
Mathematik I - IV - math.uni-frankfurt.debaumeist/md_shell.pdf · Mathematik als eine rein...
502
Mathematik I - IV J. Baumeister 1 Skript zu den Vorlesungen Mathematik I - IV in den Semestern WS 96/97, SS 97, WS 97/98, SS 98 an der Johann Wolfgang Goethe–Universit¨ at Frankfurt am Main 1 Dies sind noch unvollst¨ andige und oberfl¨ achlich korrigierte Aufzeichnungen! Kleine Teile davon wurde nicht vorgetragen.
Transcript of Mathematik I - IV - math.uni-frankfurt.debaumeist/md_shell.pdf · Mathematik als eine rein...

Mathematik I - IV
J. Baumeister1
Skript zu den Vorlesungen Mathematik I - IV in den SemesternWS 96/97, SS 97, WS 97/98, SS 98
an der Johann Wolfgang Goethe–Universitat Frankfurt am Main
1Dies sind noch unvollstandige und oberflachlich korrigierte Aufzeichnungen! Kleine Teiledavon wurde nicht vorgetragen.
Inhaltsverzeichnis
Einleitung 1
1 Mengen und Abbildungen 11.1 Aussagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11.2 Mengen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3 Abbildungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.4 Naturliche Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 141.5 Die Umkehrabbildung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 221.6 Relationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2 Elemente der Kombinatorik 282.1 Ganze Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.2 Abzahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302.3 Permutationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 342.4 Kombinationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.5 Ordnungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412.6 Sortieren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3 Elemente der Zahlentheorie 473.1 Primzahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.2 Teilbarkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 513.3 Euklidischer Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . 533.4 Diophantische Gleichungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.5 Der kleine Satz von Fermat . . . . . . . . . . . . . . . . . . . . . . . . . . 613.6 Kongruenzen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 653.7 Das RSA–Schema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4 Reelle Zahlen 744.1 Algebraische Eigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . 744.2 Anordnungsaxiom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 794.3 Axiom der Vollstandigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . 834.4 Konvergenz von Folgen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 874.5 Intervallschachtelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 974.6 Reihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1034.7 Gleitkommazahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
1

Baumeister: Mathematik I - IV / Stand: Juli 1998 2
5 Elementare Wahrscheinlichkeitsrechnung 1115.1 Versuch, Ereignis, Zufall . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1115.2 Laplace–Wahrscheinlichkeit . . . . . . . . . . . . . . . . . . . . . . . . . . 1145.3 Einige Beispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1165.4 Wahrscheinlichkeit: Der endliche Fall . . . . . . . . . . . . . . . . . . . . . 1225.5 Bedingte Wahrscheinlichkeiten . . . . . . . . . . . . . . . . . . . . . . . . . 1275.6 Produkt von Wahrscheinlichkeitsraumen . . . . . . . . . . . . . . . . . . . 132
6 Reelle Funktionen und Stetigkeit 1346.1 Reelle Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1346.2 Grenzwerte von Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . 1366.3 Stetigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1396.4 Satze uber stetige Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . 141
7 Zufallsgroßen und Verteilungen 1467.1 Axiomatische Wahrscheinlichkeit . . . . . . . . . . . . . . . . . . . . . . . 1467.2 Zufallsgroßen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1497.3 Das schwache Gesetz der großen Zahl . . . . . . . . . . . . . . . . . . . . . 1587.4 Spezielle Verteilungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
8 Differential– und Integralrechnung 1688.1 Differenzierbarkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1688.2 Mittelwertsatz und Taylorsche Formel . . . . . . . . . . . . . . . . . . . . . 1758.3 Funktionenfolgen und Funktionenreihen . . . . . . . . . . . . . . . . . . . . 1808.4 Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1858.5 Integration und Differentiation . . . . . . . . . . . . . . . . . . . . . . . . . 1918.6 Spezielle Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 195
9 Geometrie und Algebra 2009.1 Herausbildung der axiomatischen Geometrie . . . . . . . . . . . . . . . . . 2009.2 Zirkel und Lineal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2059.3 Geometrie, Symmetrie, Invarianz . . . . . . . . . . . . . . . . . . . . . . . 220
10 Gruppen, Korper, Polynome 22610.1 Gruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22610.2 Untergruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23310.3 Permutationsgruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23710.4 Korper . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24210.5 Komplexe Zahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24510.6 Nullstellen von Polynomen . . . . . . . . . . . . . . . . . . . . . . . . . . . 25210.7 Konstruierbarkeit mit Zirkel und Lineal . . . . . . . . . . . . . . . . . . . . 256
11 Euklidische Geometrie in der Ebene 26111.1 Die euklidische Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26111.2 Satze in der euklidischen Ebene . . . . . . . . . . . . . . . . . . . . . . . . 27611.3 Bewegungen und orthogonale Gruppe . . . . . . . . . . . . . . . . . . . . . 28311.4 Wege und Kurven . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 289

Baumeister: Mathematik I - IV / Stand: Juli 1998 3
11.5 Kegelschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29511.6 Vektorraume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 302
12 Absolute Geometrie der Ebene 30512.1 Einfuhrung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30512.2 Inzidenzaxiome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30712.3 Abstandsaxiome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31112.4 Anordnungsaxiome . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31412.5 Bewegungsaxiom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31712.6 Satze der absoluten Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . 32012.7 Winkelmaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32612.8 Das Parallelenaxiom in der Ebene . . . . . . . . . . . . . . . . . . . . . . . 331
13 Etwas angewandte lineare Algebra 33813.1 Ausgleichsrechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33813.2 Matrizen und lineare Gleichungen . . . . . . . . . . . . . . . . . . . . . . . 34313.3 Eliminationsverfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34913.4 Euklidische Geometrie des Raums . . . . . . . . . . . . . . . . . . . . . . . 35613.5 Die orthogonale Gruppe . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36313.6 Kegelschnitte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36513.7 Minkowski–Raum und Relativitatstheorie . . . . . . . . . . . . . . . . . . . 37713.8 Spharische Geometrie und Astronomie . . . . . . . . . . . . . . . . . . . . 38113.9 Hyperbolische Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . . 394
14 Iterationsverfahren 39914.1 Nullstellen, Kurvendiskussion, Fixpunkte . . . . . . . . . . . . . . . . . . . 39914.2 Das Newtonverfahren im Reellen . . . . . . . . . . . . . . . . . . . . . . . 40914.3 Fixpunktiteration und Chaos . . . . . . . . . . . . . . . . . . . . . . . . . 41214.4 Iteration im Komplexen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41914.5 Iteration von Drehschrumpfungen . . . . . . . . . . . . . . . . . . . . . . . 423
15 Verschlusselte Botschaften 42715.1 Problemstellung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42715.2 Entdecken und Korrigieren von Fehlern . . . . . . . . . . . . . . . . . . . . 43215.3 Lineare Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43415.4 Kryptographie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43915.5 Public key – Kryptosysteme . . . . . . . . . . . . . . . . . . . . . . . . . . 44515.6 Elektronische Unterschrift und elekronisches Geld . . . . . . . . . . . . . . 447
16 Graphentheorie 44816.1 Graphen und ihre Diagramme . . . . . . . . . . . . . . . . . . . . . . . . . 44816.2 Ebene Graphen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45816.3 Baume . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46316.4 Der Heiratssatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46816.5 Gewichtete Graphen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 471
Baumeister: Mathematik I - IV / Stand: Juli 1998 4
17 Elementare Statistik 47417.1 Merkmale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47417.2 Statistische Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47717.3 Paare von Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47917.4 Die Normalverteilung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48117.5 Schatzen von Parametern . . . . . . . . . . . . . . . . . . . . . . . . . . . 48317.6 Testen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484
Literatur i
Einleitung
Bei der Vorlesungssequenz Mathematik I, II, III handelt es sich um die fachwissenschaft-liche Ausbildung der Lehrer fur
• Grundschulen mit Wahlfach Mathematik (L1)
• Haupt- und Realschulen (L2)
• Sonderschulen mit Wahlfach Mathematik (L5)
Erganzt werden sollen diese Vorlesungen im 4. Studiensemester durch eine aus dem Ver-anstaltungsangebot des Fachbereiches frei zu wahlende Veranstaltung. (Im vorliegendenFall wird wohl eine Veranstaltung zu konstruktiven Aspekten der Mathematik angebotenwerden.)
Die Ausbildung von Lehrern in einem Unterrichtsfach umfaßt fachdidaktische und fach-wissenschaftliche Anteile. Es ist sicher angeraten, in der Lehrerausbildung der unterenSchulstufen die fachdidaktische Komponente starker zu betonen als die fachwissenschaft-liche. Dies sollte bei der Auswahl des Stoffes und der Darstellung dazu fuhren, daß eineenge Beziehung zu den Inhalten des Schulunterrichtes besteht. Allerdings verlangen dieHerausbildung von Urteils– und Kritikfahigkeit und des Verstandnisses fur die Proble-me des Lehrens und Lernens breite und tiefe Kenntnisse der Inhalte und Methoden desFachs, in wesentlichen Zugen auch uber die relevanten Themen der nachsthoheren Schul-stufe. Fur das Fach Mathematik bedeutet dies, daß der kunftige Lehrer im Laufe seinesStudiums Elemente der Arithmetik, Geometrie, Algebra und Stochastik kennenlernen undsich exemplarisch mit Anwendungsbereichen der Mathematik auseinandersetzen soll. DieVorlesungssequenz Mathematik I, II, III gibt die Vorlage dafur ab.
In der fachdidaktischen Ausbildung wird vor allem die Frage behandelt, wie Mathema-tik gelehrt werden soll, in der fachwissenschaftlichen Ausbildung steht die Frage, welcheMathematik soll erarbeitet werden, um sie kompetent lehren zu konnen, im Vordergrund.Diese Frage nach den Inhalten kann nicht rein innermathematisch beantwortet werden,dazu ist auch die Frage nach dem
”wozu“ zu klaren.
Der Mathematikunterricht an allgemeinbildenden Schulen (bis zum Abitur) hat zweierleizum Ziel: Erstens, beizutragen zur Sicherung der Studierfahigkeit, zweitens den Auftragzur Allgemeinbildung zu erfullen. Der Beitrag zur Studierfahigkeit soweit es sich um Wis-sensvermittlung handelt kann bei Schulstufen bis zur 10. Klasse hinten anstehen, derAuftrag zur Allgemeinbildung steht klar im Vordergrund. Dazu ist zunachst die Frage
I
Baumeister: Mathematik I / Stand: Januar 1997 II
Mathematikunterricht und Allgemeinbildung
zu diskutieren. Die Diskussion dieser Fragestellung ist ziemlich aktuell. Sie wurde kraftigangeschoben durch die Habilitationsschrift
”Allgemeinbildung und Mathematik“ von
Hans Werner Heymann (Universitat Bielefeld). Die argerliche publizistische Ausweidungseiner (acht) Thesen hat seinen Ansatz vollkommen verfalscht (Siehe hierzu: H. Voll-rath: Die argerlichen 7 Jahre, DMV-Mitteilungen, 1/96). Als Antwort auf die Schieflagein der offentlichen Diskussion kann der Aufsatz
”Mathematikuntericht und Allgemeinbil-
dung“ von H. Winter (siehe DMV-Mitteilungen 2/96) angesehen werden. Er schreibt zurAllgemeinbildung
Zur Allgemeinbildung soll hier das an Wissen, Fertigkeiten und Einstellun-gen gezahlt werden, was jeden Menschen als Individuum und Mitglied vonGesellschaften in einer wesentlichen Weise betrifft, was fur jeden Menschenunabhangig von Beruf, Geschlecht, Religion u.a. von Bedeutung ist. Das istnaturlich keine Definition, es mußten hierzu mindestens noch Konzepte vonden moglichen Bestimmungen des Menschen aufgezeigt werden.
und folgert daraus fur den Mathematikunterricht
Der Mathematikunterricht sollte anstreben, die folgenden drei Grunderfahrun-gen, die vielfaltig miteinander verknupft sind, zu ermoglichen:
(1) Erscheinungen der Welt um uns, die uns alle angehen oder angehen soll-ten, aus Natur, Gesellschaft und Kultur, in einer spezifischen Art wahr-zunehmen und zu verstehen,
(2) mathematische Gegenstande und Sachverhalte, reprasentiert in Sprache,Symbolen, Bildern und Formeln, als geistige Schopfungen, als eine de-duktiv geordnete Welt eigener Art kennen zu lernen und zu begreifen,
(3) in der Auseinandersetzung mit Aufgaben Problemlosefahigkeiten, dieuber die Mathematik hinaus gehen, (heuristische Fahigkeiten) zu erwer-ben.
(Unter (1) sind u.a. die Fragen der Mathematisierung und Anwendbarkeit von Mathema-tik subsumiert, bei (2) steht mehr die innere Welt der Mathematik im Vordergrund, bei(3) ist der formale Bildungswert der Mathematik angesprochen.)Hinzugefugt werden sollte zu den oberen Forderungen wohl noch, daß der Mathema-tikunterricht den kritischen Umgang mit (angeblich) exakten Daten einuben sollte; dieEhrfurcht vor Zahlen und mathematisch Verbramtem muß abgebaut werden. Die Stocha-stik kann hier viel leisten.
Was sollte also in dieser Vorlesungssequenz Mathematik I - III vermittelt werden:
1. Fachliche Kenntnisse.
2. Mathematische Modellbildung und Anwendbarkeit.
3. Bild der Mathematik als lebende Wissenschaft.
Baumeister: Mathematik I / Stand: Januar 1997 III
Wichtig erscheint dabei – dies wird in neuerer Zeit immer mehr so gesehen – Mathematiknicht als fertiges Theoriegebaude zu vermitteln, sondern auch die historische Genese derIdeen darzulegen. Otto Toeplitz in der Einleitung zu
”Die Entwicklung der Infinitesimal-
rechnung“, 1894:
”Ich will aus der Historie nur die Motive fur die Dinge, die sich hernach
bewahrt haben, herausgreifen. Nicht um die Geschichte handelt es sich, son-dern um die Genesis der Probleme, der Tatsachen und Beweise, um die ent-scheidenden Wendepunkte dieser Genesis“
Zur Bedeutung (der Physikgeschichte) in Lehre und Unterricht bemerkt der Physiker undPhilosoph Ernst Mach:
“Die Resultate einer Wissenschaft, zu deren Aufbau die Geistesarbeit vonJahrtausenden erforderlich war, sollte nicht in einer Darstellung vorgefuhrtwerden, welche den Eindruck macht, als ob es sich durchwegs um langst be-kannte und auf naheliegenden Schlußfolgerungen beruhende Dinge handelte,und den Studenten (Schuler) nicht ahnen laßt, welche Unkenntnis, welcheZweifel und Irrtumer jahrhundertelang uber manchen Fragen walteten und mitwelchen Schwierigkeiten die hervorragendsten Manner (!) der Wissenschaft zuden heute so einfach scheinenden Ergebnissen gelangt sind . . .“
Felix Klein (1849 – 1925) – er wird uns im Zusammenhang mit der Geometrie nochbegegnen – hat sich intensiv mit Fragen des Mathematikunterrichtes (an den Gymnasien)befaßt. Die sogenannten
”Meraner Vorschlage“ des Jahres 1905 gehen auf Kleins Intention
zuruck. Er forderte damals fur den Gymnasialunterricht:
1. Psychologisch richtige Unterrichtsweise.
2. Starkung des Anschauungsvermogens und Erziehung zum funktionalen Denken mit-tels des geometrisch gefaßten Funktionsbegriffs.
3. Berucksichtigung der Anwendungen.
Diese Forderungen sind wohl auch heute noch aktuell.
In unserer Darstellung der Gebiete Arithmetik, Geometrie, Algebra, Stochastik versuchenwir ein spiralformigen Aufbau: in jedem Semester werden Objekte und Strukturen ausjedem der obigen Gebiete vorgestellt. Am Ende des zweiten Semesters werden die wesent-lichen Grundzuge der Theorie dann skizziert sein.Das vorliegende Skriptum kann Lehrbucher zu den einzelnen Themen nicht ersetzen.Es soll lediglich dazu dienen, den Stoff der Vorlesung schwerpunktmaßig festzuhalten.Die Aufzeichnungen sind vorlaufig, oberflachlich korrigiert und daher mit
”wachem Ver-
stand“ zu gebrauchen. Beleitende Literatur konnten die Skripten von Fuhrer [19], Engel[12, 13, 14], Gunther [24] und die Lehrbucher von Scheid [43, 45], Blankenagel [7] undMaibaum [36] sein.
Baumeister: Mathematik I / Stand: Januar 1997 IV
Der padagogische Gesichtspunkt der Mathematik kommt in unserer Veranstaltung garnicht zum Tragen. Von D. Hilbert (1862 – 1943) (In: Wissen und mathematisches Denken,Vorlesungsmitschrift, 1922/23), von dem im Zusammenhang mit Geometrie noch viel zuhoren sein wird, stammt folgende Zusammenfassung:
”Selbstvertrauen auf die eigenen Krafte, kritischer Blick, Energie in der Uber-
windung von Schwierigkeiten, die zunachst unubersteigbar scheinen, beharr-lich auf das Ziel gerichteter Wille, sind ethische Krafte und Qualitaten, die zuwecken es kein besseres Mittel gibt als die Beschaftigung mit der Mathematik.“
Eine Definition fur”Was ist (die) Mathematik“ ist nur schwerlich zu geben. Ein Ver-
such: “Mathematik ist die Wissenschaft, die sich mit Zahl– und Raumvorstellungen undderen logischer Begrundung befaßt.“ Dies ist eine mehr aus historischer Sicht formulierteDefinition, eine etwas auf moderne Entwicklungen ausgerichtete Definition konnte sein:“Mathematik studiert in abstrakter Form Strukturen, die von Objekten und Phanomenenabgeleitet sind.“ Bei Meschkowski [36] lesen wir: Fur die Hochschulen ist die Mathematikdie “Wissenschaft von den formalen Systemen“.Bei J.D. Barrow 1 werden vier Aufassungen von Mathematik aufgelistet. Der Formulismusdefiniert die Bedeutung der Mathematik als die Menge aller Herleitungen, die sich aus allenmoglichen Schlußregeln gewinnen lassen. Diese so definierte Mathematik reibt sich an derTatsache, daß K. Godel (1906 – 1978) zeigte, daß es Aussagen geben muß, deren Wahrheitoder Falschheit sich niemals aus den Beweisen ableiten laßt. Der Inventionismus sieht dieMathematik als eine rein menschliche Erfindung; Mathematik ist das, was Mathematikertun. In der platonischen Deutung existiert Mathematik unabhangig von Mathematikern.Die Mathematik ist eine Form objektiver allgemeingultiger Wahrheit. Der Grund, warumdie Mathematik bei der Beschreibung der Wirkungsweise so erfolgreich ist, liegt darin,daß die Welt im Grunde mathematisch ist. Die meisten Naturwissenschaftler und Mathe-matiker handeln so, als ob der Platonismus wahr sei. Der Konstruktivismus wurde gegenEnde des neunzehnten Jahrhunderts entwickelt, als durch die Paradoxa der Mengenleh-re das Gefuhl aufkam, es konnten sich Fehler und Widerspruchlichkeiten einschleichen,wenn wir mit Begriffen wie dem Unendlichen umgehen. Die Beschrankung des logischenBeweises auf die Aussage des Konstruktivisten laßt so vertraute Beweisverfahren wie denindirekten Beweis nicht zu. Der Konstruktivist definiert die Dinge durch den Vorgang,durch den sie ausgefuhrt oder konstruiert werden konnen.
Als Ersatz fur den Versuch einer umfassenden Beschreibung und Definition — ohne Ma-thematik getrieben zu haben, ware sie auch ziemlich sinnlos — skizzieren wir die Wurzelnder Wissenschaft
”Mathematik“.
Die Wurzeln der Mathematik sind in den alten Kulturen der Babylonier, Agypter, Inderund Chinesen, also der vorhellenistischen Zeit, zu suchen. In diesen Kulturen uberwiegtder empirische Ansatz; Rechenkunst schlagt sich nieder in Rezepten und Analogiebetrach-tungen.In der Mathematik der Babylonier, Agypter, Inder und Chinesen finden wir noch keine
1Barrow J.D., Theorien fur alles, Rororo,1994
Baumeister: Mathematik I / Stand: Januar 1997 V
Mathematik-Sprache. Es werden jeweils die Zeichen und Werte der Alltagssprache ver-wendet, die
”Arithmetik“ wird nach unterschiedlichen Zahlensystemen abgewickelt, die
Objekte der Betrachtung sind stets sehr konkreter Natur (Ausmessen von Boschungen,Ermitteln von Entfernungen, Flachenberechnungen von Feldern, Handelsrechnungen, ...).Die Ergebnisse der Uberlegungen werden im allgemeinen nur als Rechenvorschrift fur einkonkretes Zahlenbeispiel mitgeteilt. Offen bleibt, wie man auf die Vorschrift gekommenist, und wie man sich davon uberzeugt hat, daß sie die
”richtigen“ Ergebnisse liefert. Es
liegt offenbar ein rein induktives Vorgehen vor. (In weitestem Sinne kann in stochastischenUberlegungen der erfolgreiche Versuch erkannt werden, Fakten, die an einer Stichprobebeobachtet wurden, Gultigkeit zuzuordnen und damit induktivem Schließen mathemati-schen Gehalt zu geben).
Beispiel 0.1
Die Berechnung der Flache eines Trapezes (Kanal!) ist den Babyloniern gelaufig. In die-sem Zusammenhang wird dann eine Flachenformel fur das allgemeine Viereck mit denSeitenlangen a, b, c, d (in Reihenfolge) wohl in einem Analogschluß angegeben:
F =a+ c
2·b+ d
2
Diese Formel liefert nur fur das Rechteck einen richtigen Wert! 2
Beispiel 0.2
Das sogenannte chinesische Restproblem findet sich in einem Rechenbuch von Sun Tse um300 v.Chr.: Wir haben eine Anzahl von Gegenstanden, wissen aber nicht genau wieviele.Zahlen wir sie zu dreien ab, so behalten wir 2 ubrig, zahlen wir sie zu je 5 ab, so behaltenwir 3 ubrig, zahlen wir sie zu je 7 ab, so behalten wir 2 ubrig. Wieviele Gegenstande sindes?
Sun verschafft sich 3 Zahlen:
a = 70 : Eigenschaft: Rest 0 bei Division durch 5, 7, Rest 1 bei Division mit 3.b = 21 : Eigenschaft: Rest 0 bei Division durch 3, 7, Rest 1 bei Division durch 5.c = 15 : Eigenschaft: Rest 0 bei Division durch 3, 5, Rest 1 bei Division durch 7.
Dann stellt Sun fest, daß die Zahl
z = 2a + 3b+ 2c = 233
die verlangte Eigenschaft hat und daß man noch beliebige Vielfache von 3 · 5 · 7 abziehendarf. Sun erhalt als kleinste Losung 23. Dieses Vorgehen ist eine Fassung des Beweiseszum sogenannten chinesichen Restsatzes, den wir im Zusammenhang mit Teilbarkeit undRestklassen beweisen werden, fur die vorliegende Beispielsituation. L. Euler (1707 – 1783)und C.F. Gauß (1777 – 1855) haben sich damit intensiv beschaftigt. 2
Beispiel 0.3
Baumeister: Mathematik I / Stand: Januar 1997 VI
In altindischen Aufzeichnungen findet sich eine Rechenvorschrift fur die Diagonale ineinem Quadrat:
”Man verlangere das Maß (der Quadratseite) um seinen dritten Teil und
diesen um seinen vierten Teil, weniger 134
dieses vierten Teils“ . Dies besagt, daß fur√
2der (Naherungs-) Wert
1 +1
3+
1
4·
1
3−
1
34·
1
4·
1
3
angegeben wurde. (Man beachte, daß hier nur Stammbruche, d.h. Bruche der Form12, 1
3, 1
4, · · · , vorkommen.) Ohne den
”Korrekturwert“ 1
34· 1
4·3 erhalt man als Naherungswert1712, einen Wert, der auch bei den Babyloniern verwendet wurde.
Das Problem der Wurzel aus 2 wird bei der Entwicklung der Mathematik eine große Rollespielen. (Irrationalitat von
√2). 2
Die griechische Mathematik beginnt sich von der agyptischen und babylonischen Mathe-matik abzusetzen. In der hellenistischen Kultur verliert die Mathematik ihre alleinigen
”empirischen“ Charakter, sie wird zu einer – seinerzeit der – axiomatisch–deduktiven
Wissenschaft, in der nicht nutzliche Anwendbarkeit im Vordergrund steht, sondern Er-kenntnis um ihrer selbst willen. Zur Frage nach dem “Wie“ kommt auch die Frage nachdem “Warum“. Fortan ist der Beweis das Kernstuck des mathematischen Denkens. Ne-ben das Problemdenken tritt das Systemdenken. Die Eigenentwicklung zeigt sich in einerklaren Auseinanderhaltung der logischen Bestandteile
Definition, Postulat, Axiom, Satz.
Etwa gibt es bei Euklid die folgende Definition:
”Gerade ist eine Zahl, die sich halbieren laßt, und ungerade ist eine Zahl, die sich nicht
halbieren laßt, oder die sich um eine Einheit von einer geraden Zahl unterscheidet.“Bei Euklid liegt die deduktive Methode der Mathematik fertig vor. Sie wird in den dreivorangegangenen Jahrhunderten von Thales an Schritt fur Schritt erarbeitet. Aufschlußdaruber gibt ein Kommentar von Proklos (410 – 485) zum Hauptwerk von Euklid (Ele-mente). Etwa ist hier zu lesen:
”Thales hat erkannt und ausgesprochen, daß die Basiswinkel im gleichschenk-
ligen Dreieck gleich sind“.
(Dies deutet noch nicht endgultig auf das Vorhandensein eines Beweises hin. In nach-weisbarer Form hat der Beweis Einzug in die Mathematik mit Hippokrates (um 440 v.Chr.) gehalten (Nachweis, daß sich zwei Kreisflachen wie die Quadrate ihrer Durchmesserverhalten)). Parallel zur Herausbildung des deduktiven Charakters der Mathematik unddamit verknupft gibt es die wissenschaftlichen Anfange in der Philosophie (Zeno (490? –430? v. Chr., Sokrates (469 – 399 v. Chr.), Platon (427? – 347? v. Chr.). Die Lehren vonPlaton uber das Wesen der Mathematik beeinflußt die Aussage der Mathematiker undPhilosophen in einem Zeitraum, der mehr als zwei Jahrtausende umfaßt. Nach Platonsind die Erkenntnisse der Mathematik “Einblicke in das Reich der Ideen“. (Mit der IdeeKreis, mit der Idee Gerade, mit der Idee Zahl hat es der Mathematiker zu tun, nicht mitden von Menschenhand geschaffenen Bildern dieser Ideen.) Man spricht einem platoni-schen Verstandnis (siehe oben) vom Wesen der Mathematik.Eine Klarung der Begriffe in der
”Theorie der Zahlen“ und der
”Geometrie“ war dann
ursachlich fur eine erste Krise der Mathematik: Es gibt Strecken, die kein gemeinsames
Baumeister: Mathematik I / Stand: Januar 1997 VII
Maß besitzen, sie sind inkommensurabel. Es gibt also Streckenpaare, die nicht ganzzah-lige Vielfache einer
”Einheitstrecke“sind. Euklid bringt den Beweis dafur, daß die Diago-
nale d und die Seite s eines Quadrates inkommensurabel sind. Dieser Beweis ist zugleicheiner der ersten indirekten Beweise. Er lauft so:
Wir wissen (aus dem Satz des Pythagoras, der schon bei den Babyloniern und Agypternbekannt war) : d2 = 2s2
Annahme: d und s sind kommensurabel, Dann gibt es ganze Zahlen p, q mit
d : s = p : q
(Vor Eudoxos (408? – 355? v. Chr.) werden nur die ganzen Zahlen als “Zahlen“ im ei-gentlichen Sinne bezeichnet, gebrochene Zahlen werden auf dem Wege uber Verhaltnisseeingefuhrt. Eudoxos hat als erster das sogenannte Axiom der Meßbarkeit formuliert; eswird uns als Archimedisches Axiom der Anordnung bei der Einfuhrung der reellen Zahlenbegegnen.)Es kann vorausgesetzt werden, daß p und q nicht beide gerade Zahlen sind. Aus d2 = 2s2
folgt p2 = 2q2. Daraus folgt nach der Lehre von geraden und ungeraden Zahlen (sieheEuklid), daß p nicht ungerade sein kann; es ist also p = 2p′ . Dann ist aber q2 = 2p′2,also auch q eine gerade Zahl. Damit ist ein Widerspruch zur Eingangsvoraussetzuing, daßvon den Zahlen p, q nicht beide gerade sind, hergeleitet und die Annahme ist nicht haltbar.
Ein indirekter Beweis geht von der zu beweisenden Tatsache aus, um aus der Annahme desGegenteils einen Widerspruch herzuleiten. Die zu beweisende Tatsache muß also vorherbekannt sein oder wenigstens vermutet werden. Wie kommt man (oder wie kommen dieMathematiker vor Euklid) zu einer solchen Vermutung der Inkommensurabilitat? Dieskonnte durch das Vorgehen der wechselseitigen Wegnahme erfolgt sein.
Beispiel 0.4
Sei s die Seitenlange eines Quadrats und sei d die Lange der zugehorigen Diagonalen. Wirnehmen Kommensurabilitat an:
s = pe , d = qe , p, q ganze Zahlen.
Wir bilden ein Quadrat mit Seitenlange
s1 = d− s
und Diagonaled1 = s− s1.
Es gilt dann
s1 = d− s <1
2s ,
da bekannt ist, daß d < 32s ist. Ferner haben s1 und d1 wieder das gemeinsame (Eich-)Maß
e. So fortfahrend erhalten wir schließlich eine Seitenlange eines Quadrats, die kleiner alsdas Eichmaß e ist (Dieser Sachverhalt der geometrischen Abnahme war bei Euklid schonbekannt), Dies fuhrt dann zu einem Widerspruch. 2

Baumeister: Mathematik I / Stand: Januar 1997 VIII
Beispiel 0.5
Eine andere Deutung ist die, daß die Entdeckung der Inkommensurabilitat das Ergebnisdes Interesses fur das geometrische Mittel m von a, b gewesen ist. Die Bestimmungsglei-chung fur m ist
a : m = m : b
Wie groß ist das geometrische Mittel der Zahlen 1 und 2 ?Im Altertum waren drei Mittelwerte bekannt. Seien etwa a, b naturliche Zahlen (die De-finition ist nicht darauf beschrankt!):
Arithmetisches Mittel b − m = m − a
Geometrisches Mittel a : m = m : b
Harmonisches Mittel b : a = (b − m) : (m − a)
Im Bericht von Nikomachos (um 100) werden Mittelwerte mit Staatsformen in Verbin-dung gebracht. Das arithmetische Mittel wird mit der Herrschaft einer kleinen Gruppeverglichen, weil das Verhaltnis der beiden kleineren Zahlen großer ist, als das der großerenZahlen (m : a > b : m). Das harmonische Mittel entspricht der Herrschaft der Vorneh-men (Großen), da das Verhaltnis der großeren Zahlen großer ist als das der kleineren(b : m > m : a). Eine ausgewogene und gerechte Herrschaftsform stellt das geometrischeMittel dar, weil beide Verhaltnisse gleich sind (b : m = m : a). 2
Die Irrationalitat von√
2 zerstorte die Pythagoreische Philosophie, daß alle Verhaltnissedurch ganze Zahlen bestimmt sind. Daß die Griechen nach der Entdeckung der Irratio-nalitat nicht das System der irrationalen Zahlen aufgebaut haben, ist wohl der Tatsachezuzuschreiben, daß sie das System der rationalen Zahlen nicht in “passender“ Form hatten:Sie lagen ja nur als Verhaltnis von ganzen Zahlen vor, weil der geometrisch–philosophischeStil der griechischen Mathematik dies so festschrieb. Eine Ablosung ist erst bei Diophan-tos von Alexandria (um 250) zu erkennen, wenn erstmals der Stil der reinen Mathematikdeutlich wird; Ausdruck davon ist das erstmalige Auftreten einer selbstandigen Notation.Das Irrationalitatsproblem wurde schließlich erst endgultig von A. Cauchy (1789 – 1857)geklart.
Bei Archimedes (287? – 212 v. Chr.) ist schon ein umfassendes Gebaude vorhanden:Kegelschnitte, Flacheninhaltsberechnungen, physikalische Anwendungen. Es waren auchschon die drei beruhmten mathematischen Probleme des Altertums formuliert:
1. Dreiteilung des Winkels (Teilung eines Winkels in drei gleiche Teile.)
2. Verdoppelung des Wurfels (Konstruktion einer Seite eines Wurfels, dessen Volu-men zweimal so groß ist wie das gegebene Dreieck.) Es wird das Delische Problemgenannt.
3. Quadratur des Kreises (Konstruktion eines Quadrates mit einer Flache, die derFlache eines gegebenen Kreises gleich ist.)
Baumeister: Mathematik I / Stand: Januar 1997 IX
Als Konstruktionshilfsmittel waren nur Zirkel und Lineal zugelassen! Zu allen dreiProblemen werden wir einen theoretischen Ansatz fur die Erkenntnis liefern, daß dieProbleme nicht losbar sind.
Zur Bedeutung des Beitrags der Romer zur Mathematik hat jemand bemerkt: Der ein-zige Beitrag, den die Romer zur Mathematikgeschichte geleistet haben, war der, daß einromischer Soldat den Archimedes erschlagen hat. Diese uberpointierte Auffassung bringtzum Ausdruck, daß Fortschritte in der theoretischen Mathematik bei den Romern nichtzu finden sind, ihr Interesse galt mehr den praktischen Anwendungen.Fortschritte in der Mathematik zeichneten sich erst wieder ab, nachdem mit dem IslamUbersetzungen der Lehrbucher der Griechen, Agypter, Inder und Babylonier ins Abend-land kamen. Hier sind zu nennen: Leonardo da Pisa (1180? – 1250?), genannt Fibonacci,N. Oresme (1323? – 1382), M. Stiefel (1487? – 1567), Regiomontanus (1436 – 1476), N.Tartaglia (1500? – 1557), G. Cardano (1501 –1576).Die Anfange der neuzeitlichen Mathematik zeichnen sich an der Wende zum 17. Jahr-hunderts ab. Hier sind zu nennen: F. Viete (1540 – 1603), J. Neper (1550 – 1617). Esentstehen Logarithmentafeln, mathematische Zeichensprache und es zeichnet sich einekonsequente Mathematisierung in der Physik ab: W. Snellius (1580 – 1626) entdeckt dasBrechungsgesetz und begrundet eine geometrische Optik, T. Brahe (1546 – 1601) wer-tet die astronomischen Beobachtungen des Mars aus und schafft damit die Basis fur dieAufstellung der Keplerschen Gesetze (J. Keppler (1571 – 1630)), G. Galilei (1564 – 1642)begrundet die mathematische Behandlung naturwissenschaftlicher Fragen mit seiner Hin-wendung zum Kausaldenken und zur experimentellen Arbeit.Die dramatische Wende brachte dann das 17. Jahrhundert mit dem Wirken von P. Fermat(1601 – 1665), B. Pascal (1623 – 1662), R. Descartes (1596 – 1650), C. Huygens (1629 –1695), I. Newton (1643 – 1727), G.W. Leibniz (1646 – 1716). Leibniz hat Gedanken zuraxiomatischen Begrundung des Rechnens mit naturlichen Zahlen, zur Durchleuchtung dereuklidischen Axiome in der Geometrie und zur Begrundung einer symbolischen Logik for-muliert, Gedanken, die erst im 19. Jahrhundert wieder aufgenommen wurden.Diese Entwicklungen der Mathematik der neueren Zeit und eine genauere Analyse desAnsatzes von Euklid in der Geometrie skizzieren wir im Zusammenhang mit den entspre-chenden Gebieten. Soviel wollen wir hier schon festhalten: Mathematisierung erhalteine uberragende Rolle. Mathematisierung konnen wir etwa so zusammenfassen:
• Aufspaltung der Satze (Hauptausagen) in Axiome und Theoreme.
• Uberprufung der Axiome auf Evidenz.
• Formulierbarkeit der Satze in einer der mathematischen Zeichensprache nachgebil-deten Prazisionssprache.
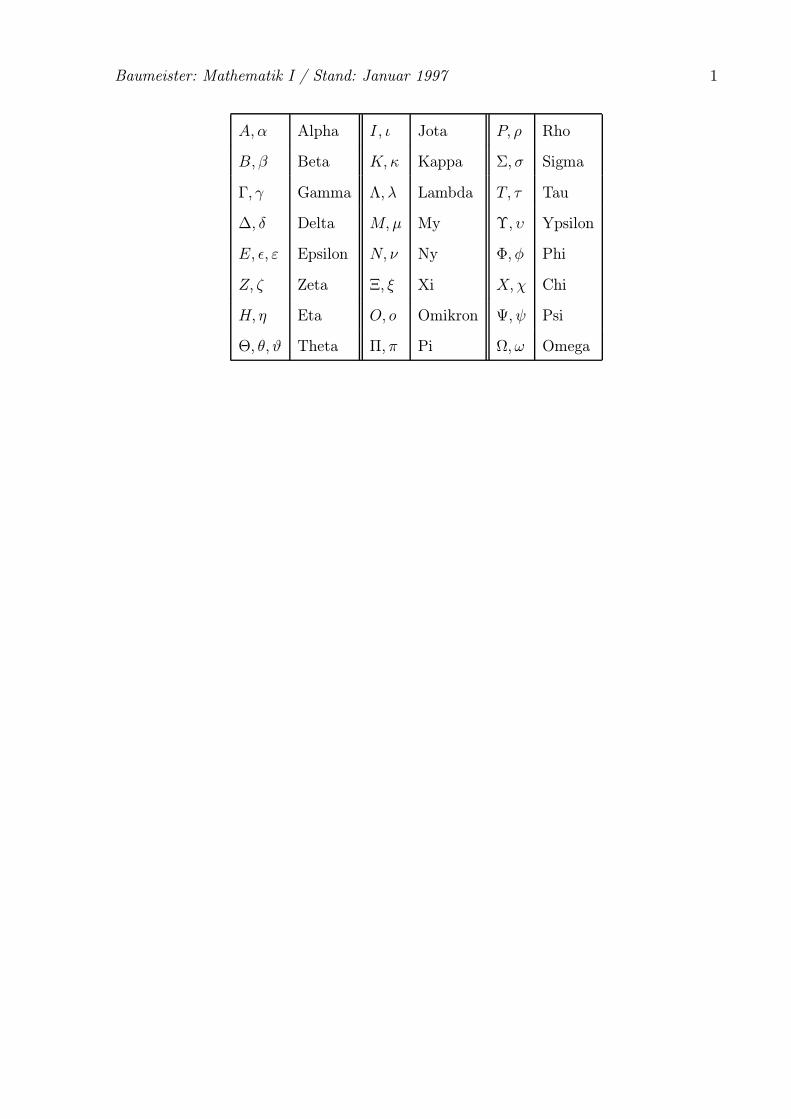
Ohne zusatzliche Zeichen kommt die Mathematik nicht aus. Wir versuchen, neben dennoch einzufuhrenden Symbolen mit dem lateinischen und dem griechischen Alphabet aus-zukommen. Hier ist das griechische Alphabet:
Baumeister: Mathematik I / Stand: Januar 1997 1
A,α Alpha I, ι Jota P, ρ Rho
B, β Beta K, κ Kappa Σ, σ Sigma
Γ, γ Gamma Λ, λ Lambda T, τ Tau
∆, δ Delta M,µ My Υ, υ Ypsilon
E, ε, ε Epsilon N, ν Ny Φ, φ Phi
Z, ζ Zeta Ξ, ξ Xi X,χ Chi
H, η Eta O, o Omikron Ψ, ψ Psi
Θ, θ, ϑ Theta Π, π Pi Ω, ω Omega
Kapitel 1
Mengen und Abbildungen
In diesem Kapitel geben wir eine Einfuhrung in die heute ubliche Sprache der Mathema-tik, soweit sie hier Verwendung findet. Diese Sprache hat sich erst allmahlich entwickelt,bezeichnenderweise sehr viel spater als die meisten konkreten Gebiete der Mathematik(Zahlentheorie, Algebra, Analysis, Topologie,. . . ). Sie hat sich als notig erwiesen, um Ge-danken, Argumente, Ergebnisse allgemeingultig zu ubermitteln.
1.1 Aussagen
Der Begriff “Aussage“ ist wie der noch zu besprechende Mengenbegriff ein mathematischerGrundbegriff. Er soll hier nicht definiert, sondern nur beschrieben werden: Eine Aussageist ein “sprachliches Gebilde“, bei dem feststeht, ob ihm Wahrheit (w) oder Falschheit (f)zukommt. Beispiele:
2 ist eine gerade ZahlEin Hund ist kein TierBrasilien ist ein EntwicklungslandDie Staße X ist naß2999991− 1 ist eine Primzahl
Die erste Aussage ist wahr, die zweite Aussage ist falsch, der Wahrheitsgehalt der drittenAussage hangt von einer Definition eines Entwicklungslandes ab. Die vierte Aussage kannauf ihren Wahrheitsgehalt mit “physikalischen“ Mitteln gepruft werden, der Wahrheits-gehalt der letzten Aussage ist offen: 2999991 − 1 ist eine Primzahl oder sie ist keine, die“Instanz“, die dies entscheiden kann, ist noch zu finden.
Die Sache mit den Aussagen und mit der Ermittlung des Wahrheitsgehalts ist so einfachnicht. Epimenides sagte: Alle Kreter sind Lugner und horen nicht auf zu lugen. Nun warer selbst ein Kreter; wenn er also die Wahrheit sagte, log er, und wenn er log, konnte essein, daß er die Wahrheit sagte.Nicht aus Vorliebe fur subtile Gedankenspielereien unternahm es der englische Philosophund Mathematiker (und engagierter Kriegsgegner in Ost und West und Nobelpreisgewin-ner fur Literatur (1950)) Bertrand Russell (1872 – 1970) nach Vorarbeiten von G. Boole(1815 – 1864) zu Beginn unseres Jahrhunderts, dieses beruhmte Ratsel zu losen, sondern
1
Baumeister: Mathematik I / Stand: Oktober 1996 2
weil das logische Problem der Wahrheit mit großer Dringlichkeit in den Aufmerksam-keitsbereich der Mathematiker trat. Wie unterscheidet der Mathematiker das Wahre vomFalschen? Fur B. Russel geht es darum, die Logik neu zu schaffen; die Schwierigkeiten,die auf der Ebene der mathematischen Begriffe aufgetreten waren, mußten durch die Un-tersuchung allgemeiner, abstrakter logischer Begriffe geklart werden. Damit wurde nachder Aristotelischen Logik (Aristoteles (384 – 322 v. Chr.)) ein neuer innermathematischerAnsatz zur Logik gemacht.
Fur die Formulierung unserer Aussagen von mathematischem Gehalt benotigen wir Verab-redungen, Sprechweisen, Symbole und eine griffige Notation. Dabei wollen wir aber nichtin die Tiefen der mathematischen Grundlagen (Mengenlehre, Logik) eintauchen, sonderngeben uns mit einem “naiven“ Standpunkt zufrieden. Er fuhrt zu keinerlei Konflikten, dawir uns stets mit ziemlich konkreten Objekten beschaftigen.
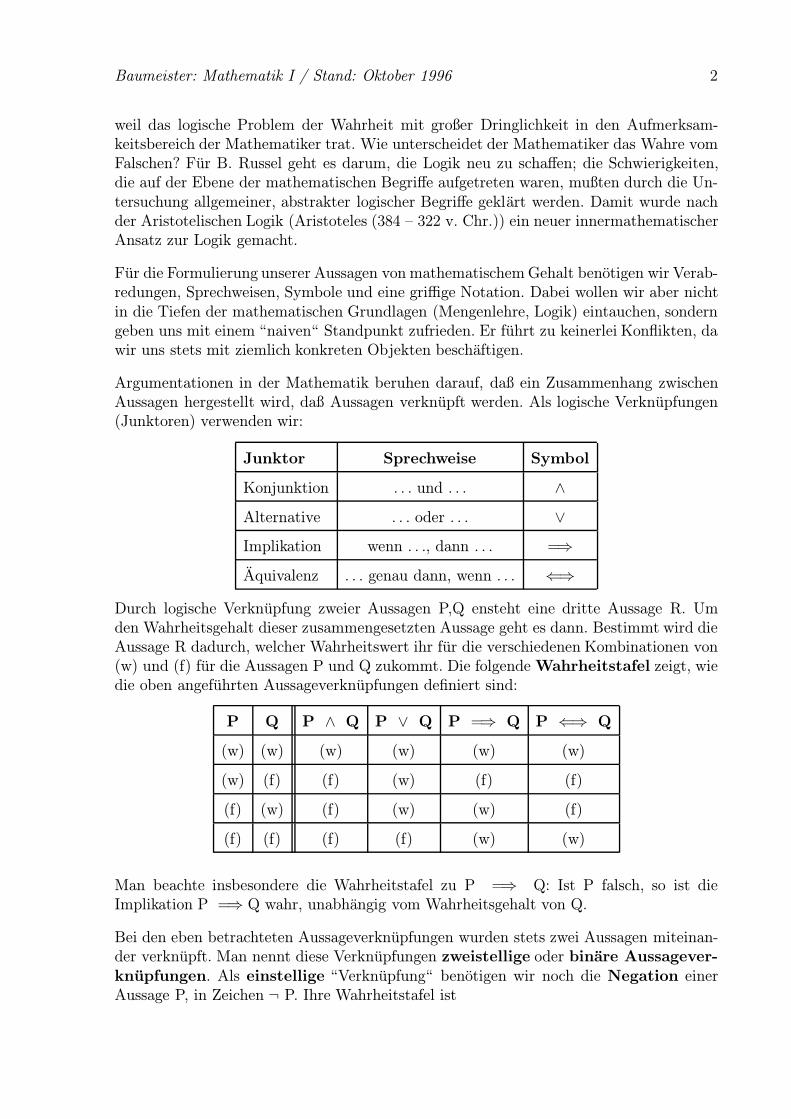
Argumentationen in der Mathematik beruhen darauf, daß ein Zusammenhang zwischenAussagen hergestellt wird, daß Aussagen verknupft werden. Als logische Verknupfungen(Junktoren) verwenden wir:
Junktor Sprechweise Symbol
Konjunktion . . . und . . . ∧
Alternative . . . oder . . . ∨
Implikation wenn . . ., dann . . . =⇒
Aquivalenz . . . genau dann, wenn . . . ⇐⇒
Durch logische Verknupfung zweier Aussagen P,Q ensteht eine dritte Aussage R. Umden Wahrheitsgehalt dieser zusammengesetzten Aussage geht es dann. Bestimmt wird dieAussage R dadurch, welcher Wahrheitswert ihr fur die verschiedenen Kombinationen von(w) und (f) fur die Aussagen P und Q zukommt. Die folgende Wahrheitstafel zeigt, wiedie oben angefuhrten Aussageverknupfungen definiert sind:
P Q P ∧ Q P ∨ Q P =⇒ Q P ⇐⇒ Q
(w) (w) (w) (w) (w) (w)
(w) (f) (f) (w) (f) (f)
(f) (w) (f) (w) (w) (f)
(f) (f) (f) (f) (w) (w)
Man beachte insbesondere die Wahrheitstafel zu P =⇒ Q: Ist P falsch, so ist dieImplikation P =⇒ Q wahr, unabhangig vom Wahrheitsgehalt von Q.
Bei den eben betrachteten Aussageverknupfungen wurden stets zwei Aussagen miteinan-der verknupft. Man nennt diese Verknupfungen zweistellige oder binare Aussagever-knupfungen. Als einstellige “Verknupfung“ benotigen wir noch die Negation einerAussage P, in Zeichen ¬ P. Ihre Wahrheitstafel ist

Baumeister: Mathematik I / Stand: Oktober 1996 3
P ¬ P
(w) (f)
(f) (w)
Halten wir einige logische Gesetze (Tautologien) fest (P,Q seien Aussagen):
(G1) (P =⇒ Q) ⇐⇒ (¬ Q =⇒ ¬ P)
(G2) ¬ (P ∧ Q) ⇐⇒ ¬ P ∨ ¬ Q
(G3) ¬ (P ∨ Q) ⇐⇒ ¬ P ∧ ¬ Q
(G4) (P =⇒ Q) ⇐⇒ (¬ P ∨ Q)
Von der Richtigkeit der Aussagen (G1), . . . ,(G4) uberzeugen wir uns, indem wir dieWahrheitstafeln erstellen. Etwa zu (G1):
P Q P =⇒ Q ¬P ¬Q ¬Q =⇒ ¬P (P =⇒ Q) ⇐⇒ (¬Q =⇒ ¬P)
(w) (w) (w) (f) (f) (w) (w)
(w) (f) (f) (f) (w) (f) (w)
(f) (w) (w) (w) (f) (w) (w)
(f) (f) (w) (w) (w) (w) (w)
Das Gesetz (G1) sagt uns, daß wir die Gultigkeit der Aussage P =⇒ Q nachweisenkonnen, indem wir die Aussage ¬Q =⇒ ¬ P verifizieren (Beweis durch Kontraposition).
Die Wahrheitstafel zu P =⇒ Q ist identisch mit der Wahrheitstafel zu ¬ P ∨ Q. DieAussage ¬ P ∨ Q vermeidet das der Umgangssprache nahestehende “folgt“ in P =⇒Q.
Der Widerspruchsbeweis basiert auf dem Gesetz (G4) zusammen mit (G3). Dem Nach-weis von Euklid, daß
√2 nicht rational ist, liegt dieses Gesetz zugrunde:
P : a reelle Zahl, a2 = 2 .Q : a ist irrational, d.h. a ist reell, aber nicht rational.
Aus der Annahme P ∧ ¬ Q leiten wir durch logisches Schließen (gultige Aussagever-knupfungen) eine Aussage ab, die nicht wahr ist. Also kann die Annahme P ∧ ¬ Q,welche ja aquivalent mit ¬ (P =⇒ Q) ist, nicht wahr sein; P =⇒ Q ist also wahr.
Fur die Verknupfungen ∧ und ∨ gelten Tautologien, die wir im nachsten Abschnittuber Mengen in anderem Kleide wiederfinden werden (P,Q,R seien Aussagen):
(G5) P ∧ Q ⇐⇒ Q ∧ P , P ∨ Q ⇐⇒ Q ∨ P
(G6) (P ∧ Q) ∧ R ⇐⇒ P ∧ (Q ∧ R) , (P ∨ Q) ∨ R ⇐⇒ P ∨ (Q ∨ R)
Baumeister: Mathematik I / Stand: Oktober 1996 4
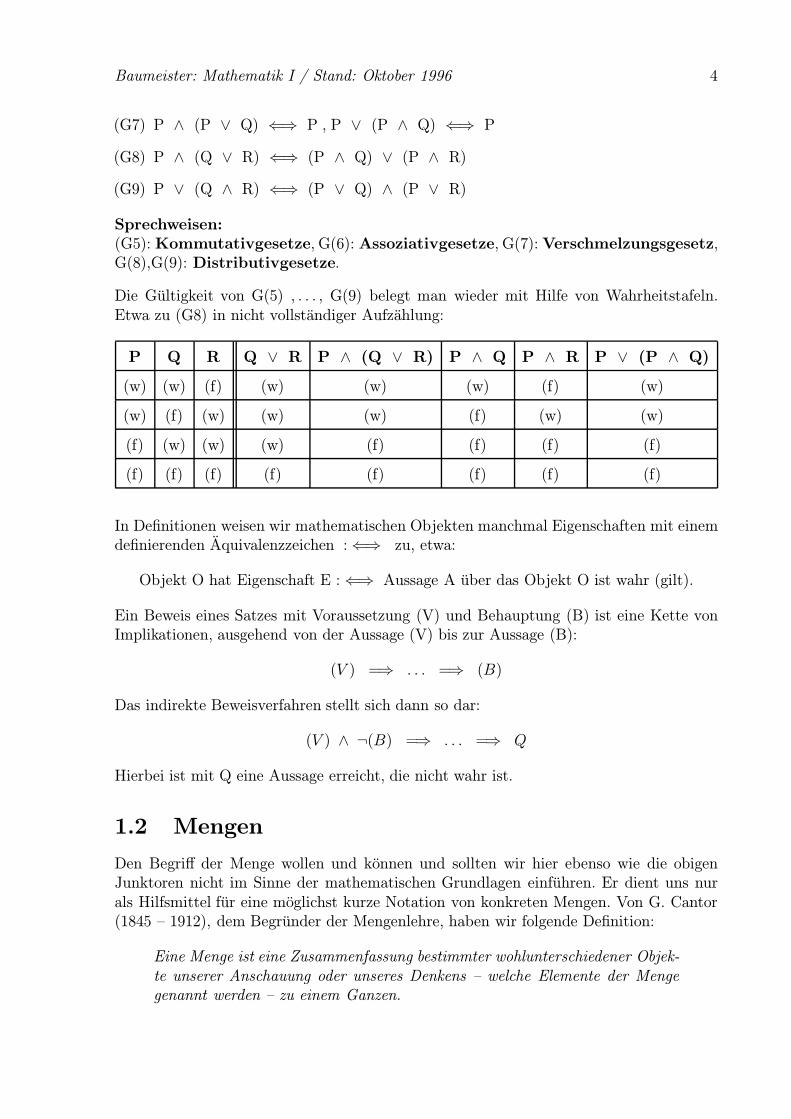
(G7) P ∧ (P ∨ Q) ⇐⇒ P , P ∨ (P ∧ Q) ⇐⇒ P
(G8) P ∧ (Q ∨ R) ⇐⇒ (P ∧ Q) ∨ (P ∧ R)
(G9) P ∨ (Q ∧ R) ⇐⇒ (P ∨ Q) ∧ (P ∨ R)
Sprechweisen:(G5): Kommutativgesetze, G(6): Assoziativgesetze, G(7): Verschmelzungsgesetz,G(8),G(9): Distributivgesetze.
Die Gultigkeit von G(5) , . . . , G(9) belegt man wieder mit Hilfe von Wahrheitstafeln.Etwa zu (G8) in nicht vollstandiger Aufzahlung:
P Q R Q ∨ R P ∧ (Q ∨ R) P ∧ Q P ∧ R P ∨ (P ∧ Q)
(w) (w) (f) (w) (w) (w) (f) (w)
(w) (f) (w) (w) (w) (f) (w) (w)
(f) (w) (w) (w) (f) (f) (f) (f)
(f) (f) (f) (f) (f) (f) (f) (f)
In Definitionen weisen wir mathematischen Objekten manchmal Eigenschaften mit einemdefinierenden Aquivalenzzeichen :⇐⇒ zu, etwa:
Objekt O hat Eigenschaft E :⇐⇒ Aussage A uber das Objekt O ist wahr (gilt).
Ein Beweis eines Satzes mit Voraussetzung (V) und Behauptung (B) ist eine Kette vonImplikationen, ausgehend von der Aussage (V) bis zur Aussage (B):
(V ) =⇒ . . . =⇒ (B)
Das indirekte Beweisverfahren stellt sich dann so dar:
(V ) ∧ ¬(B) =⇒ . . . =⇒ Q
Hierbei ist mit Q eine Aussage erreicht, die nicht wahr ist.
1.2 Mengen
Den Begriff der Menge wollen und konnen und sollten wir hier ebenso wie die obigenJunktoren nicht im Sinne der mathematischen Grundlagen einfuhren. Er dient uns nurals Hilfsmittel fur eine moglichst kurze Notation von konkreten Mengen. Von G. Cantor(1845 – 1912), dem Begrunder der Mengenlehre, haben wir folgende Definition:
Eine Menge ist eine Zusammenfassung bestimmter wohlunterschiedener Objek-te unserer Anschauung oder unseres Denkens – welche Elemente der Mengegenannt werden – zu einem Ganzen.
Baumeister: Mathematik I / Stand: Oktober 1996 5
Eine Menge besteht also aus Elementen, kennt man alle Elemente der Menge, so kenntman die Menge. Beispiele, die wir noch genauer studieren werden, sind:
IN := Menge der naturlichen Zahlen
ZZ := Menge der ganzen Zahlen
′Q := Menge der rationalen Zahlen
IR := Menge der reellen Zahlen
Man kann eine Menge dadurch bezeichnen, daß man ihre Elemente zwischen zwei ge-schweifte Klammern (Mengenklammern) schreibt. Die Zuordnung eines Elements zu einerMenge erfolgt mit dem Zeichen “ ∈“. Gehort ein Objekt x nicht zu einer Menge M, soschreiben wir x /∈M.Es hat sich als zweckmaßig erwiesen, den Mengenbegriff so aufzufassen, daß eine Mengeaus gar keinem Element bestehen kann. Dies ist dann die leere Menge, das Zeichen dafurist
∅ = leere Menge .
Ein bequemes Hilfsmittel beim Nachdenken uber Mengen sind die Venn–Diagramme,bei denen in der Zeichenblattebene Gebiete zur Darstellung von Mengen benutzt werden:Durch Kurven umschlossenes Gebiete stellen Mengen A,B, . . . dar. Solche Darstellungensind sehr gut geeignet, formale Argumente fur einen zu beweisenden Sachverhalt zu finden.
Das Hinschreiben der Elemente kann auf zweierlei Weisen geschehen.Hat die Menge nur ganz wenige Elemente, so kann man sie einfach alle hinschreiben, durchKommata getrennt, auf die Reihenfolge kommt es dabei nicht an, etwa:
1, 2, 3 = 2, 3, 1 = 3, 3, 1, 2 .
Abgekurzt verfahrt man oft auch so: Elemente, die man nicht nennt aber gut kennt,werden durch Punkte angedeutet, etwa:
1, 2, 3, 4, 5, 6, 7, 8 = 1, 2, . . . , 8 = 1, . . . , 8 .
Man nennt diese Art, Mengen hinzuschreiben, zu definieren, die Umfangsdefinition.Die zweite Moglichkeit besteht darin, Objekte einer Menge als Elemente dadurch zuzuord-nen, daß man ihnen eine charakterisierende Eigenschaft zuweist. Ist E eine Eigenschaft,die jedes Objekt x einer Menge M hat oder nicht hat, so bezeichne
x ∈M |x hat die Eigenschaft E
die Menge aller Elemente von M , die die Eigenschaft E haben; etwa
IN 0 := x ∈ ZZ |x nicht negativ .
Man nennt diese Art, Mengen hinzuschreiben, zu definieren, die Inhaltsdefinition.Von diesen beiden Definitionen ist die Inhaltsdefinition die wichtigere, denn die Umfangs-definition kann auf die Inhaltsdefinition zuruckgefuhrt werden; andersherum ist dies nichtimmer moglich.

Baumeister: Mathematik I / Stand: Oktober 1996 6
Wichtig beim Hinschreiben von Mengen ist, daß stets nachgepruft werden kann, ob einspezielles Objekt einer in Frage stehenden Menge angehort oder nicht; in der Definitionvon Cantor ist dies festgehalten. (Dies korrespondiert mit dem ausgeschlossenen Dritten).
Nun haben wir schon viele Worte zu einem recht einfachen Sachverhalt gemacht.
... Ahnlich ist es mit der Notation der Mengenlehre. Sie ist so einfach, daßsie schon an der Grundschule gelehrt werden kann. Was manchmal seitenlangin einem Vorwort zu einem Lehrbuch steht, paßt schon in ganz wenige Satze:Mit p ∈ F wird ausgedruckt, daß p ein Element der Menge F ist, und mitF ⊂ G, daß jedes Element von F ebenso ein Element vonG ist. Haben wir zweiMengen A und B, dann ist A ∩ B die Menge, die jene Elemente enthalt, diesowohl zu A als auch zur Menge B gehoren; mit A∪B ist die Menge gemeint,die jene Elemente enthalt, die zur Menge A,B oder zu beiden gehoren; und A′
ist die Menge jener Elemente, die nicht zu A gehoren. Eine Menge, die keineElemente enthalt, ist eine leere Menge und wird mit ∅, manchmal auch mit angegeben, geschweifte Klammern ohne Inhalt. Ende des Mini-Kurses.
Poulos, J.A.: Von Algebra bis Zufall, Campus, Frankfurt, 1992
Den obigen Mini-Kurs bringen wir noch in eine “anstandige“ Form:
Definition 1.1
Seien A,B Mengen.
(a) A ⊂ B :⇐⇒ (x ∈ A =⇒ x ∈ B) (Teilmenge)
(b) A = B :⇐⇒ (A ⊂ B und B ⊂ A) (Gleichheit)
(c) A ∩B := x|x ∈ A und x ∈ B := x|x ∈ A, x ∈ B (Durchschnitt)
(d) A ∪B := x|x ∈ A oder x ∈ B (Vereinigung)
2
Das Symbol “ :=“ haben wir als definierendes Gleichsetzen von Mengen eingefuhrt.
Die Nutzlichkeit der leeren Menge ∅ wird deutlich bei der Definition des Durchschnitts.Hier ist ja der Fall, daß A ∩ B kein Element enthalt, sicherlich nicht auszuschließen.
Nun ist es nutzlich, einige abkurzende Rechenregeln zur Hand zu haben.
Rechenregeln: Seien A,B,C Mengen.
(R1) A ⊂ B,B ⊂ C =⇒ A ⊂ C (Transitivitat)
(R2) A ∪ (B ∪ C) = (A ∪ B)∪ C (Assoziativgesetz)
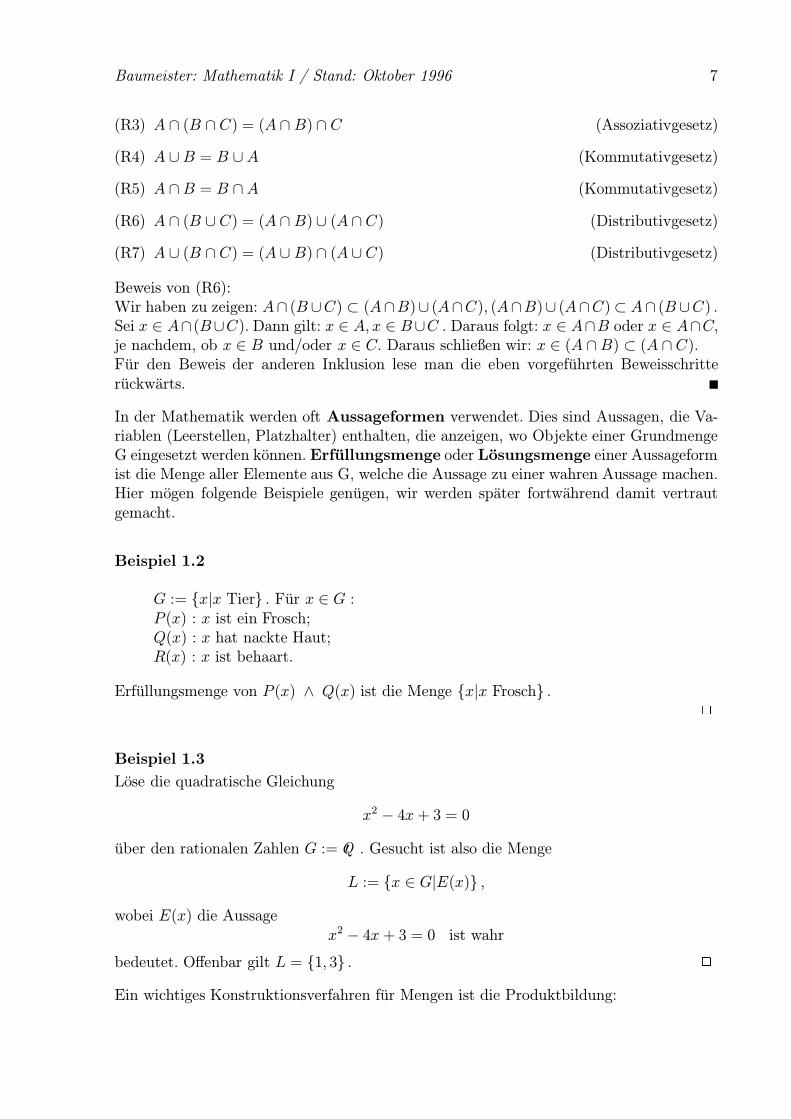
Baumeister: Mathematik I / Stand: Oktober 1996 7
(R3) A ∩ (B ∩ C) = (A ∩ B)∩ C (Assoziativgesetz)
(R4) A ∪B = B ∪A (Kommutativgesetz)
(R5) A ∩B = B ∩A (Kommutativgesetz)
(R6) A ∩ (B ∪ C) = (A ∩ B)∪ (A ∩ C) (Distributivgesetz)
(R7) A ∪ (B ∩ C) = (A ∪ B)∩ (A ∪ C) (Distributivgesetz)
Beweis von (R6):Wir haben zu zeigen: A∩ (B∪C) ⊂ (A∩B)∪ (A∩C), (A∩B)∪ (A∩C)⊂ A∩ (B∪C) .Sei x ∈ A∩(B∪C). Dann gilt: x ∈ A, x ∈ B∪C . Daraus folgt: x ∈ A∩B oder x ∈ A∩C,je nachdem, ob x ∈ B und/oder x ∈ C. Daraus schließen wir: x ∈ (A ∩B) ⊂ (A ∩ C).Fur den Beweis der anderen Inklusion lese man die eben vorgefuhrten Beweisschritteruckwarts.
In der Mathematik werden oft Aussageformen verwendet. Dies sind Aussagen, die Va-riablen (Leerstellen, Platzhalter) enthalten, die anzeigen, wo Objekte einer GrundmengeG eingesetzt werden konnen. Erfullungsmenge oder Losungsmenge einer Aussageformist die Menge aller Elemente aus G, welche die Aussage zu einer wahren Aussage machen.Hier mogen folgende Beispiele genugen, wir werden spater fortwahrend damit vertrautgemacht.
Beispiel 1.2
G := x|x Tier . Fur x ∈ G :P (x) : x ist ein Frosch;Q(x) : x hat nackte Haut;R(x) : x ist behaart.
Erfullungsmenge von P (x) ∧ Q(x) ist die Menge x|x Frosch .2
Beispiel 1.3
Lose die quadratische Gleichung
x2 − 4x+ 3 = 0
uber den rationalen Zahlen G := ′Q . Gesucht ist also die Menge
L := x ∈ G|E(x) ,
wobei E(x) die Aussagex2 − 4x+ 3 = 0 ist wahr
bedeutet. Offenbar gilt L = 1, 3 . 2
Ein wichtiges Konstruktionsverfahren fur Mengen ist die Produktbildung:
Baumeister: Mathematik I / Stand: Oktober 1996 8
Definition 1.4
Seien A,B Mengen.
(a) Sind a ∈ A, b ∈ B, so heißt (a, b) das zugeordnete geordnete Paar (bezogenauf die Reihenfolge “zuerst A, dann B“).
(b) Zwei Paare (a, b), (a′, b′) mit a, a′ ∈ A, b, b′ ∈ B, heißen gleich genau dann,wenn a = a′, b = b′ .
(c) Die Menge A × B := (a, b)|a ∈ A, b ∈ B heißt das kartesische Produktvon A,B .
2
Wir haben folgende Rechenregeln: Seien A,B,C Mengen:
(R8) A× (B ∪ C) = (A×B)∪ (A× C) .
(R9) A× (B ∩ C) = (A×B)∩ (A× C) .
Es ist klar, daß wir das kartesische Produkt auf mehr als zwei “Faktoren“ ausdehnenkonnen. Etwa korrespondiert ein (gultiger) Lottoschein mit den Elementen der Menge
x = (x1, x2, x3, x4, x5, x6) ∈ Z × · · · × Z|x1, . . . , x6 sind paarweise verschieden;
dabei ist Z = 1, 2, 3, . . . , 49.
Definition 1.5
Sei A eine Menge. Die Potenzmenge von A ist die Menge der Teilmengen von Aeinschließlich der leeren Menge:
POT (A) := B|B ⊂ A .
2
Beispiel 1.6
Sei A := p, q, r. Wie sieht die Potenzmenge POT (A) aus? Wir haben
POT (A) = ∅, p, q, r, p, q, q, rp, r, p, q, r
2
Man beachte, daß es unserer Verabredung nicht widerspricht, daß Elemente von Mengenselbst wieder Mengen sein konnen.
Beispiel 1.7
Baumeister: Mathematik I / Stand: Oktober 1996 9
In der Wahrscheinlichkeitstheorie benutzt man Mengen, um unsichere Ereignisse, also Er-eignisse, deren Eintreffen vom Zufall mitbestimmt ist, darzustellen. Dazu uberlegen wiruns spater noch wichtige Bausteine einer Theorie, namlich der Wahrscheinlichkeitstheorieund der Statistik, zusammengefaßt unter dem Thema Stochastik. Hier geben wir nureinen kleinen Hinweis.Zwei Wurfel werden gleichzeitig geworfen. Der mogliche Ausgang des Wurfelns ist einElement aus Ω := IN 6× IN 6 mit IN 6 := 1, 2, 3, 4, 5, 6. Interessiert man sich fur ei-ne Doppelsechs oder eine Wurfelsumme großer als sechs, so wird man folgende Mengenhinschreiben:
A := (x, y) ∈ Ω|x = y = 6 , B = (x, y) ∈ Ω|x+ y => 6 .
Als Wahrscheinlichkeit fur eine Doppelsechs bzw. fur das Eintreten des Ereignisses A etwa
wird man die Zahl p = 136 erwarten. 2
1.3 Abbildungen
Mit Abbildungen drucken wir den mathematischen Sachverhalt aus, daß es zwischen zweiObjekten eine klar definierte Abbhangigkeit gibt. Wiederum behandeln wir den Begriffauf der Ebene einer naiven Auffassung, auf der Ebene einer fundierten Mengenlehre laßtsich der Begriff der Abbildung ebenso wie der Umgang mit Mengen auf eine sicherereBasis stellen.
Definition 1.8
Seien A,B,C,D Mengen.
(a) Eine Abbildung f von A nach B ist eine Vorschrift, durch die jedem a ∈ Agenau ein f(a) ∈ B zugeordnet wird; A heißt Definitionsbereich, B heißtWertebereich von f.
(b) Zwei Abbildungen f : A −→ B, g : C −→ D heißen gleich, wenn
A = C,B = D, f(x) = g(x) fur alle x ∈ A
gilt.
2
Das Werden des Abbildungsbegriffs zu einem wohldefinierten zentralen Begriff der Ma-thematik hat ca. 100 Jahre gedauert. Das Wort “Funktion“ hat wohl G.H. Leibniz (1646– 1716) aus dem Lateinischen in die Mathematik eingefuhrt. Die Notation f(x) fur denFunktionswert geht auf A.C. Clairaut ( 1713 – 1765) zuruck, einen ersten konzeptionellenVersuch unternahm L. Euler (1707 – 1783) mit der Definition
Eine Funktion einer veranderlichen Große ist ein analytischer Ausdruck, derauf irgendeine Weise aus der veranderlichen Große und aus Zahlen oder kon-stanten Großen zusammengesetzt ist.
Baumeister: Mathematik I / Stand: Oktober 1996 10
Die heutzutage ubliche Definition (siehe oben) ist auf der Basis einer begrundeten Men-genlehre im wesentlichen die von P.G.L. Dirichlet (1805 – 1859) gegeben Definition:
Eine Variable ist ein Symbol, das irgendein Element einer Menge von Zahlendarstellt. Sind zwei Variablen x, y so aufeinander bezogen, daß wenn immer xein Wert zugeordnet ist, automatisch durch irgendeine Regel der Variablen y
ein Wert zugeordnet ist, sprechen wir von einer Funktion von x.
Einwande beziehen sich auf die implizit nur sprachlich formulierte Abhangigkeit und dennicht konstruktiv geforderten Abhangigkeitsbegriff.
Sei f eine Abbildung von A nach B. Wir schreiben dafur
f : A −→ B , x 7−→ f(x)
oderf : A 3 x 7−→ f(x) ∈ B
oder kurzf : A −→ B .
(Wir verwenden meist fur Abbildungen zwischen Mengen von Zahlen das Wort “Funk-tion“. Dahinter steckt kein Tiefsinn.)
Beispiel 1.9
• Die Zuordnung Person 7−→ Vorname kann nicht zu einer Abbildung ausgebautwerden, da manche Personen mehrere Vornamen besitzen.
• Die Zuordnung Person 7−→ Vater kann als Abbildung formuliert werden. (Dazuist noch Definitions– und Wertebereich festzulegen.)
• Ein EKG gibt die Spannung zwischen Herzbasis und Herzspitze als Funktion derZeit wieder.
• Bekannte Funktionen, die wir in der Geometrie noch kennenlernen werden, sindTranslationen, Streckungen, Drehungen, Spiegelungen.
2
Beispiel 1.10
Ein Stein fallt in einen Schacht, den Aufprall hort man nach 5 Sekunden. Was ist dieTiefe d des Schachts?Hier sind, bevor wir die Aufgabe losen konnen, sinnvollerweise zwei Funktionen zu ermit-teln: die Fallstrecke sf und die Schallaufzeit sr in Abhangigkeit von der Zeit t.Fallstrecke sf in Abhangigkeit von der Zeit t:
sf (t) :=1
2gt2

Baumeister: Mathematik I / Stand: Oktober 1996 11
Hier kommen die Konstanten 12 und g (Erdbeschleunigung/9.81 m/sec2) und die (un-
abhangige) Variable t (Zeit) vor; der Definitionsbereich der Abbildung sf ist damit derHalbstrahl der nichtnegativen reellen Zahlen. Das physikalische Gesetz (eigentlich eineBeobachtung), das der Formel fur sf zugrundeliegt, wurde von G. Galilei (1564 – 1642)aufgestellt. Seine Uberlegungen fuhren auch zur Formel fur die Laufzeit sr des Schalls inAbhangigkeit von der Zeit t:
sr(t) = v · t
Hier ist v die Schallgeschwindigkeit (v = 340 m/sec).Gesucht sind zur Losung der Aufgabe also die Zeiten t1, t2 mit
sf(t1) = sr(t2) , t1 + t2 = 5 .
Die Tiefe des Schachts ergibt sich damit als
d = sf(t1) = sr(t2) .
Die konkrete Rechnung fuhrt auf eine quadratische Gleichung; man erhalt t1 ∼ 4.68 secund d ∼ 108 m. 2
Definition 1.11
Sei f : A −→ B eine Abbildung. Die Menge
graph(f) := (a, b) ∈ A×B|a ∈ A, b = f(a)
heißt der Graph von f. 2
Beispiel 1.12
An folgender Funktion, die in der Analysis gelegentlich als Gegenbeispiel Verwendungfindet, wollen wir eine weitere Form des Hinschreibens einer Funktion kennenlernen.Betrachte
f : IR −→ IR , x 7−→
1 , falls x ∈ ′Q0 , falls x ∈ IR \ ′Q
.
Wie soll man den Graph hinzeichnen? 2
Definition 1.13
Sei A eine Menge. Dann nennt man die Abbildung
idA : A 3 x 7−→ x ∈ A
die Identitat auf A. (Manchmal lassen wir den Index A weg und schreiben einfachid, wenn klar ist, um welches A es sich handelt.) 2

Baumeister: Mathematik I / Stand: Oktober 1996 12
Definition 1.14
Seien A,B Mengen. Dann heißt die Abbildung
π1 : A×B 3 (a, b) 7−→ a ∈ A
die Projektion auf den ersten Faktor. 2
Es sollte klar sein, daß entsprechend auch die Projektionen auf beliebige Faktoren in einemkartesischen Produkt erklart sind.
Definition 1.15
Sei f : X −→ Y eine Abbildung und seien A ⊂ X,B ⊂ Y . Dann heißt die Menge
f(A) := f(x)|x ∈ A
die Bildmenge von A oder das Bild von A, und die Menge
f−1(B) := x ∈ X|f(x) ∈ B
heißt die Urbildmenge von B oder einfach das Urbild von B. 2
Rechenregel sind (f : X −→ Y,A1, A2 ⊂ X,B1, B2 ⊂ Y ):
(R1) A1 ⊂ A2 =⇒ f(A1) ⊂ f(A2)
(R2) f(A1 ∪A2) = f(A1) ∪ f(A2)
(R3) f(A1 ∩A2) ⊂ f(A1) ∩ f(A2)
(R4) B1 ⊂ B2 =⇒ f−1(B1) ⊂ f−1(B2)
(R5) f−1(B1 ∪ B2) = f−1(B1) ∪ f−1(B2)
Beweisen wir etwa (R5).Da eine Gleichheit von Mengen behauptet wird, sind zwei Inklusionen zu verifizieren.Zu f−1(B1 ∪B2) ⊂ f−1(B1) ∪ f−1(B2) .Sei x ∈ f−1(B1 ∪ B2) . Also gilt f(x) ∈ B1 ∪ B2 . Ist f(x) ∈ B1, dann ist x ∈ f−1(B1) ⊂f−1(B1) ∪ f−1(B2) . Ist f(x) ∈ B2, dann ist x ∈ f−1(B2) ⊂ f−1(B1) ∪ f−1(B2) .Zu f−1(B1) ∪ f−1(B2) ⊂ f−1(B1 ∪B2) .Sei x ∈ f−1(B1) ∪ f−1(B2) . Ist x ∈ f−1(B1), dann ist f(x) ∈ B1 ⊂ B1 ∪ B2, d.h.x ∈ f−1(B1∪B2) . Ist x ∈ f−1(B2), dann ist f(x) ∈ B2 ⊂ B1∪B2, d.h. x ∈ f−1(B1∪B2) .
Wir fuhren noch Quantoren ein. Damit konnen wir dann viele Resultate und Definitionennoch kompakter hinschreiben.
Baumeister: Mathematik I / Stand: Oktober 1996 13
Notation Sprechweise
∀a ∈ A “fur alle Elemente a in A“
∃a ∈ A “es existiert a in A“
∃1a ∈ A “es existiert genau ein a in A“
∀a (P (a)) “fur alle Elemente a in A ist P (a) wahr“
∀a (P (a)) “fur alle Elemente a in A gilt P (a)“
Bemerkung 1.16
Unter Benutzung der eben eingefuhrten Quantoren laßt sich die Wohldefiniertheit einerAbbildung f : A −→ B so hinschreiben:
∀a, a′ ∈ A (a = a′ =⇒ f(a) = f(a′))
oder∀a, a′ ∈ A (f(a) 6= f(a′) =⇒ a 6= a′) .
2
In der folgenden Definition verwenden wir die kompakte Quantoren – Schreibweise, nichtimmer wollen wir so verfahren, da dann der Text ziemlich “unleserlich“ wurde.
Definition 1.17
Sei f : X −→ Y eine Abbildung.
(i) f injektiv :⇐⇒ ∀x, x′ ∈ X (x 6= x′ =⇒ f(x) 6= f(x′))
(ii) f surjektiv :⇐⇒ ∀y ∈ Y ∃x ∈ X (y = f(x))
(iii) f bijektiv :⇐⇒ f injektiv und surjektiv.
2
Man vergleiche (i) aus Definition 1.17 mit der Umformulierung der Wohldefiniertheit inBemerkung 1.16.
Machen wir noch einen Ausblick (siehe Beispiel 1.7)!In der Wahrscheinlichkeitstheorie benutzt man Mengen, um unsichere Ereignisse, also Er-eignisse, deren Eintreffen vom Zufall mitbestimmt ist, darzustellen. Man stellt sich einenZufallsmechanismus vor, der bei Betatigung einen Punkt in einer (problemabhangigen)Menge Ω spezifiziert. Die Menge Z ∈ A bezeichnet das Ereignis, daß der spezifiziertePunkt in der Teilmenge A von Ω liegt. Das Ereignis, daß Z außerhalb von A spezifiziert,ist Ω\A := Z /∈ A , das Komplementarereignis zu Z ∈ A . Das Ereignis, daß sowohlZ ∈ A als auch Z /∈ A eintrifft, ist Z ∈ A ∩ Z /∈ A .

Baumeister: Mathematik I / Stand: Oktober 1996 14
Es sei nun f eine Abbildung auf Ω mit Werten in irgendeiner Menge E . Wenn der Zu-fallsmechanismus Z betatigt wird, liefert uns f(Z) einen Punkt in E . Wenn Z den Punktω realisiert, dann nimmt f(Z) den Wert f(ω) an.Betrachten wir speziell f := 1A , d.h.
1A(Z) :=
1 , falls Z ∈ A eintrifft.0 , falls Z /∈ A eintrifft.
Fur eine beliebige Menge E von E bezeichnet f(Z) ∈ E das Ereignis, daß der f–Wertdes von Z spezifizierten Punktes in E liegt.
Beispiel 1.18
Zehn Munzen werden geworfen; 1 steht fur Kopf, 0 steht fur Wappen. Der “Zufallsvektor“(Z1, Z2, . . . , Z10) nimmt Werte in Ω := Ω10 := 0, 1 × 0, 1 × . . .× 0, 1 an; Ω bestehtaus 210 = 1024 Punkten. Wenn die i–te Munze Kopf zeigt, dann soll dem Spieler derBetrag ai ausgezahlt werden. Die Auszahlungen fur die verschiedenen i werden addiert.Sein Gesamtgewinn ist dann also
f(Z) := a1Z1 + a2Z2 + · · ·+ a10Z10 .
Nehmen wir an, daß alle ai gleich 1 sind. Die Haufigkeit der 1 ist dann der zufalligeGesamtgewinn
H10 = Z1 + Z2 + · · · + Z10 .
Das Ereignis, daß mindestens 8 der Munzen “Zahl“ zeigen, kann man folgendermaßennotieren:
Z1 + Z2 + · · · + Z10 ≥ 8 ,
oderH10 ∈ 8, 9, 10 .
2
Da wir noch keine mathematischen Objekte kennen – die Schulkenntnisse wollen wir hierals nicht ausreichend fundiert ansehen – fehlt uns auch noch Beispielmaterial. DiesemUmstand wollen wir abhelfen, indem wir uns nun die naturlichen Zahlen in axiomatischerWeise verschaffen. Daraus lassen sich dann viele Objekte ableiten, ja die ganze elementareZahlentheorie steht dann zur Betrachtung offen.
1.4 Naturliche Zahlen
Die erste”mathematische Erfindung“ durfte wohl das Zahlen von Gegenstanden gewesen
sein: Jedem Gegenstand einer Familie von Gegenstanden wird der Reihe nach ein Strichauf einem
”Aufzeichnungsbrett“ zugeordnet, einer bestimmten Anzahl von Strichen wird
ein Zahlwert (Eins, Zwei,. . .) bzw. eine Zahl (1,2,. . .) zugeordnet. (Diese Zahlen stehen furdie Kardinalzahlen im Gegensatz zu den sogenannten Ordinalzahlen Erster (erster Strich),Zweiter, . . ..) Diese Zahlen bezeichnen wir als naturliche Zahlen. Sie sind (nach dieser Auf-fassung) also eine Konstruktion unseres Handelns und Denkens; nach R. Dedekind (1831
Baumeister: Mathematik I / Stand: Oktober 1996 15
– 1916)”gemacht vom menschlichem Geist“. Als Fundament fur die Mathematik sind
die naturlichen Zahlen ausreichend,”alle“ anderen konkreten Objekte der Mathematik
lassen sich dann mit Definition durch Abstraktion erfinden. Also kommt es darauf an,die naturlichen Zahlen als existierende Menge IN zu akzeptieren. Von Kronecker (1823 –1891) ist uberliefert:
Die naturlichen Zahlen hat der liebe Gott gemacht, alles andere ist Menschen-werk.
Was sind aber nun die strukturellen Eigenschaften der naturlichen Zahlen, auf die es an-kommt?Wir gehen zuruck zur Tatigkeit des Zahlens. Stets beginnen wir mit einem ersten Gegen-stand, wir ordnen ihm die Zahl 1 zu. Haben wir nun eine Reihe von Gegenstanden gezahltund ist n die Anzahl dieser gezahlten Gegenstande, dann entscheiden wir, ob noch einweiterer Gegenstand zu zahlen ist; wenn ja, ordnen wir ihm die Zahl n + 1 zu, n + 1 istalso Nachfolgezahl von n; zur Strichliste haben wir einen Strich hinzugefugt. Diese Skizzefuhrt uns zur Definition der naturlichen Zahlen, wie Peano (1858 – 1932) sie gegeben hat:
Definition 1.19
Es gibt eine Menge IN , ein Element 1 ∈ IN und eine Abbildung σ : IN −→ IN(Nachfolgerabbildung) mit:
(P1) σ ist injektiv.
(P2) 1 /∈ σ(IN ).
(P3) Ist M eine Teilmenge von IN mit 1 ∈ M und gilt (m ∈ M =⇒ σ(m) ∈ M),dann gilt M = IN .
Diese Menge IN heißt Menge der naturlichen Zahlen. 2
Ist m = σ(n), so heißt m Nachfolger von n und n Vorganger von m. (P2) besagt, daßdas Element 1 keinen Vorganger hat. (P3) druckt aus, daß eine Teilmenge M schon dienaturlichen Zahlen darstellen muß, wenn gilt:
(A1) 1 ∈M ; (A2) n ∈M =⇒ σ(n) ∈M .
Man beachte, daß wir die Definition der naturlichen Zahlen mit Existenz verknupft habenund nicht das Zahlen zur Definition herangezogen haben. Spater, wenn wir zum Zahlenauf mathematischer Ebene zuruckkommen, werden Zahlen zum Zahlen gebraucht.
In den naturlichen Zahlen IN sollten wir, wenn die axiomatische Einfuhrung wohlgelungenist, eine Addition wiederentdecken konnen. Dazu eine Vorbereitung.
Lemma 1.20
Es gilt IN = 1 ∪ σ(IN )
Beweis:
Baumeister: Mathematik I / Stand: Oktober 1996 16
Sei M := 1 ∪ σ(IN ). Es gilt M ⊂ IN und:(1) 1 ∈M ;(2) ist n ∈M, so ist σ(n) ∈ σ(M) ⊂M , da M ⊂ IN . (Beachte: σ(M) ⊂ σ(IN ) ⊂M.)Also ist nach (P3) M = IN .
Die Addition wird nun unter Berucksichtigung von Lemma 1.20 so eingefuhrt:
n+m :=
σ(n) , falls m = 1σ(n+ m) , falls m = σ(m)
;n,m ∈ IN .
(Beachte, daß m in der Definition wegen Lemma 1.20 existiert und eindeutig bestimmt ist,da σ injektiv ist.) Damit ist nun die Addition fur alle naturlichen Zahlen wohldefiniert.Betrachte dazu
M := m ∈ IN |n+m ist definiert fur alle n ∈ IN .
Es ist 1 ∈M und ist m ∈M, so ist n+m,σ(n+m) = n+σ(m) definiert, also σ(m) ∈M.
Nach (P3) ist M = IN .Wir haben nun also eine Abbildung
+ : IN × IN 3 (n,m) 7−→ n+m ∈ IN ,
die die Eigenschaften der Addition haben sollte. Dies belegen folgende
Rechenregeln:
(R1) (m+ n) + k = m+ (n+ k) fur alle m,n, k ∈ IN .
(R2) m+ n = n +m fur alle m,n ∈ N.
(R3) m+ n = m+ k =⇒ n = k (m,n, k ∈ IN ).
Wir beweisen exemplarisch (R1). Dazu beweisen wir zunachst als Vorstufe zu (R2):
(R0) m+ 1 = 1 +m ,m ∈ IN .
Sei M := m ∈ IN |m+ 1 = 1 +mKlar, 1 ∈M. Sei nun m ∈M ; wir haben
σ(m) + 1 = σ(σ(m)) = σ(m+ 1) = σ(1 +m) = 1 + σ(m)
und folgern daraus σ(m) ∈M.Also ist M = IN und (R0) ist bewiesen.Nun zum Beweis von (R1)Sei M := k ∈ IN |(m+ n) + k = m+ (n+ k) fur alle m,n ∈ IN Nach (R0) gilt
(m+ n) + 1 = σ(m+ n) = m+ σ(n) = m+ (n + 1)

Baumeister: Mathematik I / Stand: Oktober 1996 17
Also ist 1 ∈M.Sei k ∈M. Dann ist
(m+ n) + σ(k) = σ((m+ n) + k)
= σ(m+ (n+ k))
= m+ σ(n+ k)
= m+ ((n+ k) + 1)
= m+ (n+ (k + 1))
= m+ (n+ σ(k))
Also ist auch σ(k) ∈M.
Das Beweisprinzip, das auf (P3) beruht, haben wir nun schon ausgiebig eingesetzt. Es wirdVollstandige Induktion genannt, da es die Probiermethode “Es ist A(1) wahr, es istA(2) wahr, es ist . . .“ zu einem vollstandigen Beweis von “Aussage A(n) gilt fur jedes n ∈IN“ ausbaut. Bevor wir dies ausformulieren, wollen wir aber nun die Nachfolgeabbildung σdurch die Addition mit 1 ersetzen, wie wir dies in der Definition der Addition vorbereitethaben. Statt σ(n) schreiben wir meist n′. Dies hat seinen Grund darin, daß σ(n) jafur den Nachfolger von n steht. Dieser Zahlwert entsteht auf dem Aufzeichnungsbrettdurch Hinzufugung eines weiteren Strichs. (Hier wird das Bestreben deutlich, fur einenSachverhalt stets eine einpragsame und die Argumentation stutzende Bezeichnung zuwahlen.)
Das Prinzip der vollstandigen Induktion stellt sich dann so dar.:
Sei A(n) fur jedes n ∈ IN eine Aussage. Diese Aussage gilt fur alle n ∈ IN ,falls gilt:Induktionsbeginn: A(1) ist wahr.Induktionsschluß: Ist A(n) wahr, dann ist auch A(n+ 1) wahr.
Klar, man hat ja nur die Menge M := n ∈ IN |A(n) ist wahr einzufuhren und darauf(P3) anzuwenden.
Haufig wird “Sei A(n) wahr“ als Zwischenschritt “Induktionsverankerung“ oder “In-duktionsannahme“ formuliert; wir verzichten darauf.
Bisher haben wir das Beweisprinzip”Vollstandige Induktion“ nur fur die Aufklarung
der inneren Struktur der naturlichen Zahlen verwendet. Nun wollen wir dieses Prinzipumfassender verwenden.
Als Kurzschreibweise verwenden wir (A Menge):
A1 := A , An+1 := A× An , n ∈ IN .
Hierbei haben wir das Prinzip der induktive Definition verwendet:
Induktiver Beginn: A1 := A .
Induktiver Schluß: (An definiert =⇒ An+1 := A× An ist definiert)

Baumeister: Mathematik I / Stand: Oktober 1996 18
Diese Art zu definieren basiert auf der vollstandigen Induktion.
Als weiteres Beispiel fur die induktive Definition fuhren wir die Definition des Summen-zeichens an. Wir setzen:
n∑i=1
ai := a1 , fur n = 1 ,n+1∑i=1
ai := an+1 +n∑i=1
ai , fur n ≥ 1 ;
dabei sind etwa a1, . . . , an+1 ∈ X := IN ; spater konnen wir diese Definition auch furallgemeinere Mengen X ubernehmen.
Damit sind nun die MengenIN n , ZZ n , ′Qn , n ∈ IN ,
erklart, falls wir die Existenz von ZZ , ′Q hier schon hinnehmen. Ebenso etwa
N49 := 1, . . . , 49 , N649 := (N49)
6 ,
NLotto := x = (x1, . . . , x6) ∈ N649|x1, . . . , x6 paarweise verschieden.
Ist A eine Menge und x ∈ An, n ∈ IN , so gibt es x1, . . . , xn ∈ A mit x = (x1, . . . , x2). Diesist die Schreibweise als n-Tupel der Elemente in An. Dabei haben wir die Schreibweiseschon naheliegend verkurzt; wir haben ja zunachst nur zweistellige Paarklammern (·, ·)definiert.
Wir sollten nun auch die Multiplikation in den naturlichen Zahlen definieren konnen. Esliegt nahe, dies wieder mit dem Prinzip der induktiven Definition zu erledigen:
m · 1 := m, m · (n+ 1) := m · n+m
Damit ist die Abbildung
· : IN × IN 3 (m,n) 7−→ m · n ∈ IN
wohldefiniert.
Das Prinzip der induktiven Definition konnen wir nun auch verwenden, um die Potenz-schreibweise im Bereich der naturlichen Zahlen einzufuhren. Wir setzen fur alle a ∈ IN :
a1 := a , an+1 := a · an
Es gilt dann etwa:
an+m = an · am, (an)m = an·m , a, n,m ∈ IN .
Nun ist es an der Zeit, zur ublichen Notation 1, 2, 3, . . . zuruckzukehren. Dies geschiehtdurch
1, 2 := σ(1), 3 := σ(2), . . . .
Die Rechenarten +, · vertragen sich dann mit der neuen Schreibweise, etwa: 1 + 7 =8, 15 · 3 = 45, . . . . Den Multiplikationspunkt · lassen wir mitunter weg.

Baumeister: Mathematik I / Stand: Oktober 1996 19
Beispiel 1.21
Von G.F. Gauß (1777 – 1855) wird berichtet, daß er die”Beschaftigungstherapie“ seines
Lehrers”Addiert mal die ersten 100 Zahlen“ durch folgenden
”Trick“ zunichte gemacht
hat:Er addiert die erste und die letzte Zahl: Ergebnis 101.Er addiert die zweite und die vorletzte Zahl: Ergebnis 101.Also kann man das verlangte Resultat durch
1 + 2 + · · ·+ 100 = 50× 101 = 5050
erhalten.Lost man sich von den konkreten Zahlen, ist also zu beweisen:
2n∑i=1
i = n(n+ 1)
Der Beweis mittels vollstandiger Induktion sieht so aus:Induktionsbeginn: Die Formel ist offenbar richtig fur n = 1.Induktionsschluß: Die Formel sei richtig fur n. Wir zeigen damit die Richtigkeit der Formelfur n+ 1 so:
2n∑i=1
i = 2n∑i=1
i+ 2(n+ 1)
= n(n+ 1) + 2(n+ 1)
= (n+ 1)(n + 2)
2
Beispiel 1.22
Den Pythagoreern (Pythagoras, 580 – 501 v.Chr.) war bekannt, daß die Quadratzahlendie Summe ungerader Zahlen sind, d.h.
1 +n∑i=1
(2i+ 1) = (n+ 1)2 , n ∈ IN .
Sie hatten dafur einen geometrischen Beweis; lese ihn aus der folgenden Figurensequenzab!
•• • •
• • • • •
• • • • • • •
Der Beweis mittels vollstandiger Induktion sieht so aus (in abgekurzter Notation):n = 1 : Klar.

Baumeister: Mathematik I / Stand: Oktober 1996 20
n+ 1 :
1 +n+1∑i=1
(2i+ 1) = 1 +n∑i=1
(2i+ 1) + (2(n + 1) + 1)
= n2 + 4n + 4
= (n + 2)2
2
Das Beweisprinzip der vollstandigen Induktion findet sich in logisch einwandfreier Dar-stellung bei F. Maurolico (1494 – 1575).
Auch die Kleiner–Beziehung finden wir in IN wieder. Dabei lassen wir uns von der An-schauung leiten, daß einer kurzeren Strichliste einige Striche hinzuzufugen sind, um sieeiner gegebenen langeren Strichliste gleichzumachen.
Definition 1.23
Seien m,n ∈ IN .
(a) m < n :⇐⇒ ∃x ∈ IN (m+ x = n)
(b) m ≤ n :⇐⇒ m < n oder m = n
(c) m > n :⇐⇒ n < m
(d) m ≥ n :⇐⇒ n ≤ m
2
Folgerung 1.24
Ist n ∈ IN , n 6= 1, dann ist n > 1 .
Beweis:Ist n 6= 1, dann ist n ∈ σ(IN ) nach Lemma 1.20. Also gibt es x ∈ IN mit n = x+ 1 . Dieszeigt 1 < n .
Satz 1.25
Fur m,n ∈ IN gilt genau eine der folgenden Aussagen:
m < n , m = n , m > n.
Beweis:Setze Mm := x ∈ IN |n + x = m. Wir untersuchen die beiden Falle Mm 6= ∅ undMm = ∅ .Ist Mm 6= ∅, dann gibt es x ∈ IN mit n + x = m, also n < m .

Baumeister: Mathematik I / Stand: Oktober 1996 21
Wir beweisen mit vollstandiger Induktion (bezuglich m) die folgende Behauptung:Ist Mm = ∅, dann ist trifft genau eine der folgenden Aussagen zu:
n > m, n = m.
m = 1 : Ist n 6= 1 = m, dann ist nach Folgerung 1.24 n > 1 = m.
m+ 1 : Sei also Mm+1 = ∅. Dann ist auch Mm := y ∈ IN |n+ y = m = ∅, da sonst fury ∈ Mm sofort x := y + 1 ∈ Mm+1 folgt. Also gilt nach Induktionsvoraussetzung genaueine der Aussagen
n > m, n = m.
n = m ist nicht moglich, da sonst 1 ∈ Mm+1 ware. Also wissen wir nun n > m, und esgibt daher z ∈ IN mit m+z = n. Ist z = 1, dann ist m+1 = n, ist z > 1 (siehe Folgerung1.24), dann ist 1 +u = z mit einem u ∈ IN und wir haben (m+ 1) +u= m+ (1 +u) = n,d.h. n > m+ 1 .Damit ist nun gezeigt, daß eine der Aussagen
m < n , m = n , m > n
eintritt. Bleibt die Unvertraglichkeit von zweien der Aussagen zu zeigen, etwa von m = nund m > n Wenn m = n und m > n gilt, dann gibt es x ∈ IN mit m + x = m. Mitvollstandiger Induktion folgt sofort, daß diese Gleichheit fur kein m ∈ IN gelten kann.
Wir haben folgende Rechenregeln:
(R1) k < m , m < n =⇒ k < m. (Transitivitat)
(R2) m < n =⇒ m+ k < n+ k fur alle k ∈ IN .
(R3) k < m =⇒ k + 1 ≤ m
Der folgende Satz wird der Satz uber die Wohlordnung der naturlichen Zahlen genannt.
Satz 1.26
Jede nichtleere Teilmenge IN enthalt ein kleinstes Element (bezuglich ≤)
Beweis:Sei A(n), n ∈ IN , die folgende Aussage:Enthalt V ein m ∈ IN mit m ≤ n, so besitzt V ein kleinstes Element.Klar, A(1) gilt, da jedes Element in IN nicht kleiner als 1 ist.Es gelte nun A(n); wir zeigen damit A(n + 1). Enthalt V ein Element m ≤ n, so auchein kleinstes Element, da A(n) gilt. Anderenfalls enthalt V die Zahl n+ 1, da V ja nachVoraussetzung ein Element m ≤ n+ 1 enthalt. In diesem Fall ist n+ 1 kleinstes Elementvon V .
Ein etwas”naturlicherer“ Beweis von Satz 1.26 ist: Sei m ∈ M . Wahle in 1, . . . ,m das
kleinste Element m∗ aus M (bezuglich ≤ ) aus. Diese Auswahl ist moglich, da nach Satz1.25 die Elemente 1, . . . ,m bezuglich ihrer Große nach verglichen werden konnen. Da dienarurlichen Zahlen n ≥ m nicht als kleinste Elemente von M in Frage kommen, ist m∗
das kleinste Element von M .

Baumeister: Mathematik I / Stand: Oktober 1996 22
Beispiel 1.27
Beweise, daß fur jede naturliche Zahl n gilt:
(n+ 3)2 > 3(n+ 3) + n
Wir betrachten dazu die Aussage
A(n) : (n+ 3)2 > 3(n + 3) + n
und beweisen die Gultigkeit der Aussage fur jedes n ∈ IN nach dem Induktionsprinzip.Induktionsbeginn: A(1) ist wahr, da 42 > 12 + 1 ist.Induktionsschluß: Sei A(n) wahr.
((n+ 1) + 3)2 = ((n + 3) + 1)2
= (n + 3)2 + 2(n+ 3) + 1
> 3(n + 3) + n + 2(n+ 3) + 1
> 3(n + 3) + n + 1 + 3
= 3(n + 4) + n + 1
Also folgt aus der Gultigkeit der Aussage A(n) die Gultigkeit der Aussage A(n+ 1).Die Aussage A(n) ist nach dem Induktionsprinzip nun fur alle n ∈ IN bewiesen.Man sieht, daß die Ungleichung
(n+ 3)2 > 3(n + 3) + n , n ∈ IN ,
direkt auch ohne den Ruckgriff auf das Induktionsprinzip bewiesen werden kann!Die Aufgabe kann offenbar auch so formuliert werden: Beweise
A′(n) : n2 > 3n+ n − 3 , n ∈ IN , n > 3 .
Der Induktionsbeginn sieht dann so aus:A′(4) ist richtig, da 42 > 12 + 1 ist. 2
1.5 Die Umkehrabbildung
Definition 1.28
Seien f : X −→ Y, g : Y −→ Z Abbildungen. Die Hintereinanderausfuhrungoder Komposition g f der Abbildungen f, g ist erklart durch
g f : X 3 x 7−→ g(f(x)) ∈ Z .
2
Der Grund fur die Reihenfolge”zuerst g, dann f“ in der Schreibweise von gf, obwohl ja
”g nach f“ angewendet wird, ist der, daß ein Bild unter der zusammengesetzten Abbil-
dung gf gerade g(f(x)) ist. (Es gibt durchaus Mathematiker, die mit dieser Schreibweiseunzufrieden sind.)

Baumeister: Mathematik I / Stand: Oktober 1996 23
Beispiel 1.29
Auf der Menge M := x|x lebender Mensch konnen wir die Abbildung
v : M −→ M, v(x) := Vater von x
erklaren (siehe Beispiel 1.9). Die Hintereinanderausfuhrung von v und v ergibt die”Groß-
vaterabbildung (vaterlicherseits)“
g = v v : M 3 x 7−→ v(v(x)) ∈M,
da g(x) nun der Großvater von x vaterlicherseits ist. 2
Beispiel 1.30
Betrachte auf IN die Abbildungen
f : IN 3 n 7−→ n+ 1 ∈ N,
g : IN 3 n 7−→ n2 − n + 41.
Wir stellen fest, daßg f : IN 3 n −→ n2 + n+ 41
ist. 2
Rechenregeln sind (f : X −→ Y, g : Y −→ Z, h : Z −→ W Abbildungen):
(R7) idY f = f idX
(R8) h (g f) = (h g) f (Assoziativgesetz)
Man beachte aber, daß fur die Hintereinanderausfuhrung von Abbildungen ein Kommu-tativgesetz ( f g = g f) nicht gilt. Dies sieht man etwa mit
f : IN 3 x 7−→ x+ 1 ∈ IN , g : IN 3 x 7−→ x3 ∈ IN ,
da(f g)(x) = x3 + 1 , (g f)(x) = (x+ 1)3 , x ∈ IN ,
gilt.
Satz 1.31
Sei f : X −→ Y eine Abbildung und sei B := f(X). Dann gilt:
(a) f ist injektiv ⇐⇒ ∃g : B −→ X(g f = idX)
(b) f ist surjektiv ⇐⇒ ∃g : Y −→ X(f g = idY )
(c) f ist bijektiv ⇐⇒ ∃g : Y −→ X(g f = idX, f g = idY )
Beweis:

Baumeister: Mathematik I / Stand: Oktober 1996 24
Zunachst eine Voruberlegung.Sei y ∈ B . Dann ist f−1(y) 6= ∅ ; wahle xy ∈ f−1(y) . Damit definieren wir
g : B 3 y 7−→ g(y) := xy ∈ X .
Zu (a).Sei f injektiv. Wir setzen g := g . Da f injektiv ist, gilt f−1(y) = xy fur jedes y ∈ B .
Sei x ∈ X, y := f(x) . Dann ist also x = xy und wir haben
(g f)(x) = g(f(x)) = g(f(xy)) = xy = x = idX(x) fur alle x ∈ X .
Sei nun g : B −→ X mit g f = idX. Seien x, x′ ∈ X mit f(x) = f(x′). Dann ist
x = idX(x) = g(f(x)) = g(f(x′)) = idX(x′) = x′ ,
was wir zeigen wollten.Zu (b).Sei f surjektiv. Wir setzen g := g und beachten B = Y . Dann ist
(f g)(y) = f(g(y)) = f(xy) = y = idY (y) .
Die Umkehrung ist trivial.Zu (c).Gibt es g mit den notierten Eigenschaften, dann ist nach (a) und (b) die Bijektivitat vonf klar.Sei nun f bijektiv. Dann gibt es nach (a) und (b) Abbildungen ga : Y −→ X undgb : Y −→ X mit ga f = idX , f gb = idY . Wir zeigen ga = gb und sind dann fertig.Unter Verwendung der eben angefuhrten Identitaten folgt:
ga = ga idY = ga (f gb) = (ga f) gb = idX gb = gb .
Was wir in der Voruberlegung zum Beweis von Satz 1.31 hingeschrieben haben, siehtharmlos aus: Fur jedes y ∈ B haben wir x ∈ X gewahlt mit f(x) = y. Daß dies moglichist, mag einleuchtend erscheinen, doch hat die Erfahrung gezeigt, daß im Umgang mitunendlichen Mengen nichts als selbstverstandlich angenommen werden sollte. Das Aus-wahlaxiom – von E. Zermelo (1871 – 1953) und A. Frankel (1891 – 1965) wurde einAxiomensystem (ZF–System) fur die Mengenlehre begrundet – ist so bedeutsam, weildie Beweise zahlreicher Satze der Mengenlehre von seiner Anerkennung abhangen. VonP. Cohen wurde 1963 gezeigt, daß dieses Axiom unabhangig von den restlichen Axiomendes ZF–Systems ist, es kann also durch die anderen ZF–Axiome weder widerlegt nochbewiesen werden.
Die Abbildung g aus (c) in Satz 1.31 ist eindeutig bestimmt, denn ist g′ : Y −→ X eineweitere Abbildung mit
g′ f = idX , f g′ = idY ,
dann folgtg = g idY = g (f g′) = (g f) g′ = idX g
′ = g′ .

Baumeister: Mathematik I / Stand: Oktober 1996 25
Dies fuhrt zu
Definition 1.32
Sei f : −→ Y eine bijektive Abbildung. Dann heißt die nach Satz 1.31 existierendeAbbildung g : Y −→ X mit g f = idX, f g = idY die Umkehrabbildung vonf . Wir schreiben dafur f−1. 2
Nun haben wir zweimal das Symbol f−1 erklart. Dies sollte jedoch keine Schwierigkeitenbereiten, da aus dem Zusammenhang heraus wohl immer klar wird, ob die Umkehrabbil-dung oder eine spezielle Urbildmenge gemeint ist.
Im nachsten Kapitel werden wir uns intensiv mit bijektiven Abbildungen beschaftigen,wenn wir die Elemente einer Menge zahlen werden.
Beispiel 1.33
Weder die Vater noch die Großvaterabbbildung sind injektiv, beide sind auch nicht sur-jektiv, da nicht alle Vater bzw. Großvater noch am Leben sind. 2
Das Auffinden einer Umkehrabbildung f−1 zu f ist meist eine Frage der Auflosung derGleichung y = f(x) nach der Variable x, was zu x = f−1(y) fuhrt. Betrachte als heuristi-schen Hinweis etwa
y = f(x) := 2x− 1 ⇐⇒ x =1
2(y + 1),
d.h.
f−1(y) =1
2(y + 1).
Eine surjektive Abbildung f : X −→ Y kann man eventuell zu einer bijektiven Abbildungabandern, indem man den Definitionsbereich x verkleinert. Dies fuhrt dann zum Objekt
”eingeschrankte“ Abbildung:
Definition 1.34
Sei f : X −→ Y eine Abbildung und sei A ⊂ X. Dann heißt
f|A : A 3 x 7−→ f(x) ∈ Y
die Einschrankung von f auf A. 2
1.6 Relationen
Das Gleichheitszeichen “ =“ verwenden wir in einer Menge unter der stillschweigendenAnnahme der folgenden Regeln:
x = x ; x = y =⇒ y = x ; x = y, y = z =⇒ x = z .

Baumeister: Mathematik I / Stand: Oktober 1996 26
Dies nehmen wir zum Anlaß fur
Definition 1.35
Sei X eine Menge. Eine Teilmenge R ⊂ X ×X heißt Aquivalenzrelation auf X,falls gilt:
(i) (x, x) ∈ R fur alle x ∈ X (Reflexivitat)
(ii) (x, y) ∈ R =⇒ (y, x) ∈ R (Symmetrie)
(iii) (x, y), (y, z) ∈ R =⇒ (x, z) ∈ R (Transitivitat)
2
Es ist also hier das in der Mathematik so beherrschende Prinzip der Verallgemeinerungdurch Abstraktion angewendet. Daß das Umgehen mit
”Gleichheit/Ungleichheit“ nicht
ganz unproblematisch ist, hat Euklid veranlaßt, diesbezuglich seiner Entwicklung der Geo-metrie Axiome voranzustellen, die so formuliert sind, daß sie auch in anderen Disziplinensinnvolle Aussagen ergeben:
1. Dinge, die demselben Dinge gleich sind, sind einander gleich.
2. Fugt man zu Gleichem Gleiches hinzu, so sind die Summen gleich.
3. Nimmt man von Gleichem Gleiches hinweg, so sind die Reste gleich.
4. Was zur Deckung miteinander gebracht werden kann, ist einander gleich.
5. Das Ganze ist großer als sein Teil.
Liegt mit R auf X eine Aquivalenzrelation vor, so schreiben fur (x, y) ∈ R
xR∼ y oder kurz x ∼ y .
Die Bedeutung einer Aquivalenzrelation liegt darin, daß man damit die Menge X in Klas-sen (Bundel) einteilen kann, eine Einteilung, die eventuell grober ist, als die Aufteilungin einelementige Mengen, und die bezuglich eines “Merkmales“ doch noch aussagekraftigist. Die Klasseneinteilung geschieht durch
[x] := y ∈ X|y R∼ x , x ∈ X ,
undX/R
:= [x]|x ∈ X .
Die Objekte [x] heißen Aquivalenzklassen, x heißt Reprasentant der Klasse [x] . Man
beachte, daß jedes y ∈ X mit yR∼ x als Reprasentant fur [x] Verwendung finden kann.
Das folgende Lemma zeigt, daß X durch “∼“ in disjunkte Klassen zerlegt wird.
Baumeister: Mathematik I / Stand: Oktober 1996 27
Lemma 1.36
Sei X eine Menge und sei R eine Aquivalenzrelation auf X. Dann gilt:
(a) Fur jedes x ∈ X gibt es [y] ∈ X/Rmit x ∈ [y] .
(b) Es ist x ∼ y genau dann, wenn [x] = [y] gilt.
(c) Zwei Aquivalenzklassen besitzen genau dann nichtleeren Durchschnitt, wennsie gleich sind.
Beweis:Zu (a). Klar: x ∈ [x] fur alle x ∈ X wegen der Reflexivitat von “∼“.Zu (b). Sei x ∼ y . Sei u ∈ [x].Dann ist u ∼ x und aus der Symmetrie und der Transitivitatfolgt u ∼ y, d.h. u ∈ [y]. Also ist [x] ⊂ [y] gezeigt. Die Aussage [y] ⊂ [x] folgt vollig analog.Ist [x] = [y] dann ist x ∼ y, da wir x ∈ [y] = [x] haben.Zu (c). Unter Beachtung der Transitivitat, der Symmetrie von “∼“ und (b) folgt
z ∈ [x] ∩ [y] ⇐⇒ z ∼ x, z ∼ y ⇐⇒ x ∼ y ⇐⇒ [x] = [y]
was zu beweisen war.
Beispiel 1.37
Betrachte auf IN die”Kleiner–Gleich“ – Relation
n ∼ m :⇐⇒ n ≤ m,
d.h.R := (n,m) ∈ IN × IN |n ≤ m
Die Reflexivitat und Transitivitat sind erfullt, nicht jedoch die Symmetrie. Also liegt hierkeine Aquivalenzrelation vor. 2
Beispiel 1.38
Sei Keine Gruppe von Kindern. Wir erklaren darauf eine Relation durch
x ∼ y :⇐⇒ x, y haben diesselbe Blutgruppe
(Blutgruppen sind: A, AB, B, O). In der Tat liegt eine Aquivalenzrelation vor. Dadurchwird die Gruppe der Kinder in 4 Klassen eingeteilt.Wenn wir nun auf K die Abbildung
f : K 3 x 7−→ f(x) := Blutgruppe von x ∈ A,B,AB,O
betrachten, dann ist die Abbildung bei einer großen Gruppe meist surjektiv, aber nichtinjektiv. Wenn wir aber f als Abbildung auf den Klassen betrachten, dann wird die soentstehende Abbildung
f : K/∼ 3 [x] 7−→ f(x) ∈ A,B,AB,O
injektiv. 2
Kapitel 2
Elemente der Kombinatorik
Kombinatorik bedeutet”Kunst des Zahlens“. Sie beschaftigt sich mit Moglichkeiten, die
Anzahl der Elemente bei endlichen Mengen zu bestimmen. Hier stellen wir das kleine Ein-maleins der Kombinatorik vor. Die Resultate sind interessant und hilfreich beim Einstiegin die Wahrscheinlichkeitstheorie. Beim Abzahlen ist es nutzlich, eine Anzahl wegnehmenzu konnen, subtrahieren konnen. Wir stellen daher zunachst die ganzen Zahlen bereit.
2.1 Ganze Zahlen
Skizzieren wollen wir den Konstruktionsweg von den naturlichen Zahlen zu den ganzenZahlen. Wir sehen dabei die Nutzlichkeit des Begriffs der Aquivalenzrelation.Auf IN × IN laßt sich eine Aquivalenzrelation durch
R := ((m,n), (k, l)) ∈ IN 2× IN 2 |m+ l = n+ k
einfuhren. Man bestatigt leicht, daß in der Tat eine Aquivalenzrelation vorliegt.Die Zuordnung eines Paares (m,n) zu einer Klasse [(k, l)] geschieht unter dem Gesichts-punkt, daß die Differenz m−n gleich der Differenz k−l ist. Dies liefert den Zusammenhangzur Menge der ganzen Zahlen ZZ , wenn wir sie schon als bekannt voraussetzten. Also sollteetwa
[(n, n)] fur 0 ,
[(n+ 1, n)] fur 1 , [(n, n+ 1)] fur − 1 ,
[(n+ n, n)] fur n , [(n, n+ n)] fur − n ,
stehen. Der Weg, ausgehend von der Kenntnis der naturlichen Zahlen, die ganzen Zahlenzu konstruieren, ist also vorgezeichnet:
Man fuhrt ZZ als Menge der Aquivalenzklassen (IN × IN )/R ein.
Vervollstandigt wird dieser Schritt durch die Beobachtung, daß durch
[(m,n)]⊕ [(k, l)] := [(m+ k, n+ l)]
eine “Addition“ und durch
[(m,n)] [(k, l)] := [(m · k + n · l,m · l + n · k)]
28

Baumeister: Mathematik I / Stand: Dezember 1996 29
eine “Multiplikation“ eingefuhrt wird. Die Anordnung der ganzen Zahlen spiegelt sich in
[(m,n)] [(k, l)] :⇐⇒ m+ l < n + k
wieder. Hierbei sei “ <“ bei den naturlichen Zahlen bekannt. Beachte bei diesen Defini-tionen stets, daß [(m,n)] fur m− n steht.
Bemerkung 2.1
Wenn man mit Aquivalenzklassen neue Objekte unter Verwendung von Reprasentantenfur die Klassen definiert, hat man sich zu vergewissern, daß die Definition vom Repra-sentanten fur die Klasse unabhangig ist. Dies ist oben bei der Definition der Addition,Multiplikation und Kleiner–Beziehung der Fall. Bei der Addition etwa bedeutet dies, nach-zuweisen, daß [(m,n)]⊕[(k, l)] = [(m′, n′)]⊕[(k′, l′)] ist, falls [(m,n)] = [(m′, n′)] , [(k, l)] =[(k′, l′)] gilt. Dies sieht man mit Hilfe der Identitaten m + n′ = m′ + n , k + l′ = k′ + lsofort ein. 2
Wir konnen nun statt die Existenz der naturlichen Zahlen axiomatisch zu fordern, dieganzen Zahlen axiomatisch einfuhren. Wir tun dies durch Anfuhrung von Eigenschaften,die das ubliche Rechnen in den ganzen Zahlen moglich machen. (Wir legen dabei nichtWert auf ein minimales Gerust von Axiomen.)
Es gibt eine Menge ZZ mit einem Element 0 ∈ ZZ , Abbildungen
ZZ ×ZZ 3 (a, b) 7−→ a+ b ∈ ZZ , (Addition)
ZZ ×ZZ 3 (a, b) 7−→ a · b ∈ ZZ , (Multiplikation)
und eine Vergleichsoperation ≤ mit folgenden Eigenschaften:
1. (a+ b) + c = a+ (b+ c) fur alle a, b, c ∈ ZZ . (Assoziativgesetz)
2. a+ 0 = 0 + a fur alle a ∈ ZZ . (0 ist neutrales Element)
3. ∀ a ∈ ZZ ∃1 (−a) ∈ ZZ (a+ (−a)) = 0 = ((−a) + a) . ((−a) ist Negatives von a)
4. a+ b = b+ a fur alle a, b ∈ ZZ . (Kommutativgesetz)
5. (a · b) · c = a · (b · c) fur alle a, b, c ∈ ZZ . (Assoziativgesetz)
6. a · b = b · a fur alle a, b ∈ ZZ . (Kommutativgesetz)
7. a · (b+ c) = a · b+ a · c fur alle a, b, c ∈ ZZ . (Distributivgesetz)
8. IN ⊂ ZZ , 1 6= 0 , ZZ = IN ∪0 ∪ − IN .
9. 1 · a = a , 0 · a = 0 fur alle a ∈ ZZ . (1 ist neutrales Element)
10. a ≤ b ⇐⇒ b+ (−a) ∈ IN ∪0 .

Baumeister: Mathematik I / Stand: Dezember 1996 30
Dies deckt sich mit obiger Konstruktion. Zur Abkurzung fuhren wir noch die Subtraktiondurch
ZZ ×ZZ 3 (a, b) 7−→ a− b := a+ (−b) ∈ ZZ
ein, schreiben meist kurzab fur a · b
und vereinbarena < b fur a ≤ b, a 6= b .
Damit konnen wir nun in ZZ und IN genauso rechnen, wie wir es gewohnt sind.
Bemerkung 2.2
Der Weg von den ganzen Zahlen ZZ zu den rationalen ′Q und von den rationalen Zahlen′Q zu den reellen Zahlen IR kann ahnlich vollzogen werden; wir kommen spater daraufzuruck. 2
2.2 Abzahlen
Als”Prototyp“ einer Menge mit n Elementen steht uns IN n := 1, . . . , n zur Verfugung.
Damit wollen wir erklaren, wann eine Menge n Elemente besitzt. Als Vorbereitung be-weisen wir
Satz 2.3
Sei A eine Menge, seien m,n ∈ IN , und seien φ : A −→ IN n , ψ : A −→ INm
bijektiv. Dann gilt n = m.
Beweis:Wir beweisen mit vollstandiger Induktion die Aussage
Zu n ∈ IN gibt es fur 1 ≤ m < n keine injektive Abbildung g : IN n −→ INm .
n = 1 : Klar, da IN n = 1, INm = ∅ fur m < n .n+ 1 : Annahme: Es gibt eine injektive Abbildung g : IN n+1 −→ INm , 1 ≤ m < n+ 1 .Da g injektiv ist und IN n+1 mindestens die Elemente 1,2 enthalt, ist 1 < m . Sei k :=g(n + 1) . Offenbar gibt es eine Bijektion f : INm −→ INm mit f(i) = i fur i 6= k,mund f(k) = m, f(m) = k . Nun ist (f g)| INn : IN n −→ INm−1 injektiv, wobei also1 ≤ m− 1 < n gilt. Dies ist im Widerspruch zur Induktionsannahme.Nachdem nun die obige Aussage bewiesen ist, ist die Behauptung des Satzes schnell ge-zeigt.Annahme: Es gibt eine bijektive Abbildungen φ : A −→ IN n , ψ : A −→ INm , n 6= m.O.E. sei etwa n > m . Da ψφ−1 : IN n −→ INm bijektiv ist, haben wir einen Widerspruchzur obigen Aussage.
Baumeister: Mathematik I / Stand: Dezember 1996 31
Definition 2.4
Sei X eine Menge, X 6= ∅ .
(a) M heißt endlich, wenn es ein N ∈ IN und eine bijektive Abbildungξ : M −→ 1, . . . , N gibt. Da nach Satz 2.3 die Zahl N eindeutig bestimmtist, ist die Schreibweise #M := N wohldefiniert.
(b) M heißt abzahlbar unendlich, wenn es eine bijektive Abbildungξ : M −→ IN gibt. Wir schreiben dann #M =∞ .
(c) M heißt abzahlbar, wenn M endlich oder abzahlbar unendlich ist.
2
Unmittelbar aus der Definition liest man ab, daß IN n n Elemente besitzt und IN abzahlbarunendlich ist; die Identitat ist ja jeweils die passende Bijektion.Klar, der leeren Menge ordnen wir die Elementanzahl 0 zu, d.h. #∅ := 0 .
Die obige Definition sagt also, daß wir die Elemente einer (endlichen) Menge M gezahlthaben, wenn wir eine Bijektion φ : M −→ 1, . . . , N gefunden haben; das Zahlergebnisist #M := N .Man beachte, daß es Mengen gibt, die nicht abzahlbar sind. Ein wichtiges Beispiel istM := IR . Das Cantorsche Diagonalisierungsverfahren, das ublicherweise in der Analysisim Zusammenhang mit der Dezimalbruchentwicklung vorgestellt wird, belegt dies; wirkommen darauf zuruck.
Satz 2.5
Sei X eine Menge mit #X = n ∈ IN . Dann gilt #POT (X) = 2n .
Beweis:Wir beweisen die Aussage
X Menge mit #X = n =⇒ #POT (X) = 2n
durch vollstandige Induktion nach n .n=1: Hier ist X = x und daher POT (X) = ∅, x,#POT (X) = 2 .(Wir hatten auch mit n = 0 beginnen konnen. Hier ist X = ∅ und daher POT (X) =∅,#POT (X) = 1 = 20 .)n+1: Es ist etwa X = a1, . . . , an+1 . Setze X ′ := a1, . . . , an . Die Induktionsannahmebesagt #POT (X ′) = 2n .Sei nun A eine Teilmenge von X . Ist an+1 ∈ A, dann ist A = an+1 ∪ A′ mit A′ ∈POT (X ′) . Ist an+1 /∈ A, dann ist A ∈ POT (X ′) . Dies zeigt #POT (X) = 2n+2n = 2n+1 .
Baumeister: Mathematik I / Stand: Dezember 1996 32
Definition 2.6
Sei A eine endliche nichtleere Menge.A* bezeichne die Menge
2 ∪∞⋃n=1
An
der endlichen Folgen von Elementen von A; die Elemente von A* werden A−Wor-ter genannt, das Symbol 2 bezeichnet das sogenannte leere Wort. Die Menge Awird in diesem Zusammenhang ein Alphabet genannt; die Elemente von A sind derZeichenvorrat fur die Worter. Einem Element w ∈ A* mit w ∈ An wird die Langen zugesprochen; wir nennen es ein n−Wort. Das leere Wort 2 hat die Lange 0. 2
Im Spezialfall A = 0, 1 spricht man bei A* von binaren Wortern.
Bemerkung 2.7
Sei X = x1, . . . , xn eine Menge mit n Elementen. Jeder Teilmenge von X, d.h. jedemElement der Potenzmenge von X, entspricht eindeutig ein n−Wort aus dem Alphabet0, 1 :
X ⊃ A←→ b1b2 . . . bn, wobei bi =
1 , falls xi ∈ A0 , falls xi 6∈ A
Also ist die Anzahl der Elemente von POT (X) gleich der Anzahl der moglichen binarenn−Worte. Diese konnen wir so abzahlen:Es gibt wn n−Worter und wn+1 (n+ 1)−Worter. Wir sortieren die (n+ 1)−Worter nachdem 1. Buchstaben: Genau wn Worter beginnen mit 0, genau wn Worter beginnen mit 1.Daher gilt:
wn+1 = 2 ·wn , w1 = 2 .
Daraus folgt die Formelwn = 2n , n ∈ IN ,
die wir in Satz 2.5 anders bewiesen haben. 2
Bemerkung 2.8
Es gilt heute als gesicherte Tatsache, daß die Erbanlagen von Pflanzen und Tieren durchdie DNS (Desoxyribonukleinsaure) in den Chromosomen ubertragen werden. Man konntezeigen, daß die DNS aus einer langen Kette besteht, die aus 4 Bausteinen, die durch dieBuchstaben A,T,G,C dargestellt werden konnen, aufgebaut ist. Vererbung besteht daheraus langen Nachrichten, die in Worten (Strangen) aus einem Vierbuchstabenalphabetgeschrieben werden konnen; das Ergebnis einer Genom–Analyse ist also so hinschreibbar.Wenn Zellen sich teilen, werden diese Nachrichten kopiert, wobei zufallige Fehler gemachtwerden. Diese Fehler nennt man Mutationen. Die neuen Zellen oder die neuen Individuensind daher von ihren Vorfahren ein bißchen verschieden und mehr oder weniger lebens–und fortpflanzungsfahig. Dann erhalt die naturliche Auslese einige Individuen und verwirftdie weniger tauglichen oder weniger glucklichen. 2

Baumeister: Mathematik I / Stand: Dezember 1996 33
Mitunter benotigen wir
Definition 2.9
Sei X eine Menge und seien A,B Teilmengen von X. Dann heißt die Menge C||A :=
x ∈ X|x /∈ A das Komplement von A in X und A\B := x ∈ A|x /∈ B dieDifferenzmenge von A,B . 2
Wir haben nun folgende Rechenregeln (A,B,C Mengen):
(R1) Ist B Teilmenge der endlichen Menge A, so gilt: #A = #A\B + #B .
(R2) #(A ∪ B) = #A+ #B −#(A ∩ B) .
(R3) #(A ∪ B ∪ C) = #A+ #B + #C−#(A ∪ B)−#(A ∩ C)−#(B ∩ C) + #(A ∩ B ∩ C) .
Wir zeigen zunachst die Regel (R2) fur den Spezialfall A ∩B = ∅ .Ist A = ∅ oder B = ∅, so ist nichts zu beweisen.Sei nun #A = m,#B = n, mit m ≥ 1, n ≥ 1. Nach Definition gibt es Bijektionen
ϕ : A −→ INm , ξ : B −→ IN n
Wir konstruieren die Bijektion ζ : A ∪ B −→ IN n+m durch
ζ(x) :=
ϕ(x) , falls x ∈ Aξ(x) +m , falls x ∈ B
Die Voraussetzung A ∩ B = ∅ sichert, daß ζ wohldefiniert und bijektiv ist. Also gilt#(A ∪ B) = m+ n.Aus diesem eben bewiesenen Spezialfall folgt (R1), da
A = (A\B)∪B und (A\B)∩B = ∅
ist.Der Beweis zu (R2) in der allgemeinen Situation lauft nun so:Wir haben die disjunkte Zerlegung
A ∪B = A\(A ∩B) ∪ (A ∩B) ∪B\(A ∩B)
und damit#(A ∪B) = #(A\(A ∩B) + #(A ∩B) + #(B\(A ∩B))
Mit Regel (R1) folgt die Behauptung.
Nach diesen Formeln konnen wir darauf vertrauen, daß wir endliche Mengen nach un-serem anschaulichen Verstandnis abzahlen durfen. Die Formel (R2) etwa hat dabei ihreBegrundung darin, daß in der Vereinigung A ∪ B die Elemente doppelt gezahlt werden,die in A ∩ B liegen. Diese Doppelzahlung wird berucksichtigt durch die Subtraktion von#(A ∩ B).

Baumeister: Mathematik I / Stand: Dezember 1996 34
Beispiel 2.10
Eine Zahlung ergab, daß an einem Sommertag die Brauchwasserzubereitung in 1000Hausern mit Gas (265 Haushalte), Sonnenenergie (51 Haushalte), Ol (803) vorgenommenwurde. Bei einer Umfrage gaben 287, 843 bzw. 919 Haushalte an, Gas oder Sonnenenergiebzw. Sonnenenergie oder Ol bzw. Gas oder Ol benutzt zu haben. Zeige, daß diese Angabenfehlerhaft sein mussen.Die Losung geht so:
G : = x|x Haushalt; #G = 1000.
A := x ∈ G|x nutzt Gas; #A = 265.
B := x ∈ G|x nutzt Sonnenenergie; #B = 51.
C := x ∈ G|x nutzt Ol; #C = 803
Die Angaben entsprechen
#(A ∪B) = 287,#(A ∩B) = 265 + 51− 287 = 29,#(B ∩ C) = 11,#(C ∩A) = 149 .
Aus der Formel (R3) ergibt sich
#(A ∩ B ∩ C) = 1183− 1119 = 70 > #B .
Dies widerspricht aber der Tatsache, daß A ∩ B ∩ C ⊂ B gilt. 2
Sind A, B endliche Mengen, dann gilt fur das kartesische Produkt die Formel
(R4) #(A×B) = #B ·#B
Dies liest man etwa an folgendem Rechteckschema ab (#A = m,#B = n):
b1 b2 · · · bna1 (a1, b1) (a1, b2) · · · (a1, bn)a2 (a2, b1) (a2, b2) · · · (a2, bn)...
......
...am (am, b1) (am, b2) · · · (am, bn)
2.3 Permutationen
Wahle eine Menge M mit n Elementen. Wir wollen fur den Sachverhalt
Wahle Elemente von M unter den Gesichtspunkten”Anzahl, Reihenfolge“ aus
die damit verbundenen Anzahlprobleme (auf wieviele Arten ist dies moglich?) studieren.
Definition 2.11
Eine r−Permutation (ohne Wiederholung) der Elemente einer n−elementigenMenge M ist eine injektive Abbildung von 1, . . . , r nach M. 2

Baumeister: Mathematik I / Stand: Dezember 1996 35
Sei M = x1, . . . , xn mit #M = n. Aus der Definition 2.11 folgt sofort, daß r ≤ #Msein muß, wenn es r−Permutationen geben soll, weil das Bild von 1, . . . , r unter einerinjektiven Abbildung sicher r Elemente besitzt.Ist σ eine r−Permutation, so entspricht dieser Abbildung σ das geordnete Tupel
(xσ(1), . . . , xσ(r)) .
Umgekehrt, hat man eine Menge B := xi1, . . . , xir mit #B = r, so gehort dazu dier−Permutation
σ : 1, . . . , r 3 j 7−→ xij ∈M.
Damit ist wohl klar, daß die Definition 2.11 unserer Anschauung von der Auswahl von rElementen unter Berucksichtigung der Reihenfolge entspricht.
Satz 2.12
Sei M eine Menge mit n Elementen, sei r ≤ n. Die Anzahl P (n, r) derr−Permutationen ist
P (n, r) = n(n− 1) · · · (n− r + 1)
Beweis:Sei M := x1, . . . , xn . Wie konnen wir eine r−Permutation σ hinschreiben?Fur das Bild σ(1) stehen n Elemente zur Verfugung.Sind die Bilder σ(1), . . . , σ(r − 1) festgelegt, so stehen fur σ(r) wegen der gefordertenInjektivitat nur die Elemente in M\xσ(1), . . . , xσ(r−1) zur Verfugung, also n − (r − 1)Elemente. Dies bedeutet nun:
P (n, 1) = n;P (n, r) = P (n, r − 1) · (n− r + 1)
Daraus folgt durch sukzessives Ausmultiplizieren oder induktiv
P (n, r) = n(n− 1) · · · (n− r + 1)
Der Spezialfall r = n fuhrt zur Bezeichnungsweise
n! := n(n − 1) · · · 2 · 1
Sprich”n Fakultat“ fur n! . Wir erganzen mit der Vereinbarung
0! := 1
G.W. Leibniz (1646 – 1716) liebte es, zahlenmaßige Zusammenhange in Form von Ta-bellen und Tafeln darzustellen. Beispielsweise fugte er seiner Arbeit “Dissertatio de ArteCombinatoria“ aus dem Jahre 1966, in der mit seinem Titel auch die Bezeichnung Kom-binatorik (lateinisch combinatio: Zusammenfassung von Dingen) vorpragte, eine Tabelleder Fakultaten 1! bis 24! = 620448401733239439360000 an.
Baumeister: Mathematik I / Stand: Dezember 1996 36
Definition 2.13
Eine Permutation der Menge M mit n Elementen ist eine n−Permutation. 2
Folgerung 2.14
Sei M eine Menge mit n Elementen.
(a) Jede Permutation der Menge M ist bijektiv.
(b) Die Anzahl P (n, n) der Permutationen der Menge M ist n!
Beweis:Zu (a).Da das Bild einer n−Permutation von M n Elemente enthalt, und da #M = n gilt, istjede n−Permutation sogar surjektiv.Zu(b)Folgt aus Satz 2.12.
Beachte, daß wir P (n, r) auch so hinschreiben konnen:
P (n, r) =n!
(n− r)!
Diese Zahl ist kein wirklicher Bruch, sondern eine naturliche Zahl!
Beispiel 2.15
Man bestimme die Anzahl z der vierziffrigen Zahlen, deren Ziffern alle verschieden sind;0 darf als erste Ziffer nicht vorkommen.Fur die erste Ziffer gibt es 9 Moglichkeiten: 1, 2, . . . , 9 . Fur die Besetzung der verbleiben-den drei Zahlen gibt es dann jeweils noch P (9, 3) Moglichkeiten. Also
z = 9 · P (9, 3) = 4536
2
Fur die eben diskutierte Fragestellung gibt es die Interpretation durch ein Urnenexpe-rimentIn einer Urne befinden sich n Objekte, namlich die n Elemente von M . Man nimmt derReihe nach jeweils ein Element aus der Urne, ohne es wieder zuruckzulegen. Dann bildenr gezogene Elemente in der Reihenfolge, in der sie gezogen wurden, eine r−Permutationder Menge M .Eine duale Interpretation ist:Jedem Element von M entspricht eine Schachtel; wir haben also n Schachteln. Es werdennun der Reihenfolge nach r Objekte auf die n Schachteln verteilt und zwar so, daß eineSchachtel hochstens ein Objekt enthalt.

Baumeister: Mathematik I / Stand: Dezember 1996 37
Definition 2.16
Eine r−Permutation mit Wiederholung einer Menge M ist eine Abbildungτ : 1, . . . , r −→ M. 2
Satz 2.17
Sei M eine Menge mit n Elementen. Die Anzahl W (n, r) der r−Permutationen mitWiederholungen ist
W (n, r) = nr .
Beweis:Fur jedes Bild einer Abbildung τ : 1, . . . , r −→ M stehen alle n Elemente der MengeM zur Verfugung. Also wird durch W (n, r) gerade die Menge Mr abgezahlt. Diese hatnach der Produktregel nr Elemente.
Die Interpretation der r−Permutationen mit Wiederholung als Urnenexperiment ist fol-gende:Man nimmt der Reihe nach jeweils ein Element aus der Urne, insgesamt r Elemente, legtsie aber jeweils nach dem Ziehen wieder in die Urne zuruck.Die duale Interpretation als Schachtelexperiment ist die Verteilung von r Objekten auf nSchachteln, wobei jede Schachtel beliebig viele Elemente aufnehmen kann.
2.4 Kombinationen
Im letzten Abschnitt haben wir Auswahlen betrachtet, sodaß die Reihenfolge der Ele-mente von Relevanz war und verschiedene Reihenfolgen verschieden zu zahlen waren.Wenn wir nun keine Rucksicht auf die Anordnung nehmen, kommen wir zum Begriff derKombination (der Elemente).
Definition 2.18
Eine r−Kombination von M ist die Auswahl einer Teilmenge von M, bestehendaus r Elementen. 2
Man beachte, daß fur M := 1, . . . , n(1 · · · r
1 · · · r
),
(1 · · · r
r · · · 1
)
unterschiedliche r−Permutationen sind, wahrend
1, . . . , r, r, . . . , 1
identische Teilmengen mit r Elementen sind.

Baumeister: Mathematik I / Stand: Dezember 1996 38
Satz 2.19
Die Anzahl C(n, r) der r−Kombinationen einer Menge M mit n Elementen ist
C(n, r) =n!
r!(n− r)!
Beweis:Wir wissen P (n, r) = n!
(n− r)!. Jeder r−Kombination entsprechen aber nach Folgerung
2.14 r! verschiedene r−Permutationen, woraus
P (n, r) = r!C(n, r)
folgt.
Die Interpretation als Urnenexperiment kann man etwa so sehen: Man ziehe r Elementeohne Zurucklegen und vergesse die Reihenfolge der gezogenen Elemente.Die Interpretation als Schachtelexperiment ist so: Man verteile r Objekte auf n Schach-teln, sodaß in jeder Schachtel hochstens ein Objekt liegt. Einordnungen heißen aquiva-lent (oder werden nicht unterschieden), wenn sie durch eine Permutation der Objekteineinander ubergefuhrt werden konnen.
Wir fuhren die folgende Bezeichnung(n
r
):=
n!
r!(n− r)!(n, r ∈ IN , r ≤ n)
ein und nennen diese Zahlen Binominalkoeffizienten.(nr
)kann auch interpretiert werden als die Anzahl der binaren Worter mit r Einsen und
n− r Nullen. Aus dieser Interpretation oder aus der Definition folgt sofort(n
0
)=
(n
n
)= 1 ,
(n
1
)=
(n
n − 1
)= n ,
(n
r
)=
(n
n − r
)(2.1)
Sortiert man die Teilmengen der n−elementigen Menge M nach der Anzahl ihrer Elemen-te, so liefert die Summenregel(
n
0
)+
(n
1
)+ · · ·+
(n
n
)= 2n , (2.2)
da links und rechts der Identitat die Anzahl aller Teilmengen von M steht (siehe Satz2.5).
Sortieren wir die(nr
)n−Worter mit r Einsen und n− r Nullen nach der 1. Ziffer:
Mit 1 beginnen(n− 1r − 1
)n− Worter, mit 0 beginnen
(n− 1r
)n−Worter. Also(
n
r
)=
(n− 1
r − 1
)+
(n− 1
r
)(2.3)
Zusammen mit der”Randbedingung“
(n0
)=(nn
)= 1, stellt man dies im Pascalschen
Dreieck so dar:

Baumeister: Mathematik I / Stand: Dezember 1996 39
11 1
1 2 11 3 3 1
1 4 6 4 11 5 10 10 5 1
. . . . . . . . .
Diese Anordnung der Binomialkoeffizienten findet sich wohl erstmals bei B. Pascal (1623– 1622), der auch eine erste Addiermaschine erfand.
Die Bezeichnung von(nr
)als Binomialkoeffizient stammt aus folgendem Satz:
Satz 2.20
Fur a, b ∈ ZZ und n ∈ IN gilt:
(a+ b)n =n∑j=0
(n
j
)ajbn−j .
Beweis:Die Multiplikation der n Faktoren (a+ b), · · · , (a+ b) kann so erfolgen, daß man fur jedes
j, 0 ≤ j ≤ n, aus j Klammern a und aus n− j Klammern b auswahlt; dies kann auf(nj
)Arten geschehen. Daher ist der Koeffizient von ajbn−j im ausgerechneten Produkt
(nj
).
Der Beweis mittels vollstandiger Induktion sieht so aus:n = 1 : Klar.n+ 1 :
(a+ b)n+1 = (a+ b)(a+ b)n
= (a+ b)n∑j=0
(n
j
)ajbn−j
=n∑j=0
(n
j
)aj+1bn−j +
n∑j=0
(n
j
)ajbn−j+1
=n+1∑k=1
(n
k − 1
)akbn−(k−1) +
n∑j=0
(n
j
)ajbn−j+1
=
(n
0
)bn+1 +
n∑k=1
((n
k − 1
)+
(n
k
))akbn+1−k +
(n
n
)an+1
=
(n+ 1
0
)bn+1 +
n∑k=1
(n+ 1
k
)akbn+1−k +
(n + 1
n + 1
)an+1
=n+1∑k=0
(n+ 1
k
)akbn+1−k

Baumeister: Mathematik I / Stand: Dezember 1996 40
Im Satz 2.20 haben wir a, b,∈ ZZ angenommen, da wir bisher nur den Zahlbereich ZZ zurVerfugung haben. Wenn ′Q und IR zur Verfugung stehen, laßt sich der Satz sofort auchdort (und nicht nur dort) verwenden. Wichtig dafur ist nur, daß es eine Multiplikation ·gibt, bei der a · b = b · a gilt.Eine Verallgemeinerung ist
(a1 + · · ·+ ar)n =
∑j1+···+jr=n
(n
j1 · · · jr
)aj11 · · · a
jrr , (2.4)
wobei (n
j1 · · · jr
):=
n!
j1! · · · jr!(2.5)
gesetzt ist. Die Summe in 2.4 hat(n+ r − 1
n
)Summanden.
Anschaulich bedeutet die Binominalformel
(a+ b)2 = a2 + 2ab+ b2
fur n = 2, daß sich die Flache des Quadrats mit Kantenlange a+ b zerlegen laßt in zweiQuadrate mit den Kantenlangen a bzw. b und zwei Rechtecke mit den Seitenlangen a undb. Fertige eine Skizze dazu!
Beispiel 2.21
Beim Bridge-Spiel erhalt ein Spieler 13 Karten aus einem Spiel aus 52 Karten. Fur einenSpieler sind also (
52
13
)≈ 1012
Kartenzusammenstellungen moglich. Die”Wahrscheinlichkeit“ eine ganz bestimmte
”Hand“ zu
erhalten, ist fur einen Spieler also etwa 10−12. 2
Beispiel 2.22
Beim Lotto wird bei einer Ziehung aus der Menge 1, . . . , 49 eine 6–elementige Teilmengeausgewahlt. Daher ist die Anzahl der moglichen Ziehungen(
49
6
)= 13983816
2
Nun wollen wir bei der Auswahl einer Teilmenge aus einer Menge mit n Elementen auchnoch Wiederholungen zulassen. Dies fuhrt zu
Definition 2.23
Eine r−Kollektion ist eine r−fache Auswahl eines Elements aus der Menge M ,wobei jedes Element mehrfach ausgewahlt werden darf. 2

Baumeister: Mathematik I / Stand: Dezember 1996 41
Satz 2.24
Die Anzahl K(n, r) der r−Kollektionen aus einer n−elementigen Menge ist
K(n, r) =
(n+ r − 1
r
)Beweis:Eine r−Kollektion σ wird reprasentiert durch eine Wahl von Vielfachheitenm1, . . . ,mn ∈IN 0 mit
0 ≤ mi,n∑i=1
mi = r,
wobei mi die Anzahl angibt, wie oft das Element xi ∈M in der Kollektion σ vorkommt.Der r−Kollektion entsprechen also binare (r + (n − 1))–Worter, wobei eine Null Platz-halter fur ein Element aus der Menge M ist und eine Eins ein Platzhalter fur einenTrennbuchstaben ist, der die mi – Teilworter voneinander trennt. Davon gibt es nachSatz 2.19 (
r + (n− 1)
n− 1
)=
(r + (n− 1)
r
)Worter.
Die Interpretation als Urnenexperiment kann man etwa so sehen: Man ziehe r Elementemit Zurucklegen und vergesse die Reihenfolge der gezogenen Elemente.Die Interpretation als Schachtelexperiment ist so: Man verteile r Objekte auf n Schachtelnund lege innerhalb jeder Schachtel eine Anordnung fest. Dies ergibt
n(n + 1) · · · (n+ r − 1) = r!
(n+ r − 1
r
)
mogliche Einordnungen. Zwei solche Einordnungen werden nun gleichgesetzt, wenn siedurch eine Permutation der r Elemente ineinander ubergefuhrt werden konnen. In diesem
Sinne gibt es dann(n+ r − 1
r
)Einordnungen.
Beispiel 2.25
Man mochte 12 Flaschen Wein kaufen; zur Verfugung stehen 3 Weinsorten. Wie vieleMoglichkeiten l gibt es, 12 Flaschen auszuwahlen? Nach Satz 2.24 ist die Antwort
l =
(14
2
)=
(14
12
)= 91 .
2
2.5 Ordnungen
Bei den naturlichen Zahlen haben wir das Ungleichungszeichen “≤“ kennengelernt. Eshat die Eigenschaften
x ≤ x ; (x ≤ y und y ≤ x) =⇒ y = x ; x ≤ y, y ≤ z =⇒ x ≤ z ;

Baumeister: Mathematik I / Stand: Dezember 1996 42
undx, y ∈ IN =⇒ (x ≤ y oder y ≤ x).
Wir nehmen dies zum Anlaß fur
Definition 2.26
Sei X eine Menge. Eine Teilmenge O ⊂ X ×X heißt Halbordnung von X, fallsgilt:
(i) Fur alle x ∈ X gilt (x, x) ∈ O.
(ii) (x, y) ∈ O , (y, x) ∈ O =⇒ y = x .
(iii) (x, y), (y, z) ∈ O =⇒ (x, z) ∈ O .
Ist zusatzlich noch
(iv) Fur alle x, y ∈ X gilt (x, y) ∈ O oder (y, x) ∈ O
erfullt, dann heißt O eine Ordnung von X.2
Meist schreibt man bei Vorliegen einer Halbordnung O statt (x, y) ∈ O auch xO∼ y oder
kurz x ≤ y .Die ubliche “Kleiner–Gleich–Beziehung“ in IN ist also eine Ordnung.
Beispiel 2.27
Ist X eine Menge, dann ist in P(X) eine Halbordnung O definiert durch
(A,B) ∈ O :⇐⇒ A ≤ B :⇐⇒ A ⊂ B .
Beachte, daß nur in trivialen Fallen eine Ordnung vorliegt. 2
Beispiel 2.28
Ordnungen sind:x liegt stromabwarts von y in einem Flußtal, lexikographische Ordnung (im Worterbuch),hierarchische Ordnungen (?)(Vorgesetztenverhaltnis). 2
Ist ≤ eine Halbordnung auf der nichtleeren Menge X, so konnen wir bei zwei Elementenx, y ∈ X nicht immer sagen, daß sie vergleichbar sind, d.h. nicht immer konnen wirbehaupten: x ≤ y oder y ≤ x. Eine Kette nennen wir eine Teilmenge X ′ von X, in derdies moglich ist:
x ≤ y oder y ≤ x fur alle x, y ∈ X ′ .
Daran schließt sich ein Beweisprinzip an, das tief mit den Grundlagen der Mathematik(Auswahlaxiom, Kontinuumshypothese) verknupft ist. Wir fugen es ohne weitere Kom-mentierung an; es wird das Lemma von Zorn genannt:

Baumeister: Mathematik I / Stand: Dezember 1996 43
Satz 2.29
Sei X eine nichtleere Menge mit Halbordnung ≤ .Es gelte: Zu jeder Kette X ′ von X gibt es ein Element x ∈ X (obere Schranke) mitx′ ≤ x fur alle x′ ∈ X ′ .Dann gibt es ein Element x∗ ∈ X (maximales Element) mit x ≤ x∗ fur alle x ∈ X .
Dieses Beweisprinzip hat ahnlichen Stellenwert wie die vollstandige Induktion. Man ver-sucht aber dieses Prinzip aus grundsatzlichen Erwagungen (Mangel an Konstruktivitat)soweit wie moglich zu vermeiden.
2.6 Sortieren
Sei M eine endliche Menge mit einer Ordnung ≤ . Sortieren heißt, die Elemente von mso anzuordnen, daß sie bzgl. der Ordnung ≤ eine aufsteigende Elementfolge bilden. IstM = a1, . . . , an, so ist also eine bijektive Abbildung σ : 1, . . . , n −→ 1, . . . , n zufinden mit
aσ(i) ≤ aσ(j) , falls i ≤ j;
die gewunschte Anordnung ist dann
aσ(1), . . . , aσ(n)
Sortierverfahren werden benotigt etwa bei: Einordnen von Schlusseln im Werkzeugkasten,Ordnen der erhaltenen Karten beim Skatspiel, Sortieren von Dateien der Große nach.
Gesichtspunkte fur die Leistungsfahigkeit eines Sortierverfahrens sind:
Schnelligkeit. Wieviele Rechenoperationen (Vergleiche, Umstellen) in Abhangigkeit vonn sind notig? Dieser Aufwand wird Laufzeitkomplexitat des Verfahrens genannt.
Speicherplatz. Im allgemeinen kann man sich die Elemente der Menge abgelegt inFachern vorstellen. Beim Sortieren kann es sinnvoll sein, Zusatzfacher zu benutzen.Der Bedarf an Fachern in Abhangigkeit von n ist die Speicherplatzkomplexitatdes Verfahrens.
Sei nun eine MengeM = a1, . . . , an vorgegeben. Wir denken uns die Elemente a1, . . . , anjeweils einzeln in einem Feld (von Fachern) abgelegt. Wir sortieren dieses Feld, indem wirdie Elemente in den Fachern solange austauschen, bis sie angeordnet in den Fachernliegen.
Sortieren durch Auswahlen (Selection–sort).Hier geht man folgendermaßen vor:
• Finde das kleinste Element und tausche es gegen das an der ersten Stelle befindlicheElement (1. Schleife).
• Fahre in dieser Weise jeweils auf dem Rest des Feldes, das noch nicht sortiert istfort (i–te Schleifen).

