
Entwicklung und Bau der Steuerung und Mechanik … · Westfälische Wilhelms- Universität Münster...
54
Westfälische Wilhelms- Universität Münster Schriftliche Hausarbeit im Rahmen der ersten Staatsprüfung für das Lehramt an Grund-, Haupt- und Realschulen und den entsprechenden Jahrgangsstufen der Gesamtschulen Entwicklung und Bau der Steuerung und Mechanik eines inversen Pendels von Hannes Felix Boyke Münster, den 31. März 2009 Themensteller Prof. Dr. Christian Hein Institut für Technik und ihre Didaktik
Transcript of Entwicklung und Bau der Steuerung und Mechanik … · Westfälische Wilhelms- Universität Münster...

Westfälische Wilhelms- Universität Münster
Schriftliche Hausarbeit im Rahmen der ersten Staatsprüfung für das Lehramt an Grund-, Haupt- und
Realschulen und den entsprechenden Jahrgangsstufen der Gesamtschulen
Entwicklung und Bau der Steuerung und Mechanik eines inversen Pendels
von Hannes Felix Boyke
Münster, den 31. März 2009
Themensteller Prof. Dr. Christian Hein
Institut für Technik und ihre Didaktik

Inhaltsverzeichnis
1. Einleitung............................................................................................ 4
1.1. Zielsetzung, methodisches Vorgehen und gesellschaftliche
Relevanz……................................................................................ 4
1.2. Regelungstechnische Versuche im Praktikum der
Studentenausbildung…………………………………………….. 5
1.3. Ausblick auf das Ergebnis………………………………………. 6
2. Ausgangssituation und technische Vorüberlegungen……………. 7
2.1. Inverses Pendel………………………………………………...... 7
2.2. Didaktischer Aspekt……………………………………………... 11
2.2.1. Lernen am Versuch……………………………………….. 11
2.2.2. Transparenz der Struktur und des Signalflusses………….. 12
2.3. Technische Vorraussetzung mit ersten Ansätzen………………... 12
2.3.1. Vorhandener Linearantrieb und Zubehör………………… 12
2.3.2. Ein- und Ausgangsgrößen des bisherigen Festosystems…. 16
2.3.3. Weitere notwendige Größen und Elemente………………. 18
3. Konstruktion und Entwicklung des inversen Pendels…………….. 21
3.1. Konstruktion der Mechanik……………………………………… 21
3.2. Entwicklung der Regelelektronik………………………………... 23
3.2.1. Realisation durch einen elektronische Analogrechner……. 24
3.2.2. Regelungstechnische Vorgehensweise…………………… 24
3.2.2.1.Eliminierung der Problemfälle………………………... 29
3.2.3. Realisierung der Rechenoperationen mit
Operationsverstärkern…………………………………….. 31
3.2.3.1.Invertierender Subtrahierer…………………………… 32
3.2.3.2.Invertierender Addierer………………………………. 33
3.2.3.3.Nichtinvertierender Addierer…………………………. 33
3.2.4. Regelelektronik aus integrierten und diskreten
Bauelementen……………………………………………... 34
3.2.5. Bedienelemente und Anschlüsse…………………………. 38

4. Verhalten und Handhabung im praktischen Betrieb……………... 41
4.1. Verhalten…………………………………………………………. 41
4.2. Bedienung und Beobachtung in der Versuchsdurchführung…….. 43
5. Schlusswort…………………………………………………………... 47
6. Literaturverzeichnis………………………………………………… 48
7. Abbildungsverzeichnis………………………………………………. 49
8. Anhang……………………………………………………………….. 51
A.1. Fotografie Gesamtapparatur……………………………………. 51
A.2. Bestückungsplan Platine……………………………………….. 51
A.3. Ätzvorlage Oberseite…………………………………………… 52
A.4. Ätzvorlage Unterseite………………………………………….. 52
A.5. Datenblatt Operationsverstärker……………………………….. 53
9. Schlusserklärung…………………………………………………….. 54

1. Einleitung
1.1. Zielsetzung, methodisches Vorgehen und gesellschaftliche
Relevanz
In der vorliegenden Examensarbeit werden der Bau und die Konstruktion der
Steuerung und Mechanik eines inversen Pendels vorgestellt. Ein inverses
Pendel ist ein typisches regelungstechnisches Problem. Das inverse Pendel aus
dieser Arbeit soll als fester Versuchsstand zur Ausbildung der Studentinnen
und Studenten des Instituts für Technik der Universität Münster im Bereich
Informationstechnik dienen. Ziel ist es mit diesem neuen Versuchsstand die
Ausbildung zu verbessern, denn gerade im Bereich Meß-, Steuerungs- und
Regelungstechnik adäquate Versuche anzubieten, stellt keine leichte Aufgabe
dar. In diesem Bereich sind nur schwer Versuchskonzepte zu finden, die die
theoretischen Inhalte anschaulich einbinden.
Im Verlauf dieser Arbeit wird zunächst auf die didaktischen Aspekte
eingegangen, die zur Entwicklung dieses Versuchsstands beigetragen haben.
Des Weiteren wird die technische Ausgangsituation analysiert, denn das
inverse Pendel soll auf bereits vorhandenen Komponenten aufgebaut werden.
Hierbei gilt es insbesondere herauszustellen,
• welche technischen und physikalischen Eigenschaften die vorhandene
Elemente haben,
• welche Konsequenzen aus diesen Eigenschaften für die
Gesamtapparatur folgen,
• welche Bauteile noch fehlen und
• wie diese zu realisieren sind,
damit der Versuchstand der praktischen Beanspruchung im universitären
Studienbetrieb standhält.
Der Gegenstand des darauf folgenden Abschnitts ist zunächst die Entwicklung
des Systems und anschließend die theoretische Konstruktion, worauf der
praktische Bau folgt. Anschließend wird auf das Verhalten im Betrieb dieses
inversen Pendels eingegangen und herausgestellt, welche Merkmale dieser
Versuchstand zeigt und welche Erkenntnisse sich ziehen lassen, um so die
Studieninhalte der Regelungstechnik in diesem Versuch wieder zu finden.
1

„Natur, Gesellschaft und Technik sind die Bereiche, aus denen sich die
Lebenswelt eines jeden Menschen zusammensetzt“ (Hein 2005, S.3).
Technische Bildung ist somit sehr wichtig, um eine moderne Welt, die absolut
technisiert ist, zu bewältigen. Da sich die Technik stets weiter entwickelt, liegt
es auf der Hand, dass sich auch die Ausbildung der Studentinnen und
Studenten im Fach Technik stets weiter entwickeln muss. Die Schaffung neuer
Versuchstände, wie hier im Bereich der Regelungstechnik, gehört zum Inhalt
dieser Entwicklung. Auffällig ist allerdings, dass die Regelung an sich nicht
ausschließlich ein technisches Konstrukt ist, sondern sich auch in Natur und
Gesellschaft oft finden lässt. Ein typisches natürliches Beispiel ist die
Regelung des Blutzuckerspiegels im menschlichen Körper.
Wenn ein Mensch aufrecht steht, handelt es sich hierbei um nichts mehr als ein
inverses Pendel.
1.2. Regelungstechnische Versuche im Praktikum der
Studentenausbildung
In der Lehramtsstudienordnung der Westfälische Wilhelms-Universität
Münster für den Studiengang Technik wird in Modul 4 das Ziel „Beherrschung
von Funktion, Aufbau und Anwendung informationstechnischer Systeme […]“
(Westfälische Wilhelms-Universität Münster 2006, S. 375) angeführt. Zu den
Inhalten der Vorlesung ‚Information umsetzende Systeme (Informations-
technik)’, in deren Rahmen auch praktische Übungen durchgeführt werden,
gehören unter anderem Steuer- und Regelungstechnik (vgl. Westfälische
Wilhelms-Universität Münster 2006, S. 375). In den Übungen sollen die
Studentinnen und Stundenten die theoretischen Inhalte der Vorlesung an
Versuchsständen praktisch anwenden. Zum einen geschieht dies natürlich um
das angeeignete Wissen anzuwenden und somit zu festigen, aber zum anderen
auch, um Beispiele für einen praktischen Gebrauch der Theorie kennen zu
lernen.
Steuer- und Regelungstechnik wird in der Schule im Allgemeinen nur sehr
wenig bis gar nicht thematisiert. Zudem ist die Theorie dieser Thematik eher
komplex und im begrifflichen Bereich schnell unanschaulich, obwohl es
unzählige Beispiele für Regelungen und regelungstechnische Systeme in
2
unserer Umwelt gibt. An derartigen Beispielen lassen sich leider häufig die
regelungstechnischen Größen und Parameter sowie deren Auswirkungen auf
das Verhalten des Reglers und des Gesamtsystems nur schwer herausstellen.
Es gibt Konzepte zu Praktikumsversuchen der Regelungstechnik, wie z.B.
Füllstands- und Temperaturregelungen funktionieren. Des Weiteren gibt es
einen anderen Versuch, in dem man das Verhalten eines Reglers mit einem
Funktionsgenerator und einem Oszilloskop untersucht. Es ist aus solchen
Versuchen schwierig abzuleiten,
• wie der Regler genau funktioniert,
• wie das Regelverhalten ist und
• auf welche Weise dieses Regelverhalten das Ergebnis beeinflusst.
Welche Aufgabe der Regler erfüllt, liegt in dem oben genannten Beispiel mit
Funktionsgenerator und dem Oszilloskop natürlich auf der Hand, aber dafür
fehlt bei diesem Versuchsaufbau gänzlich ein sinnvoll realistischer und
lebensweltlicher Bezug.
1.3. Ausblick auf das Ergebnis
Die Kritikpunkte am Ende des letzten Abschnitts liefern direkt den Grund für
die Konstruktion und Bau des Versuchsstandes des inversen Pendels. Dieser
Versuchsstand wird so konstruiert werden, dass man die elektronische und
mechanische Struktur nachvollziehen kann und es mit entsprechender
Anleitung absolut deutlich wird, wie dieses inverse Pendel im Detail
funktioniert. Es wird möglich sein die typischen regelungstechnischen Begriffe
(Regelstrecke, Stellglied, Regelgröße, Stellgröße,…) in der Praxis zuzuweisen.
Das Regelverhalten lässt sich im praktischen Betrieb, aber auch mit dem
Oszilloskop beobachten und analysieren. Es wird direkt an der Dynamik des
inversen Pendels deutlich, inwieweit die jeweils einzustellenden Parameter das
Verhalten des inversen Pendels beeinflussen.
Alles in allem wird also ein Versuchsstand zur Regelungstechnik geschaffen,
an dem man die Theorie zur Regelungstechnik aus der Vorlesung anwenden
kann. Zudem ist das Niveau und der Umfang dieses Versuches angemessen für
3

die Studentinnen und Studenten der Faches Technik. Die Idee des inversen
Pendels ist zudem relativ lebensweltnah.
Was macht ein menschlicher Körper eigentlich, wenn man einen Besenstiel auf
dem Finger balanciert?
2. Ausgangssituation und technische Vorüberlegungen
2.1. Inverses Pendel
„Unter dem physikalischen Pendel versteht man einen starren Körper, der sich
im homogenen Schwerefeld der Erde befindet und um eine horizontale Achse
drehbar ist“ (Nolting 2002, S. 227). Geht die Drehachse nicht durch den
Schwerpunkt (vgl. Stöker 2004, S. 243) und wird das Pendel einmal in Betrieb
versetzt, so führt es die Pendelbewegung um seine stabile Ruhelage
eigenständig weiter.
stabile Ruhelage
instabile Ruhelage α
Drehachse
Stabpendel
Abb. 1: Physikalisches Pendel
Mögliche Ruhelagen für den Pendelstab sind Positionen, an denen keine Kraft
ausgeübt wird (vgl. Nolting 2002, S. 158). Das heißt, die
Winkelgeschwindigkeit bleibt konstant. Bei einem Stabpendel tritt dieser Fall
nur dann ein, wenn die Winkelgeschwindigkeit gleich Null ist und der
Pendelstab parallel zum Schwerefeld der Erde, also senkrecht nach oben bzw.
nach unten, ausgerichtet ist. Die untere Ruhelage wird als stabile Ruhelage
bezeichnet. Führt man dem Pendel Lageenergie zu, indem man es aus dieser
Ruhelage auslenkt, so beginnt das Pendel um diese stabile Ruhelage zu
schwingen. Lenkt man das Pendel aus der oberen Ruhelage aus, so mindert
man die Lageenergie und dadurch auch die Gesamtenergie des Systems.
4

Dadurch beginnt das Pendel wieder um die untere, stabile Ruhelage zu
schwingen. Die obere Ruhelage wird folglich als instabile Ruhelage
bezeichnet.
Das System Pendel strebt stets den Zustand der geringsten Gesamtenergie an
und dieser befindet sich nicht in der instabilen Ruhelage, sondern in einer
Schwingung um die stabile Ruhelage bzw. in dieser.
Kleinste Auslenkungen aus der instabilen Ruhgelage führen dazu, dass der
Pendelstab diese Ruhelage verlässt. Gründe für solche Auslenkungen können
Eigenschwingungen im Material, ein Luftzug, thermische Ausdehnung usw.
sein. Als inverses Pendel bezeichnet man ein Pendel, welchem stets die
notwenige Energie wieder zugeführt wird, um es in seiner instabilen Ruhelage
zu halten. In dem Versuchsstand, der in dieser Arbeit entwickelt wird, wird
diese Energiezufuhr durch eine ebene, lineare Bewegung der Drehachse des
Stabpendels realisiert.
Um diese theoretische Erklärung zu veranschaulichen, soll an dieser Stelle
noch einmal das Beispiel aus der Einleitung angefügt werden: Ein Besenstil,
der von einem Menschen auf dem Finger balanciert wird, ist ein inverses
Pendel. Die Energiezufuhr, durch die der Besenstiel in seiner instabilen
Ruhelage gehalten wird, wird durch eine ebene Bewegung des Fingers
bewerkstelligt. Der Mensch führt in diesem Beispiel eine Regelung aus.
Ein technisch realisiert inverses Pendel stellt eine typische
regelungstechnische Aufgabe dar. Die zu steuernde Größe ist der Winkel des
Pendels (siehe Abb. 1). Dieser wird fortlaufend gemessen und mit einer
Führungsgröße verglichen. Wenn eine Abweichung entsteht, folgt eine
Steuerung, um Ist- und Sollwert wieder anzugleichen. Ein Beispiel zu einem
bereits existierenden inversen Pendel ist der Segway®.
Abb. 2:Fotografie Segway®
Hier erfolgt Aufnahme des Winkels α über einen Lagesensor. Die so erhaltene
Regelgröße wird in einer digitalen Regelelektronik verarbeitet, an deren
5

