Kollaborierende Robotersysteme – Voraussetzungen fü r den ... · Autor: Christoph Meyer...
12
Autor: Christoph Meyer Kollaborierende Robotersysteme – Voraussetzungen für den sicheren Betrieb Seit einiger Zeit stehen dank fortschreitender Sicherheitstechnik Robotersysteme zur Verfügung, die für die Zusammenarbeit mit dem Menschen vorgesehen sind. Die klassischen Schutzsysteme wie zum Beispiel Schutzzäune als Zutrittsverhinderung entfallen dabei. Der vorliegende Artikel liefert einen Überblick über die rechtlichen und technischen Voraussetzungen zum Betrieb solcher Roboter. Außerdem wird ein Messverfahren vorgestellt, um eine angedachte Applikation sicher zu gestalten. Der Betreiber muss zusätzlich zu diesen Voraussetzungen gem. Arbeitsschutzgesetz vor Ort für die jeweiligen Einsätze bzw. Tätigkeiten der Beschäftigten geltende Gefährdungsbeurteilungen durchführen, Schutzmaßnahmen ableiten, umsetzen und die Wirksamkeit kontrollieren. Wozu kollaborierende Roboter? Im Gegensatz zu herkömmlichen Industrierobotern mit einem vollkommen automatisch gestalteten Arbeitsablauf sind kollaborierende Roboter für die Zusammenarbeit mit dem Menschen konzipiert. Daher entfallen Schutzeinrichtungen, die sonst den Aufenthalt im Arbeitsbereich des Roboters verhindern würden. Die sich bewegenden Roboter können jedoch schwere Verletzungen verursachen. Bei herkömmlichen Industrierobotern verhindern Schutzzäune den Zutritt zum Gefahrenbereich. Eine Person kann sich dem Roboter nur nähern, nachdem dieser stillgesetzt wurde. Eine direkte Zusammenarbeit zwischen Mensch und Roboter ist mit diesem Schutzkonzept nicht realisierbar. Für kollaborierende Roboter werden folglich neue Schutzkonzepte benötigt. Seit kurzem gibt es Ansätze, Produktionsabläufe derart zu optimieren, dass sich Mensch und Roboter bei der Arbeit ergänzen. Mensch und Maschine tuen das, was sie am besten können. Der Mensch bringt seine sensorischen und motorischen
Transcript of Kollaborierende Robotersysteme – Voraussetzungen fü r den ... · Autor: Christoph Meyer...

Autor: Christoph Meyer
Kollaborierende Robotersysteme – Voraussetzungen fü r den sicheren Betrieb
Seit einiger Zeit stehen dank fortschreitender Sicherheitstechnik Robotersysteme zur
Verfügung, die für die Zusammenarbeit mit dem Menschen vorgesehen sind. Die
klassischen Schutzsysteme wie zum Beispiel Schutzzäune als Zutrittsverhinderung
entfallen dabei. Der vorliegende Artikel liefert einen Überblick über die rechtlichen
und technischen Voraussetzungen zum Betrieb solcher Roboter. Außerdem wird ein
Messverfahren vorgestellt, um eine angedachte Applikation sicher zu gestalten. Der
Betreiber muss zusätzlich zu diesen Voraussetzungen gem. Arbeitsschutzgesetz vor
Ort für die jeweiligen Einsätze bzw. Tätigkeiten der Beschäftigten geltende
Gefährdungsbeurteilungen durchführen, Schutzmaßnahmen ableiten, umsetzen und
die Wirksamkeit kontrollieren.
Wozu kollaborierende Roboter?
Im Gegensatz zu herkömmlichen Industrierobotern mit einem vollkommen
automatisch gestalteten Arbeitsablauf sind kollaborierende Roboter für die
Zusammenarbeit mit dem Menschen konzipiert. Daher entfallen Schutzeinrichtungen,
die sonst den Aufenthalt im Arbeitsbereich des Roboters verhindern würden. Die sich
bewegenden Roboter können jedoch schwere Verletzungen verursachen. Bei
herkömmlichen Industrierobotern verhindern Schutzzäune den Zutritt zum
Gefahrenbereich. Eine Person kann sich dem Roboter nur nähern, nachdem dieser
stillgesetzt wurde. Eine direkte Zusammenarbeit zwischen Mensch und Roboter ist
mit diesem Schutzkonzept nicht realisierbar. Für kollaborierende Roboter werden
folglich neue Schutzkonzepte benötigt.
