FEM

of 25
description
FEM
Transcript of FEM
-
Kapitel I
Einfhrung
Bei partiellen Differentialgleichungen unterscheidet man mehrere Typen, insbesonderesind bei Differentialgleichungen 2. Ordnung die elliptischen, hyperbolischen und para-bolischen von groer Bedeutung. Die Theorie und die numerische Behandlung sind beiden drei Typen sehr unterschiedlich. So ist der Typ z. B. auch ausschlaggebend dafr,ob Anfangs-, Rand- oder Anfangsrandbedingungen sinnvoll sind. Ein solches Phnomengibt es nicht bei gewhnlichen Differentialgleichungen.
Im Mittelpunkt der Methode der Finiten Elemente steht die numerische Behandlungelliptischer Differentialgleichungen. Dennoch ist die Kenntnis der Unterschiede zwischenden drei Typen wichtig. Dazu werden einige elementare Eigenschaften erlutert. In diesemRahmen soll herausgestellt werden, dass bei Differentialgleichungen vom elliptischen Typdie Vorgabe von Randwerten und nicht die von Anfangswerten sinnvoll ist.
Bei der numerischen Lsung elliptischer Probleme unterscheidet man wiederumzwischen den Differenzenverfahren und den Variationsmethoden. Zu letzteren gehrt dieMethode der Finiten Elemente. Obwohl Finite Elemente gerade bei komplizierteren Geo-metrien als anpassungsfhiger gelten, setzt man bei einfachen Problemen noch oft Dif-ferenzenverfahren ein. Der Grund dafr ist der einfachere Zugang, und dieser lsst esuns auch angebracht erscheinen, eine kurze Betrachtung der Differenzenverfahren vo-ranzustellen.
D. Braess, Finite Elemente, DOI 10.1007/978-3-642-34797-9_1, Springer-Verlag Berlin Heidelberg 2013
-
1. Beispiele und Typeneinteilung
Beispiele
Wir betrachten zunchst einige Beispiele von partiellen Differentialgleichungen 2. Ord-nung, die in Physik und Technik hug vorkommen und die Prototypen von elliptischen,hyperbolischen bzw. parabolischen Gleichungen darstellen.
1.1 Potentialgleichung. Sei ein Gebiet im R2. Gesucht ist eine Funktion u auf mit
uxx + uyy = 0. (1.1)Zu dieser Differentialgleichung 2. Ordnung gehrt die Vorgabe von Randwerten.
Man identiziere den R2 mit der Gauschen Zahlenebene der komplexen Zahlen. Istw(z) = u(z) + iv(z) eine in holomorphe Funktion, so gengen der Realteil u und derImaginrteil v der Potentialgleichung. Aus der Funktionentheorie ist ferner bekannt, dassu und v im Innern beliebig oft differenzierbar sind und ihr Maximum sowie ihr Minimumam Rande annehmen.
Eine einfache Lsungsformel gibt es fr den Kreis := {(x, y) R2; x2+ y2 < 1}.Bei Einfhrung von Polarkoordinaten x = r cos, y = r sin erkennt man, dass dieFunktionen
rk cos k, rk sin k fr k = 0, 1, 2, . . .der Potentialgleichung gengen. Wenn man die Randwerte in eine Fourier-Reihe ent-wickelt
u(cos, sin ) = a0 +
k=1(ak cos k + bk sin k),
lsst sich die Lsung im Innern gem
u(x, y) = a0 +
k=1rk(ak cos k + bk sin k) (1.2)
darstellen.
Der Differentialoperator in (1.1) ist der 2-dimensionale Laplace-Operator.Allgemeinsetzt man fr Funktionen von d Variablen
u :=d
i=1
2ux2i
.
Ferner ist die Potentialgleichung ein Spezialfall der Poisson-Gleichung.
-
1. Beispiele und Typeneinteilung 3
1.2 Poisson-Gleichung. Sei ein Gebiet im Rd , d = 2 oder 3. Wenn die Ladungsdichtef : R in bekannt ist, gengt die Spannung u der Poisson-Gleichung
u = f (x) in . (1.3)
Zur Differentialgleichung (1.3) sind genauso wie bei der Potentialgleichung Randwertevorzugeben.
1.3 Das Plateau-Problem als Prototyp einer Variationsaufgabe. ber einen festenDraht sei (wie z. B. bei einer Trommel) eine ideal elastische Membran gespannt. DerDraht werde durch eine geschlossene, rektizierbare Kurve im R3 beschrieben und lassesich durch Parallelprojektion so auf die x y-Ebene projizieren, dass eine doppelpunkt-freie Kurve entsteht. Die Lage der Membran lsst sich dann als Graph, d.h. durch eineFunktion u(x, y) darstellen. Wegen der Elastizitt nimmt sie die Form an, bei welcherdie Oberche
1 + u2x + u2y dxdy
minimal wird.
Dieses nichtlineare Variationsproblem kann man zwecks Vereinfachung nherungs-weise lsen. Fr kleine Werte von ux und uy kann man den Integranden wegen
1 + z =
1+ z2 + O(z2) durch einen quadratischen Ausdruck ersetzen und gelangt zu der Aufgabe
12
(u2x + u2y) dxdy min! (1.4)
Dabei sind die Werte von u auf dem Rand durch die gegebene Kurve vorgegeben.Das Minimum wird nun durch die zugehrige Eulersche Gleichung
u = 0 (1.5)
charakterisiert.
Da solche Variationsaufgaben in Kapitel II genauer betrachtet werden, verizierenwir hier die Bedingung (1.5) nur unter der Voraussetzung, dass eine Minimallsung u inC2() C0() existiert. Eine Lsung in C2() C0() bezeichnet man als klassischeLsung. Setze
D(u, v) :=
(uxvx + uyvy) dxdy
und D(v) := D(v, v). Es gilt die binomische Formel
D(u + v) = D(u) + 2D(u, v) + 2D(v).
Sei v C1() und v| = 0. Da u +v fr R eine zulssige Vergleichsfunktion frdas Minimumproblem darstellt, ist bei = 0 notwendigerweise
D(u + v) = 0, und
-
4 I. Einfhrung
wir erhalten mit der binomischen Formel D(u, v) = 0. Mit dem Greenschen Integralsatzfolgt
0 = D(u, v) =
(uxvx + uyvy) dxdy
=
v(uxx + uyy) dxdy +
v(uxdy uy dx).
