
Einfachpositionierer (EPos) im SINAMICS V90 PN · Gewährleistung und Haftung SINAMICS V90 PN EPos...
31
Einfachpositionierer (EPos) im SINAMICS V90 PN SINAMICS V90 PROFINET-Version https://support.industry.siemens.com/cs/ww/de/view/109747750 Siemens Industry Online Support
Transcript of Einfachpositionierer (EPos) im SINAMICS V90 PN · Gewährleistung und Haftung SINAMICS V90 PN EPos...

Einfachpositionierer (EPos) im SINAMICS V90 PN
SINAMICS V90 PROFINET-Version
https://support.industry.siemens.com/cs/ww/de/view/109747750
Siemens Industry Online Support

Gewährleistung und Haftung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 2
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Gewährleistung und Haftung
Hinweis Die Anwendungsbeispiele sind unverbindlich und erheben keinen Anspruch auf Vollständigkeit hinsichtlich Konfiguration und Ausstattung sowie jeglicher Eventualitäten. Die Anwendungsbeispiele stellen keine kundenspezifischen Lösungen dar, sondern sollen lediglich Hilfestellung bieten bei typischen Aufgabenstellungen. Sie sind für den sachgemäßen Betrieb der beschriebenen Produkte selbst verantwortlich. Diese Anwendungsbeispiele entheben Sie nicht der Verpflichtung zu sicherem Umgang bei Anwendung, Installation, Betrieb und Wartung. Durch Nutzung dieser Anwendungs-beispiele erkennen Sie an, dass wir über die beschriebene Haftungsregelung hinaus nicht für etwaige Schäden haftbar gemacht werden können. Wir behalten uns das Recht vor, Änderungen an diesen Anwendungsbeispiele jederzeit ohne Ankündigung durchzuführen. Bei Abweichungen zwischen den Vorschlägen in diesem Anwendungsbeispiel und anderen Siemens Publikationen, wie z. B. Katalogen, hat der Inhalt der anderen Dokumentation Vorrang.
Für die in diesem Dokument enthaltenen Informationen übernehmen wir keine Gewähr. Unsere Haftung, gleich aus welchem Rechtsgrund, für durch die Verwendung der in diesem Anwendungsbeispiel beschriebenen Beispiele, Hinweise, Programme, Projektierungs- und Leistungsdaten usw. verursachte Schäden ist ausgeschlossen, soweit nicht z. B. nach dem Produkthaftungsgesetz in Fällen des Vorsatzes, der groben Fahrlässigkeit, wegen der Verletzung des Lebens, des Körpers oder der Gesundheit, wegen einer Übernahme der Garantie für die Beschaffenheit einer Sache, wegen des arglistigen Verschweigens eines Mangels oder wegen Verletzung wesentlicher Vertragspflichten zwingend gehaftet wird. Der Schadens-ersatz wegen Verletzung wesentlicher Vertragspflichten ist jedoch auf den vertragstypischen, vorhersehbaren Schaden begrenzt, soweit nicht Vorsatz oder grobe Fahrlässigkeit vorliegt oder wegen der Verletzung des Lebens, des Körpers oder der Gesundheit zwingend gehaftet wird. Eine Änderung der Beweislast zu Ihrem Nachteil ist hiermit nicht verbunden.
Weitergabe oder Vervielfältigung dieser Anwendungsbeispiele oder Auszüge daraus sind nicht gestattet, soweit nicht ausdrücklich von der Siemens AG zugestanden.
Security-hinweise
Siemens bietet Produkte und Lösungen mit Industrial Security-Funktionen an, die den sicheren Betrieb von Anlagen, Systemen, Maschinen und Netzwerken unterstützen.
Um Anlagen, Systeme, Maschinen und Netzwerke gegen Cyber-Bedrohungen zu sichern, ist es erforderlich, ein ganzheitliches Industrial Security-Konzept zu implementieren (und kontinuierlich aufrechtzuerhalten), das dem aktuellen Stand der Technik entspricht. Die Produkte und Lösungen von Siemens formen nur einen Bestandteil eines solchen Konzepts.
Der Kunde ist dafür verantwortlich, unbefugten Zugriff auf seine Anlagen, Systeme, Maschinen und Netzwerke zu verhindern. Systeme, Maschinen und Komponenten sollten nur mit dem Unternehmensnetzwerk oder dem Internet verbunden werden, wenn und soweit dies notwendig ist und entsprechende Schutzmaßnahmen (z.B. Nutzung von Firewalls und Netzwerksegmentierung) ergriffen wurden.
Zusätzlich sollten die Empfehlungen von Siemens zu entsprechenden Schutzmaßnahmen beachtet werden. Weiterführende Informationen über Industrial Security finden Sie unter
http://www.siemens.com/industrialsecurity.
Die Produkte und Lösungen von Siemens werden ständig weiterentwickelt, um sie noch sicherer zu machen. Siemens empfiehlt ausdrücklich, Aktualisierungen durchzuführen, sobald die entsprechenden Updates zur Verfügung stehen und immer nur die aktuellen Produktversionen zu verwenden. Die Verwendung veralteter oder nicht mehr unterstützter Versionen kann das Risiko von Cyber-Bedrohungen erhöhen.
Um stets über Produkt-Updates informiert zu sein, abonnieren Sie den Siemens Industrial
Security RSS Feed unter http://www.siemens.com/industrialsecurity.

Inhaltsverzeichnis
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 3
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Inhaltsverzeichnis Gewährleistung und Haftung ...................................................................................... 2
1 Aufgabe............................................................................................................... 4
1.1 Übersicht .............................................................................................. 4
2 Lösung ................................................................................................................ 5
2.1 Übersicht zur Gesamtlösung ................................................................ 5 2.2 Hard- und Softwarekomponenten ........................................................ 6 2.2.1 Gültigkeit............................................................................................... 6 2.2.2 Verwendete Komponenten ................................................................... 6
3 Grundlagen ......................................................................................................... 7
3.1 Grundlagen zur SINAMICS V90 PN-Version ....................................... 7 3.2 Installation und Inbetriebnahme ........................................................... 8 3.2.1 Installation der Hardware ..................................................................... 8 3.2.2 Probelauf .............................................................................................. 8
4 Konfiguration und Projektierung ..................................................................... 9
4.1 Konfiguration über V-ASSISTANT ....................................................... 9 4.2 Konfiguration im TIA Portal V14 ......................................................... 14
5 Bedienung der Applikation ............................................................................. 19
5.1 Szenario A (mit FB284) ...................................................................... 19 5.1.1 Funktionsbaustein SINA_POS (FB284) ............................................. 19 5.1.2 Bedienung .......................................................................................... 23
6 Anhang.............................................................................................................. 30
6.1 Service und Support ........................................................................... 30 6.2 Links und Literatur .............................................................................. 31 6.3 Kontakt ............................................................................................... 31 6.4 Änderungsdokumentation .................................................................. 31
1 Aufgabe
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 4
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
1 Aufgabe
1.1 Übersicht
Einleitung
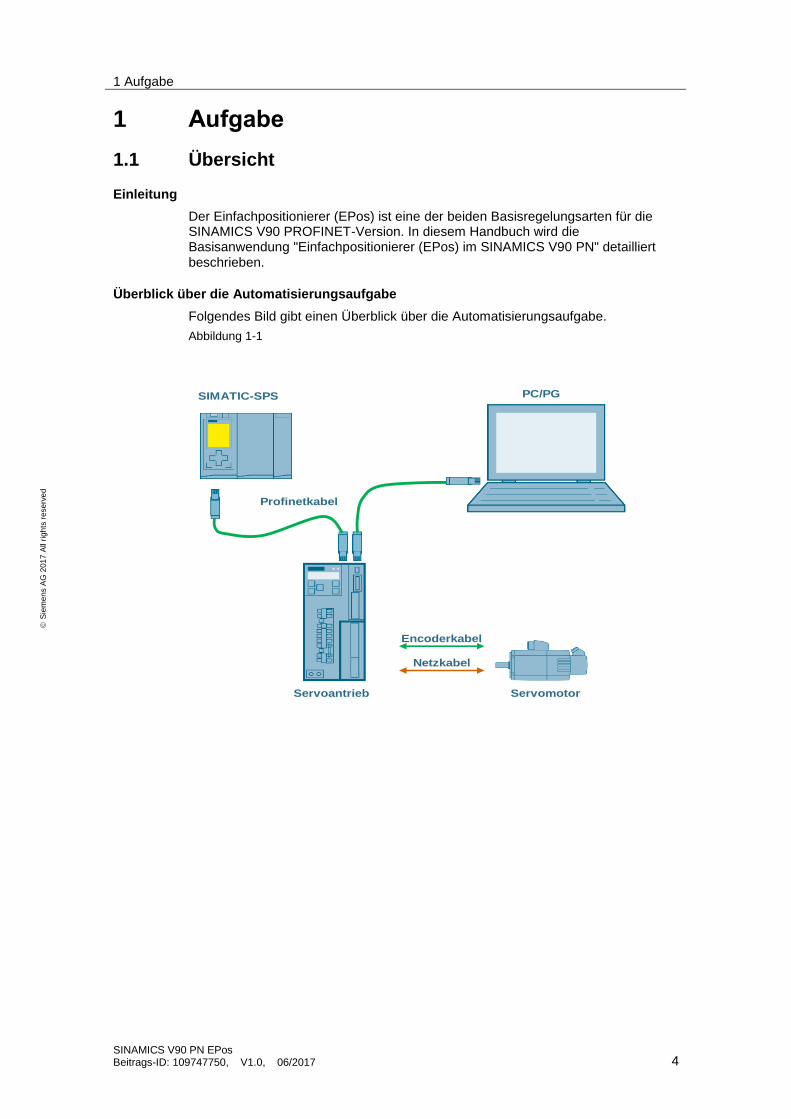
Der Einfachpositionierer (EPos) ist eine der beiden Basisregelungsarten für die SINAMICS V90 PROFINET-Version. In diesem Handbuch wird die Basisanwendung "Einfachpositionierer (EPos) im SINAMICS V90 PN" detailliert beschrieben.
Überblick über die Automatisierungsaufgabe
Folgendes Bild gibt einen Überblick über die Automatisierungsaufgabe.
Abbildung 1-1
SIMATIC-SPS
Servoantrieb Servomotor
PC/PG
Profinetkabel
Encoderkabel
Netzkabel

