Calculation of the Proton Affinities of Primary, Secondary ...
Upload
nguyenminhCategory
view
212download
0
Entwicklung einer HF-Messschaltung zur
Polarisationsdetektion
Masterarbeit
im
Studiengang
Master of Science
im Fach Physik
an der Fakultät für Physik und Astronomie
der Ruhr-Universität Bochum
von
Hendrik Vondracek
aus
Hamm
Bochum
im Sommersemester 2013

Meinem Vater
in liebevoller Erinnerung.
Referent: Prof. Dr. Werner MeyerKorreferent: Prof. Dr. Ulrich Wiedner
Lehrstuhl für Physik der Hadronen und Kerne, AG Polarisiertes Target, Ruhr-Universität Bochum

Inhaltsverzeichnis
1 Einführung 7
2 Theoretische Grundlagen 112.1 Drehimpuls und Spin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.1.1 Drehimpuls . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.2 Spin . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.1.3 Spin-Bahn-Kopplung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.4 Teilchen im äuÿeren Magnetfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Substruktur von Nukleonen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 162.3 Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.3.1 Theoretische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3.2 Dynamische Nukleonenpolarisation . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3.3 Relaxation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Polarisierte Targets 203.1 Grundkonzept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 203.2 Experimenteller Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 213.3 Targetmaterialien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.3.1 Strahlendotiertes 6LiD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 223.3.2 Chemisch dotiertes Butanol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 233.3.3 Weitere Targetmaterialien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4 HF-Technik 244.1 Schirmung von HF-Signalen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.2 HF-Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2.1 Splitter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.2.2 Richtkoppler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 254.2.3 Detektion von HF-Signalen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3 Charakterisierung von HF-Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . 264.3.1 VSWR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274.3.2 HF-spezische Einheiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
5 Grundlagen der NMR 285.1 Theoretische Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.1.1 Quantenmechanische Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . 285.1.2 Makroskopische Beschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295.1.3 Relaxationszeiten und Bloch-Gleichungen . . . . . . . . . . . . . . . . . . . . . . . 31
5.2 cw-NMR und p-NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2.1 cw-NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.2.2 p-NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
6 NMR-Messschaltungen in der Physik polarisierter Targets 336.1 Grundlegende Konzeption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
6.1.1 Der Schwingkreis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356.1.2 λ/2-Kabel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356.1.3 Phasensensitive Detektion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
iii

6.2 Durchführung einer NMR-Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.3 Charakteristische NMR-Linienformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
6.3.1 Quadrupoleekt . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
6.4 Polarisationsbestimmung aus dem NMR-Signal . . . . . . . . . . . . . . . . . . . . . . . . 38
6.5 Übersicht über verbreitete NMRs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.5.1 Die Liverpool-NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
6.6 Die Bochumer boxed NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.6.1 Die Varicap-Anpassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
6.6.2 HF-Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.6.3 HF/NF-Wandlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7 Flexible Spannungsversorgung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7 Entwicklung einer neuen Messschaltung 46
7.1 Grundkonzeption . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
7.2 Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2.1 Stecker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2.2 Varicapdiode . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2.3 HF-Verstärker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2.4 HF-Abschwächer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
7.2.5 HF-Splitter und -Richtkoppler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
7.3 Layout 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
7.4 Layout 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
7.5 Signalweiterverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.5.1 Phasenanpassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.5.2 HF/NF-Wandlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.5.3 DC-Oset-Karte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.5.4 Anschluss an den PC . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
7.6 Gesamtaufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
8 Neue Konzepte zur Phasenkompensation 59
8.1 Klassische Phasenanpassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.2 Mechanische Phasenanpassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.3 Elektronische Phasenanpassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
8.3.1 Electronic Line Stretcher Mini-Circuits ELS-210 . . . . . . . . . . . . . . . . . . . 60
8.3.2 Mini-Circuits JSPHS-x . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
8.4 Layout der Piggyback-Phasenanapassungskarte . . . . . . . . . . . . . . . . . . . . . . . . 62
8.5 Testmessungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
9 Messungen und Ergebnisse 65
9.1 Messaufbauten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.1.1 Messgeräte für erste Tests . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.1.2 Aufbauten zur Targetpolarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
9.2 Messungen mit Layout 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.2.1 Erstmessungen mit einem Sinus-Signal . . . . . . . . . . . . . . . . . . . . . . . . 66
9.2.2 Messungen zur Bestimmung der Ursache des Störsignals . . . . . . . . . . . . . . . 67
9.3 Messungen mit Layout 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.3.1 Erstmessungen mit einem Sinus-Signal . . . . . . . . . . . . . . . . . . . . . . . . 68
9.3.2 Messungen der Linearität der Diodendetektion . . . . . . . . . . . . . . . . . . . . 70
9.3.3 Messungen der Linearität der phasensensitiven Detektion . . . . . . . . . . . . . . 72
9.3.4 Messungen zur Temperaturstabilität . . . . . . . . . . . . . . . . . . . . . . . . . 73
9.3.5 Vermessung verschiedener Targetmaterialien . . . . . . . . . . . . . . . . . . . . . 75
iv

10 Fazit und Ausblick 81
A Anhang 82A.1 Mikrowellenfrequenzen für DNP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82A.2 Ergänzungen zur Bochumer boxed-NMR . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
A.2.1 Technische Daten der Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82A.3 Ergänzungen zur neu entwickelten Messschaltung . . . . . . . . . . . . . . . . . . . . . . 86
A.3.1 Schaltskizze von Layout 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.3.2 Schaltskizze von Layout 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87A.3.3 Angaben aus den Datenblättern . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88A.3.4 Details zur HF/NF-Wandler-Karte . . . . . . . . . . . . . . . . . . . . . . . . . . 93
v

1 Einführung
Ziel der vorliegenden Masterarbeit war die Entwicklung einer Messschaltung, die zur Polarisationsdetektionverschiedener Festkörpertargets mittels kernmagnetischer Resonanz (NMR - Nuclear Magnetic Resonance)verwendet werden kann. Die Einführung gibt einen kurzen Einblick in die Zielsetzung von Experimentenmit polarisierten Targets (PT). Zum Verständnis der Konzepte von Spinpolarisation und Kernspinresonanzwerden einige grundlegende theoretische Konzepte der Spinphysik benötigt. Weiterhin sind zum Verständnisder Zielsetzung von Doppelpolarisationsexperimenten Einblicke in die theoretische Beschreibung der Nukleo-nensubstruktur erforderlich. Die entsprechenden theoretischen Grundlagen sind in Kapitel 2 dargelegt. Imnachfolgenden Kapitel 3 werden dann physikalische und technische Grundlagen polarisierbarer Festkörper-targets eingehender erläutert.Die Frequenz der Kernspinresonanz liegt - bei den für die Targetpolarisation benötigten Magnetfeldern - ineinem Bereich von einigen zehn bis einigen hundert MHz. Daher werden in Kapitel 4 einige Grundlagen derHochfrequenztechnik erläutert. Zur Messung der Targetpolarisation ist die Messung der Kernspinresonanzeine etablierte Methode, deren Grundlagen in Kapitel 5 beschrieben werden. Konkrete Umsetzungen, diean verschiedenen polarisierbaren Targets Verwendung gefunden haben und Verwendung nden, werden inKapitel 6 erläutert. Die im Rahmen dieser Arbeit entwickelte Messschaltung wird in Kapitel 7 vorgestellt.Weiterhin wurden verschiedene Möglichkeiten untersucht, das für NMR-Messungen in der Regel erforderli-che Phasenkabel durch mechanische oder elektronische Komponenten zu ersetzen. Die Ansätze hierzu sindin Kapitel 8 beschrieben. Messungen, die mit der neu entwickelten Messschaltung durchgeführt wurden,werden in Kapitel 9 dargestellt und analysiert. Die Ergebnisse dieser Auswertung werden in Kapitel 10 re-ektiert und die sich daraus ergebenden Perspektiven für mögliche Erweiterungen der Messschaltung werdenaufgezeichnet.
Schon die Naturphilosophen der Antike beschäftigten sich mit der Frage nach der Zusammensetzung derMaterie. Als Grundstein gelten dabei Überlegungen des griechischen Philosophen Leukipp und seines SchülersDemokrit im 5. Jahrhundert vor Christus. In diesen Schriften ndet sich erstmals die Verwendung des nachdamaliger Vorstellung unteilbar kleinsten Bestandteils der Materie, des ατoµoς. Über Jahrhunderte bliebdie Frage nach der fundamentalen Zusammensetzung der Materie philosophischen Überlegungen überlas-sen. Erst zu Beginn des 20. Jahrhunderts entstanden Atommodelle, die auf experimentellen Beobachtungenbasierten. Als Vorreiter sind hier Philippe Lenard, William Thomson, Nagaoka Hantaro und nicht zuletzt Er-nest Rutherford zu nennen, dem es durch sein Streuexperiment (vgl. [Rut11]) mit nach heutigen Maÿstäbeneinfachen technischen Mitteln gelang, die Massenverteilung (massiver Atomkern und leichte Elektronen ineiner Atomhülle) im Atom zu ermitteln. Später konnte gezeigt werden, dass Protonen und Neutronen denkompakten, massereichen Atomkern bilden. Die Forschungsergebnisse dieser Jahre können als Grundsteinder experimentellen Hadronen1- und Kernphysik gesehen werden.Doch auch die Hadronen sollten sich wenig später nicht als kleinste Einheit erweisen: Im Jahre 1964 postu-lierten Murray Gell-Mann und George Zweig in [GM64] die Existenz von Quarks als Bausteine der Hadronen.Ihre Arbeit leistete einen entscheidenden Beitrag zur Klassizierung der Elementarteilchen und ihrer Wech-selwirkungen und die Forschungsarbeit von Murray Gell-Mann wurde 1969 mit einem Nobelpreis gewürdigt(vgl. [Nob13]) Quarks lassen sich gemäÿ der Theorie der starken Wechselwirkung (auch Quantenchromo-dynamik) jedoch nicht isoliert beobachten, da sie sich in einem so genannten connement benden. Jedeseinzelne Quark trägt zusätzlich zur elektrischen Ladung (−1
3 oder 23 der Elementarladung) noch eine Farb-
ladung (rot, grün, blau, antirot, antigrün oder antiblau).In den vergangenen Jahrzehnten wurden von theoretischen Modellen ausgehend mehrfach Multiquarkzustän-1Teilchen, die im Gegensatz zu Leptonen der starken Wechselwirkung unterworfen sind
7
de postuliert. Ein profunder Nachweis in einem teilchenphysikalischen Experiment steht jedoch bis heute aus.Bisher konnten isoliert nur Kombinationen aus zwei oder drei Quarks, deren Farbladungen sich zu weiÿ ad-dieren, beobachtet werden.In Analogie zu drei Leptonenfamilien konnten drei Quarkfamilien mit jeweils zwei Flavours:
• Up und Down• Charm und Strange• Top und Bottom
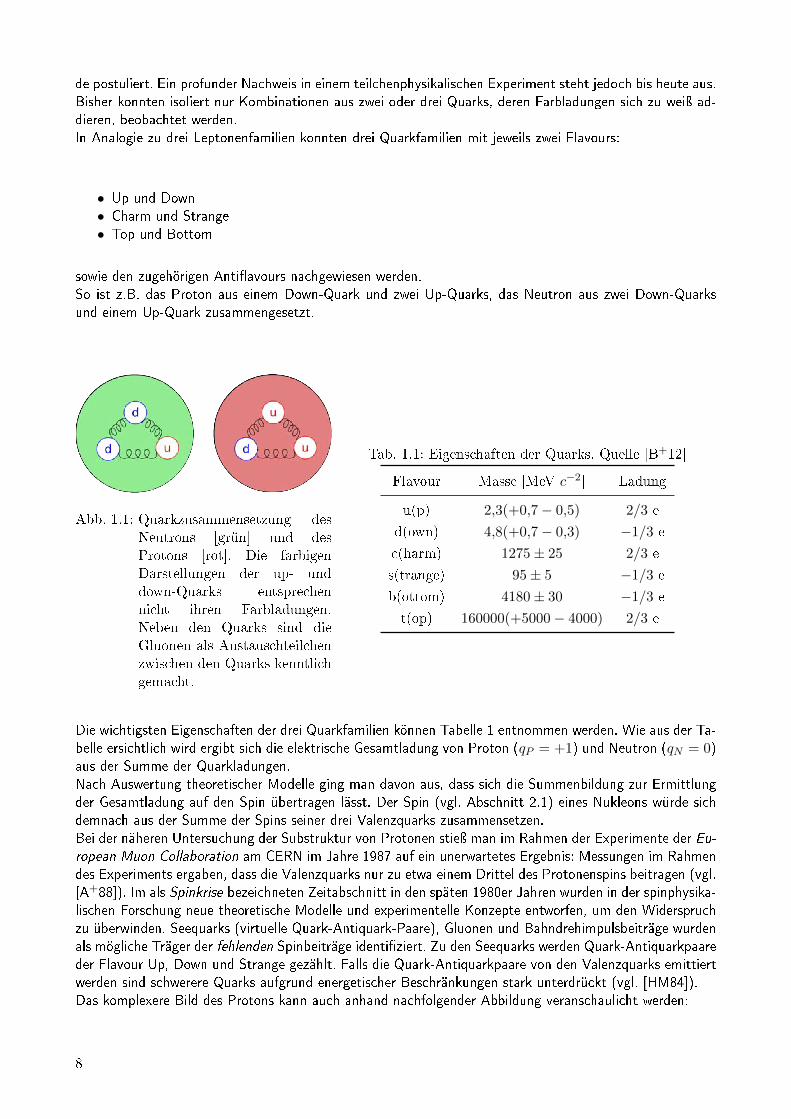
sowie den zugehörigen Antiavours nachgewiesen werden.So ist z.B. das Proton aus einem Down-Quark und zwei Up-Quarks, das Neutron aus zwei Down-Quarksund einem Up-Quark zusammengesetzt.
Abb. 1.1: Quarkzusammensetzung desNeutrons [grün] und desProtons [rot]. Die farbigenDarstellungen der up- unddown-Quarks entsprechennicht ihren Farbladungen.Neben den Quarks sind dieGluonen als Austauschteilchenzwischen den Quarks kenntlichgemacht.
Tab. 1.1: Eigenschaften der Quarks. Quelle [B+12]
Flavour Masse [MeV c−2] Ladung
u(p) 2,3(+0,7− 0,5) 2/3 e
d(own) 4,8(+0,7− 0,3) −1/3 e
c(harm) 1275± 25 2/3 e
s(trange) 95± 5 −1/3 e
b(ottom) 4180± 30 −1/3 e
t(op) 160000(+5000− 4000) 2/3 e
Die wichtigsten Eigenschaften der drei Quarkfamilien können Tabelle 1 entnommen werden. Wie aus der Ta-belle ersichtlich wird ergibt sich die elektrische Gesamtladung von Proton (qP = +1) und Neutron (qN = 0)aus der Summe der Quarkladungen.Nach Auswertung theoretischer Modelle ging man davon aus, dass sich die Summenbildung zur Ermittlungder Gesamtladung auf den Spin übertragen lässt. Der Spin (vgl. Abschnitt 2.1) eines Nukleons würde sichdemnach aus der Summe der Spins seiner drei Valenzquarks zusammensetzen.Bei der näheren Untersuchung der Substruktur von Protonen stieÿ man im Rahmen der Experimente der Eu-ropean Muon Collaboration am CERN im Jahre 1987 auf ein unerwartetes Ergebnis: Messungen im Rahmendes Experiments ergaben, dass die Valenzquarks nur zu etwa einem Drittel des Protonenspins beitragen (vgl.[A+88]). Im als Spinkrise bezeichneten Zeitabschnitt in den späten 1980er Jahren wurden in der spinphysika-lischen Forschung neue theoretische Modelle und experimentelle Konzepte entworfen, um den Widerspruchzu überwinden. Seequarks (virtuelle Quark-Antiquark-Paare), Gluonen und Bahndrehimpulsbeiträge wurdenals mögliche Träger der fehlenden Spinbeiträge identiziert. Zu den Seequarks werden Quark-Antiquarkpaareder Flavour Up, Down und Strange gezählt. Falls die Quark-Antiquarkpaare von den Valenzquarks emittiertwerden sind schwerere Quarks aufgrund energetischer Beschränkungen stark unterdrückt (vgl. [HM84]).Das komplexere Bild des Protons kann auch anhand nachfolgender Abbildung veranschaulicht werden:
8
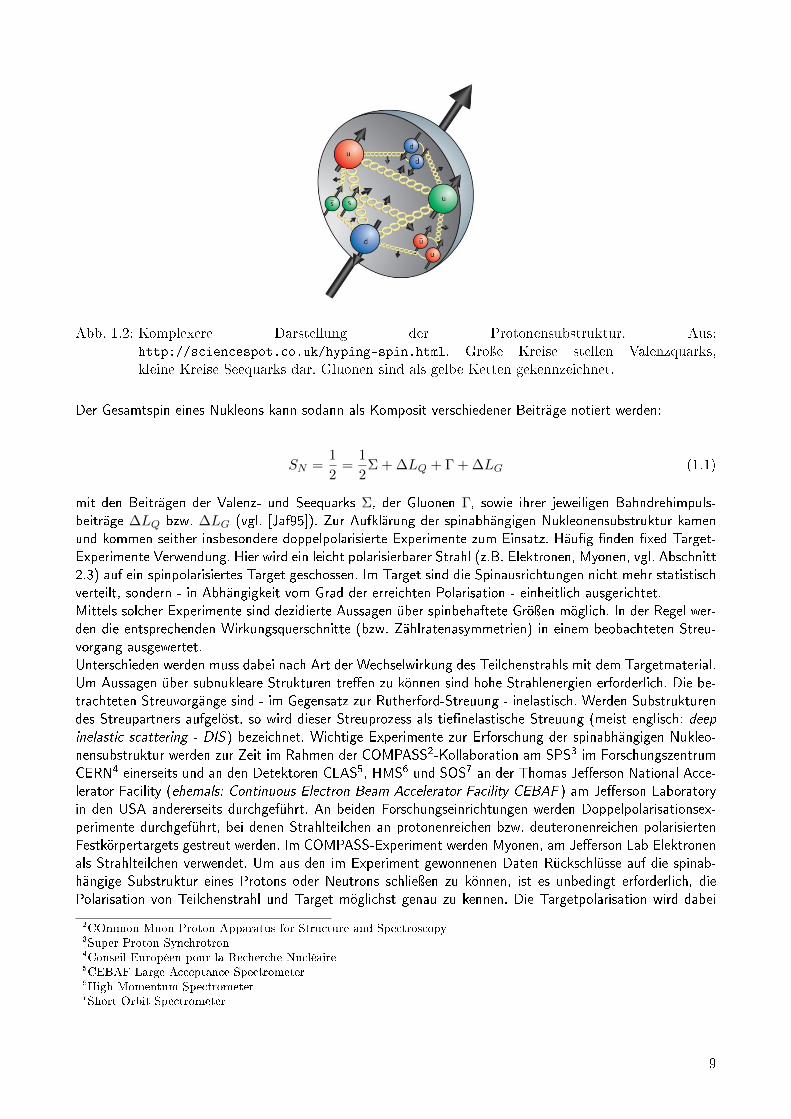
Abb. 1.2: Komplexere Darstellung der Protonensubstruktur. Aus:http://sciencespot.co.uk/hyping-spin.html. Groÿe Kreise stellen Valenzquarks,kleine Kreise Seequarks dar. Gluonen sind als gelbe Ketten gekennzeichnet.
Der Gesamtspin eines Nukleons kann sodann als Komposit verschiedener Beiträge notiert werden:
SN =1
2=
1
2Σ + ∆LQ + Γ + ∆LG (1.1)
mit den Beiträgen der Valenz- und Seequarks Σ, der Gluonen Γ, sowie ihrer jeweiligen Bahndrehimpuls-beiträge ∆LQ bzw. ∆LG (vgl. [Jaf95]). Zur Aufklärung der spinabhängigen Nukleonensubstruktur kamenund kommen seither insbesondere doppelpolarisierte Experimente zum Einsatz. Häug nden xed Target-Experimente Verwendung. Hier wird ein leicht polarisierbarer Strahl (z.B. Elektronen, Myonen, vgl. Abschnitt2.3) auf ein spinpolarisiertes Target geschossen. Im Target sind die Spinausrichtungen nicht mehr statistischverteilt, sondern - in Abhängigkeit vom Grad der erreichten Polarisation - einheitlich ausgerichtet.Mittels solcher Experimente sind dezidierte Aussagen über spinbehaftete Gröÿen möglich. In der Regel wer-den die entsprechenden Wirkungsquerschnitte (bzw. Zählratenasymmetrien) in einem beobachteten Streu-vorgang ausgewertet.Unterschieden werden muss dabei nach Art der Wechselwirkung des Teilchenstrahls mit dem Targetmaterial.Um Aussagen über subnukleare Strukturen treen zu können sind hohe Strahlenergien erforderlich. Die be-trachteten Streuvorgänge sind - im Gegensatz zur Rutherford-Streuung - inelastisch. Werden Substrukturendes Streupartners aufgelöst, so wird dieser Streuprozess als tiefinelastische Streuung (meist englisch: deepinelastic scattering - DIS) bezeichnet. Wichtige Experimente zur Erforschung der spinabhängigen Nukleo-nensubstruktur werden zur Zeit im Rahmen der COMPASS2-Kollaboration am SPS3 im ForschungszentrumCERN4 einerseits und an den Detektoren CLAS5, HMS6 und SOS7 an der Thomas Jeerson National Acce-lerator Facility (ehemals: Continuous Electron Beam Accelerator Facility CEBAF ) am Jeerson Laboratoryin den USA andererseits durchgeführt. An beiden Forschungseinrichtungen werden Doppelpolarisationsex-perimente durchgeführt, bei denen Strahlteilchen an protonenreichen bzw. deuteronenreichen polarisiertenFestkörpertargets gestreut werden. Im COMPASS-Experiment werden Myonen, am Jeerson Lab Elektronenals Strahlteilchen verwendet. Um aus den im Experiment gewonnenen Daten Rückschlüsse auf die spinab-hängige Substruktur eines Protons oder Neutrons schlieÿen zu können, ist es unbedingt erforderlich, diePolarisation von Teilchenstrahl und Target möglichst genau zu kennen. Die Targetpolarisation wird dabei
2COmmon Muon Proton Apparatus for Structure and Spectroscopy3Super Proton Synchrotron4Conseil Européen pour la Recherche Nucléaire5CEBAF Large Acceptance Spectrometer6High Momentum Spectrometer7Short Orbit Spectrometer
9

insbesondere mittels kernmagnetischer Resonanz bestimmt. In Kapitel 6 ist dargestellt, welche Implikationendie Verbesserung der Bestimmung der Targetpolarisation auf die Auswertung experimenteller Daten hat.Die Bochumer Arbeitsgruppe Polarized Target ist im Rahmen der COMPASS-Kollaboration vor allem ander Weiterentwicklung geeigneter Targetmaterialien und der Verbesserung der Targetpolarisationsdetektionbeteiligt.
10

2 Theoretische Grundlagen
2.1 Drehimpuls und Spin
Die nachfolgende theoretische Beschreibung von Drehimpuls und Spin orientiert sich im Wesentlichen an[Sch07] und [Fli08]:
2.1.1 Drehimpuls
Vor der Beschreibung des Spin soll eine kurze Beschreibung des aus der klassischen Mechanik wohlbekanntenDrehimpulses stehen, da der Spin hierzu einige Analogien aufweist.In quantenmechanischer Betrachtung kann ein Drehimpulsoperator
L = x× p (2.1)
deniert werden.Zur Bestimmung der Eigenwerte von Drehimpulsoperatoren werden oft zwei neue Operatoren, die so genann-ten Leiteroperatoren L± = Lx± iLy deniert. Betrachtet man eine Wellenfunktion ψl die Eigenfunktion zuLz mit Eigenwert lz ist, so ist L±ψl Eigenfunktion zu Lz mit Eigenwerten lz ± ~. Die Eigenschaften dieserLeiteroperatoren sind als folgt:
[Li,Lj ] = i~εijkLk (2.2)
[Lz,L±] = ±~L± (2.3)
[L+,L−] = 2~Lz (2.4)
Neben der Drehimpulsquantenzahl l ist auch noch die magnetische Drehimpulsquantenzahl m mit dem Dre-himpuls verknüpft. Für eine Eigenfunktion der Drehimpulsoperatoren ψlm gilt:
L2ψlm = ~2l(l + 1)ψlm (2.5)
Lzψlm = ~mψlm (2.6)
Für die Quantenzahlen gilt unter Verwendung der Eigenschaften der Leiteroperatoren:
|m| ≤ l (2.7)
Mit dem Bahndrehimpuls eines Elektrons ist ein magnetisches Moment
µL =qe2m· ~L (2.8)
assoziiert.
2.1.2 Spin
In diesem Kapitel sollen einige theoretische Grundlagen der Spinphysik dargelegt werden. Aus der Beob-achtung von Ferromagnetika schloss Compton 1921 erstmals auf die Existenz eines inneren magnetischen
11

Moments der Elektronen. Experimentell konnte die Existenz eines Elektronenspins 1922 im Stern-Gerlach-Experiment nachgewiesen werden. Eine erste korrekte Beschreibung der beobachteten Phänomenologie ndetsich in einem 1925 von Uhlenbeck und Goudsmit veröentlichten Paper ([UG25]):
Das Elektron rotiert um seine eigene Achse mit dem Drehimpuls ~/2. Für diesen Wert desDrehimpulses gibt es nur zwei Orientierungen für den Drehimpulsvektor. Das gyromagnetischeVerhältnis ist für die Eigenrotation doppelt so groÿ wie für die Umlaufbewegung.
Weitere Informationen zur Geschichte der Erforschung des Elektronenspins können [Sch07] entnommen wer-den. Es konnte gezeigt werden, dass alle Fermionen1 einen halbzahligen, alle Bosonen2 einen ganzzahligenSpin besitzen. Auf eine detaillierte Betrachtung des Spins von Bosonen wird an dieser Stelle verzichtet,entsprechende Beschreibungen nden sich in den gängigen Lehrbüchern der Quantenmechanik.Ein Spin-1/2-Teilchen kann zwei Spinorientierungen besitzen:
• Spin Up := |↑〉
• Spin Down := |↓〉
Man deniert nun einen Spinoperator S, der nach Multiplikation mit einem Einheitsvektor die beiden Eigen-werte ±~
2 besitzt.Ohne Einschränkungen kann nun die z-Komponente des Spinoperators betrachtet werden:
Sz
((|↑〉|↓〉
))=
~2
((+ |↑〉− |↓〉
))(2.9)
Operatoren, die eine physikalische Observable beschreiben sind stets hermitesch und die zu verschiedenenEigenwerten gehörenden Zustände sind orthogonal zueinander, so dass gilt:
〈↑ | ↓〉 = 0 (2.10)
In Analogie zur Betrachtung des Drehimpulses können nun Leiteroperatoren deniert werden:
S± = Sx ± iSy (2.11)
Insbesondere gelten damit folgende Relationen:
Sx =1
2(S+ + S−), Sy =
1
2i(S+ − S−) (2.12)
Weiterhin gelten in Analogie zum Drehimpuls folgende Kommutatorrelationen:
[Si,Sj ] = i~εijkSk (2.13)
[Sz,S±] = ±~S± (2.14)
[S+,S−] = 2~Sz (2.15)
1Materieteilchen, die der Fermi-Dirac-Statistik folgen. Zwei Fermionen im gleichen Spinzustand dürfen sich nicht amselben Ort aufhalten (Pauli-Verbot).
2Austauschteilchen, die der Bose-Einstein-Statistik folgen. Energiezustände dürfen mehrfach besetzt sein.
12

Die Anwendung der Leiteroperatoren auf die Spinzustände ergibt erwartungsgemäÿ
S+ |↑〉 = 0 (2.16a)
S+ |↓〉 = ~ |↑〉 (2.16b)
S− |↑〉 = ~ |↓〉 (2.16c)
S− |↓〉 = 0 (2.16d)
Damit lässt sich eine Übergangsmatrix für die Spinzustände denieren.
TSi =
(〈↑ |Si| ↑〉 〈↑ |Si| ↓〉〈↓ |Si| ↑〉 〈↓ |Si| ↓〉
)(2.17)
Unter Verwendung der Gleichungen 2.16 und 2.12 folgt hieraus über die Denition S = ~2σ die Denition
der bekannten Pauli-Spinmatrizen:
σx =
(0 1
1 0
), σy =
(0 −ii 0
), σz
(1 0
0 −1
)(2.18)
Auch mit dem Spin ist ein magnetisches Moment verknüpft. Abweichend gilt:
~µS = gq
2m~S (2.19)
Der Vorfaktor g, welcher sich auch über die Beobachtung des Zeeman-Eekts (vgl. Abschnitt 2.1.4) be-stimmen lässt, wird als Landé-Faktor bezeichnet. Für Elektronen beträgt er unter Vernachlässigung quante-nelektrodynamsicher Korrekturen exakt 2. Der Landé-Faktor von Nukleonen lässt sich nicht über die bisherbetrachtete theoretische Beschreibung punktförmiger Teilchen ableiten, da hier die Nukleonensubstruktur zuberücksichtigen ist. Diese bewirkt z.B. auch, dass Neutronen ein magnetisches Moment besitzen obwohl sienach auÿen ladungsneutral sind. Zur vereinfachten Darstellung werden in der Regel zwei neue Gröÿen einge-führt: Zum Einen das Magneton µx = q~
2m und zum Anderen das gyromagnetische Verhältnis γ = |~µ||~s| = gµx
~ .Bei Betrachtung von Elektronen spricht man vom Bohrschen Magneton:
µx = µB = 927,40097 · 10−26J/T, (2.20)
bei Betrachtung von Nukleonen vom Kernmagneton
µx = µK = 5,05078 · 10−27J/T (2.21)
Für die untersuchten Teilchen ergeben sich für den Spin folgende g-Faktoren und gyromagnetischen Ver-hältnisse.
Tab. 2.1: g-Faktoren und gyromagnetische Verhältnisse γ ausgewählter Teilchen
Teilchen g-Faktor γ [T−1s−1]
Elektron −2,002 32 1,760 86·1011
Proton 5,585 69 2,675 22·108
Neutron −3,826 09 1,832 47·108
Deuteron 0,857 44 4,106 63·107
Die Angabe des gyromagnetischen Verhältnisses für das Deuteron wurde aus der Denition berechnet. Alleanderen Zahlenwerte wurden [NIS11] entnommen. Zur besseren Übersichtlichkeit wurden die Werte starkgerundet.
13
2.1.3 Spin-Bahn-Kopplung
Sowohl bei Elektronen als auch bei Nukleonen tritt eine Kopplung von Bahndrehimpuls und Spin auf. Es gilt:
~J = ~L+ ~S (2.22)
Für die Eigenzustände zu ~J2, Jz, ~L2 und ~S2 kann nun eine neue Notation eingeführt werden:
|j,mj ,l〉 = |l ± 1
2,mj ,l〉 (2.23)
Es gibt nun also eine Bahndrehimpulsquantenzahl l, eine Gesamtdrehimpulsquantenzahl j und eine mag-netische Gesamtdrehimpulsquantenzahl mj . Die magnetischen Momente von Drehimpuls und Spin könnennun gemeinschaftlich betrachtet werden. Es gilt:
~µ = ~µL + ~µS (2.24a)
~µ =q
2mc· ~L+ gs
q
2mc· ~S (2.24b)
Dabei ist zu berücksichtigen, das Neutronen aufgrund ihrer fehlenden Gesamtladung keinen Bahndrehimpuls-beitrag zu ihrem magnetischen Moment erfahren, d.h. hier gilt abweichend:
~µn = gsq
2mc· ~S (2.25)
2.1.4 Teilchen im äuÿeren Magnetfeld
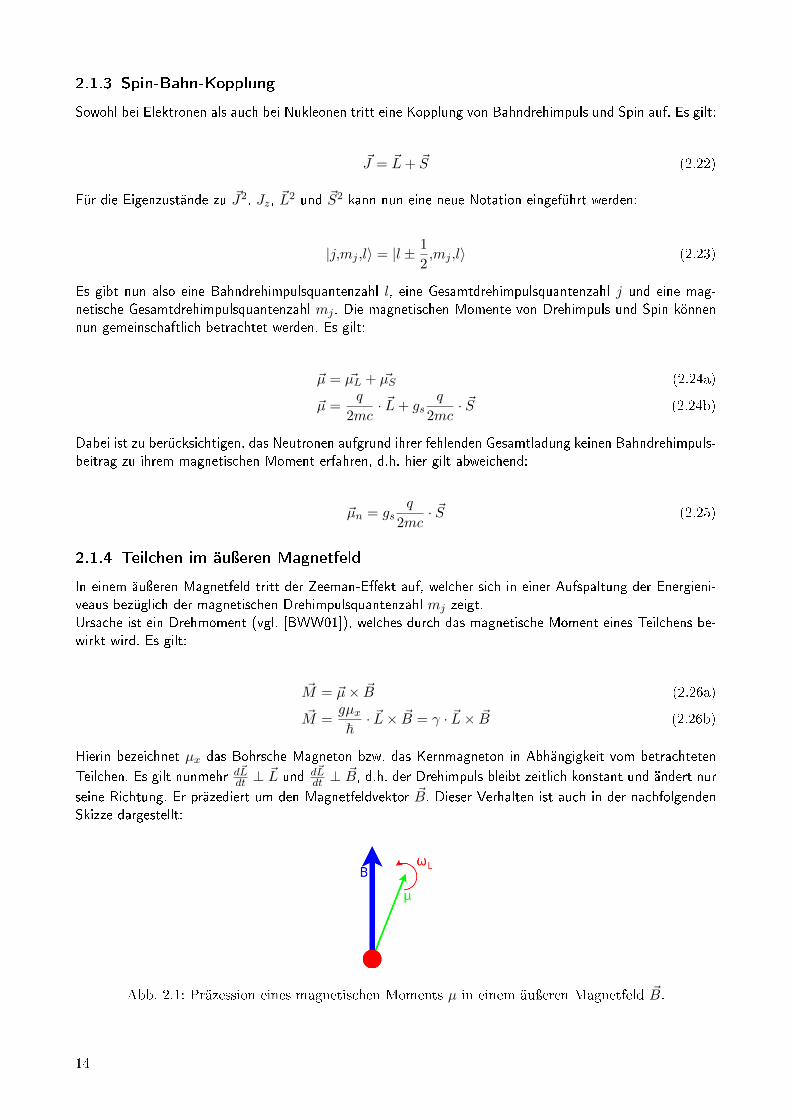
In einem äuÿeren Magnetfeld tritt der Zeeman-Eekt auf, welcher sich in einer Aufspaltung der Energieni-veaus bezüglich der magnetischen Drehimpulsquantenzahl mj zeigt.Ursache ist ein Drehmoment (vgl. [BWW01]), welches durch das magnetische Moment eines Teilchens be-wirkt wird. Es gilt:
~M = ~µ× ~B (2.26a)
~M =gµx~· ~L× ~B = γ · ~L× ~B (2.26b)
Hierin bezeichnet µx das Bohrsche Magneton bzw. das Kernmagneton in Abhängigkeit vom betrachteten
Teilchen. Es gilt nunmehr d~Ldt ⊥ ~L und d~L
dt ⊥ ~B, d.h. der Drehimpuls bleibt zeitlich konstant und ändert nur
seine Richtung. Er präzediert um den Magnetfeldvektor ~B. Dieser Verhalten ist auch in der nachfolgendenSkizze dargestellt:
Abb. 2.1: Präzession eines magnetischen Moments µ in einem äuÿeren Magnetfeld ~B.
14

