Kapitel 2.7 CAN 2010 - hs-weingarten.denosper/public/Download/Kapitel 2.7 CAN_201… · • Der...
22
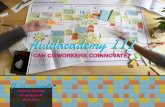
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper Bild 2.7_1 Quelle: VW Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper Bild 2.7_2 VW Phaeton : - drei Bussysteme (Antrieb, Komfort, Info), ein optischer Bus und Sub-Busse - 61 vernetzte Steuergeräte - 250 CAN-Botschaften - 2500 Signale - 3860 m Kabel Quelle: Automobilelektronik 03/2004, VW CAN
Transcript of Kapitel 2.7 CAN 2010 - hs-weingarten.denosper/public/Download/Kapitel 2.7 CAN_201… · • Der...

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_1 Quelle: VW
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_2
VW Phaeton:- drei Bussysteme (Antrieb, Komfort, Info), ein optischer Bus und Sub-Busse- 61 vernetzte Steuergeräte- 250 CAN-Botschaften- 2500 Signale- 3860 m Kabel
Quelle: Automobilelektronik 03/2004, VW
CAN

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_3
Netz-Struktur Bus-Struktur
• Serielles System• Kurze Stichleitungen• Vereinfachte Verdrahtung• Strenge Kommunikationsregeln erforderlich!
• Vermaschtes Netz• Punkt-zu-Punkt-Verbindungen• Viele Signalwege und dicke Kabel• Hohe Kosten und Fehleranfälligkeit
Quelle: Bosch
Controller Area Network (CAN)
Controller Area Network (CAN) ist ein serielles Bussystem, welches von Intel und Bosch ursprünglich für den Einsatz in Automobilen entwickelt wurde.
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_4
• Der CAN-Bus ist ein serielles Bussystem, bei dem alle Teilnehmer gleichberechtigt
sind, d.h. jedes Steuergerät kann unabhängig senden und empfangen.
• CAN adressiert im Gegensatz zu anderen Protokollen nicht die Teilnehmer, sondern die
übermittelte Nachricht. Der Teilnehmer entscheidet, ob er die Daten benötigt oder nicht.
1983 Beginn der Entwicklung des CAN- Protokolls bei Bosch
1987 Der erste CAN-Serienchip von INTEL ist verfügbar
1992 Erste Serienanwendung (Mercedes S- Klasse)
1993 Internationale Normung als ISO 11898
1995 Über 3 Millionen CAN-Bussysteme im Kfz-Bereich
CAN- Bus Entwicklung
CAN- Controller Area Network

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_5
Automatikgetriebe-Steuergerät
Automatikgetriebe-Steuergerät
ABS/EDS-SteuergerätABS/EDS-Steuergerät
Motor-SteuergerätMotor-Steuergerät 11
22
33
CAN Bus Prioritätenfolge
Quelle: VW
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_6
Übertragungssystem
Netzknoten: Besteht aus einem Mikro-Kontroller, CAN-Kontroller und BustreiberMikrokontroller: Steuert den CAN-Kontroller und bearbeitet Sende- und EmpfangsdatenCAN-Kontroller: Ist verantwortlich für den Sende- und EmpfangsbetriebBustreiber: Senden bzw. Empfangen des BuspegelBusleitung: Zweidrahtleitung (verdrillt oder abgeschirmt)Busabschluss: Widerstände zur Vermeidung von Reflexionen.
Quelle: Audi

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_7
CAN - Buspegel
Quelle: Bosch
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_8
CAN-High
CAN-Low
0 Volt
Dominant logisch 0
Rezessiv logisch 1
Logik CAN-High CAN-Low DifferenzpegelRezessive 1 2,5 Volt 2,5 Volt 0 Volt Dominant 0 3,5 Volt 1,5 Volt 2 Volt
Quelle: Audi
CAN – Buspegel Messung