Seit kurzem gibt es Ansätze, Produktionsabläufe derart zu optimieren, dass sich
Mensch und Roboter bei der Arbeit ergänzen. Mensch und Maschine tuen das, was
sie am besten können. Der Mensch bringt seine sensorischen und motorischen

Fähigkeiten ein, der Roboter übernimmt die Tätigkeiten, bei denen Kraft und
Schnelligkeit gefragt sind. Schutzkonzepte für kollaborierende Roboter müssen dies
berücksichtigen und basieren größtenteils auf der Steuerung des Roboters. Die
technischen Voraussetzungen dafür stehen heute zur Verfügung.
Welche Rechtsvorschriften gelten für Hersteller/Inv erkehrbringer/Integratoren?
Kollaborierende Robotersysteme sind verwendungsfertige Anlagen, bestehend aus
dem Roboter inklusive Roboterwerkzeugen, Fördertechnik, allen beteiligten
Vorrichtungen und Schutzmaßnahmen. Sie fallen somit in den Geltungsbereich der
Europäischen Maschinenrichtlinie 2006/42/EG [1]. Um auf dem europäischen
Binnenmarkt verkauft werden zu können, müssen für Robotersysteme eine EG-
Konformitätserklärung und eine CE-Kennzeichnung nach der Maschinenrichtlinie
vorliegen. Die harmonisierten Europäischen Normen DIN EN ISO 10218-1 [2] und
DIN EN ISO 10218-2 [3] entfalten die sogenannte Vermutungswirkung. Das
bedeutet: Bei Anwendung dieser Normen darf davon ausgegangen werden, dass die
Anforderungen der Maschinenrichtlinie eingehalten wurden.
Im Hinblick auf kollaborierende Robotersysteme sind die Anforderungen in DIN EN
ISO 10218-1 und DIN EN ISO 10218-2 aufgrund dieser relativ neuen
Technologiesparte noch unvollständig beschrieben. Daher wurden mit der
Technischen Spezifikation ISO/TS 15066 [4] ergänzende Anforderungen formuliert.
Diese Inhalte sollen zu einem späteren Zeitpunkt in die Überarbeitung der Normen
EN ISO 10218-1 und EN ISO 10218-2 einfließen.
Ein nach der Maschinenrichtlinie erforderliches Dokument ist die Risikobeurteilung.
Sie muss spätestens dann beim Hersteller bzw. Integrator verfügbar sein, wenn sich
die Maschine auf dem Markt befindet. Risikobeurteilungen für kollaborierende
Robotersysteme unterscheiden sich in der Vorgehensweise nicht grundlegend von
solchen für andere Maschinen oder Roboteranlagen. Bei kollaborierenden
Robotersystemen gilt es, die unmittelbare Nähe von Mensch und Robotersystem
besonders zu berücksichtigen und entsprechende Schutzmaßnahmen abzuleiten.
Eine ausführliche Zusammenstellung möglicher Gefährdungen, die bei
kollaborierenden Robotersystemen zu berücksichtigen sind, können in [3] und [4]
nachgelesen werden. Die von der Risikobeurteilung abzuleitenden
Schutzmaßnahmen können traditioneller Art sein, wie z. B. Lichtvorhänge oder
Laserscanner. Ebenso können auch neuartige Maßnahmen, wie Kraftbegrenzungen
oder Begrenzungen des Bewegungsbereiches, angewendet werden. Auch eine
Kombination von beidem ist möglich. Die grundlegenden Anforderungen dazu sind in
DIN EN ISO 10218-1 und 10218-2 sowie ISO/TS 15066 festgelegt.
Welche Voraussetzungen muss der Roboter erfüllen?
Es gibt verschiedene Ansätze, einen Roboter so auszustatten, dass er für den
kollaborierenden Betrieb geeignet ist und von einem Betreiber beschafft werden
kann. Er kann zum einen mit Sensoren bestückt werden, die bei Annäherung eines
Menschen rechtzeitig einen Bewegungsstopp auslösen. Zum anderen können die bei
einer Kollision auftretenden Kräfte und Drücke durch eine sichere Kraft- oder
Drehmomentbegrenzung auf ungefährliche Werte reduziert werden. Beide Ansätze
werden auch miteinander kombiniert. Die nachfolgenden Ausführungen beziehen
sich auf Roboter mit Kraftbegrenzung.