Baumeister: Mathematik I / Stand: Dezember 1996 44
Man stellt leicht fest, daß in der i–ten Schleife n−i Vergleiche und eventuell ein Austauschanfallen: Wegen (siehe Beispiel 1.21)
n−1∑i=1
(n− i) =1
2n(n− 1)
gilt fur die Komplexitat:
∼ n2
2 Vergleiche, ∼ n Austausche.
Auf den”Aufwand“ −1
2n bei den Vergleichen und −1 beim Austauschen kann manfur große n verzichten;
”∼“ bedeutet diese Vernachlassigung. (Wir verwenden diese
Abkurzung auch im folgenden.) Hierzu ein Beispiel, wobei hier die Elemente die Buchsta-ben des Alphabets in ihrer alphabetischen Ordnung sind. Anwendung von Selection–sortauf unser Beispiel EXAMPLE ergibt:
EXAMPLEAXEMPLEAEXMPLEAEEMPLXAEELPMXAEELMPX
Sortieren durch Einfugen (Insert–sort).Betrachte die Elemente der Reihe nach und fuge jedes an seinem richtigen Platz zwischenden bereits betrachteten ein, wobei diese sortiert bleiben. Das gerade bestimmte Elementwird eingefugt, indem die großeren Elemente um eine Position nach rechts geschobenwerden und das betrachtete Element auf dem frei gewordenen Platz eingefugt wird.Anwendung von Insert–sort auf unser Beispiel EXAMPLE ergibt:
EXAMPLEEXAMPLEAEXMPLEAEMXPLEAEMPXLEAELMPXEAEELMPX
Man stellt fest, daß fur die Laufzeitkomplexitat gilt:
∼n2
2Vergleiche ,∼
n2
4Austausche
Sortieren durch Austausch (Bubble–sort)Durchlaufe immer wieder das Feld und vertausche jedesmal, wenn es notwendig ist, be-nachbarte Elemente; wenn beim Durchlauf kein Austausch mehr notig ist, ist das Feldsortiert.Anwendung von Bubble–sort auf unser Beispiel EXAMPLE ergibt:
Baumeister: Mathematik I / Stand: Dezember 1996 45
EXAMPLEEAXMPLEAEXMPLEAEMXPLEAEMPXLEAEMPLXEAEMLPXEAELMPXEAELMPEXAELMEPXAELEMPXAEELMPX
Man stellt fest, daß fur die Laufzeitkomplexitat gilt:
∼n2
2Vergleiche ,∼
n2
2Austausche .
Quick–sortDies ist der wohl am meisten angewendete Sortieralgorithmus. Seine Idee geht auf C.A.R.Hoare (1960) zuruck. Es ist ein Vorgehen, das vom Typ “Teile und Herrsche“ (divideet impera, divide and conquer) ist und auf einem Zerlegen des Feldes in zwei Teile undanschließendem Sortieren der Teile unabhangig voneinander beruht. Auf die Teile kannnun diese Idee wieder angewendet werden: Das Verfahren ist rekursiv, d.h. es ruft sichselbst (auf kleinerer Stufe) wieder auf.Eine entscheidende Bedeutung kommt der Zerlegung eines Feldes zu. Es soll (zweckmaßi-gerweise) so erfolgen, daß gilt:
Wird das Feld mit Hilfe des Elements ar zerlegt, so soll dies bedeuten:
(1) ar befindet sich an seinem endgultigen Platz;
(2) fur alle j < r gilt aj ≤ ar;
(3) fur alle j > r gilt aj ≥ ar.
Bei jedem rekursiven Schritt wird eine solche Zerlegung benotigt. Wie findet man einesolche Zerlegung? Hier ist die Realisierung:
• Wahle irgendein ar.
• Durchsuche das Feld von links, bis ein Element gefunden ist, das nicht kleiner alsar ist, und durchsuche das Feld von rechts, bis ein Element gefunden ist, das nichtgroßer als ar ist. Tausche die so gefundenen Elemente.
• Wiederhole den obigen Suchprozess solange, bis sich die Suche von links und rechtsbei einem Element trifft. Nun ist das Element ar mit dem Element zu tauschen, beidem sich sich die Suche von links und rechts getroffen hat.

Baumeister: Mathematik I / Stand: Dezember 1996 46
Ist das Feld nun zerlegt (Start), das Startfeld ist also nun a1, . . . , ar, . . . , an, wird dasSortierverfahren auf die Teile a1, . . . , ar−1 und ar+1, . . . , an angewendet; als trennendeElemente konnen nun etwa die Elemente ar−1 und an verwendet werden.Anwendung von Quick–sort auf unser Beispiel EXAMPLE ergibt (M ist beim Start dastrennende Element):
EXAMPLEEEAMPLXEEALPMXEEALMPX
EEAL M PXEEA L M P XAEE L M P XA E E L M P X
AEELMPX
Das Beste, was bei Quick–sort passieren konnte, ist daß jede Zerlegung des Feldes genauhalbiert wird. Dann wurde die Anzahl Cn der von Quick–sort benotigten Vergleiche derrekurrenten Beziehung vom Typ “Teile und Herrsche“ genugen (n gerade!):
Cn = 2Cn2
+ n .
Dabei ist 2Cn2
der Aufwand fur das Sortieren der zwei halbierten Felder und n der Aufwandfur die Zerlegung. Induktiv folgt daraus
Cn = n log2 n .
Fur den allgemeinen Fall zeigt eine etwas aufwendigere Analyse
Cn = 2n ln n .
log2 n ist der Logarithmus zur Basis 2, d.h. log2 ist die Umkehrfunktion der Funktiona 7−→ 2a. lnn ist der naturliche Logarithmus, d.h. ln ist die Umkehrfunktion der Funktiona 7−→ ea mit der Eulerschen Zahl e . Wir werden dies in der Analysis besprechen.Jedenfalls gilt:
2n lnn = 1.38 log2 n .
Das bisher beschriebene Verfahren kann noch verbessert werden (Beseitigung der Re-kursion auf Kosten von “Keller–Feldern“, Verarbeitung kleiner Felder ohne Zerlegung,Auswahl des erzeugenden Elements).
Eine wichtige Begriffsbildung ist die Laufzeitkomplexitat im Mittel eines Verfahrens.Damit ist hier gemeint, wieviele Rechenschritte ein Sortierverfahren benotigt, wenn es aufein “zufallig“ vorsortiertes Feld angewendet wird. Diese Begriffsbildung konnen wir erstdiskutieren, wenn wir wissen, was “zufallig“ heißen soll, und wie ein “zufallig“ vorsortiertesFeld hergestellt werden kann. Hier spielen Zufallszahlengeneratoren eine Rolle.
Kapitel 3
Elemente der Zahlentheorie
Zahlentheorie untersucht Eigenschaften ganzer Zahlen; insbesondere der naturlichen Zah-len. Die interessanten Eigenschaften ergeben sich im wesentlichen aus der Tatsache, daßdie Division in den ganzen Zahlen nicht uneingeschrankt ausfuhrbar ist. Wir stellen Re-sultate vor, die zwar schon lange bekannt sind, aber immer noch von großem Interesse beiAnwendungen sind. In einem weiteren Kapitel uber algebraische Strukturen werden wirverwandte Fragestellungen finden. Den Abschluß bildet eine Anwendung der Resultate inder Kunst der Verschlusselung von Nachrichten.
3.1 Primzahlen
In diesem Abschnitt kommen wir ausschließlich mit den Eigenschaften der ganzen Zah-len aus, wie sie sich aus der axiomatischen Einfuhrung der naturlichen Zahlen mittelsder Peano-Axiome ergaben; insbesondere haben wir die
”Rechenarten“ +,−, ·,≤, < zur
Verfugung.
Definition 3.1
Sei n ∈ IN . m ∈ IN heißt ein Teiler von n (oder n ist ein Vielfaches von m),falls es k ∈ IN gibt mit n = km. Wir schreiben dann m|n.Ist m kein Teiler von n, so schreiben wir m 6 | n. 2
Definition 3.2
Eine Zahl p ∈ IN heißt Primzahl, falls p 6= 1 und 1 und p die einzigen Teiler vonp sind. 2
Uber die Existenz unendlich vieler Primzahlen wußte schon Euklid Bescheid. Die großteZahl, von der man zur Zeit L. Eulers (1707 – 1783) wußte, daß sie eine Primzahl ist, ist231 − 1, eine Zahl mit 10 Stellen. Zur Vorbereitung Euklid’s Beweises von der Existenzunendlich vieler Primzahlen geben wir an:
47

Baumeister: Mathematik I / Stand: Januar 1997 48
Folgerung 3.3
Sei n ∈ IN , n ≥ 2. Sei T := m ∈ IN |m ≥ 2,m|n . Dann besitzt T ein (bezuglich≤) kleinstes Element p und p ist eine Primzahl.
Beweis:Sicherlich ist n ∈ T . Klar, nach dem Wohlordnungssatz besitzt T ein kleinstes ELementp ∈ IN , p ≥ 2.Annahme: p ist keine Primzahl.Dann gibt es l ∈ IN , 2 ≤ l < p, mit l|p. Dann teilt aber l auch n, da p|n gilt, und l istkleiner als p. Dies ist ein Widerspruch zur Konstruktion von p.
Satz 3.4
Es gibt unendlich viele Primzahlen.
Beweis:Annahme: Es gibt nur endlich viele Primzahlen.Seien p1, . . . , pr diese Primzahlen. Setze N := p1 · · · pr + 1. Dann ist N ∈ IN und N ≥ 2.Da N > pi fur jedes i = 1, . . . , r ist, ist N keine Primzahl. Also besitzt N nach Folgerung3.3 einen Teiler p, der selbst Primzahl ist. Da offenbar N durch keine der Zahlen pi teilbarist, ist p verschieden von p1, . . . , pr. Dies ist ein Widerspruch.
Dies ist der euklidische Beweis von der Existenz unendlich vieler Primzahlen. Einen an-deren Beweis gab L. Euler (1737). Er stutzt sich auf Argumente der Analysis und auf diePrimfaktorzerlegung naturlichere Zahlen (siehe Satz 3.24).
Bemerkung 3.5
Man hute sich davor, aus dem Beweis zu Satz 3.4 den Schluß zu ziehen, daß die ZahlN := p1 · · · pr, wobei p1, · · · , pr die ersten r Primzahlen sind, eine Primzahl ist. Etwa:
2 · 3 · 5 · 7 · 11 + 1 = 2311 , 2 · 3 · 5 · 7 · 11 · 13 + 1 = 30031 = 59 · 509 .
2
Seien p1, p2, . . . die Primzahlen. Aus dem euklidischen Beweis zu Satz 3.4 schließen wir,daß fur die n+ 1–te Primzahl pn+1 gilt:
2 ≤ pn+1 ≤ p1 · · · pn + 1
Wegen p1 = 2 folgt mit vollstandiger Induktion
2 ≤ pn ≤ 22n−1
, n ∈ IN .
Die obere Schranke ist doch recht pessimistisch, wie wir an der Primzahlfolge/Schranken-folge sehen konnen
2/2; 3/4; 5/16; . . .
Gibt es eine Formel zur Erzeugung von (allen) Primzahlen? Im konstruktiven Verstandnisnicht!

Baumeister: Mathematik I / Stand: Januar 1997 49
Beispiel 3.6
Sei f : IN 0 3 n 7−→ n2 + n + 41 ∈ IN . Man kann verifizieren, daß f(n) fur n =0, 1, 2, . . . , 39 eine Primzahl ist. Fur n = 40, n = 41 trifft dies nicht zu:
f(40) = 41 · 41 , f(41) = 41 · 43 .
2
Beispiel 3.7
Lange Zeit glaubte man, daß die Zahlen
Fn := 22n + 1, n ∈ IN ,
stets Primzahlen sind; man nennt sie Fermatsche Zahlen. Fur n = 0, 1, 2, 3, 4 trifft dieszu:
F0 = 3, F1 = 5, F2 = 17, F3 = 257, F4 = 65537
Im Jahre 1733 widerlegte L. Euler mit dem Beispiel
F5 = 4294967297 = 641 · 6700417
die Vermutung. Bisher hat man keine weitere Zahl Fn als Primzahl erkannt, im Gegenteil,die Vermutung ist nun, daß keine Fermatzahl Fn, n ≥ 5, eine Primzahl ist (siehe Beispiel15.13 und Anhang). Die kleinste Fermatzahl, von der man derzeit noch nicht weiß, ob sieeine Primzahl ist oder nicht, ist die Zahl F24. Beispielsweise ist F18 = 13631489 · k , wobeik eine Zahl mit 78906 Stellen ist.C.F. Gauss (1777 – 1855) hat bewiesen, daß ein regelmaßiges n–Eck genau dann mit Zirkelund Lineal konstruiert werden kann, wenn n die Form
n = 2rp1 · · · pk
hat, wobei p1, . . . , pk verschiedene Fermatsche Primzahlen oder 1 sind. Beispielsweise istdas regelmaßige 65537–Eck mit Zirkel und Lineal konstruierbar; die Konstruktion wurdevon J. Hermes 1879 in Gottingen hinterlegt. 2
Wie kann man bei gegebener Zahl n entscheiden, ob es sich um eine Primzahl handeltoder nicht? Liegt eine große Zahl vor, so ist die Aufgabe schwierig. Die Probiermethode, nsukzessive auf Teiler zu untersuchen, kann man sehr schnell als sehr
”zeitraubend“ erken-
nen. Aktualitat erhielt die Frage bei der Suche nach Primzahltests in der Kryptologie.In der Kryptologie beschaftigt man sich mit der Verschlusselung von Nachrichten zumZwecke der Geheimhaltung und mit der Entschlusselung zum Zwecke der Aufdeckungvon Nachrichten. Im Abschnitt 3.6 werden wir dafur den sogenannten RSA-Algorithmusskizzieren. Seine Qualitat beruht wesentlich auf der Tatsache, daß es schwierig ist, voneiner (großen) naturlichen Zahl die Teiler zu ermitteln.
Ein Primzahltest leitet sich aus der Aquivalenz
n Primzahl ⇐⇒ n|((n− 1)! + 1)
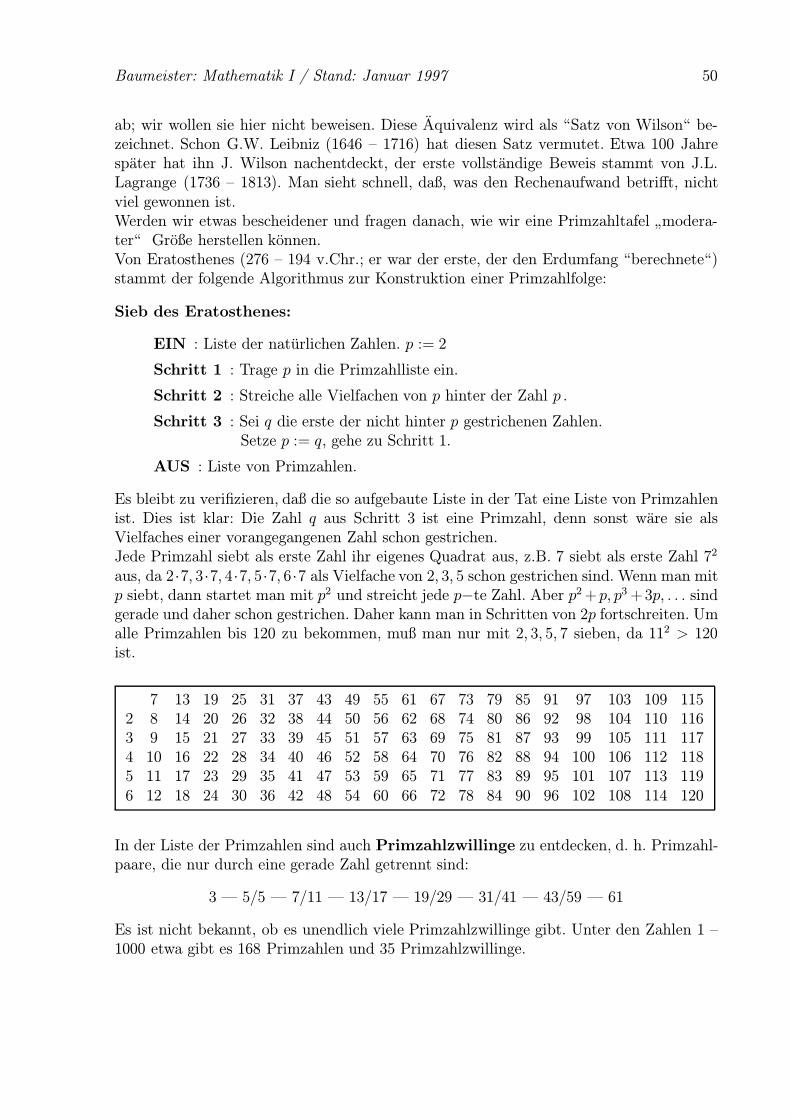
Baumeister: Mathematik I / Stand: Januar 1997 50
ab; wir wollen sie hier nicht beweisen. Diese Aquivalenz wird als “Satz von Wilson“ be-zeichnet. Schon G.W. Leibniz (1646 – 1716) hat diesen Satz vermutet. Etwa 100 Jahrespater hat ihn J. Wilson nachentdeckt, der erste vollstandige Beweis stammt von J.L.Lagrange (1736 – 1813). Man sieht schnell, daß, was den Rechenaufwand betrifft, nichtviel gewonnen ist.Werden wir etwas bescheidener und fragen danach, wie wir eine Primzahltafel
”modera-
ter“ Große herstellen konnen.Von Eratosthenes (276 – 194 v.Chr.; er war der erste, der den Erdumfang “berechnete“)stammt der folgende Algorithmus zur Konstruktion einer Primzahlfolge:
Sieb des Eratosthenes:
EIN : Liste der naturlichen Zahlen. p := 2
Schritt 1 : Trage p in die Primzahlliste ein.
Schritt 2 : Streiche alle Vielfachen von p hinter der Zahl p .
Schritt 3 : Sei q die erste der nicht hinter p gestrichenen Zahlen.Setze p := q, gehe zu Schritt 1.
AUS : Liste von Primzahlen.
Es bleibt zu verifizieren, daß die so aufgebaute Liste in der Tat eine Liste von Primzahlenist. Dies ist klar: Die Zahl q aus Schritt 3 ist eine Primzahl, denn sonst ware sie alsVielfaches einer vorangegangenen Zahl schon gestrichen.Jede Primzahl siebt als erste Zahl ihr eigenes Quadrat aus, z.B. 7 siebt als erste Zahl 72
aus, da 2·7, 3·7, 4·7, 5·7, 6·7 als Vielfache von 2, 3, 5 schon gestrichen sind. Wenn man mitp siebt, dann startet man mit p2 und streicht jede p−te Zahl. Aber p2 +p, p3 + 3p, . . . sindgerade und daher schon gestrichen. Daher kann man in Schritten von 2p fortschreiten. Umalle Primzahlen bis 120 zu bekommen, muß man nur mit 2, 3, 5, 7 sieben, da 112 > 120ist.
7 13 19 25 31 37 43 49 55 61 67 73 79 85 91 97 103 109 1152 8 14 20 26 32 38 44 50 56 62 68 74 80 86 92 98 104 110 1163 9 15 21 27 33 39 45 51 57 63 69 75 81 87 93 99 105 111 1174 10 16 22 28 34 40 46 52 58 64 70 76 82 88 94 100 106 112 1185 11 17 23 29 35 41 47 53 59 65 71 77 83 89 95 101 107 113 1196 12 18 24 30 36 42 48 54 60 66 72 78 84 90 96 102 108 114 120
In der Liste der Primzahlen sind auch Primzahlzwillinge zu entdecken, d. h. Primzahl-paare, die nur durch eine gerade Zahl getrennt sind:
3 — 5/5 — 7/11 — 13/17 — 19/29 — 31/41 — 43/59 — 61
Es ist nicht bekannt, ob es unendlich viele Primzahlzwillinge gibt. Unter den Zahlen 1 –1000 etwa gibt es 168 Primzahlen und 35 Primzahlzwillinge.

Baumeister: Mathematik I / Stand: Januar 1997 51
3.2 Teilbarkeit
Teiler einer naturlichen Zahl haben wir schon eingefuhrt. Eine Erweiterung der Begriffs-bildung ist
Definition 3.8
Seien a, b ∈ ZZ .Wir sagen, daß a die Zahl b teilt, wenn es k ∈ ZZ gibt mit b = ka. Wir schreibendafur a|b und sagen auch b ist durch a teilbar.Ist b nicht durch a teilbar, so schreiben wir a 6 | b. 2
Folgerung 3.9
Seien a, b, c ∈ ZZ . Damit gilt:
1. a|a; a|b und b|a =⇒ a = ±b; a|b und b|c =⇒ a|c.
2. d|a und d|b =⇒ d|(ax+ by) fur alle x, y ∈ ZZ .
3. a|b und a|(b+ c) =⇒ a|c.
Beweis:Zu 1.a|a, da a = 1 · a.Es gibt k, l ∈ ZZ mit b = ka, a = lb. Ist b = 0, dann ist a = 0 und nichts ist mehr zuzeigen. Sei nun b 6= 0; o.E. b > 0. Dann folgt aus b = klb offenbar kl ∈ IN , kl = 1 unddamit k = ±1, l = ±1.Wir haben b = ka, c = lb mit k, l ∈ ZZ . Daraus folgt c = lb = lka, also a|c.Zu 2.Wir haben a = kd, b = ld. Seien x, y ∈ ZZ . Dann giltax+ by = kdx + ldy = (kx+ ly)d; also d|(ax+ by) .Zu 3.Wir haben b = ka, b+ c = la mit k, l ∈ ZZ . Daraus folgt c = la− b = la− ka = (l − k)a,also a|c.
Bei Teilbarkeitsfragen in ZZ konnen wir uns o.E. immer auf positive Teiler, d.h. auf Teilerin IN , zuruckziehen, da von den zwei Zahlen a,−a stets eine in IN liegt (falls a 6= 0). Isteine Zahl b nicht durch a teilbar, so kann man Teilbarkeit mit Rest untersuchen.
Satz 3.10
Fur alle a ∈ ZZ , b ∈ IN gibt es eindeutig bestimmte Zahlen q, r ∈ ZZ mit
a = bq + r und 0 ≤ r < b.
Beweis:Wir beweisen zunachst die Existenz von q, r fur a ≥ 0 durch vollstandige Induktion:a = 0 : q := r := 0 .

Baumeister: Mathematik I / Stand: Januar 1997 52
a + 1 : Ist a + 1 < b, so gilt a + 1 = 0b + (a+ 1) und wir sind fertig. Ist a+ 1 ≥ b, sofolgt aus der Induktionsvoraussetzung a + 1 − b = qb + r mit q ∈ ZZ , 0 ≤ r < b. Alsoa+ 1 = (q + 1)b+ r.Die Existenz folgt fur a < 0 aus der Anwendung der eben bewiesenen Aussage auf −agemaß
−a = q′b+ r′, 0 ≤ r′ < b
durch
a =
(−q′ − 1)b + (b− r′) , falls r′ 6= 0(−q′)b , falls r′ = 0
Um die Eindeutigkeit zu beweisen, nehmen wir ein zweites Zahlenpaar q′, r′ mit
a = bq′ + r′, 0 ≤ r′ < b.
wobei o.E. r ≥ r′ sei. Dann ist 0 ≤ r − r′ < b, r − r′ = b(q − q′), q − q′ ≥ 0, und dies istnur mit q′ − q, r = r′ vertraglich.
Fragt man nach gemeinsamen Teilern zweier ganzer Zahlen a, b, so interessiert insbeson-dere der großte dieser gemeinsamen Teiler. Dabei konnen wir uns dann auf positive Teilerbeschranken, denn 1 ist stets ein gemeinsamer Teiler von a und b.
Definition 3.11
Seien a, b ∈ ZZ , die nicht beide 0 sind. Eine Zahl d ∈ IN heißt großter gemeinsa-mer Teiler von a, b genau dann, wenn gilt:
(1) d|a , d|b.
(2) Ist d′ ∈ IN ein Teiler von a und b, so teilt d′ auch d.
Wir schreiben d = ggT (a, b) = a u b . 2
Es ist sofort klar, daß der großte gemeinsame Teiler d gemaß Definition 3.11 eindeutigbestimmt ist dank der Tatsache, daß wir d ∈ IN gefordert haben.
Bemerkung 3.12
In ZZ konnten wir bei der Einfuhrung des großten gemeinsamen Teilers von a, b auch sovorgehen: Schreibe
T (a, b) := t ∈ ZZ | t|a, t|b
hin und bestimme a u b als großtes Element (bzgl. ≤) von T (a, b). In allgemeineren Struk-turen – vielleicht lernen wir solche noch kennen – ist wegen des Fehlens einer Wohlordnungdieses Vorgehen nicht moglich; beachte, daß wir in Definition 3.11 diese tatsachlich nichtverwendet haben. 2
Es sollte klar sein, wie nun der großte gemeinsame Teiler von endlich vielen ganzen Zahlenerklart ist.

Baumeister: Mathematik I / Stand: Januar 1997 53
Beispiel 3.13
6 u 10 = 2, 6 u 10 u 30 = 2, 6 u 10 u 15 = (6 u 10) u 15 = 6 u (10 u 15) = 1 . 2
Definition 3.14
Seien a, b ∈ ZZ . Gilt a u b = 1 , so nennen wir a, b teilerfremd. 2
Lemma 3.15
Seien a, b ∈ ZZ , nicht beide Null. Dann gilt:
a u b = (−a) u b = (−a) u (−b) = a u (−b) .
Beweis:Wir beweisen etwa die erste Gleichheit. Diese folgt aber aus der einfachen Beobachtung,daß d ein Teiler von a und b genau dann ist, wenn d ein Teiler von −a und b ist.
Im nachsten Abschnitt stellen wir einen Algorithmus fur die Berechnung des großtengemeinsamen Teilers bereit.
3.3 Euklidischer Algorithmus
Von Nikomachos (um 100 n.Chr.) wird folgendes Vorgehen, den großten gemeinsamenTeiler zu berechnen, aufgeschrieben. Beachte, daß es wegen Lemma 3.15 ausreicht, dengroßten gemeinsamen Teiler fur Zahlen in IN 0 := IN ∪0 zu berechnen. Wir schreibendas Vorgehen von Nikomachos in
”algorithmischer Form“ auf:
Algorithmus von Nikomachos
EIN a, b ∈ IN 0 mit b > 0.
Schritt 0 a′ := a, b′ = b.
Schritt 1 Ist a′ = b′, gehe zu AUS .
Schritt 2 Ist a′ 6= b′, setze (a′, b′) :=
(a′ − b′, b′) , falls a′ > b′
(a′, b′ − a′) , falls a′ < b′;
gehe zu Schritt 1.
AUS Gebe d := a′ als großten gemeinsamen Teiler aus.
Die Verifikation, daß der Algorithmus in der Tat den großten gemeinsamen Teiler vona, b liefert, folgt aus der Tatsache, daß in Schritt 2 der großte gemeinsame Teiler nichtverandert wird, d.h.
a u b = a′ u b′ mit (a′, b′) :=
(a− b, b) , falls a > b(a, b− a) , falls a < b

Baumeister: Mathematik I / Stand: Januar 1997 54
Fur a > b etwa folgt dies so:Ist d ein Teiler von a und b, dann ist nach Regel 2 aus Folgerung 3.9 d ein Teiler von bund a− b. Umgekehrt, ist d ein Teiler von a− b und b, so ist d ein Teiler von a und b nachRegel 3. aus Folgerung 3.9.Die Endlichkeit des Algorithmus, d.h. die Tatsache, daß schließlich der Schritt 1 mit demSprung nach AUS verlassen wird, folgt so:In jedem Durchlauf von Schritt 2 verringert sich die Summe a′ + b′ entweder um b′ oderum a′ . Da die Menge IN 0 ein kleinstes Element besitzt, erreicht man also schließlich denFall (Schritt 1)
a′ = b′ und damit a u b = a′ u b′ = a′ .
Man kann auch schon dann abbrechen, wenn a′ gleich 1 oder b′ gleich 1 ist, denn dann istder großte gemeinsame Teiler von a′, b′ offenbar b′ bzw. a′ .
Beispiel 3.16
78 u 35 = 43 u 35 = 8 u 35 = 8 u 27 = 8 u 19 = 8 u 11
= 8 u 3 = 5 u 3 = 2 u 3 = 2 u 1 = 1 u 1 = 1
2
Wir stellen fest, daß beim Ablauf des Algorithmus ziemlich oft ein Teilschritt wiederholtwird; oben etwa:
8 u 35 = 8 u 27 = 8 u 19 = 8 u 11 = 8 u 3
Dies legt eine Beschleunigung nahe. Der euklidische Algorithmus (um 300 v. Chr.) leistetdies. Er beruht auf dem folgenden
Lemma 3.17
Sei a ∈ ZZ und b ∈ IN . Dann folgt aus der Darstellung
a = qb+ r , q ∈ ZZ ,
die Aussagea u b = b u r.
Beweis:Ist d ein Teiler von a, b, dann ist d ein Teiler von b und r und umgekehrt (siehe oben).
Wir durfen also im Vorgehen von Nikomachos von der großeren Zahl a ein Vielfachesvon b subtrahieren. Am zweckmaßigsten ist es, das großtmogliche Vielfache zu subtrahie-ren. Dies ergibt den euklidischen Algorithmus, der schon Eudoxos (408? – 355? v. Chr.)bekannt war.
Euklidischer Algorithmus:
EIN a, b ∈ ZZ mit b > 0.
Schritt 0 a′ := a, b′ := b .

Baumeister: Mathematik I / Stand: Januar 1997 55
Schritt 1 (a′, b′) := (b′, r), wobei a′ = qb′ + r mit 0 ≤ r < b′ ist.
Schritt 2 Ist r = 0, gehe zu AUS. Ist r 6= 0, gehe zu Schritt 1.
AUS d := a′ = a u b .
Die Aussage, daß d der großte gemeinsame Teiler von a, b ist, falls die Situation r = 0erreicht wird, folgt aus dem Lemma 3.17. Bleibt noch zu klaren, daß die Situation r = 0in endlich vielen Schritten wirklich erreicht wird. Dies folgt aber aus der Tatsache, daßfur zwei aufeinanderfolgende Schritte
(a′, b′) , (a′′, b′′)
gilt:0 ≤ b′′ < b′ , b′, b′′ ∈ IN 0 .
Also muß schließlich das Verfahren bei r = 0 abbrechen.
Wir geben dem Euklidischen Algorithmus, von dem wir schon wissen, daß der Schritt 1nur endlich oft durchlaufen wird, eine explizite Fassung:
r0 := a , r1 := b
r0 = q1r1 + r2 , 0 < r2 < r1,
r1 = q2r2 + r3 , 0 < r3 < r2,...
...
rk−1 = qkrk + rk+1 , 0 < rk+1 < rk,
rk = qk+1rk+1
In dieser Darstellung ist rk+1 = d = a u b.
Beispiel 3.18
a = 36667 , b = 12247.
36667 = 2 · 12247 + 12173
12247 = 1 · 12173 + 74
12173 = 164 · 74 + 37
74 = 2 · 37
Also gilt: 36667 u 12247 = 37 . 2
Beachte: Da a1 u a2 u · · · u an = a1 u (a2 u · · · u an) gilt, ist klar, daß wir nun auchein Verfahren haben, das den großten gemeinsamen Teiler von a1, . . . , an bereitstellt: Manhat es nur mehrmals anzuwenden.
Eine wichtige Eigenschaft des Euklidischen Algorithmus ist das sogenannte Lemma vonBezout:
Baumeister: Mathematik I / Stand: Januar 1997 56
Satz 3.19
Seien a, b ∈ IN . Dann gibt es Zahlen s, t ∈ ZZ mit
a u b = sa+ tb
Beweis:Die Aussage folgt dadurch, daß wir den euklidischen Algorithmus in der expliziten Fassungruckwarts lesen. Wir strukturieren dies, indem wir nachrechnen, daß fur 0 ≤ i ≤ k + 1gilt:
ri = sia+ tib , si, ti ∈ ZZ .
i = 0 : s0 := 1, t1 := 0.i = 1 : s1 := 0, t1 := 1.Nun setzen wir
si+1 := si−1 − qisi , ti+1 := ti−1 − qiti , 2 ≤ i ≤ k. (3.1)
Dann gilt die obige Aussage offenbar.
Beispiel 3.20
Wir betrachten wieder Beispiel 3.18. Fur das Tupel (ri, qi, si, ti) haben wir dann nach(3.1) die folgende Sequenz (× bedeutet uninteressant oder nicht definiert):
(36667,×, 1, 0),
(12247, 2, 0, 1),
(12173, 1, 1,−2),
(74, 164,−1, 3),
(37,×, 165,−494).
Also haben wir37 = 36667 u 12247 = 165 · 36667 − 494 · 12247
2
Beispiel 3.21
Im Buch”liber abacci“ von Leonardo von Pisa, genannt Fibonacci (1180? - 1250?), wird
die Vermehrung eines Kaninchenpaares in folgender Weise in Abhangigkeit von der Zeitbeschrieben:Ein zur Zeit t = 0 geborenes Kaninchenpaar wirft vom 2. Monat an in jedem Monat einweiteres Paar. Die Nachkommen folgen dem Vorbild der Eltern. Alle Kaninchen uberleben.Damit ergibt sich rekursiv folgende Vorschrift
f0 := f1 := 1
fn+1 := fn + fn−1 , n ∈ IN .
Die Zahlen fn, n ∈ IN , nennt man Fibonacci–Zahlen. Sie haben viele schone, interes-sante Eigenschaften. Wir fuhren einige an:

Baumeister: Mathematik I / Stand: Januar 1997 57
1.n∑i=1
fi = fn+2 − 1 fur alle n ∈ IN ;
2.n∑i=1
f2i = fn · fn+1 fur alle n ∈ IN ;
3. fn · fn+2 − f2n+1 = (−1)n+1 fur alle n ∈ IN ;
4. f2n + f2
n+1 = f2n+1 fur alle n ∈ IN ;
5. f2n+2 − f
2n = f2n+2 fur alle n ∈ IN ;
6. fn =n∑i=0
(n − ii
)fur alle n ∈ IN ;
7. ggT (fn, fn+1) = 1 fur alle n ∈ IN ;
8. fm+n = fm−1 · fn + fm · fn+1 fur alle n,m ∈ IN ,m > 1;
9. fm·n ist durch fm teilbar fur alle n,m ∈ IN ;
10. ggT (m,n) = d =⇒ ggT (fm, fn) = fd fur alle n,m ∈ IN .
Wir beweisen hier nur 7., da die Aussage im Zusammenhang mit dem euklidischen Algo-rithmus von Interesse ist. Wir tun dies induktiv.n = 1 : Klar.n+ 1 : Mit den Regeln (3.9) ergibt sich
fn+1 u fn+2 = fn+1 u (fn+1 + fn) = fn+1 u fn = 1 .
Gilt nun fur die Zahlen r0, . . . , rk, rk+1,
rk+1 = 1, rk = 2 · rk+1, rk−1 = 1 · rk + rk+1, . . . , r1 = b, r0 = a ,
so lauft offenbar der euklidische Algorithmus besonders langsam. Dies ergibt, daß dieEingabe
a := fk+2 , b := fk+1
diesen schlechtmoglichsten Fall realisiert; der euklidische Algorithmus erzeugt hier dieZahlenfolge
r0 = fk+2, r1 = fk+1, r2 = fk, . . . , rk+1 = fk+2 u fk+1 .
2
Der euklidische Algorithmus gilt als ein recht schneller Algorithmus. Um den großtengemeinsamen Teiler d von a, b auszurechnen, ist etwa soviel Aufwand wie fur die Mul-tiplikation von a und b notig. Er findet vielfaltig Anwendung in der mathematischenInformatik.
Folgerung 3.22
Seien a,m ∈ IN mit a u m = 1 . Dann gibt es b ∈ ZZ mit m|(ab− 1) .
Beweis:

Baumeister: Mathematik I / Stand: Januar 1997 58
Wir wissen aus dem Lemma von Bezout 1 = ax+my mit x, y ∈ ZZ . Setze b := x . Dannist ab− 1 = −my = m(−y) .
Die obige Folgerung konnen wir so lesen, daß bei Teilerfremdheit von a und m zu a eineZahl b existiert, die die Gleichung
a · b = 1
bis auf ein Vielfaches von m lost.Als weitere Folgerung erhalten wir nun das Lemma von Euklid:
Folgerung 3.23
Teilt eine Primzahl ein Produkt a1 · · · ar positiver naturlicher Zahlen, so teilt p we-nigstens einen der Faktoren a1, . . . , ar.
Beweis:O.E. sei r = 2. Also haben wir a1a2 = kp mit k ∈ IN .Teilt p die Zahl a1 nicht, dann ist p u a1 = 1 und es gibt nach Satz 3.19 s, t ∈ ZZ mit 1 =sp + ta1.Daraus folgt a2 = spa2 + ta1a2 = p(sa2 + tk). Also teilt p die Zahl a2.
Bevor wir den Hauptsatz der elementaren Zahlentheorie, die Primfaktorzerlegung, be-weisen, formulieren noch eine Schreibweise/Vereinbarung.Das Produkt von Zahlen a1, . . . , an+1 definieren wir induktiv
0∏i=1
ai := 1 (leeres Produkt) ,1∏i=1
ai := a1 (einfaches Produkt) ,
n+1∏i=1
ai := an+1 ·n∏i=1
ai .
Satz 3.24
Jede naturliche Zahl n ≥ 2 laßt sich bis auf die Reihenfolge der Faktoren eindeutigals Produkt von Primzahlen darstellen.
Beweis:Die Existenz einer Darstellung fur n ∈ IN beweisen wir induktiv:Fur n = 2 ist dies nach der obigen Vereinbarung uber das einfache Produkt klar.n + 1 : Ist n + 1 eine Primzahl, dann ist nach Vereinbarung uber das einfache Produktnichts mehr zu zeigen. Anderenfalls gilt n + 1 = pm mit 1 < p,m < n + 1. O.E. konnenwir nun annehmen nach Lemma 3.3, daß n einen Teiler p besitzt, der eine Primzahl ist;also n+ 1 = pm mit 1 < p,m < n + 1 . Nach Induktionsvoraussetzung:
m = p2 · · · pr , p2, . . . , pr Primzahlen .
Dann liegt inn+ 1 = pp2 · · · pr
Baumeister: Mathematik I / Stand: Januar 1997 59
eine Zerlegung von n + 1 in Primfaktoren vor.Zur Eindeutigkeit: Sei
n = p1 · · · pr = q1 · · · qs
mit Primzahlen p1, . . . , pr, q1, . . . , qs. Durch Induktion uber n zeigen wird, daß r = s undnach Umnumerierung p1 = q1, . . . , pr = qr gilt.p1 teilt das Produkt q1 · · · qs und damit einen der Faktoren q1, . . . , qs. Also etwa nachUmnumerierung p1|q1. Da q1 Primzahl ist, ist p1 = q1. Also (Kurzungsregel)
p2 · · · pr = q2 · · · qs =: m
Da m < n gilt, sagt die Induktionsannahme
r = s, p2 = q2, . . . , pr = qs
nach eventueller Umnumerierung und wir sind fertig.
Bemerkung 3.25
Die Eindeutigkeit der Primfaktorzerlegung ist ein Resultat, das auf wesentlich auf Fol-gerung 3.23 (Lemma von Euklid) basiert. Die Existenz der Primfaktorzerlegung konntevon Euklid noch nicht bewiesen werden. Erst C.F. Gauss (1777 – 1855) publizierte diesesErgebnis, das allerdings lange vor herher schon zum Allgemeinwissen der Mathematikgehorte.Man sollte sich huten, sie als Selbstverstandlichkeit hinzunehmen, die keines Beweisesbedarf. Moglicherweise lernen wir noch Strukturen kennen, wo zwar die Existenz einerPrimfaktorzerlegung gezeigt werden kann, nicht jedoch die Eindeutigkeit. Beachte aber,daß nahezu gleiche Zahlen eine sehr verschiedene Primfaktorzerlegung besitzen konnen:
370273 = 43 · 79 · 109 , 370277 = 17 · 23 · 947 , 370279 = 7 · 13 · 13 · 313 .
2
Definition 3.26
Seien a, b ∈ ZZ , die nicht beide 0 sind. Eine Zahl k ∈ IN heißt kleinstes gemein-sames Vielfaches von a, b genau dann, wenn gilt:
(1) a|k , b|k .
(2) Sind a, b Teiler von k′ ∈ IN , so ist k ein Teiler von k′ .
Wir schreiben k = kgV (a, b) = a t b . 2
Bemerkung 3.27
Das kleinste gemeinsame Vielfache von Zahlen a, b ∈ IN ist die kleinste Zahl m ∈ IN ,fur die a|m , b|m gilt. Kennt man die Primfaktorzerlegung von a und b, so kann man essehr einfach ablesen (,wie ubrigens auch den großten gemeinsamen Teiler). 2
Die Herstellung der Primfaktorzerlegung einer (großen) Zahl ist kein leichtes Unterfan-gen. Auf der Tatsache, daß die Losung dieser Aufgabe im allgemeinen sehr aufwendig ist,beruhen Verschlusselungsverfahren; siehe Abschnitte 3.1 und 3.6).

Baumeister: Mathematik I / Stand: Januar 1997 60
3.4 Diophantische Gleichungen
Lineare Gleichungen der Form
a1x1 + · · ·+ anxn = c
mit a1, . . . , an, c ∈ ZZ nennt man diophantische Gleichungen (Diophantos von Alexan-dria (um 300 v. Chr.)). Eine solche Gleichung losen, heißt ein Tupel (x∗1, . . . , x
∗n) ∈ ZZ n zu
finden, so daß die Gleichung erfullt wird, wenn wir x∗i and die Stelle von xi setzen. (Manmache sich den Unterschied zwischen der symbolischen Notation der Gleichung und derIdentitat, die beschreibt, daß nach dem Einsetzen des Tupels die Gleichung erfullt wird,klar.) Wichtig ist: Wir suchen ganzzahlige Losungen.Bei der Untersuchung beschranken wir uns auf den Fall n = 2, der allgemeine Fall laßtsich darauf zuruckfuhren. Sei also die Gleichung
ax+ by = c (a, b, c ∈ ZZ ) (3.2)
vorgelegt. (In Ruckgriff auf die Schulmathematik oder in Vorgriff auf noch Kommendes:Diese Gleichung losen heißt also, Punkte auf der Geraden ax + by = c in IR2 zu finden,die ganzzahlige Koordinaten besitzen.)
Satz 3.28
Die diophantische Gleichung (3.2) ist genau dann losbar, wenn a u b ein Teiler vonc ist.
Beweis:Ist das Paar (x, y) ∈ ZZ 2 eine Losung von (3.2), dann ist offenbar jeder Teiler von a undb auch ein Teiler von ax+ by (siehe Folgerung 3.9), also von c. Damit folgt (a u b)|c.Sei nun d := a u b ein Teiler von c, also c = kd mit k ∈ ZZ . Mit dem euklidischenAlgorithmus erhalten wir s, t ∈ ZZ mit d = sa + tb. Dann lost aber (ks, kt) ∈ ZZ 2 diediophantische Gleichung (3.2).
Beispiel 3.29
Sei die diophantische Gleichung
36667x + 12247y = 111
vorgelegt. Aus Beispiel 3.20 wissen wir, daß
37 = 36667 u 12247 = 165 · 36667 − 494 · 12247
gilt. Daraus erhalten wir als eine Losung
(495,−1482)
Gibt es auch eine Losung in IN × IN ? 2
Wir erganzen das obige Resultat:
Baumeister: Mathematik I / Stand: Januar 1997 61
Satz 3.30
Sei (x0, y0) eine Losung von (3.2). Dann sind alle Losungen von (3.2) gegeben durch
(x0 + b′t, y0 − a′t) , t ∈ ZZ ,
wobei a = a′d, b = b′d mit d = a u b ist.
Beweis:Durch Einsetzen uberpruft man fur t ∈ ZZ , daß (x0 + b′t, y0 − a′t) eine Losung von (3.2)ist.Sei nun (x1, y1) eine beliebige Losung von (3.2). Dann folgt durch Subtraktion
a(x1 − x0) + b(y1 − y0) = 0
unda′(x1 − x0) = b′(y0 − y1).
Es folgt daraus a′|(y0−y1), da a′ u b′ = 1 ist. Damit existiert ein t∗ ∈ ZZ mit y0−y1 = t∗a′.Daraus entsteht
a′(x1 − x0) = b′a′t∗
oderx1 − x0 = b′t∗.
Dies zeigt(x1, y1) = (x0 + b′t∗, y0 − a
′t∗)
und (x1, y1) ist von der angegebenen Form.
Beispiel 3.31
Betrachte die diophantische Gleichung aus Beispiel 3.29
36667x + 12247y = 3
mit der Losung(x0, y0) := (495,−1482)
Da d = 37, 36667 = 991 · 37 und 12247 = 331 · 37 ist, ergibt sich als Losungsmenge
(495 + 331t,−1482 − 991t) , t ∈ ZZ .
Man stellt fest, daß es keine Losung in IN × IN gibt. 2
3.5 Der kleine Satz von Fermat
1640 erkannte P. Fermat (1601 - 1665) die Richtigkeit des folgendes Satzes:

Baumeister: Mathematik I / Stand: Januar 1997 62
Satz 3.32
Ist p ∈ IN eine Primzahl, dann teilt p die Differenz ap − a fur jedes a ∈ IN .
Beweis:Wir wollen induktiv die Richtigkeit der AussageA(n): Der Satz ist richtig fur alle a ≤ nbeweisen.n = 1 : A(1) ist wahr wegen 1p − 1 = 0.n + 1 : Sei a + 1 ≤ n + 1. (Wir starten naheliegenderweise mit a + 1 ≤ n + 1 statt mita ≤ n+ 1 .) Wir haben
(a+ 1)p − (a+ 1) = (ap − a) +
(p
1
)ap−1 + · · ·+
(p
p− 1
)a
Da p|(pi
)fur 1 ≤ i ≤ p − 1 gilt – siehe nachfolgende Bemerkung 3.33) – und da p ein
Teiler von ap − a ist nach Induktionsvoraussetzung, folgt p|((a+ 1)p − (a+ 1)).
Bemerkung 3.33
Ist p eine Primzahl, dann teilt p jede Zahl im Pascalschen Dreieck in der p–ten Zeile mitAusnahme der Randzahlen, d.h.
p|
(p
i
)fur 1 ≤ i ≤ p− 1 .
Dies folgt aus(pi
)= p!i!(p− i)!
∈ IN unter Beachtung der Tatsache, daß i! und (p − i)!
Teiler von (p− 1)! sein mussen, da p eine Primzahl ist. 2
Der Satz von Fermat wurde 1761 von L. Euler (1707 – 1783) erweitert zur Aussage (Satzvon Euler– Fermat)
a ∈ IN , a u m = 1 =⇒ m|(aϕ(m) − 1)
wobei ϕ die Eulersche ϕ–Funktion ist:
ϕ(m) := #k ∈ IN |1 ≤ k ≤ m, k u m = 1 ;
diese Funktion zahlt die zu m teilerfremden Zahlen zwischen 1 und m. Ist nun m = p einePrimzahl, dann ist ϕ(m) = p−1 und der Satz von Euler–Fermat geht in den FermatschenSatz uber, denn:Ist a u p = 1, dann gilt also p|(ap−1 − 1), also auch p|(ap − a) . Ist a u p = d 6= 1, dannist a = kp mit k ∈ ZZ und wir haben offensichtlich p|(ap − a) .
Beispiel 3.34

Baumeister: Mathematik I / Stand: Januar 1997 63
Es gilt:
ϕ(1) = 1 , ϕ(2) = 1 , ϕ(3) = 2 , ϕ(4) = 2 , ϕ(6) = 2 , ϕ(10) = 4 , ϕ(15) = 8 .
Der Satz von Euler sagt uns dann, daß 6 die Zahl 5ϕ(6) − 1 = 24 teilt. Er sagt uns aberauch, daß 851 ein Teiler von 31792 − 1 ist, denn
31792 − 1 = 3122·36 − 1 = 31ϕ(23·37) − 1 = 31ϕ(851) − 1 .
2
Bemerkung 3.35
Fur n = 2 wissen wir, daß die Gleichung
x2 + y2 = z2
unendlich viele Losungen (x, y, z) ∈ IN × IN × IN besitzt, namlich die pythagoreischenZahlen, die sich schon bei den Babyloniern finden (siehe unten).Der große Satz von Fermat ist folgende Aussage: Fur n ∈ IN , n ≥ 3, hat die Gleichung
xn + yn = zn
keine Losung (x, y, z) ∈ IN × IN × IN . Dieser Satz, von dem Fermat behauptete, dafureinen gar wundersamen Beweis zu haben, wurde 1994 nach vielen, vielen Fehlversuchenunter Verwendung eines umfangreichen Theoriengebaudes von Wiles bewiesen.Fur n = 4 hat Frenicle de Bessy (1602? – 1675?) bereits 1676 einen Beweis vorgelegt, denBeweis fur n = 3 hat dann L. Euler geliefert. Eine Idee dabei war, mit der Substitutionx2 =: u, y2 =: v, z2 =: w den Zusammenhang mit den pythagoreischen Zahlentripelnzu schaffen. Damit waren dann auch die Falle n = 3s, n = 4s, s ∈ IN , erledigt. Dieweitreichensten Fortschritte vor Wiles hat E.E. Kummer (1810 – 1893) erzielt, indem erden Satz u.a. fur alle Primzahlen n, 2 < n < 100, bewies. 2
Die oben erwahnten pythogoreischen Zahlen wollen wir nun finden. Sie sind definiert alsLosungen der Gleichung
x2 + y2 = z2 (x, y, z ∈ IN ) (3.3)
Es genugt die Losungen (x, y, z) mit x u y u z = 1 zu kennen, denn naturlich ist miteinem pythagoreischen Tripel (x0, y0, z0) und einem beliebigen t ∈ ZZ auch (tx0, ty0, tz0)eine Losung von (3.3).Gilt nun x u y u z = 1 und x2 + y2 = z2, dann gilt sogar
x u y = 1, x u z = 1, y u z = 1,
denn ist etwa d ein Teiler von x und y, dann ist d auch Teiler von z und damit ein Teilervon x, y, z.Speziell folgt daraus, daß nicht jede der drei Zahlen x, y, z gerade sein kann und daß zweider drei Zahlen x, y, z ungerade sein mussen. Also ist entweder x oder y gerade, da z nichtgerade sein kann, denn: Ist z gerade, so ist 4 ein Teiler von z2 und daher 4 ein Teiler der

Baumeister: Mathematik I / Stand: Januar 1997 64
Summe der beiden notwendigerweise ungeraden Zahlen x2, y2.Die ursprungliche Aufgabe ist also reduziert auf die Suche nach allen paarweise teilerfrem-den Zahlentripeln (x, y, z) ∈ IN 3, die der Gleichung (3.3) genugen und in denen y geradeist. Diese Zahlentripel nennt man primitive pythagoreische Zahlen. Also konnen wirnun setzen:
x = 2u+ 1, y = 2v, z = 2w + 1
Die Gleichung (3.3) kann man umformen zu
y2 = z2 − x2 = (z − x)(z + x)
Daraus erhalt man
4v2 = (2w + 2u + 2)(2w − 2u) = 4(w + u+ 1)(w − u).
Wegen x u z = 1 gilt auch
(w + u+ 1) u (w − u) = 1,
denn aus
w + u+ 1 =1
2(z + x) , w − u =
1
2(z − x)
– hier stehen keine eigentlichen Bruche! – wurde fur einen Teiler d von w + u+ 1, w − ufolgen
z + x = 2kd, z − x = 2ld,
alsoz = (k + l)d, x = (k − l)d,
im Widerspruch zu x u z = 1. Damit folgt nun mit v2 = (w + u+ 1)(w − u) , daß
w + u+ 1, w − u
Quadrate von Zahlen sein mussen:
w + u+ 1 =: a2, w − u =: b2,
hierbei gilt wiederum a u b = 1. Man erhalt
z + x = 2a2, z − x = 2b2,
x = a2 − b2, y = 2ab, z = a2 + b2.
Nun gilt fur jedes Tripel
(x, y, z) := (a2 − b2, 2ab, a2 + b2) , a, b ∈ IN (3.4)
auch stets die Gleichung (3.3). Damit werden in (3.4) alle primitiven pythagoreischenZahlen angegeben durch
(a2 − b2, 2ab, a2 + b2), a u b = 1, 2 6 | (a− b), a, b ∈ IN .
(Die Forderung 2 6 | (a− b) berucksichtigt zusammen mit a u b = 1 , daß x nicht geradeist.)
Baumeister: Mathematik I / Stand: Januar 1997 65
3.6 Kongruenzen
Definition 3.36
Sei a, b ∈ ZZ und sei m ∈ ZZ ,m 6= 0. Wir sagen, a ist kongruent b modulo m undschreiben
a ≡ b mod m
oder kurza ≡ b (m) ,
falls m ein Teiler von a− b ist.Die Zahl m heißt Modul der Kongruenz. 2
Da a− b genau dann durch m teilbar ist, wenn a− b durch −m geteilt wird, vereinbarenwir, daß der Modul m eine positive ganze Zahl ist.
Lemma 3.37
Fur a, b ∈ ZZ ,m ∈ IN sind aquivalent:
(a) a ≡ b mod m
(b) a = qm+ r, b = q′m+ r′, 0 ≤ r, r′ < m =⇒ r = r′ .
Beweis:(a) =⇒ (b)Sei also a = qm+ r, b = q′m+ r′, 0 ≤ r, r′ < m; sei etwa r ≥ r′. Da a ≡ b mod m gilt,gibt es k ∈ ZZ mit mk = a− b. Daraus folgt
mk = a− b = qm+ r − q′m− r′ = (q − q′)m+ r − r′
und wir erhalten m|(r − r′) und wegen 0 ≤ r − r′ < m sogar r = r′.(b) =⇒ (a)Mit Hilfe von Division mit Rest erhalten wir die Darstellungen
a = qm+ r , b = q′m+ r′ , 0 ≤ r, r′ < b.
Daraus folgt dann mit (b) m|(b− a), also a ≡ b mod m.
Der Grund, daß man die Teilbarkeitsbedingung m|(a − b) durch Kongruenzen darstellt,ist der Vorteil, daß mit Kongruenzen ahnlich gerechnet werden kann wie mit Gleichungen.Es gelten die folgenden Rechenregeln:
(R1) a ≡ a mod m.
(R2) a ≡ b mod m =⇒ b ≡ a mod m.
(R3) Aus a ≡ b mod m, b ≡ c mod m, folgt a ≡ c mod m.
(R4) a ≡ b mod m, c ≡ d mod m =⇒ ac ≡ bd mod m.

Baumeister: Mathematik I / Stand: Januar 1997 66
(R5) a · c ≡ b mod m, c ≡ d mod m =⇒ ad ≡ b mod m.
(R6) a ≡ b mod m =⇒ an ≡ bn mod m fur alle n ∈ IN .
(R7) na ≡ nb mod m , d = n u m =⇒ a ≡ b mod m/d.
(R8) na ≡ nb mod m , 1 = n u m =⇒ a ≡ b mod m.
Beweisen wir etwa (R6):Wir haben m = kd, n = ld mit k, l ∈ IN und k u l = 1 . Ausm|n(a−b) folgt sm = n(b−a)mit s ∈ IN . Wir haben also sk = l(b− a) und daraus folgt nun, daß k = m/d ein Teilervon b− a ist.
Folgerung 3.38
Seien a, b ∈ ZZ ,m1, . . . ,mr ∈ IN . Dann sind aquivalent:
(a) a ≡ b mod mj , 1 ≤ j ≤ r.
(b) a ≡ b mod k mit k = m1 t · · · t mr.
Beweis:
Sei mit der Primfaktorzerlegung etwa a =l∏
j=0pαjj , b =
l∏j=0
pβjj mit Primzahlen p1, . . . , pl
und α1, β1, . . . , αl, βl ∈ IN 0 . Dann gilt offenbar k = a t b =l∏
j=0p
maxαj ,βjj . Daraus liest
man die Behauptung leicht ab.
Satz 3.39
Seien a, b ∈ ZZ ,m ∈ IN . Die Kongruenz
ax ≡ b mod m (3.5)
ist losbar, genau dann, wenn(a u m)|b. (3.6)
gilt. Die Anzahl der Losungen von (3.5) modulo m ist gleich a u m, falls die Losbar-keitsbedingung (3.6) erfullt ist.
Beweis:Die Kongruenz (3.5) ist losbar genau dann, wenn die diophantische Gleichung
ax−my = b
losbar ist. Aus Satz 3.28 folgt die Behauptung uber die Losbarkeit.Sei nun x0 eine Losung der Kongruenz (3.5). Aus Satz 3.30 folgt, daß die Losungen x von(3.5) so dargestellt werden konnen:
x = x0 +m′t , t ∈ ZZ , wobei m′d = m mit d = a u m ist.

Baumeister: Mathematik I / Stand: Januar 1997 67
Daraus liest man ab, daß es modulo m nur die Losungen
x0, x0 +m′, . . . , x0 + (d− 1)m′
gibt.
Beispiel 3.40
Sei n ∈ IN geschrieben im Zehnersystem:
n =l∑
k=0
ak10k (a0, . . . , al ∈ IN 0 .)
Sei q(n) :=l∑
k=0ak die Quersumme von n.
Dann gilt:
n− q(n) =l∑
k=0
ak(10k − 1) =l∑
k=1
ak(10k − 1)
Da 10k ≡ 1 mod 9 fur alle k ∈ IN gilt, haben wir
n− q(n) ≡ 0 mod 9
Dies bedeutet, daß wir die Teilbarkeit von n durch 9 ablesen konnen aus der Teilbarkeitder Quersumme durch 9 (Neunerprobe). 2
Der folgende Satz ist grundlegend fur die Algorithmustheorie.
Satz 3.41
Seien m1, . . . ,mk ∈ IN paarweise teilerfremd und seien a1, . . . , ak ∈ ZZ . Dann exi-stiert eine Losung des Kongruenzsystems
x ≡ ai mod mi , 1 ≤ i ≤ k,
und alle Losung sind kongruent modulo M := m1 · · ·mk (Eindeutigkeit modulo M).
Beweis:Setze m′i :=
∏j 6=i
mj. Sei i ∈ 1, . . . , k; Wegen mi u m′i = 1 gibt es Zahlen ri, r′i ∈ ZZ , so
daßmiri +m′ir
′i = 1;
setze ei := m′ir′i. Damit gilt
ei ≡
1 , mod mi
0 , mod mj, i 6= j
und
x :=r∑i=1
aiei

Baumeister: Mathematik I / Stand: Januar 1997 68
lost das Kongruenzsystem.Ist y eine weitere Losung, so gilt
mi|(y − x) fur alle i = 1, . . . , k ,
und damitm1 · · ·mk|(y − x),
da mi u mj fur i 6= j.
Der obige Satz ist der Chinesische Restsatz. Der Beweis ist konstruktiv, denn es wirdein praktikables Vorgehen beschrieben, wie man zur Losung des Kongruenzensystemsuber die Verwendung des euklidischen Algorithmus kommt. Man beachte, daß die dabeizu berechnenden Zahlen e1, . . . , ek nur von den Moduli m1, . . . ,mk, aber nicht von denResten a1, . . . , ak abhangen.In Beispiel 0.2 haben wir eine konkrete Fassung des obigen Beweises kennengelernt. Wirschreiben es neu auf, andere konkrete Beispiele fur den chinesischen Restsatz findet manbei Brahmagupta (598 – ?) und Fibonacci (1180? – 1250?).
Beispiel 3.42
Das Kongruenzsystem lautet:
x ≡ 2 mod 3 , x ≡ 3 mod 5 , x ≡ 2 mod 7
Es sind hier also:
m1 = 3,m2 = 5,m3 = 7, a1 = 2, a2 = 3, a3 = 2.
Wir erhaltenm′1 = 35,m′2 = 21,m′3 = 15
unde1 = −35, e2 = 21, e3 = 15.
Also istx ≡ 23 mod 105
die eindeutige Losung 2
Im Kapitel uber Algebra kommen wir auf den chinesischen Restsatz zuruck. Er erhaltdort eine algebraische Fassung.
Betrachte eine Kongruenz
ax ≡ b mod m mit a u m = 1 . (3.7)
Mit dem Satz von Euler–Fermat konnen wir diese Kongruenz unter Beachtung von aφ(m) ≡1 mod m umwandeln in
x ≡ aφ(m)−1b mod m. (3.8)
Baumeister: Mathematik I / Stand: Januar 1997 69
Da die Berechnung von aφ(m) bei großem Modul m sehr muhsam sein kann, zerlegenwir den Modul in teilerfremde Faktoren m = m1 · · ·mk (etwa in die in m aufgehendenPrimzahlen) und betrachten die k Kongruenzen
ax ≡ b mod mi , i = 1, . . . , k . (3.9)
Nun kann man diese Kongruenzen umwandeln in Kongruenzen, fur die der chinesischeRestsatz “zustandig“ ist:
x ≡ ai mod mi , i = 1, . . . , k ; (3.10)
dies kann etwa erneut mit dem Satz von Euler–Fermat erfolgen. Hat man diese gelost, hatman auch die ursprungliche Kongruenz (3.7) gelost. Daß man zur Losung der Kongruenzen(3.10) nicht unbedingt den im Beweis zum chinesischen Restsatz aufgezeigten Weg gehenmuß, soll folgendes Beispiel zeigen.
Beispiel 3.43Betrachte die Kongruenz
1193x ≡ 367 mod 31500 . (3.11)
Man zerlegt31500 = 4 · 7 · 9 · 125
und erhalt nach einiger Rechnung das “aquivalente“ Kongruenzensystem
x ≡ 3 mod 4 , x ≡ 1 mod 7 , x ≡ 5 mod 9 , x ≡ 44 mod 125 .
(Etwa zur Kongruenz x ≡ 3 mod 4 : Ist 1193x ≡ 367 mod 31500, dann ist 1193x ≡367 mod 4 und daher x = 367 − 4k − 1192x mit k ∈ ZZ . Daraus liest man 4|x− 3 ab.)Der chinesische Restsatz sagt, es gibt eine Losung x. Aus der ersten Kongruenz folgt
x = 3 + 4t , t ∈ ZZ .
Eingesetzt in die zweite Kongruenz ergibt sich fur t
3 + 4t ≡ 1 mod 7 bzw. t ≡ 3 mod 7 ,
alsot = 3 + 7s , s ∈ ZZ , und x = 15 + 28s , s ∈ ZZ .
Eingesetzt in die dritte Kongruenz ergibt sich fur s
15 + 28s ≡ 5 mod 9 bzw. s ≡ 8 mod 9 ,
alsos = 8 + 9r , r ∈ ZZ , und x = 239 + 252r , r ∈ ZZ .
Eingesetzt in die vierte Kongruenz ergibt sich fur r
239 + 252r ≡ 44 mod 125 bzw. r ≡ 90 mod 125 ,
alsor = 90 + 125q , q ∈ ZZ , und x = 22919 + 252 · 125q , q ∈ ZZ .
Eine Losung der betrachteten Kongruenz ist also
x = 22919 .
2

Baumeister: Mathematik I / Stand: Januar 1997 70
3.7 Das RSA–Schema
Das RSA-Schema ist ein Chiffriersystem. Es wurde 1977 von
Ronald Rivest, Adi Shamir, Leonard Adleman
vorgeschlagen. Es beruht auf dem kleinen Satz von Fermat und stellt eine Losung folgenderAufgabe dar:Ein Absender A mochte an einen Empfanger B eine Nachricht m aus einer endlichenMenge M von Nachrichten ubermitteln, und zwar geheim.Die prinzipielle Losung sieht so aus:A verschlusselt (kodiert) dazu die Nachricht mittels des offentlichen Schlussels K desEmpfangers B, der auf der Menge M der Nachrichten injektiv operiert, also:
K : M −→ M
Dann sendet A an B die verschlusselte Nachricht K(m) (anstelle von m). Der EmpfangerB entschlusselt (dekodiert) mittels seines geheimen SchlusselsD, der ebenso auf der Mengeder Nachrichten operiert, also:
D : M −→ M
Die Schlussel sollten so zusammenpassen, daß
D(K(m)) = m
gilt, und zwar fur die gesamte Menge der moglichen Nachrichten. Dies bedeutet:
D = K−1
Da der Schlussel K offentlich ist, kann man sich auchD verschaffen und Geheimhaltung istnicht moglich. Die Uberraschung mit dem RSA-Schema ist nun die, daß Geheimhaltungim praktischen Sinne doch moglich ist, da die Schlussel K,D so gewahlt sind, daß diepraktische Bestimmung von D aus K mit einem nicht zu bewaltigenden Rechenaufwandeinhergeht.
Das RSA-Schema stellt sich so dar:
• Jede Nachricht wird dargestellt in Form einer oder mehrerer naturlicher Zahlenm ∈ 0, . . . , n− 1 =: M.
(In der Praxis hat man die konkreten Nachrichten in die zulassigen Nachrichten ausM umzuwandeln (Kodes (ASCII–Kode, . . .)).
• Wahle s ∈ IN und kodiere mit
Ks : M 3 m 7−→ ms mod n ∈M
• Wahle t ∈ IN und dekodiere gemaß
Dt : M 3 m 7−→ mt mod n ∈M

Baumeister: Mathematik I / Stand: Januar 1997 71
Man beachte, daß die Auswertung von Ks bzw. Dt (Potenzierung) im allgemeinen sehreffizient realisiert werden kann, wahrend das Auffinden der k–ten Wurzel mod n, diebenotigt wird, um Dt aus Ks zu finden, schwierig ist.
Voraussetzungen, die sicherstellen, daß die Schlussel zusammenpassen, ist:
n = p · q , p, q Primzahlen , 1 < s < ϕ(n), s u ϕ(n) = 1, ts ≡ 1 mod ϕ(n). (3.12)
Dies geht aus dem folgenden Lemma hervor:
Lemma 3.44
Seien die Voraussetzungen (15.1) erfullt. Dann gilt Dt Ks = id.
Beweis:Wir wissen st = 1 + kϕ(n) mit k ∈ ZZ . Wir zeigen zunachst
mst −m ≡ 0 mod p fur alle m ∈ 0, . . . , n− 1. (3.13)
Sei m ∈ 0, . . . , n − 1. Wir wollen dies aus dem Satz von Fermat schließen. Allerdingsfehlt die Voraussetzung m u p = 1. Klaren wir daher den Fall m u p 6= 1. Hier ist, da pPrimzahl ist, p ein Teiler von m; also m ≡ 0 mod p. Wenn p ein Teiler von m ist, dannist p sicherlich ein Teiler von mst, d.h.
mst ≡ 0 mod p und mst ≡ m mod p.
Nun zeigen wir die Behauptung (15.2) fur den Fall m u p = 1 mit dem Satz von Fermat:
mst ≡ m1+kϕ(n) mod p
≡ mmkϕ(n) mod p
≡ m(m(p−1))k·(q−1) mod p
≡ m1k·(q−1) mod p
≡ m mod p
Analog folgtmst −m ≡ 0 mod q
Daraus ergibt sich mitp|(mst −m) , q|(mst −m),
da p, q verschiedene Primzahlen sind, daß
pq|(mst −m)
gilt. Dies bedeutet aber mit n = pq
mst ≡ m mod n

Baumeister: Mathematik I / Stand: Januar 1997 72
Nachdem wir nun gezeigt haben, daß das RSA-Schema korrekt arbeitet, bleibt zu fragen,ob es auch brauchbar im Sinne der Geheimhaltung ist.Jedermann kennt die offentlichen Schlusselzahlen, also die Zahlen n und s; kein Teilnehmermuß sich p, q und ϕ(n) merken. Um den Geheimtext entschlusseln zu konnen, mußtejemand die Zahl t berechnen. Dazu reicht es auch, die Zahl ϕ(n) zu kennen, denn mitHilfe des euklidischen Algorithmus kann man dann eine Zahl t berechnen; siehe Folgerung3.22. Die Zahl ϕ(n) kennt man, wenn man die Primfaktorzerlegung von n kennt. Denndann ist n = pq und ϕ(n) = (p − 1)(q − 1). Umgekehrt, wenn man n und ϕ(n) kennt,dann kennt man sogar die Primfaktorzerlegung von n, denn aus
pq = n , (p− 1)(q − 1) = ϕ(n) ,
errechnet man
p + q = n− ϕ(n) + 1
p− q = ±√
(n− ϕ(n) + 1)2 − 4n.
Es ist also ganz einfach mit dem Auffinden des geheimen Schlussels Dt, wenn man nfaktorisieren kann. Und hier liegt die Starke des RSA-Schemas: Es ist ein schwierigesProblem, eine große Zahl zu faktorisieren.
Zum Faktorisierungsproblem !Naheliegend ist, fur alle Zahlen m ∈ 2, . . . , n − 1 durchzuprobieren, ob sie ein Teilervon n ist oder nicht. Naturlich muß man nicht alle Zahlen durchprobieren. Man kann sichauf die Primzahlen beschranken und man muß auch nur die Zahlen von 2 bis zu einemm mit m2 ≥ n testen. Denn ist n = pq , so ist p2 ≤ n oder q2 ≤ n. Das ist ein sicheresVerfahren, aber ein sehr, sehr langwieriges. Zum Beispiel muß man, um eine 200–stelligeZahl zu testen, im schlimmsten Fall die Primzahlen zwischen 2 und 10100 durchprobieren.Nach dem Primzahlsatz, den wir spater noch kennenlernen werden, bedeutet dies, etwa1098 Zahlen durchprobieren zu mussen.
Beispiel 3.45
Im Jahre 1990 wurde eine der meistgesuchten Faktorisierungen gefunden: Die neunteFermatzahl F9 = 229
+ 1 = 2512 + 1 wurde in Primfaktoren zerlegt:
F9 = 2424833 · k mit einem k ∈ ZZ .
Die Losung gelang, indem man das Problem in kleine Portionen aufteilte und happchen-weise loste. 2
Es ist festzuhalten: Bisher hat niemand einen guten/schnellen Faktorisierungsalgorithmusgefunden und man hofft (im Interesse der Geheimhaltung), daß auch in Zukunft keinschneller Algorithmus gefunden wird.Wie soll man den Schlussel wahlen? In der heutigen Rechnertechnologie ist es moglich,n ∼ 10200 , p2 ∼ n , q2 ∼ n zu realisieren. Die Wahl von s darf nicht zu klein ausfallen, dasonst ein verschlusselter Text identisch mit dem Text selbst sein kann, d.h. daß ms = mfur eine Nachricht m sein kann. Solche “Fixpunkte“ von Ks haben zu tun mit kleinenPrimteilern von p− 1 bzw. q − 1 .

Baumeister: Mathematik I / Stand: Januar 1997 73
Bemerkung 3.46
Eine Anwendung des RSA–Schemas ist die elektronische Unterschrift. Ein Nachrichtenge-ber A beglaubigt seine offentliche Mitteilung m an einen Empfanger B durch Hinzufugender kodierten Nachricht Ks(m) ; Ks ist ein nur A bekannter Schlussel. Ein Empfangerkann mit dem offentlichen Dekodierer Dt von A die Gleichung
m = Dt(Ks(m))
uberprufen. Ist sie erfullt, hat der Empfanger die Sicherheit, daß die Nachricht von Astammt. 2
Kapitel 4
Reelle Zahlen
Bisher haben wir uns nur im Zahlbereich IN oder ZZ aufgehalten. In diesem Kapitel stellenwir diejenigen Eigenschaften der reellen Zahlen zusammen, die im weiteren allein verwen-det werden; wir werden die reellen Zahlen also nicht aus IN uber ′Q konstruieren.IR sei nun eine Menge. Diese Menge wird am Ende dieses Kapitels durch drei Axiomen-gruppen vollstandig charakterisiert sein.
4.1 Algebraische Eigenschaften
Korperaxiom
IR ist ein kommutativer Korper, d.h.: Es gibt Abbildungen
+ : IR× IR 3 (x, y) 7−→ x+ y ∈ IR , · : IR× IR 3 (x, y) 7−→ x · y ∈ IR ,
ein Nullelement 0 und ein Einselelement 1 mit 1 6= 0. Damit gilt fur alle x, y, z ∈ IR :
(1) Assoziativitat der Addition: (x+ y) + z = x+ (y + z)
(2) Neutralitat des Nullelements: x+ 0 = x = 0 + x
(3) Existenz des Negativen: Es gibt eine Zahl −x ∈ IR mit (−x) + x = 0 = x+ (−x)
(4) Kommutativitat der Addition: x+ y = y + x
(5) Assoziativitat der Multiplikation: (x · y) · z = x · (y · z)
(6) Neutralitat des Einselements: 1 · x = x = x · 1
(7) Existenz des Inversen:Ist x 6= 0, so gibt es eine Zahl x−1 ∈ IR mit x−1 · x = 1 = x · x−1
(8) Kommutativitat der Multiplikation: x · y = y · x
(9) Distributivgesetz: x · (y + z) = x · y + x · z, (y + z) · x = y · x+ z · x
74

Baumeister: Mathematik I / Stand: Februar 1997 75
Hiermit haben wir die algebraischen Eigenschaften der reellen Zahlen festgelegt. Die Ab-bildung + steht daher fur die Addition, Die Abbildung · steht fur die Multiplikation.Die Eigenschaften, die wir als Grundrechenarten +,−, ·, : kennen, sind damit erklart: dieSubtraktion “−“ ergibt sich aus der Definition des Negativen, die Division ist mit “−1“eingefuhrt.Subtraktion: Fur x, y ∈ IR schreiben wir:
x− y := x+ (−y)
Division: Fur x ∈ IR, y ∈ IR, y 6= 0, schreiben wir:
x : y :=x
y:= xy−1
Aus den obigen Axiomen lesen wir ab, daß mit der Regel”Multiplikation hat Vorrag vor
der Addition“ an vielen Stellen Klammern weggelassen werden durfen. Ferner ist es ublich,an Stellen, wo die Ubersichtlichkeit nicht leidet, auch den Punkt · fur die Multiplikationwegzulassen.
Bemerkung 4.1
Eine Menge IK mit einem Nullelement 0 und einem Einzelelement 1 6= 0, auf der eineAddition und Multiplikation mit den obigen Eigenschaften (1) – (9) gegeben ist, heißtalso ein Korper. In den Korpereigenschaften spiegelt sich der algebraische Aspekt derreellen Zahlen wieder. Die Menge IK := ′Q der rationalen Zahlen, die wir zwar noch nichtgenauer definiert haben, ist ein Korper, die ganzen Zahlen ZZ sind kein Korper, da dieinversen Elemente bezuglich der Multiplikation fehlen. Weitere Beispiele werden wir nochkennenlernen.Die Theorie der Korper beginnt im wesentlichen mit E. Galois (1811 – 1832) und N.H.Abel (1802 – 1829) mit der Erweiterung der Korper ′Q , IR um Losungen algebraischerGleichungen (Korpererweiterung), allerdings noch in einer Formulierung, der mengen-theoretische Sprechweisen nicht zur Verfugung stehen. R. Dedekind (1831 – 1916) fuhrtedann die Begriffe “Korper“, “Moduln“ 1811 ein, 1893 gab dann H. Weber (1842 – 1913)dem Wort “Korper“ den gleichen allgemeinen Sinn, den es heute hat. 2
Beispiel 4.2
Die Menge IF 2 := n, e ist ein Korper, wenn wir die Verknupfungen durch die folgendenTafeln erklaren:
+ n e
n n e
e e n
· n e
n n n
e n e
Damit haben wir auch einen “kleinsten“ Korper angegeben. Klar, n steht fur 0, e stehtfur 1. 2

Baumeister: Mathematik I / Stand: Februar 1997 76
Im Korperaxiom ist nicht festgelegt, daß 1 und 0 mit den Eigenschaften (2) bzw. (6)eindeutig bestimmt sind. Dies ist jedoch der Fall, wie folgende Uberlegung etwa zu 0zeigt:Seien also 0, 0′ ∈ IR Elemente mit
x+ 0 = x = 0 + x , x+ 0′ = x = 0′ + x fur alle x ∈ IR .
Daraus folgt sofort0 = 0 + 0′ = 0′.
Die Eindeutigkeit des Negativen und Inversen ist ebenfalls schon in den Axiomen einge-baut, wie etwa folgende Uberlegung zum Inversen zeigt:Seien zu x ∈ IR, x 6= 0, zwei Elemente y, z gegeben mit
x · y = 1 = y · x , x · z = 1 = z · x
Dann folgt sofort:
y = y · 1 = y · (x · z) = (y · x) · z = 1 · z = z.
Hier sind nun einige elementare Folgerungen, die uns beim Rechnen mit reellen Zahlenhelfen. Wir lernen daraus auch, wie man aus Axiomen kleine Satze entwickelt:
Folgerung 4.3
Seien x, y, z ∈ IR . Wir haben:
(1) x+ y = x+ z =⇒ y = z .
(2) 0 · x = 0 = x · 0 .
(3) x · y = 0 =⇒ x = 0 oder y = 0 .
(4) (−1) · (−1) = 1 .
(5) (−x) · y = −x · y = x · (−y) .
(6) (−x) · (−y) = x · y .
Beweis:Zu (1):
x+ y = x+ z =⇒ (−x) + (x+ y) = (−x) + (x+ z)
=⇒ ((−x) + x) + y = ((−x) + x) + z
=⇒ 0 + y = 0 + z
=⇒ y = z
Zu (2): 0 · x+ x · x = (0 + x) · x = x · x = 0 + x · x . Mit (1) folgt 0 · x = 0.Zu (3): Sei x · y = 0 und x 6= 0. Dann folgt mit (2) 0 = x−1(xy) = (x−1x)y = 1y = y.Zu (4): 0 = 1 + (−1). Mit (2) folgt:
0 = (−1)(1 + (−1)) = −1 + (−1)(−1), d.h. 1 = (−1)(−1).

Baumeister: Mathematik I / Stand: Februar 1997 77
Zu (5): xy + (−x)y = (x+ (−x))y = 0y = 0. Also − xy = (−x)y.Zu (6): (−x)(−y) = (−1)x(−1)y = (−1)(−1)xy = 1xy = xy.
In den reellen Zahlen sollten wir die naturlichen Zahlen wiederentdecken. Wir definiereneinen Kandidaten dafur induktiv: M sei die Teilmenge von IR, fur die gilt:
1 ∈M ; x ∈M =⇒ x+ 1 ∈M
Betrachte dazu die Abbildung
σ : M 3 x 7−→ x+ 1 ∈M
Klar, M ist nun eine Menge, in der es ein Element 1 und eine injektive Abbildung (siehe(1) aus Folgerung 4.3) gibt mit:
1 ∈M ; x ∈M =⇒ σ(x) ∈M.
Wir konnen also M mit IN gleichsetzen.Damit ist auch ZZ gefunden. Die Anordnung in IN bzw. ZZ wollen wir hier noch nichtdiskutieren.Rationale Zahlen kennen wir als (gekurzte) Bruche ganzer Zahlen, genauer als Objekte
a
bmit a ∈ ZZ , b ∈ IN .
Also setzen wir nun′Q ′ := (a, b)|a ∈ ZZ , b ∈ IN .
Klar, das Paar (n, 1) steht fur den unechten Bruch n1 . Ein Problem entdecken wir sofort:
in ′Q ′ gibt es(4, 2), (2, 1), . . . .
Dies sind zwar”Bruche“, aber als rationale Zahlen sollten wir sie gleichsetzen. Wir errei-
chen dies durch eine Aquivalenzrelation: Wir setzen
(a, b) ∼ (a′, b′) :⇐⇒ ab′ = a′b
und definieren′Q := [(a, b)]|a ∈ ZZ , b ∈ IN ,
wobei [(a, b)] eine Klasse bezuglich der obigen Aquivalenzrelation ist. (Auf den Beweis,daß eine Aquivalenzrelation vorliegt, verzichten wir hier, er ist offensichtlich.) Nun ist′Q wieder als Teilmenge von IR auszumachen durch die Gleichsetzung mit dem Bild derinjektiven Abbildung
τ : ′Q 3 [(a, b)] −→ ab−1 ∈ IR .
(Wohldefiniertheit und Injektivitat folgen einfach aus der Definition der Aquivalenzrela-tion); es ist also doch “erlaubt“, rationalen Zahlen als Bruche
a
bmit a ∈ ZZ , b ∈ IN
anzusehen.

Baumeister: Mathematik I / Stand: Februar 1997 78
Die in den Axiomen festgehaltenen”Grundrechenarten“ gestatten es, Summen- und
Produktzeichen auf den Zahlenbereich IR auszuweiten. Fur reelle Zahlen a1, . . . , an ∈ IRist erklart:
n∑j=1
aj := a1 ,n∑j=1
aj :=n−1∑j=1
aj + an.
n∏j=1
aj := a1 ,n∏j=1
aj := an ·n−1∏j=1
aj
Ein Spezialfall davon ist die Potenzschreibweise:
Fur x ∈ IR : x0 := 1 , xn+1 := x · xn , n ∈ IN 0 .
Fur x ∈ IR , x 6= 0 : x−n := (x−1)n , n ∈ IN .
Satz 4.4
Die Menge ′Q der rationalen Zahlen ist abzahlbar.
Beweis:Wir schreiben die rationalen Zahlen, d.h. die Paare (a, b), a ∈ ZZ , b ∈ IN , in folgendemSchema auf:
(1, 1) −→ (2, 1) (3, 1) −→ (4, 1) · · ·
(1, 2) (2, 2) (3, 2) (4, 2) · · ·↓
(1, 3) (2, 3) (3, 3) (4, 3) · · ·
(1, 4) (2, 4) (3, 4) (4, 4) · · ·↓
(1, 5) · · ·...
Die Pfeile deuten an, in welcher Reihenfolge wir die Paare nun abzahlen. Ein einmalabgezahltes Paar wird nicht mehr berucksichtigt.
Die Fortschreibung des Binominalsatzes auf den Zahlbereich IR ist
Satz 4.5
Seien x, y ∈ IR, n ∈ IN . Dann gilt:
(x+ y)n =n∑j=0
(n
j
)xjyn−j
Beweis:Der Beweis von Satz 2.20 kann sofort ubernommen werden.

Baumeister: Mathematik I / Stand: Februar 1997 79
4.2 Anordnungsaxiom
Anordnungsaxiom
In IR gibt es eine Menge P (P ⊂ IR), so daß gilt:
(1) Fur jedes x ∈ IR gilt genau eine der folgenden Aussagen:
x ∈ P , x = 0 , −x ∈ P .
(1) Ist x ∈ P und y ∈ P, so folgt x+ y ∈ P . (Monotonie der Addition)
(2) Ist x ∈ P und y ∈ P, so folgt x · y ∈ P . (Monotonie der Multiplikation)
Definition 4.6
Wir setzen fur x, y ∈ IR .
x > 0 :⇐⇒ x ∈ P ;
x > y :⇐⇒ x− y > 0 ;
x ≥ y :⇐⇒ x > y oder x = y ;
x < y :⇐⇒ y > x ;
x ≤ y :⇐⇒ y ≥ x .
Die Elemente von P (x > 0) werden positiv genannt, die Elemente x mit −x ∈P (x < 0) heißen negativ. 2
Folgerung 4.7
Seien x, y, z ∈ IR . Dann gilt:
(1) Es gilt genau eine der folgenden Aussagen:
x > 0 , x = 0 , x < 0 .
(2) x < y =⇒ x+ z < y + z
(3) x < y, 0 < z =⇒ xz < yz
Beweis:Die Aussagen sind einfache Konsequenzen aus der Definition von > .
Bemerkung 4.8

Baumeister: Mathematik I / Stand: Februar 1997 80
Im Anordnungsaxiom haben wir eine Ordnungsstruktur, die durch P bzw. “>“ definiertist, eingefuhrt. Diese wird erlautert durch die Tatsache, daß durch ≤ eine Ordnung aufIR definiert wird. Dies laßt sich sehr einfach verifizieren. 2
Folgerung 4.9
Seien v, w, x, y, z ∈ IR . Wir haben:
(1) x ≤ y, v < w =⇒ x+ v < y + w .
(2) x ≤ y =⇒ −x ≥ −y .
(3) x ≤ y, z ≤ 0 =⇒ yz ≤ xz .
(4) x2 ≥ 0 ; x2 > 0, falls x 6= 0 .
(5) 1 > 0 .
(6) x > 0 =⇒ x−1 > 0 .
(7) 0 < x ≤ y =⇒ x−1 ≥ y−1 .
Beweis:Zu (1):Mit Folgerung 4.7 (1) folgt x + v < x + w und mit der Definition von ≤ folgt x + v <x+ w ≤ y + w.Zu (2):(−x− (−y)) = (y − x) ≥ 0 .Zu (3):Aus (2) folgt 0 ≤ −z und damit −xz ≤ −yz, also yz ≤ xz.Zu (4):Ist x ≥ 0, so folgt x2 ≥ 0 aus der Monotonie der Multiplikation. Ist x ≤ 0, so folgt x2 ≥ 0aus (3).Zu (5).:Aus 1 = 1 · 1 folgt mit (4) 1 > 0 . zu (6):Aus x−1 < 0, so folgt 1 · 1 = 1 = xx−1 < 0 im Widerspruch zu (4).Zu (7):Aus der Monotonie bzgl. der Multiplikation folgt xy > 0 und damit (xy)−1 > 0 wegen(5). Daraus folgt x−1 = (xy)−1y ≥ (xy)−1x = y−1.
Beispiel 4.10
Die Menge IF 2 := n, e ist nach Beispiel 4.2 ein Korper. Dieser Korper laßt sich nichtanordnen, d.h. es gibt keine Menge P in IF 2, so daß die drei Bedingungen der Definitionmit IF 2 statt IR erfullt sind. 2
Manchmal veranschaulichen wir uns die reellen Zahlen als Punkte einer Zahlengeraden mitUrsprung 0. Darin kommt der geometrische Aspekt der reellen Zahlen zum Ausdruck.

Baumeister: Mathematik I / Stand: Februar 1997 81
Diese Vorstellung wird erst vollstandig, wenn wir im nachsten Abschnitt die Reichhaltig-keit der reellen Zahlen (axiomatisch) eingefuhrt haben. Zur Vorstellung der reellen Zahlenals Punkte der Zahlengeraden paßt die Begriffsbildung
”Intervall“ . Zu a, b ∈ IR setzen
wir
[a, b] := x ∈ IR |a ≤ x ≤ b (Abgeschlossenes Intervall)
[a, b) := x ∈ IR |a ≤ x ≤ b (Halboffenes Intervall)
(a, b] := x ∈ IR |a < x ≤ b (Halboffenes Intervall)
(a, b) := x ∈ IR |a < x < b (Offenes Intervall mit Randpunkten a, b)
Diese Intervalle liefern uns eine lokale Betrachtungsweise der reellen Zahlengeraden. Wirsagen, daß x ∈ IR in einer Umgebung von y ∈ IR liegt, wenn es ε > 0 gibt mit
x ∈ (y − ε, y + ε) .
Dabei haben wir”naturlich“ kleine ε im Auge. Aber gibt es eigentlich
”kleine“ Zahlen,
d.h. solche Zahlen, die”nahe“ bei 0 liegen? Dazu benotigen wir das Vollstandigkeits-
axiom, das im nachsten Abschnitt bereitgestellt wird. Dabei wird auch klar werden, daßin IR die Gleichung
x2 = z
losbar ist, wahrend sie in ′Q nicht losbar ist. Die letzte Aussage folgt aus dem fruherenBeweis, da wir in ZZ als Teilmenge von IR die Aussage der elementaren Zahlentheorie zurVerfugung haben.
Definition 4.11
Man nennt
sign(x) :=
−1 , falls x < 0
0 , falls x = 01 , falls x < 0
das Vorzeichen von x und
|x| :=
x , falls x ≥ 0−x , falls x < 0
den Betrag von x. 2
Offenbar gilt |x| = sign(x) · x .
Lemma 4.12
Seien x, y ∈ IR . Dann sind aquivalent:
(a) |x| ≤ |y| .
(b) x ≤ |y| und −x ≤ |y| .
Beweis: (a) =⇒ (b)

Baumeister: Mathematik I / Stand: Februar 1997 82
Ist x ≥ 0, dann ist −x ≤ x = |x| ≤ |y| .Ist x < 0, dann ist x < −x = |x| ≤ |y| .(b) =⇒ (a)Klar.
Lemma 4.13
Seien x, y ∈ IR . Es gilt:
1. |x| = 0 ⇐⇒ x = 0 . (Definitheit)
2. |xy| = |x||y| . (Homogenitat)
3. |x+ y| ≤ |x|+ |y| . (Dreiecksungleichung)
Beweis:1. und 2. sind einfach nachzurechnen.Zu 3.Wegen x ≤ |x|, y ≤ |y| folgt x+ y ≤ |x|+ |y|. Wegen −x ≤ |x|,−y ≤ |y| folgt −(x+ y) ≤|x|+ |y|. Daraus folgt |x+ y| ≤ |x|+ |y| mit Lemma 4.12 .
Die Eigenschaften 1.,2.,3. aus Lemma 4.13 belegen, daß es sich bei der Betragsfunktion
IR 3 x 7−→ |x| ∈ IR
um eine Abstandsfunktion handelt: |x| stellt den Abstand von x zum Ursprung 0 derZahlengeraden dar.Die Dreiecksungleichung konnen wir auch so einsehen: Liegt der Ursprung 0 zwischen xund y, so gilt |x−y| = |x−0|+|y−0|, anderenfalls |x−y| < |x−0|+|y−0|, also insgesamt|x− y| ≤ |x|+ |y| ; Anwendung auf −y ergibt die Dreiecksungleichung, da | − y| = |y| ist.
Folgerung 4.14
Seien x, y ∈ IR . Es gilt:| |x| − |y| | ≤ |x− y| .
Beweis:Wir haben mit Lemma 4.13
|x| = |(x− y) + y| ≤ |x− y|+ |y|, also |x| − |y| ≤ |x− y| ,
|y| = |(y − x) + x| ≤ |y − x|+ |x|, also |y| − |x| ≤ |x− y| .
Daraus liest man die Aussage mit Lemma 4.12 ab.
Eine nutzliche Ungleichung – sie wird Bernoullische Ungleichung genannt – ist ent-halten in
Baumeister: Mathematik I / Stand: Februar 1997 83
Satz 4.15
Sei n ∈ IN , n ≥ 2. Sei x ∈ IR, x > −1, x 6= 0. Dann gilt:
(1 + x)n > 1 + nx . (4.1)
Beweis:Wir fuhren den Beweis induktiv:n = 2 : (1 + x)2 = 1 + 2x+ x2 > 1 + 2x , da x2 > 0 gilt.n+ 1 : (1 +x)n+1 = (1 +x)n(1 +x) > (1 +nx)(1 +x) = 1 +nx+x+nx2 > 1 + (n+ 1)x .
Man sieht schnell, daß auch die Ungleichung
(1 + x)n ≥ 1 + nx fur alle n ∈ IN und alle x ≥ −1 (4.2)
gilt.
4.3 Axiom der Vollstandigkeit
Die rationalen Zahlen sind ebenfalls ein Korper mit einer Ordnung ≤, namlich der, diedurch IR induziert wird. ′Q hat, betrachtet als rationale Zahlengerade, noch
”Locher“ .
Diese wollen wir nun (axiomatisch) in IR schließen.
Definition 4.16
Eine Teilmenge A von IR heißt nach oben beschrankt, wenn
∃x ∈ IR ∀a ∈ A (a ≤ x)
gilt.Jedes x ∈ IR, das die obige Eigenschaft hat, heißt eine obere Schranke von A. 2
Sei A ⊂ IR nach oben beschrankt, A 6= ∅. Dann ist also
S(A) := x ∈ IR |a ≤ x fur alle a ∈ A
nichtleer. Die”Luckenlosigkeit“ der reellen Zahlen hangt nun damit zusammen, ob es
in der Menge S(A) der oberen Schranken von A eine (bezgl. ≤) kleinste obere Schrankegibt.
Vollstandigkeitsaxiom
IR ist vollstandig, d.h. jede nichtleere, nach oben beschrankte Menge A reeller Zahlenbesitzt eine kleinste obere Schranke x .

Baumeister: Mathematik I / Stand: Februar 1997 84
Definition 4.17
Sei A eine nichtleere, nach oben beschrankte Menge. Wir schreiben
x = supa∈A
a = supa|a ∈ A oder kurz x = supA
fur die kleinste obere Schranke und nennen x auch das Supremum von A .Ist x = supA ein Element von A, so schreiben wir
x = maxa∈A
a = maxa|a ∈ A = maxA
und nennen x das Maximum von A . 2
Bemerkung 4.18
Das Korperaxiom, das Anordnungsaxiom und das Vollstandigkeitsaxiom bestimmen denKorper der reellen Zahlen schon vollstandig. Dies soll heißen, daß die Menge IR bis aufeine bijektive Abbildung, die die algebraischen Eigenschaften und die Anordnung respek-tiert, eindeutig bestimmt ist. Wir werden bei den Resultaten der Algebra genauer daraufeingehen. 2
Wir haben folgende Charakterisierung einer kleinsten oberen Schranke:
Lemma 4.19
Sei A ⊂ IR, A 6= ∅, A nach oben beschrankt. Es ist aquivalent fur eine obere Schrankex ∈ IR :
(a) x = supA
(b) ∀ε > 0∃a ∈ A (x− ε ≤ a)
Beweis:(a) =⇒ (b).Sei ε > 0. Annahme: a < x − ε fur alle a ∈ A. Dann ist aber offensichtlich x − ε obereSchranke, was ein Widerspruch zur Tatsache ist, daß x die kleinste obere Schranke ist.(b) =⇒ (a).Annahme: y < x ist obere Schranke. Setze ε := 1
2(x−y). Dann gibt es a ∈ A mit x−ε ≤ a.
Daraus folgt
a ≥ x− ε = x−1
2(x− y) =
1
2(x+ y) > y,
was ein Widerspruch zur Tatsache ist, daß y obere Schranke ist.
Aus der obigen Charakterisierung folgt sofort, daß Supremum und Maximum einer MengeA stets eindeutig bestimmt sind.
Hat man eine Menge A reeller Zahlen, dann ist A nach oben beschrankt genau dann,wenn −A := −a|a ∈ A nach unten beschrankt ist.

Baumeister: Mathematik I / Stand: Februar 1997 85
Definition 4.20
Sei A eine nichtleere Teilmenge von IR . Ist A nach unten beschrankt, dann schreibenwir
x = infa∈A
a = infa|a ∈ A oder kurz x = inf A
und nennen x großte untere Schranke oder Infimum von A .Ist x = inf A ein Element von A, so schreiben wir
x = infa∈A
a = infa|a ∈ A = minA
und nennen x das Minimum von A . 2
Definition 4.21
Eine Menge A ⊂ IR, A 6= ∅, heißt beschrankt, falls A nach unten und nach obenbeschrankt ist, d.h. falls
∃x ∈ IR ∀a ∈ A (|a| ≤ x)
gilt. 2
Beispiel 4.22Die Menge der naturlichen Zahlen ist nach unten, aber nicht nach oben beschrankt, denn:Klar, 1 ist eine untere Schranke.Annahme: x ∈ IR ist obere Schranke von IN . Dann gibt es eine kleinste obere Schrankeund wir konnen o.E. annehmen: x− 1
2ist keine obere Schranke.
Also gibt es n ∈ IN mit x − 12≤ n. Dann ist aber n + 1 > x, was ein Widerspruch zur
Tatsache ist, daß x obere Schranke ist. 2
Satz 4.23
∀x > 0∀y ∈ IR ∃n ∈ IN (nx > y)
Beweis:Annahme: nx ≤ y fur alle n ∈ IN .Daraus folgt n ≤ yx−1 fur alle n ∈ IN , was ein Widerspruch zu Satz 4.22 ist.
Die Eigenschaft des obigen Satzes wird als Archimedische Eigenschaft der reellenZahlen bezeichnet.
Folgerung 4.24
Seien ε > 0, y > 0. Dann gilt:
(1) ∃n ∈ IN ( 1n ≤ ε)
(2) Falls y > 1 ist, gibt es n ∈ IN mit yn ≥ ε .
(3) Falls y < 1 ist, gibt es n ∈ IN mit yn ≤ ε.
Beweis:

Baumeister: Mathematik I / Stand: Februar 1997 86
Zu (1).
Da 1ε keine obere Schranke fur IN sein kann (siehe Satz 4.22), gibt es n ∈ IN mit n > 1
ε ;
also 1n ≤ ε.
Zu (2).Es ist y = 1 + h mit h > 0. Dann ist
yn = (1 + h)n =n∑j=0
(n
j
)hj ≥ 1 + nh ≥ x
fur alle n ∈ IN mit n ≥ x− 1h .
Zu (3).
Es ist 1y > 1. Also gibt es nach (2) n ∈ IN mit (1
y )n ≥ 1ε , d.h. yn ≤ ε.
Nun fuhren wir den Beweis, daß die”Lucke“, die durch die Tatsache, daß die Gleichung
x2 = 2 in ′Q keine Losung besitzt, aufgezeigt wird, in IR geschlossen ist.
Folgerung 4.25
Es gibt x ∈ IR mit x2 = 2.
Beweis:Betrachte A := x ∈ IR |x > 0, x2 < 2. A ist nichtleer, da 1 ∈ A.2 ist eine obere Schranke von A, denn:Sei x ∈ IR, x > 2. Dann ist mit x = 2 + h, h > 0 :
x2 = (2 + h)2 = 4 + 4h+ h2 > 4;
also x /∈ A.Da IR vollstandig ist, gibt es x ∈ IR mit x = supA. Wir behaupten: x2 = 2.Annahme: x2 < 2.Dann ist (x+ h)2 < 2 fur ein geeignet gewahltes h > 0, denn (x+ h)2 = x2 + 2hx+ h2 >x2 + 2hx . Also haben wir einen Widerspruch zur Tatsache, daß x die kleinste obereSchranke von A ist, denn x+ h > x und x+ h ∈ A.Annahme: x2 > 2.Dann ist (x− h)2 > 2 fur ein geeignetes h > 0 (siehe oben), und daher (x− h)2 > 2 undx− h < x . Dies zeigt, daß x nicht kleinste obere Schranke sein kann.
Folgerung 4.26
Fur alle b > 0 gibt es genau ein x > 0 mit x2 = b.
Beweis:Die Existenz beweist man wie im Beweis zu Folgerung 4.25, die Eindeutigkeit folgt so:Aus x2 = b2, y2 = b folgt (x − y)(x + y) = 0. Mit der Nullteilerfreiheit folgt x = y oderx = −y. Daraus liest man die Eindeutigkeit der Losung von x2 = b fur positive x ab.
Wir fuhren die Quadratwurzel ein: Fur b > 0 setzen wir√b := x mit x > 0, x2 = b.

Baumeister: Mathematik I / Stand: Februar 1997 87
4.4 Konvergenz von Folgen
Wir wollen nun Folgen reeller Zahlen studieren. Dabei soll eine Folge die Kurzschreibweisefur die Tatsache sein, daß zu jeder naturlichen Zahl n ∈ IN genau eine reelle Zahl gegebenist. Also konnen wir eine Folge reeller Zahlen auch als eine Abbildung
f : IN 3 n 7−→ f(n) ∈ IR
auffassen, wobei wir statt f(n) die Schreibweise xn := f(n) vorziehen. Damit haben Folgenreeller Zahlen folgendes Aussehen:
(xn)n∈IN .
Beachte, daß wir damit auch wissen, wann zwei Folgen (xn)n∈IN , (yn)n∈IN gleich sind: Siesind gleich, wenn die dahinter sich verbergenden Abbildungen gleich sind:
xn = yn fur alle n ∈ IN .
Beispiel 4.27
1. Die Folge (n)n∈IN stellt eine etwas ungewohnliche Aufzahlung der naturlichen Zahlendar.
2. Die Folge ( 1n)n∈IN stellte die Folge der Stammbruche dar.
3. In Beispiel 3.21 haben wir die Fibonacci–Zahlen eingefuhrt:
f0 := f1 := 1
fn+1 := fn + fn−1 , n ∈ IN .
Die Folge (fn)n∈IN nennt man Folge der Fibonacci-Zahlen.
4. Wir betrachten das Verzinsungsproblem. Sei x das Grundkapital und sei xn dasKapital nach Verzinsung mit dem Zinssatz q am Beginn des Jahres n. Also:
x0 := x , xn+1 := qxn + xn , n ∈ IN 0 .
Wir erhalten also induktiv die Folge
((1 + q)nx)n∈IN .
Wann hat sich das Kapital verdoppelt? Dazu haben wir die Gleichung xn = 2x nachn
”aufzulosen“. Dies bedeutet
(1 + q)nx = 2x , d.h. (1 + q)n = 2.
Dies fuhrt uns auf die n–te Wurzel, die nun noch gar nicht zur Verfugung steht,aber naherungsweise kommen wir auch ohne sie aus. Es ist
(1 + q)n = 1 + nq +
(n
2
)q2 + · · · + qn

Baumeister: Mathematik I / Stand: Februar 1997 88
und wir losen ersatzweise (Verzicht auf Zinseszins) die Gleichung
1 + nq = 2.
Also n = 1q . Diese Losung ist fur kleine Zinssatze q gar nicht schlecht. Man nennt
die Folge ((1 + q)nx)n∈IN oder allgemeiner (pnx)n∈IN (p ∈ IR) eine geometrischeFolge.
2
Folgerung 4.28
Betrachte die Folge (qnx)n∈IN mit x 6= 0, q ∈ IR . Es gilt:
(a) Ist |q| > 1, dann ist qnx|n ∈ IN unbeschrankt.
(b) Ist |q| < 1, dann gibt es zu jedem ε > 0 ein N ∈ IN mit |qnx| < ε fur allen ∈ IN , n ≥ N.
Beweis:Zu (a).Da |q| > 1 gilt, gibt es h > 0 mit |q| = 1 + h. Es folgt fur n ∈ IN :
|qnx| = |x||q|n = |x|(1 + h)n ≥ |x|(1 + nh) > |x|nh.
Da die Folge der naturlichen Zahlen unbeschrankt ist (siehe Beispiel 4.22), ist die Aussagebewiesen.Zu (b).
Es ist 1|q|
> 1, also 1|q|
= 1 + h mit h > 0. Es folgt fur n ∈ IN
1
|qnx|=
1
|x|(1 + h)n ≥
1
|x|(1 + nh),
d.h.
|qnx| ≤1
1 + nh|x| ≤
1
n
|x|
h.
Wahle N ∈ IN mit 1N < h
|x|ε (siehe Folgerung 4.23). Damit verifiziert man die Aussage
(b) wegen1
n>
1
n+ 1>
1
n+ 2> · · ·
Die obigen Beobachtungen kundigen die Begriffe”Konvergenz von Folgen“ und
”Grenz-
werte von Folgen“ an. Sie sind die erfolgreiche Ausformulierung des Unendlichen (un-endlich klein, unendlich groß) als mathematischer Begriff. Das Unendliche hat seinen Ur-sprung bei den Griechen, die Beherrschung hat wohl das Fehlen einer klaren Formelspracheund die Fixiertheit auf die Geometrie verhindert. Die Erfindung der Infinitesimalrechnung

Baumeister: Mathematik I / Stand: Februar 1997 89
mußte noch 2000 Jahre warten.
Die Furcht vor dem Unendlichen zeigt sich in den beruhmten Paradoxien des Zenon, einesPhilosophen im 4. Jahrhundert v. Chr. aus Elea. Seine Paradoxien handeln von Bewegungund Kontinuitat. Es geht ihm darum, zu
”beweisen“, daß Bewegung unmoglich ist. Eine
seiner Paradoxien ist folgende:Ein Laufer, der eine bestimmte Strecke zwischen zwei Punkten zurucklegen will, mußzuerst die Halfte der Entfernung uberwinden, dann die Halfte des verbleibenden Weges,davon wieder die Halfte und immer so weiter. Dies erfordert laut Zenon eine unendlicheAnzahl von Schritten, und so wurde der Laufer nie an sein Ziel gelangen. Naturlich wußteauch Zenon sehr gut, daß der Laufer seinen Bestimmungsort nach einer endlichen Zeit-spanne erreicht, doch loste er das Paradoxon nicht auf. Die Auflosung geschieht durchfolgende Beobachtung:Indem der Laufer erst die Halfte der Gesamtstrecke zurucklegt, dann die Halfte der ver-bleibenden Halfte usw., bewaltigt er eine Entfernung, die der Summe
1
2+
1
4+ · · ·
entspricht. Diese”unendliche Summe“ – wir sprechen spater von Reihen – hat die Ei-
genschaft, daß sie nie den Wert 1 erreicht und uberschreitet, aber”beliebig“ nahe an 1
herankommt. Nehmen wir nun an, daß der Laufer eine konstante Geschwingkeit beibehalt.Die Zeitintervalle, die er benotigt, um die entsprechende Entfernung zuruckzulegen, folgendann ebenfalls dem Gesetz
1
2+
1
4+ · · ·
und so erreicht er sein Ziel in einer endlichen Zeitspanne; das Problem ist gelost.Die Griechen hatten nicht einsehen wollen, daß eine unendliche Summe einen endlichenWert erzeugen kann, bzw. daß sie gegen einen Grenzwert konvergieren kann.
Definition 4.29
Eine Folge (xn)n∈IN (reeller Zahlen) heißt konvergent, wenn
∃x ∈ IN ∀ε > 0∃N ∈ IN ∀n ≥ N (|xn − x| < ε)
gilt. Die Zahl x heißt Grenzwert von (xn)n∈IN und wir schreiben x = limnxn.
In der Definition 4.29 ist offen geblieben, ob ein Grenzwert x einer Folge (xn)n∈IN eindeutigbestimmt ist. Dies bestatigen wir nun :Sei x = lim
nxn = x′. Sei etwa x′ > x. Setze ε := 1
2(x′ − x). Dann gibt es N ∈ IN und
N ′ ∈ IN mit|xn − x| < ε , n ≥ N , |xn − x
′| < ε , n ∈ N ′.
Sei N∗ := max(N,N ′). Sei n ≥ N∗. Dann gilt
|xn − x| < ε , |xn − x′| < ε,
was im Widerspruch zu ε < x′ − x ist.

Baumeister: Mathematik I / Stand: Februar 1997 90
Beispiel 4.30
Die Konvergenz der Folge der Stammbruche ( 1n)n∈IN ist unmittelbar mit der Archimedi-
schen Anordnung verknupft. Wir behaupten
0 = limn
1
n.
Sei ε > 0. Wahle N ∈ IN mit N < 1ε . Dann gilt fur n ≥ N :
|1
n− 0| =
1
n≤
1
N< ε .
Die Folge (qn)n∈IN konvergiert fur |q| < 1 gegen Null; dazu haben wir nur Folgerung 4.28anzuwenden. 2
Beispiel 4.31
Das wohl wichtigste Beispiel einer konvergenten Folge neben der Folge der Stammbrucheist die geometrische Reihe, d.h. die Folge
(xn)n∈IN mit xn :=n∑j=0
qj, n ∈ IN ,
mit |q| < 1. Es gilt offenbar
xn =1− qn+1
1− q, n ∈ IN .
(Belege dies mit vollstandiger Induktion.) Daraus schließt man
1
1− q= lim
nxn ,
denn1− qn+1
1− q−
1
1− q=
1
1− qqn+1, n ∈ IN .
Siehe nun Folgerung 4.28. 2
Folgerung 4.32
Ist die Folge (xn)n∈IN konvergent, so ist die Menge xn|n ∈ IN beschrankt.
Beweis:Sei x = lim
nxn. Sei ε := 1. Dazu gibt es n ∈ IN mit |xn − x| < 1 fur alle n ∈ IN , d.h.
|xn| ≤ 1 + |x| , n ≥ N.
Sei a ≥ 0 mit |xj| ≤ a , 1 ≤ j ≤ N. Dann gilt
|xn| ≤ a+ 1 + |x| , n ∈ IN .

Baumeister: Mathematik I / Stand: Februar 1997 91
Beispiel 4.33
Wir betrachten die harmonische Reihe, d.h. die Folge, die beim Aufsummieren der Folgeder Stammbruche entsteht:
(hn)n∈IN mit hn :=n∑j=1
1
j, n ∈ IN .
Diese Folge ist nicht konvergent, da sie nicht beschrankt ist, wie folgende Uberlegungzeigt:
h2n = 1 +1
2+ (
1
3+
1
4) + (
1
5+
1
6+
1
7+
1
8) + · · ·+ (
1
2n−1 + 1+ · · ·+
1
2n)
≥ 1 +1
2+ (
1
4+
1
4) + (
1
8+ · · ·+
1
8) + · · ·+ (
1
2n+ · · ·+
1
2n)
= 1 +1
2+
1
2+
1
2+ · · ·+
1
2= 1 +
n
2.
2
Die obige harmonische Reihe kommt bei folgener Aufgabenstellung ins Spiel:Lege gleichartige Ziegel so aufeinander, daß ein moglichst großer Uberhang erreicht wird.Jeder Stein habe die Lange 2. Seien n Steine aufeinandergelegt, der n − te Stein bildetden Fuß des Bauwerks, der 1. Stein liege oben. Dann muß fur jedes j = 1, . . . , n − 1 derSchwerpunkt der obersten j Steine oberhalb des (j + 1)–ten Steins liegen, d.h. es muß
xj+1 − 1 ≤1
j
j∑k=1
xk , 1 ≤ j ≤ n − 1,
gelten.Man sieht, daß fur die Wahl
xj :=j∑l=1
1
l
die oben angesprochene Schwerpunktsbedingung erfullt ist. Also ist der maximale Uber-bau bei
xn =n∑l=1
1
l
erreichbar. Nun haben wir aber eben festgestellt, daß die so definierte Folge (xn)n∈IN
unbeschrankt ist. Es ist also ein beliebig großer Uberbau moglich.
Definition 4.34Sei (xn)n∈IN eine Folge.
(a) (xn)n∈IN heißt monoton wachsend bzw. monoton fallend, falls gilt:
xn ≤ xn+1 , n ∈ IN bzw. xn ≥ xn+1 , n ∈ IN .
(b) (xn)n∈IN heißt monoton, falls (xn)n∈IN monoton wachsend oder monoton fal-lend ist.
2

Baumeister: Mathematik I / Stand: Februar 1997 92
Satz 4.35
Jede beschrankte monotone Folge ist konvergent.
Beweis:Sei (xn)n∈IN eine monotone beschrankte Folge. Also xn ≤ xn+1 ≤ b, n ∈ IN , mit b ∈ IR .Sei x := supxn|n ∈ IN . Wir zeigen x = lim
nxn .
Sei ε > 0. Wahle N ∈ IN mit x− ε ≤ xN . Dann gilt fur n ≥ N
x− ε ≤ xN ≤ xn ≤ x ≤ x+ ε,
also|xn − x| < ε.
Haben wir eine Folge reeller Zahlen, so kann es sein, daß zwar die ganze Folge nichtkonvergiert, daß aber eine Teilfolge davon konvergiert. Dabei ist
”Teilfolge“ so definiert:
Definition 4.36
(xnk)k∈IN heißt Teilfolge der Folge (xn)n∈IN , wenn die Folge (nk)k∈IN eine strengmonoton wachsende Folge ist, d.h. , wenn gilt:
nk < nk+1 , k ∈ IN .
Ein Beispiel fur diese Beobachtung ist
1,−1, 1,−1, 1, . . .
Sie hat mindestens zwei konvergente Teilfolgen
1, 1, 1, . . .
−1,−1,−1, . . .
Beachte, daß das Wort”mindestens“ seine Bedeutung hat. Etwa ware auch
1,−1, 1,−1,−1,−1,−1, . . .
eine konvergente Teilfolge (Man darf eine Folge immer an endlich vielen Stellen abandern,ohne die Konvergenzeigenschaft zu beeintrachtigen.)
Definition 4.37
Eine Folge (xn)n∈IN heißt Cauchyfolge genau dann, wenn
∀ε > 0∃N ∈ IN ∀m,n ≥ N (|xm − xn| < ε)
gilt. 2
Baumeister: Mathematik I / Stand: Februar 1997 93
Folgerung 4.38
Sei (xn)n∈IN eine Folge. Es gilt:
(a) Ist (xn)n∈IN eine Cauchyfolge, dann ist (xn)n∈IN beschrankt.
(b) Ist (xn)n∈IN eine konvergente Folge, dann ist (xn)n∈IN eine Cauchyfolge.
Beweis:Zu (a).Sei ε > 0 . Wahle dazu N ∈ IN mit
|xm − xn| < ε , m, n ∈ IN .
Sei b ∈ IR mit |xm| ≤ b , 1 ≤ m ≤ N . Dann gilt fur n ≥ N
|xn| ≤ |xn − xN |+ |xN | ≤ ε+ b
und fur 1 ≤ n ≤ N|xn| ≤ b ≤ ε+ b .
Zu (b).Sei x := lim
nxn . Sei ε > 0 . Wahle N ∈ IN mit
|xn − x| <ε
2, n ≥ N .
Fur m,n ≥ N gilt dann
|xm− xn| ≤ |xm − x|+ |x+ xn| <ε
2+ε
2= ε .
Satz 4.39
Sei (xn)n∈IN eine Folge. Dann sind aquivalent:
(a) (xn)n∈IN ist konvergent.
(b) (xn)n∈IN ist eine Cauchyfolge.
Beweis:(a) =⇒ (b).Siehe Folgerung 4.38.(a) =⇒ (b).Sei A := m ∈ IN |xn < xm fur n > m . Ist #A = ∞ und A = mk|k ∈ IN , so ist(xmk)k∈IN eine monoton fallende Teilfolge. Ist #A <∞, so gibt es eine monoton wachsendeTeilfolge. Da die gesamte Folge (xn)n∈IN beschrankt ist (siehe Folgerung 4.38), besitzt nun(xn)n∈IN eine konvergente Teilfolge (xnk)k∈IN nach Satz 4.35; sei x := lim
kxnk . Wir zeigen,
daß die gesamte Folge gegen x konvergiert. Sei ε > 0 . Wahle N ∈ IN mit
|xm − xn| <ε
2fur alle m,n ≥ N

Baumeister: Mathematik I / Stand: Februar 1997 94
und|xn − x| <
ε
2.
Dann gilt fur n ≥ N
|xn − x| ≤ |xn − xN |+ |xN − x| <ε
2+ε
2= ε .
Bemerkung 4.40
Der Satz 4.39 zeigt nun, daß die Konvergenz einer Folge nachgewiesen werden kann, ohneden Grenzwert zu kennen.Man kann zeigen, daß das Vollstandigkeitsaxiom aquivalent zur Aussage “Jede Cauchy-folge konvergiert“ ist. Die eine Implikation davon ist Satz 4.39. 2
Folgerung 4.41
Sei (xn)n∈IN eine beschrankte Folge. Dann besitzt diese Folge eine konvergente Teil-folge.
Beweis:Dies ist aus dem ersten Teil des Beweises (b) =⇒ (a) zu Satz 4.39 abzulesen.
Satz 4.42
Sei (xn)n∈IN eine konvergente Folge, sei x := limnxn.
(a) Jede Teilfolge (xnk)n∈IN ist konvergent und es gilt x = limkxnk .
(b) Die Folge (|xn|)n∈IN ist konvergent und es gilt |x| = limn|xn|.
(c) Ist xn ≥ 0 fur alle n ∈ IN , dann ist auch die Folge (√xn)n∈IN konvergent und
es gilt x ≥ 0 und√x = lim
n
√xn .
Beweis:(a) ergibt sich unmittelbar aus der Definition.Zu (b).Betrachte die Ungleichung
| |xn| − |x| | ≤ |x− xn|.
Zu (c).Die Eigenschaft x ≥ 0 folgt schon aus (b). Die Identitat
√x = lim
n
√xn folgt fur x > 0
aus folgender Beobachtung
|√xn −
√x| =
|xn − x|
|√xn| · |
√x|
;
der Beweis fur den Fall x = 0 ist direkt aus der Konvergenzdefinition abzuleiten.
Seien (xn)n∈IN , (yn)n∈IN konvergente Folgen. Wir haben folgende Rechenregeln:

Baumeister: Mathematik I / Stand: Februar 1997 95
(R1) (xn + yn)n∈IN ist konvergent und limn
(xn + yn) = limnxn + lim
nyn.
(R2) (xnyn)n∈IN ist konvergent und limnxnyn = lim
nxn · lim
nyn.
(R3) Ist yn 6= 0 fur alle n ∈ IN und y := limnyn 6= 0, so ist (xnyn )n∈IN konvergent und
limn
xnyn
=limnxn
limnyn.
Wir beweisen etwa die Regel (R3) :Sei ε > 0 .Sei N1 ∈ IN mit |yn− y| ≤ 1
2|y| fur alle n ≥ N1 . Dann ist offenbar |yn| ≥ 1
2|y| > 0 fur alle
n ≥ N1 .
Sei N2 ∈ IN , N2 ≥ N1, mit |yn − y| ≤ε2 ·
|y|2
2|x|+ 1fur alle n ≥ N2 .
Sei N ∈ IN , N ≥ N2, mit |xn − x| ≤ ε2 ·|y|2 fur alle n ≥ N .
Nun folgt fur n ≥ N
|xnyn−x
y| =
|xny − xyn|
|yny|
≤|xn − x||y|+ |x||yn − y|
|yn||y|
≤ 2|xn − x||y|+ |x||yn− y|
|y|2
= |xn − x|2
|y|+ |yn − y|
(2|x|+ 1)
|y|2
≤ε
2+ε
2
Damit ist die Behauptung bewiesen.
Bisher haben wir außer den speziellen Beispielen
(qn)n∈IN (|q| < 1) , (1
n)n∈IN
keine konvergenten Folgen kennengelernt. Die obigen Rechenregeln gestatten aber neuekonvergente Folgen zu konstruieren bzw. zu analysieren, etwa:
(1
n2)n∈IN : lim
n
1
n2= 0 ; (
n
n+ 1)n∈IN : lim
n
n
n + 1= lim
n
1
1 + 1/n= 1 .
Beispiel 4.43
Betrachte die Folge (an)n∈IN mit
an :=3n2 + 1
2n2 − n+ 1, n ∈ IN .

Baumeister: Mathematik I / Stand: Februar 1997 96
Es gilt
an =3 +
1
n2
2−1
n+
1
n2
, n ∈ IN ,
und daher mit den obigen Rechenregeln:
limnan =
3 + limn
1
n2
2− limn
1
n+ lim
n
1
n2
=3
2
Beispiel 4.44
Betrachte die Folge
(1n3 (
n∑j=1
j2)
)n∈IN
. Man sollte sich durch die obige Rechenregel (R1)
nicht dazu verleiten lassen, aus
12 + 22 + · · · + n2
n3 =12
n3 +22
n3 + · · ·+n2
n3
auf den Grenzwert 0 zu schließen, denn die Anzahl der Summanden ist nicht fest, sondernhangt auch von n ab. Vielmehr haben wir
limn
1
n3 (n∑j=1
j2) = limn
n(n+ 1)(2n + 1)
6n3 =1
3;
beachte dabei (Beweis durch vollstandige Induktion)
n∑j=1
j2 =n(n+ 1)(2n + 1)
6.
2
Beispiel 4.45
Sei die Folge (xn)n∈IN induktiv durch
x1 := 1, xn+1 := 1 +1
xn, n ∈ IN ,
definiert. Konvergiert diese Folge, so folgt aus den Rechenregeln fur Grenzwerte
x = 1 +1
xd.h. x2 = x+ 1,
fur den Grenzwert x. Die Losungen der Gleichung
x2 − x− 1 = 0

Baumeister: Mathematik I / Stand: Februar 1997 97
sind gegeben durch – den Beweis fur diese Aussage wollen wir hier offen lassen –
x :=1
2(1 +
√5) , y :=
1
2(1−
√5).
Da offenbar xn > 0 fur alle n ∈ IN gilt, kann y als Grenzwert nicht in Frage kommen.Betrachte zn := xn − x, n ∈ IN . Es gilt:
zn+1 = xn+1 − x = 1 +1
xn− x =
1− x
xnzn ,
da 1 = x2 − x . Wegen xn ≥ 1 fur alle n ∈ IN , folgt
|zn+1| ≤ |1− x||zn| , n ∈ IN ,
und wir erkennen wegen |1− x| < 1, daß limnzn = 0 gilt. Daher haben wir:
|xn − x| ≤ |1− x|n , n ∈ IN , limnxn = x ,
|xn+1 − x|
|x|≤|1− x|
|x|
|x|
|xn|
|xn − x|
|x|, n ∈ IN .
Die letzte Abschatzung besagt, daß der”relative Approximationsfehler“ εn :=
|xn − x||x|
etwa linear mit dem Faktor|1− x||x|
klein wird, da limn
xxn = 1 ist. 2
Bemerkung 4.46Die Zahl x := 1
2(1+√
5) ist eine der aufregendsten Zahlen der Mathematik. Sie ist bekanntals eine Zahl, die im goldenen Schnitt (gottliche Teilung) von Bedeutung ist:Teilt der Punkt X die Strecke AB so, daß fur die Langen AB,AX,XB der entstehendenStrecken AB,AX,XB
AB : AX = AX : XB
gilt, dann ist fur AB = 1AB : AX = AX : XB = x
und AX = 12(−1 +
√5) . Dieses Teilverhaltnis wird seit der Antike als besonders ausge-
wogen empfunden. Die Kantenlangen von Buchern etwa stehen oft in diesem “gottlichen“Teilverhaltnis. Man findet dieses Teilverhaltnis auch im regelmaßigen Funfeck als Verhalt-nis, in dem sich zwei sich schneidende Diagonalen teilen. 2
4.5 Intervallschachtelung
Lemma 4.47Sei (xn)n∈IN eine monoton wachsende und (yn)n∈IN eine monoton fallende Folge undes gelte:
xn ≤ yn fur alle n ∈ IN , limn
(yn − xn) = 0.
Dann gibt es genau ein x ∈ IR mit
xn ≤ x ≤ yn, n ∈ IN .
Beweis:

Baumeister: Mathematik I / Stand: Februar 1997 98
Beide Folgen sind beschrankt und daher konvergent:
x := limnxn, y := lim
nyn.
Offenbar gilt xn ≤ x, y ≤ yn fur alle n ∈ IN und x = y wegen limn
(yn − xn) = 0. Also
xn ≤ x ≤ yn, n ∈ IN . Ist x′ ∈ IR mit xn ≤ x′ ≤ yn fur alle n ∈ IN , so ergibt sich
|x− x′| ≤ yn − xn fur alle n ∈ IN ,
also x = x′ , da limn
(yn − xn) = 0 .
Seien nun (an)n∈IN , (bn)n∈IN Folgen mit
an ≤ bn, n ∈ IN , limn
(bn − an) = 0.
Dann gilt mit In := [an, bn], n ∈ IN :
I1 ⊃ I2 ⊃ · · · ⊃ In+1 ⊃ · · ·
Man nennt diese Folge (In)n∈IN von Intervallen die zu (an)n∈IN , (bn)n∈IN gehorige Inter-vallschachtelung. Nach Folgerung 4.47 gibt es genau ein x ∈ IR mit
x =⋂n∈IN
In.
Man nennt x die durch die vorliegende Intervallschachtelung definierte Zahl. Der Mittel-punkt zn := 1
2(an + bn) approximiert x bis auf einen Fehler von 1
2(bn − an), denn
x− zn ≤ bn −1
2(an + bn) =
1
2(bn − an),
zn − x ≤1
2(an + bn)− an =
1
2(bn − an).
Bezeichnung: Zu x ∈ IR setze
bxc := supz|z ∈ ZZ , z ≤ x
dxe := infz|z ∈ ZZ , z ≥ x.
Wir nennen die Symbole b·c, d·e Gaußklammern.
Sei g eine naturliche Zahl, g ≥ 2. Ferner sei x ∈ IR eine nichtnegative Zahl. Dann ist
x = bxc+ r mit 0 ≤ r < 1.
Wir”basteln“ eine Intervallschachtelung fur r mit Hilfe der Zahl g :
1. Teile [0, 1] in g gleiche Teile [ ig ,i+ 1g ), i = 0, . . . , g − 1, und definiere z1 durch die
Eigenschaft
r ∈ [z1
g,z1 + 1
g).

Baumeister: Mathematik I / Stand: Februar 1997 99
2. Teile [z1g ,
z1 + 1g ) in g gleiche Teile [z1
g + ig2 ,
z1g + i
g2 ), i = 0, . . . , g− 1, und definiere
z2 durch die Eigenschaft
r ∈ [z1
g+z2
g2,z1
g+z2 + 1
g2)
So fortfahrend erhalten wir eine Folge (zn)n∈IN mit:
zn ∈ 0, . . . , g − 1 , r ∈
[n∑i=1
zi
gi,n∑i=1
zi
gi+
1
gn
)fur alle n ∈ IN .
Setze an :=n∑i=1
zigi, bn := an + 1
gn, n ∈ IN . Die Folgen (an)n∈IN , (bn)n∈IN definieren eine
Intervallschachtelung und es gilt:
r = limn
n∑i=1
zi
gi
Fur den ganzen Teil bxc von x haben wir eine Darstellung
bxc =m∑i=0
aigi
(a0, . . . , an lassen sich durch Division mit Rest gewinnen.) Also konnen wir die Zahl x soaufschreiben:
x = (am . . . a0, z1z2z3 . . .)g
Wir nennen sie die g-adische Entwicklung von x. Die dabei auftretenden Ziffern sindeindeutig bestimmt.Die Ziffern z1, z2, . . . ergeben sich rekursiv auch so:
z0 := 0 ; r0 := r;
zi := bri−1gc, ri := ri−1g − zi , i ∈ IN .
Ist r = ab∈ ′Q mit a, b ∈ IN , 0 ≤ a < b, so gehoren alle Reste ri zu den b verschiedenen
Bruchen0
b,1
b, · · · ,
b− 1
bund mussen sich daher wiederholen: Die g-adische Entwicklungen von rationalen Zahlensind also periodisch.Wir lesen aus den obigen Uberlegungen wieder ab, daß jede reelle Zahl Grenzwert einerFolge rationaler Zahlen ist. Man sagt, die Menge der rationalen Zahlen ist dicht in denreellen Zahlen.
Satz 4.48
Die Menge IR der reellen Zahlen ist nicht abzahlbar.
Beweis:Es genugt zu zeigen, daß das Intervall (0, 1) nicht abzahlbar ist.Angenommen, (0, 1) sei abzahlbar. Dann gibt es eine Folge (xn)n∈IN reeller Zahlen, sodaß (0, 1) = xn|n ∈ IN ist. In Dezimalbruchentwicklungen (g-adische Entwicklung mitg = 10) gelte

Baumeister: Mathematik I / Stand: Februar 1997 100
x1 = 0.a11a12a13 . . .x2 = 0.a21a22a23 . . .x3 = 0.a31a32a33 . . .
...
Definiere nun y ∈ (0, 1) durch die Dezimalbruchentwicklung
y = 0.y1y2y3 . . .
wobei
yi =
5 , falls aii 6= 54 , falls aii = 5
Nach Annahme existiert ein n ∈ IN mit y = xn. Dies ist im Widerspruch zur Konstruktionvon y, da yn 6= ann.
Bemerkung 4.49
Das im Beweis zu Satz 4.48 benutzte Vorgehen nennt man das Cantorsches Diagona-lisierungsverfahren (G: Cantor (1845 – 1918)). Wir schließen zusammen mit Satz 4.4,daß IR \ ′Q (Menge der irrationalen Zahlen) nicht abzahlbar ist. 2
Beispiel 4.50
Den Babyloniern war schon ein Verfahren zum Ziehen der Quadratwurzel bekannt. Eswird nun nach dem Griechen Heron von Alexandrien (um 75 n. Chr.) benannt.Sei a > 0. Wahle x0 ∈ IR mit x2
0 > a; definiere damit
xn+1 :=1
2(xn +
a
xn) , n ∈ IN 0 .
Damit gilt: (xn)n∈IN ist konvergent und wir haben x2 = a fur x := limnxn.
Beweis dazu:Offenbar sind alle xn positiv. Wir zeigen induktiv x2
n ≥ a. Dazu:
x2n+1 = (
1
2(xn +
a
xn))2 ≥ xn ·
a
xn= a,
da das geometrische Mittel zweier Zahlen nicht großer als das arithmetische Mittel ist.(Fur a, b ≥ 0 gilt (a+ b)2 ≥ 4ab!)(xn)n∈IN ist monoton fallend, da
xn − xn+1 = xn −1
2(xn +
a
xn) =
1
2(xn −
a
xn) =
1
2xn(x2
n − a) ≥ 0
gilt. Da (xn)x∈IN auch nach unten durch Null beschrankt ist, existiert x := limnxn. Mit
den Rechenregeln fur Grenzwerte (beachte xn 6= 0, n ∈ IN , x 6= 0)folgt
x =1
2(x+
a
x),

Baumeister: Mathematik I / Stand: Februar 1997 101
alsox2 = a, x > 0, x =
√a .
Wie gut approximiert xn die Quadratwurzeln von a? Es gilt
xn+1 −√a =
1
2(xn +
a
xn)−√a
=1
2xn(xn −
√a)2
≤1
2√a
(xn −√a)2.
Daraus liest man ab, daß sich die Anzahl der gultigen Stellen hinter dem Komma (bezug-lich der Dezimaldarstellung) bei jedem Iterationsschritt in etwa verdoppelt. Fragen dieserArt fallen unter den numerische Aspekt der reellen Zahlen.Analog zeigt man, daß die Folge
xn+1 :=1
k((k − 1)xn +
a
xk−1n
)) , n ∈ IN 0,
ausgehend von x0 mit xk0 > a gegen die k–te Wurzel von a konvergiert, d.h. der Grenzwertx := limn xn genugt der Gleichung
xk = a (a > 0, k ∈ IN , k ≥ 2) .
Die Existenz einer k–ten Wurzel k√a ist damit gesichert. Wir schreiben dafur auch a
1k .2
Wir leiten noch eine Intervallschachtelung fur die Kreiszahl π ab. Wie wir noch zu be-grunden haben, ist der Flacheninhalt eines Kreises in der Zahlenebene IR2 wohldefiniert.Die Zahl π ist der Flacheninhalt eines Kreises
K = (x, y) ∈ IR2 |x2 + y2 ≤ 1
Fur n ∈ IN sei fn der Flacheninhalt des einbeschriebenen regelmaßigen 2n+1−Ecks undferner Fn der Flacheninhalt des umbeschriebenen regelmaßigen 2n+1−Ecks von K. Auselementargeometrischen Uberlegungen folgt:
fn = hnfn+1 = h2nFn
wobei fur die”Hohen“ hn die Rekursionsformel
h1 =1
2
√2 , h2
n+1 =1
2(hn + 1)
gilt. Wir erhalten damit
Fn+1 =√fnFn , Fn+1 =
2fn+1Fn
fn+1 + Fn, n ∈ IN ,
mitf1 = 2, F1 = 4.

Baumeister: Mathematik I / Stand: Februar 1997 102
Die Folgen (fn)n∈IN , (Fn)n∈IN bilden nun eine Intervallschachtelung, denn es gilt
fn < fn+1 < Fn+1 < Fn, n ∈ IN ,
und
Fn − fn = Fn(1− h2n)
≤ 4(1− h2n)
= 2(1− hn−1
=1− hn−2
1 + hn−1
≤1− hn−2
1 + h1
=2(1− hn−2)
2 +√
2...
≤2(1− h1)
(2 +√
2)n−2
=2
(2 +√
2)n−1, n ∈ IN
Die durch diese Intervallschachtelung definierte reelle Zahl ist die Kreiszahl π. Man erhaltetwa
f12 = 3.1415923 . . . < π < F12 = 3.1415928 . . .
Beispiel 4.51
Die Folge ((1 + 1n)n)n∈IN ist monoton wachsend, denn:
(1 +1
n)n(1 +
1
n+ 1)−(n+1)
=(n + 1)
(n + 2)·
(n + 1)2n
(n+ 2)nnn
= (1−1
n+ 2)(1−
1
(n + 1)2)−n
≤ (1−1
n+ 2)(1−
n
(n + 1)2)−1
≤ (1−1
n+ 2)(1−
1
n + 2)−1 ≤ 1,
Die Folge ((1 + 1n)n+1)n∈IN ist monoton fallend und
(1 +1
n)n ≤ (1 +
1
n)n+1 , n ∈ IN .

Baumeister: Mathematik I / Stand: Februar 1997 103
Daraus liest man fur n ≥ 5 ab:
(1 +1
n)n ≤ (1 +
1
n)n+1 ≤ · · · ≤ (1 +
1
5)6 < 3
Ferner gilt:
(1 +1
n)n+1 − (1 +
1
n)n = (1 +
1
n)n(1 +
1
n− 1) =
1
n(1 +
1
n)n
Daraus schließt man, daß
(1 +1
n)n , (1 +
1
n)n+1
eine Intervallschachtelung darstellt. Die Zahl
e := limn
(1 +1
n)n
heißt Eulersche Zahl. Diese Zahl ist nicht rational, den Beweis dazu liefern wir spater. Sieist sogar transzendent, d.h. nicht Nullstelle eines Polynoms mit ganzzahligen Koeffizienten.
2
4.6 Reihen
Wir betrachten nun spezielle Folgen.
Definition 4.52
Sei (an)n∈IN eine Folge.
(a) Wir nennen∞∑k=1
ak eine Reihe und die Folge (sn)n∈IN mit sn :=n∑k=1
ak, n ∈ IN ,
die Folge der zugehorigen Partialsummen.
(b) Die Reihe∞∑k=1
ak heißt konvergent genau dann, wenn die zugehorige Folge
der Partialsummen (sn)n∈IN konvergiert; s := limn sn heißt dann Wert derReihe und wir schreiben dafur kurz
s :=∞∑k=1
ak.
(c) Wenn∞∑k=1
ak nicht konvergiert, dann heißt die Reihe divergent.
2
Beispiel 4.53

Baumeister: Mathematik I / Stand: Februar 1997 104
∞∑k=1
1k2 ist konvergent, denn die Folge der zugehorigen Folge (sn)n∈IN der Partialsummen
ist monoton wachsend (offensichtlich) und beschrankt, denn:
sn =n∑k=1
1
k2
≤ 1 +n∑k=2
1
(k − 1)k
= 1 +n∑k=2
(1
k − 1−
1
k)
= 1 + 1−1
n≤ 2 , n ≥ 2.
Die geometrische Reihe∞∑k=1
qk ist fur |q| < 1 konvergent (siehe Beispiel 8.38) und fur
|q| ≥ 1 divergent.
Die harmonische Reihe∞∑k=1
1k
ist divergent (siehe Beispiel 4.33). 2
Beispiel 4.54
Divergente Reihen sind fur eine Reihe von Irrtumern und Paradoxien verantwortlich. Diessieht man an der divergenten Reihe
s :=∞∑j=0
(−1)j .
Schreibe1 + (−1 + 1) + (−1 + 1) + · · · = 1 ,
oder(1− 1) + (1− 1) + · · · = 0 ,
oder
s = 1− (1− 1 + 1 + · · · = 1− s , d.h. s =1
2.
2
Das Cauchy-Kriterium fur Reihen sieht nun so aus:
Satz 4.55
Sei∞∑k=1
ak eine Reihe. Dann sind aquivalent:
(a)∞∑k=1
ak ist konvergent.
(b) ∀ ε > 0∃N ∈ IN ∀m,n ≥ N,m ≥ n (|n∑
k=mak| < ε)
Beweis:Wende Satz 4.39 auf die Folge (sn)n∈IN der zugehorigen Partialsummen an.
Baumeister: Mathematik I / Stand: Februar 1997 105
Folgerung 4.56
Ist die Reihe∞∑k=1
ak konvergent, dann ist (an)n∈IN eine Nullfolge, d.h. limnan = 0 .
Beweis:Folgt unmittelbar aus (b) in Satz 4.55.
Die geometrische Reihe ist sehr wichtig als Bezugsreihe fur Konvergenzbeweise. Dies be-leuchtet das sogenannte Quotientenkriterium:
Satz 4.57
Fur die Reihe∞∑k=1
ak gelte.
(a) ∃N ∈ IN ∀n ≥ N (an 6= 0)
(b) ∃q ∈ (0, 1)∀n ≥ N (|an+1||an|−1 ≤ q)
Dann ist∞∑k=1
ak konvergent.
Beweis:O.E. N = 1. Dann ist |ak+1| ≤ q|ak|, k ∈ IN . Daraus folgt
|an+1| ≤ qn|a1|
und wir sehen, daß die Reihe∞∑k=1
|ak|
konvergiert, da die Reihe∞∑k=1
qk konvergiert. Dann konvergiert aber wegen
|n∑
k=m
ak| ≤n∑
k=m
|ak|
und Satz 4.52 auch∞∑n=1
ak.
Fur x ∈ IR betrachten wir∞∑k=0
1
k!xk
(Die Summation bei k = 0 zu beginnen ist kein Problem, da man durch Umbenennung
zu∞∑j=1
xj−1
(j − 1)!ubergehen kann.) Diese Reihe konvergiert nach dem Quotientenkriterium,
denn|x|k+1
(k + 1)!·k!
|x|k=|x|
k + 1
ist fur 2|x| ≤ k + 1 kleiner als 12.

Baumeister: Mathematik I / Stand: Februar 1997 106
Definition 4.58
Die Abbildung
IR 3 x 7−→∞∑k=0
1
k!xk ∈ IR
heißt Exponentialfunktion; wir schreiben
exp(x) := ex :=∞∑k=0
1
k!xk.
2
Folgerung 4.59
Es gilt fur alle x ∈ IR :
ex = limn
(1 +x
n)n
Beweis:
(1 +x
n)n =
n∑k=0
(n
k
)xk
nk
=n∑k=0
n(n− 1) · · · (n− (k − 1))
nkxk
k!
=n∑k=0
(1−1
n) · · · (1−
k − 1
n)xk
k!
Sei |x| ≤ r. Sei ε > 0. Es gilt n ∈ IN mit
∞∑k=N+1
rk
k!<ε
3
und dazu N1 ≥ N mit
N∑k=0
|(1−1
n) · · · (1−
k − 1
n)− 1)
xk
k!| <
ε
3
fur n ≥ N1. Daraus folgt fur n ≥ N1 :
|(1 +x
n)n −
∞∑k=0
xk
k!| ≤ |
N∑k=0
((1−1
n) · · · (1−
k − 1
n)− 1)
xk
k!|
+N∑k=0
(1−1
n) · · · (1−
k − 1
n)|x|k
k!+
∞∑k=N+1
|x|k
k!
<ε
3+ε
3+ε
3.

Baumeister: Mathematik I / Stand: Februar 1997 107
4.7 Gleitkommazahlen
Auf Rechenanlagen steht nur endlicher Speicherplatz fur die Darstellung von Zahlen zurVerfugung, also auch nur eine endliche Anzahl von Zahlen und fur jede Zahl hat man sichmit einem rationalen Naherungswert zu begnugen. Bei der Festkomma–Darstellungwird jede Zahl durch das Vorzeichen, s′ Ziffern vor dem Komma und t′ Ziffern nach demKomma ersetzt. Anstelle der reellen Zahlengeraden wird ein aquidistant geteiltes endlichesPunktraster verwendet. Fur wissenschaftlich–technische Rechnungen ist die Festkomma-Darstellung nicht sehr geeignet, da beispielsweise physikalische Konstanten uber viele10-er Potenzen streuen, z.B.:
m0 : Ruhemasse des Elektrons: 9.1110 10−28 g
L : Loschmidt–Zahl: 6.02 1023 Mol−1
h : Planksches Wirkungsquantum: 6.62 10−34 Watt sec2
c : Lichtgeschwindigkeit: 3.00 1010 cm sec−1
Passender fur diese Zwecke ist die Gleitkomma-Darstellung. Das System der Gleit-kommazahlen wird charakterisiert durch 4 Parameter (Maschinenkonstanten):
• Basis g
• Mantissenstellenzahl t
• Exponentengrenzen b, B ∈ ZZ (b < 0 < B);der Exponentenbereich ist damit [b, B] := z ∈ ZZ |b ≤ z ≤ B .
Jede Gleitkommazahl hat die Form
x = sign(x)0.a1 . . . at ge mit 0 ≤ ai < g, a1 6= 0, e ∈ [b, B] ,
mit dem Vorzeichen sign(x), der Mantisse 0.a1 . . . at und dem Exponenten e . (DieBedingung a1 6= 0 erzwingt eine Normierung). Sie kann so abgespeichert werden:
x = ± a1 · · · at e
(Beachte, daß die Speicherung von a1 = 1 bei g = 2 nicht notig ist.)
Beispiel 4.60
Sei t = 5, b = −5, B = 5, x = 27.5
1. g = 10 : x = +0.27500 102
2. g = 2 : x = +0.110111 25 Nicht darstellbar!
3. g = 16 : x = +0.1B800 162 (Im Hexadezimalsystem (g = 16) schreibt man fur die“Ziffern“ 10, 11, 12, 13, 14, 15 die Buchstaben A,B,C,D,E, F .)

Baumeister: Mathematik I / Stand: Februar 1997 108
2
Wir stellen fest, daß die Null unter den normalisierten Gleitkommazahlen nicht vorkommt.Wir fugen sie hinzu – die Darstellung ist rechnerspezifisch – und nennen diese Zahlen dannMaschinenzahlen. Also gibt es 2(g − 1)gt−1(B − b+ 1) + 1 Maschinenzahlen.
Beispiel 4.61
1. g = 2, t = 3, b = −1, B = 2. Es gibt 33 Maschinenzahlen.
2. g = 10, t = 10, B = −b = 99.Die kleinste positive Maschinenzahl verschieden von Null ist
m = +0.100000000010−99 ,
die großte positive Maschinenzahl ist
M = +0.99999999991099 .
”Nachbar“ von m : m′ = +0.1000000001 10−99
”Nachbar“ von M : M ′ = +0.9999999998 1099
Also: m−m′ = 10−109 ,M −M ′ = 1089
2
Das obige Beispiel zeigt uns, daß betragsmaßig kleine Gleitkommazahlen dichter liegenals als betragsmaßig große.
Nun hat man ein Verfahren anzugeben, das eine Zahl, die keine Maschinenzahl ist, durcheine Maschinenzahl approximiert. Von einer vernunftigen Approximation x von x, x Ma-schinenzahl, wird man verlangen wollen:
|x− x| ≤ |y − x| fur jede Maschinenzahl.
Offenbar ist Rundung ein geeignetes Verfahren, ein solches x zu konstruieren.Wir wissen, daß sich jedes x ∈ IR g–adisch so darstellen laßt:
x = sign(x)0.a1 . . . atat+1 . . . ge
mit 0 ≤ ai < g, e ∈ ZZ und a1 6= 0 . Dazu erklaren wir die Rundung rd(x) durch
rd(x) :=
sign(x)0.a1 . . . at ge , falls at+1 <
g2
sign(x)(0.a1 . . . at + g−t) ge , sonst
Beispiel 4.62
g = 10, t = 4, B = −b = 99

Baumeister: Mathematik I / Stand: Februar 1997 109
rd(0.31796 1045) = 0.3180 1045
rd(0.31794 10110) = 0.3179 10110
rd(0.0012345 10−99) = 0.1235 10−100
2
Die obigen Beispiele zeigen, daß Rundung nicht immer zu einer Maschinenzahl fuhrt (Ex-ponentenuberlauf, Exponentenunterlauf). Rechenanlagen geben bei Exponentenuberlaufeine Fehlermeldung und beenden die Rechnung. Bei Exponentenunterlauf ist die Vorge-hensweise nicht einheitlich, meist wird die Rechnung mit Null fortgesetzt.
Folgerung 4.63
Fur jedes x ∈ IR gilt:
(a) |x− rd(x)| ≤ 12g1−t|x| .
(b) rd(x) = x(1 + ε) mit |ε| ≤ 12g1−t.
Beweis:Sei x = sign(x)0.a1 . . . atat+1 . . . ge.
Zu (a):Es gilt |x− rd(x)| ≤ 1
2ge−t nach Konstruktion von rd(x).
|x− rd(x)||x|−1 ≤1
2ge−t
1
0.a1 · ge≤
1
2g1−t
Zu(b):
Setze ε :=|x− rd(x)||x|
fur x 6= 0, fur x = 0 ist nichts zu beweisen. .
Die Zahl eps := 12g1−t heißt Maschinengenauigkeit.
Wegen Rundung werden die arithmetischen Operationen +,−, ·, / nicht exakt ausgefuhrt.Dies hat zur Folge, daß die Ersatzoperationen
⊕,,,
definiert durch
x⊕ y := rd(x+ y) , x y := rd(x− y), x y := rd(xy) , x y := rd(x/y)
nicht den ublichen Rechenregeln genugen. Wir sehen dabei davon ab, daß Exponen-tenuberlauf und Exponentenunterlauf auftreten kann.
Beispiel 4.64
Sei g = 10, t = 4 .
0.1000 101⊕ 0.400 10−4 = rd(1.0004) = 1 = 0.1000 101
Baumeister: Mathematik I / Stand: Februar 1997 110
Aus x⊕ y = x folgt also nicht notwendigerweise y = 0.Sei g = 10, t = 8.Es seien
a = 0.233712.58 10−4 , b = 0.33678429 102 , c = −0.33677811 102 .
Es gilt:
A : = a⊕ (b⊕ c)
= a⊕ (0, 61800000 10−3
= rd(0.02337126 103 + 0.6180000 10−3)
= rd(0.64137126 10−3)
= 0, 64137126 10−3
B : = (a⊕ b)⊕ c
= (0.00000023 102 + 0.33678429 102)⊕ c
= rd(0.33678452 102− 0.33677811 102)
= 0.64100000 10−3
Exaktes Resultat: C := a+ b+ c = 0.641371258 10−3
Also : A = rd(C) , B 6= rd(C) .Genauigkeitsverlust bei C : 5 Dezimalen! 2
Aber es gilt:
Folgerung 4.65
Sei ⊗ eine der Operationen ⊕,,, und × ihre entsprechende Operation in+,−, ·, /. Dann gilt fur alle x, y ∈ IR :
x⊗ y = (x× y)(1 + ε) mit |ε| ≤ eps.
Beweis:Folgerung 4.63 mit Definition von ⊗.
Der Genauigkeitsverlust, wie wir ihn im Beispiel 4.64 kennengelernt haben, laßt sich gutverstehen: Es werden zwei Zahlen subtrahiert, die annahernd gleich sind.
Kapitel 5
ElementareWahrscheinlichkeitsrechnung
Stochastik ist die Mathematik des Zufalls. Die beiden Hauptgebiete der Stochastik sindWahrscheinlichkeitstheorie und Statistik. In der Wahrscheinlichkeitstheorie untersuchenwir zufallige Prozesse bei bekannten Wahrscheinlichkeiten fur die in Frage stehendenEreignisse, wahrend in der Statistik aus beobachteten Daten Schlusse uber unbekannteWahrscheinlichkeiten und zweckmaßiges Handeln gezogen werden. In diesem einfuhrendenKapitel uber die Wahrscheinlichkeitstheorie stellen wir die wichtigsten Begriffe bereit underlautern sie an Hand von interessanten Fragestellungen.
5.1 Versuch, Ereignis, Zufall
Zufall, Ungewißheit, Gluck, Pech – sind das nicht ziemlich diffuse Begriffe? Eher ausdem Bereich der Wahrsager als dem der Wissenschaftler?Eine wissenschaftliche Untersuchung des Zufalls ist moglich, und sie begann mit der Ana-lyse von Glucksspielen durch B. Pascal (1623 – 1662), P. Fermat (1601 – 1688), C. Huygens(1629 – 1695) und Jakob Bernoulli (1654 – 1705). Diese Analyse hat den Wahrscheinlich-keitskalkul hervorgebracht, der lange fur einen unbedeutenden Zweig der Mathematikgehalten wurde. Einen ersten Erfolg erzielte der Kalkul in der statistischen Mechanikdurch Untersuchungen von L. Boltzmann (1844 – 1906) und J.W. Gibbs (1839 – 1903):Die
”Menge von Zufall“, die in einem Liter Luft ist, wird durch den Begriff der Entropie
gemessen. Der nachste große Erfolg ist mit der Entwicklung der Quantentheorie verknupft.Heutzutage ist der Zufall in wissenschaftlichen Theorien fast uberall prasent:
Rauschen in der Signalubertragung, Ausbreitung von Epidemien, Entwicklungvon Borsenkursen, chaotisches Verhalten von nichtlinearen Systemen, Spiel-theorie, Wetterprognosen, . . . .
Wenn man von Wahrscheinlichkeiten spricht, so tut man dies immer im Zusammenhangmit irgendwelchen Ereignissen, deren gemeinsames Kennzeichen darin besteht, daß sie– unter gegebenen Umstanden – eintreten konnen, aber nicht eintreten mussen. SolcheEreignisse wollen wir zufallige Ereignisse nennen. Was Wahrscheinlichkeit ist, glaubtjeder zu wissen, es aber zu formulieren, fallt auch jedem schwer, erst recht schwer ist es, die
111

Baumeister: Mathematik II / Stand: Mai 1997 112
Wahrscheinlichkeit fur das Eintreten eines Ereignisses anzugeben oder auszurechnen. Einezentrale Tatsache der Wahrscheinlichkeitsrechnung ist, daß wir ein Experiment kennen,das uns diesen Zufall so klar vor Augen fuhrt: der Munzwurf. Bei einer großen Anzahl vonMunzwurfen wird die Anzahl von Kopf (der Zahl) etwa bei 50 % liegen. Auf diese Weiseergibt eine lange Reihe von Munzwurfen ein nahezu sicheres Ergebnis, obwohl der Aus-gang eines einzelnen Wurfes vollstandig ungewiß ist. Dieser Ubergang von Ungewißheitzu einer Fastgewißheit, wenn wir eine lange Reihe von Ereignissen (oder große Systeme)beobachten, ist ein wesentliches Thema beim Studium des Zufalls.Zufallige Ereignisse begegnen uns als Ergebnisse von Versuchen, wobei
”Versuch“ als
Realisierung einer Gesamtheit von wohldefinierten Bedingungen (Versuchsanordnungen)verstanden werden kann. Da wir unter
”Versuch“ so unterschiedliche Objekte wie medizi-
nische Untersuchung, physikalischer Versuch, Intelligenztest,”Gedankenspielerei“, Gluck-
spielrunde, . . . verstehen wollen, wollen wir bei dieser verbalen Beschreibung bleiben. StattVersuch sagen wir haufig auch Experiment und sehen darin oft eine reale Untersuchung,einen Test, eine Probe, ein Gedankenexperiment, eine Beobachtung. Wichtig ist nun, daßwir annehmen wollen, daß ein Versuch/Experiment – wenigstens gedanklich – bei gleich-bleibender Versuchsanordnung wiederholbar ist. Ist dann die Versuchsanordnung so, daßsie den Ausgang eines Versuchs nicht eindeutig festlegt, so sind bei Wiederholung des Ver-suchs unterschiedliche Ausgange moglich. Da wir die den Ausgang determinierenden Be-dingungen nicht kennen oder nicht nennen konnen, konnen wir nicht vorhersagen, welchesder Ausgang bei der nachsten Durchfuhrung des Versuchs sein wird. Wir nennen daher sol-che Versuche Zufallsexperimente oder zufallige Ereignisse, ihren Ausgang zufallig.
”Zufall“ dient also hier zur Beschreibung einer Situation, in der wir auf Grund fehlen-
der Information den Ausgang eines Versuchs nicht vorhersagen, nicht wissen konnen. DerBegriff der
”Wahrscheinlichkeit“, der noch einzufuhren ist, dient dazu, dieses Nichtwissen
bzw. Nichtwissenkonnen theoretisch in den Griff zu bekommen und zu quantifizieren.
”Der Titel dieses Essays ist eine Frage: Ist alles vorherbestimmt? Die Antwort
lautet ja. Doch sie konnte genausogut nein lauten, weil wir niemals wissenkonnen, was vorherbestimmt ist.“ (St. Hawking, Einsteins Traum, Rowohlt,1993).
Das”Ja“ soll heißen, wir sind in fast allen Fragestellungen, wofur wir ein mathematisches
Modell haben, in der Lage, Gleichungen hinzuschreiben, in denen komplizierte Phanomenekodifiziert sind und deren Losung uns Vorhersagen erlauben (Hirntatigkeit, Wetter, . . .).Aber wir sind meist nicht in der Lage, diese (vielen) Gleichungen zu losen oder in ihneneingearbeitete Anfangsbedingungen zu bestimmen.
Beispiel 5.1
Als Zufallsexperimente konnen wir betrachten:
Munzwurf Ausgange: Kopf oder Zahl.
Wurfelwurf Ausgange: Zahlen (Augen) 1, . . . , 6.Hier konnte eine Beschreibung der Versuchsanordnung so aussehen: DerWurfel ist ein regelmaßiger Korper mit 6 identischen und glatten Sei-tenflachen, beschriftet mit den Zahlen 1, 2, 3, 4, 5, 6. Ein Versuch bestehe
Baumeister: Mathematik II / Stand: Mai 1997 113
aus einem Wurf aus einer Hohe von 10 cm auf einen ebenen Tisch. DerVersuch ist beendet, sobald der Wurfel zur Ruhe gekommen ist. Seineobenliegende Flache legt mit der dort abzulesenden Zahl das Versuchser-gebnis fest.
Urnenexperiment Ziehen von numerierten Kugeln aus einer Urne. Ausgan-ge: Nummern der gezogenen Kugeln.
Kartenspiele Ausgange: Spielpunkte.
Kegeln Ausgange: Anzahl der gefallenen Kegel.
Telefonstatistik Erfassung der Anzahl der Anrufe bei der Telefonvermitt-lung von 12.00 – 12.59 Uhr. Ausgange: Zahlen 0, 1, 2, . . . .
Die drei Experimente Munzwurf, Wurfelwurf, Urnenexperiment werden uns haufig alsBeispiel fur ein Zufallsexperiment dienen. Damit konnen wir reale Situationen erfassenund wesentliche Merkmale von zufalligen Ereignissen verdeutlichen.
Die Festlegung der Versuchsanordnung zum Wurfelwurf ist sicher noch verbesserungswur-dig (Beschaffenheit des Wurfels und der Tischflache, Ausfuhrung der Wurfbewegung). DasWurfergebnis wird aber sicher immer von Umstanden abhangen, die von Wurf zu Wurfnicht ausreichend kontrollierbar sind: Handhaltung beim Wurf, Impuls des Wurfels beimLoslassen, Puls und Atembewegung, . . . . Daher sind die verschiedenen Wurfergebnisse alszufallige Ereignisse zu betrachten: Alle sechs Ereignisse sind moglich, keines kann voraus-gesagt werden. Die Determiniertheit des Ergebnisses, die im Prinzip in der Mechanik derKorper angelegt ist, ist aufgehoben, da die mechanischen Daten nicht ausreichend kon-trollierbar, einstellbar sind. (Dies ist auch der Grund, warum uns selbst bei einem sehreinfachem dynamischem System die Dynamik oft zufallig erscheint; der Begriff Chaos solldas erfassen.)
Zu jedem Zufallsexperiment V gehort eine Menge Ω moglicher Ergebnisse/Ausgange: einω ∈ Ω wird als Ergebnis spezifiziert. Diese Ergebnisse ω ∈ Ω nennt man die zu V
gehorenden Elementarereignisse. (In vielen Fallen ist Ω eine Menge in einem Zahl-bereich IN ,ZZ , IR.) Neben diesen Elementarereignissen interessieren wir uns oft auch furweitere zusammengesetzte Ereignisse, dies sind bestimmte Teilmengen von Ω. Wirsprechen von einem Ereignis A ⊂ Ω und sagen, daß das Ereignis bei einem Versuch ein-getreten ist, wenn der Versuch ein Ergebnis ω ∈ Ω spezifiziert mit ω ∈ A, anderenfallssagen wir, daß A nicht eingetreten ist.
Beispiel 5.2
Betrachte den Munzwurf.Ω = K,Z . Elementarereignisse: ω = K(opf), ω = Z(ahl).Zusammengesetzte Ereignisse: A = ∅, A = Ω ; A = ∅ tritt nie ein, A = Ω tritt sicher ein.
2
Baumeister: Mathematik II / Stand: Mai 1997 114
Beispiel 5.3
Betrachte den Wurfelwurf. Ω = 1, . . . , 6 .Zusammengesetzte Ereignisse:A = 2, 4, 6 : Wurfeln einer geraden Zahl.A = 1, 2, 3 : Wurfeln einer Zahl kleiner als 4.Betrachte den Wurfelwurf mit zwei Wurfeln. Ω = (i, j) ∈ IN × IN |1 ≤ i, j ≤ 6.Das Elementarereignis
ω = (6, 6)
bedeutet das Wurfeln einer Doppelsechs,
A := (6, 6), (6, 5), (5, 6)(6, 4), (4, 6), (5, 5)
ist das Ereignis, das eintritt, falls die Augensume mindestens 10 betragt. 2
Mit der nun ausformulierten Betrachtungsweise von Versuch/Zufallsexperiment V ,Ereignismenge Ω und Ereignisraum POT (Ω) fur die zusammengesetzten Ereignis-se haben wir nun die mengentheoretische Schreibweise zur Verfugung. Sie hat folgendeInterpretation:
A ∩B : Ereignis, daß A und B eintreten;
A ∪B : Ereignis, daß A oder B eintritt;
Ω\A : Ereignis A tritt nicht ein;
A ⊂ B : Ereignis B tritt immer dann ein, wenn A eintritt.
Das Elementarereignis ω ∈ Ω ordnet sich als zusammengesetztes Ereignis A := ω ein;wir unterscheiden nicht.
5.2 Laplace–Wahrscheinlichkeit
Nun sind wir soweit, das Nichtwissenkonnen des Ausgangs eines Zufallsexperiments zuquantifizieren: Jedem Ereignis soll eine Zahl aus [0, 1] zugeordnet werden, die uns ge-stattet, die Unsicherheit uber den Ausgang zu quantifizieren; 1 sollte fur Sicherheit, 0fur vollstandige Unsicherheit stehen. Wir tun dies nun zunachst in einer einfachen Si-tuation, namlich in einer Situation, in der alle Elementarereignisse, was die Unsicherheituber ihr Eintreten betrifft, gleichberechtigt sind. Dazu fuhren wir die Begriffe Laplace–Experiment und Laplace–Wahrscheinlichkeit ein. (P.S. de Laplace (1749 – 1827) fuhrteinfinitesimale Methoden in die Wahrscheinlichkeitsrechnug ein.) Der Begriff der Laplace–Wahrscheinlichkeit hat den Vorteil, daß ihm die Vorstellung eines konstruktiven Vorge-hens zugrunde liegt, namlich die Vorstellung von der
”rein zufalligen Wahl“. Wir stellen
uns hierunter vor, daß es gelingt, aus einer endlichen Menge von ElementarereignissenΩ ein Element so auszuwahlen, daß jedes Element diesselbe Chance hat, ausgewahlt zuwerden. Einen Mechanismus, der eine solche Zufallswahl bewerkstelligt, nennen wir einenLaplace–Mechanismus. Ein beliebtes Bild von einem Laplace–Mechanismus ist das Ur-nenmodell, eine weitere Vorstellung von einem Laplace–Mechanismus ist der Wurfelwurf.

