
Grundlagen der Signalverarbeitung 1...
35
@ Prof. Dr.-Ing. Dr. h.c. Norbert Höptner Grundlagen der Signalverarbeitung 1 (Integraltransformationen) Prof. Dr.-Ing. Dr. h.c. Norbert Höptner Fakultät Technik Bereich Informationstechnik (IT) Hochschule Pforzheim Stand: 17.01.2017 v9
Transcript of Grundlagen der Signalverarbeitung 1...
@ Prof. Dr.-Ing. Dr. h.c. Norbert Höptner
Grundlagen der Signalverarbeitung 1
(Integraltransformationen)
Prof. Dr.-Ing. Dr. h.c. Norbert Höptner
Fakultät Technik
Bereich Informationstechnik (IT)
Hochschule Pforzheim
Stand: 17.01.2017 v9
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
2
Inhalt
1 Abtastung ............................................................................................................................ 4
2 Dirac-Impuls ........................................................................................................................ 5
3 Faltung................................................................................................................................. 6
4 Diskrete lineare zeitinvariante Systeme ............................................................................. 8
4.1 Impulsantwort und Faltung ......................................................................................... 8
4.2 Sprungantwortfolge ..................................................................................................... 8
4.3 Frequenzgang .............................................................................................................. 9
4.4 z-Transformation ....................................................................................................... 10
4.5 Übertragungsfunktion ............................................................................................... 11
4.5.1 Faltungstheorem ................................................................................................ 11
4.6 Dämpfung, Phase, Gruppenlaufzeit........................................................................... 11
4.7 Kausalität und Stabilität ............................................................................................. 13
4.8 Rekursive und nichtrekursive Systeme ...................................................................... 14
4.8.1 Nichtrekursive Struktur ...................................................................................... 16
4.8.2 Rein rekursive Struktur ....................................................................................... 17
4.8.3 Allgemeiner Fall .................................................................................................. 17
4.9 Minimalphasige Systme ............................................................................................. 17
4.10 Allpässe ...................................................................................................................... 18
4.10.1 Aufteilung der rekursiven nicht minimalphasigen Systemen ............................ 18
5 Digitale Filter ..................................................................................................................... 19
5.1 Direktstruktur ............................................................................................................ 19
5.2 Erste kanonische Form .............................................................................................. 20
5.3 Zweite kanonische Form ............................................................................................ 21
5.4 Kaskadenstruktur und Parallelstruktur ..................................................................... 21
5.4.1 Kaskadenstruktur (dritte kanonische Form) ...................................................... 21
5.4.2 Parallelstruktur (vierte kanonische Form) ......................................................... 22
6 Entwurf digitaler Filter ...................................................................................................... 23
6.1 FIR-Filter ..................................................................................................................... 23
6.1.1 Eigenschaften linearphasiger FIR-Filter .............................................................. 23
6.1.2 REMEZ-Algorithmus nach Parks und McClellan ................................................. 23
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
3
6.2 Entwurf von IIR-Filtern............................................................................................... 23
6.2.1 Approximation normierter Tiefpässe ................................................................. 23
6.2.2 Allgemeine Bilineare Transformation ................................................................ 24
7 Diskrete Fouriertransformation (DTF) .............................................................................. 25
7.1 Twiddle-Faktor ........................................................................................................... 26
7.2 Leackage-Effekt ( „Leck-Effekt“) ................................................................................ 27
7.3 Fensterfunktionen ..................................................................................................... 28
7.4 Schnelle Fouriertransformation (FFT) ....................................................................... 29
7.5 Kombinieren – „Butterfly“ ......................................................................................... 32
8 Abbildungsverzeichnis ...................................................................................................... 33
9 Anhang: Zusammenhang zwischen s-Ebene und z-Ebene ................................................ 34
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
4
Quantisierung
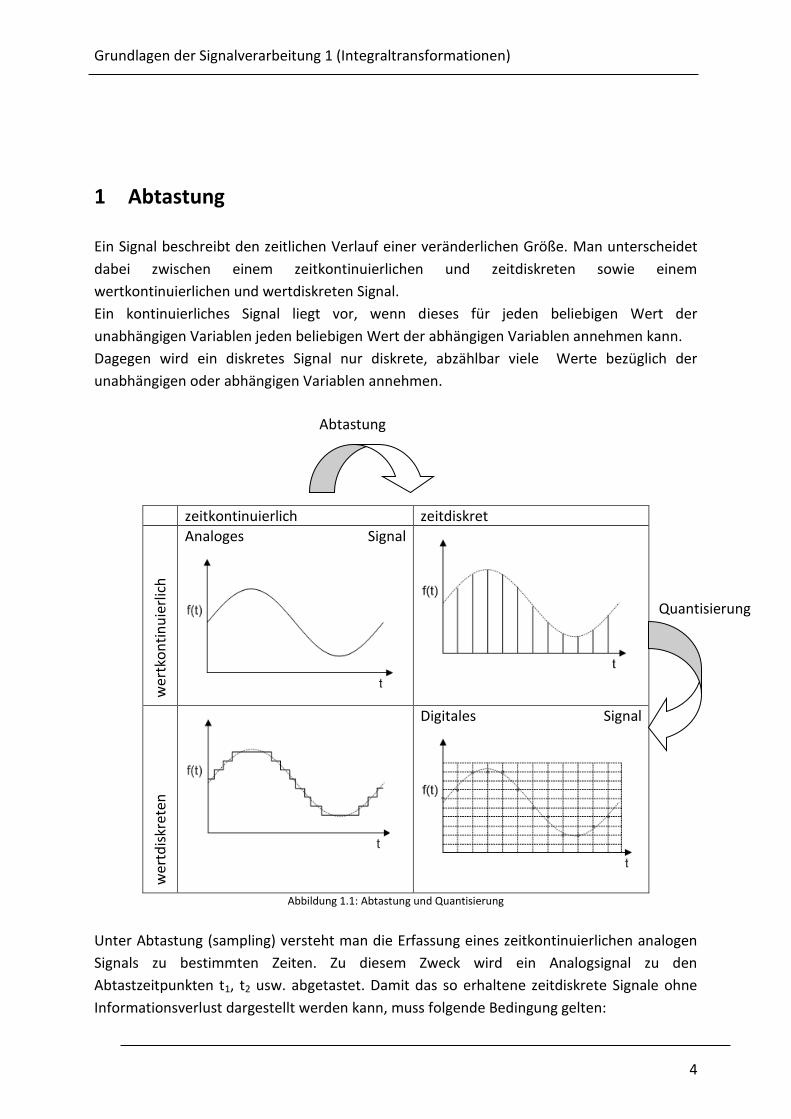
1 Abtastung
Ein Signal beschreibt den zeitlichen Verlauf einer veränderlichen Größe. Man unterscheidet
dabei zwischen einem zeitkontinuierlichen und zeitdiskreten sowie einem
wertkontinuierlichen und wertdiskreten Signal.
Ein kontinuierliches Signal liegt vor, wenn dieses für jeden beliebigen Wert der
unabhängigen Variablen jeden beliebigen Wert der abhängigen Variablen annehmen kann.
Dagegen wird ein diskretes Signal nur diskrete, abzählbar viele Werte bezüglich der
unabhängigen oder abhängigen Variablen annehmen.
zeitkontinuierlich zeitdiskret
wer
tko
nti
nu
ierl
ich
Analoges Signal
wer
tdis
kret
en
Digitales Signal
Abbildung 1.1: Abtastung und Quantisierung
Unter Abtastung (sampling) versteht man die Erfassung eines zeitkontinuierlichen analogen
Signals zu bestimmten Zeiten. Zu diesem Zweck wird ein Analogsignal zu den
Abtastzeitpunkten t1, t2 usw. abgetastet. Damit das so erhaltene zeitdiskrete Signale ohne
Informationsverlust dargestellt werden kann, muss folgende Bedingung gelten:
Abtastung
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
5
𝑓𝑎 ≥ 2 ∙ 𝑓𝑠,𝑚𝑎𝑥 1.1
Dies wird als Abtasttheorem (nach Nyquist und Shannon) bezeichnet und besagt, dass ein
kontinuierliches, analoges, bandbegrenztes Signal mit einer Minimalfrequenz 𝑓𝑠,𝑚𝑖𝑛 und
einer Maximalfrequenz 𝑓𝑠,𝑚𝑎𝑥 mit einer Abtastfrequenz 𝑓𝑎 größer oder gleich 2 ∙ 𝑓𝑠,𝑚𝑎𝑥
abgetastet werden muss.
Bei Erfüllung des Theorems kann ein Signal ohne Fehler umgesetzt werden. Wird das
Abtasttheorem nicht beachtet treten Fehler auf, die als Aliasing-Effekte oder kurz Aliasing
bezeichnet werden.
Unter Quantisierung versteht man die Umwandlung eines Signals mit unendlich vielen
Werten in ein Signal mit endlichen vielen Werten. Ein Fehler ist bei der Quantisierung immer
vorhanden und muss daher vorher abgeschätzt werden.
2 Dirac-Impuls
Für die Beschreibung von Impulsen, die nur zu einem bestimmten Zeitpunkt t auftreten
(lokalisierte Impulse) benötigt man die sogenannte Diracsche δ – Funktion (auch Dirac-Stoß
oder Impulsfunktion genannt). Dies ist keine übliche Funktion sondern eine Distribution
(„verallgemeinerte Funktion“). (vgl. Papula,Lothat: Mathematik für Ingenieure und
Naturwissenschaftler Band 2, Vieweg+Teubner, 2009).
Abbildung 2.1: Dirac-Impuls
Indem man die Breite ε eines Rechtecksignals gegen Null gehen lässt und die Fläche gleich
Eins lässt, kann man den Dirac herleiten. Der Dirac ist der Grenzfall eines Rechtecksignals.
Die Fläche des Dirac beträgt immer Eins. Er ist unendlich schmal und unendlich hoch.
∫ 𝛿(𝑡)𝑑𝑡 = 1+∞
−∞ 2.1
Der Dirac lässt sich um t0 verschieben.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
6
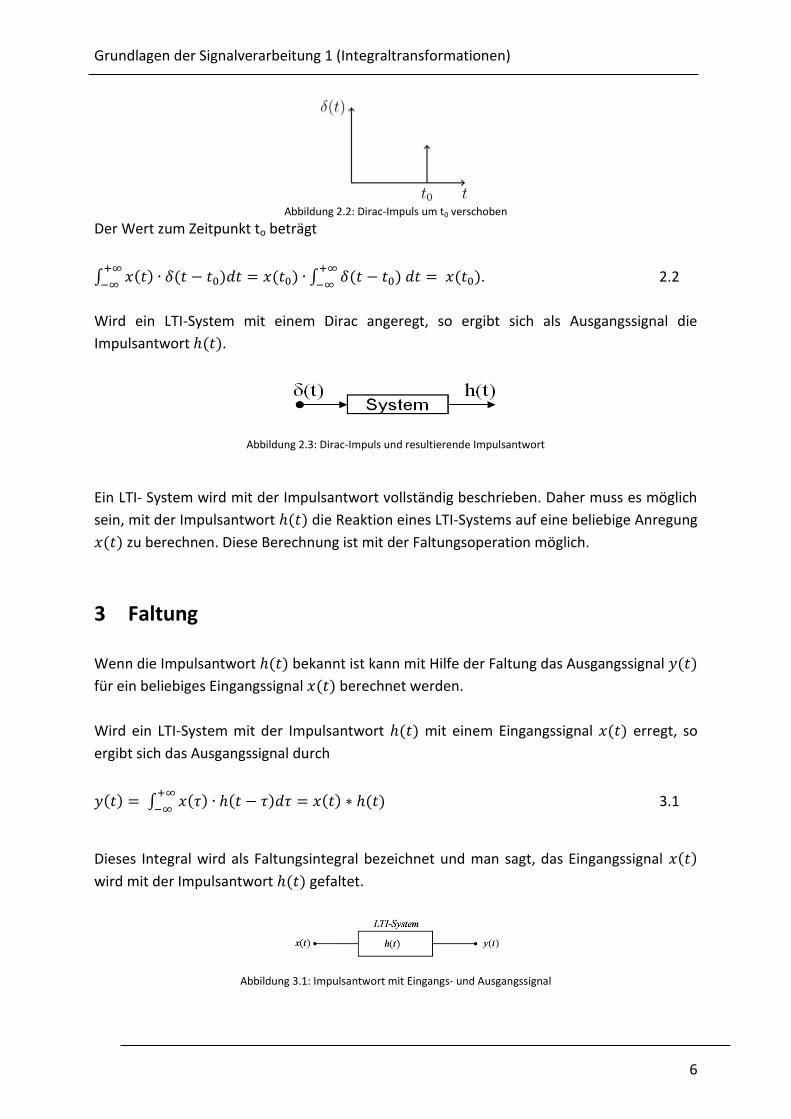
Abbildung 2.2: Dirac-Impuls um t0 verschoben
Der Wert zum Zeitpunkt to beträgt
∫ 𝑥(𝑡) ∙ 𝛿(𝑡 − 𝑡0+∞
−∞)𝑑𝑡 = 𝑥(𝑡0) ∙ ∫ 𝛿(𝑡 − 𝑡0
+∞
−∞) 𝑑𝑡 = 𝑥(𝑡0). 2.2
Wird ein LTI-System mit einem Dirac angeregt, so ergibt sich als Ausgangssignal die
Impulsantwort ℎ(𝑡).
Abbildung 2.3: Dirac-Impuls und resultierende Impulsantwort
Ein LTI- System wird mit der Impulsantwort vollständig beschrieben. Daher muss es möglich
sein, mit der Impulsantwort ℎ(𝑡) die Reaktion eines LTI-Systems auf eine beliebige Anregung
𝑥(𝑡) zu berechnen. Diese Berechnung ist mit der Faltungsoperation möglich.
3 Faltung
Wenn die Impulsantwort ℎ(𝑡) bekannt ist kann mit Hilfe der Faltung das Ausgangssignal 𝑦(𝑡)
für ein beliebiges Eingangssignal 𝑥(𝑡) berechnet werden.
Wird ein LTI-System mit der Impulsantwort ℎ(𝑡) mit einem Eingangssignal 𝑥(𝑡) erregt, so
ergibt sich das Ausgangssignal durch
𝑦(𝑡) = ∫ 𝑥(𝜏) ∙ ℎ(𝑡 − 𝜏)𝑑𝜏+∞
−∞= 𝑥(𝑡) ∗ ℎ(𝑡) 3.1
Dieses Integral wird als Faltungsintegral bezeichnet und man sagt, das Eingangssignal 𝑥(𝑡)
wird mit der Impulsantwort ℎ(𝑡) gefaltet.
