Maxwell WS 08-09
27
5/11/2018 MaxwellWS08-09-slidepdf.com http://slidepdf.com/reader/full/maxwell-ws-08-09 1/27 Technische Universität Berlin Institut für Konstruktion, Mikro - und Medizintechnik Fachgebiet Mikrotechnik Prof. Dr. rer. nat. Heinz Lehr Integrierte Lehrveranstaltung Engineering Tools II Übungseinheit MAXWELL Wintersemester 2008 / 2009 Übungsleiter: Walter Vogel Tel. 030 - 314 - 24196 [email protected]
-
Upload
meghan-wade -
Category
Documents
-
view
826 -
download
3
Transcript of Maxwell WS 08-09

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 1/27
Technische Universität Berlin
Institut für Konstruktion, Mikro - und Medizintechnik
Fachgebiet Mikrotechnik
Prof. Dr. rer. nat. Heinz Lehr
Integrierte Lehrveranstaltung
Engineering Tools II
Übungseinheit
MAXWELL
Wintersemester 2008 / 2009
Übungsleiter:
Walter Vogel
Tel. 030 - 314 - 24196

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 2/27
1
Inhaltsverzeichnis
1 Die Methode der finiten Elemente (FEM) ............................................................. 2
1.1 Schritte einer FEM-Analyse....................................................................................... 3
1.2 Randbedingungen (BCs) ............................................................................................ 4
1.3 Unterschied 2D zu 3D................................................................................................ 6
2 Kurzanleitung Maxwell (FEM-Software) .............................................................. 8
2.1 Bedienung des Programms......................................................................................... 8
3 Physikalische Grundlagen des Magnetismus....................................................... 14
3.1 Magnetische Feldstärke H........................................................................................14
3.2 Magnetische Induktion B .........................................................................................15
3.3 Magnetischer Fluß Φ ................................................................................................ 16
3.4 Magnetische Feldenergie.......................................................................................... 16
3.5 Ferromagnetische Materialien..................................................................................16
3.6 Hart- und weichmagnetische Materialien ................................................................18
3.7 Magnetkreisberechnung ...........................................................................................19
3.8 Ohm´sches Gesetz des Magnetismus.......................................................................22
3.9 Magnetkräfte ............................................................................................................24
3.9.1 Reluktantzkräfte ....................................................................................................... 24
3.9.2 Maxwell´sche Zugkraftformel..................................................................................26

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 3/27
2
1 Die Methode der finiten Elemente (FEM)
Die Methode der finiten Elemente (FEM) ist ein numerisches Verfahren zur Lösung von
partiellen Differentialgleichungen (pDGL) und von Systemen aus partiellen Differential-
gleichungen. Dazu wird das Lösungsgebiet in Intervalle aufgeteilt, die finite Elemente
genannt werden. Über jedem Intervall wird eine Interpolationsfunktion definiert, die geeignet
ist, die exakte Lösung innerhalb dieses Intervalls zu approximieren. Dazu werden meist
Polynome eines Grades verwendet, welche die Anforderungen des mathematischen Problems
hinsichtlich ihrer Differenzierbarkeit erfüllen. Beispielsweise ist ein Polynom zweiten Grades
ungeeignet, wenn in der pDGL die dritte Ableitung vorkommt, da diese dann verschwinden
würde.
Zusätzlich werden sogenannte Übergangsbedingungen an den Elementgrenzen formuliert, die
die Stetigkeit der Lösung sowie evtl. einer oder mehrerer Ableitungen an den Elementgrenzen
sicherstellen. Die Stetigkeit der Lösung bedeutet im mechanischen Fall, dass das Materialnicht auseinander gerissen wird. Da die Ableitungen der Interpolationsfunktionen bekannt
sind, lässt sich das pDGL-System auf diese Weise in ein algebraisches Gleichungssystem
übersetzten, welches automatisiert gelöst werden kann.
In Abbildung 1-1 ist diese Methodik für ein eindimensionales System der Eingangsvariablen
x veranschaulicht. y(x) sei die exakte Lösung dieses Systems. Das Lösungsgebiet ist bereits in
finite Elemente unterteilt. Je enger diese Unterteilung ist, desto genauer kann die exakte
Lösung angenähert werden. Dazu ist es hilfreich sich vorzustellen, die Interpolation zwischen
den Intervallgrenzen sei linear, wenngleich tatsächlich Polynome höherer Ordnung zur
Anwendung kommen.
Es wird außerdem klar, dass es sinnvoll ist, in Bereichen großer Krümmung feiner zu
elementieren. Bei eindimensionalen Problemen sind die finiten Elemente Strecken, die sich
lediglich in ihrer Länge unterscheiden können und die Elementgrenzen sind Punkte. Bei
zweidimensionalen und dreidimensionalen Problemen kommen dagegen Drei- und Vierecke
bzw. Tetraeder und Oktaeder zum Einsatz. Die Elementgrenzen sind entsprechend Strecken
bzw. Flächen, was die Erfüllung der Stetigkeitsforderung erschwert, so dass es schwieriger
ist, geeignete Interpolationsfunktionen zu finden.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 4/27
3
x
y(x)
finites Element Knoten
Abb. 1-1 Annäherung der exakten Lösung y(x) einer DGL mit Hilfe von
finiten Elementen. In Bereichen starker Krümmung wird sinnvoller Weise
feiner elementiert als in Bereichen geringer Krümmung.
1.1 Schritte einer FEM-Analyse
Kommerzielle FEM-Software wird zur Berechnung mechanischer, fluiddynamischer, elektro-
magnetischer und anderer physikalischer Probleme genutzt. Trotz der Verschiedenheit der
physikalischen Fragestellung ähnelt sich die Vorgehensweise zur Modellierung in den unter-
schiedlichen Programmen stark. Sie gliedert sich in folgende Schritte:
1. Preprocessing
2.2. Erstellen der Geometrie
2.3. Zuweisen von Materialeigenschaften, z.B. magnetische Permeabilität oder
relativer Dielektrizitätskonstante
2.4. Zuweisen von Lasten (z. B. Kräfte in einer mechanische Analyse) und Randbe-
dingungen (z.B. Flux-parallel-Randbedingungen in einer elektromagnetischen
Analyse)
2.5. Elementierung
2. Solver2.6. Erstellen der Gleichungssysteme
2.7. Lösen der Gleichungssysteme
3. Postprocessing
2.8. Darstellung der Ergebnisse z. B. mit Feldliniendiagrammen
2.9. Interpretation der Ergebnisse