Für die Umlaufzeit der Präzessionsbewegung gilt:
∣∣∣∣∣d~Ldt∣∣∣∣∣T = 2π
∣∣∣~L∣∣∣ sin(ϕ) (2.27)
ϕ bezeichnet den Winkel zwischen ~L und ~B. Mit der bekannten Identität ~M = d~Ldt folgt hieraus:
gµx~
∣∣∣~L∣∣∣ · ~B sin(ϕ)T = 2π∣∣∣~L∣∣∣ sin(ϕ) (2.28a)
T =h
gµxB(2.28b)
Die Präzession des Spins erfolgt mit einer als Larmor-Frequenz bezeichneten Kreisfrequenz:
ωl =gµxB
~(2.29a)
ωl = γ ·B (2.29b)
15
2.2 Substruktur von Nukleonen
Betrachtet man den Zusammenhang von Impuls und de Broglie-Wellenlänge eines Teilchens
λdB =h
p, (2.30)
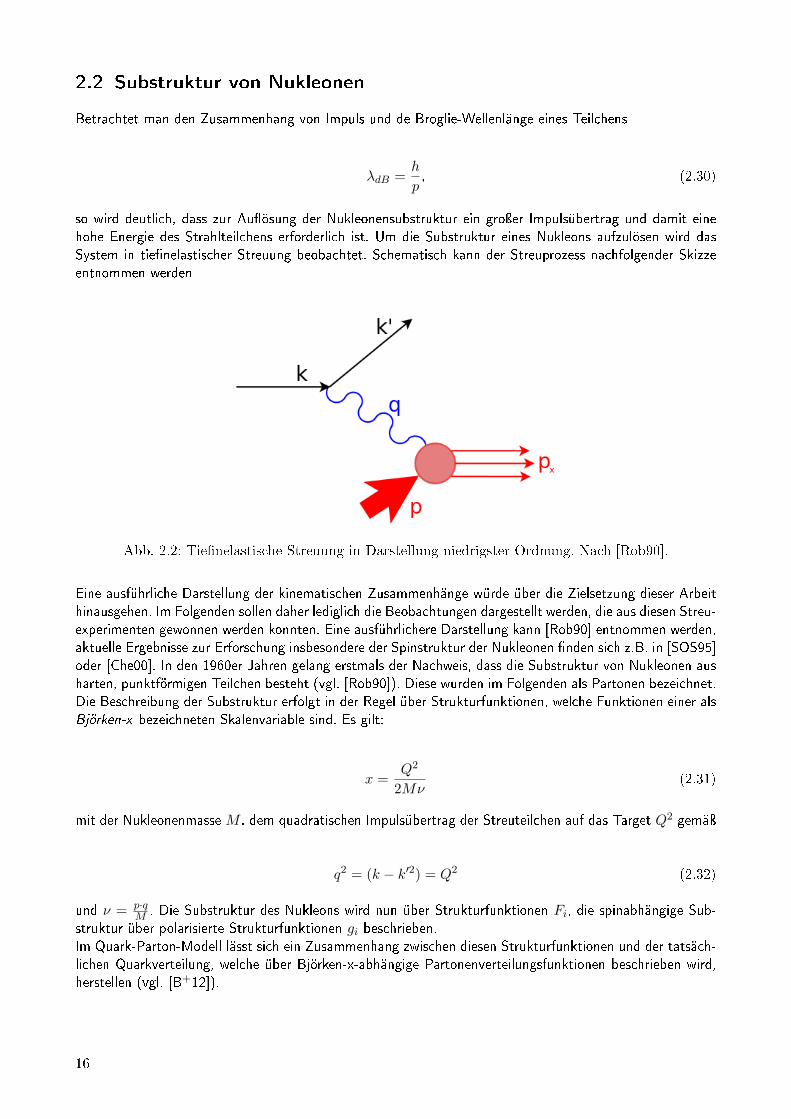
so wird deutlich, dass zur Auösung der Nukleonensubstruktur ein groÿer Impulsübertrag und damit einehohe Energie des Strahlteilchens erforderlich ist. Um die Substruktur eines Nukleons aufzulösen wird dasSystem in tienelastischer Streuung beobachtet. Schematisch kann der Streuprozess nachfolgender Skizzeentnommen werden
Abb. 2.2: Tienelastische Streuung in Darstellung niedrigster Ordnung. Nach [Rob90].
Eine ausführliche Darstellung der kinematischen Zusammenhänge würde über die Zielsetzung dieser Arbeithinausgehen. Im Folgenden sollen daher lediglich die Beobachtungen dargestellt werden, die aus diesen Streu-experimenten gewonnen werden konnten. Eine ausführlichere Darstellung kann [Rob90] entnommen werden,aktuelle Ergebnisse zur Erforschung insbesondere der Spinstruktur der Nukleonen nden sich z.B. in [SOS95]oder [Che00]. In den 1960er Jahren gelang erstmals der Nachweis, dass die Substruktur von Nukleonen ausharten, punktförmigen Teilchen besteht (vgl. [Rob90]). Diese wurden im Folgenden als Partonen bezeichnet.Die Beschreibung der Substruktur erfolgt in der Regel über Strukturfunktionen, welche Funktionen einer alsBjörken-x bezeichneten Skalenvariable sind. Es gilt:
x =Q2
2Mν(2.31)
mit der Nukleonenmasse M , dem quadratischen Impulsübertrag der Streuteilchen auf das Target Q2 gemäÿ
q2 = (k − k′2) = Q2 (2.32)
und ν = p·qM . Die Substruktur des Nukleons wird nun über Strukturfunktionen Fi, die spinabhängige Sub-
struktur über polarisierte Strukturfunktionen gi beschrieben.Im Quark-Parton-Modell lässt sich ein Zusammenhang zwischen diesen Strukturfunktionen und der tatsäch-lichen Quarkverteilung, welche über Björken-x-abhängige Partonenverteilungsfunktionen beschrieben wird,herstellen (vgl. [B+12]).
16

2.3 Polarisation
Wenn im Folgenden von Polarisation gesprochen wird, ist stets die Ausprägung einer Vorzugsrichtung derKernspins, also eine Kernspinpolarisation gemeint.Wenn Ni die Zahl der Teilchen in einem Spinzustand beschreibt, so lässt sich die Polarisation als Verhältnisdes Überschusses dieses Spinzustands zur Gesamtheit der Spinzustände beschreiben. Es gilt also für einSpin-1/2-Teilchen:
P1/2 =N↑ −N↓N↑ +N↓
(2.33)
und für ein Spin-1-Teilchen (z.B. Deuteron):
P1 =N↑ −N↓
N↑ +N0 +N↓(2.34)
Im folgenden Abschnitt soll dargelegt werden, welcher funktionale Zusammenhang zwischen der Besetzungder Spinzustände und äuÿeren Parametern besteht.
2.3.1 Theoretische Grundlagen
In einem äuÿeren magnetischen Feld kommt es im thermischen Gleichgewicht zu einer Besetzung der beidenSpinzustände (parallel oder antiparallel zum äuÿeren Magnetfeld) gemäÿ der Boltzmann-Statistik.Die Wahrscheinlichkeit ein Teilchen in einem bestimmten Spinzustand anzutreen ist also:
p(S) ∝ exp
− ESkB · T
(2.35)
Die beiden Energiezustände unterscheiden sich dabei um die Dierenz der beiden Zeeman-Energieniveaus.Es sind also:
E↑↑ = E0 +mj~ωl (2.36a)
E↑↓ = E0 −mj~ωl (2.36b)
Für hohe Temperaturen, d.h. genauer wenn die Temperatur groÿ gegen die Zeeman-Aufspaltung der Energie-niveaus ist, lässt sich die Polarisation sehr einfach über eine Hochtemperatur-Näherung darstellen. Sodanngilt:
N↓N↑
= exp
−γ~BkBT
(2.37)
Exakt lässt sich die Polarisation über die Beschreibung des magnetischen Moments einer paramagnetischenSubstanz in einem magnetischen Feld darstellen. Unter Zuhilfenahme der Abkürzung λ = γ~B
kBTlautet diese
Langevin-Brillouin-Formel gemäÿ [Dan65].
P =2J + 1
2Jcoth
(2J + 1
2J· λ)− 1
2Jcoth
(λ
2
)(2.38)
Die Formelzeichen wurde an die bisher verwendeten Symbole angepasst. Für Spin-1/2-Teilchen folgt hieraus:
P1/2 = tanh
(λ
2
)(2.39)
17

Für Spin-1-Teilchen (z.B. Deuteronen) gilt indes:
P1 =4 · tanh(λ2 )
3 + tanh2(λ2 )(2.40)
Mittels dieser Formeln lässt sich die natürliche Polarisation verschiedener Teilchen in Abhängigkeit von Tem-peratur und Magnetfeld darstellen:Es werden also sehr niedrige Temperaturen und ein starkes Magnetfeld benötigt, um eine für ein teilchen-physikalisches Experiment hinreichende Polarisation zu erzielen. Dabei sind dem Absenken der Temperaturund der Erhöhung des Magnetfelds auch technische Grenzen gesetzt (vgl. Abschnitt 3.1). Es wurden daheralternative Verfahren gesucht, die Polarisation zu steigern. Sehr erfolgreich ist die Methode der dynamischenNukleonenpolarisation. Der theoretische Hintergrund dieses Verfahrens wird im folgenden Abschnitt erläutert.
2.3.2 Dynamische Nukleonenpolarisation
Grundidee der dynamischen Nukleonenpolarisation (DNP) ist die Ausnutzung der leichten Polarisierbarkeitvon Elektronen. In einem geeigneten Targetmaterial (protonen- bzw. deuteronenreich und mit freien Elek-tronen) lässt sich die Elektronenspinpolarisation durch Einstrahlung von Mikrowellen auf die Nukleonenübertragen. Zur Beschreibung der DNP gibt es im Wesentlichen drei unterschiedliche Mechanismen: DerPolarisationsübertrag kann über den Overhauser-Eekt, über den solid eect oder über thermal mixing be-schrieben werden. Als Overhauser-Eekt werden DNP-Vorgänge in Metallen und Biomolekülen bezeichnet.Solid eect und thermal mixing werden ausführlich in [Hes09] dargestellt. Im Folgenden sollen in Anleh-nung an diese Darstellung einige Grundzüge erläutert werden. Die Theorie des solid eects stellt eine starkvereinfachende Beschreibung der DNP dar. Sie beschreibt schmale Energieniveaus, wie sie bei geringer Kon-zentration freier Elektronen und einer schmalen Resonanzlinie der Elektronenspinresonanz auftreten. DurchEinstrahlung von Mikrowellen der Frequenzen νS+νI bzw. νS−νI , entsprechend der Summe bzw. Dierenzder Elektronenspinresonanzfrequenz νS und der Kernspinresonanzfrequenz νI , können simultane Spinipsvon Elektronen und Nukleonen induziert werden. Ausgenutzt wird nun die unterschiedliche Relaxationszeit.Während die Elektronenspins rasch in ihren Ursprungszustand zurückkehren, bleiben die Nukleonen polari-siert. Die beiden Prozesse sind auch in nachfolgendem Diagramm veranschaulicht:
Abb. 2.3: Schematische Darstellung des solid eects. Nach [Hes09]
18

I bezeichnet die Orientierung eines Kernspins, S bezeichnet die Orientierung eines Elektronenspins.Durch Einstrahlung von Mikrowellen der Frequenz ν = νS + νI werden Elektronenspin und Kernspin vonNiveau |d〉 auf Niveau |a〉 angehoben. Nach Relaxation des Elektronenspins bildet sich eine negative Kern-spinpolarisation aus. Durch Einstrahlung von Mikrowellen der Dierenz der Resonanzfrequenzen ν = νS−νIwerden Elektronenspin und Kernspin von Niveau |c〉 auf Niveau |b〉 angehoben. Nach Relaxation des Elek-tronenspins bildet sich nunmehr eine positive Kernspinpolarisation aus.Eine genauere Beschreibung der DNP kann durch Einführung thermodynamischer Gröÿen erfolgen. Deneinzelnen Spin-Wechselwirkungen wird jeweils ein Energiereservoir zugeordnet und die Ordnung dieser Re-servoirs durch eine Spintemperatur beschrieben (vgl. [Hes09]). Die Polarisation der Nukleonen geschiehtnunmehr durch einen als thermal mixing bezeichneten Vorgang, bei dem das Kern-Zeeman-Reservoir unddas elektronische Spin-Spin-Reservoir aneinander koppeln. Eine ausführlichere Darstellung kann [Goe02] ent-nommen werden.
2.3.3 Relaxation
Unterschieden werden muss zwischen der Relaxation der Nukleonenspinausrichtung durch Wechselwirkungenzwischen dem Spinsystem und anderen Freiheitsgraden des Festkörpers und der Relaxation durch Wechsel-wirkungen innerhalb des Spinsystems. Erstere wird als Spin-Gitter-Relaxation (Relaxationszeit T1), letztereals Spin-Spin-Relaxation (Relaxationszeit T2) bezeichnet. Die Beschreibung der Auswirkungen auf die Ma-gnetisierung der Probe erfolgt in Abschnitt 5.1.3.
19

3 Polarisierte Targets
3.1 Grundkonzept
Die wichtigsten Aspekte eines polarisierten Targets sind:
• Targetmaterial
• Magnetfeld
• Kryo- und Vakuumtechnik
• Mikrowellensystem zur DNP (vgl. Abschnitt 2.3.2)
• NMR-Aufbau zur Polarisationsdetektion (vgl. Kapitel 6)
Im folgenden Schaubild sind die einzelnen Aspekte eines polarisierten Targets noch einmal veranschaulicht:
Abb. 3.1: Schema eines polarisierten Targets und seiner Systeme
Die einzelnen Systeme müssen aufeinander abgestimmt sein. Der Aufbau und Betrieb eines polarisiertenTargets erfordert aufgrund der Vielzahl technisch anspruchsvoller Konzepte aus unterschiedlichen Fachbe-reichen eine interdisziplinäre Zusammenarbeit und eine gute Koordination.Unterschieden werden muss zwischen zwei Polarisationsmethoden: Bei der Brute Force-Methode wird dieSpinpolarisation des Targets durch Erhöhen des Magnetfelds und Absenken der Temperatur gesteigert. DieseVerfahren weisen jedoch physikalische Grenzen auf:
20

• oberhalb von B = 10 T können teilchenphysikalische Experimente aufgrund der Krümmung derTeilchenbahn nicht mehr gut ausgewertet werden.
• die Temperatur kann nicht beliebig gesenkt werden, da dem Target durch den Teilchenstrahl Energiezugeführt wird.
Die angegeben Werte sind [HKDG77] entnommen. Gemäÿ Gleichung 2.3 lässt sich nun die Polarisationberechnen. Während Elektronen schon bei schwächeren Magnetfeldern stark spinpolarisiert sind (93,3% beiT = 1K und B = 2,5T), ergeben sich bei einer angenommenen Tiefsttemperatur von T = 100 mK undeinem Magnetfeld von B = 10 T folgende maximale Nukleonenpolarisationen:
• Protonen: 10,2%
• Deuteronen 2,1%
Betrachtet man dieses Ergebnis, so wird deutlich, dass eine derart geringe Polarisation insbesondere für dieUntersuchung seltener Prozesse und/oder das Erzielen gröÿerer statistischer Signikanz in teilchenphysika-lischen Experimenten absolut unzureichend ist.Meist wird ein polarisiertes Target daher unter Ausnutzung dynamischer Nukleonenpolarisation betrieben.Die theoretischen Grundlagen der DNP wurden bereits in Abschnitt 2.3.2 beschrieben.
3.2 Experimenteller Aufbau
Ein polarisiertes Target benötigt - unabhängig von seiner Betriebsart (Brute Force oder DNP) - ein Magnet-feld. Bendet sich der Targetaufbau ohnehin in äuÿerem Magnetfeld so kann auf ein dezidiertes Target-Magnetfeld verzichtet werden. Um Magnetfeldstärken oberhalb 2,5 T zu erreichen wird heute in der Regelauf supraleitende Magnete zurückgegrien. Im Bereich der Kryotechnik muss zwischen einem Badkryostatenund einem Dilutionkryostaten unterschieden werden. Ein Badkryostat wird in der Regel mit 4He betrieben.Tiefe Temperaturen werden durch ein Absenken des Siedepunktes des Heliums erzielt. Dies geschieht durchDruckreduzierung. Dilutionkryostaten werden mit einer Mischung aus 4He und 3He betrieben. Eine deutlichniedrigere Temperatur kann hier durch Ausnutzung eines Phasenübergangs erzielt werden. Der Übergangvon 3He-Molekülen von einer 3He-reichen Phase in eine 3He-arme Phase ist für das System mit einemVerlust thermischer Energie verbunden.Das Mikrowellensystem muss an das entsprechende äuÿere Magnetfeld angepasst sein, wie auch in dertheoretischen Beschreibung der dynamischen Nukleonenpolarisation (vgl. Abschnitt 2.3.2) ersichtlich wird.Zudem muss der Kroystat in der Lage sein, die thermische Erwärmung durch die eingestrahlte Mikrowellen-leistung zu kompensieren.Eine Übersicht über die Mikrowellenfrequenzen bei gängigen Magnetfeldern kann dem Anhang (A.1) entnom-men werden. Auch der NMR-Aufbau zur Polarisationsdetektion muss auf die Nukleonen und das Magnetfeldangepasst sein.Die entsprechenden zu berücksichtigenden Frequenzbereiche hängen von der Kern-Larmor-Frequenz ab, wiein Tabelle 6.1 dargestellt.
3.3 Targetmaterialien
Ein entscheidender Aspekt der Vorbereitung eines Doppelpolarisationsexperiments ist die Auswahl einesgeeigneten polarisierbaren Targets. Für den zu untersuchenden Streuprozess wird ein protonen- oder deu-teriumreiches Material gewählt, wobei reiner Wassersto ungeeignet bzw. nur mit erheblichem technischenAufwand verwendbar ist (vgl. [Rad97]). Um dynamische Nukleonenpolarisation zu ermöglichen müssen freie
21

Elektronen im Targetmaterial verfügbar gemacht werden. Dies kann durch chemische Dotierung (Träger-materialien zumeist Alkohole) mit Radikalen1 oder durch Ausbildung paramagnetischer Zentren mittelsStrahlendotierung geschehen. In Abhängigkeit vom Experiment ergeben sich unterschiedliche Anforderun-gen bezüglich folgender charakteristischer Eigenschaften:
• Maximalpolarisation
• Strahlenhärte
• Polarisationszeiten
• Geometrie des Targetmaterials
• Homogenität des Targets
• Herstellung, Lagerung, Transport
Das Targetmaterial muss entsprechend der Anforderungen gewählt werden. Einige wichtige Anforderungenkönnen auch über eine Figure of merit (vgl. [Mey08]) beschrieben werden:
FOMsolidtarget = ρ · κ · P 2t · f2 (3.1)
Hier bezeichnen
• ρ die Dichte des Targetmaterials• κ den Füllfaktor• Pt die Targetpolarisation• f den dilution factor, das Verhältnis polarisierbare Nukleonen
alle Nukleonenin der Probe
Im Rahmen des Tests der NMR wurden Messungen an strahlendotiertem 6LiD, TEMPO2-dotiertem H-Butanol und an Finland D363-dotiertem D-Butanol durchgeführt. Diese Materialien sollen im Folgendennäher vorgestellt werden.
3.3.1 Strahlendotiertes 6LiD
Strahlendotiertes 6LiD ist - ebenso wie das nicht deuterierte Pendant 7LiH - ein bewährtes Targetmaterial.Gemäÿ [Kei09] weisen die beiden Targetmaterialien folgende Charakteristika auf:
Tab. 3.1: Charakteristika von 7LiH und 6LiD als Targetmaterialien
Material chem. Formel dilution factor max. Polarisation [%]
Lithiumhydrid 7LiH 0,25 90
Lithiumdeuterid 6LiD 0,50 55
Das Material liegt in der Regel in unterschiedlich geformten, schwarz-grauen Bruchstücken vor. Der Füll-faktor ist damit geringer als bei den kugelförmigen, chemischen dotierten Alkoholen. Lithiumhydrid undLithiumdeuterid zeichnen sich durch eine langsame Spin-Gitter-Relaxation aus. Damit ist jedoch auch einlangsamer Polarisationsaufbau verbunden.
1Moleküle, die ein ungepaartes Elektron aufweisen22,2,6,6-Tetramethylpiperidinyloxyl3Tris-(8-hydroxycarbonyl-2,2,6,6-tetrakis-(D3 -methyl)-benzo-[1,2-d:4,5-d']bis(1,3)dithiole-4-yl)methyl
22

3.3.2 Chemisch dotiertes Butanol
Die Butanolproben werden durch Beigabe eines Radikals chemisch dotiert. Dazu wird das Radikal mit Butanolverrührt und die Mischung mittels einer Spritze in ein Stickstobad gegeben. Für eine gute Polarisierbarkeitist darauf zu achten, dass die ausfrierenden Kugeln amorph sind. Chemisch dotierte Alkohole weisen alsTargetmaterialien folgende Charakteristika (vgl. [Kei09]) auf:
Tab. 3.2: Charakteristika von Butanol und D-Butanol als Targetmaterialien
Material chem. Formel dilution factor max. Polarisation [%]
Butanol C4H9OH 0,135 90− 95
D-Butanol C4D9OD 0,238 70− 80
Mit TEMPO dotiertes H-Butanol eignet sich als protonenreiches Targetmaterial. Die untersuchte Probe warmit etwa 0,4-Gewichtsprozent TEMPO dotiert worden. Mit Finland D36 dotiertes D-Butanol eignet sich alsdeuteriumreiches Targetmaterial. Die untersuchte Probe war mit 2,7 Gewichtsprozent Finland D36 dotiertworden. Weitere Untersuchungen chemisch dotierter Butanolproben nden sich auch in [Sch06]. Dort wirdauch die Herstellung des Targetmaterials beschrieben.
3.3.3 Weitere Targetmaterialien
Neben chemisch dotierten Alkoholen und strahlendotiertem Lithiumdeuterid ndet bestrahltes Ammoniak(vgl. [Mey04]) Verwendung. Vorteilhaft sind eine relativ groÿe Strahlenhärte im Vergleich zu chemischdotierten Alkoholen und eine schnellere Aufbauzeit.Weiterhin werden alternative Materialgerechte, welche auch bei Raumtemperatur stabil sind, erforscht.Forschungsschwerpunkte sind hierbei chemisch dotiertes (ggf. deuteriertes) Polystyrol und Polyethylen.
23

4 HF-Technik
In diesem Kapitel sollen einige elektrotechnische Grundlagen der Hochfrequenztechnik erläutert werden. Miteinem Frequenzbereich von einigen zehn bis einigen hundert MHz bei in teilchenphysikalischen Experimen-ten üblichen Magnetfeldern liegt die Kernspinresonanz im unteren Bereich der HF-Anwendungen. Aus demFrequenzbereich ergeben sich einige technische Besonderheiten, welche bei der Umsetzung einer Messschal-tung zu berücksichtigen sind. Der technische Aufwand ist jedoch deutlich geringer als z.B. bei Mikrowellen,welche den Einsatz von Hohlleitern erfordern.
4.1 Schirmung von HF-Signalen
Um HF-Signale vor einem Eintrag äuÿerer Störungen zu schützen werden für deren Weiterleitung in derRegel Koaxialkabel eingesetzt. Sollen solche Signale manipuliert werden, so sollte ein geeignetes GehäuseVerwendung nden, z.B. eines aus Metall.Besondere Anforderungen stellen HF-Signale an die Anordnung von Leitern auf einer Leiterkarte. Die Anord-nung von Leiterbahnen und Masselagen muss so erfolgen, dass dem HF-Signal ein wohldenierter Rückstrom-weg vorgegeben wird. Insbesondere müssen Durchkontaktierungen in der Masselage vermieden werden (vgl.[Thü]). Weiterhin sollten Signalwege möglichst gerade und kurz gewählt werden, um zusätzliche Induktivi-täten auf der Leiterkarte zu vermeiden.Bei Verwendung eines HF-Mischers (vgl. Abschnitt 4.2.3) ist zusätzlich darauf zu achten, dass das deutlichstärkere Referenzsignal räumlich und elektrisch ausreichend vom kleinen Messsignal abgeschirmt ist.
4.2 HF-Komponenten
Neben HF-Abschwächern und HF-Kleinsignalverstärkern kommen in der Schaltung Splitter und Richtkopplerzum Einsatz, welche im Folgenden näher erläutert werden.
4.2.1 Splitter
In der HF-Technik werden zumeist so genannte Power Splitter verwendet. Im Vergleich zu einfachen T-Stücken arbeiten diese zwar nicht verlustfrei, dafür treten keine Reexionen auf. Die Beschaltung einesPower Splitters kann Skizze 4.2.1 entnommen werden:Tor 1 ist der Eingang des Splitters, die Tore 2 und 3 sind die beiden Signalausgänge. Wie sich leichtberechnen lässt (vgl. [Str12]), gilt am Verzweigungspunkt:
UV =2
3U1 (4.1)
und an den beiden Ausgängen
U2,3 =1
2U1 (4.2)
Damit geht durch den Einsatz eines idealen Power Splitters die Hälfte des Signals verloren, der Verlustbeträgt also 3 dB. Beim realen Bauteil ist der Verlust etwas gröÿer (vgl. Tabelle 7.5). Während ein solcher
24

Abb. 4.1: Schaltbild eines Power Splitters. Quelle [Str12]
Verlust bei einem Messsignal zu vermeiden wäre, ist er bei einem Signal, das einfach angepasst werden kann(z.B. Referenzsignal aus einem Signalgenerator) unproblematisch.
4.2.2 Richtkoppler
Beim Richtkoppler werden Teile eines Signals in einen benachbarten Leiter ausgekoppelt. Dabei wird derEekt des Übersprechens ausgenutzt, welcher bei HF-Leitern sonst zu vermeiden ist. Ein dem Signal inLeiter 1 proportionales Signal wird induktiv und kapazitiv in einen zweiten Leiter eingekoppelt (vgl. [Str12]).Ein Richtkoppler wird über folgendes Schaltsymbol dargestellt:
Abb. 4.2: Schaltsymbol eines Richtkopplers. Quelle: [Str12]
Charakteristisch für einen Richtkoppler sind die Richtwirkung, also welcher Anteil des Signals ausgekoppeltwird und der mainline loss, also wie stark das Signal im Richtkoppler abgeschwächt wird.
4.2.3 Detektion von HF-Signalen
Um die Amplitude eines HF-Signals zu detektieren erscheint es zweckmäÿig, das HF-Signal zunächst in eineproportionale Spannungsamplitude zu transformieren. Im einfachsten Fall kann das hochfrequente Signalmittels eines Gleichrichters transformiert werden. Dies kann z.B. ein Brückengleichrichter sein, der über
25

vier Dioden realisiert werden kann. Für ihren Einsatz als Messsonden müssen die Dioden einen geringenSpannungsverlust (engl. Forward Voltage Drop) aufweisen, um auch kleine Signale detektieren zu können.Geeignet sind Silizium- oder Germaniumdioden. Die Diodenkennlinie muss im Bereich der zu messendenSpannungen linear sein.Da das in Kernspinresonanzmessungen detektierte Signal einen reellen und einen komplexen Anteil besitzt,jedoch nur ersterer detektiert werden soll, ist eine phasensensitive Detektion des Signals erforderlich. Diesekann über einen HF-Mischer realisiert werden.Geeignet ist hier insbesondere ein so genannter Balanced Ring Mixer (vgl. [CGH+93]). Dieser verfügtüber zwei Eingänge und einen Ausgang. An einen Eingang (BRM-Load) wird ein Referenzsignal mit groÿerAmplitude angelegt. An den anderen Eingang wird (BRM-RF) wird das Messsignal angelegt. Für die Aus-gangsspannung des BRM gilt:
Uo = URF cos(ϕ) (4.3)
Wenn Referenzsignal und Messsignal in Phase gebracht werden, so ist die Ausgangsspannung dem Realteildes Messsignals proportional. Gleichzeitig ist der Mischer ein hochgradig linearer Gleichrichter, so dass - imGegensatz zum einfachen Diodengleichrichter - keine Nichtlinearitäten bei kleinen Messsignalen auftreten.In der Polarisationsdetektion wird in der Regel ein Double Balanced Mixer (mit vier Dioden) anstelle einesSingle Balanced Mixer verwendet. Der Double Balanced Mixer hat gröÿere Umwandlungsverluste, kann aberüber einen breiteren Frequenzbereich eingesetzt werden. (vgl. [Ros]). In einer Schaltskizze lässt sich einDouble Balanced Ring Mixer als folgt veranschaulichen:
Abb. 4.3: Schema eines Double Balanced Ring Mixer. Quelle: [Jol03]
In der Skizze bezeichnet LO den Load-Eingang, RF das Messsignal und IF eine Zwischenfrequenz desMischers.
4.3 Charakterisierung von HF-Komponenten
HF-Komponenten werden insbesondere über folgende allgemeine Eigenschaften charakterisiert:
• Frequenzbereich
• Rauschen (engl.: Noise Figure)
• Eingangsverlust (engl.: insertion loss)
• Linearität
• Reexion (vgl. Abschnitt 4.3.1)
26

Daneben gibt es natürlich noch bauteilspezische Eigenschaften wie z.B. Verstärkung, Abschwächung undRichtwirkung. Ein ideales Bauteil verhält sich also im gewünschten Frequenzbereich linear, hat einen geringenEingangsverlust, arbeitet rauscharm, weist geringe Reexion auf und isoliert den Ausgang gegen möglicherücklaufende Wellen. Im praktischen Anwendungsfall muss dann ein Kompromiss zwischen den verschiedenenBauteileigenschaften gefunden werden.
4.3.1 VSWR
Um die Reexion eines HF-Bauteils zu beschreiben, wird in der Regel die virtuelle Stehwellenrate (VSWR)oder der return loss angegeben. Für den Reexionskoezienten eines Bauteils gilt (vgl. [HPV97]):
Γ =Ure
Uin(4.4)
Γ ist also das Verhältnis von reektierter Spannung zur Spannung am Bauteileingang. Der Betrag des kom-plexen Reexionskoezienten wird mit ρ bezeichnet. Damit lassen sich zwei weitere Denitionen folgern:Für den return loss RL gilt:
RL = −20 · log(ρ) (4.5)
Für die VSWR gilt:
VSWR =1 + ρ
1− ρ(4.6)
Für optimal angepasste Impedanz gilt demnach Ure = ρ = 0, RL =∞ und die virtuelle Stehwellenrate ist1 : 1.
4.3.2 HF-spezische Einheiten
Im Bereich der HF-Technik werden einige Einheiten verwendet, die den Umgang mit hochfrequenten Signa-len erleichtert, zur besseren Vergleichbarkeit jedoch manchmal in SI-Einheiten transformiert werden müssen.Üblich ist die Verwendung von Dezibelmilliwatt (dBm) zur Angabe einer Leistung. Als Referenz wird dann0 dBm =1 mW verwendet. Für die Umrechnung einer Leistung LP in dBm gilt sodann:
P [mW] = 1mW · 10LP10 (4.7)
Betrachtet man Signale auf dem Oszilloskop, kann man sich zunutze machen, dass die verwendeten HF-Bauteile eine Impedanz von 50Ω aufweisen. Hiermit gilt:
URMS =√P ·R (4.8a)
URMS[mV ] =
√1mW · 10
LP10 · 50Ω (4.8b)
27

5 Grundlagen der NMR
In diesem Kapitel sollen die Grundlagen der Kernspinresonanz (engl. Nuclear Magnetic Resonance - NMR)erläutert werden. In einem äuÿeren Magnetfeld können Kernspins gequantelte Energiebeiträge mit einemüberlagerten oszillierenden Magnetfeld austauschen. Hierauf basiert die Detektion einer Kernspinresonanz.
5.1 Theoretische Beschreibung
Wir betrachten erneut, wie in Abschnitt 2.1.4, ein Teilchen mit einem magnetischen Moment ~µ in einem äu-ÿeren magnetischen Feld der Stärke ~B. Die Darstellung der theoretischen Beschreibung der Kernspinresonanzorientiert sich im Wesentlichen an [HK93].
5.1.1 Quantenmechanische Beschreibung
Für die Energie des magnetischen Moments eines Kerns in einem äuÿeren magnetischen Feld gilt:
E = −~µ ~B (5.1)
Ohne Einschränkungen kann ein Magnetfeld in Richtung der z-Achse betrachtet werden. Damit folgt
E = −Bγ~Jz (5.2)
Nun kann ein Zeeman-Hamiltonoperator H = −Bγ~Jz = ~ω0Jz deniert werden. Die zugehörigen Ener-gieeigenwerte sind damit
E(m) = −Bγ~m (5.3)
Die Zeemanenergie wird auch als Energie der Wechselwirkung von Spin und Magnetfeld bezeichnet, wobeiSpin hier eigentlich das magnetische Moment eines spinbehafteten Kerns meint. Die Energiedierenz zweierbenachbarter Niveaus m und m− 1 beträgt dann
∆E = E(m)− E(m− 1) = −γ~B (5.4)
Diese Beschreibung lässt sich nun auf ein System von N Spins übertragen, welche idealisierterweise nur mitdem äuÿeren Magnetfeld und nicht untereinander wechselwirken. Für N = 2 lautet die entsprechend zulösende Wellengleichung dann
~(ω1J
(1)z + ω2J
(2)z
)Ψ = λΨ (5.5)
Es lässt sich zeigen, dass diese Gleichung durch Produktzustände Ψ = Ψ(1)m1Ψ
(2)m2 gelöst wird. Die entsprechen-
den Spinübergänge lassen sich dann in zeitabhängiger Störungsrechnung berechnen. Auf eine ausführlicheBetrachtung der quantenmechanischen Beschreibung der Kernspinresonanz soll an dieser Stelle verzichtetwerden. Eine entsprechende Darstellung ndet sich in [HK93] und insbesondere auch in [Sli90]. Als Ergeb-nis lässt sich Kernspinresonanz als gequantelte Absorption von Strahlung aus einem elektromagnetischenFeld betrachten. Für die Übergänge gilt insbesondere die sogenannte NMR-Auswahlregel ∆m = ±1, d.h.der Spin ändert sich stets um einen ganzzahligen Wert. Ausnahmen stellen die so genannten verbotenenÜbergänge dar, welche sich aus einer erweiterten Störungsrechnung ergeben.
28