Abbildung 3.1: Impulsantwort mit Eingangs- und Ausgangssignal
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
7
Für zwei beliebige Signale gilt
𝑦(𝑡) = 𝑥1(𝑡) ∗ 𝑥2(𝑡) = ∫ 𝑥1(𝜏) ∙ 𝑥2(𝑡 − 𝜏)𝑑𝜏+∞
−∞ 3.2
Um die Faltung im Frequenzbereich zu betrachten, muss das Faltungsintegral mit Hilfe der
Fourier-Transformation transformiert werden.
𝑌(𝑓) = ∫ [∫ 𝑥(𝜏) ∙ ℎ(𝑡 − 𝜏)𝑑𝜏+∞
−∞] ∙ 𝑒−𝑗2𝜋𝑓𝑡𝑑𝑡
+∞
−∞
= ∫ 𝑥(𝜏) ∙ [∫ ℎ(𝑡 − 𝜏) ∙ 𝑒−𝑗2𝜋𝑓𝑡𝑑𝑡+∞
−∞]𝑑𝜏
+∞
−∞ 3.3
Der Ausdruck ℎ(𝑡 − 𝜏) ∙ 𝑒−𝑗2𝜋𝑓𝑡 entspricht der Fourier-Transformierten des Signals ℎ(𝑡 − 𝜏).
Nach Anwenden des Zeitversschiebungssatz ergibt sich
𝑌(𝑓) = ∫ 𝑥(𝜏) ∙ 𝐻(𝑓) ∙ 𝑒−𝑗2𝜋𝑓𝜏𝑑𝜏+∞
−∞= 𝐻(𝑓) ∙ ∫ 𝑥(𝜏) ∙ 𝑒−𝑗2𝜋𝑓𝜏𝑑𝜏
+∞
−∞. 3.4
Das Integral entspricht der Fourier-Transformierten von 𝑥(𝑡) und somit ergibt sich
𝑌(𝑓) = 𝐻(𝑓) ∙ 𝑋(𝑓). 3.5
Das Spektrum des Ausgangssignals ist also gleich dem Spektrum des Eingangssignals
multipliziert mit dem Frequenzgang des LTI-Systems. Es gilt:
ℎ(𝑡) ∗ 𝑥(𝑡) ⊶ 𝐻(𝑓) ∙ 𝑋(𝑓) 3.6
ℎ(𝑡) ∙ 𝑥(𝑡) ⊶ 𝐻(𝑓) ∗ 𝑋(𝑓) 3.7
Eine Faltung im Zeitbereich entspricht einer Multiplikation im Frequenzbereich und eine
Multiplikation im Zeitbereich entspricht einer Faltung im Frequenzbereich.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
8
4 Diskrete lineare zeitinvariante Systeme
4.1 Impulsantwort und Faltung
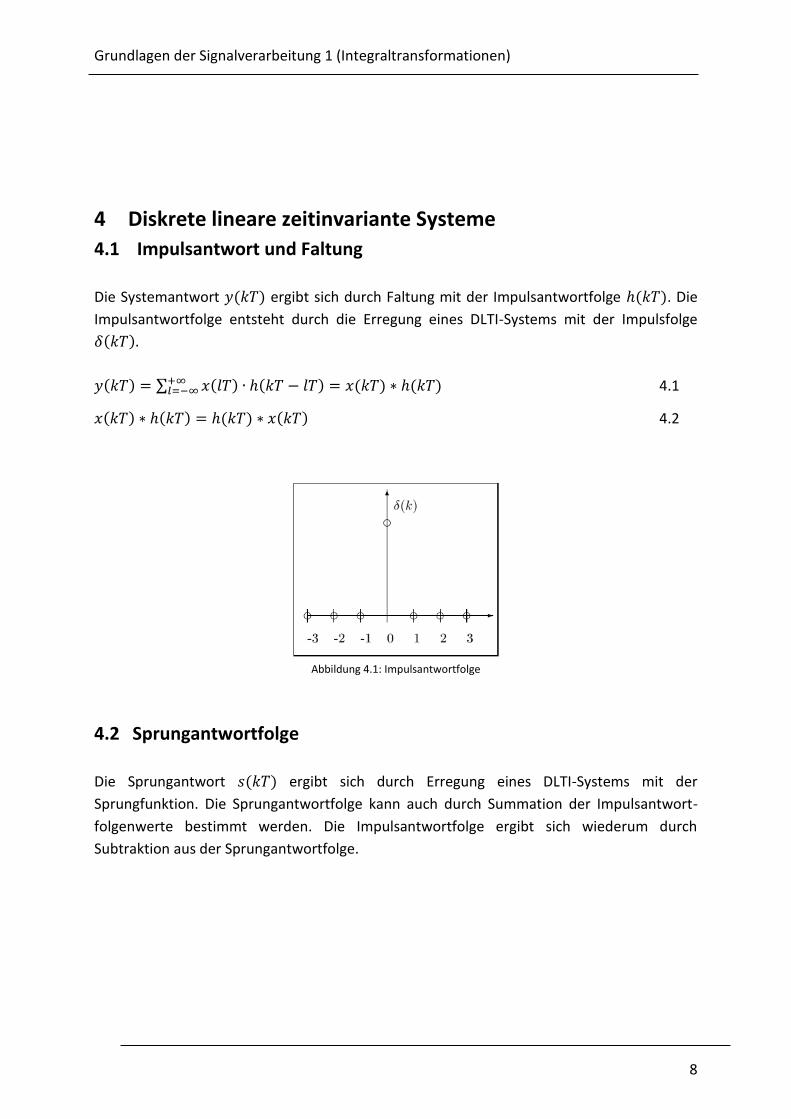
Die Systemantwort 𝑦(𝑘𝑇) ergibt sich durch Faltung mit der Impulsantwortfolge ℎ(𝑘𝑇). Die
Impulsantwortfolge entsteht durch die Erregung eines DLTI-Systems mit der Impulsfolge
𝛿(𝑘𝑇).
𝑦(𝑘𝑇) = ∑ 𝑥(𝑙𝑇) ∙ ℎ(𝑘𝑇 − 𝑙𝑇) = 𝑥(𝑘𝑇) ∗ ℎ(𝑘𝑇)+∞𝑙=−∞ 4.1
𝑥(𝑘𝑇) ∗ ℎ(𝑘𝑇) = ℎ(𝑘𝑇) ∗ 𝑥(𝑘𝑇) 4.2
Abbildung 4.1: Impulsantwortfolge
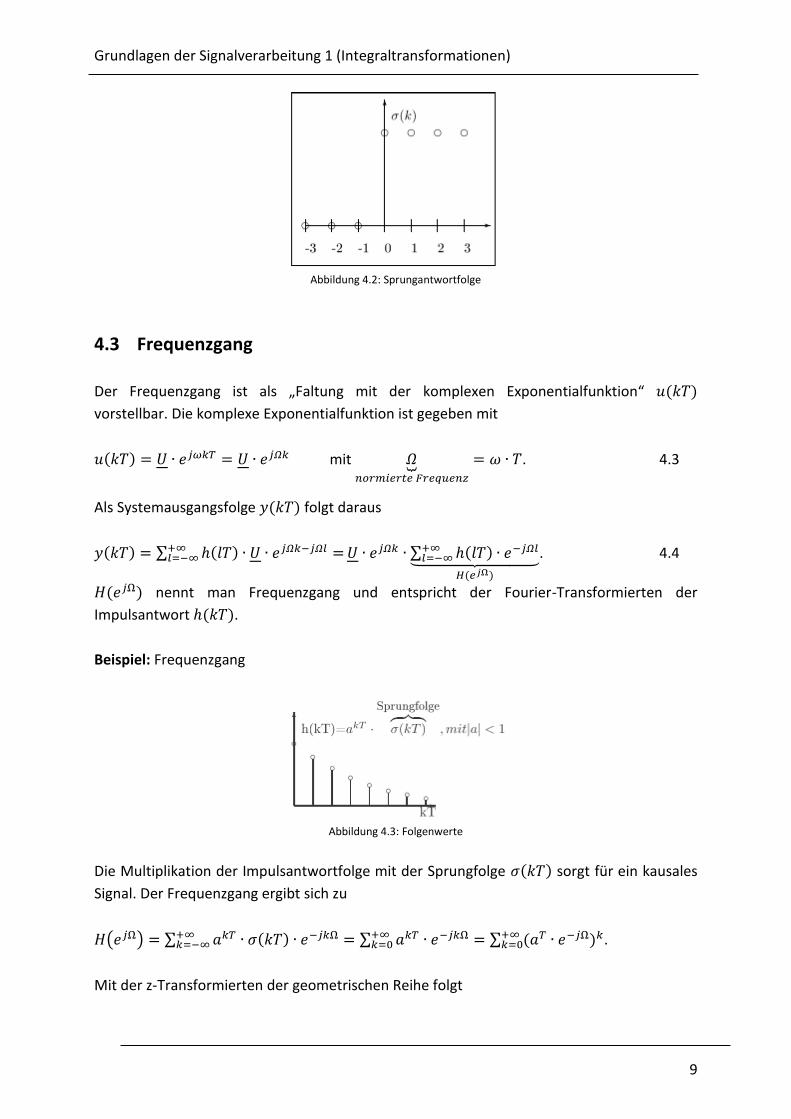
4.2 Sprungantwortfolge
Die Sprungantwort 𝑠(𝑘𝑇) ergibt sich durch Erregung eines DLTI-Systems mit der
Sprungfunktion. Die Sprungantwortfolge kann auch durch Summation der Impulsantwort-
folgenwerte bestimmt werden. Die Impulsantwortfolge ergibt sich wiederum durch
Subtraktion aus der Sprungantwortfolge.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
9
Abbildung 4.2: Sprungantwortfolge
4.3 Frequenzgang
Der Frequenzgang ist als „Faltung mit der komplexen Exponentialfunktion“ 𝑢(𝑘𝑇)
vorstellbar. Die komplexe Exponentialfunktion ist gegeben mit
𝑢(𝑘𝑇) = 𝑈 ∙ 𝑒𝑗𝜔𝑘𝑇 = 𝑈 ∙ 𝑒𝑗𝛺𝑘 mit 𝛺⏟𝑛𝑜𝑟𝑚𝑖𝑒𝑟𝑡𝑒 𝐹𝑟𝑒𝑞𝑢𝑒𝑛𝑧
= 𝜔 ∙ 𝑇. 4.3
Als Systemausgangsfolge 𝑦(𝑘𝑇) folgt daraus
𝑦(𝑘𝑇) = ∑ ℎ(𝑙𝑇) ∙ 𝑈 ∙ 𝑒𝑗𝛺𝑘−𝑗𝛺𝑙 =+∞𝑙=−∞ 𝑈 ∙ 𝑒𝑗𝛺𝑘 ∙ ∑ ℎ(𝑙𝑇) ∙ 𝑒−𝑗𝛺𝑙+∞
𝑙=−∞⏟ 𝐻(𝑒𝑗Ω)
. 4.4
𝐻(𝑒𝑗Ω) nennt man Frequenzgang und entspricht der Fourier-Transformierten der
Impulsantwort ℎ(𝑘𝑇).
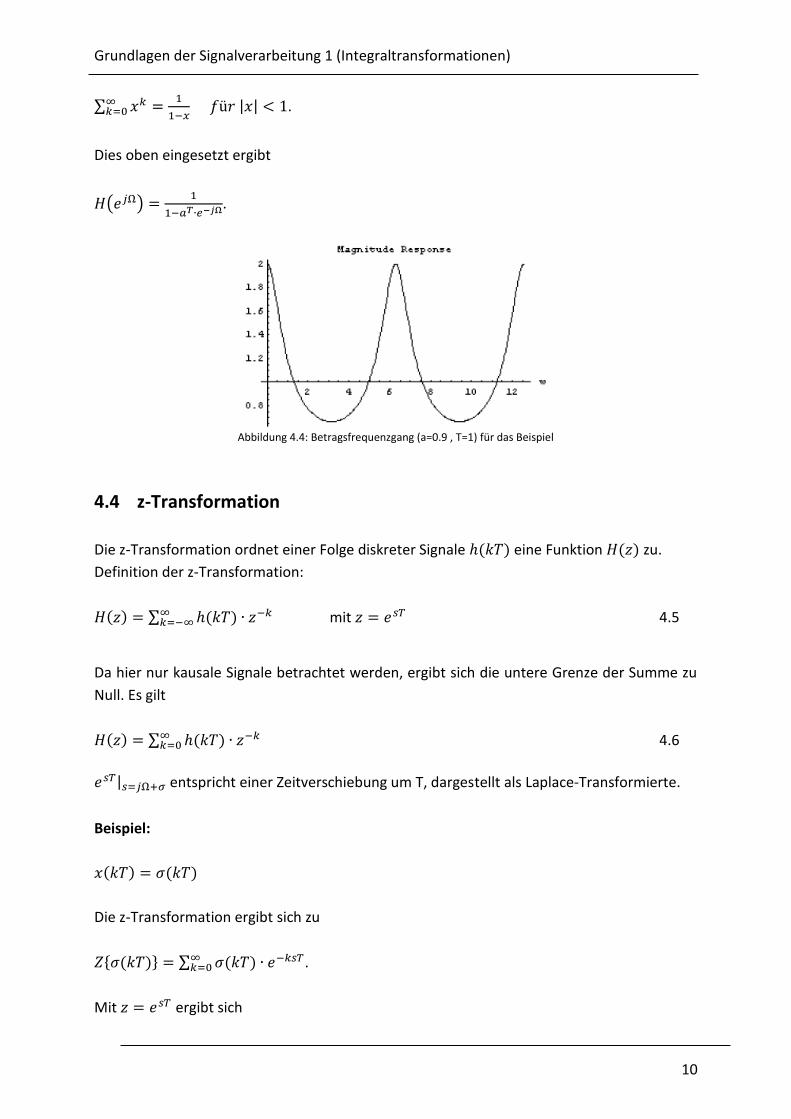
Beispiel: Frequenzgang
Abbildung 4.3: Folgenwerte
Die Multiplikation der Impulsantwortfolge mit der Sprungfolge 𝜎(𝑘𝑇) sorgt für ein kausales
Signal. Der Frequenzgang ergibt sich zu
𝐻(𝑒𝑗Ω) = ∑ 𝑎𝑘𝑇 ∙ 𝜎(𝑘𝑇) ∙ 𝑒−𝑗𝑘Ω+∞𝑘=−∞ = ∑ 𝑎𝑘𝑇 ∙ 𝑒−𝑗𝑘Ω+∞
𝑘=0 = ∑ (𝑎𝑇 ∙ 𝑒−𝑗Ω)𝑘+∞𝑘=0 .