Ausgang die Stellgröße anliegt. Mit dieser wird das Stellglied angesteuert,
welches in diesem Fall ein Elektromotor ist. Hierbei handelt es sich um einen
klassischen Regelkreis.
Inverse Pendel sind technisch schon mehrfach verwirklicht worden. Für den
hier zu konstruierenden Versuchsstand ist die Frage wichtig, wie das inverse
Pendel zu realisieren ist.
Will man das Pendel auf einen festen Versuchstand aufbauen, so ist der Raum
und damit auch der Weg, auf dem das Pendel balanciert werden kann,
begrenzt. Im Gegensatz zum obigen Beispiel des Segways® werden in dem
Versuchstand des inversen Pendels zwangsläufig zwei Regelgrößen RG1 und
RG2 mit nur einer Regeleinrichtung, einem Stellglied und einen Antrieb
geregelt. Zum einen muss durch die Regelung RG1 der Pendelstab in seine
instabile Ruhelage gehalten werden und zum anderen muss die Position des
Pendelschlittens in die Mitte des zur Verfügung stehenden Weges geregelt
werden RG2. Folglich benötigt man
• ein Bauteil, das den Winkel α (siehe Abb.1) des Pendels misst,
• ein Bauteil, das die Position s des Pendelschlittens misst,
• ein Bauteil, welches die entsprechenden Führungsgrößen W liefert
• eine Regeleinrichtung, die das gewünscht Regelverhalten realisiert und
• ein Stellglied, welches einen
• Antrieb ansteuert, der für die Bewegung des Schlittens des Pendels
sorgt.
Ein klassischer Regelkreis baut sich immer aus Regelstrecke und
Regeleinrichtung auf. Das gilt auch für den Regelkreis im Versuchstand des
inversen Pendels, wie er in Abbildung 3 skizziert ist. Zusätzlich sind in diesem
Regelkreis jedoch zwei Regelgrößen und zwei Führungsgrößen notwendig.
Die Größen und deren Wirkrichtung werden durch Pfeile dargestellt. Unter
den Begriffen ‚Regelgröße 1 α’ und ‚Regelgröße 2 s’ werden die Signale
verstanden, durch die die Position s des Schlittens bzw. der Winkel α des
Pendels beschrieben werden. Analog verstehen sich unter ‚Führungsgröße Wα’
und ‚Führungsgröße WS’ die jeweiligen Führungsgrößen, die entsprechend für
die Regelung des Pendelwinkels α und der Schlittenposition s zugeordnet
werden.
6

Führungsgröße Wα
Antrieb, mit dem der Schlitten auf einer Linie bewegt wird
Messglied zu Schlitten- position s
Messglied zu Winkel α
Stellglied, welches den
Antrieb steuert
Regeleinrichtung
Stellgröße y
Führungsgröße WS
Regelgröße 2 s
Regelgröße 1 α
Regelstrecke
Abb. 3:Regelkreis
Zusammenfassend werden noch einmal alle regelungstechnischen Größen und
Bauteile, die für einen vollständigen Versuchstand des inversen Pendels
notwenig sind, in nachstehender Tabelle aufgeführt. Diese Tabelle dient zur
späteren Orientierung, wenn die gesamte Regelapparatur konstruiert wird.
Bauteil Regelungstechnische
Größe Beschreibung
Pendelstab Regelgröße 1 α gibt den Ist-Wert des Winkels α
wieder
Schlitten Regelgröße 2 s gibt den Ist-Wert der
Schlittenposition s wieder
Potentiometer zu Wα
Führungsgröße Wα Sollwert des Pendelwinkels
Potentiometer
zu WS Führungsgröße WS Sollwert der Schlittenposition
- Stellgröße Y Eingangssignal des Stellgliedes,
womit der Antrieb angesteuert wird Abb. 4:Tabelle regelungstechnische Größen 1
7

2.2. Didaktischer Aspekt
2.2.1. Lernen am Versuch
Meyer, Hilbert: „Das Wort Experiment stammt vom lateinischen »experiri«,
d.h. versuchen, prüfen, erproben“ (1987, S. 313). Ein Versuch und ein
Experiment stellen in diesem Kontext also das Gleiche dar. In erster Linie
versteht man unter einem Versuch eine planmäßige und kontrollierte Prüfung
einer Hypothese, die zu einem unklaren Sachverhalt aufgestellt wurde (vgl.
Meyer 1987, S. 313). Somit lassen sich neue Erkenntnisse aus einem Versuch
ziehen.
Das lateinische Wort »experiri« hat aber auch die Bedeutung »erproben«. Es
lässt sich an Versuchen somit auch lernen, indem man die zunächst theoretisch
dargebotenen Inhalte einer Vorlesung, an einem realen Versuchstand praktisch
erprobt. Die Theorie aus der Vorlesung entspricht dann der Hypothese vor
dem Versuch und die Studentinnen und Studenten durchleuchten diese an
einem praktischen Versuchsaufbau.
Didaktiker wie z.B. Hilbert Meyer rufen schon länger zu einem Unterricht auf,
der ganzheitlich und schüleraktiv sein soll. Es wird in diesem Zusammenhang
vom so genannten Handlungsorientierten Unterricht gesprochen und schreibt
diesem eine besonders hohe Lerneffektivität zu (vgl. Meyer 1987, S.402 ff.).
Dies muss dann natürlich auch für die Lehre von Studentinnen und Studenten
gelten. Ein Aspekt des Handlungsorientierten Unterrichts besagt, dass Lernen
grundsätzlich ganzheitlich, also mit Kopf, Herz, Händen und allen Sinnen
abläuft (vgl. Meyer 1987, S. 403). Die selbstständige Durchführung von
Versuchen trifft diesen Aspekt genau und lässt sich zudem als Übung
auffassen. Durch die eigenständige Anwendung der neuen Inhalte verstehen
und lernen die Studentinnen und Studenten und es wird ein Transfer zwischen
Theorie und Praxis geschaffen. Zusätzlich geht eine Sicherung und Festigung
durch die praktische Tätigkeit einher. Dies gelingt natürlich nur, wenn sich die
Inhalte aus der Vorlesung im Versuchsaufbau oder in der Durchführung
eindeutig wiederfinden lassen. Des Weiteren muss der Umfang des Versuchs
passen gewählt werden: nicht zu komplex aber auch nicht zu einfach. Bei
diesen Übungsversuchen ist es zudem sinnvoll einen lebensweltlichen Bezug
herzustellen, denn wenn nicht eindeutig herausgestellt werden kann, welchen
8

Zweck die vorangegangene Theorie dient, wird der Erkenntnisgewinn aus
diesem Versuch eher geringer sein.
2.2.2. Transparenz der Struktur und des Signalflusses
Versuchsstände, die in der Lehre eingesetzt werden, sollten so konstruiert sein,
dass sich die Struktur des Aufbaus gut erkennen lässt. Beim Durchfahren des
Versuchs muss der Zusammenhang von Struktur und Funktion deutlich
werden.
Die Idee ein inverses Pendel mit einem elektronischen Regler zu bauen ist
nicht neu. Eine digitale Regeleinheit steuert einen Schrittmotor und der treibt
einen Wagen oder eine Bahn an, auf der sich das inverse Pendel befindet. Bei
derartigen regelungstechnischen Versuchsapparaturen lässt sieht das Ergebnis
gut erkennen und auch erahnen, wie der Signalfluss aussehen müsste. Die
Schwierigkeit ist hierbei deutlich herauszustellen, was mit dem Signal genau
passiert.
• Wie wird die mechanische Bewegung des Pendels zur Regelgröße?
• Wie wird diese im elektronisch Regler verarbeitet und schließlich?
• Wie wird das Signal wieder zur Mechanik zurückgeführt?
Die Antworten auf diese Fragen sind bei derartigen inversen Pendeln eher
undurchsichtig. Der Versuchstand in dieser Arbeit wurde bewusst so
konstruiert, dass der strukturelle Aufbau und der Signalfluss möglichst
transparent sind. Es soll klar werden, wie die Mechanik und Elektronik im
Zusammenspiel das Pendel balancieren, wieso das Verhalten des Pendels so
ist, wie es ist und auf welche Weise die entsprechenden Parameter und
Bauteile das Ergebnis beeinflussen.
2.3. Technische Vorraussetzung mit ersten Ansätzen
2.3.1. Vorhandener Linearantrieb und Zubehör
Vor Beginn dieser Arbeit existieren bereits einige Bauteile in der Sammlung
des Instituts für Technik und ihre Didaktik in Münster, die sich für den
Versuchsstand des inversen Pendels anbieten. Die vorhandenen Gerätschaften
stammen aus ältern, zum Teil regelungstechnischen Versuchsaufbauten,
9
welche in den Übungen jedoch aktuell nicht mehr eingesetzt werden. Somit
können sie fest im Versuchsstand des inversen Pendels integriert werden.
Die verwendeten Bauelemente werden im Folgenden vorgestellt. Es werden
die Eigenschaften bzw. Eckdaten angeführt, die für den hier thematisierten
Versuchsaufbau wichtig sind. Alle vorgestellten Bauteile stammen von der
Firma Festo-Didactic und die angegebenen Daten wurden dem offiziellen
Online-Katalog entnommen. Zum leichteren Nachvollzug sind bei den
Quellenangaben im Text stets die Produktnummern der Firma Festo-Didactic
beigefügt.
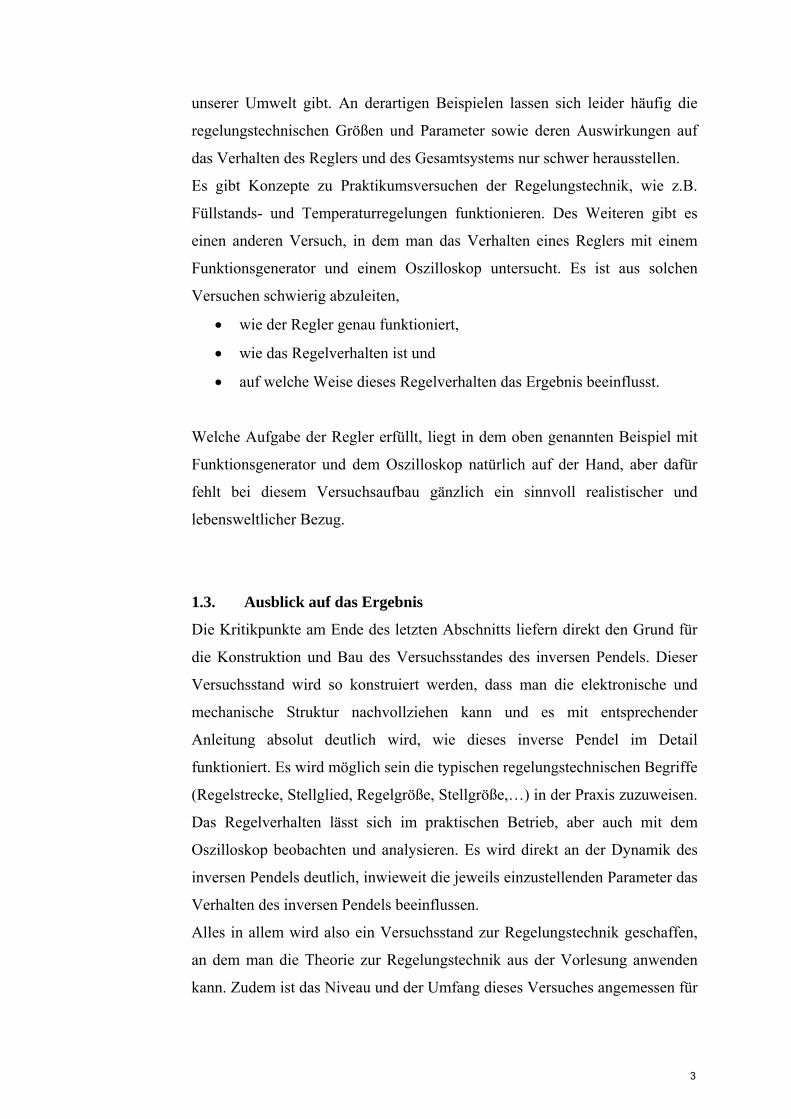
Linearantrieb:
Der Schlitten auf diesem Linearantrieb wird
von einem doppeltwirkenden Zylinder
angetrieben. Das heißt, dass per Druckluft
der Vor- und Rückhub bewirkt werden kann.
Der Linearantrieb ist so konstruiert, dass sich
der Schlitten durch eine Führung nur linear
auf der Bahn bewegen kann und jegliche Rotationen bzw. Verkeilungen
unterbunden werden.
Abb. 5: Linearantrieb
Wichtige Daten:
• Anschlüsse: 2x Druckluft (je einen pro Richtung)
• Hublänge: 450mm
• Gesamtlänge: 650mm
• Druckbereich: 2 – 8 bar
(vgl. Festo-Didactic 2009, Nr. 192501)
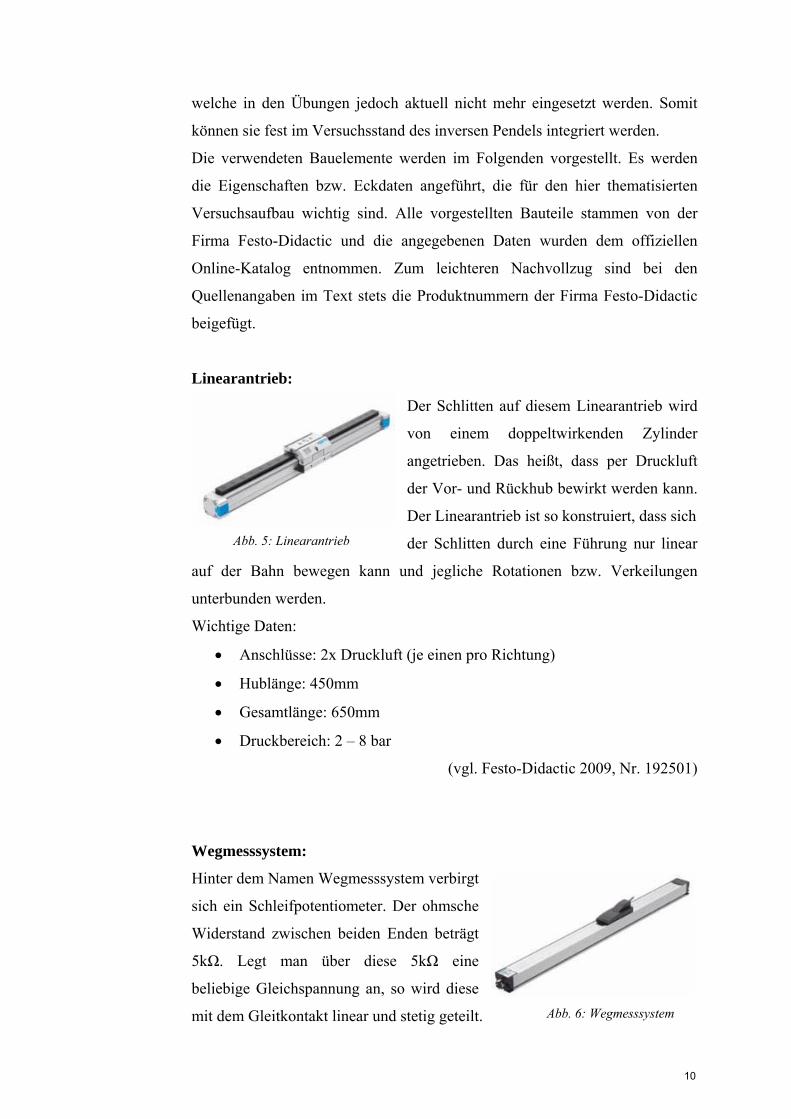
Wegmesssystem:
Hinter dem Namen Wegmesssystem verbirgt
sich ein Schleifpotentiometer. Der ohmsche
Widerstand zwischen beiden Enden beträgt
5kΩ. Legt man über diese 5kΩ eine
beliebige Gleichspannung an, so wird diese
mit dem Gleitkontakt linear und stetig geteilt. Abb. 6: Wegmesssystem
10