Das Randintegral verschwindet wegen der Randbedingung fr v. Das Gebietsintegralverschwindet nur fr alle v C1(), wenn u = uxx + uyy = 0 ist. Damit ist (1.5)bewiesen.
1.4 Die Wellengleichung als Prototyp hyperbolischer Differentialgleichungen. DieBewegung in einem idealen Gas wird durch 3 Gesetze bestimmt. Wie blich wird dieGeschwindigkeit mit v, die Dichte mit und der Druck mit p bezeichnet.
1. Kontinuittsgleichung.
t= 0 div v.
Wegen der Massenerhaltung ist die nderung der Masse in einem (Teil-) VolumenV gleich dem Flu ber die Oberche, das ist
V v ndO. Aus dem Gauschen
Integralsatz folgt die obige Gleichung. Dabei wird durch die feste Dichte 0 appro-ximiert.
2. Newtonsches Gesetz.
0v
t= grad p.
Der Druckgradient induziert ein Kraftfeld, das die Beschleunigung der Teilchenbewirkt.
3. Zustandsgleichung.p = c2.
In idealen Gasen ist der Druck bei konstanter Temperatur proportional zur Dichte.Aus den drei Gesetzen folgt
2
t2p = c2
2
t2= c2
t0 div v = c2 div(0 v
t)
= c2 div grad p = c2p.
Andere Beispiele fr die Wellengleichung
utt = c2u
ergeben sich bei 2 Raumdimensionen fr die schwingende Membran oder im eindimen-sionalen Fall mit dem schwingenden Seil. Bei einer Raumdimension vereinfacht sich dieGleichung, wenn c noch auf 1 normiert wird:
utt = uxx . (1.6)
-
1. Beispiele und Typeneinteilung 5
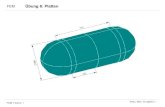
(x, t)
x t x + t Abhngigkeitsbereich
Abb. 1. Abhngigkeitsbereich bei der Wellengleichung
Zu sinnvollen Problemen fhrt die Wellengleichung zusammen mit Anfangsbedingungen
u(x, 0) = f (x),ut (x, 0) = g(x).
(1.7)
1.5 Lsung der eindimensionalen Wellengleichung. Zur Lsung der Wellengleichung(1.6), (1.7) nimmt man eine Variablentransformation vor
= x + t, = x t. (1.8)
Mit Hilfe der Kettenregel ux = u x + u x usw. lassen sich die Ableitungen leichtumrechnen
ux = u + u, uxx = u + 2u + u,ut = u u, utt = u 2u + u.
(1.9)
Durch Einsetzen der Formeln (1.9) in (1.6) folgt
4u = 0.Die allgemeine Lsung lautet
u = () + ()= (x + t) + (x t), (1.10)
wobei und Funktionen sind. Man bestimmt sie durch Einsetzen der Anfangswerte(1.7)
f (x) = (x) + (x),g(x) = (x) (x).
Nach Differenzieren der ersten Gleichung kann man die Gleichungen nach und
ausen
= 12( f + g) () = 1
2f () + 1
2
x0
g(s) ds,
= 12( f g) () = 1
2f () 1
2
x0
g(s) ds.
Mit (1.10) folgt schlielich
u(x, t) = 12[ f (x + t) + f (x t)] + 1
2
x+txt
g(s) ds. (1.11)
-
6 I. Einfhrung
Bemerkenswert an der Lsung ist, dass u(x, t) nur von denAnfangswerten zwischenden Punkten x t und x + t abhngt. [Wenn man die Konstante c nicht normiert, wirdanstatt dessen der Bereich von x ct bis x + ct erfasst.] Dies entspricht der Tatsache,dass sich im zugrundeliegenden physikalischen System alle Phnomene nur mit endlicherGeschwindigkeit ausbreiten knnen.
Ein weiteres Phnomen ist beachtenswert. Die Lsungsformel (1.11) ist unter derVoraussetzung zweimaliger Differenzierbarkeit hergeleitet worden. Wenn die Anfangs-werte f und g nicht differenzierbar sind, sind es , und schlielich u auch nicht. DieFormel (1.11) bleibt aber auch im nichtdifferenzierbaren Fall richtig und sinnvoll.
1.6 Die Wrmeleitungsgleichung als Prototyp einer parabolischen Gleichung. SeiT (x, t) die Temperaturverteilung in einem Krper. Dann ist der Wrmeu
F = grad T,wobei die Diffusionskonstante eineMaterialkonstante ist. Die Energienderung in einemVolumenelement setzt sich wegen der Energieerhaltung aus dem Wrmeu ber dieOberche und der zugefhrten Wrme Q zusammen. Mit denselben Argumenten wiebei der Massenerhaltung im Beispiel 1.4 folgt
Et
= div F + Q= div grad T + Q= T + Q,
wenn als konstant angenommen wird. Mit der spezischen Wrme a = E/T (d.h.einer weiteren Materialkonstanten) erhalten wir schlielich
Tt
= aT + 1
aQ.
Speziell fr einen eindimensionalen Stab und Q = 0 ergibt sich mit = /a fr u = T :ut = uxx , (1.12)
wobei man die Normierung = 1 wieder durch eine passende Festlegung der Maein-heiten erreichen kann.
Bei parabolischen Problemen hat man es typischerweise mit Anfangsrandwertauf-gaben zu tun.
Wir betrachten zunchst die Wrmeverteilung auf einen Stab endlicher Lnge .Dann ist auer den Anfangswerten zu spezizieren, ob an den Rndern die Temperaturoder die Menge des Wrmeusses vorgegeben wird. Der Einfachheit halber beschrnkenwir uns auf den Fall, dass die Temperaturvorgaben an beiden Enden zeitunabhngig sind.Dann kann o.E.d.A.
= 1, = und u(0, t) = u(, t) = 0
-
1. Beispiele und Typeneinteilung 7
angenommen werden, vgl. Aufgabe 1.10. Fr die Anfangswerte sei die Entwicklung indie Fourier-Reihe berechnet:
u(x, 0) =
k=1ak sin kx, 0 < x < .
