Grenzen von SROIQ bei der Unterstützung der Modellierung von Multi-Agenten-Plänen
4
{ STUDENT’S CORNER / MODELLIERUNGSSPRACHE Grenzen von SROIQ bei der Unterstützung der Modellierung von Multi-Agenten-Plänen Stephan Opfer Einleitung Um Verhalten und Koordination von Multi-Agenten- Systemen zu beschreiben, ist ein der Komplexität angemessener Modellierungsformalismus notwen- dig. Einer der aktuellsten Formalismen und zugleich Kontext unserer Untersuchungen ist ALICA – A Lan- guage for Interactive Cooperative Agents [9]. Die Planstruktur eines ALICA-Programms beinhal- tet weitverbreitete Modellierungskonzepte, wie endliche Automaten, Aufgaben, Planhierarchien, Alternativpläne, Kardinalitäten, Vor-, Laufzeit- und Nachbedingungen [7]. Daher sind unsere Ergebnisse auch für andere Beschreibungslogik nutzende Formalismen relevant. Das Ziel einer auf Beschreibungslogik basierten Unterstützung zur Modellierung von Multi-Agenten-Plänen ist die Ver- besserung der Planqualität und der Effizienz des Modellierungsprozesses. Ob ein Plan wohlgeformt ist, kann unter Berücksichtigung der Planstruktur und des an den Bedingungen annotierten domä- nenspezifischen Wissens logisch geschlussfolgert werden. Die bei der Verwendung eines auf Beschrei- bungslogik basierenden Ansatzes zur Verfügung stehende OWL-2.0-Technologie [2, 6] vereinfacht den Austausch und die Erweiterung des domänen- spezifischen Wissens. Dies verbessert somit auch die Domänenunabhängigkeit des Modellierungsforma- lismusses selbst. Im Folgenden wird die allgemeine ALICA-Planstruktur erläutert, um dann auf die pro- blematischen Schlussfolgerungsaufgaben und deren Umsetzung einzugehen. Unterstützende Schlussfolgerungsaufgaben Abbildung 1 zeigt die abstrakte Struktur eines ALICA-Programms. Das Programm umfasst vier Pläne. Einen Wurzelplan, welcher nur die Standard- aufgabe mit einem endlichen Automaten, bestehend aus Zustand Z 0 , verknüpft. Betreten Agenten einen Zustand, so müssen sie die enthaltenen Teile des ALICA-Programms ausführen. Im Fall von Zu- stand Z 0 müssen sie zwischen drei alternativen Plänen wählen, welche alle Teil des Wurzel Plantyps sind. Im Allgemeinen erzeugen Plantypen eine neue Ebene in der Planhierarchie, wohingegen Verhal- ten wie in Zustand Z 3 atomare Elemente darstellen. Trotz der Verwendung von Plantype 4 in Alterna- tive 2 und Alternative 3, wird die Planhierarchie zur Laufzeit als Baum interpretiert. Der Planbaum muss endlich sein, damit sich Zweige sich nicht endlos wiederholen und somit Zyklen entstehen können. Sollte der Modellierer Alternative 2 in den Plantyp 4 einfügen, enthält Alternative 2 sich selbst und der Planbaum wäre unendlich. Daher ist die Erkennung von Zyklen eine der realisierten Schlussfolgerungsaufgaben. Andere einfache Schlussfolgerungsaufgaben helfen bei der Sicherstellung, dass Transitionen nur Zu- stände innerhalb eines Plans verbinden und dass die minimalen und maximalen Kardinalitäten der Aufgaben valide sind. Eine komplexere Schlussfolgerungsaufgabe ist die Sicherstellung des Lokalitätsprinzips von Be- dingungen. Jeder Übergang von einem Zustand in den nächsten ist an eine Bedingung geknüpft. Diese Bedingungen dürfen domänenspezifische Teile DOI 10.1007/s00287-013-0747-3 © Springer-Verlag Berlin Heidelberg 2013 Stephan Opfer Universität Kassel, Fachgebiet Verteilte Systeme, Wilhelmshöher Allee 73, 34121 Kassel E-Mail: [email protected] 42 Informatik_Spektrum_37_1_2014