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 5/27
4
Die Geometrieerstellung ähnelt der Konstruktion in einem CAD-Programm. In vielen FEM-
Programmen ist es außerdem möglich, CAD-Modelle zu importieren.
Das Zuweisen der Materialeigenschaften beschränkt sich auf die für die jeweilige Analyse
wesentlichen Eigenschaften, beispielsweise des E-Moduls und der Querkontraktionszahl
(mechanische Analyse), der magnetischen Permeabilität bzw. BH-Kurve (magnetostatischeAnalyse), oder der relativen Dielektrizitätskonstante und elektrischen Leitfähigkeit
(elektrostatische Analyse).
Unter Lasten versteht man im mechanischen Fall beispielsweise Kräfte oder Drücke, während
man den Begriff Randbedingungen im mathematischen Sinne der Differentialgleichung
versteht. Ein Beispiel hierfür sind Symmetriebedingung, welche es ermöglichen, nur Teile der
Struktur zu modellieren, wenn diese Symmetrien aufweist (s. u.). Die Lasten werden im
elektromagnetischen Fall meist als Erregung (Excitation) bezeichnet. Hierunter fallen
beispielsweise Strom- und Spannungsquellen.
Unter der Elementierung oder Vernetzung (englisch: Mesh) versteht man die Unterteilung des
Lösungsgebietes in die finiten Elemente. Anders als in den meisten anderen FEM-
Programmen kann die Elementierung in Maxwell vollständig von der Software übernommen
werden. Sie wird dabei mit Hilfe von Energiebetrachtungen in mehreren Rechenzyklen so
lange verfeinert, bis die gewünschte Rechengenauigkeit erreicht ist. Der Anwender hat jedoch
auch die Möglichkeit, die Elementierung durch Meshseeds (wörtlich: Elementierungs-Saat)
zu beeinflussen. Dies ist jedoch meist nicht nötig.
Die Ecken der Elemente bezeichnet man als Knoten. An diesen Knoten sind die Variablen
definiert, welche letztlich das lineare Gleichungssystem bilden. Im Fall einer mechanischen3D-Analyse sind dies die Verschiebungen in den drei Raumrichtungen, im
elektromagnetischen Fall ist es das magnetische Vektorpotential. Dieses Gleichungssystem
wird vom Solver gelöst. Alle anderen Größen, z. B. mechanische Spannungen bzw.
magnetische Induktion etc. werden hieraus anschließend im Postprocesser errechnet. Der
Anwender hat die Möglichkeit, sich diese Ergebnisse auf vielerlei Weise graphisch
anschaulich darstellen zu lassen.
1.2 Randbedingungen (BCs)
Da die Anzahl der Rechenschritte und damit die Rechenzeit zur Lösung eines
Gleichungssystems exponentiell mit der Anzahl an Variablen steigt, ist es sinnvoll, das
Modell und damit die Element und Knotenzahl mit Hilfe von Randbedingungen so klein wie
möglich zu halten. Dazu werden Symmetriebedingungen definiert, welche auf den
Symmetrieflächen des Modells zugewiesen werden. In Maxwell stehen verschiedene Arten
von Randbedingungen zu Verfügung. Diese werden im Folgenden kurz erläutert. Zu beachten
ist, dass die Wirkung auf magnetische und elektrische Felder genau invertiert ist.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 6/27
5
Symmetry odd
Diese Randbedingung bewirkt, dass der magnetische Fluss, also die Feldlinien des B-Feldes,
tangential zur Grenzfläche verlaufen (vgl. Abbildung 1-2). Im Fall eines E-Feldes treten die
Feldlinien normal durch die Grenzfläche ein- oder aus.
Symmetry even
Diese Randbedingung bewirkt, dass der magnetische Fluss, also die Feldlinien des B-Feldes,
normal in die Grenzfläche ein- bzw. austreten (vgl. Abbildung 1-2). E-Feldlinien dagegen
laufen tangential zu dieser Grenzfläche.
Symmetry even(flux normal)
S y m m e t r y o d d
( f l u x p a r a l l e l )
Abb. 1-2 Feld eines Stabmagneten (links), Verkleinerung des Untersuchungsgebietes mit Hilfe
von Symmetriebedingungen (mittig) und zugehörige Elementierung (rechts)
Master und Slave
Mit Hilfe der Master & Slave BC können zyklische Symmetrien ausgenutzt werden (vgl.
Abbildung 1-3). Sie bewirkt, dass die Freiheitsgrade auf zwei Grenzflächen des Systems als
identisch angenommen werden. Dazu müssen die Elementierungen auf beiden Grenzflächen
kompatibel sein, d.h. die Knoten müssen an den gleichen Positionen liegen.
In Maxwell wird eine dieser Grenzflächen als Master, die andere als Slave bezeichnet. Dabei
gibt es die Möglichkeit die entsprechenden Freiheitsgrade mittels
• Master = Slave
• Master = -Slave
zu verknüpfen.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 7/27
6
(a) (b) (c)
Zyklische SymmetrieMaster = - Slave
Zyklische SymmetrieMaster = Slave
Abb. 1-3 Ausgelenkte Magnetkupplung. Ein 120°-Segment weist zyklische Symmetrie des Typs
Master = Slave auf (a), während ein 60°-Segment zyklische Symmetrie des Typs Master = - Slavezeigt (b). Der Unterschied zwischen beiden besteht darin, dass die Magnete, die von den
Segmentgrenzen geschnitten werden, in (a) gleichsinnig und in (b) gegensinnig magnetisiert sind.
Bildteil (c) zeigt die Berechnung des Feldes mit Hilfe von Master = - Slave. Es ist zu erkennen, dass
die Feldlinien an den Segmenträndern ineinander münden. Allerdings ist die Feldrichtung genau
gegensinnig (Master = - Slave), was hier nicht zu erkennen ist.
1.3 Unterschied 2D zu 3D
Ziel dieses Abschnittes ist es aufzuzeigen, wann es sinnvoll ist, dreidimensionale FEM-Programme einzusetzen und aufzuzeigen, dass es durchaus eine Berechtigung für die Nutzung
von zweidimensionalen Systeme gibt.
In der Übung „Maxwell 2D – Elektrostatik“ ist ein einfacher FEM-Ansatz für die Berechnung
des elektrischen Feldes in einem sehr einfachen System berechnet worden. Gelöst worden ist
dabei zuerst die Potentialverteilung im System. Daraus kann dann das elektrische Feld
berechnet werden.
Der Lösungsansatz über das Potentialfeld ist insofern speziell, als dass das Potential ein
skalares Feld und kein vektorielles Feld ist. Ebenso sind die „Lasten“ des Systems, dieLadungen, eine skalare Größe. Sie haben keinen gerichteten Charakter.
Soll aber ein vektorielles Feld gelöst werden, wie z.B. in magnetostatischen Anwendungen, so
erhöht sich die Komplexität der Matrix mit der Anzahl der Raumdimensionen. Während ein
skalares Feld in jedem Raumpunkt nur einen Funktionswert besitzt, so verfügt ein vektorielles
Feld über genau so viele Funktionswerte, wie die Anzahl der betrachteten Raumdimensionen.
Die Knotenverschiebung eines Stabwerkes beispielsweise hat als 2D Problem also zwei Werte
und in drei Dimensionen drei. Für jede dieser Werte muss in der Steifigkeitsmatrix eine
Gleichung vorgesehen werden. Hinzu kommt, dass im dreidimensionalen Fall mehr Knoten
benötigt werden als im zweidimensionalen Fall.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 8/27
7
Die zu lösenden Gleichungssysteme werden also bei 3D Problemen schnell deutlich
komplexer als im zweidimensionalen Fall und die Rechenzeit nimmt beträchtlich zu. Daher
sollte einer zweidimensionalen Modellierung des Problems der Vorzug gegeben werden,
solange dies möglich ist.
Ist es aber notwendig ein Problem in drei Dimensionen zu berechnen, so sollte versuchtwerden, das Gleichungssystem durch Nutzung von Symmetrien so weit wie möglich zu
reduzieren.
Abb. 1-4 Objekt nicht mit 2D Software darstellbar.
Der Vorteil von dreidimensionalen FEM-Systemen liegt vor allem darin, dass prinzipiell jede
beliebige Geometrie und Problemstellung berechnet werden kann. Während
zweidimensionale Programme zwar ressourcenschonender sind und im Allgemeinen schneller
Lösungen bieten, scheitert Ihr Einsatz häufig daran, dass das zu berechnende System durch
eine zweidimensionale Modellierung nicht befriedigend abgebildet werden kann.
Ein weiterer Vorteil dreidimensionaler Systeme ergibt sich im Hinblick auf Marketing
gegenüber inneren und äußeren Kunden. 3D Systeme wirken professioneller und die
ausgegeben Bilder sind optisch ansprechender. Nicht zuletzt erlauben sie es auch im Lesen
von technischen Zeichnungen ungeübten Personen die Geometrie zu erkennen.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 9/27
8
2 Kurzanleitung Maxwell (FEM-Software)
2.1 Bedienung des Programms
Diese kurze Zusammenstellung kann weder die Teilnahme an der Lehrveranstaltung, noch das
eigene Arbeiten mit dem Programm ersetzen, sie erhebt auch keinen Anspruch auf Voll-
ständigkeit. Sie dient als Nachschlagewerk und soll den Schreibaufwand während der Lehr-
veranstaltung reduzieren.
Im folgenden Beispiel wird das Magnetfeld eines einfachen Elektromagneten mit einer Spule
(siehe Abbildung 2-1) berechnet.
Abb. 2-1 Elektromagnet für die Modelberechnung
Nach dem Start von Maxwell erscheint zunächst die in der Abbildung 2-2 dargestellte
Benutzeroberfläche. Als erstes sollte man den Arbeitsraum definieren, man hat die Auswahl
zwischen dem 2D und 3D Raum (siehe Abbildung 2-2). Für das folgende Beispiel ist das 2D-
Koordinaten-System relevant.
Abb. 2-2 Maxwell Benutzeroberfläche

