Grundlagender Signalverarbeitung*und*Robo2kneumann/Signalverarb… · 19.04.11 1 Grundlagender...
15
19.04.11 1 Grundlagen der Signalverarbeitung und Robo2k Bernd Neumann Jianwei Zhang Teil 1: Grundlagen der Signalverarbeitung Vorlesung: Do 10:15 – 11:45 Übungen 1: Do 12:30 – 14:00 Übungen 2: Mi 10:15 – 11:45 Übungen • Jeden Donnerstag werden Übungsaufgaben ins Netz gestellt und in der Vorlesung kurz erläutert. • Die Übungsaufgaben müssen schriPlich bearbeitet und vor dem nächsten Übungstermin abgegeben werden. Elektronische Abgabe ist möglich an [email protected] • Übungen können in Gruppen von bis zu drei Studierenden bearbeitet und abgegeben werden. • In den Übungsstunden werden Lösungen von Teilnehmern vorgetragen und gemeinsam besprochen. • Die abgegebenen Lösungen werden bewertet, für eine erfolgreiche Übungsteilnahme ist mindestens die HälPe der maximalen Punktzahl erforderlich. • Eine erfolgreiche Teilnahme an den Übungen ist Voraussetzung für die Zulassung zur mündlichen Modulprüfung.
Transcript of Grundlagender Signalverarbeitung*und*Robo2kneumann/Signalverarb… · 19.04.11 1 Grundlagender...

19.04.11
1
Grundlagen der Signalverarbeitung und Robo2k
Bernd Neumann Jianwei Zhang
Teil 1: Grundlagen der Signalverarbeitung
Vorlesung: Do 10:15 – 11:45 Übungen 1: Do 12:30 – 14:00 Übungen 2: Mi 10:15 – 11:45
Übungen
• Jeden Donnerstag werden Übungsaufgaben ins Netz gestellt und in der Vorlesung kurz erläutert.
• Die Übungsaufgaben müssen schriPlich bearbeitet und vor dem nächsten Übungstermin abgegeben werden. Elektronische Abgabe ist möglich an [email protected]‐hamburg.de
• Übungen können in Gruppen von bis zu drei Studierenden bearbeitet und abgegeben werden.
• In den Übungsstunden werden Lösungen von Teilnehmern vorgetragen und gemeinsam besprochen.
• Die abgegebenen Lösungen werden bewertet, für eine erfolgreiche Übungsteilnahme ist mindestens die HälPe der maximalen Punktzahl erforderlich.
• Eine erfolgreiche Teilnahme an den Übungen ist Voraussetzung für die Zulassung zur mündlichen Modulprüfung.

19.04.11
2
Website
h^p://kogs-‐www.informa2k.uni-‐hamburg.de/~neumann/Signalverarbeitung-‐SoSe-‐2011/
• Sie finden diesen Link auch über meine Home Page • Auf der Website finden Sie aktuelle Nachrichten, Folienkopien, Übungsblä^er und
andere nützliche Angaben • Aktualisierung der Website jeden Dienstag
Mit wem Sie es zu tun haben ...
1967 Diplom in Elektrotechnik/Regelungstechnik in Darmstadt
1968 M.S. am MIT, Cambridge, USA
1971 Ph.D. am MIT, Cambridge, USA, in Informa2onstheorie
1971 -‐ 1982 Dozent am Fachbereich Informa2k der Universität Hamburg
1982 -‐ 1986 Professor (C2) am Fachbereich Informa2k der Universität Hamburg
1986 -‐ 2008 Professor (C4) am Fachbereich Informa2k der Universität Hamburg, Leiter des Arbeitsbereiches Kogni2ve Systeme Forschung: Bildverarbeitung und Künstliche Intelligenz
1988 -‐ 2008 Gründer und Leiter des Labors für Künstliche Intelligenz
seit 1997 Mitbegründer und Vorsitzender des Hamburger Informa2k Technologie-‐Centers (HITeC)