Mit der z-Transformierten der geometrischen Reihe folgt
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
10
∑ 𝑥𝑘 =1
1−𝑥
∞𝑘=0 𝑓ü𝑟 |𝑥| < 1.
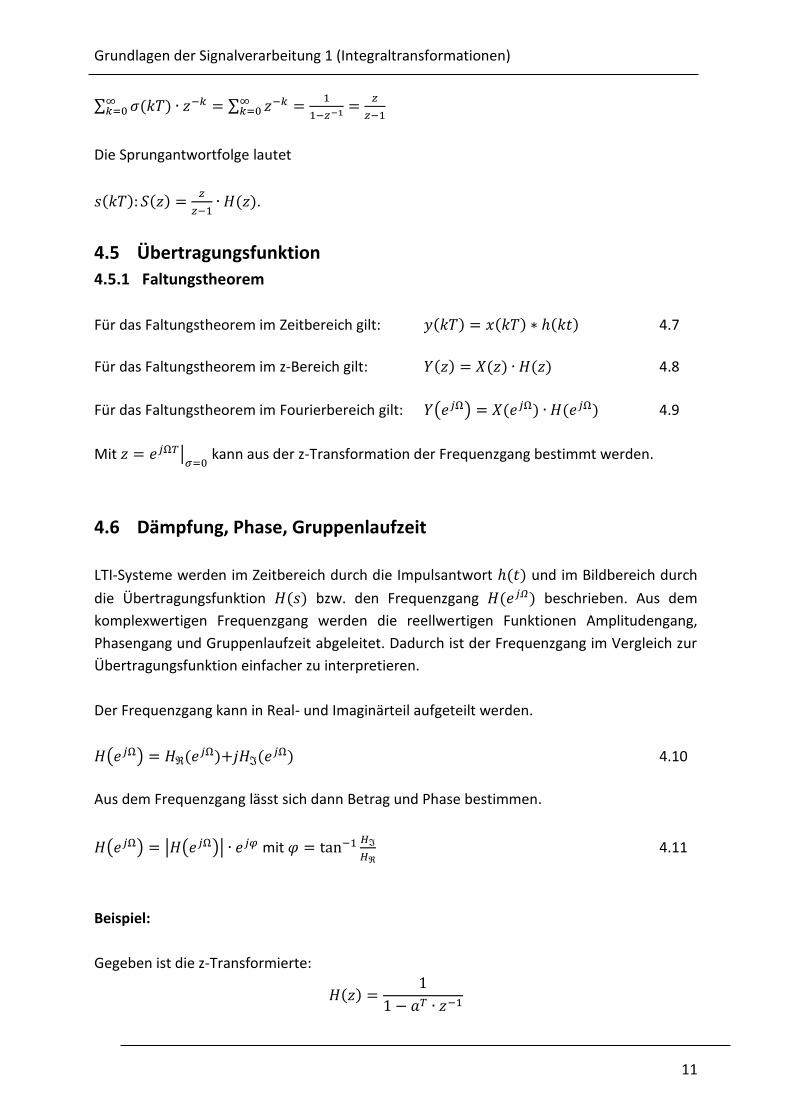
Dies oben eingesetzt ergibt
𝐻(𝑒𝑗Ω) =1
1−𝑎𝑇∙𝑒−𝑗Ω.
Abbildung 4.4: Betragsfrequenzgang (a=0.9 , T=1) für das Beispiel
4.4 z-Transformation
Die z-Transformation ordnet einer Folge diskreter Signale ℎ(𝑘𝑇) eine Funktion 𝐻(𝑧) zu.
Definition der z-Transformation:
𝐻(𝑧) = ∑ ℎ(𝑘𝑇) ∙ 𝑧−𝑘∞𝑘=−∞ mit 𝑧 = 𝑒𝑠𝑇 4.5
Da hier nur kausale Signale betrachtet werden, ergibt sich die untere Grenze der Summe zu
Null. Es gilt
𝐻(𝑧) = ∑ ℎ(𝑘𝑇) ∙ 𝑧−𝑘∞𝑘=0 4.6
𝑒𝑠𝑇|𝑠=𝑗Ω+𝜎 entspricht einer Zeitverschiebung um T, dargestellt als Laplace-Transformierte.
Beispiel:
𝑥(𝑘𝑇) = 𝜎(𝑘𝑇)
Die z-Transformation ergibt sich zu
𝑍{𝜎(𝑘𝑇)} = ∑ 𝜎(𝑘𝑇) ∙ 𝑒−𝑘𝑠𝑇∞𝑘=0 .
Mit 𝑧 = 𝑒𝑠𝑇 ergibt sich
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
11
∑ 𝜎(𝑘𝑇) ∙ 𝑧−𝑘∞𝑘=0 = ∑ 𝑧−𝑘∞
𝑘=0 =1
1−𝑧−1=
𝑧
𝑧−1
Die Sprungantwortfolge lautet
𝑠(𝑘𝑇): 𝑆(𝑧) =𝑧
𝑧−1∙ 𝐻(𝑧).
4.5 Übertragungsfunktion
4.5.1 Faltungstheorem
Für das Faltungstheorem im Zeitbereich gilt: 𝑦(𝑘𝑇) = 𝑥(𝑘𝑇) ∗ ℎ(𝑘𝑡) 4.7
Für das Faltungstheorem im z-Bereich gilt: 𝑌(𝑧) = 𝑋(𝑧) ∙ 𝐻(𝑧) 4.8
Für das Faltungstheorem im Fourierbereich gilt: 𝑌(𝑒𝑗Ω) = 𝑋(𝑒𝑗Ω) ∙ 𝐻(𝑒𝑗Ω) 4.9
Mit 𝑧 = 𝑒𝑗Ω𝑇|𝜎=0
kann aus der z-Transformation der Frequenzgang bestimmt werden.
4.6 Dämpfung, Phase, Gruppenlaufzeit
LTI-Systeme werden im Zeitbereich durch die Impulsantwort ℎ(𝑡) und im Bildbereich durch
die Übertragungsfunktion 𝐻(𝑠) bzw. den Frequenzgang 𝐻(𝑒𝑗𝛺) beschrieben. Aus dem
komplexwertigen Frequenzgang werden die reellwertigen Funktionen Amplitudengang,
Phasengang und Gruppenlaufzeit abgeleitet. Dadurch ist der Frequenzgang im Vergleich zur
Übertragungsfunktion einfacher zu interpretieren.
Der Frequenzgang kann in Real- und Imaginärteil aufgeteilt werden.
𝐻(𝑒𝑗Ω) = 𝐻ℜ(𝑒𝑗Ω)+𝑗𝐻ℑ(𝑒
𝑗Ω) 4.10
Aus dem Frequenzgang lässt sich dann Betrag und Phase bestimmen.
𝐻(𝑒𝑗Ω) = |𝐻(𝑒𝑗Ω)| ∙ 𝑒𝑗𝜑 mit 𝜑 = tan−1𝐻ℑ
𝐻ℜ 4.11
Beispiel:
Gegeben ist die z-Transformierte:
𝐻(𝑧) =1
1 − 𝑎𝑇 ∙ 𝑧−1
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
12
Der Frequenzgang 𝐻(𝑒𝑗Ω) lautet
𝐻(𝑒𝑗Ω) =1
1−𝑎𝑇∙𝑒−𝑗Ω=
1−𝑎𝑇∙𝑒𝑗Ω
(1−𝑎𝑇∙𝑒−𝑗Ω)∙(1−𝑎𝑇∙𝑒𝑗Ω) =
1−𝑎𝑇∙cosΩ
1−2𝑎𝑇∙cosΩ+𝑎2𝑇⏟ 𝑅𝑒𝑎𝑙𝑡𝑒𝑖𝑙
+ 𝑗 ∙−𝑎𝑇∙sinΩ
1−2𝑎𝑇∙cosΩ+𝑎2𝑇⏟ 𝐼𝑚𝑎𝑔𝑖𝑛ä𝑟𝑡𝑒𝑖𝑙
.
Daraus ergibt sich der Betrag
|𝐻(𝑒𝑗Ω)| =1
√1−2𝑎𝑇∙cosΩ+𝑎2𝑇
und die Phase
∠𝐻(𝑒𝑗Ω) = tan−1−𝑎𝑇∙sinΩ
1−𝑎𝑇∙𝑒𝑗Ω .
Die Dämpfung ergibt sich zu
𝑎(Ω) = 20log1
|𝐻(𝑒𝑗Ω)| ,
der Phasengang zu
𝑏(Ω) = −∠𝐻(𝑒𝑗Ω)
und die Gruppenlaufzeit zu
𝑡𝑔 = −𝑑𝑏(Ω)
𝑑Ω .
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
13
4.7 Kausalität und Stabilität
Ein System ist kausal, wenn gilt
ℎ(𝑘𝑇) = 0 𝑓ü𝑟 𝑘 < 0. 4.12
Für stabile Systeme gilt
∑ |ℎ(𝑘𝑇)|+∞𝑘=−∞ < 𝑐 < ∞ 4.13
c entspricht dabei einer Konstanten.
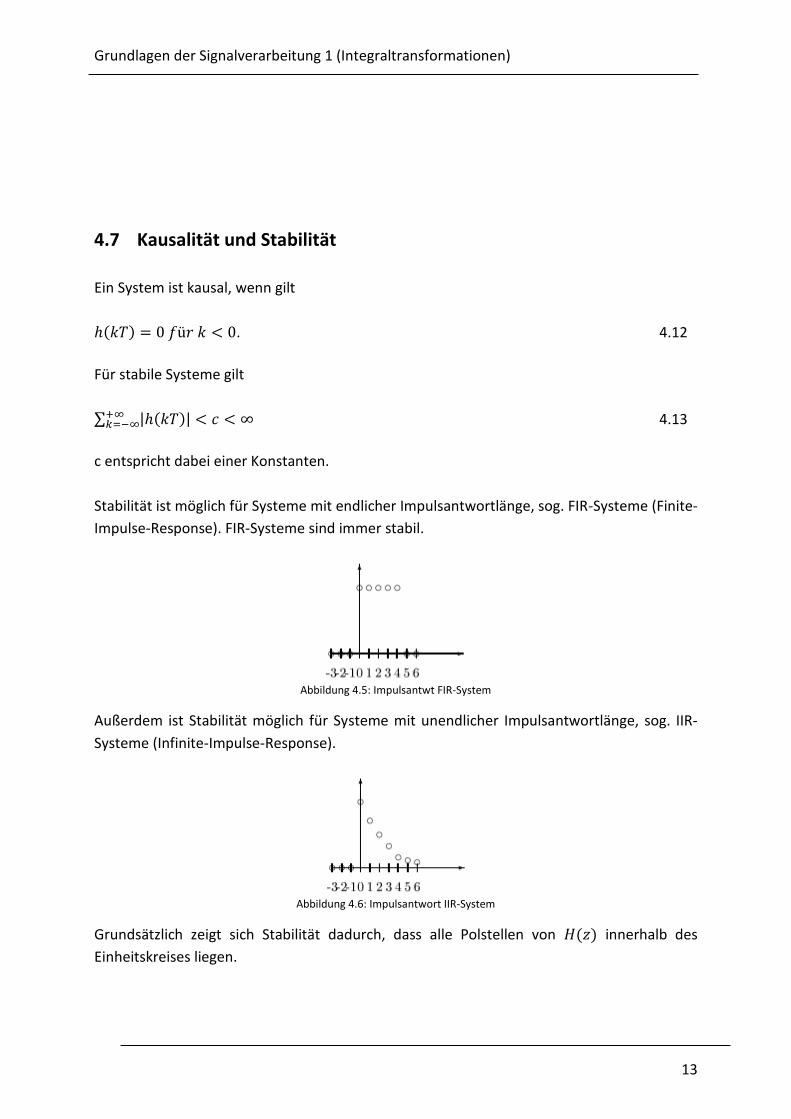
Stabilität ist möglich für Systeme mit endlicher Impulsantwortlänge, sog. FIR-Systeme (Finite-
Impulse-Response). FIR-Systeme sind immer stabil.
Abbildung 4.5: Impulsantwt FIR-System
Außerdem ist Stabilität möglich für Systeme mit unendlicher Impulsantwortlänge, sog. IIR-
Systeme (Infinite-Impulse-Response).
Abbildung 4.6: Impulsantwort IIR-System
Grundsätzlich zeigt sich Stabilität dadurch, dass alle Polstellen von 𝐻(𝑧) innerhalb des
Einheitskreises liegen.

Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
14
4.8 Rekursive und nichtrekursive Systeme
Im z-Bereich lässt sich ein System mit der Übertragungsfunktion 𝐻(𝑧) in der Polynom-
Schreibweise beschreiben.
𝐻(𝑧) =𝐷(𝑧)
𝐶(𝑧)=𝑑0+𝑑1𝑧+𝑑2𝑧
2+...+𝑑𝑚𝑧𝑚
𝑐0+𝑐1𝑧+𝑐2𝑧2+...+𝑐𝑛𝑧𝑛 4.14
Für Pole und Nullstellen im z-Bereich lässt sich ein System auch in der Produkt-Schreibweise
beschreiben.
𝐻(𝑧) =𝑑𝑚
𝑐𝑛∙∏ (𝑧−𝑧0𝑗)𝑚𝑗=1
∏ (𝑧−𝑧∞𝑖)𝑛𝑖=1
4.15
Mit Hilfe der Differenzengleichung lässt sich ein System im Zeitbereich beschreiben.