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 10/27
9
Im Weiteren geht man in der oberen Menüleiste auf >>Maxwell 2D >> Solution Type, so
dass das in der Abbildung 2-3 dargestelltes Fenster aufgerufen wird. Hier wird zwischen
magnetischen bzw. elektrostatischen Modellrechnungen unterschieden. Außerdem stellt
Maxwell 2D zwei Koordinatensysteme (kartesisches XY und zylindrisches XZ) zur Verfü-
gung.
Abb. 2-3 Auswahl der Simulationsart
Nach der Festlegung physikalischen Modells und des Koordinatensystems für die Rechnung,
wird die Geometrie des Objekts definiert. Unten links werden die Orientierung der Achsen
und die aktuellen Koordinaten angezeigt. Oben befinden sich die Menüleiste, über die alle
Funktionen erreichbar sind und darunter eine Reihe von Piktogrammen zur Schnellauswahl
häufig genutzter Funktionen. Wird die linke Maustaste auf einem Piktogramm gedrückt
gehalten eine Kurzbeschreibung der Funktion eingeblendet. In der unteren Zeile werden kurze
Bedienungshinweise der jeweiligen Funktion angezeigt. Das Zeichnen erfolgt über dieAnfangs-, End- und gegebenenfalls Zwischenpunkte der Skizzenelemente. Diese werden
jeweils mit der linken Maustaste gesetzt, ein Gedrückthalten zwischen den Punkten ist nicht
notwendig. Die zu erstellende Geometrie ist in der Abbildung 2-4 zu sehen.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 11/27
10
Abb. 2-4 Geometrie des Elektromagneten
Alle in Maxwell erstellten Objekte werden automatisch als Vakuum definiert, so dass das
nachträgliche Zuweisen von Materialeigenschaften immer notwendig ist. Dies erfolgt am ein-
fachsten in folgenden Schritten:
> Markieren des Objekts durch einen Mausklick > rechter Mausklick und Auswahl Assign Material (siehe Abbildung 2-5)
> dadurch gelangt man zur Tabelle mit den in Maxwell gespeicherten Werkstoffen (siehe
Abbildung 2-6)
> Auswahl steel_1008
Die beiden Spulenhälften sollen analog als Kupfer definiert werden.
Abb. 2-5 Zuweisen der Materialeigenschaften