Baumeister: Mathematik II / Stand: Mai 1997 115
Definition 5.4
Sei Ω endliche Menge. Fur jede Teilmenge A von Ω ist die Laplace–Wahrschein-lichkeit definiert durch
P (A) :=#A
#Ω.
Man nennt P (A) die Wahrscheinlichkeit, daß ein (rein zufallig ausgewahltes) Ele-ment ω ∈ Ω in A liegt.Die Abbildung
P : POT (Ω) 3 A 7−→ P (A) ∈ IR
heißt Laplace–Wahrscheinlichkeit. 2
Beispiel 5.5
Den Munzwurf betrachten wir als Laplace–Mechanismus. Hier ist
Ω = K,Z ; P (K) = P (Z) =1
2.
Beim Wurfelexperiment, betrachtet als Laplace–Mechanismus, haben wir
Ω = 1, . . . , 6 ; P (i) =1
6, 1 ≤ i ≤ 6.
Fur das”zusammengesetzte“ Ereignis A := 1, 2, 3 haben wir P (A) = 1
2 .Das Wurfeln mit zwei Wurfeln kann ebenfalls als Laplace–Experiment betrachtet werden.Wir haben
Ω = (i, j) ∈ IN × IN |1 ≤ i, j ≤ 6 ; P ((i, j)) =1
36, 1 ≤ i, j ≤ 6 .
Daraus errechnet sich:
P (A) =6
36=
1
6fur A := (i, j) ∈ Ω|i+ j ≥ 10,
P (A) =15
36=
5
12fur A := (i, j) ∈ Ω|i > j.
Fur das zusammengesetzte Ereignis
A := (i, j) ∈ IN × IN |i = 1 oder (i ≥ 4 und j = 1) oder (i ≥ 4 und j ≥ 4)
ist die Laplace–Wahrscheinlichkeit schon etwas muhsam auszurechnen. Sie ist 1336 . 2
Es ist nun offensichtlich, daß bei der Berechnung von Laplace–Wahrscheinlichkeiten dasEinmaleins der Kombinatorik außerst hilfreich ist.
Bemerkung 5.6

Baumeister: Mathematik II / Stand: Mai 1997 116
Beachte, daß ein Laplace–Experiment ein Modell fur eine konkrete reale Situation ist.Unsere Definition der Laplace–Wahrscheinlichkeit ist innerhalb dieses Modells gegebenund nicht fur die reale Situation. Der Ubergang von der Wirklichkeit zum Modell ist inden hier exemplarisch betrachteten Fallen meist naheliegend, in allgemeineren Situationen(”Wie wahrscheinlich ist ein Supergau in einem russischen Kernkraftwerk“) ist dieser
sicher sehr viel schwieriger zu vollziehen. 2
Legen wir nun einige Rechenregeln bereit.
Folgerung 5.7
Sei Ω eine endliche Menge. Fur die Laplace–Wahrscheinlichkeit
P : POT (Ω) 3 A 7−→#A
#Ω∈ IR
gilt:
(a) P (A) ∈ [0, 1] ∩ ′Q fur alle A ⊂ Ω.
(b) P (x) = 1#Ω fur alle x ∈ Ω.
(c) P (A ∪B) = P (A) + P (B)− P (A ∩B) fur alle A,B ∈ POT (Ω).
(d) P (Ω\A) = 1− P (A) fur alle A ⊂ Ω.
(e) P (∅) = 0.
Beweis:(a) und (b) sind trivial. Die Aussage (c) folgt aus der Formel (R2) aus Abschnitt 2.2 .Damit sind nun auch (d) und (e) klar.
5.3 Einige Beispiele
Betrachten wir ein Wurfelexperiment und nennen wir es das Augensummenparadoxon.G.W. Leibniz (1646 – 1716) hat sich bei der Analyse dieses Experimentes einen kleinenSchnitzer erlaubt:
”Es sei ihm unbegreiflich, wie ihm erfahrene Wurfelspieler versicherten,
warum bei zwei Wurfeln die Augensumme 9 wahrscheinlicher sei als die Augensumme 10,aber bei drei Wurfeln die Augensumme 10 wahrscheinlicher als die Augensumme 9. Dennschließlich konne die Summe 9 wie die Summe 10 in beiden Fallen auf gleich viele Artenanfallen, also mußten die Augensummen in beiden Fallen gleich wahrscheinlich sein.“ .Wir betrachten das Wurfeln mit zwei Wurfeln als Laplace–Experiment, haben
Ω = (i, j) ∈ IN × IN |1 ≤ i, j ≤ 6,
und interessieren uns also fur die Laplace–Wahrscheinlichkeiten der Ereignisse
A9 := (i, j) ∈ Ω|i+ j = 9,
A10 := (i, j) ∈ Ω|i+ j = 10.

Baumeister: Mathematik II / Stand: Mai 1997 117
Wir haben dazu A9, A10 abzuzahlen. Es gilt
A9 = (3, 6), (6, 3), (4, 5), (5, 4),
A10 = (4, 6), (6, 4), (5, 5).
und daher
P (A9) =4
36=
1
9, P (A10) =
3
36=
1
12
Bei drei Wurfeln zeigt eine einfache Aufzahlung (bei entsprechender Bezeichnung)
P (A9) =19
216, P (A10) =
24
216.
Leibniz hat ubersehen, daß die Reihenfolge der Summanden hier wichtig ist. Der Fehler,der hier Leibniz unterlaufen ist, ist Basis fur einen Jahrmarkttrick, der nach J. Bertrand(1822 – 1900) Bertrandsches Schachtelparadoxon genannt wird:
Drei nicht unterscheidbare Schachteln enthalten zwei Goldmunzen (1. Schach-tel), zwei Silbermunzen (2. Schachtel) und eine je eine Gold- und eine Silber-munze (3. Schachtel). Jetzt entnimmt man einer Schachtel eine Munze. DerVeranstalter des Spiels bietet nun eine Wette an: Die zweite Munze in derSchachtel ist aus demselben Metall!
Man ist versucht, zu vermuten, daß die Wette fair ist, da man geneigt ist zu vermuten,daß die Beschaffenheit der zweiten Munze gleichwahrscheinlich ist. Dies ist nicht der Fall.Analysieren wir die Situation, daß G(old) gezogen wurde. Wir vermuten richtig, daß nichtaus der Schachtel mit den zwei Silbermunzen gezogen wurde und schließen daraus irrig,daß mit Wahrscheinlichkeit 1
2beide Munzen in der Schachtel, aus der gezogen wurde,
aus Gold sind. In Wahrheit sind mit einer Wahrscheinlichkeit von 23
beide Munzen ausGold, weil in zwei von 3 Fallen die beiden Munzen in der Schachtel aus Gold sind; spaterkommen wir darauf zuruck..
Betrachten wir nun das Geburtstags–Pardoxon. Fur eine Gruppe von n Personen istdie
”Wahrscheinlichkeit“ zu ermitteln, daß mindestens ein Paar unter diesen Personen
existiert, das am gleichen Jahrestag Geburtstag hat.Annahmen:
• Das Jahr wird mit 365 Tagen angesetzt, wir sehen also vom Auftreten von Schalt-jahren ab.
• Geburtstage sind uber die Jahrestage gleichverteilt.
Damit liegt ein Laplace–Experiment vor und jede Person hat mit 1365
Wahrscheinlichkeitan einem bestimmten Jahrestag Geburtstag.Wir setzen
Ω := (ω1, . . . , ωn) ∈ IN n |1 ≤ ωi ≤ 365, 1 ≤ i ≤ n.
Das zu betrachtende Ereignis ist
A := ω1, . . . , ωn) ∈ Ω|ωi = ωj fur mindestens ein Paar (i, j), i 6= j

Baumeister: Mathematik II / Stand: Mai 1997 118
und die gesuchte Wahrscheinlichkeit ist
P ∗n := P (A) :=#A
365n
Betrachten wir zunachst einige Spezialfalle.
n ≥ 365 P ∗n = 1 .n = 2 Die erste Person hat freie Auswahl, fur die zweite Person ist die
Wahrscheinlichkeit, am gleichen Tag wie die erste Person Geburts-tag zu haben, 1
365. Also
P ∗n =1
365
n = 3 Die erste Person hat freie Auswahl, die zweite Person hat einen ver-schiedenen Geburtstag mit Wahrscheinlichkeit 364
365, die dritte Person
wiederum einen von den beiden Tagen verschiedenen Geburtstagmit Wahrscheinlichkeit 363
365. Also gilt
P ∗n = 1−365
365·
364
365·
363
365≈ 0, 009
Am Beispiel n = 3 haben wir das gunstige Vorgehen gesehen: Statt P ∗ haben wir zunachstdie Wahrscheinlichkeit ausgerechnet, daß das Ereignis nicht eintritt. Allgemein erhaltenwir
P ∗n = 1−365!
(365− n)!365n
Damit erhalt man die Tabelle
n 20 22 23 30 40 50
P ∗n 0,411 0,476 0,507 0,706 0,891 0,970
Wir sehen also, daß bei einer Gruppengroßen von 23 Personen die Wahrscheinlichkeit, daßdarunter ein Paar mit gleichem Geburtstag ist, bereits großer als 1
2ist.
Die Annahme uber das Schaltjahr beeinflußt die obigen Ergebnisse nur unwesentlich, et-wa bleibt es bei der Aussage bezuglich der Gruppengroße n = 23. Die Annahme uber dieGleichverteilung der Geburtstage ist auch kein Einwand zur Qualitat der obigen Ergeb-nisse, denn die Wahrscheinlichkeiten werden eher großer; man mache sich dies etwa daranklar, daß alle Personen an einem bestimmten Tag Geburtstag haben.
Die Uberraschung mit dem Ergebnis ist: Ein Ereignis, dessen Eintreten fur uns als Indi-viduum hochst unwahrscheinlich ist, ist fur eine Gruppe bei weitem nicht mehr unwahr-scheinlich.
Betrachten wir das Ziehen eines Glucksloses und nennen wir den Vorgang Glucksspirale.Es soll ein Gluckslos gezogen werden. Jedes Los ist ein 7–stelliges Wort aus dem Alphabet

Baumeister: Mathematik II / Stand: Mai 1997 119
0, 1, . . . , 9. Es gibt 107 Worte. Ein faires Ziehverfahren muß so gestaltet werden, daßalle Worte gleichberechtigt gezogen werden. Dies laßt sich bewerkstelligen durch
• 1 Urne mit Kugeln 0, . . . , 9/ 7–maliges Ziehen mit Zurucklegen (und Mischen) undNotieren der Reihenfolge.
• 7 Urnen mit Kugeln 0, . . . , 9/ Ziehen einer Kugel aus jeder Urne und Notieren derReihenfolge.
Bei der ersten Ausspielung der Glucksspirale 1971 (Olympialotterie) wurde folgendes Ver-fahren realisiert:
• 1 Urne, gefullt mit den Kugeln 0, 1, . . . , 9 in siebenfacher Ausfertigung / 7–maligesZiehen ohne Zurucklegen.
Dieses Verfahren war nicht fair, denn nicht jedes Wort wird mit der Wahrscheinlichkeit 107
gezogen. Dies sieht man so: O.E. konnen wir annehmen, daß die Kugeln durchnumeriertsind und die Nummern 1 bis 70 tragen. Daraus werden unter Beachtung der Reihenfolge7 Kugeln auf
70 · 69 · 68 · 67 · 66 · 65 · 64
verschiedene Arten ausgewahlt werden. Da nur jeweils 7 Kugeln mit identischen Ziffernvorhanden sind, kann eine bestimmte Zahl mit lauter identischen Ziffern auf
7 · 6 · · · 1 = 7!
Weisen ausgewahlt werden. Daraus folgt fur die Wahrscheinlichkeit, etwa die Losnummer1111111 zu ziehen, die Zahl
7 · 6 · · · 1
70 · 69 · · · 64≈ 0, 85 · 109
Eine Losnummer, die aus lauter verschiedenen Ziffern besteht, kann auf 77 Moglichkeitenausgewahlt werden. Also ist die Wahrscheinlichkeit, etwa die Zahl 1234567 zu ziehen,gegeben durch
77
70 · 69 · · · 64≈ 0, 14 · 106.
Also ist die Losummer 1234567 etwa 160–mal wahrscheinlicher als das Los mit der Num-mer 1111111.
Als nachstes betrachten wir das Hutproblem. An einer Garderobe gibt eine Gruppevon n Personen ihre Hute ab, jede Person genau einen. Durch einen Umstand werdendie Hute in einen Behalter gelegt und dabei grundlich gemischt. Jede Person der Gruppeerhalt daraus einen Hut. Mit welcher Wahrscheinlichkeit P ∗n erhalt mindestens eine Personihren Hut?Versehen wir die Hute mit den Nummern 1, . . . , n. Als Menge der elementaren Ereignisseist dann
Ω := ω|ω : 1, . . . , n −→ 1, . . . , n Permutation
zu betrachten. Es ist #Ω = n! .

Baumeister: Mathematik II / Stand: Mai 1997 120
Da grundlich gemischt wurde, liegt ein Laplace–Experiment vor. Betrachten wir zunachstkleine Gruppengroßen:
n = 1 Hier ist alles klar: P ∗n = 1.n = 2 Es gibt zwei Zuteilungen und nur eine fuhrt zum Ergebnis, daß eine
Person ihren Hut erhalt; also P ∗2 = 12.
n = 3 Wir haben hier #Ω = 6. Wir notieren die Ausgange verschiedenerZuteilungen
(1, 2, 3), (1, 3, 2), (2, 1, 3), (3, 2, 1), (3, 1, 2), (2, 3, 1).
und stellen fest, daß die vier ersten Zuteilungen zu einer Verteilungfuhren, in der mindestens eine Person ihren Hut erhalt. Also P ∗3 =46
= 23.
Mit wachsender Gruppengroße wird die obige Uberlegung unubersichtlich. Zahlen wir denallgemeinen Fall etwas anders ab.Es ist offenbar auf (n− 1)! verschiedene Arten moglich, daß die erste Person der Gruppeihren Hut zuruckerhalt, es gibt namlich (n− 1)! Moglichkeiten, die Hute 2, . . . , n auf dieTeilnehmer 2, . . . , n zu verteilen. Genauso ist es auf (n−1)! verschiedene Weisen moglich,daß der 2. Teilnehmer seinen Hut erhalt, ebenso fur die Teilnehmer 3, . . . , n. Also habenwir insgesamt n · (n − 1)! = n! =
(n1
)(n − 1)! Moglichkeiten fur zulassige Zuteilungen.
Hier sind aber offenbar einige zulassige Zuteilungen (“Treffer“) vielfach gezahlt worden,was uns auch schon die Tatsache lehrt, daß es ja insgesamt nur n! Zuteilungen gibt.Wir haben also nun die Doppeltreffer abzuziehen. Davon gibt es
(n2
)(n − 2)!; sie sind
dann von n! abzuziehen. Nun haben wir aber zuviele Zuteilungen abgezogen, namlich dieZuteilungen mit drei und mehr Treffern. Davon gibt es
(n3
)(n− 3)!; wir haben sie wieder
hinzuzufugen. Nun haben wir die Zuteilungen mit mehr als 4 Treffern wieder abzuziehen;u.s.w. Insgesamt erhalt man fur die Treffer die Formel
n!−
(n
2
)(n− 2)! +
(n
3
)(n− 3)!− · · · − (−1)n
(n
n
)1! =
n∑j=1
(−1)j+1
(n
j
)(n− j)!
Fur die gesuchte Wahrscheinlichkeit folgt
P ∗n =1
n!
n∑j=1
(−1)j+1
(n
j
)(n− j)! =
n∑j=1
(−1)j+1 1
j!
oder
P ∗n = 1−n∑j=0
(−1)j1
j!
Fur n = 2, 3 ergeben sich die bereits bekannten Werte.Die Folge (P ∗n)n∈IN ist nicht monoton. Aus Kapitel 4 wissen wir, daß die Reihe
∞∑j=0
(−1)j1
j!
konvergiert und zwar gegen die Zahl e−1. Also gilt
Baumeister: Mathematik II / Stand: Mai 1997 121
P ∗ := limnP ∗n = 1− e−1 ≈ 0.6321
Es ist einigermaßen uberraschend, daß fur große n keine wesentliche Abhangigkeit mehrvon n gegeben ist.
Bemerkung 5.8
In obigem Beispiel haben wir geklart, mit welcher Wahrscheinlichkeit eine zufallig ausder Menge der Permutation ausgewahlte Permutation ω einen Fixpunkt hat, d.h. einenPunkt i mit ω(i) = i. 2
Das Hutproblem ist auch als Recontre-Problem bekannt und geht zuruck auf P.R.Montmert (1708).
Mit dem folgenden Beispiel Spielabbruch wollen wir auf den nachsten Abschnitt hin-fuhren.Zwei Spieler A und B spielen eine Folge von Spielen, wobei jeder Spieler jedes Spiel mitWahrscheinlichkeit 1
2gewinnt, unabhangig von den vorhergehenden Spielen. Beide brin-
gen den gleichen Einsatz und vereinbaren, daß derjenige den Gesamteinsatz erhalt, derals erster insgesamt 10 Spiele gewonnen hat. Nach 15 Spielen haben A 8 Spiele und B 7Spiele gewonnen. Durch einen unvorhergesehenen Zwischenfall sehen sich die beiden Spie-ler gezwungen, ihre Spielfolge nun abzubrechen. Wie ist der Gesamteinsatz aufzuteilen?Hier sind zwei Vorschlage :
• A wird zum Sieger erklart und erhalt den gesamten Einsatz.
• Der Gesamteinsatz ist entsprechend der Wahrscheinlichkeit aufzuteilen, mit der einWeiterspielen fur die Spieler zum Erfolg fuhren wurde.
Der 1. Vorschlag wird verworfen, der zweite ist zu analysieren.1. Analyse: Spielen wir fiktiv 4 weitere Spiele. Wir erhalten dann die folgenden Ausgange(A steht fur Sieg fur A, B steht fur Sieg fur B):
AAAA ABBBAAAB BABBAABA BBABABAA BBBABAAA BBBBAABBABABABBABAABBABABBAA
Wir stellen fest, daß innerhalb dieser 4 Spiele die Entscheidung fallt: A gewinnt in 11Fallen (1. Spalte), B gewinnt in 5 Fallen (2. Spalte).Da die obigen Ausgange gleichverteilt die Wahrscheinlichkeit 1
16haben, steht A 11
16und B
Baumeister: Mathematik II / Stand: Mai 1997 122
516
des Gesamteinsatzes zu.2. Analyse: In Realitat kommen die obigen Spiele gar nicht zustande, sondern nur dieSpiele mit folgenden Ausgangen:
AA ABBBABA BBBABBA BABBBAA BBABBBAABABA
Hier gewinnt A in 6 Fallen (1. Spalte) und B in 4 Fallen (2. Spalte). Die Aufteilung610
fur A und 410
fur B vom Gesamteinsatz ware aber nicht gerecht, denn die obigenSpielausgange konnen nicht als gleichwahrscheinlich angesehen werden, da ja der AusgangAA mit Wahrscheinlichkeit 1
2· 1
2und der Ausgang BBAB mit Wahrscheinlichkeit 1
2· 1
2· 1
2· 1
2
zustandekommt. Die Ereignisse sind nicht”gleichwahrscheinlich“ und wir sprengen den
Rahmen der Laplace–Wahrscheinlichkeit. Dies fuhrt uns zu einer Verallgemeinerung derLaplace–Wahrscheinlichkeit.
5.4 Wahrscheinlichkeit: Der endliche Fall
In einer realen Situation verbindet man mit”Wahrscheinlichkeit“ eines Ereignisses die
Haufigkeit, mit der es bei wiederholter Ausfuhrung des Experiments eintreten wird.Betrachten wir ein Zufallsexperiment V mit Elementarereignissen Ω,#Ω <∞. Wir inter-essieren uns dafur, wie wahrscheinlich das Eintreten des Ereignisses A ∈ POT (Ω) ist. Wirwiederholen dazu den Versuch, n−mal (unabhangig voneinander) und zahlen, wie oft dasEreignis A in diesen n Versuchen eingetreten ist. Ist das Ereignis A in diesen n Versuchenm−mal eingetreten, so setzen wir
kn(A) := m ,hn(A) :=m
n
und nennen kn(A) absolute Haufigkeit und hn(A) relative Haufigkeit des EreignissesA in n Versuchen. Es sind folgende Eigenschaften zu beobachten:
1. 0 ≤ hn(A) ≤ 1 fur alle n ∈ IN ;
2. hn(Ω) = 1, hn(∅) = 0 fur alle n ∈ IN ;
3. hn(A ∪B) = hn(a) + hn(B)− hn(A ∩B) fur alle n ∈ IN ;
4. hn(A) ≤ hn(B) fur alle n ∈ IN , falls A ⊂ B .
Wir fuhren den Beweis nur zu 4.Sei A p–mal, B q–mal und A ∩ B r–mal in n Versuchen eingetreten. Dann ist A ∪ B(p + q − r)–mal eingetreten. Also
hn(A ∪ B) =p+ q − r
n=p
n+q
n−r
n= hn(A) + hn(B)− hn(A ∩B)
Baumeister: Mathematik II / Stand: Mai 1997 123
Man ist nun geneigt, die Wahrscheinlichkeit eines Ereignisses A ∈ POT (Ω) durch
P (A) := limnhn(A)
einfuhren zu wollen. Doch hier treten einige grundsatzliche Probleme auf:
• Existiert der Grenzwert fur jedes A ∈ POT (A)?(Im allgemeinen ist dies nicht der Fall!)
• Die eingefuhrte Zahl limnhn(A) hangt von der konkreten Versuchsreihe ab!
• Es sind unendlich viele Versuche durchzufuhren!
Die erste Problematik konnten wir eventuell umgehen durch die Auswahl von Situatio-nen, in denen der Grenzwert existiert. Die dritte Problematik ware nicht mehr so ernstzu nehmen – endlich viele Wiederholungen konnten als gute Approximation angesehenwerden – , wenn die zweite Eigenschaft nicht gegeben ware.
Das Konzept”relative Haufigkeit“ ist trotz dieser grundsatzlichen Problematik nicht
ganzlich zu verwerfen. Einerseits gibt es uns einen Hinweis, wie wir aus den Eigenschaf-ten 1., 2., 3., 4. einen abstrakten Wahrscheinlichkeitsbegriff ableiten sollten, andererseitswerden wir sehen, daß, nachdem wir einen Wahrscheinlichkeitsbegriff abstrakt eingefuhrthaben, relative Haufigkeiten einen geeigneten Sinn erhalten (Gesetz der großen Zahlen;praktisch brauchbare Maßzahl fur die
”ideale“ Maßzahl einer Wahrscheinlichkeit.)
Nun zur axiomatischen Begrundung einer Wahrscheinlichkeit im endlichen Fall.
Definition 5.9
Sei Ω eine endliche Menge mit Ereignisraum POT (Ω). Eine Abbildung
P : POT (Ω) −→ IR
heißt Wahrscheinlichkeitsverteilung oder Wahrscheinlichkeitsmaß, wenn fol-gende Bedingungen erfullt sind:
(a) P (Ω) = 1 ;
(b) P (A) ≥ 0 fur alle A ∈ POT (Ω) ;
(c) P (A ∪B) = P (A) + P (B) fur alle A,B ∈ POT (Ω) mit A ∩ B = ∅.
(Ω, POT (Ω), P ) heißt dann ein endlicher Wahrscheinlichkeitsraum. 2
Die Forderung (c) in Definition 5.9 wird Additivitat genannt.
In einer realen Situation, in der wir mit Wahrscheinlichkeiten argumentieren wollen, habenwir ein Modell von der Bauart (Ω, P ) zu finden. Die Wahl Ω ist meist unproblematisch, die
”richtige“ Wahl von P ist aber meist unklar und gar nicht so einfach zu treffen. Damit

Baumeister: Mathematik II / Stand: Mai 1997 124
korrespondiert die schwierige Frage, was Wahrscheinlichkeiten in der realen Situationsind, hier haben wir sie nur fur ein Modell der realen Situation definiert. Glucklicherweisekennen wir schon eine Problemklasse, bei der die Definition 5.9 greift.
Folgerung 5.10
Sei V ein Laplace–Experiment mit Elementarereignissen Ω := ω1, . . . , ωn. Dannwird mit
P : POT (Ω) 3 A 7−→#A
#Ω∈ IR
ein endlicher Wahrscheinlichkeitsraum (Ω, POT (Ω), P ) definiert.
Beweis:Klar : P (Ω) = 1, P (A) ≥ 0 fur alle A ∈ POT (Ω).Die Abzahlformel
#(A ∪B) = #A+ #B −#(A ∩B)
(siehe Regel (R2) aus Abschnitt 2.2) belegt die Gultigkeit der dritten Forderung in 5.9.
Fuhren wir noch einige Rechenregeln an. Sei (Ω, P ) ein endlicher Wahrscheinlichkeits-raum. Seien A,B ∈ POT (Ω), A1, . . . , Ak ∈ POT (Ω). Es gilt:
(R1) P (Ω\A) = 1− P (A) .
(R2) P (∅) = 0 .
(R3) A ⊂ B =⇒ P (A) ≤ P (B) .
(R4) P (B ∩ (Ω\A)) = P (B)− P (A ∩B) .
(R5) P (l⋃i=1
Ai) =l∑i=1
P (Ai), falls Ai ∩Aj = ∅ fur i 6= j .
(R6) P (A ∪B) = P (A) + P (B)− P (A ∩ B) .
(R7) P (A) =∑ω∈A
P (ω) .
Die Regel (R1) folgt aus der Additivitat von P mit Ω = A ∪ (Ω\A), da A ∩ (Ω\A) = ∅.(R2) ist eine Konsequenz aus (R1). (R4) folgt aus der Additivitat von P mit B = B ∩(Ω\A) ∪ (A ∩B). (R3) folgt aus (R4). (R5) und (R6) sind nun trivial.
Beispiel 5.11Betrachte ein Glucksrad, das in n Sektoren eingeteilt ist. Nimmt der i−te Sektor diepi−fache Flache des Vollkreises ein, so ist die Wahrscheinlichkeit, daß das Rad beim
”zufalligen“ Drehen im i−ten Sektor stoppt, gleich pi anzusetzen. Es liegt daher nahe,
das Experiment mit dem Wahrscheinlichkeitsraum
Ω = 1, . . . , n , P : POT (Ω) −→ IR, i 7−→ pi
zu beschreiben. 2
Baumeister: Mathematik II / Stand: Mai 1997 125
Bemerkung 5.12
In Beispiel 7.17 haben wir ein Wahrscheinlichkeitsmaß P dadurch definiert, daß wir nicht–negative Werte p1, . . . , pn auf den Elementarereignissesn w1, . . . , wn vorgegeben haben mitn∑i=1
pi = 1. Man sieht sofort, daß diese Definition mit Definition 5.9 aquivalent ist. In der
allgemeineren Situation, daß Ω nicht endlich ist, die wir spater betrachten werden, ist hierein Problem. 2
Es ist manchmal schwierig, die Wahrscheinlichkeit P (A) eines zusammengesetzten Er-eignisses A zu ermitteln, wenn P uber die Elementarereignisse definiert ist. Nicht seltenist P (Ω\A) einfacher zu berechnen. Im allgemeinen sind auch Wahrscheinlichkeiten vonDurchschnitten leichter zu ermitteln als Wahrscheinlichkeiten von Vereinigungen. Dazubeweisen wir nun die Siebformel von Poincare–Sylvester:
Satz 5.13
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum und seien A1, . . . , An ⊂Ω. Fur jedes k = 1, . . . , n sei
Pk :=∑
1≤i1<···<ik≤n
P (Ai1 ∩ · · · ∩Aik).
Dann ist
P (A1 ∪ · · · ∪ An) =n∑k=1
(−1)k−1Pk.
Beweis:Vollstandige Induktion uber n.n = 1 : Klar.n = 2 : P (A1 ∪A2) = P (A1) + P (A2)− P (A1 ∩ A2) = P1 − P2.n+ 1 : Wir wissen
P (A1∪· · ·∪An∪An+1) = P (A1∪· · ·∪An)+P (An+1)−P ((A1∩An+1)∪· · ·∪(An∩An+1)).
Mit der Induktionsvoraussetzung folgt
P (A1 ∪ · · · ∪An) =n∑k=1
(−1)k−1∑
1≤i1<···<ik≤n
P (Ai1 ∩ · · · ∩ Aik),
P ((A1 ∩An+1)∪ · · · ∪ (An ∩An+1)) =n∑
m=1
(−1)m−1∑
1≤j1<···<jm≤n
P (Aj1 ∩ · · · ∩Ajm ∩An+1)
Einsetzen dieser Identitaten und Umordnung ergibt das Resultat.

Baumeister: Mathematik II / Stand: Mai 1997 126
Folgerung 5.14Seien A1, . . . , An endliche Mengen. Fur jedes k = 1, . . . , n sei
Nk :=∑
1≤i1<···<ik≤n
#(Ai1 ∩ · · · ∩Aik) .
Dann ist
#(A1 ∪ · · · ∪An) =n∑k=1
(−1)k−1Nk .
Beweis:Ω := A1 ∪ · · · ∪ An, P := Laplace–Wahrscheinlichkeit, Anwendung der Siebformel ausSatz 5.13.
Beispiel 5.15Betrachten wir erneut unser Hutbeispiel aus Abschnitt 3. Wir haben hier
Ω = ω : 1, . . . , n −→ 1, . . . , n|ω bijektiv
und
P (ω) =1
n!, ω ∈ Ω.
Betrachte das Ereignis
A := ω ∈ Ω|ω(j) = j fur mindestens ein j
und die EreignisseAi := ω ∈ Ω|ω(i) = i, 1 ≤ i ≤ n.
Mit der Abzahlregel gilt
P (Ai) =1
n!(n− 1)! , 1 ≤ i ≤ n.
Dann folgt
P (Ai ∩ Aj) =1
n!(n− 2)! , 1 ≤ i, j ≤ n, i 6= j,
und schließlich
P (m⋂l=1
Ail) =1
n!(n−m)! , 1 ≤ i1 < · · · < im ≤ n .
Somit folgt mit der Siebformel
P (A) = P (m⋃i=1
Ai)
=m∑i=1
P (Ai)−∑
1≤i1<i2≤n
P (Ai1 ∩Ai2) + · · ·
· · ·+ (−1)n+1∑
1≤i1<···<in≤n
P (n⋂l=1
Ail)
=n∑l=1
(−1)l+1 1
n!(n − l)!
(n
l
)
=n∑l=1
(−1)l+1 1
l!,

Baumeister: Mathematik II / Stand: Mai 1997 127
da∑
1≤i1<···<il≤n1 =
(nl
)gilt. (Siehe Satz 2.19). 2
Bemerkung 5.16
Hat ein Wahrscheinlichkeitsraum (Ω, POT (Ω), P ) nur zwei Elementarereignisse, so sprichtman von einem Bernoulli–Raum (Jakob Bernoulli (1654-1705)). Das eine Ereignis ω1
interpretiert man dann haufig als Erfolg und identifiziert es mit 1 (oder Zahl (Munzwurf)),das andere Ereignis ω2 interpetiert man als Fehlschlag und identifiziert es mit 0 (oderKopf (Munzwurf)). Der Bernoulli–Raum Ω = 0, 1 ist also vollig durch die Erfolgswahr-scheinlichkeit p := P (1) und Mißerfolgswahrscheinlichkeit q := P (0) mit p + q = 1beschrieben. 2
5.5 Bedingte Wahrscheinlichkeiten
Haufig steht, bevor der Ausgang eines Zufalls–Experiments bekannt ist, schon die Informa-tion zur Verfugung, daß der Ausgang zu einer bestimmten (moglicherweise eingeforderten)Teilmenge des Ereignisraumes gehort. Was laßt sich dann uber Wahrscheinlichkeiten sa-gen? Diese Fragestellung wollen wir nun untersuchen.
Zur Motivation des folgenden greifen wir auf den Begriff der relativen Haufigkeiten zuruck.Sei V ein Zufallsexperiment mit zugehorigem Wahrscheinlichkeitsraum (Ω, POT (Ω), P ).SeienA,B Ereignisse in (Ω, P ). Der Versuch V werde nun n–mal (unabhangig) wiederholt.Die relativen Haufigkeiten von A unter der Bedingung B sind dann definiert durch
hn(A|B) :=# Es tritt A ∩B ein
# Es tritt B ein , n ∈ IN .
Erweitert man in Zahler und Nenner mit 1n, so folgt
hn(A|B) =hn(A ∩B)
hn(B), n ∈ IN .
Dabei haben wir hn(B) > 0, n ∈ IN , unterstellt. Analog zu dieser Formel kommen wirnun zu einer entsprechenden Begriffsbildung im Wahrscheinlichkeitsraum (Ω, P ).
Definition 5.17
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum.Seien A,B ⊂ Ω mit P (B) > 0. Dann heißt
P (A|B) :=P (A ∩B)
P (B)
die bedingte Wahrscheinlichkeit des Ereignisses A unter der Bedingung B. 2

Baumeister: Mathematik II / Stand: Mai 1997 128
Folgerung 5.18
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum.Sei B ⊂ Ω mit P (B) > 0. Dann ist (Ω, POT (Ω), PB) mit
PB(A) := P (A|B) , A ⊂ Ω,
ein endlicher Wahrscheinlichkeitsraum.
Beweis:Folgt unmittelbar.
Folgerung 5.19
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum. Seien B1, . . . , Bk ⊂
Ω mit Ω =k⋃i=1
Bi und Bi ∩Bj = ∅, 1 ≤ i, j ≤ k, i 6= j, und P (Bi) > 0, 1 ≤ i ≤ k.
(a) Dann ist
P (A) =k∑i=1
P (Bi)P (A|Bi) , A ⊂ Ω.
(b) Gilt P (A) > 0, so gilt
P (Bj |A) = P (Bj)P (A|Bj)(k∑i=1
P (Bi)P (A|Bi))−1
fur j = 1, . . . , k .
Beweis:(a) ergibt sich aus der Additivitat von P und der Tatsache, daß A disjunkte Vereinigungvon A ∩B1, . . . , A ∩Bk ist.(b) folgt aus (a) zusammen mit P (Bj ∩A) = P (Bj)P (A|Bj), 1 ≤ j ≤ k.
Das Ergebnis (a) aus Folgerung 5.19 heißt Satz von der totalen Wahrscheinlichkeit,das Ergebnis (b) wird als der Satz von Bayes (T. Bayes, ? – 1763) bezeichnet. Inbeiden Fallen ist man mit der Forderung nicht verschwindender Wahrscheinlichkeiten(P (Bi) > 0, 1 ≤ i ≤ n) konfrontiert. In der Formel in (a) kann man dies aber uberspielen,da das Nennerproblem nun in der Definition bedingter Wahrscheinlichkeit angelegt ist.
Beispiel 5.20
Greifen wir das Schachtelparadoxon wieder auf: Einem Beobachter werden drei Schachtelngleichen Aussehens vorgelegt. Er weiß, daß eine davon zwei Goldmunzen, die zweite zweiSilbermunzen und die dritte eine Gold– und eine Silbermunze enthalt. Der Beobachterwahlt, nachdem die Schachteln gut gemischt wurden, die 1. Schachtel und zieht darauseine Munze; es ist eine Goldmunze. Mit welcher Wahrscheinlichkeit ist die in der Schachtelverbliebene Munze ebenfalls aus Gold?In der Literatur wird die Antwort oft dann etwa so angegangen:

Baumeister: Mathematik II / Stand: Mai 1997 129
Wir setzen A :=”Eine Goldmunze wird gezogen“ und Ei :=
”Die gewahlte Schachtel hat
i Goldmunzen“ . Wir setzen P (E2) := 13. Da alle drei Schachteln . . . .
Unseres Erachtens wird dabei etwas großzugig argumentiert: Keine Elementarereignissewerden definiert, kein Wahrscheinlichkeitsmaß wird festgelegt, . . . ! Wenn die
”Rahmen-
bedingungen“ klar formuliert sind, mag man sich der abkurzenden Redeweisen bedienen.Wir versuchen etwas genauer zu sein und uns an Definition 5.18 und Folgerung 5.19 zuhalten. Sei
Ω := (ω, σ)|σ : gg, gs, ss −→ 1, 2, 3 bijektiv , ω ∈ g, s .
Hier steht gg etwa fur Goldmunze/Goldmunze und ω = g fur “eine Goldmunze wird ausSchachtel 1 gezogen“; 1, 2, 3 steht fur eine Schachtelnummer und σ beschreibt die zufalligeAufteilung auf die Schachteln. Wir wissen
#Ω = 2 · 3! = 12
und haben folgendes Wahrscheinlichkeitsmaß auf Ω :
P ((g, (gg, gs, ss)) = 16
P ((s, (gg, gs, ss)) = 0
P ((g, (gs, gg, ss)) = 112
P ((s, (gs, gg, ss)) = 112
P ((g, (ss, gs, gg)) = 0 P ((s, (ss, gs, gg)) = 16
P ((g, (gg, ss, gs)) = 16
P ((s, (gg, ss, gs)) = 0
P ((g, (gs, ss, gg)) = 112
P ((s, (gs, ss, gg)) = 112
P ((g, (ss, gg, gs)) = 0 P ((s, (ss, gg, gs)) = 16
SetzeE := (ω, σ)|σ(gg) = 1
undA := (ω, σ)|ω = g .
Uns interessiert die Wahrscheinlichkeit P (E|A). Wir haben
P (E) =1
3, P (A) =
1
2, P (A|E) =
P (A ∩E)
P (E)=P (E)
P (E)= 1 .
Also mit Folgerung 5.19
P (E|A) =P (A|E)P (E)
P (A)=
2
3.
2
Betrachten wir nun das sogenannte Ziegenproblem. 1
In einer Spielshow wird ein Kandidat vom Moderator vor drei geschlossene Turen gefuhrt.Hinter diesen Turen sind ein Auto (Preis) und jeweils eine Ziege (Nieten) versteckt. DerKandidat darf nun eine Tur bestimmen, die geoffnet werden soll. Um die Spannung zu
1G.v. Randow: Das Ziegenproblem, Reinbek, 1992, und I. Stewart: Mathematische Unterhaltungen,Spektrum 11/91, 12 – 16 .
Baumeister: Mathematik II / Stand: Mai 1997 130
erhohen, offnet der Moderator aber vor der Offnung dieser Tur – zufallig, aber mit Vor-gabe, daß dahinter kein Auto ist – eine andere Tur; hinter dieser Tur ist eine Ziege.Nun erlaubt der Moderator dem Kandidaten seine ursprugliche Wahl zu uberdenken undgegebenenfalls seine Entscheidung zu andern. Wie soll er sich entscheiden? Gibt es ausstochastischer Sicht berechtigte Grunde, die Tur zu wechseln? Ja, er soll wechseln!Dies wollen wir mit bedingten Wahrscheinlichkeiten erklaren. Bevor wir dies tun, spie-len wir die Situation mit 100 Turen, einem Auto und 99 Ziegen durch; sie vermeidet die1 : 1 : 1 Situation bei drei Turen. Mit Wahrscheinlichkeit 1
100haben wir die Tur mit
dem Auto gewahlt und mit Wahrscheinlichkeit 99100
ist das Auto hinter den verbleibendenTuren. Jetzt offnet der Moderator 98 der verbleibenden Turen, hinter jeder eine Ziege.Naturlich wurde jeder wechseln, denn mit Wahrscheinlichkeit 99
100ist das Auto hinter der
noch verschlossenen Tur.
Nun zum mathematischen Modell des Dreituren-Problems.O.E. offnet der Kandidat die erste Tur. Sei
Ω := (azz, 2), (azz, 3), (zaz, 3), (zza, 2).
Hierbei steht etwa (azz, 2) fur : Auto hinter der 1. Tur, Ziegen hinter Tur 2 und Tur 3;2 bezeichnet die Turwahl des Moderators.Wir haben als Wahrscheinlichkeitsmaß auf Ω :
P ((azz, 2)) =1
6, P ((azz, 3)) =
1
6, P ((zaz, 3)) =
1
3, P ((zza, 2)) =
1
3.
SetzeA1 := (azz, 2), (azz, 3), A2 := (zaz, 3), A3 := (zza, 2).
Wir haben P (A1) = P (A2) = P (A3) = 13.
Wir analysieren etwa den Fall, daß der Moderator Tur 3 offnet. Setze
B := (azz, 3), (zaz, 3).
Wir haben dann P (B) = 12
und P (A1 ∩ B) = 16, P (A2 ∩ B) = 1
3, P (A3 ∩ B) = 0. Also
P (B|A1) = 12, P (B|A2) = 1, P (B|A3) = 0. Damit erhalten wir:
P (A1|B) =P (A1)P (B|A1)
P (B|A1)P (A1) + P (B|A2)P (A2) + P (B|A3) · P (A3)=
1
3
,
P (A2|B) =P (A2)P (B|A2)
P (B|A1)P (A1) + P (B|A2)P (A2) + P (B|A3) · P (A3)=
2
3
Nun liegt der Beleg fur den Ratschlag”Wechsel“ vor !
Aus der bedingten Wahrscheinlichkeit leitet sich der Begriff der Unabhangigkeit ab, der furdie Bewertung von Beobachtungen von Zufallsexperimenten von uberragender Bedeutungist. Wir lassen uns dabei davon leiten, daß in einem Wahrscheinlichkeitsraum (Ω, P ) zweiEreignisse A,B (nach Wahrscheinlichkeit) als unabhangig voneinander zu betrachten sind,

Baumeister: Mathematik II / Stand: Mai 1997 131
wenn P (A) mit der bedingten Wahrscheinlichkeit P (A|B) ubereinstimmt. Da P (A|B) nurfur P (B) > 0 erklart ist, definiert man:
Definition 5.21
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum. Zwei Ereignisse A,B ⊂Ω heißen unabhangig, wenn
P (A ∩B) = P (A)P (B)
gilt. 2
Unabhangigkeit ist ein in A,B symmetrischer Begriff. Sind A,B ⊂ Ω unabhangig, dannsind es auch A,Ω\B und Ω\A,B und Ω\A,Ω\B. Die Verallgemeinerung der Unabhangig-keit auf mehr als zwei Ereignisse liegt auf der Hand:
Definition 5.22
Sei (Ω, POT (Ω), P ) ein endlicher Wahrscheinlichkeitsraum und seien A1, . . . , Ak
Ereignisse. Diese Ereignisse heißen unabhangig, wenn fur jede Wahl 1 ≤ i1 <· · · < il ≤ k gilt:
P (Ai1 ∩ · · · ∩Ail) = P (Ail) · · ·P (Ail).
2
Beispiel 5.23
Betrachte den Wahrscheinlichkeitsraum (Ω, POT (Ω), P ) mit
Ω = ω1, ω2, ω3, ω4, P (ωi) =1
4, i = 1, . . . , 4,
mit EreignissenA = ω1, ω2, B = ω2, ω3, C = ω1, ω3.
Wir haben
P (A ∩B) = P (A)P (B) , P (A ∩ C) = P (A)P (C) , P (B ∩ C) = P (B)P (C),
aber
P (A ∩B ∩ C) = 0, P (A) · P (B) · P (C) =1
8.
Dieses Beispiel beleuchtet die Definition 5.22. 2

Baumeister: Mathematik II / Stand: Mai 1997 132
5.6 Produkt von Wahrscheinlichkeitsraumen
Seien (Ω1, POT (Ω1), P1), . . . , (Ωm, POT (Ω1), Pm) endliche Wahrscheinlichkeitsraume, dieaus den Zufallsexperimenten V1, . . . , Vm resultieren mogen. Daraus wollen wir nun einenWahrscheinlichkeitsraum (Ω, POT (Ω), P ) als Modell fur das Experiment V , das aus derunabhangigen Hintereinanderausfuhrung von V1, . . . , Vm besteht, bauen. Fur die Ereignis-menge ist die Wahl wohl klar:
Ω := Ω1 × · · · × Ωm.
Als Wahrscheinlichkeit fur den Ausgang des Elementarereignisses
ω = (ω1, . . . , ωm) ∈ Ω
bietet sichP1(ω1) · · ·Pm(ωm)
an. Hierdurch wird”Unabhangigkeit“ eingearbeitet.
Definition 5.24
Seien (Ω1, POT (Ω1), P1), . . . , (Ωm, POT (Ωm), Pm) endliche Wahrscheinlichkeits-raume. Dann heißt (Ω, POT (Ω), P ) mit
Ω := Ω1 × · · · × Ωm, P := P1 × · · · × Pm,
wobeiP (A) := P1(A1) · · ·Pm(Am) fur A = A1 × · · · × Am ⊂ Ω
ist, das Produkt der Wahrscheinlichkeitsraume und P = P1 × · · · × Pm dasProdukt–Wahrscheinlichkeitsmaß. 2
Offenbar liegt in Ω := Ω1 × · · · × Ωm, P := P1 × · · · × Pm in der Tat ein endlicherWahrscheinlichkeitsraum vor und wir haben fur Zylindermengen
A := A1 × · · · × Am ∈ POT (Ω1 × · · · × Ωm)
nach DefinitionP (A) = P1(A1) · · ·Pm(Am) .
(Beachte: Nicht jede Teilmenge von Ω1 × · · · × Ωm ist eine Zylindermenge.)
Betrachte nun einen Bernoulli–Raum (Ω, POT (Ω), P ) mit
Ω = 0, 1, P (1) =: p, P (0) =: q.
Wiederholt man ein solches Experiment mehrmals (unabhangig voneinander), so sprichtman von einem Bernoulli-Experiment. Ist etwa die Anzahl der Wiederholungen n, soist (Ωn, POT (Ωn), Pn) mit
Ωn := Ω× · · · × Ω︸ ︷︷ ︸n−mal
, Pn := P × · · · × P︸ ︷︷ ︸n−mal

Baumeister: Mathematik II / Stand: Mai 1997 133
der zugehorige Wahrscheinlichkeitsraum. Der Ausgang eines Experiments ist hier ein Wortder Lange n uber dem Alphabet 0, 1. Jedes Wort mit k Einsen und n−k Nullen hat dieWahrscheinlichkeit pk(1−p)n−k. Die Wahrscheinlichkeit, daß bei n−maliger Wiederholungdie Anzahl der Erfolge (1 tritt ein) genau k ist, ist daher
β(k;n, p) :=
(n
k
)pk(1− p)n−k,
da es genau(nk
)mogliche Verteilungen von Einsen auf n Platze gibt. Man nennt β(·, n, p)
die Binominalverteilung mit den Parametern n, p. Aus der Bedingungsgleichung
1− β(0;n, p) = 1− (1− p)n >1
2
liest man ab, wieviele Wiederholungen man durchfuhren muß, damit beim Parameter pmindestens ein Erfolg mit Wahrscheinlichkeit > 1
2auftritt.
Beispiel 5.25
Ein Spieler macht mit einem Wurfel 4 Wurfe. Kommt dabei keine Sechs, hat er gewonnen,kommt eine Sechs vor, hat die Bank gewonnen.Dieses Spiel bevorzugt die Bank, wie aus der Ungleichung
(5
6)4 ≈ 0, 48 <
1
2
hervorgeht.Eine Variante ist: Wir werfen statt mit einem Wurfel mit zwei Wurfeln und machen 24solche Doppelwurfe. Kommt dabei keine Doppelsechs, gewinnt der Spieler, kommt eineDoppelsechs, gewinnt die Bank. Hier ist nun der Spieler im Vorteil, wie man aus derUngleichung
(35
36)24 >
1
2
abliest; 3536
ist die Wahrscheinlichkeit, daß bei einem Wurf mit zwei Wurfeln keine Dop-pelsechs eintritt.Dem Irrtum, dem man im Zusammenhang mit solchen Experimenten nicht erliegen soll-te, ist hier abzulesen: Die Wahrscheinlichkeit fur eine Doppelsechs bei zwei Versuchen istnicht doppelt so groß wie bei einem Versuch; solche Wahrscheinlichkeiten kann man nichtaddieren. 2
Bevor wir mit der Erweiterung der Wahrscheinlichkeitstheorie fortfahren, bauen wir dieAnalysiskenntnisse dahingehend aus, daß ein besseres Verstandnis von Abbildungen mitWertebereich IR vorliegt.
Kapitel 6
Reelle Funktionen und Stetigkeit
Wir betrachten hier Abbildungen mit Definitions- und Wertebereich in IR : Reelle Funk-tionen. Uns interessieren Eigenschaften, die bei der Diskussion von Funktionen von beson-derem Wert sind. Abschließend betrachten wir spezielle Funktionen, die fur ganz konkreteund praktische Probleme gebraucht werden.
6.1 Reelle Funktionen
Wir erinnern an den Abbildungsbegriff: Ist
f : D −→ IR, D ⊂ IR,
so ist D der Definitions-, f(D) := y|y = f(x), x ∈ D der Wertebereich und G :=(x, f(x))|x ∈ D der Graph von f. (Der Graph dient haufig auch zur Veranschaulichungder Funktion.)
Beispiel 6.1
Mehr oder minder interessante Beispiele sind
• D := IR, f(x) := |x|.
• D := [−1, 1], f(x) :=√
1− x2.
• D := IR, f(x) := x2.
• D := [0,∞) := x ∈ IR |x ≥ 0, f(x) :=√x .
2
Erinnert sei auch an die Hintereinanderausfuhrung von Funktionen: Sind
f : D −→ IR, g : E −→ IR, E ⊂ f(D),
so laßt sichg F : D 3 x 7−→ g(f(x)) ∈ IR
die Hintereinanderausfuhrung von f, g betrachten.
134

Baumeister: Mathematik II / Stand: Juni 1997 135
Beispiel 6.2Betrachte
f : [0,∞) 3 x 7−→ x2 ∈ IR .
undg : [0,∞) 3 x 7−→
√x ∈ IR .
Es ist(f f)(x) = x4, x ∈ [0,∞),
(g f)(x) = (f g)(x) = x , x ∈ [0,∞).
(g ist die Umkehrabbildung von f !) 2
Aus gegebenen Funktionen kann man unter Ausnutzung der algebraischen Eigenschaftender reellen Zahlen neue Funktionen bilden. Seien also
f : D −→ IR, g : D −→ IR
Funktionen. Damit betrachte
f + g : D 3 x 7−→ f(x) + g(x) ∈ IR (Addition)
f · g : D 3 x 7−→ f(x) · g(x) ∈ IR (Multiplikation)fg : D 3 x 7−→
f(x)g(x)
∈ IR (Division)
Klar, bei der Division haben wir auszuschließen, daß fur ein x ∈ D die Aussage g(x) = 0
gilt. Wir nennen f + g die Summe, f · g das Produkt und fg den Quotienten von f
und g .
Diese Konstruktionsprinzipien fuhren uns zu einer wichtigen Funktionenklasse, den Po-lynomen. Dies sind Funktionen der folgenden Form:
f : IR 3 x 7−→n∑i=0
aixi ∈ IR .
Sie sind durch Addition und Multiplikation aus den Monomen
IR 3 x 7−→ xi ∈ IR (i = 0, . . . , n)
und den konstanten Funktionen
IR 3 x 7−→ a ∈ IR (a ∈ IR)
entstanden. Hierbei kann man sich das Monom IR 3 x 7−→ xi ∈ IR selbst wieder durchMultiplikation entstanden denken.Die reellen Zahlen a0, . . . , an heißen Koeffizienten des obigen Polynoms und n heißt
Grad des Polynoms, falls an 6= 0 ist (sonst verringere die Darstellung zun−1∑i=0
aixi). Wir
kommen unten auf eine genauere Betrachtung der Begriffe zuruck.
Polynome haben uberragende Bedeutung in nahezu jedem Zweig der Mathematik. In derAnalysis, da man mit ihnen gute Naherungen fur Funktionen bilden kann (Approxi-mationssatz von Weierstraß), in der Algebra, da sie selbst eine interessante Struktur

Baumeister: Mathematik II / Stand: Juni 1997 136
sind und andere Strukturen aufklaren helfen (Ringtheorie, Korpererweiterung), inder Numerik, da sie als Naherung fur Funktionen einfach zu handhaben sind, denn mankann sie abspeichern und manipulieren durch die Koeffizienten.
Durch Division von Polynomen erhalt man die rationalen Funktionen. Dabei mußman aber die Nullstellen des Nennerpolynoms aus dem Definitionsgebiet entfernen. DerFundamentalsatz der Algebra, der besagt, daß ein Polynom von Grad n hochstens nNullstellen besitzt und auf dessen Beweis wir hier noch verzichten mussen, ist hier vonNutzen.
6.2 Grenzwerte von Funktionen
Bei reellen Folgen haben wir das Verhalten fur n→∞ studiert; Folgen sind Abbildungenvon IN nach IR.Nun untersuchen wir das Verhalten von Funktionen f : D −→ IR, D ⊂ IR, wenn sichx ∈ D einem Punkt a ∈ IR
”nahert“ . Wir haben dazu
”x nahe bei a ⇐⇒ f(x) nahe bei y“
zu prazisieren.
Definition 6.3
Sei D ⊂ IR . Ein Punkt y ∈ IR heißt Beruhrungspunkt von D, falls es eine Folge(xn)n∈IN gibt mit
xn ∈ D fur alle n ∈ IN , y = limnxn.
2
Beispiel 6.4
D := (a, b); Beruhrungspunkte [a, b].
D := [a, b)∪ c; Beruhrungspunkte [a, b] ∪ c.
D := 1n|n ∈ IN ; Beruhrungspunkte 1
n|n ∈ IN ∪ 0. 2
Definition 6.5
Sei f : D −→ IR und sei a ∈ IR Beruhrungspunkt von D.y heißt Grenzwert von f bei a, falls fur jede Folge (xn)n∈IN mit
xn ∈ D fur alle n ∈ IN , a = limnxn
gilt:y = lim
nf(xn).
Wir schreiben dann: y = limx→a
f(x). 2

Baumeister: Mathematik II / Stand: Juni 1997 137
Ein Grenzwert von f bei a ist eindeutig bestimmt. Dies folgt unmittelbar aus der Ein-deutigkeit des Grenzwerts von Folgen.
Miterfaßt bei der Definition 6.5 sind rechts- und linksseitige Grenzwerte. Hat man etwadie Situation
f : D −→ IR , D = (a, b),
so kann manlimx→a
f(x) , limx→b
f(x)
betrachten, da a und b Beruhrungspunkte von D sind.
Beispiel 6.6Betrachte
f : IR \1 −→ IR, f(x) :=x2 − 1
x− 1.
Offenbar ist a := 1 ein Beruhrungspunkt von D := IR \1. Fur x 6= 1 haben wir
f(x) =x2 − 1
x− 1=
(x− 1)(x+ 1)
(x− 1)= x+ 1 := g(x) .
Daraus lesen wirlimx→1
f(x) = limx→1
g(x) = 1 + 1 = 2
ab. 2
Beispiel 6.7
Betrachtef : IR −→ IR, x 7−→ sign(x).
Existiert der Grenzwert von f bei a = 0?Nein, denn
limnf(xn) = 1 , lim
nf(−xn) = −1
fur die Folge (xn)n∈IN mit xn = 1n, n ∈ IN . 2
Wir wollen nun noch prazisieren, was
”x groß (klein) =⇒ f(x) nahe bei y“
heißen soll. Dazu benotigen wir Folgen, die gegen +∞ bzw. −∞”konvergieren“ .
Definition 6.8
Sei (xn)n∈IN eine Folge. Wir sagen:
(a) limnxn =∞ :⇐⇒ ∀L > 0∃N ∈ IN ∀n ≥ N (xn > L) .
(b) limnxn = −∞ :⇐⇒ ∀L < 0∃N ∈ IN ∀n ≥ N (xn > L) .
2

Baumeister: Mathematik II / Stand: Juni 1997 138
Beispiel 6.9
limnn =∞ , lim
n−n = −∞ , lim
n
n2 + 1n = lim
n(n+ 1
n ) =∞. 2
Definition 6.10
Sei f : D −→ IR und sei ∞ ein Beruhrungspunkt von D, d.h. es gibt eine Folge(xn)n∈IN mit xn ∈ D fur alle n ∈ IN und lim
nxn = ∞. Wir sagen dann, daß f den
Grenzwert y bei ∞ hat, wenn fur jede Folge (xn)n∈IN mit
xn ∈ D fur alle n ∈ IN ,∞ = limnxn
gilt:y = lim
nf(xn).
Wir schreiben dannlimx→∞
f(x) = y.
2
Beispiel 6.11
limx→∞
1
x= 0, lim
x→∞
2x+ 1
3x+ 2= lim
x→∞
2 +1
n
3 +2
x
=2
3.
2
Beispiel 6.12
Hat man einen endlichen Wahrscheinlichkeitsraum (Ω, POT (Ω), P ) mit Ω ⊂ IR, so ist diesogenannte Verteilungsfunktion
FP : IR 3 x 7−→ P (ω ∈ Ω|ω < x) ∈ IR
ein interessantes Objekt. Die Funktion ist monoton wachsend, d.h.
FP (x) ≥ FP (y) , falls x ≥ y,
und konstant auf jedem Intervall, das keinen Punkt ω ∈ Ω mit P (ω) < 0 enthalt. In jedemPunkt ω ∈ Ω mit P (ω) > 0
”springt“ die Verteilungsfunktion FP um P (ω). Rechts- und
linksseitige Grenzwerte existieren in jedem ω ∈ Ω. 2

Baumeister: Mathematik II / Stand: Juni 1997 139
6.3 Stetigkeit
Hier beschaftigen wir uns mit
”x nahe bei a =⇒ f(x) nahe bei f(a).“
in der Situation, wenn a im Definitionsbereich von f ist.
Definition 6.13
Sei f : D −→ IR .
(a) f heißt stetig in a ∈ D, wenn limx→a
f(x) = f(a) gilt.
(b) f heißt stetig (in D), wenn f stetig in jedem a ∈ D ist.
B. Bolzano (1781 – 1848) gab 1816 die erste Definition einer stetigen Funktion: “Zusagen, eine reellwertige Funktion der reellen Variablen x sei fur alle Werte von x, dieeinem gegebenem Intervall angehoren, stetig, bedeutet nur so viel, daß wenn x irgendein solcher Werth ist, der Unterschied f(x + ω) − f(x) kleiner als jede gegebene Großegemacht werden konne, wenn man ω so klein, als man nur immer will, annehmen kann“.
Satz 6.14
Sei f : D −→ IR, a ∈ D. Es sind aquivalent:
(a) f ist stetig in a.
(b) ∀ε > 0∃δ > 0∀x ∈ D (|x− a| < δ =⇒ |f(x)− f(a)| < ε)
2
Beweis:Zu (a) =⇒ (b).Sei ε > 0. Annahme: ∀δ > 0∃x ∈ D (|x− a| < δ, |f(x)− f(a)| ≥ ε)Dann erhalten wir eine Folge (xn)n∈IN mit
xn∈IN ∈ D , |xn − a| <1
n, |f(xn)− f(a)| ≥ ε, n ∈ IN .
Also istlimnxn = a
und f(a) nicht Grenzwert von (f(xn))n∈IN , was ein Widerspruch ist.Zu (b) =⇒ (a).Sei (xn)n∈IN eine Folge mit
xn ∈ D fur alle n ∈ IN , a = limnxn.
Sei ε > 0. Wahle δ > 0 gemaß (b). Dazu gibt es N ∈ IN mit
|xn − a| < δ fur alle n ∈ IN .

Baumeister: Mathematik II / Stand: Juni 1997 140
Also gilt|f(xn)− f(a)| < ε
fur alle n ∈ IN , was die Konvergenz von (f(xn))n∈IN gegen f(a) beweist.
Man sagt, die Stetigkeit einer Funktion f in a sei eine lokale Eigenschaft, da sie nurvom Verhalten der Funktion nahe bei a abhangt. In der Topologie wird dazu der Um-gebungsbegriff (
”nahe bei“) abstrakt gefaßt und lokales Verhalten damit erfaßt. Aus den
Rechenregeln fur Grenzwerte ergeben sich sofort Rechenregeln fur stetige Funktionen.
Seien f, g : D −→ IR stetig in a ∈ D. Dann gilt:
(R1) f + g : D 3 x 7−→ f(x) + g(x) ∈ IR ist stetig in a.
(R2) f · g : D 3 x 7−→ f(x)g(x) ∈ IR ist stetig in a.
(R3) fg : D 3 7−→
f(x)g(x)
∈ IR ist stetig in a, falls g(x) 6= 0 ist fur alle x ∈ D.
Diese Rechenregel gestattet es, Polynome sofort als stetig zu erkennen, denn offenbar istjede konstante Funktion
IR 3 x 7−→ x ∈ IR (c ∈ IR)
und die IdentitatIR 3 x 7−→ x ∈ IR
stetig.Durch Division von Polynomen erhalt man die rationale Funktion. Sie sind auch stetig(da die Nullstellen des Nennerpolynoms aus dem Definitionsgebiet entfernt sind).
Beispiel 6.15
• Die Abbildung IR 3 x 7−→ |x| ∈ IR ist stetig. Dies folgt aus 4.42 oder mit (b) ausSatz 6.14 so: Wahle zu ε > 0 δ := ε und lese die Aussage aus
||x| − |a|| ≤ |x− a|
ab.
• Die Abbildung
f : IR \−2
3 3 x 7−→
2x+ 1
3x+ 2∈ IR
ist als rationale Funktion stetig.
• Die Abbildung
f : IR 3 x 7−→
0 , x ∈ ′Q1 , x /∈ ′Q
ist in keinem a ∈ IR stetig. Dies folgt aus der Tatsache, daß es zu jedem a ∈ ′Qeine Folge (xn)n∈IN mit xn ∈ IR \ ′Q fur alle n ∈ IN , lim
nxn = a gibt, und zu jedem
a ∈ IR \ ′Q eine Folge (xn)n∈IN mit xn ∈ ′Q fur alle n ∈ IN , limnxn = a gibt.
Baumeister: Mathematik II / Stand: Juni 1997 141
Die Hintereinanderausfuhrung von Funktionen ist bezuglich der Eigenschaft “Stetigkeit“eine vertragliche Konstruktion, denn
Satz 6.16
Sei f : D −→ IR stetig in a ∈ D, f(D) ⊂ W, g : W −→ IR stetig in f(a). Dannist g f : D −→ IR stetig in a .
Beweis:Sei (xn)n∈IN eine Folge mit xn ∈ D,n ∈ IN , und lim
nxn = a. Dann folgt mit der Stetigkeit
von flimnf(xn) = f(a)
und mit der Stetigkeit von g
limng(f(xn)) = g(f(a)),
d. h.limn
(g f)(xn) = (g f)(a).
6.4 Satze uber stetige Funktionen
In den folgenden Satzen wird die”Gutartigkeit“ von stetigen Funktionen deutlich.
Satz 6.17
Sei f : D −→ IR stetig in a ∈ D. Sei r ∈ IR mit f(a) > r. Dann gibt es δ > 0 mit
f(x) > r fur alle x ∈ D ∩ (a− δ, a+ δ).
Beweis:Sei ε ∈ IR mit 0 < ε < f(a)− r. Dazu gibt es δ > 0 mit
|f(x)− f(a)| < ε ∀x ∈ D ∩ (a− δ, a+ δ).
Daraus folgtf(x) > f(a)− ε > r ∀x ∈ D ∩ (a− δ, a+ δ).
Von B. Bolzano wurde 1817 der folgende Nullstellensatz bewiesen.
Satz 6.18
Sei f : [a, b] −→ IR stetig. Haben f(a) und f(b) verschiedene Vorzeichen, so gibtes z ∈ [a, b] mit f(z) = 0.
Beweis:

Baumeister: Mathematik II / Stand: Juni 1997 142
Es genugt den Fall f(a) ≤ 0, f(b) ≥ 0 zu betrachten.Wir konstruieren Folgen (an)n∈IN , (bn)n∈IN in [a, b] mit
f(an) ≤ 0 ≤ f(bn), bn+1 − an+1 =1
2(bn − an), n ∈ IN . (6.1)
induktiv:
a0 := a, b0 := b;
an+1 :=
12(an + bn) , falls f(1
2(an + bn)) ≤ 0
an , sonst
bn+1 :=
bn , falls f(1
2(an + bn)) ≤ 0
12(an + bn) , sonst
Klar, (6.1) ist damit erfullt. Offenbar ist mit den Folgen (an)n∈IN , (bn)n∈IN eine Intervall-schachtelung gegeben. Die dadurch definierte Zahl z ∈ [a, b] ist eine Nullstelle von f , dawegen der Stetigkeit
limnan = lim
nbn = z,
f(z) = limnf(an) ≤ 0 , f(z) = lim
nf(bn) ≥ 0.
Eine unmittelbare Folgerung aus dem Nullstellensatz ist der folgende Zwischenwert-satz,1 der schließlich auch wieder den Nullstellensatz einschließt.
Satz 6.19
Sei f : [a, b] −→ IR stetig. Zu jedem c zwischen f(a) und f(b) gibt es z ∈ [a, b] mitf(z) = c.
Beweis:Sei c zwischen f(a) und f(b). Betrachte g : [a, b] 3 x 7−→ f(x)− c ∈ IR .g ist stetig, da f stetig ist, und 0 liegt zwischen g(a) und g(b). Also gibt es nach Satz 6.18eine Nullstelle z von g in [a, b]; d.h.
f(z) = c.
Das im Beweis zu Satz 6.18 verwendete Intervallhalbierungsverfahren liefert eine einfacheund zuverlassige Methode zur Naherung von Nullstellen einer stetigen Funktion. Mannennt sie das Bisektionsverfahren. Wenn wir uber Sekanten und Tangenten Bescheidwissen, werden wir eine
”Beschleunigung“ dieser Idee (Regula falsi) kennenlernen.
Beispiel 6.20
1Mit c zwischen p, q wollen wir ausdrucken, daß entweder p ≤ c ≤ q oder q ≤ c ≤ p gilt.

Baumeister: Mathematik II / Stand: Juni 1997 143
Betrachte die Gleichunge−x = x.
Wir haben
e−0 − 0 = 1 > 0, e−1 − 1 =1
e− 1 < 0.
Also besitzt die obige Gleichung nach dem Nullstellensatz 6.18 eine Losung, falls wir dieGultigkeit von “IR 3 x 7−→ e−x ∈ IR ist stetig“ vorwegnehmen. Sie ist sogar eindeutigbestimmt, wie wir spater sehen werden. 2
Satz 6.21
Sei f : [a, b] −→ IR stetig. Dann gibt es u, v ∈ [a, b] mit
f(u) ≤ f(x) ≤ f(v) , x ∈ [a, b].
Beweis:Offenbar sind u, v ∈ [a, b] gesucht mit
f(u) = infx∈[a,b]
f(x) , f(v) = supx∈[a,b]
f(x).
Zur Existenz von u :Annahme: f(x)|x ∈ [a, b] ist nicht nach unten beschrankt.Dann gibt es eine Folge (xn)n∈IN mit xn ∈ [a, b], f(xn) < −n fur alle n ∈ IN . Da dieFolge (xn)n∈IN beschrankt ist, besitzt sie nach Folgerung 4.41 eine konvergente Teilfolge(xnk)k∈IN ; z := lim
kxnk . Da f stetig ist, gilt
f(z) = limkf(xnk) = −∞ .
Dies ist aber ein Widerspruch.Also ist nun f(x)|x ∈ [a, b] nach unten beschrankt und es existiert inf
x∈[a,b]f(x) . Offenbar
gibt es daher eine Folge (xn)n∈IN mit
xn ∈ [a, b], n ∈ IN , limnf(xn) = inf
x∈[a,b]f(x).
Da die Folge (xn)n∈IN beschrankt ist, besitzt sie nach Folgerung 4.41 eine konvergenteTeilfolge (xnk)k∈IN ; u := lim
kxnk . Da f stetig ist, gilt
f(u) = limkf(xnk) = lim
nf(xn) = inf
x∈[a,b]f(x).
Zur Existenz von v :Beweise analog oder beachte, daß
supx∈[a,b]
f(x) = − infx∈[a,b]
(−f)(x)
ist.

Baumeister: Mathematik II / Stand: Juni 1997 144
Der obige Satz 6.21 besagt, daß eine stetige Funktion auf einem abgeschlossenem be-schrankten Intervall – die Verallgemeinerung davon ist der Begriff der kompakten Menge– Minimum und Maximum annimmt. Die Frage nach der Gultigkeit eines Satzes diesenTyps in Unendlichdimensionalen war wesentlich fur das Verstandnis der Analysis im 19.Jahrhundert; K. Weierstraß (1815 – 1897) leistete dazu entscheidende Beitrage.
Definition 6.22
Sei f : [a, b] −→ IR .
(a) F heißt monoton wachsend (bzw. monoton fallend), wenn fur alle x, y ∈[a, b] mit x ≤ y stets f(x) ≤ f(y) (bzw. stets f(x) ≥ f(y)) ist.
(b) F heißt streng monoton wachsend (bzw. streng monoton fallend), wennfur alle x, y ∈ [a, b] mit x < y stets f(x) < f(y) (bzw. stets f(x) > f(y)) ist.
2
Zusammenfassend sprechen wir auch von monotonen bzw. streng monotonen Funktionen,wenn es uns auf den Monotonietyp (wachsend/fallend) nicht ankommt. Genau dann istf (streng) monoton wachsend, wenn −f (streng) monoton fallend ist. Es genugt dahermeist, sich auf einen Monotonietyp zu beschranken.
Satz 6.23
Sei f : [a, b] −→ IR stetig und streng monoton wachsend. Dann gilt:
(a) f([a, b]) = [f(a), f(b)] =: J .
(b) Die Umkehrfunktion f−1 : J −→ [a, b] existiert.
(c) f−1 ist streng monoton wachsend und stetig.
Beweis:(a) folgt aus dem Zwischenwertsatz 6.19.Zu (b): Da f streng monoton wachsend ist, ist f : [a, b] −→ J bijektiv.Zu (c): Klar, f−1 ist auch streng monoton wachsend.Sei y ∈ I und sei (yn)n∈IN eine Folge mit
y ∈ J fur alle n ∈ IN , y = limnyn.
Sei xn := f−1(yn), n ∈ IN , und x := f−1(y). Da (xn)n∈IN eine Folge in dem beschranktenIntervall [a, b] ist, enthalt (xn)n∈IN eine konvergente Teilfolge (xnk)k∈IN ; x := lim
kxnk . Aus
der Stetigkeit von f folgt
f(x) = limkf(xnk) = lim
kynk = y = f(x).
Da f streng monoton ist, ist x = x. Daraus schließt man, siehe nachfolgendes Lemma6.24, daß die gesamte Folge (xn)n∈IN gegen x konvergiert, also lim
nf−1(yn) = f−1(y).
Baumeister: Mathematik II / Stand: Juni 1997 145
Lemma 6.24
Sei (xn)n∈IN eine beschrankte Folge. Dann gilt:
(a) Jede Teilfolge von (xn)n∈IN enthalt eine konvergente Teilfolge.
(b) Hat jede konvergente Teilfolge der Folge (xn)n∈IN denselben Grenzwert x, sokonvergiert (xn)n∈IN gegen x.
Beweis:Zu (a). Dies ist bereits in Satz 4.41 festgehalten.Zu (b). Annahme: (xn)n∈IN konvergiert nicht gegen x.Sei ε > 0 . Dann gibt es eine Teilfolge (xnk)k∈IN mit |xnk − x| ≥ ε fur alle k ∈ IN .Diese Folge enthalt aber nach (a) eine konvergente Teilfolge mit Grenzwert x. Dies ist imWiderspruch zu |xnk − x| ≥ ε fur alle k ∈ IN .
Bemerkung 6.25
Der Satz 6.23 behalt seine entsprechend abgewandelte Gultigkeit, wenn man”streng mo-
noton wachsend“ durch”streng monoton fallend“ ersetzt.
Man kann zeigen, daß eine stetige Funktion f : [a, b] −→ IR injektiv genau dann ist,wenn sie streng monoton ist. 2

Kapitel 7
Zufallsgroßen und Verteilungen
In vielen Fallen interessiert uns bei einem Zufallsexperiment nicht so sehr das Ergebnisselbst, sondern nur eine bestimmte aus dem Ergebnis abgeleitete Große (Zufallsgroße).Diesen Zufallsgroßen wollen wir uns zuwenden, nachdem wir den Begriff des Wahrschein-lichkeitsraumes weiter gefaßt haben.
7.1 Axiomatische Wahrscheinlichkeit
Verlaßt man die Ebene endlicher Mengen als Ereignisse/Ergebnisse von Zufallsexperimen-ten, so kommt man nicht umhin, Wahrscheinlichkeiten als solche Setzungen anzusehen,die noch konsistent mit Erfahrungstatsachen sind, aber die prinzipielle Schwierigkeitenmit der Interpretation als relative Haufigkeiten vermeiden. Nach A.N. Kolmogoroff (1903– 1987) liegt die Losung des Problems darin, nicht mehr jeder Teilmenge der zugrun-deliegenden Menge der ins Auge gefaßten Elementarereignisse eine Wahrscheinlichkeitzuzuordnen.
Definition 7.1
Sei Ω eine nichtleere Menge. Eine Teilmenge Σ von POT (Ω) heißt σ−Algebra uberΩ, wenn sie folgende Eigenschaften besitzt:
(1) Ω ∈ Σ.
(2) A ∈ Σ =⇒ Ω\A ∈ Σ.
(3) An ∈ Σ, n ∈ IN , =⇒⋃
n∈INAn ∈ Σ.
Das Paar (Ω,Σ) heißt dann ein Ereignisraum. 2
Klar, daß zu jeder Menge Ω stets
Σmin := Ω, ∅ und Σmax := POT (Ω)
σ−Algebren sind.
146
Baumeister: Mathematik II / Stand: Juni 1997 147
Folgerung 7.2
Sei (Ω,Σ) ein Ereignisraum. Dann gilt:
(a) A,B ∈ Σ =⇒ A ∪B ∈ Σ .
(b) A,B ∈ Σ =⇒ A ∩B ∈ Σ .
Beweis:(b) ist ein Spezialfall der Tatsache, daß eine abzahlbare Vereinigung von Ereignissen zuΣ gehort. (a) folgt aus der Tatsache, daß
Ω\(A ∪ B) = (Ω\A)∩ (Ω\B)
gilt.
Beispiel 7.3
Sei Ω := IR und F := (a, b]|a ≤ b die Familie der halboffenen Intervalle. Nun gibt essicher eine σ−Algebra, die F enthalt; Σ := POT (Ω) ist so eine. Offenbar ist
ΣB := ∩Σ|Σ σ − Algebra,F ⊂ Σ
die kleinste σ−Algebra, die F enthalt. Sie heißt Borelsche σ− Algebra und jedes A ∈ ΣB
heißt Borelsche Menge. Diese σ−Algebra ist von großer Bedeutung in verschiedenenGebieten der Mathematik (Stochastik, Maßtheorie, Math. Physik,. . .). Wir konnen hiernoch nicht darauf eingehen, spater konnen wir im Zusammenhang mit nichtdiskretenZufallsgroßen etwas andeuten. 2
Definition 7.4
Sei (Ω,Σ) ein Ereignisraum. Ein Wahrscheinlichkeitsmaß auf (Ω,Σ) ist eineAbbildung
P : Σ −→ [0, 1],
welche folgende Bedingungen erfullt:
(K1) P (Ω) = 1 .
(K2) Sind die Ereignisse An der Ereignisfamilie (An)n∈IN paarweise disjunkt, so ist
P (⋃n∈IN
An) =∞∑n=1
P (An) .
(Ω,Σ, P ) heißt dann ein Wahrscheinlichkeitsraum. 2
Beachte, daß (K2) die Aussage einschließt, daß die Reihe∞∑n=1
P (An) konvergiert, eine
Tatsache, die aber schon daraus folgt, daß die Folge der Partialsummen von∞∑n=1
P (An)
beschrankt (durch 1) und monoton wachsend ist.

Baumeister: Mathematik II / Stand: Juni 1997 148
A.N. Kolmogoroff schreibt:Da das neue Axiom ((K2) ist gemeint) nur fur die unendlichen Wahrscheinlichkeitsfelder1
wesentlich ist, ware es kaum moglich, seine empirische Bedeutung zu erklaren. . . . Bei einer
Beschreibung irgendwelcher wirklich beobachtbarer zufalliger Prozesse kann man nur endliche
Wahrscheinlichkeitsfelder erhalten. Unendliche Wahrscheinlichkeitsfelder erscheinen nur als idea-
lisierte Schemata reeller zufalliger Prozesse.. . .
Bemerkung 7.5
Klar, ein endlicher Wahrscheinlichkeitsraum gemaß Definition 5.9 ist ein Spezialfall vonDefinition 7.4. Ein Beispiel fur einen Wahrscheinlichkeitsraum, der nicht endlich ist, leitetsich aus der ublichen Inhaltsmessung ab. Dazu definiere man beispielsweise zu Ω := [0, 1]die Borelsche σ–Algebra
ΣB := ∩Σ|Σ σ − Algebra,F ⊂ Σ ,
wobei nun hierF := (a, b]|a ≤ b
die Familie der halboffenen Intervalle in Ω ist. Ein Wahrscheinlichkeitsmaß auf ΣB erhaltman durch Fortsetzung des herkommlichen Inhalts
I((a, b]) := b− a , (a, b] ∈ F
zu einem Wahrscheinlichkeitsmaß P auf ΣB . Diese Fortsetzung ist mathematisch nichtganz trivial. 2
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum. Seien A,B ∈ Σ . Wir haben folgende Rechen-regeln:
(R1) P (∅) = 0 .
(R2) P (A) + P (Ω\A) = 1 .
(R3) P (A ∪B) = P (A) + P (B)− P (A ∩ B) .
(R4) P (A) ≤ P (B), falls A ⊂ B.
Den Beweis dieser Rechenregeln ubergehen wir, er ist nahezu trivial. Eine Erweiterungvon (R3) ist die Siebformel von Sylvester; siehe Satz 5.13. Diese Siebformel behalt inihrer entsprechenden Fassung auch ihre Gultigkeit.
Ein Ereignis A ∈ Σ heißt fast sicher, falls P (A) = 1 gilt; Ω ist ein fast sicheres Ereignis,ja sogar ein sicheres Ereignis. Es kann aber durchaus fast sichere Ereignisse A ∈ Σ geben,die verschieden von Ω sind.Die Begriffe
Bedingte Wahrscheinlichkeit, Unabhangigkeit
behalten ihre Bedeutung auch in unserem erweiterten Kontext.
1Dies ist der von Kolmogoroff gepragte Begriff fur Wahrscheinlichkeitsraume.

Baumeister: Mathematik II / Stand: Juni 1997 149
7.2 Zufallsgroßen
Ein mathematisches Modell fur ein Zufallsexperiment ist ein passender Wahrscheinlich-keitsraum (Ω,Σ, P ). In vielen Fallen laßt sich das Ergebnis einer einzelnen Ausfuhrungdes Experiments durch eine oder mehrere Zahlen kennzeichnen. Etwa
Augensumme beim zweimaligen Wurfeln, Korpergroße, Farbe, . . .
Dieser Tatbestand fuhrt uns zum Objekt der Zufallsgroße.2
Definition 7.6
Sei (Ω,Σ) ein Ereignisraum. Eine Abbildung X : Ω −→ IR heißt Zufallsgroße,wenn fur alle x ∈ IR gilt:
X ≤ x := ω ∈ Ω|X(ω) ≤ x ∈ Σ
2
Beachte, daß aus den Rechenregeln in Σ folgt, daß mit einer Zufallsgroße X aufgrund vonDefinition 7.6 stets gilt:
X > x := ω ∈ Ω|X(ω) > x ∈ Σ,
X < x := ω ∈ Ω|X(ω) < x ∈ Σ,
a ≤ X ≤ b := X ∈ [a, b] := ω ∈ Ω|X(ω) ∈ [a, b] ∈ Σ.
Ist nun X eine Zufallsgroße auf dem Wahrscheinlichkeitsraum (Ω,Σ, P ), so ist auch
X = x := ω ∈ Ω|X(ω) = x
ein Ereignis und besitzt daher eine Wahrscheinlichkeit. Daran schließt an
Definition 7.7
Sei X eine Zufallsgroße auf dem Wahrscheinlichkeitsraum (Ω,Σ, P ).
(a) Unter der Verteilung von X versteht man die Familie (PX,x)x∈IR der Wahr-scheinlichkeiten PX,x := P (X = x) , x ∈ IR .
(b) Die AbbildungFX : IR 3 x 7−→ P (X ≤ x) ∈ [0, 1]
heißt die Verteilungsfunktion von X .
2
Wir kennen bereits eine Reihe von Verteilungen aus Kapitel 5, wenn wir dort auch dieZufallsgroße nicht explizit aufgefuhrt haben. Die wichtigsten Verteilungen diskutieren wirin Abschnitt 5.4 im Zusammenhang mit weiteren Begriffen bei Zufallsgroßen.
2In der Literatur ist fur eine Zufallsgroße auch der altere Ausdruck “Zufallsvariable“ gebrauchlich. Die-se Begriffsbildung vertragt sich nicht mehr mit der heutigen Auffassung von Abbildungen und Variablen.

Baumeister: Mathematik II / Stand: Juni 1997 150
Beispiel 7.8
Sei Ω := K(opf), Z(ahl),Σ := POT (Ω), X(ω) := Anzahl von Kopf beim Wurf (Aus-gang 0 oder 1). Also
x x < 0 0 ≤ x < 1 x ≥ 1
FX(x) 0 12 1
FX ist also eine”Treppenfunktion“ mit 2 Stufen. 2
Folgerung 7.9
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X eine Zufallsgroße. Sei FX diezugehorige Verteilungsfunktion.
(a) P (a < X ≤ b) = FX(b)− FX(a) fur a ≤ b .
(b) FX ist monoton wachsend.
(c) P (X > a) = 1−FX(a) , P (X < a) = FX(a−) , a ∈ IR, wobei FX(a−) derlinkseitige Grenzwert von FX an der Stelle a ist.
(d) P (a ≤ X ≤ b) = FX(b)− FX(a−) fur a ≤ b .
(e) limx→−∞
FX(x) = 0 , limx→∞
FX(x) = 1 .
Beweis:Zu (a).FX(b) = P (X ≤ a) + P (a < X ≤ b) = FX(a) + P (a < X ≤ b) .Zu (b).Folgt aus (a).Zu (c).P (X > a) = 1− FX(a) folgt aus den Definitionen von P und FX .Die Existenz des angegebenen Grenzwerts folgt aus der Tatsache, daß die Funktion FXmonoton wachsend ist und ihr Bildbereich in [0, 1] enthalten ist, so: Zunachst existiertsicher eine Folge (xn)n∈IN mit xn < a fur alle n ∈ IN , lim
nxn = a und z := lim
nFX(xn)
existiert. Aus der Monotonie folgt, daß z fur jede solche Folge identisch ist. Also giltz = lim
nFX(xn) fur jede Folge (xn)n∈IN mit xn < a fur alle n ∈ IN und lim
nxn = a , da
(FX(xn))n∈IN eine konvergente Teilfolge enthalt; siehe 4.41 und 6.24.
P (X < a) = P (X ≤ a− 1) +∞∑k=1
P (a−1
k< X ≤ a−
1
k + 1)
= FX(a− 1) + limn
n∑k=1
P (a−1
k< X ≤ a−
1
k + 1)
= FX(a− 1) + limn
n∑k=1
(FX(a−1
k + 1)− FX(a−
1
k))
= FX(a− 1) + limnFX(a−
1
n+ 1)− FX(a− 1)

Baumeister: Mathematik II / Stand: Juni 1997 151
= limnFX(a−
1
n+ 1)
= FX(a−)
Zu (d).
P (a ≤ X ≤ b) = P (a < X ≤ b) + P (X = a)
= (FX(b)− FX(a)) + (FX(a)− FX(a−))
= FX(b)− FX(a−) .
Zu (e).Die Existenz der angegebenen Grenzwerte folgt aus der Tatsache, daß die Funktion FXmonoton wachsend ist und ihr Bildbereich in [0, 1] enthalten ist; siehe oben. Ferner habenwir 0 ≤ lim
x→−∞FX(x) ≤ lim
x→∞FX(x) ≤ 1 . Es genugt also zu zeigen, daß
limn∈IN
FX(−n) = 0 , limn∈IN
FX(n) = 1
gilt. Betrachte die Ereignisfolge (Ak)k∈ZZ mit Ak := k − 1 < X ≤ k, k ∈ ZZ . Damithaben wir P (Ω) = P (∪k∈ZZAk) und daher
1 = P (∪k∈ZZAk)
=∑k∈ZZ
P (Ak)
= limn∈IN
k=n∑k=−n
P (Ak)
= limn∈IN
k=n∑k=−n
(FX(k)− FX(k − 1))
= limn∈IN
(FX(n) − FX(−n))
= limn∈IN
FX(n)− limn∈IN
FX(−n)
Daraus liest man die Notwendigkeit limn∈IN
FX(−n) = 0 und limn∈IN
FX(n) = 1 ab.
Maßzahlen fur eine Zufallsgroße sind zwei Parameter, die sowohl in der Wahrscheinlich-keitstheorie als auch in der Statistik eine herausragende Rolle spielen. Der eine Parameterist der Erwartungswert, der zweite ist die Varianz. Bei den bisher ausgebreiteten Analy-sisergebnissen konnen wir diese Maßzahlen nicht im allgemeinen Kontext erklaren.
Definition 7.10
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X eine Zufallsgroße. X heißtdiskrete Zufallsgroße, falls der Wertebereich von X abzahlbar ist. 2
Da offenbar jede (diskrete) Zufallsgroße X : Ω −→ IR eine disjunkte Zerlegung
Ω =⋃x∈IR
X = x

Baumeister: Mathematik II / Stand: Juni 1997 152
in Ereignisse liefert, gilt stets
1 =∑x∈IR
P (X = x) .
(Beachte dabei, daß nur abzahlbar viele Summanden von Null verschieden sind.)
Definition 7.11
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X : Ω −→ IR eine diskreteZufallsgroße mit Wertebereich xn|n ∈ IN . Wir sagen, daß der ErwartungswertIE (X) von X existiert, falls die Reihe
∞∑i=1
|xi|P (X = xi)
konvergiert. Wir setzen dann
IE (X) :=∞∑i=1
xiP (X = xi)
und nennen IE (X) den Erwartungswert von X. 2
Ist X eine diskrete Zufallsgroße auf (Ω,Σ, P ), dann ist IE (X) also ein”mittlerer“ Wert
fur die Werte von X. Oder: Stellen wir uns die Zufallsgroße X als Massenverteilung aufIR vor, bei der die Werte xi das Gewicht P (X = xi) tragen, so ist IE (X) gerade der(physikalische) Schwerpunkt der Massenverteilung.
P.S. Laplace (1749 – 1827) schreibt uber den Erwartungswert:Die Wahrscheinlichkeit der Ereignisse dient dazu, die Hoffnung oder Furcht der an ihrer Exi-
stenz interessierten Personen zu bestimmen. Das Wort Hoffnung hat verschiedene Bedeutungen:
es druckt allgemein den Vorteil desjenigen aus, der irgend ein Gut in Folge von Vorausset-
zungen erwartet, die nur wahrscheinlich sind. Dieser Vorteil ist in der Theorie des Zufalls das
Produkt der erwarteten Summe mit der Wahrscheinlichkeit sie zu erlangen. . . . Wir werden
diesen Vorteil die “mathematische Hoffnung“ ( franz. esperance) nennen. . . . Man soll es im
gewohnlichen Leben immer so einrichten, daß das Produkt aus dem Gute, das man erwartet, mit
seiner Wahrscheinlichkeit dem gleichen Produkte bzgl. des Verlustes mindestens gleichkommt.
Aber um das zu erreichen, ist es notwendig, die Vorteile und Verluste und ihre gegenseitigen
Wahrscheinlichkeiten genau abzuschatzen. Dazu bedarf es einer großen Exaktheit des Geistes,
eines feinen Takts und einer bedeutenden sachlichen Erfahrung; man muß sich vor Vorurtei-
len, vor den Tauschungen der Furcht und der Hoffnung, sowie vor den falschen Begriffen von
Glucksgunst und wirklichem Gluck, mit denen die meisten Menschen ihre Eigenliebe einwiegen,
in Acht nehmen.
Die Forderung, daß nicht nur∞∑i=1
xiP (X = xi)

Baumeister: Mathematik II / Stand: Juni 1997 153
konvergiert, sondern sogar∞∑i=1
|xi|P (X = xi),
sichert, daß die Reihe∞∑i=1
xiP (X = xi) unabhangig von der Reihenfolge der Summati-
on ist. (Dies ist ein Resultat der Analysis, genannt der Umordnungssatz, den wir nichtbeweisen wollen3.)
Es sollte klar sein, daß in der Summation die Schwierigkeiten liegen, den Begriff desErwartungswertes auf eine beliebige Zufallsgroße auszuweiten.
Beispiel 7.12
Die Zufallsgroße X, die die mit einem idealen Wurfel geworfene Augenzahl beschreibt,besitzt den Erwartungswert
IE (X) = 1 ·1
6+ 2 ·
1
6+ 3 ·
1
6+ 4 ·
1
6+ 5 ·
1
6+ 6 ·
1
6= 3.5
2
Seien X, Y Zufallsgroßen auf dem Wahrscheinlichkeitsraum (Ω,Σ, P ) und sei a ∈ IR .Dann sind auch
aX : Ω 3 ω 7−→ aX(ω) ∈ IR ,
X + Y : Ω 3 ω 7−→ X(ω) + Y (ω) ∈ IR ,
X · Y : Ω 3 ω 7−→ X(ω) · Y (ω) ∈ IR ,
|X| : Ω 3 ω 7−→ |X(ω)| ∈ IR
Zufallsgroßen auf (Ω,Σ, P ) . Fur X ·X schreiben wir auch oft kurz X2 .
Folgerung 7.13
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X, Y diskrete Zufallsgroßen,deren Erwartungswerte existieren. Dann gilt:
(i) Fur a ∈ IR existiert IE (aX) und IE (aX) = a IE (x).
(ii) Der Erwartungswert von X + Y existiert und IE (X + Y ) = IE (X) + IE (Y ).
Beweis:(i) ist unmittelbar klar. Zu (ii).Wir betrachten nur den schwierigeren Fall, daß der Bildbereich von X und Y nicht endlichist. Sei X(ω)|ω ∈ Ω = xi|i ∈ IN , X(ω)|ω ∈ Ω = yj|j ∈ IN . Damit ist
(X + Y )(ω)|ω ∈ Ω = xi + yj|i, j ∈ IN
3Siehe etwa: Forster, O.: Analysis 1, Vieweg–Verlag, S. 43 ff.

Baumeister: Mathematik II / Stand: Juni 1997 154
und ∑i,j∈IN
|xi + yj|P (X + Y = xi + yj) ≤∑i,j∈IN
(|xi|+ |yj|)P (X + Y = xi + yj)
=∑i,j∈IN
(|xi|+ |yj|)P (X = xi, Y = yj)
Der letzte Schritt hat seine Berechtigung, da das Ereignis X + Y = xi + yj stets alsX = xk ∩ Y = yl mit xk + yl = xi + yj vorkommt. Also folgt nun
∑i,j∈IN
|xi + yj|P (X + Y = xi + yj)
≤∑i,j∈IN
(|xi|+ |yj|)P (X = xi, Y = yj)
=∑i,j∈IN
|xi|P (X = xi, Y = yj) +∑i,j∈IN
|yj|P (X = xi, Y = yj)
=∑i∈IN
|xi|P (X = xi) +∑j∈IN
|yj|P (Y = yj)
Da IE (X), IE (Y ) existieren, lesen wir ab, das nun auch IE (X + Y ) existiert. Nun konnenwir die Rechnung ohne Betragsstriche wiederholen und eerhalten die angegebe Formel.
Beispiel 7.14
Betrachte folgendes Spiel: Beim Werfen zweier idealer Wurfel erhalt der Spieler DM 10.–,wenn beide Wurfel eine 6 zeigen, DM 2.–, wenn genau ein Wurfel eine 6 zeigt, DM 0.–sonst.Die Ereignismenge Ω sind die Paare (i, j) mit 1 ≤ i, j ≤ 6 , als σ–Algebra nehmen
wir POT (Ω), die Wahrscheinlichkeit fur jedes Elementarereignis (i, j) ist 136 . Damit ist
angedeutet, daß die beiden Wurfel unabhangig voneinander geworfen werden.Wir bezeichnen mit X die Zufallsgroße, die den Gewinn eines Spielers beschreibt. VonInteresse sind die Ereignisse
A2 := (6, 1), (6, 2), (6, 3), (6, 4), (6, 5), (5, 6), (4, 6), (3, 6), (2, 6), (1, 6),
A10 := (6, 6) , A0 := Ω\(A10 ∪A2) .
Die Werte von X erhalten wir durch folgende Zuordnung:
Ω 3 ω 7−→
2 , falls ω ∈ A2
10 , falls ω ∈ A10
0 , sonst
Daraus leiten wir
P (X = 2) =1
36, P (X = 10) =
10
36, P (X = 0) =
25
36
ab. Als Erwartungswert ergibt sich
IE (X) = 2 ·1
36+ 10 ·
10
36+ 0 ·
25
36=
5
6

Baumeister: Mathematik II / Stand: Juni 1997 155
Dieses Ergebnis laßt erwarten – siehe unten– , daß der Spieler im Mittel 56 DM pro Spiel
gewinnt. Ein Einsatz des Spielers pro Spiel in Hohe von 1 DM ware also nicht vorteilhaft.2
Definition 7.15
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X, Y Zufallsgroßen. Diese Zu-fallsgroßen heißen unabhangig, falls
P (X = x, Y = y) = P (X = x)P (Y = y)
fur alle x, y ∈ IR gilt. 2
Folgerung 7.16
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X, Y diskrete Zufallsgroßen,deren Erwartungswert existieren. Sind X, Y unabhangig, so existiert IE (X · Y ) undes gilt IE (X · Y ) = IE (X) IE (Y ).
Beweis:Seien xi|i ∈ IN , yj|j ∈ IN die Werte von X bzw. Y . Dann sind xiyj|i, j ∈ IN dieWerte von X · Y und wir haben (siehe Beweis zu Folgerung 7.13)
∞∑i,j=1
|xi| |yj|P (X · Y = xiyj) =∞∑
i,j=1
|xi| |yj|P (X = xi, Y = yj)
=∞∑
i,j=1
|xi| |yj|P (X = xi)P (Y = yj)
=∞∑i=1
|xi|P (X = xi)∞∑j=1
|yj|P (Y = yj)
Daraus liest man ab,daß IE (X · Y ) existiert. Wir konnen nun die obige Rechnung ohnedie Betragsstriche wiederholen, da nun dank der Konvergenz mit Betragsstrichen dieUmordnung der Reihen erlaubt ist. Wir erhalten so das Ergebnis.
Beispiel 7.17
Betrachte ein Glucksrad, aufgeteilt in 4 gleiche Sektoren. Durch einen Innenkreis entstehen8 gleiche Sektoren. Die Sektoren werden folgendermaßen beschriftet:
10 innen 0 außen0 innen 20 außen10 innen 0 außen0 innen 20 außen
Damit ist eine außere Zufallsvariable X und eine innere Zufallsvariable Y auf einemoffensichtlichen Wahrscheinlichkeitsraum definiert. Wir erhalten:
IE (X) = 10 , IE (Y ) = 5 , IE (X · Y ) = 0 .

Baumeister: Mathematik II / Stand: Juni 1997 156
Also sind wegen IE (X · Y ) 6= IE (X) · IE (Y ) diese Zufallsgroßen nicht unabhangig; derWert von X bestimmt den von Y .Nimmt man stattdessen die Beschriftung
2 innen 100 außen0 innen 50 außen10 innen 100 außen2 innen 50 außen
vor, dann sind diese Zufallsgroßen unabhangig; kennt man den Wert von X, so sagt dieserWert nichts uber den Wert von Y . Es ist
IE (X) = 75 , IE (Y ) = 6 , IE (X · Y ) = 450 = IE (X) · IE (Y ) .
Definition 7.18
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X1, . . . , Xn Zufallsgroßen. Die-se Zufallsgroßen heißen unabhangig, falls
P (X1 = x1, . . . , Xn = xn) = P (X1 = x1) · · ·P (Xn = xn)
fur alle x1, . . . , xn ∈ IR gilt. 2
Durch vollstandige Induktion beweist man
Folgerung 7.19
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X1, . . . , Xn diskrete Zufalls-großen, deren Erwartungswert existieren. Sind X1, . . . , Xn unabhangig, so existiertIE (X1 · · ·Xn) und es gilt IE (X1 · · ·Xn) = IE (X1) · · · IE (Xn).
Beispiel 7.20
Betrachten wir die folgenden Spiele:
Spiel 1: Wurfeln mit drei idealen Wurfeln. Das Produkt der Augenzahlen wird in Pfen-nigen ausgezahlt.
Spiel 2: Wurfeln mit drei idealen Wurfeln. Das Funffache der Augensumme wird inPfennigen ausgezahlt.
Welches Spiel kann man bei einem Einsatz von 50 Pfennig pro Spiel spielen?Wir numerieren die Wurfel und bezeichnen mit X1, X2, X3 die Zufallsgroßen der jeweilsgeworfenen Augenzahlen. Es gibt 63 = 216 verschiedene Elementarereignisse. Da wir einBernoulli–Experiment unterstellen, gelten die Identitaten
P (X1 = i, X2 = j,X3 = k) =1
216, 1 ≤ i, j, k ≤ 6 ,

Baumeister: Mathematik II / Stand: Juni 1997 157
und
P (X1 = i)P (X2 = j)P (X3 = k) =1
216, 1 ≤ i, j, k ≤ 6 .
Die Zufallgroßen sind also unabhangig. Damit gilt nach Folgerung 7.19 fur die Gewinner-wartung:
Spiel 1: IE (X1 ·X2 ·X3) = IE (X1) IE (X2) IE (X3) = (72)3 .
Spiel 2: IE (5(X1 +X2 +X3)) = 5(IE (X1) + IE (X2) + IE (X3)) = 5 · 3 · 72 .
Die Gewinnerwartung liegt bei Spiel 1 unter, bei Spiel 2 uber dem Einsatz. Daher kannman das zweite Spiel mitmachen, das erste dagegen aber nicht. 2
Der Erwartungswert einer Zufallsgroße ist eine Maßzahl fur den Schwerpunkt, die nuneinzufuhrende Varianz ist eine Maßzahl fur die Streuung um diesen Schwerpunkt.
Definition 7.21
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X eine diskrete Zufallsgroße aufΩ mit Erwartungswert IE (X) .Existiert der Erwartungswert der Zufallsgroße (X − IE (X))2, so heißt
VI ar(X) := IE ((X − IE (X))2)
die Varianz von X und√
VI ar(X) die Streuung oder Standardabweichung vonX und wir sagen, daß die Varianz endlich sei. Wir setzen dann
σX :=√
VI ar(X) .
2
Bemerkung 7.22
Die Streuung σX einer Zufallsgroße andert sich proportional, d.h. σλX = λσX(λ > 0). Dieswurde auch fur die alternative Maßzahl E(|X− IE (x)|) gelten. Vorteile fur σX gegenuberdieser Maßzahl sind leichtere Berechenbarkeit (Betrage !) und starkere Bewertung großerAbweichungen vom Erwartungswert. 2
Lemma 7.23
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und seien X, Y diskrete Zufallsgroßen aufΩ, mit Erwartungswerten IE (X), IE (Y ) und endlichen Varianzen VI ar(X),VI ar(Y ) .Dann gilt:
(a) VI ar(X) = IE (X2)− IE (X)2
(b) VI ar(X + Y ) = VI ar(X) + VI ar(Y ), falls X, Y unabhangig sind.
Beweis:

Baumeister: Mathematik II / Stand: Juni 1997 158
Es giltE((X − IE (X))(Y − IE (Y )))
= IE (XY )− IE (X IE (Y ))− IE (Y IE (X)) + IE (IE (X) IE (Y ))
= IE (XY )− IE (X) IE (Y )− IE (Y ) IE (X) + IE (X) IE (Y )
= IE (XY )− IE (X) IE (Y )
Nun folgt (a) durch Anwendung auf Y := X . (b) folgt ebenfalls daraus unter Zuhilfenahmevon Folgerung 7.16.
7.3 Das schwache Gesetz der großen Zahl
Das schwache Gesetz der großen Zahl wird uns helfen, den Zusammenhang von Wahr-scheinlichkeiten und relativen Haufigkeiten besser zu verstehen. Das entscheidende Hilfs-mittel dabei ist die wichtige Tschebyscheffsche Ungleichung (7.1)
Satz 7.24Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X eine diskrete Zufallsgroße mitErwartungswert IE (X) und Varianz VI ar(X) . Dann gilt fur jedes ε > 0 :
P (|X − IE (X)| ≥ ε) ≤ VI ar(X)ε−2 (7.1)
Beweis:Sei ε > 0. Setze Z := X − IE (X) und
Y (ω) :=
0 , falls |Z(ω)| < εε2 , falls |Z(ω)| ≥ ε
(7.2)
Dann ist Y ≤ Z2 und daher
VI ar(X) = IE (Z2) ≥ IE (Y ) = ε2P (Y = ε2)
= ε2P (|X − IE (X)| ≥ ε)
Der Wert der Tschebyscheffschen Ungleichung liegt in ihrer Allgemeinheit. Die Abschat-zung darin ist ziemlich grob. Sie wurde erstmals von Bienayme 1853 aufgestellt, un-abhangig davon fand sie Tschebyscheff (1821 – 1894) 1867 und verwendete sie erstmalszum Beweis des Gesetzes der großen Zahl.
Satz 7.25Seien X1, . . . , Xn unabhangige diskrete Zufallsgroßen auf dem Wahrscheinlichkeits-raum (Ω,Σ, P ) Es gelte
IE (Xi) = IE (X1) , VI ar(Xi) ≤M <∞ , 1 ≤ i ≤ n .
Dann gilt fur alle ε > 0 :
P (|1
n(X1 + . . .+Xn)− IE (X1)| ≥ ε) ≤
M
ε2n(7.3)
Beweis:

Baumeister: Mathematik II / Stand: Juni 1997 159
Sei X := 1n(X1 + . . .+Xn). Dann ist IE (X) = IE (X1) und
VI ar(X) = n−2 VI ar(X1 + . . .+Xn) = n−2(VI ar(X1) + . . .+ VI ar(Xn)) ≤M
n
Nun wende man die Tschebyscheffsche Ungleichung an.
Durch das schwache Gesetz der großen Zahl konnen wir nun verstehen, weshalb die relativeHaufigkeit unter Umstanden eine gute Approximation fur Wahrscheinlichkeiten ist.
Beispiel 7.26
Wir betrachten ein Bernoulli–Experiment mit Erfolgswahrscheinlichkeit p ∈ [0, 1]. Wirwiederholen dieses Experiment n−mal unabhangig und setzen
Xi(ω) :=
1 , falls ω ∈ A0 , sonst
, 1 ≤ i ≤ n ,
wobei A ein Ereignis in einer σ–Algebra auf einer Menge Ω sei. Dann ist
IE (Xi) = p , VI ar(Xi) = p(1− p) ≤1
4, 1 ≤ i ≤ n,
und hn := 1n(X1 + . . .+Xn) ist die relative Haufigkeit der Erfolge. Also ist
P (|hn − p| ≥ ε ≤1
4ε2n
Fur großes n ist also die Wahrscheinlichkeit dafur, daß die relative Haufigkeit der Erfolgesich mehr als ε von der Erfolgswahrscheinlichkeit p unterscheidet, sehr klein. Dies istder Schlussel dafur, abwagen zu konnen, ob ein Gluckspiel mit Einsatz und Auszahlungvorteilhaft ist. 2
7.4 Spezielle Verteilungen
Zunachst eine Bezeichnung: Ist S ⊂ T, so heißt die Abbildung χS
: T −→ IR mit
χS(x) :=
1 , falls x ∈ S0 , sonst
die charakteristische Funktion von S.
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X : Ω −→ IR eine diskrete Zufallsgroßemit Wertebereich WX . Wir unterscheiden:
Diskrete Verteilung

Baumeister: Mathematik II / Stand: Juni 1997 160
Bildbereich: WX = w1, . . . , wn
Parameter der Verteilung: n = #WX
Verteilung: PX,x = P (X = x) = 1nχWX (x) , x ∈ IR .
Fur den Spezialfall WX = 1, . . . , n erhalten wir:
Erwartungswert: IE (X) = n + 12
Varianz: VI ar(X) = n2 − 112
Der Beweis zu den Formeln fur IE (X) und VI ar(X) ist einfach:
IE (X) = 1n
n∑i=1
i = 1nn(n + 1)
2 = n + 12
VI ar(X) = 1n
n∑i=1
(i− n+ 12 )2 = 1
nn∑i=1
i2 − (n+ 12 )2 = n2 − 1
12
Zu diesem Typ von Verteilung haben wir schon Beispiele kennengelernt; siehe Laplace–Wahrscheinlichkeit und Beispiel 7.12.
Bernoulli–Verteilung
Bildbereich: WX = 0, 1
Parameter der Verteilung: p ∈ [0, 1] (“Erfolgswahrscheinlichkeit“)
Verteilung: PX,x = P (X = x) = px(1− p)1−xχWX
(x) , x ∈ IR .
Erwartungswert: IE (X) = p
Varianz: VI ar(X) = p(1− p)
Der Beweis zu den Formeln fur IE (X) und VI ar(X) ist einfach:
IE (X) = 1p + 0(1− p) = p
VI ar(X) = 12p+ 02(1− p)− p2 = p(1− p)
Jedes Bernoulli–Experiment beinhaltet die Bernoulli–Verteilung; der Munzwurf (p = 12)
kann als Beispiel dafur dienen.
Binomial–Verteilung
Bildbereich: WX = 0, 1, . . . , n
Parameter der Verteilung: n, p
Verteilung: PX,x =(nx
)px(1− p)n−xχ
WX(x) , x ∈ IR .
Erwartungswert: IE (X) = np
Varianz: VI ar(X) = np(1− p)

Baumeister: Mathematik II / Stand: Juni 1997 161
Der Beweis zu den Formeln fur IE (X) und VI ar(X) ist nun schon etwas “trickreich“:
IE (X) =n∑i=0
i
(n
i
)pi(1− p)n−i
=n∑i=1
i
(n
i
)pi(1− p)n−i
=n∑i=1
n
(n− 1
i− 1
)pi(1− p)n−i
= npn∑i=1
(n − 1
i− 1
)pi−1(1− p)(n−1)−(i−1)
= npn−1∑j=0
(n− 1
j
)pj(1− p)(n−1)−j
= np(p + (1− p))n−1
= np
Der Nachweis fur die Formel fur VI ar(X) gelingt mit vergleichbaren Rechenschritten.
Beispiel 7.27
Ein Versuch bestehe aus der n–maligen Durchfuhrung eines Bernoulli–Experimentes mitErfolgswahrscheinlichkeit p ∈ [0, 1] . Die Menge der Elementarereignisse wird dann ada-quat beschrieben durch Ω := 0, 1n . Die Bernoulli–Experimente sollen unabhangig von-einander durchgefuhrt werden, das Wahrscheinlichkeitsmaß auf Ω ist also das Produkt-maß. Die erfolgreichen Ausgange unter den n Experimenten werden gezahlt durch dieZufallsgroße
X : Ω 3 (ω1, . . . , ωn) 7−→ ω1 + · · ·+ ωn ∈ IR .
Damit haben wir
P (X = x) =
(n
x
)px(1− p)n−x , x ∈ 0, . . . , n ,
und X ist also binomialverteilt. 2
Nach diesem Beispiel sehen wir auch einen anderen Weg, die Varianz einer Binomial–Verteilung zu berechnen: Wir fassen die Zufallsgroße X als Summe von ZufallsgroßenX1, . . . , Xn auf, die unabhangig und einzeln nach Bernoulli verteilt sind. Also
VI ar(X) = VI ar(X1) + · · ·+ VI ar(Xn) = np(1− p) .
Geometrische Verteilung

Baumeister: Mathematik II / Stand: Juni 1997 162
Bildbereich: WX = IN 0
Parameter der Verteilung: p ∈ (0, 1]
Verteilung: PX,x = P (X = x) = p(1− p)xχWX
(x) , x ∈ IR .
Erwartungswert: IE (X) = 1− pp
Varianz: VI ar(X) = 1− pp2
Der Nachweis fur die Formeln fur IE (X) und VI ar(X) gelingt bei Verwendung der Formeln
∞∑j=0
jqj =q
(1− q)2,∞∑j=0
j2qj =q + q2
(1− q)3,
welche fur q ∈ [0, 1) gultig sind, sehr leicht. Wir beweisen die erste der beiden Formeln:Fur N ∈ IN gilt
(N∑j=0
jqj) · (1− q)2 = q − 2NqN+1 +NqN+2
und Grenzubergang liefert die Aussage, wenn wir noch beachten, daß die Folge (nqn)n∈IN
gegen 0 konvergiert, wenn |q| < 1 ist. Dies sieht man nun so:
Es ist√|q| < 1 . Wegen lim
n∈IN
n√n = 1 (siehe Beispiel ??) gibt es N ∈ IN mit
1 ≤ n√n ≤
1√|q|
fur alle n ≥ N .
Also gilt fur alle n ≥ N
|nqn| = | n√nq|n ≤ (
1√|q||q|)n = (
√|q|)n .
Die Aussage folgt nun aus der Tatsache, daß limn∈IN
√|q|
n
= 0 gilt (siehe Beispiel 4.31).
Interessiert man sich fur die Anzahl der Versuche, bis bei einer mehrfachen Wiederholungeines Bernoulli–Experiments mit Erfolgswahrscheinlichkeit p ∈ (0, 1] zum ersten Mal einErfolg eintritt, dann beschreibt eine Zufallsgroße X mit der Verteilung
PX,x = P (X = x) = p(1− p)xχIN0
(x) , x ∈ IR ,
die Anzahl der Abbruche bis zur ersten erfolgreichen Durchfuhrung.
Hypergeometrische Verteilung

Baumeister: Mathematik II / Stand: Juni 1997 163
Bildbereich: WX = 0, 1, . . . , n
Parameter der Verteilung: n,M,N, p := MN
mit M < N,n < N .
Verteilung: PX,x = P (X = x) =(Mx )(N−Mn−x )
(Nn)χWX
(x) , x ∈ IR .
(Konvention(ij
)= 0 fur j < 0 oder j > i )
Erwartungswert: IE (X) = np
Varianz: VI ar(X) = np(1− p)N − nN − 1
Zur Berechnung von IE (X) eine Vorbemerkung. Man beweist fur (zulassige) p, q, r ∈ INdie Formel
r∑k=0
(p
k
)(q
r − k
)=
(p + q
r
)(7.4)
Damit gelingt nun die Berechnung des Erwartungswertes wie folgt:
IE (X) =
(N
n
)−1 n∑x=0
x
(M
x
)(N −M
n − x
)
=
(N
n
)−1 n∑k=1
k
(M
k
)(N −M
n− k
)
=
(N
n
)−1 n∑k=1
M
(M − 1
k − 1
)(N −M
n− k
)
= M
(N
n
)−1 n−1∑j=0
(M − 1
j
)(N −M
n− 1− j
)
= M
(N
n
)−1(M − 1 +N −M
n− 1
)
=M
Nn
Die Berechnung der Formel fur VI ar(X) erfolgt auf ahnlichem Wege.
Beispiel 7.28
Zur Herleitung einer Zufallsgroße, die hypergeometrisch verteilt ist, gehen wir von einerfur diese Verteilung typischen Situation (Qualitatskontrolle) aus.Ein Warenposten umfaßt N Teile, unter denen sich M Ausschußteile befinden. Wir ent-nehmen diesem Warenposten nacheinander und ohne Zurucklegen – es moge etwa eine“Beschadigung“ durch die Entnahme nicht auszuschließen sein – n Teile und interessierenuns fur die Wahrscheinlichkeitsverteilung derjenigen Zufallsgroße X, die die Anzahl derAusschußteile in einer solchen Stichprobe angibt.Es sei X die Anzahl der defekten Teile, die beim Versuch gezogen werden. Ein Elemen-tarereignis dieses Versuches besteht aus einer n–Teilmenge aller Teile des Warenpostens.Jedes Elementarereignis ist gleichwahrscheinlich und hat daher die Wahrscheinlichkeit

Baumeister: Mathematik II / Stand: Juni 1997 164
(Nn
). Das Ereignis X = x tritt ein, wenn man x–mal eine defektes Teil und (N − x)–
mal ein fehlerfreies Teil entnimmt. Fur die erste Wahl gibt es(Mx
), fur die zweite Wahl
gibt es(N−Mn−x
)Moglichkeiten. Damit wird
P (X = x) =
(M
x
)(N −M
n− x
)(N
n
) ,
falls x zum Wertebereich der Zufallsgroße gehort. Die Zufallsgroße hat also eine hyper-geometrische Verteilung.
2
Poisson–Verteilung
Bildbereich: WX = IN 0
Parameter der Verteilung: λ
Verteilung: PX,x = P (X = x) =exp(−λ)λx
x! χWX
(x) , x ∈ IR .
Erwartungswert: IE (X) = λ
Varianz: VI ar(X) = λ
Der Nachweis der Formel fur den Erwartungswert ist einfach:
IE (X) =∞∑k=0
k exp(−λ)λk
k!
= exp(−λ)∞∑k=1
λk
(k − 1)!
= λ exp(−λ)∞∑k=0
λk
k!
= λ exp(−λ) exp(λ)
= λ
Der Nachweis der Formel fur die Varianz erfolgt mit ahnlichen Rechenschritten.
Diese Verteilung geht auf S.D. Poisson (1781 – 1840) zuruck. Sie kommt bei seltenenEreignissen vor ; siehe unten. Stichworte sind:Anzahl der Telefonanrufe pro Zeiteinheit in der Telefonzentrale einer Firma, Anzahl dervon einer radioaktiven Probe ausgestrahlten Partikel pro Zeiteinheit, Anzahl von Jobs,die pro Zeiteinheit an einem Rechnerserver eintreffen, . . ..Wir begrunden ihre Wichtigkeit als Grenzwert der Binomialverteilung.
Beispiel 7.29

Baumeister: Mathematik II / Stand: Juni 1997 165
Die Wahrscheinlichkeit, daß eine mit einem bestimmten Serum geimpfte Person die Imp-fung nicht vertragt, sei p := 10−3 . Insgesamt werden 2000 Personen mit diesem Serumgeimpft. Die binomialverteilte Zufallsvariable X beschreibe dabei die Anzahl derjenigengeimpften Personen, die die Impfung nicht vertragen. Dabei ist n = 2000 sehr groß undder Parameter p = 10−3 sehr klein. Aus (siehe Abschnitt 5.6)
P (X = x) = β(k; 2000, 10−3) =
(2000
k
)10−3k(1− 10−3)2000−k
erhalten wir fur k = 0 die Wahrscheinlichkeit
P (X = 0) = (1− 10−3)2000−k = (1−2
2000)2000 = 0.13520 .
Wegen
limn∈IN
(1−λ
n)n = exp(−λ)
gilt fur große n die Naherung
(1−λ
n)n ≈ exp(−λ) .
Damit erhalten wir die Approximationsformel
β(0; 2000, 10−3) ≈ exp(−2) = 0.13534 .
Aus der Rekursionsformel
β(k + 1;n, p) =(n− k)p
(k + 1)(1− p)β(k;n, p) , k = 0, . . . , n− 1 ,
folgt
β(1; 2000, 10−3) = 2000 · 10−3
1 · (1− 10−3)· β(0; 2000, 10−3) ≈ 2 · exp(−2) = 0.271 ,
β(2; 2000, 10−3) = 1999 · 10−3
2 · (1− 10−3)· β(1; 2000, 10−3) ≈ 22 · 2−1 · exp(−2) = 0.271 ,
β(3; 2000, 10−3) = 1998 · 10−3
3 · (1− 10−3)· β(2; 2000, 10−3) ≈ 23 · (3!)−1 · exp(−2) = 0.180 .
Durch vollstandige Induktion uber k laßt sich leicht zeigen, daß fur alle k = 0, . . . , n dieNaherungsformel
β(k; 2000, 10−3) ≈ 2k · (k!)−1 exp(−2)
gilt. Dabei ist die Zahl 2 gleich dem Erwartungswert IE (X) = np . 2
Der folgende Satz bringt nun die hiermit angedeutete Aussage auf den Punkt.
Satz 7.30
Sei λ > 0 . Es gilt:
limn→∞,p→0,np=λ
β(k;n, p) =λk
k!exp(−λ) , k ∈ IN 0 . (7.5)
Beweis:

Baumeister: Mathematik II / Stand: Juni 1997 166
Unter Berucksichtigung von np = λ gilt:
β(k;n, p) =
(n
k
)pk(1− p)n−k
=n(n− 1) · · · (n− k + 1)
n · n · · · n
λk
k!(1−
λ
n)n(1−
λ
n)−k
= 1(1−1
n) · · · (1−
k − 1
n)(1−
λ
n)−k
λk
k!(1−
1
n)n
Damit erhalten wir fur jedes k
limn→∞
(1−1
n) · · · (1−
k − 1
n) = 1 , lim
n→∞(1−
λ
n)−k = 1
Ferner gilt
limn→∞
(1−λ
n)n = exp(−λ) .
Daraus folgt die Behauptung.
Bemerkung 7.31
In der Statistik begegnet man der Aufgabe, aus Daten auf die Art der Verteilung zuschließen. Hier deuten wir dies an folgender Tabelle an:4
Tabelle: Tote durch Hufschlag in 10 preußischen
Kavallerieregimentern wahrend 20 Jahren
Anzahl von Jahren mit x Toten
pro Regiment pro Jahr
xBeobachtet Errechnet
0 109 1091 65 662 22 203 3 44 1 1≥ 5 0 0
Die Spalte der errechneten Werte kommt so zustande:Aus den Beobachtungen errechnet sich ein “Mittelwert“
x =(0 · 109 + 1 · 65 + 2 · 22 + 3 · 3 + 4 · 1)
200= 0.61
4Entnommen aus: E. Kreyszig, Statistische Methoden und ihre Anwendungen, Vandenhoeck &Rupprecht, Gottingen, 1972

Baumeister: Mathematik II / Stand: Juni 1997 167
Nimmt man λ = x – beachte, daß der Erwartungswert einer hypergeometrischen Vertei-lung mit Verteilungsparameter λ sich als λ ergibt – in der hypergeometrischen Verteilung,dann erhalt man die Spalte der errechneten Werte (gerundet). Im Kapitel 9 kommen wirdetailiert zu solchen Uberlegungen zuruck. 2
Von den gangigen und wichtigen Verteilungen fehlt uns noch die Normalverteilung. Sieist allerdings eine Verteilung, die mit einer Zufallsgroße X, die nicht diskret ist, zusam-menhangt. Hier ist
P (a < X ≤ b) =
b∫a
1
σ√
2πexp(−
(x− µ)2
2σ2)dx , a ≤ b ,
wobeib∫a· · · fur die “Flache“ steht, die von der x–Achse, den Achsen x = a und x = b
und dem Graphen der Funktion
IR 3 x 7−→1
σ√
2πexp(−
(x− µ)2
2σ2) ∈ IR
eingeschlossen wird. (µ steht fur den Erwartungswert, σ steht fur die Varianz der Nor-malverteilung.)
Da wir den Integralbegriffb∫a· · · noch nicht kennen, haben wir die Analyse noch aufzu-
schieben.
Kapitel 8
Differential– und Integralrechnung
In diesem Kapitel schließen wir die Analysis ab mit einer Verknupfung der Differential–und Integralrechnung. Damit wird auch ein vollstandiges Studium der elementaren Funk-tionen moglich.
8.1 Differenzierbarkeit
Sei I stets ein nichtleeres Intervall. Die”Steigung“ einer linearen Funktion
l : I 3 x 7−→ mx+ b ∈ IR
(m, b ∈ IR) ist die Konstante m. Sie leitet sich hier aus dem Differenzenquotient
l(x)− l(x0)
x− x0= m , x 6= x0
ab. Fur den Fall einer nicht linearen (nichtlinearen) Funktion definieren wir die Steigungdurch den Grenzwert von Differenzenquotienten:
Definition 8.1
Sei f : I −→ IR und sei x0 ∈ I. Die Funktion f heißt differenzierbar in x0 genaudann, wenn der Grenzwert
f ′(x0) := limx→x0
f(x)− f(x0)
x− x0
existiert. f ′(x0) heißt dann Ableitung oder Differentialquotient von f an der
Stelle x0. Wir schreiben dafur auch dfdx
(x0) . 2
Die Berechnung der Ableitung einer Funktion nennen wir Differentiation. Die allgemeineMethode der Differentiation und Integration (siehe unten) als Prozesse, die invers zuein-ander sind, wurde etwa gleichzeitig von I. Newton (1642 – 1727) und G.W. Leibniz (1646– 1716) entwickelt. Die Entwicklung wurde angeregt durch Fortschritte in der Mechanik(G. Galilei (1564 – 1642)) und in der Astronomie (J. Keppler (1571 – 1630)) und bau-ten auf auf geometrischen Uberlegungen der Griechen und algebraischen Methoden von
168

Baumeister: Mathematik II / Stand: Juli 1997 169
R. Descartes (1596 – 1650). Newton war in erster Linie an Mechanik interessiert undverstand daher unter seinen Ableitungen (“Fluxionen“) in erster Linie Geschwindigkei-ten (siehe Beispiel 8.2). Leibniz beabsichtigte dagegen eher einen allgemeinen Kalkul derInfinitesimalrechnung herzuleiten. Die Leibnizsche Darstellung war auch eleganter unddurchsichtiger als die von Newton.1
Beispiel 8.2
Wir betrachten den erdnahen Fall eines Massenkorpers unter der Einwirkung der Schwer-kraft und unter Vernachlassigung des Luftwiderstands. Damit stellen wir das Experimentvon Galilei analytisch unter Einbeziehung der Kenntnis der Newtonschen Mechanik dar.Wir setzen:
t Zeit, gemessen in sec .m Masse des Korpers, gemessen in kg .s(t) Bis zur Zeit t zuruckgelegter Weg, gemessen in m.v(t) Geschwindigkeit zur Zeit t, gemessen in m
sec .b(t) Beschleunigung zur Zeit t, gemessen in m
sec2 .
Die Zusammenhange sind:
v(t0) = limt→t0
s(t)− s(t0)
t− t0,
b(t0) = limt→t0
v(t)− v(t0)
t− t0.
(Hier kommt zum Ausdruck, daß ein klarer Grenzwertbegriff erst zu einer befriedigendenDefinition von “Geschwindigkeit, Beschleunigung“ fuhrt.)
Ausgangspunkt fur die Analyse der Situation ist das folgende Newtonsche Gesetz:
mb(t) = mg
Dabei ist g die Gravitationskonstante. Ihr Wert ist etwa 9.81 msec2
.
Als Ergebnisse erhalten wir unter der Voraussetzung s(0) = 0 , v(0) = 0 :
1. b(t) = g , t ≥ 0 ;
2. v(t) = gt , t ≥ 0 ;
3. s(t) = 12gt2 , t ≥ 0 .
Es ist leicht zu verifizieren, daß dies gultige Losungen auf Grund der obigen Zusam-menhange sind, es muß aber hier noch unbestatigt bleiben, daß es sich um die einzigenLosungen handelt.Die Wegformel
s(t) =1
2gt2
1Die Bezeichnung f ′(x0) in der Definition 8.1 stammt von J.L. Lagrange (1736 – 1813), die Bezeichnungdfdx (x0) von G.W. Leibniz.

Baumeister: Mathematik II / Stand: Juli 1997 170
bestatigt die von G. Galilei experimentell ermittelte Formel. 2
Wir geben nun aquivalente Bedingungen fur Differenzierbarkeit an.
Lemma 8.3
Sei f : I −→ IR stetig in x0 ∈ I. Es sind aquivalent:
(a) f differenzierbar in x0.
(b) Es gibt eine Funktion g : I −→ IR, stetig in x0, mit
f(x)− f(x0) = g(x)(x− x0) , x ∈ I.
(c) Es gibt eine lineare Funktion l : I −→ IR mit
limx→x0
f(x)− l(x)
x− x0= 0.
Zusatz: Ist f differenzierbar in x0, so gilt
g(x) =
f(x)− f(x0)x− x0
, x 6= x0
f ′(x0) , x = x0
und l(x) = f(x0) + f ′(x0)(x− x0) x ∈ I.
Beweis:(a) =⇒ (b)Definiere g wie im Zusatz angegeben. Klar, g ist stetig in x0, und die in (b) angegebeneIdentitat ist damit erfullt.(b) =⇒ (c)Definiere l wie im Zusatz angegeben. Damit haben wir
limx→x0
f(x)− l(x)
x− x0= lim
x→x0
f(x)− f(x0)− f ′(x0)(x− x0)
x− x0
= limx→x0
f(x)− f(x0)
x− x0− f ′(x0)
= 0
(c) =⇒ (a)Sei l(x) = m(x− x0) + b , x ∈ IR . Wegen
f(x)−m(x− x0)− b
x− x0=f(x)− b
x− x0−m
gilt nach Voraussetzung
limx→x0
f(x)− b
x− x0= m
und daher b = limx→x0
f(x) = f(x0) . Dies zeigt, daß f differenzierbar in x0 ist mit Ableitungm.

Baumeister: Mathematik II / Stand: Juli 1997 171
Von besonderem Interesse ist die Bedingung (c) im Lemma 8.3. Sie besagt, daß in derUmgebung von x0 die Funktion f naherungsweise durch die lineare Funktion
l(x) := f(x0) + f ′(x0)(x− x0) , x ∈ I,
ersetzt werden darf, wobei der Fehler f(x)− l(x) schneller als |x− x0| gegen Null strebt,da
limx→x0
|f(x)− l(x)
x− x0| = 0
gilt. Geometrisch kann man diese Ersetzung deuten als die Ersetzung des Graphen von fdurch die Tangente
I 3 x 7−→ (x, f(x0) + f ′(x0)(x− x0)) ∈ IR2
von f in x0.
Folgerung 8.4
Ist f : I −→ IR in x0 ∈ I differenzierbar, so ist f in x0 stetig.
Beweis:Sei g wie im Zusatz von Lemma 8.3 definiert.
limx→x0
f(x) = limx→x0
(f(x)− f(x0) + f(x0))
= limx→x0
g(x)(x− x0) + f(x0)
= g(x0)(x0 − x0) + f(x0)
= f(x0)
Aus den Rechenregeln fur Grenzwerte folgen Rechenregeln fur die Differentiation.
(R1) Sind f, g : I −→ IR differenzierbar in x0 ∈ I, dann ist auch f, g differenzierbar inx0 und es gilt
(f + g)′(x0) = f ′(x0) + g′(x0)
(R2) Sind f, g : I −→ IR differenzierbar in x0 ∈ I, dann ist auch f · g differenzierbar inx0 und es gilt
(f · g)′(x0) = f ′(x0)g(x0) + f(x0)g′(x0).
(R3) Sind f, g : I −→ IR differenzierbar in x0 ∈ I und ist g(x0) 6= 0, so ist auch fg
differenzierbar in x0 und es gilt
(f
g)′(x0) =
g(x0)f′(x0)− g′(x0)f(x0)
g(x0)2

Baumeister: Mathematik II / Stand: Juli 1997 172
Der Beweis von (R1) ist trivial, der Beweis zu (R2) (Produktregel) folgt aus
f(x)g(x)− f(x0)g(x0)
x− x0=f(x) − f(x0)
x− x0g(x) + f(x0)
g(x)− g(x0)
x− x0
unter Beachtung der Stetigkeit von f, g in x0. Zum Beweis von (R3) (Quotientenregel)konnen wir wegen (R2) o.E. f(x) = 1, x ∈ I, annehmen. Die Behauptung lesen wir dannaus
1g(x)
− 1g(x0)
x− x0=
−1
g(x)g(x0)
g(x)− g(x0)
x− x0
unter Beachtung der Tatsache ab, daß g(x) 6= 0 gilt in einer”Umgebung“ von x0, da g
stetig in x0 ist (siehe Satz 6.17).
Beispiel 8.5• f : IR 3 x 7−→ mx+ b ∈ IR .
Offenbar ist a die Ableitung von f in jedem x0 ∈ IR .
• f : IR 3 x 7−→ xn ∈ IR. Aus
xn − xn0x− x0
=n−1∑j=0
xjxn−j0
liest man f ′(x0) = nxn−10 ab.
• Aus den Rechenregeln folgt nun, daß die Polynome in jedem x0 ∈ IR differenzierbarsind; es gilt:
(n∑j=0
ajxj)′(x0) =
n∑j=1
jajxj−10
• f : (0,∞) 3 x 7−→√x ∈ IR . Die Umformung√x−√x0
x− x0=
x− x0
(x− x0)(√x+√x0)
zeigt mit der Stetigkeit der Wurzelfunktion f :
f ′(x0) =1
2√x0
.
2
Lemma 8.6
Sei f : I −→ IR, g : J −→ IR mit f(I) ⊂ J, I, J Intervalle. Sei f differenzierbarin x0 ∈ I und sei g differenzierbar in f(x0). Dann gilt:
(g f)′(x0) = g′(f(x0))f ′(x0). (8.1)
Beweis:Sei y0 := f(x0). Fur f(x) 6= y0 gilt dann
(g f)(x)− (g f)(x0)
x− x0=g(f(x)) − g(f(x0))
f(x)− f(x0)·f(x)− f(x0)
x− x0

Baumeister: Mathematik II / Stand: Juli 1997 173
Mit
h(y) :=
g(y)− g(y0)y − y0
, y 6= y0
g′(y0) , y = y0
wird daraus(g f)(x)− (g f)(x0)
x− x0
= h(f(x))f(x)− f(x0)
x− x0
und wegenlimy→y0
h(y) = g′(y0)
folgt daraus die Behauptung.
Die in (8.1) ausgesprochene Aussage heißt Kettenregel.
Ist eine Funktion f : I −→ IR differenzierbar in jedem x0 ∈ I, so ist durch
f ′ : I 3 x 7−→ f ′(x) ∈ IR .
eine Funktion erklart; sie heißt Ableitung(sfunktion) von f. Ist nun diese Ableitungwieder in jedem x0 ∈ I differenzierbar, erhalt man als Ableitung von f ′ die zweiteAbleitung(sfunktion) f ′′ von f :
f ′′ : I 3 x 7−→ (f ′)′(x) ∈ IR .
Sukzessive erhalt man so gegebenenfalls die Funktionen
f ′, f ′′, f (3) := (f ′′)′, f (4) := f (3)′, . . . .
Fur ein Monom mn,mn(x) := xn, haben wir: m(n)n = n! , m(n+1)
n = θ .
Definition 8.7
Sei f : I −→ IR . Sei n ∈ IN .
(a) f heißt n–mal differenzierbar, wenn die Ableitungen f (i) fur i = 1, . . . , nexistieren.
(b) f heißt n–mal stetig differenzierbar, wenn die Ableitungen f (i) fur i =1, . . . , n existieren und f (n) auch stetig ist.
(c) f heißt unendlich oft differenzierbar, wenn die Ableitungen f (i) fur i ∈ INexistieren.
2
Beispiel 8.8

Baumeister: Mathematik II / Stand: Juli 1997 174
Wir konnen nun mit der Quotientenregel erkennen, daß die rationale Funktion
f : I 3 x 7−→ax+ b
cx+ d∈ IR
unendlich oft differenzierbar ist, falls cx+ d 6= 0 ist fur x ∈ I. Etwa:
f ′(x0) =da− cb
(cx0 + d)2, f ′′(x0) = (−2)c
da− cb
(cx0 + d)3, f ′′′(x0) = (−2)(−3)c2 da− cb
(cx0 + d)4
2
Berechnen wir noch die Ableitung einer Umkehrfunktion.
Satz 8.9
Sei f : [a, b] −→ IR stetig und streng monoton wachsend. Dann ist I := f([a, b]) =[f(a), f(b)] und die Umkehrfunktion f−1 : I −→ IR von f ist stetig und strengmonoton wachsend.Ferner gilt: Ist f differenzierbar in x0 ∈ (a, b), so ist f−1 differenzierbar in y0 :=f(x0) und es gilt
(f−1)′(y0) =1
f ′(x0)=
1
f ′(f−1(y0))
Beweis:Existenz, Monotonie und Stetigkeit von f−1 folgen aus Satz 6.23. Sei y0 := f(x0). Fury 6= y0, f(x) = y, gilt:
f−1(y)− f−1(y0)
y − y0=
x− x0
f(x)− f(x0)=
1
f(x)− f(x0)x− x0
Daraus liest man
limy→y0
f−1(y)− f−1(y0)
y − y0
=1
f ′(x0)
ab.
Beispiel 8.10
Die Ableitung der Wurzelfunktion (siehe Beispiel 8.5)
g : (0,∞) 3 x 7−→√x ∈ IR
konnen wir auch berechnen, indem wir Satz 8.9 anwenden mit
f : (0,∞) 3 x 7−→ x2 ∈ IR .
Es folgt damit
g′(y) =1
f ′(g(y))=
1
2√y, y ∈ (0,∞) .
2

Baumeister: Mathematik II / Stand: Juli 1997 175
8.2 Mittelwertsatz und Taylorsche Formel
Satz 8.11
Sei f : (a, b) −→ IR . Ist ξ ∈ (a, b) mit f(ξ) = maxx∈(a,b)
f(x) und ist f differenzierbar
in ξ, so gilt:f ′(ξ) = 0 .
Beweis:Wir haben f(x) ≤ f(ξ) fur alle x ∈ (a, b). Folglich ist
f(x)− f(ξ)
x− ξ
≥ 0, falls x < ξ,≤ 0, falls x > ξ
und daherf ′(ξ) = 0.
Man beachte, daß die Aussage des obigen Satzes in der Situation f : [a, b] −→ IR imallgemeinen nicht gilt. Dazu betrachte etwa f : [−1, 1] 3 x 7−→ x ∈ IR .
Bemerkung 8.12
Hat man eine Funktion mehrerer Veranderlicher, also eine Funktion
f : D −→ IR mit D ⊂ IRn , n ≥ 2 ,
so kann man sich den Begriff der Differentiation einer Veranderlicher, wie wir ihn obeneingefuhrt haben, dadurch zu Nutze machen, daß man die Funktion f “eindimensional“anschaut:Wahle ξ0 ∈ D, u ∈ IRn, – u gibt die Richtung an, in der man sich f von ξ0 aus anschaut– und betrachte
g : (a, b) 3 h 7−→ f(ξ + hu) ∈ IR
fur geignete a, b . (Dies erfordert, daß mit ξ eine ganze “Umgebung“ von ξ zu D gehort.)Insbesondere kann man damit erhalten, daß g′(0) = 0 sein muß, wenn f in ξ ein Maximum(Minimum) besitzt und g in h0 := 0 differenzierbar ist. 2
Wir fuhren nun den Satz den Satz von Rolle (M. Rolle (1652 – 1719)) an:
Satz 8.13
Sei f : [a, b] −→ IR stetig und in (a, b) differenzierbar. Sei f(a) = f(b) = 0. Danngibt es ξ ∈ (a, b) mit f ′(ξ) = 0.
Beweis:Ist f identisch Null, ist nichts zu beweisen. Also sei f nicht identisch Null. O.E. gibt esdann x ∈ (a, b) mit f(x) > 0. Nach Satz 6.21 gibt es ξ ∈ (a, b) mit
f(ξ) = maxx∈[a,b]
f(x) .

Baumeister: Mathematik II / Stand: Juli 1997 176
Da f(a) = f(b) = 0, maxx∈[a,b]
f(x) ≥ f(x) > 0 gilt, ist ξ 6= a, f(ξ) 6= b . Dann ist nach Satz
8.17 f ′(ξ) = 0 .
Der folgende Satz wird als Mittelwertsatz der Differentialrechnung bezeichnet.
Satz 8.14
Seien f, g : [a, b] −→ IR stetig und differenzierbar in (a, b). Sei g′(x) 6= 0 fur allex ∈ (a, b). Dann gibt es ξ ∈ (a, b) mit
f(b)− f(a)
g(b)− g(a)=f ′(ξ)
g′(ξ)(8.2)
Beweis:Betrachte
h : [a, b] 3 x 7−→ f(a) +f(b)− f(a)
g(b)− g(a)(g(x)− g(a)) ∈ IR .
Es gilt:h(a) = f(a), h(b) = f(b).
Nach dem Satz von Rolle, angewendet auf h− f, gibt es ξ ∈ (a, b) mit
h′(ξ) − f ′(ξ) = 0,
d.h.f(b)− f(a)
g(b)− g(a)g′(ξ) = f ′(ξ).
Die wichtigste Anwendung von Satz 8.14 ergibt sich mit g(x) := x. Dann kann man dieFormel (8.2) so lesen:
Es gibt ϑ ∈ (0, 1) mit f(b) = f(a) + f ′(a+ ϑ(b− a))(b− a) (8.3)
In dieser Form geht der Satz auf J.L. Lagrange (1735 – 1813) zuruck.
Satz 8.15
Sei f : (a, b) −→ IR stetig und (n+1)−mal differenzierbar. Seien x0, x0+h ∈ (a, b).Dazu gibt es ϑ ∈ (0, 1) mit
f(x0 + h) =n∑j=0
1
j!f (j)(x0)hj +
1
(n+ 1)!f (n+1)(x0 + ϑh)hn+1 . (8.4)
Beweis:Setze F (x) :=
n∑j=0
1j!f
(j)(x)(x0 + h− x)j , x ∈ (a, b).
Es ist
F (x0) =n∑j=0
1
j!f (j)(x0)hj , F (x0 + h) = f(x0 + h).

Baumeister: Mathematik II / Stand: Juli 1997 177
Ferner ist F differenzierbar und
F ′(x) =n∑j=0
1
j!f (j+1)(x)(x0 + h− x)j −
n∑j=1
1
(j − 1)!f (j)(x)(x0 + h− x)j−1
=1
n!f (n+1)(x)(x0 + h− x0)
n
Nach dem Mittelwertsatz folgt mit g(x) := (x0 + h− x)n+1 :
f(x0 + h) = F (x0 + h) = F (x0) +g(x0 + h)− g(x0)
g′(x0 + ϑh)F ′(x0 + ϑh),
d.h.
f(x0 + h) =n∑j=0
1
j!f (j)(x0)hj +
1
(n+ 1)!f (n+1)(x0 + ϑh)hn+1 .
Die Formel (8.4) heißt Taylorsche Formel mit Lagrangeschem Restglied (B. Taylor(1685 – 1731)). Fur n = 0 reduziert sich die Formel auf den Mittelwertsatz. Fur n ≥ 1spricht man von der Taylorentwicklung von f bis zum n–ten Glied.Man kann der Formel (8.4) auch die folgende Form
f(x) =n∑j=0
1
j!f (j)(x0)(x−x0)j+
1
(n+ 1)!f (n+1)(x0+ϑ(x−x0))(x−x0)
n+1 , x ∈ (a, b), (8.5)
geben. Der Termn∑j=0
1
j!f (j)(x0)(x− x0)
j
heißt das Taylorpolynom von f im Entwicklungspunkt x0 , der Term
1
(n + 1)!f (n+1)(x0 + ϑ(x− x0))(x− x0)
n+1
wird das zugehorige Lagrangesche Restglied genannt. Fur n = 1 ist das Taylorpoly-nom eine lineare Approximation von f , fur n = 2 ist es eine Approximation durch einquadratisches Polynom, das in x0 im Funktionswert, in der ersten und in der zweitenAbleitung mit f ubereinstimmt.
Man beachte, daß der Grenzubergang n → ∞ in der Formel (8.4) heikel ist: Es gibtBeispiele von unendlich oft differenzierbaren Funktion f : IR −→ IR, bei denen
f(x0 + h) =∞∑j=0
1
j!f (j)(x0)h
j (8.6)
nicht gilt; die Reihe (8.6) heißt Taylorreihe von f . Die Funktion
f(x) :=
exp(− 1
x2 ), x 6= 00, x = 0

Baumeister: Mathematik II / Stand: Juli 1997 178
ist eine solche Funktion. Sie wird sogar oft als eine solche Funktion benotigt. Im nachstenAbschnitt diskutieren wir u.a. Funktionen, die uber Taylorreihen definiert sind.
Definition 8.16
Sei f : I −→ IR . Ein x0 ∈ I heißt relatives Maximum bzw. relatives Mini-mum, wenn es ε > 0 gibt mit
f(x0) ≥ f(x) , x ∈ I ∩ (x− ε, x0 + ε) bzw. f(x0) ≤ f(x) , x ∈ I ∩ (x0 − ε, x0 + ε) .
Jedes relative Minimum oder Maximum nennen wir ein relatives Extremum. 2
Folgerung 8.17
Sei f : (a, b) 7−→ IR differenzierbar. Ist x0 ∈ (a, b) ein relatives Extremum, danngilt
f ′(x0) = 0 .
Beweis:Siehe Satz 8.17.(Der Fall des Minimums wird auf den Fall des Maximums durch Ubergang von f zu −fzuruckgefuhrt.)
Offenbar ist die Umkehrung der obigen Folgerung falsch: Man kann aus f ′(x0) = 0 nichtauf ein relatives Extremum x0 schließen; siehe etwa f(x) := x3, x0 := 0.
Satz 8.18
Sei f : (a, b) 7−→ IR n – mal differenzierbar, n ≥ 2 . Sei
f (k)(x0) = 0 , k = 0, . . . , n− 1, f (n)(x0) 6= 0 .
Dann gilt:
(a) x0 ist ein relatives Extremum genau dann, wenn n gerade ist.
(b) Ist n gerade, so ist x0 ein relatives Maximum bzw. relatives Minimum genaudann, wenn
f (n)(x0) < 0 bzw. f (n)(x0) > 0
ist.
Beweis:Sei etwa f (n)(x0) > 0 .Sei h ∈ IR mit x0 + h ∈ (a, b). Die Taylorsche Formel sagt
f(x0 + h) =n−2∑j=0
f (j)(x0)
j!hj +
hn−1
(n− 1)!f (n−1)(x0 + δh)
= f(x0) +hn−1
(n− 1)!f (n−1)(x0 + δh)

Baumeister: Mathematik II / Stand: Juli 1997 179
mit δ ∈ [0, 1].
Fur h genugend klein ist also wegen f (n)(x0) = limt→0
f (n−1)(x0 + t)− f (n−1)(x0)t
f (n−1)(x0 + δh)
< 0 fur h < 0> 0 fur h > 0
.
Ist n ungerade, dann ist hn−1 > 0 und daher
f (n−1)(x0 + δh)h(n−1)
< 0 fur h < 0> 0 fur h > 0
Also wechselt f(x)−f(x0) fur x = x0 sein Vorzeichen, und es kann kein relatives Extremumvorliegen.Ist n gerade, dann ist
f (n−1)(x0 + δh)hn−1 > 0
fur h 6= 0 und damit x0 ein relatives Minimum.Ist andererseits x0 ein relatives Minimum, dann folgt fur h genugend klein
f (n−1)(x0 + δh)hn−1 ≥ 0 ,
f (n−1)(x0 + δh)
≥ 0 fur h > 0≤ fur h < 0
folglich f (n)(x0) ≥ 0 . Aus der Voraussetzung ergibt sich f (n)(x0) > 0 .
Das “Spiel“ mit ungerade/gerade im obigen Beweis kann man sehr schon an den Beispielen
f(x) := x2 , f(x) := x3 , f(x) := x4 , x ∈ (−1, 1)
verfolgen.
Der obige Satz legt folgendes Vorgehen nahe, wenn man sich einen Uberblick uber denVerlauf von Funktionen machen will (Kurvendiskussion) Sei f : (a, b) 7−→ IR zweimaldifferenzierbar.
1. Man bestimme alle Nullstellen von f . Satz 6.18 ist dabei eventuell hilfreich.
2. Man studiere das Verhalten von f in den Randpunkten x0 = a, x0 = b durch Be-trachtung von lim
x→af(x), lim
x→bf(x) .
3. Man bestimme die Extrema von f durch Betrachtung der Nullstellen von f ′ (Satz6.18 ist eventuell hilfreich).
4. Man bestimme die zweite Ableitung um uber Maxima, Minima und Wendepunkte,dies sind Punkte, wo f ′′ sein Vorzeichen wechselt, entscheiden zu konnen.