2 Lösung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 5
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
2 Lösung
2.1 Übersicht zur Gesamtlösung
Schematische Darstellung
Die folgende Abbildung zeigt die wichtigsten Komponenten der Lösung:
Abbildung 2-1
IO-Device
IO-Supervisor
IO-Controller
Abgrenzung
Diese Applikation enthält keine Beschreibung der
PROFINET-Kommunikation
SINAMICS V90 PN-Version
BOP-Bedienung.
Grundlegende Kenntnisse über diese Themen werden vorausgesetzt.
Vorausgesetzte Kenntnisse
Grundlegende Kenntnisse über das TIA Portal werden vorausgesetzt.
2 Lösung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 6
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
2.2 Hard- und Softwarekomponenten
2.2.1 Gültigkeit
Dieses Anwendungsbeispiel ist gültig für
TIA Portal V14
S7-1200/ S7-1500/ S7-300/ S7-400 CPU mit PN-Schnittstelle
SINAMICS V90 PN FW V10002.4 oder höher
SIMOTICS S-1FL6 Li Motor
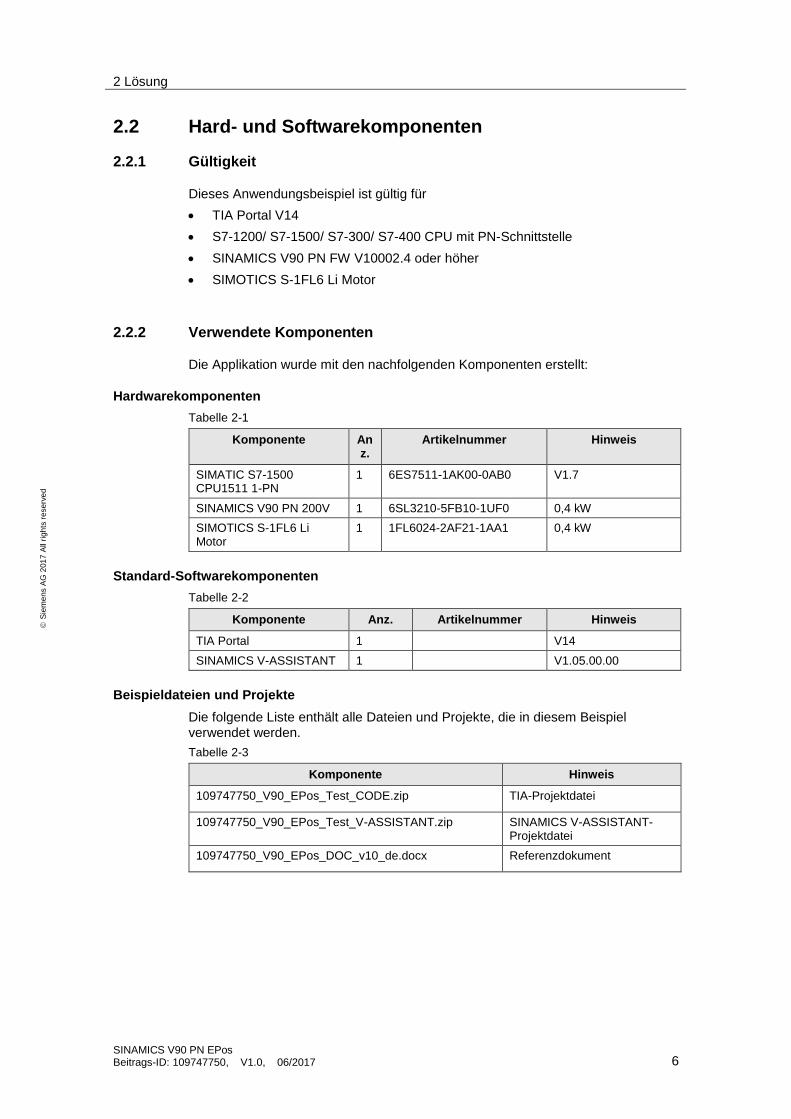
2.2.2 Verwendete Komponenten
Die Applikation wurde mit den nachfolgenden Komponenten erstellt:
Hardwarekomponenten
Tabelle 2-1
Komponente Anz.
Artikelnummer Hinweis
SIMATIC S7-1500 CPU1511 1-PN
1 6ES7511-1AK00-0AB0 V1.7
SINAMICS V90 PN 200V 1 6SL3210-5FB10-1UF0 0,4 kW
SIMOTICS S-1FL6 Li Motor
1 1FL6024-2AF21-1AA1 0,4 kW
Standard-Softwarekomponenten
Tabelle 2-2
Komponente Anz. Artikelnummer Hinweis
TIA Portal 1 V14
SINAMICS V-ASSISTANT 1 V1.05.00.00
Beispieldateien und Projekte
Die folgende Liste enthält alle Dateien und Projekte, die in diesem Beispiel verwendet werden.
Tabelle 2-3
Komponente Hinweis
109747750_V90_EPos_Test_CODE.zip TIA-Projektdatei
109747750_V90_EPos_Test_V-ASSISTANT.zip SINAMICS V-ASSISTANT-Projektdatei
109747750_V90_EPos_DOC_v10_de.docx Referenzdokument
3 Grundlagen
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 7
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
3 Grundlagen
3.1 Grundlagen zur SINAMICS V90 PN-Version
Unterstützte Telegramme
Wird der SINAMICS V90 PN in der Betriebsart EPos betrieben, werden folgende Telegramme unterstützt:
Standardtelegramm 7
Standardtelegramm 9
Siemens Telegramm 110
Siemens Telegramm 111
Von diesen vier Telegrammen wird das werkseitig voreingestellte Telegramm 111 am häufigsten verwendet. Daher wird in dieser Basisanwendung das Siemens Telegramm 111 verwendet.
Anzahl IO-Devices
Wird der Einfachpositionierer (Betriebsart EPos) im SINAMICS V90 PN eingesetzt, ist die Anzahl der IO-Devices abhängig von der Anzahl der von der Steuerung unterstützten Slaves; einschließlich der CPU selbst unterstützt beispielsweise die SIMATIC S7-1200 maximal 16 Slaves.