Die Hublänge ist mit 450mm gleich der des Linearantriebs. Es bietet sich
somit an dieses Schleifpotentiometer und den Linearantrieb parallel
auszurichten und den Schleifkontakt mit dem Schlitten des Linearantriebs fest
zu verbinden. Jede Position des Schlittens wird dann durch einen
entsprechenden Spannungsabfall am Gleitkontakt beschrieben.
(vgl. Festo-Didactic 2009, Nr. 152628)
5/3-Wege-Proportionalventil:
Ein 5/3-Wege-Ventil besitzt fünf Anschlüsse
und drei Schalterstellungen. Die fünf
Anschlüsse ergeben sich aus Druckluft-
eingang, zweimal Druckluftausgang und
zwei Entlüftungsanschlüsse. Es handelt sich
hierbei um ein elektromechanisches
Bauelement. Die Schalterstellungen werden
mit einer Steuerspannung von 0V bis 10V eingestellt, wobei die Mittelstellung
bei 5,0V ± 0,2V liegt. Zusätzlich benötigt dieses aktive Bauelement eine
Betriebsspannung von 24V. In der Mittelstellung sind beide Ausgänge und die
beiden Entlüftungsanschlüsse gesperrt. Die zwei weiteren Schalterstellungen
werden anschaulich, wenn man theoretisch die zwei Druckluftausgänge mit
den beiden Anschlüssen des doppeltwirkenden Pneumatikzylinders des obigen
Linearantriebs verbindet.
Abb. 7: 5/3-Wege-Proportionalventil
In der einen Stellung herrscht Luftdurchlass vom Drucklufteineingang zu
einem Ausgang. Der nicht verwendete Ausgang ist dann mit einem
Entlüftungsanschluss verbunden. Somit wird der Zylinder im Linearantrieb auf
der einen Seite mit Druckluft belastet, so dass er ausfährt. Die andere Seite des
doppelwirkenden Zylinders wird entlüftet, so dass er sich auch ausfahren lässt.
Die dritte Schalterstellung ist das Gegenteil der zweiten, so dass der
doppelwirkende Zylinder sich in die Richtung bewegt. Die entsprechende
Kammer wird dann mit Druckluft belastet und die andere wird entlüftet.
In diesem Ventil ist eine elektronische Regelung integriert, die dafür sorgen
soll, dass der Luftdruck, der an dem jeweiligen Ausgang anliegt proportional
zur Steuerspannung ist. Dies funktioniert allerdings nur in einem Bereich von
11

6bar bis 10bar. Ein eingrenzender Faktor an dieser Stelle ist, dass der
Linearantrieb nur mit maximal 8bar belastet werden darf. Ein weiterer
limitierender Faktor ergibt sich daraus, dass in den Versuchsräumen im Institut
für Technik und ihre Didaktik in Münster nur Druckluft von 6bar zur
Verfügung steht. Im praktischen Betrieb verhält sich dieses 5/3-Wege-
Propotionalventil somit wie ein normales 5/3-Wege-Ventil ohne interne
Proportionalitätsregelung. Man kann an dieser Stelle schon vorwegnehmen,
dass diese Eigenschaft das spätere Verhalten des Pendels stark beeinflussen
wird, da dieses somit das einzige Bauelement ist, welches nicht stetig arbeitet.
Wichtige Daten
• Betriebsspannung: 24V
• Stellzeit 5ms
• Druckbereich: 6 – 10 bar
• Nennwert bei pneumatischer Mittelstellung: 5 V DC
• Leistungsaufnahme: 2-20 W
(vgl. Festo-Didactic 2009, Nr. 167078)
Einschaltventil mit Filterregelventil:
Durch dieses Einschaltventil kann die gesamte
pneumatische Apparatur mit Druckluft versorgt aber
auch entlüftet werden. Zusätzlich wird die Luft
aufbereitet. „Das Filter mit Wasserabscheider reinigt
die Druckluft von Schmutz, Rohrsinter, Rost und
Kondenswasser. Das Druckregelventil regelt die
zugeleitete Druckluft auf den eingestellten
Betriebsdruck und gleicht Druckschwankungen aus“
(Festo-Didactic 2009, Nr. 526337).
Abb. 8: Einschalt-/Filterventil
12
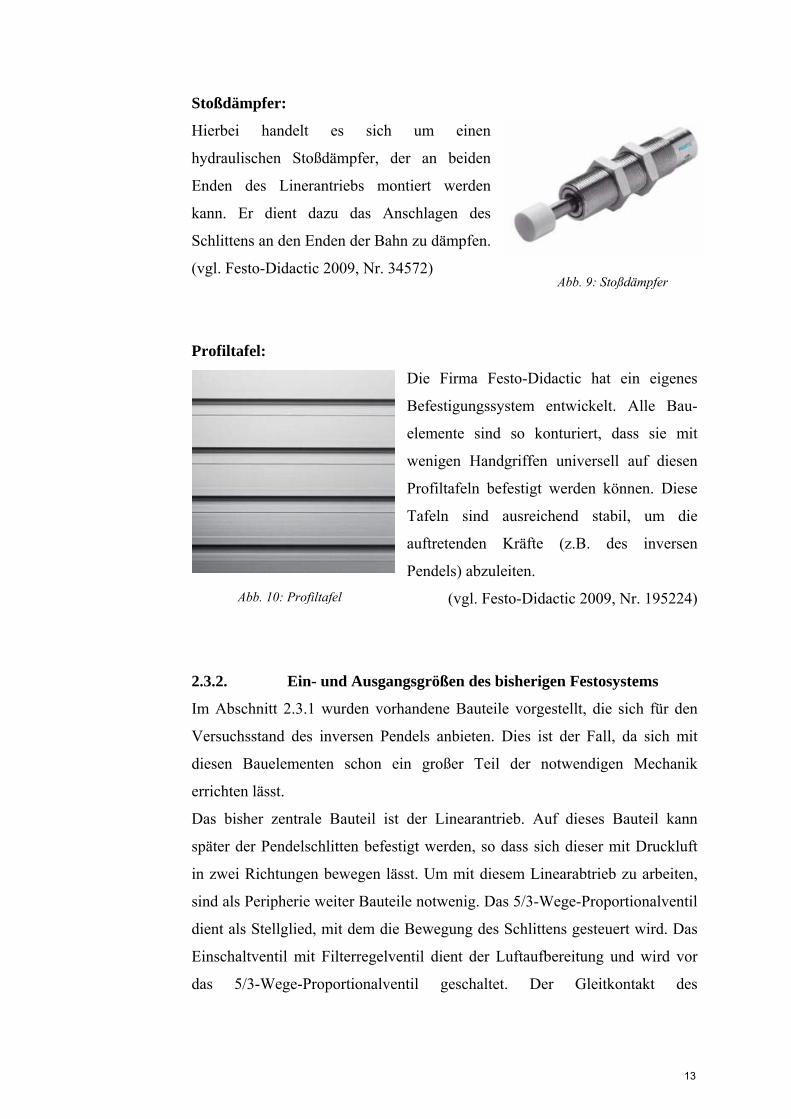
Stoßdämpfer:
Hierbei handelt es sich um einen
hydraulischen Stoßdämpfer, der an beiden
Enden des Linerantriebs montiert werden
kann. Er dient dazu das Anschlagen des
Schlittens an den Enden der Bahn zu dämpfen.
(vgl. Festo-Didactic 2009, Nr. 34572) Abb. 9: Stoßdämpfer
Profiltafel:
Die Firma Festo-Didactic hat ein eigenes
Befestigungssystem entwickelt. Alle Bau-
elemente sind so konturiert, dass sie mit
wenigen Handgriffen universell auf diesen
Profiltafeln befestigt werden können. Diese
Tafeln sind ausreichend stabil, um die
auftretenden Kräfte (z.B. des inversen
Pendels) abzuleiten.
(vgl. Festo-Didactic 2009, Nr. 195224) Abb. 10: Profiltafel
2.3.2. Ein- und Ausgangsgrößen des bisherigen Festosystems
Im Abschnitt 2.3.1 wurden vorhandene Bauteile vorgestellt, die sich für den
Versuchsstand des inversen Pendels anbieten. Dies ist der Fall, da sich mit
diesen Bauelementen schon ein großer Teil der notwendigen Mechanik
errichten lässt.
Das bisher zentrale Bauteil ist der Linearantrieb. Auf dieses Bauteil kann
später der Pendelschlitten befestigt werden, so dass sich dieser mit Druckluft
in zwei Richtungen bewegen lässt. Um mit diesem Linearabtrieb zu arbeiten,
sind als Peripherie weiter Bauteile notwenig. Das 5/3-Wege-Proportionalventil
dient als Stellglied, mit dem die Bewegung des Schlittens gesteuert wird. Das
Einschaltventil mit Filterregelventil dient der Luftaufbereitung und wird vor
das 5/3-Wege-Proportionalventil geschaltet. Der Gleitkontakt des
13

Linearpotentiometers ist mechanisch mit dem Schlitten des Linearantriebs
verbunden.
Linear-potentiometer
Schlitten
Elektrische Leitungen Druckluftleitungen
Stoßdämpfer Linearantrieb
5/3-Wege-Proportionalventil
Einschalt- und Filterregelventil
Abb. 11: Struktur des bisherigen Festosystems
Dem bisherigen Versuchsaufbau fehlt zum einen das inverse Pendel und zum
anderen existiert kein vollständiger Regelkreis. Welche Bauteile an diesem
Entwicklungspunkt fehlen und welche Anforderungen sie erfüllen müssen,
wird im nächsten Abschnitt behandelt. An dieser Stelle gilt es herauszustellen,
welche Größen das derzeitige System liefert bzw. benötigt. Eine
Eingangsgröße ist die Druckluft. Sie dient zum Antrieb des Schlittens und
wird in dem obigen System intern aufgearbeitet. Ein Signaleingang des
bisherigen Systems stellt der Steueranschluss des 5/3-Wege-
Proportionalventils dar. Dieser benötigt ein elektrisches Signal, welches durch
elektrische Spannungen zwischen 0V und 10V verwirklicht wird. Die noch
fehlenden Anschlüsse sind die des Linearpotentiometers. Bei Beschaltung als
Spannungsteiler liefert der Abgriff eine Spannung US durch die die Positionen
des Schlittens abgebildet werden.
Aus diesen Bauelementen ergibt sich ein vorläufiger Ansatz, wie der
Versuchstand des inversen Pendels realisiert werden wird. Die vorhandenen
Geräte bieten einen guten Ausgangspunkt. Sie weisen die Struktur des
Versuchsstandes aber auch in eine bestimmte Richtung. Es wird durch die
Verwendung dieser Bauteile vorgegeben, dass der Antrieb des Pendels mit
Druckluft erfolgt, die Bewegung des Schlittens über eine Spannung gesteuert
14

wird und auch die Ist-Position des Schlittens durch eine Spannung
repräsentiert wird. An diesen Signaltypen werden sich die restlichen noch
fehlenden Bauteile orientieren müssen, um das Gesamtsystem nicht unnötig
kompliziert zu machen.
Die bisherigen Größen werden angelehnt an den Regelkreis aus 2.1. in
nachstehender Tabelle zusammengefasst.
Bauteil Regelungstechnisch
e Größe Beschreibung Abbildung
Art des
Signals
Schlitten Regelgröße 2 s
gibt den Ist-
Wert der
Schlittenposition
s wieder
s → US
analoge
elektrische
Spannung
(stetig)
- Stellgröße Y
Eingangssignal
des Stellgliedes,
womit der
Linearantrieb
angesteuert wird
Y → UY
analoge
elektrische
Spannung
Abb. 12: Tabelle regelungstechnische Größen 2
2.3.3. Weitere notwendige Größen und Elemente
Nun gilt es herauszustellen, welche weiteren Größen benötigt werden, um die
vollständige Regelapparatur, so wie sie in 2.1. vorgestellt wurde, aufzubauen.
Die fehlenden Größen sind:
• Regelgröße 1 α
• Führungsgröße WP
• Führungsgröße WS
Da die Regelgröße WS und die Stellgröße Y in Form von elektrischen
Spannungen geliefert werden, liegt es nahe, die noch fehlenden Größen auch
durch elektrische Spannungen abzubilden.
15

