Einführung in die Lineare Algebra - stksachs.uni-leipzig.de · 1 Einführung in die Lineare...
23
1 Einführung in die Lineare Algebra Lineare Gleichungssysteme Dieses Kapitels dient zur Motivation und Vorbereitung der systematischen Darstellung. Wir haben dafür das wichtigste Problem der elementaren linearen Algebra gewählt, nämlich linea- re Gleichungssysteme. Dabei kann man sehr schön die wesentlichen Aspekte vorführen: den geometrischen Hintergrund und die algorithmische Methode. Auf die präzisen Beweise mit Hilfe der üblichen theoretischen Hilfsmittel wird hier zunächst verzichtet. 1 Der reelle n-dimensionale Raum Ein großer Fortschritt in der Geometrie gelang durch Einführung von Koordinaten, die man zur Erinnerung an R. DESCARTES auch kartesische Koordinaten nennt. Dadurch kann man Punkte in den Räumen der Geometrie beschreiben durch Systeme von Zahlen, und mit den Zahlen kann man rechnen. Diese Methode zur Behandlung geometrischer Fragen nennt man analytische Geometrie. Die elementarsten Begriffe hierzu seien kurz erklärt. 1.1. Wir gehen aus von den reellen Zahlen, deren Gesamtheit wir mit Թ bezeichnen. Ihre Ein- führung ist Gegenstand der Analysis, in der Geometrie dienen sie als Zahlengerade, und die- se Zahlen kann man nach den üblichen Regeln addieren und multiplizieren. Punkte der Ebene sind festgelegt durch Paare, Punkte des gewöhnlichen Raumes durch Tripel von reellen Zahlen. Für die Theorie macht es keine Probleme, gleich n-Tupel zu betrachten, wobei n eine beliebige natürliche Zahl ist. Damit erhält man den reellen Standardraum der Dimension n Թ n = { x = (x 1 ,…,x n ): x 1 ,…,x n ∈ Թ } d.h. die Menge der geordneten n-Tupel (oder Vektoren) von reellen Zahlen. Geordnet heißt, dass die Reihenfolge wichtig ist, d.h. zwei n-Tupel (x 1 , …, x n ) und (y 1 ,…,y n ) sind genau dann gleich, wenn x 1 = y 1 , … ,x n = y n . Die Zahlen x 1 ,... , x n heißen Komponenten von x. Der Fall n = 0 ist sinnlos, Թ 1 ist die Zahlengerade, Թ 2 entspricht der Ebene und Թ 3 dem „Raum". Für größere n hat man zunächst keine unmittelbare geometrische Vorstellung mehr, dafür aber eine ganz andere und sehr realistische Interpretation. Hat etwa eine Bank n Kun- den, so kann man deren Kontostände zu einem bestimmten Zeitpunkt mit x 1 , …, x n bezeich- nen, alle zusammen (und geordnet!) sind ein „Punkt" x = (x 1 ,…,x n ) ∈ Թ n Die Entwicklung der Kontostände im Laufe der Zeit wird dann durch eine „Kurve" im Թ n beschrieben, ihre Beschreibung geht schon über den Rahmen der linearen Algebra hinaus. Eine lineare Operation ist etwa die Berechnung der augenblicklichen Bilanz. Haben die Ein- lagen neben dem Nennwert x i einen Börsenkurs a i , so ist das bewertete Kapital gegeben durch , ..... 1 1 b x a x a n n ein typischer Fall für eine lineare Gleichung. In der Praxis hat man mehrere Bedingungen, und diese sind meist nicht durch Gleichungen, sondern durch Ungleichungen gegeben, von der Art, dass für die obige Summe Begrenzungen vorgegeben sind. Und das Problem besteht darin, einen „Gewinn" zu optimieren. Zur Lösung solcher Aufgaben in der linearen Optimierung benötigt man genügende Kenntnisse über linea- re Gleichungen, was vielleicht auch einen gewinnorientierten Leser eine Zeit lang bei der Stange halten kann.
Transcript of Einführung in die Lineare Algebra - stksachs.uni-leipzig.de · 1 Einführung in die Lineare...

1
Einführung in die Lineare Algebra
Lineare Gleichungssysteme Dieses Kapitels dient zur Motivation und Vorbereitung der systematischen Darstellung. Wir haben dafür das wichtigste Problem der elementaren linearen Algebra gewählt, nämlich linea-re Gleichungssysteme. Dabei kann man sehr schön die wesentlichen Aspekte vorführen: den geometrischen Hintergrund und die algorithmische Methode. Auf die präzisen Beweise mit Hilfe der üblichen theoretischen Hilfsmittel wird hier zunächst verzichtet.
1 Der reelle n-dimensionale Raum Ein großer Fortschritt in der Geometrie gelang durch Einführung von Koordinaten, die man zur Erinnerung an R. DESCARTES auch kartesische Koordinaten nennt. Dadurch kann man Punkte in den Räumen der Geometrie beschreiben durch Systeme von Zahlen, und mit den Zahlen kann man rechnen. Diese Methode zur Behandlung geometrischer Fragen nennt man analytische Geometrie. Die elementarsten Begriffe hierzu seien kurz erklärt.
1.1. Wir gehen aus von den reellen Zahlen, deren Gesamtheit wir mit bezeichnen. Ihre Ein-führung ist Gegenstand der Analysis, in der Geometrie dienen sie als Zahlengerade, und die-se Zahlen kann man nach den üblichen Regeln addieren und multiplizieren. Punkte der Ebene sind festgelegt durch Paare, Punkte des gewöhnlichen Raumes durch Tripel von reellen Zahlen. Für die Theorie macht es keine Probleme, gleich n-Tupel zu betrachten, wobei n eine beliebige natürliche Zahl ist. Damit erhält man den reellen Standardraum der Dimension n
n = { x = (x1,…,xn): x1,…,xn ∈ }
d.h. die Menge der geordneten n-Tupel (oder Vektoren) von reellen Zahlen. Geordnet heißt, dass die Reihenfolge wichtig ist, d.h. zwei n-Tupel (x1, …, xn) und (y1,…,yn) sind genau dann gleich, wenn x1 = y1, … ,xn= yn. Die Zahlen x1,... , xn heißen Komponenten von x. Der Fall n = 0 ist sinnlos, 1 ist die Zahlengerade, 2 entspricht der Ebene und 3 dem „Raum". Für größere n hat man zunächst keine unmittelbare geometrische Vorstellung mehr, dafür aber eine ganz andere und sehr realistische Interpretation. Hat etwa eine Bank n Kun-den, so kann man deren Kontostände zu einem bestimmten Zeitpunkt mit x1, …, xn bezeich-nen, alle zusammen (und geordnet!) sind ein „Punkt"
x = (x1,…,xn) ∈ n
Die Entwicklung der Kontostände im Laufe der Zeit wird dann durch eine „Kurve" im n beschrieben, ihre Beschreibung geht schon über den Rahmen der linearen Algebra hinaus. Eine lineare Operation ist etwa die Berechnung der augenblicklichen Bilanz. Haben die Ein-lagen neben dem Nennwert xi einen Börsenkurs ai, so ist das bewertete Kapital gegeben durch
,.....11 bxaxa nn
ein typischer Fall für eine lineare Gleichung. In der Praxis hat man mehrere Bedingungen, und diese sind meist nicht durch Gleichungen,
sondern durch Ungleichungen gegeben, von der Art, dass für die obige Summe Begrenzungen vorgegeben sind. Und das Problem besteht darin, einen „Gewinn" zu optimieren. Zur Lösung solcher Aufgaben in der linearen Optimierung benötigt man genügende Kenntnisse über linea-re Gleichungen, was vielleicht auch einen gewinnorientierten Leser eine Zeit lang bei der Stange halten kann.
2
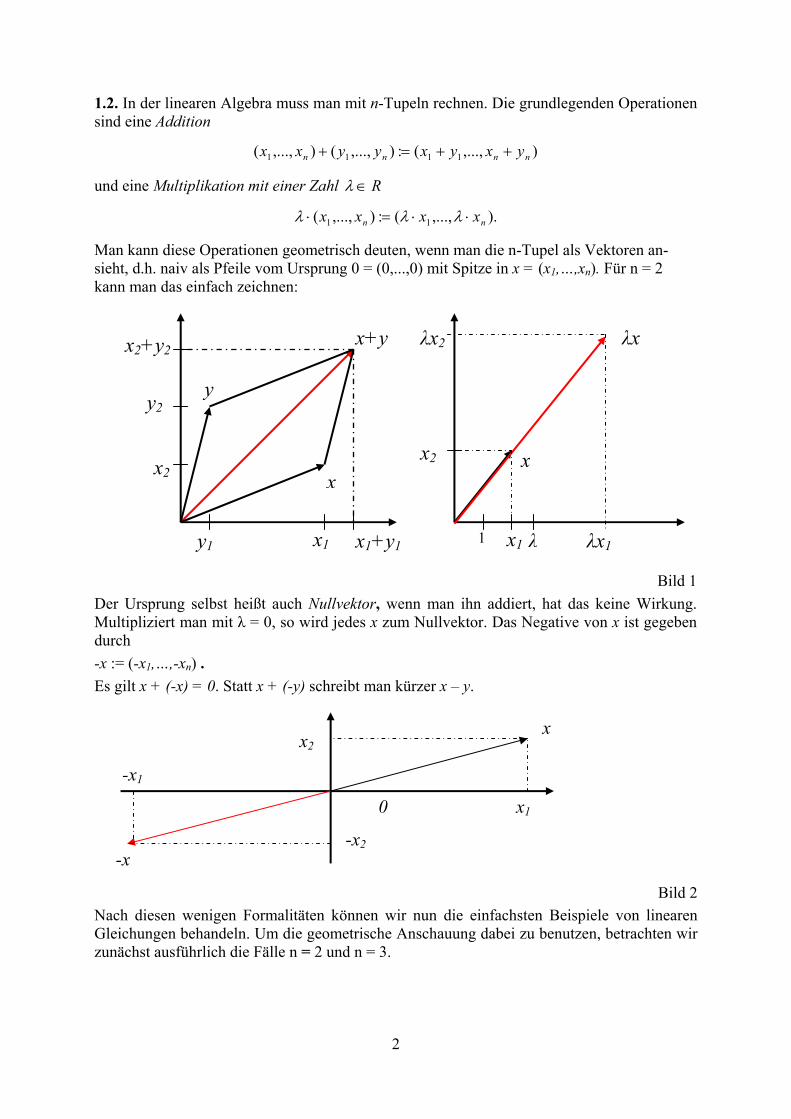
1.2. In der linearen Algebra muss man mit n-Tupeln rechnen. Die grundlegenden Operationen sind eine Addition
),...,(:),...,(),...,( 1111 nnnn yxyxyyxx
und eine Multiplikation mit einer Zahl R
).,...,(:),...,( 11 nn xxxx
Man kann diese Operationen geometrisch deuten, wenn man die n-Tupel als Vektoren an-sieht, d.h. naiv als Pfeile vom Ursprung 0 = (0,...,0) mit Spitze in x = (x1,…,xn). Für n = 2 kann man das einfach zeichnen:
Bild 1
Der Ursprung selbst heißt auch Nullvektor, wenn man ihn addiert, hat das keine Wirkung. Multipliziert man mit λ = 0, so wird jedes x zum Nullvektor. Das Negative von x ist gegeben durch
-x := (-x1,…,-xn) .
