MathematischeMethodenderPhysikI … · Kapitel1 Gewöhnliche Differentialgleichungen...
373
Mathematische Methoden der Physik I Sommersemester 2015 Gebhard Grübl Institut für Theoretische Physik Universität Innsbruck
Transcript of MathematischeMethodenderPhysikI … · Kapitel1 Gewöhnliche Differentialgleichungen...

Mathematische Methoden der Physik ISommersemester 2015
Gebhard Grübl
Institut für Theoretische PhysikUniversität Innsbruck
Inhaltsverzeichnis
Vorwort vi
1 Gewöhnliche Differentialgleichungen 11.1 Gleichungen erster Ordnung . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Definition und einfachste Beispiele . . . . . . . . . . . . . . . 11.1.2 AWP: Existenz und Eindeutigkeit . . . . . . . . . . . . . . . . 61.1.3 Differentialgleichungen mit getrennten Variablen . . . . . . . . 81.1.4 *Magnetfeldlinien eines Dipols 1 . . . . . . . . . . . . . . . . . 141.1.5 *Die Kettenlinie . . . . . . . . . . . . . . . . . . . . . . . . . . 171.1.6 *Der freie Fall aus großer Höhe . . . . . . . . . . . . . . . . . 201.1.7 Lineare Differentialgleichungen . . . . . . . . . . . . . . . . . . 251.1.8 Atmosphärische 14C-Konzentration . . . . . . . . . . . . . . . 27
1.2 Systeme erster Ordnung . . . . . . . . . . . . . . . . . . . . . . . . . 291.2.1 Definition und motivierende Beispiele . . . . . . . . . . . . . . 291.2.2 Feldlinien einer Punktladung . . . . . . . . . . . . . . . . . . . 341.2.3 AWP: Existenz- und Eindeutigkeit der Lösung . . . . . . . . . 34
1.3 Lineare Systeme erster Ordnung . . . . . . . . . . . . . . . . . . . . . 351.3.1 2d Drehungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 361.3.2 Homogen lineare Systeme . . . . . . . . . . . . . . . . . . . . 381.3.3 Autonome homogen lineare Systeme . . . . . . . . . . . . . . 391.3.4 3d Drehvektorfelder und ihre Flussabbildungen . . . . . . . . 401.3.5 *Drehbewegungen starrer Körper: Trägheitstensor . . . . . . . 421.3.6 *Allgemeine Bewegungen starrer Körper . . . . . . . . . . . . 441.3.7 *Lageabhängigkeit des Trägheitstensors . . . . . . . . . . . . . 461.3.8 *Trägheitstensor eines Ellipsoides . . . . . . . . . . . . . . . . 491.3.9 *Kraftbedarf von Drehbewegungen . . . . . . . . . . . . . . . 521.3.10 *Coriolis- und Zentrifugalkraft . . . . . . . . . . . . . . . . . . 531.3.11 Inhomogen lineare Systeme . . . . . . . . . . . . . . . . . . . 551.3.12 *E ×B - Drift einer Punktladung . . . . . . . . . . . . . . . . 571.3.13 Getriebene lineare Schwingungen: ungedämpft . . . . . . . . . 601.3.14 *Der mechanische Fourieranalysator 1 . . . . . . . . . . . . . . 621.3.15 Die retardierte Lösung von x+ ω2x = b . . . . . . . . . . . . . 64
1.4 Lineare Differentialgleichungen 2-ter Ordnung . . . . . . . . . . . . . 671.4.1 Äquivalenz zu System erster Ordnung . . . . . . . . . . . . . . 671.4.2 Eine Eulersche Differentialgleichung . . . . . . . . . . . . . . . 70
i
INHALTSVERZEICHNIS ii
1.4.3 Getriebene lineare Schwingungen: gedämpft . . . . . . . . . . 701.4.4 Eine retardierte gedämpfte Schwingung . . . . . . . . . . . . . 721.4.5 Symmetrien einer Differentialgleichung . . . . . . . . . . . . . 731.4.6 *Dehnungssymmetrie und 3. Keplersches Gesetz . . . . . . . . 771.4.7 *Potential einer homogen geladenen Kugel . . . . . . . . . . . 781.4.8 *Thomson- und Rayleighstreuung von Licht . . . . . . . . . . 801.4.9 *Klassischer Zeemaneffekt . . . . . . . . . . . . . . . . . . . . 831.4.10 Legendresche Differentialgleichung 1 . . . . . . . . . . . . . . . 861.4.11 d’Alemberts Reduktionsverfahren . . . . . . . . . . . . . . . . 921.4.12 Methode des Potenzreihenansatzes . . . . . . . . . . . . . . . 941.4.13 Legendresche Differentialgleichung 2 . . . . . . . . . . . . . . . 951.4.14 *Hermitesche Differentialgleichung . . . . . . . . . . . . . . . 991.4.15 *Airys Differentialgleichung . . . . . . . . . . . . . . . . . . . 1041.4.16 Ein lineares Rand- und Eigenwertproblem . . . . . . . . . . . 1081.4.17 *Green’sche Funktion eines Randwertproblems . . . . . . . . . 109
1.5 *Harmonisch angeregte lineare Schwingung . . . . . . . . . . . . . . . 1121.5.1 Übersicht über L0 . . . . . . . . . . . . . . . . . . . . . . . . . 1131.5.2 Partikuläre Lösungen ypart für harmonische Kraft . . . . . . . 1161.5.3 Qualitatives Resümee . . . . . . . . . . . . . . . . . . . . . . . 122
1.6 Übungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122
2 Fourieranalysis 1362.1 Fourierreihen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 137
2.1.1 Trigonometrische Polynome . . . . . . . . . . . . . . . . . . . 1372.1.2 Dirichlets Kern . . . . . . . . . . . . . . . . . . . . . . . . . . 1412.1.3 Grenzfunktionen trigonometrischer Reihen . . . . . . . . . . . 1422.1.4 Approximation durch Fourierreihen . . . . . . . . . . . . . . . 1452.1.5 Fourierreihe der Rechteckschwingung . . . . . . . . . . . . . . 1472.1.6 Fouriereihen allgemeiner Periode . . . . . . . . . . . . . . . . 1492.1.7 Periodisch getriebener Oszillator: Fourierreihenlösung . . . . . 1512.1.8 *Der mechanische Fourieranalysator 2 . . . . . . . . . . . . . . 1532.1.9 Allgemeine Eigenschaften der Fourierkoeffizienten . . . . . . . 1552.1.10 Konvergenz der Fourierreihe . . . . . . . . . . . . . . . . . . . 1572.1.11 Fourierreihen einiger Standardfunktionen . . . . . . . . . . . . 160
2.2 Fouriertransformation auf L1 (R) . . . . . . . . . . . . . . . . . . . . 1612.2.1 Von der Fourierreihe zum Fourierintegral . . . . . . . . . . . . 1612.2.2 Der Hauptsatz der Fouriertransformation . . . . . . . . . . . . 1622.2.3 Beispiele zur Fouriertransformation . . . . . . . . . . . . . . . 1672.2.4 *Frequenzmessung an einem harmonischen Signal . . . . . . . 1752.2.5 *Störung einer Quantendynamik . . . . . . . . . . . . . . . . . 1772.2.6 *Beugung am Spalt und Fouriertransformation . . . . . . . . . 1782.2.7 *Faltung und Messung . . . . . . . . . . . . . . . . . . . . . . 1792.2.8 *Faltung und Bildfehlerkorrektur . . . . . . . . . . . . . . . . 1812.2.9 *Streuung von Wellen und Fouriertransformation . . . . . . . 1832.2.10 *Einige 3d-Fouriertransformierte . . . . . . . . . . . . . . . . . 184
INHALTSVERZEICHNIS iii
2.3 Übungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 187
3 Vektoranalysis 1913.1 Differenzieren von Skalarfeldern . . . . . . . . . . . . . . . . . . . . . 192
3.1.1 Richtungsableitung und Differential . . . . . . . . . . . . . . . 1923.1.2 Beispiele zum Differential . . . . . . . . . . . . . . . . . . . . 1973.1.3 Skalarpotential eines Punktdipols . . . . . . . . . . . . . . . . 1993.1.4 *Lineare Richtungsableitungen ohne D’barkeit . . . . . . . . . 2003.1.5 Partielle Ableitungen . . . . . . . . . . . . . . . . . . . . . . . 2013.1.6 Beispiele zur partiellen Ableitung . . . . . . . . . . . . . . . . 2013.1.7 Gradient . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2023.1.8 *Kräftefreie relativistische Bewegung . . . . . . . . . . . . . . 2043.1.9 *Konstante relativistische Kraft . . . . . . . . . . . . . . . . . 2073.1.10 *Relativistischer harmonischer Oszillator . . . . . . . . . . . . 2083.1.11 Basisdarstellung eines Gradienten . . . . . . . . . . . . . . . . 2163.1.12 Faulenzerregeln zum Gradienten . . . . . . . . . . . . . . . . . 2173.1.13 Gradientenfeld des Punktdipolpotentials . . . . . . . . . . . . 2183.1.14 Gradientenfeld des Polarwinkels . . . . . . . . . . . . . . . . . 2183.1.15 *Gradient zur Minkowskigeometrie . . . . . . . . . . . . . . . 2193.1.16 *Symplektischer Gradient - Hamiltons Vektorfeld . . . . . . . 221
3.2 Differenzieren von Vektorfeldern . . . . . . . . . . . . . . . . . . . . . 2233.2.1 Differential und Richtungsableitung . . . . . . . . . . . . . . . 2233.2.2 *Lieprodukt von Vektorfeldern . . . . . . . . . . . . . . . . . . 2243.2.3 Transport von Skalar- und Tangentenvektorfeldern . . . . . . . 2273.2.4 *Lieableitung von Skalar- und Tangentenvektorfeldern . . . . . 2283.2.5 *Beschleunigung einer Integralkurve von γ = X (t, γ) . . . . . 2293.2.6 Wegintegrale eines Vektorfeldes . . . . . . . . . . . . . . . . . 2303.2.7 Wegintegrale des Vortexfeldes . . . . . . . . . . . . . . . . . . 2313.2.8 *Flächeninhalt und Drehvektorfeld . . . . . . . . . . . . . . . 2313.2.9 Konservative Vektorfelder und Potentiale . . . . . . . . . . . . 2323.2.10 *Landvermessung: Wegabhängige Höhendifferenz? . . . . . . . 2343.2.11 Poincarés Existenzsatz für skalare Potentiale . . . . . . . . . . 2353.2.12 Divergenz eines Vektorfeldes . . . . . . . . . . . . . . . . . . . 2363.2.13 Faulenzerregeln zur Divergenz und Beispiele . . . . . . . . . . 2413.2.14 Laplace-Operator . . . . . . . . . . . . . . . . . . . . . . . . . 2423.2.15 Skalarpotential einer Punktladung . . . . . . . . . . . . . . . . 2433.2.16 *Skalarpotential eines geladenen Stabes . . . . . . . . . . . . . 2443.2.17 *Skalarpotential einer geladenen Halbebene . . . . . . . . . . 2463.2.18 *Polarwinkel als Potential einer Dipolschicht . . . . . . . . . . 2473.2.19 Helmholtzgleichung: alle radialen Lösungen . . . . . . . . . . . 2483.2.20 Orientierung eines Vektorraums . . . . . . . . . . . . . . . . . 2483.2.21 Rotation eines 3d-Vektorfeldes . . . . . . . . . . . . . . . . . . 2523.2.22 Faulenzerregeln zur Rotation . . . . . . . . . . . . . . . . . . . 2543.2.23 Existenz von (Vektor)Potentialen . . . . . . . . . . . . . . . . 2563.2.24 *Lorentzkraft: Lagrange- und Hamiltonfunktion . . . . . . . . 257
INHALTSVERZEICHNIS iv
3.2.25 *Vektorpotential des freien Vortexfeldes . . . . . . . . . . . . 2603.2.26 *Vektorpotential des Punktdipols . . . . . . . . . . . . . . . . 2613.2.27 *Das elektromagnetische Nahfeld eines Pulsars . . . . . . . . . 2613.2.28 *Vektorpotential eines Punktmonopols . . . . . . . . . . . . . 2633.2.29 *Vom Mono- zum Dipolvektorpotential . . . . . . . . . . . . . 264
3.3 Krummlinige Koordinatensysteme . . . . . . . . . . . . . . . . . . . . 2653.3.1 Lokale Karten von Rn . . . . . . . . . . . . . . . . . . . . . . 2653.3.2 Navigation auf der Sphäre . . . . . . . . . . . . . . . . . . . . 2673.3.3 Kartenbasis . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2703.3.4 Vektorfeldkomponenten zu Kartenbasen . . . . . . . . . . . . 2713.3.5 Polarkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . 2733.3.6 Kugelkoordinaten . . . . . . . . . . . . . . . . . . . . . . . . . 2753.3.7 Kartenabhängigkeit von partiellen Ableitungen . . . . . . . . . 2763.3.8 Geschwindigkeit zerlegt nach Kartenbasis . . . . . . . . . . . . 2773.3.9 *Beschleunigung zerlegt nach Kartenbasis . . . . . . . . . . . 2793.3.10 *Berechnung der Christoffelsymbole einer Karte . . . . . . . . 2813.3.11 *Beschleunigung sphärisch zerlegt . . . . . . . . . . . . . . . . 2823.3.12 *Bewegung im Zentralkraftfeld . . . . . . . . . . . . . . . . . 2833.3.13 *Keplerproblem . . . . . . . . . . . . . . . . . . . . . . . . . . 2863.3.14 *Richtungsableitung eines Vektorfeldes . . . . . . . . . . . . . 2883.3.15 Div, Rot, Grad und ∆ in krummen Karten . . . . . . . . . . . 2903.3.16 *Magnetfeldlinien eines Dipols 2 . . . . . . . . . . . . . . . . . 292
3.4 *Kartenfreie Mechanik in Galileis Raumzeit . . . . . . . . . . . . . . 2943.4.1 Affine Räume . . . . . . . . . . . . . . . . . . . . . . . . . . . 2953.4.2 Flache Galilei Raumzeit M . . . . . . . . . . . . . . . . . . . 2963.4.3 Bewegung und Bezugssysteme in M . . . . . . . . . . . . . . 2983.4.4 Geschwindigkeit und Beschleunigung . . . . . . . . . . . . . . 2993.4.5 Galileigruppe . . . . . . . . . . . . . . . . . . . . . . . . . . . 3013.4.6 G-trafo von Geschwindigkeit und Beschleunigung . . . . . . . 3053.4.7 Newtons Grundgesetze der Mechanik . . . . . . . . . . . . . . 3063.4.8 Die Erhaltungssätze . . . . . . . . . . . . . . . . . . . . . . . 308
3.5 Übungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 309
4 Wahrscheinlichkeit 3164.1 Endliche Wahrscheinlichkeitsräume . . . . . . . . . . . . . . . . . . . 317
4.1.1 Wahrscheinlichkeit als Mengenfunktion . . . . . . . . . . . . . 3184.1.2 Konstruktion von Wahrscheinlichkeitsräumen . . . . . . . . . 3194.1.3 Binomialverteilung . . . . . . . . . . . . . . . . . . . . . . . . 3234.1.4 *Multinomialverteilung . . . . . . . . . . . . . . . . . . . . . . 3244.1.5 *Hypergeometrische Verteilung . . . . . . . . . . . . . . . . . 3244.1.6 Erwartungswert und Varianz . . . . . . . . . . . . . . . . . . . 3254.1.7 *Kovarianz und Korrelationskoeffizient . . . . . . . . . . . . . 3284.1.8 Das Gesetz der großen Zahl . . . . . . . . . . . . . . . . . . . 330
4.2 Abzählbar unendliche W-räume . . . . . . . . . . . . . . . . . . . . . 3374.2.1 Geometrische Verteilung . . . . . . . . . . . . . . . . . . . . . 338

INHALTSVERZEICHNIS v
4.2.2 Poissonverteilung . . . . . . . . . . . . . . . . . . . . . . . . . 3404.3 Wahrscheinlichkeitsmaße auf Rn . . . . . . . . . . . . . . . . . . . . . 342
4.3.1 Wahrscheinlichkeitsmaße auf R mit Dichtefunktion . . . . . . 3424.3.2 Gauß’sche Normalverteilung . . . . . . . . . . . . . . . . . . . 3434.3.3 Exponentialverteilung . . . . . . . . . . . . . . . . . . . . . . 3454.3.4 *Cauchyverteilung . . . . . . . . . . . . . . . . . . . . . . . . 3474.3.5 Erwartungswert und Varianz . . . . . . . . . . . . . . . . . . . 3474.3.6 Gleichverteilung auf Intervall . . . . . . . . . . . . . . . . . . 3484.3.7 W-Maße auf Rn und ihr Transport . . . . . . . . . . . . . . . 349
4.4 Übungsbeispiele . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 356
Vorwort
Seit einigen hundert Jahren begleitet die Mathematik das Bemühen der Menschenum ein besseres Verstehen der Natur. Ganz besonders in den Theorien der Physikschaffen mathematische Denkmuster eine Wirklichkeit, die vielfach in einer geradezugespenstisch weitreichenden Analogie zur sinnlichen Wirklichkeit steht. Mathematikwird damit materiell erfahrbar! Wer an diesem Erleben teilhaben will, muss sich einerintensiven mathematischen Schulung unterziehen. Als Lohn der Mühe erschließt sichein unerschöpfliches kulturelles Erbe, auf dem Physik - und manchmal sogar dieMathematik selbst - dann weiter wachsen können.
Traditionellerweise ergänzen Vorlesungen über mathematische Methoden derPhysik die eigentlichen, professionellen Mathematikvorlesungen, die von den Phy-sikstudienplänen vorgesehen sind. Sie vermitteln vorrangig rechnerische Fertigkeitenund bringen uns wie Seilbahnen rasch in Regionen, die wir durchstreifen wollen, ohnedass wir uns durch alle darunterbefindlichen Zonen hocharbeiten müssen. Natürlichum den Preis, dass wir wie Seilbahntouristen auf die nähere Umgebung der Bergsta-tion festgenagelt bleiben. Allgemeine Theorie tritt zugunsten einprägsamer Beispieleetwas in den Hintergrund. So auch in dieser Vorlesung.
Das Manuskript entstand zu meinen Vorlesungen Mathematische Methoden derPhysik I der Sommersemester 2002 bis 2015 an der Universität Innsbruck. Es istum einiges genauer und umfassender als der Vortrag. Es enthält einige (mit einemStern gekennzeichnete) nicht vorgetragene Abschnitte. Diese vertiefen entweder diegerade behandelte mathematische Technik oder wenden sie auf ein physikalischesProblem an. Sie schweifen aber auch gelegentlich vom aktuellen Kernthema ab, umphysikalisch angrenzende Motive in der zuvor dargelegten mathematischen Spra-che der Vorlesung aufzunehmen. Vielleicht kann es so die ’Aficionados’ der Theoriezu einer eigenständigen Verfestigung ihrer Kenntnisse quer über verschiedene Vor-lesungen hinweg anregen. Um eigene Gedanken angereichert, könnte der Text imVerlauf des weiteren Physikstudiums zu einer langsam vertrauten Werkzeugkistebreiter Einsetzbarkeit werden.
Hans Embacher, Peter Girtler, Gerhard Kirchner und Sabine Kreidl steuerten ei-nige Diagramme, Korrekturen und Anregungen bei. Ihnen und allen Student(inn)en,die durch unbeirrt bohrendes Fragen der Vorlesung zu größerer Klarheit verhalfen,danke ich sehr herzlich.
16. September 2015, Gebhard Grübl
vi
Kapitel 1
GewöhnlicheDifferentialgleichungen
Die analytische Mechanik fasst die Bewegung von ausgedehnter Materie als eine Be-wegung von ausdehnungslosen Bausteinen auf, die aufeinander auch durch scheinbarleeren Raum mittels Fernkräften einwirken. Diese fiktiven Elemente der Materie hei-ßen Massenpunkte. Das einzige variable Bestimmungsstück eines Massenpunkts zueiner Zeit ist sein Ort (in Newtons fiktivem absolutem Raum oder relativ zu einemBezugssystem). Die Masse oder auch die elektrische Ladung eines Massenpunkteswerden meist als unveränderlich aufgefasst.
Manchmal ersetzt ein einziger Massenpunkt eine riesige Materieansammlung, wieeine Kanonenkugel, einen Planeten, einen Stern oder auch eine Galaxie. Nämlichdann, wenn die inneren Veränderungen des zum Punkt stilisierten Aggregats fürseine kollektive Bewegung belanglos zu sein scheinen.
Die Bewegung der einzelnen Massenpunkte eines Systems regelt die Mechanik in-dem sie die momentane Beschleunigung eines jeden Massenpunktes durch die gleich-zeitigen Orte und Geschwindigkeiten aller im System vorhandenen Massenpunk-te mithilfe von Kraftgesetzen und Massen eindeutig festlegt. Deshalb scheiden diemeisten naiv vorstellbaren Bewegungen als unmöglich aus und nur ganz bestimmtebleiben übrig. Physikalisch möglich sind nur die Lösungungen der für das jeweiligeSystem charakteristischen Bewegungsgleichungen. Solche Gleichungen heißen unternoch näher zu erläuternden Begleitumständen Differentialgleichungen und von ihnenhandelt das vorliegende Kapitel. Das mechanische Beispiel eines fundamentalen Na-turgesetzes in der Form von Differentialgleichungen hat die Physik gründlich geprägt.Differentialgleichungen sind heute in Naturwissenschaft und Technik allgegenwärtig.
1.1 Gleichungen erster Ordnung
1.1.1 Definition und einfachste Beispiele
Wie kommt es zu einer Differentialgleichung? Hier ein Beispiel: Ein mit Wasser ge-fülltes Gefäß rinnt durch einen Auslass im Boden aus. Die Querschnittsfläche desGefäßes in der Höhe h > 0 über dem Boden sei A (h) > 0 und die Querschnittsflä-
1

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 2
che des Auslasses sei a > 0. Sinkt der Wasserspiegel in einem kleinen Zeitintervall∆t > 0 von der Höhe h auf die Höhe 0 < h + ∆h < h ab, dann strömt Was-ser desselben Volumens mit der Geschwindigkeit v (h) durch den Auslass. Dahergilt A (h) · (−∆h) = a ·v (h)∆t+o (∆t) (Volumserhaltung bei einer inkompressiblenFlüssigkeit). Dabei bezeichnet o (∆t) eine (im Detail unbekannte) Funktion, die aberfür ∆t → 0 so rasch gegen 0 geht, dass lim∆t→0 o (∆t) /∆t = 0 gilt.
Die Funktion v (h) lässt sich aus der Energieerhaltung erschließen. Diese besagt,dass die Abnahme der potentiellen Energie durch das Verschwinden einer kleinenWassermenge in der Höhe h, also die Energie ∆m · g · h der kinetischen Energieder ausströmenden Wassermenge ∆m · v (h)2 /2 gleicht. Es gilt also ∆m · g · h =∆m · v (h)2 /2 + o (∆m) , also v (h) =
√2gh. (Energieerhaltung) Einsetzen dieses
Zusammenhangs zwischen v und h in die Volumsbilanz ergibt im Grenzübergang∆t → 0 die Beziehung zwischen der Sinkgeschschwindigkeit des Wasserspiegels undder gerade vorliegenden Füllhöhe
−dh
dt=
a
A (h)
2gh. (1.1)
Derartige Beziehungen werden in der folgenden Definition präzisiert und verallge-meinert. Ein wichtiges Ziel wird es nun sein, zu erlernen was sich aus Gleichung (1.1)über die Funktion t → h (t) erschließen lässt. Wir werden bald sehen, dass sich dieseFunktion berechnen lässt, wenn der Füllstand anfänglich, wenn das Gefäß geöffnetwird, bekannt ist.
Definition 1 (Anfangswertproblem) Sei M = D1×D2 ⊂ R2, wobei D1 und D2
allgemeine reelle Intervalle sind. (Sie können offen, halboffen, geschlossen, uneigent-lich sein.) Eine Funktion f : M → R sei gegeben. Auf einem allgemeinen IntervallD ⊂ R sei eine Funktion α : D → R gegeben. Falls der Graph von α in M enthaltenist, und für alle x ∈ D
α′(x) = f (x, α(x))
gilt, dann heißt α eine Lösung der (gewöhnlichen) Differentialgleichung (erster Ord-nung) y′ = f(x, y). Falls α(x0) = y0 gilt, sagt man α sei eine Lösung zum Anfangs-wert (x0, y0) ∈ M. Falls zu einer Lösung α keine Lösung β : D′ → R existiert, fürdie D echt in D′ enthalten ist und β(x) = α(x) für alle x ∈ D gilt, dann heißt dieLösung α maximal.
Anmerkungen: 1) Der Definitionsbereich D einer Lösung α ist zwangsläufigTeilmenge von D1. 2) Oft wird lose formuliert: Eine Differentialgleichung ist ei-ne Gleichung, in der eine Funktion und ihre Ableitungen vorkommen. Das ist zuweitläufig, denn gilt für eine Funktion α, dass α′(x) = f(x, α(x/2)) oder dassα′(α(x)) = f(x, α(x)), so sind dies keine Differentialgleichungen im Sinn der hier zu-grunde gelegten Definition. 3) Die hier gewählte Beschränkung auf offene RechteckeM als Definitionsbereiche von f schließt übrigens auch folgendes aus: y′ = 1/(x2−y2)auf (x, y) ∈ R2 | x2 = y2 . Diese Beschränkung ist nicht wirklich notwendig und eswürde genügen, M ⊂ R2 als zusammenhängend und offen vorauszusetzen. Die Be-schränkung auf offene Rechtecke vereinfacht aber manche Überlegungen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 3
Definition 2 Sei y′ = f(x, y) eine Differentialgleichung. Sei M der Definitions-bereich von f. Dann heißt V : M → R2, (x, y) → (1, f(x, y)) das Vektorfeld vony′ = f(x, y). Jedes Vektorfeld des Typs g · V mit einer Funktion g : M → R 0heißt Richtungsfeld von y′ = f(x, y).1
Abbildung (1.1) zeigt ein Richtungsfeld der Differentialgleichung y′ = xy.
210-1-2
2
1
0
-1
-2
x
y
x
y
Abbildung 1.1: Richtungsfeld zu y′ = xy
Ist α Lösung von y′ = f(x, y) und ist x0 imDefinitionsbereich von α, dann stimmtdie Tangente des Graphen von α in (x0, α(x0)) mit (x0, α(x0)) + R · V (x0, α(x0))überein. Ein Richtungsfeld der Differentialgleichung ist somit in den Punkten desGraphen einer Lösung tangential zu diesem. Damit vermittelt ein Richtungsfeldeinen qualitativen Eindruck von den Lösungen einer Differentailgleichung.
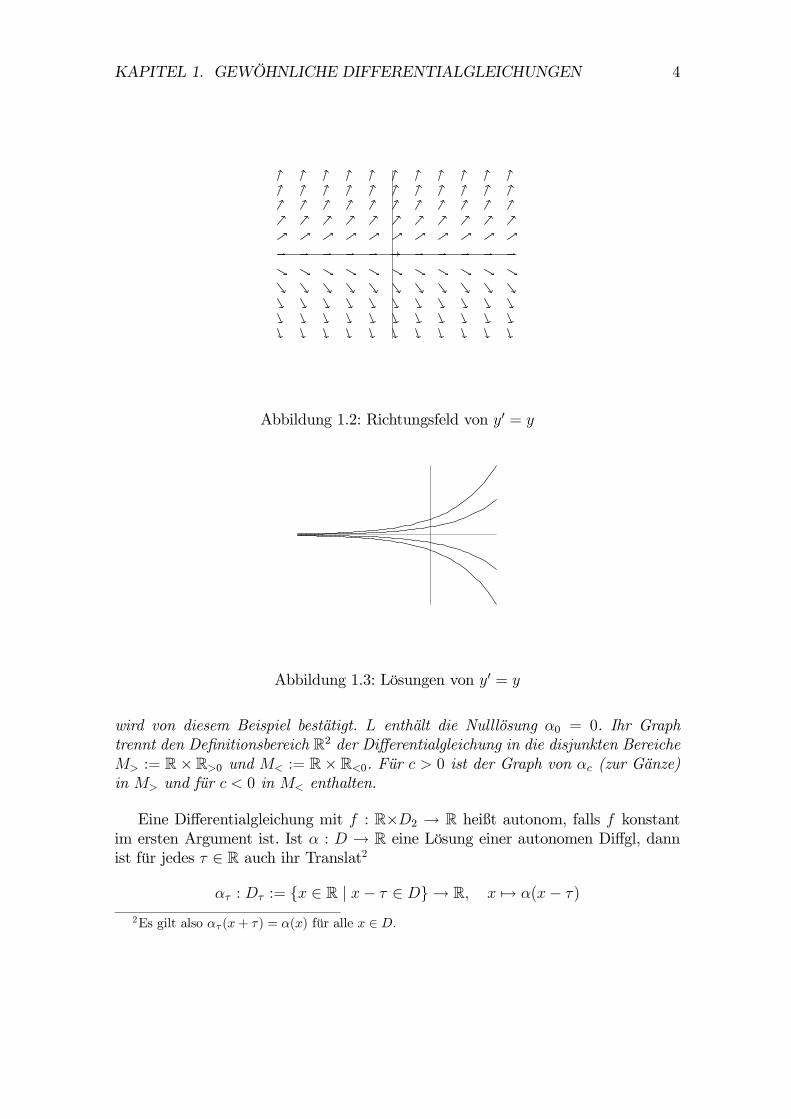
Beispiel 3 Sei f : R2 → R, (x, y) → λy für ein λ ∈ R. Abbildung 1.2 veranschau-licht ein Richtungsfeld für λ = 1. Lösungen der Differentialgleichung y′ = λy sindleicht zu erraten: Für jedes c ∈ R ist αc : R → R, x → c exp (λx) eine maximaleLösung. Abbildung 1.3 zeigt αc für λ = 1 und c = ±1,±2. Gibt es neben den Ein-schränkungen der Lösungen αc auf Intervalle weitere Lösungen von y′ = λy? Nein,denn für jede Lösung α gilt in ihrem Definitionsintervall D
(α (x) exp (−λx))′ = α′(x) exp (−λx) + α(x) (exp (−λx))′
= λα(x) exp (−λx)− λα(x) exp (−λx) = 0.
Daher ist α (x) exp (−λx) konstant auf D. (Hier wird davon Gebrauch gemacht, dassD ein Intervall ist.) Damit gilt für die Menge L aller maximalen Lösungen von y′ =λy, dass L = αc | c ∈ R. Eine maximale Lösung zum Anfangswert (x0, y0) ∈ R2
erfüllt y0 = αc(x0) = c exp(λx0). Damit folgt c = y0 exp (−λx0). Es existiert somitgenau eine maximale Lösung von y′ = λy zu einem gegebenen Anfangswert. Dienaive Erwartung, dass die Differentialgleichung die maximale Lösung determiniert,
1Vielfach wird auch die Äquivalenzklasse von Vektorfeldern g · V |g :M → R 0 als ’das’Richtungsfeld der Differentialgleichung bezeichnet. Gezeichnet wird dann nur ein Repräsentant(ohne Orientierungspfeil), meist mit konstanter Länge.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 4
Abbildung 1.2: Richtungsfeld von y′ = y
Abbildung 1.3: Lösungen von y′ = y
wird von diesem Beispiel bestätigt. L enthält die Nulllösung α0 = 0. Ihr Graphtrennt den Definitionsbereich R2 der Differentialgleichung in die disjunkten BereicheM> := R×R>0 und M< := R× R<0. Für c > 0 ist der Graph von αc (zur Gänze)in M> und für c < 0 in M< enthalten.
Eine Differentialgleichung mit f : R×D2 → R heißt autonom, falls f konstantim ersten Argument ist. Ist α : D → R eine Lösung einer autonomen Diffgl, dannist für jedes τ ∈ R auch ihr Translat2
ατ : Dτ := x ∈ R | x− τ ∈ D → R, x → α(x− τ)
2Es gilt also ατ (x+ τ) = α(x) für alle x ∈ D.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 5
eine Lösung. Warum? Für x ∈ Dτ gilt
d
dxατ
(x) = lim
ε→0
α(x− τ + ε)− α(x− τ )
ε=
d
dxα
τ
(x)
=
d
dxα
(x− τ) = f (x− τ , α(x− τ)) = f (x, ατ (x)) .
Die Funktion f der Differentialgleichung von Beispiel 3 ist konstant im ersten Ar-gument. Für αc ∈ L gilt (αc)τ = αc exp(−λτ). Die Translationen erzeugen aus α1 alleLösungen αc mit c > 0 und aus α−1 alle Lösungen αc mit c < 0. Die Nulllösung isttranslationsinvariant: (α0)τ = α0. Dies illustriert die Rolle von Symmetriegruppen:Symmetrien erzeugen aus einer Lösung andere.
Beispiel 4 Sei f : R2 → R, (x, y) → y2. Abbildung 1.4 zeigt ein Richtungsfeldvon y′ = y2. Drei maximale Lösungen sind leicht zu erraten:
• α0 : R→ R, x → 0 (konstante Lösung)
• α+ : R<0 → R>0, x → −1/x
• α− : R>0 → R<0, x → −1/x
Abbildung 1.4: Richtungsfeld von y′ = y2
Obwohl die Lösung α+ maximal ist, ist sie nur für alle x ∈ R<0 definiert. IhrGraph entschwindet für x ↑ 0 ins Unendliche. Analoges gilt für α−. Da die Diffe-rentialgleichung autonom ist, kann durch Translationen daraus die folgende MengeL maximaler Lösungen gewonnen werden.
L = α0 ∪ (α+)τ | τ ∈ R ∪ (α−)τ | τ ∈ R .
Der Definitionsbereich von (α+)τ ist das Intervall R<0+τ = (−∞, τ), der von (α−)τist R>0 + τ = (τ ,∞). Es gilt
(α+)τ (x) =1
τ − xfür x < τ und (α−)τ (x) =
1
τ − xfür x > τ.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 6
In L gibt es zu jedem Anfangswert (x0, y0) ∈ R2 genau eine Lösung. Für y0 = 0 istdies die Lösung α0. Für y0 > 0 ist es die Lösung (α+)τ mit τ = x0 +
1y0
> x0, wasaus y0 = (α+)τ (x0) = 1/ (τ − x0) folgt. Analog ist für y0 < 0 die einzige Lösung inL mit α(x0) = y0 die Funktion (α−)τ mit τ = x0 +
1y0
< x0. Der folgende Satz ziehtnach sich, dass L die Menge aller maximalen Lösungen von y′ = y2 ist.
1.1.2 AWP: Existenz und Eindeutigkeit
Die Frage, ob eine Differentialgleichung y′ = f (x, y) überhaupt Lösungen besitzt,und inwiefern verschiedene Lösungen zum selben Anfangswert sich voneinander un-terscheiden können, ist natürlich für physikalische Zwecke äußerst interessant undöffnet ein weites Aufgabenfeld. Für die Existenz von Lösungen zu beliebigem An-fangswert reicht die Stetigkeit von f. Für die Eindeutigkeit von lokalen Lösungendurch einen Punkt p braucht es jedoch etwas stärkere Annahmen an f. Hier eineinigermaßen weitreichender Satz zu beiden Fragen. Ein Beweis ist in Kap. II, §6von [18] ausgeführt.
Satz 5 Seien D1 und D2 allgemeine, offene, reelle Intervalle und M := D1 × D2.Die Funktion f : M → R sei stetig. Für jedes p ∈ M existiere ein offenes RechteckRp ⊂ M mit p ∈ M und eine reelle Zahl Lp > 0, sodass
|f(x, y1)− f(x, y2)| ≤ Lp |y1 − y2| (1.2)
für alle (x, y1) und (x, y2) in Rp.3 Die Funktionen α : D → R und β : D → R seien
Lösungen von y′ = f(x, y) mit α(x0) = β(x0) für ein x0 ∈ D. Dann gilt α = β. DerGraph einer maximalen Lösung kommt dem Rand von M beliebig nahe. Durch jedenPunkt von M existiert genau eine maximale Lösung.
Der Satz stellt klar, dass durch jeden Punkt von M Lösungen von y′ = f (x, y)existieren. Eine Lösung durch einen Punkt p, deren Definitionsintervall nicht mehrausgedehnt werden kann, ist eine maximale Lösung. Sie ist eindeutig bestimmt. Jedeweitere Lösung durch p ist Einschränkung der maximalen Lösung durch p.
Der Satz zeigt überdies, dass bei einer Abänderung der Funktion f in eine Funkti-on g mit g(x, y) = f(x, y) für alle (x, y) in einem RechteckM ′ ⊂ M mit (x0, y0) ∈ M ′
die Lösung zum Anfangswert (x0, y0) ∈ M innerhalb von M ′ unverändert bleibt.Man sagt, dass der Satz ein Nahewirkungsprinzip zum Ausdruck bringt.
Falls es für eine Differentialgleichung y′ = f(x, y), deren Funktion f die Voraus-setzungen des Satzes erfüllt, gelungen ist, zu jedemAnfangswert inM eine maximaleLösung zu finden, dann sagt der Satz, dass die Gleichung keine weiteren maximalenLösungen hat.
Eine hinreichende Bedingung dafür, dass f lokal Lipschitzbeschränkt ist, lautet:Ist die stetige Funktion f von Satz 5 nach dem zweiten Argument stetig partielldifferenzierbar, dann erfüllt f die lokale Lipschitzbedingung (1.2). Die beiden Bei-spiele 3 und 4 erfüllen somit die Voraussetzungen des Satzes. Die für die Beispiele
3Man sagt, dass f lokal Lipschitzbeschränkt ist. Lp heißt Lipschitzkonstante.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 7
angegebenen Mengen L an maximalen Lösungen enthalten zu jeder möglichen An-fangsbedingung genau eine Lösung. Nach Satz 5 existieren daher keine weiterenmaximalen Lösungen.
Hier noch eine Funktion f , die nicht auf ganz M lokal Lipschitzbeschränkt ist.
f : R2 → R, (x, y) →|y|. (1.3)
f ist stetig aber f ist nicht auf ganz R2 lokal Lipschitzbeschränkt. Warum: Wähleden Punkt p = (x0, 0). Ist f lokal Lipschitzbeschränkt um p, dann existiert einε > 0 und eine Konstante L > 0 mit
|y| ≤ L |y| für alle y ∈ (−ε, ε). Daraus
folgt 0 ≤ limy↓01√y≤ L. Das ist bekanntlich nicht der Fall. Also ist f nicht lokal
Lipschitzbeschränkt. Beachte jedoch: die Einschränkung von f auf R×R>0 ist lokalLipschitzbeschränkt, da f dort stetig partiell diffbar ist.
Ohne Lipschitzbedingung kann die Eindeutigkeit fehlen - ein Beispiel
Untersuchen wir die Differentialgleichung y′ = 2|y|. Satz 5 ist nicht anwendbar.
Das Richtungsfeld, siehe Figur 1.5, unterscheidet sich nicht besonders auffällig von
Abbildung 1.5: Richtungsfeld von y′ = 2|y|
jenem aus Beispiel 4. Wir erraten neben der Nulllösung α0 : R → R, x → 0 dieLösungen: α− : R≤0 → R≤0, x → −x2 und α+ : R≥0 → R≥0, x → x2 und derenTranslate (α±)τ .
Die Lösungen (α±)τ sind jedoch nicht maximal. Sie können stetig differenzierbardurch die Nulllösung fortgesetzt werden. So entsteht die folgende Menge L vonmaximalen Lösungen αa,b mit a ≤ b ∈ R und
αa,b : R→ R, x →
−(x− a)2 für x < a0 für a ≤ x ≤ b(x− b)2 für b < x
.
Es gilt also L = αa,b | a, b ∈ R und a ≤ b. Figur 1.6 zeigt die Lösung αa,b mita = −1 und b = 2. Zu jedem Anfangswert (x0, y0) mit y0 = 0 existiert lokal genaueine Lösung. Global existieren zu jedem Anfangswert unendlich viele verschiedene

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 8
3.752.51.250-1.25-2.5
4
2
0
-2
-4
x
y
x
y
Abbildung 1.6: Eine Lösung von y′ = 2|y|
Lösungen. Für Anfangswerte (x0, 0) existieren auch lokal unendlich viele verschie-dene Lösungen. Der Unterschied zur Lösungsmenge von Beispiel 4 ist also docherheblich.
1.1.3 Differentialgleichungen mit getrennten Variablen
Definition 6 Seien D1 und D2 allgemeine, offene Intervalle und g : D1 → R undh : D2 → R stetig. Sei f : D1 × D2 → R, (x, y) → g(x)h(y). Dann heißt dieDifferentialgleichung y′ = f(x, y) vom Typ der getrennten Variablen.
Ist h stetig differenzierbar, dann ist f lokal Lipschitzbeschränkt und der Eindeu-tigkeitssatz ist somit anwendbar.
Satz 7 Sei E ⊂ D2 ein maximales Intervall, auf dem h keine Nullstelle hat, undsei hE die Einschränkung von h auf E. Sei ΦE eine Stammfunktion der Funktion1hE
. Sei G eine Stammfunktion von g. Sei I ⊂ D1 ein allgemeines Intervall undα : I → E so, dass für ein reelles c und für alle x ∈ I gilt:
ΦE (α(x)) = G (x) + c.
Dann ist α eine Lösung der Differentialgleichung y′ = g(x)h(y) und es gilt für allex ∈ I
α(x) = Φ−1E (G (x) + c) .
Kann I für festes c nicht vergrößert werden, ist α eine maximale Lösung. Weiteremaximale Lösungen der Differentialgleichung sind die konstanten Funktionen
αi : D1 → R, x → yi,
wobei yi eine Nullstelle von h ist.
Der Beweis des Satzes ist in [10] zu finden. Eine heuristische Merkhilfe geht so
dy
h(y)=
g(x)dx.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 9
Für Lipschitzbeschränktes f ist die Menge aller maximalen Funktionen α des imSatz (7) angeführten Typs, wenn alle nullstellenfreien Teilintervalle E abgearbeitetwerden, die Menge aller maximalen Lösungen der Differentialgleichung.
Beispiel 1: y′ = y
Sei f (x, y) = y auf R2. Es gilt somit f (x, y) = g (x)h (y) für g (x) = 1 und h(y) =y für alle x, y ∈ R. Die Funktion f hat die beiden maximalen, nullstellenfreienTeilintervalle E1 := R>0 und E2 := R<0. Eine Stammfunktion ΦE1 von 1/y aufE1 ist ln(y) und eine Stammfunktion von g(x) = 1 auf R ist x. Somit ist eineFunktion α(x) > 0 mit ln (α (x)) = x+c Lösung. Da ln : E1 → R bijektiv ist, kann cbeliebig in R gewählt, und α auf ganz R definiert werden. Es folgt somit α(x) = ecex
für alle x ∈ R. Die positiven Vielfachen der Exponentialfunktion sind somit alsmaximale Lösungen identifiziert. Auf E2 hat 1/y die Stammfunktion ln (−y). Somitist eine Funktion α(x) < 0 mit ln (−α (x)) = x + c Lösung. Wie oben folgt fürbeliebiges c ∈ R, dass −α(x) = ecex für alle x ∈ R. Schließlich bleibt die auf ganzR konstante Funktion α(x) = 0 als Lösung. Wir haben somit die folgende Menge Lvon maximalen Lösungen gefunden: L = αC : R→ R, x → C exp (x) | C ∈ R .
Gibt es weitere maximale Lösungen, die noch nicht in L enthalten sind? Zu jedemAnfangswert (x0, y0) ∈ R2 existiert genau eine Funktion αC ∈ L mit αC (x0) = y0.Es ist dies die Funktion αC mit C = y0 ·e−x0 . Da es durch jeden Punkt (x0, y0) ∈ R2
nach dem Eindeutigkeitssatz höchstens eine maximale Lösung gibt, ist L aber auchschon die Menge aller maximalen Lösungen der Differentialgleichung y′ = y.
Beispiel 2
Sei f : R2 → R mit f(x, y) = g(x)h(y), wobei g(x) = −2x auf R und
h(y) =
y für y > 0y2 für y ≤ 0
.
Die maximalen nullstellenfreien Teilintervalle von h sind E1 := R>0 und E2 := R<0.Eine Stammfunktion von g ist G(x) = −x2 auf R. Eine Stammfunktion von 1/h aufE1 ist ln(y). Somit ist eine positive Funktion α mit ln (α(x)) = −x2 + c für c ∈ Reine Lösung. Für sie folgt α(x) = ece−x2. Ihr maximaler Definitionsbereich ist fürbeliebiges c ∈ R ganz R. Setze α+(x) := exp (−x2) für x ∈ R.
Eine Stammfunktion von 1/h auf E2 ist −1/y. Sie nimmt nur positive Werte an.Somit ist eine Funktion αc mit Werten in R<0 und −1/αc(x) = −x2 + c für c ∈ R>0
eine Lösung. Für sie folgt αc(x) = 1/ (x2 − c) . Ihr maximaler Definitionsbereich istdas offene Intervall (−√c,
√c) .
Die Menge L aller so bestimmten maximalen Lösungen erfüllt also
L = C · α+ |C ≥ 0 ∪ αc |c > 0 .
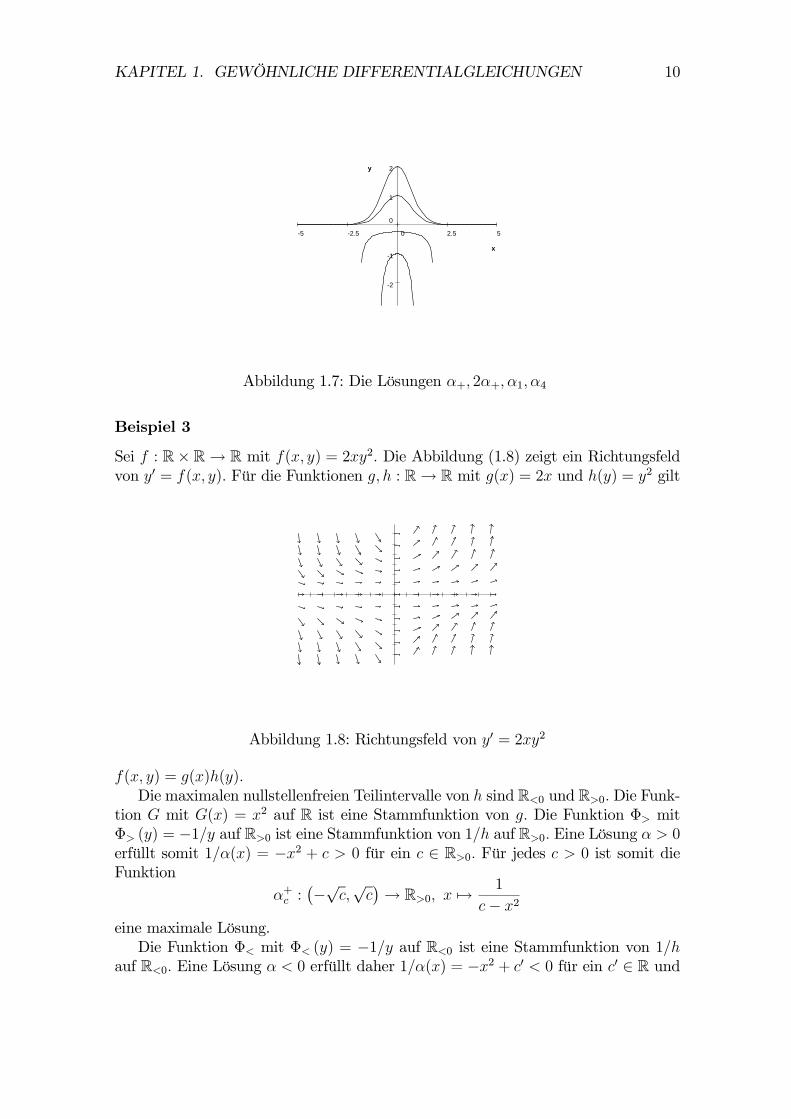
Durch jeden Punkt (x0, y0) ∈ R2 geht genau eine Funktion aus L. Somit ist L dieMenge aller maximalen Lösungen der Differentialgleichung. Abbildung (1.7) zeigtdie Graphen von α+, 2α+, α1 und α4.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 10
52.50-2.5-5
2
1
0
-1
-2
x
y
x
y
Abbildung 1.7: Die Lösungen α+, 2α+, α1, α4
Beispiel 3
Sei f : R× R→ R mit f(x, y) = 2xy2. Die Abbildung (1.8) zeigt ein Richtungsfeldvon y′ = f(x, y). Für die Funktionen g, h : R→ R mit g(x) = 2x und h(y) = y2 gilt
Abbildung 1.8: Richtungsfeld von y′ = 2xy2
f(x, y) = g(x)h(y).Die maximalen nullstellenfreien Teilintervalle von h sind R<0 und R>0. Die Funk-
tion G mit G(x) = x2 auf R ist eine Stammfunktion von g. Die Funktion Φ> mitΦ> (y) = −1/y auf R>0 ist eine Stammfunktion von 1/h auf R>0. Eine Lösung α > 0erfüllt somit 1/α(x) = −x2 + c > 0 für ein c ∈ R>0. Für jedes c > 0 ist somit dieFunktion
α+c :−√c,
√c→ R>0, x → 1
c− x2
eine maximale Lösung.Die Funktion Φ< mit Φ< (y) = −1/y auf R<0 ist eine Stammfunktion von 1/h
auf R<0. Eine Lösung α < 0 erfüllt daher 1/α(x) = −x2 + c′ < 0 für ein c′ ∈ R und

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 11
für alle x mit c′ < x2. Für jedes c =: −c′ > 0 ist somit die Funktion
α−c : R→ R<0, x → −1c+ x2
eine maximale Lösung. Für jedes c = c′ ≥ 0 sind die Funktionen
α>c :
√c,∞
→ R<0, x → −1
x2 − c
α<c :
−∞,−√c
→ R<0, x → −1
x2 − c
maximale Lösungen. Abbildung (1.9) zeigt einige maximalen Lösungen.
2.51.250-1.25-2.5
1.5
1
0.5
0
-0.5
-1
x
y
x
y
Abbildung 1.9: Die Lösungen α>c , α
<c , α
+c und α−c für c = 1 und c = 3
Schließlich gibt es noch die konstante Lösung α0 : R→ R mit α0 (x) = 0. Somithaben wir die folgende Menge L von maximalen Lösungen gefunden.
L =α+
c |c > 0∪α−c |c > 0
∪ α<
c |c ≥ 0 ∪ α>c |c ≥ 0 ∪ α0 .
Gibt es weitere maximale Lösungen unserer Differentialgleichung, die uns entgangensind?
Durch einen Punkt (x0, y0) in der Halbebene y0 > 0 geht genau eine der Lösungenα+
c |c > 0 . Durch einen Punkt der unteren Halbebene y0 < 0 mit x0 = 0 undy0 > −1/x2
0 geht genau eine der Lösungen α−c |c > 0 . Dasselbe gilt für einenPunkt (0, y0) mit y0 < 0. Durch einen Punkt (x0, y0) der unteren Halbebene y0 <0 mit x0 < 0 und y0 ≤ −1/x2
0 < 0 geht genau eine der Lösungen α<c |c ≥ 0 .
Durch einen Punkt (x0, y0) der unteren Halbebene y0 < 0 mit x0 > 0 und y0 ≤−1/x2
0 < 0 geht genau eine der Lösungen α>c |c ≥ 0 . Durch einen Punkt (x0, 0)
mit x0 ∈ R schließlich geht genau die 0-Lösung α0. In Übereinstimmung mit demEindeutigkeitssatz, der ja auf y′ = 2xy2 anwendbar ist, gibt es durch einen Punkt(x0, y0) höchstens eine maximale Lösung der Differentialgleichung y′ = 2xy2. Da zujedem Punkt (x0, y0) ∈ R2 eine maximale Lösung in L existiert, ist die Menge Laber tatsächlich die Menge aller maximalen Lösungen von y′ = 2xy2.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 12
Beispiel 4
Für die autonome Differentialgleichung y′ = cos y kann g = 1 auf R und h = cosauf R gewählt werden. Die Nullstellenmenge von h ist
(2n+ 1) π
2|n ∈ Z
. Die
maximalen nullstellenfreien Teilintervalle des Definitionsbereiches von h sind somitdie Intervalle In =
(2n− 1) π
2, (2n+ 1) π
2
.
Abbildung 1.10: Richtungsfeld zu y′ = cos y für −π2< y < π
2
Wegen cos (y + kπ) = (−1)k cos (y) genügt es, die maximalen Lösungen im In-tervall I0 =
−π
2, π2
zu bestimmen. Eine Stammfunktion4 Φ von 1/ cos auf diesem
Intervall ist die (bijektive, steigende) Funktion Φ :−π
2, π2
→ R mit
Φ (y) = ln
1
cos y+ tan y
,
denn
Φ′ (y) =cos y
1 + sin y· (1 + sin)′ (y) cos (y)− (1 + sin) (y) cos′ (y)
cos2 y
=1
1 + sin y· cos
2 (y) + (1 + sin) (y) sin (y)
cos y=
1
cos y.
Somit existiert für jede maximale Lösung α mit Werten in I0 eine Zahl c ∈ R, sodass
ln
1
cosα (x)+ tanα (x)
= x+ c. (1.4)
Da 1/ cos y =
cos2 y+sin2 ycos2 y
=
1 + tan2 y auf I0 gilt, ist Gleichung (1.4) äquivalentzu
1 + tan2 α (x) + tanα (x) = ex+c.
4Zum systematischen Bestimmen von Φ siehe: Kap. III, §10 in [4] Vol 1.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 13
Suche daher die Zahlen z ∈ R mit√1 + z2 + z = w > 0. Es folgt durch Quadrieren
1 + z2 = (w − z)2 und weiter 1 = w2 − 2wz. Letzteres gilt für
z =1
2
w − 1
w
.
Tatsächlich ist dies eine Lösung der Ausgangsgleichung.Somit folgt
tanα (x) =ex+c − e−(x+c)
2= sinh (x+ c) .
Die Menge L0 der maximalen Lösungen mit Werten im Intervall I0 ist daher dieMenge aller Funktionen αc : R→
−π
2, π2
mit c ∈ R und
αc (x) = arctan sinh (x− c) .
1050-5-10
1
0.5
0
-0.5
-1
x
Alpha
x
Alpha
Abbildung 1.11: 2πarctan sinh x (rot) und 2
πarctanx
Für die Menge Ln aller maximalen Lösungen mit Werten im Intervall In gilt
Ln = (−1)n αc + nπ |c ∈ R .
Figur 1.12 zeigt α0,−α0 + π, α0 + 2π,−α0 − π. Die Lösungen mit Werten in Instreben für gerades n bei x → ∞ gegen den oberen Rand des Intervalls In und fürungerades n gegen den unteren. Die konstante Lösung yn = (2n+ 1)π/2, die aufeiner Nullstelle von cos liegt, scheint also für gerades n die Lösungen in den beidenangrenzenden Intervallen „anzuziehen“ und ansonsten „abzustoßen“.5
5In diesem Bild wird x als Zeit interpretiert.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 14
Abbildung 1.12: Lösungen von y′ = cos y
1.1.4 *Magnetfeldlinien eines Dipols 1
Das Magnetfeld eines magnetischen Dipols6, der ausdehnungslos im Punkt 0 desdreidimensionalen Ortsvektorraums mit Skalarprodukt ·, · und zugehöriger Norm|·| ruht, ist durch das Vektorfeld B : V 0→ V mit
B (v) =D
|v|33e, v|v|2
v − e
.
gegeben. Dabei gibt D ∈ R>0 die Stärke und e ∈ V mit |e| = 1 die Richtung des(konstanten) Dipolmoments an. Das Vektorfeld B ist invariant unter Drehungenum e. Daher genügt es, sich das Vektorfeld B innerhalb einer Ebene durch 0, die eenthält, mittels Feldlinien zu veranschaulichen.
Ist (e1, e2, e3) eine Orthonormalbasis von V mit e2 = e, dann gilt für Vektorenv = xe1 + ye2 = 0, also Vektoren ungleich 0 in der Ebene v ∈ V : v, e3 = 0
B (xe1 + ye) =D
(x2 + y2)3/2
3
y
x2 + y2xe1 + 3
y
x2 + y2ye2 − e2
=D
(x2 + y2)3/2
3
xy
x2 + y2e1 +
3y2 − (x2 + y2)
x2 + y2e2
=D
(x2 + y2)3/2
3
xy
x2 + y2e1 +
2y2 − x2
x2 + y2e2
.
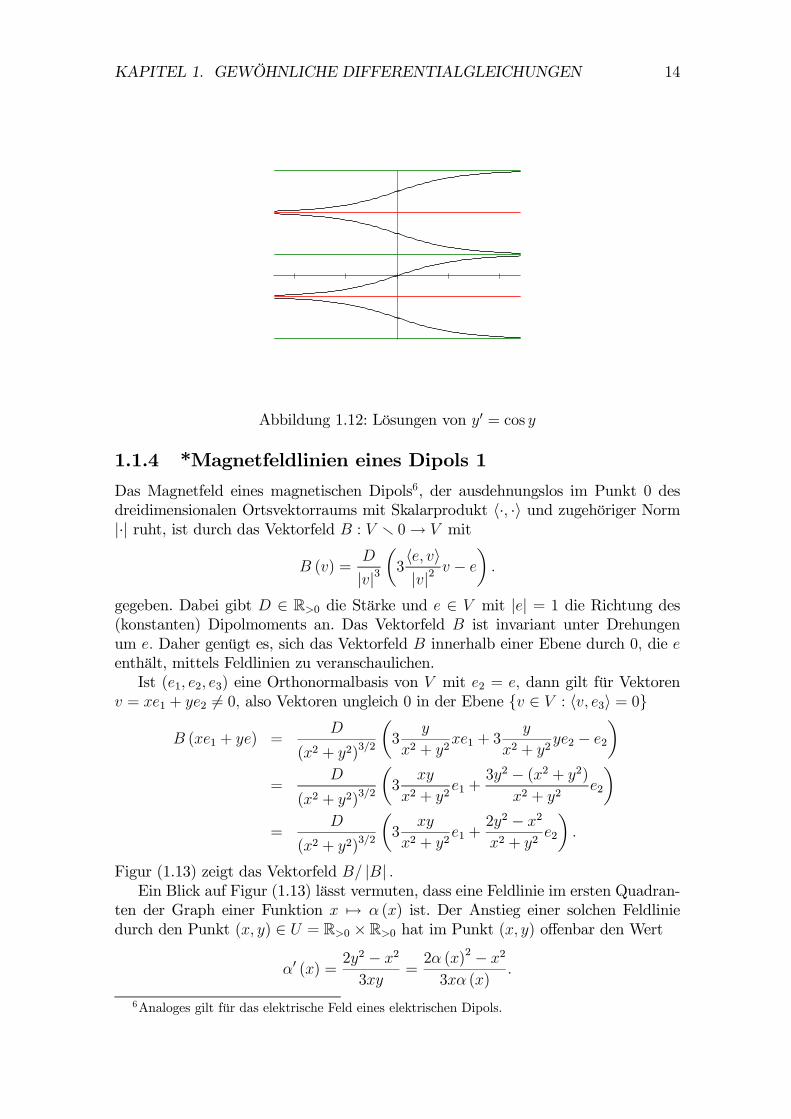
Figur (1.13) zeigt das Vektorfeld B/ |B| .Ein Blick auf Figur (1.13) lässt vermuten, dass eine Feldlinie im ersten Quadran-
ten der Graph einer Funktion x → α (x) ist. Der Anstieg einer solchen Feldliniedurch den Punkt (x, y) ∈ U = R>0 ×R>0 hat im Punkt (x, y) offenbar den Wert
α′ (x) =2y2 − x2
3xy=
2α (x)2 − x2
3xα (x).
6Analoges gilt für das elektrische Feld eines elektrischen Dipols.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 15
Abbildung 1.13: Richtungsverlauf eines Dipolvektorfeldes
Die Funktion α ist somit eine Lösung der Differentialgleichung
y′ = f (x, y) mit f : R>0 × R>0 → R und f (x, y) =2y2 − x2
3xy.
Nun gilt f (x, y) = 23yx− 1
3xy=: g (y/x) für alle (x, y) ∈ U. Die Funktion f ist
also homogen vom Grad 0. Solche Differentialgleichungen lassen sich auf U durcheinen simplen Trick in Differentialgleichungen vom Typ der separierten Variablenumformen. Für α (x) = x · β (x) gilt ja α′ (x) = β (x) + x · β′ (x) , sodass β eineLösung von
β (x) + x · β′ (x) = f (x, α (x)) = g (β (x)) .
Somit gilt
β′ (x) =g (β (x))− β (x)
x.
Im gegenwärtigen Fall erfüllt β somit die Differentialgleichung
β′ (x) =
23β (x)− 1
3β(x)
x− β (x) = − 1
3x(β (x) + 1/β (x)) = − 1
3xh (β (x))
mit h : R>0 → R>0 und h (y) = y + y−1. Die Funktion h ist nullstellenfrei und ihrKehrwert hat die Stammfunktion H : R>0 → R>0 mit H (y) = 1
2ln (1 + y2) , da ja
H ′ (y) = 12
2y1+y2
= 1y+y−1 gilt.
Damit erfüllt eine Lösung β von β′ = − 13xh (β) die Beziehung
1
2ln1 + β (x)2
= −1
3ln (x) + c
für ein c ∈ R und für alle x in einem hinreichend kleinen Intervall. Exponenzierendieser Beziehung ergibt
1 + β (x)2 = ece−23ln(x) = ecx−2/3.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 16
Daraus folgt β (x)2 = ecx−2/3−1 = (C/x)2/3−1 für ein C = e3c/2 > 0.Die zugehörigemaximale Lösung βC ist somit die Funktion
βC : (0, C)→ R>0 mit βC (x) =
(C/x)2/3 − 1.
Die zu βC gehörige Funktion αC ist die Funktion αC : (0, C)→ R>0 mit
αC (x) = x
(C/x)2/3 − 1 =
(Cx2)2/3 − x2.
Man beachte limx→C αC (x) = 0.DieMenge aller Feldlinien im ersten Quadranten ist somit die Menge der Graphen
zur Funktionenfamilie αC : C > 0 .Die Feldlinie durch einen Punkt (x0, y0) ∈ U istGraph der Funktion αC mit C > 0 so, dass αC (x0) = y0. Daraus folgt (y0/x0)
2+1 =
(C/x0)2/3 und somit
C = x0
1 + (y0/x0)
23/2 .Eine analoge Überlegung zeigt, dass im Quadranten U ′ = R>0×R<0 die Feldlinien
die Graphen der Funktionen −αC sind. Eine gesamte Feldlinie im Bereich R>0 ×Rist somit der Abschluss der Menge (x, y) : x > 0, |y| = αC (x) in R>0 × R. DurchSpiegelung an der Ebene y = 0 ergeben sich schließlich die (richtig orientierten!)Feldlinien im Bereich x < 0. Im Bereich x < 0 bildet eine Feldlinie die Menge(x, y) : x < 0, |y| = αC (|x|) . Die einzigen beiden davon nicht erfassten Feldliniensind die Halbgeraden (0,±y) : y > 0 , der Grenzfall C = 0. Durch jeden Punktder Ebene (ohne 0!) geht genau eine Feldlinie. Jede Feldlinie kommt dem Rand desDefinitionsbereiches von B, nämlich dem Punkt 0 beliebig nahe.
Abbildung 1.14: Feldlinien eines Dipols
Polardarstellung einer Feldlinie mit C > 0
Es gilt x2 + αC (x)2 = C2/3x4/3, alsox2 + αC (x)2
3= C2x4. Für Polarkoordinaten
(r, ϕ) mit x = r cosϕ und y = r sinϕ besteht auf einer Feldlinie somit der Zusam-menhang r6 = C2r4 cos4 ϕ. Die Feldlinie hat daher die Polardarstellung r = C cos2 ϕ.Dabei kann ϕ ∈ (−π/2, π/2) für eine Feldlinie im Bereich x > 0 und ϕ ∈ (π/2, 3π/2)für eine Feldlinie im Bereich x < 0 gewählt werden. Lässt man ϕ ∈ [0, 2π] zu, werdenzwei zueinander spiegelgleiche Feldlinien in den Halbräumen x > 0 bzw x > 0 zueiner einzigen Feldlinie durch die Singularität in 0 hindurch verbunden.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 17
1.1.5 *Die Kettenlinie
Eine Kette sei an zwei Punkten A und B aufgehängt, die nicht direkt übereinanderliegen. Welche Linie im Raum belegt die ruhende Kette, wenn ihre Länge unver-änderlich ist, und die einzelnen Kettenglieder zu Punkten idealisiert werden? Imfolgenden wird die Überlegung erläutert, die - zumindest gemäß der Darstellung inKap. B.11 von [17] - Johann Bernoulli 1691 zur Lösung des Problems führte.7
Johann Bernoulli scheint Newtons Mechanik, wie sie 1687 in den Prinzipia dar-gelegt war, gekannt und zur Grundlage seiner Überlegung gemacht zu haben. Denner nimmt an: Die Ketteninie γ liegt in einer (affinen) Ebene des 3d euklidischenRaumes. Diese Ebene wird vom Vektor, der A in B schiebt, und dem Richtungs-vektor der Schwerkraft aufgespannt. (Dies lässt sich beweisen!) OEdA wird A = 0gesetzt, und in der Ebene eine ONB (e1, e2) mit den zugehörigen Koordinaten (x, y)so gewählt, dass das Schwerkraftfeld die Richtung −e2 hat, und xB = x (B) > 0gilt. Weiter nimmt er an, dass γ der Graph einer zwei mal stetig differenzierbarenFunktion von x ist: d.h. es gibt8 eine C2-Funktion α : I → R, wobei I das reelleIntervall [0, xB] ist, sodass (x, y) (p) |p ∈ γ = (x, α (x)) |x ∈ I .
Sei nun p ∈ γ mit x (p) = xp > 0. Die Zahl
s (xp) =
xp
0
1 + (α′)2 (ξ)dξ
gibt die Länge jenes Teils der Linie γ an, der zwischen 0 und p liegt. Sei ϕ (xp) derAnstiegswinkel von α bei xp. Es gilt also
α′ (xp) = tanϕ (xp) mit ϕ (xp) ∈−π
2,π
2
.
An dem Kettenstück zwischen A und p greifen drei Kräfte an:
• Schwerkraft Fg = −ρgs (xp) e2; hier sind ρ die konstante Kettenmasse proLängeneinheit und g die Erdbeschleunigung;
• Befestigungskraft F0 = − |F0| (cos (ϕ (0)) e1 + sin (ϕ (0)) e2) mit |F0| > 0 in A;
• Kettenspannkraft Fp = |Fp| (cosϕ (xp) e1 + sinϕ (xp) e2) greift in p.
Die Kettenspannkraft wird vom Kettenstück, das zwischen p und B liegt, aus-geübt. Sie ist tangential zur Kette in p und nach rechts gerichtet. Eine elastischeFeder, die zwischen dem Kettenglied bei p und dem rechts davon angrenzenden Ket-tenglied eingebaut wäre, würde die Kettenspannkraft sichtbar machen. Da die Kette
7Galilei hatte vermutet, dass diese Kettenlinie eine Parabel sei. Huygens widersprach zwar schon1646, also mit 17(!) Jahren, dieser Vermutung, fand aber erst 1691, also mit 62 Jahren, die richtigeKurve, nachdem Jakob Bernoulli das Problem zur Herausforderung an seine Kollegenschaft erklärthatte. Jakob Bernoullis Problem wurde von seinem jüngeren Bruder Johann, von Leibniz, Huygensund schließlich auch von Jakob Bernoulli selbst gelöst.
8Dies ist hier eine Einengung des ursprünglichen Problems. Auch diese Annahme kann aber ausetwas allgemeineren Voraussetzungen abgeleitet werden.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 18
als ruhend vorausgesetzt ist, addieren sich alle drei Kräfte zu 0. Es gilt somit
0 = |Fp| cosϕ (xp)− |F0| cosϕ (0) ,
ρgs (xp) = |Fp| sinϕ (xp)− |F0| sinϕ (0) .
Diese beiden Gleichungen sind äquivalent zu
|Fp| = |F0|cosϕ (0)
cosϕ (xp),
ρgs (xp) = |F0| [cosϕ (0) tanϕ (xp)− sinϕ (0)]
Die zweite Gleichung ist äquivalent zu
tanϕ (xp)− tanϕ (0) =ρg
|F0| cosϕ (0)s (xp) .
Es gilt also mit k = ρg|F0| cosϕ(0) > 0 für alle x ∈ I
α′ (x) = k
x
0
1 + (α′)2 (ξ)dξ + tanϕ (0) . (1.5)
Durch Ableiten von (1.5) nach x ergibt sich schließlich auf ganz I die Differen-tialgleichung
α′′ (x) = k
1 + (α′)2 (x). (1.6)
Es liegt also die etwas ungewöhnliche Situation vor, dass die Differentialgleichungüber den Parameter k von der Anfangsbedingung α′ (0) = tanϕ (0) abhängt.
Löse zunächst die Differentialgleichung erster Ordnung für die Funktion y = α′
y′ (x) = k
1 + y2 (x).
Diese Differentialgleichung ist vom Typ der getrennten Variablen und kann mitdem (vergrößerten) Definitionsbereich (x, y) ∈ R2 versehen werden. Die Funktionh (y) =
1 + y2 hat keine Nullstelle auf R. Eine Stammfunktion von 1/h ist Φ (y) =
sinh−1 (y) . Daher existiert ein c ∈ R mit
sinh−1 (y (x)) = kx− c
für alle x ∈ R. Daraus folgt α′ (x) = sinh (kx− c) . Nochmalige Integration ergibtwegen α (0) = 0 für die Kettenlinie α
α (x) =1
k(cosh (kx− c)− cosh (c)) .
Die Funktion α hat auf R ein globales Minimum. Es hat den Wert (1− cosh (c)) /kund wird nur im Punkt x = c/k angenommen. In diesem Punkt hat α die Krümmungα′′ck
= k. Der Schmiegekreis ans Minimum hat daher den Radius 1/k.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 19
Die Parameter k und c sind durch α (xB) und die Länge L >
x2B + α (xB)
2 der
Kette eindeutig festgelegt. Es gilt kα (xB) = cosh (kxB − c) − cosh (c) und wegenGleichung (1.6)
kL =
xB
0
k
1 + α′ (x)2dx =
xB
0
α′′ (x) dx
= α′ (xB)− α′ (0) = sinh (kxB − c) + sinh (c) .
Für die symmetrische Randvorgabe α (xB) = 0 etwa folgt, dass c = kxB/2 undL2k = sinh
xB2k. Das Minimum von α wird in xB/2 angenommen. Für c gilt also
die BestimmungsgleichungL
xBc = sinh c.
Als Lösung existiert wegen L > xB in R>0 genau ein c. Aus diesem Wert für c ergibtsich k mit k = 2c/xB.
Bei symmetrischer Randvorgabe α (xB) = 0 mit xB = 1m und L = 10m folgtaus 10c = sinh c, dass c ≈ 4, 5. Somit gilt k = 2c/xB ≈ 9, 0m−1. Der Betrag derKraft, mit der die Kette im Punkt A befestigt ist, lässt sich nun auch berechnen. Esgilt mit M = ρL (Kettenmasse)
|F0| =ρg
k cosϕ (0)=
ρg
k
1 + tan2 ϕ (0) =
ρg
k
1 + α′ (ϕ (0))2
=ρg
k
1 + sinh (c)2 = ρgL
1
kL
2
+
sinh (c)
kL
2
= Mg
1
kL
2
+
1
2
2
=Mg
2
1 +
2
Lk
2
≈ Mg
2
1 +
1
45
2
.
Figur 1.15 vergleicht die (in symmetrische Lage gebrachte) Kettenlinie (rot) derLänge L ≈ 2, 4xB mit der Parabel gleicher Länge. Beide Kurven gehen durch diePunkte (±xB/2, 0) . Sie sind sichtbar voneinander verschieden.
Welche Differentialgleichung gilt für den Anstiegswinkel der Kettenlinie? Für dieFunktion ϕ mit α′ = tanϕ folgt auf I eine Differentialgleichung erster Ordnung vomTyp der getrennten Variablen, denn einerseits gilt
α′′ (x) = tan′ (ϕ (x))ϕ′ (x) =1
cos2 ϕ (x)ϕ′ (x) ,
und andererseits gilt wegen −π2< ϕ (x) < π
2
k
1 + (α′)2 (x) = k
1 + tan2 (ϕ (x)) = k
cos2 (ϕ (x)) + sin2 (ϕ (x))
cos2 (ϕ (x))
=k
cos (ϕ (x)).

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 20
10.50-0.5-1
0
-0.5
-1
-1.5
-2
Abbildung 1.15: Kettenlinie (rot) mit Parabel gleicher Länge
Somit ist die Gleichung (1.6) äquivalent zu
ϕ′ (x) = k cos (ϕ (x)) . (1.7)
Für die Funktion φ : [0, kxB] → R mit φ (kx) = ϕ (x) gilt dann die schon be-handelte parameterfreie Differentialgleichung φ′ = cosφ.Die Menge ihrer maximalenLösungen mit Werten im Intervall
−π
2, π2
ist die Menge
φc : R→
−π
2, π2
|c ∈ R
mit φc (x) = arctan sinh (x− c) . Daraus folgt für die Kettenlinie, dass ein c ∈ Rexistiert, sodass
α′ (x) = tanϕ (x) = sinh (kx− c)
für alle x ∈ [0, xB] . Damit ist also ein zweiter Weg zur Bestimmung der Kettenliniegefunden.
1.1.6 *Der freie Fall aus großer Höhe
Ein apokalyptischer Engel stoppt die Erde auf ihrem Umlauf um die Sonne und läßtsie angesichts dessen, was er zu sehen bekommt, erschrocken wieder los. Wie langedauert der Sturz der Erde in die Sonne?
Für inertiale, kartesische Erdbahnkoordinaten xi, (i = 1, 2, 3) mit Nullpunkt im(beinahe ruhenden) Sonnenzentrum als Funktion einer inertialen Zeit t gilt
mxi(t) = −GmMxi(t)
r3(t)(1.8)
(Newtons Bewegungsgleichungen). G ist Newtons Gravitationskonstante, M dieMasse der Sonne und m die Masse der Erde. Die Funktion
r :=
(x1)2 + (x2)2 + (x3)2
gibt den momentanen Abstand zwischen Erde und Sonne an. Die Anfangsbedingungder Sturzbewegung ist o.E.d.A.
x1(0) = R, x2(0) = x3(0) = 0; x1(0) = x2(0) = x3(0) = 0 (1.9)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 21
mit R ≈ 1, 5 · 1011m. Wegen x1(0) = R > 0 gibt es ein ε > 0, sodass x1(t) > 0 füralle t ∈ D := [0, ε) gilt.
Eine R3-wertige Funktion (x1, x2, x3) = (x, 0, 0), die auf dem Intervall D definiertist, und für die x > 0 gilt, ist genau dann eine Lösung von (1.8) und (1.9), wenn dieauf D definierte Funktion x eine Lösung des Anfangswertproblems
x(t) = − γ
x(t)2mit x(0) = R und x(0) = 0 (1.10)
mit γ := GM > 0 ist. Wegen (1.10) gilt x(t) = ddt(x(t)) < 0. Die Geschwindigkeit x
ist somit für Lösungen x > 0 streng monoton fallend. Daher folgt aus der gegebenenAnfangsbedingung x(0) = 0 die Ungleichung x(t) < 0 für alle 0 < t < ε. (DieLösung x ist also auf D streng monoton fallend, d.h. die Erde bewegt sich, einmalausgelassen, ausschließlich in Richtung Sonne). Zusammen mit der Nebenbedingungx(t) < 0 (für alle 0 < t < ε) ist (1.10) äquivalent zu
x(t) · x(t) = − γ
x(t)2x(t).
Dies wiederum ist wegen x(t) · x(t) = ddt
(x(t))2
2und − γ
x(t)2x(t) = d
dt
γ
x(t)
äquivalent
zud
dt
(x(t))2
2− γ
x(t)
= 0 mit x(t) < 0 für alle 0 < t < ε. (1.11)
Somit ist eine Funktion x : (0, ε)→ R genau dann Einschränkung einer Lösung desAnfangswertproblems (1.10), wenn für alle t ∈ (0, ε) die Differentialgleichung
(x(t))2
2− γ
x(t)= − γ
R(1.12)
zusammen mit x(t) < 0 und der Anfangsbedingung limt↓0 x(t) = R gilt. Die Diffe-rentialgleichung (1.12) sagt, dass die Summe aus kinetischer und potentieller Energiefür Lösungen von (1.10) konstant ist. Gleichung (1.12) ist eine implizite, gewöhn-liche, nichtlineare Differentialgleichung erster Ordnung. Mit der Nebenbedingungx(t) < 0 ist (1.12) äquivalent zu
x(t) = −
2γ/R
(R/x(t))− 1. (1.13)
Beachte dabei, dass aus x < 0 die Ungleichung x(t) < R für alle t ∈ (0, ε) folgt.Mit den dimensionslosen Koordinaten τ und ξ, definiert durch
τ = t
2γ/R3, (1.14a)
ξ(τ ) = x(t)/R < 1, (1.14b)
schließlich ist (1.13) äquivalent zu
d
dτξ(τ) = −
ξ (τ)−1 − 1,

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 22
und die Anfangsbedingung ist für die Funktion ξ durch limτ↓0 ξ(τ ) = 1 gegeben.Beachte dabei x(t) =
2γ/R dξ
dτ(τ) .
Das Problem der stürzenden Erde ist nun in die folgende „dimensionsbereinigteForm” gebracht. Sei
f : R× (0, 1)→ R, (x, y) → −
y−1 − 1.
Gesucht ist die maximale Lösung α : (0, xs)→ R von y′ = f(x, y) mit der Anfangs-bedingung
limx↓0
α(x) = 1.
Aus der Obergrenze xs des Definitionsbereichs von α ergibt sich dann für die FallzeitT
T = xs
R3/ (2γ).
Die Differentialgleichung ist autonom und vom Typ der separierten Variablen. DieFunktion f ist lokal Lipschitzbeschränkt, sodass der Eindeutigkeitssatz anwendbarist. Es gilt f(x, y) = g(y) mit der stetig differenzierbaren Funktion
g : (0, 1)→ R, y → −
y−1 − 1
g ist negativ definit und streng monoton wachsend. Für y ↓ 0 wächst |g(y)| unbe-schränkt und für y ↑ 1 strebt g(y) gegen 0. Die Funktion g hat keine Nullstelle. DenGraphen von g im Bereich 0.1 < y < 1 und ein Richtungsfeld von y′ = f(x, y) zeigendie beiden folgenden Figuren. g(y) ist die Fallgeschwindigkeit der Erde in Einheitenvon v :=
2γ/R, die sie bei einer Annäherung an die Sonne bis zum Abstand yR
erreicht. (Es gilt9 v ≈√2(2πR)/1Jahr ≈ 3, 65 ·106 km/Tag ≈ 42, 3 ·103ms−1.) Beim
Eintauchen der Erde in die Sonne, das ist bei ca. y = 1/150, hat die Erde also eineGeschwindigkeit mit dem Betrag v
√150− 1 ≈ 516 km s−1.
10.80.60.40.2
0
-0.5
-1
-1.5
-2
-2.5
-3
Der Graph von g
9Einsetzen der Modellparameter oder siehe die Schlußbemerkung.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 23
21.81.61.41.210.80.60.40.20
1
0.9
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
x
y
x
y
Richtungsfeld zu f
Achtung: Wird der Definitionsbereich von g um den Randpunkt 1 vergrößert,dann hat y′ = f(x, y) = g(y) auch die konstante Lösung α(x) = 1. Die zugehörigeFunktion x(t) = R erfüllt jedoch nicht die Newtonsche Bewegungsgleichung. Diesezusätzliche Lösung kommt durch das Multilplizieren der Newtonschen Gleichung mitx zustande, das in die Umformung von (1.10) in (1.13) eingeht.
Nun zur Bestimmung einer Stammfunktion Φ von 1/g. Es gilt für 0 < y < 1
1 1y− 1
=y
y − y2= −1
2
1− 2yy − y2
− 1y − y2
= − d
dy
y − y2 +
1
2
y − y2
Eine Stammfunktion von 1/
y − y2 im Bereich (0, 1) ist die Funktion
y → − arcsin (1− 2y) .
Dies folgt mit der Kettenregel aus arcsin′(x) = 1/√1− x2 für −1 < x < 1. Die
Funktion arcsin ist die inverse Funktion der Einschränkung der Funktion sin auf dasIntervall
−π
2, π2
. Beachte, dass die Funktion y → − arcsin (1− 2y) das Intervall
(0, 1) stetig und streng monoton steigend auf−π
2, π2
abbildet.
Damit ist eine Stamfunktion Φ : (0, 1)→ R von 1/g die Funktion
Φ(y) =
y − y2 +1
2arcsin (1− 2y) .
Φ ist wegen Φ′(y) = 1g(y)
< 0 streng monoton fallend. Die gesuchte Lösung α vony′ = f(x, y) erfüllt somit
x+ C = Φ(α(x))
für ein festes reelles C. Die Integrationskonstante C ist durch die Randbedingunglimx↓0 α(x) = 1 zu
C = limy↑1
Φ(y) =1
2arcsin (−1) = −π
4

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 24
bestimmt. Der maximale Definitionsbereich (0, xs) von α ergibt sich aus der unterenGrenze des Definitionsbereichs (0, 1) von Φ. Es gilt
xs = limy↓0
Φ(y)− C =1
2arcsin (1) +
π
4=
π
2.
Für den Graphen Γ von α gilt
Γ =
(x, y) ∈ R× (0, 1) | x =
y − y2 +
1
2arcsin (1− 2y) +
π
4
.
Das folgende Bild zeigt Γ (mit horizontaler y-Achse).
10.750.50.250
1.5
1.25
1
0.75
0.5
0.25
0
xx
Der Graph von α
Die Fallzeit der Erde in die Sonne ist somit
T = xs
R3/ (2γ) =
π
2
R3/ (2γ).
Einsetzen der Zahlenwerte der Modellkonstanten ergibt dann den gesuchten Zahlen-wert für die Fallzeit zu T ≈ 65Tage.
Schlußbemerkung: Hat man keine Tabellen zur Hand, dann geht es auch so.Die Zahl γ
R2= GM
R2ist aufgrund von Newtons Bewegungsgleichung der radialen
Beschleunigung der annähernd gleichförmigen Kreisbewegung der Erde im AbstandR um die Sonne gleich. Diese Beschleunigung ist durch Rω2 gegeben, wobei ω dieWinkelgeschwindigkeit, also 2π/Umlaufzeit der Kreisbewegung ist. Damit gilt
T =π
2
R/ (2Rω2) = π/
2√2ω.
Für die Erde gilt ω = 2π/1 y. Daraus folgt
T ≈ 1 y
4√2≈ 365Tage√
32≈ 65Tage.
Diese Fallzeit lässt sich auch über Keplers drittes Gesetz berechnen, das besagt,dass die Umlaufzeiten T1, T2 zweier Planetenbahnen um die Sonne mit ihren großenHalbachsen a1, a2 durch
(T1/T2)2 = (a1/a2)
3

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 25
verknüpft sind.Wir vergleichen die annähernd kreisförmige Erdbahn, für die T1 = 1 yund a1 = R gilt, mit dem Grenzfall einerzu einer Geraden verkümmerten Ellipse.Für die Fallzeit der Erde in die Sonne gilt dann T = T2/2, da im Fall ja nur diehalbe Ellipse durchlaufen wird, und a2 = R/2, da im Grenzfall die Sonne mit demPerihel der extrem exzentrischen Ellipse zur Deckung kommt. Somit gilt
2T
1 y
2
=
R/2
R
3
=1
23
und daher das oben erhaltene Ergebnis T = 1y/4√2.
Schließlich wird noch der Graph der Funktion y →
R3/ (2γ)α−1(1 − y) an-geführt, die dem zurückgelegten Weg y (in Einheiten von R) für 0 < y < 1 die
benötigte Fallzeit in Tagen zuordnet. Mit
R3
2γ≈ 2
π65Tage ≈ 41.38Tage ergibt sich
das folgende Bild. Es zeigt, dass die erste Hälfte des finalen Weges in etwa 55 Tagenund die zweite, wärmere Hälfte in nur mehr 10 Tagen zurückgelegt wird.
10.750.50.250
62.5
50
37.5
25
12.5
0
y
t
y
t
Reisezeit t in Tagen als Funktion der zurückgelegten Strecke y
1.1.7 Lineare Differentialgleichungen
Bei einer linearen Differentialgleichung ist die Funktion f nach einem Muster gebil-det, das die Menge aller maximalen Lösungen besonders überschaubar macht.
Definition 8 Sei D ein allgemeines Intervall und a : D → R und b : D → Rstetig. Sei f : D × R → R mit f (x, y) = a(x)y + b(x). Die Differentialgleichungy′ = f(x, y) heißt inhomogen linear, falls b = 0. Die Funktion b heißt Inhomogenität.Die Gleichung und y′ = a(x)y heißt homogen linear. Beide Fälle werden als linearbezeichnet.
Vorbemerkung über die Lösungsmenge im homogen linearen Fall y′ = a (x) y :Sind α1, α2 : D ⊃ I → R Lösungen auf einem Intervall I, dann ist für λ ∈ Rauch λα1+α2 eine Lösung mit dem Definitionsbereich I. Die Menge aller Lösungendesselben Definitionsintervalls I ist also ein (reeller) Vektorraum. Welche Dimension

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 26
hat er? Hängt seine Dimension von I ab? Der folgende Satz beantwortet derleiFragen und führt die Bestimmung der Menge L0 aller maximalen Lösungen auf dieBestimmung einer Stammfunktion A zurück.
Satz 9 Sei a : D → R stetig und A : D → R eine Stammfunktion von a, dhes gilt A′ = a. Die Menge aller maximalen Lösungen von y′ = a (x) · y ist dereindimensionale Vektorraum L0 mit
L0 = R · eA :=αC : D → R mit αC (x) = C · eA(x) |C ∈ R
.
Die Menge aller Lösungen mit Definitionsbereich I ⊂ D ist der (ebenfalls eindimen-sionale) Vektorraum R ·eAI , wobei AI die Einschränkung von A auf das TeilintervallI ⊂ D ist.
Beweis. Eine homogen lineare Differentialgleichung ist vom Typ der getrenntenVariablen. Wegen f (x, y) = a (x)·y ist der Eindeutigkeitssatz anwendbar. Daher hatder Graph einer von der 0-Lösung verschiedenen Lösung α keinen Schnittpunkt mitdem Graphen der 0-Lösung und α hat keine Nullstelle. Eine solche (’nichttriviale’)Lösung mit dem Definitionsbereich I erfüllt somit ln |α (x)| = A (x) + C für allex ∈ I. Daraus folgt α (x) = α (x0) e
A(x)−A(x0) für alle x ∈ I und für ein x0 ∈ I.Dabei ist A : D → R eine Stammfunktion von a. (Die gibt es, da a stetig ist.)Eine maximale Lösung hat offenbar den Definitionsbereich I = D. Somit gilt für dieMenge L0 aller maximalen Lösungen der homogenen Gleichung y′ = a(x)y : Sie istdie Menge aller reellen Vielfachen von eA, also der Vektorraum L0 = R· expA.
Die eindeutige maximale Lösung von y′ = a (x) · y zum Anfangswert (x0, y0) ∈D × R ist somit die Funktion
αC : D → R mit αC(x) = C · exp x
x0
a (ξ) dξ
und C = y0.
Nun zu den inhomogen linearen Gleichungen. Sei I ⊂ D ein Intervall. Sindα1 : I → R und α2 : I → R zwei Lösungen derselben inhomogenen Gleichungy′ = a(x)y + b(x), dann ist α1 − α2 eine Lösung der homogenen Gleichung y′ =a(x)y. (Nachrechnen!) Ist umgekehrt α : I → R eine Lösung der homogenen undβ : I → R eine Lösung der inhomogenen, dann ist auch α + β eine Lösung derinhomogenen Gleichung. Existiert eine Lösung α der inhomogenen Gleichung mitdem Definitionsbereich D der Funktionen a, b? Ja, denn es gilt für die Menge Lb
aller maximalen Lösungen der inhomogenen Gleichung der Satz von der Variationder Konstanten Formel.
Satz 10 Sei D ⊂ R ein Intervall, seien a, b : D → R stetig und sei A : D → R eineStammfunktion von a. Sei αc : D → R mit
αc(x) = eA(x)c+
x
s
e−A(ξ)b(ξ)dξ
(1.15)
für ein fest gewähltes s ∈ D. Dann gilt Lb = αc | c ∈ R . Die Lösung zum An-fangswert (x0, y0) ∈ D × R ist die Funktion αc mit der Integrationskonstanten
c = y0e−A(x0) −
x0
s
e−A(ξ)b(ξ)dξ.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 27
Beweis. Versuchsweiser Ansatz: α (x) = C (x) eA(x) für alle x aus einem noch zubestimmenden Teilintervall I ⊂ D. Die Funktion α ist genau dann eine Lösung derinhomogenen Gleichung, wenn für alle x ∈ I
C ′ (x) eA(x) + C (x) a (x) eA(x) = a (x)C (x) eA(x) + b (x) .
Dies ist äquivalent zuC ′ (x) = e−A(x)b (x) .
Diese Differentialgleichung für C hat die maximale Lösung
C : D → R mit C (x) =
x
s
e−A(ξ)b (ξ) dξ,
für alle x ∈ D. Es gilt C (s) = 0.Jede weitere maximale Lösung der inhomogenen Gleichung y′ = a (x) y + b (x)
ist aus der Lösung C durch Addition einer Funktion aus L0 zu erhalten.Die Variation der Konstantenformel (1.15) zeigt, dass Lb = L0+αp, wobei αp ein
beliebiges fest gewähltes Element von Lb ist. Die Menge der maximalen Lösungeneiner inhomogen linearen Differentialgleichung ist somit ein eindimensionaler affinerUnterraum von Abb (D : R) .
Die partikuläre Lösung α0 zu c = 0 hängt linear von b ab. Sei für x ∈ D
yb(x) =
x
x0
eA(x)−A(ξ)b(ξ)dξ.
Dann gilt yλb1+b2 (x) = λyb1 (x) + yb2 (x) für λ ∈ R und für b1, b2 ∈ C (D : R) .Benutzung dieses Sachverhalts erspart manche Rechnung.
Das Nahewirkungsprinzip des Eindeutigkeitssatzes wird von der Variation derKonstantenformel deutlich sichtbar gemacht: Wählt man die StammfunktionA(x) = x
x0a(ξ)dξ, dann ist die maximale Lösung der Gleichung y′ = a(x)y + b(x) zum An-
fangswert (x0, y0) die Funktion αy0. Sei nun I ⊂ D ein Intervall mit x0 ∈ I. DieVariation der Konstantenformel zeigt dann, dass die Einschränkung von αy0 auf Ibei Änderungen von a oder b außerhalb von I unverändert bleibt. In manchen phy-sikalischen Anwendungen bewirkt dieser Sachverhalt, dass künftige, oft unbekannteUmstände keine Auswirkung auf das Gegenwärtige haben.
1.1.8 Atmosphärische 14C-Konzentration
Ein Teilchen des Sonnenwindes setzt in der oberen Atmosphäre Neutronen frei, wennes einen der Kerne eines Luftmoleküls trifft und zertrümmert. Aus einem solchen’Spallationsneutron’ und einem intakten 14N Kern (eines Luftmoleküls) kann an-schließend in der Ladungstauschreaktion 14
7 N+10n →14
6 C+11p ein Kern des instabilen
Kohlenstoffisotops 14C entstehen. Andererseits zerfällt 14C mit einer Halbwertszeitvon 5730 Jahren durch den Betazerfall 14
6 C →147 N + e− + νe.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 28
Auf diese Weise erbrütet die Sonne in der hohen Atmosphäre laufend neues 14C,das natürlich auch in den Kreislauf organischen Materials Eingang findet und lang-sam wieder zerfällt. Nach Beendigung der Stoffaufnahme eines Lebewesens10 sinktdas Konzentrationverhältnis von 14C zu 12C in dessen Überresten und ermöglichteinen Rückschluss auf den Todeszeitpunkt, wenn das Konzentrationsverhälnis von14C zu 12C zur Zeit des Einbaus bekannt ist.
Die Intensität des Sonnenwindes ist nun aber, auch wenn sie über mehrere Wo-chen und über die ganze Erdkugel gemittelt wird, zeitlich nicht konstant, sodassauch das atmosphärische Konzentrationverhältnis von 14C zu 12C im Lauf der Erdge-schichte veränderlich ist. Schwankt beispielsweise die mittlere Intensität des Sonnen-windes harmonisch um einen Mittelwert, dann gilt für die (entsprechend gemittelte)Konzentration N(t) von 14C in der Erdatmosphäre zur Zeit t
N (t) = −γN (t) + c+ d · cos (ωt− δ) . (1.16)
Dabei ist γ > 0 die Zerfallskonstante von 14C, die Zahl c > 0 ein Langzeitmittelder Produktions- oder Brutrate und d > 0 die Amplitude der harmonischen Oszilla-tionen des Kurzzeitmittels der Brutrate. Die Frequenz ω dieser Oszillationen kannpositiv angenommen werden. Da die Brutrate von 14C nicht negativ sein kann, gilt0 ≤ d ≤ c. Die Phase δ ∈ [0, 2π) legt die Lage der Oszillationsfunktion auf derZeitskala fest. Duch Wahl eines Nullpunkts in der Zeit kann δ = 0 erreicht werden.
Welche Schlüsse können aus der Differentialgleichung (1.16) auf die zeitliche Ent-wicklung von N, also auf die Funktion t → N (t) , gezogen werden? Die Funktionα : R→ Rmit α (γt) = N (t)− c
γerfüllt an der Stelle x = γt die parameterreduzierte
Differentialgleichung
α′ (x) =d
dxN (x/γ)) =
N (t)
γ= −N (t) +
c
γ+
d
γ· cos (ωt)
= −N (t)− c
γ
+
d
γ· cos (ωt) = −α (x) +
d
γ· cos
ω
γx
.
α ist also Lösung von y′ = f (x, y) mit f : R2 → R und f (x, y) = −y + λ cos (kx) .Dabei gilt k = ω/γ > 0 und λ = d/γ ≥ 0.
Wir untersuchen nun diese vereinfachte Differentialgleichung für λ ∈ R. DieFunktionen a, b : R → R mit f (x, y) = a (x) · y + b (x) erfüllen also a (x) = −1und b (x) = λ cos kx. Im Fall dieser Gleichung lässt sich eine maximale Lösung derinhomogenen Gleichung leicht über den Ansatz αp (x) = α cos kx+β sin kx für x ∈ Rfinden. Die Funktion αp löst y′ = −y + λ cos kx genau dann, wenn für alle x ∈ R
k (−α sin kx+ β cos kx) = −α cos kx− β sin kx+ λ cos kx.
Koeffizientenvergleich der Faktoren vor den linear unabhängigen Funktionen cos undsin ergibt das inhomogen lineare Gleichungssystem für α, β ∈ R
βk = −α + λ und αk = β.
10Wie etwa jenes Mannes, der vor ca 5250(±125) Jahren am Hauslabjoch, einem Übergangzwischen Schnals- und Ötztal, sein Leben verlor und dessen mumifizierte Überreste am Tag des’magischen Datums’ 19.9.1991 von Bergwanderern entdeckt wurden.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 29
Dieses gilt genau dann, wenn α = λ/ (1 + k2) , β = kλ/ (1 + k2) . Zu jeder maximalenLösung α von y′ = −y + λ cos kx existiert somit eine Zahl C ∈ R, sodass α = αC .Dabei erfüllt die Funktion αC : R→ R für alle x ∈ R
αC (x) =λ
1 + k2(cos kx+ k sin kx) + C · e−x.
Die Menge L aller maximalen Lösungen von y′ = −y + λ cos kx ist somit durchL = αC |C ∈ R gegeben.
Überprüfen wir dieses Ergebnis mit der Variation der Konstantenformel. DieFunktion A : R → R mit A(x) = −x ist eine Stammfunktion von a. Daher folgtfür die maximale Lösung α des Anfangswertproblems zu x0 = 0 und y0 = 0 an derStelle x ∈ R, dass
α(x) = e−x
x
0
λ cos (kξ) eξdξ = λℜe−x
x
0
e(1+ik)ξdξ
= λℜeikx − e−x
1 + ik=
λ
1 + k2ℜ(1− ik)
eikx − e−x
=λ
1 + k2[cos (kx)− exp (−x) + k sin (kx)] .
Für α0 ∈ L0 mit α0 (x) = −λ exp(−x)1+k2
folgt α = α0 +αp, wobei αp die schon durchAnsatz erhaltene Lösung der inhomogenen Gleichung ist. Für sie gilt übrigens
αp(x) =λ
1 + k2[cos (kx) + k sin (kx)] =
λ√1 + k2
cos (kx)√1 + k2
+k sin (kx)√
1 + k2
=λ√
1 + k2[cos (δ) cos (kx) + sin (δ) sin (kx)] =
λ√1 + k2
cos (kx− δ)
mit δ = arctan (k) ∈0, π
2
. Die Lösung αp ist also eine harmonische Schwingung
derselben Periode wie die Inhomogenität der Gleichung. Sie ist jedoch um δ > 0gegen die Inhomogenität (nach rechts) verschoben. Ihre Amplitude ist fallend in k.
Für jede weitere maximale Lösung α der Differentialgleichung y′ = −y+λ cosωxexistiert ein C ∈ R, sodass α (x) = αp (x) + Ce−x für alle x ∈ R. Es gilt folglichlimx→∞ (α− αp) (x) = 0, d.h. der Einfluss der Anfangsbedingung auf die Lösung αgeht mit wachsendem x gegen 0 ohne dass die Lösung selbst gegen 0 konvergiert.Die Lösung αp nähert also das Langzeitverhalten jeder anderen Lösung.
Die zur Lösung αp gehörige 14C-Konzentration Np erfüllt zur Zeit t
Np (t) =d
γ2 + ω2cos (ωt− δ) +
c
γmit δ = arctan
ω
γ
∈0,
π
2
.
1.2 Systeme erster Ordnung
1.2.1 Definition und motivierende Beispiele
Ein Fluss strömt ruhig durch die Lande. An manchen Orten schneller, woanderslangsamer. An einem Ort p der Wasseroberfläche U ⊂ R2 und zu einer Zeit t ∈ D

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 30
habe das Wasser eine Strömungsgeschwindigkeit V (p, t) . Kurz gesagt, die Oberflä-chenströmung gibt eine Funktion V : D × U → R2, (t, p) → V (t, p) vor.
Ein welkes Blatt löst sich von einem Baum und segelt schwankend auf unserenFluss herab. Die Strömung trägt das Blatt ungerührt davon. Zur Zeit t befindet sichdas Blatt am Ort γ (t) ∈ U. Längs seiner Bahn macht das Blatt die Strömung und ihrGeschwindigkeitsfeld V sichtbar, denn es nimmt zu jeder Zeit t die GeschwindigkeitV (t, γ(t)) an, die das Wasser gerade am Ort γ(t) ∈ U des Blattes hat. V wirkt alsein Führungsfeld. Die ganze schöne Wasserreise des Blattes ist somit zu einer Kurveγ : I → U mit I ⊂ D verdichtet und eine Filmaufnahme würde zeigen, dass für allet ∈ I die Differentialgleichung γ(t) = V (t, γ(t)) gilt.
Etwas ausführlicher notiert besteht die Kurve γ aus zwei Funktionen γ1, γ2 : I →R. Auch die Funktion V ist aus zwei reellwertigen Funktionen V 1, V 2 : D × U → Raufgebaut. Die Differentialgleichung wird mit dieser Notation zum folgenden Systemvon Gleichungen für γ1, γ2.
dγ1
dt(t)
dγ2
dt(t)
=
V 1
t, (γ1(t), γ2(t))
t
V 2t, (γ1(t), γ2(t))
t
In diesem Abschnitt werden wir aus V Schlüsse über γ ziehen. Lässt sich die Reiseunseres Blattes gar berechnen?
Radioaktive Zerfallskette
Eine radioaktive SubstanzA zerfalle in eine SubstanzB, die wiederumweiter zerfällt.Für die Stoffmenge NA(t) von A zur Zeit t und NB(t) von B gilt mit λA, λB ∈ R>0
N ′A(t) = −λANA(t) und N ′
B(t) = −λBNB(t) + λANA(t).
(Beim Zerfall von n mol Stoff A werden n mol Stoff B gebildet.) Es gilt somit
d
dt
NA(t)NB(t)
=
−λA 0λA −λB
·
NA(t)NB(t)
.
Es liegen zwei gekoppelte Differentialgleichungen (erster Ordnung) für zwei Funk-tionen vor. Allerdings ist die Kopplung so einfach, dass sich die beiden Gleichungennacheinander lösen lassen. Die Menge aller maximalen Lösungen der ersten Glei-chungszeile ist
NA : R→ R, t → NA(0) exp (−λAt) | NA(0) ∈ R .Setzt man das Element NA(0) exp (−λAt) dieser Menge in die zweite Gleichung ein,wird diese zu einer inhomogen linearen Differentialgleichung erster Ordnung, nämlich
N ′B(t) + λBNB(t) = λANA(0) exp (−λAt) .
Ihre maximale Lösung zum Anfangswert NB(0) kann mit der Variation der Kon-stanten Formel erhalten werden. Für diese gilt mit NA(0), NB(0) ∈ R
NB(t) = NB(0) exp (−λBt) + λANA(0) ·
exp(−λAt)−exp(−λBt)λB−λA
falls λA = λB
t exp (−λBt) falls λA = λB
.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 31
53.752.51.250
1
0.75
0.5
0.25
0
x
y
x
y
Abbildung 1.16: Stoffmengen von A und B in Einheiten von NA(0).
Als Stoffmengen interpretierbar sind natürlich nur Konstante NA(0),NB(0) ∈R≥0. In diesem Fall folgt NA(t), NB(t) ∈ R≥0 für alle t > 0. Abbildung (1.16) zeigtfür λA = 1 und NB(0) = 0 den Graphen von NA(t)/NA(0) in schwarz. Für λB = 2zeigt sie NB(t)/NA(0) in rot und NB(t)/NA(0) für λB = 1/2 in braun. Die grüneKurve zeigt die (relative) Aktivität λANA(t)+λBNB(t)
λANA(0)für λA = 1 und λB = 2. Sie steigt
bei 0 kurzzeitig an.11
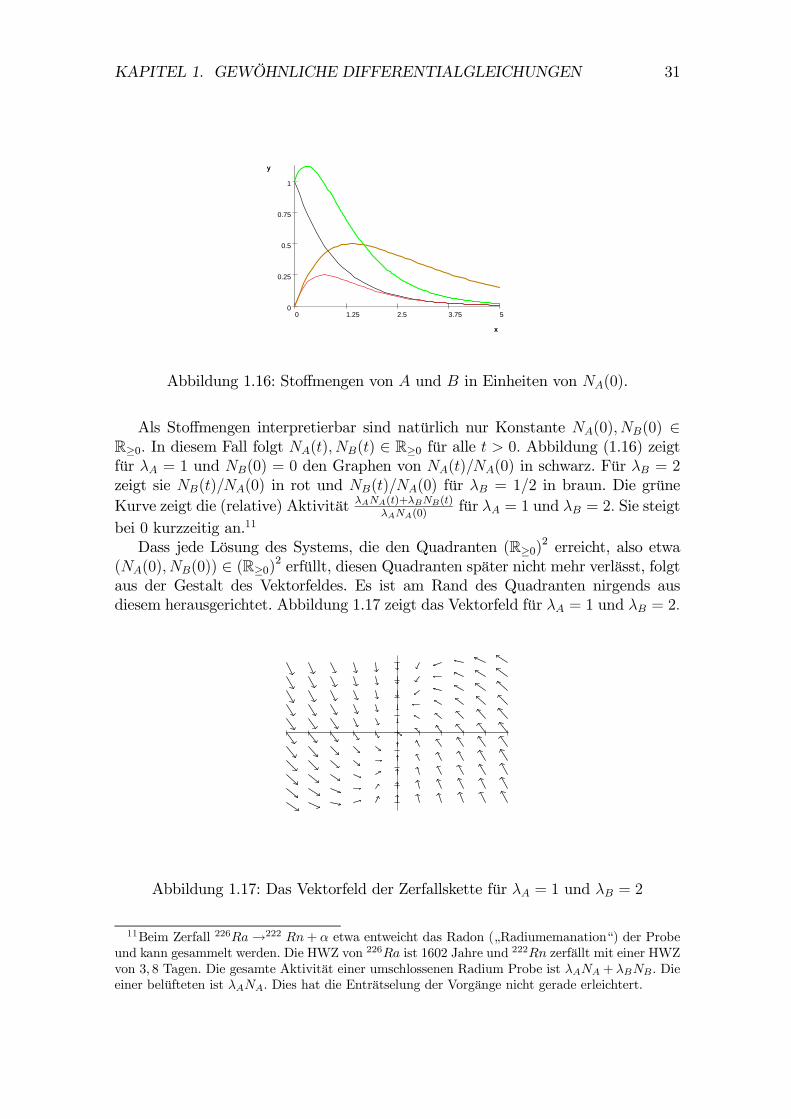
Dass jede Lösung des Systems, die den Quadranten (R≥0)2 erreicht, also etwa
(NA(0), NB(0)) ∈ (R≥0)2 erfüllt, diesen Quadranten später nicht mehr verlässt, folgt
aus der Gestalt des Vektorfeldes. Es ist am Rand des Quadranten nirgends ausdiesem herausgerichtet. Abbildung 1.17 zeigt das Vektorfeld für λA = 1 und λB = 2.
Abbildung 1.17: Das Vektorfeld der Zerfallskette für λA = 1 und λB = 2
11Beim Zerfall 226Ra→222 Rn+ α etwa entweicht das Radon („Radiumemanation“) der Probeund kann gesammelt werden. Die HWZ von 226Ra ist 1602 Jahre und 222Rn zerfällt mit einer HWZvon 3, 8 Tagen. Die gesamte Aktivität einer umschlossenen Radium Probe ist λANA+ λBNB. Dieeiner belüfteten ist λANA. Dies hat die Enträtselung der Vorgänge nicht gerade erleichtert.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 32
Lineare Schwingungen: Integration im komplexen Phasenraum
Die Bewegungsgleichung eines harmonischen Oszillators mit der Kreisfrequenz ω > 0ist eine gewöhnliche Differentialgleichung zweiter Ordnung:
d2x
dt2(t) = −ω2x(t). (1.17)
Für die beiden Funktionen x1 := x und x2 := 1ω
dxdt
folgt x′1 = ωx2 und x′2 =−ωx1. Fasst man die beiden reellwertigen Funktionen zur R2×1-wertigen Funktion(x1, x2)
T zusammen, dann ist Gleichung (1.17) äquivalent zum folgenden Systemerster Ordnung
d
dt
x1
x2
= ω
0 1
−1 0
·
x1
x2
= ω
x2
−x1
am reell 2-dimensionalen Phasenraum R2×1 äquivalent.Das hier auftretende (lineare) Geschwindigkeitsvektorfeld A : R2×1 → R2×1 mit
x1
x2
→
0 1−1 0
·
x1
x2
=
x2
−x1
ordnet einem Punkt seinen um 90 im ’Uhrzeigersinn’ gedrehten ’Ortsvektor’ zu. Esist tangential an Kreise um 0. Ein Kurve γ : I → R2×1 mit γ = ωAγ sollte daherden Punkt 0 mit konstanter Winkelgeschwindigkeit ω umkreisen (Fig 1.18).
Abbildung 1.18: Drehvektorfeld ωA
Ein erster besonders einfacher Weg, dies rechnerisch zu beweisen, nutzt die kom-plexe Multiplikation in der Ebene R2×1 ≃ C aus. Für die C-wertige Funktionz := x1 + ix2 folgt nämlich z (t) = −iωz(t). Maximale Lösungen sind nun leichtzu erraten12:
zc : R→ C, t → exp (−iωt) · c mit c ∈ C.
12Wie im Fall y′ = y zeigt man, dass weitere maximale Lösungen nicht existieren.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 33
Daraus ergibt sich mit c = a+ ib für den Realteil der Lösung zc
xa,b (t) := ℜ (zc (t)) = a cos (ωt) + b sin (ωt) .
Zur Veranschaulichung der Lösung xa,b dient die folgende Überlegung. Sei (0, 0) =(a, b) ∈ R2. Dann existiert bekanntlich genau eine Zahl δ ∈ [0, 2π) mit
(a, b) =√a2 + b2 (cos δ, sin δ) .
Damit folgt
xa,b (t) = ℜ(a− ib) · eiωt
= ℜ
√a2 + b2 (cos δ − i sin δ) · eiωt
=√a2 + b2ℜ
e−iδ · eiωt
=√a2 + b2 cos (ωt− δ) .
Die Lösung xa,b geht also aus einer Cosinusschwingung der Amplitude√a2 + b2 und
der Frequenz ω, durch Verschiebung des Zeitarguments t um δ/ω hervor.Zwei reelle „Integrationskonstanten” a und b stehen zur Anpassung der „allge-
meinen Lösung” xa,b an eine Anfangsbedingung zur Verfügung. Es folgt etwa, dassdie Funktion xa,b eine maximale Lösung von (1.17) zur Anfangsbedingung x(0) = aund x(0) = ωb ist. Dass xa,b durch diese Anfangsbedingung eindeutig festgelegt ist,werden wir etwas später einem Eindeutigkeitssatz für Systeme erster Ordnung ent-nehmen. Dazu brauchen wir zuvor eine präzise etwas allgemeinere Definition einesSystems von Differentialgleichungen erster Ordnung.
Definition 11 (Anfangswertproblem) Sei V ein endlichdimensionaler Vektor-raum über R. Sei U ⊂ V offen und X : U → V. Sei D ⊂ R ein allgemeines Intervall.Eine Abbildung γ : D → V heißt eine Lösung des autonomen Differentialgleichungs-systems erster Ordnung γ = X (γ) , falls γ (D) ⊂ U und falls γ(t) = X (γ(t))für alle t ∈ D. Falls γ(t0) = v0 ∈ U, sagt man γ sei Lösung zum Anfangswert(t0, v0) ∈ R × U. Falls keine Lösung β : D′ → V existiert, für die D ⊂ D′ (echtenthalten) und γ(t) = β(t) für alle t ∈ D, dann heißt die Lösung γ maximal.13
Sei γ : D → V eine Lösung des Systems γ = X (γ) und sei e = (e1, ...en) eineBasis von V . Seien γi : D → R und X i : U ′ ⊂ R1×n → R so, dass für alle t ∈ D undfür alle v =
nj=1 v
jej ∈ U
γ(t) =n
i=1
γi(t)ei und X(n
j=1
vjej) =n
i=1
X i(v1, ..., vn)ei.
Die reellwertigen Funktionen γi und X i heißen die Komponentenfunktionen von γund X zur Basis e. Für sie folgt durch Koeffizientenvergleich
γ1(t) = X1γ1(t), ..., γn(t)
,
...
γn(t) = Xnγ1(t), ..., γn(t)
.
13In der Quantentheorie ist die Zeitentwicklung eines Zustands ein (lineares) System erster Ord-nung auf einem komplexen Vektorraum. Dieser Fall kann auf den reellen zurückgeführt werden.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 34
Diese Formulierung der Gleichung γ = X γ rechtfertigt den Namen „System ersterOrdnung“.
Eine Abbildung γ : D → V heißt eine Kurve in V . Ihr Bild γ (D) ⊂ V heißt dieBahn der Kurve. Die Feldlinie eines elektrischen oder magnetischen Feldes X durchv ist also einfach die Bahn der maximalen Lösung von γ = X (γ) mit γ(0) = v.Der Vektor γ(t) heißt Tangentenvektor von γ in t. Der Tangentenvektor γ(t) isttangential an das Bild γ(D) im Punkt γ(t). Eine Kurve γ : D → V ist somit Lösungvon γ = X γ, falls für alle t ∈ D die Tangente von γ in t mit dem Vektor X (γ(t))übereinstimmt. Ist der Punkt γ(t) gegeben, dann legt X die Tangente von γ in tfest. Eine Lösung γ schmiegt sich an das gegebene Vektorfeld.
1.2.2 Feldlinien einer Punktladung
Sei |·| die euklidische Norm auf R3 und Q = q/4πε0 ∈ R>0. Das elektrische Feldeiner positiven Punktladung ist X : R3 0 → R3, v → Qv/ |v|3 . Ansatz: EineLösung γ von γ = X (γ) mit γ(0) = p wird von der Form γ(t) = α(t)p mit α(0) = 1sein. Da eine Lösungskurve den Nullpunkt, der außerhalb des Definitionsbereichesvon X liegt, nicht erreichen kann, muss α > 0 gelten. Daraus folgt
α(t) = Q |p|−3 · α(t)−2.Diese Gleichung ist vom Typ der separierten Variablen y′ = g(x)h(y) mit kon-
stanter Funktion g(x) = Q′ := Q/ |p|3 für x ∈ R und h : R>0 → R mit h(y) = 1/y2.Die Funktion h hat keine Nullstelle. Eine Stammfunktion von 1/h ist die FunktionΦ(y) = y3/3. Somit folgt für eine Lösung α, dass α > 0 und α(x)3/3 = Q′ · (x+ c/3)für ein reelles c.Der maximale Definitionsbereich von α ist
− c
3,∞. Die Anfangsbe-
dingung α(0) = 1 verlangt c = 1/Q′. Eine maximale Lösung des Systems γ = X (γ)mit γ(0) = p ist somit die Kurve
γ :− (3Q′)
−1,∞→ R3, t → ((3Q′t+ 1))
1/3p.
Die Bahn von γ istγ(t) | t > − (3Q′)−1
= R>0 · p, ein Halbstrahl in R3. Das ist
also die Feldlinie durch p. Sie „beginnt” in der Singularität des elektrischen Feldesund „endet” im Unendlichen. Ihre Eindeutigkeit folgt aus einem Satz des nächstenAbschnitts.
1.2.3 AWP: Existenz- und Eindeutigkeit der Lösung
Es soll zunächst der Begriff eines Systems erster Ornung so verallgemeinert werden,dass auch zeitabhängige Vektorfelder erfasst werden.
Definition 12 Sei U ⊂ R×V offen und sei X : U → V. Eine Kurve γ : I → V de-ren Graph (t, γ(t)) | t ∈ I in U enthalten ist, heißt eine Lösung des Systems ersterOrdnung γ = X (t, γ) , falls γ(t) = X (t, γ (t)) für alle t ∈ I.Falls für eine Lösungγ(t0) = v gilt, heißt γ Lösung zum Anfangswert (t0, v) ∈ U. Falls γ nicht die Ein-schränkung einer weiteren Lösung des Systems ist, heißt γ maximal. Die Dimensionvon V wird auch als die Dimension des Systems erster Ordnung bezeichnet.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 35
Durch Übergang von der Abbildung X : U → V zum Vektorfeld X auf U mitX : U → R × V, (t, v) → (1, X(t, v)) kann das nichtautonome System in einautonomes verwandelt werden. Daher genügt es, Existenz und Eindeutigkeitssätzefür autonome Systeme zu finden. Beim konkreten Aufsuchen von Lösungen hilft dieEinbettung jedoch im allgemeinen nicht.
Im folgenden werden zwei Existenz- und Eindeutigkeitssätze für die Lösung vonAnfangswertproblemen, einer für nichtautonome und einer für autonome Systemewiedergegeben. [18]
Satz 13 Sei U ⊂ R× V offen und die stetige Abbildung X : U → V sei lokal Lip-schitzbeschränkt im folgenden Sinn. Für jedes p = (t, v) ∈ U existiert eine offeneUmgebung Rp := (t′, v′) ∈ R× V : |t− t′| < ε, |v − v′| < δ von p und eine Kon-stante Lp, sodass |X (t′, v′)−X (t′, v)| ≤ Lp |v′ − v| für alle (t′, v′) ∈ Rp ∩ U. Dannbesitzt das System γ(t) = X(t, γ(t)) zu einem Anfangswert (t0, v0) ∈ U genau einemaximale Lösung. Etwas ungenauer Nachsatz: Der Graph dieser Lösung „reicht“ biszum Rand von U .
Für autonome Systeme vereinfacht sich die lokale Lipschitzbeschränkung und esvereinfachen sich einige weitergehenden Aussagen über die stetige Abhängigkeit derLösung von den Anfangsbedingungen.
Definition 14 Sei U ⊂ V offen, dann heißt ein Vektorfeld X : U → V lokalLipschitzbeschränkt, falls zu jedem v ∈ U Konstanten εv > 0 und Lv > 0 existieren,sodass |X (v′)−X (v)| ≤ Lv |v − v′| für alle v′ ∈ V mit |v − v′| < εv.
Beachte, dass ein lokal Lipschitzbeschränktes Vektorfeld automatisch stetig ist.
Satz 15 (Picard - Lindelöf) Sei U ⊂ V offen und das Vektorfeld X : U → Vsei lokal Lipschitzbeschränkt. Dann existiert zu jedem v ∈ U genau eine maximaleLösung des Systems γ = X (γ) mit γ(0) = v. Diese Lösung wird mit γv bezeichnetund ihr Definitionsintervall mit Iv. Die Menge D mit D =
v∈U (Iv × v) ist offen
in R × U und die lokale Flussabbbildung Φ : D → V, (t, v) → γv(t) ist stetig. IstX vom Ck-Typ, dann ist auch Φ vom Ck-Typ.
Die Bestimmung aller maximalen Lösungen eines autonomen Systems erster Ord-nung zum Vektorfeld X wird als ’Integration’ des Vektorfeldes X bezeichnet. Diemaximalen Lösungen des Systems werden auch Integralkurven genannt.
1.3 Lineare Systeme erster Ordnung
Im Fall der (inhomogen) linearen Systeme ist eine gemeinsame Behandlung deskomlexen und reellen Falles leicht möglich. Im Hinblich auf die Quantendynamikwird der komplexe Fall gleich mitbehandelt.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 36
Definition 16 Sei V ein endlichdimensionaler Vektorraum über K = R oder K =C und I ⊂ R sei ein allgemeines Intervall. Die beiden Abbildungen A : I → L (V, V )und b : I → V seien stetig. L (V, V ) ist der K-Vektrorraum der linearen Abbildungenvon V nach V und das Bild von v ∈ V unter einer linearen Abbildung A(t) ∈ L (V, V )wird mit A(t)v bezeichnet.14 Das System γ(t) = A(t)γ(t) + b(t) heißt inhomogenlinear falls b = 0 und homogen linear falls b = 0. Beide Fälle werden als linearbezeichnet.
Ein lineares System erfüllt die lokale Lipschitzbedingung. Daher existiert durchjeden Anfangswert (t0, v) ∈ I × V genau eine maximale Lösung. Über ihren Defini-tionsbereich gibt der folgende Satz Auskunft. Er ist in Kap. III, §14.VI von [18] zufinden.
Satz 17 Jede maximale Lösung eines linearen Systems über einem reellen IntervallI ist auf ganz I definiert.
Eine Illustration für die Behauptung des Satzes gibt der folgende Abschnitt.
1.3.1 2d Drehungen
Wir beginnen mit einem Beispiel, das uns noch wiederholt beschäftigen wird. Esist die Bewegungsgleichung eines harmonischen Oszillators y′′ + ω2y = 0. Sie wurdebereits in ein homogen lineares System erster Ordnung umgeformt und gelöst. Jetztwird dieses System nochmals aber ohne die Verwendung der komplexen Struktur imR2 für beliebige Anfangsvorgabe gelöst. Wir werden dabei die Flussabbildung alseine Drehbewegung von R2 um 0 mit konstanter Winkelgeschwindigkeit erkennen.
Die Bewegungsgleichung x + ω2x = 0 ist mit γ1 = x und γ2 = x/ω bekanntlichdem System erster Ordnung γ = −ωLγ auf dem ’Phasenraum’ V = R2×1 mit dem’Geschwindigkeitsvektorfeld’ −ωL : V → V mit
L :
ab
→−ba
=
0 −11 0
·
ab
äquivalent. Versuchen wir nun ohne Nutzung der komplexen Sruktur von R2 diemaximalen Lösungen des Systems γ = ωL (γ) zu finden.
Der Graph von L kann dadurch veranschaulicht werden, dass an einigen Stellenv seines Definitionsbereichs der Vektor λL(v) eingezeichnet wird. Die Konstanteλ > 0 wird dabei so gewählt, dass sich die Vektoren nicht überschneiden. Die sogezeichneten Vektoren sind tangential zur Bahn einer Lösung von γ = ωL γ. Imvorliegenden Beispiel gilt L(v), v = L(v)t ·v = 0. Daher sind als Bahnen maximalerLösungen Kreise um 0 zu erwarten.
14Die Größe A(t)γ(t) ist somit das Bild des Wertes der Kurve γ zur Zeit t unter der linearenAbbildung A(t). Die systematische, aber unübliche Schreibweise dafür ist A(t, γ(t)), wobei A alsAbbildung von I × V nach V aufgefasst wird.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 37
In Analogie zur reellen Differentialgleichung y′ = λy ist zu vermuten, dass fürv ∈ V die Kurve γv : R→ V, t → etωLv eine Lösung des Systems γ = ωLγ ist.
Für das Exponential eA einer linearen Abbildung A : V → V gilt
eA : V → V, v →∞
n=0
1
n!An(v),
wobei die lineare Abbildung An rekursiv durch A0 = id und An+1(v) = A (An (v))definiert ist. Die Abbildung eA : V → V ist somit als (unendliche) Summe linearerAbbildungen auch linear. (Konvergenzfragen werden vorläufig ignoriert.)
Im vorliegenden Beispiel gilt L2 = −id. Daraus folgt
etL =∞
n=0
tn
n!Ln =
∞
n=0
t2n
(2n)!L2n +
∞
n=0
t2n+1
(2n+ 1)!L2n+1
=∞
n=0
(−1)n t2n
(2n)!id+
∞
n=0
(−1)n t2n+1
(2n+ 1)!L = cos (t) · id+ sin (t) · L.
Daher ist eωtL eine Drehung von V um den Winkel ωt
eωtL =
cos(ωt) − sin(ωt)sin(ωt) cos(ωt)
. (1.18)
Durch Ableiten nach t rechnet man ddteωtL = ωLetL nach. Folglich gilt auch für
γv : R→ V mit γv (t) = eωtLv, dass γv (t) = ωLγv (t) und γv (0) = v. Die Kurve γv
ist also tatsächlich eine maximale Lösung des homogen linearen Systems γv = ωLγv
mit der Anfangsbedingung γv (0) = v.Gibt es weitere maximale Lösungen? Sei γ : I → V eine solche. Dann folgt
d
dte−ωtLγ (t) = (−ωL) e−ωtLγ (t) + e−ωtLγ (t) =
−ωLe−tL + e−tLωL
γ (t) = 0.
Somit ist t → e−ωtLγ (t) konstant. Daher existiert ein v ∈ V, sodass e−ωtLγ (t) = vfür alle t ∈ I. Man rechnet an Gleichung (1.18) leicht nach, dass für x ∈ R die

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 38
Abbildung e−xL invers zu exL ist. Daher gilt γ (t) = eωtLv für alle t ∈ I. Damit istklar, dass γv : v ∈ V alle maximalen Lösungen des Systems γ = ωLγ enthält.
Sei nun γv : R→ V, t → exp (ωtL) v und v = (a, b)t . Es gilt somit
γv(t) =
a cos(ωt)− b sin(ωt)a sin(ωt) + b cos(ωt)
.
Das Bild von γv ist der Kreis um 0 durch den Punkt v.Zwei spezielle Lösungen γv ergeben sich für v = e1 = (1, 0)t bzw. v = e2 = (0, 1)t .
Es sind dies die beiden Spalten der Matrix von eωtL zur Standardbasis. Jede andereder Lösungen γv ist eine Linearkombination der beiden Lösungen γe1 und γe2. Esgilt für v = ae1 − be2
γv = γae1−be2 = aγe1 − bγe2.
Der erste Eintrag der Lösungskurve γv ist die reelle Funktion x(t) = a cos (ωt)+b sin (ωt) . Dies stimmt mit den schon auf anderem Weg gefundenen maximalenLösungen der Gleichung (1.17) überein.
1.3.2 Homogen lineare Systeme
Für homogen lineare Systeme genügt es ganz allgemein und nicht nur im obigenBeispiel des Drehvektorfeldes L, eine endliche Anzahl maximaler Lösungen zu be-rechnen. Alle weiteren Lösungen können nämlich daraus durch Linearkombinationgewonnen werden. Genaueres dazu im folgenden Satz.
Satz 18 Sei γ(t) = A(t)γ(t) ein homogen lineares System auf einem Intervall I undeinem n-dimensionalen K-VR V. Dann ist die Menge LA,0 aller maximalen Lösun-gen des Systems ein n-dimensionaler K-VR. Für γ1, . . . γk ∈ LA,0 sind äquivalent:
1. γ1, . . . γk sind linear unabhängig in LA,0,
2. für t0 ∈ I sind γ1(t0), . . . γk(t0) linear unabhängig in V.
Definition 19 Eine Basis von LA,0 heißt ein Fundamentalsystem des homogen li-nearen Systems γ(t) = A(t)γ(t).
Ist (v1, . . . vn) eine Basis von V und gilt für γ1, . . . γn ∈ LA,0
γ1(t0) = v1, . . . γn(t0) = vn,
dann gilt für die Kurve γ =n
i=1 ciγi die Anfangsbedingung γ(t0) =
ni=1 c
ivi.Die maximale lokale Flussabbildung eines homogen linearen Systems ist daher
für t0 ∈ I über die Lösungen γt0,v ∈ LA,0 mit γt0,v (t0) = v durch
Φt0 : I × V → V, (t, v) → γt0,v (t)
auf ganz I × V definiert. Die Abbildung Φt0 ist im zweiten Argument K-linear:Φt0 (t, v + λw) = Φt0 (t, v) + λΦt0 (t, w) für alle v,w ∈ V und für alle λ ∈ K. DieAbbildung
Ut,t0 : V → V, v → Φt0 (t, v)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 39
ist wegen Satz 18 sogar für jedes t ∈ I ein Vektorraumisomorphismus, also invertier-bar. Sei e = (e1, . . . en) eine Basis von V und sei (γ1, . . . γn) jenes Fundamentalsystemvon γ(t) = A(t)γ(t), für das γ1(t0) = e1, . . . γn(t0) = en gilt. Sind γj
i : I → K so,dass γi(t) =
nj=1 γ
ji (t) ej für alle t ∈ I, dann folgt
Ut,t0
n
i=1
viei
= (e1, . . . en) ·
γ11 (t) , . . . γ1
n (t). . .
γn1 (t) , . . . γn
n (t)
·
v1
...vn
.
Die i-te Spalte der Matrix von Ut,t0 zur Basis e besteht also aus den Koordinaten-funktionen der Kurve γi zur Basis e. An einem Fundamentalsystem können daherdie „Evolutionsabbildungen” Ut,t0 für t ∈ I abgelesen werden.
1.3.3 Autonome homogen lineare Systeme
Für die Physik15 besonders wichtig sind autonome homogene lineare Systeme. Daherwird auf diese noch etwas genauer eingegangen. Für Ut,t0 gilt wie schon beim Beispieldes Drehvektorfeldes die folgende Exponentialformel.
Satz 20 Sei γ(t) = Aγ(t) ein autonomes homogen lineares System auf R und einemn-dimensionalen K-VR V mit A : V → V. Dann gilt Ut,t0 = Ut−t0,0 =: Ut−t0 und
Ut = etA : V → V v → γ0,v (t) =∞
n=0
tn
n!Anv.
Beweis. Ist γv jene maximale Lösung des autonomen Systems γ = Aγ, für dieγv (0) = v. Dann ist auch ihr Translat γ (t) = γv (t− t0) eine Lösung. Für sie giltγ (t0) = v. Daraus folgt Ut,t0v = γ (t) = γv (t− t0) = Ut−t0,0v für alle v ∈ V.
Sei · eine Norm von V . Eine Reihe∞
n=0 vn konvergiert in V genau dann, wenndie Zahlenreihe
∞n=0 vn konvergiert. Es existiert ein C > 0 mit Av ≤ C v
für alle v ∈ V. Daraus folgt####tn
n!Anv
#### ≤tn
n!Cn v .
Die Reihe∞
n=0 vn mit vn = tn
n!Anv ist somit majorisiert von der konvergenten
Reihe ∞
n=0
tn
n!Cn v = v etC
und damit selbst konvergent. Wir rechnen nun nach, dass γt0,v das System γ = Aγlöst.
d
dtγ0,v (t) =
d
dt
∞
n=0
tn
n!Anv =
∞
n=1
ntn−1
n!Anv = A
∞
n=1
tn−1
(n− 1)!An−1v = A
∞
n=0
tn
n!Anv.
15Die Schrödingergleichung i∂tΨt = HΨt ist von diesem Typ, wenngleich der Vektorraum, indem Ψt liegt, meist unendlichdimensional ist.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 40
Schließlich nimmt die Reihe∞
n=0tn
n!Anv für t = 0 den Wert v an.
Hier noch einige Eigenschaften des Exponentials von linearen Abbildungen. FürA : V → V linear und s, t ∈ R gilt esA etA = e(s+t)A,
eA−1
= e−A und deteA=
eSp(A) > 0. Man beachte jedoch, dass für lineare Abbildungen A,B : V → V imallgemeinen eA eB = eA+B.
Eine explizite Berechnung von etA ist nur in einigen wenigen Fällen, wie beimDrehvektorfeld L direkt durch Aufsummieren der Exponentialreihe möglich. Den-noch gibt es weitere lösbare Fälle. Falls Av = av für ein a ∈ K, dann folgt (mitReihe Nachrechnen!) etAv = etav.
Falls A Eigenvektoren v1, ..., vn zu Eigenwerten a1, ..., an hat, dann folgt16 ausder Linearität von etA
etA
n
i=1
civi
=
n
i=1
cietaivi.
Ist (v1, ..., vn) eine Basis von V, dann ist damit die (maximale) Flussabbildung vonγ = Aγ ermittelt.
1.3.4 3d Drehvektorfelder und ihre Flussabbildungen
Sei V ein reeller Vektroraum der Dimension 3. Eines der Skalarprodukte von V seiausgewählt und mit ·, · bezeichnet. Von den beiden Mengen aller gleichsinnig orien-tierten Basen sei eine als die positiv orientierte Klasse ausgezeichnet. Damit ist in Vein schiefsymmetrisches bilineares Vektorprodukt × : V × V → V eindeutig festge-legt. Es bildet zwei orthogonale Einheitsvektoren u, v ∈ V auf jenen Einheitsvektorw = u× v ab, der (u, v,w) zu einer positiv orientierten ONB von V macht.
Wie bewegen sich die Elemente von V, wenn sie alle um eine Gerade R ·n gedrehtwerden? Sei n ∈ V mit |n| = 1. Ein Vektor v ∈ V wird in einen Teil im UnterraumR · n und einen dazu senkrechten Teil zerlegt:
v = n, vn+ (v − n, vn) .
Der Teil n, vn liegt in R · n. Der Teil v − n, vn liegt in der Ebene n⊥ durch0, die senkrecht auf R · n steht. Beim Drehen von v um die Achse R · n bleibtn, vn unverändert. Nur der Teil v′ = v − n, vn wird in der Ebene n⊥ gedreht.Ist ein Drehwinkel α ∈ R gewählt, dann bleibt noch die Entscheidung über denDrehsinn zu fällen: wird ein Vektor v /∈ R ·n in die Richtung n× v weggedreht oderentgegengesetzt dazu? Jetzt ist klar, wozu der achsenerzeugende Vektor n dient.Er gibt die Möglichkeit den Drehsinn zu formulieren. Wird v für α > 0 in dieRichtung n × v um den Winkel α weggedreht, dann sagt man die Drehung um dieorientierte Achse R · n hat positiven Drehsinn. Andernfalls wird der Drehsinn alsnegativ bezeichnet.
Eine positive Drehung Rn (α) um die orientierte Achse R ·n und um den Winkelα erzeugt aus v′ ∈ n⊥ einen Vektor Rn (α) v
′ ∈ n⊥ derselben Länge wie v′. Die
16Dies ist das Lösungsschema für die zeitabhängige Schrödingergleichung mit statischem Hamil-tonoperator.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 41
Zerlegung von Rn (α) v′ nach den beiden 1d orthogonalen Unterräumen R · v′ und
R · (n× v′) ergibt somit (Bild!)
Rn (α) v′ = cos (α) · v′ + sin (α) · (n× v′) .
Damit folgt für einen belieben Vektor v ∈ V, dass
Rn (α) v = n, vn+ cos (α) (v − n, vn) + sin (α) (n× (v − n, vn))= n, vn+ cos (α) (v − n, vn) + sin (α) (n× v) .
Die Ableitung der Kurve γv : R ∋ α → Rn (α) v an der Stelle α = 0 ergibt denTangentenvektor γv (0) = n× v. Damit ist die folgende Definition motiviert.
Definition 21 Ist Ω ∈ V, dann heißt die lineare Abbildung LΩ : V → V mitLΩ (v) = Ω× v Drehvektorfeld zum Vektor Ω. Es ist das Geschwindigkeitsvektorfeldeiner (starren) Drehung mit dem Winkelgeschwindigkeitsvektor Ω. Die nichtnegativeZahl |Ω| wird als die (skalare) Winkelgeschwindigkeit von LΩ und für Ω = 0 wirdR · Ω als die (orientierte) Drehachse von LΩ bezeichnet.
Winkelgeschwindigkeitsvektoren werden als Axialvektoren im Gegensatz zu ’po-laren’ Vektoren bezeichnet. Was ist mit dieser absurd anmutenden Rede gemeint,wenn doch alle Vektoren in V Elemente ein und desselben Raumes sind? Gibt es daetwa eine Klasseneinteilung von V ? Nein, der Grund ist der folgende.
Die Spiegelung π : V → V mit π (v) = −v überträgt sich auf die Tangenten-vektorfelder von V indem für X : V → V das gespiegelte Vektorfeld π∗X : V → Vdurch π∗X : x → −X (−x) definiert wird. (Die Regel motiviert sich über die Tan-genten von Kurven in V.) Was passiert mit dem Vektorfeld LΩ bei Spiegelung? Esgilt (π∗LΩ) (v) = −LΩ (−v) = LΩ (v) für alle v ∈ V und somit π∗LΩ = LΩ. Mansagt dazu: ’der Winkelgeschwindigkeitsvektor eines Systems (bezüglich 0) geht beiSpiegelung des Systems (am Punkt 0) in sich über’. Es ist also die Parametrisierungder Drehvektorfelder auf V durch Elemente von V, die ’polar’ heißen sollte.
Man veranschauliche sich den Sachverhalt am Beispiel eines rotierenden Balls.Bei Spiegelung an seinem Mittelpunkt geht der Bewegungszustand des Balls in sichüber. Ein weiteres Beispiel liefert die um die Sonne umlaufende Erde. Bei Spiegelungan der Sonne bleiben Dreh- und Umlaufsinn der Erde erhalten, wenn auch Nord-und Südpol ihren Platz tauschen.
Aufgrund der Bilinearität des Vektorproduktes (v,w) → v×w von V ist die Men-ge aller Drehvektorfelder selbst ein dreidimensionaler Vektorraum, da für A,B ∈ Vund λ ∈ R gilt, dass LA + LB = LA+B und λLA = LλA. Die Hintereinanderausfüh-rung zweier Drehvektorfelder ergibt
LA LB : v → A× (B × v) = B A, v − v B,A .
Für A = 0 = B steht der Vektor L (ALBv) nicht für jedes v ∈ V senkrecht zu v.(Übung) Damit ist LA LB kein Drehvektorfeld. Aber es folgt
[LA, LB] := LA LB − LB LA : v → B A, v − A B, v .