Regelgröße 1 α
Mit dieser Größe soll der Winkel des inversen Pendels beschrieben werden.
Hier lässt sich analog zu dem Linearpotentiometer des Schlittens ein
Drehpotentiometer verwenden. Die Rotationsbewegung des Pendels wird
direkt oder mit einem Getriebe auf die Welle des Drehpotentiometers
übertragen. Bei entsprechender Beschaltung und bekanntem
Widerstandsverlauf des Drehpotentiometers wird jede Position des Pendels
durch einen entsprechenden Spannungswert UP abgebildet (α → UP).
Führungsgröße Wα und Führungsgröße WS
Diese beiden Führungsgrößen lassen sich ebenfalls durch Drehpotentiometer
eingesetzt als Spannungsteiler herstellen. Die entsprechenden Sollwerte
können dadurch fest eingestellt werden. Diese Potentiometer werden direkt in
die Regelelektronik integriert. Die Führungsgröße Wα wird durch die
Spannung UWP und die Führungsgröße WS wird durch die Spannung UWS
abgebildet. (Wα → UWP, WS → UWS)
Für den vollständigen Versuchsstand werden noch zwei Bauelemente benötigt.
Zum einen muss eine Mechanik konstruiert werden, durch die der
Pendelkörper auf den Schlitten des Linearantriebs montiert wird. Durch diese
Mechanik muss die Rotationsbewegung des Pendels auf das
Drehpotentiometer übertragen werden.
Das zweite noch zu konstruierende Bauelement ist der Regler. Die Eingangs-
und Ausgangssignale des Reglers sind durch elektrische Spannungen gegeben.
Nahe liegend ist somit eine Elektronik zu entwickeln, die die beiden
Regelgrößen α und s und Führungsgrößen Wα und WS so miteinander
verarbeitet, dass eine Stellgröße Y hergestellt wird, die über das Stellglied das
gewünschte Regelverhalten bewirkt.
Für den Versuchsstand sind nun die theoretisch notwendigen Bauelemente und
Größen vollständig. Zum Überblick ist die Versuchapparatur im Folgenden
skizziert.
16

Linearantrieb
Elektrische Leitungen Druckluft Leitungen
Schlitten
Führungsgröße Wα (→ UWP)
Führungsgröße WS
(→ UWS)
Drehpotentiometer
Regelgröße 2 s (→ US)
Regelgröße 1 α (→ UP)
Einschalt- und Filterregelventil
Stellgröße Y
Schleif-potentiometer
5/3-Wege-Proportionalventil (Stellglied)
Pendelkörper
Mechanik mit Drehpotentiometer
Regeleinrichtung
Abb. 13: Skizze Versuchapparatur
Am Ende dieses Abschnitts muss man die Frage stellen, ob bisher die
geforderte Transparenz der Struktur des Signalflusses gegeben ist. Diese Frage
ist insbesondere wichtig, da durch die vorgebenden Bauelemente zum Teil der
Signalfluss indirekt vorgegeben wurde. Berücksichtig man, dass es sich bei
diesem Versuchsstand, um eine nicht triviale regelungstechnische Apparatur
handelt, so kann man durchaus von einer transparenten Struktur des
Signalflusses reden. Setzt man sich etwas mit den vorgefertigten
Bauelementen auseinander, so lässt sich durchaus nachvollziehen, wie diese
mit dem Signal umgehen und es beeinflussen. Die Herausforderung wird nun
sein eine derartige Durchsichtigkeit auch bei den noch zu entwickelnden
Bauelementen beizubehalten. Bei der Mechanik stellt diese Anforderung eine
geringere Schwierigkeit dar als bei der noch zu bauenden Regelelektronik.
17

3. Konstruktion und Entwicklung des inversen Pendels
3.1. Konstruktion der Mechanik
Wie aus den Kapiteln ‚2.3.1. Vorhandener Linearantrieb und Zubehör’ und
‚2.3.3. Weitere notwendige Parameter und Elemente’ hervorgeht, muss eine
Mechanik konstruiert werden, die sich fest auf dem Schlitten befindet und
durch die die Rotationsbewegung des Pendelstabes auf das Drehpotentiometer
übertragen wird.
Die didaktische Anforderung ‚Transparenz des Signalflusses’ gilt auch hier.
Das mechanische Zusammenspiel von Pendelstab und Drehpotentiometer
sollte sichtbar und möglichst unkompliziert verwirklicht werden.
Von der funktionellen mechanischen Seite her, gibt es weitere Anforderungen,
die an die Mechanik gestellt werden:
• Sie muss den Pendelstab mit dem Schlitten verbinden und dabei
ausstreichend stabil sein, um alle auftretenden Kräfte abzuleiten.
• Sie muss die Verbindung zwischen Pendel und Drehpotentiometer
bewerkstelligen.
• Sie muss so konstruiert werden, dass der Pendelstab am Schlitten
vorbei schwingen kann, falls die Regelung versagt, so dass er nicht auf
den Schlitten schlägt.
• Die Verbindung zwischen der Welle, auf der sich der Pendelstab
befindet und dem Pendelstab muss so gestaltet werden, dass die
Bewegung des Pendels genau auf die Welle übertragen wird. Auf der
anderen Seite muss sich in dem Fall, dass die Regelung versagt und
das Pendel ‚fällt’ diese Verbindung hier lösen, so dass der Pendelstab
nach unten durchschwingen kann. Dadurch wird verhindert, dass das
Drehpotentiometer, welches nur einen Drehwinkel von 270° hat oder
ein anderer Teil der Mechanik zerstört wird.
An dieser Stelle werden zwei Erkenntnisse, die aus den Tests der ersten
Prototypen dieser Mechanik hervorgegangen sind, vorweggenommen:
Schon bei sehr kleinen Auslenkungen des Pendelstabes aus seiner Ruhelage
müssen die Elektronik und die Stellmechanik reagieren. Die Änderungen der
Spannungsabfälle bei derart kleinen Auslenkungen sind sehr gering. Selbst mit
18

großen Verstärkungsfaktoren in der Elektronik, ließ sich dieses Problem nicht
beheben. Deswegen wird zum einen in der Elektronik die Verstärkung im
Bereich ‚Abgleich Pendel’ verzehnfacht (man sieht im Schaltplan ein 50k
Potentiometer statt eines mit 5k) und zum anderen wird die Pendelbewegung
durch ein Stirnradgetriebe mit einem Übersetzungsverhältnis von i = 2/3 auf
die Welle des Drehpotentiometers übertragen.
Eine weitere Erkenntnis aus den ersten Tests ist, dass sich durch Reibung der
Wellen an ihren Aufhängungen, im Getriebe und im Drehpotentiometer der
Pendelstab etwas schwergängig bewegen lässt. Die Reibung im
Drehpotentiometer lässt sich nahezu nicht beeinflussen. In die Aufhängung der
Wellen in der Mechanik werden radiale Industriekugellager gesetzt, um hier
die Verluste möglichst gering zu halten. Das Getriebe wird geölt.
Die Verbindung zwischen Pendelstab und Welle wird durch eine Klemmung
realisiert (siehe Abb. 14). Die Reibung zwischen Holz und Metall reicht im
praktischen Betrieb aus, um die Rotationsbewegung zu übertragen und
gegebenenfalls erlaubt diese auch ein Durchschwingen des Pendelstabes.
Pendelstab
Klemmschraube
Welle
Spalt
Abb. 14: Foto Klemmung Pendelstab
19

Das Ergebnis zeigt Abb. 15. Diese Anordnung erfüllt alle Anforderungen, die
in diesem Abschnitt angeführt wurden.
Getriebe Drehpotentiometer
Schleifpotentiometer
Industrielager
Schlitten Befestigungspunkt P
Pendelfläche außerhalb deSchlittens und der Tischplatte
Abb. 15: Foto Mechanik
3.2. Entwicklung der Regelelektronik
Es wurde in 2.3.3. bereits erwähnt, dass die didaktische Anforderung der
Transparenz der Struktur des Signalflusses bei der Entwicklung der
Regelelektronik eine große Bedeutung zugewiesen wird. Es gibt verschiedene
Möglichkeiten die entsprechenden Ein- und Ausgangssignale des Reglers so
zu verarbeiten, dass die Regelung funktioniert. Allerdings muss zwischen einer
qualitativ guten Funktion und einem logischen, nicht zu komplexen
strukturellen Aufbau abgewogen werden. Des Weiteren soll dieser Teil der
Apparatur im praktischen Betrieb auch einfach zu Handhaben sein.
Aus diesen Gründen wird der Regler in Form eines elektronischen
Analogrechners aufgebaut.
Verbindung Schlitten-Mechanik: 2x M6 Imbus
U-Profil endelstab:
s
20

3.2.1. Realisation durch einen elektronische Analogrechner
„Der Analogrechner ist eine Einrichtung zur […] Synthese analoger Systeme
bzw. Probleme, bei der die Systemsignale bzw. Rechengrößen durch analoge
Signale dargestellt werden. Als Signalträger dienen stetig veränderbare
physikalische Größen, insbesondere elektrische Spannungen […]“ (Reinisch
1974, S. 175). Die direkten Ein- und Ausgangssignale für den zu
konstruierenden Regler werden durch das bisherige System in Form von
stetigen elektrischen Spannungen gegeben. Es liegt somit auf der Hand die
Regelelektronik durch einen elektronischen Analogrechner zu verwirklichen.
Die Basisidee ist diese analogen Signale durch entsprechende
Rechenoperationen in Beziehung zu setzen. Das Ergebnis dieser
Rechenoperationen ist ein Ausgangssignal, wodurch die gewünschte Regelung
hergestellt werden kann.
Die Regelelektronik soll so konstruiert werden, dass sich vor und nach jeder
Rechenoperation die jeweiligen Signale abgreifen lassen. Somit lässt sich mit
Hilfe eines Spannungsmessgerätes direkt nachvollziehen, auf welche Weise
das Signal innerhalb des Reglers verarbeitet wird. Dadurch ergibt sich eine
große funktionale und strukturelle Transparenz des elektronischen Reglers.
Ein weitere Vorteil des Analogrechners ist, dass direkt mit den Signalen
gearbeitet wird, die der Versuchsaufbau liefert bzw. benötigt, ohne dass diese
umgeformt oder gewandelt werden müssen, wie es z.B. bei einem digitalen
System der Fall wäre.
Im weiteren Verlauf wird zunächst die Struktur der entsprechenden Signale
und Rechenoperationen erarbeitet. Diese Struktur liefert dann die Grundlage,
auf der die Regelelektronik zunächst entwickelt und dann in der Praxis
aufgebaut wird.
3.2.2. Regelungstechnische Vorgehensweise
Zunächst gilt es herauszustellen, wie sich der Schlitten bewegen muss, um das
inverse Pendel in seiner instabilen Ruhelage zu halten. Vorraussetzung ist es
zu wissen, welche Aktion des Schlittens auf die entsprechende Bewegung des
Pendelstabes folgen muss. Überträgt man diese Aussage auf die Aufgabe der
Regelelektronik, so ergibt sich: Auf welche Regeldifferenz muss welche
21

Stellgröße folgen? Die Regeldifferenz ist die Differenz aus Führungs- und
Regelgröße.
Wie balanciert man einen Besenstiel auf der Hand? – Reduziert auf ein
zweidimensionales Problem, lautet die Antwort: Kippt der Besenstiel nach
links, so muss sich die Hand nach links bewegen. Kippt der Besenstiel nach
rechts, so muss sich die Hand nach rechts bewegen. Zusätzlich muss sich die
Hand schneller als die Spitze des Besenstiels in die entsprechende Richtung
bewegen und diese dabei überholen. Anschaulich ausgedrückt geschieht dies,
um die Kippbewegung des Besenstiels auszubremsen. Naturwissenschaftlich
argumentiert wird dem System Besenstiel durch Ausübung einer Bewegung
der Hand in die entsprechende Richtung die notwendige Energie zugefügt, um
es wieder in seine instabile Ruhelage
zu bringen (siehe 2.1. inverses
Pendel). Daraufhin wird der
Besenstielstiel in die andere Richtung
kippen und der Vorgang beginnt von
neuem (siehe Abb. 16 oberer Teil).
Damit nicht eine anhalte Schwingung
um die angestrebte Ruhelage entsteht,
muss das Maß der Beschleunigung
und Geschwindigkeit der Hand stets
so gewählt werden, dass die
maximale Abweichung des
Pendelwinkels von seiner Ruhelage
immer weiter reduziert wird. Trägt
man diesen gewünschten Vorgang der
Bewegung der Hand als Auslenkung
über der Zeit auf, ergibt sich der
Kurvenverlauf einer gedämpften Schwingung (siehe Abb. 16). Die eben
beschriebene Bewegung der Hand beim Balancieren eines Besenstiels, lässt
sich direkt auf die erforderliche Bewegung des Schlittens zum Balancieren des
inversen Pendels übertragen. Beim Versuchstand des inversen Pendels muss
aber zusätzlich und zudem gleichzeitig der Schlitten in die Mitte des
Linearantriebs geregelt werden (siehe Regelkreis in 2.1. inverses Pendel).
Abb. 16: Gedämpfte Schwingung
22

Dadurch ergibt sich ein Regelkreis mit zwei Regelgrößen und zwei
Führungsgrößen (vgl. Abb. 3 und Abb. 13).
Die Beschleunigung und Geschwindigkeit, also die Dynamik des Schlittens
hängt von vielen Faktoren des Versuchsaufbaus ab: Schlittenmasse, Luftdruck,
Steuerspannung, Kennlinie des 5/3-Wege-Ventils…. Deswegen wird der
Regler so konstruiert, dass die Größen, durch die die Regelelektronik die
Dynamik des Schlittens beeinflusst, im Betrieb direkt gestellt und angeglichen
werden können. Dies geschieht durch verstellbare Spannungsverstärker, die im
Regler an den entsprechenden Stellen im Signalfluss platziert werden. So kann
auch das eigentliche Regelverhalten im gewissen Maße beeinflusst werden und
ist dadurch in dieser Konstruktionsphase zunächst nicht zu thematisieren.
Der Regler wird im ersten Schritt so entwickelt, dass durch entsprechende
mathematische Operationen lediglich die Richtung des Schlittens gesteuert
wird. Dass diese Aufgabe schon relativ komplex ist, wird deutlich, wenn man
alle möglichen Fälle, also die möglichen Positionen von Schlitten und Pendel
miteinander kombiniert.
Zudem wird zu jedem Fall die notwendige Bewegung des Schlittens bestimmt,
um das Pendel in seiner instabilen Ruhelage zu halten. Pendel und Schlitten
können stetig jede Position einnehmen. Deswegen wird in der
Fallunterscheidung nur jeweils die Ruhelage bzw. Mittelstellung und
repräsentativ eine Position rechts und links der Ruhelage bzw. Mittelstellung
betrachtet (siehe Abb. 17).
23