Es gilt x + (-x) = 0. Statt x + (-y) schreibt man kürzer x – y.
Bild 2
Nach diesen wenigen Formalitäten können wir nun die einfachsten Beispiele von linearen Gleichungen behandeln. Um die geometrische Anschauung dabei zu benutzen, betrachten wir zunächst ausführlich die Fälle n = 2 und n = 3.
-x1
x1
x2
-x2
x
-x
0
x2+y2
y
x
x+y
1 y1
x2
y2
x1+y1x1
x2
x1
x
λx
λx1 λ
λx2
3
2 Geraden in der Ebene 2.1. Durch zwei verschiedene Punkte geht genau eine Gerade, das gehört zu den wenigen Tat-sachen der Geometrie, die auch Nicht-Mathematikern einleuchten. Mit Hilfe von Vektoren kann man das so beschreiben: Sind v, v' ∈ 2 die beiden Punkte, so ist w:= v' - v ≠ 0. Die Punkte auf der Geraden L durch v und v' kann man unter Benutzung eines reellen Parameters λ darstellen als
L = {x ∈ 2: es gibt ein λ ∈ mit x = v + w} =: v + w.
Bild 3
Man kann L auch ansehen als Bild der Zahlengerade R unter der Abbildung Φ: → L ⊂ 2, ↦ v + w.
Das nennt man eine Parametrisierung der Geraden.
2.2. Die zweite Möglichkeit der Beschreibung benutzt eine lineare Gleichung der Form
a1x1 + a2x2 = b.
Dabei gelten x1, x2 als Unbestimmte und a1, a2 ∈ als Koeffizienten. Die Unbestimmten sind variabel, die Koeffizienten fest. Man betrachtet die Menge der Lösungen
L := {(x1, x2) ∈ 2: a1x1 + a2x2 = b} .
Ist a1 = a2 = 0, so ist L = ∅ für b ≠ 0 und L = 2 für b = 0. Dieser Fall gilt als „entartet". An-dernfalls müsste man im Prinzip alle Paare (x1, x2) in die Gleichung einsetzen und feststellen, ob sie erfüllt ist. Wenn man das ohne System tut, wird man dabei sehr selten Glück haben.
Ein gutes System ist eine Parametrisierung, mit deren Hilfe sich alle Lösungen produzieren lassen. Das ist in diesem Fall leicht zu erhalten.
1) Ist a2 = 0 und a1 ≠ 0, so wird die gegebene Gleichung zu
,1
1 a
bx
das ist eine zur x2-Achse parallele Gerade, und eine Parametrisierung ist gegeben durch
x1
x2
0
L
v+ w
v
w
v’
4
→ L, .,1
a
b
Hier ist also die erste Koordinate fest, die zweite frei wählbar. Ist a1 = 0, aber a2 ≠ 0, so hat man nur die Rollen von x1 und x2 zu vertauschen.
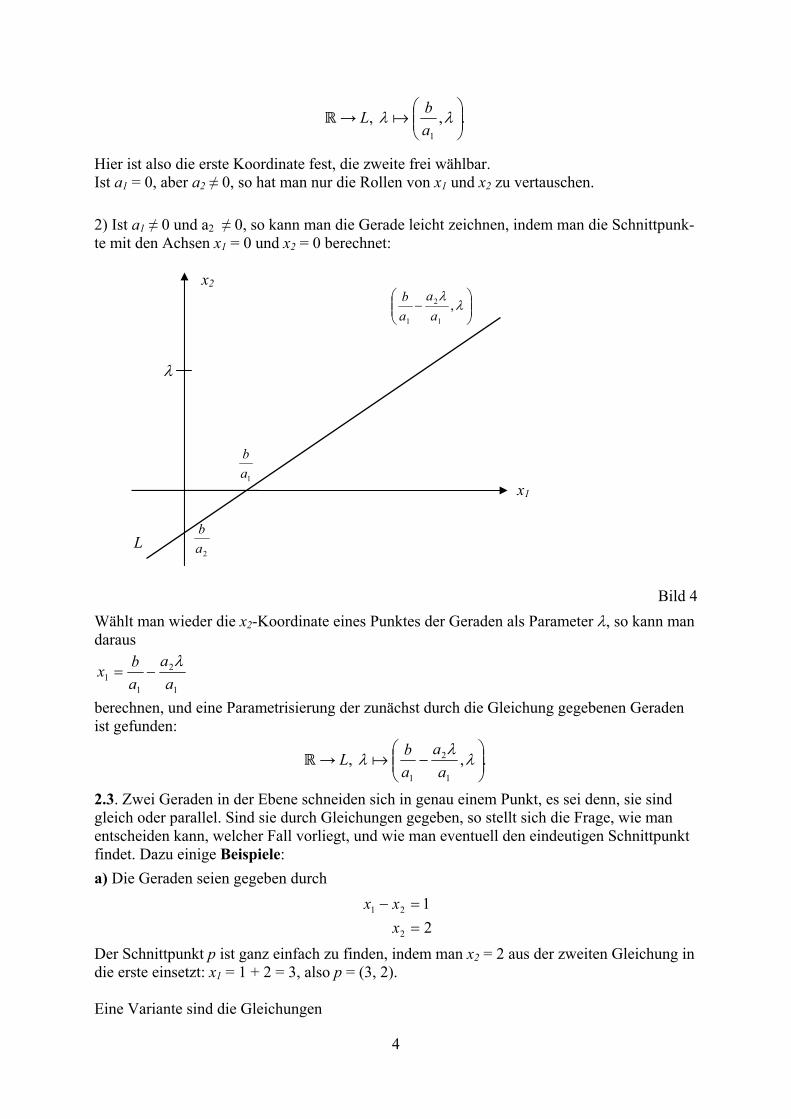
2) Ist a1 ≠ 0 und a2 ≠ 0, so kann man die Gerade leicht zeichnen, indem man die Schnittpunk-te mit den Achsen x1 = 0 und x2 = 0 berechnet:
Bild 4
Wählt man wieder die x2-Koordinate eines Punktes der Geraden als Parameter , so kann man daraus
1
2
11 a
a
a
bx
berechnen, und eine Parametrisierung der zunächst durch die Gleichung gegebenen Geraden ist gefunden:
→ L, .,1
2
1
a
a
a
b
2.3. Zwei Geraden in der Ebene schneiden sich in genau einem Punkt, es sei denn, sie sind gleich oder parallel. Sind sie durch Gleichungen gegeben, so stellt sich die Frage, wie man entscheiden kann, welcher Fall vorliegt, und wie man eventuell den eindeutigen Schnittpunkt findet. Dazu einige Beispiele:
a) Die Geraden seien gegeben durch
2
1
2
21
x
xx
Der Schnittpunkt p ist ganz einfach zu finden, indem man x2 = 2 aus der zweiten Gleichung in die erste einsetzt: x1 = 1 + 2 = 3, also p = (3, 2). Eine Variante sind die Gleichungen
x1
x2
L
,
1
2
1 a
a
a
b
1a
b
2a
b
5
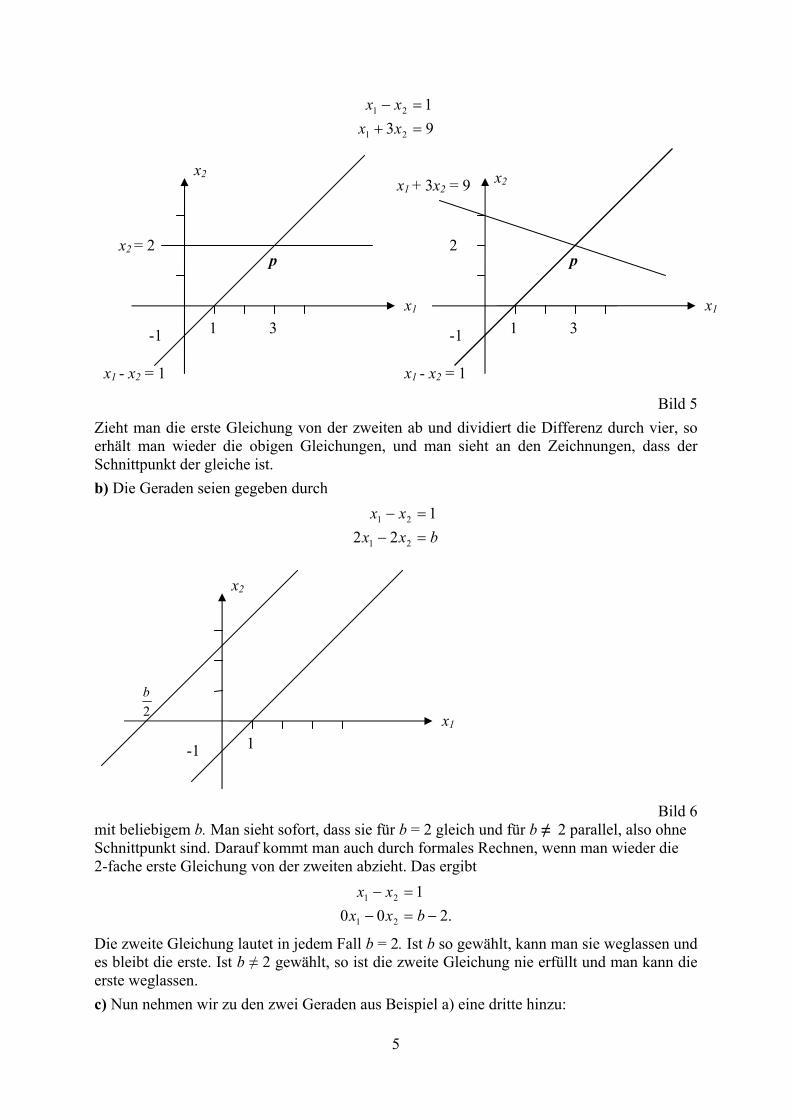
93
1
21
21
xx
xx
Bild 5
Zieht man die erste Gleichung von der zweiten ab und dividiert die Differenz durch vier, so erhält man wieder die obigen Gleichungen, und man sieht an den Zeichnungen, dass der Schnittpunkt der gleiche ist.
b) Die Geraden seien gegeben durch
bxx
xx
21
21
22
1
Bild 6
mit beliebigem b. Man sieht sofort, dass sie für b = 2 gleich und für b ≠ 2 parallel, also ohne Schnittpunkt sind. Darauf kommt man auch durch formales Rechnen, wenn man wieder die 2-fache erste Gleichung von der zweiten abzieht. Das ergibt
.200
1
21
21
bxx
xx
Die zweite Gleichung lautet in jedem Fall b = 2. Ist b so gewählt, kann man sie weglassen und es bleibt die erste. Ist b ≠ 2 gewählt, so ist die zweite Gleichung nie erfüllt und man kann die erste weglassen.
