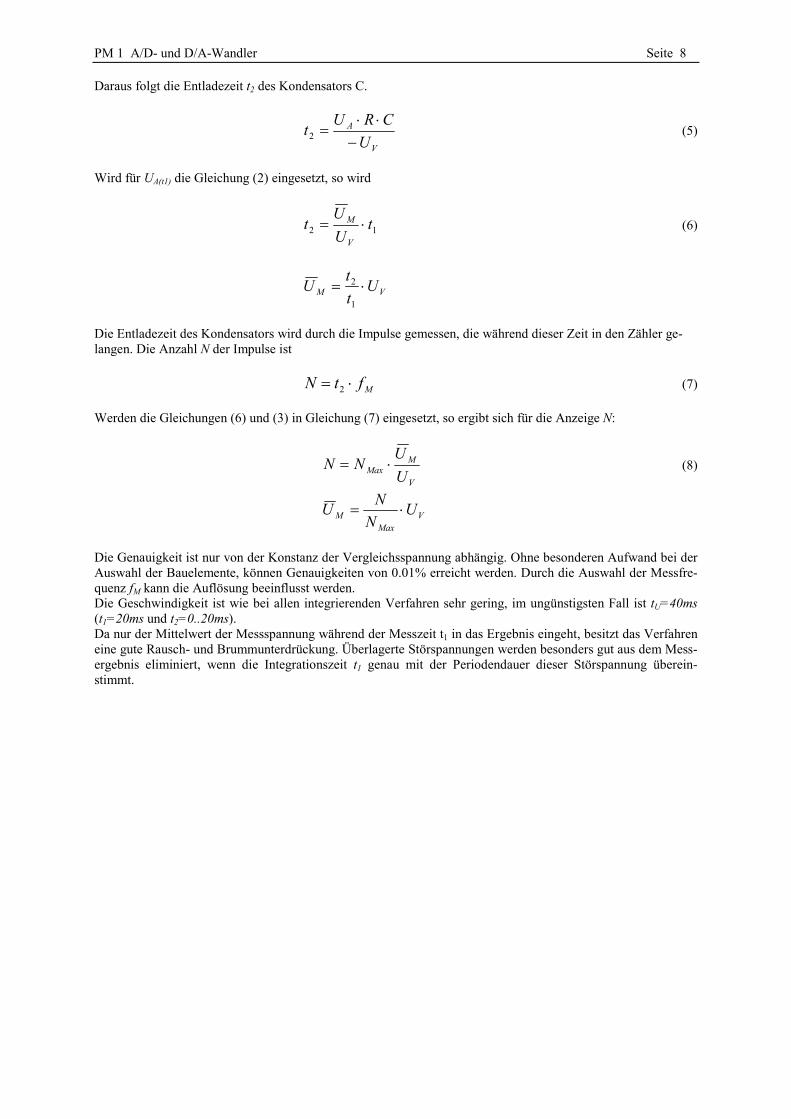
Daraus folgt die Entladezeit t2 des Kondensators C.
V
A
U
CRUt
−⋅⋅
=2 (5)
Wird für UA(t1) die Gleichung (2) eingesetzt, so wird
12 tU
Ut
V
M ⋅= (6)
VM Ut
tU ⋅=
1
2
Die Entladezeit des Kondensators wird durch die Impulse gemessen, die während dieser Zeit in den Zähler ge-langen. Die Anzahl N der Impulse ist
MftN ⋅= 2 (7)
Werden die Gleichungen (6) und (3) in Gleichung (7) eingesetzt, so ergibt sich für die Anzeige N:
V
MMax U
UNN ⋅= (8)
VMax
M UN
NU ⋅=
Die Genauigkeit ist nur von der Konstanz der Vergleichsspannung abhängig. Ohne besonderen Aufwand bei der Auswahl der Bauelemente, können Genauigkeiten von 0.01% erreicht werden. Durch die Auswahl der Messfre-quenz fM kann die Auflösung beeinflusst werden.Die Geschwindigkeit ist wie bei allen integrierenden Verfahren sehr gering, im ungünstigsten Fall ist tU=40ms(t1=20ms und t2=0..20ms).Da nur der Mittelwert der Messspannung während der Messzeit t1 in das Ergebnis eingeht, besitzt das Verfahren eine gute Rausch- und Brummunterdrückung. Überlagerte Störspannungen werden besonders gut aus dem Mess-ergebnis eliminiert, wenn die Integrationszeit t1 genau mit der Periodendauer dieser Störspannung überein-stimmt.