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 12/27
11
Abb. 2-6 Auswahl des Materials
Für die Definition der Bestromung der Spule sollen folgende Schritte durchgeführt werden
(siehe Abbildung 2-7):
> Markieren einer der Hälften
> rechter Mausklick
> Assign Excitation
> Current
Zu beachten ist, dass der Strom durch die beide Spulenhälften betragsmäßig gleich, aber mit
entgegen gesetzter Richtung einzugeben ist.
Abb. 2-7 Zuweisen des Stroms durch die Spule

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 13/27
12
Bevor die Berechnung gestartet werden kann, muss die Berechnungsgrenze festgelegt werden.
Dafür wird der Button Region in der oberen Menüleiste angeklickt und die Regiongröße in
Prozent (typischerweise 200-500 Prozent des zu berechneten Modells) eingestellt. Die Linien
welche die Grenze des Berechnungsraums (Region) darstellen, werden im Weiteren markiert
und als Baloon definiert (siehe Abbildung 2-8).
Abb. 2-8 Definieren der Berechnungsgrenze
Danach sollen die Einstellungen zur Rechnung vorgenommen werden. Dieses erfolgt über den
rechten Mausklick auf Analysis in Project Manager (siehe Abbildung 2-9). Für die erste
Modellrechnung bleiben die Einstellungen auf Standard.
Abb. 2-9 Solution Setup