Offensichtlich sind die Funktionen ek2t sin kx Lsungen der Wrmeleitungsgleichungut = uxx . Also ist
u(x, t) =
k=1akek
2t sin kx, t 0 (1.13)
eine Lsung zu den gegebenen Anfangswerten.
Im Falle eines unendlich langen Stabes entfallen die Randwerte. Man bentigtAussagen ber das Anwachsen bzw. Abklingen der Anfangswerte im unendlichen, diehier ignoriert werden sollen. Dann gibt es eine Darstellung der Lsungen mit Fourier-Integralen anstatt Fourier-Reihen. Aus dieser gewinnt man eine Darstellung, in welcherdie Anfangswerte f (x) := u(x, 0) explizit auftreten.
u(x, t) = 12
t
+
e2/4t f (x ) d. (1.14)
Man beachte, dass die Lsung im Punkte (x, t) von den Anfangswerten auf dem ganzenGebiet abhngt. Die Ausbreitungsgeschwindigkeit ist nicht endlich.
Typeneinteilung
Bei gewhnlichen Differentialgleichungen kann man eine Gleichung sowohl in Anfangs-als auch in Randwertaufgaben antreffen. Dies stimmt nicht mehr bei partiellen Differen-tialgleichungen. Ob Anfangs- oder Randwerte vorzugeben sind, hngt vom Typ der Dif-ferentialgleichung ab.
Die allgemeine lineare Differentialgleichung zweiter Ordnung in n Variablen hat dieGestalt
n
i,k=1aik(x)uxi xk +
ni=1
bi (x)uxi + c(x)u = f (x). (1.15)
Falls die Funktionen aik, bi und c unabhngig von x sind, spricht man von einer Dif-ferentialgleichung mit konstanten Koefzienten. Weil fr zweimal stetig differenzierbareFunktionen uxi xk = uxk xi gilt, kann o.E.d.A. die Symmetrie aik(x) = aki (x) vorausgesetztwerden. Die zugeordnete n n-Matrix
A(x) := (aik(x))
ist dann symmetrisch.
-
8 I. Einfhrung
1.7 Denition. (1) Die Gleichung (1.15) heit elliptisch im Punkte x , wenn A(x) positivdenit ist.(2) Die Gleichung (1.15) heit hyperbolisch im Punkte x , wenn A(x) einen negativen undn 1 positive Eigenwerte hat.(3) Die Gleichung (1.15) heit parabolisch im Punkte x , wenn A(x) positiv semidenit,aber nicht denit ist und der Rang von (A(x), b(x)) gleich n ist.(4) Eine Gleichung heit elliptisch, hyperbolisch oder parabolisch, wenn sie fr allePunkte des Gebiets die betreffende Eigenschaft hat.
Im elliptischen Fall wird die Gleichung (1.15) hug kurz als
L u = f (1.16)
geschrieben und L als elliptischer Differentialoperator der Ordnung 2 bezeichnet. DerAusdruck aik(x)uxi xk ist dann der Hauptteil von L . Bei hyperbolischen und para-bolischen Problemen ist eine Richtung ausgezeichnet. Es ist in der Regel die Zeit, so dassman hyperbolische Differentialgleichungen oft in die Form
utt + Lu = f (1.17)
bzw. parabolische in die Formut + Lu = f (1.18)
bringen kann, wobei L ein elliptischer Differentialoperator ist.
Wenn Differentialgleichungen invariant gegenber Bewegungen (also gegenberTranslationen und Drehungen) sind, dann hat der elliptische Operator die Form
Lu = a0u + c0u.
Diese Invarianz lag bei den beschriebenen Beispielen vor.
Sachgem gestellte Probleme
Was passiert, wenn man eine partielle Differentialgleichung in einem Rahmen betrachtet,der eigentlich fr einen anderen Typ richtig ist?
Wir wenden uns zur Beantwortung dieser Frage zunchst der Wellengleichung (1.6)zu und versuchen, das Randwertproblem in dem Gebiet
= {(x, t) R2; a1 < x + t < a2, b1 < x t < b2}
zu lsen. Es ist ein gedrehtes Rechteck, das in den Koordinaten , gem (1.8)achsenparallel ist. Wegen u(, ) = () + () drfen sich die Funktionswerte aufgegenberliegenden Seiten nur durch eine Konstante unterscheiden. Die Randwertaufgabemit allgemeinen Daten ist also nicht lsbar. Bei anders geformten Gebieten folgt mit
-
1. Beispiele und Typeneinteilung 9
hnlichen, wenn auch etwas schwierigeren berlegungen, dass die allgemeine Lsbarkeitunmglich ist.
Als nchstes werde die Potentialgleichung (1.1) im Gebiet {(x, y) R2; y 0} alsAnfangswertaufgabe untersucht, wobei y die Rolle der Zeit zugewiesen wird. Sei n > 0.Fr die Vorgaben
u(x, 0) = 1n
sin nx,
uy(x, 0) = 0liefert
u(x, y) = 1n
cosh ny sin nx
offensichtlich eine formale Lsung, die wie eny anwchst. Da n beliebig gro sein kann,ziehen wir folgende Konsequenz: Es gibt beliebig kleine Anfangswerte, zu denen bei y =1 beliebig groe Lsungen gehren. Lsungen sind also, sofern sie berhaupt existieren,nicht stabil gegenber Strungen der Anfangswerte.
Mit denselben Argumenten erkennt man an der Darstellung (1.13) sofort, dass sichbei parabolischen Gleichungen die Lsungen nur fr t > t0, aber nicht fr t < t0 gutartigverhalten. Die Integration der Wrmeleitungsgleichung in Richtung der Vergangenheitwre manchmal schon wnschenswert, wie die folgende Fragestellung zeigt.
Fr einen Stab sei die Temperaturverteilung zu berechnen, auf die man ihn zurZeit t = 0 bringen msste, damit er nach einer Transportzeit t1 > 0 eine vorgegebeneTemperatur(verteilung) hat. Dies ist ein bekanntes schlecht gestelltes Problem. Laut (1.13)kann man hchstens die langwelligen Anteile der Temperatur zur Zeit t1 vorgeben, aberkeineswegs die kurzwelligen.
Solche berlegungen fhrten Hadamard [1932] dazu, die Lsbarkeit von Differen-tialgleichungen (und von hnlich strukturierten Aufgaben) zusammen mit der Stabilittder Lsung zu betrachten.