In der DIN EN ISO 10218-1 sind obligatorische Sicherheitsfunktionen für
Industrieroboter festgelegt, wie z. B. ein Not-Halt, ein abschließbarer
Betriebsartenwahlschalter sowie ein Zustimmschalter. Für die Mensch-Roboter-
Kollaboration müssen diese Roboter bei der Kraftbegrenzung in der Regel über
folgende ergänzende Sicherheitsfunktionen verfügen:
a) Sichere Überwachung/Begrenzung des Drehmoments bzw. der Kraft
Neben der zu berücksichtigenden Kantengeometrie der am Arbeitsprozess
beteiligten Oberflächen des Robotersystems beeinflusst die anstehende Kraft den
Druck an den Kontaktflächen. Aus der roboterseitigen Überwachung der Kraft
bzw. des Drehmoments resultiert somit auch die Überwachung des Drucks.

b) Sichere Überwachung der Geschwindigkeit
Bei Kraft- und/oder Drehmomentüberwachungen muss eine Stoppreaktion unter
Berücksichtigung der Reaktionszeit des Systems erfolgen. Für die sich hieraus
ergebende maximale Geschwindigkeit ist eine sichere Überwachung erforderlich.
c) Sichere Überwachung der Position
Um Arbeitsbereiche definieren und abgrenzen zu können (z. B. zum geforderten
Ausschluss von Hals und Kopf), ist in der Regel eine Funktion „sicher überwachte
Position“ zur Eingrenzung des Bewegungsbereichs erforderlich.
Die Sicherheitsfunktionen müssen der Kategorie 3 Performance Level d nach DIN
EN ISO 13849-1 [6] entsprechen. Darüber hinaus sollten alle Roboterteile
(Roboterarme, Werkzeugaufnahme) gerundete Kanten besitzen. Eine Polsterung
vergrößert die Flächen und wirkt sich bei Körperkontakt dämpfend und damit positiv
aus. Um die Kontaktkräfte aufgrund von Massenträgheit gering zu halten, sollten
auch die Traglasten gering sein.
Wie wird die Sicherheit in der Applikation erreicht ?
Beim Identifizieren von Gefährdungen muss die gesamte Applikation betrachtet
werden. Neben dem eigentlichen Roboter sind daher auch die Roboterwerkzeuge,
Werkstücke, Fördertechnik sowie alle beteiligten Vorrichtungen einzubeziehen.
Grundsätzlich muss die Applikation so gestaltet werden, dass es
bestimmungsgemäß nicht zu einer Kollision zwischen Mensch und Roboter kommt.
Im Falle eines unbeabsichtigten Eingreifens, z. B. aufgrund einer
unvorhergesehenen Störung, dürfen bestimmte Grenzwerte für Kraft und Druck bei
der Kollision nicht überschritten werden. Diese Grenzwerte sind in ISO/TS 15066
festgelegt. Die Grenzwerte sind je nach Körperbereich verschieden, da z. B. die
Brust, der Bauch oder auch eine Hand über eine unterschiedliche
Druckempfindlichkeit verfügen. In der Literatur sind sie unter dem Begriff

„biomechanische Grenzwerte“ zu finden. Basis für diese Grenzwerte sind u.a. von
der Berufsgenossenschaft Holz und Metall geförderte Forschungsprojekte, deren
Ergebnisse zur Gewährleistung der Vermeidung bzw. Minimierung von
Beeinträchtigungen von Sicherheit und Gesundheit der Beschäftigten in die
internationale Normung erfolgreich eingebracht werden konnten. Die
Forschungsprojekte wurden unter Einhaltung aktueller Standards solcher Studien,
wie z.B. einer Ethikkommission, durchgeführt.
Gibt es keine Erfahrungen über eintretende Kontaktkräfte und Drücke (z. B. durch
Simulationstools), müssen diese Werte für die ausgewählten Kontaktszenarien nach
ISO/TS 15066 messtechnisch ermittelt werden. Unter der Voraussetzung einer
durchdachten Applikationsgestaltung und Bahnplanung können sich die Messungen
für ein typisches Robotersystem in der Kollaborationsart Kraftbegrenzung auf wenige
ausgewählte Kontaktszenarien reduzieren. Die Werte setzen sich aus einem Druck-
Grenzwert und einem Grenzwert für die Kraft zusammen. Kommt es zum Kontakt,
entsteht in der Regel ein transienter, impulsartiger Belastungseffekt (Spitzendruck,
Spitzenkraft) sowie ein quasistatischer Belastungseffekt (Klemmdruck, Klemmkraft).