PM 1 A/D- und D/A-Wandler Seite 9
2.3 Abgleichverfahren
2.3.1 ZählmethodeAnalog-Digital-Wandler, die nach dem Abgleichverfahren arbeiten, kompensieren die Messspannung durch eine sich ändernde Vergleichsspannung. Die Vergleichsspannung wird so lange erhöht, bis die Differenz zwischen ihr und der Messspannung ihren kleinsten feststellbaren Wert erreicht hat. Abb. 7 zeigt das Blockschaltbild eines AD-Wandlers nach der Zählmethode (engl. counter method). Auf Grund des Verlaufes der Vergleichspannung werden diese Wandler auch als digitale Rampenumsetzer bezeichnet (Abb. 8).
Abb. 7: Blockschaltbild eines AD-Wandlers nach der Zählmethode
Eine Konversion wird mit einem Startimpuls eingeleitet, der den Zähler löscht und den Taktgenerator startet. Jeder Schritt des Zählers erhöht die Vergleichsspannung UV, die durch einen Digital-Analog-Wandler erzeugt wird, um eine Quantisierungseinheit Abb. 8. Die Anzahl der Schritte bis zum Stoppen des Zählers durch den Komparator ist ein Maß für die in der Messspannung UM enthaltenen Quantisierungseinheiten.
Abb. 8: Verlauf der Vergleichsspannung UV
Bei diesem Verfahren bestimmt der DA-Wandler die Genauigkeit und Auflösung des Systems. Ein Nachteil ist, dass der Zähler einer Verringerung der Messspannung nicht folgen kann, da er nur vorwärts zählt und bei jeder Umsetzung von Null aus beginnen muss. Die daraus resultierende Umsetzrate ist gering. Die Umsetzzeit tU ist von der Messfrequenz fM , der Auflösung N und vom Messwert selbst abhängig.
Nf
tM
U ⋅=1
Der AD-Wandler nach der Zählmethode eignet sich besonders als Maximalwertzähler (engl. peak detecting), da er Änderungen der Eingangsgröße nur in einer Richtung folgt.
PM 1 A/D- und D/A-Wandler Seite 10
2.3.2 Folgezähler
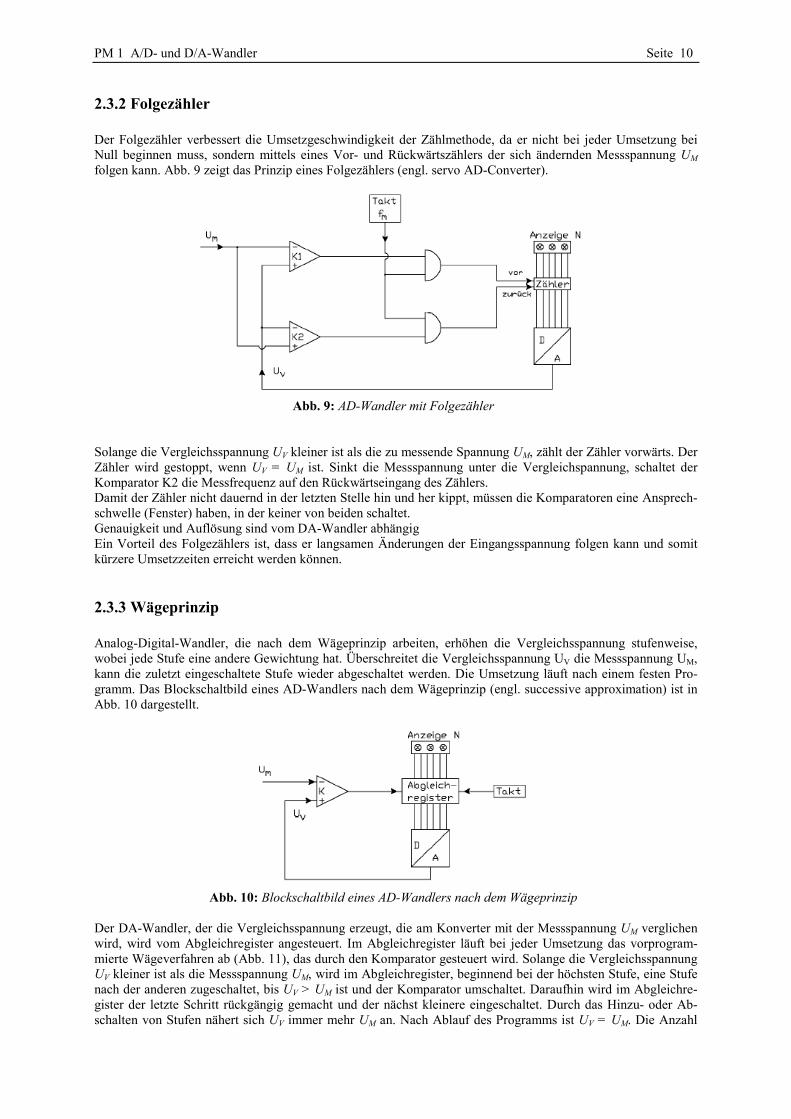
Der Folgezähler verbessert die Umsetzgeschwindigkeit der Zählmethode, da er nicht bei jeder Umsetzung bei Null beginnen muss, sondern mittels eines Vor- und Rückwärtszählers der sich ändernden Messspannung UM
folgen kann. Abb. 9 zeigt das Prinzip eines Folgezählers (engl. servo AD-Converter).
Abb. 9: AD-Wandler mit Folgezähler
Solange die Vergleichsspannung UV kleiner ist als die zu messende Spannung UM, zählt der Zähler vorwärts. Der Zähler wird gestoppt, wenn UV = UM ist. Sinkt die Messspannung unter die Vergleichspannung, schaltet der Komparator K2 die Messfrequenz auf den Rückwärtseingang des Zählers.Damit der Zähler nicht dauernd in der letzten Stelle hin und her kippt, müssen die Komparatoren eine Ansprech-schwelle (Fenster) haben, in der keiner von beiden schaltet.Genauigkeit und Auflösung sind vom DA-Wandler abhängigEin Vorteil des Folgezählers ist, dass er langsamen Änderungen der Eingangsspannung folgen kann und somit kürzere Umsetzzeiten erreicht werden können.
2.3.3 Wägeprinzip
Analog-Digital-Wandler, die nach dem Wägeprinzip arbeiten, erhöhen die Vergleichsspannung stufenweise, wobei jede Stufe eine andere Gewichtung hat. Überschreitet die Vergleichsspannung UV die Messspannung UM, kann die zuletzt eingeschaltete Stufe wieder abgeschaltet werden. Die Umsetzung läuft nach einem festen Pro-gramm. Das Blockschaltbild eines AD-Wandlers nach dem Wägeprinzip (engl. successive approximation) ist in Abb. 10 dargestellt.
Abb. 10: Blockschaltbild eines AD-Wandlers nach dem Wägeprinzip
Der DA-Wandler, der die Vergleichsspannung erzeugt, die am Konverter mit der Messspannung UM verglichen wird, wird vom Abgleichregister angesteuert. Im Abgleichregister läuft bei jeder Umsetzung das vorprogram-mierte Wägeverfahren ab (Abb. 11), das durch den Komparator gesteuert wird. Solange die Vergleichsspannung UV kleiner ist als die Messspannung UM, wird im Abgleichregister, beginnend bei der höchsten Stufe, eine Stufe nach der anderen zugeschaltet, bis UV > UM ist und der Komparator umschaltet. Daraufhin wird im Abgleichre-gister der letzte Schritt rückgängig gemacht und der nächst kleinere eingeschaltet. Durch das Hinzu- oder Ab-schalten von Stufen nähert sich UV immer mehr UM an. Nach Ablauf des Programms ist UV = UM. Die Anzahl

