
Lecture 4 - lemos.uni-rostock.de · The stabilizing moment acting against the perturbing one is...
21
Lecture 4: Ship oscillation damping Parametric oscillations N. Kornev, Lehrstuhl für Modellierung und Simulation Fakultät für Maschinenbau und Schiffstechnik Universität Rostock
-
Upload
phungduong -
Category
Documents
-
view
214 -
download
0
Transcript of Lecture 4 - lemos.uni-rostock.de · The stabilizing moment acting against the perturbing one is...

Lecture 4:
Ship oscillation dampingParametric oscillations
N. Kornev,Lehrstuhl für Modellierung und Simulation
Fakultät für Maschinenbau und SchiffstechnikUniversität Rostock

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 2/21
Ship oscillation damping
The damping devices are subdivided into• damping tanks,• bilge keels and• active fins.
The efficiency of damping is quantified by the ratio of the oscillation amplitudes with and without stabilization systems
Oscillations in regular waves
Oscillations in irregular waves
0.12.0 e

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 3/21
Damping of roll oscillationsPassive systems
U-tube passive tanks of FrahmFrahm H. Results of trials of the anti-rolling tanks at sea. Trans. of the Institution of Naval Architects, Vol.53, 1911.
The stabilizing moment acting against the perturbing one is created by the
• weight and• inertia
of the water moving in U- form channel
The tubes of the U-channel are connected by the air channel in the upper side of the device. The water can freely flow from one board tothe other without counteracting effects caused by the air compression.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 4/21
Damping of roll oscillations
U-tube passive roll stabilization system manufactured by HoppeMarine (http://www.hoppe-marine.com/). Orange tube the are air channel.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 5/21
Principle of Frahm tanks designThe Frahm tanks belong to the resonance adjusted devices. The duct and air channel are selected to fulfill the following conditions:
the phenomenon of the doubled resonance occurs at the wave frequency correspondingto the resonance case:• resonance between ship oscillations and wave perturbations,• resonance between ship oscillations and water oscillations in tanks.The phase displacement between the perturbing moment oscillation and ship oscillation for the first resonance is . The ship oscillations are behind the perturbation moment.The phase displacement between the ship oscillation and the water oscillation in tank is also . The water oscillation is behind the ship oscillation.
the phase displacement between the perturbation and the water oscillation is . The water oscillation acts against the perturbation oscillation resulting in the ship amplitude reduction.
2/
2/

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 6/21
Frahm tanks
• The reduction of the oscillation amplitude attained with a well designed Frahmstabilization system can up to 50 percent for the swell. • In irregular waves the efficiency of the tanks is lower.
Outside of the resonance zone the stabilization system can increase the roll oscillations
Response function versus referred frequency without (solid line) and with (dashed line) stabilization system.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 7/21
Frahm tanks 2nd art
The efficiency of the Frahm tank of the 2nd type is similar to that of the 1st type.
resonance adjusted
If the ship draught is changed in operations the eigen frequency of the ship is also changed. The eigen frequency of water oscillations in tank remains constant. The stabilizing system becomes non efficient.
The Frahm system is usually used on ships with approximately constant displacement and draught.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 8/21
Flum tankFree surface Type passive Roll stabilization systems of Flume

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 9/21
Arrangement of Flum tanks on ships
Offshore Support Vessel
Passenger Ship
Offshore Patrol Vessel
Research ship