In der ISO/TS 15066 sind die Grenzwerte für beide Wirkungen aufgeführt.
Bild 1: Vorbereitung der Kraft- und Druckmessung am Werkzeug eines kollaborierenden Robotersystems [8]
Beim Druck-Grenzwert ist der Einfluss der Geometrie aller am Arbeitsprozess
beteiligten Maschinenteile (Kanten, Ecken, Spitzen) berücksichtigt. Dabei gilt: Je

kleiner die Flächen, das heißt je scharfkantiger z. B. Werkzeuge sind, desto höher ist
der Druck.
Der Grenzwert für die Kraft wird z. B. für großflächige oder gepolsterte Teile des
Robotersystems besonders relevant. Bei einem solchen Kontakt des Robotersystems
mit Körperteilen ist der gemessene Druck unkritisch. In diesem Fall muss die Kraft
begrenzt werden, sodass trotz weichem Auftreffen auf den Körper nur in o.g.
Forschungsprojekten ermittelte, akzeptable Belastungen für tiefer liegendes
Körpergewebe entstehen. Ebenso dürfen keine Personen umgestoßen werden
können.
Deswegen sind immer beide Grenzwerte, für Kraft und für Druck, zu berücksichtigen.
Wird einer der Grenzwerte überschritten, ist der Test nicht bestanden. In der Regel
müssen dann die am Roboter eingestellten Sicherheitslimits für die Kraft in
Verbindung mit der sicher überwachten Geschwindigkeit reduziert werden. Werden
danach beispielsweise die Druckwerte weiterhin überschritten, muss die Konstruktion
geändert werden: durch größere Flächen, verstärkte Polsterung, federnd gelagerte
Greifer etc. Nicht als Sicherheitsfunktion ausgewiesene Begrenzungen von Kraft,
Geschwindigkeit und dergleichen bleiben bei der Messung unberücksichtigt. Es muss
im Robotersystem möglich sein, solche Funktionen für Programmier- und
Messzwecke auszuschalten bzw. es müssen Worst-Case-Annahmen getroffen
werden (größtmögliche Kraft, Geschwindigkeit, Reichweite etc.).
Große, kantige und schwere Werkstücke sind nach heutigem Stand der Technik für
diese Art der Kollaboration nicht geeignet. Die Massenträgheit schwerer Werkstücke
führt in der Regel zur Überschreitung der Kraft- bzw. Druckgrenzwerte.
Des Weiteren sind die für den Kollaborationsbetrieb vorgesehenen
Roboterbewegungen ausschlaggebend. In der Regel können mithilfe der Funktion
„Sichere Begrenzung des Bewegungsbereiches“ die Verfahrwege des Roboters
eingegrenzt werden, um sensible Körperteile wie beispielsweise den Kopf und Hals
bei einer bestimmungsgemäßen Verwendung vom Arbeitsbereich ausschließen zu

können. Falls weiterhin Risiken bestehen, müssen diese Bereiche durch zusätzliche
trennende oder auch transparente Schutzeinrichtungen vom Zugang ausgeschlossen
sowie mit ergänzenden Anweisungen an die Benutzerin oder den Benutzer versehen
werden.
Für Scher-, Schneid- oder Stichgefährdungen existieren keine biomechanischen
Grenzwerte. Die Applikation muss Gefährdungen dieser Art ausschließen. Ansonsten
ist kein kollaborierender Betrieb zulässig.
Not-Halt Einrichtungen sollten zudem leicht erreichbar und in ausreichender Anzahl
vorhanden sein. Wegen des möglichen direkten Kontaktes zwischen Person und
Robotersystem muss es eine Einrichtung am Robotersystem geben, mit der sich
Personen jederzeit selbständig befreien können.
Wie sieht das Messverfahren für die biomechanischen Grenzwerte aus?
Für die Messung der biomechanischen Grenzwerte sollte ein System wie auf Bild 2
angewendet werden.