5.1.2 Makroskopische Beschreibung
Eine makroskopische Gröÿe ist die Magnetisierung der Probe M . Die Magnetisierung wird in Bezug auf dasProbenvolumen angegeben. Wenn M ′ das magnetische Moment der Probe in einem äuÿeren magnetischenFeld beschreibt, so gilt für die Magnetisierung
M =M ′
V(5.6)
Verwendet man die Hochtemperatur-Näherung (vgl. Abschnitt 2.3.1) für die Besetzung der Spinzustände,so gilt für die Magnetisierung im thermischen Gleichgewicht nach der Langevin-Curie-Formel:
MTE =γ2~2BN0
3kBT· J(J + 1) (5.7)
Die Magnetisierung hat die gleiche Orientierung wie das äuÿere Magnetfeld. TE wird als Kennzeichnung desthermischen Gleichgewichts verwendet, N0 bezeichnet die Zahl der Kerne je m3 Probenvolumen. Weiterhinkann als Gröÿe die magnetische Suszeptibilität χ eingeführt werden. Im thermischen Gleichgewicht gilt dabei
~M = χTE ~H (5.8)
mit der magnetischen Feldstärke H. Betrachtet man ein NMR-System so besteht dieses aus einer Spule in ei-nem äuÿeren Magnetfeld, welche mit einem Probenmaterial gefüllt ist. Die elementaren magnetischen Dipoledes Probenmaterials induzieren ein zusätzliches magnetischen Moment. Die Summe der zwei magnetischenMomente beträgt
M ′ = (H +M)V (5.9)
mit der Magnetisierung M . Weiterhin bleibt auch noch zu berücksichtigen, dass das Magnetfeld zeitlichveränderlich sein muss. Dies kann z.B. durch das Feld eines Wechselstroms in der NMR-Spule entstehen.Für die Magnetfeldstärke und die Magnetisierung gilt sodann:
H = 2H1 expiωt (5.10a)
M = Γ2H1 expiωt expiϕ (5.10b)
M = ΓH expiϕ (5.10c)
In diesem Beispiel ändert sich die Magnetfeldstärke periodisch mit der Zeit mit einer Amplitude 2H1. Nunkann eine Darstellung in Analogie zu Gleichung 5.8 gewählt werden.
~M = χ ~H (5.11)
Die Suszeptibilität ist damit eine komplexe Gröÿe, welche in einen Realteil χ′ und einen Imaginärteil χ′′
zerlegt werden kann, so dass gilt χ = χ′ + iχ′′. Betrachtet man nun eine Spule der Länge l mit dem Quer-schnitt D und N Windungen kann die durch Selbstinduktivität induzierte Spannung nach dem FaradayschenGesetz bestimmt werden:
U = −DN dB
dt= −Dµ0N
2
l(1 + χ)
dI
dt(5.12a)
U = −LdIdt
(5.12b)
29

µ0 bezeichnet die magnetische Permeabilitätszahl. Legt man an diese Spule nun einen Wechselstrom derFrequenz ω
2π an, so lässt sich die komplexe Induktivität der Spule über
iωL = iωk(1 + χ′)− ωkχ′′ (5.13)
mit k = Dµ0N2
l bestimmen. Nun beschreibt χ′′ den Energieverlust der Spule an die Probe und χ′ die vonder Probe in die Spule induzierte Spannung. Folgerichtig werden χ′ als Dispersionskoezient und χ′′ alsAbsorptionskoezient bezeichnet.In Abschnitt 2.1.4 wurde bereits die Präzession eines Spins in einem äuÿeren Magnetfeld beschrieben. Mitdem Spin präzediert natürlich auch die Magnetisierung. Man betrachte die Gleichung für das magnetischeMoment 2.24b. Nun ist die Magnetisierung dem magnetischen Moment proportional (vgl. Gleichung 5.6),so dass gilt:
~M = γ~L (5.14)
~L bezeichnet hier den Bahndrehimpuls der Kernspins. Für diesen Bahndrehimpuls gilt dann der klassischeErhaltungssatz
d
dt~L = ~Md (5.15)
mit dem Drehmoment ~Md. Durch Einsetzen erhält man eine Dierentialgleichung für die Bewegung derMagnetisierung:
d
dt~M = γ ~M × ~B0 (5.16)
Zur Auswertung dieser Dierentialgleichung wird meist eine Transformation in ein rotierendes Koordina-tensystem, welches mit einer konstanten Winkelgeschwindigkeit ~ω rotiert, durchgeführt. Dies entspricht derBewegung in einem eektiven Magnetfeld:
d
dt~M = γ ~M × ~Be (5.17)
mit ~Be = ~B0 + ~ωγ . Im Gleichgewichtszustand gilt dabei ~M ‖ ~B0, der Magnetisierungsvektor ruht also im
kartesischen Koordinatensystem. Um eine Präzessionsbewegung zu beobachten muss also eine Auslenkungdes Magnetisierungsvektors durch ein zusätzliches Magnetfeld B1 erfolgen. Dieses Magnetfeld rotiert mitder Winkelgeschwindigkeit ~ω, so dass ~B1 im rotierenden Koordinatensystem ruht. Das eektive Gesamtma-gnetfeld ist damit:
~Be,tot = ~B0 +~ω
γ+ ~B1 (5.18)
Im Resonanzfall gilt (vgl. Gleichung 2.29b) ~ω = −γ ~B0, so dass die Probe nur das zusätzliche Magnetfeld ~B1
sieht. Dieses - im Vergleich zu ~B0 schwache - Magnetfeld ist in der Lage den Kernspin zu ippen, sofern dasMagnetfeld mit der Larmorfrequenz der Kernspins rotiert. Experimentell kann ein rotierendes Magnetfeld~B1 mit einer Spule umgesetzt werden, welche ein oszillierendes Magnetfeld
~Bosc = 2B1 cos(ωlt)~ex (5.19)
erzeugt. Ein entlang der x-Achse oszillierendes Feld kann in zwei gegenläug drehende Vektoren der LängeB1 zerlegt werden, denn bekanntermaÿen gilt
cos(ωlt) =1
2[expiωlt+ exp−iωlt] (5.20)
30

5.1.3 Relaxationszeiten und Bloch-Gleichungen
Bisher wurden zur Vereinfachung isolierte Spins betrachtet. Um reale Prozesse zu beschreiben müssenjedoch Wechselwirkungen der Kernspins untereinander (Spin-Spin-Wechselwirkungen) und mit ihrer Umge-bung (Spin-Gitter-Wechselwirkungen) berücksichtigt werden. Für die Magnetisierung in Magnetfeldrichtunggilt sodann
d
dtMz = −(Mz −MTE)
T1(5.21)
und für die transversale Magnetisierung:
d
dt|M⊥| = −
|M⊥|T2
(5.22)
Die Zeit T1 wird als longitudinale Relaxationszeit oder Spin-Gitter-Relaxationszeit, die Zeit T2 als transver-sale Relaxationszeit oder Spin-Spin-Relaxationszeit bezeichnet. Betrachtet man die transversale Relaxation,so sind neben den Spin-Spin-Wechselwirkungen auch Auswirkungen möglicher Inhomogenitäten der Ma-gnetisierung zu berücksichtigen, welche in einer gemeinsamen transversalen Relaxationszeit T ′2 vereinigtwerden können. Die makroskopische Beschreibung erfolgt über die 1946 von Bloch entwickelten Gleichun-gen ([Blo46]). Betrachte hierzu eine Superposition von Aufbau der Magnetisierung gemäÿ Gleichung 5.17und der Relaxation der Kernspins gemäÿ der Gleichungen 5.21 und 5.22. Die Magnetisierung wird nun wiederim rotierenden Koordinatensystem betrachtet, so dass der Vektor der Magnetisierung
~M =
Mx′
My′
Mz
(5.23)
zu verwenden ist. Nun können die drei Bloch-Gleichungen gefolgert werden:
d
dtMx′ = −Mx′
T2+My′∆ω (5.24a)
d
dtMy′ = −Mx′∆ω −
My′
T2+ γB1Mz (5.24b)
d
dtMz = −My′γB1 −
(Mz −MTE)
T1(5.24c)
Hier bezeichnet ∆ω die Abweichung von der Resonanzfrequenz ∆ω = ωl + γB0. Nach einer Zeit stelltsich ein Gleichgewicht zwischen Präzessionsbewegung und Relaxationsbewegung der Magnetisierung ein.Die Bloch-Gleichungen lassen sich dann einfacher lösen, denn für den stationären Zustand gilt
dMx′
dt=dMy′
dt=dMz
dt= 0 (5.25)
Damit folgt für die Lösung der Dierentialgleichungen
Mx′ =∆ωγB1T
22
1 + (∆ωT2)2 + γ2B21T1T2
MTE (5.26a)
My′ =γB1T2
1 + (∆ωT2)2 + γ2B21Z1T2
MTE (5.26b)
Mz =1 + (∆ωT2)2
1 + (∆ωT2)2 + γ2B21T1T2
MTE (5.26c)
31

Die transversale Magnetisierung lässt sich nun in einen komplexen Ausdruck überführen
M⊥ = Mx′ + iMy′ (5.27)
Vergleicht man diesen Ausdruck mit Gleichung 5.13, so lässt sich (vgl. [HK93], S. 103) die Identität
M⊥ = (χ′ + iχ′′)Hx (5.28)
mit Hx = Bxµ0
zeigen. Damit entspricht die x-Komponente der Magnetisierung dem dispersiven Signalanteil,die y-Komponente dem absorptiven Signalanteil.
5.2 cw-NMR und p-NMR
Unterscheiden werden muss zwischen den Betriebsarten continuous wave-NMR (kurz: cw-NMR) und dergepulsten NMR (pulsed NMR oder kurz p-NMR). In der Physik polarisierbarer Targets wird in der Regel dieältere Methode der cw-NMR eingesetzt.
5.2.1 cw-NMR
Bei der cw-NMR wird ein HF-Signal quasikontinuierlich eingestrahlt. Die Magnetisierung M⊥ wird zeit-gleich detektiert. Um ein Spektrum aufzuzeichnen wird die Frequenz (Frequenzsweep) oder das Magnetfeld(Feldsweep) moduliert. Um eine eektive dynamische Nukleonenpolarisation zu ermöglichen, muss das Ma-gnetfeld unverändert bleiben. Daher wird in der Physik polarisierbarer Targets beim Betrieb einer cw-NMRdem Frequenzsweep der Vorzug gegeben. Die Aufnahme eines cw-NMR-Spektrums erfordert im Vergleichzur gepulsten NMR eine längere Messdauer bei einem schlechteren Verhältnis von Signal zu Rauschen (engl.:SNR - Signal-to-Noise-Ratio). Im Rahmen dieser Arbeit wurde eine NMR für diese Betriebsart entwickelt.Weitere Angaben zur technischen Umsetzung nden sich in den nachfolgenden Kapiteln 6 und 7.
5.2.2 p-NMR
Bei der gepulsten NMR werden kurze Pulse in die Probe eingestrahlt. Die Magnetisierung M⊥ wird dannanschlieÿend aufgezeichnet. Es werden verschiedene Pulsformen eingesetzt, die sich unterschiedlich auf dieMagnetisierung einer Probe auswirken. Ein 90-Puls klappt die Kernspins in die xy-Ebene, wo sie dannauseinander laufen. Das detektierte Signal wird als Free-Inductance-Decay bezeichnet. Ein 180-Puls sorgtfür eine Drehung der Spins in der Ebene und lässt sie wieder zusammenlaufen. Das eigentliche Messsi-gnal wird durch Fourier-Transformation gewonnen. Eine ausführlichere Darstellung der gepulsten NMR kann[Hes04] und [Her10] entnommen werden. Zur Polarisationsdetektion wird p-NMR in der Regel nicht ver-wendet. Ein Teil des FID-Signals (von einigen µs) nach der Pulseinstrahlung muss verworfen werden, dazunächst die ring-down-Zeit abzuwarten ist (vgl. [RBH+11]). In diesem Zeitabschnitt ändert sich aber dieQuadrupolverbreiterung des Signals und nach der Fouriertransformation eignet sich das veränderte Signalnicht mehr zur Anpassung einer Linienform. Auÿerdem zerstört der energiereiche Puls die aufgebaute Polari-sation. Die gepulste NMR eignet sich besonders zur genauen Detektion von Relaxationszeiten. In einem alsNEDOR (Nuclear Electron Double Resonanz) bezeichneten Verfahren lässt sich zudem die Relaxationszeitder Elektronenspins in dynamischer Nukleonenpolarisation bestimmen. Details hierzu nden sich in [Hes09].
32

6 NMR-Messschaltungen in der Physik polarisierter
Targets
Eine NMR-Messschaltung ist das Standardverfahren um die Polarisation eines polarisierten Targets zu ermit-teln. Eine exakte Bestimmung ist zur physikalischen Interpretation der aufgezeichneten Teilchenkollisionenunabdingbar. Die Bedeutsamkeit der Polarisation für die Auswertung der experimentell gewonnenen Datensoll im Folgenden am bereits in der Einführung erwähnten Paper [A+88], welches als Auslöser der Spinkri-se angesehen werden kann, verdeutlicht werden. In polarisierten Streuexperimenten wird in der Regel dieZählratenasymmetrie eines Ereignisses detektiert. Sie ist das Verhältnis von Dierenz der Ereignisse mitparallelem und der Ereignisse mit antiparallelem Spin zur Gesamtzahl der Ereignisse bzw. äquivalent dazudas Verhältnis der Wirkungsquerschnitte.
∆ =N+ −N−N+ +N−
(6.1)
Im Experiment der EMC wurde ein Target mit zwei Targetzellen verwendet, welche simultan gegenläugpolarisiert werden konnten. Hierdurch kann sichergestellt werden, dass für beide Polarisationsrichtungen mitdem gleichen Strahl und gleichen apparativen Bedingungen gemessen werden kann. Für die Formel 6.1 folgtdann unter Verwendung der Indizes i = 1,2 für die beiden Targetzellen:
∆ =N1 −N2
N1 +N2(6.2a)
∆ = PTPBfA (6.2b)
mit der zu bestimmenden physikalischen Asymmetrie A, der Targetpolarisation PT , der StrahlpolarisationPB und dem Anteil der auf Wechselwirkungen mit einem freien Proton zurückführbaren Ereignisse f . Wirddie Wechselwirkung vereinfachend als Wechselwirkung eines einzelnen virtuellen Photons betrachtet, so lässtsich die Asymmetrie A = dσ↑↓−dσ↑↑
dσ↑↓+dσ↑↑über A = D(A1 +ηA2) beschreiben. Hierin ist D der Depolarisierungs-
faktor der virtuellen Photonen. A2 stellt einen Anteil der transversalen Polarisation dar. Näherungsweise giltfür den im Experiment betrachteten Energiebereich ηA2 ≈ 0. Für den Zusammenhang zwischen polarisierterStrukturfunktion g1 und Asymmetrie gilt etwa (vgl. [A+88]):
g1 'F2A1
2x(1 +R)(6.3)
mit dem Skalenfaktor Björken-x (vgl. Abschnitt 2.2), dem Verhältnis von longitudinalem zu transversalemWechselwirkungsquerschnitt der virtuellen Photonenabsorption R = σL
σTund der Strukturfunktion F2. Im
untersuchten Energiebereich gilt R << 1.Hier wird deutlich, dass die Genauigkeit der Bestimmung von g1 der Genauigkeit der Polarisationsdetektiondirekt proportional ist, denn es ist
g1 ∝ A1 ≈∆
PTPBfA(6.4)
Im EMC-Experiment konnte die Polarisation mit einer Genauigkeit von etwa 5% bestimmt werden, so dassdie Ungenauigkeit der Polarisationsbestimmung einen nicht unerheblichen Anteil zur Gesamtunsicherheit derexperimentell gewonnenen Daten beiträgt.
33
6.1 Grundlegende Konzeption
Grundsätzlich unterscheidet sich die experimentelle Konzeption eines NMR-Aufbaus in der Physik polari-sierbarer Targets nicht von NMR-Anwendungen in anderen Forschungsbereichen, z.B. NMR zur Analysebiologischer, biochemischer und chemischer Proben (vgl. z.B. [Har86]). Allerdings sind doch einige Beson-derheiten in der Konzeption zu berücksichtigen:
• in den meisten Anwendungen ist die Verwendung eines cw -NMR-Aufbaus vorteilhaft, vgl. Abschnitt5.2
• durch die äuÿeren Bedingungen des polarisierbaren Targets ist Stärke und Richtung des Magnetfeldsvorgegeben
• das Target - und damit auch die NMR-Spule - benden sich in einem Kryosystem
• eine gewünschte Nähe von NMR-Box und Target steht im Konikt zum magnetfeldbedingt erforder-lichen Abstand zwischen Target und elektronischen Komponenten
• das Signal der Probe kann sehr schwach sein (v.a. Deuteronen-TE-Signale)
Zur Polarisationsdetektion wird die cw-NMR in der Regel als RLC-Serienschwingkreis (mit konstantemStrom) in einer so genannten Q-Meter-Schaltung umgesetzt. Die Impedanz an den beiden Spulenenden wirddurch eine Variation der Güte Q verändert. Gemäÿ [CGH+93] ändert das Probenmaterial die Induktivitätder Spule gemäÿ
L(ω) = L0(1 + 4πηχ(ω)) (6.5)
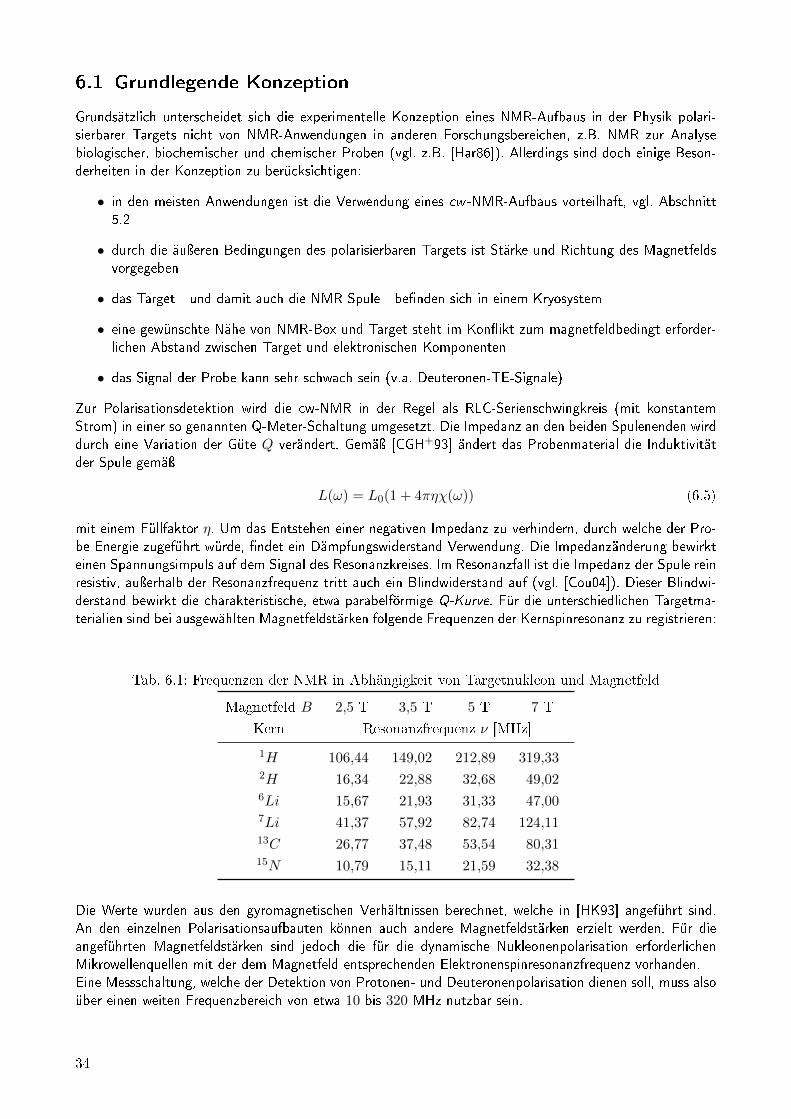
mit einem Füllfaktor η. Um das Entstehen einer negativen Impedanz zu verhindern, durch welche der Pro-be Energie zugeführt würde, ndet ein Dämpfungswiderstand Verwendung. Die Impedanzänderung bewirkteinen Spannungsimpuls auf dem Signal des Resonanzkreises. Im Resonanzfall ist die Impedanz der Spule reinresistiv, auÿerhalb der Resonanzfrequenz tritt auch ein Blindwiderstand auf (vgl. [Cou04]). Dieser Blindwi-derstand bewirkt die charakteristische, etwa parabelförmige Q-Kurve. Für die unterschiedlichen Targetma-terialien sind bei ausgewählten Magnetfeldstärken folgende Frequenzen der Kernspinresonanz zu registrieren:
Tab. 6.1: Frequenzen der NMR in Abhängigkeit von Targetnukleon und Magnetfeld
Magnetfeld B 2,5 T 3,5 T 5 T 7 T
Kern Resonanzfrequenz ν [MHz]
1H 106,44 149,02 212,89 319,332H 16,34 22,88 32,68 49,026Li 15,67 21,93 31,33 47,007Li 41,37 57,92 82,74 124,1113C 26,77 37,48 53,54 80,3115N 10,79 15,11 21,59 32,38
Die Werte wurden aus den gyromagnetischen Verhältnissen berechnet, welche in [HK93] angeführt sind.An den einzelnen Polarisationsaufbauten können auch andere Magnetfeldstärken erzielt werden. Für dieangeführten Magnetfeldstärken sind jedoch die für die dynamische Nukleonenpolarisation erforderlichenMikrowellenquellen mit der dem Magnetfeld entsprechenden Elektronenspinresonanzfrequenz vorhanden.Eine Messschaltung, welche der Detektion von Protonen- und Deuteronenpolarisation dienen soll, muss alsoüber einen weiten Frequenzbereich von etwa 10 bis 320 MHz nutzbar sein.
34

6.1.1 Der Schwingkreis
Der Schwingkreis besteht aus der Spule L, einem Dämpfungswiderstand Rd und einem Kondensator C. In derRegel ist letzterer als variable Kapazität ausgeführt. In Bochum nden hierfür Varicap-Dioden Verwendung.Weiterhin wird zumindest ein Signalgenerator, ein Konstantstromwiderstand Rcc, eine VerstärkerschaltungG und zur Detektion des Signals eine Diodenschaltung (D) oder eine Möglichkeit der phasensensitiven De-tektion (PSD, vgl. Abschnitt 6.1.3) benötigt. Die erforderlichen Komponenten können auch der folgendenSkizze entnommen werden:
Abb. 6.1: Unbedingt erforderliche Komponenten einer NMR-Schaltung. Nach [RBH+11]
6.1.2 λ/2-Kabel
Das λ/2-Kabel wird benötigt, da sich Teile des Schwingkreises aus technischen Gründen in der Regel nichtin unmittelbarer Nähe zur Spule benden können1. Während sich die Spule im Kryostateinsatz bendet,werden Dämpfungswiderstand und Kondensator in der Regel auÿerhalb des tiefkalten Bereiches angeordnet.So kann der Wärmeeintrag ins Kryosystem minimiert und der technische Zugri auf die Komponentenwährend der Messung erleichtert werden. Wird als Kabellänge ein ganzes Vielfaches der halben Wellenlängen · λ2 gewählt, so entspricht die Impedanz am Kabelende in erster Näherung der Impedanz am Ende derSpule (vgl. [CGH+93]). Zu berücksichtigen ist allerdings, dass auÿerhalb der Resonanzfrequenz durch dasKabel ein erheblicher Blindwiderstand in den Schwingkreis eingeführt wird. Da Realteil und Imaginärteil derSpulenimpedanz unterschiedlich beeinusst werden können, kann auch eine Verzerrung des Signals erfolgen.
1Ein alternativer Ansatz wird in Kapitel 10 beschrieben
35
6.1.3 Phasensensitive Detektion
Wie bereits in der Beschreibung der theoretischen Grundlagen der Kernspinresonanz angeführt, besteht diedetektierte magnetische Suszeptibilität aus einem absorptiven und einem dispersiven Anteil. Detektiert mannun die Gesamtamplitude, so erhält man letztlich eine Überlagerung dieser Signalanteile. Hierdurch ergebensich erhebliche Nichtlinearitäten (vgl. [CGH+93]), die dem Verhältnis von maximaler Impedanzänderung ∆Zzu Leerimpedanz2 Z0 proportional sind. Etabliert hat sich daher ein Verfahren der phasensensitiven Detek-tion. Hierbei wird der Imaginärteil der Suszeptbilität geltert: Das RF-Signal, welches zur NMR-Messungverwendet werden soll, wird zunächst in ein Referenzsignal und ein Messsignal geteilt. Das Messsignal wirdauf die NMR-Spule gegeben und dann einer Verstärkerkette zugeführt. Das Referenzsignal wird ebenfallseiner Verstärkerkette zugeführt. Die Phase des Referenzsignals wird nunmehr angepasst, so dass Referenz-signal und Messsignal gleichphasig auf einen HF-Mischer gegeben werden können. Der hierzu in der Regelverwendete Balanced Ring Mixer wurde bereits in Abschnitt 4.2.3 näher beschrieben.Die Verwendung der phasensensitiven Detektion reduziert die Nichtlinearitäten in erheblichem Maÿe. Beider Detektion einer Protonenpolarisation mit ∆Z
Z0= ±0,6 ergeben sich Abweichungen von höchstens 2,4%
(vgl. [CGH+93]. Eine weitere Verringerung dieser Nichtlinearitäten kann durch die Verwendung hochohmigerVerstärker ermöglicht werden.
6.2 Durchführung einer NMR-Messung
Die Probe wird zunächst in einen Behälter gegeben, um den äuÿerlich eine Spule gewickelt ist. Die Spulemuss mit Kontakten am Kryostateinsatz verlötet werden. Ist die Probe in den Kryostaten eingebracht, kanndie NMR-Messung vorbereitet werden:
• das λ/2-Kabel ist entsprechende der zu untersuchenden Kerne zu wählen
• die NMR-Schaltung wird an das λ/2-Kabel angeschlossen
• RF-Generator und Magnetfeld werden eingeschaltet
• der Schwingkreis wird mittels einer Varicap-Diode abgestimmt, so dass ein symmetrisches Amplituden-signal vorliegt
• die Phase des Referenzsignals wird angepasst, so dass ein symmetrisches Signal am Mischerausgangvorliegt
Um das eigentliche Messsignal zu erhalten, muss die parabelförmige Q-Kurve abgezogen werden. Dies ge-schieht durch eine so genannte Abzugsmessung. Das Magnetfeld wird verändert, so dass das aufgezeichneteSignal nur noch aus der Resonanzkurve des Schwingkreises ohne Messsignal besteht. Diese Resonanzkurvewird dann vom Messsignal abgezogen. Reste der Q-Kurve äuÿern sich durch eine parabelförmige Grundlinie.Diese kann z.B. durch einen Fit genähert und subtrahiert werden, so dass das auszuwertende Messsignaleine gerade Grundlinie aufweist. Eine detaillierte Beschreibung der einzelnen Schritte kann auch [A+94]entnommen werden.
6.3 Charakteristische NMR-Linienformen
In Abhängigkeit vom untersuchten Targetmaterial und von den untersuchten Kernen können unterschiedlichecharakteristische Linienformen beobachtet werden. In einem Spin-1/2-System treten nur zwei Energienive-aus und damit nur eine Resonanzlinie auf. In einfachster Näherung ist das NMR-Signal damit ein scharferPeak. Aufgrund von Feldverschiebungen auf mikroskopischer Ebene kommt es jedoch zu einer so genanntenDipolverbreiterung der Resonanzlinie, die somit die Form einer Gauÿfunktion oder einer Lorentzfunktion
2Impedanz, wenn kein Signal detektiert wird
36

annimmt.Betracht man indes ein Spin-1-System gibt es für die magnetische Spinquantenzahl ms drei Einstellmög-lichkeiten ms = −1,0,1. Damit sind auch drei Energieniveaus zu erwarten. Die Situation ist nunmehr jedochdeutlich komplexer: Die Bindungen der Moleküle können elektrische Feldgradienten erzeugen, welche an dieQuadrupolmomente der Spins koppeln. Dieser Vorgang wird auch als Quadrupoleekt bezeichnet.
6.3.1 Quadrupoleekt
Die nachfolgende Darstellung orientiert sich an den Angaben aus [Dul96]. Für die Energieniveaus gilt:
Ems = −~ωlms + ~ωq
3 cos2(θ)− 1· (3m2
s − 2) (6.6)
mit dem Polarwinkel θ zwischen den Achsen der Molekülbindung und dem Vektor des Magnetfelds ~B. DasQuadrupolmoment wird über eine Frequenz unter Verwendung von ~ωq = ∂Ez
∂zQ8 mit dem elektrischen Feld-
gradienten in Richtung des Bindungswinkels ∂Ez∂z und dem elektrischen Quadrupolmoment der betrachteten
Spins Q ausgedrückt. Man betrachtet nun die Übergänge mit ∆ms = 1. Damit gilt:
∆E± = ±~ω (6.7a)
∆E± = ~ωl ∓ 3~ωq
3 cos2(θ)− 1
(6.7b)
Diese Gleichung lässt sich nun unter Verwendung von ε = ±1 für die beiden Übergänge und nach Einführungeiner reduzierten Frequenz R = ω−ωl
3ωqin Bezug auf den Polarwinkel als folgt ausdrücken:
cos(θε) =
√1− εR
3(6.8)
Die Linienform des Absorptionsspektrums ist nun dem Produkt der Intensität der Spinübergänge (und damitder Besetzung der Spinzustände n−,0,+) und der Frequenzverteilung der Raumwinkel proportional. Es giltsomit:
f(ω) ∝∑ε=±
Iε(θ)
∣∣∣∣d cos(θε)
dω
∣∣∣∣ (6.9a)
f(ω) ∝∑ε=±
Iε(θ)Iε(θ)
ωq cos(θε)(6.9b)
f(ω) ∝ n+ − n0
ωq√
1−R+
n0 − n−ωq√
1 +R(6.9c)
Diese Darstellung berücksichtigt nunmehr den Quadrupoleekt. Weiterhin muss aber auch noch - in Ana-logie zum Protonensignal - die Dipolverbreiterung berücksichtigt werden. Das Messsignal lässt sich dannüber eine Faltung der beschriebenen Linienform mit einer Lorentzfunktion, welche ωl verbreitert, beschrei-ben. Die Lorentzverbreiterung wird über A = σ
3ωqnormiert. Zur Vereinfachung wird zudem die Substitution
y =√
1− εx durchgeführt. Für eine analytische Beschreibung des Messsignals gilt damit:
Fε(R,A) = ε
∫ ε
−2ε
dx√1− εx
· A/π
A2 + (x−R)2(6.10a)
Fε(R,A) =2A
π·∫ √3
0
dy
y4 − 2(1− εR)y2 +A2 + (1− εR)2(6.10b)
(6.10c)
37

Die Auswertung des Integrals liefert nach [Dul96]:
Fε(R,A) =1
2πq
[2 cos
(α2
)arctan
(y2 − q2
2yq sin(α2
))+ sin(α
2
)· ln
(y2 + q2 + 2yq cos
(α2
)y2 + q2 − 2yq cos
(α2
))]y=√
3
y=0
(6.11)
mit den Abkürzungen q2 =√A2 + (1− εR)2 und cos(α) = 1−εR
q2. Der folgenden Grak können aus den
Gleichungen 6.9c und 6.11 simulierte Signalkurven entnommen werden.
Abb. 6.2: Simuliertes Deuteronensignal. Aus [Dul96]. Die gestrichelte Linie wurde mittels Gl. 6.9c, diedurchgezogene Linie mittels Gl. 6.11 ermittelt.
Wie die Signalform zur Bestimmung der Polarisation verwendet werden kann ist im folgenden Abschnittnäher beschrieben.
6.4 Polarisationsbestimmung aus dem NMR-Signal
Die Targetpolarisation einer Probe bewirkt eine Suszeptibilität (vgl. Gleichung 5.8). Für den Zusammenhangzwischen magnetischer Suszeptibilität und Targetpolarisation gilt (vgl. [CGH+93]):
P ∝∫ ∞
0χ′′(ω)dω (6.12)
Dies wirft zwei Probleme auf: Einerseits ist der Füllfaktor aus Gleichung 6.5 nicht trivial zu bestimmen.Andererseits ist die Polarisation nicht der Gesamtsuszeptibilität sondern nur dem absorptiven Anteil derSuszeptbilität proportional.
38
Um eine Bestimmung des Füllfaktors zu vermeiden und die Polarisationsdetektion unabhängig von Variatio-nen der Targetgeometrie zu machen wird zusätzlich zum Messsignal in DNP auch ein Signal im thermischenGleichgewicht aufgezeichnet. Das NMR-Signal wird also mit der aus der Theorie (vgl. Abschnitt 2.3) be-kannten TE-Polarisaton kalibriert. Für die detektierte dynamische Polarisation gilt dann (vgl. [RBH+11]):
Pdyn = Adyn ·PTEATE
, (6.13)
wobei A die Fläche unter der Kurve bezeichnet.Um den dispersiven und absorptiven Anteil der Suszeptibilität zu trennen wird die Technik einer phasensen-sitiven Detektion verwendet (vgl. Abschnitt 6.1.3). Um sowohl TE-Signal als auch Messsignal mit gleicherVerstärkung aufzeichnen zu können, muss eine NMR-Messschaltung über einen groÿen Bereich linear sein.Gemäÿ [Dul96] sollte die Modulation, also das Verhältnis von maximaler Messsignalgröÿe dividiert durch dasMinimum der Q-Kurve 30% nicht übersteigen um die Linearität der Polarisationsdetektion zu gewährleisten.Während die TE-Kalibrierung zur Messung der Protonenpolarisation gut geeignet ist, sind die NMR-Signaleeiner Deuteronenprobe im thermischen Gleichgewicht meist zu schwach um eine genaue Kalibrierung zu er-möglichen. Neben der TE-Kalibrierung ist bei der Bestimmung der Deuteronenpolarisation daher zusätzlichdas Verfahren der Messung der Peakasymmetrie etabliert. Eine entsprechende Auswertung ist allerdings nurmöglich, wenn ein beobachtbarer Quadrupoleekt vorliegt. Im Rahmen der Polarisationsbestimmung wirdein Fit an das aufgezeichnete Messsignal durchgeführt. Hierzu werden die Funktion F (R,A) (6.11) undihre Ableitungen ∂F±
∂A , ∂F±∂ωq
und ∂F±∂ωl
angepasst. Um einen Fit an ein Messsignal zu ermöglichen müssendie Parameter r,A,ωq,ωl und K ermittelt werden. A,ωq und ωl sind dabei die aus Abschnitt 6.3 bekanntenGröÿen, K ist eine Konstante. Unter Verwendung der Denition der Polarisation gemäÿ Gleichung 2.34 undunter Berücksichtigung der Tatsache, dass die Energiezustände gemäÿ der Boltzmannstatistik besetzt sind,lässt sich die Polarisation über einen Asymmetrieparameter r = expβ~ωl mit β = 1
kBTausdrücken. Es
gilt (vgl. [Dul96]):
P =r2 − 1
r2 + 1 + r1+3qλ(θ)(6.14)
mit q =ωq
ωlund λ(θ) = 3 cos2(θ)− 1. Deutlich vereinfacht wird diese Darstellung für kleine Polarisationen
(etwa unter 50%). Dann gilt näherungsweise ωq ≈ 0 und es folgt:
P =r2 − 1
r2 + 1 + r(6.15)
Für das Verhältnis der Übergangsintensitäten (und damit für das Verhältnis der Peakhöhen) gilt in diesemFalle
I+
I−= r (6.16)
Somit lässt sich die Polarisation einfach aus der Höhe der Maxima abschätzen. Genauer ist indes in jedemFall ein Fit an das Messsignal. Es gilt:
χ′′(ω) =
(K
ωq
)[r2 − r1−3qR
r1−qR
]F+(R,A) +
[r1+3qR − 1
r1+qR
]F−(R,A)
(6.17)
Prinzipiell ist der Quadrupoleekt auch bei der Bestimmung der TE-Polarisation von Deuteronen zu be-rücksichtigen, dies gilt insbesondere für Messungen mit einer groÿen Quadrupolverbreiterung, wie z.B. Po-larisationsuntersuchungen an Stickstokernen in Ammoniak. Eine weitere Korrektur berücksichtigt nicht-achsensymmetrische Feldgradienten. Unter Berücksichtigung dieser Korrekturen sind die auftretenden Inte-grale jedoch nicht mehr analytisch sondern nur noch numerisch lösbar, was insbesondere bei einer schnellen
39