3 Grundlagen
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 8
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
3.2 Installation und Inbetriebnahme
3.2.1 Installation der Hardware
Nachfolgendes Bild zeigt den Hardwareaufbau der Anwendung:
VORSICHT Fehlverdrahtung kann den Antrieb beschädigen!
In dieser Anwendung wird die einphasige 230V-Stromversorgung verwendet. Die Überprüfung der Versorgungsspannung ist Pflicht, andernfalls kann der Antrieb beschädigt werden!
Abbildung 3-1
L
N
PE
M
L1 L2 PE
U V W Port2 Port1
24V+ 0V PE X1-1
SINAMICS V90 PN
SIMATIC S7-1500
CPU 1511 1PNPM
1-phasig230V
L N PE
24V 0V
3.2.2 Probelauf
Tabelle 3-1 Probelauf
Nr. Aktion Anmerkung
1. Setzen Sie den Antriebsparameter p29108 auf 1. Die TIPP-Funktion ist aktiviert, wenn p29108=1.
2. Rufen Sie am BOP das TIPP-Menü auf.
3. Betätigen Sie die Schaltfläche oder , um den Motor laufen zu lassen.
Prüfen Sie, ob der Motor einwandfrei läuft.
4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 9
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
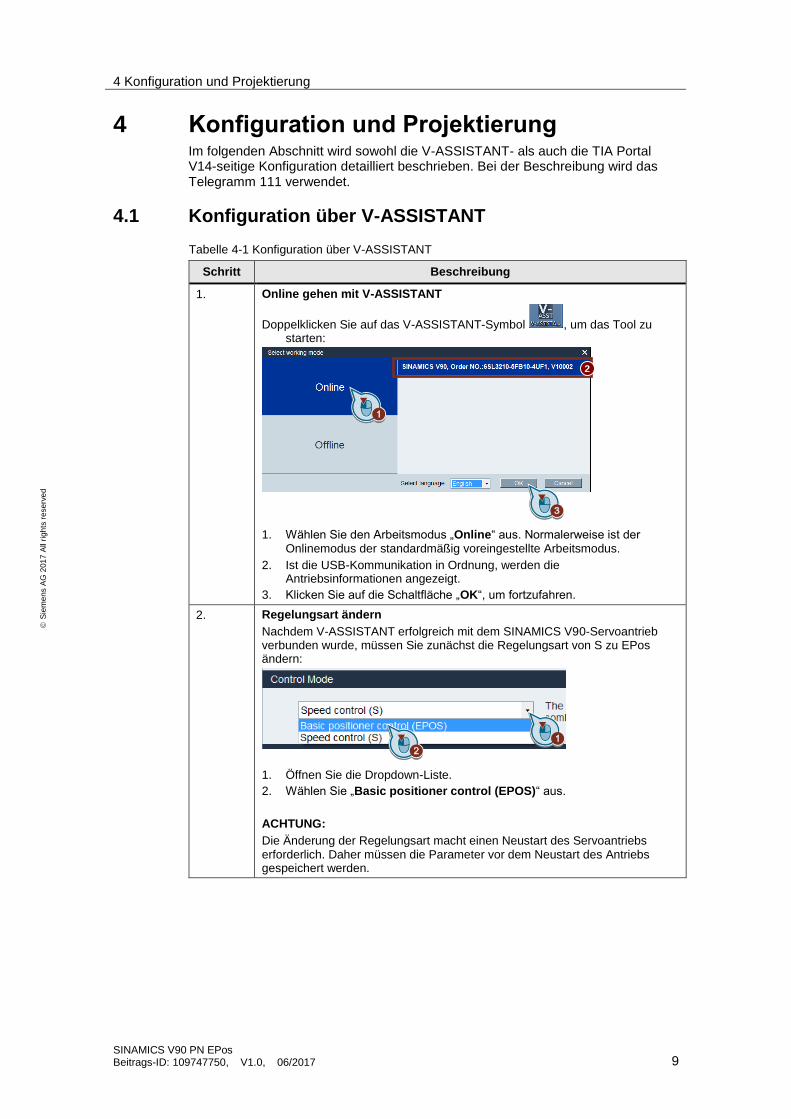
4 Konfiguration und Projektierung Im folgenden Abschnitt wird sowohl die V-ASSISTANT- als auch die TIA Portal V14-seitige Konfiguration detailliert beschrieben. Bei der Beschreibung wird das Telegramm 111 verwendet.
4.1 Konfiguration über V-ASSISTANT
Tabelle 4-1 Konfiguration über V-ASSISTANT
Schritt Beschreibung
1. Online gehen mit V-ASSISTANT
Doppelklicken Sie auf das V-ASSISTANT-Symbol , um das Tool zu starten:
1. Wählen Sie den Arbeitsmodus „Online“ aus. Normalerweise ist der Onlinemodus der standardmäßig voreingestellte Arbeitsmodus.
2. Ist die USB-Kommunikation in Ordnung, werden die Antriebsinformationen angezeigt.
3. Klicken Sie auf die Schaltfläche „OK“, um fortzufahren.
2. Regelungsart ändern
Nachdem V-ASSISTANT erfolgreich mit dem SINAMICS V90-Servoantrieb verbunden wurde, müssen Sie zunächst die Regelungsart von S zu EPos ändern:
1. Öffnen Sie die Dropdown-Liste.
2. Wählen Sie „Basic positioner control (EPOS)“ aus.
ACHTUNG:
Die Änderung der Regelungsart macht einen Neustart des Servoantriebs erforderlich. Daher müssen die Parameter vor dem Neustart des Antriebs gespeichert werden.
2

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 10
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
3. Telegramm konfigurieren
Nach dem erfolgreichen Umschalten auf die Betriebsart EPos können Sie das Telegramm für die konkrete Anwendung auswählen:
1. Klicken Sie auf „Select telegram“.
2. Wählen Sie aus der Dropdown-Liste ein Telegramm aus. In dieser Beispielanwendung wird das Standardtelegramm 111 verwendet.
4. Netzwerkeinstellungen konfigurieren
Mit SINAMICS V-ASSISTANT können die folgenden Parameter aus dem Menüfeld PROFINET Einstellungen konfiguriert werden:
1. Klicken Sie auf „Configure network“.
2. Geben Sie einen Gerätenamen für den aktuell angeschlossenen SINAMICS V90 PN-Servoantrieb ein.
3. Geben Sie eine gültige IP-Adresse für den Servoantrieb ein.
4. Klicken Sie auf die Schaltfläche „Save and active“.