𝑦(𝑘𝑇) =−1
𝑐𝑛∙ ∑ 𝑐𝑛−𝑙 ∙ 𝑦(𝑘𝑇 − 𝑙𝑇) +
𝑛𝑙=1
1
𝑐𝑛∙ ∑ 𝑑𝑚−𝑙 ∙ 𝑥(𝑘𝑇 − 𝑙𝑇)
𝑚𝑙=0 4.16
Beispiel:
Die Polynom-Schreibweise
𝐻(𝑧) =𝑌(𝑧)
𝑋(𝑧)=𝑑2+𝑑1𝑧
−1+𝑑0𝑧−2
1+𝑐1𝑧−1+𝑐0𝑧−2=𝑑2𝑧
2+𝑑1𝑧1+𝑑0
𝑧2+𝑐1𝑧1+𝑐0
lässt sich in eine Differenzengleichung umformen:
𝑌(𝑧) ∙ [1 + 𝑐1𝑧−1 + 𝑐0𝑧
−2] = 𝑋(𝑧) ∙ 𝑑2 + 𝑑1𝑧−1 + 𝑑0𝑧
−2
Diese Gleichung nach 𝑌(𝑧) aufgelöst ergibt
𝑌(𝑧) = −𝑌(𝑧) ∙ [𝑐1𝑧−1 + 𝑐0𝑧
−2] + 𝑋(𝑧) ∙ [𝑑2 + 𝑑1𝑧−1 + 𝑑0𝑧
−2].
Diese Gleichung umgeformt ergibt
𝑦(𝑘𝑇) = −𝑐1 ∙ 𝑦(𝑘𝑇 − 𝑇) − 𝑐0 ∙ 𝑦(𝑘𝑇 − 2𝑇) + 𝑑2 ∙ 𝑥(𝑘𝑇) + 𝑑1 ∙ 𝑥(𝑘𝑇 − 𝑇) + 𝑑0 ∙ 𝑥(𝑘𝑇 − 2𝑇).
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
15
Da die Nullstellen des Nennerpolynoms den Polstellen entsprechen, ergeben sich die Pole zu
𝑧∞1,2 =−𝑐1
2±√(
𝑐1
2)2
− 𝑐0.
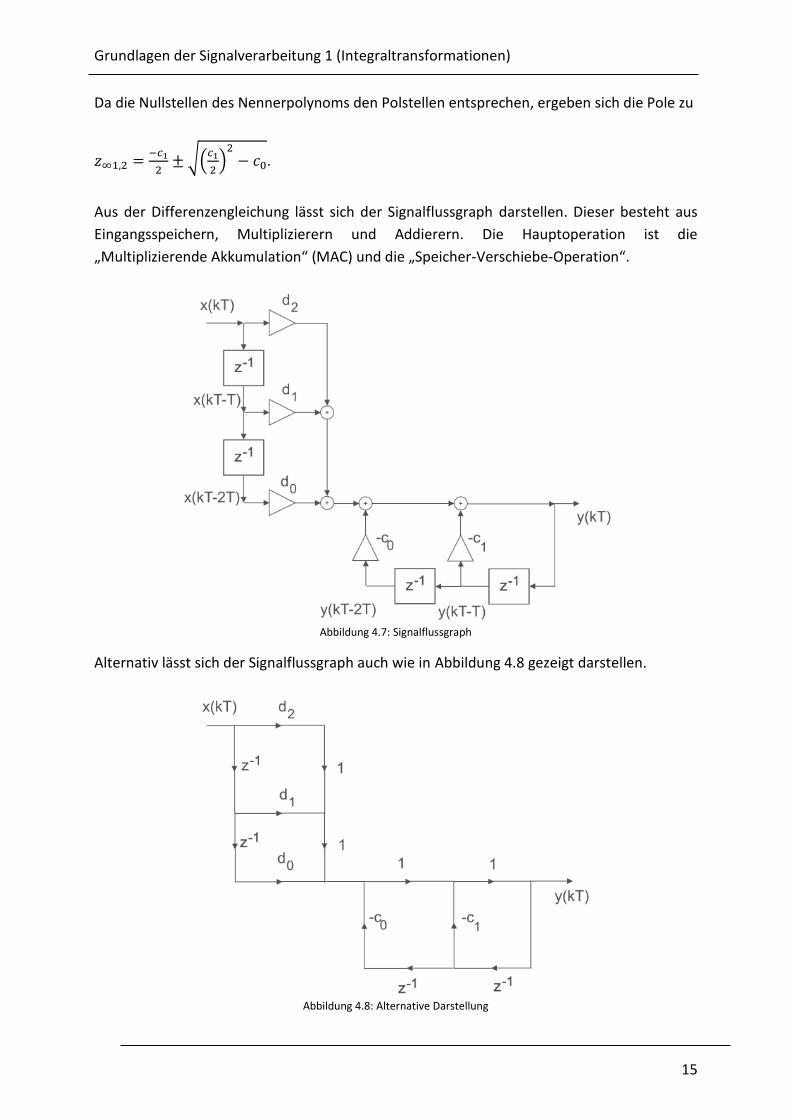
Aus der Differenzengleichung lässt sich der Signalflussgraph darstellen. Dieser besteht aus
Eingangsspeichern, Multiplizierern und Addierern. Die Hauptoperation ist die
„Multiplizierende Akkumulation“ (MAC) und die „Speicher-Verschiebe-Operation“.
Abbildung 4.7: Signalflussgraph
Alternativ lässt sich der Signalflussgraph auch wie in Abbildung 4.8 gezeigt darstellen.
Abbildung 4.8: Alternative Darstellung

Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
16
4.8.1 Nichtrekursive Struktur
Gegeben ist die Impulsantwort der Länge N, hier 𝑁 = 3.
ℎ(𝑘𝑇) = {1;−2; 3}, 𝑠𝑜𝑛𝑠𝑡 0
Die Differenzengleichung ergibt sich daraus zu
𝑦(𝑘𝑇) = 𝑥(𝑘𝑇) − 2𝑥(𝑘𝑇 − 𝑇) + 3𝑥(𝑘𝑇 − 2𝑇) .
Die Ausgangswerte 𝑦(𝑘𝑇) werden bei einer nichtrekursiven Struktur nicht zurückgekoppelt.
Der rechte Teil in Gleichung 4.16 entspricht einer nichtrekursiven Struktur.
Die z-Transformation ergibt sich zu
𝑌(𝑧) = 𝑋(𝑧) − 2𝑋(𝑧) ∙ 𝑧−1 + 3𝑋(𝑧) ∙ 𝑧−2
Der Zusammenhang zwischen den Koeffizienten 𝑑𝑚 der Polynomdarstellung nach Kapitel 4.8
und den Werten der Impulsantwort ℎ(𝑘𝑇) der Länge N bei einem nichtrekursiven System
ergibt sich grundsätzlich zu
𝑦(𝑘𝑇) = ∑ 𝑑𝑚 ∙ 𝑥(𝑘 ∙ 𝑇 − (𝑁 − 1 −𝑚) ∙ 𝑇)
𝑁−1
𝑚=0
Dabei verhält sich die Zählrichtung der Indizes der Koeffizienten 𝑑𝑚 invers zur Zählrichtung
der Indizes der Impulsantwort, d.h.
𝑑0 =̂ ℎ(𝑁 − 1)
𝑑1 =̂ ℎ(𝑁 − 2)
𝑑𝑁−1 =̂ ℎ(0)
Bei nichtrekursiven Systemen handelt es sich um FIR-Systeme. Wichtige Eigenschaften sind:
Endliche Impulsantwortlänge, n-fache Polstellen im Ursprung der z-Ebene
Nichtrekursive Systeme sind immer stabil
Koeffizienten 𝑑𝑚 entsprechen den Werten der Impulsantwortlänge ℎ(𝑘𝑇)
Aus Realisierungsgründen müssen die Koeffizienten 𝑑𝑚 reell sein, die Nullstellen sind
reell oder konjugiert komplex
Alle FIR-Filter mit symmetrischer Impulsantwort sind linearphasig
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
17
Nachteile von nichtrekursiven Systemen sind die
geringe Filtersteilheit und die
hohe Filterordnung. Daraus ergeben sich Filter mit höherer Verzögerungszeit.
4.8.2 Rein rekursive Struktur
Bei rein rekursiven Strukturen werden die Eingangswerte nicht verzögert, die Ausgangswerte
werden dagegen zurückgeführt. Der linke Teil in Gleichung 4.16 entspricht einer rein
rekursiven Struktur. Daraus ergibt sich eine unendlich lange Impulsantwortfolge. IIR-Systeme
sind also Systeme mit einer rein rekursiven Struktur. Sie sind nur stabil, wenn alle Polstellen
im Einheitskreis liegen.
4.8.3 Allgemeiner Fall
Im allgemeinen Fall wird die Kombination aus nichtrekursivem und rein rekursivem System
verwendet. Diese Systeme bestehen aus Pol- und Nullstellen und besitzen gute
Filtereigenschaften.
4.9 Minimalphasige Systeme
Minimalphasige Systeme besitzen nur Nullstellen innerhalb des Einheitskreises. Die
Abhängigkeit der Phase von der Frequenz ist bei minimalphasigen Systemen so gering wie
möglich.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
18
4.10 Allpässe
Allpässe verändern nur frequenzabhängig die Phase eines Systems, sie ändern nicht den
Betrag. Ein idealer Allpass hat also für alle Frequenzen einen konstanten Betrag (konstanter
Betragsfrequenzgang). Die Pol- und Nullstellen liegen sich gespiegelt am Einheitskreis
gegenüber (invers konjugiert komplex).
Beweis, dass der Betragsfrequenzgang eines Allpasses eine Konstante über der Frequenz ist:
𝐻(𝑧) =𝑧−𝑧0
𝑧−𝑧∞=𝑧−𝑧0
𝑧−1
𝑧0∗→ |𝐻(𝑧)| = 1|𝑧=𝑒𝑗𝛺 4.17
𝐻(𝑒𝑗𝛺) =𝑒𝑗𝛺−𝑧0
𝑒𝑗𝛺−1
𝑧0∗∙𝑒−𝑗𝛺
𝑒−𝑗𝛺=1−𝑧0∙𝑒
−𝑗𝛺
1−1
𝑧0∗ ∙𝑒−𝑗𝛺
=1−𝑧0∙𝑒
−𝑗𝛺
1−1
𝑧0∗ ∙𝑒𝑗𝛺
=1−𝑧0∙𝑒
−𝑗𝛺
𝑧0∗ ∙𝑒𝑗𝛺−1
𝑧0∗ ∙𝑒𝑗𝛺
= −𝑧0∗ ∙ 𝑒𝑗𝛺 ∙
1−𝑧0∙𝑒−𝑗𝛺
1−𝑧0∗∙𝑒𝑗𝛺
4.18
Bestimmung des Betrags:
|𝐻(𝑒𝑗𝛺)| = |−𝑧0∗ ∙ 𝑒𝑗𝛺| ∙
|1−𝑧0∙𝑒−𝑗𝛺|
|1−𝑧0∗∙𝑒𝑗𝛺|
= |−𝑧0∗| ∙ |𝑒𝑗𝛺| ∙
|1|+|−𝑧0|∙|𝑒−𝑗𝛺|
|1|+|−𝑧0∗|∙|𝑒𝑗𝛺|
= |𝑧0| ∙ 1 ∙1+|𝑧0|∙1
1+|𝑧0|∙1
= |𝑧0| = 𝑐𝑜𝑛𝑠𝑡. ! 4.19
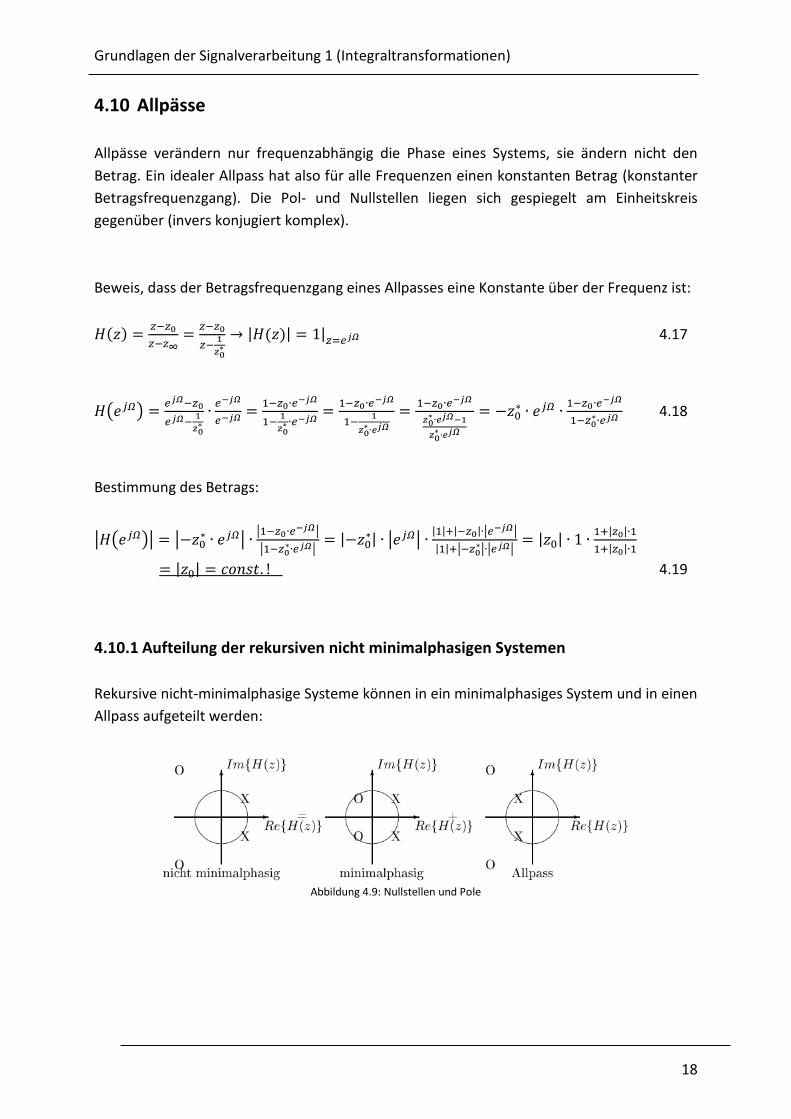
4.10.1 Aufteilung der rekursiven nicht minimalphasigen Systemen
Rekursive nicht-minimalphasige Systeme können in ein minimalphasiges System und in einen
Allpass aufgeteilt werden:
Abbildung 4.9: Nullstellen und Pole
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
19
5 Digitale Filter
Zur graphischen Darstellung von Systemrealisierungen von DLTI-Systemen verwendet man
den sog. Signalflussgraphen.