Online-Polarisationsbestimmung eine Verwendung dieser genaueren Fits ausschlieÿt. Details zu den entspre-chenden Korrekturen sind ausführlich in [Dul96] angeführt.
6.5 Übersicht über verbreitete NMRs
Im Folgenden soll die historische Entwicklung der in verschiedenen PT-Experimenten verwendeten NMR-Module aufgezeichnet werden.
6.5.1 Die Liverpool-NMR
Das Liverpool-NMR-Modul wurde in den späten 1970er Jahren für das polarisierte Target der EMC entwi-ckelt. Auch heute noch ndet das NMR-Modul in zahlreichen Experimenten (z.B. [Poo07]) Verwendung. Eszeichnet sich durch gute Stabilität und Linearität in Bezug auf die Verstärkungsleistung aus. Bekannte Nach-teile (vgl. [Cou04]) sind Schwierigkeiten bei der Detektion groÿer Protonenpolarisation und sehr geringer(TE)-Deuteronenpolarisation. Problematisch ist, dass ein baugleicher Neubau von Liverpool-NMR-Modulenoder eine Reparatur einzelner Komponenten nahezu ausgeschlossen ist, da zahlreiche Bauteile abgekündigtsind und zum Teil auch die Herstellerrmen nicht mehr bestehen. Die nachfolgende Beschreibung orientiertsich an den Angaben im Handbuch zum Liverpool-NMR-Modul [Oli]. Die Liverpool-NMR besteht aus 5Platinen:
Tab. 6.2: Platinen und Anwendungen der Liverpool-NMR.
Platine Anwendung
1 Abstimmung des Schwingkreises, Verstärkung und Aufteilung des Messsignals
2 Phasenanpassung, Mischung von Referenz- und Messsignal
3 Verstärkung des Signals vom Mischerausgang
4 Diodendetektion und Verstärkung des Gesamtamplitudensignals
5 Verstärkung der beiden Signale vor dem Ausgang
Die Platinen sind zweilagig ausgeführt. Beide Seiten bestehen aus einer Kupferschicht (Masse), aus welcherdie Leiterbahnen zur Spannungsversorgung herausgefräst sind. Die Hochfrequenzsignale werden durch äu-ÿerlich angebrachte Litzen übertragen. Die Platine ist in ein massives Messinggehäuse eingelassen, welcheseinerseits der Schirmung vor äuÿeren HF-Signalen, andererseits aber auch der Temperaturstabilisierung dient.Durch den guten Wärmeleiter Messing kann eine gleichmäÿige Temperierung der Komponenten gewährleistetwerden.
HF-Teil
Als HF-Teil wird derjenige Teil des NMR-Aufbaus bezeichnet, in dem das hochfrequente Signal verstärktund abgeschwächt wird.Aufgrund der Anfälligkeit hochfrequenter Signale für äuÿere Störungen aber auch für die Ausbildung vonstörenden Einüssen im Schaltkreis muss bei der Entwicklung dieses Moduls besonders achtsam gearbeitetwerden.Mögliche Probleme, wie sie auch im Rahmen der Neuentwicklung, insbesondere in Layout 1 festgestelltwurden, sind in Abschnitt 4.1 angeführt.In den HF-Teil des Liverpool-NMR-Moduls sind ein mechanisch einstellbarer Abstimmkondensator, derDämpfungswiderstand und der KonstantstromwiderstandRcc integriert. Das in Bochum vorhandene Liverpool-NMR-Modul wurde im Vergleich zum Originalmodul um eine Varicapdiode ergänzt, so dass die Kapazität
40

elektronisch gesteuert und optimiert werden kann. Rcc fungiert hier auch als Spannungsteiler und wirdanstelle eines Splitters verwendet, um das Signal in Referenzsignal und Messsignal aufzuteilen. Der Wider-stand kann über ein Reed-Relais auf Masse geschaltet werden, so dass kein HF-Signal mehr auf die Spulegegeben wird. Dies ermöglicht einen Betrieb als multichannel system. Mehrere NMR-Module können anunterschiedlichen Spulen mit einem Signalgenerator und einer DAQ-Einheit betrieben werden. So könnenz.B. Protonenpolarisation und Deuteronenpolarisation einer Probe hintereinander gemessen werden, ohnedass eine Neuverkabelung erforderlich ist. Dabei wird das HF-Signal stets auf den Referenzarm eines jedenModuls gegeben. Hierdurch kann eine Temperaturstabilität des Moduls erhalten werden und Wartezeitenbeim Umschalten zwischen den Modulen entfallen.Die Anordnung der Komponenten in der Liverpool-NMR-Box kann Blockschaltbild 6.3 entnommen werden.Eine detaillierte Aufstellung der verwendeten Komponenten und ihrer Spezikationen kann [Oli] entnommenwerden. Für die Spannungsversorgung der HF-Verstärker werden sowohl 15V als auch 24V benötigt.
HF/NF-Wandlung
Die Detektion des HF-Signals erfolgt bei der Liverpool-Box sowohl als Detektion der Gesamtamplitude alsauch durch eine phasensensitive Detektion des absorptiven Anteils der Suszeptibilität.Über den Diodendetektor kann zunächst eine Abstimmung des Q-Meters erfolgen, welche es dann ermöglicht,den HF-Mischer direkt mittels seines Ausgangssignals abzustimmen. Als HF-Mischer wird der Balanced RingMixer Mini-Circuits SRA-1 verwendet. Als Diodengleichrichter kommt Modell BD3 zum Einsatz.
NF-Teil
Am Dioden- und Mischerausgang erfolgt eine weitere Verstärkung in zwei Stufen. Die Verstärkung des nie-derfrequenten Signals erfolgt über rauscharme Dierenzverstärker. Zur Signalweiterverarbeitung muss dasparabelförmige Q-Meter-Signal vom Messsignal subtrahiert werden (vgl. Abschnitt 6.1). Eine Beispielschal-tung für die Hintergrundsubtraktion unter den technischen Voraussetzungen zur Zeit der Entwicklung derLiverpool-Box ndet sich in [Oli], Kapitel 1, Abbildung 8.
6.6 Die Bochumer boxed NMR
Die Bochumer boxed NMR ist eine in Bochum neu entwickelte Messschaltung zur Polarisationsdetektion,welche auf den Erfahrungen mit dem Liverpool-NMR-Modul basiert. Anstelle einer Platine verfügt die Bo-chumer boxed NMR über einzelne, geschirmte Module (boxes), die jeweils eine Komponente beinhalten.Diese Module verfügen über SMA-Buchsen an ihren Ein- und Ausgängen. Temperaturstabilität wird durchMontage auf eine massive Aluminiumplatte erzielt. Die Spannungsversorgung erfolgt über QLA-Stecker. Die-se werden mit einem Gehäuse verbunden, welches die HF/NF-Wandlerkarte (vgl. Abschnitt 6.6.3) enthält.Vorteilhaft ist die gute Schirmung und die gute Trennung von hochfrequenten und niederfrequenten Si-gnalen in der Bochumer boxed NMR. Allerdings ist die NMR-Anordnung sehr groÿ und unförmig. Es gibtBestrebungen, die einzelnen boxes in ein Gehäuse zu integrieren. Die Anordnung der Komponenten kannBlockschaltbild 6.4 entnommen werden.
6.6.1 Die Varicap-Anpassung
Die Varicap-Anpassung erfolgt über ein in Bochum entwickeltes Modul, welches Dämpfungswiderstand, Kon-stantstromwiderstand, Varicap-Diode BB212 und 50Ω-Anpassung enthält. Die Kapazität kann durch einevon Auÿen über ein Koaxialkabel mit QLA-Stecker herangeführte Spannung variiert werden. Die Spannungwird am PC über einen National Instruments DAC PXI 6289 erzeugt.RF-Eingang und die beiden Ausgänge (zur Spule und zum Signalarm) sind als SMA-Buchsen ausgeführt.
41

Abb. 6.3: Blockschaltbild der Liverpool-NMR-Box. Aus: [Oli].
42

6.6.2 HF-Komponenten
Als HF-Komponenten kommen die bereits erwähnten Module zum Einsatz. Es handelt sich um HF-Verstärker,-Splitter und -Richtkoppler in eckigen Gehäusen der Firma Mini-Circuits. Die Abschwächer verfügen eben-falls über eigene, zylindrische Gehäuse und SMA-Buchsen. Insgesamt kommen folgende Komponenten zumEinsatz:
Tab. 6.3: Komponenten der HF-Schaltung der Bochumer boxed NMR
Komponente Hersteller Bezeichnung Anmerkung
Verstärker Mini-Circuits ZFL500 20 dB, zwei Stück
Verstärker Mini-Circuits ZX60-14012L 9− 12 dB, High Output
Verstärker Mini-Circuits ZFL500LN 24 dB, Low Noise
Abschwächer Mini-Circuits VAT-6+ drei Stück
Abschwächer Mini-Circuits VAT-4+
Abschwächer Mini-Circuits VAT-3+
Splitter Mini-Circuits ZFRSC-42
Richtkoppler Mini-Circuits ZFDC-10-1-S 10:1-Richtkoppler
Die technischen Daten sind im Anhang A.2.1 angeführt.
6.6.3 HF/NF-Wandlung
Die HF/NF-Wandlung erfolgt nach dem aus der Liverpool-Box bewährten Verfahren: Die Gesamtamplitudewird über einen Brückengleichrichter, der absorptive Signalanteil in phasensensitiver Detektion mit einemBalanced Ring Mixer detektiert. Die Komponenten sind auf einer in Bochum entwickelten Platine integriert,welche über einen D-Sub-25-Stecker, drei SMA-Buchsen und Hilfsanschlüsse zur Spannungsversorgung derBochumer boxed NMR verfügt. Die Karte ist zur besseren Schirmung in ein Gehäuse eingelassen. Für dieneu entwickelte NMR wurden Karten nach dem selben Layout angefertigt. Detaillierte Angaben zur Funk-tionsweise der Schaltung nden sich in Abschnitt 7.5.2.Im Anschluss an die Umwandlung in ein Spannungssignal erfolgt noch ein Abzug des DC-Osets und gege-benenfalls eine Verstärkung.
43

Abb. 6.4: Blockschaltbild der Bochumer boxed NMR
44

6.7 Flexible Spannungsversorgung
Zur Versorgung der Liverpool-Box und aller ähnlich konzipierten Messschaltungen zur Polarisationsdetek-tion wird eine besonders rauscharme Spannungsversorgung benötigt. Insbesondere sind Masseschleifen zuvermeiden. Daher scheint eine Verwendung einer einfachen kommerziellen Spannungsversorgung oder dieVerwendung von NIM- oder CAMAC-Crates (vgl. auch [Oli]) wenig ratsam.Als Standard hat sich der Aufbau einer Spannungsversorgung aus diskreten Modulen etabliert. Insbeson-dere werden die Spannungen für den HF-Teil und den NF-Teil getrennt erzeugt und die Masseleitungender einzelnen Spannungen getrennt geführt. Zur Spannungsversorgung der NMR-Module, sowie der Modulezur Signalnachbearbeitung und zur Weiterleitung niederfrequenter Signale wird ein D-Sub-25 Kabel verwen-det. Um eine weitestgehende Kompatibilität zu erzielen wird seit der Entwicklung der Liverpool-Box die inSchema 6.5 dargestellte Pin-Belegung unverändert eingesetzt.
Abb. 6.5: Pinbelegung des D-Sub-25 Steckers für NMR-Module.
Im Vergleich zum Originalstecker sind 12 V zusätzlich verfügbar. Diese werden für einen Verstärker in derBochumer boxed-NMR benötigt.Im Rahmen dieser Arbeit wurde eine exible Spannungsversorgung zusammengesetzt, welche die benötigtenSpannungen an drei D-Sub-25 Buchsen bereitstellt. Dies stellt eine Ergänzung zu einer bereits im Laborvorhandenen Spannungsversorgung dar. Es wurden im Einzelnen folgende Module der Firma FG-Elektronikverwendet:
• Modul 1: NMC 101 A (±5V und ±15 V für den NF-Teil)• Modul 2: NMC 102 (24V)• Modul 3: NMC 102 A (12V)• Modul 4: NMC 107 (±15V für den HF-Teil)
Die verwendeten Komponenten der Spannungsversorgung sind besonders rauscharm (∆Upp ≤ 5 mV).
45

7 Entwicklung einer neuen Messschaltung
Bei der Neukonzipierung der NMR wurden in erster Linie auf Kompatibilität und Kompaktheit geachtet. DieAnschlussbuchse der Spannungsversorgung, die im weiteren auch für die Signalübertragung der NF-Signaleverwendet wird, ist vollständig mit den Buchse der Liverpool-Box und der Buchse der bereits vorhandenenHF/HF-Wandler-Karte (vgl. Abschnitt 7.5.2) kompatibel.Für alle HF-Signale sind Buchsen nach dem SMA-Standard vorgesehen. Die Weiterleitung hochfrequenterSignale des Signalgenerators, von und zur NMR-Spule sowie zu weiteren Platinen kann somit über geschirm-te, hochfrequenztaugliche Koaxialkabel mit SMA-Steckern erfolgen. Eine feste Verbindung zwischen Kabelund Bauteil ist durch den SMA-Schraubverschluss sichergestellt.Die Platine wurde im Europakartenformat mit einer Tiefe von 160 mm entwickelt. Die vorderen 40 mmnehmen dabei Haltenasen ein, der Mittelteil ist herausgefräst. Die Halterungen können also im Bedarfsfallproblemlos entfernt werden. Da auch die bereits vorhandenen HF/NF-Wandler-Karten und die DC-Oset-Karten in gleicher Gröÿe entwickelt wurden (Europakartenformat, allerdings mit etwas geringerer Tiefe),können sie gegebenenfalls gemeinsam in ein geeignetes, HF-geschirmtes Gehäuse verbaut werden. Vorgese-hen ist der Einbau von HF-Karte und HF/NF-Wandler-Karte zusammen mit der neu entwickelten Piggyback-Phasenkarte (vgl. Kapitel 8) in ein gemeinsames, HF-geschirmtes Aluminiumgehäuse (vgl. Abschnitt 7.6).Für die DC-Oset-Karte soll entsprechend ein zusätzliches Gehäuse verwendet werden.Eine oder mehrere dieser NMR-Module lassen sich dann in einem klassischen 19′′-Einschub unterbringen,welches dann in ein 19′′-Rack, wie es in praktisch jedem teilchenphysikalischen Labor zu nden ist, eingebautwerden kann.Alternativ dazu besteht auch die Möglichkeit, die drei Komponenten in ein kleines Aluminiumgehäuse (lie-gend) zu verbauen und auf die Rackeinschubmöglichkeit zu verzichten. Vorteilhaft ist hierbei, dass dieseBox in unmittelbarer Nähe zum Kryostateinsatz verwendet werden kann und somit zur Deuteronenmessungvorteilhafte, kürzere Signalwege ermöglicht werden.Dies ist insbesondere für die Wahl eines geeigneten λ/2-Kabels erforderlich (vgl. hierzu auch Tabelle 6.1)
7.1 Grundkonzeption
Die Grundkonzeption sieht eine Unterteilung der HF-Karte in einen Signalbereich und einen Referenzbereichvor. Dies entspricht somit im Wesentlichen der schon in 6.1 dargestellten Struktur. In beiden entworfenenLayouts stellt die obere Hälfte der Platine den Referenzkanal dar, während das eigentliche Messsignal dieuntere Hälfte der Platine durchläuft.Ein externer Signalgenerator erzeugt ein an Magnetfeld, NMR-Spule und zu untersuchende Kerne (vgl. 6.1)angepasstes, sinusförmiges Hochfrequenz-Signal. Das Signal wird mittels eines Splitters geteilt und sowohlin den Referenzkreis, als auch auf die NMR-Spule gegeben.Im Referenzkreis folgen verschiedene Abschwächer und Verstärker, die nachfolgend noch näher erläutertwerden. Das Referenzsignal wird dann auf einen der Eingänge des Balanced Ring Mixers (vgl. 6.1.3) ge-geben. Im Signalteil wird das von der NMR-Spule kommende Signal weiterverarbeitet. Erneut ndet eineAnordnung von Verstärkern und Abschwächer Verwendung. Am Ende des Signalarms wird das Signal ineinem Richtkoppler aufgeteilt. Das stärkere Signal wird zur direkten Detektion auf eine Diode gegeben, dasschwächere Signal gelangt auf den anderen Eingang des Balanced Ring Mixers.Das Signal im Referenzarm muss phasenadaptiert werden, so dass auf den Mischer phasengleiche Signalegegeben werden können. Die Phasenanpassung ist in den beiden entwickelten Layouts etwas unterschiedlichrealisiert und wird daher in den entsprechenden Abschnitten erläutert.
46
7.2 Komponenten
Im Folgenden sind die für die Messschaltung verwendeten Komponenten aufgeführt. Sofern dies möglich war,sind insbesondere auch die entsprechenden Bauteile in der Liverpool-NMR und der Bochumer boxed-NMRaufgeführt. Erste Auswahlkriterien waren - neben der Eignung für die entsprechende Aufgabe - möglichstgeringes Rauschen, eine geringe VSWR1 und eine Eignung für einen möglichst groÿen Frequenzbereich(idealerweise zwischen 0 und 500 MHz). Da ein Groÿteil der Komponenten von Mini-Circuits stammen wirddiese Firma im Folgenden zur besseren Übersichtlichkeit mit MC abgekürzt.
7.2.1 Stecker
Für alle hochfrequenten Signale wurden SMA-Buchsen verwendet. Die Wahl zwischen senkrechten undabgewinkelten Buchsen wurde dabei von der Position auf der Platine abhängig gemacht. Unmittelbar ander Kante wurden abgewinkelte Buchsen verwendet. Nach Einbau in ein Gehäuse müssen die Buchsen aufder Platine mit entsprechenden SMA-Chassisbuchsen im Gehäuse verbunden werden. Dies geschieht überbiegbare HandFlex-Kabel von MC (Modellbezeichnung 086-xSM+ für Kabel mit geraden Buchen bzw. 086-xSMRSM+ für Kabel mit einer abgewinkelten Buchse - das x steht für die Länge des Kabels in Zoll) oderüber starre SMA-Verlängerungen.Alle Bauteile auf der Platine benötigen eine Versorgungsspannung von U+ = 15 V. Soll die HF/NF-Wandlerkarte im selben Gehäuse verbaut werden, so ist zu berücksichtigen, dass diese Karte U+ = 15V und zusätzlich U− = −15 V benötigt. Die Spannungsversorgung der Wandlerkarte sollte durch eine ge-trennte Spannungsversorgung erfolgen um einen Eintrag von Störungen in den HF-Bereich der NMR zuverhindern. Das Konzept der Spannungsversorgung ist in Abschnitt 6.7 erläutert.
7.2.2 Varicapdiode
Die Varicapdiode, die zur Abstimmung des Schwingkreises in synchroner Resonanzabstimmung erforderlichist, bendet sich in einem separaten, kleinen Messinggehäuse. Diese Anordnung wurde aus der Bochumerboxed NMR übernommen und ist in Abschnitt 6.6.1 näher beschrieben.
7.2.3 HF-Verstärker
Die Verstärkung erfolgt in zwei Schritten. Dies wäre für das Referenzsignal nicht unbedingt erforderlich. Dajedes Bauelement jedoch die Reektion des Signals in Gegenrichtung minimiert - die HF-Bauteile weiseneine groÿe reverse isolation auf - hat sich eine symmetrische Anordnung seit der Liverpool-Box bewährt. DieVerstärkung in Signalarm stellt kein Problem dar - die Verstärkung um insgesamt etwa 40 dB lässt sich sichdurch zwei Verstärker (∆P = 20,5 bzw. ∆P = 28 dB) und verschiedene Abschwächer realisieren.Das Signal im Referenzarm hingegen ist prinzipbedingt bereits vor der Verstärkung deutlich stärker. Hierausergeben sich zwei Möglichkeiten:
• es werden zwei Verstärker mit ∆P = 20,5 dB gewählt. Dann muss das Signal zwischen den Verstärkernum mehr als 20 dB abgeschwächt werden.
• nach einem ersten Verstärker mit ∆P = 20,5 dB wird eine schwächere Verstärkung von nur etwa 12,5dB gewählt. Solche Verstärker mit der benötigten Ausgangsleistung von mindestens 9 dB sind jedochnicht marktüblich und entsprechend teurer.
Beide Kongurationen wurden getestet. Nachfolgend wird die Konguration mit den zwei identischen Ver-stärkern als 20dB-Konguration und die mit den unterschiedlichen Verstärkern als 12dB-Konguration be-zeichnet (nach der Verstärkungsleistung des zweiten Verstärkers). Insgesamt kommen folgende Verstärker
1Virtuelle Stehwellenrate
47

zum Einsatz:
Tab. 7.1: Liste der HF-Verstärker in der neuen Messschaltung.
Hersteller Bezeichnung Verstärkung Referenz Liverpool Referenz boxed
MC AMP-75+ 19± 1,0 dB WJ A71 MC ZFL 500
MC AMP-76+ 26± 1,0 dB WJ A54 MC ZFLN 500 LN
Teledyne AC548 11,5± 0,4 dB Avantek GPD403 MC ZX60-14012+
Die Verstärker der Liverpool-Box können dabei nicht direkt mit den anderen Aufbauten verglichen werden, dahier im Signalarm drei Verstärker Verwendung nden (vgl. Abschnitt 6.5.1). Neben den drei hier benanntenVerstärkern kommt ein Avantek GPD402 im Referenzarm zum Einsatz. Die Zuordnung wurde anhand derVerstärkungsleistung - nicht anhand der Position im Aufbau - getroen.Alle im neuen Aufbau verwendeten Verstärker zeichnen sich durch Kaskadierbarkeit, eine hohe Linearität,eine akzeptable Stehwellenrate (etwas schlechter als bei der Bochumer boxed NMR) und einen niedrigenRauschpegel (niedriger als bei der Bochumer boxed NMR) aus. Von den Herstellern werden dabei folgendewichtige Kenngröÿen benannt. Eine detaillierte Darstellung der Informationen aus den Datenblättern kanndem Anhang (A.3.3) entnommen werden.
Tab. 7.2: Kenndaten der HF-Verstärker in der neuen Messschaltung.
Bezeichnung Strom max. [mA] Noise Figure VSWR max. Input max. Output
AMP-75+ 31 2,4 dB 2,0 : 1 13 dBm 12 dBm
AMP-76+ 71 3,1 dB 2,0 : 1 6 dBm 13,5 dBm
AC548 64 4,5 dB 1,9 : 1 13 dBm 17,8 dBm
Dabei handelt es sich um typische Werte, der Hersteller garantiert also nicht die Einhaltung dieser Spezi-kationen. Beim Verstärker von Teledyne handelt es sich um garantierte Werte für einen Betriebsbereichzwischen 0 und 50 C. Die maximale Ausgangsleistung wird am 1dB-Kompressionspunkt angegeben, d.h.bei dieser Ausgangsleistung weicht die Verstärkung um 1 dB von der Nennverstärkung ab. Alle Verstärkerwerden mit U = 15 V versorgt und arbeiten in einem Bereich von 5− 500 MHz.
7.2.4 HF-Abschwächer
Um die maximale Eingangsleistung nicht zu überschreiten, muss das Signal zwischen den Verstärkern ab-geschwächt werden. Eine weitere Abschwächung kann gegebenenfalls auch nach dem zweiten Verstärkererfolgen um die gewünschte Ausgangsleistung zur weiteren Verarbeitung des Signals zu erlangen.Es kommen HF-Abschwächer mit einem Keramikgehäuse zum Einsatz. Die Abschwächer sind sehr klein undlassen sich daher gut auf einer Platine integrieren. Zudem sind die Abschwächer in nahezu allen Dämpfungenverfügbar, so dass mit nur zwei Abschwächern eine beliebige Dämpfung zwischen 0 und 20 dB in Schrittenvon 1 dB erzielt werden kann. Da die Abschwächer baugleich sind, werden sie hier mit PAT-x+ bezeichnet,worin x die jeweilige Abschwächung bezeichnet. Die detaillierte Bestückung kann den einzelnen Layoutsentnommen werden.In Layout 1 sind zudem zwei variable Abschwächer (je einer im Signal- und Referenzarm) vorgesehen. Dieseermöglichen es, das Signal in einem Bereich von 0 bis 15,5 dB variabel in Schritten von 0,5 dB zu dämpfen.Die Steuerung des variablen Abschwächers kann durch ein paralleles Steuersignal erfolgen. Um einen Ein-trag möglicher Störungen durch ein zusätzliches Signal auf der Platine zu verhindern, wurde der direktenVerschaltung der einzelnen Bits auf der Platine durch DIP-Schalter der Vorzug gegeben. Die zusätzlich
48
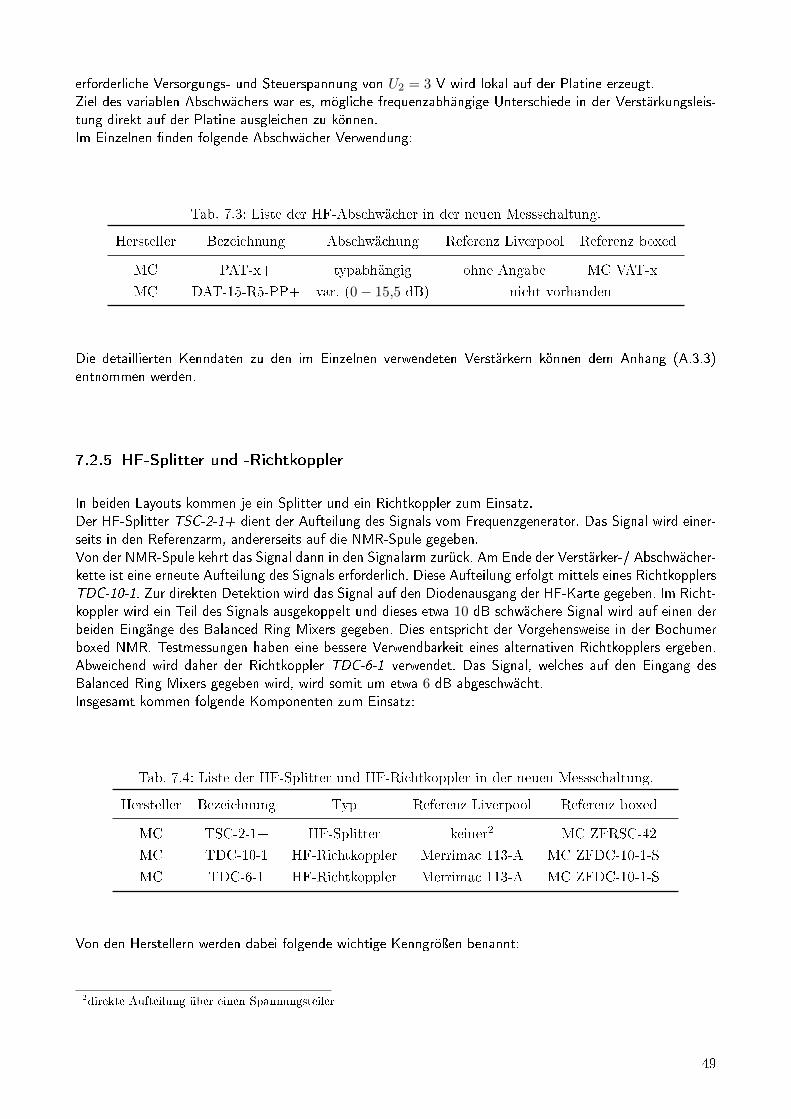
erforderliche Versorgungs- und Steuerspannung von U2 = 3 V wird lokal auf der Platine erzeugt.Ziel des variablen Abschwächers war es, mögliche frequenzabhängige Unterschiede in der Verstärkungsleis-tung direkt auf der Platine ausgleichen zu können.Im Einzelnen nden folgende Abschwächer Verwendung:
Tab. 7.3: Liste der HF-Abschwächer in der neuen Messschaltung.
Hersteller Bezeichnung Abschwächung Referenz Liverpool Referenz boxed
MC PAT-x+ typabhängig ohne Angabe MC VAT-x+
MC DAT-15-R5-PP+ var. (0− 15,5 dB) nicht vorhanden
Die detaillierten Kenndaten zu den im Einzelnen verwendeten Verstärkern können dem Anhang (A.3.3)entnommen werden.
7.2.5 HF-Splitter und -Richtkoppler
In beiden Layouts kommen je ein Splitter und ein Richtkoppler zum Einsatz.Der HF-Splitter TSC-2-1+ dient der Aufteilung des Signals vom Frequenzgenerator. Das Signal wird einer-seits in den Referenzarm, andererseits auf die NMR-Spule gegeben.Von der NMR-Spule kehrt das Signal dann in den Signalarm zurück. Am Ende der Verstärker-/ Abschwächer-kette ist eine erneute Aufteilung des Signals erforderlich. Diese Aufteilung erfolgt mittels eines RichtkopplersTDC-10-1. Zur direkten Detektion wird das Signal auf den Diodenausgang der HF-Karte gegeben. Im Richt-koppler wird ein Teil des Signals ausgekoppelt und dieses etwa 10 dB schwächere Signal wird auf einen derbeiden Eingänge des Balanced Ring Mixers gegeben. Dies entspricht der Vorgehensweise in der Bochumerboxed NMR. Testmessungen haben eine bessere Verwendbarkeit eines alternativen Richtkopplers ergeben.Abweichend wird daher der Richtkoppler TDC-6-1 verwendet. Das Signal, welches auf den Eingang desBalanced Ring Mixers gegeben wird, wird somit um etwa 6 dB abgeschwächt.Insgesamt kommen folgende Komponenten zum Einsatz:
Tab. 7.4: Liste der HF-Splitter und HF-Richtkoppler in der neuen Messschaltung.
Hersteller Bezeichnung Typ Referenz Liverpool Referenz boxed
MC TSC-2-1+ HF-Splitter keiner2 MC ZFRSC-42
MC TDC-10-1 HF-Richtkoppler Merrimac 113-A MC ZFDC-10-1-S+
MC TDC-6-1 HF-Richtkoppler Merrimac 113-A MC ZFDC-10-1-S+
Von den Herstellern werden dabei folgende wichtige Kenngröÿen benannt:
2direkte Aufteilung über einen Spannungsteiler
49