c) Nun nehmen wir zu den zwei Geraden aus Beispiel a) eine dritte hinzu:
x1
x2
-1 1
2
b
x1
x2
1
x1
x2
-1 1 -1 3 3
2 x2 = 2
x1 + 3x2 = 9
x1 - x2 = 1
p p
x1 - x2 = 1
6
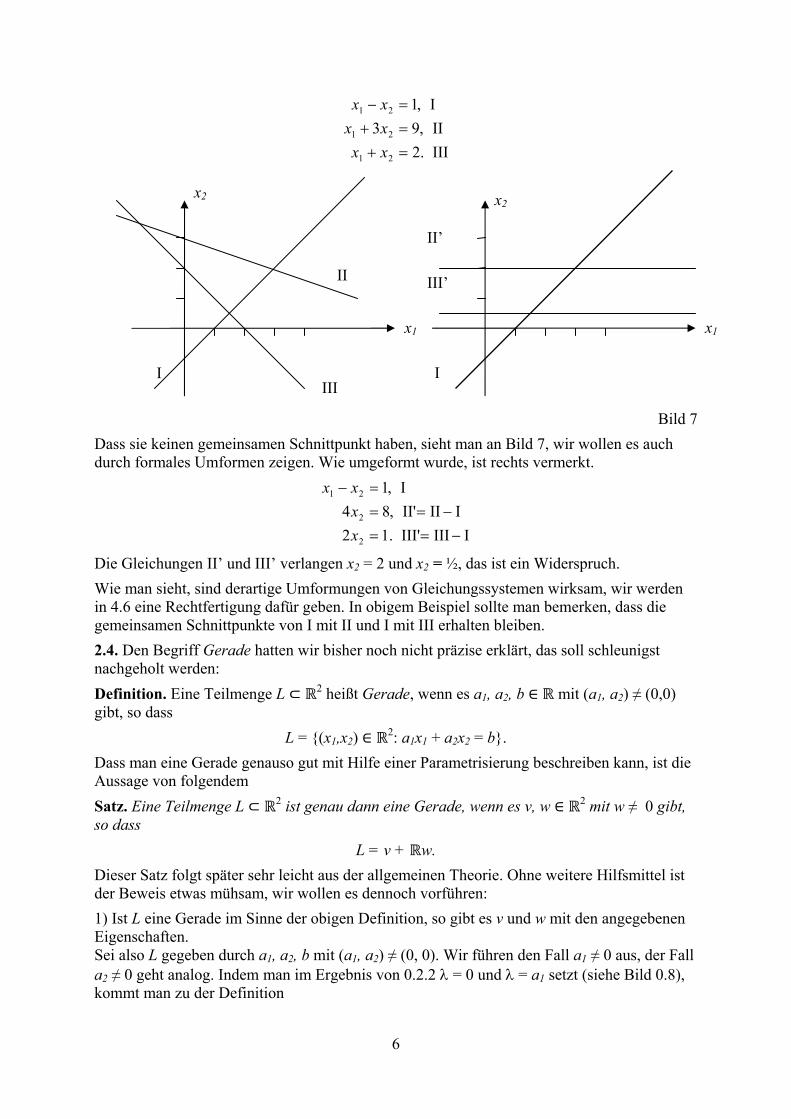
III.2
II,93
I,1
21
21
21
xx
xx
xx
Bild 7
Dass sie keinen gemeinsamen Schnittpunkt haben, sieht man an Bild 7, wir wollen es auch durch formales Umformen zeigen. Wie umgeformt wurde, ist rechts vermerkt.
IIIIIII'.12
IIIII',84
I,1
2
2
21
x
x
xx
Die Gleichungen II’ und III’ verlangen x2 = 2 und x2 = ½, das ist ein Widerspruch.
Wie man sieht, sind derartige Umformungen von Gleichungssystemen wirksam, wir werden in 4.6 eine Rechtfertigung dafür geben. In obigem Beispiel sollte man bemerken, dass die gemeinsamen Schnittpunkte von I mit II und I mit III erhalten bleiben.
2.4. Den Begriff Gerade hatten wir bisher noch nicht präzise erklärt, das soll schleunigst nachgeholt werden:
Definition. Eine Teilmenge L ⊂ 2 heißt Gerade, wenn es a1, a2, b ∈ mit (a1, a2) ≠ (0,0) gibt, so dass
L = {(x1,x2) ∈ 2: a1x1 + a2x2 = b}.
Dass man eine Gerade genauso gut mit Hilfe einer Parametrisierung beschreiben kann, ist die Aussage von folgendem
Satz. Eine Teilmenge L ⊂ 2 ist genau dann eine Gerade, wenn es v, w ∈ 2 mit w ≠ 0 gibt, so dass
L = v + w.
Dieser Satz folgt später sehr leicht aus der allgemeinen Theorie. Ohne weitere Hilfsmittel ist der Beweis etwas mühsam, wir wollen es dennoch vorführen:
1) Ist L eine Gerade im Sinne der obigen Definition, so gibt es v und w mit den angegebenen Eigenschaften. Sei also L gegeben durch a1, a2, b mit (a1, a2) ≠ (0, 0). Wir führen den Fall a1 ≠ 0 aus, der Fall a2 ≠ 0 geht analog. Indem man im Ergebnis von 0.2.2 = 0 und = a1 setzt (siehe Bild 0.8), kommt man zu der Definition
x1
x2
x1
x2
I I
II
III
III’
II’
7
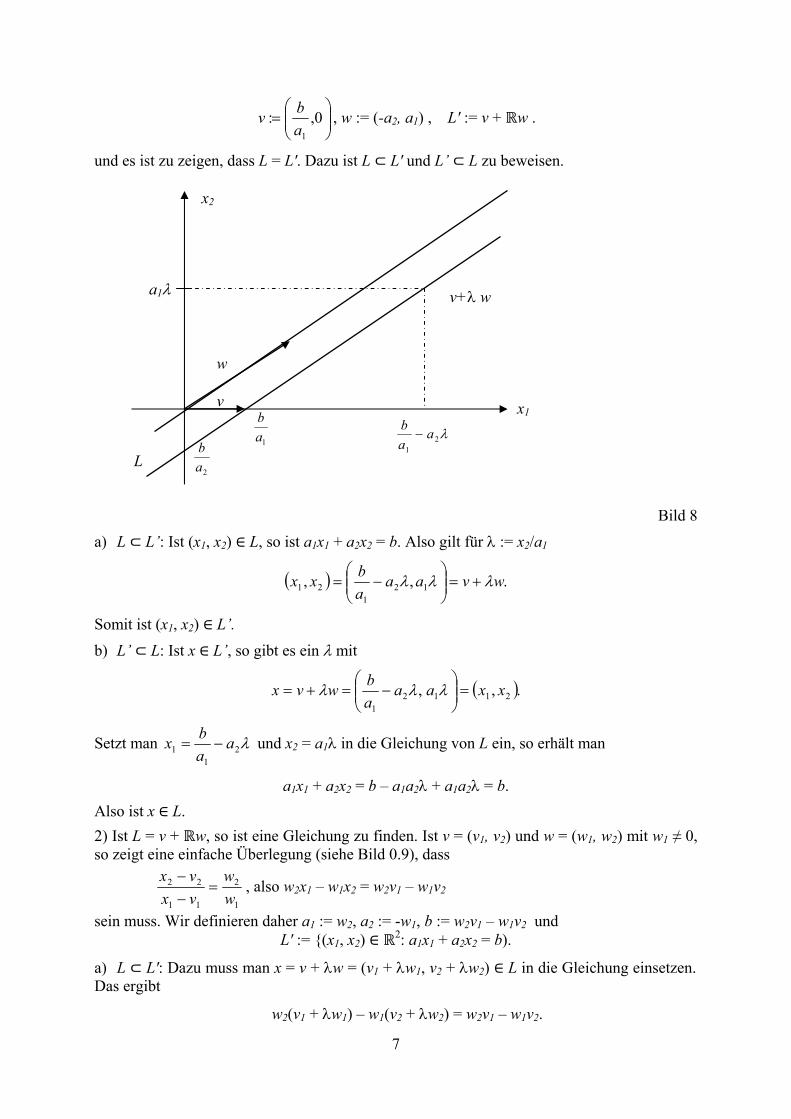
0,:
1a
bv , w := (-a2, a1) , L' := v + w .
und es ist zu zeigen, dass L = L'. Dazu ist L ⊂ L' und L’ ⊂ L zu beweisen.
Bild 8
a) L ⊂ L’: Ist (x1, x2) ∈ L, so ist a1x1 + a2x2 = b. Also gilt für := x2/a1
.,, 121
21 wvaaa
bxx
Somit ist (x1, x2) ∈ L’.
b) L’ ⊂ L: Ist x ∈ L’, so gibt es ein mit
.,, 21121
xxaaa
bwvx
Setzt man 21
1 aa
bx und x2 = a1 in die Gleichung von L ein, so erhält man
a1x1 + a2x2 = b – a1a2 + a1a2 = b.
Also ist x ∈ L.
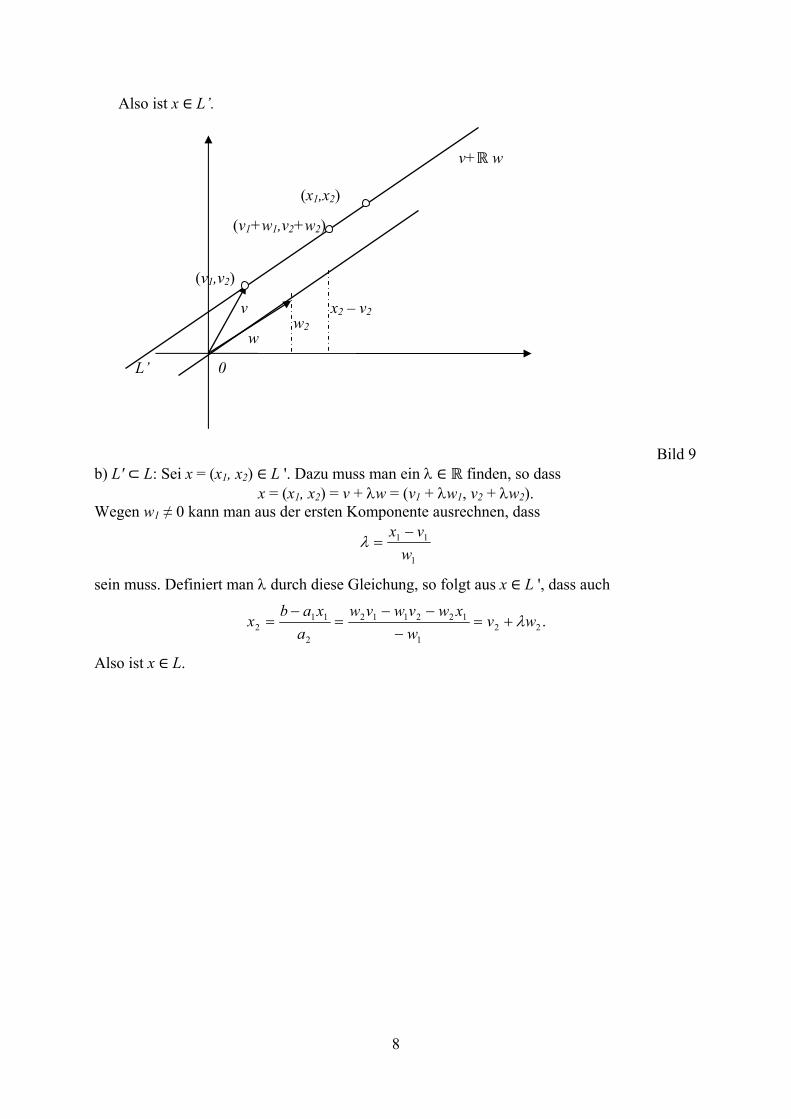
2) Ist L = v + w, so ist eine Gleichung zu finden. Ist v = (v1, v2) und w = (w1, w2) mit w1 ≠ 0, so zeigt eine einfache Überlegung (siehe Bild 0.9), dass
1
2
11
22
w
w
vx
vx
, also w2x1 – w1x2 = w2v1 – w1v2
sein muss. Wir definieren daher a1 := w2, a2 := -w1, b := w2v1 – w1v2 und L' := {(x1, x2) ∈ 2: a1x1 + a2x2 = b).
a) L ⊂ L': Dazu muss man x = v + w = (v1 + w1, v2 + w2) ∈ L in die Gleichung einsetzen. Das ergibt
w2(v1 + w1) – w1(v2 + w2) = w2v1 – w1v2.
x1
x2
L
a1
1a
b
2a
b2
1
aa
b
v+ w
w
v
8
Also ist x ∈ L’.