Die Fälle 5 und 9 stellen
Sonderfälle da. Hier ist die
notwendige Bewegung des
Schlittens zunächst nicht
eindeutig, da Schlitten und
Pendel je eine
gegensätzliche Schlitten-
bewegung fordern. Im
Zweifel, hat in diesen
Sonderfällen das Pendel
Vorrang.
Im Folgenden werden den
jeweiligen Positionen von
Schlitten und Pendel
Beispielspannungen
zugeordnet, so wie sie sich
im realen Betrieb an den
entsprechenden Positionen
von den Potentiometern abfallen könnten. Es wird zunächst davon
ausgegangen, dass an das Potentiometer 10V angelegt werden. US ist der
Spannungsabfall am Linearpotentiometer des Schlittens (Abbildung der
Regelgröße 2 s) und der Spannungsabfall am Drehpotentiometer des Pendels
wird durch die Variable UP beschrieben (Abbildung der Regelgröße 1 α).
Fallnummer Position Pendel und Schlitten
Notwendige Bewegungs- richtung des
Schlittens
1
(Stillstand)
2
3
4
5 -
6
7
8
9 -
Abb. 17: Tabelle Fallunterscheidung
UP = 5V US = 5V
UP = 2V US = 2V
UP = 8V US = 8V
Abb. 18: Tabelle Beispielspannungen
Die Führungsgrößen werden angelehnt an die Mittelpositionen in Abb. 18 wie
folgt festgelegt.
Führungsgröße WS Schlitten: UWS = 5V
Führungsgröße Wα Pendel: UWP = 5V
24

Das 5/3-Wege-Ventil schaltet bei einer Eingangsspannung von 5V in seine
Mittelstellung. Das heißt, dass der Schlitten sich nicht bewegt. Bei
Eingangsspannungen von weniger als 5V bewegt sich der Schlitten nach links
und bei Eingangsspannung von mehr als 5V fährt der Schlitten nach rechts.
Nun gilt es die Eingangsspannungen der Regelelektronik (US: Abbildung der
Regelgröße 2 s, UP: Abbildung der Regelgröße 1 α, UWS: Abbildung der Führungsgröße WS, UWP: Abbildung der Führungsgröße Wα) miteinander
mathematisch zu verknüpfen, so dass das Ausgangssignal UY das 5/3-Wege-
Ventil entsprechend schaltet, wodurch sich der Schlitten in die gewünschten
Richtungen (siehe Abb. 17) bewegt. Die nachstehende Tabelle zeigt einen
ersten Ansatz dieser mathematischen Verknüpfung:
Abb. 19: Fallunterscheidung mit Berechnung der Beispielspannungen
Um den Signalverlauf in Verbindung mit den entsprechenden
Rechenoperationen, wie sie in Abb. 19 durchgeführt wurden, zu
veranschaulichen, wird der bisherige strukturelle Aufbau in nachstehender
Abbildung schematisch dargestellt. In dieser Schemadarstellung werden zu
Spannungen UWS und UWP jeweils noch die Spannungen UWS-fein und UWP-fein
hinzu addiert. Die Spannungen UWS-fein und UWP-fein können Werte von (-10)mV
bis (+10)mV annehmen. Da im späteren Betrieb die Spannungen UWS und UWP
sehr präzise einzustellen sind, werden hierdurch zwei Feineinstellungen
möglich gemacht.
25

UWP-fein
US
UP
UWS
UWS-fein
UWP
+
_
+
_
_ +5V UY
Legende: Additionsoperator A = E1 + E2
Subtraktionsoperator A = E1 - E2
Additionsoperator +5V A = E + 5V
+ E1
-E1 A A A E + 5V
E2 E2
Abb. 20: Aufbau 1
Die Werte für UY (Abbildung der Stellgröße) befinden sich in der letzten
Spalte in der Tabelle in Abb. 19. Wie man aus ihnen ableiten kann, würde sich
für die Fälle 1-4 und 6-8 die richtige Schalterstellung ergeben. In den Fällen 5
und 9 befindet sich das 5/3-Wege-Ventil in seiner Mittelstellung und der
Schlitten bewegt sich nicht. Aufgrund der Tatsache, dass es sich um stetige
Signale handelt und die analogen Rechenoperationen auch nur stetige Signale
liefern, gibt es unendlich viele Fälle, in denen am Ausgang 5V anliegen und
somit der Schlitten sich nicht bewegt. Diese Problemfälle treten immer dann
ein, wenn die Auslenkung des Pendelstabes aus seiner Ruhelage und die
Auslenkung des Schlittens aus seiner Mittelstellung den gleichen
Spannungsabfall liefern. Im praktischen Betrieb würde das Pendel sich
innerhalb dieser Positionen versuchen einzuregeln. Dies funktioniert natürlich
nicht, denn dabei fällt der Pendelstab zu einer Seite und gleichzeitig schlägt
der Schlitten am entsprechenden Ende des Linearantriebs an.
3.2.2.1. Eliminierung der Problemfälle
Mit der bisherigen Vorgehensweise, also durch Addition und Subtraktion der
entsprechenden Signale, lassen sich diese Problemfälle nicht beheben. Dies ist
26

der Fall, da sich alle komplexeren Additions- und Subtraktionsstrukturen, die
die geforderte Aufgabe an die Regelelektronik erfüllen, stets auf die bisherige
Struktur zurückführen lassen. Zum einen ist dafür das Assoziativ- und
Kommutativgesetz verantwortlich und zum anderen die Möglichkeit, dass sich
entsprechende Operationen gegenseitig aufheben können. Durch
mathematische Umformung und Zusammenfassung, ergeben sich stets
Rechnungen, die sich mit folgender Gleichung beschreiben lassen.
X + n · (UWP - UP) + m · (UWS - US) = UY [1]
X ist ein Spannungswert in Volt. Hier in der Regel die Addition von 5V. Die
Variablen n und m sind Elemente der reellen Zahlen.
Werden die allgemeingültigen Rechengesetze berücksichtigt, macht es
mathematisch betrachtet keinen Unterschied für das Ergebnis, in welcher
Reihenfolge die entsprechenden Operationen ausgeführt werden. Zudem spielt
die Rechenzeit hierbei auch keine Rolle.
Bei einem Analogrechner ist das anders. Die Verarbeitung der Signale dauert
einen kurzen Moment von ca. 8-10ms je nach verwendeten Bauelementen.
Dieser zeitliche Versatz und die Gegebenheit, dass die Operationen
entsprechend Abb. 20 nacheinander ausgeführt werden, lassen sich ausnutzen,
um die auftretenden Problemfälle zu eliminieren.
Dies geschieht, indem noch eine zweite Abbildung der Führungsgröße
Schlitten UWS-2 hinzugeführt wird. Von dieser Spannung UWS-2 wird die
Spannung US abgezogen und die Differenz nach der Addition von 5V wieder
zum bestehenden Signalfluss hinzuaddiert. Daraus ergibt sich, dass der Teil
des Analogrechners, der dafür sorgt, dass der Schlitten stets in die Mitte des
Linearantriebs geregelt wird, sich zweimal in der Regelelektronik befindet.
Rein mathematisch betrachtet macht diese Angelegenheit keinen Unterschied.
Man könnte ebenso eine Multiplikation mit dem Faktor zwei an der
entsprechenden Stelle durchführen.
Für die Funktion der Regelelektronik ist diese „zweite“ Regelung des
Schlittens jedoch entscheidend. Dadurch wird zusätzlich eine Regelung
geschaffen, die den Schlitten in die angestrebte Mittelposition regelt. Aufgrund
der Tatsache, dass diese Regelung nicht durch drei weitere Rechenstufen
muss, wird diese auch dreimal schneller durchgeführt.
27

Somit ergeben sich im Analogrechner praktisch zwei Regelungen. Die Eine
sorgt dafür, dass Pendel und Schlitten geregelt werden. Diese weist jedoch
noch gewisse Problemfälle auf. Eine weitere Regelung ist dann dafür
verantwortlich, dass diese Problemfälle eliminiert werden.
Somit ergibt sich nachstehende vollständige Struktur im Signalfluss.
UWS
+
UWP-fein
US
UP
UWS-fein
UWP
+
_
_
_ +5V
UY +
_
UWS-2
Legende siehe Abb. 20
Abb. 21: Aufbau 2
3.2.3. Realisierung der Rechenoperationen mit
Operationsverstärkern
Für die Regelelektronik werden elektrische Schaltungen benötigt, die
verschiedenen Spannungen Ui addieren bzw. subtrahieren können. Zusätzlich
muss das Ergebnis einer jeden Addition bzw. Subtraktion mit einem
Verstärkungsfaktor η versehen werden:
UA = η · (U1 ± U2) [2]
U1 und U2 stellen in der Formel 2die Eingangsspannungen dar und UA
repräsentiert die Ausgangsspannung.
„Unter einem Operationsverstärker versteht man einen universell anwendbaren
Gleichspannungsverstärker, der ohne äußere Beschaltung bestimmte,
standardisierte Eigenschaften zeigt. Erst die Beschaltung mit externen
28
Bauelementen ergibt die gewünschten Eigenschaften der Schaltung“
(Lohninger 1990, S. 54). Durch Verwendung von Operationsverstärkern lassen
sich mit geringem Aufwand Schaltungen erstellen, die die in vorherigen
Abschnitten angeführten Rechenoperationen einschließlich eines Verstärkers
realisieren.
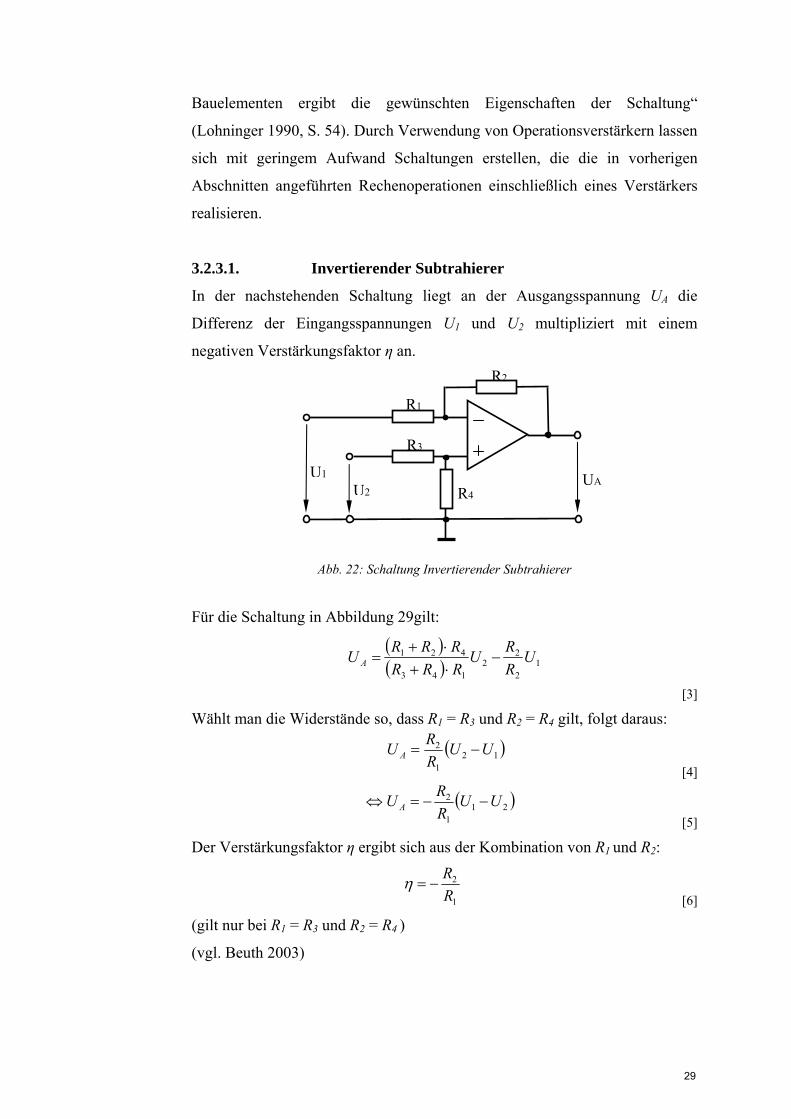
3.2.3.1. Invertierender Subtrahierer
In der nachstehenden Schaltung liegt an der Ausgangsspannung UA die
Differenz der Eingangsspannungen U1 und U2 multipliziert mit einem
negativen Verstärkungsfaktor η an.
R2
R1
R3
U1 UA U2 R4
Abb. 22: Schaltung Invertierender Subtrahierer
Für die Schaltung in Abbildung 29gilt:
( )( ) 1
2
22
143
421 URRU
RRRRRRU A −⋅+⋅+
=
[3]
Wählt man die Widerstände so, dass R1 = R3 und R2 = R4 gilt, folgt daraus:
( )121
2 UURRU A −=
[4]
( )211
2 UURRU A −−=⇔
[5]
Der Verstärkungsfaktor η ergibt sich aus der Kombination von R1 und R2:
1
2
RR
−=η[6]
(gilt nur bei R1 = R3 und R2 = R4 )
(vgl. Beuth 2003)
29