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_9
Datenbus-Leitung
Steuergerät 1 Steuergerät 2 Steuergerät 3 Steuergerät 4
Daten übernehmen
Daten übernehmen
Daten bereitstellen
Datenprüfen
Daten empfangen
Datenprüfen
Datenprüfen
Daten empfangen
Daten empfangen
Daten senden
Ablauf einer Datenübertragung
1. Daten bereitstellen
Die Daten werden dem CAN-Controller vom Steuergerät zum Senden bereitgestellt.
4. Daten prüfen
Die Steuergeräte prüfen, ob sie die empfangenen Daten für ihre Funktionen benötigen oder nicht.
5. Daten übernehmen
Sind die Daten wichtig, werden sie übernommen und verarbeitet, ansonsten vernachlässigt.
2. Daten senden
Der CAN-Transceiver bekommt vom CAN-Controller die Daten, wandelt sie in elektrische Signale um und sendet sie.
3. Daten empfangen
Alle anderen Steuergeräte, die mit dem CAN-Datenbus vernetzt sind, werden zu Empfängern.
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_10
Data Field:
Infodaten
0- 64 bit
Data Field:
Infodaten
0- 64 bit
Acknowledgement Field:Bestätigt ob Botschaft fehlerfreiempfangen wurdeACK Bit: 0= korrekter EmpfangACK Delimiter: 1 rezessives Bit
2 bit
Acknowledgement Field:Bestätigt ob Botschaft fehlerfreiempfangen wurdeACK Bit: 0= korrekter EmpfangACK Delimiter: 1 rezessives Bit
2 bit
0
001 011 011 01
0
001 011001 011 011 011 111 011 111 101 000 111 00
001 011 111 011 111
01
1111111
Remote Transmission Request (RTR):
Datafield (0) oderRemotefield (1)
1 bit
Remote Transmission Request (RTR):
Datafield (0) oderRemotefield (1)
1 bit
Cyclic Redundancy Check:
15 bit
Cyclic Redundancy Check:
15 bit
End of Frame:
Markiert das Ende einerBotschaft.
7 bit
End of Frame:
Markiert das Ende einerBotschaft.
7 bit
Control Field:IDE-Bit: CAN 2.0A oder BR0: reserviertDLC: LängeNachricht
6 bit
Control Field:IDE-Bit: CAN 2.0A oder BR0: reserviertDLC: LängeNachricht
6 bit
Identifier:
Inhalt der Botschaft für die Akzeptanzprüfung
11 bit
Identifier:
Inhalt der Botschaft für die Akzeptanzprüfung
11 bit
Start of Frame Identifier Kontrolle Dateninhalt Checksumme Empfangstempel Ende
Aufbau Datenprotokoll
Start of Frame:Markiert den Anfang einerBotschaft.
1 bit
Start of Frame:Markiert den Anfang einerBotschaft.
1 bit
011 001 111 111 011 111 101 000 111 001 11
Quelle: Vw

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_11
Botschaftsrahmen
Quelle: Braess
Standard CAN Format (CAN 2.0 A)
Extended CAN Format (CAN 2.0 B)
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_12
Aufgabe: Auswerten folgender Botschaft
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
SO
F
RT
R
De
limite
r
De
limite
r
Identifier Control Daten CRC-Feld

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_13
CAN Datenverkehr: Auswertung
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 1 11 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
SO
F
RT
R
De
limite
r
De
limite
r
1 0 0 3 FF 01 A4 6 C 6 E
Identifier Control Daten CRC-Feld
0
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_14
Arbitrierungsverfahren
Netzknoten 1
Netzknoten 2
Netzknoten 3
Buspegel
Identifier ControlField
DataField
RTR
SOF
listen
listen
rezessiv
dominant
0 1 2 3 4 5 6 7 9 108
Quelle: Bosch

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_15
Methoden der Bitcodierung
PWM
Manchester
NRZ
0 1 0 0 0 1 1 1 0
None Return to Zero
Pulsweitenmoduliert
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_16
Bit-Stuffing
Stuff = Stopfen > Stuffingregel
NRZ > Vorteil: geringere Frequenz < 50% als bei anderen BitcodierungenNachteil: fehlende Synchronisierung bei vielen gleiche Bits hintereinanderAbhilfe: Einstopfen eines invertierten Synchronisierbits nach einem 5. gleichen Bit.
Empfänger filtert eingestopfte Bits wieder heraus.
Quelle: Audi