Bild 2: Beispiel eines Messsystems für Kraft und Druck. [8]
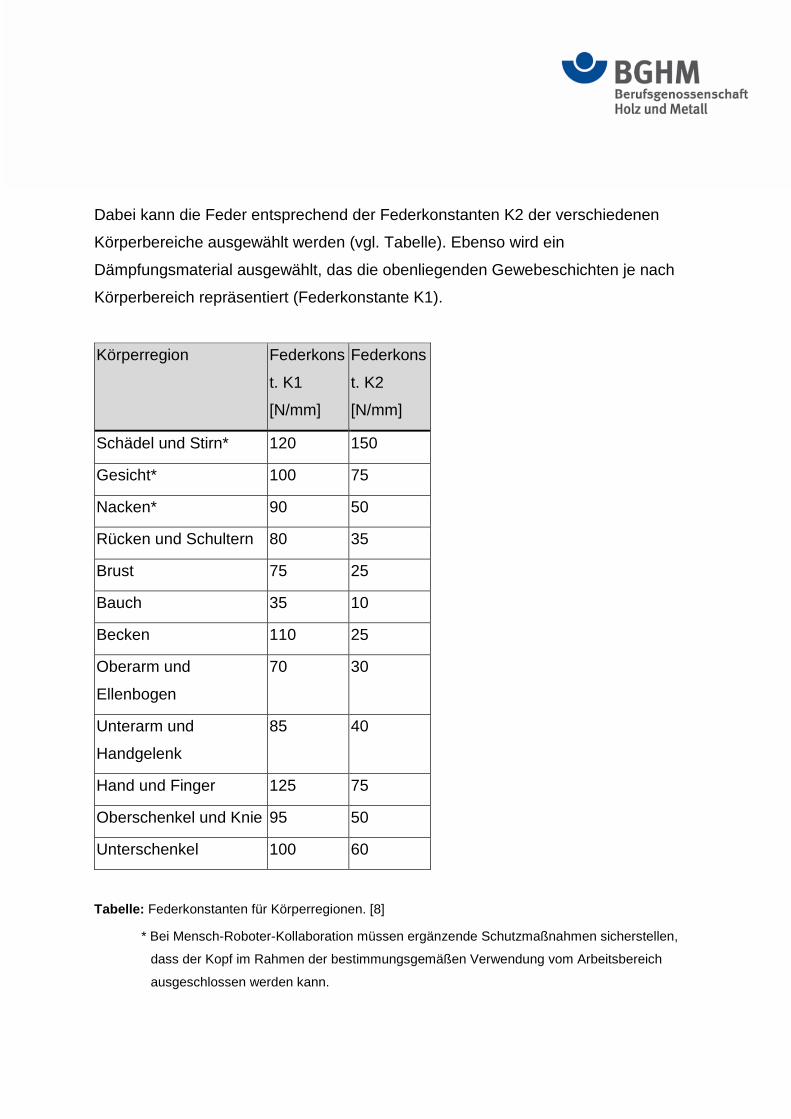
Dabei kann die Feder entsprechend der Federkonstanten K2 der verschiedenen
Körperbereiche ausgewählt werden (vgl. Tabelle). Ebenso wird ein
Dämpfungsmaterial ausgewählt, das die obenliegenden Gewebeschichten je nach
Körperbereich repräsentiert (Federkonstante K1).
Körperregion Federkons
t. K1
[N/mm]
Federkons
t. K2
[N/mm]
Schädel und Stirn* 120 150
Gesicht* 100 75
Nacken* 90 50
Rücken und Schultern 80 35
Brust 75 25
Bauch 35 10
Becken 110 25
Oberarm und
Ellenbogen
70 30
Unterarm und
Handgelenk
85 40
Hand und Finger 125 75
Oberschenkel und Knie 95 50
Unterschenkel 100 60
Tabelle: Federkonstanten für Körperregionen. [8]
* Bei Mensch-Roboter-Kollaboration müssen ergänzende Schutzmaßnahmen sicherstellen,
dass der Kopf im Rahmen der bestimmungsgemäßen Verwendung vom Arbeitsbereich
ausgeschlossen werden kann.

Das System muss Messungen ermöglichen, die entweder gleichzeitig oder
aufeinanderfolgend sowohl den zeitlichen Verlauf der Krafteinwirkung als auch des
Drucks für die jeweilige Kontaktsituation ermitteln. Es kann davon ausgegangen
werden, dass die zeitlichen Verläufe von Kraft und Druck im Verhältnis miteinander
korrespondieren. Es kann daher ausreichen, nur den zeitlichen Verlauf der Kraft
aufzuzeichnen und das Druckmaximum mit einer Druckmessfolie zu bestimmen und
den Klemmdruck zuzuordnen.