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 42
Wegen LA×B (v) = (A×B) × v = −v × (A×B) = −A v, B + B A, v gilt so-mit [LA, LB] = LA×B. Das (bilineare und schiefsymmetrische) Kommutatorproduktzweier Drehvektorfelder ist wieder ein Drehvektorfeld.
Satz 22 Die Evolutionsabbildung Ut (zur Anfangszeit t0 = 0) des Systems ersterOrdnung γ = LΩγ zum Geschwindigkeitsvektorfeld einer Drehung mit Winkelge-schwindigkeit Ω = 0 erfüllt U (t) = etLΩ = eωtLn = Rn (ωt) mit n = Ω/ |Ω| undω = |Ω| . Für alle v ∈ V gilt Utv = n, vn+cos (ωt) (v − n, vn)+sin (ωt) (n× v) .
Beweis. Der entscheidende Sachverhalt ist a × (b× c) = b a, c − c a, b füra, b, c ∈ V. Daraus folgt für alle v ∈ V, dass
L2nv = n× (n× v) = n, vn− n, n v = − (v − n, vn) = −P ′
nv,
mit der Abkürzung P ′n : V → V, v → v − n, vn. Die Abbildung P ′
n ist somit dieOrthogonalprojektion auf n⊥. Damit gilt für v ∈ n⊥
L2kn v = (−1)k v und L2k+1
n v = (−1)k n× v für alle k ∈ N0,
während für v ∈ R · n folgt, dass L0nv = v und Lk>0
n v = 0. Anwendung der Expo-nentialreihe von eωtLn auf die Zerlegung v = n, vn+ (v − n, vn) ergibt dann dieBehauptung des Satzes.
1.3.5 *Drehbewegungen starrer Körper: Trägheitstensor
An dieser Stelle bietet sich ein Exkurs zur Physik der Drehbewegungen starrer Kör-per an. Dabei wird das Gebiet der gewöhnlichen Differentialgleichungssysteme zwarkurz verlassen, aber die Übersichtlichkeit und Transparenz der basisfreien Vektor-rechnung kann illustriert werden.
Sei X = x1, . . . xn ⊂ V die Menge der Orte der ausdehnungslosen Bestandteileeines Körpers zur Zeit t = 0. So ein Körper wird als starr bezeichnet, wenn seineBestandteile C2-Kurven γi : I → V mit γi (0) = xi durchlaufen, für die eine gemein-same Kurve R : I → SO (V ) und eine gemeinsame Kurve a : I → V existiert, sodassγi (t) = a (t) + R (t) xi für alle i ∈ 1, . . . n und für alle t ∈ I gilt. Hier bezeichnetSO (V ) die Menge aller linearen Abbildungen A : V → V mit |Av| = |v| für allev ∈ V und detA > 0. Es ist dies die Menge aller Drehungen von V und es folgtdetA = 1 für alle A ∈ SO (V ) .17 Im folgenden wird der Spezialfall a = 0 fehlendenTranslationsanteils behandelt.
Tragen die Massenpunkte γi die Massen mi ∈ R>0, und rotieren sie zur Zeit t = 0mit der Winkelgeschwindigkeit Ω ∈ V um 0 ∈ V, dann hat der ’Massenpunkt’ zurZeit t = 0 die Geschwindigkeit vi = R (0) xi = LΩxi mit LΩ = R (0) . Das rotierendeMassenpunktsystem hat in diesem Augenblick die kinetische Energie
Tkin =n
i=1
mi
2|vi|2 =
n
i=1
mi
2LΩxi, LΩxi =
n
i=1
mi
2Ω× xi,Ω× xi .
17Der Konfigurationsraum eines starren Körpers ist somit V × SO (V ) , eine differenzierbareMannigfaltigkeit, die kein Vektorraum ist. Daher benötigt die Mechanik des starren Körpers eineVerallgemeinerung der Differential- und Integralrechnung auf nichlineare Mannigfaltigkeiten.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 43
Mit a× b, v × w = a, v b, w − a, w b, v für alle a, b, v, w ∈ V folgt
Tkin =n
i=1
mi
2
|Ω|2 |γi|2 − Ω, xi2
=
$Ω,
n
i=1
mi
2
|xi|2 ιdV − xi xi, ·
Ω
%.
Die lineare Abbildung Θm : V → V mit
Θm =n
i=1
mi
|xi|2 ιdV − xi xi, ·
(1.19)
heißt Trägheitstensor der Massenverteilung m : X → R>0 mit xi → mi bezüglich derRotationen um 0. Bei Rotation von m mit der momentanen WinkelgeschwindigkeitΩ hat das System also die kinetische Energie Tkin = Ω,ΘmΩ /2. Als Funktion vonΩ ist Tkin also die zum Trägheitstensor gehörige quadratische Form.
Der Trägheitstensor ΘRm der drehgespiegelten Massenverteilung Rm : RX →R>0 mit Rxi → mi für ein R ∈ O (V ) hängt offenbar mit Θm gemäß ΘRm =RΘmR∗ = RΘmR−1 zusammen. Zu einer beliebigen Zeit t haben wegen γi (t) =R (t)xi die Massenpunkte des Körpers die Geschwindigkeiten γi (t) = R (t) xi =R (t)R (t)−1 γi (t) = LΩ(t)γi (t) mit LΩ(t) = R (t)R (t)−1 . Die kinetische Energie desKörpers hat daher zur Zeit t den Wert
Tkin (t) =&Ω (t) ,ΘR(t)mΩ (t)
'=&R (t)−1Ω (t) ,ΘmR (t)−1Ω (t)
'.
Dreht sich ein Körper im Lauf der Zeit mit konstanter Winkelgeschwindigkeit Ω,dann hat er zur Zeit t die Massenverteilung mt = R (t)m mit R (t) = exp (tLΩ) .Daher gilt Ω,ΘmtΩ =
&e−tLΩΩ,Θme−tLΩΩ
'= Ω,ΘmΩ , dh die kinetische Energie
ist zeitlich konstant.Ist eine Massenverteilung m unter einer Drehspiegelung R ∈ O (V ) invariant,
gilt also Rm = m, dann folgt RΘmR∗ = ΘRm = Θm, oder auch RΘm = ΘmR, derTrägheitstensor kommutiert mit der Symmetrie R von m. Ist v ∈ V ein Eigenvektorvon Θm zum Eigenwert ϑ, dann folgt daraus Θm (Rv) = RΘmv = ϑ · (Rv) , dh Rbildet die Eigenräume von Θm jeweils auf sich ab. Ist ein Eigenraum eindimensional,dann sind seine Elemente v = 0 auch Eigenvektoren von R.
Die Eigenwerte von Θm heißen Hauptträgheitsmomente und die Eigenräume dieHauptträgheitsachsen von m. Da Θm bezüglich ·, · symmetrisch ist, existiert eineOrthonormalbasis von V aus Eigenvektoren von Θm.
Im folgenden ist m fest gewählt, sodass die Notation Θm gefahrlos zu Θ verkürztwerden kann. Die Gramsche Matrix der Bilinearform Θ : V ×V → R mit Θ(v, w) =v,Θw zu einer beliebigen Orthonormalbasis (e1, e2, e3) von V hat die Einträge
Θrs = er,Θes =n
i=1
mi
|xi|2 δrs − er, xi xi, es
Diese basisabhängige Matrix wird vielfach auch als Trägheitstensor bezeichnet.Was hat Θ oder auch Θ mit einem Tensor der linearen Algebra zu tun? Ist V ∗
der Vektrorraum aller linearen Abbildungen von V nach R, dann existieren zu einer

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 44
beliebigen Basis e = (e1, e2, e3) von V drei Elemente (E1, E2, E3) von V ∗, sodassEi (ej) = δij . Diese drei Element bilden eine Basis von V ∗, die sogenannte duale
Basis, und es gilt v =3
i=1 Ei (v) ei für alle v ∈ V. Daraus ergibt sich
Θ(v,w) =3
r,s=1
ΘrsEr (v) · Es (w) .
Die bilineare Abbildung18 ⊗ : V ∗ × V ∗ → Bil (V × V ) mit
⊗ (X, Y ) ≡ X ⊗ Y : V × V ∋ (v, w) → X (v) · Y (w) ∈ R
ist ein sogenanntes Tensorprodukt im Sinn der linearen Algebra. Mit diesem giltdaher Θ =
3r,s=1
Θrs · (Er ⊗Es) .Der gesamte (kinetische) Drehimpuls lkin eines zusammengesetzten Systems setzt
sich aus den Drehimpulsen seiner Bestandteile additiv zusammen. Es gilt daher fürein starr um 0 rotierendenes System wegen a× (b× c) = b a, c − c a, b
lkin =n
i=1
mixi × vi =n
i=1
mixi × (Ω× xi) =n
i=1
mi
|xi|2Ω− xi,Ω xi
= ΘΩ.
Θ bildet die Winkelgeschwindigkeit einer Massenverteilung auf ihren Drehimpuls ab.
1.3.6 *Allgemeine Bewegungen starrer Körper
Sei V ein reeller Vektorraum der Dimension 3 und sei ·, · ein Skalarprodukt vonV. Die Menge aller linearen Abbildungen A : V → V mit Av,Aw = v, w für allev, w ∈ V ist bezüglich der Hintereinanderausführung die Gruppe O3. Für A ∈ O3
gilt somit A∗ = A−1 und detA = ±1. Die Untergruppe SO3 = A ∈ O3 : detA = 1bildet zusammen mit der Translationsgruppe V die Gruppe B = SO3 ⋊ V von V :
B ∋ gA,a : V → V, v → Av + a.
Wegen
[gA2,a2 gA1,a1 ] (v) = A2 (A1v + a1) + a2 = A2A1v +A2a1 + a2
= (A2A1, A2a1 + a2) v
gilt das Gruppenmultiplikationsgesetz eines semidirekten Produktes
gA2,a2 gA1,a1 = gA2A1,A2a1+a2
für alle (A1, a1) , (A2, a2) ∈ SO3 × V.Zwei Abbildungen gA1,a1 , gA2,a2 ∈ B sind übrigens genau dann gleich, wenn A1 =
A2 und a1 = a2. Gilt nämlich A1v+a1 = A2v+a2 für alle v ∈ V, dann folgt aus demFall v = 0, dass a1 = a2. Daraus wiederum folgt nun für alle v ∈ V, dass A1v = A2v,also A1 = A2. Daher wird abgekürzt: gA,a = (A, a) .
18Hier bezeichnet Bil (V × V ) den Vektorraum aller bilinearen Abbildungen von V ×V nach R.Man beachte, dass dim (V × V ) = 6 und dimBil (V × V ) = 9.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 45
Definition 23 Eine Abbildung f : V → V mit |f (x)− f (y)| = |x− y| für allex, y ∈ V heißt Isometrie von V.
Satz 24 Die Menge aller Isometrien von V stimmt mit B überein.
Beweis. Siehe Kap. 1 der Vorlesung von Franz Pauer, ’Gruppentheorie für Ma-thematiker, Physiker und Chemiker’, SoSe 1986.
Definition 25 Sei I ⊂ R ein offenes Intervall und Φ : I × V → V d’bar mitΦ (t, ·) ∈ B für alle t ∈ I. Dann heißt Φ d’bare Bewegung von V.
Ist Φ : I ×V → V eine d’bare Bewegung von V, dann existiert also für alle t ∈ Igenau ein (A (t) , a (t)) ∈ B mit Φ (t, v) = A (t) v+a (t) . Für zwei Vektoren v, w ∈ Vfolgt
Φ (t, v) = Φ (t, w) +A (t) (v − w) .
Diese Formel stellt die Bewegung von v als Hintereinanderausführung einer Drehungvon v um w und einer anschließenden Translation um Φ (t, w) dar. Daraus folgt mitder Bezeichnung Φ (t, v) = γv (t) wegen γv (t)− γw (t) = A (t) (v − w) , dass
γv (t) = γw (t) + A (t)A (t)−1 [γv (t)− γw (t)] .
Lemma 26 Ist A : I → SO3 d’bar, dann ist für t ∈ I die Abbildung C (t) :=A (t)A (t)−1 antisymmetrisch, d.h. es gilt w,C (t) v = −C (t)w, v für alle v, w ∈V, oder äquivalent dazu C (t)∗ = −C (t) .
Beweis. Es gilt für alle v,w ∈ V
0 =d
dtw, v = d
dtA (t)w,A (t) v =
(A (t)w,A (t) v
)+(A (t)w, A (t) v
)
=(A (t)A (t)−1 A (t)w,A (t) v
)+(A (t)w, A (t)A (t)−1 A (t) v
).
Da A (t) bijektiv ist, gilt somit auch(A (t)A (t)−1 x, y
)+(x, A (t)A (t)−1 y
)= 0 für alle x, y ∈ V.
Anmerkung: Die Liealgebra der SO3 kann mit dem Tangentialraum der SO3 imEinselement e = ιdV , also mit TeSO3 = so3 identifiziert werden. Sie stimmt mit denantisymmetrischen linearen Abbildungen von V nach V überein. A (t) ist Elementdes Tangentalraumes von SO3 im Punkt A (t) .
Lemma 27 Ist die lineare Abbildung C : V → V antisymmetrisch und ist eineOrientierung von V gewählt, dann existiert genau ein ω ∈ V mit Cv = ω× v ≡ Lωvfür alle v ∈ V. (Dabei ist × das äußere Produkt von V bezüglich der gewähltenOrientierung. Für eine positiv orientierte ONB e = (e1, e2, e3) von V gilt also e1 ×e2 = e3 zyklisch.)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 46
Beweis. Sei e eine positiv orientierte ONB von V. Dann existieren eindeutigbestimmte reelle Zahlen a, b, c sodass für die Matrix M (C, e) gilt:
M (C, e) =
0 −c bc 0 −a−b a 0
.
Für alle v =
i vi · ei ∈ V gilt dann
Cv = (e1, e2, e3) ·
0 −c bc 0 −a−b a 0
·
v1
v2
v3
.
Andererseits gilt mit ω =
i ωi · ei für alle v ∈ V
ω × v = (e1, e2, e3) ·
0 −ω3 ω2
ω3 0 −ω1
−ω2 ω1 0
·
v1
v2
v3
.
Cv = ω × v gilt nun genau dann, wenn (ω1, ω2, ω3) = (a, b, c) .Damit ist nun gezeigt:
Satz 28 Ist Φ : I × V → V eine d’bare Bewegung von V, dann existiert eine stetigeAbbildung Ω : I → V, sodass γv (t) = γw (t)+Ω (t)×[γv (t)− γw (t)] für alle v, w ∈ V.
Dieser Satz zerlegt die Geschwindigkeit der Kurve γv zur Zeit t in die Geschwin-digkeit γw (t) des Referenzpunktes w zur Zeit t und die momentane Geschwindigkeiteiner Drehung von γv (t) um γw (t) .
1.3.7 *Lageabhängigkeit des Trägheitstensors
Sei K eine endliche Menge von Punkten v1, . . . vN ⊂ V und sei Φ : I×V → V eined’bare Bewegung von V. Man stellt sich die Punkte von K als jene Raumpunkte vor,die von fiktiven ausdehnungslosen Elementarbausteinen des Körpers (in der LageK) eingenommen werden. Dann durchlaufen die Punkte vi ∈ K unter Φ die Kurvenγi = Φ (·, vi) : I → V. Eine Abbildung m : K → R>0 sei gegeben. Sie gibt dieMassen der Bausteine des Körpers an.
Ist mi = m (vi) > 0 die Masse jenes Massenpunktes des starren Körpers, derdie Kurve γi durchläuft, dann ist die kinetische Energie T (t) des Körpers zur Zeitt gegeben durch
T (t) :=N
i=1
mi
2|γi (t)|2 .
Sei nun w ∈ V ein beliebiger Punkt, der Element von K sein kann aber nichtsein muss. Es kann w zB der Schwerpunkt19 des Körpers in der Lage K sein. Indiesem Fall gilt
w = v∗ :=1
M
N
i=1
mivi mit M =N
i=1
mi.
19Dieser ist iA nicht Element von K.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 47
Im Fall eines beliebigen Referenzpunktes w ∈ V folgt mit der Abkürzung δi (t) :=γi (t)− γw (t) ∈ V, dass
T (t) =N
i=1
mi
2|γw (t) + Ω (t)× δi (t)|2
=M
2|γw (t)|2 +
N
i=1
mi
2|Ω (t)× δi (t)|2 +
$γw (t) ,Ω (t)×
N
i=1
miδi (t)
%.
Nach der Spatproduktformel a, b× c = c, a× b = a× b, c gilt für den letz-ten Summanden$
γw (t) ,Ω (t)×N
i=1
miδi (t)
%=
$γw (t)× Ω (t) ,
N
i=1
miδi (t)
%.
Für den zweiten Summanden gilt wegen |a× b|2 = |a|2 |b|2 − a, b2N
i=1
mi
2|Ω (t)× δi (t)|2 =
N
i=1
mi
2
|Ω (t)|2 |δi (t)|2 − Ω (t) , δi (t)2
.
Die lineare Abbildung ΘK(t),w : V → V mit
ΘK(t),w =N
i=1
mi
|δi (t)|2 ιdV − δi (t) δi (t) , ·
heißt Trägheitstensor des Körpers in der Lage Φ (t,K) =: K (t) ⊂ V bezüglich desReferenzpunktes Φ (t, w) = γw (t) . Es gilt also
T (t) =M
2|γw (t)|2 + 1
2
&Ω (t) ,ΘK(t),wΩ (t)
'+
$γw (t)× Ω (t) ,
N
i=1
miδi (t)
%.
Wegen δi (t) = A (t) (vi − w) und wegen A (t) ∈ SO3 gilt
ΘK(t),w = A (t)ΘK,wA (t)−1
mit
ΘK,w =N
i=1
mi
|ζi|2 ιdV − ζi ζi, ·
und ζi := vi − w.
Die lineare Abbildung ΘK,w heißt Trägheitstensor des Körpers in Lage K bezüglichdes Referenzpunktes w. Offenbar gilt ΘK,w = ΘK−w,0.
Wie hängt ΘK,w mit ΘK,v∗ zusammen, wenn v∗ der Schwerpunkt des Körpers ist?Es folgt für beliebiges δ := w−v∗ ∈ V unter Verwendung von
Ni=1 mi (vi − v∗) = 0
ΘK,v∗+δ =N
i=1
mi
|vi − v∗ − δ|2 ιdV − (vi − v∗ − δ) vi − v∗ − δ, ·
=N
i=1
mi
|vi − v∗|2 ιdV − (vi − v∗) vi − v∗, ·
+M
|δ|2 ιdV − δ δ, ·
.
Also gilt eine Formel, die als Steinerscher Satz bezeichnet wird.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 48
Satz 29 Sei ΘK,v∗ der Trägheitstensor eines Körpers in Lage K bezüglich seinesSchwerpunktes v∗. Dann gilt für den Trägheitstensor des Körpers in LageK bezüglicheines allgemeinen Referenzpunktes w = v∗ + δ
ΘK,w = ΘK,v∗ +M|δ|2 ιdV − δ δ, ·
.
Im Fall w = v∗ vereinfacht sich die kinetische Energie T (t) zu
T (t) =M
2|γv∗ (t)|2 +
1
2
&Ω (t) ,ΘK(t),v∗Ω (t)
'.
Sie zerfällt also in einen Beitrag der Schwerpunktsgeschwindigkeit und einen derWinkelgeschwindigkeit.
Die Definition des Trägheitstensors kann auf den Fall einer kontinuierlichen Mas-sendichte verallgemeinert werden. Ist ρ : V → R≥0 eine integrable Funktion, dieaußerhalb einer endlichen Kugel nur den Wert 0 annimmt, dann wird definiert:
Θρ,w =
V
ρ (v)|v − w|2 ιdV − (v − w) v − w, ·
d3v.
Ein Trägheitstensor ΘK,w ist eine positiv gewichtete Summe von Abbildungendes Typs |v|2 ιdV − v v, · . Jeder Summand ist symmetrisch bezüglich des Skalar-produktes. Somit gilt auch Θ∗
K,w = ΘK,w. Für v = 0 gilt
|v|2 ιdV − v v, · = |v|2*ιdV −
v v, ·|v|2
+= |v|2 [ιdV − PR·v] = |v|2 Pv⊥.
Für v = 0 ist |v|2 ιdV −v v, · ein positives Vielfaches der Orthogonalprojektion vonV auf das orthogonale Komplement von R · v. Für v = 0 ist |v|2 ιdV − v v, · = 0,also die Orthogonalprojektion auf 0. Als Summe positiver linearer Abbildungen istΘK,w somit positiv. Die Eigenwerte von ΘK,w werden als Hauptträgheitsmomentebezeichnet. Sie sind nicht negativ. Eindimensionale Eigenräume von ΘK,w werdenHauptträgheitsachsen genannt. Weiter gilt folgende Ungleichung für die Eigenwerteeines Trägheitstensors.
Satz 30 Ist θ ein Eigenwert von ΘK,w, dann gilt Sp (ΘK,w)− 2θ ≥ 0.
Beweis. Sei e = (e1, e2, e3) eine ONB von V. Mit vi =3
j=1 vji ej hat die Abbil-
dung Θ = ΘK,w die Matrix M (Θ, e) bezüglich e. Für jedes ihrer Diagonalelementegilt wegen vi, ek = vk
i
M (Θ, e)kk =N
i=1
mi
|vi|2 −
vki
2.
Für die Spur von Θ folgt daher
SpΘ =3
j=1
M (Θ, e)jj = 2N
i=1
mi |vi|2 ≥ 2N
i=1
mi
|vi|2 −
vki
2= 2M (Θ, e)kk
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 49
für jedes k ∈ 1, 2, 3 . Ist nun e eine ONB aus Eigenvektoren von Θ, dann istM (Θ, e)kk ein Eigenwert θ von Θ.
Sind also θ1 ≥ θ2 ≥ θ3 ≥ 0 die drei Diagonalmatrixelemente der Matrix von Θbezüglich einer ONB, dann gilt θ2 + θ3 ≥ θ1. Daraus folgt θ1 + θ2 + θ3 − 2θ1 ≥ 0und wegen θ1 ≥ θ2 ≥ θ3 auch θ1 + θ2 + θ3 − 2θ2 ≥ 0 und θ1 + θ2 + θ3 − 2θ3 ≥ 0. Esgilt also20
θ1 + θ2 + θ3 − 2θi ≥ 0 für alle i ∈ 1, 2, 3 .Anmerkung: Falls eine ONB e aus Eigenvektoren von Θ besteht, ist jedes Diago-
nalmatrixelement θi von Θ zu dieser ONB ein Hauptträgheitsmoment. Beobachtung:Das größte der Hauptträgheitsmomente stimmt mit der Spektralnorm
Θ = sup |Θv| : v ∈ V mit |v| ≤ 1
überein. (Siehe zB V2, § 21, sect 1.3 und 2.1, p 548-550 in [4].) Wegen
Sp (Θ) = Sp√
Θ∗√
Θ=###√Θ###2
HS
(Hilbert-Schmidt Norm-Quadrat) ist obiger Satz somit äquivalent zur Formel
###√Θ###2
HS≥ 2 Θ .
1.3.8 *Trägheitstensor eines Ellipsoides
Es wird nun der Trägheitstensor eines starr um sein Zentrum rotierenden Ellipsoi-des homogener Massendichte bestimmt. Als einfacherem Spezialfall wenden wir unszunächst der Kugel mit konstanter Massendichte zu.
Die Summenformel (1.19) für den Trägheitstensor überträgt sich auf eine Mas-senverteilung mit Dichtefunktion ρ : V → R≥0 wie folgt
Θ =
V
ρ (x)|x|2 ιdV − x x, ·
dτ =
3M
4πR3
|x|<R
|x|2 ιdV − x x, ·
dτ.
Hier bezeichnet R > 0 den Radius und M > 0 die Gesamtmasse der Kugel. Dasmetrische Volumselement in V zu ·, · ist mit dτ notiert.
Wir zeigen nun, dass
Θ =2
5MR2 · ιdV (1.20)
gilt. Gleichung (1.20) ist - man beachte die Polarisierungsformel quadratischer For-men - äquivalent zu v,Θv = (2/5)MR2 · |v|2 für alle v ∈ V. Berechnen wir alsov,Θv für ein beliebiges v ∈ V. Es gilt
v,Θv = 3M
4πR3
|x|<R
|x|2 |v|2 − x, v2
dτ .
20Dies erinnert an die CHSH-Ungleichungen. Gibt es tatsächlich einen tieferen mathematischenZusammenhang?

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 50
Unter Verwendung von Kugelkoordinaten (r, θ, ϕ) mit r (x) = |x| und x, v =|x| |v| cos θ (x) folgt mit der Substitution z = cos θ
v,Θv = 3M |v|24πR3
R
0
π
0
2π
0
r21− cos2 θ
r2 sin θdϕdθdr
=3M |v|24πR3
2π
R
0
r4dr
−1
1
1− z2
(−1) dz =
3M |v|22R3
R5
5
1
−1
1− z2
dz
=3M |v|2
2
R2
52
z − z3
3
,,,,1
0
=3M |v|2 R2
5
2
3=
2MR2
5|v|2 .
Damit ist Gleichung (1.20) bewiesen.Ein Ellipsoid in V wird mithilfe einer positiven quadratischen Form q beschrie-
ben. Das Ellipsoid ist dann die Punktmenge x ∈ V : q (x) ≤ 1 . Zu einer qua-dratischen Form q : V → R existiert genau eine symmetrische lineare AbbildungQ : V → V mit q (x) = x,Qx für alle x ∈ V.
Ein Ellipsoid, dessen Halbachsen die Längen R1, R2, R3 ∈ R>0 und die Rich-tungseinheitsvektoren e1, e2, e3 besitzen, hat die quadratische Form q mit
qx1e1 + x2e2 + x3e3
=
3
i=1
xi
Ri
2
für allex1, x2, x3
∈ R3.
Die zugehörige lineare Abbildung Q ist somit durch
Q =3
i=1
R−2i ei ei, · (1.21)
gegeben. Sie ist positiv definit, und erfüllt Qei = R−2i ei. Die zu Q inverse Abbildung
erfüllt Q−1 =3
i=1 R2i ei ei, · .
Lemma 31 Sei Q wie in Gleichung (1.21). Das Ellipsoid x ∈ V : x,Qx ≤ 1 hatdann das (zum Skalarprodukt ·, · gehörige) Volumen VQ = 4πR1R2R3/3.
Beweis. Das Volumen ist definiert durch
VQ =
q(x)≤1dτ =
q(x)≤1dx1dx2dx3.
Mit der Substitution xi = Riξi und der Definition ξ =
3i=1 ξ
iei folgt
VQ = R1R2R3
|ξ|≤1dξ1dξ2dξ3 =
4π
3R1R2R3.
Satz 32 Sei Q wie in Gleichung (1.21). Der Trägheitstensor Θ eines Ellipsoidesx ∈ V : x,Qx ≤ 1 der Masse M und homogener Massendichte erfüllt
Θ =M
5
SpQ−1 · ιdV −Q−1
=M
5
R2
2 +R23
e1 e1, ·+
R2
1 +R23
e2 e2, ·+
R2
1 +R22
e3 e3, ·
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 51
Beweis. Die Massendichte ist gegeben durch ρ = M/VQ im Bereich x,Qx ≤ 1und ρ = 0 für x,Qx > 1. Die Definition von Θ spezialisiert sich somit auf
Θ =M
VQ
q(x)≤1
|x|2 ιdV − x x, ·
dτ.
Wir zeigen zunächst, dass ei,Θej = 0 für i = j. Dies ergibt sich aus der Antisym-metrie des Integranden unter der Spiegelung Πi mit Πei = −ei und Πej = ej fürj = i wegen
ei,Θej = −M
VQ
q(x)≤1xixjdx1dx2dx3 = 0.
Damit ist klar, dass die Vektoren ei in Richtung der Halbachsen des EllipsoidesEigenvektoren des Trägheitstensors Θ des Ellipsoides sind.
Wir bestimmen nun die Eigenwerte von Θ, die Hauptträgheitsmomente. Es gilt
ei,Θei =M
VQ
q(x)≤1
|x|2 −
xi2
dτ =M
VQ
q(x)≤1
3
j=1,j =i
xj2
dx1dx2dx3.
Mit der Substitution xi = Riξi und der Definition ξ =
3i=1 ξ
iei folgt
Θii ≡ ei,Θei =M
VQ
R1R2R3
3
j=1,j =i
R2j
|ξ|≤1
ξj2
dξ1dξ2dξ3
=3
j=1,j =i
R2j
*3M
4π
|ξ|≤1
ξj2
dξ1dξ2dξ3+.
Der Ausdruck in der eckigen Klammer ist unabhängig von den Parametern R1, R2
und R3 und konstant in j. Daher folgt
Θii =
*3M
4π
|ξ|≤1
ξ12
dξ1dξ2dξ3+ 3
j=1,j =i
R2j .
Spezialisierung dieser Formel auf den Fall R1 = R2 = R3 = R ergibt
Θii =
*3M
4π
|ξ|≤1
ξ12
dξ1dξ2dξ3+2R2.
In diesem Fall wissen wir aber vom Trägheitstensor der Kugel vom Radius R, dassΘii = (M/5) 2R2. Somit folgt, dass der Ausdruck in der eckigen Klammer den WertM/5 hat. Damit ist gezeigt, dass für alle R1, R2, R3 ∈ R>0
Θii =M
5
3
j=1,j =i
R2j =
M
5
SpQ−1−R2
i
.
Daraus folgt nun Θ =3
i=1Θiiei ei, · =
=M
5
SpQ−1 · ιdV −
3
i=1
R2i ei ei, ·
=
M
5
SpQ−1 · ιdV −Q−1 .

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 52
1.3.9 *Kraftbedarf von Drehbewegungen
Ein Beispiel für den Nutzen von Drehungen und Winkelgeschwindigkeit liefert dasStudium von Bewegungkurven γ : I → V, deren zeitabhängige Zerlegung nach einerrotierenden Basis von V einfacher als die Zerlegung nach einer fest gewählten Basis,ja vielleicht sogar konstant ist. Sei zunächst γ0 : I → V mit dimV = 3 eine zwei maldifferenzierbare Kurve. Soll ein (kleiner) Gegenstand der Masse m seinen Ort gemäßder Kurve γ0 im Laufe der Zeit verändernen, dann ist auf diesen Gegenstand zur Zeitt die Kraft mγ0 (t) auszuüben.
21 Nun kann die Hilfskurve γ0 unserer Konstruktion ineine gleichförmige Drehbewegung mit der Winkelgeschwindigkeit Ω = ωn versetztwerden, dh die aus zwei Abbildungen zusammengestzte Kurve γ : I → V mitγ (t) = eωtLnγ0 (t) wird gebildet.
Welche Kraft muss auf einen Massenpunkt einwirken, damit er der modifiziertenKurve γ folgt? Solche Fragen tauchen auf, wenn man einen Gegenstand auf einerfest mit einer rotierenden Scheibe verbundenen geraden Schiene von der Peripherieins Zentrum bewegen will. Welche Kraft muss die Schiene ausüben können und mitwelcher Kraft ist zu schieben? Eine ganz ähnliche Frage ist die: Bewegt man sichauf einem Erdmeridian nach Norden und überstreicht in gleichen Zeiten gleichlangeMeridianstücke benötigt man welche Kraft? Würde die Erde nicht rotieren, bräuchteman keine Kraft aufzuwenden.
Durch Ableiten von γ (t) = eωtLnγ0 (t) folgt γ (t) = ωLnγ (t) + eωtLnγ0 (t) und
γ (t) = ωLnγ (t) + ωLneωtLn γ0 (t) + eωtLnγ0 (t)
= ωLn
ωLnγ (t) + 2eωtLnγ0 (t)
+ eωtLn γ0 (t)
= ω2L2nγ (t) + 2ωLne
ωtLn γ0 (t) + eωtLn γ0 (t)
= eωtLn−ω2P ′
nγ0 (t) + 2ω (n× γ0 (t)) + γ0 (t).
Die zum ersten Summanden gehörige Kraft −mω2P ′nγ (t) heißt Zentripetalkraft.
Sie ist der Komponente P ′nγ (t) des momentanen Ortsvektors γ (t) , die senkrecht
zur Drehachse steht, entgegengerichtet und ihr Betrag ist proportional ω2. Die zumzweiten Summanden gehörige Kraft 2mΩ× eωtLn γ0 (t) ist unabhängig vom Ort aberlinear in Geschwindigkeit γ (t) und Winkelgeschwindigkeit Ω. Beide Kräfte sind zurZeit t zusätzlich zur gedrehten Kraft eωtLn γ0 (t) der Trajektorie γ0 aufzubringen, umdas Teilchen zu einer Bewegung gemäß γ zu zwingen.
Das einfachste Beispiel bietet die kräftefreie Kurve γ0 : R → V mit γ0 (t) = xfür ein festes x ∈ V und für alle t ∈ R. Dann folgt für γ : R→ V mit γ (t) = eωtLnxim Fall von x ∈ n⊥
mγ (t) = −mω2γ (t) .
21V ist also eine mathematische Präzisierung von Newtons absolutem, ruhendem Raum, der füreine begrifflich möglichst reduzierte Formulierung der Mechanik eigentlich entbehrlich ist. Er wirdaber als metaphysische Krücke eines ausgezeichneten inertialen ’Weltenruhsystems’, immer nochin elementaren Erläuterungen (meist unausgesprochen) genutzt, weil er eine einfachere Formulie-rung der mechanischen Grundgesetze erlaubt. Die moderne Mechanik ist auf einer Raumzeit mitZeitform, Riemannscher Metrik auf den instantanen Räumen und Affinzusammenhang, aber ohneausgezeichnetem Inertialsystem errichtet.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 53
Um ein Teilchen der Masse m auf einer Kreisbahn vom Radius |x| mit konstan-ter Winkelgeschwindigkeit ω umlaufen zu lassen, ist also eine Kraft vom (zeitlichkonstanten) Betrag |mω2γ (t)| = mω2 |x| auf das Teilchen auszuüben.
Etwas interessanter ist die kräftefreie Kurve γ0 : R → V mit γ0 (t) = tv für einfestes v ∈ V und für alle t ∈ R. Dann folgt für γ : R → V mit γ (t) = teωtLnv imFall von v ∈ n⊥
mγ (t) = m−ω2t+ 2ωLn
eωtLnv.
1.3.10 *Coriolis- und Zentrifugalkraft
Manchmal bietet es sich an, eine Kurve γ0, die den Zeitablauf einer Bewegung in Vbeschreibt, nach einer rotierenden Basis von V zu zerlegen. Dann gibt die zeitlicheÄnderung der Koordinaten von γ0 (t) bezüglich der zeitabhängigen Basis ein trüge-risches Bild der tatsächlich vorliegenden Kräfte, die γ0 erzeugen. Werden nämlichbeim Ableiten von γ0 nur die Koordinaten nicht aber die Basisvektoren differen-ziert, dann erscheint sogar eine konstante Kurve γ0 als relativ zur rotierenden Basisbeschleunigt. Die so identifizierten ’Kräfte’ werden als Scheinkräfte bezeichnet.
Um das etwas detaillierter darzulegen, zerlegen wir eine C2-Kurve γ0 : I → Vnach einer (hier der Einfachheit halber) gleichförmig rotierende Basis von V. Seialso e = (e1, e2, e3) eine Basis von V und R (t) = eωtLn. Dann ist auch f (t) =(R (t) e1, R (t) e2, R (t) e3) eine Basis von V.Die Koordinaten von γ0 (t) zur gedrehtenBasis f (t) sind dieselben wie jene von
γ (t) := R (t)−1 γ0 (t) = e−ωtLnγ0 (t)
zur konstanten Basis e. Die Geschwindigkeit dieser Hilfskurve γ zur Zeit t, also
γ (t) = −ωn× γ (t) + e−ωtLn γ0 (t)
wird als Geschwindigkeit von γ0 zur Zeit t relativ zur rotierenden Basis f (t) aufge-fasst. Die Beschleunigung γ (t) der Krurve γ : I → V mit t → γ (t) zur Zeit t wirddemgemäß als ’Beschleunigung’ und mγ (t) als ’Scheinkraft’ von γ0 zur Zeit t relativzur rotierenden Basis f (t) zum Zeitpunkt t gedeutet.
Berechnung der Realtivbeschleunigung γ (t) : Es gilt wie im vorigen Abschnittnach Ersetzung von n durch −n
γ (t) = −ω2P ′nγ (t)− 2ωLne
−ωtLn γ0 (t) + e−ωtLnγ0 (t) .
Ersetzen von e−ωtLnγ0 (t) durch γ (t) + ωLnγ (t) ergibt
γ (t) = −ω2P ′nγ (t)− 2ωLn (γ (t) + ωLnγ (t)) + e−ωtLnγ0 (t)
= ω2P ′nγ (t)− 2ωLnγ (t) + e−ωtLn γ0 (t) .
Erfüllt γ0 die Newtonsche Bewegungsgleichung γ0 (t) = f (|γ0 (t)|) · γ0 (t) einesZentralkraftproblems für eine stetige Funktion f : R≥0 → R, dann folgt mit |γ0 (t)| =|γ (t)| die Bewegungsgleichung
γ (t) =f (|γ (t)|) + ω2Pn
· γ (t)− 2ω (n× γ (t)) (1.22)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 54
für die Kurve γ. Die radial von der Drehachse weg gerichtete Scheinkraft der Stärkemω2Pnγ (t) heißt Zentrifugalkraft. Sie ist verantwortlich dafür, dass eine am Erd-boden befestigte Waage nicht das tatsächliche Gewicht des Wägegutes anzeigt. DieScheinkraft −2mωn× γ (t) wird als Corioliskraft bezeichnet. Sie bewirkt, dass eineauf der Nordhalbkugel nach Norden strömende Luftmasse dem Erdboden bei sei-ner nach Osten gerichteten Drehbewegung etwas vorauseilt, bei naiver Betrachtungsomit als ostwärts beschleunigt erscheint.22
Ein Stein fällt vom Himmel23
Als Illustration eignet sich ein Stein, der aus h = 5 km Höhe über dem Äquator(reibungsfrei) zum Boden fällt. Am Beginn des Falls zur Zeit t = 0 ruhe der Steinrelativ zur Erde. In welchem Abstand vom Fußpunkt unter dem Startpunkt desSteins schlägt dieser nach welcher Zeit auf?
Der Erdmittelpunkt ruhe im Punkt 0 von V. Die Funktion f ist dann annäherndgegeben durch f (r) = −g/r, wobei g = 9, 81m s−2 die Erdbeschleunigungskonstanteist. Die Kreisfrequenz der Erde hat den Wert ω = 2π/ (24 · 3600) = 7, 27 · 10−5 s−1.Die Basis e sei eine ONB und so gewählt, dass die Kurve γ0 die Vorgaben γ0 (0) =(R+ h) · e1, und γ0 (0) = ω (R+ h) · e2 erfüllt. Dabei ist R = 6378 km der Er-dradius. Der Vektor R · e1 ist der Fußpunkt unter dem Stein am Beginn des Falls.Der Einheitsvektor n in Richtung der Erdachse zu rechtshändigem Drehsinn erfülltn = e1 × e2 = e3.
Rotiert die Basis f (t) mit der Erde und erfüllt f (0) = e, dann gilt für dieHilfskurve γ, dass γ (0) = γ0 (0) = (R+ h) e1 und γ (0) = −ωn × γ (0) + γ0 (t) =−ω (R + h) e3 × e1 + ω (R + h) · e2 = 0, sowie
γ (t) =−g |γ (t)|−1 + ω2Pn
· γ (t)− 2ω (n× γ (t)) . (1.23)
Die Drehsymmetrie der Differentialgleichung um die Achse R · e3 legt zusammenmit den in der Ebene R · e1 + R · e2 liegenden Anfangswerten den Lösungsansatzγ (t) = (R+ x (t)) · e1 + y (t) · e2 = R · e1 + ξ (t) nahe. Einsetzen in Gleichung (1.23)ergibt
ξ (t) =ω2 − g |R · e1 + ξ (t)|−1
(R · e1 + ξ (t))− 2ωn× ξ (t)
mit der Anfangsvorgabe ξ (0) = he1 und ξ (0) = γ (0) = 0.Ohne Fehlerabschätzung wird nun - nicht ganz unplausibel - approximiert:
ω2 − g/ |R · e1 + ξ (t)|
(R · e1 + ξ (t)) ≈ −g · e1.
Dies führt auf das inhomogen lineare System 2. Ordnung
ξ (t) = −g · e1 − 2ωn× ξ (t) . (1.24)
22Ein weiteres Beispiel liefert ein rotierender Kran, dessen Last längs des Kranarmes verschobenwird. Bei einer Bewegung nach innen eilt die Last der Drehbewegung des Kranarms voraus, beieiner Verschiebung nach außen hingegen hinkt sie hingegen der Drehung nach.
23Aufgabe 1 zu § 39 in L D Landau, E M Lifschitz, Mechanik, Vieweg, Braunschweig, 1970

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 55
Die komponentenweise Form von Gleichung (1.24) für ξ (t) = x (t) · e1 + y (t) · e2 ist
(x (t) , y (t)) = (−g, 0) + 2ω (y (t) ,−x (t)) .
Man beachte, dass ω2 = 5, 3 · 10−9 s−2 ≪ g/R = 1, 5 · 10−6 s−2 gilt, und überprüftspäter an der Lösung die Vermutung, dass x2 (t)+ y2 (t)≪ R2 zu allen Zeiten t > 0bis zum Aufschlag erfüllt ist. Die Anfangsvorgabe ist x (0) = h, y (0) = 0, x (0) =0, y (0) = 0.
Im Abschnitt über die E ×B-Drift wird das inhomogen lineare System
v (t) = −g · e1 − 2ωn× v (t) , (1.25)
das sich aus (1.24) mit v = ξ ergibt, exakt gelöst. Vorläufig wird das Problem durcheine nochmalige plausible Approximation vereinfacht, nämlich zu
(x (t) , y (t)) = − (g, 2ωx (t)) . (1.26)
Die Lösung von Gleichung (1.26) mit x (0) = h, x (0) = 0, y (0) = 0, y (0) = 0erfüllt
x (t) , y (t)
=
h− gt2/2, ωgt3/3für alle t > 0. Der Stein erreicht
den Erdboden genau zu jener Zeit t > 0, wenn (R+ x (t))2 + y (t)2 = R2 gilt.Annähernd ist dies die Zeit T, zu der x (T ) = 0 gilt. Es folgt T =
2h/g = 32 s
und y (T ) = ωgT 3/3 = (2hω/3)
2h/g = 7, 7m. Der Stein schlägt also in dieserunkontrollierten Approximation 7, 7m östlich des Abwurffußpunkts nach 32 s auf.
1.3.11 Inhomogen lineare Systeme
Nun zum Fall der inhomogen linearen Systeme. Ähnlich wie im eindimensionalenFall genügt für die Lösung eines inhomogen linearen Systems die Kenntnis von LA,0
und einer einzigen („partikulären”) Lösung des inhomogenen Systems γ = Aγ + b.Genaueres sagt der folgende Satz.
Satz 33 Sei γ(t) = A(t)γ(t) + b(t) ein inhomogen lineares System auf einem In-tervall I und einem n-dimensionalen K-VR V. Sei LA,b die Menge aller maximalenLösungen dieses Sytems und sei γb : I → V ein beliebiges Element von LA,b. Danngilt LA,b = LA,0 + γb.
Eine weitergehende Lösungsformel für das Anfangswertproblem gibt die folgendeVariation der Konstantenformel.
Satz 34 Sei γ(t) = A(t)γ(t)+ b(t) ein inhomogen lineares System auf einem Inter-vall I und einem n-dimensionalen K-VR V . Die Evolutionsabbildung des homogenenSystems γ(t) = A(t)γ(t) zur Anfangszeit t0 ∈ I sei t → Ut,t0 für t ∈ I. Dann gilt fürdie maximale Lösung γt0,v des inhomogen linearen Systems zum Anfangswert (t0, v)für jedes t ∈ I
γt0,v (t) = Ut,t0
v +
t
t0
U−1ξ,t0
b (ξ) dξ
.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 56
Beweis. Es genügt zu zeigen, dass die Kurve γ : I → V mit
γ (t) = Ut,t0
v +
t
t0
U−1ξ,t0
b (ξ) dξ
die 1) Differentialgleichung γ(t) = A(t)γ(t) + b(t) für alle t ∈ I und 2) die Anfangs-bedingung γ (t0) = v erfüllt. Aufgrund des Eindeutigkeitssatzes folgt dann γ = γt0,v.
Sei γ0 : I → V mit γ0 (t) = Ut,t0v. Dann gilt nach Konstruktion von Ut,t0,dass γ0 (t) = A (t) γ0 (t) und γ0 (t0) = v. Es genügt also zu zeigen, dass die Kurveγp : I → V mit
γp (t) = γ (t)− γ0 (t) = Ut,t0
t
t0
U−1ξ,t0
b (ξ) dξ
die inhomogene Gleichung γp(t) = A(t)γp(t) + b(t) für alle t ∈ I erfüllt und zudemγp(t0) = 0.
Ersteres folgt mit Produktregel und Hauptsatz der Integralrechnung so:
γp (t) = (∂tUt,t0)
t
t0
U−1ξ,t0
b (ξ) dξ + Ut,t0∂t
t
t0
U−1ξ,t0
b (ξ) dξ
= (A (t)Ut,t0)
t
t0
U−1ξ,t0
b (ξ) dξ + Ut,t0U−1t,t0
b (t) = A (t) γp (t) + b (t) .
Die Anfangsbedingung γp(t0) = 0 ergibt sich wegen
γp (t0) = Ut0,t0
t0
t0
U−1ξ,t0
b (ξ) dξ = ιd (0) = 0.
Bemerkung 35 Es gilt Ut,t0U−1ξ,t0
= Ut,ξ und daher auch
γt0,v (t) = Ut,t0v +
t
t0
Ut,ξb (ξ) dξ.
Die partikuläre Lösung γt0,0 mit dem Anfangswert (t0, 0), für die ja
γt0,0(t) =
t
t0
Ut,ξb (ξ) dξ
für alle t ∈ I gilt, erhält eine besonders anschauliche Bedeutung, wenn das Inte-gral durch eine Riemannsumme approximiert wird. Die Inhomogenität b(ξi) an denStützstellen t0 < ξi < t tritt als Anfangswert (ξi, b(ξi)) der Lösung Ut,ξib (ξi) derhomogenen Gleichung in Erscheinung. Über diese homogenen Lösungen wird dannaufsummiert. Wie im eindimensionalen Fall hängt γt0,0 linear von b ab.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 57
1.3.12 *E ×B - Drift einer Punktladung
Sei V ein reeller Vektorraum der Dimension 3. In V sind ein Skalarprodukt ·, · undeine Orientierung gewählt. Damit ist auch das Kreuzprodukt zweier Vektoren vonV erklärt. Die Kurve γ : I → V (’Bewegungsgeschichte’) eines elektrisch geladenenMassenpunktes in einem (räumlich und zeitlich) konstanten elektromagnetischenFeld ist durch die Lorentzsche Bewegungsgleichung
mγ (t) = q (E + γ (t)×B) . (1.27)
geregelt. In ihr bezeichnet m ∈ R>0 die Masse und q ∈ R die elektrische Ladung desTeilchens. Die Vektoren E ∈ V und B ∈ V bezeichnen die (konstante) elektrischeFeldstärke und die (konstante) magnetische Flussdichte, denen das Teilchen ausge-setzt ist. Gesucht ist die maximale Lösung von Gleichung (1.27) zur Anfangsvorgabeγ (0) = x0 und γ (0) = v0.
Zerlegt man für B = 0 die Kurve γ in eine Komponente γ⊥ im Unterraum B⊥ =v ∈ V : B, v = 0 und eine Komponente γ in R ·B, dann gilt unter Verwendungdes Einheitsvektors n = B/ |B|
γ = γ⊥ + γ mit γ = n n, γ und γ⊥ = γ − n n, γ .
Die Bewegungsgleichung (1.27) entkoppelt die beiden Komponenten voneinander,denn es gilt wegen n×B = 0
mγ⊥ (t) = qγ⊥ (t)×B + E⊥ und mγ (t) = qE.
Dabei gilt E = E⊥ + E mit E = n n,E und E⊥ = E − n n,E .Die maximale Lösung γ : R→ R·B der Gleichungmγ (t) = qE mit γ (0) = x0
und γ (0) = v0 erfüllt
γ (t) = x0 + v
0t+
q
2mt2E.
Die Anfangswerte x0 und v0 werden dabei natürlich einer analogen Zerlegung wie γunterworfen.
Für die Komponente γ⊥ gilt mit24 ω = q |B| /m ∈ R
γ⊥ (t) =−ωn× γ⊥ (t) +
q
mE⊥. (1.28)
Die Kurve v = γ⊥ : R → B⊥ ⊂ V erfüllt also mit Ln : B⊥ → B⊥, v → n × v undE = q
mE⊥ ∈ B⊥ das inhomogen lineare System erster Ordnung
v (t) = −ωLnv (t) + E . (1.29)
Für die Evolutionsabbildung Ut = exp (−ωtLn) der homogenen Gleichung giltwegen25 L2
n = −PB⊥ = − (ιdV − n n, ·)
e−ωtLn = n n, ·+ cos (ωt) (ιdV − n n, ·)− sin (ωt)Ln.
24Die Zahl |ω| = |qB| /m heißt ’Zyklotronkreisfrequenz’.25PB⊥ bezeichnet die Orthogonalprojektion auf den Untervektorraum B⊥.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 58
Mit v⊥0 ∈ B⊥ folgt daraus
Utv⊥0 = cos (ωt) v⊥0 − sin (ωt)Lnv
⊥0 .
Sie beschreibt eine Drehbewegung des Vektors v⊥0 um 0 in der Ebene B⊥ mit kon-stanter Winkelgeschwindigkeit ω. Der Drehsinn ist so, dass zur Zeit t = 0 der Vektorv⊥0 in die Richtung −Lnv0 = −n× v⊥0 bewegt.
Eine partikuläre Lösung der inhomogenen Gleichung (1.29) ergibt sich mit demAnsatz v (t) = w ∈ B⊥ für alle t ∈ R. Dieser Ansatz ist genau dann Lösung, wennωLnw = E gilt. Anwendung von Ln auf diese Gleichung liefert ωL2
nw = LnE , also
w = −LnEω
= −n× Eω
= − q
mωn×E⊥ =
q
mω |B|E⊥ ×B =
E⊥ ×B
|B|2.
Die Geschwindigkeit
vD := −LnEω
=E⊥ ×B
|B|2=
E ×B
|B|2∈ B⊥
wird im folgenden wiederholt vorkommen und erhält deshalb eine eigene Bezeich-nung, nämlich ’Driftgeschwindigkeit’ vD. Sie ist jene Geschwindigkeit in B⊥, die vonden vorgegebenen Feldern E und B nicht verändert wird. Die Komponente der Lor-entzkraft im Unterraum B⊥ verschwindet. Warum sie Driftgeschwindigkeit genanntwird, wird gleich klar werden.
Die maximale Lösung v von Gleichung (1.29) mit Anfangswert v⊥0 ∈ B⊥ ergibtsich durch Addition einer Lösung der homogenen Gleichung zu
v (t) = vD + Ut
v⊥0 − vD
.
Die Geschwindigkeit v rotiert also auf einem Kreis in B⊥ um den Mittelpunkt vDmit konstanter Winkelgeschwindigkeit |ω| = |qB| /m. Der Radius des Kreises ist derBetrag der Abweichung der Anfangsgeschwindigkeit v⊥0 von vD, also
,,v⊥0 − vD,, . Der
Drehsinn ist so, dass sich zur Zeit 0 der Vektor v⊥0 − vD in die Richtung des Vektors−ωLn
v⊥0 − vD
= q
m
v⊥0 − vD
×B dreht.
Für die maximale Lösung γ⊥ von Gleichung (1.28) mit γ⊥ (0) = x⊥0 und γ⊥ (0) =v⊥0 folgt also für alle t ∈ R
γ⊥ (t)− x⊥0 =
t
0
v (s) ds =
t
0
Us
v⊥0 − vD
+ vD
ds =
t
0
Us
v⊥0 − vD
ds+ tvD
Unter Beachtung von ddsUs
v⊥0 − vD
= −ωLnUs
v⊥0 − vD
, −L2
n
v⊥0 − vD
=
v⊥0 − vDund [Us, Ln] = 0 folgt nun
t
0
Us
v⊥0 − vD
ds = −
t
0
UsL2n
v⊥0 − vD
ds = −Ln
t
0
LnUs
v⊥0 − vD
ds
= Ln
t
0
1
ω
d
dsUs
v⊥0 − vD
ds =
Ln
ω(Ut − ιd)
v⊥0 − vD
= (Ut − ιd)
Ln
ω
v⊥0 − vD
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 59
Somit gilt wegen LnvD = −L2nE/ω = E/ω = qE⊥/ (mω) = E⊥/ |B|
Ln
ω
v⊥0 − vD
=
n× v⊥0ω
− E⊥
ω |B| .
Mit der Abkürzung ξ = E⊥/ (ω |B|) = mE⊥/q |B|2
gilt daher für alle t ∈ R
γ⊥ (t) = (Ut − ιd)
n× v⊥0
ω− ξ
+ tvD + x⊥0 . (1.30)
Die Lösungsformel (1.30) überlagert eine gleichförmige Drehbewegung des Vek-tors
n× v⊥0 /ω
− ξ mit einer gleichförmige Translationsbewegung auf der Geraden
R · E × B. Die Kurve t → (Ut − ιd)w dreht den Vektor w um den Punkt −w. Siedurchläuft einen Kreis mit dem Radius |w| und geht zur Zeit t = 0 durch 0. Die Kur-ve t → tvD beschreibt eine unbeschränkte, gleichförmige Bewegung auf der GeradenR ·E×B. Daher der Name E×B-Drift für die Bewegung eines geladenen Teilchensin einem statischen und homogenen elektromagnetischen Feld mit E × B = 0. DieDriftgeschwindigkeit vD ist unabhängig von Betrag und Vorzeichen der Ladung q!
Spezialisierung auf den Fall n = B/ |B| = e3, v0/ω = λe1 und ξ = E⊥/ (ω |B|) =µe2 für eine positiv orientierte ONB e = (e1, e2, e3) von V ergibt γ⊥ (t)− x⊥0 =
(1− cos (ωt)) (µe2 − e3 × λe1) + sin (ωt) e3 × (µe2 − e3 × λe1) + ωt (µe2 × e3)
= (1− cos (ωt)) (µ− λ) e2 + sin (ωt) (µ+ λ) e1 + ωtµe1
= (µ− λ) (1− cos (ωt)) e2 + ((µ+ λ) sin (ωt) + µωt) e1,
also etwas übersichtlicher
γ⊥ (t)− x⊥0 = (e1, e2) ·
(µ+ λ) sin (ωt) + µωt(µ− λ) (1− cos (ωt))
.
Figur 1.19 zeigt einen Ausschnitt der Bahn von γ⊥ − x⊥0 für λ = 1 und µ = 1/8in rot, für λ = −1 und µ = 1/8 in grün, und für λ = 1 und µ = 0 in schwarz.Für
3210-1
2
1
0
-1
-2
x
y
x
y
Abbildung 1.19: γ⊥ (0 < s < 6π)− x⊥0 für einige Parameterkombinationen

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 60
E⊥ = 0 spezialisiert sich γ⊥ wegen vD = 0 = ξ zu
γ⊥ (t) = (Ut − ιd)
n× v⊥0
ω
+ x0.
Die Kurve γ⊥ umkreist also fürE⊥ = 0 den Punkt x0−n×v⊥0 /ω (in der Ebene B⊥) imAbstand
,,v⊥0 /ω,, = m
,,v⊥0,, / |qB|mit konstanter (orientierter) Winkelgeschwindigkeit
ω = q |B| /m. Diese Komponente der Kurve γ ist somit periodisch.
1.3.13 Getriebene lineare Schwingungen: ungedämpft
Der harmonische Oszillator mit äußerer Kraft ist wie die E × B -Drift ein Fallfür die Variation der Konstanten. Wir behandeln ihn nun aber nicht als reell 2dinhomogen lineares System sondern als komplex 1-dimensionales. So wird’s nocheinfacher. Zudem betrachen wir hier nur den reibungslosen Grenzfall.
Sei ω ∈ R>0, sei I ⊂ R ein Intervall und sei b : I → R stetig. Für x : I → R geltex′′ + ω2x = b und x (t0) = x0 und x′ (t0) = v0 für ein t0 ∈ I. Dazu äquivalent ist dieKurve γ : I → C mit γ = x+ ix′/ω die maximale Lösung des komplex 1d Systems
γ′ = −iωγ + ib/ω auf I
mit γ (t0) = x0 + iv0/ω =: γ0. Es gilt ja
γ′ = x′ +i
ωx′′ = x′ +
i
ω
b− ω2x
= −iω
x+
i
ωx′+
i
ωb.
Eine Lösung des homogenen Systems ist die Funktion t → exp (−iωt) auf I. Fürdie Lösung γ : I → C des inhomogenen Systems mit γ (t0) = γ0 gilt für alle t ∈ I
γ (t) = e−iω(t−t0)
γ0 +
i
ω
t
t0
eiω(ξ−t0)b (ξ) dξ
= e−iω(t−t0)γ0 +ie−iωt
ω
t
t0
eiωξb (ξ) dξ.
Daraus folgt durch Bildung des Realteils der folgende Satz.
Satz 36 Sei I ein Intervall I ⊂ R und sei b : I → R stetig. Dann gilt für diemaximale Lösung x von x′′+ω2x = b zur Anfangsbedingung x(t0) = x0 und x′(t0) =v0 für ein t0 ∈ I für alle t ∈ I
x (t) = x0 cos (ω (t− t0)) +v0ω
sin (ω (t− t0)) +1
ω
t
t0
sin (ω (t− ξ)) b (ξ) dξ. (1.31)
Beweis. Hier ein Beweis ohne Verwendung komplexer Zahlen. Für h : I → Rmit
h(t) = x0 cos (ω (t− t0)) +v0ω
sin (ω (t− t0))

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 61
gilt offensichtlich h′′ + ω2h = 0. Also bleibt für die Funktion xb : I → R mit
xb(t) :=1
ω
t
t0
sin(ω (t− ξ))b(ξ)dξ
zu zeigen, dass x′′b + ω2xb = b. Wegen sin(α − β) = sin (α) cos (β) − cos (α) sin (β)gilt
xb(t) =sin (ωt)
ω
t
t0
cos (ωξ) b(ξ)dξ − cos (ωt)
ω
t
t0
sin (ωξ) b(ξ)dξ.
Dies wird mit der Produktregel und dem Hauptsatz der Integralrechnung zweimaldifferenziert. Es folgt x′′b +ω2xb = b. Analog sind die Anfangsbedingungen zu zeigen.
Mit Gleichung (1.31) ist die Berechnung der Bewegung eines harmonischen Os-zillators, der von einer beliebigen, stetig zeitabhängigen äußeren Kraft angetriebenwird, bei gegebener Anfangbedingung auf die Integration von sin(ω (t− ξ))b(ξ) überξ zurückgeführt.
Zur Illustration sei I = R, t0 = 0 und b (t) = b0ωt für ein b0 ∈ R. Dann folgt
1
ω
t
0
sin (ω (t− ξ)) b (ξ) dξ = b0
t
0
ξ sin (ω (t− ξ)) dξ
= b0
t
0
d
dξ
*sin (ω (t− ξ))
ω2+ ξ
cos (ω (t− ξ))
ω
+dξ
=b0ω
*t− sin (ωt)
ω
+=
b0ω2
[ωt− sin (ωt)] .
Für alle t ∈ R gilt somit
x (t) = x0 cos (ωt) +
v0ω− b0
ω2
sin (ωt) +
b0ω2
ωt.
Nun noch ein paar Anmerkungen zu verschiedenen graphischen Veranschau-lichungen von Lösungen eines Systems erster Ordnung. Abbildung (1.20) zeigt zweiLösungen x für ω = 1 = b0. Sie stellen die „Wann-wo-Protokolle” der Schwingungeneines Oszillators um die Gleichgewichtslösung ξ(t) = t der Schwingungsgleichungx′′ + x = t dar. Die „Wann-wie-schnell” Information ist dem Graphen von x nurindirekt über seinen Anstieg im Punkt über t zu entnehmen. Die Graphen verschie-dener Lösungen x können einander schneiden, obwohl sich die Graphen der Lösungenγ selbst aufgrund des Eindeutigkeitssatzes nicht schneiden können.
Abbildung (1.21) zeigt die Bahn einer Lösung γ in der komplexen Ebene. Siewird von links nach rechts durchlaufen. Die Bahn der Lösung gibt ein „Wo-wie-schnell Protokoll”. Beim Durchlaufen der etwas überraschenden Spitzen26 bei y = 0gilt γ = 0. Dem Bild ist jedoch nicht zu entnehmen, wann die Lösung γ einenbestimmten Punkt des Graphen durchläuft.
Abbildung (1.22) zeigt eine Bahn, die kein Funktionsgraph ist. (Es ist natürlichauch gar nicht zu erwarten, dass eine Projektion eines Funktionsgraphen wieder einFunktionsgraph ist.)
26Obwohl γ differenzierbar ist, kann die Bahn von γ einen derart „nichtdifferenzierbaren” Ein-druck machen. Das geht, da in den Spitzen die Geschwindigkeit gleich Null ist.
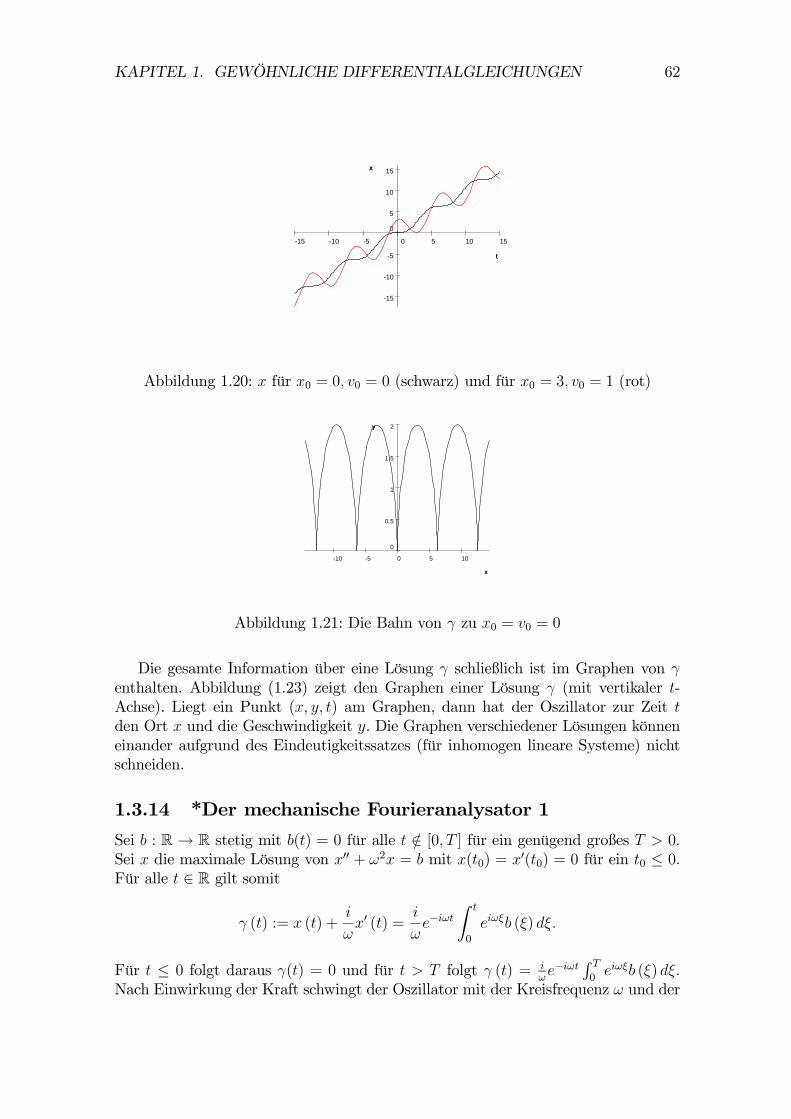
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 62
151050-5-10-15
15
10
5
0
-5
-10
-15
t
x
t
x
Abbildung 1.20: x für x0 = 0, v0 = 0 (schwarz) und für x0 = 3, v0 = 1 (rot)
1050-5-10
2
1.5
1
0.5
0
x
y
x
y
Abbildung 1.21: Die Bahn von γ zu x0 = v0 = 0
Die gesamte Information über eine Lösung γ schließlich ist im Graphen von γenthalten. Abbildung (1.23) zeigt den Graphen einer Lösung γ (mit vertikaler t-Achse). Liegt ein Punkt (x, y, t) am Graphen, dann hat der Oszillator zur Zeit tden Ort x und die Geschwindigkeit y. Die Graphen verschiedener Lösungen könneneinander aufgrund des Eindeutigkeitssatzes (für inhomogen lineare Systeme) nichtschneiden.
1.3.14 *Der mechanische Fourieranalysator 1
Sei b : R → R stetig mit b(t) = 0 für alle t /∈ [0, T ] für ein genügend großes T > 0.Sei x die maximale Lösung von x′′ + ω2x = b mit x(t0) = x′(t0) = 0 für ein t0 ≤ 0.Für alle t ∈ R gilt somit
γ (t) := x (t) +i
ωx′ (t) =
i
ωe−iωt
t
0
eiωξb (ξ) dξ.
Für t ≤ 0 folgt daraus γ(t) = 0 und für t > T folgt γ (t) = iωe−iωt
T
0eiωξb (ξ) dξ.
Nach Einwirkung der Kraft schwingt der Oszillator mit der Kreisfrequenz ω und der
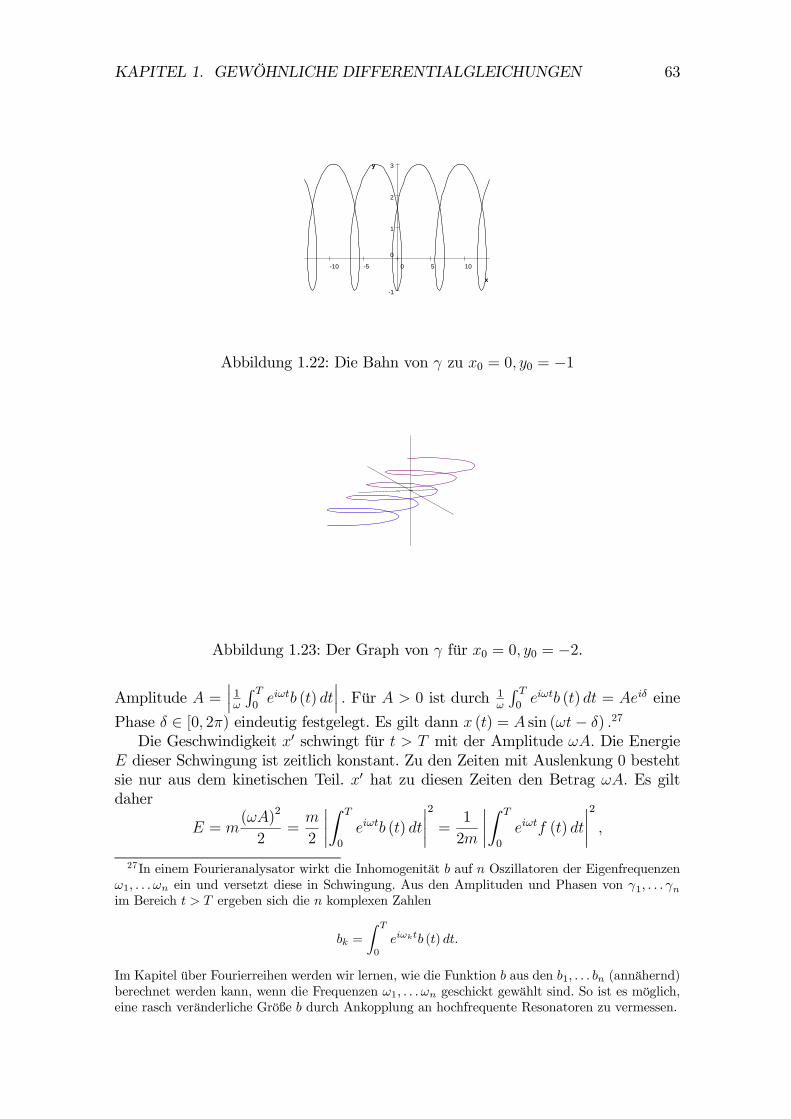
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 63
1050-5-10
3
2
1
0
-1
x
y
x
y
Abbildung 1.22: Die Bahn von γ zu x0 = 0, y0 = −1
Abbildung 1.23: Der Graph von γ für x0 = 0, y0 = −2.
Amplitude A =,,, 1ω T
0eiωtb (t) dt
,,, . Für A > 0 ist durch 1ω
T
0eiωtb (t) dt = Aeiδ eine
Phase δ ∈ [0, 2π) eindeutig festgelegt. Es gilt dann x (t) = A sin (ωt− δ) .27
Die Geschwindigkeit x′ schwingt für t > T mit der Amplitude ωA. Die EnergieE dieser Schwingung ist zeitlich konstant. Zu den Zeiten mit Auslenkung 0 bestehtsie nur aus dem kinetischen Teil. x′ hat zu diesen Zeiten den Betrag ωA. Es giltdaher
E = m(ωA)2
2=
m
2
,,,, T
0
eiωtb (t) dt
,,,,2
=1
2m
,,,, T
0
eiωtf (t) dt
,,,,2
,
27In einem Fourieranalysator wirkt die Inhomogenität b auf n Oszillatoren der Eigenfrequenzenω1, . . . ωn ein und versetzt diese in Schwingung. Aus den Amplituden und Phasen von γ1, . . . γnim Bereich t > T ergeben sich die n komplexen Zahlen
bk =
T
0
eiωktb (t) dt.
Im Kapitel über Fourierreihen werden wir lernen, wie die Funktion b aus den b1, . . . bn (annähernd)berechnet werden kann, wenn die Frequenzen ω1, . . . ωn geschickt gewählt sind. So ist es möglich,eine rasch veränderliche Größe b durch Ankopplung an hochfrequente Resonatoren zu vermessen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 64
wobei f = mb die auf den Oszillator der Masse m einwirkende Kraftfunktion ist.
1.3.15 Die retardierte Lösung von x+ ω2x = b
Die Lösungsformel aus Satz 36 setzt sich aus zwei Anteilen zusammen. Einerseitsaus der Lösung
h (t) = x0 cos (ω (t− t0)) +v0ω
sin (ω (t− t0))
der homogenen Gleichung. Sie ist durch die Anfangsvorgabe (x0, v0) zur Zeit t0eindeutig festgelegt. Andererseits enthält die Lösungsformel die partikuläre Lösung
xb (t) =1
ω
t
t0
sin (ω (t− ξ)) b (ξ) dξ
der inhomogenen Gleichung. Für eine Inhomogenität b, die in einer genügend fernenVergangenheit verschwindet, hängt xb nicht vom genauen Wert der Anfangszeit t0ab, wenn dieser nur in dieser fernen Vergangenheit liegt. Warum ist das so?
Sei also b so, dass ein T ∈ R existiert, dass b (t) = 0 für alle t < T. Weiter seit0 < T. Sei Θ Heavisides Stufenfunktion, d.h. es gilt Θ(t) = 0 für t < 0 und Θ(t) = 1für t ≥ 0. Damit folgt für alle t ∈ R
xb (t) =1
ω
t
−∞sin (ω (t− ξ)) b (ξ) dξ =
1
ω
∞
−∞Θ(t− ξ) sin (ω (t− ξ)) b (ξ) dξ.
Definition 37 Die Funktion Gret : R → R mit Gret(t) = Θ (t) sin (ωt) /ω heißtretardierte Fundamentallösung oder auch retardierte Greensche Funktion zu ∂2+ω2.
Wir fassen zusammen:
Satz 38 Sei b : R → R stetig und es gebe eine Konstante T ∈ R, sodass b(t) = 0für alle t < T. Sei x die maximale Lösung von x′′ + ω2x = b mit x(t0) = x′(t0) = 0für ein t0 < T. Dann gilt
x(t) =
∞
−∞Θ(t− ξ)
sin (ω(t− ξ))
ωb(ξ)dξ =: (Gret ∗ b) (t)
für alle t ∈ R. (Die Funktion Gret ∗ b heißt Faltung von Gret mit b. Sie ist jeneLösung der inhomogenen Schwingungsgleichung, die vor dem Einsetzen der äußerenKraft ruht.)
Die Funktion Gret ist zwar stetig, aber bei 0 nicht differenzierbar. Auf den In-tervallen x > 0 und x < 0 stimmt Gret mit Lösungen der homogenen Schwingungs-gleichung überein. In 0 springt die Ableitung von Gret von 0 auf 1, sodass eineDifferentialgleichung im bisher entwickelten Sinn für x = 0 nicht formulierbar ist.Gret ist also selbst keine Lösung der Schwingungsgleichung. In der Vorlesung Math.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 65
Meth. II wird klar werden, dass der Funktion Gret eine Lösung Gret einer distribu-tionellen Differentialgleichung entspricht, die Diracs Delta-Distribution enthält. Esgilt G′′
ret + ω2 Gret = δ.Eine andere Fundamentallösung zur Schwingungsgleichung ist für alle t ∈ R
durchGav (t) = Gret (−t) = −Θ(−t) sin (ωt) /ω
gegeben. Sie heißt avancierte Fundamentallösung. Für sie gilt
Satz 39 Sei b : R → R stetig und es gebe eine Konstante T ∈ R, sodass b(t) = 0für alle t > T. Sei x die maximale Lösung von x′′ + ω2x = b mit x(t0) = x′(t0) = 0für ein t0 > T. Dann gilt x(t) = (Gav ∗ b) (t) für alle t ∈ R.
Beweis. Da b(ξ) = 0 für alle ξ > T, gilt auch b (ξ) = 0 für alle ξ > t0. Darausfolgt mit Satz 36
x(t) =
t
∞
sin (ω (t− ξ))
ωb(ξ)dξ = −
∞
t
sin (ω (t− ξ))
ωb(ξ)dξ
= − ∞
−∞Θ(ξ − t)
sin (ω (t− ξ))
ωb(ξ)dξ =
∞
−∞Gav(t− ξ)b(ξ)dξ.
Die Lösung Gav ∗ b ist jene getriebene Schwingung, die von der Quelle zumStillstand gebracht wird.
Die Differenz Gret − Gav ist eine Lösung der homogenen Schwingungsgleichungx′′ + ω2x = 0, denn Gret (t) − Gav (t) = sin (ωt) /ω. Ferner ist (Gret −Gav) ∗ beine Lösung der homogenen Gleichung. Die Funktion 1
2(Gret +Gav) ∗ b hingegen ist
Lösung von x′′ + ω2x = b. Sie gehört zur Fundamentallösung Gsym mit
Gsym (t) =1
2(Gret +Gav) (t) =
1
2ω[Θ (t) sin (ωt)−Θ(−t) sin (ωt)] =
sin (ω |t|)2ω
.
Feynman erkannte eine komplexwertige Fundamentallösung, nämlich GF mitGF (t) = i
2ωe−iω|t| als nützlich für die Beschreibung von Teilchenerzeugungsprozes-
sen. Es gilt GF (t) = i2ω
[cos (ω |t|)− i sin (ω |t|)] = Gsym (t) + i2ω
cos (ωt) .
Schwingung nach einem Einheitskraftstoß
Wir zeigen nun, dass Gret eine Näherung an eine Lösung der inhomogenen Schwin-gungsgleichung mit einem kurzzeitig wirkenden Kraftstoß mit (annähernd) Einheits-Geschwindigkeitsübertrag (δ-Stoß) ist. Gret approximiert jene Lösung, die vor demKraftstoß mit der Nulllösung übereinstimmt.
Für ein τ ∈ R>0 gelte bτ (t) = 0 für alle t /∈ [−τ , τ ] und
bτ (t) =1
τ
1− |t|
τ

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 66
sonst. Daraus folgt limτ→0 bτ (t) = 0 für t = 0. Hingegen divergiert bτ (0) = 1/τ fürτ → 0. Für alle τ > 0 gilt ∞
−∞bτ (t) dt = 1.
xτ sei die maximale Lösung von x′′ + ω2x = bτ mit xτ (t0) = 0 = x′τ (t0) für eint0 < −τ . Konvergiert xτ (t) für τ → 0? Für t < −τ gilt xτ (t) = 0. Für alle t < 0folgt daher limτ→0xτ (t) = 0.
Nun zur Berechnung von xτ (t) für t > τ nach Satz 36. Es gilt τ
−τ
cos (ωξ) bτ (ξ) dξ =2
τ
τ
0
cos (ωξ)
1− ξ
τ
dξ
=2
τ
sin (ωτ)
ω− 1
τ
*cos (ωξ)
ω2+
ξ sin (ωξ)
ω
+τ
0
=2
τω
sin (ωτ )− 1
τ
*cos (ωτ )− 1
ω+ τ sin (ωτ )
+=
2
τ 2ω2[1− cos (ωτ )] .
Da bτ gerade ist, folgt τ
−τsin (ωξ) bτ (ξ) dξ = 0. Mit Satz 36 folgt für alle t > τ
xτ (t) =2
(ωτ )2[1− cos (ωτ)]
sin (ωt)
ω.
Für ωτ ∈ 2π · N schwingt der Oszillator nach der Einwirkung des Kraftstoßes alsonicht nach. Die Schwingungsamplitude von xτ im Bereich t > τ wird von der (di-mensionslosen) Funktion x → 2 (1− cosx) /x2 für x > 0 bestimmt. Sie ist in Figur(1.24) für x = ωτ ∈ [0, 15] skizziert.
1512.5107.552.50
1
0.75
0.5
0.25
0
Abbildung 1.24: 2 (1− cosx) /x2
Wegen limx→02x2
[1− cosx] = 1 folgt limτ→0xτ (t) = sin (ωt) /ω für alle t > 0.Für t = 0 gilt
xτ (0) = − 1
ω
0
−τ
sin (ωξ) bτ (ξ) dξ =1
ωτ
τ
0
sin (ωξ)
1− ξ
τ
dξ
=1
τω2
ωτ
0
sin (u)1− u
ωτ
du → 0 für τ → 0.
Damit gilt limτ→0xτ (t) = Θ (t) sin (ωt) /ω = Gret (t) für alle t ∈ R.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 67
1.4 Lineare Differentialgleichungen 2-ter Ordnung
Einige einfache Differentialgleichungen zweiter Ordnung konnten wir schon als Sys-teme erster Ordnung behandeln. Wie etwa den getriebenen ungedämpften harmo-nischen Oszillator oder die ExB-Drift eines geladenen Teilchens. Wir sehen uns nunan, wie eine lineare (sakalare) Differentialgleichung beliebiger Ordnung in ein äquiva-lentes lineares System von Differentialgleichungen erster Ordnung übersetzt werdenkann.
Die Äquivalenz zeigt ihren Nutzen nicht so sehr beim Aufsuchen spezieller Lösun-gen. Vielmehr erlaubt sie eine einfache Übertragung von strukturellen Eigenschaf-ten der Systeme erster Ordnung, wie Dimension des Lösungsraums, auf Gleichungenhöherer Ordnung. Auch die Variation der Konstantenformel für Systeme erster Ord-nung lässt sich so auf Gleichungen höherer Ordnung umlegen.
1.4.1 Äquivalenz zu System erster Ordnung
Definition 40 Sei I ⊂ R ein allgemeines Intervall. Die Funktionen a0, ..., an−1, b :I → R seien stetig. Eine Funktion α : D ⊂ I → R auf einem Intervall D, mit
dnα
dxn(x) + an−1(x)
dn−1α
dxn−1 (x) + ...+ a0(x)α(x) = b(x) (1.32)
für alle x ∈ D heißt Lösung der gewöhnlichen Differentialgleichung n-ter Ordnungy(n)+an−1y
(n−1)+ ...+a0y(0) = b. Hier wird y(i) = diy
dxifür i ∈ N und y(0) = y notiert.
Die Gleichung heißt inhomogen linear falls b = 0 und homogen linear falls b = 0.Beide Fälle werden als linear bezeichnet. Gilt für eine Lösung α und ein x0 ∈ D,dass
α(x0), α(1)(x0), ..., α
(n−1)(x0)= (c0, c1, ...cn−1) ,
sagt man, α sei eine Lösung zum Anfangswert (x0; c0, c1, ...cn−1) . Eine Lösung α :D → R heißt maximal, wenn keine Lösung β : D′ → R mit D ⊂ D′ (echt) existiert,sodass α mit β auf D übereinstimmt.
Die Menge aller Lösungen von Gleichung (1.32) wird durch die lineare Abbildungα →
α(0), α(1), . . . α(n−1)t bijektiv auf die Menge aller Lösungen des Systems erster
Ordnung auf I × Rn×1
d
dx
y0y1...yn−1
=
0 1 0 · · ·0 0 1 · · ·...
−a0 −a1 −a2 · · ·
00
...−an−1
·
y0y1...
yn−1
+
00...b
(1.33)
abgebildet. Damit übertragen sich die Sätze für (in)homogen lineare Systeme ersterOrdnung auf (in)homogen lineare Diffgleichungen n-ter Ordnung.
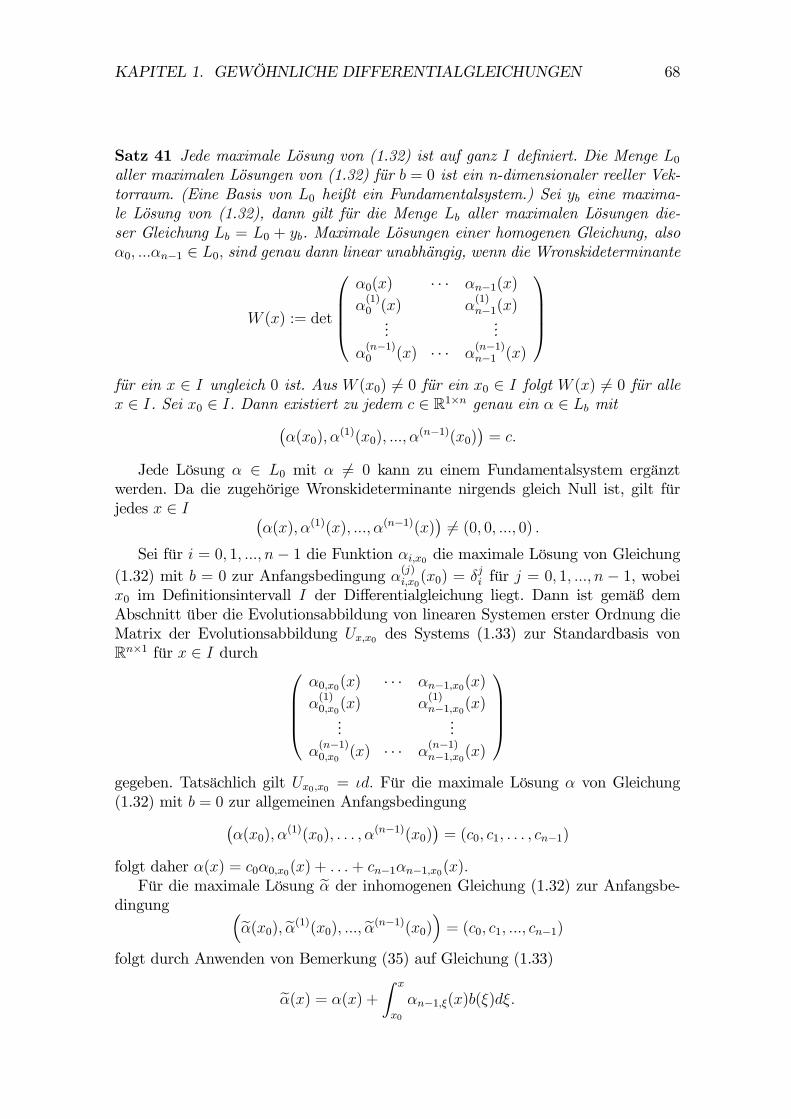
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 68
Satz 41 Jede maximale Lösung von (1.32) ist auf ganz I definiert. Die Menge L0
aller maximalen Lösungen von (1.32) für b = 0 ist ein n-dimensionaler reeller Vek-torraum. (Eine Basis von L0 heißt ein Fundamentalsystem.) Sei yb eine maxima-le Lösung von (1.32), dann gilt für die Menge Lb aller maximalen Lösungen die-ser Gleichung Lb = L0 + yb. Maximale Lösungen einer homogenen Gleichung, alsoα0, ...αn−1 ∈ L0, sind genau dann linear unabhängig, wenn die Wronskideterminante
W (x) := det
α0(x) · · · αn−1(x)
α(1)0 (x) α
(1)n−1(x)
......
α(n−1)0 (x) · · · α
(n−1)n−1 (x)
für ein x ∈ I ungleich 0 ist. Aus W (x0) = 0 für ein x0 ∈ I folgt W (x) = 0 für allex ∈ I. Sei x0 ∈ I. Dann existiert zu jedem c ∈ R1×n genau ein α ∈ Lb mit
α(x0), α
(1)(x0), ..., α(n−1)(x0)
= c.
Jede Lösung α ∈ L0 mit α = 0 kann zu einem Fundamentalsystem ergänztwerden. Da die zugehörige Wronskideterminante nirgends gleich Null ist, gilt fürjedes x ∈ I
α(x), α(1)(x), ..., α(n−1)(x)= (0, 0, ..., 0) .
Sei für i = 0, 1, ..., n− 1 die Funktion αi,x0 die maximale Lösung von Gleichung
(1.32) mit b = 0 zur Anfangsbedingung α(j)i,x0
(x0) = δji für j = 0, 1, ..., n − 1, wobeix0 im Definitionsintervall I der Differentialgleichung liegt. Dann ist gemäß demAbschnitt über die Evolutionsabbildung von linearen Systemen erster Ordnung dieMatrix der Evolutionsabbildung Ux,x0 des Systems (1.33) zur Standardbasis vonRn×1 für x ∈ I durch
α0,x0(x) · · · αn−1,x0(x)
α(1)0,x0
(x) α(1)n−1,x0(x)
......
α(n−1)0,x0
(x) · · · α(n−1)n−1,x0(x)
gegeben. Tatsächlich gilt Ux0,x0 = ιd. Für die maximale Lösung α von Gleichung(1.32) mit b = 0 zur allgemeinen Anfangsbedingung
α(x0), α
(1)(x0), . . . , α(n−1)(x0)
= (c0, c1, . . . , cn−1)
folgt daher α(x) = c0α0,x0(x) + . . . + cn−1αn−1,x0(x).Für die maximale Lösung α der inhomogenen Gleichung (1.32) zur Anfangsbe-
dingung α(x0), α(1)(x0), ..., α(n−1)(x0)
= (c0, c1, ..., cn−1)
folgt durch Anwenden von Bemerkung (35) auf Gleichung (1.33)
α(x) = α(x) +
x
x0
αn−1,ξ(x)b(ξ)dξ.
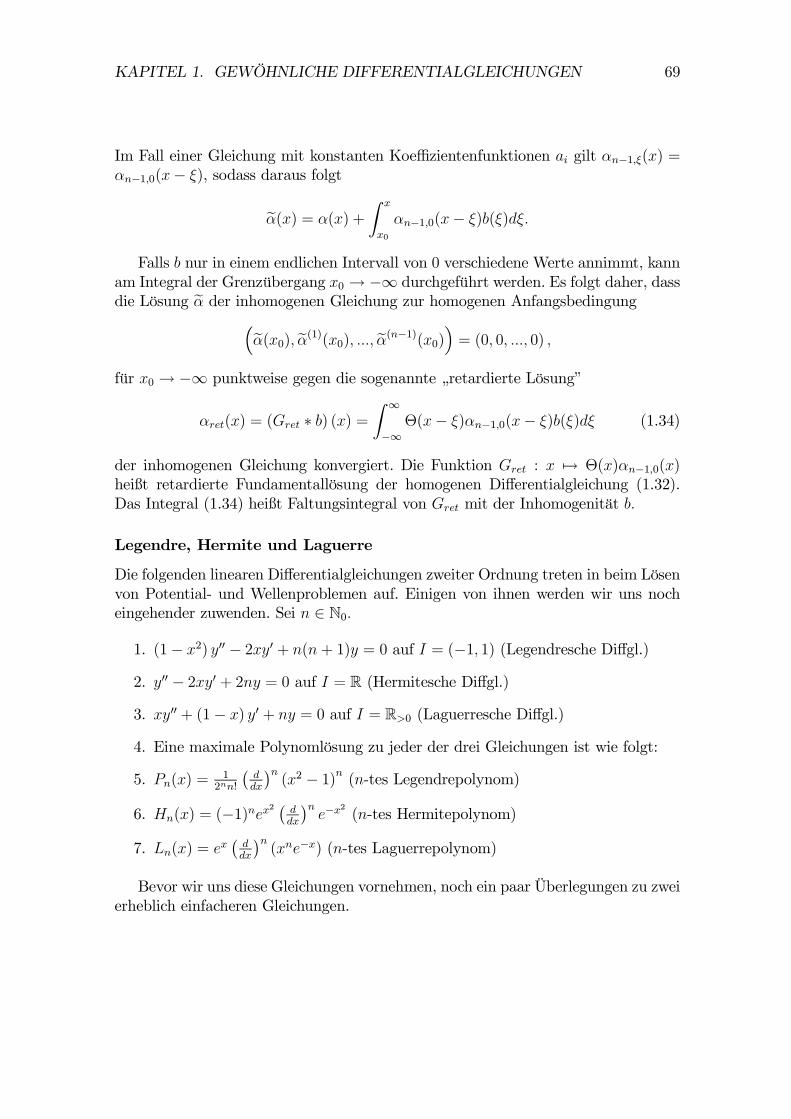
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 69
Im Fall einer Gleichung mit konstanten Koeffizientenfunktionen ai gilt αn−1,ξ(x) =αn−1,0(x− ξ), sodass daraus folgt
α(x) = α(x) +
x
x0
αn−1,0(x− ξ)b(ξ)dξ.
Falls b nur in einem endlichen Intervall von 0 verschiedene Werte annimmt, kannam Integral der Grenzübergang x0 → −∞ durchgeführt werden. Es folgt daher, dassdie Lösung α der inhomogenen Gleichung zur homogenen Anfangsbedingung
α(x0), α(1)(x0), ..., α(n−1)(x0)
= (0, 0, ..., 0) ,
für x0 → −∞ punktweise gegen die sogenannte „retardierte Lösung”
αret(x) = (Gret ∗ b) (x) =
∞
−∞Θ(x− ξ)αn−1,0(x− ξ)b(ξ)dξ (1.34)
der inhomogenen Gleichung konvergiert. Die Funktion Gret : x → Θ(x)αn−1,0(x)heißt retardierte Fundamentallösung der homogenen Differentialgleichung (1.32).Das Integral (1.34) heißt Faltungsintegral von Gret mit der Inhomogenität b.
Legendre, Hermite und Laguerre
Die folgenden linearen Differentialgleichungen zweiter Ordnung treten in beim Lösenvon Potential- und Wellenproblemen auf. Einigen von ihnen werden wir uns nocheingehender zuwenden. Sei n ∈ N0.
1. (1− x2) y′′ − 2xy′ + n(n+ 1)y = 0 auf I = (−1, 1) (Legendresche Diffgl.)
2. y′′ − 2xy′ + 2ny = 0 auf I = R (Hermitesche Diffgl.)
3. xy′′ + (1− x) y′ + ny = 0 auf I = R>0 (Laguerresche Diffgl.)
4. Eine maximale Polynomlösung zu jeder der drei Gleichungen ist wie folgt:
5. Pn(x) =1
2nn!
ddx
n(x2 − 1)
n (n-tes Legendrepolynom)
6. Hn(x) = (−1)nex2 d
dx
ne−x2 (n-tes Hermitepolynom)
7. Ln(x) = ex
ddx
n(xne−x) (n-tes Laguerrepolynom)
Bevor wir uns diese Gleichungen vornehmen, noch ein paar Überlegungen zu zweierheblich einfacheren Gleichungen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 70
1.4.2 Eine Eulersche Differentialgleichung
Für x ∈ R>0 sei y′′(x) − 12x
y′(x) + 12x2
y(x) = 0. Die Gleichung ist homogen linear.Potenzansatz: die Funktion y(x) = xα ist eine Lösung genau dann, wenn für allex > 0
α(α− 1)− α
2+
1
2
xα−2 = 0.
Dies ist äquivalent zu α ∈ 1, 1/2 . Daraus folgen die beiden maximalen Lösungenα1(x) = x und α2(x) =
√x auf R>0. Für ihre Wronskideterminante folgt
W (x) = det
x
√x
1 12√x
= −
√x
2< 0.
(α1, α2) ist somit eine Basis des Lösungsraumes der Differentialgleichung, ein Fun-damentalsystem.
Zur Lösung einer inhomogenen Gleichung
y′′(x)− 1
2xy′(x) +
1
2x2y(x) = b(x) für alle x ∈ R>0 (1.35)
nach der Variation der Konstantenformel für Systeme erster Ordnung wird die maxi-male Lösung α1,ξ =: αξ der homogenen Gleichung zur Anfangsbedingung αξ(ξ) = 0und α′ξ(ξ) = 1 benötigt. Für sie gilt für alle x > 0
αξ(x) = 2x−
ξx.
Somit folgt für die maximale Lösung y der inhomogenen Gleichung mit der Anfangs-bedingung α(1) = α′(1) = 0 für alle x > 0, dass
α(x) = x
1
αξ(x)b(ξ)dξ = 2
x
x
1
b(ξ)dξ −√x
x
1
ξb(ξ)dξ
.
Rechnen Sie zur Übung nach, dass die Funktion α tatsächlich eine Lösung der Dif-ferentialgleichung 1.35 ist.
1.4.3 Getriebene lineare Schwingungen: gedämpft
Die (parameterreduzierte) Bewegungsgleichung des getriebenen, gedämpften harmo-nischen Oszillators ist mit α ≥ 0 und stetiger Inhomogenität f : R→ R durch
y′′ + 2αy′ + y = f (1.36)
gegeben. Der Ansatz y (x) = e−αxu (x) für alle x ∈ R führt die Gleichung mitDämpfung auf eine ohne Dämpfung zurück. Es folgt nämlich (y + 2αy′ + y′′) (x) =
= e−αxu (x) + 2α [−αu (x) + u′ (x)] +
α2u (x)− 2αu′ (x) + u′′ (x)
= e−αxu′′ (x) +
1− α2
u (x)
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 71
Die Differentialgleichung für u enthält u′ nicht:
u′′ (x) +1− α2
u (x) = eαxf (x) .
Sei zunächst der homogene Fall f = 0 betrachtet: Wegen u′′ = − (1− α2)u liegtfür α2 < 1 folgender Sachverhalt vor: Die Krümmung (oder auch Beschleunigung)von u ist positiv für negatives u und negativ für positives u. Der Graph von u istoberhalb der x-Achse nach unten und unterhalb nach oben gekrümmt. Dabei nimmtder Betrag der Krümmung linear mit dem Abstand von der Achse zu. Die Funktion uoszilliert dementsprechend mit unendlich vielen Nulldurchgängen zwischen positivenund negativen Werten. Genauer gilt: Es existieren a, b ∈ R, sodass für alle x ∈ R
u (x) = a cos√
1− α2x+ b sin
√1− α2x
.
Es ist, als würde u zum Wert u = 0 hingezogen. Für y folgt bei f = 0 somit für allex ∈ R
y (x) = e−αxa cos
√1− α2x
+ b sin
√1− α2x
.
y wechselt wie u das Vorzeichen in denselben Nullstellen wie u. Für α > 0 geht y (x)für x →∞ gegen 0. Für x → −∞ wächst der Betrag der lokalen Extrema von y (x)unbeschränkt an.
Für α2 > 1 ist u im positiven Bereich nach oben gekrümmt, im negativen nachunten. Der Wert u = 0 scheint abzustoßen. Genauer gilt für α2 > 1 : Es existierena, b ∈ R, sodass für alle x ∈ R
u (x) = ae√α2−1x + be−
√α2−1x.
u hat höchstens eine Nullstelle. Für y folgt bei f = 0 somit für alle x ∈ R
y (x) = ae−(α−√α2−1)x + be−(α+
√α2−1)x.
Auch y hat höchstens eine Nullstelle. Diese stimmt mit jener von u überein. Fürx →∞ konvergiert y (x) gegen 0. Für x → −∞ divergiert y (x) .
Im Grenzfall α2 = 1 gilt: Es existieren a, b ∈ R, sodass für alle x ∈ R
u (x) = a+ bx und y (x) = e−x [a+ bx] .
Sei nun 0 ≤ α2 < 1. Dann gilt für y0 : R → R genau dann y′′0 + 2αy′0 + y0 = 0,wenn reelle Konstanten a, b existieren, sodass mit ω =
√1− α2 für alle x ∈ R
y0 (x) = e−αx [a cos (ωx) + b sin (ωx)]
Die beiden Lösungen ri : R→ R mit
r1 (x) = e−αx cos (ωx) und r2 (x) = e−αx sin (ωx)
bilden ein Fundamentalsystem der homogenen Differentialgleichung, da
Wr (0) =
r1 (0) r2 (0)r′1 (0) r′2 (0)
=
1 0−α ω
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 72
Das Fundamentalsystem α = (α1, α2) ≡ (α0,0, α1,0) , dessen Wronskimatrix Wα (x)im Punkt x = 0 die Einheitsmatrix ist, geht aus der Basis r = (r1, r2) mit einerkonstanten Matrix M ∈ R2×2 gemäß α = r ·M hervor. Es gilt daher auch Wα (x) =Wr (x) ·M und somit
M = Wr (0)−1 =
1
ω
ω 0α 1
=
1 0αω
1ω
.
Für die maximalen Lösungen αi : R→ R der homogenen Gleichung mit α1 (0) = 1und α′1 (0) = 1 und α2 (0) = 0 und α′2 (0) = 1 gilt daher für alle x ∈ R
α1 (x) = e−αxcos (ωx) +
α
ωsin (ωx)
und α2 (x) =
e−αx
ωsin (ωx) .
Daraus folgt für die maximale Lösung y0 : R → R der inhomogenen Gleichungmit Inhomogenität f zur Anfangsbedingung y0(x0) = y′0(x0) = 0 für ein x0 ∈ R,dass für alle x ∈ R
y0 (x) =e−αx
ω
x
x0
sin (ω (x− ξ)) eαξf(ξ)dξ
=e−αx
ω
*sin (ωx)
x
x0
cos (ωξ) eαξf(ξ)dξ − cos (ωx)
x
x0
sin (ωξ) eαξf(ξ)dξ
+.
Dabei gilt 0 ≤ α < 1 und ω =√1− α2.
Ist die Inhomogenität f für x < 0 polynomial beschränkt, dh es existiert einPolynom p mit |f (x)| ≤ |p (x)| für alle x < 0, dann existiert das uneigentlicheIntegral
limx0→−∞
x
x0
sin (ω (x− ξ)) eαξf(ξ)dξ,
aufgrund der exponentiellen Dämpfung durch eαξ, sodass die Funktion yret : R ∋x → limx0→−∞ y0 (x) existiert. Sie löst Gleichung (1.36) und wird als die retardierteLösung bezeichnet. Damit hingegen eine avancierte Lösung yav (x) = limx0→∞ y0 (x)existiert, benötigt f im Bereich x > 0 eine stärkere als nur polynomiale Schranke.Der folgende Abschnitt gibt ein Beispiel einer retardierten Lösung für eine Inhomo-genität ohne Nullstelle.
1.4.4 Eine retardierte gedämpfte Schwingung
Sei wieder die Dämpfungskonstante α ∈ [0, 1) . Die Differentialgleichung (1.36) mitf (x) = exp (−λ |x|) für alle x ∈ R und für ein festes λ ∈ R>0 besitzt also eineLösung yret : R→ R, für die limx→−∞ yret (x) = 0 gilt. Sie kann entweder mittels
yret (x) =e−αx
ω
x
−∞sin (ω (x− ξ)) eαξe−λ|ξ|dξ
berechnet werden, oder aber für x ≤ 0 mittels des Ansatzes yret (x) = c · eλx.Dieser gibt der reellen Konstante c den Wert c = 1/
λ2 + 2αλ+ 1
. Im Punkt

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 73
x = 0 gilt somit yret (0) = c und y′ret (0) = λc. Die Addition einer nichttrivialenLösung der homogenen Gleichung im Bereich x ≤ 0 zu yret (x) = c exp (λx) wirdvon limx→−∞ yret (x) = 0 ausgeschlossen. Keine von ihnen geht für x → −∞ gegen0.
In den Bereich x ≥ 0 wird die Lösung wieder durch Ansatz fortgesetzt. Es giltf (x) = e−λx für x > 0 und daher gibt der Ansatz yp (x) = c′ exp (−λx) eine Lösungvon (1.36) im Bereich x ≥ 0 mit c′ = 1/
λ2 − 2αλ+ 1
. Daher existieren Zahlen
A,B ∈ R mit
yret (x) = yp (x) +Aα1 (x) +Bα2 (x) für alle x ≥ 0.
Dabei ist (α1, α2) jenes Fundamentalsystem der homogenen Gleichung, dessenWrons-kimatrix in x = 0 die Einheitsmatrix ist. Aus der Anschlussbedingung für yret imPunkt x = 0 folgt somit A = yret (0)− yp (0) und B = y′ret (0)− y′p (0) , also
A = c− c′ =−4αλ
λ2 + 1
2 − (2αλ)2und B = λ (c+ c′) =
2λ2 + 1
λ2 + 1
2 − (2αλ)2.
Zusammenfassend gilt mit ω =√1− α2
yret (x) =
eλx
λ2+2αλ+1für x ≤ 0
e−λx
λ2−2αλ+1+ 4λαe−αx
(λ2+1)−2α2λ
2αωsin(ωx)−cos(ωx)
(λ2+1)2−(2αλ)2
für x > 0
1.4.5 Symmetrien einer Differentialgleichung
Für manche Differentialgleichungen lassen sich einfache Prozeduren, sogenannteSymmetrien, finden, die aus bereits bekannten Lösungen weitere Lösungen erzeu-gen. Das hilft gelegentlich beim Auffinden der gesamten Lösungsmenge. Wichtigeraber ist die von Symmetrien errichtete Struktur der Lösungsmenge, denn sie fassenauseinander hervorgehende Lösungen zu Klassen ’ähnlicher’ Lösungen zusammen.Wir sehen uns das an einem Beispiel an.
Die Abbildung Π : C (R : R) → C (R : R) ordne einer Funktion f ∈ C (R : R)die Funktion Π (f) ≡ Πf zu, die Πf : x → f (−x) erfüllt. Der Funktionsgraphvon Πf geht also aus jenem von f durch Spiegelung an der y-Achse hervor. Jenach physikalischem Kontext kann Π als Raum- oder Zeitspiegelung auftreten. Esgilt: Π Π = ιd und daher Π−1 = Π. Für alle f ∈ C1 (R : R) gilt (Πf)′ = −Πf ′
(Kettenregel).Die Abbildung Ta : C (R : R) → C (R : R) ordne einer Funktion f ∈ C (R : R)
für a ∈ R die Funktion Taf ≡ Ta (f) zu, die Taf : x → f (x− a) erfüllt. DerFunktionsgraph von Taf geht also aus jenem von f durch Verschieben um a längsder x-Achse hervor. Es folgt Ta Tb = Ta+b und weiter T−1a = T−a. Zudem giltΠ Ta = T−a Π und (Taf)
′ = Taf′ für alle f ∈ C1 (R : R) und für alle a ∈ R.
Sei L für ein ω > 0 die Menge aller Funktionen y : R→ R mit
y′′ (x) + y (x) = 1− cos (ωx) für alle x ∈ R. (1.37)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 74
L ist also die Menge aller maximalen Lösungen der Differentialgleichung (1.37). Manbeachte, dass 1− cos (ωx) = 2 sin2 (ωx/2) .
Satz 42 Für y ∈ L folgt Πy ∈ L und Tkτy ∈ L für alle k ∈ Z und τ = 2π/ω.
Beweis. 1) Spiegelung: Aufgrund der Kettenregel gilt (Πy)′′ (x) = y′′ (−x) =(Πy′′) (x) für alle x ∈ R. Daraus folgt
(Πy)′′ (x) + (Πy) (x) = y′′ (−x) + y (−x) = 1− cos (ω (−x)) = 1− cos (ωx) .
Also ist auch Πy Element von L.2) Translation: Aufgrund der Kettenregel gilt (Tay)
′′ (x) = y′′ (x− a) = (Tay′′) (x)
für alle x ∈ R. Daraus folgt
(Tay)′′ (x) + (Tay) (x) = y′′ (x− a) + y (x− a) = 1− cos (ω (x− a)) .
Für a = kτ folgt aus cos (ω (x− a)) = cos (ωx− k2π) = cos (ωx) , dass Tay ∈ L.Da die linearen Abbildungen Π und Tkτ : k ∈ Z den affinen Unterraum L ⊂
C (R : R) auf sich abbilden, heißen sie Symmetrien oder auch Invarianzen von L bzwGleichung (1.37).28 Für eine Funktion y ∈ L gilt typischerweise Πy = y und Tkτy =y. Eine Lösung y ∈ L mit Πy = y und Tτy = y stellt einen hochsymmetrischenSonderfall dar und sie wird als invariant unter Π und Tτ bezeichnet. Sie ist alsogerade und τ -periodisch. Sie ist auch invariant unter Tkτ für alle k ∈ Z.
Ziehen wir ein paar Schlüsse aus diesen einfachen Überlegungen: Ist y ∈ L, dannfolgt für den geraden Teil von y, dass y+ := (y +Πy) /2 ∈ L. Hingegen ist derungerade Teil y− = (y − Πy) /2 /∈ L. Vielmehr ist y− eine Lösung der homogenenDG zu (1.37). Es ist sogar so, dass in L keine einzige ungerade Funktion enthalten ist.Gäbe es nämlich eine ungerade Funktion u ∈ L, dann wäre auch die Funktion u+ =(u+Πu) /2 = 0 ∈ L. Das ist aber nach Gl (1.37) nicht der Fall. Jede Funktion y ∈ Lmit y′ (0) = 0 ist gerade, denn aus (Πy) (0) = y (0) und (Πy)′ (0) = −y′ (0) = 0 =y′ (0) folgt, dass die beiden maximalen Lösungen y und Πy von Gl (1.37) dieselbenAnfangsbedingungen bei x = 0 erfüllen und somit nach dem Eindeutigkeitssatzübereinstimmen, dh y = Πy. Eine Regel zeichnet sich ab: Sind Differentialgleichungund Anfangsvoragbe invariant unter einer Symmetrie, dann ist - bei Wirksamkeitdes Eindeutigkeitssatzes - die zugehörige maximale Lösung invariant unter dieserSymmetrie.
Ähnlich folgt für y ∈ L, dass für eine endliche Teilmenge J ⊂ Z die Funkti-on
k∈J (Tkτy) / |J | in L liegt. Der Grenzfall yp := limN→∞
|k|≤N Tkτy/ (2N + 1)schließlich sollte analog zur Bildung von y+ aus y eine τ -periodische Lösung ergeben,soferne der Limes existiert. Überprüfen wir an L all diese Überlegungen.
Nichtresonanter Fall ω = 1 : Eine unter Π und Tτ invariante Lösung kann mitdem Ansatz yp (x) = a+ b cos (ωx) gesucht werden. Es gilt dann
y′′p (x) + yp (x) = a+ b1− ω2
cos (ωx) .
28Jede Permutation einer Menge M heißt Symmetrie von M. Die Menge aller Permutationen vonM bildet bezüglich der Hintereinanderausführung eine Gruppe, die symmetrische Gruppe S (M) .Jede Untergruppe von S (M) wird als Symmetriegruppe von M bezeichnet. Die Einschränkungenvon Π und Tkτ auf L sind also in S (L) .

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 75
yp erfüllt genau dann die DG, wenn a = 1 und b = −1/ (1− ω2) . Es gilt also
yp (x) = 1− cos (ωx)
1− ω2für alle x ∈ R. (1.38)
Die Lösung yp ∈ L ist periodisch. Ihre kleinste Periode ist τ = 2π/ω > 0. IhrPeriodenmittel hat den Wert 1, denn
1
τ
τ
0
yp (x) dx = 1.
Für ω < 1 gilt 1 − ω2 > 0 und die Schwingung yp hat die Amplitude Aω =
(1− ω2)−1
> 1. Die Amplitudenfunktion ω → Aω ist im Intervall (0, 1) strengmonoton wachsend und für ω → 1 unbeschränkt. Für ω → 0 gilt Aω → 1. DieSchwingung folgt der Inhomogenität in Phase, dh sie nimmt ein Maximum genaudann an, wenn die Inhomogenität maximal ist & vice versa. In ihren Tiefpunktennimmt yp einen negativen Wert an, nämlich
yp (0) = 1− 1
1− ω2= − ω2
1− ω2= ω2Aω = −y′′p (0) < 0.
Für ω > 1 gilt 1 − ω2 < 0 und die Schwingung yp hat die Amplitude Aω mitAω = (ω2 − 1)
−1> 0. Die Amplitudenfunktion ω → Aω ist im Intervall (1,∞)
streng monoton fallend und für ω → 1 unbeschränkt. Für ω → ∞ konvergiert siegegen 0. Die Schwingung folgt der Inhomogenität mit einen Phasenschub von π, dhsie nimmt ein Maximum genau dann an, wenn die Inhomogenität minimal ist & viceversa. Für 1 < ω2 < 2 gilt Aω > 1 und für ω2 > 2 gilt Aω < 1. Die Lösungen yp sindfür die unterkritische Frequenz ω = 1/2 und die beiden überkritischen Frequenzenω = 1, 2 <
√2 und ω = 3/2 in Figur 1.25 wiedergegeben. Die Lösung − cos (x) der
homogenen Gleichung ist als Referenztaktgeber in grau eingefügt.
Abbildung 1.25: yp für ω = 1/2 (rot), ω = 1, 2 (grün), ω = 3/2 (schwarz)
Zu jeder Lösung y ∈ L existiert für ω = 1 somit ein Dupel (A,B) ∈ R2, sodassy = y(A,B) mit y(A,B) (x) = A cos (x) + B sin (x) + yp (x) für alle x ∈ R. Es giltΠy(A,B) = y(A,−B) und Tτy(A,B) = y(A cos τ−B sin τ,A sin τ+B cos τ). Die Translation um τdreht den Parametervektor (A,B) um den Winkel τ .
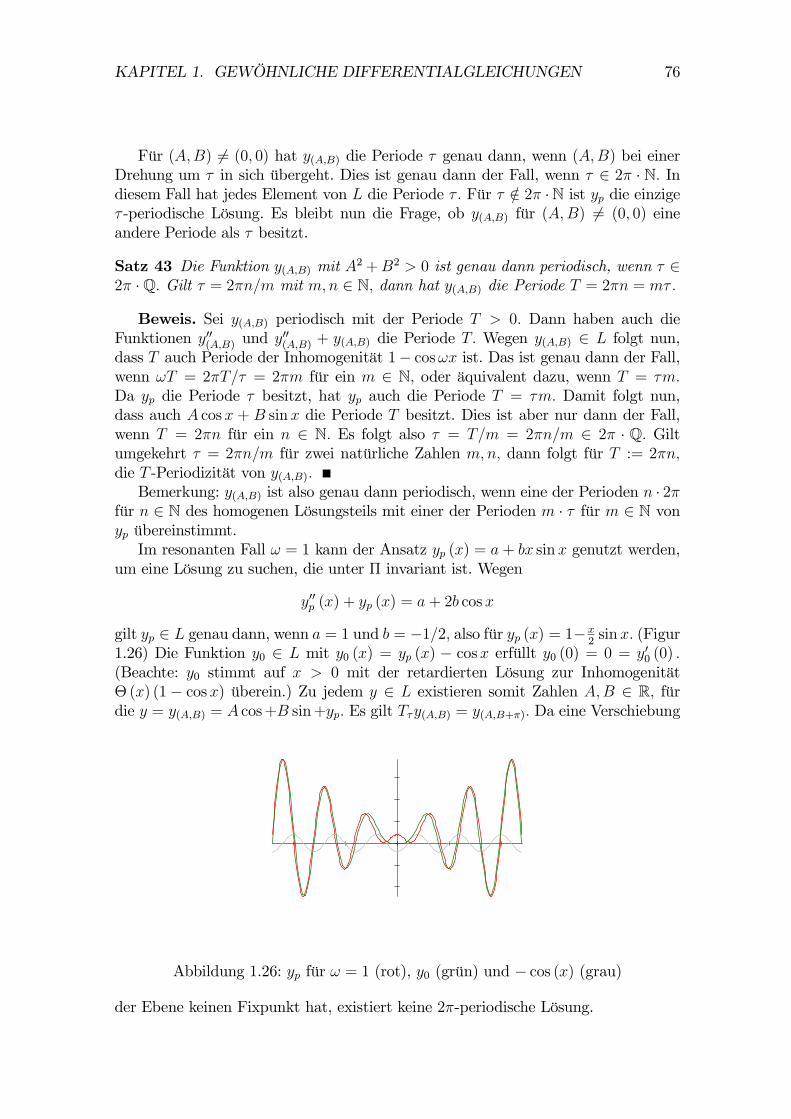
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 76
Für (A,B) = (0, 0) hat y(A,B) die Periode τ genau dann, wenn (A,B) bei einerDrehung um τ in sich übergeht. Dies ist genau dann der Fall, wenn τ ∈ 2π · N. Indiesem Fall hat jedes Element von L die Periode τ . Für τ /∈ 2π ·N ist yp die einzigeτ -periodische Lösung. Es bleibt nun die Frage, ob y(A,B) für (A,B) = (0, 0) eineandere Periode als τ besitzt.
Satz 43 Die Funktion y(A,B) mit A2 +B2 > 0 ist genau dann periodisch, wenn τ ∈2π ·Q. Gilt τ = 2πn/m mit m,n ∈ N, dann hat y(A,B) die Periode T = 2πn = mτ.
Beweis. Sei y(A,B) periodisch mit der Periode T > 0. Dann haben auch dieFunktionen y′′(A,B) und y′′(A,B) + y(A,B) die Periode T. Wegen y(A,B) ∈ L folgt nun,dass T auch Periode der Inhomogenität 1− cosωx ist. Das ist genau dann der Fall,wenn ωT = 2πT/τ = 2πm für ein m ∈ N, oder äquivalent dazu, wenn T = τm.Da yp die Periode τ besitzt, hat yp auch die Periode T = τm. Damit folgt nun,dass auch A cosx + B sin x die Periode T besitzt. Dies ist aber nur dann der Fall,wenn T = 2πn für ein n ∈ N. Es folgt also τ = T/m = 2πn/m ∈ 2π · Q. Giltumgekehrt τ = 2πn/m für zwei natürliche Zahlen m,n, dann folgt für T := 2πn,die T -Periodizität von y(A,B).
Bemerkung: y(A,B) ist also genau dann periodisch, wenn eine der Perioden n · 2πfür n ∈ N des homogenen Lösungsteils mit einer der Perioden m · τ für m ∈ N vonyp übereinstimmt.
Im resonanten Fall ω = 1 kann der Ansatz yp (x) = a+ bx sin x genutzt werden,um eine Lösung zu suchen, die unter Π invariant ist. Wegen
y′′p (x) + yp (x) = a+ 2b cosx
gilt yp ∈ L genau dann, wenn a = 1 und b = −1/2, also für yp (x) = 1− x2sin x. (Figur
1.26) Die Funktion y0 ∈ L mit y0 (x) = yp (x) − cosx erfüllt y0 (0) = 0 = y′0 (0) .(Beachte: y0 stimmt auf x > 0 mit der retardierten Lösung zur InhomogenitätΘ(x) (1− cosx) überein.) Zu jedem y ∈ L existieren somit Zahlen A,B ∈ R, fürdie y = y(A,B) = A cos+B sin+yp. Es gilt Tτy(A,B) = y(A,B+π). Da eine Verschiebung
Abbildung 1.26: yp für ω = 1 (rot), y0 (grün) und − cos (x) (grau)
der Ebene keinen Fixpunkt hat, existiert keine 2π-periodische Lösung.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 77
Zusammenfassung: Aus der Menge L aller maximalen Lösungen der Differential-gleichung (1.37) sind je nachWert von ω kein einziges, genau eines oder alle Elementeinvariant unter Tτ . Für ω = 1 ist kein y ∈ L invariant unter Tτ . Für ω = 1/n mitn ∈ N 1 ist jedes y ∈ L invariant unter Tτ . Für ω ∈ R>0 1/n : n ∈ N ist ypaus Gleichung (1.38) die einzige unter Tτ invariante Lösung.
1.4.6 *Dehnungssymmetrie und 3. Keplersches Gesetz
Sei V ein (endlichdimensionaler) Vektorraum und |·| sei eine Norm von V. Die Kurveγ : I → V 0 erfülle für alle t im offenen reellen Intervall I die NewtonscheBewegungsgleichung
γ (t) = − c
|γ (t)|3γ (t) . (1.39)
Dabei ist c eine reelle Konstante. Im Fall der Bewegung eines Planeten um die Sonneist c das Produkt aus Gravitationskonstante G und Sonnenmasse M und V hat dieDimension 3.
Gibt es eine Zahl α ∈ R, sodass für ein λ ∈ R>0 die gedehnte Funktion
Dλγ : λ · I → V mit (Dλγ) (t) = λαγ (λt)
ebenfalls Gleichung (1.39) erfüllt? Es gilt (Dλγ)′′ (t) = λ2+αγ (λt) und
(Dλγ) (t)
|(Dλγ) (t)|3= λ−2α
γ (λt)
|γ (λt)|3.
Die Kurve Dλγ erfüllt daher genau dann Gleichung (1.39), wenn λ2+α = λ−2α, wennalso 2 = −3α.
Damit ist gezeigt: Die Abbildung Dλ : γ → Dλγ mit (Dλγ) (t) = λ−2/3γ (λt)bildet für jedes λ ∈ R>0 die Menge aller (lokalen) Lösungen von Gleichung (1.39)auf sich ab, ist also eine Symmetrie. Dieser Sachverhalt wird als Skaleninvarianz derBewegungsgleichung (1.39) bezeichnet.
Sei nun γ : R→ V 0 eine periodische Lösung. Ihre kleinste Periodenlänge wirdmit T und ihr Maximalabstand von 0 wird mit L := maxt |γ (t)| bezeichnet. Dannhat die Lösung Dλγ von Gleichung (1.39) die kleinste Periodenlänge Tλ = T/λ undden maximalen Nullpunktsabstand Lλ = λ−2/3M. Es gilt also
1
λ=
Tλ
T=
Lλ
L
3/2
bzw
Tλ
T
2
=
Lλ
L
3
.
Analog gilt für die Minimalabstände von 0, nämlich l = mint |γ (t)| und lλ =mint |(Dλγ) (t)| , dass (Tλ/T )
2 = (lλ/l)3 . Daraus folgt für A = (l + L) /2 und Aλ =
(lλ + Lλ) /2 der Spezialfall des dritten Keplerschen Gesetzes29 (Tλ/T )2 = (Aλ/A)3 .
PS: Kepler abstrahierte aus den ihm bekannten Planetendaten: 1) Die Bahnender Planeten sind Ellipsen und die Sonne befindet sich in einem der Brennpunk-te. 2) Das Geradenstück zwischen Sonne und Planet überstreicht in gleichen Zeiten
29Das dritte Keplergesetz gilt nicht nur für 2 Lösungen, die auseinander durch Dehnung hervor-gehen, sondern für alle Paare von periodischen Lösungen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 78
Sektoren gleicher Flächeninhalte. 3) Die Quadrate der Umlaufzeiten verhalten sichzueinander so wie die Kuben der großen Halbachsen. (Die große Halbachse einer El-lipse ist das arithmetische Mittel von Perihel- und Apheldistanz.) Newton erkannte,dass Gleichung (1.39) eine Erklärung für Keplers Gesetze liefert.
1.4.7 *Potential einer homogen geladenen Kugel
Bisher haben wir eine maximale Lösung y einer gewöhnlichen Differentialgleichungzweiter Ordnung durch die Vorgabe der Werte y (x0) und der Ableitung y′ (x0) ineinem Punkt x0 des Definitionsbereiches der Differentialgleichung festgelegt. Es gibtaber auch andere Möglichkeiten, eine spezielle Lösung aus der Menge aller maxima-len Lösungen auszuwählen.
Das folgende Beispiel zeigt, dass maximale Lösungen einer Differentialgleichung(unter Umständen) auch durchWachstumsschranken enger eingegrenzt werden. Über-dies zeigt es, wie Lösungen verschiedener Differentialgleichungen sich zur Gesamt-lösung einer komplexeren Aufgabenstellung zusammenfügen können. Das Beispielliefert das elektrische Potential einer homogen geladenen Vollkugel oder auch Yuka-was Mesonpotential eines ausgedehnten Nukleons.
Sei für ein R ∈ R>0 und ein ρ0 ∈ R die Funktion ρ : R3 → R durch ρ (p) = ρ0für |p| < R und ρ (p) = 0 sonst gegeben. Die Normfunktion |·| wird im Folgendenals r notiert. Die Funktion ρ beschreibt die Ladungsdichte einer homogen geladenenKugel. Gesucht ist eine beschränkte C1-Funktion Φ : R3 → R mit Φ = ϕ (r) fürein ϕ : R≥0 → R und (−∆+ κ2)Φ = ρ/ε0 auf R3 R · S2. Dabei ist κ ∈ R>0 eineKonstante zur Modellierung entweder einer hypothetischen (kleinen) Photonmas-se oder der Polarisierbarkeit eines raumfüllenden Dielektrikums. ε0 ist die elektri-sche Feldkonstante. Der Fall der Standardelektrostatik im Vakuum ergibt sich durchGrenzübergang κ → 0. Durch den Ansatz ϕ (r) = u (r) /r auf R>0 wird das Problemmittels ∆(u (r) /r) = u′′ (r) /r übersetzt in die folgende (äquivalente) Aufgabe:
Problem 44 Gesucht ist eine C1-Funktion u : R>0 → R mit u′′ (x)− κ2u (x) = cxfür 0 < x < R und u′′ (x)−κ2u (x) = 0 für R < x. Dabei gilt c = −ρ0/ε0. Zudem ist uso, dass die Abbildung x → u (x) /x erstens auf R>0 beschränkt ist, und zweitens ihrGrenzwert für x → 0 existiert. Diese beiden Bedingungen werden als (uneigentliche)’Randbedingung’ bezeichnet.
Im Bereich x > R gilt also u (x) = Ae−κx + Beκx mit Zahlen A,B ∈ R. Nurfür B = 0 ist u (x) /x im Bereich x > R beschränkt. Daher gilt u (x) = Ae−κx füralle x > R mit A ∈ R. Im Bereich 0 < x < R ist up (x) = −cx/κ2 eine partikuläreLösung der dort gültigen Differentialgleichung. Somit gibt es a, b ∈ R mit
u (x) = a cosh (κx) + b sinh (κx)− cx
κ2für alle x ∈ (0, R) .
Der Grenzwert limx→0 u (x) /x existiert genau dann, wenn a = 0.Somit erfüllt u die beiden Differentialgleichungen und die ’Randbedingung’ genau
dann, wenn zwei Zahlen A, b ∈ R existieren, sodass
u (x) =
Ae−κx für alle x > Rb sinh (κx)− c
κ2x für alle x ∈ (0, R)
. (1.40)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 79
Eine Funktion u : R>0 → R, für die Gleichung (1.40) gilt, ist genau dann stetigdifferenzierbar, wenn
limε→0
u (R+ ε) = limε→0
u (R− ε) und limε→0
u′ (R + ε) = limε→0
u′ (R− ε) .
Dies ist genau dann der Fall, wenn
Ae−κR = b sinh (κR)− c
κ2R und − κAe−κR = bκ cosh (κR)− c
κ2.
Es liegt also ein lineares Gleichungssystem für die Integrationskonstanten A, bvor, nämlich
−e−κR sinh (κR)κe−κR κ cosh (κR)
·
Ab
=
c
κ2
R1
.
Die Determinante der Matrix
M :=
−e−κR sinh (κR)κe−κR κ cosh (κR)
hat den Wert detM = −κe−κR (cosh (κR) + sinh (κR)) = −κ < 0. Damit folgt, dass
Ab
=
c
κ2·M−1
R1
=
c
κ3
−κ cosh (κR) sinh (κR)
κe−κR e−κR
·
R1
=c
κ3
sinh (κR)− κR cosh (κR)
(1 + κR) e−κR
.
Daraus folgt nun für das Potential
Φ = −ρ0ε0· 1
κ2·
(sinh (κR)− κR cosh (κR)) e−κr
κrfür r > R
(1 + κR) e−κR sinh(κr)κr
− 1 für 0 < r < R. (1.41)
Mit der Gesamtladung Q = (4πR3/3) ρ0 drückt sich Φ durch x = r/R und α = κRwie in Gl (1.42) angeführt aus.
Φ =Q
4πε0R· 3
α3·.
(α cosh (α)− sinh (α)) e−αx
xfür x > 1
α− (1 + α) e−α sinh(αx)x
für 0 < x < 1(1.42)
Die Taylorentwicklung bezüglich α um α = 0 der Terme in der geschwungenenKlammer ergibt im Limes κ → 0 bei festgehaltenem Ort das Coulombsche Potentialeiner homogen geladenen Kugel30
Φ =Q
4πε0R·
x−1 für x > 112(3− x2) für 0 < x < 1
. (1.43)
Figur 1.27 zeigt die Abbildung x →
Q4πε0R
−1· Φ für α = 1 in grün, für α = 1/2
in rot und den Grenzfall κ → 0 in schwarz. Das Phänomen einer mit wachsendem κzunehmenden Ladungsabschirmung ist sichtbar.
30Ersetzung von Q/ (4πε0) durch −GNM in Φ ergibt das Newtonsche Gravitationspotential ΦNeiner Kugel homogener Massendichte mit Radius R und Masse M. Die Konstante GN bezeichnetNewtons Gravitationskonstante. Die Kraft auf eine Masse m am Ort p ist dann −m gradp ΦN .