1.8 Denition. Ein Problem heit sachgem gestellt (engl. well posed), wenn eineLsung existiert, diese eindeutig ist und stetig von den vorgegebenen Daten abhngt.Andernfalls heit das Problem schlecht gestellt (engl. improperly posed).
Ob ein Problem sachgem gestellt ist, kann im Prinzip von der Wahl der Normender betreffenden Funktionenrume abhngen. So erkennen wir z. B. aus (1.11), dass dieAufgabe (1.6), (1.7) sachgem gestellt ist. Die durch (1.11) denierte Abbildung
C(R) C(R) C(R R+)f, g u
ist stetig, wenn C(R) mit der blichen Maximumnorm und C(RR+) mit einer gewich-teten Norm versehen wird:
u := maxx,t
{ |u(x, t)|1 + |t | }.
Die sachgeme Aufgabenstellung fr elliptische und parabolische Probleme ergibt sichaus dem Maximumprinzip, das im nchsten dargestellt wird.
-
10 I. Einfhrung
Aufgaben
1.9 Die Potentialgleichung sei im Kreis := {(x, y) R2; x2 + y2 < 1} mit derRandwertvorgabe fr die Ableitung in Normalenrichtung
ru(x) = g(x) fr x
zu lsen. Man bestimme die Lsung, wenn g als Fourier-Reihe ohne konstanten Term
g(cos, sin ) =
k=1(ak cos k + bk sin k)
gegeben ist. (Dass das konstante Glied verschwindenmu, erkennt man zwar amErgebnis,der tiefere Grund wird allerdings erst in Kap. II 3 deutlich.)
1.10 Die Wrmeleitungsgleichung (1.12) sei fr einen Stab mit Daten = 1, = und u(0, t) = u(, t) = T0 = 0 gegeben. Wie whlt man die Skalen, d.h. die Zahlen frdie Transformation t t , y y, u u + , um das gegebene Problem aufdas normierte zurckzufhren?
1.11 Man lse das Wrmeleitungsproblem fr einen Stab, fr den nur am linken Randdie Temperatur xiert ist. Am rechten Rand sei der Stab isoliert, dort verschwindet alsoder Wrmeu und mit ihm T/x .
Hinweis: Die Funktionen k(x) = sin kx, k ungerade, erfllen die Randbedingungenk(0) = 0, (2 ) = 0.
1.12 Man betrachte eine Lsung der Wellengleichung. Zur Zeit t = 0 gelte u = 0auerhalb einer beschrnkten Menge. Man zeige, dass die Energie
Rd[u2t + c2(grad u)2] dx (1.19)
konstant ist.
Hinweis: Man schreibe die Wellengleichung in der symmetrischen Form
ut = c div v,vt = c grad u,
und stelle die Zeitableitung des Integranden in (1.19) als Divergenz dar.
-
2. Maximumprinzip
Bei der Analyse von Differenzenverfahren spielt das diskrete Analogon des sogenanntenMaximumprinzips eine wichtige Rolle. Deshalb betrachten wir vorab eine einfache Fas-sung des Prinzips.
Im folgenden sei stets ein beschrnktes Gebiet im Rd , wobei wir uns spter aufden Fall d = 2 beschrnken werden. Ferner sei durch
Lu := d
i,k=1aik(x)uxi xk (2.1)
ein linearer elliptischer Differentialoperator L deniert. Die Matrix A = (aik) sei alsosymmetrisch und positiv denit in . Der Leser mchte sich die Koefzientenfunktio-nen aik als stetig vorstellen, obwohl die Aussagen unter schwcheren Voraussetzungengelten. Zur Gewinnung von Abschtzungen bentigen wir eine quantitative Fassung derElliptizitt.
2.1 Denition. Ein elliptischer Operator der Form (2.1) heit gleichmig elliptisch,wenn mit einer Zahl > 0
A(x) 2 fr Rd , x (2.2)gilt. Die Zahl wird als Elliptizittskonstante bezeichnet.
2.2 Maximumprinzip. Fr u C2() C0() seiLu = f 0 in .
Dann nimmt u sein Maximum auf dem Rand von an. Wenn darber hinaus u seinMaximum an einem inneren Punkt von annimmt und zusammenhngend ist, ist u auf konstant.
Beweis (der erstenAussage des Satzes. Fr die zweite sei auf Gilbarg & Trudinger [1983]verwiesen.)
(1) Wir fhren den Beweis zunchst unter der strkeren Voraussetzung f < 0.Angenommen, es sei x0 und
u(x0) = supx
u(x) > supx
u(x).
Bei einer linearen Koordinatentransformation x = Ux lautet der Differential-operator in den neuen Koordinaten
Lu = i,k
(UT A(x)U )ikui k .
-
12 I. Einfhrung
Wegen der Symmetrie knnen wir eine orthogonale Matrix U whlen, mit der UT A(x0)Udiagonal wird. Aus der Denitheit von A(x0) schlieen wir, dass die Diagonalelementepositiv sind. Weil x0 Extremalpunkt ist, gilt bei x = x0
ui = 0, ui i 0.
Dies bedeutetLu(x0) =
i
(UT A(x0)U )i i ui i 0
im Widerspruch zu Lu(x0) = f (x0) < 0.(2) Sei nun nur f (x) 0 angenommen, und es gebe ein x = x mit u(x) >
supx u(x). Die Hilfsfunktion h(x) := (x1 x1)2 + (x2 x2)2 + . . . + (xd xd)2 istauf beschrnkt. Wenn > 0 hinreichend klein gewhlt wird, nimmt also auch dieFunktion
w = u + hihr Maximum bei einem Punkt x0 im Innern an. Wegen hxi xk = 2ik ist
Lw(x0) =Lu(x0) + Lh(x0)= f (x0) 2
i
aii (x0) < 0.
Wie im ersten Teil des Beweises ergibt sich ein Widerspruch.
Beispiele
Das Maximumprinzip ist brigens in den Beispielen 1.11.3 auch von der Aufgaben-stellung her einleuchtend. Wenn in einem Gebiet die Ladungsdichte verschwindet, istdie Spannung durch die Potentialgleichung bestimmt. Im ladungsfreien Zustand kann dieSpannung im Innern nicht grer sein als das Maximum am Rand. Dasselbe trifft auchzu, wenn nur negative Ladungstrger vorhanden sind.