Bild 9 b) L' ⊂ L: Sei x = (x1, x2) ∈ L '. Dazu muss man ein ∈ finden, so dass
x = (x1, x2) = v + w = (v1 + w1, v2 + w2). Wegen w1 ≠ 0 kann man aus der ersten Komponente ausrechnen, dass
1
11
w
vx
sein muss. Definiert man durch diese Gleichung, so folgt aus x ∈ L ', dass auch
.221
122112
2
112 wv
w
xwvwvw
a
xabx
Also ist x ∈ L.
0 L’
v+ w
w
v
(v1+w1,v2+w2)
(x1,x2)
w2 x2 – v2
(v1,v2)
9
3 Ebenen und Geraden im Standardraum 3 3.1. Als „Raum" betrachten wir den dreidimensionalen reellen Raum. Wie in der Ebene geht durch zwei verschiedene Punkte v ,v' ∈ 3 genau eine Gerade L. Ist w := v' - v, so ist wie in 0.2.1
L = { v + w: λ ∈ } = v + w
eine Parameterdarstellung von L. Es gibt jedoch zwei wesentliche Unterschiede zur Ebene:
1) Zwei Geraden sind im Allgemeinen windschief, d.h. ohne Schnittpunkt und nicht parallel.
2) Eine lineare Gleichung im 3 beschreibt eine Ebene, zur Beschreibung einer Geraden benötigt man zwei lineare Gleichungen (d.h. man stellt sie als Schnitt von zwei Ebenen dar).
Das wird im Folgenden genauer ausgeführt.
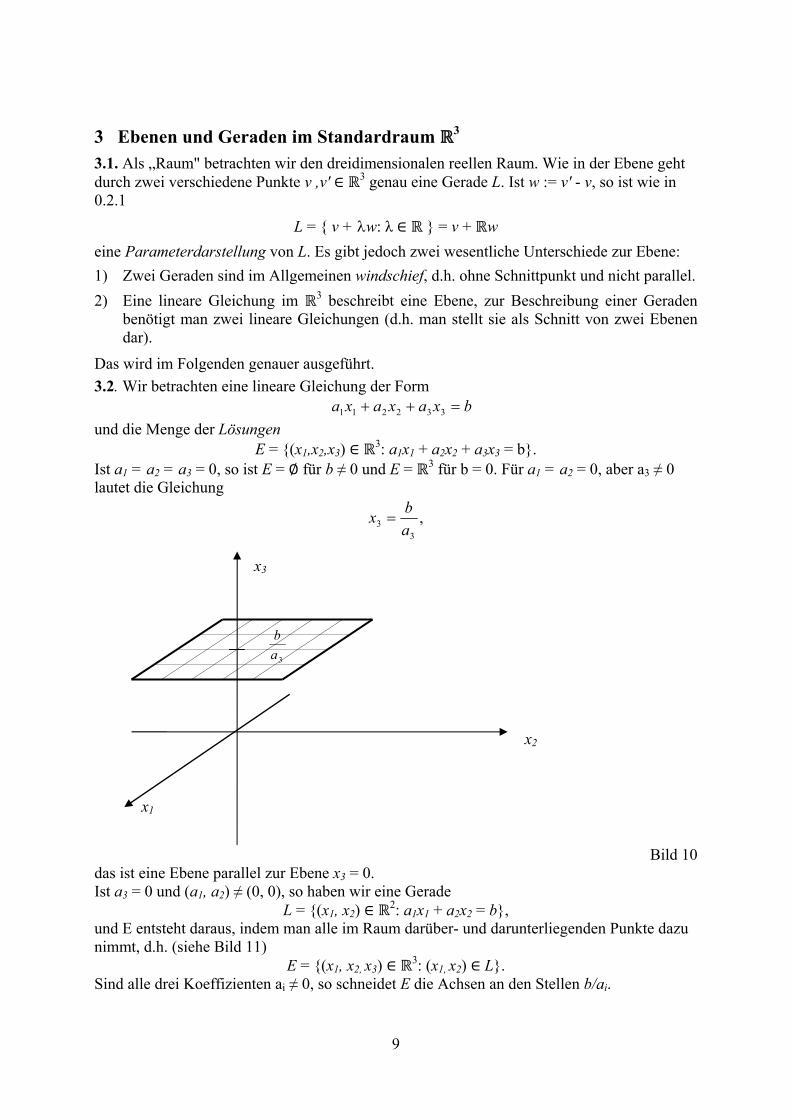
3.2. Wir betrachten eine lineare Gleichung der Form bxaxaxa 332211
und die Menge der Lösungen E = {(x1,x2,x3) ∈ 3: a1x1 + a2x2 + a3x3 = b}.
Ist a1 = a2 = a3 = 0, so ist E = ∅ für b ≠ 0 und E = 3 für b = 0. Für a1 = a2 = 0, aber a3 ≠ 0 lautet die Gleichung
,3
3 a
bx
Bild 10
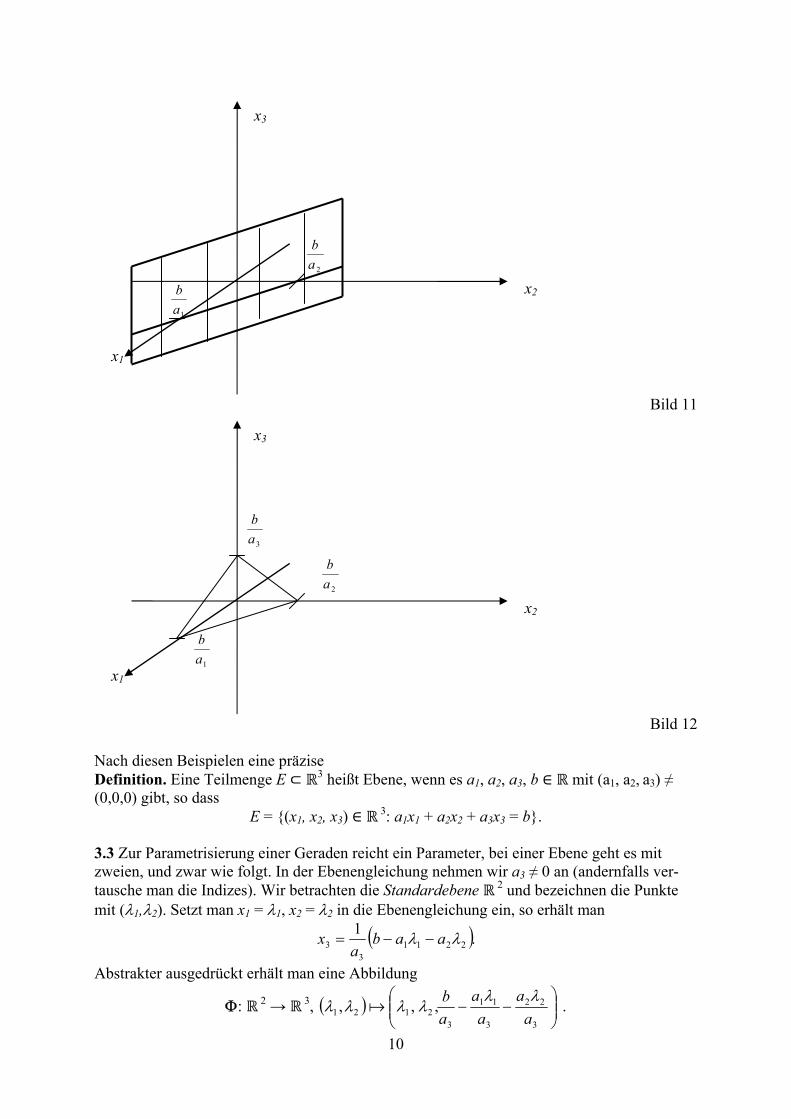
das ist eine Ebene parallel zur Ebene x3 = 0. Ist a3 = 0 und (a1, a2) ≠ (0, 0), so haben wir eine Gerade
L = {(x1, x2) ∈ 2: a1x1 + a2x2 = b}, und E entsteht daraus, indem man alle im Raum darüber- und darunterliegenden Punkte dazu nimmt, d.h. (siehe Bild 11)
E = {(x1, x2, x3) ∈ 3: (x1, x2) ∈ L}. Sind alle drei Koeffizienten ai ≠ 0, so schneidet E die Achsen an den Stellen b/ai.
x1
x2
3a
b
x3
10
Bild 11
Bild 12
Nach diesen Beispielen eine präzise Definition. Eine Teilmenge E ⊂ 3 heißt Ebene, wenn es a1, a2, a3, b ∈ mit (a1, a2, a3) ≠ (0,0,0) gibt, so dass
E = {(x1, x2, x3) ∈ 3: a1x1 + a2x2 + a3x3 = b}. 3.3 Zur Parametrisierung einer Geraden reicht ein Parameter, bei einer Ebene geht es mit zweien, und zwar wie folgt. In der Ebenengleichung nehmen wir a3 ≠ 0 an (andernfalls ver-tausche man die Indizes). Wir betrachten die Standardebene 2 und bezeichnen die Punkte mit (1,2). Setzt man x1 = 1, x2 = 2 in die Ebenengleichung ein, so erhält man
.12211
33 aab
ax
Abstrakter ausgedrückt erhält man eine Abbildung
: 2 → 3,
3
22
3
11
32121 ,,,
a
a
a
a
a
b .