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 80
43210
1.5
1.25
1
0.75
0.5
0.25
xx
Abbildung 1.27: Potentialverlauf für α = 1 (grün), α = 1/2 (rot) und α = 0
Die elektrische Feldstärke E = − gradΦ ist stetig und erfüllt im Grenzfall κ→ 0
E (p) =Q
4πε0· p
|p|3 für |p| > RpR3
für |p| ≤ R.
Die Umlaufzeit einer Testladung q mit Qq < 0 auf einer Kreisbahn an der Grenzflä-che |p| = R ist daher für κ = 0 unabhängig davon, ob die Bewegung als Grenzfalleiner Bewegung im Inneren oder Äußeren der geladenen Vollkugel formuliert wird.Da alle Bewegungen von Testladungen mit denselben spezifischen Ladungen q/mim Inneren der Kugel ein und dieselbe Periode haben, dauert ein Umlauf knappaußerhalb der Grenzfläche gleich lang wie der Sturz von der Kugeloberfläche durchden Kugelmittelpunkt zum Antipoden und zurück. Im Kontext der Gravitation im-pliziert dies, dass Münchhausens Sturz vom Nordpol zum Südpol und zurück gleichlange dauert, wie der Umlauf eines erdnahen Satelliten, also ca 1, 5 h.
1.4.8 *Thomson- und Rayleighstreuung von Licht
Sei V ein Vektorraum der Dimension 3 und ·, · sei ein Skalarprodukt von V mitzugehöriger Norm |·| . Eine elektrische Punktladung der Stärke q ∈ R sei harmonischan die Gleichgewichtslage 0 ∈ V gebunden. In Thomsons Modell eines Wasserstoffa-toms ist dies für das Elektron, solange es sich im Inneren der positiven Ladungswolkebefindet, der Fall. Hat die Ladung die Masse m und wird sie von einer (freien, ebe-nen) elektromagnetischen Welle der Frequenz ω überstrichen, dann gilt für ihrenzeitabhängigen Ort γ (t)
γ (t) + ω20γ (t) =
q
mE cos (ωt− δ) für alle t ∈ R. (1.44)
Dabei sind E ∈ V und δ ∈ R fest gwählt. Die Eigenfrequenz ω0 des gebundenenTeilchens und seine Masse m sind positiv reell und es wird ω0 = ω angenommen.Die angeführte Bewegungsgleichung vernachlässigt die Lorentzkraft, die von jenem

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 81
Magnetfeld ausgeht, welches das Feld E begleitet, sowie eine relativistische Teilchen-kinematik.
Im Fall eines Thomsonatoms, also einer homogen positiv geladenen Kugel mitRadius R und Ladung Ze, gilt für das eingebettete Elektron q = −e und31
ω20 = Z
r0R
c
R
2mit r0 =
e2
4πε0mc2.
Spezialisierung auf Elektronenladung und -masse in r0 ergibt den sogenannten klas-sischen Elektronenradius re ≈ 2, 82 ·10−15m. Daraus folgt mit R = 0, 5 ·10−10m undZ = 1 für ν0 = ω0/2π der Wert ν0 ≈ 7 · 1015Hz. Der sichtbare Frequenzbereich vonLicht erstreckt sich über das Intervall 4, 5 · 1014 Hz < ν < 8 · 1014Hz. Ein ohne ein-fallende Strahlung schwingendes Elektron eines Thomsonschen H-Atoms emittiert,soferne |γ| < R gilt, daher eine elektromagnetische Strahlung mit nur einer einzigenFrequenz. Diese liegt im UV-Bereich. Thomsons Modell scheint mit der Wirklichkeitalso wenig zu tun zu haben, wenngleich die Größenordnung der Schwingungsfrequenzstimmig ist.
Eine maximale partikuläre Lösung von Gleichung (1.44) ist γp : R→ V mit
γp (t) =qE
m (ω20 − ω2)
cos (ωt− δ) .
Unter Berufung auf eine winzige - in Gleichung (1.44) nicht aufgenommene Strah-lungsdämpfung - ist es plausibel, dass γp jede Lösung der ’realen’ Schwingungsglei-chung nach Ablauf des Einschwingvorgangs approximiert.
Eine auf Larmor zurückgehende Formel32 nähert (ohne Fehlerschranken anzu-geben) die elektromagnetische Strahlungsleistung einer bewegten Punktladung beigegebenen Bewegungskurve γ : I → V. Sie besagt, dass zur Zeit t ∈ I pro Zeitein-heit ∆t eine Energie Pt (Ω)∆t in den (messbaren) Raumwinkelbereich Ω ⊂ S2 ⊂ Vabströmt, wobei
Pt (Ω) =
n∈Ω
dP
dΩ(t, n) dΩ mit
dP
dΩ(t, n) =
q2
4πε0
|γ (t)|2 − n, γ (t)24πc3
gilt. Die Funktion dPdΩ
: I × S2 → R≥0 heißt Richtungsdichte der Strahlungsleistung.Die Größe |γ (t)|2 − n, γ (t)2 ist das Betragsquadrat der Normalkomponente derBeschleunigung γ (t) zur Richtung n.
Die Spezialisierung von Larmors Formel auf die Bewegungskurve γp ergibt
dP
dΩ(t, n) =
q2
4πε0
qω2
m (ω20 − ω2)
2 |E|2 − n,E24πc3
cos2 (ωt− δ) .
Für E = 0 existiert genau ein33 θ ∈ [0, π] mit n,E = |E| cos θ, sodass dann für dieüber eine Schwingungsperiode zeitgemittelte Richtungsdichte dP/dΩ (n) folgt
dP
dΩ(n) =
ω
2π
2π/ω
0
dP
dΩ(t, n) dt =
q2
4πε0
qω2
m (ω20 − ω2)
2 |E|2 − n,E24πc3
· 12,
31c bezeichnet die Lichtgeschwindigkeit, deren Wert sich aus ω0 herauskürzt.32Siehe zB Gl 20.114 in A Zangwill, Modern Electrodynamics, Cambridge UP, 201333θ ist also der ungerichtete Winkel zwischen der (linear angenommenen) Polarisationsrichtung
der elektrischen Feldstärke und der betrachteten Abstrahlungsrichtung n.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 82
alsodP
dΩ(n) = Π · sin2 θ mit Π =
q2
4πε0
q
m
2|E|2
ω2
ω2 − ω20
21
8πc3.
Im Grenzfall ω0 ≪ ω schwach gebundener Ladung gilt ω2/ (ω2 − ω20) ≈ 1, sodass
die Strahlungsleistung frequenzunabhängig wird (Thomsonstreuung). Im Grenzfallω0 ≫ ω stark gebundener Ladung hingegen gilt ω2/ (ω2
0 − ω2) ≈ (ω/ω0)2 . In diesem
Bereich wächst die Strahlungsleistung mit (ω/ω0)4 (Rayleighstreuung). Von dieser
Beobachtung gehen Erkläungen für das Blau des Himmels aus.Figur (1.28) zeigt den Graphen der Funktion x → (x2/ (x2 − 1))
2, der die Fre-
quenzabhängigkeit von Π als Funktion von ω/ω0 bestimmt, im Rayleighbereich rotund im Thomsonbereich blau. Um x = 1 ist die Funktion unbeschränkt, dh fürω → ω0 wächst die Strahlungsleistung unbeschränkt an. Dieser Sachverhalt weistauf ein resonantes Anwachsen der Ausstrahlung hin, ist aber natürlich nicht beimWort zu nehmen. Er ist das Resultat einer unvollständigen Modellierung. Die Rück-wirkung der Ausstrahlung auf die erzwungene Bewegung γ fehlt.
53.752.51.250
1.5
1.25
1
0.75
0.5
0.25
0
xx
Abbildung 1.28: Die Funktion (x2/ (x2 − 1))2
Die gemittelte Richtungsdichte dP/dΩ (n) wird vielfach auch auf die pro Flächen-einheit einfallende periodengemittelte Einstrahlungsleistung bezogen. Diese einfal-lende Strahlungsintensität I ist im vorliegenden Fall34 durch I = ε0c |E|2 /2 gegeben.Somit folgt für den differentiellen Streuquerschnitt (dσ/dΩ) (n) = dP
dΩ(n) /I
dσ
dΩ(n) =
Π
I· sin2 θ.
Der richtungsunabhängige Vorfaktor Π/I hat die Dimension einer Fläche:
Π
I= r20 ·
ω2
ω2 − ω20
2
mit r0 =q2
4πε0mc2.
Der Vektor E steht senkrecht auf die Ausbreitungsrichtung m ∈ V einer ebenenelektromagnetischen Welle. Ist diese Ausbreitungsrichtung gewählt, dann ist E auf
34Siehe zB Gl (16.42), (16.44) in A Zangwill, Modern Electodynamics, Cambridge UP, 2013.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 83
den 2d Untervektorraum m⊥ eingeschränkt. Sei auch |E| > 0 gewählt und es sei dieRichtung ε = E/ |E| gleichverteilt am Einheitskreis S1m ⊂ m⊥. Sei (ε1, ε2,m) eineONB von V. Dann gilt für den Erwartungswert der periodengemittelten Strahlungs-leistung in Richtung von n
dP
dΩ(n) =
Π
2π
2π
0
1− n, cos (α) ε1 + sin (α) ε22
dα.
Aufgrund der Invarianz der Gleichverteilung auf S1m unter Drehungen um m, kannoEdA die ONB (ε1, ε2,m) so gewählt werden, dass ε1 in der von n und m erzeugtenEbene liegt. Dann folgt, dass n, ε2 = 0, und daher
dP
dΩ(n) = Π
1
2π
2π
0
1− cos2 (α) cos2 (θ1)
dα = Π ·
1− 1
2cos2 θ1
.
Dabei ist θ1 der ungerichtete Winkel zwischen ε1 und n. Für den Winkel Θ zwischenEinfallsrichtung m und Ausstrahlungsrichtung n folgt
1− 1
2cos2 θ1 = 1− 1
2sin2Θ =
1
2
2− sin2Θ
=
1
2
1 + cos2Θ
und somit für die perioden- und polarisationsgemittelte Strahlungsleistung als Funk-tion des Streuwinkels Θ zwischen Einfallsrichtung und Ausstrahlungsrichtung
dP
dΩ(n) =
1
2Π ·1 + cos2Θ
mit Π =
q2
4πε0
q
m
2 |E|28πc3
ω2
ω2 − ω20
2
.
Schließlich wird noch die insgesamt in alle Richtungen n abgestrahlte periodenge-mittelte Leistung berechnet. Dazu ist n über die Einheitssphäre S2 aufzuintegrieren,wofür sich Kugelkoordinaten zur Polarrichtung m anbieten. Dann ist Θ ≡ θ derPolarwinkel der Kugelkoordinaten. Es gilt
2π
0
dϕ
π
0
cos2 θ sin θdθ = −2π
3
π
0
cos3 θ
′dθ = −2π
3
cos3 θ
θ=π
θ=0=
4π
3.
Daher folgt
P =
n∈S2
dP
dΩ(n) dΩ =
1
2Π4π
1 +
1
3
=
8π
3Π.
Der zugehörige polarisationsgemittelte gesamte Wirkungsquerschnitt erfüllt dement-sprechend
σ =
n∈S2
dσ
dΩ(n) dΩ =
8π
3· r20 ·
ω2
ω2 − ω20
2
.
1.4.9 *Klassischer Zeemaneffekt
In der Endphase seines ungeheuer ertragreichen Entdeckerlebens, im Jahr 1862, ver-suchte Faraday die Erzeugung von Licht durch ein Magnetfeld zu beeinflussen.35 Er
35Siehe p. 122-3 in N Forbes, B Mahon, Faraday, Maxwell and the electromagnetic Field, Pro-metheus, 2014.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 84
färbte eine zwischen den Polen eines Elektromagneten brennende Gasflamme mitKochsalz ein und beobachtete, ob die Frequenz der Natrium D-Linie von der Stärkedes Magnetfeldes abhängt. Er konnte eine solche Abhängigkeit nicht nachweisen.Erst um 1896 gelang es Zeeman mit stärkeren Magneten, als sie Fraday zur Verfü-gung standen, den Effekt nachzuweisen. Mit Unterstützung durch Lorentz konnteZeeman die entscheidende Frage nach dem Zusammenhang zwischen Polarisationund Richtung des ausgesandten Lichtes angehen.36 So konnte geklärt werden, dasseine negative Ladung im Atom für die Abstrahlung des Lichtes sorgt. Die folgendeModellrechnung zeigt, wie diese Überlegung funktioniert.
Sei V ein reeller Vektorraum der Dimension 3. In V sind ein Skalarprodukt ·, ·und eine Orientierung gewählt. Damit ist auch das Kreuzprodukt zweier Vektorenvon V erklärt. Das Elektron eines Thomsonschen Wasserstoffatoms ist im Innerender positiven Ladungswolke harmonisch an seine Gleichgewichtslage 0 ∈ V gebun-den. Wird das Atom einem (räumlich und zeitlich konstanten) Magnetfeld B ∈ Vausgesetzt, dann erfüllt der Elektronenort γ (t) zur Zeit t das homogen lineare Sys-tem zweiter Ordnung
γ (t)− e
mB × γ (t) + ω2
0γ (t) = 0 für alle t ∈ R. (1.45)
Hier bezeichnet −e < 0 die Ladung und m die Masse des an die positive Wolkegebundenen Punktteilchens (Elektrons). Die Frequenzkonstante ω0 > 0 wird vomRadius der Ladungswolke bestimmt.
Für B = 0 wird n = B/ |B| gesetzt und die Kurve γ wie im Fall der E × B-Drift in eine Komponente γ parallel zu B und eine Komponente γ⊥ senkrecht zuB zerlegt. Es gilt also
γ = γ + γ⊥ mit γ = n n, γ und γ⊥ = γ − n n, γ .
Die Bewegungsgleichungen der beiden Komponenten entkoppeln voneinander. Esgilt erstens
γ (t) + ω20γ (t) = 0 für alle t ∈ R. (1.46)
Zweitens gilt mit ω = e |B| /m > 0 und Ln : n⊥ → n⊥, v → n× v
γ⊥ (t)− ωLnγ⊥ (t) + ω2
0γ⊥ (t) = 0 für alle t ∈ R. (1.47)
Dabei ist n⊥ = v ∈ V : v, n = 0 das orthogonale Komplement von R · n.Zu jeder maximalen Lösungen γ von Gleichung (1.46) existieren Konstanten
A,B ∈ R, sodass
γ (t) = [A cos (ω0t) +B sin (ω0t)] · n für alle t ∈ R.
Die Bewegung parallel zu B bleibt also von B unbeeinflusst.Einige maximale Lösungen von Gleichung (1.47) lassen sich über einen sym-
metriemotivierten Ansatz finden. Die 2-dimensionale Bewegungsgleichung (1.47) ist
36Siehe sect 40 in F K Richtmeyer, E H Kennard, Introduction to modern Physics, McGraw-Hill,1947.
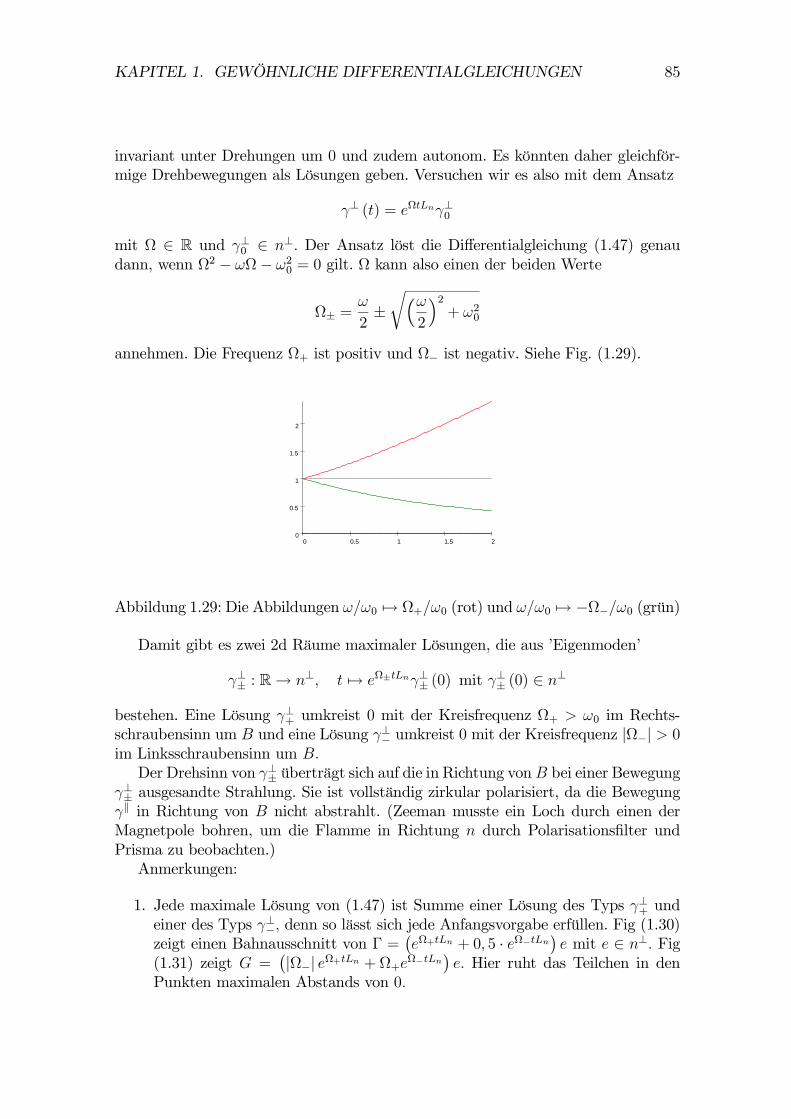
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 85
invariant unter Drehungen um 0 und zudem autonom. Es könnten daher gleichför-mige Drehbewegungen als Lösungen geben. Versuchen wir es also mit dem Ansatz
γ⊥ (t) = eΩtLnγ⊥0
mit Ω ∈ R und γ⊥0 ∈ n⊥. Der Ansatz löst die Differentialgleichung (1.47) genaudann, wenn Ω2 − ωΩ− ω2
0 = 0 gilt. Ω kann also einen der beiden Werte
Ω± =ω
2±/ω
2
2+ ω2
0
annehmen. Die Frequenz Ω+ ist positiv und Ω− ist negativ. Siehe Fig. (1.29).
21.510.50
2
1.5
1
0.5
0
Abbildung 1.29: Die Abbildungen ω/ω0 → Ω+/ω0 (rot) und ω/ω0 → −Ω−/ω0 (grün)
Damit gibt es zwei 2d Räume maximaler Lösungen, die aus ’Eigenmoden’
γ⊥± : R→ n⊥, t → eΩ±tLnγ⊥± (0) mit γ⊥± (0) ∈ n⊥
bestehen. Eine Lösung γ⊥+ umkreist 0 mit der Kreisfrequenz Ω+ > ω0 im Rechts-schraubensinn um B und eine Lösung γ⊥− umkreist 0 mit der Kreisfrequenz |Ω−| > 0im Linksschraubensinn um B.
Der Drehsinn von γ⊥± überträgt sich auf die in Richtung vonB bei einer Bewegungγ⊥± ausgesandte Strahlung. Sie ist vollständig zirkular polarisiert, da die Bewegungγ in Richtung von B nicht abstrahlt. (Zeeman musste ein Loch durch einen derMagnetpole bohren, um die Flamme in Richtung n durch Polarisationsfilter undPrisma zu beobachten.)
Anmerkungen:
1. Jede maximale Lösung von (1.47) ist Summe einer Lösung des Typs γ⊥+ undeiner des Typs γ⊥−, denn so lässt sich jede Anfangsvorgabe erfüllen. Fig (1.30)zeigt einen Bahnausschnitt von Γ =
eΩ+tLn + 0, 5 · eΩ−tLn
e mit e ∈ n⊥. Fig
(1.31) zeigt G =|Ω−| eΩ+tLn +Ω+e
Ω−tLne. Hier ruht das Teilchen in den
Punkten maximalen Abstands von 0.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 86
2. Zu Zemanns Zeit waren nur Werte von ω erreichbar, die ω/ω0 ≪ 1 erfüllen.Daher genügt es, die Frequenzen |Ω±| durch ihre Tangentialapproximation bei0 zu nähern. Es gilt |Ω±| ≈ ω0 ± ω/2. Die Verschiebung ω/2 der ungestörtenFrequenz ω0 durch das Magnetfeld wird als Larmorkreisfrequenz bezeichnet.Sie ist die Hälfte der Zyklotronkreisfrequenz.
3. Mit besseren Messmethoden wurde später klar, dass auch die Aufspaltung derNatrium D-Linie in einem Magnetfeld etwas komplexer ist, als es das hierbeschriebene Modell denkbar macht. (Das Modell kennt zB keinen Spin.) Diegenaueren Messungen fanden erst eine Erklärung durch die Quantentheorie.
Abbildung 1.30: Bahn von Γ
Abbildung 1.31: Bahn von G
1.4.10 Legendresche Differentialgleichung 1
Es soll nun die Legendresche Differentialgleichung1− x2
y′′(x)− 2xy′(x) + n(n+ 1)y(x) = 0 (1.48)
genauer behandelt werden. Natürlich kann anstelle des Definitionsintervalls (−1, 1)auch ganz R als Definitionsbereich für die Legendresche Differentialgleichung (1.48)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 87
gewählt werden. Da aber die Koeffizientenfunktion (1− x2) vor der höchsten Ablei-tung y′′ bei x = ±1 Nullstellen hat, ist die Legendresche Differentialgleichung aufganz R nicht von dem in Definition 40 betrachteten Typ. Auf das LegendrepolynomPn, das auf ganz R Lösung der Legendreschen Differentialgleichung mit Parametern ∈ N0 ist, soll zunächst etwas auführlicher eingegangen werden. Eine zweite, vonPn linear unabhängige Lösung der Legendreschen Differentialgleichung auf (−1, 1),die Legendrefunktion der „zweiten Art”, wird am Ende des Kapitels ermittelt. Siehat keine stetige Fortsetzung auf das abgeschlossene Intervall [−1, 1].
Definition 45 (Rodrigues’ Formel) Sei n ∈ N0. Dann heißt das Polynom
Pn : R→ R mit Pn(x) =1
2nn!
d
dx
n x2 − 1
n
n-tes Legendrepolynom.
Einige offensichtliche Eigenschaften der Legendrepolynome:
• Das reelle Polynom Pn hat als n-fache Ableitung eines Polynoms vom Grad2n den Grad n.
• Pn ist als n fache Ableitung der geraden Funktion x → (x2 − 1)nCn gerade,falls n gerade ist und ungerade sonst. Es gilt also Pn (−x) = (−1)n Pn (x)
• Pn(1) = 1, denn wiederholtes Ableiten von (x2 − 1)n ergibt ein Polynom Q,sodass
d
dx
n (x2 − 1)n
=
d
dx
n−1 n(x2 − 1)n−12x
=
d
dx
n−2 n(n− 1)(x2 − 1)n−2 (2x)2 + n(x2 − 1)n−12
= . . . . = n! (2x)n + (x2 − 1)Q(x).
Also folgt Pn(1) = 1.
• Pn hat genau n Nullstellen. Sie sind alle im Intervall I = (−1, 1) . Das siehtman so: Das Polynom Rn (x) = (x2 − 1)
n hat keine Nullstelle in I, hat aberNullstellen in den Randpunkten von I. Nach dem Satz von Rolle hat daherR′
n mindestens eine Nullstelle in I. Für n > 1 hat aber R′n Nullstellen in den
Randpunkten von I. Daher hat wieder nach dem Satz von Rolle R′′n mindestens
zwei Nullstellen in I. Diese trennen die Nullstellen von R′n. Dieses Argument
wiederholt sich bis zur n-ten Ableitung von Rn, die ein Vielfaches von Pn
ist. Daher hat Pn mindestens n Nullstellen im Intervall I. Als Polynom n-tenGrades hat aber Pn höchstens n Nullstellen. Somit ist die Zahl der Nullstellenvon Pn genau n und sie liegen alle in I.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 88
• Einige Spezialfälle sind:
P0(x) = 1, P1(x) = x, P2(x) =1
2
3x2 − 1
,
P3(x) =1
2
5x3 − 3x
, P4(x) =
1
8
35x4 − 30x2 + 3
.
Abbildung (1.32) zeigt die Graphen von P1, . . . P4 im Bereich −1, 1 < x < 1, 1.
10.50-0.5-1
2
1.5
1
0.5
0
-0.5
-1
-1.5
x
y
x
y
Abbildung 1.32: Legendrepolynome Pn für n = 1, . . . 4
Satz 46 Für alle x ∈ R gilt (1− x2)P ′′n (x)− 2xP ′
n(x) + n(n+ 1)Pn(x) = 0.
Beweis. Zunächst eine Vorüberlegung: Rechne nach, dass für alle x ∈ R
(1− x2)d
dx(x2 − 1)n + 2nx(x2 − 1)n = 0.
Diese Gleichung wird nun n + 1 mal nach x differenziert. Dies gelingt überschau-bar mithilfe der Leibnizregel, die für beliebige n-mal differenzierbare reellwertigeFunktionen f und g mit reellem Definitionsbereich gilt. Sie sagt
dn
dxn(fg) =
n
k=0
n
k
f (k)g(n−k).
Der Beweis der Leibnizregel geht induktiv und wird weiter unten nachgeholt. Mithilfeder Leibnizregel folgt mit der Abkürzung D = d
dxzunächst
Dn+1(1− x2)D(x2 − 1)n
=
*(1− x2)
n+ 1
0
Dn+2 − 2x
n+ 1
1
Dn+1 − 2
n+ 1
2
Dn
+(x2 − 1)n
=(1− x2)Dn+2 − 2(n+ 1)xDn+1 − n(n+ 1)Dn
(x2 − 1)n.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 89
Analog ergibt sich
Dn+12nx(x2 − 1)n
=
*n+ 1
0
2nxDn+1 +
n+ 1
1
2nDn
+(x2 − 1)n
= 2nxDn+1 + (n+ 1)Dn
(x2 − 1)n.
Daraus folgt durch Addition
0 = Dn+1(1− x2)D + 2nx
(x2−1)n =
(1− x2)D2 − 2xD + n(n+ 1)
Dn(x2−1)n.
Daher löst das Polynom (n-ten Grades) cDn(x2− 1)n für jedes c ∈ R auf ganz R dieLegendresche Differentialgleichung. Nun zum Beweis der Leibnizregel.
Lemma 47 Sei I ⊂ R und f, g : I → R. Die beiden Funktionen f und g seienn-mal diffbar in x. Dann gilt die Leibnizregel
(fg)(n) (x) =n
k=0
n
k
f (k)g(n−k) (x) .
Beweis. Der Beweis wird durch Induktion geführt. Für n = 0 ist die Formeloffensichtlich richtig. Für n = 1 spezialisiert sich die Formel auf die Produktregel.Annahme: die Formel gilt für ein n ≥ 1. Zeige nun, dass sie dann auch für n+1 gilt,falls f und g nicht nur n-mal, sondern n+ 1-mal diffbar sind. Dazu wird
(fg)(n) =n
k=0
n
k
f (k)g(n−k)
mithilfe der Produktregel einmal abgeleitet. Dies geht, da die Funktionen f (k) undg(n−k) für k = 0, . . . n mindestens einmal differenzierbar sind. Es folgt
(fg)(n+1) =d
dx
n
k=0
n
k
f (k)g(n−k) =
n
k=0
n
k
f (k+1)g(n−k) + f (k)g(n+1−k)
=n−1
k=0
n
k
f (k+1)g(n−k) +
n
n
f (n+1)g +
n
0
fg(n+1) +
n
k=1
n
k
f (k)g(n+1−k)
=n
k=1
n
k − 1
f (k)g(n+1−k) + 1 · f (n+1)g + 1 · fg(n+1) +
n
k=1
n
k
f (k)g(n+1−k)
=n
k=1
*n
k − 1
+
n
k
+f (k)g(n+1−k) + f (n+1)g + fg(n+1)
Aus der Definition der Binomialkoeffizienten folgt
n
k − 1
+
n
k
=
n!
(k − 1)! (n+ 1− k)!+
n!
(k)! (n− k)!
=(n+ 1)!
k! (n+ 1− k)!
*k
n+ 1+
n+ 1− k
n+ 1
+=
n+ 1
k
.
Damit gilt die Leibnizregel auch für n+ 1 und in der Folge für alle n ∈ N0.Eine nützliche Eigenschaft der Legendrepolynome auf (−1, 1) ist ihre „Orthogo-
nalität”.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 90
Satz 48 Sei n,m ∈ N0. Dann gilt 1
−1 Pn(x)Pm(x)dx = 22n+1
δnm.
Beweis. Sei zunächst n = m. Weiter sei oEdA n < m und daher m = 0. Danngilt aufgrund der Legendreschen Differentialgleichung
1
−1Pn(x)Pm(x)dx =
−1m(m+ 1)
1
−1Pn(x)
*d
dx(1− x2)
d
dx
+Pm(x)dx.
Partielle Integration der Ableitungen 1
−1Pn(x)
*d
dx(1− x2)
d
dx
+Pm(x)dx
= − 1
−1
*(1− x2)
dPn
dx(x)
+dPm
dx(x)dx+ (1− x2)PnP
′m |1−1
führt unter Berücksichtigung des Verschwindens der Randterme schließlich zu 1
−1Pn(x)Pm(x)dx =
n(n+ 1)
m(m+ 1)
1
−1Pn(x)Pm(x)dx.
Wäre 1
−1 Pn(x)Pm(x)dx = 0, dann folgte n(n + 1) = m(m + 1), was m = −n − 1oder n = m verlangt. Beides steht im Widerspruch zu n,m ∈ N0 und n = m. Alsofolgt die Behauptung für n = m.
Nun zum Fall n = m. Es gilt nach Rodrigues’ Formel und mit n-facher partiellerIntegration
1
−1(Pn(x))
2 dx =
1
2nn!
2 1
−1
*dn
dxn
x2 − 1
n+ *
dn
dxn
x2 − 1
n+dx
=
1
2nn!
2 1
−1(−1)n
x2 − 1
n d2n
dx2n
x2 − 1
ndx
=
1
2nn!
2 1
−1(−1)n
x2 − 1
n(2n)!dx = (2n)!
1
2nn!
2 1
−1
1− x2
ndx.
Einschub: Für n ∈ N0 gilt 1
−1
1− x2
ndx = 22n+1 (n!)2
(2n+ 1)!.
Damit folgt 1
−1(Pn(x))
2 dx = (2n)!
1
2nn!
2
22n+1 (n!)2
(2n+ 1)!=
2
2n+ 1.
Nun wird noch der Einschub bewiesen. Sei In := 1
−1 (1− x2)ndx für n ∈ N0. Dann
folgt für n ∈ N mit partieller Integration
In =
1
−1
1− x2
1− x2
n−1dx = In−1 +
1
−1x (−x)
1− x2
n−1dx
= In−1 +
1
2n
1
−1x
d
dx
1− x2
ndx = In−1 −
1
2n
1
−1
1− x2
ndx
= In−1 −
1
2n
In.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 91
Damit gilt für alle n ∈ N die Rekursion In = 2n2n+1
In−1. Ihre Auflösung ergibt
In =2n
2n+ 1· 2 (n− 1)
2 (n− 1) + 1In−2 = . . . =
2nn!
(2n+ 1) (2n− 1) . . . · 3 · 1I0
=2nn!
(2n+ 1) 2n (2n− 1) (2n− 2) . . . · 4 · 3 · 2 · 1 · 2n · (2n− 2) . . . · 4 · 2 · I0
=(2nn!)2
(2n+ 1)!I0.
Wegen I0 = 2 folgt schließlich der Einschub.Eine Zerlegung von Pn in Monome gibt der folgende Satz.
Satz 49 Sei x ∈ R und n ∈ N. Dann gilt
Pn (x) =1
2n
[n/2]
k=0
(−1)kn
k
2n− 2k
n
xn−2k.
Beweis. Man entwickelt das Polynom (x2 − 1)n in der Formel von Rodrigues
mit dem binomischen Lehrsatz und leitet dann n-mal ab. Die Details werden in denÜbungen ausgeführt.
Der folgende Satz ist für die Multipolentwicklung der Potentialtheorie wichtig.Er zeigt, dass die Abbildung t → (1− 2xt+ t2)
−1/2 auf dem Intervall (−1, 1) fürx ∈ (−1, 1) die Werte Pn (x) als Koeffizienten ihrer Potenzreihe um 0 hat. DieseAbbildung heißt daher die erzeugnede Funktion der Legendrepolynome.
Satz 50 Seien t, x ∈ (−1, 1) . Dann gilt (1− 2xt+ t2)−1/2
=∞
n=0 Pn (x) tn.
Den Beweis wird in Math. Meth. 2 im Kapitel über radial separierte Lösungender 3d Laplacegleichung geführt. Ein direkter Beweis ist in Kap. II, §4.3.2 d von [4](p. 76) angedeutet.
Eine Rückführung des Legenrepolynoms Pn auf Pn−1 und Pn−2 gibt die folgendeRekursionsrelation.
Satz 51 Für n ∈ N und x ∈ R gilt (n+ 1)Pn+1 (x) = (2n+ 1) xPn (x)−nPn−1 (x) .
Beweis. Die n+1Koeffizienten eines Polynoms vomGrad n sind durch die Wertedes Polynoms an n+ 1 voneinander verschiedenen Stellen festgelegt. Also gilt: Sindzwei Polynome auf einem nichtleeren offenen Intervall gleich, so sind sie auch aufganz R gleich. Sei daher x ∈ (−1, 1) . Leite t → (1− 2xt+ t2)
−1/2=∞
n=0 Pn (x) tn
mit −1 < t < 1 nach t ab und multipliziere dann mit (1− 2xt+ t2) . Das ergibt
−1
2
1− 2xt+ t2
−1/2(2t− 2x) =
1− 2xt+ t2
∞
n=1
nPn (x) tn−1.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 92
(Potenzreihen können gliedweise differenziert werden!) Die linke Seite hat nach demSatz von der erzeugenden Funktion die Potenzreihe
∞
n=0
xPn (x) tn −
∞
n=1
Pn−1 (x) tn.
Die rechte Seite hingegen hat die Potenzreihe
∞
n=0
(n+ 1)Pn+1 (x) tn − 2x
∞
n=1
nPn (x) tn +
∞
n=1
(n− 1)Pn−1 (x) tn.
Koeffizientenvergleich zum Monom tn ergibt für n ∈ N
xPn (x)− Pn−1 (x) = (n+ 1)Pn+1 (x)− 2xnPn (x) + (n− 1)Pn−1 (x) .
Das ist äquivalent zu
(n+ 1)Pn+1 (x) = (2n+ 1) xPn (x)− nPn−1 (x) .
Koeffizientenvergleich zum Monom t0 ergibt P1 (x) = xP0 (x) .Eingeschränkt auf das Intervall (−1, 1) ist die Legendresche Differentialgleichung
vomTyp der Definition 40. Es gibt daher ein Paar von linear unabhängigen Lösungenmit Definitionsbereich (−1, 1). Die Restriktion von Pn auf (−1, 1) ist eine maximaleLösung der auf (−1, 1) eingeschränkten Gleichung (1.48). Es soll nun eine weiteremaximale Lösung auf (−1, 1) („Legendrefunktion zweiter Art”) bestimmt werden,die Pn zu einem Fundamentalsystem ergänzt.
1.4.11 d’Alemberts Reduktionsverfahren
Jede Lösung y einer homogen linearen Differentialgleichung zweiter Ordnung kannlokal um einen Punkt x0 ∈ I, für den y(x0) = 0, mit der folgenden Methode -sie heißt d’Alemberts Reduktionsverfahren - zu einem Fundamentalsystem ergänztwerden.
Seien p und q reelle stetige Funktionen auf dem Intervall I. Seien y1, y2 : I → RLösungen der linearen Diffgleichung y′′ + py′ + qy = 0. Dann gilt für die Wronski-determinante W : I → R, x → y1y
′2 − y′1y2, dass W ′ = −pW. (Übung) Daraus folgt
für x0, x ∈ I, dass
W (x) = W (x0) exp
− x
x0
p(ξ)dξ
.
Aus W (x0) = 0 folgt somit W (x) = 0 für alle x ∈ I. Für y1(x0) = 0 ist y1 in einergenügend kleinen Umgebung von x0 nirgends 0. In einer solchen Umgebung folgtmit der Quotientenregel
W (x) = y1(x)2 d
dx
y2y1
(x).

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 93
Ersetzen von W (x) durch W (x0) exp− x
x0p(ξ)dξ
führt auf
d
dx
y2y1
(x) =
W (x0)
y1(x)2exp
− x
x0
p(ξ)dξ
.
Integration ergibt
y2(x) = y1(x)
y2(x0)
y1(x0)+W (x0)
x
x0
exp− z
x0p(ξ)dξ
y1(z)2dz
.
Dieser Zusammenhang zwischen den beiden Lösungen y1 und y2 kann in einer Um-gebung von x0 ∈ I mit y1(x0) = 0 dazu benützt werden, um etwa mit W (x0) = 1und y2(x0) = 0 aus einer gegebenen Lösung y1 eine zweite lokale, linear unabhängigeLösung y2 zu berechnen.
Im Fall der Legendreschen Differentialgleichung gilt
p(x) = − 2x
1− x2=
d
dxln1− x2
und daher mit x0 ∈ (−1, 1)
W (x) = W (x0) exp
− ln
1− x2
1− x20
= W (x0)
1− x20
1− x2.
Die Wronskideterminante eines Fundamentalsystems auf (−1, 1) divergiert somit fürx → ±1 und das Fundamentalsystem kann nicht auf das abgeschlossene Intervallfortgesetzt werden. Das ist auch nicht verwunderlich, da aus der LegendreschenDifferentialgleichung für eine Lösung, deren Definitionsbereich x = 1 enthält,
−2y′ (1) + n(n+ 1)y (1) = 0
folgt. Daraus ergibt sich, dass die Wronskideterminante W (1) zweier beliebiger in1 definierter Lösungen gleich 0 ist. Damit ist der Raum aller auf [−1, 1] definiertenLösungen der Legendreschen Differentialgleichung mit Parameter n der Raum R·Pn.
Das oben skizzierte Verfahren liefert, trotz Nullstellen von Pn, eine maximalelinear unabhängige Lösung der Legendreschen Differentialgleichung auf dem gan-zen Bereich (−1, 1). (Für n = 0 wird das Verfahren gar nicht benötigt.) Für den2-dimensionalen Vektorraum Ln der auf ganz (−1, 1) definierten Lösungen der Le-gendreschen Differentialgleichung mit Parameter n folgt so
L0 = αa,b | a, b ∈ R mit αa,b(x) := a+ b ln
1 + x
1− x
für x ∈ (−1, 1) ,
L1 = αa,b | a, b ∈ R mit αa,b(x) := ax+ b
*x ln
1 + x
1− x
− 2
+für x ∈ (−1, 1) .
Wir zeigen die Aussage über L1. Wähle y1 (x) = x. Dann ergibt sich als einelinear unabhängige Lösung auf (0, 1) die Funktion y2 mit d’Alemberts Formel
y2 (x) = x
x
x0
W (u)
u2du.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 94
Mit der Wahl W (x0) (1− x20) = 1 und x0 = 1/2 folgt für 0 < x < 1
y2 (x) = x
x
1/2
du
u2 (1− u2).
Das Integral ergibt sich mittels der Partialbruchzerlegung
1
x2 (1− x2)=
1
x2+
1
2
1
1 + x+
1
1− x
zu
y2 (x) = x
1
2ln
1 + x
1− x− 1
x+ 2− 1
2ln 3
=
1
2
*x ln
1 + x
1− x− 2
++ x
*2− 1
2ln 3
+.
Subtrahiert man auf (0, 1) von y2 die Lösung2− 1
2ln 3y1 und multipliziert dann
mit 2, so erhält man die Lösung
f2 (x) = x ln1 + x
1− x− 2.
Die Funktion f2 ist die Einschränkung einer geraden C2-Funktion auf (−1, 1) . Dieseergänzt daher y1 zu einem Fundamentalsystem der Legendre’schen Differentialglei-chung für n = 1.
Eine Verallgemeinerung der Legendreschen Differentialgleichung ist
1− x2
y′′(x)− 2xy′(x) +
λ− m2
1− x2
y(x) = 0 (1.49)
auf I = (−1, 1) mit m ∈ N0 und λ ∈ R. Auch diese Gleichung heißt LegendrescheDifferentialgleichung. Eine Methode zu ihrer Lösung wird im folgenden Abschnittüber Potenzreihenlösungen erläutert. Diese Methode bringt den folgende Sachver-halt zutage: Gleichung (1.49) hat genau dann eine von 0 verschiedene Lösung, diesich stetig auf den Rand des Intervalls (−1, 1) fortsetzen lässt, wenn λ = n(n + 1)für ein n ∈ N0 mit n ≥ m. Dieses Faktum ist bei der Bestimmung dreidimensionalerPotentiale und Schwingungsvorgänge bedeutsam. Dort regelt die (verallgemeinerte)Legendresche Differentialgleichung die Abhängigkeit des betrachteten Feldes vomPolarwinkel eines Kugelkoordinatensystems. Die stetige Fortsetzbarkeit eines Feldesin die polare Achsensingularität der Kugelkoordinaten erzwingt dann die „Diskreti-sierung” von λ ∈ R zu λ ∈ n(n+ 1) | n ∈ N0. Genaueres dazu findet sich in derVorlesung Math. Meth. Phys. 2 oder in Kapitel 13 von [12].
1.4.12 Methode des Potenzreihenansatzes
Ein systematisches Verfahren, die Legendrepolynome als Lösungen der Legendre-schen Differentialgleichung zu finden, ist die Methode des Potenzreihenansatzes.Siehe Übung 22. Diese Methode funktioniert auch bei vielen anderen gewöhnlichenhomogen linearen Differentialgleichungen mit nichtkonstanten Koeffizientenfunktio-nen. Den Grund für das Funktionieren der einfachsten Variante der Lösungsmethodedurch Potenzreihenansatz (Frobeniusmethode) gibt der folgende Satz.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 95
Satz 52 Sei I ⊂ R ein Intervall mit 0 ∈ I. Zwei Funktionen p und q von I nachR mögen um 0 die Potenzreihenentwicklungen
p(x) =∞
k=0
akxk und q(x) =
∞
k=0
bkxk
mit den Konvergenzradien rp > 0 und rq > 0 haben. Die Konvergenzintervalle(−rp, rp) und (−rq, rq) der Potenzreihen seien in I enthalten. Dann hat die ma-ximale Lösung αc0,c1 der Differentialgleichung
y′′(x) + p(x)y′(x) + q(x)y(x) = 0
zur Anfangsbedingung y(0) = c0 und y′(0) = c1 eine Potenzreihenentwicklung um 0mit einem Konvergenzradius r ≥ min rp, rq. Es gilt dann für alle x ∈ (−r, r)
αc0,c1(x) = c0 + c1x+ limn→∞
n
k=2
ckxk.
Die Koeffizenten ck sind für alle k ∈ 2, 3, 4, . . . durch die Rekursionsformeln
(k + 1) (k + 2) ck+2 = −k
m=0
[(k −m+ 1) amck−m+1 + bmck−m] für k ∈ N0,
k (k + 1) ck+1 = −k−1
m=0
[(k −m) akck−m + bkck−m−1] für k ∈ N0
auf c0, c1 zurückgeführt und durch eine Wahl von (c0, c1) ∈ R2 eindeutig festgelegt.
Die Beweisidee wird an den einfacheren Spezialfällen der Legendreschen undHermiteschen Differentialgleichung klar gemacht.
1.4.13 Legendresche Differentialgleichung 2
Für y : (−1, 1)→ R gelte für alle x ∈ (−1, 1) und für ein λ ∈ R1− x2
y′′ (x)− 2xy′ (x) + λy (x) = 0.
Lösungsansatz: Ist y (x) =∞
k=0 ckxk eine Potenzreihe mit dem Konvergenzradius
ρ > 0, dann gilt für alle x mit |x| < ρ
y′ (x) =∞
k=1
kckxk−1,
y′′ (x) =∞
k=2
k (k − 1) ckxk−2 =
∞
k=0
(k + 2) (k + 1) ck+2xk.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 96
Für x2y′′ (x) und xy′ (x) gilt daher für alle x mit |x| < ρ
xy′ (x) =∞
k=1
kckxk =
∞
k=0
kckxk,
x2y′′ (x) =∞
k=2
k (k − 1) ckxk =
∞
k=0
k (k − 1) ckxk.
Daraus folgt für |x| < ρ wegen x2y′′ (x) + 2xy′ (x)− λy (x) =
=∞
k=0
[k (k − 1) + 2k − λ] ckxk =
∞
k=0
[k (k + 1)− λ] ckxk,
dass ∞
k=0
(k + 2) (k + 1) ck+2xk =
∞
k=0
[k (k + 1)− λ] ckxk.
Aus dem Identitätssatz für Potenzreihen folgt somit für alle k ∈ N0 die Rekursion
ck+2 = Rkck, mit Rk :=(k + 1) k − λ
(k + 2) (k + 1)
Die Teilfolgen (c2k)k∈N0 und (c2k+1)k∈N0 sind über die Rekursion jeweils durch c0und c1 festgelegt. Für alle k mit k (k + 1) > λ ist der Faktor Rk, der die Rekursionbestimmt, für alle hinreichend großen k positiv. Es gilt also für alle k ≥ k0 mithinreichend großem k0
Rk :=(k + 1) k − λ
(k + 2) (k + 1)=
k
k + 2
1− λ
(k + 1) k
> 0.
Das Vorzeichen der Folgenglieder ck ändert sich also ab einem hinreichend großenk0 nicht mehr.
Wenn ein n ∈ N0 existiert, für das λ = n (n+ 1) gilt, folgt Rn = 0 und daher0 = cn+2j für alle j ∈ N. (Falls solch ein n mit λ = n (n+ 1) existiert, dann istes eindeutig, da n → n (n+ 1) streng monoton ist.) Gilt λ = n (n+ 1) für eingerades n, dann „bricht die gerade indizierte Teilfolge ab“, d.h. es gilt c2k = 0 füralle k > n/2. Die ungerade indizierte Teilfolge bricht in diesem Fall nicht ab. Gilthingegen λ = n (n+ 1) für ein ungerades n, dann „bricht die ungerade indizierteTeilfolge ab“, d.h. es gilt c2k+1 = 0 für alle 2k + 1 > n, und die gerade indizierteTeilfolge bricht nicht ab. Falls kein n ∈ N0 existiert, sodass λ = n (n+ 1) , dannfolgt aus c0 = 0, dass auch c2k = 0 für alle k ∈ N. Analog folgt aus c1 = 0, dassc2k+1 = 0 für alle k ∈ N.
Mit der Wahl c1 = 0 ergibt sich für c0 = 0 eine Potenzreihe c0y+ mit ausschließ-lich geraden Potenzen. Mit der Wahl c0 = 0 und c1 = 0 hingegen ergibt sich einePotenzreihe c1y− mit ausschließlich ungeraden Potenzen. Es gilt also
y+ (x) = 1 +∞
k=1
c2kx2k und y− (x) = x
1 +
∞
k=1
c2k+1x2k
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 97
Für λ = n (n+ 1) mit n ∈ N0 ist - je nach dem ob n gerade oder ungerade ist -entweder y+ oder y− ein Polynom vom Grad n, dessen Potenzreihe dann natürlichauf ganz R konvergiert. In allen anderen Fällen ergibt sich der Konvergenzradiusvon y± wie folgt.
Der Konvergenzradius einer Potenzreihe∞
k=0 akxk ist durch ρ = limk→∞
akak+1
gegeben, soferne dieser Limes existiert. Siehe Satz 38, §8, Kap. 3, Vol I von [3].Anwendung dieser Formel auf die Potenzreihe y+ ergibt wegen
y+ (x) =∞
k=0
c2kx2k
mit ak = c2k die Konvergenz der Reihe für alle x2 < limk→∞c2k
c2k+2= limk→∞ (1/Rk) =
1. Also hat y+ den Konvergenzradius 1. Analog folgt auch für y− der Konvergenz-radius 1.
y+ und y− sind also gemäß Konstruktion gerade bzw. ungerade Lösungen derLegendreschen Differentialgleichung auf (−1, 1) . Im Fall einer abbrechenden Po-tenzreihe mit λ = n (n+ 1) gilt die Differentialgleichung sogar auf ganz R.
Sei nun u eine der beiden Funktionen y+ und y− mit nicht abbrechender Potenz-reihenentwicklung. Welches Konvergenzverhalten hat die Potenzreihe von u (x) fürx → 1? Es gilt für N = k + 2n mit k, n ∈ N so, dass Rk > 0
cN =N − 2
N
1−
λN
N − 1
· N − 4
N − 2
1−
λN−2
N − 3
. . . · k
k + 2
1−
λk
k + 1
· ck
=1
N
1− λ
N (N − 1)
·1− λ
(N − 2) (N − 3)
. . . ·
1− λ
(k + 1) k
k · ck.
Zwischenbehauptung: Das Produkt ΠN mit
ΠN =
1− λ
N (N − 1)
·1− λ
(N − 2) (N − 3)
. . . ·
1− λ
(k + 1) k
strebt für N →∞ einem Grenzwert zu. Warum? Das sieht man so:Jeder der Faktoren πj =
1− λ
j(j−1)
liegt zwischen 0 und 1. Daher kann das
Produkt logarithmiert werden und es gilt lnΠN =N
j=k+1 ln πj. Für j →∞ hat πj
das asymptotische Verhalten (Taylorentwicklung)
ln πj = − λ
j (j − 1)+ o
λ
j (j − 1)
.
Daraus folgt für alle hinreichend großen j die Abschätzung
− 2λ
j (j − 1)< ln πj < 0.
Die unendliche Reihe ∞
j=2
1
j (j − 1)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 98
ist aber absolut konvergent. Daher konvergiert auch die ReiheN
j=k+1 lnπi. Aus derStetigkeit der Exponentialfunktion folgt nun, dass
limN→∞
ΠN = limN→∞
elnΠN = elimN→∞ lnΠN .
WegenNcN = ΠN ·k ·ck gibt es somit auch ein γ > 0 mit limn→∞ (N · cN) = γ ·ck.Daraus folgt aber für die Koeffizienten ck+2n der Reihe für u für alle n > N0 mithinreichend großem N0 ∈ N die Abschätzung
ck+2n
ck>
1
2
γ
k + 2n.
Der Reihenrest der Reihe für u mit den Termen der Ordnung xk+2n für alle n >N0 > k erfüllt daher für alle x > 0
∞
n=N0
ck+2n
ckxk+2n >
1
2
∞
n=N0
γ
k + 2nxk+2n >
1
2
∞
n=N0
γ
3nxk+2n =
γ
6xk
∞
n=N0
x2n
n.
Für x = 1 divergiert diese Reihe bestimmt gegen∞. Daher divergiert auch die Reihevon u bei x = 1.
Gibt es für λ = n (n+ 1) eine Linearkombination von von y+ und y−, die inbeiden Randpunkten x = ±1 beschränkt ist? Nein, denn die Partialsummen derReihen y± divergieren wegen des gleichbleibenden Vorzeichens der Koeffizienten ckin den beiden Randpunkten ±1 monoton. Die Partialsummen der geraden Funktiony+ divergieren in beiden Randpunkten gleich, während jene von y− dort gegenläufigdivergieren. Damit kann eine Linearkombination zwar in einem Randpunkt konver-gieren, nicht aber in beiden.
Die Funktionen y± sind also ein Fundamentalsystem der Legendreschen Differen-tialgleichung. Für λ = n (n+ 1) ist genau eine der beiden Funktionen ein Polynom,während die andere eine Potenzreihendarstellung mit dem Konvergenzradius 1 hat.Eine Polynomlösung der DG ist uns jedoch schon bekannt, das LegendrepolynomPn, das daher eine Linearkombination von y+ und y− sein muss. Der Entwicklungs-koeffizient vor der nichtpolynomialen Lösung muss aber 0 sein.
Fassen wir das Ergebnis dieser etwas längeren Überlegung zusammen zum
Satz 53 Die Legendresche Differentialgleichung auf (−1, 1) mit Parameter λ ∈ R1− x2
y′′ (x)− 2xy′ (x) + λy (x) = 0
besitzt genau dann nichttriviale maximale Lösungen mit stetiger Fortsetzung auf[−1, 1] , wenn ein n ∈ N0 existiert, sodass λ = n (n+ 1) . Für jede solche Lösung yder Legendreschen Differentialgleichung mit λ = n (n+ 1) existiert eine Zahl c ∈ R,sodass y (x) = c · Pn (x) für alle x ∈ (−1, 1) .

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 99
1.4.14 *Hermitesche Differentialgleichung
Die Schrödingergleichung für eine Energieeigenfunktion ψ : R → R eines harmoni-schen Oszillators lautet mit gegebenen Konstanten m,ω, ∈ R>0
− 2
2mψ′′ (x) +
mω2
2x2ψ (x) = Eψ (x) für alle x ∈ R. (1.50)
Gesucht sind jene Werte von E ∈ R, für die Gleichung (1.50) eine nichttrivialeLösung ψ besitzt, für die der Limes
limL→∞
L
−L
ψ2 (x) dx
existiert. Für solche Werte von E sind überdies die Lösungen ψ von Gleichung (1.50)zu bestimmen. Äquivalent zu Gleichung (1.50) ist
ω
2
*−
mωψ′′ (x) +
mω
x2ψ (x)
+= Eψ (x) . (1.51)
Über die Substitution u
mω x= ψ (x) ist Gleichung (1.51) äquivalent zu
u′′ (ξ)− ξ2u (ξ) = −2E
ωu (ξ)
Die Bestimmung der stationären Zustände eines quantenmechanischen harmoni-schen Oszillators führt also nach obiger Parameterreduktion auf die folgende Fra-gestellung. Zu welchen Werten von ε = E/ω ∈ R hat die auf ganz R definierteDifferentialgleichung
u′′(x)− x2u(x) + 2εu(x) = 0 (1.52)
eine maximale von der Nullfunktion verschiedene Lösung u : R→ R, für die dasuneigentliche Integral
∞−∞ u(x)2dx existiert?
Eine kleine Nebenrechnung zeigt: Für u : R→ R gilt Gleichung (1.52) genaudann, wenn die Funktion y : R→ R mit u(x) = exp (−x2/2) y(x) eine Lösung derHermiteschen Differentialgleichung mit λ := ε− 1
2∈ R
y′′(x)− 2xy′(x) + 2λy(x) = 0 (1.53)
ist. Sei Lλ der 2-dimensionale Raum der auf ganz R definierten maximalen Lösungenvon Gleichung (1.53).
Die Spiegelungssymmetrie von Lλ
Lλ hat eine nützliche Spiegelungssymmetrie: Aus α ∈ Lλ folgt nämlich mit derKettenregel, dass auch die gespiegelte Funktion Πα : R→ R, mit Πα (x) := α (−x)in Lλ liegt. Zu einer beliebigen Funktion α : R→ R heißt α+ := 1
2(α +Πα) ihr
gerader Anteil und α− := 12(α−Πα) ihr ungerader Anteil. Es gilt dann Πα± = ±α±
und α = α++α−. Aus α ∈ Lλ folgt somit, dass auch α± ∈ Lλ. Es wird nun gezeigt,dass Lλ gerade und ungerade Funktionen enthält, die nicht die Nulllösung sind.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 100
Sei α die maximale Lösung zur Anfangsbedingung α(0) = 1, α′(0) = 0. Darausfolgt Πα (0) = 1 und (Πα)′ (0) = 0. Da die maximale Lösung des Anfangswertpro-blems eindeutig ist, gilt α = Πα. Die Lösung α ist daher gerade. Eine ganz ähnlicheÜberlegung zeigt, dass die maximale Lösung β mit β(0) = 0, β′(0) = 1 ungerade ist.Die gerade Lösung α erzeugt also einen 1-dimensionalen Unterraum (Lλ)+ geraderLösungen, und die ungerade Lösung β erzeugt einen 1-dimensionalen Unterraum(Lλ)− ungerader Lösungen. Zusammenfassend gilt Lλ = R · α⊕R · β.
Potenzreihenansatz für α ∈ Lλ
Da die Koeffizientenfunktionen der Hermiteschen Differentialgleichung als Polyno-me eine auf ganz R konvergente Potenzreihenentwicklung um 0 haben, hat jedemaximale Lösung dieser Differentialgleichung eine auf ganz R konvergente Potenz-reihenentwicklung. Der etwas schlauer gewählte Potenzreihenansatz
α(x) =∞
k=0
ckxk
k!(1.54)
ergibt
α′(x) =∞
k=1
kckxk−1
k!=
∞
k=0
ck+1xk
k!und α′′(x) =
∞
k=0
ck+2xk
k!.
Einsetzen in die Hermitesche Differentialgleichung ergibt für alle x im Konvergenz-bereich der Reihe ∞
k=0
[ck+2 − 2 (k − λ) ck]xk
k!= 0.
Eine Potenzreihe ist auf ihrem Konvergenzintervall genau dann überall gleich 0,wenn alle ihre Koeffizienten gleich 0 sind. Siehe Kapitel III.8.4 in Vol I von [3]. DieFunktion α ist somit genau dann eine Lösung von Gleichung 1.53, wenn für allek ∈ N0 die Rekursion
ck+2 = 2 (k − λ) ck (1.55)
gilt. Die Koeffiziententeilfolge (c0, c2, c4, . . .) , also der gerade Anteil α+ von α istsomit durch c0 festgelegt. Analog ist (c1, c3, c5, . . .) , also der ungerade Anteil α−durch c1 eindeutig festgelegt. Es gilt α(0) = c0 und α′(0) = c1.
Polynomlösungen
Eine erhebliche Vereinfachung ergibt sich, falls λ = n ∈ N0. Dann gilt nämlichcn+2 = cn+4 = cn+6 = . . . = 0. Für gerades λ = n sind dann die geraden LösungenPolynome vom Grad n. Die ungeraden Lösungen sind in diesem Fall natürlich keinePolynome. Für ungerades λ = n sind die ungeraden Lösungen Polynome vom Gradn und die geraden Lösungen sind keine Polynome.
Für λ = 0 folgt c2 = c4 = . . . = 0. Damit ist die konstante Funktion α = 1 aufganz R eine Lösung. (Probe machen!)
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 101
Für λ = 1 folgt c3 = c5 = . . . = 0. Damit ist die Funktion α (x) = x auf ganz Reine Lösung. (Probe machen!)
Für λ = 2 folgt c2 = −4c0 und c4 = c6 = . . . = 0. Damit ist die Funktionα (x) = 2x2 − 1 auf ganz R eine Lösung. (Probe machen!)
Der folgende Satz zeigt, warum im Hinblick auf unsere Ausgangsfragestellungden Polynomlösungen ein Sonderstatus zukommt.
Satz 54 Sei y : R→ R eine Lösung von Gleichung (1.53). Dann existiert das Inte-gral ∞
−∞exp−x2
y(x)2dx
genau dann, wenn y ein Polynom ist.
Beweis. Der ist ausführlich in Kap. 4.3.3 von [4] vorgeführt.Aus der Rekursion der Koeffizienten folgt also, dass
(Lλ)pol := α ∈ Lλ | α ist Polynom = 0
genau dann, wenn λ ∈ N0. Für gerades n gilt (Ln)pol = (Ln)+ und für ungerades ngilt (Ln)pol = (Ln)−. Der Unterraum (Ln)pol ist also eindimensional. Das eingangserwähnte quantenmechanische Problem hat also die folgende Antwort: Gleichung(1.52) hat eine quadratintegrable von 0 verschiedene Lösung genau dann, wenn ε =1/2 + n für ein n ∈ N0. Diese Lösung ist bis auf einen konstanten Faktor eindeutigbestimmt. Die so charakterisierten Zahlen ε ∈ R werden als die Eigenwerte desProblems bezeichnet.
Wir wenden uns nun den Polynomlösungen von Gleichung (1.53) für λ ∈ N0
etwas eingehender zu.
Definition 55 Sei n ∈ N0 und [n/2] das größte Ganze von n/2. Für gerades n istdies n/2 und für ungerades ist dies (n− 1)/2. Das Polynom Hn : R→ R mit
Hn(x) :=
[n/2]
k=0
(−1)k n!
k!(n− 2k)!(2x)n−2k (1.56)
heißt n-tes Hermitepolynom.
Bemerkung 56 Das Polynom Hn hat den Grad n und der Koeffizient von xn ist2n und es gilt Hn(−x) = (−1)nHn(x).
Satz 57 Für n ∈ N0 gilt (Ln)pol = R ·Hn.
Beweis. Wir betrachten nur den Fall n = 2m mit m ∈ N0. Die Funktion αvon Gleichung (1.54) ist eine Polynomlösung der Hermiteschen Differentialgleichunggenau dann, wenn c1 = 0. Dann gilt α− = 0. Für die Koeffizienten ak := c2k mit

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 102
k ∈ N0 gilt nach Gleichung (1.55) die Rekursion ak+1 = 4 (k −m) ak. Die Lösungder Rekursion ergibt für alle k ∈ 0, 1, . . . ,m
ak = (−1)k 22k m!
(m− k)!a0
und ak = 0 für alle k ∈ m+ 1, . . .. Daraus folgt
α(x) =m
k=0
akx2k
(2k)!= a0
m
k=0
(−1)k 22km!
(m− k)!
x2k
(2k)!.
Mit der Substitution k = m− i folgt
α(x) = a0
n/2
i=0
(−1)n2−i
n2
!
i! (n− 2i)!xn−2i = a0
n2
!
n!(−1)
n2
n/2
i=0
(−1)i n!
i! (n− 2i)!xn−2i.
Mit der Wahl
a0 =n!n2
!(−1)
n2
ergibt sich α = Hn. Der Fall n = 2m+ 1 wird analog bewiesen.Hier noch einige nützliche Eigenschaften der Hermitepolynome.
Satz 58 Für alle x ∈ R gilt die Formel von Rodrigues
Hn(x) = (−1)n expx2 dn
dxnexp−x2
und die Rekursion Hn+1(x) = 2xHn(x)− 2nHn−1(x).
Beweis. Sei Yn(x) := (−1)nex2 dn
dxne−x2 für alle x ∈ R. Dann folgt unter Verwen-
dung der Leibnizregel
Yn+1(x) = −(−1)nex2 dn
dxn
d
dxe−x2 = −(−1)nex2 dn
dxn
−2xe−x2
= −(−1)nex2
*(−2x)
dn
dxne−x2 − 2n
dn−1
dxn−1 e−x2+= 2xYn(x)− 2nYn−1(x).
Es gilt also für alle n ∈ N die Rekusionsformel
Yn+1(x) = 2xYn(x)− 2nYn−1(x). (1.57)
Damit lässt sich nun zeigen, dass Yn eine Lösung von Gleichung (1.53) ist. Zunächstfolgt aus der Produktregel Y ′
n(x) =
(−1)n2xex2 dn
dxne−x2 + (−1)nex
2 dn+1
dxn+1e−x2 = 2xYn(x)− Yn+1(x)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 103
Daraus ergibt sich
Y ′′n (x) = 2Yn(x) + 2xY ′
n(x)− Y ′n+1(x)
= 2Yn(x) + 2x [2xYn(x)− Yn+1(x)]− [2xYn+1(x)− Yn+2(x)]
= 2Yn(x) + (2x)2 Yn(x)− 4xYn+1(x) + Yn+2(x).
Ersetzt man in der letzten Zeile Yn+2(x) durch 2xYn+1(x)−2 (n+ 1)Yn(x), so ergibtsich
Y ′′n (x)− 2xY ′
n(x) = −2nYn(x).
Also ist Yn eine Lösung der Hermiteschen Differentialgleichung (1.53) zu λ = n.Überdies ist Yn offenbar ein Polynom vom Grad n und der Koeffizient vor derhöchsten Potenz ist 2n. Da der Unterraum polynomialer Lösungen von Gleichung(1.53) zu λ = n eindimensional ist, gilt aufgrund des Eindeutigkeitsatzes, dassYn(x) = cnHn(x) für alle x ∈ R. Da die Koeffizienten von xn in Yn und Hn überein-stimmen, gilt cn = 1. Somit gilt die für Yn bewiesene Rekusionsformel (1.57) auchfür Hn.
Schließlich seien noch die Polynome Hn für n = 0, 1, 2, 3 aufgelistet. Man ver-schafft sich z.B. H0 und H1 aus Rodrigues’ Formel und gewinnt dann die höherenaus der Rekursion (1.57).
H0(x) = 1, H1(x) = 2x, H2(x) = 22x2 − 1
, H3(x) = 4x
2x2 − 3
.
Die folgenden zwei Bilder zeigen die quadratintegrablen Lösungen
hn(x) =exp (−x2/2)Hn(x)
n!2n√π
.
von Gleichung (1.52) mit ε = 12+ n für n = 0, 1, 2, 3. Es sind dies die Graphen von
h0(x) =exp−x2
2
4√π
, h1(x) =
2√πx exp
−x2
2
,
h2(x) =(2x2 − 1)
2√π
exp
−x2
2
, h3(x) =
x (2x2 − 3)3√π
exp
−x2
2
.
420-2-4
0.75
0.5
0.25
0
-0.25
-0.5
h0 und h1
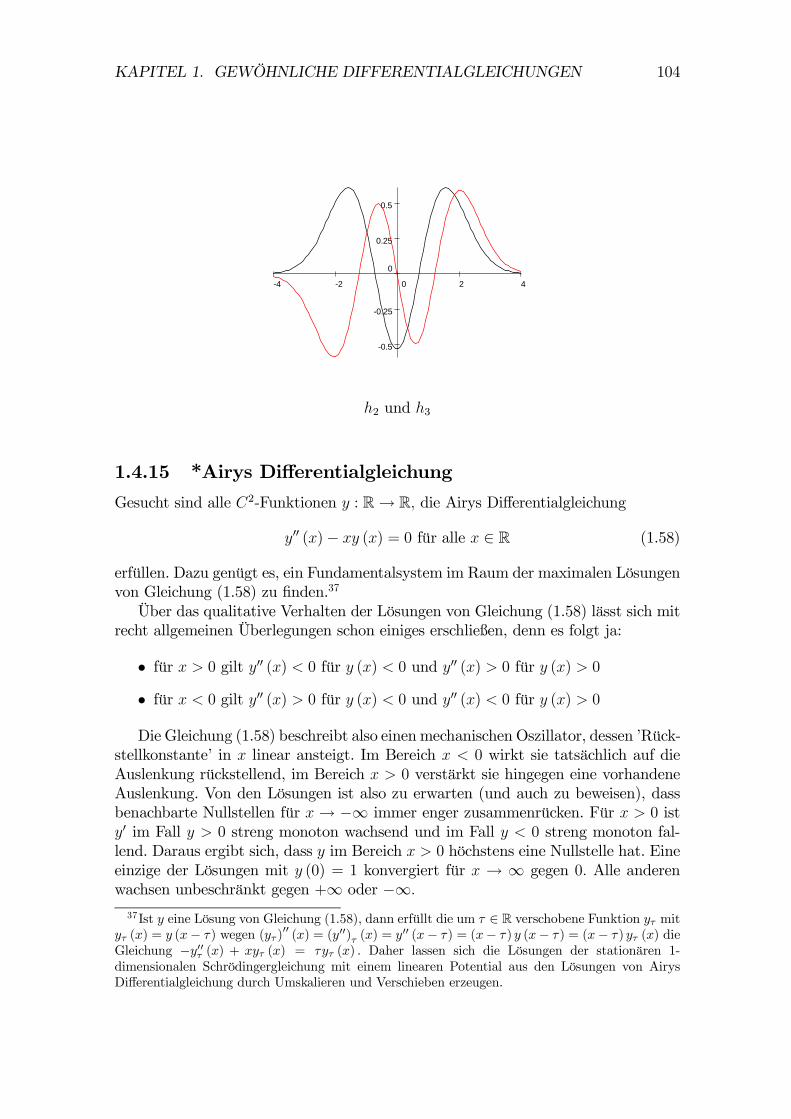
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 104
420-2-4
0.5
0.25
0
-0.25
-0.5
h2 und h3
1.4.15 *Airys Differentialgleichung
Gesucht sind alle C2-Funktionen y : R→ R, die Airys Differentialgleichung
y′′ (x)− xy (x) = 0 für alle x ∈ R (1.58)
erfüllen. Dazu genügt es, ein Fundamentalsystem im Raum der maximalen Lösungenvon Gleichung (1.58) zu finden.37
Über das qualitative Verhalten der Lösungen von Gleichung (1.58) lässt sich mitrecht allgemeinen Überlegungen schon einiges erschließen, denn es folgt ja:
• für x > 0 gilt y′′ (x) < 0 für y (x) < 0 und y′′ (x) > 0 für y (x) > 0
• für x < 0 gilt y′′ (x) > 0 für y (x) < 0 und y′′ (x) < 0 für y (x) > 0
Die Gleichung (1.58) beschreibt also einen mechanischen Oszillator, dessen ’Rück-stellkonstante’ in x linear ansteigt. Im Bereich x < 0 wirkt sie tatsächlich auf dieAuslenkung rückstellend, im Bereich x > 0 verstärkt sie hingegen eine vorhandeneAuslenkung. Von den Lösungen ist also zu erwarten (und auch zu beweisen), dassbenachbarte Nullstellen für x → −∞ immer enger zusammenrücken. Für x > 0 isty′ im Fall y > 0 streng monoton wachsend und im Fall y < 0 streng monoton fal-lend. Daraus ergibt sich, dass y im Bereich x > 0 höchstens eine Nullstelle hat. Eineeinzige der Lösungen mit y (0) = 1 konvergiert für x → ∞ gegen 0. Alle anderenwachsen unbeschränkt gegen +∞ oder −∞.
37Ist y eine Lösung von Gleichung (1.58), dann erfüllt die um τ ∈ R verschobene Funktion yτ mityτ (x) = y (x− τ) wegen (yτ )
′′ (x) = (y′′)τ (x) = y′′ (x− τ) = (x− τ) y (x− τ) = (x− τ) yτ (x) dieGleichung −y′′τ (x) + xyτ (x) = τyτ (x) . Daher lassen sich die Lösungen der stationären 1-dimensionalen Schrödingergleichung mit einem linearen Potential aus den Lösungen von AirysDifferentialgleichung durch Umskalieren und Verschieben erzeugen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 105
Der Potenzreihenansatz
y (x) =∞
k=0
ckxk
ergibt:
y′′ (x)− xy (x) =∞
k=2
ckk (k − 1) xk−2 −∞
k=0
ckxk+1
= c2 · 2 · 1 +∞
k′=0
ck′+3 (k′ + 3) (k′ + 2) xk′+1 −
∞
k=0
ckxk+1
= 2c2 +∞
k=0
[ck+3 (k + 3) (k + 2)− ck] xk+1.
Für jede Potenzreihenlösung von Airys Differentialgleichung gilt somit
c2 = 0 und ck+3 =ck
(k + 3) (k + 2)für alle k ∈ N0.
Die Rekursion führt die Koeffizienten c3, c6, c9, . . . auf c0 zurück, die Koeffizientenc4, c7, c10, . . . sind durch c1 festgelegt und c5, c8, c11, . . . ergeben sich durch ihre Rück-führung auf c2 zu 0.
Mit der Wahl c0 = 1 und c1 = 0 ergibt sich daraus die Potenzreihe
y1 (x) = 1 +1
3 · 2x3 +
1
6 · 5 · 3 · 2x6 +
1
9 · 8 · 6 · 5 · 3 · 2x9 + . . .
= 1 +1
3!x3 +
4 · 16!
x6 +7 · 4 · 1
9!x9 + . . .
Wie vom Hauptsatz über Potenzreihenlösungen schon festgestellt, ist der Konver-genzradius dieser Reihe unendlich. Und tatsächlich gilt für den Quotienten zweieraufeinanderfolgender nichtverschwindender Summanden dieser Reihe
ck+3
,,xk+3,,
ck |xk| =|x|3
(k + 3) (k + 2)−→ 0 für k →∞,
sodass das Quotientenkriterium den unendlichen Konvergenzradius liefert. Die durchdie Potenzreihe auf ganz R definierte Funktion y1 ist also die maximale Lösung vonAirys Differentialgleichung zur Anfangsvorgabe y1 (0) = 1 und y′1 (0) = 0.
Mit der Wahl c0 = 0 und c1 = 1 ergibt sich analog die Potenzreihe
y2 (x) = x+1
4 · 3x4 +
1
7 · 6 · 4 · 3x7 +
1
10 · 9 · 7 · 6 · 4 · 3x10 + . . .
= x+2
4!x4 +
5 · 27!
x7 +8 · 5 · 210!
x10 + . . .
Auch diese Potenzreihe konvergiert auf ganz R. Die durch sie definierte maximaleLösung erfüllt die Anfangsvorgabe y2 (0) = 0 und y′2 (0) = 1.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 106
Die beiden Funktionen y1 und y2 sind auf R>0 positiv und streng monoton wach-send. Jeder Summand der Potenzreihe wächst für x → ∞ unbeschränkt an, sodassdies auch y1 und y2 tun. Das Reduktionsverfahren von d’Alembert ergibt einenZusammenhang zwischen den beiden Lösungen y1 und y2. Dieser ergibt sich folgen-dermaßen. Für die Wronskideterminante der beiden Lösungen gilt
W (0) = y1 (0) y′2 (0)− y′1 (0) y2 (0) = 1.
Da die Koeffizientenfunktion p des Ableitungsterms erster Ordnung für Airys Dif-ferentialgleichung verschwindet, spezialisiert sich die Reduktionsformel mit x0 = 0für die beiden Lösungen y1 und y2 zu
y2 (x) = y1 (x)
x
0
1
y1 (ξ)2dξ
zumindest für alle x ∈ R>0, wo y1 ja keine Nullstelle hat.Das Integral über y−21 von 0 bis x > 0 erfüllt wegen
y1 (ξ) = 1 +1
3!ξ3 +
4 · 16!
ξ6 +7 · 4 · 1
9!ξ9 + . . . > 1 +
1
3!ξ3
die Abschätzungen
0 <
x
0
1
y1 (ξ)2dξ <
x
0
11 + 1
3!ξ32dξ.
Da die obere Schranke für x →∞ gegen einen endlichen Wert konvergiert, unddas Integral I (x) =
x
0y1 (ξ)
−2 dξ in x streng monoton steigend ist, konvergiert auchI (x) für x →∞ gegen einen endlichen positiven Grenzwert c. Daraus lässt sich nunschließen, dass cy1 (x)− y2 (x) für x →∞ gegen 0 konvergiert. Das geht so: Es gilt
cy1 (x)− y2 (x) = y1 (x) ·* ∞
0
dξ
y1 (ξ)2 −
x
0
dξ
y1 (ξ)2
+= y1 (x) ·
∞
x
dξ
y1 (ξ)2 .
Wegen y1 (x) > 0 für x > 0 folgt daraus für alle x > 0
0 < cy1 (x)− y2 (x) < y1 (x) · ∞
x
dξ
inf y1 (z) : x < z <∞ · y1 (ξ)
= y1 (x) · ∞
x
dξ
y1 (x) · y1 (ξ)=
∞
x
dξ
y1 (ξ)<
∞
x
dξ
1 + ξ3
3!
< 3!
∞
x
dξ
ξ3=
3!
2x2→ 0 für x →∞.
Im Lösungsraum von Airys Differentialgleichung existiert somit genau ein eindimen-sionaler Unterraum von Lösungen y mit der Eigenschaft, dass limx→∞ y (x) = 0.
Eine Mitteilung ohne Beweis38: Die Konstante c hat den Wert
c =Γ13
31/3Γ23
≈ 1, 3717.
38Siehe Abramowitz & Stegun, Chapt. 10.4. Ein Beweis der Behauptung ist in Chapt. 2, § 8 vonF W J Olver, Asymptotics and Special Functions, New York, 1974, nachzulesen.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 107
(Die Gammafunktion wird in Math Meth 2 behandelt.) Die Linearkombination y0 =c1y1 − c2y2 mit
c1 =1
32/3Γ23
≈ 0, 35503 und c2 =1
31/3Γ13
≈ 0, 25882
liegt also in dem Unterraum von Lösungen, die für x →∞ gegen 0 konvergieren. Siewird üblicherweise als Airyfunktion Ai bezeichnet. Figur (1.33) zeigt ihren Graphen.
2.50-2.5-5-7.5-10-12.5-15
0.4
0.2
0
-0.2
-0.4
AiAi
Abbildung 1.33: Airys Funktion
Die Airyfunktion erfüllt: y0 (0) = c1 und y′0 (0) = −c2. Sie trennt auf R>0 dieMenge L+ aller Lösungen mit y (0) = c1 und y′ (0) > −c2 von der Menge L− allerLösungen mit y (0) = c1 und y′ (0) < −c2. Die Elemente von L+ haben in R>0 keineNullstelle und wachsen für x →∞ gegen +∞. Die Elemente von L− hingegen habenin R>0 genau eine Nullstelle und sinken auf R>0 streng monoton und unbeschränktvon c1 gegen −∞. Überdies gilt: Zu jedem Punkt (a, b) ∈ R>0 × (R 0) existiertgenau eine Lösung y in L+ ∪ L− mit y (a) = b. Die Graphen aller Lösungen mity (0) = c bilden somit für jedes beliebige c eine Faserung von R>0 ×R.
Die Koeffizienten der Potenzreihen der Funktionen y1 und y2 für allgemeines klassen sich durch Eulers Gammafunktion ausdrücken. Deren Kenntnis wird im Restdieses Abschnitts vorausgesetzt.
Mit der Bezeichnung ck = c3k für alle k ∈ N0 gilt also
y1 (x) =∞
k=0
ckx3k mit c0 = 1 und ck =ck−1
3k (3k − 1)für alle k ∈ N.
Die Auflösung der Rekursion ergibt unter Verwendung von Γ (x+ 1) = xΓ (x) für

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 108
alle x ∈ R (−N0)
ck =ck−1
3k [3k − 1]=
1
3k [3k − 1]· ck−23 (k − 1) [3 (k − 1)− 1]
= . . .
=1
3k [3k − 1]· 1
3 (k − 1) [3 (k − 1)− 1]· . . . · c0
3 · 1 (3 · 1− 1)
=1
32k· 1
kk − 1
3
· 1
(k − 1)(k − 1)− 1
3
· . . . · c0
11− 1
3
=1
32k· Γ
23
k!Γk + 2
3
· c0 =1
32k· Γ
23
k!Γk + 2
3
.
Somit gilt für alle x ∈ R
y1 (x) = Γ
2
3
∞
k=0
x3k
32kk!Γk + 2
3
.
Nun zur Potenzreihe von y2. Mit der Bezeichnung ck = c3k+1 für alle k ∈ N0 gilt
y2 (x) =∞
k=0
ckx3k+1 mit c0 = 1 und ck =ck−1
(3k + 1) 3kfür alle k ∈ N.
Die Auflösung der Rekursion geschieht wie für y1 und ergibt für alle x ∈ R
y2 (x) = Γ
4
3
∞
k=0
x3k+1
32kk!Γk + 4
3
.
1.4.16 Ein lineares Rand- und Eigenwertproblem
Im vorigen Abschnitt haben wir die quadratintegrablen Lösungen der Differential-gleichung (1.52) bestimmt. Nur für Werte ε ∈ N0+1/2 hat Gleichung (1.52) eine vonder Nulllösung verschiedene, man sagt nichttriviale, quadratintegrable Lösung. DasProblem hat eine Ähnlichkeit zu den Eigenwertproblemen der linearen Algebra: DieZahlen ε ∈ N0+1/2 können als die Eigenwerte des Differentialoperators 1
2(−∂2
x + x2)auf dem Vektorraum der quadratintegrablen (unendlich oft differenzierbaren) Funk-tionen und die Funktionen hn als seine Eigenvektoren aufgefasst werden. Da bei derBestimmung der Eigenwerte ε im vorigen Abschnitt gewisse Lücken bestehen blie-ben, der Satz 54 wurde ja nicht bewiesen, soll in diesem Abschnitt ein sehr einfachesEigenwertproblem39 eines Differentialoperators vollständig gelöst werden.
Eine maximale Lösung α einer (inhomogen) linearen Differentialgleichung n-terOrdnung mit Anfangswerten α(x0), α
(1)(x0) . . . α(n−1)(x0) existiert und ist eindeutig.
Gilt ähnliches, wenn die n Vorgaben α(i)(xi) an voneinander verschiedenen Stellenx0, . . . xn−1 gewählt werden? Das folgende kleine Beispiel zeigt, dass dies im allge-meinen mit Nein zu beantworten ist.
39Diesem Eigenwertproblem kommt in der Quantenmechanik eines eingesperrten Teilchens einetragende Rolle zu.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 109
Definition 59 (Homogenes Randwertproblem) Seien λ, L ∈ R mit L > 0.Eine stetige Funktion α : [0, L] → R mit α(0) = 0 = α(L) und α′′(x) + λα(x) = 0für alle x ∈ (0, L) heißt Lösung des homogenen Randwertproblems zu d2
dx2+ λ auf
[0, L].
Für λ < 0 bilden die beiden Funktionen cosh√−λx
und sinh
√−λx
ein
Fundamentalsystem der Differentialgleichung auf (0, L). Mit
α(x) = A cosh√
−λx+B sinh
√−λx
folgt aus α(0) = 0, dass A = 0 und dann aus α(L) = 0, dass B = 0. Für λ < 0 hatdas Randwertproblem also eine eindeutige Lösung, nämlich die 0-Lösung. Für λ = 0folgt dasselbe.
Für λ > 0 bilden die beiden Funktionen cos√
λxund sin
√λxein Funda-
mentalsystem der Differentialgleichung auf (0, L). Mit
α(x) = A cos√
λx+B sin
√λx
folgt aus α(0) = 0, dass A = 0 und aus α(L) = 0, dass B sin√
λL
= 0. Dies
ist einerseits wiederum für B = 0 erfüllt. Lösungen mit B = 0 existieren aber auch(wegen
√λL > 0) genau dann, wenn
√λL ∈ πN. Das Randwertproblem hat also für
λ =n π
L
2mit n ∈ N unendlich viele Lösungen
α(x) = B sinnπ
Lx.
Eine Zahl λ, für die das homogene Randwertproblem einen (mindestens) eindimen-sionalen Lösungsraum hat, heißt Eigenwert von − d2
dx2zur homogenen Randbedin-
gung auf [0, L]. Im gegenwärtigen Beispiel ist0
nπL
2 | n ∈ N1
die Menge aller Ei-
genwerte. Die zugehörigen Lösungsräume, auch Eigenräume genannt, sind alle ein-dimensional.
Der mathematische Mechanismus, der im Rahmen der Quantentheorie zur Dis-kretisierung von klassisch kontinuierlichen Größen, wie Energie und Drehimpulsführt, ist eine Verallgemeinerung des hier beschriebenen.
1.4.17 *Green’sche Funktion eines Randwertproblems
Für y : [0, 1] → R gelte y′′ (x) = b (x) mit stetiger Funktion b : [0, 1] → R. Gibt esunter allen solchen Funktionen y eine, für die die homogene Randvorgabe y (0) =y (1) = 0 gilt?40 Ja, es gibt genau eine. Warum?
40Dieses Randwertproblem legt etwa das Potential im Gebiet zwischen den geerdeten Platteneines (ebenen) Kondensators fest, wenn sich dort auch eine eben verteilte Ladungsdichte befindet.Eine andere Interpretation gibt die Bewegung eines 1d Massenpunktes unter dem Einfluss eineräußeren Kraft. Gesucht ist jene Bewegung, bei der sich der Massenpunkt zu den Zeiten 0 und 1 imNullpunkt befindet.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 110
Ein Fundamentalsystem der homogenen Gleichung y′′ = 0 ist (α1, α2)mit α1 (x) =1 und α2 (x) = x für alle x ∈ [0, 1] . Für jede Funktion y mit y′′ = b auf [0, 1] exis-tieren daher α, β ∈ R, sodass
y (x) = α + βx+
x
0
(x− ξ) b (ξ) dξ.
Die Randvorgabe für y gilt genau dann, wenn α = 0 und
0 = β +
1
0
(1− ξ) b (ξ) dξ.
Damit ist die Funktion y : [0, 1]→ R mit
y (x) = − 1
0
x (1− ξ) b (ξ) dξ +
x
0
(x− ξ) b (ξ) dξ
die eindeutige Lösung der inhomogenen Gleichung mit der homogenen Randvorgabe.Durch Aufspalten des Integrals von 0 bis 1 in eines von 0 bis x und eines von x
bis 1 ergibt sich:
y (x) =
x
0
[(x− ξ)− x (1− ξ)] b (ξ) dξ − 1
x
x (1− ξ) b (ξ) dξ
=
x
0
ξ (x− 1) b (ξ) dξ − 1
x
x (1− ξ) b (ξ) dξ
=
1
0
Γ (x, ξ) b (ξ) dξ.
Hierbei gilt für die Funktion Γ : Q = [0, 1]× [0, 1]→ R
Γ (x, ξ) =
ξ (x− 1) für 0 ≤ ξ ≤ x ≤ 1x (ξ − 1) für 0 ≤ x ≤ ξ ≤ 1
. (1.59)
Offensichtlich ist Γ stetig und es gilt Γ (x, ξ) = Γ (ξ, x) auf Q. Die Einschränkun-gen der Funktion Γ (·, ξ) auf [0, ξ] und [ξ, 1] sind jeweils Lösungen der homogenenGleichung y′′ = 0. Bei x = ξ macht ihre Ableitung jedoch einen Sprung um 1, d.h.es gilt
limε→0
Γ′ (·, ξ)|x=ξ+ε − limε→0
Γ′ (·, ξ)|x=ξ−ε = 1.
Weiter gilt für jedes ξ ∈ [0, 1] , dass Γ (0, ξ) = Γ (1, ξ) = 0. Die Funktion Γ heißtGreen’sche Funktion zu y′′ = 0 und zur Randvorgabe y (0) = y (1) = 0. Sie ist einedurch die Randvorgabe eindeutig festgelegte Fundamentallösung von y′′ = 0 mitnichtdifferenzierbarer Stelle bei ξ ∈ [0, 1] . Sie legt - selbst unabhängig von b - dieder Inhomogenität b zugehörige eindeutige Lösung des halbhomogenen Randwert-problems über eine Integration fest. Wir fassen zusammen:
Satz 60 Sei b : [0, 1]→ R stetig. Für y : [0, 1]→ R gelte y′′ = b und y (0) = y (1) =0. Dann gilt für alle x ∈ [0, 1] mit der Green’schen Funktion Γ aus Gleichung (1.59)
y (x) =
1
0
Γ (x, ξ) b (ξ) dξ.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 111
Diese Lösungsformel mittels eines linearen Integraloperators lässt sich auf allge-meinere lineare Randwertprobleme erweitern. Siehe etwa Kap. V, §26 in [18]. DieGreen’sche Funktion hängt dann natürlich vom homogenen Teil der Differentialglei-chung und den Randbedingungen ab.
Im Fall der Differentialgleichung y′′ = b auf dem Intervall [0, 1] existiert alsogenau eine Lösung y mit der Randvorgabe y (0) = y (1) = 0. Für b = 0 entspricht diesder uns schon bekannten Tatsache, dass 0 kein Eigenwert von − d2
dx2zur homogenen
Randbedingung auf [0, 1] ist. Welche Lösungen hat aber die inhomogene Gleichungy′′ + y = b mit stetiger Funktion b : [0, π]→ R wenn y (0) = y (π) = 0 als homogeneRandvorgabe verlangt wird? Wir wissen ja, dass y (x) = C sin x für jedes C ∈ Reine Lösung im homogenen Fall b = 0 ist.
Ein Fundamentalsystem der homogenen Gleichung ist (α1, α2) mit α1 (x) = cosxund α2 (x) = sin x. Daher gibt es für jede Lösung y von y′′+ y = b Zahlen α, β ∈ R,sodass für alle x ∈ [0, π]
y (x) = α cosx+ β sin x+
x
0
sin (x− ξ) b (ξ) dξ
gilt. Die Randvorgabe y (0) = 0 gilt genau dann, wenn α = 0. Für α = 0 folgt mitsin (π − ξ) = sin ξ
y (π) =
π
0
sin (π − ξ) b (ξ) dξ =
π
0
sin (ξ) b (ξ) dξ,
da ja β sin π = 0 gilt. Die Bedingung y (π) = 0 lässt sich daher genau dann erfüllen,wenn für die Inhomogenität b die „Orthogonalitätsbedingung”
π
0
sin (ξ) b (ξ) dξ = 0
gilt. Wenn diese erfüllt ist, dann hat das Randwertproblem unendlich viele Lösungen.Andernfalls hat es keine einzige Lösung.
Mithilfe der Orthogonalitätsbedingung lässt sich nun eine Greensche Funktionfür das vorliegende Randwertproblem finden. Es gilt π
0
sin (|x− ξ|) b (ξ) dξ =
x
0
sin (x− ξ) b (ξ) dξ − π
x
sin (x− ξ) b (ξ) dξ (1.60)
Umformen des zweiten Integrals mit dem Sinussatz ergibt π
x
sin (x− ξ) b (ξ) dξ = sin (x)
π
x
cos (ξ) b (ξ) dξ − cos (x)
π
x
sin (ξ) b (ξ) dξ.
Aus der Orthogonalitätsbedingung folgt π
x
sin (ξ) b (ξ) dξ = − x
0
sin (ξ) b (ξ) dξ.
Weiter gilt π
x
cos (ξ) b (ξ) dξ =
π
0
cos (ξ) b (ξ) dξ − x
0
cos (ξ) b (ξ) dξ.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 112
Daraus folgt nun π
x
sin (x− ξ) b (ξ) dξ = sin (x)
* π
0
cos (ξ) b (ξ) dξ − x
0
cos (ξ) b (ξ) dξ
+
+cos (x)
x
0
sin (ξ) b (ξ) dξ
= − x
0
sin (x− ξ) b (ξ) dξ + sin (x)
π
0
cos (ξ) b (ξ) dξ.
Einsetzen in (1.60) ergibt π
0
sin (|x− ξ|) b (ξ) dξ = 2
x
0
sin (x− ξ) b (ξ) dξ − sin (x)
π
0
cos (ξ) b (ξ) dξ.
Sei nun die Green’sche Funktion Γ : Q = [0, π] × [0, π] → R so, dass Γ (x, ξ) =12sin (|x− ξ|) für alle (x, ξ) ∈ Q. Dann gilt also
x
0
sin (x− ξ) b (ξ) dξ =
π
0
Γ (x, ξ) b (ξ) dξ +sin (x)
2
π
0
cos (ξ) b (ξ) dξ.
Γ ist stetig und es gilt Γ (x, ξ) = Γ (ξ, x) auf Q. Die Ableitung von Γ (·, ξ) springtbei x = ξ um 1. Aber Achtung41: 2Γ (0, ξ) = sin ξ = 2Γ (π, ξ) = 0 für alle ξ ∈ (0, π) .Wir fassen diese Ergebnisse zusammen:
Satz 61 Sei b : [0, π]→ R stetig und es gelte die Orthogonalitätsbedingung π
0
sin (ξ) b (ξ) dξ = 0.
Eine C2-Funktion y : [0, π] → R ist Lösung von y′′ + y = b mit y (0) = y (π) = 0genau dann, wenn eine Zahl β ∈ R existiert, sodass für alle x ∈ [0, π]
y (x) = β sin x+1
2
π
0
sin (|x− ξ|) b (ξ) dξ.
Für eine Funktion b, die die Orthogonalitätsbedingung nicht erfüllt, hat das Rand-wertproblem keine Lösung.
1.5 *Harmonisch angeregte lineare Schwingung
In diesem Abschnitt wird auf einen sehr speziellen Fall von inhomogen linearen Glei-chungen zweiter Ordnung mit konstanten Koeffizienten ausführlicher eingegangen,auf die Gleichung einer gedämpften, linearen Schwingung mit „harmonischer“ äu-ßerer Anregung. Die mechanische Bewegungsgleichung für die Auslenkung ξ eines
41Das sollte nicht verwundern, denn der Einheitskraftstoß auf den Oszillator erfüllt die Ortho-gonalitätsbedingung nicht! Daher gibt es auch keine Fundamentallösung zu y′′ + y = 0, die in 0und π Nullstellen hat.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 113
eindimensionalen, linearen Oszillators der Masse m, der von einer zeitabhängigenKraft F angetrieben wird, lautet
ξ + 2ρξ + ω20ξ = F/m.
Hier sind ω0,m ∈ R>0 und ρ ∈ R≥0. Die Funktion F : R → R sei stetig. Ei-ne sogenannte ’harmonische’ Anregung ist eine Kraftfunktion F, für die F (t) =A cos (ωt− δ) mit A,ω, δ ∈ R für alle t ∈ R gilt.42
Mit der dimensionslosen Zeit x := ω0t, dem dimensionlosen Dämpfungsparame-ter α := ρ/ω0 ∈ R≥0 ergibt sich für y(x) := ξ(t) die parameterbereinigte Gleichung
y′′ + 2αy′ + y = g (1.61)
mit der Inhomogenität g := F/mω20. Das dazu äquivalente System erster Ordnung
für (y1, y2) := (y, y′) ist
d
dx
y1
y2
=
0 1−1 −2α
y1
y2
+
0g
. (1.62)
Nach den Sätzen über inhomogen lineare Systeme erster Ordnung gibt es für x0 ∈ Rund für v ∈ R2 genau eine Lösung γv : R → R2 von (1.62) mit γv(x0) = v. Daherexistiert zu jedem x0 ∈ R und zu jedem (a, b) ∈ R2 genau eine Lösung y : R → Rvon (1.61) mit y(x0) = a und y′(x0) = b. Ist ypart eine maximale Lösung von (1.61),dann gilt für die Menge aller maximalen Lösungen Lg dieser Gleichung
Lg = L0 + ypart.
Hier ist L0 der Vektorraum der maximalen Lösungen von (1.61) mit g = 0.
1.5.1 Übersicht über L0
Einsetzen der Versuchsfunktion y : R → R mit y(x) = exp (µx) für ein µ ∈ R in(1.61) ergibt: y ist Lösung genau dann, wenn µ Nullstelle des reellen „charakteristi-schen“ Polynoms P zweiten Grades mit
P (λ) := λ2 + 2αλ+ 1 = (λ+ α)2 −α2 − 1
ist, dh wenn P (µ) = 0. Für einer Diskussion der Nullstellenmenge von P ist eineTrennung der Fälle α > 1, α = 1 und 0 ≤ α < 1 hilfreich.
1. Überkritische Dämpfung: α > 1. Das charakteristische Polynom P hatzwei (reelle) Nullstellen. Es sind dies
µ± = −α±√α2 − 1.
42Die Bezeichnung ’harmonisch’ dürfte in der Tatsache gründen, dass eine solche (monofrequente)Schwingung eines menschlichen Trommelfells von seinem zugehörigen Gehirn als rein oder ’harmo-nisch’ empfunden wird. Aber Achtung: In der Theorie der partiellen Differentialgleichen wird derBegriff ’harmonische Funktion’ mit einer gänzlich anderen Bedeutung verwendet.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 114
Es gilt:−2α < µ− < µ+ < 0.Die beiden zu den Nullstellen gehörigen Lösungeny± : R→ R mit
y+(x) = eµ+x, y−(x) = eµ−x
sind im Fall α > 1 linear unabhängig und daher eine Basis des LösungsraumesL0 oder ein sogenanntes Fundamentalsystem von (1.61). Dies zeigt man etwamithilfe der Wronskideterminante bei 0. Beide Lösungen y+, y− sind strengmonoton fallend. Sie werden für α = 3/2 von Abbildung (1.34) gezeigt.Die
32.521.510.50-0.5
1.5
1.25
1
0.75
0.5
0.25
0
x
y
x
y
Abbildung 1.34: Fundamentalsystem für α = 3/2, y+ strichliert
Lösung y+ − y− für α = 3/2 zeigt Figur (1.35). Die Auslenkung schwingteinmal durch 0 und kehrt für x → ∞ dorthin zurück. Für große negative xdominiert y− und für große positive x dominiert y+. Jargon: Eine Lösung hatim allgemeinen zwei Zeitskalen eine schnelle (µ−) und eine langsame (µ+).
53.752.51.250
0.5
0.25
0
-0.25
-0.5
-0.75
-1
x
y
x
y
Abbildung 1.35: Die Überschwinglösung y+ − y−
Für die zum Fundamentalsystem (y+, y−) gehörigen physikalisch parametri-sierten Funktionen ξ+ und ξ− gilt
ξ±(t) = e−ρ∓√
ρ2−ω20
t für alle t ∈ R.
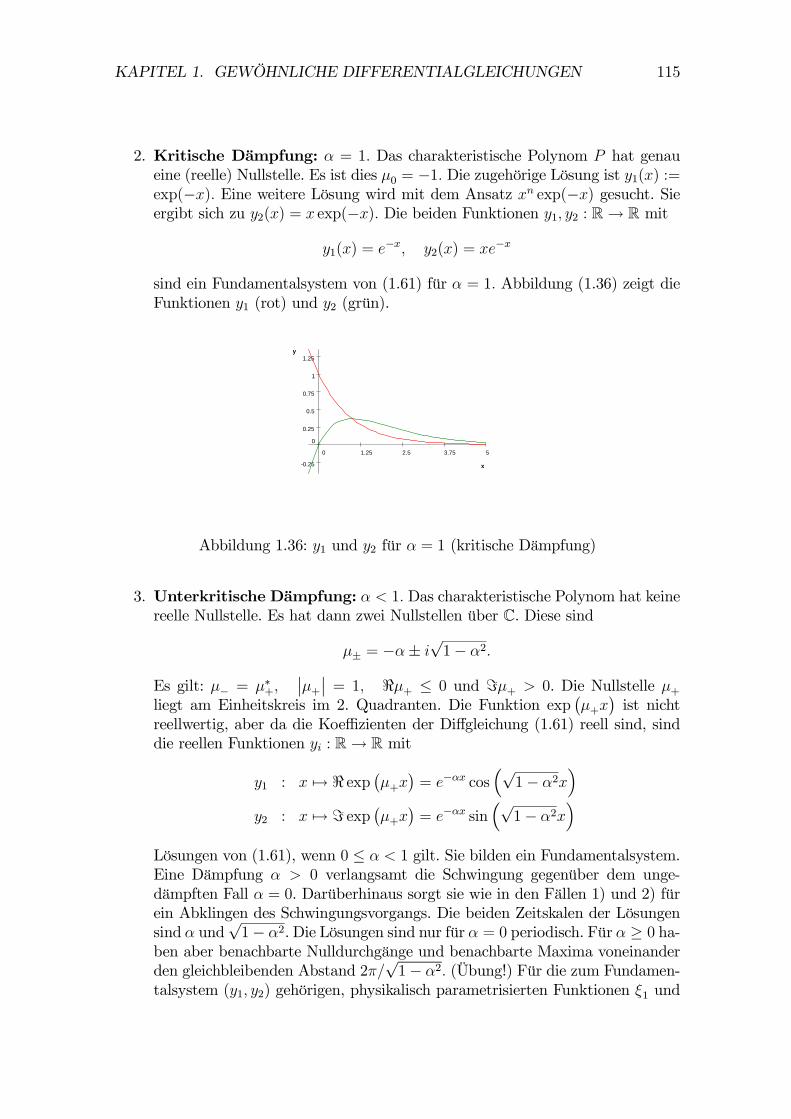
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 115
2. Kritische Dämpfung: α = 1. Das charakteristische Polynom P hat genaueine (reelle) Nullstelle. Es ist dies µ0 = −1. Die zugehörige Lösung ist y1(x) :=exp(−x). Eine weitere Lösung wird mit dem Ansatz xn exp(−x) gesucht. Sieergibt sich zu y2(x) = x exp(−x). Die beiden Funktionen y1, y2 : R→ R mit
y1(x) = e−x, y2(x) = xe−x
sind ein Fundamentalsystem von (1.61) für α = 1. Abbildung (1.36) zeigt dieFunktionen y1 (rot) und y2 (grün).
53.752.51.250
1.25
1
0.75
0.5
0.25
0
-0.25 x
y
x
y
Abbildung 1.36: y1 und y2 für α = 1 (kritische Dämpfung)
3. Unterkritische Dämpfung: α < 1. Das charakteristische Polynom hat keinereelle Nullstelle. Es hat dann zwei Nullstellen über C. Diese sind
µ± = −α± i√1− α2.
Es gilt: µ− = µ∗+,,,µ+
,, = 1, ℜµ+ ≤ 0 und ℑµ+ > 0. Die Nullstelle µ+
liegt am Einheitskreis im 2. Quadranten. Die Funktion expµ+x
ist nicht
reellwertig, aber da die Koeffizienten der Diffgleichung (1.61) reell sind, sinddie reellen Funktionen yi : R→ R mit
y1 : x → ℜ expµ+x
= e−αx cos
√1− α2x
y2 : x → ℑ expµ+x
= e−αx sin
√1− α2x
Lösungen von (1.61), wenn 0 ≤ α < 1 gilt. Sie bilden ein Fundamentalsystem.Eine Dämpfung α > 0 verlangsamt die Schwingung gegenüber dem unge-dämpften Fall α = 0. Darüberhinaus sorgt sie wie in den Fällen 1) und 2) fürein Abklingen des Schwingungsvorgangs. Die beiden Zeitskalen der Lösungensind α und
√1− α2. Die Lösungen sind nur für α = 0 periodisch. Für α ≥ 0 ha-
ben aber benachbarte Nulldurchgänge und benachbarte Maxima voneinanderden gleichbleibenden Abstand 2π/
√1− α2. (Übung!) Für die zum Fundamen-
talsystem (y1, y2) gehörigen, physikalisch parametrisierten Funktionen ξ1 und

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 116
ξ1 gilt
ξ1(t) = e−ρt cos
ω20 − ρ2t
,
ξ2(t) = e−ρt sin
ω20 − ρ2t
.
Für α = 1/10 zeigt Abbildung (1.37) das Fundamentalsystem (y1, y2).
2520151050-5
1.5
1
0.5
0
-0.5
-1
x
y
x
y
Abbildung 1.37: Fundamentalsystem (y1, y2) für α = 1/10; y2 strichliert
Für jede reelle Linearkombination y = c1y1+ c2y2 = 0 existiert genau ein Paarvon Zahlen
(a, x0) ∈ R>0 ×*0,
2π√1− α2
,
sodass für alle x ∈ R
y(x) = ae−αx cos√
1− α2 (x− x0).
Diese Zahlen sind bestimmt durch
c1 = a cos√
1− α2x0
, c2 = a sin
√1− α2x0
.
(Nachrechnen mit Additionstheorem für sin und cos . Übung!) Jedes Elementvon L0 ist somit ein Translat eines Vielfachen von y1 (und auch von y2).
1.5.2 Partikuläre Lösungen ypart für harmonische Kraft
Sei F (t) = F0 cos(ωt) mit ω ∈ R>0 und F0 ∈ R. Daher gilt g(x) = F0mω20
cos
ωω0
x.
Suche eine Lösung ypart von (1.61) für g0(x) = cos(qx) mit q := ωω0∈ R>0.
Zunächst jedoch etwas allgemeiner: Suche komplexwertige Lösungen yc von (1.61)für die Inhomogenität g(x) = exp(µx) mit µ ∈ C. Auf dem C-VR V der zweimal diffbaren Funktionen von R nach C ist die lineare Abbildung L durch L [y] =y′′ + 2αy′ + y definiert. Für die gesuchte Funktion yc gilt daher
L [yc] (x) = eµx. (1.63)

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 117
Es gilt L [exp (µx)] = P (µ) exp (µx) , mit P (λ) = λ2 + 2αλ + 1 (charakteristischesPolynom von L). Dieses dient der folgenden Fallunterscheidung.
1. P (µ) = 0: Falls µ keine (möglicherweise komplexe) Nullstelle von P ist, dannist yc : R→ R mit
yc(x) =1
P (µ)eµx
eine Lösung von (1.63).
2. P (µ) = 0, P ′(µ) = 0: Dies ist der Fall für µ ∈µ+, µ−
. Es gilt dann
L [xeµx] = L
*∂
∂µeµx+=
∂
∂µL [eµx]
=∂
∂µ(P (µ)eµx) = (P ′(µ) + xP (µ)) eµx = P ′(µ)eµx.
Somit ist die Funktion yc : R→ R mit
yc(x) =xeµx
P ′(µ)
eine Lösung von (1.63).
3. P (µ) = 0, P ′(µ) = 0 : Dies ist genau dann der Fall, wenn α = 1 (Doppelnull-stelle, kritische Dämpfung) und µ = −1. Dann gilt wegen P ′′ = 2
Lx2eµx
= L
2∂
∂µ
2
eµx
3=
∂
∂µ
2
L [eµx]
=∂2
∂µ2(P (µ)eµx) =
P ′′(µ) + 2xP ′(µ) + x2P (µ)
eµx = 2eµx.
Somit ist die Funktion yc : R→ R mit
yc(x) =x2eµx
2
eine Lösung von (1.63).
Zur Inhomogenität g0(x) = cos(qx) = ℜ exp(iqx) gewinnt man Lösungen wiefolgt. Wähle in den partikulären Lösungen yc zur Inhomogenität exp(µx) den Para-meter µ = iq und nehme davon den Realteil
ypart := ℜyc.
Dann gilt wegen der Linearität von L, dass ypart : R → R eine Lösung von (1.61)mit g0(x) = cos(ωx) ist.
Der Fall 3) tritt für α ∈ R≥0 nicht ein wegen der beiden für q ∈ R>0 unverträg-lichen Bedingungen µ = iq und µ = −1.
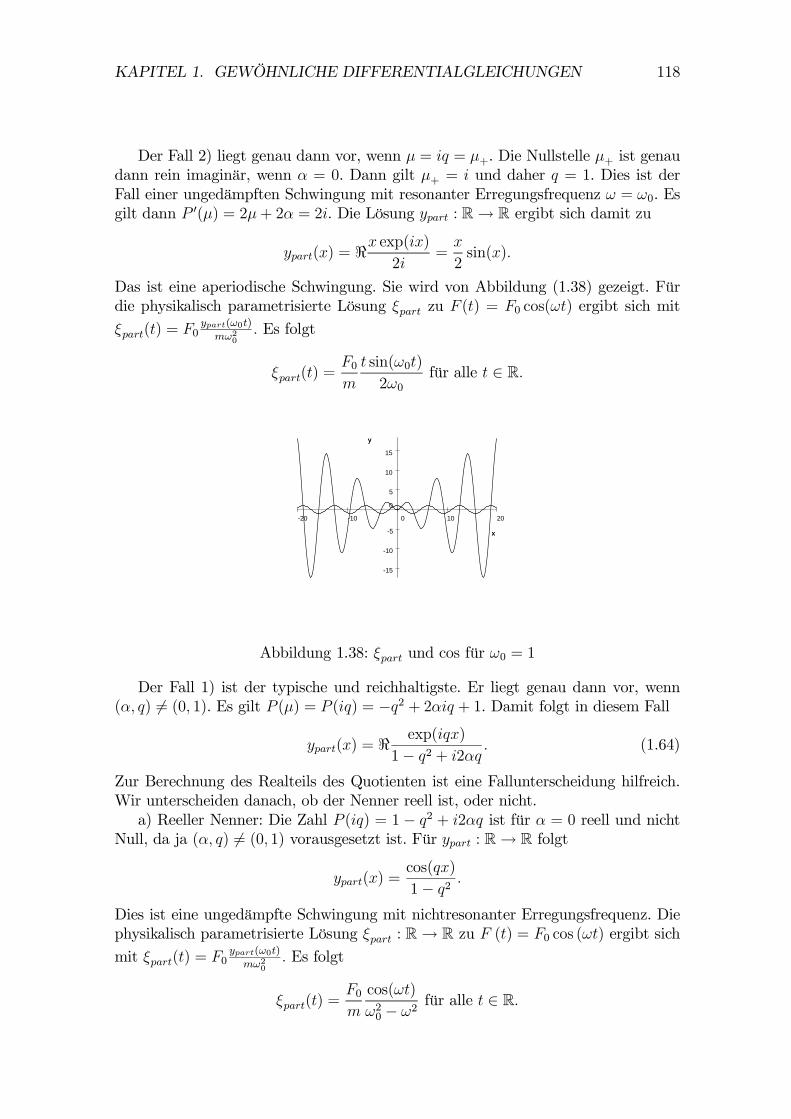
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 118
Der Fall 2) liegt genau dann vor, wenn µ = iq = µ+. Die Nullstelle µ+ ist genaudann rein imaginär, wenn α = 0. Dann gilt µ+ = i und daher q = 1. Dies ist derFall einer ungedämpften Schwingung mit resonanter Erregungsfrequenz ω = ω0. Esgilt dann P ′(µ) = 2µ+ 2α = 2i. Die Lösung ypart : R→ R ergibt sich damit zu
ypart(x) = ℜx exp(ix)
2i=
x
2sin(x).
Das ist eine aperiodische Schwingung. Sie wird von Abbildung (1.38) gezeigt. Fürdie physikalisch parametrisierte Lösung ξpart zu F (t) = F0 cos(ωt) ergibt sich mit
ξpart(t) = F0ypart(ω0t)
mω20. Es folgt
ξpart(t) =F0
m
t sin(ω0t)
2ω0
für alle t ∈ R.
20100-10-20
15
10
5
0
-5
-10
-15
x
y
x
y
Abbildung 1.38: ξpart und cos für ω0 = 1
Der Fall 1) ist der typische und reichhaltigste. Er liegt genau dann vor, wenn(α, q) = (0, 1). Es gilt P (µ) = P (iq) = −q2 + 2αiq + 1. Damit folgt in diesem Fall
ypart(x) = ℜ exp(iqx)
1− q2 + i2αq. (1.64)
Zur Berechnung des Realteils des Quotienten ist eine Fallunterscheidung hilfreich.Wir unterscheiden danach, ob der Nenner reell ist, oder nicht.
a) Reeller Nenner: Die Zahl P (iq) = 1− q2 + i2αq ist für α = 0 reell und nichtNull, da ja (α, q) = (0, 1) vorausgesetzt ist. Für ypart : R→ R folgt
ypart(x) =cos(qx)
1− q2.
Dies ist eine ungedämpfte Schwingung mit nichtresonanter Erregungsfrequenz. Diephysikalisch parametrisierte Lösung ξpart : R→ R zu F (t) = F0 cos (ωt) ergibt sich
mit ξpart(t) = F0ypart(ω0t)
mω20. Es folgt
ξpart(t) =F0
m
cos(ωt)
ω20 − ω2
für alle t ∈ R.
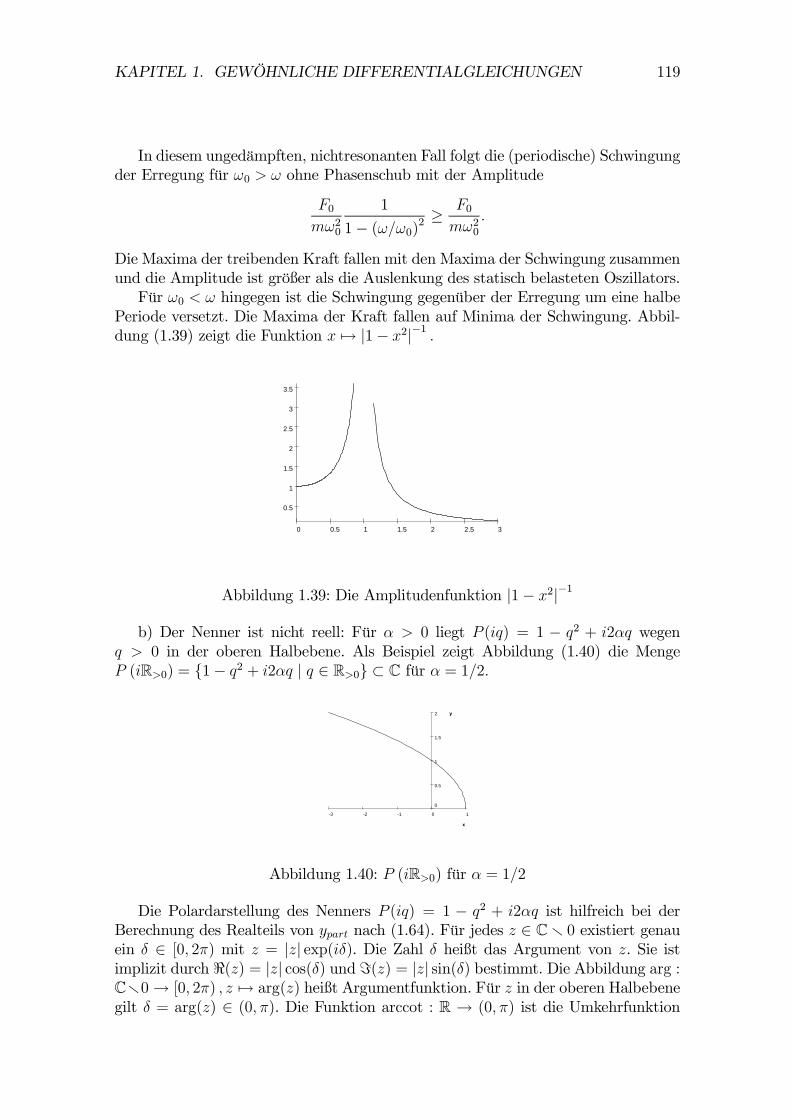
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 119
In diesem ungedämpften, nichtresonanten Fall folgt die (periodische) Schwingungder Erregung für ω0 > ω ohne Phasenschub mit der Amplitude
F0
mω20
1
1− (ω/ω0)2 ≥
F0
mω20
.
Die Maxima der treibenden Kraft fallen mit den Maxima der Schwingung zusammenund die Amplitude ist größer als die Auslenkung des statisch belasteten Oszillators.
Für ω0 < ω hingegen ist die Schwingung gegenüber der Erregung um eine halbePeriode versetzt. Die Maxima der Kraft fallen auf Minima der Schwingung. Abbil-dung (1.39) zeigt die Funktion x → |1− x2|−1 .
32.521.510.50
3.5
3
2.5
2
1.5
1
0.5
Abbildung 1.39: Die Amplitudenfunktion |1− x2|−1
b) Der Nenner ist nicht reell: Für α > 0 liegt P (iq) = 1 − q2 + i2αq wegenq > 0 in der oberen Halbebene. Als Beispiel zeigt Abbildung (1.40) die MengeP (iR>0) = 1− q2 + i2αq | q ∈ R>0 ⊂ C für α = 1/2.
10-1-2-3
2
1.5
1
0.5
0
x
y
x
y
Abbildung 1.40: P (iR>0) für α = 1/2
Die Polardarstellung des Nenners P (iq) = 1 − q2 + i2αq ist hilfreich bei derBerechnung des Realteils von ypart nach (1.64). Für jedes z ∈ C 0 existiert genauein δ ∈ [0, 2π) mit z = |z| exp(iδ). Die Zahl δ heißt das Argument von z. Sie istimplizit durch ℜ(z) = |z| cos(δ) und ℑ(z) = |z| sin(δ) bestimmt. Die Abbildung arg :C0→ [0, 2π) , z → arg(z) heißt Argumentfunktion. Für z in der oberen Halbebenegilt δ = arg(z) ∈ (0, π). Die Funktion arccot : R → (0, π) ist die Umkehrfunktion
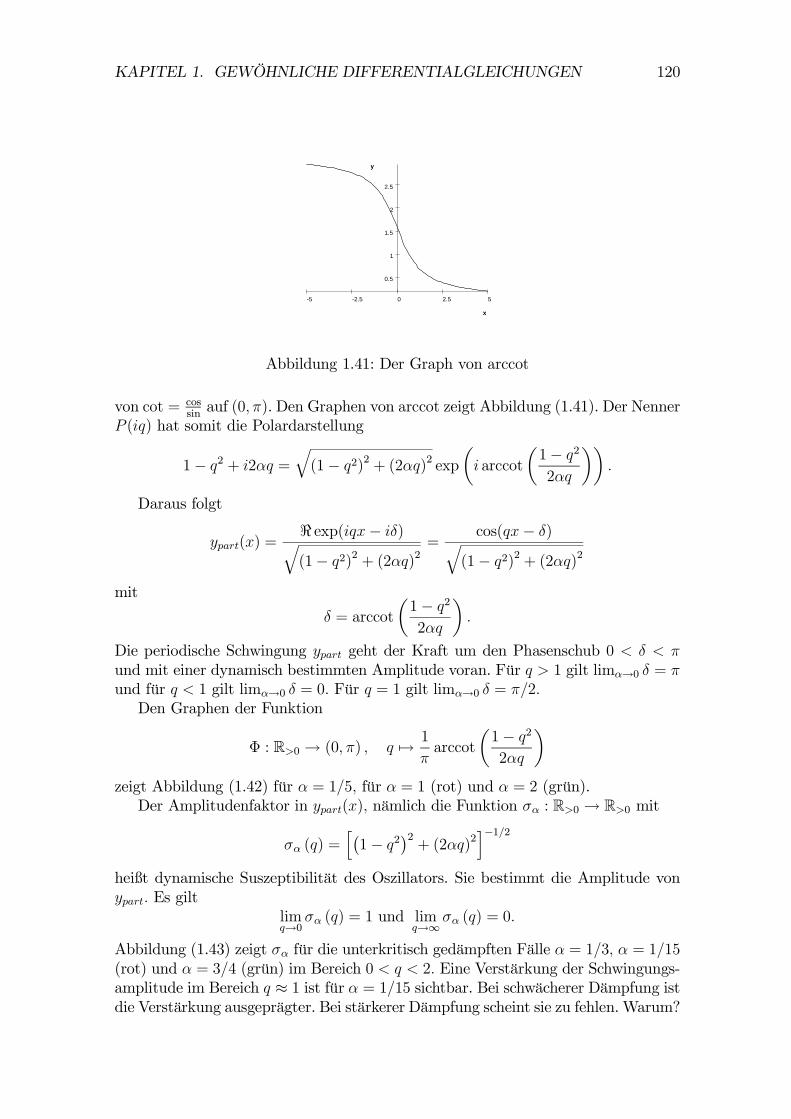
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 120
52.50-2.5-5
2.5
2
1.5
1
0.5
x
y
x
y
Abbildung 1.41: Der Graph von arccot
von cot = cossin
auf (0, π). Den Graphen von arccot zeigt Abbildung (1.41). Der NennerP (iq) hat somit die Polardarstellung
1− q2 + i2αq =
(1− q2)2 + (2αq)2 exp
i arccot
1− q2
2αq
.
Daraus folgt
ypart(x) =ℜ exp(iqx− iδ) (1− q2)2 + (2αq)2
=cos(qx− δ)
(1− q2)2 + (2αq)2
mit
δ = arccot
1− q2
2αq
.
Die periodische Schwingung ypart geht der Kraft um den Phasenschub 0 < δ < πund mit einer dynamisch bestimmten Amplitude voran. Für q > 1 gilt limα→0 δ = πund für q < 1 gilt limα→0 δ = 0. Für q = 1 gilt limα→0 δ = π/2.
Den Graphen der Funktion
Φ : R>0 → (0, π) , q → 1
πarccot
1− q2
2αq
zeigt Abbildung (1.42) für α = 1/5, für α = 1 (rot) und α = 2 (grün).Der Amplitudenfaktor in ypart(x), nämlich die Funktion σα : R>0 → R>0 mit
σα (q) =1− q2
2+ (2αq)2
−1/2
heißt dynamische Suszeptibilität des Oszillators. Sie bestimmt die Amplitude vonypart. Es gilt
limq→0
σα (q) = 1 und limq→∞
σα (q) = 0.
Abbildung (1.43) zeigt σα für die unterkritisch gedämpften Fälle α = 1/3, α = 1/15(rot) und α = 3/4 (grün) im Bereich 0 < q < 2. Eine Verstärkung der Schwingungs-amplitude im Bereich q ≈ 1 ist für α = 1/15 sichtbar. Bei schwächerer Dämpfung istdie Verstärkung ausgeprägter. Bei stärkerer Dämpfung scheint sie zu fehlen. Warum?
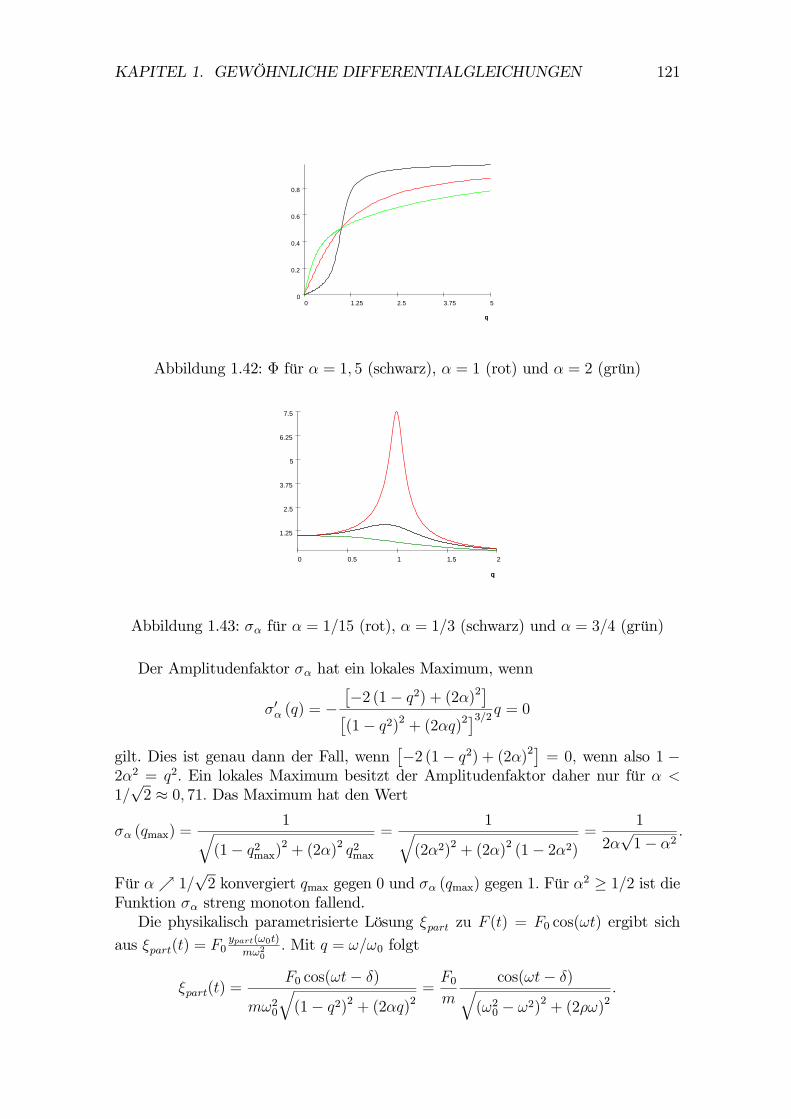
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 121
53.752.51.250
0.8
0.6
0.4
0.2
0
Abbildung 1.42: Φ für α = 1, 5 (schwarz), α = 1 (rot) und α = 2 (grün)
21.510.50
7.5
6.25
5
3.75
2.5
1.25
Abbildung 1.43: σα für α = 1/15 (rot), α = 1/3 (schwarz) und α = 3/4 (grün)
Der Amplitudenfaktor σα hat ein lokales Maximum, wenn
σ′α (q) = −−2 (1− q2) + (2α)2
(1− q2)2 + (2αq)2
3/2 q = 0
gilt. Dies ist genau dann der Fall, wenn−2 (1− q2) + (2α)2
= 0, wenn also 1 −
2α2 = q2. Ein lokales Maximum besitzt der Amplitudenfaktor daher nur für α <1/√2 ≈ 0, 71. Das Maximum hat den Wert
σα (qmax) =1
(1− q2max)2 + (2α)2 q2max
=1
(2α2)2 + (2α)2 (1− 2α2)=
1
2α√1− α2
.
Für α ր 1/√2 konvergiert qmax gegen 0 und σα (qmax) gegen 1. Für α2 ≥ 1/2 ist die
Funktion σα streng monoton fallend.Die physikalisch parametrisierte Lösung ξpart zu F (t) = F0 cos(ωt) ergibt sich
aus ξpart(t) = F0ypart(ω0t)
mω20. Mit q = ω/ω0 folgt
ξpart(t) =F0 cos(ωt− δ)
mω20
(1− q2)2 + (2αq)2
=F0
m
cos(ωt− δ) (ω2
0 − ω2)2+ (2ρω)2
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 122
Für den Phasenschub δ folgt
δ = arccot
ω20 − ω2
2ρω
.
1.5.3 Qualitatives Resümee
Jede Lösung der inhomogenen Gleichung (1.61) ist vom Typ y = y0 + ypart mity0 ∈ L0. Für α > 0 konvergiert y0(x) für x → ∞ gegen 0 und y schmiegt sichdaher für x → ∞ an ypart. Jede gedämpfte, harmonisch getriebene Schwingungennähert sich also der Lösung ypart. Der Einfluß der Anfangsbedingungen wird durchdie Dämpfung praktisch ausgelöscht.
Einwand: Keine reale Kraft produziert cos auf ganz R. Entgegnung: Ist die Kraftauf einem hinreichend großen reellen Intervall I vom Typ cos, dann ist die hierdiskutierte Funktion ypart für Zeiten aus dem späteren Teil von I, auf dem der Einflußder Vorgeschichte bereits schwach ist, eine Näherung der Lösung zur tatsächlichenInhomogenität.
Frage: Warum verdient der sehr spezielle Fall einer cos-Kraft so große Auf-merksamkeit? Antwort: Die Theorie der Fourieranalyse zeigt, dass sich eine großeKlasse von Funktionen durch Summen (Integrale) von cos und sin Funktionen di-verser Frequenzen beliebig gut approximieren lassen. Sei g eine solche Funktion,also
g(x) =
i
Ai cos (ωix) +Bi sin (ωix) .
Sind Ci bzw Si partikuläre Lösungen von Ly = cos(ωix) bzw Ly = sin(ωix), dannist
i AiCi (x) + BiSi (x) eine partikuläre Lösung von Ly = g. Damit ebnet dieDiskussion harmonischer Inhomogenitäten zusammen mit der Fourieranalyse denWeg zum Verständnis von Lg für viele physikalisch relevante allgemeinerer Inho-mogenitäten. Das Resonanzphänomen der dynamischen Suszeptibilität zeigt, dassdie partikuläre Lösung ypart zu einer Summe von harmonischen Kräften von jenenAnteilen dominiert wird, deren Antriebsfrequenz ω nahe der Eigenfrequenz ω0 desSystems liegt.
1.6 Übungsbeispiele
1. (Separierte Variable) Ein Kondensator habe die Kapazität C > 0. Zur Zeitt = 0 bestehe eine Spannung von U0 > 0 zwischen seinen Platten. Auf seinerpositiv geladenen Platte befindet sich daher die Ladung Q0 = CU0. Wird zurZeit t = 0 zwischen den Platten eine leitende Verbindung vom Widerstand Rhergestellt, so verändert sich die Ladung auf der positiven Platte derart, dassdiese Ladung Q (t) zur Zeit t für alle t > 0
RQ (t) +Q (t)
C= 0

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 123
erfüllt. Zeigen Sie, dass zur Zeit t > 0 zwischen den Platten die SpannungU (t) = U0e
−t/RC vorliegt. In einer Zeit der Dauer τ = RC verringert sich alsoU (t) um den Faktor 1/e ≈ 0, 368.
Ist der Kondensator zur Zeit t = 0 ungeladen und wird er zu t = 0 übereinen Widerstand R an eine Spannungsquelle mit der Spannung U0 > 0 an-geschlossen, dann gilt für die Ladung Q (t) auf seiner positiven Platte für allet > 0
RQ (t) +Q (t)
C= U0.
Zeigen Sie, dass zur Zeit t > 0 zwischen den Platten die Spannung U (t) =U0
1− e−t/RC
vorliegt.
2. (Separierte Variable) Für die Füllhöhe y(t) > 0 eines mit Wasser gefülltenGefäßes zur Zeit t, das sich über ein Loch im waagrechten Boden entleert, giltmit α > 0
d
dty(t) = −α
y(t).
(a) Skizzieren Sie das Richtungsfeld der Differentialgleichung y′ = f(x, y)mitf : R×R>0 → R, (x, y) → −α
√y für α > 0.
(b) Bestimmen Sie die maximale Lösung zur Anfangsbedingung y(0) = y0 >0. Nach welcher Zeit ist das Gefäß leer?
3. (Separierte Variable) Für die Geschwindigkeit v(t) der vertikalen Bewegungim homogenen Schwerefeld (Beschleunigungskonstante g > 0) gilt bei linearerReibung, (Reibungskoeffizient γ > 0)
d
dtv(t) = −g − γv(t).
Der Definitionsbereich der Diffenrentialgleichung sei maximal.
(a) Skizzieren Sie das Richtungsfeld dieser Differentialgleichung.
(b) Bestimmen Sie die maximale Lösung zur Anfangsbedingung v(0) = v0 >0. Hat v(t) Grenzwerte für t → ±∞?
4. (Separierte Variable) Sei f : R× R>0 → R, (x, y) → −xy.
(a) Skizzieren Sie das Richtungsfeld der Differentialgleichung y′ = f(x, y).
(b) Bestimmen Sie die Menge L der maximalen Lösungen der Differential-gleichung y′ = f(x, y). (Geben Sie zu jeder maximalen Lösung ihrenDefinitionsbereich an; zeigen Sie, dass durch jeden Punkt von R × R>0
genau eine maximale Lösung geht; Skizze!)
(c) Zeigen Sie (ohne Verwendung der expliziten Kenntnis der Menge allermaximalen Lösungen L), dass für Lösungen y der Differentialgleichunggilt: (x2 + y2)
′= 0.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 124
(d) Sei g : R×R<0 → R, (x, y) → −xy. Bestimmen Sie die Menge M der maxi-
malen Lösungen der Differentialgleichung y′ = g(x, y). Hinweis: BeachtenSie die Symmetrie: g(x, y) = −f(x,−y) für (x, y) ∈ R×R<0.
5. (Separierte Variable) Sei f : R× R→ R, (x, y) → xy1+x2
.
(a) Skizzieren Sie das Richtungsfeld der Differentialgleichung y′ = f(x, y).(Siehe Abbildung 1.44.)
(b) Bestimmen Sie die Menge L der maximalen Lösungen der Differential-gleichung y′ = f(x, y). (Geben Sie zu jeder maximalen Lösung ihren De-finitionsbereich an; zeigen Sie, dass durch jeden Punkt von R×R genaueine maximale Lösung geht; Skizze!) (Siehe Abbildung 1.45.)
(c) Zeigen Sie (ohne Verwendung von L), dass für Lösungen y der Differen-
tialgleichung gilt:
y√1+x2
′= 0.
543210-1-2-3-4-5
5
3.75
2.5
1.250
-1.25
-2.5
-3.75
-5
x
y
x
y
Abbildung 1.44: Das Richtungsfeld zu y′ = xy/(1 + x2)
210-1-2
4
2
0
-2
-4
x
y
x
y
Abbildung 1.45: Lösungen von y′ = xy/(1 + x2)
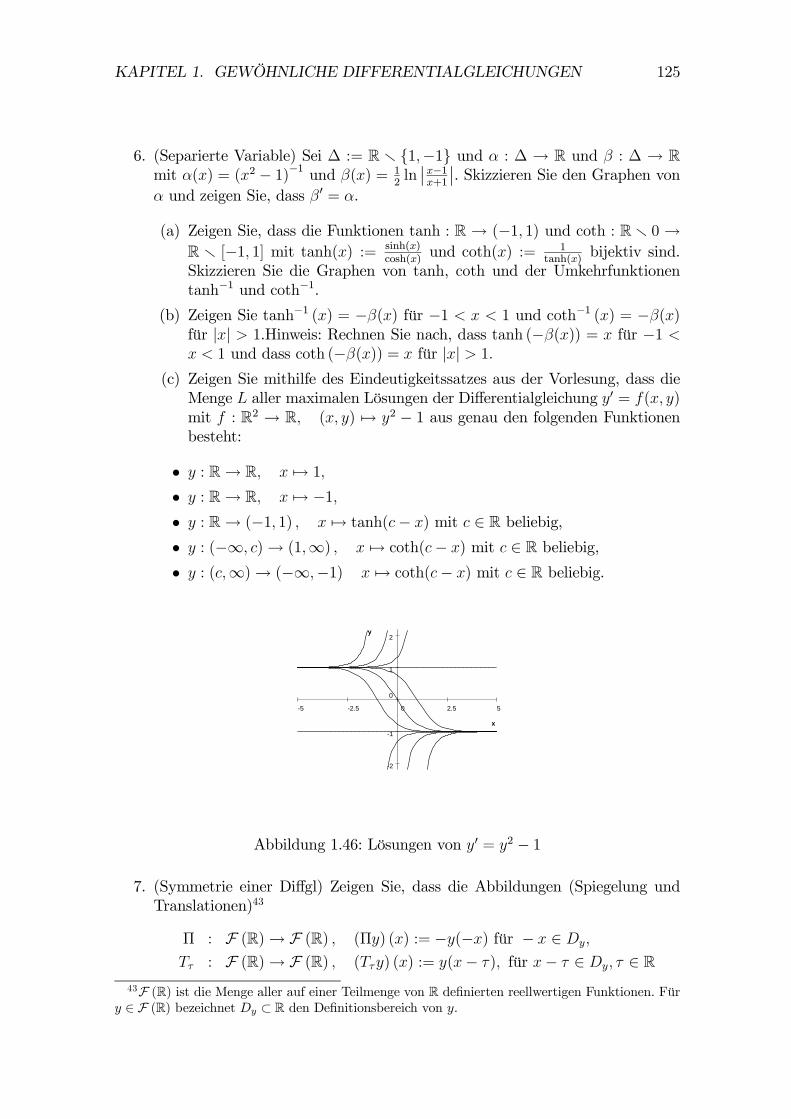
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 125
6. (Separierte Variable) Sei ∆ := R 1,−1 und α : ∆ → R und β : ∆ → Rmit α(x) = (x2 − 1)
−1 und β(x) = 12ln,,x−1x+1
,,. Skizzieren Sie den Graphen vonα und zeigen Sie, dass β′ = α.
(a) Zeigen Sie, dass die Funktionen tanh : R → (−1, 1) und coth : R 0 →R [−1, 1] mit tanh(x) := sinh(x)
cosh(x)und coth(x) := 1
tanh(x)bijektiv sind.
Skizzieren Sie die Graphen von tanh, coth und der Umkehrfunktionentanh−1 und coth−1.
(b) Zeigen Sie tanh−1 (x) = −β(x) für −1 < x < 1 und coth−1 (x) = −β(x)für |x| > 1.Hinweis: Rechnen Sie nach, dass tanh (−β(x)) = x für −1 <x < 1 und dass coth (−β(x)) = x für |x| > 1.
(c) Zeigen Sie mithilfe des Eindeutigkeitssatzes aus der Vorlesung, dass dieMenge L aller maximalen Lösungen der Differentialgleichung y′ = f(x, y)mit f : R2 → R, (x, y) → y2 − 1 aus genau den folgenden Funktionenbesteht:
• y : R→ R, x → 1,
• y : R→ R, x → −1,• y : R→ (−1, 1) , x → tanh(c− x) mit c ∈ R beliebig,
• y : (−∞, c)→ (1,∞) , x → coth(c− x) mit c ∈ R beliebig,
• y : (c,∞)→ (−∞,−1) x → coth(c− x) mit c ∈ R beliebig.
52.50-2.5-5
2
1
0
-1
-2
x
y
x
y
Abbildung 1.46: Lösungen von y′ = y2 − 1
7. (Symmetrie einer Diffgl) Zeigen Sie, dass die Abbildungen (Spiegelung undTranslationen)43
Π : F (R)→ F (R) , (Πy) (x) := −y(−x) für − x ∈ Dy,
Tτ : F (R)→ F (R) , (Tτy) (x) := y(x− τ), für x− τ ∈ Dy, τ ∈ R43F (R) ist die Menge aller auf einer Teilmenge von R definierten reellwertigen Funktionen. Für
y ∈ F (R) bezeichnet Dy ⊂ R den Definitionsbereich von y.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 126
die Lösungsmenge L aus Beispiel 6) auf sich abbilden. Man sagt: Π und Tτ
sind Symmetrien von y′ = y2 − 1. Diese Symmetrien ermöglichen es, sich beider Lösung des Anfangswertproblems auf Anfangswerte (x0, y0) mit x0 = 0und y0 ≥ 0 zu beschränken. Warum?
8. (Inhomogen linear mit Variation der Konstanten) Die radiale Komponenten-funktion r → Er eines kugelsymmetrischen, statischen elektrischen Feldes isteine Lösung der Diffgleichung y′ = f(x, y) mit
f : R>0 × R→ R, (x, y) → −2y
x+ g(x).
Hier ist g : R>0 → R stetig. (g = ρ/4πε0 für die Ladungsdichte ρ.) Die Diffglist also inhomogen linear.
(a) Zeigen Sie mit der Variation der Konstantenformel, dass für die MengeL aller maximalen Lösungen von y′ = f(x, y) gilt:
L =
αC : R>0 → R, x → 1
x2
C +
x
0
ξ2g(ξ)dξ
,,,,,,C ∈ R
.
(b) Seien g0 ∈ R und R ∈ R>0. Berechnen Sie die Funktion α0 : R>0 → R,
x → 1x2
x
0
ξ2g(ξ)dξ für die (unstetige!) Ladungsdichte, für die
g(x) =
g0 für 0 < x < R0 für R ≤ x
.
Skizzieren Sie den Graphen von α0. Wo ist der Betrag von α0 maximal?Zeigen Sie, dass α0 auf R>0 stetig ist, und dass für x = R
α′0(x) = −2α0(x)
x+ g(x)
gilt.
9. Sie v ∈ R. Bestimmen Sie die Menge L aller Funktionen y : R → R mity′ (x) = y (x) sin x + v sin x für alle x ∈ R. Lösung: Sei yc : R → R so, dassyc (x) = ce− cosx − v für alle x ∈ R. Dann gilt L = yc |c ∈ R . Für welcheder Funktionen yc gilt die Anfangsbedingung yc (0) = 0? Lösung: Nur jeneFunktion yc mit c = ev.
10. (Inhomogen linear mit Variation der Konstanten) Zwischen den Enden einesDrahtes mit dem Widerstand R ∈ R>0 und der Selbstinduktivität L ∈ R>0
liege zur Zeit t die Spannung U(t) an. Die Funktion U : R → R sei stetig.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 127
Für die Stromstärke I(t), die zur Zeit t durch den Draht fließt, gilt dann44
(näherungsweise) für alle t ∈ R die Differentialgleichung
Ld
dtI(t) +RI(t) = U(t). (1.65)
(a) Zeigen Sie, dass für U (t) = U0 cos (ωt) genau eine beschränkte maximaleLösung I von (1.65) existiert, und dass für diese gilt
I (t) =U0 cos (ωt− δ)
R2 + (Lω)2mit δ = arctan
Lω
R∈0,
π
2
.
(b) Berechnen Sie die maximale Lösung von (1.65) zur AnfangsbedingungI(0) = 0 für die Inhomogenität U = Ue (stetiger Einschaltvorgang),wobei
Ue(t) =
0 für t < 0U0Tt für 0 ≤ t < T
U0 für T ≤ t
mit T ∈ R>0 und U0 ∈ R. Hinweis: Setzen Sie eine partikuläre Lösungin den Bereichen 0 ≤ t < T und T ≤ t inhomogen linear an. Bestim-men Sie die gesuchte Lösung zum Vergleich auch mit der Variation derKonstantenformel. Lösung:
I(t) =
0 für t < 0I0
τT
exp− t
τ
+ t
τ− 1
für 0 ≤ t < TI01− τ
T
expTτ
− 1exp− t
τ
für T ≤ t
mit den Konstanten τ = L/R und I0 = U0/R. Abbildung 1.47 zeigtU(t)/U0 für T = 1 (grün) und I(t)/I0 für T = 1 und τ = 1/2 (schwarz)bzw. τ = 2 (rot). Der Strom im Schaltkreis mit der höheren Induktivitätbaut sich also langsamer auf.
(c) Sei c > 0 und Ue,c(t) := Ue(t − c). Geben Sie die maximale Lösung von(1.65) im Fall der Inhomogenität Ue,c und der Anfangsbedingung I(0) = 0an.
(d) Gegen welche Funktion konvergiert die Lösung von a) für T → 0?
(e) Berechnen Sie die maximale Lösung von (1.65) mit der InhomogenitätU = U0 −Ue zur Anfangsbedingung I(0) = U0/R (stetiger Ausschaltvor-gang). Achtung: Die Lösung kann aus jener von a) ganz einfach gewonnenwerden.
11. (Inhomogen linear mit Variation der Konstanten) Die Differentialgleichung(1.65) kann auch für unstetige Inhomogenität U formuliert werden. Dazu einBeispiel: Sei
U(t) =
U0 für 0 < t < T0 sonst
.
44Siehe etwa: R Resnik, D Halliday, K S Crane, Physics, New York, 1992; Kap 38-3
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 128
6420-2
1
0.75
0.5
0.25
0
tt
Abbildung 1.47: Einschaltvorgang
mit U0 ∈ R (”Rechteckpuls”). Die Funktion U ist auf den drei IntervallenD1 = (−∞, 0) ,D2 = (0, T ) und D3 = (T,∞) stetig. Damit sind drei Differen-tialgleichungen y′ = ai(x)y+bi(x) = fi(x, y) im Sinn der Vorlesung auf offenenDefinitionsbereichen Di gegeben.
(a) Berechnen Sie jene drei Lösungen αi von y′ = fi(x, y), die Einschränkun-gen einer (einzigen!) stetigen Funktion α auf R mit y(0) = 0 sind. GebenSie α an.
(b) Wo ist α diffbar? Skizzieren Sie den Graphen der Abbildung x → α′(x).(LI gibt im Fall der Serienschaltung einer Spule und eines OhmschenWiderstandes die Spannung zwischen den Enden der Spule an.)
12. (Autonomes lineares System erster Ordnung; Bahnen der Lorentzgruppe) Fürdie Abbildung X : R2×1 → R2×1 gelte
X :
xy
→
yx
.
Der Graph der Abbildung X, also die Menge
Γ (X) :=(v,X (v)) | v ∈ R2×1 ⊂ R2×1 × R2×1,
wird als das Vektorfeld (zu) X bezeichnet. Siehe Abbildung 1.48.
(a) Zeigen Sie, dass für die Menge L aller maximalen Lösungen des Systemsγ = X(γ) gilt L = γv | v ∈ R2×1 mit γv : R→ R2×1 und
γv(t) =
cosh(t) sinh(t)sinh(t) cosh(t)
·
v1
v2
für v =
v1
v2
∈ R2×1.
(b) Skizzieren Sie die Bahnen durch die Punkte (1, 0)t , (0, 1)t und (1, 1)t. DieBahn durch (1, 0)t ist die Menge
cosh(t) sinh(t)sinh(t) cosh(t)
·
10
| t ∈ R
.
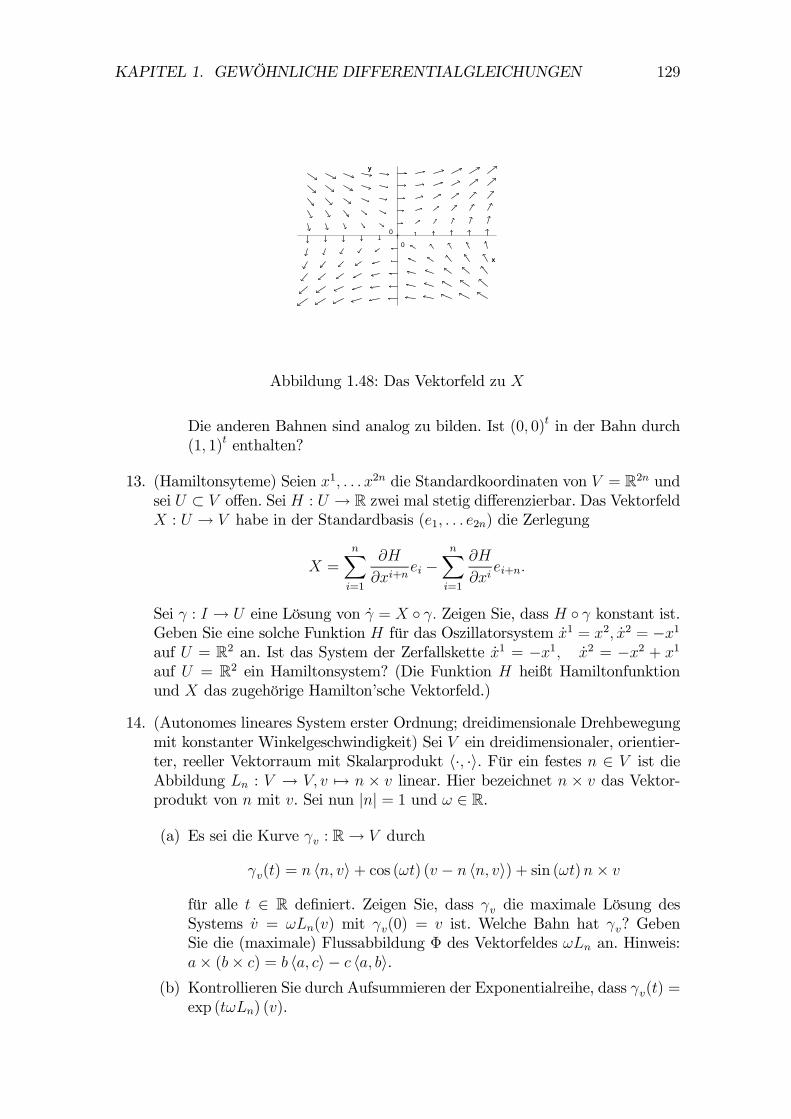
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 129
0
0
x
y
x
y
Abbildung 1.48: Das Vektorfeld zu X
Die anderen Bahnen sind analog zu bilden. Ist (0, 0)t in der Bahn durch(1, 1)t enthalten?
13. (Hamiltonsyteme) Seien x1, . . . x2n die Standardkoordinaten von V = R2n undsei U ⊂ V offen. Sei H : U → R zwei mal stetig differenzierbar. Das VektorfeldX : U → V habe in der Standardbasis (e1, . . . e2n) die Zerlegung
X =n
i=1
∂H
∂xi+nei −
n
i=1
∂H
∂xiei+n.
Sei γ : I → U eine Lösung von γ = X γ. Zeigen Sie, dass H γ konstant ist.Geben Sie eine solche Funktion H für das Oszillatorsystem x1 = x2, x2 = −x1
auf U = R2 an. Ist das System der Zerfallskette x1 = −x1, x2 = −x2 + x1
auf U = R2 ein Hamiltonsystem? (Die Funktion H heißt Hamiltonfunktionund X das zugehörige Hamilton’sche Vektorfeld.)
14. (Autonomes lineares System erster Ordnung; dreidimensionale Drehbewegungmit konstanter Winkelgeschwindigkeit) Sei V ein dreidimensionaler, orientier-ter, reeller Vektorraum mit Skalarprodukt ·, ·. Für ein festes n ∈ V ist dieAbbildung Ln : V → V, v → n × v linear. Hier bezeichnet n × v das Vektor-produkt von n mit v. Sei nun |n| = 1 und ω ∈ R.
(a) Es sei die Kurve γv : R→ V durch
γv(t) = n n, v+ cos (ωt) (v − n n, v) + sin (ωt)n× v
für alle t ∈ R definiert. Zeigen Sie, dass γv die maximale Lösung desSystems v = ωLn(v) mit γv(0) = v ist. Welche Bahn hat γv? GebenSie die (maximale) Flussabbildung Φ des Vektorfeldes ωLn an. Hinweis:a× (b× c) = b a, c − c a, b.
(b) Kontrollieren Sie durch Aufsummieren der Exponentialreihe, dass γv(t) =exp (tωLn) (v).
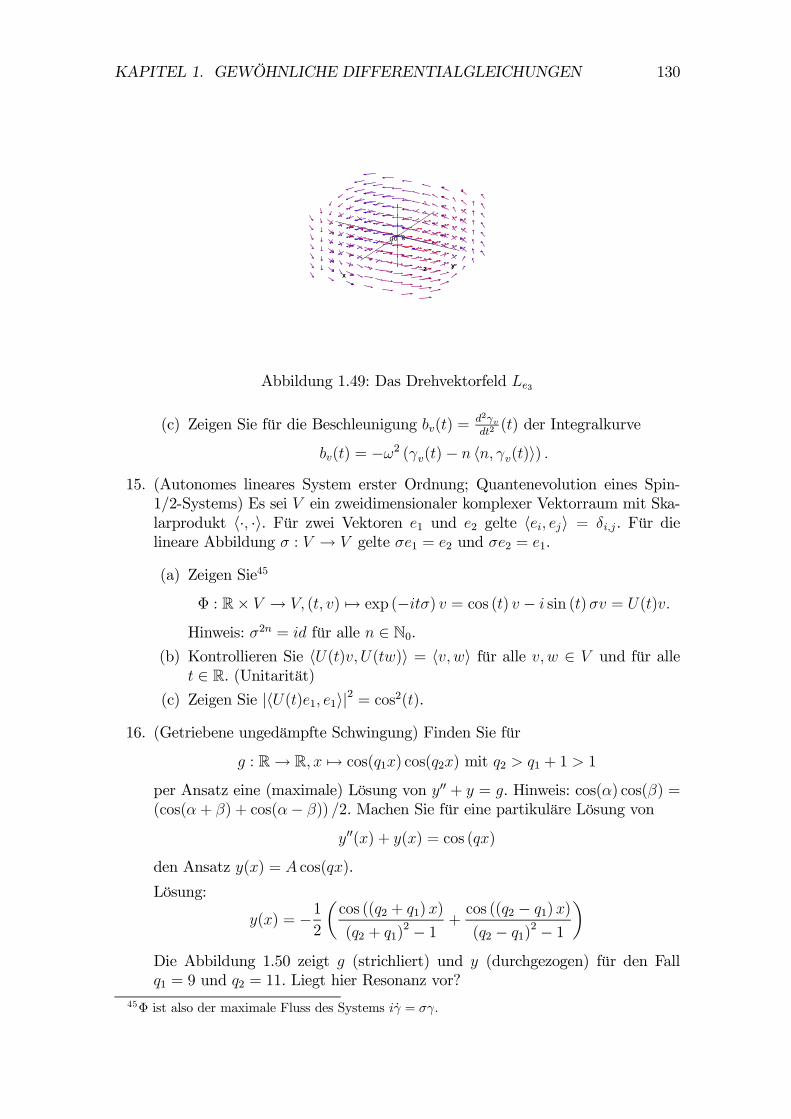
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 130
00 0
x
yzx
yz
Abbildung 1.49: Das Drehvektorfeld Le3
(c) Zeigen Sie für die Beschleunigung bv(t) =d2γvdt2
(t) der Integralkurve
bv(t) = −ω2 (γv(t)− n n, γv(t)) .
15. (Autonomes lineares System erster Ordnung; Quantenevolution eines Spin-1/2-Systems) Es sei V ein zweidimensionaler komplexer Vektorraum mit Ska-larprodukt ·, ·. Für zwei Vektoren e1 und e2 gelte ei, ej = δi,j. Für dielineare Abbildung σ : V → V gelte σe1 = e2 und σe2 = e1.
(a) Zeigen Sie45
Φ : R× V → V, (t, v) → exp (−itσ) v = cos (t) v − i sin (t)σv = U(t)v.
Hinweis: σ2n = id für alle n ∈ N0.
(b) Kontrollieren Sie U(t)v, U(tw) = v, w für alle v, w ∈ V und für allet ∈ R. (Unitarität)
(c) Zeigen Sie |U(t)e1, e1|2 = cos2(t).
16. (Getriebene ungedämpfte Schwingung) Finden Sie für
g : R→ R, x → cos(q1x) cos(q2x) mit q2 > q1 + 1 > 1
per Ansatz eine (maximale) Lösung von y′′ + y = g. Hinweis: cos(α) cos(β) =(cos(α + β) + cos(α− β)) /2. Machen Sie für eine partikuläre Lösung von
y′′(x) + y(x) = cos (qx)
den Ansatz y(x) = A cos(qx).
Lösung:
y(x) = −1
2
cos ((q2 + q1) x)
(q2 + q1)2 − 1
+cos ((q2 − q1) x)
(q2 − q1)2 − 1
Die Abbildung 1.50 zeigt g (strichliert) und y (durchgezogen) für den Fallq1 = 9 und q2 = 11. Liegt hier Resonanz vor?
45Φ ist also der maximale Fluss des Systems iγ = σγ.
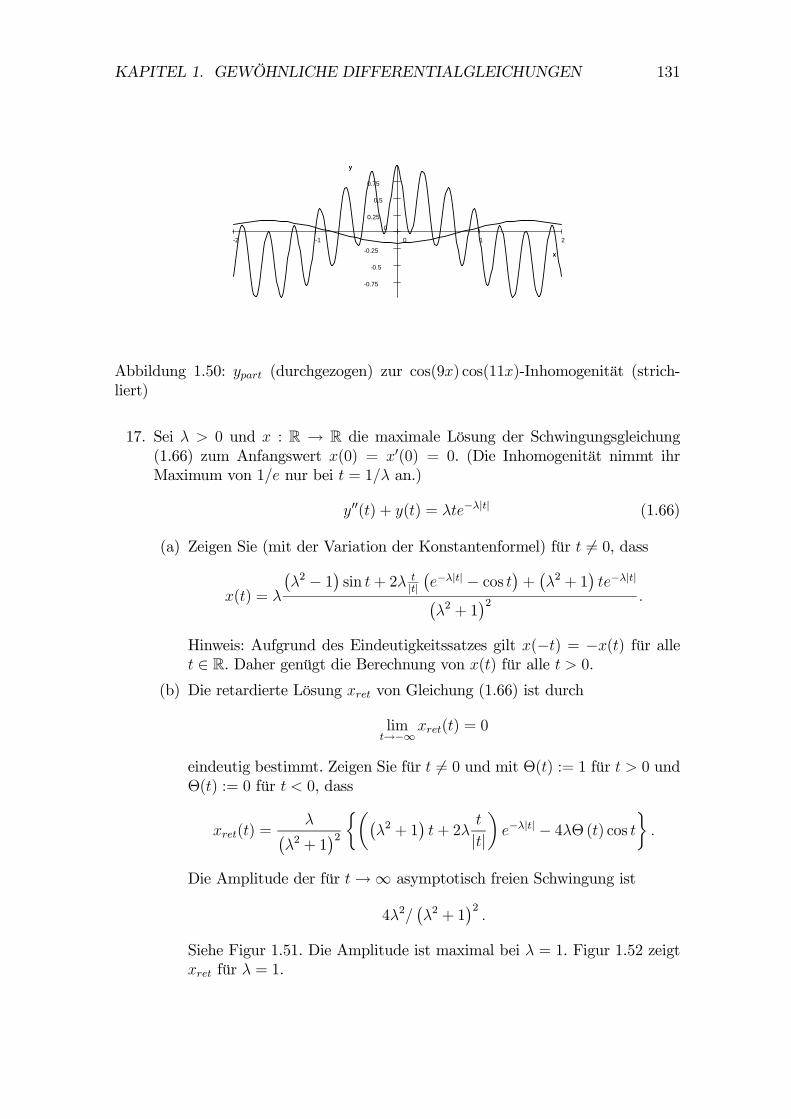
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 131
210-1-2
0.75
0.5
0.25
0
-0.25
-0.5
-0.75
x
y
x
y
Abbildung 1.50: ypart (durchgezogen) zur cos(9x) cos(11x)-Inhomogenität (strich-liert)
17. Sei λ > 0 und x : R → R die maximale Lösung der Schwingungsgleichung(1.66) zum Anfangswert x(0) = x′(0) = 0. (Die Inhomogenität nimmt ihrMaximum von 1/e nur bei t = 1/λ an.)
y′′(t) + y(t) = λte−λ|t| (1.66)
(a) Zeigen Sie (mit der Variation der Konstantenformel) für t = 0, dass
x(t) = λ
λ2 − 1
sin t+ 2λ t
|t|e−λ|t| − cos t
+λ2 + 1
te−λ|t|
λ2 + 1
2 .
Hinweis: Aufgrund des Eindeutigkeitssatzes gilt x(−t) = −x(t) für allet ∈ R. Daher genügt die Berechnung von x(t) für alle t > 0.
(b) Die retardierte Lösung xret von Gleichung (1.66) ist durch
limt→−∞
xret(t) = 0
eindeutig bestimmt. Zeigen Sie für t = 0 und mit Θ(t) := 1 für t > 0 undΘ(t) := 0 für t < 0, dass
xret(t) =λ
λ2 + 1
2
λ2 + 1t+ 2λ
t
|t|
e−λ|t| − 4λΘ(t) cos t
.
Die Amplitude der für t →∞ asymptotisch freien Schwingung ist
4λ2/λ2 + 1
2.
Siehe Figur 1.51. Die Amplitude ist maximal bei λ = 1. Figur 1.52 zeigtxret für λ = 1.
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 132
107.552.50
1
0.75
0.5
0.25
0
Abbildung 1.51: Asymptotische Amplitude
2520151050-5-10
1
0.5
0
-0.5
-1
tt
Abbildung 1.52: xret(t) für λ = 1 und t exp (− |t|)
18. (Homogen lineare Diffgl zweiter Ordnung; Wronskideterminante, d’AlembertsReduktionsverfahren) I sei ein offenes, reelles Intervall. Die Funktionen p :I → R und q : I → R seien stetig und y1, y2 : I → R seien Lösungen von
y′′ + py′ + qy = 0. (1.67)
Die Wronskideterminante W : I → R von y1 und y2 ist definiert durch
W (x) = det
y1(x) y2(x)y′1(x) y′2(x)
.
(a) Zeigen Sie zunächst W ′ = −pW . Dann beweisen Sie: Aus W (x0) = 0 fürein x0 ∈ I folgt, dass W (x) = 0 für alle x ∈ I.
(b) Sei (y1, y2) ein Fundamentalsystem von (1.67), für das y1(x0) = 0, y2(x0) =0 und W (x0) = 1 gilt. Dann existiert eine Umgebung J ⊂ I von x0 mity1(x) = 0 für alle x ∈ J . Leiten Sie aus
W (x) = exp
− x
x0
p(ξ)dξ
die folgende Integraldarstellung von y2(x)
y2(x) = y1(x)
x
x0
1
y1(ξ)2exp
− ξ
x0
p(t)dt
dξ
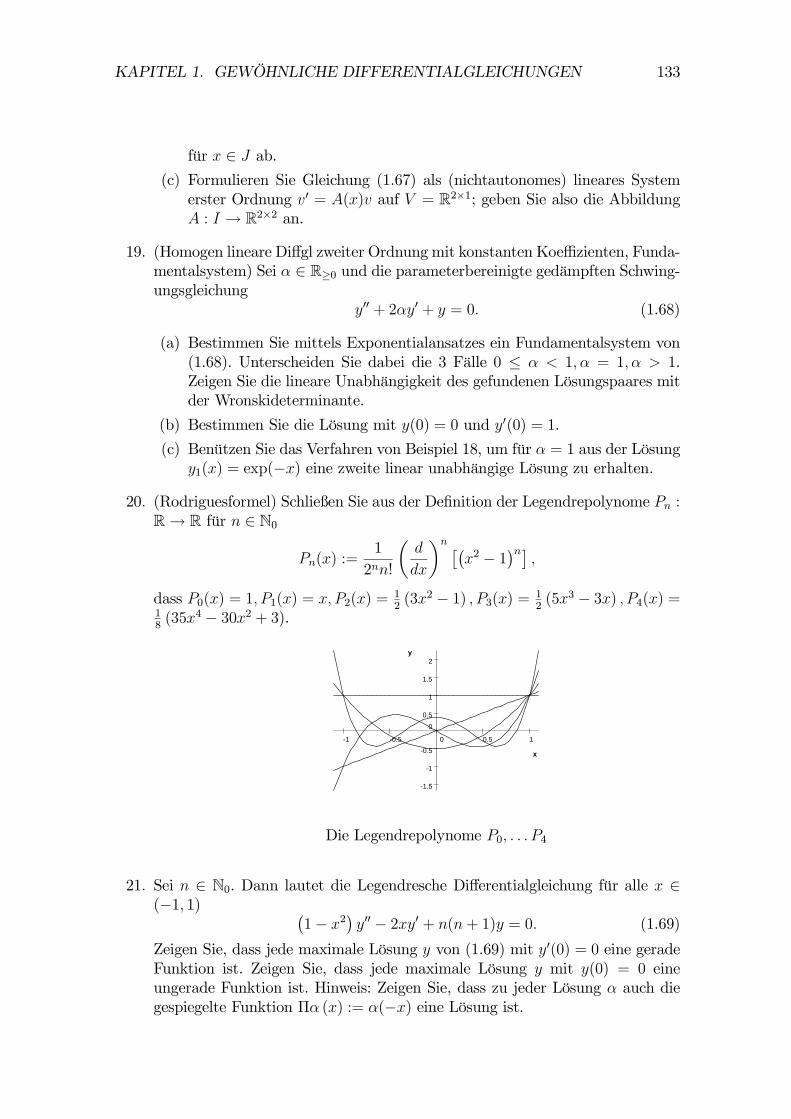
KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 133
für x ∈ J ab.
(c) Formulieren Sie Gleichung (1.67) als (nichtautonomes) lineares Systemerster Ordnung v′ = A(x)v auf V = R2×1; geben Sie also die AbbildungA : I → R2×2 an.
19. (Homogen lineare Diffgl zweiter Ordnung mit konstanten Koeffizienten, Funda-mentalsystem) Sei α ∈ R≥0 und die parameterbereinigte gedämpften Schwing-ungsgleichung
y′′ + 2αy′ + y = 0. (1.68)
(a) Bestimmen Sie mittels Exponentialansatzes ein Fundamentalsystem von(1.68). Unterscheiden Sie dabei die 3 Fälle 0 ≤ α < 1, α = 1, α > 1.Zeigen Sie die lineare Unabhängigkeit des gefundenen Lösungspaares mitder Wronskideterminante.
(b) Bestimmen Sie die Lösung mit y(0) = 0 und y′(0) = 1.
(c) Benützen Sie das Verfahren von Beispiel 18, um für α = 1 aus der Lösungy1(x) = exp(−x) eine zweite linear unabhängige Lösung zu erhalten.
20. (Rodriguesformel) Schließen Sie aus der Definition der Legendrepolynome Pn :R→ R für n ∈ N0
Pn(x) :=1
2nn!
d
dx
n x2 − 1
n,
dass P0(x) = 1, P1(x) = x, P2(x) =12(3x2 − 1) , P3(x) =
12(5x3 − 3x) , P4(x) =
18(35x4 − 30x2 + 3).
10.50-0.5-1
2
1.5
1
0.5
0
-0.5
-1
-1.5
x
y
x
y
Die Legendrepolynome P0, . . . P4
21. Sei n ∈ N0. Dann lautet die Legendresche Differentialgleichung für alle x ∈(−1, 1)
1− x2y′′ − 2xy′ + n(n+ 1)y = 0. (1.69)
Zeigen Sie, dass jede maximale Lösung y von (1.69) mit y′(0) = 0 eine geradeFunktion ist. Zeigen Sie, dass jede maximale Lösung y mit y(0) = 0 eineungerade Funktion ist. Hinweis: Zeigen Sie, dass zu jeder Lösung α auch diegespiegelte Funktion Πα (x) := α(−x) eine Lösung ist.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 134
22. (Frobeniusmethode zur Berechnung der Legendrepolynome) Nach dem Ent-wicklungssatz hat jede maximale Lösung von Gleichung (1.69) eine Potenzrei-henentwicklung (1.70) mit einem Konvergenzradius r ≥ 1.
y(x) =
k∈N0
ckxk
k!(1.70)
(a) Zeigen Sie: Ist y eine maximale Lösung von (1.69), dann gilt für allek ∈ N0 die Rekursion
ck+2 = (k(k + 1)− λ) ck. (1.71)
(b) Zeigen Sie: y ist ein Polynom genau dann, wenn λ = n(n + 1) für einn ∈ N0 und wenn Πy = (−1)n y. (Da das Legendrepolynom Pn Lösungvon Gleichung (1.69) mit λ = n(n+1) ist, ist nach dem Eindeutigkeitssatzder Raum der Polynomlösungen durch R · Pn gegeben.)
(c) Sei λ = 3(3+1). Berechnen Sie die Polynomlösung y von Gleichung (1.69)mit limx→1 y(x) = 1 über die Reihenformel. Überprüfen Sie, dass y = P3.
(d) Prüfen Sie mit dem Quotientenkriterium, dass eine Potenzreihe (1.70),für deren Koeffizienten (1.71) gilt, tatsächlich für alle |x| < 1 konvergiert.Bemerkung: (Ohne Beweis) α hat genau dann eine stetige Fortsetzungnach [−1, 1], wenn y ein Polynom ist.
(e) Sei n ∈ N0. Zeigen Sie für Pn (x) = dn
dxn(x2 − 1)
n/2nn! mit Hilfe der
Binomialreihe für (x2 − 1)n, dass
Pn (x) =1
2n
[n/2]
k=0
(−1)k
nk
2n− 2k
n
xn−2k.
Überprüfen Sie daran die Rekursionsformel (1.71). [n/2] bezeichnet dasGrößte Ganze von n/2.
23. (Fundamentalsystem der Legendreschen Differentialgleichung für n = 0 undfür n = 1) Berechnen Sie für n = 0 und n = 1 jeweils die Menge aller ma-ximalen Lösungen der auf (−1, 1) eigeschränkten Differentialgleichung (1.69).Hinweis: Die Lösung Pn kann mit d’Alemberts Reduktionsverfahren auf (−1, 1)zu einem Fundamentalsystem ergänzt werden. Lösung (Fig. 2):
Ln=0 =
αa,b : (−1, 1)→ R, x → a+ b ln
1 + x
1− x
| a, b ∈ R2
,
Ln=1 =
αa,b : (−1, 1)→ R, x → ax+ b
*x ln
1 + x
1− x
− 2
+| a, b ∈ R2
.