Baumeister: Mathematik II / Stand: Juli 1997 180
Beispiel 8.19
Betrachte
f := fµ,σ2 : IR 3 x 7−→1
σ√
2πexp(−
(x− µ)2
2σ2 ) ∈ IR
Wir halten unter der Annahme, daß wir schon wissen, daß die Ableitung der Exponenti-alfunktion die Exponentialfunktion selbst ist (siehe Beispiel 8.25), fest:
• f hat keine Nullstellen.
• limx→∞
f(x) = 0 = limx→−∞
f(x), da limt→∞
e−t = 0 ist.
• Die einzige Nullstelle von f ′ ist x0 = µ, denn
f ′µ,σ2(x) =1
σ√
2π(−
(x− µ)
σ2 ) exp(−(x− µ)2
2σ2 ) .
• Es liegt in x0 = µ ein Maximum vor, da f ′′(µ) < 0 gilt. Beachte:
f ′′(x) =1
σ√
2π(−
1
σ2 ) exp(−(x− µ)2
2σ2 ) +1
σ√
2π(−
(x− µ)
σ2 )2 exp(−(x− µ)2
2σ2 )
• Es liegen in x0 ± σ Wendepunkte vor, da f ′′(µ± σ) = 0 gilt.
8.3 Funktionenfolgen und Funktionenreihen
Sei D eine nichtleere Teilmenge von IR und seien fn : D −→ IR, n ∈ IN , gegebeneFunktionen. Wir gehen nun der Frage nach, wann wir die Konvergenz von (fn(x))n∈IN
gegen f(x) fur alle x ∈ D mit einer Funktion (Grenzfunktion) f : D −→ IR erwartendurfen.Beispiele fur diese Situation sind die Monome
mn : IR 3 x 7−→ xn ∈ IR , n ∈ IN 0 .
Beispiel 8.20
Fur die Folge der Monome (mn)n∈IN , betrachtet auf D := [−1, 1] (siehe oben), haben wiroffenbar folgende Situation:
limnmn(x) =
0 , falls |x| < 11 , falls x = 1
und limnmn(x) existiert nicht fur x = −1. Selbst, wenn wir die Folge etwa nur auf D :=
[0, 1] betrachten, sehen wir, daß die”Grenzfunktion“
f : [0, 1] 3 7−→ limnmn(x) ∈ IR

Baumeister: Mathematik II / Stand: Juli 1997 181
nicht stetig ist, obwohl alle Monome stetig sind. Ein klarender Ausweg aus dieser Situationergibt sich nach folgender Definition.2 2
Definition 8.21
Eine Funktionsfolge (fn)n∈IN mit gemeinsamem Definitionsbereich D ⊂ IR konver-giert gleichmaßig gegen die Funktion f : D −→ IR genau dann, wenn gilt:
∀ ε > 0∃N ∈ IN ∀n ≥ N ∀x ∈ D (|fn(x)− f(x)| < ε)
Wir nennen f dann den Grenzwert der Funktionenfolge (fn)n∈IN . 2
Die gleichmaßige Konvergenz ist offenbar eine verscharfte Forderung von limn∈IN
fn(x) = f(x)
fur alle x ∈ D (Punktweise Konvergenz).
Klar, der Grenzwert f einer Funktionenfolge (fn)n∈IN ist eindeutig bestimmt, da derGrenzwert von Folgen reeller Zahlen eindeutig bestimmt ist.
Satz 8.22
Der Grenzwert f einer gleichmaßig konvergenten Funktionenfolge (fn)n∈IN mit De-finitionsbereich D ist stetig in x0 ∈ D, falls jede Funktion fn stetig in x0 ist.
Beweis:Sei ε > 0. Dazu gibt es N ∈ IN mit
|fn(x)− f(x)| <ε
3, x ∈ D,n ≥ N.
Da fN stetig in x0 ist, gibt es δ > 0 mit
|fN(x)− fN (x0)| <ε
3, x ∈ D ∩ (x0 − δ, x0 + δ).
Sei nun x ∈ D ∩ (x0 − δ, x0 + δ). Wir haben
|f(x)− f(x0)| ≤ |f(x)− fN (x)|+ |fN (x)− fN (x0)|+ |fN (x0)− f(x0)| <ε
3+ε
3+ε
3= ε .
Mit Satz 6.14 folgt die Stetigkeit von f in x0 .
Den Inhalt von Satz 8.33 kann man sich auch als Vertauschungsregel merken: Ist (fn)n∈IN
eine gleichmaßig konvergente Folge von stetigen Funktionen mit Grenzwert f , so gilt fureine Folge (xk)k∈IN mit lim
kxk = x0 :
limk
limnfn(xk) = lim
kf(xk) = f(x0) = lim
nfn(x0) = lim
nlimkfn(xk)
2Dre Begriff der gleichmaßigen Konvergenz wurde 1848 unabhangig voneinander von v. Seidel (1821 –1896) und G. Stokes (1819 – 1903) eingefuhrt, unausgesprochen war die Begriffsbildung aber schon fruherbei K. Weierstraß (1815 – 1897) zu finden.

Baumeister: Mathematik II / Stand: Juli 1997 182
Spezielle Funktionenfolgen ergeben sich als Folge der Partialsummen von Funktionen-reihen. Hier ergibt sich (fn)n∈IN folgendermaßen:
fn(x) :=n∑j=0
gj(x), n ∈ IN , x ∈ D, mit gj : D −→ IR, j ∈ IN 0 .
Als Symbol fur den Grenzwert limnfn schreiben wir hier
∞∑j=0
gj
Die gleichmaßige Konvergenz von Funktionenreihen ist erklart uber die gleichmaßige Kon-vergenz der zugehorigen Funktionenfolge der Partialsummen (siehe oben). Als Ergebniskonnen wir festhalten:
Satz 8.23
Sind gj : D −→ IR, j ∈ IN 0, stetig in x0 ∈ D und konvergiert∞∑j=0
gj gleichmaßig
gegen f , so ist f stetig in x0.
Beweis:Anwendung von Satz 8.33 auf die Folge (fn)n∈IN mit
fn : D 3 x 7−→n∑j=0
gj(x) ∈ IR,
wobei offenbar jedes fn stetig in x0 ∈ D ist.
Satz 8.24
Seien gj : (a, b) −→ IR differenzierbar in (a, b) fur jedes j ∈ IN 0 . Fur mindestens
ein x0 ∈ (a, b) sei∞∑j=0
gj(x0) konvergent. Dann gilt:
Konvergiert die Reihe∞∑j=0
g′j gleichmaßig, dann konvergiert auch∞∑j=0
gj gleichmaßig
und
(∞∑j=0
gj)′(x) =
∞∑j=0
g′j(x) , x ∈ (a, b) .
Beweis:Sei ε > 0. Aus der gleichmaßigen Konvergenz der Reihe
∞∑j=0
g′j folgt die Existenz von
N ∈ IN mit
|m∑j=n
g′j(x)| <ε
1 + (b− a), x ∈ (a, b), n,m ≥ N.
Nach dem Mittelwertsatz ist
m∑j=n
(gj(x)− gj(x0)) = (x− x0)m∑j=n
g′j(x0 + δ(x− x0))

Baumeister: Mathematik II / Stand: Juli 1997 183
mit einem δ ∈ (0, 1). Daraus folgt fur x ∈ D
|m∑j=k
(gj(x)− gj(x0))| = |x− x0||m∑j=n
g′j(x0 + δ(x− x0))| < ε.
Dies zeigt zusammen mit der Voraussetzung, daß∞∑j=0
gj(x0) konvergiert, daß∞∑j=0
gj gleich-
maßig konvergiert.Sei ξ ∈ [a, b] . Definiere
Fj(x) :=
gj(x)− gj(ξ)
x− ξ , x 6= ξ
g′j(ξ) , x = ξ, j ∈ IN 0 , x ∈ [a, b] .
Wir wissen, daß jedes Fj stetig ist. Wie oben sieht man, daß
|m∑j=n
Fj(x)| = |m∑j=n
g′j(ξ + δ(x− ξ))| <ε
1 + (b− a)< ε
ist. Also ist auch∞∑j=0
Fj gleichmaßig konvergent und folglich∞∑j=0
Fj stetig. Damit folgt:
∞∑j=0
g′j(ξ) =∞∑j=0
Fj(ξ) = limx→ξ
∞∑j=0
Fj(x)
= limx→ξ
∞∑j=0
gj(x)− gj(ξ)
x− ξ
= limx→ξ
1
x− ξ
∞∑j=1
(gj(x)− gj(ξ))
= (∞∑j=0
gj)′(x)
Der obige Satz besagt, daß (unter seinen Voraussetzungen) eine gleichmaßig konvergenteReihe “gliedweise“ differenziert werden darf.
Die wichtigsten Funktionenreihen sind Potenzreihen, also Reihen der Form
∞∑j=0
aj(x− x0)j , x ∈ IR .
Der Punkt x0 heißt Entwicklungspunkt, die Zahlen aj heißen Koeffizienten der Po-tenzreihe. Moglicherweise konvergiert eine solche Reihe nur fur x = x0.
Sei f : (a, b) −→ IR eine unendlich oft differenzierbare Funktion und sei x0 ∈ (a, b).Formal konnen wir damit die
”Taylorreihe“
∞∑j=0
f (j)(x0)
j!(x− x0)j

Baumeister: Mathematik II / Stand: Juli 1997 184
verknupfen. Die Taylorreihe ist also eine Potenzreihe.Hier sind x, x0, aj reelle Zahlen. Tiefere Einsicht in die Natur der Potenzreihen kann manerst im Rahmen der Theorie komplexwertiger Funktionen (Funktionentheorie) gewinnen.Dort sind x, x0, aj komplexe Zahlen, also Elemente von ′C .
Beispiel 8.25Die Exponentialreihe ist definiert als Reihe
∞∑j=0
xj
j!, x ∈ IR .
Wir wissen, daß diese Reihe fur jedes x0 ∈ IR konvergiert (siehe Abschnitt 4.6). AlsVerscharfung zeigen wir die gleichmaßige Konvergenz dieser Potenzreihe in jedem Intervall(−R,R) . Sie folgt aus
|M∑j=N
xj
j!| ≤
M∑j=N
|x|j
j!≤
M∑j=N
Rj
j!
und der Konvergenz von∞∑j=0
Rj
j! (gegen exp(R)).
Wegen∞∑j=1
jxj−1
j!=∞∑k=0
xj
k!, x ∈ IR ,
folgt nun mit Satz 8.24exp′(x) = exp(x) fur alle x ∈ IR .
Damit ist die Exponentialfunktion unendlich oft differenzierbar in jedem x0 ∈ IR . DieTaylorsche Formel (8.4) besagt also fur x0 = 0 :
exp(h) =n∑j=0
hj
j!+
hn+1
(n+ 1)!exp(ϑh) (8.7)
fur jedes h ∈ IR mit einem ϑ ∈ [0, 1] . Da nun limn∈IN
hn+1
(n+1)!= 0 fur jedes h ∈ IR gilt, folgt,
daß die Darstellung der Exponentialfunktion als Funktionenreihe gerade der Taylorreiheder Exponentialfunktion mit Entwicklungspunkt x0 = 0 entspricht.Festzuhalten bleibt, daß die Exponentialfunktion die auffallende Eigenschaft hat, daß dieAbleitung mit der Funktion ubereinstimmt. 2
Beispiel 8.26
Wir wissen aus Beispiel 8.25, daß exp′(x) = exp(x) fur alle x ∈ IR gilt. Daraus leitet sich
ln′(x) =1
exp(ln(x))=
1
x, x > 0 ,
mit Satz 8.9 ab.Wir wahlen als Entwicklungspunkt im Definitionsgebiet des Logarithmus naheliegender-weise den Punkt x0 = 1 und erhalten
ln(1 + x) =n∑j=1
1
j!(−1)j−1(j − 1)!xj +
xn+1
(n+ 1)!
(−1)nn!
(1 + ϑx)n+1(8.8)

Baumeister: Mathematik II / Stand: Juli 1997 185
und sehen, daß fur den naturlichen Logarithmus die folgende Darstellung vorliegt:
ln(1 + x) =∞∑j=1
(−1)j−1
j!xj , |x| < 1 .
2
8.4 Integration
Wir wollen nun das Integral3 von stetigen Funktionen einfuhren. Das Integrieren (stetigerFunktionen) hat zwei verschiedene Aspekte: zum einen die Messung von Langen, Flachen-inhalten und generell Volumina, zum anderen die Bestimmung von Stammfunktionen,d.h. von Funktionen, die eine gegebene Funktion als Ableitung besitzen. Wir wenden unszunachst dem ersten Aspekt zu.
Sei f : [a, b]→ IR beschrankt. Sei
Z : a = x0 < x1 < . . . < xn−1 < xn = b
eine Zerlegung des Intervalls [a, b]. Sei
Ml := supx∈[xl−1,xl]
f(x) , ml := infx∈[xl−1,xl]
f(x), l = 1, . . . , n .
Die Zahlen
Sf (Z) :=n∑l=1
Ml(xl − xl−1) , Sf (Z) :=n∑l=1
ml(xl − xl−1)
heißen Ober– und Untersummen von f bezuglich der Zerlegung Z.Eine Zerlegung Z∗ heißt Verfeinerung von Z, wenn jeder Teilpunkt xl von Z auch einTeilpunkt von Z∗ ist.
Lemma 8.27
Sei f : [a, b] −→ IR beschrankt und sei Z∗ eine Verfeinerung der Zerlegung Z.Dann gilt:
Sf(Z) ≤ Sf (Z∗) ≤ Sf (Z∗) ≤ Sf(Z)
Beweis:Seien
Z : a = x0 < . . . < xn = b, Z∗ : a = x∗0 < . . . < x∗m = b.
Sind die Zerlegungen identisch, ist nichts zu beweisen. Sei etwa [xi−1, xi] = [x∗l+m−1, x∗l+m].
Dann ist mit der ublichen Bedeutung von mi,Mi,m∗i ,M
∗i
l+m∑j=l
m∗j(x∗j − x
∗j−1) ≤
l+m∑j=l
M∗j (x∗j − x∗j−1) ,
3Der Begriff “Integral“ (lat. integer = ganz) wurde von Johann Bernoulli (1667 – 1748) verwendet,das unten zur Verwendung kommende Zeichen
∫ist ein stilisiertes Summenzeichen. Leibniz verwendet
ursprunglich “Summe“ dafur.

Baumeister: Mathematik II / Stand: Juli 1997 186
l+m∑j=l
m∗j(x∗j − x
∗j−1) ≥ mi(xi − xi−1) ,
l+m∑j=l
M∗j (x∗j − x∗j−1) ≤ Mi(xi − xi−1).
Daraus liest man die Behauptung ab.
Folgerung 8.28
Sei f : [a, b]→ IR beschrankt und seien Z1, Z2 Zerlegungen von [a, b]. Dann gilt:
Sf (Z1) ≤ Sf (Z2)
Beweis:Dies ist klar, denn fur jede gemeinsame Verfeinerung Z von Z1 und Z2 – dies ist eineZerlegung von [a, b], die gerade die Zerlegungspunkte von Z1 und Z2 als Zerlegungspunktehat – folgt
Sf (Z1) ≤ Sf (Z) ≤ Sf (Z) ≤ Sf (Z2).
Es existieren also nach Folgerung 8.28 zu einer beschrankten Funktion f : [a, b] −→ IR
If := supSf (Z)|Z Zerlegung von [a, b],
If := infSf(Z)|Z Zerlegung von [a, b],
und wir werden damit zu folgender Definition gefuhrt:
Definition 8.29
Eine beschrankte Funktion f : [a, b] → IR heißt (Riemann-)integrierbar, wennmit
If := supSf(Z)|Z Zerlegung von [a, b],If := infSf (Z)|Z Zerlegung von [a, b],
gilt: If = If . Dann heißtb∫a
f(x)dx := If = If
das (Riemann–)Integral von f ; a heißt untere Grenze, b heißt obere Grenzedes Integrals. 2
Diese Definition stammt von B. Riemann (1826 – 1866).

Baumeister: Mathematik II / Stand: Juli 1997 187
Satz 8.30
Sei f : [a, b]→ IR beschrankt. Dann sind aquivalent:
(a) f ist integrierbar.
(b) ∀ ε > 0∃ Zerlegung Z (Sf (Z)− Sf (Z) < ε) .
Beweis:(a) =⇒ (b). Sei ε > 0. Wahle Zerlegungen Z1, Z2 mit∫ b
af(x)dx > Sf (Z1)−
ε
2,∫ b
af(x)dx < Sf (Z2) +
ε
2.
Ist dann die Zerlegung Z die gemeinsame Verfeinerung von Z1, Z2, dann gilt
Sf (Z)− Sf (Z) ≤ Sf (Z1)− Sf(Z2 < ε .
(b) =⇒ (a). Sei ε > 0 . Dann gibt es eine Zerlegung Z mit
If − If ≤ Sf(Z)− Sf (Z) < ε .
Da ε > 0 beliebig war, folgt If ≤ If , d.h. If = If .
Bemerkung 8.31
Ist f : [a, b] −→ IR Riemann-integrierbar, dann kann man zeigen, daß man das Integralb∫af(x) dx durch
n∑i=1
f(ξi)(xi − xi−1), approximieren kann; dabei ist
a = x0 < x1 < . . . < xn = b , ξi ∈ [xi−1, xi], 1 ≤ i ≤ n,
eine Zerlegung von [a, b] . Man hat ja nur zu beachten, daß mi ≤ f(ξi) ≤ Mi in derublichen Bezeichnung gilt. 2
Der Zusatz “Riemann–“ bei der Integrierbarkeit hat seine Bedeutung darin, daß es nochandere Integrierbarkeitsbegriffe (Lebesgue–integrierbar,. . .) gibt, die sich etwa hinsichtlichder Approximierbarkeit durch andere Ober– und Untersummen unterscheiden und furallgemeinere Funktionsklassen geeignet sind. Fur stetige Funktionen ist Riemann–Inte-grierbarkeit der passende Begriff. Dazu benotigen wir naturlich, daß stetige FunktionenRiemann–integrierbar sind.
Satz 8.32
Sei f : [a, b] −→ IR stetig. Dann gilt:
(a) ∀ε > 0∃δ > 0∀x, y ∈ [a, b] (|x− y| < δ =⇒ |f(x)− f(y)| < ε) .
(b) f ist Riemann–integrierbar.
(c) |b∫af(x)dx| ≤ (b− a) max
x∈[a,b]|f(x)| .
Beweis:

Baumeister: Mathematik II / Stand: Juli 1997 188
Zu (a): Annahme: Die Behauptung unter (a) gilt nicht.Dann gibt es ε > 0 und Folgen (xn)n∈IN , (yn)n∈IN
mit
xn, yn ∈ [a, b], |xn− yn| <1
n, |f(xn)− f(yn)| ≥ ε fur alle n ∈ IN .
Nach Satz 4.41 gibt es konvergente Teilfolgen (xnk)k∈IN , (ynk)k∈IN und daher x ∈ [a, b] mitx = lim
kxnk = lim
kynk . Daraus folgt
f(x) = limkf(xnk) = lim
kf(ynk)
was im Widerspruch zur Tatsache
|f(xn)− f(yn)| ≥ ε fur alle n ∈ IN
ist.Zu (b).Sei ε > 0. Wahle δ > 0 gemaß (a). Fur jede Zerlegung
Z : a = x0 < x1 < . . . < xn = b
mit xi − xi−1 < δ , 1 ≤ i ≤ n, gilt dann mit der ublichen Bedeutung von Mi,mi
Sf(Z)− Sf (Z) =n∑i=1
(Mi −mi)(xi − xi−1) < ε(b− a)
Daraus folgt (b).Zu (c).Offensichtlich, da die Aussage auf der Ebene der Ober– und Untersummen gilt.
Bemerkung 8.33
Vergleicht man die Bedingung (a) aus Satz 8.32 mit der Aussage (b) aus Satz 6.14, sofallt auf, daß in (a) die Wahl von δ nicht von den Punkten x, y in [a, b] abhangt: StetigeFunktionen auf einem abgeschlossenen, beschrankten Intervall sind gleichmaßig stetig.(Diese Begriffsbildung und das Ergebnis (a) aus Satz 8.32 geht auf G. Cantor (1845 –1918) zuruck).
Wir fuhren Rechenregeln an.
(R1) Ist f : [a, b] −→ IR integrierbar und [α, β] ⊂ [a, b], so ist f : [α, β] −→ IR auchintegrierbar.
(R2) Ist f : [a, b] −→ IR, a ≤ b ≤ c und ist f |[a,b], f |[b,c] integrierbar, so ist f integrierbarund es gilt ∫ c
af(x)dx =
∫ b
af(x)dx+
∫ c
bf(x)dx .
(R3) Sind f, g : [a, b] −→ IR integrierbar, so ist αf + βg fur alle α, β ∈ IR integrierbarund es gilt ∫ b
a(αf + βg)(x)dx = α
∫ b
af(x)dx+ β
∫ b
ag(x)dx .

Baumeister: Mathematik II / Stand: Juli 1997 189
(R4) Ist f : [a, b] −→ IR integrierbar und ist f(x) ≥ 0 fur alle x ∈ [a, b], dann ist∫ b
af(x)dx ≥ 0 .
(R5) Ist f : [a, b] −→ IR integrierbar, so ist auch |f | : [a, b] 3 7−→ |f(x)| ∈ IRintegrierbar und es gilt
|∫ b
af(x)dx| ≤
∫ b
a|f(x)|dx .
(R6) Sind f, g : [a, b] −→ IR integrierbar, so ist auch fg : [a, b] 3 x 7−→ f(x)g(x) ∈ IRintegrierbar.
(R1),(R2),(R3),(R4) ergeben sich ganz einfach aus der Tatsache, daß entsprechende Aus-sagen fur Unter– und Obersummen gelten.Zu (R5).Den Beweis zur Aussage, daß Integrierbarkeit von |f | aus der Integrierbarkeit vonf folgt,uberlassen wir dem Leser. Die angegebene Ungleichung folgt aus der Tatsache, daß eineentsprechende Ungleichung fur Unter– und Obersummen gilt.Zu (R6).Den Beweis uberlassen wir dem Leser.
Satz 8.34
Jede monotone Funktion f : [a, b] −→ IR ist integrierbar.
Beweis:Sei f etwa monoton wachsend. Ist
Z : x0 = a < x1 < . . . < xn = b
eine Zerlegung, dann gilt
Sf (Z) =n∑i=1
f(xi−1)(xi − xi−1) , Sf(Z) =n∑i=1
f(xi)(xi − xi−1) ,
und damit
Sf (Z)− Sf(Z) =n∑i=1
(f(xi)− f(xi−1))(xi − xi−1) ≤ max1≤i≤n
(xi − xi−1) (f(b) − f(a)) ,
woraus man die Behauptung mit Satz 8.30 abliest.
Beispiel 8.35

Baumeister: Mathematik II / Stand: Juli 1997 190
Sei wiederum f : [0, 1] −→ IR mit
f(x) :=
1 , x ∈ ′Q0 , x /∈ ′Q
betrachtet. Da in der Umgebung eines jeden Punktes sowohl rationale als auch irrationalePunkte liegen, gilt fur jede Zerlegung Z von [0, 1] :
Sf(Z) = 0 , Sf (Z) = 1.
Also kann f nicht integrierbar sein. 2
Beispiel 8.36Betrachte die Funktion
f : [0, 1] 3 x 7−→ x2 ∈ IR .
Da sie als Polynom stetig ist, ist sie integrierbar. Die Riemann–Summen zu einer beliebigenZerlegung Z sehen so aus:
Sf (Z) =n∑i=1
f(xi−1)(xi − xi−1) =n∑i=1
x2i−1(xi − xi−1)
Sf (Z) =n∑i=1
f(xi)(xi − xi−1) =n∑i=1
x2i (xi − xi−1).
Mit der speziellen Zerlegung
Z : 0 = x0 < x1 = h < x2 = 2h < . . . < xn = nh = 1
wird daraus
Sf (Z) =n−1∑i=0
i2h3 = h3 ·(n− 1)n(2n − 1)
6
Sf(Z) =n−1∑i=0
(i+ 1)h3 = h3 ·n(n + 1)(2n + 1)
6,
Sf (Z) =1
6(1− h)(2− h) , Sf (Z) =
1
6(1 + h)(2 + h)
Der Grenzwert h→ 0 liefert dann1∫
0
f(x)dx =2
3
2
Bemerkung 8.37Will man das Riemann–Integral
∫ ba f(x)dx numerisch berechnen, so ist ein praktikables
Vorgehen, [a, b] in 2n Intervalle der Lange h := (b − a)/2n zu zerlegen und das Integraluber ein Intervall der Lange 2h gemaß
(i+1)h∫(i−1)h
f(x)dx ≈2h
6(f((i+ 1)h) + 4(ih) + f((i− 1)h))
zu ersetzen Die obige Formel heißt Simpsonsche Regel. 2

Baumeister: Mathematik II / Stand: Juli 1997 191
8.5 Integration und Differentiation
Wir stellen nun einen Zusammenhang zwischen Integration und Differentiation her.
Definition 8.38
Sei f : [a, b] → IR . Eine Funktion F : [a, b] → IR heißt Stammfunktion von f,wenn F differenzierbar ist und F ′ = f gilt. 2
Satz 8.39
Ist F eine Stammfunktion von f : [a, b] → IR, so gibt es zu jeder anderen Stamm-funktion G von f eine Konstante c ∈ IR mit
G(x) = F (x) + c , x ∈ [a, b].
Beweis:Offenbar ist fur jedes c ∈ [a, b]
F + c : [a, b] 3 x 7−→ F (x) + c ∈ IR
eine Stammfunktion von f. Sei G irgendeine Stammfunktion. Dann ist
(F −G)′(x) = F ′(x)−G′(x) = f(x)− f(x) = 0, x ∈ IR .
Also folgt mit dem Mittelwertsatz 8.14 mit x0 ∈ [a, b]
(F −G)(x)− (F −G)(x0) = (F − g)′(ξ)(x− x0) = 0, x ∈ IR,
und wir habenF (x) = G(x) + c , x ∈ IR,
mitc := (F −G)(x0)
Der folgende Satz ist der Mittelwertsatz der Integralrechnung.
Satz 8.40
Sei f : [a, b] −→ IR stetig. Dann gibt es ξ ∈ [a, b] mit∫ b
af(x)dx = f(ξ)(b − a) .
Beweis:Sei (siehe Satz 6.21)
m := minx∈[a,b]
f(x) ,M := maxx∈[a,b]
f(x) .
Wegen m ≤ f(x) ≤M,x ∈ [a, b], ist
(a− b)∫ b
amdx ≤
∫ b
af(x)dx ≤
∫ b
aM dx = M(b− a).

Baumeister: Mathematik II / Stand: Juli 1997 192
Daher gibt es µ ∈ [m,M ] mit ∫ b
af(x)dx = µ(b− a).
Wegen der Stetigkeit von f gibt es ξ ∈ [a, b] mit f(ξ) = µ.
Satz 8.41
Sei f : [a, b]→ IR stetig. Dann ist
F : [a, b] 3 x 7−→∫ x
af(ξ)dξ ∈ IR
eine Stammfunktion von f .
Beweis:f ist integrierbar auf jedem Intervall [a, x], x ∈ [a, b] ; wende dazu Satz 8.32 an.Es gilt fur x0 ∈ [a, b], h > 0 mit x0 + h ∈ [a, b] :
F (x0 + h)− F (x0) =∫ x0+h
af(ξ)dξ −
∫ x0
af(ξ)dξ
=∫ x0+h
x0
f(ξ)dξ
= f(x0 + δh)h
mit δ ∈ [0, 1] unter Verwendung des Mittelwertsatzes der Integralrechnung (Satz 8.40).Daher gilt
F (x0 + h)− F (x0)
h= f(x0 + δh)
Folglich haben wir – die obige Identitat folgt auch sinngemaß fur h < 0 –
limh→0
F (x0 + h)− F (x0)
h= f(x0) ,
da f stetig ist. Also ist F differenzierbar in x0 und es gilt F ′(x0) = f(x0).
Die Stammfunktion in Satz 8.41 kann man als Flacheninhaltsfunktion deuten. Eine Skizzelegt den Sachverhalt, daß Differenzenquotienten von F gegen die Werte vonf konvergieren,sofort offen.
Folgerung 8.42
Sei f : [a, b] → IR stetig und seien c, d ∈ [a, b], c ≤ d. Dann gilt mit jeder Stamm-funktion F von f ∫ d
cf(ξ)dξ = F (d)− F (c).
Beweis:Die allgemeine Stammfunktion F von f hat die Gestalt
F (x) :=∫ x
af(ξ)dξ + c , x ∈ IR .

Baumeister: Mathematik II / Stand: Juli 1997 193
Es folgt also
F (d)− F (c) =∫ d
af(ξ)dξ + c−
∫ c
af(ξ)dξ − c =
∫ d
cf(ξ)dξ
Das Ergebnis von 8.42 wird als Hauptsatz der Differential- und Integralrechnungbezeichnet. Es besagt, daß das Integrieren einer (stetigen) Funktion auf das Aufsucheneiner Stammfunktion zuruckgefuhrt werden kann.
Beispiel 8.43
Offenbar ist fur n ∈ IN 0
F : [a, b] 3 7−→1
n+ 1xn+1 ∈ IR
eine Stammfunktion vonf : [a, b] 3 7−→ xn ∈ IR .
Also gilt etwa ∫ b
ax2dx =
b3
3−a3
3.
(Siehe Beispiel 8.36.) 2
Beispiel 8.44
Wir wissen, daß die Ableitung der Exponentialfunktion die Exponentialfunktion ist. Alsogilt ∫ b
aexdx = eb − ea.
2
Als wichtiges Instrument zur Berechnung von Integralen stellen wir zunachst die Substi-tutionsregel bereit.
Satz 8.45
Sei f : [a, b] −→ IR stetig und sei g : [α, β] −→ IR stetig differenzierbar. Fernergelte:
g([α, β]) ⊂ [a, b] , g(α) = a, g(β) = b .
Dann gilt:b∫a
f(x)dx =
β∫α
f(g(t))g′(t)dt (8.9)
Beweis:Nach Satz 8.41 besitzt f eine Stammfunktion F. Dann ist mit der Kettenregel
(F g)′(t) = F ′(g(t))g′(t) = f(g(t))g′(t) , t ∈ [α, β]

Baumeister: Mathematik II / Stand: Juli 1997 194
und wegen Satz 8.42
β∫α
f(g(t))g′(t)dt = F (g(β))− F (g(α)) = F (b)− F (a) =
b∫a
f(x)dx .
Als zweites wichtiges Instrument zur Berechnung von Integralen schreiben wir die par-tielle Integration auf.
Satz 8.46
Seien f, g : [a, b] −→ IR differenzierbar und seien f ′, g′ : [a, b] −→ IR stetig. Danngilt:
b∫a
f ′(t)g(t)dt+
b∫a
f(t)g′(t)dt =
b∫a
f(t)g(t)dt . (8.10)
Beweis:fg ist eine Stammfunktion von (fg)′ . Aus der Produktregel der Differentiation und ausFolgerung 8.42 folgt die Behauptung.
Beispiel 8.47
Durch zweimalige Anwendung von Satz 8.46 erhalt man unter Beachtung, daß x 7−→ ex
eine Stammfunktion von x 7−→ ex ist:
1∫0
exx2dx = e112 − e002 −
1∫0
ex2xdx
= e−
1∫0
ex2xdx
= e− 2e11 + 2e00 +
1∫0
2exdx
= e− 2 .
2
Die Gesamtheit der Stammfunktionen einer stetigen Funktion f : [a, b] −→ IR wirdmeist durch das Symbol ∫
f(x)dx
hingeschrieben und als unbestimmtes Integral bezeichnet im Gegensatz zum bestimm-
ten Integralb∫af(x)dx .
Beispiel 8.48

Baumeister: Mathematik II / Stand: Juli 1997 195
Mit der Substitutionregel 8.45 konnen wir die Funktionalgleichung fur den Logarithmuserneut bestatigen.Seien x, y > 0 .
ln(xy) =
xy∫1
1
tdt
=
x∫1
1
tdt+
xy∫x
1
tdt
= ln(x) +
y∫1
1
tdt
= ln(x) + ln(y)
2
8.6 Spezielle Funktionen
Wir kennen spezielle Funktionen: Polynome, Exponentialfunktion, Logarithmus,hyperbolische Funktionen. Es fehlen noch die trigonometrischen Funktionen.In der Schule werden diese Winkelfunktionen gewohnlich am Einheitskreis definiert:Ist x die Lange eines Kreisbogenstucks in der “Ebene“ IR2, gemessen von (1, 0) im Gegen-uhrzeigersinn, und ist (P,Q) der Endpunkt dieses Kreisbogenstucks auf dem Einheitskreis,dann ist
sin(x) = Hohe im Dreieck mit den Endpunkten (0, 0), (1, 0), (P,Q) ,
cos(x) =√
1− sin2(x) .
Wir konnen die Sinus– und Kosinusfunktion uber Reihen einfuhren:
cos(x) :=∞∑j=0
(−1)jx2j
(2j)!, x ∈ IR ,
sin(x) :=∞∑j=0
(−1)jx2j+1
(2j + 1)!, x ∈ IR .
Hierbei ist aber nicht unmittelbar erkennbar, daß die Eigenschaften, die man vom Sinusund Kosinus kennt, gegeben sind.
Folgerung 8.49
Die Funktionen sin, cos : IR −→ IR sind unendlich oft differenzierbar, und es gilt
sin′(x) = cos(x) , cos′(x) = − sin(x) , x ∈ IR .
Beweis:Sei R > 0 . Sei x ∈ IR . Fur n ≥ 2|x| gilt:
|x|n+1n!
(n+ 1)!|x|n=|x|
n+ 1≤
1
2.

Baumeister: Mathematik II / Stand: Juli 1997 196
Dies bedeutet dann fur N,M ≥ 2|x|
|M∑j=N
(−1)jx2j
(2j)!| ≤
M∑j=N
|x|2j
(2j)!
≤M∑j=N
(1
2
2j−N |x|2N
(2N)!
≤|x|2N
(2N)!·∞∑j=0
(1
2)j
= 2|x|2N
(2N)!
≤ 2|R|2N
(2N)!
Daraus liest man mit der Konvergenz der Reihe zu eR ab, daß die Kosinus–Reihe aufjedem Intervall [−R,R] gleichmaßig konvergiert.Entsprechendes gilt auch fur die Sinus–Reihe. Da
sin(x) = cos(x), cos′(x) = − sin(x), x ∈ IR,
gilt – Satz 8.24 ist nun anwendbar – sehen wir, daß Sinus und Kosinus unendlich oftdifferenzierbar sind.
Wir haben folgende Rechenregeln:
(R1) sin(−x) = − sin(x), cos(−x) = cos(x), x ∈ IR .
(R2) sin(x+ y) = sin(x) cos(y) + cos(x) sin(y), x, y ∈ IR .
(R3) cos(x+ y) = cos(x) cos(y)− sin(x) sin(y), x, y ∈ IR .
(R4) sin(x)2 + cos(x)2 = 1 , x ∈ IR .
(R5) limx→0
sin(x)x = 1 :
Die Aussage (R1) ist offensichtlich.Fur a ∈ IR betrachte die Funktion
f : IR 3 x 7−→ sin(x) cos(a− x) + cos(x) sin(a− x) ∈ IR .
Man stellt fest:f ′(x) = 0, d.h. f(x) = sin(a) fur alle x ∈ IR .
Mit a := x+ y erhalt man (R2).Analog beweist man (R3). (R4) folgt mit (R3) aus
1 = cos(0) = cos(x− x) = cos(x) cos(x) + sin(x) sin(x)

Baumeister: Mathematik II / Stand: Juli 1997 197
(R5) ergibt sich aus der Beobachtung
sin(x)
x=∞∑j=0
(−1)jx2j
(2j + 1)!
fur x 6= 0 und der gleichmaßigen Konvergenz der entstandenen Reihe.
Die eingangs angefuhrte Einfuhrung des Sinus und Kosinus am Einheitskreis belegt zu-sammen mit der Rechenregel (R4) (Trigonometrischer Pythagoras), daß im rechtwinkligenDreieck mit Ankathede a, Gegenkathede b und Hypothenuse c die Rechnung
cos(x) =a
c, sin(x) =
b
c
angewendet werden kann.
Es fehlt uns noch die Eigenschaft der Periodizitat. Aus der Taylorentwicklung (8.4) furden Kosinus lesen wir ab (Entwicklung bis zum quadratischen Glied)
cos(2) = 1 + 0− 2 + 0 +2
3cos(2δ), 0 < δ < 1 .
Da nach (R4) | cos(2δ)| ≤ 1 gilt, folgt, daß cos(2) < 0 ist. Da die Kosinusfunktion stetigist, besitzt sie in (0, 2) eine Nullstelle. Die kleinste Nullstelle in (0, 2) sei α. Wir setzen
π := 2α .
Dann ist (x ∈ IR)
(T1) cos(π2 ) = 0 , sin(π2) = 1 ;
(T2) sin(π2 − x) = cos(x) , sin(π2 + x) = cos(x) ;
(T3) cos(π2 − x) = sin(x) , cos(π2 + x) = − sin(x) ;
(T4) sin(π + x) = − sin(x) , cos(π + x) = − cos(x) ;
(T5) sin(2π + x) = sin(x) , cos(2π + x) = cos(x) .
Zu(T1).Wir haben cos(π2) = 0 nach Definition. Wegen sin′ = cos, sin(0) = 0 und sin′(0) =
cos(0) = 1 erhalt man aus (R4) sin(x) ∈ [0, 1) fur alle x ∈ [0, π2). Also folgt mit der
Stetigkeit der Sinusfunktion schließlich sin(π2) = 1 wegen cos(π2) = 0 .
Zu (T2),. . .,(T5).Beachte die Rechenregeln (R1),. . .,(R5).
Die Sinus– und Kosinusfunktion ist also nach (T5) periodisch mit Periode 2π.
Die Zahl π haben wir nun sehr indirekt eingefuhrt. Es wird damit nicht deutlich, daß πdie sogenannte Kreiszahl ist, die die Flache einer Kreisscheibe mit Radius 1 angibt (sieheAbschnitt 4.5). Dazu:

Baumeister: Mathematik II / Stand: Juli 1997 198
Beispiel 8.50
Betrachte die Funktion
f : [−1, 1] 3 x 7−→√
1− x2 ∈ IR .
Als Graph von f erhalten wir einen Halbkreisbogen in der oberen Halbebene (von IR2),
denn es ist x2+f(x)2 = 1, x ∈ [−1, 1] .Also beschreibt1∫−1f(x)dx die Flache einer Halfte der
Kreisscheibe mit Radius 1 . Konnen wir1∫−1f(x)dx ausrechnen? Man kann! Wir verwenden
dazu die Substitutionsregel (8.9) folgendermaßen:
g(t) := − cos(t), t ∈ [0, π] .
Damit folgt
1∫−1
√1− x2dx =
π∫0
√1− cos(t)2 sin(t)dt
=
π∫0
sin(t)2dt
Mit partieller Integration (siehe Satz 8.46) folgt
π∫0
sin(t)2dt =
π∫0
cos(t)2dt .
Also folgt
π =
π∫0
1dt =
π∫0
(sin(t)2 + cos(t)2)dt = 2
π∫0
sin(t)2dt .
Damit erhalten wir das gewunschte Ergebnis
1∫−1
√1− x2dx =
π
2.
2
Hier ist ein Pseudobeweis, daß π = 2 ist.
π ist die Lange eines Halbkreises mit Radius 1. Man ersetze den Halbkreis durch
zwei aneinandergefugte Halbkreise mit dem halben Radius. Dann ist die neue Kur-
ve genauso lang wie die alte. Man ersetze nach demselben Muster jeden Halbkreis
durch ein Paar von Halbkreisen mit dem halben Radius, und so weiter. Jede der
so entstehenden Kurven hat dieselbe Lange wie ihre Vorgangerin, und die Kurven
kommen dem Durchmeser des ursprunglichen Halbkreises beliebig nahe. Der hat
aber die Lange 2. Also ist π = 2 . Der Fehler der Argumentation liegt darin, daß die
Kurven zwar gegen den Durchmesser “konvergieren“, wenn man einen ublichen Ab-
standsbegriff zugrundelegt, nicht aber bezuglich dessen, der fur die Langenmessung
der angemessene ist.

Baumeister: Mathematik II / Stand: Juli 1997 199
Man bestatigt sukzessive (x ∈ IR):
(F1) sin(2x) = 2 sin(x) cos(x) ;
(F2) cos(2x) = cos(x)2 − sin(x)2 ;
(F3) sin(3x) = 3 sin(x)− 4 sin(x)3 ;
(F4) cos(3x) = 4 cos(x)3 − 3 cos(x) ;
(F5) sin(4x) = 8 cos(x)3 sin(x)− 4 cos(x) sin(x) ;
(F6) cos(4x) = 8 cos(x)4 − 8 cos(x)2 + 1 ;
(F7) sin(5x) = 16 cos(x)4 sin(x)− 12 cos(x)2 sin(x) + sin(x) ;
(F6) cos(5x) = 5 cos(x)− 20 cos(x)3 + 16 cos(x)5 .
Damit kann man nun mit der Kenntnis von sin(2π) = 0 auch sin(2π5 ) berechnen. Es ergibt
sich etwa:
sin(2π
5) =
1
4
√10 + 2
√5 , cos(
2π
5) =
1
4(√
5− 1) . (8.11)
In Kenntnis von Sinus und Kosinus definiert man den Tangens und Kotangens:
tan(x) :=sin(x)
cos(x)(x 6= (k +
1
2)π, k ∈ ZZ )
cot(x) :=cos(x)
sin(x)(x 6= kπ, k ∈ ZZ )
Durch Betrachtung der Monotonieeigenschaften von tan und cot gelangt man zu Aussagenuber ihre Umkehrfunktionen arctan und arccot .
Kapitel 9
Geometrie und Algebra
Das Ziel dieses Kapitels ist es, die Entwicklung der Geometrie und die Entstehung derabstrakten Algebra aus der Untersuchung beruhmter geometrischer Probleme heraus zuskizzieren. Es sind dies Probleme, die zum Teil 2500 Jahre alt sind und Ursprung vie-ler moderner Konzepte und Techniken sind. Die Algebraisierung der Geometrie gelangdurch die Einfuhrung von Koordinaten und die Formulierung geometrischer Probleme alspolynomiale Gleichungen fur die Koordinaten.
9.1 Herausbildung der axiomatischen Geometrie
Geometrie bedeutet Erdmessung.1 Bereits fruh in der Entwicklungsgeschichte habensich die Menschen mit Geometrie beschaftigt. Eine erste Beschaftigung mit Geometrieist nachweisbar anhand von Fundstucken, auf denen Ornamente und Muster auftreten,wo geometrische Beziehungen wie Kongruenz, Ahnlichkeit und Symmetrie Verwendungfinden (um 4000 v. Chr.).Die nachste Stufe in der Entwicklung der Geometrie stellen Messungen von Strecken undWinkeln sowie Messungen und Berechnungen an geometrischen Figuren wie Drei– undVierecken dar. Bereits um 1550 v. Chr. erfolgte die Berechnung des Flacheninhalts vonDreiecken als Halfte des Produkts der Lange der Grundseite und der Lange der entspre-chenden Hohe. Der Flacheninhalt eines Kreises wurde zu dieser Zeit nach einer Vorschriftberechnet, die in unserer heutigen Schreibweise der Formel F = (d− d9)2 (d Durchmesser)entspricht, was bedeutet, daß fur π der Naherungswert 3, 16 Verwendung fand. ZahlreicheSatze und Zusammenhange der Geometrie waren im alten Agypten und im babylonischenReich ebenfalls bereits bekannt, wobei diese der Anschauung entnommen wurden.
Eine vollig neue Qualitat erhielt die Beschaftigung mit Mathematik – und dabei spieltedie Geometrie eine herausragende Rolle – im alten Griechenland. Das Studium der Ma-thematik in der fruhen griechischen Periode hatte das Ziel, eine ableitbare Einsicht in dieStellung des Menschen innerhalb des Kosmos zu gewinnen. Die Idee, intuitiv gefundeneZusammenhange zu beweisen, ist erstmals bei Thales von Milet (etwa 624 – 547 v. Chr.)zu finden, der als
”Vater der griechischen Mathematik“ angesehen wird. Er bewies sechs
geometrische Satze, die wahrscheinlich alle schon vorher formuliert waren. Sein Verdienstbestand also nicht so sehr darin, daß er neue geometrische Zusammenhange entdeckte,
1γη (griech.) = Erde; µετ ειν (griech.) = messen.
200

Baumeister: Mathematik III / Stand: Januar 1998 201
sondern vielmehr in der Entwicklung der Methode des Beweises bestimmter Behauptun-gen als Mittel der Erkenntnissicherung. Die Arbeit des Thales wurde so nicht nur zurGrundlage der modernen Mathematik, sondern zu einer wesentlichen Grundlage der mo-dernen Wissenschaft uberhaupt.Um einen wissenschaftlichen Aufbau der Geometrie betreiben zu konnen, mussen be-stimmte Grundausagen (Axiome) formuliert werden, die man als gegeben ansieht und ausdenen dann die anderen geometrischen Eigenschaften und Satze ableitbar sind. Der ernst-hafte Versuch, ein geordnetes System der ebenen Geometrie zu schaffen, also bestimmteGrundaussagen festzulegen (zu
”postulieren“ ) und die Geometrie aus diesen Grundaus-
sagen ohne Zuhilfenahme der Anschauung auf rein logischem Wege aufzubauen, wurdeungefahr 200 Jahre nach Thales erstmals unternommen. Eine besondere Bedeutung er-langten in diesem Zusammenhang die Sophisten. Die Angehorigen dieser philosophischenSchule betrachteten mathematische Probleme sehr konsequent im Geiste des Verstehensund nur sehr untergeordnet unter dem Aspekt einer vordergrundigen Nutzlichkeit. DieseHerangehensweise ermoglichte es, zu den Grundlagen des exakten Denkens vorzustoßen.Einen besonderen Einfluß auf die Nachwelt erlangten die mathematischen Arbeiten derSophisten nicht, um so mehr jedoch die um 325 v. Chr. geschriebenen ELEMENTE desEuklid von Alexandria (ca. 365 – 300 v.Chr.). (Als ein Ziel der Elemente erscheint derNachweis, daß es funf regulare (“Platonische“) Korper gibt; wir kommen darauf nochzuruck.) Die ELEMENTE werden als das erste umfassende mathematische Lehrbuch derWeltgeschichte angesehen. Seit der Erfindung der Buchdruckerkunst sind sie in mehr als1000 Auflagen erschienen und damit nach der Bibel das am zweithaufigsten gedruckteBuch uberhaupt. Bis in das vorige Jahrhundert stellten sie die wesentliche Grundlagedes Mathematikunterrichts an hoheren Schulen dar. Die ELEMENTE bestehen aus 13Buchern, in denen alle damals bekannten Gebiete der Mathematik abgehandelt werden.Sie enthalten den ersten uberlieferten Versuch, die Geometrie als theoretisches Systemdarzustellen, indem die damals bekannte Geometrie aus einer Reihe von Grundaussagenauf rein deduktivem Wege aufgebaut wird.Euklid teilte seine Grundlagen in drei Kategorien, die Erklarungen (Definitionen) derauftretenden Begriffe, die Axiome (Grundaussagen, die fur alle Wissenschaften interes-sant sind) und die Postulate (Grundaussagen, die sich speziell auf die Geometrie bezie-hen). Im folgenden sind die Definitionen von Euklid auszugsweise und die Axiome sowiePostulate vollstandig in der Ubersetzung von C. Thaer aufgefuhrt.
Definitionen:
1. Ein Punkt ist, was keine Teile hat,
2. eine Linie breitenlose Lange.
3. Die Enden einer Linie sind Punkte.
4. Eine gerade Linie (Strecke) eine solche, die zu den Punkten auf ihr gleichmaßig liegt.
5. Eine Flache ist, was nur Lange und Breite hat.
15. Ein Kreis ist eine ebene, von einer einzigen Linie [die Umfang (Bogen) heißt] umfaßteFigur mit der Eigenschaft, daß alle von einem innerhalb der Figur gelegenen Punktebis zur Linie [zum Umfang des Kreises] laufenden Strecken einander gleich sind.
Baumeister: Mathematik III / Stand: Januar 1998 202
20. Von den dreiseitigen Figuren ist ein gleichseitiges Dreieck jede mit drei gleichenSeiten, ein gleichschenkliges jede mit nur zwei gleichen Seiten, ein schiefes jede mitdrei ungleichen Seiten.
23. Parallel sind gerade Linien, die in derselben Ebene liegen und dabei, wenn man sienach beiden Seiten ins unendliche verlangert, auf keiner einander treffen.
Postulate
1. Daß man von jedem Punkt nach jedem Punkt die Strecke ziehen kann.
2. Daß man eine begrenzte gerade Linie zusammenhangend gerade verlangern kann.
3. Daß man mit jedem Mittelpunkt und Abstand den Kreis zeichnen kann.
4. Daß alle rechten Winkel einander gleich sind.
5. Und daß, wenn eine gerade Linie beim Schnitt mit zwei geraden Linien bewirkt, daßinnen auf derselben Seite entstehende Winkel kleiner als zwei Rechte werden, danndie zwei geraden Linien bei Verlangerung im Unendlichen sich treffen auf der Seite,auf der die Winkel liegen, die zusammen kleiner als zwei Rechte sind.
Axiome
1. Was demselben gleich ist, ist auch einander gleich.
2. Wenn Gleichem Gleiches hinzugefugt wird, sind die Ganzen gleich.
3. Wenn von Gleichem Gleiches weggenommen wird, sind die Reste gleich.
4. Wenn Ungleichem Gleiches hinzugefugt wird, sind die Ganzen ungleich.
5. Die Doppelten von demselben sind einander gleich.
6. Die Halben von demselben sind einander gleich.
7. Was einander deckt, ist einander gleich.
8. Das Ganze ist großer als der Teil.
9. Zwei Strecken umfassen keinen Flachenraum.
Das funfte Postulat teilt die Eleganz der vorhergenden vier Postulate nicht. Euklid be-trachtete wohl dieses Postulat als den anderen irgendwie unterlegen. Beim Beweis derersten 28 Satze in den Elementen griff er nicht darauf zuruck. Diese 28 Satze bilden dasGerust der absoluten Geometrie, die wir in Kapites 12 betrachten werden.
Trotz einiger Probleme, auf die noch naher eingegangen wird, war das System von EU-KLID mehr als 2000 Jahre lang Grundlage jeglicher Beschaftigung mit der Geometrie.Das erste logisch vollstandig exakte Axiomensystem stellte D. Hilbert (1862–1943) imJahre 1899, also etwa 2200 Jahre (!) nach den ELEMENTEN des EUKLID, vor.

Baumeister: Mathematik III / Stand: Januar 1998 203
Das Axiomensystem von EUKLID – gemeint ist damit die Menge von Aussagen, dieaus den Definitionen, den Axiomen und den Postulaten besteht – weist (zumindest ausheutiger Sicht) einige Mangel auf.
1. Das Axiomensystem ist nicht vollstandig: Nicht alle relevanten Aussagen der Geo-metrie lassen sich aus den Axiomen 1.– 9. und den Postulaten 1.– 5. ableiten.
2. Die Definitionen der Begriffe Punkt, Gerade usw. genugt nicht den Anspruchenlogischer Exaktheit. Fur diese Defintionen werden Begriffe wie
”Teile,
”Breite,
”En-
den“ und andere benotigt, die ihrerseits nicht definiert sind aud auch nicht hinrei-chend klar gefaßt werden konnen.
3. Die sprachliche Exaktheit der Formulierungen (vor allem der Axiome) genugt heu-tigen Anspruchen nicht, was jedoch im Hinblick auf den Enstehungszeitraum desSystems von EUKLID kaum verwundern kann und auch recht leicht zu beheben ist.
Das interessanteste von den genannten drei Problemen ist das zweite. Die Frage der Defini-tion grundlegender geometrischer Begriffe hat die Mathematiker (die im Altertum zumeistauch Philosophen waren) sehr lange Zeit beschaftigt. Das zeigen einige Versuche, die imLaufe der Jahrhunderte angestellt wurden, um den Begriff
”Punkt“ zu definieren:
Ein Punkt ist der Anfang einer Linie (Plato, ca. 380 v. Chr.); ein Punkt ist eine unteilbareEinheit, die eine Position besitzt (Aristoteles, ca. 340 v. Chr.); was keine Teile hat, ist einPunkt (Euklid, ca. 325 v.Chr.).
Die Schwierigkeiten mit den Axiomen 1 – 6 werden beleuchtet durch das folgende (durch-aus angreifbare) Beispiel.
Beispiel 9.1
Lose die Gleichungx− 1 = 2
in folgenden Schritten:Multipliziere auf beiden Seiten mit x− 5 :
x2 − 6x+ 5 = 2x − 10 .
Subtrahiere davon x− 7, was zu
x2 − 7x+ 12 = x− 3
fuhrt, und dividiere mit x− 3 auf beiden Seiten. Dies ergibt die Gleichung
x− 4 = 1 oder x = 5 .
Aber x = 5 lost die ursprunglich vorgelegte Gleichung nicht! 2
Hinzuweisen ist auch auf die Schwierigkeit mit dem Axiom 8. Sie hat zu tun mit demProblem der Unendlichkeit: Eine unendliche Menge kann “ebenso viele“ Elemente haben
Baumeister: Mathematik III / Stand: Januar 1998 204
wie ein Teil von ihr. G. Galilei (1564 – 1642) hatte diese Paradoxie an den Quadratzahlenbeobachtet, indem er jede (naturliche) Zahl mit ihrem Quadrat “verheiratete“:
1 2 3 4 · · ·12 22 32 42 · · ·
Die Schwierigkeiten mit den Begrifflichkeiten muß Euklid bereits bemerkt haben: In seinenBeweisen und Herleitungen greift er namlich auf die Definitionen nie zuruck, sondernbenutzt nur die Axiome und Postulate. Erst im 19. Jahrhundert stellte man fest, daß dieangegebenen Definitionen ganzlich uberflussig sind und daß grundlegende Begriffe durchAxiome festzulegen sind. In der axiomatischen Sicht der Geometrie der Ebene sieht diesetwa so aus:
Es existieren Punkte und Geraden. Diese besitzen folgende Eigenschaften:
1. Geraden sind Mengen von Punkten.
2. Zwei voneinander verschiedene Geraden haben hochstens einen gemein-samen Punkt.
3. Durch jeden Punkt . . . .
Hilbert treibt die axiomatische Sichtweise auf die Spitze, wenn er sagt, statt von Punkten,Geraden und Ebenen konnte man auch von Tischen, Stuhlen und Bierseideln sprechen.Dann drangt sich aber die Frage nach dem Verhaltnis einer axiomatisch–deduktiv aufge-bauten Theorie und der Realitat, also dem Verhaltnis von axiomatischer Geometrie undder Anschauungsgeometrie (realer Raum) auf, denn Satze der axiomatischen Geometriewerden nicht der Anschauung entnommen, sondern nach logischen Regeln aus den Axio-men abgeleitet. Hat die Geometrie damit also ihren Bezug zur Realitat verloren ? (Manbeachte, daß Geometrie Erdmessung bedeutet, also die “Kunst“ eines naturwissenschaftli-chen Umgangs mit unserer physikalischen Umgebung.) Diese Frage kann verneint werden,denn bei der Aufstellung eines Axiomensystems spielt die Betrachtung der Realitat bzw.die Anschauung eine wichtige Rolle, und das in zweierlei Hinsicht:
1. Die Axiome mussen den Gegebenheiten des realen Raumes (bzw. unseren Erfah-rungen damit, also unserer Anschauung) Rechnung tragen und durfen diesen nichtwidersprechen.
2. Die Axiome mussen”ausreichend“ sein, um alle uns aus der Anschauung oder der
Praxis bekannten geometrischen Eigenschaften abzuleiten.
Unsere Betrachtungen werden eindrucksvoll belegen, daß diese beiden Gesichtspunkte sehrwohl bei der Aufstellung eines Axiomensystems der Geometrie beachtet sind.Uberraschenderweise offnet die Axiomatik sogar die Augen fur Geometrien, die weit wegvon der Anschauung in der Ebene und im Raum sind. Es sind dies die endlichen Geome-trien, die in der diskreten Mathematik, also in der Mathematik, die sich mit endlichenStrukturen beschaftigt, ein wichtiges Konzept darstellen.
In diesem Kapitel skizzieren wir noch einige elementar–geometrische Sachverhalte undmotivieren algebraische Strukturen im Zusammenhang mit der Geometrie. Nicht immer
Baumeister: Mathematik III / Stand: Januar 1998 205
konnen wir die Begriffe und Resultate schon in letzter Exaktheit benutzen bzw. herleiten.Im Laufe der nachsten Kapitel holen wir dies Stuck fur Stuck nach. Dabei wird vor allemklar werden, wo die Beweise verankert sind.Im nachsten Kapitel stellen wir die algebraischen Strukturen “Gruppen, Korper“ – dieimaginaren Zahlen finden hier ihren Platz – bereit. Die Polynome, die in diesem Kapitelschon bei der Frage nach der Konstruierbarkeit mit Zirkel und Lineal ins Blickfeld geratenwerden, lassen sich damit ausreichend diskutieren.Im folgenden Kapitel 11 beschaftigen wir uns dann mit der euklidischen Ebene. Hiermussen wir die Grundbegriffe
”Punkte, Geraden“ nicht aus dem
”Nichts“ schaffen,
sie sind schon vorhanden dank der angenommenen Existenz der reellen Zahlen. Dieelementar–geometrischen Uberlegungen haben den Sinn, Anschluß an antike Fragestellun-gen zu schaffen und den Wert der Vektoranalysis (in der euklidischen Ebene) aufzuzeigen.Der axiomatische Zugang zur Geometrie wird im Kapitel 12 beschritten. Wir betrachtendort die absolute Geometrie, d.h. den teil der Geometrie, der ohne das Parallelenaxiomauskommt. Diese Geometrie enthalt dann bis auf die Aussage uber die Winkelsumme imDreieck schon alle wesentlichen Satze der Dreiecksgeometrie.Durch Hinzunahme des Parallelenaxioms in verschiedenen Varianten entstehen dann un-terschiedliche Geometrien, von denen hier die euklidische Geometrie von besonderem In-teresse ist. Wir gehen darauf in einem weiteren Kapitel ein. Als Beispiele fur konkreteGeometrien betrachten wir die spharische Geometrie, die ihren Wert auch in der sphari-schen Astronomie hat. Die Betrachtung endlicher Geometrien und der mit ihnen zusam-menhangenden Graphen verschieben wir auf spatere mehr angewandte Abhandlungen.
9.2 Zirkel und Lineal
Unter einer Konstruktionsaufgabe versteht man die Aufgabe, auf dem Zeichenblatt mitgegebenen Hilfsmitteln aus gegebenen Punkten und Linien gesuchte Punkte und Linien zufinden. Gedacht ist an Zeichnungen, die auf einem Blatt Papier mit einem oder mehrerenBleistiften auszufuhren sind. Dabei wird angenommen, daß es sich um ideale Bleistiftehandelt, also um solche, die eine Linie der Dicke Null ziehen. Auch Punkte gelten alsausdehnungslos (siehe oben).Die einfachsten geometrischen Instrumente sind das Lineal zum Ziehen von geraden Linienund der Zirkel zum Zeichnen von Kreisen (euklidische Werkzeuge). Genauer: Mit demLineal zeichnen wir durch Anlegen der geradlinigen Kante des Lineals eine gerade Liniezwischen zwei Punkten der Zeichenebene/Anschauungsebene und mit dem Zirkelzeichnen wir einen Kreis mit vorgegebenem Mittelpunkt durch einen weiteren Punkt.Konstruktionen mit diesen euklidischen Werkzeugen wollen wir uns nun zuwenden.
Was ist die Anschauungsebene? Es ist dies eine Menge von Punkten, wofur wir IE 2 schrei-ben: IE steht fur Euklid und/oder Ebene, · 2 steht fur die “Dimension“ dieser Punktmenge.In der Vektoranalysis erhalt diese Sicht eine auf der Kenntnis der reellen Zahlen fundierteFormulierung, hier gehen wir ad hoc vor.Heutzutage ist die gebrauchlichste Methode, Probleme der ebenen Geometrie zu behan-deln, sie durch Einfuhrung von cartesischen Koordinaten in Probleme der Vektoranalysiszu ubersetzen. Das bedeutet, daß man die Punkte von IE 2 mit den Elementen von IR2
Baumeister: Mathematik III / Stand: Januar 1998 206
identifiziert: Zu jedem Punkt P der euklidischen Ebene IE 2 gibt es genau ein Paar (xP , yP )in IR2, die Koordinaten von P, das diesen Punkt reprasentiert, und ganz IR2 wird damitausgeschopft. Eine Figur in der Ebene IE 2 ist dann eine Teilmenge der Menge der Punktein IE 2 . Kennenlernen werden wir die Figuren “Dreieck, Vieleck, Gerade, Ebene, . . .“.Mit dieser Methode kann man nahezu alle “elementaren“ Probleme der ebenen Geometriein Fragen der linearen Algebra, der Algebra und/oder der Analysis ubersetzen. Beispielewerden wir spater sehen.
Die eben zitierte Methode geht im wesentlichen auf R. Descartes (1596 – 1650) zuruck.Ihr analytisches Vorgehen steht im Gegensatz zu der synthetischen Auffassung derGeometrie, wie sie in der Antike entwickelt wurde. Das synthetische Vorgehen ist, grobgesagt, das folgende: Man formuliert zunachst einige Tatsachen uber geometrische Objekte(wie Punkte, Geraden, Winkel usw.), die allgemein einsichtig und beweislos anzuerkennensind, und folgert aus ihnen durch rein logisches Schließen neue Tatsachen, die auf denersten Blick nicht immer offensichtlich sind; dies ist also im wesentlichen das Konzept,das Euklid darstellte.
Zirkel und Lineal konnen also verwendet werden, ausgehend von zwei Punkten P,Q dereuklidischen Ebene neue Punkte zu konstruieren durch Schneiden von Linien und Kreisen.Etwas genauer:Seien O und E die Punkte in IE 2 mit den Koordinaten (0, 0) bzw. (1, 0) .Unter Konstruktion mit Zirkel und Lineal versteht man das Auffinden neuer Punkteaus gegebenen durch folgende Prozesse:
1. Anlegen des Lineals an gegebene oder bereits konstruierte Punkte zwecks Auszeich-nen der durch diese Punkte bestimmten Geraden.
2. Einsetzen der beiden Zirkelspitzen in zwei gegebene oder schon konstruierte Punkte,Zeichnung eines Kreises um einen gegebenen oder bereits konstruierten Punkt alsMittelpunkt mit dem in die Zirkeloffnung genommenen (durch zwei schon vorhan-dene Punkte bestimmten) Radius.
3. Erzeugung neuer Punkte durch Schnitt von Geraden und Kreisen, die auf die ebenbeschriebene Weise gewonnen wurden.
Wie die Punkte O und E, mit denen wir die Konstruktion beginnen, auf das Papiergekommen sind, ist eine Frage, die vollig außer Betracht bleibt.Es ist dabei Teil der Spielregeln, daß weder das Lineal noch der Zirkel verwendet werdendurfen, Abstande zu ubertragen. Aber man kann zeigen, daß man dann doch den Zirkelso verwenden darf, daß man damit Abstande ubertragen kann (siehe Bemerkung 9.3).
Der Ausgangspunkt fur die Konstruktionen sind zwei Punkte P und Q bzw. O und E .Dies entspricht der Annahme, eine “geeichte“ Ausgangsstrecke auf der Zeichenebene zuhaben, namlich die Strecke zwischen O und E .Wir werden sehen, daß man mit Zirkel und Lineal auf diese Weise Punkte konstruierenkann, deren Koordinaten sich durch die Operationen
+,−, ·,÷,√

Baumeister: Mathematik III / Stand: Januar 1998 207
in den reellen Zahlen aus den ursprunglichen Koordinaten errechnen lassen. Dies erkenntman sehr einfach, wenn man Schnittpunkte von Geraden mit Geraden, Geraden mit Krei-sen und Kreisen mit Kreisen berechnet: Nur die obigen Operationen werden dabei ver-wendet. Wir gehen im nachsten Kapitel genauer darauf ein.Zirkel und Lineal kann man verwenden, um konstruktiv
a+ b, a− b, ab,b
a,√a
fur reelle Zahlen a, b zu konstruieren, indem man a, b als euklidische Abstande zwischengeeigneten Punkten der Zeichenebene interpretiert.
Definition 9.2
Seien P,Q Punkte in IE 2 mit Koordinaten (xP , yP ) bzw. (xQ, yQ) in IR2 . Der eu-klidische Abstand d(P,Q) von P,Q ist erklart durch
d(P,Q) :=√
(xP − xQ)2 + (yP − yQ)2 .
2
Abbildung 9.1: Euklidischer Abstand
d(P,Q) ist also die Lange der Strecke PQ , d.h. des Abschnitts der Geraden (siehe unten)durch P,Q , der zwischen P und Q liegt.
Damit haben wir den pythagoreischen Lehrsatz (im Dreieck PRQ) vorweggenommen,der am Anfang einer jeden Elementargeometrie, die Anwendungen im Auge hat, steht.Er besagt bekanntlich, daß in einem rechtwinkligen2 Dreieck die Summe der Quadrateder Katheten gleich dem Quadrat der Hypothenuse ist; dabei sind die Katheten dieDreiecksseiten, die den rechten Winkel bilden, die Hypothenuse ist dritte Dreiecksseite.(In der obigen Abstandsformel in Definition 9.2 kommt dies gerade zum Ausdruck.) In der“Praxis“ ist aber die Umkehrung dieses Satzes, die auch gilt, von Wert: Ein Dreieck, furdas die Summe der Quadrate zweier Seiten gleich dem Quadrat der dritten Seite ist, istnotwendig rechtwinklig. Man kann damit rechtwinklige Dreiecke abstecken, eine im Bau–und Ingenieuswesen wichtige Aufgabe.
2Einen rechten Winkel deuten wir durch ⊂· an. Ein rechter Winkel ist ein halber gestreckter Winkel,ein gestreckter Winkel “liegt“ auf einer Seite einer geraden Linie.
Baumeister: Mathematik III / Stand: Januar 1998 208
Abbildung 9.2: Pythagoreischer Lehrsatz
Es gibt eine Vielzahl von Beweisen fur den pythagoreischen Lehrsatz, teils auf Griechenund Inder zuruckgehend. Vielleicht sollte man eher von Veranschaulichungen fur die Rich-tigkeit des Satzes sprechen. Aus indischen Quellen stammt der Beweis, der aus der Abbil-dung 9.3 abzulesen ist. Weitere Beweise sind abzulesen in Abbildung 9.4 und Abbildung
Abbildung 9.3: Ein indischer Beweis des pythagoreischen Lehrsatzes
9.5. Als Wissen benotigt man die Flacheninhaltsformel fur rechtwinklige Dreiecke undRechtecke:
FRechteck = a · h wobei a, h die Seitenlangen des Rechteckes sind.
Frechtwinkliges Dreieck =a · b
2wobei a, b die Katheten des Dreiecks sind.

Baumeister: Mathematik III / Stand: Januar 1998 209
Abbildung 9.4: Ein weiterer Beweis des pythagoreischen Lehrsatzes
Abbildung 9.5: Ein Mosaikbeweis des pythagoreischen Lehrsatzes
Der Beweis der Flacheninhaltsformel fur rechtwinklige Dreiecke ergibt sich aus der Fla-cheninhaltsformel fur Rechtecke, da durch Aneinanderlegen zweier Kopien eines recht-winkligen Dreiecks ein Rechteck entsteht; siehe Abbildung 9.7. Hier ist das Prinzip“Additi-vitat von Flacheninhalt“ enthalten, das unmittelbar einsichtig erscheint, in der axiomati-schen Sicht der Geometrie aber durchaus problematisch ist. Die Flacheninhaltsformel furRechtecke ist eigentlich eine Definition von Flacheninhalt: Die Flache ist die Anzahl derEinheitsquadrate, die zur Uberdeckung des Rechtecks notig ist. Die Flacheninhaltsformelfur das allgemeine Dreieck ergibt sich aus der fur das rechtwinklige Dreieck, wie aus derAbbildung 9.7 hervorgeht.
Aus dem pythagoreischen Lehrsatz gewinnt man die Formel
sin(α)2 + cos(α)2 = 1
zuruck, denn fur die Winkel α, β an der Hypothenuse gilt β = π/2−α , da der dritte Winkelein rechter ist. Wir haben hier vorweggenommen, daß in einem Dreieck die Winkelsummezwei rechte Winkel betragt. Dies ist ein Faktum, das eng mit dem Jahrhunderte dauerndenSuchen nach einem Beweis fur das Parallelenpostulat verbunden ist.
Wir haben hier die Winkelmaße nicht im Gradmaß sondern im Bogenmaß angegeben,

Baumeister: Mathematik III / Stand: Januar 1998 210
Abbildung 9.6: Flacheninhaltsformel
Abbildung 9.7: Additivitat des Flacheninhalts
d.h. mit der Lange des Kreisbogens, der vom Winkel auf einem Kreis mit Radius 1 aus-geschnitten wird. Man beachte dazu, daß der Umfang eines Kreises mit Radius 1 gerade2π betragt.
Aus dem pythagoreischen Lehrsatz entwickelt sich das Problem der pythagoreischen Zah-lentripel: Fur welche m,n, k ∈ IN gilt
m2 + n2 = k2 ?
Man bestatigt, daß es unendlich viele solche Tripel gibt (siehe Abschnitt 3.5). Der Satzvon Fermat, der nun endlich bewiesen ist (R. Wilson, 1994), besagt, daß die analogeFragestellung, wieviele Zahlentripel (m,n, k) die Gleichung
ms + ns = ks
fur s ∈ IN , s ≥ 3, losen, vollig anders zu beantworten ist:
Es gibt kein solches Zahlentripel !
Kommen wir zuruck zur Konstruktion mit Zirkel und Lineal. Als erste Konstruktionfuhren wir die Halbierung einer Strecke durch. Sie ist festgehalten in Abbildung 9.8.Damit macht man sich auch klar, wie das Lot eines Punktes auf eine Strecke gefallt wird.Die fur die Formulierung des pyhagoreischen Lehrsatzes benotigten rechten Winkel lassensich damit konstruktiv erzeugen: Sie sind mittels eines Lotes halbierte gestreckte Winkel.
Bemerkung 9.3

Baumeister: Mathematik III / Stand: Januar 1998 211
Abbildung 9.8: Halbierung einer Strecke
Bei der Konstruktion mit Zirkel und Lineal ist es nicht erlaubt, Abstande zu ubertragen.Das Lineal hat also keinen Maßstab, der Zirkel (alter Art) laßt sich nicht feststellen. Manmochte nun meinen, daß mit einem Zirkel moderner Art – ein solcher Zirkel hat einenMechanismus, der es erlaubt, eine
”beliebige“ Offnung festzustellen – eine großere Vielfalt
von Figuren konstruiert werden kann. Dies ist nicht der Fall. Um dies zu verifizieren,genugt es zu zeigen: Sind A,B,O Punkte der Ebene, so laßt sich mit Zirkel (alter Art) undLineal ein Kreis mit Mittelpunkt O und Radius r := |AB| zeichnen. Die dies bestatigendeKonstruktion ist festgehalten in Abbildung 9.9.
Abbildung 9.9: Ubertrag von Strecken
2
Aus Abbildung 9.10 wird klar, wie a+ b, a− b konstruiert werden konnen.Nun ist es auch moglich, die rechtwinkligen Dreiecke in Abbildung 9.11 zu konstruieren

Baumeister: Mathematik III / Stand: Januar 1998 212
Abbildung 9.10: Addition und Subtraktion
und ab, ba abzulesen. Beachte dabei, daß die Strecke der Lange 1 verabredungsgemaß als
Abstand von O und E vorliegt. Daß die Konstruktion wirklich ab (fur ba analog) liefert,
Abbildung 9.11: Multiplikation und Division
dafur kann man verschiedene Begrundungen abgeben:
1.Begrundung: Es gilt tan(α) = a1 = x
b.
2. Begrundung: Nach dem Strahlensatz gilt x : a = b : 1 .
Beide Begrundungen beruhen aber schon auf einem betrachtlichen “Stuck“ Geometrie:Trigonometrie bei 1., (versteckte) Ahnlichkeitsaussagen bei 2.. Wir liefern spater auf demFundament der euklidischen Geometrie die Begrundung. Soviel sei schon angemerkt: Pa-rallelitat spielt in jedem Falle eine entscheidende Rolle.
Die Konstruktion von√a ist abzulesen aus Figur 9.12.
Dort ist
tan(α) =x
a, tan(α) =
1
x, x2 = a .
Dazu muß man aber wissen, daß α+ β = π2 gilt (oder den Hohensatz kennen). Dies sieht
man an Abbildung 9.13, in der der Thaleskreis vorweggenommen ist.
α+ γ + α = πβ + π − γ + β = π
=⇒ α + β =
π
2
Wir haben hier wieder vorweggenommen, daß in einem Dreieck die Winkelsumme zweirechte betragt.

Baumeister: Mathematik III / Stand: Januar 1998 213
Abbildung 9.12: Wurzelziehen
Abbildung 9.13: Eine Beobachtung am Thaleskreis
Unter dem goldenen Schnitt (lat. sectio aurea)3 versteht man die Unterteilung einerStrecke AB durch einen Punkt P , so daß fur die Verhaltnisse der Langen |AB|, |AP |, |PB|der Teilstrecken AB,AP, PB gilt:
|AB|
|AP |=|AP |
|PB|
Bezeichnet man die Lange der Strecke AB mit a und von AP mit x , so folgt also fur dengemeinsamen Wert g dieser beiden Verhaltnisse
g :=a
x=
x
a− x.
Es folgt
x2 + ax− a2 = 0 , g2 = g + 1 , (9.1)
und wir machen hier erste Bekanntschaft mit einer polynomialen Gleichung fur einengeometrischen Sachverhalt.
3Eine vergleichbare Aufgabenstellung wird von I. Stewart in Spektrum 11/97, 10 – 13, behandelt.

Baumeister: Mathematik III / Stand: Januar 1998 214
Diese Art der Teilung geht auf Euklid zuruck, ihre mystische Bedeutung erhielt sie im 16.Jahrhundert durch L. Paciolo (1445 – 1512), der ein von Leonardo da Vinci (1452 – 1519)illustriertes Buch mit dem Titel
”De divina proportione“ (Uber die gottliche Teilung)
veroffentlichte.Wir erhalten fur g
g =1
2(1 +
√5) = 1.618033988 . . .
und fur h := 1g
h2 + h = 1, also h = g − 1 =1
2(√
5− 1) . (9.2)
Die Heron–Iteration (siehe Abschnitt 4.5)
xk+1 :=1
2xk +
1
2
5
xk, x0 := 2,
liefert die Approximationen
2,9
4,161
72,51841
23184
fur die Zahl√
5 und daher die Approximationen
3
2,13
8,232
144,75025
46368
fur die Zahl g,
Beachte: h stimmt recht gut mit π2
16 uberein. Eine Naherung fur die Kreiszahl π ist also
4√h, also eine mit Zirkel und Lineal konstruierbare Zahl. Die Quadratur des Kreises
gelingt also naherungsweise (!) mit Zirkel und Lineal, obwohl sie, wie wir sehen werden,exakt nicht gelingt.
Die Zahl g = 12(1 +
√5) ist mit Zirkel und Lineal konstruierbar. Eine Konstruktion in
einem Schritt, also nicht als Kette
√5 , 1 +
√5 ,
1
2(1 +
√5)
(gemaß den oben gegebenen Hinweisen), ist der Abbildung 9.14 zu entnehmen. Es ist hiernamlich:
|AB| = 1 , |CD| =1
2,
|AC| =
√1 +
1
4=
1
2
√5,
|AP | =1
2
√5−
1
2= h,
|AQ| = h+ 1 = g .
Baumeister: Mathematik III / Stand: Januar 1998 215
Abbildung 9.14: Teilungsverhaltnis im goldenen Schnitt
Abbildung 9.15: Euklid’s Konstruktion
Von Euklid wird (als Satz 30) eine ahnliche Konstruktion angegeben. Sie ist festgehaltenin Abbildung 9.15.Wir haben hier
|AB| = 1 , |AB| = 2 · |BC| , |CA| = |CD| , |BD| = |BR| ,
also|AB|
|RB|= g .
Die Konstruktion eines regelmaßigen Funfeckes mit Zirkel und Lineal ist gleichwertig
mit der Konstruktion eines Winkels α := 2π5 oder der Zahl cos(2π
5 ) mit Zirkel und
Lineal, wie man am Einheitskreis abliest. Es ist cos(2π5 ) = 1
4(√
5− 1) (siehe (8.11)), alsoeine konstruierbare Zahl. Der Konstruktionsschritt fur das regelmaßige Funfeck ist nunabzulesen aus Abbildung 9.16.
Bemerkung 9.4
In (9.1) haben wir gesehen, daß fur die Zahl g des goldenen Schnitts die Formel
g =√
1 + g

Baumeister: Mathematik III / Stand: Januar 1998 216
Abbildung 9.16: Regelmaßiges Funfeck
gilt. Sukzessives Wiedereinsetzen von√
1 + g fur g fuhrt zu
g =√
1 + g =
√1 +
√1 + g =
√1 +
√1 +
√1 + g = · · · .
Dieser unendlich fortgesetzter Einsetzungsprozeß laßt sich als iteratives Verfahren zur nununbekannt angenommenen Zahl g verstehen. Etwa folgt mit der Startschatzung g0 := 1fur g :
g1 :=√
1 + g0 =√
2 , g2 :=√
1 + g1 =√
1 +√
2 , g3 :=√
1 + g2 =
√1 +
√1 +√
2 , . . . .
Ohne Beweis4 wird mitgeteilt, daß diese Iterationsfolge (gk)k∈IN gegen g konvergiert.Die Zahl g erfullt auch die Gleichung
g = 1 +1
g.
Sukzessives Wiedereinsetzen von 1 + 1g fur g auf der rechten Seite fuhrt zu
g = 1 +1
g= 1 +
1
1 +1
g
= 1 +1
1 +1
1 +1
g
= · · · .
Faßt man dies wieder als Iteration
g0 := 1 , gk+1 := 1 +1
gk, k ∈ IN 0 ,
4Siehe etwa M. Koecher: Klassische elementare Analysis, Birkhauser Verlag, Basel, 1987

Baumeister: Mathematik III / Stand: Januar 1998 217
auf, so konvergiert auch dieses Vorgehen gegen g . Aufgrund des Zustandekommens von gin dieser Form schreibt man
g = 1 +1
1 +1
1 +1
1 +1
1 + · · ·
und nennt dies einen (unendlichen) Kettenbruch.Die obigen Konvergenzergebnisse sind nicht selbstverstandlich. Betrachten wir etwa dieGleichung (siehe (9.2))
h2 + h = 1 bzw. h =√
1− h ,
so erhalten wir
h =√
1− h =√
1−√
1− h =
√1−
√1−√
1− h = · · · .
Die zugehorige Iteration
h0 := 0 , hk+1 :=√
1− hk , k ∈ IN 0 ,
ist offenbar nicht (gegen h) konvergent. 2
Kommen wir nun zu den beruhmten Problemen, deren konstruktive Losung mit Zirkelund Lineal bereits in der Antike betrachtet wurde:Verdoppelung des Wurfels, Dreiteilung eines Winkels, Konstruktion regel-maßiger n–Ecke, Quadratur des Kreises.
Zur Verdoppelung des Wurfels. (Delisches Problem)Das Volumen des Einheitswurfels ist Eins.
Ist es moglich, mit Zirkel und Lineal die Seitenlange eines Wurfels zu konstruie-ren, dessen Volumen 2 ist ?
(Dieses Verdoppelungsproblem geht der Sage nach auf ein Orakel aus Delphi zuruck; furden Wurfel hat man sich einen Altar zu denken.)Die Losung lauft darauf hinaus, ein x ∈ IR zu konstruieren mit
x3 = 2 , (9.3)
oder nach Menaichmos (um 350 v. Chr.) den Schnittpunkt der Parabeln
x2 = y , y2 = 2x
zu konstruieren.
Die Antwort ist NEIN !
Zur Dreiteilung eines Winkels.Die Halbierung eines Winkels mit Zirkel und Lineal ist immer moglich, wie man an Ab-bildung 9.17 abliest.

Baumeister: Mathematik III / Stand: Januar 1998 218
Abbildung 9.17: Halbierung eines Winkels
Ist es moglich, einen beliebigen Winkel mit Zirkel und Lineal zu dritteln ?
Dazu aquivalent ist die Frage, ob fur einen beliebigen Winkel ϑ die Zahl cos(ϑ) mit Zirkelund Lineal konstruierbar ist, wenn die Zahl cos(3ϑ) vorliegt. Da
cos(3ϑ) = 4 cos(ϑ)3 − 3 cos(ϑ)
nach bekannten trigonometrischen5 Formeln (siehe Abschnitt 8.6) gilt, ist die Frage aqui-valent damit, ob eine Losung x der kubischen Gleichung
4x3 − 3x = c (9.4)
mit Zirkel und Lineal fur einen beliebigen Wert c (c = cos(3ϑ)) konstruierbar ist.
Die Antwort ist NEIN !
Die Dreiteilung eines Winkels gelingt, wenn man die Spielregel “Nur mit Zirkel und Lineal“aufgibt. Fruhe derartige Losungen stammen von Hippias (um 460 v. Chr.) (Quadratix)und Archimedes (287? – 212?) (Konchoide/Muschellinie).
Zur Konstruktion regelmaßiger n–Ecke.Das obige Problem, etwas allgemeiner gefaßt, lautet, ob es moglich ist, mit Zirkel undLineal den n−ten Teil eines Winkels zu konstruieren.Der interessante Spezialfall ist die Teilung des Vollwinkels in n gleiche Teile, d.h. die
Konstruktion von (cos(2πn ), sin(2π
n )) aus den Punkten (0, 0), (1, 0) heraus.
Ist es moglich, den Punkt (cos(2πn ), sin(2π
n )) mit Zirkel und Lineal zu kon-struieren ?
Die Antwort ist abhangig von n : Das regelmaßige n–Eck ist mit Zirkel undLineal konstruierbar genau dann, wenn die Zahl n die Darstellung
n = 2mp1 · · · pk
besitzt; hierbei ist m ∈ IN und p1, . . . , pk sind verschiedene Fermatsche Prim-zahlen oder 1. (Siehe Abschnitt 3.1.)
5τριγoνoν (griech.) = Dreieck

Baumeister: Mathematik III / Stand: Januar 1998 219
Fur eine durchsichtige Behandlung dieses Problems der Konstruierbarkeit regelmaßigern−Ecke sind die komplexen Zahlen hilfreich; dazu Abschnitt dient uns 10.4 .
Zur Quadratur des Kreises.Der Flacheninhalt des Einheitskreises ist π.
Ist es moglich, die Seitenlange x eines Quadrates mit Zirkel und Lineal so zukonstruieren, daß der Flacheninhalt dieses Quadrats gleich π ist ?
Die Frage lauft darauf hinaus, ob es moglich ist, mit Zirkel und Lineal eine Losung von
x2 = π
zu konstruieren.
Die Antwort ist NEIN !
Die negativen Antworten wurden gegeben von Wantzel 1837 zu den ersten beiden Pro-blemen und von Lindemann 1882 zum vierten Problem. Die Losung des dritten Problemswurde von C.F. Gauss (1777 – 1855) erbracht. Wesentliche Vorarbeiten stammen vonR. Descartes. Die Quadratur des Kreises – mit
”Quadratur“ wird die Berechnung von
Flacheninhalten, welche ja im wesentlichen auf der Auszahlung von Quadraten besteht,bezeichnet – ist im Gegensatz zu den beiden anderen Problemen kein rein algebraischesProblem.
In der Antike gab es fur die Losbarkeit der Frage der Quadratur des Kreises durchaus po-sitive Ansatze. Etwa zeigte Hippokrates (um 440 v. Chr.) – von ihm stammen Fragmenteeines Lehrbuchs der Geometrie – , daß der Flacheninhalt des Mondes in der folgendenSkizze fur das Verhaltnis α/β = 3 oder α/β = 3/2 quadrierbar ist. Erst in diesem Jahr-
Abbildung 9.18: Quadrierung von Mondchen
hundert konnte die Vermutung, daß dies genau fur die rationalen Verhaltnisse α/β mit
α
β= 3 ,
3
2, 5 ,
5
2

Baumeister: Mathematik III / Stand: Januar 1998 220
gilt, auf der Basis der Galoistheorie, deren Kernstuck eine intensive Nutzung der Grup-penstruktur (siehe nachstes Kapitel) ist, verifiziert werden.
Bemerkung 9.5
Konstruktion mit Zirkel und Lineal ist ein idealer Vorgang, er bezieht sich nicht auf dieSchwierigkeiten, Konstruktionen in Praxis exakt auszufuhren. In der Literatur sind vieleKonstruktionen mit Zirkel und Lineal zu finden, die die obigen Aufgaben “naherungs-weise“ mit nahezu vorgebbarer Genauigkeit losen (siehe oben). Dies ist aber ein andererAnsatz. 2
9.3 Geometrie, Symmetrie, Invarianz
Es lassen sich drei Entwicklungsphasen der Geometrie erkennen:Die erste Phase fuhrte zur synthetischen Geometrie. Hier werden die Strukturen ohneBezuge zu anderen Disziplinen direkt oder
”rein geometrisch“ in einer eigenen Axiomatik
eingefuhrt, in der nur mengentheoretisch deutbare Operationen (”Verbinden“,
”Schnei-
den“) vorkommen. Das euklidische Konzept ist der synthetischen Geometrie zuzuordnen.
Die zweite Phase fuhrte zur Analytischen Geometrie, in der man sich der Sprache derlinearen Algebra bedient. Diesen Ansatz verfolgen wir im nachsten Kapitel. Punkte undgeometrische Figuren der synthetischen Geometrie werden durch Koordinaten bzw. Glei-chungen in den Koordinaten gegeben. Die Resultate werden erzielt durch algebraischesRechnen mit den Gleichungen. In ihrer modernen Fortentwicklung ist die analytische Geo-metrie zu dem geworden, was heute mit der Algebraischen Geometrie umschriebenwird.
Die dritte Phase laßt sich schließlich in der Entwicklung der Differentialgeometriefestmachen. Hier bedient man sich auch der Sprache der Analysis, und zwar u.a. zurBeschreibung von Tangenten an Kurven und Flachen, Arbeitsmittel sind
”Ableitung“ und
”Integral“. Fur die mathematische Physik ist dieser Entwicklungszweig der Geometrie
besonders fruchtbar (Hamiltonsche Mechanik, Relativitatstheorie). D. Hilbert (1862 –1943)6 stellt die unwidersprochene Behauptung auf: “Die Geometrie ist nichts als einZweig, der alteste Zweig der Physik; die geometrischen Wahrheiten sind in keiner Hinsichtanders gestellt oder anders geartet als die physikalischen.“ C.F. Gauss (1777 – 1855) undH. Helmholtz (1821 – 1895) sind die Ersten gewesen, die diese Tatsache erkannt undumgesetzt haben.
Eng verknupft mit der Geometrie ist der Begriff der Symmetrie.
Symmetrie, ob man ihre Bedeutung weit oder eng faßt, ist eine Idee, vermoge derer
der Mensch durch Jahrtausende seiner Geschichte versucht hat, Ordnung, Schonheit
und Vollkommenheit zu begreifen und zu schaffen.
H.Weyl, 1885–1955.
6In: Hilbert, D.: Wissen und mathematisches Denken. Vorlesungsmitschrift aus dem WS 1922/23
Baumeister: Mathematik III / Stand: Januar 1998 221
Invarianz und Symmetrie sind Leitprinzipien mathematischer Asthetik. Sie sind komple-mentare Begriffe: Etwas ist in dem Maße symmetrisch, wie es invariant (unveranderlich)ist, wenn es einer gewissen Transformation unterworfen wird. A. Einsteins (1879 – 1955)Relativitatstheorie resultiert aus der Vorstellung, daß die physikalischen Gesetze invariantunter der sogenannten Lorentz–Transformation sein sollten. Einstein dachte sogar daran,seine Relativitatstheorie Invariantentheorie zu nennen. Geometrie und Symmetrie konnenals Leitmotive der mathematischen Physik aufgefaßt werden.7
In Abbildung 9.19 sind zwei Paare von Figuren zu sehen. Wir sagen, daß die rechte Figur
Abbildung 9.19: Mehr oder minder symmetrische Figuren
jeweils symmetrischer ist als die linke Figur. Die prazise Formulierung der Symmetriegelingt mit dem Gruppenbegriff, mit dem wir uns im nachsten Kapitel beschaftigen; er istdas Ergebnis einer langen historischen Entwicklung. Grob gesagt mißt man die Symmetrieeiner Figur damit, wieviele Drehungen und Spiegelungen es in der Ebene (Raum) gibt,die die Figur mit sich selbst zur Deckung bringen (Deckabbildungen). Die zugehorigeSymmetriegruppe ist umso großer, je symmetrischer das Objekt ist.
Definition 9.6
Eine Abbildung φ : IE 2 −→ IE 2 heißt Isometrie (Kongruenzabbidung), wennsie bijektiv und daruberhinaus abstandserhaltend ist, d.h. wenn
d(φ(P ), φ(Q)) = d(P,Q) fur alle P,Q ∈ IE 2
gilt. 2
Isometrien sind etwa die Identitat und die Spiegelungen
IR2 3 x = (x1, x2) 7−→ (−x1, x2) ∈ IR2 , IR2 3 x = (x1, x2) 7−→ (x2, x1) ∈ IR2 .
7Siehe etwa M. Schottenloher: Geometrie und Symmetrie in der Physik – Leitmotiv der mathemati-schen Physik, Vieweg–Verlag, Braunschweig, 1995.

Baumeister: Mathematik III / Stand: Januar 1998 222
Wir haben hier die Identifikation der euklidischen Ebene IE 2 mit IR2 ausgenutzt.
Die Voraussetzung der Bijektivitat in Definition 9.6 ist uberflussig. Wir werden spatersehen, daß eine abstandserhaltende Abbildung schon bijektiv ist.
Definition 9.7
Sei M eine Teilmenge von IE 2 .
(a) Wir nennen
Iso(M) := ψ : M →M |ψ(M) = M ; es gibt eine Isometrie φ mit φ|M = ψ
die Symmetriegruppe von M und jedes Element ψ ∈ Iso(M) eine Bewe-gung von M .
(b) M heißt symmetrisch, wenn Iso(M)\id 6= ∅ ist.
2
(Die Bezeichnung “Gruppe“ greift den Dingen schon etwas vor.)
Betrachten wir als erstes Beispiel ein gleichseitiges Dreieck mit den EckenA1, A2, A3 ; sieheAbbildung 9.20. Haben die Ecken A1, A2, A3 die Koordinaten x1, x2, x3, so wird der PunktS mit den Koordinaten (x1 +x2 +x3)/3 Schwerpunkt genannt. Er ist auch Schnittpunktder Seitenhalbierenden, wie wir spater sehen werden. Man sieht sofort Isometrien, die zur
Abbildung 9.20: Symmetrie im gleichseitigen Dreieck
Symmetriegruppe des Dreiecks A1A2A3 gehoren:
1. Die Spiegelung an der Achse durch den Punkt A1 und den Mittelpunkt der StreckeA2A3, die wir mit φ1 bezeichnen.
Baumeister: Mathematik III / Stand: Januar 1998 223
2. Die Spiegelung an der Achse durch den Punkt A2 und den Mittelpunkt der StreckeA3A1, die wir mit φ2 bezeichnen.
3. Die Spiegelung an der Achse durch den Punkt A3 und den Mittelpunkt der StreckeA1A2, die wir mit φ3 bezeichnen.
4. Die Drehung um den Schwerpunkt des Dreiecks mit dem Drehwinkel 120o, die wirmit ψ1 bezeichnen.
5. Die Drehung um den Schwerpunkt des Dreiecks mit dem Drehwinkel 240o, die wirmit ψ2 bezeichnen.
6. Die identische Abbildung id .
Damit haben wir folgende Liste von Isometrien erhalten:
D3 := id, φ1, φ2, φ3, ψ1, ψ2 . (9.5)
Man kann sich nun uberzeugen, daß die Hintereinanderausfuhrung von je zwei der obigenAbbildungen wiederum eine Abbildung aus der obigen Liste ergibt. So gilt etwa:
φ1 φ1 = id , φ2 φ2 = id , φ3 φ3 = id ,
ψ1 ψ1 = ψ2 , ψ2 ψ2 = ψ1 , φ2 φ1 = ψ1 , φ1 φ2 = ψ2 .
Mit Ausnahme der letzten Aussage sind die obigen Gleichungen leicht nachzuprufen. Dieletzte Gleichung ist zumindest plausibel, daA1 auf A3, A2 auf A1, und A3 auf A2 abgebildetwerden, ebenso, wie dies bei ψ2 der Fall ist.
Die Frage ist nun, haben wir mit id, φ1, φ2, φ3, ψ1, ψ2 alle Isometrien des DreiecksA1A2A3
gefunden. Dies trifft zu. Dazu beachte, daß man jede der obigen Abbildung mit einerPermutation (siehe Abschnitt 2.1) der Ziffern 1,2,3 in Verbindung bringen kann und esgerade 6 solche Permutationen gibt. Etwa entspricht ψ2 der Permutation, die folgendeAbbildungseigenschaft hat:
1 7−→ 3, 2 7−→ 1, 3 7−→ 2
Andererseits ist einsichtig, daß jedes Element der Symmetriegruppe des Dreiecks die Ei-genschaft hat, Eckpunkte auf Eckpunkte abzubilden. Im nachsten Kapitel kommen wirauf diesen Zusammenhang zuruck, wenn wir die Struktur “Gruppe“ betrachten.
Die obige Liste von Isometrien finden wir auch durch einen anderen Blick auf das Problem:
• Je eine Isometrie erhalten wir durch Drehung des Dreiecks (um den Schwerpunkt)
um ein Vielfaches von 2π3 . Dies sind die Isometrien id, ψ1, ψ2 .
• Spiegelung etwa an der Achse durch den Punkt A3 und den Mittelpunkt der Strecke
A1A2, und anschließende Drehung um ein Vielfaches von 2π3 . Dies ergibt die Isome-
trien φ3 = id φ3, φ2 = ψ1 φ3, φ1 = ψ2 φ3 .
AlsoD3 = id, ψ1, ψ2, φ3, ψ1 φ3, ψ2 φ3 . (9.6)
Baumeister: Mathematik III / Stand: Januar 1998 224
Die eben angefuhrte Spiegelung (φ3) ist gleichbedeutend mit einer halben Drehung des (zueinem raumlich etwas “verdickten“) Dreiecks im Raum um die Achse durch den PunktA3 und den Mittelpunkt der Strecke A1A2 und dem damit verbundene Austausch vonvon “vorne“ und “hinten“. Da beide Seiten des Dreiecks damit in Betrachtung kommen,wird D3 eine Dihedralgruppe (dihedral (griech.): zweigesichtig) oder Diedergruppegenannt.Die zweite Betrachtungsweise ist ubertragbar auf den Fall allgemeiner regelmaßiger n–Ecke. Sie fuhrt dann dazu, daß die SymmetriegruppeDn eines regelmaßigen n–Ecks gerade2 · n Elemente besitzt. Hat man die obige Analogie mit Permutationen im Auge, so falltauf, daß darnach
#D3 = #S3 = 3! = 6 ,
aber#D4 = 8 , #S4 = 4! = 24
gilt. Beim regelmaßigen 6–Eck ist der Unterschied
#D6 = 12 , #S6 = 6! = 720
schon eklatant.
Die obige Beobachtung, daß Drehungen sich durch Spiegelungen erreichen lassen (ψ1 =φ2 φ1 , ψ2 = φ2 φ1 im Fall der Dihedralgruppe D3) ist kein “Zufall.“ Die alle Drehungen
in Dn erzeugende Drehung ψ um 2πn vermoge
id, ψ, . . . , ψn−1
laßt sich stets als Hintereinanderausfuhrung von zwei Spiegelungen φ1, φ2 schreiben, diedurch Spiegelungsachsen erzeugt werden, die einen Winkel πn einschließen. Sind die Spie-gelungsachsen reale Spiegel, so hat ein Objekt, das zwischen die beiden Spiegel gestelltwird, 2n Spiegelbilder. Das Kaleidoskop8 ist das daraus abgeleitete Instrument.
Satz 9.8
Sei M eine Teilmenge von IE 2 . Es gilt:
(a) id ist eine Bewegung von M .
(b) Sind f, g Bewegungen von M, so ist auch f g eine Bewegung von M .
(c) Ist f Bewegung der Menge M, so ist f bijektiv und f−1 ist eine Bewegung vonM.
Beweis:(a), (b) sind trivial, zu (c).Zu f gibt es eine Isometrie φ : IE 2 −→ IE 2 mit φ|M = f . Dann ist f bijektiv und
8καλoς (griech.) = schon, ειδoς (griech.) = Form, σκoπειν (griech.) = sehen
Baumeister: Mathematik III / Stand: Januar 1998 225
f−1 = φ−1|M , wobei auch φ−1 eine Isometrie ist, denn:
Seien P,Q ∈M und seien P ′, Q′ ∈M mit φ(P ′) = P, φ(Q′) = Q. Dann ist
d(φ−1(P ), φ−1(Q)) = d(P ′, Q′)
= d(φ(P ′), φ(Q′))
= d(P,Q) .
Eine Charakterisierung von Bewegungen von IE 2 gelingt im Kapitel 11. Wir werden sehen,daß sie sich aus Translationen, Drehungen und Spiegelungen aufbauen. Man beachte, daßIso(M) keineswegs endlich sein muß, wie obige Beispiele vielleicht suggerieren konnten.
Im obigen Satz 9.8 haben wir nachgewiesen, daß die Menge der Bewegungen einer MengeM eine Gruppe, also eine Menge mit Gruppenstruktur darstellt; in Abschnitt 10.1 folgtdie Definition. Hierin ist der Ansatz zur Geometrie zu erkennen, wie er sich im letztenJahrhundert herausgebildet hat. Ein Vordenker in dieser Richtung war F. Klein (1849 –1925). Seine Hauptfrage lautet etwa: Woher gewinnt man eine Methode, nach der sichvon den Eigenschaften einer Figur entscheiden laßt, welche als geometrisch zu bezeichnensind und welche nicht?In der Kongruenzgeometrie sehen wir alle kongruenten Figuren – dies sind solche, diebis auf eine Bewegung gleich sind – als geometrisch gleich an; ihre Unterscheidungsmerk-male (in welchem Buch, aus welcher Farbe,. . .) bewerten wir nicht als geometrisch.In der Ahnlichkeitsgeometrie werden Figuren als geometrisch gleich angesehen, wennsie maßstabsgetreue Abbilder sind; die wirkliche Lange einer Strecke ist hier nicht geo-metrisch, entscheidend ist nur das Streckenverhaltnis. Beim Ubergang von den Kongruenz-abbildungen zu den Ahnlichkeitsabbildungen verzichtet man auf die Langentreue, dieWinkeltreue wird verlangt. (Der Satz des Pythagoras ist ein Satz der Ahnlichkeitsgeome-trie.)In der affinen Geometrie verzichtet man auch noch auf die Winkeltreue, d.h. auch derWinkel ist hier nicht geometrisch. Verlangt wird noch die Geradentreue, d.h. daß Geradenin Geraden abgebildet werden.
Felix Klein formuliert:
Eine geometrische Eigenschaft gehort derjenigen Geometrie an, bei deren Ab-bildungen sie invariant bleibt. Am Anfang stehen also die Abbildungen, die inForm einer Gruppe festgesetzt werden. Je umfangreicher die Gruppe der zu-grundegelegten Abbildungen ist, umso weniger Eigenschaften sind invariant.
In den oben angefuhrten Beispielen steht am Anfang also die Gruppe der Kongruenzab-bildungen bzw. der Ahnlichkeitsabbildungen bzw. der affinen Abbildungen.Die projektive Geometrie erhalt man, wenn man die Gruppe der projektiven Abbil-dungen zum Ausgangspunkt macht. Motivation fur diese Geometrie ist die sogenannteZentralprojektion, wie man sie bei einer punktformigen Lichtquelle beobachtet. (InBildern (z.B. von Durer) kann man ohne Muhe ein solches “Projektionszentrum“ finden.)
Kapitel 10
Gruppen, Korper, Polynome
In diesem Kapitel greifen wir die algebraischen Konzepte auf, die im vorhergehendenKapitel ins Blickfeld kamen. Zentral ist der Gruppenbegriff, der Korperbegriff erlaubteine algebraische Diskussion der Konstruierbarkeit mit Zirkel und Lineal. Die Nullstellenvon Polynomen werden zur Konstruktion von Korpern herangezogen, die dabei benotigtwerden.
10.1 Gruppen
Die Gruppenstruktur ist von uberrragender Bedeutung. Ihre Nutzung hinterließ eine Er-folgsspur in der Mathematik. Von H. Poincare (1854 – 1912) ist die Aussage uberliefert,Gruppen seien “die ganze Mathematik“.
Definition 10.1
Eine Menge G zusammen mit einer Verknupfung • : G×G 3 (a, b) 7−→ a • b ∈ Gheißt eine Gruppe genau dann, wenn gilt:
(N) Es gibt ein Element e ∈ G mit a • e = e • a = a fur alle a ∈ G.
(I) Zu jedem a ∈ G gibt es ein Element a ∈ G mit a • a = a • a = e .
(A) Fur alle a, b, c ∈ G gilt a • (b • c) = (a • b) • c .
Ist zusatzlich noch
(K) Fur alle a, b ∈ G gilt a • b = b • a .
erfullt, so heißt die Gruppe kommutativ. 2
Sei G eine Gruppe.Die Bedingung (N) besagt, daß es ein bezuglich der Verknupfung “•“ neutrales Elemente in G gibt. Ist e′ ein weiteres neutrales Element in G, so lesen wir aus
e′ = e′ • e = e
226
Baumeister: Mathematik III / Stand: Januar 1998 227
– wir haben dabei (N) zweimal verwendet – ab, daß das neutrale Element in einer Gruppeeindeutig bestimmt ist.Das in der Bedingung (I) eingefuhrte Element a heißt das zu a inverse Element. Es istebenfalls eindeutig bestimmt, denn aus
a • a = a • a = e , a • a′ = a′ • a = e ,
folgta′ = a′ • e = a′ • (a • a) = (a′ • a) • a = e • a = a .
Die Bedingung (A), die wir eben verwendet haben, nennt man das Assoziativgesetz.Es besagt, daß Klammern bei der Reihenfolge der Verknupfungen beliebig gesetzt wer-den durfen und deshalb, soweit sie nicht fur die Lesbarkeit benotigt werden, weggelassenwerden durfen.
Seit dem 17. Jahrhundert ist der Gruppenbegriff implizit bei Mathematikern zu finden,zunachst wohl nur bei konkreten Beispielen. Eine erste explizite Definition einer abstrak-ten kommutativen Gruppe findet sich bei H. Grassmann (1809 – 1877). Entscheidend warder Gruppenbegriff bei E. Galois fur die Behandlung algebraischer Probleme. G. Peano(1858 – 1932) nahm den Gruppenbegriff auf; ihm standen dazu nun die mengentheoreti-schen Sprechweisen zur Verfugung. Die Betrachtungen spalteten sich auf in Untersuchun-gen endlicher Gruppen (Drehungen,. . .) und solcher, die kontinuierliche Transformationenbeschreiben. S. Lie (1842 – 1899) hat zu den kontinuierlichen Gruppen uberragende Bei-trage geleistet; der Begriff Lie–Gruppe dankt es ihm. Zu Beginn des 20. Jahrhundertskam dann die Verbindung der Gruppentheorie zur Physik als Motivation fur die Untersu-chungen hinzu.Die Theorie der Gruppen ist nach wie vor im Zentrum der Algebra sehr lebendig, dievollstandige Klassifizierung von speziellen Klassen von Gruppen ist ein Hauptziel der Un-tersuchungen. Im Jahre 1980 wurde die Klassifikation der endlichen einfachen Gruppenfur beendet erklart; der Beweis zum Klassifikationssatz umfaßt weit mehr als 10000 Sei-ten. Eine letzte spezielle Gruppe dieser Art wurde 1975 entdeckt. Es dies eine Gruppemit mehr als 86 · 1018 Gruppenelementen.
Bemerkung 10.2
Die Forderungen (N) und (I) in Definition 10.1 kann man bei Beibehaltung von (A) auchschwacher formulieren ohne etwas zu verlieren. Es reicht, statt (N) und (I) zu fordern:
(N’) ∃e ∈ G ∀a ∈ G (e • a = a) .
(I’) ∀a ∈ G ∃a ∈ G (a • a = e) .
Den Beweis – man folgert zunachst (I) aus (N’) und (I’) und dann (N) – wollen wirubergehen. 2
Wegen der Eindeutigkeit des inversen Elements (siehe oben) konnen wir nun ein inversesElement in der Bezeichnung auszeichnen.Bezeichnung: Wir schreiben fur das inverse Element a von a im abstrakten Rahmenmeist a−1, in speziellen Fallen weichen wir davon ab.

Baumeister: Mathematik III / Stand: Januar 1998 228
Wir fuhren nun eine Reihe von Beispielen an und zeigen damit, daß der Gruppenbe-griff in der Tat geeignet ist, viele Objekte unter einem gemeinsamen Gesichtspunkt zubetrachten.1 Dabei schreiben wir dann Verknupfung, Einselement, Inverses immer mitdem Symbol, das wir in der speziellen Situation bereits kennen. Auf die Verifikation derAssoziativitat bzw. Kommutativitat verzichten wir meist, da hier in der Regel kein Pro-blem vorliegt.
Beispiel 10.3
(G := ZZ , • := +) ist eine kommutative Gruppe mit neutralem Element 0 und Inversem−z fur z ∈ ZZ . 2
Wenn die Verknupfung eine Addition ist wie etwa in Beispiel 10.3, nennt man das Inverseeines Elements meist das Negative. Ist die Verknupfung • in einer Gruppe einer Addition“verwandt“, so nennt man sie, wenn sie kommutativ ist, auch abelsch.
Der Begriff “abelsch“ ist vom Namen des norwegischen Mathematikers N.H. Abel (1802–1829) abgeleitet. Neben Arbeiten zur Konvergenz von Reihen beschaftigte er sich mitder Losbarkeit von Gleichungen funften Grades und bewies die Unmoglichkeit der Losungeiner allgemeinen Gleichung funften Grades mit Hilfe von Radikalen (Wurzelausdrucken);siehe dazu Abschnitt 11.7. Seine Ideen hierzu sind eng mit denen des franzosischen Mathe-matikers E. Galois (1811 – 1832), dessen Theorie in der Algebra eine uberragende Rollespielt, verwandt. Mit ihm teilt er auch das Schicksal, sehr jung zu sterben, Abel starb anSchwindsucht, Galois in einem Duell.
Beispiel 10.4
(G := ′Q , • := +) , (G := IR, • := +) sind abelsche Gruppen. Das neutrale Element istjeweils 0, das Inverse (Negative) eines Elementes r ist −r. 2
Beispiel 10.5
(G := IK ∗ := IK \0, • := ·) ist fur IK ∈ ′Q , IR eine kommutative Gruppe mit neutra-lem Element 1 und Inversem a−1 fur a ∈ IK ∗ .Die Rechenregeln einer Gruppe sind uns hier wohlvertraut, ebenso die Potenzregeln. Manbeachte, daß wir das Nullelement aus IK entfernen mußten, da dieses Element kein Inver-ses bezuglich der Multiplikation besitzt. 2
In einer Gruppe (G, •) mit Einselement e konnen wir nun die Potenzschreibweiseeinfuhren:
a0 := e , ak+1 := ak • a , k ∈ IN 0 ; a−k := (a−1)k , k ∈ IN .
Nun haben wir die Gruppenstrukturen in den Zahlen erkannt. Wir finden sie auch beimRechnen mit Restklassen, wie folgendes Beispiel zeigt.
1“In der Mathematik bringt man heute immer mehr unter einen Hut, aber wer holt es wieder hervor?“O. Perron ( – )

Baumeister: Mathematik III / Stand: Januar 1998 229
Beispiel 10.6
Wir kennenZZm = [0], . . . , [m− 1] , m ∈ IN ,
aus Abschnitt 1.5 und wissen, daß durch
[k]⊕ [l] := [k + l] , [k] [l] := [k · l] , k, l ∈ ZZ ,
eine “Addition“ und “Multiplikation“ erklart ist.Zur Erinnerung:Fur z ∈ ZZ ist
[z] := [z]m := x ∈ ZZ |m teilt x− z
die zugehorige Restklasse und es gibt genau m verschiedene Restklassen, da bei Divisioneiner ganzen Zahl durch m genau m verschiedene“echte“ Reste auftreten konnen, namlich0, 1, . . . ,m− 1 . Also konnen wir ZZm := [z]|z ∈ ZZ durch
ZZm = [0], . . . , [m− 1]
erfassen; wir haben dabei die kleinsten nichtnegativen Vertreter fur Restklassen gewahlt.Man beachte daß die oben eingefuhrte Addition und Multiplikation von den gewahltenVertretern der Restklassen unabhangig ist, d.h. man verifiziert
[k] = [k′], [l] = [l′] =⇒ [k]⊕ [l] = [k′]⊕ [l′] , [k] [l] = [k′] [l′] .
(G := ZZm, • := ⊕) ist eine kommutative Gruppe .
Das neutrale Element ist die Klasse [0], das Negative zu a := [k] ist −a := [−k] = [m−k] .Dieses Ergebnis gilt unabhangig von m.Bei der Multiplikation liegt die Situation etwa anders:
(G := ZZm \[0], • := ) ist eine Gruppe genau dann, wenn m eine Primzahl ist.
Daß keine Gruppe vorliegt, wenn m keine Primzahl ist, sieht man exemplarisch daran,daß etwa [2] [2] = [0] in ZZ 4 gilt, d.h. die Verknupfung fuhrt dort aus G heraus. (Wennwir [0] zu G wieder hinzunehmen, hat [0] kein Inverses!)Ist nun m eine Primzahl, dann ist die Klasse [1] ein neutrales Element und aus Folgerung3.22 (Konsequenz aus dem euklidischen Algorithmus) wissen wir, daß es zu jeder Zahlk = 1, . . . ,m− 1 ein l ∈ IN gibt mit m teilt kl− 1; d.h. [k] [l] = [1] . Somit hat man furjedes Element in ZZm \[0] ein Inverses.Die Gruppentafeln — so bezeichnen wir eine vollstandige Auflistung der Verknupfungender Gruppenelemente — zu m = 5 sehen so aus:
⊕ [0] [1] [2] [3] [4]
[0] [0] [1] [2] [3] [4]
[1] [1] [2] [3] [4] [0]
[2] [2] [3] [4] [0] [1]
[3] [3] [4] [0] [1] [2]
[4] [4] [0] [1] [2] [3]
[1] [2] [3] [4]
[1] [1] [2] [3] [4]
[2] [2] [4] [1] [3]
[3] [3] [1] [4] [2]
[4] [4] [3] [2] [1]

Baumeister: Mathematik III / Stand: Januar 1998 230
Man beachte, daß sowohl in der Gruppentafel zur Addition als auch in der Gruppentafelzur Multiplikation in jeder Zeile und Spalte jede Klasse genau einmal vertreten ist.Beachte ferner, daß die Potenzen des Elements [2] alle Elemente von ZZ ∗5 := ZZ 5 \[0]durchlaufen:
[2]0 = [1] , [2]1 = [2] , [2]2 = [4] , [2]3 = [3] , [2]4 = [1] .
Man nennt eine Gruppe, die ein solches “zyklisches Element“ besitzt, eine zyklischeGruppe. 2
Hat man eine endliche Gruppe (G, •), so tritt in jeder Spalte und jeder Zeile der Grup-pentafel jedes Element der Gruppe genau einmal auf. Dies folgt aus der Bijektivitat derAbbildungen
g :3 h 7−→ h • g ∈ G, g :3 h 7−→ g • h ∈ G
fur jedes g ∈ G. Die Verifikation dieser Tatsache sei dem Leser uberlassen.
Beispiel 10.7
In Abschnitt 9.3 haben wir die Dihedralgruppen Dn, n ≥ 3, kennengelernt, deren Ordnung2n ist. Diese Gruppen sind nicht abelsch, wie man schon am Beispiel von D3 erkennt.Eine Gruppe der Ordnung 2n ist auch die Faktorgruppe ZZ 2×ZZ n, wobei die Verknupfungdurch
ZZ 2×ZZ n 3 (([a], [b]), ([a′], [b′])) 7−→ ([a+ a′], [b+ b′]) ∈ ZZ 2×ZZ n
erklart ist; Nullelement und Inverses ergeben sich in ganz offensichtlicher Weise. Da dieseGruppe abelsch ist, haben wir in den Gruppen Dn,ZZ 2×ZZ n zwei sehr verschiedene Ex-emplare von Gruppen vor uns. Man sagt, daß Dn,ZZ 2×Zn nicht isomorph (siehe unten)aufeinander abbildbar sind. 2
Isomorphien sind bijektive Abbildungen von einer Gruppe auf eine andere, die mit derGruppenoperation vertraglich sind. Genauer:Seien (G•), (G′, •′) Gruppen und φ : G −→ G′ eine Abbildung. φ heißt Isomorphismusund G isomorph G′ vermoge φ, wenn φ bijektiv ist und φ(g • h) = φ(g) •′ φ(h) fur alleg, h ∈ G gilt.Die Klassifikation von Gruppen bedeutet dann, die Klassen von Gruppen zu bestimmen,die sich hochstens um einen Isomorphismus unterscheiden. (Sind etwa G,G′ isomorph, soist G kommutativ genau dann, wenn G′ kommutativ ist.) “Speziell“, wie oben verwendet,erklart sich hiermit.
Eine Realisierung der einelementigen Gruppen ist die Symmetriegruppe des BuchstabensF als Figur der Ebene. Alle einelementigen Gruppen sind isomorph.
Realisierungen der zweielementigen Gruppen sind:
• Die additive Gruppe ZZ 2 .
• Die Symmetriegruppe des Buchstabens A als Figur der Ebene.
• Die Symmetriegruppe des Buchstabens Z als Figur der Ebene.
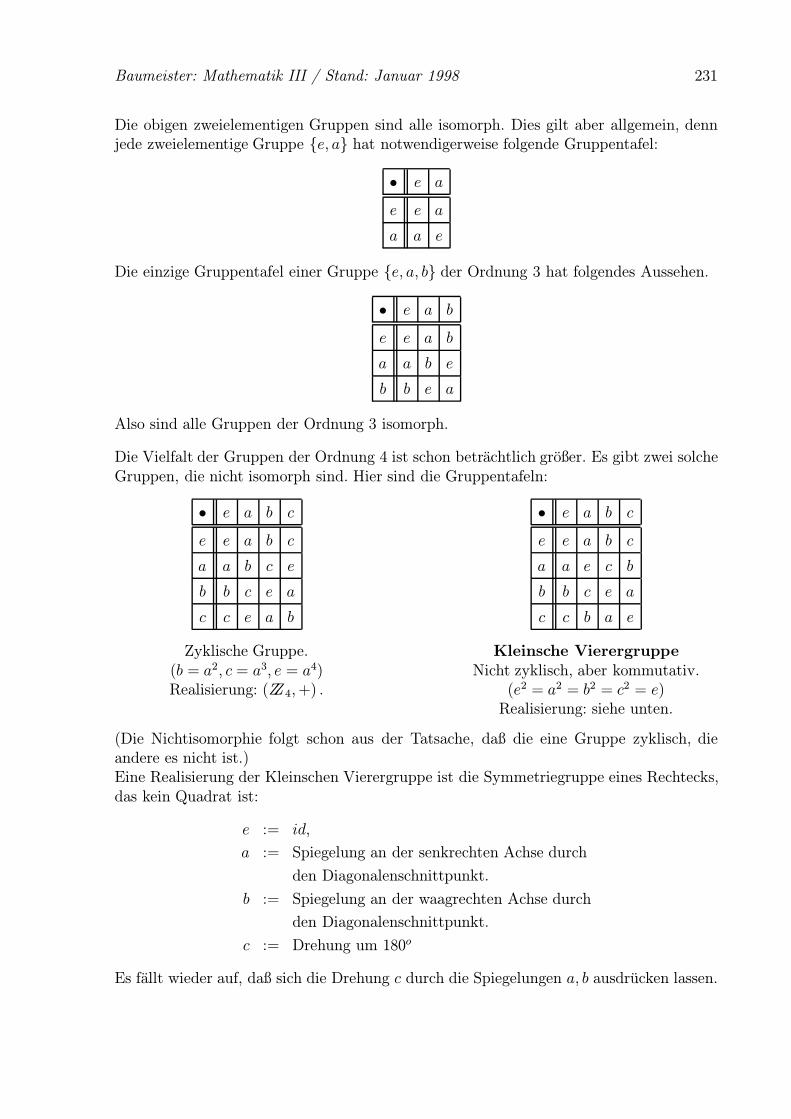
Baumeister: Mathematik III / Stand: Januar 1998 231
Die obigen zweielementigen Gruppen sind alle isomorph. Dies gilt aber allgemein, dennjede zweielementige Gruppe e, a hat notwendigerweise folgende Gruppentafel:
• e a
e e a
a a e
Die einzige Gruppentafel einer Gruppe e, a, b der Ordnung 3 hat folgendes Aussehen.
• e a b
e e a b
a a b e
b b e a
Also sind alle Gruppen der Ordnung 3 isomorph.
Die Vielfalt der Gruppen der Ordnung 4 ist schon betrachtlich großer. Es gibt zwei solcheGruppen, die nicht isomorph sind. Hier sind die Gruppentafeln:
• e a b c
e e a b c
a a b c e
b b c e a
c c e a b
Zyklische Gruppe.(b = a2, c = a3, e = a4)Realisierung: (ZZ 4,+) .
• e a b c
e e a b c
a a e c b
b b c e a
c c b a e
Kleinsche VierergruppeNicht zyklisch, aber kommutativ.
(e2 = a2 = b2 = c2 = e)Realisierung: siehe unten.
(Die Nichtisomorphie folgt schon aus der Tatsache, daß die eine Gruppe zyklisch, dieandere es nicht ist.)Eine Realisierung der Kleinschen Vierergruppe ist die Symmetriegruppe eines Rechtecks,das kein Quadrat ist:
e := id,
a := Spiegelung an der senkrechten Achse durch
den Diagonalenschnittpunkt.
b := Spiegelung an der waagrechten Achse durch
den Diagonalenschnittpunkt.
c := Drehung um 180o
Es fallt wieder auf, daß sich die Drehung c durch die Spiegelungen a, b ausdrucken lassen.

Baumeister: Mathematik III / Stand: Januar 1998 232
Beispiel 10.8
Ebene regelmaßige Ornamente (auch Parkettierungen der Ebene genannt) lassen sichklassifizieren, je nachdem, welche Bewegungen (Drehungen, Spiegelungen, Translationen)das jeweilige Ornament invariant lassen; siehe Abbildung 10.1.
Abbildung 10.1: Ornamente
Die Symmetriegruppen, die dabei auftreten, nennt man Alhambragruppen. Wenn manauf diese Weise einen Uberblick uber die Reichhaltigkeit aller regelmaßigen Ornamentegewinnen will, so stellt sich heraus, daß es genau siebzehn strukturell verschiedene Al-hambragruppen gibt, und daß zu diesen siebzehn Gruppen entsprechende Ornamente inder Alhambra zu finden sind (V. Fedorov (1851 – 1919)). 2
Uber die Losbarkeit einer “linearen Gleichung“ in einer Gruppe gibt Auskunft
Folgerung 10.9
Sei (G, •) eine Gruppe und seien a, b ∈ G. Dann gilt:
∃1 x, y ∈ G (a • x = b , y • a = b) .
Beweis:Klar: x := a • b , y := b • a sind Losungen; hierbei ist a das Inverse zu a .Die Eindeutigkeit folgt etwa im Fall a • x = b so:Aus a • x = b , a • z = b , x, z ∈ G, folgt
x = a • b = a • (a • z) = (a • a) • z = e • z = z .
Man beachte, daß wir in Folgerung 10.9 nicht die Kommutativitat vorausgesetzt habenund daher moglicherweise “Links–“ und “Rechtslosung“ verschieden sind.
Definition 10.10
Sei (G, •) eine Gruppe.Die Anzahl der Elemente von G heißt Ordnung von G. Wir schreiben |G| fur dieOrdnung von G . 2

Baumeister: Mathematik III / Stand: Januar 1998 233
Hierbei ist verabredet, daß die Ordnung unendlich sei, falls G keine endliche Menge ist.Also |G| =∞, falls #G =∞ .
Von besonderem Interesse sind Matrixgruppen. Wir lernen sie erst im Zusammenhangmit der euklidischen Geometrie in der Ebene und des Raums kennen.
10.2 Untergruppen
Definition 10.11
Sei (G, •) eine Gruppe.Eine nichtleere Teilmenge H von G heißt Untergruppe von G, falls
g • h−1 ∈ H fur alle g, h ∈ H
gilt. 2
Sei H eine Untergruppe von G. Da H nichtleer ist, ist das Einselelement e von G in H.Dann ist aber fur jedes h ∈ H auch h−1 = e • h−1 in H. Damit folgt nun sofort, daß Hmit der Verknupfung • selbst eine Gruppe ist.
Beispiel 10.12
Hn := nZZ := nk|k ∈ ZZ fur jedes n ∈ IN eine Untergruppe der additiven Gruppe ZZ .2
Beispiel 10.13
Betrachte die symmetrische Gruppe
G := S(IR2) := f : IR2 → IR2 |f bijektiv .
Zusammen mit der Verknupfung” “ (Hintereinanderausfuhrung) ist G eine Gruppe mit
Einselelement id .Eine Abbildung
g : IR2 → IR2
heißt linear genau dann, wenn
g(ax+ by) = ag(x) + bg(y)
fur alle a, b ∈ IR und x, y ∈ IR2 gilt. Man stellt fest, daß die Teilmenge
H := f ∈ G|f linear
eine Untergruppe von G ist. Diese Untergruppe heißt allgemeine lineare Gruppe aufIR2 und wird mit GL(2; IR) bezeichnet. 2

Baumeister: Mathematik III / Stand: Januar 1998 234
Definition 10.14
Sei (G, •) eine Gruppe und H eine Untergruppe von G. Fur g ∈ G heißt
gH := g • h|h ∈ H bzw. Hg := h • g|h ∈ H
die Linksnebenklasse bzw. Rechtsnebenklasse von H. 2
Beachte: Sei (G, •) eine Gruppe mit Einselement e und H eine Untergruppe von G. Danngilt:
eH = hH = H fur alle h ∈ H .
Beispiel 10.15
Sei Hn := nZZ (siehe Beispiel 10.12).Dann ist offenbar
gHn|g ∈ G = g + nZZ |g ∈ ZZ = nZZ , . . . , n− 1 + nZZ.
und wir konnen
ZZ =n−1⋃i=0
(i+ nZZ ).
schreiben, was nichts anderes ist als ZZ = [0] ∪ . . . ∪ [m− 1], wobei hier die Restklassenzum Modul m stehen. 2
Folgerung 10.16
Sei (G, •) eine Gruppe und H eine Untergruppe von G. Dann gilt fur g1, g2 ∈ G
#g1H = #g2H
und wir haben die folgenden Alternativen:Entweder ist g1H = g2H oder g1H ∩ g2H ist leer. 2
Beweis:Die Abbildung
K : g1H 3 g1 • h 7−→ g2 • h ∈ g2H
ist wohldefiniert und bijektiv, wie man leicht nachrechnet. Daraus folgt #g1H = #g2H.Ist g ∈ g1H∩g2H, d.h. g = g1•h1 = g2•h2 mit h1, h2 ∈ H, so folgt g1 = g2•h2•h
−11 ∈ g2H.
Daraus folgt g1H ⊂ g2H und aus Symmetriegrunden auch g2H ⊂ g1H.
Definition 10.17
Sei (G, •) eine Gruppe und H eine Untergruppe. Die Zahl [G : H] := #gH|g ∈ Gheißt der Index von H in G. 2
Beachte, daß wenn zwei der Zahlen |G|, |H|, [G : H] endlich sind, dann ist es auch diedritte Zahl. Es gibt Gruppen G,H unendlicher Ordnung, fur die [G : H] endlich ist.
Baumeister: Mathematik III / Stand: Januar 1998 235
Satz 10.18
Sei (G, •) eine endliche Gruppe und H eine Untergruppe von G. Dann ist die Ord-nung |H| von H ein Teiler der Ordnung |G| von G.
Beweis:Offenbar gibt es nach Folgerung 10.16 g1, . . . , gl ∈ G mit
G =l⋃
i=1
giH , (10.1)
so daß die diese Vereinigung disjunkt ist. Also gilt |G| = l|H| und [G : H] = l .
Es ist offensichtlich, daß der obige Satz 10.18 fur unendliche Ordnung von G keinen Sinnergibt, die in (10.1) aufgefuhrte Darstellung kann aber trotzdem bestehen.
Beispiel 10.19
Sei (G, •) eine endliche Gruppe mit Einselement e und sei g ∈ G, g 6= e . Sei H die kleinsteUntergruppe von G, die das Element g enthalt; die Existenz dieser Untergruppe folgt ausder leicht zu verifizierenden Tatsache, daß der Durchschnitt von Untergruppen stets wiedereine Untergruppe ist. Da die Menge G endlich ist, gibt es ein Paar (k, l) ∈ IN × IN mitgk = gl und k > l . Es folgt gk−l = e . Sei N ∈ IN die kleinste Zahl n mit gn = e . Damitgilt
H = e, g, . . . , gN−1 ,
denn:Offenbar ist H ′ := e, g, . . . , gN−1 eine Untergruppe mit g ∈ H ′ . Daraus folgt H ⊂ H ′
nach Definition von H . Da gr ∈ H fur jedes r ∈ IN 0 gelten muß, folgt auch H ′ ⊂ H .Nun ist auch noch klar, daß ord(H) = N, N ein Teiler von ord(G) ist und gord(H) = egilt. 2
Beispiel 10.20
Wendet man den Sachverhalt aus Beispiel ??auf die multiplikative GruppeG := ZZp \[0],p Primzahl, an, so erhalt man schnell die Implikation
a 6≡ 0 ( mod p) =⇒ ap−1 ≡ 1 ( mod p) .
Dies ist der kleine Satz von Fermat. 2
Wir bringen nun ein Beispiel einer unendlichen Gruppe, in der man uber alle UntergruppenBescheid weiß, namlich ((ZZ ,+)). Die Argumentation dazu laßt Teilbarkeit in ZZ in neuemLicht erscheinen.
Satz 10.21
Zu jeder Untergruppe U der additiven Gruppe ZZ gibt es eine Zahl m ∈ ZZ ,m ≥ 0,mit U = mZZ .
Beweis:

Baumeister: Mathematik III / Stand: Januar 1998 236
Sei U eine Untergruppe von ZZ . Ist U = 0, setze m := 0 . Sei nun U 6= 0 . Danngibt es eine kleinste positive Zahl m ∈ U . Damit ist offenbar mZZ ⊂ U . Sei u ∈ U . MitDivision mit Rest folgt
u = mq + r , 0 ≤ r < m , q ∈ ZZ .
Da mq, u ∈ U gilt, ist auch r ∈ U . Also ist r = 0 nach Wahl von m und wir habenu ∈ mZZ .
Folgerung 10.22
Seien a, b ∈ ZZ . Dann ist
H := ax+ by|x, y ∈ ZZ
eine Untergruppe von ZZ , die aus allen Vielfachen von d := a u b besteht, d.h.
H = dZZ .
Beweis:Sind ax1 + by1, ax2 + by2 ∈ H, dann ist auch
(ax1 + by1)− (ax2 + by2) = a(x1 − x2) + b(y1 − y2) ∈ H .
Also ist H eine Untergruppe von ZZ und es gibt nach Satz 10.21 ein m ∈ ZZ ,m ≥ 0, mitH = mZZ . Es gilt nun m|a,m|b und daher m|d := a u b . Andererseits gilt d|ax+ by furalle x, y ∈ ZZ , also d|h fur alle h ∈ H , was d|m impliziert. Daher gilt d = m.
Es ist klar, daß Linksnebenklasse gleich Rechtsnebenklasse ist, falls die zugrundeliegendeGruppe kommutativ ist. Untergruppen, fur die dies ohne die Voraussetzung der Kommu-tativitat eintritt, sind Gegenstand der folgenden Definition.
Definition 10.23
Sei (G, •) eine Gruppe und H eine Untergruppe von G. H heißt ein Normalteilervon G, falls gH = Hg fur alle g ∈ G gilt. 2
Fur einen Normalteiler H in der Gruppe (G, •) gilt also gHg−1 = H fur alle g ∈ G. Daein Element g • h • g−1 als zu h konjugiert bezeichnet wird, kann man Normalteiler alsinvariant gegenuber Konjugation bezeichnen.
Folgerung 10.24
Sei (G, •) eine Gruppe und H eine Untergruppe von G. Es sind aquivalent:
(a) H ist Normalteiler von G.
(b) G/H := gH|g ∈ H ist zusammen mit der Verknupfung
ψH : G/H ×G/H 3 (gH, g′H) 7−→ (g • g′)H ∈ G/H
eine Gruppe.
Beweis:

Baumeister: Mathematik III / Stand: Januar 1998 237
(a) =⇒ (b)Die Wohldefiniertheit der Abbildung ist klar. Einselelement ist eH, Inverses von gH istg−1H.(b) =⇒ (a)Fur g ∈ G, h ∈ H gilt:
(g • h • g−1)H = ψH((g • h)H, g−1H)
= ψH((g • e)H, g−1H)
= ψH(gH, g−1H)
= eH
= H
Dies zeigt g • h • g−1 ∈ H fur alle g ∈ G, h ∈ H . Daran liest man die Behauptung ab.
Die Gruppe G/H gemaß b) aus Folgerung 10.24 heißt Faktorgruppe. Die Ordnung dieserFaktorgruppe ist der Index [G : H] von H in G. Der Anteil H ist damit gleichsam wie einTeiler aus den Nebenklassen herausdividiert worden. Die Begriffsbildungen “Normalteiler“und “Faktorgruppe“ finden damit ihre Deutung.
Beispiel 10.25
Wir kennen die Dihedralgruppe D3. Sie ist nicht kommutativ. Ein Normalteiler in D3 istdie Untergruppe
C3 := id, ψ1, ψ21 .
Die Quotientengruppe D3/C3enthalt nun noch 2 Elemente, namlich die Nebenklassen eC3
und ϕ3C3 und die Quotientengruppe D3/C3ist kommutativ, da ihre Ordnung zwei ist.
(Jede Gruppe der Ordnung zwei ist kommutativ, wie uns obige Beispiele gelehrt haben.)2
10.3 Permutationsgruppen
Sei M eine nichtleere Menge. Wir setzen
Abb (M) := f : M −→ M .
In dieser Menge der Selbstabbildungen von M ist eine “Multiplikation“ erklart durch dieKomposition von Abbildungen:
f • g := f g , f, g ∈ Abb (M) .
Nun ist klar, daß(G := f ∈ Abb (M)|f bijektiv , • := )
eine (im allgemeinen nicht kommutative) Gruppe darstellt. Das Assoziativgesetz ist klar,das neutrale Element ist die Identitat idM , das inverse Element eines Elements f ∈ Gist f−1 . Man hat noch nachzuprufen, daß mit f, g ∈ G auch f g ∈ G, f−1 ∈ G gilt.

Baumeister: Mathematik III / Stand: Januar 1998 238
Dazu hat man nur einzusehen, daß f g , f−1 bijektiv sind, falls f, g bijektiv sind. Wiruberlassen dies dem Leser.Bezeichnung: Fur diese Gruppe G schreiben wir nun S(M) .
Definition 10.26
Ist M eine nichtleere Menge, so nennen wir die Gruppe S(M) die symmetrischeGruppe von M.Ist M = 1, . . . ,m, dann nennen wir S(M) Permutationsgruppe und jedesElement in S(M) eine Permutation. In diesem Spezialfall schreiben wir kurz Sm .
2
Die Wortwahl Permutationsgruppe wird verstandlich, wenn wir beobachten, daß beider Menge M = 1, . . . ,m einer Abbildung f in Sm die Umstellung der Elemente in Mgemaß (
1 2 . . . mf(1) f(2) . . . f(m)
)entspricht. Die Wortwahl symmetrische Gruppe ruhrt daher, daß die Funktionen derVariablen x1, . . . , xm , die bei allen Permutationen der Variablen invariant bleiben, diesymmetrischen Funktionen sind.
Beispiel 10.27
Wir betrachten S3. Die sechs Elemente der Gruppe sind dann
τ0 =
(123
123
)τ1 =
(123
132
)τ2 =
(123
213
)τ3 =
(123
231
)τ4 =
(123
312
)τ5 =
(123
321
).
Klar, τ0 ist die Identitat. Die Gruppentafel stellt sich folgendermaßen dar:
id τ1 τ2 τ3 τ4 τ5
id id τ1 τ2 τ3 τ4 τ5
τ1 τ1 id τ3 τ2 τ5 τ4
τ2 τ2 τ4 id τ5 τ1 τ3
τ3 τ3 τ5 τ1 τ4 id τ2
τ4 τ4 τ2 τ5 id τ3 τ1
τ5 τ5 τ3 τ4 τ1 τ2 id
Beispielsweise bedeutet τ4 inSpalte 3, Zeile 4
τ1 τ2 = τ4
und τ2 in Spalte 7, Zeile 5
τ5 τ3 = τ2 .
2
Bemerkung 10.28
Einer endlichen Gruppe, d.h. einer Gruppe mit endlich vielen Elementen, kann man durchBlick auf ihre Gruppentafel sofort ansehen, ob sie kommutativ ist. Sie ist namlich kom-mutativ genau dann, wenn ihre Gruppentafel symmetrisch zur Hauptdiagonalen ist. S3

Baumeister: Mathematik III / Stand: Januar 1998 239
ist also nicht kommutativ. Daraus folgt, daß Sm,m ≥ 3, nicht kommutativ ist (Beweis!).2
Eine einfache Uberlegung zeigt, daß Sm m! Elemente besitzt. (Es sind zur Realisierungeiner Permutation m verschiedene Objekte auf m Platze zu verteilen; siehe Abschnitt 3.2.)
Sei nun stets Sm fur m ≥ 2 betrachtet, S1 ist ja trivial!
Definition 10.29
Sei σ ∈ Sm. Wir setzen
a(σ) := #(i, j) ∈ INm× INm |i < j, σ(i) > σ(j) , ε(σ) := (−1)a(σ)
und nennen σ gerade, falls ε(σ) = 1 gilt, anderenfalls ungerade. ε(σ) heißt dasSignum von σ und a(σ) die Fehlstandszahl von σ . 2
Beispiel 10.30
Sei
σ =
(1 2 3 4 53 5 1 4 2
).
Dann gilt a(σ) = 6, denn:Wir zahlen A := (i, j) ∈ INm× INm |i < j, σ(i) > σ(j) ab.i = 1 : (1, 3), (1, 5) ∈ A .i = 2 : (2, 3), (2, 4), (2, 5) ∈ A .i = 3 : Fehlanzeige.i = 4 : (4, 5) ∈ A .Also ist σ eine gerade Permutation. 2
Lemma 10.31
Fur jedes σ ∈ Sm gilt
ε(σ) =∏
1≤i<j≤m
σ(j)− σ(i)
j − i
Beweis:Sei n := a(σ) . Es gilt:∏
1≤i<j≤m
(σ(j)− σ(i)) =∏
1≤i<j≤m,σ(i)<σ(j)
(σ(j)− σ(i)) ·∏
1≤i<j≤m,σ(i)>σ(j)
(σ(j)− σ(i))
=∏
1≤i<j≤m,σ(i)<σ(j)
(σ(j)− σ(i)) · (−1)n∏
1≤i<j≤m,σ(i)>σ(j)
|σ(j)− σ(i)|
= (−1)n∏
1≤i<j≤m
|σ(j)− σ(i)|
= (−1)n∏
1≤i<j≤m
(j − i)

Baumeister: Mathematik III / Stand: Januar 1998 240
Bei der letzten Gleichung haben wir die Beobachtung verwendet, daß die beiden Produktebis auf die Reihenfolge die gleichen Faktoren enthalten, was aus der Bijektivitat von σfolgt.
Ein τ ∈ Sm heißt Nachbarvertauschung, wenn
∃i ∈ 1, . . . ,m mit τ (i) = i+ 1 , τ (i+ 1) = i ; τ (j) = j , j 6= i, i+ 1,
gilt. Ein τ = τkl ∈ Sm , k 6= l , heißt Transposition, wenn gilt:
τ (k) = l , τ (l) = k ; τ (j) = j , j 6= k, l ,
gilt. Nachbarvertauschungen sind also spezielle Transpositionen. Man uberzeugt sich leicht,daß fur eine Transposition τ ∈ Sm gilt: τ−1 = τ .
Lemma 10.32
Sei σ ∈ Sm und sei τ ∈ Sm eine Nachbarvertauschung. Dann gilt ε(τ σ) = −ε(σ) .
Beweis:
ε(τ σ) =∏
1≤i<j≤m
τ (σ(j))− τ (σ(i))
j − i
=∏
1≤i<j≤m
τ (σ(j))− τ (σ(i))
σ(j)− σ(i)·
∏1≤i<j≤m
σ(j)− σ(i)
j − i
= ε(σ)∏
1≤i<j≤m
τ (σ(j))− τ (σ(i))
σ(j)− σ(i)
= −ε(σ)
Bei der letzten Gleichheit haben wir verwendet, daß im Produkt
∏1≤i<j≤m
τ (σ(j))− τ (σ(i))
σ(j)− σ(i)
auf Grund der Tatsache, daß τ eine Transposition ist, alle Faktoren den Wert 1 habenmit einer Ausnahme; dieser Faktor hat den Wert −1.
Folgerung 10.33
Sei σ ∈ Sm und sei τ ∈ Sm eine Transposition. Dann gilt ε(τ σ) = −ε(σ) .
Beweis:Sei etwa τ = τkl . Setze σ′ := τ σ . Betrachte nun
Σ : σ(1), . . . , σ(m) Σ′ : σ′(1), . . . , σ′(m)
Hier unterscheiden sich die beiden Anordnungen nur dadurch, daß k und l die Platzegetauscht haben. Sei s die Anzahl der Zahlen, die in Σ zwischen k und l vorkommen.

Baumeister: Mathematik III / Stand: Januar 1998 241
Dann erhalt man Σ′ aus Σ durch 2s+ 1 sukzessive Vertauschung benachbarter Elemente.Nach Lemma 10.32 gilt dann ε(σ′) = (−1)2s+1ε(σ) = −ε(σ) .
Satz 10.34
Jedes σ ∈ Sm laßt sich als Hintereinanderausfuhrung von hochstens m Transposi-tionen schreiben, d.h. zu jedem σ ∈ Sm gibt es s ≤ m Transpositionen τ1, . . . , τs mitσ = τ1 · · · τs .
Beweis:Sei σ ∈ Sm . Fur σ = id gilt σ = τ21 τ12 . Sei σ 6= id . Dann gibt es ein kleinstes i1 mitσ(i1) = j1 6= i1 . Setze σ1 := σ τi1j1 . Es ist σ1(i) = i fur 1 ≤ i ≤ i1 . Falls σ1 = id gilt,sind wir fertig. Anderenfalls gibt es ein i2 > i1 mit σ1(i2) = j2 6= i2 . Setze σ2 := σ1 τi2j2 .Dann gilt σ2(i) = i fur 1 ≤ i ≤ i2 . So fortfahrend erreichen wir ein σs, s ≤ m, mit σs = id .
Dann ist σ = τisjs · · · τi1j1 .
Folgerung 10.35
Ist σ ∈ Sm Hintereinanderausfuhrung von r Transpositionen, dann gilt ε(σ) =(−1)r .
Beweis:Folgt aus Satz 10.34 durch mehrmaliges Anwenden von
ε(τ σ) = −ε(σ)
(siehe Folgerung 10.33) fur jede beteiligte Transposition τ.
Wir haben gesehen, daß unabhangig von der Art der Darstellung einer Permutation alsProdukt von Transpositionen die Anzahl der dabei benotigten Transpositionen bei gera-den Permutationen stets gerade und bei ungeraden Permutationen stets ungerade ist.
Folgerung 10.36
Sei m ≥ 2 .
(a) ε(σ σ′) = ε(σ)ε(σ′) , σ, σ′ ∈ Sm .
(b) ε(σ−1) = ε(σ) , σ ∈ Sm .
(c) Am := σ ∈ Sm|ε(σ) = 1 ist ein Normalteiler in Sm .
(d) #Sm = m! , #Am = m!/2 .
Beweis:(a) folgt aus Satz 10.34 und Folgerung 10.35, ebenso (b), da fur jede Transposition τ gilt:τ−1 = τ . Die Aussage #Sm = m! in (d) ist klar (siehe oben), die Ausage #Am = m!/2folgt aus der Tatsache, daß fur jede Nachbarvertauschung τ durch
Sm 3 σ 7−→ τ σ ∈ Sm
Baumeister: Mathematik III / Stand: Januar 1998 242
eine bijektive Abbildung definiert ist, bei der die geraden Permutationen auf ungeradeund die ungeraden Permutationen auf gerade Permutationen abgebildet werden.(c) folgt aus der Tatsache, daß fur σ ∈ Sm, τ ∈ Am stets
ε(σ τ σ−1) = ε(σ)ε(τ )ε(σ−1) = 1
gilt.
Definition 10.37
Die Menge Am := σ ∈ Sm|ε(σ) = 1 heißt alternierende Gruppe. 2
Beispiel 10.38
Die Permutationsgruppe S4 hat außer sich selbst und der Einheitsgruppe nur die folgendenNormalteiler:
• die alternierende Gruppe A4,
• die “Kleinsche Vierergruppe“ V4, bestehend aus den Permutationen(1234
1234
),
(1234
4321
),
(1234
2143
),
(1234
3412
)
2
Erste allgemeine Satze uber Permutationsgruppen wurden von P. Ruffini (1765 – 1822)uber S5 im Zusammenhang mit dem Versuch, eine Gleichung 5. Grades durch Radika-le (“Wurzelausdrucke“) zu losen. Er gibt die 120 Elemente explizit an und betrachtetUntergruppen von S5 . Insbesondere studiert er die alternierende Gruppe A5.
Bemerkung 10.39
Anfang der 80er Jahre erregte der ungarische Wurfel (Rubik’s cube) Aufsehen in derOffentlichkeit. Die Zuge, die diesen Wurfel in seinen geordneten Grundzustand zuruck-fuhren, lassen sich sehr gut als Gruppenoperationen auf der Menge der moglichen Konfi-gurationen erklaren.2 2
10.4 Korper
Wir wollen nun Korper einfuhren. Die Bezeichnung dafur haben wir in den konkretenFallen IK = IR und IK = ′Q bereits vorweggenommen.
2Siehe dazu M. Mrowka, J. Weber: Mathematische Uberlegungen zum Wurfel, MU 27 (1981).
Baumeister: Mathematik III / Stand: Januar 1998 243
Definition 10.40
Eine Menge IK mit zwei Verknupfungen
+ : IK × IK 3 (a, b) 7−→ a+ b ∈ IK , (Addition)
· : IK × IK 3 (a, b) 7−→ a · b ∈ IK (Multiplikation)
heißt ein Korper, wenn gilt:
(A) (IK ,+) ist eine abelsche Gruppe mit neutralem Element 0.
(M) (IK ∗ := IK \0, ·) ist eine abelsche Gruppe mit neutralem Element 1 .
(D) Fur alle a, b, c ∈ IK gilt: a · (b+ c) = a · b+ a · c .
2
Die Bedingungen (A), (M) sind uns wohlvertraut. Mit der Tatsache 1 6= 0 ist schonklar, daß ein Korper mindestens zwei Elemente besitzt, namlich das Nullelement 0(neutrales Element bzgl. der Addition) und das Einselement 1 (neutrales Element bzgl.der Multiplikation). Die Bedingung (D) heißt Distributivgesetz. Es erklart, wie sich diebeiden Verknupfungen miteinander “vertragen“.Wir wissen schon, daß 0, 1 durch ihre Eigenschaft, neutrales Element zu sein, eindeutigbestimmt sind. Das Inverse von a bzgl. der Addition schreiben wir mit−a, das Inverse vona ∈ IK ∗ bezuglich der Multiplikation schreiben wir mit a−1. Dies geschieht in Anlehnungan das Rechnen in ′Q bzw. IR.
Beispiel 10.41
′Q , IR sind mit der ublichen Addition und Multiplikation Korper. Kein Korper ist ZZ , wennman mit der ublichen Addition und Multiplikation rechnen will. Die (abstrakte) MengeIF 2 := n, e ist ein Korper, wenn wir die Verknupfungen durch die folgenden Gruppen-tafeln erklaren:
+ n e
n n e
e e n
· n e
n n n
e n e
Damit haben wir auch einen “kleinsten“ Korper angegeben. Klar, n steht fur 0, e stehtfur 1. 2
Die Theorie der Korper beginnt im wesentlichen mit E. Galois (1811 – 1832) und N.H.Abel (1802 – 1829) mit der Erweiterung der Korper ′Q , IR um Losungen algebraischerGleichungen (Korpererweiterung), allerdings noch in einer Formulierung, der mengen-theoretische Sprechweisen nicht zur Verfugung stehen. R. Dedekind (1831 – 1916) fuhrte1811 die Begriffe “Korper“, “Modul“ ein, 1893 gab dann H. Weber (1842 – 1913) demWort “Korper“ den gleichen allgemeinen Sinn, den es heute hat. Auf abstrakter Ebenefinden wir Korper dann auch bei E. Steinitz (1871 – 1928).

Baumeister: Mathematik III / Stand: Januar 1998 244
Folgerung 10.42
Sei IK ein Korper und seien a, b ∈ IK . Es gilt:
(1) Die Gleichung a+ x = b hat die eindeutige Losung x = b+ (−a) .
(2) −(−a) = a , −(a+ b) = (−a) + (−b) .
(3) Die Gleichung a · x = b hat die eindeutige Losung x = a−1b falls a 6= 0 .
(4) (a−1)−1 = a , falls a 6= 0 .
(5) (a · b)−1 = b−1 · a−1 , falls a 6= 0, b 6= 0 .
(6) a · 0 = 0 .
(7) a · b = 0 ⇐⇒ a = 0 oder b = 0 .
(8) (−a) · b = −(a · b) , (−a) · (−b) = a · b .
Beweis:(1) und (3) folgen aus Satz 10.9.Zu (2).Aus (−a) + (−(−a)) = 0, (−a) + a = 0 folgt mit (1) die Aussage −(−a) = a .
Aus (a+ b) + (−(a+ b)) = 0 folgt durch Addition von (−a) auf jeder Seiteb+ (−(a+ b)) = −a , d.h. −(a+ b) = −a+ (−b) .(4), (5) folgen analog (2) .Zu (6).a · 0 = a · (0 + 0) = a · 0 + a · 0, also mit (1) a · 0 = 0 .Zu (7).Offensichtlich folgt mit (6) aus a = 0 oder b = 0 sofort a · b = 0 .Die Umkehrung folgt mit (6) , falls etwa a 6= 0 .Zu (8).0 = 0 · b = (a + (−a)) · b = a · b + (−a) · b , woraus die erste Aussage folgt. Die zweiteAussage folgt mit −b aus der eben bewiesenen Aussage.
Die Aussage (3) in Folgerung 10.42 kann etwas umfassender formuliert werden:Die Gleichung a · x = b hat die eindeutige Losung x = a−1b falls a 6= 0 , sie hat keineLosung, falls a = 0 und b 6= 0, und sie hat jedes x ∈ IK als Losung, falls a = b = 0 . Manhat dazu nur (6) aus Folgerung 10.42 heranzuziehen.
Von Nutzen ist die folgende Schreibweise nx , n ∈ IN 0, x ∈ IK :
Induktiv fur x ∈ IK : 0x := 0 ; (n+ 1)x := x+ nx , n ∈ IN 0 .
Nutzlich ist auch die Potenzschreibweise, die in einem beliebigem Korper IK Anwendungfinden kann:
Induktiv fur x ∈ IK ∗ = IK \0 : x0 := 1 ; xn+1 := x · xn , n ∈ IN 0 .
Baumeister: Mathematik III / Stand: Januar 1998 245
Beispiel 10.43
In ZZm , m ∈ IN \1 , haben wir schon eine Addition und eine Multiplikation kennen-gelernt. Es ist nun sofort einzusehen, daß ZZm ein Korper genau dann ist, wenn m einePrimzahl ist. IF 2 ist bis auf die Wahl der Bezeichnung der Korper ZZ 2 .
Ist nun m = p eine Primzahl, dann beobachten wir in dem zugehorigen Korper ZZ p, daß
n · 1 = 0 fur n = p
ist und keine naturliche Zahl n < p diese Eigenschaft hat. Man sagt, der Korper ZZ p hatdie Charakteristik p. (Einem Korper, in dem n · 1 = 0 fur keine naturliche Zahl gilt,wird die Charakteristik 0 zugeordnet. Also haben ′Q , IR die Charakteristik 0.) 2
Im Korper der reellen und damit auch der rationalen Zahlen haben wir eine Anordnung,indem wir Zahlenpaare auf kleiner (<) oder großer (>) uberprufen. Dies ist in allgemeinenKorpern nicht moglich. Ein Beispiel lernen wir im nachsten Abschnitt kennen.
10.5 Komplexe Zahlen
Die Tatsache, daß in IR eine Anordnung zeigt, daß in IR die Gleichung
x2 + 1 = 0 (10.2)
keine Losung hat, da x2 nichtnegativ und 1 = 12 positiv ist. Wir erweitern nun die reellenZahlen zu einem Korper der komplexen Zahlen. In diesem Korper hat dann die Gleichung(10.2) eine Losung.
Definiere in IR2 die folgenden Verknupfungen:
+ : IR2× IR2 3 ((a, b), (c, d)) 7−→ (a+ c, b+ d) ∈ IR2 , (Addition)
· : IR2× IR2 3 ((a, b), (c, d)) 7−→ (ac− bd, ad+ bc) ∈ IR2 . (Multiplikation)
Dann sind(IR2,+) , (IR2 \(0, 0), ·) abelsche Gruppen .
Das neutrale Element bzgl. der Addition ist (0, 0), das neutrale Element bzgl. der Mul-tiplikation ist (1, 0) . Das Inverse von (a, b) ∈ IR2 bzgl. der Addition ist (−a,−b), dasInverse von (a, b) 6= (0, 0) bzgl. der Multiplikation ist (a(a2 + b2)−1,−b(a2 + b2)−1) .Diesen Korper wollen wir nun den
Korper der komplexen Zahlen
nennen.Eine vielleicht eher bekannte Notation der Elemente von ′C ergibt sich aus der Darstellung
(a, b) = (1, 0)a+ (0, 1)b , (a, b) ∈ IR2 . (10.3)
Wir haben
(1, 0) · (1, 0) = (1, 0) und (0, 1) · (0, 1) = (−1, 0) = −(1, 0) .