Transcript of Grenzen von SROIQ bei der Unterstützung der Modellierung von Multi-Agenten-Plänen

{ STUDENT’S CORNER / MODELLIERUNGSSPRACHE
Grenzen von SROIQ bei derUnterstützung der Modellierungvon Multi-Agenten-Plänen
Stephan Opfer
EinleitungUm Verhalten und Koordination von Multi-Agenten-Systemen zu beschreiben, ist ein der Komplexitätangemessener Modellierungsformalismus notwen-dig. Einer der aktuellsten Formalismen und zugleichKontext unserer Untersuchungen ist ALICA – A Lan-guage for Interactive Cooperative Agents [9]. DiePlanstruktur eines ALICA-Programms beinhal-tet weitverbreitete Modellierungskonzepte, wieendliche Automaten, Aufgaben, Planhierarchien,Alternativpläne, Kardinalitäten, Vor-, Laufzeit-und Nachbedingungen [7]. Daher sind unsereErgebnisse auch für andere Beschreibungslogiknutzende Formalismen relevant. Das Ziel einer aufBeschreibungslogik basierten Unterstützung zurModellierung von Multi-Agenten-Plänen ist die Ver-besserung der Planqualität und der Effizienz desModellierungsprozesses. Ob ein Plan wohlgeformtist, kann unter Berücksichtigung der Planstrukturund des an den Bedingungen annotierten domä-nenspezifischen Wissens logisch geschlussfolgertwerden. Die bei der Verwendung eines auf Beschrei-bungslogik basierenden Ansatzes zur Verfügungstehende OWL-2.0-Technologie [2, 6] vereinfachtden Austausch und die Erweiterung des domänen-spezifischen Wissens. Dies verbessert somit auch dieDomänenunabhängigkeit des Modellierungsforma-lismusses selbst. Im Folgenden wird die allgemeineALICA-Planstruktur erläutert, um dann auf die pro-blematischen Schlussfolgerungsaufgaben und derenUmsetzung einzugehen.
UnterstützendeSchlussfolgerungsaufgaben
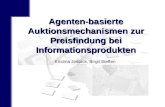
Abbildung 1 zeigt die abstrakte Struktur einesALICA-Programms. Das Programm umfasst vier
Pläne. Einen Wurzelplan, welcher nur die Standard-aufgabe mit einem endlichen Automaten, bestehendaus Zustand Z0, verknüpft. Betreten Agenten einenZustand, so müssen sie die enthaltenen Teile desALICA-Programms ausführen. Im Fall von Zu-stand Z0 müssen sie zwischen drei alternativenPlänen wählen, welche alle Teil des Wurzel Plantypssind. Im Allgemeinen erzeugen Plantypen eine neueEbene in der Planhierarchie, wohingegen Verhal-ten wie in Zustand Z3 atomare Elemente darstellen.Trotz der Verwendung von Plantype 4 in Alterna-tive 2 und Alternative 3, wird die Planhierarchie zurLaufzeit als Baum interpretiert.
Der Planbaum muss endlich sein, damit sichZweige sich nicht endlos wiederholen und somitZyklen entstehen können. Sollte der ModelliererAlternative 2 in den Plantyp 4 einfügen, enthältAlternative 2 sich selbst und der Planbaum wäreunendlich. Daher ist die Erkennung von Zykleneine der realisierten Schlussfolgerungsaufgaben.Andere einfache Schlussfolgerungsaufgaben helfenbei der Sicherstellung, dass Transitionen nur Zu-stände innerhalb eines Plans verbinden und dassdie minimalen und maximalen Kardinalitäten derAufgaben valide sind.