Tab. 7.5: Kenndaten der HF-Splitter und -Richtkoppler in der neuen Messschaltung.
Bezeichnung Bereich [MHz] Isolierung [dB] Verlust über 3 dB [dB]
TSC-2-1+ 1− 400 25− 30 0,25− 1,0
Bezeichnung Bereich [MHz] Richtwirkung [dB] Kopplung [dB] Verlust Hauptleitung [dB]
TDC-10-1+ 1− 400 15− 35 dB 10± 0,5 1,0− 1,5
TDC-6-1+ 10− 400 15− 36 dB 3,3± 0,4 2,0− 2,5
Eine detaillierte Darstellung der Informationen aus den Datenblättern kann dem Anhang (A.3.3) entnommenwerden. Beide Richtkoppler haben eine maximale Eingangsleistung von 1 W und eine VSWR von 1,5 : 1.
7.3 Layout 1
Im Folgenden ist das zuerst entwickelte Platinenlayout dargestellt. In der nachfolgenden Skizze 7.1 wird deut-lich, dass die Phasenkabel am Ende der Verstärker- und Abschwächerkette des Referenzarms vorgesehen ist.Zwischen Phasenanpassung und Mischerausgang des Referenzarms ist noch eine zusätzliche Abschwächungum 1 dB vorgesehen.Der variable Abschwächer benötigt eine zusätzliche Spannung von 3 V, welche auf der Platine erzeugt wird.Eine weitere Schaltskizze ist im Anhang (A.3.1) angefügt.Betrachtet man das Platinenlayout, so ist zu erkennen, dass sich alle Ein- und Ausgänge an der Vorder-seite der Platine benden. Rückseitig ist der Anschluss des standardisierten Spannungsversorgungs- undDatenkabels (D-Sub 25) vorgesehen. Im rechten Drittel bende sich zudem die Spannungsversorgung dervariablen Abschwächer. Sie ist über einen LM317-Chip realisiert, dessen Ausgangsspannung durch die Wahleiner geeigneten Beschaltung mit Widerständen angepasst werden kann.Die Masseächen des Referenzarms, des Signalarms, des 1 dB-Abschwächers (zwischen Phasenanpassungund Mischerausgang des Referenzarms) und der Spannungsversorgung sind durch HF lternde Spulen von-einander getrennt. Dies soll verhindern, dass eine etwaige Störung in einem der Teilabschnitte über dieMasseäche weitergeleitet wird, z.B. in den besonders empndlichen Signalarm.Die Platine wurde vierlagig ausgeführt. Die beiden unteren Layer beinhalten dabei vorwiegend Signalleiter,die beiden oberen Layer Versorgungsspannungen und Masse. Aufgrund der erforderlichen Präzision, ins-besondere beim Verlöten der variablen Abschwächer (Abstand der Kontaktpunkte 0,25 mm, ohne äuÿereKontakte) wurde die Bestückung von der Elektronikwerkstatt des Lehrstuhls für Elektronische Schaltungs-technik durchgeführt. Leider musste im Rahmen verschiedener Messungen festgestellt werden, dass diePlatine hochfrequente Störsignale erzeugte, welche das Test- oder Messsignal überlagerten. Zu den Messun-gen und den ermittelten Ursachen für die Störsignale sind nähere Details in den Kapiteln 9 und 10 angeführt.Keine der beschrittenen Maÿnahmen brachte die erforderliche Minimierung des Störsignals, so dass letztlichein neues Layout entwickelt wurde.
50

Abb. 7.1: Schematische Darstellung der Schaltung von Layout 1
51
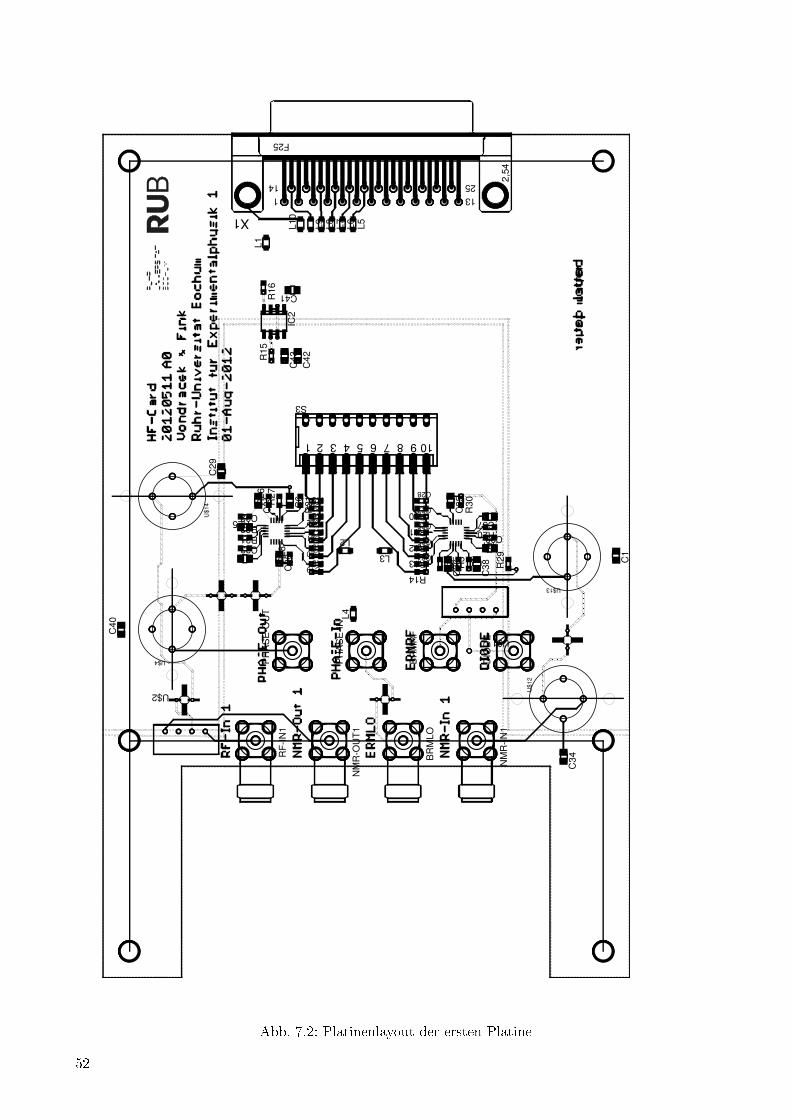
1 2 3 4 5 6 7 8 9 10
1 1314 25 2,
54
F25
U$1
U$1
2U$13
U$1
4
NM
R-O
UT1
RF-
IN1
U$4
S3
C19
C20
C21
C22
C23R5
R6
R7
R8
R9 C24
C25
C26
C27
C28
R10
R11
R12
R13
R14
IC2
R15
R16
X1
L1
L2
L3
L4
L5L6L7L8L9L10
U$2
PH
AS
E-O
UT
PH
AS
E-IN
NM
R-IN
1
BR
MLO
DIO
DE
BR
MR
F
R27
R28
R29
R30C
6
C29
C30
C31
C32
C33C
34
C35
C36
C37
C38
C39
C40
C41
C42
C43
C1
R1 R2
R3
R4R20
R21
R22R25
R26
R31
Abb. 7.2: Platinenlayout der ersten Platine
52

7.4 Layout 2
Im neu entwickelten Layout wurden einige Änderungen vorgesehen. Im Schaltplan wird zunächst ersichtlich,dass auf den Einsatz variabler Abschwächer nunmehr verzichtet wird. Sowohl für die Spannungsversorgung,als auch für die Steuerung der Abschwächer mittels eines DIP-Schalters konnte - auch aufgrund der rechtlangen Leiterbahnen - eine Partizipation an der Produktion des HF-Störsignals nicht ausgeschlossen werden.Insbesondere legt die Messung durch eine HF-Messsonde (vgl. Abschnitt 9.2.2) eine solche Beteiligung nahe.Der Verzicht auf variable Abschwächer bedeutet natürlich auch einen Verlust an Komfort, da eine Kompen-sation frequenzabhängiger Variationen der Verstärkungs- und Abschwächungsleistung nur extern erfolgenkann oder mit dem Austausch eines fest verlöteten Bauteils verbunden ist. Vor einer erneuten Verwendungsollten die Abschwächer eingehend in einem separaten System geprüft werden.Eine weitere Veränderung betrit die Positionierung der Phasenanpassung. Diese ist weiterhin im Refe-renzarm, nun jedoch vor dem zweiten Verstärker vorgesehen. Dies geschieht um den Einsatz eines span-nungsgesteuerten Phasenschiebers (vgl. Abschnitt 8.3) zu ermöglichen. Dieser kann im Betrieb maximal einHF-Signal mit einer Leistung von 0 dBm verschieben. Diese Signalstärke ist vor dem zweiten Verstärker,nicht jedoch am Ende des Referenzarms gegeben.Die Schaltung kann auch in Blockschaltbild 7.3 nachvollzogen werden.Eine detaillierte Schaltskizze ist im Anhang (A.3.2) beigefügt.Betrachtet man das Platinenlayout, so werden einige weitere Änderungen deutlich: Da Schleifen des Signal-leiters durch ihre Spulenwirkung als mögliche Ursache des HF-Störsignals ermittelt werden konnten, wurdeauf einen möglichst geraden Signalleiterweg geachtet. Auch wurde ein möglichst kurzer Signalleiterweg ge-wählt, so dass Verstärker und Abschwächer nunmehr abwechselnd auf Vorder- und Rückseite der Platineaufgebracht sind. Dies impliziert jedoch auch, dass sich Ein- und Ausgänge nicht mehr an der Vorderseite,sondern bisweilen mitten auf der Platine benden. Eine Signalweiterleitung von der Platinenmitte zur Ge-häusefront mittels eines geschirmten Koaxialkabels ist optisch zwar weniger ansprechend, dürfte aber eineäuÿere Beeinussung des HF-Signals deutlich minimieren.Die Platine wurde erneut vierlagig ausgeführt. Die beiden äuÿeren Layer enthalten Signalleiter, dazwischenist je ein Layer für die Masse und ein Layer für die Versorgungsspannung (+15V) vorgesehen.Dabei wurde bei der Fertigung durch Wahl eines breiteren Signalleiters auf eine bessere Anpassung an diesystemweit verwendete Impedanz von 50Ω geachtet. Die Signalleiterbreite wurde dabei mit einer Softwarenamens TXLine bestimmt und der theoretisch berechnete Wert in Rücksprache mit dem Fertiger der Pla-tinen, der Firma Fischer Leiterplattentechnik, auf die Gegebenheiten der dort verwendeten Komponentenangepasst. Die Signalleiter wurden mit 1,13 mm deutlich breiter ausgeführt als im ersten Layout.
53

Abb. 7.3: Schematische Darstellung der Schaltung von Layout 2
54

1 1314 25 2,
54
F25
U$1
NM
R-O
UT1
RF-
IN1
X1
U$2
PH
AS
E-O
UT
NM
R-IN
1
DIODE BRMRF
PH
AS
E-IN
BR
MLO
U$4
U$5
U$7
U$12
Abb. 7.4: Platinenlayout von Board 2
55
7.5 Signalweiterverarbeitung
Die Signalweiterverarbeitung umfasst die Umwandlung des hochfrequenten Signals in eine dem Signal propor-tionale Spannung. Dabei stehen sowohl die Gesamtamplitude des Signals, welche über eine Diode detektiertwird als auch der rein absorptive Anteil des Kernspinresonanzsignals zur Verfügung. Letzteres Signal wirddurch eine Signalmischung in einem Balanced Ring Mixer erzeugt. Die Funktionsweise dieses Mischers istin Abschnitt 6.1.3 näher erläutert.Um die Mischung von Referenz- und Messsignal zu ermöglichen, müssen die beiden Signale in Phase gebrachtwerden. Aufgrund des recht langen Signalweges zur NMR-Spule im Kryostateinsatz und unterschiedlicherSignalleitungseigenschaften ist die Wahl eines identischen Referenzarms unpraktikabel. Der Referenzarmwird daher im Regelfall durch ein Phasenkabel angepasst.
7.5.1 Phasenanpassung
Wie bereits erwähnt, erfolgt die Phasenanpassung in der Regel über ein Phasenkabel. Soll eine Anschluss-möglichkeit des Phasenkabels in der Gehäusefront vorgesehen werden, so ist insbesondere für die Pha-senanpassung des Deuteronensignals der Signalweg innerhalb des Gehäuse zu berücksichtigen. Aufgrundder langen Wellenlänge der Kernspinresonanz der Deuteronen ist daher der Einbau in eine Einzelbox demGehäuseeinbau vorzuziehen um die Anpassung mit kurzen Phasenkabeln zu ermöglichen. Der Anschluss fürdas Phasenkabel kann dann - sofern keine elektronische Phasenanpassung erfolgen soll - an der Gehäuseseitemit SMA-Buchsen ausgeführt werden.
7.5.2 HF/NF-Wandlung
Die Karte zur HF/NF-Wandlung wurde von Gerhard Reicherz auf Grundlage des entsprechenden Modulsder Liverpool-Box entwickelt. Über drei Eingänge können der Karte die Signale des Diodenausgangs und derbeiden BRM-Ausgänge der HF-Karte zugeführt werden.Zur Detektion der Gesamtamplitude werden zwei Dioden verwendet (Typ: BA296, in neueren Karten durchTyp AA143 ersetzt), je eine Diode für positive und negative Signalanteile. Referenz- und Messsignal für diePSD werden direkt auf den BRM (Typ: SRA− 1) gegeben. Die Spannungen werden durch Operationsver-stärker OP200 und LF356 verstärkt. Das Platinenlayout ist im Anhang (A.3.4) beigefügt.Die entsprechenden Ausgangssignale werden über den Liverpool-Stecker - wie auch schon in den ursprüng-lichen Spezikationen vorgesehen - herausgeführt.
7.5.3 DC-Oset-Karte
Die beiden Spannungen - eine Spannung proportional zur Signalgesamtamplitude und eine Spannung propor-tional zum herausgemischten absorptiven Anteil der Kernspinresonanz - müssen nun noch weiterverarbeitetwerden. Es werden eine feste Spannung und eine variable Spannung abgezogen. Auÿerdem kann das Mess-signal um einen Faktor 10 oder 100 verstärkt werden. Diese Verstärkung ist insbesondere zur Detektionvon TE-Signalen erforderlich. In Bochum stehen zwei DC-Oset-Karten zur Verfügung: Eine Karte stammtaus dem Entwicklungszeitraum nach der Liverpool-Box und wurde um 1994 in Yale entwickelt (Yale-Karte)Die andere DC-Oset-Karte ist eine Eigenentwicklung von Gerhard Reicherz in Bochum aus dem Jahre2003. In beiden Fällen sind die Karten in Vollmessing-Gehäuse, ähnlich der Liverpool-Box eingelassen. InsGehäuse sind QLA-Buchsen eingelassen. Die Signale werden dann über Koaxialkabel an eine Anschlussbox
weitergegeben.
7.5.4 Anschluss an den PC
Der Anschluss an den PC erfolgt über eine NI-Karte3 in einem als Anschlussbox bezeichneten 19′′-Gehäuse,welche als Adapter von proprietären Steckern auf QLA-Stecker dient. Die Messsignale werden der An-schlussbox über Koaxialkabel zugeführt und die Signale an einen PC übertragen und dort digitalisiert. Der3National Instruments
56

PC (National Instruments PXI 1024Q) verfügt dazu über eine NI-Karte PXI 6289 mit Digitaleingängen und 4D/A-Wandlern. Die D/A-Wandler werden verwendet um die Spannung für die Varicapdiode und den Triggerfür den DC-Oset-Abzug zu erzeugen. Zwei weitere D/A-Wandler stehen also zur Verfügung und könntenzur elektronischen Phasenanpassung Verwendung nden. Die Übertragung der Spannungen an die Varicapdi-ode und an die DC-Oset-Karte erfolgt erneut über ein Koaxialkabel. Auch hierfür sind QLA-Steckkontaktein der Anschlussbox vorgesehen. Die Steuerung und Datenerfassung erfolgt mittels LabView.
7.6 Gesamtaufbau
Insgesamt besteht der Aufbau somit aus:
• NMR-Spannungsversorgung
• Anschlussbox
• Varicapdiode
• Aluminiumgehäuse mit
HF-Karte
elektronischem Phasenschieber oder Phasenkabel
HF/NF-Wandler
• DC-Oset-Karte
• PC zur Steuerung und Signalverarbeitung
Die in diesem Kapitel besprochenen NMR-Messschaltungen sind auch auf den nachfolgenden Fotos 7.5 und7.6 zu erkennen:
57

Abb. 7.5: Die drei NMR-System im Vergleich: (v.l.n.r.) Liverpool-Box, Bochumer boxed NMR mitHF/NF-Wandlerkarte in separatem Gehäuse und die neu entwickelte NMR-Messschaltung,hier mit Varicapdiode und Widerständen im externen Gehäuse.
Abb. 7.6: Neu entwickelte NMR-Messschaltung und HF/NF-Wandlerkarte jeweils in einer Hälfte einesAluminiumgehäuses. Die Karten werden über Kabel (vgl. 7.2.1) miteinander verbunden unddas Gehäuse dann zusammengesteckt.
58

8 Neue Konzepte zur Phasenkompensation
Im Rahmen der Arbeit wurden auch neue Konzepte zur Phasenanpassung erprobt. Ziel war es, die Phasenab-stimmung des Referenzsignals direkt in das NMR-Modul zu integrieren. Hierfür erscheint eine elektronischePhasenanpassung geeignet. Eine spannungsgesteuerte Phasenanpassung lässt sich leicht in ein Platinenlayoutintegrieren.
8.1 Klassische Phasenanpassung
Bisher wurde - sowohl an der Liverpool Box als auch bei der Bochumer boxed NMR die Phase zwischenAusgang der NMR und HF/NF-Wandler-Karte durch Variation der Kabellänge angepasst.In der Praxis wird die Länge eines oder mehrerer SMA-Kabel durch kleine, starre Verbindungselemente an-gepasst. Die Einstellgenauigkeit ist zur Nutzung des Balanced Ring Mixers hinreichend, bleibt aber durchdas kleinste verfügbare Verbindungselement begrenzt. Insbesondere sind mehrere Schritte erforderlich, umReferenzsignal und Messsignal in Phase zu bringen.Vorteilhaft ist indes, dass die Phasenanpassung keinerlei gröÿeren Temperaturschwankungen unterworfen istund durch geeignete Wahl der Koaxialkabel Dämpfung und Eintrag äuÿerer Störungen minimiert werden.
8.2 Mechanische Phasenanpassung
Eine mechanische Phasenanpassung erfolgt über einen variablen Innenleiter, der mittels eines Drehknopfesgekürzt oder verlängert werden kann. Das Prinzip entspricht im Wesentlichen dem Zug einer Posaune.In der Arbeitsgruppe ist ein solcher mechanischer Phasenschieber vorhanden. Der in der Werkstatt für Fein-mechanik gefertigte Phasenschieber verfügt jedoch nicht über Standard-SMA-Anschlüsse.Kommerzielle Phasenschieber sind sehr teuer und eine Anschaung stünde letztlich in keinem Verhältniszum Nutzen. Einerseits lässt sich hier zwar die Phase sehr genau einstellen und der entsprechende Winkelauch auf einer Skala ablesen. Andererseits erfordert die Phasenanpassung immer noch eine mehrschrittigeNachjustierung und muss unmittelbar am Phasenschieber durchgeführt werden.Das Konzept einer mechanischen Phasenanpassung erscheint daher für die Anwendungen an einem PT-Aufbau ungeeignet und wurde im Rahmen dieser Arbeit nicht weiter verfolgt.Gleichwohl wäre eine elektronisch gesteuerte, mechanische Phasenanpassung - z.B. mittels eines Schrittmo-tors der den Zug des Innenleiters variiert - denkbar.
8.3 Elektronische Phasenanpassung
Eine elektronische Phasenanpassung erfolgt in der Regel spannungsgesteuert. Hierbei ndet eine spannungs-veränderliche Kapazität Verwendung, welche Bestandteil eines LC-Glieds ist. Grundlage ist in der Regel einQuadratur-Phasenschieber (vgl. [MW112]). Ein Quadratur-Koppler teilt das Eingangssignal in zwei um 90
phasenverschobene Signale. Die beiden Signale werden dann vom LC-Glied reektiert und treen an einemAusgang zusammen. Voraussetzung hierfür ist, dass die Reexionskoezienten der beiden Glieder in Bezugauf Amplitude und Phase identisch sind. Die Anordnung kann auch Schema 8.3 entnommen werden.Ein Nachteil der elektronischen Phasenschieber ist ihre meist geringe Bandbreite. Im Folgenden werden zweiKomponenten betrachtet, die im Rahmen dieser Arbeit untersucht wurden:
59

Abb. 8.1: Schema eines elektronischen Phasenschiebers mit Quadraturkoppler. Quelle: [Mer96]
8.3.1 Electronic Line Stretcher Mini-Circuits ELS-210
Beim Electronic Line Stretcher (ELS) der Firma Mini-Circuits handelt es sich um einen rückwärtsgekoppeltenPhasenschieber. Das phasenverschobene Signal wird somit als reektiertes Signal am Eingang zur Verfügunggestellt. Schematisch ist die Funktionsweise des ELS in Abbildung 8.3.1 veranschaulicht.Der ELS eignet sich damit insbesondere zur Simulation einer phasenveränderlichen Last an einem span-
Abb. 8.2: Schematische Darstellung des Electronic Line Stretchers. Nach Angaben aus dem Datenblatt
nungsgetriebenen Oszillator. Über eine Stehwellenmessbrücke ist ein Einsatz als Phasenschieber für ein Re-ferenzsignal denkbar. Negativ wirkt sich hier jedoch der für den eigentlichen Anwendungszweck gewünschteLeistungsverlust von 12 dB aus. Insgesamt verfügt gemäÿ der technischen Spezikationen aus dem Daten-blatt der untersuchte ELS-210 über folgende Charakteristika:
60

Tab. 8.1: Charakteristika des ELS-210 nach Angaben des Herstellers
Frequenzbereich 80− 210 MHz
max. Eingangsleistung 10 dBm
Phasenbereich 360
Return Loss typ. 10− 12 dB
Regelspannung 0,5− 25 V
Mit dem ELS-210 kann eine gröÿere Einstellgenauigkeit als mit einer kabelgestützten Phasenanpassungerzielt werden. Dies gilt insbesondere für höhere Frequenzen. So lässt sich z.B. für ν = 106 MHz unter Ver-wendung der kleinsten verfügbaren Verlängerung eine Phasenanpassung auf etwa ±3 ermöglichen. Um einegenaue elektronische Phasenanpassung durchzuführen muss die Phasencharakteristik aufgezeichnet werdenund die Phasenverschiebung in Abhängigkeit von der angelegten Regelspannung bestimmt werden. Für dieAnwendung einer NMR-Messschaltung erscheint ein Phasenschieber mit Vorwärtskopplung jedoch geeigne-ter, so dass nachfolgendes Bauteil ausführlicher getestet wurde:
8.3.2 Mini-Circuits JSPHS-x
Bei der JSPHS-Reihe der Firma Mini-Circuits handelt es sich um vorwärtsgekoppelte Phasenschiebermodulezur Leiterplattenmontage. Die Bauteile stehen für eine Vielzahl von Frequenzbereichen zur Verfügung. Lei-der können nicht alle für NMR-Anwendungen erforderlichen Frequenzbereiche abgedeckt werden. Um einenmöglichst exiblen Einsatz zu ermöglichen wurden bei einem Teil der nach Layout 2 (vgl. Abschnitt 7.4)gefertigten Karten die SMA-Buchsen für den Anschluss des Phasenkabels durch MCX-Buchsen ersetzt. Aufdiese können dann Piggyback-Karten mit MCX-Steckern gesteckt werden, welche jeweils ein Phasenschie-bermodul tragen. Nähere Angaben zum Layout der Piggyback-Karten sind in Abschnitt 8.4 angeführt. ImRahmen dieser Arbeit wurden die Module JSPHS-16, JSPHS-26 und JSPHS-150 getestet. Den Datenblät-tern können folgende technische Spezikationen entnommen werden:
Tab. 8.2: Technische Daten der Phasenschiebermodule der JSPHS -Reihe nach Angaben des Herstellers
Eigenschaft JSPHS − 16 JSPHS − 26 JSPHS − 150
Frequenzbereich [MHz] 12− 16 18− 26 100− 150
Phasenbereich [] 180 180 180
Eingangsverlust typ. 1,0 1,2 1,2
Eingangsverlust max. 2,5 3,0 2,5
Regelspannung [V] 0− 7 0− 12 0− 12
VSWR typ. 1,1 : 1 1,2 : 1 1,2 : 1
VSWR max. 1,8 : 1 1,7 : 1 1,7 : 1
Als Grenzwert werden benannt:
• Betriebstemperatur zwischen −40 C und 85 C
• Eingangsleistung max. 20 dBm
• max. Regelspannung 20 V (12 V bei JSPHS-26)
61
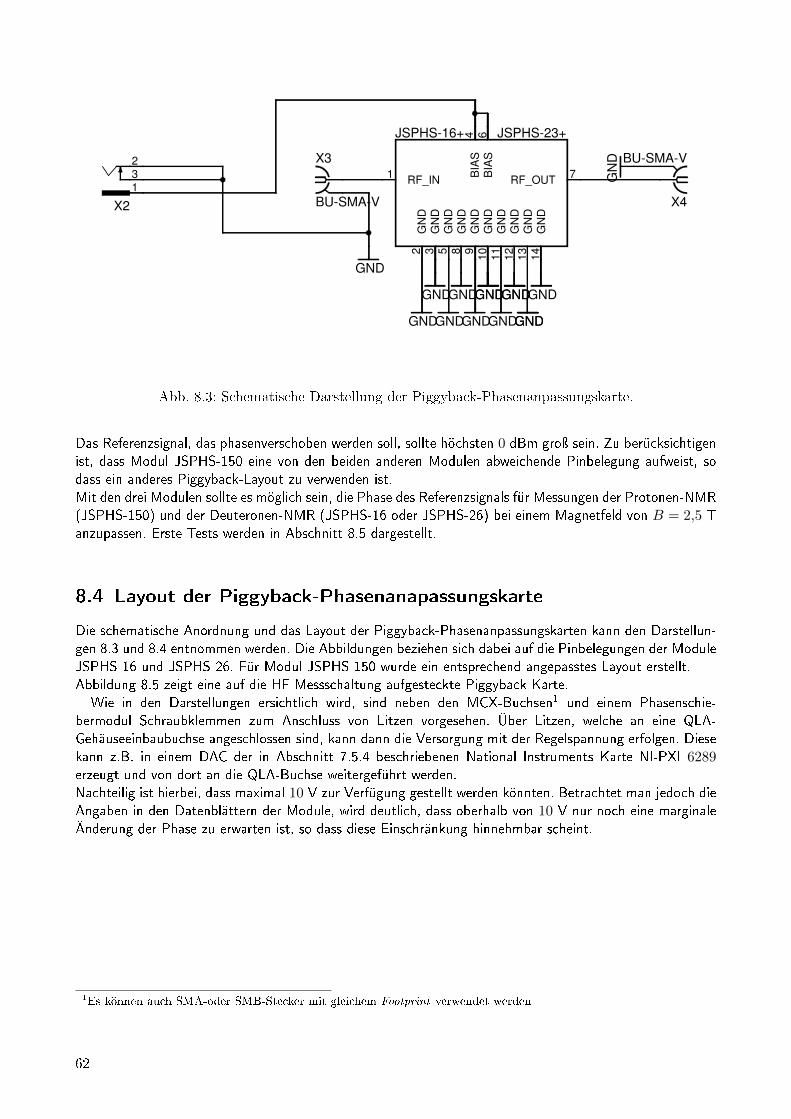
JSPHS-23+
GND
GND
GND
GND
GND
GND
GNDGND
GN
D
GND
BU-SMA-V
BU-SMA-V
GND
GND
GNDGNDGND
RF_IN1 RF_OUT 7BIA
S4
BIA
S6
GN
D2
GN
D3
GN
D5
GN
D8
GN
D9
GN
D10
GN
D11
GN
D12
GN
D13
GN
D14
JSPHS-16+
X41
23
X2
X3
Abb. 8.3: Schematische Darstellung der Piggyback-Phasenanpassungskarte.
Das Referenzsignal, das phasenverschoben werden soll, sollte höchsten 0 dBm groÿ sein. Zu berücksichtigenist, dass Modul JSPHS-150 eine von den beiden anderen Modulen abweichende Pinbelegung aufweist, sodass ein anderes Piggyback-Layout zu verwenden ist.Mit den drei Modulen sollte es möglich sein, die Phase des Referenzsignals für Messungen der Protonen-NMR(JSPHS-150) und der Deuteronen-NMR (JSPHS-16 oder JSPHS-26) bei einem Magnetfeld von B = 2,5 Tanzupassen. Erste Tests werden in Abschnitt 8.5 dargestellt.
8.4 Layout der Piggyback-Phasenanapassungskarte
Die schematische Anordnung und das Layout der Piggyback-Phasenanpassungskarten kann den Darstellun-gen 8.3 und 8.4 entnommen werden. Die Abbildungen beziehen sich dabei auf die Pinbelegungen der ModuleJSPHS-16 und JSPHS-26. Für Modul JSPHS-150 wurde ein entsprechend angepasstes Layout erstellt.Abbildung 8.5 zeigt eine auf die HF-Messschaltung aufgesteckte Piggyback-Karte.Wie in den Darstellungen ersichtlich wird, sind neben den MCX-Buchsen1 und einem Phasenschie-
bermodul Schraubklemmen zum Anschluss von Litzen vorgesehen. Über Litzen, welche an eine QLA-Gehäuseeinbaubuchse angeschlossen sind, kann dann die Versorgung mit der Regelspannung erfolgen. Diesekann z.B. in einem DAC der in Abschnitt 7.5.4 beschriebenen National Instruments Karte NI-PXI 6289erzeugt und von dort an die QLA-Buchse weitergeführt werden.Nachteilig ist hierbei, dass maximal 10 V zur Verfügung gestellt werden könnten. Betrachtet man jedoch dieAngaben in den Datenblättern der Module, wird deutlich, dass oberhalb von 10 V nur noch eine marginaleÄnderung der Phase zu erwarten ist, so dass diese Einschränkung hinnehmbar scheint.
1Es können auch SMA-oder SMB-Stecker mit gleichem Footprint verwendet werden
62

X4
X2
X3
BU-SMA-VBU-SMA-V
Abb. 8.4: Layout der Piggyback-Phasenanpassungskarte.
Abb. 8.5: HF-Teil der NMR-Messschaltung mit aufgesteckter Piggyback-Phasenanpassungskarte.
63

8.5 Testmessungen
Mit den Phasenschieberkarten konnten erste Testmessungen durchgeführt werden. Dabei konnte festgestelltwerden, dass der spannungsgesteuerte Phasenabgleich über den im Datenblatt benannten Bereich von etwa180 möglich ist.Beim Versuch, die Phase spannungsgesteuert anzupassen, erwies sich die Spannungsversorgung TTI PL330DP(vgl. Abschnitt 9.1.1) mit einer Genauigkeit von ∆U = ±10 mV als zu ungenau für diesen Anwendungs-zweck. Dies gilt insbesondere für die - im Datenblatt ersichtlichen - steilen Flanken der Phasenwinkel-Spannungs-Beziehung für kleine Phasenwinkel. Weitere Messungen mit einem Oszilloskop machten auÿer-dem leichte Verzerrungen des Signals durch den Phasenschieber deutlich. In weiteren Untersuchungen müsstenun geklärt werden, inwiefern diese Verzerrungen einen Einuss auf die Linearität der phasensensitiven De-tektion haben.
64
9 Messungen und Ergebnisse
9.1 Messaufbauten
Nachfolgend werden die für die ersten Testmessungen und zur Polarisationsdetektion an verschiedenenProben verwendeten Aufbauten beschrieben.
9.1.1 Messgeräte für erste Tests
Erste Tests wurden mit folgenden Komponenten durchgeführt:
• programmierbare Spannungsversorgung TTI1 PL330DP
• Signalgenerator Rohde & Schwarz SMY01
• Oszilloskop Tektronix TDS 3034 B
• Oszilloskop Tektronix MSO 4104
• Spektrumanalysator Hameg HM5014-2
• Multimeter HP 34401 A
9.1.2 Aufbauten zur Targetpolarisation
In Bochum sind drei Aufbauten zur Targetpolarisation vorhanden. Da die Schwerpunkte der BochumerPT-Gruppe in der Weiterentwicklung von Targetmaterialien, Polarisationsverfahren und Methoden zur Po-larisationsdetektion liegen, sind die Aufbauten nicht Bestandteil eines teilchenphysikalischen Beschleuniger-experiments.Gewissermaÿen können die drei Bochumer Targetaufbauten SOPHIE2, CHRISTA und SATAN3 also alsTeststände für die groÿen polarisierbaren Targets in Experimenten an den Beschleunigern ELSA4 in Bonnund MAMI5 in Mainz, sowie für das COMPASS-Target angesehen werden. Der im Rahmen dieser Arbeitzu Testzwecken verwendete Aufbauten, SOPHIE, wird nachfolgend kurz beschrieben: Bei SOPHIE handeltes sich um ein 4He-Badkryostaten. Der Kroystat bendet sich in einem normalleitenden Elektromagnetenmit einer maximalen Feldstärke von B = 2,5 T. Die Temperaturen, welche auch zur Bestimmung der TE-Polarisation benötigt werden, können über temperaturabhängige Widerstände ermittelt werden. Beim AufbauSOPHIE kommen dabei Widerstände der Firma Allen-Bradley zum Einsatz, die eine besondere Charakte-ristik bei tiefen Temperaturen aufweisen. Eine detaillierte Beschreibung kann [Har97] entnommen werden.Die Steuerung von Magnetfeld, Signalgenerator (Rohde & Schwarz SMT02) und Mikrowellen erfolgt überverschiedene von Gerhard Reicherz entwickelte Labview VIs6. Auch zur Aufzeichnung der NMR-Messsignale(NMR-DAQ), zur Überwachung der Kryostattemperatur und zur Steuerung und Überwachung des Vaku-umpumpstandes stehen entsprechende VIs zur Verfügung.
1Thurlby Thandar Instrumets2Spin Orientation PHysics Investigation Equipment3Spin Ausrichtende Tieftemperatur ANlage4ELektronen-Stretcher-Anlage5MAinz MIcrotron6Virtuelle Instrumente
65