Weiter betrachten wir die Variationsaufgabe 1.3. Man setze c := maxx u(x).Wenn die Lsung u das Maximum nicht am Rande annimmt, wird durch
w(x) := min{u(x), c}
eine von u verschiedene Vergleichsfunktion deniert. Das Integral D(w,w) existiert imSinne von Lebesgue, und mit 1 := {(x, y) ; u(x) < c} ist
D(w,w) =1
(u2x + u2y) dxdy 0 erforderlich. Dannist Lu(x0) c(x0)u(x0) Lu(x0) 0. Auerdem ist durch den Hauptteil Lu cuein elliptischer Operator deniert. Deshalb kann der Beweis wie fr Satz 2.2 vollzogenwerden.
Aufgaben
2.4 Fr einen gleichmig elliptischen Differentialoperator der Form (2.4) zeige mandie stetige Abhngigkeit der Lsung von den Daten.
-
3. Differenzenverfahren
Bei der numerischen Behandlung elliptischer Differentialgleichungen mit Differenzenver-fahren berechnet man Nherungswerte der Lsung auf den Punkten eines rechteckigenGitters. Dabei werden die Ableitungen durch Differenzenquotienten ersetzt. Die Stabili-tt liefert hier ein diskretes Analogon des Maximumprinzips, das als diskretes Maxi-mumprinzip bezeichnet wird. Der Einfachheit halber sei ein Gebiet im 2-dimensionalenRaum.
Diskretisierung
Zur Diskretisierung wird ber das Gebiet ein 2-dimensionales Gitter gelegt. Der Ein-fachheit halber beschrnken wir uns auf quadratische Gitter, die Maschenweite werde mith bezeichnet:
h := {(x, y) ; x = kh, y = h mit k, Z},h := {(x, y) ; x = kh oder y = h mit k, Z}.
Berechnet werden die Nherungswerte fr die Funktionswerte von u auf h . Die Nhe-rungswerte denieren eine Funktion U auf h h . Hug werden wir U auch alsVektor auffassen, wobei die Dimension gleich der Zahl der Gitterpunkte ist.
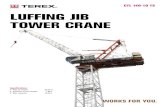
Abb. 2. Gitter bei der Diskretisierung
Fr jeden Punkt zi = (xi , yi ) von h erhlt man durch die Auswertung der Diffe-rentialgleichung Lu = f eine Gleichung. Dabei werden die Ableitungen durch Differen-zenquotienten ersetzt. Der betreffende Gitterpunkt wird als Zentrum betrachtet, und dieNachbarpunkte werden entsprechend den Himmelsrichtungen bezeichnet (s. Abb. 3).
Fr Punkte, deren Abstand vom Rand grer als h ist, haben die vier Nachbarneinen einheitlichen Abstand (s. Abb. 2). Dagegen braucht man fr Punkte in der Nhe des
-
16 I. Einfhrung
N(x, y + hN )
(x hW , y) (x, y) (x + hO , y) W Z O
(x, y hS)S
Abb. 3.Koordinaten der Nachbarpunkte in den vier Himmelsrichtungen bei unterschied-lichen Schrittweiten
Randes Formeln, in denen hO = hW und hN = hS sein darf. Man berechnet mittels derTaylorschen Formel
uxx = 2hO(hO + hW )uO 2
hOhWuZ + 2hW (hO + hW )uW + O(h) fr u C
3().
(3.1)Im Spezialfall gleicher Schrittweite, d.h. im Fall hO = hW = h ergibt sich eine einfachereFormel und auerdem fr den Abbruchfehler die Ordnung 2:
uxx = 1h2 (uO 2uZ + uW ) + O(h2) fr u C4(). (3.2)
Entsprechend lauten die Formeln, wenn uyy durch die Werte uZ , uS und uN approximiertwerden. Der Differenzenquotient, welcher der gemischtenAbleitung uxy entspricht, ben-tigt entweder noch die Werte in NW und SO oder aber in NO und SW.
Bei der Diskretisierung der Poisson-Gleichung u = f entsteht ein System derForm
ZuZ + OuO + SuS + WuW + NuN = h2 f (xZ ) fr xZ h . (3.3)
Dabei sind die Gleichungen (3.3) wie folgt zu lesen: Fr jedes xZ h ist uZ derzugehrige Funktionswert. Die Gren mit einer Himmelsrichtung als Index beziehensich auf den betreffenden Nachbarn von xZ . Bei fester Schrittweite und Gleichungen mitkonstanten Koefzienten sind die Koefzienten fr alle Punkte, also fr alle Glei-chungen in (3.3) gleich. Man drckt sie dann auch durch einen Differenzenstern (engl.stencil) [
NW N N OW Z OSW S SO
]
(3.4)
aus. Insbesondere erhalten wir fr den Laplace-Operator aus (3.2) den sogenannten Stan-dard-Fnf-Punkte-Stern
1h2
[ 11 +4 1
1
]
-
3. Differenzenverfahren 17
Eine hhere Ordnung fr den Diskretisierungsfehler liefert der Neun-Punkte-Stern fr denOperator 112 (8u(x, y)+u(x + h, y)+u(x h, y)+u(x, y + h)+u(x, y h),also fr den gemittelten Laplace-Operator
16h2
[1 4 14 20 41 4 1
]
Diesen Stern ndet man in der Literatur auch unter der Bezeichnung Mehrstellenformel.
3.1 Algorithmisches Vorgehen bei der Diskretisierung des Dirichlet-Problems.1. Whle eine Schrittweite h > 0. Ermittle h und h .2. Seien n und m die Anzahl der Punkte von h bzw. h . Bei der Nummerierung der
Punkte vonh whle man Zahlen von 1 bis n. In der Regel erfolgt die Nummerierungso, dass die Punkte nach den Koordinaten (xi , yi ) lexikographisch geordnet werden. Die Randpunkte erhalten Nummern von n + 1 bis n + m.
3. Setze fr die Randpunkte die gegebenen Werte ein
Ui = u(zi ) fr i = n + 1, . . . , n + m.