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_17 Quelle: Audi
Bit-Stuffing
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_18
Fakten und Eigenschaften CAN
- Low Speed - CAN (ISO11519-2) mit Bitraten < 125 kBit/s
- High Speed - CAN (ISO11898) mit Bitraten > 125 kBit/s
- Minimale Datenrate = 10 kBit/s
- Maximale Datenrate = 1 MBit/s (max. 40 m Leitungslänge)
- Zweidrahtleitung
- Terminierung mit 120 Ω Abschlusswiderstand
- Maximale 32 Busteilnehmer
- Standard CAN Format (CAN 2.0 A)
- Extended CAN Format (CAN 2.0 B)

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_19
Reduzierung Montagezeit
-
- Unterstützung Modulbauweise(z.B. Lenksäulenmodul
5 Arbeitsschritte → 2)- Modultests dezentral
Qualitätssteigerung
- Weniger Steckkontakte- 100% diagnostizierbar- Verbesserung EMV
bei optischem Bus
Bus
neue Möglichkeiten- Integriertes Bedienkonzept- Sprachbedienung- Animierte Bedienungsanleitung- Fahrzeugferndiagnose- Unfallvermeidendes Fahrzeug- Komfortfunktionen
(z. B. keyless entry)- Software Updates- erweiterte Diagnosemöglichkeiten
- Verteilung von Funktionen auf Steuergeräte
Steigerung Flexibilität,Erweiterungsfähigkeit- Änderungen durch Software- Teilweise Plug & Play
Kosteneinsparung
- weniger Leitungen- Mehrfachnutzung Sensorik- Ausnutzung von Restkapazitäten in Steuergeräten durch verteilte Funktionen
Reduzierung Gewicht/Volumen- Weniger Leitungen- Teilw . dünnere Leitungen- Unterbringung wo Platz ist- Mehr Funktionalität
pro Leitung
Vorteile von Bussystemen
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_20
CAN-Kfz-Anwendungen
• Im Antriebsstrang:
– Bei der Antriebsschlupfregelung sind die Eingriffe in die Zündung, die Einspritzung und die Drosselklappenstellung zu koordinieren.
• In der mobilen Kommunikation:
– Vernetzung von Mulitmedia-Komponenten wie Autoradio, Telefon, CD-Wechsler, Navigations- und Fahrerinformations-systemen etc.
• Im Karosserie- und Komfortbereich:
– Anzeigen, Beleuchtung, Zugangsberechtigungen, Diebstahl-warneinrichtungen, Sitz- und Spiegelverstellung, Klimaregelung, Scheibenwischer etc.

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_21
Einsatzgebiete CAN
Personen- und Lastkraftwagen
- Motorsteuerungen
- Sensoren
- Aktoren
- Entertainment
Öffentliches Verkehrs- und Transportwesen
- Personenbeförderung und Güterverkehr
- Signalüberwachung und Signalsteuerung
- Fahrgast - Informations - Systeme
Industrie und Automatisierung
- Maschinensteuerung
- Robotersteuerung
- Überwachungssysteme
Haus- und Energietechnik
- Fahrstuhl - Kontrollsysteme
- Markisensteuerung bei Sonneneinstrahlung
- Klimatisierungsautomatik
- Raum/Temperatur - Regelung
- Lichtanlagen - RegelungEmbedded Systems
- Haushaltsgeräte
- Kassensysteme
- Spielautomaten
- Büromaschinen
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_22
CAN Architektur
Quelle: Bosch

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_23
CAN Komponenten
Steuergerät
CAN Controller
TX RXRxRx = =
EmpfangsmodulEmpfangsmodulTx =
Sendemodul
Transceiver
Quelle: VW
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_24
CAN Low
CAN High
orange/braun
orange/schwarz
orange/braun
orange/grün
orange/braun
orange/violett
orange/braun
orange/rot
orange/braun
orange/blau
Antrieb
Komfort
Infotainment
CAN Diagnose
Kombi
CAN Bus Datenleitung
CAN Farbcodierungen
Quelle: VW

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_25
CAN Software
Quelle: Vector, Ixxat
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_26
Blinkeransteuerung via CAN
Verknüpfung mit D3 Richtungsblinken.exe.lnk
Quelle: Audi