19.04.11
3
Wahlspruch
Dem Ingeniör ist nichts zu schwör!
Original: "He does, huh? Well, I´ll show him that Gyro Gearloose can make anything talk!"
Inhalt von Teil 1 (1) • Signale in linearen zei2nvarianten Systemen
-‐ Elementarsignale -‐ Lineare zei2nvariante Systeme -‐ Faltungsintegral
• Fourier-‐Transforma2on
-‐ EigenschaPen der Fourier-‐Transforma2on -‐ Beispiele für Fourier-‐Tranforma2onen -‐ Filtern im Orts-‐ und Frequenzbereich
• Diskrete Signale
-‐ Shannon's Abtas^heorem, Rekonstruk2on -‐ Topologieerhaltende Abtastung -‐ Bilddigitalisierung
• Diskrete Faltung und diskrete Fourier-‐Transforma2on
-‐ Schnelle Fourier-‐Tranforma2on (FFT) -‐ Filtern von Digitalbildern

19.04.11
4
Inhalt von Teil 1 (2) • Digitale Bildverarbeitung
-‐ Bildkompression -‐ Karhunen-‐Loeve-‐Transforma2on -‐ Geometrische Transforma2onen
• Digitale perspek2vische Abbildung
-‐ 3D nach 2D -‐ 2D nach 3D
• Bewegungsanalyse -‐ Op2scher Fluss -‐ Kalman-‐Filter -‐ Essen2elle Matrix
Was sind Signale?
"Signale stellen die materielle Realisierung von Informa5onen dar. Sie haben einen Informa5onsgehalt, dargestellt durch den Verlauf bzw. die Änderung von informa5onstragenden Parametern. Die physikalische Größe, von der das Signal getragen wird, heißt Signalträger."
Woshni, Informa2onstechnik, Verlag Technik, 1988
"Ein Signal ist ein physikalisches Phänomen, dessen Vorhandensein oder Änderung als Darstellung von Informa5onen angesehen wird."
DN 40146-‐1: Nachrichtenübertragung, 1994
Viele physikalische Größen: -‐ Spannung -‐ Schalldruck -‐ Lich2ntensität -‐ Lichtrequenz -‐ Temperatur . . .
Von einer physikalischen Größe abstrahierende Repräsenta2onsformen: -‐ mathema2sche Funk2on -‐ Kurvenverlauf, Grafik, Diagramm -‐ Zahlenreihe, Zahlenfeld . . .

19.04.11
5
Signal, Nachricht, Informa2on
"heute ist schönes FrühlingsweJer"
weiß ich doch
Signal
Nachricht
leider keine Informa2on für den Empfänger
Signale können mit verschiedenen Trägern übermiJelt werden
Nachrichten werden durch Zeichen oder Symbole dargestellt
InformaTonsgehalt hängt vom "Überraschungsgrad" des Nachrichten-‐empfängers ab
Von Signalen zur Bedeutung
Müllabfuhr und BrieZräger bei der Arbeit
• Signalverarbeitung kann zahlreiche komplexe Teilprozesse mit wechselnden Repräsenta2onen umfassen
• Wir behandeln hier vorwiegend allgemein verwendbare Grundformen der Signalverarbeitung und ihre Gesetzmäßigkeiten mathema2sche Abstrak2onen