Baumeister: Mathematik III / Stand: Januar 1998 246
Nun schreiben wir fur das Einselement (1, 0) kurz 1 und fur (0, 1) fuhren wir die ima-ginare Einheit i ein. Dies bedeutet nun, daß wir wegen (10.3) jedes Element (a, b) ∈ ′Cso schreiben konnen
(a, b) = a+ ib ,
wobei wir nochmal abgekurzt haben: Statt 1a haben wir einfach a geschrieben.Damit schreiben wir nun
′C := a+ ib|a, b ∈ IR
und passen die Verknupfungen an:
+ : ′C × ′C 3 (a+ ib, c+ id) 7−→ (a+ c) + i(b+ d) ∈ ′C , (Addition)
· : ′C × ′C 3 (a+ ib, c+ id) 7−→ (ac− bd) + i(ad+ bc) ∈ ′C . (Multiplikation)
Der Korper ist nun als Erweiterung des Korpers der reellen Zahlen aufzufassen, da wir in
j : IR 3 a 7−→ a+ i0 = a ∈ ′C
eine injektive “Einbettung“ haben. Wir finden die reellen Zahlen also in den komplexenZahlen wieder als komplexe Zahlen mit verschwindenden Imaginarteil.Wir unterscheiden nun nicht zwischen a + i0 ∈ ′C und a ∈ IR und schreiben fur a + ibmanchmal auch a+ bi . Beachte auch, daß in dieser Schreibweise nun aus a+ ib = 0 stetsa = b = 0 folgt.
Definition 10.44
Sei z = a+ ib eine komplexe Zahl. a heißt Realteil und b heißt Imaginarteil vonz ; wir schreiben
a = <z , b = =z .
2
Fur die Division machen wir Gebrauch von komplexer Konjugation und vom Betrag.
Definition 10.45
Sei z = a+ ib eine komplexe Zahl. Die zu z konjugierte Zahl ist z := a− ib, derBetrag von z ist |z| :=
√a2 + b2 . 2
Mit der Betragsfunktion konnen wir
Br(z) := z′ ∈ ′C ||z′ − z| ≤ r , Br := Br(0) .
definieren.
Offenbar gilt fur jede komplexe Zahl z die Identitat |z|2 = zz. Ein Quotient z1z−12 , z2 6= 0,
laßt sich dann wegen
z1z−12 =
z1z2
z2z2=z1z2
|z2|2

Baumeister: Mathematik III / Stand: Januar 1998 247
in ein Produkt komplexer Zahlen mit anschließender Division durch eine reelle Zahluberfuhren, z.B.
1
1 + i=
1− i
(1 + i)(1− i)=
1− i
2=
1
2+
1
2i
Da wir nun mit der Betragsfunktion eine Abstandsfunktion auf ′C haben, konnen wirohne Muhe auch die Konvergenz einer Folge komplexen Zahlen erklaren.
Definition 10.46
Sei (zn)n∈IN eine Folge komplexer Zahlen.Wir sagen, daß (zn)n∈IN gegen z ∈ ′C konvergiert, wenn
∀ ε > 0∃N ∈ IN ∀n ≥ N (|zn − z| < ε)
gilt. z heißt dann Grenzwert und wir schreiben z = limn∈IN
zn . 2
Es ist leicht einzusehen, daß eine Folge komplexer Zahlen (zn)n∈IN genau dann konvergiert,wenn die Folgen (<zn)n∈IN und (=zn)n∈IN als reelle Zahlenfolgen konvergieren. Damit istdie Konvergenz komplexer Zahlenfolgen auf die reeller Zahlenfolgen zuruckgefuhrt.
Die trigonometrische Schreibweise fur eine komplexe Zahl z = a+ ib ist
z = r(cos φ+ i sinφ)
wobei r = |z| :=√a2 + b2 der Betrag und φ := arg z := arctan(b/a) das Argument der
Zahl z ist. Fur z = r(cos φ+i sinφ) verwendet man auch die exponentielle Schreibweise
z = reiφ , d.h. eiφ = cos φ+ i sinφ .
Die Menge′C− := ′C \z ∈ ′C |=z = 0,<z ≤ 0
nennt man die negativ geschlitzte Ebene. Fur jedes z ∈ ′C− gibt es genau ein φ ∈(−π, π) und r > 0 mit
z = r(cos φ+ i sinφ) .
Die Bezeichnung “komplexe Zahl“ hat C.F. Gauß (1777 – 1855) eingefuhrt. Er hat mitseinen Untersuchungen das Geheimnis, das die komplexen Zahlen immer noch umgebenhatte, beseitigt. Das Symbol “ i“ stammt von L. Euler (1707 – 1783), er hat in der Formeleiπ + 1 = 0 die fundamentalen Konstanten der Arithmetik (0,1), der Geometrie (π), derAnalysis (e) und der komplexen Zahlen (i) auf einfache Weise zusammmengefaßt.Merkwurdig ist, daß die erste Einfuhrung der komplexen Zahlen in der Theorie der kubi-schen Gleichungen bei H. Cardano (1501 – 1576) geschah – er nannte sie “fiktiv“ – undnicht bei der Betrachtung einer quadratischen Gleichung, wie wir sie ins Spiel gebrachthaben.Die trigonometrische Schreibweise geht auf J. Argand (1768 – 1822) zuruck.

Baumeister: Mathematik III / Stand: Januar 1998 248
Beispiel 10.47
Wie berechnet man eine Wurzel aus einer komplexen Zahl?Sei z = a + ib ∈ ′C . Mit der trigonometrischen Darstellung von z als z = reiφ (r = |z|)gelingt die Berechnung von w mit w2 = z ganz einfach:
w =√rei
φ2 =√r(cos(
φ
2) + i sin(
φ
2)) .
Beachte,daß auch w′ =√rei(
φ2
+π) eine solche Zahl ist. Auf der geschlitzten negativenEbene kann man diese Zweideutigkeit in folgendem Sinne vermeiden: Man bezeichnet dieFunktion
′C− 3 z = reiφ 7−→√rei
φ2 ∈ ′C
den Hauptzweig der Wurzelfunktion. 2
Beachte, daß fur jede Operation
+ , − , · , ÷ ,√
in den komplexen Zahlen es jeweils eine Konstruktion mit Zirkel und Lineal gibt.
Der Ausgangspunkt unserer Uberlegung war die Losbarkeit der Gleichung (10.2). Diesehat nun in der Tat in ′C eine Losung, namlich das Element i und das Element −i . DieLosbarkeit dieser Gleichung haben wir durch “Korpererweiterung“ erreicht. Damit habenwir das Problem der Korpererweiterung gestreift, das in der Theorie von Galois seine auchasthetisch befriedigende Aufklarung findet.
Beispiel 10.48
Das Prinzip der Korpererweiterung wird auch deutlich, wenn wir etwa die Gleichung
x2 = 2
im Korper IK := ′Q losen wollen. Wir wissen, daß keine rationale Zahl diese Gleichunglost. Also gehen wir wie oben vor: Wir adjungieren zu ′Q ein Symbol
√2 gemaß
′Q [√
2] := a+ b√
2|a, b ∈ ′Q
und definieren Addition und Multiplikation durch
+ : ′Q × ′Q 3 (a+ b√
2, c+√
2d) 7−→ (a+ c) + (b+ d)√
2 ∈ ′Q [√
2] ,
· : ′Q × ′Q 3 (a+ b√
2, c+ d√
2) 7−→ (ac+ 2bd) + (ad+ bc)√
2 ∈ ′Q [√
2] .
Dann ist ′Q [√
2] ein Korper mit Nullelement 0 + 0√
2 und Einselement 1 + 0√
2, in den ′Qvermoge
′Q 3 a 7−→ a+ 0√
2 ∈ ′Q [√
2]
eingebettet ist. Die obige Gleichung ist losbar mit x = 0 + 1√
2 .Nun ist offenbar (Beweis!) die Gleichung
x2 = 3

Baumeister: Mathematik III / Stand: Januar 1998 249
in ′Q [√
2] nicht losbar. Wir adjungieren ein Symbol√
3 und erhalten ( ′Q [√
2])[√
3]. Das“Spiel“ ist nun wohl durchschaut. Bei der Untersuchung der Konstruierbarkeit mit Zirkelund Lineal im Abschnitt 11.5 gehen wir naher darauf ein. 2
Von C.F. Gauß (1777 – 1855) wurde intensiv das komplexe Zahlengitter ZZ [i] :=a + ib|a, b ∈ ZZ untersucht, das hier als Teilmenge der Korpererweiterung ′Q [i] von′Q mit dem Ziel der Losbarkeit von x2 + 1 = 0 in ′Q sicherzustellen, daherkommt. ZZ [i]hat viele interessante Eigenschaften, die ein intensives Studium von allgemeiner Arith-metik angestoßen haben, etwa: Wie ist die Darstellung der Primzahl 5 ∈ IN durch5 = (1 + 2i)(1− 2i) ∈ ZZ [i] einzuordnen? In der Algebra werden Antworten gegeben.
Die Aussage, daß jedes nicht konstante Polynom mit Koeffizienten in ′C eine Nullstelle be-sitzt, wird der Fundamentalsatz der Algebra genannt. Alle bekannten Beweise diesesSatzes – C.F. Gauß publizierte 1799 den ersten strengen Beweis, spater gab er einigeweitere Beweise dafur – benutzen offen oder versteckt auch das Konzept
”Stetigkeit“ aus
der Analysis. Wir geben einen Beweis, der nur wenige uber die Analysis der reellen Zahlenhinausgehende Fakten verwendet.
Lemma 10.49
Ist p ein nichtkonstantes Polynom und ist |p(z0)| 6= 0, dann gibt es zu jedem r > 0ein z1 ∈ Br(z0) mit |p(z1)| < |p(z0)|.
Beweis:Sei p(z) = anz
n +an−1zn−1 + · · ·+a1z+a0, z ∈ ′C , und r > 0. Dann haben wir mit w ∈ ′C
p(z0 + w) = p(z0) +Asws + · · ·+Anw
n ,
wobei As, . . . , An ∈ ′C und 1 ≤ s gilt. Diese Aussage folgt sofort durch Betrachtung derDifferenz p(z0 + w)− p(z0) und Aufsammlung der Potenzen von w . Da p nicht konstantist, ist nach Wahl von s sicher A 6= 0 .Wir wollen nun w ∈ ′C so wahlen, daß z0 +w ∈ Br(z0) und |p(z0 +w)| < |p(z0)| gilt. Miteinem solchen w setzen wir dann z1 := z0 + w und wir sind fertig.
Sei p(z0) = r0eiφ0 und seien Aj = rie
iφj , s ≤ j ≤ n . Wir setzen φ := π − φ0s und setzen
w damit als w := reiφ an; es bleibt noch r geeignet zu wahlen. Wir haben nun
p(z0 + w) = r0eiφ0 − Arseiφ0 = (r0 −Ar
s)eiφ0 + rs+1g(r)
mit einem Polynom g . Da die stetigen Funktionen r 7−→ Asrs und r 7−→ rg(r) im
Nullpunkt verschwinden und da r0 > 0 und As > 0 gilt, gibt es δ > 0 mit |Asrs| ≤ r0 und
|rg(r)| < rs fur |r| ≤ δ . Fur jedes r mit 0 ≤ r ≤ δ ist nun
|p(z + w)| ≤ |r0 − Asrs|+ rs|rg(r)|
= r0 − Asrs + rs|rg(r)|
= r0 − rs(As − |rg(r)|)
< r0 = |p(z)| .

Baumeister: Mathematik III / Stand: Januar 1998 250
Bemerkung 10.50
Das obige Lemma 10.49, das auf J.-B d’Alembert (1717 - 1783) zuruckgeht, ist wesentlichfur den folgenden Beweis des Fundamentalsatzes. Eine entsprechende Aussage ist im Reel-len falsch, wie man sofort an dem Polynom p(x) := x2 + 1 sieht. Daß sie im Komplexengilt, hangt wesentlich an der Tatsache, daß die Abbildung
IK 3 z 7−→ zs ∈ IK
fur IK = ′C stets surjektiv ist, daß dies fur IK = IR aber bei geradem s sicher nichtzutrifft. 2
Im folgenden Beweis des Fundamentalsatzes benotigen wir das Konzept der stetigen Ab-bildung f : ′C → IR . Wir bauen es im Beweis ein, es birgt im Vergleich zur Analysis inIR keine Uberraschungen.
Satz 10.51
Sei p ein nicht konstantes Polynom mit Koeffizienten in ′C . Dann gibt es ein z0 ∈ ′Cmit p(z0) = 0.
Beweis:Sei p(z) = anz
n + an−1zn−1 + · · ·+ a1z + a0. Wahle R > 0 so, daß
f : ′C \BR 3 z 7−→ |p(z)| ∈ IR
monoton wachsend mit |z| ist, d.h.
R ≤ |z| ≤ |z1| =⇒ f(z) ≤ f(z1) .
Dies ist moglich, da der Term z 7−→ |anzn| den Term z −→ |an−1zn−1 + · · ·+ a1z + a0|
fur |z| genugend groß uberwiegt. Da die Abbildung
q : BR 3 z 7−→ |p(z)| ∈ IR
stetig ist — dies bedeutet: limnzn = z =⇒ lim
nq(zn) = q(z) fur alle z ∈ BR — gibt es
z0 ∈ BR mitq(z0) = min
z∈BRq(z) .
Ist q(z0) = |p(z0)| = 0, d.h. p(z0) = 0, sind wir fertig.Zur Aussage q(z0) = |p(z0)| 6= 0 erhalten wir mit Lemma 10.49 einen Widerspruch wiefolgt:Es gibt z1 ∈ ′C mit |p(z1)| < |p(z0)|. Ist dieses z1 in BR, so haben wir einen Widerspruchzur Wahl von z0, ist dieses z1 nicht in BR, so haben wir einen Widerspruch zur Monotonievon q in ′C \BR.

Baumeister: Mathematik III / Stand: Januar 1998 251
Folgerung 10.52
Jedes Polynom n–ten Grades p, p(z) = a0 + · · ·+anzn, z ∈ ′C , n ≥ 1, mit Koeffizien-ten in ′C besitzt in ′C genau n Nullstellen und das Polynom zerfallt in Linearfaktoren,d.h.
p(z) = an(z − z1) · · · · · (z − zn) , z ∈ ′C . (10.4)
Beweis:Nach Satz 10.51 besitzt p eine Nullstelle z1. Mit Division mit Rest spalten wir den Line-arfaktor z 7−→ z − z1 ab und erhalten ein Polynom n − 1–ten Grades. So fortfahrenderhalten wir das Ergebnis.
Die Theorie der komplexen Funktionentheorie (Funktionentheorie), also der Funktionenf : ′C −→ ′C laßt sich prinzipiell wie die der reellen Funktionen anpacken. Allerdingskonnen gewisse komplexe Funktionen sehr uberraschende Eigenschaften haben. Es sinddies die sogenannten holomorphen Funktionen. Dabei heißt eine Funktion f : ′C −→′C holomorph, wenn sie uberall differenzierbar ist, d.h. wenn fur jedes z0 ∈ ′C die Aussage
limz→z0
f(z) − f(z0)
z − z0existiert
gilt. Die uberraschende Eigenschaft von holomorphen Funktionen ist, daß sie unendlichoft differenzierbar sind. Beispiele solcher Funktionen sind die Polynome (naturlich!), dieExponentialfunktion, alle als Potenzreihen definierte Funktionen. Nicht holomorph istetwa ′C 3 z 7−→ z ∈ ′C , denn wir haben
limh→0
(h+ 0i)− 0
(h+ 0i)− 0= 1 , lim
h→0
(0 + ih)− 0
(0 + ih)− 0= −1 .
Die Konstruktion regelmaßiger n−Ecke ist aquivalent mit der Konstruktion des Punktes
z = cos2π
n+ i sin
2π
n,
wenn wir IR2 mit ′C identifizieren, da dann zusammen mit z = 1 das regelmaßige n–Eck berechnet (konstruiert) werden kann. Dieser Punkt kann auch angesehen werden eineLosung der Gleichung zn = 1. Da
zn − 1 = (z − 1)(zn−1 + zn−2 + · · · + z + 1)
ist und uns die Losung z = 1 nicht interessiert, suchen wir konstruktiv eine Losung von
zn−1 + zn−2 + · · ·+ z + 1 = 0. (10.5)
Umgekehrt, fuhrt eine Losung z von (10.5) auch stets zu einem regularen n−Eck? Diesist im allgemeinen nicht der Fall, denn etwa bei
z7 + z6 + · · ·+ z + 1 = 0
ergibt die Losung z = i ein regulares 4−Eck (mit den Ecken i, i2, i3, i4), aber kein re-gelmaßiges 8−Eck, was aber nicht schwerwiegend ist, da daraus das regelmaßige 8–Eck

Baumeister: Mathematik III / Stand: Januar 1998 252
konstruierbar ist. Etwas allgemeiner: Ist n = md, so kann eine Losung z von (10.5) nichtnur zn = 1 sondern auch zd = 1 erfullen.Um also ein n−Eck zu erhalten, benotigen wir eine primitive Wurzel der Gleichungzn − 1 = 0, d.h. gesucht ist ein zn ∈ ′C mit
znn = 1, zdn 6= 1 fur 1 ≤ d < n.
Ein solches zn heißt primitive n−te Einheitswurzel. Liegt eine primitive Einheits-wurzel vor, so sind zn, z
2n, . . . , z
n−1n , 1 alle verschieden und wir konnen sie als Ecken eines
regelmaßigen n−Eckes verwenden. Ist n eine Primzahl, dann ist jede Wurzel von (10.5)eine primitive n−te Einheitswurzel.
10.6 Nullstellen von Polynomen
Wir betrachten nun das Problem der Auflosbarkeit von polynomialen Gleichungen mitKoeffizienten in einem Korper IK ∈ ′Q , IR, ′C. Aus den Losungsformeln kann man dannablesen, wann diese Auflosbarkeit in ′Q bzw. IR bzw. ′C gelingt.
Eine Gleichung der Formx− c = 0 (10.6)
heißt eine lineare Gleichung. Der einzige Losungskandidat ist x = c .
Gegeben sei die quadratische Gleichung
ax2 + bx+ c = 0 (10.7)
fur a 6= 0. Sie wird vereinfacht durch auf G. Cardano (1501 – 1576) zuruckgehende Sub-
stitution y = x+ b2a, denn fur y ergibt sich die Gleichung
y2 =b2 − 4ac
4a2 , (10.8)
deren Losung unmittelbar klar ist:
y = ±1
2a
√b2 − 4ac .
Die Losungen von (10.7) werden damit mit
x = −b
2a±
1
2a
√b2 − 4ac
angegeben.Die Gleichung 10.8 steht auch fur das Ergebnis, das man durch quadratische Erganzung
(x+b
2a)2 = x2 +
b
ax+
b2
4a2= −
c
a+
b2
4a2
erhalt.

Baumeister: Mathematik III / Stand: Januar 1998 253
Uber ′Q liegt also Losbarkeit vor, wenn b2 − 4ac ein Quadrat (einer rationalen Zahl) ist.Uber IR liegt Losbarkeit vor, wenn b2−4ac ≥ 0 ist. Die Losbarkeit uber ′C liegt universellvor. Insbesondere hat die Gleichung
x2 + 1 = 0
die Losungen (Wurzeln) x = ±i.
Bemerkung 10.53
Aus den obigen Formeln lesen wir ab, daß das Produkt der Losungen der quadratischenGleichung (10.7) fur a = 1 gleich dem Koeffizienten c ist. Diese Tatsache bezeichnet manals Vietaschen Wurzelsatz (F. Viete ( 1540 – 1603)). 2
Es gibt fur die Losung quadratischer Gleichungen auch geometrische Beweise. Dazu sagtdann G. Cardano im Zusammenhang mit der Gleichung
x2 + b = ax
“ Wenn die Subtraktion der Zahl b vom Quadrat der Halfte der Zahl a2 der res (gemeintist das Ziehen der Wurzel) nicht ausgefuhrt werden kann, dann ist die Aufgabe selbstfalsch, und das, was gefunden werden soll, kann nicht existieren“. An komplexe Zahlendenkt er hier also nicht.
Wir wissen aus der Analysis (siehe Satz ??), daß jede kubische Gleichung mit Koeffizientenin IR eine Losung in IR besitzt (Nullstellensatz).
Betrachte die kubische Gleichung
ax3 + bx2 + cx+ d = 0 (10.9)
fur a 6= 0. Sie wird vereinfacht durch die Substitution y = x+ b3a, denn fur y ergibt sich
die Gleichungy3 = py + q,
wobei p, q gewisse rationale Ausdrucke in a, b, c, d sind. Diese Gleichung ist immer nochnicht einfach, aber folgende Substitution y = u+ v hilft weiter, denn es entsteht
3uv(u+ v) + u3 + v3 = p(u+ v) + q.
Wir spalten auf in3uv = p , u3 + v3 = q,
setzen v := p3u, und losen
u3 + (p
3u)3 = q,
d.h.(u3)2 − qu3 + (
p
3)3 = 0.
Baumeister: Mathematik III / Stand: Januar 1998 254
Dies ist eine quadratische Gleichung in u3 und wir haben
u3 =q
2±√
(q
2)2 − (
p
3)3.
Die Symmetrie der Formeln in u und v hat zur Folge, daß sich fur v nichts wesentlichNeues ergibt. Wir erhalten
u3 =q
2+
√(q
2)2 − (
p
3)3 , v3 =
q
2−√
(q
2)2 − (
p
3)3,
und daher
y = u+ v = 3
√q
2+
√(q
2)2 − (
p
3)3 + 3
√(q
2−√
(q
2)2 − (
p
3)3 .
Fur die ursprungliche Gleichung (10.9) erhalten wir damit eine Losung x = y− b3a. Durch
Division mit Rest reduzieren wir dann die Gleichung 3. Grades auf eine Gleichung 2.Grades und behandeln diese nach dem schon vorgestellten Verfahren fur Gleichungen 2.Grades weiter.
Die Idee mit den Hilfsgroßen u, v hatte wohl N. Tartaglia (1500? – 1557). Er teilte dieLosung einer kubischen Gleichung Cardano in Form eines Sonetts mit. Die wesentlicheZeile lautete: “Trovan dui altri“ (Finde zwei andere Großen). Diese Idee laßt sich geome-trisch aus einer Zerlegung eines Einheitswurfels ableiten.
Beispiel 10.54
Betrachte die Gleichungx3 − 7x − 6 = 0 .
Sie hat die Losungen x1 = 1, x2 = 2, x3 = 3 . Die obige Vorgehensweise liefert die Losung
x∗ =3
√√√√3 + i
√100
27+
3
√√√√3− i
√100
27.
Man stellt fest, daß es sich dabei um die Losung x3 handelt.Betrachte die Gleichung
x3 + 3x− 4 = 0 .
Sie hat die Losung x1 = 1 . Die obige Vorgehensweise liefert die Losung
x∗ =3√
2 + i√
5 +3√
2− i√
5 .
Man stellt fest, daß es sich dabei um die Losung x1 handelt. 2
Betrachte die quartische Gleichung
ax4 + bx3 + cx2 + dx+ e = 0 (10.10)
fur a 6= 0. Diese Gleichung wird vereinfacht durch die Substitution y = x+ b4a zu
y4 + py2 + qy + r = 0,

Baumeister: Mathematik III / Stand: Januar 1998 255
wobei p, q, r gewisse rationale Ausdrucke in a, b, c, d, e sind. Wir schreiben sie um zu
(y2 + p)2 = py2 − qy + p2 − r
– dieser Reduktionsschritt geht wohl auf R. Descartes (1596 – 1650) zuruck – und
(y2 + p + u)2 = (py2 − qy + p2 − r) + 2u(y2 + p) + u2
fur beliebiges u ∈ IK . Wahle nun u so, daß
py2 − qy + p2 − r + 2u(y2 + p) + u2
ein Quadrat wird. Dies bedeutet, daß
B2 − 4AC = 0
wird furA := p + 2u,B := −q, C := p2 − r + 2up+ u2.
Dies ist eine kubische Gleichung fur u, die nach dem obigen Verfahren behandelt werdenkann. Nach Wahl von u ziehen wir nun die Wurzel und losen die resultierende quadrati-
sche Gleichung fur y. Einsetzen in die Substitution x = y − b4a ergibt Losungen fur die
Gleichung (10.10).
Eine gemeinsame Beobachtung bei den obigen Vorgehensweisen ist, daß die Losungen,wenn sie denn existieren – dies ist eine Frage nach dem gewahlten Korper – Ausdrucke inden Koeffizienten der Gleichungen sind, die nur die Operationen
+,−, ·,÷, m√
mit m ≤ 2 (quadratische Gleichung) bzw. m ≤ 3 (kubische Gleichung) bzw. m ≤ 4(quartische Gleichung) verwenden. Allgemein sagt man, daß eine polynominale Gleichung
anxn + an−1x
n−1 + · · ·+ a1x+ a0 = 0
losbar durch Radikale ist, wenn eine Losung als rationaler Ausdruck in den Koeffizientena0, . . . , an existiert, der nur die Operationen
+,−, ·,÷, m√
, m ≤ n,
verwendet.
Nach der Losung der kubischen (del Ferro (um 1500 ), Tartaglia (1530)) und quartischen(Ferrari (um 1540)) Gleichungen durch Radikale (siehe oben) – Cardano hat die Ergebnis-se gesammelt – , ließen viele erfolglose Versuche, die quintische Gleichung (m = 5) durchRadikale zu losen, die Vermutung keimen, daß dies prinzipiell unmoglich sein konnte.Viete (1591) bestarkte dies durch die Entdeckung, daß die Frage der Losbarkeit der quin-tischen Gleichung durch Radikale aquivalent zur Winkeldreiteilung ist. Der Beweis, daßdie Vermutung zutrifft, gelang Abel (1826) und Galois (1831) im Rahmen einer grandio-sen Theorie uber Korpererweiterungen (Galoistheorie). Der Kern dieser Theorie ist, daßes gelingt, die Frage der Berechenbarkeit durch algebraische Konzepte zu erfassen, ohneBerechnungen wirklich durchfuhren zu mussen. Diese Konzepte konnen als der Beginn dermodernen Algebra angesehen werden. Sie
”vollenden“ die von R. Descartes begonnene
Algebraisierung geometrischer Fragen.

Baumeister: Mathematik III / Stand: Januar 1998 256
10.7 Konstruierbarkeit mit Zirkel und Lineal
In Abschnitt 9.2 haben wir festgelegt, was eine Konstruktion mit Zirkel und Lineal ist.
Definition 10.55
Ein Punkt P ∈ IE 2 heißt ZL–konstruierbar, wenn er mit endlich vielen Zirkel–Lineal Konstruktionen, ausgehend von O,E konstruierbar ist. 2
Definition 10.56
Eine Zahl r ∈ IR heißt ZL–konstruierbar, wenn es ZL–konstruierbare PunkteP,Q ∈ IE 2 gibt mit
|r| = d(P,Q) .
Wir setzen ′Qa := r ∈ IR |r ZL–konstruierbar und nennen ′Qa den algebraischenAbschluß von ′Q . 2
Die Uberlegungen aus Abschnitt 9.2 zeigen, daß
′Q ⊂ ′Qa , √q|q ∈ ′Q , q ≥ 0 ⊂ ′Qa
gilt.
Lemma 10.57
Fur P ∈ IE 2 mit Koordinaten (xP , yP ) ∈ IR2 sind aquivalent:
(a) P ist ZL–konstruierbar.
(b) xP , yP ∈ ′Qa .
Beweis:(a) =⇒ (b)Klar, mit P ist auch P ′ mit den Koordinaten (xP , 0) ZL–konstruierbar. Also ist xP ∈ ′Q
a
wegen|xP | = d(P ′, O) .
Analog fur yP .(b) =⇒ (a)Sei etwa |xP | = d(P ′, Q′) mit ZL–konstruierbaren Punkten P ′, Q′ . O.E. xP ≥ 0. DerSchnittpunkt A der Geraden g1 durch P ′Q′ und der Geraden g2 durch O und E ist ZL–konstruierbar. Dann sind auch B und C als Schnittpunkte des Kreises mit MittelpunktA und Radius AP ′ bzw. AQ′ ZL–konstruierbar. Daraus folgt, daß ein Punkt C ′ mit denKoordinaten (d(P ′, Q′), 0) = (xP , 0) ZL–konstruierbar ist. Analog ist ein Punkt (0, yP )ZL–konstruierbar. Dann ist aber offenbar auch P ZL–konstruierbar.

Baumeister: Mathematik III / Stand: Januar 1998 257
Satz 10.58
′Qa ist zusammen mit den Verknupfungen “+“ und “·“ ein Korper mit
i) ′Q ⊂ ′Qa ⊂ IR, ′Q 6= ′Qa .
ii) q ∈ ′Qa, q ≥ 0 =⇒√q ∈ ′Qa .
Beweis:Daß ′Q ein Korper ist, zeigen die Uberlegungen aus Abschnitt 9.2 in Verbindung mitLemma 10.57. Die Eigenschaften ′Q ⊂ ′Qa und ′Q 6= ′Qa sind trivial. Die Eigenschaft ii)folgt ebenfalls aus Abschnitt 9.2.
Fur die Aussage′Qa 6= IR
mussen wir noch einiges bereitstellen.
Beispiel 10.59
Sei IK ein Unterkorper von IR mit ′Q ⊂ IK . (Ein Unterkorper IK ′ eines Korpers IKist eine Teilmenge von IK , die zusammen mit den Verknupfungen, die die Korperstrukturin IK definieren, selbst ein Korper ist. Unterkorper von IR ist ′Q , Unterkorper von ′C istIR .) Sei a ∈ IK , a > 0. Dann bildet
IK (√a) := x+ y
√a|x, y ∈ IK
einen Unterkorper (siehe unten) von IR mit IK ⊂ IK (√a) ⊂ IR . Nullelement ist 0+0 ·
√a,
Einselelement ist 1 + 0√a.
Wir rechnen etwa nach, daß mit x+y√a, x′+y′
√a ∈ IK (
√a) auch x+ y
√a
x′ + y′√a
zu IK (√a)
gehort, falls x′ + y′√a 6= 0 ist.
Ist x′ − y′√a 6= 0, erhalt man x′2 − ay′2 = (x′ + y′
√a)(x′ − y′
√a) 6= 0 und
x+ y√a
x′ + y′√a
=(x+ y
√a)(x′ − y′
√a)
x′2 − ay′2
=xx′ − yy′a
x′2 − ay′2+−xy′+ x′y
x′2 − ay′2√a
Ist x′ − y′√a = 0, erhalt man x′ 6= 0 und
x+ y√a
x′ + y′√a
=x
2x′+
y
2x′√a
Man beachte, daß die Nennerbildung in beiden Fallen moglich ist.
2

Baumeister: Mathematik III / Stand: Januar 1998 258
Ein Beispiel fur eine Zahl in ′Qa ist etwa√√√√√√√√√1 + 3
√8
√7 + 1
+ 1 +√
11
Nicht zu ′Qa gehort
2
π=
√2
2·
√2 +√
2
2·
√2 +
√2 +√
2
2· · · ,
da π nicht zu ′Qa gehort; siehe unten. Die obige Identitat wurde von Viete 1593 vorgestellt.Sie entsteht aus der Gleichung
sin(φ)
φ= cos(
φ
2) · cos(
φ
4) · cos(
φ
8) · · ·
unter Beachtung von 2 cos(φ2 )2 = 1 + cos(φ), wenn man φ = π2 einsetzt.
Der Kehrwert von 2π hat nach J. Wallis (1616 – 1703) auch eine Darstellung, die auf die
Nichtzugehorigkeit zu ′Qa verweist, da unendlich viele rationale Operationen notig sind:
π
2=
2
1·
2
3·
4
3·
4
5·
6
5·
6
7·
8
7·
8
9·
10
9· · ·
Satz 10.60
Besitzt die Gleichung dritten Grades
x3 + ax2 + bx+ c = 0
mit Koeffizienten a, b, c ∈ ′Q keine Losung in ′Q, so besitzt sie auch keine Losung in′Qa .
Beweis:Annahme: Die Gleichung besitze eine Losung x0 in ′Qa .Dann finden wir, da x0 durch endlich viele Zirkel–Lineal–Konstruktionen konstruiert wer-den kann, eine Kette von Korpern
K0 = ′Q , . . . , IK i+1 = IK i(√ai), . . . , IKN
mitai ∈ IK i, 1 ≤ i ≤ N − 1, x0 ∈ IKN .
Also x0 = µ + λ√aN−1, µ, λ, α := aN−1 ∈ IKN−1 .
Wir betrachten dazu die minimale Kette, also N so klein wie moglich.Damit gilt:
0 = (µ + λ√α)3 + a(µ+ λ
√α)2 + b(µ+ λ
√α) + c
= µ3 + 3µλ2α + aµ2 + aλ2α + bµ+ c+ (3µ2λ + λ3α+ 2αµλ + bλ)√α

Baumeister: Mathematik III / Stand: Januar 1998 259
Ware nun 3µ32λ + λ3α + 2αµλ + bλ 6= 0, so konnten wir√α durch Elemente in IKN−1
ausdrucken und es wurde x0 ∈ IKN−1 folgen. Dies widersprache der minimalen Wahl vonN . Also bleibt nur noch die Moglichkeit
3µ2λ + λ3α + 2αµλ + bλ = 0,
d.h. auchµ3 + 3µλ2α + aµ2 + aλ2α + bµ+ c = 0 .
In beiden Gleichungen kann man λ durch −λ ersetzen und wir erhalten, daß auch x1 =µ− λ
√α eine Losung der Gleichung
x3 + ax2 + bx+ c = 0
ist. Also konnen wir das Produkt
(µ+ λ√α)(µ− λ
√α)
durch Division mit Rest abspalten und erhalten ein lineares Polynom x− γ . Durch Ko-effizientenvergleich erhalt man
α = γ − 2µ , γ = α+ 2µ ∈ IKN−1 .
Also ist die Nullstelle γ in IKN−1 und wir haben gezeigt, daß unter der Annahme, daß dieGleichung
x3 + ax2 + bx+ c = 0
eine Losung in IKN hat, sie auch eine in IKN−1 hat. Also muß die Gleichung wegen derMinimalitat von N eine Nullstelle in IK 0 = ′Q haben.
Aus dem obigen Satz folgt die Unlosbarkeit des Delischen Problems mit Zirkel und Linealso: Die Gleichung x3 − 2 = 0 hat in ′C die drei Losungen
3√
3,3√
3(cos(2π
3) + i sin
2π
3),
3√
3(cos(4π
3) + i sin(
4π
3)).
Keine davon liegt in ′Q , also liegt auch keine davon in ′Qa, d.h. 3√
3 /∈ ′Qa .
Auch die Unmoglichkeit der Winkeldreiteilung mit Zirkel und Lineal folgt daraus. Wirkonnen etwa speziell fragen, ob der Winkel π3 gedrittel werden kann. Dazu haben wir
dann zun zeigen, daß die Gleichung 4x3 − 3x − 12 = 0 keine Losung in ′Q besitzt.
Annahme: x = pq sei eine Losung der Gleichung. O. E. sind p, q teilerfremd.
Es folgt
4p3
q3 +3p
q−
1
2= 0 , (8p3 − 6q2)p = q3 .
Dies bedeutet, daß q3 durch p teilbar ist, also muß irgendein Primteiler von p auch in qenthalten sein, im Widerspruch zur Teilerfremdheit von p, q.
Die Gleichung 4x3 − 3x − 12 = 0 hat also keine Losung in ′Q , also auch keine in ′Qa.

Baumeister: Mathematik III / Stand: Januar 1998 260
Ohne Beweis sei noch angemerkt, daß die Konstruktion eines regelmaßigen n−Ecks mitZirkel und Lineal genau dann moglich ist, wenn die Primfaktorzerlegung von n die Formn = 2mp1 · · · pr hat, wobei p1, . . . , pr paarweise verschiedene Primzahlen der Form
22k + 1 (Fermatsche Zahlen)
(siehe Abschnitt 3.1) sind. Fur k = 0, 1, 2, 3, 4 erhalt man die Primzahlen 3, 5, 17, 257, 65537.Fur k = 5 ist 225
+ 1 durch 641 teilbar, und auch fur k > 5 hat man bislang noch keineweiteren Primzahlen der Form 22k + 1 gefunden.
Ohne Beweis geben wir an:
Satz 10.61
Zu jeder Zahl x ∈ ′Qa gibt es ein Polynom p(x) = x3 + an−1xn−1 + · · ·+ a1x+ a0 mit
Koeffizienten ak ∈ ′Q , k = 0, . . . , n− 1, das x0 als Nullstelle hat.
Alle Zahlen in IR , die als Nullstellen von Polynomen mit rationalen Koeffizienten auftre-ten, nennt man algebraisch. Alle ZL–konstruierbaren Zahlen sind also algebraisch, abernicht alle algebraischen Zahlen sind ZL–konstruierbar wie das Beispiel 3
√2 lehrt. Zahlen,
die nicht algebraisch sind, nennt man transzendent. Transzendente Zahlen konnen als
”besonders irrational“ angesehen werden. Die bekanntesten transzendenten Zahlen sinde, π. (Hier wissen wir noch nicht einmal, daß π, e irrational, d.h. nicht rational sind.) DerTaranszendentbeweis zu e wurde 1873 von C. Hermite (1822 – 1901), der zu π 1882 von F.Lindemann (1852 – 1939) erbracht; siehe [?]. Also ist π /∈ ′Qa und daher auch
√π /∈ ′Qa, da
mit a ∈ ′Qa, a ≥ 0, auch√a ∈ ′Qa ist. Also ist
√π nicht mit Zirkel und Lineal konstruierbar
und die Quadratur des Kreises mit Zirkel und Lineal ist nicht moglich.
Kapitel 11
Euklidische Geometrie in der Ebene
Hier betrachten wir die euklidische Geometrie in der Ebene mit den Hilfsmitteln der ana-lytischen Geometrie. Die Resultate der Elementargeometrie ergeben sich damit auf einemsicheren Fundament, die Bewegungen der Ebene lassen sich abschließend charakterisieren.Die Betrachtung von Kurven in der Ebene fuhrt uns zu interessanten Anwendungen.
11.1 Die euklidische Ebene
Punkte P der Ebene IE 2 sind festgelegt durch Paare x = (x1, x2) ∈ IR2; die Zahlen x1, x2
heißen Koordinaten des Punktes P . Fur diese Menge der Paare hat man zwei wesentlicheOperationen:
Addition: (x1, x2) + (y1, y2) := (x1 + y1, x2 + y2)Skalare Multiplikation: a(x1, x2) := a · (x1, x2) := (ax1, ax2) , a ∈ IR .
Man beachte, daß sich das Paar θ := (0, 0) ∈ IR2 bezuglich der Addition wie ein neutralesElement verhalt:
x+ θ = θ + x = x fur alle x ∈ IR2 . (11.1)
Das Negative −(x1, x2) eines Paares (x1, x2) ist bezuglich der Addition gerade so erklart,daß
−(x1, x2) + (x1, x2) = θ
gilt.
Damit ist auch eine Subtraktion erklart:
Subtraktion: (x1, x2)− (y1, y2) := (x1 − y1, x2 − y2)
Man kann diese Operationen geometrisch denken, wenn man die Paare als Vektoren an-sieht, d.h. naiv als Pfeile vom Ursprung O mit den Koordinaten θ := (0, 0) mit Spitze inP = (xP , yP ); siehe Abbildung 11.1. Genauer, Vektoren sind Aquivalenzklassen von ge-
richteten Strecken→PQ mit P als Anfangspunkt P und mit Q als Endpunkt (=Pfeilspitze),
so daß fur jeden Punkt R der euklidischen Ebene genau eine solche gerichtete Strecke mit
261

Baumeister: Mathematik III / Stand: Februar 1998 262
R als Anfangspunkt existiert. Zwei gerichtete Strecken→PQ und
→RS definieren genau dann
denselben Vektor, d.h. sind genau dann Reprasentanten derselben Aquivalenzklasse, wennsie durch Parallelverschiebung auseinanderhervorgehen. Ein Vektor ~x mit Reprasentant→PQ kann als ein Symbol fur die Operation der Parallelverschiebung interpretiert werden,die P in Q uberfuhrt. Auf die ausdruckliche Bezugnahme auf diese Aquivalenz verzichtenwir im folgenden meist.
Abbildung 11.1: Ortsvektoren
Aus der Physik kennen wir Vektoren als gerichtete Strecken, etwa in der Mechanik (Kraft,Geschwindigkeit, Beschleunigung, Impuls . . .). Die Ortsvektoren erhalt man dadurch,daß man den Ursprung O wahlt und jeden Vektor dadurch reprasentiert, daß man O alsAnfangspunkt wahlt.
Beispiel 11.1
Zwei Bruder ziehen einen Schlitten an zwei Seilen, die mit der Langsachse des Schlittensjeweils ein 450 Winkel einschließen; der großere Bruder zieht doppelt so stark. In welcheRichtung bewegt sich der Schlitten?Sei f := |~f1| der Betrag, der vom kleineren Bruder ausgeubten Kraft. Der Vektor ~f1 liegtim 1. Quadranten und schließt mit der x−Achse den Winkel π4 ein, es gilt also
~f1 = f(cosπ
4, sin
π
4) =
f√
2(1, 1) .
Entsprechend gilt fur die zweite Kraft:
~f2 = 2f(cosπ
4, sin
π
4) = f
√2(1, 1) .
Die resultierende Kraft ergibt sich als vektorielle Summe ~fges = ~f1 + ~f2, also
~fges =f√
2(3,−1) =
√5f(
3√
10,−
1√
10)
Daraus lesen wir die erwartete Tatsache ab, daß der großere Bruder den Schlitten aufseine Seite zieht. 2
Im folgenden machen wir uns den Standpunkt der linearen Algebra zu eigen und bezeich-nen die Elemente von IR2 als Vektoren. Fur die Rechnung mit Vektoren gilt:
Baumeister: Mathematik III / Stand: Februar 1998 263
Lemma 11.2
Sei V := IR2 .
(a) V ist zusammen mit der Vektoraddition + eine abelsche Gruppe.
(b) Es gelten:
1. a(x+ y) = ax+ ay fur alle a ∈ IR, x, y ∈ V .
2. (a+ b)x = ax+ bx fur alle a ∈ IR, x ∈ V .
3. a(bx) = (ab)x fur alle a, b ∈ IR, x ∈ V .
4. 1x = x fur alle x ∈ V .
Beweis:Die Aussagen sind einfach zu verifizieren.
Die im Lemma aufgefuhrten Resultate sind die definierenden Eigenschaften eines Vektor-raums V uber dem Skalarkorper IR. In der linearen Algebra ist dieser Begriff zentral. Imnachsten Kapitel werden den Vektorraum V := IR3 als außerst praktikable Beschreibungdes (uns umgebenden) Raumes kennenlernen.
Die wichtigsten Figuren in IE 2 sind die Geraden.
Definition 11.3
Eine Teilmenge L von IE 2 heißt Gerade, falls es p, w ∈ IR2 , w 6= θ, gibt mit
L = Lp,w := p + tw|t ∈ IR .
Der Vektor w heißt Richtungsvektor von L .Wir sagen, daß ein Punkt P mit Koordinaten (xP , yP ) auf der Geraden L liegt, wenn(xP , yP ) ∈ L gilt. 2
Abbildung 11.2: Geraden in der Ebene
Ist L eine Gerade und P ein Punkt in IE 2 , so verwenden wir die Sprechweisen

Baumeister: Mathematik III / Stand: Februar 1998 264
• Der Punkt P liegt auf L
• P gehort L an
• P liegt auf L
• P ∈ L
• P ist ein Punkt der Geraden L
• Die Gerade L geht durch den Punkt P
• P inzidiert mit L
synomym. Die letzte Sprechweise “P inzidiert mit L“ fuhrt den Begriff der Inzidenz1
ein, einen Begriff, der in der axiomatisch betriebenen Geometrie ganz am Anfang nebenden Begriffen “Punkte, Geraden“ steht.
Punkte P1, . . . , Pl ∈ IE 2 nennen wir kollinear, wenn es eine Gerade gibt, auf der diesePunkte liegen.Mitunter benotigen wir den Sachverhalt, daß wir den Koordinatenursprung verschiebenwollen. Dieses ist festgehalten in
Beispiel 11.4
Jede Translationτp : IR2 3 x 7−→ x+ p ∈ IR2
bildet eine Gerade Lq,u offenbar auf die Gerade Lτp(q),w ab (Geradentreue). Ferner istsie abstandserhaltend, denn es gilt ja
|τp(x)− τp(y)| = |(x+ p) − (y + p)| = |x− y|
fur alle x, y ∈ IR2 . 2
Drei nicht auf einer Geraden liegende Punkte A,B,C ∈ IE 2 nennen wir ein Dreieck.Die Figur Dreieck ensteht, wenn man die Punkte A,B und B,C und C,A durch Gera-den verbindet; die Punkte A,B,C sind dann die Ecken des Dreiecks. Daß dies moglichist, gehort zu den sofort akzeptierten Tatsachen. Spater werden wir diese Fragestellungals axiomatische Fragestellung in allgemeinem Kontext kennenlernen. Bevor wir diesenSachverhalt verifizieren, stellen wir einige nutzliche und interessante Begriffe bereit.
Definition 11.5
Die Abbildung
< ·, · > : IR2× IR2 3 (x, y) 7−→ x1y1 + x2y2 ∈ IR
nennen wir Skalarprodukt auf IR2 . 2
1incidere (lat.) = hineinfallen

Baumeister: Mathematik III / Stand: Februar 1998 265
Die Bezeichnung “Skalarprodukt“ ruhrt daher, daß in der analytischen Geometrie Ele-mente von IR2 als Vektoren und die Elemente des zugrundeliegenden Korpers IR als Ska-lare bezeichnet werden. Dies stimmt mit der in der Physik ublichen Bezeichnungsweiseuberein, Großen mit “Richtung“ als Vektoren und Zahlgroßen als Skalare zu benennen.Das Skalarprodukt ist also eine Abbildung, die ein Paar von Vektoren auf einen Skalarabbildet.
Folgerung 11.6
Fur das Skalarprodukt haben wir folgende Eigenschaften:
1. < x, x >≥ 0 fur alle x ∈ IR2 und < x, x >= 0 genau dann, wenn x = θ .
2. < x, y >=< y, x > fur alle x, y ∈ IR2 .
3. < ax+ by, z >= a < x, z > +b < y, z > fur alle a, b ∈ IR und x, y ∈ IR2 .
Beweis:Diese Eigenschaften verifiziert man ohne Muhe.
Definition 11.7
Die Abbildung| · | : IR2 3 x 7−→
√< x, x > ∈ IR
heißt euklidische Norm auf IR2 ; die Norm |x| von x ∈ IR2 heißt auch euklidischeLange von x . 2
Interpretiert man ein x ∈ IR2 als Ortsvektor mit Spitze in P mit den Koordinaten x, soentspricht x ein Pfeil ~x mit gegebener Richtung und Lange |x|.
Wir sehen, daß sich der euklidische Abstand aus Definition 9.2 so ergibt:
d(P,Q) = |x− y|, falls x, y die Koordinaten von P,Q sind.
Diese Funktion hat die Eigenschaften einer Abstandsfunktion, die man im allgemeinenKontext auch als Metrik bezeichnet.
Folgerung 11.8
Fur die Norm haben wir folgende Eigenschaften:
1. |x| = 0 genau dann, wenn x = θ .
2. |ax| = |a||x| fur alle a ∈ IR und x ∈ IR2 .
3. |x+ y| ≤ |x|+ |y| fur alle x, y ∈ IR2 .
4. | < x, y > | ≤ |x| |y| fur alle x, y ∈ IR2 .
Beweis:
Baumeister: Mathematik III / Stand: Februar 1998 266
Die Eigenschaften 1. und 2. verifiziert man ohne Muhe.Zu 4.Seien x, y ∈ IR2 . Die Behauptung gilt offenbar, wenn x = y = θ ist. Sei nun etwa y 6= θ .Es gilt fur alle a ∈ IR :
0 ≤ < x− ay, x− ay >= |x|2 + a2|y|2 − 2a < x, y > .
Wahlt man
a = ±< x, y >
< y, y >,
was wegen y 6= θ moglich ist, so folgt die Aussage.Zu 3.Seien x, y ∈ IR2 . Mit 4. folgt
|x+ y|2 = |x|2 + |y|2 + 2 < x, y > ≤ |x|2 + |y|2 + 2|x||y| = (|x|+ |y|)2 .
Daran liest man die Behauptung ab.
Die Eigenschaften 1., 2., 3. in Folgerung 11.8 sind typisch fur eine Langenfunktion; sie hei-ßen Definitheit, Homogenitat bzw. Dreiecksungleichung. Der Begriff “Dreiecksun-gleichung“ erklart sich aus der Tatsache, daß sie sich als Ungleichung fur die Seitenlangenim Dreieck mit den Ecken O,A,B mit den Koordinaten θ, x, y deuten laßt. Die 4. Eigen-schaft heißt Cauchy–Schwarzsche Ungleichung.
Bemerkung 11.9
Aus dem Beweis zu Folgerung 11.8 lesen wir ab, daß in der Cauchy–Schwarzschen Un-gleichung Gleichheit genau dann gilt, wenn x = ay oder y = ax mit einem a ∈ IR gilt.
2
Aus der Cauchy–Schwarzschen Ungleichung und aus der Tatsache, daß der Bildbereichvon [0, π] unter der hier injektiven Kosinusfunktion [−1, 1] ist, folgt, daß es zur Zahl
< x, y >
|x||y|
genau eine Zahl α ∈ [0, π] gibt mit
cos(φ) =< x, y >
|x||y|.
Wir nennen diese Zahl φ Winkel zwischen x und y. Beachte, daß hier kein “orientierter“Winkel definiert wird: Der Winkel zwischen x und y ist gleich dem Winkel zwischen yund x; Winkel großer als π kommen daher nicht vor. Daß die obige Definition mit derAnschaung ubereinstimmt, entnimmt man der folgenden Abbildung 11.3. Dort ist
cos(α) =x2
|x|, cos(β) =
y2
|y|, sin(α) =
x1
|x|, sin(β) =
y1
|y|.
Dacos(φ) = cos(β − α) = cos(β) cos(α) + sin(β) sin(α)

Baumeister: Mathematik III / Stand: Februar 1998 267
Abbildung 11.3: Winkel zwischen Vektoren
ist, folgt
cos(φ) =y2
|y|·x2
|x|+x1
|x|·y1
|y|=< x, y >
|x||y|.
Definition 11.10
Zwei Vektoren x, y heißen orthogonal (senkrecht), wenn der Winkel zwischen x, yein rechter Winkel ist, d.h. wenn < x, y >= 0 ist. 2
Wir erhalten mit der Definition von φ sofort
|x− y|2 = |x|2 + |y|2 − 2|x||y| cos(φ) . (11.2)
Es ist dies der sogenannte Kosinussatz, angewendet auf das Dreieck mit den EckenO,A,B mit den Koordinaten θ, x, y. Im Spezialfall φ = π
2 (φ ist ein rechter Winkel), alsofur ein rechtwinkliges Dreieck, erhalt man den pythagoreischen Lehrsatz zuruck.Der Sinussatz in diesem Dreieck ist die Aussage
|y|
sinα=|x|
sin β,
wobei α der Winkel zwischen x, x− y und β der Winkel zwischen y, x− y ist. Der Beweisfolgt aus
sinα =hO
|x|, sinβ =
hO
|y|,
wobei hO die Hohe durch O ist.Der Sinussatz in einem allgemeinen Dreieck mit den Seitenlangen a, b, c und den Winkelnα, β, γ – wir folgen der Konvention, die Seiten und Winkel entsprechend Abbildung 11.4zu bezeichnen – lautet:
a
sinα=
b
sin β=
c
sin γ. (11.3)
Eine hilfreiche Konstruktion in der euklidischen Ebene ist die “Orthogonalisierung“:
IR2 3 x = (x1, x2) 7−→ x⊥ := (−x2, x1) ∈ IR2

Baumeister: Mathematik III / Stand: Februar 1998 268
Abbildung 11.4: Das allgemeine Dreieck
Abbildung 11.5: Orthogonalisierung
Die folgende Figur zeigt, daß x⊥ aus x durch Drehung um π/2 hervorgeht:
Der Begriff “Orthogonalisierung“ leitet sich aus der Tatsache ab, daß stets < x, x⊥ >= 0gilt, d.h. daß der Winkel zwischen x und x⊥ ein rechter Winkel ist; x, x⊥ stehen also stetssenkrecht aufeinander.
Wir definieren noch
[· , ·] : IR2× IR2 3 (x, y) 7−→ < x⊥, y > ∈ IR
und listen folgende Regeln damit auf:
(R1) < x, x⊥ >= 0 , (x⊥)⊥ = −x , |x⊥| = |x| fur alle x ∈ IR2 .
(R2) < x, y⊥ >= − < x⊥, y > fur alle x, y ∈ IR2 .
(R3) [x, y] = −[y, x] , [x⊥, y⊥] = [x, y] fur alle x, y ∈ IR2 .
(R4) < x, y >2 +[x, y]2 = |x|2|y|2 fur alle x, y ∈ IR2 .
(R5) [x, y]z+ [y, z]x+ [z, x]y = θ fur alle x, y, z ∈ IR2 .
Man verifiziert diese Regeln ganz ohne Muhe.
Baumeister: Mathematik III / Stand: Februar 1998 269
Definition 11.11
Vektoren x1, . . . , xl ∈ IR2 heißen linear unabhangig, wenn die Implikation
l∑i=1
aixi = θ =⇒ a1 = · · · = al = 0
fur alle a1, . . . , al ∈ IR . gilt.Sind die Vektoren x1, . . . , xl nicht linear unabhangig, dann heißen sie linearabhangig. 2
Beispiel 11.12
• Der Nullvektor ist offenbar linear abhangig.
• Sind x1, . . . , xl ∈ IR2 und fugt man xl+1 := θ oder xl+1 := xj mit j ∈ 1, . . . , lhinzu, so sind x1, . . . , xl, xl+1 linear abhangig.
• e1 := (1, 0) ist linear unabhangig, denn aus ae1 = θ folgt (a, 0) = (0, 0), d.h. a = 0 .
• e1 := (1, 0), e2 := (0, 1) sind linear unabhangig, denn aus ae1 + be2 = θ folgt (a, b) =(0, 0), d.h. a = b = 0 nach Definition geordneter Paare.
2
Lemma 11.13
(a) Sind x1, . . . , xl Vektoren in IR2 und ist l ≥ 3, so sind diese Vektoren linearabhangig.
(b) Es gibt linear unabhangige Vektoren x, y ∈ IR2 .
Beweis:Zu (a)O.E. l = 3. Ist [x1, x2] = 0, dann liegt lineare Abhangigkeit vor nach Bemerkung 11.9.Gilt [x1, x2] 6= 0, dann liegt lineare Anhangigkeit nach Rechenregel (R5) vor.Zu (b)Offenbar sind e1 := (1, 0), e2 := (0, 1) linear unabhangig; siehe Beispiel 11.12.
Definition 11.14
Zwei Vektoren x, y ∈ IR2 heißen eine Basis von IR2, wenn zu jedem z ∈ IR2 Zahlena, b ∈ IR existieren mit
z = ax+ by .
2
Die sogenannten Einheitsvektoren e1, e2 (siehe oben) bilden offenbar eine Basis in IR2 .
Verwendet man sie als Richtungsvektoren fur Geraden g1, g2 durch den Ursprung, so erhaltman damit ein kartesisches Koordinatensystem in IE 2 , in dem man Punkte, Geraden nach

Baumeister: Mathematik III / Stand: Februar 1998 270
Festlegung einer positiven Richtung auf den Geraden einzeichnen kann. Damit wird dieZweidimensionalitat der euklidischen Ebene IE 2 beschrieben.
Folgerung 11.15
Seien x, y eine Basis in IR2 . Dann gilt:
(a) x 6= θ, y 6= θ und x, y sind linear unabhangig.
(b) Sind z = ax + by = a′x + b′y zwei Darstellungen von z ∈ IR2, so sind dieDarstellungen identisch, d.h. a = a′, b = b′ .
Beweis:Zu (a)Klar, x = y = θ ist nicht moglich, da es Vektoren z ∈ IR2 mit z 6= θ gibt. Sei etwa x = θ .Dann ist y⊥ = by mit b ∈ IR, da x, y eine Basis ist, und es folgt
|y|2 = |y⊥|2 = < y⊥, y⊥ > = b < y, y⊥ > = 0,
also auch y = θ, was nicht zulassig ist (siehe oben).Annahme: x, y sind linear abhangig.Dann gibt es also a, b ∈ IR mit
ax+ by = θ , a2 + b2 6= 0 .
Sei etwa a 6= 0 . Dann ist x = ry mit r ∈ IR . Da x, y eine Basis ist, gibt es a′, b′ ∈ IR mity⊥ = a′x+ b′y = (a′r + b′)y. Es folgt
|y|2 = |y⊥|2 = < y⊥, y⊥ > = (a′r + b′) < y, y⊥ > = 0,
d.h. y = θ, x = ry = θ, was ein Widerspruch ist.Zu (b)Es folgt θ = (a − a′)x + (b − b′)y und da x, y nach (a) linear unabhangig sind, folgta− a′ = b− b′ = 0 .
Folgerung 11.16
Fur zwei Vektoren x, y sind aquivalent:
(a) x, y ist eine Basis von IR2 .
(b) x, y sind linear unabhangig.
Beweis:(a) =⇒ (b)Siehe Folgerung 11.15.(b) =⇒ (a)Sei z ∈ IR2 . Aus Lemma 11.13 wissen wir, daß z, x, y linear abhangig sind. Also gibt esa, b, c ∈ IR mit
az + bx+ cy = θ , a2 + b2 + c2 6= 0 .
Baumeister: Mathematik III / Stand: Februar 1998 271
Da x, y linear unabhangig sind, kann a = 0 nicht eintreten, da dann auch b = c = 0 geltenmußte. Also ist a 6= 0 und wir erhalten
z = −b
ax−
c
ay .
Satz 11.17
Ist x ∈ IR2 \θ, so ist x, x⊥ eine Basis von IR2 .
Beweis:Nach Folgerung 11.16 haben wir nur die lineare Unabhangigkeit von x, x⊥ zu zeigen.Sei also ax + bx⊥ = θ . Es folgt 0 =< θ, x >=< ax + bx⊥, x >= a < x, x > und0 =< θ, x⊥ >=< ax + bx⊥, x⊥ >= b < x⊥, x⊥ >= b < x, x > und daher, weil x 6= 0 ist,a = b = 0 .
Liegt eine Basis x, x⊥ vor, so sind zu z ∈ IR2 Zahlen a, b ∈ IR mit z = ax+ bx⊥ besonderseinfach zu finden:Wir machen den Ansatz z = ax+ bx⊥ und finden a, b aus
< z, x >= a < x, x > , < z, x⊥ >= b < x⊥, x⊥ > ,
da x, x⊥ 6= θ gilt nach Folgerung 11.15 .
Satz ?? liefert uns “ganz viele“ Basen von IR2 . Beachte aber, daß nicht jede Basis sozustande kommt. Etwa ist auch e1, e1 +e2 eine Basis, aber e1, e1 +e2 sind nicht orthogonal.
Oben haben wir die Figur “Gerade“ in der Parameterdarstellung Lp,w kennengelernt;Parameter von Lp,w sind der Vektor p und der Richtungsvektor w . Eine andere Darstel-lungsmoglichkeit fur die Figur “Gerade“ ist die Gleichungsdarstellung:
Hz,α := x ∈ IR2 | < z, x > = α , z 6= θ .
Es handelt sich hier wirklich um die gleichen Objekte. Dies ist im folgenden Satz festge-halten:
Satz 11.18
Es gilt fur p, w, z ∈ IR2, w 6= θ, z 6= θ, und α ∈ IR :
Lp,w = Hw⊥,<w⊥,p> , Hz,α = L(α|z|−2)z,z⊥ (11.4)
Beweis:Zu Lp,w = Hw⊥,<w⊥,p> . Sei w = (w1, w2) und sei etwa w1 6= 0 .Sei x ∈ Lp,w, also x = p + tw mit t ∈ IR . Es ist
< w⊥, x >= −w2(p1 + tw1) + w1(p2 + tw2) = −w2p1 + w1p2 = < w⊥, p >,
Baumeister: Mathematik III / Stand: Februar 1998 272
also x ∈ Hw⊥,<w⊥,v> .Sei x ∈ Hw⊥,<w⊥,v> , d.h. −w2x1 +w1x2 = −w2p1 +w1p2 . Setze t := (x1− p1)w−1
1 . Danngilt x1 = p1 + tw1 und
p2 + tw2 = p2 + (x1w2 − p1w2)w−11 = p2 + (w1x2 −w1p2)w−1
1 = x2 ,
also x ∈ Lp,w .
Die obige Aussage kann man nun dahingehend deuten, daß man die Figuren, die wirGeraden nennen, auch mit den “linearen Gleichungen“ identifizieren konnen, denn x ∈Hz,α ist aquivalent mit dem Erfulltsein der Gleichung z1x1 + z2x2 = α .
Satz 11.19
(a) Jede Gerade enthalt unendlich viele Punkte.
(b) Durch jeden Punkt gehen unendlich viele Geraden.
(c) Durch zwei verschiedene Punkte geht genau eine Gerade.
(d) Zwei verschiedene Geraden haben entweder keinen oder genau einen Punktgemeinsam.
Beweis:Zu(a)Dies folgt aus der Tatsache, daß fur eine Gerade g = Lp,w stets w 6= (0, 0) vorausgesetztist und IR unendlich viele Elemente enthalt.Zu (b)Folgt aus (c), da IE 2 unendlich viele Punkte enthalt.Zu (c)Seien P,Q ∈ IE 2 mit Koordinaten x = (x1, x2) bzw. y = (y1, y2) . Setze w := x−y, v := x.Dann ist x = x+ 0 · w , y = x+ (−1) · w , also x, y ∈ Lv,w, d.h. P,Q liegen in Lv,w .Also ist die Existenz einer “verbindenden“ Gerade gezeigt, die Eindeutigkeit folgt aus (d).Zu (d)Seien Lp,w, Lq,u verschiedene Geraden. Ist Lp,w ∩ Lq,u = ∅, so ist nichts mehr zu zeigen.Sei nun Lp,w ∩Lq,u 6= ∅ und z ∈ Lp,w ∩Lq,u . Dann konnen wir o.E. annehmen p = q = z .Also ist zu zeigen Lz,w ∩ Lz,u = z .Ist < w, u⊥ > = 0, dann ist nach Satz 11.17 u = aw mit einem a ∈ IR \0 und dahersicherlich Lz,w = Lz,u im Widerspruch zur Tatsache, daß die beiden Geraden verschiedensind.Also ist < w, u⊥ > 6= 0 . Sei y ∈ Lz,w ∩ Lz,u . Dann ist
y = z + tw = z + su, d.h. t < w, u⊥ > = 0 , −s < u,w⊥ > = 0 ,
also t = s = 0 und damit u = z .
Im Beweis zu Satz 11.19 haben wir bereits Schnittpunkte von Geraden ausgerechnet.Halten wir dies etwas allgemeiner fest.

Baumeister: Mathematik III / Stand: Februar 1998 273
Schnittformel (I): Geraden Lp,w, Lq,u
• Voraussetzung: [w, u] 6= 0 .
• Schnittpunkt: Lp,w ∩ Lq,u =([q, u]w− [p, w]u)
[w, u]
Schnittformel (II): Geraden Lp,w, Hz,α
• Voraussetzung: < w, z > 6= 0 .
• Schnittpunkt: Lp,w ∩Hz,α = p + α− < p, z >< w, z > w
Schnittformel (III): Geraden Hz,α, Hy,β
• Voraussetzung: [z, y] 6= 0 .
• Schnittpunkt: Hz,α ∩Hy,β = βz⊥ − αy⊥
[z, y]
Definition 11.20
Zwei Geraden g, h heißen parallel, wenn g = h oder g ∩ h = ∅ gilt.Wir schreiben dann g‖h . 2
Folgerung 11.21
Zwei Geraden g = Lp,w, h = Lq,u sind parallel genau dann, wenn < w, u⊥ > = 0gilt.
Beweis:Seien g, h parallel. Ist g = h, dann ist w = u = x − y fur zwei Punkte x, y ∈ g, also< w, u⊥ > = < w,w⊥ > = 0 . Ist g ∩ h = ∅ , dann haben wir < w, u⊥ >= 0 im Beweis zuSatz 11.19 (d) mitbewiesen.Gilt < w, u⊥ > = 0, dann ist u = rw mit r ∈ IR . Dann folgt aber g ∩ h = ∅ oder g = h .
Folgerung 11.22
Durch die Relationg ∼ h :⇐⇒ g‖h
wird auf der Menge der Geraden in IE 2 eine Aquivalenzrelation erklart.
Beweis:Reflexivitat und Symmetrie sind nahezu trivial. Zur Transitivitat. Sei g‖h, h‖k .Seien g = Lp,w, h = Lq,u, k = Lr,y . Dann gilt nach Folgerung 11.21
< w⊥, u > = < u⊥, y > = 0 .
Daraus folgt < w⊥, y >= 0 und daher mit Folgerung 11.21 g‖k .
Die folgende Eigenschaft der Anschauungsebene ist das beruhmte Parallelenpostulat.Wir werden spater sehen, daß man auch ohne diese Eigenschaft sinnvoll geometrischeBetrachtungen anstellen kann.
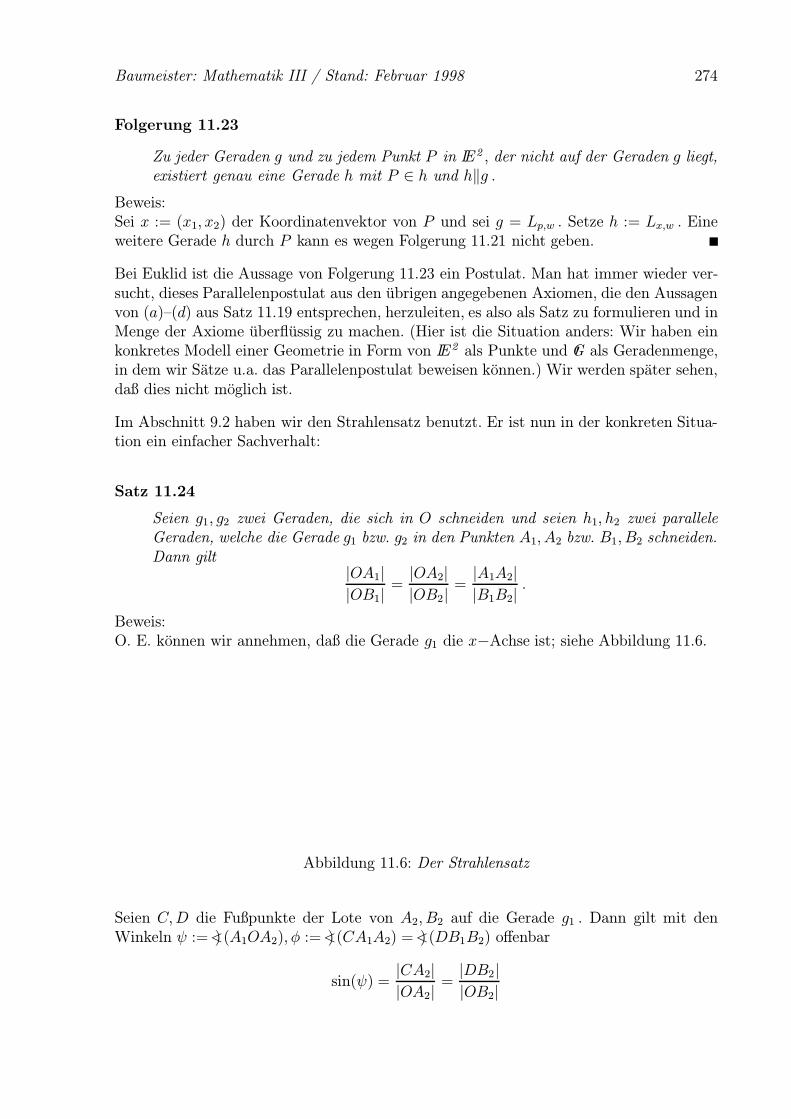
Baumeister: Mathematik III / Stand: Februar 1998 274
Folgerung 11.23
Zu jeder Geraden g und zu jedem Punkt P in IE 2 , der nicht auf der Geraden g liegt,existiert genau eine Gerade h mit P ∈ h und h‖g .
Beweis:Sei x := (x1, x2) der Koordinatenvektor von P und sei g = Lp,w . Setze h := Lx,w . Eineweitere Gerade h durch P kann es wegen Folgerung 11.21 nicht geben.
Bei Euklid ist die Aussage von Folgerung 11.23 ein Postulat. Man hat immer wieder ver-sucht, dieses Parallelenpostulat aus den ubrigen angegebenen Axiomen, die den Aussagenvon (a)–(d) aus Satz 11.19 entsprechen, herzuleiten, es also als Satz zu formulieren und inMenge der Axiome uberflussig zu machen. (Hier ist die Situation anders: Wir haben einkonkretes Modell einer Geometrie in Form von IE 2 als Punkte und ′G als Geradenmenge,in dem wir Satze u.a. das Parallelenpostulat beweisen konnen.) Wir werden spater sehen,daß dies nicht moglich ist.
Im Abschnitt 9.2 haben wir den Strahlensatz benutzt. Er ist nun in der konkreten Situa-tion ein einfacher Sachverhalt:
Satz 11.24
Seien g1, g2 zwei Geraden, die sich in O schneiden und seien h1, h2 zwei paralleleGeraden, welche die Gerade g1 bzw. g2 in den Punkten A1, A2 bzw. B1, B2 schneiden.Dann gilt
|OA1|
|OB1|=|OA2|
|OB2|=|A1A2|
|B1B2|.
Beweis:O. E. konnen wir annehmen, daß die Gerade g1 die x−Achse ist; siehe Abbildung 11.6.
Abbildung 11.6: Der Strahlensatz
Seien C,D die Fußpunkte der Lote von A2, B2 auf die Gerade g1 . Dann gilt mit denWinkeln ψ :=<) (A1OA2), φ :=<) (CA1A2) =<) (DB1B2) offenbar
sin(ψ) =|CA2|
|OA2|=|DB2|
|OB2|

Baumeister: Mathematik III / Stand: Februar 1998 275
und
sin(φ) =|CA2|
|A1A2|=|DB2|
|B1B2|.
Mit einfachen Rechnungen folgt daraus die Aussage.
Eine Gerade in IE 2 teilt die Anschauungsebene in zwei Halbraume auf. Diese konkreti-sieren sich sofort, wenn die Gerade in Gleichungsdarstellung Hz,α vorliegt: Die Halbraumesind gegeben durch
H+z,α := x ∈ IR2 | < z, x > ≥ α,
H−z,α := x ∈ IR2 | < z, x > ≤ α .
Damit sind die Ungleichungen
z1x1 + z2x2 ≥ α , z1x1 + z2x2 ≤ α
verknupft. Man nennt diese Ungleichungen linear, da die “Unbekannten“ x1, x2 nur linear,d.h. nur in erster Potenz, eingehen. Lineare Ungleichnungen haben große Bedeutungin der Modellierung von realen Problemen.
Beispiel 11.25
Auf einem Wochenmarkt werden saisonbedingt nur die zwei Gemusesorten A1, A2 angebo-ten. Wie wurde eine mathematisch vorgebildete Hausfrau einkaufen, um ein Mittagessenmit mindestens 50 Kalorien und mindestens 1200 Vitamine der Gemusebeilagen moglichstbillig zu erhalten. Kalorien, Vitamingehalt und Preis (pro kg) sind der folgenden Tabellezu entnehmen:
A1 A2
Kalorien 200 100Vitamine 2000 3000
Preise 16 18
Wie ist die Aufgabe nun mathematisch zu formulieren? Wir setzen an:
xi := gekaufte Menge der Gemusesorte Ai, i = 1, 2 .
Es ergibt sich damit die folgende Ausgabe:
16x1 + 18x2 =: < c, x >
mit c := (16, 18).Zu berucksichtigen beim Einkauf sind die folgenden Ungleichungen:
< z1, x > = 200x1 + 100x2 ≥ 50 =: b1,
< z2, x > = 2000x1 + 3000x2 ≥ 1200 =: b2,
< z3, x > = 1x1 + 0x2 = x1 ≥ 0 =: b3,
< z4, x > = 0x1 + 1x2 = x2 ≥ 0 =: b4,
Baumeister: Mathematik III / Stand: Februar 1998 276
mitz1 := (200, 100), z2 := (2000, 3000), z1 := (1, 0), z4 := (0, 1) .
Die Aufgabe lautet nun also:
Minimiere den Wert < c, x >unter den Nebenbedingungen < zi, x > ≥ bi, i = 1, 2, 3, 4 .
Dies ist eine Aufgabe der linearen Optimierung. Man lost sie graphisch, in dem man
die Halbraume H+zi,bi
skizziert und auf der zulassigen Menge4⋂i=1
H+zi,bi
den kleinsten Wert
von < c, x > ermittelt. Dabei kommt uns zugute, daß die Niveaulinien Hc,r, r ∈ IR, eineSchar paralleler Geraden sind.
Abbildung 11.7: Graphisches Losungsverfahren
Die Beobachtung, daß die Losung in einer “Ecke“ des zulassigen Bereichs angenommenwird, ist kein Zufall, es ist die “Regel“. Diese Beobachtung ist Grundlage fur ein Losungs-verfahren fur Aufgaben der linearen Optimierung, dem sogenannten Simplexverfahren.
2
Ein weiteres Bespiel fur die Anwendungsbreite der linearen Optimierung stellt das Pro-blem des Handlungsreisenden dar.
11.2 Satze in der euklidischen Ebene
Das Lot von einem Punkt P ∈ IE 2 mit Koordinaten p auf eine Gerade Hz,α (z 6= θ !)ist die Gerade durch P, die auf Hz,α senkrecht steht. Da Hz,α die Richtung w := z⊥ hat(siehe Satz 11.18), erhalt man das Lot durch P in der Form Lp,z. Die Koordinaten ydes Fußpunkt F dieses Lotes, also des Schnittpunktes des Lotes mit der Geraden Hz,α,
berechnet sich nach Schnittformel (II) zu
y = p +α− < z, p >
< z, z >z
Der Abstand des Punktes P von der Geraden Hz,α ist

Baumeister: Mathematik III / Stand: Februar 1998 277
|p− y| =|α− < z, p > |
|z|(11.5)
Man erhalt damit
Satz 11.26
Hat eine Gerade g die Form Hz,α mit |z| = 1, so hat ein Punkt P ∈ IE 2 mitKoordinaten p den Abstand |α− < z, p > | von dieser Geraden.
Beweis:Siehe Gleichung (11.5).
Der obige Satz heißt Satz uber die Hessesche Normalform (L.O. Hesse (1811 –1874)). Diese Normalform laßt eine geometrische Deutung der Konstanten α bei einerGeraden Hz,α zu: Der Ursprung O hat von dieser Geraden den Abstand |α|.
Der Flacheninhalt eines Dreiecks mit den Ecken A,B,C ∈ IE 2 mit den Koordinatenx, y, z ∈ IR2 ist nach elementar–geometrischer Uberlegung gleich dem halben Produktvon Grundlinie und Hohe; siehe Abschnitt 9.2. Die Lange hC der Hohe durch C ist gleichdem Abstand des Punktes C von der Geraden g durch A,B, d.h. von der Geraden Lx,y−xbzw. H(y−x)⊥,<y−x,x>. Also gilt nach (11.5)
hC =1
|y − x|| < (y − x)⊥, z > − < (y − x)⊥, x > |,
d.h.
hC =1
|y − x|| < y⊥ − x⊥, z − x > | . (11.6)
Hier ist
< y⊥ − x⊥, z − x > = < y⊥, z > − < y⊥, x > − < x⊥, z > = [x, y] + [y, z] + [z, x].
Fuhrt man also die Abkurzung
[x, y, z] := [x, y] + [y, z] + [z, x] = [x− z, y − z]
ein, so erhalt man fur die Lange hC der Hohe durch C schließlich
hC =|[x, y, z]|
|x− y|,
und der Flacheninhalt FABC des Dreiecks mit den Ecken A,B,C ergibt sich als
FABC =1
2|[x, y, z]| (11.7)
Als Konsequenz lesen wir ab: Drei Punkte liegen auf einer Geraden genau dann, wenn inden Koordinaten [x, y, z] = 0 gilt.

Baumeister: Mathematik III / Stand: Februar 1998 278
Fur den Flacheninhalt FOABC eines Parallelogramms mit den Ecken O,A,B,C — dieKoordinaten seien θ, x, y, x+ y — gilt:
FOABC = 2FOAB = |[x, y]|,
alsoFOABC = |x||y|| sin(α)|,
wobei α der Winkel zwischen x und y ist.
Ein bekannter Satz der Elementar–Geometrie der Ebene ist der Satz uber den Hohen-schnittpunkt.
Satz 11.27
Seien A,B,C die Ecken eines nichtentarteten Dreieckes mit den Koordinaten x, y, z,d.h. es gelte [x, y, z] 6= 0 . Dann schneiden sich die Hohen in einem Punkt.
Beweis:Die Hohengeraden sind gegeben durch
Hy−z,<y−z,x> , Hz−x,<z−x,y> , Hx−y,<x−y,z> .
Ist also h der Schnittpunkt der Hohengeraden durch A und B, so ist zu zeigen, daß hauch auf der Hohengeraden durch C liegt, d.h. daß < x− y, h >=< x− y, z > ist. Dazu
< x− y, h > = < x− z + z − y, h >
= < x− z, h > + < z − y, h >
= − < z − x, y > − < y − z, x > − < x− y, z > + < x− y, z >
= < x− y, z >
Neben der Geraden durch zwei Punkte P,Q hat man in der euklidischen Ebene als weitereinteressante Figur den Kreis durch Q mit Mittelpunkt P. Sind x, y ∈ IR2 die Koordinatenvon P,Q, so ist dieser Kreis gegeben als Punktmenge
z ∈ IR2 | |z − x| = |x− y|
Ein Kreis ist also der geometrische Ort aller Punkte, die von einem gegebenem Punkt(Mittelpunkt) einen konstanten Abstand haben. Wir setzen fur r ≥ 0, x ∈ IR2 .
Kr(x) := z ∈ IR2 ||z − x| = r , Br(x) := z ∈ IR2 ||z − x| ≤ r .
Eine Tangente2 an einen Kreis ist eine Gerade, die mit dem Kreis genau einen Punkt,den Beruhrungspunkt, gemeinsam hat. Hat man einen Punkt auf der Tangente, der ver-schieden von dem Beruhrungspunkt ist, so bezeichnet man die Strecke zwischen demBeruhrungspunkt und diesem Punkt als Tangentenabschnitt.
2tangere (lat.) = beruhren
Baumeister: Mathematik III / Stand: Februar 1998 279
Satz 11.28
Ist p ∈ IR2 ein Punkt des Kreises Kr(x), so ist die Tangente an den Kreis im Punktp gegeben durch
Hp−x,r2+<x,p−x>
Beweis:O.E. konnen wir x = θ annehmen; K := Kr(θ). Eine Gerade durch p ist offenbar Hp,r2.Ist nun x ∈ Hp,r2 ∩K, dann folgt
|x− p|2 = |x|2 − 2 < x, p > +|p|2 = r2 − 2r2 + r2 = 0,
also x = p.
Es ist schnell einzusehen, wie man mit Zirkel und Lineal die Tangente in einem Punkt desKreises konstruiert.
Eine Sekante3 ist eine Gerade, die einen Kreis in zwei Punkten schneidet; die hierdurchbestimmte Strecke im Inneren des Kreises heißt Sehne. (Der Sprachgebrauch kommtwohl von der Tatsache, daß eine Sehne Verwendung fand, um einen (Flitze–)Bogen zuspannen; ein gespannter Bogen hat Ahnlichkeit mit einem Teil eines durch eine Sekantezerschnittenen Kreises.) Hat man einen Punkt auf einer solchen Sekante, so bestimmendie Schnittpunkte P1 und P2 dieser Sekante mit dem Kreis die Strecken PP1, PP2. DieseAschnitte heißen Sehnenabschnitte.
Bemerkung 11.29Diese obige sehr anschauliche Einfuhrung von Abschnitten auf einer Geraden ist in unse-rem Kontext wohl klar; sie beruht auf der Anordnung der reellen Zahlen. Im Kapitel uberabsolute Geometrie wird ein solcher Begriff durch ein Axiom eingefuhrt. 2
Satz 11.30
Sei K := Kr(x) ein Kreis und p ∈ IR2 ein Punkt im Inneren von K, d.h. |p−x| < r.Dann ist fur jede Sehne durch p das Produkt ab der Sehnenabschnitte a, b gleich.
Beweis:O.E. x = θ.Betrachte eine Gerade Lp,w mit |w| = 1 durch p und bringe sie zum Schnitt mit dem KreisK. Die Schnittpunkte errechnen sich aus
|p+ tw|2 = r2,
d.h.r2 = |p|2 + 2t < w, p > +t2|w|2 = |p|2 + 2t < w, p > +t2.
Nach dem Vietaschen Wurzelsatz (siehe Bemerkung 10.53) ist das Produkt t1, t2 der beidenWurzeln gleich dem konstanten Term |p|2−r2 und damit von der Richtung w unabhangig.Andererseits sind die Sehnenabschnitte gegeben durch
|p− p− t1w|, |p− p− t2w|, also durch a = |t1|, b = |t2| .
3secare (lat.) = schneiden
Baumeister: Mathematik III / Stand: Februar 1998 280
Daraus folgtab = r2 − |p|2 .
Der obige Satz 11.30 heißt Sehnensatz.Ist P ein Punkt außerhalb eines Kreises K, dann konnen wir die Tangente an den Kreisbetrachten, die durch diesen Punkt verlauft. Diese Tangente kann man mit Zirkel undLineal konstruieren, wie man unter Berucksichtigung des Thaleskreises uber der Verbin-dungsstrecke Punkt/Kreismittelpunkt sofort sieht.Der Beweis fur den folgenden Sehnen–Tangentensatz verlauft vollig analog.
Satz 11.31
Sei K = Kr(x) ein Kreis und p ∈ IR2 ein Punkt im Außeren von K, d.h.|p− x| > r. Fur jede den Kreis schneidende Gerade durch p ist das Produkt ab derSehnenabschnitte a, b gleich dem Quadrat des Tangentenabschnittes c .
Die Seitenhalbierenden in einem Dreieck mit den Ecken A,B,C mit den Eckenkoordi-naten x, y, z sind die Geraden durch einen Eckpunkt und die Mitte der gegenuberliegendenSeite. Diese drei Geraden sind
Lx,x−(y−z)/2 , Ly,y−(z−x)/2 , Lz,z−(x−y)/2 .
Man rechnet nun leicht nach, daß der Schwerpunkt S mit den Koordinaten (x+ y+ z)/3der Schnittpunkt dieser drei Seitenhalbierenden ist.
Wir wollen nun den Umkreis eines Dreiecks berechnen.Seien A,B,C die Ecken eines Dreieckes mit den Koordinaten x, y, z. Dieses Dreieck seinicht entartet, d.h. es gelte
[x, y, z] 6= 0.
Mittelpunkt m und Radius r eines Kreises durch die Ecken A,B,C sind festgelegt durch
|x−m| = |y −m| = |z −m| = r.
Quadrieren der Gleichungen
|x−m| − |y −m| = 0, |y −m| − |z −m| = 0, |z −m| − |x−m| = 0
fuhrt zu
< 2m − (x+ y), x− y > = 0, < 2m− (y + z), y − z > = 0, < 2m− (z + x), z − x > = 0.
Also liegt m, wie es der Anschauung entspricht, auf der Mittelsenkrechten der Verbin-dungsstrecken von A,B, B,C und C,A. Verwendet man die Schnittpunktformel (III), soergibt sich die Formel
m =1
2[x, y, z]((|y|2 − |z|2)x⊥ + (|z|2 − |x|2)y⊥ + (|x|2 − |y|2)z⊥) (11.8)

Baumeister: Mathematik III / Stand: Februar 1998 281
fur die Koordinaten m des Umkreismittelpunktes.
Satz 11.32
Der Mittelpunkt m und Radius r des Umkreises durch die Ecken eines nichtent-arteten Dreieckes mit den Ecken–Koordinaten x, y, z ist gegeben durch
m =1
2[x, y, z]((|y|2 − |z|2)x⊥ + (|z|2 − |x|2)y⊥ + (|x|2 − |y|2)z⊥) ,
r =|x− y||y − z||z − x|
2|[x, y, z]|
Beweis:Die Formel fur m haben wir oben schon hergeleitet. Man definiert r wie oben. Die Formelfur r andert sich weder bei zyklischer Vertauschung der Ecken noch bei Verschiebung (desKoordinatensystems). Also durfen wir z = θ annehmen und haben |m| = r nachzurechnen.
|m|2 =1
4[x, y]2||y|2x− |x|2y|2 = (
|x|y||x− y|
2[x, y])2 = r2 .
Ist ein nichtentartetes Dreieck mit den Ecken–Koordinaten x, y, z gegeben, so bezeichnenS den Schwerpunkt, H den Hohenschnittpunkt und M den Umkreismittelpunkt. Danngilt nach Euler die sogenannte Euler–Gleichung
3s = h+ 2m ;
dabei sind s, h,m die Koordinaten von S,H,M.Zum Nachweis darf man o.E., da eine Transaltion geradentreu ist, m = θ, d.h. |x| = |y| =|z| annehmen. Die Hohe durch z hat die Geradengleichung
Hx−y,<z,x−y>
Fur den Punkt p := x+ y + z = 3s gilt dann offenbar
< x−y, p > = < x−y, x+y+z >=< x−y, x−y > + < x−y, z >= |x|2−|y|2+ < x−y, z >=< x−y, z >
Also liegt p auf der Hohe durch z. Aus Symmetriegrunden folgt, daß p auch auf den Hohendurch x und y liegt und es ist p = h.
Ist s 6= h, dann liegen also s, h und m auf der Geraden
Ls,s−h
denn aufgrund der Euler–Gleichung ist
m = s+1
2(s− h) .
Baumeister: Mathematik III / Stand: Februar 1998 282
Dieses Ergebnis ist der aus dem Jahre 1763 stammende Satz von Euler.
Satz 11.33
In einem Dreieck liegen Schwerpunkt, Hohenschnittpunkt und Mittelpunkt des Um-kreises auf einer Geraden, auf der sogenannten Euler–Geraden.
Beweis:Die obige Ableitung war gultig fur s 6= h. Ist aber s = h, dann gilt nach der Euler–Gleichung auch m = h und die Behauptung ist sicher auch hier richtig.
Bemerkung 11.34
Die Existenz der Euler-Geraden ist wohl der erste nicht–triviale Sachverhalt in der Dreiecks-geometrie, der in der Antike nicht bekannt war. 2
Im Jahre 1822 entdeckte W. Feuerbach (1800 – 1834), daß es mit dem Kreis durch die Sei-tenmitten (Feuerbachkreis) eines Dreiecks eine besondere Bewandtnis hat: Bezeichnetnamlich f die Koordinaten des Mittelpunktes dieses Kreises, so gilt damit die sogenannteFeuerbach–Gleichung (Beweis!):
3s = m+ 2f
Eliminiert man den Schwerpunkt aus der Euler– und Feuerbach–Gleichung, so folgt
2f = m+ h .
Also liegt f auf der Euler–Geraden und zwar liegt f in der Mitte zwischen Umkreismit-telpunkt und Hohenschnittpunkt. Die Abstande der Punkte h, f, s,m verhalten sich wie3 : 1 : 2.Schreibt man die Feuerbach–Gleichung in der Form
m− x = 2(1
2(y + z)− f),
so folgt, daß der Radius des Feuerbach–Kreises gerade die Halfte des Umkreisradius ist.Eliminiert man m aus Euler– und Feuerbach–Gleichung, so erhalt man
4f = 3s + h .
Daraus folgt, daß die Mitten der Hohenabschnitte zwischen Hohenschnittpunkt und zu-gehoriger Ecke auf dem Feuerbach–Kreis liegen. Weiterhin erhalt man noch, daß die Fuß-punkte der Hohen auf dem Feuerbach–Kreis liegen. Zusammengefaßt gilt
Satz 11.35
In einem nichtentarteten Dreieck liegen
Seitenmitten, Mitten der Hohenabschnitte, Fußpunkte der Hohen
auf dem Feuerbach–Kreis.
Baumeister: Mathematik III / Stand: Februar 1998 283
Das Resultat von Satz ?? wird oft dadurch festgehalten, daß man den Feuerbach–Kreisden Neunpunktekreis nennt.
Sei ein Dreieck mit den Ecken A,B,C gegeben. Auf der Winkelhalbierenden durchden Eckpunkt A liegen die Punkte, die von den anliegenden Dreiecksseiten gleich großenAbstand besitzen. Der Schnittpunkt zweier Winkelhalbierenden im Dreieck hat dann vonallen drei Dreiecksseiten gleich großen Abstand. Also ist dieser Punkt der gemeinsameSchnittpunkt der Winkelhalbierenden und damit der Mittelpunkt des Inkreises des Drei-ecks.
Gegeben sei ein spitzwinkeliges Dreieck ABC, d.h. ein Dreieck, dessen Winkel alle kleinerals π2 sind; die Seiten seien wie ublich mit a, b, c beschriftet. Auf diese Seiten werden nachaußen gleichseitige Dreiecke ACB′, BCA′ und ABC ′ aufgesetzt. Dann schneiden sichdie Geraden durch A,A′, B,B′ und C,C ′ in einem Punkt, dem sogenannten Fermat–Punkt (Pierre de Fermat (1601 – 1655). Zeichnet man nun die Umkreise der DreieckeACB′, BCA′ und ABC ′ ein, dann schneiden sich diese Kreise im Fermat–Punkt und dieUmkreismittelpunkte bilden eine gleichseitiges Dreieck, das sogenannte Napoleon–Dreieck(Napoleon Bonaparte (1769 – 1821)). Die Beweise dieser Aussagen wollen wir hier nichtanfuhren.
11.3 Bewegungen und orthogonale Gruppe
Wir kennen den Begriff der Bewegung schon aus Kapitel 9. Wir wiederholen ihn hier inetwas schlankerer Form.
Definition 11.36
Eine Abbildung F : IR2 −→ IR2 heißt eine Bewegung (oder Kon-gruenz(abbildung)), falls sie abstandserhaltend ist. 2
Wir haben also hier auf den Zusatz “surjektiv“ verzichtet. Wir werden zeigen konnen,daß eine Bewegung schon bijektiv ist.Klar, die Hintereinanderausfuhrung von Bewegungen ist stets wieder eine Bewegung;siehe Abschnitt 9.3. In Beispiel 11.4 haben wir schon eine erste Bewegung analytisch–geometrisch kennengelernt.
Beispiel 11.37
Jede Spiegelung an einer Geraden g (Achsenspiegelung mit Spiegelungsachse g) isteine Bewegung. Dabei ist die Geradenspiegelung F an der Geraden g, gegeben durch Hz,α
mit |z| = 1, so erklart:
F : IR2 3 x 7−→ x+ 2(α− < z, x >)z ∈ IR2 .
Offenbar stimmt dies mit der Anschauung uberein, daß die Punkte der Geraden fix bleibenund die Gerade g die Mittelsenkrechte der Verbindungsstrecke von x und F (x) ist.

Baumeister: Mathematik III / Stand: Februar 1998 284
F ist abstandserhaltend, denn
|F (x)− F (y)|2 = |x− y + 2(α− < z, y >)z − 2(α− < z, y >)z|2
= |x− y + 2(< z, y > − < z, x >)z|2
= |x− y − 2 < z, x− y > z|2
= |x− y|2
2
Beispiel 11.38
Eine Drehung der euklidischen Ebene mit Drehzentrum θ kann so beschrieben werden:
T : IR2 3 x = (x1, x2) 7−→ (cos(α)x1 − sin(α)x2, sin(α)x1 + cos(α)x2) ∈ IR2 .
Dabei steht α fur den Drehwinkel, denn es gilt
< x, T (x) >= cos(α)x21 − sin(α)x1x2 + sin(α)x1x2 + cos(α)x2
2 ,
d.h.
cos(α) =< x, T (x) >
|x||T (x)|.
2
Beispiel 11.39
Die Hintereinanderausfuhrung von zwei Geradenspiegelungen ist eine Translation odereine Drehung, je nachdem, ob die Spiegelungsachsen parallel sind oder nicht. Sind Fg, Fhdie Spiegelungen mit den Spiegelungsachsen Hz,α, Hz′,α, so haben wir:
(Fg Fh)(x) = Fg(x+ 2(α′− < z′, x >)z′)
= x+ 2(α′− < z′, x >)z′ + 2(α− < z, x+ 2(α′− < z′, x >)z′ >)z
= x+ 2(α′− < z′, x >)z′ + 2(α− < z, x > z −
2(α′− < z′, x >) < z′, z > z) >
Ist z = z′, dann lesen wir wegen
(Fg Fh)(x) = x+ 2(α + α′)z
ab, daß die resultierende Abbildung Fg Fh eine Translation mit Verschiebungsvektor2(α + α′)z istIst z = z′, dann sehen wir ohne Muhe
(Fg Fh)(x) = −x ,
und wir lesen ab, daß die resultierende Abbildung Fg Fh eine sogenannte Punktspie-gelung ist. 2

Baumeister: Mathematik III / Stand: Februar 1998 285
Bei allen Beispielen von Bewegungen laßt sich feststellen, daß sie nicht nur abstandserhal-tendend sind, sondern sogar geradentreu (Geraden werden in Geraden uberfuhrt) undwinkeltreu (Winkel werden in gleiche Winkel uberfuhrt). Dies wollen wir noch allgemeinzeigen. Ob wir in den obigen Beispielen schon alle moglichen Kongruenzabbildungen er-faßt haben, laßt sich hier noch nicht entscheiden. Allerdings laßt sich durch Betrachtungdes IR2 in der Gestalt der komplexen Zahlen hier schon mehr aufklaren, denn jede Ab-bildung f : ′C −→ ′C , die abstandserhaltend ist, ist notwendigerweise von der Form f+
oder f−, wobeif+(z) = ζ + eiφz oder f−(z) = ζ + eiφz
mit ζ ∈ ′C und φ ∈ IR . Wir wollen dies hier nicht beweisen, ein Hinweis fur den Beweisist enthalten in Bemerkung ??. Daß sich f+ bzw. f− aus einer Translation (ζ steht dafur)und einer Drehung (um φ) zusammensetzt, ist leicht abzulesen.
Lemma 11.40
Sei F : IR2 −→ IR2 eine Bewegung. Dann gilt fur alle x, y ∈ IR2 und a ∈ IR
F (ax+ (1− a)y) = aF (x) + (1− a)F (y) .
Beweis:Sei z := ax+ (1− a)y .1. Fall: 0 ≤ a ≤ 1 . Es folgt
|x− z| = |x− ax− (1− a)y| = |(1− a)(x− y)| = (1− a)|x− y|
und|y − z| = |y − ax− (1− a)y| = |a(y − x)| = a|x− y| .
Wir setzen u := F (x), v := F (y), w := F (z) . Es folgt
|u− w| = |x− z| = (1− a)|x− y| = (1− a)|u− v| ,
|v − w| = |y − z| = a|x− y| = a|u− v| ,
und daher|u− v| = |u− w|+ |w − v| .
Diese Entfernungsbeziehung kann aber nur gelten, wenn
w = au+ (1− a)v
gilt; alsoF (ax+ (1− a)y) = aF (x) + (1− a)F (y) .
2. Fall: a /∈ [0, 1], etwa a < 0 .Damit gilt
y = a′z + (1− a′)x mit a′ :=1
1− a.
Da a′ ∈ [0, 1] ist, konnen wir das Ergebnis aus dem ersten Fall ablesen.

Baumeister: Mathematik III / Stand: Februar 1998 286
Die Aussage von Lemma 11.40 besagt, daß F eine affine Abbildung ist.
Folgerung 11.41
Sei F : IR2 −→ IR2 eine Bewegung. Dann gilt:
(a) F fuhrt Geraden in Geraden uber.
(b) F fuhrt Winkel in gleiche Winkel uber.
(c) F fuhrt ein Dreieck in ein seitengleiches Dreieck uber.
Beweis:Zu (a)Sei eine Gerade g gegeben durch Lp,w . Fur einen Punkt x der Geraden gilt dann
x = p + tw = t(w + p) + (1− t)p mit einem t ∈ IR .
Mit Lemma 11.40 folgt
F (x) = tF (w+ p) + (1− t)F (p) = F (p) + t(F (w+ p)− F (p) .
Daraus lesen wir ab, daß das Bild der Geraden Lp,w die Gerade LF (p),F (w+p)−F (p) ist.Zu (b)Fur x, y ∈ IR2 gilt
2 < F (x), F (y)> = |F (x)|2 + |F (y)|2− |F (x)− F (y)|2
= |x|2 + |y|2 − |x− y|2
= 2 < x, y >
woraus die Behauptung ablesbar ist.(c) folgt aus (a) und (b) .
Bemerkung 11.42Im Beweis zur Folgerung 11.41 haben wir gesehen, daß eine abstandserhaltende AbbildungF : IR2 → IR2 zusatzlich auch das Skalarprodukt invariant laßt. 2
Damit konnen wir nun endlich bestatigen, daß wir in Abschnitt 9.3 etwa in der Dihedral-gruppe D3 alle Bewegungen des gleichseitigen Dreiecks gefunden haben. Denn mit Folge-rung ?? schließen wir, daß die Bilder von Eckpunkten wieder Eckpunkte sein mussen. Alsoist jede Bewegung des gleichseitigen Dreiecks schon durch die Permutation der Eckpunktebestimmt.
Nun wollen wir die Bewegungen konkreter als Koordinatenabbildungen beschreiben. Dazubetrachten wir fur α ∈ IR folgende Abbildungen:
T (α) : IR2 3 x = (x1, x2) 7−→ (cos(α)x1 − sin(α)x2, sin(α)x1 + cos(α)x2) ∈ IR2
S(α) : IR2 3 x = (x1, x2) 7−→ (cos(α)x1 + sin(α)x2, sin(α)x1 − cos(α)x2) ∈ IR2
Setzee(ϕ) := (cosϕ, sin(ϕ)) , ϕ ∈ IR .
Mit Hilfe der Additionstheoreme fur Sinus und Cosinus verifiziert man leicht:
Baumeister: Mathematik III / Stand: Februar 1998 287
(R1) T (α)x = y ⇐⇒ x = T (−α)y
(R2) S(α)x = y ⇐⇒ x = S(α)y
(R3) T (π2)x = x⊥.
(R4) T (α) T (β) = T (α, β), S(α) S(β) = T (α− β)
(R5) T (α) S(β) = S(α + β), S(β) T (α) = S(β − α)
(R6) T (β)e(α) = e(α+ β), S(β)e(α) = e(β − α)
Aus (R6) lesen wir ab, daß die Abbildung T (β) eine Drehung um den Winkel β beschreibt.Offenbar ist S(0) eine Spiegelung an der x1−Achse. Da nach (R5) S(α) = T (α)S(0) ist,konnen wir die Abbildungen S(α) als Spiegelungen bezeichnen.
Definition 11.43
Wir setzenO+(2) := T (α)|α ∈ IR , O−(2) := S(α)|α ∈ IR,
und nennenO(2) := O+(2) ∪ O−(2)
die orthogonale Gruppe und
SO(2) := O+(2)
die spezielle orthogonale Gruppe. 2
Die Bezeichnung”Gruppe“ in Definition 13.28 ist gerechtfertigt, denn:
Lemma 11.44
O(2) ist eine Untergruppe von GL(2; IR) und SO(2) ist ein Normalteiler von O(2).
Beweis:O(2) ist eine Teilmenge von GL(2, IR) nach (R1) und (R2). Aus (R1), (R2) und (R4) liestman ab, daß mit g, h ∈ O(2) auch g h−1 ∈ O(2) gilt. Also ist O(2) nach Definition 10.23eine Untergruppe von GL(2; IR) .SO(2) ist offenbar eine Teilmenge von O(2). Aus (R1) und (R2) liest man ab, daß mitg, h ∈ SO(2) auch g h−1 ∈ SO(2) gilt. Also ist SO(2) eine Untergruppe von O(2).Die Normalteilereigenschaft liest man aus den Rechenregeln (R1) – (R6) ab.
Satz 11.45
(a) Ist F : IR2 −→ IR2 eine abstandserhaltend, so ist F bijektiv.
(b) F : IR2 −→ IR2 ist eine Bewegung genau dann, wenn es T ∈ O(2) undp ∈ IR2 gibt mit
F (x) = Tx+ p , x ∈ IR2 .
Beweis:

Baumeister: Mathematik III / Stand: Februar 1998 288
Sei F abstandserhaltend.Sei zunachst F (θ) = θ. Wir zeigen in diesem Spezialfall, daß F eine lineare Abbildung ist.Aus Bemerkung 11.42 wissen wir, daß F das (euklidische) Skalarprodukt invariant laßt.Aus
< F (ei), F (ej) > =
0 , i 6= j1 , i = j
, i, j = 1, 2 .
folgt, daß F (e1), F (e2) eine Basis von IR2 ist; siehe Satz 11.17.Sei x = ae1 + be2 ∈ IR2 . Da F (e1), F (e2) eine Basis von IR2 ist, gibt es a′, b′ ∈ IR mit
F (x) = a′F (e1) + b′F (e2).
Aus< F (x), F (e1) >=< x, e1 >= a , < F (x), F (e2) >=< x, e2 >= b
liest mana′ = a, b′ = b, d.h. F (x) = aF (e1) + bF (e2)
ab. Dies zeigt unmittelbar, daß F linear ist.Da |F (e1)| = |F (e2)| = 1 und F (e2) = F (e1)⊥ gilt, folgt
F (e1) =
(cosϕ
sinϕ
), F (e2) =
(− sinϕ
cosϕ
)
mit einem ϕ ∈ IR . Dies zeigt F = T (ϕ).Sei nun F (θ) = p.Setze G(x) := F (x)−p, x ∈ IR2 . Dann ist auch G abstandserhaltend und wegen G(θ) = θgibt es ϕ ∈ IR mit
G(x) = T (ϕ)x , x ∈ IR2 .
Also istF (x) = T (ϕ)x+ p, x ∈ IR2 .
Damit ist von (b) die Darstellungsaussage schon gezeigt.Die Bijektivitat folgt nun sofort aus der abgeleiteten Darstellung fur F . Daß jedes F wiein (b) dargestellt, eine abstandserhaltende Abbildung ist, ist klar.
Nun wollen wir (reichlich spat) die Kongruenzsatze der Dreiecksgeometrie anfuhren.
Definition 11.46
Zwei Dreiecke ABC,A′B′C ′ heißen kongruent, wenn es eine Bewegung F :IR2 −→ IR2 gibt mit
F (A) = A′, F (B) = B′, F (C) = C ′ .
2
Seien Dreiecke ABC,A′B′C ′ gegeben mit Winkeln α, β, γ und Seiten a, b, c .
Baumeister: Mathematik III / Stand: Februar 1998 289
SWS Ist |AB| = |A′B′|, |AC| = |A′C ′| und <)BAC =<)B′A′C ′, so sindABC und A′B′C ′
kongruent.
WSW Ist |AB| = |A′B′| und <)BAC =<)B′A′C ′, <)ABC =<)A′B′C ′, so sind ABC undA′B′C ′ kongruent.
SSS Ist |AB| = |A′B′|, |AC| = |A′C ′|, |BC| = |B′C ′|, so sind ABC und A′B′C ′ kongru-ent.
SSW Ist |AB| = |A′B′|, |AC| = |A′C ′| und <)ACB =<)A′C ′B′ so sind ABC und A′B′C ′
kongruent.
Der Beweis zum Kongruenzsatz SWS (zwei Seiten und der dazwischenliegende Winkelsind gegeben) etwa sieht so aus: Man finde eine Translation, die A nach A′ abbildet. Man
wahle eine Drehung T (α), die den Richtungsvektor ~AB nach ~AC dreht. Die Hintereinan-derausfuhrung dieser beiden Bewegungen leistet das Gewunschte.
Bemerkung 11.47
In der Anschauungsebene IE 2 oder in IR2 kann eine Orientierung dadurch gegeben werden,daß man eine der beiden moglichen Drehrichtungen um den Nullpunkt als
”positiv“ aus-
zeichnet. Die in Mathematik und Physik ubliche Drehrichtung ist diejenige, welche demUhrzeiger entgegen dreht. Man sagt, ein Paar (x, y) ∈ IR2 ist positiv orientiert, wenn[x, y] =< x⊥, y > positiv ist. Beispielsweise ist fur x 6= θ das Paar (x, x⊥) stets positivorientiert; insbesondere ist das Paar (e1, e2) positiv orientiert (e2 entsteht aus e1 durchDrehung im Gegenuhrzeigersinn um den Winkel π2). 2
11.4 Wege und Kurven
Es gibt zwei Arten, den Begriff einer Kurve einzufuhren. In der geometrischen Auf-fassung ist eine Kurve der Ort von Punkten in der Ebene oder im Raum, die durchgewisse Eigenschaften charakterisiert sind. So wird etwa in der Ebene ein Kreis durchden konstanten Abstand zu einem Punkt beschrieben. Die Kegelschnitte (siehe Abschnitt13.6), ein Hauptgegenstand der griechischen Mathematik, sind durch geometrische Eigen-schaften definiert. In der mechanischen Vorstellung erscheint die Kurve als Bahnkurveeines bewegten Punktes. Beide Auffassungen finden sich bereits in der Antike. Die erstemechanisch erklarte Kurve ist die Archimedische Spirale.
Wenn sich ein Halbstrahl in einer Ebene um seinen Endpunkt mit gleichformiger
Geschwindigkeit dreht, nach einer beliebigen Zahl von Umdrehungen wieder in die
Anfangslage zuruckkehrt und sich auf dem Strahl der Punkt mit gleichformiger
Geschwindigkeit, vom Endpunkt des Halbstrahls beginnend, bewegt, so beschreibt
dieser Punkt eine Spirale.4
4Siehe H. Gericke: Mathematik in Antike und Orient; Springer-Verlag, 1984, S. 120.

Baumeister: Mathematik III / Stand: Februar 1998 290
Man beachte, daß der Begriff der”gleichformigen Geschwindigkeit“ vorkommt, ein Be-
griff, der erst bei I. Newton (1643 – 1727) im 16. Jahrhundert Klarung und Bedeutungerfuhr.
Die analytische Geometrie gestattet es, Kurven durch analytische Beziehungen zwischenden Koordinaten ihrer Punkte zu beschreiben. Bei Verwendung des ublichen rechtwinkli-gen Koordinatensystems – hier schreiben wir anstatt (x1, x2) stets (x, y) – haben wir:
(a) die implizite Darstellung in der Form einer Gleichung f(x, y) = c,
(b) die explizite Darstellung y = f(x),
(c) die Parameterdarstellung x = ϕ(t), y = ψ(t).
Die mechanische Auffassung wird in (c) deutlich: t wird als Zeit aufgefaßt. Die Bahndes Punktes ergibt sich als (ϕ(t), ψ(t))|t ∈ I, wobei I das Intervall der zulassigen (zurVerfugung stehenden) Zeit ist.
Beispiel 11.48
Fur die Kreislinie hat man folgende Darstellungen:
(a) implizite Darstellung: x2 + y2 = r2 ,
(a) explizite Darstellung: y = ±√
1− x2, |x| ≤ 1 ,
(a) Parameterdarstellung: x = cos(t), y = sin(t), t ∈ [0, 2π] .
Man beachte, daß auch
x = cos(πt), y = sin(πt), t ∈ [0, 2) ,
eine Parameterdarstellung der Kreislinie ist. In beiden Fallen stimmt naturlich die Bahnuberein, das Bewegungsgesetz ist verschieden (Zeitskala!). 2
Beispiel 11.49
Ein Punkt P mit Masse m bewege sich auf der Kreislinie mit Radius r > 0 um denUrsprung O nach dem Gesetz
x(t) = re(ωt) = (r cos(ωt), r sin(ωt)) , t ∈ IR ;
dabei ist x(t) der Ortsvektor und ω > 0 eine Konstante.Fur den Geschwindigkeitsvektor v(t) := x(t) (x(t) ist Physikernotation), dies ist diezeitliche Anderung des Ortes, gilt:
v(t) = ωx(t)⊥ , |v(t)| = ωr .
Diese Beziehung motiviert die Bezeichnung Winkelgeschwindigkeit fur ω .Fur den Beschleunigungsvektor b(t) := v(t), dies ist die zeitliche Anderung des Ge-schwindigkeitsvektors, haben wir
b(t) = −ω2x(t) , |b(t)| = ω2 .
Baumeister: Mathematik III / Stand: Februar 1998 291
Der Geschwindigkeitsvektor ist tangential zur Bewegung (< v(t), x(t) >= 0 !) und derBeschleunigungsvektor ist entgegengesetzt dem Ortsvektor. Nach dem Kraftgesetz vonNewton (siehe unten) wirkt auf den Massenpunkt eine Kraft k(t), gegeben durch
k(t) := mb(t) = −mω2x(t) .
Diese Kraft nennt man Zentripetalkraft. Sie zwingt den Massenpunkt P auf der Kreis-linie zu bleiben. (Man spurt diese Zentripetalkraft, wenn man etwa einen Stein an einemFaden bindet und im Kreis schwingt als Zugkraft des Fadens.) Auf einem Karusell sitzendnehmen wir die Zentripetalkraft als Zentrifugalkraft wahr. 2
Isaac Newton formulierte 1687 sein Weltsystem in der Schrift “Philosophiae Natura-lis Principia Mathematica“. Er faßt darin das gesamte physikalische Geschehen in dreiGrundsatzen oder Gesetzen der Bewegung zusammen, die an Einfachheit und Evidenznicht zu uberbieten sind. Es sind dies das Tragheits–, das Kraft–, und das Reaktions-gesetz. Unbeschleunigte Systeme, in denen also das Tragheitsgesetz gilt, heißen Inertial-systeme. Die Naturgesetze haben in allen Inertialsystemen die gleiche Form (Aquivalenzder Inertialsysteme). Newton fuhrt damit die komplexe Vielfalt der (makroskopischen)Erscheinungswelt auf wenige einfache Ursachen zuruck. Die (spater anzufuhrenden) Kep-lerschen Gesetze, die J. Kepler phanomenologisch aufgestellt hat, ergeben sich daraus (inerster und guter Naherung) auf mathematisch durchsichtige Weise zwingend. Die Formder Planetenbahnen ist also keine Sache der Vorliebe der Natur fur eine bestimmte edleBewegungsform, sondern nur eine Folge von außeren Zwangen und der Anfangsbedingungbei ihrer Entstehung; siehe die Bemerkung zu Kometenbahnen. Erst ca. 200 Jahre spaterwurden seine Erklarungen von Materie, Kraft, Bewegung, absoluter Zeit, absolutem Raumdurch das Experiment von Michelsen 1881 in Frage gestellt. Der wesentliche Schritt zurBeseitigung der damit verbundenen Probleme sollte A. Einstein 1905 gelingen, indem erdie Aquivalenz der Inertialsysteme um die Annahme der Konstanz der Lichtgeschwindig-keit in Bezug auf solche Inertialsysteme erganzte.
Solange man sich mit ganz konkreten aus der Physik kommenden Kurven beschaftigte,kam man in keinen Konflikt mit mathematischer Strenge. Dies anderte sich
”dramatisch“,
nachdem C. Jordan (1838–1922) 1883 eine Kurve C als stetiges Bild eines Intervalls defi-nierte:
C : [a, b] 3 t 7−→ (ϕ(t), ψ(t)) ∈ IR2 , ϕ, ψ : [a, b] 7−→ IR stetig .
Peano bewies namlich 1890, daß es stetige Funktionen ϕ, ψ : [0, 1] 7−→ IR gibt, so daßdie damit definierte Kurve
C : [0, 1] 3 t 7−→ (ϕ(t), ψ(t)) ∈ IR2
das ganze Quadrat [0, 1]× [0, 1] ausfullt, d.h.
[0, 1]× [0, 1] = (ϕ(t), ψ(t))|t ∈ [0, 1].
Dies ist deswegen so uberraschend, da [0, 1]× [0, 1] eine zweidimensionale Menge , [0, 1] alsDefinitionsgebiet der Parameterdarstellung eindimensional ist. Hier ist (ohne Nachweis)eine die Beschreibung einer solchen Kurve:
ϕ(t) :=∞∑k=0
g(42kt)
2k+1, ψ(t) :=
∞∑k=0
g(42k+1t)
2k+1

Baumeister: Mathematik III / Stand: Februar 1998 292
mit
r(t) :=
0 , 0 ≤ t ≤ 1
33t− 1 , 1
3 ≤ t ≤ 23
1 , 23 ≤ t ≤ 1
s(t) :=
r(t) , t ∈ [0, 1]r(−t) , t ∈ [−1, 0] ,
g : IR −→ IR mit g(t) = g(t+ 2) , t ∈ IR , g(t) = s(t) , falls |t| ≤ 1.
Eine erste (analytische) Aufgabe ist die Bestimmung der Lange einer Kurve. Da wir schonwissen, daß die Zahl π nicht durch Zirkel und Lineal konstruierbar ist, ist die Lange einerKurve nicht immer rektifizierbar5, d.h. es ist nicht immer moglich, die Lange der Kurveauf einer Geraden abzutragen. Analytisch bestimmen wir die Lange einer Kurve durchApproximation mit Streckenzugen; siehe Abbildung 11.8
Abbildung 11.8: Approximierende Streckenzuge
Ein Streckenzug zu einem Weg (φ, ψ) kommt so zustande:Wahle eine Zerlegung
a = t0 < t1 < · · · < tn = b
des Intervalls [a, b] und setze
p(t0, . . . , tn) :=n∑i=1
|(φ, ψ)(ti)− (φ, ψ)(ti−1)| ;
dies ist nach Pythagoras die Lange des zugehorigen (approximierenden) Streckenzuges.Damit konnen wir nun die Lange einer Kurve definieren:
Definition 11.50
Eine Kurve (φ, ψ) : [a, b] −→ IR2 hat Lange l genau dann, wenn
l = supp(t0, . . . , tn)|a = t0 < t1 < · · · < tn = b Zerlegung <∞
gilt. 2
5rectificare (lat.) = gerade machen

Baumeister: Mathematik III / Stand: Februar 1998 293
Ohne Beweis teilen wir mit:
Satz 11.51
IstC : [a, b] 3 t 7−→ (ϕ(t), ψ(t)) ∈ IR2
eine Kurve und sind die Abbildungen ϕ, ψ stetig differenzierbar, so gilt fur die Langel der Kurve:
l =
b∫a
(ϕ′(t)2 + ψ′(t)2)12 (11.9)
Die Formel 11.9 folgt durch Grenzubergang aus der Langenformel fur einen approximie-renden Streckenzug.
Der Einheitskreis hat als Parameterdarstellung
[0, 2π] 3 t 7−→ (cos(t), sin(t)) ∈ IR2 .
Fur die Lange l der Kreislinie erhalten wir nach Satz ?? somit
l =
2π∫0
(sin(t)2 + cos(t)2)12 dt = 2π
Ein erster uber den Kreis hinausgehender erfolgreicher Versuch einer Langenberechnungwar die Berechnung der Lange der Neilschen Parabel (W. Neil (1637 – 1670)), die inimpliziter Darstellung so lautet:
y2 − x3 = 0 .
Der Bogeny = x
32 , 0 ≤ x ≤ 4 ,
ist ein Stuck davon. Als Parameterdarstellung dieses Bogens haben wir
[0, 4] 3 t 7−→ (t, t32 ) ∈ IR2 ,
und fur die Lange dieses Bogenstucks erhalten wir mit Satz 11.51
4∫0
√(1 +
9
4t)dt =
8
27(10√
10− 1) .
Noch eine Klarung von Begriffen: Liegt eine Kurve in Parameterdarstellung
C : [a, b] 3 t 7−→ (ϕ(t), ψ(t)) ∈ IR2
vor, so heißt (ϕ, ψ) der zugehorige Weg und C(t)|t ∈ [a, b] die zugehorige Bahn.
Eine Jordankurve (C. Jordan (1838 – 1923)) ist eine Kurve, deren Parameterdarstellunginjektiv ist. Eine Jordankurve C heißt geschlossen, wenn C(a) = C(b) gilt.

Baumeister: Mathematik III / Stand: Februar 1998 294
Aufklarend ist der Jordansche Kurvensatz: Zu jeder geschlossenen Jordankurve Cgehoren zwei Gebiete, ein beschranktes Innengebiet G1 und ein unbeschranktes Außen-gebiet G2 mit der Eigenschaft, daß C als Rand der Gebiete G1 und G2 auftritt undIR2 = C ∪G1 ∪G2 ist, wobei G1∩G2 = ∅ gilt. Anders ausgedruckt: Die Punkte der Ebenezerfallen in zwei Mengen G1, G2 so, daß gilt: Punkte in G1 bzw. G2 konnen durch eineKurve so verbunden werden, daß die Kurve die Kurve C nicht schneidet, Punkte in G1
konnen mit Punkten in G2 durch eine Kurve mit stetiger Parameterdarstellung nur soverbunden werden, daß ein Schnittpunkt mit der Kurve C auftritt.Der Beweis dieses Satzes ist nicht einfach und kann hier nicht einmal von der Idee herausgebreitet werden. Die Schwierigkeiten fur den Beweis ruhren daher, daß der Begriff dergeschlossenen Jordankurven sehr allgemeine Kurven zulaßt, so daß innen und außen erstgeeignet prazisiert werden muß. Selbst fur Kurven, die sich aus Streckenzugen aufbauen,ist der Beweis noch fordernd, wenngleich durchsichtig6
Ein spezielle Klasse von Kurven sind die zweiter Ordnung. In impliziter Darstellung isteine Gleichung zweiten Grades eine Gleichung der Form
Ax2 +Bxy + Cy2 +Dx + Ey + F = 0. (11.10)
A,B,C,D,E, F sind reelle Zahlen. Generell sei vorausgesetzt: A,B,C seien nicht alleNull. Es kann vorkommen, daß die zugehorige Losungsmenge, d.h. die Menge der Punkte
(x, y) ∈ IR2, die eingesetzt in die linke Seite der Gleichung (11.10) Null ergeben, leer ist.Hier ist ein Beispiel:
x2 + y2 = −1 .
Wir zahlen sechs der wichtigsten Spezialfalle der allgemeinen Gleichung 11.10 auf:
1. Die Gleichung einer Ellipse
x2
a2 +y2
b2 = 1 (a ≥ b > 0)
mit den Halbachsen a und b. Fur den Fall a = b ist dies die Gleichung eines Kreises.
x2 + y2 = a2
mit dem Mittelpunkt im Koordinatenursprung und dem Radius a.
2. Die Gleichung einer Hyperbel
x2
a2 −y2
b2 = 1 (a ≥ b > 0)
mit den Halbachsen a und b.
3. Die Gleichung einer Parabel
y2 = 2px (p > 0) .
6Siehe: R. Courant, H. Robbin: Was ist Mathematik, Springer, 1992, S. 202 ff

Baumeister: Mathematik III / Stand: Februar 1998 295
4. Die Gleichung eines Paares sich schneidender Geraden
a2x2 − b2y2 = 0 (a > 0, b > 0) .
5. Die Gleichung eines Paares paralleler oder zusammenfallender Geraden
x2 − a2 = (a ≥ 0) .
6. Die Gleichung fur einen Punkt
(x− x0)2 + (y − y0)2 = 0 .
Bemerkung 11.52
Die oben angefuhrten 6 Spezialfalle ergeben sich als vollstandige Liste von Fallen, wennman zulaßt, das rechtwinklige Koordinatensystem geeignet zu wahlen. 2
11.5 Kegelschnitte
Die Kurven Ellipse, Parabel, Hyperbel konnen gemeinsam definiert werden durch:
Ein Kegelschnitt C ist der geometrische Ort der Punkte P , deren Distanzvon einem festen Punkt F das ε−fache der Distanz von einer festen Gerade gist.
ε heißt Exzentrizitat, der Punkt F heißt Brennpunkt und g heißt Leitgerade. DieseBezeichnungen gehen auf Apollonius (262? – 190? v. Chr.) zuruck. Die Kegelschnitte sindfestgehalten in der Abbildung 13.6.
Abbildung 11.9: Kegelschnitte
Sei g′ die Gerade durch F parallel zur Leitgeraden g und sei h die Gerade durch F
senkrecht zur Geraden g. Offenbar ist der geometrische Ort C nun symmetrisch zu h.

Baumeister: Mathematik III / Stand: Februar 1998 296
Dann liegt auf g′ eine Strecke LL′, deren Endpunkte L und L′ auf dem geometrischen OrtC liegen. Sei L := |FL| = |FL′|. Wir haben nun definitionsgemaß
l = |FL| = ε|LH|
wobei H der Schnittpunkt der Geraden h′ durch L, parallel zu h, ist.Durch g′, h wird ein rechtwinkliges Koordinatensystem mit Ursprung F vorgelegt. Fureinen Punkt P des geometrischen Ort C mit den kartesischen Koordinaten (x, y) habenwir in Polarkoordinaten
x = r cosϑ , y = r sin ϑ
mitr = |FP | = ε|PK| = ε(|LH| − r cosϑ) = l− εr cosϑ
wobei K der Schnittpunkt der Geraden h′′ durch P parallel zu h ist. Also haben wir
l
r= 1 + ε cos ϑ (11.11)
Hierin spiegelt sich dank cosϑ = cos(−ϑ), sin(−ϑ) = − sin(ϑ), wieder die Symmetrie desgeometrischen Ortes, bzgl. der Geraden h wieder.)Ist ε ∈ (0, 1), dann ist 1 + ε cos ϑ stets positiv und dies bedeutet, daß der Abstand r
beschrankt bleibt: Die Ellipse ist eine geschlossene Kurve.Ist ε = 1, dann ist r
”unendlich“ fur ϑ = −π; die Parabel ist keine geschlossene Kurve.
Ist ε > 1, dann ist 1+ε cos ϑ positiv oder negativ, je nachdem, ob cosϑ großer oder kleiner
als −1ε ist. Dies deutet auf die zwei Aste der Hyperbel hin.
Quadriert man in der Gleichung 13.18, so erhalt man
x2 + y2 = (l− εx)2 (11.12)
Ist ε 6= 1, erhalten wir mit a := l1− ε2
x+ εa)2
a2 +y2
la= 1 (11.13)
und wir erkennen, daß hier die Gleichungen fur eine Ellipse oder Hyperbel stehen, al-lerdings nicht symmetrisch zum Ursprung. Nun gehen wir auf die verschiedenen Typenein.
Ellipse
x2
a2 +y2
b2 = 1 (a ≥ b > 0) .
Ist a = b, dann haben wir den Kreis als geometrischen Ort vor uns.Sei etwa a > b. Wir setzen c :=
√a2 − b2, tragen auf der x−Achse die Punkte F1, F2
mit den Koordinaten (−c, 0) bzw. (c, 0) ein; dies sind die Brennpunkte der Ellipse. DieEllipse ist nun der geometrische Ort aller Punkte, fur die die Summe der Abstande vonF1 und F2 konstant (gleich 2a) ist. Denn es gilt fur einen Punkt P mit den Koordinaten(x, y) die Ellipsengleichung genau dann, wenn
|(x, y)− (−c, 0)|+ |(x, y)− (c, 0)| = 2a
Baumeister: Mathematik III / Stand: Februar 1998 297
gilt. Diese Tatsache entspricht der sogenannten Gartner–Konstruktion einer Ellipse:Ein Seil der Lange 2a wird in den Brennpunkten (−c, 0), (c, 0) eingepflockt und zu einemDreieck F1F2M gespannt; in M gleitet bei gespanntem Seil ein Stab entlang. Dieser 3.Punkt beschreibt dann eine Ellipse.Die Zahl ε := c/a heißt Exzentrizitat der Ellipse.Die Gleichung einer Ellipse kann man auch in Parameterform schreiben:
x = a cos(ϑ) , y = b sin(ϑ) (ϑ ∈ IR) .
Wenn ϑ monoton das Intervall [0, 2π] durchlauft, so beschreibt der Punkt (x, y) einevollstandige Ellipse.Klaren wir nun die Bezeichnung
”Brennpunkt“ auf. Dazu schicken wir folgende Betrach-
tung voraus, die aus Abbildung 13.7 abzulesen ist:Ist P eine Punkt auf der Ellipse, so verlangern wir die Strecke F1P uber P hinaus biszu einem Punkt F ′1 so, daß |F1F
′2| = 2a gilt. Das Dreieck F2PF
′2 ist nun gleichschenk-
lig, da ja |F1P | + |Pf2| = 2a und daher |PF ′2| = |PF2| gilt. Die Winkelhalbierende tvon <) (F2PF
′2) ist also auch Mittelsenkrechte von F2F
′2. Der Punkt P liegt auf t und t
enthalt keinen weiteren Punkt, denn ist 6= P ein Punkt der Ellipse, so gilt aufgrund derDreiecksungleichung
|QF1|+ |QF2| = |QF1|+ |QF′2| > |PF1|+ |PF
′2|+ |PF
′2| = 2a.
Dabei ist t Tangente an die Ellipse in P.Die zu t senkrechte Gerade durch P , die wir Normale and die Ellipse in P nennen, istWinkelhalbierende im Winkel <) (F1PF2). Wir haben also gezeigt:
Satz 11.53
In jedem Ellipsenpunkt wird der Winkel <) (F1PF2) von der Ellipsennormale hal-biert.
Aus Satz 13.35 ergibt sich nun, daß ein von F1 ausgehender Strahl an der Ellipse bzw.ander Ellipsentangente so reflektiert wird, daß der reflektierte Strahl durch F2 verlauft.Ein von außen auf die Ellipse treffender Strahl, dessen Verlangerung durch F1 verlauft,wird so reflektiert, daß die Verlangerung des reflektierten Strahls durch F2 verlauft. Eineentsprechende Eigenschaft hat ein Ellipsoid. Dies ist die Figur, die im Raum entsteht, wennwir eine Ellipse um eine ihrer Achsen rotieren lassen. Hat ein Gewolbe in einem Bauwerkdie Form eines Halbellipsoids, so kann ein Ton, der in F1 erzeugt wird, in F2 besonders gutgehort werden; man spricht daher bei solchen Gewolben von Flustergewolben. DieseEigenschaft macht man sich auch bei der
”Bundelung“ von Ultraschallwellen bei der
Zertrummerung von Nierensteinen zunutze.
Hier ist der Platz, einige Anmerkungen zur geometrischen Optik zu machen. Dies istder Teil der Phanomene der Lichtausbreitung, in dem man von einer geradlinigen Ausbrei-tung ausgehen kann, also von der Wellenstruktur des Lichtes absehen kann. (Experimente,in denen sich die auf die Wellennatur des Lichts verrat, sind die Streuexperimente an en-gen Schlitzen und kleinen Lochern.)
Baumeister: Mathematik III / Stand: Februar 1998 298
Fallt ein Lichtstrahl auf eine ebene Flache (siehe Abbildung ??), die zwei Medien vonein-ander trennt, so wird er von ihr zum Teil oder auch vollstandig reflektiert. Der reflektierteStrahl liegt in der Ebene durch den einfallenden Strahl und das Lot, das auf dem Spiegelim Auftreffpunkt des einfallenden Strahls errichtet wird. Der Einfallswinkel ist gleich demAusfallswinkel. Aus diesem Reflexionsgesetz folgt, daß ein Beobachter das virtuelle Bildeiner den Strahl aussendenden Lichtquelle in einem Punkt hinter dem Spiegel, der vomSpiegel den gleichen Abstand wie das reelle Bild hat.Die wichtigsten Anwendungen geometrischer Optik haben zu tun mit der Reflexion vonLicht an gekrummten Flachen. Eine solche haben wir schon am Parabolspiegel gesehen.Haufiger sind Anwendungen an sogenannten spharischen Hohlspiegeln, d.h. an derverspiegelten Innenwand eines Kugelsegments.Sei eine Kugel mit Radius R und Mittelpunkt M betrachtet. Fur unsere Uberlegungenkonnen wir einen ebenen Schnitt (Ebene durch M) betrachten. Sei S Scheitel die Mittedes Kreissegments; die durch S und M gehenden Halbgerade bezeichnen wir als Achse.Fallt nun parallel zur Achse ein Strahlenbundel ein wird jeder achsennahe Strahl vomSpiegel so reflektiert, daß er naherungsweise durch den in der Mitte zwischen S und Mliegenden Punkt F hindurchgeht; F bezeichnen wir daher als Brennpunkt. Die Be-grundung sieht so aus:Sei F ′ der Durchgang eines in A reflektierten Strahls durch die Achse. Dann ist also nachdem Reflexionsgesetz - der Halbstrahl, der durch A und M geht, ist Winkelhalbierendeim Dreieck F ′AB, wenn B irgendein Punkt auf dem einfallenden Strahl ist - MF ′O eingleichschenkliges Dreieck. Daraus folgt nach kurzer Rechnung
|F ′M | =R
2
1
cosα
wenn α =<) (MOF ′) ist. Fur kleine Werte von α konnen wir 1cos(α)
durch 1+12α
2 ersetzen,
da die Reihe fur den Kosinus so aussieht:
cos(α) = 1−1
2!α2 +
1
4!α4 −
1
6!α6 + · · · ;
also ist1
1−1
2α2
= 1 +1
2α2 + ϑ mit ϑ =
1
4·
α4
1− 12α2
.
(Fur α = 10o etwa betragt die Abweichung von |F ′M | von R/2 = |FM | nur ca. 1, 5%.)
Die Große f := R2 bezeichnet man nun als Brennweite.
Hat man nun einen leuchtenden Pfeil der Hohe h auf dem Achsenpunkt P mit |SP | >|SF | vor dem Hohlspiegel stehen, so ensteht ein an der Achse gespiegeltes Bild davon imAchsenpunkt P ′, der sich folgendermaßen ergibt:Der Strahl S1, der von der Pfeilspitze in der Hohe h achsenparallel auf den Hohlspiegel in<) fallt, wird als ein Strahl durch F reflektiert. Der Strahl S2, der von der Pfeilspitze durchden Mittelpunkt M verlauft, wird in sich reflektiert. Der Strahl S3, der vom Punkt P imScheitel S auf den Hohlspiegel fallt, wird in sich reflektiert. Diese drei Strahlen erzeugendann ein Dreieck FP ′′M und der Fußpunkt des Lotes von P ′′ auf der Achse ist P ′. P ′′P ′
ist also das Bild des Pfeils. Man stellt nach einiger Rechnung fest:
1
|PS|+
1
|P ′S|=
1
f
Baumeister: Mathematik III / Stand: Februar 1998 299
Dies ist die Newtonsche Abbildungsgleichung. Diese gilt nun auch sinngemaß fur denFall |PS| < f, allerdings liegt dann das Bild als virtuelles Bild jenseits des Hohlspiegels.Lichtdurchlassige Korper, die von zwei Kugelflachen begrenzt werden, bezeichnet manals Linsen. Die Verbindugslinie der Mittelpunkte M1 ud M2 der Kugelflachen ist dieAchse der Linse. Je nachdem, ob die Linse in der Achsenmitte dicker oder dunner ist alsam Rande, ist sie eine Sammellinse oder eine Zertrennungslinse. Linsen konnen ebensowie Hohlspiegel zur Abbildung dienen. Die Abbildung 13.8 moge dies, ohne weiter dar-auf einzugehen, veranschaulichen. Die optischen Instrumente Fernrohr und Mikroskop,Augenlinse und Brille, sind eine außerst nutzliche Realisierung dieser Abbildungseigen-schaften. Die Abbildungsfehler dieser Instrumente resultieren im wesentlichen aus derTatsache, daß die Voraussetzung
”achsennah“ verletzt ist.
Bemerkung 11.54
Der Beweis von Satz 13.35 enthalt eine einfache Konstruktionsvorschrift fur die Tangentean die Ellipse in einem Punkt. Er enthalt auch die Tatsache, daß eine Ellipse auch dergeometrische Ort aller Punkte ist, die von einem Kreis (Kreis um F1 mit Radius 2a) undeinem Punkt innerhalb des Kreises (F2) den gleichen Abstand haben. 2
Analytisch-geometrisch erhalt man eine Ellipse aus einem Kreis
x2 + y2 = b2
durch die Koordinatentransformation
u :=a
bx , v := y, (11.14)
denn es resultiert in den Koordinaten u, v die Gleichung
u2
a2 +v2
b2 = 1
Die Transformation 13.22 ist eine affine Transformation; man sagt, daß eine Ellipse einaffines Abbild eines Kreises ist. Die Abbildung 13.9 gibt dies wieder. Sie enthalt auchgleichzeitig eine Moglichkeit, eine Ellipse aus einem Kreis heraus zu zeichnen.
Gestutzt auf die astronomischen Messungen von Tycho de Brahe (1546 – 1601) entdeckteJ. Kepler (1571 – 1630), daß sich die Planeten um die Sonne nicht auf Kreisbahnen sondernauf elliptischen Bahnen mit der Sonne im Brennpunkt bewegen. Er konnte damit und mitquantitativen Aussagen uber Umlaufzeiten das heliozentrische Kopernikanische Systemstutzen. Die Halbachsen der Bahnellipse verhalten sich im Falle der Erde wie 7200 zu7199 (Exzentrizitat ε = 0, 017), so daß es verstandlich erscheint, daß N. Kopernikus (1473– 1543) die Umlaufbahn der Erde um die Sonne noch fur einen Kreis hielt. (Im Falle derMarsbahn ist ε = 0, 0007.) Kepler stellt 1609/1619 die nach ihm benannten Gesetze auf:
1. Der Planet bewegt sich um die Sonne auf einer Ellipse, in deren einem Brennpunktdie Sonne steht.
2. Der von der Sonne zum Planeten gezogene Fahrstrahl uberstreicht in gleichen Zeitengleiche Flachen.

Baumeister: Mathematik III / Stand: Februar 1998 300
3. Die Quadrate der Umlaufzeiten der Planeten verhalten sich wie die Kuben dergroßen Halbachsen ihrer Bahnellipsen.
Hyperbel
x2
a2 −y2
b2 = 1 (a ≥ b > 0) .
Sei etwa a > b. Wir setzen c :=√a2 + b2 und tragen auf der x− Achse die Brennpunkte
F1, F2 mit den Koordinaten (−c, 0) bzw. (c, 0) ein. Die Hyperbel ist der geometrischeOrt aller Punkte, fur die die Differenz der Abstande von den Brennpunkten F1 und F2
konstant (gleich 2a) ist. Denn es gilt fur eine Punkt P mit den Koordinaten (x, y) dieHyperbelgleichung genau dann,wenn
|(x, y)− (−c, 0)| − |(x, y)− (c, 0)| = 2a
gilt. Damit haben wir aber nur den”rechten Ast“ der Hyperbel beschrieben. Der linke
Ast resultiert aus|(x, y)− (c, 0)| − |(x, y)− (−c, 0)| = 2a .
Die Punkte (−a, 0) und (a, 0), in denen die Hyperbel die x−Achse schneidet, heißenScheitel der Hyperbel. Die Geraden
y = ±b
ax
sind die Asymptoten der Hyperbel, da sich die Hyperbelaste im Unendlichen diesenAsymptoten annahern.Die Gleichung etwa des rechten Hyperbelastes kann in Parameterform so geschriebenwerden:
x = a cosh(u) , y = b sinh(u) (u ∈ IR)
Die Konstruktion der Ellipse und Hyperbel aus den Punkten (a, 0), (0, b) mit Zirkel undLineal kann man aus folgender Skizze ablesen:
Abbildung 11.10: Konstruktion der Ellipse und der Hyperbel
Baumeister: Mathematik III / Stand: Februar 1998 301
Ein Satz 13.35 entsprechendes und analog zu beweisendes Ergebnis ist
Satz 11.55
Die Tangente an die Hyperbel in einem Punkt P ist Winkelhalbierende von<) (F1PF2) .
Aus diesem Satz 13.38 folgt nun wieder die Eigenschaft, daß ein von F1 ausgehender oderauf F1 gerichteter Strahl so an der Hyperbel reflektiert wird, daß der reflektierte Strahloder seine Verlangerung durch F2 geht. Die Konstruktion der Tangente an eine Hyperbelist festgehalten in Abbildung 13.10.Bei der Ellipse sehen wir, daß sie als Bahn fur einen Massenkorper in dem Zentralfeldder Sonne auftritt; ein Planet ist eingefangen durch die von der Sonne (große Masse) aufden Planeten (kleine Masse) ausgeubte Gravitationskraft. Die Hyperbel kommt ins Spiel,wenn wir uns einen Massenkorper, der mit positiver Engergie ins Kraftfeld der Sonneeintritt, vorstellen: Er beschreibt dann eine Hyperbelbahn, auf der er das Sonnensystemdurcheilt und schließlich wieder verlaßt.
Parabel
y = 2px (p > 0) .
Wir markieren auf der x−Achse den Brennpunkt F mit den Koordinaten (p/2, 0) undzeichnen die Gerade x = −p/2, welche Leitlinie der Parabel heißt, ein.Die Parabel ist also der geometrische Ort aller Punkte, die vom Brennpunkt und derLeitlinie den gleichen Abstand haben.
Ein Satz 13.38 entsprechendes Ergebnis ist
Satz 11.56
Die Tangente an die Parabel in einem Punkt P ist die Winkelhalbierende von<) (FPL), wobei L der Fußpunkt des Lotes von P auf die Leitlinie ist.
Bringt man in einem Brennpunkt eines Parabolspiegels eine Lichtquelle an, so werden dieLichtstrahlen parallel zur Achse der Parabel reflektiert. Dies wird bei der Konstruktionvon Scheinwerfern ausgenutzt. Treffen Lichtstrahlen parallel zur Achse auf den Parabol-spiegel dann gehen die reflektierten Lichtstrahlen durch den Brennpunkt. Diese Eigen-schaft kann bei der Konstruktion eines Sonnenofens ausgenutzt werden; die Bezeichnung
”Brennpunkt“ ist also mehr als angebracht.
Von Archimedes (287 ? – 212 v.Chr.) wird berichtet, daß er im Krieg gegen die Romereinen Parabolspiegel eingesetzt hat, um die Flotte des Feindes in Brand zu setzen.Bei der Bewegung von Massenkorpern in einem Zentralfeld kommt die Parabel ins Spiel,wenn wir uns einen Korper, der mit Engergie Null ins Kraftfeld der Sonne “eintritt“,vorstellen: Er beschreibt dann eine Parabelbahn, auf der er das Sonnensystem durcheiltund schließlich wieder mit Energie Null “verlaßt“.

Baumeister: Mathematik III / Stand: Februar 1998 302
Wie wir oben gesehen haben, bestehen zwischen Ellipse, Hyperbel und Parabel viele Ge-meinsamkeiten. Der Schlussel zum Verstandnis hierfur ist neben der gemeinsamen Defini-tion als geometrischer Ort die Menaichmos (um 350 v.Chr.) zugeschriebene Entdeckung,daß diese Kurven beim Schnitt eines Kreiskegels mit einer geeigneten Ebene entstehen.Sie heißen daher auch Kegelschnitte. Von A. Durer (1471 – 1528) gibt es dazu illustra-tive Bilder. Die Bestatigung, daß dies so ist, liefern wir im Kapitel uber den euklidischenRaum mit etwas Rechnung in (dreidimensionalen) Koordinaten.
11.6 Vektorraume
Definition 11.57
Sei IK ein Korper mit Einselement 1, sei V eine Menge und seien Verknupfungen
⊕ : V × V 3 (u, v) 7−→ u⊕ v ∈ V , (Addition)
: IK ×V 3 (a, v) 7−→ a v ∈ V , (Skalare Multiplikation)
gegeben. V heißt zusammen mit ⊕, ein IK – Vektorraum (oder IK – linearerRaum), falls gilt:
(V1) (V,⊕) ist abelsche Gruppe.
(V2) Fur alle u, v ∈ V, a, b ∈ IK gilt:
(1) (a+ b) v = a v ⊕ b v ,
(2) a (u⊕ v) = a v ⊕ a v ,
(3) (a · b) v = a (b v) ,
(4) 1 v = v .
Die Elemente von V heißen Vektoren, die Elemente von IK Skalare und IK heißtSkalarkorper.
Beispiel 11.58
Sei IK ein Korper mit den Verknupfungen +, · . Dann ist fur jedes n ∈ IN IK n zusammenmit der Addition
⊕ : IKn× IK n 3 ((x1, . . . , xn), (y1, . . . , yn)) 7−→ (x1 + y1, . . . , xn + yn) ∈ IKn
und der skalaren Multiplikation
: IK × IK n 3 (a, (x1, . . . , xn)) 7−→ (ax1, . . . , axn) ∈ IK n
ein Vektorraum uber IK .
Fur IK := IR erhalten wir Modelle, in dem unsere physikalische Umwelt sich ganz gut ab-bilden laßt: IR3 dient als Modell fur den uns umgebenden Raum, IR4 dient als Modell, das
Baumeister: Mathematik III / Stand: Februar 1998 303
als Beschreibungsmittel der Raum–Zeit–Welt geeignet ist und in der RelativitatstheorieVerwendung findet. 2
In einem Vektorraum (V,⊕,) ist auch eine Subtraktion erklart:
: V × V 3 (x, y) 7−→ x y := x⊕ (−y) ∈ V ,
wobei −y das Negative zu y bezuglich der Addition in der abelschen Gruppe (V,⊕) ist.Damit gilt dann fur alle x ∈ V :
x x = θ ,
wobei θ das neutrale Element in der abelschen Gruppe (V,⊕) ist.
Die Bezeichnungen ⊕, in einem Vektorraum (V,⊕,) haben wir zur Unterscheidungvon der Notation in konkreten Vektorraumen gewahlt, in denen meist ⊕ mit einer Additi-on + und mit einer Multiplikation · in Verbindung gebracht werden kann (siehe Beispiel11.58). Dies nimmt man zum Anlaß, allgemein die Verknupfungen in einem Vektorraumschlicht als +, ·,− zu schreiben; selbst · laßt man meist noch weg, wie es bei Multiplika-tionen in IR auch der Fall ist. Allerdings empfiehlt es sich, das neutrale Element in derGruppe (V,+) zur Unterscheidung von der skalaren Null immer noch als θ zu bezeichnen.Im Beispiel V := IRn bedeutet dies etwa θ := (0, . . . , 0) .
Die Struktur des Vektorraums spielt die zentrale Rolle in der Linearen Algebra/Analy-tischen Geometrie, also in dem “Kalkul“, der algebraisches Rechnen und analytischesWerkzeug so erfolgreich verbindet. Gegenstande der Betrachtung in der Linearen Algebrasind lineare Gleichungssysteme, Basis, Dimension, lineare Abbildungen (als denzur Struktur des Vektorraums passenden Abbildungen), Determinanten, quadratischeFormen (als Verallgemeinerungen der Flachen zweiter Ordnung).Der Begriff eines (endlich erzeugten) Vektorraums findet sich prazise formuliert bei H.Grassmann (1809 – 1877), seine Ideen wurden aber erst nach seinem Tod aufgegriffen,insbesondere von G. Peano (1858 – 1932). Ihm standen nun die mengentheoretischenSprechweisen zur Verfugung, er beschrankte sich auch nicht auf endlich erzeugte Vek-torraume. In Lehrbuchern findet sich der Begriff des abstrakten Vektorraums zu Beginndes 20. Jahrhunderts.
Definition 11.59
Vektoren x1, . . . , xl in einem Vektorraum V uber IK heißen linear unabhangig,wenn die Implikation
l∑i=1
aixi = θ =⇒ a1 = · · · = al = 0
gilt.Sind die Vektoren x1, . . . , xl nicht linear unabhangig, dann heißen sie linearabhangig. 2
Zum Begriff der Basis und Dimension, in Abschnitt 11.1 haben wir dies konkret schon voll-zogen, kommt man, wenn man in einem Vektorraum nach der einer Menge von Vektoren

Baumeister: Mathematik III / Stand: Februar 1998 304
sucht, mit denen man noch jeden Vektor des Vektorraums als endliche Linearkombinationdarstellen kann; dabei heißt
v =l∑i=1
aixi
Linearkombination von x1, . . . , xl mit Koeffizienten a1, . . . , al , die v darstellt. Sindx1, . . . , xl linear unabhangig, dann sind die Koeffizienten sogar eindeutig durch v be-stimmt; dies sieht man mit Definition 11.59 sofort ein.
Definition 11.60
Eine Menge E von Vektoren in einem Vektorraum V uber IK heißt ein Erzeugen-densystem, wenn es zu jedem v ∈ V endlich viele Vektoren x1, . . . , xl ∈ E undSkalare a1, . . . , al gibt mit
v =l∑i=1
aixi .
Gibt es keine endliches Erzeugendensystem, so heißt der Vektorraum V nicht endlicherzeugt. 2
Beispiel 11.61
Kein Zweifel,
e1 := (1, 0, 0, . . . , 0) , e2 := (0, 1, 0, . . . , 0) , . . . , en := (0, 0, . . . , 0, 1)
ist ein Erzeugendensystem von IRn . 2
Definition 11.62
Eine Menge B von Vektoren in einem Vektorraum V uber IK heißt eine Basis, wennB eine linear unabhangige Menge und ein Erzeugendensystem ist. Ist die Menge Bendlich, so sagen wir, daß der Vektorraum V die Dimension #B hat, anderenfallssagen wir, daß die Dimension von V unendlich sei. 2
In der Definition 11.62 ist eine Schwierigkeit verborgen, denn es ist von vorneherein nichtklar, ob jede Basis gleich viele Elemente besitzt. Dies laßt sich im Falle der endlichenDimension konstruktiv beweisen.Ohne Beweis sei auch mittgeteilt, daß jeder Vektorraum, endlichdimensional oder unend-lichdimensional, eine Basis besitzt. Wir beschranken uns auf konkrete Falle, im Fall IR2
hatten wir dies schon in Satz 11.17 festgestellt.
Kapitel 12
Absolute Geometrie der Ebene
In diesem Kapitel erarbeiten wir den axiomatischen Aufbau der Geometrie (der Ebene)soweit, wie wir ohne Parallelenaxiom kommen. Als Grundbegriffe verwenden wir Punkt,Gerade, Abstand, zentral wird vor allem der (abgeleitete) Kongruenzbegriff sein.
12.1 Einfuhrung
Beim axiomatischen Aufbau der Geometrie treten zwei grundlegend verschiedene Artenvon Begriffen auf:
• (undefinierte) Grundbegriffe, deren Inhalt durch die Axiome bestimmt wird, und
• definierte Begriffe, fur die auf der Basis der Grundbegriffe Definitionen angegebenwerden konnen.
Ebenso gibt es zwei Kategorien von Aussagen:
• Axiome (unbewiesene Grundaussagen) und
• Satze (Aussagen, die aus den Axiomen auf logischem Wege abgeleitet werden).
Es ist nicht von vorneherein zwingend vorgegeben, welche Begriffe als Grundbegriffe de-klariert und welche definiert werden. So ist es zum Beispiel moglich, den Begriff Kon-gruenz als Grundbegriff aufzufassen und den Begriff Bewegung zu definieren, aber ebensogibt es Axiomensysteme der euklidischen Geometrie, bei denen der Grundbegriff Bewe-gung auftritt und auf dieser Grundlage die Kongruenz bestimmt wird. Wir werden einenganz anderen Weg wahlen und den Begriff Abstand als Grundbegriff verwenden und dar-aus Bewegungen und Kongruenz definieren. Auswahlmoglichkeiten bestehen auch bei derFestlegung der Axiome – hier ist zu entscheiden, welche Aussagen aus welchen Aussagenbewiesen werden sollen.
Fur ein und dieselbe mathematische Theorie kann es recht unterschiedliche Axiomensy-steme geben. Fur die euklidische Geometrie gibt es eine sehr große Zahl von Axiomensy-stemen, die alle zueinander aquivalent sind, aber vollig verschiedene Grundbegriffe undAxiome enthalten. Welches Axiomensystem benutzt wird, hangt von speziellen vefolgten
305
Baumeister: Mathematik III / Stand: November 1997 306
Zielstellungen ab und ist auch eine”Geschmacksfrage. Oft steht
”mathematische Ele-
ganz“ dem leichten Verstandnis eines Axiomensystems gegenuber. So ist beispielsweisedie Forderung nach einem unbedingt minimalen Axiomensystem mit einigen recht schwerverstandlichen Axiomen verbunden.
Als Grundbegriffe unseres Axiomensystems verwenden wir Punkt, Gerade, Abstand.Alle anderen Begriffe konnen dann damit definiert werden.
Die Axiome lassen sich in 5 Axiomengruppen zusammenfassen:
(I) Inzidenzaxiome
(II) Abstandsaxiome
(III) Anordnungsaxiome
(IV) Bewegungsaxiom
(V) Parallelenaxiom
Die Axiome I – IV sind die Axiome, auf die wir unsere Geometrie in diesem Kapitelaufbauen.1 Die entstehende Geometrie nennen wir absolute Geometrie. Im nachstenKapitel fugen wir dann unterschiedliche Varianten des Parallelenaxioms hinzu. Es entste-hen dann euklidische und nichteuklidische Geometrien.Mit den Axiomengruppen I – V steht ein vollstandiges Axiomensystem der ebenen Geo-metrie zur Verfugung. Entwickelt wurde dieses Axiomensystem in den sechziger Jahrenvon dem russischen Mathematiker und Mathematikdidaktiker A.N. Kolmogorow (1903 –1987), der vor allem durch seine Arbeiten auf dem Gebiet der Wahrscheinlichkeitstheoriebekannt wurde. Wesentliche Grundideen, auf denen das Axiomensystem aufgebaut ist,wurden jedoch von Kagan bereits 1902 vorgestellt.Die Gruppe der Inzidenzaxiome (incidere (lat.): hineinfallen) beschaftigt sich mit derelementarsten geometrischen Relation, namlich mit der Zusammmengehorigkeit von Punk-ten und Geraden. Hinter der Gruppe der Abstandsaxiome verbergen sich Eigenschaf-ten, die wir aus Kapitel 11 schon in einer konkreten Situation kennen. Die Gruppe derAnordnungsaxiome dient dazu, Begriffe wie Strahl, Strecke und Winkel einzufuhren.Das Bewegungsaxiom wird benotigt, um Kongruenzgeometrie betreiben zu konnen. DieReihenfolge der Axiomengruppe ist nicht beliebig, da sie aufeinander aufbauen.
Ein streng logisch–deduktives Arbeiten stellt in der Geometrie eine besondere Schwie-rigkeit dar, da geometrische Begriffe immer anschauliche Vorstellungen hervorrufen, wasabstraktes Arbeiten in der Geometrie erschwert.
Neben der Frage, welche Satze der Geometrie aus bestimmten Axiomengruppen folgen,ist auch interessant, welche geometrischen Eigenschaften aus den entsprechenden Axio-men heraus noch nicht gegeben sind. Dazu werden Modelle einzelner Axiomengruppen
1Wir folgen ziemlich eng der Darstellung in A. Filler, Euklidische und nichteuklidische Geometrie, BIWissenschaftsverlag, 1993
Baumeister: Mathematik III / Stand: November 1997 307
betrachtet, die verdeutlichen, welche”Spielraume“ diese Axiomengruppe offenlassen. Je
mehr Axiome hinzugezogen werden, desto kleiner werden diese”Spielraume“ und dem-
nach die Vielfalt der moglichen Modelle.
12.2 Inzidenzaxiome
Unter Inzidenzgeometrie wird die Herleitung von Folgerungen aus den Inzidenzaxiomenund die Betrachtung von Modellen dieser Axiomengruppe verstanden. Daruber hinaus istder Begriff Inzidenzgeometrien als Bezeichnung fur einzelne konkrete Modelle der In-zidenzaxiome gebrauchlich.
I. Inzidenzaxiome
I/1 Jede Gerade ist eine Punktmenge.
I/2 Zu zwei beliebigen, voneinander verschiedenen Punkten gibt es genau eine Gera-de, welche diese beiden Punkte enthalt.
I/3 Jede Gerade enthalt mindestens einen Punkt.
I/4 Es existieren (mindestens) drei Punkte, die nicht einer Geraden angehoren.
Bevor wir die wichtigsten Satze auf der Grundlage der Axiome I/1 - I/4 beweisen, sindeinige Bezeichnungen und Sprechweisen zu klaren:
• Punkte werden mit Großbuchstaben A,B,C, . . . , P,Q, . . . bezeichnet, Geraden be-zeichnen wir mit Kleinbuchstaben g, h, . . ..
• IP ist die Menge aller Punkte, ′G ist die Menge aller Geraden. Die Menge allerPunkte wird auch Ebene genannt.
• Folgende Sprech– und Schreibweisen werden synonym verwendet:
– Der Punkt P ist Element der Geraden g (P ∈ g).
– P indiziert mit g ; P liegt auf g.
– P gehort g an; P ist ein Punkt der Geraden g.
• Ebenso synonym gebraucht werden
– P ist Schnittpunkt der Geraden g und h.
– P ∈ g∩h oder (falls g und h nur den einen Punkt gemeinsam haben, also nichtidentisch sind) P = g ∩ h.
Baumeister: Mathematik III / Stand: November 1997 308
Definition 12.1
Seien g, h Geraden.
(a) g, h schneiden sich, falls #g ∩ h = 1 gilt.
(b) g, h sind parallel, falls g ∩ h = ∅ oder g = h gilt .
2
Definition 12.2
Eine Menge von Punkten heißt kollinear, falls es eine Gerade gibt, zu der alle diesePunkte gehoren. 2
Satz 12.3
(a) Zwei Geraden, die nicht identisch sind, haben hochstens einen Punkt gemein-sam.
(b) Sind g, h Geraden und existieren verschiedene Punkte P,Q, die beide sowohlauf g als auch auf h liegen, so sind g, h identisch.
Beweis:Die beiden Aussagen (a), (b) sind aquivalent. Also genugt es (b) zu zeigen.Wegen Axiom I/2 existiert genau eine Gerade, die P und Q enthalt. Daher muß es sichbei g und h um ein und dieselbe Gerade handeln.
Satz 12.4
Es existieren mindestens drei paarweise verschiedene Geraden, d.h. # ′G ≥ 3.
Beweis:Nach Axiom I/4 existieren drei Punkte P,Q,R, die nicht kollinear sind. Nach I/2 gibt esGeraden gPQ durch P,Q, gPR durch P,R und gQR durch Q,R. Die Geraden sind vonein-ander verschieden, denn sonst waren P,Q,R kollinear.
Unter einem Modell einer mathematischen Theorie (im hier vorliegenden Fall der AxiomeI/1 - I/4) verstehen wir die Interpretation dieser Theorie in einer bereits bekannten (ma-thematischen oder nichtmathematischen) Struktur. Das bedeutet, daß die in der Theorieverwendeten Grundbegriffe innerhalb der bekannten Struktur eine konkrete Bedeutungzugewiesen bekommen und untersucht wird, ob bei dieser Interpretation der Grundbe-griffe die Axiome der Theorie erfullt sind. Wir betrachten dazu ein Beispiel.
Modell 1:Gegeben seien vier Halbkugeln H1, . . . , H4. Setzt man zwei dieser Halbkugeln Hi und Hj
zusammen, so ergibt sich daraus eine Kugel Kij , wobei wir die Halbkugeln als Elemente derKugel und die Kugel als Vereinigungsmengen jeweils zweier Halbkugeln auffassen(K12 =
Baumeister: Mathematik III / Stand: November 1997 309
H1 ∪H2). Unsere Struktur besteht also aus vier Halbkugeln und der”Operation“, Halb-
kugeln zu Kugeln zusammenzufugen. Diese Struktur darf als (zumindet intuitiv) be-kannt vorausgesetzt werden. Die Grundbegriffe unserer Theorie interpretieren wir in dieserStruktur folgendermaßen.
IP := Menge der HalbkugelnH1, . . . , H4,
′G := Menge aller moglichen Kugeln, die sich durch diese vier Halbkugeln
zusammensetzen lassen, also K12, K13, K14, K23, K24 und K34 .
Die Axiome der Gruppe I sagen fur dieses Modell nun folgendes aus:
I/1 Jede Kugel ist eine Menge von Halbkugeln.
I/2 Zu zwei beliebigen, voneinander verschiedenen Halbkugeln gibt es genau eine Kugel,welche diese beiden Halbkugeln enthalt.
I/3 Jede Kugel enthalt mindestens eine Halbkugel.
I/4 Es existieren (mindestens) drei Halbkugeln, die nicht einer Kugel angehoren.
Offensichtlich gelten alle diese Aussagen. Modell 1 ist also tatsachlich ein Modell derInzidenzaxiome.
Innerhalb des Modells 1 wurden die Grundbegriffe”Punkt“ und
”Gerade“ definiert. Kon-
nen Grundbegriffe also doch definiert werden ? Die Antwort auf diese Frage ergibt sichdaraus, daß die Definitionen fur Punkt und Gerade nur auf das spezielle Modell bezogensind. Es handelt sich dabei also nicht um allgemeingultige Definitionen dieser Begriffesondern lediglich um modellbezogene Interpretationen. In anderen Modellen werden dieseBegriffe vollig anders definiert (interpretiert).
Eine Verstandnisschwierigkeit durfte sich aus der Formulierung”Interpretation in einer
bekannten Struktur“ ergeben. Wahrend fur den theoretisch–axiomatischen Aufbau derGeometrie die streng deduktive Herleitung aller Aussagen gefordert wird, machen wir in-nerhalb des Modells von anschaulich einleuchtenden Tatsachen Gebrauch. Dies ist dahergerechtfertigt, daß mit der Betrachtung von Modellen ein vollig anderes Ziel verfolgt wird,als mit dem axiomatischen Aufbau einer Theorie. Da wir bei dem Aufbau einer Theoriebildlich gesprochen,
”Neuland“ betreten, ist hierbei, also bei der Ableitung allgemeingulti-
ger Schlußfolgerungen, ein besonders exaktes Vorgehen notig. Bei der Betrachtung vonModellen bewegen wir uns hingegen auf
”vertrautem Terrain“ . Ein Ziel der Betrachtung
von Modellen besteht in der Veranschaulichung bestimmter Aspekte einer Theorie. Ausdem Modell konnen unter keinen Umstanden allgemeingultige Schlußfolgerungen fur dieTheorie abgeleitet werden.Ein zweites Ziel bei der Betrachtung von Modellen besteht darin, die Widerspruchs-freiheit einer Theorie zu belegen. Lassen sich namlich die Grundbegriffe einer Theorieinnerhalb einer bekannten Struktur in einer Weise interpretieren, daß die Axiome wahreAussagen ergeben, dann kann diese Theorie keine Widerspruche enthalten, falls nicht inder Struktur an sich Widerspruche auftreten. Im Hinblick auf den Aspekt des Nachweisesder Widerspruchsfreiheit ist es also gunstig, auf
”abgesichertere“ Strukturen zuruckzu-
greifen als im Modell 1. Dafur bietet sich beispielsweise die Mengenlehre an.