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_27
CAN – Datenbusvernetzung: Gateway im Schalttafeleinsatz
Aufgaben des Gateway im Schalttafeleinsatz
Datenaustausch zwischen
- CAN - Antrieb
- CAN - Komfort
- CAN - Infotainment
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_28
Gateway
Die Aufgabe des Vernetzungsgateway besteht im wesentlichen darin, dieSchnittstelle zwischen den verschiedenen Bussystemen im Fahrzeug darzustellen,d.h. eine Kommunikation zwischen den Steuergeräten in den verschiedenenBussystemen zu ermöglichen. Der Datendurchsatz im Vernetzungsgateway mussmit geringsten Laufzeiten und ohne Datenverlust sichergestellt werden.Bisher war das Gateway im Kombi verbaut.
Schnittstellen:
Antriebs- CAN 500 kbps Gateway
Kombi- CAN 500 kbps
Komfort- CAN 100 kbps
Diagnose- CAN 500 kbps
E- CAN 500 kbps(M-Ausstattung)
Infotainment- CAN100 kbps

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_29
Negative Logik
In der Spezifikation des CAN-Bus ist die negative Logik festgelegt worden
Dominantes Signal
Schalter geschlossen
Lampe leuchtet nicht
Rezessives Signal
Schalter geöffnet
Lampe leuchtet
Zustand mit Wert
Transceiver geschlossen
Spannung auf Datenleitung
ca. 2 V bzw. 3 V im Komfortbus
ca. 1,5 bzw. 3,5 V im Antriebsbus
Zustand mit Wert
Transceiver geöffnet
Spannung auf Datenleitung
ca. 0 V bzw. 5 V im Komfortbus
ca. 2,5 V im Antriebsbus
5 Volt
0 Volt0 Volt
5 Volt
CAN-Bus
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_30
Am CAN-Datenbussystem sind immer mehrere Steuergeräte angeschlossen.
Nur wenn alle Steuergeräte ein „1“-Bit senden ist die Information auf dem Bus logisch „1“.
Sendet mindestens ein Steuergerät ein „0“-Bit, so ist das Signal auf der Busleitung logisch „0“.
Die „0“-Information des einen Steuergeräts überschreibt die „1“-Information der anderen Steuergeräte.
Das „0“-Bit ist dominant
Das „1“-Bit ist rezessiv
0-Dominanz
Negative Logik

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_31CAN-Bus
TTx
20K
1M
10M
25M
Flexray
MOSToptischer Ring
0,5 5,02,51,0
Dat
enra
te (
Bit
/s)
Relative Kosten pro Busknoten
(€)
CANZweidrahtbus
Übersicht der gängigen Bussysteme
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_32CAN-Bus
Spezifikation 1999 19991983
Übertragungsrate Bis 20 KBit/s Bis 1 MBit/s Bis 22,5 MBit/s
Datenmenge gering mittel hoch
Medium Ein-Draht Zwei-Draht Lichtwellenleiter
Rel. Kosten/Knoten Gering (~1€) Mittel (~2€) Hoch (~5€)
Bus-Zugriff Master/Slave Multi-Master Master/Slave
Buszugriff asynchron asynchron synchron und asynchron
Anzahl Teilnehmer Master + 16 Slaves(empfohlen)
Nicht definiert(abhängig von Schnittstellenbausteinen)
Max. 64
Datensicherheit Parity-Bits
Checksumme (CRC)
Bit-Fehler, Formatfehler,
Stuff-Fehler, ACK-Fehler, CRC-Fehler
Checksumme (CRC)
Vergleich verschiedener Bussysteme

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_33
Navi
CAN - Antrieb
CAN - Komfort
CAN - Kombi
CAN - Abstandsregelung
SubbussystemeLIN
MOST
Frisch-luft-
gebläse
ACC
ILM hinten
UGDO
Motor
LWR
AirbagAPS
Advanced Key AASRDK
ILM-Fahrer
SitzmemoryGateway
ILM -BF
E-Rücksitz
Anhänger
Multi-funktion
EPB
Antenne RDK
BEM
TSGTelefon/
Telematik
Klima
DAB
K-Box
TV-Tuner
ESP
Standheizung
CDC
Head-unit(MMI)
ELVAntenne RDK
TSG
FZH
SMLS
KombiEZS
MFL
PTC-Heizung
LM-Schein-werfer
LM-Schein-werfer
LIN - Klima
LIN - RDK
AFS - CAN
WWS
C6 - Vernetzung
ESP - CAN
DSPDuosensor(ESP)
FBS-Bus
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_34 Quelle: Audi
CAN Architektur Audi A8