Eine komplexere Schlussfolgerungsaufgabe istdie Sicherstellung des Lokalitätsprinzips von Be-dingungen. Jeder Übergang von einem Zustand inden nächsten ist an eine Bedingung geknüpft. DieseBedingungen dürfen domänenspezifische Teile
DOI 10.1007/s00287-013-0747-3© Springer-Verlag Berlin Heidelberg 2013
Stephan OpferUniversität Kassel,Fachgebiet Verteilte Systeme,Wilhelmshöher Allee 73, 34121 KasselE-Mail: [email protected]
42 Informatik_Spektrum_37_1_2014

ZusammenfassungDie Unterstützung durch logisches Schluss-folgern während der Modellierung vonMulti-Agenten-Plänen erhöht die Qualitätder Ergebnisse und die Effizienz des Mo-dellierungsprozesses. Daher haben wir dieAnwendbarkeit eines auf Beschreibungslogikbasierenden Verfahrens für die Multi-Agenten-Modellierungssprache ALICA untersucht. Wirwählten SROIQ als eine der ausdrucksstärks-ten Beschreibungslogiken. Für eine umfassendeBeurteilung der Anwendbarkeit wurdenSchlussfolgerungsaufgaben verschiedener Kom-plexität realisiert. Nach einer ausführlichenDiskussion der entdeckten Probleme kom-men wir zu dem Schluss, dass nur verbesserteoder alternative Schlussfolgerungstechnikenfür die Komplexität von Multi-Agenten-Plänengeeignet sind.
sowie Teile über den Ausführungsstand des ALICA-Programms selbst enthalten. Hierbei sind die Teilezum Ausführungszustand auf den Geltungsbereichdes entsprechenden Plans beschränkt. So darf dieBedingung zum Übergang von Zustand Z5 nach Z7
nicht fordern, dass sich ein Agent in Zustand Z9
befindet, da Z9 nicht teil des Plans Alternative 2 ist.Zur Formulierung der für die Schlussfol-
gerungsaufgaben notwendigen Axiome haben
Abb. 1 Abstrakte Struktur eines ALICA-Programms
wir uns für die Beschreibungslogik SROIQ [3]entschieden, da es sich hierbei um eine der aus-drucksstärksten Beschreibungslogiken handelt.Jedoch sind die entsprechenden Axiome, trotz derzur Verfügung stehenden Ausdrucksstärke, nichtausdrückbar. Erst mit der zusätzlichen Ausdrucks-stärke von SWRL-Regeln [4] ist es möglich, diezuvor erwähnten Schlussfolgerungsaufgaben zurealisieren. Darüber hinaus gibt es noch weitereSchlussfolgerungsaufgaben, für die sogar die Kom-bination von SROIQ- und SWRL-Regeln nichtausdrucksstark genug ist. Die Semantik von Plan-typen erfordert es, zum Beispiel Disjunktionen überSubkonzeptaxiome ausdrücken zu können. Abbil-dung 1 nochmals betrachtend, müssen alle Agenten,welchen den Wurzel Plan ausführen, den gleichenAlternativplan ausführen. Da während des Mo-dellierungsprozesses keine Auswahl zwischen denAlternativen stattfindet, ist es notwendig, ein Axiomzu formulieren, welches besagt, dass entweder dieAgenten in Alternative 1, die Agenten in Alternative 2oder die Agenten in Alternative 3 ein Subkonzept derAgenten in Wurzel sind. Axiom 1 beschreibt genaudiese Semantik, allerdings ist das Axiom nicht mitder Kombination von SROIQ- und SWRL-Regelnausdrückbar.
(Agent� (inPlan value Wurzel) �Agent� (inPlan value Alternative 1))
� (Agent� (inPlan value Wurzel) �Agent� (inPlan value Alternative 2))
Informatik_Spektrum_37_1_2014 43

{ MODELLIERUNGSSPRACHE
AbstractProviding reasoning support during the model-ling of multi-agent plans improves the qualityof the results and the efficiency of the modellingprocess. Therefore, we investigated the applica-bility of a description logic reasoning supportfor the multi-agent modelling language ALICA.We choose SROIQ as one of the most expres-sive description logics. For a proper judgementof its applicability, several reasoning tasks ofdifferent complexity are evaluated. The encoun-tered problems are highlighted and discussed.Finally we conclude that only improved or alter-native reasoning techniques are suitable for thecomplexity of multi-agent plans.