x1
x2
x3
1a
b
2a
b
3a
b
x1
x2
x3
1a
b
2a
b
11
Eine triviale Rechnung ergibt
,3
22
3
11
332211 b
a
a
a
a
a
baaa
also ist ( 2) ⊂ E, und mit etwas mehr Rechnung als in 2.4 kann man zeigen, dass : 2 → E
sogar bijektiv ist. Wir verzichten darauf, das hier vorzurechnen, weil es aus der allgemeinen Theorie folgt. Die so erhaltene Abbildung von der Standardebene 2 auf die in 3 liegen-de Ebene E heißt Parametrisierung. In der oben angegebenen Form hat sie eine einfache ge-ometrische Interpretation: ist die Umkehrung der Projektion
: E → 2 , ,,,, 21321 xxxxx
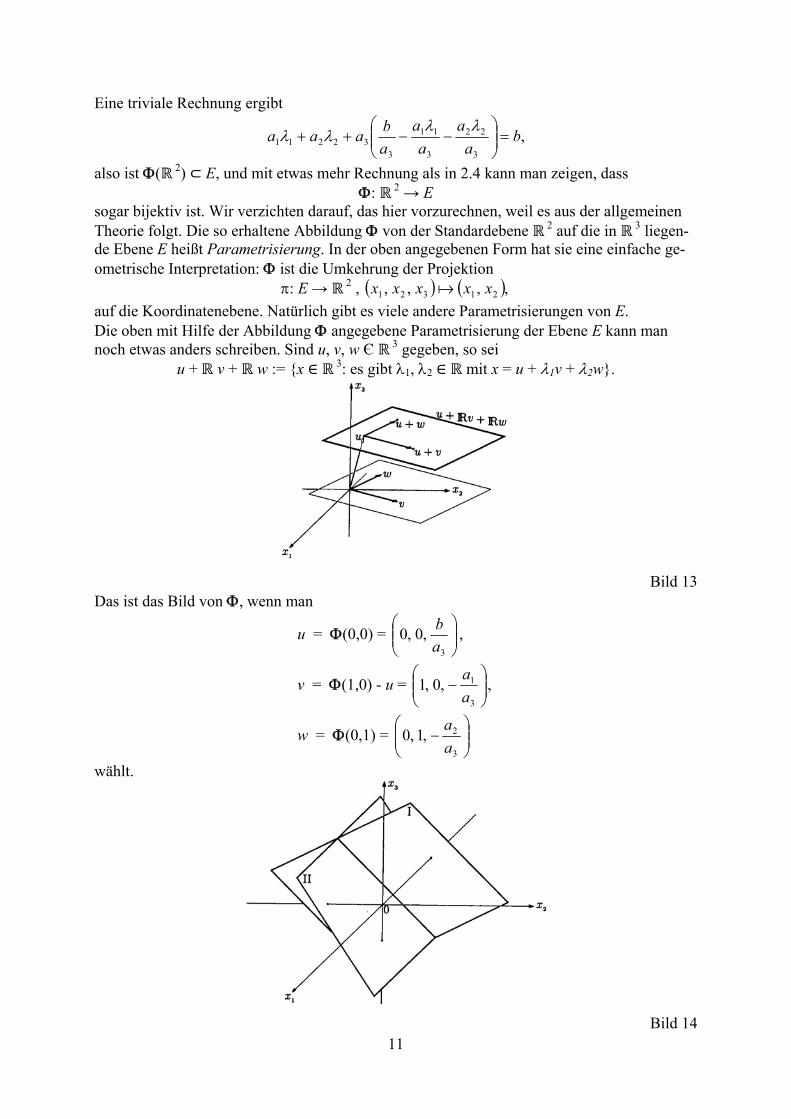
auf die Koordinatenebene. Natürlich gibt es viele andere Parametrisierungen von E. Die oben mit Hilfe der Abbildung angegebene Parametrisierung der Ebene E kann man noch etwas anders schreiben. Sind u, v, w Є 3 gegeben, so sei
u + v + w := {x ∈ 3: es gibt 1, 2 ∈ mit x = u + 1v + 2w}.
Bild 13
Das ist das Bild von , wenn man
u = (0,0) =
3
,0,0a
b,
v = (1,0) - u =
3
1,0,1a
a,
w = (0,1) =
3
2,1,0a
a
wählt.
Bild 14
12
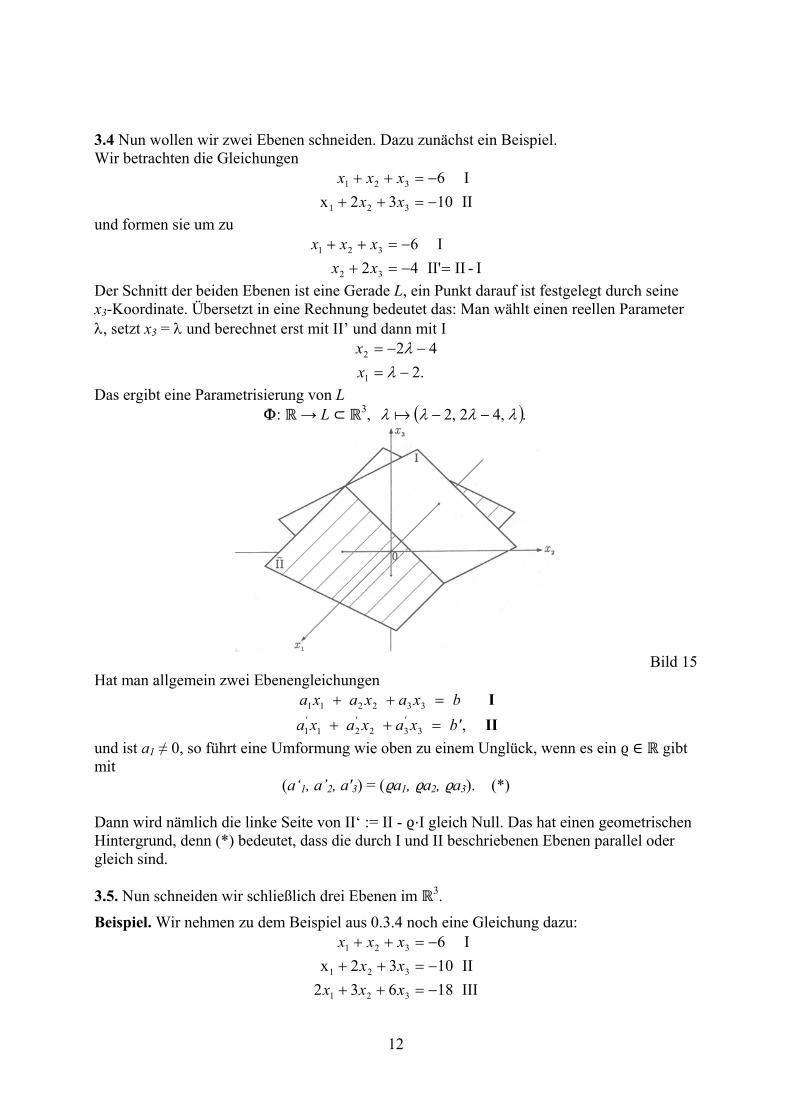
3.4 Nun wollen wir zwei Ebenen schneiden. Dazu zunächst ein Beispiel. Wir betrachten die Gleichungen
II1032x
I6
321
321
xx
xxx
und formen sie um zu
I - IIII'42
I6
32
321
xx
xxx
Der Schnitt der beiden Ebenen ist eine Gerade L, ein Punkt darauf ist festgelegt durch seine x3-Koordinate. Übersetzt in eine Rechnung bedeutet das: Man wählt einen reellen Parameter , setzt x3 = und berechnet erst mit II’ und dann mit I
.2
42
1
2
x
x
Das ergibt eine Parametrisierung von L : → L ⊂ 3, .,42,2
Bild 15
Hat man allgemein zwei Ebenengleichungen b xa x a xa 332211 I
,332211 b' xa x a xa ''' II
und ist a1 ≠ 0, so führt eine Umformung wie oben zu einem Unglück, wenn es ein ϱ ∈ gibt mit
(a‘1, a’2, a'3) = (ϱa1, ϱa2, ϱa3). (*) Dann wird nämlich die linke Seite von II‘ := II - ϱ I gleich Null. Das hat einen geometrischen Hintergrund, denn (*) bedeutet, dass die durch I und II beschriebenen Ebenen parallel oder gleich sind. 3.5. Nun schneiden wir schließlich drei Ebenen im 3.
Beispiel. Wir nehmen zu dem Beispiel aus 0.3.4 noch eine Gleichung dazu:
III18632
II1032x
I6
321
321
321
xxx
xx
xxx
13
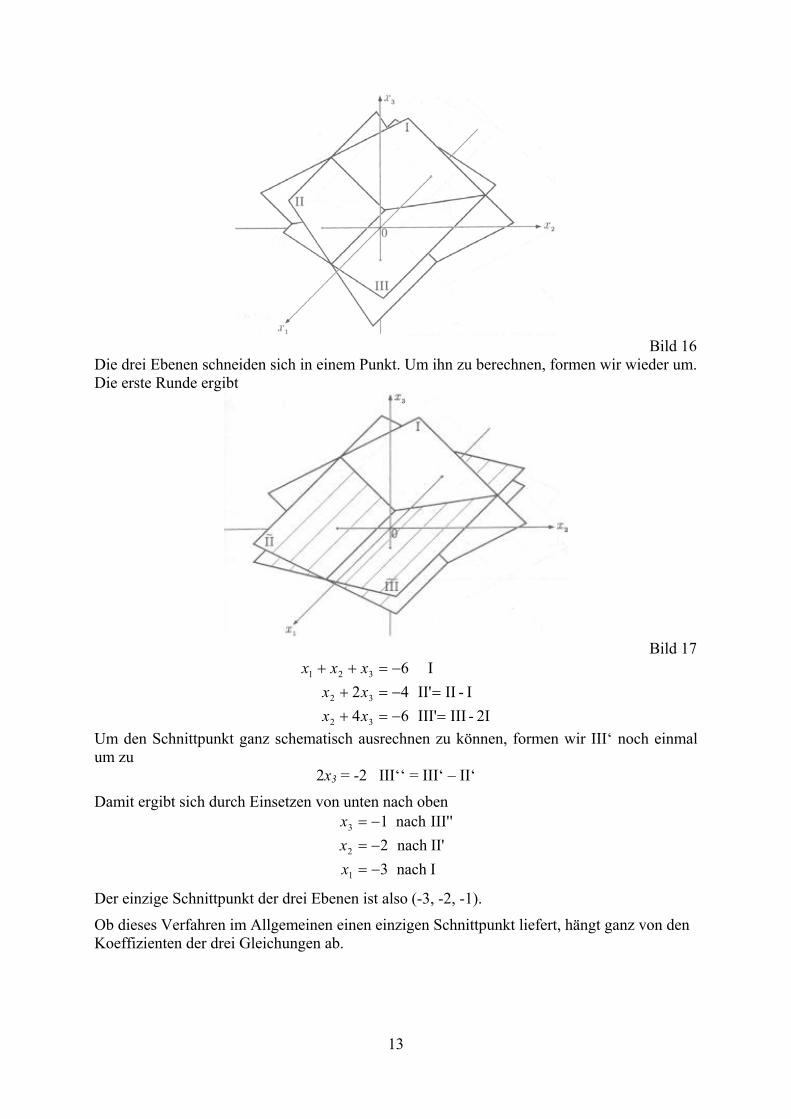
Bild 16
Die drei Ebenen schneiden sich in einem Punkt. Um ihn zu berechnen, formen wir wieder um. Die erste Runde ergibt
Bild 17
2I-IIIIII'64
I-IIII'42
I6
32
32
321
xx
xx
xxx
Um den Schnittpunkt ganz schematisch ausrechnen zu können, formen wir III‘ noch einmal um zu
2x3 = -2 III‘‘ = III‘ – II‘
Damit ergibt sich durch Einsetzen von unten nach oben
Inach 3
II'nach 2
'III'nach1
1
2
3
x
x
x
Der einzige Schnittpunkt der drei Ebenen ist also (-3, -2, -1).
Ob dieses Verfahren im Allgemeinen einen einzigen Schnittpunkt liefert, hängt ganz von den Koeffizienten der drei Gleichungen ab.