PM 1 A/D- und D/A-Wandler Seite 11
der Schritte bis zur Beendigung einer Umsetzung ist intern durch die Auflösung festgelegt und wird durch die Messspannung am Eingang nicht beeinflusst.
Abb. 11: Verlauf der Vergleichsspannung beim Wägeverfahren
Durch sein festes Programm kann der AD-Wandler Eingangsspannungsänderungen nur bedingt folgen. Im un-günstigsten Fall wird das Programm durchgeführt, ohne zu einem richtigen Messergebnis zu kommen. Bei Mes-sungen mit hoher Auflösung ist das Wägeprinzip schneller als der Folgezähler, da nur n Schritte (n : Anzahl der Bits) gemacht werden, während der Folgezähler 2n-1 Schritte machen muss.Die Umsetzzeit tU ist nur noch gering von der Auflösung N abhängig.
stNf
t UU µ100..11
≈⋅=
Da die Abhängigkeit von der Auflösung entfällt, hat das Wägeprinzip trotz hoher Auflösung eine hohe Umsetz-rate.Das Störverhalten aller Abgleichverfahren ist schlecht, da der Momentanwert der Messspannung UM zum Ver-gleich mit der Vergleichsspannung UV benutzt wird. Ist der Messspannung UM eine Störwechselspannung (Rau-schen) überlagert, kann der Messwert um den Scheitelpunktswert der Störspannung falsch sein. Die Störung lässt sich im Messergebnis nicht ohne weiteres erkennen. Das Rauschen kann durch ein vorgeschaltetes Tiefpassfilter abgeblockt werden.
PM 1 A/D- und D/A-Wandler Seite 12
2.4 Parallelverfahren
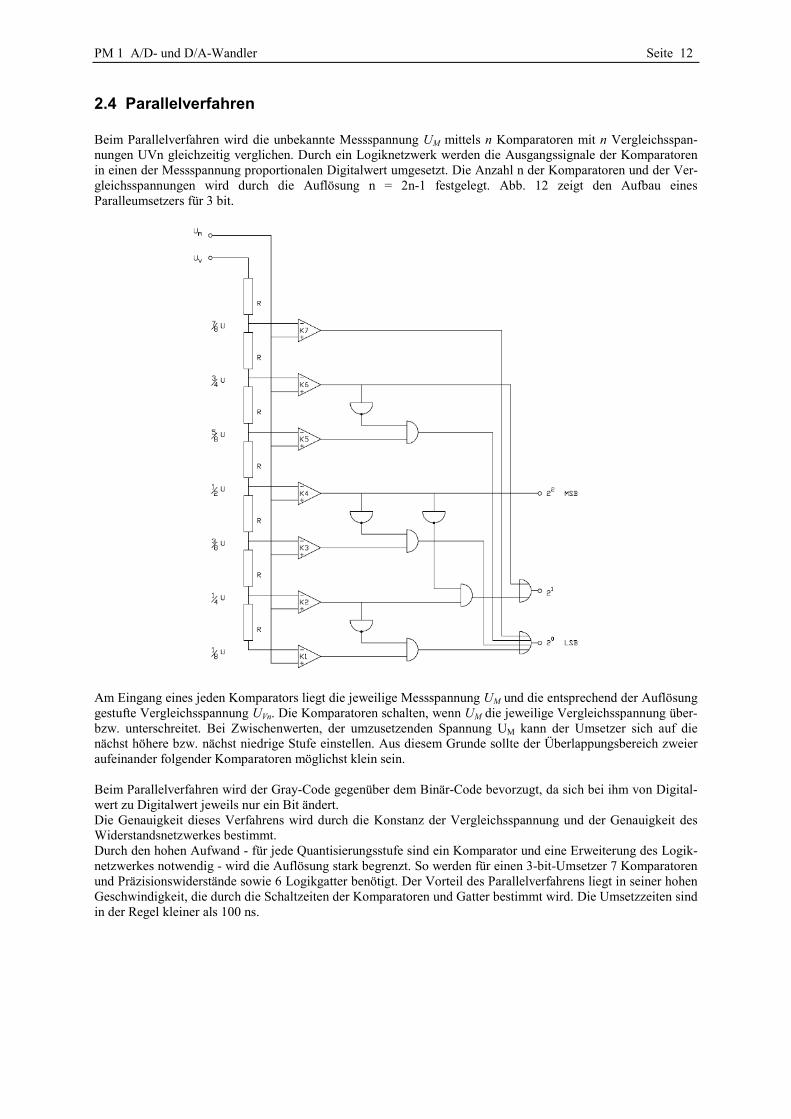
Beim Parallelverfahren wird die unbekannte Messspannung UM mittels n Komparatoren mit n Vergleichsspan-nungen UVn gleichzeitig verglichen. Durch ein Logiknetzwerk werden die Ausgangssignale der Komparatoren in einen der Messspannung proportionalen Digitalwert umgesetzt. Die Anzahl n der Komparatoren und der Ver-gleichsspannungen wird durch die Auflösung n = 2n-1 festgelegt. Abb. 12 zeigt den Aufbau eines Paralleumsetzers für 3 bit.
Am Eingang eines jeden Komparators liegt die jeweilige Messspannung UM und die entsprechend der Auflösung gestufte Vergleichsspannung UVn. Die Komparatoren schalten, wenn UM die jeweilige Vergleichsspannung über-bzw. unterschreitet. Bei Zwischenwerten, der umzusetzenden Spannung UM kann der Umsetzer sich auf die nächst höhere bzw. nächst niedrige Stufe einstellen. Aus diesem Grunde sollte der Überlappungsbereich zweier aufeinander folgender Komparatoren möglichst klein sein.
Beim Parallelverfahren wird der Gray-Code gegenüber dem Binär-Code bevorzugt, da sich bei ihm von Digital-wert zu Digitalwert jeweils nur ein Bit ändert.Die Genauigkeit dieses Verfahrens wird durch die Konstanz der Vergleichsspannung und der Genauigkeit des Widerstandsnetzwerkes bestimmt.Durch den hohen Aufwand - für jede Quantisierungsstufe sind ein Komparator und eine Erweiterung des Logik-netzwerkes notwendig - wird die Auflösung stark begrenzt. So werden für einen 3-bit-Umsetzer 7 Komparatoren und Präzisionswiderstände sowie 6 Logikgatter benötigt. Der Vorteil des Parallelverfahrens liegt in seiner hohen Geschwindigkeit, die durch die Schaltzeiten der Komparatoren und Gatter bestimmt wird. Die Umsetzzeiten sind in der Regel kleiner als 100 ns.