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 11
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
5. Mechanismus konfigurieren
Stellen Sie die entsprechenden Mechanikparameter für die konkrete Mechanik ein:
1. Klicken Sie auf „Parameterize“.
2. Klicken Sie auf „Set mechanism“.
3. Stellen Sie den Getriebefaktor ein. In diesem Beispiel werden die Standardeinstellungen verwendet.
4. Stellen Sie die Längeneinheit pro Lastumdrehung ein. In diesem Beispiel werden die Standardeinstellungen verwendet.
6. Referenzierung konfigurieren
Konfigurieren Sie den Referenziermodus:
1. Klicken Sie auf „Parameterize“.
2. Klicken Sie auf „Configure referencing“.
3. Für einen SINAMICS V90 PN in der Betriebsart EPos stehen drei Referenziermodi zur Verfügung (0: Signal REF; 1: Referenznocken und Gebernullmarke; 2: nur Gebernullmarke). In diesem Beispiel wird der dritte Modus verwendet (nur Gebernullmarke).
4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 12
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
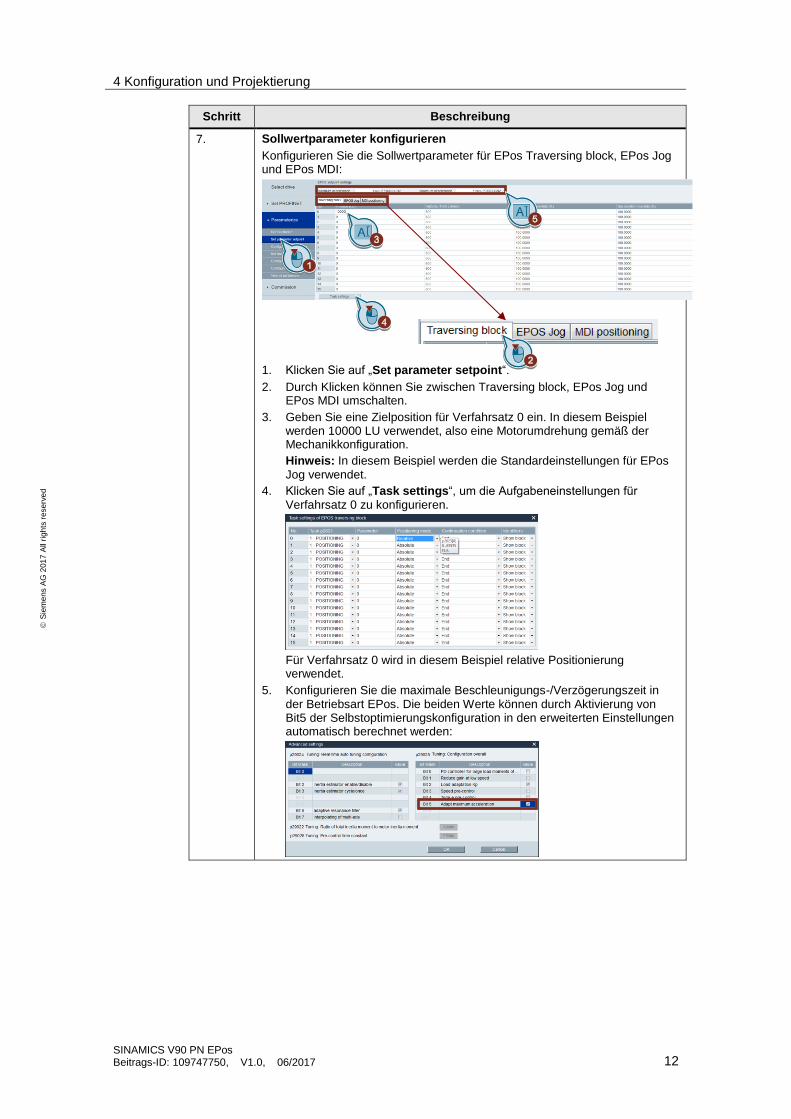
7. Sollwertparameter konfigurieren
Konfigurieren Sie die Sollwertparameter für EPos Traversing block, EPos Jog und EPos MDI:
1. Klicken Sie auf „Set parameter setpoint“.
2. Durch Klicken können Sie zwischen Traversing block, EPos Jog und EPos MDI umschalten.
3. Geben Sie eine Zielposition für Verfahrsatz 0 ein. In diesem Beispiel werden 10000 LU verwendet, also eine Motorumdrehung gemäß der Mechanikkonfiguration.
Hinweis: In diesem Beispiel werden die Standardeinstellungen für EPos Jog verwendet.
4. Klicken Sie auf „Task settings“, um die Aufgabeneinstellungen für Verfahrsatz 0 zu konfigurieren.
Für Verfahrsatz 0 wird in diesem Beispiel relative Positionierung verwendet.
5. Konfigurieren Sie die maximale Beschleunigungs-/Verzögerungszeit in der Betriebsart EPos. Die beiden Werte können durch Aktivierung von Bit5 der Selbstoptimierungskonfiguration in den erweiterten Einstellungen automatisch berechnet werden:
4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 13
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
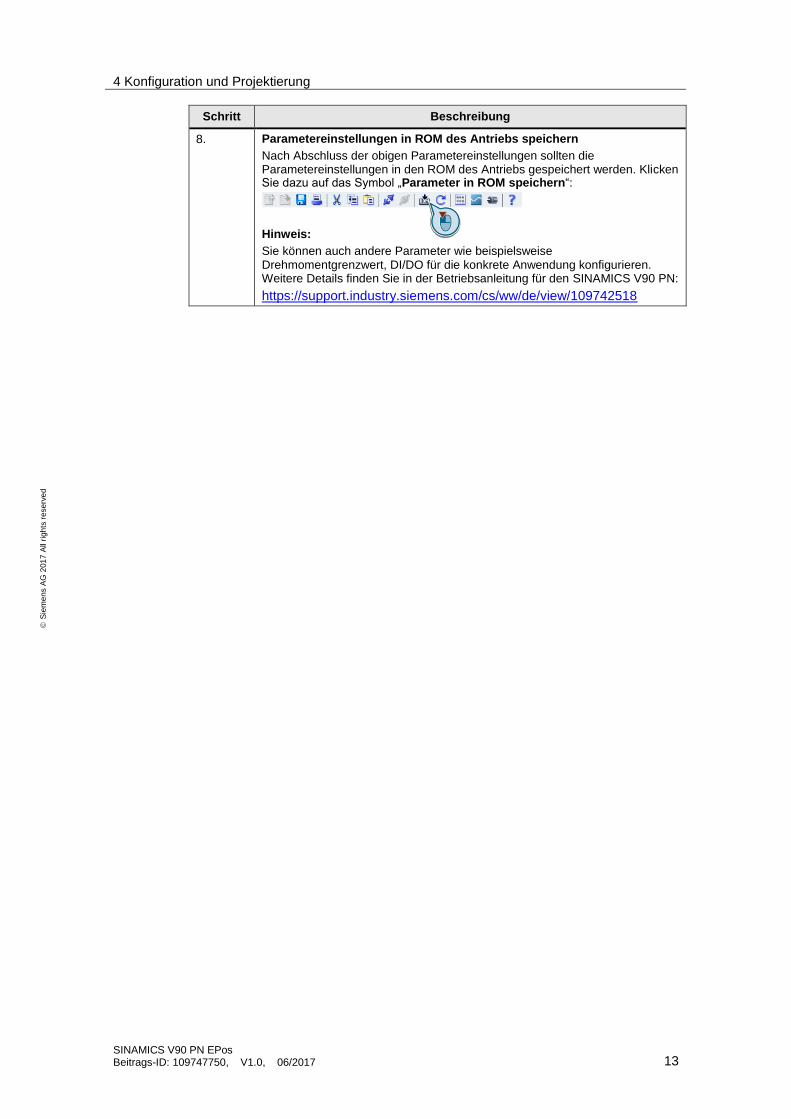
8. Parametereinstellungen in ROM des Antriebs speichern
Nach Abschluss der obigen Parametereinstellungen sollten die Parametereinstellungen in den ROM des Antriebs gespeichert werden. Klicken Sie dazu auf das Symbol „Parameter in ROM speichern“:
Hinweis:
Sie können auch andere Parameter wie beispielsweise Drehmomentgrenzwert, DI/DO für die konkrete Anwendung konfigurieren. Weitere Details finden Sie in der Betriebsanleitung für den SINAMICS V90 PN:
https://support.industry.siemens.com/cs/ww/de/view/109742518

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 14
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
4.2 Konfiguration im TIA Portal V14
Tabelle 4-2 Konfiguration im TIA Portal V14
Schritt Beschreibung
1. Neues Projekt erstellen
Öffnen Sie TIA Portal V14 und erstellen Sie ein neues Projekt:
1. Klicken Sie auf „Neues Projekt erstellen“.
2. Geben Sie einen Namen für das neu erstellte Projekt ein, beispielsweise „EPos_Test“.
3. Klicken Sie auf die Schaltfläche „Erstellen“.
2. Steuerung zum Projekt hinzufügen
1. Klicken Sie auf „Geräte & Netze“.
2. Klicken Sie auf „Neues Gerät hinzufügen“.
3. Suchen Sie die Ziel-Steuerung.
4. Wählen Sie die FW-Version der Steuerung aus.

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 15
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
3. V90 PN GSD-Datei im TIA Portal installieren
1. Klicken Sie auf „Extras“ „Gerätebeschreibungsdateien (GSD) verwalten“.
2. Suchen und installieren Sie die GSD-Datei.
Hinweis:
Die aktuelle V90 PN GSD-Datei finden Sie unter folgendem Link:
http://support.automation.siemens.com/WW/view/de/109737269

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 16
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
4. V90 PN in Projekt einfügen
1. Klicken Sie auf die Registerkarte „Netzsicht“, um zur „Netzsicht“ zu wechseln.
2. Klicken Sie im „Hardwarekatalog“ auf „Weitere Feldgeräte“ „PROFINET IO“ „Antriebe“ „SIEMENS AG“ „SINAMICS“ „SINAMICS V90 PN V1.0“.
3. Doppelklicken Sie auf den V90 PN-Knoten oder ziehen Sie ihn in die Netzsicht.
5. SINAMICS V90 PN mit SIMATIC-Steuerung verbinden
Verbinden Sie den SINAMICS V90 PN mit der SIMATIC-Steuerung:

4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 17
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
6. Gerätekonfigurationen für SIMATIC-Steuerung vornehmen
1. Doppelklicken Sie in der „Netzsicht“ auf die Steuerung, um die Gerätesicht der SIMATIC-Steuerung zu öffnen:
2. Doppelklicken Sie auf die Steuerung, um die Eigenschaften der SIMATIC-Steuerung zu öffnen:
Konfigurieren Sie PLC-Eigenschaften wie Gerätename, Ethernet-Adresse…
Hinweis:
Sie können auch „Online-Zugänge“ verwenden, um die erreichbaren
Teilnehmer zu ermitteln und die Konsistenz der Informationen sicherzustellen:
4 Konfiguration und Projektierung
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 18
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
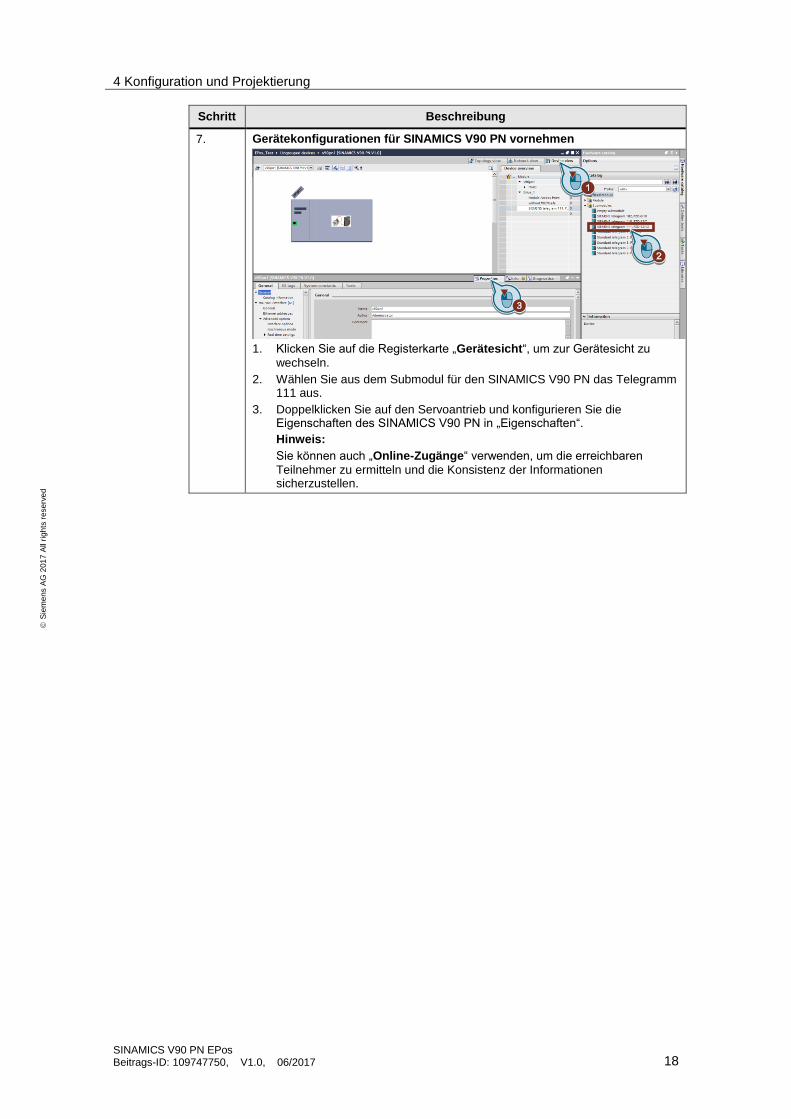
7. Gerätekonfigurationen für SINAMICS V90 PN vornehmen
1. Klicken Sie auf die Registerkarte „Gerätesicht“, um zur Gerätesicht zu
wechseln.
2. Wählen Sie aus dem Submodul für den SINAMICS V90 PN das Telegramm 111 aus.
3. Doppelklicken Sie auf den Servoantrieb und konfigurieren Sie die Eigenschaften des SINAMICS V90 PN in „Eigenschaften“.
Hinweis:
Sie können auch „Online-Zugänge“ verwenden, um die erreichbaren
Teilnehmer zu ermitteln und die Konsistenz der Informationen sicherzustellen.
5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 19
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
5 Bedienung der Applikation
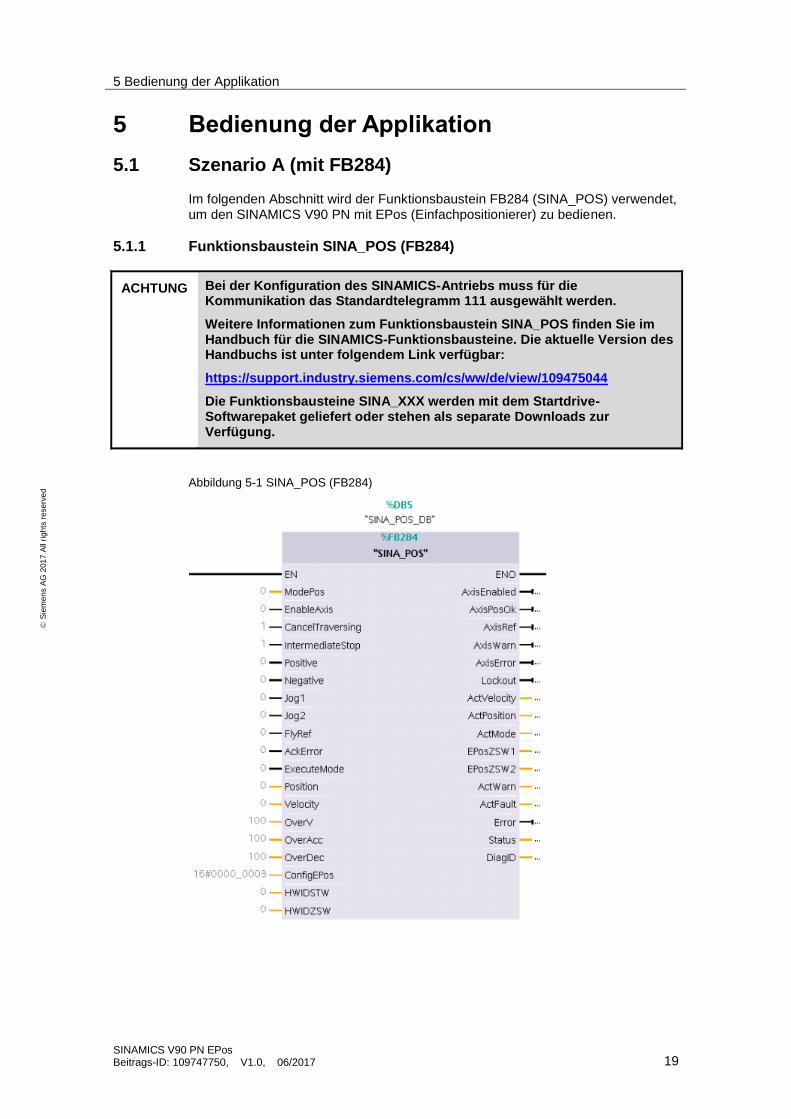
5.1 Szenario A (mit FB284)
Im folgenden Abschnitt wird der Funktionsbaustein FB284 (SINA_POS) verwendet, um den SINAMICS V90 PN mit EPos (Einfachpositionierer) zu bedienen.
5.1.1 Funktionsbaustein SINA_POS (FB284)
ACHTUNG Bei der Konfiguration des SINAMICS-Antriebs muss für die Kommunikation das Standardtelegramm 111 ausgewählt werden.
Weitere Informationen zum Funktionsbaustein SINA_POS finden Sie im Handbuch für die SINAMICS-Funktionsbausteine. Die aktuelle Version des Handbuchs ist unter folgendem Link verfügbar:
https://support.industry.siemens.com/cs/ww/de/view/109475044
Die Funktionsbausteine SINA_XXX werden mit dem Startdrive-Softwarepaket geliefert oder stehen als separate Downloads zur Verfügung.
Abbildung 5-1 SINA_POS (FB284)