9.2 Messungen mit Layout 1
9.2.1 Erstmessungen mit einem Sinus-Signal
Zur Untersuchung des Platinenverhaltens wurden Messungen mit einem Sinussignal aus dem SignalgeneratorSMY01 und einer Abschwächerkette (verschiedene Mini-Circuits VAT-x mit einer Gesamtdämpfung von 32dB) zwischen NMR-Ausgang des Splitters und NMR-Eingang des Signalarms durchgeführt. Das nachfolgenddargestellte Messsignal wurde mit dem Oszilloskop MSO4104 aufgezeichnet. Um die - unabhängig von derEingangsleistung auftretenden - Störungen deutlicher darstellen zu können wurde ein sehr niedriges Refe-renzsignal mit einer Amplitude von nur −30 dBm gewählt:
Messsignal von Leiterkarte 1 am Oszilloskop
Span
nung
U [
mV]
−10
−5
0
5
10
15
Zeit t [μs]−1 −0,5 0 0,5 1
Diode BRM RF BRM Load
Diode BRM RF BRM Load
Abb. 9.1: Messsignal von Leiterkarte 1, aufgezeichnet mit Oszilloskop MSO 4104. Frequenz 16,3 MHz.Eingangsleistung −30 dBm.
Deutlich sichtbar wird, dass insbesondere das Signal der Mischerausgänge durch starke Störungen überlagertwird. Im Rahmen der durchgeführte Messungen traten solche Störungen vornehmlich im Bereich von 300oder 500 MHz auf. Führt man - mit dem Oszilloskop oder wie hier mit QTIPlot eine Fouriertransformationdes Messsignals durch kann die Störfrequenz ermittelt werden:
66
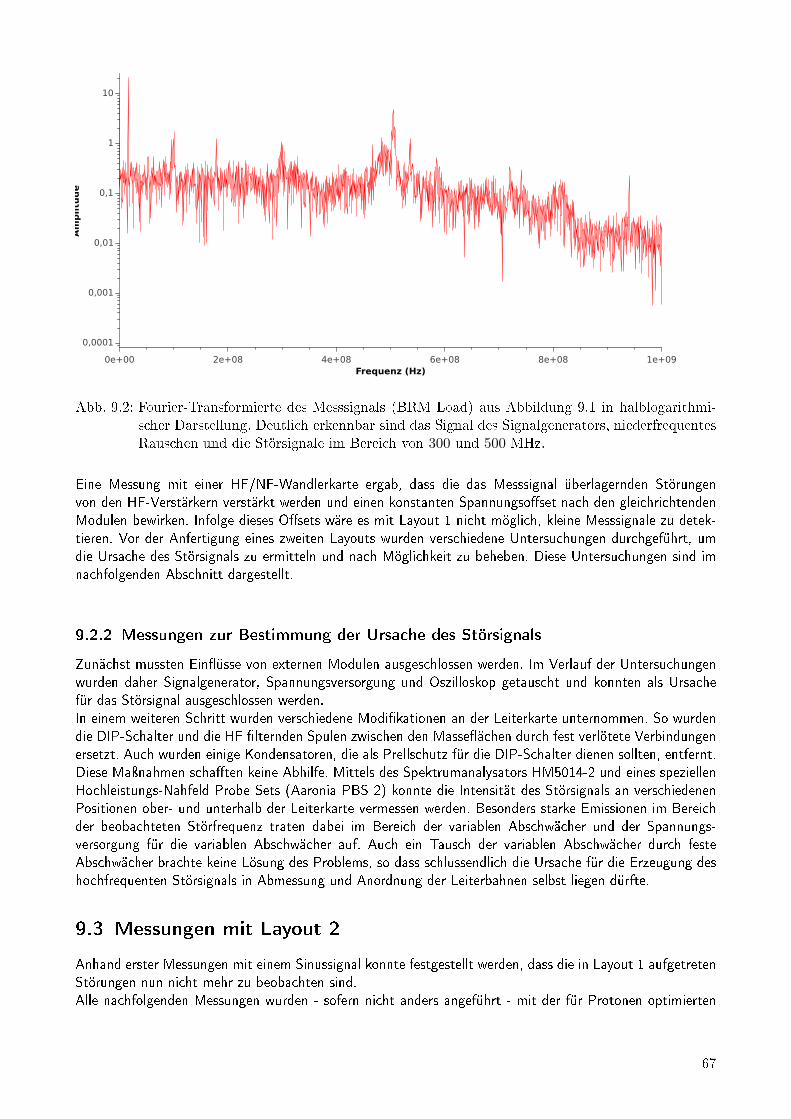
Ampl
itud
e
0,0001
0,001
0,01
0,1
1
10
Frequenz (Hz)0e+00 2e+08 4e+08 6e+08 8e+08 1e+09
Abb. 9.2: Fourier-Transformierte des Messsignals (BRM Load) aus Abbildung 9.1 in halblogarithmi-scher Darstellung. Deutlich erkennbar sind das Signal des Signalgenerators, niederfrequentesRauschen und die Störsignale im Bereich von 300 und 500 MHz.
Eine Messung mit einer HF/NF-Wandlerkarte ergab, dass die das Messsignal überlagernden Störungenvon den HF-Verstärkern verstärkt werden und einen konstanten Spannungsoset nach den gleichrichtendenModulen bewirken. Infolge dieses Osets wäre es mit Layout 1 nicht möglich, kleine Messsignale zu detek-tieren. Vor der Anfertigung eines zweiten Layouts wurden verschiedene Untersuchungen durchgeführt, umdie Ursache des Störsignals zu ermitteln und nach Möglichkeit zu beheben. Diese Untersuchungen sind imnachfolgenden Abschnitt dargestellt.
9.2.2 Messungen zur Bestimmung der Ursache des Störsignals
Zunächst mussten Einüsse von externen Modulen ausgeschlossen werden. Im Verlauf der Untersuchungenwurden daher Signalgenerator, Spannungsversorgung und Oszilloskop getauscht und konnten als Ursachefür das Störsignal ausgeschlossen werden.In einem weiteren Schritt wurden verschiedene Modikationen an der Leiterkarte unternommen. So wurdendie DIP-Schalter und die HF lternden Spulen zwischen den Masseächen durch fest verlötete Verbindungenersetzt. Auch wurden einige Kondensatoren, die als Prellschutz für die DIP-Schalter dienen sollten, entfernt.Diese Maÿnahmen schaten keine Abhilfe. Mittels des Spektrumanalysators HM5014-2 und eines speziellenHochleistungs-Nahfeld Probe Sets (Aaronia PBS 2) konnte die Intensität des Störsignals an verschiedenenPositionen ober- und unterhalb der Leiterkarte vermessen werden. Besonders starke Emissionen im Bereichder beobachteten Störfrequenz traten dabei im Bereich der variablen Abschwächer und der Spannungs-versorgung für die variablen Abschwächer auf. Auch ein Tausch der variablen Abschwächer durch festeAbschwächer brachte keine Lösung des Problems, so dass schlussendlich die Ursache für die Erzeugung deshochfrequenten Störsignals in Abmessung und Anordnung der Leiterbahnen selbst liegen dürfte.
9.3 Messungen mit Layout 2
Anhand erster Messungen mit einem Sinussignal konnte festgestellt werden, dass die in Layout 1 aufgetretenStörungen nun nicht mehr zu beobachten sind.Alle nachfolgenden Messungen wurden - sofern nicht anders angeführt - mit der für Protonen optimierten
67

Karte mit dem 6:1-Richtkoppler TDC-6-1 durchgeführt. Da die Karten sich in Bezug auf die Verstärkungsleis-tung und die aktiven Komponenten nicht unterscheiden, ist keine groÿe Abweichung in Bezug auf Linearitätund Messsignal zu erwarten. Die für Protonen optimierte Karte ist universell einsetzbar. Zur Messung vonDeuteronensignalen sollte das Messsignal am Signalarmeingang (NMR-In) um 3 dB abgeschwächt werdenum die Diodendetektion in ihrem linearen Bereich verwenden zu können.
9.3.1 Erstmessungen mit einem Sinus-Signal
Mit einem Sinussignal variabler Frequenz und Amplitude wurde die Linearität der Ausgänge überprüft. Diesgeschah jeweils mit der bei einem Magnetfeld von 2,5 T zu untersuchenden Protonenlarmorfrequenz vonν ≈ 106 MHz und der Deuteronenlarmorfrequenz von ν ≈ 16 MHz sowie bei benachbarten Frequenzen.Dazu wurde ein Eingangssignal zwischen 70 und 200 mV (RMS) auf den HF-Eingang gegeben und dieSignalstärke am BRM-Eingang des Referenzarms detektiert. Auÿerdem wurde ein Eingangssignal zwischen1 und 5 mV (RMS) auf den Signalarm gegeben und mit einem Oszilloskop die Spannung am Diodenein-gang und am BRM-Eingang des Signalarms gemessen. In einer realen Messung würde die Signalamplitudeam HF-Eingang zu 140 mV gewählt, das Messsignal hat dann eine Amplitude von etwa 2,5 mV. Deutlichsichtbar sind Nichtlinearitäten bei zu hoher Eingangsleistung. Der oberste Messwert wurde so gewählt, dassje bei einem der verwendeten Verstärker der 1dB-Kompressionspunkt erreicht wird.Vernachlässigt man die extremen Werte, lässt sich für kleinere Eingangsleistungen eine deutlich gröÿere Li-nearität ermitteln. Die linearen Fits wurden daher unter Vernachlässigung der drei gröÿten Signalamplitudenam HF-Eingang (200,190 und 180 mV) und im Signalarm (5,1, 4,52 und 3,98 mV) angepasst. Für dieDeuteronenfrequenzen konnten folgende Messkurven aufgezeichnet werden:
Abb. 9.3: Linearitätsuntersuchung von BRM-Load bei ν ≈ 16 MHz
68
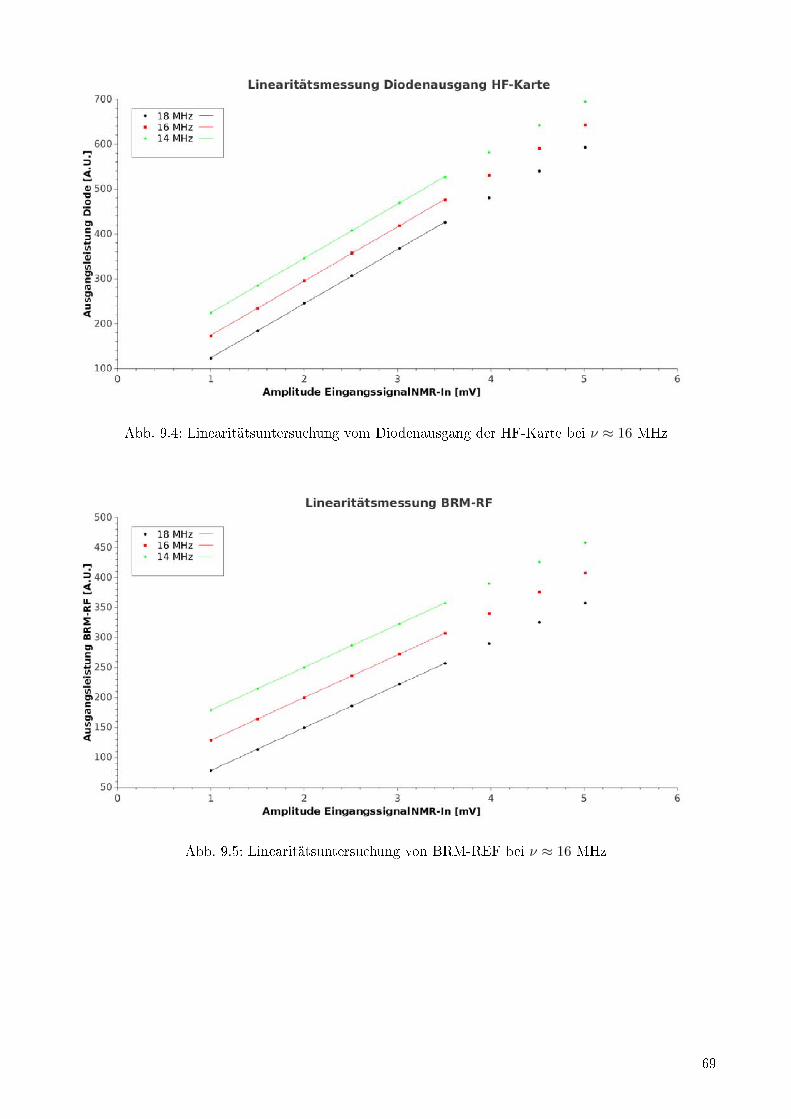
Abb. 9.4: Linearitätsuntersuchung vom Diodenausgang der HF-Karte bei ν ≈ 16 MHz
Abb. 9.5: Linearitätsuntersuchung von BRM-REF bei ν ≈ 16 MHz
69

Es lassen sich folgende Proportionalitätskonstanten ermitteln:
Tab. 9.1: Proportionalitätskonstanten aus der Linearitätsuntersuchung bei ν ≈ 16 MHz
Ausgang Frequenz [MHz] Steigung Oset
BRM-LOAD 18 3,386±0,040 33,2 ±5,0
BRM-LOAD 16 3,394±0,039 32,9 ±4,8
BRM-LOAD 14 3,397±0,040 33,9 ±5,0
Diode 18 120,6 ±0,5 3,5±1,2
Diode 16 120,8 ±0,5 3,3±1,3
Diode 14 120,8 ±0,4 3,8±0,9
BRM-REF 18 71,25±0,17 7,12±0,40
BRM-REF 16 71,03±0,11 7,80±0,27
BRM-REF 14 71,11±0,16 8,02±0,38
Die Kurve für 16 MHz wurde hierbei um 50 AU, die Kurve für 14 MHz um 100 AU verschoben, um einebessere Darstellbarkeit zu ermöglichen. Die reale Abweichung der gemessenen Spannungen beträgt für denjeweils betrachteten Frequenzbereich höchstens 3 mV. Betrachtet man Protonen- und Deuteronenfrequenz,so ist der Verstärkungshub zwischen diesen Messungen deutlich gröÿer. Dies stellt jedoch keinen Nachteildar, da die Messungen nicht wechselseitig kalibriert werden. Für die Protonenfrequenzen wurden gleichartigeMessungen durchgeführt. Aug eine Darstellung der aufgezeichneten Messwerte wird an dieser Stelle verzich-tet. Aus den Messungen konnten folgende Proportionalitätskonstanten und Osets ermittelt werden:
Tab. 9.2: Proportionalitätskonstanten aus der Linearitätsuntersuchung bei ν ≈ 106 MHz
Ausgang Frequenz [MHz] Steigung Oset
BRM-LOAD 109 3,154±0,028 25,3 ±3,5
BRM-LOAD 106 3,165±0,027 25,1 ±3,4
BRM-LOAD 103 3,166±0,029 25,9 ±3,5
Diode 109 115,2 ±0,5 3,7±1,2
Diode 106 115,4 ±0,5 3,5±1,2
Diode 103 115,6 ±0,5 3,3±1,2
BRM-REF 109 67,68±0,15 8,02±0,37
BRM-REF 106 67,73±0,40 8,56±0,96
BRM-REF 103 67,68±0,13 8,19±0,32
9.3.2 Messungen der Linearität der Diodendetektion
Die Linearität der Diodendetektion wurde durch Variation der Eingangsleistung überprüft. Eingangsleistun-gen wurden zwischen −50 dBm und −32 dBm variiert und das Signal am Diodenausgang der HF/NF-Wandlerkarte über das LabView VI der NMR-DAQ ausgelesen. Im Experiment ist ein Messsignal von etwa−39 dBm, entsprechend einer Amplitude von 2,5 mV zu erwarten. Für diese Wert ist die Diodendetektionlinear.
70

Linearität der Diodendetektion [16 MHz]Sp
annu
ng D
iode
naus
gang
U [
mV]
−2.000
0
2.000
4.000
6.000
8.000
10.000
12.000
Amplitude Messsignal U [mV]0 0,5 1 1,5 2 2,5 3 3,5
Linearer FitSteigung m = 6157 +/- 119 mV
Abb. 9.6: Linearitätsuntersuchung der Diodendetektion für ν ≈ 16 MHz. Eine lineare Anpassung wurdefür 1,5 mV ≤ U ≤ 2,6 mV durchgeführt.
Linearität der Diodendetektion [106 MHz]
Span
nung
Dio
dena
usga
ng U
[m
V]
−2.000
0
2.000
4.000
6.000
8.000
10.000
12.000
Amplitude Messsignal U [mV]0 0,5 1 1,5 2 2,5 3 3,5
Linearer FitSteigung m = 6073 +/- 79 mV
Abb. 9.7: Linearitätsuntersuchung der Diodendetektion für ν ≈ 106 MHz. Eine lineare Anpassungwurde für 1,5 mV ≤ U ≤ 2,6 mV durchgeführt.
Betrachtet man die neu gefertigten HF/NF-Wandlerkarte ist aufgrund der abweichenden Forward VoltageDrop Charakteristik ggf. ein zusätzlicher Abschwächer zu verwenden. Weitere Messungen hierzu stehen nochaus.
71
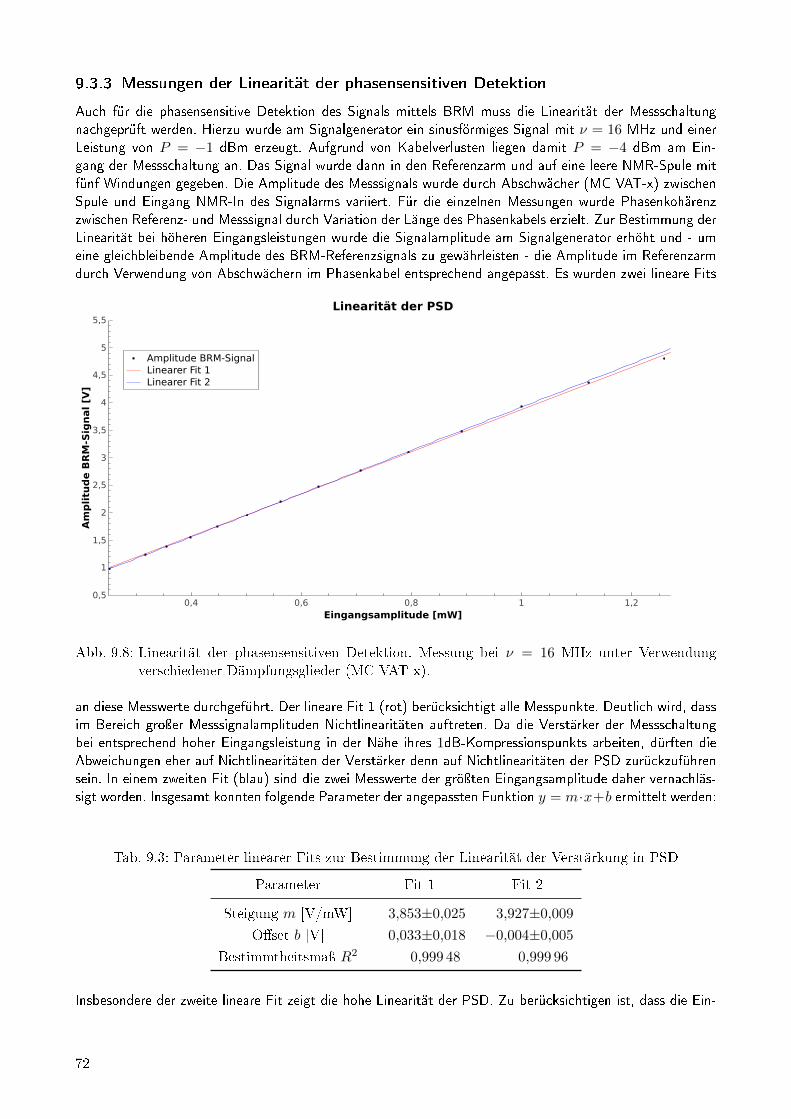
9.3.3 Messungen der Linearität der phasensensitiven Detektion
Auch für die phasensensitive Detektion des Signals mittels BRM muss die Linearität der Messschaltungnachgeprüft werden. Hierzu wurde am Signalgenerator ein sinusförmiges Signal mit ν = 16 MHz und einerLeistung von P = −1 dBm erzeugt. Aufgrund von Kabelverlusten liegen damit P = −4 dBm am Ein-gang der Messschaltung an. Das Signal wurde dann in den Referenzarm und auf eine leere NMR-Spule mitfünf Windungen gegeben. Die Amplitude des Messsignals wurde durch Abschwächer (MC VAT-x) zwischenSpule und Eingang NMR-In des Signalarms variiert. Für die einzelnen Messungen wurde Phasenkohärenzzwischen Referenz- und Messsignal durch Variation der Länge des Phasenkabels erzielt. Zur Bestimmung derLinearität bei höheren Eingangsleistungen wurde die Signalamplitude am Signalgenerator erhöht und - umeine gleichbleibende Amplitude des BRM-Referenzsignals zu gewährleisten - die Amplitude im Referenzarmdurch Verwendung von Abschwächern im Phasenkabel entsprechend angepasst. Es wurden zwei lineare Fits
Linearität der PSD
Ampl
itud
e BR
M-S
igna
l [V]
0,5
1
1,5
2
2,5
3
3,5
4
4,5
5
5,5
Eingangsamplitude [mW]0,4 0,6 0,8 1 1,2
Amplitude BRM-Signal Linearer Fit 1 Linearer Fit 2
Abb. 9.8: Linearität der phasensensitiven Detektion. Messung bei ν = 16 MHz unter Verwendungverschiedener Dämpfungsglieder (MC VAT-x).
an diese Messwerte durchgeführt. Der lineare Fit 1 (rot) berücksichtigt alle Messpunkte. Deutlich wird, dassim Bereich groÿer Messsignalamplituden Nichtlinearitäten auftreten. Da die Verstärker der Messschaltungbei entsprechend hoher Eingangsleistung in der Nähe ihres 1dB-Kompressionspunkts arbeiten, dürften dieAbweichungen eher auf Nichtlinearitäten der Verstärker denn auf Nichtlinearitäten der PSD zurückzuführensein. In einem zweiten Fit (blau) sind die zwei Messwerte der gröÿten Eingangsamplitude daher vernachläs-sigt worden. Insgesamt konnten folgende Parameter der angepassten Funktion y = m·x+b ermittelt werden:
Tab. 9.3: Parameter linearer Fits zur Bestimmung der Linearität der Verstärkung in PSD
Parameter Fit 1 Fit 2
Steigung m [V/mW] 3,853±0,025 3,927±0,009
Oset b [V] 0,033±0,018 −0,004±0,005
Bestimmtheitsmaÿ R2 0,999 48 0,999 96
Insbesondere der zweite lineare Fit zeigt die hohe Linearität der PSD. Zu berücksichtigen ist, dass die Ein-
72

gangsleistungen aufgrund der nominellen Abschwächung der Abschwächer ohne Berücksichtigung möglicherSchwankungen und Eingangsverluste ermittelt wurde. Die Messungen stellen daher keine genaue Lineari-tätsuntersuchung, sondern eine Abschätzung der Linearität dar.
9.3.4 Messungen zur Temperaturstabilität
Die Temperaturstabilität wurde mit Hilfe eines Pt1000-Widerstands überprüft. Der auf einem der Verstärkermit Wärmeleitpaste und Aluminiumklebeband befestigte Widerstand wurde an ein Multimeter (HP 34401A) angeschlossen und der Widerstandswert in einer Vierpunktmessung bestimmt. Das HF-Signal (−4 dBm)wurde nach etwa einer Minute eingeschaltet. Dieser Zeitpunkt ist im Diagramm deutlich zu erkennen. DieMesswerte wurden über eine Computerschnittstelle etwa alle zwei Sekunden ausgelesen. Für den ersten Ver-stärker im Referenzarm konnte folgende Widerstandskurve aufgezeichnet werden:
Temperaturkurve an Verstärker 1 im Referenzarm
Wid
erst
and
R (P
t100
0) [
Ohm
]
1.080
1.090
1.100
1.110
1.120
1.130
1.140
1.150
1.160
Zeit t [s]0 500 1.000 1.500
Abb. 9.9: Temperaturverhalten des ersten Verstärkers (MC AMP-75) im Referenzarm
Der Temperaturverlauf nach dem Einschalten lässt sich recht gut über eine Funktion (rot) der Form
R(t) = R0 +A√t
+B · t (9.1)
beschreiben. Es konnten folgende Konstanten ermittelt werden:
A = −674± 4
B = −0,00565± 0,00018
R0 = 1177,1± 0,3
Die Genauigkeit des Messwiderstands beträgt im Temperaturbereich von 30− 40C etwa 1,8Ω , was einerTemperaturdierenz von etwa 0,5C entspricht. Unter Vernachlässigung des kleinen linearen Beitrags kon-vergiert diese Beschreibung gegen einen Widerstand von Rmax = 1177Ω. Dies entspricht einer Temperatur
73

von etwa 45,6C. Nach einer halben Stunde ist eine Temperatur von etwa 41,5C erreicht. Ohnehin hat dieTemperatur nur einen geringen Einuss auf die Verstärkungsleistung. Innerhalb von 12 Minuten nach demEinschalten änderte sich die Verstärkungsleistung um 2− 6 mV, in den nachfolgenden 12 Minuten lediglichum 1 mV.
74

9.3.5 Vermessung verschiedener Targetmaterialien
Mit der neuen Messschaltung wurde die Polarisation verschiedener Targetmaterialien bestimmt.
6LiD
Zunächst wurde 6LiD im Aufbau SOPHIE untersucht. Die Untersuchungen konnten bei der Temperatur vonüssigem Sticksto (T = 77 K) durchgeführt werden. Dabei konnten in DNP folgende Signale detektiertwerden:
Negativ Polarisierte LiD-Probe
Ampl
itud
e [A
U]
0
1
2
3
4
Frequenz ν [MHz]16.26 16.27 16.28 16.29 16.3 16.31 16.32
Abb. 9.10: Gröÿte - im Rahmen der Messung detektierte - negative Polarisation von 6LiD.
Abb. 9.11: Gröÿte - im Rahmen der Messung detektierte - positive Polarisation von 6LiD.
75

Deutlich wird, dass in 6LiD keine Quadrupolverbreiterung des Signals beobachtet werden kann, da auf-grund der fcc-Struktur des Gitters keine elektrischen Feldgradienten auftreten (vgl. [BC+99]). Die deutlichfeststellbare Asymmetrie ist typisch für ein 6LiD-Signal.
H-Butanol mit TEMPO
Weiterhin wurde eine protonenreiche, chemisch dotierte Butanolprobe im Aufbau SOPHIE untersucht. Dabeihandelte es sich um eine mit 0,4 Gewichtsprozent TEMPO dotierte H-Butanol-Probe. Im thermischenGleichgewicht konnten mehrere Signale aufgezeichnet werden. Nachfolgend ist ein Beispiel dargestellt:
TE-Signal von H-Butanol + 0,5% TEMPO
Ampl
itud
e [m
V]
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
Frequenz [MHz]106.1 106.2 106.3 106.4 106.5
Abb. 9.12: TE-Signal einer H-Butanol-Probe mit 0,4% TEMPO, gemessen in SOPHIE (T ≈ 1 K) mit512 Sweeps.
Es konnten insgesamt 24 TE-Signale aufgezeichnet und die Fläche unter den Kurven zu ATE = 0,0532±0,001 Flächeneinheiten gemittelt werden. Weiterhin wurden im Rahmen der Messung folgende Maximalpo-larisationen aufgezeichnet:
76
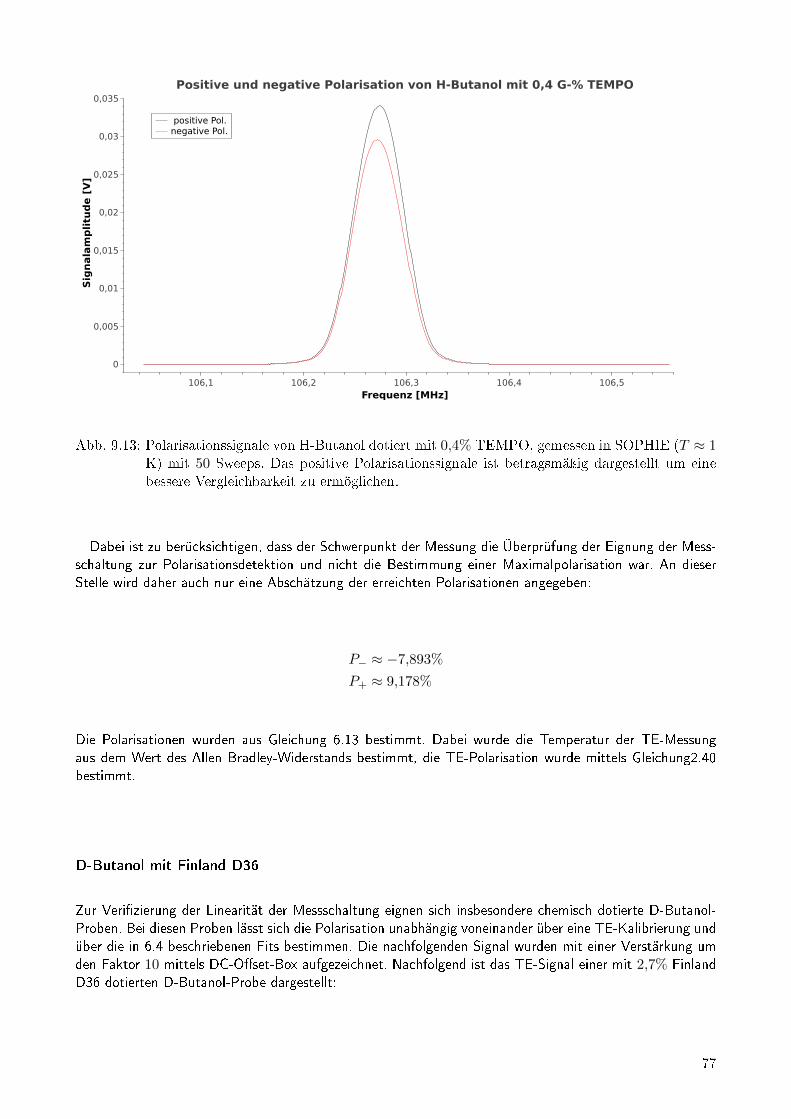
Positive und negative Polarisation von H-Butanol mit 0,4 G-% TEMPOSi
gnal
ampl
itud
e [V
]
0
0,005
0,01
0,015
0,02
0,025
0,03
0,035
Frequenz [MHz]106,1 106,2 106,3 106,4 106,5
positive Pol.negative Pol.
Abb. 9.13: Polarisationssignale von H-Butanol dotiert mit 0,4% TEMPO, gemessen in SOPHIE (T ≈ 1K) mit 50 Sweeps. Das positive Polarisationssignale ist betragsmäÿig dargestellt um einebessere Vergleichbarkeit zu ermöglichen.
Dabei ist zu berücksichtigen, dass der Schwerpunkt der Messung die Überprüfung der Eignung der Mess-schaltung zur Polarisationsdetektion und nicht die Bestimmung einer Maximalpolarisation war. An dieserStelle wird daher auch nur eine Abschätzung der erreichten Polarisationen angegeben:
P− ≈ −7,893%
P+ ≈ 9,178%
Die Polarisationen wurden aus Gleichung 6.13 bestimmt. Dabei wurde die Temperatur der TE-Messungaus dem Wert des Allen Bradley-Widerstands bestimmt, die TE-Polarisation wurde mittels Gleichung2.40bestimmt.
D-Butanol mit Finland D36
Zur Verizierung der Linearität der Messschaltung eignen sich insbesondere chemisch dotierte D-Butanol-Proben. Bei diesen Proben lässt sich die Polarisation unabhängig voneinander über eine TE-Kalibrierung undüber die in 6.4 beschriebenen Fits bestimmen. Die nachfolgenden Signal wurden mit einer Verstärkung umden Faktor 10 mittels DC-Oset-Box aufgezeichnet. Nachfolgend ist das TE-Signal einer mit 2,7% FinlandD36 dotierten D-Butanol-Probe dargestellt:
77
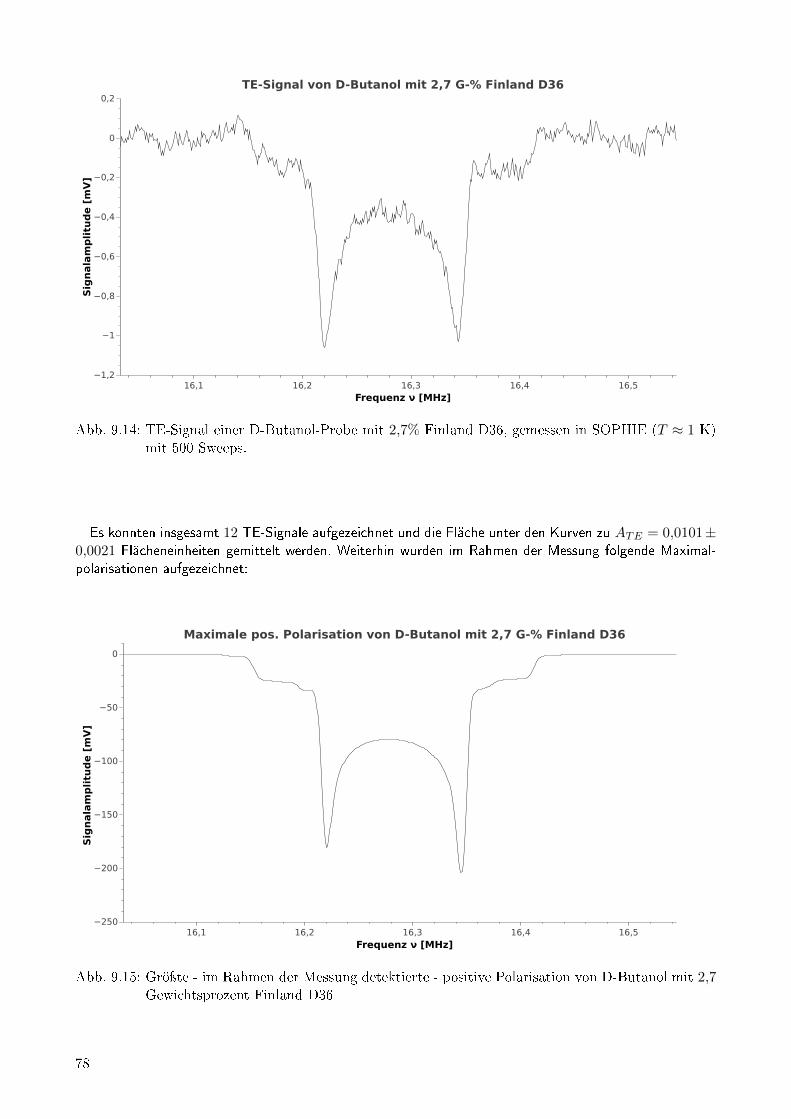
TE-Signal von D-Butanol mit 2,7 G-% Finland D36Si
gnal
ampl
itud
e [m
V]
−1,2
−1
−0,8
−0,6
−0,4
−0,2
0
0,2
Frequenz ν [MHz]16,1 16,2 16,3 16,4 16,5
Abb. 9.14: TE-Signal einer D-Butanol-Probe mit 2,7% Finland D36, gemessen in SOPHIE (T ≈ 1 K)mit 500 Sweeps.
Es konnten insgesamt 12 TE-Signale aufgezeichnet und die Fläche unter den Kurven zu ATE = 0,0101±0,0021 Flächeneinheiten gemittelt werden. Weiterhin wurden im Rahmen der Messung folgende Maximal-polarisationen aufgezeichnet:
Maximale pos. Polarisation von D-Butanol mit 2,7 G-% Finland D36
Sign
alam
plit
ude
[mV]
−250
−200
−150
−100
−50
0
Frequenz ν [MHz]16,1 16,2 16,3 16,4 16,5
Abb. 9.15: Gröÿte - im Rahmen der Messung detektierte - positive Polarisation von D-Butanol mit 2,7Gewichtsprozent Finland D36
78
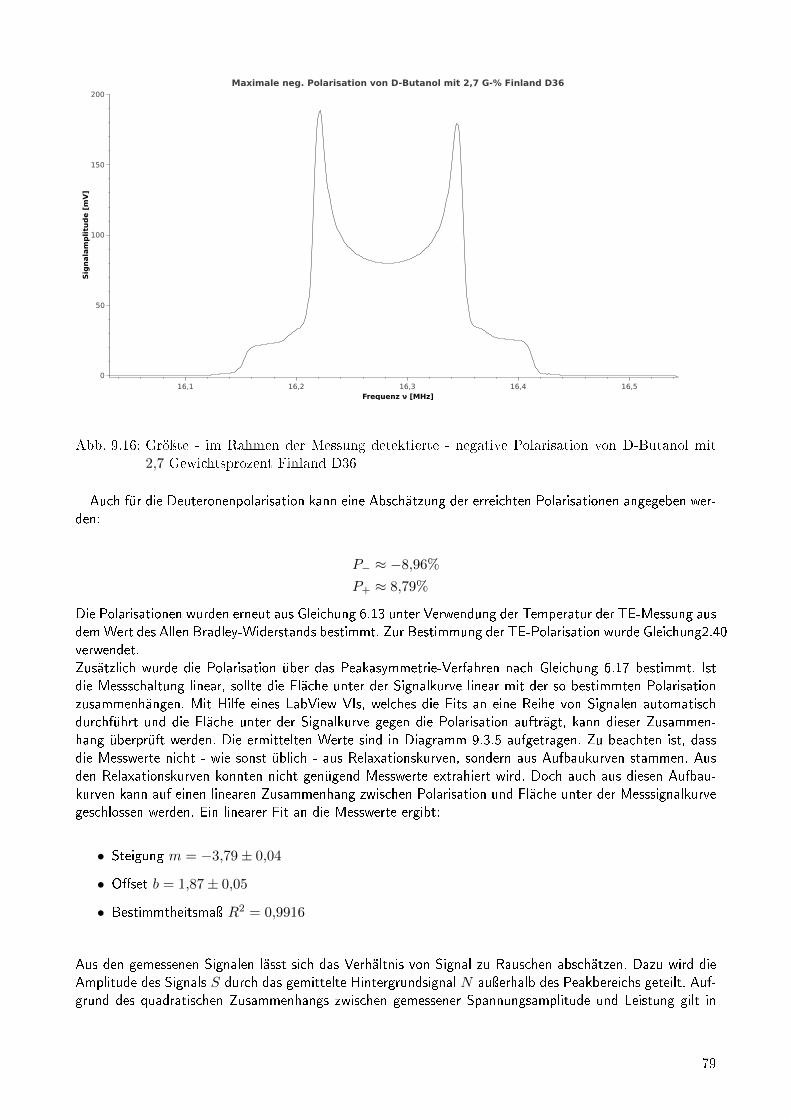
Maximale neg. Polarisation von D-Butanol mit 2,7 G-% Finland D36Si
gnal
ampl
itud
e [m
V]
0
50
100
150
200
Frequenz ν [MHz]16,1 16,2 16,3 16,4 16,5
Abb. 9.16: Gröÿte - im Rahmen der Messung detektierte - negative Polarisation von D-Butanol mit2,7 Gewichtsprozent Finland D36
Auch für die Deuteronenpolarisation kann eine Abschätzung der erreichten Polarisationen angegeben wer-den:
P− ≈ −8,96%
P+ ≈ 8,79%
Die Polarisationen wurden erneut aus Gleichung 6.13 unter Verwendung der Temperatur der TE-Messung ausdemWert des Allen Bradley-Widerstands bestimmt. Zur Bestimmung der TE-Polarisation wurde Gleichung2.40verwendet.Zusätzlich wurde die Polarisation über das Peakasymmetrie-Verfahren nach Gleichung 6.17 bestimmt. Istdie Messschaltung linear, sollte die Fläche unter der Signalkurve linear mit der so bestimmten Polarisationzusammenhängen. Mit Hilfe eines LabView VIs, welches die Fits an eine Reihe von Signalen automatischdurchführt und die Fläche unter der Signalkurve gegen die Polarisation aufträgt, kann dieser Zusammen-hang überprüft werden. Die ermittelten Werte sind in Diagramm 9.3.5 aufgetragen. Zu beachten ist, dassdie Messwerte nicht - wie sonst üblich - aus Relaxationskurven, sondern aus Aufbaukurven stammen. Ausden Relaxationskurven konnten nicht genügend Messwerte extrahiert wird. Doch auch aus diesen Aufbau-kurven kann auf einen linearen Zusammenhang zwischen Polarisation und Fläche unter der Messsignalkurvegeschlossen werden. Ein linearer Fit an die Messwerte ergibt:
• Steigung m = −3,79± 0,04
• Oset b = 1,87± 0,05
• Bestimmtheitsmaÿ R2 = 0,9916
Aus den gemessenen Signalen lässt sich das Verhältnis von Signal zu Rauschen abschätzen. Dazu wird dieAmplitude des Signals S durch das gemittelte Hintergrundsignal N auÿerhalb des Peakbereichs geteilt. Auf-grund des quadratischen Zusammenhangs zwischen gemessener Spannungsamplitude und Leistung gilt in
79