PM 1 A/D- und D/A-Wandler Seite 13
3 Digital-Analog-Wandler
3.1 Anwendung von Digital-Analog-Wandlern
Häufig tritt das Problem auf, digitale Signale in analoge Spannungen oder Ströme umzuformen, um damit z.B. analoge Regelkreise zu steuern. Bei den in Abschnitt 2.3 beschriebenen Vergleichsverfahren, wird die zum Ver-gleich benötigte variable Vergleichsspannung von Digital-Analog-Wandlern erzeugt.Ein Digital-Analog-Wandler soll eine an seinem Eingang liegende digitale Information in einen proportionalen analogen Wert umformen.Die große Anzahl von Verfahren zur Digital-Analog-Wandlung kann in zwei Gruppen, in seriell und parallel arbeitende Verfahren, eingeteilt werden.Bei den parallelen Verfahren werden alle Bits gleichzeitig umgesetzt, während bei den seriellen Verfahren die einzelnen Bits nacheinander ausgewertet werden. Da das serielle Verfahren zwei Nachteile hat, die lange Um-setzzeit und die notwendige Zwischenspeicherung des Analogwertes, wird in der Praxis meistens ein parallelesVerfahren verwendet.In den folgenden Abschnitten werden die wichtigsten parallelen Verfahren zur Digital-Analog-Wandlung be-schrieben.
3.2 Digital-Analog-Wandler mit gewichteten Widerständen
Der Bewertungsteil des DA-Wandlers, der die digitale Information in eine proportionale Analogspannung um-setzt, besteht bei diesem Verfahren aus einem Spannungteiler, dessen Widerstände, je nach dem verwendeten Code, unterschiedlich gewichtet sind. Abb. 13 zeigt das Prinzip für den Binär-Code (engl. weighted register DA-Converter).
Abb. 13: DA-Wandler mit gewichteten Widerständen
Die Schalter, die in der Regel durch Transistoren realisiert werden, schalten durch ein Signal, in der ihnen zu-geordneten Bit-Leitung, den Widerstand in den Spannungsteiler, so dass sich die Ausgangsspannung entspre-chend der Wertigkeit des Widerstands erhöht.Die Genauigkeit dieses Umsetzer ist zum einen abhängig von der Genauigkeit der Widerstände, wobei für jedes Bit ein Präzisionswiderstand mit entsprechender Wertigkeit benötigt wird, and zum anderen von der Konstanz der Vergleichsspannung, die lastabhängig ist. Bei einem 10-bit Umsetzer ändern sich die Widerstandswerte im Verhältnis 1:1024.Vorteilhaft ist die beliebige Erweiterbarkeit des Spannungsteilers. Dabei ist jedoch zu beachten, dass eine hohe Auflösung nicht gleichzeitig auch eine hohe Genauigkeit bedeutet.

PM 1 A/D- und D/A-Wandler Seite 14
3.3 Digital-Analog-Wandler mit R-2R-Kettenleiter
Um die Nachteile des einfachen gestuften Spannungsteilers zu umgehen, wird bei diesem Verfahren der Bewer-tungsteil aus einem R-2R-Kettenleiteraufgebaut, der sich aus der Hintereinanderschaltung gleicher Spannungs-teiler ergibt. Das Prinzip des R-2R-Kettenleiters (engl. R-2R-ladder network) ist in Abb. 14 dargestellt.
Abb. 14: Schaltung für DA-Wandler mit R-2R-Kettenleiter
Kettenleiter haben die Eigenschaft, dass jeder der drei Zweige, die von einem Knotenpunkt abgehen, den glei-chen Widerstandswert hat (2R mit R-2R-Kettenleiter).Der Lastwiderstand an jedem Schalter ist
RRRR 32||22 =+
Jede Stufe liefert eine Spannung Ux = 1/3 * UB, die sich von Stufe zu Stufe um die Hälfte verringert. Die Ge-samtspannung am Ausgang ergibt sich aus der Wirkung aller eingeschalteten Stufen.
+++++= nnBA ZZZZZUU
2
1...
8
1
4
1
2
1
3
13210
oder
∑ == +n
nnBA nZUU ...2,1,02
1
3
21
Z gibt den Zustand des Schalters an und kann Null oder Eins sein.Der Ausgangswiderstand des Kettenleiters ist konstant und stellt somit eine konstante Last für die Spannungs-quelle dar. Werden die Widerstände für den Kettenleiter im kΩ-Bereich gewählt (R = 10kΩ; 2R = 20kΩ), so sind die Übergangswiderstände der Schalter (Transistoren) gegenüber R vernachlässigbar klein. Bei den Wider-ständen kommt es nicht so sehr auf die Absolutwerte an, sondern auf die Relativwerte. Die Genauigkeit ist vom Verhältnis der Widerstände abhängig.Die Auflösung kann durch Erweiterung des Kettenleiters erhöht werden.

PM 1 A/D- und D/A-Wandler Seite 15
3.4 Digital-Analog-Wandler mit gewichteten Strömen
Werden mehrere binär gewichtete Ströme dem Summationspunkt eines Addierers zugeführt, so kann am Aus-gang des Addierers eine Spannung abgenommen werden, die der Summe der Ströme direkt proportional ist und somit ein direkter Ausdruck für die digitale Information ist.
Abb. 14a: D/A-Wandlung durch Addition gewichteter Ströme
Sind die einzelnen Ströme unterschiedlich gewichtet, gelten für das Widerstandsnetzwerk dieselben Überlegun-gen wie für das Verfahren mit gewichteten Widerständen.Für das Verfahren mit gleich gewichteten Strömen wird ein R-2R-Kettenleiter verwendet, bei dem alle Wider-stände 2R an Masse gelegt werden and an den Knotenpunkten Ströme gleicher Größe eingespeist werden. Es stellen sich praktisch die gleichen Verhältnisse ein wie in Abschnitt 3.3 beschrieben.Der als Addierer verwendete OP-Verstärker verursacht ggf. einen zusätzlichen Fehler.
4 Repetitorium
1. Welche Vor- und Nachteile haben die analogen Messverfahren?2. Welche Vor- und Nachteile haben digitale Messverfahren?3. Vergleichen Sie die Genauigkeit analoger und digitaler Messverfahren.4. Wodurch unterscheiden sich U/t- und U/f-Verfahren?5. Vergleichen Sie das U/f-Verfahren mit dem Zweirampenverfahren.6. Durch welche Maßnahme kann das Störverhalten der Integrationsverfahren verbessert werden?7. Welches Verfahren zur AD-Wandlung eignet sich ohne besonderen Aufwand zur Maximalwertzäh-
lung?8. Welche Vorteile bietet ein AD-Wandler, der nach dem Abgleichverfahren mit Folgezähler arbeitet?9. Wie verhalten sich die Umsetzzeiten von AD-Wandlern die als Folgezähler und nach dem Wägeprinzip
arbeiten?10. Wie verhalten sich AD-Wandler nach dem Abgleichverfahren bei verrauschter Eingangsspannung?11. Wann wird den Integrationsverfahren der Vorzug gegenüber den Abgleichverfahren gegeben?12. Welche Vor- und Nachteile haben Parallelverfahren?13. Ist die Forderung nach hoher Genauigkeit und Geschwindigkeit mit geringem Aufwand zu realisieren?14. Vergleichen Sie die DA-Wandler mit gewichteten Widerständen mit den R-2R-Kettenleitern.15. Welche Vor- und Nachteile haben DA-Wandler die mit gewichteten Strömen arbeiten?
+Uref
R2R4R8R
UA