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 20
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Eingangsinterface SINA_POS
Das Eingangsinterface besteht aus 19 Eingängen mit verschiedenen Datenformaten.
Beim erstmaligen Projektieren des Funktionsbausteins werden die Eingänge mit Initialwerten eingerichtet. Nachfolgend die Übersicht zum Eingangsinterface:
Tabelle 5-1 Eingangsinterface SINA_POS
Eingangssignal Typ Default Bedeutung
ModePos INT 0 Betriebsart:
1 = Positionieren relativ
2 = Positionieren absolut
3 = Positionieren als Einrichten
4 = Referenzpunktfahrt
5 = Referenzpunkt setzen
6 = Verfahrsatz 0~15
7 = Tippen
8 = inkrementell Tippen
EnableAxis BOOL 0 Schaltbefehl: 0=AUS, 1=EIN
CancelTraversing BOOL 1 0 = aktiven Verfahrauftrag verwerfen, 1 = nicht verwerfen
IntermediateStop BOOL 1 0 = aktiver Fahrbefehl wird unterbrochen, 1 = kein Zwischenhalt
Positive BOOL 0 Positive Richtung
Negative BOOL 0 Negative Richtung
Jog1 BOOL 0 Tippen Signalquelle 1
Jog2 BOOL 0 Tippen Signalquelle 2
FlyRef BOOL 0 0 = Fliegend Referenzieren abwählen, 1 = Fliegend Referenzieren anwählen
Hinweis:
Fliegend Referenzieren wird aktuell vom SINAMICS V90 PN nicht unterstützt.
AckError BOOL 0 Quittieren von Fehlern
ExecuteMode BOOL 0 Verfahrauftrag aktivieren / Sollwertübernahme / Referenzfunktion aktivieren
Position DINT 0[LU] Positionssollwert in [LU] für Betriebsart Sollwertdirektvorgabe / MDI ODER Verfahrsatznummer für Betriebsart Verfahrsatz
Velocity DINT 0[1000 LU/min]
Geschwindigkeit in [1000 LU/min] für Betriebsart MDI
OverV INT 100[%] Geschwindigkeitsoverride für alle Betriebsarten wirksam: 0-199%
OverAcc INT 100[%] Beschleunigungsoverride wirksam 0-100%
OverDec INT 100[%] Verzögerungsoverride wirksam 0-100%

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 21
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Eingangssignal Typ Default Bedeutung
ConfigEPos DWORD 3h Mit diesem Interface können folgende Bit-Funktionen des Telegramms 111 übertragen werden:
Bit0 = STW1.1 (AUS2: 1 = keine Impulssperre)
Bit1 = STW1.2 (AUS3 1 = keine Impulssperre)
Bit2 = EPosSTW2.14 (Softwareendschalter: 1 = aktiv)
Bit3 = EPosSTW2.15 (Stopp-Nocken: 1 = aktiv)
Bit4 = EPosSTW2.11 (reserviert)
Bit5 = EPosSTW2.10 (reserviert)
Bit6 = EPosSTW2.2 (Referenzmarke Signalquelle)
Bit7 = STW1.13 (externer Satzwechsel)
Bit8 = EPosSTW1.12 (kontinuierliche Sollwertübernahme MDI: 1 = aktiv)
Bit9 = STW2.0 (reserviert)
Bit10 = STW2.1 (reserviert)
Bit11 = STW2.2 (reserviert)
Bit12 = STW2.3 (reserviert)
Bit13 = STW2.4 (reserviert)
Bit14 = STW2.7 (reserviert)
Bit15 = STW1.14 (reserviert)
Bit16 = STW1.15 (reserviert)
Bit17 = EPosSTW1.6 (reserviert)
Bit18 = EPosSTW1.7 (reserviert)
Bit19 = EPosSTW1.11 (reserviert)
Bit20 = EPosSTW1.13 (reserviert)
Bit21 = EPosSTW2.3 (reserviert)
Bit22 = EPosSTW2.4 (reserviert)
Bit23 = EPosSTW2.6 (reserviert)
Bit24 = EPosSTW2.7 (reserviert)
Bit25 = EPosSTW2.12 (reserviert)
Bit26 = EPosSTW2.13 (reserviert)
Bit27 = STW2.5 (reserviert)
Bit28 = STW2.6 (reserviert)
Bit29 = STW2.8 (auf Festanschlag fahren: 1 = aktiv)
Bit30 = STW2.9 (reserviert)
HWIDSTW HW_IO 0 Symbolischer Name bzw. HW-ID / E/A-Adresse auf der SIMATIC S7-1x00/300/400 des Sollwertslots
HWIDZSW HW_IO 0 Symbolischer Name bzw. HW-ID / E/A-Adresse auf der SIMATIC S7-1x00/300/400 des Sollwertslots

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 22
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Ausgangsinterface SINA_POS
Das Ausgangsinterface besteht aus 16 Ausgängen mit verschiedenen Datenformaten.
Beim erstmaligen Projektieren des Bausteins werden die Ausgänge mit Initialwerten eingerichtet. Nachfolgend die Übersicht zum Ausgangsinterface:
Tabelle 5-2 Ausgangsinterface SINA_POS
Ausgangssignal Typ Default Bedeutung
AxisEnabled BOOL 0 Antrieb ist bereit und eingeschaltet
AxisPosOk BOOL 0 Zielposition der Achse erreicht
AxisRef BOOL 0 Referenzpunkt gesetzt
AxisWarn BOOL 0 Warnung Antrieb
AxisError BOOL 0 Fehler Antrieb
Lockout BOOL 0 Einschaltsperre
ActVelocity DINT 0 Ist-Geschwindigkeit (skaliert 40000000h = 100% x p2000)
ActPosition DINT 0[LU] Istposition in LU
ActMode INT 0 Aktuell aktive Betriebsart
EPosZSW1 WORD 0 Zustand des EPos ZSW1 (bitgranular)
EPosZSW2 WORD 0 Zustand des EPos ZSW2 (bitgranular)
ActWarn WORD 0 Aktuelle Warnnummer
ActFault WORD 0 Aktuell aktive Störung
Error BOOL 0 1 = Sammelstörung liegt vor
Status INT 0 16#7002: Keine Störung – Baustein wird ausgeführt
16#8401: Antriebsstörung
16#8402: Einschaltsperre
16#8403: Fliegendes Referenzieren konnte nicht gestartet werden
16#8600: Fehler DPRD_DAT
16#8601: Fehler DPWR_DAT
16#8202: Falsche Betriebsart angewählt
16#8203: Falsche Sollwerte parametriert
16#8204: Falsche Verfahrsatznummer angewählt
DiagID WORD 0 Erweiterte Kommunikationsstörung Fehler beim SFB-Aufruf
5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 23
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
5.1.2 Bedienung
Tabelle 5-3 Bedienung
Schritt Beschreibung
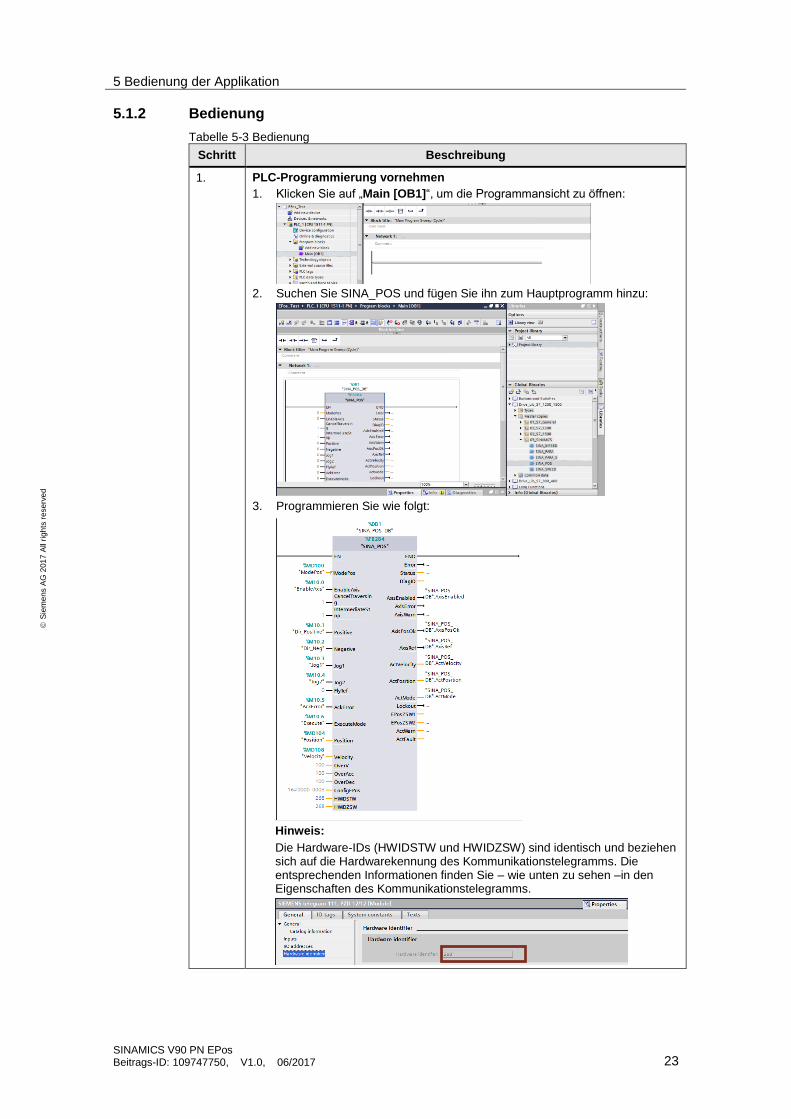
1. PLC-Programmierung vornehmen
1. Klicken Sie auf „Main [OB1]“, um die Programmansicht zu öffnen:
2. Suchen Sie SINA_POS und fügen Sie ihn zum Hauptprogramm hinzu:
3. Programmieren Sie wie folgt:
Hinweis:
Die Hardware-IDs (HWIDSTW und HWIDZSW) sind identisch und beziehen sich auf die Hardwarekennung des Kommunikationstelegramms. Die entsprechenden Informationen finden Sie – wie unten zu sehen –in den Eigenschaften des Kommunikationstelegramms.