KAPITEL 1. GEWÖHNLICHE DIFFERENTIALGLEICHUNGEN 135
0.750.50.250-0.25-0.5-0.75
2.5
1.25
0
-1.25
-2.5
x
y
x
y
Die Lösungen α0,1 für n = 0 und n = 1 (strichliert)
24. (Erzeugende Funktion der Legenre Polynome) Seien x,y ∈ R3 mit r := |x| ,und r0 := |y|. Ist θ der Winkel zwischen x und y, dann gilt für x = y
1
|x− y| =1
r2 + r20 − 2rr0 cos θ.
Behauptung46: Für −1 < λ < 1 gilt
11− 2λ cos θ + λ2
=∞
n=0
Pn (cos θ)λn.
Kontrollieren Sie diese Behauptung an den ersten 3 Summanden unter Ver-wendung der Taylorreihe
1√1 + x
= 1− 1
2x+
1.3
2.4x2 − 1.3.5
2.4.6x3 + . . . für − 1 < x ≤ 1.
Zeigen Sie nun, dass
1
|x− y| =1
r
∞
n=0
Pn (cos θ)r0
r
n
für r0 < r.
25. (Orthogonalisierung von Polynomen) Sei ek : [−1, 1]→ R, x → xk für k ∈ N0.Die Folge Bn := (ek)k≤n ist eine geordnete Basis des Vektorraums Vn allerreellen Polynome auf [−1, 1] , deren Grad kleiner oder gleich n ist. Auf demVektorraum C ([−1, 1]) aller stetigen Funktionen von [−1, 1] nach R ist durch
f, g := 1
−1f(x)g(x)dx
ein Skalarprodukt definiert. Wenden Sie auf die Basis B2 von V2 das Gram-Schmidt Verfahren zu ·, · an. Kontrollieren Sie, dass dies auf die Basis
k + 1/2Pk
0≤k≤2
von V2 führt.
46Der Beweis folgt in der Vorlesung Mathematische Methoden der Physik II.

Kapitel 2
Fourieranalysis
Das Studium der Schwingungsgleichung y′′ (t)+y (t) = f (t) zeigte uns, dass im Fallvon f (t) = cosωt für ω = 1 eine maximale Lösung Cω mit dem Ansatz A cos(ωt) zuerhalten ist1. Es ergibt sich A = 1/ (1− ω2) . Eine Rechtstranslation um π/2 erzeugtaus Cω eine maximale Lösung Sω zur Inhomogenität sinωt. Für die allgemeinereInhomogenität f : R→ R des Typs
f (t) =
ω∈Ω[aω cos(ωt) + bω sin(ωt)] (2.1)
mit aω, bω ∈ R ist daher, für endliche Menge Ω, eine Lösung durch die Überlagerungvon Einzellösungen durch y (t) =
ω∈Ω [aωCω (t) + bωSω (t)] gegeben. Dieses Lö-
sungsverfahren funktioniert in leicht abgewandelter Form für alle inhomogen linea-ren Differentialgleichungen mit konstanten Koeffizienten und einer Inhomogenitätdes Typs von Gleichung (2.1).
Damit stellt sich die Frage, welche Funktionen durch eine Funktion f des Typsvon Gleichung (2.1) auf kontrollierbare Weise approximiert werden können. Kelvinbenutzte z.B. einen solchen Ansatz, um den Gezeitengang des Wasserspiegels ineinem englischen Kriegshafen auf Jahre im voraus aus Aufzeichnungen über zurück-liegende Werte vorauszusagen. Die britische Marine zog ihren Nutzen daraus.
Erheblich einfacher wird die Frage nach der Approximierbarkeit einer Funktiondurch Summen von Sinus- und Cosinusfunktionen für stetige Funktionen mit einemendlichen Definitionsintervall, also für f : [0, T ]→ R. Schon J. B. Fourier vermutete,dass solche Funktionen im Fall von f (0) = f (T ) durch endliche Summen des Typs(2.1) mit Ω ⊂ (2π/T )N0 punktweise beliebig genau approximiert werden können.Seine Vermutung wurde später von Weierstraß bewiesen: Sei f : [0, T ] → R stetigund es gelte f(0) = f(T ). Dann existieren zu jedem ε > 0 reelle Zahlen a0, . . . an
und b1, . . . bn, sodass für die Funktion fn : R→ R mit
fn(t) :=a02
+n
k=1
ak cos
2πk
t
T
+ bk sin
2πk
t
T
(2.2)
für alle t ∈ [0, T ] die Abschätzung |f(t)− fn(t)| < ε gilt. (Die Zahlen n und a1, . . . bnhängen dabei im Allgemeinen von ε ab.)
1Im ungedämpften, resonanten Fall ω = 1 führt der Ansatz Ct cos(ωt− δ) zum Ziel.
136

KAPITEL 2. FOURIERANALYSIS 137
Fourier gab auch eine Rezeptur an, wie zwei unendliche Zahlenfolgen, die Fou-rierkoeffizienten, (a0, a1, . . .) und (b1, b2, . . .) zu berechnen sein könnten, sodass füralle t ∈ [0, T ] die punktweise Konvergenz
f(t) =a02
+ limn→∞
n
k=1
ak cos
2πk
t
T
+ bk sin
2πk
t
T
(2.3)
gilt. Fouriers Rezeptur stellte sich zwar in vielen aber nicht in allen Fällen als korrektheraus. Eine korrekte Konstruktion stammt von Fejér. Sie realisiert eine Variantevon Gleichung (2.3) für stetige Funktion f mit Koeffizienten an
k und bnk , die sich mitn ändern. Das Erstaunliche an der Approximation (2.2) ist jedenfalls die Tatsache,dass ein Frequenzspektrum Ω ⊂ (2π/T )N0 ausreicht.
Die weitere Ausarbeitung von Fouriers Approximationsrezeptur zeigte, dass siezwar nicht unbedingt punktweise aber wenigstens „im quadratischen Mittel“ funk-tioniert. Und dies sogar auch für gewisse unstetige Funktionen.
Fouriers Idee durchdringt heute die Physik. Sinus und Cosinus sind die Bausteine,aus denen viele Schwingungen und Wellen zusammengesetzt sind. Akustische oderoptische Spektralanalyse ist eine Methode, die (annähernd) monofrequenten Anteilevon Schall oder Licht zu isolieren. Dabei werden Geräusche in (fast) reine Töneoder Licht in seine Bestandteile (fast) reiner Spektralfarben zerlegt. Wirklich reineTöne oder Farben bleiben allerdings eine von der Natur grundsätzlich unerreichbareFiktion.
2.1 Fourierreihen
Eine Fourierreihe ist eine unendliche Folge von zunehmend besseren Approximatio-nen an eine (stückweise stetige, komplexe) Funktion auf [0, L] . Die Approximatio-nen sind die Partialsummen einer Reihe aus Sinus- und Cosinusfunktionen derselbenPeriode L. Der Fall aperiodischer Funktionen auf R wird im Abschnitt über Fou-rierintegration behandelt.
2.1.1 Trigonometrische Polynome
Definition 62 Eine Funktion F : R→ C mit F (x+L) = F (x) für alle x ∈ R heißtperiodisch mit der Periode L (oder kurz L-periodisch).
Die Funktionen sin, cos sind 2π-periodisch. Jede auf einem halboffenen Intervallder Länge L definierte Funktion kann eindeutig zu einer L-periodischen Funktionfortgesetzt werden. Durch Umskalierung einer L-periodischen Funktion ist eine Stan-dardisierung der Periode möglich: Ist F eine L-periodische Funktion, dann ist dieFunktion f(x) := F
L x
2π
eine 2π-periodische. Umkehrung: F (x) = f
2π x
L
.
Definition 63 Seien n ∈ N0 und a0, a1, . . . , an, b1, . . . , bn ∈ C. Die Funktion
f : R→ C mit f(x) =a02
+n
k=1
ak cos(kx) +n
k=1
bk sin(kx)

KAPITEL 2. FOURIERANALYSIS 138
heißt trigonometrisches Polynom der Ordnung n. Die Menge aller trigonometrischenPolynome der Ordnung n wird in diesem Kapitel mit Vn bezeichnet.
Jedes trigonometrische Polynom ist als endliche Linearkombiation von 2π-perio-dischen C∞-Funktionen selbst beliebig oft stetig differenzierbar und 2π-periodisch.Da für f, g ∈ Vn und λ ∈ C auch f + g ∈ Vn und λf ∈ Vn gilt, ist Vn ein C-Vektorraum. Für m < n ist Vm ein (echter) UnterVR von Vn.
Beispiele: 1) Es gilt sinn, cosn ∈ Vn. Für cosn folgt dies so:
2n cosn(x) =eix + e−ix
n=
n
k=0
n
k
eixn−k
e−ixk
=
=
n
n
einx +
n
n− 1
ei(n−2)x + . . .+
n
0
e−inx = 2
⌊n/2⌋
k=0
n
k
cos ((n− 2k)x)
Hier bezeichnet ⌊n/2⌋ die größte ganze Zahl kleiner oder gleich n/2.2) Für ein Polynom pn : R→ C vom Grad n sind die Funktionen x → pn (cosx)
und x → pn (sin x) in Vn. Umgekehrt existiert auch für jedes n ∈ N ein (reelles)Polynom Tn genau n-ten Grades mit cos (nx) = Tn (cosx) für alle x ∈ R. SieheLemma 5.3 in Kap. 5 von [13].
3) Wegen f (x) := sin (x− δ) = cos (δ) sin (x) − sin (δ) cos (x) gilt f ∈ V1 mita0 = 0, a1 = − sin (δ) , b1 = cos (δ) .
4) Sei γ : R → R2 mit γ (t) =2 sin t, 1
2sin 2t
. Die Menge γ (R) ist eine Lissa-
jousfigur.2 (Siehe Figur 2.1.) Mit sin2 t = (1− cos 2t) /2 folgt
|γ (t)|2 = 4 sin2 (t) +sin2 (2t)
4= 2 (1− cos 2t) +
1− cos 4t
8=
17
8− 2 cos 2t− cos 4t
8.
Die Funktion t → |γ (t)|2 ist also ein trigonometrisches Polynom vom Grad 4. Wegen
210-1-2
0.5
0.25
0
-0.25
-0.5
x
y
x
y
Abbildung 2.1: Bahn von γ
γ (t) = (2 cot s, cos 2t) und 2 cos2 t = 1 + cos 2t ist auch |γ|2 ∈ V4 :
|γ (t)|2 = 4 cos2 t+ cos2 2t = 2 (1 + cos 2t) +1 + cos 4t
2=
5
2+ 2 cos 2t+
cos 4t
2.
2Die Kurve γ = (x, y) ist eine Lösung der Newtonschen Bewegungsgleichungen eines anisotro-pen, 2d harmonischen Oszillators da ja x′′ = −x und y′′ = −4y.

KAPITEL 2. FOURIERANALYSIS 139
Aus γ (t) = −2 (sin t, sin 2t) folgt für das Normquadrat der Beschleunigung3
|γ (t)|2 = 4sin2 t+ sin2 2t
= 2 (2− cos 2t− cos 4t) .
Es gilt also |γ|2 , |γ|2 , |γ|2 ∈ V4. (Siehe Figur 2.2.)
10.750.50.250
6.25
5
3.75
2.5
1.25
0
Abbildung 2.2: |γ|2 , (grau), |γ|2 (grün) und |γ|2 (rot) als Funktion von t/2π
Der Vektorraum Vn wird von den 2n + 1 Funktionen 1, cos (kx) , sin (kx)nk=1
aufgespannt. Somit gilt dim (Vn) ≤ 2n+1. Wir werden nun zeigen, dass dim (Vn) =2n+ 1 gilt. Dazu verschaffen wir uns ein weiteres erzeugendes System von Vn.
Lemma 64 Für k ∈ Z sei ek : R → C mit ek(x) := exp(ikx). Das Funktionensys-tem ek : |k| ≤ n spannt Vn auf.
Beweis. Mit cos(kx) =eikx + e−ikx
/2 und sin(kx) =
eikx − e−ikx
/2i folgt
für f ∈ Vn
f (x) =a02
+n
k=1
ak cos(kx) +n
k=1
bk sin(kx)
=a02
+1
2
n
k=1
(ak − ibk) e
ikx + (ak + ibk) e−ikx=
n
k=−n
ck exp(ikx),
mit den Zahlen ck : k ∈ Z, |k| ≤ n ⊂ C, die durch
c0 = a0/2, ck = (ak − ibk)/2 für k = 1, . . . , n und
ck = (a−k + ib−k)/2 für k = −1, . . . ,−n
gegeben sind. Also ist auch exp(ikx) | k ∈ Z und − n ≤ k ≤ n ein erzeugendesSystem von Vn.
Die Definition der Koeffizienten ck ist nach ak, bk auflösbar. Es gilt
ak = ck + c−k für k = 0, . . . , n,
bk = i (ck − c−k) für k = 1, . . . , n.
Zudem ist nun klar: aus f ∈ Vm und g ∈ Vn folgt f · g ∈ Vm+n.
3Die elektromagnetische Strahlungsleistung einer elektrischen Punkladung q, die sich gemäß
einer Kurve γ mit |γ| ≪ c bewegt, ist zur Zeit t annähernd durch P (t) =
q2
4πε0
23c3 |γ ((t))|
2
gegeben. (Larmors Strahlungsformel; c bezeichnet die Lichtgeschwindigkeit)

KAPITEL 2. FOURIERANALYSIS 140
Lemma 65 Das Funktionensystem ekk∈Z ist ein Orthonormalsystem des Vektor-raumes aller stetigen 2π-periodischen Funktionen bezüglich des Skalarproduktes
f, g := 1
2π
2π
0
f(x)g(x)dx,
d.h. es gilt ek′, ek = δk′k für alle k, k′ ∈ Z. Das Funktionensystem 1, Ck, Sk |k ∈ Nmit Ck (x) =
√2 cos (kx) , Sk (x) =
√2 sin (kx) ist ein weiteres Orthonormalsystem.
Beweis. Seien zunächst k, k′ ∈ Z mit k = k′. Dann gilt
2π
0
exp(i(k − k′)x)dx =exp(i(k − k′)x)
i(k − k′)
,,,,2π
0
=1− 1
i(k − k′)= 0.
Für k = k′ gilt aber 2π
0exp(i(k−k′)x)dx =
2π
0dx = 2π. Daher gilt ek′, ek = δk′k.
Für Ck = 1√2(ek + e−k) , Sk = 1
i√2(ek − e−k) mit k ∈ N folgt für alle l,m ∈ N,
dass Cl, Cm = Sl, Sm = δl,m, Cl, Sm = Cl, 1 = Sl, 1 = 0 und 1, 1 = 1.
Satz 66 Das Funktionensystem eknk=−n ist eine Orthonormalbasis von Vn. Es giltsomit dim (Vn) = 2n+ 1. Für f ∈ Vn mit f =
nk=−n ckek gilt
f (x) =a02
+n
k=1
ak cos(kx) +n
k=1
bk sin(kx),
ck =1
2π
2π
0
exp(−ikx)f(x)dx für alle k = −n, . . . n,
ak =1
π
2π
0
cos(kx)f(x)dx für alle k = 0, . . . n,
bk =1
π
2π
0
sin(kx)f(x)dx für alle k = 1, . . . n.
Beweis. Das System eknk=−n ist ein erzeugendes Sytem von Vn. Sei f =nk=−n ckek. Wegen
el, f =n
k=−n
ck el, ek = cl
folgt aus f = 0, dass cl = 0 für alle l = −n, . . . n. Damit ist eknk=−n ein linearunabhängiges, orthonormales, erzeugendes System von Vn, eine sogenannte Ortho-normalbasis. Für die Koeffizienten ak, bk folgt
ak = ck + c−k = ek + e−k, f =1
2π
2π
0
e−ikx + eikx
f(x)dx
=1
π
2π
0
cos(kx)f(x)dx,
bk = i (ck − c−k) =1
π
2π
0
sin(kx)f(x)dx.

KAPITEL 2. FOURIERANALYSIS 141
Dieser Satz zeigt also, dass die Entwicklungskoeffizienten (ck)nk=−n eines trigo-
nometrischen Polynoms f ∈ Vn erstens eindeutig sind und zweitens durch Ska-larproduktbildung zu berechnen sind. Gerade das macht ja die Orthonormalbaseneines Vektorraums so praktisch. Als weitere unmittelbare Folge gilt für f ∈ Vn mitf =
nk=−n ckek, dass f2 = f, f =n
k=−n |ck|2 .Eine weitere bemerkenswerte Eigenschaft von Vn ist, dass eine beliebige Trans-
lation den Raum Vn in sich überführt, denn es gilt ja für δ ∈ R und f ∈ V
(Tδf) (x) := f (x− δ) =n
k=−n
ckeik(x−δ) =
n
k=−n
cke−ikδeikx.
Bei einer Translation um δ geht die Funktion f ∈ V mit den Koeffizienten (ck)nk=−n
in die Funktion Tδf ∈ Vn mit den Koeffizientene−ikδck
nk=−n
über. Insbesondere
gilt Tδek = e−ikδek.
2.1.2 Dirichlets Kern
Für f ∈ Vn und x ∈ R gilt f (x) =n
k=−n eikx ek, f = 12π
2π
0
nk=−n eik(x−y)f (y) dy.
Das trigonometrische Polynom Dn ∈ Vn mit den Koeffizienten ck = 1 erfüllt alsoDn (x) =
nk=−n exp(ikx) = 1 + 2
nk=1 cos (kx) und für alle f ∈ Vn
f (x) =1
2π
2π
0
Dn (x− y) f (y) dy.
Dn stellt auf Vn die identische Abbildung als Integraloperator dar. Die Funktionen-folge (Dn)n∈N0 heißt Dirichletkern.
Untersuchen wir die Funktion Dn etwas genauer. Offenbar ist Dn reellwertig undgerade. Mit z = eix folgt Dn(x) = z−n
2nk=0 z
k. Mit der Formel für die Partialsummeeiner geometrischen Reihe ergibt sich nun für z = 1, also für x /∈ 2πZ,
Dn(x) = z−n1− z2n+1
1− z=
z−n − znz
1− z=
e−i(n+ 12)x − ei(n+
12)x
e−ix2 − ei
x2
=sin2n+12
x
sinx2
.
Für x ∈ 2πZ folgt Dn(x) =n
k=−n 1 = 2n+ 1. Es gilt somit
Dn (x) =
.sin( 2n+12
x)sin(x2 )
für x ∈ R 2πZ
2n+ 1 für x ∈ 2πZ
Dn ist stetig. Die Funktion Dn fällt zwischen 0 und ihrer kleinsten positivenNullstelle 2π/(2n+1) von ihrem größtenWert, nämlich 2n+1, auf 0 ab. Die Breite derSpitze bei 0 geht mit wachsendem n gegen 0. Hier zeigt sich erstmals die Faustregel:Je schärfer ein Signal eingegrenzt sein soll, umso mehr Frequenzen müssen beitragen.
Für die Norm von Dn folgt Dn2 =n
k=−n |ck|2 = 2n + 1. Für die Funktion
Fn : R→ R mit (2n+ 1) ·Fn (x) = |Dn (x)|2 = sin22n+12
x/ sin2
x2
≥ 0 gilt daher
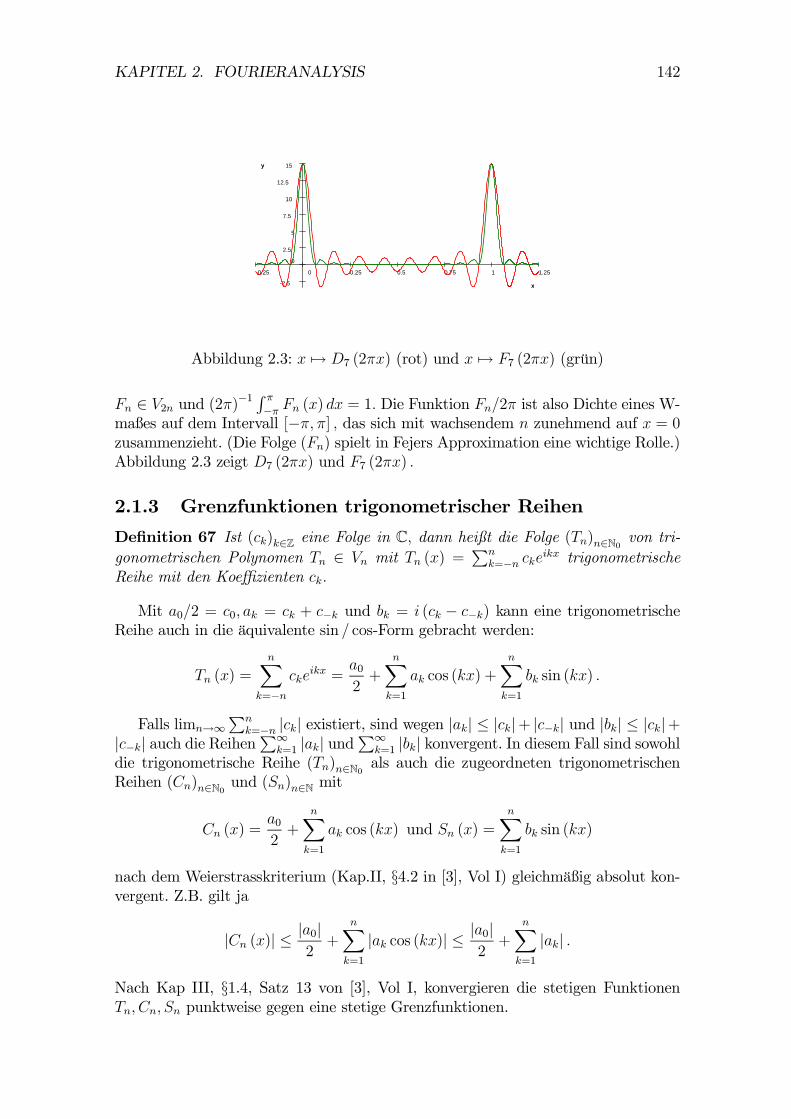
KAPITEL 2. FOURIERANALYSIS 142
1.2510.750.50.250-0.25
15
12.5
10
7.5
5
2.5
0
-2.5 x
y
x
y
Abbildung 2.3: x → D7 (2πx) (rot) und x → F7 (2πx) (grün)
Fn ∈ V2n und (2π)−1 π
−πFn (x) dx = 1. Die Funktion Fn/2π ist also Dichte eines W-
maßes auf dem Intervall [−π, π] , das sich mit wachsendem n zunehmend auf x = 0zusammenzieht. (Die Folge (Fn) spielt in Fejers Approximation eine wichtige Rolle.)Abbildung 2.3 zeigt D7 (2πx) und F7 (2πx) .
2.1.3 Grenzfunktionen trigonometrischer Reihen
Definition 67 Ist (ck)k∈Z eine Folge in C, dann heißt die Folge (Tn)n∈N0 von tri-gonometrischen Polynomen Tn ∈ Vn mit Tn (x) =
nk=−n cke
ikx trigonometrischeReihe mit den Koeffizienten ck.
Mit a0/2 = c0, ak = ck + c−k und bk = i (ck − c−k) kann eine trigonometrischeReihe auch in die äquivalente sin / cos-Form gebracht werden:
Tn (x) =n
k=−n
ckeikx =
a02
+n
k=1
ak cos (kx) +n
k=1
bk sin (kx) .
Falls limn→∞n
k=−n |ck| existiert, sind wegen |ak| ≤ |ck|+ |c−k| und |bk| ≤ |ck|+|c−k| auch die Reihen
∞k=1 |ak| und
∞k=1 |bk| konvergent. In diesem Fall sind sowohl
die trigonometrische Reihe (Tn)n∈N0 als auch die zugeordneten trigonometrischenReihen (Cn)n∈N0 und (Sn)n∈N mit
Cn (x) =a02
+n
k=1
ak cos (kx) und Sn (x) =n
k=1
bk sin (kx)
nach dem Weierstrasskriterium (Kap.II, §4.2 in [3], Vol I) gleichmäßig absolut kon-vergent. Z.B. gilt ja
|Cn (x)| ≤|a0|2
+n
k=1
|ak cos (kx)| ≤|a0|2
+n
k=1
|ak| .
Nach Kap III, §1.4, Satz 13 von [3], Vol I, konvergieren die stetigen FunktionenTn, Cn, Sn punktweise gegen eine stetige Grenzfunktionen.

KAPITEL 2. FOURIERANALYSIS 143
Es gibt aber auch wichtige Beispiele von punktweise konvergenten trigonometri-schen Reihen, für die
nk=−n |ck| nicht konvergiert. Hier ein Beispiel, das mit einem
sehr schlauen Trick arbeitet. Für das Folgenglied Dn des Dirichletkerns gilt aufR 2πZ
Dn (x) = 1 + 2n
k=1
cos (kx) =sin2n+12
x
sinx2
.
Sei nun Yn : (0, 2π)→ R (hier steckt der Trick!) mit
Yn (x) =
x
0
Dn (t) dt+2
2n+ 1
cos2n+12
x
sinx2
= x+ 2n
k=1
sin (kx)
k+
2
2n+ 1
cos2n+12
x
sinx2
.
Für jedes n gilt Yn (π) = π und somit auch limn→∞ Yn (π) = π. Es folgt weiter für0 < x < 2π
Y ′n (x) = Dn (x)−
sin2n+12
x
sinx2
− 1
2n+ 1
cos2n+12
xcosx2
sin2x2
= − 1
2n+ 1
cos2n+12
xcosx2
sin2x2
.
Somit konvergiert Y ′n auf jedem abgeschlossenen Intervall [a, b] ⊂ (0, 2π) gleichmäßig
gegen 0. Daher gilt für alle x ∈ (0, 2π)
limn→∞
Yn (x)− π = limn→∞
(Yn (x)− Yn (π)) = limn→∞
x
π
Y ′n (t) dt
=
x
π
limn→∞
Y ′n (t) dt = 0.
Also gilt für alle x ∈ (0, 2π)
π = limn→∞
Yn (x) = x+ 2 limn→∞
n
k=1
sin (kx)
k.
Für x = 0 gilt limn→∞n
k=1sin(k0)
k= 0. Alle weiteren Werte x ergeben sich aus der
2π-Periodizität. Damit ist die punktweise Konvergenz der trigonometrischen Reihe
sin x
1+
sin 2x
2+
sin 3x
3+ . . .
gezeigt. Siehe Abbildung 2.4. Und dies, obwohl die Reihe ihrer Koeffizienten bk = 1/kdivergiert (harmonische Reihe). Wir fassen zusammen.
Lemma 68 Die trigonometrische Reihe∞
k=1sin(kx)
kkonvergiert punktweise. Auf je-
dem abgeschlossenen Intervall, das keinen Punkt aus 2πZ enthält, ist die Konvergenzgleichmäßig. Es gilt
limn→∞
n
k=1
sin (kx)
k=
π−x2
für x ∈ (0, 2π)0 für x ∈ 2πZ
.

KAPITEL 2. FOURIERANALYSIS 144
Für x = π/2 ergibt sich somit der Wert der alternierenden Reihe zu∞
k=1
sink π2
k=
∞
k=0
(−1)k
2k + 1=
π
4.
Abbildung 2.4:n
k=1sin kx
kfür n = 5 und n = 10 (grün) und Grenzfunktion (rot)
Als eine Folgerung ergibt sich eine weitere trigonometrische Reihe durch Sym-metrisierung um π/2.
Korollar 69 Die trigonometrische Reihe∞
k=1sin((2k+1)x)
2k+1konvergiert punktweise.
Auf jedem abgeschlossenen Intervall, das keinen Punkt aus πZ enthält, ist die Kon-vergenz gleichmäßig. Es gilt
limn→∞
n
k=1
sin ((2k + 1)x)
2k + 1=
π4
für 0 < x < π0 für x ∈ πZ−π
4für − π < x < 0
.
Beweis. Sei −π/2 < ξ < π/2. Damit folgt wegen π2± ξ ∈ (0, π) aus dem Lemma
limn→∞
n
k=1
sinkπ2+ ξ
k+ lim
n→∞
n
k=1
sinkπ2− ξ
k=
π −π2+ ξ
2+
π −π2− ξ
2=
π
2.
Nun gilt
sinkπ2+ ξ
=ikeikξ − (−i)k e−ikξ
2i= (−1)k (−i)k eikξ − ike−ikξ
2i
= (−1)k+1 ike−ikξ − (−i)k eikξ
2i= (−1)k+1 sin
kπ2− ξ
.
Daher ergibt die gliedweise Addition der beiden (konvergenten!) Reihen
limn→∞
n
k=1
sinkπ2+ ξ
+ sinkπ2− ξ
k= lim
n→∞
n
k=1
sinkπ2+ ξ 1 + (−1)k+1
k
= 2 limn→∞
n
k=1
sin(2k + 1)
π2+ ξ
2k + 1= 2 lim
n→∞
n
k=1
sin ((2k + 1)x)
2k + 1.

KAPITEL 2. FOURIERANALYSIS 145
Damit ist für 0 < x < π gezeigt, dass
limn→∞
n
k=1
sin ((2k + 1)x)
2k + 1=
π
4.
Für x = 0 ist die Behauptung des Korollars offensichtlich und der Fall −π < x < 0wird auf 0 < x < π zurückgeführt:
limn→∞
n
k=1
sin ((2k + 1) x)
2k + 1= − lim
n→∞
n
k=1
sin ((2k + 1) |x|)2k + 1
= −π
4.
2.1.4 Approximation durch Fourierreihen
Ziel ist es nun, eine gegebene Funktion f : [0, 2π] → C durch trigonometrischePolynome „möglichst gut” zu approximieren. Da die approximierenden trigonome-trischen Polynome 2π-periodisch sind, setzen wir auch f periodisch nach ganz R fort.(Dazu muss eventuell der Wert von f im Punkt 2π an den Wert im Punkt 0 ange-glichen werden. Das schränkt uns aber nicht ein, da unstetige f zulässig sind, undeine punktweise Approximation unstetiger Funktionen ohnehin nur in ganz speziel-len Fällen möglich ist.) Welches fn ∈ Vn ist die „beste“ Approximation an f? EineMöglichkeit über die Nähe von fn zu f zu räsonieren gibt die mittlere quadratischeAbweichung zwischen f und fn, nämlich
f − fn2 =1
2π
2π
0
|f (x)− fn (x)|2 dx.
Man sucht also nach einem fn ∈ Vn, für das f − fn minimal ist. Mit steigendem nkann die Approximation fn sicher nicht schlechter werden, da ja V0 ⊂ V1 ⊂ V2 ⊂ . . .Einen Hinweis darauf, welches fn ∈ Vn den Ausdruck f − fn minimiert, liefert dieGeometrie eines unitären Vektorraumes mit dem folgenden Satz.4
Satz 70 Sei V ein endlichdimensionaler C−VR mit dem Skalarprodukt ·, · unddem Untervektorraum U. Sei (e1, ..., en) eine ONB von U. Sei v ∈ V. Dann folgt
1. u ∈ U und v − u, u′ = 0 ∀u′ ∈ U ⇔ u = PU (v) :=n
k=1 ek, v ek.
2. v − u′ ≥ v − PU (v) für alle u′ ∈ U.
3. Für ein u′ ∈ U gilt v − PU (v) = v − u′ genau dann, wenn u′ = PU (v) .
4Eine andere Art der Approximation ist es, das kleinste ε ≥ 0 zu bestimmen, für das eineFunktion fn ∈ Vn existiert, sodass |f (x)− fn (x)| ≤ ε für alle x ∈ R gilt. Diese Approximation istjedoch viel schwieriger zu behandeln als jene im Sinn des quadratischen Mittels.

KAPITEL 2. FOURIERANALYSIS 146
Beweis. Sei u ∈ U. Dann existieren ck ∈ C mit u =n
k=1 ckek. Daraus folgtek, v − u = ek, v−ck. Ist der Vektor v−u senkrecht auf U, folgt ek, v − u = 0 füralle k, also ck = ek, v für alle k. Damit ist gezeigt, dass (v − u) ⊥ U ⇒ u = PU (v) .Die Umkehrung folgt durch direktes Nachrechnen.
Sei nun u = PU (v) . Dann gilt für alle u′ ∈ U
v − u′2 = v − u− (u′ − u)2
= v − u2 + 2ℜ v − u, u′ − u+ u′ − u2
= v − u2 + u′ − u2 ≥ v − u2 ,
da ja u′− u ∈ U und somit v − u, u′ − u = 0. Die Gleichheit v − u′2 = v − u2gilt genau dann, wenn u− u′2 = 0, also genau dann, wenn u′ = u.
Dieser Satz gibt eine eindeutige Zerlegung eines beliebigen Vektors v ∈ V ineine Komponente PU (v) ∈ U und eine dazu senkrechte Komponente v−PU (v) . DieAbbildung PU : V → U mit v → PU (v) ist linear und heißt Orthogonalprojektion aufU. Weiter identifiziert der Satz PU (v) als den einzigen Vektor in U mit minimalemAbstand zu v.
Definition 71 Sei V der Vektorraum aller 2π-periodischen, beschränkten Funktio-nen f : R→ C, die auf dem Intervall [0, 2π] Riemann-integrierbar5 sind. Die Abbil-dung ·, · : V × V → C mit
f, g = 1
2π
2π
0
f(x)g(x)dx
ist ein inneres Produkt auf V . Es wird notiert f =f, f. Für f ∈ V und
k ∈ Z heißen die Zahlen ck := ek, f die Fourierkoeffizienten von f . Die Folge(Pn [f ])n∈N0 der trigonometrischen Polynome Pn [f ] ∈ Vn mit Pn [f ] :=
nk=−n ckek
ist eine trigonometrische Reihe. Sie heißt Fouriereihe von f. Kurzschreibweise: f ≃k∈Z ckek.
Die Definition von Pn [f ] ist offenbar äquivalent zu
Pn [f ] (x) =1
2π
2π
0
Dn (x− y) f (y) dy,
mit der Dirichletfunktion Dn (x) =n
k=−n exp (ikx) = sin2n+12
x/ sin
x2
(für
x ∈ R 2πZ).Der Unterschied zur Elementargeometrie: V ist unendlichdimensional und ·, ·
ist kein Skalarprodukt, weil f, f = 0 nicht f = 0 impliziert. Die Einschränkung von·, · auf Vn × Vn ist jedoch ein Skalarprodukt, da die Elemente von Vn stetig sind.Dies genügt, um ein zum endlichdimensionalen Fall analoges Resultat zu erzielen:
Satz 72 Sei f ∈ V und fn ∈ Vn. Dann gilt f − fn2 ≥ f − Pn [f ]2 . Die Gleich-heit gilt genau dann, wenn fn = Pn [f ] .
5Jede beschränkte 2π-periodische Funktion mit höchstens endlich vielen Unstetigkeitsstellen in[0, 2π] ist daher in V . Überdies gilt Vn ⊂ V für alle n ∈ N0.

KAPITEL 2. FOURIERANALYSIS 147
Beweis. Aus der Definition von Pn [f ] folgt f − Pn [f ] , ek = 0 für alle k =−n, . . . n. Somit gilt auch f − Pn [f ] , u = 0 für alle u ∈ Vn, insbesondere auch füru = Pn [f ]− fn. Damit folgt
f − fn2 = f − Pn [f ] + Pn [f ]− fn2 = f − Pn [f ] + u2
= f − Pn [f ]2 + u2 + 2ℜf − Pn [f ] , u= f − Pn [f ]2 + u2 ≥ f − Pn [f ]2 .
Also giltf − fn2 − f − Pn [f ]2 = u2 ≥ 0.
Da ·, · auf Vn × Vn ein Skalarprodukt ist, gilt
f − fn2 − f − Pn [f ]2 = u2 = 0
genau dann, wenn u = 0, d.h., wenn Pn [f ] = fn.Das trigonometrische Polynom Pn [f ] ist also das einzige Element von Vn, das
die quadratische Abweichung zu f minimiert. Es wird als das n-te Fourierpolynomvon f bezeichnet und lässt sich mit exp(ikx) = cos(kx)+ i sin(kx) natürlich auch insin und cos Funktionen entwickeln:
Pn [f ] (x) =a02
+n
k=1
(ak cos(kx) + bk sin(kx)) , mit
ak≥0 = ck + c−k =1
π
2π
0
cos(kx)f(x)dx,
bk>0 = i(ck − c−k) =1
π
2π
0
sin(kx)f(x)dx.
2.1.5 Fourierreihe der Rechteckschwingung
Sei f ∈ V ungerade mit f(0) = f(π) = 0 und f(x) = 1 für 0 < x < π. Da fungerade ist, folgt
2πck =
π
−π
e−ikxf (x) dx = −i
π
−π
sin (kx) f (x) dx = −2i π
0
sin (kx) dx,
also c0 = 0 und 2πck = 2ikcos (kx)|π0 = 2i
k
(−1)k − 1
für k = 0. Es gilt somit ck = 0
für k ∈ 2Z und ck = 2iπk
für k ∈ 2Z+ 1. Die Fourierreihe von f ergibt sich zu
f(x) ≃∞
k=0
c2k+1
ei(2k+1)x − e−i(2k+1)x
=
4
π
∞
k=0
sin ((2k + 1) x)
2k + 1
=4
π
sin x+
1
3sin 3x+
1
5sin 5x+ . . .
.
Dass die Reihe sinx+ 13sin 3x+ 1
5sin 5x+. . . für alle x ∈ (0, π) gegen ein und den-
selben Wert π/4 konvergiert, ist, wie wir aus dem Abschnitt über trigonometrische

KAPITEL 2. FOURIERANALYSIS 148
Reihen wissen, der Fall, aber beileibe nicht offensichtlich.6 Für x = 0 konvergiert dieReihe natürlich gegen 0, da alle ihre Glieder gleich 0 sind.
Der Versuch, aus der Fourierreihe von f eine Potenzreihe von f um 0 abzulesen,scheitert schon beim in x linearen Teil, da für x → 0 gilt
sin x+1
3sin 3x+ . . .+
1
2n+ 1sin (2n+ 1) x = (n+ 1) x+ o (x) .
Die Entwicklung nach Funktionen, die selbst schon durch Potenzreihen gegeben sind,hat also unsere Approximationsmöglichkeiten erheblich ausgeweitet.
Die Abbildungen 2.5 und 2.6 zeigen die Fourierpolynome Pn [f ] für n = 1, 3, 5, 7und f. Wie gut approximiert Pn [f ] die Rechteckfunktion f im quadratischen Mittel?
1.510.50-0.5-1-1.5
1
0.5
0
-0.5
-1
x/pix/pi
Abbildung 2.5: P1 [f ] and P3 [f ]
1.510.50-0.5-1-1.5
1
0.5
0
-0.5
-1
x/pix/pi
Abbildung 2.6: P5 [f ] and P7 [f ]
Da f − Pn [f ] nach Konstruktion senkrecht auf Vn ist, gilt
1 =1
2π
2π
0
f 2 (x) dx = f2 = Pn [f ]2 + f − Pn [f ]2 .
6Für x = π/2 etwa ergibt sich die Leibniz’sche Reihe 1−1/3+1/5−1/7+ . . . Sie konvergiert alsalternierende Reihe von Gliedern, deren Beträge eine monotone Nullfolge bilden. (Leibnizkriterium)Ihr Grenzwert ist π/4. Siehe [3] Vol I, Kap IV.4.3.

KAPITEL 2. FOURIERANALYSIS 149
Da√
2 sin ((2k + 1) x) : k = 1, . . . nein orthonormales Funktionensystem in V2n+1
ist, gilt
P2n+1 [f ]2 =n
k=1
|b2k+1|22
=8
π2
n
k=1
1
(2k + 1)2.
Für n = 7 folgt z.B. P7 [f ]2 = 8π2
1 + 1
9+ 1
25+ 1
49
≈ 0, 949.Der (relative) mittlere
quadratische Fehler der Approximation P7 [f ] beträgt also f − P7 [f ]2 / f2 ≈5%.
Welchen Grenzwert hat die FolgePn [f ]2
n? Es gilt nach Kap. IV.3.6 in Vol.I
von [3]∞
k=1 k−2 = π2/6. Daraus folgt wegen
∞
k=1
1
k2=
∞
k=1
1
(2k)2+
∞
k=0
1
(2k + 1)2=
1
4
∞
k=1
1
k2+
∞
k=0
1
(2k + 1)2,
dass ∞
k=0
1
(2k + 1)2=
3
4
∞
k=1
1
k2=
π2
8.
Also gilt limn→∞ Pn [f ] = 1 = f und daher limn→∞ f − Pn [f ] = 0. Diemittlere quadratische Abweichung zwischen Pn [f ] und f geht (wie es aufgrund derpunktweisen Konvergenz sein muss) für n →∞ gegen 0.
2.1.6 Fouriereihen allgemeiner Periode
Ist F : R → C eine L-periodische, Riemann-integrierbare Funktion, dann ist x →f(x) = F (Lx
2π) eine 2π-periodische Funktion in V , und ihre Fourierreihe ist die Funk-
tionenfolge (sn)n∈N0 mit
sn(x) :=n
k=−n
ckeikx, ck :=
1
2π
2π
0
e−ikxf(x)dx.
Die Fourierreihe von F ist dann mit ω := 2π/L
F (x) = f
2π
Lx
≃
k∈Zcke
i 2πkxL =
k∈Zcke
iωkx.
Das Frequenzspektrum der Fourierreihe von F ist die Menge der Zahlen ωk = 2πLk ∈
2πLZ, für die ck = 0. Die Zahl ω = 2π
Lheißt „Grundfrequenz”. Achtung: Die Redeweise
verwischt den Unterschied zwischen Frequenz ν := 1/L und Kreisfrequenz ω = 2π/L.Übrigens: Durch Übergang zur Sinus/Cosinus-Zerlegung von sn gelangt man analogzu zwei nichtnegativen Frequenzspektren, Teilmengen von ωN0. Eines für die Sinus-und eines für die Cosinusanteile.
Der Fourierkoeffizient ck drückt sich durch F folgendermaßen aus:
ck =1
2π
2π
0
e−ikxf(x)dx =1
2π
2π
0
e−ikxF
Lx
2π
dx =
1
L
L
0
e−i 2πkyL F (y)dy.

KAPITEL 2. FOURIERANALYSIS 150
Besitzt eine L-periodische Funktion F mit der Fourierreihe
k∈Z ck exp(iωkx)auch die kleinere Periode L/n mit einem n ∈ N, dann hat F auch eine Fourierreihezur Grundfrequenz ωn, also
F (x) ≃
k∈Zcke
inωkx.
Wegen der linearen Unabhängigkeit der Funktionen ek erfordert dies, dass ck =0, falls k /∈ nZ. Das Frequenzspektrum von F kann also zu einer Teilmenge vonωnZ ⊂ωZ präzisiert werden.
Ist F : [0, L] → C mit F (0) = 0 = F (L) Riemann-integrierbar, dann lässt sichF eindeutig zu einer ungeraden 2L-periodischen Funktion G : R → C fortsetzen.Ihre Fourierreihe ist
G(x) ≃
k∈Zcke
iωkx
mit ck := 12L
L
−Lexp(−iωkx)G(x)dx und ω := 2π/(2L) = π/L. Da G schief ist, folgt
c−k = −ck und daherG(x) ≃
k∈N2ick sin(ωkx).
Für den Koeffizienten bk = 2ick dieser Sinusreihe gilt
bk =i
L
L
−L
e−iωkxG(x)dx =i
L
L
−L
(−i sin(ωkx))G(x)dx
=2
L
L
0
sin(ωkx)G(x)dx =2
L
L
0
sinπ
LkxF (x)dx.
Damit hat die Funktion F : [0, L]→ C die Fourierreihe7
F (x) ≃
k∈Nbk sin
πLkx
mit bk =2
L
L
0
sinπLkxF (x)dx.
Sei etwa die ungerade Funktion f ∈ V die Rechteckschwingung mit f(0) =f(π) = 0 und f(x) = 1 für 0 < x < π. Für B ∈ R, T ∈ R>0 sei F : R → R mitF (t) = Bf(2πt
T). Dann hat F die Periode T und die (punktweise gültige) Fourierreihe
F (t) = B4
π
∞
k=0
sin ((2k + 1)ωt)
2k + 1
mit ω := 2π/T > 0.Das (Kreis-)Frequenzspektrum von F ist die Menge ω (2N0 + 1) .Gilt zB T = 10−1 s, dann ist die Grundfrequenz ν = 1/T von 10Hz unhörbar. Aberder Koeffizient der hörbaren Frequenz 90Hz beträgt noch 1/9 des Koeffizienten derGrundfrequenz und kann somit zu Lärmbelästigung führen, wenn F die ruckartigeBewegung eines Maschinenteils modelliert.
7Von diesem Sachverhalt macht die Wellenmechanik eines Teilchens im Würfel Gebrauch.

KAPITEL 2. FOURIERANALYSIS 151
2.1.7 Periodisch getriebener Oszillator: Fourierreihenlösung
Welche Lösungen besitzt die Bewegungsgleichung eines (ungedämpften) harmoni-schen Oszillators, auf den eine (hinreichend glatte) periodische Kraft einwirkt? DieBewegungsgleichung ist
x+ ω20x = f auf R. (2.4)
Für f (t) = cosωt und ω = ω0 ist x : R → R mit x (t) = cos (ωt) / (ω20 − ω2)
eine Lösung von Gleichung (2.4). Für f (t) = sinωt und ω = ω0 ist x : R → R mitx (t) = sin (ωt) / (ω2
0 − ω2) eine Lösung. Hat daher eine T -periodische Inhomogenitätf die punktweise (gleichmäßig und absolut)) konvergente Fourierreihenentwicklung
f (t) =a02
+∞
k=1
(ak cos (kωt) + bk sin (kωt))
mit ω = 2π/T, dann ist die Funktion xF : R→ R mit
xF (t) =a02ω2
0
+∞
k=1
ak cos (kωt) + bk sin (kωt)
ω20 − k2ω2
eine maximale Lösung von Gleichung (2.4), falls k2ω2 = ω20 für alle k ∈ N. Sie ist
T -periodisch. Alle weiteren maximalen Lösungen gehen aus xF durch Addieren einerLösung der homogenen Schwingungsgleichung hervor.
Als Beispiel für eine Funktion f kann die Rechtecksfunktion des vorigen Ab-schnittes herangezogen werden, wenn sie zur Glättung durch ihr Fourierpolynom
fn (t) = B4
π
n
k=0
sin ((2k + 1)ωt)
2k + 1
ersetzt wird. fn ist 2π/ω-periodisch. Falls ω (2k + 1) = ω0 für alle k ∈ N0 gilt, hatGleichung (2.4) die 2π/ω-periodische Lösung x : R→ C mit
x (t) = B4
π
n
k=0
1
2k + 1
sin ((2k + 1)ωt)
ω20 − (2k + 1)2 ω2
.
Die Bedingung ω (2k + 1) = ω0 für alle k ∈ N0 stellt sicher, dass die Eigenfrequenzω0 des Oszillators im Fourierspektrum der Inhomogenität f nicht vorkommt, unddaher kein Resonanzfall vorliegt.
Figur (2.7) zeigt für den Fall B/ω20 = 1, ω = ω0/2 und n = 3 die Schwingung x
und ihre Teilschwingungen xk, für die x =n
k=0 xk gilt, als Funktion von τ = ω0t/2πim Bereich 0 < τ < 2. Die höherfrequenten Teilschwingungen modifizieren das Bildfür größere n kaum, da die Amplituden der Teilschwingungen rasch abnehmen.
Ein weiteres etwas interessanteres Beispiel für f gibt die stetige 2π-periodischeFunktion b mit b (t) = |t| für −π < t ≤ π ab. Wir bestimmen nun die (einzige!)2π-periodische Lösung xF von Gleichung (2.4), wenn ω0 keine natürliche Zahl ist.Dazu benützen wir zunächst die Fourierreihe von b, also
b (t) =π
2− 4
π
∞
k=0
cos ((2k + 1) t)
(2k + 1)2.
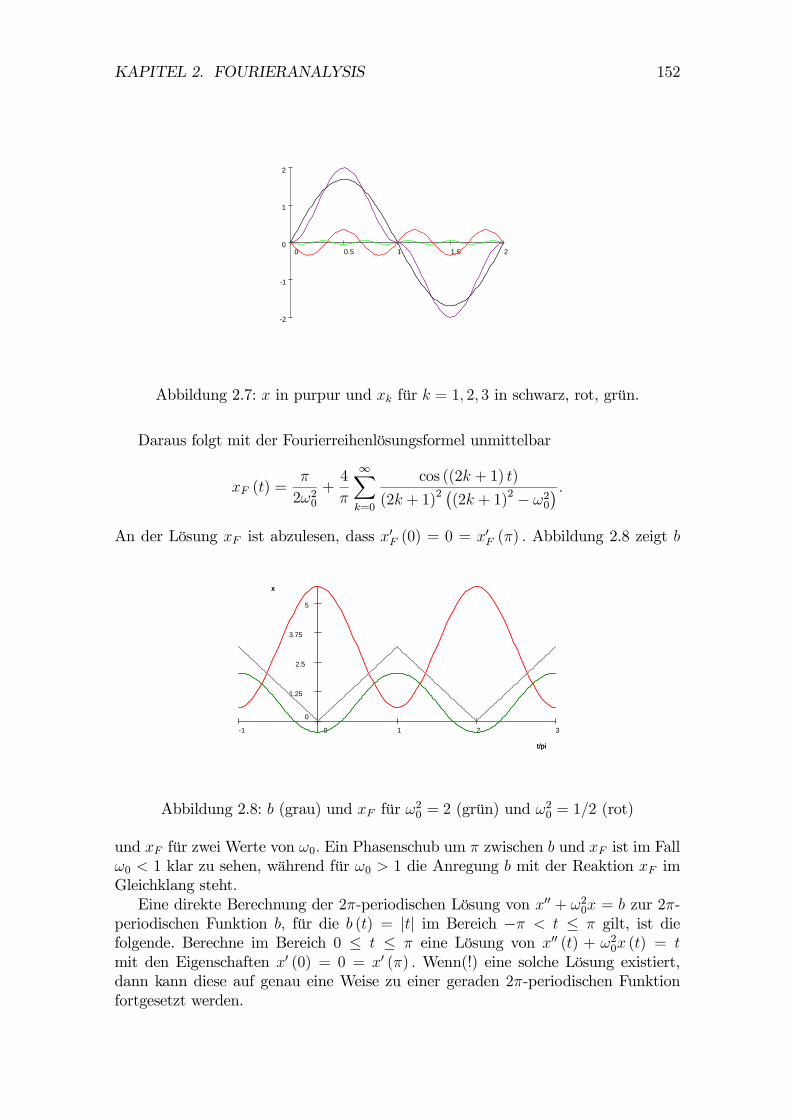
KAPITEL 2. FOURIERANALYSIS 152
21.510.50
2
1
0
-1
-2
Abbildung 2.7: x in purpur und xk für k = 1, 2, 3 in schwarz, rot, grün.
Daraus folgt mit der Fourierreihenlösungsformel unmittelbar
xF (t) =π
2ω20
+4
π
∞
k=0
cos ((2k + 1) t)
(2k + 1)2(2k + 1)2 − ω2
0
.
An der Lösung xF ist abzulesen, dass x′F (0) = 0 = x′F (π) . Abbildung 2.8 zeigt b
3210-1
5
3.75
2.5
1.25
0
t/pi
x
t/pi
x
Abbildung 2.8: b (grau) und xF für ω20 = 2 (grün) und ω2
0 = 1/2 (rot)
und xF für zwei Werte von ω0. Ein Phasenschub um π zwischen b und xF ist im Fallω0 < 1 klar zu sehen, während für ω0 > 1 die Anregung b mit der Reaktion xF imGleichklang steht.
Eine direkte Berechnung der 2π-periodischen Lösung von x′′ + ω20x = b zur 2π-
periodischen Funktion b, für die b (t) = |t| im Bereich −π < t ≤ π gilt, ist diefolgende. Berechne im Bereich 0 ≤ t ≤ π eine Lösung von x′′ (t) + ω2
0x (t) = tmit den Eigenschaften x′ (0) = 0 = x′ (π) . Wenn(!) eine solche Lösung existiert,dann kann diese auf genau eine Weise zu einer geraden 2π-periodischen Funktionfortgesetzt werden.

KAPITEL 2. FOURIERANALYSIS 153
Zu jeder Lösung im Bereich 0 ≤ t ≤ π existieren Zahlen A,B ∈ R, sodass füralle t ∈ [0, π]
x (t) =t
ω20
+A cos (ω0t) +B sin (ω0t) .
Die Vorgabe x′ (0) = 0 ist genau dann erfüllt, wenn Bω0 = −ω−20 . Damit gilt
x (t) =t− sin(ω0t)
ω0
ω20
+A cos (ω0t) .
Die Vorgabe x′ (π) = 0 ist genau dann erfüllt, wenn
0 =1− cos (ω0π)
ω20
− Aω0 sin (ω0π) ,
wenn also A sin (ω0π) = (1− cos (ω0π)) /ω30. Da ω0 /∈ N vorausgesetzt ist, folgt
A =1− cos (ω0π)
ω30 sin (ω0π)
,
also
x (t) =t− sin(ω0t)
ω0
ω20
+1− cos (ω0π)
ω30 sin (ω0π)
cos (ω0t) für alle t ∈ [0, π] .
Die gerade Fortsetzung auf das Intervall [−π, π] dieser Lösung erfüllt somit
x (t) =ω0 |t| − sin (ω0 |t|)
ω30
+1− cos (ω0π)
ω30 sin (ω0π)
cos (ω0t) für alle t ∈ [−π, π] .
Da es für ω0 /∈ N genau eine 2π-periodische Lösung von Gl (2.8) gibt, muss die2π-periodische Fortsetzung von x mit xF übereinstimmen. Daher gilt für t ∈ [−π, π]
π
2ω20
+4
π
∞
k=0
1
(2k + 1)2·cos ((2k + 1) t)
(2k + 1)2 − ω20
=ω0 |t| − sin (ω0 |t|)
ω30
+1− cos (ω0π)
ω30 sin (ω0π)
cos (ω0t) .
2.1.8 *Der mechanische Fourieranalysator 2
Sei b : R → R (stückweise) stetig mit b (t) = 0 für alle t /∈ [0, T ] . Sei für ω ≥ 0die Funktion xω : R → R zwei mal (stückweise) stetig differenzierbar. In allenStetigkeitspunkten von b gelte x′′ω + ω2xω = b. Weiter gelte die Anfangsvorgabexω (0) = x′ω (0) = 0. Dann folgt für alle t > T und ω > 0
xω (t) = ℜie−iωt
ω
T
0
eiωξb (ξ) dξ
.
Am Intervall [0, T ] hat b die Fourierreihe
b (t) ≃
k∈Zck [b] e
i 2πT
kt mit ck [b] =1
T
T
0
e−i 2πT
ktb (t) dt = c−k [b]. (2.5)

KAPITEL 2. FOURIERANALYSIS 154
Außerhalb von [0, T ] gibt Gleichung (2.5) die Fourierreihe jener T -periodischen Funk-tion, die auf [0, T ] mit b übereinstimmt und natürlich keinesfalls der Funktion b, dieja gar nicht periodisch ist.
Daher gilt für einen Oszillator mit der an die Beobachtungsdauer T angepasstenEigenfrequenz ω = ωk := 2π
Tk mit k ∈ N für alle t > T
xωk (t) = ℜ.ie−i 2π
Tkt
2πTk
T
0
ei2πT
kξb (ξ) dξ
7= ℜ
.ie−i 2π
Tkt
2πTk
Tc−k [b]
7
=T 2
2πkℜ0ie−i 2π
Tktck [b]
1.
Für die Amplitude8 Ak von xωk im Bereich t > T gilt Ak = T 2
2πk|ck [b]| .
Sei etwa speziell T = 2π und
b (t) =
1 für 0 < t < π−1 für π < t < 2π0 sonst
.
Dann gilt ck [b] = 0 für k ∈ 2Z und ck [b] =−2iπk
für k ∈ 2Z+ 1. Daraus folgt für allet > 2π mit der Abkürzung xk = xωk
xk (t) =
0 für k ∈ 2N− 4
k2cos (kt) für k ∈ 2N0 + 1
.
So schwingt also der Oszillator mit der Eigenfrequenz k nach der Einwirkung von b.Unter http://physik.uibk.ac.at/muw/physlets/fourier/Rechteck.html findet sich
eine mechanische Simulation eines Fourieranalysators, die Emmerich Kneringer miteinem Baukasten für „virtuelle Experimente“ programmiert hat. Dort wird die Inho-mogenität der Schwingungsgleichung eines der Resonatoren indirekt dadurch festge-legt, dass für seine Gleichgewichtslage eine zeitabhängige Funktion vorgegeben wird.Dies geschieht im Detail so: Der Oszillator wird durch einen Körper der Masse m,der auf einer reibungsfreien Schiene gleitet und durch eine Feder an einen festenPunkt gebunden ist, realisiert. Hat die Feder die Federkonstante k > 0, dann erfülltdie Auslenkung des Körpers aus seiner Gleichgewichtslage die Bewegungsgleichungmx′′ (t) = −kx (t) . Hat das kontrolliert geregelte Ende der Feder zur Zeit t den Ortξ (t) , dann gilt die Bewegungsgleichung mx′′ (t) = −k [x (t)− ξ (t)] . Es gilt dahermit ω2 = k/m
x′′ + ω2x = ω2ξ.
Hängt also der Oszillator mit der Eigenfrequenz ω an einem manipulierten Null-punkt mit der Auslenkung ξ (t) zur Zeit t, dann gilt b = ω2ξ. Es sei ξ (t) = 0 für allet /∈ [0, T ] . Der Oszillator schwingt daher zur Zeit t > T mit der Amplitude
A =T 2ω2
2πk|c−k [ξ]| .
8Durch Messung von Ak lässt sich somit der Betrag des Fourierkoeffizienten ck [b] ermitteln.Der Koeffizient c0 [b] ergibt sich analog aus dem (konstanten) Wert von x′0 (t) im Bereich t > T.

KAPITEL 2. FOURIERANALYSIS 155
Speziell für ω = ωk := 2πTk mit k ∈ Z ergibt sich für die Amplitude Ak von xk
Ak =T 2
2πk|c−k [b]| =
T 2
2πk
,,c−k
ω2
kξ,, = 2πk |c−k [ξ]| .
Für die Nullpunktsverschiebung
ξ (t) =
L für 0 < t < π−L für π < t < 2π0 sonst
mit L > 0 folgt daher
Ak = 2πk |c−k [ξ]| = 2πkL
,,,,
0 für k ∈ 2Z2iπk
für k ∈ 2Z+ 1
,,,, =
0 für k ∈ 2Z4L für k ∈ 2Z+ 1
.
Jeder Resonator, dessen Eigenfrequenz ein ungerades Vielfaches der Grundfrequenz2π/T ist, schwingt also mit derselben Amplitude 4L nach.
2.1.9 Allgemeine Eigenschaften der Fourierkoeffizienten
Aus bereits berechneten Fourierkoeffizientenen können gelegentlich weitere mit fol-genden Formeln ohne großen Aufwand bezogen werden. Auch zum Aufspüren vonRechenfehlern eignen sich diese Faulenzerregeln gut.
Lemma 73 Sei ck(f) := ek, f der k-te Fourierkoeffizient von f. Seien f, g ∈ Vund λ ∈ C. Dann gilt:
1. ck(f + g) = ck(f) + ck(g), ck(λf) = λck(f).
2. f(R) ⊂ R ⇒ c−k(f) = ck(f) ⇒ ak(f) = 2ℜck(f), bk(f) = −2ℑck(f) fürk ≥ 0. Sinus/Cosinusreihe hat reelle Koeffizienten.
3. ck(Tξf) = exp(−ikξ)ck(f) mit Tξf (x) = f(x− ξ) (Translation um ξ ∈ R).
4. f gerade ⇒ c−k(f) = ck(f) für alle k ∈ Z ⇒ f(x) ≃ c0 +∞
k=1 2ck cos(kx).
5. f ungerade ⇒ c−k(f) = −ck(f) für alle k ∈ Z ⇒ f(x) ≃∞k=1 2ick sin(kx).
6. f ∈ C1 ⇒ ck (f′) = ikck (f) für alle k ∈ Z ⇒ ak (f
′) = kbk (f) , bk (f′) =
−kak (f′) für k ∈ N und a0 (f
′) = 0.
Beweis. Einfach nachrechnen.Probieren wir diese Regeln am Beispiel der Rechteckschwingung f aus. Die Fou-
rierkoeffizienten
ck =
0 für k ∈ 2Z2/(iπk) für k ∈ 2Z+ 1
erfüllen die aus der Realität von f folgende Bedingung c−k = ck offenbar. Weiter istf ungerade. Tatsächlich ist auch die Spektralfunktion k → ck ungerade. Vielleicht

KAPITEL 2. FOURIERANALYSIS 156
können wir auch noch das Faktum c2k = 0 als Folge einer Symmetrie verstehen?Das geht so: Das Rechtstranslat Tπ/2f der Funktion f um den Betrag π/2 ist einegerade Funktion. Daher muss die Spektralfunktion von Tπ/2f ebenfalls gerade sein.Nach der 3. Faulenzerregel ist diese Spektralfunktion durch
k → exp (−ikπ/2) ck
gegeben. Also folgt exp (ikπ/2) c−k = exp (−ikπ/2) ck. Dies ist äquivalent zu c−k =exp (−ikπ) ck = (−1)k ck. Für k ∈ 2Z folgt somit −ck = c−k = ck und daher ck = 0.
Die folgende Abschätzung für die Fourierkoeffizienten ck einer Funktion f kanneinerseits zum Nachweis der punktweisen absoluten Konvergenz von Fourierreihenbenutzt werden, kann aber dann auch die Abschätzung des Fehlers bei Approximati-on von f(x) durch das n-te Fourierpolynom Pn [f ] ermöglichen, wenn die punktweiseKonvergenz limn→∞ Pn [f ] (x) = f(x) sichergestellt ist.
Satz 74 Sei f ∈ V stetig und n ∈ N. Die Funktion f sei n− 1 mal stetig differen-zierbar und die Funktion f (n−1) sei stückweise stetig differenzierbar. Das heißt, dassPunkte 0 =: x0 ≤ x1 < . . . < xM−1 ≤ xM := 2π existieren, sodass die Einschränkungvon f (n−1) auf das Intervall (xi, xi+1) für alle i ∈ 0, 1, . . .M − 1 differenzierbar ist,und dass die einseitigen Limiten limε↓0 f
(n)(xi±ε) für alle i ∈ 1, . . .M − 1 existie-ren. Dann gilt |ck| ≤ C/ |k|n mit C := 1
2π
M−1i=0
xi+1xi
,,f (n)(x),, dx für alle k ∈ Z 0.
Beweis. Mit partieller Integration folgt
2πck =
2π
0
f(x) · e−ikxdx =i
k
2π
0
f(x) · d
dx
e−ikx
dx
=i
k
f(x) · e−ikx |2π0 −
2π
0
f (1)(x) · e−ikxdx
= − i
k
2π
0
f (1)(x) · e−ikxdx = . . . =
− i
k
n−1 2π
0
f (n−1)(x) · e−ikxdx
=
− i
k
n−1 2π
0
f (n−1)(x) · i
k
d
dx
e−ikx
dx
=
− i
k
n
·M−1
i=0
xi+1
xi
f (n)(x) · e−ikxdx− f (n−1)(x) · e−ikx |xi+1xi
=
− i
k
n
·M−1
i=0
xi+1
xi
f (n)(x) · e−ikxdx
.
Also gilt
ck =1
2π
− i
k
n
·M−1
i=0
xi+1
xi
f (n)(x) · e−ikxdx
.
(Für die n-te partielle Integration wurde hier das Intervall [0, 2π] in die von den Aus-nahmepunkten x1, . . . xM−1 vorgegebenen Teilintervalle zerlegt. Die Funktion f (n−1)
ist in allen Punkten von [0, 2π] außer den Punkten x1, . . . xM−1 differenzierbar. Es

KAPITEL 2. FOURIERANALYSIS 157
wird weiter x0 = 0 und xM = 2π gesetzt. Der Beitrag der Randterme von denIntegralen über die einzelnen Teilintervalle verschwindet im allgemeinen nicht; ihreSumme jedoch schon.) Unter Verwendung der Dreiecksungleichung folgt schließlichdie Behauptung.
2.1.10 Konvergenz der Fourierreihe
Es soll nun beschrieben werden, in welchem Sinn die Fourierreihe einer Funktionf ∈ V die Funktion f selbst eindeutig festlegt. Unterscheiden sich im Intervall[0, 2π] zwei Funktionen f, g ∈ V nur in endlich vielen Punkten, dann sind die Fou-rierkoeffizienten von f und g gleich. Die Funktionen f und g haben dann natürlichauch die selbe Fourierreihe ohne selbst gleich zu sein. Nun könnte man vermuten,dass wenigstens stetige Funktionen f ∈ V durch ihre Fourierkoeffizienten eindeutigfestgelegt sind. Das ist tatsächlich so, wenngleich auch die Fouriereihe einer stetigenFunktion f ∈ V nicht notwendig an jeder Stelle x gegen f(x) konvergiert. (Gegen-beispiel von Du Bois-Reymond, Sätze von Carleson, Kahane und Katznelson, sieheKapitel 18, 19 in [13])
Im Allgemeinen konvergiert die Fourierreihe von f ∈ V nur im quadratischenMittel gegen f. Eine Rekonstruktion von f aus seiner Fourierreihe ist dann „fastüberall” möglich. „Fast überall” bedeutet: überall bis auf eine Ausnahmemenge vom„Volumen” 0. Z.B. hat eine abzählbare Teilmenge von R das Volumen 0.
Satz 75 Sei f ∈ V und Pnf =n
k=−n ckek mit ck = ek, f . Sei9 ak = ck + c−k fürk ∈ N0 und bk = i (ck − c−k) für k ∈ N. Dann gilt
1. f2 = Pnf2 + f − Pnf2 ≥ Pnf2 und
2. Pnf2 =n
k=−n |ck|2 = 12
|a0|22
+n
k=1
|ak|2 + |bk|2
.
Beweis. Wegen Pnf, f − Pnf = 0 folgt die erste Behauptung aus
f2 = f − Pnf + Pnf2 = Pnf2 + f − Pnf2 + 2ℜPnf, f − Pnf .
Die zweite Behauptung folgt aus der Tatsache, dass (ek)nk=−n eine ONB von Vn ist:
Pnf2 = Pnf, Pnf =n
i,j=−n
cick ei, ek =n
k=−n
|ck|2 .
Mit |a0|2 = 4 |c0|2 und |ak|2 + |bk|2 = |ck + c−k|2 + |ck − c−k|2 = 2|ck|2 + |c−k|2
folgt die letzte Gleichheit von Teil 2).
Korollar 76 Sei f ∈ V. Dann konvergiertn
k=−n |ck|2 und es gilt die Bessel’scheUngleichung f2 ≥ limn→∞
nk=−n |ck|
2 . Weiter gilt limn→∞ Pnf − f = 0 genaudann, wenn f2 = limn→∞
nk=−n |ck|2 . (Parseval’sche Gleichung oder Vollstän-
digkeitsrelation.)
9ak und bk sind also die Koeffizienten der Sinus-Cosinus Darstellung von Pnf.

KAPITEL 2. FOURIERANALYSIS 158
Beweis. Die Konvergenz der monoton wachsenden Folgen
k=−n |ck|2folgt
aus ihrer oberen Schranke f2 . Wegen f2 = Pnf2 + f − Pnf2 gilt f2 =lim Pnf2 genau dann, wenn lim f − Pnf2 = 0.
Da für f ∈ V die Reihe
k∈N|ak|2 + |bk|2
konvergiert, gilt limn→∞ ak = 0 =
limn→∞ bk. Daraus folgt das
Lemma 77 (Riemann) Für f ∈ V gilt
limk→∞
2π
0
f(x) sin(kx)dx = limk→∞
2π
0
f(x) cos(kx)dx = 0.
Redeweise: Eine Funktionenfolge (fn)n∈N in V mit limn→∞ fn − f = 0 kon-vergiert gegen f ∈ V im quadratischen Mittel. Der Nachweis der Parselval’schenGleichung ist für manche Funktionen f, wie z.B. die Rechteckschwingung, möglich.Damit ist dann in diesen Fällen die Konvergenz der Fourierreihe von f im quadra-tischen Mittel gegen f sichergestellt. Allgemeinere Auskunft gibt der folgende Satz.(Siehe [5], p. 196)
Satz 78 Für alle f ∈ V gilt: limn→∞ Pnf − f = 0.
Die Fourierreihe jeder Funktion f in V konvergiert also im quadratischen Mittelgegen f . Für beschränkte Funktionen mit höchstens endlich vielen Unstetigkeitsstel-len in [0, 2π] ist der Beweis auf p. 287 von [10] geführt.
Es folgen 3 Sätze über die Konvergenz von Fourierreihen unter etwas stärkerenVoraussetzungen als nur f ∈ V . Alles ohne Beweise.
Satz 79 Sei f : R → C eine stetige 2π-periodische Funktion. (Also gilt f ∈ V ).Weiter sei f so, dass Zahlen 0 = x0 < x1 < . . . < xn = 2π existieren, sodass dieEinschränkungen von f auf die Intervalle [xi−1, xi] für alle i = 1, . . . , n stetig diffbarsind 10. Dann konvergiert die Fourierreihe von f punktweise gleichmäßig gegen f .
Beweis. Siehe p. 199 von [5].
Fouriereihe von f : R→ C mit f (x) = |sin(x)| .Da f reell und gerade ist, gilt c−k = ck ∈ R. Für den Fourierkoeffizienten ck von fals 2π-periodische Funktion ergibt sich, da f gerade ist,
2πck =
2π
0
e−ikx |sin x| dx =
π
−π
[cos (kx)− i sin (kx)] |sinx| dx
= 2
π
0
cos (kx) sin (x) dx = 2
π
0
[sin ((k + 1) x)− sin ((k − 1) x)] dx.
10Man sagt f ist stückweise stetig diffbar.

KAPITEL 2. FOURIERANALYSIS 159
Für k = 1 folgt daraus 2πc1 = 2 π
0sin (2x) dx = 0. Für k = ±1 folgt 2πck =
2
π
0
[sin ((k + 1) x)− sin ((k − 1) x)] dx = − cos ((k + 1) x)
k + 1
,,,,π
0
+cos ((k − 1) x)
k − 1
,,,,π
0
=1− cos ((k + 1) π)
k + 1+
cos ((k − 1) π)− 1
k − 1=
1− (−1)k+1
k + 1+
(−1)k−1 − 1
k − 1
=1 + (−1)k
* 1
k + 1− 1
k − 1
+= −21 + (−1)k
k2 − 1.
Somit gilt für alle k ∈ Z, dass11 c2k+1 = 0 und c2k = − 2π
14k2−1 . Daher hat f = |sin|
die gleichmäßig konvergente Fourierreihe
|sin (x)| =
k∈Zc2ke
i2kx = c0 +∞
k=1
c2ke2ikx + e−2ikx
=
2
π
21− 2
∞
k=1
cos (2kx)
4k2 − 1
3.
Abbildung 2.9 zeigt die Fourierpolynome P4 und P6 von |sin x| . (GleichgerichteteWechselspannung)
10.50-0.5-1
1
0.75
0.5
0.25
0
x/pix/pi
Abbildung 2.9: Die Fourierpolynome 4. (grün) und 6. Grades (rot) von |sinx|
Satz 80 Sei f : R → C eine beschränkte 2π-periodische Funktion mit höchstensendlich vielen Unstetigkeitsstellen im Intervall [0, 2π] (also gilt f ∈ V ). Es sei x ∈ Reine Stelle, für die ein C > 0 existiert, sodass für alle h ∈ R
|f(x+ h)− f(x)| ≤ C |h|
gilt. 12 Dann konvergiert die Fourierreihe von f an der Stelle x gegen f(x).
11Das Verschwinden der Fourierkoeffizienten mit ungeradem Index ist eine Folge der π-Periodizität von f. Das sieht man so. Da f und die um π nach rechts verschobene Funktion fmiteinander übereinstimmen gilt ck = eikπck = (−1)k ck. Für ungerades k gilt daher ck = −ck,also ck = 0.
12f ist bei x Lipschitzbeschränkt; f ist in x stetig.

KAPITEL 2. FOURIERANALYSIS 160
Der Beweis ist auf p. 284 von [10] gegeben. Beispiel: In den Stetigkeitsstellen derRechteckschwingung f konvergiert ihre Fourierreihe punktweise gegen f .
Satz 81 Sei f : R → C eine beschränkte 2π-periodische Funktion mit höchstensendlich vielen Unstetigkeitsstellen im Intervall [0, 2π] (also gilt f ∈ V ). Es sei x ∈ Reine Stelle, für die f±(x) = limh↓0 f(x±h) existieren und für die überdies ein C > 0existiert, sodass für alle h ∈ R>0
|f(x± h)− f±(x)| ≤ C · h.
Dann gilt
limn→∞
(Pnf) (x) =f+(x) + f−(x)
2.
Der Beweis ist auf p. 286 von [10] gegeben. Beispiel: In den Unstetigkeitsstellender Rechteckschwingung f konvergiert ihre Fourierreihe punktweise gegen 0.
Abschließend noch ein Satz des 19-jährigen Fejér, der zeigt, dass die Werte einerFunktion f ∈ V in ihren Stetigkeitspunkten durch die Fourierkoeffizienten ck von ffestgelegt sind. Fejérs Formel greift auch in Punkten, in denen die Fourierreihe nichtkonvergiert. Der Beweis ist in [13] ausgeführt.
Satz 82 (a) Sei f ∈ V stetig in x. Dann gilt
limn→∞
n
k=−n
*1− |k|
n+ 1
+ck exp (ikx) = f(x).
(b) Sei f ∈ V überall stetig. Dann konvergiert die Funktionenfolge
σn : R→ C, x →n
k=−n
*1− |k|
n+ 1
+ck exp (ikx)
gleichmäßig gegen f.
2.1.11 Fourierreihen einiger Standardfunktionen
Die folgenden Funktionen f : R→ C sind alle 2π-periodisch und über eine Perioderiemannintegrierbar. Ihre Fouriereihen konvergieren nach den im vorigen Abschnittangeführten Sätzen überall punktweise gegen die Funktion. Es gilt
1. Kippschwingung
f(x) = x für 0 < x < 2π und f (0) = π
F-Reihe: f (x) = π − 2∞
k=1sin(kx)
k

KAPITEL 2. FOURIERANALYSIS 161
2. Rechteckschwingung
f ∈ V ungerade mit f(0) = f(π) = 0 und f(x) = 1 für 0 < x < π.
F-Reihe: f(x) = 4π
∞k=0
12k+1
sin ((2k + 1) x) .
3. Sägezahn:
f(x) = |x| für −π < x ≤ π.
F-Reihe: f (x) = π2− 4
π
∞k=0
cos[(2k+1)x]
(2k+1)2
4. Gleichgerichteter Wechselstrom
f(x) =,,sin(x
2),,
F-Reihe: f (x) = 2π
1−∞
k=02 cos(kx)
(2k)2−1
2.2 Fouriertransformation auf L1 (R)
Jede Funktion f ∈ C1 ([a, b] : C) mit f (a) = f (b) ist also durch die Fourierreiheihrer (b− a)-periodischen Fortsetzung punktweise korrekt wiedergegeben. Für eineriemannintegrierbare Funktion f : [a, b] → C gibt die Fourierreihe zumindest eineDarstellung im quadratischen Mittel. Lässt sich die Darstellung von Funktionendurch ihre Fourierreihen auf nichtperiodische Funktionen mit Definitionsbereich Rausweiten? Es gelingt für eine große Menge an Funktionen, wenn die Summen durchIntegrale ersetzt werden.
2.2.1 Von der Fourierreihe zum Fourierintegral
Für welche nichtperiodischen Funktionen f : R→ C existiert eine stetige Funktionc : R→ C mit
∞
−∞|c (ω)| dω <∞ und f (t) =
∞
−∞c (ω) exp (iωt) dω
für alle t ∈ R? Eine heuristische Überlegung, welche Funktionen f eine solche Dar-stellung als sogenanntes Fourierintegral haben, ist die folgende.
Gegeben sei eine beschränkte Riemann-integrable Funktion fl : [0, l] → C. Ihrzugeordnet ist für L > l die L-periodische Funktion fL : R → C mit fL(t) = fl(t)für 0 ≤ t ≤ l und fL(t) = 0 für l < t < L. Für die Funktion f : R → C geltef (t) = fl(t) für 0 ≤ t ≤ l und f (t) = 0 sonst. Für die Fourierkoeffizienten ck (fL)
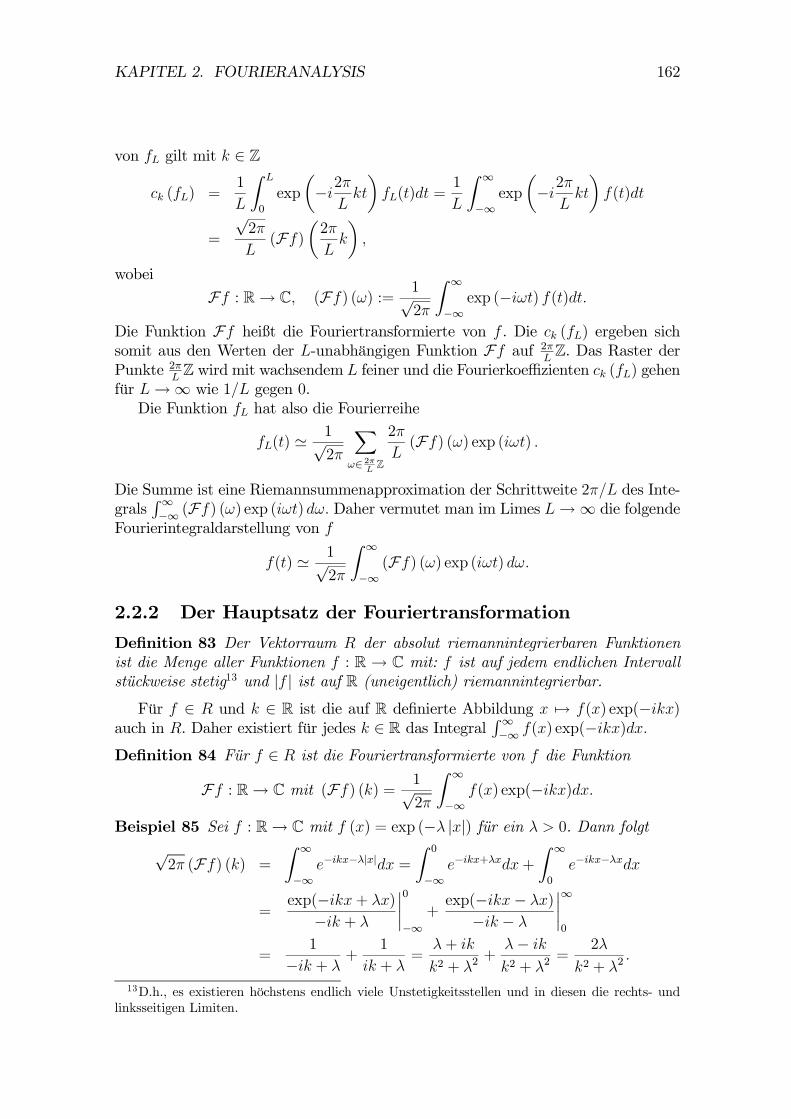
KAPITEL 2. FOURIERANALYSIS 162
von fL gilt mit k ∈ Z
ck (fL) =1
L
L
0
exp
−i
2π
Lkt
fL(t)dt =
1
L
∞
−∞exp
−i
2π
Lkt
f(t)dt
=
√2π
L(Ff)
2π
Lk
,
wobei
Ff : R→ C, (Ff) (ω) :=1√2π
∞
−∞exp (−iωt) f(t)dt.
Die Funktion Ff heißt die Fouriertransformierte von f . Die ck (fL) ergeben sichsomit aus den Werten der L-unabhängigen Funktion Ff auf 2π
LZ. Das Raster der
Punkte 2πLZ wird mit wachsendem L feiner und die Fourierkoeffizienten ck (fL) gehen
für L →∞ wie 1/L gegen 0.Die Funktion fL hat also die Fourierreihe
fL(t) ≃1√2π
ω∈ 2πLZ
2π
L(Ff) (ω) exp (iωt) .
Die Summe ist eine Riemannsummenapproximation der Schrittweite 2π/L des Inte-grals
∞−∞ (Ff) (ω) exp (iωt) dω. Daher vermutet man im Limes L →∞ die folgende
Fourierintegraldarstellung von f
f(t) ≃ 1√2π
∞
−∞(Ff) (ω) exp (iωt) dω.
2.2.2 Der Hauptsatz der Fouriertransformation
Definition 83 Der Vektorraum R der absolut riemannintegrierbaren Funktionenist die Menge aller Funktionen f : R → C mit: f ist auf jedem endlichen Intervallstückweise stetig13 und |f | ist auf R (uneigentlich) riemannintegrierbar.
Für f ∈ R und k ∈ R ist die auf R definierte Abbildung x → f(x) exp(−ikx)auch in R. Daher existiert für jedes k ∈ R das Integral
∞−∞ f(x) exp(−ikx)dx.
Definition 84 Für f ∈ R ist die Fouriertransformierte von f die Funktion
Ff : R→ C mit (Ff) (k) =1√2π
∞
−∞f(x) exp(−ikx)dx.
Beispiel 85 Sei f : R→ C mit f (x) = exp (−λ |x|) für ein λ > 0. Dann folgt
√2π (Ff) (k) =
∞
−∞e−ikx−λ|x|dx =
0
−∞e−ikx+λxdx+
∞
0
e−ikx−λxdx
=exp(−ikx+ λx)
−ik + λ
,,,,0
−∞+
exp(−ikx− λx)
−ik − λ
,,,,∞
0
=1
−ik + λ+
1
ik + λ=
λ+ ik
k2 + λ2 +λ− ik
k2 + λ2 =2λ
k2 + λ2 .
13D.h., es existieren höchstens endlich viele Unstetigkeitsstellen und in diesen die rechts- undlinksseitigen Limiten.
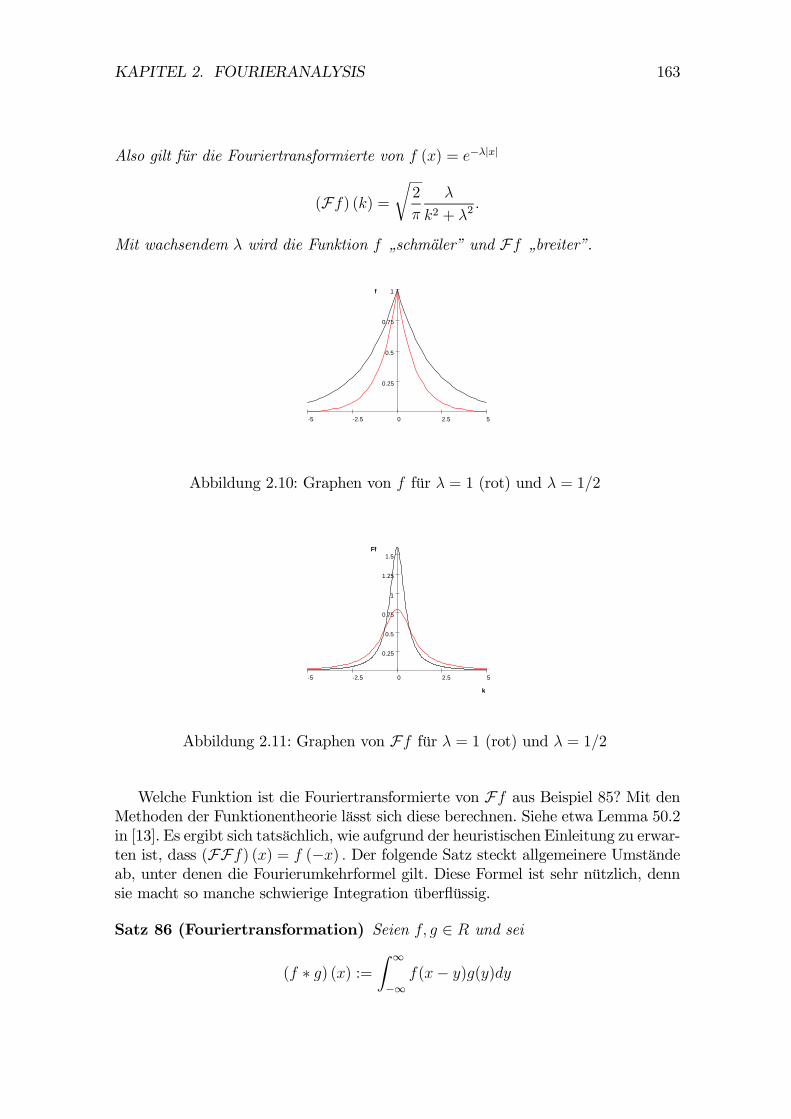
KAPITEL 2. FOURIERANALYSIS 163
Also gilt für die Fouriertransformierte von f (x) = e−λ|x|
(Ff) (k) =
/2
π
λ
k2 + λ2 .
Mit wachsendem λ wird die Funktion f „schmäler” und Ff „breiter”.
52.50-2.5-5
1
0.75
0.5
0.25
ff
Abbildung 2.10: Graphen von f für λ = 1 (rot) und λ = 1/2
52.50-2.5-5
1.5
1.25
1
0.75
0.5
0.25
k
Ff
k
Ff
Abbildung 2.11: Graphen von Ff für λ = 1 (rot) und λ = 1/2
Welche Funktion ist die Fouriertransformierte von Ff aus Beispiel 85? Mit denMethoden der Funktionentheorie lässt sich diese berechnen. Siehe etwa Lemma 50.2in [13]. Es ergibt sich tatsächlich, wie aufgrund der heuristischen Einleitung zu erwar-ten ist, dass (FFf) (x) = f (−x) . Der folgende Satz steckt allgemeinere Umständeab, unter denen die Fourierumkehrformel gilt. Diese Formel ist sehr nützlich, dennsie macht so manche schwierige Integration überflüssig.
Satz 86 (Fouriertransformation) Seien f, g ∈ R und sei
(f ∗ g) (x) :=
∞
−∞f(x− y)g(y)dy

KAPITEL 2. FOURIERANALYSIS 164
die Faltung 14 von f mit g. Dann folgt:1) Ff ist eine stetige und beschränkte Funktion mit der Schranke
|(Ff) (k)| ≤ 1√2π
∞
−∞|f(x)| dx.
2) Falls f ∗ g ∈ R, dann gilt F (f ∗ g) =√2π (Ff) · (Fg) (Faltungssatz).
3) Ist f stetig differenzierbar und Null außerhalb eines endlichen Intervalls, danngilt für alle k ∈ R
(F (f ′)) (k) = ik (Ff) (k).
4) Ist id · f : x → xf(x) in R, dann ist Ff stetig differenzierbar und es gilt
F (id · f) = i (Ff)′ .
5) Es gilt (Ff) · g ∈ R, f · Fg ∈ R und (Parseval) ∞
−∞(Ff) (k)g(k)dk =
∞
−∞f(x) (Fg) (x)dx.
6) Falls |f |2 ∈ R, dann gilt |Ff |2 ∈ R und (Plancherel) ∞
−∞|f (x)|2 dx =
∞
−∞|(Ff) (k)|2 dk.
7) Falls Ff ∈ R, dann existiert eine stetige Funktion frev ∈ R, die mit f fastüberall übereinstimmt. Für diese gilt Ff = Ffrev und limx→±∞ frev (x) = 0. Für allex ∈ R gilt die Umkehrformel
frev(x) =1√2π
∞
−∞(Ff) (k) exp(ikx)dk.
Ein Beweis dieser Aussagen ist in [7] gegeben. Wir machen sie zumindest plau-sibel.
Zu 1) Ist eine Folge eines allgemeinen Satzes über Parametrintegrale und derDreiecksungleichung für Integrale.
Zu 2): Durch Vertauschen der Integrationsreihenfolgen folgt
F (f ∗ g) (k) =
∞
−∞
e−ikx
√2π
* ∞
−∞f (x− y) g (y) dy
+dx
=
∞
−∞e−iky
* ∞
−∞
e−ik(x−y)
√2π
f (x− y) dx
+g (y) dy
=√2πFf (k)
∞
−∞
e−iky
√2π
g (y) dy =√2πFf (k)Fg (k)
14Das Integral existiert für alle x ∈ R außer in einer Menge vom Volumen 0. Wo es nicht existiert,kann der Faltung ein beliebiger Wert gegeben werden.

KAPITEL 2. FOURIERANALYSIS 165
Zu 3): Sei L > 0 so, dass f (x) = 0 für alle x mit |x| ≥ L. Dann folgt durchpartielle Integration
√2π (F (f ′)) (k) =
L
−L
e−ikxf ′ (x) dx
= −ike−ikxf (x),,L−L
+ ik
L
−L
e−ikxf (x) dx =√2πik (F (f)) (k).
Zu 4): Nach einem Satz über die Ableitung uneigentlicher Parameterintegralegilt
∞
−∞e−ikxxf (x) dx =
∞
−∞id
dke−ikxf (x) dx = i
d
dk
∞
−∞e−ikxf (x) dx.
Zu 5): Durch Vertauschen der Integrationsreihenfolgen folgt ∞
−∞(Ff) (k)g(k)dk =
∞
−∞
* ∞
−∞
e−ikx
√2π
f(x)dx
+g(k)dk
=
∞
−∞f (x)
* ∞
−∞
e−ikx
√2π
g(k)dk
+dx =
∞
−∞f(x) (Fg) (x)dx.
Einschub: Diracs δ-„Funktion“
Die Unterscheidung zwischen f und frev in der Umkehrformel wird in heuristischenTexten meist unterdrückt. Die Umkehrformel wird auch oft als Definition des Diracδ-s vorgeführt. Dabei geht es recht formal zu:
f(x) =
∞
−∞
eikx√2π
∞
−∞
e−ikx′
√2π
f(x′)dx′
dk
=
∞
−∞f(x′)
1
2π
∞
−∞eik(x−x′)dk
dx′ =
∞
−∞f(x′)δ(x− x′)dx′.
Also
δ(x) =1
2π
∞
−∞eikxdk.
Dieses parameterabhängige uneigentliche Riemannintegral existiert nicht, dennfür K > 0 gilt
δK(x) =1
2π
K
−K
eixkdk =
.12π
eixk
ix
,,,K
−K= sin(Kx)
πxfür x = 0
Kπ
für x = 0.
Die Funktion K → δK(x) hat somit keinen Grenzwert für K →∞. Abbildung 2.12zeigt δK für K = 5π (rot) und für K = 10π (schwarz).
Die Funktion δK ist stetig und nimmt in 0 ihr absolutes Maximum vom WertK/π an. Für L > 0 folgt mit der Substitution y = Kx und Y = KL
limK→∞
L
−L
δK(x)dx = limY→∞
Y
−Y
sin (y)
πydy = 1.
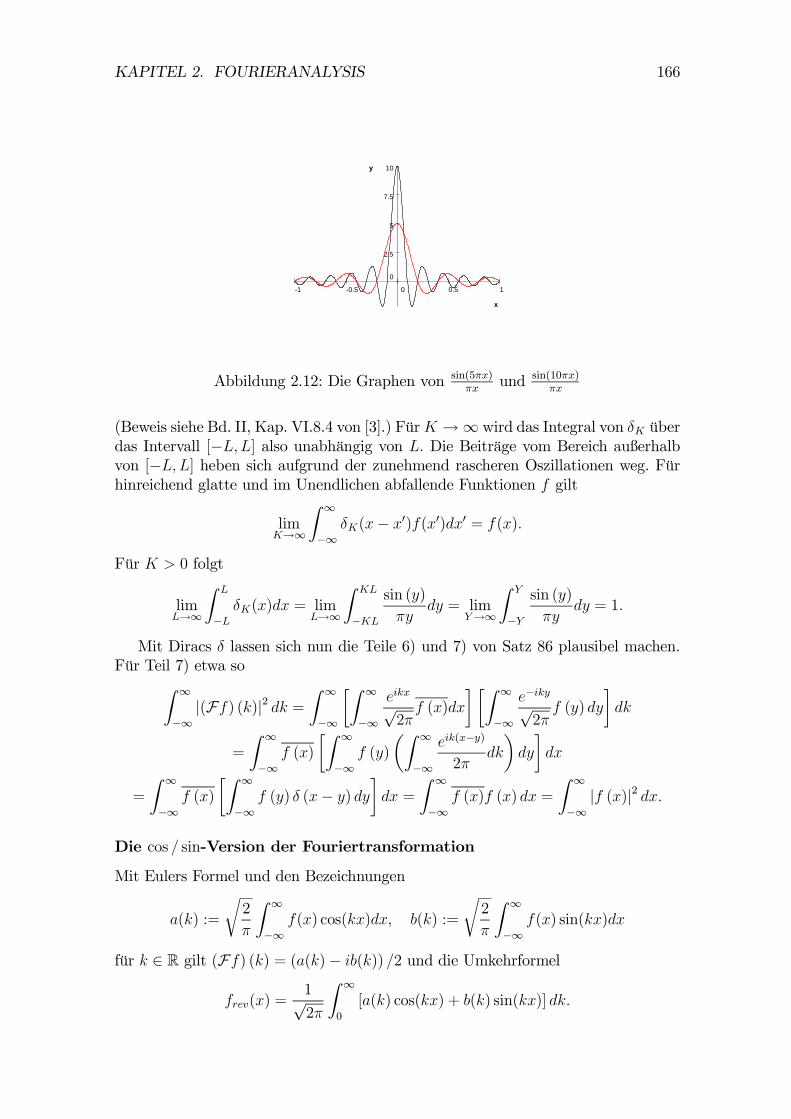
KAPITEL 2. FOURIERANALYSIS 166
10.50-0.5-1
10
7.5
5
2.5
0
x
y
x
y
Abbildung 2.12: Die Graphen von sin(5πx)πx
und sin(10πx)πx
(Beweis siehe Bd. II, Kap. VI.8.4 von [3].) FürK →∞ wird das Integral von δK überdas Intervall [−L,L] also unabhängig von L. Die Beiträge vom Bereich außerhalbvon [−L,L] heben sich aufgrund der zunehmend rascheren Oszillationen weg. Fürhinreichend glatte und im Unendlichen abfallende Funktionen f gilt
limK→∞
∞
−∞δK(x− x′)f(x′)dx′ = f(x).
Für K > 0 folgt
limL→∞
L
−L
δK(x)dx = limL→∞
KL
−KL
sin (y)
πydy = lim
Y→∞
Y
−Y
sin (y)
πydy = 1.
Mit Diracs δ lassen sich nun die Teile 6) und 7) von Satz 86 plausibel machen.Für Teil 7) etwa so
∞
−∞|(Ff) (k)|2 dk =
∞
−∞
* ∞
−∞
eikx√2π
f (x)dx
+ * ∞
−∞
e−iky
√2π
f (y) dy
+dk
=
∞
−∞f (x)
* ∞
−∞f (y)
∞
−∞
eik(x−y)
2πdk
dy
+dx
=
∞
−∞f (x)
* ∞
−∞f (y) δ (x− y) dy
+dx =
∞
−∞f (x)f (x) dx =
∞
−∞|f (x)|2 dx.
Die cos / sin-Version der Fouriertransformation
Mit Eulers Formel und den Bezeichnungen
a(k) :=
/2
π
∞
−∞f(x) cos(kx)dx, b(k) :=
/2
π
∞
−∞f(x) sin(kx)dx
für k ∈ R gilt (Ff) (k) = (a(k)− ib(k)) /2 und die Umkehrformel
frev(x) =1√2π
∞
0
[a(k) cos(kx) + b(k) sin(kx)] dk.

KAPITEL 2. FOURIERANALYSIS 167
Die Funktion a bzw. b heißt Cosinus- bzw. Sinus - Transformierte von f . Die Funktiona ist gerade und b ist ungerade. Daher sind a und b durch ihre Einschränkungen aufR≥0 eindeutig bestimmt. Allgemein gilt für k ∈ R
a(k) = (Ff) (k) + (Ff) (−k) , b(k) = i [(Ff) (k)− (Ff) (−k)] .
Im Fall einer reellwertigen Funktion f sind a und b ebenfalls reellwertig.
Faulenzerregeln
Wie bei den Fourierreihen gibt es einige einfach zu beweisende Faulenzerregeln,die gelegentlich den Rechenaufwand verringern helfen. Neue Fouriertranformiertewerden auf schon bekannte zurückgeführt. Der Beweis dieser Regeln ist einfach durchdirektes Nachrechnen zu führen.
Seien f, g ∈ R. Dann gilt:
1. Für λ ∈ C gilt F(f+λg) = Ff+λFg (Die „Fouriertransformation” ist linear.)
2. Ist f reellwertig, dann gilt (Ff) (−k) = (Ff) (k) für alle k ∈ R.
3. Ist f gerade, dann ist Ff gerade. Ist f ungerade, dann ist Ff ungerade.
4. Für ξ ∈ R ist Tξf : x → f(x− ξ) die Translation von f um ξ. Dann gilt
(F(Tξf)) (k) = exp(−ikξ) (Ff) (k) für alle k ∈ R.
5. Sei fλ(x) := f(λx) für alle x ∈ R mit festem λ ∈ R>0 (Streckung für λ < 1bzw. Stauchung für λ > 1). Dann gilt
F (fλ) = λ−1 (Ff)λ−1 : k →1
λ(Ff)
k
λ
für alle k ∈ R.
2.2.3 Beispiele zur Fouriertransformation
Beidseitig gedämpfter Sinus und Cosinus
Für λ > 0 und Ω ∈ R sind die Funktionen g, h : R→ R mit
g(t) = exp (−λ |t|) cos (Ωt) und h(t) = exp (−λ |t|) sin (Ωt)
in R. Es sollen ihre Fouriertransformierten aus jener von fΩ : R → R mit fΩ (t) =exp (−λ |t|) exp (iΩt) berechnet werden. Es gilt nach Beispiel 85
(FfΩ) (ω) =
∞
−∞
e−i(ω−Ω)t√2π
e−λ|t|dt =1√2π
2λ
λ2 + (ω − Ω)2.
Daraus folgt mit g = (fΩ + f−Ω) /2 und h = (fΩ − f−Ω) /2i
Fg (ω) =λ√2π
*1
λ2 + (ω − Ω)2+
1
λ2 + (ω +Ω)2
+
=2λ√2π
λ2 +Ω2 + ω2
λ4 + 2λ2 (ω2 +Ω2) + (ω2 − Ω2)2

KAPITEL 2. FOURIERANALYSIS 168
und
Fh (ω) =−iλ√2π
*1
λ2 + (ω − Ω)2− 1
λ2 + (ω +Ω)2
+
= − 4iλ√2π
ωΩ
λ4 + 2λ2 (ω2 +Ω2) + (ω2 − Ω2)2.
Man beachte: Die Funktionen g und h sind beide reellwertig. g ist gerade und h istungerade. Nach den Faulenzerregeln 2 und 3 ist die Funktion Fg somit zwangsläufigreellwertig und gerade, während F (ih) = iFh reellwertig und ungerade sein muss.Unser Ergebnis bestätigt diese allgemeine Einsicht.
Die Umkehrformel ergibt für g daher die Cosinuszerlegung
g (t) =1√2π
∞
−∞eiωtFg (ω) dω =
1√2π
∞
−∞cos (ωt)Fg (ω) dω
=1√2π
∞
0
a (ω) cos (ωt) dω
mit der Spektralfunktion
a (ω) = 2Fg (ω) =4λ√2π
λ2 +Ω2 + ω2
λ4 + 2λ2 (ω2 +Ω2) + (ω2 − Ω2)2.
Für h folgt analog die Sinuszerlegung
h(t) =1√2π
∞
0
b(ω) sin(ωt)dω.
mit der Spektralfunktion
b(ω) = 2iFh(ω) =8λ√2π
ωΩ
λ4 + 2λ2 (ω2 +Ω2) + (ω2 − Ω2)2.
Die Abbildungen 2.13 und 2.14 zeigen die Funktionen h und b auf R>0 für dieParameterwerte Ω = 10 und λ = 1. Das Ein- und Ausschalten der Sinusschwingungführt zu einer um die Trägerfrequenz Ω lokalisierten Spektralfunktion. Die unüber-sichtlichen, hektischen Oszillationen der Funktion h werden durch die Fouriertrans-formation zum Verschwinden gebracht: die Funktion b hat nur einen einzigen breitenBuckel bei ω ≈ Ω, was bei einer numerischenWeiterverarbeitung ein erheblicher Vor-teil sein kann. Fig 2.15 zeigt b für λ = 1 und Ω = 20. Die Spektralfunktionen a und bwerden mit wachsendem Ω bei gleichbleibendem λ zunehmend besser approximiertdurch
a (ω) = 2Fg (ω) ≈ λ
/2
π
1
λ2 + (ω − Ω)2,
b(ω) = 2iFh(ω) ≈ λ
/2
π
1
λ2 + (ω − Ω)2.
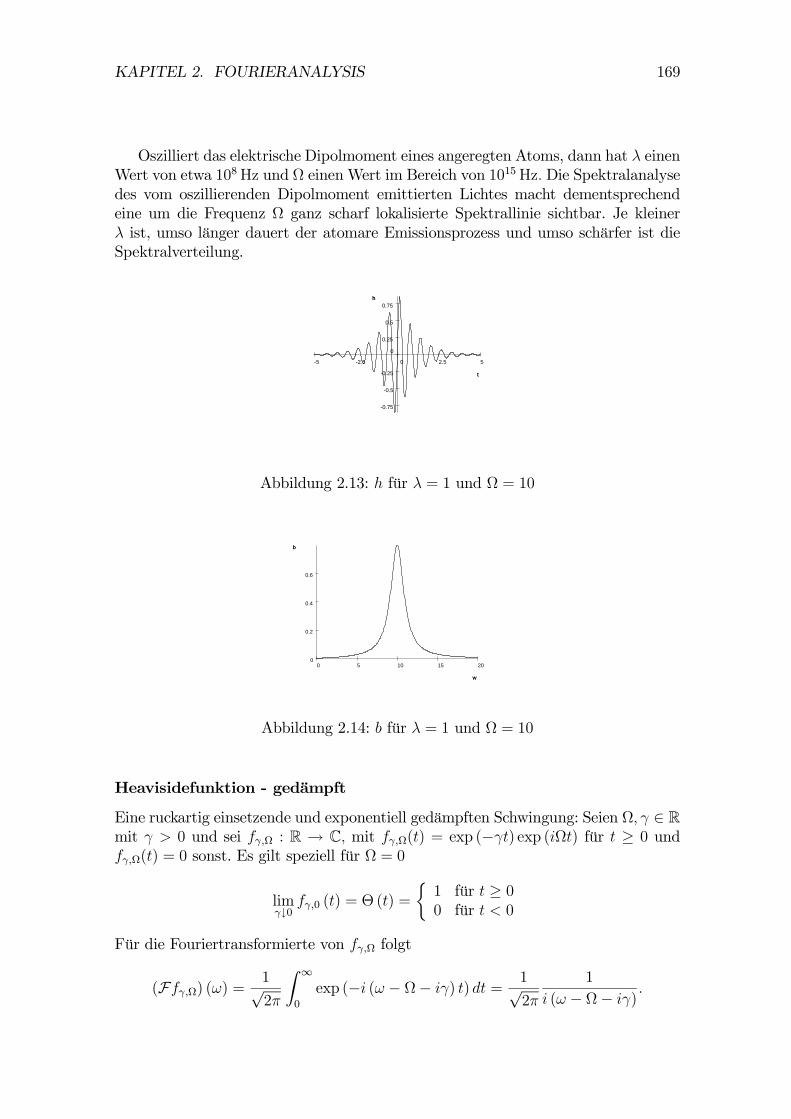
KAPITEL 2. FOURIERANALYSIS 169
Oszilliert das elektrische Dipolmoment eines angeregten Atoms, dann hat λ einenWert von etwa 108Hz und Ω einen Wert im Bereich von 1015Hz. Die Spektralanalysedes vom oszillierenden Dipolmoment emittierten Lichtes macht dementsprechendeine um die Frequenz Ω ganz scharf lokalisierte Spektrallinie sichtbar. Je kleinerλ ist, umso länger dauert der atomare Emissionsprozess und umso schärfer ist dieSpektralverteilung.
52.50-2.5-5
0.75
0.5
0.25
0
-0.25
-0.5
-0.75
t
h
t
h
Abbildung 2.13: h für λ = 1 und Ω = 10
20151050
0.6
0.4
0.2
0
w
b
w
b
Abbildung 2.14: b für λ = 1 und Ω = 10
Heavisidefunktion - gedämpft
Eine ruckartig einsetzende und exponentiell gedämpften Schwingung: Seien Ω, γ ∈ Rmit γ > 0 und sei fγ,Ω : R → C, mit fγ,Ω(t) = exp (−γt) exp (iΩt) für t ≥ 0 undfγ,Ω(t) = 0 sonst. Es gilt speziell für Ω = 0
limγ↓0
fγ,0 (t) = Θ (t) =
1 für t ≥ 00 für t < 0
Für die Fouriertransformierte von fγ,Ω folgt
(Ffγ,Ω) (ω) =1√2π
∞
0
exp (−i (ω − Ω− iγ) t) dt =1√2π
1
i (ω − Ω− iγ).

KAPITEL 2. FOURIERANALYSIS 170
403020100
0.6
0.4
0.2
0
x
y
x
y
Abbildung 2.15: b für λ = 1 und Ω = 20
Ffγ,Ω liegt nicht in R, denn für ω → ±∞ geht Ffγ,Ω (ω) nur wie 1/ |ω| gegen 0.Dass Ffγ,Ω gar nicht in R sein kann, folgt schon aus Teil 7 von Satz 86. Es gibtnämlich gar keine stetige Funktion, mit der fγ,Ω fast überall übereinstimmt. Daherist der Umkehrsatz nicht anwendbar. Und tatsächlich gilt die Umkehrformel15
Θ(t) exp (−γt) =1
2πi
∞
−∞
eiωt
ω − iγdω (2.6)
nur für alle t ∈ R0. Das wird im Kapitel über Funktionentheorie von Math. Meth.II mit dem Residuensatz gezeigt. Folglich gilt für alle t ∈ R 0
Θ (t) = limγ↓0
1
2πi
∞
−∞
eiωt
ω − iγdω =
1 für t > 00 für t < 0
.
Für t = 0 ist Gleichung (2.6) ohne eine weitere Präzisierung sinnlos, da für−a < 0 < b
b
−a
1
ω − iγdω =
b
−a
ω
ω2 + γ2dω +
b
−a
iγ
ω2 + γ2dω
=1
2lnω2 + γ2
,,,,b
−a
+ i
b/γ
−a/γ
1
x2 + 1dx = ln
b2 + γ2
a2 + γ2+ i
arctan
b
γ− arctan
a
γ
= lnb
a+ ln
899:1 +γb
2
1 +γa
2 + i
arctan
b
γ− arctan
a
γ
gilt. Der Limes a → ∞ oder b → ∞ von ln baexistiert nicht. Die beiden weiteren
Terme hingegen konvergieren gegen 0 und iπ unabhängig von der Reihenfolge derbeiden Grenzübergänge. Korreliert man a mit b durch b = λa mit λ > 0, dann folgtbei festem λ > 0
lima→∞
λa
−a
dω
ω − iγ= lnλ+ iπ.
15Es genügt eine Diskussion des Falles Ω = 0.

KAPITEL 2. FOURIERANALYSIS 171
Der Wert des formalen Integrals∞−∞
dωω−iγ
ist also erst nach Vorgabe einer weiterenZusatzvorschrift, z.B. λ = 1, festgelegt. Für λ = 1 ergibt sich damit
1
2πilima→∞
a
−a
dω
ω − iγ=
1
2.
Halbseitiger Sinus - gedämpft
Sei nun g(t) = exp (−γt) sin (Ωt) /Ω für t ≥ 0 und g(t) = 0 sonst. g ist in 0 stetig undg′ springt in 0 von 0 auf 1. Die Funktion g ist daher für γ < ω0 und Ω =
ω20 − γ2
die retardierte Fundamentallösung der (unterkritisch) gedämpften Schwingungsglei-chung y′′+2γy′+ω2
0y = 0. Welches Fourierspektrum hat diese von einem δ-Kraftstoßerzeugte Schwingung?
3020100
0.75
0.5
0.25
0
-0.25
-0.5
t
g
t
g
Abbildung 2.16: g für γ = 1/10 und Ω = 1
Es gilt g = (fγ,Ω − fγ,−Ω) /2iΩ und daher√2π (Fg) (ω) =
1
2iΩ
*1
i (ω − Ω− iγ)− 1
i (ω +Ω− iγ)
+=
1
2Ω
1
ω +Ω− iγ− 1
ω − Ω− iγ
.
Auf gemeinsamen Nenner gebracht ergibt sich
√2π (Fg) (ω) =
1
Ω2 − ω2 + γ2 + 2iγω=
Ω2 − ω2 + γ2 − 2iγω
(Ω2 − ω2 + γ2)2 + (2γω)2.
Daher gilt Fg ∈ R und der Fourierumkehrsatz sagt, da g stetig ist, mit ω± = ±Ω+iγfür alle t ∈ R
Θ(t)exp (−γt) sin (Ωt)
Ω=
∞
−∞
−eiωt
2π (ω − ω+) (ω − ω−)dω.
Diese (punktweise) Fourierdarstellung der retardierten Fundamentallösung g werdenwir im Kapitel über Funktionentheorie mithilfe des Residuensatzes verifizieren.
Die reellen Sinus/Cosinus Transformierten a und b von g sind an (Fg) (ω) =(a(ω)− ib(ω)) /2 abzulesen. Es gilt
a(ω) =
/2
π
Ω2 − ω2 + γ2
(Ω2 − ω2 + γ2)2 + (2γω)2, b(ω) =
/2
π
2γω
(Ω2 − ω2 + γ2)2 + (2γω)2.

KAPITEL 2. FOURIERANALYSIS 172
Figur 2.17 zeigt diese beiden Spektralamplituden von f für Ω = 10 und γ = 1/10.Für Ω ≫ γ sind die Spektralamplituden nur in der Nähe der Trägerfrequenz Ωdeutlich von 0 verschieden.
1512.5107.55
0.375
0.25
0.125
0
-0.125
Abbildung 2.17: Spektralamplituden a (grün) und b (rot) für Ω = 10 und γ = 1/10.
Eine unbeschränkte Funktion
Sei λ > 0 und f : R→ R, mit f (x) = e−λx/√x für x > 0 und f (x) = 0 sonst. Dann
folgt mit u =√x und dem Gaußschen Integral aus Kap I
Ff (k) =
∞
0
e−ikx
√2π
e−λx
√x
dx =
∞
0
1√2π
e−(λ+ik)u2
u2udu =
/2
π
∞
0
e−(λ+ik)x2dx
=1√2π
∞
−∞e−(λ+ik)x2dx =
1√2π
/π
λ+ ik=
1√2
e−i2arctan k
λ
4
λ2 + k2.
Ff liegt nicht in R, denn für k → ±∞ geht Ff (k) nur wie |k|−1/2 gegen 0. DassFf gar nicht in R sein kann, folgt schon aus Teil 7 von Satz 86. Es gibt nämlichgar keine stetige Funktion, mit der f fast überall übereinstimmt. Wegen |f |2 /∈ Rist Plancherels Formel nicht anwendbar.
Sei nun g : R→ R, mit g (x) = e−λ|x|/|x| für alle x ∈ R 0. Der Wert, den g
bei 0 annimmt, ist für die Fouriertransformierte von g belanglos. Es gilt
Fg (k) =
∞
−∞
e−ikx
√2π
e−λ|x||x|
dx =
0
−∞
eik(−x)
√2π
e−λ(−x)
(−x)
dx+
∞
0
e−ikx
√2π
e−λx
√x
dx
=
∞
0
eikx√2π
e−λx
√x
dx+
∞
0
e−ikx
√2π
e−λx
√x
dx = Ff (−k) + Ff (k)
=
√2
4
λ2 + k2
ei2arctan k
λ + e−i2arctan k
λ
2.
Somit gilt
Fg (k) =
√2
4
λ2 + k2cos
1
2arctan
k
λ
.
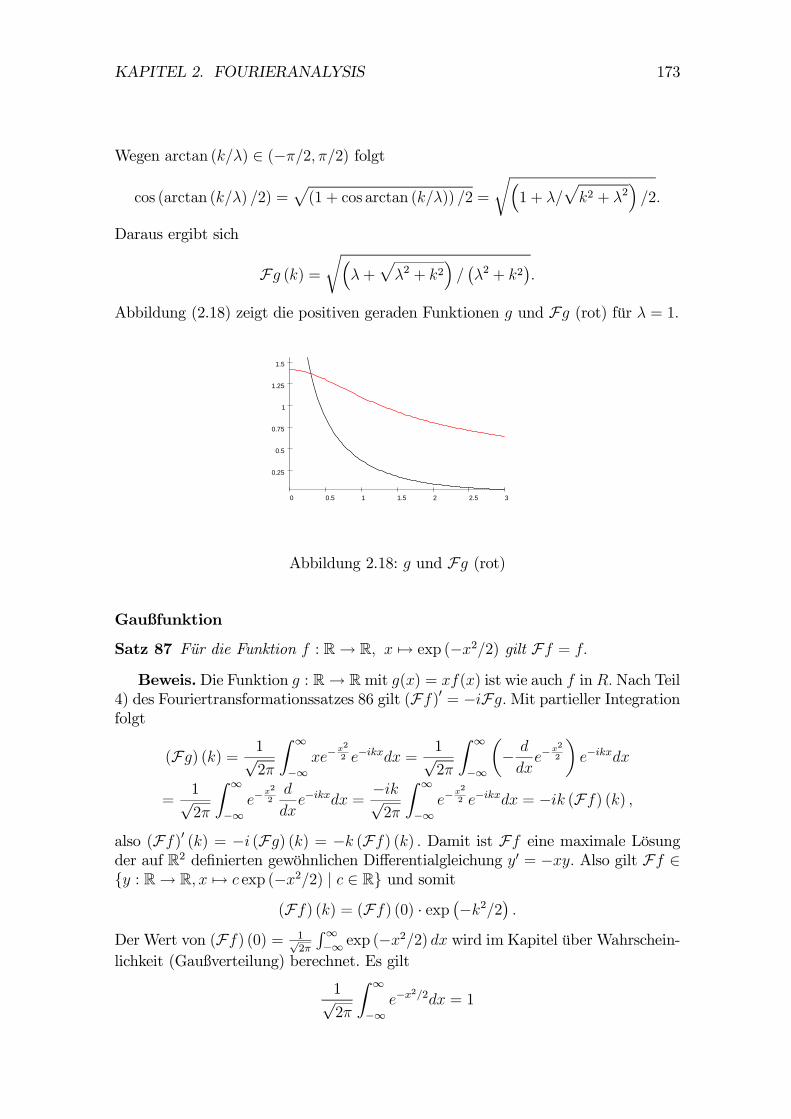
KAPITEL 2. FOURIERANALYSIS 173
Wegen arctan (k/λ) ∈ (−π/2, π/2) folgt
cos (arctan (k/λ) /2) =
(1 + cos arctan (k/λ)) /2 =
/1 + λ/
k2 + λ2
/2.
Daraus ergibt sich
Fg (k) =
/λ+
λ2 + k2
/λ2 + k2
.
Abbildung (2.18) zeigt die positiven geraden Funktionen g und Fg (rot) für λ = 1.
32.521.510.50
1.5
1.25
1
0.75
0.5
0.25
Abbildung 2.18: g und Fg (rot)
Gaußfunktion
Satz 87 Für die Funktion f : R→ R, x → exp (−x2/2) gilt Ff = f.
Beweis. Die Funktion g : R→ Rmit g(x) = xf(x) ist wie auch f in R. Nach Teil4) des Fouriertransformationssatzes 86 gilt (Ff)′ = −iFg. Mit partieller Integrationfolgt
(Fg) (k) =1√2π
∞
−∞xe−
x2
2 e−ikxdx =1√2π
∞
−∞
− d
dxe−
x2
2
e−ikxdx
=1√2π
∞
−∞e−
x2
2d
dxe−ikxdx =
−ik√2π
∞
−∞e−
x2
2 e−ikxdx = −ik (Ff) (k) ,
also (Ff)′ (k) = −i (Fg) (k) = −k (Ff) (k) . Damit ist Ff eine maximale Lösungder auf R2 definierten gewöhnlichen Differentialgleichung y′ = −xy. Also gilt Ff ∈y : R→ R, x → c exp (−x2/2) | c ∈ R und somit
(Ff) (k) = (Ff) (0) · exp−k2/2
.
Der Wert von (Ff) (0) = 1√2π
∞−∞ exp (−x2/2) dx wird im Kapitel über Wahrschein-
lichkeit (Gaußverteilung) berechnet. Es gilt
1√2π
∞
−∞e−x2/2dx = 1

KAPITEL 2. FOURIERANALYSIS 174
und daher (Ff) (k) = e−k2/2 = f (k) für alle k ∈ R.Anmerkung: Ein Beweis für Ff = f mit den Mitteln der Funktionentheorie ist
im Beweis von Lemma 50.2 von [13] angeführt.Übertragung auf g(x) := exp (−x2/ (2a2)) = f (x/a) für a > 0 : Mit Regel 5 folgt
(Fg) (k) = ae−a2k2/2.
Man beachte wieder die Reziprozität der Breiten von g und Fg.Übertragung auf h(x) := exp
− (x− ξ)2 / (2a2)
= g(x − ξ) für ξ ∈ R : Mit
Regel 4 folgt(Fh) (k) = ae−ikξe−a2k2/2.
Rechtecksfunktion
Sei h : R→ R mit h(x) = 1 falls |x| < L und h(x) = 0 sonst. Dann gilt für k = 0
(Fh) (k) :=
∞
−∞
e−ikx
√2π
h(x)dx =
L
−L
e−ikx
√2π
dx =e−ikL − eikL
−ik√2π
= L
/2
π
sin(kL)
kL.
Weiter gilt (Fh) (0) = L
2/π. Die Funktion Fh ist also tatsächlich stetig, liegt
aber nicht in R, denn R
−R|(Fh) (k)| dk wächst für R → ∞ unbeschränkt. (Siehe
etwa Bsp. 46.4 von [13]) Dass Fh nicht in R sein kann, folgt auch schon aus Teil7 von Satz 86. Es gibt nämlich gar keine stetige Funktion, mit der h fast überallübereinstimmt.
1050-5-10
1
0.75
0.5
0.25
0
kk
Abbildung 2.19: Graph von (sin(k)/k)2
Da aber h ∈ R und |h|2 ∈ R, gilt nach Teil 6) des Hauptsatzes ∞
−∞|h (x)|2 dx =
∞
−∞|Fh (k)|2 dk.
Daraus ergibt sich mit der Substitution ξ = kL
2L =
L
−L
dx =
∞
−∞|h (x)|2 dx =
∞
−∞|(Fh) (k)|2 dk =
2L
π
∞
−∞
sin(ξ)
ξ
2
dξ.

KAPITEL 2. FOURIERANALYSIS 175
Somit gilt ∞
−∞
sin(ξ)
ξ
2
dξ = π.
Man beachte auch, dass für alle L > 0 ∞
−∞
L
π
sin (kL)
kL
2
dk = 1
gilt. Die Fläche unter dem Graphen der Funktion gL (k) = Lπ
sin(kL)
kL
2≥ 0 hat
unabhängig von L den Wert 1, konzentriert sich aber mit wachsendem L zunehmendbei k = 0.
2.2.4 *Frequenzmessung an einem harmonischen Signal
Ein Fourieranalysator wird über eine endliche Zeitspanne hinweg an ein harmo-nisches Signal, an die Funktion f (t) = cos (Ωt− δ) , gekoppelt. Welches Fourier-spektrum sieht der Analysator und wie kann die Signalfrequenz Ω am Spektrumabgelesen werden? Wie ist der Phasenparameter δ zu bestimmen?
Sei Ω > 0 und δ ∈ R. Es gelte f (t) = cos (Ωt− δ) für alle t ∈−T
2, T2
und
f (t) = 0 sonst. Dann folgt für die Fouriertransformierte des abgehackten Signals
Ff (ω) =1√2π
T/2
−T/2
e−iωt eiΩt−iδ + e−iΩt+iδ
2dt = e−iδg (ω − Ω) + eiδg (ω +Ω)
mit
g (ω) =1
2√2π
T/2
−T/2
e−iωtdt.
Es gilt somit für ω = 0
g (ω) =1
2√2π
e−iωT2 − ei
ωT2
−iω=
1√2π
sinωT2
ω=
T
2√2π
sinωT2
ωT2
und g (0) = T2√2π
=
π2
1ω0
mit ω0 = 2π/T. Da g gerade ist, folgt Ff (−ω) = Ff (ω),so wie es für ein reelle Funktion f nach den Faulenzerregeln auch sein muss. Folglichist auch die Funktion |Ff |2 gerade.
Die Funktion |g| nimmt nur bei 0 ihr Maximum an. Es hat denWert (π/ω0) /√2π.
Die Nullstellenmenge von g ist ω0 ·(Z 0) . Das Maximum von |g| liegt also zwischenden beiden benachbarten Nullstellen ω = ±ω0. Im Intervall (0, ω0) ist |g| streng mo-noton fallend. Zwischen den benachbarten positiven Nullstellen kω0 und (k + 1)ω0
von |g| hat |g| genau ein lokales Maximum (k ∈ N) . Dessen Wert ist kleiner als1/√2πkω0 = g (0) /πk.Zur qualitativen Diskussion der Funktion |Ff |2 formen wir um auf dimensions-
lose Variable. Es gilt
|Ff (ω)|2 =,,e−iδg (ω − Ω) + eiδg (ω +Ω)
,,2
= |g (ω − Ω)|2 + |g (ω +Ω)|2 + 2 cos (δ) g (ω − Ω) g (ω +Ω) .

KAPITEL 2. FOURIERANALYSIS 176
Mit der Abkürzung S (x) = sin (x) /x und den dimensionslosen Variablen x = ω/Ωund y = Ω/ω0 folgt somit
Py (x) : =2ω2
0
π|Ff (ω)|2
= S
πω − Ω
ω0
2
+ S
πω +Ω
ω0
2
+ 2 cos (δ)S
πω − Ω
ω0
S
πω +Ω
ω0
= S (πy (x− 1))2 + S (πy (x+ 1))2 + 2 cos (δ)S (πy (x− 1))S (πy (x+ 1)) .
Daher kann Py (x) eingegrenzt werden durch die Abschätzungen
[|S (πy (x− 1))| − |S (πy (x+ 1))|]2 ≤ Py (x) ≤ [|S (πy (x− 1))|+ |S (πy (x+ 1))|]2 .
Für y = Ω/ω0 ≫ 1 ist einer der beiden Terme |S (πy (x− 1))| und |S (πy (x+ 1))|jeweils viel kleiner als der andere, sodass die Eingrenzung von Py (x) eng ist. Dannhat |Ff |2 zwei scharf voneinander getrennte Maxima in der Nähe von ±Ω. DieAbbildung (2.20) zeigt den Graphen von x → Py (x) für cos δ = 1 und einige Wertevon y.
Ein Fourieranalysator misst |Ff (ω)|2 für ω ∈ ω0 · I mit I = 1, 2 . . . N . Erbestimmt also die Werte Py (x) für x = kω0/Ω = k/y mit k ∈ I. Ist die Vermes-sungsdauer T viel größer als die Schwingungsperiode 2π/Ω des Signals, dann kanndie Signalfrequenz Ω eines harmonischen Signals aus der Lage des absoluten Maxi-mums von |Ff (ω)|2 im Bereich ω > 0 mit einem Fourieranalysator einigermaßengenau ermittelt werden, falls Nω0 ≥ Ω. Es gilt in diesem Fall natürlich Ω ≫ ω0.Soll hingegen der Phasenlageparameter δ bestimmt werden, ist sein Einfluss deutli-cher, wenn Ω ≈ ω0 gewählt wird. Dann ist nämlich der die δ-Abhängigkeit steuern-de Interferenzterm S (πy (x− 1))S (πy (x+ 1)) von derselben Größenordnung wieS (πy (x− 1))2 + S (πy (x+ 1))2 . Moral: Zur Bestimmung der Frequenz eines har-monischen Signals einerseits und seiner Phasenlage andererseits eignen sich zweieinander ausschließende Vermessungsprozeduren.
52.50-2.5-5
1.5
1.25
1
0.75
0.5
0.25
0
Abbildung 2.20: x → Py (x) für y = 0.5 (grün), y = 1 (schwarz) und y = 5 (rot)

KAPITEL 2. FOURIERANALYSIS 177
2.2.5 *Störung einer Quantendynamik
SeiH ein endlichdimensionaler C-Vektorraum. ·, · sei ein Skalarprodukt vonH.Dielineare Abbildung h0 sei bezüglich ·, · symmetrisch, dh es gilt ϕ, h0ψ = h0ϕ, ψfür alle ϕ,ψ ∈ H. Die lineare Abbildung h0 definiert ein lineares System ersterOrdnung auf H, eine Quantendynamik. Sie ist durch
id
dtψ (t) = h0ψ (t)
für alle t ∈ R gegeben. Für die maximalen Lösungen des Systems gilt ψ (t) =e−ih0(t−t0)ψ (t0) für alle t ∈ R. Manchmal interessiert der Fall, dass während einesendlichen Zeitintervalls die Dynamik h0 durch eine andere, i.A. zeitabhängige, lineareAbbildung h (t) ersetzt wird. Wählt man als Zeitintervall der gestörten Dynamik dasIntervall [0, T ] , dann versteht man unter einer Lösung des gestörten Systems einestetige Funktion ψ : R→ H mit
id
dtψ (t) =
h0ψ (t) für alle t /∈ [0, T ]
h (t)ψ (t) für alle t ∈ (0, T ).
Bei t = 0 und t = T braucht ψ nicht differenzierbar zu sein. Hier ist aber ψ jedenfallsstetig. Für jede maximale Lösung der gestörten Dynamik folgt somit
ψ (t) =
e−ih0tψ (0) für t < 0
e−ih0(t−T )tψ (T ) für t > T.
Der Vektor ψ (T ) ergibt sich aus einer Vorgabe für ψ (0) durch Lösung des Anfangs-wertproblems im Zeitintervall t ∈ (0, T ) . Dies ist bei schwacher Störung näherungs-weise möglich.
Die Abbildung16 h′ : [0, T ]→ Ls (H) sei stetig. Die zu h (t) = h0+εh′ (t) gehörigeQuantendynamik ist das (nichtautonome) lineare System auf H, das durch
id
dtψ (t) = h (t)ψ (t) (2.7)
gegeben ist. Dabei ist ε ∈ R. Die autonome Dynamik h0 wird im Zeitintervall [0, T ]also durch Addition von h′ „gestört“. Durch den Ansatz ψ (t) = e−ih0tϕ (t) geht dasSystem 2.7 über in das dazu äquivalente System
id
dtϕ (t) = ε;h (t)ϕ (t) mit ;h (t) = eih0th′ (t) e−ih0t für alle t ∈ (0, T ) . (2.8)
Wird als Anfangswert des Systems 2.7 zu t = 0 ein (beliebiger) Vektor ψ (0) =ϕ (0) ∈ H vorgegeben, dann folgt für die maximale Lösung des Anfangswertproblemsψ (T ) = e−ih0Tϕ (T ) mit
ϕ (T ) = ϕ (0) + (−iε)
T
0
;h (t)ϕdt+ (−iε)2 T
0
;h (t)
t
0
;h (t′)ϕdt′
dt+ . . .
16Ls (H) ist der Vektorraum aller linearen, symmetrischen Abbildungen von H nach H. Dielineare Abbildung h′ (t) ist also wie h0 symmetrisch für alle t ∈ [0, T ] .