4. Fr jeden inneren Punkt zi h schreibe man die Differenzengleichung mit zi alsMittelpunkt
=Z ,O,S,W,NU = f (zi ) (3.5)
auf, die das diskrete Analogon zu Lu(zi ) = f (zi ) darstellt. Wenn ein Nach-barpunkt z zum Rand h gehrt, bringe man den Term durch Subtraktion vonU in (3.5) auf die rechte Seite.
5. In Schritt 4 wird ein System von n Gleichungen in n Unbekannten Ui erstellt:
AhU = f.
Lse dieses Gleichungssystem und identiziere die Lsung U als Nherungslsungvon u auf dem Gitter h . U wird auch als numerische Lsung bezeichnet.
9 8
10 3 7 6
11 1 2
4 5
Abb. 4. Gitter im Beispiel 3.2
-
18 I. Einfhrung
3.2 Beispiele. (1) Sei ein rechtwinklig gleichschenkliges Dreieck mit Katheten derLnge 7, s. Abb. 4. Zu lsen sei die Laplace-Gleichung u = 0 mit Dirichlet-Randbedin-gungen. Fr h = 2 enthlt h drei Punkte. Es entsteht ein Gleichungssystem fr U1,U2und U3:
U1 14U2 14U3 = 14U4 +
14U11
16U1 + U2 = 16U5 +
13U6 + 13U7
16U1 + U3 = 13U8 +
13U9 + 16U10.
(2) Zu lsen sei die Poisson-Gleichung im Einheitsquadrat
u = f in = [0, 1]2,u = 0 auf .
Es werde mit einem Gitter der Maschenweite h = 1/m berzogen. Das entstehendeGleichungssystem wird dann bersichtlicher bei Benutzung von Doppelindizes Ui j u( im ,
jm ), 1 i, j m 1. Es entsteht das Gleichungssystem
4Ui, j Ui1, j Ui+1, j Ui, j1 Ui, j+1 = fi, j , 1 i, j m 1 (3.6)
mit fi, j = h2 f ( im , jm ). Die Terme mit Indizes 0 oder m gelten als nicht geschrieben.
Diskretes Maximumprinzip
Beim Standard-5-Punkte-Stern (und auch im Beispiel 3.2) wird jederWert als gewichtetesMittel von Nachbarwerten erhalten. Dann ist offensichtlich kein Wert grer als dasMaximum ber alle Nachbarn. Dies ist ein Spezialfall der Theorie fr Differenzensterne,deren Koefzienten ein bestimmtes Vorzeichenverhalten aufweisen.
3.3 Stern-Lemma. Sei k 1. Fr die Zahlen i und pi , 0 i k, geltei < 0 fr i = 1, 2, . . . , k
ki=0
i 0,k
i=0i pi 0.
Ferner sei p0 0 oderk
i=0 i = 0. Dann folgt aus p0 max1ik pi die Gleichheit
p0 = p1 = . . . = pk . (3.7)
Beweis. Aus den Voraussetzungen folgt
ki=1
i (pi p0) =k
i=0i (pi p0) =
ki=0
i pi p0k
i=0i 0.
-
3. Differenzenverfahren 19
In der links stehenden Summe sind alle Summanden wegen i < 0 und pi p0 0nicht negativ. Also hat jeder Summand den Wert 0. Aus i = 0 folgt nun (3.7).
Im folgenden ist zu beachten, dass die topologische Struktur durch die Diskreti-sierung verndert werden kann. Wenn zusammenhngend ist, bedeutet das noch nicht,dass (mit der richtigen Analogie) auch h zusammenhngend ist. Die Situation in Abb.5 fhrt zu einem Gleichungssystem mit zerfallender Matrix. Erst eine hinreichend kleineMaschenweite garantiert, dass die Matrix nicht zerfllt.
Abb. 5. Zusammenhngendes Gebiet , fr das h nicht zusammenhngend ist
3.4 Denition. h heit (diskret) zusammenhngend, wenn zu jedem Punktepaar vonh ein Streckenzug existiert, der entlang der Gitterlinien und ganz in verluft.
Ein Differenzenverfahren fr die Poisson-Gleichung fhrt offenbar genau dann zueinem nicht zerfallenden Gleichungssystem, wenn h diskret zusammenhngend ist.
Nun sind wir in der Lage, das diskrete Maximumprinzip zu formulieren. Manbeachte, dass die Voraussetzungen fr den Standard-5-Punkte-Stern des Laplace-Opera-tors erfllt sind.
3.5 Diskretes Maximumprinzip. Sei U eine Lsung des linearen Gleichungssystems,das aus der Diskretisierung der elliptischen Gleichung
Lu = f in mit f 0
herrhrt. Der Differenzenstern zu jedem Gitterpunkt in h genge folgenden drei Bedin-gungen:
i) Alle Koefzienten, abgesehen von dem des Zentrums, sind nicht positiv.ii) Der Koefzient in Ostrichtung sei negativ: O < 0.iii) Die Summe aller Koefzienten ist nicht negativ.
Dann istmaxzih
Ui max ( maxzjh
Uj , 0). (3.8)
Wenn das Maximum im Innern angenommen wird, die Koefzienten in den Hauptrich-tungen O , S, W und N negativ sind und h diskret zusammenhngend ist, dann ist Ukonstant.
-
20 I. Einfhrung
Beweis. (1) Wenn das Maximum bei einem Punkt zi h , also im Innern angenommenwird, stimmtUi mit denWerten an allen Nachbarpunkten berein, die im Differenzensternvon zi auftreten. Dies folgt aus dem Stern-Lemma, wenn UZ mit p0 sowie UO ,US, . . .mit p1, p2, . . . identiziert werden.
(2) Die Behauptung des Satzes folgt nun mittels der Technik des Marschierens zumRand. Man betrachte alle Punkte von h und h , die auf derselben horizontalen Gitter-linie wie der Punkt zi liegen. Durch Induktion folgt aus (1), dass bei allen Punkten aufdieser Linie zwischen zi und dem ersten Randpunkt, der angetroffen wird, das Maximumangenommen wird.
(3) Wenn h zusammenhngend ist, kann man von zi zu jedem Punkt zk in h einenStreckenzug gem Denition 3.4 whlen. Indem man den Schluss gem (2) wiederholt,folgt Ui = Uk und U ist konstant.