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 14/27
13
Nach diesen Schritten kann die Analyse, durch einen Klick auf das Ausrufezeichen in der
oberen Menüleiste, gestartet werden.
Die Vorgehensweise zur Darstellung der Ergebnisse (in diesem Fall das B-Feld) ist in der
Abbildung 2-10 zu sehen. Man markiert alle Elemente, in denen der Feldverlauf angezeigt
werden soll und geht in Project Manager auf Field Overlays >Fields >B > Mag_B
Abb. 2-10 Darstellung der Ergebnisse

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 15/27
14
3 Physikalische Grundlagen des Magnetismus
Das Programm Maxwell (Ansoft) dient der numerischen Berechnung von elektrostatischen
und magnetischen Feldern. Für den Umgang mit dieser Software im Rahmen der
Lehrveranstaltung „Engineering Tools“ am Fachgebiet Mikrotechnik der TU Berlin ist daher
die Kenntnis einiger physikalischer Grundlagen erforderlich. Dieses Skript dient zur
Vermittlung der wesentlichen physikalischen Theorie – unabhängig von der verwendeten
Software – auf der die Übungen und Hausaufgaben basieren. Dabei wird auf eine
grundlegende und umfassende Beschreibung verzichtet und lediglich auf die
übungsrelevanten Fragestellungen eingegangen. Zum weiteren Verständnis wird auf
entsprechende Literatur verwiesen.
3.1 Magnetische Feldstärke H
Die magnetische Feldstärke H ist ein Hilfsfeld, welches beispielsweise den Einfluss vonmakroskopischen, z.B. in Drähten fließenden Strömen beschreibt. Wo immer ein Strom fließt,
wird dieser von einem H-Feld umgeben. Dies wird durch die erste Maxwellsche Gleichung
ohne Verschiebungsstrom ausgedrückt.
(1) ∫ Θ=⋅= sdH , jHrotr
rrr
Hiernach ist die Rotation des H-Feldes an jeder Stelle gleich der es verursachenden
Stomdichte j. Nach dem Satz von Stokes ist dies gleichbedeutend mit der Aussage, dass jedes
geschlossene Linienintegral des H-Feldes gleich der Durchflutung Θ = N·I ist, der durch dievom Integrationsweg eingeschlossenen Fläche fließt.
Im Inneren von Spulen konzentriert sich das H -Feld aus geometrischen Gründen. Für
schlanke Zylinderspulen folgt aus (1)
Il
NH ⋅=
mit der Windungszahl N, der Spulenlänge l und dem Spulenstrom I.
H
I
Abb. 3-1 Jeder Strom wird von einem H-Feld umgeben