Bild 3: Druckverteilung einer kantigen Kontur mit Druckmaximum (Beispiel). [8]
Bei komplexeren Applikationen kann der messtechnische Aufwand viel Zeit
beanspruchen. Praktische Erfahrungen belegten jedoch, dass die
Kraftmessergebnisse beim Austausch der diversen Federn wenig voneinander
abweichen. Bleiben Kopf und Hals außerhalb des Arbeitsbereichs des
Robotersystems, kann es im Rahmen der bestimmungsgemäßen Verwendung sowie
der vorhersehbaren Fehlanwendung ausreichen, nur die ungünstigste (härteste)
Feder mit einer Federkonstanten K2 von 75 N/mm zu verwenden. Ebenso konnte in
vielen Fällen die Anzahl der Dämpfungsmaterialien reduziert werden. Durch diese

Erfahrungen konnte der Aufwand deutlich reduziert werden. Zudem ließen sich
handliche und praxistaugliche Messgeräte entwickeln, die mittlerweile auf dem Markt
sind.
Bild 4: Kraftmessgerät (Beispiel).
Viele Hersteller von kollaborierenden Robotern lassen die Übereinstimmung ihres
Produktes mit dem Regelwerk zusätzlich durch eine unabhängige Prüfstelle
zertifizieren, wie z.B. der Prüf- und Zertifizierungsstelle Maschinen und
Fertigungsautomation im DGUV Test bei der Berufsgenossenschaft Holz und Metall.
Wichtig ist dabei, dass die Roboter in einer geeigneten und typischen Applikation
überprüft werden. Nur so kann festgestellt werden, ob die oben genannten
Grenzwerte auch unter Praxisbedingungen eingehalten werden.
Durch die erwähnten praxistauglichen Messverfahren und –geräte, werden
Hersteller, Integratoren und Betreibende in die Lage versetzt, die Bewertung
kollaborierender Roboter in der Applikation mit vertretbarem Aufwand selbst
vorzunehmen.
Für die Zukunft ist u.a. seitens der Roboterhersteller die Entwicklung von
Simulationstools zu erwarten, die einen schrittweisen Verzicht auf Messungen
ermöglichen.
Veröffentlichung
Erschienen im November 2016 in der Zeitschrift „Technische Sicherheit“, Ausgabe
November/Dezember 2016.
Kontakt
Sollten Sie als Medienvertreterin oder -vertreter auf Autorensuche für Fachartikel oder Themen sein,
kontaktieren Sie uns gerne per E-Mail an [email protected]

Literatur:
[1] RICHTLINIE 2006/42/EG DES EUROPÄISCHEN PARLAMENTS UND DES
RATES vom 17. Mai 2006 über Maschinen und zur Änderung der Richtlinie
95/16/EG (Neufassung) - Amtsblatt der Europäischen Union L 157/24
[2] DIN EN ISO 10218-1 Industrieroboter - Sicherheitsanforderungen - Teil 1:
Roboter, 2012-01, Beuth-Verlag, Berlin
[3] DIN EN ISO 10218-2 Industrieroboter - Sicherheitsanforderungen - Teil 2:
Robotersysteme und Integration, 2012-06, Beuth-Verlag, Berlin
[4] ISO/TS 15066 Roboter und Robotikgeräte – Kollaborierende Roboter, 2016-02,
Beuth-Verlag, Berlin
[5] DGUV-Information 209-074 “Industrieroboter”. Deutsche Gesetzliche
Unfallversicherung e.V. (DGUV). Ausgabe Januar 2015.
[6] DIN EN ISO 13849-1 Sicherheit von Maschinen - Sicherheitsbezogene Teile von
Steuerungen - Teil 1: Allgemeine Gestaltungsleitsätze, 2008-12, Beuth-Verlag
[8] DGUV Information Nr. 080 des Fachbereichs Holz und Metall „Kollaborierende
Robotersysteme“ (Entwurf 11/2015),
Internet: www.bghm.de Webcode: <626>
[9] Umbreit, M.: Fachbeitrag „Arbeitsplätze mit kollaborierenden Robotern“, ASU
protect 1/2012.