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 10/21
Arrangement of Flum tanks on ships
Reduction of the roll amplitude using the Flume tank designedby Hoppe Marine
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 11/21
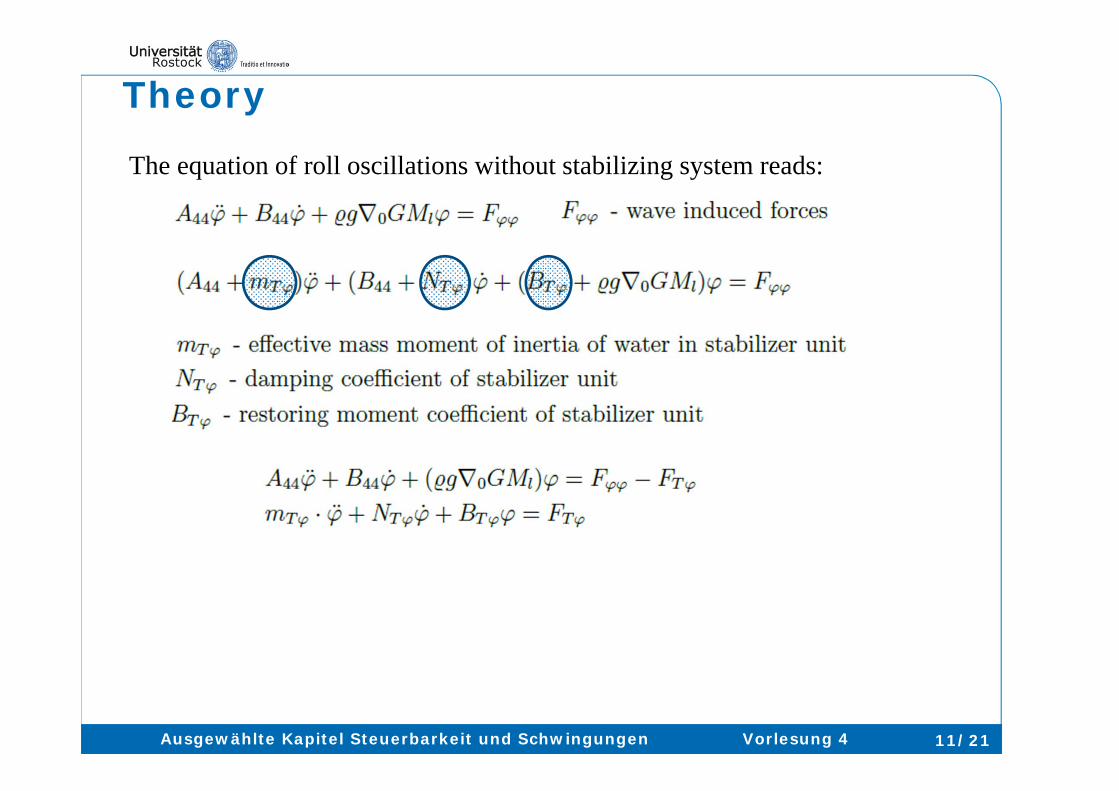
Theory
The equation of roll oscillations without stabilizing system reads:

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 12/21
Theory

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 13/21
Active stabilizing tanks
Bilge keelThe ratio of the bilge keel span to its lengthvaries between 0.01 and 0.02.
Bilge keels can reduce the roll amplitude up to forty percent in swell and up to thirty percent in irregular waves.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 14/21
Rudders
The rudders are very efficient ways to reduce the roll oscillations of fastpassenger and combat ships. The efficiency parameter can attain values of 0.2. They can be either active or passive and are maintained at the ship bilge. The stabilizing moment arises due to dynamic lift force on rudderswhich is proportional to the ship speed squared. Therefore the rudders haveno effect when the ship speed decreases, for instance at zero speed duringanchorage. The actively controlled rudders installed in horizontal plane arecalled active fins. They can be retracted during mooring.
Vertical rudder
Horizontal rudder
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 2
Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 15/21
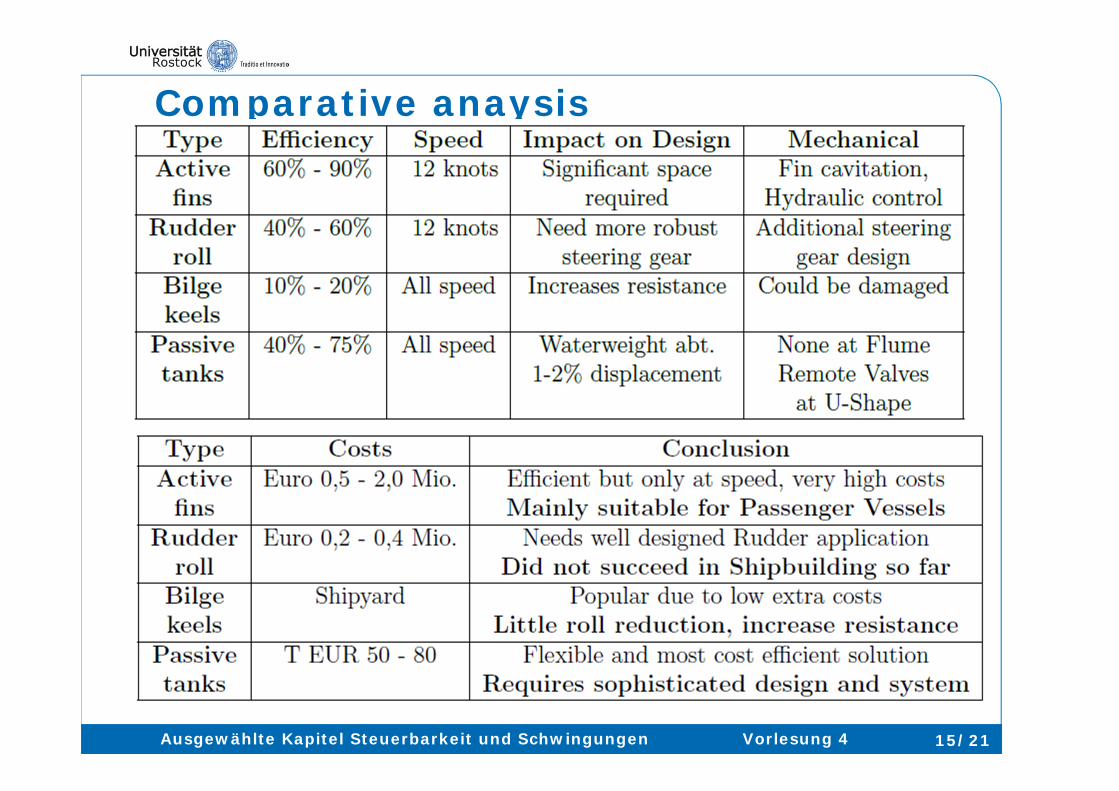
Comparative anaysis