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 16/27
15
3.2 Magnetische Induktion B
Die magnetische Induktion B wird heute als das eigentliche Magnetfeld betrachtet1. Sie
bestimmt die magnetischen Kräfte, wie Lorentzkraft und Maxwellkraft und kann mit Hilfe
von geeigneten Sensoren (z.B. Feldplatten oder Hallsensoren) gemessen werden. Die
magnetische Induktion wird auch magnetische Flussdichte genannt, weil ihr Flächenintegral
den magnetischen Fluss ergibt (s.u.). Damit stellt sie das Pendant zur Stromdichte in
elektrischen Kreisen dar.
Auch der Begriff der magnetischen Feldlinien bezieht sich auf die magnetische Induktion.
Ihre Richtung stimmt in jedem Punkt mit der Richtung des dortigen B-Vektors überein und
ihre Dichte ist proportional zum Betrag von B.
Das B-Feld ist quellenfrei, was mit der Aussage identisch ist, dass es keine magnetischen
Monopole gibt. Dieser Zusammenhang wird mathematisch durch die zweite Maxwellsche
Gleichung ausgedrückt.
(2) 0AdB ,0Bdiv =⋅= ∫ rrr
Eine magnetische Induktion kann entweder mit Hilfe eines Permanentmagneten oder durch
eine Spule nach dem Zusammenhang
(3) HBrr
μ=
hervorgerufen werden. Die Proportionalitätskonstante µ heißt magnetische Permeabilität. Siesetzt sich nach
(4) µ = µ0 µr
aus der magnetischen Feldkonstante oder Vakuumpermeabilität µ0 =1,257·10-6 Vs/Am und der
relativen Permeabilität µr zusammen. Letztere ist eine Materialeigenschaft. Für Luft hat sie
etwa den Wert 1, während ferromagnetische Werkstoffe Permeabiliäten von bis zu 100000
aufweisen. Allerdings ist diese hierbei eine Funktion von H, also µr,Fe=µr,Fe(H) (s.u.).
Materialien mit hohem µr reagieren bei gleichem H-Feld mit viel höherer magnetischen
Induktion B als Luft oder Werkstoffe mit niedrigem µr .
In Permanentmagneten gilt anstelle von (3)
(5) HBB Mr
rrr
μ+= ,
da hier die Remanenz Br , also die durch den Magneten verursachte magnetische Induktion
(s.u.) hinzukommt. Dies wird in Abschnitt 3.8 erläutert.
1 Im Folgenden wird der Begriff Magnetfeld immer das B-Feld bezeichnen.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 17/27
16
3.3 Magnetischer Fluß Φ
Der magnetische Fluß Φ ist definiert als das Flächenintegral der magnetischen Induktion.
(6) ∫ ⋅=Φ AdBrr
Ist B über dem gesamten Querschnitt konstant und tritt senkrecht durch A, so vereinfacht sich
dies zu Φ = BA. Dies gilt näherungsweise in den meisten magnetischen Kreisen mit kleinen
Luftspalten.
3.4 Magnetische Feldenergie
Die magnetische Energiedichte ist gegeben durch
(7) HB
2
1w mag
rr
⋅= .
Da B und H nach (3) außerhalb von Permanentmagneten in gleicher Richtung verlaufen,
vereinfacht sich dies dort zu
(8) μ
=2
mag
B
2
1w .
Die gesamte Feldenergie des Systems ergibt sich als Volumenintegral seiner Energiedichte zu
(9) ∫ =V
magmag dVwW .
3.5 Ferromagnetische Materialien
Zunächst sei ein Ringkern betrachtet, auf den eine Spule gewickelt ist (vgl. Abbildung 3-2).
Bei einer Windungszahl von N tritt also ein Gesamtstrom von NI ( I: Spulenstrom) durch den
Kreisring. Wendet man (1) in Integralform auf dieses System, also
(10) NIsdH =⋅∫ r
r
und wählt man als Integrationsweg die gestrichelt eingezeichnete Linie mit dem Umfang l, soergibt sich Hl=NI, also
(11) l
NI)I(H = .
Die magnetische Feldstärke im Kreis ist also proportional zum Spulenstrom I. Das
Ringmaterial reagiert darauf mit einer magnetischen Induktion B=B(H). Dieser
Zusammenhang ist bei ferromagnetischen Materialien nichtlinear und hysteresebehaftet (siehe
Abbildung 3-2).
Ist der Ring anfangs unmagnetisiert, so wird B bei steigendem Spulenstrom und damit beisteigendem H zunächst der Neukurve folgen. An Punkt A würde eine weitere Erhöhung des
H-Feldes nur noch ein geringes Ansteigen der Induktion B nach (3) mit der

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 18/27
17
Vakuumpermeabilität µ0 zur Folge haben. An diesem Punkt ist der Eisenkern magnetisch
gesättigt. Reduziert man den Strom nun wieder bis auf Null, so folgt B dem eingezeichneten
Verlauf bis zum Punkt B. Obwohl jetzt kein strombedingtes H-Feld mehr wirkt, bleibt eine
magnetische Induktion BR zurück, die Remanenz genannt wird. Diese Remanenz ist es, die
einen Dauermagneten zum Magneten im herkömmlichen Sinne macht.Bestromt man die Spule nun in Gegenrichtung, erreicht man bei der Feldstärke HC, die
Koerzitivfeldstärke genannt wird, den Punkt C, an dem die magnetische Induktion den Wert
Null annimmt. Erhöht man den Betrag des H-Feldes weiter in negativer Richtung, so erreicht
man schließlich den Punkt D, an dem das Eisen in umgekehrter Richtung gesättigt ist als an
Punkt A. Bei einer erneuten Stromumkehr würde die magnetische Induktion nun der unteren
Kurve der Hystereseschleife bis zum Punkt A folgen.
Die in der Hystereseschleife enthaltenen Fläche entspricht der Energie, die aufgebracht
werden muss, um die Schleife einmal zu durchfahren. Diese Energie macht sich in
Transformatoren als Magnetisierungsverlust bemerkbar.
B, H
Eisenring
Spule
l
Abb. 3-2 Geschlossener Eisenkreis mit Spule (links) und die BH-Kurve
ferromagnetischer Materialien (rechts)

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 19/27
18
3.6 Hart- und weichmagnetische Materialien
In Abbildung 3-3 sind die B-H-Kurven eines hart- und eines weichmagnetischen Materials
abgebildet. Hartmagnetische Materialien weisen eine breite Hysterese mit hoher
Koerzitivfeldstärke HC und großer Remanenz BR auf und werden daher als Permanentmagnete
eingesetzt.
Bei weichmagnetischen Materialen ist die Hysterese sehr schmal ausgeprägt. Sowohl ihre
Koerzitivfeldstärke als auch ihre Remanenz ist deutlich geringer als bei hartmagnetischen
Materialen. Ihre Sättigungsinduktion hingegen ist im Idealfall sehr hoch. Aufgrund dieser
Eigenschaften wird Weicheisen zur Feldverstärkung in Spulen und als Leitung für den
magnetischen Fluss verwendet.
BB
HHHcHc
BR
BR
hartmagnetisches Material weichmagnetisches Material
Abb. 3-3 BH-Kurven für ein hartmagnetisches (links) und für ein weichmagnetisches Material (rechts)