3.2.3.2. Invertierender Addierer
Bei dieser Schaltung werden die Eingangsspannungen U1 und U2 aufsummiert.
Zudem wird die Summe mit einem negativen Verstärkungsfaktor η
multipliziert.
R3
R2R1
UAU2
U1
Abb. 23: Schaltung Invertierender Addierer
Für die Ausgangsspannung in Abbildung 22 gilt folgende Gleichung.
⎟⎟⎠
⎞⎜⎜⎝
⎛+−=
3
2
1
12 R
URURU A [7]
Wählt man die Eingangswiderstände R1 und R3 gleich groß, ergibt sich:
( )211
2 UURRU A +−=
[8]
Der Verstärkungsfaktor η wird durch die Kombination R1 und R2 bestimmt.
1
2
RR
−=η[9]
(gilt nur bei R1 = R3)
(vgl. Buch Lohninger 1990 Seite 68)
3.2.3.3. Nichtinvertierender Addierer
Bei dem nichtinvertierenden Addierer handelt es sich um eine
Verstärkerschaltung, in der die beiden Eingangsspannungen U1 und U2 addiert
werden und die Ausgangsspannung keinen Vorzeichenwechsel erfährt. Der
Verstärkungsfaktor η ist somit positiv.
R1
R2
R0
R3
R4
UA
U2U1
30

Abb. 24: Schaltung Nichtinvertierender Addierer
Wie aus der Abbildung 23 zu entnehmen ist, benötigt eine solche
nichtinvertierende Rechenschaltung mehr Widerstände zur äußeren
Beschaltung des Operationsverstärkers, als es bei den invertierenden
Schaltungen der Fall ist. Dadurch ist sie zum einen anfälliger für Fehler und
zum anderen wird auch die Berechnung komplexer. Für die Beziehung
zwischen den Eingangsspannungen U1 und U2 und der Ausgangsspannung UA
gilt:
210
2
2
1
1
4
3
1111
RRR
RU
RU
RRU A
++
+⋅⎟⎟⎠
⎞⎜⎜⎝
⎛+=
[10]
Dimensioniert man die Widerstände R0, R1 und R2 von gleicher Größe, ergibt
sich:
( )214
3
3
1UUR
R
U A +⋅+
=
[11]
Der Verstärkungsfaktor η hängt dann von der Wahl der Widerstände R3 und R4
ab und das über folgende Beziehung.
3
14
3
RR
+=η
[12]
(vgl. Schröder 2006, S.7)
3.2.4. Regelelektronik aus integrierten und diskreten
Bauelementen
Zur besseren Übersichtlichkeit der Struktur der Schaltung, werden
verschiedene Bereiche nach ihrer Aufgabe eingeteilt. In den Bereichen
‚Abgleich Pendel’ und ‚Abgleich 1 Schlitten’ werden die Spannungen UWP
und UWS präzise eingestellt und die entsprechenden Differenzen
(Regeldifferenz) gebildet. Analog wird in ‚Abgleich 2 Schlitten’ die Differenz
gebildet. In diesem Bereich wird auf die Feinregelung verzichtet. Zusätzlich
werden die Ergebnisse mit einem verstellbaren Verstärkungsfaktor η versehen.
Im Bereich Kombination findet sich die Differenz aus den Abglichen von
Schlitten 1 und Pendel und auch hier wird das Ergebnis mit einem frei
wählbaren Verstärkungsfaktor versehen. Im letzten Bereich ‚Addition’ wird
31
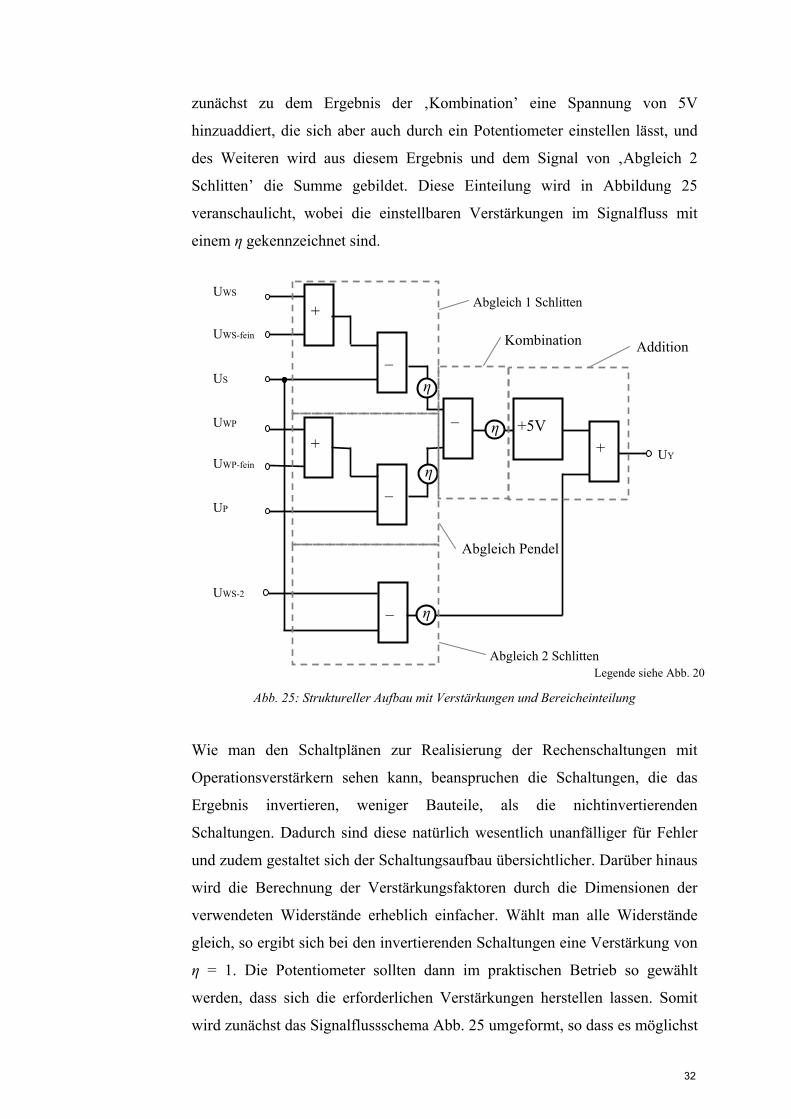
zunächst zu dem Ergebnis der ‚Kombination’ eine Spannung von 5V
hinzuaddiert, die sich aber auch durch ein Potentiometer einstellen lässt, und
des Weiteren wird aus diesem Ergebnis und dem Signal von ‚Abgleich 2
Schlitten’ die Summe gebildet. Diese Einteilung wird in Abbildung 25
veranschaulicht, wobei die einstellbaren Verstärkungen im Signalfluss mit
einem η gekennzeichnet sind.
UWP-fein
US
UP
UWS
UWS-fein
UWP
+
+
_
_
_ +5V
UY +
_ UWS-2
η
η
η
η
Abgleich 1 Schlitten
AdditionKombination
Abgleich 2 Schlitten
Abgleich Pendel
Legende siehe Abb. 20
Abb. 25: Struktureller Aufbau mit Verstärkungen und Bereicheinteilung
Wie man den Schaltplänen zur Realisierung der Rechenschaltungen mit
Operationsverstärkern sehen kann, beanspruchen die Schaltungen, die das
Ergebnis invertieren, weniger Bauteile, als die nichtinvertierenden
Schaltungen. Dadurch sind diese natürlich wesentlich unanfälliger für Fehler
und zudem gestaltet sich der Schaltungsaufbau übersichtlicher. Darüber hinaus
wird die Berechnung der Verstärkungsfaktoren durch die Dimensionen der
verwendeten Widerstände erheblich einfacher. Wählt man alle Widerstände
gleich, so ergibt sich bei den invertierenden Schaltungen eine Verstärkung von
η = 1. Die Potentiometer sollten dann im praktischen Betrieb so gewählt
werden, dass sich die erforderlichen Verstärkungen herstellen lassen. Somit
wird zunächst das Signalflussschema Abb. 25 umgeformt, so dass es möglichst
32

viele invertierte Rechenoperationen enthält. Dabei werden auch bei
ausgewählten Spannungseingängen die Vorzeichen geändert. Das lässt sich
durch die symmetrische Spannungsversorgung in der praktischen Konstruktion
gut verwirklichen. Bei den invertierenden Rechenoperationen ist stets ein (-1)
angegeben. Das Ergebnis wird bei dieser Umformung nicht verändert.
UWP-fein
- US
- UP
UWS
UWS-fein
UWP
+
+
_
_
_ +5V
UY +
_ - UWS-2
η
η
η
η
Abgleich 1 Schlitten
Addition Kombination
Abgleich 2 Schlitten
Abgleich Pendel
(-1)
(-1)
(-1) (-1) (-1)
(-1)
Legende siehe Abb. 20 (-1)
Abb. 26: Struktureller Aufbau mit invertierten Rechenoperationen
Vor dem ersten Betrieb muss festlegen werden, mit welchen Spannungs-
umfängen das System arbeiten soll. Das 5/3-Wege-Ventil benötigt eine
Betriebsspannung von 24V Gleichspannung. Diese 24V werden von einer
separaten Spannungsquelle erzeugt. Die verwendeten Operationsverstärker
vom Typ 741 (Datenblatt im Anhang) benötigen eine symmetrische
Spannungsversorgung von ±12V. Die gesamte Elektronik wird mit diesem
Pegel aufgebaut, denn alle verwendeten Potentiometer, Widerstände und
integrierten Schaltkreise funktionieren in diesem Bereich.
Auf der folgenden Seite befindet sich der vollständige Schaltplan der
Regelelektronik. Er ergibt sich aus der Struktur des Signalflusses in Abb. 26,
den Beschaltungen der Operationsverstärker zur Verwirklichung der
33
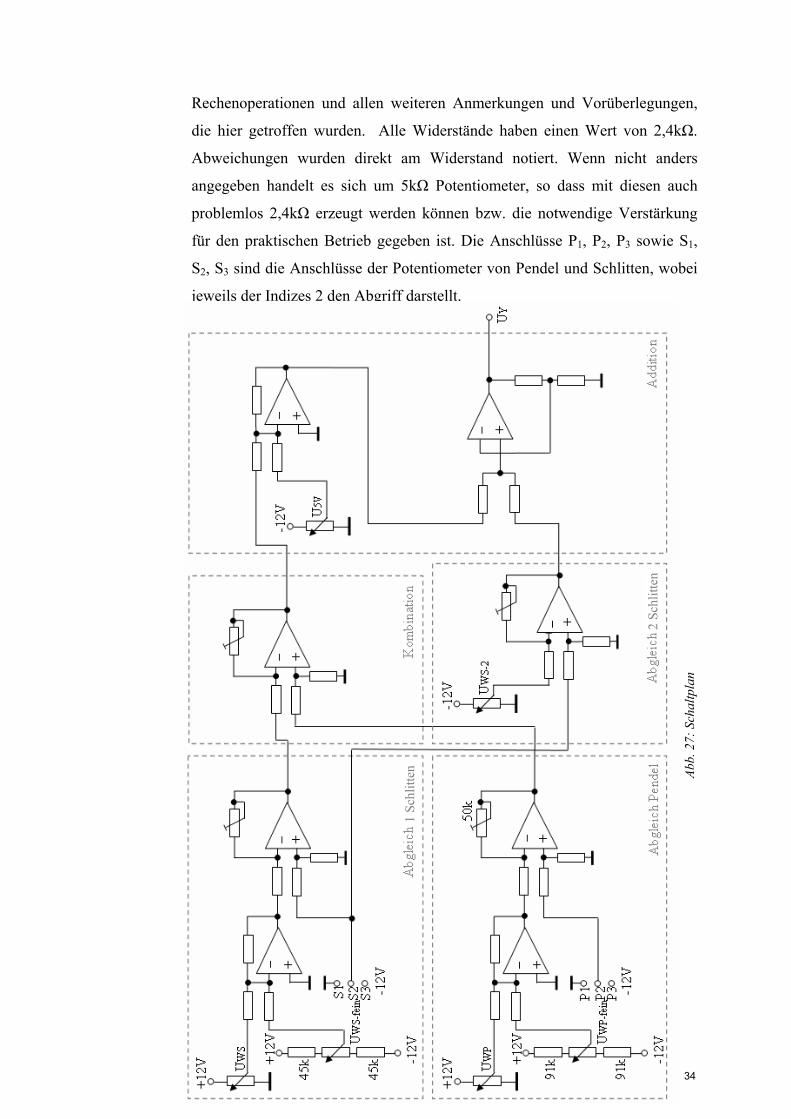
Rechenoperationen und allen weiteren Anmerkungen und Vorüberlegungen,
die hier getroffen wurden. Alle Widerstände haben einen Wert von 2,4kΩ.
Abweichungen wurden direkt am Widerstand notiert. Wenn nicht anders
angegeben handelt es sich um 5kΩ Potentiometer, so dass mit diesen auch
problemlos 2,4kΩ erzeugt werden können bzw. die notwendige Verstärkung
für den praktischen Betrieb gegeben ist. Die Anschlüsse P1, P2, P3 sowie S1,
S2, S3 sind die Anschlüsse der Potentiometer von Pendel und Schlitten, wobei
jeweils der Indizes 2 den Abgriff darstellt.
Abb.
27:
Sch
altp
lan
2 Sc
hlitt
en
1 Sc
hlitt
en
34

3.2.5. Bedienelemente und Anschlüsse
Wie man dem vollständigen Schaltplan in Abb. 27 entnehmen kann, existieren
zehn Drehpotentiometer, die während der Versuchsdurchführung zu bedienen
sind. Zudem hat die Platine auch diverse Anschlüsse. Damit durch die
Bedienung und Verkabelung der Versuch nicht unnötig kompliziert gemacht
wird, werden die Bedien- und Anschlusselemente übersichtlich und
systematisch in einem Pult angeordnet.
Die Potentiometer werden angelehnt an die Struktur des Signalflusses wieder
in die Bereiche ‚Abgleich 1 + 2 Schlitten’, ‚Abgleich Pendel’, ‚Kombination’
und ‚Addition’ eingeteilt. Die Bedienelemente, die zu einem Bereich gehören,
werden vertikal angeordnet und die Bereiche horizontal nebeneinander
positioniert. Dabei befinden sich die Verstärkungen einheitlich in der unteren
Zeile. Wenn man sich beim Arbeiten am Versuch, von links nach rechts und
von oben nach unten durch die Einstellungsmöglichkeiten arbeitet, verfolgt
man nahezu direkt den Signalfluss in der Elektronik. Zudem ist bei dieser
Anordnung leicht zu erkennen, welche Parameter enger zusammenhängen. Die
Beschriftung Vergleich stehen für die Führungsgrößen und die gestrichelten
Linien zeigen die Position der Platine (Grau) und die der Potentiometer
(Schwarz).
Addition
Verstärkung
Vergleich
Vergleich Fein Vergleich Fein
Vergleich
Verstärkung
Vergleich
Verstärkung
Kombiniert: Pendel:Schlitten 1: Schlitten 2:
Verstärkung Kombination
Abb. 28: Bedienelemente
Um die Potentiometer während der Versuchsdurchführung entsprechend
einzustellen, muss dass Signal jeweils nach den fünf Bereichen betrachtet
werden. Hierzu sind an diesen Stellen Spannungsabgriffe eingebaut. Diese
35