19.04.11
6
Signalverarbeitung in Systemen Die formale, abstrahierende Beschreibung von Signalverarbeitung ermöglicht die Analyse und Synthese von verschiedenen Anwendungssystemen mit denselben Mi^eln.
gedämpPer elektrischer Serienschwingkreis
gedämpPer mechanischer Schwinger
Überführung der Gleichungen ineinander mit L ⇔ m, R ⇔ b, c ⇔ 1/C, i ⇔ x Systemtheorie liefert z.B. Kriterien für die Stabilität eines Schwingkreises unabhängig von seiner physikalischen Realisierung.
Erklärungsanspruch der Systemtheorie
Wurzeln: • Regelungstechnik: Regelungsvorgänge in technischen Systemen • Kyberne2k: Vergleichende Betrachtung von Gesetzmäßigkeiten in technischen,
biologischen und soziologischen Systemen
Norbert Wiener (1894 – 1964) begründete die Kyberne2k: "Wir haben beschlossen, das ganze Gebiet der Regelung und Nachrichtentheorie, ob
in der Maschine oder im Tier, mit dem Namen 'Kyberne2k' zu benennen ..." N. Wiener: Cyberne2cs or Control and Communica2on in the Animal and the Machine. 1. Auflage 1948
Deutsche Ausgabe: Kyberne2k-‐Regelung und Maschine. Rowohlt 1963
κυβερνητης = Steuermann ≈ governor ≈ Regler

19.04.11
7
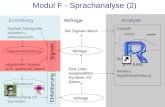
Verhaltensbeschreibung
System(komponenten) werden durch Eingabe-‐Ausgabe-‐Verhalten als Black Box oder White Box beschrieben:
Eingabe x Ausgabe y
Eingabe x Ausgabe y
Innere Struktur nicht bekannt, abstrakte Verhaltensmodelle (nützlich für Verhaltensanalyse komplexer Systeme)
Verhalten ergibt sich aus Kenntnissen der inneren Struktur (nützlich für AbstrakTon von bekanntem Detail)
• x und y werden häufig als "Zeitunk2on" x(t) und y(t) beschrieben • Die Transforma2on durch eine Komponente ist y(t) = Tr{ x(t) }
Kon2nuierliche vs. diskrete Signale (1)
Kon2nuierlich: zu jedem Zeitpunkt definiert, kann jede Stelle im Wertebereich annehmen ⇒ Defini2ons-‐ und Wertebereich entsprechen reelen Zahlen
Diskret oder quan2siert: Signal kann nur bes2mmte Stellen im Zeitbereich ("zeitdiskret") oder Wertebereich ("wertediskret") einnehmen
analoge Signale wertkonTnuierlich zeitkonTnuierlich
quan2sierte Signale wertdiskret
zeitkonTnuierlich
abgetastete Signale wertkonTnuierlich
zeitdiskret
digitale Signale wertdiskret zeitdiskret

19.04.11
8
Kon2nuierliche vs. diskrete Signale (2)
Beispiele:
Abtastung und Quan2sierung von Bildern

19.04.11
9
Elementarsignale
Elementarsignale • eignen sich als Eingabe zur Charakterisierung von Systemkomponenten • haben eine einfache Beschreibung • können als Bestandteile beliebiger Signale verstanden werden
s(t) = sin(2πt) 1
1
t
s(t) = exp(πt2)
s(t) = ε(t) 1
t
Gauss-‐Signal
Sinus-‐Signal SprungfunkTon
s(t) = rect(t)
Rechteckimpuls Dreieckimpuls
s(t) = Λ(t)
s(t) = δ(t)
t
Dirac-‐Impuls
Transforma2onen von Elementarsignalen
Skalierung eines Signals mit Faktor a:
s(t) ⇒ a s(t) Zeitverschiebung (Verzögerung) eines Signals um t0:
s(t) ⇒ s(t-‐t0) Zeitliche Dehnung eines Signals um Faktor T:
s(t) ⇒ s(t/T)
Beispiel: Verzögerter und skalierter Rechteckimpuls mit Dauer T
s(t) = a rect(t ! t0
T)
a