14
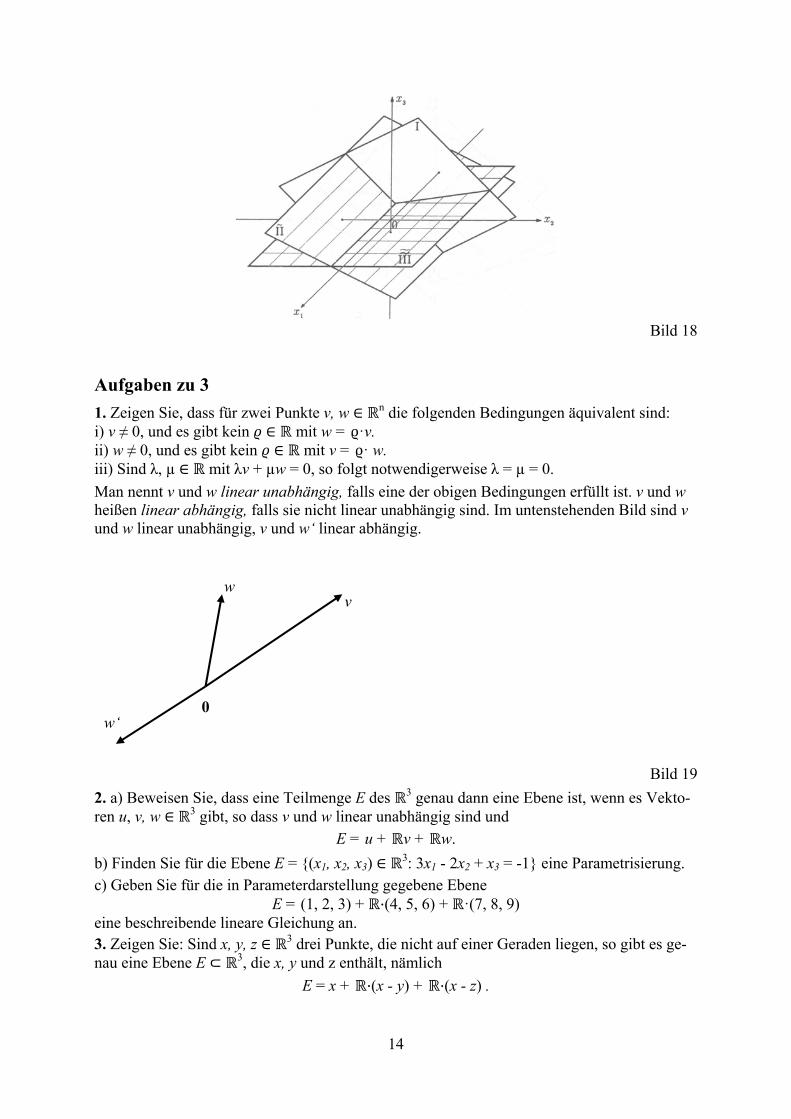
Bild 18
Aufgaben zu 3
1. Zeigen Sie, dass für zwei Punkte v, w ∈ n die folgenden Bedingungen äquivalent sind: i) v ≠ 0, und es gibt kein ∈ mit w = ϱ·v. ii) w ≠ 0, und es gibt kein ∈ mit v = ϱ· w. iii) Sind λ, µ ∈ mit λv + µw = 0, so folgt notwendigerweise λ = µ = 0.
Man nennt v und w linear unabhängig, falls eine der obigen Bedingungen erfüllt ist. v und w heißen linear abhängig, falls sie nicht linear unabhängig sind. Im untenstehenden Bild sind v und w linear unabhängig, v und w‘ linear abhängig.
Bild 19
2. a) Beweisen Sie, dass eine Teilmenge E des 3 genau dann eine Ebene ist, wenn es Vekto-ren u, v, w ∈ 3 gibt, so dass v und w linear unabhängig sind und
E = u + v + w.
b) Finden Sie für die Ebene E = {(x1, x2, x3) ∈ 3: 3x1 - 2x2 + x3 = -1} eine Parametrisierung. c) Geben Sie für die in Parameterdarstellung gegebene Ebene
E = (1, 2, 3) + (4, 5, 6) + ·(7, 8, 9) eine beschreibende lineare Gleichung an. 3. Zeigen Sie: Sind x, y, z ∈ 3 drei Punkte, die nicht auf einer Geraden liegen, so gibt es ge-nau eine Ebene E ⊂ 3, die x, y und z enthält, nämlich
E = x + (x - y) + (x - z) .
0
w v
w‘

15
4 Das Eliminationsverfahren von GAUSS 4.1 Nach den vielen Spezialfällen und Beispielen ist der Leser hoffentlich gerüstet für den allgemeinen Fall. Die Zahl n ∈ ist die Zahl der Unbestimmten, davon unabhängig kann man eine Zahl m ∈ für die Anzahl der linearen Bedingungen wählen. Da m die Anzahl der ver-fügbaren Buchstaben überschreiten kann, verwenden wir für die Koeffizienten aij doppelte Indizes. Das Gleichungssystem lautet also:
mnmnm
nn
b xa xa
b xa xa
....
....
11
11111
und gesucht ist die Menge der (x1,... , xn) ∈ n, die alle Gleichungen erfüllen. Das System (*) ist mühsam aufzuschreiben. Ein Meister in übersichtlichen Rechenverfahren war A. CAYLEY, der auch erstmals systematisch Matrizen verwendete. Das hilft hier sofort. Die Koeffizienten aij schreibt man, wie sie in (*) vorkommen, als rechteckiges Schema (Mat-rix genannt)
mnm
n
a a
a a
A
....
....
:
1
111
Nun ist der Kniff, nicht die liegenden Vektoren (oder Zeilen) (x1, ... ,xn) und (b1,... ,bn) zu be-trachten, sondern entsprechend der Anordnung der bi in (*) die stehenden Vektoren (oder Spalten)
mx
x
x
1
: und
mb
b
b
1
:
Zwischen der Matrix A und der Spalte x der Höhe n erklärt man ein Produkt, das eine Spalte der Höhe m ergibt:
.
....
....
:
11
1111
nmnm
nn
xa xa
xa xa
xA
Dabei ist entscheidend, dass x so viele Zeilen wie A Spalten hat. Das lineare Gleichungssys-tem (*) kann man dann in der Form
bxA : schreiben, wobei das eine Gleichheit von zwei Spalten mit jeweils m Zeilen bedeutet. Diese geschickte Schreibweise ist gewöhnungsbedürftig und auch etwas gefährlich, weil man leicht vergessen kann, was sie explizit bedeutet. Man nennt A die Koeffizientenmatrix des linearen Gleichungssystems. Hängt man die Spalte b noch an, so erhält man die Matrix
mmnm
n
b a a
b a a
bA
....
....
:,
1
1111
,
sie heißt erweiterte Koeffizientenmatrix. Darin ist alle Information über das Gleichungssystem enthalten. Hat eine Matrix A insgesamt m Zeilen und n Spalten, so spricht man zur Abkürzung von einer (m n)-Matrix. Man schreibt dafür A = (aij), die reellen Zahlen aij heißen Einträge von A.
(*)
(*‘)
16
Eine andere Methode, das Gleichungssystem (*) kürzer aufzuschreiben, benutzt das Summenzeichen ∑. Allgemein ist
.....: 211
n
n
jj cccc
Dabei heißt j der Summationsindex, man kann ihn durch jeden anderen Buchstaben ersetzen. In dieser Schreibweise lautet die i-te Gleichung
,:1
i
n
jjij bxa
das ganze System also
i
n
jjij bxa
:1
für i = 1, … , m.
Welche Schreibweise man bevorzugt, ist nebensächlich. Wir werden vorwiegend A x = b benutzen, weil dabei die geringste Anzahl von Buchstaben erforderlich ist. 4.2 Nachdem eine energiesparende Schreibweise für Gleichungssysteme vereinbart ist, können wir das Problem der Lösung in Angriff nehmen. Die Lösungsmenge ist nach Definition gleich
Lös (A,b) := {x ∈ n : A·x = b}, wobei x als Spaltenvektor geschrieben ist. Das System zu lösen heißt, eine effiziente Methode zur Beschreibung der Menge Lös (A, b) anzugeben. Was wir schließlich erhalten werden, ist eine Zahl k ∈ und eine explizit angebbare bijektive Abbildung
Φ: k → Lös (A,b) ⊂ n, sie heißt Parametrisierung. Die Berechnung von Φ mit Hilfe des nach C.F. GAUSS benannten Eliminationsverfahrens ist recht einfach, das ist Ziel dieses Kapitels. Der Nachweis der guten Eigenschaften von Φ erfordert etwas Theorie und wird in Kapitel 2 nachgeholt. Der abstrakte Hintergrund von linearen Gleichungssystemen wird schließlich in Kapitel 6 erläutert. 4.3 In den Beispielen aus 2 und 3 hatten wir Gleichungssysleme so lange umgeformt, bis eine Parametrisierung schrittweise „von unten nach oben“ berechnet werden konnte. Beispiele für so umgeformte Koeffizientenmatrizen A waren
,10
11
210
111, .
200
210
111
Die Nullen zu Beginn der Zeilen haben dabei eine typische Staffelung, die Trennlinie von den anderen Einträgen hat Stufenform.
Definition. Eine m n-Matrix A = (aij) heißt in Zeilenstufenfonn, wenn sie von der folgenden Form ist;
0
Ar
(*‘‘)
17
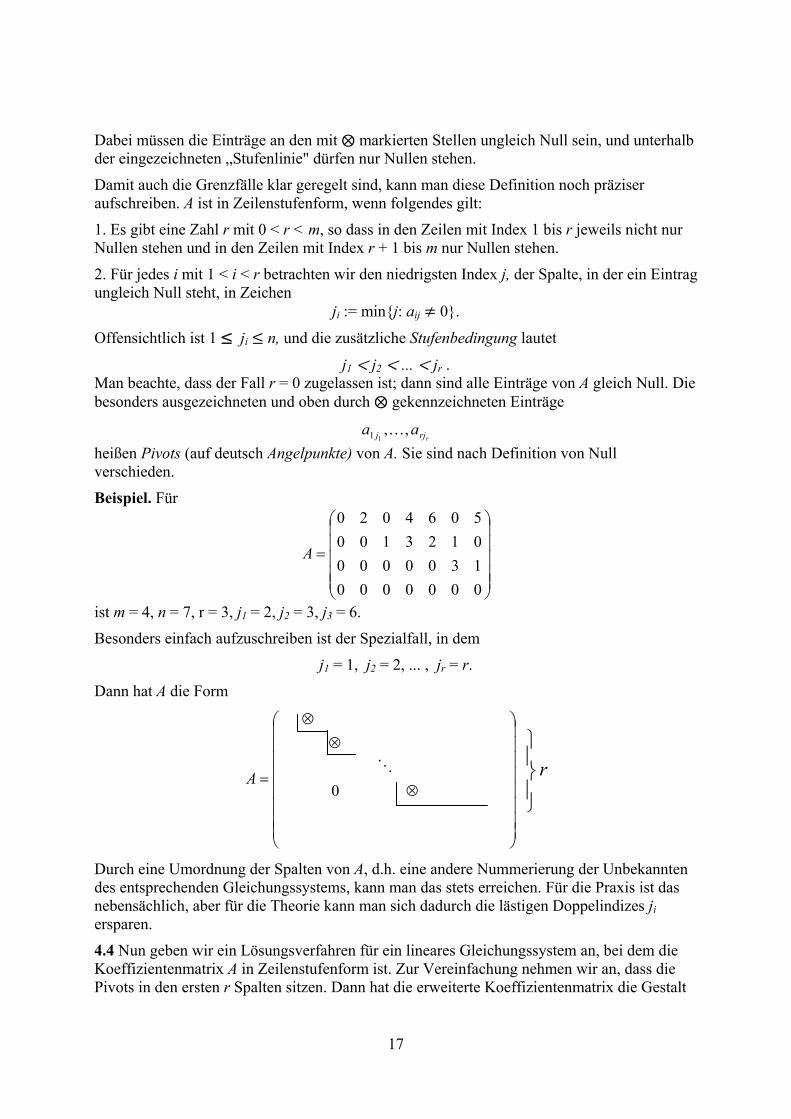
Dabei müssen die Einträge an den mit ⨂ markierten Stellen ungleich Null sein, und unterhalb der eingezeichneten „Stufenlinie" dürfen nur Nullen stehen.