PM 1 A/D- und D/A-Wandler Seite 16
5 Das Modulsystem
5.1 Methodisch-didaktische Konzeptionen
Um die vorgegebenen Lernziele, wie z.B.:
• Kennenlernen der verschiedenen Verfahren zur Analog-Digital und Digital-Analog Wandlung• Bedeutung der verschiedenen Parameter für die verwendeten Messverfahren
zu erreichen, werden an das methodische Konzept folgende Anforderungen gestellt:
• Demonstration der Grundprinzipien von Analog-Digital und Digital-Analog Wandlern• Möglichkeiten zum Vergleich verschiedener Verfahren zur Analog-Digital und Digital-Analog Wand-
lung• Veranschaulichung der verschiedenen Parameter• Darstellung wichtiger Effekte• Flexibilität und Variabilität des Messprogramms
Diese Forderungen können am besten durch ein Modulsystem erfüllt werden.
5.2 Technische Konzeption
Die technische Ausführung der Module sollte
• funktionssicher,• leicht zu handhaben und zu bedienen,• kompatibel und• erweiterbar sein.
Hinsichtlich der Stromversorgung und der verschiedenen Signale werden an die Module besondere Forderungen gestellt, die in den folgenden Abschnitten erläutert werden.
5.2.1 Stromversorgung
Zur Stromversorgung wird eine kurzschlussfeste Spannungsquelle benötigt, die die Spannungen +15V, -15V und +5V liefert. Spannungsänderungen dürfen bei +15V +1% und bei +5V +5% nicht überschreiten, damit die Be-triebssicherheit der Module nicht gefährdet wird.Zur Verhinderung von schädlichen Störeinflüssen sollten die Stromversorgungsleitungen möglichst kurz sein und eine möglichst kleine Impedanz und Induktivität besitzen. Aus diesem Grunde werden die einzelnen Module getrennt an die Stromversorgung angeschlossen. Die beim Abschalten von integrierten Digitalschaltungen auf-tretenden Strömstöße verursachen Spannungsabfälle, die bei gemeinsamen Masseleitern direkt in andere Teilsys-teme eingekoppelt werden können. Um Störungen dieser Art auszuschließen, werden die Masseleiter für die analoge und digitale Versorgungsspannung getrennt zur Versorgungsspannung zurückgeführt.
5.2.2 Analoge Signale
Analoge Ein- und Ausgangssignale sind auf die unipolaren Bereiche von 0..10V begrenzt worden. Bei der Fest-legung der Impedanzen muss darauf geachtet werden, dass die bei der Kopplung von Modulen auftretende Sig-nalverfälschung möglichst gering gehalten wird. Der Kopplungsfaktor k sollte möglichst klein sein, damit das vorgeschaltete Messsystem nicht belastet wird. Der Kopplungsfaktor k ergibt sich aus der Anzahl N der mögli-chen Lasten und aus der Auflösung des Messsystems.
%1,02564
1
2
1≤
⋅≤
⋅≤
NNk
PM 1 A/D- und D/A-Wandler Seite 17
Daraus ergeben sich für die Ein- und Ausgangsimpedanzen folgende Forderungen:
EA RkR ⋅≤Eingangsimpedanz Ω≥ kRE 5
Ausgangsimpedanz Ω≤ 5,0AR
5.2.3 Digitale Steuersignale
Die verwendeten digitalen Bauteile arbeiten mit positiver Logik auf TTL-Pegeln. Ein- und Ausgangsimpedanz:Bei integrierten Schaltungen werden der Eingangslastfaktor und die Ausgangsbelastbarkeit in Lasteinheiten angegeben, die normiert sind (DIN 41 859, Blatt 1).Bei den verwendeten Standard TTL-Schaltungen belastet der Eingang den vorgeschalteten Ausgang mit einer Lasteinheit, während die Ausgänge mit 10 Lasteinheiten belastet werden können.
5.2.4 Digitale Datensignale
Die Datenein- und ausgabe erfolgt parallel im 8bit Binärcode.Um die Störsicherheit zu erhöhen, wird zur internen Übertragung eine 16adrige Bandleitung verwendet, in der jeder Datenleitung eine Masseleitung zugeordnet ist.Die Eingangs- und Ausgangsbelastbarkeit wird ebenfalls in TTL-Lasteinheiten angegeben. Datenein-gang : 1 LasteinheitDatenausgang : 4 Lasteinheiten
PM 1 A/D- und D/A-Wandler Seite 18
5.3 Beschreibung der Module
5.3.1 Modul Nr.1: Spannungs-Frequenzwandler
Abb. 15: Blockschaltbild eines U/f-Wandlers
Bauteile: U/f-Wandler 4721 Teledyne PhilbrickOpAmp 741 Teledyne Philbrick
Funktionsbeschreibung:Die analoge Eingangsspannung wird durch den OpAmp invertiert, da der U/f-Wandler im Bereich 0..-10V arbei-tet.Vollausschlag und Offset können durch Trimmpotentiometer abgeglichen werden.
5.3.2 Modul Nr.2: Zweirampen AD-Wandler (Dual-Slope)
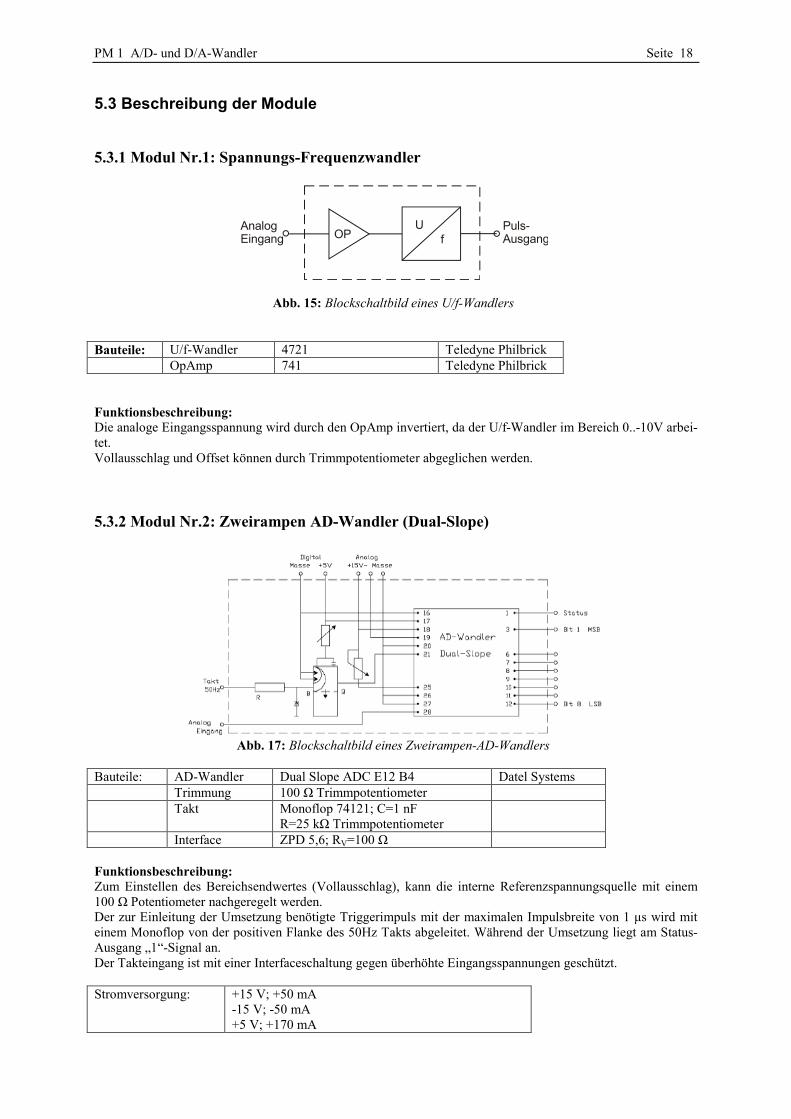
Abb. 17: Blockschaltbild eines Zweirampen-AD-Wandlers
Bauteile: AD-Wandler Dual Slope ADC E12 B4 Datel SystemsTrimmung 100 Ω TrimmpotentiometerTakt Monoflop 74121; C=1 nF
R=25 kΩ TrimmpotentiometerInterface ZPD 5,6; RV=100 Ω
Funktionsbeschreibung:Zum Einstellen des Bereichsendwertes (Vollausschlag), kann die interne Referenzspannungsquelle mit einem 100 Ω Potentiometer nachgeregelt werden.Der zur Einleitung der Umsetzung benötigte Triggerimpuls mit der maximalen Impulsbreite von 1 μs wird mit einem Monoflop von der positiven Flanke des 50Hz Takts abgeleitet. Während der Umsetzung liegt am Status-Ausgang „1“-Signal an.Der Takteingang ist mit einer Interfaceschaltung gegen überhöhte Eingangsspannungen geschützt.
Stromversorgung: +15 V; +50 mA-15 V; -50 mA+5 V; +170 mA
Uf
Puls-Ausgang
AnalogEingang OP