Wenn die Voraussetzungen des diskreten Maximumprinzips erfllt sind, gelten auchEigenschaften, die denen der Folgerungen 2.3 genau entsprechen. Insbesondere sei aufdas Vergleichsprinzip und die stetige Abhngigkeit von f und von den Randdaten hinge-wiesen. Eine weitere wollen wir explizit nennen.
3.6 Folgerung. Wenn dieVoraussetzungen des diskreten Maximumprinzips 3.5 erfllt sind,ist das Gleichungssystem AhU = f in 3.1(5) eindeutig lsbar.Beweis. Das zugehrige homogene Gleichungssystem AhU = 0 entspricht der Diskreti-sierung der homogenen Differentialgleichung mit Nullrandbedingungen. Nach 3.5 istmax Ui = min Ui = 0. Also hat das homogene System nur die triviale Lsung, und dieMatrix des Gleichungssystems ist nicht singulr.
-
4. Eine Konvergenztheorie fr Differenzenverfahren
Die Konvergenz von Differenzenverfahren folgt aus einfachen berlegungen, wenn dieLsung u gengend glatt bis zum Rand ist und die zweiten Ableitungen beschrnkt sind.Obwohl die Voraussetzungen sehr einschneidend sind, erhlt man einen ersten Eindruckder Konvergenztheorie. Bei schwcherenVoraussetzungen ist eine erheblich aufwendigereAnalyse erforderlich, s. z.B. Hackbusch [1986].
Konsistenz
Um den Formalismus nicht unntig aufzublhen, werden wir mit Lh den Differenzen-operator (Differenzenstern) eines Verfahrens und das Verfahren selbst bezeichnen. Ins-besondere ist fr u C() mit Lhu die Auswertung des Differenzenoperators auf demGitter gemeint. Die Matrix des entstehenden Gleichungssystems erhlt das Symbol Ah .
4.1 Denition. Ein Differenzenverfahren Lh heit konsistent mit der elliptischen Glei-chung Lu = f , wenn
Lu Lhu = o(1) auf h fr h 0
fr jede Funktion u C2() gilt. Ein Verfahren hat die Konsistenzordnung m, wenn frjedes u Cm+2()
Lu Lhu = O(hm) auf h fr h 0
gilt.
Die mittels Taylorscher Formel hergeleiteten 5-Punkte-Formeln fr den Laplace--Operator haben nach (3.1) die Ordnung 1 bei beliebigen Gittern und die Ordnung 2 imsymmetrischen Fall.
Lokaler und globaler Fehler
DieAussagen ber die Konsistenz beziehen sich auf den lokalenFehler, d.h. auf LuLhu.Fr die Konvergenz des Verfahrens ist dagegen der globale Fehler auf h
(zi ) := u(zi ) Ui
ausschlaggebend. Den Zusammenhang liefert eine
-
22 I. Einfhrung
4.2 Differenzengleichung fr den globalen Fehler. Sei
Lu = f in und
AhU = Fdas zugehrige lineare Gleichungssystem ber h mit Fi = f (zi ). Ferner gelte fr dieRandpunkte
U (zj ) = u(zj ) fr zj h .Mit dem lokalen Fehler r := Lu Lhu auf h ergibt sich dann wegen der Linearitt desDifferenzenoperators fr den globalen Fehler :
(Lh)i = (Lhu)(zi ) (AhU )i= (Lhu)(zi ) f (zi ) = (Lhu)(zi ) (Lu)(zi )= ri .
(4.1)
Also kann man als Lsung einer diskreten Randwertaufgabe interpretieren
Lh = r in h, = 0 auf h .
(4.2)
4.3 Bemerkung. Wenn man in (4.2) diejenigenVariablen eliminiert, die zu h gehren,bekommt man ein System der Form
Ah = r.Dabei ist der Vektor Dabei ist Ah die im Algorithmus 3.1 eingefhrte Matrix miti = (zi ) fr zi h . Die Konvergenz ist also gesichert, wenn r gegen 0 strebt frh 0 und wenn auerdem die Inversen L1h beschrnkt bleiben. Letzteres bezeichnetman als Stabilitt. Man sagt: Konsistenz und Stabilitt bewirken zusammen Konvergenz.
Um den Formalismus in der Strungsrechnung gem (4.1) zu verdeutlichen, un-terbrechen wir die Rechnung fr eine formale Betrachtung. Wir interessieren uns fr dieDifferenz der Lsungen der beiden Gleichungssysteme
Ax = b,(A + F)y = b,
wobei F als kleine Fehlermatrix aufgefasst wird. Offensichtlich ist (A+F)(x y) = Fx .Also ist der Fehler in der Lsung xy = (A+F)1Fx klein, wenn F klein und (A+F)1beschrnkt ist.
Bei der Abschtzung des globalen Fehlers mittels der Strungsrechnung ist zubeachten, dass sich die gegebene elliptische Gleichung und die Differenzengleichung aufverschiedene Rume beziehen. Anstatt der Norm der Inversen A1h werden wir lieberdie Lsungen der Differenzengleichungen abschtzen. Die Interpretation der Gleichungals diskretisiertes Problem ist dabei hilfreich.
-
4. Eine Konvergenztheorie fr Differenzenverfahren 23
4.4 Hilfssatz. Sei im Kreis BR(0) := {(x, y) R2; x2 + y2 < R2} enthalten. Mit demStandard 5-Punkte-Stern Lh sei V Lsung der Gleichung
LhV = +1 in h,V = 0 auf h .
(4.3)
Dann ist
0 V (xi , yi ) 14 (R2 x2i y2i ). (4.4)
Beweis.Man betrachte die Funktionw(x, y) := 14 (R2x2y2) und setze Wi = w(xi , yi ).Da w ein Polynom zweiten Grades ist, verschwinden die bei der Bildung des Differenzen-sterns vernachlssigten Ableitungen, d.h. es ist (LhW )i = Lw(xi , yi ) = 1. Auerdemist W 0 auf . Aus dem Vergleichsprinzip folgt V W , aus dem MinimumprinzipV 0, und (4.4) ist bewiesen.
Wesentlich ist, dass (4.4) eine von h unabhngige Schranke liefert. Der Hilfs-satz lsst sich auf alle elliptischen Differentialgleichungen bertragen, bei denen dieDifferenzenapproximation fr Polynome vom Grad 2 keine Diskretisierungsfehler liefert.In der Abschtzung ist dann der Faktor 14 durch eine Zahl zu ersetzen, in welche dieElliptizittskonstante eingeht.