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_35
CAN Bus Versionen
RingStrang SternLichtwellenleiter
Quelle: VW
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_36
MOST Datenbus
Ton
Video
CAN
TV-Tuner
Bedieneinheit
Display
Sound System
MOST
Datenübertragung mit Hilfe von modulierten Lichtwellen• geringerer Leitungsbedarf
• geringeres Gewicht
• feste Taktfrequenz (44,1kHz wie bei digitalen Audiogeräten) ermöglicht die Übertragung synchroner Daten
• dadurch höhere Datenübertragungsrate (bis zu 21 Mbit / Sekunde)
• mit Hilfe der Signalcodierung können verschiedene Anwendungen in einem Datenring zusammengeschlossen werden
• keine Probleme durch elektromagnetische Einflüsse
• ebenso keine elektromagnetische Störquelle
Quelle: Audi

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_37
Optische Datenübertragung
Totalreflexion Radius > 25mm Radius < 25mm
Optisch dichteres Medium
Optisch dünneres Medium
Totalreflexion von optisch dichterem zu optisch dünnerem Medium!
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_38
Aufbau und Ringstruktur
• Jedes Steuergerät besitzt einen eigenen binären Adresscode (Identifier)
• Jedes Steuergerät sendet die Daten in einer Richtung zum nächsten Steuergerät
• Dieses Weitersenden wird solange fortgesetzt, bis das „Autoren“-Steuergerät die Nachricht wieder empfängt→ geschlossener Ring
CD-Wechsler Telematik
TV-Tuner
Radio-Tuner
Sprach-bedienung
VerstärkerNavigation
Kartenleser
Bedieneinheit
DisplaySteuergerät für Information vorn
Diagnose Interfacefür Datenbus
(Gateway)
Diagnose-Anschluss
Quelle: Audi

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_39
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_40
• Alle Steuergeräte befinden sich innerhalb eines begrenztenBauraumes (lokales System).
• Der Datenaustausch zwischen den einzelnen LIN-Bussystemen in einem Fahrzeug erfolgt über jeweils ein Steuergerät durchden CAN-Datenbus.
• Beim LIN-Bus handelt es sich um einen Eindraht-Bus. Der Leitungsquerschnitt beträgt 0,35 mm². Eine Abschirmung ist nicht erforderlich.
• Das System ermöglicht den Datenaustausch zwischen einem LIN-Master-Steuergerät und bis zu 16 LIN-Slave-Steuergeräten.
• Die Datenübertragungsrate beträgt 1 bis 20 Kbit/s.
Eigenschaften LIN

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_41
SchaltmodulLenksäule
SMLS
GatewayStg.
ABSStg.
Wischervorne
M
M
M
Schalter Frontwischer
Schalter Heckwischer
Empf. / Intervall
Regen-sensor
BordnetzStg.
Dual-
Pumpe
Heckwischer MHochdruckpumpe
VKomfortStg.
Motorhaube Heckklappe
Wischersystem
Beispiel LIN
Quelle: Audi
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_42
Standardisiertes Kurzstrecken Funksystem
Bluetooth

Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_43
Bluetooth Aufbau
2,45 GHz Frequenzband (lizenzfrei)
Antenne, Steuerung und Verschlüsselung (128-Bit-Schlüssel) und Sende- und
Empfangstechnik sind ein einem Modul integriert.
Damit Bluetooth-Geräte eine Verbindungaufbauen können, müssen sie angelernt werden. Der
Verbindungsaufbau erfolgt anschließend automatisch.
Maximal acht aktive Bluetooth-Geräte bilden ein Piconet.Ein Gerät im Piconet übernimmt die Master-Funktion.
Jedes Gerät hat eine weltweit einmalige 48-Bit-lange Adresse, das ermöglicht weltweit 281 281 Billionen Geräte identifizieren!
Mechatronische Systemtechnik im KFZ Kapitel 2: CAN Prof. Dr.-Ing. Tim J. Nosper
Bild 2.7_44
500100 100 20
6000
1000
0
1000
2000
3000
4000
5000
6000 CAN-Antrieb
CAN-Komfort
CAN-Infotainmentlin
MOST
Bluetooth
Datenübertragungsraten