Verhältnis Polarisation zu FlächeneinheitenPo
lari
sati
on [
%]
−6
−4
−2
0
2
4
6
8
10
Flächeneinheiten [A.U.]−1,5 −1 −0,5 0 0,5 1 1,5
PrLinearFit1
Datenpunkte linearer Fit
Tab. 9.4: SNR aus unterschiedlichen Messungen
Messung Art der Messung SNR [dB]
9.11 DNP an 6LiD 58,7
9.10 DNP an 6LiD 57,7
9.3.5 TE von H-Butanol mit TEMPO 46,2
9.3.5 DNP pos. Pol. von H-Butanol mit TEMPO 69,4
9.14 TE von D-Butanol mit Finland D36 30,9
9.15 DNP pos. Pol. von D-Butanol mit Finland D36 71,8
logarithmischer Darstellung:
SNR = 20 · log10
S
N(9.2)
Damit folgt:
80
10 Fazit und Ausblick
Im Rahmen dieser Masterarbeit konnte eine Messschaltung zur Polarisationsdetektion mittels Kernspinreso-nanz entwickelt und getestet werden.Die Linearität der neu entwickelten HF-Messschaltung wurde einzeln und auch in Verbindung mit einerHF/NF-Wandlerkarte gezeigt. Erste Messungen an verschiedenen Targetmaterialien konnten zeigen, dassdie neue Messschaltung zur Detektion der Spinpolarisation von Protonen und Deuteronen geeignet ist. Be-sonders erwähnenswert ist das gute SNR, welches die Detektion des TE-Signals der Deuteronenpolarisationohne zusätzliche Vorkehrungen ermöglicht. Betrachtet man das Messsignal aus der Protonenuntersuchung,so kann aus der Signalhöhe von etwa 35 mV auf ein maximale Signalhöhe von etwa 380 mV bei einerangenommenen Polarisation von 100% geschlossen werden. Bei einer Amplitude der Q-Kurve von etwa 3 Vin phasensensitiver Detektion entspricht dies einer Modulation von 12,7% und bleibt damit deutlich unterder in Dul96 geforderten maximalen Modulation von 30%
Die Integration eines elektrischen Phasenschiebers kann die Abstimmung des NMR-Schwingkreises deut-lich vereinfachen. Vor der Nutzung im Experiment sollte jedoch zunächst noch eine Prüfung des Bauteilsauf mögliche Nichtlinearitäten erfolgen.Im Hinblick auf eine einfachere Montage der Leiterkarten ist der Einbau in ein acheres Gehäuse - inseiner Form ähnlich dem Gehäuse der Liverpool-Box - angedacht. Die Ausgestaltung der kompletten NMR-Messschaltung auf Leiterkarten erlaubt darüber hinaus eine einfache Variation der Anordnung und einemöglich Ergänzung (z.B. um die Bestandteile der externen Varicap-Box).
Eine weitere Verbesserung der Messschaltung wäre durch einen Einbau des Schwingkreises in den Kryo-staten denkbar. Der Verzicht auf das λ/2-Kabel in einem so genannten non-resonant cable NMR circuit
lässt - auch aufgrund der Reduzierung thermischen Rauschens - eine deutliche Verbesserung des SNR er-warten (vgl. [CBC+01].
81
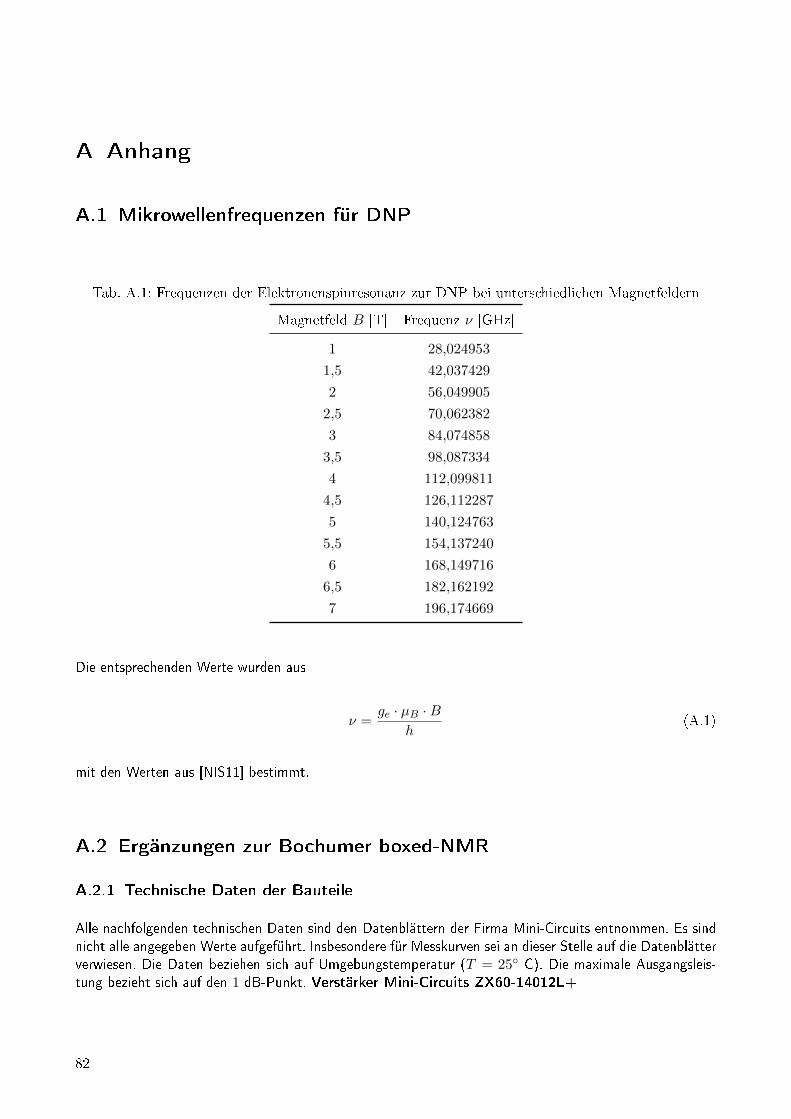
A Anhang
A.1 Mikrowellenfrequenzen für DNP
Tab. A.1: Frequenzen der Elektronenspinresonanz zur DNP bei unterschiedlichen Magnetfeldern
Magnetfeld B [T] Frequenz ν [GHz]
1 28,024953
1,5 42,037429
2 56,049905
2,5 70,062382
3 84,074858
3,5 98,087334
4 112,099811
4,5 126,112287
5 140,124763
5,5 154,137240
6 168,149716
6,5 182,162192
7 196,174669
Die entsprechenden Werte wurden aus
ν =ge · µB ·B
h(A.1)
mit den Werten aus [NIS11] bestimmt.
A.2 Ergänzungen zur Bochumer boxed-NMR
A.2.1 Technische Daten der Bauteile
Alle nachfolgenden technischen Daten sind den Datenblättern der Firma Mini-Circuits entnommen. Es sindnicht alle angegeben Werte aufgeführt. Insbesondere für Messkurven sei an dieser Stelle auf die Datenblätterverwiesen. Die Daten beziehen sich auf Umgebungstemperatur (T = 25 C). Die maximale Ausgangsleis-tung bezieht sich auf den 1 dB-Punkt. Verstärker Mini-Circuits ZX60-14012L+
82
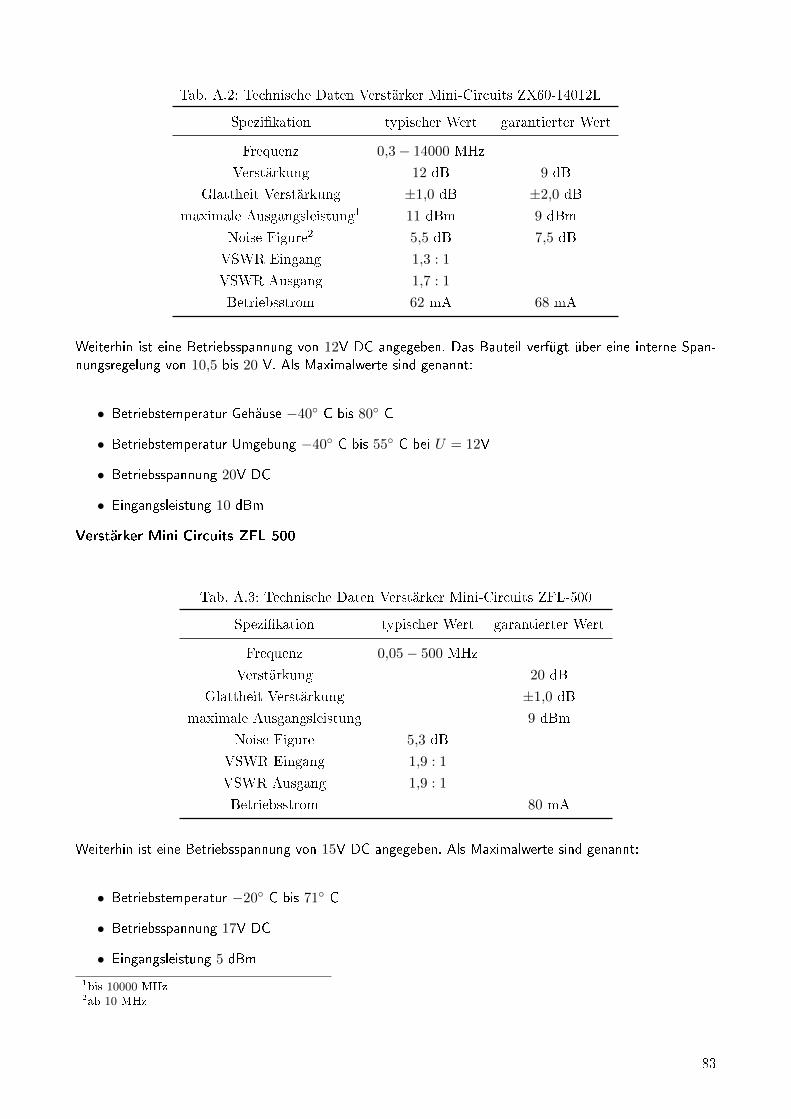
Tab. A.2: Technische Daten Verstärker Mini-Circuits ZX60-14012L+
Spezikation typischer Wert garantierter Wert
Frequenz 0,3− 14000 MHz
Verstärkung 12 dB 9 dB
Glattheit Verstärkung ±1,0 dB ±2,0 dB
maximale Ausgangsleistung1 11 dBm 9 dBm
Noise Figure2 5,5 dB 7,5 dB
VSWR Eingang 1,3 : 1
VSWR Ausgang 1,7 : 1
Betriebsstrom 62 mA 68 mA
Weiterhin ist eine Betriebsspannung von 12V DC angegeben. Das Bauteil verfügt über eine interne Span-nungsregelung von 10,5 bis 20 V. Als Maximalwerte sind genannt:
• Betriebstemperatur Gehäuse −40 C bis 80 C
• Betriebstemperatur Umgebung −40 C bis 55 C bei U = 12V
• Betriebsspannung 20V DC
• Eingangsleistung 10 dBm
Verstärker Mini-Circuits ZFL-500
Tab. A.3: Technische Daten Verstärker Mini-Circuits ZFL-500
Spezikation typischer Wert garantierter Wert
Frequenz 0,05− 500 MHz
Verstärkung 20 dB
Glattheit Verstärkung ±1,0 dB
maximale Ausgangsleistung 9 dBm
Noise Figure 5,3 dB
VSWR Eingang 1,9 : 1
VSWR Ausgang 1,9 : 1
Betriebsstrom 80 mA
Weiterhin ist eine Betriebsspannung von 15V DC angegeben. Als Maximalwerte sind genannt:
• Betriebstemperatur −20 C bis 71 C
• Betriebsspannung 17V DC
• Eingangsleistung 5 dBm
1bis 10000 MHz2ab 10 MHz
83
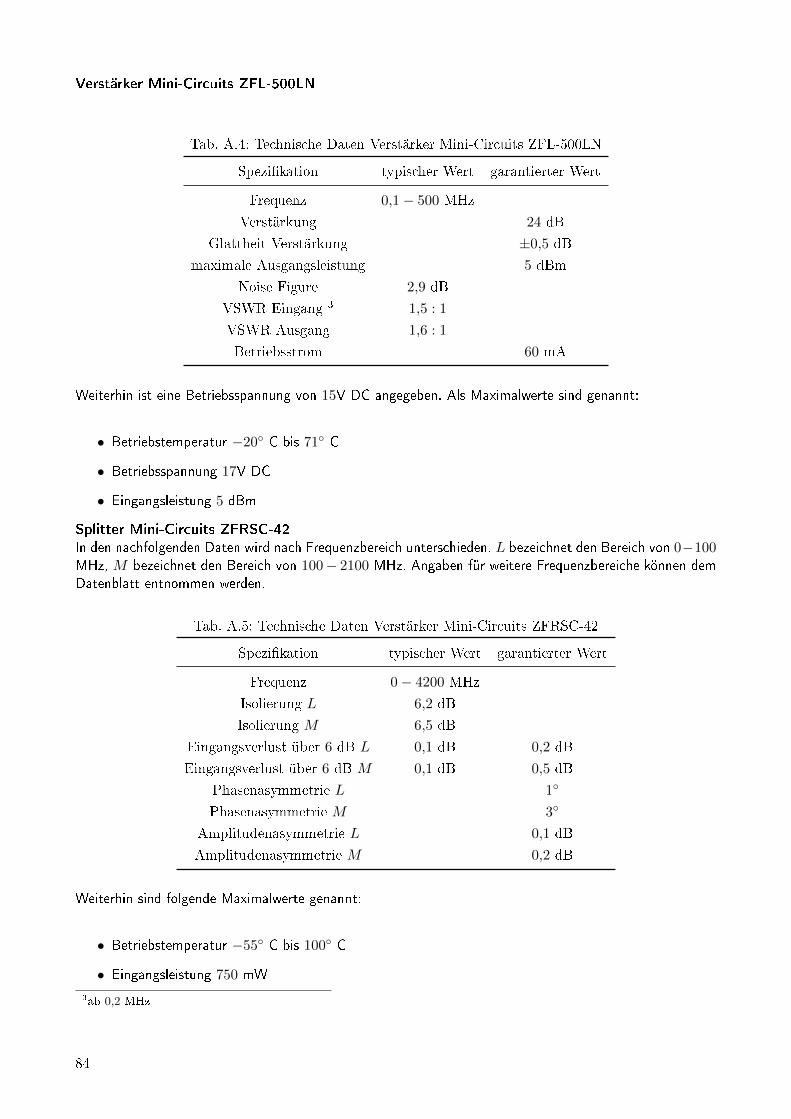
Verstärker Mini-Circuits ZFL-500LN
Tab. A.4: Technische Daten Verstärker Mini-Circuits ZFL-500LN
Spezikation typischer Wert garantierter Wert
Frequenz 0,1− 500 MHz
Verstärkung 24 dB
Glattheit Verstärkung ±0,5 dB
maximale Ausgangsleistung 5 dBm
Noise Figure 2,9 dB
VSWR Eingang 3 1,5 : 1
VSWR Ausgang 1,6 : 1
Betriebsstrom 60 mA
Weiterhin ist eine Betriebsspannung von 15V DC angegeben. Als Maximalwerte sind genannt:
• Betriebstemperatur −20 C bis 71 C
• Betriebsspannung 17V DC
• Eingangsleistung 5 dBm
Splitter Mini-Circuits ZFRSC-42In den nachfolgenden Daten wird nach Frequenzbereich unterschieden. L bezeichnet den Bereich von 0−100MHz, M bezeichnet den Bereich von 100− 2100 MHz. Angaben für weitere Frequenzbereiche können demDatenblatt entnommen werden.
Tab. A.5: Technische Daten Verstärker Mini-Circuits ZFRSC-42
Spezikation typischer Wert garantierter Wert
Frequenz 0− 4200 MHz
Isolierung L 6,2 dB
Isolierung M 6,5 dB
Eingangsverlust über 6 dB L 0,1 dB 0,2 dB
Eingangsverlust über 6 dB M 0,1 dB 0,5 dB
Phasenasymmetrie L 1
Phasenasymmetrie M 3
Amplitudenasymmetrie L 0,1 dB
Amplitudenasymmetrie M 0,2 dB
Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −55 C bis 100 C
• Eingangsleistung 750 mW
3ab 0,2 MHz
84

Richtkoppler Mini-Circuits ZFDC-10-1In den nachfolgenden Daten wird nach Frequenzbereich unterschieden. L bezeichnet den Bereich von 0−10MHz, M bezeichnet den Bereich von 10− 250 MHz, U bezeichnet den Bereich von 250− 500 MHz.
Tab. A.6: Technische Daten Richtkoppler Mini-Circuits ZFDC-10-1
Spezikation typischer Wert garantierter Wert
Frequenz 1− 500 MHz
Kopplung 10,5± 0,25 dB
Glattheit Kopplung ±0,6 dB
Verlust mainline L 1,0 dB 1,3 dB
Verlust mainline M 0,8 dB 1,1 dB
Verlust mainline U 1,0 dB 1,3 dB
Richtwirkung L 32 dB 25 dB
Richtwirkung M 33 dB 25 dB
Richtwirkung U 22 dB 15 dB
VSWR 1,2 : 1
Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −55 C bis 100 C
• Eingangsleistung 1500 mW bis 10 MHz, darüber 3000 mW
Abschwächer Mini-Circuits VAT-xDie nachfolgenden Daten beziehen sich auf den Frequenzbereich zwischen 0− 3000 MHz.
Tab. A.7: Technische Daten Abschwächer Mini-Circuits VAT-x
Spezikation typischer Wert garantierter Wert
Frequenz 1− 6000 MHz
Glattheit Abschwächung 0,2 dB
VSWR 1,05 : 1 1,25 : 1
Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −45 C bis 100 C
• Eingangsleistung 1000 mW
Die nominelle Abschwächung ändert sich temperaturabhängig maximal um 0,3 dB.
85
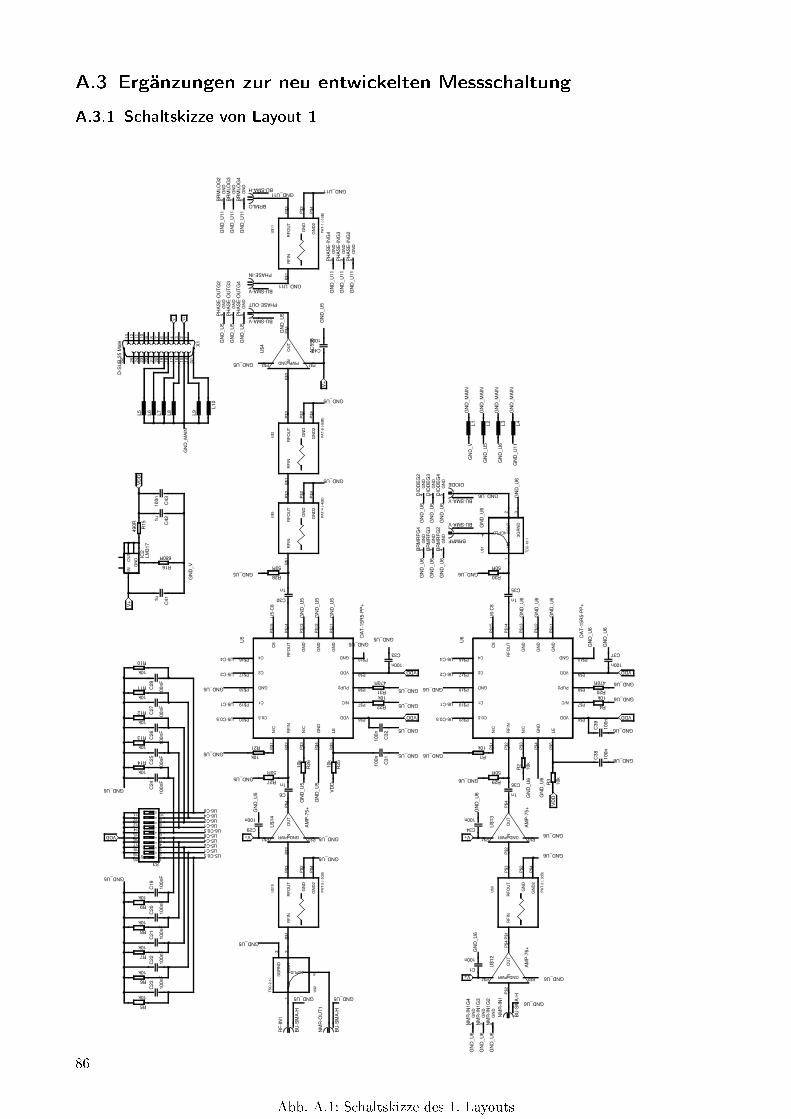
A.3 Ergänzungen zur neu entwickelten Messschaltung
A.3.1 Schaltskizze von Layout 1
TDC
-10-
1
PA
T-3
(-3d
B)
PA
T-5
(-5d
B)
PA
T-1
(-1d
B)
AM
P-7
6+A
MP
-75+
AM
P-7
5+
BU
-SM
A-H
BU
-SM
A-H
AC
558
DA
T-15
R5-
PP
+
DA
T-15
R5-
PP
+
100n
F10
0nF
100n
F10
0nF
100n
F
10k
10k
10k
10k
10k
100n
F10
0nF
100n
F10
0nF
100n
F
10k
10k
10k
10k
10k
LM31
7
490R
680R
D-S
UB
25
Mal
e
TSC
-2-1
+
PA
T-8
(-8d
B)
PA
T-4
(-4d
B)
BU-SMA-V
BU-SMA-V
BU
-SM
A-H
BU-SMA-H
BU-SMA-V
BU-SMA-V
50R
50R
50R
50R
1n
100n
1n
100n
100n
100n
100n
1n
1n
100n
100n
100n
100n
1u1u
100n
100n
10k
10k
10k
10k
470R
10k
10k
10k
10k
470R
1IN
12O
UT
2
3GR
ND
3
4CPLD4
U$1
RF
INP
$1R
FO
UT
P$3
GN
DP
$2
GN
D2
P$4
U$9
RF
INP
$1R
FO
UT
P$3
GN
DP
$2
GN
D2
P$4
U$1
0
RF
INP
$1R
FO
UT
P$3
GN
DP
$2
GN
D2
P$4
U$1
1
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$1
2
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$1
3
INP
$2O
UT
P$4
PWRP$1 GND P$3U
$14
NM
R-O
UT1
RF-
IN1
U$4
INP
$2
GNDP$3 PWR P$1
OU
TP
$4
N/C
P$1
RF
INP
$2
N/C
P$3
GN
DP
$4
LEP
$5
VDD P$6
N/C P$7
PUP2 P$8
VDD P$9
GND P$10
GN
DP
$11
GN
DP
$12
GN
DP
$13
RF
OU
TP
$14
C8
P$1
5
C4P$16
C2P$17
GNDP$18
C1P$19
C0.5P$20
U5
N/C
P$1
RF
INP
$2
N/C
P$3
GN
DP
$4
LEP
$5
VDD P$6
N/C P$7
PUP2 P$8
VDD P$9
GND P$10
GN
DP
$11
GN
DP
$12
GN
DP
$13
RF
OU
TP
$14
C8
P$1
5
C4P$16
C2P$17
GNDP$18
C1P$19
C0.5P$20
U6
121314151617181920 1
23456789
S3
1011
C19
C20
C21
C22
C23
R5
R6
R7
R8
R9
C24
C25
C26
C27
C28
R10
R11
R12
R13
R14
IC2
GN
D
INO
UT
R15
R16
114
215
316
417
518
619
720
821
922
1023
1124
1225
13
X1
G1
G2
L1 L2 L3 L4
L5 L6 L7 L8 L9
L10
1IN
12O
UT
2
3GR
ND
3
4CPLD 4
U$2
RF
INP
$1R
FO
UT
P$3
GN
DP
$2
GN
D2
P$4
U$3
RF
INP
$1R
FO
UT
P$3
GN
DP
$2
GN
D2
P$4
U$5
PHASE-OUT
GN
D4P
HA
SE
-OU
TG2
GN
D3P
HA
SE
-OU
TG3
GN
D5P
HA
SE
-OU
TG4
PHASE-IN
GN
D4P
HA
SE
-IN
G2
GN
D3P
HA
SE
-IN
G3
GN
D5P
HA
SE
-IN
G4
NM
R-I
N1
GN
D4N
MR
-IN
1G2
GN
D3N
MR
-IN
1G3
GN
D5N
MR
-IN
1G4
BRMLO
GN
D4B
RM
LOG
2
GN
D3B
RM
LOG
3
GN
D5B
RM
LOG
4
DIODE
GN
D4D
IOD
EG
2
GN
D3D
IOD
EG
3
GN
D5D
IOD
EG
4
BRMRF
GN
D4B
RM
RFG
2G
ND
3BR
MR
FG3
GN
D5B
RM
RFG
4
R27
R28
R29
R30
C6
C29
C30
C31
C32
C33
C34
C35
C36
C37
C38
C39
C40
C41
C42
C43
C1
R1
R2
R3
R4
R20
R21
R22
R25
R26
R31
U5-C0.5
U5-C0.5
U5-C1
U5-C1
U5-C2
U5-C2
U5-C4
U5-C4U
5-C
8
U5-C8
U6-C0.5
U6-C0.5
U6-C1
U6-C1
U6-C2
U6-C2
U6-C4
U6-C4
U6-
C8
U6-C8
VDD
VD
D
VDD
VDD
VD
D
VDD
VDD
VD
D
V-
V+
V+V+
V+
V+
V+
GN
D_V
GN
D_V
GN
D_U
5
GND_U5
GND_U5
GND_U5
GND_U5 GND_U5
GND_U5
GN
D_U
5
GND_U5
GND_U5
GND_U5
GND_U5
GND_U5GND_U5
GN
D_U
5
GN
D_U
5
GN
D_U
5
GND_U5
GND_U5
GN
D_U
5
GN
D_U
5
GN
D_U
5
GND_U5
GND_U5
GND_U5
GND_U5
GND_U5
GN
D_U
5
GN
D_U
5
GN
D_U
5
GN
D_U
5
GN
D_U
6
GND_U6
GND_U6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GND_U6
GND_U6GND_U6
GND_U6
GND_U6
GND_U6
GN
D_U
6
GN
D_U
6GND_U6
GN
D_U
6
GND_U6
GN
D_U
6
GN
D_U
6
GND_U6
GND_U6
GND_U6
GN
D_U
6
GND_U6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
6
GN
D_U
11
GND_U11
GND_U11GND_U11
GN
D_U
11
GN
D_U
11
GN
D_U
11
GN
D_U
11
GN
D_U
11
GN
D_U
11
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
12
34
56
78
9
ON
10
Abb. A.1: Schaltskizze des 1. Layouts
86
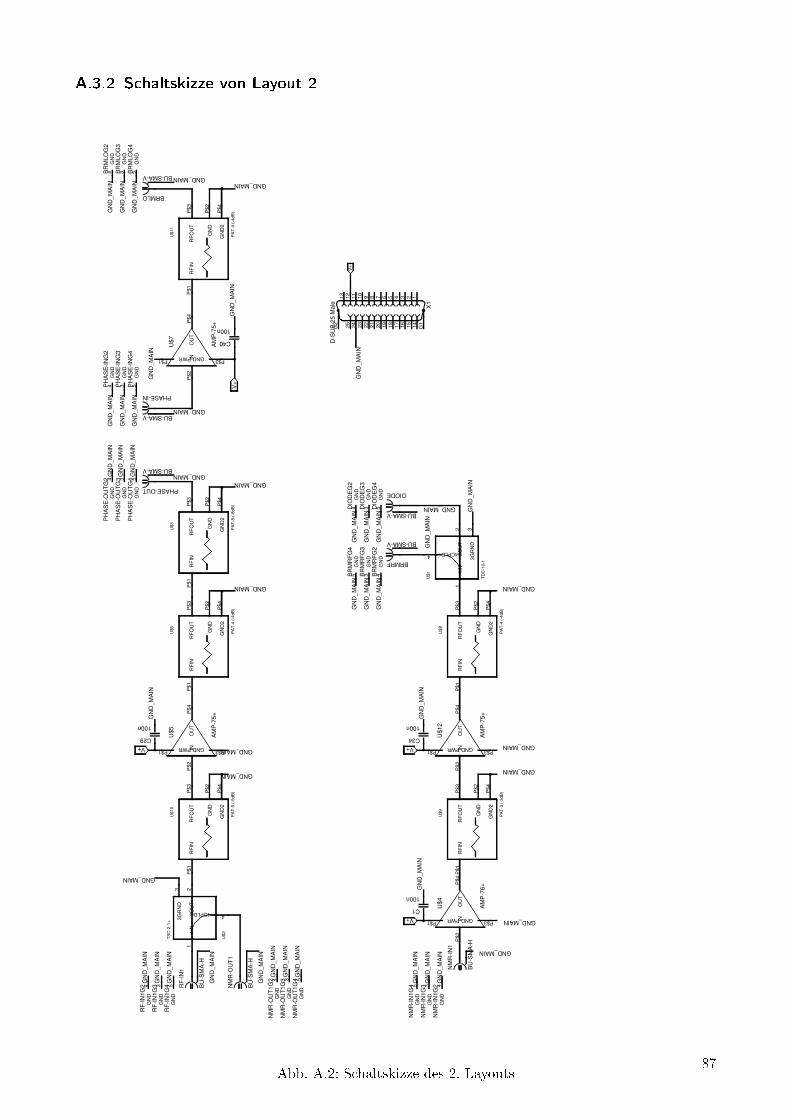
A.3.2 Schaltskizze von Layout 2
TDC
-10-
1
PA
T-3
(-3d
B)
PA
T-5
(-5d
B)
BU
-SM
A-H
BU
-SM
A-H
D-S
UB
25
Mal
e
TSC
-2-1
+
PA
T-8
(-8d
B)
BU-SMA-V
BU
-SM
A-H
BU-SMA-V
BU-SMA-V
100n 100n
100n
100n
PA
T-4
(-4d
B)
PA
T-4
(-4d
B)
PA
T-4
(-4d
B)
BU-SMA-V
BU-SMA-V
AM
P-7
6+
AM
P-7
5+A
MP
-75+
AM
P-7
5+
1IN
12O
UT
2
3GR
ND
3
4CPLD4
U$1
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$9
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$1
0
NM
R-O
UT1
GN
D4
NM
R-O
UT1
G2
GN
D3
NM
R-O
UT1
G3
GN
D5
NM
R-O
UT1
G4
RF-
IN1
GN
D4
RF-
IN1G
2
GN
D3
RF-
IN1G
3
GN
D5
RF-
IN1G
4
114
215
316
417
518
619
720
821
922
1023
1124
1225
13
X1
G1
G2
1IN
12O
UT
2
3GR
ND
3
4CPLD 4
U$2
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$3
PHASE-OUT
GN
D4
PH
AS
E-O
UTG
2
GN
D3
PH
AS
E-O
UTG
3
GN
D5
PH
AS
E-O
UTG
4
NM
R-IN
1G
ND
4N
MR
-IN1G
2G
ND
3N
MR
-IN1G
3G
ND
5N
MR
-IN1G
4
DIODE
GN
D4D
IOD
EG
2
GN
D3D
IOD
EG
3
GN
D5D
IOD
EG
4
BRMRF
GN
D4B
RM
RFG
2G
ND
3BR
MR
FG3
GN
D5B
RM
RFG
4
C29 C34
C40
C1
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$6
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$8
RFI
NP
$1R
FOU
TP
$3
GN
DP
$2
GN
D2
P$4
U$1
1
PHASE-IN
GN
D4P
HA
SE
-ING
2
GN
D3P
HA
SE
-ING
3
GN
D5P
HA
SE
-ING
4
BRMLO
GN
D4B
RM
LOG
2
GN
D3B
RM
LOG
3
GN
D5B
RM
LOG
4
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$4
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$5
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$7
INP
$2O
UT
P$4
PWRP$1 GND P$3
U$1
2
V+V+
V+
V+
V+
GN
D_M
AIN
GN
D_M
AIN
GND_MAIN
GN
D_M
AIN
GND_MAIN
GND_MAIN
GND_MAIN
GND_MAIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GND_MAIN
GND_MAIN
GND_MAIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GND_MAIN
GND_MAIN
GND_MAIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GND_MAIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GND_MAIN
GND_MAINGND_MAIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
GN
D_M
AIN
Abb. A.2: Schaltskizze des 2. Layouts87