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 24
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
2. Projekt übersetzen und in die Steuerungs-CPU laden
1. Klicken Sie auf das Symbol „Übersetzen“, um das Projekt zu übersetzen.
2. Laden Sie das Projekt in die Steuerungs-CPU.

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 25
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
3. Programmüberwachung aktivieren
1. Wechseln Sie zur Hauptprogramm-Ansicht.
2. Klicken Sie auf das Symbol „Überwachen“, um die Programmüberwachung zu aktivieren.
4. Fehler beseitigen
Beseitigen Sie Fehler mit M10.5 (AckError) = 1.
5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 26
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
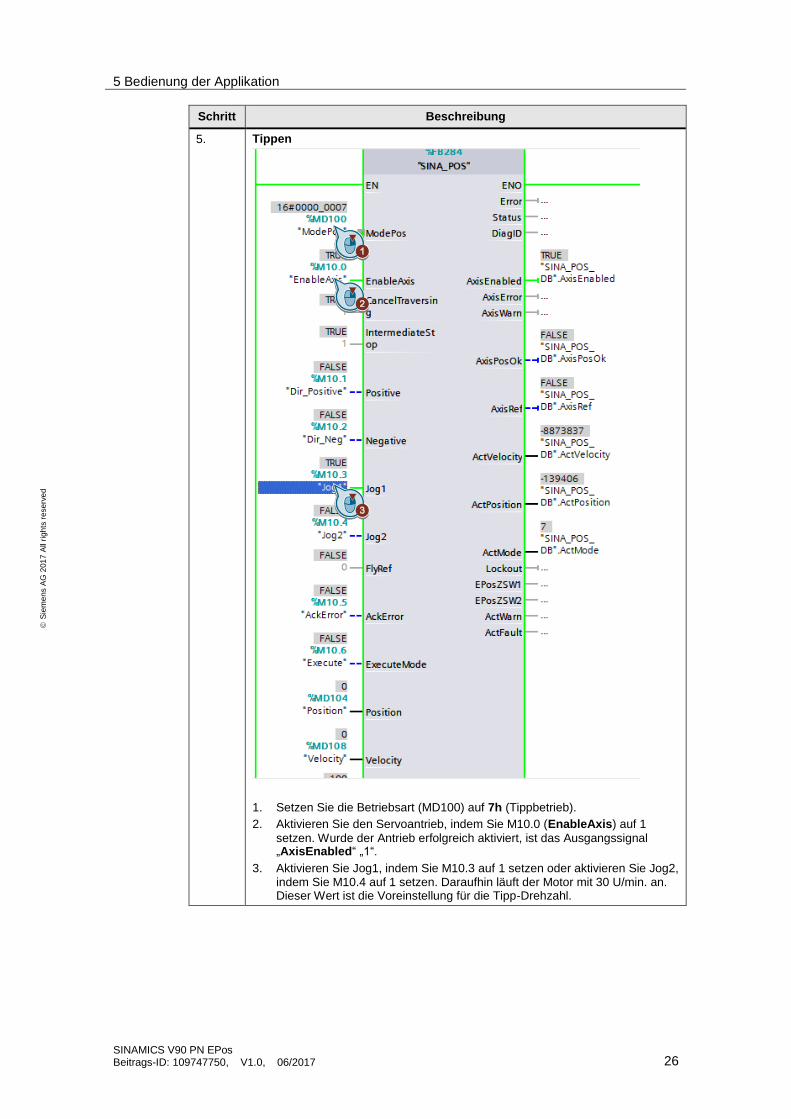
5. Tippen
1. Setzen Sie die Betriebsart (MD100) auf 7h (Tippbetrieb).
2. Aktivieren Sie den Servoantrieb, indem Sie M10.0 (EnableAxis) auf 1
setzen. Wurde der Antrieb erfolgreich aktiviert, ist das Ausgangssignal „AxisEnabled“ „1“.
3. Aktivieren Sie Jog1, indem Sie M10.3 auf 1 setzen oder aktivieren Sie Jog2, indem Sie M10.4 auf 1 setzen. Daraufhin läuft der Motor mit 30 U/min. an. Dieser Wert ist die Voreinstellung für die Tipp-Drehzahl.