KAPITEL 2. FOURIERANALYSIS 178
Der Vektor ϕ (T ) ist als Potenzreihe in ε gegeben. Die Reihe konvergiert für alleε ∈ R. Seien nun insbesondere e und e′ zwei auf 1 normierte Eigenvektoren von h0.Es gelte also e = e′ = 1 und h0e = ωe und h0e
′ = ω′e′. Da h0 symmetrisch ist,gilt ω, ω′ ∈ R. Damit folgt für ϕ (0) = e
e′, ψ (T ) =&e′, e−ih0Tϕ (T )
'=&eih0Te′, ϕ (T )
'= e−iω′T e′, ϕ (T )
und unter Verwendung von ϕ (T ) = ϕ (0) + (−iε) T
0;h (t)ϕ (0) dt + o (ε) für ε → 0
folgt e′, ϕ (T ) − e′, e =
= −iε
T
0
(e′,;h (t) e
)dt+ o (ε) = −iε
T
0
&e−ih0te′, h′ (t) e−ih0te
'dt+ o (ε)
= −iε
T
0
(e−iω′te′, h′ (t) e−iωte
)dt+ o (ε) = −iε
T
0
e−i(ω−ω′)t e′, h′ (t) e dt+ o (ε)
= −iε
T
0
e−i(ω−ω′)t e′, h′ (t) e dt+ o (ε) = −iε√2πFV (ω − ω′) + o (ε) .
Hierbei bezeichnet FV die Fouriertransformierte der Funktion V : R→ C
V (t) =
e′, h′ (t) e für t ∈ [0, T ]
0 sonst.
Im Spezialfall einer im Intervall [0, T ] konstanten Störung folgt für ω = 0
√2πFV (ω) = V (0)
T
0
e−iωtdt = V (0)e−iωt
−iω
,,,,T
0
= V (0)e−iωT − 1
−iω
= V (0) e−iω T22
ωsin
ωT
2
.
Für ω = 0 folgt√2πFV (0) = V (0)T. Somit gilt im Fall konstanter Störung für
ε → 0 für die Lösung ϕ des Systems 2.8 mit ϕ (0) = e
e′, ϕ (T ) = e′, e − iεT e′, h′ (0) e e−i(ω−ω′)T2 S
(ω − ω′)
T
2
+ o (ε) ,
wobei
S
(ω − ω′)
T
2
=
sin(ω − ω′) T
2
(ω − ω′) T2
.
2.2.6 *Beugung am Spalt und Fouriertransformation
In der Einführungsvorlesung über Physik wird die Beugung am unendlich langenSpalt behandelt. Dabei wird die (ungefähre) Intensität einer monochromatischenelektromagnetischen Welle auf einem Schirm hinter dem Spalt und in großer Ent-fernung vom Spalt als Funktion des Ablenkwinkels α gegenüber der geraden Durch-gangsrichtung durch den Spalt plausibel gemacht. Diese Überlegung zeigt, dass

KAPITEL 2. FOURIERANALYSIS 179
die Fouriertransformierte der Rechtecksfunktion das Beugungsbild des Spaltes amSchirm bestimmt.17 Das kommt folgendermaßen zustande.
Zunächst wird das Problem wegen seiner Translationsinvarianz in Spaltrichtungzu einem 2d Problem verkürzt und der Vektorcharakter des Signals ignoriert. DerSpalt sei das Gebiet −L < x < L und y = 0. Das Signal am Ort p = R (sinα, cosα)mit −π
2< α < π
2ist die „Summe“ der Signale von einzelnen Kreiswellen, die
von den Punkten des Spaltes ausgehen.18 Die Quellpunkte (x, 0) dieser fiktiven 2d-Kreiswellen der Frequenz ω und Wellenzahl k = ω/c haben alle vom Aufpunkt peinen etwas anderen Abstand19 l (x) = |p− (x, 0)| ≈ R−x sinα. Die genaue Formelfür 2d Kreiswellen kann hier nicht erläutert werden. Sie enthält die Hankelfunkti-on H
(2)0 , eine Lösung der Besselschen Differentialgleichung mit Parameter 0. Für
großen Abstand r zwischen Quell- und Aufpunkt vereinfacht sich jedoch die auslau-fende monofrequente (komplexe) Kreiswelle zu annähernd − exp i (ωt− kr) /
√8πr.
Daher ist das Summensignal in einem „fernen“ Punkt p annähernd proportionalzum Realteil von L
−L
ei(ωt−kl(x))
l (x)
dx ≈ ei(ωt−kR)
√R
L
−L
eik sin(α)xdx = Lei(ωt−kR)
√R
1
−1eikL sin(α)xdx
= 2Lei(ωt−kR)
√R
sin (kL sinα)
kL sinα.
Die Intensität I (α), die dem Absolutquadrat der Amplitude proportional ist, erfülltsomit bei festem R annähernd
I (α) = I (0)
sin (kL sinα)
kL sinα
2
.
In optischen Situationen gilt kL ≈ 103. I hat die kleinste positive Nullstelle beikL sinα = π. Der zugehörige Beugungswinkel α hat für kL = 103 den Wert von10−3π, was 10, 8′ entspricht.
2.2.7 *Faltung und Messung
In diesem Abschnitt wird an einem sehr einfachen Beispiel klar gemacht, warum beider Vermessung einer in der Natur ’realisierten’ Funktion von Ort, Zeit, Frequenzoder dergleichen die Anzeige des Messgeräts, zB einer Waage, einerseits von derFunktion selbst und andererseits von einer für das Messverfahren charakteristischen’Empfindlichkeitsfunktion’ abhängt. Es zeigt sich, dass die Anzeige des Messgerätsdie Faltung der Empfindlichkeitsfunktion mit der zu vermessenden Funktion ist. DerFachjargon sagt dazu: ’Die Sensitivität wird ins Signal gefaltet’.
17Chapt. 46-2, 46-3 von D Halliday, R Resnik, K Krane, Physics Vol II, New York, 199218Dieses intuitive Rezept von Huyghens wurde erst später durch Kirchhoff aus der Maxwellschen
Theorie heraus mit der Methode der Greenschen Funktionen plausibel gemacht. Exakt lösbar istdie das Beugungsproblem darstellende Integralgleichung auch heute noch nicht.
19Da für x ∈ [−L,L] gilt: l (x) = |R (sinα, cosα)− (x, 0)| = R 1− 2 xR sinα+
xR
2= R −
x sinα+ oLR
für L
R → 0.
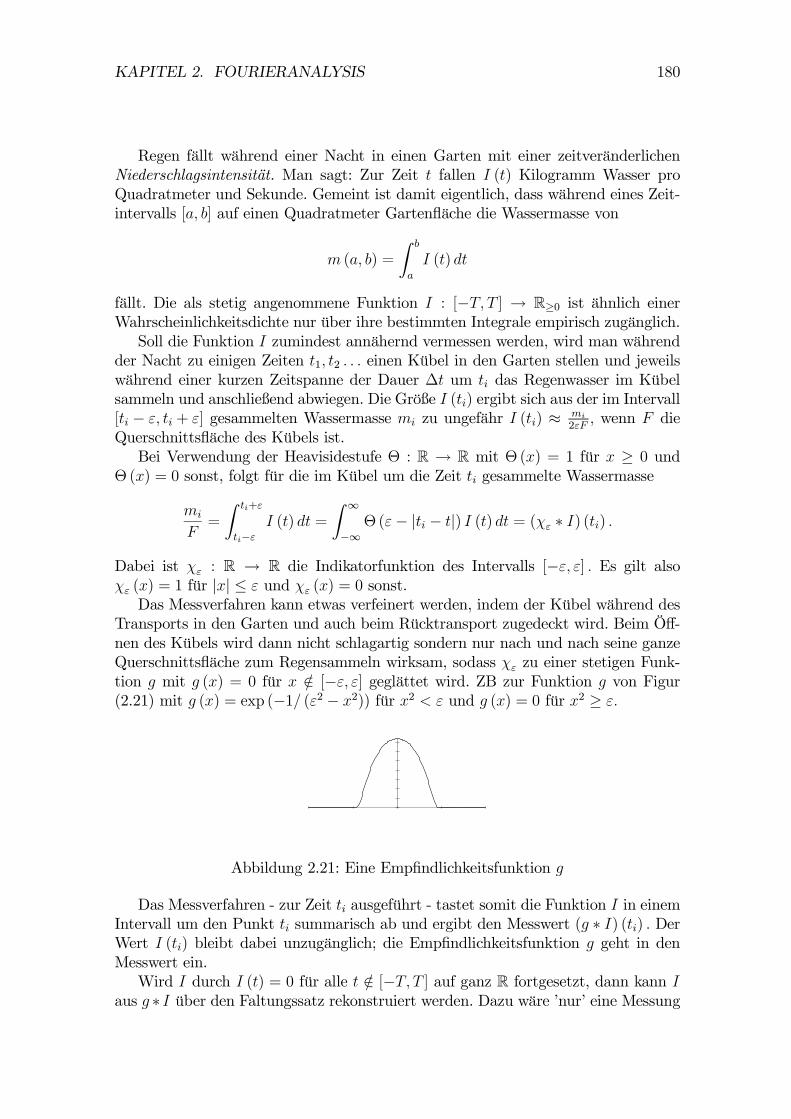
KAPITEL 2. FOURIERANALYSIS 180
Regen fällt während einer Nacht in einen Garten mit einer zeitveränderlichenNiederschlagsintensität. Man sagt: Zur Zeit t fallen I (t) Kilogramm Wasser proQuadratmeter und Sekunde. Gemeint ist damit eigentlich, dass während eines Zeit-intervalls [a, b] auf einen Quadratmeter Gartenfläche die Wassermasse von
m (a, b) =
b
a
I (t) dt
fällt. Die als stetig angenommene Funktion I : [−T, T ] → R≥0 ist ähnlich einerWahrscheinlichkeitsdichte nur über ihre bestimmten Integrale empirisch zugänglich.
Soll die Funktion I zumindest annähernd vermessen werden, wird man währendder Nacht zu einigen Zeiten t1, t2 . . . einen Kübel in den Garten stellen und jeweilswährend einer kurzen Zeitspanne der Dauer ∆t um ti das Regenwasser im Kübelsammeln und anschließend abwiegen. Die Größe I (ti) ergibt sich aus der im Intervall[ti − ε, ti + ε] gesammelten Wassermasse mi zu ungefähr I (ti) ≈ mi
2εF, wenn F die
Querschnittsfläche des Kübels ist.Bei Verwendung der Heavisidestufe Θ : R → R mit Θ(x) = 1 für x ≥ 0 und
Θ(x) = 0 sonst, folgt für die im Kübel um die Zeit ti gesammelte Wassermasse
mi
F=
ti+ε
ti−ε
I (t) dt =
∞
−∞Θ(ε− |ti − t|) I (t) dt = (χε ∗ I) (ti) .
Dabei ist χε : R → R die Indikatorfunktion des Intervalls [−ε, ε] . Es gilt alsoχε (x) = 1 für |x| ≤ ε und χε (x) = 0 sonst.
Das Messverfahren kann etwas verfeinert werden, indem der Kübel während desTransports in den Garten und auch beim Rücktransport zugedeckt wird. Beim Öff-nen des Kübels wird dann nicht schlagartig sondern nur nach und nach seine ganzeQuerschnittsfläche zum Regensammeln wirksam, sodass χε zu einer stetigen Funk-tion g mit g (x) = 0 für x /∈ [−ε, ε] geglättet wird. ZB zur Funktion g von Figur(2.21) mit g (x) = exp (−1/ (ε2 − x2)) für x2 < ε und g (x) = 0 für x2 ≥ ε.
Abbildung 2.21: Eine Empfindlichkeitsfunktion g
Das Messverfahren - zur Zeit ti ausgeführt - tastet somit die Funktion I in einemIntervall um den Punkt ti summarisch ab und ergibt den Messwert (g ∗ I) (ti) . DerWert I (ti) bleibt dabei unzugänglich; die Empfindlichkeitsfunktion g geht in denMesswert ein.
Wird I durch I (t) = 0 für alle t /∈ [−T, T ] auf ganz R fortgesetzt, dann kann Iaus g ∗ I über den Faltungssatz rekonstruiert werden. Dazu wäre ’nur’ eine Messung
KAPITEL 2. FOURIERANALYSIS 181
von g ∗ I in jedem Punkt des Intervalls [−T − ε, T + ε] nötig, da (g ∗ I) (t) = 0 fürt /∈ [−T − ε, T + ε] . Auch die Messung von g ∗ I in einem beschränkten Intervall istnatürlich lückenlos nicht durchführbar. Ein Mangel, der durch Hypothesen über dieVariation von I auf kleinster Skala kaschiert wird. Aber die Körnigkeit der Regen-tropfen selbst setzt der Vorstellung von einer stetigen Niederschlagsintensität I jaganz offenbar ihre Grenzen, sodass derlei Ungenauigkeiten für das, was vom Modellerwartet wird, belanglos sind.
Wegen g ∗ I ∈ R gilt (Faltungssatz!) F (g ∗ I) =√2π (Fg) · (FI) und daher
I = F−1 F(g∗I)√2πFg
, also für t ∈ R
I (t) =
∞
−∞
eiωt
2π
F (g ∗ I) (ω)
(Fg) (ω)dω.
Man beachte, dass auch in den Nullstellen von Fg der Integrand F (g ∗ I) /Fg = FIaufgrund der Stetigkeit von FI stetig ist.
2.2.8 *Faltung und Bildfehlerkorrektur
Das Licht eines Sterns fällt durch ein Teleskop auf eine lichtempfindliche ebeneSchicht. Licht, das parallel zur optischen Achse läuft, hinterlässt im fiktiven Ideal-fall auf der Schicht einen hellen Punkt p0 der Belichtungsstärke f > 0. Wir wählendiesen Punkt als Nullpunkt der Bildebene. Realistischerweise wird jedoch durchBeugung an den optischen Teilen und durch atmosphärische Brechung ein ausge-dehnter Lichtfleck um p0 herum erzeugt. Er wird durch eine Belichtungsfunktionf · Kt : R2 → R≥0 beschrieben. Es gilt dabei
R2 Kt (x) d
2x = 1, da die gesamteBelichtungsstärke den Wert f behalten soll. Die Funktion Kt hängt vom Zeitpunktt der Aufnahme ab, da die Atmosphäre flimmert.
Fällt nun Licht gleichzeitig aus mehreren achsennahen Richtungen ein, dannwürden im Idealfall an Stellen x1, . . . xn Lichtpunkte der Stärken f1, . . . fn entste-hen. Im Realfall hingegen wird jeder Lichtpunkt xi zu einer BelichtungsfunktionfiTxiKt verwaschen. Hier bezeichnet TxiKt das Translat von Kt um xi. Diese Belich-tungsfunktionen addieren sich zu einer Gesamtbelichtung, die an der Stelle x denWert
ni=1 fiKt (x− xi) hat. Im Grenzfall eines Kontinuums von Lichtquellen wird
aus der Summe ein Integral des Typs
Bt (x) =
R2f (ξ)Kt (x− ξ) d2ξ.
Es gilt also Bt = Kt ∗ f, wobei f eine fiktive idealisierte Belichtung angibt. Über Kt
ist zu wenig bekannt, als dass f aus einem gemessenen Bild Bt berechnet werdenkönnte. Man gewinnt, indem man Bescheideneres versucht.
Aus einem Bild Bt berechnet man zunächst seine 2d-Fouriertransformierte FBt :R2 → C mit
(FBt) (k) =1
2π
R2e−ik·xBt (x) d
2x
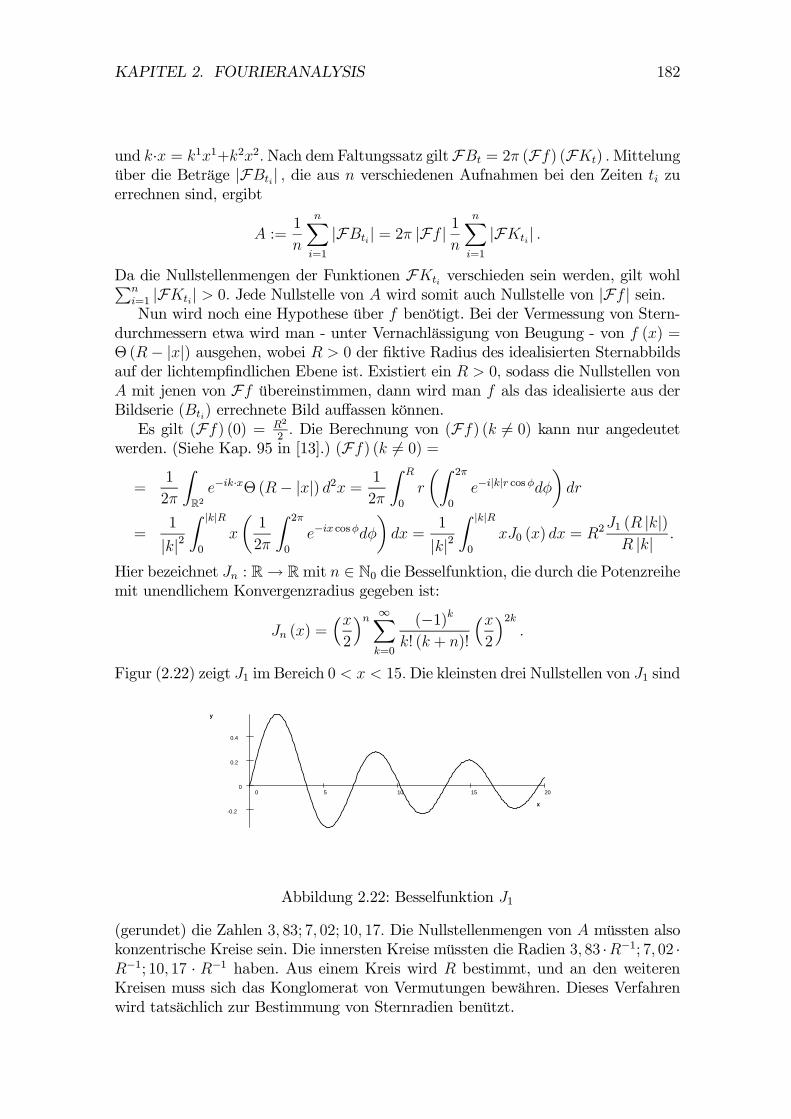
KAPITEL 2. FOURIERANALYSIS 182
und k·x = k1x1+k2x2.Nach demFaltungssatz giltFBt = 2π (Ff) (FKt) .Mittelungüber die Beträge |FBti| , die aus n verschiedenen Aufnahmen bei den Zeiten ti zuerrechnen sind, ergibt
A :=1
n
n
i=1
|FBti | = 2π |Ff | 1n
n
i=1
|FKti| .
Da die Nullstellenmengen der Funktionen FKti verschieden sein werden, gilt wohlni=1 |FKti| > 0. Jede Nullstelle von A wird somit auch Nullstelle von |Ff | sein.Nun wird noch eine Hypothese über f benötigt. Bei der Vermessung von Stern-
durchmessern etwa wird man - unter Vernachlässigung von Beugung - von f (x) =Θ (R− |x|) ausgehen, wobei R > 0 der fiktive Radius des idealisierten Sternabbildsauf der lichtempfindlichen Ebene ist. Existiert ein R > 0, sodass die Nullstellen vonA mit jenen von Ff übereinstimmen, dann wird man f als das idealisierte aus derBildserie (Bti) errechnete Bild auffassen können.
Es gilt (Ff) (0) = R2
2. Die Berechnung von (Ff) (k = 0) kann nur angedeutet
werden. (Siehe Kap. 95 in [13].) (Ff) (k = 0) =
=1
2π
R2e−ik·xΘ(R− |x|) d2x =
1
2π
R
0
r
2π
0
e−i|k|r cosφdφ
dr
=1
|k|2 |k|R
0
x
1
2π
2π
0
e−ix cosφdφ
dx =
1
|k|2 |k|R
0
xJ0 (x) dx = R2J1 (R |k|)R |k| .
Hier bezeichnet Jn : R→ Rmit n ∈ N0 die Besselfunktion, die durch die Potenzreihemit unendlichem Konvergenzradius gegeben ist:
Jn (x) =x2
n ∞
k=0
(−1)k
k! (k + n)!
x2
2k.
Figur (2.22) zeigt J1 im Bereich 0 < x < 15.Die kleinsten drei Nullstellen von J1 sind
20151050
0.4
0.2
0
-0.2x
y
x
y
Abbildung 2.22: Besselfunktion J1
(gerundet) die Zahlen 3, 83; 7, 02; 10, 17. Die Nullstellenmengen von A müssten alsokonzentrische Kreise sein. Die innersten Kreise müssten die Radien 3, 83 ·R−1; 7, 02 ·R−1; 10, 17 · R−1 haben. Aus einem Kreis wird R bestimmt, und an den weiterenKreisen muss sich das Konglomerat von Vermutungen bewähren. Dieses Verfahrenwird tatsächlich zur Bestimmung von Sternradien benützt.

KAPITEL 2. FOURIERANALYSIS 183
2.2.9 *Streuung von Wellen und Fouriertransformation
Manche physikalischen Qualitäten sind orts- und zeitabhängig. Sie können sich vonOrt zu Ort und von Augenblick zu Augenblick ändern. In manchen Fällen ist einGesetz, das die möglichen Zeit- und Ortsabhängigkeiten regelt, durch eine linearepartielle Differentialgleichungen gegeben. Vielfach haben diese Gleichungen ebeneWellenlösungen20 des Typs Uk : R × R3 → C mit Uk (t, x) = ei(ωt−k,x), wobeik ∈ R3, ω ∈ R>0 und k, x das Standardskalarprodukt in R3 bezeichnet. Der Wel-lenzahlvektor k ist beliebig und die Kreisfrequenz ω ist aus k durch eine zur Wellen-gleichung gehörige Formel, die Dispersionsrelation, zu berechnen. Im Fall von Schallgilt etwa ω = c |k| .
Fällt auf eine Störstelle am Ort ξ ∈ R3 eine Welle, die während einer gewissenZeit in einer Umgebung von ξ durch Uk genähert wird, ein, so spürt die Störstelle dieErregung e−iωteik,ξ. Sie reagiert darauf nach einem Einschwingvorgang durch einestationäre, periodische Veränderung der Frequenz ω. Dabei erzeugt die Störstelleselbst eine Welle, die der einfallenden Welle Uk zu addieren ist. Vielfach kann dieseStreuwelle in einer endlichen Umgebung von ξ als Kugelwellenlösung des Typs S|k| :R× (R3 ξ)→ C mit
S|k| (t, x) = e−ik,ξAξei(ωt−|k||x−ξ|)
|x− ξ|genähert werden. Dabei beschreibt Aξ ∈ C die Stärke und Phasenlage der Reaktionder Störstelle auf die einlaufende Welle.21 Die Zahl Aξ kann dabei von k abhängigsein.
In einem Punkt p ∈ R3, der von der Störstelle ξ großen, aber nicht zu großen,Abstand hat, kann die Streuwelle mithilfe von
S|k| (t, p) = e−ik,ξAξei|k|n,ξe
i(ωt−|k|r)
r(1 +O (ε)) für ε → 0
genähert werden. Dabei gilt n = p/ |p| und r = |p| und ε = |ξ| /r. Die Näherungerhält man aus
|p− ξ| =p− ξ, p− ξ =
r2 − 2 p, ξ+ |ξ|2 = r
/1− 1
r22 p, ξ+ |ξ|2
= r
1− n, ξ
r+ o (ε)
für ε → 0.
Durch Integration über eine kontinuierliche StörstellenreaktionsamplitudendichteA : R3 → C ergibt sich die Streuwelle in stationärer Fernfeldnäherung
S|k| (t, p) ≈ei(ωt−|k|r)
r
R3A (ξ) ei|k|n−k,ξd3ξ.
20Hier wird mit komplexen Lösungen argumentiert, um die Diskussion der Phasenlagen abzukür-zen. Direkte physikalische Realität haben im Bereich der klassischen Physik nur reelle Lösungen.Da die der Diskussion zugrunde liegenden Differentialgleichungen alle (inhomogen) linear und reellsind, ist die vorgelegte Argumentation schlüssig.
21Hat die einlaufende Welle die Amplitude α, so ist auch die erzeugte Kugelwelle mit α zumultiplizieren.

KAPITEL 2. FOURIERANALYSIS 184
Die auslaufende Streuwelle hat also am (fernen) Halbstrahl n eine mit 1/r abneh-mende Amplitude, die der dreidimensionalen Fouriertransformierten vonA im Punktk−|k|n proportional ist. Die Differenz q := k−|k|n zwischen einlaufendem Wellen-zahlvektor und dem lokalen Wellenzahlvektor der Streuwelle bei p hat den Betrag2 |k| sin (θ/2) , wobei θ der Winkel zwischen k und Auslaufrichtung n ist. Es gilt0 ≤ |2q| ≤ |k| .
2.2.10 *Einige 3d-Fouriertransformierte
Yukawapotential
Sei κ ∈ R>0. Für Y : R3 → R gelte Y (x) = e−κ|x|
4π|x| für x = 0. Der Wert Y (0) istfür das folgende belanglos. Für x → 0 wächst Y (x) unbeschränkt an. Trotzdem giltR3 |Y (x)| d3x <∞. Daher existiert die Fouriertransformierte FY : R3 → C mit
FY (k) =1
(2π)3/2
R3e−ik,xY (x) d3x.
Aus der Drehinvarianz von Y folgt die Drehinvarianz von FY, denn für eineDrehung R : R3 → R3 gilt (2π)3/2FY (Rk) =
=
R3e−iRk,xY (x) d3x =
R3e−iRk,RR−1xY (x) d3x =
R3e−ik,R−1xY (x) d3x
=
R3e−ik,yY (Ry) d3y =
R3e−ik,yY (y) d3y = (2π)3/2FY (k) .
Es genügt daher FY (k) für k = (0, 0, q) mit q > 0 zu berechnen. Unter Verwendungvon Kugelkoordinaten folgt (2π)3/2FY (qe3) =
=
∞
0
e−κr
4πr
π
0
2π
0
e−iqr cos θr2 sin θdθdφdr
=1
2
∞
0
re−κr
π
0
1
iqr
d
dθ
e−iqr cos θ
dθdr =
1
2iq
∞
0
e−κreiqr − e−iqr
dr
=1
2iq
1
κ− iq− 1
κ+ iq
=
1
2iq
(κ+ iq)− (κ− iq)
q2 + κ2=
1
q2 + κ2.
Berechnen wir noch zur Kontrolle (2π)3/2FY (0) =
=
∞
0
re−κrdr =1
κ
∞
0
r
− d
dr
e−κrdr =
1
κ
*r
− d
dr
e−κr
,,,,∞
0
+
∞
0
e−κrdr
+
=1
κ
*0 +
e−κr
−κ
,,,,∞
0
+=
1
κ2.
FY ist also wie vom Hauptsatz behauptet stetig und es gilt22 für alle k ∈ R3
(2π)3/2FY (k) =|k|2 + κ2
−1. (2.9)
22Man beachte, dass für κ = 0 die obige Definition von FY unsinnig ist, da∞0sin (qr) dr nicht
existiert. Trotzdem ergibt limκ→0FY eine Funktion auf R3 \ 0, die lokal Riemannintegrabel ist.Davon macht die distributionelle Fouriertransformation Gebrauch.

KAPITEL 2. FOURIERANALYSIS 185
Wenig überraschend ist die Funktion |FY | = FY nicht über ganz R3 riemannin-tegrierbar. Dies entspricht der Tatsache, dass Y (x) für x → 0 divergiert. Trotzdemlässt sich mit den Methoden der Funktionentheorie, siehe Math. Meth. 2, zeigen,dass für alle x = 0 die Umkehrformel
Y (x) =1
(2π)3lim
K→∞
|k|<K
eik,x
|k|2 + κ2d3k
gilt. Die Oszillationen von exp (i k, x) machen es möglich.Die Funktionen |Y |2 und |FY |2 sind beide Riemannintegrabel. Es gilt
R3|Y (x)|2 d3x =
∞
0
r2e−2κr
(4πr)24πdr =
1
8πκ.
Die dreidimensionale Version des Satzes von Parseval sagt
R3|FY (k)|2 d3k =
R3|Y (x)|2 d3x =
1
8πκ.
Wegen
R3|FY (k)|2 d3k =
1
(2π)34π
∞
0
k2
(k2 + κ2)2dk =
1
(2π)2
∞
−∞
k2
(k2 + κ2)2dk
folgt somit ∞
−∞
k2
(k2 + κ2)2dk =
1
κ
∞
−∞
x2
(x2 + 1)2dx =
π
2κ.
Und tatsächlich gilt ∞
−∞
x2dx
(x2 + 1)2=
∞
−∞x
−1
2
d
dx
dx
1 + x2=
1
2
∞
−∞
dx
1 + x2=
1
2arctan (x)|∞−∞ =
π
2.
Coulombpotential
Im Sonderfall κ = 0 hat Y eine „Fourierdarstellung“ ohne selbst im Sinn von Funk-tionen eine Fouriertransformierte zu besitzen. Die „Fourierdarstellung“ besteht inder Aussage, dass für alle x = 0
1
4π |x| =1
(2π)3lim
K→∞
|k|<K
eik,x
|k|2d3k.
Dies lässt sich folgendermaßen ableiten. Sei x = 0. dann gilt
1
2π
|k|<K
eik,x
|k|2d3k =
K
0
dq
π
0
eiqr cos θ sin θdθ = − K
0
−1
1
eiqrξdξ
dq
=
K
0
1
−1eiqrξdξ
dq =
K
0
eiqrξ
iqr
,,,,1
−1dq = 2
K
0
sin (qr)
qrdq =
2
r
Kr
0
sin (t)
tdt.
Die (ungerade) Funktion Si : R→ R mit Si (x) = x
0sin(t)
tdt heißt Integralsinus und
es gilt limx→∞ Si (x) = π/2. (Ein Beweis ist in Vol. 2, Kap. VI.8.4 von [3] angeführt.)Damit folgt
limK→∞
1
(2π)3
|k|<K
eik,x
|k|2d3k =
1
4π |x| .

KAPITEL 2. FOURIERANALYSIS 186
Gleichverteilung in einer Kugel
Sei R ∈ R>0. Für ρ : R3 → R gelte ρ (x) = 34πR3
für |x| ≤ R und ρ (x) = 0 sonst. Es
gilt also (2π)3/2Fρ (0) =R3 ρ (x) d
3x = 1.Unter Verwendung von Kugelkoordinaten folgt für q > 0
(2π)3/2Fρ (qe3) =3
4πR3
R
0
π
0
2π
0
e−iqr cos θr2 sin θdθdφdr
=3
2R3
R
0
r2 π
0
1
iqr
d
dθ
e−iqr cos θ
dθdr =
3
2iqR3
R
0
reiqr − e−iqr
dr
=3
qR3
∞
0
r sin (qr) dr =3
q2R3
R
0
r
− d
dr
cos (qr) dr
=3
q2R3
− r cos (qr)|R0 +
R
0
cos (qr) dr
=
3
q2R2
sin (qR)
Rq− cos (qR)
.
Also gilt
(2π)3/2Fρ (k) =
.1 für k = 0
3|k|2R2
0sin(|k|R)|k|R − cos (|k|R)
1sonst
.
Fρ ist stetig. Figur 2.23 zeigt die Funktion |k|R → (2π)3/2Fρ (k) .
1512.5107.552.50
1
0.75
0.5
0.25
0
Abbildung 2.23: Die Funktion 3x2
sin(x)
x− cos (x)
Die Funktion (2π)3/2Fρ hat als Formfaktor einer ausgedehnten, homogenen La-dungsverteilung Bedeutung in Kern- und Teilchenphysik. Ein ausgedehnter Kernerzeugt ein Streupotential Y ∗ ρ mit Y = e−κr/4πr für ein κ > 0. In einem Streuex-periment wird |F (Y ∗ ρ) (k)|2 gemessen. Nun kommt der Faltungssatz ins Spiel. Esgilt
F (Y ∗ ρ) (k) = (2π)3/2 (FY ) (k) (Fρ) (k) .
Aus gemessenen Werten |F (Y ∗ ρ) (k)|2 für diverse k werden die Modellparameterκ und R durch Anpassung bestimmt. (Die Nullstellen von |F (Y ∗ ρ) (k)|2 sind auchdie von (2π)3 |F (ρ) (k)|2 , da FY nach Gleichung (2.9) keine Nullstelle hat. Da keinstellbar ist, legt die erste Nullstelle bei |k|R ≈ 4, 49 den Wert R schon fest.)
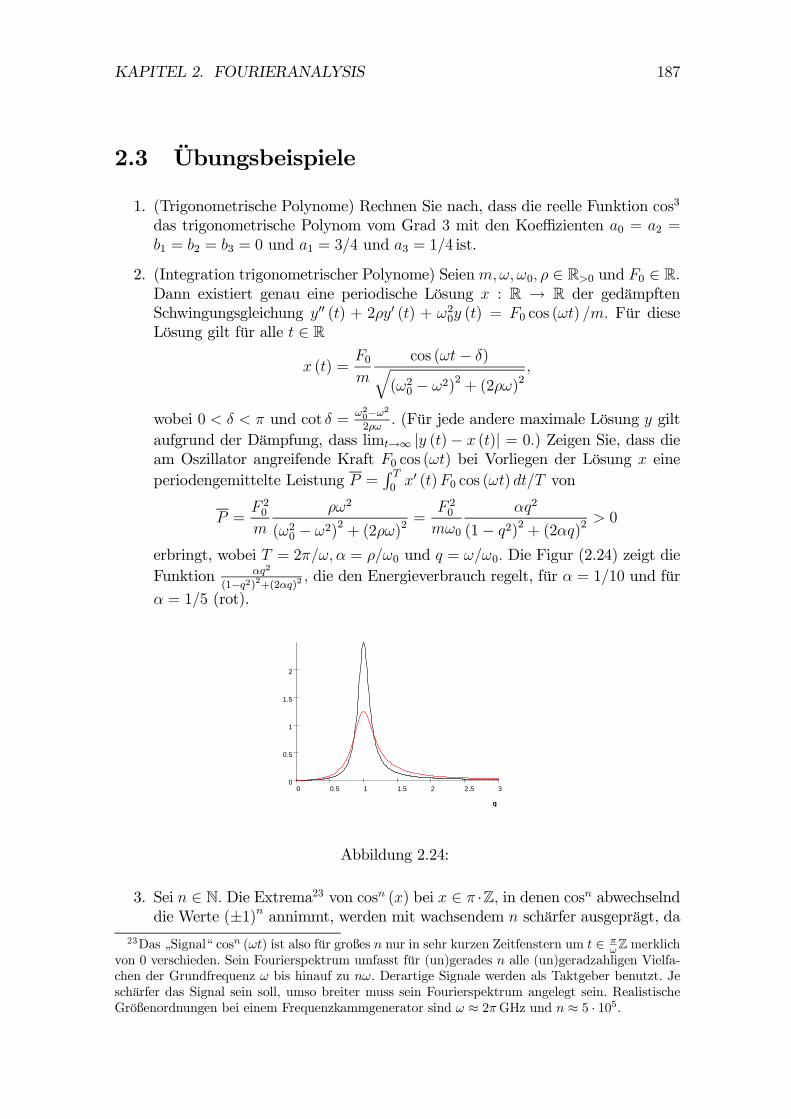
KAPITEL 2. FOURIERANALYSIS 187
2.3 Übungsbeispiele
1. (Trigonometrische Polynome) Rechnen Sie nach, dass die reelle Funktion cos3
das trigonometrische Polynom vom Grad 3 mit den Koeffizienten a0 = a2 =b1 = b2 = b3 = 0 und a1 = 3/4 und a3 = 1/4 ist.
2. (Integration trigonometrischer Polynome) Seien m,ω, ω0, ρ ∈ R>0 und F0 ∈ R.Dann existiert genau eine periodische Lösung x : R → R der gedämpftenSchwingungsgleichung y′′ (t) + 2ρy′ (t) + ω2
0y (t) = F0 cos (ωt) /m. Für dieseLösung gilt für alle t ∈ R
x (t) =F0
m
cos (ωt− δ) (ω2
0 − ω2)2 + (2ρω)2,
wobei 0 < δ < π und cot δ =ω20−ω2
2ρω. (Für jede andere maximale Lösung y gilt
aufgrund der Dämpfung, dass limt→∞ |y (t)− x (t)| = 0.) Zeigen Sie, dass dieam Oszillator angreifende Kraft F0 cos (ωt) bei Vorliegen der Lösung x eineperiodengemittelte Leistung P =
T
0x′ (t)F0 cos (ωt) dt/T von
P =F 20
m
ρω2
(ω20 − ω2)
2+ (2ρω)2
=F 20
mω0
αq2
(1− q2)2 + (2αq)2> 0
erbringt, wobei T = 2π/ω, α = ρ/ω0 und q = ω/ω0. Die Figur (2.24) zeigt dieFunktion αq2
(1−q2)2+(2αq)2, die den Energieverbrauch regelt, für α = 1/10 und für
α = 1/5 (rot).
32.521.510.50
2
1.5
1
0.5
0
Abbildung 2.24:
3. Sei n ∈ N. Die Extrema23 von cosn (x) bei x ∈ π ·Z, in denen cosn abwechselnddie Werte (±1)n annimmt, werden mit wachsendem n schärfer ausgeprägt, da
23Das „Signal“ cosn (ωt) ist also für großes n nur in sehr kurzen Zeitfenstern um t ∈ πωZ merklich
von 0 verschieden. Sein Fourierspektrum umfasst für (un)gerades n alle (un)geradzahligen Vielfa-chen der Grundfrequenz ω bis hinauf zu nω. Derartige Signale werden als Taktgeber benutzt. Jeschärfer das Signal sein soll, umso breiter muss sein Fourierspektrum angelegt sein. RealistischeGrößenordnungen bei einem Frequenzkammgenerator sind ω ≈ 2πGHz und n ≈ 5 · 105.

KAPITEL 2. FOURIERANALYSIS 188
limn→∞ cosn (x) = 0 für alle x /∈ π ·Z. Ein Maß für die Breite24 der Spitzen voncosn ist In := 1
2π
2π
0cos2n (x) dx = Pulsbreite / Abstand benachbarter Pulse.
(a) Zeigen Sie
In =(2n)!
4n (n!)2. (2.10)
Hinweis: Berechnen Sie von cos2n (x) =
eix+e−ix
2
2nden Fourierkoeffizi-
enten c0 über die binomische Formel. Es gilt dann c0 [cos2n] = In.
(b) Verwenden Sie nun Stirlings Formel limn→∞n!√2πn
en
n= 1, um aus Glei-
chung (2.10) abzuleiten, dass limn→∞√nπIn = 1. Mit wachsendem n
wird somit die Approximation In ≈ 1/√nπ immer besser. cos100 hat (in
dieser Approximation) daher die relative Breite I100 ≈ 0, 056.
Abbildung 2.25: cos200 auf [0, 2π]
4. (Grundbeispiele für Fourierreihen) Berechnen Sie die Fourierkoeffizienten
ck =1
2π
2π
0
e−ikxf(x)dx, k ∈ Z
der folgenden 2π-periodischen Funktionen und skizzieren Sie jeweils den Gra-phen der Abbildung k → |ck| (Fourierspektrum).
(a) f(x) = |x| für −π < x ≤ π (Sägezahn)
(b) f(x) = x für 0 ≤ x < 2π (Kippschwingung)
(c) f(x) =,,sin(x
2),, (gleichgerichteterWechselstrom)
24Als Pulsbreite ist dabei jene Zahl δ gemeint, für die π/2−π/2 cos
2n (x) dx = δ/2−δ/2 1dx = δ gilt.

KAPITEL 2. FOURIERANALYSIS 189
(d) f(x) = sin2(x2) Achtung: f ist ein trigonome-
trisches Polynom. Daher sind Integrationen hier unnötig.
5. (Fourierreihe des δ-Kamms) Zeigen Sie für die Fourierkoeffizienten ck der L-periodischen Funktion f , für die f(x) = f(−x) und mit 0 < ε < L
2
f(x) =
(ε− x)/ε2 für 0 ≤ x < ε
0 ε ≤ x ≤ L2
,
dass c0 = 1/L und mit ω := 2π/L für alle k ∈ Z 0
ck =1
L
sin (εωk/2)
εωk/2
2
gilt. Skizzieren Sie die Abbildung ωk := 2πLk → |ck|. Wie verändert diese sich,
wenn L vergrößert wird? Zeigen Sie limε↓0 ck = 1/L für alle k ∈ Z bei festemL. (δ-Kamm)
-100 -80 -60 -40 -20 0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5
ω k
|ck|
L = 2, ε = 0.2
6. (Aperiodische Sinus-Cosinus Überlagerung) Seien ω1, ω2, . . . ωN ∈ R>0 vonein-ander verschieden. Für f : R → C gelte mit a0, a1, . . . aN , b1, . . . bN ∈ C füralle t ∈ R
f(t) =a02
+N
k=1
(ak cos (ωkt) + bk sin (ωkt)) .
Die Funktion f ist also im Allgemeinen nicht periodisch. Zeigen Sie25, dass für
25Kelvin approximierte den gezeitenbhängigen Wasserstand in einem englischen Meereshafendurch eine Funktion t → f(t) des obigen Typs. Aus den Aufzeichnungen während der Zeit S <t < S + T ermittelte er annähernd die Konstanten a0, . . . bN . Dabei wählte er ω1 = 2π 2
1d , ω2 =228 d , ω3 =
2365d und nahm noch die ersten paar ganzzahligen Vielfachen davon dazu. Damit
konnte er f im Beobachtungszeitraum recht gut approximieren. Die Marine verließ sich auf denweiteren Verlauf der Funktion f und war mit Kelvins Prognose zufrieden. Da die Berechnungensehr mühsam waren, erfand Kelvin gleich auch noch einen mechanischen Analogrechner, der dieFourieramplituden a0, . . . bN „berechnete”, und einen, der den künftigen Verlauf von f auf ein Jahrim Voraus mit einer Auflösung von wenigen Minuten aufzeichnen konnte.

KAPITEL 2. FOURIERANALYSIS 190
jedes S ∈ R gilt
a0 = limT→∞
2
T
S+T
S
f(t)dt,
ak = limT→∞
2
T
S+T
S
cos (ωkt) f(t)dt, bk = limT→∞
2
T
S+T
S
sin (ωkt) f(t)dt.
7. (Fouriertransformation) Berechnen Sie die Fouriertransformierte
(Ff) (k) =1√2π
∞
−∞e−ikxf(x)dx, k ∈ R
der folgenden auf R definierten Funktionen. Geben Sie auch die Funktionena, b der sin / cos-Version
f(x) =1√2π
∞
0
[a(k) cos(kx) + b(k) sin(kx)] dk
der Umkehrformel an.
(a) f(x) = 1 für −1 < x < 1 und f(x) = 0 sonst. Überprüfen Sie die Regeln2 und 3 von Bemerkung 2.2.2 an Ff .
(b) g(x) = fx−ξL
mit f wie in a) und für ein L > 0 und ein ξ ∈ R.
(c) f(x) = x für −1 < x < 1 und f(x) = 0 sonst. Überprüfen Sie an Ff dieRegeln 2 und 3 von Bemerkung 2.2.2 und unter Verwendung von Beispiel3a den Teil 4) von Satz 86.
8. Sei f wie in Beispiel 6a
(a) Überprüfen Sie daran Teil 1) von Satz 86.
(b) Berechnen Sie die Faltung f ∗ f und überprüfen Sie Teil 2) von Satz 86.
Kapitel 3
Vektoranalysis
Die Physik kennt neben dem Teilchenbild der Materie auch ein Kontinuumsbild.Während das Teilchenbild von vereinzelten Weltlinien als den Elementarbausteineneiner „Weltgeschichte“ ausgeht, unterstellt das Kontinuumsbild, dass Materie ausge-dehnte Raumgebiete lückenlos ausfüllt. Um die zeitliche Entwicklung von Kontinu-umsmaterie zu beschreiben, werden Funktionen benützt, die auf offenen Teilmengender Raumzeit definiert sind. Solche Funktionen werden Felder genannt. Die Bildbe-reiche der Felder können R,C, ein höherdimensionaler Vektorraum, oder auch einganzes „Bündel“ von Vektorräumen sein. Beispiele sind Massendichte, Strömungs-geschwindigkeit, Ladungsstromdichte, Temperaturverteilung, elektrisches Feld, Gra-vitationspotential.
Zur Formulierung von Naturgesetzen werden Differentiations- und Integrations-prozeduren für Felder benötigt. Einen ersten Eindruck davon gibt das vorliegendeKapitel. Dabei wird die Zeit vorläufig aus dem Spiel gelassen und als (instantaner)Raum wird ein reeller Vektorraum mit einem ausgewählten Skalarprodukt benützt.
Die Relativitätsprinzipien der Physik verlangen nach Naturgesetzen, die ohneVerwendung allzu spezieller, die Symmetrie brechende Vektorraumstrukturen, alsoinsbesonders ohne spezielle Wahl einer Basis formulierbar sind. Daher sollten Dif-ferentiation und Integration basisfrei definiert werden. Bis zu einem bescheidenenGrad werden wir dieses „absolute1 Programm“ hier in seiner euklidischen Variantekennenlernen. Es werden Richtungsableitung, Differential, Gradient, Divergenz undRotation vorgestellt. Die Einbettung dieser Rechenoperationen in Modelle mit Raumund Zeit erfordert, soweit dies überhaupt möglich ist, weitere oder andere Struktu-ren, wie die absolute Gleichzeitigkeit der galileischen Raumzeit, oder das indefiniteinnere Produkt der minkowskischen Raumzeit. In seiner vorläufig letzten Konse-quenz gibt das absolute Programm auch die Vektorräume als Bühne für Differentialund Integral auf und ersetzt sie durch differenzierbare Mannigfaltigkeiten.
1Das heißt von Zusatzstrukturen losgelöst, befreit.
191
KAPITEL 3. VEKTORANALYSIS 192
3.1 Differenzieren von Skalarfeldern
Wie können Skalarfelder differenziert werden? Ein erstes Problem gegenüber demFall einer auf R definierten Funktion ist die Vielzahl von Richtungen mithilfe derereine Folge von Differenzenquotienten gebildet werden kann. Aus der Rechts- undLinksableitung wird im höherdimensionalen Fall die Richtungsableitung.
3.1.1 Richtungsableitung und Differential
Notation
Zunächst zur Festlegung der Notation eine Wiederholung aus dem Bereich der li-nearen Algebra. Sei V ein n-dimensionaler reeller Vektorraum und e = (e1, ..., en)eine Basis von V . Die Abbildung ·, · : V × V → R sei ein Skalarprodukt. ZumSkalarprodukt gehört eine Norm |·| von V , nämlich |v| :=
v, v. Die Matrix
Ge :=
e1, e1 · · · e1, en
.... . .
...en, e1 · · · en, en
heißt Gramsche Matrix des Skalarproduktes ·, · zur Basis e. Eine Basis, derenGramsche Matrix die Einheitsmatrix In ∈ Rn×n ist, heißt Orthonormalbasis (ONB)von V. Solche gibt es für jedes Paar (V, ·, ·) unendlich viele.
Zu jedem Vektor v ∈ V existiert genau eine von der Wahl von e abhängige Spalteve := (v1, . . . , vn)
t ∈ Rn×1, sodass
v = e · ve =n
i=1
viei.
Die Spalte ve heißt kontravariante Koordinatenspalte von v zur Basis e. Die linearebijektive Funktion
Φe : V → Rn×1, v → ve
heißt kontravariante Karte von V zur Basis e.Es gilt für alle v, w ∈ V
v,w = vte ·Ge · we.
Ist f eine weitere Basis von V und ist M die zugehörige Übergangsmatrix, d.h. esgilt f = e ·M , dann folgt für alle v ∈ V
vf = M−1 · ve. (3.1)
Ist U ⊂ V, dann heißt eine Abbildung f : U → R Skalarfeld auf U. Die Abbildungfe : Φe (U)→ R, für die f(v) = fe(ve) für alle v ∈ U gilt, heißt Kartenausdruck vonf zur Basis e. Es gilt also fe = f Φ−1e
,,Φe(U)
.
Ist U ⊂ V, dann heißt eine Abbildung X : U → V Vektorfeld auf U. Bisherhaben wir nur den Graphen von X als Vektorfeld bezeichnet. Im gegenwärtigen

KAPITEL 3. VEKTORANALYSIS 193
Zusammenhang ist es üblich und praktisch, die V -wertigen Abbildungen selbst alsVektorfelder zu bezeichnen. Nach Wahl einer Basis e ist jedem Vektorfeld die Funk-tion Φe X : U → Rn×1 zugeordnet. Für sie gilt X = e · Φe X. Die SkalarfelderX i
e := Φie X : U → R für i = 1, ..., n heißen die Komponentenfunktionen von
X. Sind für offenes U ihre Kartenausdrücke alle vom Ck-Typ, dann heißt X einCk-Vektorfeld.
Vektorfelder auf U können addiert und mit Skalarfeldern auf U multipliziertwerden. Das geschieht punktweise mittels der Vektorraumrechenoperationen gemäß
X + Y : U → V, v → X(v) + Y (v),
fX : U → V, v → f(v) ·X(v).
Richtungsableitung
Bewegt sich ein (kleiner) Sensor als Funktion der Zeit gemäß einer Kurve γ : I →U durch den Definitionsbereich U eines Skalarfeldes f, dann ist es vielfach vonInteresse zu wissen, wie rasch sich die Größe f am Ort γ (t) des Sensors zur Zeit tändert. Gesucht ist also die Ableitung (f γ)′ (t) und damit die beste inhomogenlineare Approximation der Funktion ε → f (γ (t+ ε)) = a + bε bei ε = 0. Ist dieKurve γ in t ∈ I differenzierbar, wird erstens die Kurve γ selbst in der Nähe vonp = γ (t) durch ein hinreichend kleines Stück der Gerade p + R · γ (t) approximiertund zweitens die Funktion f über dem Geradenstück inhomogen linear genähert.Für manche Funktionen f existiert eine beste inhomogen lineare Approximationnur für die einseitig definierte Funktion 0 ≤ ε → f (γ (t+ ε)) ≈ f (p+ εγ (t)) beiε = 0. In solchen Fällen liefert die (etwas allgemeinere) Definition der einseitigenRichtungsableitung die gesuchte Approximation.
Definition 88 (Richtungsableitung eines Skalarfeldes) Sei U ⊂ V offen undf : U → R. Falls für ein p ∈ U und ein X ∈ V der Grenzwert
[X]p f := limε↓0
f(p+ εX)− f(p)
ε∈ R
existiert, dann heißt die reelle Zahl [X]p f einseitige Richtungsableitung2 von f inp unter X. Existiert der beidseitige Limes limε→0 (f(p+ εX)− f(p)) /ε ∈ R, dannwird er als die Richtungsableitung [X]p f von f im Punkt p unter X ∈ V bezeichnet.
Anmerkungen:
1. Zur Definition von [X]p f wird keine Norm von V benötigt.
2. Die einseitige Richtungsableitung [X]p f gibt - falls existent - die beste inho-mogen lineare Approximation an die Funktion f auf dem Halbstrahl p+R≥0 ·X(hinreichend nahe) bei p, denn für den ’Fehler’ ψ mit
ψ (ε) = f(p+ εX)− f(p)− ε [X]p f
2Der Name ’Richtungsableitung’ ist etwas irreführend, da [X]p f nicht nur von der Richtungdes Vektors X abhängt, sondern auch von seinem Betrag. Besser wäre die Bezeichnung ’Geschwin-digkeitsableitung’.

KAPITEL 3. VEKTORANALYSIS 194
gilt limεց0 ψ (ε) /ε = 0. Für eine Zahl c ∈ R mit c = [X]p f folgt ja für denFehler ψc der Approximation f(p+ εX) ≈ f(p) + cε im Limes ε ց 0
ψc (ε)
ε=
f(p + εX)− f(p)− εc
ε=
ψ (ε) + ε [X]p f − εc
ε→ [X]p f − c = 0.
In diesem Sinn ist f(p + εX) ≈ f(p) + ε [X]p f die beste inhomogen lineareApproximation an ε → f (p+ εX) bei ε = 0 im Bereich ε > 0. Existiert die(beidseitige) Richtungsableitung [X]p f, dann ist f(p+ εX) ≈ f(p) + ε [X]p fdie beste inhomogen lineare Approximation an ε → f (p+ εX) beidseitig umε = 0.
3. Ist γ : I → U ⊂ V eine differenzierbare Kurve und existiert für ein Skalarfeldf : U → R in p = γ (t) die Richtungsableitung unter X = γ (t) für ein t ∈ I,dann ist ε → f (p)+ ε [X]p f auch die beste inhomogen lineare Approximationan die Funktion ε → f (γ (t+ ε)) bei ε = 0.
4. Seien auf einer offenen Menge U ⊂ V ein Skalarfeld f und ein VektorfeldX gegeben. Existieren in jedem Punkt p ∈ U die (einseitigen) Richtungs-ableitungen [X (p)]p f, dann ist durch die Abbildung [X] f : U → R mit([X] f) (p) = [X (p)]p f das Skalarfeld der (einseitigen) Richtungsableitungenvon f unter X gegeben.
5. Die (einseitige) Richtungsableitung kann auch für Funktionen f : U → Werklärt werden, wenn W irgendein reeller Vektorraum ist. Es kommt ja nurdarauf an, dass im Bildraum addiert und mit Skalaren multipliziert werdenkann. Die Richtungsableitung ist dann, falls existent, ein Element von W.
Satz 89 Besitzen die beiden Skalarfelder f, g : U → R in p die (einseitigen) Rich-tungsableitungen unter X, dann gilt [X]p (f + g) = [X]p f + [X]p g (Additivität) unddie Produktregel [X]p (f · g) = g (p) · [X]p f + f (p) · [X]p g.
Beweis. Die Additivität der Richtungsableitung ist aus der Definition klar. ZurProduktregel: es gilt
[X]p (f · g) = limε↓0
f (p+ εX) g (p+ εX)− f (p) g (p)
ε
= limε↓0
f (p+ εX) g (p+ εX)− f (p+ εX) g (p) + f (p+ εX) g (p)− f (p) g (p)
ε
= f (p) [X]p g +[X]p f
g (p) .
Satz 90 Sind zwei Vektoren X, Y ∈ V 0 gleichgerichtet, dh es existiert ein λ > 0mit Y = λX, dann folgt bei existenter einseitiger Richtungsableitung [X]p f, dass[Y ]p f = λ [X]p f. Existiert die beidseitige(!) Richtungsableitung [X]p f, dann gilt[λX]p f = λ [X]p f für alle λ ∈ R.

KAPITEL 3. VEKTORANALYSIS 195
Beweis. Existiert die einseitige Richtungsableitung, dann gilt
[Y ]p f = limε↓0
f(p+ εY )− f(p)
ε= λ lim
ε↓0
f(p+ ελX)− f(p)
λε
= λ limη↓0
f(p+ ηX)− f(p)
η= λ [X]p f.
Existiert die beidseitige Richtungsableitung, dann folgt für λ = 0
[λX]p f = limε→0
f(p+ ελX)− f(p)
ε= λ lim
ε→0
f(p+ ελX)− f(p)
λε
= λ limη→0
f(p+ ηX)− f(p)
η= λ [X]p f.
Für λ = 0 folgt [0 ·X]p f = 0 = 0 · [X]p f.Soll das Verhalten von f bei p in verschiedene Richtungen quantitativ bewertet
werden, werden die Richtungsableitungen mit Einheitsvektoren gebildet und mit-einander verglichen. Dazu muss natürlich erst eine Norm in V ausgewählt werden.
An der Menge der Zahlen0[X]p f : X ∈ V, |X| = 1
1lässt sich dann gegebenenfalls
ermitteln, in welche Richtung - bei Abwanderung von p - der Wert der Funktion fam stärksten zu- bzw abnimmt.
Richtungsableitung der Norm r = |·|Ist r = |·| : V → R durch ein Skalarprodukt von V gemäß r (p) =
p, p definiert,
dann gilt für einen Punkt p = 0 und X ∈ V
r (p+ εX)2 − r (p)2
ε=p+ εX, p+ εX − p, p
ε= 2 p,X+ ε |X|2 .
Es existiert also der Limes ε → 0 und somit die Richtungsableitung [X]p r2. Sie
erfüllt [X]p r2 = 2 p,X . Wegen r (p) =
r (p)2 folgt nun mit der Kettenregel
[X]p r =d
dε
r (p+ εX)2
,,,,ε=0
=1
2r (p)
d
dεr (p+ εX)2
,,,,ε=0
=1
2 |p| [X]p r2 =
p,X|p| .
Für p = 0 funktioniert diese zweistufige Art der Berechnung der Richtungsableitungvon r nicht, da die Wurzelfunktion in 0 nicht differenzierbar ist. Wir gehen dieRichtungsableitung direkt an. Es gilt für ε > 0
r (0 + εX)− r (0)
ε=
r (εX)
ε= |X| .
Für ε < 0 hingegen gilt
r (0 + εX)− r (0)
ε=
r (εX)
ε= − |X| .
Es existiert also zwar die einseitige Richtungsableitung von r in 0 unter X = 0, nichtaber die beidseitige. Für die einseitige Richtungsableitung gilt [X]0 r = |X| .

KAPITEL 3. VEKTORANALYSIS 196
Totales Differential
Eine Verschärfung des Differenzierbarkeitsbegriffes, der über die Richtungsableitunghinausgeht, ist möglich, indem nach einer linearen Approximation der FunktionX → f (p+X)− f (p) nicht nur auf einem hinreichend kurzen Geradenstück durch0, sondern in einer genügend kleinen offenen Umgebung von 0 gefragt wird.
Definition 91 (Differential eines Skalarfeldes) Sei f : U → R mit U ⊂ Voffen. Existiert für p ∈ U eine lineare Abbildung dpf : V → R, sodass
limX→0
f (p+X)− f (p)− dpf (X)
|X| = 0,
dann heißt f differenzierbar in p und dpf heißt das (totale) Differential von f in p.
Anmerkungen:
1. Diese implizite Definition des Differentials einer in p differenzierbaren Funktionf legt dpf eindeutig fest, denn für eine von dpf verschiedene lineare FunktionL : V → R gilt für den Fehler der Approximation X → f (p) + L (X) vonX → f (p+X) auf einer hinreichend kleinen Umgebung U0 von 0 ∈ V
ψL (X) : =f (p+X)− (f (p) + L (X))
|X|
=f (p+X)− f (p)− dpf (X)
|X| +(dpf − L) (X)
|X|
und dieser Ausdruck konvergiert fürX → 0 nicht gegen 0. Das Differential gibtalso die beste lineare Approximation an die Funktion f im Punkt p, weil sie dieeinzige ist, deren Fehler ψ so rasch gegen 0 geht, dass limX→0 ψ (X) / |X| = 0folgt.
2. Das Differential einer Funktion f in einem Punkt p ist also keine „infinitesima-le” Größe, sondern eine lineare Abbildung. Die Vorstellung vom Differentialals kleine Zahl rührt von der Tatsache her, dass dpf (X) in der Regel nur fürhinreichend kleine X die Differenz f (p+X)−f (p) gut nähert. Und für kleineX ist natürlich auch dpf (X) klein.
3. Die Definition des Differentials eines Skalarfeldes macht Gebrauch von einerNorm von V. Da jedoch alle Normen eines endlichdimensionalen Vektorraumszueinander äquivalent3 sind, ergeben alle Normen dasselbe Differential.
4. Ist f : U → R in p ∈ U differenzierbar, dann liefert das Differential von f in palle seine Richtungsableitungen in p. Aus der Linearität von dpf folgt nämlich
3Zwei Normen |·|1 und |·|2 heißen äquivalent, wenn zwei positive reelle Zahlen c1, c2 existieren,sodass für alle v ∈ V gilt, dass |v|1 ≤ c1 |v|2 und |v|2 ≤ c2 |v|1 .

KAPITEL 3. VEKTORANALYSIS 197
für X ∈ V und ε = 0, dass dpf (X) = |X| dpf(εX)ε|X| = sgn (ε) |X| dpf(εX)
|εX| . Darausfolgt weiter
dpf (X) = |X| limε→0
sgn (ε)dpf (εX)
|εX| = |X| limε→0
sgn (ε)f(p+ εX)− f(p)
|εX|
= limε→0
f(p+ εX)− f(p)
ε= [X]p f.
5. Ist f überall differenzierbar, dann heißt die Abbildung df : U → Hom (V : R)mit p → dpf das Differential von f. Hier bezeichnet Hom (V : R) die Mengealler linearen Abbildungen von V nach R, also den Vektorraum der ’Linear-formen’ von V.
6. Das analog definierte Differential existiert für Funktionen f : U → W, wennW irgendein reeller Vektorraum ist.
Skalarfelder können punktweise addiert und multipliziert werden. Diesbezüglichgibt es wieder einfache aber umso nützlichere Regeln.
Satz 92 Seien f, g : U → R (mit U ⊂ V offen) in p ∈ U differenzierbar und λ ∈ R.Dann gilt dp (λf + g) (X) = λdpf (X) + dpg (X) (Linearität) und die Produktregeldp (f · g) (X) = g (p) · dpf (X) + f (p) · dpg (X) für alle X ∈ V.
3.1.2 Beispiele zum Differential
Differential einer konstanten Funktion
Sei f : V → R konstant. Dann gilt f (p+X)− f (p) = 0 und daher
limX→0
f (p+X)− f (p)− 0
|X| = 0.
Somit gilt dpf (X) = 0 für alle p,X ∈ V.
Differential einer Linearform
Das einfachste Beispiel nach den konstanten Funktionen liefert eine lineare Funktionf : V → R. Es gilt für p,X ∈ V
f(p+X)− f (p)− f (X)
|X| = 0.
Die Abbildung f ist somit differenzierbar und es gilt dpf (X) = f (X) für allep,X ∈ V. Beispielsweise folgt für f : V → R mit f (p) = k, p , wobei ·, · einSkalarprodukt von V und k ∈ V ein fest gewählter Vektor ist, dpf (X) = k,X .

KAPITEL 3. VEKTORANALYSIS 198
Differential und Kettenregel
Etwas allgemeiner ergibt sich für h : V → R mit h (p) = k, pn und n ∈ Z dasDifferential dph mit der Kettenregel. Sie besagt für die Hintereinanderausführungh = g f zweier differenzierbarer Funktionen f : V → R und g : R → R dass füralle X ∈ V
dph (X) = df(p)g (dpf (X)) = g′ (f (p)) · dpf (X) .
Im vorliegenden Fall setzen wir f (p) = k, p für alle p ∈ V und g (x) = xn für allex ∈ R. Dann ergibt die Kettenregel dph (X) = n k, pn−1 k,X für alle X ∈ V.
Differential eines Normquadrats
Für f : V → R mit f(p) = p, p = |p|2 gilt f(p + h) = p+X, p+X = p, p +2 p,X+ X,X und somit
limX→0
f(p+X)− f (p)− 2 p,X|X| = lim
X→0
X,X|X| = lim
X→0|X| = 0.
Ein Skalarprodukt ist bilinear. Daher ist die Abbildung von V nach R mit X →2 p,X linear und es gilt dp |·|2 (X) = 2 p,X für alle X ∈ V.
Differential einer quadratischen Form
Sei A : V → V linear und symmetrisch bezüglich des Skalarprodukts ·, · von V.Dann gilt für die Abbildung f : V → R mit f (p) = p,Ap
f (p+X)− f (p) = p, AX+ X,Ap+ X,AX = 2 p, AX+ X,AX .Daraus folgt
limX→0
f (p+X)− f (p)− 2 p, AX|X| = 0.
Somit ist die Funktion f, eine sogenannte quadratische Form, überall differenzierbarund es gilt dpf (X) = 2 p,AX für alle X ∈ V.
Differential einer Norm
Sei r := |·| mit |p| =p, p. An der Stelle p = 0 gilt für ε > 0 und X ∈ V
r(0 + εX)− r(0)
ε=
ε |X| − 0
ε= |X| = [X]0 r.
Alle einseitigen Richtungsableitungen von r existieren also an der Stelle p = 0. Aberdie AbbildungX → [X]0 r = |X| ist nicht linear. Wäre sie das, müsste |−X| = − |X|gelten, was für X = 0 im Widerspruch zu 0 < |X| = |−X| steht. Somit ist r in 0nicht differenzierbar.
Dass r an einer Stelle p = 0 differenzierbar ist, folgt aus der Differenzierbarkeitder Wurzelfunktion auf R>0. Es gilt nach der Kettenregel
dpr = dp
√· r2
=
1
2
r2 (p)dpr
2 =1
2 |p| · 2 p, · ,

KAPITEL 3. VEKTORANALYSIS 199
alsodpr (X) = p/ |p| , X für alle p ∈ V 0 und für alle X ∈ V. (3.2)
Richtungsableitung der Norm unter Drehvektorfeld
Schließlich soll noch für einen dreidimensionalen, orientierten Vektorraum V dasskalare Feld der Richtungsableitungen von r = |·| mit dem Drehvektorfeld zur Ach-senrichtung n
L : V → V, p → n× p
berechnet werden. Dabei gehört die Norm r zu jenem Skalarprodukt von V, das zurBildung des Vektorproduktes benutzt wird. Für p = 0 kann der Vektor L(p) in dasDifferential dpr eingesetzt werden. Dies ergibt
[L]p r = (dpr) (n× p) =1
|p| p, n× p = 0.
Für p = 0 steht kein Differential von r zur Verfügung und es ist die Definition 88 derRichtungsableitung zu verwenden. Wegen L(0) = 0 folgt also auch [L]0 r = 0. DasFaktum [L]p r = 0 für alle p ∈ V signalisiert die Drehinvarianz der Funktion r, dennes bewirkt, dass die Integralkurven von L in den Niveauflächen von r verlaufen, dassalso r auf zwei Punkten, die auseinander durch Drehen hervorgehen, denselben Werthat.
3.1.3 Skalarpotential eines Punktdipols
Die elektrische Potentialfunktion eines Punktdipols entsteht aus der einer Punktla-dung durch die Bildung einer Richtungsableitung. Und zwar so:
Eine im Ort X ∈ V ruhende Punktladung der Stärke q ∈ R trägt für dimV = 3das elektrische Potentialfeld
ΦX : V X → R mit ΦX (p) =q
4πε0· 1
|p−X| .
Befindet sich zusätzlich eine Punktladung −q am Ort 0, dann addieren sich diebeiden Potentialfunktionen zum Gesamtpotential, das in p ∈ V 0, X den Wert
ΦX (p)− Φ0 (p) = Φ0 (p−X)− Φ0 (p) = − (dpΦ0) (X) + Ψp (X)
hat, wobei der Fehler Ψp (X) der Tangentialapproximation für X → 0 so rasch gegen0 strebt, dass limX→0Ψp (X) / |X| = 0. Mit dpr
−1 = − |p|−3 p, · folgt
− (dpΦ0) (X) = − [X]p Φ0 =q
4πε0
p,X|p|3
=1
4πε0
qX, p|p|3
.
Der Vektor δ = qX ∈ V heißt Dipolmoment der beiden Punktladungen und
D0 : V 0→ R mit D0 (p) = − [δ]p
1
4πε0· 1|·|
=
1
4πε0
δ, p|p|3
KAPITEL 3. VEKTORANALYSIS 200
heißt Potentialfunktion eines (fiktiven) Punktdipols im Ort 0 mit Dipolmoment δ.Aber D0 ≈ ΦX − Φ0 gilt nur im Bereich |p| ≫ |X| . Sitzt ein Punktdipol in einembeliebigen Ort X, dann trägt er das Potential DX mit DX (p) = D0 (p−X) .
Vielfach ist von einem realen Dipol weder q noch X bekannt, sondern lediglichder Vektor δ. Für das Dipolmoment eines HF-Moleküls etwa gilt |δ| = 6 · 10−30Cm,wobei aber das HF-Molekül nicht als neutrales Paar von zwei ruhenden Punktla-dungen verstanden wird und es die Größen q und X im HF-Molekül gar nicht zugeben scheint. Eher stimmt das Bild einer stetigen auf kleinem Raum lokalisiertenLadungsdichte, deren Potential weit weg vom Molekül durch D0 approximiert wird.
3.1.4 *Lineare Richtungsableitungen ohne D’barkeit
Eine Funktion, deren Richtungsableitungen in 0 alle gleich 0 sind, die aber trotzdemin 0 nicht differenzierbar ist, ist die folgende: Seien f : V → R und e = (e1, e2) eineBasis von V mit
f (x · e1 + y · e2) =x3y
x4 + y2für x2 + y2 > 0 und f (0) = 0.
Dann gilt für X = cosα · e1 + sinα · e2 und ε > 0
f (εX)− f (0)
ε=
ε cos3 α sinα
ε2 cos4 α + sin2 α→ 0 für ε ց 0.
Alle Richtungsableitungen von f in 0 existieren und haben den Wert 0. Die Abbil-dung V ∋ X → [X]0 f ist also linear.
Ist f in 0 auch differenzierbar? Dazu müsste limp→0 (f (p)− f (0)) / |p| = 0 fürirgendeine4 beliebige Norm |·| von V gelten, da ja alle Richtungsableitungen in 0verschwinden. Wegen f (0) = 0 ist also der Grenzwert limp→0 f (p) / |p| zu untersu-chen. Sei also |·| die Norm zu jenem Skalarprodukt, das die Basis e zu einer ONBmacht. Dann gilt
f (x · e1 + y · e2)|x · e1 + y · e2|
=x3y
(x4 + y2)
x2 + y2.
Wir werten nun f längs der C1-Kurve γ : [0, 1] → V mit γ (t) = t · e1 + t2 · e2 aus,setzen also x = t und y = t2. Dies ergibt
f (0 + γ (t))− f (0)
|γ (t)| =t3t2
(t4 + t4)√t2 + t4
=t5
2t5√1 + t2
=1
2√1 + t2
→ 1
2für t → 0.
Somit ist f in 0 nicht differenzierbar.
4Gilt dies für eine Norm, dann gilt es auch für jede andere, da ja alle Normen eines endlichdi-mensionalen Vektorraumes zueinander äquivalent sind.

KAPITEL 3. VEKTORANALYSIS 201
3.1.5 Partielle Ableitungen
Sei U ⊂ V offen und f : U → R. Sei e eine Basis von V. Für p ∈ U existiere derGrenzwert limε→0 (f(p+ εei)− f(p)) /ε. Es gilt dann
limε→0
(f(p + εei)− f(p))
ε= [ei]p f = − [−ei]p f.
Sei fe der Kartenausdruck von f zur Basis e. Dann folgt mit der Standardbasis δvon Rn×1
[ei]p f = limε→0
fe(pe + εδi)− fe(pe)
ε=
∂fe∂xi
(pe).
Die Richtungsableitung [ei]p f von f in p unter dem Basisvektor ei stimmt also mitder i-ten partiellen Ableitung des Kartenausdrucks fe von f zur Basis e im Punkt peüberein. Daher wird unter den vorliegenden Umständen das Skalarfeld p → [ei]p fauf U kurz als die i-te partielle Ableitung ∂e
i f von f bezüglich der Basis e bezeichnet
∂ei f :=
∂fe∂xi
Φe|U
= [ei] f.
Zur Berechnung des Skalarfeldes [ei] f durch partielles Differenzieren wird alsoder Koordinatenausdruck von f zur Basis e benötigt.
Ein Skalarfeld f : U → R sei in jedem Punkt p ∈ U ⊂ V differenzierbar. Dannkann mit einem Vektorfeld X : U → V das Skalarfeld [X] f : U → R gebildetwerden, das einem Punkt p die Richtungsableitung von f an der Stelle p unter demVektor X(p) zuordnet. Sein Wert an der Stelle p ∈ U wird mit [X]p f := [X(p)]p fbezeichnet. In den Koordinaten zur Basis e gilt
[X]p f = dpf
n
i=1
eiΦie (X (p))
=
n
i=1
Φie (X (p)) dpf (ei) =
n
i=1
Φi
e X· ∂e
i f(p) .
Ein nützliches Kriterium für die Differenzierbarkeit eines Skalarfeldes in Termender partiellen Ableitungen gibt der folgende Satz. (§6, Satz 2, p 47 in [6])
Satz 93 Sei U ⊂ V offen und e eine Basis von V . Der Koordinatenausdruckfe von f : U → R sei überall partiell differenzierbar. Die partiellen Ableitungen∂fe∂xi
(x1, ..., xn) seien stetig im Punkt p ∈ U. Dann ist f in p differenzierbar.
3.1.6 Beispiele zur partiellen Ableitung
Richtungsableitung unter Drehvektorfeld
Nun soll die Berechnung der Richtungsableitung der Norm mit dem Drehvektorfeldunter Verwendung von Koordinaten zur Standardbasis e von V = R3×1 wiederholt
werden. Es gilt r = re(x1, x2, x3) =
(x1)2 + (x2)2 + (x3)2. Das Drehvektorfeld
L : p → n× p ist für n = (n1, n2, n3)t durch
L =
n2x3 − n3x2
n3x1 − n1x3
n1x2 − n2x1
=:
3
i=1
Lix1, x2, x3
· ei

KAPITEL 3. VEKTORANALYSIS 202
gegeben. Für die partiellen Ableitungen von r gilt auf V 0
∂ei r =
∂re∂xi
x1, x2, x3
=
xi
(x1)2 + (x2)2 + (x3)2
=xi
r.
Damit folgt für das Skalarfeld [L] r auf V 0, dass
[L] r =3
i=1
Li∂re
∂xi
(x1, x2, x3)
=1
r
x1n2x3 − n3x2
+ x2
n3x1 − n1x3
+ x3
n1x2 − n2x1
= 0.
Partielle DGen und Vektorfelder
Seien auf U = (R 0)×R das Skalarfeld f = y/x und das Vektorfeld Y = (2x,−3y)gegeben. Dann gilt [Y ] f = 2x∂x
yx− 3y∂y
yx= −2xy/x2 − 3y/x = −5y/x. Man sagt:
f ist Lösung der „partiellen Differentialgleichung“ [Y ] f + 5f = 0. Vektorfelderinduzieren also nicht nur Systeme von gewöhnlichen Differentialgleichungen sondernauch partielle Differentialgleichungen (beide erster Ordnung).
Partielle Ableitungen ohne D’barkeit
Seien f : V → R und e = (e1, e2) eine Basis von V mit f (0) = 0 und
f (x · e1 + y · e2) =xy
x2 + y2für x2 + y2 > 0.
Es folgt f (y · e2) = f (x · e1) = 0 für alle x, y ∈ R. Daher gilt ∂e1f (0) = ∂e
2f (0) = 0.Für α ∈ R und r > 0 folgt fe (r cosα, r sinα) = cosα sinα = sin (2α) /2. Auf jedernoch so kleinen Kreisscheibe um 0 nimmt somit f jeden Wert zwischen −1/2 und1/2 an. Daher ist f in 0 unstetig und nicht differenzierbar. Die Richtungsableitungvon f in 0 mit X = cosα · e1 + sinα · e2 existiert für 0 < α < π/2 nicht, da für alleε > 0
f (εX)− f (0)
ε=
sin (2α)
2ε
für ε ց 0 nach∞ divergiert. Also gilt: die partiellen Ableitungen (∂ei f) (0) existieren,
nicht aber die Richtungsableitung [X]0 f unter X = x · e1 + y · e2 mit x · y = 0.
3.1.7 Gradient
Das Differential einer differenzierbaren Funktion f : V ⊃ U → R im Punkt p ∈ Uist eine lineare Abbildung von V nach R, eine sogenannte Linearform. Das folgendeLemma hält fest, dass sich jede Linearform auf V als Skalarprodukt mit einem geeig-neten Vektor in V darstellen lässt. Damit ist über die Darstellung des Differentialseines Skalarfeldes als Skalarprodukt der Weg zur Definition des Gradienten geebnet.

KAPITEL 3. VEKTORANALYSIS 203
Lemma 94 Seien e = (e1, . . . en) eine Basis und ·, · ein Skalarprodukt von V.Zu jeder Linearform L : V → R existiert genau ein Vektor l =
ni=1 l
iei ∈ V,sodass L(X) = l, X für alle X ∈ V gilt. Die Koordinaten li von l bezüglich e sinddurch li =
nj=1
G−1
e
ijL (ej) gegeben. Dabei bezeichnet G−1
e die inverse Matrix derGramschen Matrix Ge zur Basis e und zum Skalarprodukt ·, · .
Beweis. Zur Eindeutigkeit: Angenommen es gibt zwei Vektoren l1, l2 ∈ V, fürdie l1, X = L(X) und l2, X = L(X) für alle X ∈ V. Dann wäre l1 − l2,X = 0für alle X ∈ V die Folge. Für X = l1 − l2 folgt daraus |l1 − l2|2 = 0, also l1 = l2.
Wie lässt sich l bestimmen? Sei e = (e1, . . . en) eine Basis und l =n
i=1 liei.
Dann ist L(X) = l, X für alle X ∈ V genau dann erfüllt, wenn
L (ej) = l, ej =n
i=1
li ei, ej =n
i=1
li (Ge)ij
für alle j ∈ 1, . . . n gilt. Wegen5 detGe = 0 ist die Matrix Ge invertierbar und esfolgt mit ihrer als G−1
e notierten inversen Matrix li =n
j=1
G−1
e
ijL (ej) .
Die Darstellung einer beliebigen Linearform L : V → R als Skalarprodukt L =l, · mit einem eindeutig durch L und ·, · bestimmten Vektor l ∈ V ermöglichtnun die folgende Definition des Gradienten.
Definition 95 (Gradient) Sei U ⊂ V offen und f : U → R sei differenzierbar inp ∈ U. Dann heißt der Vektor gradp (f) ∈ V mit
&gradp (f) , X
'= [X]p f = dpf(X) für alle X ∈ V
Gradient von f im Punkt p. Ist f überall differenzierbar, dann heißt das Vektorfeldgrad (f) : U → V, p → gradp (f) das Gradientenfeld von f.
Die hier getroffene koordinatenfreie Definition des Gradienten enthält die Wahleines Skalarproduktes. Ein und dieselbe Funktion f hat also je nach Skalarprodukteinen anderen Gradientenvektor in p. Die Definition des Differentials dpf hingegenmacht keinen Gebrauch von der Wahl eines Skalarprodukts und ist daher wenigerstark von zusätzlichen Strukturen auf V beeinflusst.
Gradient einer Linearform
Sei g : V → R mit g (p) = k, p für ein k ∈ V. Wegen dpg (X) = k,X gilt somitgradp (g) = k für alle p ∈ V.
Gradient einer quadratischen Form
Sei A : V → V linear und symmetrisch bezüglich des Skalarprodukts ·, · von V.Dann hat die quadratische Form f : V → R mit f (p) = p, Ap an der Stelle p ∈ Vdas Differential dpf : X → 2 p, AX = 2 Ap,X . Somit folgt gradpf = 2Ap.
5Aus detGe = 0 würde folgen, dass Ge den Eigenwert 0 hat. Dies steht im Widerspruch zurEigenschaft der Nichtausgeartetheit des Skalarproduktes, die besagt, dass v,w = 0 für alle w ∈ Vnur dann gilt, wenn v = 0.

KAPITEL 3. VEKTORANALYSIS 204
Geometrische Bedeutung des Gradienten
Sei f ein in p differenzierbares Skalarfeld. Für gradp (f) = 0 und X ∈ V 0 existiertdann genau ein θ ∈ [0, π] mit
[X]p f =&gradp (f) ,X
'= |X|
,,gradp (f),, cos θ.
(θ wird als der ungerichtete Winkel zwischen den Vektoren gradp (f) und X bezeich-net.) Daraus folgt max Xp [f ] | X ∈ V, |X| = 1 =
,,gradp (f),, . Das Maximum der
Richtungsableitungen Xp [f ] für X ∈ V mit |X| = 1 wird also genau dann angenom-
men, wenn X =,,gradp (f)
,,−1 gradp (f) . Ein von 0 verschiedener Gradientenvektorgradp (f) gibt somit am Punkt p jene Richtung in V an, in welche die Funktion fam stärksten zunimmt.6 Nimmt die Funktion f um p in keine Richtung zu, danngilt gradp (f) = 0. Der Punkt p wird dann als kritischer Punkt von f bezeichnet.
Eine Kurve γ : (−ε, ε) → U ⊂ V sei differenzierbar in 0 und es gelte γ(0) = p.Weiter sei f(γ(t)) = f(p) für alle t ∈ (−ε, ε) . Die Kurve γ nimmt also nur Werteauf jener Niveaumenge von f an, in der p liegt, also in q ∈ U | f(q) = f(p) . Ausder Konstanz von f γ folgt
0 =d
dt(f γ)
,,,,t=0
= dpf (γ (0)) =&gradp (f) , γ(0)
'.
Der Gradientenvektor gradp (f) steht somit senkrecht auf die Tangentenvektoren derNiveaumenge von f im Punkt p.
Gradient der Norm
Sei f : V → R, mit f(p) = p, p und r = |·| = √f. Dann gilt dpf = 2 p, · , woraus
gradp (f) = 2p folgt. Analog ergibt sich aus dpr = p/ |p| , · , dass gradp (r) = p/ |p|für p ∈ V 0. Beide Vektorfelder sind in p = 0 radial nach außen gerichtet undstehen in p senkrecht auf die Niveaufläche von f, eine Sphäre um 0 mit dem Radiusr(p). Wir fassen als Funktionsgleichungen auf V 0 zusammen:
gradr2= 2ιd und grad (r) =
ιd
r.
3.1.8 *Kräftefreie relativistische Bewegung
Zur Illustration des Gradienten eignet sich die relativistische Mechanik eines kräf-tefreien Massenpunktes. Seine Lagrangefunktion spezialisiert sich durch Wahl einesInertialsystems zu L : V ×Kc → R mit
L (x, v) = −mc2
1− |v/c|2.6Die Sphäre der Vektoren X mit |X| = 1 hängt vom benützten Skalarprodukt ab, und damit
auch die Richtung von gradp (f) . Die Aussage, dass der Gradient in die Richtung der stärkstenÄnderung weist, täuscht daher eine Unabhängigkeit vom Skalarprodukt bloß vor.

KAPITEL 3. VEKTORANALYSIS 205
Man beachte, dass
−mc2
1− |v/c|2 = −mc2 +m
2|v|2 +O
|v/c|4
für v/c → 0.
Dabei bezeichnet V einen reellen Vektorraum, ·, · ein Skalarprodukt von V mit
Abbildung 3.1: −√1− x2 (rot) und Taylorpolynom −1 + x2/2
zugehöriger Norm |·| und Kc ⊂ V die offene Kugel um 0 mit Radius c für eine reellepositive Konstante c, die Lichtgeschwindigkeit. L ist also im ersten Argument, demOrt, konstant.
Die Euler-Lagrangegleichung zu L für eine C2-Kurve γ : I → V mit |γ| < c ist
d
dtgradγ(t)L (γ (t) , ·) = 0. (3.3)
Es bietet sich nun an, die Funktion f : Kc → Rmit L (x, v) = −mcf (v) zu benützen.
Das Gradientenfeld von f =
c2 − |·|2 > 0 erfüllt für alle v ∈ Kc
gradv (f) =−gradv |·|2
2
c2 − |v|2=
−v
f (v).
Gleichung (3.3) besagt also, dass
mcd
dt
γ (t)
f (γ (t))
= 0.
Es gilt nach Quotienten- und Kettenregel
d
dt
γ (t)
f (γ (t))=
γ (t) f (γ (t))− γ (t) [γ (t)]γ(t) (f)
f (γ (t))2
=γ (t) f (γ (t)) + γ (t) γ (t) , γ (t) /f (γ (t))
f (γ (t))2=
f (γ (t))2 γ (t) + γ (t) , γ (t) γ (t)
f (γ (t))3.
Gleichung (3.3) ist daher äquivalent zu
f (γ (t))2 γ (t) + γ (t) , γ (t) γ (t) = 0. (3.4)

KAPITEL 3. VEKTORANALYSIS 206
Bildung des Skalarproduktes von Gleichung (3.4) mit γ (t) ergibtf (γ (t))2 + |γ (t)|2
γ (t) , γ (t) = c2 γ (t) , γ (t) = 0,
also γ (t) , γ (t) = 0. Berücksichtigung dieser Tatsache in Gleichung (3.4) ergibtschließlich γ (t) = 0. Die maximalen Lösungen dieser Gleichung sind γ : R→ V mitγ (t) = x0 + v0t für ein x0 ∈ V und ein v0 ∈ Kc. Wie im newtonschen Fall kannsich ein freies Teilchen nur mit konstanter Geschwindigkeit bewegen. Neu ist dieBeschränkung der Geschwindigkeit v0 durch |v0| < c.
Die Hamiltonfunktion H zu L ist (im gegenwärtigen Kontext!) definiert durch
H (x, p (x, v)) = p (x, v) , v − L (x, v) und p (x, v) = gradvL (x, ·) = mv 1− |v|2 /c2
.
Daraus folgt erstens Einsteins Beziehung zwischen Energie und Geschwindigkeit
H (x, p (x, v)) =mc |v|2 c2 − |v|2
+mc
c2 − |v|2 = mc2
1− |v/c|2
mit der Niederenergieasymptote
mc2 1− |v/c|2
= mc2 +m
2v2 +O
vc
4für v/c → 0.
Weiters folgt, da die Abbildung p (x, ·) : Kc → V bijektiv ist, für die Hamiltonfunk-tion H : V × V → R eines kräftefreien relativistischen Massenpunkts
H (x, p) = c
m2c2 + |p|2.
Dies ist so zu sehen: c
m2c2 + |p|2 =
c
m2c2 +
m2 |v|2
1− |v/c|2= c
m2c2
1− |v|2 /c2
+m2 |v|2
1− |v/c|2=
mc2 1− |v/c|2
.
Hier noch die Inversion der relativistischen Abbildung von Geschwindigkeit aufImpuls.
Lemma 96 Sei V ein endlichdimensionaler Vektorraum mit Norm |·| und seienm, c ∈ R>0. Für zwei Vektoren v, p ∈ V gilt
p = mv/
1− |v/c|2 ⇐⇒ v = p/
m2 + |p/c|2.
Beweis. Aus p = mv/
1− |v/c|2 folgt |p|21− |v/c|2
= m2 |v|2 und weiter
|p|2 = |v|2m2 + |p/c|2
, also |v|2 = |p|2 /
m2 + |p/c|2
.Aus v = (p/m)
1− |v/c|2
ergibt sich damit
v =p
m
/1−
,,,vc
,,,2
=p
m
1− |p/c|2
m2 + |p/c|2=
p
m
m2
m2 + |p/c|2=
p m2 + |p/c|2
.
Der Umkehrschluss geht völlig analog.

KAPITEL 3. VEKTORANALYSIS 207
3.1.9 *Konstante relativistische Kraft
Die Lagrangefunktion L : V × Kc → R eines relativistischen Teilchens in einemvorgegeben (im gewählten Inertialsystem zeitlich konstanten) Kraftfeld mit PotentialΦ erfüllt
L (x, v) = −mc
c2 − |v|2 − Φ (x) .
Die zugehörige Eeuler-Lagrangegleichung ist
d
dt
mγ (t) 1− |γ (t) /c|2
= −gradγ(t)Φ. (3.5)
Der Zusammenhang zwischen Geschwindigkeit und Impuls ist dann wie im FallΦ = 0. Die zugehörige Hamiltonfunktion H : V × V → R erfüllt
H (x, p) = c
m2c2 + |p|2 +Φ(x) .
Lösungen der Hamiltonschen Bewegungsgleichung verlaufen innerhalb einer Niveau-fläche von H. Daher ist auch die Energie
E [γ] :=mc2
1− |v/c|2+Φ(x)
,,,,,,x=γ(t),v=γ(t)
einer Lösung γ der Euler-Lagrangegleichung (3.5) unabhängig von t.Sei nun Φ für ein g ∈ V durch die Linearform Φ : V → R mit Φ (x) = −m g, x
gegeben. Es gilt also
L (x, v) = −mc
c2 − |v|2 +m g, x .
Die zugehörige Euler-Lagrangegleichung ist
d
dt
mγ (t) 1− |γ (t) /c|2
= mg. (3.6)
Ist γ : I → V eine Lösung dieser Bewegungsgleichung, dann existiert ein Vektorv0 ∈ V, sodass
γ (t) 1− |γ (t) /c|2
= gt+ v0 für alle t ∈ I. (3.7)
Daraus folgt nun, dass eine differenzierbare Funktion λ : I → R>0 mit γ (t) =λ (t) (gt+ v0) für alle t ∈ I existiert. Gleichung (3.7) ist genau dann erfüllt, wenn
λ (t) 1− λ (t)2 |gt+v0|2
c2
= 1 bzw λ (t) =1
1 + |gt+v0|2c2
für alle t ∈ I.

KAPITEL 3. VEKTORANALYSIS 208
Für die Geschwindigkeit einer Lösung γ : I → V gilt somit
γ (t) =gt+ v0 1 + |gt+v0|2
c2
für alle t ∈ I.
Man beachte, dass daraus |γ (t)| < c und limt→±∞ |γ (t)| = c folgt. Der Impuls desTeilchens wächst also unbeschränkt in der Zeit an, nicht aber die Geschwindigkeit.Ihr Betrag ist durch c begrenzt. Der Vektor v0 stimmt nicht mit der Geschwindigkeitzur Zeit t = 0 überein, vielmehr gibt mv0 den Impuls zur Zeit t = 0 an.
Die maximalen Lösungen der Euler-Lagrangegleichung (3.6) sind somit die Kur-ven γ : R→ V mit
γ (t) = x0 + g
t
0
s 1 + |gs+v0|2
c2
ds+ v0
t
0
ds 1 + |gs+v0|2
c2
für beliebige Vektoren x0, v0 ∈ V.Für die maximalen Lösungen zur Anfangsvorgabe v0 = 0 folgt somit
γ (t) = x0 + g
t
0
s 1 + |g|2
c2s2
ds.
Diese Kurve erfüllt γ (−t) = γ (t) und ihre Bildmenge ist der Halbstrahl x0+R≥0 ·g.Mit der Substitution u = |g| s/c ergibt sich γ (t) für g = 0 zu
γ (t) = x0 + gc2
|g|2 |g|t/c
0
u√1 + u2
du = x0 + gc2
|g|2 |g|t/c
0
d
du
√1 + u2du
= x0 + gc2
|g|2*
1 + |tg/c|2 − 1
+.
Für den Abstand zwischen γ (t) und dem Punkt X = x0 − g c2
|g|2 gilt daher
|γ (t)−X| =c2/ |g|
1 + |tg/c|2.
Daraus ergibt sich für die Weltlinie (ct, γ (t)) : t ∈ R ⊂ R × V die Hyperbelglei-chung |γ (t)−X|2 − c2t2 = c4/ |g|2 .
3.1.10 *Relativistischer harmonischer Oszillator
Die Potentialfunktion Φ : R → R eines harmonischen Oszillators erfüllt Φ (x) =kx2/2 für ein k ∈ R>0. Die Menge aller maximalen Lösungen der Bewegungsglei-chung eines nichtrelativistischen harmonischen Oszillators mit der Masse m > 0 undder Federkonstante k > 0 umfasst bekanntlich die Funktionen xA,B : R → R mitxA,B (t) = A cos (ωt) + B sin (ωt) für A,B ∈ R und ω =
k/m. Jede Lösung ist
ein Vielfaches eines Translats von x1,0. Der relativistische Fall hat eine weit wenigerdurchsichtige Lösungsmenge.

KAPITEL 3. VEKTORANALYSIS 209
Versuchen wir daher wenigstens teilweise Einsichten in die maximalen Lösungender (nichtlinearen!) Bewegungsgleichung des relativistischen harmonischen Oszilla-tors zu gewinnen. Zunächst ist es praktisch, den Parameter k durch mω2 zu ersetzen,was natürlich nur eine Umbenennung und nichts weiter sonst ist. Dann fällt nämlich- ähnlich dem nichtrelativistischen Fall - die Masse auch aus der relativistischen Be-wegungsgleichung heraus. Es wird sich herausstellen, dass die maximalen Lösungendieser Bewegungsgleichung ebenfalls periodisch sind. Die kleinste Periode einer ma-ximalen Lösung, also ihre Schwingungsdauer, ist allerdings, anders als beim nichtre-lativistischen Oszillator, abhängig von der Schwingungsamplitude, mit der sie strengmonoton wächst. Die Zeit T = 2π/ω tritt nur als Grenzwert der Schwingungsdauerfür gegen 0 strebende Amplitude auf.
Die Lagrangefunktion sei also für m,ω ∈ R>0 durch L : R× (−c, c)→ R mit
L (x, v) = −mc2
1− (v/c)2− mω2
2x2 = −mc2
1− (v/c)2 +
1
2
ωcx2
. (3.8)
gegeben. Man beachte, dass v/c und ωx/c physikalisch dimensionslos sind, dh ihreZahlenwerte sind invariant unter beliebigen Änderungen von Längen-, Zeit- undMasseneinheit.
Die zu L gehörige Hamiltonfunktion H ist H : R×R→ R mit
H (x, p) = c
(mc)2 + p2 +
mω2
2x2 = mc2
1 + (p/mc)2 +
1
2
ωcx2
.
Das zu H gehörige Phasenraumgeschwindigkeitsfeld XH = (∂pH,−∂xH) erfüllt
XH (x, p) =
p/m
1 + (p/mc)2,−mω2x
.
Aus (x, p) = X (x, p) folgt die Phasenraumbewegungsgleichung (in dimensionslosenaber nichtkanonischen Phasenraumkoordinaten ωx/c und p/mc)
d
dt
ωcx= ω
p/mc 1 + (p/mc)2
undd
dt
p
mc
= −ω
ωcx.
Eine Phasenraumkurve γ = (x, p) : I → R2 erfüllt somit genau dann γ = XH γ,wenn die zugeordnete dimensionslose Kurve
η : ω · I → R2 mit η (t) =η1 (ωt) , η2 (ωt)
=
ω
cx (t) ,
p (t)
mc
das System erster Ordnung η = Y η mit Y (a, b) =b/√1 + b2,−a
löst. Daraus
folgt für η2 =: ξ die DG zweiter Ordnung
d2
dt2ξ (t) = − ξ (t)
1 + ξ (t)2. (3.9)

KAPITEL 3. VEKTORANALYSIS 210
Gleichung (3.9) ist die Bewegungsgleichung eines (nichtlinearen) 1-dimensionalenOszillators im (asymptotisch linearen) Potential V (x) =
√1 + x2, da ja V ′ (x) =
x/√1 + x2. Für ihre Lösungen gilt der Erhaltungssatz
d
dt
ξ2
2+
1 + ξ2
= 0.
Für jede Lösung existiert somit eine Zahl ε > 1, sodass
ξ2
2+
1 + ξ2 = ε.
Daraus folgt für eine Lösung ξ : I → R mit ξ (0) > 0 und ξ (0) = 0,
ξ (t) =√2
/ε−
1 + ξ (t)2 für alle t ∈ I.
Für kleinen Impulsbetrag kann H approximiert werden gemäß
H (x, p) = mc21 +
1
2
p
mc
2+
1
2
ωcx2
+O p
mc
4für p/mc → 0.
Dementsprechend ist die Newtonsche Asymptote Hnr : R× R→ R von H durch
Hnr (x, p) = mc21 +
1
2
p
mc
2+
1
2
ωcx2
= mc2 +p2
2m+
mω2x2
2
gegeben. Fig. (3.2) zeigt die Niveaulinien von H (rot) und Hnr (grün) mit H =2mc2 = Hnr mit x in Einheiten von c/ω und p in Einheiten von mc.
10.50-0.5-1
1.5
1
0.5
0
-0.5
-1
-1.5
x
y
x
y
Abbildung 3.2: Line H = 2mc2 (rot) und Hnr = 2mc2 (grün)
Die Euler-Lagrangesche Bewegungsgleichung zur Lagrangefunktion (3.8) ist
d
dt
x (t) /c 1− (x (t) /c)2
= −ω ·ωcx (t)
(3.10)

KAPITEL 3. VEKTORANALYSIS 211
oder äquivalent dazu
x+ ω2 ·1− (x/c)2
3/2 · x = 0. (3.11)
Wachsender Geschwindigkeitsbetrag verkleinert gleichsam die Federkonstante ω,setzt also die Festigkeit der Feder herab.
Der zu Gleichung (3.11) gehörige Energieerhaltungssatz besagt für jede ihrerLösungen x : I → R
mc2d
dt
1− (x (t) /c)2
−1/2+
1
2
ωcx (t)
2= 0 für alle t ∈ I. (3.12)
Die Größe in der runden Klammer ist somit konstant. Sie ist zudem nichtnegativ.Wegen 0 < 1 − (v/c)2 < 1 ist der Ausdruck in der runden Klammer größer als 1.Damit existiert zu jeder Lösung x eine von der Wahl der Lösung abhängige Zahlε > 0, sodass
1− (x (t) /c)2
−1/2+
1
2
ωcx (t)
2= 1 + ε für alle t ∈ I. (3.13)
Der zulässige Wertebereich der betrachteten Lösung x mit der Energie mc2 (1 + ε)ist damit eingegrenzt auf das Intervall mit ω |x| /c <
√2ε. Die Zahl a = c
√2ε/ω
gibt die Amplitude einer maximalen Lösung von Gleichung (3.11) an, deren Energieden Wert mc2 (1 + ε) hat.
Eine Parameterreduktion wird nun durch Übergang von der Lösung x zur di-mensionslosen Funktion y : ω · I → R mit y (ωt) = ωx (t) /c erzielt. Die Funktion yerfüllt dann wegen x (t) /c = y′ (ωt) auf ihrem Definitionsbereich ω · I
d
dτ
y′ (τ) 1− y′ (τ )2
= −y (τ ) (3.14)
oder äquivalent dazu
y′′ +1− y′2
3/2y = 0. (3.15)
Die Energieerhaltung nimmt auf ω · I die parameterreduzierte Form
11− y′2
+y2
2= 1 + ε (3.16)
an. Die Funktion y ist dadurch auf den Wertebereich |y| <√2ε =: α eingegrenzt.
Fig. (3.3) zeigt die kinetische Energie (1− y′2)−1/2 − 1 samt ihrem Taylorpolynom
y′2/2 an der Stelle 0.In einer hinreichend kleinen Umgebung eines Punktes τ0 mit y′ (τ0) > 0 ist (3.16)
äquivalent zur expliziten autonomen DG erster Ordnung vom Typ der separiertenVariablen y′ = h (y) mit h : (−α, α)→ R>0 und
h (y) =
1− (1 + ε− y2/2)−2 =
(1 + ε− y2/2)2 − 1
1 + ε− y2/2. (3.17)

KAPITEL 3. VEKTORANALYSIS 212
10.50-0.5-1
1.25
1
0.75
0.5
0.25
0
x
y
x
y
Abbildung 3.3: Kinetische Energie (1− v2)−1/2 − 1 und Taylorpolynom v2/2 (gün)
Es gilt also limy→α h (y) = 0. Die Funktion 1/h ist über das Intervall (0, α) inte-grierbar. Daher wird der Umkehrpunkt y = α in endlicher Zeit erreicht und diemaximalen Lösungen von Gleichung (3.15) sind periodisch.
Die analoge Differentialgleichung des nichtrelativistischen Oszillators ergibt sichaus der Niederenergieasymtote an Gleichung (3.16). Letztere besagt, dass
y′2 + y2 = 2ε.
Daraus folgt in einer hinreichend kleinen Umgebung eines Punktes τ 0 mit y′ (τ0) > 0die explizite Differentialgleichung y′ =
2ε− y2.
Fig. (3.3) lässt somit vermuten, dass die maximale Lösung von y′ = h (y) beijeder Auslenkung y eine kleinere Geschwindigkeit y′ hat, als die maximale Lö-sung von y′ =
2ε− y2. Daher sollte die Dauer einer relativistischen Oszillator-
schwingung größer sein als die des nichtrelativistischen Oszillators gleicher Ampli-tude und gleicher Frequenzkonstante ω. Problem: Zeige h (y) <
2ε− y2 für alle
y ∈−√2ε,
√2ε.
Fig. (3.4) zeigt für ε = 1 die Menge aller Punkte (y, y′) mit y′ = ±h (y) inrot und die Menge aller Punkte (y, y′) mit y′ = ±
2ε− y2 in grün. Es sind dies
Niveaulinien der jeweiligen Energiefunktionen von Auslenkung und Geschwindigkeit.Die Auswirkung der relativistischen Geschwindigkeitsschranke ist klar ersichtlich.
Die Schwingungsdauer des nichtrelativistischen Oszillators ergibt sich wie folgt.Die Differentialgleichung y′ =
2ε− y2 ist mit z = y/
√2ε ∈ (−1, 1) äquivalent zur
parameterfreien Differentialgleichung z′ =√1− z2. Die maximale Lösung der DG
für z zur Anfangsvorgabe z (0) = 0 ist die Funktion
z : (−π/2, π/2)→ (−1, 1) mit z (x) = sin x.
Damit folgt für die Schwingungsdauer Tnr der Lösungen von y′′+ y = 0 unabhängigvon der Amplitude
√2ε, dass Tnr = 2π.
Was lässt sich über die maximale Lösung η von y′ = h (y) zur Anfangsvorgabe

KAPITEL 3. VEKTORANALYSIS 213
10.50-0.5-1
1
0.5
0
-0.5
-1
y
y'
y
y'
Abbildung 3.4: Linien mit ε = 1 : relativistisch (rot), nichtrelativistisch (grün)
η (0) = 0 schließen? Für alle τ mit |η (τ )| < α =√2ε folgt mit s = y/
√2
τ =
η(τ)
0
dy
h (y)=
η(τ)/√2
0
√2 (1 + ε− s2) ds (1 + ε− s2)2 − 1
. (3.18)
Da h eine gerade Funktion ist, ist η auf dem Intervall (−τ 0, τ0) definiert, wobei
√2
√ε
0
1 + ε− s2 (1 + ε− s2)2 − 1
ds = τ0
gilt. Aus Symmetriegründen ist die Zeit T = 4τ 0/ω die Schwingungsdauer derLösung x von Gleichung (3.11) mit x (t) = cη (ωt) /ω. Man beachte auch, dassη′ (0) = h (0) =
ε (2 + ε)/ (1 + ε) .
Eine weitere Umformung der Bestimmungsgleichung (3.18) für η ergibt sich mitder Substitution s =
√ε sin θ. Damit folgt für alle τ ∈ (−τ 0, τ0)
τ =√2ε
arcsinη(τ)√2ε
0
(1 + ε cos2 θ) cos θdθ (1 + ε cos2 θ)2 − 1
=
arcsinη(τ)√2ε
0
1 + ε cos2 θ1 + ε
2cos2 θ
dθ.
Für τ 0 folgt
τ 0 =
π/2
0
1 + ε cos2 θ1 + ε
2cos2 θ
dθ.
Zur Kontrolle dieses Ergebnisses für τ0 wird nun der nichtrelativistische Grenzfallε → 0 betrachtet. Es sollte limε→0 τ0 = π/2 gelten. Tatsächlich folgt für ε → 0
τ 0 =
π/2
0
1 + ε cos2 θ1 + ε
2cos2 θ
dθ =
π/2
0
1 + ε cos2 θ
1− ε
4cos2 θ +O
ε2 cos4 θ
dθ
=
π/2
0
1 +
3
4ε cos2 θ +O
ε2 cos4 θ
dθ =
π
2
1 +
3
8ε+O
ε2
.
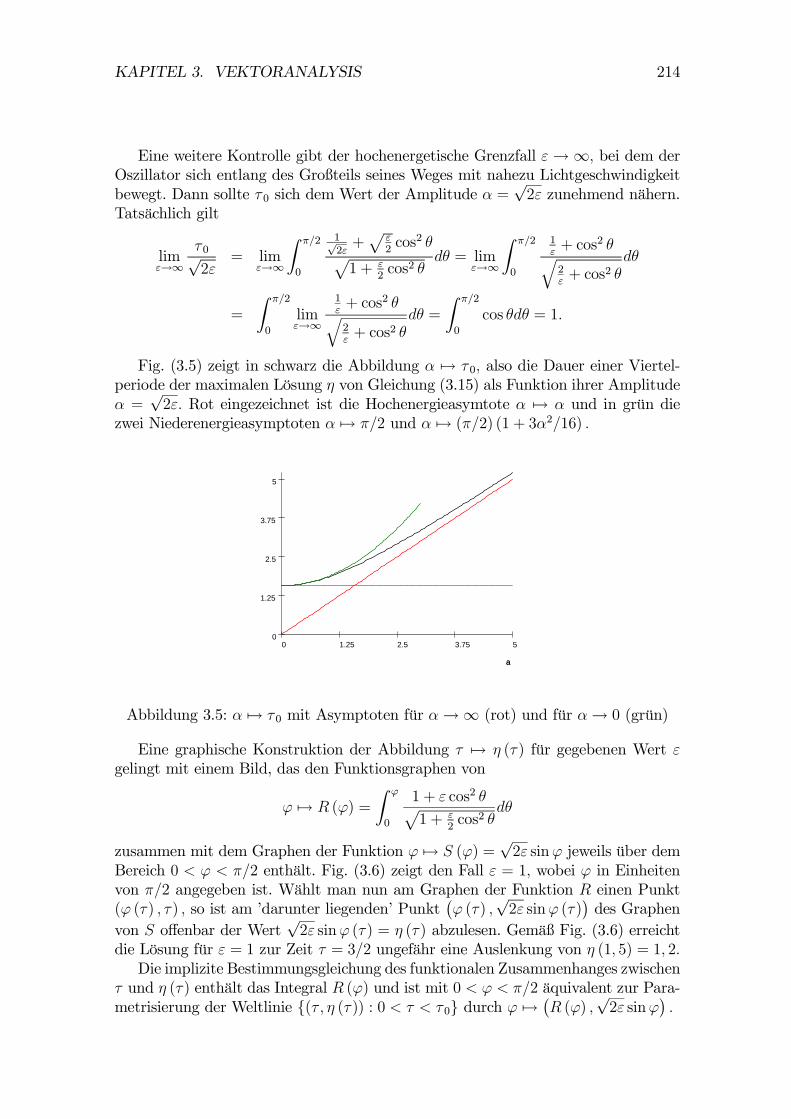
KAPITEL 3. VEKTORANALYSIS 214
Eine weitere Kontrolle gibt der hochenergetische Grenzfall ε →∞, bei dem derOszillator sich entlang des Großteils seines Weges mit nahezu Lichtgeschwindigkeitbewegt. Dann sollte τ 0 sich dem Wert der Amplitude α =
√2ε zunehmend nähern.
Tatsächlich gilt
limε→∞
τ0√2ε
= limε→∞
π/2
0
1√2ε
+
ε2cos2 θ
1 + ε
2cos2 θ
dθ = limε→∞
π/2
0
1ε+ cos2 θ 2ε+ cos2 θ
dθ
=
π/2
0
limε→∞
1ε+ cos2 θ 2ε+ cos2 θ
dθ =
π/2
0
cos θdθ = 1.
Fig. (3.5) zeigt in schwarz die Abbildung α → τ 0, also die Dauer einer Viertel-periode der maximalen Lösung η von Gleichung (3.15) als Funktion ihrer Amplitudeα =
√2ε. Rot eingezeichnet ist die Hochenergieasymtote α → α und in grün die
zwei Niederenergieasymptoten α → π/2 und α → (π/2) (1 + 3α2/16) .
53.752.51.250
5
3.75
2.5
1.25
0
aa
Abbildung 3.5: α → τ 0 mit Asymptoten für α →∞ (rot) und für α → 0 (grün)
Eine graphische Konstruktion der Abbildung τ → η (τ ) für gegebenen Wert εgelingt mit einem Bild, das den Funktionsgraphen von
ϕ → R (ϕ) =
ϕ
0
1 + ε cos2 θ1 + ε
2cos2 θ
dθ
zusammen mit dem Graphen der Funktion ϕ → S (ϕ) =√2ε sinϕ jeweils über dem
Bereich 0 < ϕ < π/2 enthält. Fig. (3.6) zeigt den Fall ε = 1, wobei ϕ in Einheitenvon π/2 angegeben ist. Wählt man nun am Graphen der Funktion R einen Punkt(ϕ (τ ) , τ ) , so ist am ’darunter liegenden’ Punkt
ϕ (τ) ,
√2ε sinϕ (τ )
des Graphen
von S offenbar der Wert√2ε sinϕ (τ ) = η (τ ) abzulesen. Gemäß Fig. (3.6) erreicht
die Lösung für ε = 1 zur Zeit τ = 3/2 ungefähr eine Auslenkung von η (1, 5) = 1, 2.Die implizite Bestimmungsgleichung des funktionalen Zusammenhanges zwischen
τ und η (τ) enthält das Integral R (ϕ) und ist mit 0 < ϕ < π/2 äquivalent zur Para-metrisierung der Weltlinie (τ , η (τ )) : 0 < τ < τ0 durch ϕ →
R (ϕ) ,
√2ε sinϕ
.
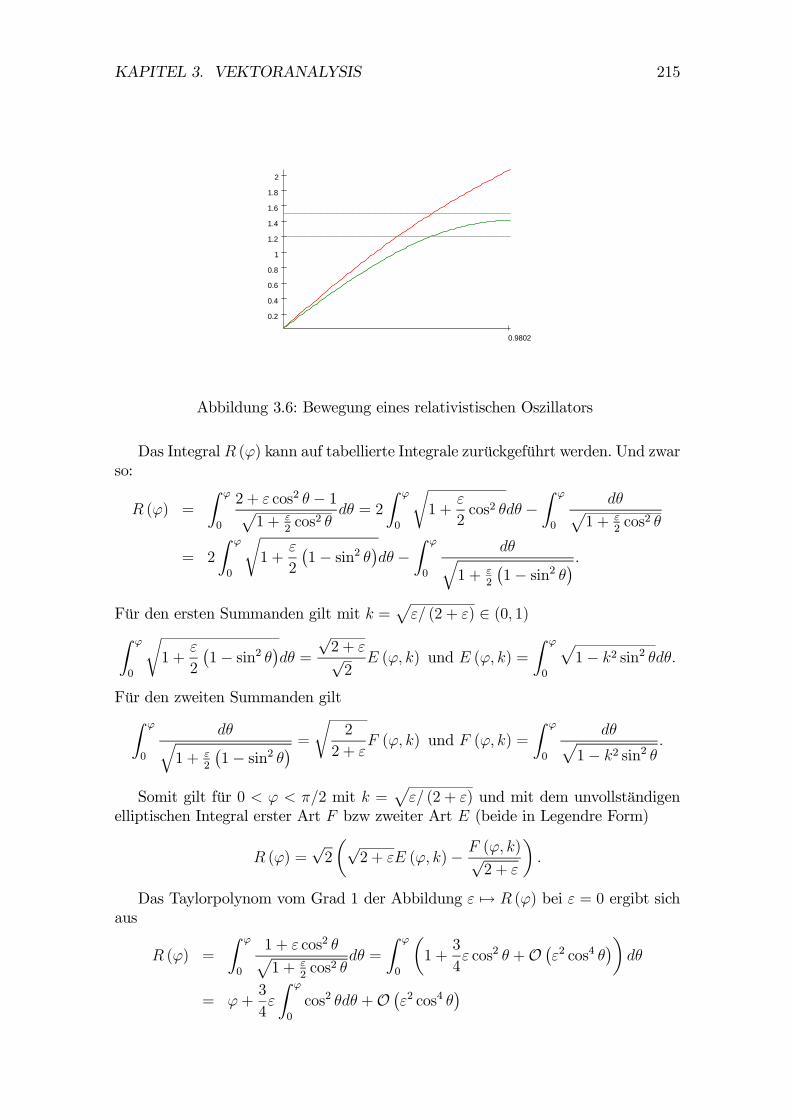
KAPITEL 3. VEKTORANALYSIS 215
0.9802
2
1.8
1.6
1.4
1.2
1
0.8
0.6
0.4
0.2
Abbildung 3.6: Bewegung eines relativistischen Oszillators
Das Integral R (ϕ) kann auf tabellierte Integrale zurückgeführt werden. Und zwarso:
R (ϕ) =
ϕ
0
2 + ε cos2 θ − 11 + ε
2cos2 θ
dθ = 2
ϕ
0
/1 +
ε
2cos2 θdθ −
ϕ
0
dθ1 + ε
2cos2 θ
= 2
ϕ
0
/1 +
ε
2
1− sin2 θ
dθ −
ϕ
0
dθ 1 + ε
2
1− sin2 θ
.
Für den ersten Summanden gilt mit k =
ε/ (2 + ε) ∈ (0, 1)
ϕ
0
/1 +
ε
2
1− sin2 θ
dθ =
√2 + ε√2
E (ϕ, k) und E (ϕ, k) =
ϕ
0
1− k2 sin2 θdθ.
Für den zweiten Summanden gilt ϕ
0
dθ 1 + ε
2
1− sin2 θ
=
/2
2 + εF (ϕ, k) und F (ϕ, k) =
ϕ
0
dθ1− k2 sin2 θ
.
Somit gilt für 0 < ϕ < π/2 mit k =
ε/ (2 + ε) und mit dem unvollständigenelliptischen Integral erster Art F bzw zweiter Art E (beide in Legendre Form)
R (ϕ) =√2
√2 + εE (ϕ, k)− F (ϕ, k)√
2 + ε
.
Das Taylorpolynom vom Grad 1 der Abbildung ε → R (ϕ) bei ε = 0 ergibt sichaus
R (ϕ) =
ϕ
0
1 + ε cos2 θ1 + ε
2cos2 θ
dθ =
ϕ
0
1 +
3
4ε cos2 θ +O
ε2 cos4 θ
dθ
= ϕ+3
4ε
ϕ
0
cos2 θdθ +Oε2 cos4 θ

KAPITEL 3. VEKTORANALYSIS 216
zu
R1 (ϕ) = ϕ+3
4ε
ϕ
0
1
2(1 + cos (2θ)) dθ = ϕ+
3ε
8
ϕ+
sin (2ϕ)
2
.
Die Viertelperiode der Weltlinie ϕ →R1 (ϕ) , η (ϕ) /
√2ε= (R1 (ϕ) , sin (ϕ))
mit 0 < ϕ < π/2 zu ε = 0, 1 ist zusammen mit der Newtonschen Weltlinieϕ → (ϕ, sin (ϕ)) in Fig. (3.7) dargestellt. Der Newtonsche Oszillator benötigt fürdie Viertelperiode eine sichtbar kürzere Zeit.
Abbildung 3.7: Oszillator nach Newton (grün), relativistisch (rot)
3.1.11 Basisdarstellung eines Gradienten
Wie lässt sich der Gradient eines Skalarfeldes als Linearkombination der Elementeirgendeiner Basis von V darstellen?
Satz 97 Sei U ⊂ V offen und f : U → R sei differenzierbar. Sei e = (e1, ..., en)eine Basis von V mit der Gramschen Matrix Ge. Ihre Inverse wird oben indiziert.7
Dann gilt
grad (f) =n
i,j=1
eiG−1
e
ij∂ejf. (3.19)
Beweis. Gemäß Definition 95 gilt&gradp (f) , X
'= dpf (X) für alle X ∈ V.
Somit folgt gemäß der einleitend beschriebenen Konstruktion des Vektors l zu einerLinearform L, dass
gradp (f) =n
i,j=1
eiG−1
e
ijdpf (ej) .
Mit dpf (ej) = ∂ejf folgt die Behauptung.
Es ist aufschlussreich, zu verifizieren, dass Gleichung (3.19) tatsächlich für jedeBasis von V gilt, wenn sie für eine gilt. Sei b eine weitere Basis von V mit e =
7Es gilt alsonk=1
G−1e
ik Gekj
= δij =
1 für i = j0 sonst
.

KAPITEL 3. VEKTORANALYSIS 217
b ·M. (Ausführlicher: ei =n
j=1 bjMji) Dann folgt Ge = M t ·Gb ·M. Angenommen
Gleichung (3.19) gilt für die Basis e. Mit der Zeile [e] f = ([e1] f, ..., [en] f) ist diese
Gleichung wegen [ei] f = ∂ei f zu grad(f) = e · G−1
e · [e] f t äquivalent. Wegen derLinearität des Differentials dpf gilt
df(ei) = df
n
j=1
bjMji
=
n
j=1
M jidf (bj) .
Als Matrixgleichung gilt somit [e] f = [b] f ·M. Daraus folgt
grad(f) = b ·M ·M t ·Gb ·M
−1 ·[b] f ·M
t
= b ·M ·M−1 ·G−1b ·
M t−1 ·M t · [b] f t = b ·G−1
b · [b] f t.
Im Fall V = Rn×1 und der Standardbasis e folgt grad (f) =
∂f∂x1
, ..., ∂f∂xn
t.
3.1.12 Faulenzerregeln zum Gradienten
Die folgenden einfach zu beweisenden Regeln dienen der Arbeitsersparnis. Seien f, gdifferenzierbare Skalarfelder auf U ⊂ V (offen) und λ ∈ R. Weiter sei F : D → Rdifferenzierbar mit f(U) ⊂ D ⊂ R und D offen. Dann gilt für p ∈ U
1. grad(f + λg) = grad(f) + λ grad(g),
2. grad(f · g) = grad(f) · g + f · grad(g),
3. gradp (F f) = F ′ (f (p)) · gradp (f) .
Weitere 8 Regeln ergeben sich für umskalierte, translahierte und gedrehte dif-ferenzierbare Skalarfelder f mit Definitionsbereich U . In solchen Fällen seienfür ξ ∈ V und λ > 0 die Skalarfelder (Dλf) (p) := f (λp) auf U ′ := 1
λ· U ,
Tξf (p) := f(p− ξ) auf U ′ := U + ξ und (Rf) (p) := f (R−1p) auf U ′ := R (U)mit R : V → V einer n-dimensionalen Drehspiegelung. Dann gelten für p ∈ U ′
die folgenden Regeln, oft als Kovarianzregeln bezeichnet.
4. gradp (Dλf) = λ · gradλp (f) (Dilatation),
5. gradp (Tξf) = gradp−ξ (f) (Translation),
6. gradp (Rf) = RgradR−1p (f)
(Drehspiegelung).
8Diese Regeln folgen aus Spezialfällen der Kettenregel für Differentiale. Seien f : U → R undg : U ′ → U mit U,U ′ ⊂ V offen. Für differenzierbare f und g gilt die Kettenregel
dp (f g) = dg(p)f dpg.
Durch Dualisieren dieser Formel mit dem Skalarprodukt gelangt man zu den drei angeführtenRegeln. Dabei gehen Linearität und On-Invarianz des Skalarproduktes ein.

KAPITEL 3. VEKTORANALYSIS 218
Ein Beispiel zu Regel 4: Sei f : V 0 → R mit f = rα für ein α ∈ R. Dann giltwegen grad (r) = ιd/r
grad (f) = αrα−1 · ιdr
= αrα−2 · ιd.
3.1.13 Gradientenfeld des Punktdipolpotentials
Für dimV = 3 ist das elektrostatische Potential eines Punktdipols mit Dipolmomentδ ∈ V durch Φ (p) = γ δ, p / |p|3 mit γ = 1/4πε0 gegeben. Bei beliebiger Dimensionvon V liefern Produkt- und Kettenregel ohne Umwege über Koordinaten
gradp (Φ) = γ
δ
|p|3− 3
δ, p|p|4
· p
|p|
für p ∈ V 0.
Das elektrische Feldstärkefeld E : V 0 → V eines Punktdipols, der im Punkt 0lokalisiert ist, erfüllt somit (im Fall dimV = 3)
E (p) = −gradp (Φ) =γ
|p|33δ, p|p|2
p− δ
.
3.1.14 Gradientenfeld des Polarwinkels
Sei V = R1×2 mit den Standardkoordinatenfunktionen x, y. Auf der geschlitztenEbene U := (a, b) ∈ R1×2 | b = 0⇒ a < 0 sind die Polarkoordinatenfunktionenr : U → R>0 und φ : U → (0, 2π) ⊂ R implizit durch x = r cosφ, y = r sinφdefiniert. Es gilt wegen r > 0, dass r =
x2 + y2 und somit gradp (r) = p/r(p)
für p ∈ U . Aus den impliziten Definitionsgleichungen für r und φ folgt auf U durchGradientenbildung
(1, 0) = grad (x) = grad (r) cos (φ)− r sin (φ) grad (φ) ,
(0, 1) = grad (y) = grad (r) sin (φ) + r cos (φ) grad (φ) .
Multiplikation der ersten Gleichung mit − sinφ und der zweiten mit cosφ und an-schließender Addition der beiden Gleichungen ergibt auf U
r · grad (φ) = (− sinφ, cosφ) =1
r(−y, x) .
Daraus folgt auf U, dass grad (φ) = 1r2(−y, x) . Siehe Fig 3.8.
Das Vektorfeld grad (φ) ist auf U ein Vielfaches des Drehvektorfeldes der Ebene.Es steht senkrecht auf die Niveauflächen von φ, die von 0 ausgehende Halbstrahlensind. Der Betrag von grad (φ) nimmt mit der Entfernung von 0 ab: |grad (φ)| = 1/r.
Für V = R1×3 mit den Standardkoordinatenfunktionen x, y, z sind die Zylinder-koordinatenfunktionen (r, φ, z) auf U := (a, b, c) ∈ R1×3 | b = 0⇒ a < 0 implizitdurch (x, y, z) = (r cosφ, r sinφ, z) definiert. Ähnlich wie im Fall der Ebene folgenr =
x2 + y2 und grad (r) = (x, y, 0) /r auf U. Der Gradient des Polarwinkels φ
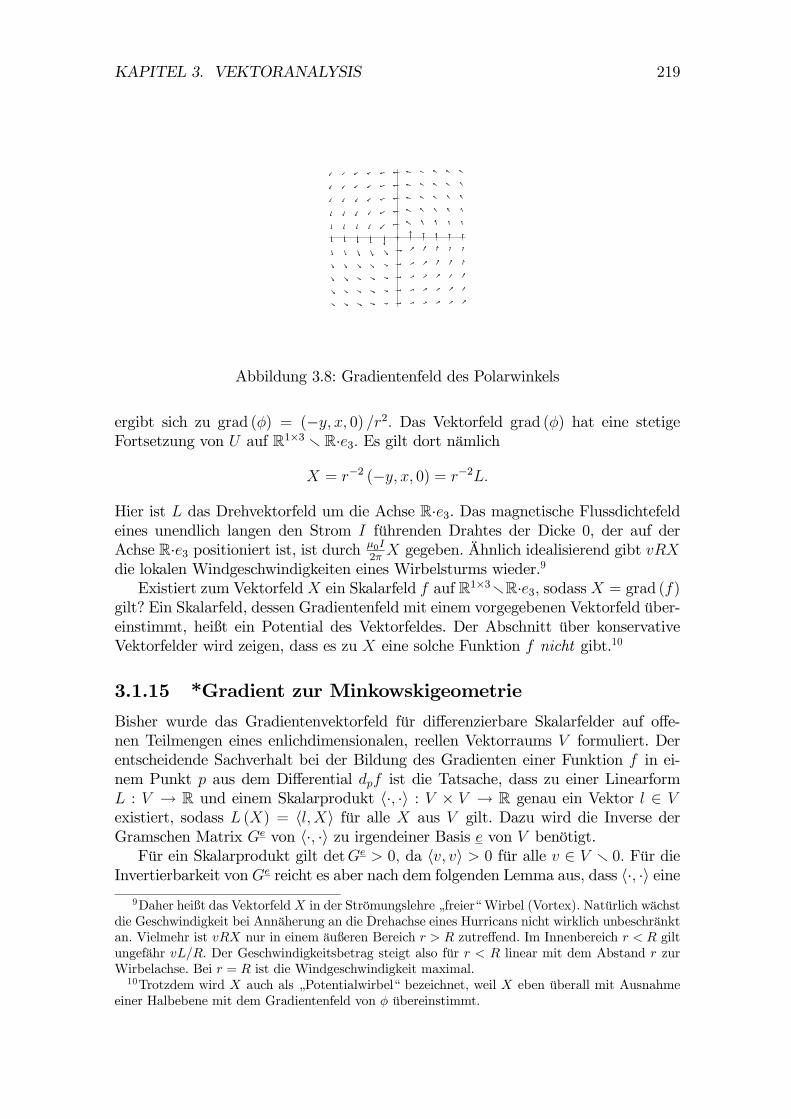
KAPITEL 3. VEKTORANALYSIS 219
Abbildung 3.8: Gradientenfeld des Polarwinkels
ergibt sich zu grad (φ) = (−y, x, 0) /r2. Das Vektorfeld grad (φ) hat eine stetigeFortsetzung von U auf R1×3 R·e3. Es gilt dort nämlich
X = r−2 (−y, x, 0) = r−2L.
Hier ist L das Drehvektorfeld um die Achse R·e3. Das magnetische Flussdichtefeldeines unendlich langen den Strom I führenden Drahtes der Dicke 0, der auf derAchse R·e3 positioniert ist, ist durch µ0I
2πX gegeben. Ähnlich idealisierend gibt vRX
die lokalen Windgeschwindigkeiten eines Wirbelsturms wieder.9
Existiert zum Vektorfeld X ein Skalarfeld f auf R1×3R·e3, sodass X = grad (f)gilt? Ein Skalarfeld, dessen Gradientenfeld mit einem vorgegebenen Vektorfeld über-einstimmt, heißt ein Potential des Vektorfeldes. Der Abschnitt über konservativeVektorfelder wird zeigen, dass es zu X eine solche Funktion f nicht gibt.10
3.1.15 *Gradient zur Minkowskigeometrie
Bisher wurde das Gradientenvektorfeld für differenzierbare Skalarfelder auf offe-nen Teilmengen eines enlichdimensionalen, reellen Vektorraums V formuliert. Derentscheidende Sachverhalt bei der Bildung des Gradienten einer Funktion f in ei-nem Punkt p aus dem Differential dpf ist die Tatsache, dass zu einer LinearformL : V → R und einem Skalarprodukt ·, · : V × V → R genau ein Vektor l ∈ Vexistiert, sodass L (X) = l, X für alle X aus V gilt. Dazu wird die Inverse derGramschen Matrix Ge von ·, · zu irgendeiner Basis e von V benötigt.
Für ein Skalarprodukt gilt detGe > 0, da v, v > 0 für alle v ∈ V 0. Für dieInvertierbarkeit von Ge reicht es aber nach dem folgenden Lemma aus, dass ·, · eine
9Daher heißt das VektorfeldX in der Strömungslehre „freier“ Wirbel (Vortex). Natürlich wächstdie Geschwindigkeit bei Annäherung an die Drehachse eines Hurricans nicht wirklich unbeschränktan. Vielmehr ist vRX nur in einem äußeren Bereich r > R zutreffend. Im Innenbereich r < R giltungefähr vL/R. Der Geschwindigkeitsbetrag steigt also für r < R linear mit dem Abstand r zurWirbelachse. Bei r = R ist die Windgeschwindigkeit maximal.
10Trotzdem wird X auch als „Potentialwirbel“ bezeichnet, weil X eben überall mit Ausnahmeeiner Halbebene mit dem Gradientenfeld von φ übereinstimmt.

KAPITEL 3. VEKTORANALYSIS 220
nicht ausgeartete symmetrische Bilinearform ist. Eine symmetrische Bilinearform·, · : V × V → R heißt nicht ausgeartet, wenn aus v, w = 0 für alle w ∈ V folgtdass v = 0.
Lemma 98 Ist Ge die Gramsche Matrix einer symmetrischen nicht ausgeartetenBilinearform, dann gilt detGe = 0.
Beweis. Ge ist als symmetrische Matrix diagonalisierbar und in der Diagonalestehen die Eigenwerte von Ge. Aus detGe = 0 folgt, dass 0 Eigenwert von Ge ist.Sei (v10, . . . v
n0 )
t ∈ Rn×1 ein Eigenvektor von Ge zum Eigenwert 0. Dann folgt für allew ∈ V mit v0 =
ni=1 v
i0ei
v0, w = w, v0 =w1, . . . wn
·Ge ·
v10, . . . v
n0
t= 0.
Dies bedingt nun v0 = 0 im Widerspruch zur Annahme, dass (v10, . . . vn0 )
t ein Eigen-vektor von Ge ist.
Damit ist die folgende Verallgemeinerung des Gradienten möglich.
Definition 99 Ist ·, · : V × V → R bilinear, symmetrisch und nicht ausgeartet,dann heißt der Vektor gradp (f) mit dpf (X) = gradp (f) ,X für alle X ∈ V derGradient in p des in p differenzierbaren Skalarfeldes f : V ⊃ U → R bezüglich ·, · .Dabei ist U offen in V und p ∈ U.
Offenbar zerfällt auch der verallgemeinerte Gradient nach einer Basis von Vgemäß
gradp (f) =n
i=1
ei(Ge)−1
ij ∂ejf(p) .
Die spezielle Realtivitätstheorie nutzt beispielsweise eine Minkowskische Pseudo-metrik, eine nicht ausgeartete symmetrische Bilinearform ·, · : V × V → R, derenGramsche Matrix genau einen positiven Eigenwert besitzt. Für diese Pseudometrikexistieren daher Normalbasen e = (e0, e1, . . . en) mit
Geij = ei, ej =
1 für i = j = 0−1 für i = j ∈ 1, . . . n0 sonst
.
Bezüglich einer NB e gilt daher mit den partiellen Ableitungen des Kartenausdrucksvon f in den kontravarianten Koordinaten zu e
gradp (f) = (∂0fe) (p) · e0 −n
i=1
(∂ife) (p) · ei.
Im folgenden Abschnitt wird die Symmetrie der Bilinearform ·, · durch Anti-symmetrie ersetzt. Auch in diesem Fall kann ein Gradient gebildet werden, sofernenur die Bilinearform nicht ausgeartet ist.

KAPITEL 3. VEKTORANALYSIS 221
3.1.16 *Symplektischer Gradient - Hamiltons Vektorfeld
Sei V ein reeller Vektorraum gerader Dimension. Auf V sei eine schiefsymmetrischebilineare Abbildung ω : V ×V → R gewählt. Es gilt also ω (v, w) = −ω (w, v) für allev, w ∈ V. Überdies sei ω nicht ausgeartet, dh, wenn ω (v, x) = 0 für alle x ∈ V gilt,dann folgt v = 0. Eine solche Abbildung ω heißt symplektische Form. Ähnlich wiemit einem Skalarprodukt von V der Gradient eines Skalarfeldes gebildet wird, kannmit ω ein ’symplektischer Gradient’ eines Skalarfeldes gebildet werden. Er regeltals Hamiltonsches Vektorfeld die Bewegung eines mechanischen Systems durch einSystem von gewöhnlichen Differentialgleichungen erster Ordnung.
Lemma 100 Ist ω eine symplektische Form auf V, dann existiert eine Basis e =(e1, . . . en, en+1, . . . e2n) von V mit ω (ei, ej) = ω (en+i, en+j) = 0 und ω (ei, en+j) = δijfür alle i, j ∈ 1, . . . n , eine sogenannte symplektische Normalbasis (SNB).
Beweis.Der Beweis nutzt die Jordansche Normalform einer schiefsymmetrischenreellen Matrix.
Lemma 101 Ist ω eine symplektische Form auf V und ist L : V → R linear, dannexistiert genau ein l ∈ V, sodass L (v) = ω (l, v) für alle v ∈ V. Ist e eine SNB vonV, dann gilt l =
ni=1 (L (en+i) · ei − L (ei) · en+i) .
Beweis. Dazu ist erstens zu prüfen, dass L (ej) = ω (l, ej) und L (en+j) =ω (l, en+j) für alle j ∈ 1, . . . n gilt:
ω (l, ej) =n
i=1
[L (en+i)ω (ei, ej)− L (ei)ω (en+i, ej)] =n
i=1
L (ei) δji = L (ej) ,
ω (l, en+j) =n
i=1
[L (en+i)ω (ei, en+j)− L (ei)ω (en+i, en+j)] = L (en+j) .
Ist l′ ein weiterer Vektor mit L (ej) = ω (l′, ej) und L (en+j) = ω (l′, en+j) für allej ∈ 1, . . . n , dann folgt ω (l′ − l, v) = 0 für alle v ∈ V und somit l′ − l = 0. Damitist die Eindeutigkeit von l gezeigt.
Definition 102 Ist U ⊂ V offen und das Skalarfeld H : U → R differenzierbar,dann heißt das Vektorfeld XH : U → V, das in jedem Punkt p ∈ U die BedingungdvH (·) = ω (XH (v) , ·) erfüllt, das Hamiltonsche Vektorfeld zu H.
Eine Integralkurve γ eines Hamiltonschen Vektorfeldes XH erfüllt γ = XH γ.Wegen (H γ)′ (t) = dγ(t)H (XH (γ (t))) = ω (XH (γ (t)) , XH (γ (t))) = 0 ist H γeine konstante Abbildung und XH (v) ist in v tangential an die Niveaufläche von Hdurch v. Man sagt daher: H ist unter der Evolution zu XH ’erhalten’.
Satz 103 Ist e eine SNB von V und das Skalarfeld H : U → R differenzierbar,dann gilt XH =
ni=1
∂en+iH · ei − ∂e
iH · en+i
.

KAPITEL 3. VEKTORANALYSIS 222
Beweis. Zu zeigen ist für alle j ∈ 1, . . . n , dass dvH (ej) = ω (XH (v) , ej) unddvH (en+j) = ω (XH (p) , en+j) . Nun gilt aber für alle j ∈ 1, . . . n einerseits
dvH (ej) = ∂ejH (v) , dvH (en+j) = ∂e
n+jH (v)
und andererseits
ω (XH (v) , ej) =n
i=1
− (∂ei H) (v)ω (en+i, ej) =
∂ejH(v) ,
ω (XH (v) , en+j) =n
i=1
∂en+iH
(v)ω (ei, en+j) =
∂en+jH
(v) .
Unter Verwendung der kontravarianten Karte Φe ≡ (q1, . . . qn, p1, . . . pn) zu einerSNB e von V ist das System γ = XH γ offenbar äquivalent zu
d
dt
qi γ
(t) = ∂piH
,,γ(t)
undd
dt
pi γ
(t) = − ∂qiH
,,γ(t)
für alle i ∈ 1, . . . n , den Hamiltonschen Bewegungsgleichungen zu H.Für die Änderung eines differenzierbaren Skalarfeldes f : U → R entlang einer
Integralkurve γ : I → U des Hamiltonschen Vektorfeldes XH gilt mit γ (t) = v
d (f γ)
dt(t) = dvf (γ (t)) = dvf (XH (v)) = dvf
n
i=1
∂en+iH
vei − (∂e
i H)v en+i
=n
i=1
∂en+iH
v(∂e
i f)v − (∂ei H)v
∂en+if
v
.
Definition 104 Sei U ⊂ V offen und f, g : U → R differenzierbar. Das Skalarfeldf, g : U → R mit f, g (v) = [Xg]v f = dvf (Xg (v)) = ω (Xf (v) , Xg (v)) heißtPoissonklammer von f mit g.
Für differenzierbare f, g : U → R mit offenem U ⊂ V folgt also f, g =ω (Xf , Xg) = −g, f und bezüglich der kontravarianten Karte zu einer SNB gilt
f, g =n
i=1
∂f
∂qi∂g
∂pi− ∂f
∂pi∂g
∂qi
.
Das oben abgeleitete Resultat für die Änderung eines Skalarfeldes entlang einerIntegralkurve eines Hamiltonschen Vektorfeldes lässt sich wie folgt zusammenfassen.
Satz 105 Für eine Integralkurve γ des Hamiltonschen Vektorfeldes XH und eindifferenzierbares Skalarfeld f : U → R, dessen offener Definitionsbereich U das Bildvon γ enthält, gilt (f γ)′ = f,H γ.
Ein Skalarfeld f mit f,H = 0 ist eine Erhaltungsgröße der Dynamik zu H, dajede Integralkurve vonXH innerhalb einer Niveaumenge von f verläuft. Insbesondereist H selbst eine Erhaltungsgröße unter der Dynamik zu H.

KAPITEL 3. VEKTORANALYSIS 223
3.2 Differenzieren von Vektorfeldern
Vektorfelder eignen sich zur Darstellung von mehrdimensionalen Größen auf einemvorgegeben Raum, wenn diese sich von Punkt zu Punkt ändern. So ordnet etwadie Wellenfunktion eines Elektrons jedem Raumzeitpunkt (t, x) ∈ R× R3 in einemreellen Vektorraum einen Punkt Ψ(t, x) im komplexen Vektorraum C2 zu. Einenwichtigen Spezialfall geben die Tangentenvektorfelder, die jedem Punkt einer (offe-nen) Teilmenge eines Vektorraums V einen Vektor im selben Raum V zuweist. Mandenke etwa an das Geschwindigkeitsfeld einer strömenden Flüssigkeit. Es gibt für je-den Punkt des flüssigkeitgefüllten Raumgebietes linear nähernd seine Verschiebungin diesem Raum während einer kurzen Zeitspanne an. Im Folgenden werden nurmehr Tangentenvektorfelder behandelt und die Bezeichnung zu Vektorfeld verkürzt.
3.2.1 Differential und Richtungsableitung
Ganz ähnlich wie bei Skalarfeldern kann auch bei Vektorfeldern auf offenen Teilmen-gen eines Vektorraums nach Richtungsableitungen und Differential gefragt werden.Wir beschränken uns hier auf differenzierbare Vektorfelder X.
Definition 106 Ein Vektorfeld X : U → V, für das in jedem Punkt p seines (in Voffenen) Definitionsbereiches U eine lineare Abbildung dpX : V → V existiert, sodassdie in einer hinreichend kleinen offenen Umgebung von 0 ∈ V definierte Abbildungψp mit X (p+ h) = X (p)+dpX (h)+ψp (h) die Eigenschaft limh→0 ψp (h) / h = 0hat, heißt differenzierbar. Die Abbildung dpX heißt das Differential oder die Tan-gentialabbildung von X in p.
Für ein lineares Vektorfeld X : V → V gilt offenbar X (p+ h) = X (p) +X (h) ,sodass dpX (h) = X (h) für alle p, h ∈ V folgt.
Wie ist der Vektor [h]p X = dpX (h) ∈ V, die Richtungsableitung von X in punter h in den Koordinaten zu einer Basis von V zu ermitteln? Sei U ⊂ V offenund X : U → V ein C1-Vektorfeld. e = (e1, . . . en) bezeichnet eine Basis von V undX =
ni=1 X
iei definiert die Komponentenfunktionen von X zu dieser Basis. Es giltalso Xi ≡ Xi
e. Dann ist durch
[ei]p X = limε→0
1
ε[X (p+ εei)−X (p)] =
n
j=1
[ei]p X
j· ej =
n
j=1
∂eiX
jp· ej
die Richtungsableitung von X mit dem Vektor ei definiert. Etwas allgemeiner gehtes wie folgt.
Definition 107 Für ein C1-Vektorfeld X mit offenem Definitionsbereich U ⊂ Vund ein Vektorfeld Y : U → V heißt das Vektorfeld [Y ]X, das in p ∈ U den Wert
[Y (p)]p X = dpX (Y (p)) = limε→0
X (p+ εY (p))−X (p)
ε
hat, Feld der Richtungsableitung oder kovariante Ableitung von X mit dem Vektor-feld Y. Statt [Y (p)]p X wird auch [Y ]p X oder (∇Y X) (p) notiert.

KAPITEL 3. VEKTORANALYSIS 224
Ist das Vektorfeld X die Einschränkung einer linearen Abbildung auf U, dannfolgt aus der Definition von [Y ]X unmittelbar [Y ]X = X Y. In komplizierterenFällen kann die Richtungsableitung [Y ]X unter Zuhilfenahme einer Basis von Vberechnet werden gemäß
[Y ]p X =n
j=1
[Y ]p X
jej =
n
i,j=1
Y i (p)∂eiX
jp· ej .
Die beiden folgenden Produktregeln sind ebenfalls brauchbare Rechenhilfen.
Satz 108 Seien f : U → R und X, Y : U → V mit U ⊂ V offen vom C1-Typ.Weiter seien Z : U → V und ein Skalarprodukt ·, · von V gewählt. Dann gilt
[Y ] (f ·X) = ([Y ] f) ·X + f · ([Y ]X) und [Z] X, Y = [Z]X,Y + X, [Z]Y .
Sollen Tangentenvektorfelder differenziert werden, die auf gekrümmten Mannig-faltigkeiten wie einer Kugeloberfläche definiert sind, dann versagt die hier beschrie-bene Konstruktion von Richtungsableitung und Differential. Es muss eine Vorschriftformuliert werden, die als Paralleltransport von Tangentenvektoren bezeichnet wird.Erst eine solche Vorschrift, die auch als ’Affinzusammenhang’ bezeichnet wird, er-laubt es, Vektoren, die in verschiedenen Tangentenräumen liegen, aufeinander zubeziehen und einen Differenzenquotienen zu bilden.
Ein von einem Affinzusammenhang unabhängiger Begriff einer Richtungsablei-tung eines Vektorfeldes ist die sogenannte Lieableitung. Diese wird in den drei fol-genden Abschnitten im einfachen Fall von Vektorfeldern auf Vektorräumen erklärt.Der Transport mit dem Fluss eines Vektorfeldes übernimmt dabei die Rolle desParalleltransports.
3.2.2 *Lieprodukt von Vektorfeldern
In diesem Abschnitt wird eine schiefsymmetrische, bilineare Multiplikation von Vek-torfeldern beschrieben, die als Ergebnis ein neues Vektorfeld ergibt. Dabei erweist essich als hilfreich, ein Vektorfeld als eine bestimmte lineare Abbildung, als ’Derivati-on’, auf demVektorraum der C∞-Skalarfelder aufzufassen. Einige dieser Derivationendienen (in einer komplexifizierten) Version als Impuls- und Drehimpulsoperatorender Quantenmechanik. Impulse sind mit konstanten Vektorfeldern der Länge 1 as-soziiert und Drehimpulse mit den Drehvektorfeldern.
Seien X, Y : U → V Vektorfelder mit offenem Definitionsbereich U ⊂ V. DieKomponentenfunktionen X i
e und Y ie von X und Y zu einer beliebigen Basis e von
V seien C∞-Funktionen. Für jedes Skalarfeld f ∈ C∞ (U : R) ist das Skalarfeld derRichtungsableitungen [X] f : U → R mit [X] f (v) = dvf (X (v)) wieder ein Skalar-feld in C∞ (U : R) . Sei nun X die dem Vektorfeld zugeordnete lineare(!) Abbildung
X : C∞ (U : R)→ C∞ (U : R) mit Xf = [X] f für alle f ∈ C∞ (U : R) .
Es gilt die Produktregel X (f · g) = g · X (f) + f · X (g) für alle f, g ∈ C∞ (U : R) .