� (Agent� (inPlan value Wurzel) �Agent� (inPlan value Alternative 3)) (1)
DiskussionUnter Berücksichtigung der beschriebenen Schluss-folgerungsaufgaben ist die Kombination vonSROIQ- und SWRL-Regeln akzeptabel, da diemeisten Axiome ausdrückbar sind und die nichtausdrückbaren Teile mit ergänzenden Algorith-men umgesetzt werden können. Die Semantikvon Plantypen kann durch das Hinzufügen je-weils eines Subkonzeptaxioms und entsprechenderKonsistenzprüfung der Wissensbasis erfasst werden.
Zwei allgemeinere Probleme widersprechen derVerwendung von SROIQ. Die Annahme einer of-fenen Welt (OWA, Open World Assumption [7]),welche von SROIQ getroffen wird, ist im Kontextvon vollständig bekannten Planstrukturen unan-gebracht und erhöht das Risiko einer zu hohenontologischen Festlegung (Ontological Overcommit-ment). Ein Plan ohne Zustände würde zum Beispielkeine Inkonsistenz der Wissensbasis zur Folge ha-ben, da der Schlussfolgerungsalgorithmus keinenBeweis dafür hat, dass der Plan anders als Plänemit Zuständen ist. Tatsächlich würde der Schluss-folgerungsalgorithmus annehmen, dass keine Pläneohne Zustände existieren und daraus schließen, dassder eigentlich inkonsistente Plan mindestens einenunbekannten Zustand hat, welcher ihn wieder kon-sistent werden lässt. Um die Annahme einer offenenWelt zu verbieten, sind viele zusätzliche Axiome zum
Schließen der offenen Welt notwendig. Die Liste um-fasst Covering Axiome, Closure Axiome, Domänen-und Zielrestriktionen für Rollen, Zahlrestriktio-nen, negative Rollenaxiome für Individuen unddie Definition von Nominalen. Besonders die zweizuletzt genannten Axiome sind mit viel Aufwandverbunden, da die Axiome für große Mengen voneinzelnen Planelementen formuliert werden müssenund nicht Teil des statischen Hintergrundwissensüber ALICA-Programme sein können.
Des Weiteren wird das Risiko einer zu hohenontologischen Festlegung durch die hohe Anzahl anzusätzlich notwendigen Axiomen zum Schließen deroffenen Welt erhöht. Eine Wissensrepräsentationunterliegt einer zu hohen ontologischen Festlegung,wenn die enthaltenen Axiome restriktiver als not-wendig sind [8]. Falls zum Beispiel eine Ontologieüber Menschen erfordert, dass jeder genau einenVor-, Zweit- und Nachnamen hat, handelt es sichin den meisten Fällen um eine zu hohe ontologi-sche Festlegung, da viele Menschen mehr als einenZweitnamen und einige gar keinen haben. Hierausfolgt, dass es angemessener wäre, wenn gar keineAnnahme zu der Anzahl von Zweitnamen axioma-tisiert würde. Allerdings wäre es dann unmöglich,zu dem Schluss zu kommen, dass zwei Menschenden gleichen Namen haben. Der Schlussfolgerungs-algorithmus hätte keinen Beweis dafür, dass alleZweitnamen von zwei zu vergleichenden Personenbekannt sind. Der benötigte Beweis würde durchdie Einführung eines Nominals für Zweitnamen undder Negierung aller Verbindungen zwischen nichtverwendeten Zweitnamen und den Personen selbsterbracht werden. Um diesen Beweis fortwährenderbringen zu können, müsste das Nominal für Zweit-namen sowie die Liste der negierten Verbindungenbei der Einführung jedes neuen Zweitnamens erneu-ert werden. Ein ähnlicher Aufwand wäre notwendig,um den Schluss zu ermöglichen, dass zwei Zuständedie gleiche Anzahl an eingehenden Transitionenhaben. Daher ist es sehr verlockend, eine zu hoheontologische Festlegung zu akzeptieren und dieAnzahl der Zweitnamen allgemein zu beschrän-ken. Als Konsequenz hieraus ergibt sich, dass derSchlussfolgerungsalgorithmus schließen kann, dasszwei Menschen den gleichen Namen haben, weildie maximale Anzahl der Zweitnamen erreicht istund daher alle Zweitnamen bekannt sind. Wie zuvorbeschrieben, sind viele Restriktionen notwendig,um im Kontext von vollständig bekannten Plan-
44 Informatik_Spektrum_37_1_2014

strukturen die Annahme einer offenen Welt in dieAnnahme einer geschlossenen Welt umzuwandeln.Die Fülle an Restriktionen erhöht das Risiko einer zuhohen ontologischen Festlegung, da es verlockendist, Arbeit zu sparen, indem man zu allgemeine undrestriktive Axiome verwendet. Außerdem wird dieKomplexität der Ontologie durch die vielen zusätz-lichen Restriktionen erhöht, wodurch gleichzeitigdie Anzahl der Modellierungsfehler in der Ontologiepotenziell steigt.