Anschlüsse, inklusive einen für die Masse gegen die gemessen wird, werden
als Buchsen über den Bedienelementen angebracht. Somit ist dieser Teil des
Pultes der, an dem während des Betriebs gesteckt und gestellt werden kann.
Die Reihenfolge der Buchsen ist wieder angelehnt an die Anordnung der
Potentiometer bzw. der Bereiche im Signalfluss.
Abgriffe Elektronik:
Schlitten 1 Kombination
Addition Schlitten 2
Masse Pendel
Abb. 29: Abgriffe Elektronik
Im linken Teil des Bedienpultes befinden sich alle weiteren Anschlüsse, die
allerdings nur einmal vor der Inbetriebnahme verkabelt werden müssen. Hier
sind oben angeordnet die Eingänge der symmetrischen Spannungsversorgung
für die Platine, sowie die 24V Betriebsspannung des 5/3-Wege-Ventils. Mittig
sind die Anschlüsse des 5/3-Wege-Ventils angebracht und im unteren Bereich
sind jeweils die drei Anschlüsse des Schleif- und des Drehpotentiometers
platziert.
Die Buchsenfarbe ist einheitlich schwarz. Die Farbwahl der Stecker ist zum
Teil durch die verwendeten Bauelemente vorgegeben. Wie man der Abb. 30
entnehmen kann, wurde die Farbe des entsprechenden Steckers stets an die
jeweilige Buchse geschrieben. Die Anschlüsse des Drehpotentiometers sind
die einzigen, wo die Kabel fest installiert sind und die Farben noch frei
wählbar waren. Hier wurde die Farbzuordnung bewusst willkürlich gewählt.
36

Abb. 30: Foto Bedienpult
Das gesamte Bedien- und Schaltpult ist vollständig aus Acrylglas gefertigt.
Man sieht die Platine von beiden Seiten und kann erahnen, welchen Umfang
und Aufwendigkeit hinter der Schaltung steckt. Wenn man schließlich die
Struktur und Funktion verstanden hat und die komplette Elektronik betrachten
kann, lässt sich eventuell bei den Studentinnen und Studenten die Angst vor
derartigen elektronischen Konstruktionen nehmen.
37

4. Verhalten und Handhabung im praktischen Betrieb
4.1. Verhalten
Unter dem Wort Verhalten versteht man in der Regelungstechnik die
Bewegung des Ausgangssignals eines Systems in Abhängigkeit von dessen
Eingangssignal (vgl. Reinisch 1974, S. 51). Betrachtet man das Verhalten, so
interessiert stets, wie ein System z.B. die Regelstrecke unter bestimmten
Umständen reagiert. In der Reglungstechnik finden oft Regler Verwendung,
die je nach Notwendigkeit und Möglichkeit proportionales, integrierendes oder
differentielles Verhalten herstellen. Bei dem Regelkreis im Versuchstand des
inversen Pendels betrachten wir zunächst getrennt das Verhalten der einzelnen
Elemente im Regelkreis, um so das Verhalten des gesamten Systems zu
erklären. Dieses lässt sich dann im praktischen Betrieb beobachten.
Zur Orientierung dient die Struktur des Versuchsaufbaus in Abb. 13. Die
Abbildungen der Regelgrößen Schlitten US und Pendel UP werden beide durch
lineare Potentiometer erzeugt. Durch diese werden die Positionen von
Schlitten und Pendelstab stetig proportional in Spannungen übertragen.
Begrenzt wird diese Proportionalität nur konstruktiv durch die Länge bzw.
Drehwinkel der einzelnen Potentiometer. In diesem Abschnitt herrscht reines
P-Verhalten. Das nächste Glied im Regelkreis ist die Regelelektronik. Hier
werden die stetigen Eingangssignale durch verzweigte mathematische
Operationen verarbeitet. Die Ergebnisse dieser Operationen sind auch stetig.
Hier herrscht somit auch stetig proportionales Verhalten. Die Regelelektronik
hat jedoch auch eine zeitliche Verzögerung (T-Verhalten), was sich daraus
ergibt, dass die jeweiligen Rechenstufen eine gewisse Verarbeitungszeit von 8-
10ms benötigen. Übersteuert man die Regelelektronik durch zu hohe
Eingangspegel, so bricht dieses P-T-Verhalten zusammen und am Ausgang UY
liegt lediglich die Betriebsspannung an.
Das 5/3-Wege-Proportional-Ventil und der Linearantrieb werden gemeinsam
betrachtet. Das 5/3-Wege-Proportional-Ventil soll laut Hersteller die
Steuerspannung an seinem Eingang proportional in ein Druckluftsignal
übertragen und das soll eine proportionale Bewegung des Schlittens bewirken.
Es wurde bereits in Abschnitt 2.3.1. erklärt und begründet, dass dieses
Verhalten im praktischen Betrieb hier nicht realisiert werden kann. Das reale
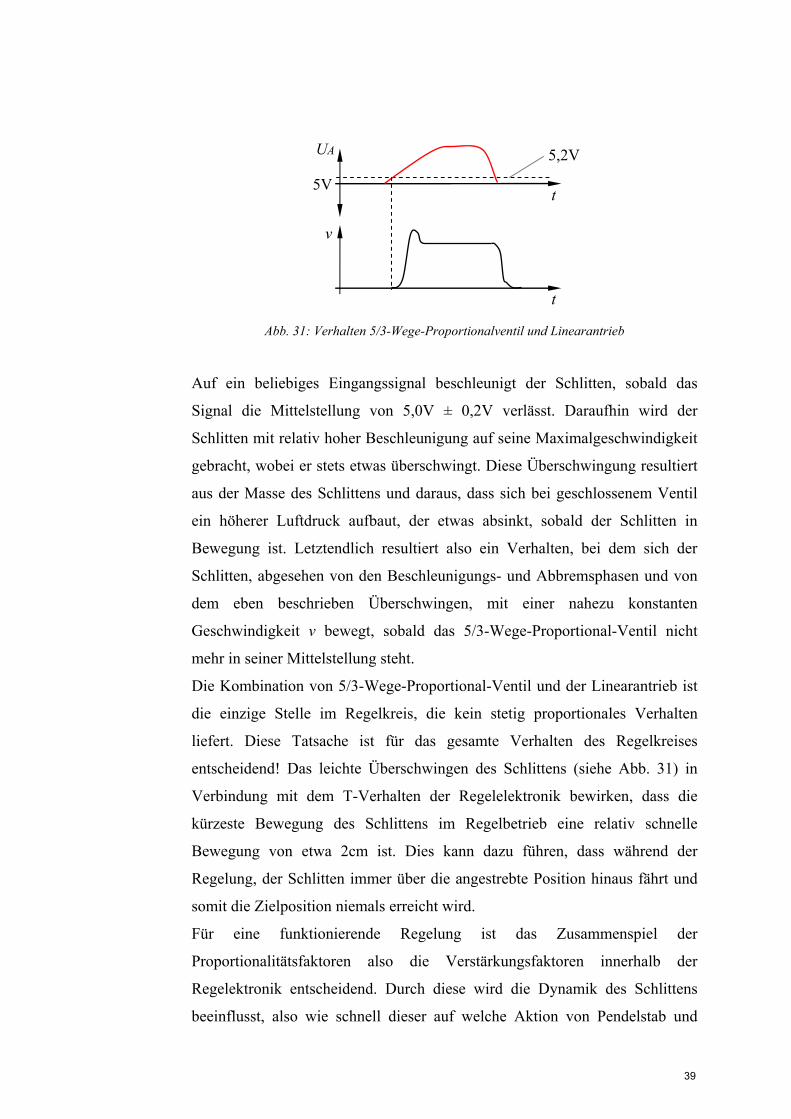
Verhalten ist in Abb. 31 skizziert.
38
5V
5,2V
t
t
v
UA
Abb. 31: Verhalten 5/3-Wege-Proportionalventil und Linearantrieb
Auf ein beliebiges Eingangssignal beschleunigt der Schlitten, sobald das
Signal die Mittelstellung von 5,0V ± 0,2V verlässt. Daraufhin wird der
Schlitten mit relativ hoher Beschleunigung auf seine Maximalgeschwindigkeit
gebracht, wobei er stets etwas überschwingt. Diese Überschwingung resultiert
aus der Masse des Schlittens und daraus, dass sich bei geschlossenem Ventil
ein höherer Luftdruck aufbaut, der etwas absinkt, sobald der Schlitten in
Bewegung ist. Letztendlich resultiert also ein Verhalten, bei dem sich der
Schlitten, abgesehen von den Beschleunigungs- und Abbremsphasen und von
dem eben beschrieben Überschwingen, mit einer nahezu konstanten
Geschwindigkeit v bewegt, sobald das 5/3-Wege-Proportional-Ventil nicht
mehr in seiner Mittelstellung steht.
Die Kombination von 5/3-Wege-Proportional-Ventil und der Linearantrieb ist
die einzige Stelle im Regelkreis, die kein stetig proportionales Verhalten
liefert. Diese Tatsache ist für das gesamte Verhalten des Regelkreises
entscheidend! Das leichte Überschwingen des Schlittens (siehe Abb. 31) in
Verbindung mit dem T-Verhalten der Regelelektronik bewirken, dass die
kürzeste Bewegung des Schlittens im Regelbetrieb eine relativ schnelle
Bewegung von etwa 2cm ist. Dies kann dazu führen, dass während der
Regelung, der Schlitten immer über die angestrebte Position hinaus fährt und
somit die Zielposition niemals erreicht wird.
Für eine funktionierende Regelung ist das Zusammenspiel der
Proportionalitätsfaktoren also die Verstärkungsfaktoren innerhalb der
Regelektronik entscheidend. Durch diese wird die Dynamik des Schlittens
beeinflusst, also wie schnell dieser auf welche Aktion von Pendelstab und
39

Schlitten reagiert. In Abschnitt ‚3.2.2. Regelungstechnische Vorgehensweise’
wurde erklärt, dass die anzustrebende zeitliche Auslenkung des Schlittens aus
der Mittelposition an eine gedämpfte Schwingung erinnern soll. Diese kann im
praktischen Betrieb durch das entsprechende Zusammenspiel der jeweiligen
Verstärkungsfaktoren innerhalb der Regelelektronik in Verbindung mit dem
Gesamtsystem bewirkt werden. Bei falscher Einstellung kann sich jedoch das
Gegenteil ergeben: Der Schlitten schwingt immer weiter aus seiner
angestrebten Mittelposition heraus und schlägt an die Grenzen des
Linearantriebs an.
Um das Regelverhalten noch weitergehend zu beeinflussen und dadurch
eventuell ein noch saubereres Regelungsverhalten zu erzeugen, könnte man
eine P-I-D-Reglerkarte zwischen Regelungselektronik und 5/3-Wege-
Proportional-Ventil schalten, wobei man durch das P-Verhalten dieser Karte
das Signal praktisch nicht mehr beeinflussen bräuchte, da dies schon in der
eigentlichen Regelelektronik geschieht. Die Stellgröße, also das
Eingangssignal des 5/3-Wege-Proportional-Ventils, könnte man damit mit
Sicherheit so beeinflussen, dass sich ein modifiziertes Regelverhalten ergeben
würde. Der limitierende Faktor in diesem Regelkreis ist aber das Verhalten
von 5/3-Wege-Proportional-Ventil in Verbindung mit dem Linearantrieb.
Deswegen würde das Zuschalten einer solchen Reglerkarte eher wenig
bringen. Die Übersichtlichkeit der Funktion des Gesamtsystems würde
dadurch auch nicht verbessert werden. Somit liegt es nahe, den Regelkreis und
sein Verhalten so zu belassen, wie er ist. Zudem ergibt sich dadurch für die
Lehre eine entsprechende Veranschaulichung, wie die jeweiligen Elemente im
Zusammenspiel das Verhalten eines Systems beeinflussen.
4.2. Bedienung und Beobachtung in der Versuchsdurchführung
Möchte man den Versuch eigenständig durchführen, sind Kenntnisse über die
Struktur und Funktion des Systems obligatorisch. Im Folgenden werden einige
Eckpunkte angegeben, die die Kalibrierung und das Einstellen des
Regelverhaltens etwas anleiten.
1. Nachdem der gesamte Versuchsaufbau verkabelt wurde, wird zunächst
die Versorgung der Druckluft geschlossen, das Pendel in seine
40