5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 27
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
6. MDI
1. Setzen Sie M10.3 (Jog1) bzw. M10.4 (Jog2) auf „0“.
2. Setzen Sie die Betriebsart (MD100) auf 1h (MDI: Positionieren relativ).
3. Aktivieren Sie den Servoantrieb, indem Sie M10.0 (EnableAxis) auf 1
setzen. Wurde der Antrieb erfolgreich aktiviert, ist das Ausgangssignal „AxisEnabled“ „1“.
4. Konfigurieren Sie die MDI (Positionieren relativ)-Parameter wie folgt:
– MD104 = 100000: MDI-Zielposition 10 Motorumdrehungen (10000 LU)
– MD108 = 1000: MDI-Drehzahl 100 U/min.
5. Erzeugen Sie eine steigende Flanke an M10.6 (ExecuteMode). Der Motor läuft an – 10 Umdrehungen lang, mit einer Drehzahl von 100 U/min.
5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 28
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
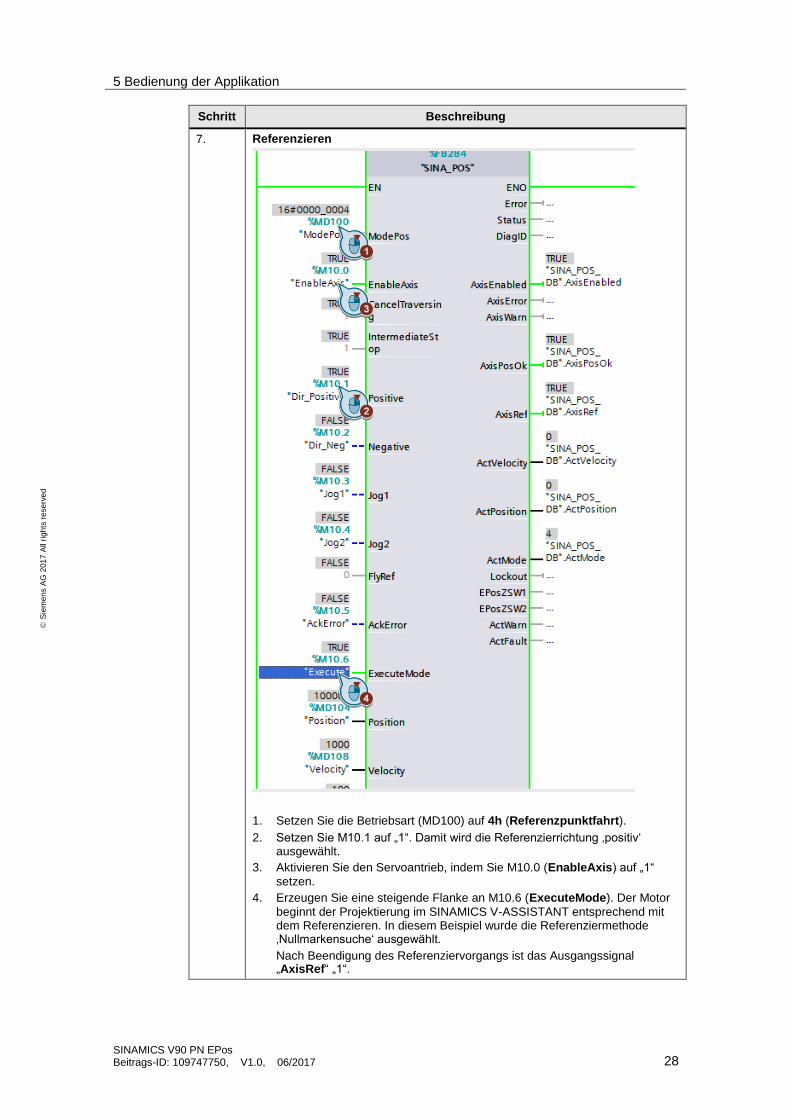
7. Referenzieren
1. Setzen Sie die Betriebsart (MD100) auf 4h (Referenzpunktfahrt).
2. Setzen Sie M10.1 auf „1“. Damit wird die Referenzierrichtung ‚positiv‘ ausgewählt.
3. Aktivieren Sie den Servoantrieb, indem Sie M10.0 (EnableAxis) auf „1“
setzen.
4. Erzeugen Sie eine steigende Flanke an M10.6 (ExecuteMode). Der Motor
beginnt der Projektierung im SINAMICS V-ASSISTANT entsprechend mit dem Referenzieren. In diesem Beispiel wurde die Referenziermethode ‚Nullmarkensuche‘ ausgewählt.
Nach Beendigung des Referenziervorgangs ist das Ausgangssignal „AxisRef“ „1“.
5 Bedienung der Applikation
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 29
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
Schritt Beschreibung
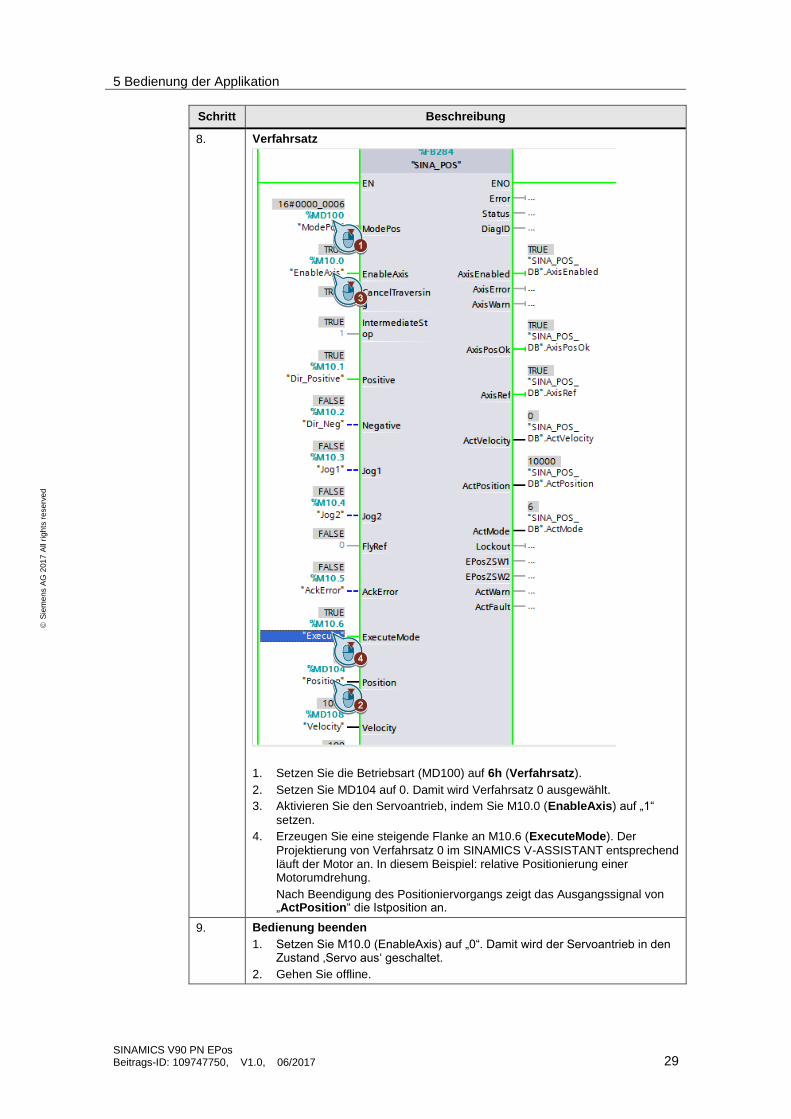
8. Verfahrsatz
1. Setzen Sie die Betriebsart (MD100) auf 6h (Verfahrsatz).
2. Setzen Sie MD104 auf 0. Damit wird Verfahrsatz 0 ausgewählt.
3. Aktivieren Sie den Servoantrieb, indem Sie M10.0 (EnableAxis) auf „1“
setzen.
4. Erzeugen Sie eine steigende Flanke an M10.6 (ExecuteMode). Der
Projektierung von Verfahrsatz 0 im SINAMICS V-ASSISTANT entsprechend läuft der Motor an. In diesem Beispiel: relative Positionierung einer Motorumdrehung.
Nach Beendigung des Positioniervorgangs zeigt das Ausgangssignal von „ActPosition“ die Istposition an.
9. Bedienung beenden
1. Setzen Sie M10.0 (EnableAxis) auf „0“. Damit wird der Servoantrieb in den Zustand ‚Servo aus‘ geschaltet.
2. Gehen Sie offline.

6 Anhang
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 30
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
6 Anhang
6.1 Service und Support
Industry Online Support
Sie haben Fragen oder brauchen Unterstützung?
Über den Industry Online Support greifen Sie rund um die Uhr auf das gesamte Service und Support Know-how sowie auf unsere Dienstleistungen zu.
Der Industry Online Support ist die zentrale Adresse für Informationen zu unseren Produkten, Lösungen und Services.
Produktinformationen, Handbücher, Downloads, FAQs und Anwendungsbeispiele – alle Informationen sind mit wenigen Mausklicks erreichbar: https://support.industry.siemens.com
Technical Support
Der Technical Support von Siemens Industry unterstützt Sie schnell und kompetent bei allen technischen Anfragen mit einer Vielzahl maßgeschneiderter Angebote – von der Basisunterstützung bis hin zu individuellen Supportverträgen.
Anfragen an den Technical Support stellen Sie per Web-Formular: www.siemens.de/industry/supportrequest
Serviceangebot
Unser Serviceangebot umfasst, unter anderem, folgende Services:
Produkttrainings
Plant Data Services
Ersatzteilservices
Reparaturservices
Vor-Ort und Instandhaltungsservices
Retrofit- und Modernisierungsservices
Serviceprogramme und Verträge
Ausführliche Informationen zu unserem Serviceangebot finden Sie im Servicekatalog: https://support.industry.siemens.com/cs/sc
Industry Online Support App
Mit der App "Siemens Industry Online Support" erhalten Sie auch unterwegs die optimale Unterstützung. Die App ist für Apple iOS, Android und Windows Phone verfügbar: https://support.industry.siemens.com/cs/ww/de/sc/2067

6 Anhang
SINAMICS V90 PN EPos Beitrags-ID: 109747750, V1.0, 06/2017 31
S
iem
en
s A
G 2
01
7 A
ll ri
gh
ts r
ese
rve
d
6.2 Links und Literatur
Tabelle 6-1
Nr. Thema
\1\ Siemens Industry Online Support
https://support.industry.siemens.com
\2\ Link auf die Beitragsseite des Anwendungsbeispiels
https://support.industry.siemens.com/cs/ww/de/view/109747750
\3\ SINAMICS V90 PROFINET, SIMOTICS S-1FL6 Betriebsanleitung
https://support.industry.siemens.com/cs/ww/de/view/109742518
6.3 Kontakt
Siemens Ltd., China
DF M3-BF GMC
No. 18 Siemens Road Jiangning Development Zone
Nanjing, 211100 China mailto: [email protected]
6.4 Änderungsdokumentation
Tabelle 6-2
Version Datum Änderung
V1.0 06/2017 Erste Ausgabe


