PM 1 A/D- und D/A-Wandler Seite 19
Analog-Eingang: Unipolar; 0 .. +10 V; Impedanz: RE=10 kΩ
Digital-Eingang: 50 Hz TaktDigital-Ausgang: StatussignalDatenausgang: 8bit parallel; Binär codiert
Abb. 18: Modulansicht des Zweirampen AD-Wandlers
5.3.3 Modul Nr.3: AD-Wandler nach der Zählmethode
Abb. 19: AD-Wandler nach der Zählmethode
Bauteil: AD-Wandler ADC 590-8 Digital Ramp Hybrid Systems
Funktionsbeschreibung:Mit der positiven Flanke des externen Takts (50Hz) wird der interne Zähler gelöscht (Reset) und am Status (Busy Bit) „1“-Signal gesetzt. Die negative Flanke leitet die Umsetzung ein. Das Ende der Umsetzung wird durch den Status angezeigt, der dann „0“-Signal hat. Offset und Verstärkung (Gain) sind extern nicht geregelt.
Stromversorgung: +15 V; +40 mA-15 V; -20 mA+5 V; +120 mA
Analog-Eingang: Unipolar; 0 .. +10 V; Impedanz: RE=5 kΩ
Digital-Eingang: 50 Hz (Strobe)Digital-Ausgang: Statussignal (Busy Bit)Datenausgang: 8bit parallel; Binär codiert
Abb. 20: Modulansicht des AD-Wandlers nach der Zählmethode

PM 1 A/D- und D/A-Wandler Seite 20
5.3.4 Modul Nr.4: Maximalwertzähler (Peak detecting)
zur Zeit nicht implementiert
5.3.5 Modul Nr.5: AD-Wandler nach dem Wägeprinzip
Abb. 23: Blockschaltbild eines AD-Wandlers nach dem Wägeprinzip
Bauteile: AD-Wandler ADC 80 AS-10 Burr BrownInverter NAND 2 * 7400Takt Monoflop 74121; C=1 nF
R=50 kΩ TrimmpotentiometerInterface ZPD 5,6; RV=100 Ω
Funktionsbeschreibung:Die Umsetzung wird durch einen Impuls (maximal 2 μs) auf den Takteingang (18 Convert Command) eingelei-tet. Der Startimpuls wird durch ein Zeitglied von der positiven Flanke des 50Hz Taktes abgeleitet. Während der Umsetzung liegt am Statusausgang „1“-Signal. Da der AD-Wandler mit komplementärem Binärcode arbeitet, müssen die Ausgangssignale invertiert werden.Offset and Verstärkung sind extern nicht geregelt. Der Takteingang ist mit einer Interfaceschaltung gegen über-höhte Eingangsspannungen geschützt.
Stromversorgung: +15 V; +20 mA-15 V; -20 mA+5 V; +70 mA
Analog-Eingang: Unipolar; 0 .. +10 V; Impedanz: RE=5 kΩ
Digital-Eingang: 50 Hz TaktDigital-Ausgang: StatussignalDatenausgang: 8bit parallel; Binär codiert
Abb. 24: Modulansicht des AD-Wandlers nach dem Wägeprinzip