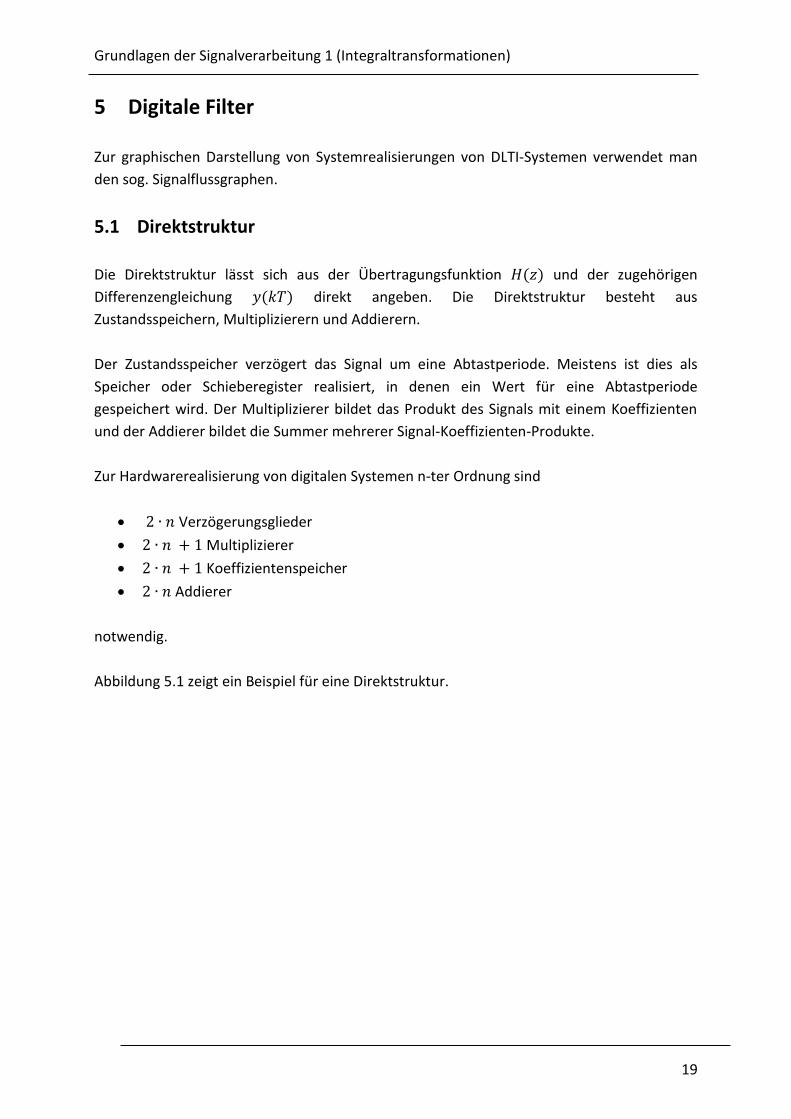
5.1 Direktstruktur
Die Direktstruktur lässt sich aus der Übertragungsfunktion 𝐻(𝑧) und der zugehörigen
Differenzengleichung 𝑦(𝑘𝑇) direkt angeben. Die Direktstruktur besteht aus
Zustandsspeichern, Multiplizierern und Addierern.
Der Zustandsspeicher verzögert das Signal um eine Abtastperiode. Meistens ist dies als
Speicher oder Schieberegister realisiert, in denen ein Wert für eine Abtastperiode
gespeichert wird. Der Multiplizierer bildet das Produkt des Signals mit einem Koeffizienten
und der Addierer bildet die Summer mehrerer Signal-Koeffizienten-Produkte.
Zur Hardwarerealisierung von digitalen Systemen n-ter Ordnung sind
2 ∙ 𝑛 Verzögerungsglieder
2 ∙ 𝑛 + 1 Multiplizierer
2 ∙ 𝑛 + 1 Koeffizientenspeicher
2 ∙ 𝑛 Addierer
notwendig.
Abbildung 5.1 zeigt ein Beispiel für eine Direktstruktur.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
20
Abbildung 5.1: Direktstruktur
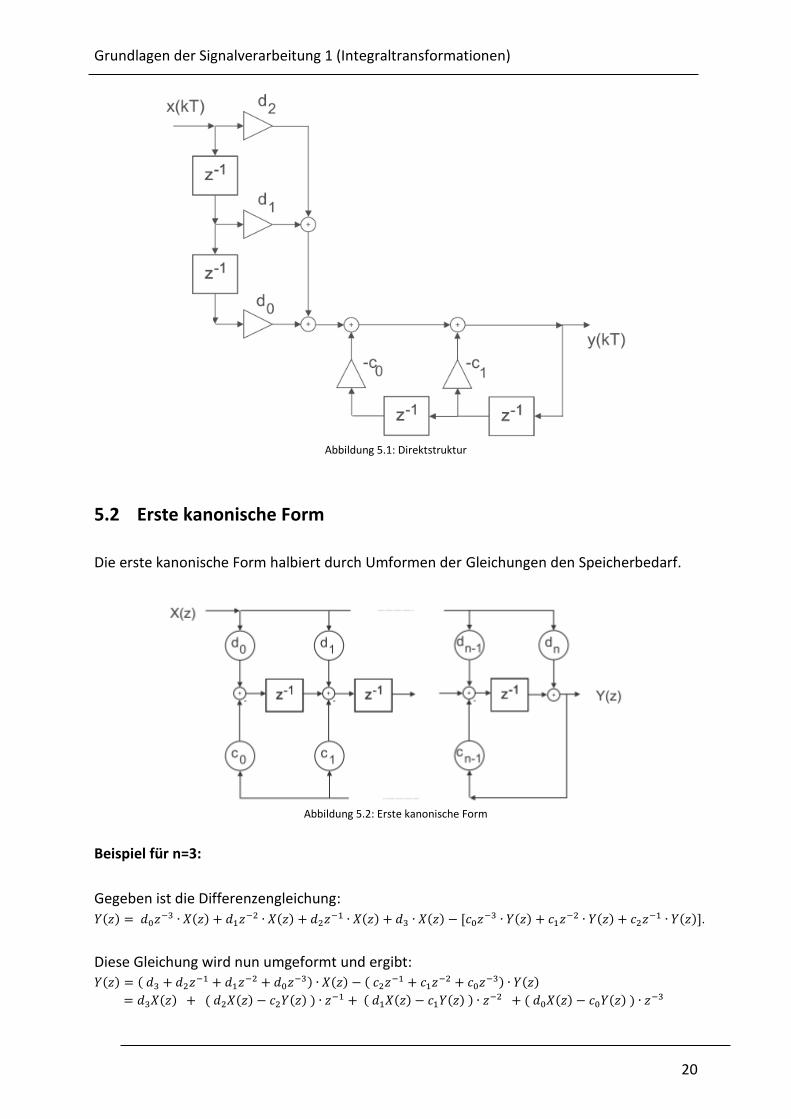
5.2 Erste kanonische Form
Die erste kanonische Form halbiert durch Umformen der Gleichungen den Speicherbedarf.
Abbildung 5.2: Erste kanonische Form
Beispiel für n=3:
Gegeben ist die Differenzengleichung: 𝑌(𝑧) = 𝑑0𝑧
−3 ∙ 𝑋(𝑧) + 𝑑1𝑧−2 ∙ 𝑋(𝑧) + 𝑑2𝑧
−1 ∙ 𝑋(𝑧) + 𝑑3 ∙ 𝑋(𝑧) − [𝑐0𝑧−3 ∙ 𝑌(𝑧) + 𝑐1𝑧
−2 ∙ 𝑌(𝑧) + 𝑐2𝑧−1 ∙ 𝑌(𝑧)].
Diese Gleichung wird nun umgeformt und ergibt: 𝑌(𝑧) = ( 𝑑3 + 𝑑2𝑧
−1 + 𝑑1𝑧−2 + 𝑑0𝑧
−3) ∙ 𝑋(𝑧) − ( 𝑐2𝑧−1 + 𝑐1𝑧
−2 + 𝑐0𝑧−3) ∙ 𝑌(𝑧)
= 𝑑3𝑋(𝑧) + ( 𝑑2𝑋(𝑧) − 𝑐2𝑌(𝑧) ) ∙ 𝑧−1 + ( 𝑑1𝑋(𝑧) − 𝑐1𝑌(𝑧) ) ∙ 𝑧
−2 + ( 𝑑0𝑋(𝑧) − 𝑐0𝑌(𝑧) ) ∙ 𝑧−3
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
21
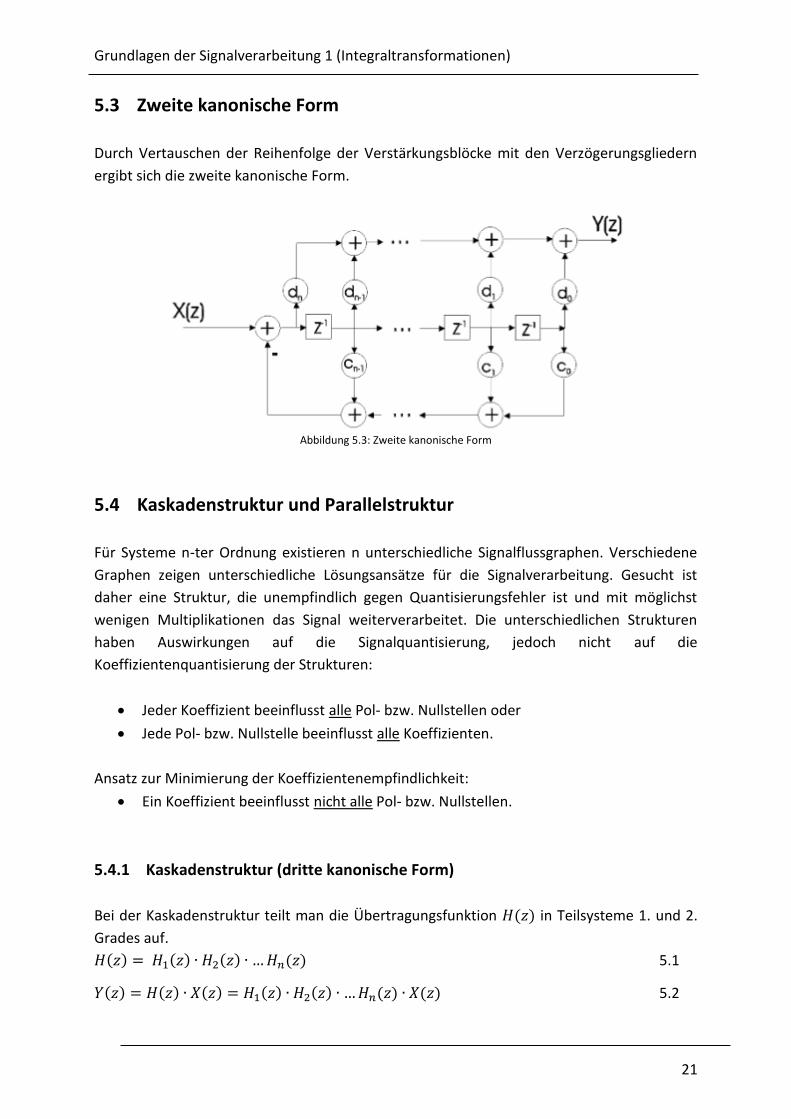
5.3 Zweite kanonische Form
Durch Vertauschen der Reihenfolge der Verstärkungsblöcke mit den Verzögerungsgliedern
ergibt sich die zweite kanonische Form.
Abbildung 5.3: Zweite kanonische Form
5.4 Kaskadenstruktur und Parallelstruktur
Für Systeme n-ter Ordnung existieren n unterschiedliche Signalflussgraphen. Verschiedene
Graphen zeigen unterschiedliche Lösungsansätze für die Signalverarbeitung. Gesucht ist
daher eine Struktur, die unempfindlich gegen Quantisierungsfehler ist und mit möglichst
wenigen Multiplikationen das Signal weiterverarbeitet. Die unterschiedlichen Strukturen
haben Auswirkungen auf die Signalquantisierung, jedoch nicht auf die
Koeffizientenquantisierung der Strukturen:
Jeder Koeffizient beeinflusst alle Pol- bzw. Nullstellen oder
Jede Pol- bzw. Nullstelle beeinflusst alle Koeffizienten.
Ansatz zur Minimierung der Koeffizientenempfindlichkeit:
Ein Koeffizient beeinflusst nicht alle Pol- bzw. Nullstellen.
5.4.1 Kaskadenstruktur (dritte kanonische Form)
Bei der Kaskadenstruktur teilt man die Übertragungsfunktion 𝐻(𝑧) in Teilsysteme 1. und 2.
Grades auf.
𝐻(𝑧) = 𝐻1(𝑧) ∙ 𝐻2(𝑧) ∙ …𝐻𝑛(𝑧) 5.1
𝑌(𝑧) = 𝐻(𝑧) ∙ 𝑋(𝑧) = 𝐻1(𝑧) ∙ 𝐻2(𝑧) ∙ …𝐻𝑛(𝑧) ∙ 𝑋(𝑧) 5.2
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
22
Abbildung 5.4: Kaskadenstruktur
In den Teilsystemen 1. Ordnung werden reelle Pol- bzw. Nullstellen mit reellen Koeffizienten
zusammengefasst. In den Teilsystemen 2. Ordnung werden konjugiert komplexe Pol- bzw.
Nullstellen mit reellen Koeffizienten zusammengefasst.
Der Fehlereinfluss wird minimiert, da die Koeffizienten der Teilsysteme 𝐻𝑖(𝑧) immer nur
zwei Pol- bzw. Nullstellen beeinflussen. Die Durchlaufzeit wird jedoch größer, da die
Teilsysteme einzeln berechnet werden müssen.