Baumeister: Mathematik III / Stand: November 1997 310
Modell 2:Wir betrachten die Menge M , die aus vier Elementen A,B,C, und D besteht. DieseElemente nennen wir Punkte, alle Zweiermengen von (verschiedenen) Elementen dieserMenge Geraden. Mit den zu Beginn des Abschnitts eingefuhrten Bezeichnungen ist also
IP = M und ′G = A,B, A,C,A,D, B,C, B,D, C,D
Man uberzeugt sich leicht, daß die Axiome I/1 bis I/4 erfullt sind. Eine triviale Veran-schaulichung des Modells ist:
In den Modellen 1 und 2 existieren 4 Punkte und 6 Geraden, wobei jede Gerade 2 Punkteenthalt. Diese Eigenschaften der Modelle sind nicht allgemeingultig aus den Axiomenableitbar. Umgekehrt bedeutet dies, daß aus den Inzidenzaxiomen nicht ableitbar ist, daß
• unendlich viele Punkte existieren,
• unendlich viele Geraden existieren,
• jede Gerade unendlich viele Punkte enthalt.
Zusatzliche Axiome sind notig, um dies zu sichern.
Modell 3:Sei IP := A,B,C, ′G := A,B, A,C, B,C.Hier haben wir ein minimales Modell, in dem die Axiome I/1 bis I/4 erfullt sind. Mankann sich namlich leicht uberlegen, daß man mit weniger Punkten und Geraden nichtauskommt. Eine triviale Veranschaulichung des Modells ist:
Wir haben naturlich großes Interesse, daß die euklidische Geometrie der Ebene, wie wirsie in Kapitel 11 kennengelernt haben, hierher paßt. Dies ist Inhalt von
Modell 4:Sei IP := IE 2, ′G := Hz,d|z ∈ IR2, z 6= θ; d ∈ IRMan weist nun mit den Ergebnissen des Kapitels 11 nach, daß die Axiome I/1 bis I/4gelten.
Die Vielfalt der moglichen Modelle ist fur die Axiomengruppe I also noch sehr groß. Durchdie Hinzunahme weiterer Axiomengruppen in unsere Betrachtungen wird die Zahl derModelle immer kleiner und die Gestalt der Modelle wird immer mehr den Vorstellungenvon einer Geometrie der Ebene entsprechen.
Baumeister: Mathematik III / Stand: November 1997 311
12.3 Abstandsaxiome
II. Abstandsaxiome
II/1 Zu zwei beliebigen Punkten A und B gibt es eine nichtnegative reelle Zahl d, diegenau dann verschwindet, wenn A = B gilt. Diese Zahl wird als Abstand |AB|der Punkte A und B bezeichnet.
II/2 Fur zwei beliebige Punkte A und B gilt |AB| = |BA|.
II/3 Fur drei beliebige Punkte A,B, und C gilt
|AB|+ |BC| ≥ |AC|.
Falls A,B und C auf einer Geraden liegen, so gilt eine der drei Gleichungen
|AB|+ |BC| = |AC|,
|AC|+ |CB| = |AB|,
|BA|+ |AC| = |BC|
ist umgekehrt eine dieser drei Gleichungen erfullt, so liegen A,B und C auf einerGeraden.
Um Modelle der Axiomengruppe I zu Modellen der Axiomengruppe I und II zu erweitern,muß in diesen Modellen der Abstandsbegriff geeignet festgelegt werden.
Beispiel 12.5
Betrachte Modell 3:
IP := A,B,C , ′G := A,B, A,C, B,C.
Als Abstandsbegriff legen wir fest:
|PQ| := d(P,Q) =
1 , falls P = Q0 , falls P 6= Q
Man kann sich leicht uberzeugen, daß damit die Abstandsaxiome II/1 bis II/3 erfullt sind.Ebenso geht man in den Modellen 1,2 vor. 2
Beispiel 12.6
In der euklidischen Geometrie der Ebene (IP , ′G wie in Modell 4) verwende man den Betrag| . | als Abstandsfunktion. Klar die Axiome II/1 bis II/3 sind erfullt.Statt des ublichen euklidischen Abstands kann man es auch mit dem sogenannten l1−Abstand versuchen:
d1(x, y) := |x1 − y1|+ |x2 − y2| , (xi, yi) ∈ IR2, i = 1, 2.
Baumeister: Mathematik III / Stand: November 1997 312
Offensichtlich genugt auch diese Abstandsfunktion den Abstandsaxiomen II/1 bis II/3 1.Aussage. Die 2. Aussage in II/3 ist verletzt, wie man an den Punkten A(x1, x2), B(y1, y2)mit dem Punkt C(y1, x2) sieht. Dafur verantwortlich ist die Tatsache, daß die obigenGeraden kurzeste Verbindungen nur fur den euklidischen Abstand darstellen. 2
Kommen wir nun zu Folgerungen aus den Axiomen I und II. Als (neu zu definierender)Begriff kommt nun Halbgerade und Strecke hinzu.
Definition 12.7
Ein Punkt B liegt zwischen zwei Punkten A und C, falls B von A und C ver-schieden ist und
|AB|+ |BC| = |AC|
gilt. Wir schreiben dann Zw(A,B,C). 2
Folgerung 12.8
(a) Aus Zw(A,B,C) folgt Zw(C,B,A).
(b) Falls Zw(A,B,C) gilt, so sind A,B,C kollinear.
(c) Von drei verschiedenen kollinearen Punkten liegt stets (mindestens) einer zwi-schen den beiden anderen.
Beweis:Zu (a)Es gelte Zw(A,B,C). Dann ist B verschieden von C und A und es gilt
|AB|+ |BC| = |AC|
Wegen I/2 gilt aber damit auch
|CB|+ |BA| = |AC|
und damit Zw(C,B,A) .Zu (b)Folgt aus II/3.Zu (c)Folgt aus II/3.
Es sei an dieser Stelle bemerkt, daß keinesfalls die Existenz dreier Punkte A,B, und Cmit Zw(A,B,C) nachgewiesen werden kann. Dies laßt sich leicht dadurch begrunden,daß in den Modellen 1,2 und 3 Geraden jeweils nur zwei Punkte enthalten und dreikollineare Punkte deshalb uberhaupt nicht vorhanden sind. Selbstverstandlich gelten inallen Modellen der Axiomengruppe I und II, insbesondere bei den Modellen 1 – 4, diedrei oben aufgefuhrten Folgerungen. Bei genauer Betrachtung laßt sich jedoch feststellen,daß die Voraussetzungen fur diese Folgerungen nicht erfullt sind, falls keine drei kollinearePunkte existieren. Somit gelten diese Folgerungen zwar, beinhalten aber fur bestimmteModelle nur eine Aussage uber eine leere Menge.

Baumeister: Mathematik III / Stand: November 1997 313
Definition 12.9
(a) Als offene Strecke (AB) zwischen den voneinander verschiedenen PunktenA und B wird die Menge aller Punkte X bezeichnet, die zwischen A und Bliegen:
(AB) := X|X ∈ IP ; es gilt Zw(A,X,B
(b) Als abgeschlossene Strecke AB (oder Strecke oder Verbindungsstrecke)wird die Vereinigungsmenge der offenen Strecke (AB) mit den Punkten A undB bezeichnet:
AB := (AB)∪ A,B.
(c) Die Punkte A und B heißen Endpunkte der Strecke AB.
(d) Der Abstand |AB| heißt Lange der Strecke AB
Die Bezeichnung “Lange“ der Strecke fur die Zahl |AB| ist nicht ganz korrekt, aber weit-hin verbreitet. Korrekt ware es, diese Zahl als Langenmaß oder Maßzahl zu bezeichnen.Eine Streckenlange ist streng genommen keine Zahl, sondern eine Aquivalenzklasse kon-gruenter Strecken. Um unnotige Schwierigkeiten zu vermeiden und in Anbetracht derTatsache, daß in der Umgangssprache (aber auch im Mathematikunterricht) Langenmaß-zahlen einfach nur Langen genannt werden, benutzen wir diese Bezeichnung ebenfalls.
Definition 12.10
Seien O und A zwei verschiedene Punkte.
(a) Die Mengen OA+ und OA− mit
OA+ := P |P ∈ IP , Zw(OAP ) oder Zw(OAP ) oder P = A
OA− := P |P ∈ IP , Zw(POA)
heißen offene Halbgeraden mit dem Anfangspunkt O.
(b) Die Vereinigungsmenge einer offenen Halbgeraden mit ihrem Anfangspunktheißt abgeschlossene Halbgerade.
Satz 12.11
Sei g eine Gerade und O,A zwei verschiedene Punkte auf dieser Geraden. Dann giltfur die offenen Halbgeraden OA+ und OA−:
OA+ ∩OA− = ∅ , OA+ ∪ OA− = g\O .
Beweis:Zu (a)Sei P ∈ OA+ ∩ OA−. Dann gilt nach Definition 12.10 Zw(OAP ) oder Zw(OAP ) oderP = A und Zw(POA). Wegen Folgerung 12.8 (c) kann jedoch von drei Punkten nur einer
Baumeister: Mathematik III / Stand: November 1997 314
zwischen den beiden anderen Punkten liegen, was fur P 6= A sofort zu einem Widerspruchfuhrt. Ist jedoch P = A , kann wegen O 6= A nicht Zw(AOA) gelten, also gehort P = Anicht zu OA−.Zu (b)Sei Q ein von O verschiedener Punkt der Geraden g. Nach Folgerung 12.8 (c) liegt dannvon den PunktenO,A undQ einer zwischen den beiden anderen oder Q ist mitA identisch.In beiden Fallen gehort Q einer der beiden Halbgeraden OA+ und OA− und somit derVereinigungsmenge OA+ ∪OA− an.
Der obige Satz 12.11 laßt sich auch anders formulieren:
Satz 12.12
Ein Punkt O einer Geraden g teilt die Menge der von O verschiedenen Punkte derGeraden g in zwei disjunkte Mengen derart, daß
(a) fur zwei Punkte A und B, die verschiedenen Mengen angehoren, der Punkt Ozwischen den Punkten A und B liegt,
(b) wenn die Punkte A und B derselben Menge angehoren, einer von ihnen zwi-schen O und dem anderen Punkt liegt.
Beweis:Der Beweis dieser Variante sei dem Leser uberlassen.
Mit den bisher zugrundegelegten Axiomen I und II laßt sich nicht nachweisen, daß essich bei den offenen Halbgeraden um nichtleere Mengen handelt. So kann anhand derModelle 1–3 nachgepruft werden, daß Halbgeraden auch die leere Menge sein konnen.Dieser Teil wird im nachsten Abschnitt durch die Hinzufugung von Anordnungsaxiomenausgeschlossen.
12.4 Anordnungsaxiome
III. Anordnungsaxiome
III/1 Zu jeder nichtnegativen reellen Zahl a und jedem Punkt O der Ebenen existiertauf jedem Strahl mit dem Anfangspunkt O genau ein Punkt A mit |OA| = a.
III/2 Eine beliebige Gerade g teilt die Menge der ihr nicht angehorenden Punkte derEbene in zwei nichtleere, disjunkte Mengen derart, daß
(a) die Verbindungsstrecke zweier beliebiger Punkte, die verschiedenen Mengenangehoren, die Gerade g schneidet und
(b) die Verbindungsstrecke zweier beliebiger Punkte, die derselben Menge an-gehoren, die Gerade g nicht schneidet.
Baumeister: Mathematik III / Stand: November 1997 315
Folgerung 12.13
Jede Gerade, jede Strecke, jede Halbgerade enthalt unendlich viele Punkte.
Beweis:Folgt unmittelbar aus Axiom III/1 und den Definitionen von Strecken und Halbgeraden.
Aus der obigen Folgerung 12.13 wird nun klar, daß die endlichen Modelle keine Modelleder Axiomengruppen I,II,III sind. Es bleibt nur Modell 4 ubrig.
Beispiel 12.14
Das Modell 4 ist in der Tat ein Modell der Axiomengruppe I,II,III, denn:Axiom II/1 folgt sofort durch Betrachtung einer Geraden durch O mit Richtungsvektore1 und Wahl von A mit den Koordinaten (x1 + a, x2) wenn O die Koordinaten (x1, x2)hat.Axiom III/2 folgt aus der Betrachtung der Mengen
Hz,α , H+z,α\Hz,α , H
−z,α\Hz,α,
wobei z = w+, α =< w+, p > ist, wenn die gegebene Gerade g die ParameterdarstellungLp,w hat (siehe Satz 11.18). 2
Definition 12.15
Die beiden in Axiom III/2 ausgezeichneten nichtleeren disjunkten Mengen heißenoffene Halbebenen bezuglich g mit Randgerade g. 2
Definition 12.16
Seien A,B,C drei nichtkollineare Punkte. Die Punktmenge
(AB) ∪ (BC)∪ (AC)∪ A,B,C
heißt Dreieck ABC. Die offenen Strecken (AB), (BC), (AC) heißen offene Seiten,die Strecken AB,BC,AC Seiten und die Punkte A,B,C Eckpunkte des DreiecksABC. 2
Satz 12.17
Sei ABC ein Dreieck und sei g eine Gerade, die keinen der Eckpunkte dieses Drei-ecks enthalt. Hat g mit der Seite AB einen Punkt gemeinsam, so hat g auch mitgenau einer der beiden Seiten AC und BC einen gemeinsamen Punkt.
Beweis:Da A,B,C nicht auf g liegen, und die Verbindungsstrecke AB die Gerade g schneidet,liegen A und B nach Axiom III/2 und Definition 12.15 in unterschiedlichen offenen Halb-ebenen bzgl. g.
Baumeister: Mathematik III / Stand: November 1997 316
Schneidet AC die Gerade g nicht, dann liegen A,C in derselben offenen Halbebene unddaher B,C in verschiedenen offenen Halbebenen. Also hat g mit BC einen gemeinsamenPunkt.Schneidet AC die Gerade g, dann liegen A,C in verschiedenen offenen Halbebenen. Dannliegen aber B,C in derselben offenen Halbebene und BC schneidet g nicht.
Der obige Satz heißt Satz von Pasch. Dieses Resultat taucht in vielen Axiomensystemenals
”Paschsches Anordnungsaxiom“ auf. Der Grund ist der, daß die Aussage von Satz
12.17 aquivalent mit Axiom III/2 ist (Beweis!).
Wir kommen zum wichtigen Begriff des Winkels. Er wird als Figur eingefuhrt.
Definition 12.18
Ein Paar (p, q) von Halbgeraden p und q mit einem gemeinsamen Anfangspunkt Oheißt (orientierter, gerichteter) Winkel <) (p, q) zwischen p und q, die Halbgera-den p und q werden als Schenkel, der Punkt O als Scheitel des Winkels <) (p, q)bezeichnet. Sind p und q verschiedene Halbgeraden einer Geraden, so wird <) (p, q)gestreckter Winkel, bei p = q wird <) (p, q) Nullwinkel genannt. 2
Falls A ein Punkt einer Geraden g und B ein Punkt einer Geraden h ist, so wird fur denWinkel <) (g, h) mit dem Scheitel O auch die Bezeichnung <) (AOB) verwendet.
Ist ABC ein Dreieck, so werden durch jede Strecke AB,AC,BC jeweils zwei offene Halb-ebenen definiert. Wir setzen:
ABC+ := Halbebene bezuglich AB, in dem C liegt;
ACB+ := Halbebene bezuglich AC, in dem B liegt;
BCA+ := Halbebene bezuglich BC, in dem A liegt.
Definition 12.19
Als Inneres int <) (AOB) eines Winkels <) (AOB) wird die Schnittmenge der Halb-ebenen AOB+ und BOA+ bezeichnet, also:
int <) (AOB) := AOB+ ∩BOA+
2
Bemerkung 12.20Die Definitionen beinhalten offenbar nicht die aus der Anschauungsgeometrie bekanntenuberstumpfen Winkel (Winkel großer als 180o), sondern nur die spitzen, rechten, stumpfenund gestreckten Winkel. Um die uberstumpfen Winkel in den Begriff aufzunehmen, wareeine wesentlich kompliziertere und schwerer handhabbare Winkeldefinition erforderlich.Das Innere eines gestreckten Winkels <) (p, q) wird durch Definition III/4 nicht beschriebenund kann auch nicht eindeutig definiert werden. Naheliegend ware es, darunter eine derbeiden Halbebenen bezuglich der Geraden p, q zu verstehen, allerdings ist durch <) (p, q)keine davon ausgezeichnet. 2
Baumeister: Mathematik III / Stand: November 1997 317
Abbildung 12.1: Das Innere eines Winkels
12.5 Bewegungsaxiom
Die vorangegangenen Abschnitte haben deutlich gemacht, daß unter ausschließlicher Zu-grundelegung der Axiomengruppen I - III kaum interessante Aussagen der Geometriehergeleitet werden konnen. Insbesondere wurde noch kein einziger Satz der Schulgeome-trie bewiesen. Das liegt vor allem daran, daß die Kongruenz geometrischer Figuren nochnicht zur Verfugung stand. Wesentlich voranbringen beim axiomatischen Aufbau der Geo-metrie wird uns das Axiom IV. Bevor wir dieses Axiom betrachten, werden wir zunachstdefinieren, was unter einer Bewegung zu verstehen ist und einige Eigenschaften von Bewe-gungen nachweisen. Beachte, daß wir in der konkreten Situation der euklidischen Ebenebereits Bewegungen betrachtet haben.
Definition 12.21
Eine Bewegung ist eine surjektive Abbildung f : IP → IP , die abstandserhaltend ist,d.h. fur die
|f(A) f(B)| = |AB| fur alle A,B ∈ IP
gilt. 2
Folgerung 12.22
Jede Bewegung ist bijektiv.
Beweis:Nach Definition 12.21 ist eine Bewegung surjektiv. Da eine Bewegung abstandserhaltendist, ist eine Bewegung auch injektiv.
Folgerung 12.23
Die MengeIso (IP ) := φ : IP −→ IP |φ Bewegung
der Bewegungen bildet zusammen mit der Hintereinanderausfuhrung eine Gruppe.
Beweis:
Baumeister: Mathematik III / Stand: November 1997 318
Seien φ, ψ ∈ Iso (IP ). Dann gilt fur alle A,B ∈ IP :
|(φ ψ)(A) (φ ψ)(B)| = |φ(ψ(A))φ(ψ(B))|
= |ψ(A)ψ(B)|
= |AB|
Also ist auch φψ abstandserhaltend. Die Verifikation, daß idIP Identitat und φ−1 Inverseszu φ im Sinne der Gruppendefinition ist, uberlassen wir dem Leser.
Wie fruher schon angedeutet, nennen wir eine Teilmenge F von IP eine Figur.
Satz 12.24
Sei φ eine Bewegung. Dann wird
(a) jede Gerade auf eine Gerade,
(b) jede Strecke auf eine Strecke, deren Endpunkte die Bilder der Endpunkte derOriginalstrecke sind, sowie
(c) jede Halbgerade mit einem Anfangspunkt O auf eine Halbgerade mit dem An-fangspunkt φ(O)
abgebildet.Zusatz: Falls zwei Geraden, Strecken, Halbgeraden oder zwei verschiedene dieserFiguren einen Punkt P gemeinsam haben, so haben die Bildfiguren den Punkt φ(P )gemeinsam.
Beweis:Zu a)Es sei g eine beliebige Gerade, A und B seien zwei Punkte dieser Geraden. Durch (diewegen Folgerung 12.23) voneinander verschiedenen Punkte φ(A) und φ(B) wird wegenAxiom I/2 genau eine Gerade g′ bestimmt. Wir weisen nach, daß die Gerade g auf dieGerade g′ abgebildet wird. Dazu ist zu zeigen, daß erstens jeder Punkt von g auf einemPunkt von g′ abgebildet wird und zweitens ein beliebiger Punkt auf g′ ein Urbild auf gbesitzt. Ist P ein beliebiger Punkt der Geraden g, so gilt nach Axiom II/3
|AP |+ |PB| = |AB| oder |AB|+ |BP | = |AP | oder |PA|+ |AB| = |PB| .
Da φ abstandserhaltend ist, ist dann auch eine der drei folgenden Gleichungen
|φ(A)φ(B)|+ |φ(P )φ(B)| = |φ(A)φ(B)|,
|φ(A)φ(B)|+ |φ(B)φ(P )| = |φ(A)φ(P )|,
|φ(P )φ(A)|+ |φ(A)φ(B)| = |φ(P )φ(B)|
erfullt, was wiederum nach Axiom II/3 bedeutet, daß φ(P ) auf der Geraden g′ liegt. Istumgekehrt Q ein Punkt von g′, so kann aufgrund der Tatsache, daß die inverse Abbildungφ−1 von φ auch eine Bewegung ist, auf gleiche Weise gezeigt werden, daß das Urbildφ−1(Q) des Punktes Q auf g liegt.
Baumeister: Mathematik III / Stand: November 1997 319
Zu (b)Sei P ein Punkt zwischen A und B. Dann gilt
|AP |+ |PB| = |AB|
und daher auch|φ(A)φ(P )|+ |φ(P )φ(B)| = |φ(A)φ(B)| .
Dies bedeutet, daß φ(P ) zwischen φ(A) und φ(B) liegt.Den Beweis von (c) und des Zusatzes uberlassen wir dem Leser.
IV. BewegungsaxiomWenn der Abstand zweier Punkte A und B positiv und gleich dem Abstand zweierPunkte C und D ist, dann gibt es genau zwei Bewegungen, die A auf C und B aufD abbilden. Eine Halbebene bezuglich der Geraden AB wird bei jeder dieser beidenBewegungen auf eine andere Halbebene bezuglich CD abgebildet.
Beispiel 12.25
Wir wissen, daß das Modell 4 (euklidische Ebene IE 2) ein Modell der AxiomengruppeI,II,III ist. Aus Abschnitt 11.3 wissen wir, daß in diesem Modell 4 auch das Bewegungs-axiom erfullt ist. 2
Geben wir speziellen Bewegungen einen Namen !
Definition 12.26
a) Eine Bewegung, bei der alle Punkte einer Geraden g auf sich und die Punk-te der beiden offenen Halbebenen bezuglich g auf Punkte der jeweils anderenHalbebene abgebildet werden, heißt Geradenspiegelung an g.
b) Eine Bewegung, bei der genau ein Punkt P auf sich abgebildet wird, heißtDrehung um P.
c) Eine Bewegung, die alle Punkte einer Geraden g auf Punkte dieser Geradenund keinen Punkt der Ebenen auf sich selbst abbildet und bei der alle Punkteeiner Halbebene H bezuglich g wieder auf Punkte von H abgebildet werden,heißt Verschiebung entlang der Geraden g.
2
Es lassen sich mit diesen Begriffen die folgenden beweisbaren Aussagen formulieren:
1. Jede Bewegung laßt sich als Hintereinanderausfuhrung hochstens einer Geradenspie-gelung, einer Drehung und einer Verschiebung darstellen.
2. Jede Bewegung laßt sich als Hintereinanderausfuhrung von hochstens drei Geraden-spiegelungen darstellen.
Baumeister: Mathematik III / Stand: November 1997 320
In dem konkreten Modell 4 (aus Kapitel 11) kennen wir diese Aussagen zwar noch nichtin dieser feinen Formulierung, sie lassen sich dort jedoch gut einsehen.
Bewegungen sind ein unerlassliches Hilfsmittel bei der Betrachtung von Figuren.
Definition 12.27
Seien M1,M2 ⊂ IP . M1 und M2 heißen kongruent, in Zeichen M1 = M2, fallseine Bewegung f : IP −→ IP existiert mit f(M1) = M2. 2
Klar, beim Begriff der Kongruenz handelt es sich um eine Aquivalenzrelation. Er spieltnun im folgenden Abschnitt eine uberragende Rolle.
Bemerkung 12.28
Bei der Kongruenz von Dreiecken verwenden wir die Bezeichnung ABC ≡ DEF nurdann, wenn bei der die Kongruenz definierenden Bewegung A auf D, B auf E, C auf Fabgebildet wird. Die Reihenfolge bei der Bezeichnung ist daher von Bedeutung. 2
12.6 Satze der absoluten Geometrie
Folgerung 12.29
Zwei Strecken AB und CD sind genau dann kongruent, wenn |AB| = |CD| gilt.
Beweis:Sei f : IP −→ IP eine Bewegung mit f(AB) = f(CD). Seien A′ := f(A), B′ := f(B).Es gilt dann
|CD| = |CA′|+ |A′B′|+ |B′D| = |CA′|+ |AB|+ |B′D| ≥ |AB|
aus Symmetriegrunden gilt auch |AB| ≥ |CD| und wir haben |AB| = |CD|.Es gelte |AB| = |CD|. Nach Axiom IV gibt es eine Bewegung f : IP −→ IP mitf(A) = C, f(B) = D. Dadurch wird die Strecke AB auf CD abgebildet (siehe Satz12.24).
Folgerung 12.30
Zu jedem Winkel <) (g, h) und zu jeder Halbgeraden g′ gibt es in jeder Halbebenebezuglich g′ genau eine Halbgerade h′ mit <) (g′, h′) ≡<) (g, h).
Beweis:Sei O der Schnittpunkt von g und h.Wahle auf g einen Punkt P 6= O und wahle auf h einen Punkt Q mit |OQ| = |OP |, wasnach Axiom III moglich ist. Nach Axiom IV gibt es eine Bewegung f , die O auf O und Pauf Q abbildet. Sei P ′ ein Punkt auf g′ mit |QP ′| = |OQ|. Setze Q′ := f(P ′). Dann giltoffenbar, daß <) (g, h) auf <) (g′, h′) abgebildet wird.
Baumeister: Mathematik III / Stand: November 1997 321
Die obige Folgerung 12.30 beschreibt offenbar die Tatsache, daß Winkel angetragen werdenkonnen. Das folgende Resultat formuliert die Winkeladdition.
Satz 12.31
Seien p, q, r Halbgeraden mit einem gemeinsamen Anfangspunkt O sowie p′, q′, r′
Halbgeraden mit einem Punkt O′ als Anfangspunkt. Liegt die Halgerade r im Innerendes Winkels <) (p, q) und die Halbgerade r′ im Inneren des Winkels <) (p′, q′) und gilt<) (p, r) ≡<) (p′, r′) sowie <) (r, q) ≡<) (r′, q′), so sind auch die Winkel <) (p, q) und<) (p′, q′) zueinander kongruent.
Beweis:Es existieren Bewegungen ϕ, ψ mit
ϕ(<) (p, r)) =<) (p′, r′), ψ(<) (r, q)) =<) (r′, q′).
Beide Bewegungen bilden r auf r′ sowie O auf O′ ab. ϕ bildet die Halbebene bezuglichr, in der p liegt, auf die Halbebene bezuglich r′ ab, in der p′ liegt. Da q und q′ jeweilsin anderen Halbebenen bezuglich r und r′ liegen als p und p′, bildet ϕ die Halbebenenbezuglich r, in der q liegt, auf die Halbebenen bezuglich r′ ab, in der q′ liegt. Da ψ sichebenso verhalt, sind ϕ und ψ nach Axiom IV identisch. Diese Bewegung ϕ bildet also pauf p′, q auf q′ und somit <) (p, q) auf <) (p′, q′) ab.
Die Winkelsubtraktion kann man ahnlich formulieren.
Kommen wir nun zu den wichtigen Kongruenzsatzen fur Dreiecke. Der Kongruenzsatz“SWS“ ist
Satz 12.32
Sind ABC und DEF zwei Dreiecke und gilt
AB ≡ DE,AC ≡ DF, <) (BAC) ≡<) (EDF ),
so sind die beiden Dreiecke ABC und DEF kongruent.
Beweis:Wegen <) (BAC) ≡<) (EDF ) gibt es eine Bewegung ϕ , die <) (BAC) auf <) (EDF ) ab-bildet. Dann gilt aber auch
ϕ(A) = D,ϕ(AB+) = DE+, ϕ(AC+) = DF+ .
Wegen AB ≡ DE gilt |ED| = |AB| = |ϕ(B)D|. Wahle auf DE+ einen Punkt E′ mit|DE′| = |AB| (siehe Axiom III). Es folgt E = E′ = ϕ(B).Analog ergibt sich F = ϕ(C). Die Eckpunkte des Dreiecks ABC werden also auf dieEckpunkte des Dreiecks DEF abgebildet. Also werden auch die Seiten des Dreiecks ABCauf die Seiten der Dreiecks DEF abgebildet. Also sind die gegebenen Dreiecke kongruent.
Ein weiterer Kongruenzsatz ist “WSW“.
Baumeister: Mathematik III / Stand: November 1997 322
Satz 12.33
Sind ABC und DEF zwei Dreiecke und gilt
AB ≡ DE, <) (BAC) ≡<) (EDF ), <) (ABC) ≡<) (DEF ),
so sind die beiden Dreiecke kongruent.
Beweis:Sei P ein Punkt auf DF+ mit |PD| = |AC|. Nach “SWS“ sind die Dreiecke ABC undDEF kongruent und es gilt <) (ABC) ≡<) (DEP ). Da auch <) (ABC) ≡<) (DEF ) gilt, ist<) (DEF ) =<) (DEP ). Dann sind aber EF+ und EP+ identisch. Also liegen F, P sowohlauf der Geraden EP als auch auf der Geraden DP . Da aber diese Geraden nicht identischsind (D ∈ DP ), D /∈ EP, da DEP ein Dreieck ist), gilt P = F . Aus der Kongruenz derDreiecke ABC und DED folgt die Kongruenz der Dreiecke ABC und DEF .
Die Kongruenzsatze “SSS“ und “SSW“ werden bewiesen nach Bereitstellung weitererResultate. Der Basiswinkelsatz (im gleichschenkligen Dreieck) lautet:
Satz 12.34
Ist ABC ein Dreieck mit AC = BC, so sind <) (BAC) und <) (ABC) kongruent.
Beweis:Nach Kongruenzsatz “SWS“ sind die Dreiecke ABC und BAC kongruent (beachte Be-merkung 12.28). Damit sind auch die Winkel <) (BAC) und <) (ABC) kongruent.
In unserem axiomatischen Rahmen haben wir noch die in Kapitel 11 konkret bereitsbetrachteten Objekte
”Mittelpunkt, Lot, Winkelhalbierende, . . .“ zu betrachten.
Satz 12.35
Ist AB eine Strecke und P ein Punkt von AB mit |AP | = |PB|, so heißt P Mittel-punkt der Strecke AB, 2
Folgerung 12.36
Jede Strecke besitzt genau einen Mittelpunkt.
Beweis:P ist Mittelpunkt von AB genau dann, wenn |AB| = |PB| = 1
2|AB| gilt. Es gibt nach
Axiom III genau einen solchen Punkt.
Definition 12.37
Sei <) (p, q) ein Winkel und r eine Halbgerade; O sei der gemeinsame Anfangspunktvon p, q, r . r heißt Winkelhalbierende, falls <) (p, r) und <) (r, q) kongruent sind.
2
Baumeister: Mathematik III / Stand: November 1997 323
Satz 12.38
Jeder Winkel, der kein gestreckter Winkel ist, besitzt genau eine Winkelhalbierende.
Beweis:Sei <) (AOB) kein gestreckter Winkel; es gelte o.E. |OA| = |OB|. Sei P ein Punkt derStrecke AB. Nun ist OP+ genau dann Winkelhalbierende von <) (AOB), wenn P Mittel-punkt von AB ist. Diese Aussage folgt aus dem Basiswinkelsatz 12.34 und dem Kongru-enzsatz “SWS“ (Satz 12.32). Da es nun nach Satz 12.36 genau einen Mittelpunkt vonAB gibt, folgt die Aussage zum Winkel <) (AOB) sofort.
Der Ausnahmefall, daß ein gestreckter Winkel vorliegt, dessen Winkelhalbierende zu be-trachten ist, wird noch behandelt.
Definition 12.39
Sei <) (p, q) ein Winkel. Dann heißen <) (p, q−), <) (p−, q) Nebenwinkel und<) (p−, q−) Scheitelwinkel dazu. 2
Satz 12.40
(a) Sind die Winkel <) (p, q) und <) (p′, q′) kongruent, so ist jeder Nebenwinkel desWinkels <) (p, q) zu seinem entsprechenden Nebenwinkel des Winkel <) (p′, q′)kongruent.
(b) Jeder Winkel ist zu seinem Scheitelwinkel kongruent.
Beweis:Zu (a).Es werde etwa der Nebenwinkel <) (p, q−) und dazu also <) (p′, q′−) betrachtet; O bzw. O′
seien die Schnittpunkte von p, q bzw. p′, q′ .Es gibt genau eine Bewegung φ, die die Halbebene H mit p ∈ H in die Halbebene H ′ mitp′ ∈ H ′, q auf q′ und O auf O′ abbildet (Beweis!).Sei nun ψ eine Bewegung, die die Kongruenz von <) (p, q) und <) (p′, q′) definiert. Danngilt notwendigerweise φ = ψ . Also wird <) (p, q−) auf <) (p′, q′−) abgebildet und die Winkelsind kongruent. Zu (b).Der Winkel <) (q−, p) ist sowohl Nebenwinkel von <) (q−, p−) als auch von <) (p, q). An-wendung von (a) ergibt die Aussage.
Definition 12.41
Ein Winkel, der zu einem seiner Nebenwinkel kongruent ist, heißt rechter Winkel.2
Satz 12.42
Zu jeder Halbgeraden p existiert in jeder Halbebene bezuglich p genau ein rechterWinkel, dessen einer Schenkel p ist.
Beweis:
Baumeister: Mathematik III / Stand: November 1997 324
Sei p = OA+, g die Gerade durch O,A, H eine Halbebene bezuglich g, P ein Punkt in H,der nicht auf g liegt. Sei ϕ die Bewegung, die O auf O, p auf p− und H auf sich abbildet.Ist ϕ(P ) = P, dann sind die Nebenwinkel <) (p,OP+) und <) (p′, OP+) kongruent und<) (p,OP+) ist ein rechter Winkel.Ist P ′ := ϕ(P ) 6= P, dann ist <) (POP ′) kein gestreckter Winkel, da P und P ′ in derselbenHalbebene bezuglich g liegen und O ein Punkt von g ist. Dieser nichtgestreckte Winkel be-sitzt also nach Satz 12.38 genau eine Winkelhalbierende q. Da die Bewegung ϕ den PunktP auf P ′, O auf sich und die Halbgerade p auf p′ abbildet, sind die Winkel <) (p,OP+)und <) (p,OP+) kongruent und da q Winkelhalbierende des Winkels <) (OP+, OP ′+) ist,gilt <) (q, OP+) ≡<) (q, OP−). Wegen Satz 12.40 sind die Winkel <) (p, q) und <) (p−, q)kongruent und <) (p, q) ist nach Definition ein rechter Winkel.
Definition 12.43
(a) Ein Winkel <) (p, q) heißt spitzer Winkel, falls ein rechter Winkel <) (p, r)mit gleichem Scheitel und einem gemeinsamen Schenkel p existiert mit q ∈int <) (p, r).
(b) Ein Winkel, der weder ein rechter noch ein spitzer noch ein gestreckter Winkelist, heißt stumpfer Winkel.
2
Folgerung 12.44
(a) Jeder stumpfe Winkel enthalt einen rechten Winkel.
(b) Jeder Nebenwinkel eines spitzen Winkels ist ein stumpfer Winkel und umge-kehrt.
(c) Kein spitzer Winkel enthalt einen rechten Winkel.
Beweis:Diese Aussagen folgen sehr einfach und seien daher dem Leser uberlassen.
Nachdem wir nun rechte Winkel kennen, liegt es nahe, den Begriff des Senkrechtstehenseinzufuhren. In Kapitel 11 haben wir diesen Begriff aus dem Skalarprodukt heraus ent-wickelt.
Definition 12.45
Zwei Geraden g und h heißen senkrecht aufeinander – wir schreiben dann g⊥h –falls g eine Halbgerade p und h eine Halbgerade q enthalt, so daß <) (p, q) ein rechterWinkel ist. 2
Definition 12.46
Sei P ein Punkt und g eine Gerade. Dann heißt eine Gerade h mit P ∈ h und g⊥hLot von P auf g und der Punkt Q mit Q = g ∩ h heißt Fußpunkt dieses Lotes.
2
Baumeister: Mathematik III / Stand: November 1997 325
Satz 12.47
Fur jeden Punkt P und jede Gerade g existiert genau ein Lot von P auf g.
Beweis:Ist P ∈ g, dann folgt die Aussage aus Satz 12.42. Sei also nun P /∈ g. Sei ϕ die Bewegung,die g auf sich und die Halbraume bezuglich g vertauscht. Sei P ′ := ϕ(P ) und sei Qder Schnittpunkt der Geraden g mit der Geraden durch Punkt P ′. Da Q ∈ g gilt, istϕ(Q) = Q. Also wird OP+ auf OP ′+ und eine Halbgerade QR⊥ von g auf sich abgebildet.Die Winkel <) (QR+, QP+) und <) (QR∗, QP ′+) sind somit kongruente Nebenwinkel unddie Existenz des Lotes folgt.Den Nachweis der Eindeutigkeit des Lotes ubergehen wir.
Kommen wir zum Kongruenzsatz “SSS“.
Satz 12.48
Sind ABC und DEF Dreiecke mit
AB ≡ DE , AC ≡ DF , BC ≡ EF ,
so sind die Dreiecke ABC und DEF kongruent.
Beweis:Nach Axiom IV existiert ein zu DEF kongruentes Dreieck ABP , das mit ABC dieEckpunkte A sowie B gemeinsam hat, wobei P in der Halbebene ABC− liegt. Wegender Transitivitat der Kongruenz genugt es, zu zeigen, daß die Dreiecke ABC und ABPkongruent sind. Dazu sei M der Mittelpunkt der Strecke PC. Nach dem Basiswinkelsatzfolgt, daß die Winkel <) (ACM) und <) (APM) sowie <) (BCM) und <) (BPM) jeweilszueinander kongruent sind. Aus dem Kongruenzsatz “SWS“ ergibt sich <) (ACM) ≡<) (MBP ) sowie (da aus den hergeleiteten Dreieckskongruenzen <) (MBP ) ≡<) (MBC)resultiert) <) (ABC) ≡<) (ABP ) ergibt. Nach dem Kongruenzsatz “SWS“ sind daher dieDreiecke ABC und ABP und folglich auch die Dreiecke ABC und DEF kongruent.
Definition 12.49
Eine Gerade m heißt Mittelsenkrechte einer Strecke AB, falls m den Mittelpunktvon AB enthalt und auf der Geraden durch A und B senkrecht steht. 2
Die Existenz einer Mittelsenkrechten folgt unmittelbar aus der Existenz eines Mittelpunk-tes und eines Lotes.
Satz 12.50
Die Mittelsenkrechte zu einer Strecke AB ist die Menge aller Punkte P mit |AP | =|BP |.
Beweis:Sei m die Mittelsenkrechte.
Baumeister: Mathematik III / Stand: November 1997 326
Sei C der Mittelpunkt der Strecke AB. Sei P ∈ m. Dann sind die Dreiecke ACP undABC nach dem Kongruenzsatz “SWS“ kongruent und somit gilt |AP | = |BP |.Sei nun P ein Punkt mit |AP | = |PB|.Nach dem Kongruenzsatz “SSS“ sind die Dreiecke ACQ und BCQ kongruent. Demnachgilt <) (ACQ) ≡<) (ACQ), <) (ACQ) und <) (BCQ) sind rechte Winkel und die Geradedurch P und C ist (die eindeutig bestimmte) Mittelsenkrechte der Strecke AB. Also liegtP auf der Mittelsenkrechten.
Es ist klar, daß”Kongruenz“ eine Aquivalenzrelation ist. Dadurch wird die Menge aller
Figuren in nichtleere disjunkte Teilmengen (Aquivalenzklassen) zerlegt.
12.7 Winkelmaße
In diesem Abschnitt betrachten wir hauptsachlich die Aquivalenzklassen kongruenter Win-kel. (Eine spezielle Klasse ist die der rechten Winkel.)
Definition 12.51
Als Große α eines Winkels <) (g, h) wird die Menge aller zu <) (g, h) kongruentenWinkel bezeichnet, d.h.
α = <) (p, q)| <) (p, q) ≡<) (g, h)
2
Die Große eines Winkels ist also eine Aquivalenzklasse. In Definition 12.51 ist <) (g, h) einReprasentant dieser Winkelgroße.Es mag auf den ersten Blick etwas ungewohnlich erscheinen, daß die Große keine reelle Zahlist. Es wird aber keine
”absolute“ Große definiert, sondern nur eine Relation
”gleichgroß“.
Man sieht aber, daß es mit dieser Definition gelingt, von der konkreten Lage eines Winkelszu abstrahieren.
Definition 12.52
Seien α, β Winkelgroßen zu den Winklen <) (p, q) bzw. <) (p, r) mit gemeinsamenScheitel. Liegt ein Punkt P ∈ p im Inneren des Winkels <) (p, r), so heißt die Großeγ des Winkels <) (q, r) Winkelsumme von α und β; wir schreiben γ = α + β undnennen α+ β die Summe der Winkelgroßen. 2
Wichtig ist, daß die Definition der Summe der Winkelgroßen unabhangig von den dazuverwendeten Reprasentanten ist. Dies ist hier jedoch gegeben, wie man an Satz ?? sieht.
Haben wir zwei Winkel <) (g, h) und <) (p, q) , so konnen wir diese Winkel aneinanderlegen;es entsteht dann ein gemeinsamer Schenkel und ein gemeinsamer Scheitel. Trifft dann dieSituation aus Definition 12.52 zu, konnen wir die Winkelgroßen, die durch <) (g, h) bzw.<) (p, q) gegeben sind, addieren.
Baumeister: Mathematik III / Stand: November 1997 327
Definition 12.53
Eine Winkelgroße α heißt kleiner als eine Winkelgroße β (α < β), falls eine Win-kelgroße γ mit α + γ = β existiert, wobei γ nicht die Winkelgroße der Nullwinkelist. 2
Satz 12.54
Sei ABC ein Dreieck. Dann ist |AC| kleiner als |BC|, wenn der Winkel <) (ABC)kleiner als der Winkel <) (BAC) ist.
Beweis:
Wir wollen nun jedem Winkel eine Meßzahl zuordnen, die mit der Winkelgroße bezuglichder Relation
”kleiner“ vertraglich ist.
Festsetzung: π sei das Winkelmaß eines gestreckten Winkels,0 sei das Winkelmaß eines Nullwinkels.
Davon ausgehend wird das Winkelmaß durch ein”Intervallschachtelungsverfahren“ er-
mittelt:Sei <) (p, g) weder ein Nullwinkel noch ein gestreckter Winkel. Sei h0 ein Halbstrahl, derim Scheitel von <) (p, q) senkrecht zu p steht und bezuglich p in derselben Halbebene liegtwie q.
Setze: p00 := p, p1
0 := p−, ε0 := 0 .Es konnen nun drei Falle auftreten:
1. q = h0; dann setzen wir ε1 := 1 und brechen das Verfahren ab.
2. q ∈ int <) (p00, h0); dann setzen wir p0
1 := p00, p
11 := h0, ε1 := 0.
3. q ∈ int <) (h0, p10); dann setzen wir p0
1 := h0, p11 := p1
0, ε1 := 1.
In den Fallen 2 und 3 bezeichnen wir mit h1 die Winkelhalbierende des Winkels <) (p01, p
11).
Wir fuhren das Verfahren weiter, indem wir erneut drei Falle untersuchen:
1. q = h1; dann setzen wir ε2 := 1 und brechen das Verfahren ab.
2. q ∈ int <) (p01, h1); dann setzen wir p0
1 := p01, p
12 := h1, ε2 := 0.
3. q ∈ int <) (h1, p11); dann setzen wir p0
1 := h1, p12 := p1
1, ε2 := 1.
Sukzessives Weiterfuhren dieses Verfahrens fuhrt auf zwei Moglichkeiten:
(i) Das Verfahren bricht bei einem Schritt (den wir den k−ten nennen) ab, indem derStrahl g mit der Winkelhalbierenden hk−1 zusammenfallt, das heißt, beim k−tenSchritt des Verfahrens tritt der oben beschriebene Fall 1. ein. Als Maß m(<) (p, q))des Winkels <) (p, q) bezeichnen wir dann die Zahl
m(<) (p, q)) := π ·k∑i=1
εi
2i.
Baumeister: Mathematik III / Stand: November 1997 328
(ii) Das Verfahren bricht nie ab, es tritt immer einer der Falle 2. oder 3. ein. In diesemFall erhalten wir eine unendliche Folge von εi. Wir setzen
m(<) (p, q)) := π ·∞∑i=1
εi
2i.
Damit diese Definition sinnvoll ist, muß die Summe
∞∑i=1
εi
2i:= lim
k→∞
k∑i=1
εi
2i
konvergieren, was sich jedoch mit Hilfe des Majorantenkriteriums sofort aus der Konver-genz der Summe
∞∑i=1
1
2i
folgt, da εi nur die Werte 0 oder 1 annimmt.
Bemerkung 12.55
Man kann zeigen, daß zu jeder reellen Zahl r aus dem Intervall [0, π] ein Winkel <) (g, h)existiert, dessen Winkelmaß gerade r ist. Die
”Normierung“ des Intervalls auf die Lange
π ist naturlich aus ubergeordnetem Wissen getroffen. 2
Satz 12.56
Ist ABC ein Dreieck, so heißen die Winkel <) (AB+, AC+), <) (BA+, BC+) und<) (CA+, CB+) Innenwinkel und alle Nebenwinkel dieser drei Winkel Außenwin-kel des Dreiecks ABC . 2
Satz 12.57
Jeder Innenwinkel eines Dreiecks ist kleiner als der zugehorige Außenwinkel.
Beweis:Sei ABC ein Dreieck. Wir betrachten die Situation in der Ecke A. Zu zeigen ist, daß imInneren des Außenwinkels <) (BA+, BC−) ein Punkt P existiert mit <) (AB+, AC+) ≡<) (BA+, BP+).Sei D der Mittelpunkt der Strecke AB und sei P ein Punkt der Halbgeraden DC− mitCD ≡ DP . Die Dreiecke ADC und BDP sind wegen AD ≡ BD,DC ≡ DP und <
) (DB+, DP+) ≡<) (DA+.DC+) nach dem Kongruenzsatz “SWS“ kongruent. Somit sind<) (AB+, AC+) und <) (BA+, BP+) kongruent. Es reicht also noch nachzuweisen, daß P ∈int <) (BA+, BC+) gilt, d.h. daß P ∈ BCA+ ∩ ABC− gilt. Wegen P ∈ DC− ist Dein Punkt der Strecke CP. Da D auf der Geraden durch A,B liegt, liegen C und P inunterschiedlichen Halbebenen bezuglich dieser Geraden. Also gilt P ∈ ABC−.Da C auf der Geraden durch B,C liegt, D der Strecke CP angehort und daher nichtC ∈ CP gelten kann, haben DP und die Geraden durch B,C keinen gemeinsamen Punkt.
Baumeister: Mathematik III / Stand: November 1997 329
P und D liegen also in derselben Halbebene bezuglich dieser Geraden. Ferner liegenauch die Punkte A und D in einer Halbebene bezuglich der Geraden durch B,C da derSchnittpunkt B der Geraden durch AB und B,C nicht der Strecke AD angehort. Somitsind also A und P Punkte derselben Halbebene bezuglich der Geraden durch B,C; es giltP ∈ BCA+.
Folgerung 12.58
In jedem Dreieck sind mindestens zwei Innenwinkel spitze Winkel.
Beweis:
Folgerung 12.59
Die Summe zweier Innenwinkel in einem Dreieck ist stets kleiner als ein gestreckterWinkel.
Beweis:
Nun fehlt noch der Abstand eines Punktes von einer Geraden. Dazu
Satz 12.60
Ist g eine Gerade, P ein Punkt, der nicht auf g liegt, und Q der Fußpunkt des Lotesvon P auf g, so hat jeder Punkt auf g einen Abstand von P , der großer als |PQ| ist.
Beweis:Sei R 6= Q,R ∈ g. Nach Folgerung ?? ist <) (PRQ) ein spitzer Winkel und somit kleinerals der Winkel <) (PQR), woraus nach Satz ?? unmittelbar |PR| > |PQ| folgt.
Definition 12.61
Sei g eine Gerade und P ein Punkt. Dann wird |PQ|, wobei Q der Fußpunkt desLotes von P auf g ist, also den Abstand von P zu G bezeichnet. 2
Nun zum letzten Kongruenzsatz “SSW“.
Satz 12.62
Sind ABC und DEF Dreiecke mit
AB ≡ DE,AC ≡ DF, |AB| > |AC|, <) (ACB) ≡<) (DFE),
so gilt ABC ≡ DEF
Beweis:Wir weisen nach, daß die SeitenBC und EF kongruent sind, was nach dem Kongruenzsatz“SWS“ die Konvergenz der beiden Dreiecke nach sich zieht. Dazu sei G ein Punkt auf
Baumeister: Mathematik III / Stand: November 1997 330
der Halbgeraden CB+ mit |CG| = |FE|. Nach dem Kongruenzsatz “SWS“ sind dieDreiecke DEF und AGC kongruent und es gilt deshalb AG ≡ DE ≡ B. Wir betrachtenim Folgenden den Fall, daß der Punkt G der Strecke BC angehort, der andere moglicheFall (B ∈ GC) ist analog nachzuweisen. Da die Basiswinkel <) (ABG) und <) (AGB)des gleichschenkligen Dreiecks AGB kongruent sind, folgt aus der Voraussetzung |AB| >|AC| nach Satz IV.18 (Beziehung großere Seite – großerer Winkel) <) (ACB) ><) (AGB).Andererseits ergibt sich aber aus dem schwachen Außenwinkelsatz <) (AGB) ><) (ACB),was einen Widerspruch bedeutet. Somit mussen die PunkteB undG identisch sein, worauswegen der Kongruenz der Dreiecke DEF und AGC die Behauptung folgt.
Als Vorbereitung zum nachsten Kapitel, in dem das Parallelenaxiom in den Mittelpunktruckt, hier erste Anmerkungen dazu.
Definition 12.63
Zwei Geraden g, h heißen parallel, wenn sie keinen gemeinsamen Punkt besitzen.2
Satz 12.64
Zwei Winkel <) (p, q) und <) (r, s) heißen Stufenwinkel, falls ein Schenkel r deseinen Winkles eine Teilmenge eines Schenkels p des anderen Winkels ist und diebeiden Schenkel g und s in einer Halbebene bezuglich der Geraden g liegen, diedurch die beiden Schenkel p und r gegeben ist. 2
Satz 12.65
Die Schenkel an kongruenten Stufenwinkeln sind parallel.
Beweis:Es seien <) (p, q) und <) (r, s) kongruente Stufenwinkel mit den Scheiteln A und B. Wirnehmen an, die Geraden, denen q und s angehoren, haben einen Schnittpunkt C, dero.B.d.A. bezuglich g auf der Seite von r und s liegen moge (anderenfalls kann der Beweiswegen des Scheitelwinkelsatzes ebenso gefuhrt werden). Der Winkel <) (p, q) ist ein Innen-winkel des Dreiecks ABC, der Winkel <) (r, s) ist ein Außenwinkel dieses Dreiecks oderumgekehrt. Wegen <) (p, q) ≡<) (r, s) ist dies jedoch ein Widerspruch zu Satz ??.
Satz 12.66
Zu jeder Geraden g und zu jedem nicht auf g liegenden Punkt P gibt es mindestenseine Gerade h, die P enthalt und zu g parallel ist.
Beweis.Es sei f eine Gerade durch P . Ist f ∩ g = ∅, dann ist f eine Gerade, welche die Be-hauptung erfullt. Anderenfalls sei f ∩ g = Q, dann laßt sich wegen der Moglichkeitdes Winkelantragens durch P eine Gerade h derart legen, daß g und h mit f kongruenteStufenwinkel bilden. Nach Satz 12.65 sind die Geraden g und h somit parallel.æ
Baumeister: Mathematik III / Stand: November 1997 331
12.8 Das Parallelenaxiom in der Ebene
Wir fugen nun den Axiomengruppen I - IV das Parallelenaxiom hinzu.
V. ParallelenaxiomZu jeder Geraden g und zu jedem nicht auf g liegenden Punkt P gibt es hochstens eineGerade, die durch P lauft und zu g parallel ist.
Beachte, daß wir die Existenz von Parallelen schon den Axiomengruppen I – IV entnom-men haben (siehe Satz 12.66).
Satz 12.67
Stufenwinkel an geschnittenen Parallelen sind kongruent.
Beweis:Seinen g, h zwei parallele Geraden, die von einer Geraden f in A und B geschnittenwerden.Seien P,Q,R Punkte mit
P ∈ f,Q ∈ g, R ∈ h,
sodaß P,Q,A im der selben Halbebene bezuglich h und Q,R im der selben Halbebenebezuglich f liegen.Annahme: <) (PAQ) ist nicht kongruent <) (PBR).Dann gibt es eine Gerade h′, die durch B geht und mit f einen zu <) (PAQ) kongruentenWinkel <) (PBS) (S ∈ h′) bildet. Wegen Satz ?? sind g und h′ parallel, was aber wegeng||h einen Widerspruch zu Axiom V bedeutet.
Folgerung 12.68
Wechselwinkel an geschnittenen Parallelen sind kongruent.
Beweis:Folgt aus Satz 12.67 und Satz ??.
Satz 12.69
In jedem Dreieck ist die Summe der Innenwinkel gleich zwei Rechten.
Beweis:Sei ein Dreieck ABC gegeben. Sei h eine Parallele zur Strecke AB, sei D 6= C ein Punktauf h und sei E 6= C ein Punkt auf der Geraden durch A,B . Der Winkel <) (ACE) istein gestreckter Winkel, also gleich zwei Rechten. Es gilt
<) (ACE) = <) (ACB) ∪ <) (BCD) ∪ <) (DCE)
und da nach Satz 12.68 <) (BCD) = <) (ABC) und nach Satz 12.67 <) (DCE) = <) (BAC)gilt, folgt die Behauptung.
Baumeister: Mathematik III / Stand: November 1997 332
Satz 12.70
Ein Außenwinkel in einem Dreieck ist so groß wie die Summe der beiden nichtan-liegenden Innenwinkel dieses Dreiecks.
Beweis:Sei ein Dreieck ABC gegeben. Sei h eine Parallele zur Strecke AC, sei E 6= B ein Punktauf h und sei D 6= B ein Punkt auf der Geraden durch A,B . Es gilt
<) (CBD) = <) (CBE) ∪ <) (EBD) = <) (ACB) ∪ <) (CAB) .
Dabei haben wir wieder den Wechsel– und Stufenwinkelsatz verwendet.
Als Beispiel fur einen der Satze uber gemeinsame Schnittpunkte beweisen wir den Satzuber den Schnittpunkt der Mittelsenkrechten. Da wir schon wissen, daß die euklidischeEbene, wie wir sie in Kapitel 11 betrachtet haben, ein Modell fur die Geometrie darstellt,die den Axiomengruppen I - IV genugt, konnen die anderen Satze uber die Schnittpunkteder Hohen, Seiten– und Winkelhalbierenden dann auch akzeptiert werden.
Satz 12.71
Die Mittelsenkrechten eines Dreiecks ABC schneiden sich in einem Punkt. DieserPunkt hat von den Punkten A,B,C den gleichen Abstand.
Beweis:Seien mAB ,mAC Mittelsenkrechten der Seiten AB und AC.mAB,mAC sind nicht parallel, da sonst nach dem StufenwinkelsatzAB,AC parallel waren.Also schneiden sich mAB,mAC in einem Punkt M. Fur diesen Punkt M gilt
|AM | = |BM | , |AM | = |CM |
und somit|AM | = |BM | = |CM |.
Nach Satz 12.50 folgt, daß M auch ein Punkt der Mittelsenkrechten mBC ist.
Satz 12.72
Ist g eine beliebige Gerade und a eine beliebige reelle nichtnegative Zahl, so istdie Menge aller Punkte, die von g den Abstand a haben und in einer Halbgera-den bezuglich g liegen, eine zu g parallele Gerade (fur a 6= 0) bzw. die Gerade g
selbst (fur a = 0).
Beweis:Fur a = 0 ist die Behauptung trivial. Fur a 6= 0 mussen wir zeigen, daß alle Punkte,die von g den Abstand a haben und in einer Halbgeraden bezuglich g liegen, einer zu gparallelen Geraden h angehoren und daß jeder Punkt dieser Geraden von g den Abstanda hat. Wir weisen zunachst die zweite Aussage nach.Es sei P ein Punkt, der von g den Abstand a hat und h die zu g parallele Gerade durchP sowie Q ein beliebiger Punkt auf h. Ferner seien L und L′ die Fußpunkte der Lotevon P bzw. Q auf g . Die Geraden PL und QL′ sind wegen Satz ?? (Umkehrung des
Baumeister: Mathematik III / Stand: November 1997 333
Stufenwinkelsatzes) parallel und nach Satz ?? gilt |PL| = |QL′|, was aber gerade bedeutet,daß P und Q von g denselben Abstand a haben. Es sei nun R ein Punkt, der mit P ineiner Halbebene bezuglich g liegt und von g den Abstand a hat. Das Lot von R auf g(mit dem Fußpunkt L′′) schneidet h in einem Punkt S, der (wie bereits gezeigt) von L′′
den Abstand a hat. Es gilt also |L′′S| = |L′′R| = a, was nach der Eindeutigkeitsaussagevon Axiom III/1 bedeutet, daß S und R identisch sein mussen und somit R der Geradenh angehort.
Wir werden spater sehen, daß bei Zugrundelegung nur der Axiomengruppen I - IV Ab-standslinien im allgemeinen keine Geraden sind.
Als Erganzung beweisen wir noch einen Satz aus der Gruppe der Strahlensatze. DazuAbbildung 12.2.
Abbildung 12.2: Ein Strahlensatz
Satz 12.73
Es seien p1 und p2 zwei Halbgeraden mit einem gemeinsamen Anfangspunkt O sowieA1B1 und A2B2 zwei parallele Geraden, welche die Strahlen p1 in den Punkten A1
und A2 sowie p2 in B1 und B2 schneiden. Dann gilt:
|OA1|
|OB1|=|OA2|
|OB2|=|A1A2|
|B1B2|.
Beweis:Wir beweisen die Behauptung zunachst fur den Spezialfall mit |OA2| = 2 · |OA1|. Dazubetrachten wir die Parallele A1C zu B1B2 im Punkt A1, wobei C ein Punkt auf A2B2
sei, und die Parallele B1D zu A1A2 in B1, wobei D auf A2B2 liegen soll (siehe Abbildung12.3). Die Punkte C und D sind identisch, wobei wir auf den Nachweis dieser Tatsacheverzichten, da wir sie fur den Beweis des vorliegenden Satzes nicht benotigen.Durch Anwendung des Stufenwinkelsatzes und des Kongruenzsatzes wsw ergibt sichOB1A1 ≡ B1B2D. Daher sind die Strecken OB1 und B1B2 kongruent. Dementsprechendgilt |OB2| = 2 · |OB1| und die Behauptung wurde fur den betrachteten Spezialfall nachge-wiesen. Da das bei diesem Beweis genutzte Verfahren mehrfach angewendet werden kann,gilt es auch fur den etwas allgemeineren Fall |OA2| = 2n · |OA1|. Auf analoge Weise laßt es

Baumeister: Mathematik III / Stand: November 1997 334
sich fur |OA2| = k · |OA1| mit k ∈ IN zeigen, wovon wir im folgenden Gebrauch machen.Wir beweisen den vorliegenden Satz jetzt allgemein. Dazu sei fur jedes n ∈ IN einXn ∈ OA
+1 mit
|OXn| =|OA1|
2n
und ein Yn ∈ OB+1 mit XnYn||A1B1 gegeben. Dann gilt wegen des bereits bewiesenen
Spezialfalls
|OYn| =|OB1|
2n.
Es sei nun k = k(n) ∈ IN gewahlt mit
k(n) · |OXn| ≤ |OA2| < (k(n) + 1) · |OXn|
Abbildung 12.3: Erlauterung zum Beweis des Strahlensatzes
beziehungsweise damit gleichbedeutend
k(n)
2n· |OA1| ≤ |OA2| <
k(n) + 1
2n· |OA1|.
Dann gilt die Beziehungk(n)
2n≤|OA2|
|OA1|<k(n) + 1
2n.
Also ist die Folge (k(n)2−n)n∈IN beschrankt und besitzt daher eine konvergente Teilfolge(k(n′)2−n
′)n′∈IN . Dafur gilt
limn′→∞
k(n′)
2n′ =
|OA2|
|OA1|.
O.E. nehmen wir nun an, daß die Folge (k(n)2−n)n∈IN selbst schon konvergiert.Wir betrachten nun Punkte Zn und Zn+1 der Halbgeraden OA+
1 mit
|OZn| = k(n) · |OXn| , |OZn+1 | = (k(n) + 1) · |OXn|
sowie Wn und Wn+1 auf OB+1 mit
ZnWn ||XnYn , Zn+1Wn+1 ||XnYn

Baumeister: Mathematik III / Stand: November 1997 335
(siehe Abbildung 12.3).Hierfur ergibt sich anhand des oben betrachteten Spezialfalls
|OWn| = k(n) · |OYn| , |OWn+1| = (k(n) + 1) · |OYn|.
WegenZn+1Wn+1 ||ZnWn ||XnYn ||A2B2
und der Anordnung von Zn, A2 und Zn+1, liegt Wn zwischen O und B2 sowie B2 zwischenWn und Wn+1 oder Wn und B2 sind identisch. Also
|OWn| ≤ |OB2| < |OWn+1| ,
oderk(n) · |OYn| ≤ |OB2| < (k(n) + 1) · |OYn| ,
und somitk(n)
2n≤|OB2|
|OB1|<k(n) + 1
2n.
Also folgt|OA2|
|OA1|= lim
n→∞
k(n)
2n=|OB2|
|OB1|.
Ohne Beweise werden weitere Satze vom Typ der Strahlensatze mitgeteilt.
Satz 12.74
Es seien p1 und p2 zwei Halbgeraden mit einem gemeinsamen Anfangspunkt O sowieA1B1 und A2B2 zwei parallele Geraden, welche die Strahlen p1 in den Punkten A1
und A2 sowie p2 in B1 und B2 schneiden. Dann gilt:
|OA1|
|OA2|=|A1B1|
|A2B2|.
Satz 12.75
Es seien p1 und p2 zwei Halbgeraden mit einem gemeinsamen Anfangspunkt O,A1, A2 zwei Punkte auf p1 sowie B1, B2 zwei Punkte auf p2 . Wenn dann
|OA1|
|OB1|=|OA2|
|OB2|
gilt, so sind die Geraden durch A1, B1 und A2, b2 parallel.
Baumeister: Mathematik III / Stand: November 1997 336
Satz 12.76
Es sei p1 ein Halbstrahl mit dem Anfangspunkt O, der zwei Punkte A1 und A2
enthalt. Ferner seien zwei weitere Punkte B1 und B2 gegeben. Sind die Geradendurch A1, B1 und A2, b2 parallel und gilt
|OA1|
|OA2|=|A1B1|
|A2B2|,
so verlauft die Gerade durch B1, B2 auch durch O .
Den Satz 12.74 bezeichnet man als 2. Strahlensatz. Sein Beweis laßt sich vergleichbarzum Beweis zum 1. Strahlensatz 12.73 erbringen. Satz 12.75 ist eine Umkehrung des 1.Strahlensatzes, Satz 12.76 ist eine (gewisse) Umkehrung des 2. Strahlensatzes.
Wir haben nun die Entwicklung der axiomatischen Geometrie weit vorangetrieben undwollen die Anfuhrung von Resultaten hier benennen. Abschließend aber noch einige An-merkungen, die deutlich machen, wo etwa der Satz des Pythagoras in diesem Konzeptangesiedelt ist.Neben der Kongruenz von Figuren ist der Begriff der Ahnlichkeit von Interesse. Wirbauen ihn wieder auf dem Abbildungsbegriff auf.
Definition 12.77
Eine Abbildung Φ : IP −→ IP heißt Streckung mit Streckungszentrum Z undStreckungsfaktor k 6= 0 genau dann, wenn gilt:Fur jeden Punkt P ∈ IP gilt
|ZΦ(P )| = |k||ZP |
undΦ(P ) ∈ ZP+, falls k > 0 , Φ(P ) ∈ ZP−, falls k < 0 .
2
Man stellt schnell fest, daß Streckungen bijektiv und geraden– und winkeltreu sind, d.h.daß Geraden auf Geraden und Winkel auf kongruente Winkel abgebildet werden. Es giltsogar, daß parallele Geraden auf parallele Geraden abgebildet werden. Die Hintereinander-ausfuhrung einer Bewegung und Streckung wird Ahnlichkeitsabbildung genannt. Zweigeometrische Figuren heißen dann ahnlich, wenn eine Ahnlichkeitsabbildung existiert,die diese Figuren aufeinander abbildet. Der Hauptsatz der Ahlichkeitsabbildungenbesagt, daß zwei Dreiecke ABC,DEF ahnlich sind, falls
<) (ABC) ≡<) (DEF ) , <) (BAC) ≡<) (EDF )
gilt. Der Hohensatz in einem rechtwinkligen Dreieck, der besagt, daß das Quadrat derHohe, die auf der Hypothenuse senkrecht steht, gleich dem Produkt der Langen der durchden Hohenfußpunkt definierten Hypothenusenabschnitte ist, basiert auf der Ahnlichkeitder Dreiecke AFC,BFC ; siehe Abbildung 12.4.
Baumeister: Mathematik III / Stand: November 1997 337
Abbildung 12.4: Der Hohensatz
Abbildung 12.5: Der Kathetensatz
Aus dem Hohensatz folgt nun recht schnell der Kathetensatz (siehe Abbildung 12.5)und der Satz des Pythagoras.
Im nachsten Abschnitt betrachten wir die euklidische Geometrie des Raums. Dabei gehenwir wieder analytisch–geometrisch vor. Es sei aber hier erwahnt, daß die axiomatische Vor-gehensweise auch moglich ist. Dazu kann man die Axiomengruppen I,II,IV so erweitern,daß die euklidische Geometrie des Raums entsteht, wie sie unserer Anschauung entspricht.Wir geben nun die Erweiterung von Axiom I explizit wieder.
I/5 Zu je drei nicht auf einer Geraden liegenden Punkte gibt es genau eine Ebene,die diesen Punkt enthalt. Jede Ebene enthalt einen Punkt.
I/6 Wenn zwei Punkte einer Geraden g in einer Ebene e liegen, so liegt jeder Punktvon g in e.
I/7 Wenn zwei Ebenen einen Punkt gemeinsam haben, so haben sie noch einen wei-teren Punkt gemeinsam.
I/8 Es gibt vier Punkte, die nicht in einer Ebene liegen.
Das Anordnungsaxiom III/2 und das Bewegungsaxiom IV sind auch geringfugig zu ver-andern. Als Ergebnis erhalten wir dann wiederum u.a. die Aussage, daß Geraden undEbenen unendlich viele Punkte enthalten mussen.
Kapitel 13
Etwas angewandte lineare Algebra
Hauptziel ist die Bereitstellung eines Verfahrens zur Losung von linearen Gleichungen,dem sogenannten Eliminationsverfahren. Darum herum skizzieren wir einige Anwendun-gen von linearer Algebra in einer analytisch–geometrischer Fassung.
13.1 Ausgleichsrechnung
Ein in der Praxis des experimentellen Messens haufig zu losendes Problem ist folgendes:
Das Ergebnis y eines Versuchs hangt von einer Stellgroße x ab. Gesucht istder funktionale Zusammenhang y = f(x). Hierzu fuhrt man mit n paarwei-se verschiedenen Stellgroßen x1, . . . , xn den Versuch durch und erhalt n Ver-suchsergebnisse y1, . . . , yn. Die Funktion f ist so zu bestimmen, daß sie dieVersuchsergebnisse moglichst gut wiedergibt.
Das klassische Verfahren der Ausgleichsrechnung ist die Methode der Gaußschen Feh-lerquadratmethode. Wir beschreiben das Vorgehen am Beispiel des Ausgleiches durcheine Gerade, d.h. unter der Annahme, daß der funktionale Zusammenhang f von der Form
f(x) = mx+ b
ist oder so angenommen werde. Die Steigung m und de Nulldurchgangswert b sind somitzu bestimmen.
Seien also in IR2 Paare (xi, yi), i = 1, . . . , n, gegeben. Als Kriterium fur die Gute einerAusgleichsgerade
y = mx+ b
liegt dann (nach C.F. Gauß)
S(m, b) :=n∑i=1
(mxi + b− yi)2
vor. Es sind also m∗, b∗ so zu bestimmen, daß
S(m∗, b∗) = minm,b
S(m, b) (13.1)
338

Baumeister: Mathematik III / Stand: Mai 1998 339
gilt. Wie lost man nun die Extremwertaufgabe ?Haben wir eine Losung m∗, b∗, so muß doch sicher
S(m∗, b∗) = minm
S(m, b∗),
undS(m∗, b∗) = min
bS(m∗, b)
gelten. Da die Funktionen
S1 : m 7−→ S(m, b∗) , S2 : b 7−→ S(m∗, b),
sicher differenzierbar sind, muß
dS1
dm(m∗) = 0 ,
dS2
db(b∗) = 0.
gelten. Dies bedeutet:
2n∑i=1
(m∗xi + b∗ − yi)xi = 0 (13.2)
und
2n∑i=1
(m∗xi + b∗ − yi) = 0 . (13.3)
Die beiden Gleichungen (13.2), (13.3) sind lineare Gleichungen (siehe unten) fur die un-bekannten Großen m∗, b∗ :
m∗(n∑i=1
x2i ) + b∗(
n∑i=1
xi) =n∑i=1
xiyi (13.4)
m∗(n∑i=1
xi) + b∗n =n∑i=1
yi (13.5)
(13.6)
Hier losen wir ad hoc, unten bereiten wir dies methodisch auf:
m∗ =
nn∑i=1
xiyi −n∑i=1
xi
n∑i=1
yi
nn∑i=1
x2i − (
n∑i=1
xi)2
, b∗ =1
n(n∑i=1
yi −m∗
n∑i=1
xi) (13.7)
Die Losungsformeln in 13.7 sind unter dem Vorbehalt, daß
nn∑i=1
x2i − (
n∑i=1
xi)2 6= 0
ist; gleichbedeutend ist
(n∑i=1
x2i )(
n∑i=1
12)− (n∑i=1
xi · 1)2 6= 0.

Baumeister: Mathematik III / Stand: Mai 1998 340
Fur n = 2 ist uns eine Aussage dieser Art bekannt aus der Cauchy–Schwarzschen Unglei-chung: Es ist mit x := (x1, x2) ∈ IR2, e := (1, 1) ∈ IR2
< x, e >2= |x|2|e|2
genau dann, wenn x, e linear abhangig sind. Da x1 6= x2 nach Voraussetzung gilt, sind x, ein der Tat linear unabhangig und wir haben in diesem Fall tatsachlich, daß der Vorbehaltkeiner ist. Fur n > 2 ist dies genauso, wie spatere Uberlegungen zeigen; siehe Folgerung13.20. Ein direkter Beweis fur den Fall n = 2 geht so:Aus der Annahme 2(x2
1 + x22) = (x1 + x2)2 folgt schnell x2
1 + x22 = 2x1x2 und damit
(x1 − x2)2 = 0 . Dies ist jedoch im Widerspruch zur Tatsache x1 6= x2 .
Beispiel 13.1
Die Belastung einer Feder der Lange l durch die Kraft F verursacht eine Verlangerungum ∆l. Legt man die Lange der Feder bei keiner Belastung (Ruhelage/nur Schwerkraftwird berucksichtigt) auf Null fest, so gibt es also einen Zusammenhang zwischen Langeund Belastung. Diesen Zusammenhang tragt man in der sogenannten Federkennlinie auf:
Abbildung 13.1: Federkennlinie
In der Skizze haben wir den typischen Verlauf der Federkennlinie schon vorweggenommen:Fur kleine Belastungen, d.h. fur kleine Auslenkungen l aus der Ruhelage (keine Belastung)gilt das Hooksche Gesetz, nach dem Auslenkung und Belastung proportional sind; d.h.die Federkennlinie kann fur kleine Werte von F durch eine Gerade angenahert werden.Diese Gerade kann nun durch eine Versuchsreihe mit Hilfe von Ausgleichsrechnung be-stimmt werden. Es liege etwa folgende Versuchsreihe vor:
xi 1 2 3 4 5 xi steht fur eine Belastung Fi
yi 12 14 17 19 23 yi steht fur eine Auslenkung li
Wir stellen die Tabelle
Baumeister: Mathematik III / Stand: Mai 1998 341
xi yi x2i xiyi
1 12 1 12
2 14 4 28
3 17 9 51
4 19 16 76
5 23 25 115∑15 85 55 282
auf und erhalten gemaß (13.7)
m∗ =5 · 282− 15 · 85
5 · 55− 225= 2.7 , b∗ =
1
5(85− 4.7 · 15) = 8.9
Man beachte, daß man nun etwa fur die Belastung F = 2.5 die Auslenkung l = 14.65voraussagen kann. Die Aussage l = 49.9 fur die Belastung F = 10 ist dagegen schon sehrgewagt, da die Annahme der Linearitat schon nicht mehr zutreffen mag. In der Tat isteine verbessertes Hooksches Gesetz gegeben durch einen Ansatz der Form
y = mx+ b+ dx3 .
2
Kennlinien sind das ubliche Hilfsmittel, eine bestimmte physikalische Eigenschaft einesWerkstucks/Instruments festzuhalten. Wir kennen (vielleicht) aus der Schule noch dieKennlinie einer Elektronenrohre. (Die Wichtigkeit von Rohren hat durch die Halbleiter-technik sehr stark an Bedeutung verloren.) Hier ist eine typische Abbildung dazu:
Abbildung 13.2: Kennlinie einer Elektronenrohre
Von großem Interesse sind sogenannte Hysteresis–Kennlinien. Dadurch werden Pha-nomene erfaßt, die sich nicht durch einen funktionalen, sondern einen relationellen Zusam-menhang darstellen lassen. Wir kennen sicher die Magnetisierungskennlinie (des Ferroma-gnetismus); siehe Abbildung 13.3. Hieran ist abzulesen, daß der Grad der Magnetisierungeines Werkstucks abhangig ist von der “Veranderungsrichtung“ (Zuwachs/Abnahme) desaußeren Magnetfelds.
Baumeister: Mathematik III / Stand: Mai 1998 342
Abbildung 13.3: Magnetisierungsschleife
Noch klarer wird das Phanomen durch einen Warmethermostat beleuchtet. Die Kenn-linie des Thermostats ist in Abbildung 13.4 festgehalten. Dabei sind s0, s1 festgelegteSchaltpunkte.
Abbildung 13.4: Kennlinie eines Thermostats
Eine solche Kennlinie ist auch maßgebend in vielen Situationen unserer Wahrnehmung,wie die Bilderkette 13.5 uns lehrt.Kennlinien in Form von Hysteresisschleifen beschreiben physikalisch erwunschte Material-eigenschaften. Etwa kann man damit Materialien modellieren, die (temperaturabhangiges)Formgedachtnis besitzen und daher gerade in der Medizin von großem Wert sind, da ohne“Eingriff“ ein gewunschter Effekt erzielbar ist.
Bemerkung 13.2
Das Vorgehen der Ausgleichsrechnung lauft ganz analog, wenn man statt der Ausgleichs-geraden ein Ausgleichspolynom der Form
pm(x) := amxm + . . . + a1x+ a0
verwendet; siehe die Aussage uber das Hooksche Gesetz in Beispiel 13.1. Man erhalt einlineares Gleichungssystem fur die Koeffizienten a0, . . . , an. 2
Baumeister: Mathematik III / Stand: Mai 1998 343
Abbildung 13.5: Hysteresiseffekt in unserer Wahrnehmung
13.2 Matrizen und lineare Gleichungen
Matrizen sind ein wichtiges Objekt in der Linearen Algebra. Den Zugang zu diesem Objektkann man auf zweierlei Weisen finden. Der Zugang, der mehr von der Praxis her moti-viert ist, geht aus von den Aufgaben, die sich als lineare Gleichungen formulieren lassen;wir bevorzugen hier diese Herangehensweise. Der andere Zugang entwickelt sich aus derTheorie der Vektorraume heraus und kommt zu Matrizen als beschreibendes Hilfsmittelfur lineare Abbildungen.
Sei IK ein Korper; seine Elemente nennen wir in diesem Zusammenhang Skalare.1 DieAddition in IK schreiben wir mit + , die Multiplikation mit · , meist jedoch lassenwir · auch weg. Hauptinteresse besteht an IK = IR oder IK = ′C ; fur die Belange derCodierungstheorie ist etwa auch der Korper ZZ 2 von Interesse.
Betrachte eine Gleichungax = b (a, b ∈ IK )
in einer “Unbekannten“. Als Losung suchen wir x ∈ IK , so daß die Gleichung, wenn wirx einsetzen, erfullt ist. Die Gleichung hat
– keine Losung, falls a = 0, aber b 6= 0 ist;
– jedes x als Losung, falls a = 0 und b = 0 ist;
– genau eine Losung x = a−1 b , falls a 6= 0 ist.
Die Gleichunga1x1 + a2x2 = b (13.8)
in zwei Unbekannten – sie ist uns aus Kapitel 11 bekannt – mit a1, a2, b ∈ IK hat
– keine Losung, falls a1 = a2 = 0, aber b 6= 0 ist;
– alle (x1, x2) ∈ IK 2 als Losung, falls a1 = a2 = b = 0 ist;
1Bei den Griechen hießen die (ungleichen) Seitenlangen eines quaderformigen Korpers σκαλενoιαριϑµoι.

Baumeister: Mathematik III / Stand: Mai 1998 344
– alle Paare (x1, x2) in
(z1, z2)|z2 = a−12 (b− a1z1) , z1 ∈ IK , falls a2 6= 0 ,
bzw. in(z1, z2)|z1 = a−1
1 (b− a2z2) , z2 ∈ IK , falls a1 6= 0 ,
als Losung.
Wir nennen die Gleichung (13.8) eine lineare Gleichung, da in ihr nur Summanden derForm ai xi auftreten mit ai als Skalar und xi als Variable. Keine linearen Gleichungen sinddemnach:
x1 + 3x22 = 7 ,
√x1 + 2x2 = −1 , x1 x2 + x2 = 1 .
Beispiel 13.3
Aus der”Vollstandigen Anleitung zur Algebra“ von L. Euler (1707 – 1783):
”Eine Gesellschaft von Mannern und Frauen sind in einem Wirtshaus. Jeder
Mann gibt 25 Groschen, jede Frau aber 16 Groschen aus, und es stellt sichheraus, daß samtliche Frauen einen Groschen mehr ausgegeben haben als dieManner. Wieviele Frauen und Manner sind es gewesen ?“
Als Gleichung lautet die Frage:25x− 16y = −1
Da aber eine Losung in den naturlichen Zahlen gesucht ist, gehort die Fragestellung inden Bereich “diophantische Gleichungen“. Mit dem euklidischen Algorithmus erhaltenwir als eine Losung x = 7, y = 11, als “benachbarte Losung“ haben wir x = 23, y = 36,die vielleicht schon nicht mehr in Frage kommt, da das Wirtshaus 59 Personen nichtaufnehmen kann. 2
Fur das System linearer Gleichungen
a11x1 + a12x2 = b1 (13.9)
a21x1 + a22x2 = b2 (13.10)
mit a11, a12, a21, a22, b1, b2 ∈ IK sucht man “simultane“ Losungen, d.h. Paare (x1, x2) ∈IK 2, so daß beim Einsetzen beide Gleichungen erfullt sind. Wir machen eine Fallunter-scheidung:
Fall 1: a11 = a12 = a21 = a22 = 0.Ist b1 6= 0 oder b2 6= 0, so gibt es keine Losung.Sind b1 = b2 = 0, so sind alle Paare (x1, x2) ∈ IR2 Losungen.
Fall 2: a11 6= 0.Addiere das (−a−1
11 a21) – fache der ersten Gleichung (13.9) zur zweiten Gleichung (13.10).Dies ergibt
0 · x1 + (a22 − a−111 a21 a12)x2 = b2 − a
−111 a21 b1 . (13.11)
Baumeister: Mathematik III / Stand: Mai 1998 345
Multiplikation mit a11 fuhrt auf
(a11a22 − a12a21)x2 = a11b2 − a21b1 . (13.12)
Die Losungsmengen von (13.9),(13.10) bzw. (13.9),(13.11) bzw. (13.9),(13.12) sind iden-tisch.
Fall 2a: ∆ := a11a22 − a12a21 6= 0 .Man rechnet aus (13.12) x2 aus:
x2 = ∆−1 (a12b2 − a21b1) ,
setzt in (13.9) ein und “lost“ nach x1 auf (siehe Uberlegungen zur Gleichung mit einerUnbekannten):
x1 = ∆−1 (a22b1 − a12b2) .
Man verifiziert, daß nun das Paar (x1, x2) den Gleichungen (13.9),(13.10) genugt. Es gibtalso genau eine Losung.
Fall 2b: ∆ = 0 .Nun existiert fur a11b2 − a21b1 6= 0 keine Losung. Fur a11b2 − a21b1 = 0 ist x2 in (13.12)frei wahlbar und als Losungsmenge zum Gleichungssystem (13.9),(13.10) erhalten wir dieMenge
(x1, x2)|x1 = a−111 (b1 − a12x2) , x2 ∈ IK .
Fall 3: Tritt Fall 1 nicht ein, so kann o.E. Fall 2 erreicht werden, denn:Ist a11 6= 0, ist Fall 2 gegeben.Ist a21 6= 0, mache Gleichung (13.9) zur Gleichung (13.10) und Gleichung (13.10) zurGleichung (13.9) durch Umnummerierung (“Zeilenvertauschung“).Ist a12 6= 0, mache Unbekannte x1 zur Unbekannten x2 und Unbekannte x2 zur Unbe-kannten x1 (“Spaltenvertauschung“).Ist a22 6= 0, kombiniere die Schritte “Zeilenvertauschung“ und “Spaltenvertauschung“.
Bemerkung 13.4
Die Losung des Gleichungssystems (13.9),(13.10) bedeutet offenbar, den Schnittpunkt derbeiden Geraden
a11x1 + a12x2 = b1 , a21x1 + a22x2 = b2
im “Anschauungsraum“ IK 2 zu suchen. 2
Bemerkung 13.5
Die Große ∆, welche im Fall 1 gleich Null ist, bestimmt offenbar, ob es genau eine Losungdes Gleichungssystems (13.9),(13.10) gibt oder nicht. Diese Zahl heißt Determinante,betrachtet in Abhangigkeit von den Großen aij im Gleichungssystem, heißt sie Determi-nantenfunktion. Wir kommen auf diese Große noch zuruck.Die Bezeichnung “Spaltenvertauschung“ wird noch noch einsichtig werden. 2
Ein lineares Gleichungssystem in n Unbekannten und m Gleichungen ist gegebendurch ein Schema

Baumeister: Mathematik III / Stand: Mai 1998 346
a11x1 + a12x2 + . . . + a1nxn = b1...
......
...am1x1 + am2x2 + . . . + amnxn = bm
Die Großen aij ∈ IK nennen wir Koeffizienten des Gleichungssystems. Jede Zeile diesesSchemas konnen wir mit dem Summenzeichen aufschreiben. Dann erhalten wir:
n∑j=1
aijxj = bi , 1 ≤ i ≤ m. (13.13)
Definition 13.6
Ein x ∈ IKn mit x = (x1, . . . , xn) heißt Losung von (13.13), falls
n∑j=1
aijxj = bi , 1 ≤ i ≤ m.
gilt. 2
Beispiel 13.7
Wir betrachten eine spezielle Interpolationsaufgabe.
Finde eine Parabel y = ax2 + bx+ c durch die Punkte (0, 0), (1, 1), (−1, 2) .
Als Gleichungssystem erhalten wir in naheliegenderweise:
0 = a · 0 + b · 0 + c , 1 = a · 12 + b · 1 + c , 2 = a · (−1)2 + b · (−1) + c .
Also c = 0 unda+ b = 1 , a− b = 2 ,
d.h.a = 3/2 , b = −1/2 , c = 0 .
Damit ist die Parabel nun (eindeutig) bestimmt. 2
Bezeichnung: Mit dem Symbol k = n1(n2)n3 bezeichnen wir die Aufzahlung
k = n1, n1 + n2, n1 + 2n2, . . . , n3 .
Nun fassen wir die Zeilen (13.13) noch zu einem noch kompakterem Schema zusammen,indem wir einfuhren:
A :=
a11 a12 . . . a1n
a21 a22 . . . a2n...
......
am1 am2 . . . amn
:= (aij)i=1(1)m , j =1(1)n
Baumeister: Mathematik III / Stand: Mai 1998 347
Wir nennen A eine Matrix, genauer eine (m × n) – Matrix mit Eintragen aus demZahlbereich IK . Die Matrizen mit m Zeilen und n Spalten fassen wir zusammen in derMenge IKm,n . statt IR1,1 bzw. ′C 1,1 schreiben wir wieder IR bzw ′C .
Das aus dem Lateinischen kommende Wort “Matrix“ bedeutete ursprunglich “Mutterleib“oder “Uterus“, also etwas, worin oder woraus sich etwas entwickelt. Im Vergleich dazuist die mathematische Definition steril. Der Tensorbegriff ist eine Verallgemeinerung desMatrixbegriffs. Als “Erfinder“ der Matrizen ist A. Cayley (1821 – 1895) anzusehen.
Beispiele sind: (1√
232 π
)∈ IR2,2 ,
(7 i e+ 2i
0 12 ln(5)
)∈ ′C 2,3
Wir fassen nun noch die rechte Seite des obigen Gleichungssystems zusammen zu
b :=
b1
b2...bm
∈ IKm,1
und die gesuchte Losung oder die Unbekannten zu
x :=
x1
x2...xn
∈ IK n,1 .
Das Gleichungssystem schreiben wir dann als
Ax = b (13.14)
Betrachte nun das Gleichungssystem (13.14). Die Daten des Gleichungssystems sind A ∈IKm,n (Systemmatrix), b ∈ IKm,1 (rechte Seite); x ∈ IKn,1 steht fur den Losungs-vektor.Die rechte Seite b und die Losung x haben wir als Spaltenvektoren geschrieben. Spalten-vektoren sind die Elemente von IK k,1, wahrend die Elemente von IK 1,k Zeilenvektorenheißen. Offenbar sind Spalten– bzw. Zeilenvektoren spezielle Matrizen. Ihre Verwendungfuhrt dazu, daß wir die Schreibweise Ax = b in (13.14) mit einer Matrixmultiplikation gutinterpretieren konnen. Die Matrixmultiplikation ist folgendermaßen erklart:Sind A := (aij)i=1(1)m , j =1(1)n ∈ IKm,n , B := (bij)i=1(1)n , j =1(1)r ∈ IKn,r , so ist das
Produkt C := AB := (cij)i=1(1)m , j =1(1)r ∈ IKm,r erklart durch
cij :=n∑k=1
aikbkj , 1 ≤ i ≤ m, 1 ≤ j ≤ r .

Baumeister: Mathematik III / Stand: Mai 1998 348
Man beachte, daß das Matrixprodukt nicht kommutativ ist, d.h., daß im allgemeinenAB 6= BA gilt. Wichtig festzuhalten ist, daß eine Matrix A ∈ IKm,n linear auf denSpaltenvektoren in IKn,1 operiert, d.h.
A(x+ y) = Ax+Ay fur alle x, y ∈ IK n,1 .
Bezeichnung:Mit θ schreiben wir wie immer den Nullvektor in einem Raum IK n, also θ = (0, . . . , 0).Diese Bezeichnung verwenden wir sinngemaß auch fur θ als Spalten– bzw. Zeilenvektor.Mit Θ schreiben wir die Nullmatrix in IKm,n, d.h. Θ = (aij )i=1(1)m , j =1(1)n mit Eintragenaij = 0 , i = 1(1)m, j = 1(1)n .
Definition 13.8
Das SystemAx = b
heißt homogen, falls b = θ ist, anderenfalls inhomogen. 2
Satz 13.9
(a) Ist das System (13.14) homogen, so hat es die triviale Losung x = θ.
(b) Lθ := x ∈ IKn,1 |Ax = θ ist abgeschlossen bzgl. der Addition und skalarenMultiplikation, d.h.
u+ v ∈ Lθ , ru ∈ Lθ, , falls u, v ∈ Lθ, r ∈ IK .
(c) Ist Lb := x ∈ IK n,1 |Ax = b 6= ∅, dann ist
Lb = x+ Lθ := x+ u|u ∈ Lθ ,
wobei x (irgendeine spezielle) Losung von (13.14) ist.
Beweis:Zu (a). Trivial.Zu (b). Folgt aus (??).Zu (c).Sei x ∈ Lb. Dann gilt A(x− x) = θ, d.h. x− x ∈ Lθ .Sei x = x+ u mit u ∈ Lθ . Dann ist offenbar Ax = Ax = b , d.h. x ∈ Lb .
Beispiel 13.10
Sei A :=
(0 10 0
).
(1)
(00
),
(10
)∈ Lθ , aber
(x1
x2
)/∈ Lθ , falls x2 6= 0 .
Also Lθ =
(r0
) ∣∣∣ r ∈ IK
.

Baumeister: Mathematik III / Stand: Mai 1998 349
(2) Fur b =
(01
)gilt Lb = ∅ .
(3) Fur b =
(10
)gilt Lb =
(r1
) ∣∣∣ r ∈ IK
, da
(01
)∈ Lb . (Siehe c) von Satz
13.9 und (1).)
2
13.3 Eliminationsverfahren
Die Losung linearer Gleichungssysteme ist zentral in der numerischen Mathematik undin weiterem Sinne auch in der angewandten Mathematik. Die konstruktive Losungsideebesteht darin, ein gegebenes System durch aquivalente Umformungen, d.h. durch Umfor-mungen, die die Losungsmenge nicht andern, in eine Form zu bringen, aus der man dieLosung dann ablesen kann. Eine solche erstrebenswerte Form ist eine Matrix von obererDreiecksgestalt:
Definition 13.11
(a) Eine Matrix A = (aij)i=1(1)m , j =1(1)n heißt von oberer Dreiecksgestalt,wenn
aij = 0 , falls i > j,
gilt.
(b) Eine Matrix A = (aij)i=1(1)m , j =1(1)n heißt Diagonalmatrix, wenn
aij = 0 , falls i 6= j ,
gilt.
2
In der “einfachsten“ Situation m = n = 2 hat ein Gleichungssystem mit einer Systemma-trix von oberer Dreiecksgestalt folgende Form:(
a11 a12
0 a22
) (x1
x2
)=
(b1
b2
).
Nun ist klar: Ist a11a22 6= 0, so lost man so:
x2 := a−122 b2 , x1 := (b1 − a
−122 a12b2)a−1
11 .
Dies ist die 2 × 2 – Version eines Algorithmus, der Ruckwartssubstitution genanntwird. In der Einfuhrung haben wir in (13.9),(13.11) ein solches System vorgefunden.
Baumeister: Mathematik III / Stand: Mai 1998 350
Definition 13.12
Eine Matrix A = (aij)i=1(1)n , j =1(1)n von oberer Dreiecksgestalt heißt regular, falls
a11 · · · ann 6= 0
gilt, anderenfalls singular. 2
Beachte, daß eine Diagonalmatrix eine Matrix von oberer Dreiecksgestalt ist und damitauch Regularitat und Singularitat fur diesen Typ von Matrizen erklart ist. Das Produkta11 · · · ann ist im Spezialfall n = 2, a21 = 0 gerade die in Abschnitt 13.2 ins Spiel gebrachteGroße ∆ .
Die Bedeutung des Begriffs “regular“ liegt bei Systemen mit einer Systemmatrix vonoberer Dreiecksgestalt darin, daß die eindeutige Losbarkeit durch diese Eigenschaft ge-sichert wird; Losbarkeit alleine kann auch ohne diese Bedingung vorliegen. Dies ist eineKonsequenz aus dem folgenden Algorithmus2, der die Losung eines Gleichungssystemsmit einer Systemmatrix von oberer Dreiecksgestalt beschreibt.
Hier ist der Platz, einige Anmerkungen zum Begriff Algorithmus zu machen. Mit Algo-rithmen bezeichnet man Verfahren, die fur eine Realisierung auf einem Computer geeignetsind. Schreibt man ein Verfahren als Folge von Rechenvorschriften fur einen Computer soauf, daß es als Algorithmus bezeichnet werden kann, so sind bestimmte Eigenschaften zuberucksichtigen:
Eigenschaften eines Algorithmus:
1. Endlichkeit Ein Algorithmus muß nach endlich vielen Rechenschritten – man kannsie bis auf endlich viele Elementaroperationen zuruckverfolgen – enden.
2. Wohldefiniertheit Jeder Schritt muß exakt definiert sein und durchfuhrbar sein.
3. Input Die Eingangsgroßen sind vollstandig zu beschreiben.
4. Output Die Ausgangsgroßen sind dem Ziel des Algorithmus entsprechend zu beschrei-ben.
5. Effektivitat Von einem Algorithmus erwartet man, daß er eine vorgelegte Aufgabein effektiver Weise lost.
Es ist ein wesentlicher Bestandteil der Analyse von Algorithmen, Kriterien fur den Ver-gleich anzugeben. Als ein sehr wichtiges Kriterium wird man die Schnelligkeit, mit dereine Aufgabe durch einen speziellen Algorithmus gelost wird, anschauen.
Algorithmus Ruckwartsubstitution
EIN Regulare Matrix A ∈ IKn,n von oberer Dreicksgestalt, rechte Seite b ∈IK n,1 .
2Das Wort “Algorithmus“ ist aus dem Namen Al-Khwarazmi (780? – 850?) eines bedeutendemMathematikers des anfangenden Mittelalters abgeleitet.
Baumeister: Mathematik III / Stand: Mai 1998 351
S1 i := n
S2 xi := bi
S3 Fur j = (i+ 1)(1)n xi := xi − aijxjS4 xi := xi/aii
S5 Ist i > 1, gehe mit i := i− 1 zu S2, sonst zu AUS
AUS Gebe den Losungsvektor x = (x1, . . . , xn) aus
(Den Losungsvektor haben wir in AUS aus Platz–okonomischen Grunden als n-Tupelund nicht als Spaltenvektor geschrieben).
Es ist nun erstrebenswert, eine beliebige Matrix auf eine obere Dreiecksgestalt in einerWeise zu transformieren, daß sich der Losungsraum dabei nicht verandert. Dieses leistetdas Eliminationsverfahren, das nach C.F. Gauß benannt ist, das allerdings fur konkreteFalle schon sehr viel fruher Anwendung fand.
Aus dem 2. Jahrhundert n. Chr. gibt es eine Ubersetzung der “Neun Bucher uber dieKunst der Mathematik“, die wohl im 2. Jahrhundert v. Chr. aufgeschrieben wurden; dasMethodenmaterial kann aber durchaus alter sein. Diese Bucher sind eine Art Lehrbuchfur Verwaltungsbeamte. Im VIII. Buch ist folgende Aufgabe enthalten:
Aus drei Garben einer guten Ernte, 2 Garben einer mittelmaßigen Ernte, und1 Garbe einer schlechten Ernte erhalt man den Ertrag von 39 Tou. Aus 2Garben einer guten Ernte, 3 Garben einer mittelmaßigen Ernte und 1 Garbeeiner schlechten Ernte erhalt man 34 Tou. Aus 1 Garbe guter Ernte, 2 Garbenmittelmaßiger Ernte und 3 Garben schlechter Ernte erhalt man 26 Tou. Wievielist der Ertrag einer Garbe?
Diese Aufgabe wurde in eine rechteckige Tabelle gebracht (Matrixschema !) und nachRegeln (“Immer multipliziere mit der Garbenzahl der guten Ernte mit der . . .
”), die den
Eliminationschritten (siehe unten) entsprechen, auf eine Dreieckstabelle gebracht. Dabeikonnen auch negative Zahlen – sie werden hier wohl erstmals in der Entwicklungsge-schichte der Mathematik gehandhabt – auftreten, fur den Umgang dafur wurden Regelnangegeben. Wir konnen das resultierende rechteckige Schema nun als lineares Gleichungs-system mit einer Systemmatrix von oberer Dreiecksgestalt lesen: 3 2 1
0 5 10 0 12
x1
x2
x3
=
392439
.
Nun wird mit Ruckwartssubstitution gelost.Die Idee der Elimination wurde auch studiert von Diophantos aus Alexandrien (um 250n. Chr.).
Welche Manipulationsschritte – wir nennen sie nun elementare Umformungen – sindes, die wir auf ein lineares Gleichungssystem anwenden durfen, ohne die Losungsmengezu verandern? Es sind dies:
Baumeister: Mathematik III / Stand: Mai 1998 352
Zeilenvertauschung: Vertauschung von zwei Gleichungen, was eine Zeilenver-tauschung in der Systemmatrix und der rechten Sei-te bedeutet. Diese wird verwendet, um an einer gewis-sen Stelle der Matrix ein Element p 6= 0 (Pivotele-ment/“Ankerelement“) zu haben.
Multiplikation: Eine Gleichung wird mit einem Skalar r 6= 0 multipliziert.Dies entspricht der Multiplikation einer Zeile in der Sy-stemmatrix und in der rechten Seite. Diese wird verwen-det, um an einer gewissen Stelle der Matrix ein Element p(Pivotelement) geeigneter Große zu haben.
Addition: Eine Gleichung wird zu einer anderen Gleichung addiert.Dies entspricht einer Addition einer Zeile in der System-matrix und in der rechten Seite. Diese wird verwendet, uman einer gewissen Stelle der Matrix einen Eintrag zu Nullzu machen.
Spaltenvertauschungen: Vertauschung von zwei Unbekannten, was einer Spalten-vertauschung in der Systemmatrix entspricht; man hat sichdies zu merken, da sie einer Umnumerierung der Variablenentspricht. Diese kann man verwenden, um an einer gewis-sen Stelle der Matrix ein Element p 6= 0 (Pivotelement) zuhaben.
Kein Zweifel, nichts andert sich an der Losungsmenge, da man jeden Schritt wiederruckgangig machen kann. Man beachte, daß man, bis auf die Spaltenvertauschung, dieManipulationen stets auf die geranderte Matrix (A|b) anzuwenden hat (A Systemma-trix, b rechte Seite). In unserer Einfuhrung haben wir diese Schritte bereits kennengelernt.Was ist nun das Ziel dieser elementaren Umformungen? Es ist das Ziel, eine Variable xi ausallen Gleichungen i+1, . . . ,m zu elimieren, indem man die Eintrage mli , l = i+1, . . . ,m,in der Matrix zu Null macht.
Beispiel 13.13
Betrachte das Gleichungssystem aus dem VIII. Buch der “Neun Bucher uber die Kunstder Mathematik“: 3 2 1
2 3 11 2 3
x1
x2
x3
=
393426
.
Das Eliminationsverfahren nach Gauß wird folgendermaßen durchlaufen: 3 2 1 392 3 1 341 2 3 26
,
1 2/3 1/3 130 5/3 1/3 80 4/3 8/3 13
,
1 2/3 1/3 130 1 1/5 24/50 0 12/5 33/5
,
3 2 1 390 5 1 240 0 12 33
.

Baumeister: Mathematik III / Stand: Mai 1998 353
Mit Ruckwartsubstitution erhalten wir als Losung x = (x1, x2, x3) :
x3 = 11/4 , x2 = 17/4 , x1 = 37/4
2
Sei nun das allgemeine Gleichungssystem (13.14) betrachtet. Die Eliminationsschritte –wir nennen ihre Zusammenfassung das bf Gaußsche Eliminationsverfahren – , angewendetauf die geranderte Matrix (A|b) fuhren dann schließlich zu einem Endergebnis, das soaussieht: (
U B uΘ Θ c
);
dabei ist U = (uij) ∈ IRk,k eine obere Dreiecksmatrix mit ∆(U) := u11 · · · ukk 6= 0. Darausliest man sofort ab, daß das gegebene Gleichungssystem Ax = b losbar genau dann ist,wenn c = θ ist. In diesem Fall erhalt man die Losungskomponenten z := (x1, . . . , xk) ineindeutiger Weise durch Ruckwartssubstitution aus dem Gleichungssystem
Uz = u−Bv ,
wobei die restlichen Losungskomponenten v := (xk+1, . . . , xn) beliebig vorgegeben werdenkonnen. Daraus schließt man, daß der Losungsraum n− k “Freiheitsgrade“ hat.
Beispiel 13.14
Betrachte das homogene Gleichungssystem
Ax = θ
mit A ∈ IKm,n . Dieses hat stets die Losung x = θ . Ist m < n – das Gleichungssystemheißt dann unterbestimmt – hat es auch nichttriviale Losungen. Dies sieht man so:Das Gaußsche Eliminationsverfahren uberfuhrt die geranderte Matrix (A|θ) in(
U B θΘ Θ θ
).
(Beachte, daß sich die rechte Seite bei den Manipulationen nicht andert.) Hierbei ist U ∈IK k,k mit k ≤ m und wir haben n− k > 1 . Also besitzt das homogene Gleichungssystemauch nichttriviale Losungen, da die Losungskomponenten xk+1, . . . , xn beliebig festgesetztwerden konnen. 2
Die Große ∆(U) heißt heißt Determinante von U ; wir schreiben det(U) := ∆(U) . Fureine allgemeine Matrix A = (aij)i=1(1)n , j =1(1)n fuhrt man eine Determinante so ein:
det(A) :=∑σ∈Sn
ε(σ)a1σ(1) · · · anσ(n)
Fur n = 2 erhalten wir det(A) = a11a22 − a12a21 (siehe Abschnitt 13.2) und fur n = 3
det(A) = a11a22a33 + a12a23a31 + a13a21a32 − a31a22a13 − a21a12a33 − a32a23a11 .

Baumeister: Mathematik III / Stand: Mai 1998 354
Die Regel fur n = 3, sie heißt Regel von Sarrus, kann man sich leicht merken durchfolgende Stutze:Man schreibt den ersten und zweiten Spaltenvektor der Matrix hinter die drei Spalten derMatrix; die drei Produkte der Hauptdiadonalen ergeben die positiven Summanden, diedrei Produkte der Nebendiagonalen ergeben die Summanden mit dem negativen Vorzei-chen.Die Determinante fuhrt auch zu einem Losungsrezept (Cramersche Regel) fur quadra-tische Gleichungssysteme, auf das wir aber nicht naher eingehen wollen, da es nur furdie Falle von 2 oder 3 Gleichungen wirklich praktisch interessant ist: Die Losung x vonAx = b erhalt man mit
xj =1
det(A)det((a1| . . . |aj−1| b |aj+1| . . . |an)) , 1 ≤ j ≤ n ,
wobei A die Spalten a1, . . . , an habe. Die Eigenschaft det(A) 6= 0, die notwendig fur obigeFormel ist, ist notwendig und hinreichend fur die eindeutige Losbarkeit der GleichungAx = b .
Die obige Losungsmethode, die man als Gaußsches Eliminationsverfahren bezeichnet, laßtsich nun leicht in eine Rechenvorschrift fur einen Computer umwandeln. Wir konnen hierauf weitere Erlauterungen dazu verzichten, da auf nahezu jedem Rechner heutzutage Soft-warelosungen bereits vorhanden sind. Den Algorithmus zur Ruckwartssubstitution habenwir angefuhrt, um Hinweise zu geben, wie man Rechenvorschriften programmiersprachen-nah aufschreibt.
In der Praxis wird die Losung eines (großen) linearen Gleichungssystems auf einem Com-puter durchgefuhrt. Dieser hat nur endlich viele (Dezimal–)Stellen fur die Rechnung zurVerfugung, auf die jeweils durch eine Variante einer “Rundung“ die Zahlen reduziert wer-den. Berucksichtigt man dies, so kommt zu den bisher angesprochenen Fragen
Existenz (einer Losung), Eindeutigkeit (einer Losung)
die Frage der
Stabilitat (der Berechnung gegenuber Rundung)
hinzu. Die Frage der Stabilitat ist wesentlicher Teil von Uberlegungen, die in der numeri-schen Mathematik hinsichtlich der numerischen Losung von linearen Gleichungssystemen(auch unabhangig vom Losungsverfahren) angestellt werden. Die Wahl eines Pivotele-ments spielt eine wesentliche Rolle bei der Betrachtung.Sind bei einem Gleichungssystem alle drei Fragen positiv beantwortet, nennt man dasProblem gut konditioniert. Diese Begriffsbildung ist eine Version des von J. Hadamard(1865 – 1963) im Zusammenhang mit partiellen Differentialgleichungen eingefuhrten Be-griffs korrekt gestellt oder gut gestellt. Nach Hadamard heißt ein Problem korrektgestellt, wenn folgende Aussagen verifiziert werden konnen:
Existenz: Das Problem hat eine Losung.
Eindeutigkeit: Das Problem hat hochstens eine Losung.
Stabilitat: Die Losung hangt stetig von den Daten des Problems ab.

Baumeister: Mathematik III / Stand: Mai 1998 355
Beispiel 13.15
Betrachte ein Gleichungssystem Ax = b mit Systemmatrix
A :=
(2 13 2
)∈ IR2,2 .
Losungen:
x1 =
(51−2
)fur b1 =
(100149
),
x2 =
(47.4
4
)fur b2 =
(99
150.5
),
x3 =
(348−598
)fur b3 =
(100−149
),
x4 =
(348.5−598
)fur b4 =
(99−150.5
).
Man stellt fest, daß b1 − b2 und b3 − b4
”klein“ ist, wahrend x1 − x2
”groß“ und x3 −
x4
”klein“ ist. Dieses Losungsverhalten laßt sich verstehen, wenn man die Losung des
Gleichungssystems als Schneiden von zwei Geraden auffaßt. 2
Die Inversion einer Matrix A ∈ IRn,n, d.h. die Berechnung einer Matrix B mit AA−1 = E– wir schreiben dafur A−1 – , kann man mit dem Eliminationsverfahren auch bewerkstel-ligen. Man hat lediglich die Gleichungen
Axj = ej , 1 ≤ j ≤ n,
zu losen und A−1 := (x1| · · · |xn) zu setzen. Kennt man die Inverse A−1 der Matrix A ∈IK n,n , so ist das Gleichungssystem Ax = b leicht zu losen: x := A−1b ist die Losung.Die Berechnung der Inversen lohnt sich daher dann, wenn fur “viele“ rechte Seiten b dasGleichungssystem zu losen ist.
Kommt das Gleichungssystem Ax = b aus einer angewandten Situation, so ist oft A ∈IRm,n mit m > n ; das Geichungssystem ist uberbestimmt. Eine Losung existiert dannmeist nicht, da Meßfehler, Datenfehler, . . . den linearen Zusammenhang zerstoren. AlsErsatz sucht man nach einer Ausgleichslosung, d.h. nach einem x∗ ∈ IRn,1, das den DefektAx − b , gemessen durch den euklidischen Abstand im IRn (siehe nachster Abschnitt),minimal macht. Man kann zeigen, daß ein solches x∗ immer existiert und wieder einlineares Gleichungssystem lost, namlich
AtAx = Atb . (13.15)
Dabei ist die Matrix At die zu A transponierte Matrix, d.h. die Matrix, die ausA = (aij)i=1(1)m , j =1(1)n dadurch entsteht, daß man die Eintrage an der Hauptdiago-
nalen “spiegelt“, also At = (aji)i=1(1)n , j =1(1)m . Die Gleichung (13.15) heißt Normalglei-chung. In Abschnitt 13.1 haben wir in einer konkreten Situation diese Vorgehensweisevorweggenommen. C.F. Gauß gelang 1801 mittels (nichtlinearer) Ausgleichsrechnung dieWiederauffindung des (kleinen) Planeten Ceres.
Baumeister: Mathematik III / Stand: Mai 1998 356
13.4 Euklidische Geometrie des Raums
Wir gehen hier nicht axiomatisch–geometrisch sondern analytisch–geometrisch vor, d.h.wir erweitern die Sicht des Kapitels 11 auf den Raum. Von da ist dann der Weg zur Li-nearen Algebra, die sich mit denselben Fragestellungen in einem abstrakten Vektorraumbeschaftigt, nicht mehr weit und nicht mehr mit prinzipiellen Schwierigkeiten versehen.
Punkte P des euklidischen Raums IE 3 sind festgelegt durch Tripel x = (x1, x2, x3) ∈ IR3,die Zahlen x1, x2, x3 heißen Koordinaten des Punktes P . Fur diese Menge der Tripel hatman analog zum Fall IR2 wesentliche Operationen: Addition und skalare Multiplikation.In der Sprache der Linearen Algebra bedeutet dies, daß V = IR3 zusammen mit denVerknupfungen
”Addition“,
”Skalare Multiplikation“ ein Vektorraum uber dem Skalar-
korper IR ist, dessen Dimension drei ist und in dem die Vektoren
e1 := (1, 0, 0) , e2 := (0, 1, 0) , e3 := (0, 0, 1)
eine Basis darstellen, d.h. eine anzahlmaßig kleinste Menge von Vektoren, mit deren Hilfejeder Vektor x = (x1, x2, x3) als Linearkombination dargestellt werden kann:
x = x1e1 + x2e
2 + x3e3 .
Das in Kapitel 11 so nutzliche Objekt x⊥ fur ein x ∈ IR2 steht uns in IR3 in der allgemeinennutzlichen Formulierung nicht zur Verfugung. An seine Stelle tritt hier das Vektorpro-dukt, ein Objekt das auch in IRn, n ≥ 4, definierbar ist, aber dort bei weitem nicht sobedeutungsvoll ist.
Definition 13.16
Fur x, y ∈ IR3, x = (x1, x2, x3), y = (y1, y2, y3), definiert man das Vektorproduktvon x, y durch
x× y := (x2y3 − x3y2, x3y1 − x1y3, x1y2 − x2y1) .
Die Abbildung× : IR3× IR3 3 (x, y) 7−→ x× y ∈ IR3
heißt das Vektorprodukt in IR3 . 2
Bevor wir Rechenregeln uber das Vektorprodukt formulieren, eine Verallgemeinerung desSkalarprodukts auf den Fall IRn . (Das Vektorprodukt ist ein
”Produkt“, dessen Ergebnis
ein Vektor ist, das Skalarprodukt ist ein”Produkt“, dessen Ergebnis ein Skalar, d.h. eine
Zahl ist.)
Definition 13.17
Die Abbildung
< ·, · > : IRn× IRn 3 ((x1, . . . , xn), (y1, . . . , yn)) 7−→ x1y1 + · · ·+ xnyn ∈ IR
nennen wir Skalarprodukt auf IRn . 2

Baumeister: Mathematik III / Stand: Mai 1998 357
(Die Definition eines Skalarprodukts auf ′C n sollte damit auch sofort klar sein.)
Folgerung 13.18
Fur das Skalarprodukt haben wir folgende Eigenschaften:
1. < x, x >≥ 0 fur alle x ∈ IRn und < x, x >= 0 genau dann, wenn x = θ .
2. < x, y >=< y, x > fur alle x, y ∈ IRn .
3. < ax+ by, z >= a < x, z > +b < y, z > fur alle a, b ∈ IR und x, y ∈ IRn .
Beweis:Diese Eigenschaften verifiziert man ohne Muhe.
Definition 13.19
Die Abbildung| · | : IRn 3 x 7−→
√< x, x > ∈ IR
heißt euklidische Norm auf IRn . 2
Folgerung 13.20
Fur die euklidische Norm in IRn haben wir folgende Eigenschaften:
1. |x| = 0 genau dann, wenn x = θ .
2. |ax| = |a||x| fur alle a ∈ IR und x ∈ IRn .
3. |x+ y| ≤ |x|+ |y| fur alle x, y ∈ IRn .
4. | < x, y > | ≤ |x| |y| fur alle x, y ∈ IRn , und es gilt Gleichheit genau dann,wenn x, y linear abhangig sind.
Beweis:Man ubertrage den Beweis zu Folgerung 11.8.
Die Eigenschaften 1., 2., 3. in Folgerung 13.20 sind die Eigenschaften Definitheit, Homo-genitat, Dreiecksungleichung, die 4. Eigenschaft heißt Cauchy–Schwarzsche Un-gleichung (siehe Abschnitt 11.1).
Aus der Cauchy–Schwarzschen Ungleichung leitet sich wie in Abschnitt 11.1 ab, daß eszur Zahl
< x, y >
|x||y|
genau eine Zahl φ ∈ [0, π] gibt mit
cos(φ) =< x, y >
|x||y|.
Baumeister: Mathematik III / Stand: Mai 1998 358
Wir nennen diese Zahl φ Winkel zwischen x und y und schreiben dafur <) (x, y) . (NachKapitel 12 mußten wir φ eigentlich ein Winkelmaß nennen.)Wiederum lesen wir sofort den Cosinussatz ab:
|x− y|2 = |x|2 + |y|2 − 2|x||y| cos(<) (x, y)) (13.16)
Wir listen Rechenregeln fur das Vektorprodukt auf:
(R1) x× y = −y × x fur alle x, y ∈ IR3 .
(R2) (ax+ by)× z = a(x× z) + b(y × z) fur alle x, y, z ∈ IR3, a, b ∈ IR .
(R3) e1 × e2 = e3, e2 × e3 = e1, e3 × e1 = e2
(R4) e1 × e1 = e2 × e2 = e3 × e3 = θ.
(R5) x× (y × z) =< x, z > y− < x, y > z fur alle x, y, z ∈ IR3 .
(R6) x× (y × z) + y × (z × x) + z × (x× y) = θ .
(R7) < x× y, u× v >=< x, u >< y, v > − < x, v >< y, u > fur alle x, y, u, v ∈ IR3 .
(R8) < x, y >2 + |x× y|2 = |x|2|y|2 fur alle x, y ∈ IR3 .
Die Beweise zu diesen Rechenregeln sind einfach. Wir ubergehen diese Rechenarbeit.
Die Identitat in (R1) besagt, daß das Vektorprodukt antikommutativ ist. Die Identitatin (R5) nennt man Grassmann–Identitat. Sie illustriert die fehlende Assoziativitat desVektorprodukts; etwa:
(e1 × e1)× e2 = θ , e1 × (e1 × e2) = −e2 .
Die Identitat in (R6) heißt Jakobi–Identitat, die Identitat in (R7) Lagrange–Identi-tat. Aus (R8) lesen wir ab, daß an die Stelle von [x, y] in IR2 hier der Ausdruck |x × y|getreten ist. Als Konsequenz haben wir x× y = 0 genau dann, wenn x, y linear abhangigsind (siehe Folgerung 13.20).
Bemerkung 13.21
Eine Menge A mit einem Produkt, welches antikommutativ ist und der Jakobi–Identitatgenugt, nennt man nach dem norwegischen Mathematiker S. Lie (1842 – 1899) eine Lie–Algebra. Solche Algebren sind fur viele Gebiete der Mathematik und Physik von großerBedeutung. 2
Aus (R7) folgen unter Beachtung der Art, wie ein Winkel zwischen Vektoren x und y
eingefuhrt wurde, die Identitaten
< x, y >= |x||y| cos(<) (x, y)) , |x× y| = |x||y| sin(<) (x, y))
Anschaulich ist damit klar, daß durch |x × y| der Flacheninhalt des Paralellogrammsangegeben wird, das durch x, y aufgespannt wird.
Baumeister: Mathematik III / Stand: Mai 1998 359
Lemma 13.22
Seien x, y Vektoren in IR3 . Dann gilt:
(a) < x× y, x >=< x× y, y >= 0 .
(b) Sind x, y linear unabhangig, dann bilden x, y, x× y eine Basis von IR3.
Beweis:(a) rechnet man einfach nach. (b) enthalt die Aussagen, daß x, y, x× y linear unabhangigsind und daß jeder Vektor z ∈ IR3 sich als Linearkombination von x, y, x× y schreibenlaßt.Zur linearen Unabhangigkeit. Sei ax+ by + c(x× y) = θ. Dann folgt mit (a)
0 =< ax+by+c(x×y), θ >=< ax+by+c(x×y), ax+by+c(x×y)>= c < x×y, x×y > .
Ist |x × y|2 = 0, dann gilt in (R7) < x, y >2 = |x|2|y|2 , d.h. Gleichheit in der Cauchy–Schwarzschen Ungleichung. Dann mußten aber x, y linear abhangig sein. Also ist |x×y| 6= 0und daher c = 0. Da x, y linear unabhangig sind, folgt a = b = 0.Zur Eigenschaft, Erzeugendensystem zu sein. Sei z ∈ IR3 . Dann sind z, x, y, x× y linearabhangig, da nach 13.14 das Gleichungssystem dz + ax + by + cx × y eine nichttrivialeLosung besitzt. Also gibt es d, a, b, c ∈ IR mit dz + ax+ by + cx× y = θ, wobei nicht alled, a, b, c verschwinden. Da x, y, x× y linear unabhangig sind, kann d nicht verschwinden.Dann konnen wir eine Darstellung von z sofort ablesen.
In IR3 (und nicht nur dort) hat man zwei verschiedene Klassen von Basen: positiv orien-tierte und negativ orientierte Basen. Der Klasse der positiv orientierten Basen ordnetman eine Basis x, y, z zu, wenn die Determinante der Matrix (x|y|z) ∈ IR3,3 (x, y, z sindals Spaltenvektoren aufzufassen) positiv ist. Die Basis e1, e2, e3 ist daher positiv orientiert.Ebenso jede Basis von der Form x, y, x× y, da die Determinante von (x|y|x× y) positivist. (Man beachte, daß die Orientierung von der Reihenfolge der Aufzahlung abhangt.)Die positive Orientierung einer beliebigen Basis kann man durch die sogenannte Rechte–Hand–Regel erkannt werden: Aus gestrecktem Daumen, Zeigefinger, Mittelfinger derrechten Hand laßt sich ein Koordinatenkreuz formen, das mit e1, e2, e3 beschriftet durchDrehung in Ubereinstimmung mit dem Koordinatenkreuz x, y, z gebracht werden kann.
In IR3 haben wir nun auch Geraden:
Lp,u := x ∈ IR3 |x = p + tu, t ∈ IR (u 6= θ) ;
p ist ein Punkt der Geraden, u ist wieder ein Richtungsvektor. Es ist sofort klar, daßdurch zwei verschiedene Punkte p, q ∈ IR3 genau eine verbindende Gerade festgelegt wird,namlich Lp,q−p .
Zwei Geraden im Raum mussen sich nicht schneiden. Dies tritt z.B. dann ein, wenn sieparallel sind, was gleichbedeutend mit der Tatsache ist, daß ihre Richtungsvektoren linearabhangig sind. Dies ist zu beachten in folgender Definition.
Baumeister: Mathematik III / Stand: Mai 1998 360
Definition 13.23
Zwei Geraden Lp,u, Lq,v heißen windschief, wenn Lp,u∩Lq,v = ∅ gilt oder u, v linearabhangig sind. 2
Lemma 13.24
Lp,u, Lq,v sind windschief genau dann, wenn q − p, u, v linear unabhangig sind. 2
Beweis:Seien Lp,u, Lq,v windschief. Dann sind u, v sicher linear unabhangig. Betrachte eine Glei-chung a(q−p) + bu+ cv = θ . Daraus folgt sofort a < (q−p), u× v >= 0 . Ist a = 0, dannist auch b = c = 0 , da u, v linear unabhangig sind. Ist a 6= 0, dann ist < q−p, u×v >= 0.Da u, v, u× v eine Basis von IR3 bilden, haben wir q− p = tu+ sv fur geeignete t, s ∈ IR .Daraus folgt aber sofort, daß sich Lp,u, Lq,v schneiden.Zur Umkehrung. Da q − p, u, v linear unabhangig sind, sind sicher auch u, v linear un-abhangig. Ware Lp,u ∩ Lq,v 6= ∅, gabe es einen Vektor x mit x = p+ tu = q + sv , woraussofort die lineare Abhangigkeit von q − p, u, v folgte.
Zwei windschiefe Geraden Lp,u, Lq,v haben einen positiven Abstand
dist(Lp,u, Lq,v) := min|x− y||x ∈ Lp,u, y ∈ Lq,v .
Es ist anschaulich plausibel, es muß aber bewiesen werden, daß dieses Minimum ange-nommen wird. Vom Standpunkt der Analysis ist dazu die Funktion
IR2 3 (t, s) 7−→ |p + tu− q − sv| ∈ IR
zu minimieren. Geometrisch ist klar, daß ein gemeinsames Lot, d.h. ein Vektor l = y′−x′
mitx′ ∈ Lp,u , y
′ ∈ Lq,v , < l, x >=< l, y >= 0 fur alle x ∈ Lp,u , y ∈ Lq,v ,
den kurzesten Abstand realisiert. Man hat dazu nur den Satz des Pythagoras geeignetanzuwenden. Es laßt sich nun verifizieren, daß l := y′ − x′ := q + s′v − p− t′u mit
s′ =< u× v, (q − p)× u >
|u× v|2, t′ =
< u× v, (q − p)× v >
|u× v|2
ein solches gemeinsames Lot ist. Damit ist der Abstand dieser windschiefer Geraden ge-geben durch
dist(Lp,u, Lq,v) = |l| = |q + s′v − p− t′u| ,
d.h. (nach Einsetzen von s′, t′ und einfacher Rechnung)
dist(Lp,u, Lq,v) =| < u× v, q − p > |
|u× v|.
Nun zu den Ebenen. Wir schreiben sie zunachst in Parameterform auf:
Ep,u,v := x ∈ IR3 |x = p+ tu+ sv, s, t ∈ IR (u, v sind linear unabhangig) ;
Baumeister: Mathematik III / Stand: Mai 1998 361
dabei heißen u, v Richtungsvektoren, p ist ein Punkt der Ebene. Der Vektor u× v heißteine Normale zur Ebene Ep,u,v. Sie hat die Eigenschaft, senkrecht auf jedem Vektor, derin der Ebene Eθ,u,v liegt, zu sein (siehe Lemma 13.22).Die obige Darstellung der Ebene nennt man die Ebene in Parameterdarstellung. AlsDarstellung einer Ebene als Hyperebene sieht man
Hc,γ := x ∈ IR3 | < x, c >= γ (c 6= θ)
an. Die Bestimmungsgleichung < x, c >= γ haben wir in Abschnitt 13.2 als lineareGleichung kennengelernt.Wir haben die Identitat
Ep,u,v = Hu×v,α mit α =< u× v, p > .
Der Beweis dazu sieht so aus:Ist x = p + tu+ sv ∈ Ep,u,v, so gilt offenbar
< u× v, x >=< u× v, p > +t < u× v, u > +s < u× v, v >=< u× v, p >= α ,
also x ∈ Hu×v,α .Ist x ∈ Hu×v,α, dann laßt sich x− p mit Hilfe der Basis u, v, u× v so schreiben: x− p =au+ bv + cu× v . Wegen < u× v, x− p >= 0 folgt x = p+ au+ bv ∈ Ep,u,v .
Wenn nun eine Ebene in der Form Hc,γ vorliegt, wie findet man ihre Darstellung in derForm Ep,u,v ? Man wahlt einen Punkt p ∈ Hc,γ und bestimmt zwei linear unabhangigeVektoren u, v mit < c, u >=< c, v >= 0 . Dies ist moglich, da das homogene Gleichungs-system < c,w >= 0 nach Beispiel 13.14 zwei linear unabhangigeLosung besitzt.
Eine Normale einer Ebene in der Form Hc,γ ist der Vektor c , denn er steht senkrecht aufjedem Richtungsvektor der Ebene.
Eine Gerade Lp,u und eine Ebene Hc,γ haben genau dann genau einen Punkt gemeinsam,wenn < u, c > 6= 0 gilt. Dies folgt sehr einfach aus der Tatsache, daß aus der Gleichungγ =< c, p + tu > ein Parameter t in eindeutiger Weise ausgerechnet werden kann, wenn< u, c >6= 0 gilt.
Ohne auf die Hessesche Normalform einzugehen, halten wir den Abstand dist(q, Ep,u,v)eines Punktes q von der Ebene Ep,u,v fest:
dist(q, Ep,u,v) =| < u× v, q − p > |
|u× v|
Er kommt so zustande:Seien P,Q die Punkte im Raum mit den Koordinaten p bzw. q. Von Q aus fallen wirdas Lot auf die Ebene Ep,u,v; der gemeinsame Punkt der Geraden Lq,u×v und der EbeneEp,u,v ist der Fußpunkt F des Lotes. Dadurch ist nun das rechtwinklige Dreieck FQPentstanden; die Lange h der Seite QF ist der gesuchte Abstand. Wir erhalten dafur
h = |q − p|| cos(<) (u × v, q− p))| = |q − p|| < u× v, q − p > |
|u× v||q − p|

Baumeister: Mathematik III / Stand: Mai 1998 362
und das Ergebnis folgt.
Definition 13.25
Die Ebenen Hc,γ und Hb,β heißen genau dann parallel, wenn Hc,γ ∩Hb,β = ∅ oderHc,γ = Hb,β gilt. 2
Offenbar sind die Ebenen Hc,γ und Hb,β parallel genau dann, wenn c× b 6= θ gilt. Sind dieEbenen Hc,γ und Hb,β nicht parallel, dann schneiden sie sich in einer Geraden und dieseSchnittgerade ist gegeben durch
Hc,γ ∩Hb,β = Lp,c×b, falls p ∈ Hc,γ ∩Hb,β ist.
Als Winkel zwischen zwei sich schneidenden Ebenen wird man den Winkel zwischenden Normalen der Ebenen verstehen. Damit ist der Winkel zwischen Ebenen der FormHc,γ , Hb,β gleich dem Winkel zwischen c, b und zwischen Ebenen der Form Ep,u,v und Eq,x,ygleich dem Winkel zwischen u× v und x× y.
Lemma 13.26
Seien x, y, z ∈ IR3 und seien y − x, z − x linear unabhangig. Dann ist die Ebenedurch x, y, z beschrieben durch Lx,y−x,z−x bzw. Hc,γ wobei
c = x× y + y × z + z × x , γ =< x, c >
ist.
Beweis:Die Aussage zu Lx,y−x,z−x ist klar. Wegen x×y+y×z+z×x = (x−z)× (y−z) 6= θ liegtin Hc,γ in der Tat eine Hyperebene vor. Daß x in der Ebene Hc,γ liegt, ist unmittelbarklar. Fur y (analog fur z) folgt dies so:
< y, c > = < y − x, c > + < x, c >
= < y − x, (x− z)× (y − z) > +γ
= < y − x, [(x− y) + (y − z)]× (y − z) > +γ
= < y − x, x− y > +γ
= γ
Unter einem Parallelotop versteht man eine Figur
Px,y,z := ax+ by + cz|0 ≤ a, b, c ≤ 1,
wobei x, y, z linear unabhangig sind. Es ist dies eine Figur, die von drei Paaren parallelerEbenen begrenzt wird. Der Abstand des Punktes z von der Ebene Eθ,x,y ist gleich
| < x× y, z > ||x× y|−1 .

Baumeister: Mathematik III / Stand: Mai 1998 363
Da der Flacheninhalt der Grundflache von Px,y,z in Eθ,x,y gleich |x× y| ist, erhalt man alsVolumen von Px,y,z schließlich:
Volumen (Px,y,z) = | < x× y, z > |
Da ein Parellelotop wie ein Spat–Kristall aussieht, nennt man
< x× y, z >
manchmal auch das Spat–Produkt von x, y, z.
Beispiel 13.27
Welche Figur entsteht, wenn wir eine Kugel K mit einer Ebene E schneiden? Zur Dis-kussion dieser Frage reicht es aus den Spezialfall
E := (x, y, z) ∈ IR3 |z = a , K := (x, y, z) ∈ IR3 |x2 + y2 + z2 = R2
zu betrachten (a ∈ IR , R ≥ 0).Ist |a| > R, dann gibt es nach der Dreiecksungleichung keinen Schnittpunkt. Ist |a| = R,
dann besteht K ∩E aus genau einem Punkt und wir sagen, daß die Ebene E die Kugel indiesem Punkt beruhrt. Eine Ebene mit dieser Eigenschaft nennt man eine Tangential-ebene. Fur |a| < R ergibt sich die Schnittmenge K ∩E als
K ∩E = (x, y, z) ∈ IR3 |x2 + y2 = R2 − a2 .
Dies ist offenbar eine Kreisscheibe mit Radius R− |a| . 2
13.5 Die orthogonale Gruppe
Definition 13.28
Wir setzen
O+(3) := T ∈ IR3,3 |T = (a, b, a× b, a, b ∈ K31, < a, b >= 0, O−(3) := −O+(3) ,
und nennenO(3) := O+(3) ∪ O−(3)
die orthogonale Gruppe und
SO(3) := O+(3)
die spezielle orthogonale Gruppe. 2
Die Bezeichnung”Gruppe“ in Definition 13.28 ist gerechtfertigt, denn:

Baumeister: Mathematik III / Stand: Mai 1998 364
Lemma 13.29
O(3) is eine Untergruppe von GL(3; IR) und SO(3) ist ein Normalteiler von O(3).
Beweis:Dies zeigt man wie fruher (Satz 11.44).
Die Gruppen O(3), SO(3) sind von großer Bedeutung in den Naturwissenschaften Physikund Chemie.
The use of group theory by chemists to determine certain properties of suitable
molecules is a well–established procedure and there is a vast literature on the sub-
ject. For a single molecule the group involved is the molecule’s symmetriy group
which, up to conjugacy, can be considered as a subgroup of O(3) (necessarily finite,
assuming the molecule is non–trivial). The most significant part of the symmetry
group is its intersection, G, with SO(3) . . . .3
Satz 13.30
Sei f : IR3 −→ IR3 abstandserhaltend. Dann gilt:
(a) f ist bijektiv.
(b) Es gibt T ∈ O(3) und p ∈ IR3 mit
f(x) = Tx+ p , x ∈ IR3 .
Beweis:Dies zeigt man wie fruher (Satz ??).
Schon Euler wußte, daß man Drehungen, das heißt die Abbildungen aus O+(3), durchdie speziellen Drehungen um die Koordinatenachsen erzeugen kann. Dazu haben wir dieDrehungen in IR2, die wir aus Abschnitt 11.5 kennen, zu Drehungen im IR3
”fortzusetzen“ .
Wir setzen
T1(α) :=
1 0 00 cosα − sinα0 sinα cosα
, T2(α) :=
cosα 0 − sinα0 1 0
sinα 0 cosα
,
T3(α) :=
cosα − sinα 0sinα cosα 0
0 0 0
Satz 13.31
Fur jedes T ∈ O+(3) gibt es Winkel α, β, γ mit
T = T1(α)T2(β)T3(γ)
Beweis:3B. Kostant: The graph of the truncated icosaedron and the last letter of Galois, DMV–Mitteilungen
4/95.
Baumeister: Mathematik III / Stand: Mai 1998 365
Da man nach (R2) aus Abschnitt 11.5 zu jedem x ∈ IR2 ein α ∈ IR finden kann mitT (α)x = le2 mit l ∈ IR , gibt es ein α ∈ IR, so daß der Eintrag von T1(α)T an derStelle (2, 3) Null ist. Mit dem gleichen Argument findet man γ ∈ IR, so daß T1(α)TT3(γ)an der Stelle (2, 2) einen Eintrag Null hat. Da die Spaltenvektoren von T1(α)TT3(γ) dieeuklidische Norm 1 haben, folgt, daß der Eintrag von T1(α)TT3(γ) an der Stelle (2, 2)Eins ist. Dann gibt es aber β ∈ IR mit T1(α)TT3(γ) = T2(β). Also
T = T1(−α)T2(β)T3(−γ)
Bemerkung 13.32
Das Ergebnis von Satz ?? ist, daß man jede Drehung T ∈ O+(3) als Drehung um die dreiKoordinatenachsen darstellen kann. Es ist auf den ersten Blick uberraschend, daß manein beliebiges T ∈ O+(3) auch durch drei Drehungen um zwei Achsen darstellen kann. Esgilt namlich, daß es zu T ∈ O+(3) Winkel ϕχϑ gibt mit
T = T3(χ)T1(ϑ)T3(varphi).
Diese Winkel heißen Eulersche Winkel. Die Zerlegungsergebnisse sind in der Kreisel-theorie von großer Bedeutung. 2
.
13.6 Kegelschnitte
Es gibt zwei Arten, den Begriff einer Kurve einzufuhren. In der geometrischen Auf-fassung ist eine Kurve der Ort von Punkten in der Ebene oder im Raum, die durchgewisse Eigenschaften charakterisiert sind. So wird etwa in der Ebene ein Kreis durchden konstanten Abstand zu einem Punkt beschrieben. Die Kegelschnitte (siehe unten),ein Hauptgegenstand der griechischen Mathematik, sind durch geometrische Eigenschaf-ten definiert. In der mechanischen Vorstellung erscheint die Kurve als Bahnkurve einesbewegten Punktes. Beide Auffassungen finden sich bereits in der Antike. Die erste me-chanisch erklarte Kurve ist die Archimedische Spirale.
Wenn sich ein Halbstrahl in einer Ebene um seinen Endpunkt mit gleichformiger
Geschwindigkeit dreht, nach einer beliebigen Zahl von Umdrehungen wieder in die
Anfangslage zuruckkehrt und sich auf dem Strahl der Punkt mit gleichformiger
Geschwindigkeit, vom Endpunkt des Halbstrahls beginnend, bewegt, so beschreibt
dieser Punkt eine Spirale.4
Man beachte, daß der Begriff der”gleichformigen Geschwindigkeit“ vorkommt, ein Be-
griff, der erst bei I. Newton (1643 – 1727) im 16. Jahrhundert endgultige Klarung undBedeutung erfuhr.
4Siehe H. Gericke: Mathematik in Antike und Orient; Springer-Verlag, 1984, S. 120.

Baumeister: Mathematik III / Stand: Mai 1998 366
Betrachten wir zunachst ebene Kurven, also Kurven in der euklidischen Ebene IR2 . Dieanalytische Geometrie gestattet es, Kurven durch analytische Beziehungen zwischen denKoordinaten ihrer Punkte zu beschreiben. Bei Verwendung des ublichen rechtwinkligenKoordinatensystems – hier schreiben wir anstatt (x1, x2) stets (x, y) – haben wir:
(a) die implizite Darstellung in der Form einer Gleichung f(x, y) = c,
(b) die explizite Darstellung y = f(x),
(c) die Parameterdarstellung x = ϕ(t), y = ψ(t).
Die mechanische Auffassung wird in (c) deutlich: t wird als Zeit aufgefaßt. Die Bahndes Punktes ergibt sich als (ϕ(t), ψ(t))|t ∈ I, wobei I das Intervall der zulassigen (zurVerfugung stehenden) Zeit ist.
Beispiel 13.33
Fur die Kreislinie hat man folgende Darstellungen:
(a) implizite Darstellung: x2 + y2 = r2 ,
(a) explizite Darstellung: y = ±√r − x2, |x| ≤ r ,
(a) Parameterdarstellung: x = r cos(t), y = r sin(t), t ∈ [0, 2π) .
Man beachte, daß auch
x = r cos(πt), y = r sin(πt), t ∈ [0, 2) ,
eine Parameterdarstellung der Kreislinie ist. In beiden Fallen stimmt naturlich die Bahnuberein, das Bewegungsgesetz ist verschieden (Zeitskala!). 2
Beispiel 13.34
Ein Punkt P mit Masse m bewege sich auf der Kreislinie mit Radius r > 0 um denUrsprung O nach dem Gesetz
x(t) = (r cos(ωt), r sin(ωt)) , t ∈ IR ;
dabei ist x(t) der Ortsvektor und ω > 0 eine Konstante.Fur den Geschwindigkeitsvektor v(t) := x(t) (x(t) ist Physikernotation), dies ist diezeitliche Anderung des Ortes, gilt:
v(t) = ωx(t)⊥ , |v(t)| = ωr .
Diese Beziehung motiviert die Bezeichnung Winkelgeschwindigkeit fur ω .Fur den Beschleunigungsvektor b(t) := v(t), dies ist die zeitliche Anderung des Ge-schwindigkeitsvektors, haben wir
b(t) = −ω2x(t) , |b(t)| = ω2r .
Baumeister: Mathematik III / Stand: Mai 1998 367
Der Geschwindigkeitsvektor ist tangential zur Bewegung (< v(t), x(t) >= 0 !) und derBeschleunigungsvektor ist entgegengesetzt dem Ortsvektor. Nach dem Kraftgesetz vonNewton wirkt auf den Massenpunkt eine Kraft k(t), gegeben durch
k(t) := mb(t) = −mω2x(t) .
Diese Kraft nennt man Zentripetalkraft. Sie zwingt den Massenpunkt P auf der Kreis-linie zu bleiben. (Man spurt diese Zentripetalkraft, wenn man etwa einen Stein an einemFaden bindet und im Kreis schwingt als Zugkraft des Fadens. Auf einem Karusell sitzend,nehmen wir die Zentripetalkraft als Zentrifugalkraft wahr.) 2
Isaac Newton formulierte 1687 sein Weltsystem in der Schrift “Philosophiae Natura-lis Principia Mathematica“. Er faßt darin das gesamte physikalische Geschehen in dreiGrundsatzen oder Gesetzen der Bewegung zusammen, die an Einfachheit und Evidenznicht zu uberbieten sind. Es sind dies das Tragheits–, das Kraft–, und das Reaktions-gesetz. Unbeschleunigte Systeme, d. h. Systeme, in denen das Tragheitsgesetz gilt, heißenInertialsysteme. Die Naturgesetze haben in allen Inertialsystemen die gleiche Form(Aquivalenz der Inertialsysteme). Newton fuhrt damit die komplexe Vielfalt der(makroskopischen) Erscheinungswelt auf wenige einfache Ursachen zuruck. Die (spateranzufuhrenden) Keplerschen Gesetze, die J. Kepler phanomenologisch aufgestellt hat, er-geben sich daraus (in erster und guter Naherung) auf mathematisch durchsichtige Weisezwingend. Die Form der Planetenbahnen ist also keine Sache der Vorliebe der Natur fureine bestimmte edle Bewegungsform, sondern nur eine Folge von außeren Zwangen undder Anfangsbedingung bei ihrer Entstehung; siehe die Bemerkung zu Kometenbahnen un-ten. Erst ca. 200 Jahre spater wurden seine Erklarungen von Materie, Kraft, Bewegung,absoluter Zeit, absolutem Raum durch das Experiment von Michelsen 1881, das besagt,daß die Ausbreitungsgeschwindigkeit des Lichtes auf der bewegten (beschleunigten) Erdein jeder Richtung die gleiche ist, in Frage gestellt. Der wesentliche Schritt zur Beseitigungder damit verbundenen Probleme sollte A. Einstein 1905 gelingen, indem er die Aquiva-lenz der Inertialsysteme um die Annahme der Konstanz der Lichtgeschwindigkeit in Bezugauf solche Bezugssysteme erganzte und das Naturgeschehen in Raum und Zeit beschrieb.Die Punkte der Raum–Zeit werden Ereignisse genannt und durch den Minkowski–Raum(siehe Abschnitt 13.5) erfaßt.
Die Kurven Ellipse, Parabel, Hyperbel sind von besonderem Interesse. Sie konnengemeinsam definiert werden durch:
Ein Kegelschnitt C zum Parameter ε ist der geometrische Ort der PunkteP , deren Distanz von einem festen Punkt F das ε−fache der Distanz von einerfesten Gerade g ist.
ε heißt Exzentrizitat, der Punkt F heißt Brennpunkt und g heißt Leitgerade. DieseBezeichnungen gehen auf Apollonius (262? – 190? v. Chr.) zuruck. Die Kegelschnitte sindfestgehalten in der Abbildung 13.6.Sei g′ die Gerade durch F parallel zur Leitgeraden g und sei h die Gerade durch Fsenkrecht zur Geraden g. Offenbar ist der geometrische Ort C nun symmetrisch zu h. Dannliegt auf g′ eine Strecke LL′, deren Endpunkte L und L′ auf dem geometrischen Ort C

Baumeister: Mathematik III / Stand: Mai 1998 368
Abbildung 13.6: Kegelschnitte
liegen, denn es gibt sicher Punkte L,L′ auf der geraden g′ mit |FL| = |FL′| = εdist(F, g) .Sei l := |FL| = |FL′|. Wir haben nun definitionsgemaß
l = |FL| = ε|LH|
wobei H der Schnittpunkt der Geraden h′ durch L, parallel zu h, ist.Durch g′, h wird ein rechtwinkliges Koordinatensystem mit Ursprung F vorgelegt. Fureinen Punkt P des geometrischen Ort C mit den kartesischen Koordinaten (x, y) habenwir in Polarkoordinaten
x = r cos(ϑ) , y = r sin(ϑ)
mitr = |FP | = ε|PK| = ε(|LH| − r cos(ϑ)) = l− εr cos(ϑ) = l − εx , (13.17)
wobei K der Schnittpunkt der Geraden h′′ durch P parallel zu h ist. Also haben wir
l
r= 1 + ε cos(ϑ) , (13.18)
eine Darstellung des geometrischen Ortes (implizit) in Polarkoordinaten. (Hierin spiegeltsich dank cos(ϑ) = cos(−ϑ), sin(−ϑ) = − sin(ϑ), wieder die Symmetrie des geometrischenOrtes, bzgl. der Geraden h wieder.) Unten analysieren wir die Gleichung in kartesischenKoordinaten.Ist ε ∈ (0, 1), dann ist 1 + ε cos(ϑ) stets positiv und dies bedeutet, daß der Abstand rbeschrankt bleibt: Der geometrische Ort ist eine geschlossene Kurve; er heißt Ellipse.Ist ε = 1, dann ist r
”unendlich“ fur ϑ = −π; der geometrische Ort, er heißt Parabel,
ist keine geschlossene Kurve.Ist ε > 1, dann ist 1 + ε cos(ϑ) positiv oder negativ, je nachdem, ob cos(ϑ) großer oder
kleiner als −1ε ist. Dies deutet auf die zwei getrennte Teile des geometrischen Ortes hin;
er heißt Hyperbel.
Quadriert man in der Gleichung (13.17), so erhalt man
x2 + y2 = (l− εx)2 (13.19)

Baumeister: Mathematik III / Stand: Mai 1998 369
Ist ε 6= 1, erhalten wir mit a := l1− ε2
(x+ εa)2
a2 +y2
la= 1 (13.20)
und wir erkennen, daß hier die Gleichungen fur eine Ellipse oder Hyperbel stehen, aller-dings nicht symmetrisch zum Ursprung.Ist ε = 1, erhalten wir
y2 = l2 − 2lx (13.21)
und wir erkennen die Gleichung einer Parabel.
Nun gehen wir auf die verschiedenen Typen in einer “Standardform“ ein.
Ellipse
x2
a2 +y2
b2 = 1 (a ≥ b > 0) .
Ist a = b, dann haben wir den Kreis als geometrischen Ort vor uns.Sei etwa a > b. Wir setzen c :=
√a2 − b2, tragen auf der x−Achse die Punkte F1, F2 mit
den Koordinaten (−c, 0) bzw. (c, 0) ein; dies sind die Brennpunkte (siehe unten) derEllipse. Die Ellipse ist nun also der geometrische Ort aller Punkte, fur die die Summe derAbstande von F1 und F2 konstant (gleich 2a) ist. Denn es gilt fur einen Punkt P mit denKoordinaten (x, y) die Ellipsengleichung genau dann, wenn
|(x, y)− (−c, 0)|+ |(x, y)− (c, 0)| = 2a
gilt. (Die Verifikation gelingt ausgehend von√
(x+ c)2 + y2 = 2a −√
(x− c)2 + y2 sehrschnell.) Diese Tatsache entspricht der sogenannten Gartner–Konstruktion einer El-lipse Ein Seil der Lange 2a wird in den Brennpunkten (−c, 0), (c, 0) eingepflockt und zueinem Dreieck F1F2P gespannt; in P gleitet bei gespanntem Seil ein Stab entlang. Dieser3. Punkt P beschreibt dann eine Ellipse.Die Zahl ε := c/a heißt Exzentrizitat der Ellipse.Die Gleichung einer Ellipse kann man auch in Parameterform schreiben:
x = a cos(ϑ) , y = b sin(ϑ) (ϑ ∈ IR) .
Wenn ϑ monoton das Intervall [0, 2π] durchlauft, so beschreibt der Punkt (x, y) einevollstandige Ellipse.Klaren wir nun die Bezeichnung
”Brennpunkt“ auf. Dazu schicken wir folgende Betrach-
tung voraus, die aus Abbildung 13.7 abzulesen ist:Ist P ein Punkt auf der Ellipse, so verlangern wir die Strecke F1P uber P hinaus bis zueinem Punkt F ′2 so, daß |F1F
′2| = 2a gilt. Das Dreieck F2PF
′2 ist nun gleichschenklig, da ja
|F1P |+ |PF2| = 2a und daher |PF ′2| = |PF2| gilt. Die Winkelhalbierende t von <) (F2PF′2)
ist also auch Lot von P auf die Verbindungsstrecke von F2F′2 . Der Punkt P liegt auf t
und t enthalt keinen weiteren Punkt, denn ist Q 6= P ein Punkt der Tangente, so gilt|QF2| = |QF ′2| und aufgrund der Dreiecksungleichung (unter Heranziehung des DreiecksF1QF
′2) haben wir
|PF1|+ |PF2| = 2a = |F1F′2| < |QF1|+ |QF
′2| = |QF1|+ |QF2| .