PM 1 A/D- und D/A-Wandler Seite 21
5.3.6 Modul Nr.6 : Digital-Analog-Wandler (Burr Brown)
Abb. 25: DA-Wandler
Bauteile: DA-Wandler DAC 80 CBI-V Burr BrownInverter NAND 2 * 7400
Funktionsbeschreibung:Da der DA-Wandler intern mit komplementärem Binärcode arbeitet, müssen die Dateneingänge invertiert wer-den. Die nicht benutzten Dateneingänge des DA-Wandlers sind, aufgrund des Komplementärcodes, an +5V („1“) gelegt worden (Bit 9-12).Offset and Verstärkung sind extern nicht geregelt.
Stromversorgung: +15 V; +25 mA-15 V; -25 mA+5 V; +40 mA
Dateneingang: 8bit parallel; Binär codiertAnalog-Ausgang: Unipolar; 0 .. +10 V
Impedanz RA=0,05 Ω
Abb. 26: Modulansicht DA-Wandler

PM 1 A/D- und D/A-Wandler Seite 22
5.3.7 Modul Nr.7 : Digital-Analog-Wandler (Hybrid Systems)
Abb. 27: DA-Wandler
Bauteile: DA-Wandler DAC 371-V-8 Hybrid Sys-tems
Offset 20 kΩ PotentiometerGain 20 kΩ Potentiometer
Funktionsbeschreibung:Die Bereichsendwerte -Nullpunkt und Vollausschlag- können durch die Regelung des Offsets und der Verstär-kung genau eingestellt werden.
Stromversorgung: +15 V; -20 mA-15 V; -15 mA
Dateneingang: 8bit parallel; Binär codiertAnalog-Ausgang: Unipolar; 0 .. +10 V
Impedanz RA=0,1 kΩ
Abb. 28: Modulansicht DA-Wandler

PM 1 A/D- und D/A-Wandler Seite 23
5.3.8 Modul Nr.8 : Digitale Dateneingabe (8bit)
Abb. 29: Schalter der digitalen Dateneingabe
Funktionsbeschreibung:Bei der Ansteuerung von integrierten Digitalschaltungen durch mechanische Kontakte, muss mit einem Prellen der Kontakte gerechnet werden, das von der nachfolgenden integrierten Digitalschaltung registriert wird und dann zu Störungen führt.Störungen durch Kontaktprellen werden dadurch vermieden, dass die Impulse einer Prellserie durch ein RC-Glied integriert werden und danach ein Schmitt-Trigger die erforderliche Flankensteilheit wiederherstellt. Die Zeitkonstante des RC-Gliedes muss der maximalen Prellzeit angepasst sein. Der Inverter sorgt für eine positive Logik am Ausgang.
Stromversorgung: +5 V; 120 mAEingang: Umschalter ein=“1“-Signal
Umschalter aus=“0“-SignalAusgang: 8 bit parallel; Binär codiert
Abb. 30: Modulansicht der digitalen Dateneingabe

PM 1 A/D- und D/A-Wandler Seite 24
5.3.9 Modul Nr.9 : Digitale Datenanzeige (8bit)
Abb. 31: Digitale Datenanzeige
Um die Messsignale, die bei der Analog-Digital-Wamdlung entstehen, auswerten zu können, wird ein Anzeige-modul benötigt. Die Anzeige erfolgt mit Leuchtdioden im Binärcode, wobei jeder Datenleitung (bit) eine Leuchtdiode mit der entsprechenden Wertigkeit zugeordnet ist. Damit der vorgeschaltete Ausgang nicht zu stark belastet wird, ist der Strom durch die Leuchtdiode durch einen Vorwiderstand RV = 280 Ω begrenzt.
Datenausgang: 8 bit parallel; Binär codiert
Abb. 32: Modulansicht der digitalen Datenanzeige

PM 1 A/D- und D/A-Wandler Seite 25
5.3.10 Modul Nr.10: Taktgenerator 50Hz/20kHz
Analog-Digital-Wandler benötigen, um die an ihrem Eingang liegende analoge Spannung in einen digitalen Wert umzuformen, einen Startimpuls. Mit diesem Startimpuls, der jeweils eine Umsetzung einleitet, kann der AD-Wandler gesteuert werden. Die Impulsfrequenz, die durch äußere Bedingungen vorgegeben sein kann, wird nach oben durch die maximale Umsetzzeit des AD-Wandlers begrenzt.Für das Modulsystem wurde eine Taktfrequenz von 50Hz gewählt, die es ermöglicht, alle verwendeten AD-Wandler zu triggern. Da eine hohe Genauigkeit und Konstanz der Frequenz gefordert wird, wird zur Frequenzer-zeugung ein Quarz benutzt, der mit 3.726MHz schwingt. Mit einem Frequenzteiler wird die benötigte Frequenz von 50 Hz daraus abgeleitet.
Abb. 33: Taktgenerator mit Einzelimpulsschaltung
Für einige Messungen, z.B. des Störverhaltens, wird ein Einzelimpuls (one shot) benötigt.Ein Einzelimpuls wird durch das Betätigen der Taste 'Einzelimpuls' ausgelöst. Durch den Tastendruck wird ein Zeitglied gesetzt, das sehr genau eingestellt (20ms) sein muss, um Fehlschaltungen zu verhindern. Mit dem Zeit-glied wird ein D-Flip-Flop vorbereitet, das mit dem 50 Hz Takt getriggert wird. Mit der positiven Flanke auf T wird das Flip-Flop gesetzt und mit der negativen Flanke auf C gelöscht, so dass an den Ausgang ein mit dem Takt synchroner Einzelimpuls von 10ms Dauer gelangt. Um undefinierte Zustände des D-Flip-Flops zu verhin-dern, ist der Takteingang T gegenüber dem Clear-Eingang C durch 2 NAND-Gatter um 20ns verzögert.Um Fehlschaltungen,die durch Kontaktprellen der Einzelimpulstaste entstehen können zu verhindern, ist die Taste durch ein nachgeschaltetes RS-Flip-Flop entprellt worden.
Bauteile: QuarzFrequenzteilerZeitgliedSpeicherEntprellung
3,276 MHzICN 7038 AMonoflop 74121D-Flip-FlopNAND 7400
Stromversorgung +5 V; 50 mADigitalausgang 50Hz/20kHz Takt Einzelimpuls, Taktsynchron 10 ms
Abb. 34: Modulansicht 50 Hz Taktgenerator