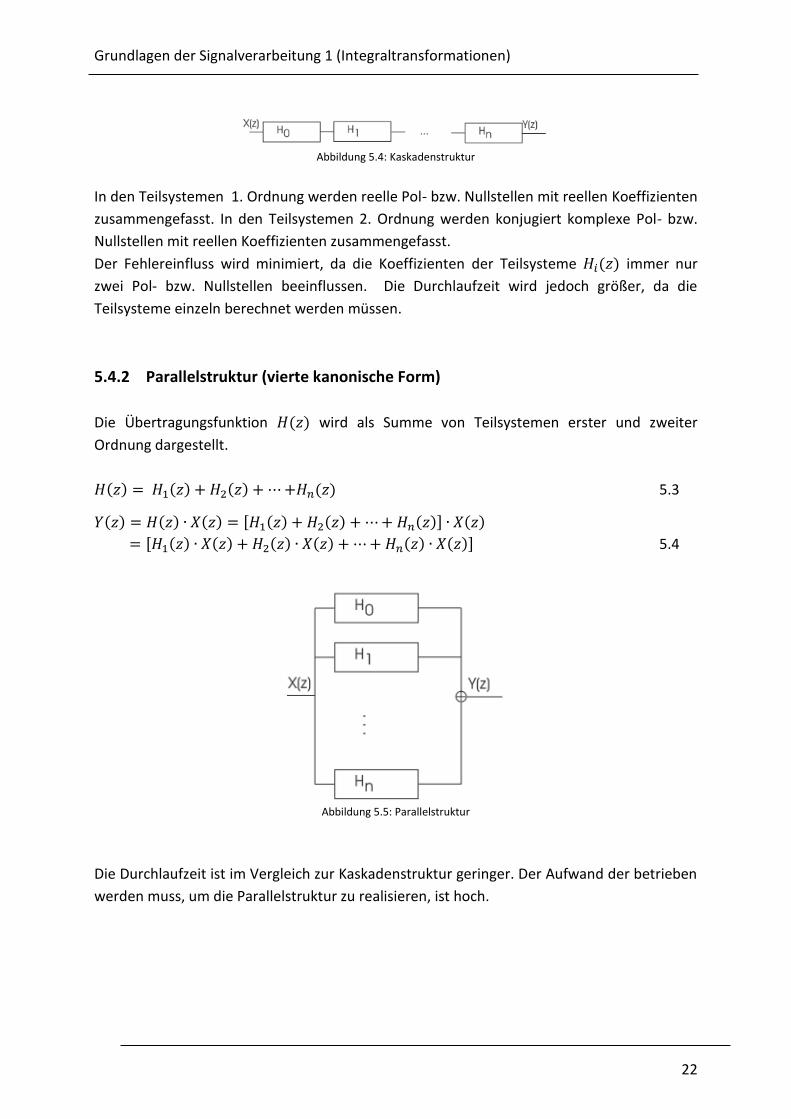
5.4.2 Parallelstruktur (vierte kanonische Form)
Die Übertragungsfunktion 𝐻(𝑧) wird als Summe von Teilsystemen erster und zweiter
Ordnung dargestellt.
𝐻(𝑧) = 𝐻1(𝑧) + 𝐻2(𝑧) + ⋯+𝐻𝑛(𝑧) 5.3
𝑌(𝑧) = 𝐻(𝑧) ∙ 𝑋(𝑧) = [𝐻1(𝑧) + 𝐻2(𝑧) + ⋯+ 𝐻𝑛(𝑧)] ∙ 𝑋(𝑧)
= [𝐻1(𝑧) ∙ 𝑋(𝑧) + 𝐻2(𝑧) ∙ 𝑋(𝑧) + ⋯+ 𝐻𝑛(𝑧) ∙ 𝑋(𝑧)] 5.4
Abbildung 5.5: Parallelstruktur
Die Durchlaufzeit ist im Vergleich zur Kaskadenstruktur geringer. Der Aufwand der betrieben
werden muss, um die Parallelstruktur zu realisieren, ist hoch.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
23
6 Entwurf digitaler Filter
6.1 FIR-Filter
6.1.1 Eigenschaften linearphasiger FIR-Filter
Die Impulsantwort linearphasiger FIR-Filter ist achsen- und punktsymmetrisch.
Die Nullstellen liegen:
gespiegelt am Einheitskreis bei 𝑧 = 𝑧1und 𝑧 =1
𝑧1∗
als konjugiert komplexes Paar auf dem Einheitskreis bei 𝑧 = 𝑒𝑗Ω1 und 𝑧 = 𝑒−𝑗Ω1
als Vierergruppe bei 𝑧 = 𝑧1 , 𝑧 =1
𝑧1 , 𝑧 = 𝑧∗ und 𝑧 =
1
𝑧∗∗
6.1.2 REMEZ-Algorithmus nach Parks und McClellan
Betragsfrequenzgang für linearphasige FIR-Filter im Tschebyscheffschen Sinne approximiert.
6.2 Entwurf von IIR-Filtern
IIR-Filter können mit Hilfe von analogen Prototypenfilter (z.B. Tiefpassfilter) entworfen
werden.
6.2.1 Approximation normierter Tiefpässe
Ausgehend von einem normierten Tiefpass kann ein Hochpass, ein Bandpass oder eine
Bandsperre entworfen werden.

Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
24
6.2.2 Allgemeine Bilineare Transformation
Die Bilinear-Transformation ist eine Transformation zwischen der zeitkontinuierlichen und
zeitdiskreten Darstellung von Systemfunktionen. Die Transformation kann in beide
Richtungen erfolgen.
Dabei ist die Idee, die Integration mit deren zeitdiskreten Umsetzung (Summation!)
gleichzusetzen.
𝐻(𝑠) =1
𝑠=̂ 𝐻(𝑧) 6.1
Die prinzipielle Möglichkeit zeitdiskret zu integrieren besteht in der Summenbildung der
rechteckigen Flächenelemente
𝑦(𝑘𝑇𝐴) = ∑𝑥(𝑘𝑇𝐴) ∙ 𝑇𝐴. 6.2
Hierzu eignet sich die Trapezregel:
𝑦(𝑘𝑇𝐴) = ∑1
2[𝑥(𝑛 ∙ 𝑇𝐴) + 𝑥((𝑛 − 1) ∙ 𝑇𝐴)] ∙ 𝑇𝐴
𝑘𝑛=1 . 6.3
Dies führt zu
𝐻(𝑧) =𝑇𝐴
2∙1+𝑧−1
1−𝑧−1=𝑇𝐴
2∙𝑧+1
𝑧−1≈1
𝑠. 6.4
also:
𝑠 = 2
𝑇𝐴∙𝑧−1
𝑧+1 6.5
bzw.:
𝑧 = 1+
𝑇𝐴 2∙𝑠
1−𝑇𝐴2 ∙𝑠
. 6.6
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
25
7 Diskrete Fouriertransformation (DFT)
Mit Hilfe der Fourier-Transformation lässt sich das Frequenzspektrum eines
zeitkontinuierlichen Signals ermitteln, um eine Aussage über die vorkommenden Frequenzen
zu machen.
Werden dagegen zeitdiskrete Signale verarbeitet, so benutzt man die diskrete Fourier-
Transformation (DFT). Die DFT ist im Gegensatz zur gewöhnlichen Fourier-Transformation
eine Folge von Frequenzlinien. Mithilfe der DFT lassen sich außerdem digitale
Signalverarbeitungsalgorithmen direkt im Frequenzbereich realisieren.
Ausgangspunkt für die Herleitung der DFT ist die Formel der Fourier-Transformation:
𝐹(𝜔) = ∫ 𝑓(𝑡) ∙ 𝑒−𝑗𝜔𝑡𝑑𝑡+∞
−∞ 7.1
Mit Hilfe dieser Formel kann ein zeitkontinuierliches Signal transformiert werden.
Durch Abtastung lässt sich ein zeitkontinuierliches Signal in ein zeitdiskretes Signal
überführen, wobei das Abtasttheorem beachtet werden muss.
In der Formel 7.1 wird 𝑓(𝑡) durch die Abtastwerte 𝑓(𝑘𝑇) ersetzt, sowie das Integral durch
eine Summe angenähert:
𝐹(𝑗𝛺) = ∑ 𝑓(𝑘𝑇) ∙ 𝑒−𝑗𝑘𝛺+∞𝑘=−∞ 𝑚𝑖𝑡 𝛺 = 𝜔 ∙ 𝑇 . 7.2
Aus der eigentlich unendlichen Anzahl von Abtastwerten betrachten wir einen Zeitausschnitt
von N Abtastwerten für 𝑘𝑇 = 0 bis 𝑘𝑇 = (𝑁 − 1) ∙ 𝑇 und erhalten so für das abgetastete
Signal das Kurzzeitspektrum:
𝐹(𝑗𝛺) = ∑ 𝑓(𝑘𝑇) ∙ 𝑒−𝑗𝑘𝛺𝑁−1𝑘=0 7.3
Da das Spektrum zeitdiskreter Signale in 𝑓𝑎 periodisch ist, genügt die Berechnung des
Spektrums von f = 0 bis 𝑓𝑎 bzw. 𝛺 = 0 bis 2𝜋. In diesem Frequenzbereich werden nun N
Frequenzpunkte zwischen 0 und 𝑓𝑎 gleichverteilt mit 7.3 berechnet:
𝑘𝛺 = 𝑘𝜔𝑇 = 𝑘 ∙ 2𝜋 ∙ 𝑓 ∙ 𝑇
→ 𝑘 ∙ 2𝜋 ∙ (𝑛 ∙𝑓𝑎
𝑁) ∙ 𝑇
= 𝑘 ∙ 2𝜋 ∙ (𝑛 ∙𝑓𝑎
𝑁) ∙
1
𝑓𝑎
= 𝑘 ∙ 𝑛 ∙2𝜋
𝑁 = 𝑘𝛺𝑛 7.4

Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
26
Damit ergibt sich die DFT zu:
𝐹(𝑛) = ∑ 𝑓(𝑘𝑇) ∙ 𝑒−𝑗𝑘2𝜋
𝑁𝑛 =𝑁−1
𝑘=0 ∑ 𝑓(𝑘𝑇) ∙ 𝑒−𝑗𝑘𝛺𝑛𝑁−1𝑘=0 . 7.5
Die Inverse DFT wird hier ohne Herleitung eingeführt:
𝑓(𝑘𝑇) =1
𝑁∑ 𝐹(𝑛) ∙ 𝑒𝑗𝑘𝛺𝑛𝑁−1𝑛=0 . 7.6
Mit Hilfe der DFT können aus einer gegebenen Folge von Funktionswerten 𝑓(𝑘𝑇) im
Zeitbereich die Werte 𝐹(𝑛) im Frequenzbereich ermittelt werden.
Wenn die Werte im Frequenzbereich bekannt sind, ermittelt man mit Hilfe der Inversen DFT
die Werte im Zeitbereich.
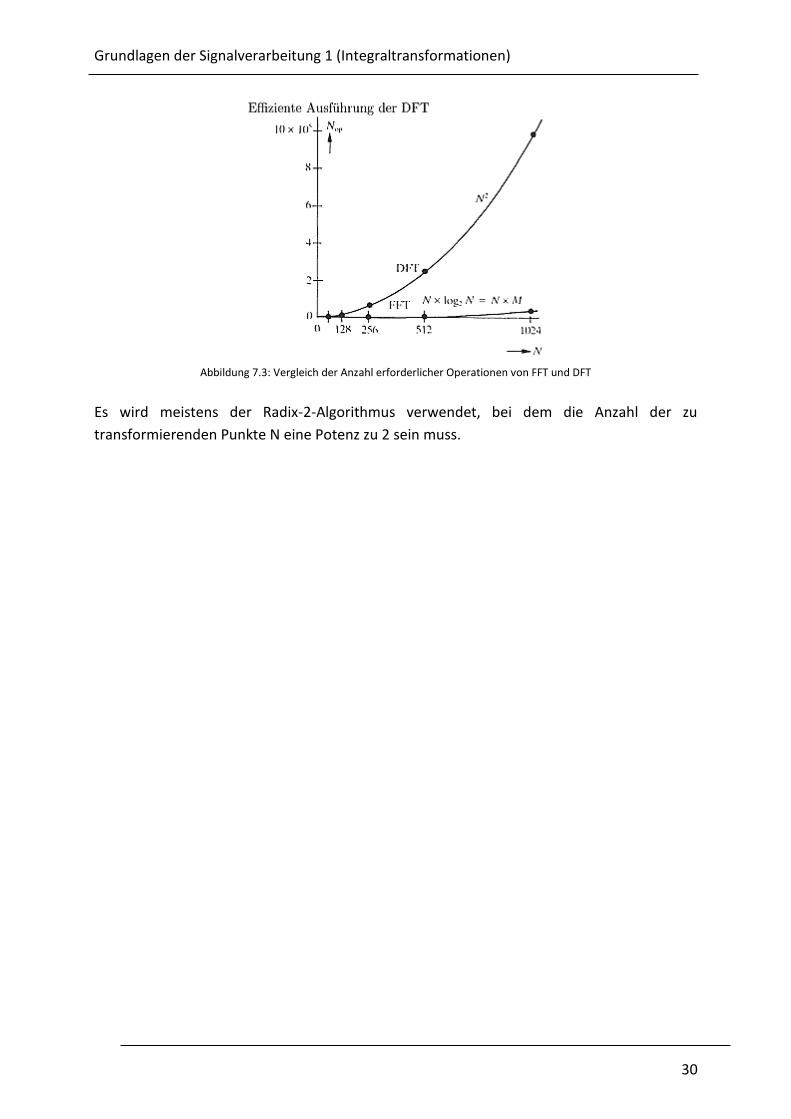
Der Implementierungsaufwand für eine DFT ist proportional zu N2-Multiplikationen, wobei N
der Anzahl der Abtastwerte für das Kurzzeitspektrum entspricht.
7.1 Twiddle-Faktor
Der Twiddle-Faktor wird als Abkürzung für
𝑊𝑁 = 𝑒−𝑗
2𝜋
𝑁 7.7
definiert. Daraus ergibt sich:
𝑒−𝑗𝑘𝛺𝑛 = 𝑒−𝑗𝑘𝑛2𝜋
𝑁 = 𝑊𝑁𝑘𝑛 . 7.8
Nach Euler gilt:
𝑊𝑁𝑘𝑛 = 𝑒−𝑗𝑘𝑛
2𝜋
𝑁 = 𝑐𝑜𝑠 (2𝜋𝑘𝑛
𝑁) − 𝑗𝑠𝑖𝑛 (
2𝜋𝑘𝑛
𝑁) 7.9
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
27
Den Twiddle-Faktor in die DFT eingesetzt ergibt
𝐹(𝑛) = ∑ 𝑓(𝑘𝑇) ∙𝑁−1𝑘=0 𝑊𝑁
𝑘𝑛 7.10
und in die IDFT eingesetzt
𝑓(𝑘𝑇) =1
𝑁∑ 𝐹(𝑛) ∙ 𝑊𝑁
−𝑘𝑛𝑁−1𝑛=0 . 7.11
Den „Twiddle-Faktor“ oder „Dreh-Faktor“ kann man als Zeiger in der komplexen Ebene, der
mit zunehmender Frequenz entgegen dem Uhrzeigersinn auf dem Einheitskreis entlang
wandert, interpretieren:
f=0 𝛺=0, z=(1,0); f=𝑓𝑎/4 𝛺= 𝜋/2, z=(0,j); f=𝑓𝑎/2 𝛺= 𝜋, z=(-1,0);
f=3𝑓𝑎/4 𝛺= 3𝜋/2, z=(0,-j); f=𝑓𝑎 𝛺= 2𝜋, z=(1,0); usw. .