KAPITEL 3. VEKTORANALYSIS 225
Für zwei C∞-Vektorfelder X, Y auf U ist auch der ihnen zugeordnete Kommu-tator
X, Y= X Y − Y X
eine lineare Abbildung von C∞ (U : R) nach C∞ (U : R) . Es wird nun gezeigt, dass
ein C∞-Vektorfeld Z : U → V mit Z =X, Y
existiert.
Auf U giltY X
f = [Y ] ([X] f) =
=n
j=1
Y ie ∂
ei
n
i=1
Xje∂
ejf
=
n
i,j=1
Y ie
∂eiX
je
∂ejf+Xj
e
∂ei ∂
ejf
.
Für die Differenz der beiden Skalarfelder [X] ([Y ] f) und [Y ] ([X] f) ergibt sich dar-aus wegen des Weghebens der zweiten Ableitungen von f
X Y − Y X
f = [X] ([Y ] f)− [Y ] ([X] f)
=n
i,j=1
X i
e
∂ei Y
je
− Y i
e
∂eiX
je
∂ejf= [[X]Y ] f − [Y [X]] f.
Dies aber ist das Feld der Richtungsableitungen von f unter dem Vektorfeld Z =[X]Y − [Y ]X. Die Komponentenfunktionen Zj
e von Z mit Z =n
j=1 ej ·Zje : U → V
erfüllen daher
Zje =
n
i=1
X i
e
∂ei Y
je
− Y i
e
∂eiX
je
. (3.20)
Die Bestimmung von Z wurde hier basisfrei ausgeführt. Sehen wir uns trotzdemnoch an, warum auch die komponentenweise Definition von Z ein von der Basis eunabhängiges Vektorfeld ergibt.
Lemma 109 Seien X, Y ∈ C∞ (U : V ) . Dann ist das Vektorfeld Z =n
j=1 Zje ·ej ∈
C∞ (U : V ) mit Zje wie in Gleichung (3.20) wohldefiniert, dh unabhängig von der
Wahl der Basis e.
Beweis. Sei f = e · A eine weitere Basis von V. Dann gilt wegen der Konstanzder Basiswechselmatrix A ∈ Rn×n
Zje =
n
i=1
X i
e
∂ei Y
je
− Y i
e
∂eiX
je
=n
i=1
n
α,β=1
AiαA
jβ
0Xα
f
∂ei Y
βf
− Y α
f
∂eiX
βf
1
=n
α,β=1
Ajβ
.Xα
f
n
i=1
Aiα∂
ei Y
βf
− Y α
f
n
i=1
Aiα∂
eiX
βf
7
=n
β=1
Ajβ
n
α=1
0Xα
f
∂fαY
βf
− Y α
f
∂fαX
βf
1=
n
β=1
AjβZ
βf
und somitn
j=1 Zje · ej =
nj=1
nβ=1 A
jβZ
βf ·n
α=1 (A−1)
αj fα =
nα=1 Z
αf · fα.

KAPITEL 3. VEKTORANALYSIS 226
Definition 110 Zu zwei Vektorfeldern X,Y ∈ C∞ (U : V ) heißt das Vektorfeld Z =[X]Y −Y [X] ∈ C∞ (U : V ) das Lieprodukt (die Lieklammer) von X mit Y. Es wirdnotiert Z = [X,Y ]L .
Es gilt alsoX, Y
= [X, Y ]L. Das Lieprodukt
[·, ·]L : C∞ (U : V )× C∞ (U : V )→ C∞ (U : V )
ist offenbar schiefsymmetrisch und bilinear. Es erfüllt zudem die Jacobiidentität
[A, [B,C]L]L + [B, [C,A]L]L + [C, [A,B]L]L = 0
für alle A,B,C ∈ C∞ (U : V ) . Die Jacobiidentität lässt sich anhand der entspre-chenden Kommutatoridentität der Derivationen ganz einfach nachrechnen, da sichvon den zwölf Summanden sechs Paare zu 0 aufaddieren.
Lieprodukt zweier Drehvektorfelder
Sei zunächst V von beliebiger endlicher Dimension und X, Y : V → V seien linear.Dann gilt [X]Y = Y X und [Y ]X = X Y. Daraus folgt
[X, Y ]L = Y X −X Y = [Y,X] .
Das Lieprodukt von zwei linearen Vektorfeldern stimmt also mit dem negativen(!)Kommutator der beiden Vektorfelder im Abbildungssinn überein.
Nutzen wir diesen Sachverhalt, um das Lieprodukt von zwei Drehvektorfeldern zuberechnen. Der Vektorraum V habe also nun die Dimension 3. Ein Skalarprodukt·, · und eine Orientierung von V seien gewählt. Das zugehörige Vektorproduktzweier Vektoren u, v wird als u× v bezeichnet. Das Drehvektorfeld Ln : V → V zueinem n ∈ V erfülle Ln (v) = n× v für alle v ∈ V. Das Vektorfeld Ln ist linear.
Lemma 111 Für m,n ∈ V gilt [Ln, Lm] = Ln Lm − Lm Ln = Ln×m.
Beweis. Für v ∈ V gilt Ln (Lmv) = n× (m× v) = m n, v − v m,n . Darausfolgt Ln (Lm (v)) − Lm (Ln (v)) = m n, v − n m, v . Andererseits gilt Ln×m (v) =(n×m)× v = −v × (n×m) = −n v,m+m n, v .
Der Kommutator zweier Drehvektorfelder ist also wieder ein Drehvektorfeld. Iste = (e1, e2, e3) eine positiv orientierte Orthonormalbasis von V, dann gelten für dieVektorfelder Li ≡ Lei
[L1, L2] = L3 (zyklisch).
Man beachte, dass aus L2nv ≡ (Ln Ln) v = n n, v − v |n|2 folgt
C :=3
i=1
L2i = −2ιdV .
Das lineare Vektorfeld C ist also ein Vielfaches der identischen Abbildung, eine soge-nannte ’Casimirinvariante’. Der Kommutator von C mit Ln verschwindet offenbar,wie auch die zugehörige Lieklammer, für alle n ∈ V.

KAPITEL 3. VEKTORANALYSIS 227
Der lineare Operator <Ln der Richtungsableitung mit dem Drehvektorfeld Ln aufder Menge der C∞-Skalarfelder auf V erfüllt für alle v ∈ V
<Lnf(v) = [Ln (v)]v f = dvf (n× v) = n× v, gradv (f) .
Es gilt daher auch[Ln (v)]v f = n, v × gradv (f) .
Für n = e3 spezialisiert sich diese Definition beispielsweise zu
[Le3 (v)]v f = v1e (∂e2f) (v)− v2e (∂
e1f) (v) .
Da die Lieklammer [Ln, Lm]L der Vektorfelder Ln und Lm mit dem Kommutator[Lm, Ln] übereinstimmt, gilt
<Ln, <Lm
= −Ln×m.
Die Quantenmechanik nutzt für n ∈ V mit |n| = 1 die Operatoren −i<Ln = Ln alsBahndrehimpulskomponenten zur Achse R · n. Diese erfüllen daher die Kommuta-torrelationen [Ln,Lm] = iLn×m.
3.2.3 Transport von Skalar- und Tangentenvektorfeldern
Es wird nun ein natürlicher abbildungsinduzierter Transport von skalaren und Tan-gentenvektorfeldern beschrieben, welcher im Fall der Flussabbildung eines Vektor-feldes X der Lieableitung ’unter’ X zugrunde liegt.
Sei ϕ : U → ϕ (U) ⊂ V eine bijektive C∞-Funktion mit offenem Definitionsbe-reich U ⊂ V. Die Umkehrabbildung ϕ−1 sei ebenfalls eine C∞-Funktion. Zu einerC∞-Funktion f : U → R ist die Funktion ϕ∗f : ϕ (U)→ R mit (ϕ∗f) (ϕ (v)) = f (v)dann ein skalares C∞-Feld auf dem Bildbereich von ϕ.
Die Abbildung ϕ überträgt so die Funktionswerte eines Skalarfeldes punktweisein ihren Bildbereich. Die Abbildung ϕ∗f heißt der Transport des Skalarfeldes funter (dem Diffeomorphismus) ϕ. Es gilt kurz ϕ∗f = f ϕ−1. Ein anschauliches Bilddieser Konstruktion vermittelt etwa ein Körper aus endlich vielen Massenpunkten,welche die offene Menge U ’sampeln’. f ordnet diesen Punkten reelle Massen zu ϕtransportiert die Punkte unter Beibehaltung ihrer Massen in neue Positionen. DieAbbildung ϕ überhöht die ’reale’ endliche Menge also zu einem Kontinuum.
Ein Beispiel: Sei ϕ = A : V → V linear mit detA = 0. Dann folgt für f ∈C∞ (V : R) , dass (A∗f) (v) = f (A−1v) .
Mit ϕ lassen sich auch C∞-Kurven γ : I → U von U nach ϕ (U) übertragen.Eine naheliegende Definition ist ϕ∗γ = ϕγ : I → ϕ (U) . Aufgrund der Kettenregelgilt
d
dt(ϕ∗γ) (t) = dγ(t)ϕ (γ (t)) .
Beim Transport einer Kurve γ werden die Tangentenvektoren nicht wie die Werteeines Skalarfeldes unverändert von ϕ∗ mitgenommen, sondern der Tangentialappro-ximation von ϕ entsprechend linear verzerrt.

KAPITEL 3. VEKTORANALYSIS 228
Dieses ’Transformationsverhalten’ der Tangentenvektoren von Kurven motiviertdie folgende Definition des Transports von Tangentenvektorfeldern.
Definition 112 Sei U ⊂ V offen und ϕ : U → ϕ (U) ⊂ V eine bijektive C∞-Funktion. Für ein Vektorfeld X ∈ C∞ (U : V ) heißt das Vektorfeld ϕ∗X : ϕ (U)→ Vmit (ϕ∗X) (ϕ (v)) = (dvϕ) (X (v)) der Transport von X unter ϕ.
Ein Beispiel: Sei ϕ = A : V → V linear mit detA = 0. Dann folgt für X ∈C∞ (V : V ) , dass (A∗X) (Av) = A (X (v)) oder auch kurz A∗X = A X A−1.
3.2.4 *Lieableitung von Skalar- und Tangentenvektorfeldern
Sei U ⊂ V offen und X ∈ C∞ (U : V ) . Dann existiert zu jedem Punkt p ∈ U einelokale Flussabbildung Φ : (−ε, ε)× Up → U mit
∂tΦ (t, v) = X (Φ (t, v)) für alle (t, v) ∈ (−ε, ε)× Up.
Der lokale Fluss transportiert ein Skalarfeld f ∈ C∞ (U : R) in einer hinreichendkleinen Umgebung von p in die Abbildung Φ (t, ·)∗ f mit
(Φ (t, ·)∗ f) (v) = f (Φ (−t, v)) für alle (t, v) ∈ (−ε, ε)× Up.
Der Limes
(LXf) (v) := limt→0
(Φ (t, ·)∗ f) (v)− f (v)
t= lim
t→0
f (Φ (−t, v))− f (v)
t
= limt→0
f (v − tX (v))− f (v)
t= −dvf (X (v)) = − [X]v f
gibt somit die beste lineare Approximation an die Kurve t → (Φ (t, ·)∗ f) (v) beit = 0. Das Skalarfeld LXf = − [X] f wird als die Lieableitung von f unter demVektorfeld X bezeichnet.
Für ein Tangentenvektorfeld Y ∈ C∞ (U : V ) ist eine analoge Konstruktion mög-lich, nämlich die folgende.
(LXY ) (v) := limt→0
(Φ (t, ·)∗ Y ) (v)− Y (v)
t= lim
t→0
(Φ (t, ·)∗ Y ) (Φ (t, v))− Y (Φ (t, v))
t
= limt→0
(dvΦ (t, ·))Y (v)− Y (v + tX (v))
t
= limt→0
Y (v) + tdvX (Y (v))− Y (v + tX (v))
t= dvX (Y (v))− dvY (X (v))
= − [X,Y ]L (v)
Das Vektorfeld LXY : U → V mit LXY = − [X, Y ]L wird als Lieableitungdes Vektorfeldes Y unter dem Vektorfeld X bezeichnet. Sie gibt der Lieklammerzweier Vektorfelder eine neue Bedeutung. Ein Vektorfeld Y ist ganau dann unterdem Transport mit dem Fluss des Vektorfeldes X invariant, wenn [X, Y ]L = 0.

KAPITEL 3. VEKTORANALYSIS 229
Ein anschauliches Bild der Lieableitung eines Vektorfeldes liefert das folgendePhänomen. Markieren Sie (zB mit Sägemehl) kleine Pfeile auf einer langsam strö-menden Flüssigkeitsoberfläche (mit dem Geschwindigkeitsfeld X) und beobachtenSie, wie sich die Fußpunkte der Pfeile während eines kurzen Zeitintervalls verschiebenund sich die Pfeile selbst drehen und dehnen. Mit ein bischen Phantasie können Siedie Lieableitung von Y unter dem Geschwindigkeitsfeld X an der lokalen Evolutionder Pfeile um t = 0, nämlich
Y (t, v) = Y (0, v) + t (LXY ) (v) + o (t) = Y (0, v)− t [X,Y ] (v) + o (t)
ablesen.
3.2.5 *Beschleunigung einer Integralkurve von γ = X (t, γ)
Die Kurve γ : I → V sei Lösung des nichtautonomen Differentialgleichungssystemserster Ordnung γ (t) = X (t, γ (t)) für alle t im offenen reellen Intervall I. Die dif-ferenzierbare Abbildung X : D → V sei auf einer offenen Teilmenge D von R × Verklärt.
Unter diesen Voraussetzungen lässt sich die ’Beschleunigung’ γ (t) zur Zeit t beiKenntnis des Ortes γ (t) zur Zeit t alleine aus der Funktion X berechnen. Manbraucht also die Funktion γ selbst gar nicht wirklich zu kennen. Es gilt nämlich
γ (t) = ∂tX (t, γ (t)) + [X (t, γ (t))]γ(t) X (t, ·) .
Warum ist das so?Es gilt
γ (t) := limε→0
γ (t+ ε)− γ (t)
ε= lim
ε→0
X (t+ ε, γ (t+ ε))−X (t, γ (t))
ε
= limε→0
X (t+ ε, γ (t+ ε))−X (t, γ (t+ ε)) +X (t, γ (t+ ε))−X (t, γ (t))
ε
= limε→0
X (t+ ε, γ (t+ ε))−X (t, γ (t+ ε))
ε+ lim
ε→0
X (t, γ (t+ ε))−X (t, γ (t))
ε
= ∂tX (t, γ (t)) + limε→0
X (t, γ (t+ ε))−X (t, γ (t))
ε.
Wegen γ (t+ ε) = γ (t) + εγ (t) + ψ (ε) mit limε→0 ψ (ε) /ε = 0 folgt
limε→0
X (t, γ (t+ ε))−X (t, γ (t))
ε= lim
ε→0
X (t, γ (t) + εγ (t) + ψ (ε))−X (t, γ (t))
ε=dγ(t)X (t, ·)
(γ (t)) = [γ (t)]γ(t) X (t, ·) = [X (t, γ (t))]γ(t) X (t, ·) .
Somit ist gezeigt, dass
γ (t) = ∂tX (t, γ (t)) + [X (t, γ (t))]γ(t) X (t, ·) .
KAPITEL 3. VEKTORANALYSIS 230
3.2.6 Wegintegrale eines Vektorfeldes
Ein Vektorfeld auf einem n-dimensionalen Raum ist durch n reellwertige Kompo-nentenfunktionen der n Koordinaten bestimmt. Manche Vektorfelder lassen sichaus einem Skalarfeld durch Gradientenbildung, also aus einer einzigen reellwertigenFunktion der n Koordinaten erzeugen. Welche Vektorfelder sind das? Inwiefern sindsie ausgezeichnet?
Eine Kurve γ : [a, b] → V heißt stückweise C1-Kurve, falls Zahlen a = t0 <t1 < t2 < ... < tk = b existieren, sodass die Einschränkungen der Kurve γ auf dieTeilintervalle [ti, ti+1] allesamt C1-Kurven sind. Da für eine stückweise C1-Kurve dieeinseitigen Ableitungen auch in den Randpunkten ti der Teilintervalle existieren, isteine solche Kurve überall stetig.
Definition 113 Sei U ⊂ V offen und X : U → V ein stetiges Vektorfeld. DieAbbildung γ : [a, b]→ U sei eine stückweise C1-Kurve. Dann heißt
γ
X :=k
i=1
ti
ti−1
X γ (t) , γ(t) dt
das Kurvenintegral von X längs γ, wobei ·, · ein Skalarprodukt von V bezeichnet.
Satz 114 (Reparametrisierungsinvarianz) Sei φ : [a′, b′] → [a, b] eine stetigdifferenzierbare Abbildung mit φ(a′) = a und φ(b′) = b. Dann gilt für das Kurvenin-tegral eines stetigen Vektorfeldes X auf U längs γ : [a, b] → U, dass
γX =
γφ X.
Falls φ(a′) = b und φ(b′) = a, dann giltγX = −
γφ X.
Beweis. Siehe zB sect 16.3, p 352 in [10].Aufgrund der Invarianz von Kurvenintegralen unter orientierungserhaltenden
Umparametrisierungen werden Kurvenintegrale meist als Wegintegrale bezeichnet,da der Weg als (orientierte) Bildmenge der Kurve das Integral bereits festlegt.
Ist ein Vektorfeld ein Gradientenfeld, dann sind Kurvenintegrale besonders ein-fach zu berechnen. Es gilt nämlich für X = grad (f) und eine C1-Kurve γ aufgrundder Kettenregel
γ
X =
b
a
&gradγ(t) (f) , γ (t)
'dt =
b
a
dγ(t)f (γ (t))
=
b
a
d
dt(f γ) (t) dt = f (γ (b))− f (γ (a)) .
Das Kurvenintegral eines Gradientenfeldes hängt also nicht vom detaillierten Verlaufder Kurve ab, sondern nur von ihren Anfangs- und Endpunkten. Eine stückweise C1-Kurve γ : [a, b]→ U ⊂ V heißt geschlossen, falls γ(a) = γ(b). Für eine geschlosseneKurve γ und ein Gradientenfeld X gilt daher
γX = 0.

KAPITEL 3. VEKTORANALYSIS 231
3.2.7 Wegintegrale des Vortexfeldes
Sei X der freie Vortex auf der Ebene ohne Nullpunkt, d.h.
X : R2 0→ R2 mit X (x, y) = (−y, x) /x2 + y2
.
Sei γ : [0, ε] → R2 mit γ (t) = R (cos t, sin t) mit R ∈ R>0 und 0 < ε. Für dasSkalarprodukt gelte (a, b) , (x, y) = ax + by. Dies ergibt γ (t) = R (− sin t, cos t)und
X γ (t) , γ (t) ==
1
R(− sin t, cos t) , R (− sin t, cos t)
>= 1.
Daraus folgtγX =
ε
0dt = ε. Insbesondere ist für ε = 2π die Kurve γ geschlossen
und es giltγX = 2π. Moral: X ist kein Gradientenfeld!
3.2.8 *Flächeninhalt und Drehvektorfeld
Sei L : R2 → R2 mit L (x, y) = (−y, x) . Das Kurvenintegral von L/2 längs einerKurve γ : [a, b]→ R2
1
2
γ
L =1
2
b
a
−γ2 (t) γ1 (t) + γ1 (t) γ2 (t)
dt
ergibt den (gewichteten, euklidischen) Inhalt der Fläche, die von γ überstrichen wird.Dabei wird ein ’infinitesimales’ Flächenelement positiv gewichtet, wenn (γ (t) , γ (t))zur Standardbasis gleichsinnig orientiert ist, und andernfalls negativ. Umrundet einegeschlossene Kurve das eingeschlossene Gebiet G einmal so, dass G in Laufrichtunggesehen links der Kurve liegt, dann ist
γL der Flächeninhalt von G.
Der Grund dafür ist der: Wir wählen eine positiv orientierte ONB (e1, e2) in R2,sodass γ (t) = |γ (t)| e1. Es gilt dann L γ (t) = |γ (t)| e2. Weiters existiert genau einWinkel ϕ (t) ∈ [0, 2π) , sodass γ (t) = |γ (t)| · (cosϕ (t) · e1 + sinϕ (t) · e2) . Damitfolgt
1
2L γ (t) , γ (t)∆t =
1
2|γ (t)| · |γ (t)| · sin [ϕ (t)] ·∆t.
Für 0 ≤ ϕ (t) ≤ π ist somit L γ (t) , γ (t) /2 die Fläche des Dreiecks mit denEckpunkten 0, γ (t) , γ (t) + ∆t · γ (t) , sodass der Name „Flächengeschwindigkeit”für L γ (t) , γ (t) zutrifft. Für π < ϕ (t) < 2π gibt L γ (t) , γ (t) die mit −1multipliziere Fläche des Dreiecks, die Flächengeschwindigkeit ist negativ.
Am Kartenbereich der Polarkoordinaten (r, φ) gilt übrigens, wie schon gezeigt,L = r2gradφ und somit nach der Kettenregel
L γ (t) , γ (t) =&
r2gradφ γ(t) , γ (t)
'= |γ (t)|2 (φ γ)′ (t) .
Überprüfen wir diese Überlegung an einem Kreis mit dem Radius R und demMittelpunkt (a, b) . Es gilt mit γ (t) = (a+R cos t, b+R sin t)
γ
L =
2π
0
[− (b+R sin t) (−R sin t) + (a+R cos t) (R cos t)] dt
= R2
2π
0
sin2 t+ cos2 t
dt = 2R2π.

KAPITEL 3. VEKTORANALYSIS 232
Das IntegralγL/2 stimmt also wirklich mit dem Flächeninhalt eines Kreises vom
Radius R überein.Johannes Kepler konnte den Aufzeichnungen Tycho de Brahes über seine Pla-
netenbeobachtungen Hinweise darauf entnehmen, dass erstens jede Planetenbahn ineiner Ebene durch die Sonne liegt und zweitens die Flächengeschwindigkeit des Vek-tors von der Sonne zum betrachteten Planeten im Lauf der Zeit konstant ist. IsaakNewton gelang es dann, diese ersten beiden „Keplerschen Gesetze” als eine Folgeder Drehimpulserhaltung bei Bewegungen in einem Zentralkraftfeld F = |F | · ιd/ |·|zu deuten und zwar so.
Die Abbildung t → γ (t)×γ (t) ist konstant, wenn γ (t) den Vektor von der Sonnezum Planeten zur Zeit t bezeichnet, da wegen mγ (t) = (F γ) (t)
d
dt(γ (t)×mγ (t)) = γ (t)×mγ (t) = − |F (γ (t))| γ (t)× γ (t)
|γ (t)| = 0
folgt. Hier bezeichnen m die Masse des Planeten, F das von der Sonne erzeugteKraftvektorfeld und γ (t) × mγ (t) den Bahndrehimpuls(vektor) des Planeten zurZeit t. Er ist, wie natürlich auch γ (t) × γ (t) , eine (vektorielle) Konstante der Be-wegung. Der Bahndrehimpuls definiert, falls er nicht 0 ist, somit die t-unabhängigeFlächeneinheitsnormale
n =γ (t)× γ (t)
|γ (t)× γ (t)|auf die Bahnebene. Es folgt daraus γ (t) , n = 0 für alle t. Daher liegt γ (t) zu jederZeit in jener Ebene durch 0, die senkrecht auf n steht.
Die Flächengeschwindigkeit des Planeten zur Zeit t ist dann mit dem Drehvek-torfeld Ln : p → n× p durch
(Ln γ) (t) , γ (t) = n× γ (t) , γ (t) = γ (t)× γ (t) , n = |γ (t)× γ (t)|
gegeben und ist somit zeitlich konstant. Sie ist positiv, da das Tripel (γ (t) , γ (t) , n)positiv orientiert ist. Für γ (t)× γ (t) = 0 verläuft die Bahn in einer Geraden durch0. Die Flächengeschwindigkeit |γ (t)× γ (t)| verschwindet in diesem Fall.
3.2.9 Konservative Vektorfelder und Potentiale
Bewegt sich ein Körper unter dem ausschließlichen Einfluss eines vorgegebenenKraftfeldes11 X : V → V, dann folgt seine Bewegung einer (zeitparametrisierten)Kurve γ : [t0, t1]→ V, die Newtons Bewegungsgleichung mγ = X γ löst. Existiertfür das das Kraftfeld X eine Potentialfunktion Φ mit X = −grad (Φ) , dann ist dieGesamtenergie der Lösung γ, nämlich die Summe aus kinetischer und potentiellerEnergie längs γ
Eγ =m
2|γ|2 +Φ γ
11ZB dem Schwerefeld der Erde.

KAPITEL 3. VEKTORANALYSIS 233
eine konstante Funktion. Das kommt so zustande:
d
dt
m2|γ (t)|2 +Φ(γ (t))
=
m
2
d
dtγ (t) , γ (t)+ dγ(t)Φ (γ (t))
= m γ (t) , γ (t)+&gradγ(t)Φ, γ (t)
'= 0.
Wird der Körper unter Zuhilfenahme von regelbaren Zusatzkräften (’Zwangs-kräften’) längs einer beliebigen C1-Kurve γ : [0, 1]→ V mit γ (0) = 0 = γ (1) durchdas Kraftfeld X vom Punkt γ (0) zum Punkt γ (1) geführt, dann gibt −
γX die von
den Zwangskräften verrichtete Arbeit an. Ist diese positiv, dann nimmt die potenti-elle Energie des Körpers im Kraftfeld X zu. (Die kinetische Energie am Anfang undam Ende des Weges verschwindet ja wegen γ (0) = 0 = γ (1) .) Ist die Arbeit nega-tiv, nimmt die potentielle Energie des Körpers im Feld X ab. Der die Zwangskräfteerzeugende Rest der Welt ’bezieht’ dann Energie aus dem System, das aus demKörper im Kraftfeld X besteht. Die Gesamtenergie bleibt auch hier ’konserviert’.
Ist γ ein geschlossener Weg und X das statische Kraftfeld einer in der Naturrealisierten Bewegungsgleichung des Typs mγ = X γ, dann gilt nach heutigemWissensstand jedenfalls
γX = 0. Wäre das nicht so, gäbe es periodische Prozes-
se, aus denen unbegrenzt Energie bezogen werden könnten. Eine solche Welt wäreziemlich sicher instabil. Energie und damit die Vehemenz der Vorgänge dieser Weltwürde unbegrenzt anwachsen und lebende Organismen wären bald ausgelöscht.
Definition 115 Ein stetiges Vektorfeld X : U → V heißt konservativ, wenn füralle geschlossenen C1-Kurven γ mit Werten in U gilt, dass
γX = 0.
Anmerkung: Jedes Gradientenvektorfeld ist offenbar konservativ.Das Vektorfeld X von Abschnitt 3.1.14, das durch Fortsetzung des Gradienten-
vektorfeldes des Polarwinkels ϕ entsteht, ist also nicht konservativ. Es gilt ja füreine geschlossene Kurve γ, welche den Ursprung einmal umläuft
γX = 2π. Die
Einschränkung von X auf R2 R≥0 · e1 ist hingegen konstruktiongemäß das Gradi-entenfeld von ϕ.
Der folgende Satz legt klar, dass nicht nur jedes Gradientenfeld konservativ ist,sondern auch jedes konservative Vektorfeld Gradient eines Skalarfeldes ist.
Satz 116 Ein stetiges Vektorfeld X : U → V mit offenem U ⊂ V ist genau dannkonservativ, wenn es eine C1-Funktion f : U → R gibt, für die X = grad (f) gilt.(Die Funktion −f wird dann als ein Potential von X bezeichnet.) Ist U kurvenzu-sammenhängend und sind f und g Potentiale von X, dann ist f − g konstant.
Beweis. Siehe: [10], p. 358.Anmerkung: Auf den kurvenzusammenhängenden Teilen des Definitionsbereiches
eines konservativen Vektorfeldes X ist ein Potential von X also bis auf eine additiveKonstante eindeutig bestimmt.
KAPITEL 3. VEKTORANALYSIS 234
Jedes stetige, drehinvariante, radiale Vektorfeld ist konservativ
f : (a, b) → R mit 0 ≤ a < b sei stetig. Für X : p ∈ V : a < |p| < b → V gelteX (p) = 2f
|p|2p. In jedem Punkt p ist X (p) ein skalares Vielfaches von p. Man
sagt daher X sei ein radiales Vektorfeld. Außerdem gilt X R = R X für alleR ∈ SOn, da |Rp| = |p| für alle p ∈ U und für alle R ∈ SOn. Man sagt daher X istein drehinvariantes Vektorfeld. (Jedes radiale, drehinvariante und stetige Vektorfeldist vom hier angegebenen Typ.)
Sei F eine Stammfunktion von f. Wegen
X (p) = 2F ′ |p|2p = F ′ |p|2
gradp
|·|2= gradp
F r2
ist X ein Gradientenfeld und somit konservativ. Die Kraft, mit der die Erde aneiner Masse zieht, ist als Funktion des Ortes der Masse zwar ein Gradientenfeld,aber nur annähernd radial und drehinvariant. Dies erschwert die Höhenbestimmungvon Bergen.
3.2.10 *Landvermessung: Wegabhängige Höhendifferenz?
Bei der Landvermessung spielen Wegintegrale eines konservativen Vektorfeldes eineRolle: Was ist mit der Aussage gemeint, dass der Großglockner eine Höhe von 3798müber Meeresniveau hat? Wo ist das Meeresniveau unter dem Großglockner, zu demman durch einen Schacht ein Lot hinunterlassen könnte? Eine Ersatzkonstruktionhilft aus: Längs einer Kurve γ, die von einem Ort p1 am Meer in Venedig zum Gipfelp2 des Großglockners führt, wird mit einer Wasserwaage und einer Federwaage dasGradientenfeld des Gravitationspotentials φ einer Testmasse m im Feld der Erdebestimmt, und durch Triangulieren die Arbeit
W =
γ
grad (φ) = φ (p2)− φ (p1)
gemessen. W/mg ist ein Höhenunterschied, der nicht vom Weg γ abhängt. Dabei istg ein standardisierter Wert der Erdbeschleunigung. Würde man auf die Federwaageverzichten und lediglich mit Wasserwaage, Längen- und Winkelmessern arbeiten, sokönnte man nur das Wegintegral
γ
grad (φ)
|grad (φ)|messen. Dieses ergibt aber eine wegabhängige Seehöhe, da im Fall des Gravitations-potentials φ der Erde das Vektorfeld grad (φ) / |grad (φ)| nicht konservativ ist.12
Hier ein 2d Beispiel dazu. Sei φ : R2 → R mit dem Standardkartenausdruckφ = x2 − y2. Auf R2 0 gilt
X :=grad (φ)
|grad (φ)| =1
x2 + y2(x · e1 − y · e2) .
12Nun sind Sie für einen Besuch der wunderbaren Abteilung für Geodäsie des technischen Mu-seums in München gerüstet.

KAPITEL 3. VEKTORANALYSIS 235
Für die beiden Komponentenfunktionen X1 = x/
x2 + y2 und X2 = −y/
x2 + y2
des Vektorfeldes X gilt ∂1X2 − ∂2X
1 = 2xy (x2 + y2)−3/2
. Die Tatsache ∂1X2 =
∂2X1 stellt nun, wie im nächsten Abschnitt klar wird, bereits sicher, dass X nicht
konservativ ist. Figur 3.9 zeigt das Vektorfeld X.
Abbildung 3.9: Das Vektorfeld grad (φ) / |grad (φ)| zu φ = x2 − y2
Um gleich hier zu sehen, dass X nichtkonservativ ist, basteln wir einen geschlos-senen Weg γ mit nichtverschwindendem Wegintegral über X. Er ist die Zusam-mensetzung von vier Wegen, nämlich einem (im Gegenuhrzeigersinn durchlaufenen)Viertelkreis um 0 von R · e1 nach R · e2 mir R > 0. Anschließend wird die y-Achsevon R · e2 bis r · e2 mit 0 < r durchlaufen, dann der Viertelkreis um 0 von r · e2 nachr · e1 im Uhrzeigersinn. Der Rest des Weges wird entlang der x-Achse von re1 bisR · e1 zurückgelegt. Es folgt (Übung!)
γ
X = R − r.
3.2.11 Poincarés Existenzsatz für skalare Potentiale
Definition 117 Ein C1-Vektorfeld X : U → V mit offenem U ⊂ V heißt rotations-frei, falls bezüglich einer Basis e von V auf U die Gleichungen ∂e
i ej, X = ∂ej ei, X
für alle i, j gelten.
Das folgende Lemma gibt der Rotationsfreiheit Bedeutung.
Lemma 118 Jedes C1-Vektorfeld mit Potential ist rotationsfrei.
Beweis. Für die C2-Funktion fe := f Φe|U
−1gilt ∂i∂jfe = ∂j∂ife und wegen
ej ,X = ej , grad f = ∂ejf auch ∂e
i [ej, X] = ∂ei ∂
ejf = ∂e
j∂ei f = ∂e
j [ei,X] .Ist e eine ONB(!) und ist Xi
e := Φie X, d.h. es gilt X =
ni=1 X
ieei, ist X wegen
X ie = ei, X genau dann rotationsfrei, wenn ∂e
iXje = ∂e
jXie für alle i, j.
Will man erkennen, ob ein C1-Vektorfeld X konservativ ist, wird man zunächstprüfen, ob X rotationsfrei ist. (Das ist eine einfache Differentiationsaufgabe.) IstX nicht rotationsfrei, dann ist X sicher kein Gradientenfeld und somit auch nicht

KAPITEL 3. VEKTORANALYSIS 236
konservativ. Ist X aber rotationsfrei, wird man als nächsten Schritt versuchen, eini-ge Kurvenintegrale von X längs geschlossener Kurven zu berechnen. Ist ein solchesIntegral ungleich 0, dann ist X nicht konservativ. Sind aber alle berechneten Kur-venintegrale gleich 0, und schafft man es nicht, wirklich alle existenten geschlossenenKurvenintegrale zu berechnen, dann wird man untersuchen, ob X ein Potential hat.(Dazu sind partielle Differentialgleichungen zu lösen.) Findet man ein Potential vonX, dann ist klar, dass X konservativ ist. Findet man keines, dann bleibt weiterunklar, ob X konservativ ist.
Als Beispiel für dieses Vorgehen nehmen wir das Gradientenfeld X des Polar-winkels aus Abschnitt 3.1.14. Der erste Schritt zeigt: X ist rotationsfrei und könntesomit konservativ sein. Der zweite Schritt zeigt, dass X nicht konservativ ist. Daherhat X auch kein Potential.
Der folgende Satz gibt eine einschränkende Bedingung für den Definitionsbe-reich eines Vektorfeldes X an, die sicherstellt, dass aus der Rotationsfreiheit von Xfolgt, dass X konservativ ist. Erfüllt der Definitionsbereich von X die Bedingungdes Satzes, dann reduziert sich die Untersuchung, ob X konservativ ist, auf die Be-rechnung der Rotation von X. Für solche Vektorfelder X gilt also: X ist genau dannkonservativ, wenn es rotationsfrei ist.
Definition 119 Eine Teilmenge U ⊂ V heißt sternförmig, wenn ein Punkt p0 ∈ Uexistiert, sodass für jeden Punkt p ∈ U die Verbindungsstrecke zwischen p0 und pzur Gänze in U liegt, d.h. es gilt tp0 + (1− t)p | 0 ≤ t ≤ 1 ⊂ U.
Satz 120 (Poincaré-Lemma) Sei U ⊂ V offen und sternförmig. X : U → Vsei ein rotationsfreies C1-Vektorfeld. Dann existiert eine Funktion f : U → R mitX = grad (f) .
Beweis. (Siehe: [10], p. 362; [4], Vol 1, Kap VI, § 24.5.5)Eine nützliche Anwendung von Poincarés Lemma: Ein elektrostatisches Naturge-
setz besagt, dass das (statische!) elektrische Kraftfeld E : R3 → R3 einer statischen(und hinreichend glatten) Ladungsdichte ein rotationsfreies C1-Vektorfeld ist. Daherexistiert ein Potential Φ : R3 → R mit E = −grad (Φ) .
3.2.12 Divergenz eines Vektorfeldes
Ein VektorfeldX kann in der Nähe eines Punktes p ∈ V imMittel mehr oder wenigerauf p hinweisen oder auch weggerichtet sein. Wie kann man diese vage formulierteEigenschaft quantifizieren?
Der Fluss des Vektorfeldes durch die Oberfläche einer ’sehr’ kleinen, glatt be-randeten (offenen) Umgebung von p ist das entscheidende Instrument: Lege einenkleinen achsenparallelen Würfel um den Punkt, multipliziere zu jeder der 2n Würfel-flächen die nach außen gerichtete Flächeneinheitsnormale skalar mit einem repräsen-tativen Wert des Vektorfeldes auf der jeweiligen Oberfläche. Addition der Flüsse undanschließende Division durch das Volumen des Würfels ergibt im Grenzübergang zurKantenlänge 0 einen das lokale Auseineanderstreben von X in p quantifizierendenZahlenwert, die Divergenz des Vektorfeldes in p.

KAPITEL 3. VEKTORANALYSIS 237
Die Ausarbeitung dieser Idee gelingt mit der Tangentialapproximation
X (p+ εei) = X (p) +n
k=1
ekε (∂ei )p X
k + o (ε) .
Die beiden gegenüberliegenden Würfelseiten, die zur Achse ei senkrecht stehen, tra-gen dann im Fall einer ONB e folgendermaßen bei:(Xp+
ε
2ei, εn−1ei
)+(Xp− ε
2ei,−εn−1ei
)= εn∂e
iXi (p) + εn−1o (ε) .
Daher gilt
limε→0
1
εn
n
i=1
0εn (∂e
i )p Xi + εn−1o (ε)
1=
n
i=1
(∂ei )p X
i.
Definition 121 Sei U ⊂ V offen. Das Vektorfeld X : U → V sei ein C1-Vektorfeldauf U. Sei e eine beliebige Basis von V. Die Komponentenfunktionen X i
e : U → Rvon X erfüllen X =:
ni=1 X
ieei. Dann heißt das Skalarfeld div (X) : U → R mit
div (X) :=n
i=1 ∂eiX
ie Divergenz oder Quelldichte von X. Ein Vektorfeld X mit
div (X) = 0 wird divergenzfrei genannt.
In die Bildung der Divergenz geht die Wahl einer Basis ein. Trotzdem ist dasSkalarfeld div (X) unabhängig von dieser Wahl. Ist nämlich f = e ·M eine weitereBasis von V, dann gilt
n
i=1
∂f
i Xif =
n
i=1
[fi]n
k=1
M−1i
k
Xk
e =n
k=1
n
i=1
M−1i
k
2 n
j=1
ejMji
3Xk
e
=n
k=1
n
j=1
n
i=1
M j
i
M−1i
k
[ej]X
ke =
n
k=1
n
j=1
δjk [ej ]Xke =
n
k=1
[ek]Xke = div (X) .
Obwohl die Definition der Divergenz hier mithilfe einer Überlegung motiviertwurde, die neben einer Basis auch ein Skalarprodukt benützt, ist die Divergenzeines Vektorfeldes auch unabhängig von der Wahl des Skalarproduktes.13
Im 3d Fall ist die Divergenz eines Vektorfeldes eine wichtige Größe der Elek-trostatik. Sie dient der Formulierung eines Zusammenhangs zwischen elektrostati-schem Feld E und elektrischer Ladungsdichte ρ. Es gilt nämlich das NaturgesetzdivE = ρ/ε0. Der Integralsatz von Gauß gibt der Divergenz eines Vektorfeldes einerecht anschauliche Bedeutung. Er sagt im Fall des Vektorfeldes E (in etwas präzise-rer Form), dass der Fluss von E durch den 2-dimensionalen, auswärts orientiertenRand eines kompakten Bereiches mit dem Volumsintegral der Ladungsdichte ρ/ε0
13Der tiefere Grund dafür ist die Tatsache, dass der Fluss eines Vektorfeldes X durch eine Flächeder Kodimension 1 nach Wahl einer Volumsform τ ∈ Ωn (V ) bereits eindeutig festgelegt ist. ImQuotineten von Fluss und Volumen kürzt sich die einzige willkürliche Normierungskonstante derVolumsform heraus. Eine explizit basis- und skalarproduktfreie Definition der Divergenz von Xliefert Cartans Kalkül der Differentialformen durch d [τ (X, ·)] = div (X) τ .
KAPITEL 3. VEKTORANALYSIS 238
übereinstimmt. Die Größe ρ/ε0 ist deshalb die Quelldichte von E. Ganz ähnlichliegen die Dinge in der Strömungslehre.
Die Divergenz des Geschwindigkeitsfeldes X einer Strömung gibt Auskunft dar-über, ob diese Strömung als tatsächlich zeitunabhängige Strömung ohne Quellenoder Senken realisiert werden kann. Wäre etwa divpX < 0, dann müsste im Innereneiner genügend kleinen Kugel um p die in ihr enthaltene Flüssigkeitsmenge perma-nent zunehmen. Das geht allem Anschein nach im 2d Fall nur, wenn aus dem Punktp Flüssigkeit seitlich, also in eine zusätzliche Dimension, abgesaugt wird. Im 3d Fallscheint divX = 0 statisch, also dauerhaft, gar nicht physikalisch realisierbar zu sein.
Ist das Vektorfeld X : U → V vom C1-Typ, dann hat die Differentialglei-chung γ = X γ eindeutig bestimmte maximale Lösungen γp zur Anfangsvorgabeγ (0) = p. Es existiert also eine (eindeutig bestimmte) lokale Flussabbildung Φ mitΦ (t, p) = γp (t) und es steht für hinreichend kurze Evolutionszeiten t fest, in wel-che Punktmenge die Strömung mit dem Geschwindigkeitsfeld X eine PunktmengeΩ ⊂ U überführt. Ist Ω eine glatt berandete messbare Menge, dann folgt (ein Bildzusammen mit dem Integralsatz von Gauß macht es zumindest plausibel)
∂t
Φ(t,Ω)
dnx
,,,,t=0
=
∂Ω
X,n df =
Ω
div (X) dnx.
Für div (X) = 0 ist das Volumen von Ω unter dem Transport mit der Strömung desGeschwindigkeitsfeldes X daher unverändert. Man sagt: eine divergenzfreie Strö-mung ist volumserhaltend.
Ganz einfache Beispiele sind die Vektorfelder X = id = (x, y) , und Y = (x,−y)auf R1×2. Es gilt div (X) = 2 und div (Y ) = 0. Berechnen wir noch zur Kontrolleund Übung div (Y ) mithilfe der Basis f1 = (1, 1) , f2 = (0, 1) . Es gilt (x, y) =(x, x) + (0, y − x) = xf1 + (y − x) f2. Die kontravarianten Koordinatenfunktionenvon R1×2 zur Basis f sind somit u = x und v = y − x. Daraus folgt
Y = (x,−y) = (x, x) + (0,−x− y) = xf1 − (x+ y) f2 = uf1 − (v + 2u) f2.
Also gilt Y 1f = u und Y 2
f = −2u− v. Nun folgt div (Y ) = ∂f
1Y1f + ∂
f
2Y2f = 1− 1 = 0.
Stellt man sich die Vektorfelder X und Y als Geschwindigkeitsfelder von ebe-nen Wasserströmungen zwischen zwei Glasplatten vor, ist klar, dass ohne seitlicheWasserzufuhr X nicht zu realisieren ist, Y hingegen schon. Siehe Abbildungen 3.10,3.11. In der Strömung X müssten Hohlräume entstehen, da das Wasser in immergrößerer Entfernung vom Zentrum immer schneller abfließt. Es muss also überalldurch Löcher in den Glasplatten Wasser nachgeliefert werden. Im Fall von Y strömtWasser aus großer Entfernung zum Zentrum hin, wird dabei langsamer und strömtwieder nach außen ab. Diese Strömung kommt ohne seitliche Wasserzufuhr aus.
Das elektrische Feld einer Punktladung
Sei r : V → R die Norm zu einem Skalarprodukt von V und sei e eine Basisvon V. Zu ihr gehören die Koordinatenfunktionen x1, . . . , xn. Die reelle Funktionf : (a, b)→ R mit 0 ≤ a < b sei differenzierbar. Setze X(p) = f(|p|) · p. Es gilt alsoauf U := p ∈ V | a < |p| < b die Funktionsgleichung X =
ni=1 f(r)x
iei.

KAPITEL 3. VEKTORANALYSIS 239
0
0
Abbildung 3.10: Das Vektorfeld X = (x, y)
0
0
Abbildung 3.11: Das Vektorfeld Y = (x,−y)
Ist e orthonormiert, dann gilt auf U nach Produkt- und Kettenregel
∂ej
f(r)xi
= f ′(r)
xj
rxi + f(r)δij
und somit div (X) = rf ′ (r)+nf (r). Insbesondere folgt durch Wahl der konstantenFunktion f = 1, dass div (id) = n auf ganz V .
Welche Funktionen f machen X divergenzfrei? Offenbar ist X genau dann di-vergenzfrei, wenn f eine Lösung der auf dem Gebiet (x, y) ∈ R>0 × R definiertenDifferentialgleichung y′ = −ny/x ist. Für die Menge L aller maximalen Lösungendieser Differentialgleichung, sie ist vom Typ der separierten Variablen, gilt (Nach-rechnen!)
L =α : R>0 → R, x → Cx−n | C ∈ R
.
Somit existiert für jedes radiale, drehinvariante, divergenzfreie Vektorfeld X eineKonstante C ∈ R, sodass X auf seinem Definitionsbereich mit
XC : V 0→ V, XC(p) = Cp/ |p|n
übereinstimmt. XC ist das elektrische Feld einer Punktladung im n-dimensionalenRaum. Die Fälle n = 1 bzw. n = 2 ergeben das elektrische Feld einer Flächen-, bzw.

KAPITEL 3. VEKTORANALYSIS 240
Linienladung im 3-dimensionalen Raum. Für C = 0 hat XC keine stetige Fortset-zung auf ganz V. Es existiert also kein drehinvariantes, radiales, von 0 verschiedenesVektorfeld, das auf ganz V divergenzfrei ist.
Drehvektorfelder sind divergenzfrei
Sei dimV = 3 und n ∈ V. Setze14 L : V → V, p → n× p. Bezüglich einer ONB hatL den Koordinatenausdruck
L = e ·
n2x3 − n3x2
n3x1 − n1x3
n1x2 − n2x1
.
Wegen ∂Li
∂xi= 0 folgt div (L) = 0. Jedes Drehvektorfeld ist also divergenzfrei und
damit volumserhaltend.
Abbildung 3.12: Das Drehvektorfeld L in einer Ebene senkrecht zu n
Hamiltonsche Vektorfelder sind divergenzfrei
Sei H : U → R zwei mal stetig differenzierbar. (Hamiltonfunktion) Dabei ist U ⊂ Voffen in einem Vektorraum V mit dimV = 2n. Das Hamiltonsche Vektorfeld XH hatin der Karte (q1, . . . qn, p1, . . . pn) zu einer symplektischen Normalbasis (e1, . . . e2n)von V die Zerlegung
XH =n
i=1
∂piH · ei −n
i=1
∂qiH · en+i.
Daher gilt div (XH) =n
i=1 ∂qi∂piH − ∂pi∂qiH = 0. Hamiltonsche Flussabbildungensind somit volumserhaltend, ein berühmtes Ergebnis von Liouville.
14Das Vektorfeld ωL ist also das Geschwindigkeitsfeld eines starren Körpers, der mit der Win-kelgeschindigkeit ωn rotiert.

KAPITEL 3. VEKTORANALYSIS 241
3.2.13 Faulenzerregeln zur Divergenz und Beispiele
Lemma 122 Seien X, Y in p differenzierbare Vektorfelder und sei f eine in p dif-ferenzierbare Skalarfunktion. Weiter sei λ ∈ R. Dann gilt:
1. divp (X + Y ) = divp (X) + divp (Y )
2. divp (λX) = λ divp (X)
3. divp (fX) =&gradp (f) , X (p)
'+ f (p) divp (X)
Das Vektorpotential eines Punktdipols ist quellenfrei
Für X : V 0 → V ≃ R3 mit X (p) = f (|p|)L (p) = f (|p|)n × p und f ∈C1 (R>0 : R) folgt divp (X) = f ′ (|p|) p/ |p| , n× p+f (|p|) divpL = 0. Was das Vek-torpotential X mit dem magnetischen Feld eines magnetischen Punktdipolmomentszu tun hat, wird im Kapitel über die Rotation eines Vektorfeldes klar werden.
Die Quelldichte eines radialen Vektorfelds
Ein radiales Vektorfeld X erfüllt X = f (r) · id mit differenzierbarem f : I → Rauf einem offenen Intervall I ⊂ R>0. Dann gilt divp X = |p| f ′ (|p|) + nf (|p|) . Dasergibt sich mit Regel 3 folgendermaßen
divp X = divp [(f r) · id] =&gradp (f r) , p
'+ f (|p|) divp (id)
= f ′ (|p|)=
p
|p| , p>+ nf (|p|) = |p| f ′ (|p|) + nf (|p|) .
Allgemeine Vortexfelder sind divergenzfrei
Sei dimV = 3 und n ∈ V mit |n| = 1. Sei L : V → V, p → n×p und sei f : R>0 → Rdifferenzierbar. Dann ist mit ρ := |L| : V → R auf U := V (R·n) das Vektorfeld
X : U → V, p → f (ρ(p)) · (n× p)
ein C1-Vektorfeld. Es heißt allgemeines Vortexfeld. ZB das Magnetfeld eines langenstromführenden Drahtes endlicher Dicke ist von dieser Art X = f(ρ)L.
Die Zahl ρ(p) = |n× p| ist der Normalabstand von p zur Achse R·n. Somit giltX (p + λn) = X (p+ λn) für alle λ ∈ R. Man sagt: X ist invariant unter Verschie-bungen parallel zu n. Weiter folgt X
eαLnp
= eαLnX (p) für alle α ∈ R. Man sagt:
X ist invariant unter den Drehungen um n.Aus dem Gradienten der 2d-Abstandsfunktion folgt
gradp (ρ) = |p− n n, p|−1 (p− n n, p) .Dieser Gradientenvektor steht in p senkrecht zum Zylindermantel durch p mit AchseR·n. Der Vektor L(p) hingegen ist tangental zum Mantel in p. Somit gilt
divp (X) = divp (f (ρ) · L) =&gradp (f (ρ)) , L (p)
'+ f (ρ(p)) · divp (L)
= f ′ (ρ(p))&gradp (ρ) , L (p)
'+ 0 = 0.

KAPITEL 3. VEKTORANALYSIS 242
3.2.14 Laplace-Operator
Nun zur Quelldichte des Gradientenfeldes eines skalaren Feldes.
Definition 123 Sei U ⊂ V offen und f : U → R sei eine C2-Funktion. Dann heißtdas Skalarfeld ∆f : U → R, p → divp (grad (f)) Laplace von f zum Skalarpro-dukt ·, · von V. Die zugehörige lineare Abbildung ∆ : C2 (U : R) → C (U : R) heißtLaplace-Operator auf U.
Ist e eine Basis von V, dann gilt ∆f =n
i,j=1
G−1
e
ij∂ei ∂
ejf. Im Fall einer ONB
folgt weiter (∆f) (v) =n
i=1 ∂i∂ife (ve) . Ist beispielsweise V = R2 mit der Stan-dardbasis e = (e1, e2) und den zugehörigen Standardkoordinatenfunktionen (x, y)dann folgt für die Funktion u = x2 − y2, dass ∆u = 0, wenn ∆ mit dem Stan-dardskalarprodukt gebildet wird. Ein weiteres Skalarprodukt auf V hat bezüglichder Basis e die Gramsche Matrix
Ge =
2 11 1
mit der Inversen G−1
e =
1 −1
−1 2
.
Dann folgt für den Laplaceoperator ∆ zu diesem zweiten Skalarprodukt ∆u =∂2x + 2∂2
y − 2∂x∂y
u = −2. Der Laplaceoperator hängt also wenig überraschend
wie der Gradient von der Wahl des Skalarprodukts ab.
∆u für radialsymmetrische Funktionen u
Eine Funktion u : V ⊃ U → R ist genau dann invariant unter allen Drehungen um0, wenn U selbst unter diesen invariant und u konstant auf den Niveauflächen derNorm von V ist. Eine solche Funktion u wird als radialsymmetrisch bezeichnet.
Lemma 124 Sei r : V → R, p → |p| und sei f : R>0 ⊃ D → R eine C2-Funktion.D sei offen. Für u = f r ≡ f(r) auf U := v ∈ V : |v| ∈ D folgt dann ∆u =f ′′(r) + n−1
rf ′(r) mit n = dim(V ).
Beweis. Zunächst folgt auf U, dass grad (f r) = f ′(r) grad (r) = (f ′(r)/r) · id.Weiter folgt mit Faulenzerregel 3. von Bemerkung 122 zur Divergenz, dass
div (grad (f r)) =
=grad
f ′(r)
r
, id
>+
f ′(r)
rdiv (id)
=
$f ′(r)
r
′
grad (r) , id
%+ n
f ′(r)
r=
=f ′′(r)
r− f ′(r)
r2
· idr, id
>+ n
f ′(r)
r
= f ′′(r) +(n− 1)
rf ′(r).
Beispiel: Für α ∈ R gilt ∆rα = α (n+ α− 2) rα−2 auf V 0.In den folgenden vier Abschnitten werden reellwertige Funktionen u untersucht,
die auf beinahe ganz V definiert sind und ∆u = λu für ein λ ∈ R erfüllen. Überdies

KAPITEL 3. VEKTORANALYSIS 243
haben diese Funktionen ein hohes Maß an Symmetrie. Die Fehlstellen im Definiti-onsbereich von u sind entweder ein einziger Punkt, eine Halbgerade, eine Gerade,oder eine Ebene. Die hohe Symmetrie reduziert die Gleichung ∆u = λu auf einegewöhnliche Differentialgleichung, wodurch solche Funktionen systematisch aufge-funden werden können. Zuerst wird der für die Elektrostatik wichtige Fall λ = 0 be-handelt und dann der Fall λ = 0, der in der (zB quantenmechanischen) Streutheoriebenötigt wird. Einige der hier behandelten Funktionen sind Greensche Funktionender Laplace- bzw Helmholtzgleichung. Sie werden im zweiten Teil der Vorlesungweiter behandelt.
3.2.15 Skalarpotential einer Punktladung
Für welche Funktionen f : R>0 → R gilt ∆(f r) = 0? Dies gilt genau dann, wennf ′ eine Lösung der Differentialgleichung y′ = 1−n
xy auf (x, y) ∈ R>0 × R ist. Die
allgemeine maximale Lösung dieser Gleichung lautet y = Cx1−n mit C ∈ R. Alsogilt f ′(r) = Cr1−n. Daraus folgt durch Integration, dass f(r) eine Funktion des Typs
f(r) =
A
rn−2 +B für n = 1, 3, 4, ...A ln (r) +B für n = 2
mit A,B ∈ R ist. Für A = 0 und n > 1 lässt sich f (r) nicht stetig auf V fortsetzen.Die Funktionen f (r) sind als Potentiale von Flächen-, Linien- und Punktladungenin der Elektrostatik von Bedeutung. Warum?
Imwichtigsten Fall n = 3 folgt für den Fluss von−grad (Ar−1 +B) = Ar−2 (ιd/r)durch eine (nach außen orientierte) Kugeloberfläche um 0
∂KR
=−grad
A
r+B
,ιd
r
>R2dΩ = 4πA
mit KR = v ∈ V : |v| < R . Ist A/r + B für A,B ∈ R ein elektrisches Potential,dann wird das Integral
ε0 ·
∂KR
=−grad
A
r+B
,ιd
r
>R2dΩ = 4πA · ε0 =: Q
als die elektrische Ladung des Potentials A/r +B bezeichnet. Die Funktion
Φ =Q
4πε0r+B : V 0→ R
heißt daher Potential einer Punktladung der Stärke Q in 0. Die Konstante B istdurch kein physikalisches Gesetz geregelt und wird meist gleich 0 gewählt.
Im Fall n = 2 folgt für den Fluss von −grad (A ln r +B) = −Ar−1 (ιd/r) durcheine (nach außen orientierte) Kreislinie um 0
∂KR
=−grad (A ln r +B) ,
ιd
r
>Rdϕ = −2πA.

KAPITEL 3. VEKTORANALYSIS 244
Ist A ln r +B für A,B ∈ R ein elektrisches Potential, dann wird das Integral
ε0 ·
∂KR
=−grad (A ln r +B) ,
ιd
r
>R2dΩ = −2πA · ε0 =: σ
als die elektrische Linienladungsdichte des Potentials A ln r +B bezeichnet.Die Funktion Φ = −σ (ln (r) /2πε0) + B : V 0 → R dient als Potential einer
Linienladungsdichte der Stärke σ durch 0 in folgendem Sinn: Ein homogen geladener,langer, gerader Draht befinde sich in einem Raum V ′ der Dimension 3. Geht derDraht, der zu einer unendlichen Geraden hochstilisiert wird, durch 0 ∈ V ′, dannwird das orthogonale Komplement zur Geraden als V bezeichnet. In der Nähe desDrahtes, genügend weit weg von seinen Enden, ist dann das Potential einer solchenLadungsverteilung in p ∈ V ′ durch Φ (p) = − σ
2πε0ln r (p)+B gegeben, wobei r (p) =
|p− n n, p| die Norm der Normalkomponente von p zum Einheitsrichtungsvektorn ∈ V ′, also den Normalabstand des Punktes p vom Draht bezeichnet.
3.2.16 *Skalarpotential eines geladenen Stabes
Sei dimV = 3. Für ein e ∈ V mit |e| = 1 sei Φe das Skalarfeld
Φe : V R≥0 · e → R, p → ln (|p| − e, p) .
Für p = |p| e, also Punkte auf der Halbachse R≥0 · e gilt |p| − e, p = 0. Für p =− |p| e = 0 gilt |p|− e, p = 2 |p| > 0. Für Punkte p /∈ R · e gilt p⊥ := p− e e, p = 0
und daher |p|2 = e, p2 +,,p⊥,,2 > e, p2 . Damit ist gezeigt, dass für alle p ∈ V
|p| − e, p ≥ 0.
Zudem gilt |p| − e, p = 0 genau dann, wenn p ∈ R≥0 · e. Die Funktion Φe istsomit wohldefiniert und hat maximalen Definitionsbereich in V. Für eine konvergentePunktfolge (pn)n∈N mit pn → p0 ∈ R≥0 · e für n → ∞ divergiert die Folge Φe (pn)(bestimmt) gegen −∞.
Es gilt also auf Ue := V R≥0 · e die Funktionsgleichung Φe = ln (r − e, ·) .Ist (e1, e2, e3) eine ONB von V, dann folgt beispielsweise für e = e3 und mit den
Koordinatenfunktionen (x, y, z) zu dieser Basis, dass Φe = ln
x2 + y2 + z2 − z.
Die Niveaufläche von Φe mit Φe = ln c für ein c > 0 ist das Rotationsparaboloid mitz = (x2 + y2 − c2) /2c. Der Schnitt der Niveaufläche Φe = ln c mit der Ebene y = 0ist für die Werte c ∈ 1/2, 1, 2 in Fig. 3.13 zu sehen. Das Gradientenfeld von Φe inder y = 0 Ebene zeigt Fig. 3.14.
Am gemeinsamen Definitionsbereich Ue∩U−e = V R·e ist die Funktion Φe+Φ−e
definiert und erfüllt dort
(Φe +Φ−e) (p) = ln (|p| − e, p) + ln (|p|+ e, p) = ln|p|2 − e, p2
= 2 ln ρ (p) .
Hier ist ρ (p) = |p|2 − e, p2 der Abstand von p zur Geraden R · e. Wir kennen
bereits Φe + Φ−e als das Potential einer homogenen Linienladungsdichte auf der

KAPITEL 3. VEKTORANALYSIS 245
2.51.250-1.25-2.5
2
1.5
1
0.5
0
-0.5
-1
x
z
x
z
Abbildung 3.13: Nivaumengen für c = 1 (schwarz), c = 1/2 (rot) und c = 2 (grün)
Abbildung 3.14: Feldstärke eines geladenen Halbstrahls
Geraden R · e. Die Funktion Φ−e entsteht durch Spiegelung von Φe am Punkt 0 ∈ V.Die Funktion Φe könnte daher das Potential des homogen geladenen HalbstrahlsR≥0 · e sein. Und tatsächlich gilt:
Lemma 125 ∆Φe = 0.
Beweis. Das Gradientenfeld von Φe ergibt sich auf Ue zu
grad (Φe) =grad (r)− e
r − e, · =1
r − e, ·
ιdV
r− e
.
Weiter folgt
∆Φe =−1
(r − e, ·)2=grad (r − e, ·) ,
ιdV
r− e
>+
divιdVr− e
r − e, ·
=−1
(r − e, ·)2,,,,ιdV
r− e
,,,,2
+divιdVr
r − e, · .
Nebenrechnung 1:,,,,ιdV
r− e
,,,,2
=1
r2|ιdV − re|2 = 1
r2|ιdV |2 − 2r ιdV , e+ r2 |e|2
= 2 (1− cos θ) .

KAPITEL 3. VEKTORANALYSIS 246
Hier bezeichnet θ (p) ∈ (0, π] den ungerichteten Winkel zwischen p und e. Somit gilt,, ιdV
r− e,,2
(r − e, ·)2=
2 (1− cos θ)
r2 (1− cos θ)2=
2
r2 (1− cos θ).
Nebenrechnung 2:
div
ιdV
r
= − 1
r2grad (r) , ιd+ div (ιd)
r= − 1
r2
=ιd
r, ιd
>+
div (ιd)
r=
2
r.
Somit gilt divιdVr
/ (r − e, ·) = 2/r2 (1− cos θ) , sodass die Behauptung folgt.
Das Potential Φ : V [−L,L] · e → R eines geladenen Geradenstücks der Länge2L > 0, das den Bereich [−L,L] · e belegt, ergibt sich durch Addieren des Translatsvon Φe um den Vektor −Le und dem Translat von −Φe um den Vektor Le. Es giltzunächst für p ∈ V [−L,∞) · e
Φ (p) = ln (|p+ Le| − e, p + Le)− ln (|p− Le| − e, p− Le)
= ln|p+ Le| − e, p + Le|p− Le| − e, p− Le
und (nicht offensichtlich!) Φ (−p) = Φ (p) . Für Koordinaten (x, y, z) zu einer ONBmit e = e3 gilt
Φ = ln
x2 + y2 + (z + L)2 − (z + L)
x2 + y2 + (z − L)2 − (z − L)
.
Ohne Beweis sei mitgeteilt: Die Funktion Φ hat eine C∞-Fortsetzung nach V [−L,L] · e. Für diese gilt natürlich auch ∆Φ = 0.
3.2.17 *Skalarpotential einer geladenen Halbebene
Sei nun dimV = 2 und e ∈ V mit |e| = 1. Gelingt es mit dem Ansatz Φe =f (r − e, ·) auf V R≥0 ·e ein (nichtkonstantes) Skalarfeld mit ∆Φe = 0 zu finden?
Es gilt
gradΦe = f ′ (r − e, ·) ·ιdV
r− e
und weiter ∆Φe = div gradΦe =
f ′′ (r − e, ·) ·=
ιdV
r− e
,
ιdV
r− e
>+ f ′ (r − e, ·) · div
ιdV
r− e
= f ′′ (r − e, ·) · 2r(r − e, ·) + f ′ (r − e, ·) ·
− 1
r2·=ιdV
r, ιdV
>+
2
r
=1
r· [f ′′ (r − e, ·) · 2 (r − e, ·) + f ′ (r − e, ·)] .
Es gilt also ∆Φe = 0 genau dann, wenn
2xf ′′ (x) + f ′ (x) = 0 für alle x > 0.

KAPITEL 3. VEKTORANALYSIS 247
Der Lösungsraum der maximalen Lösungen dieser (Eulerschen) linearen Differen-tialgleichung wird erzeugt vom Fundamentalsystem u1, u2 : R>0 → R mit u1 (x) = 1und u2 (x) =
√x. Folglich ist die Funktion Φe mit
Φe =
r − e, · =
r (1− cosϕ) =√2r
sin2 (ϕ/2) =√2r sin
ϕ2
eines der gesuchten Skalarpotentiale. Hierbei gilt für p ∈ V R≥0 · e
p = cosϕ (p) · e+ sinϕ (p) · e⊥ mit 0 < ϕ (p) < 2π,
wobeie, e⊥
eine ONB von V ist. In kartesischen Koordinaten (x, y) mit e = e1 gilt
Φe =
x2 + y2 − x.
Der Funktionsgraph von Φe (Fig. 3.15) erinnert einen Schiffskiel. Fig 3.16 zeigtdas Gradientenfeld von Φe. Jedes weitere der gesuchten Potentiale ist eine der Funk-
Abbildung 3.15: Potential Φe einer geladenen Halbachse für dimV = 2
tionen AΦe + B mit beliebigen reellen Konstanten A,B. Sie können als Potentialevon geladenen Halbebenen im 3d Fall genutzt werden.
3.2.18 *Polarwinkel als Potential einer Dipolschicht
Auf der geschlitzten Ebene U = R2R≥0·e1 gilt x = r cosϕ und y = r sinϕmit r > 0und 0 < ϕ < 2π. Daraus folgt auf U, dass (bezüglich des Standardskalarprodukts)gradϕ = (−y, x) / (x2 + y2) und weiter
∆ϕ =div (−y, x)
x2 + y2+
=(−y, x) ,
−2 (x, y)
(x2 + y2)2
>= 0.
Die dehnungsinvariante Polarwinkelfunktion ϕ erfüllt also ∆ϕ = 0 auf U. Die Ni-veaulinien von ϕ sind offene Halbgerade, die von 0 ausgehen, und die Feldlinien vongradϕ sind punktierte Kreise um 0. Nach Einbettung in den R3 kann ϕ als dasPotential der dipolbelegten Halbebene R≥0 · e1 + R · e3 genutzt werden.
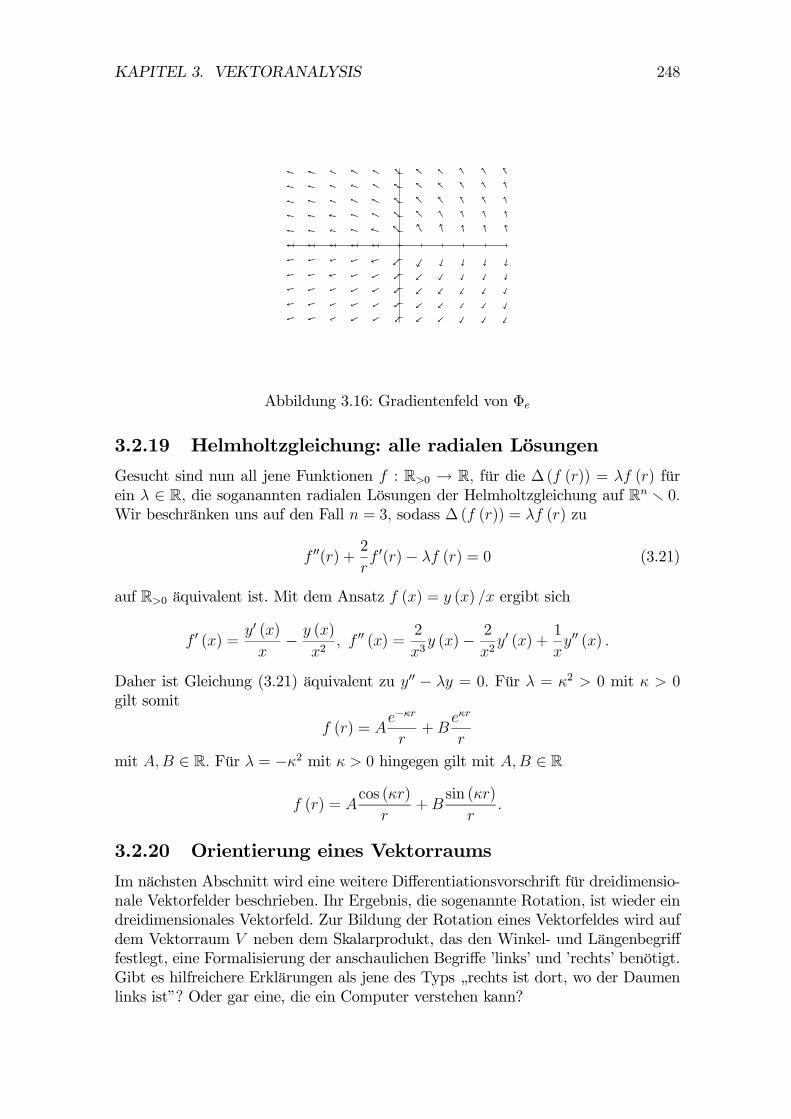
KAPITEL 3. VEKTORANALYSIS 248
Abbildung 3.16: Gradientenfeld von Φe
3.2.19 Helmholtzgleichung: alle radialen Lösungen
Gesucht sind nun all jene Funktionen f : R>0 → R, für die ∆(f (r)) = λf (r) fürein λ ∈ R, die soganannten radialen Lösungen der Helmholtzgleichung auf Rn 0.Wir beschränken uns auf den Fall n = 3, sodass ∆(f (r)) = λf (r) zu
f ′′(r) +2
rf ′(r)− λf (r) = 0 (3.21)
auf R>0 äquivalent ist. Mit dem Ansatz f (x) = y (x) /x ergibt sich
f ′ (x) =y′ (x)
x− y (x)
x2, f ′′ (x) =
2
x3y (x)− 2
x2y′ (x) +
1
xy′′ (x) .
Daher ist Gleichung (3.21) äquivalent zu y′′ − λy = 0. Für λ = κ2 > 0 mit κ > 0gilt somit
f (r) = Ae−κr
r+B
eκr
r
mit A,B ∈ R. Für λ = −κ2 mit κ > 0 hingegen gilt mit A,B ∈ R
f (r) = Acos (κr)
r+B
sin (κr)
r.
3.2.20 Orientierung eines Vektorraums
Im nächsten Abschnitt wird eine weitere Differentiationsvorschrift für dreidimensio-nale Vektorfelder beschrieben. Ihr Ergebnis, die sogenannte Rotation, ist wieder eindreidimensionales Vektorfeld. Zur Bildung der Rotation eines Vektorfeldes wird aufdem Vektorraum V neben dem Skalarprodukt, das den Winkel- und Längenbegrifffestlegt, eine Formalisierung der anschaulichen Begriffe ’links’ und ’rechts’ benötigt.Gibt es hilfreichere Erklärungen als jene des Typs „rechts ist dort, wo der Daumenlinks ist”? Oder gar eine, die ein Computer verstehen kann?

KAPITEL 3. VEKTORANALYSIS 249
Die Anweisung „gehe zehn Schritte geradeaus und dann fünf Schritte nach links”macht nur Sinn, wenn die Person, an welche die Anweisung gerichtet ist, ihre linkevon der rechten Hand unterscheiden kann. Sie muss aber auch wissen, welche Rich-tung mit „geradeaus” gemeint ist. Wollte man einen Taucher im trüben Gewässermit solchen Anweisungen wo hinschicken, wird bewusst, dass neben der Richtung„geradeaus” noch die Orientierung der Körperachse bestimmt sein muss, wenn dieAnweisung „zehn Meter geradeaus und dann fünf Meter nach links” eine Endpo-sition festlegen soll. Die Vorgabe einer Blickrichtung und einer Orientierung derKörperachse von den Füßen zum Kopf legt also erst fest, was mit links oder rechtsgemeint ist.
Wie aber lässt sich ohne direktes Hinweisen jemandem erklären, was seine rechteHand ist? Anstatt Kindern immer wieder zu zeigen, welche Hand es denn ist, diesie zur Begrüßung zu reichen haben, könnte in unseren Breiten der folgende phy-sikalische Sachverhalt genutzt werden. Steht das Kind bei Sonnenschein aufrechtirgendwo in der gemäßigten Zone der Nordhalbkugel, kann es ein paar Minuten dieSonne betrachten und dabei beobachten, in welche Richtung sie wandert. Es bildetdann in seinem Standpunkt einen Vektor ’nach oben’ und nennt ihn e3. Dann bildetes einen Richtungsvektor vom eigenen Standpunkt ’zur Sonne’ und nennt ihn e2.Zuletzt wählt das Kind einen Vektor, der in den Halbraum weist, in den sich dieSonne hineinbewegt. Diesen Vektor nennt es e1.
Nun kann das Kind ausprobieren, für welche seiner beiden Hände es, so wie inAbbildung 3.17, den Daumen an e1, den Zeigefinger an e2 und den Mittelfinger an e3auszurichten vermag. Diese Hand nennt es fortan seine ’rechte’ Hand und die Basise = (e1, e2, e3) nennt es rechtshändig oder positiv orientierte Basis des Raums allermöglichen Örter physikalischer Gegenstände. Eine weitere Basis f = (f1, f2, f3) ,die ja aus e durch eine invertierbare lineare Abbildung A : V → V mit Aei = fihervorgeht, wird ebenfalls als rechtshändig bezeichnet, wenn detA > 0 gilt und alslinkshändig, wenn detA < 0 gilt. Der Fall detA = 0 kann ja nicht eintreten. DieMenge aller Basen von V zerfällt so in zwei disjunkte Teilmengen von rechts- bzwlinkshändig orientierten Basen.
Hier ein Beispiel: Ist e = (e1, e2, e3) eine Basis von V, dann sind f = (e2, e1, e3)und g = (e2, e3, e1) auch Basen von V.Die Basen e und f sind gegengesetzt orientiert,während e und g gleichsinnig orientiert sind. Jede Vertauschung zweier benachbarterBasiselemente führt zu einem Orientierungswechsel. Die Basis g geht durch einesogenannte zyklische Vertauschung aus der Basis e hervor. Die Basen e und h =(e1,−e2, e3) sind gegengesetzt orientiert, hingegen f und h gleich.
Die eben ausgebreitete Überlegung zeigt, wie ohne Sichtkontakt und Gefuchtelmit den Händen jemandem erklärt werden kann, was rechts und was links ist. EinemKind der Südhalbkugel muss natürlich gesagt werden, dass sich die Sonne von rechtsnach links und nicht von links nach rechts bewegt und dass die nach obiger Regelerzeugte Basis linkshändig heißt.15 Was aber tun, wenn einer Person unabhängigvon deren Aufenthaltsort unser Begriff von links und rechts nahegebracht werdensoll?
15Wir ignorieren die Komplikationen, die für Bewohner der Tropen auftreten.
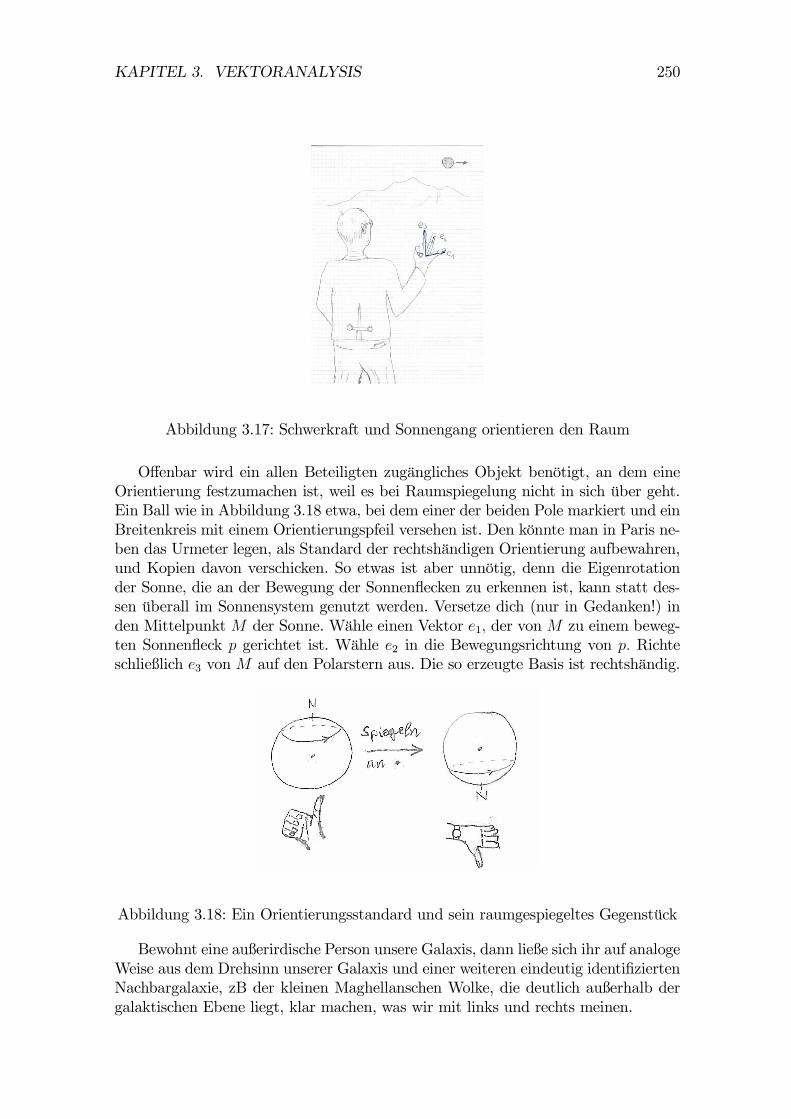
KAPITEL 3. VEKTORANALYSIS 250
Abbildung 3.17: Schwerkraft und Sonnengang orientieren den Raum
Offenbar wird ein allen Beteiligten zugängliches Objekt benötigt, an dem eineOrientierung festzumachen ist, weil es bei Raumspiegelung nicht in sich über geht.Ein Ball wie in Abbildung 3.18 etwa, bei dem einer der beiden Pole markiert und einBreitenkreis mit einem Orientierungspfeil versehen ist. Den könnte man in Paris ne-ben das Urmeter legen, als Standard der rechtshändigen Orientierung aufbewahren,und Kopien davon verschicken. So etwas ist aber unnötig, denn die Eigenrotationder Sonne, die an der Bewegung der Sonnenflecken zu erkennen ist, kann statt des-sen überall im Sonnensystem genutzt werden. Versetze dich (nur in Gedanken!) inden Mittelpunkt M der Sonne. Wähle einen Vektor e1, der von M zu einem beweg-ten Sonnenfleck p gerichtet ist. Wähle e2 in die Bewegungsrichtung von p. Richteschließlich e3 von M auf den Polarstern aus. Die so erzeugte Basis ist rechtshändig.
Abbildung 3.18: Ein Orientierungsstandard und sein raumgespiegeltes Gegenstück
Bewohnt eine außerirdische Person unsere Galaxis, dann ließe sich ihr auf analogeWeise aus dem Drehsinn unserer Galaxis und einer weiteren eindeutig identifiziertenNachbargalaxie, zB der kleinen Maghellanschen Wolke, die deutlich außerhalb dergalaktischen Ebene liegt, klar machen, was wir mit links und rechts meinen.
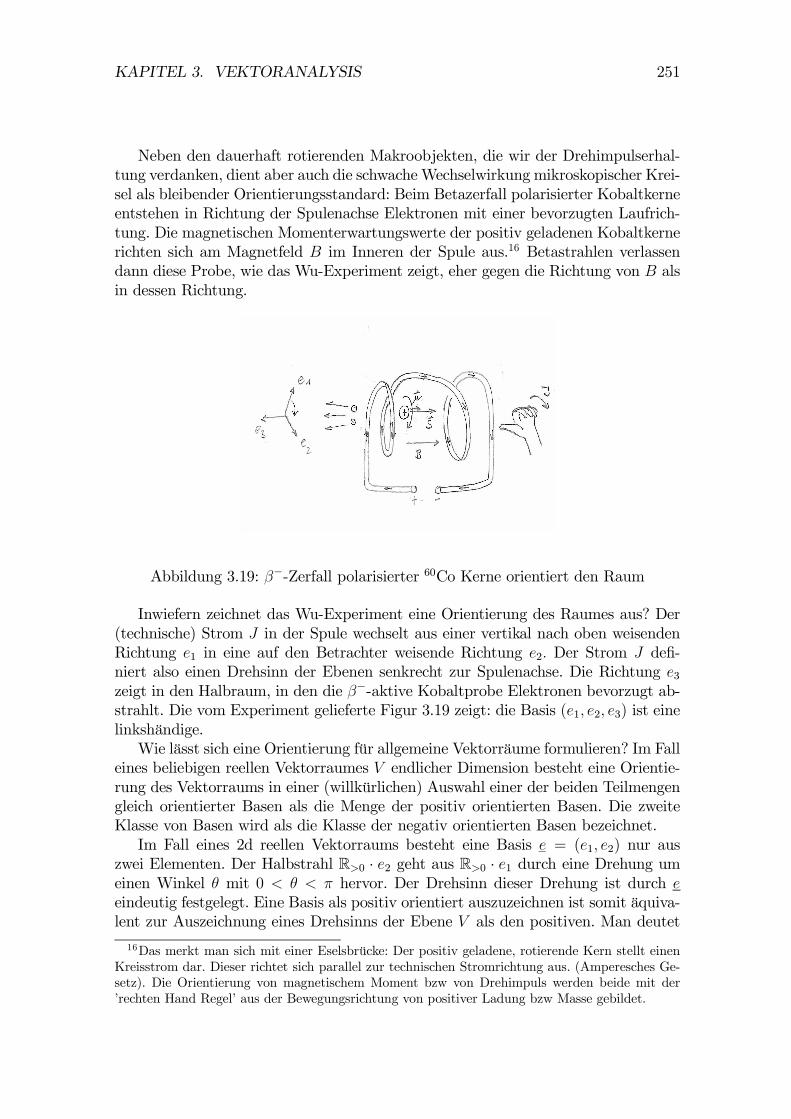
KAPITEL 3. VEKTORANALYSIS 251
Neben den dauerhaft rotierenden Makroobjekten, die wir der Drehimpulserhal-tung verdanken, dient aber auch die schwacheWechselwirkung mikroskopischer Krei-sel als bleibender Orientierungsstandard: Beim Betazerfall polarisierter Kobaltkerneentstehen in Richtung der Spulenachse Elektronen mit einer bevorzugten Laufrich-tung. Die magnetischen Momenterwartungswerte der positiv geladenen Kobaltkernerichten sich am Magnetfeld B im Inneren der Spule aus.16 Betastrahlen verlassendann diese Probe, wie das Wu-Experiment zeigt, eher gegen die Richtung von B alsin dessen Richtung.
Abbildung 3.19: β−-Zerfall polarisierter 60Co Kerne orientiert den Raum
Inwiefern zeichnet das Wu-Experiment eine Orientierung des Raumes aus? Der(technische) Strom J in der Spule wechselt aus einer vertikal nach oben weisendenRichtung e1 in eine auf den Betrachter weisende Richtung e2. Der Strom J defi-niert also einen Drehsinn der Ebenen senkrecht zur Spulenachse. Die Richtung e3zeigt in den Halbraum, in den die β−-aktive Kobaltprobe Elektronen bevorzugt ab-strahlt. Die vom Experiment gelieferte Figur 3.19 zeigt: die Basis (e1, e2, e3) ist einelinkshändige.
Wie lässt sich eine Orientierung für allgemeine Vektorräume formulieren? Im Falleines beliebigen reellen Vektorraumes V endlicher Dimension besteht eine Orientie-rung des Vektorraums in einer (willkürlichen) Auswahl einer der beiden Teilmengengleich orientierter Basen als die Menge der positiv orientierten Basen. Die zweiteKlasse von Basen wird als die Klasse der negativ orientierten Basen bezeichnet.
Im Fall eines 2d reellen Vektorraums besteht eine Basis e = (e1, e2) nur auszwei Elementen. Der Halbstrahl R>0 · e2 geht aus R>0 · e1 durch eine Drehung umeinen Winkel θ mit 0 < θ < π hervor. Der Drehsinn dieser Drehung ist durch eeindeutig festgelegt. Eine Basis als positiv orientiert auszuzeichnen ist somit äquiva-lent zur Auszeichnung eines Drehsinns der Ebene V als den positiven. Man deutet
16Das merkt man sich mit einer Eselsbrücke: Der positiv geladene, rotierende Kern stellt einenKreisstrom dar. Dieser richtet sich parallel zur technischen Stromrichtung aus. (Amperesches Ge-setz). Die Orientierung von magnetischem Moment bzw von Drehimpuls werden beide mit der’rechten Hand Regel’ aus der Bewegungsrichtung von positiver Ladung bzw Masse gebildet.

KAPITEL 3. VEKTORANALYSIS 252
ihn grafisch durch einen Kreisbogen mit Pfeil an. Nun ist klar, wie die technischeStromrichtung einer Spule zur Orientierung der Ebenen senkrecht zur Spulenachsegenutzt werden kann.
3.2.21 Rotation eines 3d-Vektorfeldes
Schränkt man ein Vektorfeld in einem n-dim Vektorraum auf eine 2-dim Ebene durchden Punkt p ein, so kann sich das Feld auf dieser Ebene in der unmittelbaren Um-gebung von p mehr oder weniger um p winden. Das Kurvenintegral des Vektorfeldeslängs einer kleinen geschlossenen Kurve γ um p, die in der Ebene verläuft, zeigt eineStärke der Windung um p herum an. Lässt man die Kurve auf den Punkt p zusam-menschrumpfen und bildet den Limes von Windungsintegral durch Flächeninhaltder von γ umzingelten Fläche, ergibt sich ein Maß der lokalen Windung um p. Mannennt sie die Rotation des Vektorfelds in p bezüglich der Ebene. Eine 2-dim Ebenewird durch ein Paar von Basisvektoren (ei, ej) mit i < j gekennzeichnet. In einemn-dim Vektorraum existieren durch jeden Punkt n!/2! (n− 2)! „linear unabhängige“Ebenen. Zu jeder solchen Ebene gehört eine Komponente der Rotation in p. Fürn = 3 sind dies 3 Komponenten, die (nach Wahl einer Orientierung) zu einem Vek-torfeld zusammengefasst werden können. Für n = 4 sind es schon 6 Komponenten.
Seien also ei, ej zwei Elemente einer Orthonormalbasis von V und sei p im Defi-nitionsbereich des C1-Vektorfeldes X. Die Tangentialapproximation an Xi := X, eiin p besagt, dass
X (p + λei + µej) , ej = X (p) , ej+ λ (∂ei )p Xj + µ
∂ej
pXj + o (λei + µej) .
Daraus folgt für das Kurvenintegral von X längs einer Kurve γ, die das quadratischeGebiet
p+ λei + µej
,,λ, µ ∈− ε
2, ε2
mit hinreichend kleinem ε > 0 umschließt,
γ
X =
ε/2
−ε/2
(Xp+
ε
2ei + tej
−X
p− ε
2ei − tej
, ej
)dt+
+
ε/2
−ε/2
(Xp +
ε
2ej − tei
−X
p− ε
2ej + tei
,−ei
)dt
Tangentialapproximation der Integranden ergibt
γ
X =
ε/2
−ε/2
0ε (∂e
i )p X, ej+ 2t∂ej
pX, ej
1dt
− ε/2
−ε/2
0ε∂ej
pX, ei − 2t (∂e
i )p X, ei1dt+ o
ε2.
Die in t linearen Terme des Integranden integrieren sich zu 0 auf, sodass folgt
γ
X = ε0(∂e
i )p X, ej −∂ej
pX, ei
1 ε/2
−ε/2
dt+ oε2
= ε20(∂e
i )p X, ej −∂ej
pX, ei
1+ oε2.

KAPITEL 3. VEKTORANALYSIS 253
Die Orientierung der Randkurve des Quadrats wurde dabei so gewählt, dass andie Kante, die in Richtung +ei durchlaufen wird, jene Kante anschließt, die in +ejRichtung durchlaufen wird. Bei Vertauschung von i mit j wechselt das Integral
γX
sein Vorzeichen. Die Fläche des Quadrats ist ε2 und daher gilt
limε→0
1
Fläche
γ
X = ∂ei X, ej − ∂e
j X, ei .
Soll im Fall n = 3 aus Zij = ∂ei X, ej − ∂e
j X, ei ein Vektorfeld rot (X) ge-bildet werden, wird eine Konvention benötigt, die etwa sagt, ob Z12 oder Z21 die3-Komponente ist. Und dabei sollte rot (X) aber von der speziellen Wahl der ONBunabhängig sein. Dies gelingt erst durch die Auszeichnung der „rechtshändig“ ori-entierten Basen, für die Z12 die 3-Komponente ist. Im Fall allgemeiner Dimensionspricht man in Ermangelung einer „rechten“ Hand von positiv orientierten Basen.
Da im folgenden das äußere Vektorprodukt in einem 3-dim Vektorraum zu einemSkalarprodukt ·, · eine Rolle spielt, sei an seine Definition erinnert. Auch dabei wirdeine Orientierung benötigt.
Definition 126 Der reelle, orientierte Vektorraum V habe die Dimension 3 und·, · sei ein Skalarprodukt von V. Das vektorielle Produkt zu Skalarprodukt und Ori-entierung von V ist die schiefsymmetrische, bilineare Abbildung × : V ×V → V mite1×e2 = e3, e3×e1 = e2, e2×e3 = e1 für eine beliebig gewählte positiv orientierteONB e.
Das vektorielle Produkt ist unabhängig von der Wahl von e, soferne e aus derKlasse der positiv orientierten Basen gewählt ist.
Definition 127 Der reelle Vektorraum V habe die Dimension 3 und ·, · sei einSkalarprodukt von V. Eine Orientierung von V sei gewählt. Sei U ⊂ V offen undX : U → V ein C1-Vektorfeld mit den Komponentenfunktionen X i : U → R bezüg-lich einer positiv orientierten ONB e, d.h. X = e · (X1, X2, X3)
t. Dann heißt das
Vektorfeld rot (X) = e · (∂e2X
3 − ∂e3X
2, ∂e3X
1 − ∂e1X
3, ∂e1X
2 − ∂e2X
1)t die Rotation
von X. Sein Wert im Punkt p wird als rotp (X) notiert. Formal gilt
rot (X) = e ·
∂1∂2∂3
×
X1
X2
X3
.
Nach Definition 117 ist für dim (V ) = 3 ein C1-Vektorfeld X genau dann rota-tionsfrei, wenn rot (X) = 0 gilt. Das komponentenweise definierte Vektorfeld rot (X)ist unabhängig von der Wahl von e, soferne e nur eine positiv orientierte ONB ist.Eine explizit basisfreie Definition der Rotation ist über den Cartanschen Kalkül derDifferentialformen möglich. Außerdem zeigt diese Theorie was die Rotation im Fallhöherdimensionaler Räume ist. Historisch gab die Abänderung der ätherbezogenenMaxwellgleichungen, in denen die Rotation ja vorkommt, zu einer relativistischenFeldgleichung den Anstoß zur Entwicklung dieses Kalküls.

KAPITEL 3. VEKTORANALYSIS 254
Der klassische Satz von Stokes gibt der Rotation eines Vektorfeldes eine rechtanschauliche Bedeutung. Er sagt, dass der Fluss der Rotation durch eine stückweiseglatt berandete, kompakte 2-dimensionale Fläche mit dem Kurvenintegral des Vek-torfeldes längs einer zugehörig orientierten geschlossenen Randkurve übereinstimmt.Die Sätze von Gauß und von Stokes sind n = 3 Spezialfälle eines weitaus allgemei-neren Satzes über die Integration von Differentialformen im (äußeren) Differential-kalkül von Cartan. Diese Theorie bringt die begriffliche Struktur der Vektoranalysisviel besser zum Vorschein als die hier skizzierte klassischen Vorstufe.
3.2.22 Faulenzerregeln zur Rotation
Rotation von Einheits- und Drehvektorfeld mit Koordinaten
Der reelle Vektorraum V habe die Dimension 3 und ·, · bezeichne ein Skalarproduktvon V. Eine Orientierung von V sei gewählt. Für das Einheitsvektorfeld ιd : V → Vgilt offenbar rot (ιd) = 0. Für das Drehvektorfeld Ln : V → V mit Ln(p) = n× p fürein n ∈ V gilt rot (Ln) = 2n, denn
rot (Ln) = e ·
∂1∂2∂3
×
n2x3 − n3x2
n3x1 − n1x3
n1x2 − n2x1
= e ·
n1 + n1
n2 + n2
n3 + n3
= 2n.
Das Vektorfeld LB/2 dient wegen rotLB/2 = B als Vektorpotential der konstantenmagnetischen Flussdichte B im Inneren einer unendlich langen Spule.
Faulenzerregeln
Sei λ ∈ R, und seien f : U → R und X, Y : U → V vom C1-Typ, mit U ⊂ V offenund dim(V ) = 3. Dann gilt
1. rot (λX + Y ) = λ rot (X) + rot (Y ) ,
2. rot (fX) = grad (f)×X + f rot (X) (Regel 1. ist hierin enthalten),
3. div (X × Y ) = rot (X) , Y − X, rot (Y ) ,4. grad X, Y = X × rot (Y ) + Y × rot (X) + [Y ]X + [X]Y,
5. grad X,X = 2 (X × rot (X) + [X]X) ,
6. rot (X × Y ) = X div (Y )− Y div (X)− [X]Y + [Y ]X,
7. rot (R X R−1) = det (R) · (R rot (X) R−1) für R ∈ O (V ) ,
8. Die folgende Regel17 benötigt die Wahl einer (beliebigen) Basis e = (e1, e2, e3)von V. Ist X : U → V vom C2-Typ, mit X =
3i=1 X
ie · ei, dann gilt
rot (rot (X)) = grad div (X)−3
i=1
∆X i
e
· ei.
17Achtung: Diese Regel ist nicht naiv auf die Zerlegung von X nach einer krummlinigen Karten-basis zu übertragen.

KAPITEL 3. VEKTORANALYSIS 255
Rotation von Ln koordinatenfrei
Mit Regel 6. kann das Ergebnis rot (Ln) = 2n koordinatenfrei erhalten werden: Esgilt Ln = X × Y mit X = n und Y = ιd. Daraus folgt wegen der Konstanz von Xund unter Beachtung von [X]Y = dY (X) = Y (X) = X
rot (Ln) = rot (X × Y ) = X div (Y )− [X]Y = 3n− n = 2n.
Rotation des freien Vortexfeldes
Benutzen wir diese Regeln, um die Rotation des freien Vortex X : V R ·n → V mitX (p) = n×p/ |n× p|2 zu berechnen. Für den freien Vortex X gilt also X = fL mitf = |L|−2 . Sei oEdA |n| = 1. In diesem Fall stimmt |L (p)| mit dem Normalabstanddes Punktes p von der Achse R · n überein. Warum? Für alle a, b, c, d ∈ V gilta× b, c× d = a, c b, d − a, d b, c . Daraus folgt
L (p) , L (p) = n× p, n× p = |p|2 − n, p2 .
Somit stimmt |L (p)| mit dem Normalabstand des Punktes p von der Achse R · nüberein.
Wollen wir die dritte Regel bei der Berechnung von rot (fL) nutzen, benötigenwir den Gradienten von |L| . Den berechnen wir uns über die Kettenregel
gradp |L| = gradp
L,L = 1
2L (p) , L (p)
gradp L,L .
Nun brauchen wir gradp L,L :
gradp L,L = gradp
|·|2 − n, ·2
= 2 (p− n n, p) .
Es gilt daher
gradp |L| =(p− n n, p)
|L (p)|(Das wäre auch zu erraten gewesen, da ja |L (p)| gerade die Norm der Komponentevon p senkrecht zu R · n ist.)
Damit folgt aus der dritten Faulenzerregel zur Rotation
rotp (X) =−2
|L (p)|3gradp |L| × L (p) +
1
|L (p)|2rotp (L)
=−2
|L (p)|3p− n n, p|L (p)| × (n× p) +
2n
|L (p)|2.
Nun gilt für das iterierte Kreuzprodukt dreier Vektoren a, b, c ∈ V :
a× (b× c) = b a, c − c a, b .
Daraus ergibt sich wegen |n| = 1
[p− n n, p]× (n× p) = n p, p − p p, n − n, p (n n, p − p n, n)= n
|p|2 − n, p2
= n |L (p)|2 .

KAPITEL 3. VEKTORANALYSIS 256
Daraus folgt nun schließlich rot (X) = 0.Ohne jede Rechnerei lässt sich diese Tatsache aber auch aus dem folgenden Satz
erschließen.
Satz 128 Sei U ⊂ V offen und dim(V ) = 3. Die Abbildungen f : U → R undX : U → V seien C2. Dann gilt 1) rot (grad (f)) = 0, und 2) div (rot (X)) = 0.
Beweis. Für Teil 1 benützt man eine positiv orientierte ONB e, sodass mitUnterdrückung der Basisindizierung die Behauptung aus ∂i∂jf = ∂j∂if folgt:
rot (grad (f)) = e ·
∂1∂2∂3
×
∂1f∂2f∂3f
= e ·
∂2∂3f − ∂3∂2f∂3∂1f − ∂1∂3f∂1∂2f − ∂2∂1f
= 0.
Teil 2 folgt analog mit
div (rot (X)) = ∂1∂2X
3 − ∂3X2+ ∂2
∂3X
1 − ∂1X3+ ∂3
∂1X
2 − ∂2X1= 0.
Die Definition von Rotation und Divergenz über Limesprozesse macht
div (rot (X)) = 0 und rot (grad (f)) = 0
ohne jede Rechnung klar. Die Komponenten der Rotation von X in p ergeben sichaus den Wegintegralen von X längs einer Familie von geschlossenen, ebenen Kurvenum p in einem Grenzprozess kleiner werdender Kurven. Ist X ein Gradientenfeld, sohat jedes dieser Integrale denWert 0.Der Quotient aus Wegintegral und umlaufenemFlächeninhalt strebt somit erst recht gegen 0.
Die Divergenz eines Vektorfeldes Y in p ergibt sich aus den Oberflächenintegralenvon Y durch eine Familie von geschlossenen Flächen, die p einschließen. (Wir habenin einer heuristischen Motivation des Rotationsbegriffes die Oberfläche von Würfelnbenützt.) Ist das Vektorfeld Y die Rotation eines Vektorfeldes X, dann stimmt nachdem Satz von Stokes das Oberflächenintegral von Y mit dem Integral von X längsdes Randes der gewählten Fläche überein. Für jede geschlossene Fläche ist aber derRand leer. Somit hat das Oberflächenintegral von Y über eine geschlossene Flächeden Wert 0. Damit folgt div (rot (X)) = 0.
Da für |n| = 1 der freie Vortex X überall, mit Ausnahme einer Halbebene, mitdem Gradientenfeld des Polarwinkels in der Ebene senkrecht zu n übereinstimmt,siehe Abschnitt 3.1.14, ergibt sich ohne Rechnung rot (X) = 0.
3.2.23 Existenz von (Vektor)Potentialen
Der folgende Satz gibt Begleitumstände an, unter denen durch einfaches Differen-zieren des Vektorfeldes X festgestellt werden kann, ob es zu X ein skalares oder einVektorpotential gibt. Teil 1 ist ein Spezialfall von Satz 120.
Satz 129 Sei U ⊂ V offen, sternförmig und dim(V ) = 3. Dann gilt:

KAPITEL 3. VEKTORANALYSIS 257
1. Ist X : U → V vom C1-Typ mit rot (X) = 0, dann existiert eine C2-Funktionf : U → R mit X = grad (f) , das skalare Potential von X.
2. Ist X : U → V vom C1-Typ mit div (X) = 0, dann existiert ein C2-VektorfeldY : U → V mit X = rot (Y ) , das Vektorpotential von X.
Beweis. Ein Beweis ist auf pp. 362-364 von [10] und pp. 158-160 von [11] angege-ben. Dieser Beweis gibt eine explizite Konstruktion von Potentialen f bzw.Y an. Seip0 ein Punkt im Definitionsbereich U von X, sodass γp(t) := p0 + t (p− p0) ∈ U füralle p ∈ U und t ∈ [0, 1]. Ist X rotationsfrei, dann ist die Skalarfunktion f : U → Rmit
f(p) :=
γp
X =
= 1
0
Xγp(t)
dt, (p− p0)
>
ein skalares Potential von X. Ist X divergenzfrei, dann ist das Vektorfeld Y : U → Vmit
Y (p) := (p0 − p)× 1
0
tXγp(t)
dt
ein Vektorpotential von X. Mit diesen Ansätzen bleibt dann nur mehr zu zeigen,dass grad (f) = X bzw. rotY = X, falls X rotationsfrei bzw. divergenzfrei ist.
3.2.24 *Lorentzkraft: Lagrange- und Hamiltonfunktion
Die Newton’sche Bewegungsgleichung eines geladenen Massenpunktes in einem vor-gegebenen, zeitabhängigen, elektromagnetischen Feld schränkt die möglichen Orts-geschichten des Massenpunktes
γ : R ⊃ I → Ω ⊂ V
dadurch ein, dass die Gültigkeit der Differentialgleichung zweiter Ordnung
mγ (t) = e [E (t, γ (t)) + γ (t)×B (t, γ (t))] (3.22)
angenommen wird. Dabei bezeichnet m ∈ R>0 die Masse, e ∈ R die elektrischeLadung des Massenpunkts. V ist ein dreidimensionaler, orientierter, reeller Vek-torraum. ·, · bezeichnet ein Skalarprodukt von V. In einer offenen und einfachzusammenhängenden Teilmenge Ω von V könne sich das Teilchen bewegen, d.h. diezeitliche Abfolge der Orte des Teilchens ist durch eine C2-Kurve γ : I → Ω beschrie-ben, wobei I ein reelles Intervall ist. Das elektromagnetische Feld ist ein Paar vonzeitabhängigen Vektorfeldern auf Ω ⊂ V, d.h. Abbildungen
E,B : R× Ω→ V.
Die beiden Funktionen E,B seien stetig. Die rechte Seite von Gleichung (3.22) istnach dem niederländischen Physiker H A Lorentz (1853 - 1928) benannt. Diese’Lorentzkraft’ erklärt die gekrümmten Bahnen eines schnell bewegten Teilchens ineinem homogenen Magnetfeld.

KAPITEL 3. VEKTORANALYSIS 258
Für ein systematisches Studium Newton’scher Bewegungsgleichungen ist es nütz-lich, jedem solchen Gleichungssystem zweiter Ordnung eine Lagrangefunktion zuzu-ordnen, aus der sich die Bewegungsgleichung durch Differenzieren ableiten lässt. Ineinem sehr vagen Sinn ist die Lagrangefunktion einer Bewegungsgleichung so etwaswie das Potential eines Vektorfeldes. Im gegenwärtigen Kontext ist die Lagrange-funktion L eine C2-Funktion
L : R× Ω× V → R,
sodass die Lorentzgleichung (3.22) äquivalent ist zur sogenannten Euler-LagrangeGleichung der Lagrangefunktion L, also zu18
d
dtgradγ(t)L (t, γ (t) , ·) = gradγ(t)L (t, ·, γ (t)) . (3.23)
Tatsächlich existiert eine solche Funktion L. Sie enthält als Bausteine die folgen-den Potentiale Φ, A der Funktionen E und B. Dass es diese Potentiale gibt, ist nichtselbstverständlich, sondern eine Folge der Naturgesetze, die die zulässigen Funktio-nen E,B einschränken. (Die Maxwellgleichungen gelten auf R×Ω und Ω ist einfachzusammenhängend.) Es existieren also Funktionen
Φ : R× Ω→ R und A : R× Ω→ V,
sodass für alle (t, x) ∈ R× Ω
E (t, x) = −gradxΦ (t, ·)− 1
c
∂
∂tA (t, x) und cB (t, x) = rotxA (t, ·)
gilt.19 Die Konstante c ∈ R>0 hat den Wert der Lichtgeschwindigkeit und ist imgegenwärtigen Kontext belanglos, da sie durch Übergang von A zu A/c aus allenhier behandelten Aussagen zum Verschwinden gebracht wird. Sie gewinnt erst Sub-stanz, wenn die Gesetze für E und B ausformuliert werden. Dann erweist es sich alspraktisch, die Potentiale so zu dimensionieren, wie es hier geschehen ist.
Satz 130 Sei Ω ⊂ V offen und einfach zusammenhängend. Dann ist die Euler-Lagrange Gleichung (3.23) zur Lagrangefunktion L : R× Ω× V → R mit
L (t, x, v) =m
2|v|2 − e
Φ (t, x)−
(vc,A (t, x)
)
zur Lorentzgleichung (3.22) äquivalent. Hierbei gilt |v|2 = v, v .
Beweis. Es gilt mit der Abkürzung A/c = α
gradxL (t, ·, v) = e [−gradxΦ (t, ·) + gradx v, α (t, ·)] ,gradvL (t, x, ·) = mv + eα (t, x) .
18Hier bezeichnet etwa L (t, ·, v) : Ω→ R die Funktion, für die gilt L (t, ·, v) : x → L (t, x, v) .19Es existieren unendlich viele verschiedene solche Potentiale zu ein und demselben Paar (E,B).
Man nennt dies die Eichfreiheit bei der Auswahl von (Φ, A) .

KAPITEL 3. VEKTORANALYSIS 259
Daraus folgt für die linke Seite der Euler-Lagrange Gleichung
d
dtgradγ(t)L (t, γ (t) , ·) =
d
dt[mγ (t) + eα (t, γ (t))]
= mγ (t) + e [∂tα] (t, γ (t)) + e3
j=1
[γ (t)]γ(t) α
j (t, ·)δj
= : mγ (t) + e [∂tα] (t, γ (t)) + e [γ (t)]γ(t) α (t, ·) .
Hier ist (δj) eine Basis von V und α (t, x) =3
j=1 αj (t, x) δj für alle (t, x) ∈ R×Ω.
Für die rechte Seite der Euler-Lagrange Gleichung ergibt sich
gradγ(t)L (t, ·, γ (t)) = e−gradγ(t)Φ (t, ·) + gradγ(t) γ (t) , α (t, ·)
.
Somit ist die Euler-Lagrange Gleichung äquivalent zu mγ (t) =
e−gradγ(t)Φ (t, ·)− [∂tα] (t, γ (t)) + gradγ(t) γ (t) , α (t, ·) − [γ (t)]γ(t) α (t, ·)
= eE (t, γ (t)) + gradγ(t) γ (t) , α (t, ·) − [γ (t)]γ(t) α (t, ·)
.
Sehen wir uns die letzten beiden Terme der rechten Seite dieser Newton’schenBewegungsgleichung an. Sie sind mit (t, x, v) ∈ R× Ω× V vom Typ
gradx v, α (t, ·) − [v]x α (t, ·) .
Andererseits gilt analog zur Tripelvektorproduktformel a×(b× c) = b a, c−c a, b
v × rotxα (t, ·) = gradx (v, α (t, ·) − [v]x α (t, ·)) .
(Komponentenweises Nachrechnen mit einer positiv orientierten Orthonormalbasisberuhigt vielleicht noch etwas.) Also gilt tatsächlich
mγ (t) = e (E (t, γ (t)) + γ (t)×B (t, γ (t))) .
Die Umformung der Bewegungsgleichung zweiter Ordnung (3.22) in eine Be-wegungsgleichung erster Ordnung auf einem geeigneten Phasenraum kann durchEinführung einer Hamiltonfunktion H als Legendretransformierter von L erreichtwerden. Die Hamiltonfunktion ist festgelegt durch p (t, x, v) = gradvL (t, x, ·) und
H (t, x, p (t, x, v)) = v, p (t, x, v) − L (t, x, v) für alle (t, x, v) ∈ R× Ω× V.
Daraus folgt wegen p (t, x, v) = mv + ecA (t, x)
H (t, x, p (t, x, v)) =(v,mv +
e
cA (t, x)
)− m
2|v|2 + e
Φ (t, x)−
(vc, A (t, x)
)
=m
2|v|2 + eΦ (t, x)
=1
2m
,,,p (t, x, v)− e
cA (t, x)
,,,2
+ eΦ (t, x) ,

KAPITEL 3. VEKTORANALYSIS 260
also H : R× Ω× V → R mit
H (t, x, p) =1
2m
,,,p− e
cA (t, x)
,,,2
+ eΦ (t, x) .
Die nichtautonome Hamiltonsche Bewegungsgleichung erster Ordnung am Pha-senraum Ω×V lautet somit γ (t) = XH (t, γ (t)) mit dem zeitabhängigen Hamilton-vektorfeld XH (t, ·) : Ω× V → V × V
XH (t, x, p) = (gradpH (t, x, ·) ,−gradxH (t, ·, p)) .
3.2.25 *Vektorpotential des freien Vortexfeldes
Sei V dreidimensional und eine Orientierung sei gewählt. Sei n ∈ V mit |n| = 1 undsei X : V R · n → V mit X (p) = n× p/ |n× p|2 . Bis auf einen konstanten Faktorstimmt X mit dem Magnetfeld eines unendlich langen stromführenden Drahtes derDicke 0 überein. Gesucht ist ein Vektorfeld Y : V R · n → V mit X = rot (Y ) .
Versuche den Ansatz Y (p) = f (|n× p|)n mit einer C1-Funktion f : R>0 → R.Daraus folgt mit L (p) = n× p für p ∈ V R · n
rotp (Y ) = gradp (f |L|)× n = f ′ (|n× p|) gradp |L| × n.
Aus dem Abschnitt über die Rotation des freien Vortex ist bekannt, dass
gradp |L| =(p− n n, p)
|L (p)| für alle p ∈ V R · n.
Daraus folgt für p ∈ V R · n
rotp (Y ) = f ′ (|n× p|) (p− n n, p)|L (p)| × n = −f ′ (|n× p|)
|L (p)| n× p.
Es gilt also rotp (Y ) = X (p) = n × p/ |n× p|2 genau dann, wenn f ′ (|n× p|) =−1/ |n× p| . Dies ist genau dann der Fall, wenn ein A ∈ R existiert, sodass f (x) =− ln (x) +A für alle x > 0.
Somit ist das Vektorfeld Y : V R · n → V mit
Y (p) = − (ln |n× p|)n+An
für eine beliebe Zahl A ∈ R ein Vektorpotential des freien Vortexfeldes X. Daskonstante Vektorfeld An = grad An, · trägt zu rot (Y ) nicht bei. Weitere Vektor-potentiale ergeben sich aus Y durch Übergang zu Y + gradφ mit einer beliebigenC2-Funktion φ : V R·n → R. (In der Elektrodynamik wird diese Unterbestimmtheiteines Vektorpotentials als „Eichfreiheit“ bezeichnet.)
Der Definitionsbereich V R · n von X ist nicht sternförmig. Daher garantiertSatz 129 die Existenz des vorliegenden Vektorpotentials Y nicht. Nimmt man ausV R · n jedoch eine Halbebene heraus, die von R · n berandet ist, so ist diesesGebiet sternförmig. Für dieses Gebiet garantiert Satz 129 die Existenz eines Vek-torpotentials Y. Wir haben ein solches gefunden, das eine C2-Fortsetzung auf ganzV R · n hat. Dass eine solche Fortsetzbarkeit nicht immer gegeben ist, zeigt derspätere Abschnitt über das Vektorpotential eines Punktmonopols.

KAPITEL 3. VEKTORANALYSIS 261
3.2.26 *Vektorpotential des Punktdipols
Sei V dreidimensional und orientiert. Ein Skalarprodukt ·, · sei gewählt. Das elek-trische Feldstärkefeld E oder magnetische Flussdichtefeld20 B eines Punktdipols mitdem elektrischen bzw magnetischen Dipolmoment m ∈ V, das in 0 ∈ V ruht, stimmtfür p ∈ V 0 mit dem Vektorfeld X : V 0→ V überein, für das
X (p) =γ
|p|33m, p|p|2
p−m
für alle p ∈ V 0
gilt. Dabei ist im elektrischen Fall γ = 1/4πε0 und im magnetischen Fall γ = µ0/4πzu setzen.21 Es folgt daraus divX = 0. Gibt es ein Vektorfeld A : V 0 → V mitX = rotA?
Mit dem durch die Drehinvarianz von X um die Achse R · p motivierten AnsatzA (p) = f (|p|)Lm (p) = f (|p|)m× p folgt rotpA =
f ′ (|p|) p
|p| × (m× p) + f (|p|) rotpLm =f ′ (|p|)|p|
m |p|2 − p m, p
+ f (|p|) 2m
= (f ′ (|p|) |p|+ 2f (|p|))m− f ′ (|p|) m, p|p| p.
Die Bedingung X = rotA ist genau dann überall erfüllt, wenn für alle p = 0
−f ′ (|p|) m, p|p| = 3γ
m, p|p|5
und f ′ (|p|) |p|+ 2f (|p|) = − γ
|p|3
gilt. Dies ist äquivalent zu
−f ′ (|p|) = 3γ
|p|4und − 3
γ
|p|3+ 2f (|p|) = − γ
|p|3für alle p = 0.
Die zweite dieser Gleichungen ist äquivalent zu f (|p|) = γ/ |p|3 (für alle p = 0) unddie erste ist dann auch erfüllt.
Ergebnis: Für das Vektorfeld A : V 0 → V mit A (p) = γm × p/ |p|3 giltX = rotA. Das Feld A ist homogen vom Grad −2 und divergenzfrei.
3.2.27 *Das elektromagnetische Nahfeld eines Pulsars
Pulsare werden heute als Überreste einer Supernovaexplosion gedeutet. In diesemBild rotiert eine Kugel mit dem Radius R ≈ 10 km und einer Masse von ungefähr
20Das Vektorpotential eines magnetischen Dipols ist für die Physik viel wichtiger als das Vektor-potential eines elektrischen Dipols, da in die Lagrangefunktion eines geladenen Teilchens einerseitsdas Vektorpotential des magnetischen und andererseits das skalare Potential des elektrischen Fel-des, welche gemeinsam auf das Teilchen einwirken, eingehen.
21Das magnetische Dipolmoment einer ’kleinen’, ebenen stromführenden Leiterschleife hat denBetrag IA, wenn I die Stromstärke im Leiter und A der Flächeninhalt des von der Schleife be-randeten ebenen Gebietes ist. Der Vektor m liegt in der Achse senkrecht zur Schleife und ist soorientiert, dass die technische Stromrichtung rechtshändig um m rotiert.
KAPITEL 3. VEKTORANALYSIS 262
einer Sonnenmasse mit einer Periode T von einigen Millisekunden bis einigen Sekun-den. Das magnetische Moment des explodierten Sternes ist so wie ein erheblicherTeil seiner Masse und seines Eigendrehimpulses im verdichteten Rest konserviert.Seine Leptonenzahl hingegen strahlt der explodierende Sternkern über Neutrinosweitgehend ab und wird so zu einem Neutronenstern, einem gravitativ gebundendenRiesenbaryon mit der Massendichte eines Atomkerns. Beim Schrumpfen des Sternra-dius von 106 km auf 10 km steigt die magnetische Flussdichte an der Sternoberflächeum den Faktor 1015 an.
Fällt das magnetische Moment eines Neutronensterns nicht auf seine Drehachse,dann rotiert das Magnetfeld des Sterns und regt das umgebende ionisierte Gas zuscharf ausgerichteter elektromagnetischer Abstrahlung in Richtung der momentanvorliegenden magnetischen Achse an. Überstreicht ein solcher Scheinwerferkegel beiseiner Rotation auch noch die Erde, dann macht sich der Neutronenstern in einembreiten Frequenzbereich als pulsierende Strahlungsquelle bemerkbar.
Der Pulsarmittelpunkt wird in den Punkt 0 ∈ V gesetzt. Er rotiere mit derKreisfrequenz ω = 2π/T > 0 im Rechtsschraubensinn um die Achse R · n für einn ∈ V mit |n| = 1. Sein magnetisches Moment zur Zeit t sei eωtLnm ∈ V. FürPunkte p ∈ V mit R < |p| ≪ cT kann22 das exakte Flussdichtefeld B durch diequasistatischer Näherung B0 : R× (V 0)→ V mit
B0 (t, p) =γ
|p|3
3
&eωtLnm, p
'
|p|2p− eωtLnm
genähert werden. Für das Vektorpotential A0 : R× (V 0) → V mit rotA0 (t, ·) =B0 (t, ·) gilt dann A0 (t, p) = γ
eωtLnm
× p/ |p|3 mit γ = µ0/4π. Damit geht ein
elektrisches Feld E0 einher. Diese erfüllt im Bereich R < |p| ≪ cT
E (t, p) ≈ E0 (t, p) = −∂tA0 (t, p) = −γωn×eωtLnm
× p
|p|3.
Die beiden Felder E0 und B0 erfüllen offenbar die homogene MaxwellgleichungrotE0 (t, ·) + ∂tB0 (t, ·) = 0. Zudem gilt auf V 0
divB0 (t, ·) = 0, rotB0 (t, ·) = 0, divE0 (t, ·) = 0.
Die (inhomogene) Maxwellgleichung rotB = µ0j + ε0µ0∂tE wird von den quasista-tischen Näherungsfeldern E0 und B0 jedoch nicht erfüllt, da ja j = 0 und ∂tE0 = 0,aber rotB0 (t, ·) = 0 überall auf V 0 gilt.
Der Betrag vonB0 beträgt an den magnetischen Polen 2γ |m| /R3 = µ0 |m| /R32π.Wenn die kolportierten Flussdichten von bis zu 108 Tesla korrekt sind, dann hättedas magnetische Dipolmoment eines solchen Pulsars einen Betrag von
|m| = 2πR3 · 108 T
µ0
= 2π ·104m
3 · 108T
4π · 10−7Tm/A=
1
2· 1027Am2.
22c bezeichnet die Vakuumlichtgeschwindigkeit. Also liegt cT bei nur 300 km für T = 1ms.

KAPITEL 3. VEKTORANALYSIS 263
Das Dipolmoment der Erde beträgt etwa 7, 7 · 1022Am2. Die Querschnittsflächeder Erde ist π · 63802 · 106m2 = 1, 3 · 1014m2. Eine Leiterschleife von der Größedes Erdäquators müsste also einen Strom von ca 108A führen, um eine solchesDipolmoment zu erzeugen. Im Fall des Pulsars hätte der Strom eine Stärke von ca1018A. Der Betrag des elektrischen Feldes E0 hat an der Oberfläche des Sterns eineGrößenordnung von Rω · 108T. Für R = 104m und ω = 2π · 10Hz ergibt dies einenWert von etwa 104 ·2π ·10 ·108Tms−1 = 2π ·1013Vm−1. Bis in eine Entfernung von100 ·R sinkt die elektrische Feldstärke auf 10−4 · 2π · 1013Vm−1 = 2π ·109Vm−1 ab.
3.2.28 *Vektorpotential eines Punktmonopols
Zur Illustration der Sätze 128 und 129 dient uns das elektrische Feldstärkefeld X ei-ner Punktladung in 0 ∈ V mit dim(V ) = 3. Es giltX : V0→ V, X (p) := p/ |p|3 .Hat X ein skalares und ein Vektorpotential? Die nach Satz 128 dafür notwendigenBedingungen sind wegen div (X) = 0, rot (X) = 0 erfüllt. Da U := V 0 nichtsternförmig (aber einfach zusammenhängend) ist, sind jedoch die hinreichenden Be-dingungen von Satz 129 nicht gegeben. Nur eine etwas allgemeinere Version diesesSatzes, die für einfach zusammenhängende Gebiete gilt, stellt klar, dass ein skalaresPotential existiert.
Dieses kennen wir auch schon, da X = − grad1r
mit r = |·| . Im vorliegenden
Fall lässt sich die Existenz eines skalaren Potentials von X auf die Aussage vonSatz 129 zurückführen. Und zwar so: Wir können X auf das offene und sternförmigeGebiet U ′ := V (R≥0 · n) einschränken, wobei n ∈ V mit |n| = 1 sei. Zu einem soeingeschränkten X ′ := X |U ′ existieren gemäß Satz 129 sowohl ein skalares als auchein Vektorpotential. Klarerweise gilt X ′ = − grad (1/r) auf U ′. Das Potential 1/rauf U ′ kann nun offensichtlich zu einem differenzierbaren Skalarfeld auf U fortgesetztwerden. Damit findet die Existenz des skalaren Potentials von X mit seinem einfachzusammenhängenden aber nicht sternförmigen Definitionsbereich eine Erklärung.Die Frage nach einem skalaren Potential von X stellt sich in der Elektrostatik.
In der Magnetostatik ist X das magnetische Induktionsfeld eines (fiktiven) ma-gnetischen Monopols. Für die Lagrangeformulierung der Mechanik einer Punktla-dung im Feld X benötigt man ein Vektorpotential von X. Wegen div (X) = 0könnte es eines geben. Ob ein solches tatsächlich existiert, lässt Satz 129 offen. Ersagt jedoch, dass die Einschränkung X ′ von X ein Vektorpotential hat. Ein solchesVektorpotential A′ : U ′ → V von X ′ ist auf U ′ gegeben durch
A′(p) := − n× p
r(p) (r(p)− n, p) ,
da X ′ = rot (A′) gilt. (Dies koordinatenfrei nachzurechnen ist eine nützliche Übung!A′ ist Diracs Vektorpotential eines magnetischen Monopols.) Sei nun θ(p) ∈ [0, π]der Winkel zwischen p und n, d.h. n, p = r(p) cos (θ(p)). Da
|A′(p)| = sin (θ(p))
r(p) (1− cos (θ(p)))→∞ für θ(p)→ 0.
kann das Vektorfeld A′ offenbar nicht stetig von U ′ nach U fortgesetzt werden. Eineetwas weitergehende Überlegung mit dem Satz von Stokes zeigt, dass und warum

KAPITEL 3. VEKTORANALYSIS 264
es auch kein anderes Vektorpotential zum maximal definierten Vektorfeld X gebenkann. Nur die Einschränkungen von X auf die Mengen U ′ haben Vektorpotentiale.U ′ entsteht aus V durch Entfernen eines von 0 ausgehenden Halbstrahles.23 Dasdivergenz- und rotationsfreie Vektorfeld X hat somit zwar ein skalares, aber keinVektorpotential.
3.2.29 *Vom Mono- zum Dipolvektorpotential
Das skalare Potential eines Punktdipols geht durch Richtungsableitung aus demskalaren Potential eines Punktmonopols hervor. (Siehe Beispiele zur Richtungsablei-tung) Geht auch das Vektorpotential eines Punktdipols
A : V 0→ V mit A (p) =n× p
|p|3
mit n ∈ V und |n| = 1 aus dem Vektorpotential eines Punktmonopols
A′ : V (R≥0 · n)→ V mit A′(p) := − n× p
r(p) (r(p)− n, p) = − Ln
r2 (1− cos θ)(p)
in ähnlicher Weise hervor?Zieht man von dem in n-Richtung etwas verschobenen Vektorpotential A′ das
unverschobene Vektorpotential ab, dann könnten sich die Singularitäten auf derAchse R≥0 · n gegenseitig ausgleichen und vielleicht ein differenzierbares Vektorfeldauf V 0 ergeben. Probieren wir das aus.
Sei ε > 0. Dann gilt für alle p ∈ V (−∞, ε] · n wegen n× (p− εn) = n× p
A′(p− εn)− A′(p)
ε= −(n× p)
ε·
1
r2 (1− cos θ)
,,,,p−εn
− 1
r2 (1− cos θ)
,,,,p
.
Für den Grenzübergang zu ε → 0 folgt somit
limε→0
A′(p− εn)−A′(p)
ε= (n× p) · [n]p
1
r2 (1− cos θ)
.
Es ist also die Richtungsableitung von r−2 (1− cos θ)−1 = |·|−1 (|·| − n, ·)−1 an derStelle p unter n zu berechnen. Es gilt
[n]p
1
|·| (|·| − n, ·)
= −
[n]p|·|2 − |·| n, ·
|p|2 (|p| − n, p)2
= −2 p, n − p,n
|p| n, p − |p| n, n|p|2 (|p| − n, p)2
=n, p2 + |p|2 − 2 p, n |p|
|p|3 (|p| − n, p)2=
1
|p|3.
23Dirac erkannte, dass die Wahl von n, die in A′ eingeht, auf die quantenmechanischen Eigen-schaften eines elektrisch geladenes Teilchens, das dem Feld A′ ausgesetzt ist, genau dann keinenEinfluss hat, wenn die elektrische Ladung des Teilchens ein ganzzahliges Vielfaches einer univer-sellen Ladungseinheit ist. Das führte ihn zur Vermutung, dass die Existenz von (hypothetischen)magnetischen Monopolen die Erklärung für die „Quantisierung“ aller elektrischen Ladungen gebenkönnte. Darum wird immer wieder nach magnetischen Monopolen gesucht.

KAPITEL 3. VEKTORANALYSIS 265
Für die Richtungsableitung von A′ unter n gilt somit für alle p ∈ V (R≥0 · n)
− [n]p A′ := lim
ε→0
A′(p− εn)−A′(p)
ε=
n× p
|p|3.
Das Vektorfeld − [n]p A′ hat offenbar eine stetige Fortsetzung nach V 0. Diese ist
das Vektorpotential eines Punktdipols.
3.3 Krummlinige Koordinatensysteme
Um die Notation zu vereinfachen, sei in diesem Abschnitt V = Rn mit dem Stan-dardskalarprodukt. Die (kontravariante) Karte Φe =: Ξ von V bzüglich der Stan-dardbasis e wird als Ξ = (x1, . . . , xn) bezeichnet.24 Für n = 2, 3 wird auch Ξ = (x, y)bzw. Ξ = (x, y, z) notiert. Zwischen Zeilen- und Spaltenvektoren wird nicht syste-matisch unterschieden, sondern meist nach graphischen Vorteilen notiert.
Ein Koordinatensystem von Rn ist ein Schema, mit dem alle Punkte einer offe-nen Teilmenge von Rn durch n-Tupel reeller Zahlen eindeutig addressiert werden.Die von uns bisher benützten (globalen) Koordinatensysteme entstehen durch dieWahl einer Basis des betrachteten Vektorraums. Solche an die Vektorraumstrukturangepasste Koordinaten heißen lineare Koordinaten. Zwischen linearen Koordina-ten zu verschiedenen Basen besteht der lineare Zusammenhang von Gleichung (3.1).In diesem Abschnitt werden wir allgemeinere Koordinatensysteme kennenlernen.Die Verwendung eines geschickt gewählten allgemeineren Koordinatensystems kannmanche konkrete numerische Rechnung erheblich vereinfachen. Manche Koordina-tensysteme sind etwa an die Symmetrie einer speziellen Situation angepasst undbieten sich in solchen Fällen an. Wirklich zwingend wird die Einführung allgemei-nerer Koordinaten jedoch dann, wenn Vektorräume als Bühne für Differential undIntegral verlassen werden. Was ist der Gradient eines Skalarfeldes, das nur auf derOberfläche einer Kugel gegeben ist? Solchen Fragen, die sich z. B. im Bereich derMechanik mit Zwangsbedingungen ergeben, werden wir hier nicht nachgehen.
3.3.1 Lokale Karten von Rn
Definition 131 Sei U ⊂ V offen. Eine C∞-AbbildungΦ =
Φ1, ...,Φn
: U → Φ (U) ⊂ Rn,
die bijektiv ist, und deren Umkehrabbildung auch vom C∞-Typ ist, heißt eine lokaleKarte oder ein lokales Koordinatensystem von Rn. Die reellwertigen Funktionen Φi
für i = 1, . . . , n heißen Koordinatenfunktionen von Φ.
Polarkoordinaten
Für n = 2 sei U die geschlitzte Ebene
U := p ∈ V | y(p) = 0⇒ x(p) < 0 .24xi ist also jene Funktion von V nach R, die einen Punkt (p1, . . . pn) auf pi abbildet.
KAPITEL 3. VEKTORANALYSIS 266
Dann ist die Abbildung Φ = (r, φ) : U → (0,∞)×(0, 2π) implizit durch x = r cos (φ)und y = r sin (φ) auf U definiert. Beachte: r =
x2 + y2; φ (p) ist der orientierte
Winkel zwischen (1, 0) und p. Der Beweis, dass Φ eine lokale Karte ist, benötigt denSatz über implizite Funktionen.
Die Koordinatenlinien durch p ∈ U : Die Niveaulinie φ = φ(p) ∈ (0, 2π) istder von 0 ausgehende Halbstrahl durch p. Auf ihr ist r nicht konstant. Sie heißtKoordinatenlinie zu r durch p. Die Niveaulinie r = r(p) > 0 ist der Kreis um (0, 0)durch p, aus dem der Punkt (r(p), 0) entfernt ist. Diese Linie heißt Koordinatenliniezu φ durch p. Sie ist gekrümmt und darauf spielt die Bezeichnung krummlinigesKoordinatensystem an.
Zylinderkoordinaten
Sei n = 3 undU := p ∈ V | y(p) = 0⇒ x(p) < 0 .
Dann ist die Abbildung
Φ = (r, φ, z) : U → (0,∞)× (0, 2π)×R
implizit definiert durch x = r cos (φ) und y = r sin (φ). Beachte: r =
x2 + y2; φ (p)ist der orientierte Winkel zwischen (1, 0, 0) und der Parallelprojektion (x(p), y(p), 0)von p in die Ebene z = 0 längs der z-Achse.
Die Koordinatenlinien durch p ∈ U : Die Niveaufläche φ = φ(p) ∈ (0, 2π) ist dievon der z-Achse ausgehende Halbebene durch p. Die Niveaufläche r = r(p) > 0 istder Zylindermantel um R · (0, 0, 1) durch p, aus dem die affine Gerade (r(p), 0,R)entfernt ist. Die Niveaufläche zu z = z(p) ist wie bei kartesischen Koordinaten dieaffine Ebene durch p senkrecht zur z-Achse, aus der die Halbgerade (R≥0, 0, z(p))entfernt ist. Die Koordinatenlinie zu r durch p ist die Schnittmenge der Niveauflä-chen zu φ und z durch p, also eine Halbgerade. Die Koordinatenlinie zu φ durch p,also die Schnittmenge der Niveauflächen zu r und z durch p, ist der Kreis, dem derPunkt (r(p), 0, z(p)) fehlt. Etc., etc...
Kugelkoordinaten
Sei n = 3 undU = p ∈ V | y(p) = 0⇒ x(p) < 0 .
Dann istΦ = (r, θ, φ) : U → (0,∞)× (0, π)× (0, 2π)
implizit definiert durch x = r sin (θ) cos (φ) , y = r sin (θ) sin (φ) und z = r cos (θ) .Beachte: r =
x2 + y2 + z2; φ (p) ist der (orientierte) Winkel zwischen (1, 0, 0) und
der Parallelprojektion von p in die Ebene z = 0 längs der z-Achse; θ(p) ist der ein-deutig bestimmte Winkel im Intervall (0, π) , für den e3, p = |p| cos (θ(p)) gilt. DieNiveauflächen von r, θ und φ sind Sphären ohne Nullmeridian, Kegelmäntel ohneφ-Schweissnaht und offene von der z-Achse begrenzte Halbebenen. Die Koordina-tenlinien sind Halbgerade, Meridiane und (punktierte) Breitenkreise.

KAPITEL 3. VEKTORANALYSIS 267
In allen drei Beispielen ist der Definitionsbereich der Karte Φ nicht der gesamteRaum V. Der Definitionsbereich der Abbildungen Φ könnte etwas ausgedehnt wer-den. Dabei würde Φ jedoch unstetig und nicht differenzierbar werden und somit dieKarteneigenschaft verlieren.
3.3.2 Navigation auf der Sphäre
Polarstern und Erdradius
Welchen Abstand haben die Breitenkreise auf der Erde, deren Polarwinkel die Werte0 < θ1 < θ2 < π haben? Es gilt D = (θ2 − θ1) · R mit R = 6370 km. Soll also derPolarstern um 1 höher am Himmel stehen, muss man sich auf der Nordhalbkugelauf einem Meridian um D = π ·R/180 = 111, 2 km nach Norden bewegen.
Nach Kontroversen über die Erdabplattung wurde im 19. Jahrhundert ein mitt-lerer Wert von R durch Vermessung von D für einige Meridianbögen mit ebenfallsgenau vermessenen Werten θ2 − θ1 ermittelt. Diese Meridianbögen waren auf meh-rere Kontinente verteilt. Eine der ’Messkampagnen’ leitete Gauß. Dabei wurde der2 Bogen eines Meridians zwischen Göttingen und Hamburg Altona durch damalsnoch schwer zugänglich Sümpfe hindurch markiert und vermessen.25
Wie weit muss man von Innsbruck nach Osten gehen, damit sich die geogra-phische Länge um 1 erhöht, dass also die Sonne um 4 Minuten früher ihren Zeniterreicht als in Innsbruck? Innsbruck liegt auf 47 nördlicher Breite und hat somitden Polarwinkel von θ = 43. Der Breitenkreis durch Innsbruck hat dann den Um-fang von 2Rπ · sin θ = 2π sin
43180
π· 6370 km = 27296 km = 360 · 75, 822 km. Man
muss also um ca. 76 km nach Osten, also nach Wörgl gehen.Damit ist klar, warum die englischen Seefahrer, die den Pazifik erkundeten und
kartierten, auf möglichst genaue und vor allem seetüchtige Uhren angewiesen waren.An die Strapazen der Navigatoren bei Polarexpeditionen, die mit Sextant und Uhrbei Sturm und Minusgraden durch unkartiertes Gelände den Weg zum Pol wiesen,will man gar nicht denken! Ein Magnetkompass ist ja in Polnähe völlig unbrauchbar.Erst Kreiselkompass und später GPS brachten hier eine deutliche Erleichterung.Unterseeboote sind bei polnahen Tauchgängen immer noch auf den Kreiselkompassangewiesen, da das Wasser sie nicht nur vom Feind, sondern auch von den eigenenGPS-Satelliten abschirmt.
Sphärischer Abstand
Als Beispiel für den etwas komplexeren Einsatz von Kugelkoordinaten bestimmenwir den sphärischen Abstand zweier Punkte p, q der Oberfläche einer Kugel vomRadius R.
Was ist ein sphärischer Abstand? Die Ebene durch den Mittelpunkt der Sphäreund durch die Oberflächenpunkte p und q schneidet die Oberfläche. Das Schnittge-bilde ist ein Großkreis durch p und q. Die Punkte p, q zerlegen den Großkreis in zwei
25http://de.wikipedia.org/wiki/Gradmessung

KAPITEL 3. VEKTORANALYSIS 268
Teile, sogenannte Großkreisbögen. Das Minimum der Längen der beiden Großkreis-bögen wird als ’Abstand auf der Kugel’ zwischen p und q oder auch als der sphärischeAbstand zwischen p und q bezeichnet. Er ist auch die Länge des kürzesten Wegesauf der Kugeloberfläche, der p und q verbindet. Ein Tunnelweg von p nach q, dereiner Sekante folgt, wird also nicht in Erwägung gezogen.
Die Kugelkoodinaten von p bzw q werden als r (p) = rp, θ (p) = θp etc bezeichent.Es gilt rp = rq = R. Der Kreisbogen von p nach q hat demnach die Länge
d (p, q) = R · arccos p, qR2
.
Nun gilt wegen p/R = sin θp cosϕp · ex + sin θp sinϕp · ey + cos θp · ez
p, qR2
= sin θp cosϕp sin θq cosϕq + sin θp sinϕp sin θq sinϕq + cos θp cos θq
= sin θp sin θqcosϕp cosϕq + sinϕp sinϕq
+ cos θp cos θq
= sin θp sin θq cosϕp − ϕq
+ cos θp cos θq.
Welchen spärischen Abstand hat also Innsbruck (= q) von Perth (= p) in Aus-tralien? Innsbruck hat die (gerundeten) geographischen Koordinaten 47N, 11Owährend Perth auf 32S, 116O liegt. Es gilt also θq = 43 · π/180, θp = 122 · π/180und ϕq − ϕp = 105 · π/180. Daraus folgt mit R = 6370 km
d (p, q) = R · arccossin θp sin θq cos
ϕp − ϕq
+ cos θp cos θq
= 13619 km.
Wollte man von Innsbruck aus auf kürzestem Weg nach Perth gelangen, müssteman in welche Richtung losfliegen? Ersetzt man Perth durch Mekka, ergibt sich diefür Muslime in q wichtige Frage ’Wohin sich wenden zum Gebet?’. Geophysikalischinteressanter ist aber: In welcher Richtung liegt der magnetische Südpol? Berechnenwir nun diese Richtung für Innsbruck.
Sphärische Peilung
Der magnetische Südpol der Erde liegt gegenwärtig (2013) zwar in der Nähe desgeographischen Nordpols, aber eben nicht genau in ihm. Diese Abweichung ist eineder Ursachen dafür, dass der Nordpol einer Kompassnadel nicht genau nach Nordenweist. In welche Richtung zeigte eine Kompassnadel, wenn alle anderen Beiträge zurmagnetischen ’Missweisung’ belanglos wären?
Der magnetische Südpol liegt derzeit auf 85, 75 nördlicher Breite und 144, 46
westlicher Länge. Seine Entfernung zum geographischen Nordpol beträgt somit etwaRE · 4,25
180 π = 6370 km · 7, 417× 10−2 ≈ 470 km.Sei (x, y, z) jene kartesische Karte, für die der Erdmittelpunkt in 0, der geo-
graphische Nordpol auf der positiven z-Achse und der magnetische Südpol in derHalbebene y = 0 mit x > 0 liegt. Dies fixiert die zugehörigen Kugelkoodinaten desmagnetischen Südpols p zu θp =
4,25
180 π = 7, 417× 10−2 und ϕp = 0.Sei q ein Ort auf der Erde im Kartenbereich der Kugelkoordinaten. Die Werte
von θ und ϕ in q werden wieder mit θq und ϕq bezeichnet. Innsbruck zB liegt auf

KAPITEL 3. VEKTORANALYSIS 269
47 nördlicher Breite und 11 östlicher Länge, sodass in diesem Fall θq = 43
180 · π =
0, 75049 und ϕq =144,46+11
180 · π = 2, 7133 folgt.Der Richtungseinheitsvektor vom Erdmittelpunkt zum Ort q zerlegt sich nach
der kartesischen Standardbasis (ex, ey, ez) gemäß
eq = sin θq cosϕq · ex + sin θq sinϕq · ey + cos θq · ez.
Die Ebene durch Erdmittelpunkt, geographischen Nordpol und q hat den Norma-leneinheitsvektor nq = (ez × eq) / |ez × eq| =
− sinϕq · ex + cosϕq · ey
. Die Ebene,
in der Erdmittelpunkt, magnetischer Südpol p und q liegen, hat den Normalenein-heitsvektor
pq :=ep × eq|ep × eq|
.
Der (ungerichtete) Winkel δ zwischen den beiden Einheitsvektoren nq und pq stimmtmit dem (ungerichteten) Winkel zwischen der wahren Nordrichtung in q und derTangente jenes Großkreises durch q überein, der auch durch p geht. Würde einKompass in q in Richtung des kürzesten Weges nach p weisen, wäre dies die vomKompass angezeigte (falsche) Nordrichtung. Es gilt also
cos δ = nq · pq =nq · (ep × eq)
|ep × eq|.
Wenden wir uns zunächst dem Zähler zu. Es gilt
nq · (ep × eq) = − sinϕq (ep × eq)x + cosϕq (ep × eq)
y .
Nun folgt unter Verwendung von ep = sin θp · ex + cos θp · ez
(ep × eq)x = eype
zq − ezpe
yq = −ezpe
yq = − cos θp sin θq sinϕq,
(ep × eq)y = ezpe
xq − expe
zq = cos θp sin θq cosϕq − sin θp cos θq.
Daher gilt
nq · (ep × eq) = cos θp sin θq sin2 ϕq + cosϕq
cos θp sin θq cosϕq − sin θp cos θq
= cos θp sin θq − sin θp cos θq cosϕq.
Nun zum Nenner |ep × eq| . Wegen
|ep × eq|2 = 1− (ep · eq)2 = 1−sin θp sin θq cosϕq + cos θp cos θq
2
folgt
cos δ =cos θp sin θq − sin θp cos θq cosϕq
1−sin θp sin θq cosϕq + cos θp cos θq
21/2 .
Einsetzen der Winkel ergibt für Innsbruck δ = 2, 4175. Ein Tangentenvektor inInnsbruck an jenen Großkreisbogen, der Innsbruck mit dem magnetischen Nordpolverbindet, weist also in die Richtung von ca 2, 5 West.