PM 1 A/D- und D/A-Wandler Seite 26
5.3.13 Modul Nr.13 : Stromversorgung
Um eine gegenseitige Beeinflussung der analogen (+15V) and der digitalen (+5V) Stromversorgung zu verhin-dern, werden zwei kurzschlussfeste Netzbauteile verwendet. Der Betriebszustand des Stromversorgungsmoduls wird durch Leuchtdioden angezeigt.
Abb. 39: Stromversorgung
Stromversorgung: Analog: ±15 V; ±50 mADigital: +5 V; +650 mA
Abb. 40: Modulansicht Stromversorgung

PM 1 A/D- und D/A-Wandler Seite 27
6 Anwendung der Module
6.2 Messungen an Analog-Digitalwandlern
6.2.1 Genauigkeit
Für die Messschaltung werden folgende Module verwendet:
Modul Nr.1-5: Analog-Digital-WandlerNr.10: Taktgenerator 50HzNr. 9: Digitale DatenanzeigeNr.13: Stromversorgung
eine regelbare Spannungsquelle und ein Digitalvoltmeter (DVM). Bild 42 zeigt die Anordnung der Module.
Abb. 42: Messschaltung zur Ermittlung der Genauigkeit
Mit der analogen Spannungsquelle wird eine Eingangsspannung eingestellt, die vom AD-Wandler in einen digi-talen Wert umgewandelt wird. Durch den Vergleich der tatsächlich eingestellten Eingangsspannung, die am Digitalvoltmeter abgelesen werden kann, mit dem von der Datenanzeige angezeigten Wert, können Aussagen über die Genauigkeit des AD-Wandlers gemacht werden.Folgende Parameter können mit dieser Messanordnung gemessen werden:
• Nullpunktsabweichung (Offset)• Verstärkungsfehler (Gain drift) bei Vollausschlag• Monotonie• Reproduzierbarkeit
6.2.2 Umsetzzeit
Analog-Digital-Wandler setzen während der Umsetzung am Statusausgang „l“-Signal. Die Messung der Um-setzzeit (conversion time) erfolgt mit einem Oszilloskop. Bild 43 zeigt den Schaltungsaufbau für den folgende Module benötigt werden:
Modul Nr.1-5: AD-WandlerNr.10: Taktgenerator 50HzNr.13: Stromversorgung
Eine regelbare analoge Spannungsquelle, ein Digitalvoltmeter and ein Oszilloskop.

PM 1 A/D- und D/A-Wandler Seite 28
Abb. 43: Modulanordnung zur Messung der Umsetzzeit

PM 1 A/D- und D/A-Wandler Seite 29
6.3 Messungen an Digital-Analog-Wandlern
6.3.1 Genauigkeit
Für die Messschaltung (Abb. 45) werden die folgenden Module verwendet:
Modul Nr.: 6&7: DA-WandlerNr.: 8: Digitale DateneingabeNr.: 13: Stromversorgung
Und ein Digitalvoltmeter.
Abb. 45: Modulanordnung zur Messung der Genauigkeit
Mit der digitalen Dateneingabe eingegebene Werte werden vom DA-Wandler in eine analoge Spannung umge-wandelt. Durch den Vergleich der eingegebenen mit den angezeigten Werten können Aussagen über die Genau-igkeit des DA-Wandlers gemacht werden.
• Nullpunktabweichung (Offset)• Verstärkungsfehler (Gain drift)• Einzelbitbeiträge• Summation der Bitbeträge bei verschiedenen Bitkombinationen
6.3.2 Qualitative Messung der differentiellen Linearität
Modul Nr.: 6&7: DA-WandlerNr.: 8: Digitale DateneingabeNr.: 10: TaktgeneratorNr.: 12: Zähler mit SteuerlogikNr.: 13: Stromversorgung
Und ein Oszilloskop. Die Messschaltung ist in Abbildung 46 dargestellt.
Abb. 46: Messschaltung zur differentiellen Linearität
Bei der differentiellen Linearität wird geprüft, ob jede Stufe des Wandlers linear ist. Die Abweichung darf nicht größer sein als ±1/2 LSB sein.Die Messung erfolgt mit der Steuerlogik des Zählers (Schalter „messen“ auf „ein“), die im 50Hz Takt die Bitum-schaltung wiederholt. Bleibt der Spannungssprung, der auf dem Oszilloskop sichtbar gemacht wird (Bild 47), innerhalb der Grenze von ±1/2 LSB, ist diese Stufe des DA-Wandlers linear.

PM 1 A/D- und D/A-Wandler Seite 30
Abb. 47: Abbildung der differentiellen Linearität auf dem Oszilloskop
6.3.3 Settling Time; Slew Rate; Glitch
Für die Messung der Settling Time, Slew Rate und Glitch wird die gleiche Messanordnung wie im vorigen Punktverwendet.
1. Settling Time (Einstellzeit)Settling Time ist die Zeit, die ein DA-Wandler braucht, um nach einer Änderung des Eingangs den neu-en Wert innerhalb der Grenzen von ±1/2 LSB anzuzeigen.Werden an der Dateneingabe alle Bits eingeschaltet, so schaltet die Steuerlogik den DA-Wandler im 50Hz Takt von Null auf Vollausschlag und ungekehrt (worst case). Bild 48 zeigt das Überschwingen, das bei der Umschaltung entsteht.
Abb. 48: Überschwingen bei der Umschaltung von Null auf Vollausschlag
2. Slew Rate (Anstiegsgeschwindigkeit)Der OpAmp im Ausgang des DA-Wandlers begrenzt die Änderungsgeschwindigkeit der Ausgangs-spannung. Worst case : Änderung von Null auf Vollausschlag. Eine geringe Slew Rate begrenzt das Überschwingen (Bild 49).

PM 1 A/D- und D/A-Wandler Seite 31
Abb. 49: Slew rate; Umschaltung von Null auf Vollausschlag
3. Glitch (Einbruch)Da Logikelemente schneller aus- als einschalten, entsteht beim Umschalten ein Einbruch, der bei nach-folgenden Logikelementen Fehlschaltungen verursachen kann. Bild 50 zeigt einen solchen Einbruch.
Abb. 50: Glitch
6.3.4 Digitale Rampe
Die digitale Rampe eines DA-Wandlers kann mit der gleichen Messanordnung wie vorher auf dem Oszilloskop dargestellt werden.Die Steuerlogik wird durch den Schalter „messen“ auf „aus“ abgeschaltet. Der Zähler läuft jetzt vom Takt ge-steuert kontinuierlich durch. Bild 51 zeigt so eine digitale Rampe.
Abb. 51: Digitale Rampe