Mittelstellung und der Schlitten in die gewünschte Position gebracht.
Hierbei muss der Pendelstab ggf. festgehalten werden.
2. Nun werden die Führungsgrößen eingestellt. Da an den Abgriffen
‚Pendel’, ‚Schlitten 1’ und Schlitten 2’ jeweils die Differenz aus
Führungsgröße und Regelgröße anliegt, müssen die Führungsgrößen so
eingestellt werden, dass an diesen Abgriffen je 0V abfallen. Dabei ist
es wichtig diese Größen auf 1-2mV genau einzustellen. Trotz der
Feineinstellung erfordert diese Tätigkeit eventuell etwas
Fingerspitzengefühl.
3. Vorerst werden alle Verstärkungen in ihre Mittelposition gebracht.
Sind die Führungsgrößen korrekt eingestellt, so muss auch am Abgriff
‚Kombination’ 0V abfallen. Ist das nicht der Fall, sollte korrigiert
werden. Nun wird mit dem Drehpotentiometer ‚Addition’ der
Summand von 5V eingestellt, so dass am Abgriff ‚Addition’ 5V
abfallen.
4. Das Pendel wird jetzt an seiner Spitze mit der Hand festgehalten und
die Luftzufuhr geöffnet. Der Pendelstab muss festgehalten werden, da
es eher Zufall währe, dass das Zusammenspiel der
Verstärkungsfaktoren derart stimmig ist, dass das Pendel in seine
instabile Ruhelage geregelt wird.
5. Beim Einstellen des Regelungsverhalten sind zunächst die
Verstärkungen von ‚Pendel’, ‚Schlitten 1’ und Schlitten 2’ so
einzustellen, dass jeder dieser Bereiche das Verhalten des Schlittens
beeinflusst. Man merkt den jeweiligen Einfluss, wenn man die
einzelnen Verstärkungen weiter hinein und wieder heraus dreht.
Entscheidend ist das Zusammenspiel dieser Verstärkungen. Man kann
an dieser Stelle keine absolut allgemeingültige Anweisung gegeben,
wie die Einstellung richtig ist. Man muss sich selber in der Praxis
damit auseinander setzen. Wichtig ist, dass die Verstärkungen nicht zu
gering sind und der Schlitten sich nicht nur träge und langsam bewegt.
Das Maß der Amplitude und mögliches Aufschwingen ist zunächst
nicht so wichtig, da noch immer die Pendelspitze mit der Hand
festgehalten wird. Dass die Schlittenbewegung stets versucht, die
Abweichungen des Pendelwinkels wieder auszugleichend und dabei
41

selber nicht aus seine angestrebte Position zu verlassen, ist an dieser
Stelle wichtiger.
Zieht man die Pendelspitze mit der Hand in eine Richtung, sollte der
Schlitten versuchen diese Störung zu kompensieren.
6. Befinden sich die bisher verwendeten Verstärkungen in einer zufrieden
stellenden Relation, so wird als letztes die Verstärkung der
‚Kombination’ langsam herausgenommen. In der Kombination finden
sich beide Signale ‚Pendel’ und ‚Schlitten 1’. Diese Verstärkung wird
so weit reduziert, bis das System nicht mehr aufschwingt, trotzdem
aber alle Abweichungen herausregelt. Nun sollte der Pendelstab in
seiner instabilen Ruhelage balanciert werden.
Hinweise:
• Messgeräte stören den Betrieb nicht und es können auch mehrere
eingesteckt sein.
• Ändert man die Verstärkungen, kann es passieren, dass sich der Offset
der Rechenschaltungen ein wenig verschiebt und die Führungsgrößen
etwas nachgestellt werden müssen. Da diese aber im Millivoltbereich
genau einzustellen sind, sollte man sie nach Einstellen der Verstärkung
zwischendurch öfter kontrollieren.
Welche Beobachtungen und Erfahrungen können die Studentinnen und
Studenten während der Durchführung dieses Versuches machen? –
Selbstverständlich wie bei allen Praktika und Versuchen wird der Umgang mit
den verwendeten Geräten und Werkzeugen geschult. In diesem Fall der
Umgang mit Spannungsquellen, Spannungsmessgeräten, Pneumatik-
apparaturen, Oszilloskop und nicht zuletzt mit einem Regelkreis, der ein reales
Verhalten aufweist, welches man zudem noch beobachten kann.
Zum einen sieht man die Bewegungen von Pendel und Schlitten und man kann
direkt beobachten, wie Veränderungen der einzelnen Parameter das Ergebnis
beeinflussen. Es lässt sich deutlich das unstetige Verhalten erkennen, was sich
aus dem Verhalten des 5/3-Wege-Ventil in Verbindung mit dem Linearantrieb
ergibt. Es lassen sich aber auch mit einem Oszilloskop die Eigenschaften der
42

einzelnen Elemente des Regelkreises untersuchen, wobei sich deutlich das P-
Verhalten, was fast alle Bauteile aufweisen, darstellen lässt. Man kann über
die verschiedenen Spannungsabgriffe der Regelelektronik sogar die
Verarbeitung des Signals innerhalb der Elektronik verfolgen und beobachten.
Mithilfe eines Speicheroszilloskops lässt sich die zeitliche Verzögerung (T-
Verhalten) der verschiedenen Signalwege innerhalb der Regelelektronik
zeigen, durch die die Regeleinrichtung letztendlich erst funktioniert. Indem
man Schritt für Schritt das Verhalten der jeweiligen Elemente im Regelkreis
mit dem Oszilloskop untersucht, kann man schnell erklären, warum in der
Summe das inverse Pendel sich so verhält, wie man es mit bloßen Augen
beobachten kann.
Es lassen sich aber auch allgemeine regelungstechnische Inhalte in diesem
Versuch wieder finden. Regelungen sind immer begrenzt. Sei es konstruktiv,
wie es in diesem Fall durch die Dimension des Linearantriebes ist, oder sei es
in der Regelung an sich. Man kann die Verstärkungen entweder so einstellen,
dass die Regelung kleine Auslenkungen des Pendels kompensiert oder dass
etwas größere Auslenkungen möglich sind. Dann ist das Verhalten aber meist
nicht sehr sauber. Eine weitere Grenze ist, dass zu große Auslenkungen durch
diesen Versuchsaufbau gar nicht bewältigt werden können.
An dieser Stelle lässt sich der Transfer ziehen, dass eine Regelung in der
Praxis stets nur so gut wie notwendig ist. Die Aufgabe hier beinhaltet ein
inverses Pendel zu konstruieren und zu bauen, welches funktioniert und als
Versuchsstand in der Lehre eingesetzt werden kann. Die Notwendigkeit war
nicht, ein absolut perfektes Regelverhalten herzustellen und dabei das System
noch viel umfangreicher und verworrener zu gestalten.
Letztendlich lassen sich an diesem Versuchsstand auch die Komplexität einer
solchen Anlage und das Zusammenspiel der einzelnen Komponenten sehen.
43

5. Schlusswort
Neben diesem schriftlichen Teil ist das Ergebnis dieser Arbeit der
Versuchstand eines inversen Pendels, welcher im ‚Institut für Technik und ihre
Didaktik’ an der Westfälischen Wilhelms-Universität in Münster in der
Studentenausbildung eingesetzt werden soll. Deswegen wurde bei der
Entwicklung stets darauf Wert gelegt didaktische Aspekte, die in dem
schriftlichen Teil thematisiert wurden, in die Konstruktion und den Bau mit
einfließen zu lassen. Neben dem Ziel ein inverses Pendel zu konstruieren und
zu bauen, wurde somit immerzu berücksichtigt, dass dieses inverse Pendel als
Versuchsstand eingesetzt werden soll.
Es blieb leider nicht aus, dass sich in der Summe eine relativ komplexe
Apparatur ergeben hat. Deswegen ist es unumgänglich, dass sich die
Studierenden, die an diesem Versuch arbeiten, sich vorher ausreichend mit
dem strukturellen und funktionellen Aufbau dieses Versuchsstandes
auseinandersetzen. Dann lassen sich aber viele regelungstechnische Begriffe,
Eigenschaften und Verhaltensweisen in diesem Versuchsaufbau wieder finden.
Es lässt sich deren Zusammenspiel in einem realen System beobachten,
welches sich zudem auf einige Beispiele im alltäglichen Leben übertragen
lässt.
Der schriftliche Teil dieser Arbeit stellt die Vorgehensweise bei der
Entwicklung und Konstruktion vor. Darüber hinaus wird in diesem eine grobe
Schrittfolge zur Handhabung gegeben und auch vorweggenommen, wie das
Verhalten des Regelkreises ist und welche interessanten regelungstechnischen
Eigenschaften man an diesem inversen Pendel beobachten kann.
Findet dieser Versuchsstand Anklang bei den Studentinnen, Studenten und
Dozenten, so wird er sich hoffentlich fest in das bestehende
Versuchsprogramm eingliedern. Gerade im Bereich Regelungstechnik gibt es
auf der einen Seite sehr viele Beispiele und auf der anderen Seite nur sehr
wenige Versuche, in den man praktisch und mit einem halbwegs sinnvollem
Ziel die theoretischen Inhalte der Regelungstechnik aus der Vorlesung
praktisch anwenden kann. Dieser Versuchsstand setzte genau dort an.
44

6. Literaturverzeichnis
Lohninger, Hans: Angewandte Mikroelektronik. München 1990
Schröder, Hartmut: Skriptum zur Vorlesung Grundlagen der
Informationsverarbeitung 1 Sommersemester 2006. Universität Dortmund
2006 Abgerufen am 14.03.2009 unter: http://arteclab.artec.uni-
bremen.de/courses/mechatronik/material/GrundlagenInformationsverarbeitung1.pdf
Beuth, Klaus; Beuth, Olaf: Digitaltechnik. Würzburg 2003
Hein, Christian: Was ist Technik? In: Skript zur Vorlesung ‚Einführung in die
Technik’, 2005 Abgerufen am 14.03.2009 unter: http://www.uni-
muenster.de/Physik.TD/einfuehrung_technik.html
Westfälische Wilhelms-Universität Münster: Studienordnung für den Studiengang Technik mit dem Abschluss Erste Staatsprüfung für das Lehramt an Grund- Haupt- und Realschulen und den entsprechenden Jahrgangsstufen der Gesamtschulen, Studienschwerpunkt Haupt-, Real- und Gesamtschule, Münster 2006 Meyer, Hilbert: Unterrichtsmethoden 2: Praxisband. Berlin 1987 Nolting, Wolfgang: Grundkurs theoretische Physik 1 – Klassische Mechanik. Berlin 2002 Reinisch, Karl: Kybernetische Grundlagen und Beschreibung kontinuierlicher Systeme. Berlin 1974
45

7. Abbildungsverzeichnis
Alle Abbildungen ohne Quellenangabe sind eigens erstellte Zeichnungen,
Skizzen oder Fotografien.
Abb. 1: Physikalisches Pendel Seite 4
Abb. 2: Fotografie Segway® Seite 5 Quelle: http://www.solarcenter.de/produkte/segway_personal_transporter_x2-113/
(abgerufen am 16.03.2009)
Abb. 3: Regelkreis Seite 7
Abb. 4: Tabelle regelungstechnische Größen 1 Seite 7
Abb. 5: Linearantrieb Seite 10 Quelle: http://www.festo-didactic.com/de-
de/lernsysteme/trainingspakete/562/komponenten-
pneumatik/linearantrieb,pneumatisch,mit-fuehrung-und-zubehoer.htm
(abgerufen am 16.03.2009)
Abb. 6: Wegmesssystem Seite 10 Quelle: http://www.festo-didactic.com/de-
de/lernsysteme/trainingspakete/562/komponenten-pneumatik/linearpotentiometer-
wegmesssystem.htm (abgerufen am 16.03.2009)
Abb. 7: 5/3-Wege-Proportionalventil Seite 11 Quelle: http://www.festo-didactic.com/de-
de/lernsysteme/trainingspakete/562/komponenten-pneumatik/5-3-wege-
proportionalventil.htm (abgerufen am 16.03.2009)
Abb. 8: Einschalt-/Filterventil Seite 12 Quelle: http://www.festo-didactic.com/de-
de/lernsysteme/trainingspakete/562/komponenten-pneumatik/einschaltventil-mit-
filterregelventil,5-m.htm (abgerufen am 16.03.2009)
Abb. 9: Stoßdämpfer Seite13 Quelle: http://www.festo-didactic.com/de-
de/lernsysteme/trainingspakete/562/komponenten-pneumatik/stossdaempfer.htm
(abgerufen am 16.03.2009)
Abb. 10: Profiltafel Seite 13 Quelle: http://www.festo-didactic.com/de-de/lernsysteme/trainingspakete/die-neuen-
festo-geraetesaetze/jetzt-umruesten-von-blau-auf-silber.-die-profiltafel-mit-
unschlagbaren-vorteilen-auch-auf-ihren-bewaehrten-labormoebeln..htm
(abgerufen am 16.03.2009)
Abb. 11: Struktur des bisherigen Festosystems Seite 14
Abb. 12: Tabelle regelungstechnische Größen 2 Seite 15
46

Abb. 13: Skizze Versuchapparatur Seite 17
Abb. 14: Foto Klemmung Pendelstab Seite 19
Abb. 15: Foto Mechanik Seite 20
Abb. 16: Gedämpfte Schwingung Seite 22
Abb. 17: Tabelle Fallunterscheidung Seite 24
Abb. 18: Tabelle Beispielspannungen Seite 24
Abb. 19: Fallunterscheidung mit Berechnung der Beispielspannungen
Seite 25
Abb. 20: Aufbau 1 Seite 26
Abb. 21: Aufbau 2 Seite 28
Abb. 22: Schaltung Invertierender Subtrahierer Seite 29
Abb. 23: Schaltung Invertierender Addierer Seite 30
Abb. 24: Schaltung Nichtinvertierender Addierer Seite 30
Abb. 25: Struktureller Aufbau mit Verstärkungen und Bereicheinteilung
Seite 32
Abb. 26: Struktureller Aufbau mit invertierten Rechenoperationen
Seite 33
Abb. 27: Schaltplan Seite 34
Abb. 28: Bedienelemente Seite 35
Abb. 29: Abgriffe Elektronik Seite 36
Abb. 30: Foto Bedienpult Seite 36
Abb. 31: Verhalten 5/3-Wege-Proportionalventil und Linearantrieb
Seite 39
47

8. Anhang
A.1. Fotografie Gesamtapparatur
A.2. Bestückungsplan Platine
48

A.3. Ätzvorlage Oberseite
A.4. Ätzvorlage Unterseite
49

A.5. Datenblatt Operationsverstärker
©1995 National Semiconductor Corporation Quelle: http://www2.produktinfo.conrad.com/datenblaetter/175000-199999/175935-da-01-en-
LM741CN_TO_DIP.pdf (abgerufen am 16.03.09)
50

54
9. Schlusserklärung
Ich, Hannes Felix Boyke, versichere, dass ich die schriftliche Hausarbeit
selbständig verfasst und keine anderen als die angegebenen Quellen und
Hilfsmittel benutzt habe. Alle Stellen der Arbeit, die anderen Werken dem
Wortlaut oder Sinn nach entnommen wurden, habe ich in jedem Fall unter
Angabe der Quelle als Entlehnung kenntlich gemacht. Das gleiche gilt auch
für die beigegebenen Zeichnungen, Kartenskizzen und Darstellungen.
Münster, den ___________ ______________________
Hannes Felix Boyke
51


