KAPITEL 3. VEKTORANALYSIS 270
Die tatsächliche Abweichung zwischen der geographischen und magnetischenNordrichtung ist jedoch eine andere. Die magnetische Nordrichtung ist momentan inInnsbruck um eine Missweisung von etwa 2 nach Osten(!) aus der geographischenNordrichtung gedreht. Und dann verlaufen auch noch die Linien gleicher Misswei-sung in Mitteleuropa nahezu in Nord-Süd Richtung.26
3.3.3 Kartenbasis
Eine Karte erzeugt in jedem Punkt p ihres Definitionsbereiches U ⊂ V = Rn eineBasis des Vektorraumes V. Im allgemeinen variiert diese Basis von Punkt zu Punkt.Wie wird diese Kartenbasis gebildet? Der i-te Basisvektor in p weist von p ausin jene Richtung, in die in linearer Approximation die i-te Koordinatenfunktionzunimmt und alle anderen Koordinatenfunktionen konstant sind. Die Länge des i-ten Basisvektors
δΦipwird so gewählt, dass für ε → 0
Φjp + ε
δΦip
= Φj (p) + εδji + o (ε) .
Der folgende Satz zeigt, wie diese Kartenbasis berechnet werden kann.
Satz 132 (Kartenbasis) Sei Φ : U → Φ (U) ⊂ Rn eine lokale Karte von Rn. Seip ∈ U und q = Φ(p). Dann sind für genügend kleines ε > 0 die Kurven
γΦp,i : (−ε, ε)→ U, t → Φ−1(q + tei) für i = 1, ..., n
wohldefiniert. Sie erfüllen γΦp,i(0) = p und sind in 0 differenzierbar. Die Tangenten-
vektorenδΦip:= γΦ
p,i (0) =n
j=1
∂Φi x
jp· ej für i = 1, ..., n
bilden eine Basis von V. Sie heißt Kartenbasis zu Φ im Punkt p. Die Richtungsablei-tung
δΦipf einer differenzierbaren Funktion f : U → R an der Stelle p erfüllt
δΦipf =
∂ (f Φ−1)∂xi
(Φ (p)) .
Die Funktion fΦ := f Φ−1 heißt der Φ-Kartenausdruck von f. Daher die Be-zeichnung:
δΦipf =:
∂Φi f(p) . Um ∂Φ
i f zu berechnen, sind also zwei Schritteauszuführen: 1) Bestimmung des Kartenausdrucks von f in der Karte Φ und 2)diesen Kartenausdruck partiell nach der i-ten Variablen differenzieren.Beweis. Da Φ bijektiv ist und mit Φ auch Φ−1 eine C∞-Funktion ist, ist die
Jakobimatrix∂Φi xjpin jedem Punkt p invertierbar. Damit ist das Vektorensystem
26Siehe http://www.zamg.ac.at/cms/de/geophysik/magnetik/landesaufnahme und die Erklä-rungen auf http://de.wikipedia.org/wiki/Missweisung.

KAPITEL 3. VEKTORANALYSIS 271
δΦpeine Basis. Die Formel für die Richtungsableitung von f unter
δΦipfolgt so:
δΦipf = lim
ε→0
fp+ ε
δΦip
− f (p)
ε
= limε→0
(f Φ−1 Φ)p+ ε
δΦip
− (f Φ−1 Φ) (p)
ε
= limε→0
fΦ (Φ (p) + εei)− fΦ (Φ (p))
ε=
∂ (f Φ−1)∂xi
(Φ (p)) .
Satz 133 Auf dem Durchschnitt der Definitionsbereiche zweier lokaler Karten Φund Ψ gilt die Kartenwechselformel ∂Φ
i f =n
j=1
∂Φi Ψ
j·∂Ψj f
für i = 1, . . . , n.
Beweis. Das ist einfach die Kettenregel angewandt auf f Φ−1 = (f Ψ−1) (Ψ Φ−1) am Bereich Φ
UΦ ∩ UΨ
.
Anmerkungen:1) Auf U gilt die Dualitätsrelation
δΦjΦi = δij. Dazu äquivalent ist jede der drei
Aussagen:dΦiδΦj= δij ,
&grad
Φi, δΦj'= δij, ∂Φ
j Φi = δij .
Damit ist für p ∈ U auch die Familie von Vektoren (gradpΦ1, . . . gradpΦ
n) eineBasis von Rn. Sie wird wegen ihrer Dualität zur Kartenbasis als die duale (oderauch reziproke) Kartenbasis in p bezeichnet.
2) Für die Einträge der Gramschen Matrix des Standardskalarproduktes zurKartenbasis gilt in p ∈ U
GΦij (p) =
(δΦip,δΦjp
)=
n
k,l=1
∂Φi xkpek, el
∂Φj xlp=
n
k=1
∂Φi xkp
∂Φj x
kp.
3) Das Bild der Kurve γΦp,i ist in der Φi-Koordinatenlinie, also im DurchschnittC
j =i Nj,p der Niveauflächen Nj,p := q ∈ U | Φj(q) = Φj (p) enthalten.
4) Die Vektorfelder δΦi : U → V, p →δΦipmit i = 1, ..., n sind C∞-Vektorfelder.
3.3.4 Vektorfeldkomponenten zu Kartenbasen
Ist X : U → V ein Vektorfeld, dann hat es an jeder Stelle p ∈ U eine Zerle-gung nach der Standardbasis (e1, . . . en) und natürlich eine nach der Kartenbasis
δΦ1p, . . .
δΦnp
einer beliebigen Karte Φ : U → Rn. Diese sind gegeben durch
die beiden Sätze von kontravarianten Komponentenfunktionen X iΞ : U → R und
X iΦ : U → R mit
X (p) =n
i=1
X iΞ (p) · ei =
n
i=1
X iΦ (p) ·
δΦip=
n
i=1
X iΦ (p) ·
n
j=1
∂Φi xjp· ej .

KAPITEL 3. VEKTORANALYSIS 272
Somit gilt die Kartenwechselformel auf U
XjΞ =
n
i=1
X iΦ ·∂Φi xj.
Multiplikation dieser Gleichung mit der Funktion∂Ξj Φ
kund Summation über j
ergibt die Auflösung nach XkΦ, denn aufgrund der Kettenregel gilt ja
n
j=1
XjΞ ·∂Ξj Φ
k=
n
j=1
n
i=1
XiΦ
∂Φi xj
∂Ξj Φ
k=
n
i=1
X iΦ∂
Φi Φ
k =n
i=1
X iΦδ
ki = Xk
Φ.
Somit gilt für die Komponentenfunktionen X iΦ zur allgemeinen Karte der folgende
Zusammenhang mit den Komponentenfunktionen zur Standardkarte Ξ :
X iΦ =
n
j=1
XjΞ ·∂Ξj Φ
i.
Die Komponente X iΦ (p) stimmt also mit der Richtungsableitung der Koordinaten-
funktion Φi an der Stelle p mit dem Vektor X (p) überein:
[Xp] Φi = X i
Φ (p) .
Ein weiterer Satz von Bestimmungsstücken für das Vektorfeld X ist durch die nFunktionen XΦ
i : U → R für i = 1, . . . n mit
XΦi (p) =
(δΦip,X (p)
)=
n
j=1
GΦij (p)X
iΦ (p) und
GΦij (p) =
(δΦip,δΦjp
)=
n
k=1
∂Φi xkp
∂Φj xkp.
gegeben. Sie heißen kovariante Komponentenfunktionen des Vektorfeldes X. DieGramsche Matrix vermittelt also zwischen den beiden n-Tupeln von Funktionenüber die ’Indexherunterziehformel’
XΦi =
n
j=1
GΦijX
jΦ.
Wie drücken sich die kovarianten Komponentenfunktionen bezüglich einer allge-meinen Karte Φ durch jene der Standardkarte aus? Es gilt
XΦi (p) =
(δΦip, X (p)
)=
n
i=1
∂Φi xjpej, X (p) =
n
i=1
∂Φi x
jpXΞ
j (p) .
Um die kontravarianten Komponentenfunktionen XiΦ aus den kovarianten zu
berechnen, wird die inverse Matrix von GΦ (p) :=GΦ (p)
−1der Grammatrix GΦ (p)
benötigt. Ihre Einträge werden oben indiziert, sodass als Funktionsgleichung
X iΦ =
n
j=1
GijΦX
Φj

KAPITEL 3. VEKTORANALYSIS 273
gilt. Damit wird eine Automatik bezüglich des Transformationsverhaltens der Kom-ponenten unter Kartenwechsel in der Schreibweise etabliert. Sie hat aber lediglichden Charakter einer Merkhilfe.
Behauptung: Die Gramsche Matrix der dualen Kartenbasis in p stimmt mitG−1
Φ (p) überein, dh für die Einträge GijΦ (p) mit p ∈ U gilt
GijΦ (p) =
&gradpΦ
i, gradpΦj'=
n
k,l=1
∂ΞkΦ
ipδkl∂Ξl Φ
jp=
n
k=1
∂ΞkΦ
ip
∂ΞkΦ
jp.
Zum Beweis genügt es über die Kettenregel nachzurechnen, dass
n
j=1
GijΦ (p)GΦ
jk (p) = δik =
1 für i = k0 sonst
folgt. Dies geht so
n
j=1
GijΦ (p) ·GΦ
jk (p) =n
j=1
n
l=1
∂Ξl Φ
ip
∂Ξl Φ
jp·
n
r=1
∂Φj xrp
∂Φk xrp
=n
l=1
n
r=1
∂Ξl Φ
ip
∂Φk xrp
n
j=1
∂Ξl Φ
jp·∂Φj xrp
=n
l=1
n
r=1
∂Ξl Φ
ip
∂Φk xrpδrl =
n
r=1
∂Φk xrp
∂Ξr Φ
ip
=∂Φk Φ
ip= δik.
3.3.5 Polarkoordinaten
Seien Φ = (r, φ) die Polarkoordinaten von R2. Dann gilt für p ∈ U
δΦ1p
=d
dt
(r(p) + t) cos (φ(p))(r(p) + t) sin (φ(p))
,,,,t=0
=
cos (φ(p))sin (φ(p))
=
p
r(p).
δΦ2p
=d
dt
r(p) cos (φ(p) + t)r(p) sin (φ(p) + t)
,,,,t=0
= r(p)
− sin (φ(p))cos (φ(p))
=
−y(p)x(p)
.
Das Vektorfeld δΦ1 ist ein radial nach außen gerichtetes Einheitsvektorfeld und δΦ2stimmt auf U mit dem Drehvektorfeld L = −yδΞ1 + xδΞ2 überein.27 Ein reellwertigesSkalarfeld f ∈ C1 (R2 0) erfüllt daher genau dann die partielle Differentialgleichung[L] f = 0, wenn 0 =
δΦ2f = ∂Φ
2 f, wenn also der polare Kartenausdruck von f nichtvon φ abhängt. Dies ist genau dann der Fall, wenn f invariant unter allen Drehungenum 0 ist.
Die Quantenmechanik macht von komplexwertigen Skalarfeldern f ∈ C1 (R2 0)Gebrauch, die [L] f = λf für ein λ ∈ C lösen. Solch eine Funktion f erfüllt also∂Φ2 f = λf auf U. Es existiert somit eine Funktion g ∈ C1 (R>0) mit f = g (r) eλφ
27Ξ bezeichnet wieder die Standardkarte.

KAPITEL 3. VEKTORANALYSIS 274
auf U. Für g = 0 ist f aber genau dann in C1 (R2 0) , wenn λ = im für einm ∈ Z. Es gilt somit für jede Funktion fm, die auf U fm = g (r) eimφ erfüllt, dieEigenwertgleichung [−iL] fm = mfm auf ganz R2 0. Für eine Drehung Rα von fmum den Winkel α im positiven Sinn folgt weiters
Rαfm (p) := fmR−1
α p= g (|p|) eim(φ(p)−α) = e−imαfm (p)
für alle p ∈ U mit R−1α p ∈ U. Wegen der Stetigkeit von fm gilt Rαfm = e−imαfm auf
ganz R2 0. Die Funktion |fm|2 ist folglich invariant unter allen Drehungen um 0.Die Gramsche Matrix GΦ(p) der Kartenbasis δΦp ergibt sich somit zu
GΦ(p) =
1 00 r(p)2
.
Wir abstrahieren aus dem vorangehenden Beispiel das Kurzrezept
δΦi =∂
∂Φi
x1(Φ1, . . . ,Φn)...
xn(Φ1, . . . ,Φn)
auf U,
das zum Tragen kommt, wenn die Karte Φ implizit gegeben ist.
Laplaceoperator in Polarkoordinaten
Sei Ξ = (x, y) die Standardkarte von R2. Dann gilt für die Karte der PolarkoodinatenΦ = (r, φ) auf der geschlitzten Ebene U
δΦ1 , δ
Φ2
=δΞ1 , δ
Ξ2
·
cos φ −r sinφsinφ r cosφ
.
Die Inversion des Basiswechsels gibt
δΞ1 , δ
Ξ2
=δΦ1 , δ
Φ2
·
cosφ sinφ−r−1 sinφ r−1 cosφ
.
Für eine C2-Funktion f : U → R gilt daher
δΞ1f = cosφ
δΦ1f − sinφ
r
δΦ2f,
δΞ2f = sinφ
δΦ1f +
cosφ
r
δΦ2f.
Wir kürzen die Richtungsableitungen als partielle Ableitungen abδΞ1f = ∂xf,
δΞ2f = ∂yf,
δΦ1f = ∂ρf,
δΦ2f = ∂φf.
Damit gilt
∂xf =
cosφ∂r −
sinφ
r∂φ
f,
∂yf =
sinφ∂r +
cosφ
r∂φ
f.

KAPITEL 3. VEKTORANALYSIS 275
Iteration der RichtungsableitungδΞ1
δΞ1f= ∂2
xf ergibt nun
∂2xf =
cosφ∂r −
sinφ
r∂φ
cosφ∂r −
sinφ
r∂φ
f
=
cos2 φ∂2
r + cosφsinφ
r2∂φ −
cosφ sinφ
r∂r∂φ
f
+
sin2 φ
r∂r −
sinφ cosφ
r∂φ∂r +
sinφ cosφ
r2∂φ +
sin2 φ
r2∂φ∂φ
f.
Analog ergibt sich
∂2yf =
sinφ∂r +
cosφ
r∂φ
sinφ∂r +
cosφ
r∂φ
f
=
sin2 φ∂2
r − sinφcosφ
r2∂φ + sinφ
cosφ
r∂r∂φ
f
+
cos2 φ
r∂r +
cosφ sinφ
r∂φ∂r −
cosφ sinφ
r∂φ +
cos2 φ
r2∂2φ
f.
Daraus folgt für den Lpalaceoperator in Polarkoordinaten
∆f = ∂2xf + ∂2
yf =
∂2r +
1
r∂r +
1
r2∂2φ
f =
1
r∂r (r∂r) +
1
r2∂2φ
f.
Nutzen wir dies, um am skaleren Potential Φ =√r sin (ϕ/2) einer geladenen
Halbgeraden in der Ebene zu überprüfen, dass∆Φ = 0. Es gilt ∂rΦ = sin (ϕ/2) /2r1/2
und ∂2rΦ = − sin (ϕ/2) /4r3/2. Daraus folgt∂2r +
1
r∂r +
1
r2∂2φ
Φ =
− 1
4r3/2+
1
2r3/2− 1
4r3/2
sin (ϕ/2) = 0.
3.3.6 Kugelkoordinaten
Seien Φ = (r, θ, φ) Kugelkoordinaten und Ξ = (x, y, z) die Standardkarte. Anwen-dung des Kurzrezeptes ergibt die Vektorfelder auf U
δΦ1 =
sin (θ) cos (φ)sin (θ) sin (φ)
cos (θ)
=
id
r,
δΦ2 = r ·
cos (θ) cos (φ)cos (θ) sin (φ)− sin (θ)
,
δΦ3 = r ·
− sin (θ) sin (φ)sin (θ) cos (φ)
0
.
δΦ1 ist ein radial nach außen gerichtetes Einheitsvektorfeld. Der VektorδΦ1pist
im Punkt p tangential an die Schnittlinie der beiden Niveauflächen θ = θ (p) und

KAPITEL 3. VEKTORANALYSIS 276
φ = φ (p) . Analog istδΦ2pist in p tangential an denMeridian r = r(p) und φ = φ(p)
durch p. Das Vektorfeld δΦ3 stimmt auf U mit dem Drehvektorfeld um die z-Achsezur Standardorientierung überein.
δΦ3pist in p tangential an den Breitenkreis, der
durch θ = θ (p) und r = r (p) bestimmt ist.Gemäß Konstruktion gilt
δΦi =3
j=1
δΞj · ∂Φi Ξ
j
oder in Matrixnotation δΦ = δΞ · J t mit der Jakobimatrix
J t =
∂Φ1 Ξ
1 ∂Φ2 Ξ
1 ∂Φ3 Ξ
1
∂Φ1 Ξ
2 ∂Φ2 Ξ
2 ∂Φ3 Ξ
2
∂Φ1 Ξ
3 ∂Φ2 Ξ
3 ∂Φ3 Ξ
3
.
δΦ =δΦ1 , δ
Φ2 , δ
Φ3
ist genau dann in jedem Punkt p ∈ U eine Basis, wenn die Deter-
minante der Jakobimatrix
J t =
sin (θ) cos (φ) cos (θ) cos (φ) − sin (θ) sin (φ)sin (θ) sin (φ) cos (θ) sin (φ) sin (θ) cos (φ)
cos (θ) − sin (θ) 0
nirgends gleich 0 ist. Tatsächlich ergibt sich (zB durch Entwicklung nach der letztenZeile)
detJ t = sin θ > 0 auf U.
Die Basen δΦ (p) und δΞ (p) sind also in jedem Punkt p ∈ U gleich orientiert.Die Gramsche Matrixfunktion auf U ergibt sich zu
GΦ =
1 0 00 r2 00 0 r2 sin2 (θ)
.
3.3.7 Kartenabhängigkeit von partiellen Ableitungen
Auf V = R2 sei die Funktion g durch g := x2 + xy gegeben. Es sollen zwei par-tielle Ableitungen von g berechnet werden, die zur Vorsicht mahnen. Neben derStandardkarte Ξ := Φe := (x, y) = id der kontravarianten Koordinaten von V zurStandardbasis e ist auch die Karte Φ := Φf zur Basis
f = (f1, f2) := (e1, e2) ·
1 0−1 1
eine globale, lineare Karte von R2. Es gilt Φ = (x, x+ y). Die lineare FunktionΦ : R2 → R2 mit
Φ =
1 01 1
·
xy

KAPITEL 3. VEKTORANALYSIS 277
ist als Hintereinanderschaltung zweier linearer Funktionen, die erste davon eine Kar-
te, natürlich eine C∞-Funktion. Wegen det
1 01 1
= 1 ist sie invertierbar und
somit eine Karte. Es gilt weiter g = Φ1Φ2 und daher
∂Ξ1 g = 2x+ y und ∂Φ
1 g = Φ2 = x+ y.
Die Verschiedenheit der beiden partiellen Ableitungen ist wegen δΞ1 = e1 = (1, 0)und δΦ1 = f1 = (1,−1) zu erwarten. Wenn aber der Kartenname an den Symbolen∂Ξ1 und ∂Φ
1 weggelassen wird, und wenn man wegen Φ1 = Ξ1 = x dann noch statt ∂1das Symbol ∂x verwendet, hat man zur Kenntnis zu nehmen, dass ∂xg ohne weitereAngaben sinnlos ist, da es davon abhängt, durch welche weiteren Funktionen dieFunktion x zu einer Karte ergänzt wird. Dieser Sachverhalt sorgt in der Wärmelehrefür zwei unterschiedliche spezifischeWärmen. Eine bei konstantemVolumen und einebei konstantem Druck.
Eine Verallgemeinerung des vorigen Beispiels bietet die Galileitransformation.Sie wechselt von der Standardkarte Ξ := (t, x) von R2 zur linearen Karte (t′, x′)gemäß
t′ = t und x′ = x− vt.
Hier ist v ∈ R die Relativgeschwindigkeit der beiden Karten. Wir notieren systema-tischer:
Φ :=
t′
x′
=
1 0
−v 1
·
tx
=: M · Ξ.
Wegen der Kartenwechselformel für die partiellen Ableitungen eines Skalarfeldes g
∂Ξi g =
j=1,2
∂Ξi Φ
j·∂Φj g
folgt mit ∂Ξ1 Φ
1 ∂Ξ1 Φ
2
∂Ξ2 Φ
1 ∂Ξ2 Φ
2
= M t
dass ∂Ξ1 g, ∂Ξ
2 g=
∂Φ1 g, ∂Φ
2 g·M =
∂Φ1 g − v∂Φ
2 g, ∂Φ2 g.
Mit der Kurznotation ∂Ξ1 g = ∂tg, ∂Φ
1 g = ∂t′g und ∂Ξ2 g = ∂xg, ∂Φ
2 g = ∂x′g folgt somit
∂tg = ∂t′g − v∂x′g und ∂xg = ∂x′g,
wegen t′ = t und x′ = x etwas irritierend. Dieser Sachverhalt ist für die Galileisym-metrie der freien Schrödingergleichung oder auch der Wärmeleitungsgleichung vonBedeutung.
3.3.8 Geschwindigkeit zerlegt nach Kartenbasis
Ein Flugkörper nähert sich einem Schiff, indem er eine Kurve γ : R ⊃ I → R3
verwirklicht. I ist dabei ein offenes Intervall. Die Radarstation des Schiffes misst

KAPITEL 3. VEKTORANALYSIS 278
eine zeitliche Abfolge des Abstands zwischen Schiff und Flugobjekt. Der Mann amFernrohr notiert zeitliche Abfolgen der Winkel, um die das Fernrohr aus der Nord-richtung gedreht und gegen den Horizont geneigt werden muss, um das Objekt insFadenkreuz zu bekommen. Die Frau an der Kanone wird unruhig und möchte wissenmit welcher Geschwindigkeit sich das Objekt nähert. Sie erinnert sich an ihre Vor-lesung über Math Phys. Irgendwie bestimmen die drei Funktionen r γ, θ γ, ϕ γdie Größe γ (t)! Aber wie geht das nochmals?
Der folgende Satz illustriert, inwiefern Kartenbasen die Lösung des Problemsübersichtlich gestalten. Er ist eine Folge der Kettenregel und er zeigt, wie der Tan-gentenvektor einer Kurve γ in einem Punkt γ (t) nach einer Kartenbasis im Punktγ (t) zu zerlegen ist. Die Komponenten dieses meist als Geschwindigkeit von γ inγ (t) bezeichneten Vektors bezüglich der Kartenbasis ergeben sich einfach durch Dif-ferenzieren der Komponenten des Kartenbildes Φ γ der Kurve an der Stelle t.
Satz 134 Sei Φ : U → Φ (U) eine lokale Karte von Rn. Die Kurve γ : I → U sei
differenzierbar. Sei γiΦ := Φi γ. Dann gilt γ(t) =
ni=1
dγiΦ(t)
dt
δΦiγ(t)
und
|γ(t)| =
899:n
i,j=1
dγiΦ(t)
dtGΦ
ij (γ (t))dγj
Φ(t)
dt.
Beweis. Der Beweis benützt die Kettenregel für die Hintereinanderschaltungγ = Φ−1 (Φ γ). Mit γ(t) = p und mit Φ =
ni=1Φ
iei folgt
γ(t) = (dtγ) (1) =
dΦ(p)Φ−1 dt (Φ γ)
(1) =
dΦ(p)Φ
−1 (dt (Φ γ) (1))
=dΦ(p)Φ
−1
n
i=1
dΦi (γ (t))
dtei
=
n
i=1
dΦi (γ (t))
dt
dΦ(p)Φ
−1 (ei)
=n
i=1
dΦi (γ (t))
dtlimε→0
Φ−1 (Φ(p) + εei)− Φ−1 (Φ(p))
ε=
n
i=1
dγiΦ(t)
dt
δΦip.
Als Beispiel diene der Kugelkoordinatenausdruck der kinetischen Energie. SeienΦ = (r, θ, φ) Kugelkoordinaten mit dem Kartenbereich U und sei γ : I → R3
differenzierbar. Für alle t ∈ I mit γ(t) ∈ U folgt dann γ(t), γ(t) =
=3
i,j=1
dγiΦ(t)
dt
(δΦiγ(t)
,δΦjγ(t)
) dγjΦ(t)
dt=
3
i,j=1
dγiΦ(t)
dtGΦ
ij (γ(t))dγj
Φ(t)
dt
=(r γ)′ (t)
2+(θ γ)′ (t)
2 r2 γ
(t) +
(φ γ)′ (t)
2 (r sin (θ))2 γ
(t) .
In Physiktexten wird diese Formel verkürzt zu |γ|2 = r2+(rθ)2+(r sin (θ) φ)2. Manbeachte jedoch, dass diese Schreibweise Φi undΦiγ nicht voneinander unterscheidet.

KAPITEL 3. VEKTORANALYSIS 279
3.3.9 *Beschleunigung zerlegt nach Kartenbasis
Sei nun γ : I → U ⊂ Rn eine C2-Kurve mit γ (t) = p und sei (e1, . . . en) dieStandardbasis von Rn und Ξ = (x1, . . . , xn) die zugehörige Standardkarte von Rn.Es gilt also idRn =
ni=1 x
i · ei. Die Abbildung Φ : U → Rn sei eine lokale Karte.Die Geschwindigkeit zur Zeit t ist der folgende Vektor aus V :
dγ
dt(t) =
n
i=1
Φi γ
′(t) ·
δΦip=
n
i=1
Φi γ
′(t) ·
n
j=1
∂Φi xj(p) · ej
Die Beschleunigung von γ zur Zeit t ist die zweite Ableitung von γ an der Stelle
t. Sie ergibt sich mit den Abkürzung γiΦ := Φi γ und γi
Φ =dγiΦdt
zu
d2γ
dt2(t) =
n
i,j=1
d
dt
γiΦ (t) ·
∂Φi xj(γ (t))
· ej .
Satz 135 Für die Beschleunigung d2γdt2
einer C2-Kurve γ : I → Rn gilt für alle t ∈ I,für die γ (t) Element des Definitionsbereiches U der Karte Φ : U → Rn ist, mit derAbkürzung γi
Φ = Φi γ
d2γ
dt2(t) =
n
k=1
2d2γk
Φ
dt2(t) +
n
i,j=1
γiΦ (t) γj
Φ (t)Γkij γ
(t)
3·δΦkγ(t)
. (3.24)
Dabei sind die Christoffelsymbole Γkij : U → R der Karte Φ für i, j, k ∈ 1, . . . n
durch
Γkij (p) =
n
l=1
∂Φj ∂
Φi x
lp
∂Ξl Φ
kp
definiert.
Beweis. Die Zerlegung von ej nach der BasisδΦpergibt sich aus
δΦip=n
j=1
∂Φi x
j(p) · ej zu
n
i=1
∂ΞkΦ
ip
δΦip
=n
i=1
∂ΞkΦ
ip
n
j=1
∂Φi xjp· ej =
n
j=1
2n
i=1
∂Φi Ξ
jp
∂ΞkΦ
ip
3· ej
=n
j=1
∂ΞkΞ
jp· ej = ek.
Unter Verwendung dieser Zerlegung und, wo gefahrlos möglich, unter Verwendung

KAPITEL 3. VEKTORANALYSIS 280
der Abkürzung p = γ (t) folgt dγdt(t) =
n
i,j=1
d
dt
γiΦ (t) ·
∂Φi xjγ(t)
· ej
=n
i,j=1
d
dt
γiΦ (t) ·
∂Φi xjγ(t)
n
k=1
∂Ξj Φ
k· δΦkp
=n
i,j,k=1
*dγi
Φ
dt(t) ·
∂Φi xjp+ γi
Φ (t) · d
dt
∂Φi x
jp
+ ∂Ξj Φ
k· δΦkp
=n
i,j,k=1
2d2γi
Φ
dt2(t) ·
∂Φi xjp+ γi
Φ (t)n
l=1
γlΦ (t)
∂Φl ∂
Φi x
jp
3∂Ξj Φ
kp·δΦkp.
Da für alle p ∈ U
n
j=1
∂Φi x
jp
∂Ξj Φ
kp=
n
j=1
∂Φi Φ
kp= δki
gilt, folgt weiter
dγ
dt(t) =
n
i,k=1
2d2γi
Φ (t)
dt2δik + γi
Φ (t)n
j,l=1
γlΦ (t)
∂Φl ∂Φ
i xjp
∂Ξj Φ
kp
3δΦkp
=n
k=1
2d2γk
Φ
dt2(t) +
n
i,j=1
γiΦ (t) γj
Φ (t)n
l=1
∂Φj ∂
Φi x
lp
∂Ξl Φ
kp
3δΦkp.
Sind die von γ unabhängigen Funktionen Γkij : U → R (Zusammenhangskompo-
nenten oder Christoffelsymbole der Karte Φ) so definiert, dass für p ∈ U
Γkij (p) =
n
l=1
∂Φj ∂
Φi x
lp
∂Ξl Φ
kp, (3.25)
dann gilt folglich
d2γ
dt2(t) =
n
k=1
2d2γk
Φ
dt2(t) +
n
i,j=1
γiΦ (t) γj
Φ (t)Γkij γ
(t)
3·δΦkγ(t)
.
Man beachte, dass wegen ∂Φj ∂
Φi x
l = ∂Φi ∂Φ
j xl auch Γkij = Γk
ji. Die k-Komponenteder Beschleunigung zur Zeit t setzt sich also additiv aus der zweiten Ableitung vonΦk (γ (t)) und einer ortsabhängigen quadratischen Form Γk
γ(t) (γ (t)) des Geschwin-digkeitsvektors zusammen.

KAPITEL 3. VEKTORANALYSIS 281
3.3.10 *Berechnung der Christoffelsymbole einer Karte
Die definierende Formel (3.25) ist für eine Berechnung der Funktionen Γkij oft unge-
eignet, da etwa in Kugelkoordinaten die Berechnung der partiellen Ableitungen ∂Ξl Φ
k
sehr umständlich ist. Oft erweist sich der folgende Umweg über die ’indexgezogene’Größe Γikj als hilfreich. Sei also Γikj : U → R mit
Γikj (p) :=n
l=1
GΦkl (p) Γ
lij (p) .
Dann folgt daraus
Γikj =n
l=1
GΦkl
n
r=1
∂Φj ∂
Φi x
r
∂Ξr Φ
l
=n
l=1
n
s=1
∂Φk x
s
∂Φl x
s n
r=1
∂Φj ∂Φ
i xr
∂Ξr Φ
l
=n
s=1
∂Φk xs n
r=1
∂Φj ∂
Φi x
r n
l=1
∂Φl x
s
∂Ξr Φ
l
=n
s=1
∂Φk xs n
r=1
∂Φj ∂
Φi x
rδsr =
n
s=1
∂Φk x
s
∂Φj ∂
Φi x
s.
Offenbar gilt Γikj = Γjki ebenso wie Γkij = Γk
ji für alle i, j, k. Der Zusammenhang
Γikj =n
s=1
∂Φk x
s
∂Φj ∂Φ
i xs
(3.26)
enthält nun keine Ableitungen des Typs ∂Ξl Φ
k sondern nur mehr Ableitungen derStandardkoordinatenfunktionen nach den allgemeinen. Aber auch Formel (3.26) istfür praktische Rechnungen noch mühselig. Eine weitere Vereinfachung schafft diefolgende Einsicht.
Satz 136 Für die Zusammenhangskomponenten der Karte Φ : U → Rn gilt auf U
Γikj =1
2
∂Φi GΦ
jk + ∂Φj GΦ
ik − ∂Φk G
Φij
. (3.27)
Beweis. Auf der rechten Seite die drei Matrixelemente der Gramschen Matrixdurch die Darstellung
GΦij =
n
s=1
∂Φi x
s
∂Φj x
s
ersetzen, ausdifferenzieren mit Produktregel und wegheben.

KAPITEL 3. VEKTORANALYSIS 282
Christoffelsymbole der Kugelkoordinaten
Probieren wir die Kraft von Gleichung (3.27) am Beispiel der Kugelkoordinaten aus.Sei Φ = (r, θ, ϕ) und Ξ = (x, y, z) mit
xyz
= r
sin θ cosϕsin θ sinϕ
cos θ
auf dem Kartenbereich U der Kugelkoordinaten. Um bei der Berechnung der Funk-tionen Γikj die Übersicht behalten zu können, empfiehlt sich die Bildung von Matrix-Paketen Γk = [Γikj ] . Es ergibt sich mithilfe von Gleichung (3.27)
Γ1 =
0 0 00 −r 00 0 −r2 sin2 θ
, Γ2 =
0 r 0r 0 00 0 −r2 sin θ cos θ
, (3.28)
Γ3 =
0 0 r sin2 θ0 0 r2 sin θ cos θ
r sin2 θ r2 sin θ cos θ 0
.
Wegen der Diagonalität von GΦ folgen die Matrizen Γk =Γkij
mit Γk = GΦ
kkΓk zu
Γ1 = Γ1 =
0 0 00 −r 00 0 −r2 sin2 θ
, Γ2 =
1
r2Γ2 =
0 1r
01r
0 00 0 − sin θ cos θ
,
(3.29)
Γ3 =1
r2 sin2 θΓ3 =
0 0 1r
0 0 cos θsin θ
1r
cos θsin θ
0
.
3.3.11 *Beschleunigung sphärisch zerlegt
Die Beschleunigung a : I → R3 einer C2-Kurve γ : I → R3 soll nun zur Zeit t fürγ (t) ∈ U nach den Elementen der Kartenbasis der Karte Φ : U → R3 der Kugelkoor-dinaten im Punkt γ (t) zerlegt werden. Die entsprechenden Komponentenfunktionenai : I → R werden also wie folgt definiert: für t ∈ I gilt
a (t) =d2γ
dt2(t) =
3
i=1
ai (t)δΦiγ(t)
.
Um die Suggestivkraft der Formeln zu erhöhen wird vereinfachend notiert a1 =ar, a2 = aθ, a3 = aϕ. Darüberhinaus wird etwas sinnentstellend (Φi γ) =
(r, θ, ϕ) , (Φi γ)′=r, θ, ϕ
und (Φi γ)
′′=r, θ, ϕ
abgekürzt.

KAPITEL 3. VEKTORANALYSIS 283
Die Spezialisierung von Formel (3.24) auf die Christoffelsymbole von Gleichung(3.29) ergibt dann
ar = r − rθ2 − r sin2 (θ) ϕ2,
aθ = θ +2
rrθ − sin (θ) cos (θ) ϕ2,
aϕ = ϕ+2
rrϕ+ 2
cos θ
sin θθϕ.
Beispiel 137 Sehen wir uns an, ob die Beschleunigungskomponenten ar, aθ und aϕ
der folgenden unbeschleunigten ’Bewegung’ γ : R>0 → R3 tatsächlich gleich 0 sind.Es gelte mit s, v ∈ R>0
γ (t) = vt · e1 + s · e2,d.h. die Bewegung führt vom Punkt s · e2 mit konstanter Geschwindigkeit in positive1-Richtung. Es gilt also r (t) =
s2 + (vt)2, θ (t) = π/2, ϕ (t) = arctan s
vtund
daher
r (t) =v2t
s2 + (vt)2, r (t) =
(sv)2
s2 + (vt)2
3/2 .
Weiter folgt θ = 0 = θ und
ϕ (t) =−sv
s2 + (vt)2ϕ (t) =
2sv3ts2 + (vt)2
2 .
Daraus folgt
ar (t) = r (t)− r (t) ϕ2 (t) =(sv)2
s2 + (vt)2
3/2 −
s2 + (vt)2 · (sv)2
s2 + (vt)2
2 = 0,
aθ (t) = 0,
aϕ (t) =2sv3t
s2 + (vt)2
2 +2
s2 + (vt)2· v2t
s2 + (vt)2· −sv
s2 + (vt)2= 0.
3.3.12 *Bewegung im Zentralkraftfeld
Als Anwendung der Zerlegung eines Beschleunigungsvektors nach der Kartenbasisder Kugelkoordinaten soll nun noch das Beispiel von Newtons Bewegungsgleichungmit einem stetigen, drehinvarianten und radial gerichteten Kraftfeld behandelt wer-den.
Wir wissen bereits, dass so ein Kraftfeld ein Gradientenfeld ist. Wirkt auf einen(klassischen) Massenpunkt der Masse m eine solche Kraft, dann ist die zeitlicheAbfolge der Orte des Massenpunktes eine Kurve γ : I → R3, für die
mγ (t) = −gradγ(t) (V r)

KAPITEL 3. VEKTORANALYSIS 284
gilt. Dabei ist V : R>0 → R eine C1-Funktion und r (p) bezeichnet den Abstand vonp ∈ R3 zum Kraftzentrum. Wird das Kraftzentrum in 0 angesiedelt, dann gilt füralle t ∈ I
mγ (t) = −V ′ (|γ (t)|) γ (t)
|γ (t)| . (3.30)
Gesucht sind letztlich alle maximalen Lösungen γ dieser Bewegungsgleichung.Diese Aufgabenstellung werden wir jedoch nicht lösen können. Wir werden aberzumindest einige Eigenschaften der Lösungen γ von Gleichung (3.30) ableiten.
Verwendung von Standardkoordinaten Ψ bringt Newtons Gleichung in die Form
mxi (t) = −V ′
j (xj (t))2
j (x
j (t))2xi (t) .
Dabei wurde xi = Ψi γ gesetzt. Die Gleichungen sind außer für V (r) = kr2
nichtlinear und miteinander verkoppelt.Verwendung von Kugelkoordinaten Φ um das Kraftzentrum führt, wegen
gradγ(t) (V r) = V ′ (|γ (t)|)δΦ1γ(t)
,
auf die Komponentenform
mr − rθ
2 − r sin2 θϕ2= −V ′ (r) , (3.31a)
m
θ +
2
rrθ − sin θ cos θϕ2
= 0, (3.31b)
m
ϕ+
2
rrϕ+ 2
cos θ
sin θθϕ
= 0. (3.31c)
Wieder wurde verkürzend notiert: Φ1 γ = r etc. Auch dieser Satz von gekoppeltenGleichungen erscheint zunächst unlösbar. Aber zwei Erhaltungssätze helfen weiter.
Zunächst beachtet man, dass
d
dt(γ (t)× γ (t)) = γ (t)× γ (t) + γ (t)× γ (t) = 0,
da γ (t) und γ (t) gemäß Gleichung (3.30) kollinear sind. Somit gilt für alle t, t0 ∈ I,dass
γ (t)× γ (t) = γ (t0)× γ (t0) .
Wegen0 = γ (t) , γ (t)× γ (t) = γ (t) , γ (t0)× γ (t0)
liegen das Bild von γ in der Ebene durch 0 mit dem Normalenvektor γ (t0)× γ (t0) ,wobei t0 ∈ I beliebig ist.
Da jede Lösung γ von (3.30) durch eine Drehung R in eine Lösung Rγ mit Bildin der z = 0 Ebene übergeführt werden kann, genügt es, Lösungen γ zu untersuchen,

KAPITEL 3. VEKTORANALYSIS 285
für die θγ = π/2 gilt. Für diese ist (3.31b) trivial erfüllt und die Gleichungen (3.31a)und (3.31c) vereinfachen sich zu
mr − rϕ2
= −V ′ (r) , (3.32a)
m
ϕ+
2
rrϕ
= 0. (3.32b)
Der Vektor γ (t)× γ (t) spezialisiert sich für Lösungen mit z = 0 zu
γ (t)× γ (t) = r (t)δΦ1γ(t)
×r (t)
δΦ1γ(t)
+ ϕ (t)δΦ3γ(t)
= −r (t) ϕ (t)
δΦ2γ(t)
= r2 (t) ϕ (t) e3.
Da dieser Vektor von t unabhängig ist, existiert eine Zahl l ∈ R, sodass für alle t ∈ I
l = mr2 (t) ϕ (t) . (3.33)
l ist die dritte Komponente des Drehimpulses mγ (t)× γ (t) bezüglich der Zerlegungnach der Standardbasis.
Mittels (3.33) lässt sich nun ϕ aus Gleichung (3.32a) eliminieren. Damit ergibtsich die folgende 1-dimensionale Bewegungsgleichung auf R>0
m
r − l2
m2r3
= −V ′ (r) . (3.34)
Multiplikation dieser Gleichung (3.34) mit r ergibt
m
rr − l2
m2r3r
+ V ′ (r) r = 0
Dies wiederum ist äquivalent zu
d
dt
*m
2
r2 +
l2
m2r2
+ V (r)
+= 0.
Es existiert also eine Zahl E ∈ R, sie heißt Energie des Massenpunktes, für die
E =m
2
r2 +
l2
m2r2
+ V (r) . (3.35)
Damit sind von den ursprünglich drei gekoppelten Gleichungen zweiter Ord-nung nur mehr die beiden Gleichungen (3.35) und (3.33) erster Ordnung übrig. DieGleichung (3.35) kann nach r aufgelöst und dann nach Wahl einer Anfangsvorga-be zumindest numerisch gelöst werden. Diese Lösung kann dann in (3.33) eingeseztwerden, womit auch diese Gleichung einer numerischen Integration zugänglich ist.In speziellen Fällen wie etwa V (r) = α/r mit α ∈ R lässt sich auch die exakteAnalyse weitertreiben. Details davon gibt eine Vorlesung über klassische Mechanikim Kapitel über das Keplerproblem.

KAPITEL 3. VEKTORANALYSIS 286
3.3.13 *Keplerproblem
Weil dieses Ergebnis eines der Kronjuwelen der Physik ist, soll hier noch aus denbeiden Gleichungen (3.33) und (3.35) abgeleitet werden, dass die Bildmenge einermaximalen Lösung von Newtons Bewegungsgleichung (3.30) im Fall V (r) = α/rmit α ∈ R ein Kegelschnitt ist. Dazu wird aus den beiden Bewegungsgleichungen(3.33) und (3.35) eine Differentialgleichung für den lokalen Funktionszusammenhangzwischen r und ϕ abgeleitet. Das geht so: Sei r (0) = r0 und ϕ (0) = ϕ0 und für0 < t < ε gelte r (t) = ρ (ϕ (t)) mit einer differenzierbaren Funktion ρ : J =(ϕ0 −∆1, ϕ0 +∆2) → R>0 größtmöglichen Definitionsbereichs. Dann folgt für allet ∈ J
r (t) = ρ′ (ϕ (t)) · ϕ (t) = ρ′ (ϕ (t)) · l
mr2 (t)= ρ′ (ϕ (t)) · l
mρ2 (ϕ (t)).
Einsetzen dieses Ausdrucks für r in (3.35) ergibt auf J
E =m
2
ρ′2 · l2
m2ρ4+
l2
m2ρ2
+ V (ρ) .
OEdA28 kann dies zumindest29 für l = 0 aufgelöst werden zu
dρ
dϕ= ρ
/2m
l2(E − V (ρ)) ρ2 − 1.
Diese Differentialgleichung ist vom Typ des separierten Variablen und es folgt füralle ϕ ∈ J
ϕ− ϕ0 =
ρ(ϕ)
r0
dx
x
2ml2
(E − V (x))x2 − 1.
Mit a := 2mE/l2 und b := mα/l2 ist dieses Integral für V (r) = α/r elementarzu lösen:
ϕ− ϕ0 =
ρ(ϕ)
r0
dx
x√ax2 − 2bx− 1
= − arcsin
bx+ 1
x√a+ b2
,,,,ρ(ϕ)
r0
.
Anwendung von sin ergibt
− sin
ϕ− ϕ0 − arcsin
br0 + 1
r0√a+ b2
=
bρ (ϕ) + 1
ρ (ϕ)√a+ b2
=b√
a+ b2+
1
ρ (ϕ)√a+ b2
,
also für alle ϕ ∈ J
1
ρ (ϕ)= −b ·
1 +
√a+ b2
bsin (ϕ− δ)
28Die Bewegungsumkehrinvarianz kann dazu benützt werden ρ′ > 0 herbeizuführen.29Für l = 0 liegt die Bahnkurve auf einer Graden durch 0.

KAPITEL 3. VEKTORANALYSIS 287
mit
δ = ϕ0 + arcsin
br0 + 1
r0√a+ b2
.
Es ist dies die Polardarstellung eines (Teils eines) Kegelschnitts.Ein zweiter Weg zu diesem Ergebnis, startet direkt von der 1-d Bewegungs-
gleichung (3.34). In dieser werden die Zeitableitungen von r über die Kettenregeldurch die Winkelableitungen einer zumindest lokal existierenden Funktion u, für dieu (ϕ (t)) = 1/r (t) gilt, ausgedrückt. Aus der Kettenregel ergibt sich
r (t) =d
dt
1
u (ϕ (t))
= − u′ (ϕ (t))
u (ϕ (t))2ϕ (t) = − u′ (ϕ (t))
u (ϕ (t))2· l
mr (t)2= − l
mu′ (ϕ (t))
und daher auch
r (t) = − l
m
d
dtu′ (ϕ (t)) = − l
mu′′ (ϕ (t)) ϕ (t) = − l
mu′′ (ϕ (t)) · l
mr (t)2
= −
l
m
2
u′′ (ϕ (t)) · u (ϕ (t))2 .
Ersetzen von r (t) in der radialen Bewegungsgleichung (3.34) durch
−
l
m
2
u′′ (ϕ (t)) · u (ϕ (t))2
ergibt
0 = m
r (t)− l2
m2r3 (t)
+ V ′ (r (t))
= −m ·
l
m
2
· [u′′ (ϕ (t)) + u (ϕ (t))] · u (ϕ (t))2 − α · u (ϕ (t))2
oder äquivalent dazu
u′′ (ϕ (t)) + u (ϕ (t)) = −αm
l2. (3.36)
Für jede Lösung u auf dem Intervall (0, 2π) von Gleichung (3.36) existieren Zah-len p, δ ∈ R, sodass
1
r (t)= u (ϕ (t)) = p cos (ϕ (t)− δ)− αm
l2
für alle t mit ϕ (t) ∈ (0, 2π) . Natürlich bleibt hier die Funktion t → ϕ (t) im Dun-keln, aber zumindest der Zusammenhang zwischen r (t) und ϕ (t) ist bis auf dieIntegrationskonstanten p, l und δ vollkommen festgelegt. Für die Bestimmung derIntegrationskonstanten sind Anfangsbedingungen zu stellen.

KAPITEL 3. VEKTORANALYSIS 288
3.3.14 *Richtungsableitung eines Vektorfeldes
Zunächst eine Erinnerung an die Richtungsableitung eines Vektorfeldes, das aufeiner offenen Teilmenge U des Vektorraums V = Rn definiert ist. Sei X : U → Rn
ein C1-Vektorfeld. (e1, . . . en) bezeichnet wieder die Standardbasis von Rn und X =ni=1 X
iei definiert die Komponentenfunktionen von X zur Standardbasis. Ξ sei dieStandardkarte von Rn. Es gilt also X i = X i
e = X iΞ. Dann ist durch
[ei]p X = limε→0
1
ε[X (p+ εei)−X (p)] =
n
j=1
[ei]p X
j· ej =
n
j=1
∂Ξi X
jp· ej
eine Richtungsableitung von X mit dem Vektor ei definiert. Sie ist selbst vektorwer-tig. Etwas allgemeiner geht es wie folgt.
Definition 138 Für ein C1-Vektorfeld X mit offenem Definitionsbereich U ⊂ Rn
und ein Vektorfeld Y : U → Rn heißt das Vektorfeld [Y ]X, das in p ∈ U den Wert
[Y ]p X = limε→0
1X (p+ εY (p))−X (p)
ε
hat, Richtungsableitung oder kovariante Ableitung von X mit dem Vektorfeld Y. Statt[Y ]p X wird auch (∇Y X) (p) notiert.
Mit den Komponentenfunktionen zur Standardkarte ergibt sich offenbar
[Y ]p X =n
j=1
[Y ]p X
jej =
n
i,j=1
Y i (p)∂Ξi X
jp· ej
Die beiden folgenden Produktregeln sind brauchbare Rechenhilfen.
Satz 139 Seien f : U → R und X,Y : U → Rn mit U ⊂ Rn offen vom C1-Typ.Weiter seien Z : U → Rn und ein Skalarprodukt ·, · von Rn gewählt. Dann gilt
[Y ] (f ·X) = ([Y ] f) ·X + f · ([Y ]X) und [Z] X, Y = [Z]X,Y + X, [Z]Y .
Seien X, Y Vektorfelder auf dem Kartenbereich U einer beliebigen lokalen KarteΦ : U → Rn, wobei X ein C1-Vektorfeld ist. Wie drückt sich das Vektorfeld [Y ]X :U → Rn durch die partiellen Ableitungen und die Komponentenfunktionen von Xund Y bezüglich der Karte Φ aus?
Satz 140 Seien X,Y : U → Rn mit X vom C1-Typ. Φ : U → Rn sei eine lokaleKarte. Die Komponentenfunktionen des Vektorfelds X bezüglich der Kartenbasis zuΦ sind durch X =
ni=1 X
iΦ ·δΦi definiert. Analoge Bezeichnungen sind für Y gewählt.
Dann gilt mit den Zusammenhangskomponenten Γkij der Karte Φ
[Y ]X =n
k=1
n
i=1
Y iΦ
.∂Φi X
kΦ
+
n
j=1
ΓkijX
jΦ
7· δΦk . (3.37)

KAPITEL 3. VEKTORANALYSIS 289
Beweis. Es gilt
[Y ]X =n
i=1
Y iΦ
δΦiX =
n
i=1
Y iΦ
δΦi n
j=1
XjΦδ
Φj
=n
i=1
Y iΦ
δΦi n
j=1
XjΦ
n
k=1
∂Φj x
k · ek =n
i,j,k=1
Y iΦ
δΦi
XjΦ∂
Φj x
k· ek.
Verfolgen wir das Skalarfeld der RichtungsableitungδΦi
XjΦ∂
Φj x
kzunächst weiter.
Es gilt δΦi
XjΦ∂
Φj xk=∂Φi X
jΦ
∂Φj xk +Xj
Φ
∂Φi ∂
Φj x
k
und dahern
k=1
δΦi
XjΦ∂
Φj x
k· ek =
n
k=1
∂Φi Xj
Φ
∂Φj xk +Xj
Φ
∂Φi ∂Φ
j xk· ek
=n
k=1
∂Φi Xj
Φ
∂Φj xk +Xj
Φ
∂Φi ∂Φ
j xk n
l=1
∂ΞkΦ
l · δΦl
=n
l=1
.∂Φi Xj
Φ
δlj +Xj
Φ
n
k=1
∂Φi ∂Φ
j xk
∂ΞkΦ
l7· δΦl .
Somit ist gezeigt, dass [Y ]X =
n
l=1
n
i,j=1
Y iΦ
∂Φi Xj
Φ
δlj + Γl
ijXjΦ
· δΦl =
n
l=1
n
i=1
Y iΦ
.∂Φi X l
Φ
+
n
j=1
ΓlijX
jΦ
7· δΦl .
Als Spezialfall von (3.37) ergibt sichδΦiδΦj =
nl=1 Γ
lij · δΦl . Zusammen mit der
Produktregel [Y ] (fX) = ([Y ] f)X+f [Y ]X für ein Skalarfeld f und ein VektorfeldX ergibt sich daraus wieder der allgemeine Fall.
Man beachte, dass für zwei C1-Vektorfelder X, Y wegen Γlij = Γl
ji folgt, dass
[Y,X] := [Y ]X − [X]Y =n
i,j=1
Y iΦ
∂Φi X
jΦ
−X i
Φ
∂Φi Y
jΦ
· δΦj .
Die Christoffelsymbole fallen also aus dem Lieprodukt der Vektorfelder X und Yheraus! Überdies folgt für f ∈ C2 (U : R) und X, Y ∈ C1 (U : Rn) , dass [Y ] ([X] f)−[X] ([Y ] f) = [[Y,X]] f auf U gilt. Dabei bezeichnet [X] f das Skalarfeld auf U, fürdas [X] f : p → [X]p f. Die letzte Behauptung ergibt sich unter Verwendung einerKarte Φ am Kartenbereich der Karte wegen ∂Φ
i ∂Φj f = ∂Φ
j ∂Φi f so:
[Y ] ([X] f)− [X] ([Y ] f) =n
i,j=1
Y iΦ∂
Φi
Xj
Φ∂Φj f−X i
Φ∂Φi
Y jΦ∂
Φj f
=n
i,j=1
Y iΦ
∂Φi Xj
Φ
−X i
Φ
∂Φi Y j
Φ
∂Φj f = [[Y,X]] f.

KAPITEL 3. VEKTORANALYSIS 290
3.3.15 Div, Rot, Grad und ∆ in krummen Karten
Große rechnerische Bedeutung haben auch die Kartenausdrücke von Gradient, Di-vergenz, Rotation und Laplace in krummlinigen Koordinatensystemen. Der folgendeSatz gibt allgemeine Formeln an. Die Spezialisierungen auf einzelne Koordinaten-systeme sind tabelliert. [14]
Satz 141 Sei Φ : U → Φ(U) ⊂ Rn eine lokale Karte. Die Abbildungen f : U → Rund X : U → V seien vom C1-Typ. Die skalaren Komponentenfunktionen X i
Φ vonX bezüglich der Kartenbasis zu Φ sind durch X =
ni=1 X
iΦδ
Φi definiert. Dann gilt
(a) X i(p) =n
j=1
GΦ(p)
−1ij (δΦjp,X(p)
)für p ∈ U,
(b) grad (f) =n
i,j=1
∂Φi f
GΦ−1ij
δΦj ,
(c) div (X) =1√
detGΦ
n
i=1
∂Φi
√detGΦX i
Φ
,
(d) ∆f =1√
detGΦ
n
i,j=1
∂Φi
√detGΦ
GΦ−1ij
∂Φj f
für f ∈ C2.
Für n = 3 und eine Karte Φ mit positiv orientierter Kartenbasis gilt
(e) rot (X) =1√
detGΦ
3
k,l,m=1
εklm
2∂Φk
3
i=1
GΦliX
iΦ
3δΦm.
Hier ist εklm = det (ek, el, em). Für eine Karte mit negativ orientierter Kartenbasisist εklm durch −εklm zu ersetzen.
Verwunderlich ist auf den ersten Blick das Vorkommen des Skalarprodukts in derFormel für div (X). Die beiden Funktionen detGΦ zu zwei Skalarprodukten unter-scheiden sich jedoch nur um einen konstanten, positiv reellen Faktor voneinander.Dieser Faktor kürzt sich im Ausdruck für div (X) heraus, sodass div (X) nicht vonder Wahl des Skalarproduktes abhängt. Das gilt nicht mehr für die allgemeinere Si-tuation Riemann’scher Mannigfaltigkeiten anstelle von Vektorräumen. Dort ist derFaktor nicht notwendig konstant.Beweis. Zu (a): Sei δ eine beliebige Basis eines reellen Vektorraums V und sei
·, · ein Skalarprodukt von V. Die Gram’sche Matrix von ·, · zu δ sei G. Dann giltfür den Vektor X =
nj=1 X
jδj
δi,X =n
j=1
Xj δi, δj =n
j=1
XjGij .
Daraus folgt Xj =n
j=1 (G−1)
ji δi, X . Damit ist (a) gezeigt.

KAPITEL 3. VEKTORANALYSIS 291
Zu (b): Ein beliebiges Vektorfeld X =n
i=1 XiΦδ
Φi ergibt das Skalarfeld der
Richtungsableitungen von f zu
X [f ] =n
i=1
X iΦδ
Φi [f ] =
n
i=1
X iΦ∂
Φi f.
Andererseits gilt mit grad (f) =n
j=1 grad (f)j δΦj
X [f ] = grad (f) , X =n
i=1
X iΦ
&grad (f) , δΦi
'
=n
i,j=1
X iΦgrad (f)
j &δΦj , δΦi'=
n
i,j=1
X iΦgrad (f)
j GΦji.
Wähle nun das Vektorfeld X so, dass XiΦ = δik für ein k ∈ 1, . . . n . Da dies für
alle k = 1, . . . n möglich ist, folgt für alle k
∂Φk f =
n
j=1
grad (f)j GΦjk.
Somit folgt grad (f)j =n
i=1
GΦ−1ji ∂Φ
i f und (b) ist gezeigt.Der Beweis von (c) ist in Vol 3 von [4] zu finden. (d) schließlich ist durch Einsetzen
von (b) in (c) offensichtlich. (e) ist in [10] zu finden.
Kugelkoordinaten
Sei n = 3 und Φ = (r, θ, φ) Kugelkoordinaten. Dann gilt für f : U → R vom C1-Typmit der Kurznotation ∂r = ∂Φ
1 , δr = δΦ1 etc.
grad (f) = (∂rf) δr +∂θf
r2δθ +
∂φf
r2 sin2 (θ)δφ.
Insbesondere gilt: grad (r) = δr, grad (θ) = r−2δθ und grad (φ) = r−2 sin−2 (θ) δφ.Für f : U → R vom C2-Typ folgt
∆f =1
r2∂r
r2∂rf
+
1
r2 sin θ
*∂θ (sin θ · ∂θf) +
∂2φf
sin θ
+
=
∂2r +
2
r∂r +
1
r2
∂2θ + cot θ · ∂θ +
1
sin2 θ∂2φ
f.
Probieren wir diese Formeln gleich aus:1) Welche Divergenz hat das Vektorfeld δθ auf U? Es gilt
√detGΦ = r2 sin θ und
daher
div (δθ) =1
r2 sin θ∂θ
r2 sin θ
= cot θ.

KAPITEL 3. VEKTORANALYSIS 292
2) Das Potential einer geladenen Halbgerade ist Φe = ln (|·| − e, ·) mit |e| = 1.Rechnen wir nach, dass ∆Φe = 0. Mit Kugelkoordinaten (r, θ, ϕ) zur Polrichtung egilt Φe = ln (r (1− cos θ)) . Daraus folgt nun
∆Φe =
∂2r +
2
r∂r
ln r +
1
r2∂2θ + cot θ · ∂θ
ln (1− cos θ) .
Es gilt erstens∂2r +
2r∂r
ln r = (−r−2 + 2r−2) = 1/r2 und zweitens
∂2θ + cot θ · ∂θ
ln (1− cos θ) = (∂θ + cot θ)
sin θ
1− cos θ
=(1− cos θ) cos θ − sin2 θ
(1− cos θ)2+
cos θ
1− cos θ=
−1
1− cos θ+
cos θ
1− cos θ= −1.
Damit folgt nun ∆Φe = 0.
3.3.16 *Magnetfeldlinien eines Dipols 2
Das elektrische bzw magnetische Feldstärkevektorfeld eines elektrischen bzw magne-tischen Punktdipols ist bis auf einen konstanten Faktor das Gradientenfeld des ska-laren Potentials f : R3 0→ R mit f = e3, · /r3. Auf U gilt somit f = cos (θ) /r2.Im Bereich z > 0 folgt daraus f > 0 und im Bereich z < 0 hingegen f < 0.
Die Gradientenformel in Kugelkoordinaten ergibt im Kartenbereich U
grad (f) = − 1
r3
*2 cos (θ) δr +
sin (θ)
rδθ
+.
Nach stetiger Fortsetzung von U nach R3 0 zeigt sich: an den Polen ist das Feldradial und am Äquator tangential. Es folgt weiter auf U
|grad (f)| = 1
r3
(2 cos (θ))2 + (sin (θ))2 =
1
r3
1 + 3 cos2 (θ).
Das Magnetfeld B der Erde ist außerhalb der Erdkugel annähernd vom Typc · grad (f) . Daher variiert |B| auf der Erdoberfläche mit der geografischen Breite.An den Polen ist |B| maximal, am Äquator hingegen minimal und nur halb sogroß wie am Pol. Am Pol steht B senkrecht zur Erdoberfläche, am Äquator ist Btangential zum Meridian.
Eine weitere Veranschaulichung des Feldes eines Punktdipols liefern die Feldlini-en des Vektorfeldes grad (f) . Dazu sind alle maximalen Lösungen des Systems ersterOrdnung γ (t) = gradγ(t) (f) zu bestimmen. Die Bildmenge einer solchen Lösung γergibt dann eine Feldlinie oder ’Integralmannigfaltigkeit’ von grad (f) . Zwei Vek-torfelder X und Y, für die eine stetige skalare Funktion α ohne Nullstelle existiert,sodass X = αY gilt, haben aber dieselben Feldlinien. Wir gehen daher im BereichU mit cos θ = 0 vom Vektorfeld grad (f) zum Vektorfeld
X := − r4
cos θgrad (f) = 2rδr + tan (θ) δθ

KAPITEL 3. VEKTORANALYSIS 293
über. Unter Verwendung von r γ =: rγ und θ γ =: θγ nimmt nun das Systemγ (t) = X (γ (t)) die komponentenweise Form
rγ (t) = 2rγ (t) und θγ (t) = tan θγ (t)
an. Das System X entkoppelt also (lokal30) die beiden Funktionen rγ und θγ .Die Menge der maximalen Lösungen der radialen Gleichung y′ = 2y umfasst
wegen der Einschränkung des Definitionsbereiches der Differentialgleichung auf y >0 nur die Funktionen ρc : R→ R>0 mit ρc (t) = ce2t mit c ∈ R>0.
Die Polarwinkelgleichung y′ = tan y im Bereich 0 < y < π/2 ist vom Typ derseparierten Variablen. Wegen
1
tan y=
d
dyln sin y
erfüllt eine Lösung y die Gleichung ln sin y (t) = t+k für ein k ∈ R. Äquivalent dazuist
sin y (t) =et
C
für ein C ∈ R>0. Die Menge aller maximalen Lösungen imWertebereich 0 < y < π/2besteht somit aus den (bijektiven, wachsenden) Funktionen
αC : (−∞, lnC)→0,
π
2
mit αC (t) = arcsin
et
Cmit C ∈ R>0.
Eine maximale Lösung (ρc, αC) des Systems ist somit nur auf (−∞, lnC) defi-niert.31 In diesem Bereich erfüllt sie
ρc (t)
c= e2t = C sin2 αC (t) .
Damit sind die Bahnen der maximalen Integralkurven von X die Punktmengen in Umit ϕ = const und r = r0 sin
2 θ im Bereich 0 < θ < π/2. Dabei ist r0 das Supremumder Restriktion von r auf die jeweilige Bahn.
Eine analoge Überlegung im Bereich π/2 < θ < π zeigt, dass jede Bahn im ’obe-ren’ Halbraum z > 0 an genau eine Bahn im Bereich z < 0 stetig anschließt. DieFeldlinien eines Dipols im Schnitt der Ebene x = 0 mit U sind somit die Punktmen-gen in U, auf denen x = 0 und
r = r0 sin2 θ für ein r0 ∈ R>0
gilt. Dabei gibt r0 die maximale Entfernung der Feldlinie von 0 an. Nur zwei Feld-linien in R3 0 entschwinden in unendliche Entfernung, nämlich die Halbstrahlenx = y = 0 mit z > 0 bzw z < 0. Sie besitzen keine Polardarstellung. Alle anderenFeldlinien beginnen und enden in der Singularität des Nullpunktes.
30Global, werden wir gleich sehen, ist dies nicht der Fall.31Dies ist eine globale Kopplung der beiden Funktionen ργ und θγ durch das DG-System X.

KAPITEL 3. VEKTORANALYSIS 294
Eine magnetische Feldlinie, die auf einer geografischen Breite von 45 aus demErdinneren austritt, steigt wegen R = r0 sin
2 π/4 = r0/2 bis zu einer maximalenHöhe eines Erdradiuses über dem Äquator auf. Feldlinien, die im Bereich des Po-larkreises von θ = 23 ≈ 20 austreten, erreichen einen maximalen Abstand vonr0 ≈ R/ sin2 π/9 = 54455 km zum Erdmittelpunkt. Dies entspricht einer Höhe vonetwa 7, 5 Erdradien über dem Äquator. Dieser Bereich des Erdmagnetfeldes fängtdie Teilchen des Sonnenwindes ab und leitet sie zu den Polen um, wo sie tiefer in dieAtmosphäre eindringen und ihr das sanfte Leuchten der ’Aurora borealis’ entlocken.
Einige Feldlinien von grad (f) werden in Abb. 3.20 in rot gezeigt. Die grünenLinien zeigen Schnitte von Niveauflächen von f mit der Ebene x = 0. Der blaueKreis ist der Einheitskreis. Alle anderen Feldlinien enstehen aus jenen in der Ebenex = 0 durch Drehung um die z-Achse.
210-1-2
2
1
0
-1
-2
y
z
y
z
Abbildung 3.20: Punktdipol: Feldlinien (rot) und Äquipotentiale (grün)
Wir rechnen abschließend für das skalare Dipolpotential f = cos θ/r2 auf U inKugelkoordinaten noch nach, dass ∆f = 0 gilt.
∆f =1
r2∂r
r2∂rf
+
1
r2 sin (θ)[∂θ (sin (θ) ∂θf)]
=1
r2∂r
−2 cos θ
r
+
1
r4 sin (θ)∂θ
− sin2 θ
=
2 cos θ
r4− 2 cos θ
r4= 0.
Wegen f ∈ C2 (R3 0 : R) gilt somit ∆f = 0 auf ganz R3 0.
3.4 *Kartenfreie Mechanik in Galileis Raumzeit
Seit der Entdeckung von Einsteins Relativität vollzog sich die Entwicklung fun-damentaler physikalischer Theorien weitgehend am Boden einer vierdimensionalen
KAPITEL 3. VEKTORANALYSIS 295
Raumzeit mit pseudoriemannscher Geometrie. Dabei wurde zunehmend klar, dassdie kartenfreie Formulierung einer Theorie die Symmetrien derselben am klarstenhervortreten lässt. Bei einer solchen Formulierung der Naturgesetze werden alle ma-thematischen Strukturen, die den Naturgesetzen innewohnen, ja notgedrungen ex-plizit und bewusst gemacht.
Aufgrund dieser Erfahrungen erscheint es nur naheliegend, auch Newtons Mecha-nik innerhalb einer vierdimensionalen Raumzeit kartenfrei darzustellen. Dabei zeigtsich, dass Begriffe wie Bezugssystem mathematisch greifbar werden und nicht indie umrahmenden Reden verbannt werden müssen. Geschwindigkeit und Beschleu-nigung werden explizit von der Wahl eines Bezugssystems abhängig, da die Weltlinieeines Teilchens als absolutes Objekt frei von derWahl eines Bezugs- oder gar Koordi-natensytsems formuliert wird. Newtons Bewegungsgesetze abgeschlossener Systemewerden so gebildet, dass ihre Galileiinvarianz offensichtlich ist.
3.4.1 Affine Räume
Galileis flache Raumzeit, auf der Newtons Mechanik ähnlich der relativistischen Me-chanik formuliert werden soll, kann als ein spezieller affiner Raum konzipiert werden.Daher wird zunächst beschrieben, was ein affiner Raum ist. Ein solcher besitzt wieein Vektorraum einen natürlichen Fernparallelismus zwischen je zwei seiner Tan-gentialräume. Dadurch wird die Beschreibung von Differential, Vektorfeldern undkovarianter Ableitung wesentlich einfacher als für allgemeine differenzierbare Man-nigfaltigkeiten. Das entscheidende Bestimmungsstück eines affinen Raumes ist dieOperation einer Gruppe auf einer Menge.
Definition 142 Sei G eine Gruppe und M eine Menge. Die Verknüpfung zweierGruppenelemente g1, g2 ∈ G wird als g2 · g1 notiert. Das neutrale Element von Gwird durch 0 bezeichnet. Eine Abbildung µ : G×M → M heißt Linksoperation derGruppe G auf M, falls µ (g2, µ (g1, x)) = µ (g2 · g1, x) für alle g1, g2 ∈ G und für allex ∈ M. Existiert für je zwei Elemente x, y ∈ M ein g ∈ G, sodass µ (g, x) = y, dannheißt µ transitiv. Falls µ (g, x) = x für ein x ∈ M impliziert, dass g = 0, dann heißtµ frei.
Ein affiner Raum ist eine Menge M, deren Punkte aus einem beliebigen PunktvonM durch ’Schieben’ mit den Elementen eines Vektorraums hervorgehen. Genauerist damit das Folgende gemeint.
Definition 143 Sei V ein reeller Vektorraum endlicher Dimension. Bezüglich derAddition + seiner Elemente ist V eine Gruppe, (V,+) . Eine Menge M mit einerfreien und transitiven Operation µ von (V,+) auf M heißt affiner Raum.
Nach Wahl eines Punktes p in einem affinen Raum M über dem VektorraumV lässt sich somit jeder weitere Punkt q ∈ M mit einem Element v ∈ V als q =µ (v, p) ≡ p + v darstellen. Dieser durch p und q eindeutig (!) bestimmte Vektor vwird als q−p notiert, obwohl M kein Vektorraum ist. Die Dimension von V ist auch

KAPITEL 3. VEKTORANALYSIS 296
die Dimension von M als Mannigfaltigkeit. Ein Beispiel eines affinen Raumes derDimension 2 ist mit komponentenweiser Addition
M =(x, y, z) ∈ R3 : x+ y + z = 1
, V =
(x, y, z) ∈ R3 : x+ y + z = 0
.
Sei I ⊂ R ein offenes Intervall und p ∈ M ein beliebiger Punkt. Zu einer Kurveγ : I → M existiert dann genau eine Kurve γ : I → V mit γ (t) = p + γ (t) für allet ∈ I. Ist γ stetig bzw differenzierbar, dann heißt auch γ stetig bzw differenzierbar.Im Fall der Differenzierbarkeit von γ wird der Vektor dγ (t) /dt als γ (t) bezeichnet.Dieser Vektor γ (t) hängt nicht von der Wahl von p ab. Es gilt dann γ (t+ ε) =γ (t) + εγ (t) + ψ (ε) mit ψ (ε) /ε → 0 für ε → 0.
Sei f : M ⊃ U → R mit U offen in M und sei γ : I → U differenzierbar mitγ (t0) = p für ein t0 im offenen Intervall I ⊂ R. Existiert die Ableitung
d
dt(f γ) (t0) = lim
ε→0
f (p+ γ (t0 + ε))− f (p)
ε
= limε→0
fp+ γ (t0) ε
− f (p)
ε≡ [γ (t0)]p f,
wird sie als Richtungsableitung von f unter γ (t0) bezeichnet.Eine Funktion f wie oben heißt differenzierbar in p, falls eine lineare Abbildung
dpf : V → R existiert, sodass die Funktion ψ mit
f (p+ ξ) = f (ξ) + dpf (ξ) + ψ (ξ) ,
die auf einer hinreichend kleinen Umgebung von 0 definiert ist, die Bedingunglimξ→0 ψ (ξ) / |ξ| = 0 erfüllt. Dabei ist |·| irgendeine Norm von V. Die Abbildungdpf hängt, falls existent, nicht von der Wahl von |·| ab. Sie wird als das Differentialvon f im Punkt p bezeichnet.
Eine Abbildung X : M ⊃ U → V heißt Tangentenvektorfeld auf U. Genaugenommen ist ein Tangentenvektor also ein Dupel (p, v) ∈ M × V. Vielfach wirdauch v alleine als Tangentenvektor aufgefasst. Diese Vereinfachung macht hier Sinn,da die Gruppenoperation von V auf M einen kanonischen Isomorphismus zwischenden Tangentialräumen in zwei Punkten von M erzeugt.
3.4.2 Flache Galilei Raumzeit MIn einer flachen Galilei Raumzeit existiert eine Äquivalenzrelation, welche die Raum-zeit in ’instantane Räume’ gleichzeitiger Ereignisse blättert. Zusätzlich wird für jezwei instantane Räume deren zeitlicher Abstand erklärt. Diese Struktur versucht daszu formalisieren, was Newton ’absolute Zeit’ nannte. Zudem trägt jeder instantaneRaum eine euklidische Metrik. Daher das Attribut ’flach’, da ungekrümmt.
Auf eine Faserung der Raumzeit in Weltlinien gleicher Orte, wie sie in Newtonsabsolutem Raum zum Ausdruck kommt, wird verzichtet. Eine solche Struktur hatsich als unnötiger Ballast entpuppt, denn ’absolute Orte’ können in einem New-tonschen Universum aufgrund dessen Galileiinvarianz nicht identifiziert werden. Die

KAPITEL 3. VEKTORANALYSIS 297
von Maxwells Elektrodynamik vorübergehend angebotene Möglichkeit eines Äther-ruhsystems von absoluten Orten hat sich ja bekanntlich auch nicht verwirklichenlassen.
Definition 144 Im Vektorraum V eines affinen Raumes (M,V, µ) sei eine lineareAbbildung Z : V → R gewählt. (Zeitform) Im Untervektorraum V0 = kerZ von Vsei ein Skalarprodukt ·, · gewählt. Dann wird der DatensatzM = (M,V, µ, Z, ·, ·)als flache Galileische Raumzeit bezeichnet. Sind p, q ∈ M, dann heißt Z (q − p) dieZeit, die von p bis q verstreicht, oder auch Zeitdauer von p bis q. Ein Vektor v ∈ Vmit Z (v) = 1 heißt zeitnormiert. Für Z (q − p) = 0 werden p und q als gleichzeitigbezeichnet, und |q − p| =
q − p, q − p heißt Abstand zwischen den gleichzeiti-
gen Punkten p und q. Ein Vektor v ∈ V0 heißt raumartig. Sind drei Punkte q, r, sgleichzeitig, dann heißt für r = q = s die Zahl θ ∈ [0, π] mit |r − q| |s− q| cos θ =r − q, s− q der Winkel zwischen den Strecken von q nach r und von q nach s.
Die übliche koordinatenweise Formulierung der Mechanik wird durch die Wahleiner Karte vonM ermöglicht. Dabei wird meist eine an die Strukturen V, Z und ·, ·angepasste globale Karte gewählt. Eine solche Karte ’identifiziert’ M mit R × Rn.Wie sind diese Karten gebildet?
Definition 145 Eine Basis e = (e0, e1, . . . en) von V mit Z (e0) = 1, Z (ei) = 0 füri = 1, . . . n und ei, ej = δij heißt Galileibasis (G-basis) von V. Ist ein Punkt p ∈ Mgewählt, dann heißt die Abbildung Φe,p : M → Rn+1 mit
x = p +n
i=0
Φie,p (x) · ei
die zu (p, e) gehörige galileische Karte von M.
Es gilt also Φie,p (p) = 0 für i = 0, 1, . . . n.
Lemma 146 Ist Φe,p eine galileische Karte vonM, dann gilt
Z (y − x) = Φ0e,p (y)− Φ0
e,p (x) für alle x, y ∈ M und
|y − x|2 =n
i=1
Φi
e,p (y)− Φie,p (x)
2für alle gleichzeitigen x, y ∈ M.
Beweis. Zu je zwei Punkten x, y ∈ M existieren Vektoren vx, vy ∈ V, sodassx = p+ vx und y = p+ vy gilt. Daraus folgt y = x+ (vy − vx) und daher
Z (y − x) = Z (vy − vx) = Z
n
i=0
Φie,p (y) ei −
n
i=0
Φie,p (x) ei
= Φ0e,p (y)− Φ0
e,p (x) .

KAPITEL 3. VEKTORANALYSIS 298
Für Z (y − x) = 0 folgt
|y − x|2 =
$n
i=0
Φi
e,p (y)− Φie,p (x)
ei,
n
j=0
Φj
e,p (y)− Φje,p (x)
ej
%
=n
i,j=1
Φi
e,p (y)− Φie,p (x)
Φj
e,p (y)− Φje,p (x)
δij
=n
i,j=1
Φi
e,p (y)− Φie,p (x)
2.
Die Größen Zeitdauer, Abstand und Winkel berechnen sich also in allen galilei-schen Karten gleich.
3.4.3 Bewegung und Bezugssysteme in MEinen Schwarm von Teilchen fassen wir als eine Teilmenge X eines instantanenRaumes p + V0 ⊂ M einer flachen Galileischen Raumzeit M auf. Die Bewegungeines Schwarmteilchens, dh eines Punktes x ∈ X, ist dann eine stetige injektiveAbbildung γx : J → M eines reellen Intervalls J nach M, sodass x in der Bildmengevon γx enthalten ist, und diese Bildmenge jeden instantanen Unterraum von Min höchstens einem Punkt schneidet. Die Bewegung des ganzen Schwarms X wirddurch eine Schar von stetig differenzierbaren Kurven γx : J → M erfasst. Dabeiist J ⊂ R ein offenes Intervall. Für alle Kurven γx existiert oEdA ein gemeinsamest0 ∈ J, sodass γx (t0) = x für alle x ∈ X. Weiter gilt Z
γx (t)− γy (t)
= 0 für
alle x, y ∈ X und für alle t ∈ J. Überdies gelte Z (γx (t)) = 0 für alle t ∈ J. Einedifferenzierbare Kurve γ : J → M mit Z (γ (t)) = 0 für alle t ∈ J heißt zeitartig.
Durch eine Umparametrisierung der Kurven γx lässt sich offenbar immer dieZeitnormierung Z (γx (t)) = 1 für alle t ∈ J erreichen. Die Parametrisierung einerzeitartigen Kurve γx ist willkürlich und ohne physikalischen Gehalt. Die Bildmengevon γx, die sogenannte Weltline zu γx, enthält bereits die gesamte Information wie-viel Zeit zwischen dem Punkt x ∈ p + V0 und einem Punkt y = γx (t) liegt. Sie hatden Wert Z (y − x) . Der Parameterwert t spielt dabei keine Rolle.
Inertialsysteme idealisieren die Bewegung eines raumerfüllenden Schwarmes vonausdehnungslosen Referenzteilchen, die sich gegenseitig nicht beeinflussen und dieauch von keinen weiteren eventuell vorhandenen Körpern beeinflusst werden unddie sich alle in dieselbe Richtung bewegen. Die Bewegung eines derart (kräfte)freien(inertialen) Schwarmteilchens folgt einer Kurve des Typs γx : R→M mit konstanterAbleitung γx = I ∈ V und Z (I) = 1. Dabei ist x ein beliebiges Element einesinstantanen Raumes p+ V0 ⊂ M. Überdies gilt γx = γy für alle x, y ∈ p+ V0.
Etwas allgemeiner ist die Definition eines Bezugssystems als zeitnormiertes Tan-gentenvektorfeld, dessen Integralkurven die Bewegung eines idealisierten Schwarmsvon eventuell nichtinertialen Referenzteilchen beschreiben. Auch diese Integralkur-ven dienen der (lokalen) Koordinatisierung des Raumes, welche eine Einordnungdessen erlaubt, was wann wo ist.

KAPITEL 3. VEKTORANALYSIS 299
Definition 147 Ein unendlich oft differenzierbares Tangentenvektorfeld B : M →V auf einer flachen Galileischen Raumzeit M = (M,V, µ,Z, ·, ·) mit Z B = 1heißt Bezugssytem vonM. Ist B konstant, dann heißt B Inertialsystem vonM.
Zu zwei Inertialsystemen B1 und B2 existiert ein u ∈ V0, sodass B2 = B1 + u.Der raumartige Vektor u heißt Geschwindigkeit von B2 relativ zu B1.
Ein rotierendes Bezugssystem mit inertial bewegtem Drehpunkt ist für dimM =4 gegeben durch das folgende Vektorfeld. Seien eine Zahl ω ∈ R, ein Punkt p ∈ Mund Vektoren e0, n ∈ V mit Z (e0) = 1, Z (n) = 0 und |n| = 1 fest gewählt. Danngilt für alle t ∈ R und für alle v ∈ V0
B (p+ te0 + v) = e0 + ωn× v.
Die maximale Integralkurve γp+x : R→M von B mit γp+x (0) = p+x für ein x ∈ V0
erfülltγp+x (t) = p+ te0 + eωtLnx.
Sie windet sich mit derWinkelgeschwindigkeit ω·n ∈ V0 um die Integralkurve γp.DieKurve γp ist auch Integralkurve des Inertialsystems mit B = e0. Natürlich benötigtdas Vektorprodukt n× v die Wahl einer Orientierung von V0.
3.4.4 Geschwindigkeit und Beschleunigung
Mechanische Geschwindigkeit und Beschleunigung einer Weltlinie γ (J) sind durchdie Kurve γ : J → M alleine nicht festgelegt. Vielmehr gehen neben den ers-ten beiden Ableitungen von γ auch die Wahl eines Bezugssystems in die GrößenGeschwindigkeit und Beschleunigung ein. Und zwar so, dass letzere reparametrisie-rungsinvariant sind, also nur von der Weltlinie abhängen.
Sei B ein Bezugssytem und γ : J → M eine differenzierbare Kurve. Dann lässtsich jeder Vektor v ∈ V eindeutig bezüglich der direkten Summe
V = R ·B (p)⊕ V0
zerlegen. Die zu dieser Zerlegung gehörige Projektion ΠB(p) in den Raum V0 erfülltΠB(p) : V → V0, v → v − Z (v) ·B (p) .
Definition 148 Sei γ : J → M differenzierbar und zeitartig. B sei ein Bezugs-sytem. Dann heißt der Vektor vB
γ (t) ∈ V0 mit γ (t) = λB (γ (t)) + vB
γ (t)für ein
λ ∈ R 0 die Geschwindigkeit von γ an der Stelle t relativ zu B.
Aus der Definitionsgleichung von vBγ (t) folgt durch Anwendung von Z
Z (γ (t)) = λZB (γ (t)) + vB
γ (t)= λZ (B (γ (t))) + 0 = λ.
Somit gilt
vBγ (t) =
ΠB(γ(t)) (γ (t))
Z (γ (t)).
Die Geschwindigkeit einer Kurve an der Stelle t ist reparametrisierungsinvariant.

KAPITEL 3. VEKTORANALYSIS 300
Definition 149 Sei γ : J → M zwei mal differenzierbar und B ein Bezugssystem.Dann heißt der raumartige Vektor
bBγ (t) =1
Z (γ (t))
d
dtvBγ (t) ≡ vB
γ (t)
Z (γ (t))
die Beschleunigung von γ an der Stelle t ∈ J relativ zum Bezugssystem B.
Relativ zu einem Inertialsystem I spezialisieren sich Geschwindigkeit und Be-schleunigung zu
vIγ (t) =
ΠI (γ (t))
Z (γ (t))und bIγ (t) =
Z (γ (t))ΠI (γ (t))− Z (γ (t)) ΠI (γ (t))
Z (γ (t))3.
Beispiel: Sei p ∈ M und I ein Inertialsystem vonM.Dann hat die Kurve γ : R→M mit γ (t) = p+ tI wegen γ (t) = I die Geschwindigkeit vI
γ (t) = 0 relativ zu I. DieGeschwindigkeit von γ relativ zum Inertialsystem I ′ = I+u, das sich relativ zu I mitder Geschwindigkeit u bewegt, hat wegen γ (t) = I = I ′ − u den Wert vI′
γ (t) = −u.Die Beschleunigung von γ relativ zu I ′ erfüllt wegen Z (γ (t)) = Z (I ′) = 1 undwegen γ = 0
bI′
γ (t) =Z (γ (t))ΠI′ (γ (t))− Z (γ (t))ΠI′ (γ (t))
Z (γ (t))3= 0.
Lemma 150 Besteht zwischen zwei Inertialsystemen der Zusammenhang I ′ = I+umit u ∈ V0 und ist γ : J → M eine C2-Kurve, dann folgt
vI′γ (t) = vI
γ (t)− u und bI′
γ (t) = bIγ (t) für alle t ∈ J.
Insbesondere ist also die Beschleunigung relativ zu einem Inertialsystem I eineGröße, die nicht von der speziellen Wahl von I abhängt, sie ist ’absolut’. Daher kannder Index I im Fall der Beschleunigung relativ zu einem Inertialsystem gefahrlosweggelassen werden.Beweis.Die Definitionsgleichung für vI′
γ (t) ∈ V0 ist γ (t) = Z (γ (t))I ′ + vI′
γ (t).
Daher gilt
γ (t) = Z (γ (t))I ′ + vI′
γ (t)= Z (γ (t))
I + u+ vI′
γ (t)
= Z (γ (t))I + vI
γ (t).
Somit folgt vI′γ (t) + u = vI
γ (t) . Für die Beschleunigungen folgt daraus
bI′
γ (t) =ddtvI′γ (t)
Z (γ (t))=
ddt
vIγ (t)− u
Z (γ (t))=
ddtvIγ (t)
Z (γ (t))= bIγ (t) .
Sei γ : J → M zeitartig und zwei mal differenzierbar und I = e0 ∈ V einInertialsystem. Durch eine Umparametrisierung von γ lässt sich immer Z (γ) = 1

KAPITEL 3. VEKTORANALYSIS 301
herbeiführen. OEdA kann daher ein Punkt p ∈ M und ein t0 ∈ J gewählt werden,sodass eine (von I abhängige!) zwei mal d’bare Kurve xI : J → V0 existiert, für die
γ (t) = p+ (t− t0) e0 + xI (t)
für alle t ∈ J gilt. Geschwindigkeit vIγ und Beschleunigung bIγ von γ bezüglich des
Inertialsystems I erfüllen dann wegen γ = e0 + xI und γ = xI
vIγ = xI und bIγ = xI .
In dieser vereinfachten auf ein Inertialsystem abgestimmten Form wird die Bewegungvon Massenpunkten in elementaren Physiktexten meist abgehandelt.
3.4.5 Galileigruppe
Die Galileigruppe operiert als Untergruppe der Permutationsgruppe von M auf derflachen Galileiraumzeit und lässt dabei ihre Strukturelemente wie zeitliche Abstän-de zwischen Punkten, oder Winkel und Abstände zwischen gleichzeitigen Punktenunverändert.
Definition 151 Sei p ein fest gewählter Punkt in einer galileischen RaumzeitM =(M,V, µ,Z, ·, ·) . Zu einer Abbildung G : M → M existiert genau eine Abbildungg : V → V mit G (p+ v) = G (p) + g (v) für alle v ∈ V. Ist g linear und geltenZ g = Z und |·| g = |·| , dann heißt G Galileitransformation (G-trafo) von M.
Sei G eine G-trafo bezüglich eines Punktes p ∈ M und sei p′ ein weiterer Punktin M. Dann gilt für a = p′ − p ∈ V
G (p′ + v) = G (p+ a+ v) = G (p) + g (a) + g (v) = G (p′) + g (v)
für alle v ∈ V. Die Menge der G-trafos hängt also nicht von der Wahl des Referenz-punktes p ∈ M ab. Zudem hängt die zu einer G-trafo G gehörige lineare Abbildungg nicht von der Wahl von p ab. Man beachte jedoch, dass wegen
G (p′)− p′ = G (p+ a)− p− a = G (p)− p+ g (a)− a
der Translationsanteil G (p′)− p′ von G bezüglich p′ für g = ιdV von der Wahl vonp′ abhängt.
Die identische Abbildung ιdM ist wegen ιdM (p+ v) = p+ v eine G-trafo.
Satz 152 Sei G eine G-trafo von M = (M,V, µ,Z, ·, ·) . Dann gilt
Z (G (x)−G (y)) = Z (x− y) für alle x, y ∈ M und
|G (x)−G (y)| = |x− y| für alle x, y ∈ M mit Z (x− y) = 0.

KAPITEL 3. VEKTORANALYSIS 302
Beweis. Sei x = p+ a und y = p+ b. Dann folgt
Z (G (x)−G (y)) = Z (g (a)− g (b)) = Z g (a− b) = Z (a− b) = Z (x− y) .
Für x, y ∈ M mit Z (x− y) = 0 gilt Z (a− b) = 0 und somit
|G (x)−G (y)| = |g (a)− g (b)| = |g (a− b)| = |a− b| = |x− y| .
Lemma 153 SeiM = (M,V, µ, Z, ·, ·) eine galileischen Raumzeit und p, p′ ∈ M.Die Abbildung g : V → V sei linear. Die Abbildung G : M → M mit G (p+ v) =p′ + g (v) ist genau dann eine G-trafo, wenn das Bild einer G-basis von V unter gwieder eine G-basis ist.
Beweis. Sei zunächst e = (e0, e1, . . . en) eine G-basis von V und G eine G-trafo.Dann folgt wegen G (p) = p′
G (p+ e0) = p′ + g (e0) mit Z (g (e0)) = Z (e0) = 1
undG (p+ ei) = p′ + g (ei) mit Z (g (ei)) = Z (ei) = 0 für i = 1, . . . n.
Überdies gilt (Polarisierungstrick) für i, j = 1, . . . n.
g (ei) , g (ej) = ei, ej = δij .
Damit ist ge = (g (e0) , . . . g (en)) eine G-Basis von V.Seien nun e und ge = (g (e0) , . . . g (en)) G-Basen von V. Dann folgt für v =n
i=0 viei ∈ V
Z (g (v)) = v0Z (g (e0)) = v0 = Z (v) .
Es gilt also Zg = Z.Weiter folgt für v =n
i=1 viei ∈ V0, dass g (v) =
ni=1 v
ig (ei) ∈V0 und
|g (v)|2 =n
i,j=1
vivj g (ei) , g (ej) =n
i,j=1
vivjδij = |v|2 .
Es gilt also auch |·| g = |·| . Daher ist G eine G-trafo.Die lineare Abbildung g einer G-trafo G ist invertierbar, da sie eine Basis von V
auf eine Basis von V abbildet.
Satz 154 Sei M = (M,V, µ, Z, ·, ·) eine Galileiraumzeit und seien p ∈ M unda, a′ ∈ V. Die Abbildungen G,G′ : M →M mit
G (p+ v) = p+ a+ g (v) und G′ (p+ v) = p+ a′ + g′ (v) für alle v ∈ V
seien G-trafos vonM. Dann folgt für alle v ∈ V
(G′ G) (p+ v) = p+ a′ + g′ (a) + (g′ g) (v) .

KAPITEL 3. VEKTORANALYSIS 303
Beweis. Es gilt für alle v ∈ V
(G′ G) (p+ v) = G′ (p+ a+ g (v)) = G′ (p) + g′ (a) + g′ (g (v))
= p+ a′ + g′ (a) + g′ (g (v))
Wählt man in diesem Satz g′ = g−1 und a′ = −g−1 (a) , dann folgt G′ G = ιdM .Vertauscht man die Abbildungen G und G′ im Satz und wählt wiederum g′ = g−1
und a′ = −g−1 (a) , dann folgt G G′ = ιdM und somit G′ = G−1. Die Menge allerGalileitransformationen bildet somit eine Gruppe, wenn als Gruppenprodukt G′ ·Gdie Hintereinanderausführung G′ G der beiden Abbildungen G und G′ gewähltwird.
Definition 155 Die Untergruppe der Permutationsgruppe S (M) einer flachen Gali-leiraumzeit M, die von der Menge aller Galileitransformationen von M gebildetwird, heißt inhomogene Galileigruppe ΓM über M.
Nach Wahl eines Punktes p ∈ M lassen sich homogene G-trafos bezüglich pdefinieren. Gilt für ein G ∈ ΓM, dass G (p) = p, dann wird G als homogene G-trafobezüglich p bezeichnet. Die Menge aller homogenen G-trafos bezüglich p ist eineUntergruppe von ΓM. Sie wird als Stabilisatorgruppe ΓpM von p bezeichnet. Ist Ghomogen bezüglich p, dann gilt G (p+ v) = p+ g (v) für alle v ∈ V. Bezüglich einesPunktes p′ = p+ a ∈ M gilt
G (p′ + v) = G (p+ a+ v) = p+ g (a) + g (v) .
Für g (a) = a folgt dann G (p′) = p+ g (a) = p′. Eine bezüglich p homogene G-trafobraucht also bezüglich eines anderen Punktes p′ nicht homogen zu sein.
Eine weitere Untergruppe von ΓM ist die Menge der Translationen. EinG ∈ ΓMmit G (p+ v) = G (p) + v für alle v ∈ M heißt Translation. Es gilt für alle x ∈ M
G (x) = G (p+ (x− p)) = G (p) + (x− p) = x+ (G (p)− p) .
G verschiebt also jeden Punkt in M um den Vektor a = (G (p)− p) ∈ V. Man notiertdann G = Ta. Die Untergruppe der Translationen hängt also nicht von der Wahlvon p ab.
Jedes G ∈ ΓM besitzt somit eine eindeutige Zerlegung G = Ta Gp0 mit a =
G (p)− p ∈ V und Gp0 ∈ ΓpM. Man beachte jedoch, dass a von p abhängt, denn es
gilt für p′ = p+ b mit b ∈ V
G (p′ + v) = (p′ + g (v)) +G (p′)− p′
und G (p′)− p′ = G (p+ b)− p′ = G (p) + g (b)− p+ p− p′ = (G (p)− p) + g (b)− b.Somit gilt
G = Ta+g(b)−b Gp+b0 mit Gp+b
0 ∈ Γp+bM.
Sehen wir uns noch die Stabilisatorgruppe ΓpM eines Punktes p genauer an. Esgilt für G ∈ ΓpM, dass G (p+ v) = p + g (v) für alle v ∈ V, wobei die lineare Ab-bildung g : V → V die Invarianzbedingungen Z g = Z und |·| g = |·| erfüllt. Sei

KAPITEL 3. VEKTORANALYSIS 304
e0 ∈ V mit Z (e0) = 1. Jeder Vektor v ∈ V besitzt dann eine eindeutige Zerlegungder Art v = Z (v) e0 + v0 mit v0 ∈ V0. Eine lineare Abbildung g erfüllt die Inva-rianzbedingungen genau dann, wenn erstens g (v0) ∈ V0 für alle v0 ∈ V0, zweitensg|V0 ∈ O (V0) und drittens g (e0) = e0 + u für ein u ∈ V0 gilt.
Wird nach Wahl eines zeitnormierten Vektors e0 ∈ V die lineare Abbildungg : V → V mit g (e0) = e0 + u und g|V0 = R zu den Daten (u,R) ∈ V0 × O (V0) alsge0u,R und die zugehörige G-trafo in ΓpM als Gp,e0
u,R notiert, dann gilt
ΓpM =Gp,e0
u,R : (u,R) ∈ V0 ×O (V0).
Satz 156 Sind (u,R) und (u′, R′) in V0 ×O (V0) , dann gilt
ge0u′,R′ ge0
u,R = ge0u′+R′(u),R′·R.
Beweis. Es genügt die Bilder des zeitnormierten Vektors e0 und von Vektorenv ∈ V0 unter gu′,R′ gu,R zu berechnen. Es gilt unter Weglassen des Superskripts e0
gu′,R′ gu,R : e0 → gu′,R′ (e0 + u) = e0 + u′ +R′u und
gu′,R′ gu,R : v → gu′,R′ (Rv) = R′R (v) .
Die Menge der linearen Abbildungenge0u,R : (u,R) ∈ V0 ×O (V0)
ist somit ei-
ne Untergruppe der Gl (V ) . Sie ist das semidirekte Produkt der Gruppe (V0,+)mit O (V0) und wird als V0 ⋉ O (V0) notiert. Übrigens gilt als Korollar zum Satz:ge0u,R
−1= ge0
−Rtu,Rt .Die Matrix von g ≡ ge0
u,R ∈ V0 ⋉O (V0) zu einer G-basis e = (e0, e1, . . . en) erfüllt
M (g, e) =
1 0 . . . 0u1 R1
1 . . . R1n
......
. . ....
un Rn1 . . . Rn
n
=
gij
.
Entwicklung nach der ersten Zeile zeigt, dass det g = detR. Und für R ∈ O (V0) giltbekanntlich |detR| = 1.
Welcher Zusammenhang besteht zwischen zwei Galileikarten? Definitionsgemäßgilt für alle x ∈ M
p+n
i=0
Φie,p (x) · ei = p′ +
n
i=0
Φie′,p′ (x) · e′i.
Es existiert ein G ∈ ΓM mit G (p+ v) = G (p) + g (v) und g (ei) = e′i. Damit folgtfür alle x ∈ M
n
i=0
Φie′,p′ (x) · g (ei) = p− p′ +
n
i=0
Φie,p (x) · ei.

KAPITEL 3. VEKTORANALYSIS 305
Mit der Zerlegung von p− p′ ∈ V nach der Basis e folgt
n
j=0
n
i=0
Φie′,p′ (x) g
ji ej =
n
j=0
(p− p′)
j+Φj
e,p (x)ej .
Koeffizientenvergleich ergibt daher
Φie′,p′ =
n
j=0
g−1ij
(p− p′)
j+Φj
e,p
.
Vorgreifende Anmerkung: Sei für p ∈ M und eine G-basis e die alternierenden+ 1-Form
τ = dΦ0e,p ∧ dΦ1
e,p ∧ . . . ∧ dΦne,p.
Sie hängt wegen |det g| = 1 für g ∈ V0 ⋉O (V0) nur von der Orientierung von e ab,nicht aber von p oder den weiteren Details von e. Nach Wahl einer Orientierung vonV und bei Zugrundelegung einer positiv orientierten G-basis e ist die so definierteForm τ eindeutig und unabhängig von p und e. Sie dient als Volumsform der Gali-leiraumzeit zur Integration über offene Raumzeitgebiete. Sie ermöglicht es auch, dieDivergenz von Vektorfeldern auf M ohne zusätzliche Strukturen zu definieren. DieKontinuitätsgleichung etwa greift darauf zu.
3.4.6 G-trafo von Geschwindigkeit und Beschleunigung
Sei J ⊂ R ein offenes Intervall. Die C2-Kurve γ : J →M sei zeitartig. Für G ∈ ΓMistGγ die mitG galileitransformierte Kurve γ.Wie verändern sich Geschwindigkeitund Beschleunigung von G γ an der Stelle t bezüglich eines Inertialsystems I mitG? Die Antwort gibt der folgende ’Kovarianzsatz’.
Satz 157 SeiM = (M,V, µ,Z, ·, ·) eine flache Galileiraumzeit und I = e0 sei einInertialsystem vonM. Sei γ : J →M eine zeitartige C2-Kurve. Für die GalileitrafoG ∈ ΓM gelte G (p+ v) = G (p)+ g (v) für alle v ∈ V. Dann folgt für Geschwindig-keit und Beschleunigung der G-transformierten Kurve G γ mit u = g (e0)− e0
vIGγ (t) = g
vIγ (t)
+ u und bIGγ (t) = g
bIγ (t)
für alle t ∈ J.
Beweis. Die Geschwindigkeit von (G γ) in (G γ) (t) relativ zu I ist festgelegtdurch
d
dt(G γ) (t) = λ
e0 + vI
Gγ (t)mit λ = 0.
Da γ zeitartig ist, kann oEdA Z (γ (t)) = 1 für alle t ∈ J vorausgesetzt werden.Nach Wahl eines Punktes p ∈ M hat G die (eindeutige) Zerlegung G = Ta Gp
0
mit Gp0 ∈ ΓpM für ein a ∈ V. Weiter hat Gp
0 eine Darstellung als Gp0 = Gp,e0
u,R miteinem eindeutig bestimmten Paar (u,R) ∈ V0 × O (V0) . Nun gilt mit der durchγ (t) = p+ γ (t) eindeutig bestimmten Abbildung γ : J → V
(G γ) (t) = p+ a+ ge0u,R (γ (t)) .

KAPITEL 3. VEKTORANALYSIS 306
Ableiten nach t ergibt
d
dt(G γ) (t) = ge0
u,R
d
dtγ (t)
= ge0
u,R
e0 + vI
γ (t)= e0 + u+R
vIγ (t)
.
Somit gilt vIGγ (t) = R
vIγ (t)
+ u.
Für die Beschleunigung von G γ bezüglich I ergibt sich daraus wegen
d2
dt2(G γ) (t) = R
vIγ (t)
und Z (γ (t)) = 1
bIGγ (t) =Z (γ (t)) ΠI (γ (t))− Z (γ (t))ΠI (γ (t))
Z (γ (t))3= R
vIγ (t)
= R
bIγ (t)
.
Beide Resultate sind zusammengefasst in den für das Inertialsystem I = e0 und füralle G ∈ ΓM gültigen Gleichungen
vIGγ (t) = g
vIγ (t)
+ u und bIGγ (t) = g
bIγ (t)
.
Dabei gilt G (p+ v) = G (p) + g (v) für alle v ∈ V mit g (e0) = e0 + u für ein u ∈ V0
und g (v) = R (v) für alle v ∈ V0.
3.4.7 Newtons Grundgesetze der Mechanik
1. Newton I: Ein ’freies’ Teilchen, dh eines, das vom Rest der Welt unbeeinflusstist, durchläuft das Bild einer zeitartigen Kurve γ : J → M, für die bIγ (t) = 0für alle t ∈ J. Dabei ist J ⊂ R ein (evt uneigentliches) offenes Intervall und Iirgendein Inertialsystem.
2. Newton II: Ein System aus N Teilchen, das vom Rest der Welt unbeeinflusstist, wird von N (N − 1) stetigen Funktionen Fi←j : V0 ⊃ Ui←j → V0 miti = j und i, j ∈ 1, . . . N , und N reelle Zahlen mi > 0 charakterisiert. Dabeiist mit Ui←j offen in V0. Für die Funktionen Fi←j : V0 → V0 gilt dabei dieÄquivarianzbedingung
Fi←j g|V0 = g Fi←j für alle g ∈ Gal (V0) .
Jede mögliche Bewegung eines solchen Systems durchläuft das Bild einer KurveΓ = (γ1, . . . γN ) : J →MN mit Z
γi − γj
= 0 für alle i, j ∈ 1, . . . N . Da-
bei ist J ⊂ R ein (evt uneigentliches) offenes Intervall. Zudem erfüllt die KurveΓ das System von gewöhnlichen Differentialgleichungen zweiter Ordnung
mibIγi(t) =
N
j=1,j =i
Fi←j
γi (t)− γj (t)
für alle t ∈ J.
Die Funktion Fi←j heißt Kraftfunktion des Teilchens j auf das Teilchen i. DieZahl mi ∈ R>0 heißt Masse des Teilchens i und I ist irgendein Inertialsystem.Beachte: bIγi hängt nicht von I ab.

KAPITEL 3. VEKTORANALYSIS 307
3. Newton III: Für ein System aus N Teilchen, das vom Rest der Welt unbe-einflusst ist, erfüllen die Kraftfunktionen Fi←j die ’Aktio ist gleich ReaktioBedingung’ Fi←j (x) = −Fj←i (−x) . Insbesondere gilt −Ui←j = Uj←i.
Man beachte, dass dieses Regelwerk (fast offensichtlich) galileiinvariant im fol-genden Sinn ist.
Satz 158 Ist Γ = (γ1, . . . γN ) : J → MN mit Z γi − γj
= 0 für alle i, j ∈
1, . . . N eine mögliche Bewegung eines Systems mit Kraftfunktionen Fi←j : i = j ,dann ist die Kurve G Γ ebenso eine mögliche Bewegung desselben Systems.
Beweis. Es gilt GΓ = (G γ1, . . . G γN) und somit nach Newton II und demKovarianzsatz mit G (p + v) = G (p) + g (v) für ein p ∈ M und für alle v ∈ V
mibIGγi (t)−
N
j=1,j =i
Fi←j
G γi (t)−G γj (t)
= gmib
Iγi(t)−
N
j=1,j =i
Fi←j
gγi (t)− γj (t)
= g
mib
Iγi(t)−
N
j=1,j =i
Fi←j
γi (t)− γj (t)
= 0
Anmerkungen
• Newtons Grundgesetze haben keinesfalls den Status mathematischer Axiomeoder auch Sätze oder Definitionen. Vielmehr formulieren sie faktische Aussa-gen über die Natur unter Zuhilfenahme eines sehr hoch entwickelten mathe-matischen Begriffsgebäudes. Wie wir heute wissen, sind diese Aussagen strenggenommen falsch. Dennoch treffen sie einen wichtigen und großen Teil derWirklichkeit sehr genau.
• Wie stellt man fest, ob ein (System von) Teilchen frei ist? Es reagiert nicht aufÄnderungen imRest derWelt. Dazu sind wiederholte Beobachtungen ähnlicherVorgänge nötig.
• Reale Objekte eines klassisch mechanisch beschriebenen Problemkreises sindimmer ausgedehnt und zusammengesetzt. Wann ist eine Beschreibung als ’Punkt’angebracht? Wenn die Ausdehnung im Verhältnis zu den sonst vorkommendenAbständen winzig ist.
• Die angeführten Grundgesetze sind noch nicht hinreichend allgemein, denn dieauf ein Teilchen wirkende Gesamtkraft setzt sich nach dem Prinzip der unge-störten Kräfteüberlagerung ausschließlich additiv aus Paarkräften zusammen.Das Regelwerk schließt zudem geschwindigkeitsabhängige Kräfte aus. Verall-gemeinerungen existieren.

KAPITEL 3. VEKTORANALYSIS 308
• Wird einem N -Teilchensystem ein weiteres Teilchen hinzugefügt, werden dieFunktionen Fi←j für i, j ∈ 1, . . .N unverändert übernommen. Lediglich dieneuen Funktionen FN+1←j für j ∈ 1, . . . N sind einzuführen. Die FunktionenFj←N+1 für j ∈ 1, . . . N ergeben sich aus Newton III.
• Das Beispiel eines gravitativen Zweikörperproblems ergibt sich für N = 2 unddim (V ) = 4mit F1←2 (x) = −Km1m2x/ |x|3 = −F2←1 (−x) für alle x ∈ V00.Hier bezeichnet K Newtons Gravitationskonstante.
3.4.8 Die Erhaltungssätze
Durch Wahl eines Inertialsystems I = e0 und bei zeitnormierter Parametrisierungder Kurven γi gemäß γi (t) = p+(t− t0) e0+xI
i (t) mit xIi : J → V0 vereinfacht sich
die Bewegungsgleichung in Newton II zu
mixIi (t) =
N
j=1,j =i
Fi←j
xIi (t)− xI
j (t)für alle t ∈ J.
Damit folgt aus II und III:Die Kurve X : J → M (Schwerpunkt; hängt nicht von I ab!) mit m =
Ni=1 mi
und
X (t) = p+ (t− t0) e0 +1
m
N
i=1
mixIi ((t))
ist unbeschleunigt, dh es gilt bIX = 0. (Schwerpunktsatz)Die Abbildung P I : J → V0 (Gesamtimpuls bezüglich I) mit
P I (t) =N
i=1
mixIi ((t))
ist konstant. (Impulserhaltungssatz)Die Abbildung LI : J → V0 (Gesamtdrehimpuls bezüglich I) mit
LI (t) =N
i=1
mixIi (t)× xI
i ((t))
ist konstant. (Drehimpulserhaltungssatz)Zu jeder Kraftfunktion Fi←j existiert ein Potential Φi←j : V0 ⊃ Ui←j → R mit
Fi←j (x) = −gradx (Φi←j) . Die Abbildung EI : J → R (Gesamtenergie bezüglich I)mit
EI (t) =N
i=1
mi
2
,,xIi (t)
,,2 + 1
2
N
i,j=1,i=j
Φi←j
xIi (t)− xI
j (t)
ist konstant. (Energieerhaltungssatz)

KAPITEL 3. VEKTORANALYSIS 309
3.5 Übungsbeispiele
1. (Richtungsableitung ohne Differential) V sei ein reeller, 3-dimensionaler, ori-entierter Vektorraum. ·, · bezeichne ein Skalarprodukt von V und |·| die zu-gehörige Norm. Für p1, p2 ∈ V sei32
Φ : V 0→ R, x → |x|−3p1, p2 − 3 |x|−2 p1, x p2, x
.
Das radiale Einheitsvektorfeld E und das Drehvektorfeld L um R · p1 = 0 sinddie folgenden beiden Abbildungen.
E : V 0→ V, x → |x|−1 x und L : V → V, x → |p1|−1 p1 × x.
Zeigen Sie für die Richtungsableitungen von Φ unter E und unter L, also z.B.für
E [Φ] : V 0→ R, x → limε↓0
[Φ(x+ εE(x))− Φ(x)] /ε =: Ex [Φ] ,
dass für alle x ∈ V 0 gilt:
Ex [Φ] = −3 |x|−1Φ(x) und Lx [Φ] = 3 |x|−5 |p1|−1 p1, x p1 × p2, x .
Hinweis: Zeigen und benützen Sie Ex [Φ] = |x|−1 ddλΦ (λx) |λ=1. Der Umweg
über dΦ oder gradΦ ist mühsamer. Ähnliches gilt für Lx [Φ].
2. (Gradient) Sei V = R2×1 und e = (e1, e2) sei die Standardbasis. Zwei weitereBasen f und g sind durch
f1 = e1 + e2, f2 = e2,
g1 = e1 + e2, g2 = e2 − e1
gegeben. Sei Φe =φ1e, φ
2e
t= (x, y)t die kontravariante Karte zur Basis e, d.h.
es gilt idV = e · Φe. Sei h : R → R differenzierbar. Dann ist ψ : V → R mitψ = h (y − x) ein differenzierbares Skalarfeld. Sei ·, · jenes Skalarprodukt,für das e eine ONB ist.
(a) Zeigen Sie für die zu den Basen f und g gehörigen kontravarianten Karten
Φf =
1 0−1 1
· Φe und Φg =
1
2
1 1−1 1
· Φe,
Gf =
2 11 1
und Gg = 2
1 00 1
.
Skizzieren Sie einige Koordinatenlinien der drei Karten. Bestimmen Siedie Niveaulinien von ψ.
32Φ ist im SI-System 4πε0 mal der Wechselwirkungsenergie zweier elektrischer Dipolmomentep1, p2 mit dem Verbindungsvektor x.

KAPITEL 3. VEKTORANALYSIS 310
(b) Zeigen Sie für die partiellen Ableitungen von ψ
∂e1ψ = −h′ (y − x) = −∂e
2ψ,
∂f
1ψ = 0, ∂f
2ψ = h′ (y − x) ,
∂g
1ψ = 0, ∂g
2ψ = 2h′ (y − x) .
Beachten Sie: Obwohl φ1e = φ1
f gilt, gilt ∂f
1ψ = ∂e1ψ.
(c) Berechnen Sie das Gradientenvektorfeld von ψ mit der Entwicklungsfor-mel nach einer beliebigen Basis mit den drei Basen e, f und g. Kontrol-lieren Sie, dass die drei Rechnungen übereinstimmend auf grad (ψ) =h′ (y − x) (e2 − e1) führen.
(d) Berechnen Sie das Gradientenvektorfeld von ψ bezüglich jenes Skalarpro-duktes, zu dem f eine ONB ist. Lösung:
grad (ψ) = h′ (y − x) e2.
Wie kann grad (ψ) senkrecht auf die Niveaulinien von ψ stehen, wenndies auch grad (ψ) tut?
3. (Kurvenintegral) Sei V = R2 und X : V → V, (x, y) → (x2y, xy2) (Figur3.21). Berechnen Sie das Kurvenintegral von X längs γ : [0, 1] → V, t →(1− t, t2) .
53.752.51.250-1.25-2.5-3.75-5
5
3.75
2.5
1.250
-1.25
-2.5
-3.75
-5
x
y
x
y
Abbildung 3.21: Das Vektorfeld (x2y, xy2)
4. Sei (x, y) die Standardkarte von V = R2×1. Für L : V → V gelte L = (−y, x)(Drehvektorfeld). Es soll nun mit verschiedenen Methoden gezeigt werden,dass das Vektorfeld L kein Potential hat, d.h., dass keine Funktion f : V → Rexistiert, sodass L = grad (f).
(a) Direkte Methode: Zeigen Sie, dass die beiden Differentialgleichungen (be-züglich der Standardbasis) −y = ∂1f und x = ∂2f keine Lösung f haben.

KAPITEL 3. VEKTORANALYSIS 311
(b) Indirekt: Zeigen Sie, dass L nicht rotationsfrei ist.
(c) Sei γ1 : [−R,R] → V mit γ1 (t) = (t, 0) . Zeigen Sieγ1
L = 0. Sei
γ2 : [0, π] → V mit γ2 (t) = (R cos t,R sin t) . Zeigen Sieγ2
L = R2π.Warum folgt daraus, dass L kein Potential hat?
(d) Sei γ eine Kurve in V, deren Bildmenge der Rand eines achsenparallelenQuadrats mit der Seitenlänge 2ε und mit dem Mittelpunkt (a, b) ∈ V ist.Die Kurve durchlaufe den Rand im Gegenuhrzeigersinn einmal. ZeigenSie, dass
γL = 8ε2 = Doppelte Fläche des Quadrats. Das Integral ist
also unabhängig von (a, b) .
Hinweis: Die untere Seite des Quadrats kann folgendermaßen durchlaufenwerden
γ1 : [−ε, ε]→ V mit γ1 (t) = (a+ t, b− ε) .
Wählen Sie für die drei weiteren Seiten analoge Kurven.
(e) Sei nun X = 1x2+y2
L auf V 0. Sei γ wie oben eine Kurve, die denRand eines (beliebigen) Quadrats im Gegenuhrzeigersinn einmal durch-läuft. Zeigen Sie
γ
X =
2π falls (0, 0) innerhalb des Quadrats liegt0 falls (0, 0) außerhalb des Quadrats liegt
.
Falls γ durch (0, 0) führt, istγX nicht definiert. Hinweis: Auf der ge-
schlitzten Ebene gilt X = grad (φ) .
5. (Gradient, Divergenz) V sei ein n-dimensionaler reeller Vektorraum. ·, · be-zeichne ein Skalarprodukt von V und r := |·| die zugehörige Norm. BerechnenSie grad(f) und div (grad (f)) der folgenden Funktionen vom Typ f : U → Rmit U ⊂ V offen.33
(a) Sei ki ∈ V für i = 1, ...,m und f(p) :=m
i=1 ki, p2 für alle p ∈ V .
(b) f := −1rauf U = V 0. Skizzieren Sie grad(f) für n = 2.
(c) Sei e ∈ V mit |e| = 1 und f(p) := 1r(p)
e, p für alle p ∈ U = V 0. 34
(d) f = Φ mit Φ von Beispiel 1.
6. (Richtungsableitung über Gradient, Kurvenintegral) Sei U die geschlitzte Ebe-ne.
U =(x, y) ∈ R2 | y = 0⇒ x < 0
Für φ : U → (0, 2π) gelte idU = r · (cosφ, sinφ) auf U , wobei r(x, y) :=x2 + y2. Für grad (φ) (bezüglich des Standardskalarproduktes) folgt für alle
p ∈ U (siehe Beispiel 3.1.14) gradp (φ) = X(p) mit X : R2 0→ R2, (x, y) →1
x2+y2(−y, x). Figur 3.22 zeigt das Drehvektorfeld (−y, x). Achtung: Der Defi-
nitionsbereich von X ist größer als jener von grad(φ).
33Arbeiten Sie dabei entweder ohne Benützung einer Basis, also koordinatenfrei, oder mithilfeder Koordinaten des Vektorraumes zu einer ONB e. Benützen Sie die Kettenregel.
34f(p) ist also der Kosinus des Winkels zwischen e und p. Fig. 1 zeigt das Vektorfeld−xy, x2
.

KAPITEL 3. VEKTORANALYSIS 312
(a) Berechnen Sie die Abbildung X [f ] : p →&gradp (f) , X(p)
'= Xp [f ] für
alle p ∈ R2 0 zu f : R2 → R mit f(x, y) = xy. Richtungsableitung vonf bei p mit X(p).
(b) Zeigen Sie div(X) = 0 auf R2 0.
(c) Berechnen Sie das Linienintegral von X längs eines Kreises um 0 mit Ra-dius R > 0. Gibt es eine differenzierbare Funktion F , sodass grad (F ) =X auf R2 0?
Abbildung 3.22: Drehvektorfeld
7. (Divergenz, Rotation des Linienvortexfeldes) Für n ∈ V = R3 gelte |n| = 1.Auf U = V (R · n) ist das Vektorfeld
B(p) = Cn× p
|n× p|2
mit C ∈ R definiert.35 Es hat die Symmetrien: B(p + λn) = B(p) undB(R (p)) = R (B(p)) mit λ ∈ R und R Drehung um n. Beachte: |n× p| ist derAbstand zwischen p und der Achse R · n.
(a) Zeigen Sie div(B) = 0 und rot(B) = 0 auf U .
(b) Berechnen Sie mit dem Ansatz A(p) = f(|n× p|) · n (auf U) ein Vektor-potential zu B. Finden Sie also eine Lösung A von B = rot(A). Gibt esmehrere Lösungen? 36
(c) Ist B konservativ?
8. (Rotation eines allgemeinen Vortexfeldes) Sei V ein 3-dim Vektorraum. EineOrientierung und ein Skalarprodukt ·, · seien gewählt. Sei n ∈ V mit |n| = 1.Sei f : R>0 → R differenzierbar. Für X : V → V gelte für alle p ∈ V R · n
X (p) = f (|n× p|) n× p
|n× p|2.
35B ist für C = µ0I2π das Magnetfeld eines auf R · e in Richtung e fließenden Stromes der Stärke
I.36Eine Lösung ergibt sich mit f(x) = −C ln (x).

KAPITEL 3. VEKTORANALYSIS 313
Zeigen Sie
rotp (X) =f ′ (|n× p|)|n× p| n.
9. Bestimmen Sie für dim (V ) = 2 die elektrische Potentialfunktion Φp einesPunktdipols, der in 0 ∈ V sitzt, und das Dipolmoment p ∈ V hat. ÜberprüfenSie, dass ∆Φp = 0.37
Hinweis: Φp (v) ergibt sich für das Dipolmoment p = |p|·e ∈ V für alle v ∈ V 0durch den Grenzübergang
2πε0 · Φp (v) := limεց0
|p|ε
ln,,,v − ε
2e,,,− ln
,,,v +ε
2e,,,.
Rechnen Sie nach, dass 2πε0 · Φp (v) = − [p]v ln |·| = −p, v / |v|2 .
10. (Rotation in allgemeiner Basis) Sei e = (e1, . . . en) eine Basis des VektorraumsV mit dem Skalarprodukt ·, · . Das Vektorfeld X : V ⊃ U → V sei aufU differenzierbar. γij : I → U sei eine stückweise C1-Kurve. Sie durchlaufeden Rand des Parallelogramms Γij =
p+ λei + µej : λ, µ ∈
− ε
2, ε2
zuerst
in Richtung ei, dann in Richtung ej usw.
(a) Zeigen Sie, dass mit den kovarianten KomponentenfunktionenXi = ei, Xvon X und den partiellen Ableitungen ∂i = ∂e
i für p ∈ U folgt:
limε→0
1
ε2
γij
X = [∂iXj − ∂jXi] (p) .
(b) Für die n2 Zahlen Iij := [∂iXj − ∂jXi] (p) gilt Iij = −Iji und daherIii = 0. Wie viele Paare (i, j) ∈ 1, . . . n2 mit i < j gibt es? Für welchesn sind es genau n Stück?
(c) Sei nun n = 3 und e positiv orientiert. Mit einem noch unbekanntenSkalarfeld C auf U sei das Vektorfeld rotX durch
rotX = C [(∂2X3 − ∂3X2) · e1 + (∂3X1 − ∂1X3) · e2 + (∂1X2 − ∂2X1) · e3]
definiert. Kann C so gewählt werden, dass für das Flussintegral von rotXdurch Γij
limε→0
1
ε2
Γij
rotX, dfij = Iij
gilt? Lösung: C = 1/
det (Ge).
(d) Überprüfen Sie, dass rotX mit C = 1/
det (Ge) nicht von der Wahl der(positiv orientierten) Basis e abhängt.
37Φp idealisiert das Potential zweier langer, entgegengesetzt geladener, zureinander paralleler,dünner Drähte im Nahbereich der Drähte. Der Abstand der Drähte ist viel kleiner als ihre Länge.
KAPITEL 3. VEKTORANALYSIS 314
11. (Polarkoordinaten) Sei Ψ = (x, y) die Standardkarte von R2 und sei U :=R2 (a, 0) ∈ R2 : a ≥ 0 (geschlitzte Ebene). Sei Φ = (ρ, φ) die Karte derPolarkoordinaten auf U .
(a) Skizzieren sie einige Niveaulinien ρ = const bzw. φ = const.
(b) Drücken Sie die Kartenbasis in p ∈ U mit Φ (p) = (ρ0, φ0) durch dieStandardbasis aus.
(c) Zeigen Sie, dass die Funktionalmatrix∂Φj Ψ
iüberall maximalen Rang
hat.
(d) Berechnen Sie die Gram’sche Matrix38 GΦ in p ∈ U mit Φ (p) = (ρ0, φ0) .
12. (Parabolische Koordinaten) Sei Ψ = (x, y) die Standardkarte von R2 und seiU := R2 (a, 0) ∈ R2 : a ≥ 0 (geschlitzte Ebene). Für die „parabolische”Karte Φ = (u, v) gilt auf U
x =1
2
u2 − v2
, y = uv mit v > 0.
(a) Skizzieren sie einige Niveaulinien u = const bzw. v = const.
(b) Drücken Sie die Kartenbasis in p ∈ U mit Φ (p) = (u0, v0) durch dieStandardbasis aus.
(c) Zeigen Sie, dass die Funktionalmatrix∂Φj Ψ
iüberall maximalen Rang
hat.
(d) Berechnen Sie die Gram’sche Matrix GΦ in p ∈ U mit Φ (p) = (u0, v0) .
13. (grad, div, ∆ in krummlinigen Koordinaten) Seien (x, y) die Standardkoordi-naten von R2. Sei U := R2 (a, 0) ∈ R2 : a ≥ 0 .
(a) Sei f = x2 − y2 auf R2. Berechnen Sie grad (f) und ∆f (bezüglichdes Standardskalarproduktes) auf U unter Benützung von Polarkoordi-naten. Kontrollieren Sie ihre Ergebnisse durch eine zweite Berechnungvon grad (f) und ∆f unter Benützung von Standardkoordinaten. (SieheFigur 3.23)
(b) Sei f = x/ (x2 + y2) auf R20. Berechnen Sie grad (f) und∆f (bezüglichdes Standardskalarproduktes) auf U unter Benützung von Polarkoordina-ten. Kontrollieren Sie ihre Ergebnisse durch eine zweite Berechnung vongrad (f) und ∆f unter Benützung von Standardkoordinaten.
(c) Sei f = x2 + y2. Berechnen Sie grad (f) und ∆f (bezüglich des Stan-dardskalarproduktes) auf U unter Benützung von parabolischen Koordi-naten. Kontrollieren Sie ihre Ergebnisse durch eine zweite Berechnungvon grad (f) und ∆f unter Benützung von Standardkoordinaten.
38Zum Standardskalarprodukt von R2.

KAPITEL 3. VEKTORANALYSIS 315
Abbildung 3.23: Die Funktion x2 − y2
14. (grad, div, ∆ in Kugelkoordinaten) Für das Skalarfeld f : R3 0 → R geltein der Standardkarte (x, y, z) von R3 mit r =
x2 + y2 + z2
f =2xy
r5.
(f ist ein Beispiel für ein Quadrupolpotential.) Auf dem Definitionsbereich Uder Kugelkoordinaten Φ = (r, θ, φ) gilt daher
f =1
r3sin2 (θ) sin (2φ) .
0.750.50.250-0.25-0.5-0.75
0.75
0.5
0.25
0
-0.25
-0.5
-0.75
x
y
x
y
Polardiagramm von |sin (2φ)|
10.750.50.250
0.375
0.25
0.125
0
-0.125
-0.25
-0.375
zz
Polardiagramm von sin2 θ
(a) Berechnen Sie auf U bezüglich des Standardskalarproduktes die Kompo-nenten von grad (f) zur Kartenbasis von Φ.
(b) Leiten Sie aus dem Ergebnis von a) ab, dass ∆f = 0 auf U.
(c) Zeigen Sie ∆f = 0 auf R3 0 unter Verwendung der Standardkarte.
15. (rot in Kugelkoordinaten) Seien (r, φ, z) Zylinderkoordinaten im R3 und seif : R>0 → R differenzierbar. Auf dem Kartenbereich U von (r, φ, z) gelteX = f(r)
r2δφ. Zeigen Sie (unter Verwendung der Formel für die Rotation in
einem krummlinigen Koordinatensystem), dass rot (X) = f ′(r)r
(0, 0, 1) auf U.
Kapitel 4
Wahrscheinlichkeit
Schon lange erfreuen sich Menschen an Glücksspielen. Der Ausgang eines solchenSpiels ist nicht vorhersehbar und erst recht nicht beeinflussbar. Denn das Spiel machtGebrauch von Naturvorgängen, die von den Spielern nur unvollkommen gesteuertwerden können.
In der großen Welt, die uns umgibt, sind solche unabsehbaren Naturvorgängeeher die Regel als die Ausnahme, sodass sich die Physik mit diesem sogenanntenZufall auseinandersetzen muss. Jede Naturbeobachtung wird ja von unkontrollier-ten Umständen beeinflusst. Was kann also aus gestörten Beobachtungen über dieNatur eines idealisierten Systems ermittelt werden? Gibt es so etwas wie ’durch-schnittliche’ Eigenschaften von einer goßen Zahl von ähnlichen, im Detail aber dochverschiedenen Systemzuständen? Die Antwort auf derlei Fragen kommt in Reichwei-te, wenn es gelingt im Zufall Regelhaftigkeit auszumachen. Etwas verkürzt gesagtist also darüber nachzudenken, wie aus einem Glücksspiel ein sicheres Geschäft zumachen ist.
Wird ein kommerzielles Glücksspiel hinreichend oft gespielt, dann zeichnet sicheine Regelmäßigkeit ab, die eine der spielenden Parteien, in der Regel jene Partei,welche die Regeln vorschlägt, nahezu sicher zur Gewinnerin macht. Der entschei-dende Sachverhalt ist uns aus dem einfachen Würfelspiel geläufig. Ein Würfel werdeN mal geworfen. Dabei sei ni die Anzahl jener Würfe, die als Ergebnis die Augen-zahl i ergeben. Für ’hinreichend’ große Zahl N liegt dann die Häufigkeit ni/N derAugenzahl i in der ’Nähe’ von 1/6. Je größer N, umso besser ist ’in der Regel’ dieÜbereinstimmug zwischen ni/N und 1/6. Es gibt also Aussagen über die Ausgängeeiner großen Zahl von Glückspielen, die (fast) sicher wahr sind und auf die sich dahersorglos wetten lässt.
Von solchen Einsichten leben alle Kasinos und in einem übertragenen Sinn diegesamte ’statistische Physik’. Probieren Sie es aus, indem Sie mit einer großen Zahlvon Freunden gegen Zahlung von einem Euro pro Würfelversuch die Auszahlungvon zwei Euro im Falle eines geworfenen Sechsers vereinbaren. Endet ein Würfelver-such mit einer anderen Augenzahl als Sechs, gehört der Einsatz Ihnen. Nach 1000Würfelversuchen werden Sie um etwa 500 Euro reicher sein. Dass Sie um 2000 Euroärmer sind, ist zwar möglich, aber äußerst unwahrscheinlich.
Natürlich geben empirische Häufigkeiten keine mathematische Definition von
316
KAPITEL 4. WAHRSCHEINLICHKEIT 317
Wahrscheinlichkeit ab. Vielmehr geben sie ein Ziel dafür vor, was erklärt werdensoll: Man versuche, Regelmäßigkeiten in einer großen Anzahl von ähnlich gelagertenVorgängen zu erkennen und zu verstehen. Auch dann, wenn die einzelnen Vorgängevöllig regellos erscheinen mögen.
Das Galtonbrett1 lässt eine solche Regelhaftigkeit im Zufall besonders klar her-vortreten. Eine Kugel ist entlang einer vertikalen Fallstrecke immer wieder an einemHindernis (Nagel) gezwungen, vom geraden Weg nach links oder rechts um einenEinheitsschritt abzuweichen. Nach sagen wir 10 Hindernissen ist die Kugel um nSchritte horizontal versetzt, wobei −10 ≤ n ≤ 10 gilt. Der genaue Weg oder auchnur der Endversatz einer einzelnen Kugel ist nicht vorhersehbar. Lässt man abereine große Zahl von Kugeln das Brett durchfallen, dann ergibt sich ein zumindestin seinen groben Zügen reproduzierbares Muster in der Verteilung der Ankunftsorteder einzelnen Kugeln. Gewisse Zufallsgrößen werden mit wachsendem N zunehmenddeterministisch. So schwankt etwa der Prozentsatz der Kugeln mit Gesamtversatz nbei einer Wiederholung eines Experiments mit N Kugeln umso weniger, je größer Nist. Oder es geht die Wahrscheinlichkeit des Ereignisses, dass alle Kugeln denselbenEndversatz haben, mit wachsendem N gegen 0.
Der Weg einer Kugel durch ein Galtonbrett liefert ein vielfach zutreffendes Bildvom Zustandekommen eines Einzelmesswertes, in den eine ganze Reihe von zufälli-gen, unvermeidlichen Störungen Eingang findet. Die Verteilung der gestörten Ein-zelmesswerte (bei oftmaliger Wiederholung der Messung) ist in ihren groben Zügendeterminiert. Sie hat ihr Maximum nahezu sicher über dem unverfälschten Wert.
Nur Ereignisse mit Wahrscheinlichkeiten nahe bei 0 oder 1 geben die Möglich-keit zum Vergleich einer wahrscheinlichkeitsbehafteten Theorie mit Beobachtungen.Solche Ereignisse gilt es zu finden, wenn ein Wahrscheinlichkeitsmodell empirischenGehalt bekommen soll.
4.1 Endliche Wahrscheinlichkeitsräume
Etwa 300 Jahre mathematischen Räsonierens haben einen präzisen Wahrscheinlich-keitsbegriff hervorgebracht, der von empirischen Häufigkeiten und dem Versuch be-freit ist, den Zufall selbst zu definieren. Er stammt von Andrei N. Kolmogorow2 undfasst Wahrscheinlichkeit als etwas auf, das den Teilmengen einer Grundmenge Ω inähnlicher Weise zukommt, wie Volumia oder Massen den Teilen eines (physischen)Körpers zuzuweisen sind.
Allerdings ist der moderne mathematische Wahrscheinlichkeitsbegriff erstaunlichweit vom realitätsnahen Häufigkeitsbegriff entfernt. Er ist als rein mathematischerBegriff zunächst ohne jeden Bezug zur materiellen Wirklichkeit gefasst. Wie Wahr-scheinlichkeit ’gemessen’ werden kann, ist nicht mehr Teil der Definition. Dement-sprechend werden Häufigkeiten erst in einem höher entwickelten Stadium der Theorieeingeführt und erst dann wird klar werden, wie empirische Wahrscheinlichkeiten zu-
1Siehe: http://en.wikipedia.org/wiki/Bean_machineEine Simulation wird von http://www.ms.uky.edu/~mai/java/stat/GaltonMachine.html gezeigt.2http://de.wikipedia.org/wiki/Kolmogorow
KAPITEL 4. WAHRSCHEINLICHKEIT 318
mindest halbwegs sicher ermittelt werden können. Eine vollkommene Sicherheit wirdsich dabei jedoch als unerreichbar erweisen. Das wiederum löst naturphilosophischeZweifel und Fragen aus, welche die Mathematik aber unberührt lassen.3
4.1.1 Wahrscheinlichkeit als Mengenfunktion
Definition 159 Ein endlicher Wahrscheinlichkeitsraum ist eine endliche Menge Ωzusammen mit einer Funktion W : pot(Ω)→ R, sodass
(i) W (A) ≥ 0 für alle A ⊂ Ω,(ii) W (A ∪B) = W (A) +W (B) für alle A,B ⊂ Ω mit A ∩ B = ,(iii) W (Ω) = 1.
Die Elemente von Ω repräsentieren die in einem Zufallsexperiment möglichenErgebnisse, die als Versuchsausgänge bezeichnet werden. Teilmengen A ⊂ Ω heißenEreignisse und für ω ∈ Ω wird die einelementige Teilmenge ω als Elementarereignisbezeichnet. Ein EreignisA tritt in einem Zufallsexperiment genau dann ein, wenn derVersuchsausgang Element von A ist. Die Potenzmenge pot(Ω) von Ω ist die Mengealler Teilmengen von Ω. Die Funktion W , die jeder Teilmenge von Ω eine Zahlzuordnet, wird als ein Wahrscheinlichkeitsmaß (W-maß) auf Ω bezeichnet. Die ZahlW (A) heißt Wahrscheinlichkeit des Ereignisses A. Zur Beschreibung verschiedenerZufallsexperimente werden im allgemeinen verschiedene Grundmengen Ω und W-maße W benötigt.
Die Zahlen W (A) sind gemäß (i) nicht negativ. Aus (ii) folgt W () = 0. ImBeispiel eines Münzwurfs besteht Ω nur aus zwei Elementen nämlich K (Kopf) undZ (Zahl). Die Menge der Teilmengen pot(Ω) besteht aus , K , Z , K,Z = Ω.Gilt etwa bei einer (etwas ungerechten) Münze W (K) = 0, 95, dann folgt aus (ii),dass W (Z) = 0, 05. Gleichung W () = 0 sagt, dass die Wahrscheinlichkeit dafür,dass nach einem Münzwurf weder Kopf noch Zahl obenauf liegt, 0 ist.
Beispiel 160 (Würfel) Sei Ω := 1, 2, 3, 4, 5, 6 mit pi := W (i) := 1/6 für allei ∈ Ω. Nach Regel (ii) folgt W (1, 4) = W (1) + W (4) = 1
6+ 1
6= 1
3. So kann
die Wahrscheinlichkeit eines jeden Ereignisses aus den Wahrscheinlichkeiten derElementarereignisse durch Addition berechnet werden. Im Beispiel ist das Ereignis1, 4 das mathematische Bild des Ereignisses: beim einmaligen Wurf eines Würfelswird eine der beiden Augenzahlen 1 oder 4 geworfen.
Definition 161 Ein endlicher W-raum (Ω,W )mit W (ω) = 1/ |Ω| für alle ω ∈ Ωheißt Gleichverteilung. Hier bezeichnet |Ω| die Zahl der Elemente von Ω.
Ist (Ω,W ) Gleichverteilung, dann gilt für jedes A ⊂ Ω, dass W (A) = |A| / |Ω| .Gleichverteilungen werden wegen ihrer Einfachheit oft als Beispiele diskutiert, sind
3Solche Fragen werden z.B. Kapitel VIII und diversen Anhängen in Karl Popper, Logik derForschung, J CB Mohr, Tübingen, 1973, untersucht.
KAPITEL 4. WAHRSCHEINLICHKEIT 319
jedoch „winzige Inseln im Meer der Wahrscheinlichkeitsräume”. Ein gezinkter Wür-fel ist etwa durch die sechs im allgemeinen voneinander verschiedenen Elementar-wahrscheinlichkeiten 0 ≤ W (i) =: pi mit der Nebenbedingung
6i=1 pi = 1 cha-
rakterisiert. Der Extremfall eines gezinkten Würfels ist mit
pi =
1 für i = k0 sonst
für ein fest gegebenes k ∈ Ω realisiert. Dieser Würfel wirft mit Sicherheit die Au-genzahl k.
Definition 162 Ein W-maß Wk, für das gilt Wk(A) = 1 für k ∈ A und Wk(A) = 0für k /∈ A, heißt Punktmaß, lokalisiert in k.
Das Beispiel des Würfels macht klar, dass jedes Wahrscheinlichkeitsmaß W einerendlichen Menge Ω durch die endlich vielen Werte pω := W (ω) für ω ∈ Ω eindeu-tig bestimmt ist. Es gilt ja nach (ii) W (ω1, . . . ωk) = W (ω1) + . . . + W (ωk)Die Funktion p : Ω → [0, 1] , ω → pω hat einen eigenen Namen. Sie heißt Wahr-scheinlichkeitsfunktion. Falls also p auf Ω konstant ist und daher überall den Wert1/ |Ω| annimmt, ist W eine Gleichverteilung.
4.1.2 Konstruktion von Wahrscheinlichkeitsräumen
Wie kann aus einem oder mehreren Wahrscheinlichkeitsräumen ein neuer gebildetwerden? Dieser Abschnitt stellt einige wichtige Konstruktionsverfahren für dermaßen„abgeleitete“ Wahrscheinlichkeitsräume vor.
Bedingte Wahrscheinlichkeit
Zwei unterscheidbare Münzen werden geworfen. Das Ergebnis des Wurfes der erstenMünze wird mit ε ∈ 1,−1 , jenes der zweiten mit η ∈ 1,−1 bezeichnet. DieGrundmenge aller möglichen Versuchsausgänge ist somit die vierelementige MengeΩ = (ε, η) |ε, η ∈ 1,−1 . Jedes Wahrscheinlichkeitsmaß W auf Ω ist durch seineWahrscheinlichkeitsfunktion p festgelegt. Wir notieren p (1, 1) = λ, p (1,−1) = µ undp (−1, 1) = ν mit λ, µ, ν ∈ R≥0 und λ+µ+ν ≤ 1, sodass p (−1,−1) = 1−λ−µ−ν ≥ 0folgt. Die Gleichverteilung liegt genau dann vor, wenn λ = µ = ν = 1/4.
Hat das Ergebnis ε des Wurfes der ersten Münze Einfluss auf das Ergebnis η deszweiten Wurfes? Zunächst ein Wort über eine praktische und übliche Kurzschreib-weise. Das Ereignis (ε, η) ∈ Ω : ε = 1 wird kurz als das Ereignis ε = 1 bezeichnet.Für die Wahrscheinlichkeit von ε = 1 gilt unter Verwendung dieser KurznotationW (ε = 1) = W ((1, 1) , (1,−1)) = λ+ µ.
Falls nun W (ε = 1 und η = 1) = W (ε = 1) ·W (η = 1) gilt, dann hat das Er-eignis η = 1 bei Vorliegen des Ereignisses ε = 1 bezogen auf die Wahrschein-lichkeit von ε = 1 dieselbe Wahrscheinlichkeit wie im gesamten Raum Ω. DieZusatzbedingung ε = 1 hat keinen Einfluss auf die Wahrscheinlichkeit für dasEintreten von η = 1. Wegen W (η = 1) = λ + ν ist dies also genau dann der

KAPITEL 4. WAHRSCHEINLICHKEIT 320
Fall, wenn λ = (λ+ µ) (λ+ ν) gilt. Ist zB W eine Gleichverteilung, dann gilt alsoW ((1, 1)) = W (ε = 1) ·W (η = 1) .
Für W (ε = 1 = η) = W (ε = 1) · W (η = 1) aber, besteht ein stochastischerZusammenhang zwischen den Ereignissen ε = 1 und η = 1. Ein extremer Falleines solchen Zusammenhangs liegt für λ = 1/2 und µ = ν = 0 vor. Es gilt dannW (ε = 1) = 1/2 = W (η = 1) und W (ε = η) = 1. Die beiden Münzen fallen mitSicherheit auf dieselbe Seite.4
Definition 163 Zwei Ereignisse A,B ⊂ Ω eines W-raumes (Ω,W ) heißen stochas-tisch unabhängig, falls W (A ∩ B) = W (A)W (B).
Ein quantitatives Maß für den Einfluß eines Ereignisses B auf die Wahrschein-lichkeit des gemeinsamen Vorliegens von A und B gibt die folgende Definition.
Definition 164 Sei (Ω,W ) ein W-raum und B ⊂ Ω ein fest gewähltes Ereignismit W (B) > 0. Dann heißt WB(A) := W (A∩B)
W (B)die Wahrscheinlichkeit von A relativ
zu B. Oft wird statt WB(A) die Schreibweise W (A | B) benutzt und als bedingteWahrscheinlichkeit bezeichnet.
Satz 165 Die Mengenfunktion WB auf pot(Ω) ist ein W-maß auf Ω.
Beweis. (i) ist klar. Für A1, A2 ⊂ Ω mit A1 ∩A2 = gilt
WB(A1 ∪ A2) =W ((A1 ∪ A2) ∩ B)
W (B)=
W ((A1 ∩B) ∪ (A2 ∩B))
W (B)
=W (A1 ∩ B) +W (A2 ∩ B)
W (B)= WB(A1) +WB(A2).
Die Normiertheit WB(Ω) = 1 ist klar.
Mischen und Produktbildung
Satz 166 Sind Wi für i = 1, . . . n W-maße auf Ω, und sind λi für i = 1, . . . npositive reelle Zahlen mit
i λi = 1, dann ist auch W :=
ni=1 λiWi ein W-maß auf
Ω. (W wird als Mischung der Maße Wi bezeichnet.)
Beweis. (Induktion) Zunächst für n = 2: Die Bedingung (i) aus KolmogorowsDefinition ist erfüllt. (ii) folgt so: W (A∪B) = λ1W1(A∪B)+λ2W2(A∪B). Da W1
und W2 beides W-maße sind, gilt für disjunkte Mengen A und B, dass Wi(A∪B) =Wi(A) +Wi(B). Somit folgt
W (A ∪B) = λ1W1(A) + λ2W2(A) + λ1W1(B) + λ2W2(B) = W (A) +W (B).
4Liest man das Ereignis ε = 1 als „Die Person X hat mehr als 1000 Zigaretten geraucht“ undη = 1 als „Die Person X erkrankt an Lungenkrebs“, dann wird die praktische Bedeutung vonbedingten Wahrscheinlichkeiten drastisch sichtbar, denn für W ((1, 1)) > W (ε = 1) ·W (η = 1)erhöht Rauchen das Erkrankungsrisiko.