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 20/27
19
3.7 Magnetkreisberechnung
Beispiel 1: Weicheisenkreis mit Spule und Luftspalt
Versieht man den magnetischen Kreis aus Abbildung 3-2 mit einem Luftspalt, so ergibt sichder in Abbildung 3-4 gezeigte Aufbau. Dabei wirkt der Luftspalt aufgrund seiner niedrigen
Permeabilität als magnetischer Widerstand, was gegenüber dem Kreis ohne Luftspalt einen
geringeren Magnetfluss zur Folge hat. Aus (10) folgt
(12) lHFe + δHL=NI.
Da Φ wegen (2) überall im Kreis, also auch im Luftspalt, den gleichen Wert haben muss, gilt
Φ=ΦFe=ΦL=const. Da der Kreisquerschnitt A im gesamten Kreis konstant ist, folgt daraus
wegen Φ=BA, B=BL=BFe. Berücksichtigt man weiterhin, dass B=BL=µLHL, so ergibt sich aus
(12)
(13) FeLL
L Hl
NIBBδ
μ−
δ
μ== .
Zusammen mit der BH-Kurve von Eisen BFe=BFe(HFe), ergibt sich ein Gleichungssystem, das
sich nach B auflösen lässt. Da die BH-Kurve jedoch nichtlinear ist, muss diese Lösung
numerisch oder graphisch erfolgen, wie in Abb. Abb. 3-4 dargestellt. Für die folgende
Betrachtung soll von einer linearen BH-Kurve
(14) B=BFe=µFe H
ausgegangen werden. Damit lässt sich das Gleichungssystem (12),(14) lösen. Für den
Arbeitspunkt ergibt sich dann
(15)
l
NI
lB
Fe
L
L
δ+
μ
μμ
=
Da µFe>>µL, verringert sich der Einfluss des Summanden µL/µFe gegenüber dem
geometrieabhängigen Summanden δ/l bei gebräuchlichen Magnetkreisgeometrien deutlich.
Der Einfluss von µFe und damit auch die Nichtlinearität der BH-Kurve des Eisens nehmen
daher durch den Luftspalt ab. Vernachlässigt man den Summanden µL/µFe in (15), so ergibt
sich für die magnetische Induktion im Kreis in guter Näherung
(16) NIB L
δμ
≈ .
Das gleiche Ergebnis hätte man erhalten, wenn man den Eisenterm in (12) von vorn herein
weggelassen hätte. Dies bedeutet, dass der magnetische Widerstand des Eisens in
magnetischen Kreisen, ähnlich wie der elektrische Widerstand des Kupfers in elektrischen
Kreisen, im Vergleich zu dem in Luft vernachlässigt werden kann.

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 21/27
20
B, H
Spulel
δ
FeLL
L Hl NIBBδ
μ−δμ==
BFe=BFe(HFe) (Neukurve) NIL
δ
μ
Arbeitspunkt
HFe
B
Abb. 3-4 Magnetischer Kreis mit Luftspalt (links) und graphische Ermittlung
seines Arbeitspunktes in der BH-Neukurve von Weicheisen (rechts)
Die oben angeführten analytischen Rechnungen basieren auf der Annahme, dass die
Querschnittsfläche des magnetischen Flusses im Eisen und im Luftspalt gleich groß ist.
Tatsächlich kann es jedoch zu Kurzschlüssen zwischen den Eisenteilen und Streuflüssen um
den Arbeitsspalt herum kommen (siehe Abb. 3-5 bis Abb. 3-7). Die Berechnungen zu den
Abbildungen entstammen aus Maxwell 2D. Hierbei ist θ = NI = 4000 A, Eisenrückschluss aus
Baustahl St37 mit 30 x 30 mm2 Querschnittsfläche, Luftspaltlänge δ = 10 mm.
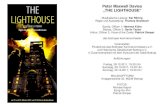
Abb. 3-5 Magnetischer Kreis mit Luftspalt. Darstellung der Feldlinien (Maxwell 2D)
In Abbildung 3-7 ist der Verlauf der magnetischen Induktion B über der x-Achse (horizontale
Symmetrieachse, die durch die Mitte der Spule über dem linken Eisenschenkel sowie durch
den Luftspalt verläuft) dargestellt. Innerhalb des linken Eisenschenkels herrscht über eine
Breite von 30 mm eine Induktion von knapp 1,1 T. Würde der magnetische Fluss perfekt
durch das Eisen geführt und in einem parallelen Flussbündel durch den Arbeitspalt δ
verlaufen, so herrschten aufgrund der Flusserhaltung in einem 30 mm breiten Luftspalt
ebenfalls knapp 1,1 T. Aus dem Diagramm ist jedoch zu entnehmen, dass es unmittelbar außerhalb des linken vertikalen Eisenschenkels – und nicht nur im Arbeitspalt – zu
Rückflüssen kommt. Die Induktion in dem Luftspalt beträgt aufgrund dieser Streuverluste in