A.3.3 Angaben aus den Datenblättern
Auch diese technischen Daten sind den Datenblättern der Firmen Mini-Circuits und Teledyne entnommen.Es sind nicht alle angegeben Werte aufgeführt. Insbesondere für Messkurven sei an dieser Stelle auf die Da-tenblätter verwiesen. Die Daten auf Umgebungstemperatur (T = 25 C). Die maximale Ausgangsleistungbezieht sich auf den 1 dB-Punkt. Verstärker Mini-Circuits AMP-75
Tab. A.8: Technische Daten Verstärker Mini-Circuits AMP-75
Spezikation Wert
Frequenz 5− 500 MHz
Verstärkung mind. 19 dB
Glattheit Verstärkung ±1,0 dB
maximale Ausgangsleistung 12 dBm
Noise Figure typ. 2,4 dB
VSWR Eingang typ. 2,0 : 1
VSWR Ausgang typ. 2,0 : 1
Betriebsstrom max. 31 mA
Weiterhin ist eine Betriebsspannung von 15V DC angegeben. Als Maximalwerte sind genannt:
• Betriebstemperatur −54 C bis 85 C bei U = 12V
• Eingangsleistung 13 dBm
• Versorgungsspannung 17V
Verstärker Mini-Circuits AMP-76
Tab. A.9: Technische Daten Verstärker Mini-Circuits AMP-76
Spezikation Wert
Frequenz 5− 500 MHz
Verstärkung mind. 26 dB
Glattheit Verstärkung ±1,0 dB
maximale Ausgangsleistung 13,5 dBm
Noise Figure typ. 3,1 dB
VSWR Eingang typ. 2,0 : 1
VSWR Ausgang typ. 2,0 : 1
Betriebsstrom max. 71 mA
Weiterhin ist eine Betriebsspannung von 15V DC angegeben. Als Maximalwerte sind genannt:
• Betriebstemperatur −54 C bis 85 C
• Betriebsspannung 17V DC
88

• Eingangsleistung 6 dBm
Verstärker Teledyne AC548
Tab. A.10: Technische Daten Verstärker Teledyne AC548
Spezikation typischer Wert garantierter Wert
Frequenz 5− 600 MHz 5− 500 MHz
Verstärkung 12,5 dB 11,5 dB
Glattheit Verstärkung ±0,2 dB ±0,4 dB
maximale Ausgangsleistung 19 dBm 17,8 dBm
Noise Figure 3,7 dB 4,5 dB
VSWR Eingang 1,5 : 1 1,9 : 1
VSWR Ausgang 1,3 : 1 1,4 : 1
Betriebsstrom 58 mA 61 mA
Weiterhin ist eine Betriebsspannung von 15V DC angegeben. Die garantierten Werte beziehen sich auf eineBetriebstemperatur von 0 − 50. Als Maximalwerte sind genannt:
• Betriebstemperatur Gehäuse ≤ 125 C
• Betriebsspannung 17V DC
• Eingangsleistung 13 dBm
Splitter Mini-Circuits TSC-2-1+In den nachfolgenden Daten wird nach Frequenzbereich unterschieden. L bezeichnet den Bereich von 1−10MHz, M bezeichnet den Bereich von 10− 200 MHz, U bezeichnet den Bereich von 200− 400 MHz.
Tab. A.11: Technische Daten Splitter Mini-Circuits TSC-2-1+
Spezikation typischer Wert garantierter Wert
Frequenz 1− 400 MHz
Isolierung L 30 dB 25 dB
Isolierung M 30 dB 25 dB
Isolierung U 30 dB 20 dB
Eingangsverlust über 3 dB L 0,25 dB 0,5 dB
Eingangsverlust über 3 dB M 0,4 dB 0,75 dB
Eingangsverlust über 3 dB U 0,8 dB 1,0 dB
Phasenasymmetrie L 2
Phasenasymmetrie M 3
Phasenasymmetrie U 4
Amplitudenasymmetrie L 0,15 dB
Amplitudenasymmetrie M 0,2 dB
Amplitudenasymmetrie M 0,6 dB
89

Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −55 C bis 100 C
• Eingangsleistung 1000 mW
Richtkoppler Mini-Circuits TDC-10-1In den nachfolgenden Daten wird nach Frequenzbereich unterschieden. L bezeichnet den Bereich von 1−10MHz, M bezeichnet den Bereich von 10− 200 MHz, U bezeichnet den Bereich von 200− 400 MHz.
Tab. A.12: Technische Daten Richtkoppler Mini-Circuits TDC-10-1
Spezikation typischer Wert garantierter Wert
Frequenz 1− 400 MHz
Kopplung 10,0± 0,5 dB
Glattheit Kopplung ±0,5 dB
Verlust mainline L 1,2 dB 1,5 dB
Verlust mainline M 1,0 dB 1,3 dB
Verlust mainline U 1,2 dB 1,5 dB
Richtwirkung L 35 dB 25 dB
Richtwirkung M 30 dB 20 dB
Richtwirkung U 20 dB 15 dB
VSWR 1,5 : 1
Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −55 C bis 100 C
• Eingangsleistung 1000 mW bis 10 MHz, darüber 2000 mW
Richtkoppler Mini-Circuits TDC-6-1In den nachfolgenden Daten wird nach Frequenzbereich unterschieden. L bezeichnet den Bereich von 10−100MHz, M bezeichnet den Bereich von 100− 200 MHz, U bezeichnet den Bereich von 200− 400 MHz.
Tab. A.13: Technische Daten Richtkoppler Mini-Circuits TDC-6-1
Spezikation typischer Wert garantierter Wert
Frequenz 10− 400 MHz
Kopplung 6,3± 0,4 dB
Glattheit Kopplung ±0,4 dB
Verlust mainline L 2,0 dB 2,4 dB
Verlust mainline M 2,0 dB 2,4 dB
Verlust mainline U 2,0 dB 2,5 dB
Richtwirkung L 36 dB 30 dB
Richtwirkung M 30 dB 25 dB
Richtwirkung U 20 dB 15 dB
VSWR 1,5 : 1
90

Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −55 C bis 100 C
• Eingangsleistung 1000 mW bis 100 MHz, darüber 2000 mW
Abschwächer Mini-Circuits PAT-xDie nachfolgenden Daten beziehen sich auf den Frequenzbereich zwischen 0− 1000 MHz.
Tab. A.14: Technische Daten Abschwächer Mini-Circuits PAT-x
Spezikation garantierter Wert
Frequenz 0− 7000 MHz
Glattheit Abschwächung PAT-1 bis PAT-6 0,3 dB
Glattheit Abschwächung PAT-7 bis PAT-10 0,4 dB
VSWR PAT-1 bis PAT-6 1,2 : 1 dB
VSWR PAT-7 bis PAT-15 1,3 : 10,4 dB
Weiterhin sind folgende Maximalwerte genannt:
• Betriebstemperatur −45 C bis 100 C
• Eingangsleistung 1000 mW
variabler Abschwächer Mini-Circuits DAT-15R5-PP+Die nachfolgenden Daten beziehen sich auf den Frequenzbereich zwischen 0− 1000 MHz.
Tab. A.15: Technische Daten Abschwächer Mini-Circuits DAT-15R5-PP+
Spezikation typischer Wert garantierter Wert
Genauigkeit 0,5 dB-Bit 0,03 dB 0,1 dB
Genauigkeit 1 dB-Bit 0,02 dB 0,1 dB
Genauigkeit 2 dB-Bit 0,05 dB 0,15 dB
Genauigkeit 4 dB-Bit 0,07 dB 0,2 dB
Genauigkeit 8 dB-Bit 0,03 dB 0,2 dB
Eingangsverlust über 0 dB 1,3 dB 1,9 dB
VSWR 1,2 : 1 1,5 : 1
Betriebsstrom 100µA
Steuerstrom 1µA
Die Versorgungsspannung UDD soll zwischen 2,7 und 3,3 V liegen. Weiterhin sind folgende Grenzwertegenannt:
• Steuersignal low ≤ 0,3 · UDD
• Steuersignal high ≥ 0,7 · UDD
• Betriebstemperatur −40 C bis 85 C
91

• Versorgungsspannung UDD zwischen −0,3 V und 4 V
• Eingangsleistung 24 dBm
92

A.3.4 Details zur HF/NF-Wandler-Karte
Abb. A.3: Layout der HF/NF-Wandlerkarte.93
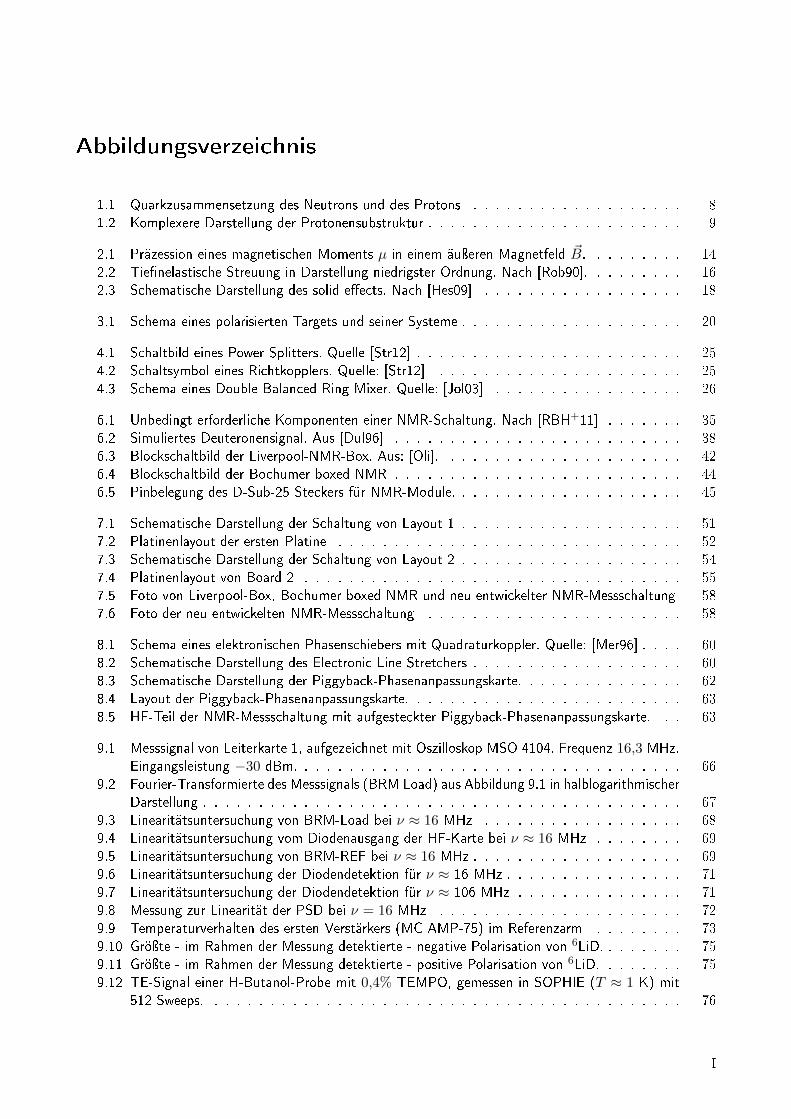
Abbildungsverzeichnis
1.1 Quarkzusammensetzung des Neutrons und des Protons . . . . . . . . . . . . . . . . . . . 81.2 Komplexere Darstellung der Protonensubstruktur . . . . . . . . . . . . . . . . . . . . . . . 9
2.1 Präzession eines magnetischen Moments µ in einem äuÿeren Magnetfeld ~B. . . . . . . . . 142.2 Tienelastische Streuung in Darstellung niedrigster Ordnung. Nach [Rob90]. . . . . . . . . 162.3 Schematische Darstellung des solid eects. Nach [Hes09] . . . . . . . . . . . . . . . . . . 18
3.1 Schema eines polarisierten Targets und seiner Systeme . . . . . . . . . . . . . . . . . . . . 20
4.1 Schaltbild eines Power Splitters. Quelle [Str12] . . . . . . . . . . . . . . . . . . . . . . . . 254.2 Schaltsymbol eines Richtkopplers. Quelle: [Str12] . . . . . . . . . . . . . . . . . . . . . . 254.3 Schema eines Double Balanced Ring Mixer. Quelle: [Jol03] . . . . . . . . . . . . . . . . . 26
6.1 Unbedingt erforderliche Komponenten einer NMR-Schaltung. Nach [RBH+11] . . . . . . . 356.2 Simuliertes Deuteronensignal. Aus [Dul96] . . . . . . . . . . . . . . . . . . . . . . . . . . 386.3 Blockschaltbild der Liverpool-NMR-Box. Aus: [Oli]. . . . . . . . . . . . . . . . . . . . . . 426.4 Blockschaltbild der Bochumer boxed NMR . . . . . . . . . . . . . . . . . . . . . . . . . . 446.5 Pinbelegung des D-Sub-25 Steckers für NMR-Module. . . . . . . . . . . . . . . . . . . . . 45
7.1 Schematische Darstellung der Schaltung von Layout 1 . . . . . . . . . . . . . . . . . . . . 517.2 Platinenlayout der ersten Platine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 527.3 Schematische Darstellung der Schaltung von Layout 2 . . . . . . . . . . . . . . . . . . . . 547.4 Platinenlayout von Board 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 557.5 Foto von Liverpool-Box, Bochumer boxed NMR und neu entwickelter NMR-Messschaltung 587.6 Foto der neu entwickelten NMR-Messschaltung . . . . . . . . . . . . . . . . . . . . . . . 58
8.1 Schema eines elektronischen Phasenschiebers mit Quadraturkoppler. Quelle: [Mer96] . . . . 608.2 Schematische Darstellung des Electronic Line Stretchers . . . . . . . . . . . . . . . . . . . 608.3 Schematische Darstellung der Piggyback-Phasenanpassungskarte. . . . . . . . . . . . . . . 628.4 Layout der Piggyback-Phasenanpassungskarte. . . . . . . . . . . . . . . . . . . . . . . . . 638.5 HF-Teil der NMR-Messschaltung mit aufgesteckter Piggyback-Phasenanpassungskarte. . . 63
9.1 Messsignal von Leiterkarte 1, aufgezeichnet mit Oszilloskop MSO 4104. Frequenz 16,3 MHz.Eingangsleistung −30 dBm. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
9.2 Fourier-Transformierte des Messsignals (BRM Load) aus Abbildung 9.1 in halblogarithmischerDarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
9.3 Linearitätsuntersuchung von BRM-Load bei ν ≈ 16 MHz . . . . . . . . . . . . . . . . . . 689.4 Linearitätsuntersuchung vom Diodenausgang der HF-Karte bei ν ≈ 16 MHz . . . . . . . . 699.5 Linearitätsuntersuchung von BRM-REF bei ν ≈ 16 MHz . . . . . . . . . . . . . . . . . . . 699.6 Linearitätsuntersuchung der Diodendetektion für ν ≈ 16 MHz . . . . . . . . . . . . . . . . 719.7 Linearitätsuntersuchung der Diodendetektion für ν ≈ 106 MHz . . . . . . . . . . . . . . . 719.8 Messung zur Linearität der PSD bei ν = 16 MHz . . . . . . . . . . . . . . . . . . . . . . 729.9 Temperaturverhalten des ersten Verstärkers (MC AMP-75) im Referenzarm . . . . . . . . 739.10 Gröÿte - im Rahmen der Messung detektierte - negative Polarisation von 6LiD. . . . . . . . 759.11 Gröÿte - im Rahmen der Messung detektierte - positive Polarisation von 6LiD. . . . . . . . 759.12 TE-Signal einer H-Butanol-Probe mit 0,4% TEMPO, gemessen in SOPHIE (T ≈ 1 K) mit
512 Sweeps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
I

9.13 Polarisationssignale von H-Butanol dotiert mit 0,4% TEMPO, gemessen in SOPHIE (T ≈ 1K) mit 50 Sweeps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
9.14 TE-Signal einer D-Butanol-Probe mit 2,7% Finland D36, gemessen in SOPHIE (T ≈ 1 K)mit 500 Sweeps. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9.15 Gröÿte - im Rahmen der Messung detektierte - positive Polarisation von D-Butanol mit 2,7Gewichtsprozent Finland D36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
9.16 Gröÿte - im Rahmen der Messung detektierte - negative Polarisation von D-Butanol mit 2,7Gewichtsprozent Finland D36 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
A.1 Schaltskizze des 1. Layouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.2 Schaltskizze des 2. Layouts . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87A.3 Layout der HF/NF-Wandlerkarte. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
II

Tabellenverzeichnis
1.1 Eigenschaften der Quarks. Quelle [B+12] . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1 g-Faktoren und gyromagnetische Verhältnisse γ ausgewählter Teilchen . . . . . . . . . . . 13
3.1 Charakteristika von 7LiH und 6LiD als Targetmaterialien . . . . . . . . . . . . . . . . . . 223.2 Charakteristika von Butanol und D-Butanol als Targetmaterialien . . . . . . . . . . . . . . 23
6.1 Frequenzen der NMR in Abhängigkeit von Targetnukleon und Magnetfeld . . . . . . . . . 346.2 Platinen und Anwendungen der Liverpool-NMR. . . . . . . . . . . . . . . . . . . . . . . . 406.3 Komponenten der HF-Schaltung der Bochumer boxed NMR . . . . . . . . . . . . . . . . . 43
7.1 Liste der HF-Verstärker in der neuen Messschaltung. . . . . . . . . . . . . . . . . . . . . . 487.2 Kenndaten der HF-Verstärker in der neuen Messschaltung. . . . . . . . . . . . . . . . . . 487.3 Liste der HF-Abschwächer in der neuen Messschaltung. . . . . . . . . . . . . . . . . . . . 497.4 Liste der HF-Splitter und HF-Richtkoppler in der neuen Messschaltung. . . . . . . . . . . . 497.5 Kenndaten der HF-Splitter und -Richtkoppler in der neuen Messschaltung. . . . . . . . . . 50
8.1 Charakteristika des ELS-210 nach Angaben des Herstellers . . . . . . . . . . . . . . . . . 618.2 Technische Daten der Phasenschiebermodule der JSPHS-Reihe nach Angaben des Herstellers 61
9.1 Proportionalitätskonstanten aus der Linearitätsuntersuchung bei ν ≈ 16 MHz . . . . . . . 709.2 Proportionalitätskonstanten aus der Linearitätsuntersuchung bei ν ≈ 106 MHz . . . . . . . 709.3 Parameter linearer Fits zur Bestimmung der Linearität der Verstärkung in PSD . . . . . . . 729.4 SNR aus unterschiedlichen Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
A.1 Frequenzen der Elektronenspinresonanz zur DNP bei unterschiedlichen Magnetfeldern . . . 82A.2 Technische Daten Verstärker Mini-Circuits ZX60-14012L+ . . . . . . . . . . . . . . . . . 83A.3 Technische Daten Verstärker Mini-Circuits ZFL-500 . . . . . . . . . . . . . . . . . . . . . 83A.4 Technische Daten Verstärker Mini-Circuits ZFL-500LN . . . . . . . . . . . . . . . . . . . . 84A.5 Technische Daten Verstärker Mini-Circuits ZFRSC-42 . . . . . . . . . . . . . . . . . . . . 84A.6 Technische Daten Richtkoppler Mini-Circuits ZFDC-10-1 . . . . . . . . . . . . . . . . . . 85A.7 Technische Daten Abschwächer Mini-Circuits VAT-x . . . . . . . . . . . . . . . . . . . . . 85A.8 Technische Daten Verstärker Mini-Circuits AMP-75 . . . . . . . . . . . . . . . . . . . . . 88A.9 Technische Daten Verstärker Mini-Circuits AMP-76 . . . . . . . . . . . . . . . . . . . . . 88A.10 Technische Daten Verstärker Teledyne AC548 . . . . . . . . . . . . . . . . . . . . . . . . 89A.11 Technische Daten Splitter Mini-Circuits TSC-2-1+ . . . . . . . . . . . . . . . . . . . . . . 89A.12 Technische Daten Richtkoppler Mini-Circuits TDC-10-1 . . . . . . . . . . . . . . . . . . . 90A.13 Technische Daten Richtkoppler Mini-Circuits TDC-6-1 . . . . . . . . . . . . . . . . . . . . 90A.14 Technische Daten Abschwächer Mini-Circuits PAT-x . . . . . . . . . . . . . . . . . . . . . 91A.15 Technische Daten Abschwächer Mini-Circuits DAT-15R5-PP+ . . . . . . . . . . . . . . . 91
III
Literaturverzeichnis
[A+88] Ashman, J. u. a.: A Measurement Of The Spin Asymmetry And Determination Of The StructureFunction g1 In Deep Inelastic Muon-Proton Scattering. In: Phys. Lett. B 206 (1988), May, Nr.2, S. 364370
[A+94] Adeva, B. u. a.: Measurement of the deuteron polarization in a large target. In: Nucl. Instrum.Methods Phys. Res., Sect. A 349 (1994), S. 334344
[B+12] Beringer, J. (Particle Data G. u. a.: Review of Particle Physics. In: Phys. Rev. D 86 (2012),S. 1
[BC+99] Bültmann, S. ; Crabb, D.G. u. a.: A Study Of Lithium Deuteride As A Target Material ForA Polarized Target. In: Nucl.Instrum.Meth. A 425 (1999), S. 2336
[Blo46] Bloch, F.: Nuclear Induction. In: Phys. Rev. 7&8 (1946), S. 460474
[BWW01] Bethge, Klaus ; ; Walter, Gertrud ; WIedemann, Bernhard: Kernphysik. Eine Einfürung.Berlin : Springer, 2001
[CBC+01] Crabb, D. G. ; Bültmann, S. ; Court, G. ; Day, D. B. ; Houlden, M. ; Keith, C. ;Penttilä, S. ; Prok, Y.: Improved NMR System with Non-Resonant Cable Arrangement forTarget Polaization Measurements. In: al., K. H. (Hrsg.): CP570, Spin2000, 14th InternationalSpin Physics Symposium, American Institute of Physics, 2001
[CGH+93] Court, G.R. ; Gifford, D.W. ; Harrison, P. ; Heyes, W.G. ; Houlden, M.A.: A highprecision Q-meter for the measurement of proton polarization in polarised targets. In: Nucl.Instrum. Methods Phys. Res., Sect. A 324 (1993), S. 433440
[Che00] Cheng, Hai-Yang: The Proton Spin Puzzle: A Status Report. In: Chinese J. Phys. 38 (2000),August, Nr. 4, S. 753772
[Cou04] Court, G.R.: The developmen of NMR techniques for the high precision measurement of targetpolarisation. In: Nucl. Instrum. Methods Phys. Res., Sect. A 526 (2004), S. 6569
[Dan65] Daniels, J. M.: Oriented Nuclei, Polarized Targets and Beams. New York : Academic Press,1965
[Dul96] Dulya, Christopher M.: The Polarization of Deuterons in Butanol and of Nitrogen Nuclei inAmmonia, University of California, Los Angeles, Diss., 1996
[Fli08] Flieÿbach, Torsten: Quantenmechanik: Lehrbuch zur Theoretischen Physik III. Heidelberg :Spektrum Akademischer Verlag, 2008
[GM64] Gell-Mann, Murray: A schematic model of baryons and mesons. In: Phys. Lett. 8-3 (1964),S. 214215
[Goe02] Goertz, Stefan: Spintemperatur und magnetische Resonanz verdünnter elektronischer Systeme- ein Weg zur Optimierung polarisierter Festkörper-Targetmaterialien, Ruhr-Universität, Bochum,Habilitationsschrift, 2002
[Har86] Harris, Robert K.: Nuclear Magnetic Resonance Spectroscopy. Harlow : Logman Scientic,1986
IV

[Har97] Harmsen, Jörg: Ein 4He-Verdampfer-Kryostat zur Entwicklung polarisierter Festkörpertargets,Ruhr-Universität, Bochum, Diplomarbeit, Januar 1997
[Her10] Herick, Jonas: Kalibrierung eines gepulsten NMR-Systems zur Polarisationsbestimmung vonFestkörpertargets, Ruhr-Universität, Bochum, Diplomarbeit, 2010
[Hes04] Hess, Christian: Ein gepulstes NMR-System zur Polarisationsmessung an Festkörpertargets,Ruhr-Universität Bochum, Diplomarbeit, 2004
[Hes09] Hess, Christian: Messung elektronischer Relaxationszeiten in dynamisch polarisiertenFestkörpertargets mittels gepulster NMR, Ruhr-Universität Bochum, Diss., November 2009
[HK93] Hennel, Jacek W. ;Klinowski, Jacek: Fundamentals of Nuclear Magnetic Resonance. Harlow(Essex) : Longman Group UK, 1993
[HKDG77] Hubert, D. ; Knütel, J. ; Dratzig, A. S. ; Genzel, H.: DESPOT - Eine Apparatur zur Er-zeugung polarisierter Targets für Hochenergieexperimente / Deutsches Elektronen-SynchrotronDESY, Hamburg. 1977. Forschungsbericht
[HM84] Halzen, Francis ; Martin, Alan D.: Quarks And Leptons. An Introductory Course in ModernParticle Physics. John Wiley & Sons, New York, 1984
[HPV97] Hewlett-Packard. Understanding the Fundamental Principles of Vector Network Analysis.Application Note 1287-1,. http://www.hpmemory.org/an/pdf/an_1287-1.pdf. Version:Mai1997
[Jaf95] Jaffe, R.L.: The Context Of High Energy QCD Spin Physics. In: Shibata, T.A. (Hrsg.) ;Ohta, S. (Hrsg.) ; Saito, N. (Hrsg.): Proceedings of The RIKEN Symposium on Spin StructureOf The Nucleon, World Scientic, 1995
[Jol03] Jolly, Simon: The NLC IP Fast Feedback System in: An Intra-pulse Fast Feedback Systemfor a Future Linear Collider. Diss. http://www-pnp.physics.ox.ac.uk/~font/jolly/FONT/thesis/3_feedback.html. Version: 2003
[Kei09] Keith, C.D.: Polarized Solid Targets. Recent Progress And Future Prospects. In: Ciullo,G. (Hrsg.) ; Contalbrigo, M. (Hrsg.) ; Lenisa, P. (Hrsg.): Polarized Sources, Targets andPolarimetry. Proceedings of the 13th International Workshop. Ferrara : World Scientic, 2009
[Mer96] Merrimac (Hrsg.): Phase Shifters. Electronic & Mechanical; Analog & Digital. 200 kHz to 3GHz. General Information. West Caldwell, New Jersey: Merrimac, März 1996
[Mey04] Meyer, W.: Ammonia as a polarized solid target materiala review. In: Nucl. Instrum. MethodsPhys. Res., Sect. A 526 (2004), S. 1221
[Mey08] Meyer, W.: Perspectives for dynamic polarized solid target experiments. In: Proceedings ofThe 11th Workshop on The Physics of Excited Nucleons, 58 September 2007, Bonn, GermanyBd. 11 NSTAR, 2008, S. 144151
[MW112] Quadrature reection phase shifters. http://www.microwaves101.com/encyclopedia/
phaseshifters_reflection_quadrature.cfm. Version: August 2012
[NIS11] NIST: 2010 CODATA recommended values. http://physics.nist.gov/cuu/Constants/
index.html. Version: Juni 2011
[Nob13] Nobelprize.org: The Nobel Prize in Physics 1969. http://www.nobelprize.org/nobel_prizes/physics/laureates/1969/. Version:March 2013
V

[Oli] Oliver Lodge Laboratory. Department Of Physics. University of Liverpool.
(Hrsg.): Liverpool NMR Module, Q-Meter Fundamentals and Circuit Testing. Oliver LodgeLaboratory. Department Of Physics. University of Liverpool.
[Poo07] Poole, John O.: A Dynamically Polarized Deuteron Target, North Carolina State University,Diss., 2007
[Rad97] Radtke, Eric: Untersuchungen zur Tauglichkeit von H2, D2 und HD als polarisierteFestkörpertargets, Ruhr-Universität Bochum, Diplomarbeit, 1997
[RBH+11] Reicherz, Gerhard ; Berlin, Alexander ; Herick, Jonas ; Heÿ, Christian ;Meyer, Werner:A Continuous Wave NMR System For Detection Of The Polarization Of Solid Targets. In: Gri-goryev, K. (Hrsg.) ; Kravtsov, P. (Hrsg.) ; Vasilyev, A. (Hrsg.): Proc. 14th InternaionalWorkshop on Polarized Sources, Targets and Polarimetry (PSTP 2011). St. Petersburg / Russ-land, September 2011
[Rob90] Roberts, R.G.: The Structure Of The Proton. Cambridge University Press, 1990
[Ros] Rosu, Iulian: RF mixers. http://www.qsl.net/va3iul/RF%20Mixers/RF_Mixers.pdf
[Rut11] Rutherford, Ernest: The scattering of alpha and beta particles by matter and the structureof the atom. In: Philosophical Magazine 21 (1911), S. 669688
[Sch06] Schiemann, Martin: Polarisationsmessungen an mit Trityl-Radikalen dotiertem D-Butanol,Ruhr-Universität Bochum, Diplomarbeit, September 2006
[Sch07] Schwabl, Franz: Quantenmechanik. Eine Einführung. Hamburg : Springer, 2007
[Sli90] Slichter, Charles P.: Principles Of Magnetic Resonance. 3. Springer, Berlin, 1990
[SOS95] Shibata, T.-A. (Hrsg.) ;Ohta, S. (Hrsg.) ; Saito, N. (Hrsg.) ; RIKEN (Veranst.): Proceedingsof The RIKEN Symposium on Spin Structure Of The Nucleon. World Scientic, Singapur,December 1995
[Str12] Strauÿ, F.: Grundkurs Hochfrequenztechnik. Vieweg+Teubner, Wiesbaden, 2012. Elektro-nische Ausgabe
[Thü] Thüringer, Rainer: HighTech-/HighSpeed Baugruppen (Kapitel 3). In: Skript zur VorlesungAVT - Aufbau- und Verbindungstechnik FB Elektro- und Informationstechnik der FH Gieÿen-Friedberg
[UG25] Uhlenbeck, G. E. ; Goudsmit, S.: Ersetzung der Hypothese vom unmechanischenZwang durch eine Forderung bezüglich des inneren Verhaltens jedes einzelnen Elektrons. In:Naturwissenschaften 13 (1925), November, Nr. 47, S. 953954
VI
Danksagung
Im Folgenden möchte ich mich bei all jenen bedanken, die zum Gelingen dieser Arbeit beigetragen haben.Für die interessante Themenstellung, die es mir ermöglichte, mich in Theorie wie in Praxis mit der Kern-spinresonanz tiefer zu befassen, danke ich Herrn Prof. Dr. Werner Meyer ganz herzlich.
Weiterhin danke ich Herrn Prof. Dr. Ulrich Wiedner, der sich freundlicherweise bereit erklärt hat, das Kor-referat für diese Arbeit zu übernehmen.
Die Arbeit so fertigzustellen wäre nicht möglich gewesen ohne die vielen Impulse, die ich hierzu erhal-ten habe. Insbesondere möchte ich mich hierfür bedanken bei Dr. Gerhard Reicherz, Alexander Berlin undJonas Herick.
Besonders danken möchte ich auch Herrn Dipl.-Ing. Mario Fink, der mich bei der Entwicklung des Lay-outs der Platinen unterstützt hat und mir stets bei allen elektrotechnischen Problemen zur Seite stand.
Die Fertigung der Leiterkarten und der Gehäuse wäre nicht möglich gewesen ohne die Unterstützung derMitarbeiterinnen und Mitarbeiter vom Lehrstuhl für Elektronische Schaltungstechnik, der Zentralen Elektro-nikwerkstatt und der Mechanikwerkstatt.
Nicht zuletzt möchte auch allen Mitarbeiterinnen und Mitarbeitern des Lehrstuhls für Experimentalphysik Ifür die freundschaftliche und produktive Zusammenarbeit und für hilfreiche Kommentare und Diskussionenaller Art danken.
Ich danke meiner Familie für die Unterstützung während meines gesamten Studiums. Ohne sie wäre dieseArbeit nicht möglich gewesen.
VII