19.04.11
10
Lineare zei2nvariante Systeme
LTI-‐Systeme (engl. linear 2me-‐invariant systems) haben spezielle EigenschaPen: 1. Linearität ⇒ es gilt der Superposi2onssatz
Tr aisi(t)i!"#
$
%&'= aiTr si(t){ } = ai
i! gi(t)
i!
2. Zei2nvarianz
Tr{ s(t) } = g(t) ⇒ Tr{ s(t – t0) } = g(t -‐ t0)
Komponenten aus Bauelementen mit zeitunabhängigen EigenschaPen und ohne zeitabhängige Strom-‐ und Spannungsquellen sind zei2nvariant.
Weitere Systemtypen
Ein kausales System reagiert auf ein Eingangssignal und an2zipiert es nicht.
Technisch realisierbare Systeme sind stets kausal hinsichtlich zeitabhängiger Signale.
Ein System heißt dynamisch, wenn sein Ausgangssignal auch von vergangenen Werten seines Eingangssignals abhängt.
Dazu muss das System mindest einen Speicher enthalten, z.B. eine Kapazität.
Ein System heißt stabil, wenn es auf beschränkte Eingabesignale stets mit beschränkten Ausgabesignalen reagiert.
Diese Forderung kann auf verschiedene Weise ausgedrückt werden: -‐ Die Impulsantwort (s.u.) des Systems muss absolut integrierbar sein. -‐ BIBO = bounde-‐input-‐bounded-‐output

19.04.11
11
EigenschaPen von LTI-‐Systemen (1)
LTI-‐Systeme transformieren sinusförmige Eingangssignale in sinusförmige Ausgangssignale mit derselben Frequenz, aber i.A. veränderter Amplitude und Phasenlage.
Das Verhalten von LTI-‐Systemen kann durch Amplitudengang und Phasengang beschrieben werden.
ω
ω
Amplitudengang A(ω)
Phasengang ϕ(ω)
Bode-‐Diagramm für einen Tiefpass
EigenschaPen von LTI-‐Systemen (2)
u1 = x(t) u2 = y(t) Sta2sche LTI-‐Systeme werden durch algebraische Gleichungen mit konstanten und reellen Koeffizienten beschrieben.
y(t) =R2
R1 +R2
x(t)
u1 = x(t) u2 = y(t)
y(t) +RC !y(t) = x(t)
Dynamische LTI-‐Systeme werden durch lineare Differen2algleichungen mit konstanten und reellen Koeffizienten beschrieben.
Allgemeine Form: a0y(t) + a1 !y(t) + a2!!y(t) + ... = b0x(t) + b1 !x(t) + b2!!x(t) + ...
Elegante Lösung durch Laplace-‐ und Fourier-‐Transforma2on

19.04.11
12
Vorschau: Systembeschreibung mit Laplace-‐ und Fourier-‐Transforma2on
Zeitunk2onen x(t), y(t) ⇒ Bildfunk2onen X(s), Y(s) [Laplace] bzw. X(jω), Y(jω) [Fourier] Ableitungen ⇒ Faktor s [Laplace] bzw. Faktor jω [Fourier]
a0Y(s) + a1sY(s) + a2s2Y(s) + ... = b0X(s) + b1sX(s) + b2s
2Y(s) + ...
H(s) = Y(s)X(s)
=b0 + b1s + b2s
2 + ...a0 + a1s + a2s
2 + ...Übertragungsfunk2on H(s) ist vollständige Beschreibung des LTI-‐Systems
Mit Laplace-‐Transforma2on:
Mit Fourier-‐Transforma2on:
H( j!) = Y( j!)X( j!)
=b0 + b1j! + b2( j!)
2 + ...a0 + a1j! + a2( j!)
2 + ...
LTI-‐Systeme werden im Bildbereich durch einen komplexwer2gen Quo2enten aus zwei Polynomen in s bzw. jω beschrieben. Beide Polynome haben reelle und konstante Koeffizienten.
Systembeschreibung mit Elementarfunk2onen
Rechteckimpuls mit Breite 1/T0 und Höhe T0 ergibt Systemantwort g0(t)
Beliebiges Eingangssignal s(t) kann durch Rechteckimpulse angenähert werden und ergibt Superposi2on einzelner Systemantworten
ga(t) = s(nT0 )g0(t ! nT0 )T0 " g(t)n=!#
#
$
sa(t) = s(nT0 )s0(t ! nT0 )T0 " s(t)n=!#
#
$ approximierte Eingangsfunk2on
approximierte Ausgangsfunk2on