FazitDie Ausdrucksstärke von SROIQ- undSWRL-Regeln ist im Kontext von aktuellen Multi-Agenten-Planstrukturen unzureichend. Obwohldie mangelnde Ausdrucksstärke mit zusätzlichenAlgorithmen abgefangen werden kann, macht derAufwand, eine offene Welt in eine geschlosseneWelt umzuwandeln, den Einsatz einer auf Be-schreibungslogik basierten Unterstützung für denModellierungsprozess von Multi-Agenten-Plänennoch unangemessener und erhöht zugleich dasRisiko einer zu hohen ontologischen Festlegung.Forschung, welche diese Probleme adressiert, wird
von Motik et al. [5] sowie Tao et al. [10] durchge-führt. Alternativ bieten autoepistemische Logikeneinen guten Kompromiss zwischen einer offenenund einer geschlossenen Welt [1].
Literatur1. Brachman R, Levesque H (2004) Knowledge Representation and Reasoning. Mor-
gan Kaufmann Publishers Inc, San Francisco, CA, USA2. Horridge M, Bechhofer S (2011) The OWL API: A Java API for OWL ontologies. Se-
mantic Web J 2(1):11–213. Horrocks I, Kutz O, Sattler U (2006) The even more irresistible SROIQ. In: Do-
herty P, Mylopoulos J, Welty CA (eds), Proceedings of the 10th International Con-ference on Principles of Knowledge Representation and Reasoning, AAAI Press,57–67
4. Horrocks I, Patel-Schneider PF, Boley H, Tabet S, Grosof B, Dean M (2004) SWRL:A Semantic Web Rule Language Combining OWL and RuleML, 5. http://www.w3.org/Submission/SWRL/, letzter Zugriff: 1.8.2012
5. Motik B, Horrocks U, Sattler I (2009) Bridging the gap between OWL and relatio-nal databases. J Web Sem 7(2):74–89
6. Musen M, Horridge M, Noy N, Redmond T, Tudorache T, O’Conner M, Nyulas C,Tu S, Vendetti J (2012) Protege. http://protege.stanford.edu, letzter Zugriff:5.7.2012
7. Russell SJ, Norvig P (2010) Artificial Intelligence – A Modern Approach. 3rd Intedn, Pearson Education, 2010
8. Schreiber G (2008) Knowledge engineering. In: van Harmelen F, Lifschitz V,Porter B (eds) Foundations of Artificial Intelligence, chap 25, Elsevier, 929–946
9. Skubch H (2012) Modelling and Controlling Behaviour of Cooperative AutonomousMobile Robots. PhD thesis, University of Kassel
10. Tao J, Sirin E, Bao J, McGuinness DL (2010) Integrity Constraints in OWL. In: Pro-ceedings of the 24th AAAI Conference on Artificial Intelligence. AAAI Press, 1443–1448
Informatik_Spektrum_37_1_2014 45