Damit auch die Grenzfälle klar geregelt sind, kann man diese Definition noch präziser aufschreiben. A ist in Zeilenstufenform, wenn folgendes gilt:
1. Es gibt eine Zahl r mit 0 < r < m, so dass in den Zeilen mit Index 1 bis r jeweils nicht nur Nullen stehen und in den Zeilen mit Index r + 1 bis m nur Nullen stehen.
2. Für jedes i mit 1 < i < r betrachten wir den niedrigsten Index j, der Spalte, in der ein Eintrag ungleich Null steht, in Zeichen
ji := min{j: aij 0}.
Offensichtlich ist 1 ji n, und die zusätzliche Stufenbedingung lautet
j1 j2 ... jr . Man beachte, dass der Fall r = 0 zugelassen ist; dann sind alle Einträge von A gleich Null. Die besonders ausgezeichneten und oben durch ⨂ gekennzeichneten Einträge
rrjj aa ,,11
heißen Pivots (auf deutsch Angelpunkte) von A. Sie sind nach Definition von Null verschieden.
Beispiel. Für
0000000
1300000
0123100
5064020
A
ist m = 4, n = 7, r = 3, j1 = 2, j2 = 3, j3 = 6.
Besonders einfach aufzuschreiben ist der Spezialfall, in dem
j1 = 1, j2 = 2, ... , jr = r.
Dann hat A die Form
0
A r
Durch eine Umordnung der Spalten von A, d.h. eine andere Nummerierung der Unbekannten des entsprechenden Gleichungssystems, kann man das stets erreichen. Für die Praxis ist das nebensächlich, aber für die Theorie kann man sich dadurch die lästigen Doppelindizes ji ersparen.
4.4 Nun geben wir ein Lösungsverfahren für ein lineares Gleichungssystem an, bei dem die Koeffizientenmatrix A in Zeilenstufenform ist. Zur Vereinfachung nehmen wir an, dass die Pivots in den ersten r Spalten sitzen. Dann hat die erweiterte Koeffizientenmatrix die Gestalt

18
m
r
rrr
b
b
ba
a
ba
bA
1
22
111
0
),(
mit a11 0, ... , arr 0. Die Einträge br+1,... . bm sind entscheidend für die Frage, ob es überhaupt eine Lösung gibt.
Bemerkung. Gibt es ein bi 0 mit r + 1 i m, so ist Lös {A, b} leer.
Beweis. Die i-te Gleichung lautet
0·x1 + ... + 0·xn = bi 0.
Diese Bedingung kann kein x erfüllen.
Im gegenteiligen Fall
br+1 = ... = bm = 0
geben wir nun eine Methode an, Lösungen zu konstruieren. Dazu unterscheiden wir zwischen zwei Arten von Variablen:
xr+1, ..., xn sind freie Variablen, sie können alle beliebigen Werte annehmen. x1,...,xr sind gebundene Variablen, sie sind eindeutig dadurch festgelegt, für welche Werte sich die freien Variablen entschieden haben.
Das kann man so beschreiben. Man setzt k := n - r, das ist die Zahl der freien Variablen, wählt λ1,...,λk ∈ als Parameter, und setzt
xr+1 = λ1, xr+2 = λ2, ..., xn = k .
Zur Berechnung der x1,... , xr daraus beginnt man mit der r-ten Gleichung
arrxr + ar,r+1 λ1 + ... + arn k = br..
Daraus erhält man
)...(1
11, krnrrrrr
r aaba
x .
Setzt man das in die (r - l)-te Gleichung ein, erhält man analog
,... ,111,1,111,11 kkrrrrrrrrr ccbdbdx
wobei die auftretenden Zahlen c und d von den Eintragen der Zeilen r - 1 und r aus der Matrix A abhängen. Fährt man so fort, erhält man schließlich
.... 111111111 kkrr ccbdbdx
Insgesamt ergibt sich eine Abbildung
Φ: k → Lös (A, b) ⊂ n,
(λ1,…,λk) ↦ (x1,…,xr, λ1,…,λk ,
wobei für x1, ... , xr die oben berechneten von λ1,…,λk , den Einträgen von A und b1, ..., br
abhängigen Ausdrücke einzusetzen sind. Da hierfür nach den obigen Rechnungen alle r

19
Gleichungen erfüllt sind, liegen die Werte von Φ in der Lösungsmenge Lös (A, b). Man hat also für beliebig gewählte Parameter λ1,…,λk eine Lösung des gegebenen Gleichungssystems erhalten.
Beispiel. Ist A die (4 x 7)-Matrix aus 0.4.3, und wählt man
b1=3, b2 = 1, b3 =2, b4 = 0,
so sind die Lösungen von A · x = b also in Spalten geschrieben gegeben durch
1
0
0
0
0
0
1
0
2
3
0
0
0
0
1
3
2
0
0
0
0
0
0
0
1
0
0
0
0
23
32
31
31
25
4321
32
31
23
4
431
32
3
2
431
3231
425
3223
1
7
6
5
4
3
2
1
x
x
x
x
x
x
x
4.5 Einen wichtigen Spezialfall wollen wir noch erwähnen: Ist die Matrix A quadratisch, so hat man ebensoviele Gleichungen wie Unbekannte. Ist speziell A auf Zeilenstufenform mit r = n, so ist
0
A ,
und es gibt wegen k = n - r = 0 keinen freien Parameter, also eine einzige Lösung
x = (x1,..., xn),
die man wieder von unten nach oben berechnet. Ist überdies
b1 = ... = bn = 0, so ist xn = ... = x1 = 0,
man erhält also nur die triviale Lösung. Beispiele für eindeutig lösbare Gleichungssysteme findet man in 0.2.3 a), 0.3.5 und Aufgabe 2.
4.6 Nachdem wir gesehen haben, wie sich ein Glcichungssystem in Zeilenstufenform lösen lässt, versuchen wir nun. ein beliebiges System auf diese Form zu bringen. Dazu benutzen wir zwei Arten von elementaren Zeilenumformungen der erweiterten Koeffizientenmatrix:
1) Vertauschung von zwei Zeilen.
2) Addition der -fachen i-ten Zeile zur k-ten Zeile, wobei 0 λ ∈ und i k ist.
Diese Umformungen sind gerechtfertigt durch den
Satz. Sei (A,b) die erweiterte Koeffizientenmatrix eines linearen Gleichungssystems, und
)~
,~
( bA aus (A, b) durch endlich viele elementare Zeilenumformungen entstanden. Dann haben
die Systeme A · x = b und bxA~~
gleiche Lösungsräume, in Zeichen Lös (A, b) = Lös )~
,~
( bA .
Vorsicht! Man beachte, dass Spaltenumformungen eine völlig andere Wirkung haben, weil dadurch die Unbekannten „gemischt“ werden. Das ist unerwünscht. Nur Vertauschungen in den ersten n Spalten sind ungefährlich, sie bewirken lediglich eine Umnummerierung der Unbekannten.

20
Beweis. Es genügt zu beweisen, dass der Lösungsraum bei einer einzigen elementaren Zeilenumformung unverändert bleibt, denn dann ändert auch Wiederholung nichts.
Typ 1) ist völlig unproblematisch, weil alle Gleichungen simultan erfüllt sein müssen, die Reihenfolge ist gleichgültig.
Bei Typ 2) muss man etwas rechnen. Da nur die Zeilen i und k betroffen sind, genügt es zu zeigen, dass die beiden aus jeweils zwei Gleichungen bestehenden Systeme
inini b xa xa 11
knknk b xa xa 11
und
ikninknik
inini
b b xaa xaa
b xa xa
)()( 111
11
gleiche Lösungsräume haben. Erfüllt x = (x1,..., xn) die Gleichungen (*), so auch die erste von (*‘), und durch Addition der λ-fachen ersten Gleichung von (*) zur zweiten die zweite Gleichung von (*‘). Umgekehrt folgt durch Subtraktion der λ-fachen ersten Gleichung aus (*‘) von der zweiten auch die zweite Gleichung aus (*).
Was bei Umformungen vom Typ 2) geometrisch vorgeht, sieht man am einfachsten in der Ebene. Zwei Gleichungen beschreiben zwei Geraden, die Lösungsmenge besteht aus den Schnittpunkten (keiner, einer, oder eine ganze Gerade, vgl. 0.2). Was verschiedene Faktoren λ bewirken, wollen wir am besten an einem Beispiel zeigen: Gegeben seien Geraden
Li durch x1 = 1 und Lk durch x1 – x2 = 2.
Bild 20
Dann ist Lk+i gegeben durch (1+λ)x1 – x2 = 2 + λ.
Diese Schar von Geraden mit Parameter k geht durch (1, -1), sie enthält alle Geraden durch (1,-1) mit Ausnahme von Li, und die Zahl ist am Schnittpunkt mit der Geraden x1 = 2 zu sehen.