4.5 Konvergenzsatz. Wenn die Lsung der Poisson-Gleichung eine C2-Funktion ist unddie Ableitungen uxx und uyy in gleichmig stetig sind, konvergieren die mit Hilfe des5-Punkte-Sterns gewonnenen Nherungen gegen die Lsung. Es gilt
maxzh
|Uh(z) u(z)| 0 fr h 0. (4.5)
Beweis. Durch die Taylor-Entwicklung im Punkt (xi , yi ) erkennt man, dass
Lhu(xi , yi ) = uxx (i , yi ) uyy(xi , i )
ist, wobei i und i passende Zwischenwerte darstellen. Wegen der gleichmigen Stetig-keit strebt der lokale Diskretisierungsfehler maxi |ri | gegen 0. Aus (4.2) und Hilfssatz 4.4folgt
max |i | R2
4 max |ri | (4.6)
und damit Konvergenz.
Analog erhlt man mittels (4.6) O(h) bzw. O(h2) Abschtzungen fr den globalenFehler, falls u in C3() bzw. in C4() enthalten ist.
-
24 I. Einfhrung
Grenzen der Konvergenztheorie
Die Voraussetzungen des Konvergenzsatzes an die Ableitungen sind hug zu einschnei-dend.
4.6 Beispiel. Gesucht sei die Lsung der Potentialgleichung im Einheitskreis zu den(Dirichlet-)Randwerten
u(cos, sin ) =
k=2
1k(k 1) cos k.
Wegen der absoluten und gleichmigen Konvergenz stellt die Reihe eine stetige Funktiondar. Die Lsung der Randwertaufgabe lautet nach (1.2) in Polarkoordinaten
u(x, y) =
k=2
rk
k(k 1) cos k. (4.7)
Auf der x-Achse ist die zweite Ableitung
uxx (x, 0) =
k=2xk2 = 1
1 x
in der Nhe des Randpunktes (1, 0) unbeschrnkt, und Satz 4.5 ist nicht direkt anwendbar.
Eine vollstndige Konvergenztheorie ndet man z. B. bei Hackbusch [1986]. Siebenutzt die Stabilitt der Differenzenoperatoren im Sinne der L2-Norm, whrend hierdie Maximum-Norm zugrundegelegt wurde, (s. jedoch auch Aufgabe 4.8). Weil wir unsschwerpunktmig den Finiten Elementen zuwenden wollen, beschrnken wir uns aufeine einfache Verallgemeinerung.
Mit einem Approximationsargument lsst sich der Konvergenzsatz so erweitern,dass er zumindest beim Kreis fr beliebige stetige Randwerte anwendbar wird undein unbeschrnktes Anwachsen der Ableitungen nicht mehr strt. Nach dem Appro-ximationssatz von Weierstra ist jede periodische stetige Funktion beliebig gut durchtrigonometrische Polynome approximierbar. Zu gegebenen > 0 gibt es also ein trigono-metrisches Polynom
v(cos, sin ) = a0 +m
k=1(ak cos k + bk sin k)
mit |v u| < 4 auf . Sei V die Lsung des Differenzenverfahrens zu
v(x, y) = a0 +m
k=1rk(ak cos k + bk sin k).
-
4. Eine Konvergenztheorie fr Differenzenverfahren 25
Aus dem Maximumprinzip und dem diskreten Maximumprinzip schlieen wir
|u v| < 4
in , |U V | < 4
in h . (4.8)
Man beachte, dass die zweite Abschtzung in (4.8) uniform fr alle h gilt. Da fr dieFunktionen aus der abgebrochenen Fourier-Reihe die Ableitungen (bis zur Ordnung 4)beschrnkt sind, ist laut Konvergenzsatz |V v| < 2 in h fr hinreichend kleines h.Aus der Dreiecksungleichung folgt nun
|u U | |u v| + |v V | + |V U | < in h .Die explizite Darstellung fr die Lsungen der Poisson-Gleichung auf dem Einheits-
kreis wurde letzten Endes nur benutzt, um die Dichtheit der Randwerte zu erhalten, diezu guten Lsungen gehren. Wenn wir die Voraussetzung abstrakt formulieren, erhaltenwir die folgende Verallgemeinerung.
4.7 Satz. Diejenigen Lsungen der Poisson-Gleichung, deren Ableitungen uxx und uyy in gleichmig stetig sind, seien dicht in der Menge
{u C(); Lu = f }.Dann konvergieren die mit Hilfe des 5-Punkte-Sterns gewonnenen Nherungen gegen dieLsung, und es gilt (4.5).
Aufgaben
4.8 Sei Lh der Differenzenoperator, den man mit (3.1) aus dem Laplace-Operator erhlt,und h,0 die Menge der (inneren) Punkte von h , zu denen alle 4 Nachbarn ebenfalls zuh gehren. Wenn man bercksichtigen will, dass der Konsistenzfehler am Rande grersein darf, bentigt man in Analogie zu (4.3) die Lsung von
LhV = 1 in h\h,0LhV = 0 in h,0
V = 0 auf h .Man zeige (evtl. der Einfachheit halber fr ein Quadrat)
0 V h2 in h .4.9 Das Eigenwertproblem
u = u in = [0, 1]2,u = 0 auf
zur Poisson-Gleichung im Einheitsquadrat hat die Eigenlsungen
uk(x, y) = sin kx sin y, k, = 1, 2, . . . (4.9)mit den Eigenwerten (k2 + 2)2. Man zeige, dass die Restriktion der Funktionen aufdas Gitter die Eigenfunktionen des Differenzenoperators (3.4) darstellt, wenn h = 1/nist. Werden die kleinen oder die groen Eigenwerte besser approximiert?
Kapitel I Einfhrung 1. Beispiele und TypeneinteilungBeispieleTypeneinteilungSachgem gestellte ProblemeAufgaben
2. MaximumprinzipBeispieleFolgerungenAufgaben
3. DifferenzenverfahrenDiskretisierungDiskretes Maximumprinzip
4. Eine Konvergenztheorie fr DifferenzenverfahrenKonsistenzLokaler und globaler FehlerGrenzen der KonvergenztheorieAufgaben