1 without fins2 with passive fins3 with active fins with control law for angle of attackAusgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 16/21
Stabilizing systems for pitch oscillations
A common way to reduce the pitch oscillations is utilization of wings (fins) maintained at ship stern or ship bow.The pitch stabilizing system can be either active or passive.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 17/21
Parametric oscillationsParametric oscillations arise when one of parameters characterizing the oscillatingsystem depends periodically on time. Parametric ship oscillations arise due to periodic change of the metacentric height:
The motion equation of free roll oscillations with variable metacentric height is:
change of the metacentric height can cause the perturbation moment resulting in parametric oscillations.

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 18/21
Parametric roll oscillatons
Physical reason for the appearance of the additional perturbation moment is the effect of the ship submergence change during roll and vertical oscillations.
The change of the roll angle causes the moment:
The change of the ship draught results in an additional moment
if the frequency of perturbation moment is twice as large as the free roll oscillation frequency, i.e. , the parametric resonance takes place.
Conditions for parametric resonance appearance

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 19/21
Parametric resonanceSince the perturbation moment depends on heave, the parametric resonance takesplace when the frequency of vertical oscillations is approximately twice aslarge as the frequency of roll oscillations. With the other words, during semiperiod of roll oscillations the heave change performs the full period oscillationas shown schematically:

Ausgewählte Kapitel Steuerbarkeit und Schwingungen Vorlesung 4 20/21
For parametric oscillation it is necessary that ship is brought from the equilibrium state by a certain perturbation.
The natural reason of such perturbation for roll oscillations is beam seaway.
However, the parametric roll oscillation can arise also in head waves. If the ship has a certain roll angle in head waves, the hydrostatic lift force becomes larger at the wave crest andsmaller at wave valley. This results in a perturbation moment depending on roll angle.
Reasons for parametric rolling

Vielen Dank für Ihre Aufmerksamkeit !
Literatur:Kornev N. Ship Dynamics in Waves, Chapters 8 an 9.
21/21








![Stirnradgetriebe R-Serie - MSW Motion Control GmbH · Jr [Kg.m2] Momento d‘inerzia Riduttore Gear reducer moment of inertia Trägheitsmoment / Getriebe Ju [Kg . m 2 ] Momento d'inerzia](https://static.fdokument.com/doc/165x107/5e0329afd9e2ea2f20420c86/stirnradgetriebe-r-serie-msw-motion-control-jr-kgm2-momento-dainerzia-riduttore.jpg)