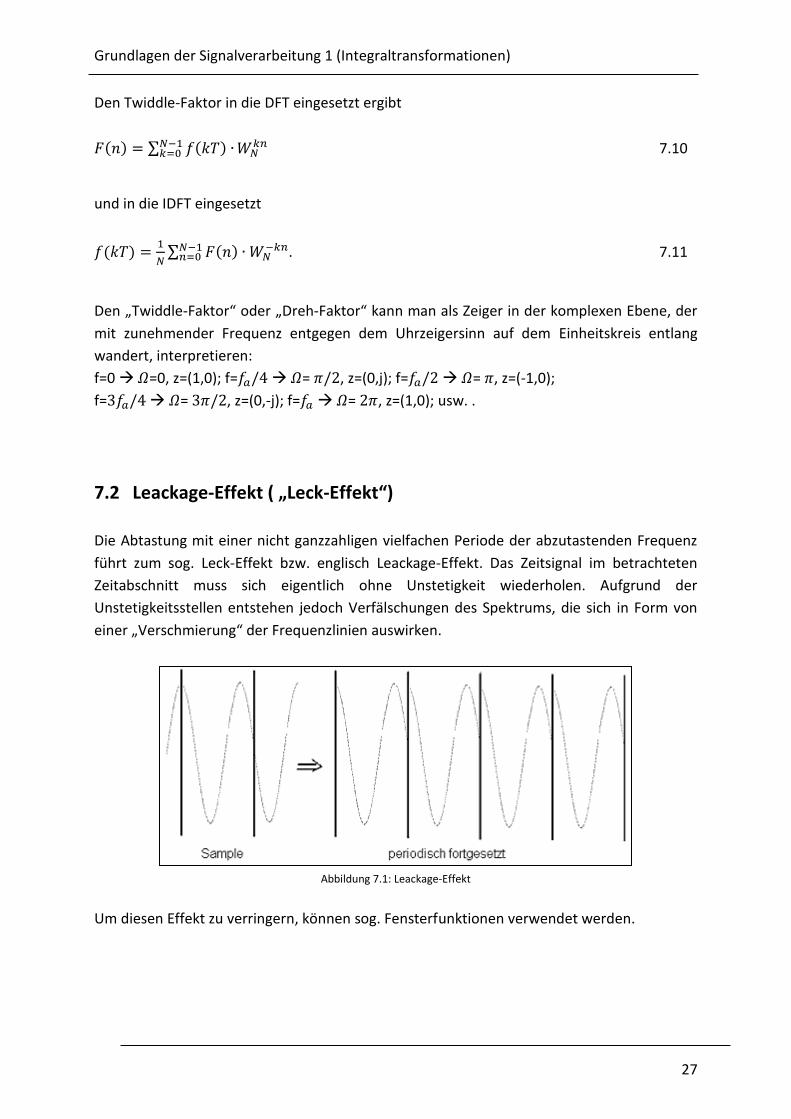
7.2 Leackage-Effekt ( „Leck-Effekt“)
Die Abtastung mit einer nicht ganzzahligen vielfachen Periode der abzutastenden Frequenz
führt zum sog. Leck-Effekt bzw. englisch Leackage-Effekt. Das Zeitsignal im betrachteten
Zeitabschnitt muss sich eigentlich ohne Unstetigkeit wiederholen. Aufgrund der
Unstetigkeitsstellen entstehen jedoch Verfälschungen des Spektrums, die sich in Form von
einer „Verschmierung“ der Frequenzlinien auswirken.
Abbildung 7.1: Leackage-Effekt
Um diesen Effekt zu verringern, können sog. Fensterfunktionen verwendet werden.

Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
28
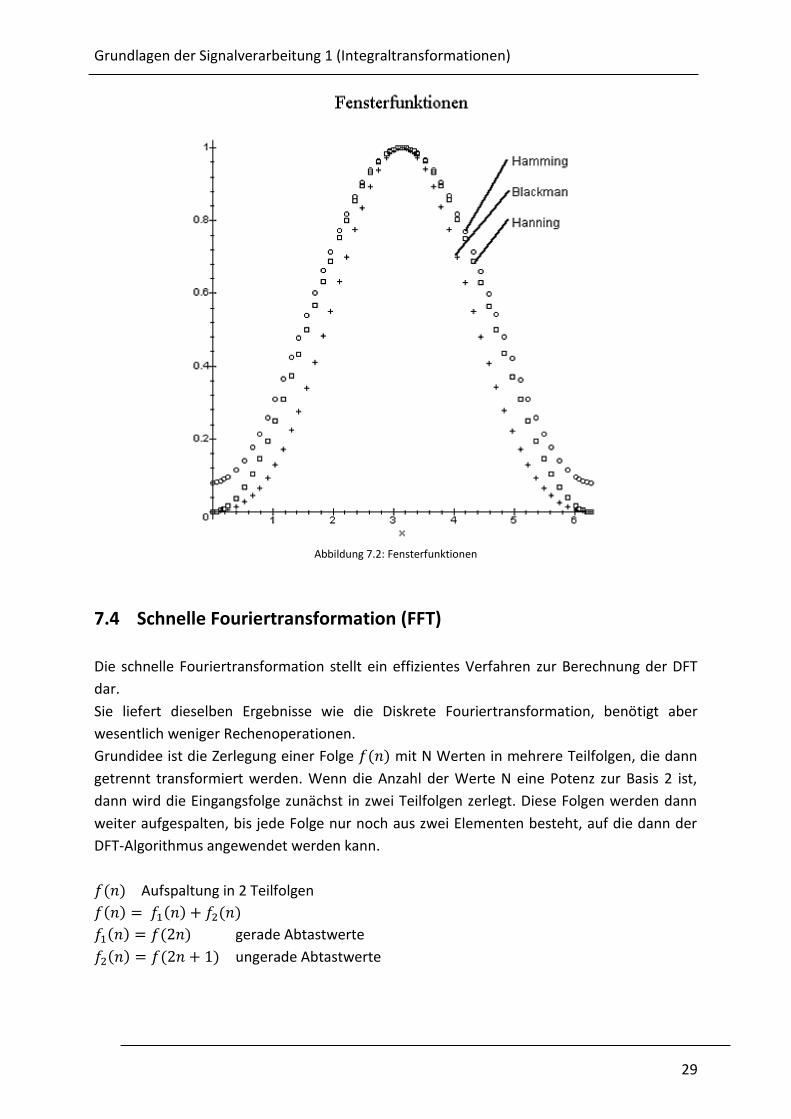
7.3 Fensterfunktionen
Fensterfunktionen verringern die Effekte, die durch einen rechteckigen Ausschnitt des
Zeitsignals bei nicht kontinuierlicher Fortsetzung entstehen. Das zu transformierende
Zeitsignal wird mit einer Fensterfunktion, die typischerweise am Anfang und am Ende des
Fensters den Wert Null hat, multipliziert. Auf diese Weise wird ein identischer Anfangs- und
Endwert des Zeitausschnitts erzwungen und so eine kontinuierliche Fortsetzung erreicht.
Allerdings ist nun das zu analysierende Signal verfälscht worden.
Die Wahl einer Fensterfunktion hängt also von der notwendigen Trennschärfe der
Frequenzlinien und der „in Kauf genommenen“ Verfälschung des Zeitsignal-Ausschnittes ab.
Beispiele für Fensterfunktionen:
Rechteckfenster:
𝑓𝑅(𝑘) = {1 0 ≤ 𝑘 ≤ 𝑁 − 10 𝑠𝑜𝑛𝑠𝑡
7.12
Hannfenser (früher: Hanningfenster):
𝑓𝐻𝑛(𝑘) = {0,5 [1 − cos (
2𝜋𝑘
(𝑁−1))] 0 ≤ 𝑘 ≤ 𝑁 − 1
0 𝑠𝑜𝑛𝑠𝑡 7.13
Hammingfenster:
𝑓𝐻𝑚(𝑘) = {0,54 − 0,46 ∙ 𝑐𝑜𝑠 (
2𝜋𝑘
(𝑁−1)) 0 ≤ 𝑘 ≤ 𝑁 − 1
0 𝑠𝑜𝑛𝑠𝑡 7.14
Blackmanfenster:
𝑓𝐵𝑙(𝑘) = {0,42 − 0,5 ∙ 𝑐𝑜𝑠 (
2𝜋𝑘
(𝑁−1)) + 0,08 ∙ 𝑐𝑜𝑠 (
4𝜋𝑘
(𝑁−1)) 0 ≤ 𝑘 ≤ 𝑁 − 1
0 𝑠𝑜𝑛𝑠𝑡 7.15
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
29
Abbildung 7.2: Fensterfunktionen
7.4 Schnelle Fouriertransformation (FFT)
Die schnelle Fouriertransformation stellt ein effizientes Verfahren zur Berechnung der DFT
dar.
Sie liefert dieselben Ergebnisse wie die Diskrete Fouriertransformation, benötigt aber
wesentlich weniger Rechenoperationen.
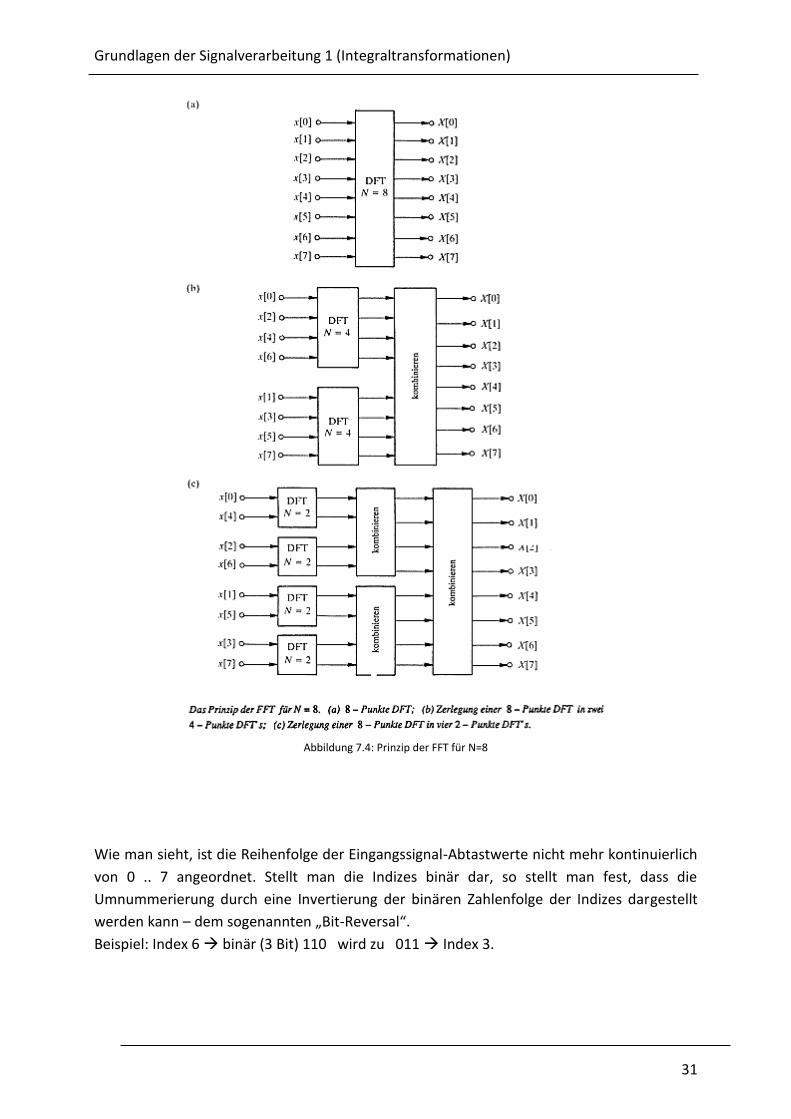
Grundidee ist die Zerlegung einer Folge 𝑓(𝑛) mit N Werten in mehrere Teilfolgen, die dann
getrennt transformiert werden. Wenn die Anzahl der Werte N eine Potenz zur Basis 2 ist,
dann wird die Eingangsfolge zunächst in zwei Teilfolgen zerlegt. Diese Folgen werden dann
weiter aufgespalten, bis jede Folge nur noch aus zwei Elementen besteht, auf die dann der
DFT-Algorithmus angewendet werden kann.
𝑓(𝑛) Aufspaltung in 2 Teilfolgen
𝑓(𝑛) = 𝑓1(𝑛) + 𝑓2(𝑛)
𝑓1(𝑛) = 𝑓(2𝑛) gerade Abtastwerte
𝑓2(𝑛) = 𝑓(2𝑛 + 1) ungerade Abtastwerte
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
30
Abbildung 7.3: Vergleich der Anzahl erforderlicher Operationen von FFT und DFT
Es wird meistens der Radix-2-Algorithmus verwendet, bei dem die Anzahl der zu
transformierenden Punkte N eine Potenz zu 2 sein muss.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
31
Abbildung 7.4: Prinzip der FFT für N=8
Wie man sieht, ist die Reihenfolge der Eingangssignal-Abtastwerte nicht mehr kontinuierlich
von 0 .. 7 angeordnet. Stellt man die Indizes binär dar, so stellt man fest, dass die
Umnummerierung durch eine Invertierung der binären Zahlenfolge der Indizes dargestellt
werden kann – dem sogenannten „Bit-Reversal“.