x1
x2
Lk
(2,0) (1,-1)
(2,)
Lk+i
Li
(*)
(*‘)
21
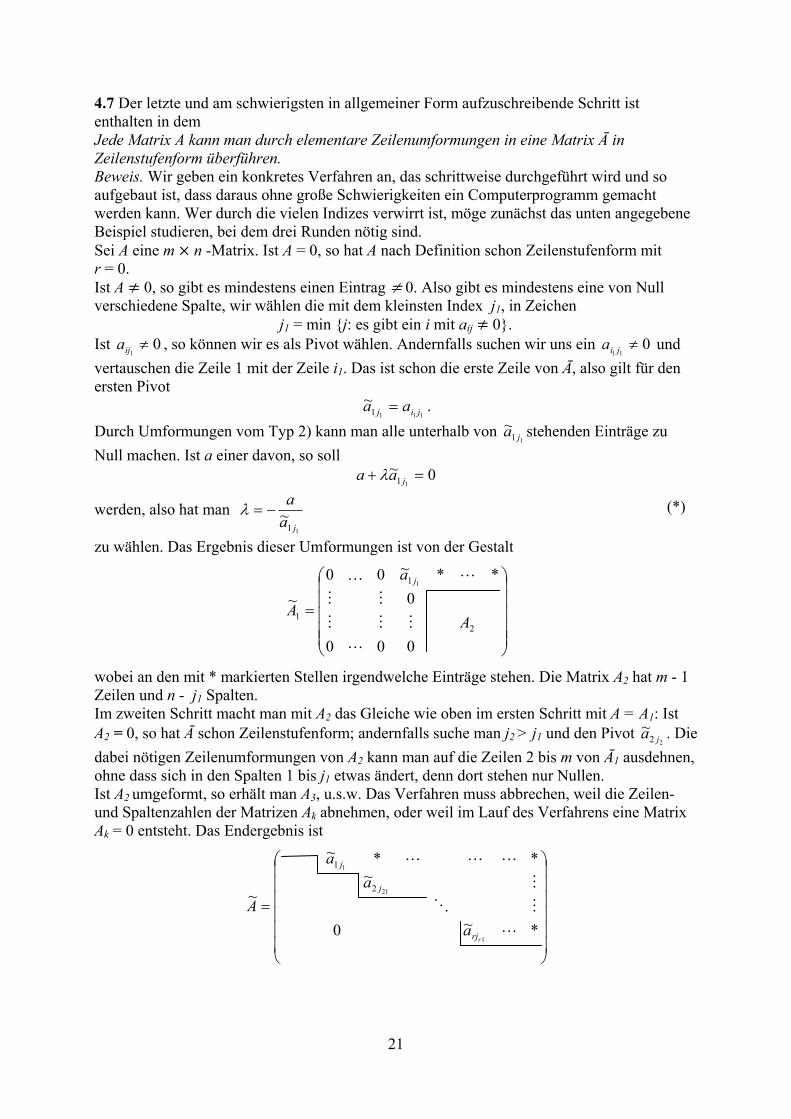
4.7 Der letzte und am schwierigsten in allgemeiner Form aufzuschreibende Schritt ist enthalten in dem Jede Matrix A kann man durch elementare Zeilenumformungen in eine Matrix Ā in Zeilenstufenform überführen. Beweis. Wir geben ein konkretes Verfahren an, das schrittweise durchgeführt wird und so aufgebaut ist, dass daraus ohne große Schwierigkeiten ein Computerprogramm gemacht werden kann. Wer durch die vielen Indizes verwirrt ist, möge zunächst das unten angegebene Beispiel studieren, bei dem drei Runden nötig sind. Sei A eine m n -Matrix. Ist A = 0, so hat A nach Definition schon Zeilenstufenform mit r = 0. Ist A 0, so gibt es mindestens einen Eintrag 0. Also gibt es mindestens eine von Null verschiedene Spalte, wir wählen die mit dem kleinsten Index j1, in Zeichen
j1 = min {j: es gibt ein i mit aij 0}. Ist 0
1ija , so können wir es als Pivot wählen. Andernfalls suchen wir uns ein 0
11jia und
vertauschen die Zeile 1 mit der Zeile i1. Das ist schon die erste Zeile von Ā, also gilt für den ersten Pivot
1111~
jij aa .
Durch Umformungen vom Typ 2) kann man alle unterhalb von 11
~ja stehenden Einträge zu
Null machen. Ist a einer davon, so soll 0~
11 jaa
werden, also hat man 11
~ja
a
zu wählen. Das Ergebnis dieser Umformungen ist von der Gestalt
000
0
**~00
~
2
1
1
1
A
a
A
j
wobei an den mit * markierten Stellen irgendwelche Einträge stehen. Die Matrix A2 hat m - 1 Zeilen und n - j1 Spalten. Im zweiten Schritt macht man mit A2 das Gleiche wie oben im ersten Schritt mit A = A1: Ist A2 = 0, so hat Ā schon Zeilenstufenform; andernfalls suche man j2 > j1 und den Pivot
22~
ja . Die
dabei nötigen Zeilenumformungen von A2 kann man auf die Zeilen 2 bis m von Ā1 ausdehnen, ohne dass sich in den Spalten 1 bis j1 etwas ändert, denn dort stehen nur Nullen. Ist A2 umgeformt, so erhält man A3, u.s.w. Das Verfahren muss abbrechen, weil die Zeilen- und Spaltenzahlen der Matrizen Ak abnehmen, oder weil im Lauf des Verfahrens eine Matrix Ak = 0 entsteht. Das Endergebnis ist
*~0
~**~
~
1
21
1
2
1
rrj
j
j
a
a
a
A
(*)
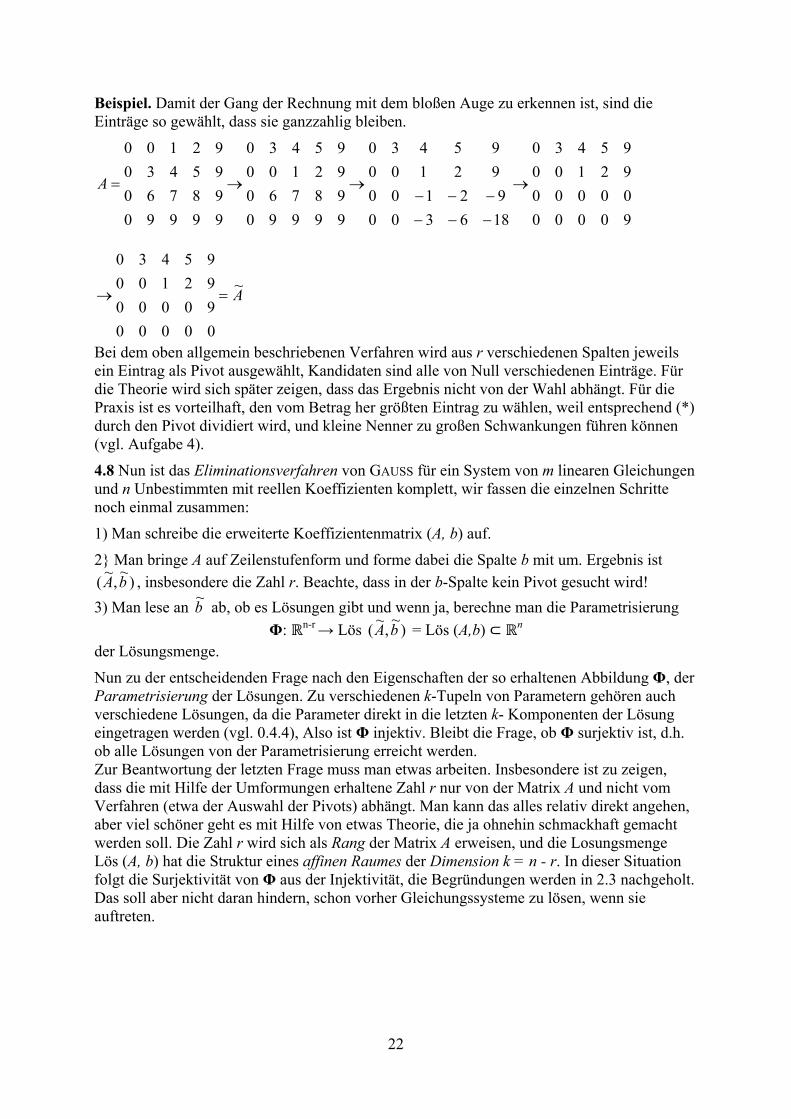
22
Beispiel. Damit der Gang der Rechnung mit dem bloßen Auge zu erkennen ist, sind die Einträge so gewählt, dass sie ganzzahlig bleiben.
90000
00000
92100
95430
186300
92100
92100
95430
99990
98760
92100
95430
99990
98760
95430
92100
A
A~
00000
90000
92100
95430
Bei dem oben allgemein beschriebenen Verfahren wird aus r verschiedenen Spalten jeweils ein Eintrag als Pivot ausgewählt, Kandidaten sind alle von Null verschiedenen Einträge. Für die Theorie wird sich später zeigen, dass das Ergebnis nicht von der Wahl abhängt. Für die Praxis ist es vorteilhaft, den vom Betrag her größten Eintrag zu wählen, weil entsprechend (*) durch den Pivot dividiert wird, und kleine Nenner zu großen Schwankungen führen können (vgl. Aufgabe 4).
4.8 Nun ist das Eliminationsverfahren von GAUSS für ein System von m linearen Gleichungen und n Unbestimmten mit reellen Koeffizienten komplett, wir fassen die einzelnen Schritte noch einmal zusammen:
1) Man schreibe die erweiterte Koeffizientenmatrix (A, b) auf.
2} Man bringe A auf Zeilenstufenform und forme dabei die Spalte b mit um. Ergebnis ist
)~
,~
( bA , insbesondere die Zahl r. Beachte, dass in der b-Spalte kein Pivot gesucht wird!
3) Man lese an b~
ab, ob es Lösungen gibt und wenn ja, berechne man die Parametrisierung
Φ: n-r → Lös )~
,~
( bA = Lös (A,b) ⊂ n der Lösungsmenge.
Nun zu der entscheidenden Frage nach den Eigenschaften der so erhaltenen Abbildung Φ, der Parametrisierung der Lösungen. Zu verschiedenen k-Tupeln von Parametern gehören auch verschiedene Lösungen, da die Parameter direkt in die letzten k- Komponenten der Lösung eingetragen werden (vgl. 0.4.4), Also ist Φ injektiv. Bleibt die Frage, ob Φ surjektiv ist, d.h. ob alle Lösungen von der Parametrisierung erreicht werden. Zur Beantwortung der letzten Frage muss man etwas arbeiten. Insbesondere ist zu zeigen, dass die mit Hilfe der Umformungen erhaltene Zahl r nur von der Matrix A und nicht vom Verfahren (etwa der Auswahl der Pivots) abhängt. Man kann das alles relativ direkt angehen, aber viel schöner geht es mit Hilfe von etwas Theorie, die ja ohnehin schmackhaft gemacht werden soll. Die Zahl r wird sich als Rang der Matrix A erweisen, und die Losungsmenge Lös (A, b) hat die Struktur eines affinen Raumes der Dimension k = n - r. In dieser Situation folgt die Surjektivität von Φ aus der Injektivität, die Begründungen werden in 2.3 nachgeholt. Das soll aber nicht daran hindern, schon vorher Gleichungssysteme zu lösen, wenn sie auftreten.
23
Aufgaben zu 4 1. Lösen Sie folgende lineare Gleichungssysteme:
a)
06543
05432
0432
032
4321
4321
4321
432
xxxx
xxxx
xxxx
xxx
b)
5451415
123
32389
22266
4321
321
4321
4321
xxxx
xxx
xxxx
xxxx
2. Geben Sie die Lösung des linearen Gleichungssystems an, das durch die folgende
erweiterte Koeffizientenmatrix gegeben ist:
2
2
9
7
2113
0152
1304
3211
3. Bestimmen Sie, für welche t ∈ das folgende lineare Gleichungssystem in
Matrixdarstellung lösbar ist und geben Sie gegebenenfalls die Lösung an.
87
712
12
6101
7122
242
t
t
t
4. Lösen Sie das folgende lineare Gleichungssystem auf einem Taschenrechner mit einer Rechengenauigkeit von n Stellen hinter dem Komma (Abschneiden weiterer Stellen ohne Rundung!) für ε = 10-k für größer werdendes k ≤ n, und zwar einmal mit dem Pivot ε und einmal mit dem „maximalen Zeilenpivot" 1 der ersten Spalte.
.1
,2
yx
yx
Beschreiben Sie den geometrischen Hintergrund dieser Umformungen



![Lineare Algebra I Bernd Ammann, WS 2007/08 · ... Lineare Algebra und Analytische Geometrie [8] Falko Lorenz, Lineare Algebra I und II [9] Serge Lang, Linear Algebra, Second Edition,](https://static.fdokument.com/doc/165x107/5c66806a09d3f252168c7903/lineare-algebra-i-bernd-ammann-ws-200708-lineare-algebra-und-analytische.jpg)