Baumeister: Mathematik III / Stand: Mai 1998 370
Abbildung 13.7: Eigenschaft einer Ellipsennormalen
Daher ist t Tangente an die Ellipse in P.Die zu t senkrechte Gerade durch P , die wir Normale an die Ellipse in P nennen, istWinkelhalbierende im Winkel <) (F1PF2). Wir haben also gezeigt:
Satz 13.35
In jedem Ellipsenpunkt wird der Winkel <) (F1PF2) von der Ellipsennormale hal-biert.
Aus Satz 13.35 ergibt sich nun, daß ein von F1 ausgehender Strahl an der Ellipse bzw.an der Ellipsentangente so reflektiert wird, daß der reflektierte Strahl durch F2 verlauft.Ein von außen auf die Ellipse treffender Strahl, dessen Verlangerung durch F1 verlauft,wird so reflektiert, daß die Verlangerung des reflektierten Strahls durch F2 verlauft. Eineentsprechende Eigenschaft hat ein Ellipsoid. Dies ist die Figur, die im Raum entsteht, wennwir eine Ellipse um eine ihrer Achsen rotieren lassen. Hat ein Gewolbe in einem Bauwerkdie Form eines Halbellipsoids, so kann ein Ton, der in F1 erzeugt wird, in F2 besonders gutgehort werden; man spricht daher bei solchen Gewolben von Flustergewolben. DieseEigenschaft macht man sich auch bei der
”Bundelung“ von Ultraschallwellen bei der
Zertrummerung von Nierensteinen zunutze.
Hier ist der Platz, einige Anmerkungen zur geometrischen Optik zu machen. Dies ist derTeil der Phanomene der Lichtausbreitung, in dem man von einer geradlinigen Ausbreitungausgehen kann, also von der Wellenstruktur des Lichtes absehen kann. (Experimente, indenen sich die auf die Wellennatur des Lichts verrat, sind die Streuexperimente an einemengen Spalt oder einem kleinem Loch. Das Schillern von Compact discs in Regenbogen-farben ist auch eine Konsequenz dafur: Die “Rillen“ dienen als Spalte.)Fallt ein Lichtstrahl auf eine ebene Flache, die zwei Medien voneinander trennt, so wirder von ihr zum Teil oder auch vollstandig reflektiert. Der reflektierte Strahl liegt in derEbene durch den einfallenden Strahl und das Lot, das auf dem Spiegel im Auftreffpunktdes einfallenden Strahls errichtet wird. Der Einfallswinkel ist gleich dem Ausfallswinkel.Aus diesem Reflexionsgesetz folgt, daß ein Beobachter das virtuelle Bild einer den Strahl
Baumeister: Mathematik III / Stand: Mai 1998 371
aussendenden Lichtquelle in einem Punkt hinter dem Spiegel, der vom Spiegel den glei-chen Abstand wie das reelle Bild hat.Die wichtigsten Anwendungen geometrischer Optik haben zu tun mit der Reflexion vonLicht an gekrummten Flachen. Eine solche haben wir schon am Parabolspiegel gesehen.Haufiger sind Anwendungen an sogenannten spharischen Hohlspiegeln, d.h. an derverspiegelten Innenwand eines Kugelsegments.Sei eine Kugel mit Radius R und Mittelpunkt M betrachtet. Fur unsere Uberlegungenkonnen wir einen ebenen Schnitt (Ebene durch M) betrachten. Von der resultierendenKreislinie betrachten wir nur eine Halfte, also ein Kreissegment. Sei S (Scheitel) dieMitte dieses Kreissegments. Die durch S und M gehenden Halbgerade bezeichnen wirals Achse. Fallt nun parallel zur Achse ein Strahlenbundel ein, wird jeder achsennaheStrahl vom Spiegel so reflektiert, daß er naherungsweise durch den in der Mitte zwischenS und M liegenden Punkt F hindurchgeht; F bezeichnen wir daher als Brennpunkt.Die Begrundung sieht so aus:Sei F ′ der Durchgang eines in A reflektierten Strahls durch die Achse. Dann ist also nachdem Reflexionsgesetz – der Halbstrahl, der durch A und M geht, ist Winkelhalbierendeim Dreieck F ′AB, wenn B irgendein Punkt auf dem einfallenden Strahl ist – MF ′O eingleichschenkliges Dreieck. Daraus folgt nach kurzer Rechnung
|F ′M | =R
2
1
cos(α)
wenn α =<) (MOF ′) ist. Fur kleine Werte von α konnen wir 1cos(α)
durch 1+12α
2 ersetzen,
da die Reihe fur den Kosinus so aussieht:
cos(α) = 1−1
2!α2 +
1
4!α4 −
1
6!α6 + · · · ;
also ist1
1−1
2α2
= 1 +1
2α2 + ϑ mit ϑ =
1
4·
α4
1− 12α2
.
(Fur α = 10o etwa betragt die Abweichung von |F ′M | von R/2 = |FM | nur ca. 1, 5%.)Die Große f := R/2 bezeichnet man nun als Brennweite. Ihr Kehrwert klassifiziert alsDioptrie (1m = 1 Dioptrie) die Starke von Brillen.Hat man nun einen leuchtenden Pfeil der Hohe h auf dem Achsenpunkt P mit |SP | >|SF | vor dem Hohlspiegel stehen, so ensteht ein an der Achse gespiegeltes Bild davon imAchsenpunkt P ′, der sich folgendermaßen ergibt:Der Strahl S1, der von der Pfeilspitze in der Hohe h achsenparallel auf den Hohlspiegel in<) fallt, wird als ein Strahl durch F reflektiert. Der Strahl S2, der von der Pfeilspitze durchden Mittelpunkt M verlauft, wird in sich reflektiert. Der Strahl S3, der vom Punkt P imScheitel S auf den Hohlspiegel fallt, wird in sich reflektiert. Diese drei Strahlen erzeugendann ein Dreieck FP ′′M und der Fußpunkt des Lotes von P ′′ auf der Achse ist P ′. P ′′P ′
ist also das Bild des Pfeils. Man stellt nach einiger Rechnung fest:
1
|PS|+
1
|P ′S|=
1
f

Baumeister: Mathematik III / Stand: Mai 1998 372
Dies ist die Newtonsche Abbildungsgleichung. Diese gilt nun auch sinngemaß fur denFall |PS| < f, allerdings liegt dann das Bild als virtuelles Bild jenseits des Hohlspiegels.Lichtdurchlassige Korper, die von zwei Kugelflachensegmenten begrenzt werden, bezeich-net man als Linsen. Die Verbindungslinie der Mittelpunkte M1 und M2 der Kugelflachenist die Achse der Linse. Je nachdem, ob die Linse in der Achsenmitte dicker oder dunner istals am Rande, ist sie eine Sammellinse oder eine Zertreuungslinse. Linsen konnen ebensowie Hohlspiegel zur Abbildung dienen. Die Abbildung 13.8 moge dies, ohne weiter daraufeinzugehen, veranschaulichen.
Abbildung 13.8: Abbildung an einer Linse
Die optischen Instrumente Fernrohr, Mikroskop, Augenlinse und Brille sind eine außerstnutzliche Realisierung dieser Abbildungseigenschaften. Die Abbildungsfehler dieser In-strumente resultieren im wesentlichen aus der Tatsache, daß die Voraussetzung
”achsen-
nah“ verletzt ist.
Bemerkung 13.36
Der Beweis von Satz 13.35 enthalt eine einfache Konstruktionsvorschrift fur die Tangentean die Ellipse in einem Punkt. Er enthalt auch die Tatsache, daß eine Ellipse auch dergeometrische Ort aller Punkte ist, die von einem Kreis (Kreis um F1 mit Radius 2a) undeinem Punkt innerhalb des Kreises (F2) den gleichen Abstand haben. 2
Analytisch–geometrisch erhalt man eine Ellipse aus einem Kreis
x2 + y2 = b2
durch die Koordinatentransformation
u :=a
bx , v := y, (13.22)
denn es resultiert in den Koordinaten u, v die Gleichung
u2
a2 +v2
b2 = 1

Baumeister: Mathematik III / Stand: Mai 1998 373
Abbildung 13.9: Die Ellipse als affines Bild
Die Transformation (13.22) ist eine affine Transformation; man sagt, daß eine Ellipse einaffines Abbild eines Kreises ist. Die Abbildung 13.9 gibt dies wieder. Sie enthalt auchgleichzeitig eine Moglichkeit, eine Ellipse aus einem Kreis heraus zu zeichnen.
Bemerkung 13.37
Mit der obigen Idee, eine Ellipse als affines Bild eines Kreises aufzufassen, kann manheuristisch sehr schnell auf die Formel fur den Flacheninhalt einer Ellipse kommen. Umeinen Kreis mit Radius b mit Quadraten der Seitenlange h zu uberdecken, benotigt man
etwa Nh := πb2
h2 Quadrate. Im affinen Bild der Ellipse benotigt man Nh Bilder dieser
Quadrate (Rechtecke), die nun die Flache abh2 haben. Also ist die Flache FE der Ellipse
gegeben durch
FE = Nh ·a
bh2 , d.h. FE = πab;
eine Formel, die korrekt ist. 2
Gestutzt auf die astronomischen Messungen von Tycho de Brahe (1546 – 1601) entdeckteJ. Kepler (1571 – 1630), daß sich die Planeten um die Sonne nicht auf Kreisbahnen,sondern auf elliptischen Bahnen mit der Sonne im Brennpunkt bewegen. Er konnte damitund mit quantitativen Aussagen uber Umlaufzeiten das heliozentrische KopernikanischeSystem stutzen. Die Halbachsen der Bahnellipse verhalten sich im Falle der Erde wie 7200zu 7199 (Exzentrizitat ε = 0, 017), so daß es verstandlich erscheint, daß N. Kopernikus(1473 – 1543) die Umlaufbahn der Erde um die Sonne noch fur einen Kreis hielt. (ImFalle der Marsbahn ist ε = 0, 0007.) Kepler stellt in den Jahren 1609 und 1619 die nachihm benannten Gesetze auf:
1. Der Planet bewegt sich um die Sonne auf einer Ellipse, in deren einem Brennpunktdie Sonne steht.
2. Der von der Sonne zum Planeten gezogene Fahrstrahl uberstreicht in gleichen Zeitengleiche Flachen.
Baumeister: Mathematik III / Stand: Mai 1998 374
3. Die Quadrate der Umlaufzeiten der Planeten verhalten sich wie die Kuben dergroßen Halbachsen ihrer Bahnellipsen.
Hyperbel
x2
a2 −y2
b2 = 1 (a ≥ b > 0) .
Sei etwa a > b. Wir setzen c :=√a2 + b2 und tragen auf der x–Achse die sogenannten
Brennpunkte F1, F2 mit den Koordinaten (−c, 0) bzw. (c, 0) ein. Die Hyperbel ist dergeometrische Ort aller Punkte, fur die die Differenz der Abstande von den BrennpunktenF1 und F2 konstant (gleich 2a) ist. Denn es gilt fur eine Punkt P mit den Koordinaten(x, y) die Hyperbelgleichung genau dann,wenn
|(x, y)− (−c, 0)| − |(x, y)− (c, 0)| = 2a
gilt. Damit haben wir aber nur den”rechten Ast“ der Hyperbel beschrieben. Der linke
Ast resultiert aus|(x, y)− (c, 0)| − |(x, y)− (−c, 0)| = 2a .
Die Punkte (−a, 0) und (a, 0), in denen die Hyperbel die x−Achse schneidet, heißenScheitel der Hyperbel. Die Geraden
y = ±b
ax
sind die Asymptoten der Hyperbel, da sich die Hyperbelaste im Unendlichen diesenGeraden annahern.Die Gleichung etwa des rechten Hyperbelastes kann in Parameterform so geschriebenwerden:
x = a cosh(u) , y = b sinh(u) (u ∈ IR)
Ein Satz 13.35 entsprechendes und analog zu beweisendes Ergebnis ist
Satz 13.38
Die Tangente an die Hyperbel in einem Punkt P ist Winkelhalbierende von<) (F1PF2) .
Aus diesem Satz 13.38 folgt nun wieder die Eigenschaft, daß ein von F1 ausgehender oderauf F1 gerichteter Strahl so an der Hyperbel reflektiert wird, daß der reflektierte Strahloder seine Verlangerung durch F2 geht. Die Konstruktion der Tangente an eine Hyperbelist festgehalten in Abbildung 13.10.Bei der Ellipse sehen wir, daß sie als Bahn fur einen Massenkorper in dem Zentralfeldder Sonne auftritt; ein Planet ist eingefangen durch die von der Sonne (große Masse) aufden Planeten (kleine Masse) ausgeubte Gravitationskraft. Die Hyperbel kommt ins Spiel,wenn wir uns einen Massenkorper, der mit positiver Engergie ins Kraftfeld der Sonne
Baumeister: Mathematik III / Stand: Mai 1998 375
Abbildung 13.10: Tangentenkonstruktion bei der Hyperbel
eintritt, vorstellen: Er beschreibt dann eine Hyperbelbahn, auf der er das Sonnensystemdurcheilt und schließlich wieder verlaßt.
Parabel
y2 = 2px (p > 0) .
Wir markieren auf der x−Achse den Brennpunkt F mit den Koordinaten (p/2, 0) undzeichnen die Gerade x = −p/2, welche Leitlinie der Parabel heißt, ein.Die Parabel ist also der geometrische Ort aller Punkte, die vom Brennpunkt und derLeitlinie den gleichen Abstand haben.
Ein Satz 13.38 entsprechendes Ergebnis ist
Satz 13.39Die Tangente an die Parabel in einem Punkt P ist die Winkelhalbierende von<) (FPL), wobei L der Fußpunkt des Lotes von P auf die Leitlinie ist.
Durch Drehung einer Parabel um seine Achse entsteht im Raum ein sogenanntes Para-boloid. Ist die Innenseite verspiegelt, nennt man ein solches Paraboloid einen Parabol-spiegel. Bringt man in einem Brennpunkt eines Parabolspiegels eine Lichtquelle an, sowerden die Lichtstrahlen parallel zur Achse der Parabel reflektiert. Dies wird bei der Kon-struktion von Scheinwerfern ausgenutzt. Treffen Lichtstrahlen parallel zur Achse auf denParabolspiegel dann gehen die reflektierten Lichtstrahlen durch den Brennpunkt. DieseEigenschaft kann bei der Konstruktion eines Sonnenofens ausgenutzt werden; die Bezeich-nung
”Brennpunkt“ ist also mehr als angebracht. Von Archimedes (287 ? – 212 v. Chr.)
wird berichtet, daß er im Krieg gegen die Romer einen Parabolspiegel eingesetzt hat, umdie Flotte des Feindes in Brand zu setzen.Bei der Bewegung von Massenkorpern in einem Zentralfeld kommt die Parabel ins Spiel,wenn wir uns einen Korper, der mit Energie Null ins Kraftfeld der Sonne “eintritt“, vor-stellen: Er beschreibt dann eine Parabelbahn, auf der er das Sonnensystem durcheilt undschließlich wieder mit Energie Null “verlaßt“.

Baumeister: Mathematik III / Stand: Mai 1998 376
Wie wir oben gesehen haben, bestehen zwischen Ellipse, Hyperbel und Parabel viele Ge-meinsamkeiten. Der Schlussel zum Verstandnis hierfur ist neben der gemeinsamen Defini-tion als geometrischer Ort die Menaichmos (um 350 v.Chr.) zugeschriebene Entdeckung,daß diese Kurven beim Schnitt eines Kreiskegels mit einer geeigneten Ebene entstehen. Sieheißen daher auch Kegelschnitte. Von A. Durer (1471 – 1528) gibt es dazu illustrativeBilder. Die Bestatigung, daß dies so ist, liefern wir nun.
Zunachst benotigen wir die Beschreibung eines Kegels und des Kegelmantels. Ein Kegel(in spezieller Lage) ist die Figur
(x, y, z) ∈ IR3 |x2
a2 +y2
b2 −z2
c2 ≤ 0 (a, b, c > 0);
sein Mantel ist die Menge
(x, y, y) ∈ IR3 |x2
a2 +y2
b2 −z2
c2 = 0,
seine Spitze ist der Punkt (0, 0, 0). Wahlt man z = h fest, so entsteht die Gleichung
x2
a2 +y2
b2 =h2
c2
in der Ebene (x, y, z) ∈ IR3 |z = h; es ist dies eine Gleichung einer Ellipse mit den
Halbachsen ahc bzw. bhc . Wahlt man y = 0, so entsteht in der x−z – Ebene die Gleichung
eines Paares sich in (0, 0) schneidender Geraden.Fur unsere Betrachtung der Kegelschnitte reicht es nun aus, den
”Einheitskegel“ mit
definierender Gleichungx2 + y2 − z2 = 0
zu betrachten. Die schneidende Ebene E setzen wir parametrisch so an:
E := u ∈ IR3 |u = re3 + te1 + s(ae2 + be3), s, t ∈ IR ;
dabei sind r > 0 und a, b ∈ IR noch freie Parameter.Die Schnittmenge S des Kegelmantels mit der Ebene H wird dann durch die Gleichung
t2 + (a2 − b2)s2 = r2 + 2brs
beschrieben. Man erhalt also nun in der Tat Kegelschnitte durch unterschiedliche Wahlder Parameter a, b :
a2 > b2 : Ellipsea2 < b2 : Hyperbela2 = b2 : Parabel
Man stelle sich nun vor, daß eine Schnittebene den Kegel schneidet. Dann haben wir alsodie drei obigen Falle. Im Fall der Ellipse und der Hyperbel konnen wir zwei Kugeln in denKegel legen, die jeweils die Schnittebene in einem Punkt und den Kegelmantel in einemKreis beruhren. Im Fall einer Parabel konnen wir nur eine solche Kugel unterbringen;siehe Abbildung 13.11. Diese Kugeln heißen nach P.G. Dandelin Dandelinsche Kugeln.Die Kegelschnitte finden wir in dieser Konstruktion dann als Projektion der Beruhrungs-kreise auf die Schnittebene von der Spitze aus. Die Brennpunkte der Kegelschnitte sindgerade die Beruhrungspunkte der Dandelinschen Kugeln mit der Schnittebene.
Baumeister: Mathematik III / Stand: Mai 1998 377
Abbildung 13.11: Dandelinsche Kugeln
13.7 Minkowski–Raum und Relativitatstheorie
Die spezielle Relativitatstheorie wird mit dem Namen von A. Einstein (1879 – 1955)verbunden, hat aber eine Vor– und Nachgeschichte. Zuerst ist in diesem ZusammenhangA. A. Michelson (1852 – 1931) zu nennen, der 1881 die Konstanz der Lichtgeschwindigkeitc entdeckt hatte und 1907 mit dem Nobelpreis ausgezeichnet wurde. Weitere Vorlaufersind H. A. Lorentz (1853 – 1928) und H. Poincare (1854 – 1912). Das Verdienst von H.Minkowski (1864 – 1909), einem akademischen Lehrer von A. Einstein, besteht in derGeometrisierung der Speziellen Relativitatstheorie, so daß der zugrunde liegende Raumihm zu Ehren (reeller) Minkowski–Raum genannt wird.Uberraschend einfach ist das die damalige Physik revolutionierende Relativitatsprinzip:
”Ist K ′ ein in bezug auf K gleichformig und drehungsfrei bewegtes Koor-
dinatensystem, so verlauft das Naturgeschehen in bezug auf K ′ nach genaudenselben allgemeinen Gesetzen wie in bezug auf K ′′.
Erganzend muß bemerkt werden, daß jegliches Naturgeschehen in Raum und Zeit statt-findet; die Punkte der Raum–Zeit werden Ereignisse genannt, statt Raum–Zeit sprichtman auch vom Ereignisraum. Bezuglich K wird ein Ereignis durch drei raumliche undeine Zeitkoordination beschrieben:
(x, y, z, t) ∈ IR4
Eine euklidische Metrik im Ereignisraum fuhrte zu einem Widerspruch, denn das Additi-onstheorem x = x1+x2 der Geschwindigkeiten der Newtonschen Mechanik fuhrt zu einemWiderspruch zur entdeckten Konstanz der (Vakuum–)Lichtgeschwindgkeit c. Lorentz haterkannt, daß die quadratische Form
Φ(x, y, z; t) := x2 + y2 + z2 − c2t2
invariant bleiben muß. Wenn als vierte Koordinate ct statt t benutzt wird, d.h. , daß furB = (e1, e2, e3, e4) bezuglich der ursprunglichen Basis (a1, a2, a3, a4) offenbar
e1 := a1, e2 := a2, e3 := a3, e4 :=1
ca4

Baumeister: Mathematik III / Stand: Mai 1998 378
sein muß, um ta4 = t · ce4 = (ct)e4 zu erhalten. Die normierten Ereigniskoordinatenbezuglich B lauten
z1 = x, z2 = y, z3 = z, z4 = ct.
In IR4 haben wir nun neben dem euklidischen Skalarprodukt < ·, · > Bilinearform
< z, y >M = z1y1 + z2y2 + z3y3 − z4y4.
Zusammenfassend konnen wir feststellen: Nach Einstein ist folgendes Modell sinnvoll:
Der Ereignisraum ist ein Minkowski–Raum. Koordinatentransformationen wer-den von seinen Bewegungen realisiert.
Zur physikalischen Interpretation erweist sich ein isotroper Kegel wie folgt als Lichtkegel:Wir betrachten die Ereignisse Ei = (xi, yi, zi, ti), i = 1, 2, und konnen etwa t1 < t2 anneh-men. Ferner gehen wir von einem “Signal“ aus, das sich mit konstanter Geschwindkeitausbreitet:
v = (v1, v2, v3) = (x2 − x1
t2 − t1,y2 − y1
t2 − t1,z2 − z1
t2 − t1) .
Es gibt bis auf Vertauschung von 1 und 2 folgende Falle:
1. E1 ∈ KE2 (|v|2− c2 ≤ 0) , ; d.h., daß ein im Zeitpunkt t1 in (x1, y1, z1) ausgesandtesLichtsignal zum Zeitpunkt t2 in (x2, y2, z2) ankommt.
2. E1 ∈ intKE2 (|v|2−c2 < 0) , ; d.h. daß ein im Zeitpunktt1 in (x1, y1, z1) ausgesandtesLichtsignal fruher als t2 den Punkt (x2, y2, z2) erreicht. Somit sind die BezeichnungenZukunft (Nachkegel) und Vergangenheit (Vorkegel) gerechtfertigt.
3. E1 ∈ extKE2 (|v|2 − c2 > 0) ; d.h. nach Michelson, daß die Ereignisse E1 undE2 in keinem kausalen Zusammenhang (Ursache–Wirkung–Zusammenhang) stehenkonnen.
Da sich die Koordinatensysteme K und K ′ gleichformig und drehungsfrei, insbesonderegeradlinig, gegeneinander bewegen, durfen wir voraussetzen, daß K und K ′ fur t = 0 einund denselben Ursprung besitzen und daß y− und z−Koordinate konstant bleiben, d.h.x = |v|. Setzen wir noch voraus, daß x fur wachsendes t wachst, dann reduziert sich dieTransformationsmatrix im wesentlichen auf die zweireihige Matrix einer hyperbolischenDrehung bzw. eigentlichen Lorentztransformation.
x = cosh(α)z + sinh(α)ct , ct = sinh(α)z + cosh(α)ct .
Fur den Ursprung θ′ von K ′ gilt z = 0, so daß wir wegen x = sinh(α) · ct, ct = cosh(α) · ct
v =dx
dt= c tanh(α) bzw.
v
c= tanh(α) .
Wegen
tanh2(α) =cos2(α) − 1
cos2(α)

Baumeister: Mathematik III / Stand: Mai 1998 379
ergibt sich
cosh(α) =1√
1− (vc )2.
Schließlich erhalten wir die in der Physik genutzten Transformationsgleichungen
x =x+ vt√1− (
v
c)2
, y = y , z = z , t =t−
v
c2x√1− (
v
c)2
.
Die Abbildung 13.12 veranschaulicht Koordinatensystem K und K ′ mit unseren Vereinba-rungen. Insbesondere erkennt man sofort: Punkte gleicher Zeit bezuglich K sind die Paral-lelen zur x−Achse, Punkte gleicher Zeit bezuglich K ′ sind die Parallelen zur x−Achse; dadiese Achsen sich schneiden, gibt es keine vom Koordinatensystem unabhangige Gleich-zeitigkeit.
Abbildung 13.12: Lichtkegel
Fur kleine Geschwindigkeiten v (v << c) gilt
x ≈ x− vt, y, z = z, t = t,
d.h. naherungsweise Gultigkeit der Galilei–Transformation.
Addition von GeschwindigkeitenBewegt sich ein Koordinatensystem K ′′ bezuglich K ′ gleichformig und drehungsfrei mitder konstanten Geschwindgkeit w in derselben Richtung wie K ′ bezuglich K und werdendieselben Verabredungen wie oben getroffen, dann gilt fur die Geschwindigkeit u von K ′
bezuglich K
u
c= tanh(α+ β) =
tanh(α) + tanh(β)
1 + tanh(α) tanh(β)=
v
c+w
c
1 +vw
c
,
Additionstheorem gleichgerichteter Geschwindigkeiten. Es hat seine Bestatigung schonvorher im (Leitfuhrungs–) Versuch von Fizeau (1819 – 1896) gefunden, zunachst falschlichgedeutet.

Baumeister: Mathematik III / Stand: Mai 1998 380
Langenkontraktion und Zeitdilatation
a) Fur t = 0 gilt fur die Langeneinheit der x− Achse nach ??
1 = x =x√
1− (v
c)2
, d.h. x =
√1− (
v
c)2 < 1
b) Im Vergleich mit einer in O′ ruhenden Uhr geht eine in O ruhende Uhr langsamer:
t =t√
1− (x
ct)2
> t.
EnergieDie Mechanik sehr schneller (Elementar–)Teilchen hat, um von K ′ bzw. K ′′ unabhangigeBegriffe zu erhalten, eine Modifikation des klassischen Begriffsystems notig, insbesonderesind Masse und (klassische) Energie je fur sich vom Koordinatensystem abhangig. AlsInvariante der Speziellen Relativitatstheorie erweist sich nunmehr
Ea +mac2√
1− (v
c)2
;
dabei ist v die Geschwindigkeit des bewegten Teilchens, das im Ursprung des Koordina-tensystems K ′ sei, bezuglich K ′ die (Strahlungs–)Energie E0 aufgenommen hat und dieRuhemasse m0 besitzt. Mittels (10) wird die relativistische Engergie definiert, wobei(nach Reihenentwicklung)
Ekin :=m0c
2√1− (
v
c)2
−m0c2 =
m0c2
2+
3
8m0
v4
c2 + · · ·
als kinetische Energie mit einer relativistischen Korrektur nach dem klassischen Ausdruckm0v
2
2 angesehen wird. Insbesondere gibt es die Energie–Masse–Beziehung
e = mc2 ,
die z.B. die hohen bei Zwischenfallen freisetzbaren Energien bei Kernkraftwerken erklart.
EigenzeitWiederum sei ein mit der Geschwindigkeit v gleichformig und drehungsfrei bewegter Mas-senpunkt Ursprung des Koordinatensystems K ′, wobei alle bisherigen Verabredungen gel-ten. Wegen x = 0 gilt x = vt und
s
c:= t =
t−v
c2vt√1− (
v
c)2
= t
√1− (
v
c)2
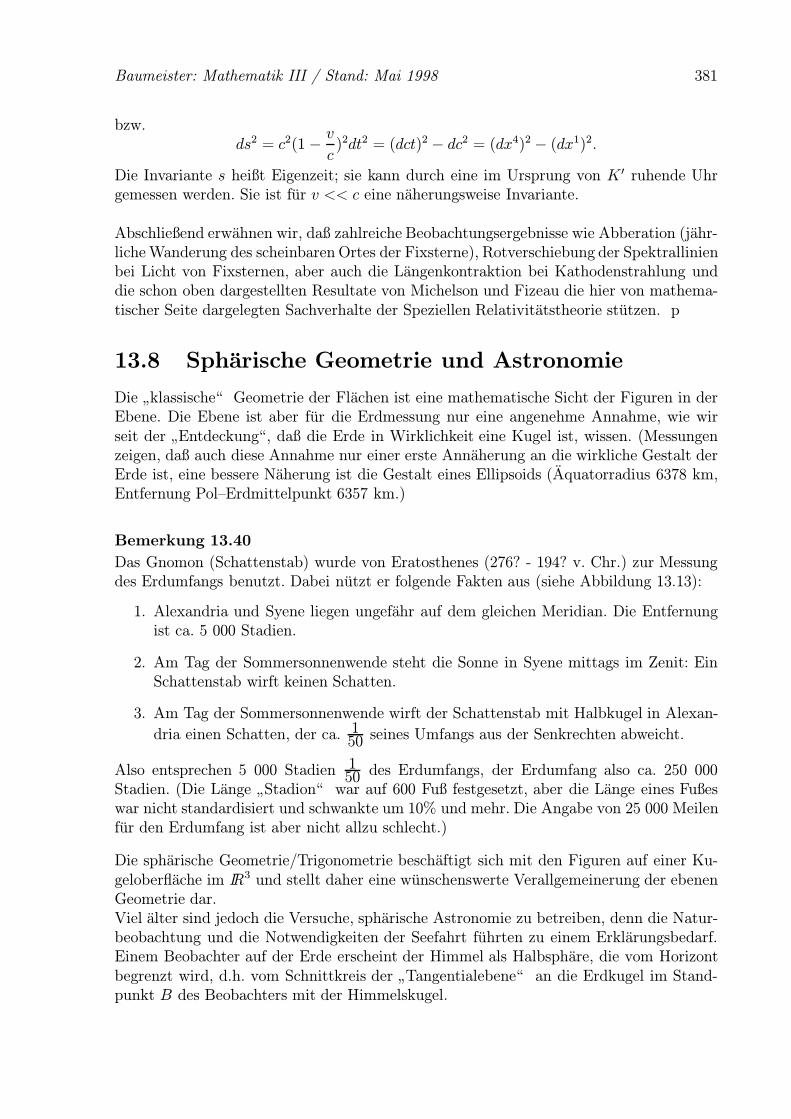
Baumeister: Mathematik III / Stand: Mai 1998 381
bzw.ds2 = c2(1−
v
c)2dt2 = (dct)2 − dc2 = (dx4)2 − (dx1)2.
Die Invariante s heißt Eigenzeit; sie kann durch eine im Ursprung von K ′ ruhende Uhrgemessen werden. Sie ist fur v << c eine naherungsweise Invariante.
Abschließend erwahnen wir, daß zahlreiche Beobachtungsergebnisse wie Abberation (jahr-liche Wanderung des scheinbaren Ortes der Fixsterne), Rotverschiebung der Spektrallinienbei Licht von Fixsternen, aber auch die Langenkontraktion bei Kathodenstrahlung unddie schon oben dargestellten Resultate von Michelson und Fizeau die hier von mathema-tischer Seite dargelegten Sachverhalte der Speziellen Relativitatstheorie stutzen. p
13.8 Spharische Geometrie und Astronomie
Die”klassische“ Geometrie der Flachen ist eine mathematische Sicht der Figuren in der
Ebene. Die Ebene ist aber fur die Erdmessung nur eine angenehme Annahme, wie wirseit der
”Entdeckung“, daß die Erde in Wirklichkeit eine Kugel ist, wissen. (Messungen
zeigen, daß auch diese Annahme nur einer erste Annaherung an die wirkliche Gestalt derErde ist, eine bessere Naherung ist die Gestalt eines Ellipsoids (Aquatorradius 6378 km,Entfernung Pol–Erdmittelpunkt 6357 km.)
Bemerkung 13.40
Das Gnomon (Schattenstab) wurde von Eratosthenes (276? - 194? v. Chr.) zur Messungdes Erdumfangs benutzt. Dabei nutzt er folgende Fakten aus (siehe Abbildung 13.13):
1. Alexandria und Syene liegen ungefahr auf dem gleichen Meridian. Die Entfernungist ca. 5 000 Stadien.
2. Am Tag der Sommersonnenwende steht die Sonne in Syene mittags im Zenit: EinSchattenstab wirft keinen Schatten.
3. Am Tag der Sommersonnenwende wirft der Schattenstab mit Halbkugel in Alexan-
dria einen Schatten, der ca. 150 seines Umfangs aus der Senkrechten abweicht.
Also entsprechen 5 000 Stadien 150 des Erdumfangs, der Erdumfang also ca. 250 000
Stadien. (Die Lange”Stadion“ war auf 600 Fuß festgesetzt, aber die Lange eines Fußes
war nicht standardisiert und schwankte um 10% und mehr. Die Angabe von 25 000 Meilenfur den Erdumfang ist aber nicht allzu schlecht.)
Die spharische Geometrie/Trigonometrie beschaftigt sich mit den Figuren auf einer Ku-geloberflache im IR3 und stellt daher eine wunschenswerte Verallgemeinerung der ebenenGeometrie dar.Viel alter sind jedoch die Versuche, spharische Astronomie zu betreiben, denn die Natur-beobachtung und die Notwendigkeiten der Seefahrt fuhrten zu einem Erklarungsbedarf.Einem Beobachter auf der Erde erscheint der Himmel als Halbsphare, die vom Horizontbegrenzt wird, d.h. vom Schnittkreis der
”Tangentialebene“ an die Erdkugel im Stand-
punkt B des Beobachters mit der Himmelskugel.
Baumeister: Mathematik III / Stand: Mai 1998 382
Abbildung 13.13: Zur Messung des Erdumfangs
Abbildung 13.14: Die Himmelssphare
Wir gehen beide Problemkreisen nicht axiomatisch, sondern analytisch–geometrisch an,d.h. wir arbeiten mit Koordinaten und den Gleichungen, die die Figuren dann beschreiben.
Wir betrachten die Kugel mit Radius R, eingebettet in IR3.”Nahert“ sich eine Ebene
(im IR3) der Kugel, so erhalt man zunachst einen Beruhrungspunkt und bei weitererAnnaherung eine Schnittfigur, die ein Kreis ist. Der Radius dieses Kreises wachst, bis ermit dem Kugelradius ubereinstimmt; die Ebene verlauft dann durch den Kugelmittelpunkt(siehe Beispiel 13.27).Die Schnittkreise der Kugel mit Ebenen durch den Kugelmittelpunkt heißen Großkreise,die Schnittkreise mit den ubrigen Ebenen heißen Kleinkreise, ihre Radien haben Wertezwischen 0 und R. Die Schnittkreise der Kugel mit Ebenen (x, y, z) ∈ IR3 |z = a heißenBreitenkreise. Der Aquator ist der Schnittkreis der Ebene (x, y, z) ∈ IR3 |z = 0 mitder Kugel. Die Großkreise, die auf dem Aquator senkrecht stehen, heißen Meridianeoder Langenkreise. Der Aquator und die Meridiane sind Großkreise, die Breitenkreisemit Ausnahme des Aquators sind Kleinkreise. Punkte auf der Kugel, die durch eine Geradedurch den Mittelpunkt verbunden sind, heißen diametral. Meridiane und Breitenkreiseschneiden sich senkrecht.
Baumeister: Mathematik III / Stand: Mai 1998 383
Abbildung 13.15: Die Erdkugel
Lemma 13.41
Zwei Punkte der Kugeloberflache, die nicht diametral sind, liegen auf genau einemGroßkreis.
Beweis:Seien A,B zwei nicht diametral liegende Punkte der Kugel und sei O der Mittelpunkt derKugel. Diese drei Punkte definieren eindeutig eine Ebene und diese Ebene schneidet dieKugeloberflache in einem Großkreis.
Hat man zwei Punkte A,B auf der Kugeloberflache, so lassen sich durch A,B außerdem Großkreis noch
”unendlich“ viele andere Ebenen legen. Alle diese Ebenen haben
gemein, daß die Verbindungsgerade von A,B in dieser Ebene liegt und daß sie Kreise aufder Kugeloberflache ausschneiden, deren Durchmesser in [|AB|, 2R] liegen. Die PunkteA,B teilen diese Kreise in zwei Kreisbogen, von denen der kurzere der beiden Bogen denkleinsten Abstand von der Strecke AB hat, falls der vorliegende Kreis der Großkreis ist.Der Großkreis realisiert also die kurzeste Verbindung von A nach B auf der Kugelober-flache unter all diesen Kreisbogen. Der Beweis, daß dieser Kreisbogen des Großkreisessogar die kurzeste Verbindung unter allen verbindenden Kurvenstucken liefert, erfordertHilfsmittel und Uberlegungen, die weit uber den Rahmen der Elementargeometrie hin-ausgehen, er ist der Variationsrechnung zuzuordnen, einem Teilgebiet der Mathematik,das wesentlich zur Entwicklung der Analysis beigetragen hat. Die Beweisidee ist folgende:Jede
”vernunftige“ Kurve auf der Kugeloberflache laßt sich durch eine Kurve bestehend
aus Großkreisbogen annahern. Da jeder Großkreisbogen, der zwei Punkte direkt verbin-det, kurzer als eine Kurve, bestehend aus mehreren Großkreisbogen ist, trifft die obigeAussage zu.
Wir setzen
KnR := x ∈ IRn | |x| = R .
Damit liegt nun nahe, die Ingredienzien einer axiomatischen Geometrie auf der Sphare

Baumeister: Mathematik III / Stand: Mai 1998 384
(spharische Geometrie) folgendermaßen einzufuhren:
Punkte: (x, y, z) ∈ K3R .
Geraden: Großkreise auf K3R .
Strecken: Großkreisbogen, die nicht langer als ein halber Großkreis sind.
Abstand: d(A,B) := Lange des kurzeren Großkreisbogen, der A,B verbindet.(A,B seien nicht diametral.)
Bewegungen: Abstandserhaltende surjektive Abbildungen der Sphare K3R .
Daß damit aber geometrische Sachverhalte definiert werden, die nicht mehr als euklidischzu bezeichnen sind, sieht man an folgenden unmittelbar einsichtigen Aussagen:
IS/1 Zwei voneinander verschiedene Geraden haben genau zwei Punkte gemeinsam.
IS/2 Es gibt keine parallelen Geraden.
IS/3 Durch zwei diametrale Punkte gibt es unendlich viele Geraden.
Ferner ist im allgemeinen eine Figur von Punkten, die von einer gegebenen Geradengleichen Abstand haben, keine Gerade; betrachte etwa den Aquator und Breitenkreise.(IS/2 ergibt sich aus der Tatsache, daß ein Großkreis durch einen Punkt stets zwei Punktemit jedem anderen Großkreis gemein hat.)
Eine Besonderheit der spharischen Geometrie ist auch das Zweieck: Durch zwei Großkreisewird die Sphare in vier Teile zerlegt, die spharische Zweiecke genannt werden. Jedesdieser Zweiecke hat zwei gleich große Winkel und zwei gleich große Seiten, die jeweils dieLange π haben. Der Flacheninhalt F eines Zweieckes ist allein durch den Winkel α desZweieckes bestimmt:
F =α
2π· 4πR2 = 2αR2
Drei beliebige Punkte A,B,C der Sphare, die paarweise nicht diametral seien, lassensich paarweise durch Großkreise verbinden. Dadurch entsteht ein spharisches DreieckABC, dessen Seiten von den jeweils kurzeren Großkreisbogen gebildet werden. Da sichdie Großkreise ja zweimal schneiden, entsteht noch ein weiteres Dreieck A∗B∗C∗. Es heißtGegendreieck von ABC. Beide Dreiecke haben die gleichen Seiten a, b, c und die gleichenWinkel α, β, γ. Man sieht, daß die 6 Punkte A,B,C,A∗, B∗, C∗ noch weitere 6 Dreieckeentstehen lassen:
ABC∗, AB∗C,A∗BC,AB∗C∗, A∗B∗C,A∗BC∗.
Da wir die Flacheninhalte von Zweiecken schon kennen, konnen wir den Flacheninhalt desspharischen Dreiecks ABC berechnen. Wir gehen aus von
FABC + FA∗BC = 2αR2,
FABC + FAB∗C = 2βR2,
FABC + FABC∗ = 2γR2,
und
FABC + FA∗BC + FAB∗C + FABC∗ = 2πR2,
Baumeister: Mathematik III / Stand: Mai 1998 385
Abbildung 13.16: Der Flacheninhalt von spharischen Dreiecken
da FABC∗ = FA∗B∗C gilt. Dies liefert
FABC = (α+ β + γ − π)R2
Die Großeε := α + β + γ − π
heißt spharischer Exzeß des Dreiecks ABC . Da wohl im allgemeinen der Flacheninhalteines spharischen Dreiecks nicht Null ist, muß also die Winkelsumme im Kugeldreieckgroßer als π sein, im Gegensatz zum ebenen Dreieck, bei dem die Winkelsumme ja πbetragt. Am Spharenoktant kann man dies uberzeugend sehen. Es ist dies das spharischeDreieck, das durch die drei Koordinatenebenen auf der Kugel ausgeschnitten wird. Hier
ist die Winkelsumme offenbar 3π2 . Halten wir fest:
Satz 13.42
Die Winkelsumme eines spharischen Dreiecks ist stets großer als zwei Rechte.
Die spharische Geometrie/Trigonometrie ist die Beschaftigung mit den Figuren auf einerKugeloberflache.Es ist nutzlich, die Punkte auf der Kugeloberflache K3
R durch Kugelkoordinaten dar-zustellen.Jeder Punkt (x, y, z) ∈ K3
R laßt eine Darstellung
(x, y, z) = (R cosφ sin ϑ,R sinφ sin ϑ,R cos ϑ)
mit φ ∈ (−π, π], ϑ ∈ [0, π] zu.φ ist dabei der Winkel, der von der Polachse aus gemessen wird, und ϑ ist der Winkel, dervon den Polarkoordinaten in der Aquatorebene herruhrt. Diese Darstellung ist eindeutigfur jeden Punkt der Kugeloberflache mit Ausnahme der Pole.
Baumeister: Mathematik III / Stand: Mai 1998 386
Abbildung 13.17: Die geographischen Koordinaten
Betrachte etwa einen Punkt (x, y, z) ∈ K3R mit z 6= ±1 . In der dritten Gleichung z =
R cosϑ ist ϑ dadurch eindeutig bestimmt. Weiter ist ρ :=√x2 + y2 = R sinϑ, und aus
der Darstellung x = ρ cos φ , y = ρ sin φ (ebene Polarkoordinaten) ergibt sich die Formel.Es gibt noch eine andere Darstellung durch Kugelkoordinaten, welche den Winkel ϑ′ :=π2 − ϑ benutzt. Die entsprechenden Formeln
(x, y, z) = (R cosφ cos ϑ′, R sinφ cos ϑ′, R sinϑ′)
werden vor allem in der Kartographie der Erde benutzt. Es ist dann θ′ die geographischeBreite und φ die geographische Lange des Ortes. Hierbei wird die Lange fur φ ≥ 0als ostliche Lange und fur φ < 0 als westliche Lange |φ| angegeben. Genauso verfahrtman bei der Breite: ϑ ≥ 0 wird als nordliche Breite, ϑ < 0 wird als sudliche Breite |ϑ|bezeichnet. Dabei ist es ublich, die Langen und Breiten nicht im Bogenmaß, sondern in
Grad anzugeben: 1o entspricht dem Bogenmaß 2π360 . (1o auf einem Großkreis der Erde hat
die Lange von ca. 111 km.)Beispiele sind:
Frankfurt Berlin New York Johannesburg
Lange 8, 5o o.L. 13, 4o o.L. 73, 8o o.L. 33, 1o o.L.
Breite 50, 1o n.B. 52, 5o n.B. 40, 8o n.B. 26, 2o n.B.
Wir wissen schon: Die Punktmengen konstanter Lange heißen Meridiane oder Langenkrei-se, die Punktmengen konstanter Breite heißen Breitenkreise. Der Nullmeridian (ϑ = 0)ist der Meridian durch Greenwich (London), der Breitenkreis 0.–ter Breite ist der Aquator.
Wir handeln nun trigonometrische Aussagen fur den Fall R = 1 ab.Haben wir drei Punkte P,Q,R auf der Kugeloberflache mit den Koordinaten x, y, z ∈ K3

Baumeister: Mathematik III / Stand: Mai 1998 387
gegeben, so definieren wir die Seiten (man beachte |x| = |y| = |z| = 1) a, b, c durch
cos a :=< y, z > , cos b :=< x, z > , cos c :=< y, z > ,
und Winkel α, β, γ durch
cosα :=< x× z, x× y >
|x× z||x× y|, cos β :=
< y × x, y × z >
|y × x||y × z|, cos γ :=
< z × y, z × x >
|z × y||z × x|.
Dabei sind α, β, γ offenbar die Winkel zwischen den Ebenen durch θ, die von x, y, z paar-weise erzeugt werden. Diese Ebenen schneiden auf der Kugeloberflache ein spharischesDreieck aus. Ziel der spharischen Trigonometrie ist es, Beziehungen zwischen den tri-gonometrischen Funktionen der Seiten, und den Winkeln α, β, γ herzustellen. Da wir beiden obigen Formeln schon die uberaus nutzlichen Begriffe
”Skalarprodukt“ und
”Vektor-
produkt“ verwendet haben, gelingen solche Herleitungen schnell. Hier sind solche Bezie-hungen:
Sinussatz: sinαsin a = sinβ
sin b = sin γsin c
1.Cosinussatz: cosa = cos b · cos c+ sin b · sin c · cosα
2.Cosinussatz: sin c · cos b · cos c · cosα + sin a · cos β.
Zum Beweis des Sinussatzes:Es gilt offenbar
< x× y, z >= sinα · sin b · sin c ,
und wir erhaltensinα
sin a=
< x× y, z >
sin a · sin b · sin c.
Da sich die rechte Seite bei zyklischer Vertauschung nicht andert, erhalt man das Ergebnis.
Zum Beweis des 1. Cosinussatzes:Wir haben
sin b · sin c · sinα = |x× z||x× y| cosα
= < x× z, x× y >
= < x, x >< y, z > − < x, y >< x, z >
= cos a− cos c · cos b .
Zum Beweis des 2. Cosinussatzes:Die Behauptung ist gleichwertig mit
|x× y| < x, z >= |x× y| < x, y >< x× z, x× y >
|x× z||x× y|+ |y × z|
< y × x, y × z >
|x× y||y × z|,
Baumeister: Mathematik III / Stand: Mai 1998 388
also mit
|x× y|2 < x, z >=< x, y >< x× z, x× y > + < y × x, y × z > .
Eine einfache Rechnung zeigt dies.
Betrachten wir noch eine Grundaufgabe der spharischen Trigonometrie, die Entfernungs-aufgabe.5
Gegeben: Orte A,B auf der Nordhalbkugel mit den Koordinaten (φA, ϑA), (φB, ϑB) .Gesucht: Lange der spharischen Strecke AB.
Dazu bilden wir das spharische Dreieck ABN , wobei N der Nordpol ist. In diesem Dreiecksind gegeben:
Winkel γ := φB − φA am Pol N , Strecke b := AN = ϑA , Strecke a := BN = ϑB .
Berechnet werden soll nun die Strecke c := AB. (Fur die Praxis waren auch die”Kurs-
winkel“ α, β interessant; dazu sei auf Formelsammlungen verwiesen.)Aus dem 1. Cosinussatz ergibt sich
cos c = cos a cos b+ sin a sin b cosφ,
alsocos c = cos(ϑB) cos(ϑA) + sin(ϑB) sin(ϑA) cos(φB − φA)
Die obigen drei Satze konnen nun zu Kongruenzsatzen uber spharische Dreiecke ausgebautwerden. Wir verzichten hier darauf.
Bemerkung 13.43
Die Flug– und Seerouten werden in dem Wissen gewahlt, daß spharische Geraden diekurzesten Entfernungen liefern. Dabei fallt dann wiederholt die Entfernungsaufgabe mitBestimmung der Kurswinkel (Routenaufgabe) an. Die Routenaufgabe kann auch graphischgelost werden. 2
Der Sinussatz war bereits Vieta bekannt. Wegen limx→0
sinxx
= 1 geht der obige Sinussatz
der spharischen Trigonometrie in den Sinussatz der ebenen Trigonometrie uber. Somitist fur
”kleine“ Teile der Erdoberflache die Anwendung des ebenen Sinus–Satzes zulassig.
Dies ist nun der”Beweis“, daß die Betrachtung unserer Umwelt im Kleinen als euklidische
Ebene erlaubt ist.
Infolge der Rotation der Erde um ihre Achse greift nach dem Urteil des mitbewegtenBeobachters an allen außerhalb der Achse liegenden Masseteilchen eine ZentrifugalkraftZ an. Diese betragt dem Betrage nach fur eine Masse m an der Erdoberflache auf dergeographischen Breite ϑ
|Z| = mω2r = mω2R cos ϑ;
Baumeister: Mathematik III / Stand: Mai 1998 389
Abbildung 13.18: Zentrifugalkraft an der Erdoberflache
siehe Abbildung 13.18.Ihre Komponente ZR in radialer Richtung ist
ZR = mω2R cos2 ϑ,
ihre Komponente ZT in tangentialer Richtung ist
ZT = mω2R cosϑ sin ϑ.
Die Tangentialkomponente ist Ursache fur die Abplattung der Erde and der Pole. DasGewicht ist aufgrund dieser Abplattung am Pol um ca. 5, 2% großer als am Aquator.Korper, die sich in einem rotierenden System relativ zu ihm bewegen, erfahren eineTragheitskraft, die als Corioliskraft (G.–G. Coriolis (1792-1843)) bezeichnet wird. Wirbetrachten einen Spezialfall; siehe Abbildung 13.19.
Abbildung 13.19: Zur Corioliskraft
Auf einer Drehscheibe mit Radius r, die durch eine zylindrische Wand berandet ist, diesich mitdreht, und die sich mit konstanter Winkelgeschwindigkeit ω von A nach B dreht,befindet sich im Abstand ρ von der Drehachse in P ein Beobachter; er wirft in radialerRichtung einen Korper K mit Masse m mit der Geschwindigkeit u > 0. Bei ruhender
5Die Annahme in der Aufgabe, daß beide Orte auf der Nordhalbkugel liegen, ist nicht wesentlich furdie Vorgehensweise, ist nur bequem fur die Berechnung.
Baumeister: Mathematik III / Stand: Mai 1998 390
Scheibe (ω = 0) wird K in A auftreffen und er benotigt fur den Weg von P nach A dieZeit
4t =r − ρ
u.
Dreht sich nun die Scheibe mit positiver Winkelgeschwindigkeit, so befindet sich der Be-obachter nach dieser Zeit in Punkt P ′, und er erwartet,wenn er von der Drehung nichtsweiß, den Aufprall des Korpers in B. Nun hatte aber K vor dem Abwurf in der Hand desBeobachters infolge der Drehung um Z die Geschwindigkeit u′ := ωρ, die senkrecht zurStrecke ZP gerichtet ist. K verlaßt also nach dem Abwurf den Ort P mit der aus u, u′ re-sultierenden Geschwindigkeit und erreicht die Wand in dem Punkt C, der verschieden vonB sein wird. Sein Abstand von A ist gleich dem Weg, den K infolge der Geschwindigkeitu′ allein wahrend der Zeitspanne 4t zurucklegen wurden:
|AC| = u′4t = ωρ4t,
|BC| = |AB| − |AC| = r · ρ− ωρ4t
= rω4t− ρω4t =r − ρ
u· u · ω4t = uω4t2.
Der Beobachter, der K statt am erwarteten Ort B in C auftreffen sieht, urteilt: An K mußsenkrecht zu seiner erwarteten Bewegungsrichtung eine Kraft gewirkt haben, die K um|BC| aus seiner Bahn getrieben hat. Nimmt er diese Kraft als konstant an, so muß aucheine konstante Beschleunigung bcor aufgetreten sein, welche die scheinbare Abweichung|BC| aus der radialen Richtung bewirkt. Fur diese Abweichung gilt nun
|BC| =1
2bcor4t
2.
Durch Vergleich folgtbcor = 2uω .
Mit dieser Coriolisbeschleunigung hangt zusammen nach Newton die sogenannte Co-rioliskraft
Kcor = mbcor.
Auf der rotierenden Erde hat die Corioliskraft im allgemeinen eine Horizontal– und eineVertikalkomponente. Wenn die Bewegung in der Erdoberflache erfolgt, wirkt die Coriolis-kraft am Pol nur horizontal, am Aquator nur radial. Die Horizontalkomponente bewirktfur alle sich auf der nordlichen Halbkugel bewegenden Korper eine Rechtsabweichung, aufder Sudhalbkugel eine Linksabweichung. Dies ist beobachtbar beim Wasserabfluß in derBadewanne und von großer Bedeutung bei der Bewegung atmospharischer Luftmassen(Tief– und Hochspiralen).
Umgekehrt kann aus dem Auftreten einer Corioliskraft auf die Rotation der Erde ge-schlossen werden. Das Foucaultsche Pendel (ein schweres nahezu reibungsfrei gelagertesPendel an einem langen Faden) zeigt dies, da seine Schwingungsebene sich dreht: Es wirddie charakteristische Rosettenschleife beobachtet (siehe Abbildung ??. Diese Drehung derSchwingungsebene um 2π erfolgt an einem Ort mit der geographischen Breite ϑ′ in der
Zeit von T = 2πsinϑ′
Stunden, also in Frankfurt/Main (ϑ′ ∼ 50o) etwa um 11o in einer
Stunde.
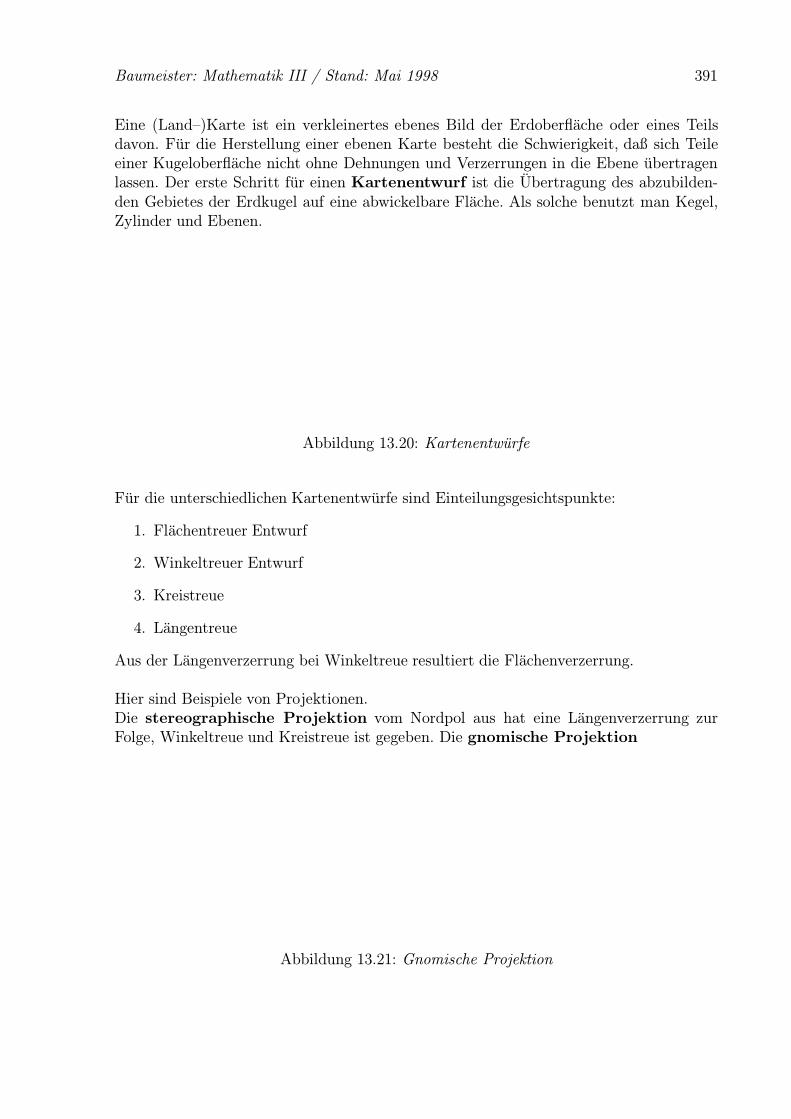
Baumeister: Mathematik III / Stand: Mai 1998 391
Eine (Land–)Karte ist ein verkleinertes ebenes Bild der Erdoberflache oder eines Teilsdavon. Fur die Herstellung einer ebenen Karte besteht die Schwierigkeit, daß sich Teileeiner Kugeloberflache nicht ohne Dehnungen und Verzerrungen in die Ebene ubertragenlassen. Der erste Schritt fur einen Kartenentwurf ist die Ubertragung des abzubilden-den Gebietes der Erdkugel auf eine abwickelbare Flache. Als solche benutzt man Kegel,Zylinder und Ebenen.
Abbildung 13.20: Kartenentwurfe
Fur die unterschiedlichen Kartenentwurfe sind Einteilungsgesichtspunkte:
1. Flachentreuer Entwurf
2. Winkeltreuer Entwurf
3. Kreistreue
4. Langentreue
Aus der Langenverzerrung bei Winkeltreue resultiert die Flachenverzerrung.
Hier sind Beispiele von Projektionen.Die stereographische Projektion vom Nordpol aus hat eine Langenverzerrung zurFolge, Winkeltreue und Kreistreue ist gegeben. Die gnomische Projektion
Abbildung 13.21: Gnomische Projektion
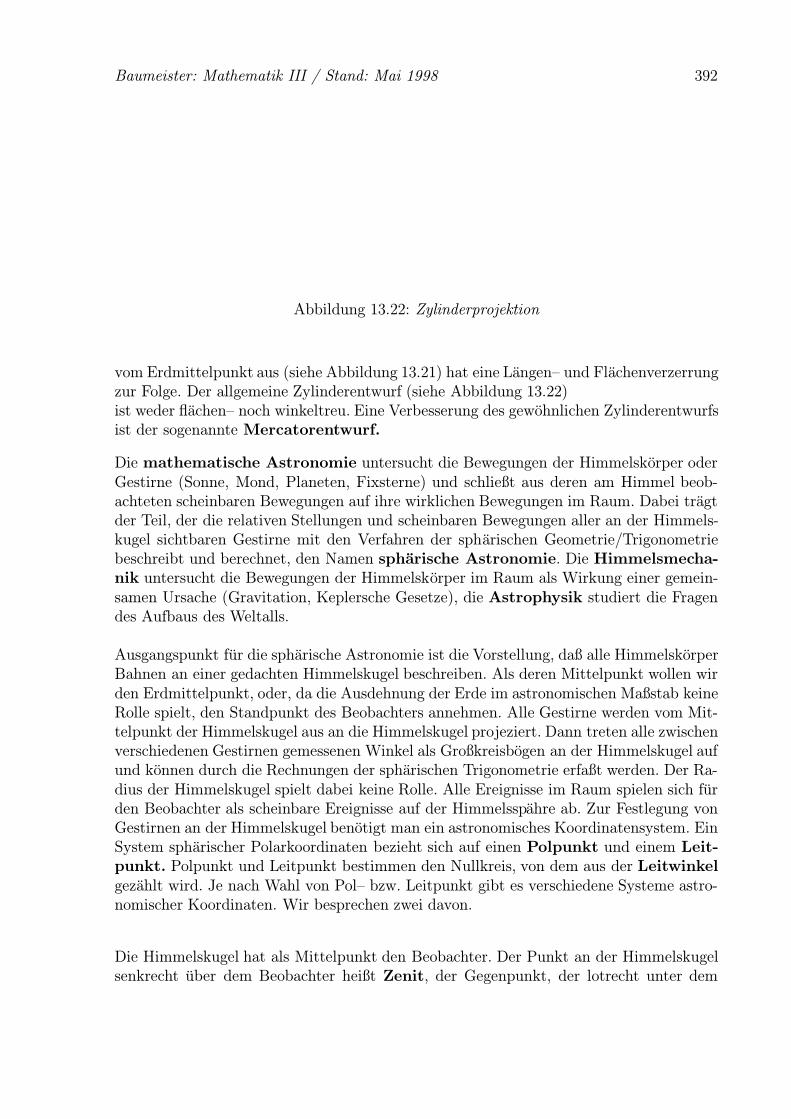
Baumeister: Mathematik III / Stand: Mai 1998 392
Abbildung 13.22: Zylinderprojektion
vom Erdmittelpunkt aus (siehe Abbildung 13.21) hat eine Langen– und Flachenverzerrungzur Folge. Der allgemeine Zylinderentwurf (siehe Abbildung 13.22)ist weder flachen– noch winkeltreu. Eine Verbesserung des gewohnlichen Zylinderentwurfsist der sogenannte Mercatorentwurf.
Die mathematische Astronomie untersucht die Bewegungen der Himmelskorper oderGestirne (Sonne, Mond, Planeten, Fixsterne) und schließt aus deren am Himmel beob-achteten scheinbaren Bewegungen auf ihre wirklichen Bewegungen im Raum. Dabei tragtder Teil, der die relativen Stellungen und scheinbaren Bewegungen aller an der Himmels-kugel sichtbaren Gestirne mit den Verfahren der spharischen Geometrie/Trigonometriebeschreibt und berechnet, den Namen spharische Astronomie. Die Himmelsmecha-nik untersucht die Bewegungen der Himmelskorper im Raum als Wirkung einer gemein-samen Ursache (Gravitation, Keplersche Gesetze), die Astrophysik studiert die Fragendes Aufbaus des Weltalls.
Ausgangspunkt fur die spharische Astronomie ist die Vorstellung, daß alle HimmelskorperBahnen an einer gedachten Himmelskugel beschreiben. Als deren Mittelpunkt wollen wirden Erdmittelpunkt, oder, da die Ausdehnung der Erde im astronomischen Maßstab keineRolle spielt, den Standpunkt des Beobachters annehmen. Alle Gestirne werden vom Mit-telpunkt der Himmelskugel aus an die Himmelskugel projeziert. Dann treten alle zwischenverschiedenen Gestirnen gemessenen Winkel als Großkreisbogen an der Himmelskugel aufund konnen durch die Rechnungen der spharischen Trigonometrie erfaßt werden. Der Ra-dius der Himmelskugel spielt dabei keine Rolle. Alle Ereignisse im Raum spielen sich furden Beobachter als scheinbare Ereignisse auf der Himmelsspahre ab. Zur Festlegung vonGestirnen an der Himmelskugel benotigt man ein astronomisches Koordinatensystem. EinSystem spharischer Polarkoordinaten bezieht sich auf einen Polpunkt und einem Leit-punkt. Polpunkt und Leitpunkt bestimmen den Nullkreis, von dem aus der Leitwinkelgezahlt wird. Je nach Wahl von Pol– bzw. Leitpunkt gibt es verschiedene Systeme astro-nomischer Koordinaten. Wir besprechen zwei davon.
Die Himmelskugel hat als Mittelpunkt den Beobachter. Der Punkt an der Himmelskugelsenkrecht uber dem Beobachter heißt Zenit, der Gegenpunkt, der lotrecht unter dem
Baumeister: Mathematik III / Stand: Mai 1998 393
Beobachter liegt, heißt Nadir. Fur den Beobachter ist die waagrechte Ebene, von der auser beobachtet, die Tangentialebene an die Erdkugel im Beobachtungsort. Sie ist senkrechtzur Verbindungsstrecke Zenit–Nadir. Da wir von der Ausdehnung der Erde absehen, istsie eine Ebene durch den Erdmittelpunkt; sie heißt Horizontebene.
Das Horizontsystem hat als Polpunkt den Zenit und als Leitpunkt den Himmelsnordpol.Zur Ermittlung der Koordinaten eines Gestirns G in diesem System zieht man den Groß-kreis M durch G und den Zenit Z und den Nadir Na heran. Auf diesem Großkreis kannman die Hohe h des Gestirns ablesen, d.h. die Lange des Bogens zwischen Schnittpunkt SGdieses Großkreises mit der Horizontebene und G. Der Großkreis, der durch den Himmels-nordpol, den Zenit und den Nadir verlauft, heißt Himmelsmeridian des Beobachters;der Schnittpunkt mit der Horizontebene wird mit HN bezeichnet. Der Himmelsmeridiandient als Nullkreis fur die zweite Koordinate. Diese zweite Koordinate heißt Azimut undwird als Bogenlange des Horizontkreises, gemessen von HN bis zu SG, ausgedruckt.
Bemerkung 13.44
Zur Bestimmung von Azimut und Hohe der Sonne bediente man sich im Altertum desGnomon. Das Gnomon ist ein am Beobachtungsort vertikal aufgestellter schattenwerfen-der Stab, mit dessen Hilfe man Nordsudrichtung, Azimut und Hohe der Sonne bestimmenkann. In der Praxis bedient man sich zur Messung von Azimut und Hohe im Vermessungs-wesen des Theodolits und in der Seefahrt des Kompasses und des Sextanten. (DerTheodolit ist ein Fernrohr, das um eine vertikale und um eine horizontale Achse drehbarist.) 2
Es gibt zwei Aquatorsysteme. Das erste Aquatorsystem hat als Leitpunkt den Zenitund als Polpunkt den Himmelsnordpol. Das zweite Aquatorsystem, das wir nun bespre-chen wollen, hat als Leitpunkt den sogenannten Fruhlingspunkt und als Polpunkt denHimmelsnordpol. Wir fuhren zunachst an, was beiden Aquatorsystemen gemeinsam ist.Die zum Himmelsaquator – dies ist die Ebene senkrecht zur Achse (Himmelsachse)Himmelsnordpol–Himmelssudpol – parallel laufenden Kleinkreise nennt man Deklina-tionskreise, die durch den Nordpol und Sudpol des Himmels laufenden Großkreise hei-ßen Stundenkreise. Unter den Stundenkreisen gibt es einen, der durch Zenit und Nadirdes Beobachters geht. Er entspricht dem Hinmelsmeridian. Der Bogen auf dem Stunden-kreis vom Himmelsaquator bis zum Gestirn wird Deklination genannt; sie wird vomHimmelsaquator aus nach Norden und Suden gezahlt. (Damit kommt dieselbe Bezeich-nungsweise wie bei Lange und Breite auf der Erdkugel zum Einsatz.) Hinsichtlich derDeklination unterscheiden sich die beiden Aquatorsysteme nicht.Die zweite Koordinate im ersten Aquatorsystem ist der Ortsstundenwinkel. Dies ist derWinkel zwischen dem Himmelsmeridian (des Beobachters) und dem Stundenkreis des Ge-stirns; er wird als Bogen auf dem Himmelsaquator nach Westen als positiv und nach Ostenals negativ gezahlt. Er gibt den Abstand des Gestirns von seiner oberen Kulmination an.Wenn man ihn im Zeitmaß mißt, gibt er die Zeit an, die seit der oberen Kulminationverflossen ist. (Beachte dabei, daß jedes Gestirn uber dem Himmelsmeridian seinen Kul-minationspunkt hat.) Dabei wird die Zeit von der oberen Kulmination eines Fixsterns biszu nachsten als 24 Sternstunden bezeichnet, d.h. 360o entsprechen 24 Stunden. Diese Zeit
Baumeister: Mathematik III / Stand: Mai 1998 394
heißt Sternzeit. Der Ortsstundenwinkel andert sich also mit dem Standort des Beobach-ters, da sich der Himmelsmeridian mit dem Standort des Beobachters andert. Wegen derBedeutung des Nullmeridians auf der Erdkugel ist der Ortsstundenwinkel von Greenwichvon Interesse. In der Orts– und Zeitabhangigkeit des Ortstundenwinkels druckt sich dieAbhangigkeit des ersten Aquatorsystems vom Beobachter aus.
Abbildung 13.23: Die Koordinaten eines Aquatorsystems
Die zweite Koordinate im zweiten Aquatorsystem wird auf einen auf der Himmelskugelfesten Stundenkreis als Nullstundenkreis bezogen. Als dieser Nullstundenkreis wird derStundenkreis durch den Fruhlingspunkt gewahlt. Der Fruhlingspunkt, auch Widderpunktgenannt, spielt eine Rolle in der scheinbaren Bewegung der Sonne um die Erde. (ImKoordinatensystem auf der Erde entspricht ihm der Schnittpunkt des Nullmeridians mitder Aquatorebene.)Den Winkel zwischen dem Fruhlingspunkt und dem Stundenkreis des Gestirns nenntman Sternwinkel. Er wird, vom Fruhlingspunkt beginnend, in Richtung der taglichenUmdrehung des Sternenhimmels, also nach Westen von o0 bis 360o) gezahlt. Manchmalfindet auch die sogenannte Rektaszension (lat.: ascensio recta = gerade Aufsteigung)Verwendung. Es ist dies auch der Winkel zwischen Fruhlingspunkt und Stundenkreis desGestirns, aber entgegengesetzt gezahlt. Mißt man Sternwinkel oder Rektaszension in Zeit(360o∧ 24h), dann spricht man beim Sternwinkel von Sternzeit. Das nautische Jahrbuchgibt den Sternwinkel fur die bei der Nautik in Frage kommenden Fixsterne an, ebenso dieDeklination.Bestimmt man die Rektaszension und die Deklination der Sonne taglich und tragt dieseWerte in einer Karte der Himmelskugel (Sternkarte) ein, so findet man, daß die Sonneeine Bahn beschreibt, die ein Großkreis der Himmelskugel ist. Sie wird Ekliptik genannt,sie hat gegen den Himmelsaquator eine Neigung von 23, 5o.
13.9 Hyperbolische Geometrie
Aus heutiger Sicht ist es verwunderlich, daß die Existenz nicht–euklidischer Geometrienso lange (ca. 2200 Jahre) nicht in Betracht gezogen wurde, gab es doch die spharischeGeometrie mit ihrer
”Parallelenanomalie“ seit langer Zeit. Ursachlich dafur war sicher
auch, daß die spharische Geometrie nicht als eigenstandige Geometrie, sondern als Beson-derheit in der Raumgeometrie betrachtet wurde. Erst B. Riemann (1826 – 1866) machte

Baumeister: Mathematik III / Stand: Mai 1998 395
den Blick frei fur eine eigenstandige Betrachtung, lange nach der Entdeckung nichteuklidi-scher Geometrien. Nach Fehlschlagen vieler Versuche, das Parallelenpostulat zu beweisen,waren drei Mathematiker nahezu gleichzeitig und weitgehend unabhangig voneinander zuder Uberzeugung gekommen, daß dieses Postulat nicht bewiesen werden kann, daß es alsovon den anderen Axiomen und Postulaten unabhangig ist. Diese Mathematiker warenJ. Bolyai (1801 – 1860), C. F.Gauß (1777 – 1855), N. I. Lobatschewski (1792 – 1856).Die Theorie von Lobatschewski war der von Bolyai sehr ahnlich, die Veroffentlichungder Arbeiten von Gauß zu diesem Thema erfolgten erst nach seinem Tode. Wir gebenzunachst das Parallelenpostulat von Lobatschewski wieder und skizzieren dann ein kon-kretes Modell die hyperbolische Ebene dafur. (Ein weiteres Modell ware die sogenannte
”Bierdeckelgeometrie“ von Cayley–Klein.)
V’: Parallelenpostulat von LobatschewskiEs existiert eine Gerade g und ein nicht auf g liegender Punkt, durch den mindestenszwei Geraden verlaufen, die g nicht schneiden.
Man beachte, daß nur die Existenz einer Geraden gefordert wurde, zu der eine besondereSituation bezuglich Parallelitat besteht.
Satz 13.45Gelten die Axiomengruppen I – IV und gilt V’, so existieren zu jeder Geraden gund zu jedem nicht auf g liegenden Punkt P mindestens zwei Geraden, die durch Pverlaufen und g nicht schneiden.
Beweis:Annahme: Es gibt eine Gerade g und einen Punkt P /∈ g, durch den eine Gerade h verlauft,die g nicht schneidet.Nach Satz ?? folgt die Gultigkeit des euklidischen Parallelenaxioms in Widerspruch zuAxiom V’.
Kommen wir nun zu einer Konkretisierung der Lobatschewski–Geometrie, die wir H. Poin-care (1854 – 1912) verdanken. H. Poincare war ein außerst vielseitiger Mathematiker.Seine Arbeiten waren richtungsweisend in vielen Gebieten (Topologie, Geometrie, Diffe-rentialgleichungen) und bereiteten viele Theorien (Relativitatstheorie, Wahrscheinlich-keitstheorie) vor. Was heute als Chaostheorie verkundet wird, hat H. Poincare angedacht;der sogenannte Schmetterlingseffekt war implizit bei ihm schon erkannt.Im Poincare–Modell sind nun die Objekte “Punkte, Gerade, Abstand“ zu definieren. Aus-gangspunkt ist die uns schon vertraute euklidische Ebene IE 2 , konkretisiert in IR2 . Wirbetrachten nun die obere Halbebene
H := (x, y) ∈ IR2 |y > 0
und nennen Punkte der Poincare–Geometrie die Elemente von H, also
IP := (x, y) ∈ IR2 |y > 0 .
In der Ebene IE 2 bzw. IR2 kennen wir Halbkreise und Kreise, ebenso in H. Davon machenwir nun Gebrauch. Die euklidische Gerade
L := x|x = te1, t ∈ IR

Baumeister: Mathematik III / Stand: Mai 1998 396
bezeichnen wir mit U ;U gehort IP nicht an. Wir setzen
G := Kr(Z)|Z ∈ U, r > 0 ∪ L(S)|S ∈ U;
dabei ist
Kr(Z) := (x, y) ∈ H|(x− z)2 + y2 = r2 , wobei Z = (z, 0) ist,
L(S) := (x, y) ∈ H|x = s, y > 0 , wobei S = (s, 0) ist.
Abbildung 13.24: Die hyperbolische Ebene
Die Gerade U wird als Randgerade der hyperbolischen Ebene bezeichnet. Die Schnitt-punkte der Halbkreise Kr(Z) und der Geraden L(S) bezeichnen wir als uneigentlichePunkte. Man rechnet nach, daß die Inzidenzaxiome I damit erfullt sind.Es fehlt uns noch der Abstand.Jede Gerade im Poincare–Modell, die ein Halbkreis Kr(Z) mit Z ∈ U ist, hat
”End-
punkte“ R, S auf U . Sind nun A,B Punkte auf dieser Geraden, so definieren wir denhyperbolischen Abstand |AB|H durch
|AB|H :=1
2ln(|AR|
|BR|·|BS|
|AS|)|
wobei | · | der euklidische Abstand in der Ebene IE 2 ist. Sind dagegen A,B Punkte einerGeraden L(S), so sei
|AB|H := |ln(|AS|
|BS|)|.
(Die Konstante 12
wollen wir nicht erklaren, sie laßt sich begrunden.) Man verifiziert damit(in etwas muhsamen Fallunterscheidungen), daß es sich bei | · |H um eine Abstandsfunk-tion handelt. Nun laßt sich auch der Nachweis der Gultigkeit des Anordnungsaxiome imPoincare–Modell fuhren.Als letzter Baustein fur die absolute hyperbolische Geometrie sind die Bewegungen anzu-geben. Wir entwicklen sie aus Abbildungen der euklidischen Ebene heraus.Euklidische Verschiebungen entlang der Randgeraden U :
H 3 (x, y) 7−→ (x+ k, y) ∈ H
Spiegelung an einer zu U senkrechten Geraden L(S) mit S = (s, 0) :
H 3 (x, y) 7−→ (2x− a, y) ∈ H
Baumeister: Mathematik III / Stand: Mai 1998 397
Zentrische Streckung mit einem positiven Streckungsfaktor und einem Streckungszen-trum Z auf U(Z = (z, 0)) :
H 3 (x, y) 7−→ (z, 0) + k(x− z, y) ∈ H.
Inversion an einem Kreis K − r(U)(Z0(z, 0)) :
H 3 (x, y) 7−→r2
|(x− z, y)|2(x− z, y) ∈ H.
Man verifiziert, daß es sich bei allen vier Abbildungstypen um Bewegungen handelt undman kann zeigen, daß damit eine Liste von Bewegungen gegeben ist, mit der sich derNachweis der Gultigkeit des Bewegungsaxioms erbringen laßt.Die Gultigkeit des Lobatschewskischen Parallelenaxiom V’ entnimmt man folgender Ab-bildung 13.25. (Sie enthalt sogar noch weitere Informationen uber die Vielfalt von Paral-lelen.)
Abbildung 13.25: Zur Gultigkeit des Parallelenaxioms von Lobatschewski
In der hyperbolischen Ebenen H kann man nun auch wieder Trigonometrie betreiben.
Wir haben nun drei verschiedene Modelle von Geometrien kennengelernt. EuklidischeGeometrie, spharische Geometrie, hyperbolische Geometrie. Man weist der euklidischenGeometrie konstante Krummung Null zu, der spharischen Geometrie konstante positi-ve Krummung, der hyperbolischen Geometrie konstante negative Krummung. Die Frage,welche Geometrie fur unser Universum gultig ist, laßt sich in diesem Deutungsmuster aufdie Frage nach der Krummung des realen Raumes zuruckfuhren. Die Antwort, die uns A.Einstein gegeben hat, wird noch komplexer dadurch, daß der Raum nicht von der Zeitzu trennen ist. Mit der speziellen Relativitatstheorie stellt Einstein die Geometrie derRaum–Zeit–Welt als
”pseudo–euklidischen“ Raum dar, der viel von der hyperbolischen
Geometrie hat. Mit der allgemeinen Relativitatstheorie, mit der Einstein die spezielleRelativitatstheorie prazisierte und erganzte, stellte sich heraus, daß die Geometrie derrealen Raum–Zeit–Welt als allgemeine vierdimensionale Riemannsche Mannigfaltigkeitmit variabler Krummung anzusehen ist. Die Krummung dieser Mannigfaltigkeit hangtvon der Dichte der Materie in der Umgebung dieses Punktes ab, je großer die Dich-te, desto großer die Krummung. (Hier haben die schwarzen Locher ihren
”Platz“ : Der

Baumeister: Mathematik III / Stand: Mai 1998 398
Raum in ihrer Umgebung ist so stark gekrummt, daß selbst Licht (in seiner Teilchenstruk-tur) nicht entweichen kann.) In einer hinreichend kleinen Umgebung eines jeden Punk-tes ist die Raum–Zeit–Welt ein vierdimensionaler pseudo–euklidischer Raum, so daß dieVerhaltnisse in diesen kleinen Bereichen durch die spezielle Relativitatstheorie beschrie-ben werden konnen. In noch
”kleineren“ Bereichen bei kleinen Geschwindigkeiten zerfallt
die Raum–Zeit–Welt wieder in eine Raum–Welt und eine Zeit–Achse und die klassischeNewton–Mechanik greift. Das Tor zu diesen Entwicklungen, die mit der allgemeinen Re-lativitatstheorie ihre Vollendung fand, aufgestoßen hat die Uberwindung der Denkfessel,daß die euklidische Geometrie die einzig mogliche Geometrie ist.
Kapitel 14
Iterationsverfahren
Der Nullstellensuche kommt in der Analysis und in der Angewandten Mathematik uber-ragende Bedeutung zu; wir besprechen hier ein Verfahren, das auf I. Newton insofernzuruckgeht, als er als Erster klar definiert hat, was eine Tangente ist. Die umfassendereVorgehensweise ist die Fixpunktiteration. Wir skizzieren sie in unterschiedlichen Variantenund Kontexten und stoßen dabei auch auf das Paradigma “Chaos“.
14.1 Nullstellen, Kurvendiskussion, Fixpunkte
Wir wollen uns den Verlauf von Funktion f : IR −→ IR anschauen. Dabei geht es nichtum die quantitative Angabe von speziellen Werten der Funktion, sondern um qualitativeAspekte der Funktion. Aus der Schule kennen wir dafur den Begriff Kurvendiskussion.
Sei f : I −→ IR, I = [a, b] Intervall. Fragen der Kurvendiskussion sind:
A Nullstellensuche: Gibt es z ∈ I mit f(z) = 0 ?
B Extremwertsuche: Gibt es z ∈ IR mit f(z) = minx∈I
f(x) bzw. f(z) = maxx∈I
f(x) ?
C Extremstellensuche: Gibt es z ∈ I mit f ′(z) = 0 ?
D Wendepunktsuche: Gibt es z ∈ I mit f ′′(z) = 0 ?
Bei C,D benotigen wir naturlich die Differenzierbarkeit bzw. die zweimalige Differenzier-barkeit.
Der Zusammenhang zwischen C und B ist dadurch hergestellt, daß Extremstellen Kan-didaten fur Extremwerte f(z) liefern (und D kann hierzu herangezogen werden). Diesbedeutet in etwas genauerer Betrachtung:• Ist z ∈ (a, b) ein Minimum von f, so gilt
f ′(z) = 0, f ′′(z) ≥ 0
(siehe Abschnitt 6.4).• Ist z ∈ [a, b] ein Minimum von f, so gilt
f ′(z)(x− z) ≥ 0 fur alle x ∈ [a, b] .
399

Baumeister: Mathematik IV / Stand: Juni 1998 400
• Ist z ∈ (a, b) mit f ′(z) = 0 und f ′′(z) > 0 so ist z ein Minimum.• Ist z ∈ (a, b) mit f ′(z) = 0 und wechselt f ′ in z sein Vorzeichen, so ist z ein Minimum.
Bemerkung 14.1
Man ubertragt die obigen Uberlegungen zu Minima von f auf Maxima von f , indem manvon f zu −f ubergeht, denn es ist ja
minx∈I
f(x) = −maxx∈I−f(x) .
2
Beispiel 14.2
Schon Euklid bewies, daß unter den Rechtecken gleichen Umfangs das Quadrat dengroßten Flacheninhalt besitzt. Wir geben den (elementargeometrischen) Beweis so wieder:Sei l der Umfang eines Rechtecks mit den Seitenlangen x und z .D, Ist x = z , dann liegtein Quadrat vor und wir haben nichts mehr zu zeigen. Ist x 6= z , also etwa z > x, dannkonnen wir o.E. z = y + u mit x < y und u > 0 annehmen; siehe Abbildung 14.1.
Abbildung 14.1: Skizze zum euklidischen Beweis
Da der Umfang des Rechtecks 2x + 2y + 2u betragt, der Umfang des Quadrats mit Sei-tenlange y aber 2x+2y+2v (x+v = y!), muß u = v sein. Dann ist aber das Rechteck mitden Seiten y, v großer als das Rechteck mit den Seiten x, u . Damit folgt, daß die Flachedes Rechtecks mit Seitenlange x, y+u kleiner als die Flache des Quadrats mit Seitenlangey ist.Der Beweis mit analytischen Mitteln sieht so aus:Sei x die eine Seite eines Rechtecks. Dann ist f(x) := x(l − 2x) seine doppelte Flache.Also ist die Funktion f zu maximieren. Wegen
f ′(x) = −4x+ l , f ′′(x) = −4
schließen wir, daß x = l4 die Losung ist; das zugehorige Rechteck ist ein Quadrat. 2
Beispiel 14.3
Baumeister: Mathematik IV / Stand: Juni 1998 401
Abbildung 14.2: Optimale Auslegung einer Wanne
Hier ist ein Beispiel fur Extremwertaufgaben, wie sie schon seit ca. 2 000 Jahren betrach-tet werden.Ein Materialstreifen der Lange l soll rechtwinklig so aufgekantet werden, daß ein im Quer-schnitt nach oben offenes Rechteck (Wanne) entsteht, dessen Flache maximal ist; sieheAbbildung 14.2.
Also ist die Aufgabe gestellt:
Maximiere f(x) := x(l − 2x) .
Dabei ist x die Hohe des Rechtecks.Da f ′(x) = l − 4x ist, erhalten wir als Kandidaten fur die Losung x := l
4mit dem
Extremwert l2
8. Da f ′′( l
4) = −4 ist, wissen wir, daß in der Tat in z := l
4ein Maximum
vorliegt. (Die eben angestellte Uberlegung bestatigt auch, daß die obige Maximumaufgabeohne die eigentlich vorliegenden Nebenbedingungen 0 ≤ x ≤ l betrachtet werden kann.)
2
Beispiel 14.4
100 Meter eines Zaunes stehen schon. 200 m sollen so hinzugefugt werden, daß ein mog-lichst großes rechteckiges Areal eingezaunt wird.Sei x die Lange des Stucks, das an der schon stehenden Seite angefugt wird. Da dieeine Rechteckseite nun 100 + x und der halbe Umfang 150 betragt, ist die Flache desentstehenden Areals
f(x) := (100 + x)(50− x) .
Wegenf ′(x) = −2x− 50
ist z = −25 ein Kandidat fur die Losung. Da f ′′(z) = −2 ausfallt, liegt tatsachlich einMaximum vor. Von dem bereits stehenden Zaun sind 25 m abzureißen! Davon war in derAufgabenstellung aber nicht die Rede.Um dies zu korrigieren, haben wir die Nebenbedingung x ≥ 0 zu berucksichtigen, d.h. fetwa auf dem Intervall [0, 200] zu betrachten. Nun schließen wir aus
f(x) = 5000 − (x2 + 50x) , x ∈ [0, 200] ,

Baumeister: Mathematik IV / Stand: Juni 1998 402
daß f in z := 0 den maximalen Wert annimmt. Wir hatten dieses Ergebnis auch aus
(−f)′(0)(x− 0) ≥ 0 fur alle x ∈ [0, 200] , (−f)′′(0) > 0 ,
schließen konnen.Das Ergebnis sagt also, daß so anzufugen ist, daß das resultierende Rechteck dem Quadratam nachsten kommt; siehe dazu Beispiel 14.2.
2
Es bleibt also mit A,C,D die sinnvolle Aufgabe, eine Nullstelle einer Funktion zu suchen.Eine direkte Methode, B zu losen, skizzieren wir in Bemerkung 14.11.
Wir konnen nun annehmen, daß folgende Situation vorliege:
Gesucht ist eine Nullstelle der stetigen Funktion f : [a, b] −→ IR .
Das Bisektionsverfahren, wie wir es in Abschnitt 8.3 besprochen haben – es benotigtdie Differenzierbarkeit von f nicht – ist ein mogliches Verfahren zum Aufsuchen einerNullstelle von f. Es ist aber im allgemeinen ein sehr langsames Verfahren, d.h. es sindviele Rechenschritte notig, bis ein z ∈ [a, b] gefunden ist, das als Nullstelle von f akzeptiertwird. Ein schnelleres Verfahren zu besprechen, darum geht es im nachsten Abschnitt. Hierbereiten wir die allgemeine Idee auf.
Jede Suche nach einer Nullstelle z von f kann man auf eine Suche nach einem Fixpunktvon g : x 7−→ x+ f(x) zuruckfuhren. Es gilt ja
f(z) = 0 ⇐⇒ z = z + f(z) = g(z) . (14.1)
Eine Nullstelle z von f ist gerade ein Punkt z , der unter der Abbildung g fix bleibt: z istFixpunkt von g .Hier liegt eine gewisse Willkur vor: Es gilt ja sogar fur jedes gw mit gw(x) := x+w(x)f(x)die Aquivalenz
f(z) = 0 ⇐⇒ z = z + w(z)f(z) = gw(z) ,
falls nur w(z) 6= 0 ist.
Fur die Suche nach einem Fixpunkt einer stetigen Funktion g : [a, b] −→ IR ist nun dieVorgehensweise der sukzessiven Approximation naheliegend:
xn+1 := g(xn) , n ∈ IN 0 ; (14.2)
hierbei ist noch eine Startnaherung x0 vorzugeben. Eine Folge, die gemaß (14.2) erzeugtwurde, heißt Orbit (mit Startwert x0). Da g stetig ist, ist sofort klar, daß ein Grenzwert zvon (xn)n∈IN ein Fixpunkt von g ist. Um die Konvergenz eines Orbits muß es also gehen.
Beispiel 14.5
Betrachten wir eine einfach zu durchschauende Situation: Die Iterationsfunktion g sei einelineare Funktion, also
g(x) = mx+ b .

Baumeister: Mathematik IV / Stand: Juni 1998 403
Den Fixpunkt von g zu bestimmen lauft daraufhinaus, den Schnittpunkt der Geraden
y = x , y = mx+ b
zu bestimmen, was naturlich ein Leichtes ist, wenn m 6= 1 ist:
x∗ :=b
1−mist der gesuchte Fixpunkt.
Die Sonderfalle bei m = 1 sind:
m = 1, b = 0 : Jedes x ∈ IR ist Fixpunktm = 1, b 6= 0 : Es gibt keinen Fixpunkt
Sei nun ein Orbit gemaßxn+1 := g(xn) , n ∈ IN 0 ,
berechnet. Man liest nun im Fall |m| < 1 aus
|xn+1 − x∗| = |g(xn)− g(x∗)| = |m||xn− x
∗|
sofort die Konvergenz der Folge (xn)n∈IN 0 gegen x∗ ab.Im Fall m = −1 muß keine Konvergenz vorliegen, wie folgender Spezialfall zeigt: Furg(x) := −x+ 4 erhalt man mit x0 = 1
2die periodische Folge x1 = 7
2, x2 = 1
2, x3 = 7
2, . . . .
Der Fall |m| > 1 laßt sich dadurch handhaben, daß man die Gerade y = mx+ b so auflost
x =y
m−
b
m
und die Fixpunktgleichung y = ym −
bm gemaß
yn+1 :=yn
m−
b
m, n ∈ IN 0 ,
iteriert, | 1m | ist nun kleiner als 1 . 2
Beispiel 14.6
Man bestimme die Nullstelle von f(x) := x − cos x . Dies ist gleichbedeutend mit derBerechnung eines Fixpunktes von g(x) := cos(x).
Wegen f(0) − 1 < 0, f(π4 ) = π4 −
2√
24 > 0, besitzt f eine Nullstelle in (0, π4). Wegen
f ′(x) = 1 + sin(x) ≥ 0 fur alle x ∈ IR folgt, daß Nullstellen nur in (0, π4) liegen konnen.
Da f ′(x) > 0, x ∈ (0, π4), gilt, folgt, daß die einzige Nullstelle von f in (0, π4) liegt. Also
besitzt g genau einen Fixpunkt x∗ in (0, π4).Naherungswerte fur x∗ bestimmen wir mit der Fixpunktiteration
xn+1 := cosxn , n ∈ IN 0 .
Wahlt man als Startwert (siehe oben)
x0 :=π
4∼ 0, 785398 ,
so ergibt sich folgende Zahlenfolge:

Baumeister: Mathematik IV / Stand: Juni 1998 404
x2k−1 x2k
k = 0 · · · 0, 785398
k = 1 0, 707106 0, 760244
k = 2 0, 724667 0, 748719
k = 3 0, 732560 0, 743464...
......
k = 12 0, 739079 0, 739088
k = 13 0, 739082 0, 739086
Von x25 stimmen die angegebenen 5 Ziffern nach dem Komma mit der Losung uberein.
Wir haben oben 0 < x1 ≤ x2 ≤ x0 beobachtet. Da g monoton fallend ist (g′(x) ≤ 0 furalle x), schließt man ohne Muhe
0 < x2k−1 ≤ x2k+1 ≤ x∗ ≤ x2k+2 ≤ x2k , k ∈ IN 0 .
Wir wissen daher in jedem Stadium der Rechnung
|x2k+2 − x∗| ≤ |x2k+2 − x2k+1| ,
wobei die Schranke |x2k+2 − x2k+1| bei der Rechnung zur Verfugung steht. 2
Der folgende Satz liefert allgemeine Bedingungen, unter denen die Vorgehensweise dersukzessiven Approximation zum Ziel fuhrt.
Satz 14.7
Sei g : [a, b] −→ [a, b] und mit L ∈ [0, 1) gelte
|g(x)− g(y)| ≤ L|x− y| fur alle x, y ∈ [a, b] . (14.3)
Dann gilt:
(a) Es gibt genau einen Fixpunkt x∗ in [a, b] .
(b) Fur alle x0 ∈ [a, b] konvergiert die Fixpunktiteration
xn+1 := g(xn) , n ∈ IN 0, (14.4)
gegen den Fixpunkt x∗ und wir haben
|xn+1 − x∗| ≤
Ln
1− L|x1 − x0| , n ∈ IN 0 . (14.5)
Beweis:Zu (a)

Baumeister: Mathematik IV / Stand: Juni 1998 405
Offenbar folgt aus der Bedingung (14.3), daß g stetig ist. Also ist auch G, definiert durchG(x) := g(x)− x, x ∈ [a, b], stetig. Aus
G(a) = g(a)− a ≥ 0 , G(b) = g(b)− b ≤ 0
folgt, daß G eine Nullstelle, g also einen Fixpunkt, in [a, b] besitzt.Seien x∗, x+ zwei Fixpunkte von g. Dann gilt
|x∗ − x+| = |g(x∗)− g(x+) ≤ L|x∗ − x+| ,
und daraus folgt wegen L < 1 sicherlich |x∗ − x+| = 0 .Zu (b)Man beweist durch vollstandige Induktion
|xn+1 − xn| ≤ Ln|x1 − x0| , n ∈ IN 0,
und folgert daraus fur alle m,n ∈ IN ,m ≥ n,
|xm − xn| ≤m−1∑i=n
|xi+1 − xi| ≤ Ln(∞∑i=0
Li) |x1 − x0| .
Da (Ln)n∈IN eine Nullfolge ist, folgt, daß (xn)n∈IN eine Cauchyfolge ist. Also ist (xn)n∈IN
konvergent. Sei x∗ der Grenzwert. Aus der Stetigkeit von g folgt x∗ = g(x∗) .
Wir schreiben die Fixpunktiteration programmiersprachennah auf:
Algorithmus Fixpunktiteration
EIN g (Rechte Seite der Fixpunktgleichung x = g(x)), x0 (Startnaherung)
S0 n := 0 , x := x0
S1 x := g(x) , n := n+ 1
S2 Wird x nicht als Fixpunkt akzeptiert, gehe zu S1
AUS Gebe x := x (Naherungslosung) und n (Iterationsindex) aus
Uber die Durchfuhrbarkeit des Algorithmus “Fixpunktiteration“ gibt Satz 14.7 Auskunft.Um die Endlichkeit, d.h. das Verlassen uber AUS, sicherzustellen, ist in Schritt S2 einetypische Abfrage zu implementieren: Erfullt x ein Abbruchkriterium? Dazu benotigtman im allgemeinen einen weiteren Parameter:
Regel 1 Man gibt eine maximale Iterationstiefe n∗ vor und formuliert S2 so: Gehe zuAUS, falls n > n∗, sonst gehe zu S1.
Regel 2 Man gibt eine Toleranz ε > 0 vor und formuliert S2 etwa so: Gehe zu AUS,falls |x− g(x)| ≤ ε, sonst gehe zu S1.

Baumeister: Mathematik IV / Stand: Juni 1998 406
Ergebnis eines Abbruchkriteriums sollte es sein, daß nach Verlassen des Algorithmus uberAUS feststeht, welche Genauigkeit die Naherungslosung x hat, d.h. daß eine Schrankefur |x− x∗| angegeben werden kann. Dies stellt sich folgendermaßen dar:Regel 1 ist ein a–priori–Kriterium: Es wird vorneherein festgelegt, daß nach einerAnzahl von Iterationen die Losung akzeptiert wird. Dies ist nur dann sinnvoll, wenn dieWahl von n∗ so moglich ist, daß eine vorgegebene Genauigkeit η > 0 fur |x−x∗| erreichtwird. Unter den Bedingungen des Satzes 14.7 ist dies moglich: Es ist ja
|x− x∗| ≤ η , falls n∗ ≥ln(η(1− L)|x1 − x0|
−1)
ln(L).
Regel 2 ist ein a–posteriori–Kriterium: Es wird erst wahrend der Rechnung, abhangigvon den Rechenergebnissen festgelegt, wann abzubrechen ist. Wiederum ist diese Vorgabenur dann sinnvoll, wenn das Abbrechkriterium sicherstellt, daß eine vorgegebene Genau-igkeit η > 0 fur |x − x∗| erreicht wird. Unter den Bedingungen des Satzes 14.7 ist diesmoglich: Es ist ja
|x− x∗| ≤ |x− g(x)|+ |g(x)− x∗| ≤ ε+ L|x− x∗| ,
d.h.|x− x∗| ≤
ε
1− L.
Also hat man ε als η(1 − L) zu wahlen. Allerdings liegt L meist nicht explizit vor, dieKenntnis einer Naherung L ∈ (L, 1) reicht aber aus.
Die Idee der Fixpunktiteration ist das Konzept, in dem sich im wesentlichen alle Verfahrenzur Nullstellensuche interpretieren lassen. Wir entdecken sie in unterschiedlichen Frage-stellungen. Immer ist der Satz 14.7 die Richtschnur fur die Absicherung der Verfahrens-weisen. Insbesondere die Bedingung (14.3) ist wesentlich. Sie beschreibt die Lipschitz-stetigkeit der Abbildung g; die Konstante L heißt Lipschitzkonstante (R. Lipschitz(1832 – 1903)). Der obige Satz 14.7 ist ein Spezialfall des Banachschen Fixpunktsatzes(S. Banach (1892 – 1945)).
Bemerkung 14.8
Die Lipschitzkonstante L in Satz 14.7 kann man uber die Differenzierbarkeit von g er-mitteln. Es gilt ja nach dem Mittelwertsatz der Differentialrechnung (siehe (8.3)) fur allex, y ∈ [a, b]
|g(x)− g(y)| = |g′(ξ)||x− y| mit einem ξ zwischen x, y .
Als Lipschitzkonstante fallt daher L := sup|g′(ξ)| |ξ ∈ [a, b] an. 2
Aus den obigen Uberlegungen kann man die Vermutung ableiten, daß zumindest die Kon-vergenz der Fixpunktiteration sehr im Zweifel ist, wenn die Lipschitzkonstante nicht klei-ner als 1 ist. Wir fuhren ein Beispiel an, das in anderem Kleide noch sehr interessantwerden wird.
Beispiel 14.9

Baumeister: Mathematik IV / Stand: Juni 1998 407
Betrachte die Fixpunktgleichung mit
g : [0, 1] 3 x 7−→ x2 ∈ [0, 1] .
Wir stellen fest, daß die kleinste Lipschitzkonstante L = 2 ist. Weiterhin stellen wir fest,daß fur jeden Orbit (xn)n∈IN 0 der Fixpunktiteration
limnxn =
0 , falls x0 ∈ [0, 1)1 , falls x0 = 1
gilt. Der Fixpunkt x = 1 laßt sich unter realistischen Umstanden also nicht annahern,leicht jedoch der Fixpunkt x = 0 . Dies ist unmittelbar einsichtig: In der Umgebungvon x = 1 herrscht die Lipschitzkonstante 2, in der Umgebung von x = 0 herrscht dieLipschitzkonstante 0; beachte g′(1) = 2 , g′(1) = 0 . 2
Definition 14.10
Sei g : [a, b] −→ [a, b] differenzierbar und sei x∗ ein Fixpunkt von g. Der Fixpunktx∗ heißt instabil, falls |g′(x∗)| > 1, stabil, falls |g′(x∗)| < 1, und superstabil, falls|g′(x∗)| = 0 ist. 2
Sei g : [a, b] −→ [a, b] differenzierbar. Sei (xn)n∈IN 0 ein Orbit der Fixpunktiteration. Wirbetrachten einen weiteren Orbit (x′n)n∈IN0 und setzen δxn := xn − x′n , n ∈ IN 0 .Ist L eine Lipschitzkonstante von g, dann bestatigt man leicht, daß
|xn+1 − x′n+1| ≤ Ln+1|x0 − x
′0| , n ∈ IN 0 ,
gilt, d.h., daß|δxn| ≤ exp(λn)|δx0| , n ∈ IN 0, (14.6)
mit λ = ln(L) gilt.Nach dem Zwischenwertsatz gilt
|δx2| = |(g g)(x0)− (g g)(x′0)| = |g′(g(ξ))g′(ξ)||δx0| mit einem ξ zwischen x0 und x′0 .
Wenn wir die Naherung g′(g(x0))g′(x0) fur g′(g(ξ))g′(ξ) akzeptieren, erhalten wir
ln(|δx2|
|δx0|) = ln(|g′(x1)|) + ln(|g′(x0)|) .
Die obige Abschatzung (14.6) schreiben wir nun zu einem Naherungsansatz
|δxn| = exp(λn)|δx0| , n ∈ IN 0,
mit einem unbekannten λ um. Dann haben wir
λ =1
2
1∑i=0
ln(|g′(xi)|) .

Baumeister: Mathematik IV / Stand: Juni 1998 408
Allgemein kann man die Formel
λ = limn
1
n
n−1∑i=0
ln(|g′(xi)|)
bestatigen. λ kommt also als Mittelwert der Lipschitzkonstanten entlang des Orbits zu-stande und zeigt damit im Mittel die Abstoßung bzw. Annaherung an. λ heißt Ljapu-novexponent von x0 (A.M. Ljapunov (1857 – 1918)); wir schreiben λ(x0) . Im obigenBeispiel 14.9 haben wir also λ(1) = ln(2) und λ(0) = −∞ .
Bemerkung 14.11
Wollen wir f : IR −→ IR minimieren, so ist eine Nullstelle von f ′ (Differenzierbarkeit vor-ausgesetzt) ein Kandidat fur ein Minimum. Also konnen wir versuchen, einen Kandidatenfur ein Minimum uber die Fixpunktiteration
xn+1 := xn − f′(xn) , n ∈ IN 0 , (14.7)
zu suchen. Aus
f(xn+1) = f(xn) + f ′(ξ)(xn+1 − xn) mit einem ξ zwischen xn+1, xn ,
folgtf(xn+1) = f(xn) + f ′(ξ)(−f ′(xn)) ,
und wir lesen ab, daßf(xn+1) < f(xn)
zu erwarten ist, da in der Umgebung eines Minimums, wir wollen dort ja hinkommen,f ′(ξ) und f ′(xn) gleiches Vorzeichen haben werden. Man bezeichnet das durch (14.7)angegebene Verfahren das Gradientenverfahren. (Bei der Minimumsuche im IRn stehtfur f ′(xn) der Gradient, d.h. die Richtung, wo es am steilsten zum Minimum geht. DasVerfahren heißt daher auch Verfahren des steilsten Abstiegs.)Nicht immer ist aber Konvergenz sichergestellt. Dies sieht man etwa am Beispiel x 7−→ x2
sofort: Die Iteration lautet ja xn+1 := −xn . Es liegt daher nahe, die Iteration (14.7) miteiner Schrittweitensteuerung zu versehen:
xn+1 := xn − λnf′(xn) , n ∈ IN 0 ; (14.8)
dabei wird λn so bestimmt, daß ein Abstieg gewahrleistet wird:
f(xn+1) < f(xn) .
Damit wird im allgemeinen Konvergenz erzwungen. Die Rechenarbeit steigt aber naturlichan. 2
Baumeister: Mathematik IV / Stand: Juni 1998 409
14.2 Das Newtonverfahren im Reellen
Das klassische Newtonverfahren zur Berechnung der Losung der Gleichung
f(x) = 0 (14.9)
besteht darin (siehe Abbildung 14.3), daß man zu einer Naherungslosung xn die Tangenteim Punkt (xn, f(xn)) an den Graphen von f bestimmt und eine “verbesserte“ Naherungxn+1 als Nullstelle der Tangentengleichung wahlt, d.h.
xn+1 := xn − f′(xn)−1f(xn) . (14.10)
Nach Wahl einer Startnaherung x0 ist das Verfahren damit schon klar. Allerdings istsicherzustellen, daß das Verfahren durchfuhrbar bleibt, d.h. daß f ′(xn) 6= 0 fur alle ngultig bleibt.
Abbildung 14.3: Das Newtonverfahren
Algorithmus Newtonverfahren
EIN f (Die Gleichung f(x) = 0 ist zu losen), x0 (Startnaherung)
S0 n := 0, x := x0
S1 x := x− f ′(x)−1f(x) , n := n+ 1
S2 Wird x nicht als Nullstelle akzeptiert, gehe zu S1
AUS Gebe x := x (Naherungslosung) und n (Iterationsindex) aus
Das Newtonverfahren bedeutet, auf die zu (14.9) aquivalente Gleichung (f ′(x) 6= 0!)
x = g(x) := x− f ′(x)−1f(x) (14.11)
den Algorithmus “Fixpunktiteration“ anzuwenden. Damit ordnet sich die Analyse desVerfahrens (Konvergenz, Abbrechkriterium) unter bei der Fixpunktiteration. Allerdingsist die quantitative Seite der Konvergenz noch speziell zu klaren. Daß nicht immer Kon-vergenz zu verzeichnen ist, soll folgendes Beispiel vermitteln.
Beispiel 14.12

Baumeister: Mathematik IV / Stand: Juni 1998 410
Betrachte die Newtoniterationsfolge zur Gleichung
f(x) := x3 − x = 0 .
Mit dem Startwert x0 = −√
55 erhalten wir x1 =
√5
5 und x2 = x0 , also sicher keineKonvergenz. Was passiert fur den Startwert x0 = 10? 2
Satz 14.13
Sei f : (a, b) −→ IR zweimal stetig differenzierbar und sei x∗ ∈ (a, b) mit
f(x∗) = 0, f ′(x∗) 6= 0 .
Dann gibt es δ > 0 so, daß fur alle (Startnaherungen) x0 ∈ (x∗ − δ, x∗ + δ) ⊂ (a, b)gilt:
(a) Die Folge (xn)n∈IN , erklart durch
xn+1 := xn − f′(xn)−1f(xn) , n ∈ IN 0,
ist wohldefiniert.
(b) limn∈IN
xn = x∗ .
(c) Es gibt positive Konstanten m,M mit
|xn+1 − x∗| ≤
M
2m|xn − x
∗|2 , n ∈ IN 0 . (14.12)
Beweis:Fur hinreichend kleines δ1 > 0 existieren Konstanten M > 0,m > 0 mit
|f ′(x)| ≥ m , |f ′′(x)| ≤M , x ∈ (x∗ − δ1, x∗ + δ1) ⊂ (a, b) .
Sei nun δ > 0 mit δ < min(δ1,2mM ).
Die Taylor Formel ergibt
0 = f(x∗) = f(xn) + (x∗ − xn)f ′(xn) +
x∗∫xn
(x∗ − ξ)f ′′(ξ)dξ ,
und wegenf(xn) + (x∗ − xn)f ′(xn) = (x∗ − xn+1)f ′(xn)
gilt
|x∗ − xn+1| ≤M
2m|x∗ − xn|
2
Dies zeigt: Ist xn ∈ (x∗− δ, x∗+ δ), so gilt dies auch fur xn+1. Damit ist a) und c) gezeigt.b) folgt mit
q :=M
2mδ < 1

Baumeister: Mathematik IV / Stand: Juni 1998 411
wegen
|x∗ − xn+1| ≤2m
Mq2n+1
, n ∈ IN 0 ,
(vollstandige Induktion!).
Bemerkung 14.14
Die Voraussetzung f(x∗) = 0, f ′(x∗) 6= 0 bedeutet, daß x∗ eine einfache Nullstelle ist, d.h.daß f in x∗ sein Vorzeichen wechselt. Sie bedeutet auch, daß x∗ ein superstabiler Fixpunktvon x 7−→ x− f ′(x)−1f(x) ist.Die Abschatzung (14.12) besagt, daß die Konvergenzrate quadratisch ist, d.h. daß die An-zahl der gultigen Stellen von xn sich in xn+1 verdoppelt; man spricht von quadratischerKonvergenz. Dies sieht man an
|xn+1 − x∗|
|xn − x∗|2∼
M
2m.
Liegt eine mehrfache Nullstelle vor, dann kann man immer noch
|xn+1 − x∗|
|xn − x∗|∼ c
(c Konstante) beweisen, was als lineare Konvergenz bezeichnet wird.Daß nicht mehr zu erwarten ist in dieser Situation, sieht man am Beispiel f(x) := x2 , x ∈IR , mit x∗ = 0 als Nullstelle. Hier liefert das Newtonverfahren
xn+1 = xn − xn/2 , n ∈ IN 0,
und daher|xn+1 − x
∗| = |xn − x∗|/2 .
2
Bemerkung 14.15
In Abschnitt 8.2 haben wir das sogenannte Heronverfahren zur Bestimmung einer Qua-dratwurzel kennengelernt. Dazu gilt es die Gleichung
f(x) := x2 − a = 0
zu losen. Das Newtonverfahren dafur, das fur a 6= 0 quadratisch konvergiert, reduziertsich auf das Heronverfahren, wie man sofort bestatigt. 2
Bemerkung 14.16
Baumeister: Mathematik IV / Stand: Juni 1998 412
Uberraschenderweise kann man mit dem Newtonverfahren die Berechnung des Inverseeiner reellen Zahl a 6= 0 naherungsweise mit Multiplikationen erledigen. Dazu hat mandie Gleichung
f(x) := x−1 − a = 0
zu losen. Das Newtonverfahren lautet
xn+1 = 2xn − x2na , n ∈ IN 0 .
Es konvergiert quadratisch, wenn die Startnaherung x0 gut genug ist. 2
Bemerkung 14.17
Wollen wir f : IR −→ IR minimieren, so ist eine Nullstelle von f ′ (Differenzierbarkeit vor-ausgesetzt) ein Kandidat fur ein Minimum. Also konnen wir versuchen, einen Kandidatenfur ein Minimum uber die Newtoniteration
xn+1 := xn − f′′(xn)−1f ′(xn) , n ∈ IN 0 , (14.13)
zu suchen, zweimalige Differenzierbarkeit vorausgesetzt. Da in einem Minimum z bekann-termaßen f ′′(z) ≥ 0 zutrifft, haben wir es hier mit einem “verzerrten“ Gradientenverfahrenzu tun (siehe Bemerkung 14.7). Wiederum liegt es nahe, eine Schrittweitensteuerung
xn+1 := xn − λnf′′(xn)−1f ′(xn) , n ∈ IN 0
einzubauen; dabei wird λn wieder so bestimmt, daß
f(xn+1) < f(xn)
gilt. 2
14.3 Fixpunktiteration und Chaos
Die Frage der Anwendbarkeit von Computermodellen auf komplexe Systeme mit chao-tischen Verhaltensmoglichkeiten – Chaos hier noch im Umgangssprachlichen verstan-den – hat starkes Interesse gefunden. Im Zusammenhang mit Modellen (Klima, Wetter,Wettrusten, Epidemien, . . .) wird oft gefragt, warum nicht historische Daten verwendetwerden, um die Modelle zu verifizieren und damit gultige Prognosen fur die Zukunftzu ermoglichen. Die Chaos–Theorie hat hierzu die Erkenntnisse geliefert, daß schon ein-fachste nichtlineare Gleichungen beliebige geschichtliche Entwicklungen produzieren. DieFrage der Anfangsbedingungen ist deutlich in den Vordergrund geruckt. Wir werden diesillustrieren.
Starten wir mit einer konkreten Situation. Die Entwicklung einer Spareinlage von Jahr zuJahr bei Verzinsung jeweils am Jahresende zu einem festen Zinssatz r > 0 laßt sich einfachverfolgen: Ist x das Kapital am Beginn des Jahres n, so ist y := x+ x · r das Kapital am

Baumeister: Mathematik IV / Stand: Juni 1998 413
Beginn des Jahres n+ 1. Also haben wir fur die Kapitalentwicklung vom Jahre n = 0 anfolgende Iterationsvorschrift
xn+1 = (1 + r)xn , n ∈ IN 0 ,
d.h.xn = (1 + r)nx0 , n ∈ N.
Eine Verdopplung des Kapitals beobachtet man nach etwa
n :=ln(2)
ln(1 + r)
Jahren.Nun konnte man auf die
”sozialistische“ Idee kommen, den Zinssatz abhangig von der
Kapitalhohe zu gestalten, um das unbegrenzte Wachstum zu unterbinden. Ein Ansatz furden kapitalabhangigen Zinssatz ist
r = r(x) := (1−x
K)r0.
Hier ist r0 der Zinssatz, mit dem kleine Guthaben verzinst werden und K das Guthaben,bei dem der Zinssatz auf Null gesunken ist; fur Guthaben oberhalb von K wurden negativeZinsen erhoben. Mit diesem Ansatz erhalten wir folgende Iterationsvorschrift
xn+1 = xn + (1−xn
K)r0xn ,
d.h.xn+1 = (1 + r0)xn −
r0
Kx2n , n ∈ IN 0 . (14.14)
Der Zinssatz r0 fur Kleinguthaben ist nun noch (frei) zu wahlen.
Bemerkung 14.18
Die Iterationsvorschrift (14.14) finden wir auch in der Populationskinetik. Dort steht xnfur die Populationsgroße einer Spezies in Biomasse (Hase, Fisch, . . .) zu Beginn einesZeitabschnitts (Jahr, Monat, . . .) n ; wir normieren eine solchen Zeitabschnitt auf 1.Dann laßt sich die Vorschrift (14.14) so interpretieren: Die Zuwachsrate
xn+1 − xnxn
ist abhangig von der Populationsgroße: Sie ist”konstant“ fur kleine Populationsgroßen,
sie nimmt ab fur wachsende Populationsgroßen. Diese Abnahme der Zuwachsrate wirdmotiviert durch
”sozialen Druck“, dem eine Uberpopulation ausgesetzt ist. 2
Die folgenden Analyseschritte wollen wir nun in einer”normierten“ Situation durchfuh-
ren. Dazu betrachten wir die Iterationsvorschrift
xn+1 := ga(xn) , n ∈ IN 0,

Baumeister: Mathematik IV / Stand: Juni 1998 414
wobeiga(x) := ax(1− x), x ∈ [0, 1],
die sogenannte logistische Funktion ist. Die Umrechnung der obigen konkreten Situa-tion in unsere nun schlankere Form ist so moglich, daß ein Ruckschluß auf unser Ver-zinsungsproblem moglich ist. Nun haben wir zwei Großen in unserer Iteration, die nochoffen sind: der Parameter a ≥ 0 und der Startwert x0 ∈ [0, 1]. (Das Intervall [0, 1] ist inKorrespondenz zum Guthabenintervall [0, K].) Da ga nur dann [0, 1] nach [0, 1] abbildet,wenn a ≤ 4 ist, betrachten wir also nur das Parameterintervall [0, 4]. Die Startwertex0 = 0, x0 = 1 sind nicht interessant, da ga(0) = 0, ga(1) = 0, und die Iterationsfolgeuninteressant wird.
Hier sind numerische Befunde, die im sogenannten Feigenbaumszenario zusammenge-faßt sind; siehe Abbildung 14.4.
Abbildung 14.4: Das Feigenbaumszenario
Es entsteht folgendermaßen: Man wahle einen beliebigen Startwert x0 ∈ (0, 1), berechnedie Iterierten x1, . . . , x500 und trage davon x301, . . . , x500 uber dem Parameter a auf. DieDruchfuhrung zeigt, daß das Bild nahezu unabhangig vom Startwert x0 ist. Wir lesen zweiverschiedene Dynamiken ab:
1. Konvergenzverhalten fur 1 < a < 3 .
2. Periodisches Verhalten fur 3 < a < a∞ .
3. Chaotisches Verhalten fur a∞ < a < 4 .
Dabei ist a∞ eine noch zu findende Zahl; sie wird sich als 3.5699456 . . . erweisen.
Bevor wir weiter in die Analyse eintreten, betrachten wir zwei andere Iterationsvorschrif-ten. Damit laßt sich dann das obige Bild sehr viel leichter verstehen. Wir betrachten alserstes die Iteration
xn+1 := M(xn) , n ∈ IN 0 ,
der Modulo–Abbildung
M : [0, 1] −→ [0, 1] , M(x) :=
2x, x ∈ [0, 1/2),
2x− 1, x ∈ [1/2, 1],; (14.15)
siehe Abbildung 14.5 .
Die Abbildung ist nicht injektiv und bei x = 12 unstetig. Ferner sind folgende Eigenschaf-
ten unmittelbar klar:

Baumeister: Mathematik IV / Stand: Juni 1998 415
Abbildung 14.5: Die Modulo–Abbildung
a) Es gibt genau zwei Fixpunkte, namlich x0 = 0 und x0 = 1.
b) Aus MN (x) = 2Nx mod 1 fur x 6= 1,MN (1) = 1 folgt, daß MN genau 2N Fix-punkte hat (welche?). Davon bilden einige echte Orbits der Period N , die anderengehoren zu niedrigeren Perioden.
c) Wegen M ′(x) = 2 fur alle x ∈ [0, 1]\12, ist kein Fixpunkt stabil.
Die Wirkung der Abbildung laßt sich besser verstehen, wenn wir ein x ∈ [0, 1] in Dualdar-stellung schreiben:
x = 0, a1a2a3 . . . oder x =∞∑i=1
ai2−i, ai ∈ 0, 1.
Die Iteration bewirkt dann wegen
M(x) = 0, a2a3a4 · · ·
ein Streichen der ersten Ziffer und anschließende Linksverschiebung um eine Stelle; dieModulo–Abbildung wird daher auch Bernoulli–Verschiebung (Bernoulli–shift) ge-nannt. Wir konnen genauer festhalten: Zahlen x, deren Dualdarstellung streng periodischist (mit der kleinsten Periode N), gehoren zu Orbits der Periode N. Startpunkte, derenDualdarstellung ab einer gewissen Stelle periodisch ist, werden von (instabilen) periodi-schen Orbits angezogen. Damit ist uns das Schicksal der rationalen Punkte bekannt. Sogibt es genau einen Orbit der Periode 2, der aus den Punkten
x1 = 0, 0101 · · · = 1/3, x2 = 0, 1010 · · · = 2/3
besteht und z.B. von x = 0, 011101010 . . . nach drei Iterationen erreicht wird.Was geschieht aber mit der uberwiegenden Mehrheit aller Punkte, namlich den irrationa-len Zahlen, die durch nichtperiodische Dualbruche dargestellt werden? Es laßt sich zeigen,daß fast alle irrationalen Zahlen in ihrer Dualdarstellung jede endliche Folge von Ziffernunendlich oft enthalten. Damit wird jedes Intervall [(j − 1) · 2−m, j · 2−m),m = 1, 2, . . . ,von den Iterierten Mk(x0), k = 1, 2, . . . , einer irrationalen Zahl x0 unendlich oft erreicht(und aus Symmetriegrunden alle solchen Intervalle mit festem m gleich haufig). Jede“typische“ Trajektorie irrt also fortwahrend durch das gesamte Intervall [0, 1] mit einerrelativen Haufigkeit, die asymptotisch zur Gleichverteilung wird.

Baumeister: Mathematik IV / Stand: Juni 1998 416
Fur eine beliebige stuckweise stetige Funktion F : [0, 1] −→ IR1 – die Stetigkeitsforde-rung laßt sich abschwachen – gilt deshalb
limN
N−1∑k=0
F [Mk(x0)] =
1∫0
F (x)dx fur fast alle x0 .
Wendet man dies mit einer charakteristischen Funktion F = χI
eines Intervalls I an,so besagt dies, daß ein Orbit sich im Intervall I im Mittel so oft aufhalt, wie die Großevon I uns nahelegt. Man sagt, die Bernoulli–Verschiebung ist ergodisch mit der Gleich-verteilung als invariantem Maß.Alle diese Eigenschaften haben letztlich ihre Ursache in der topologischen Wirkung vonM : das Intervall [0, 1] wird (um den Faktor 2) gestreckt, zerschnitten und ubereinanderge-legt. Daraus resultiert eine sensitive Abhangigkeit der Trajektorien von den Anfangswer-ten: Sind x0 und x0 ab der (n+1)–ten dualen Ziffer verschieden, so wird dieser Unterschieddurch die Iteration vergroßert, und Mn(x0) bzw. Mn(x0) haben nichts mehr gemeinsam.Da aber reale Messungen/Zahldarstellungen stets mit einer endlichen Genauigkeit durch-gefuhrt werden, wird eine langzeitliche Vorhersage unmoglich.Daß der Begriff deterministisches Chaos fur diese Situation gerechtfertigt ist, zeigtauch folgender Umstand: Registrieren wir mittels
s(xn) :=
0 , falls xn ∈ [0, 1/2),1 , falls xn ∈ [1/2, 1],
, n ∈ IN 0 , (14.16)
lediglich, ob die entsprechende Iterierte xn im linken oder rechten Halbintervall liegt, soentsteht eine Folge 0110 . . ., die sich durch nichts von einer Realisierung eines zufalligenMunzwurfs (0 = Wappen,1 = Zahl) unterscheidet. Ein willkurlich aus [0, 1] entnommenerStartwert x0 besitzt namlich in der Dualdarstellung Ziffern a0, a1, . . . , die unabhangigvoneinander mit der Wahrscheinlichkeit 1/2 die Werte 0 oder 1 annehmen. Auf einemvergroberten Beschreibungsniveau tritt deshalb eine rein zufallige Bewegung auf.
Die obige Iteration wird von einer Funktion “gesteuert“, die nicht stetig ist. Das seltsameVerhalten der Iteration hangt aber nicht von dieser Tatsache ab, wie die Iteration
xn+1 := Z(xn) , n ∈ IN 0 ,
mit der sogenannten Zeltdach–Abbildung
Z : [0, 1] −→ [0, 1] , Z(x) :=
2x , falls x ∈ [0, 1/2),
2− 2x , falls x ∈ [1/2, 1],
zeigt. Hier folgt aus der Dualdarstellung x = 0, a0a1a3 . . . von x offenbar
Z(x) =
0, a2a3a4 . . . fur a1 = 0,0, a2a3a4 . . . fur a1 = 1,
(14.17)
so daß Z eine Bernoulli–Verschiebung und (fur a1 = 1) eine anschließende Komplemen-tierung aller Ziffern bewirkt. Die Komplementierung sieht so aus: 0 := 1, 1 := 0 .Die fur die Modulo–Abbildung getroffenen Aussagen bleiben fast wortlich bestehen: Es

Baumeister: Mathematik IV / Stand: Juni 1998 417
gibt zwei Fixpunkte (hier: x0 = 1/3 und x0 = 2/3) und endlich viele Orbits der PeriodeN (der Graph von ZN besteht aus 2N−1 gleichschenkligen Dreiecken der Hohe 1 und derGrundseite 21−N ), aber wegen |f ′(x)| = 2 fur alle x sind alle Fixpunkte und periodischenOrbits instabil. Alle rationalen Zahlen gehoren zu Orbits der Periode N = 1, 2, . . . oderwerden von diesen angezogen.Jeder typische Orbit (d.h. mit irrationalem Anfangswert) besucht in unregelmaßiger Fol-ge das gesamte Intervall [0, 1] gleichmaßig. Die Dynamik ist ebenfalls ergodisch mit derGleichverteilung als invariantem Maß.Der topologische Unterschied gegenuber der Modulo–Abbildung besteht darin, daß dieIterationsabbildung stetig ist und das Intervall [0, 1] bei jeder Iteration gestreckt undanschließend gefaltet wird.
Nun konnen wir zur Parabel–Abbildung ga mit a = 4 zuruckkommen und sie mit Hilfeder Zeltdach–Abbildung auch verstehen. Die bijektive Abbildung
h : [0, 1] 3 x 7−→2
πarcsin(
√x) ∈ [0, 1]
transformiert die Iteration fur die Parabel–Abbildung namlich in eine Iteration fur dieZeltdach–Abbildung:
yn+1 := h(xn+1) = h(g4(xn)) = (h g4 h−1)(yn),
d.h.
yn+1 =
2yn falls yn ∈ [0, 12]
2− 2yn falls yn ∈ (12 , 1]
Deren Verhalten haben wir aber als chaotisch (und in gewisser Hinsicht gleichbedeutendzum Munzwurf) erkannt. Da sich die Orbits der Parabel–Abbildung durch eine eindeutigestetige Transformation aus denen der Zeltdach–Abbildung ergeben, sind sie in ahnlicherWeise chaotisch. Insbesondere wissen wir damit, daß die Parabelabbildung fur a = 4 keinestabilen Fixpunkte und keine stabilen periodischen Orbits besitzt.Mehr Information erhalten wir durch ein Histogramm, indem wir fur jedes von N gleich-großen Teilintervallen von [0, 1] die relative Anzahl der Besuche eines typischen Orbitsregistrieren. Nach hinreichend vielen Iterationen andert sich das Histogramm nicht mehrund druckt damit die Ergodizitat der Dynamik aus.Fur a = 4 konnen wir die Haufigkeit sogar angeben: Da bei der Zeltdach–Abbildung dieGleichverteilung mit der Dichte q(y) = 1 auf [0, 1] invariant bleibt, wird sich wegen (5.12)bei der Parabel–Abbildung mit a = 4 asymptotisch eine Verteilung mit der Dichte
p(x) = q(y(x)) · |dy
dx(x)| =
1
π√x(1− x)
einstellen; siehe Abbildung 14.6. Wir erkennen daran, daß sich ein Bahnpunkt besondersgern in der Nahe der Endpunkte x = 0 und x = 1 aufhalt.
Wir wollen jetzt einen Begriff einfuhren, der das exponentiell schnelle Auseinanderlaufenbenachbarter Trajektorien quantitativ erfaßt und dessen grundlegende Bedeutung noch

Baumeister: Mathematik IV / Stand: Juni 1998 418
Abbildung 14.6: Das invariante Maß der Parabel–Abbildung
deutlich werden wird.Sei der Anfangswert x0 einer Iteration
xn+1 := f(xn) , n ∈ IN 0
– fur f denke man an ga,M, Z – aus einem Intervall [x, x + ε] gewahlt. Dann wird furhinreichend kleines ε sein Bild fn(x0) nach n Iterationen in einem Intervall liegen, dessenLange
|fn(x+ ε)− fn(x)| = |(fn)′(x)| · ε+ o(ε)
betragt. Wir vergleichen dies mit einem exponentiellen Wachstum der Form xn+1 =axn , n ∈ IN 0 , wobei a := eλ mit einem λ ∈ IR ist. Hier wird aus dem Intervall [x, x+ ε]nach n Iterationen ein Intervall mit der Lange
|eλn(x+ ε)− eλnx| = eλnε .
Grenzubergang ε ↓ 0, n→∞ liefert
eλ := limn|(fn)′(x0)|1/n = lim
n(n−1∏k=0
|f ′(xk)|)1/n .
Die Große
λ(x0) := limn
1
n
n−1∑k=0
| ln(|f ′(xk))|
heißt Ljapunov–Exponent. Sie mißt die mittlere logarithmische Ausdehnungsrate (infini-tesimal kleiner Intervalle) langs eines Orbits und ist eine Funktion des Anfangspunktesx0.Gehort x0 zum Anziehungsbereich eines asymptotisch stabilen Fixpunktes x0, so gilt of-fenbar
λ(x0) = λ(x0) = ln(|f ′(x0)|) < 0 .
Wird x0 von einem asymptotisch stabilen periodischen Orbit (x1, . . . , xN ) der Periode Nangezogen, so folgt zwangslaufig
λ(x0) = λ :=1
N
N∑k=1
ln(|f ′(xk))| < 0 ,

Baumeister: Mathematik IV / Stand: Juni 1998 419
weil |(fN )′(xk)| < 1 unabhangig von k gilt. Gehort x0 dagegen zum Anziehungsbereicheines chaotischen Attraktors A, so gilt
λ(x0) = λA > 0 ,
weil sich infinitesimal benachbarte Punkte auf A exponentiell schnell (∼ eλAn) entfernen,wobei global eine Faltung uberlagert wird.Sowohl fur die Modulo–Abbildung f := M als auch fur die Zeltdach–Abbildung f := Z
ist |f ′(x)| = 2 fur alle x ∈ [0, 1] (fur x = 1/2 nur links– bzw. rechtsseitig). Deshalb betragtder Ljapunov–Exponent
λ(x) = ln(2) fur alle x ∈ [0, 1] .
Numerische Berechnungen fur die Parabel–Abbildung widerspiegeln die bisherigen Uber-legungen: Alle typischen Orbits ergeben den gleichen Ljapunov–Exponenten, der durchden jeweiligen Attraktor bestimmt ist; siehe Abbildung 14.7.
Abbildung 14.7: Die Ljapunovkoeffizienten
Bei Vorliegen stabiler Perioden gilt λ(a) < 0, wobei λ fur superstabile Orbits minimalwird, wahrend an den Verzweigungspunkten (Bifurkationspunkten) an , n ∈ IN 0 ,
λ(a1) = λ(a2) = · · · = λ(a∞) = 0
gilt. Auch daran sehen wir, daß fur a = a∞ noch kein Chaos vorhanden ist. Im Chaos-bereich haben wir λ(a) > 0, der Maximalwert von λ(a) wird fur a = 4 erreicht. Deutlichsichtbar sind auch die Fenster mit stabilen Perioden, wo λ(a) vorubergehend negativ wird.Halten wir als Fazit fest: Der chaotische Bereich der Dynamik wird durch einen positivenLjapunov–Exponenten charakterisiert. Das ist Ausdruck der sensitiven Abhangigkeitdes Bahnverlaufs von den Anfangswerten, das heißt des exponentiell schnellen Auseinan-derlaufens benachbarter Punkte (auf dem Attraktor), dem eine globale Faltung uberlagertwird.
14.4 Iteration im Komplexen
In Abschnitt 14.3. haben wir die logistische Funktion
ga(x) := ax(1− x)

Baumeister: Mathematik IV / Stand: Juni 1998 420
kennengelernt. Sie hat sehr interessante Orbits bei der Fixpunktiteration erzeugt. Es liegtnun nahe, diese Iteration auf die komplexen Zahlen auszudehnen und daher folgendeIteration zu betrachten:
zn+1 = gλ(zn) := λzn(1− zn), n ∈ IN 0 . (14.18)
Wiederum haben wir zwei Parameter : λ, z0 ∈ ′C .Betrachte φ(z) := 2− 4z , G2(z) := z2 − 2. Dann gilt
φ g4 = G2 φ
und wir konnen die Iteration (14.18) auch uber die Iteration
zn+1 := Gµ(zn) , n ∈ IN 0, (14.19)
fur µ = 2 studieren, wobei die Schar Gµ so erklart ist:
Gµ(z) := z2 − µ, µ ∈ ′C .
Diese Schar ist die”einfachste“ nichtlineare Funktion in ′C mit nur einem Parameter. Sie
hat durch die Analysen und Illustration von B. Mandelbrot betrachtliche populare Be-deutung erlangt, sie wurde aber mathematisch schon von Fatou 1906 intensiv untersucht.
Die Iteration zu µ = 0 ist nicht sehr aufregend. Die Fixpunkte von G0 sind z = 0, z =1, und z = ∞; letztere Aussage ist hier nur heuristisch, aber verifizierbar durch eineVariablentransformation, die z = ∞ auf z = 0 transformiert. Die Fixpunkte z = 0und z = ∞ sind attraktiv, da die Lipschitzkonstante in der Umgebung davon 0 ist, derFixpunkt z = 1 ist instabil, da die Lipschitzkonstante dort 2 ist. (Man kann ahnlichwie in Bemerkung 14.8 die Lipschitzkonstante uber Ableitungen berechnen. Wir habenG′0(z) = 2z; bestatige dies uber den Grenzwert von Differenzenquotienten!) Die Dynamikzu G0 ist nun recht einfach: Es gilt
limnzn =
0 , falls |z0| < 1∞ , falls |z0| > 1
. (14.20)
Der Einheitskreis D1 := z ∈ ′C ||z| = 1 bildet die Grenze zwischen diesen Einzugsbe-reichen der Attraktoren z = 0 und z =∞ . Er wird als Julia-Menge J0 der AbbildungG0 bezeichnet. Der instabile Fixpunkt z = 1 liegt in J0: Interessant ist die Dynamik aufJ0. Ein Punkt z = ei2πt, 0 ≤ t ≤ 1, wird abgebildet durch G0 auf z1 := ei4πt Also lautetdie Dynamik auf J0:
[0, 1] 3 t 7−→
2t , falls t ∈ [0, 1/2)
2t − 1 , falls t ∈ [1/2, 1]
Dies ist aber gerade der in Abschnitt 14.2. diskutierte Bernoulli–Shift. Dies bedeutet nun,daß die Dynamik auf der Juliamenge J0 chaotisch ist.Als nachstes betrachten wir nun die Juliamenge zum Parameter µ = i/2 . Fixpunkte sindnun neben z =∞ noch
z1/2 =1
2(1 +
√1− 4µ) ,

Baumeister: Mathematik IV / Stand: Juni 1998 421
alsoz1 ≈ 1.14− 0.39i, z2 ≈ 0.14 + 0.39i .
z2 ist stabil und z1 ist instabil. Die Juliamenge Jµ ist hier wieder der Rand des Einzugs-gebietes von z =∞ und z2. Sie ist eine Kurve, die nirgends differenzierbar ist, aber dochals eine Abbildung des Einheitskreises D1 aufgefaßt werden kann.Nun ist klar, wie wir auch fur andere Parameterwerte vorgehen. Stets erhalt man ziem-lich seltsam, aber meist auch interessant aussehende Juliamengen Jµ. Wir halten einigeEigenschaften von Jµ fest:
1. Invarianz Es gilt: Jµ ist abgeschlossen und beschrankt und Gµ(Jµ) = Jµ = G−1µ (Jµ)
2. Reichhaltigkeit Jµ enthalt uberabzahlbar viele Punkte.
3. Berechenbarkeit Fur jedes z ∈ Jµ liegen die Punkte zk mit Gkµ(zk) = z , k ∈ IN ,
dicht in Jµ.
4. Selbstahnlichkeit Fur jedes z ∈ Jµ und jedes ε > 0 gibt es n ∈ IN mit Gµ(Jµ) = Jµ,wobei Jµ := z ∈ Jµ||z − z| < ε ist.
Die Reichhaltigkeitseigenschaft ist eine Konsequenz, daß wir nun im Komplexen sind unddaher die polynomialen Gleichungen
Gnµ(z) = z
stets eine mit n wachsende Zahl von Losungen besitzen. Die Berechenbarkeitseigenschaftdruckt aus, daß man durch Ruckwartsiteration, ausgehend von einem Punkt der Julia-menge, jedem Punkt der Juliamenge beliebig nahe kommen kann. Prinzipiell bietet dieseEigenschaft die Moglichkeit, die Juliamenge graphisch darzustellen, in Praxi treten aberProbleme dadurch auf, daß nicht alle Teile von Jµ gleich haufig aufgesucht werden.Die Selbstahnlichkeitseigenschaft besagt, daß sich die gesamte Juliamenge Jµ durch eineendliche Anzahl von Iterationen aus jedem noch so kleinen Ausschnitt Jµ von Jµ generie-ren laßt. Daher die Wortwahl fur diese Eigenschaft.
Bemerkung 14.19In der euklidischen Geometrie kennen wir die Gebilde
”Gerade, Kreis, Kugel, Kegel“,
Gebilde, die im Vergleich mit den fraktalen Juliamengen ziemlich langweilig aussehen.Die einfach
”codierte Dynamik“ Gµ erzeugt Mengen und Kurven, die z.T. auf in der
Natur vorkommende Gebilde verweisen.1979 entdeckte B. Mandelbrot das Ordnungsprinzip, welches die Einteilung in zusammen-hangende und nicht zusammenhangende Juliamengen erlaubt. Die Parameter µ in dersogenannten Mandelbrotmenge
M := µ ∈ ′C |(Gkµ(0))k∈IN konvergiert nicht gegen ∞
erzeugen zusammenhangende Juliamengen. Die Menge M ist nun selbst wieder eine sehrseltsame Menge. Sie ist als Apfelmannchen bekannt und weist wieder große Selbstahn-lichkeit auf. In ihr bilden sich auch die wesentlichen Merkmale des Feigenbaumszenariosab. Dies ist nicht uberraschend, da ja die Abbildungen
gλ , Gµ

Baumeister: Mathematik IV / Stand: Juni 1998 422
verwandt sind. Diese Klarheit entdeckt man aber erst, nachdem wir den Schritt vomReellen zum Komplexen vollzogen haben. 2
Im Reellen haben wir das Heronverfahren zur Berechung der Quadratwurzel kennenge-lernt. Es ist gerade das Newtonverfahren zur Losung der Gleichung x2 = 2, denn dasNewtonverfahren zur Losung der Gleichung x2 = 2 lautet:
xn+1 :=1
2(xn +
2
xn) , n ∈ IN 0,
Im Komplexen formulieren wir in Analogie – wir wollen die Losungen von z2 = 1 finden– folgende Iteration:
zn+1 :=1
2(zn +
1
zn) , n ∈ IN 0 .
Offensichtlich sind die Startwerte z0, die rein imaginar sind, nicht “erlaubt“, denn hierkann keine Konvergenz eintreten, da die Imaginarachse nicht verlassen wird. Man kannnun zeigen, daß fur z0 ∈ ′C− Konvergenz gegen −1 und fur z0 ∈ ′C + Kovergenz gegen +1eintritt. Dabei sind
′C− := z ∈ ′C |Rez < 0, ′C + := z ∈ ′C |Rez > 0.
In Analogie zum Newtonverfahren im Reellen formuliert man zur Gleichung
z3 = 1
im Komplexen die Iteration
zn+1 := zn −z3n − 1
3z2n
=2z3
n + 1
3z2n
, n ∈ IN 0 .
Wie sieht nun das Konvergenzverhalten der zugehorigen Orbits aus ? Diese Frage erweistsich als außerordentlich tiefliegend. Als Erster versuchte A. Cayley (1821-1895) die Fragezu beantworten; er konnte es nicht. Erst eine ziemlich schwierige Analyse der Iterationvon rationalen Funktionen im Komplexen durch G. Julia (1893-1978) und P. Fatou (1878-1929) brachte einige Klarheit in diese Fragestellung. Die Arbeiten von B. Mandelbrot zuFraktalen in den Jahren von 1975 bis 1985 machten diese Ergebnisse wieder popular. Diezunachst naheliegende Vermutung, daß die Einzugsgebiete der drei Nullstellen
z1 = 1 , z2 = −1
2
√3 +
1
2i , z3 = −
1
2
√3−
1
2i
an jeweils einer Halbgeraden zusammenstoßen sollten, trifft nicht zu. Computerbilder zei-gen eine ganz uberraschende Unubersichtlichkeit des Konvergenzverhaltens. Die Randerder jeweiligen Einzugsgebiete sind so ineinander verwoben, daß immer dort, wo zwei Ein-zugsbereiche zusammenstoßen, der dritte Einzugsbereich bereits vorhanden ist; die Randerder Einzugsbereiche sind keine glatten Kurven, sondern sehr eigenwillig gefranste Gebilde;sie stellen wieder eine sogenante Julia–Menge dar, die die oben angefuhrten Eigenschaftenbesitzt.
Baumeister: Mathematik IV / Stand: Juni 1998 423
Das seltsame Verhalten der Newton–Iteration im Komplexen wurde untersucht fur dieGleichungen
z4 − 1 = 0 , z5 − 1 = 0,
(z − 1)(z2 + z + c) = 0 (c ∈ ′C ).
Immer wieder stoßt man auf Einzugsgebiete, deren Rander vom Typ Julia–Mengen sind.Uberraschend ist, daß als geradezu universelle Menge wieder das Apfelmannchen ins Spielkommt: Farbt man die Parameter c im dritten Fall schwarz ein, wenn z0 = 0 kein guterStartwert (keine Konvergenz) ist, so entsteht wieder ein Apfelmannchen.
14.5 Iteration von Drehschrumpfungen
Wir benutzen hier Matrizen als Hilfsmittel, Figuren der Ebene in neue zu verwandeln.Dabei interessieren uns hier Matrizen, die nicht starr operieren wie etwa (reine) Drehungenund Translationen, hier interessieren sogenannte Drehschrumpfungen. Dies sind affineAbbildungen, die Figuren neben einer Drehung und Translation auch auf ein Zentrum hinzusammenziehen.Mit einer Matrix A ∈ IR2,2 und einem Vektor z ∈ IR2 verbinden wir die Abbildung
TA,z : IR2 3 x 7−→ Ax+ z ∈ IR2
wobei wir IR2 als Raum der Spaltenvektoren (IR2,1) zu verstehen haben; solche Abbildun-gen nennen wir affin.Ist F eine Figur der Ebene, d.h. eine Teilmenge von IR2, dann ist
FA,z := y ∈ IR2 |y = Ax+ z, x ∈ F
ihre Bildfigur. Interessante Spezialfalle sind:
• Reine Drehung, d.h.
A =
(cosα sinα− sinα cosα
)und z = θ . Die Zahl α ist der Drehwinkel. Zur Erinnerung: Solche Drehungen lassenAbstande und Winkel invariant.
• Zentrische Streckung mit Zentrum θ und Streckungsfaktor s ≥ 0 :
A =
(s 00 s
)
• Drehschrumpfung mit Zentrum θ und Streckungsfaktor s ≥ 0 :
A = s
(cosα sinαsinα cosα
)
Beispiel 14.20

Baumeister: Mathematik IV / Stand: Juni 1998 424
Wir legen als Figur ein Dreieck F0 mit den Eckpunkten A,Z,B durch die Koordinaten
A : (−1, 1) Z : (0, 0) B : (1,−1)
fest und bestimmen mit dem Schrumpfungsfaktor s := 0.9 die iterierten Bildfiguren gemaß
Fn+1 := TA,θ(Fn) , n ∈ IN 0 .
Wenn wir die Bildfiguren abwechselnd schwarz und weiß einfarben, entsteht im Quadrat[−1, 1] × [−1, 0] das perspektivische Bild von Eisenbahnschwellen; siehe Abbildung 14.8
2
Abbildung 14.8: Die Eisenbahnschwellen
Beispiel 14.21
Betrachte das Dreieck F0 mit den Eckpunkten B,C,D mit den Koordinaten
B : (0, 1) C : (−1, 1) D : (−1, 0)
und bestimme mit dem Schrumpfungsfaktor s := 0.5 die Iterierten
Fn+1 := TA,θ(Fn) , n ∈ IN 0 .
Es ergibt sich, wenn wir die Figuren Fn, n ∈ IN 0, schwarz einfarben, folgendes GesamtbildF∞ := ∪n∈IN 0Fn (siehe Abbildung 14.11). 2
Abbildung 14.9: Ein Dreiecksmuster

Baumeister: Mathematik IV / Stand: Juni 1998 425
Beispiel 14.22
Gegeben sei ein Quadrat mit den Eckpunkten A,B,C,D mit den Koordinaten
A : (1,−1) B : (1, 1) C : (−1, 1) D : (−1,−1) .
Wir wollen nun dieses Quadrat so drehen und schrumpfen (Winkel ϕ, Zentrum θ, Faktors), daß die Eckpunkte A′, B′, C ′, D′ des so entstehenden Quadrats auf den Seiten des Aus-gangsquadrats zu liegen kommen. Wir legen dazu ϕ fest und fragen nach dem passendenSchrumpfungsfaktor. Aus der Abbildung 14.10 lesen wir ab:
sinϕ =x
2s, cosϕ =
2− x
2s.
Abbildung 14.10: Zur Wahl des Schrumpfungsfaktors
Also wird die gesuchte Abbildung vermittelt durch die Matrix
A(ϕ) :=1
cosϕ+ sinϕ
(cosϕ sinϕsinϕ cosϕ
).
Iteriert man nun gemaßFn+1 := TA(ϕ)(Fn) , n ∈ IN 0,
so ergibt die Folge der Eckpunkte der Figuren Fn eine interessante Spirale. 2
Nun kombinieren wir die Drehschrumpfungen unter Einbeziehung von verschiedenen Zen-tren in folgender Weise: Seien T1, T2 zwei (verschiedene) Drehschrumpfungen mit ZentrumZ1 bzw. Z2 . Wir starten mit einer Figur F0 und iterieren gemaß
Fn+1 := T2(T1(Fn)) , n ∈ IN 0 , i = 1, 2 . (14.21)
Die Beschreibung der”Kontraktionen“ T1, T2 gelingt mit den Ortsvektoren der Zentren
Z1, Z2, den Schrumpfungsfaktoren s1, s2 und den Winkeln ϕ1, ϕ2 folgendermaßen:
Ti(x) = siA(ϕi)x+ (1− si)zi .
Beispiel 14.23Mit der Iteration (14.21) wird die Abbildung 14.11 erzeugt; der Schrumpfungsfaktor ist
in beiden Abbildungen 12
√2 , der Winkel π4 .
2

Baumeister: Mathematik IV / Stand: Juni 1998 426
Abbildung 14.11: Ein Dreiecksmuster
Kapitel 15
Verschlusselte Botschaften
In standig wachsendem Umfang werden heutzutage Daten auf elektronischem Wege ge-speichert, ubertragen und verarbeitet. Wir wollen Methoden besprechen, wie diese Da-tenverarbeitung gegen zufallige Storungen und beabsichtigte Eingriffe gesichert werdenkann. Sie sind interessante Anwendungen der algebraischen Strukturen.1
15.1 Problemstellung
Zunachst wollen wir besprechen, wie die Ubermittlung von Nachrichten vor sich geht.
Nachrichten bilden wir ublicherweise in Form von gesprochenen oder geschriebenen Wor-tern, die aus Buchstaben eines Alphabets bestehen: Beispiele:
BAUM : Deutsches Alphabet A,B,C, . . . , X,Y,Z,A,U,O01001 : Binares Alphabet 0, 1− − •− : Morsealphabet −, • (Das angegebene Zeichen steht fur “q“)ATGGC : Ausschnitt aus der DNS, geschrieben im Alphabet A,C,G,T
Die Ubertragung von Nachrichten geschieht mittels durch Hardware realisierter mecha-nischer oder elektronischer Impulse. Telefon, Morseapparat, Telegraph, Funkgerat sindInstrumente der Nachrichtenubermittlung. Die Strecke (physikalische Verbindung), aufder die Ubermittlung vor sich geht, bezeichnet man als Kanal. Zur Ubertragung werdendie Nachrichten in besonderer Weise vorbereitet. Eine erste Vorbereitung ist die soge-nannte Quellencodierung, bei der eine Nachricht (einer naturlichen Sprache), die einSender an einen Empfanger ubermitteln will, in einem vorgegebenen System, Code ge-nannt, dargestellt wird. Wir beschranken uns hier meist darauf, fur diesen Quellencodedas 0, 1− Alphabet zu verwenden; Worte werden also als 0, 1− Folgen dargestellt.
Sei A ein endliches Alphabet. Dann heißt ein Tupel w ∈ An (n ∈ IN ) ein Wort derLange n. Als Wort der Lange 0 fugen wir das leere Wort ( ) ∈ A0 hinzu und setzendamit
A∗ := ∪n∈IN0An .
1Die Uberschrift ist der Titel eines Buches: R. Kippenhahn, Verschlusselte Botschaften – Geheim-schrift, Enigma und Chipkarte. Rowohlt, 1997
427
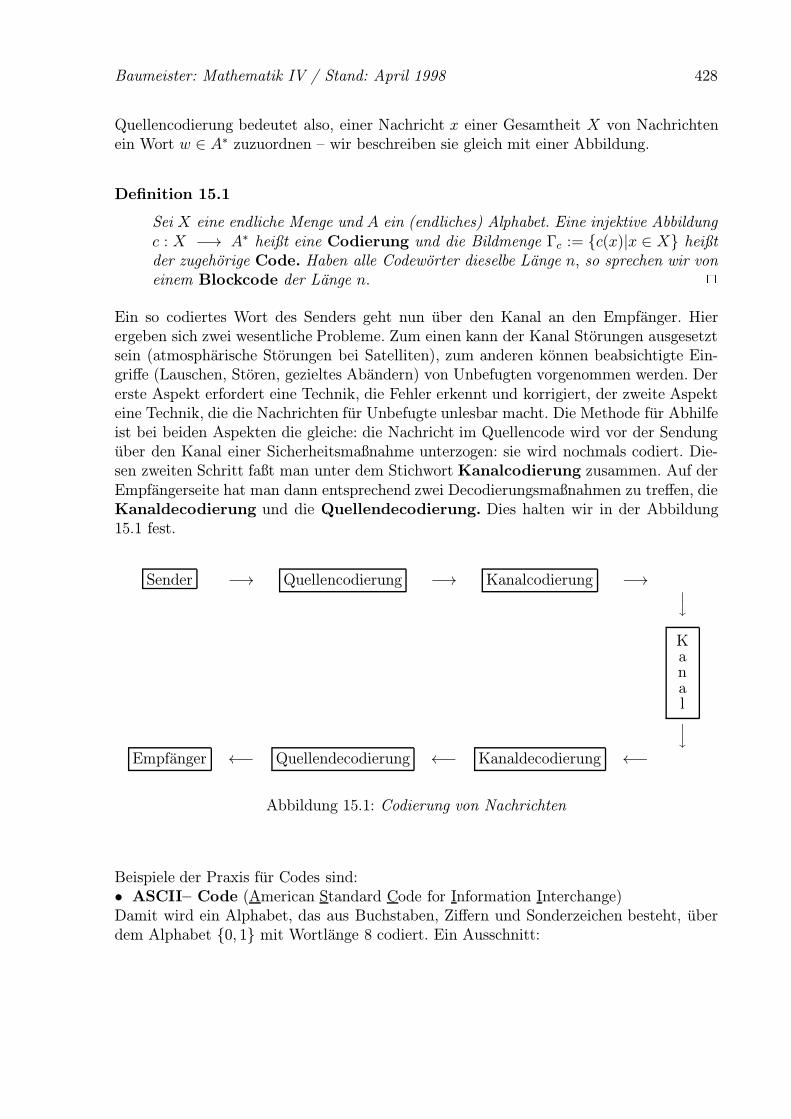
Baumeister: Mathematik IV / Stand: April 1998 428
Quellencodierung bedeutet also, einer Nachricht x einer Gesamtheit X von Nachrichtenein Wort w ∈ A∗ zuzuordnen – wir beschreiben sie gleich mit einer Abbildung.
Definition 15.1
Sei X eine endliche Menge und A ein (endliches) Alphabet. Eine injektive Abbildungc : X −→ A∗ heißt eine Codierung und die Bildmenge Γc := c(x)|x ∈ X heißtder zugehorige Code. Haben alle Codeworter dieselbe Lange n, so sprechen wir voneinem Blockcode der Lange n. 2
Ein so codiertes Wort des Senders geht nun uber den Kanal an den Empfanger. Hierergeben sich zwei wesentliche Probleme. Zum einen kann der Kanal Storungen ausgesetztsein (atmospharische Storungen bei Satelliten), zum anderen konnen beabsichtigte Ein-griffe (Lauschen, Storen, gezieltes Abandern) von Unbefugten vorgenommen werden. Dererste Aspekt erfordert eine Technik, die Fehler erkennt und korrigiert, der zweite Aspekteine Technik, die die Nachrichten fur Unbefugte unlesbar macht. Die Methode fur Abhilfeist bei beiden Aspekten die gleiche: die Nachricht im Quellencode wird vor der Sendunguber den Kanal einer Sicherheitsmaßnahme unterzogen: sie wird nochmals codiert. Die-sen zweiten Schritt faßt man unter dem Stichwort Kanalcodierung zusammen. Auf derEmpfangerseite hat man dann entsprechend zwei Decodierungsmaßnahmen zu treffen, dieKanaldecodierung und die Quellendecodierung. Dies halten wir in der Abbildung15.1 fest.
Sender −→ Quellencodierung −→ Kanalcodierung −→ yKanaly
Empfanger ←− Quellendecodierung ←− Kanaldecodierung ←−
Abbildung 15.1: Codierung von Nachrichten
Beispiele der Praxis fur Codes sind:• ASCII– Code (American Standard Code for Information Interchange)Damit wird ein Alphabet, das aus Buchstaben, Ziffern und Sonderzeichen besteht, uberdem Alphabet 0, 1 mit Wortlange 8 codiert. Ein Ausschnitt:
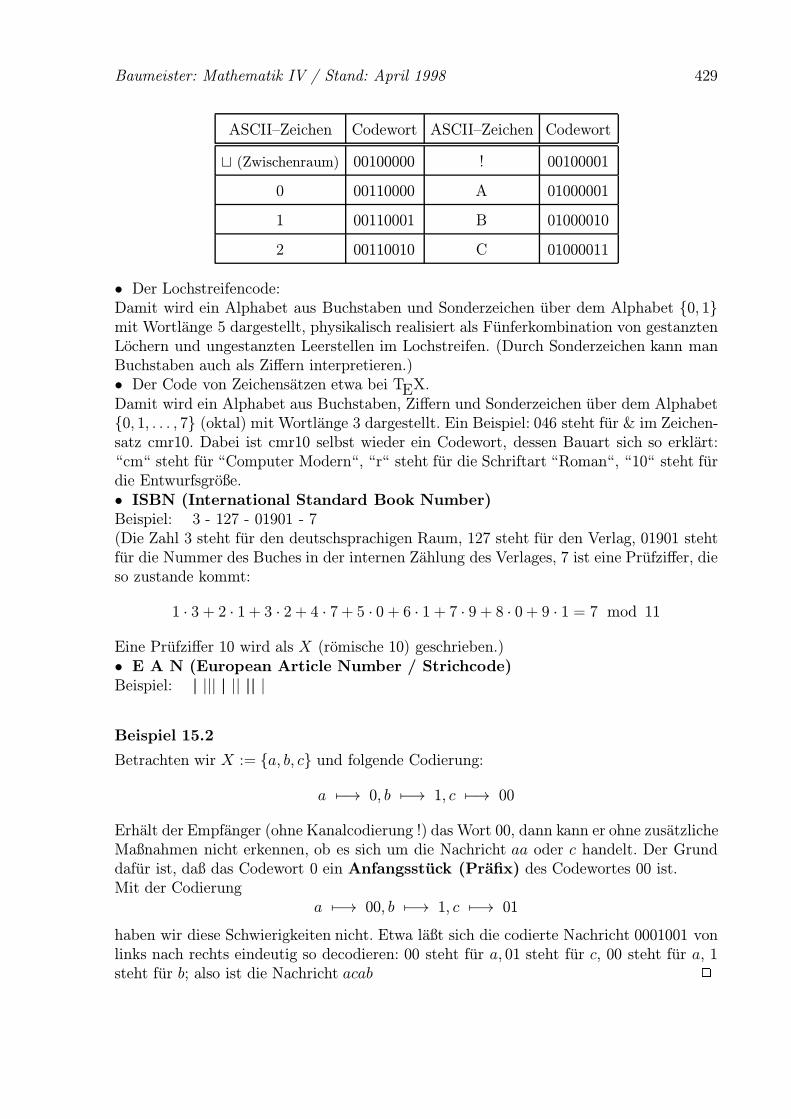
Baumeister: Mathematik IV / Stand: April 1998 429
ASCII–Zeichen Codewort ASCII–Zeichen Codewort
t (Zwischenraum) 00100000 ! 00100001
0 00110000 A 01000001
1 00110001 B 01000010
2 00110010 C 01000011
• Der Lochstreifencode:Damit wird ein Alphabet aus Buchstaben und Sonderzeichen uber dem Alphabet 0, 1mit Wortlange 5 dargestellt, physikalisch realisiert als Funferkombination von gestanztenLochern und ungestanzten Leerstellen im Lochstreifen. (Durch Sonderzeichen kann manBuchstaben auch als Ziffern interpretieren.)• Der Code von Zeichensatzen etwa bei TEX.Damit wird ein Alphabet aus Buchstaben, Ziffern und Sonderzeichen uber dem Alphabet0, 1, . . . , 7 (oktal) mit Wortlange 3 dargestellt. Ein Beispiel: 046 steht fur & im Zeichen-satz cmr10. Dabei ist cmr10 selbst wieder ein Codewort, dessen Bauart sich so erklart:“cm“ steht fur “Computer Modern“, “r“ steht fur die Schriftart “Roman“, “10“ steht furdie Entwurfsgroße.• ISBN (International Standard Book Number)Beispiel: 3 - 127 - 01901 - 7(Die Zahl 3 steht fur den deutschsprachigen Raum, 127 steht fur den Verlag, 01901 stehtfur die Nummer des Buches in der internen Zahlung des Verlages, 7 ist eine Prufziffer, dieso zustande kommt:
1 · 3 + 2 · 1 + 3 · 2 + 4 · 7 + 5 · 0 + 6 · 1 + 7 · 9 + 8 · 0 + 9 · 1 = 7 mod 11
Eine Prufziffer 10 wird als X (romische 10) geschrieben.)• E A N (European Article Number / Strichcode)Beispiel: | ||| | || || |
Beispiel 15.2
Betrachten wir X := a, b, c und folgende Codierung:
a 7−→ 0, b 7−→ 1, c 7−→ 00
Erhalt der Empfanger (ohne Kanalcodierung !) das Wort 00, dann kann er ohne zusatzlicheMaßnahmen nicht erkennen, ob es sich um die Nachricht aa oder c handelt. Der Grunddafur ist, daß das Codewort 0 ein Anfangsstuck (Prafix) des Codewortes 00 ist.Mit der Codierung
a 7−→ 00, b 7−→ 1, c 7−→ 01
haben wir diese Schwierigkeiten nicht. Etwa laßt sich die codierte Nachricht 0001001 vonlinks nach rechts eindeutig so decodieren: 00 steht fur a, 01 steht fur c, 00 steht fur a, 1steht fur b; also ist die Nachricht acab 2

Baumeister: Mathematik IV / Stand: April 1998 430
Das obige Beispiel fuhrt uns dazu, Codierungen auszuzeichnen, deren Codeworter vonlinks nach rechts eindeutig zu lesen sind. Also:
Definition 15.3
Eine Codierung c : X −→ A∗ heißt Prafix–Code, falls kein Codewort Prafix einesanderen Wortes ist. 2
In der Praxis will man naturlich moglichst effizient codieren, d.h. die Wortlange der Co-deworter nicht unnotig lang gestalten. Etwa ist die Prafix–Codierung
a 7−→ 00, b 7−→ 1, c 7−→ 01
wesentlich gunstiger als die Prafix–Codierung
a 7−→ 00, b 7−→ 101, c 7−→ 1100.
Gesucht ist also ein Prafix–Code c : X −→ A∗, fur den die Lange aller Codeworterminimal ist, d.h. fur den ∑
x∈X
l(c(x))
minimal ist; dabei ist l(w) = n gesetzt, falls w ∈ An ist.
Das Problem einer Wahl eines Prafix–Codes zur Quellencodierung laßt sich nun so fassen:
Gegeben sei eine Menge X = x1, . . . , xn und eine Haufigkeitsverteilungp(x1), . . . , p(xn). Man konstruiere einen Prafix–Code c : X −→ A∗, furden die Große
L(c) :=n∑i=1
p(xi)l(c(xi))
(durchschnittliche/mittlere Lange der Codeworter) minimal ist.
Die Annahme uber die Wahrscheinlichkeiten ist fur die Praxis schon wesentlich. Denn hatdie Menge X eine zusatzliche Struktur, wie dies etwa bei unserem deutschen AlphabetX = A,B, . . . , Z2 der Fall ist, dann kommen nicht alle Elemente x ∈ X in Nachrichtengleich haufig vor. Wir kommen darauf zuruck.
Ein beruhmte Satz von C. Shannon (1916 – ) besagt, daß die mittlere Lange der Codewor-ter des optimalen Prafix–Codes Γopt bis auf einen Fehler kleiner als 1 bestimmt werdenkann. Man hat namlich
−n∑i=1
p(xi) log2 p(xi) ≤ L(Γopt) ≤ 1−n∑i=1
p(xi) log2 p(xi) .
Den optimalen Prafix–Code kann man mit dem Algorithmus von Huffmann (1952) be-rechnen.
2Umlaute werden als AE, OE, UE, β als SS geschrieben.
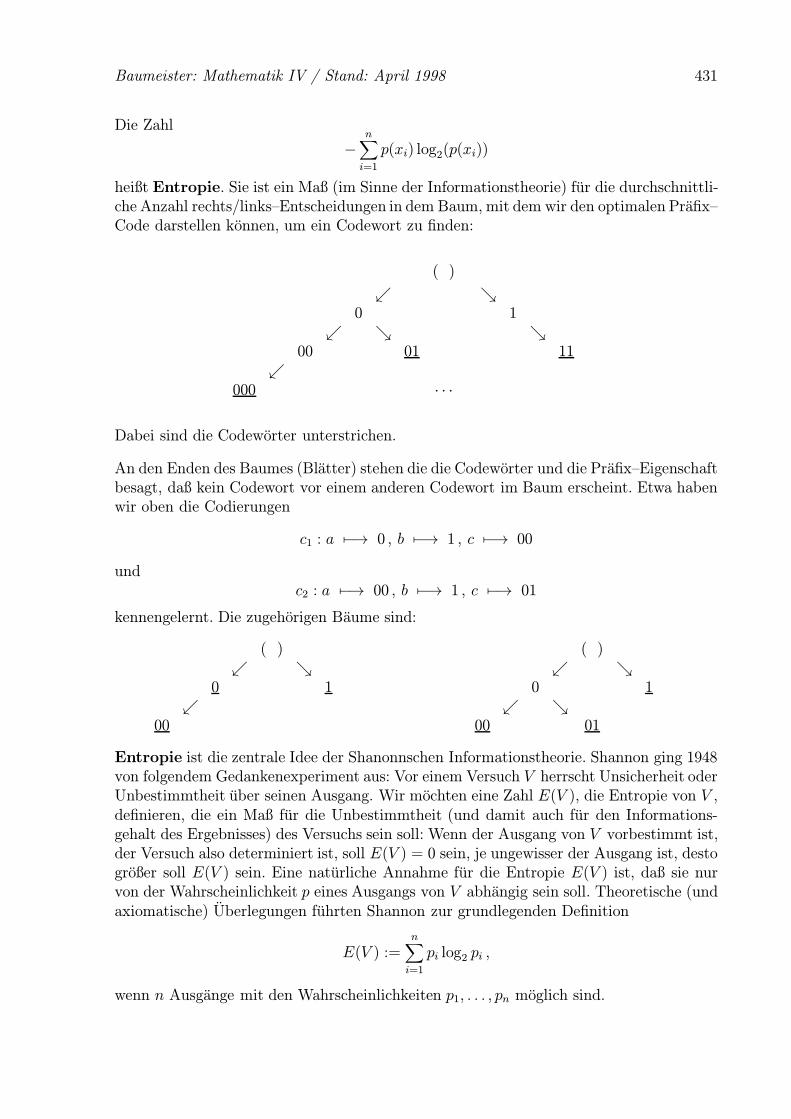
Baumeister: Mathematik IV / Stand: April 1998 431
Die Zahl
−n∑i=1
p(xi) log2(p(xi))
heißt Entropie. Sie ist ein Maß (im Sinne der Informationstheorie) fur die durchschnittli-che Anzahl rechts/links–Entscheidungen in dem Baum, mit dem wir den optimalen Prafix–Code darstellen konnen, um ein Codewort zu finden:
( )
0 1
00 01 11
000 · · ·
Dabei sind die Codeworter unterstrichen.
An den Enden des Baumes (Blatter) stehen die die Codeworter und die Prafix–Eigenschaftbesagt, daß kein Codewort vor einem anderen Codewort im Baum erscheint. Etwa habenwir oben die Codierungen
c1 : a 7−→ 0 , b 7−→ 1 , c 7−→ 00
undc2 : a 7−→ 00 , b 7−→ 1 , c 7−→ 01
kennengelernt. Die zugehorigen Baume sind:
( )
0 1
00
( )
0 1
00 01
Entropie ist die zentrale Idee der Shanonnschen Informationstheorie. Shannon ging 1948von folgendem Gedankenexperiment aus: Vor einem Versuch V herrscht Unsicherheit oderUnbestimmtheit uber seinen Ausgang. Wir mochten eine Zahl E(V ), die Entropie von V ,definieren, die ein Maß fur die Unbestimmtheit (und damit auch fur den Informations-gehalt des Ergebnisses) des Versuchs sein soll: Wenn der Ausgang von V vorbestimmt ist,der Versuch also determiniert ist, soll E(V ) = 0 sein, je ungewisser der Ausgang ist, destogroßer soll E(V ) sein. Eine naturliche Annahme fur die Entropie E(V ) ist, daß sie nurvon der Wahrscheinlichkeit p eines Ausgangs von V abhangig sein soll. Theoretische (undaxiomatische) Uberlegungen fuhrten Shannon zur grundlegenden Definition
E(V ) :=n∑i=1
pi log2 pi ,
wenn n Ausgange mit den Wahrscheinlichkeiten p1, . . . , pn moglich sind.
Baumeister: Mathematik IV / Stand: April 1998 432
15.2 Entdecken und Korrigieren von Fehlern
In diesem Abschnitt verwenden wir ausschließlich das binare Alphabet, d.h. A := 0, 1.
Sendet man ein Wort w ∈ A∗ uber den Kanal, so wird in der Regel ein”Buchstabe“ 0
als 0 und ein”Buchstabe“ 1 als 1 empfangen. Manchmal wird jedoch auf Grund von
Storungen 0 als 1 und/oder 1 als 0 empfangen. Es ist nach Methoden gefragt, die dieseFehler entdecken und eventuell korrigieren. Meist verwendet man folgende Methode:Die Nachricht (etwa in Quellencodierung) wird in gleichlange Blocke der Lange k zusam-mengefaßt. Nach jedem Block werden r Kontrollsymbole angehangt, welche in gewisserWeise aus den k Informationssymbolen gewonnen werden. Der gesamte Block der Langek + r ist ein Kanal–Codewort. Die Aufgabe besteht nun darin, die Kontrollsymbole sozu wahlen, daß Ubermittlungsfehler entdeckt und eventuell korrigiert werden konnen.
Beispiel 15.4
Wir wahlen zur Blocklange k die Lange r des Kontrollblocks als 2k und wiederholenim Codewort die Informationssymbole zweimal. Wir nennen diese Kanalcodierung dieWiederholungscodierung. Beispiel:Nachricht : 1011Kanal-Codewort : 101110111011
Wird statt des Kanal–Codewortes 101110111011 das Wort 100110111011 empfangen, soist klar, daß das 3.Informationssymbol fehlerhaft ist, allerdings nur dann, wenn wir wis-sen, daß bei der Ubertragung hochstens ein Fehler passiert ist. Dieser Wiederholungscodeentdeckt und korrigiert also einen Fehler. Er ist aber nicht sehr effizient, denn die Infor-mationsrate betragt wegen k
k+2k= 1
3nur 33%. 2
Beispiel 15.5
Wir wahlen zur Blocklange k die Lange r des Kontrollblocks als 1. Das Kontrollsymbolwahlen wir, indem wir die Summe der Informationssymbole mod 2 anhangen. Beispiel:Nachricht : 1011Kanal-Codewort : 10111
Damit enthalten Kanal–Codeworte stets eine gerade Anzahl von Einsen, weshalb derCode Paritatscode genannt wird. Der Paritatscode kann im allgemeinen einen Fehlerentdecken, aber nicht korrigieren. 2
Beispiel 15.6
Beim ISBN–Code erkennt man an der Prufziffer, ob an einer der 10 Stellen ein Fehlerubermittelt wurde, eine Fehlerkorrektur ist damit nicht moglich. In der Praxis ubermitteltman den ISBN–Code erneut. 2
Das Hauptproblem der Kanalcodierung besteht nun darin:
Man konstruiere einen Code mit moglichst hoher Informationsrate und mog-lichst geringer Wahrscheinlichkeit, daß das empfangene Wort falsch decodiertwird.