KAPITEL 4. WAHRSCHEINLICHKEIT 321
Die Normiertheit W (Ω) = 1 folgt aus W (Ω) = λ1W1(Ω) + λ2W2(Ω) = λ1 + λ2 = 1.Der Fall n > 2 kann nun mittels Induktion nach n gezeigt werden. Wir nehmen dazuan, dass für n− 1 die Behauptung gilt. Nun gilt
n
i=1
λiWi =n−1
i=1
λiWi + λnWn = (1− λn)n−1
i=1
λi
1− λn
Wi + λnWn.
Wegenn−1
i=1λi
1−λn= 1 ist gemäß Induktionsvoraussetzung W ′ :=
n−1i=1
λi1−λn
Wi einW-maß. Die Mischung der beiden Maße W ′ und Wn ist dann gemäß n = 2 einW-maß.
Die Mischung zweier W-maße λW1 + (1 − λ)W2 kann man sich so vorstellen.Beim Würfeln mit einem Würfel wird der Würfel selbst zunächst zufällig aus einerPalette von zwei Würfelsorten ausgewählt. Die Würfelsorte 1 hat die Wahrschein-lichkeit λ und ein Würfel dieser Sorte wirft gemäß W1. Die Würfelsorte 2 hat dieWahrscheinlichkeit 1− λ und ein Würfel dieser Sorte wirft gemäß W2.
Satz 167 Sind (Ωi,Wi) für i = 1, . . . n W-räume, dann existiert auf Ω1 × ... × Ωn
genau ein W-maßW , sodassW (A1×. . .×An) = W1(A1) . . .Wn(An) für alle Ai ⊂ Ωi
gilt. Notation: W = W1 × . . .×Wn („Produktmaß”).
Beweis. Jede Mengenfunktion W mit W (A1 × . . . × An) = W1(A1) . . .Wn(An)hat auf den Elementarereignissen wegen (ω1, . . . ωn) = ω1 × . . . × ωn dieeindeutig bestimmten Werte
p(ω1, . . . ωn) := W ((ω1, . . . , ωn)) =D
i
Wi (ωi) =D
i
pi (ωi) .
Über die Additivität wird W dann auf alle anderen Teilmengen von Ω eindeutigfortgesetzt. Für W (A1 × . . .× An) folgt somit
W (A1 × . . .×An) =
ω1∈A1
...
ωn∈An
p(ω1, . . . ωn) =
ω1∈A1
. . .
ωn∈An
D
i
pi (ωi)
=D
i
ωi∈Ai
pi (ωi)
=D
i
Wi(Ai).
Die Positivität von W ist klar. Die Normierungsbedingung gilt wegen
W (Ω) = W (Ω1 × . . .× Ωn) =D
i
Wi(Ωi) = 1.
Das zweimalige Werfen eines Würfels gibt ein Beispiel für das Produktmaß.Sei Ω1 = Ω2 = 1, 2, . . . 6 mit der Gleichverteilung W1 = W2 auf Ωi. Dann istp(i, j) := p1(i)p2(j) = 1
36für alle i, j. Das Produkt W1 × W2 ist also wieder eine
Gleichverteilung. Analog hat das n-malige Werfen eines Würfels denWahrscheinlich-keitsraum 1, 2, . . . 6n mit der Gleichverteilung. Sie gibt jeder Folge (ω1, . . . ωn) von

KAPITEL 4. WAHRSCHEINLICHKEIT 322
Augenzahlen dieselbe Wahrscheinlichkeit p (ω1, . . . ωn) = 6−n. Bei 10malWürfeln 10Sechser zu werfen hat also eine Wahrscheinlichkeit von 6−10 = e−10 ln 6 ≈ 1, 65 · 10−8.Wer so eine Wurffolge erlebt, wird wohl den Würfel beginnen zu untersuchen.
Ein physikalisch interessanteres Beispiel liefert das Isotopengemisch von norma-lem Wasser, halbschwerem Wasser und schwerem Wasser, also von H2O, HDO undD2O, im natürlichen Wasser. Dort kommen diese Moleküle in einem Zahlenverhält-nis von 1 : 3, 1 · 10−4 : 2, 4 · 10−8 vor. Können wir das mit einem einfachen Modellverstehen?
Bei der Bildung von Wasser bindet ein Sauerstoffatom aus dem es umgebendenIsotopengemisch an Wasserstoff zwei Wasserstoffatome. Es „zieht“ also ein Elementdes Raumes H,D × H,D . Mit der Wahrscheinlichkeit x wird ein H und mitder Wahrscheinlichkeit 1 − x = x′ wird ein D gezogen. Angenommen die Ziehungzweier Atome geschieht unabhängig, also mit dem Produktmaß, dann verbrennt dasO-Atom mit den Wahrscheinlichkeiten W ((H,H)) = x2,W ((H,D) , (D,H)) =2xx′ und W ((D,D)) = x′2 zu jeweils H2O, HDO und D2O. Die Wahrscheinlich-keiten stehen also gemäß dieser Vorstellung im Verhältnis 1 : 2x′/x : (x′/x)2 . Aus3, 1 · 10−4 = 2x′/x folgt x′/x = 1, 55 · 10−4 und damit (x′/x)2 = 2, 4 · 10−8. DasModell erklärt also den Anteil an D2O aus jenem von HDO. Der Wert von x′ ergibtsich zu x′ ≈ 1/6500. Eines von 6500 Wasserstoffatomen ist ein schweres.
Transport von W-Maßen
Satz 168 Ist (Ω,W ) ein W-raum und f : Ω → Ω′ mit Ω′ endlich. Dann ist Ω′
zusammen mit Wf : pot (Ω′) → R und Wf (A′) := W (f−1(A′)) ein W-raum. Er
heißt Transport von W unter f, oder Verteilung von f unter W.
Hier bezeichnet f−1(A′) = ω ∈ Ω |f (ω) ∈ A′ das Urbild von A′ unter f. ZurAbbildung f braucht keine inverse Abbildung zu existierenen. Für die Wahrschein-lichkeitsfunktion pf : Ω′ → [0, 1] von Wf gilt also
pf (ω′) = W (ω ∈ Ω |f (ω) = ω′) .
Beweis. Die Positivität ist klar. Zur Additivität: A,B ⊂ Ω′ disjunkt impliziertdass auch f−1(A)∩f−1(B) = . Daher und wegen f−1 (A ∪B) = f−1 (A)∪f−1 (B)gilt Wf (A ∪B) = W (f−1 (A ∪B)) = W (f−1 (A) ∪ f−1 (B)) = Wf (A) + Wf (B) .Normiertheit: Wf (Ω
′) = W (f−1(Ω′)) = W (Ω) = 1.Sei Ω := 1, .., 6 × 1, .., 6 und W die Gleichverteilung (zwei Würfel, einer
rot, einer grün). Ein Farbenblinder kann das Elementarereignis (i, j) für i = j nichtvon (j, i) unterscheiden. Er identifiziert daher für i < j die zwei Würfe (i, j) und(j, i). Sei f : Ω → Ω′ := (i, j) ∈ Ω | i ≤ j, mit f(i, j) = (i, j) falls i ≤ j undf(i, j) = (j, i) sonst. Der Farbenblinde sieht also nur das mit der Abbildung ftransportierte W-maß Wf . Es hat die Wahrscheinlichkeitsfunktion pf (i, j) =
118
füri > j und pf (i, i) =
136. Natürlich ist Wf keine Gleichverteilung.

KAPITEL 4. WAHRSCHEINLICHKEIT 323
4.1.3 Binomialverteilung
Ein weiteres Beispiel zum Produkt und Transport von W-maßen ist der N malige-Wurf einer unwuchtigen Münze. Hier ist Ω = 0, 1 mit W (1) = x ∈ [0, 1] derW-raum eines einzigen Wurfes. (Siehe auch Übungsbeispiel 14.) Der W-raum desN -maligen Wurfes ist ΩN mit dem Produktmaß WN . Es gilt WN ((ω1, ..., ωN)) =EN
i=1 W (ωi). Die Abbildung ZN : ΩN → R mit (ω1, ..., ωN) →N
i=1 ωi ordnetjeder Folge von Münzwurfausgängen (ω1, ..., ωN) die Zahl der in ihr vorkommendenEinsen zu.5 DerWertebereich von ZN ist 0, ...,N. Auf diesem ist das transportierteW-maß
WN
ZN
definiert. Es gilt
WN
ZN
(k) = WN
ω ∈ ΩN | ZN (ω) = k
= xk(1− x)N−k,,Z−1
N (k),,
= xk(1− x)N−k
Nk
.
Hier gibt der Binomialkoeffizient
Nk
:= N !
(N−k)!k!die Mächtigkeit der Menge
Z−1N (k), also die Zahl der Möglichkeiten an, genau k Einsen in einer Folge aus N
Nullen oder Einsen unterzubringen.
Definition 169 Für x ∈ [0, 1] und N ∈ N0 heißt das W-maß W auf 0, ...,N mit
W (k) := Bi(k;N, x) := xk(1− x)N−k
Nk
Binomialverteilung. (Siehe Abb. 4.1)
1007550250
0.175
0.15
0.125
0.1
0.075
0.05
0.025
0
kk
Abbildung 4.1: Bi (k;N,x) (interpoliert) für N = 100 und x = 0, 1 (grün), x = 0, 5(rot) und x = 0, 95.
5Auch der Weg einer Kugel durch das Galtonbrett kann als Element ω von ΩN aufgefasstwerden. Der Wert ZN (ω) gibt dann den Endversatz des Weges nach N Hindernissen an.

KAPITEL 4. WAHRSCHEINLICHKEIT 324
4.1.4 *Multinomialverteilung
Eine naheliegende Verallgemeinerung der Binomialverteilung ergibt sich aus einemk-elementigen W-Raum (Ω,W ) durch Übergang zum W-Raum
ΩN ,WN
. Sei Ω
also eine endliche Menge mit k Elementen: Ω = ω1, . . . ωk . W sei ein beliebigesW-Maß auf Ω. Abkürzung: W (ωi) = pi. Es gilt pi ≥ 0 und
ki=1 pi = 1.
Das W-Maß WN auf ΩN = Ω× . . .× Ω ist definiert durch
WN ((ωi1 , . . . ωiN )) = pi1 · . . . · piN .
Die Funktion Zi : ΩN → N0 mit i ∈ 1, . . . k und
Zi (ωi1 , . . . ωiN ) = δi,i1 + . . .+ δi,iN
gibt für jeden Punkt (ωi1 , . . . ωiN ) ∈ ΩN an, wieviele seiner Einträge mit ωi überein-stimmen.
Sei (n1, . . . nk) ∈ Nk0. Dann gilt WN (ω ∈ ΩN : Z1 (ω) = n1, . . . Zk (ω) = nk) =
=
N !
n1!...nk!pn11 . . . pnkk für n1 + . . .+ nk = N
0 sonst.
Dieses W-Maß auf Nk0 heißt N-te Multinomialverteilung über W. Sie ist der Trans-
port von WN unter der Abbildung (Z1, . . . Zk) : ΩN → Nk
0.Die Multinomialverteilung beantwortet Fragestellungen des Typs: Ein unfairer
Würfel wird 1000 mal geworfen. Wie groß ist die Wahrscheinlichkeit, dass dabei 155mal die Eins, 201 mal die Zwei, usw geworfen wird, wenn p1 die Wahrscheinlichkeitfür eine Eins bei einem einzigenWurf ist und p2 die ...? Oder auch diese: In einer Urnesind s1 Kugeln der Sorte 1, . . . sk Kugeln der Sorte k. Daher ist bei einer wahllosenZiehung die Wahrscheinlichkeit gleich pi = si/
kr=1 sr eine Kugel der Sorte i zu
ziehen. Werden nun N Ziehungen einer Kugel aus der Urne vorgenommen und dieKugeln jeweils vor der nächsten Ziehung in die Urne zurückgelegt, dann hat dieWahrscheinlichkeit dabei n1 Kugeln der Sorte 1, . . . nk Kugeln der Sorte k zu ziehenwelchen Wert?
4.1.5 *Hypergeometrische Verteilung
In einer Urne sind N Kugeln. Sie tragen die Nummern 1, . . . N. Davon sind dieKugeln mit den Nummern 1, . . .M weiß und die restlichen N − M Kugeln sindschwarz. Nun werden aus der Urne wahllos n Kugeln entnommen. Wie groß istdie Wahrscheinlichkeit, dass von den entnommenen Kugeln k weiße und der Restschwarze Kugeln sind? Es gilt also N,M, n ∈ N, k ∈ N0 mit M ≤ N und k ≤ n.
Jede Ziehung ω kann als n-elementige Teilmenge der Menge 1, . . . N aufgefasstwerden. Der Ereignisraum Ω ist also die Menge aller n-elementigen Teilmengen von1, . . . N . Es gilt |Ω| =
Nn
. Die Zahl aller k-elementigen Teilmengen von 1, . . .M
istMk
für k ≤ M und 0 sonst. Setzen wir für k > M die Zahl
Mk
= 0, dann
gilt für alle k ∈ N0, dass die Zahl der k-elementigen Teilmengen von 1, . . .Mgleich
Mk
ist. Die Zahl aller (n− k)-elementigen Teilmengen von M + 1, . . . N

KAPITEL 4. WAHRSCHEINLICHKEIT 325
ist dementsprechend gleichN−Mn−k
. Die Zahl aller n-elementigen Teilmengen von
1, . . . N deren Durchschnitt mit 1, . . .M die Mächtigkeit k hat, ist somit gleichMk
·N−Mn−k
. Damit ergibt sich nun für die Gleichverteilung W auf Ω, dass
W (ω ∈ Ω : |ω ∩ 1, . . .M| = k) =Mk
·N−Mn−k
Nn
.
Das W -maß auf der Menge 0, 1, . . . n mit
WN,M,n (k) =Mk
·N−Mn−k
Nn
mit N,M, n ∈ N mit M ≤ N,n ≤ N wird als hypergeometrische Verteilung zuden Parameterwerten N,M, n bezeichnet. Es entsteht aus der Gleichverteilung aufΩ durch Transport mit der Funktion
f : Ω→ 0, 1, . . . n , ω → |ω ∩ 1, . . .M| .
Hypergeometrische Verteilungen steuern die Wahrscheinlichkeit mit einem Tipbeim Lotto ’Sechs aus 45’ drei ’richtige’ zu erraten. Sie finden weiters Verwendung inder Qualitätskontrolle. Den weißen Kugeln entsprechen dabei etwa die fehlerhaftenStücke einer Produktion, den schwarzen die makellosen.
4.1.6 Erwartungswert und Varianz
Reellwertige Funktionen auf einem W-raum, sogenannte (reelle) stochastische Va-riable, haben besondere Bedeutung. Sie geben etwa bei Glücksspielen Verlust oderGewinn in Abhängigkeit vom Versuchsausgang an. Wichtige Größen sind Erwar-tungswert und Varianz einer reellen stochastischen Variable.
Definition 170 Sei (Ω,W ) ein Wahrscheinlichkeitsraum und f : Ω → R. Dannheißt fW :=
ω∈Ω f(ω)W (ω) Erwartungswert und VW (f) :=
&(f − fW )2
'W≥
0 Varianz von f unter W . Die Zahl (∆f)W :=
VW (f) heißt Streuung (oder Stan-dardabweichung) von f. Der Index W an Erwartungswert und Varianz wird wegge-lassen, wenn das Wahrscheinlichkeitsmaß W aus dem Zusammenhang klar ist.
Ein Freund(?) bietet Ihnen ein Würfelspiel an. Wird die gerade Augenzahl n ge-worfen, bezahlen Sie ihm n Euro. Wird jedoch eine ungerade Augenzahl n geworfen,erhalten Sie von ihm n Euro. Mit welchem Gewinn oder Verlust pro Spiel müssenSie bei einer großen Anzahl N von Spielen rechnen? Die Gewinnfunktion f erfüllt:f(n) = −(−1)nn. Etwas später werden wir lernen, dass im Grenzübergang N →∞die Wahrscheinlichkeit gegen 1 konvergiert, einen Gewinn pro Spiel in der Höhe vonG = f Euro zu erhalten. Es gilt somit
G =1
6(1− 2 + 3− 4 + 5− 6) = −1
2
und Sie werden das Spiel besser nicht zu oft spielen.

KAPITEL 4. WAHRSCHEINLICHKEIT 326
Satz 171 Sei Ω = 1, 2, ..., n und sei W das gleichverteilte W-maß auf Ω. Diestochastische Variable f := idΩ hat den Erwartungswert f = n+1
2und die Varianz
V (f) = n2−112
unter W .
Beweis. Es gilt f = (1/n)n
k=1 k = (1/n) · (n/2) · (n+ 1) = (n+ 1) /2. Nunzur Varianz. Es gilt V (f) = f2 − f2 = (1/n)
nk=1 k
2 − (n+ 1)2 /4. Mit
n
k=1
k2 =n (n+ 1) (2n+ 1)
6(4.1)
folgt daraus die Behauptung, denn
V (f) =(n+ 1) (2n+ 1)
6− (n+ 1)2
4= (n+ 1)
2n+ 1
6− n+ 1
4
= (n+ 1)
4n+ 2
12− 3n+ 3
12
= (n+ 1)
n− 1
12=
n2 − 1
12.
Gleichung (4.1) zeigt man durch Induktion. Für n = 1 gilt sie. Gilt (4.1) für einn ≥ 1, dann folgt daraus einerseits
n+1
k=1
k2 =n
k=1
k2 + (n+ 1)2 =n (n+ 1) (2n+ 1)
6+ (n+ 1)2
=n+ 1
6
2n2 + n+ 6n+ 6
=
n+ 1
6
2n2 + 7n+ 6
.
Andererseits gilt n+16
(n+ 2) (2(n+ 1) + 1)
=n+ 1
6
2n2 + 2n+ 4n+ 4 + n+ 2
=
n+ 1
6
2n2 + 7n+ 6
und somit Gleichung (4.1) auch für n+ 1 und damit für alle n ∈ N.Der folgende Satz listet eine Reihe nützlicher Eigenschaften von Varianz und
Erwartungswert auf. Diese Eigenschaften ersparen manche Rechnung, sind nützlichbei der Fehlersuche oder begründen, wie im Fall der Chebyshevungleichung, dieBedeutung der Varianz.
Satz 172 Sei (Ω,W ) ein Wahrscheinlichkeitsraum mit f, g : Ω→ R. Dann gilt:
1. αf + βg = α f+ β g für α, β ∈ R (Linearität)
2. min f(Ω) ≤ f ≤ max f(Ω)
3. fnW =
x∈f(Ω) xnpf(x) =
&idf(Ω)
n'Wf
mit n ∈ N0 und
pf(x) := Wf (x) = Wf−1 x
= W (ω ∈ Ω | f(ω) = x) .
(Die Wahrscheinlichkeitsfunktion von Wf , also pf : f (Ω)→ [0, 1] , heißt auchVerteilungsfunktion von f unter W )

KAPITEL 4. WAHRSCHEINLICHKEIT 327
4. fλW1+(1−λ)W2= λ fW1
+ (1 − λ) fW2(Der Erwartungswert unter einer
Mischung ist gleich der Mischung der Erwartungswerte.)
5. Wf ist Punktmaß in x ∈ f(Ω) ⇒ f = x
6. V (f) = f2 − f2 ,&(f − x)2
'= V (f) + (f − x)2 für x ∈ R (Der Er-
wartungswert der quadratischen Abweichung zwischen f und x ist minimal fürx = f .)
7. V (f) = 0 genau dann, wenn der Transport Wf ein Punktmaß ist.
8. W (ω ∈ Ω : |f(ω)− f| ≥ t) ≤ 1t2V (f) für alle positiven t. (Chebyshev Un-
gleichung)
9. VλW1+(1−λ)W2(f) = λVW1(f)+(1−λ)VW2(f)+λ (1− λ)fW1
− fW2
2(Die
Varianz unter einer Mischung ist also nicht kleiner als die Mischung der Va-rianzen.)
Beweis. Die meisten Aussagen sind direkt nachzurechnen. Wir zeigen beispiel-haft wie die Aussagen 8) und 9) zustande kommen. Zunächst zu 9): Für die Varianzvon f unter der Mischung W = λW1+(1− λ)W2 mit p (ω) = λp1 (ω)+(1− λ) p2 (ω)gilt VW (f) =
=
ω∈Ωp (ω) f (ω)2 −
ω∈Ωp (ω) f (ω)
2
= λ&f 2'1+ (1− λ)
&f 2'2− [λ f1 + (1− λ) f2]2
= λV1 (f) + (1− λ)V2 (f) + λ f21 + (1− λ) f22 − [λ f1 + (1− λ) f2]2
= λV1 (f) + (1− λ)V2 (f) + λ (1− λ)f21 − 2 f1 f2 + f22
= λV1 (f) + (1− λ)V2 (f) + λ (1− λ) [f1 − f2]2 .
Aussage 8) kann so gezeigt werden. Sei t ∈ R>0, dann gilt
V (f) =
ω∈Ω(f(ω)− f)2 p(ω) ≥
ω∈Ω, mit (f(ω)−f)2≥t2
(f(ω)− f)2 p(ω)
≥
ω∈Ω, mit (f(ω)−f)2≥t2
t2p(ω) = t2W (ω ∈ Ω | |f(ω)− f| ≥ t) .
Die Chebyshev Ungleichung gibt gelegentlich für große t eine nützliche Abschät-zung der Wahrscheinlichkeit von Ereignissen, auf denen f vom Erwartungswert min-destens um t abweicht.
Satz 173 Sei Ω = 0, 1, ..., N . Dann gilt idΩ = Nx und V (idΩ) = Nx(1 − x)unter der Binomialverteilung zum Parameter x ∈ [0, 1] .

KAPITEL 4. WAHRSCHEINLICHKEIT 328
Beweis. Der Beweis kann auf den N-maligen Münzwurf zurückgeführt werden.(Siehe unten) Der direkte Beweis geht unter Verwendung des Binomialsatzes wiefolgt. Für N = 0 gilt idΩ = Nx offensichtlich. Dann gilt für N > 0
idΩ =N
k=0
kBi(k;N, x) =N
k=1
xk(1− x)N−k N !
(k − 1)!(N − k)!
= NxN
k=1
xk−1(1− x)N−1−(k−1)(N − 1)!
(k − 1)!(N − 1− (k − 1))!
= NxN−1
j=0
xj(1− x)N−1−j (N − 1)!
j!(N − 1− j)!= Nx(1− x+ x)N−1 = Nx.
Als Vorstufe zur Varianz berechnen wir für f = idΩ den Erwartungswert von f(f−1).Sei N > 1
f(f − 1) =
N
k=0
k (k − 1)Bi(k;N, x) =N
k=2
xk(1− x)N−k N !
(k − 2)!(N − k)!
= N(N − 1)x2N−2
j=0
xj(1− x)N−2−j (N − 2)!
j!(N − 2− j)!
= N(N − 1)x2(1− x+ x)N−2 = N(N − 1)x2.
Für N = 0 und für N = 1 gilt f(f − 1) = N(N − 1)x2 offensichtlich. Damit folgtnun
V (f) =&f2'− f2 = f(f − 1)+ f − f2
= N(N − 1)x2 +Nx−N2x2 = Nx(1− x).
Für x = 0 und für x = 1 gilt V (idΩ) = 0. In genau diesen Fällen ist die Binomi-alverteilung ein Punktmaß. Für x = 0 ist sie in k = 0 lokalisiert und für x = 1 istsie in k = N lokalisiert.
4.1.7 *Kovarianz und Korrelationskoeffizient
Sei Ω eine endliche Menge von Personen, aus der eine Person durch einen Zufallsme-chanismus, also ein W-maßW, gezogen werden kann. Die Funktion m : Ω→ R ordnejeder Person ω ∈ Ω ihre Masse (in irgendeiner Einheit) zu und l : Ω → R gebe ihreLänge an. Für viele jener Personen ω, die überdurchschnittlich groß sind, nicht aberunbedingt für alle von ihnen, ist auch ihre Masse überdurchschnittlich. Wie lässtsich diese Beobachtung quantifizieren? Ein Maß für einen solchen „Parallelismus“gibt die sogenannte Kovarianz zweier Zufallsvariablen.
Definition 174 Sei (Ω,W ) ein endlicher W-raum mit den Funktionen f, g : Ω →R. Die Zahl C (f, g) = (f − f) (g − g) heißt Kovarianz von f und g.

KAPITEL 4. WAHRSCHEINLICHKEIT 329
Falls also f (ω) > f genau dann gilt, wenn g (ω) > g , dann ist die Funk-tion (f − f) (g − g) nicht negativ und erst recht ihr Erwartungswert, also dieKovarianz C (f, g) . Einige Eigenschaften der Kovarianz gibt der folgende Satz.
Satz 175 Sei (Ω,W ) ein endlicher W-raum mit reellwertigen Funktionen f, g, h.dann gilt
1. C (f, g) = fg − f g ,2. C (f, g) = C (g, f) ,
3. C (λf, g) = λC (f, g) für alle λ ∈ R4. C (f + g, h) = C (f, h) + C (g, h) ,
5. V (f + g) = V (f) + V (g) + 2C (f, g)
6. C (f, g) = 0 für jede konstante Funktion f,
7. C (f, f) = V (f) ,
8. |C (f, g)| ≤
V (f)V (g).
Beweis. Die Aussagen 1. bis 7. sind offensichtlich bzw. direkt nachzurechnen.Teil 8. folgt aus der Cauchy-Schwarz Ungleichung des Standardskalarproduktes desRn so:
C (f, g) = (f − f) (g − g) =
ω∈Ωp (ω) (f (ω)− f) (g (ω)− g)
=
ω∈Ω
p (ω) (f (ω)− f)
p (ω) (g (ω)− g)
=
ω∈Ωx (ω) y (ω) = x, y
mit x (ω) =
p (ω) (f (ω)− f) und y (ω) =
p (ω) (g (ω)− g) . Wegen V (f) =ω∈Ω p (ω) (f (ω)− f)2 = x, x folgt nun aus Cauchy Schwarz
x, y2 ≤ x, x y, ydie Ungleichung
C (f, g)2 ≤ V (f)V (g)
und somit Aussage 8.Aufgrund von Teil 8. des Satzes liegt der sogenannte Korrelationskoeffizient
K (f, g) =C (f, g)V (f)V (g)
im Intervall [−1, 1] . Offenbar gilt K (f, f) = 1 und K (f,−f) = −1. Überdies ist Kinvariant unter einer Umskalierung der Funktionen f oder g, d.h. es gilt für λ > 0
K (λf, g) = K (f, λg) = K (f, g) .
Der Korrelationskoeffizient von Länge undMasse für die Elemente ω einer Menschen-menge Ω ist somit unabhängig von den gewählten Längen- und Masseneinheiten.

KAPITEL 4. WAHRSCHEINLICHKEIT 330
4.1.8 Das Gesetz der großen Zahl
Dieser Abschnitt zeigt wie in einemWahrscheinlichkeitsmodell Ereignisse mit Wahr-scheinlichkeit sehr nahe bei 1 identifiziert werden können. Solche Ereignisse gebendie Möglichkeit ein Wahrscheinlichkeitsmodell an der beobachteten Wirklichkeit zuüberprüfen.
Definition 176 Sei (Ω,W ) ein Wahrscheinlichkeitsraum mit den Funktionen fi :Ω → Xi für i = 1, . . . , n. Die Funktionen fi heißen stochastisch unabhängig, fallsfür alle Ai ⊂ Xi gilt W
f−11 (A1) ∩ . . . ∩ f−1n (An)
=En
i=1 Wf−1i (Ai)
.
Sei (Ω,W ) ein Wahrscheinlichkeitsraum mit den unabhängigen reellwertigenFunktionen f und g. Welche Wahrscheinlichkeitsfunktion pf+g hat Wf+g? Es giltfür x ∈ f (Ω) + g (Ω) ⊂ R
pf+g (x) = W (ω ∈ Ω |f (ω) + g (ω) = x) .
Aus der Darstellung
ω ∈ Ω |f (ω) + g (ω) = x =F
a∈f(Ω)(ω |f (ω) = a ∩ ω |g (ω) = x− a)
=F
a∈f(Ω)
f−1 (a) ∩ g−1 (x− a)
als disjunkte Vereinigung folgt mit der Additivität von W und der Unabhängigkeitvon f und g
pf+g (x) =
a∈f(Ω)Wf−1 (a) ∩ g−1 (x− a)
=
a∈f(Ω)Wf−1 (a)
Wg−1 (x− a)
=
a∈f(Ω)pg (x− a) pf (a) =
a∈f(Ω)∪g(Ω)pg (x− a) pf (a) = (pg ∗ pf) (x) .
Die Funktion pg ∗ pf : f (Ω) + g (Ω) → [0, 1] wird als die Faltung von pg mit pf ander Stelle x bezeichnet. Substituiert man x− a = b, so ergibt sich auch
pf+g (x) =
b∈f(Ω)∪g(Ω)pf (x− b) pg (b) = (pf ∗ pg) (x) .
Satz 177 Seien (Ωi,Wi) für i = 1, . . . , n Wahrscheinlichkeitsräume mit Fi : Ωi →Xi. Am Produktraum Ω := Ω1×. . .×Ωn mit dem ProduktmaßW sind die Funktionenfi := Fi pri mit pri(ω1, . . . , ωn) := ωi stochastisch unabhängig.
Beweis. Es gilt einerseits Wf−11 (A1) ∩ . . . ∩ f−1n (An)
=
= W ((ω1, . . . , ωn) ∈ Ω | F1(ω1) ∈ A1, . . . , Fn(ωn) ∈ An)= W
F−11 (A1)× . . .× F−1
n (An)=D
i
Wi
F−1
i (Ai).

KAPITEL 4. WAHRSCHEINLICHKEIT 331
Andererseits gilt Wf−1i (Ai)
=
= W ((ω1, . . . , ωn) ∈ Ω | Fi(ωi) ∈ Ai) = WΩ1 × . . .× F−1
i (Ai)× . . .× Ωn
= W1 (Ω1) · . . . ·Wi
F−1
i (Ai)· . . . ·Wn (Ωn) = Wi
F−1
i (Ai)
Somit folgt die Bedingung für die stochastische Unabhängigkeit, nämlich
Wf−11 (A1) ∩ ... ∩ f−1n (An)
=D
i
Wf−1i (Ai)
.
Im Fall eines ungezinkten Würfels sind Augenzahl und Quadrat der Augenzahlnicht stochastisch unabhängig. Sei f (ω) := ω und g := f 2. Somit gilt f−1 (1) =1 und g−1 (4) = 2 . Daraus folgt
0 = Wf−1 (1) ∩ g−1 (4)
= W
f−1 (1)
Wg−1 (4)
= 1/36.
Satz 178 Sei (Ω,W ) ein Wahrscheinlichkeitsraum und fi : Ω → R für i = 1, ..nseien stochastisch unabhängig. Sei k1, . . . , kn ∈ N0. Dann gilt
((f1)
k1 ... (fn)kn)=
nD
i=1
((fi)
ki)und V (f1 + ...+ fn) =
n
i=1
V (fi).
Beweis.((f1)
k1 ... (fn)kn)=
ω∈Ω (f1(ω))k1 · ... · (fn(ω))kn W (ω)
=
x1∈f1(Ω)...
xn∈fn(Ω)(x1)
k1 · ... · (xn)kn W
f−11 (x1) ∩ ... ∩ f−1n (xn)
=
x1∈f1(Ω)...
xn∈fn(Ω)(x1)
k1 · ... · (xn)kn W
f−11 (x1)
· ... ·W
f−1n (xn)
=
x1∈f1(Ω)(x1)
k1 Wf−11 (x1)
· ... ·
xn∈fn(Ω)(xn)
kn Wf−1n (xn)
=nD
i=1
((fi)
ki)
Für die Varianz gilt V (f1 + ...+ fn) =
=
$n
i=1
fi
2%−$
n
i=1
fi
%2
=n
i=1
&f 2i
'+
n
i,j=1,i=j
fifj −
n
i=1
fi2
=n
i=1
&f 2i
'+
n
i,j=1,i=j
fifj −n
i=1
fi2 −n
i,j=1,i=j
fi fj
=n
i=1
&f 2i
'−
n
i=1
fi2 =n
i=1
V (fi)

KAPITEL 4. WAHRSCHEINLICHKEIT 332
Sind zwei Funktionen f, g : Ω → R unter dem W-Maß W auf Ω stochastischunabhängig, dann gilt also f · g = f · g . Umgekehrt folgt jedoch aus f · g =f · g nicht, dass f und g stochastisch unabhängig sind. Dazu ein Gegenbeispiel.
Sei W : pot (Ω) → [0, 1] die Gleichverteilung auf Ω = 1, 2, 3 . Es gilt alsoW (ω) = 1/3 für alle ω ∈ Ω. Die Funktionen f, g seien wie folgt gewählt:
f (1) = 1, f (2) = 0, f (3) = −1,g (1) = 0, g (2) = 1, g (3) = 0.
Somit gilt f · g = 0 and f = 0, g = 1/3. Daraus folgt weiter, dass f · g =f · g . Die Funktionen f und g sind somit unkorreliert.
Die Ereignisse A = 1 ⊂ Ω und B = 2 ⊂ Ω erfüllen
A = f−1 (1) = ω : f (ω) = 1 and B = g−1 (1) = ω : g (ω) = 1 .
A und B haben beide die Wahrscheinlichkeit 1/3, sind aber disjunkt, sodass
Wf−1 (1) ∩ g−1 (1)
= 0 = (1/3)2 = W
f−1 (1)
·W
g−1 (1)
.
f und g sind also stochastisch abhängig und dennoch unkorreliert. Der Transportvon W unter der Abbildung f × g ist dementsprechend auch kein Produktmaßauf f (Ω) × g (Ω) . Für die W-Funktion pf×g von Wf×g gilt vielmehr die folgendeTabelle, aus der ersichtlich ist, dass die beiden Zeilen pf×g (x, 0) und pf×g (x, 1)linear unabhängig sind. Im Fall eines Produktmaßes wären sie linear abhängig.
pf×g (x, y) x = −1 x = 0 x = 1y = 0 1/3 0 1/3y = 1 0 1/3 0
Beispiel 179 Die Seitenlängen x und y eines Rechtecks werden aus den Vielfa-chen i · L einer Längeneinheit L > 0 mit i ∈ Ω1 = 1, 2, . . . 6 gewürfelt. DerWahrscheinlichkeitsraum ist also Ω = Ω1 × Ω1 mit der Gleichverteilung W. Wel-chen Erwartungswert und welche Varianz haben Fläche und Umfang der Rechtecke?Welche Kovarianz haben Fläche und Umfang?
Das Rechteck (i, j) hat die Fläche A (i, j) = L2ij und den Umfang U (i, j) =2L (i+ j) . Also ergeben sich mit x (i, j) = Li und y (i, j) = Lj die Erwartungswerte
U = 2 (x+ y) = 4 x = 14L,
A = xy = x y = x2 = L249
4,
von Umfang und Fläche. Für die Varianz des Umfangs folgt
V (U) = 4 (V (x) + V (y)) = 8V (x) = 8L235
12=
70
3L2.

KAPITEL 4. WAHRSCHEINLICHKEIT 333
Für die Varianz der Fläche folgt
V (A) =&x2y2
'− xy2 =
&x2' &
y2'− x2 y2 =
&x2'2 − x4
=V (x) + x2
2 − x4 = V (x)2 + 2V (x) x2 = V (x)V (x) + 2 x2
= L4
35
12
35
12+
49
2
= L4
35
12
7
2
5
6+ 7
= L4
35
12
247
5≈ 79. 965L4.
Die Kovarianz von Umfang und Fläche ergibt sich daraus so
UA = 2 (x+ y)xy = 2&
x2y'+&xy2'
= 4&x2'x = 4
V (x) + x2
x
= 4L3
35
12+
49
4
7
2
C (U,A) = UA − U A = 4L3
35
12+
49
4
7
2− 14L349
4
= 14L3
*35
12+
49
4
− 49
4
+= L37
35
6= L372
5
6.
Daraus folgt nun der Korrelationskoeffizient
K (U,A) =C (U,A)V (U)V (A)
=72 5
6 703
3512
3512
+ 492
=72 5
6 73
1221035 · 47
= 2
/105
470≈ 0.945 31.
Beispiel 180 Ein ungezinkter Würfel wird 1000 mal geworfen. Lässt sich die Wahr-scheinlichkeit abschätzen, mit der die Summe der geworfenen Augenzahlen vom Er-wartungswert 3500 um mindestens 1000 abweicht? Chebyshevs Ungleichung gibt eineAntwort. Sei Ω = 1, . . . 6 und Wn die Gleichverteilung auf Ωn. Sei fn : Ωn → Rmit fn (ω1, . . . ωn) =
ni=1 ωi. Dann gilt
Wn
ω ∈ Ωn :
,,fn (ω)− fnWn
,, ≥ t≤ VWn (fn)
t2.
Mit fnWn= n f1W1
= n · 7/2 und VWn (fn) = nVW1 (f1) = n36−112
folgt daraus
Wn
ω ∈ Ωn :
,,,,fn (ω)− n7
2
,,,, ≥ t
≤ n
t235
12.
Wählen wir nun n = 1000 und t = 1000, dann ergibt sich
Wn
ω ∈ Ωn :
,,,,f1000 (ω)− 10007
2
,,,, ≥ 1000
≤ 35
12000≈ 2, 9 · 10−3.

KAPITEL 4. WAHRSCHEINLICHKEIT 334
Der folgende Satz baut das vorangehende Beispiel zu einem allgemeinen Resultataus. Er zeigt, wie bei einer großen Anzahl von Wiederholungen eines Zufallsexperi-ments Mittelwerte gebildet werden können, deren Varianzen gegen 0 gehen. Er bildetsomit eine Version des „Gesetzes der großen Zahl“.
Satz 181 Sei (Ω1,W1) ein endlicher Wahrscheinlichkeitsraum und f : Ω1 → R.Dann gilt für die Funktionen fi = f pri auf (Ωn
1 ,W1 × . . .W1)
VWn
1
n
i
fi
=
1
nVW1 (f) .
Beweis. Sei Ωn := (Ω1)n und Wn := W1 × . . . ×W1 mit den Funktionen fi :=
f pri. Sie sind stochastisch unabhängig. Es folgt zunächst((fi)
k)Wn
=((f)k
)W1
für i = 1, ..., n und k ∈ N0. Wegen
1
n
n
i=1
fi (ω1, ..., ωn) =1
n
n
i=1
f (ωi)
heißt 1n
i fi(ω) für ω ∈ Ωn der Mittelwert von f in der Folge ω = (ω1, ..., ωn) von
n Elementen ωi ∈ Ω1. Aus der Linearität des Erwartungswertes folgt$1
n
n
i=1
fi
%
Wn
= fW1.
Aus der Formel für die Varianz einer Summe von stochastisch unabhängigen Varia-blen folgt
VWn
1
n
i
fi
=
1
n2VWn
i
fi
=
1
n2
i
VWn (fi) =1
n2nVW1 (f) .
Beispiel 182 Sei Ω = 0, 1 mit W (1) = x ∈ [0, 1] (gezinkter Münzwurf, Kern-zerfall, ...). Wn sei das Produktmaß auf Ωn. Wir wissen schon, dass der Transportvon Wn mit der Funktion
Zn : Ωn → 0, 1, .., n , (ω1, ..ωn) →n
k=1
ωi =n
k=1
pri (ω1, ..ωn) ,
die Binomialverteilung mit Parameter x auf 0, 1, .., n ist. Es gilt also
(Wn)Zn (k) = Bi(k;n, x).
Da die Funktionen pri stochastisch unabhängig sind, folgt
ZnWn=
n
k=1
priWn= nx und VWn (Zn) = nx(1− x).

KAPITEL 4. WAHRSCHEINLICHKEIT 335
Also stimmen ZnWnund VWn (Zn) mit Erwartungswert und Varianz von id unter
der Binomialverteilung überein:
ZnWn= id(Wn)Zn
, VWn (Zn) = V(Wn)Zn(id) .
Dies ist also eine etwas indirekte, zweite Möglichkeit, Erwartungswert und Varianzvon id unter der Binomialverteilung zu berechnen.
Aus Satz 181 folgt, dass für n → ∞ die Varianz des Mittelwerts gegen 0 geht,der Mittelwert wird also deterministisch. Auf solche Mittelwerte von f läßt sich mitwenig Risiko wetten! Man beachte dazu auch die Übungsbeispiele 14, 15.
Satz 181 lässt sich noch weiter auswerten. Wähle dazu ein Element x ∈ Ω1 unddie zugehörige Indikatorfunktion
f = δx : Ω1 → R, ω →
1 für ω = x0 sonst
.
Für den Erwartungswert von f gilt fW1= W1 (x) = p(x). Er gibt also die
Wahrscheinlichkeit des Elementarereignisses x an. Die Funktioni fi auf Ωn gibtfür ω := (ω1, ..., ωn) ∈ Ωn an, wie oft x ∈ Ω1 in ω auftritt. Der Quotient hn,x(ω) :=1n
i fi(ω) heißt die relative Häufigkeit von x in der Folge ω von n Zufallsereignissen.
Es gilt hn,xWn= p(x). Wegen
VWn (hn,x) =
ω∈Ωn(hn,x (ω)− p(x))2 Wn (ω)→ 0
bei n →∞, gilt für jedes feste ε > 0 nach der Ungleichung von Chebyshev, dass
limn→∞
Wn (ω ∈ Ωn | |hn,x(ω)− p(x)| > ε) = 0.
Deshalb nähert für genügend großes n ein einzelner „zufälliger”6 Wert hn,x(ω) dieWahrscheinlichkeit W1 (x) mit „großer” Wahrscheinlichkeit. Diese mathemati-schen Fakten („Gesetz der großen Zahl”) bilden die Basis für die Benützung vonWahrscheinlichkeit in den empirischen Wissenschaften.
Ein Beispiel liefert das radioaktive Zerfallsgesetz. Eine Probe enthalte zur Zeitt = 0 eine Anzahl von n0 instabilen Kernen. Für jeden dieser Kerne sei die Wahr-scheinlichkeit zur Zeit t > 0 noch unzerfallen zu sein, durch pt = e−λt gegeben. DieKonstante λ > 0 heißt Zerfallskonstante. Sie hängt nicht von t ab. Die Zahl der zurZeit t noch unzerfallenen Kerne in der Probe erfüllt somit für großes n (mit hoherWahrscheinlichkeit)
nt ≈ n0e−λt.
Für die Zahl Z der Kerne, die zwischen t und t+ τ zerfallen, gilt für λτ ≪ 1
nt − nt+τ ≈ n0e−λt1− e−λτ
≈ λτn0e
−λt.
6Dh jedes Element der Folge ω wird von einem Zufallsgenerator erzeugt, der durch W1 beschrie-ben ist. Man denke etwa an eine Folge von Würfelexperimenten.

KAPITEL 4. WAHRSCHEINLICHKEIT 336
Für die Aktivität At der Probe zur Zeit t gilt somit
At =nt − nt+τ
τ≈ λn0e
−λt.
Das Gesetz der großen Zahl bildet auch den Ausgangspunkt der mathematischenStatistik, Fehlerrechnung und Schätztheorie. Dort geht es um die Frage, wie aus end-lich vielen Zufallsexperimenten die Verteilung einer Funktion f mit möglichst großerWahrscheinlichkeit richtig zu erraten ist. Immer gehen dabei Hypothesen über denTyp des Maßes Wf ein, und ermittelt werden Parameter, die das Maß dann nurmehr im Detail bestimmen. (Achtung: Oft hat man keine klare Vorstellung vom De-finitionsbereich von f.) Eine rezeptartige Zusammenfassung der für die statistischeAuswertung von Messreihen wichtigen Formeln ist in Kapitel 12 von K. Weltner,Mathematik für Physiker 1, Springer 2001, gegeben. Einige Resultate sind die fol-genden. Die beste Schätzung des Erwartungswertes f ist der Mittelwert
f :=f1 + ...+ fn
n
der aus den n zur Verfügung stehenden (unabhängigen) Stichproben von Wertenfi := f(ωi) ∈ R, der einen(!) Funktion f zu bilden ist. Die beste Schätzung derVarianz V (f) ist aus der mittleren quadratischen Abweichung
s2 :=1
n
n
i=1
fi − f
2
mit nn−1s
2 gegeben. Beachte: Die auf R definierte differenzierbare Abbildung S, dasPolynom zweiten Grades
S : x → 1
n
n
i=1
(fi − x)2 ,
hat bei x = f ihr globales Minimum. Denn
S ′(x) = −2
n
n
i=1
(fi − x) = −2(f − x)
und somit S ′(x) = 0 genau dann, wenn x = f . Wegen S ≥ 0 ist der kritische Punktdes Polynoms zweiten Grades das globale Minimum von S. Die mittlere quadratischeAbweichung der Messwerte fi von irgendeinem Referenzwert x ist minimal für x = f .
Abschließend wird noch eine etwas allgemeinere Version des Gesetzes der großenZahl für (unendliche) W-räume angegeben.
Satz 183 Sei (Ω,W ) ein W-raum. Die Funktionen fi : Ω → R für i ∈ N seienstochastisch unabhängig. Die Zahlenfolge (V (fi))i∈N sei beschränkt . Sei ε > 0. Danngilt
limn→∞
W
ω ∈ Ω :
,,,,f1(ω) + ...+ fn(ω)
n−=
f1 + ...+ fnn
>
W
,,,, <nε
√n
= 1.

KAPITEL 4. WAHRSCHEINLICHKEIT 337
Beweis. Anwendung der Chebyshevungleichung (Eigenschaft 8 in Bemerkung172) auf Zn := 1
n
ni=1 fi ergibt wegen der stochastischen Unabhängigkeit der fi
nach Satz 178
W (ω ∈ Ω : |Zn(ω)− ZnW | ≥ t) ≤ 1
t2VW (Zn) =
1
t2n2
n
i=1
VW (fi) ≤K
t2n,
wobei K ∈ R mit VW (fi) ≤ K für alle i ∈ N. Mit t = nε/√n für ε > 0 folgt
W
ω ∈ Ω : |Zn(ω)− ZnW | ≥ nε/√n≤ K
n2ε.
Damit folgt
1 ≥ W
ω ∈ Ω : |Zn(ω)− ZnW | < nε/√n≥ 1− K
n2ε→ 1 für n →∞.
4.2 Abzählbar unendliche W-räume
Auf abzählbar unendliche Mengen Ω übertragen sich die Begriffe und Sätze, diefür endliche Mengen formuliert wurden, weitgehend. Im folgenden wird anhand vonzwei physikalisch vielgenutzten Beispielen ein erster Eindruck der neuen Situationvermittelt. Es sind dies die geometrische und die Poissonverteilung. Die Boltzmann- Gibbs Konstruktion der „thermischen” W-maße zu einer „Energie”-funktion aufΩ wird auch kurz gestreift.
Eine Mengenfunktion W : pot(Ω) → R für eine abzählbar unendliche Menge Ωheißt W-maß auf Ω, falls analog zu Bedingung (ii) in Kolmogorows Definition füralle abzählbaren Familien (Ai)i∈I disjunkter Teilmengen von Ω
WF
i∈IAi
=
i∈IW (Ai)
gilt. Bedingung (i) und (iii) werden unverändert übernommen. Analog zum Fallendlicher W-räume gilt dann für jede Menge A ⊂ Ω, dass W (A) =
ω∈A W (ω) .
Die Normierungsbedingung (iii) sagt W (Ω) =
ω∈Ω W (ω) = 1.Damit kann aus einer beliebigen nichtnegativen Funktion q : Ω→ R ein W-maß
auf Ω erzeugt werden, sofern die Reihe Z :=
ω∈Ω q(ω) konvergiert. Man wählt dieWahrscheinlichkeitsfunktion p : Ω→ R, ω → q(ω)/Z und definiert für A ⊂ Ω
W (A) =
ω∈Ap (ω) .
In der physikalischen Anwendung auf thermische Quantenzustände ist Ω dieMenge aller stationären Zustände des jeweils zugrundegelegten Quantensystems. Für

KAPITEL 4. WAHRSCHEINLICHKEIT 338
jeden Zustand ω ∈ Ω ist eine Energie E (ω) gegeben. Falls die Reihe („Zustandss-umme”)
ω∈Ω exp (−βE(ω)) konvergiert, existiert das W-maß Wβ zur Wahrschein-
lichkeitsfunktion pβ
pβ(ω) :=exp (−βE(ω))
Z(β)mit Z(β) :=
ω∈Ωexp (−βE(ω))
mit β = 1/kT (Boltzmannkonstante k > 0).7 (Boltzmann-Gibbs Verteilung derTemperatur T zur Energiefunktion E.)
Falls die Abbildung β →ω∈Ω E(ω) exp (−βE(ω)) als Grenzfunktion einer Folge
von Funktionen auf R>0 gewisse Konvergenzbedingungen8 erfüllt, dann folgt für denErwartungswert der Energie, dass für alle β > 0
EWβ=
ω∈ΩE(ω)pβ(ω) =
1
Z(β)
ω∈ΩE(ω) exp (−βE(ω)) = − 1
Z(β)Z ′(β).
Ein wichtiger Spezialfall der Konstruktion ergibt sich für den quantenmechani-schen harmonischen Oszillator. Hier gilt Ω = N0 und E(n) = ε0+hνn. (Dann ist Wβ
das thermische Gleichgewichts-W-maß einer Hohlraumstrahlungsmode der Frequenzν > 0, wobei h die Plancksche Konstante ist. Das Elementarereignis n steht fürdas Vorhandensein von n Photonen in der Mode.) Es gilt für n ∈ N0
pβ(n) =exp(−β (hνn+ ε0))
Z(β),
Z(β) = exp(−βε0)
n∈N0
exp(−βhνn) = exp(−βε0)
n∈N0
xn =exp(−βε0)
1− x
mit x := exp (−βhν) ∈ (0, 1) . Damit ergibt sich pβ(n) = (1− x)xn.
4.2.1 Geometrische Verteilung
Ein unverbesserlicher Optimist kauft jeden Freitag Abend einen Tipp für die nächsteZiehung von 6 aus 45. SeineWahrscheinlichkeit auf einen Sechser ist p = 1/8145060 ≈10−7. Er nimmt sich vor, so lange zu spielen, bis er den ersten Sechser einfährt. SeinSpiel hat also den Wahrscheinlichkeitsraum N0. Dabei steht n ∈ N0 für die Zahlseiner sechserlosen Tipps bis zu seinem finalen Sechser. Die Wahrscheinlichkeit, dasser nach n Fehltipps einen Sechser tippt, ist gleich px (n) = xn · p mit x = 1 − p.Kontrolle der Normierungsbedingung:
∞
k=0px (n) = p
∞
k=0xn =
p
1− x= 1.
Definition 184 Sei x ∈ (0, 1) und Ω := N0. Dann heißt der W-raum (Ω,Wx) mitder Wahrscheinlichkeitsfunktion px : Ω → [0, 1] , n → (1 − x)xn geometrischeVerteilung zum Parameterwert x.
7Natürlich funktioniert die Konstruktion bei endlichen Mengen Ω immer.8Siehe Satz 35 samt Bemerkung in Kapitel III, Abschnitt 7, Band I von [3].

KAPITEL 4. WAHRSCHEINLICHKEIT 339
Wegen px (n+ 1) = xpx (n) ist die Funktion px streng monoton fallend. Von zweiElementarereignissen m und n mit m < n hat also m die größere Wahr-scheinlichkeit. Mit steigendem x wird px „flacher”. Für x ↓ 0 geht Wx gegen dasPunktmaß, das auf 0 lokalisiert ist, denn limx→0(1− x)xn = δ0,n.
109876543210
0.5
0.375
0.25
0.125
0
nn
Abbildung 4.2: Geometrische Verteilung für x = 0.5 und x = 0.8 (rot)
Nun zu Erwartungswert und Varianz von id unter der geometrischen Verteilung.(Die Beweise werden in Übungsbeispiel 12) geführt.)
Satz 185 Für die geometrische Verteilung zum Parameterwert x ∈ (0, 1) gilt:
idWx=
x
1− xund VWx(id) =
x
(1− x)2.
Man beachte: limx↓0 id = 0 = min id(Ω) und limx↓0 V (id) = 0. Für x → 1wachsen id und V (id) unbeschränkt.
Wieviele sechserlose Tipps muss unser Optimist bis zu seinem ersten Sechsererwarten? Ungefähr (1− 10−7) /10−7 ≈ 107. Wenn er wöchentlich einen Tipp abgibt,muss er sich auf ca. 2 · 105 Jahre einrichten.
Münzwurfspiel mit Gewinnwahrscheinlichkeit x ∈ [0, 1]
Das folgende Beispiel zerlegt den Ereignisraum N mit der geometrischen Verteilungzum Parameter 1/2 in zwei komplementäre Ereignisse mit den Wahrscheinlichkeitenx ∈ [0, 1] und 1− x. Auf diese Weise lässt sich mit einer fairen Münze jedes W-Maßauf einer zweielementigen Menge erzeugen.
Die Zahl x ∈ [0, 1] habe die Binärentwicklung 0, x1x2 . . . , d.h. für die unendlicheFolge (x1, x2, . . .) mit Einträgen aus der Menge 0, 1 gilt
x =∞
k=1
xk1
2k.
Werfen Sie nun eine (gleichverteilte) Münze. Wenn Kopf fällt, werten Sie dies alsdie Zahl 0, fällt hingegen Zahl, werten Sie dies als 1. Werfen Sie die Münze n-mal

KAPITEL 4. WAHRSCHEINLICHKEIT 340
hintereinander, so erzeugen Sie eine Folge ω = (ω1, . . . ωn) in 0, 1 . Sie wählen nundie Zahl n der Würfe nicht fest, sondern lassen den Zufall über n nach der Regel
ωi = xi für i = 1, . . . n− 1 und ωn = xn
entscheiden. Sie werfen also so oft, bis die geworfene Folge erstmals von der Binär-folge von x abweicht. Der Wahrscheinlichkeitsraum Ω dieses Spiels ist also N.
Die Wahrscheinlichkeit, dass Sie eine Folge der Länge n werfen, ist durch pn = 12n
gegeben. Es gilt übrigens∞
n=1
pk =∞
n=0
1
2k− 1 =
1
1− 12
− 1 = 1.
Wie groß ist die Wahrscheinlichkeit, dass der erste Fehlwurf, der zum Spielendeführt, ωn < xn erfüllt? Für xn = 0 kann ωn < xn nicht gelten. Für xn = 1 hingegenfolgt aus ωn = xn, dass ωn < xn. Daher gilt für eine Folge ω der Länge n, dassωn < xn, genau dann, wenn xn = 1. Wegen xn ∈ 0, 1 gilt
W (n ∈ N : xn = 1) =∞
n=1,xn=1
pn =∞
n=1
xnpn = x.
Die beiden komplementären Ereignisse: Spiel abgebrochen wegen ωn < xn bzw.wegen ωn > xn haben somit die Wahrscheinlichkeiten x bzw. 1− x.
4.2.2 Poissonverteilung
Eine radioaktive Probe enthalte n = 1020 instabile Kerne. Jeder der Kerne habe diewinzige Wahrscheinlichkeit von x = 10−18 =: δ/n innerhalb der nächsten Sekundezu zerfallen. Es gilt also δ = 100. Die Wahrscheinlichkeit, dass in der nächstenSekunde genau k ∈ 0, 1, . . . n der Kerne zerfallen, ist Bi (k, n, x) = Bi (k, n, δ/n) .Wir werden nun zeigen, dass Bi (k, n, δ/n) ≈ e−δδk/k! gilt.9 (Gesetz der kleinenWahrscheinlichkeiten)
Definition 186 Für δ > 0 heißt der W-raum (N0,Wδ) mit pδ (n) → e−δ · δn/n!Poissonverteilung zum Parameter δ.
Es gilt die Normierungsbedingung∞
n=0 pδ(n) = 1. Wegen pδ (n) = pδ (n− 1) ·δ/n gilt pδ (n) > pδ (n− 1) für alle n < δ und pδ (n) < pδ (n− 1) für alle n > δ.Der Graph von pδ wird mit wachsendem δ flacher. Für δ ↓ 0 geht Wδ gegen dasPunktmaß, das auf 0 lokalisiert ist. Abbildung 4.4 zeigt für δ = 100 und für δ = 120den Graphen jener reellen Interpolation Pδ(x) der Poissonverteilung pδ, die für x ∈R≥0 mittels Eulers Gammafunktion Γ durch
Pδ(x) := δxe−δ/x! mit x! := Γ(1 + x) :=
∞
0
e−ttxdt
gegeben ist. Die vorliegende graphische Auflösung kann Pδ nicht von pδ unterschei-den.
9Den Fehler werden wir allerdings nicht abschätzen können.
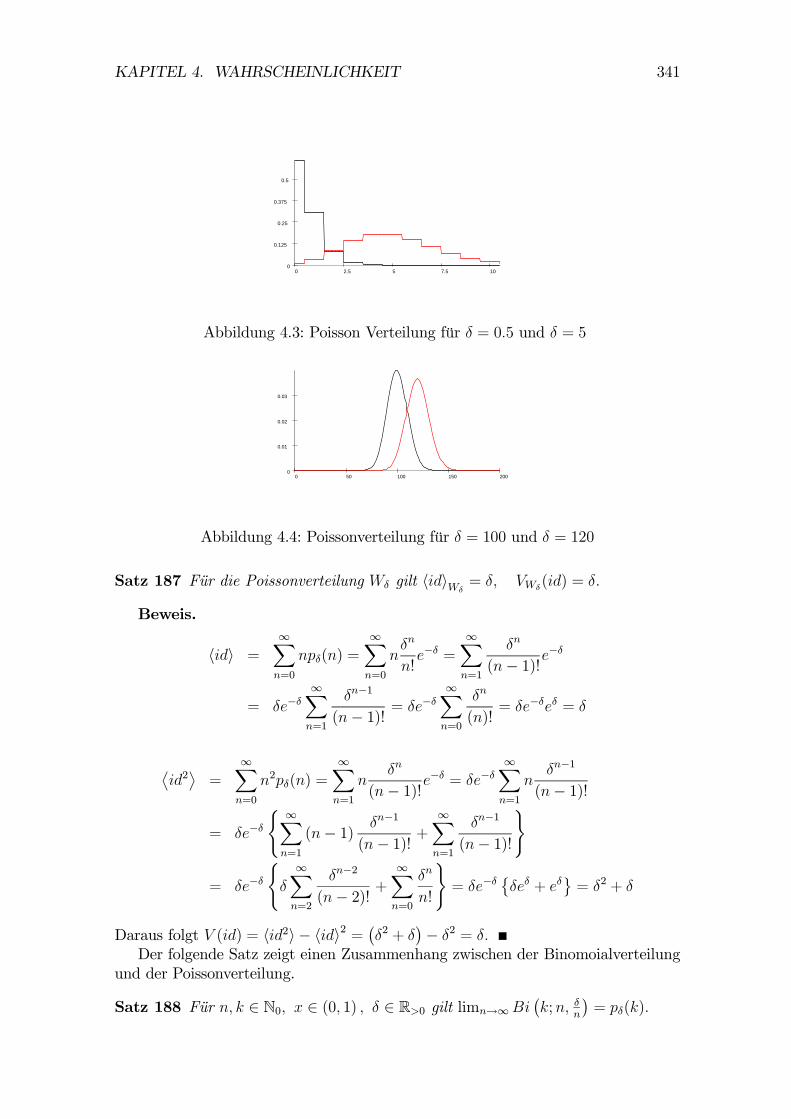
KAPITEL 4. WAHRSCHEINLICHKEIT 341
107.552.50
0.5
0.375
0.25
0.125
0
Abbildung 4.3: Poisson Verteilung für δ = 0.5 und δ = 5
200150100500
0.03
0.02
0.01
0
Abbildung 4.4: Poissonverteilung für δ = 100 und δ = 120
Satz 187 Für die Poissonverteilung Wδ gilt idWδ= δ, VWδ
(id) = δ.
Beweis.
id =
∞
n=0
npδ(n) =∞
n=0
nδn
n!e−δ =
∞
n=1
δn
(n− 1)!e−δ
= δe−δ
∞
n=1
δn−1
(n− 1)!= δe−δ
∞
n=0
δn
(n)!= δe−δeδ = δ
&id2'
=∞
n=0
n2pδ(n) =∞
n=1
nδn
(n− 1)!e−δ = δe−δ
∞
n=1
nδn−1
(n− 1)!
= δe−δ
. ∞
n=1
(n− 1)δn−1
(n− 1)!+
∞
n=1
δn−1
(n− 1)!
7
= δe−δ
.δ∞
n=2
δn−2
(n− 2)!+
∞
n=0
δn
n!
7= δe−δ
δeδ + eδ
= δ2 + δ
Daraus folgt V (id) = id2 − id2 =δ2 + δ
− δ2 = δ.
Der folgende Satz zeigt einen Zusammenhang zwischen der Binomoialverteilungund der Poissonverteilung.
Satz 188 Für n, k ∈ N0, x ∈ (0, 1) , δ ∈ R>0 gilt limn→∞Bik;n, δ
n
= pδ(k).

KAPITEL 4. WAHRSCHEINLICHKEIT 342
Beweis. Sei ohne Einschränkung n > δ und n > k. Dann gilt
Bi(k;n,δ
n) =
nk
δ
n
k1− δ
n
n−k
=δk
k!
1− δ
n
−k 1− δ
n
nn!
(n− k)!nk
Nun gilt wegen der Stetigkeit von x → (1− x)−k bei x = 0, dass limn→∞ (1− δ/n)−k =1. Für das k-fache Produkt
n!
(n− k)!nk=
n (n− 1) ... (n− k + 1)
nk= 1 ·
1− 1
n
· ... ·
1− k − 1
n
folgt limn→∞n!
(n−k)!nk= 1. Mit Eulers Formel limn→∞
1− δ
n
n= exp (−δ) folgt
schließlich die Behauptung.Eine Approximation der Binomialverteilung zu festem Parameter x gibt der fol-
gende Grenzwertsatz von de-Moivre und Laplace.
Satz 189 Sei Wn die Binomialverteilung10 auf Ωn = 0, 1, . . . n zum Parameterα ∈ (0, 1) . Sei Yn =
idΩn−nα√nα(1−α)
. Dann gilt Yn = 0 und V (Yn) = 1 und
limn→∞
Wn (k ∈ Ωn : Yn (k) ≤ x) = 1√2π
x
−∞e−
u2
2 du.
Dieser Satz erklärt also die Gauß’sche Glockenkurve am Galtonbrett. Darüber-hinaus führt er uns zu überabzählbar unendlichen W-Räumen.
4.3 Wahrscheinlichkeitsmaße auf Rn
FürW-maße auf überabzählbar unendlichen MengenΩmuß die Potenzmenge pot(Ω)zwar zu einer darin enthaltenen σ-Algebra von Teilmengen von Ω verkleinert wer-den, aber viele Analogien zum Fall einer endlichen Menge Ω bleiben bestehen. Wirbehandeln überabzählbar unendliche Mengen Ω nur beispielhaft und weichen derFormulierung allgemeiner Sachverhalte aus.
4.3.1 Wahrscheinlichkeitsmaße auf R mit Dichtefunktion
Der Grenzwertsatz von de Moivre und Laplace legt die folgende allgemeine Kon-struktion für W-Maße auf R nahe. Sei ρ0 : R→ R eine stetige nichtnegative Funkti-on, für die das Integral
∞−∞ ρ0 (x) dx existiert. Durch Übergang zu ρ = cρ0 mit einer
positiven reellen Zahl c kann dann immer erreicht werden, dass∞−∞ ρ (x) dx = 1
gilt. Damit wird nun die Funktion F : R→ [0, 1] mit
F (x) =
x
−∞ρ (t) dt
10Es gilt also pn (k) =
nk
αk (1− α)n−k .

KAPITEL 4. WAHRSCHEINLICHKEIT 343
monoton wachsend und es gilt F ′ = ρ und limx→−∞ F (x) = 0, limx→∞ F (x) = 1.Die Zahl F (x) kann als Definition derWahrscheinlichkeit des Ereignisses (−∞, x]
in R gewählt werden. Die Funktion F heißt Verteilungsfunktion des W-Maßes undρ heißt Dichte von F. Einem endlichen Intervall (a, b] wird die Wahrscheinlichkeit
W ((a, b]) =
b
a
ρ (x) dx = F (b)− F (a)
zugeordnet.W ((a, b]) gleicht also dem Inhalt jener Fläche, die zwischen a und b unterdem Graphen von ρ liegt. Nach dem Mittelwertsatz der Integralrechnung existiertein x ∈ [a, b] , sodass
W ((a, b]) =
b
a
ρ(x)dx = (b− a) · ρ(x).
Für eine (abzählbare) Vereinigung von disjunkten Intervallen Iα wird
W (∪αIα) =
αW (Iα)
gesetzt.
4.3.2 Gauß’sche Normalverteilung
Ein Beispiel für das Konstruktionsschema11 des vorigen Abschnitts liefert die nachGauß benannte Normalverteilung.
Definition 190 Das W-Maß auf R, das für alle x ∈ R dem Ereignis (−∞, x] dieWahrscheinlichkeit
F (x) =
x
−∞
1√2πδ2
e−(t−x0)22δ2 dt (4.2)
zuordnet, heißt (Gauß’sche) Normalverteilung zu den Parameterwerten δ > 0 undx0 ∈ R. Die Funktion F heißt Verteilungsfunktion und die Ableitung ρ = F ′ ihreDichte.
Die Verteilungsfunktion F der Normalverteilung zu (δ, x0) geht aus der parame-terfreien Gauß’schen Fehlerfunktion12
erf : R→ R, erf(x) :=2√π
x
0
e−t2dt =1√π
x
−x
e−t2dt
folgendermaßen hervor
F (x) =1
2
1 + erf
x− x0√
2δ2
. (4.3)
11Noch allgemeiner ist die Vorgabe einer Verteilungsfunktion F : R→ R mit den Eigenschaften:F ist nicht fallend, F ist stetig bis auf höchstens abzählbar viele Sprungstellen, in den Sprungstellenist F rechtsseitig stetig, limx→−∞ F (x) = 0 und limx→∞ F (x) = 1.
12Das Kürzel erf leitet sich von error function ab.

KAPITEL 4. WAHRSCHEINLICHKEIT 344
Die Parameter x0 und δ der Verteilung F schieben und strecken die Fehlerfunktion.Warum gilt Gleichung (4.3)? Substitutiere t := (x− x0) /
√2δ2 in Gleichung (4.2).
Damit folgt
F (x) =1√π
x−x0√2δ
−∞e−t2dt =
1√π
0
−∞e−t2dt+
1√π
x−x0√2δ
0
e−t2dt
=1√π
∞
0
e−t2dt+1√π
x−x0√2δ
0
e−t2dt =1
2
1 + erf
x− x0√
2δ
.
Für das letzte Gleichheitszeichen wurde limx→∞ erf(x) = 1 benützt, was weiterunten bewiesen wird. Wegen Gleichung (4.3) stellt dies sicher, dass limx→∞ F (x) = 1.
Die Abbildung 4.5 zeigt ρ für x0 = 0 und δ = 1 bzw. δ = 1/2. Die Abbildung4.6 zeigt F für x0 = 0 und δ = 1 bzw. δ = 1/2. Der Fall x0 > 0 entsteht durchVerschieben der Graphen um x0 nach rechts.
52.50-2.5-5
0.6
0.4
0.2
0
Abbildung 4.5: ρ für δ = 1 bzw. δ = 1/2 (die schmälere) und x0 = 0
52.50-2.5-5
1
0.75
0.5
0.25
0
Abbildung 4.6: F für δ = 1 bzw. δ = 1/2 (die steilere) mit x0 = 0
Nun zeigen wir noch limx→∞ erf(x) = 1. Mit Polarkoordinaten des R2, näm-lich x = r cos (φ) und y = r sin (φ), folgt für das Quadrat der positiven Zahl

KAPITEL 4. WAHRSCHEINLICHKEIT 345
I = limx→∞ erf(x) =∞−∞ exp (−x2) dx/
√π
I2 =
∞
−∞
∞
−∞
1
πe−(x
2+y2)dx
dy =
1
π
2π
0
∞
0
e−r2rdr
dφ
=1
π
2π
0
∞
0
d
dr
−1
2e−r2
drdφ =
1
2π
2π
0
dφ = 1.
Bemerkung 191 Substituieren von x = t/√2δ2 in
∞−∞ exp (−x2) dx =
√π ergibt
mit δ > 0 ∞
−∞e−
t2
2δ2 dt = δ√2π.
Diese Formel gilt jedoch nicht nur für δ ∈ R>0, sondern auch für δ ∈ C 0, sofern−π
4< arg(δ) < π
4. (Das Argument einer von Null verschiedenen komplexen Zahl
δ ist dabei durch δ = |δ| exp (i arg(δ)) mit −π < arg(δ) ≤ π definiert.) Im Fallδ ∈ C 0 mit −π
4< arg(δ) < π
4gilt übrigens die für die Konvergenz des Integrals
nötige Ungleichung ℜδ2> 0.
4.3.3 Exponentialverteilung
Die Beobachtung radioaktiver Zerfälle zeigt: Die Wahrscheinlichkeit p (τ) , dass eininstabiler Atomkern (eines festgelegten Typs) eine Zeitspanne der Dauer τ > 0unzerfallen übersteht, sinkt für τ → ∞ gegen 0 ab. Umgekehrt strebt für τ → 0diese ’Überlebenswahrscheinlichkeit’ p (τ) gegen 1. Für Zeiten τ > 0 nahe bei 0 gilteine (einseitige) Tangentialapproximation p (τ) ≈ 1− λτ mit λ ∈ R>0, deren Fehlerψ (τ) = p (τ)−(1− λτ ) die Bedingung limτ→0 ψ (τ) /τ = 0 erfüllt. Die positive reelleZahl λ wird als ’Zerfallsrate’ bezeichnet. Mit welcher Wahrscheinlichkeit überlebtder Atomkern höchstens N Zeitspannen der Dauer τ? Gibt es eine stetige Funktionauf R, welche die Wahrscheinlichkeit angibt, dass ein zur Zeit 0 vorliegender Kernirgendwann vor der Zeit t ∈ R zerfällt?
Unter der physikalischen Hypothese, dass der Kern jedes Zeitintervall der Dauerτ mit Wahrscheinlichkeit p (τ ) intakt übersteht, ist die Wahrscheinlichkeit für dasÜberleben von höchstens N ∈ N0 solchen (aneinander gereihten) Intervallen durchdie geometrische Verteilung Wx auf N0 mit Parameter x = p (τ ) gegeben, dh
Wx (n ∈ N0 : n ≤ N) =N
n=0
(1− x) xn = 1− xN+1.
Sei nun t ∈ R>0. Dann gilt mit tτ=tτ
+
tτ
und
tτ
∈ N0 und 0 ≤
tτ
< 1
Wx
n ∈ N0 : n ≤
t
τ
= 1− x[
tτ ]+1 = 1− x
tτ x1− t
τ .
Die Zahl α = 1−
tτ
liegt im Intervall (0, 1] . Die Zahl xα = eα ln p(τ) erfüllt wegen
ln p (τ) < 0 die Abschätzung elnp(τ) ≤ xα < e0 = 1. Aus limτ→0 eln p(τ) = 1 folgt
daher limτ→0 xα = 1.

KAPITEL 4. WAHRSCHEINLICHKEIT 346
Den Faktor xtτ formen wir um zu
xtτ = (1− λτ + ψ (τ ))
tτ =
1− λt
t/τ+
λt
t/τ
ψ (τ )
λτ
tτ
.
Für τ → 0 ergibt sich daher mit s = t/τ
limτ→0
xtτ = lim
s→∞
1− λt
s
1− ψ (t/s)
λt/s
s
= e−λt.
Für die Wahrscheinlichkeit Pλ (t) , dass ein Kern, der eine ’Zerfallsrate’ λ besitztund der zur Zeit 0 intakt vorliegt, irgendwann vor einer Zeit t > 0 zerfällt, gilt somit
Pλ (t) = limτ↓0
W1−λτ (n ∈ N0 : n ≤ t/τ) = 1− e−λt.
Für t = 0 ergibt sich
Pλ (0) = limτ↓0
W1−λτ (n ∈ N0 : n ≤ 0) = limτ↓0
W1−λτ (0) = limτ↓0
(1− p (τ )) = 0.
Definition 192 Sei λ ∈ R>0. Dann heißt das Wahrscheinlichkeitsmaß auf R mitder Verteilungsfunktion Fλ (x) = 1− e−λx für x > 0 und Fλ (x) = 0 sonst, Exponen-tialverteilung zum Parameter λ.
Anmerkung: Die Funktion ρλ mit ρλ (x) = λe−λx für x > 0 und ρλ (x) = 0 fürx ≤ 0 ist eine Dichte der Verteilungsfunktion Fλ.
Damit bekommt Curies Zerfallsgesetz eine probabilistische Form: Ein zur Zeitt0 vorliegender Kern mit der Zerfallsrate λ > 0 zerfällt mit der WahrscheinlichkeitFλ (t) vor der Zeit t0+ t. Figur 4.7 zeigt diese Zerfallswahrscheinlichkeit bis zur Zeitt0 + t als Funktion von x = λt in rot und die dazu komplementäre Überlebenswahr-scheinlichkeit in grün. Achtung: Für t < 0 ist die Wahrscheinlichkeit, dass der Kernvor der Zeit t0 + t, also auch vor t0 zerfallen ist, gleich 0. Das erscheint plausibel,wenn ein Zerfall ein einmaliger, irreversibler Vorgang ist, hat aber wenig mit demtatsächlichen Vorliegen des Kerns zu tun.
53.752.51.250
1
0.75
0.5
0.25
0
x
y
x
y
Abbildung 4.7: Exponentialverteilung F1 (rot) und 1− F1 (grün)

KAPITEL 4. WAHRSCHEINLICHKEIT 347
4.3.4 *Cauchyverteilung
Die Gaußverteilung haben wir aus einer Dichtefunktion konstruiert. Umgekehrt bie-tet sich auch manch nichtnegative, beschränkte, monoton wachsende Funktion direktals Verteilungsfunktion an. Die arctan - Funktion etwa ist monoton wachsend undbildet R auf (−π/2, π/2) bijektiv ab. Sie legt daher die folgende Konstruktion einesW-maßes auf R nahe.
Definition 193 Die Funktion F : R → (0, 1) mit F (x) = 12+ 1
πarctan
x−x0
δ
ist
für jedes Paar (x0, δ) ∈ R2 mit δ > 0 eine Verteilungsfunktion. Diese Verteilung aufR heißt Cauchy- oder auch Lorentzverteilung zu den Parametern x0, δ.
F hat wegen arctan′(x) = 11+x2
die Dichte ρ : R→ R>0 mit
ρ(x) =1
δπ· 1
1 +x−x0
δ
2 =1
π· δ
δ2 + (x− x0)2 .
Die Dichte ρ ist maximal bei x = x0 mit ρ (x0) = 1/δπ. Der Parameter δ regelt dieBreite von ρ, denn für |x− x0| = δ gilt ρ (x) = ρ (x0) /2. Siehe Figur 4.8. Obwohl
52.50-2.5-5
0.8
0.6
0.4
0.2
Abbildung 4.8: Cauchyverteilung mit Dichte für δ = 1 und x0 = 0
jede Cauchyverteilung einer Gaußverteilung ähnlich sieht, bestehen im Detail docherhebliche Unterschiede. Figur 4.9 vergleicht die Dichte der Lorenzverteilung mitδ = 1 und x0 = 0 mit der Dichte der Gaußverteilung für δ =
π/2 und x0 = 0.
Beide haben zwar bei x = 0 denselbenWert, die Gaußverteilung gibt jedoch größerenWerten von |x| weniger Gewicht. Dies lässt sich mit den Begriffen Erwartungswertund Varianz präzisieren.
4.3.5 Erwartungswert und Varianz
Definition 194 Sei ρ : R → R Dichte eines W-Maßes auf R und f : R → R seiderart, dass die Funktionen |f | ρ und f2ρ über R uneigentlich riemannintegrierbarsind. Dann sind Erwartungswert f und Varianz V (f) von f unter dem W-maßmit der Dichte ρ wie folgt definiert.
f := ∞
−∞f(x)ρ(x)dx und V (f) :=
&(f − f)2
'=&f2'− f2 .
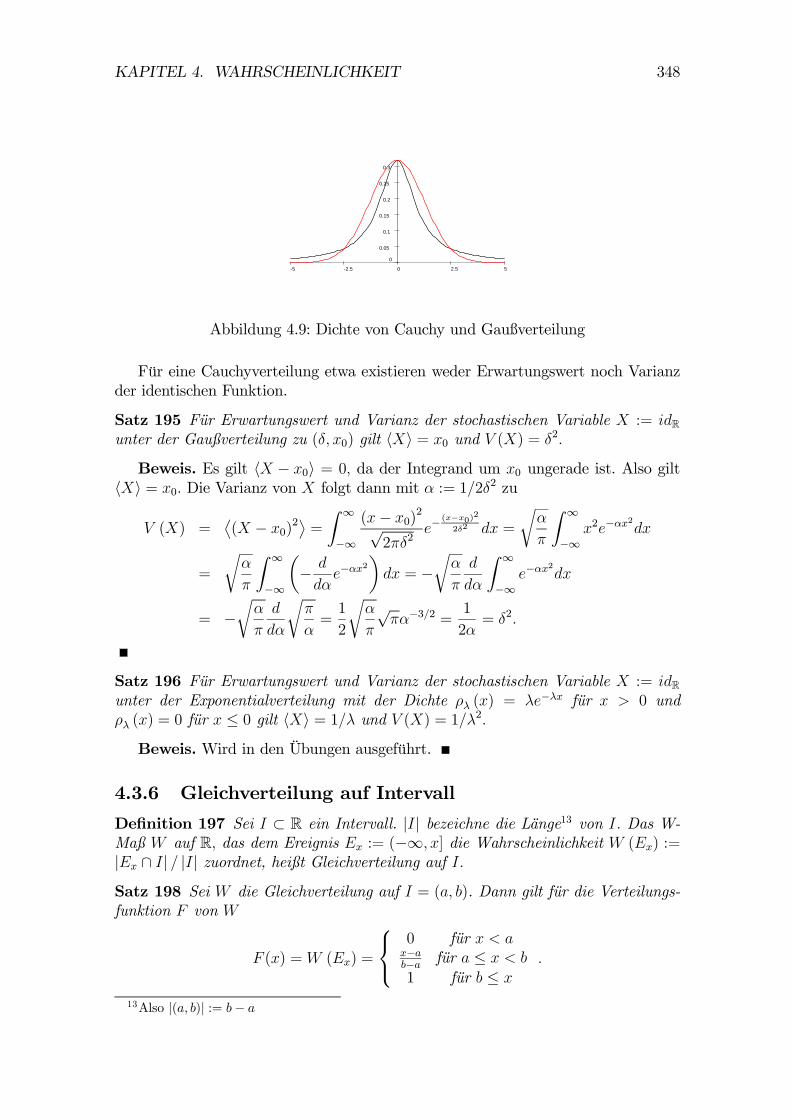
KAPITEL 4. WAHRSCHEINLICHKEIT 348
52.50-2.5-5
0.3
0.25
0.2
0.15
0.1
0.05
0
Abbildung 4.9: Dichte von Cauchy und Gaußverteilung
Für eine Cauchyverteilung etwa existieren weder Erwartungswert noch Varianzder identischen Funktion.
Satz 195 Für Erwartungswert und Varianz der stochastischen Variable X := idRunter der Gaußverteilung zu (δ, x0) gilt X = x0 und V (X) = δ2.
Beweis. Es gilt X − x0 = 0, da der Integrand um x0 ungerade ist. Also giltX = x0. Die Varianz von X folgt dann mit α := 1/2δ2 zu
V (X) =&(X − x0)
2' = ∞
−∞
(x− x0)2
√2πδ2
e−(x−x0)22δ2 dx =
/α
π
∞
−∞x2e−αx2dx
=
/α
π
∞
−∞
− d
dαe−αx2
dx = −
/α
π
d
dα
∞
−∞e−αx2dx
= −/
α
π
d
dα
/π
α=
1
2
/α
π
√πα−3/2 =
1
2α= δ2.
Satz 196 Für Erwartungswert und Varianz der stochastischen Variable X := idRunter der Exponentialverteilung mit der Dichte ρλ (x) = λe−λx für x > 0 undρλ (x) = 0 für x ≤ 0 gilt X = 1/λ und V (X) = 1/λ2.
Beweis. Wird in den Übungen ausgeführt.
4.3.6 Gleichverteilung auf Intervall
Definition 197 Sei I ⊂ R ein Intervall. |I| bezeichne die Länge13 von I. Das W-Maß W auf R, das dem Ereignis Ex := (−∞, x] die Wahrscheinlichkeit W (Ex) :=|Ex ∩ I| / |I| zuordnet, heißt Gleichverteilung auf I.Satz 198 Sei W die Gleichverteilung auf I = (a, b). Dann gilt für die Verteilungs-funktion F von W
F (x) = W (Ex) =
0 für x < ax−ab−a
für a ≤ x < b1 für b ≤ x
.
13Also |(a, b)| := b− a

KAPITEL 4. WAHRSCHEINLICHKEIT 349
F hat die Dichte ρ(x) = 1b−a
für a < x < b und ρ(x) = 0 sonst. Für den Erwar-tungswert und die Varianz der stochastischen Variable X := idR gilt X = b+a
2und
V (X) = (b−a)2
12.
Beweis. Für x ≤ a gilt (−∞, x] ∩ (a, b) = ∅ und daher F (x) = W (∅) = 0. Füra < x < b gilt (−∞, x] ∩ (a, b) = (a, x] und daher F (x) = W ((a, x]) = x−a
b−a. Für
x ≥ b gilt (−∞, x] ∩ (a, b) = (a, b) und daher F (x) = W ((a, b)) = 1.Die Formel
F (x) =
x
−∞ρ (u) du
ist offensichtlich. Der Erwartungswert von X ergibt sich mit
X = ∞
−∞xρ (x) dx =
b
a
x
b− adx =
1
2
1
b− a
b2 − a2
=
a+ b
2.
Die Varianz von X ergibt sich mit der Substitution u = x− a+b2
V (X) =
∞
−∞
x− a+ b
2
2
ρ (x) dx =1
b− a
b
a
x− a+ b
2
2
dx
=1
b− a
(b−a)/2
−(b−a)/2
u2du =2
b− a
u3
3
,,,,(b−a)/2
0
=2
b− a
1
3
b− a
2
3
=(b− a)2
12.
4.3.7 W-Maße auf Rn und ihr Transport
Ist U eine Kugel, ein Quader oder ähnliches im Rn, dann ist die Gleichverteilungauf U durch das W-maß W (A) := |U∩A|
|U | für A ⊂ Rn (messbar) definiert, wobei |X|das euklidische Volumen einer (meßbaren) Menge X ⊂ Rn bezeichnet.
Für n > 1 sind etwas allgemeinere W-maße durch eine integrable Dichte ρ : Rn →R mit ρ ≥ 0 und
Rn ρ(x)dnx = 1 charakterisiert. Dann ist die Wahrscheinlichkeit
W (A) des Ereignisses A ⊂ Rn (messbar) definiert durch
W (A) =
A
ρ(x)dnx.
Die Gleichverteilung auf U hat die Dichte ρ mit ρ (x) = 1/ |U | für x ∈ U undρ (x) = 0 sonst.
Sei f : Rn → R eine stochastische Variable. Falls |f | ρ und f2ρ über ganz Rn
integrierbar sind, dann existieren Erwartungswert und Varianz von f unter W
fW :=
Rnf(x)ρ(x)dnx, und VW (f) =
&(f − fW )2
'W
.
Der Transport Wf von W unter f ist analog zu Satz 168 durch
Wf (A′) := W
f−1 (A′)
für A′ ⊂ R (messbar)

KAPITEL 4. WAHRSCHEINLICHKEIT 350
definiert. Das W-maß Wf hat die Verteilungsfunktion Ff : R→ R mit
Ff(x) := Wf−1 (−∞, x]
.
Falls Ff stetig und überall (außer möglicherweise in endlich vielen Stellen) diffe-renzierbar ist, hat Ff eine Dichte ρf , die folgendermaßen gewählt werden kann:In den Differenzierbarkeitsstellen x von Ff sei ρf (x) = F ′
f (x) , in Punkten x, indenen Ff nicht differenzierbar ist, ist ρf (x) beliebig in R≥0. Dann gilt nämlichFf (x) =
x
−∞ ρf (u) du für alle x ∈ R. Falls der Erwartungswert von fn für ein n ∈ Nunter W existiert, lässt er sich auch aus ρf durch 1-dim Integration berechnen:
fnW =
∞
−∞xnρf (x) dx = (idR)nWf
.
Gleichverteilung auf Rechteck
Sei W die Gleichverteilung auf R = [0, 1]× [0, 1] und für die Funktion14 f : R2 → Rgelte f (a, b) = a2 für alle (a, b) ∈ R. Ein Blick auf den Funktionsgraphen von f,siehe Figur (4.10), zeigt, dass bei gleichverteilter Ziehung von (a, b) Funktionswertef (a, b) < 1/2 eher als Funktionswerte f (a, b) > 1/2 zu erwarten sind. Etwas ge-nauer: Für 0 ≤ x ≤ 1 gilt f−1 ((−∞, x]) = [0,
√x] × [0, 1] . Daraus folgt für die
Verteilungsfunktion von f
Ff (x) =,,0,
√x× [0, 1]
,, =√x für 0 ≤ x ≤ 1.
Für x < 0 gilt Ff (x) = 0 und für x > 1 gilt Ff (x) = 1. (Siehe Figur 4.11) Für dieDichte ρf von Ff gilt ρf (x) = F ′
f (x) = 1/ (2√x) für 0 < x < 1 und ρf (x) = 0 sonst.
Die Wahrscheinlichkeit von f (x) < 1/2 ist somit 1/√2 ≈ 0.7, jene von f (x) > 1/2
ist dann 1− 1/√2 ≈ 0.3.
Berechnen wir noch fnW . Es gilt
fnW =
1
0
1
0
a2nda
db =
1
2n+ 1.
Für den Erwartungswert von f gilt somit fW = 1/3. Die Varianz von f ergibt sichzu V (f) = f 2W − f2W = 1
5− 1
9= 4
45. Eine Kontrolle gibt
fnW = idnWf=
∞
−∞ρf (x) x
ndx =
1
0
xn
2√xdx =
1
2· 1
n+ 12
xn+12
,,,1
0=
1
2n+ 1.
Gleichverteilung auf Kreisscheibe
Sei W die Gleichverteilung auf KR = (a, b) ∈ R2 |a2 + b2 ≤ R2 für ein R > 0. Seir (a, b) =
√a2 + b2 für (a, b) ∈ R2. Für die Verteilungsfunktion Fr von Wr folgt dann
für 0 ≤ x ≤ R
Fr (x) = W (p ∈ KR |r (p) ≤ x) = x2π
R2π= x
R
2.
14Wie f außerhalb von R definiert ist, spielt im Folgenden keine Rolle.
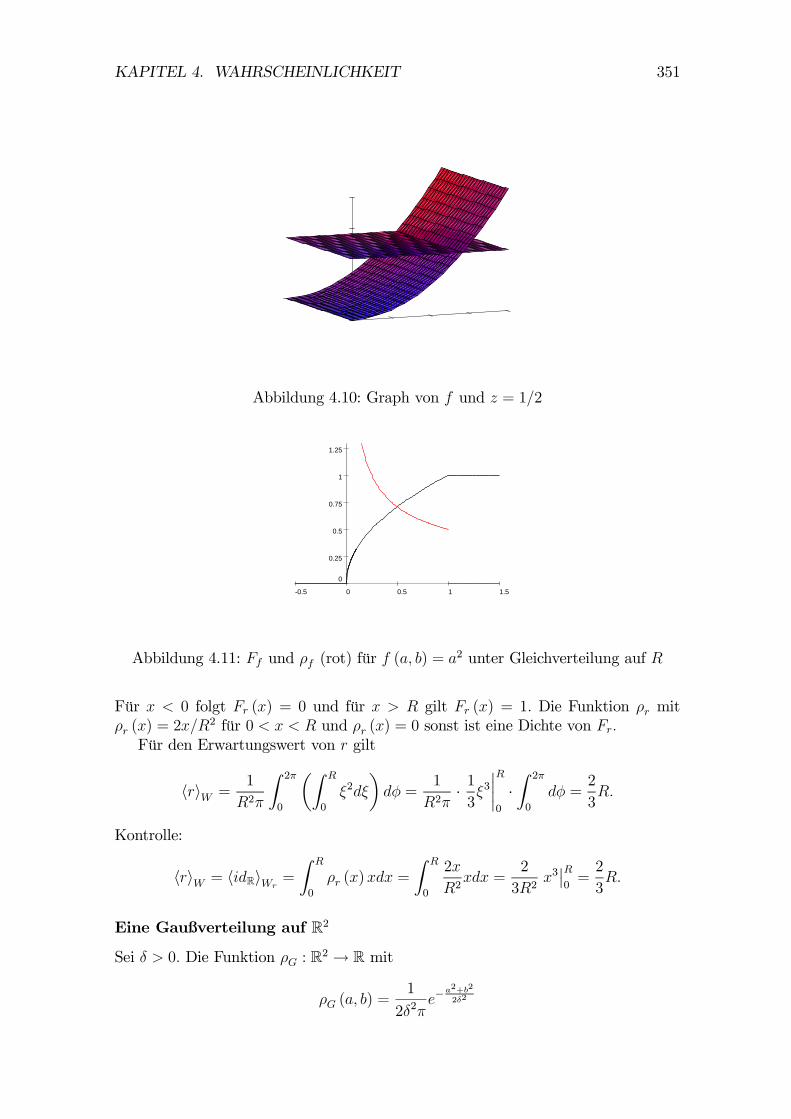
KAPITEL 4. WAHRSCHEINLICHKEIT 351
Abbildung 4.10: Graph von f und z = 1/2
1.510.50-0.5
1.25
1
0.75
0.5
0.25
0
Abbildung 4.11: Ff und ρf (rot) für f (a, b) = a2 unter Gleichverteilung auf R
Für x < 0 folgt Fr (x) = 0 und für x > R gilt Fr (x) = 1. Die Funktion ρr mitρr (x) = 2x/R2 für 0 < x < R und ρr (x) = 0 sonst ist eine Dichte von Fr.
Für den Erwartungswert von r gilt
rW =1
R2π
2π
0
R
0
ξ2dξ
dφ =
1
R2π· 13ξ3,,,,R
0
· 2π
0
dφ =2
3R.
Kontrolle:
rW = idRWr=
R
0
ρr (x)xdx =
R
0
2x
R2xdx =
2
3R2x3,,R0=
2
3R.
Eine Gaußverteilung auf R2
Sei δ > 0. Die Funktion ρG : R2 → R mit
ρG (a, b) =1
2δ2πe−
a2+b2
2δ2

KAPITEL 4. WAHRSCHEINLICHKEIT 352
ist Dichte eines W-Maßes. Für die Verteilung der Betragsfunktion r = |·| : R2 → Rmit |(a, b)| =
√a2 + b2 unter ρG ergibt sich für ξ ≥ 0
Fr (x) = W
p ∈ R2 ||p| ≤ x
=1
2δ2π
2π
0
x
0
e−t2
2δ2 tdt
dφ
=2π
2δ2π
x
0
e−t2
2δ2 tdt =
x/√2δ2
0
2ue−u2du = − x/
√2δ2
0
d
due−u2du
= 1− e−x2
2δ2 .
Für x < 0 gilt Fr (x) = 0. Die Funktion ρr mit ρr (x) = xδ2e−
x2
2δ2 für x > 0 undρr (x) = 0 für x < 0 ist eine Dichte von Fr.
Damit ergibt sich der Erwartungswert der Betragsfunktion r unter ρG zu
r =
∞
0
xρr (x) dx =
∞
0
x2
δ2e−
x2
2δ2 dx =
∞
−∞
x2
2δ2e−
x2
2δ2 dx
=π√2δ2π
∞
−∞x2 e−
x2
2δ2√2δ2π
dx =πδ2√2δ2π
=
πδ2
2.
Für den Erwartungswert von r2 folgt
&r2'
=
∞
0
x2ρr (x) dx =
∞
0
x3
δ2e−
x2
2δ2 dx = 2δ2 ∞
0
x2
2δ2e−
x2
2δ22xdx
2δ2
= 2δ2 ∞
0
te−tdt = 2δ2.
Das Ergebnis r2 = 2δ2 ist auch ganz einfach mit 2d Integration über ρG zu erhalten:
&r2'
=
R2
x2 + y2
1
2δ2πe−
x2+y2
2δ2 dxdy = 2
∞
−∞x2 e−
x2
2δ2√2δ2π
dx
∞
−∞
e−y2
2δ2√2δ2π
dy
= 2
∞
−∞x2 e−
x2
2δ2√2δ2π
dx = 2δ2.
Für die Varianz von r gilt somit V (r) = (2− π/2) δ2.
Eine Gaußverteilung auf R3
Sei δ > 0. Die Funktion ρG : R3 → R mit
ρG (v) =1
2δ2π
3/2 e− |v|22δ2
ist Dichte eines W-Maßes. Für die Verteilung Fr der Betragsfunktion r = |·| : R3 →R unter ρG folgt für x ≥ 0
Fr (x) = W
v ∈ R3 ||v| ≤ x
=1
2δ2π
3/2 2π
0
dφ
π
0
sin θdθ
x
0
e−t2
2δ2 t2dt
=4π
2δ2π
3/2 x
0
e−t2
2δ2 t2dt =4√π
x/2δ2
0
e−u2u2du.

KAPITEL 4. WAHRSCHEINLICHKEIT 353
Für x < 0 gilt Fr (x) = 0. Die Funktion15 ρr : R→ R mit ρr (x) =4πx2
(2δ2π)3/2e
− x2
2δ2 für
x > 0 und ρr (x) = 0 für x < 0 ist eine Dichte von Fr.
Für den Erwartungswert von r unter ρG gilt r =
8δ2/π, denn
∞
0
xρr (x) dx =4π
2δ2π
3/2 ∞
0
x3e−x2
2δ2 dx =4√π
2δ2 ∞
0
u3e−u2du
= 2
2δ2
π
∞
0
te−tdt = −2
2δ2
π
∞
0
te−t′
dt = 2
2δ2
π.
Für den Erwartungswert von r2 gilt analog zum 2d Fall r2 = 3δ2. Mit derDichte ρr folgt dies auch mithilfe der Gammafunktion, da
∞
0
x2ρr (x) dx =4π
2δ2π
3/2 ∞
0
x4e−x2
2δ2 dx =4√π2δ2 ∞
0
u4e−u2du
=4δ2√π
∞
0
t3/2e−tdt =4δ2√πΓ
5
2
.
Mit Γ52
= 3
2Γ32
= 3
212Γ12
= 3
4
√π folgt schließlich
∞
0
x2ρr (x) dx = 3δ2.
Die Varianz von r ergibt sich somit zu V (r) = (3− 8/π) δ2.
Gleichverteilung am Halbkreis
Hier ein Beispiel, das eine Cauchyverteilung aus einer Gleichverteilung erzeugt.Der Halbstrahl R>0 · (cos φ, sinφ) ⊂ R2 mit −π
2< φ < π
2schneidet die Gerade
(δ, 0) + R · (0, 1) mit δ > 0 im Punkt S = (δ, δ tanφ) . Siehe Figur 4.12. Ist aufdem Winkelintervall −π
2< φ < π
2eine Gleichverteilung gegeben, so gilt für die
Wahrscheinlichkeit des Ereignissesφ ∈
−π
2, π2
: δ · tanφ < y
W (φ : δ · tanφ < y) =,,−π
2, arctan y
δ
,,π
=1
2+
1
πarctan
y
δ.
Die y-Koordinate des Schnittpunkts S ist also Cauchy-verteilt. Moral: Der Transportder Gleichverteilung auf
−π
2, π2
mit der Funktion δ · tan ergibt eine Cauchyvertei-
lung.
15In der Physik tritt Fr mit δ2 = kT/m als Maxwells thermische Geschwindigkeitsverteilungeines einzelnen Teilchens von einem Massenpunktgas der Temperatur T auf. Der Erwartungswertder kinetischen Energiem |v|2 /2 des Teilchens ergibt sich zu 3kT/2. Da die Geschwindigkeiten allerTeilchen voneinander unabhängig verteilt sind, gilt für die Zahl N (x) der Teilchen mit |v| < x,dass N (x) /Nges ≈ Fr (x) .
KAPITEL 4. WAHRSCHEINLICHKEIT 354
Abbildung 4.12: Halbstrahl schneidet achsenparallele Gerade
Gleichverteilung am Intervall
Ein Auto fährt mit der Geschwindigkeit v und ist zu einer Vollbremsung gezwungen.Für seinen Bremsweg s gilt bei einer konstanten Bremsbeschleunigung b, dass s =v2
2b. Die für eine Vollbremsung zur Verfügung stehende Bremsbeschleunigung eines
zufällig herausgegriffenen Autos sei im Intervall I := [b1, b2] ⊂ R>0 gleichverteilt.Unter diesen Annahmen sollen die folgenden Größen berechnet werden.
1. Der Erwartungswert s des Bremsweges für v = 30m/ s und b1 = 4m/ s2 undb2 = 8m/ s2.
2. Die Verteilungsfunktion des Bremsweges und ihre Dichte. (Graphen)
3. Für v = 30m/ s und b1 = 4m/ s2 und b2 = 8m/ s2 die Wahrscheinlichkeit,dass ein zufällig herausgegriffenes Auto einen Bremsweg hat, der kleiner alss ist.
Der Bremsweg ist am Intervall I der möglichen Werte von b durch die strengmonoton fallende Funktion
s : I → R, b → v2
2b
87654
112.5
100
87.5
75
62.5
b
s
b
s
Die Funktion s
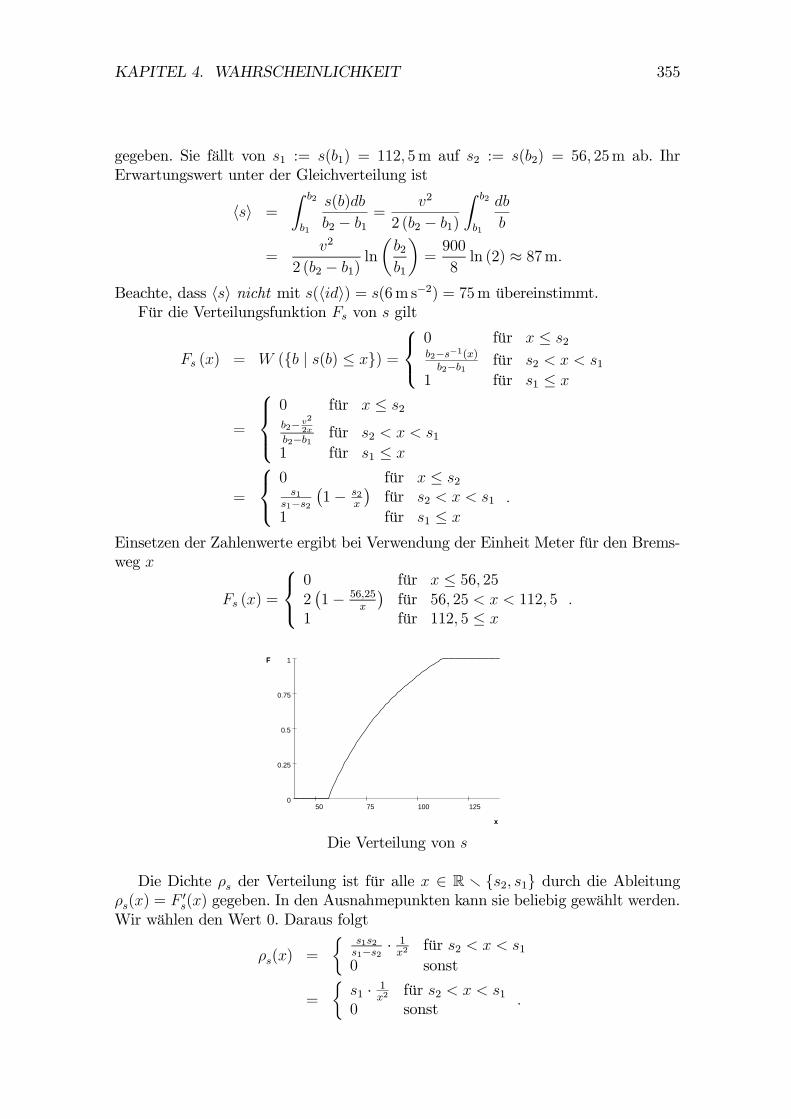
KAPITEL 4. WAHRSCHEINLICHKEIT 355
gegeben. Sie fällt von s1 := s(b1) = 112, 5m auf s2 := s(b2) = 56, 25m ab. IhrErwartungswert unter der Gleichverteilung ist
s =
b2
b1
s(b)db
b2 − b1=
v2
2 (b2 − b1)
b2
b1
db
b
=v2
2 (b2 − b1)ln
b2b1
=
900
8ln (2) ≈ 87m.
Beachte, dass s nicht mit s(id) = s(6m s−2) = 75m übereinstimmt.Für die Verteilungsfunktion Fs von s gilt
Fs (x) = W (b | s(b) ≤ x) =
0 für x ≤ s2b2−s−1(x)
b2−b1für s2 < x < s1
1 für s1 ≤ x
=
0 für x ≤ s2b2− v2
2x
b2−b1für s2 < x < s1
1 für s1 ≤ x
=
0 für x ≤ s2s1
s1−s2
1− s2
x
für s2 < x < s1
1 für s1 ≤ x.
Einsetzen der Zahlenwerte ergibt bei Verwendung der Einheit Meter für den Brems-weg x
Fs (x) =
0 für x ≤ 56, 2521− 56,25
x
für 56, 25 < x < 112, 5
1 für 112, 5 ≤ x.
1251007550
1
0.75
0.5
0.25
0
x
F
x
F
Die Verteilung von s
Die Dichte ρs der Verteilung ist für alle x ∈ R s2, s1 durch die Ableitungρs(x) = F ′
s(x) gegeben. In den Ausnahmepunkten kann sie beliebig gewählt werden.Wir wählen den Wert 0. Daraus folgt
ρs(x) =
s1s2s1−s2
· 1x2
für s2 < x < s10 sonst
=
s1 · 1
x2für s2 < x < s1
0 sonst.
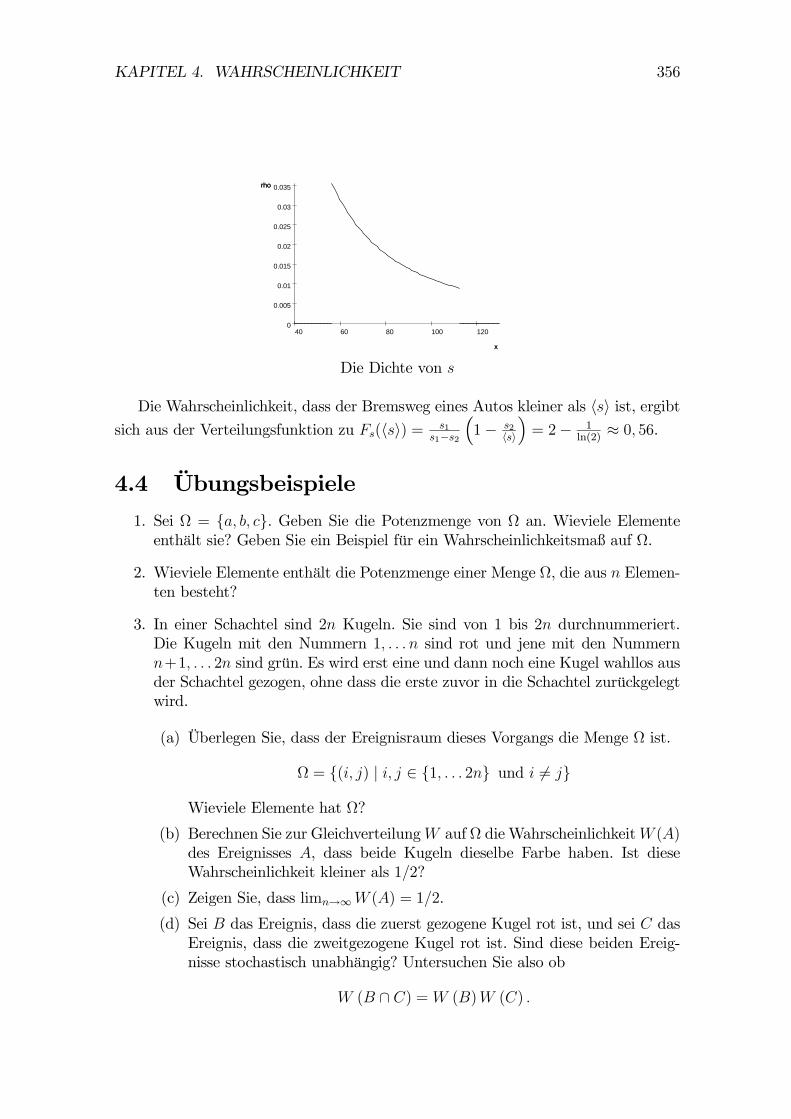
KAPITEL 4. WAHRSCHEINLICHKEIT 356
120100806040
0.035
0.03
0.025
0.02
0.015
0.01
0.005
0
x
rho
x
rho
Die Dichte von s
Die Wahrscheinlichkeit, dass der Bremsweg eines Autos kleiner als s ist, ergibtsich aus der Verteilungsfunktion zu Fs(s) = s1
s1−s2
1− s2
s
= 2− 1
ln(2)≈ 0, 56.
4.4 Übungsbeispiele
1. Sei Ω = a, b, c. Geben Sie die Potenzmenge von Ω an. Wieviele Elementeenthält sie? Geben Sie ein Beispiel für ein Wahrscheinlichkeitsmaß auf Ω.
2. Wieviele Elemente enthält die Potenzmenge einer Menge Ω, die aus n Elemen-ten besteht?
3. In einer Schachtel sind 2n Kugeln. Sie sind von 1 bis 2n durchnummeriert.Die Kugeln mit den Nummern 1, . . . n sind rot und jene mit den Nummernn+1, . . . 2n sind grün. Es wird erst eine und dann noch eine Kugel wahllos ausder Schachtel gezogen, ohne dass die erste zuvor in die Schachtel zurückgelegtwird.
(a) Überlegen Sie, dass der Ereignisraum dieses Vorgangs die Menge Ω ist.
Ω = (i, j) | i, j ∈ 1, . . . 2n und i = j
Wieviele Elemente hat Ω?
(b) Berechnen Sie zur GleichverteilungW auf Ω dieWahrscheinlichkeit W (A)des Ereignisses A, dass beide Kugeln dieselbe Farbe haben. Ist dieseWahrscheinlichkeit kleiner als 1/2?
(c) Zeigen Sie, dass limn→∞W (A) = 1/2.
(d) Sei B das Ereignis, dass die zuerst gezogene Kugel rot ist, und sei C dasEreignis, dass die zweitgezogene Kugel rot ist. Sind diese beiden Ereig-nisse stochastisch unabhängig? Untersuchen Sie also ob
W (B ∩ C) = W (B)W (C) .

KAPITEL 4. WAHRSCHEINLICHKEIT 357
4. In einem Becher sind zwei unterscheidbare, ungezinkte Würfel. Der Becher wirdgeschüttelt und auf ein Tablett geleert. Ein Elementarereignis dieses Spiels istsomit ein Paar (i, j) von Augenzahlen i, j ∈ 1, .., 6.
(a) Geben Sie für den Wahrscheinlichkeitsraum (Ω,W ) dieses Würfelspielsdie Werte der Wahrscheinlichkeitsfunktion p(ω) := W (ω) für alle ω ∈Ω an.
(b) Die Teilmenge A ⊂ Ω steht für das Ereignis „Mindestens eine der ge-würfelten Augenzahlen ist 1 oder prim”? Welche Wahrscheinlichkeit hatA?
(c) B ⊂ Ω steht für: ”Die Summe der Augenzahlen ist größer als 11”. SindA und B stochastisch unabhängig, d. h. gilt W (A ∩ B) = W (A)W (B)?
(d) Sei f : Ω→ R, (i, j) → i+ j. Berechnen Sie den Erwartungswert und dieVarianz von f :
fW =
ω∈Ωp (ω) f(ω), V (f) =
&f 2'W− f2W .
(e) Geben Sie für den Transport16 Wf von W mit f die Wahrscheinlichkeits-funktion pf auf f(Ω) an. Berechnen Sie also für jedes x ∈ f(Ω) die Zahlpf(x) := W (ω ∈ Ω | f(ω) = x) =? Zeigen Sie fW =
x∈f(Ω) xpf(x).
5. Beantworten Sie die Frage 4a) für zwei ununterscheidbare, ungezinkte Würfel.Liegt wie in 4a) eine Gleichverteilung vor?
6. Ein ungezinkter Würfel wird n mal geworfen. Wie groß ist die Wahrscheinlich-keit, dass die ersten k Würfe eine 6 und die restlichen Würfe keine einzige 6ergeben? Welcher Wert ergibt sich für n = 600 und k = 100?
7. Welchen Wahrscheinlichkeitsraum hat das Lotto Sechs aus 45? Welche Wahr-scheinlichkeit hat ein Elementarereignis? Hinweis: Eine Ziehung ist eine in-jektive17 Abbildung f : 1, 2, . . . 6 → 1, 2, . . . 45. Wieviele solche Abbil-dungen gibt es? Sind f und g zwei solche Abbildungen mit g (1, 2, . . . 6) =f (1, 2, . . . 6), dann werden sie als dasselbe Zufallsereignis aufgefasst, da dieReihenfolge der gezogenen Zahlen ignoriert wird. Wieviele sechselementigeTeilmengen hat also 1, 2, .., 45? Für N, k ∈ N0, k ≤ N heißen die Zahlen
Nk
:=
N !
k! (N − k)!
Binomialkoeffizienten18. Für k ∈ N ist k! := k(k − 1) . . . 1 und 0! := 1.
16Es gilt für jedes A ⊂ f(Ω) dass Wf (A) =Wf−1 (A)
, wobei f−1(A) = ω ∈ Ω | f(ω) ∈ A.
17Eine Abbildung f : X → Y heißt injektiv, falls für alle a, b ∈ X mit a = b gilt: f(a) = f(b).18Es gilt
(x+ y)N =N
k=0
Nk
xkyN−k

KAPITEL 4. WAHRSCHEINLICHKEIT 358
8. Ein ungezinkter Würfel wird n mal geworfen. Wie groß ist die Wahrschein-lichkeit, dass genau k Würfe eine 6 werfen? Welchen Wert hat sie für n = 600und k = 100?
9. Ein Signalprozessor liest eine Folge aus Nullen und Einsen. Die Wahrschein-lichkeit, dass er ein Zeichen falsch liest sei 0, 05. Wie groß ist die Wahrschein-lichkeit, dass er beim Lesen einer Folge von 39 Zeichen mindestens 7 Zeichenfalsch liest?
10. Ein instabiler Atomkern sei nach Ablauf der Zeitspanne τ mit der Wahrschein-lichkeit x ∈ [0, 1] zerfallen. Der W-raum (Ω,W ) dieses Versuchs ist Ω = 0, 1mit dem W-maß W , für das W (1) = x gilt. Die Zahl 1 steht also für dasElementarereignis ”Der Kern ist zerfallen”.
(a) Welchen Erwartungswert und welche Varianz hat Z : Ω→ R, ω → ω?
(b) Wenn N unterscheidbare Kerne sich gegenseitig nicht beeinflussen, hatder Zufallsversuch ”Welche der N Kerne zerfallen innerhalb einer Sekun-de?” den W-raum (ΩN ,WN ) mit
ΩN := ΩN und WN(A1 × ..×AN ) :=ND
i=1
W (Ai).
Die Zahl der in einem Elementarereignis (ω1, .., ωN) ∈ ΩN zerfallenenKerne wird von der stochastischen Variablen ZN : ΩN → R mit
ZN(ω1, .., ωN) :=N
i=1
Z(ωi)
angegeben. Welchen Erwartungswert und welche Varianz hat ZN?
(c) Zeigen Sie, dass der Transport von WN mit ZN die Binomialverteilungauf 0, 1, .., N ist. Es gilt für k ∈ 0, 1, .., N
WN(Z−1N (k)) = Bi (k;N,x) := xk(1− x)N−k N !
(N − k)!k!.
Die Abbildungen 1 und 2 zeigen die Binomialverteilung
k → WN(Z−1N (k))
für N = 10 und N = 100 und x = 1/3 und x = 2/3.
(d) Sei nun x = 10−3. Welchen Wert hat die Wahrscheinlichkeit, dass vonN = 103 Kernen innerhalb von einer Sekunde mehr als 2 (bzw. 3) zerfal-len? Hinweis: Berechnen Sie zunächst die Wahrscheinlichkeit des komple-mentären Ereignisses.
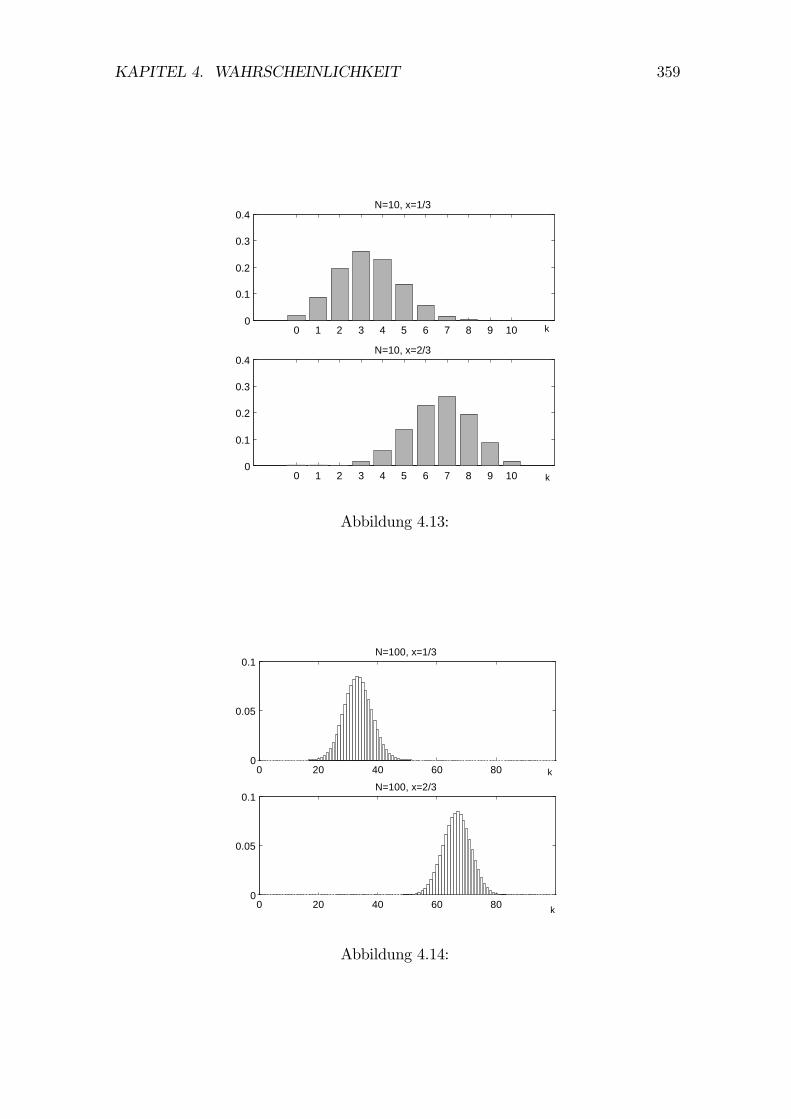
KAPITEL 4. WAHRSCHEINLICHKEIT 359
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
k
N=10, x=1/3
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
k
N=10, x=2/3
Abbildung 4.13:
0 20 40 60 800
0.05
0.1
k
N=100, x=1/3
0 20 40 60 800
0.05
0.1
k
N=100, x=2/3
Abbildung 4.14:

KAPITEL 4. WAHRSCHEINLICHKEIT 360
(e) Kontrollieren Sie Ihr Ergebnis für d) an der Chebyshev Ungleichung19.
11. Die Wahrscheinlichkeit x, dass ein Atomkern während einer Zeitspanne derDauer τ > 0 zerfällt, sei für hinreichend kleine τ durch γτ gegeben. Dabei seiγ > 0 und γτ ≪ 1.
(a) Der Kern wird für ein n ∈ N über eine Zeitspanne der Dauer nτ beob-achtet. Falls der Kern zerfällt, wird festgestellt, in welchem der n Teilin-tervalle der Dauer τ er zerfällt. Mit welcher Wahrscheinlichkeit zerfällt erim k-ten Zeitintervall?
(b) Sei P (t) die Wahrscheinlichkeit, dass der Kern ein Zeitintervall der Dauert > 0 überlebt. Zeigen Sie, dass
limτ→0
P (t) = e−γt.
Hinweis: Überlegen Sie, dass limτ→0 P (t) = limn→∞ P
tn
n.
12. Geometrische Verteilung zum Parameter x : Ein instabiler Atomkern, zerfalleunabhängig von seinem Alter in einer Sekunde mit der Wahrscheinlichkeit(1− x) ∈ ]0, 1[. Die Wahrscheinlichkeit, dass er n ∈ N0 Sekunden überlebtund dann bis zum Zeitpunkt n+ 1 zerfällt, ist p(n) := W (n) := xn(1− x).Seine Lebensdauer ist also in diesem diskreten Modell geometrisch verteilt. Esist, als würde der Kern, so lange er lebt, jede Sekunde eine Münze werfen, dieüber sein Leben entscheidet. Wenn er zum ersten Mal „Tod” wirft, ist seinZufallsexperiment beendet.
(a) Sei N ∈ N0 gegeben. Mit welcher Wahrscheinlichkeit zerfällt der Kernvor der Zeit N + 1? Gilt W (N0) = 1?
(b) Die stochastische Variable τ := idN0 heißt Lebensdauer. Welchen Erwar-tungswert und welche Varianz hat τ? Hinweis:
∞
n=0
nxn = xd
dx
∞
n=0
xn und∞
n=0
n(n− 1)xn = x2 d2
dx2
∞
n=0
xn
(c) Skizzieren Sie den Graphen der Verteilung p (von τ).
(d) Seien M,m ∈ N0 gegeben. Mit welcher Wahrscheinlichkeit zerfällt einKern, der in einem Intervall n ≥ M zerfällt, in irgendeinem Intervallmit n < M +m? Hinweis: Die bedingte Wahrscheinlichkeit W (A | B) =W (A∩B)W (B)
für A = n ∈ N0 | n < M +m und B = n ∈ N0 | n ≥ M istzu ermitteln.
19Für eine reelle stochastische Variable f auf einem endlichen Wahrscheinlichkeitsraum (Ω,W )gilt
W (ω ∈ Ω : |f(ω)− f| ≥ t) ≤ V (f)t−2.
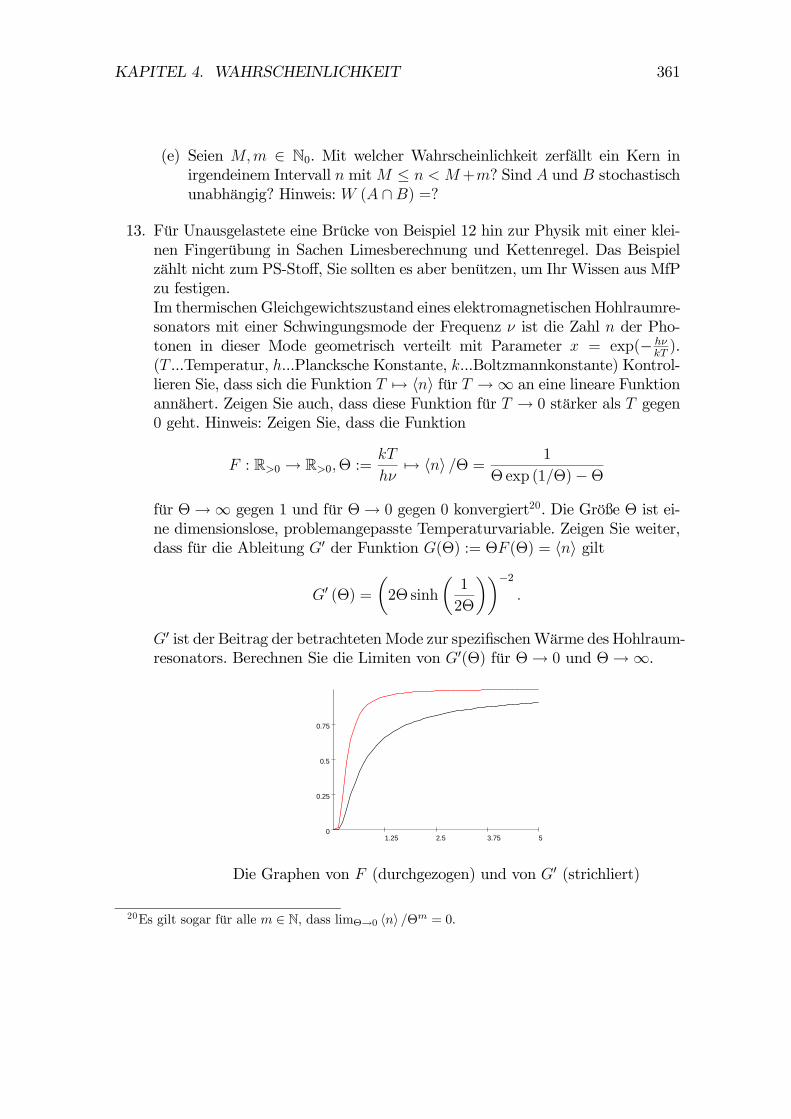
KAPITEL 4. WAHRSCHEINLICHKEIT 361
(e) Seien M,m ∈ N0. Mit welcher Wahrscheinlichkeit zerfällt ein Kern inirgendeinem Intervall n mit M ≤ n < M+m? Sind A und B stochastischunabhängig? Hinweis: W (A ∩B) =?
13. Für Unausgelastete eine Brücke von Beispiel 12 hin zur Physik mit einer klei-nen Fingerübung in Sachen Limesberechnung und Kettenregel. Das Beispielzählt nicht zum PS-Stoff, Sie sollten es aber benützen, um Ihr Wissen aus MfPzu festigen.Im thermischen Gleichgewichtszustand eines elektromagnetischen Hohlraumre-sonators mit einer Schwingungsmode der Frequenz ν ist die Zahl n der Pho-tonen in dieser Mode geometrisch verteilt mit Parameter x = exp(− hν
kT).
(T ...Temperatur, h...Plancksche Konstante, k...Boltzmannkonstante) Kontrol-lieren Sie, dass sich die Funktion T → n für T →∞ an eine lineare Funktionannähert. Zeigen Sie auch, dass diese Funktion für T → 0 stärker als T gegen0 geht. Hinweis: Zeigen Sie, dass die Funktion
F : R>0 → R>0,Θ :=kT
hν→ n /Θ =
1
Θ exp (1/Θ)−Θ
für Θ→∞ gegen 1 und für Θ→ 0 gegen 0 konvergiert20. Die Größe Θ ist ei-ne dimensionslose, problemangepasste Temperaturvariable. Zeigen Sie weiter,dass für die Ableitung G′ der Funktion G(Θ) := ΘF (Θ) = n gilt
G′ (Θ) =
2Θ sinh
1
2Θ
−2.
G′ ist der Beitrag der betrachtetenMode zur spezifischenWärme des Hohlraum-resonators. Berechnen Sie die Limiten von G′(Θ) für Θ→ 0 und Θ→∞.
53.752.51.25
0.75
0.5
0.25
0
Die Graphen von F (durchgezogen) und von G′ (strichliert)
20Es gilt sogar für alle m ∈ N, dass limΘ→0 n /Θm = 0.
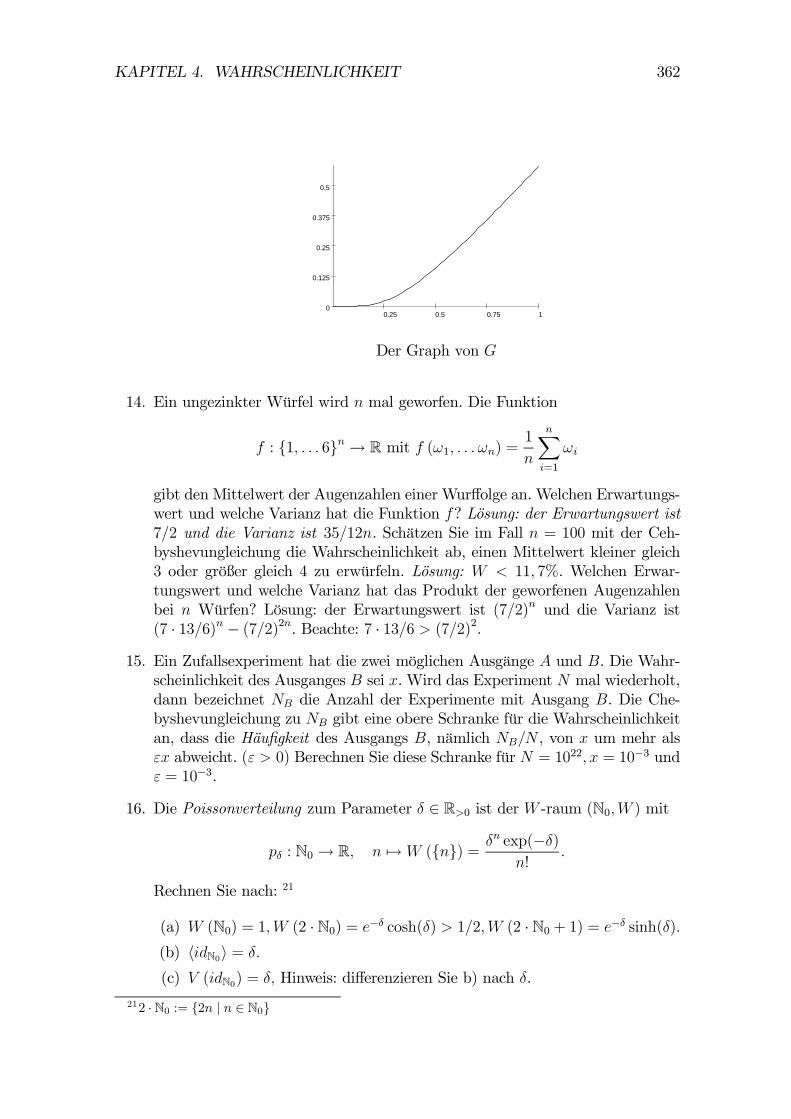
KAPITEL 4. WAHRSCHEINLICHKEIT 362
10.750.50.25
0.5
0.375
0.25
0.125
0
Der Graph von G
14. Ein ungezinkter Würfel wird n mal geworfen. Die Funktion
f : 1, . . . 6n → R mit f (ω1, . . . ωn) =1
n
n
i=1
ωi
gibt den Mittelwert der Augenzahlen einer Wurffolge an. Welchen Erwartungs-wert und welche Varianz hat die Funktion f? Lösung: der Erwartungswert ist7/2 und die Varianz ist 35/12n. Schätzen Sie im Fall n = 100 mit der Ceh-byshevungleichung die Wahrscheinlichkeit ab, einen Mittelwert kleiner gleich3 oder größer gleich 4 zu erwürfeln. Lösung: W < 11, 7%. Welchen Erwar-tungswert und welche Varianz hat das Produkt der geworfenen Augenzahlenbei n Würfen? Lösung: der Erwartungswert ist (7/2)n und die Varianz ist(7 · 13/6)n − (7/2)2n. Beachte: 7 · 13/6 > (7/2)2.
15. Ein Zufallsexperiment hat die zwei möglichen Ausgänge A und B. Die Wahr-scheinlichkeit des Ausganges B sei x. Wird das Experiment N mal wiederholt,dann bezeichnet NB die Anzahl der Experimente mit Ausgang B. Die Che-byshevungleichung zu NB gibt eine obere Schranke für die Wahrscheinlichkeitan, dass die Häufigkeit des Ausgangs B, nämlich NB/N , von x um mehr alsεx abweicht. (ε > 0) Berechnen Sie diese Schranke für N = 1022, x = 10−3 undε = 10−3.
16. Die Poissonverteilung zum Parameter δ ∈ R>0 ist der W -raum (N0,W ) mit
pδ : N0 → R, n → W (n) = δn exp(−δ)
n!.
Rechnen Sie nach: 21
(a) W (N0) = 1,W (2 · N0) = e−δ cosh(δ) > 1/2,W (2 · N0 + 1) = e−δ sinh(δ).
(b) idN0 = δ.
(c) V (idN0) = δ, Hinweis: differenzieren Sie b) nach δ.
212 · N0 := 2n | n ∈ N0
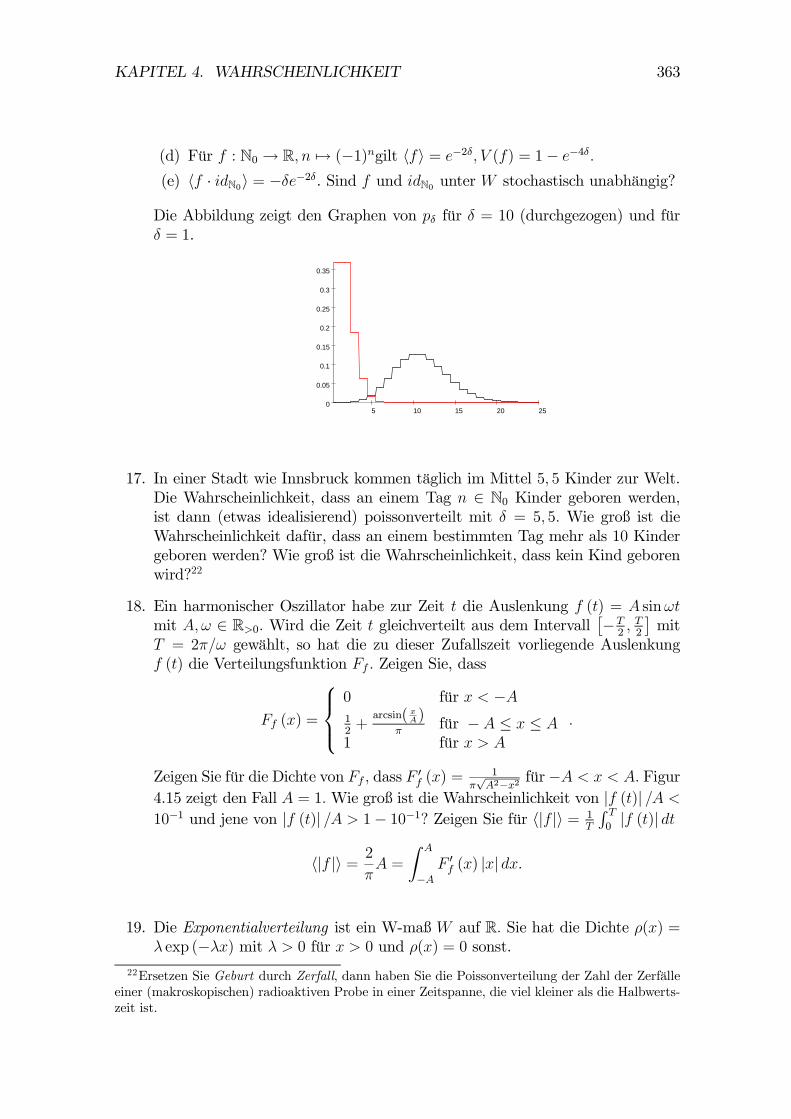
KAPITEL 4. WAHRSCHEINLICHKEIT 363
(d) Für f : N0 → R, n → (−1)ngilt f = e−2δ, V (f) = 1− e−4δ.
(e) f · idN0 = −δe−2δ. Sind f und idN0 unter W stochastisch unabhängig?
Die Abbildung zeigt den Graphen von pδ für δ = 10 (durchgezogen) und fürδ = 1.
252015105
0.35
0.3
0.25
0.2
0.15
0.1
0.05
0
17. In einer Stadt wie Innsbruck kommen täglich im Mittel 5, 5 Kinder zur Welt.Die Wahrscheinlichkeit, dass an einem Tag n ∈ N0 Kinder geboren werden,ist dann (etwas idealisierend) poissonverteilt mit δ = 5, 5. Wie groß ist dieWahrscheinlichkeit dafür, dass an einem bestimmten Tag mehr als 10 Kindergeboren werden? Wie groß ist die Wahrscheinlichkeit, dass kein Kind geborenwird?22
18. Ein harmonischer Oszillator habe zur Zeit t die Auslenkung f (t) = A sinωtmit A, ω ∈ R>0. Wird die Zeit t gleichverteilt aus dem Intervall
−T
2, T2
mit
T = 2π/ω gewählt, so hat die zu dieser Zufallszeit vorliegende Auslenkungf (t) die Verteilungsfunktion Ff . Zeigen Sie, dass
Ff (x) =
0 für x < −A
12+
arcsin( xA)π
für − A ≤ x ≤ A1 für x > A
.
Zeigen Sie für die Dichte von Ff , dass F ′f (x) =
1π√A2−x2
für−A < x < A. Figur4.15 zeigt den Fall A = 1. Wie groß ist die Wahrscheinlichkeit von |f (t)| /A <
10−1 und jene von |f (t)| /A > 1− 10−1? Zeigen Sie für |f | = 1T
T
0|f (t)| dt
|f | = 2
πA =
A
−A
F ′f (x) |x| dx.
19. Die Exponentialverteilung ist ein W-maß W auf R. Sie hat die Dichte ρ(x) =λ exp (−λx) mit λ > 0 für x > 0 und ρ(x) = 0 sonst.
22Ersetzen Sie Geburt durch Zerfall, dann haben Sie die Poissonverteilung der Zahl der Zerfälleeiner (makroskopischen) radioaktiven Probe in einer Zeitspanne, die viel kleiner als die Halbwerts-zeit ist.

KAPITEL 4. WAHRSCHEINLICHKEIT 364
1.510.50-0.5-1-1.5
1.25
1
0.75
0.5
0.25
0
Abbildung 4.15: Verteilung und Dichte (rot) der Auslenkung
(a) Berechnen Sie die Verteilungsfunktion F : R→ R mit x → W ((−∞, x])von W. Zeigen Sie, dass
limx→0
F (x) = 0, limx→∞
F (x) = 1.
Skizzieren Sie die Graphen von F und F ′.
(b) Zeigen Sie durch Induktion nach n für den Erwartungswert der stochas-tischen Variablen Xn := (idΩ)
n mit n ∈ N0, dass Xn = n!/λn.
(c) Welche Verteilungsfunktion Ff : R→ R und Dichte F ′f hat der Transport
Wf von W unter der stochastischen Variablen f :=|X1| : R → R?
Lösung:
Ff(ξ) : = Wf ((−∞, ξ]) = W0
x ∈ R ||x| ≤ ξ
1
=
0 für ξ ≤ 01− exp
−λξ2
für ξ > 0
.
Skizzieren Sie die Graphen von Ff und F ′f .
(d) Sei L > 0, das Ereignis B = (L,∞) und WB das konditionelle W-maß zuB. Welche Verteilungsfunktion Fg,B und Dichte F ′
g,B hat die stochastischeVariable g := X1 − L : R→ R unter WB? Hinweis:
Fg,B(ξ) := (WB)g ((−∞, ξ]) =W (g−1 ((−∞, ξ]) ∩B)
W (B)
(e) Welche bedingte Wahrscheinlichkeit W (A | B) hat das Ereignis A =(0, L1) bezüglich B = (0, L2)? Sind A und B stochastisch unabhängig?

KAPITEL 4. WAHRSCHEINLICHKEIT 365
20. Das W-maß W auf R3, sei für ein R > 0 in der Kugel
KR :=(x, y, z) ∈ R3 | x2 + y2 + z2 < R2
gleichverteilt.
(a) Welche Verteilungsfunktion Fr : R→ R und Dichte F ′r hat der Transport
Wr von W unter der stochastischen Variablen
r : R3 → R, (x, y, z) →
x2 + y2 + z2.
Lösung:
Fr(ξ) := Wr−1 ((−∞, ξ])
=
0 für ξ ≤ 0ξR
3für 0 < ξ < R
1 für ξ ≥ R
.
(b) Zeigen Sie, dass
rW :=
∞
−∞
F ′r (ξ) ξdξ =
3
4R, VW (r) =
3R2
80
(c) Welche Verteilungsfunktion Fπ1hat der Transport von W unter π1 : R3 →R, (x, y, z) → x?
21. Der Abstand r zwischen Kern und Elektron eines H-Atoms ist eine (nicht-negative) reelle stochastische Variable auf R3. Sie hat im Grundzustand dieVerteilungsfunktion F : R>0 → R mit
F (x) :=
x
0
ρ(ξ)dξ, ρ(x) := Nx2 exp(−x).
(Hier ist der halbe Bohrsche Radius als Längeneinheit gewählt.) N ∈ R
(a) N =? Hinweis: limx→∞F (x) = 1.
(b) Skizzieren Sie die Graphen von F und ρ.
(c) r =?, V (r) =?
Literaturverzeichnis
[1] V. I. Arnold, Gewöhnliche Differentialgleichungen, Springer, Berlin, 1979
[2] H. Dehling, B. Haupt, Einführung in die Wahrscheinlichkeitstheorie und Sta-tistik, Springer, Berlin, 2004
[3] F. Erwe, Differential- und Integralrechnung, Vol. 1,2, BI, Mannheim, 1962
[4] H. Fischer, H. Kaul, Mathematik für Physiker, Vol.1, 2, 3, Teubner, Stuttgart,1998-2006
[5] O. Forster, Analysis 1, Vieweg, Braunschweig, 1983
[6] O. Forster, Analysis 2, Vieweg, Braunschweig, 1984
[7] O. Forster, Analysis 3, Vieweg, Braunschweig, 1984
[8] L. Garding, Encounter with Mathematics, Springer, Berlin, 1977
[9] K. Jänich, Vektoranalysis, Springer, Berlin, 1993
[10] K. Jänich, Mathematik 1 Geschrieben für Physiker, Springer, Berlin, 2001
[11] K. Jänich, Mathematik 2 Geschrieben für Physiker, Springer, Berlin, 2002
[12] K. Jänich, Analysis für Physiker und Ingenieure, Springer, Berlin, 2001
[13] T. W. Körner, Fourier Analysis, Cambridge UP, Cambridge, 1988
[14] W. Neutsch, Koordinaten, Spektrum, Heidelberg, 1995
[15] F. Pauer, Mathematik für Physiker 1, Skriptum WS99/00, Universität Inns-bruck
[16] L. Rade, B. Westergren, Springers mathematische Formeln, Springer, Berlin,1996
[17] G. F. Simmons, Calculus Gems, The Mathematical Association of Amerika(Inc), 2007
[18] W. Walter, Gewöhnliche Differentialgleichungen, Springer, Berlin, 2000
366