19.04.11
13
Faltungsintegral
s(t) = s(!)"(t # !)d!#$
$
%
g(t) = s(!)h(t " !)d!"#
#
$
Grenzübergang T0 -‐> 0:
s0(t) -‐> δ(t) Dirac-‐Impuls
g0(t) -‐> h(t) Impulsantwort, Stoßantwort, Gewichtsfunk2on
Eingangssignal als unendliche Reihe von Dirac-‐Impulsen
Ausgangssignal als Faltung der Impulsantwort des Systems mit dem Eingangssignal
Die Transforma2on eines Signals durch ein System kann durch die Faltung (engl. convolu2on) des Eingabesignals mit der Impulsantwort des Systems beschrieben werden.
Grenzübergang für RC-‐Glied
Wie antwortet ein RC-‐Glied auf einen Rechteckimpuls (Spannung) mit Breite 1/T0 und Höhe T0, wenn T0 -‐> 0?
T0 -‐> 0
• Systemantwort h(t) bei Eingabe von δ(t) heißt "Impulsantwort" oder "Gewichtsfunk2on"
• h(t) charakterisiert des Verhalten des Bauelementes

19.04.11
14
Veranschaulichung der Faltung Beispiel: Faltung eines Rechteckimpulses mit der Impulsantwort h(t) des RC-‐Gliedes: h(t) = 1
T!(t)e" t /T mit T = RC
g(t) = s(!)h(t " !)d!"#
#
$
s(t) = a rect(t)
Qualita2ver Verlauf des Faltungsergebnisses
Faltungsalgebra
h(t) s(t) g(t)
Symbolische Schreibweise: g(t) = s(t) ∗ h(t)
g(t) = s(!)h(t " !)d!"#
#
$
s(t) = s(!)"(t # !)d!#$
$
%• δ(t) ist Einselement: s(t) = s(t) ∗ δ(t) • Ein System mit der Gewichtsfunk2on δ(t) heißt ideal verzerrungsfrei
Es reproduziert das Eingangssignal exakt als Ausgangssignal. • Faltung ist kommuta2v: g(t) = s(t) ∗ h(t) = h(t) ∗ s(t) • Faltung ist assozia2v: [f(t) ∗ s(t)] ∗ h(t) = f(t) ∗ [s(t) ∗ h(t)] • Faltung ist distribu2v: f(t) ∗ [s(t) + h(t)] = [f(t) ∗ s(t)] + [f(t) ∗ h(t)] • Ableitung:
"SiebeigenschaP"
ddt(f(t) !h(t)) = df
dt!h(t) = f(t) ! dh
dt

19.04.11
15
Faltung mehrdimensionaler Funk2onen
Faltungsopera2onen und ihre EigenschaPen lassen sich auf mehrere Dimensionen verallgemeinern. 2-‐dimensionale Faltung:
(f !h)(x,y) = f(u,v)h(x " u,y " v)dudv"#
#
$"#
#
$
Anwendung in der Bildverarbeitung: f(x, y) Intensitäten eines Grautonbildes h(x, y) Filter, z.B. h(x,y) =
12!"2
e# x
2+y2
2"2
Faltung und Kreuzkorrela2on
Kreuzkorrela2on von f(t) und h(t):
(f !h)(x,y) = f(u,v)h(u ! x,v ! y)dudv!"
"
#!"
"
#
Vergleiche mit f ∗ h: Integrand h ist bei Kreuzkorrela2on nicht gespiegelt! Ist f ein Bild und h eine Schablone, kann Kreuzkorrela2on als Schablonenvergleich gedeutet werden.
Wo im Bild findet sich das in der Schablone gezeigte Zeichen?