Baumeister: Mathematik IV / Stand: April 1998 433
Die beiden angesprochenen Ziele sind ersichtlich gegenlaufig. Theoretisch ist das Problemdurch einen weiteren Satz von Shannon gelost: Es gibt einen Code, der die beiden Zielein einem vorgegebenen Sinne erreicht.
Die beiden Ziele wollen wir nun genauer untersuchen.Sei c eine Codierung mit Code Γc. Sei y eine Nachricht, die als Codewort v uber denKanal gesendet wird, als Wort w beim Empfanger ankommt. Der Empfanger decodiertals Codewort v′ und interpretiert es als Nachricht y′.Als erstes Problem besprechen wir das Problem, welches Codewort v′ der Dekodiererwahlen soll, wenn er w ∈ An erhalt. Es ist naheliegend nach der Regel vorzugehen, daß
”wenige“ Fehler wahrscheinlicher sind als
”viele“ und zu w ∈ An ein Codewort v′ ∈ Γc
zu wahlen, welches sich von w an moglichst wenigen Stellen unterscheidet. Hat er mehrereCodeworter zur Auswahl, so wahlt er eines davon. Insbesondere setzt er im Fall w ∈ Γcnaheliegenderweise v′ := w.Diese Betrachtungsweise fuhrt nun zu einem Distanzbegriff fur Worter, der sogenanntenHamming–Distanz. Wir setzen
dH(w,w′) := #i|wi 6= w′i fur w = (w1, . . . , wn), w′ = (w′1, . . . , w′n) ∈ An.
Es lassen sich sehr einfach die Eigenschaften einer Metrik verifizieren:
1. dH(w,w′) = 0 genau dann, wenn w = w′.
2. dH(w,w′) = d(w′, w)
3. dH(w,w′) ≤ dH(w,w′′) + dH(w′′, w)
Die Zahl d(w,w′) heißt Hamming–Abstand der Worter w,w′ ∈ An. Die 1. Eigenschaftheißt Definitheit, die 2. Eigenschaft heißt Symmetrie und die 3. Eigenschaft heißt Drei-ecksungleichung. Mit dem Abstandsbegriff sind auch “Kugeln“ erklart:
Br(w) := w′ ∈ An|dH(w,w′) ≤ r (Kugel um w mit Radius r)
Wir analysieren die Frage der Fehlerentdeckung und Fehlerkorrektur unter der Annahme,daß bei der Ubermittlung im Kanal hochstens t Fehler passieren. Also:
Annahme:w ∈ An unterscheidet sich von v an hochstens t Stellen, d.h., daß es zu dem empfangenenWort w ein Codewort v gibt mit v ∈ Bt(w).
Dann haben wir das Ergebnis:
• Ein Code c : X −→ An entdeckt t Fehler, falls dH(w,w′) ≥ t + 1 fur alle w,w′ ∈An, w 6= w′, gilt.
• Ein Code c : X −→ An korrigiert t Fehler, falls dH(w,w′) ≥ 2t + 1 fur allew,w′ ∈ An, w 6= w′, gilt.

Baumeister: Mathematik IV / Stand: April 1998 434
Wie erhalt man etwa das Ergebnis fur die Fehlerentdeckung ?Wird v in den Kanal eingegeben und das Wort w ∈ An mit w ∈ Bt(v), w 6= v, erhalten,so entdeckt der Dekodierer, daß w nicht das eingegebene Wort ist, wenn w nicht selbstCodewort ist. Es darf in Bt(v) also kein von v verschiedenes Codewort liegen, d.h. es muß
Γc ∩ Bt(v) = v
gelten fur alle v ∈ Γc. Dies ist gleichbedeutend mit
dH(v, v) ≥ t+ 1 fur alle v, v ∈ Γc, v 6= v.
Bei unseren eingangs angefuhrten Beispielen haben wir:Wiederholungs–Code: dH(v, v) ≥ 3, v 6= v.
Also entdeckt dieser Code zwei Fehler und korrigiert einen Fehler.
Paritats–Code: dH(v, v) ≥ 2, v 6= v.
Also entdeckt dieser Code einen Fehler, kann aber keinen korrigieren.
Es ist nun klar, daß Codierungen c : X 7−→ An gesucht sind, die die beiden widerstrei-tenden Ziele
• dH(Γc) := infdH(v, v)|v, v ∈ Γc, v 6= v ist moglichst groß
• #Γc ist moglichst groß
erreichen. Hieran schließen sich schone kombinatorische Probleme an, u.a. das so reizvolleund mathematisch anspruchvolle Problem der Kugelpackungen. Wir gehen nicht weiterdarauf ein, nur soviel sei angedeutet: Ein t−korrigierender Code ist besonders perfekt,wenn die Kugeln Bt(w), w ∈ An, die Menge An so uberdecken, daß jedes Codewort ingenau einer Kugel liegt.
15.3 Lineare Codes
In diesem Abschnitt wollen wir Codes konstruieren und auf ihre Korrekturfahigkeit un-tersuchen. Dabei werden wir nur
”lineare“ Codes betrachten. Diese lassen sich besonders
gut untersuchen und anwenden, da dafur Methoden der linearen Algebra herangezogenwerden konnen.
Die Binarsymbole 0, 1 kann man als Elemente des Restklassenkorpers IF 2 := ZZ 2 auffas-sen. Dort haben wir eine Addition und Multiplikation, die sich aus den Tafeln
+ 0 1
0 0 1
1 1 0
· 0 1
0 0 0
1 0 1

Baumeister: Mathematik IV / Stand: April 1998 435
ergibt. Die binaren Worter w ∈ An mit dem Alphabet A := 0, 1 := ZZ 2 kann man daheraddieren und skalar multiplizieren gemaß:
⊕ : An ×An 3 ((x1, . . . , xn), (y1, . . . , yn)) 7−→ (x1 + y1, . . . , xn + yn) ∈ An
: A× An 3 (a, (x1, . . . , xn)) 7−→ (ax1, . . . , axn) ∈ An
Die Worter An, n ∈ IN , bilden daher einen Vektorraum uber dem Skalarkorper IK := ZZ 2 .
Seine Dimension ist n, da die Worter
100 . . . 0, 010 . . . 0, . . . , 0 . . . 01
aufgefaßt als Vektoren
(1, 0, . . . , 0), (0, 1, 0, . . . , 0), . . . , (0, . . . , 0, 1)
eine Basis bilden.Codes der Lange n sind Teilmengen von An (siehe oben). Wir zeichnen nun spezielleTeilmengen als Codes aus, namlich diejenigen, die abgeschlossen sind bezuglich der Ad-dition und der skalaren Multiplikation. Solche Teilmengen sind bekanntermaßen lineareUnterraume von An. Also:
Definition 15.7
Ein linearer Code (der Lange n) uber dem Alphabet A := ZZ 2 ist ein linearerUnterraum Γ von An. Die Dimension k dieses Unterraums heißt die Dimensiondes Codes. Wir sprechen also von einem (n, k)− Code, wenn ein linearer Code derLange n und der Dimension k vorliegt. 2
In der obigen Definition haben wir die Codierung bei der Notation von Γ unterdruckt.
Es sollte sofort klar sein, daß man lineare Codes uber beliebigen endlichen Korpern be-trachten kann; es ist lediglich das Alphabet A := ZZ 2 gegen einen beliebigen endlichenKorper auszutauschen. Bei der Fehlerkorrektur auf Compact Discs wird ein Code uber ei-nem Korper IK mit pr, p Primzahl, – solche Korper gibt es, wenngleich ZZ pr nicht dafur inFrage kommt, wenn r > 1 ist, – verwendet. Etwa konstruiert man damit Codes der Lange2056, die bis zu 33 aufeinanderfolgende Fehler (etwa entstanden durch einen Blitzschlag)korrigieren konnen.
In linearen Codes kann man die Minimaldistanz dH(Γ) etwas kompakter ausdrucken. Hatman zwei Codeworter w1, w2 ∈ Γ, so gilt
dH(w1, w2) = dH(w1 − w2, θ)
und daher
dH(Γ) = mindH(w1, w2)|w1, w2 ∈ Γ, w1 6= w2 = mindH(w, θ)|w ∈ Γ, w 6= θ
Etwa bildet der Code000, 011, 101, 100

Baumeister: Mathematik IV / Stand: April 1998 436
einen 3, 2–Code. Als Basiselmente fur diesen Code konnen die Worter
011, 101
dienen, denn 110 = 011 + 101. Sein minimaler Abstand ist offenbar 2. Er ist besonderssystematisch, da er in den ersten beiden Parametern alle Worter aus A2 enthalt (sieheunten.)Der ISBN–Code ist ein (10, 9)− Code, allerdings uber dem Korper ZZ 11 . Man uberprufedies !
Sei nun ein (n, k)−Code Γ vorgelegt und seien w1, . . . , wk Vektoren einer Basis von Γ.Diese binaren Tupel kann man als Zeilenvektoren einer k × n Matrix schreiben. Eine sozustandegekommene Matrix G nennen wir eine Generatormatrix des Codes. (Sie istgenausowenig eindeutig wie eine Basis !) Jedes Codewort kann eindeutig als Linearkom-bination der Basisworter geschrieben werden. Dies bedeutet, daß jedes Codewort w ∈ Γdurch
w = aG
wobei a = (a1, . . . , an) die Koeffizienten in der Linearkombination von w sind. (Es istKonvention in der Codierungstheorie w = aG zu schreiben und nicht w = G′a, wobei inder Matrix G′ die Basisworter die Spalten sind. Aus dieser Darstellungsweise lesen wirsofort ab, daß ein (n, k)–Code genau 2k verschiedene Codeworter besitzt.Beachte auch, daß zur Speicherung eines (n, k)–Codes nur die k Basis–Codeworter gespei-chert werden mussen, alle 2k Codeworter lassen sich daraus einfach ableiten.Etwa ist
G :=
(0 1 11 0 1
)eine Generatormatrix des Codes
001, 011, 101, 110
Ein (n, n− 1)−Code mit der Generatormatrix
G :=
1 0 1
. . ....
0 1 1
entspricht einem Code, in dem die n−te Position ein Paritatsbit ist. Ein (n, 1)−Code mitder Generatormatrix
G⊥ := (1, . . . , 1)
ist nichts anderes als der Wiederholungscode. Die Bezeichnung G⊥ ist nicht zufalliggewahlt, denn die zugehorigen Codes sind in einem gewissen Sinn
”orthogonal“ . Dies
wollen wir nun aufklaren.

Baumeister: Mathematik IV / Stand: April 1998 437
Definition 15.8
Ein (n, k)–Code Γ heißt systematisch, wenn es zu jedem u ∈ Ak genau ein Code-wort w ∈ Γ gibt mit w = (u, v). Man nennt dann u die Nachricht, die als Codewortw codiert wird. 2
Oben haben wir schon systematische Codes gesehen. Es ist nun sehr wichtig, einzusehen,daß zu einem systematischen (n, k)−Code stets eine kanonische Generatormatrix,d.h. eine Generatormatrix G der Form
G = (E|R)
mit der Einheitsmatrix E ∈ Ak,k existiert. Dies folgt aus der Tatsache, daß es zu jederNachricht
e1 := (1, 0, . . . , 0), . . . , ek := (0, . . . , 0, 1) ∈ Ak
Codeworterw1, . . . , wk ∈ Γ
gibt. Also konnen wir als G die Matrix mit den Zeilen
(e1|w1), . . . , (ek|wk)
wahlen.Haben wir daher einen systematischen (n, k)− Code und dazu eine kanonische Genera-tormatrix G, so ist klar, wie eine Nachricht u ∈ Ak durch ein Codewort w ∈ Γ codiertwird:
w = uG
Eine wichtige Frage ist, wie man erkennt, ob ein Wort w ∈ An ein Codewort ist. Dazubedienen wir uns einer Prufmatrix.
Definition 15.9
Eine Matrix H ∈ Al,n heißt Kontrollmatrix oder Prufmatrix zum Code Γ, fallsfur jedes w ∈ An aquivalent ist:
(a) w ∈ Γ .
(b) Hw = θ .
2
Mit etwas linearer Algebra erhalt man folgende Aussage:Ist G = (E|R) eine kanonische Generatormatrix des (n, k)− Codes Γ, so ist
H := (Rt|E)
eine Kontrollmatrix von Γ, genannt kanonische Kontrollmatrix.Eine kanonische Generatormatrix zum (3, 2)–Code
000, 011, 101, 110

Baumeister: Mathematik IV / Stand: April 1998 438
ist
G :=
(1 00 1
11
).
Also istH := (1 1|1)
eine Kontrollmatrix. Ein Wort w = abc gehort also zum Code genau dann, wenn
a+ b+ c = 0
gilt, d.h. die Anzahl der Einsen in w gerade ist.
Mit der Kontrollmatrix kann man also uberprufen, ob ein Wort ein Codewort ist. Wirkommen nun zur Frage, wie zu verfahren ist bei der Decodierung. Die naheliegendsteMethode ist naturlich, ein empfangenes Wort mit jedem Codewort zu vergleichen. Fur diehier vorliegenden linearen Codes gibt es eine bessere Moglicheit.Ist also Γ ein linearer (n, k)− Code, dann wird durch
w ∼ w′ :⇐⇒ w − w′ ∈ Γ
eine Aquivalenzrelation erklart. Die Klassen schreiben wir als w + Γ, d.h.
w + Γ := w + v|v ∈ Γ
Da die Dimension von Γ den Wert k hat, gibt es s := 2n−k Klassen wi + Γ mit
An = ∪si=1(wi + Γ)
Liegt also ein”gesendetes“ Wort v ∈ An vor, so ist zu entscheiden, als welches Codewort
es interpretiert werden soll, und zwar auch dann, wenn es fehlerhaft ubertragen wurde.Ist w ∈ Γ das gesendete Wort, v ∈ An das empfangene Wort und e ∈ An der bei derUbertragung aufgetretene Fehler, so gilt also
v = w + e, v = wi + v′ mit v′ ∈ Γ, i ∈ 1, . . . , s,
und es folgte = wi + (w − v′) ∈ wi + Γ.
Dies fuhrt uns zu zwei Codierregeln.
1.Regel Decodiere v ∈ wi + Γ als das Codewort w := wi + v
2. Regel Berechne das sogenannte Syndrom σ := Hv und decodiere v als w := wi + σ,falls σ ∈ wi + Γ ist.
Baumeister: Mathematik IV / Stand: April 1998 439
15.4 Kryptographie
Im Gegensatz zu den vorhergehenden Ausfuhrungen uber Codierung, die der technischenEffizienz dienen soll, ist nun das Verbergen von Nachrichten beabsichtigt. Dazu wirdder vorliegende Klartext, der auch als Quellencode vorliegen mag, ublicherweise in so-genannten Nachrichteneinheiten (Buchstaben, Buchstabengruppen, Blocks, Zifferngrup-pen) codiert. Solche Codiersysteme bezeichnen wir nun entsprechend ihrer ZielsetzungKryptosysteme.3
Durch eine Ubermittlung von Nachrichteneinheiten durch einen Sender A an einen Em-pfanger B, codiert durch ein Kryptosystem, entsteht ein Geheimtext. Es ist das Ziel, dasKryptosystem so zu entwerfen und zwischen A und B abzusprechen, daß zwar B den Textdecodieren kann, ein Unbefugter jedoch nicht. Gelingt dies einem Unbefugten, so sprichtman vom Brechen des Kryptosystems.
Wir unterscheiden im folgenden nun nicht mehr Nachricht und Nachrichteneinheit.
Die prinzipielle Losung sieht so aus:A codiert (verschlusselt) dazu die Nachricht mittels einer Schlusselabbildung K, dieauf der Menge M der Nachrichten injektiv operiert, also:
K : M −→ M .
Dann sendet A an B die verschlusselte Nachricht K(m) (anstelle von m). Der EmpfangerB decodiert (entschlusselt) mittels einer SchlusselabbildungD, die ebenso auf der Mengeder Nachrichten operiert, also:
D : M −→ M .
Die Schlussel sollten so zusammenpassen, daß
D(K(m)) = m
gilt, und zwar fur alle moglichen Nachrichten m. Dies bedeutet:
D = K−1
In der Behandlung der Schlussel K,D – privat oder offentlich – unterscheiden sich dieKryptosysteme. Sie sollten sich aber nicht im Grundsatz der Kryptographie unter-scheiden, der da lautet:
Die Sicherheit eines Kryptosystems darf nicht von der Geheimhaltung des“Algorithmus“, d.h. vom Verfahren zur Ermittlung von K(m) oder D(m)abhangen. Die Sicherheit grundet sich nur auf die Geheimhaltung des Schlus-sels.
Private key – Kryptosysteme, sie werden auch klassische Kryptosysteme genannt,zeichnen sich dadurch aus, daß A,B geheim die Schlussel K,D austauschen. Hierin liegt
3κρvπτ oς (griech.) = geheim
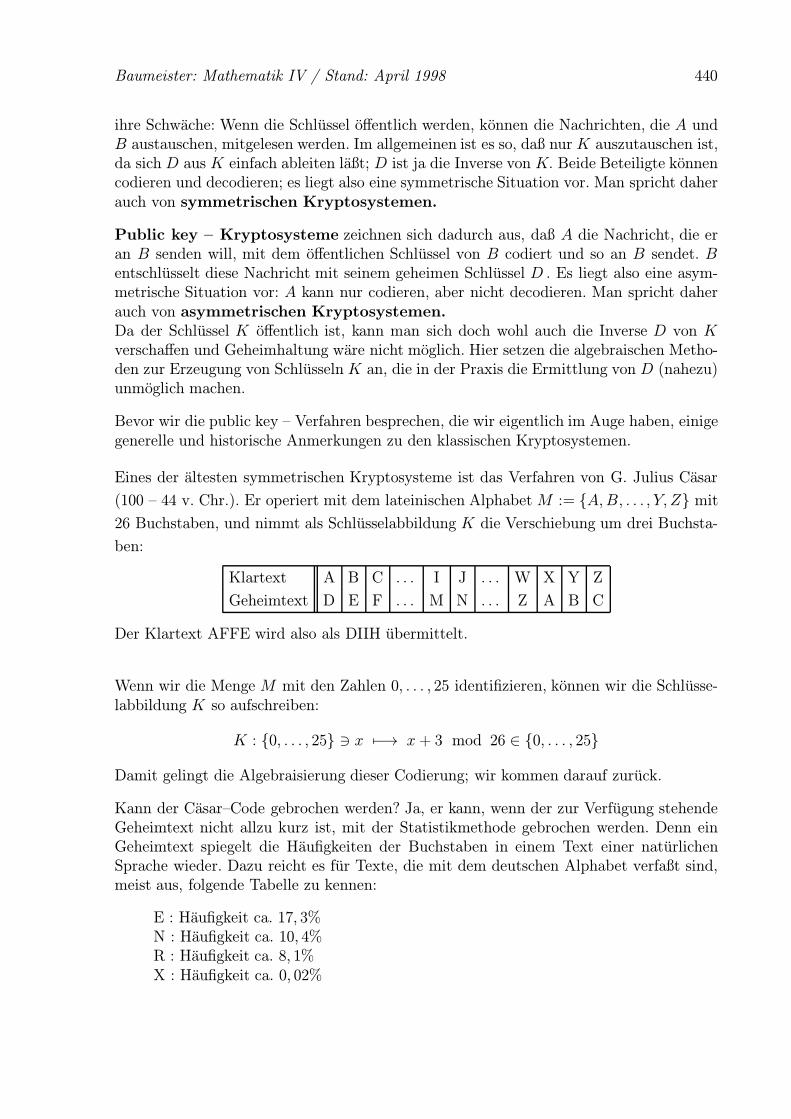
Baumeister: Mathematik IV / Stand: April 1998 440
ihre Schwache: Wenn die Schlussel offentlich werden, konnen die Nachrichten, die A undB austauschen, mitgelesen werden. Im allgemeinen ist es so, daß nur K auszutauschen ist,da sich D aus K einfach ableiten laßt; D ist ja die Inverse von K. Beide Beteiligte konnencodieren und decodieren; es liegt also eine symmetrische Situation vor. Man spricht daherauch von symmetrischen Kryptosystemen.
Public key – Kryptosysteme zeichnen sich dadurch aus, daß A die Nachricht, die eran B senden will, mit dem offentlichen Schlussel von B codiert und so an B sendet. Bentschlusselt diese Nachricht mit seinem geheimen Schlussel D . Es liegt also eine asym-metrische Situation vor: A kann nur codieren, aber nicht decodieren. Man spricht daherauch von asymmetrischen Kryptosystemen.Da der Schlussel K offentlich ist, kann man sich doch wohl auch die Inverse D von Kverschaffen und Geheimhaltung ware nicht moglich. Hier setzen die algebraischen Metho-den zur Erzeugung von Schlusseln K an, die in der Praxis die Ermittlung von D (nahezu)unmoglich machen.
Bevor wir die public key – Verfahren besprechen, die wir eigentlich im Auge haben, einigegenerelle und historische Anmerkungen zu den klassischen Kryptosystemen.
Eines der altesten symmetrischen Kryptosysteme ist das Verfahren von G. Julius Casar
(100 – 44 v. Chr.). Er operiert mit dem lateinischen Alphabet M := A,B, . . . , Y, Z mit
26 Buchstaben, und nimmt als Schlusselabbildung K die Verschiebung um drei Buchsta-
ben:
Klartext A B C . . . I J . . . W X Y Z
Geheimtext D E F . . . M N . . . Z A B C
Der Klartext AFFE wird also als DIIH ubermittelt.
Wenn wir die Menge M mit den Zahlen 0, . . . , 25 identifizieren, konnen wir die Schlusse-labbildung K so aufschreiben:
K : 0, . . . , 25 3 x 7−→ x+ 3 mod 26 ∈ 0, . . . , 25
Damit gelingt die Algebraisierung dieser Codierung; wir kommen darauf zuruck.
Kann der Casar–Code gebrochen werden? Ja, er kann, wenn der zur Verfugung stehendeGeheimtext nicht allzu kurz ist, mit der Statistikmethode gebrochen werden. Denn einGeheimtext spiegelt die Haufigkeiten der Buchstaben in einem Text einer naturlichenSprache wieder. Dazu reicht es fur Texte, die mit dem deutschen Alphabet verfaßt sind,meist aus, folgende Tabelle zu kennen:
E : Haufigkeit ca. 17, 3%N : Haufigkeit ca. 10, 4%R : Haufigkeit ca. 8, 1%X : Haufigkeit ca. 0, 02%
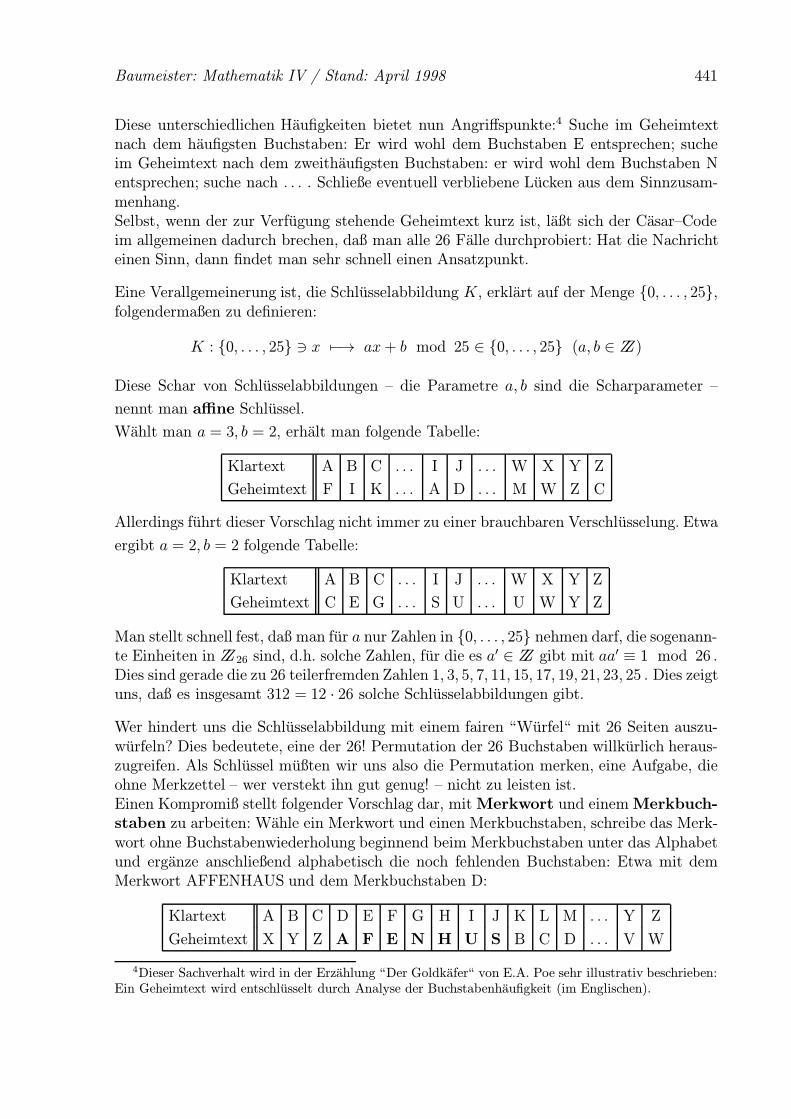
Baumeister: Mathematik IV / Stand: April 1998 441
Diese unterschiedlichen Haufigkeiten bietet nun Angriffspunkte:4 Suche im Geheimtextnach dem haufigsten Buchstaben: Er wird wohl dem Buchstaben E entsprechen; sucheim Geheimtext nach dem zweithaufigsten Buchstaben: er wird wohl dem Buchstaben Nentsprechen; suche nach . . . . Schließe eventuell verbliebene Lucken aus dem Sinnzusam-menhang.Selbst, wenn der zur Verfugung stehende Geheimtext kurz ist, laßt sich der Casar–Codeim allgemeinen dadurch brechen, daß man alle 26 Falle durchprobiert: Hat die Nachrichteinen Sinn, dann findet man sehr schnell einen Ansatzpunkt.
Eine Verallgemeinerung ist, die Schlusselabbildung K, erklart auf der Menge 0, . . . , 25,folgendermaßen zu definieren:
K : 0, . . . , 25 3 x 7−→ ax+ b mod 25 ∈ 0, . . . , 25 (a, b ∈ ZZ )
Diese Schar von Schlusselabbildungen – die Parametre a, b sind die Scharparameter –
nennt man affine Schlussel.
Wahlt man a = 3, b = 2, erhalt man folgende Tabelle:
Klartext A B C . . . I J . . . W X Y Z
Geheimtext F I K . . . A D . . . M W Z C
Allerdings fuhrt dieser Vorschlag nicht immer zu einer brauchbaren Verschlusselung. Etwa
ergibt a = 2, b = 2 folgende Tabelle:
Klartext A B C . . . I J . . . W X Y Z
Geheimtext C E G . . . S U . . . U W Y Z
Man stellt schnell fest, daß man fur a nur Zahlen in 0, . . . , 25 nehmen darf, die sogenann-te Einheiten in ZZ 26 sind, d.h. solche Zahlen, fur die es a′ ∈ ZZ gibt mit aa′ ≡ 1 mod 26 .Dies sind gerade die zu 26 teilerfremden Zahlen 1, 3, 5, 7, 11, 15, 17, 19, 21, 23, 25 . Dies zeigtuns, daß es insgesamt 312 = 12 · 26 solche Schlusselabbildungen gibt.
Wer hindert uns die Schlusselabbildung mit einem fairen “Wurfel“ mit 26 Seiten auszu-wurfeln? Dies bedeutete, eine der 26! Permutation der 26 Buchstaben willkurlich heraus-zugreifen. Als Schlussel mußten wir uns also die Permutation merken, eine Aufgabe, dieohne Merkzettel – wer verstekt ihn gut genug! – nicht zu leisten ist.Einen Kompromiß stellt folgender Vorschlag dar, mit Merkwort und einem Merkbuch-staben zu arbeiten: Wahle ein Merkwort und einen Merkbuchstaben, schreibe das Merk-wort ohne Buchstabenwiederholung beginnend beim Merkbuchstaben unter das Alphabetund erganze anschließend alphabetisch die noch fehlenden Buchstaben: Etwa mit demMerkwort AFFENHAUS und dem Merkbuchstaben D:
Klartext A B C D E F G H I J K L M . . . Y Z
Geheimtext X Y Z A F E N H U S B C D . . . V W
4Dieser Sachverhalt wird in der Erzahlung “Der Goldkafer“ von E.A. Poe sehr illustrativ beschrieben:Ein Geheimtext wird entschlusselt durch Analyse der Buchstabenhaufigkeit (im Englischen).
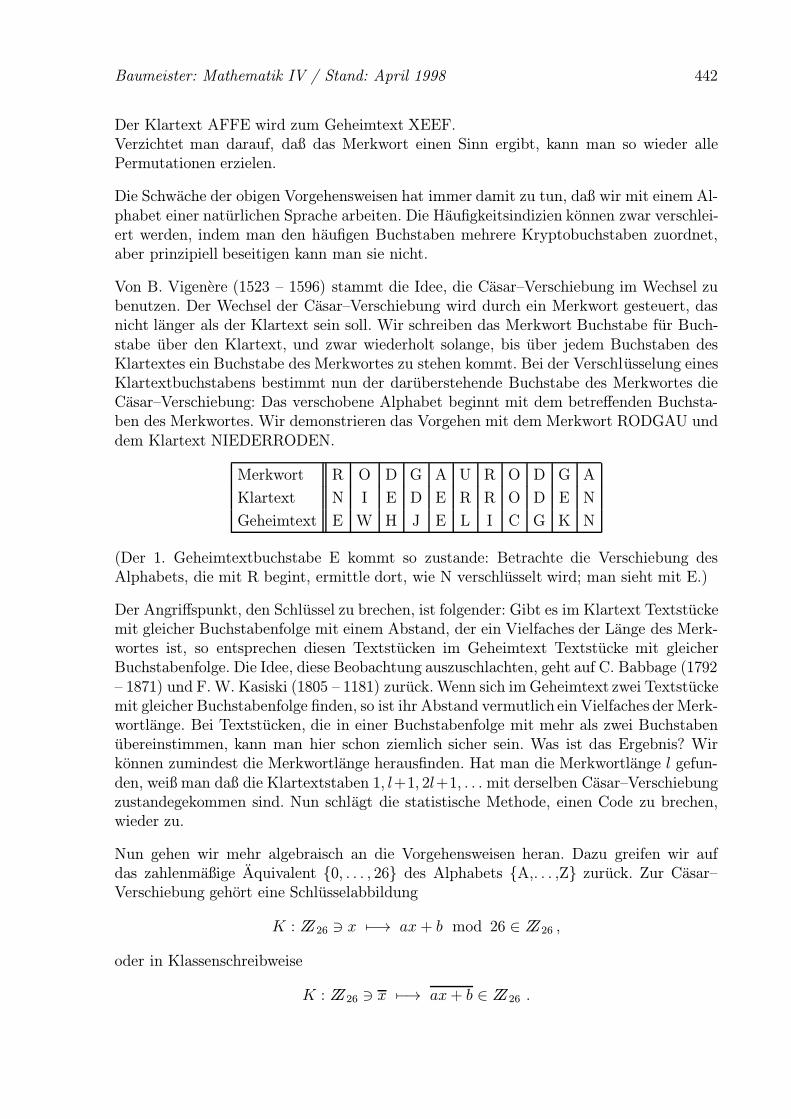
Baumeister: Mathematik IV / Stand: April 1998 442
Der Klartext AFFE wird zum Geheimtext XEEF.Verzichtet man darauf, daß das Merkwort einen Sinn ergibt, kann man so wieder allePermutationen erzielen.
Die Schwache der obigen Vorgehensweisen hat immer damit zu tun, daß wir mit einem Al-phabet einer naturlichen Sprache arbeiten. Die Haufigkeitsindizien konnen zwar verschlei-ert werden, indem man den haufigen Buchstaben mehrere Kryptobuchstaben zuordnet,aber prinzipiell beseitigen kann man sie nicht.
Von B. Vigenere (1523 – 1596) stammt die Idee, die Casar–Verschiebung im Wechsel zubenutzen. Der Wechsel der Casar–Verschiebung wird durch ein Merkwort gesteuert, dasnicht langer als der Klartext sein soll. Wir schreiben das Merkwort Buchstabe fur Buch-stabe uber den Klartext, und zwar wiederholt solange, bis uber jedem Buchstaben desKlartextes ein Buchstabe des Merkwortes zu stehen kommt. Bei der Verschlusselung einesKlartextbuchstabens bestimmt nun der daruberstehende Buchstabe des Merkwortes dieCasar–Verschiebung: Das verschobene Alphabet beginnt mit dem betreffenden Buchsta-ben des Merkwortes. Wir demonstrieren das Vorgehen mit dem Merkwort RODGAU unddem Klartext NIEDERRODEN.
Merkwort R O D G A U R O D G A
Klartext N I E D E R R O D E N
Geheimtext E W H J E L I C G K N
(Der 1. Geheimtextbuchstabe E kommt so zustande: Betrachte die Verschiebung desAlphabets, die mit R begint, ermittle dort, wie N verschlusselt wird; man sieht mit E.)
Der Angriffspunkt, den Schlussel zu brechen, ist folgender: Gibt es im Klartext Textstuckemit gleicher Buchstabenfolge mit einem Abstand, der ein Vielfaches der Lange des Merk-wortes ist, so entsprechen diesen Textstucken im Geheimtext Textstucke mit gleicherBuchstabenfolge. Die Idee, diese Beobachtung auszuschlachten, geht auf C. Babbage (1792– 1871) und F. W. Kasiski (1805 – 1181) zuruck. Wenn sich im Geheimtext zwei Textstuckemit gleicher Buchstabenfolge finden, so ist ihr Abstand vermutlich ein Vielfaches der Merk-wortlange. Bei Textstucken, die in einer Buchstabenfolge mit mehr als zwei Buchstabenubereinstimmen, kann man hier schon ziemlich sicher sein. Was ist das Ergebnis? Wirkonnen zumindest die Merkwortlange herausfinden. Hat man die Merkwortlange l gefun-den, weiß man daß die Klartextstaben 1, l+1, 2l+1, . . . mit derselben Casar–Verschiebungzustandegekommen sind. Nun schlagt die statistische Methode, einen Code zu brechen,wieder zu.
Nun gehen wir mehr algebraisch an die Vorgehensweisen heran. Dazu greifen wir aufdas zahlenmaßige Aquivalent 0, . . . , 26 des Alphabets A,. . . ,Z zuruck. Zur Casar–Verschiebung gehort eine Schlusselabbildung
K : ZZ 26 3 x 7−→ ax+ b mod 26 ∈ ZZ 26 ,
oder in Klassenschreibweise
K : ZZ 26 3 x 7−→ ax+ b ∈ ZZ 26 .

Baumeister: Mathematik IV / Stand: April 1998 443
Eine solche Abbildung enthalt zwei Parameter a, b . b kann beliebig in 0, . . . , 25 gewahltwerden, a muß, um die Injektivitat der Schlusselabbildung zu sichern, eine Einheit sein,d.h. es muß die Gleichung
aa′ ≡ 1 mod 26
in ZZ 26 losbar sein; a−1 := a′ ist dann das Inverse von a . Dann kann man auch dieUmkehrabbildung D von K definieren:
D : ZZ 26 3 x 7−→ a′x+ b′ mod 26 ∈ ZZ 26 ;
dabei ist a′ := a−1, b′ := −a−1b . Wir sehen, daß fur Verschlusselung und Entschlusselungderselbe Algorithmus notig ist.Die statistische Codeanalyse druckt sich nun so aus: Es sind etwa von u, v ∈ ZZ 26 dieUrbilder x, y von K (x konnte E, y konnte N entsprechen). Den Code zu brechen reichtes nun aus, aus den Kongruenzen
a′u+ b′ ≡ x mod 26 , a′v + b′ ≡ y mod 26
die Parameter a′, b′ zu berechnen. Im Rahmen der Zahlentheorie haben wir dazu Hilfs-mittel kennengelernt. Hier bietet sich sofort an, die Kongruenzen zu subtrahieren:
a′(u− v) ≡ x− y mod 26 .
Daraus erhalten wir a′ sofort, falls u− v eine Einheit ist:
a′ ≡ (u− v)−1(x− y) mod 26 .
Einsetzen von a′ ergibt b′ und schließlich insgesamt a, b . Damit ist D,K bekannt und derCode gebrochen.
Wir skizzieren nun kurz die algebraische Seite, wenn wir als Nachrichteneinheiten imKlartext 2–Buchstaben–Blocks ansehen. (Wir sehen von Tatsache ab, daß es nun eventuellgeraten ist, den Zwischenraum t zum Alphabet hinzuzunehmen; wir hatten dann ZZ 26
durch ZZ 27 zu ersetzen.) Es ist klar, daß es 26 · 26 Paare gibt. Um Anschluß an das obenschon Diskutierte zu finden, wollen wir diese Paare als Elemente von ZZ 26·26 auffassen.Dies gelingt durch die Abbildung
R : ZZ 26×ZZ 26 3 (x, y) 7−→ 26x + y ∈ ZZ 26·26 .
Damit konnen wir die Frage der Verschlusselung auf ZZ 26·26 betrachten. Es gibt daher inSachen affine Verschlusselungsabbildungen nichts Neues zu erarbeiten. Allerdings benoti-gen wir zusatzliche Informationen, wenn wir einen affinen Code mit der Statistikmethodebrechen wollen, namlich eine Statistik uber die Haufigkeit des Auftretens von Paaren.Hier ist eine Tabelle dazu:
EN : Haufigkeit ca. 3, 8%ER : Haufigkeit ca. 3, 7%CH : Haufigkeit ca. 2, 7%DE : Haufigkeit ca. 2, 0%

Baumeister: Mathematik IV / Stand: April 1998 444
Beispiel 15.10Der Klartext laute MATHE. Um Paare bilden zu konnen, brauchten wir ein gerade An-zahl von Buchstaben. Dies erzwingen wir durch Anhangen eines Buchstabens, der denSinngehalt der Nachricht nicht wesentlich storen sollte; wir andern hier ab zu MATHEQ.Fur eine affine Verschlusselung wahlen wir a = 3, b = 3 .
MA : 3 · (26 · 12 + 0) + 3∧= KD
TH : 3 · (26 · 19 + 7) + 3∧= FY
MA : 3 · (26 · 9 + 0) + 3∧= NZ
Der Geheimtext lautet also KDFYNZ. 2
Wir konnen mit Paaren auch anders umgehen: Wir lassen affine Abbildungen direkt aufden Paaren wirken. Dies erreichen wir, indem wir Paare als Vektoren in ZZ 26×ZZ 26 auf-fasen und affine Abbildungen auf solchen Vektoren wirken lassen. Ohne genauer auf Hin-tergrunde einzugehen, schreiben wir die Schlusselabbildung so auf:
K : ZZ 26×ZZ 26 3 z = (x, y) 7−→ Az +B ∈ ZZ 26×ZZ 26
Dabei ist A eine Matrix mit Eintragen in ZZ 26 und B ein Vektor mit Eintragen in ZZ 26 ;die Große Az entsteht als Produkt von A mit z in der ublichen Weise.
Beispiel 15.11Wir wahlen:
A :=
(2 37 8
), B :=
(12
).
Wie sieht die Verschlusselung von MATHEQ aus?
MA :
(2 37 8
)(120
)+
(12
)=
(258
)∧= ZI
TH :
(2 37 8
)(1916
)+
(12
)=
(93
)∧= JD
EQ :
(2 37 8
)(416
)+
(12
)=
(52
)∧= FC
Der Geheimtext lautet also ZIJDFC. 2
Wie sieht nun in diesem Fall Die Entschlusselungsabbildung D aus? Halten wir uns andie Analogie zum Fall der affinen Abbildungen auf ZZ 26 .
D : ZZ 26×ZZ 26 3 z = (x, y) 7−→ A′z +B′ ∈ ZZ 26×ZZ 26
Dabei wahlen wir die Matrix A′ mit Eintragen in ZZ 26 so, daß
AA′ = I wobei I die Einheitsmatrix ist,
gilt. Ist dies moglich? Ja, es ist moglich, wenn die Determinante der Matrix A eine Einheitin ZZ 26 ist. Damit berechnet sich dann A′ wie die Inverse von A im Fall IR2,2 und B′ istgleich −A′B . Etwa ist die Inverse von A aus dem obigen Beispiel gegeben durch
A′ =
(14 1117 10
),
wobei die Determinante von A als 2 · 8− 3 · 7 = −5 = 21 gegeben ist. (Beachte, 21 und26 sind teilerfremd.)
Baumeister: Mathematik IV / Stand: April 1998 445
15.5 Public key – Kryptosysteme
Das RSA-Schema ist ein Kryptosystem, das mit offentlichen Schlusseln arbeitet. Es wurde1977 von
Ronald Rivest, Adi Shamir, Leonard Adleman
vorgeschlagen.
Das RSA-Schema stellt sich so dar:
• Jede Nachricht wird dargestellt in Form einer oder mehrerer naturlicher Zahlenm ∈ 0, . . . , n− 1 =: M.(In der Praxis hat man die konkreten Nachrichten in die zulassigen Nachrichten ausM durch Codes (etwa den ASCII–Code, wobei die Worter als naturliche Zahlen zuinterpretieren sind) umzuwandeln.
• Wahle s ∈ IN und kodiere mit
Ks : M 3 m 7−→ ms mod n ∈M
• Wahle t ∈ IN und dekodiere gemaß
Dt : M 3 m 7−→ mt mod n ∈M
Man beachte, daß die Auswertung von Ks bzw. Dt (Potenzierung) im allgemeinen sehreffizient realisiert werden kann, wahrend das Auffinden der k–ten Wurzel mod n, diebenotigt wird, um Dt aus Ks zu finden, schwierig ist.
Voraussetzungen, die sicherstellen, daß die Schlussel zusammenpassen, ist:
n = p · q , p, q Primzahlen , 1 < s < ϕ(n), s u ϕ(n) = 1, ts ≡ 1 mod ϕ(n). (15.1)
Dies geht aus dem folgenden Lemma hervor:
Lemma 15.12
Seien die Voraussetzungen (15.1) erfullt. Dann gilt Dt Ks = id.
Beweis:Wir wissen st = 1 + kϕ(n) mit k ∈ ZZ . Wir zeigen zunachst
mst −m ≡ 0 mod p fur alle m ∈ 0, . . . , n− 1. (15.2)
Sei m ∈ 0, . . . , n − 1. Wir wollen dies aus dem Satz von Fermat schließen. Allerdingsfehlt die Voraussetzung m u p = 1. Klaren wir daher den Fall m u p 6= 1. Hier ist, da pPrimzahl ist, p ein Teiler von m; also m ≡ 0 mod p. Wenn p ein Teiler von m ist, dannist p sicherlich ein Teiler von mst, d.h.
mst ≡ 0 mod p und mst ≡ m mod p.

Baumeister: Mathematik IV / Stand: April 1998 446
Nun zeigen wir die Behauptung (15.2) fur den Fall m u p = 1 mit dem Satz von Fermat:
mst ≡ m1+kϕ(n) mod p
≡ mmkϕ(n) mod p
≡ m(m(p−1))k·(q−1) mod p
≡ m1k·(q−1) mod p
≡ m mod p
Analog folgtmst −m ≡ 0 mod q
Daraus ergibt sich mitp|(mst −m) , q|(mst −m),
da p, q verschiedene Primzahlen sind, daß
pq|(mst −m)
gilt. Dies bedeutet aber mit n = pq
mst ≡ m mod n
Nachdem wir nun gezeigt haben, daß das RSA-Schema korrekt arbeitet, bleibt zu fragen,ob es auch brauchbar im Sinne der Geheimhaltung ist.Jedermann kennt die offentlichen Schlusselzahlen, also die Zahlen n und s; kein Teilnehmermuß sich p, q und ϕ(n) merken. Um den Geheimtext entschlusseln zu konnen, mußtejemand die Zahl t berechnen. Dazu reicht es auch, die Zahl ϕ(n) zu kennen, denn mitHilfe des euklidischen Algorithmus kann man dann eine Zahl t berechnen; siehe Folgerung3.22. Die Zahl ϕ(n) kennt man, wenn man die Primfaktorzerlegung von n kennt. Denndann ist n = pq und ϕ(n) = (p − 1)(q − 1). Umgekehrt, wenn man n und ϕ(n) kennt,dann kennt man sogar die Primfaktorzerlegung von n, denn aus
pq = n , (p− 1)(q − 1) = ϕ(n) ,
errechnet man
p + q = n− ϕ(n) + 1
p− q = ±√
(n− ϕ(n) + 1)2 − 4n.
Es ist also ganz einfach mit dem Auffinden des geheimen Schlussels Dt, wenn man nfaktorisieren kann. Und hier liegt die Starke des RSA-Schemas: Es ist ein schwierigesProblem, eine große Zahl zu faktorisieren.
Zum Faktorisierungsproblem !Naheliegend ist, fur alle Zahlen m ∈ 2, . . . , n − 1 durchzuprobieren, ob sie ein Teilervon n ist oder nicht. Naturlich muß man nicht alle Zahlen durchprobieren. Man kann sich
Baumeister: Mathematik IV / Stand: April 1998 447
auf die Primzahlen beschranken und man muß auch nur die Zahlen von 2 bis zu einemm mit m2 ≥ n testen. Denn ist n = pq , so ist p2 ≤ n oder q2 ≤ n. Das ist ein sicheresVerfahren, aber ein sehr, sehr langwieriges. Zum Beispiel muß man, um eine 200–stelligeZahl zu testen, im schlimmsten Fall die Primzahlen zwischen 2 und 10100 durchprobieren.Nach dem Primzahlsatz, den wir spater noch kennenlernen werden, bedeutet dies, etwa1098 Zahlen durchprobieren zu mussen.
Beispiel 15.13
Im Jahre 1990 wurde eine der meistgesuchten Faktorisierungen gefunden: Die neunteFermatzahl F9 = 229
+ 1 = 2512 + 1 wurde in Primfaktoren zerlegt:
F9 = 2424833 · k mit einem k ∈ ZZ .
Die Losung gelang, indem man das Problem in kleine Portionen aufteilte und happchen-weise loste. 2
Es ist festzuhalten: Bisher hat niemand einen guten/schnellen Faktorisierungsalgorithmusgefunden und man hofft (im Interesse der Geheimhaltung), daß auch in Zukunft keinschneller Algorithmus gefunden wird.Wie soll man den Schlussel wahlen? In der heutigen Rechnertechnologie ist es moglich,n ∼ 10200 , p2 ∼ n , q2 ∼ n zu realisieren. Die Wahl von s darf nicht zu klein ausfallen, dasonst ein verschlusselter Text identisch mit dem Text selbst sein kann, d.h. daß ms = mfur eine Nachricht m sein kann. Solche “Fixpunkte“ von Ks haben zu tun mit kleinenPrimteilern von p− 1 bzw. q − 1 .
15.6 Elektronische Unterschrift und elekronisches Geld
Eine Anwendung des RSA–Schemas ist die elektronische Unterschrift. Ein Nachrichtenge-ber A beglaubigt seine offentliche Mitteilung m an einen Empfanger B durch Hinzufugender kodierten Nachricht Ks(m) ; Ks ist ein nur A bekannter Schlussel. Ein Empfangerkann mit dem offentlichen Dekodierer Dt von A die Gleichung
m = Dt(Ks(m))
uberprufen. Ist sie erfullt, hat der Empfanger die Sicherheit, daß die Nachricht von Astammt.
Kapitel 16
Graphentheorie
Graphentheorie gilt als ein wesentlicher Bestandteil der “Diskreten Mathematik“, die sichvor allem mit der Manipulation endlicher Mengen beschaftigt. Im Kontext dieser Theorielassen sich viele Aufgaben sehr einfach verstehen. Der algorithmische Standpunkt kommthier zwar etwas zu kurz, ist aber von großer Bedeutung, da es sich bei den Aufgabenstel-lungen meist um sehr angewandte Situationen handelt.
16.1 Graphen und ihre Diagramme
Graphen bilden die fundamentale Datenstruktur in der Diskreten Mathematik, die sichvor allem mit endlichen Mengen (Abzahlen, Strukturieren, Verknupfung, . . . ) beschaftigt.Die einfachste Struktur auf endlichen Mengen wird von einer zweistelligen Relation er-zeugt: Zwei Elemente einer Menge stehen in einer vorgegebenen Beziehung oder nicht.Mit dem Begriff des Graphen erfassen wir gerade diese Situation.
Beginnen wir mit einem bestens bekannten “Graphen“.
Abbildung 16.1: Das Haus von Nikolaus
Es hat Ecken () und Kanten (—) und ist im Rythmus von Dies ist das Haus von Ni–ko–laus in einem Zug auf das Papier zu zaubern, ohne zweimal eine Kante nachziehen zumussen. Damit sind schon wesentliche Begriffe der Graphentheorie angesprochen.
448
Baumeister: Mathematik IV / Stand: Juli 1998 449
Definition 16.1
Ein Graph besteht aus einem Paar (E,K), wobei E eine endliche nichtleere Mengevon Ecken und K eine endliche Menge von Kanten ist und einer Vorschrift, diejeder Kante k ∈ K genau zwei (verschiedene oder gleiche) Ecken a, b ∈ E zuordnet,die wir Endecken von k nennen; ist a = b, so nennen wir k eine Schlinge bei a.Wir sagen, daß k die Ecken a und b verbindet, wenn a, b Endecken von k sind; oftschreiben wir dafur k = a, b oder kurz k = ab . 2
Fur einen Graphen mit Ecken E und Kanten K schreiben wir G(E,K). Ecken, die durcheine Kante verbunden sind, nennen wir benachbart. Eine Ecke, die zu keiner KanteEndecke ist, nennen wir isoliert. Sind zwei Ecken durch Kanten k1, k2, . . . , kn, n ≥ 2,verbunden, so heißen die Kanten k1, . . . , kn Mehrfachkanten.
Definition 16.2
Ein Graph G(E,K) heißt einfach, wenn er weder Schlingen noch Mehrfachkantenbesitzt. 2
Einen Graph veranschaulicht man sich am besten durch eine Diagramm, indem man dieEcken als Punkte der (Zeichen–)Ebene zeichnet und die Kanten als Kurven zwischenden Endpunkten zeichnet, die naturlich im Fall einer Schlinge geschlossen sind. Dadurchist auch die Bezeichnung “ Graph“ erklart: das Ecken–Kanten–System erinnert an diegraphische Darstellung von Funktionen. Diagramme sind ein nutzliches Hilfsmittel, unsdie abstrakte Struktur eines Graphen vorzustellen.
Abbildung 16.2: Beispiele von Graphen
Beispiel 16.3
Betrachte ein Beispiel einer”endlichen Geometrie“ :
IP := A,B,C , ′G := A,B, A,C, B,C
IP steht fur die Punkte, ′G steht fur die Menge der Geraden.Dies ist ein Graph G(IP , ′G). Endecken etwa der Kante k := A,B sind A und B.Ein Diagramm dazu ist in Abbildung 16.2 enthalten. 2

Baumeister: Mathematik IV / Stand: Juli 1998 450
Beispiel 16.4
Sei E := 1, 2, 3, 4, 5, 6, K := 11, 12, 25, 34, 36, 46, 64. (Die Kante ij verbindet die Eckei mit der Ecke j .)Mit E,K liegt ein Graph G(E,K) vor, zu dem das 3. Diagramm in der Abbildung 16.2gehoren mag. (Die Schlinge bei 1 ist die Kante 11.) 2
Im folgenden werden wir nahezu ausschließlich einfache Graphen betrachten. Einige ein-fache Graphen sind so wichtig, daß sie eigene Namen tragen. Z.B. heißen die einfachenGraphen Gn := G(E,K) mit #E = n und #K =
(n2
)– es gilt stets #K ≤
(n2
)–
vollstandige Graphen. In Abbildung 16.3 sind Diagramme dazu fur n ≤ 5 .
Abbildung 16.3: Einfache Graphen
Weitere Graphen spezieller Struktur sind die bipartiten Graphen Gm,n = G(E,K) mit
E = U ∪ V , U ∩ V = ∅ ,#U = m,#V = n ,
und jede Kante hat eine Ecke in U und eine Ecke in V . G3,3 ist in Abbildung 16.4 linkszu sehen.
Abbildung 16.4: Bipartite Graphen
Beispiel 16.5
Die Teilbarkeit in den naturlichen Zahlen laßt sich durch einen Graphen veranschaulichen,etwa:
G := G(E,K) mit E := 1, . . . , n, K := (i, j)|1 ≤ i, j ≤ n, i teilt j.
Der Graph dazu ist als mittleres Diagramm in Abbildung 16.3 zu sehen. 2
Beispiel 16.6

Baumeister: Mathematik IV / Stand: Juli 1998 451
Geplant ist eine Tennisturnier mit funf Teilnehmern a, b, c, d, e . Die Turnierbedingungenseien:
1. Es steht nur ein Tennisplatz zur Verfugung.
2. Jeder Teilnehmer spielt gegen jeden anderen Teilnehmer genau einmal.
3. Kein Teilnehmer spielt in zwei aufeinanderfolgenden Spielen.
Abbildung 16.5: Graph eines Tennisturniers
In der Abbildung 16.5 stellt jede der zehn Verbindungslinien eines der Spiele dar. In derAbbildung 16.5 ist auch ein Spielplan aufgezeichnet: Die zehn Punkte reprasentieren dieSpiele, und zwei Punkte sind genau dann verbunden, wenn sie keinen gemeinsamen Spielerhaben. Der doppelt eingezeichnete
”Weg“ liefert eine Losung fur die obigen Bedingungen
(1), (2). Die zugehorige Abbildung ist also ein Graph mit 10 Ecken und 15 Kanten. DasDiagramm haben wir nicht willkurlich gestaltet, sondern eine asthetisch ansprechende undeinpragsame Form dafur gewahlt. 2
Mit den nun folgenden Begriffen “Kantenzug, Weg, Kreis“ konnen wir etwas uber dieFein–/Unterstruktur von Graphen herausfinden.
Definition 16.7
Sei G(E,K) ein Graph.
(a) Sind v0, v1, . . . , vn ∈ E, so daß vi mit vi+1 fur jedes i = 0, . . . , n− 1 verbundenist, so nennen wir W := [v0, . . . , vn] einen Kantenzug von v0 nach vn derLange n .
(b) Ein Kantenzug W = [v0, . . . , vn] heißt Weg, falls alle zugehorigen Kantenvivi+1 paarweise verschieden sind.
(c) Ein Weg W = [v0, . . . , vn] heißt Kreis, falls v0 = vn gilt.
2
Beispiel 16.8
Baumeister: Mathematik IV / Stand: Juli 1998 452
Der Graph in Beispiel 16.4 enthalt einen Kreis der Lange 3, namlich [3, 4, 6, 3].Ein Kreis der Lange 1 ist die Schlinge 11. Ein Kreis der Lange 2 ist [4, 6, 4], er wird durchdie Mehrfachkanten 46, 64 erzeugt. 2
Definition 16.9
Sei G(E,K) ein Graph.
(a) Ein Weg W = [v0, . . . , vn] heißt ein Eulerweg, wenn der Weg jede Kante desGraphen genau einmal enthalt.
(b) Ein Eulerweg heißt ein Eulerkreis, wenn er ein Kreis ist.
(c) Der Graph heißt Eulergraph, falls er einen Eulerkreis enthalt.
2
Der Begriff”Eulerkreis“ stammt von dem vermutlich altesten graphentheoretisch erfaßten
Problem, der Losung des Konigsberger Bruckenproblems durch L.Euler (1707 – 1783) imJahre 1736. Die Abbildung 16.6 zeigt 4 Landstucke A,B,C,D und 7 Verbindungsbruckena, b, . . . , g.
Abbildung 16.6: Das Konigsberger Bruckenproblem
Frage: Ist es moglich von der Insel A aus einen Spaziergang zu machen, bei dem man alleBrucken genau einmal passiert und schließlich nach A zuruckkehrt ?Ubersetzen wir dies in die Graphensprache, so resultiert der Graph aus Abbildung 16.7.Euler hat die Frage negativ beantworten konnen, indem er zeigte, daß kein Eulerkreisexistiert. Nach Bereitstellung von Begriffen konnen wir dies ziemlich elementar beweisen.
Definition 16.10
Ein Graph G(E,K) heißt zusammenhangend, falls es zu jedem Paar vonEcken einen Kantenzug gibt, der diese Ecken verbindet, ansonsten unzusam-menhangend. 2
Baumeister: Mathematik IV / Stand: Juli 1998 453
Abbildung 16.7: Der Graph zum Konigsberger Bruckenproblem
Definition 16.11
Sei G = G(E,K) ein zusammenhangender Graph. Eine Kante k ∈ K heißt eineBrucke, falls der Graph G′ = G(E′, K ′) mit E′ = E,K ′ = K\k nicht zusam-menhangend ist. 2
Abbildung 16.8: Zusammenhangende Graphen
Definition 16.12
Sei G(E,K) ein Graph.
(a) Ein Weg W = [v0, . . . , vn] heißt Hamiltonweg, wenn der Weg W jede Eckedes Graphen genau einmal enthalt.
(b) Ein Weg W = [v0, . . . , vn] heißt Hamiltonkreis, wenn W ′ := [v0, . . . , vn−1]ein Hamiltonweg ist und v0 = vn gilt.
(c) Der Graph heißt Hamiltongraph, wenn er einen Hamiltonkreis enthalt.
2
Das Studium der hamiltonschen Wege und Kreise wurde 1856, etwa gleichzeitig, von Kirk-mann und Hamilton angeregt. Hamilton fragte nach einem Hamiltonkreis im Graphen,der dem Kantenweg auf dem Dodekaeder entspricht. Die Abbildung 16.9 gibt die Antwort.

Baumeister: Mathematik IV / Stand: Juli 1998 454
Abbildung 16.9: Der Hamiltonkreis zum Dodekaeder
Die Abbildung 16.10 zeigt die Graphen zu anderen regularen Korpern.
Abbildung 16.10: Hamiltonkreise zum Tetraeder bzw. Wurfel
Spezielle Aufgaben, die sich mit der Problematik Hamiltonweg/Hamiltonkreis beschafti-gen, sind viel alter. Euler behandelte schon das Problem des Rosselsprungs auf einemn × n–Schachbrett. Gefordert ist, daß der Springer von einem Feld beginnend mit konti-nuierlichen Zugen alle Felder genau einmal beruhrt und dann wieder zu seinem Ausgangs-punkt zuruckkehrt.
Beispiel 16.13
Nehmen wir ein (quadratisches) Schachbrett mitn2 Feldern und verbinden wir zwei Ecken,wenn sie durch einen Springerzug verbunden sind; es resultiert ein Graph. Dann ist dieFrage nach einem Hamiltonweg bzw. Hamiltonkreis klar. Seit Euler ist schon bekannt,daß ein Hamiltonkreis auf dem 8× 8–Schachbrett existiert.Im Jahre 1991 gab es eine “Jugend forscht–Arbeit“ von A. Conrad, H. Morsey, T. Hind-richs mit dem Titel “Springer–Projekt“, die mit dem ersten Preis ausgezeichnet wurde.Sie behandelte das Springer–Problem hauptsachlich von der algorithmischen Seite her.Es konnte u.a. nachgewiesen werden, daß jedes n × n–Schachbrett mit n ≤ 30 einenHamiltonweg enthalt. Am beeindruckensten war die Idee, zur Suche nach Hamiltonwegen
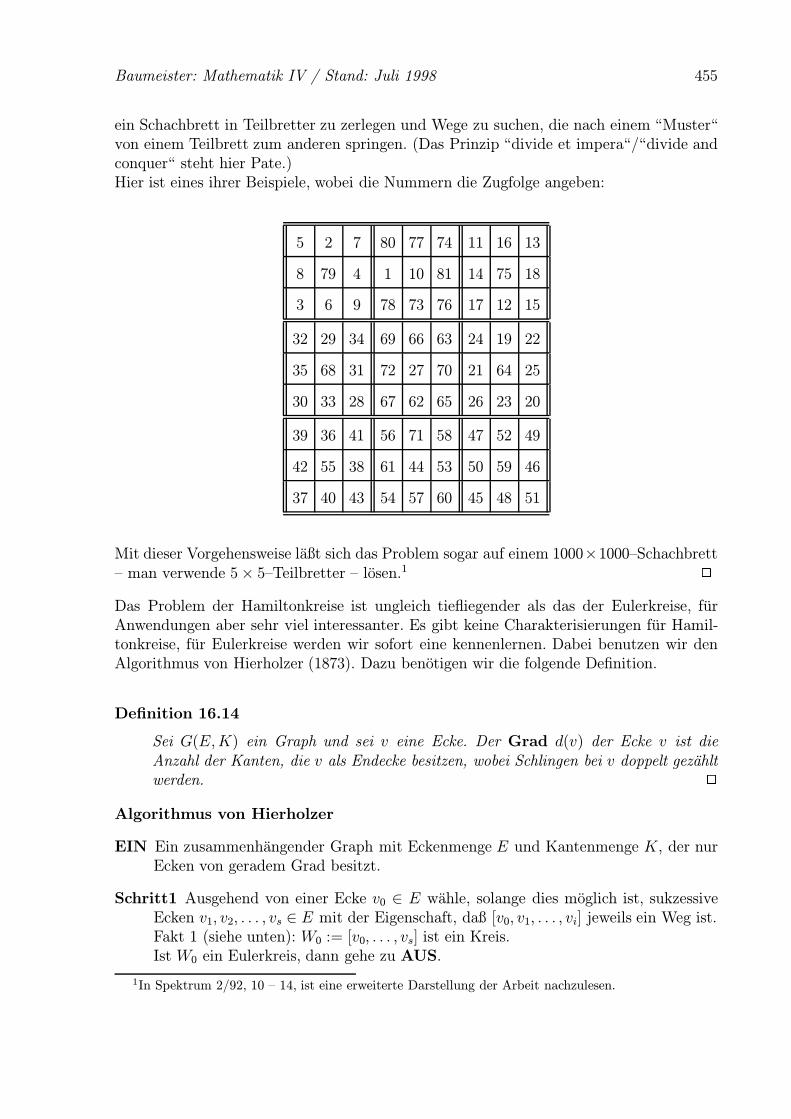
Baumeister: Mathematik IV / Stand: Juli 1998 455
ein Schachbrett in Teilbretter zu zerlegen und Wege zu suchen, die nach einem “Muster“von einem Teilbrett zum anderen springen. (Das Prinzip “divide et impera“/“divide andconquer“ steht hier Pate.)Hier ist eines ihrer Beispiele, wobei die Nummern die Zugfolge angeben:
5 2 7 80 77 74 11 16 13
8 79 4 1 10 81 14 75 18
3 6 9 78 73 76 17 12 15
32 29 34 69 66 63 24 19 22
35 68 31 72 27 70 21 64 25
30 33 28 67 62 65 26 23 20
39 36 41 56 71 58 47 52 49
42 55 38 61 44 53 50 59 46
37 40 43 54 57 60 45 48 51
Mit dieser Vorgehensweise laßt sich das Problem sogar auf einem 1000×1000–Schachbrett– man verwende 5× 5–Teilbretter – losen.1 2
Das Problem der Hamiltonkreise ist ungleich tiefliegender als das der Eulerkreise, furAnwendungen aber sehr viel interessanter. Es gibt keine Charakterisierungen fur Hamil-tonkreise, fur Eulerkreise werden wir sofort eine kennenlernen. Dabei benutzen wir denAlgorithmus von Hierholzer (1873). Dazu benotigen wir die folgende Definition.
Definition 16.14
Sei G(E,K) ein Graph und sei v eine Ecke. Der Grad d(v) der Ecke v ist dieAnzahl der Kanten, die v als Endecke besitzen, wobei Schlingen bei v doppelt gezahltwerden. 2
Algorithmus von Hierholzer
EIN Ein zusammenhangender Graph mit Eckenmenge E und Kantenmenge K, der nurEcken von geradem Grad besitzt.
Schritt1 Ausgehend von einer Ecke v0 ∈ E wahle, solange dies moglich ist, sukzessiveEcken v1, v2, . . . , vs ∈ E mit der Eigenschaft, daß [v0, v1, . . . , vi] jeweils ein Weg ist.Fakt 1 (siehe unten): W0 := [v0, . . . , vs] ist ein Kreis.Ist W0 ein Eulerkreis, dann gehe zu AUS.
1In Spektrum 2/92, 10 – 14, ist eine erweiterte Darstellung der Arbeit nachzulesen.
Baumeister: Mathematik IV / Stand: Juli 1998 456
Schritt 2 Wahle eine Ecke w0 im Kreis W0, zu der es eine Kante gibt, die eine Endeckehat, die nicht zu W0 gehort.Fakt 2 (siehe unten): Diese Wahl ist moglich.
Schritt 3 Wie in Schritt 1 konstruiere ausgehend von w0 einen WegW ′1 = [w0, w1, . . . , wt],
wobei die Kanten von W0 nicht verwendet werdenFakt 3 (siehe unten): W ′
1 ist ein Kreis.
Schritt 4 Der neue Kreis W0 entsteht aus W0,W′1 dadurch, daß zuerst W0 bis w0, dann
W ′1 ganz und dann W0 von w0 bis vs durchlaufen wird.
Fakt 4 (siehe unten): W0 ist ein Kreis. Ist W0 ein Eulerkreis, dann gehe zu AUS,sonst zu Schritt 2.
AUS In endlich vielen Schritten wird ein Eulerkreis W0 erzielt.
Zu Fakt 1 :Annahme: W0 ist nicht Kreis, d.h. v0 6= vs. Wird vs q−mal im Weg W0 durchlaufen, danngilt d(vs) = 2q + 1 im Widerspruch zur Voraussetzung.
Zu Fakt 2:Diese Wahl ist moglich, da der Kreis W0 noch kein Eulerkreis ist.
Zu Fakt 3:Begrundung wie zu Fakt 1.
Zu Fakt 4:Offensichtlich.
Beispiel 16.15
Betrachte den Graphen aus Abbildung 16.11
Abbildung 16.11: Beispiel zum Algorithmus von Hierholzer
und wende den Algorithmus von Hierholzer an mit v0 = a. Wir erhalten etwa sukzessive
W0 = [a, b, h, a] ,W ′1 = [b, c, d, f, c, h, g, b],
W0 = [a, b, c, d, f, c, h, g, h, a] ,W ′1 = [d, e, f, g, d],
W0 = [a, b, c, d, e, f, g, d, f, c, h, g, b, h, a] ,
und W0 ist ein Eulerkreis. 2

Baumeister: Mathematik IV / Stand: Juli 1998 457
Satz 16.16
Sei G = G(E, k) ein Graph. Dann sind aquivalent:
(a) G ist ein Eulergraph.
(b) G ist zusammenhangend und alle Ecken haben geraden Grad.
Beweis:(a) =⇒ (b)Mit der Existenz eines Eulerkreises ist klar, daß G zusammenhangend ist. Sei W =[v0, . . . , vn−1, v0] ein Eulerkreis. Tritt die Ecke v in der Folge v0, . . . , vn−1 genau p−malauf, so gilt d(v) = 2p. Da G zusammenhangend ist, kommt jedes v ∈ E in W auch vor.(b) =⇒ (a)Es bleibt lediglich noch zu zeigen, daß AUS im Algorithmus von Hierholzer tatsachlicherreicht wird. Wurde dies nicht eintreten, so gabe es schließlich eine Kante k ∈ K, dieim erreichten Kreis W0 nicht enthalten ist, die aber nur Endecken u, v aus W0 besitzt.Dann gibt es aber keinen Weg von u nach v, Dies widerspricht der Voraussetzung, daßder Graph zusammenhangend ist.
Hier ist ein Resultat zur Existenz von Hamiltonkreisen.
Satz 16.17
Sei G = G(E;K) ein zusammenhangender Graph mit n := #E ≥ 3. Dann ist G einHamiltongraph, falls
d(u) + d(v) ≥ n (16.1)
gilt fur alle u, v ∈ E, die nicht benachbart sind.
Beweis:Sei W := [v1, . . . , vm] ein Weg in G von maximaler Lange. Klar, alle Nachbarn von v1 undvm gehoren zu W.1. Fall: G enthalt einen Kreis W ′ = [w0, . . . , wm] der Lange m.Annahme: m < n .Dann gibt es, da der Graph zusammenhangend ist, eine Ecke wi in W ′, die benachbartzu einer Ecke u ist, die nicht zu W ′ gehort. Dann ist aber der Weg [v, wi, wi+1, . . . , wi−1]ein Weg der Lange m+ 1, im Widerspruch zur Maximalitat von W.Also gilt m = n und ein Hamiltonkreis ist gefunden.2. Fall: G enthalt keinen Kreis der Lange m.Seien
N(v1) := a ∈ E|a gehort zu W, v1a ∈ K ,
N(vm) := a ∈ E|a gehort zu W, avm ∈ K .
Offensichtlich sind v1, vm nicht benachbart und N(v1) ∩ N(vm) = ∅, denn sonst wurde Geinen Kreis der Lange m enthalten. Aus der Voraussetzung des Satzes folgt
n ≤ d(v1) + d(vm) = #N(v1) + #N(vm) < m ,
was wegen m ≤ n ein Widerspruch ist. Also tritt Fall 2 nicht ein.
Baumeister: Mathematik IV / Stand: Juli 1998 458
Die Voraussetzung (16.1) ist z.B. erfullt, wenn jede der n Ecken einen Grad nicht kleinerals n
2hat. Man beachte, daß dieses Kriterium fur das n× n Schachbrett bei weitem nicht
erfullt ist.
16.2 Ebene Graphen
Wir haben schon darauf hingewiesen, daß wir ublicherweise einen Graphen G(E,K) durchein Punkt–Linien–System in der Ebene veranschaulichen. Gibt es eine Darstellung, in derdie Kanten von G sich nur an Ecken treffen aber niemals dazwischen, so sagen wir, derGraph G ist plattbar und nennen den so darstellbaren Graphen einen ebenen Graphen.Isolierte Ecken spielen dabei keine Rolle, sie konnen ja irgendwohin plaziert werden, al-lerdings darf keine Kante uber eine isolierte Ecke laufen.
Beispiel 16.18
Die Darstellung in Beispiel 16.4 ist keine ebene Darstellung, da sich z.B. die Linien 25 und36 in einem Zwischenpunkt schneiden. Der Graph ist aber – ebenso wie der Graph zumHaus von Nikolaus – plattbar, wir mussen ja nur die Komponenten auseinanderziehen;siehe Abbildung 16.12.
Abbildung 16.12: Beispiel fur plattbare Graphen
2
Ist G(E,K) ein ebener Graph, so zerlegen die Linien die Ebene in endlich viele topologischzusammenhangende Gebiete, von denn genau eines, das
”außere“ Gebiet, nicht beschrankt
ist. Der Grund dafur ist der beruhmte Jordansche Kurvensatz: “Eine geschlosseneJordankurve ϕ zerlegt die Ebene in zwei topologisch zusammenhangende Gebiete, vondenen genau eines nicht beschrankt ist.“ Das heißt: Zwei Punkte der Ebenen konnen genaudann durch eine Jordan–Kurve verbunden werden, die ϕ nicht trifft, wenn sie entwederbeide im Inneren oder beide im Außeren von ϕ liegen. So einleuchtend dieser Satz auchist, sein Beweis ist alles andere als leicht.
Wir konnen also unterstellen, daß bei einem ebenen Graphen die Linien (die fur die Kantenstehen) die Ebene in endlich viele topologisch zusammenhangende Gebiete zerlegen. DieseGebiete wollen wir Lander nennen.Haben wir umgekehrt eine
”reale Landkarte“ L gegeben, so konnen wir L sofort einen
ebenen Graphen G(E,K) zuordnen: Die Ecken E sind die Schnittpunkte verschiedener

Baumeister: Mathematik IV / Stand: Juli 1998 459
Grenzen und die Kanten sind die zwischen Schnittpunkten verlaufenden Grenzlinien; eineInsel wird als Punkt und seine Grenze als Schlinge dargestellt. Wir halten ausdrucklichfest: Lander grenzen entlang einer Grenzlinie an, nicht nur in einem Punkt, und die Landersind zusammenhangend.
Abbildung 16.13: Beispiele fur “Nicht–Landkarten“
Definition 16.19
Eine Landkarte L(E,K,L) ist ein ebener Graph G = G(E,K) zusammen mit denzu G gehorenden Landern L .Lander, die eine gemeinsame Grenze haben, nennen wir benachbart.
2
Abbildung 16.14: Eine Landkarte mit zugehorigem Graph
Definition 16.20
Eine Farbung einer Landkarte L(E,K,L) ist eine Abbildung f : L→M, wobei Meine endliche Menge von Farben ist, so daß Lander, die eine gemeinsame Grenzkantebesitzen, stets verschiedene Farben erhalten. 2
Mit diesen Begriffen konnen wir nun den 4–Farben–Satz formulieren:
Jede Landkarte L hat die chromatische2 Zahl χ(L) ≤ 4 , d.h. die kleinsteZahl von Farben, die fur eine Farbung ausreicht, ist 4 .
2χρoµα (griechisch) = (Haut–)Farbe.

Baumeister: Mathematik IV / Stand: Juli 1998 460
Beachte die Vereinbarung uber Landkarten! Bei den “Nicht–Landkarten“ aus Beispiel16.13 ist die Situation anders: Im linken Diagramm (Angrenzung nur in einem Punkt)waren nur zwei oder sieben Farben notig, je nachdem, wie wir die Nachbarschaft definieren,im rechten Diagramm (E besteht aus zwei “Stucken“) waren funf Farben notig.
In Abbildung 16.15 sehen wir ein Beispiel, das zeigt, daß im allgemeinen wirklich 4 Farbennotig sind.
Abbildung 16.15: Eine Landkarte, bei der 4 Farben notig sind
Der 4–Farben–Satz hat eine interessante Geschichte, die Beweisversuche dazu haben vielzur Entwicklung der Graphentheorie beigetragen.Am 23. Oktober 1852 schrieb Augustus de Morgan an seinen Kollegen Sir William Ha-milton:
”Ein Student (F. Guthrie) fragte mich heute, ob es stimmt, daß die Lander jeder
Landkarte stets mit hochstens 4 Farben gefarbt werden konnen, unter der Maßgabe, daßangrenzende Lander verschiedene Farben erhalten.“Schon 1878 legte A.Kempe einen Beweisversuch fur den 4–Farben Satz vor. Obwohl Kem-pes Beweis einen Fehler enthielt – er wurde 1890 von Heawood entdeckt –, so vereinigte erdoch nahezu alle Ideen, die zur endgultigen Losung 100 Jahre spater gefuhrt haben. Der5–Farbensatz von Heawood aus dem Jahre 1898 sagt, daß stets χ(L) ≤ 5 gilt. Ein korrek-ter Beweis fur den 4–Farbensatz wurde 1976 von Appel und Haken3 vorgelegt. Allerdingswurde der Beweis von der mathematischen Welt mit gemischten Gefuhlen aufgenommen,denn der Beweis wurde gefuhrt unter massivem Einsatz von Computern. (Der Compu-ter wurde benutzt, um entscheidende Reduktionsschritte abzusichern.) Es gibt nun einenBeweis, der zwar immer noch nicht ohne Computer auskommt, der diesen aber schonreduziert einsetzt.4 Uber 100 Jahre hinweg hat das 4–Farben–Problem bedeutende Ma-thematik hervorgebracht und in seiner Losung stoßt es das Tor zu einer vielleicht dienachsten 100 Jahre pragenden mathematischen Entwicklung auf: Computer–gestutztesSuchen nach mathematischer Erkenntnis.
Ein Marchen schildert die Farbungsproblematik5 in anderem Kleide.Es war einmal ein Konig, der hatte funf Sohne. Als er sein Ende nahen fuhlte, rief er siezu sich und gebot ihnen, nach seinem Tode das Reich so unter sich zu teilen, daß jeder andie Reiche aller vier Bruder grenzte, aber nicht nur in einem Punkt, sondern langs einer
3Habiliert in Frankfurt, Dr. h.c. der Universitat Frankfurt am Main4Siehe M. Aigner: Ein neuer Beweis des 4–Farbensatzes, DMV–Mitteilungen 1/955Das Farbungsproblem ist interessant erlautert in D. Hilbert, Wissen und math. Denken, Vorlesungs-
mitschrift aus dem WS 1922/23. Dort ist auch dieses Marchen zu finden.

Baumeister: Mathematik IV / Stand: Juli 1998 461
Grenzlinie. Bald, nachdem er dies verfugt hatte, starb er, und die Sohne machten sich anden Versuch, das Reich im Sinne des Vaters zu teilen. Die Vorschrift schien den Brudernvernunftig und in ihrem Interesse. Aber so viel sie auch probierten und studierten, undobwohl sie die großten Geometer des Landes zu Rate zogen, es gelang ihnen nicht, einesolche Aufteilung zu finden. Das Reich blieb ungeteilt, und da es dabei gedieh, kamen dieBruder auf den Gedanken, der Vater habe die Unerfullbarkeit seiner Vorschrift gekanntund durch ihren Erlaß nur die Einheit des Reiches erhalten wollen.Die Aufgabe ist also, 5 Gebiete in einer Ebene anzugeben, sodaß jedes Gebiet an jedesandere langs einer Linie angrenzt. Wir zeichnen zunachst zwei Gebiete, die langs einerGrenzlinie zusammenstoßen, und sehen sofort, daß wir das dritte Gebiet nur anlegendurfen; in Abbildung 16.16 sind diese zwei Schritte zu sehen. In Abbildung 16.17 sindzwei Fortsetzungsversuche zu sehen; ein funftes Gebiet laßt sich den Regeln entsprechendnicht anfugen.
Abbildung 16.16: Skizzen zum Marchen
Abbildung 16.17: Skizzen zum Marchen
Wir wissen nun, daß es keine Losung gibt, da das 4–Farben–Problem in Form des 4–Farben–Satzes gelost ist. Hatten die 5 Konigsbruder auf einem Torus (Fahrradschlauch)gelebt, so hatten sie der testamentarischen Bestimmung ohne Muhe nachkommen konnen,ja sogar mit 7 Brudern ware die Aufteilung noch moglich gewesen; siehe Beispiel 16.22.
Beispiel 16.21
Eine Landkarte, die dadurch entsteht, daß endlich viele Geraden zum Schnitt gebrachtwerden, kann mit zwei Farben gefarbt werden; siehe Abbildung 16.18.
2
Beispiel 16.22

Baumeister: Mathematik IV / Stand: Juli 1998 462
Abbildung 16.18: Eine spezielle Landkarte
Abbildung 16.19: Farbung auf dem Mobiusband
Fur das Mobiusband gilt der 6–Farben–Satz: Jede Landkarte auf einem Mobiusband laßtsich mit 6 Farben farben. Daß man im allgemeinen tatsachlich 6 Farben benotigt, wirddurch Abbildung 16.19 gezeigt.Dabei muß man wissen, daß das Mobiusband aus einem rechteckigen Streifen dadurchentsteht, daß man zwei gegenuberliegende Ecken so aneinander klebt, daß die Pfeile zurDeckung kommen (siehe Abbildung 16.19); die Farbung ist daher beidseitig vorzunehmen.In Abbildung 16.20 ist eine Landkarte auf einem Torus (Fahrradschlauch) aufgezeichnet.Dazu muß man wissen, daß der Torus aus einem rechteckigen Streifen dadurch entsteht,daß man jeweils gegenuberliegende Enden so aneinander klebt, daß die Pfeile zur Deckungkommen. Die Landkarte zeigt, daß beim Torus mindestens 7 Farben zur Farbung notigsind. Es gilt der 7–Farben–Satz: Jede Landkarte auf dem Torus laßt sich mit 7 Farbenfarben.
Abbildung 16.20: Farbung auf dem Torus

Baumeister: Mathematik IV / Stand: Juli 1998 463
2
16.3 Baume
Kehren wir zuruck zur Graphentheorie. Wir beweisen erste Ergebnisse. Sie waren aucherste Schritte im Beweisversuch des 4–Farben–Satzes von A. Kempe.
Lemma 16.23
Sei G = G(E,K) ein Graph. Dann gilt
#K =1
2
∑v∈E
d(v)
Beweis:Wir zahlen die Paare (v, k), v ∈ E, k ∈ K, ab, fur die v Endecke von k ist. Da jede Kantegenau 2 Endecken hat, ist die Anzahl einerseits 2 #K, andererseits tragt jede Ecke v ∈ Emit d(v) zu dieser Anzahl bei.
Das obige Lemma wird als Handschlaglemma bezeichnet. Die Wortwahl kommt vonder Interpretation, daß man sich K als die Paare von Personen (E) vorstellen kann, diesich per Handschlag begrußen. Z. B. lesen wir daraus ab, daß die Anzahl der Personen, dieauf einer Party eine ungerade Anzahl von Gasten mit Handschlag begrußt haben, geradeist. Dies ist eine Interpretation von
Folgerung 16.24
Jeder Graph hat eine gerade Anzahl von Ecken ungeraden Grades.
Beweis:Sei G = G(E;K) ein Graph. Seien
E0 := u ∈ E|d(u) gerade , E1 := u ∈ E|d(u) ungerade .
Nach Lemma 16.23 gilt2 #K =
∑u∈E0
d(u) +∑v∈E1
d(v) ,
woraus folgt, daß∑v∈E1
d(v) gerade ist. Also muß #E1 gerade sein.
Definition 16.25
Ein einfacher Graph heißt Baum, wenn er zusammenhangend ist und keine Kreiseenthalt. 2
In Abbildung 16.21 sind alle Baume mit hochstens 5 Ecken aufgefuhrt, Abbildung 16.22enthalt alle Baume mit 6 Ecken. Dabei ist zu berucksichtigen, daß wir zwei Graphen G1 =

Baumeister: Mathematik IV / Stand: Juli 1998 464
Abbildung 16.21: Alle Baume mit hochstens 5 Ecken
G(E1, K1), G2 = G(E2, K2) dann nicht unterscheiden, wenn es eine bijektive Abbildungφ : E1 −→ E2 gibt mit der Eigenschaft
u, v ∈ E1 sind benachbart ⇐⇒ φ(u), φ(v) ∈ E2 sind benachbart .
Wir sagen dann, G1, G2 sind isomorph (bezuglich φ).
Abbildung 16.22: Alle Baume mit 6 Ecken
Baume6 kommen ins Blickfeld bei der Betrachtung von elektrischen Netzwerken. In derInformatik sind sehr wichtig die sogenannten binaren Wurzelbaume. Dies ist ein Baum,der genau eine Ecke von Grad 2 und sonst nur Ecken von Grad 1 oder 3 besitzt; die Eckevon Grad 2 dient als Wurzel des Baumes.
Lemma 16.26
Ist G = G(E,K) ein Baum, so gilt #K = #E − 1.
Beweis:Induktion nach n := #E .Ist n = 1, dann kann es keine Kante geben, da sonst eine Schlinge vorhanden sein mußte.Sei #E = n+ 1.Sei k ∈ K. Da G(E,K) keine Kreise enthalt, muß k eine Brucke sein. Der Graph G(E′, K ′),der nach Weglassen von k entsteht, d.h.
E′ = E,K ′ = K\k,
6Seine Bahnhofsvorlesung am 14.11.97 in Frankfurt/Main (anlaßlich eines Protests gegen die Sparmaß-nahmen an Hessens Hochschulen) begann der Informatikprofessor Seeger aus Marburg mit den Worten:“Baume sind in der Theorie der Datenbanken von großer Wichtigkeit.“

Baumeister: Mathematik IV / Stand: Juli 1998 465
zerfallt daher in zwei Graphen G(E1, K1), G(E2, K2), die offenbar wieder Baume sind. Danun #E1 < #E, #E2 < #E ist, erhalten wir mit der Induktionsvoraussetzung
#K1 = #E1 − 1 , #K2 = #E2 − 1,
und somit
#K = #K1 + #K2 + 1 = (#E2 − 1) + (#E2 − 1) + 1 = #E − 1.
Beachte: In einem Baum ist jede Kante eine Brucke. (Die Begrundung dafur haben wirim Beweis zu Lemma 16.26 gegeben.)
Der Zusammenhang der Anzahlen von Ecken, Kanten und Landern in einem ebenenGraphen ist Inhalt der eulerschen Polyederformel, die wir nun beweisen konnen.
Satz 16.27
Sei G = G(E,K) ein ebener zusammenhangender Graph mit den Landern L . Danngilt
#E −#K + #L = 2 . (16.2)
Beweis:Wir fuhren Induktion nach der Anzahl n := #K der Kanten.Fur n = 0 besteht der Graph aus einer einzelnen Ecke, so daß #E = #L = 1 ist, dieFormel also richtig ist.Sei nun
#K = n+ 1.
Gibt es eine Kante k ∈ K, die keine Brucke ist, dann ist der Graph G(E′, K ′), der ausG(E,K) entsteht, indem wir die Kante k entfernen noch immer zusammenhangend unddie an k angrenzenden Lander
”verschmelzen“. Also
#E′ = #E,#K ′ = #K − 1,#K−,#L′ = #L− 1 ,
und somit mit der Induktionsvoraussetzung
#E −#K + #L = #E′ −#K ′ − 1 + #L′ + 1 = 2.
Besitzt aber der Graph nur Brucken, so muß er ein Baum sein. Dann ist aber #L = 1und die Formel folgt aus 16.26.
Nun wollen wir noch die platonischen Korper entdecken. Dazu
Definition 16.28
Ein ebener Graph G(E,K) mit Landern L heißt platonisch, wenn es naturlicheZahlen r, s ≥ 3 gibt, so daß gilt:
1. alle Ecken haben Grad r;
2. alle Lander sind von Kreisen der Lange s berandet.
2

Baumeister: Mathematik IV / Stand: Juli 1998 466
Satz 16.29
Es gibt (bis auf Isomorphie) genau die in der Abbildung 16.23 dargestellten Graphen.
Beweis:Sei n := #E, k := #K, l := #L.Da ein Kreis keine Kante doppelt enthalten kann, wird jedes der l Lander von s verschiede-nen Kanten berandet. Da sich auf beiden Seiten einer Kante nie dasselbe Land befindenkann, denn in diesem Fall kame die Kante in dem das Land berandenden Kantenzugdoppelt vor, gilt
ls = 2k.
Jede Ecke hat Grad r. Also folgt mit dem Handschlaglemma
nr = 2k.
Aus n− k + l = 2 folgt nach Erweiterung mit dem Faktor 2r schließlich
l(2s+ 2r − sr) = 4r
Daraus folgt2s+ 2r − sr > 0, d.h. (s− 2)(r − 2)− 4 < 0.
Also gilt(s− 2)(r − 2) < 4.
Nun gibt es aber wegen r, s ≥ 3 nur funf Produkte (s− 2)(r − 2), die kleiner als 4 sind,namlich
1 · 1 , 1 · 2 , 2 · 1 , 1 · 3 , 3 · 1 .
Daraus lassen sich s und r und schließlich l, k, n bestimmen. Es ergibt sich damit dieuntenstehende Tabelle. Die Abbildung 16.23 zeigt, daß es zu jeder dieser Moglichkeitenauch wirklich einen Graphen gibt.
Abbildung 16.23: Graphen der platonischen Korper
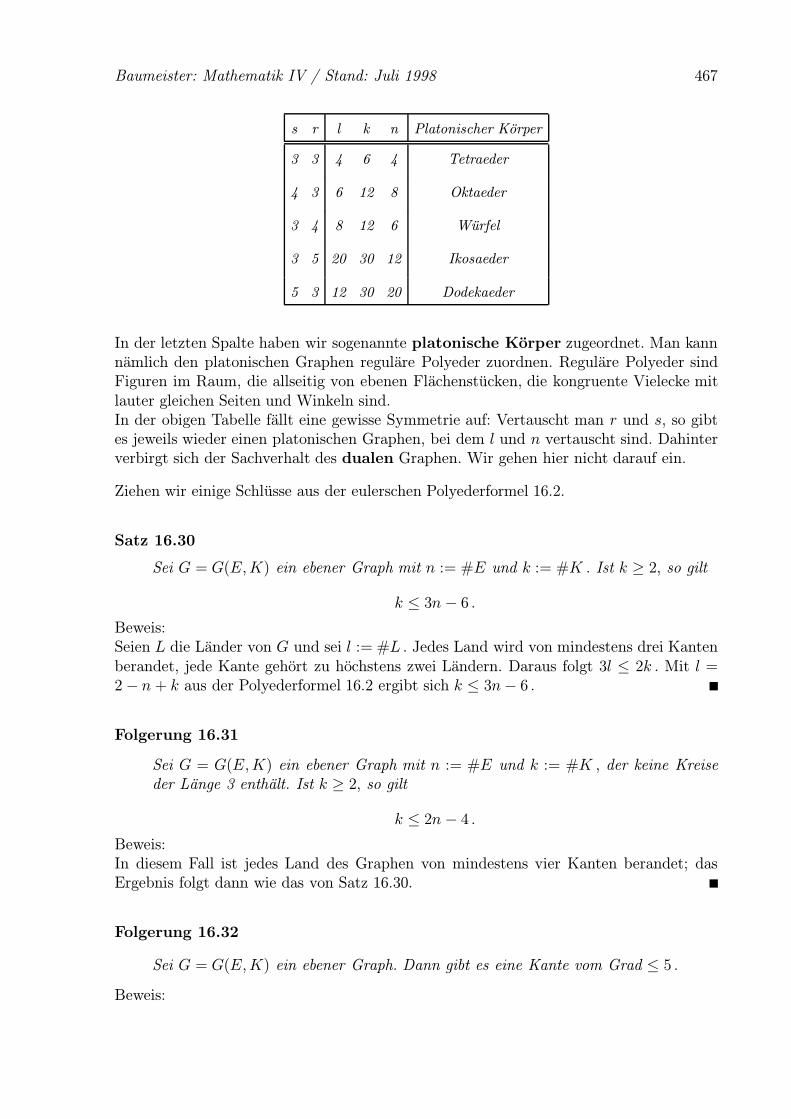
Baumeister: Mathematik IV / Stand: Juli 1998 467
s r l k n Platonischer Korper
3 3 4 6 4 Tetraeder
4 3 6 12 8 Oktaeder
3 4 8 12 6 Wurfel
3 5 20 30 12 Ikosaeder
5 3 12 30 20 Dodekaeder
In der letzten Spalte haben wir sogenannte platonische Korper zugeordnet. Man kannnamlich den platonischen Graphen regulare Polyeder zuordnen. Regulare Polyeder sindFiguren im Raum, die allseitig von ebenen Flachenstucken, die kongruente Vielecke mitlauter gleichen Seiten und Winkeln sind.In der obigen Tabelle fallt eine gewisse Symmetrie auf: Vertauscht man r und s, so gibtes jeweils wieder einen platonischen Graphen, bei dem l und n vertauscht sind. Dahinterverbirgt sich der Sachverhalt des dualen Graphen. Wir gehen hier nicht darauf ein.
Ziehen wir einige Schlusse aus der eulerschen Polyederformel 16.2.
Satz 16.30
Sei G = G(E,K) ein ebener Graph mit n := #E und k := #K . Ist k ≥ 2, so gilt
k ≤ 3n − 6 .
Beweis:Seien L die Lander von G und sei l := #L . Jedes Land wird von mindestens drei Kantenberandet, jede Kante gehort zu hochstens zwei Landern. Daraus folgt 3l ≤ 2k . Mit l =2− n + k aus der Polyederformel 16.2 ergibt sich k ≤ 3n− 6 .
Folgerung 16.31
Sei G = G(E,K) ein ebener Graph mit n := #E und k := #K , der keine Kreiseder Lange 3 enthalt. Ist k ≥ 2, so gilt
k ≤ 2n − 4 .
Beweis:In diesem Fall ist jedes Land des Graphen von mindestens vier Kanten berandet; dasErgebnis folgt dann wie das von Satz 16.30.
Folgerung 16.32
Sei G = G(E,K) ein ebener Graph. Dann gibt es eine Kante vom Grad ≤ 5 .
Beweis:

Baumeister: Mathematik IV / Stand: Juli 1998 468
Sei G = G(E,K) ein ebener Graph mit n := #E und k := #K .Annahme: d(v) ≥ 6 fur alle v ∈ E .Mit dem Handschlaglemma 16.23 folgt
2k =∑v∈E
d(v) ≥ 6n ,
was mit Satz 16.30 einen Widerspruch ergibt.
Beispiel 16.33
Die Graphen
Abbildung 16.24: Nichtplanare Graphen
sind nicht plattbar, was man fur G5 mit Satz 16.30 und fur G3,3 mit Folgerung 16.31einsieht. Entdeckt man diese Graphen als “Details“ in einem großerem Graphen, so kannman sicher sein, daß auch der großere Graph nicht plattbar ist. 2
16.4 Der Heiratssatz
Der sogenannte Heiratssatz gibt Antwort auf die Frage, unter welchen Bedingungen esmoglich ist, daß jeder Mann eine seiner Bekannten heiratet. Dabei sei vorausgesetzt, daßjeder in der Mannergruppe einige unter der Frauengruppe als Bekannte hat.Fur die Losbarkeit dieses Problems ist es offensichtlich notwendig, daß fur jedes k je kManner insgesamt mindestens k Frauen kennen. Der Heiratsatz hat zum Inhalt, daß diesenotwendige Bedingung schon hinreichend ist. Die Modellierung des Problems nimmt denBegriff des bipartiten Graphen auf. In Abbildung 16.25 sind zwei Situationen erfaßt, einelosbare und eine unlosbare.
Abbildung 16.25: Zwei Beispiele zum Heiratssatz
Baumeister: Mathematik IV / Stand: Juli 1998 469
Im rechten Diagramm reicht der Bekanntenkreis w, y fur die”Interessenten“c, d, e
nicht aus. Die fetten Kanten in diesem Diagramm geben an, daß fur a, b, c, e undv, w, x, y die Aufgabe gelost werden kann.
Definition 16.34
Sei ein bipartiter Graph G = G(U ∪ V,K) gegeben. Ein Matching M ⊂ K ist eineMenge von Kanten, die paarweise keine Endecken gemeinsam haben. 2
In einem bipartiten Graphen G interessieren wir uns fur ein naximal großes Matching –der Name
”Matching“ leitet sich aus dem englischen Wort
”match“ (= Partner) ab – und
insbesondere fur die Matching-Zahl zu m(G) von G, welche die Anzahl vom Kanten ineinem maximal großen Matching bezeichnet. Im rechten Diagramm von Abbildung 16.25ist m(G) = 4. Man beachte, daß es zur Matching-Zahl m(G) mehrere Realisierungengeben kann.Als erstes beantworten wir die Frage, wann m(G) = #U ist; in diesem Falle sprechen wirvon einem perfekten Matching. Dazu zunachst folgende Bezeichnung:Ist G = G(E,K) ein Graph und ist A eine Teilmenge von E, so bezeichnen wir mit
N(A) := v ∈ V |u, v sind benachbart fur ein u ∈ U
die Menge der Nachbarn von A.
Satz 16.35
Sei G = G(U ∪V,K) ein bipartiter Graph. Dann ist m(G) = #U genau dann, wennfur jede Teilmenge A von U mit der Menge N(A) der Nachbarn von A gilt:
#A ≤ #N(A) (16.3)
Beweis:Die Notwendigkeit der Bedingung 16.3 ist klar. Sei nun die Bedingung 16.3 erfullt. SeiM ⊂ K ein Matching mit #M < #U ; irgendein Matching laßt sich immer finden. Wirwollen zeigen, daß M kein maximales Matching sein kann.Sei u0 ∈ U eine Ecke, die mittels M nicht gematcht wird, d.h., die in M nicht vorkommt.Da #N(u0) ≥ #u0 = 1 ist, existiert ein Nachbar v1 ∈ V. Falls v1 nicht gematcht istin M , d.h., falls v1 /∈ N(M) gilt, fugen wir die Kante u0v1 zum Match M hinzu. STOP.Falls v1 gematcht ist, gibt es also u1 ∈ U mit u1v1 ∈M fur u1 6= u0. Da #N(u0, u1) ≥#u0, u1 = 2 ist, gibt es eine Ecke v2 ∈ V mit v2 6= v1, welche zu u0 oder u1 benachbartist. Falls u2 nicht gematcht ist in M , fugen wir wie oben eine Kante zu M hinzu; STOP.Anderenfalls existiert eine Kante u1, u2 in M mit u2 ∈ u0, u1. Wir fahren nun so fortund erreichen schließlich eine ungematchte Ecke vr, wobei jede Ecke vi benachbart zumindestens einer Ecke ui mit i < j ist. Gehen wir von vr ruckwarts, so erhalten wir einenWeg W = [vr, ua, va, ub, . . . vh, u0], dessen Kanten uava, ubvb, . . . alle in M liegen, wahrenddie Kanten vrua, vaub, . . . vhub, . . . , vhu0 nicht zu M gehoren. Wir ersetzen nun im WegW die s M–Kanten durch die s+ 1 Kanten, die nicht zu M gehoren. Das so entstehendeMatching M∗ hat eine Kante mehr.

Baumeister: Mathematik IV / Stand: Juli 1998 470
Im allgemeinen wird ein bipartiter Graph G = G(U ∪ V,K) kein Matching m mit #M =#U besitzen. Wie groß kann die Matchingzahl m(G) sein ? Falls #A −#N(A) > 0 istfur eine Teilmenge A von U , so bleiben mindestens #a−#N(A) Ecken ungematcht, d.h.
m(G) ≤ #U − (#A−#N(A)).
Mitδ := max
A⊂U(#A−#N(A))
sehen wirm(G) ≤ #U − δ.
(Beachte, daß δ ≥ 0 gilt wegen #∅ −#N(∅) = 0.)
Satz 16.36
Sei G = G(U ∪ V,K) ein bipartiter Graph. Dann ist
m(G) = #U −maxA⊂U
(#A−#N(A)).
Beweis:Sei δ := max
A⊂S(#A−#N(A)). Wir wissen schon m(G) ≤ #U − δ. Sei D eine neue Ecken-
menge mit #D = δ. Damit fuhren wir den Graphen G∗ = G(U ∪ (V ∪ D), K∗) ein; K∗
entsteht aus K, indem wir zu K alle Kanten zwischen U und D hinzunnehmen. Fur A ⊂ Ugilt in G∗ fur die Nachbarn N∗(A) :
N∗(A) = N(A) ∪D.
Also haben wir#N∗(A) = #N(A) + δ ≥ #A,
und in G∗ existiert ein Matching M∗ mit
#M∗ = #U
nach Satz 16.35. Entfernen wir nun die Kanten aus M∗, die zu D fuhren, so erhalten wirein Matching M in G mit
#M = #U − δ.
Bemerkung 16.37Der Heiratssatz kann auf vielfache Weise kombinatorisch interpretiert werden, indem einegegebene Situation als Matchingproblem aufgefaßt wird. Etwa laßt sich damit fur eineFamilie S = (S1, . . . , Sn) von Teilmengen einer gegebenen Menge A die Frage klaren,ob es paarweise verschiedenen Elemente u1, . . . , un gibt mit ui ∈ Si, 1 ≤ i ≤ n (Einsolches Tupel (u1, . . . , un) heißt Transversale von S.) Die notwendige und hinreichendeBedingung dafur ist
#I ≥ #(∪i∈ISi) fur alle I ⊂ 1, . . . , n.
2
Die Konstruktion von maximalen Matchings ist die hauptsachlich interessierende Frage.Algorithmen dafur gibt es !

Baumeister: Mathematik IV / Stand: Juli 1998 471
16.5 Gewichtete Graphen
In einem Graphen G = G(E,K) konnen wir jedem Weg W , der u ∈ E mit v ∈ E
verbindet, eine Lange l(W ) zuordnen: ist W = [u, w1, . . . ws, v] ein solcher Weg, so setzenwir
l(W ) := s+ 1 .
Wenn wir allgemeiner jede Kante des Weges nicht mit eins, sondern mit einer reellen Zahlbewerten, werden wir zur folgenden Definition gefuhrt.
Definition 16.38
Sei G = G(E,K) ein Graph.
(a) Eine Abbildung ω : K −→ IR heißt eine Gewichtsfunktion auf dem Gra-phen. Das Paar (G,ω) heißt ein gewichteter Graph.
(b) Ist W = [u, w1, . . . , ws, v] ein Weg in G, der u mit v verbindet, so heißt
lω(W ) := ω(uw1) + . . .+ ω(wsv)
die (mit ω) gewichtete Lange von W.
2
Je nach Anwendung kann es sich bei den Gewichten bzw. Langen um Zeitdauern, Kosten,Gewinne, Verluste und vieles andere handeln.Es ist klar, daß der Fall einer nichtnegativen Gewichtsfunktion der weitaus interessantesteist, zumal negative Gewichte auch zu Problemen fuhren konnen. Wir vereinbaren daher,daß eine Gewichtsfunktion stets nichtnegativ ist.
Definition 16.39
Sei G = G(E,K) ein Graph und sei ω : K −→ [0,∞] eine Gewichtsfunktion aufG. Wir setzen fur u, v ∈ E die verbindbar sind
distω(u, v) := minlω(W )|W Weg, der u, v verbindet
unddistω(u, v) :=∞,
falls u, v nicht verbindbar sind. 2
Beispiel 16.40
Betrachte den Graphen aus Abbildung 16.26, der etwa eine Straßenkarte in einer Ortschaftwiedergibt:Was ist der kurzeste Weg von a nach e ? Wir konnen naturlich alle Wege von a nach bauflisten und den kurzesten heraussuchen. Gesucht ist aber ein systematisches Vorgehen,

Baumeister: Mathematik IV / Stand: Juli 1998 472
Abbildung 16.26: Ein gewichteter Graph
das die Vielzahl von Wegen, die große Lange besitzen, vermeidet. Um von a nach e zukommen, kann man den optimalen Weg entweder von e aus oder von a aus konstruieren.Von a aus hat man dist(a, e) aus den Großen
distω(b, e) + lω(ab), distω(h, e) + lω(ah), distω(g, e) + lω(ag)
herauszufinden. Damit ist der Schlussel der rekursiven Idee gefunden. Unten formulierenwir dies algorithmisch, hier im Beispiel geben wir die Losung so an, indem wir an jederEcke die
”Kosten“ notieren, die entstehen um dorthin von a aus zu kommen.
Abbildung 16.27: Ein gewichteter Graph
Wir lesen den optimalen Weg [ah, he] mit Kosten distω(a, e) = 3 ab. 2
Algorithmus von Dijkstra
EIN Gegeben sei ein mit ω : K −→ [0,∞] gewichteter Graph G = G(E,K) und eineEcke u0 ∈ E.
Schritt 0 Setze d(u0) := 0, d(u) :=∞ fur u ∈ E\u0. Setze U := E.
Schritt 1 Falls U = ∅, dann gehe zu AUS.
Schritt 2 Finde u∗ ∈ U mit d(u∗) = minu∈U
d(u).
Schritt 3 Fur alle u ∈ U mit u∗u ∈ K setze d(u) := mind(u), d(u) + lω(u∗u)
Schritt 4 Setze U := U\u∗ und gehe zu Schritt 1.

Baumeister: Mathematik IV / Stand: Juli 1998 473
AUS Fur jedes u ∈ E wird ein Wert d(u) errechnet, der die kurzeste Lange von u0 nachu angibt.
Der Schritt 2 ist noch nicht prazise formuliert, da keine Eindeutigkeit fur u∗ vorliegenmuß. Man kann aber grundsatzlich festlegen, daß man die
”kleinste“ Ecke bezuglich
einer Listenzuordnung nimmt.
Uberlegen wir uns noch den Rechenaufwand, der im Algorithmus von Dijkstra anfallt.Sicherlich kommt man mit #U − 1 Vergleichen aus. In Schritt 3 hat man maximal #UWertzuweisungen vorzunehmen. Die Schleife von Schritt 1 bis Schritt 4 ist insgesamt #Emal zu durchlaufen. Da immer #U ≤ #E gilt, ergeben sich maximal
(#E)2
Operationen. Dies bedeutet, daß die Laufzeit des Algorithmus polynomial in der Großedes Problems ist.

Kapitel 17
Elementare Statistik
Das Kapitel uber Statistik ist hauptsachlich der Verbindung der Theorie mit der Wirk-lichkeit gewidmet. Kurz ausgedruckt: Es handelt sich hier um das Problem, aus der Be-trachtung eines (relativ kleinen) Teils einer großen Menge auf deren Gesetzmaßigkeitenzu schließen.
17.1 Merkmale
Im Alltag, in Wissenschaft und Technik, in Verwaltungen fallen große Datenmengen anoder werden gezielt erhoben. Im Regelfall sind dies Daten uber ein Merkmal X, dasan den Elementen einer (umfangreichen) Beobachtungsmenge der Grundgesamtheit vonIndividuen oder Objekten in unterschiedlichen Auspragungen zu erkennen ist. Das Zielvon Datenanalyse ist dann, eine aufschlußreiche Beschreibung der Verteilung dieser Aus-pragung uber die Beobachtungsmenge zu gewinnen. Unter einer statistischen Aussageuber X verstehen wir dann eine Aussage uber diese Verteilungen. Wahrscheinlichkeitenkommen dann ins Spiel, wenn wir in X eine Zufallsgroße sehen (oder vermuten).
Beispiel 17.1
Der Fachbereich Mathematik der Universitat startet eine Umfrage unter ehemaligen Stu-denten, die in den letzten funf Jahren den Abschluß als Diplommathematiker erreichthaben. Es wird eine Fragebogen erarbeitet und verschickt mit folgenden Fragen:
(1) Wieviele Monate dauerte es vom Erwerb des Diploms bis zur ersten Anstellung ?
(2) Sind Sie selbstandig erwerbstatig oder war ihre erste Anstellung an einer Univer-sitatseinrichtung, in einer Großfirma (mehr als 200 Mitarbeiter), in einem mittel-großen Betrieb (30 bis 200 Mitarbeiter), in einer Kleinfirma (weniger als 30 Mitar-beiter) oder sind Sie noch ohne Anstellung ?
(3) Wie schatzen Sie Ihr Gehalt ein ? Hoher, etwa gleich oder niedriger als das Gehaltvon Diplominformatikern ?
Die erste Frage bezieht sich auf ein quantitatives Merkmal, als Antwort kommt eine Zahl,die zweite Frage bezieht sich auf ein qualitatives Merkmal, als Antwort ist ein Elementaus der Menge mit den Elementen
474
Baumeister: Mathematik I / Stand: April 1997 475
selbstandig, Universitatseinrichtung, Großbetrieb, Mittelbetrieb, Kleinfirma,ohne Anstellung
zu entnehmen. Die dritte Frage bezieht sich auf ein Rangmerkmal, der Befragte soll seinGehalt in eine vorgegebenen Liste einordnen. Die Beobachtungsmenge ist hier die Mengeder erfolgreichen Studienabganger im Studiengang
”Diplommathematiker “. 2
Beispiel 17.2
Eine Universitat legt Datenmaterial uber Prufungsergebnisse der letzten 10 Jahre vor.
Als politische”Botschaft“ wird verkundet:
• In allen Fachbereichen schnitten die Kandidatinnen besser ab als ihre mannlichenKonkurrenten.
• Frauen sind an der Universitat benachteiligt, aber erheblich leistungsfahiger !
Was ist dran an dieser Botschaft ? Die Prozentzahlen sind einigermaßen verwirrend:
• Von der Gesamtheit haben 18.3% Frauen bestanden, aber 44.4% der Manner.
• Von den 7000 weiblichen Kandidaten haben 62.1% bestanden, von den mannlichenaber 64.4%.
Die Analyse erfolgt spater ! 2
Definition 17.3
Sei Ω eine nichtleere Menge.
(a) Eine Abbildung X : Ω −→ IR heißt quantitatives Merkmal; den WertX(ω) fur ein Element ω ∈ Ω nennt man seine Auspragung.
(b) Die Beobachtung von Auspragungen x1, . . . , xn von n Elementen aus Ω nenntman eine Meßreihe (oder Stichprobe); die Zahl n heißt der Stichproben-umfang.
2
Beachte: Die Werte in einer Stichprobe mussen nicht notwendigerweise verschieden sein.
Beispiel 17.4
Zur Erhebung aus Beispiel 17.1. Ein Teil (98) der Befragten (107) antwortete. Die Aus-wertung der Antworten auf die 3. Frage ergab:

Baumeister: Mathematik I / Stand: April 1997 476
Wartezeit x (Monate) Absolute Haufigkeit Relative Haufigkeit0 10 0.101 8 0.082 15 0.153 48 0.484 1 0.015 2 0.026 3 0.03> 6 11 0.11
2
Definition 17.5
Sei S = x1, . . . , xn eine Stichprobe zum Merkmal X.
(a) Wir setzen
hS(x) :=1
n#X = xχ
S(x) , x ∈ IR,
und nennen die so definierte Funktion hS : IR −→ IR die Haufigkeitsfunk-tion oder empirische Dichte des Merkmals X bei der Stichprobe S.
(b) Wir setzen
HS(x) :=1
n#X ≤ xχ
S(x) x ∈ IR,
und nennen die so definierte Funktion HS : IR −→ IR die empirischeVerteilungsfunktion.
2
(Der Vergleich mit Verteilung und Verteilungsfunktion wird deutlich, wenn wir als Wahr-scheinlichkeitsmaß das Zahlmaß verwenden.)Die Funktionen hS, HS erfullen offenbar die folgenden Bedingungen:
• 0 ≤ hS(x) ≤ 1 , 0 ≤ HS(x) ≤ 1 , x ∈ IR .
• HS ist monoton wachsend.
• limx→∞
HS(x) = 1, limx→∞
HS(x) = 0.
Beispiel 17.6
Aus der Tabelle in 17.4 lesen wir ab:
(A) Zehn Prozent der befragten Mathematikabsolventen fanden ihre Arbeit bereits vorEnde ihres Studiums (hS(0) = 0.10).
(B) Vier von funf Befragten fanden ihre Arbeit bereits drei Monate nach Beendigungdes Studiums (HS(3) = 0.81).

Baumeister: Mathematik I / Stand: April 1997 477
(C) Mehr als zehn Prozent der Befragten hatten nach einem halben Jahr noch keinenJob.
2
17.2 Statistische Parameter
Stichproben kann man durch die Angabe von sogenannten”Kenngroßen“ kennzeichnen.
Hier besprechen wir die beiden Kenngoßen, die spater als Approximation fur den Erwar-tungswert und die Varianz angesehen werden konnen.
Definition 17.7
Sei 1, . . . , xn eine Stichprobe des Merkmals X. Dann heißt das arithmetische Mit-tel
x :=1
n(x1 + · · ·+ xn)
das Stichprobenmittel von S. 2
Das Stichprobenmittel besitzt eine Optimalitatseigenschaft.
Satz 17.8
Sei S = x1, . . . , xn eine Stichprobe zum Merkmal X. Dann gilt mit dem Stichpro-benmittel x :
n∑i=1
(xi − x)2 = infx∈IR
n∑i=1
(xi − x)2
Beweis:Betrachte f(x) :=
n∑i=1
(xi − x)2, x ∈ IR . Es gilt fur x ∈ IR :
f ′(x) = −2n∑i=1
(xi − x), f ′′(x) = 2n∑i=1
1 = 2n > 0.
Also ist x ein Minimum von f genau dann, wenn f ′(x) = 0 gilt; siehe Satz 8.18. DieGleichung f ′(x) = 0 fuhrt zu
n∑i=1
xi = nx, d.h x =1
n
n∑i=1
xi = x
Bemerkung 17.9
Baumeister: Mathematik I / Stand: April 1997 478
Eine weitere Kenngroße einer Stichprobe S = x1, . . . , xn ist der Stichprobenmedianx :
x :=
xn+1
2, falls n ungerade
12(xn
2+ xn+1
2) , falls n gerade
Dieser Stichprobenmedian hat auch eine Optimalitatseigenschaft, namlich
n∑i=1
|xi − x| = infx∈IR
n∑i=1
|xi − x|
Die Schwierigkeit beim Nachweis dieser Eigenschaft liegt darin, daß die Funktion
g : IR 3 x 7−→n∑i=1
|xi − x| ∈ IR
nicht uberall differenzierbar ist. Aus der Darstellung
g(x) =l∑i=1
(x− xi) +n∑
i=l+1
(xi − x) = (2l − n)x+n∑
I=l+1
xi −l∑i=1
xi,
wobei o.E. x1 ≤ x2 ≤ . . . ≤ xn (Umnumerierung) gelte und l so gewahlt sei, daß xl ≤x ≤ xl+1 gilt, kann man durch Fallunterscheidung (n gerade/n ungerade) das Ergebnisermitteln.Weitere Kenngroßen, auf die wir nicht eingehen, sind geometrische und harmonische Mittelund Spannweiten. 2
Definition 17.10
Sei S = x1, . . . , xn eine Stichprobe zum Merkmal X. Als Maß fur die Abweichungvon Stichprobenmittel x dient die Stichprobenvarianz
s2x :=
1
n− 1
n∑i=1
(xi − x)2 .
Die Zahl
sx :=
√√√√ 1
n− 1
n∑i=1
(xi − x)2
heißt Stichprobenstreuung oder Standardabweichung. 2
Zur praktischen Berechnung von s2x ist oft die Gultigkeit der Identitat
s2x =
1
n − 1(n∑i=1
x2i − nx)
nutzlich (Nachweis!).Aus der Definition von sx leitet man leicht die Aussage
xi ∈ [x−√n− 1sx, x+
√n − 1sx] , 1 ≤ i ≤ n,
Baumeister: Mathematik I / Stand: April 1997 479
ab. Sie zeigt deutlich, wie die Stichprobenstreuung die Ausdehnung der durch x1, . . . , xngegebenen Punktmenge auf der Zahlengeraden beschreibt.Die Standardabweichung gibt Auskunft, wie sehr die Stichprobenwerte um ihr Zentrumstreuen. Sie hat gegenuber der Stichprobenvarianz den Vorteil, daß sie dieselbe Dimensionwie das beobachtete Merkmal X hat.
Bemerkung 17.11
In der Definition der Stichprobenvarianz wurde man anstatt des Faktors 1n−1
den Faktor1n
erwarten. Man beachte aber, daß s2x bei festem Stichprobenmittel x eine Funktion von
n− 1 Variablen ist, da z.B. xn aus der Gleichung
n−1∑i=1
xi + xn = x
ermittelt und in s2x eingesetzt werden kann. 2
17.3 Paare von Messungen
Liegt eine Stichprobe S = (x1, y1), . . . , (xn, yn) eines”zweidimensionalen“ Merkmals
X, Y vor, so sind die Stichprobenparameter Stichprobenmittel, Stichprobenvarianz, Stan-dardabweichung entsprechend definiert:
(x, y) := (1
n
n∑i=1
xi,1
n
n∑i=1
yi),
s2x :=
1
n− 1
n∑i=1
(xi − x)2, sx :=
√√√√ 1
n− 1
n∑i=1
(xi − x)2,
s2y :=
1
n− 1
n∑i=1
(yi − y)2, sy :=
√√√√ 1
n − 1
n∑i=1
(yi − y)2
Dazu kommt nun noch die Stichprobenkovarianz
s2x,y :=
1
n− 1
n∑i=1
(xi − x)(yi − y).
Als Veranschaulichung einer solchen”zweidimensionalen“ Stichprobe ist der Eintrag von
(xi, yi) als Punkt in der Ebene IR2 vernunftig. Stellt sich nun heraus, daß diese Punkte na-hezu auf einer Geraden liegen, so konnen wir versuchen, eine
”Ausgleichsgerade“, auch
”Regressionsgerade“ von Y bzgl. X genannt, die sich der Lage der Punkte moglichst
gut anpaßt, einzuzeichnen. Aus dieser Geraden konnen wir dann ablesen, welcher”Y−
Wert“zu einem vorgebenen”X-Wert“ zu erwarten ist. Wir haben ein Maß fur die Gute
der Geraden bzgl. der Stichproben anzugeben. Ein solches Maß wird durch das Prinzipder kleinsten Quadrate, das auf C.F. Gauß zuruckgeht, definiert. Die Gerade ist so zulegen, daß die Summe der Quadrate aller Abstande der Punkte von der Geraden moglichstklein wird. Dies bedeutet, daß die Aufgabe

Baumeister: Mathematik I / Stand: April 1997 480
Finde a, b ∈ IR so , daß
n∑i=1
(y1 − bxi − a)2 ≤n∑i=1
(yi − bxi − a)2
fur alle a, b ∈ IR gilt.
zu losen ist; dabei ist die Geradendarstellung
x 7−→ y := bx+ a
mit Steigung b und Achsenabschnitt a eingearbeitet. Zur Losung ist also das Minimumder Funktion
q(a, b) :=n∑i=1
(yi − bxi − a)2 , a, b ∈ IR
zu finden. Zu festem a bzw. b muß sicher
q(·, b) bzw. q(a, ·)
ein Minimum besitzen. Dafur kennen wir die notwendige Bedingung, daß die Ableitungverschwinden muß. Dies bedeutet:
n∑I=1
(yi − bxi − a) = 0 ,n∑i=1
(yi − bxi − a)xi = 0.
Daraus liest man ab:
a =1
n
n∑i=1
yi −b
n
n∑i=1
xi = y − bx
n∑i=1
(yi − bxi − y + bx)xi = 0,
n∑i=1
(yi − y)xi − bn∑i=1
(xi − x)xi = 0
Damit sind Kandidaten fur die gesuchten Geradenparameter a, b gefunden:
b =s2x,y
s2x
, a = y − bx. (17.1)
Allerdings ist nun noch nicht klar, ob dieses Paar (a, b) wirklich eine Minimum von qliefert.Aus (17.1) lesen wir ab, daß die Regressionsgerade die schone Eigenschaft besitzt, daß derStochprobenmittelwert (x, y) auf dieser Geraden liegt.
Baumeister: Mathematik I / Stand: April 1997 481
17.4 Die Normalverteilung
Definition 17.12
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum. Eine Zufallsgroße X : Ω −→ IR heißtkontinuierliche Zufallsgroße, wenn es eine Funktion f : IR 7−→ IR gibt mit
FX(x) := P (X ≤ a) =
a∫∞
f(t)dt
fur alle a ∈ IR . (Dabei ista∫−∞
f(t)dt) so zu verstehen:a∫−∞
f(t)dt = limu→−∞
a∫uf(t)dt .)
Die Funktion f heißt dann Dichtefunktion und FX wieder Verteilungsfunktion.2
Die Rechenregeln zur Verteilungsfunktion behalten ihre Gultigkeit, eine Besonderheit ist
P (a ≤ x ≤ b = P (a < X ≤ b), a ≤ b,
dank der Tatsache, daß ein Integral∫ aa f(t)dt stets verschwindet.
Definition 17.13
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X : Ω −→ IR eine kontinuier-liche Zufallsgroße mit Dichte f .Wir sagen, daß der Erwartungswert von X existiert, wenn das (uneigentliche) In-tegral
∞∫∞
|f(t)|dt := lima→−∞
limb→∞
b∫a
|f(t)|dt
existiert.
IE (X) :=
∞∫−∞
|f(t)|dt
heißt dann Erwartungswert von X . 2
Definition 17.14
Sei (Ω,Σ, P ) ein Wahrscheinlichkeitsraum und sei X : Ω −→ IR eine kontinuier-liche Zufallsgroße mit Dichte f .Wir sagen, daß die Varianz von X existiert, wenn das (uneigentliche) Integral
∞∫∞
(x− IE (X))2f(x)dx := lima→−∞
limb→∞
b∫a
(x− IE (X))2f(x)dx
existiert.
VI ar(X) :=
∞∫−∞
(x− IE (X))2f(x)dx
heißt dann Varianz von X . 2
Baumeister: Mathematik I / Stand: April 1997 482
Wir fuhren drei Beispiele fur kontinuierliche Zufallsgroßen an.
Gleichverteilung
Bildbereich: WX = IR
Parameter der Verteilung: α, β ∈ IR
Verteilung: P (X ≤ a) =a∫−∞
χ[α,β](x) 1β − αdx
Erwartungswert: IE (x) = α+ β2
Varianz: VI ar(X) =(β − α)2
12
Beispiel 17.15
Beim Drehen eines Glucksrades mit zufalligem Ausgang, das nicht in Sektoren eingeteiltist, kommt eine kontinuierliche gleichverteilte Zufallsgroße ins Spiel: Wir beobachten denWinkel (oder das Bogenmaß) α ∈ [0, 2π) . Als Wahrscheinlichkeitsraum bietet sich an:
Ω := [0, 2π);Σ := kleinste σ–Algebra, die alle offenen Teilintervalle von [0, 2π) enthalt;P := Wahrscheinlichkeitsmaß, das auf offenen Intervalle mit der Intervallange, dividiert du
Die oben gewahlte Zufallsgroße ist dann die Idebntitat auf ω . Hier sehen wir, daß dieTatsache
pα := P (X = α) = 0 , α ∈ [0, 2π) ,
seine Berechtigung hat. Ware etwa pα∗ > 0 fur ein α∗, so mußte palpha = pα∗ fur alleα ∈ [0, 2π) sein und die Bedingung P (Ω) = 1 ware nicht erfullt. 2
Normalverteilung
Bildbereich: WX = IR
Parameter der Verteilung: µ, σ
Verteilung: P (X ≤ a) =a∫−∞
fµ,σ2(t)dt
Erwartungswert: IE (X) = µ
Varianz: VI ar(X) = σ2
Exponentialverteilung

Baumeister: Mathematik I / Stand: April 1997 483
Bildbereich: WX = (0,∞)
Parameter der Verteilung: λ > 0
Verteilung: P (X ≤ a) =a∫−∞
λe−λtχ(0,∞)(t)dt
Erwartungswert: IE (X) = 1λ
Varianz: VI ar(X) = 1λ2
Wir haben die Binominalverteilung kennengelernt. Ihre Verteilung enthalt die Parameterp und n. Wir haben auch schon gesehen (Satz 7.30), daß man bei einem Grenzubergangn → ∞, p → 0, pn = λ , die Poissonverteilung erhalt. Macht man nun den Grenzuber-gang n → ∞ bei festem p, so erhalt man als Naherung fur die Binominalverteilung dieNormalverteilung in folgendem Sinne:
P (X = k) ≈1√
2πnp(1− p)exp(−
(k − np2)
2np(1− p))
Diese Naherung ist schlecht, wenn p nahe 0 oder 1 liegt oder wenn n klein ist. In derPraxis betrachtet man die Naherung als brauchbar, wenn etwa np(1− p) ≥ 10 gilt.
17.5 Schatzen von Parametern
Das Ziel von Schatzverfahren ist es, aus Beobachtungen/Stichproben Schlusse zu ziehen.Man wird dabei nicht darauf bestehen durfen, daß die Schlusse stets richtig sind. Man wirddann mit dem Schlußverfahren zufrieden sein, wenn der Schaden, den der Schluß, basierendauf zufalligen Beobachtungen, mit sich bringt, klein ist. Wahrscheinlichkeit kommt uberdie Auswahl der Stichprobe ins Spiel.
Beispiel 17.16
Ein Teich enthalt eine unbestimmte Zahl N von Fischen, die geschatzt werden soll. Dazuwerden M Fische gefangen, mit einem weißen Fleck markiert und wieder ausgesetzt. Manwartet eine Weile, dann werden in einem zweiten Fischzug n Fische gefangen, und dieZahl x der markierten Fische in diesem zweiten Fang ermittelt.Eine plausible Schatzung N von N ergibt sich aus folgender Uberlegung: Wenn x nicht zuklein ist, mußte der Anteil xn der markierten Fische am zweiten Fang ungefahr gleich dem
Anteil MN
der markierten Fische am Gesamtbestand sein. Wenn N eine gute Schatzungvon N ist, mußte also
x
n≈M
N, d.h. N ≈
Mn
x
gelten. Es liegt daher nahe, als Schatzwert N(x) die zu MnN
benachbarte ganze Zahl zuwahlen.Die Wahrscheinlichkeit, x markierte Fische im zweiten Fang zu haben, ist
PN (x) =
(Mx
)(N−Mn−x
)(Nn
) (0 ≤ x ≤ n)
Baumeister: Mathematik I / Stand: April 1997 484
Der obige Schatzwert N maximiert (Nachweis !) diese Wahrscheinlichkeit, d.h. PN (x) =maxN∈IN
PN (x). 2
17.6 Testen
Literaturverzeichnis
[1] AGYRIS, J., FAUST, G., HAASE, M.: Die Erforschung des Chaos, Vieweg–Verlag,Braunschweig, 1993
[2] AIGNER, M.: Graphentheorie, Teubner Studienbucher, Stuttgart, 1983
[3] ANTON, H.: Lineare Algebra, Spektrum–Verlag, Heidelberg, 1994
[4] BARTHOLOME, A., RUNG, J., KERN, H.: Zahlentheorie fur Einsteiger, Vieweg–Verlag, Braunschweig, 1994
[5] BAUMEISTER, J.: Lineare Algebra I,II, Vorlesungsskript, Universitat Frank-furt/Main, 1995/96
[6] BEHR, H.: Lineare Algebra und analytische Geometrie, Vorlesungsskript, UniversitatFrankfurt/Main, 1977/78
[7] BLANKENAGEL, J.: Elemente der Angewandten Mathematik, BI Wissenschafts-verlag, Mannheim, 1991
[8] BOSCH, K.: Elementare Einfuhrung in die Wahrscheinlichkeitsrechnung, Vieweg–Verlag, Braunschweig, 1995
[9] DIEUDONNE, J.: Geschichte der Mathematik 1700 – 1900, Vieweg, Braunschweig,1985
[10] DINGES, H., ROST, H.: Prinzipien der Stochastik, Teubner Studienbucher, Stutt-gart, 1982
[11] EBBINGHAUS, H.D., u.a.: Zahlen, Springer, New York, 1988
[12] ENGEL, A.: Mathematik I, Vorlesungsskript, Universitat Frankfurt/Main, 1993/94
[13] ENGEL, A.: Mathematik II, Vorlesungsskript, Universitat Frankfurt/Main, 1994
[14] ENGEL, A.: Mathematik III, Vorlesungsskript, Universitat Frankfurt/Main, 1981/82
[15] EKELAND, I.: Zufall, Gluck und Chaos, C. Hanser Verlag, Munchen, 1992
[16] EVES, H., NEWSOM, C.,V.: An introduction to the Foundations and fundamentalconcepts of mathematics, Holt, Rinehart and Winston, New York, 1965
i
[17] FILLER, A.: Euklidische und nichteuklidische Geometrie, BI Wissenschaftsverlag,Mannheim, 1993
[18] FORSTER, O.: Analysis 1 und 2, Vieweg, Braunschweig, 1976 (Teil 1) und 1979 (Teil2)
[19] FUHRER, L.: Mathematik I: Einfuhrung in die Stochastik, Vorlesungsskript, Uni-versitat Frankfurt/Main, 1993/94
[20] GARDNER, M.: Mathematischer Karneval, Ullstein, 1975
[21] GERICKE, H.: Mathematik in Antike und Orient, Fourier, Wiesbaden, 1992
[22] GREINER, M., TINHOFER, G.: Stochastik fur Studienanfanger der Informatik, C.Hanser Verlag, Munchen, 1996
[23] GRIFFITHS, H.B., HILTON, P.J.: Klassische Mathematik in zeitgemaßer Darstel-lung, Band 1,2,3, Vandenhoeck & Rupprecht, Gottingen, 1976
[24] GUNTHER, B.: Mathematik III: Einfuhrung in die Geometrie, Vorlesungsskript,Universitat Frankfurt/Main, 1995/96
[25] HILBERT, D.: Grundlagen der Geometrie, Teubner Studienbucher, Stuttgart, 1987
[26] IHRINGER, T.: Diskrete Mathematik, Teubner Verlag, Stuttgart, 1994
[27] INDLEKOFER, K.–H.: Zahlentheorie, Birkhauser Verlag, Stuttgart, 1978
[28] KOECHER, M.: Lineare Algebra und analytische Geometrie, Springer, New York,1985
[29] KOECHER, M.: Klassische elementare Analysis, Birkhauser, Basel, 1987
[30] KRAMER, W.: Denkste! Trugschlusse aus der Welt des Zufalls und der Zahlen,Campus, Frankfurt, 1995
[31] KNORRER, H.: Geometrie, Vieweg, Braunschweig, 1996
[32] KRENGEL, U.: Einfuhrung in die Wahrscheinlichkeitstheorie und Statistik, Vieweg,Braunschweig, 1988
[33] KROPP, G.: Geschichte der Mathematik, Sammlung Aula, Wiesbaden, 1985
[34] LENZ, H.: Vorlesungen uber projektive Geometrie, Akademische Verlagsgesellschaft,Leipzig, 1965
[35] LENZ, H.: Grundlagen der Elementarmathematik, C. Hanser Verlag, Munchen–Wien, 1976
[36] MAIBAUM, G.: Wahrscheinlichkeitsrechnung, Verlag Harri Deutsch, Frankfurt/M.,1972
[37] MALLE, H.: Mathematik erleben, Harry Deutsch, Frankfurt/M., 1993
ii
Baumeister: Mathematik I / Stand: April 1997 iii
[38] MESCHKOWSKI, H.: Einfuhrung in die moderne Mathematik, BI Wissenschafts-verlag, Mannheim, 1963
[39] PADBERG, F.: Elementare Zahlentheorie, Verlag Herder, Mainz, 1972
[40] PAULOS, J.A.: Von Algebra bis Zufall, Campus, Frankfurt, 1995
[41] REMMERT, R., ULLRICH, P.: Elementare Zahlentheorie, Birkhauser Verlag, Stutt-gart, 1987
[42] RUELLE, D.: Zufall und Chaos, Springer, Berlin, 1994
[43] SCHEID, H.: Elemente der Geometrie, BI Wissenschaftsverlag, Mannheim, 1991
[44] SCHMID, W., BORSDORF, W.: Spharische Trigonometrie, Band I und II, Bergaka-demie Freiberg, 1959
[45] SCHEID, H.: Elemente der Arithmetik und Algebra, BI Wissenschaftsverlag, Mann-heim, 1991
[46] SOMINSKIJ, I.S.: Die vollstandige Induktion, Deutscher Verlag der Wissenschaft
[47] STILLWELL, J.: Elements of Algebra, Springer, Berlin, 1994
[48] STORCH, U., WIEBE, H.: Lehrbuch der Mathematik, Band I, BI Wissenschaftsver-lag, Mannheim, 1989
[49] STROTH, G.: Lineare Algebra, Heldermann, Lemgo, 1995
[50] STRUIK, D.J.: Abriß der Geschichte der Mathematik, VEB Deutscher Verlag derWissenschaften, Berlin, 1980
[51] TIETZE, H.: Geloste und ungeloste Mathematische Probleme aus alter und neuerZeit, Verlag C.H. Beck, Munchen, 1959
[52] TOTH, G.: Glimpses of Algebra and Geometry, Springer–Verlag, Berlin, 1998
[53] TURAU, V.: Algorithmische Graphentheorie, Addison–Wesley, 1996













![2017-09-26-Begründung für frühzeitige Auslegungürgerbeteiligung.sachsen.de/portal/information/1004826_1... · 9rukdehqeh]rjhqhu %hedxxqjvsodq (ovwhukhlgh Ä:rkqkdxv dxi](https://static.fdokument.com/doc/165x107/5ba0cd8009d3f2df578d91f8/2017-09-26-begrandung-far-frahzeitige-auslegung-ue-9rukdehqehrjhqhu.jpg)