Beispiel: Index 6 binär (3 Bit) 110 wird zu 011 Index 3.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
32
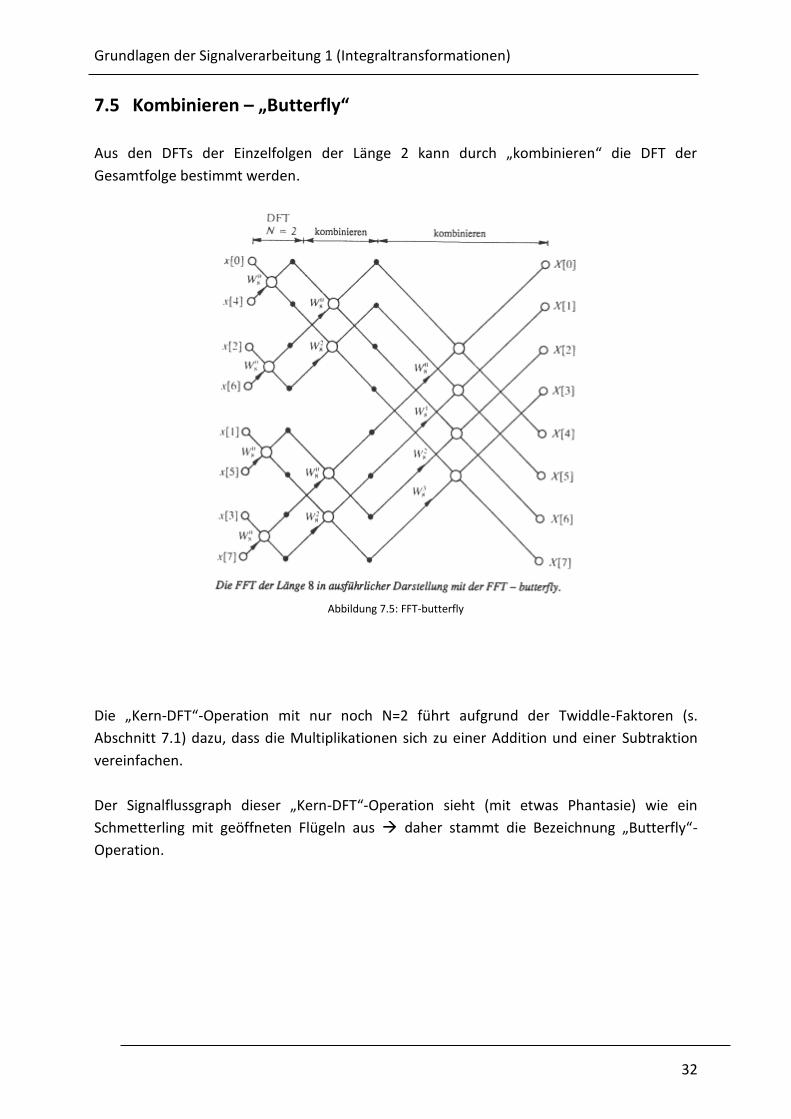
7.5 Kombinieren – „Butterfly“
Aus den DFTs der Einzelfolgen der Länge 2 kann durch „kombinieren“ die DFT der
Gesamtfolge bestimmt werden.
Abbildung 7.5: FFT-butterfly
Die „Kern-DFT“-Operation mit nur noch N=2 führt aufgrund der Twiddle-Faktoren (s.
Abschnitt 7.1) dazu, dass die Multiplikationen sich zu einer Addition und einer Subtraktion
vereinfachen.
Der Signalflussgraph dieser „Kern-DFT“-Operation sieht (mit etwas Phantasie) wie ein
Schmetterling mit geöffneten Flügeln aus daher stammt die Bezeichnung „Butterfly“-
Operation.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
33
8 Abbildungsverzeichnis
Abbildung 1.1: Abtastung und Quantisierung ............................................................................ 4
Abbildung 2.1: Dirac-Impuls ....................................................................................................... 5
Abbildung 2.2: Dirac-Impuls um t0 verschoben ......................................................................... 6
Abbildung 2.3: Dirac-Impuls und resultierende Impulsantwort ................................................ 6
Abbildung 3.1: Impulsantwort mit Eingangs- und Ausgangssignal ............................................ 6
Abbildung 4.1: Impulsantwortfolge ........................................................................................... 8
Abbildung 4.2: Sprungantwortfolge ........................................................................................... 9
Abbildung 4.3: Folgenwerte ....................................................................................................... 9
Abbildung 4.4: Betragsfrequenzgang (a=0.9 , T=1) für das Beispiel ........................................ 10
Abbildung 4.5: Impulsantwt FIR-System .................................................................................. 13
Abbildung 4.6: Impulsantwort IIR-System ............................................................................... 13
Abbildung 4.7: Signalflussgraph ............................................................................................... 15
Abbildung 4.8: Alternative Darstellung .................................................................................... 15
Abbildung 4.9: Nullstellen und Pole ......................................................................................... 18
Abbildung 5.1: Direktstruktur .................................................................................................. 20
Abbildung 5.2: Erste kanonische Form..................................................................................... 20
Abbildung 5.3: Zweite kanonische Form .................................................................................. 21
Abbildung 5.4: Kaskadenstruktur ............................................................................................. 22
Abbildung 5.5: Parallelstruktur ................................................................................................ 22
Abbildung 7.1: Leackage-Effekt ................................................................................................ 27
Abbildung 7.2: Fensterfunktionen ........................................................................................... 29
Abbildung 7.3: Vergleich der Anzahl erforderlicher Operationen von FFT und DFT ............... 30
Abbildung 7.4: Prinzip der FFT für N=8 .................................................................................... 31
Abbildung 7.5: FFT-butterfly .................................................................................................... 32
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
34
9 Anhang: Zusammenhang zwischen s-Ebene und z-Ebene
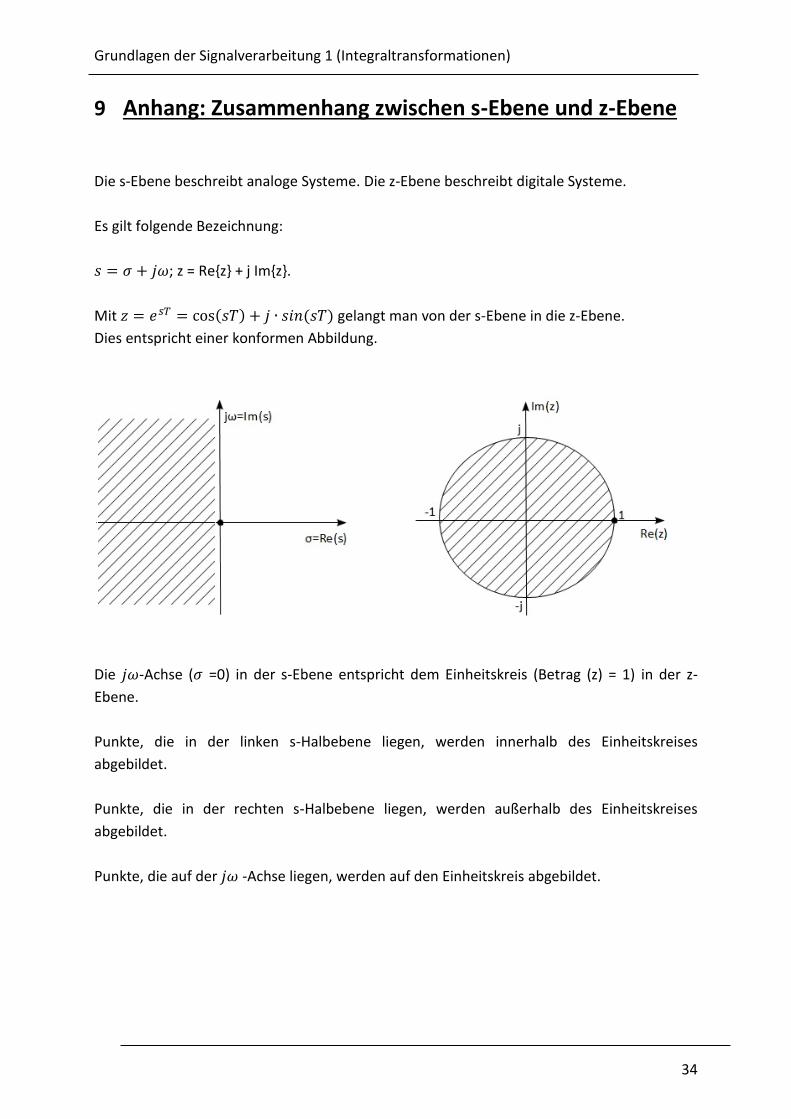
Die s-Ebene beschreibt analoge Systeme. Die z-Ebene beschreibt digitale Systeme.
Es gilt folgende Bezeichnung:
𝑠 = 𝜎 + 𝑗𝜔; z = Re{z} + j Im{z}.
Mit 𝑧 = 𝑒𝑠𝑇 = cos(𝑠𝑇) + 𝑗 ∙ 𝑠𝑖𝑛(𝑠𝑇) gelangt man von der s-Ebene in die z-Ebene.
Dies entspricht einer konformen Abbildung.
Die 𝑗𝜔-Achse (𝜎 =0) in der s-Ebene entspricht dem Einheitskreis (Betrag (z) = 1) in der z-
Ebene.
Punkte, die in der linken s-Halbebene liegen, werden innerhalb des Einheitskreises
abgebildet.
Punkte, die in der rechten s-Halbebene liegen, werden außerhalb des Einheitskreises
abgebildet.
Punkte, die auf der 𝑗𝜔 -Achse liegen, werden auf den Einheitskreis abgebildet.
Grundlagen der Signalverarbeitung 1 (Integraltransformationen)
35
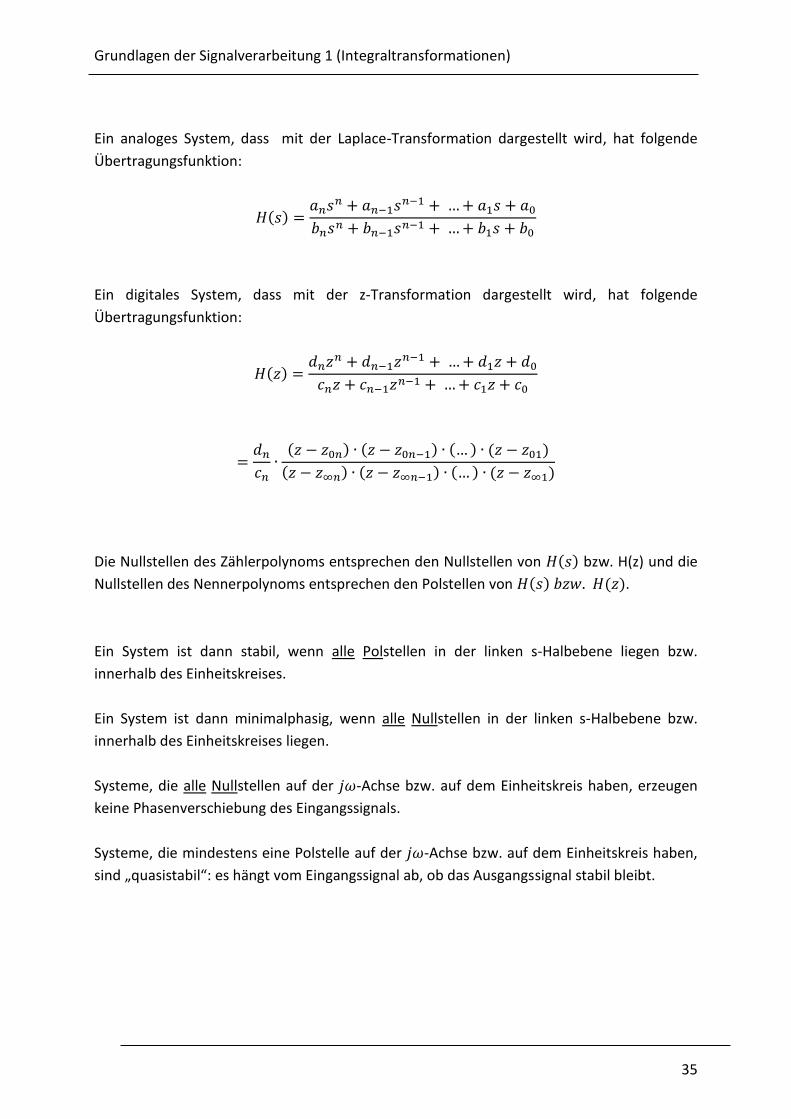
Ein analoges System, dass mit der Laplace-Transformation dargestellt wird, hat folgende
Übertragungsfunktion:
𝐻(𝑠) =𝑎𝑛𝑠
𝑛 + 𝑎𝑛−1𝑠𝑛−1 + …+ 𝑎1𝑠 + 𝑎0
𝑏𝑛𝑠𝑛 + 𝑏𝑛−1𝑠𝑛−1 + …+ 𝑏1𝑠 + 𝑏0
Ein digitales System, dass mit der z-Transformation dargestellt wird, hat folgende
Übertragungsfunktion:
𝐻(𝑧) =𝑑𝑛𝑧
𝑛 + 𝑑𝑛−1𝑧𝑛−1 + …+ 𝑑1𝑧 + 𝑑0
𝑐𝑛𝑧 + 𝑐𝑛−1𝑧𝑛−1 + …+ 𝑐1𝑧 + 𝑐0
=𝑑𝑛𝑐𝑛∙(𝑧 − 𝑧0𝑛) ∙ (𝑧 − 𝑧0𝑛−1) ∙ (… ) ∙ (𝑧 − 𝑧01)
(𝑧 − 𝑧∞𝑛) ∙ (𝑧 − 𝑧∞𝑛−1) ∙ (… ) ∙ (𝑧 − 𝑧∞1)
Die Nullstellen des Zählerpolynoms entsprechen den Nullstellen von 𝐻(𝑠) bzw. H(z) und die
Nullstellen des Nennerpolynoms entsprechen den Polstellen von 𝐻(𝑠) 𝑏𝑧𝑤. 𝐻(𝑧).
Ein System ist dann stabil, wenn alle Polstellen in der linken s-Halbebene liegen bzw.
innerhalb des Einheitskreises.
Ein System ist dann minimalphasig, wenn alle Nullstellen in der linken s-Halbebene bzw.
innerhalb des Einheitskreises liegen.
Systeme, die alle Nullstellen auf der 𝑗𝜔-Achse bzw. auf dem Einheitskreis haben, erzeugen
keine Phasenverschiebung des Eingangssignals.
Systeme, die mindestens eine Polstelle auf der 𝑗𝜔-Achse bzw. auf dem Einheitskreis haben,
sind „quasistabil“: es hängt vom Eingangssignal ab, ob das Ausgangssignal stabil bleibt.


