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 22/27
21
dem dargestellten Aufbau knapp 0,5 T. Eine Integration der Induktion über die x-Achse ergibt
in der Summe Null.
Da diese Streueffekte sehr stark von der Geometrie des Magnetkreises und den nicht-linearen
magnetischen Eigenschaften der Werkstoffe abhängen, lässt sich kein verlässlicher
Verlustfaktor ermitteln, der diese Verluste in den analytischen Rechnungen berücksichtigenkönnte. In diesem Zusammenhang wird die Bedeutung der numerischen Methoden ersichtlich,
bei denen sämtliche dieser Einflüsse berücksichtigt werden.
Abb. 3-6 Magnetischer Kreis mit Luftspalt. Darstellung der Induktion B
-0,6
-0,4
-0,2
0
0,2
0,4
0,6
0,8
1
1,2
-100 -50 0 50 100 150 200 250 300
Position x [mm]
I n d
u k t i o n
B
[ T ]
Abb. 3-7: Magnetischer Kreis mit Luftspalt. Darstellung des Verlaufs der
Induktion B entlang der x-Achse (siehe Abb. 3-6).
x
y
Polbreite über
Luftspalt

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 23/27
22
3.8 Ohmsches Gesetz des Magnetismus
Zur einfacheren Berechnung von Magnetkreisen, die aus Spulen und Weicheisen bestehen,
lässt sich das ohmsche Gesetz des Magnetismus nutzen. Es stellt eine Analogie zwischen
elektromagnetischen und elektrischen Kreisen dar und lautet
(17) Φ⋅=θ mR
Die magnetische Spannung zwischen zwei Punkten des Magnetkreises ist hierin definiert als
(18) ∫ ⋅=θQ
Pr dHr
r
Der magnetische Widerstand ist definiert als
(19) A
lR
r 0
m μμ=
Das Pendant zum elektrischen Strom ist der magnetische Fluss Φ nach (6). Das Gesetz ist einetriviale Folge aus (3), (6) und der Definition (18). Tatsächlich hat es nichts mit einem
Leitungsmechanismus zu tun, sondern vereinfacht lediglich die Berechnung magnetischer
Kreise.
Angewandt auf den Kreis nach Abb. 18 würde es lauten:
(20) )AA
l()R R ( NI
Luft0FeFe0
Luft,mFe,m μδ
+μμ
Φ=+⋅Φ=
Unter Verwendung von AFe=ALuft=A sowie Φ=BA ergibt sich hieraus selbstverständlich das
gleiche Ergebnis wie in (15).
Wegen (2) gilt übrigens auch die Knotenregel
∑ =Φi
i 0
und wegen (1) zusammen mit der Definition (18) auch die Maschenregel für θ. Damit sind
aller Rechenverfahren zur Berechnung elektrischer Kreise auch auf magnetische Kreise
anwendbar
Die Entsprechungen zwischen elektrischen und magnetischen Kreisen sind in Tabelle 1
zusammengefasst.
Magnetische Größe Elektrisches Pendant
magnetische Spannung θ=NI elektrische Spannung U
magnetischer Fluss Φ=BA elektrischer Strom I
magnetischer Widerstand Al
m r 0R μμ= elektrischer Widerstand R
Tabelle 1 Analogie zwischen magnetischen und elektrischen Größen

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 24/27
23
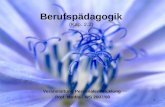
Beispiel 2: Kreis mit Permanentmagnet und Luftspalt
N
S
B, H
Permanent-magnet δ
lM
BM=BM(HM)(allgemein)
Arbeitspunkt
HFe
B
BM=BR +µMHM (NdFeB)
ML HlBδ
μ−=
Abb. 3-8 Permanentmagnetischer Kreis mit Luftspalt (links) und die graphische Ermittlung seines
Arbeitspunktes im zweiten Quadranten der BH -Kennlinie eines Permanentmagneten (rechts)
Aus (10) folgt für den permanentmagnetischen Kreis nach Abbildung 3-8
(21) 0lHlHlH LLFeFeMM =++ .
Im Folgenden wird davon Gebrauch gemacht, dass der magnetische Widerstand von Eisen
vernachlässigbar ist (s.o.). Damit verkürzt sich dies zu
(22) 0lHlH LLMM =+
Diese Gleichung kann nur dann erfüllt sein, wenn HM und HL entgegengesetzte Vorzeichen
haben. Da im Luftspalt wegen (3) HL parallel zu BL verläuft und damit positiv ist und B
wegen (6) überall im Kreis die gleiche Richtung hat, muss HM in Permanentmagneten negativ
sein. Damit befindet sich der Arbeitspunkt eines Permanentmagneten zwangsläufig im
zweiten Quadranten der BH-Kurve, da nur hier B positiv und H negativ ist.
Da Φ wegen (6) überall im Kreis, also auch im Luftspalt, den gleichen Wert haben muss, gilt
Φ=ΦM=ΦL=const. Da der Kreisquerschnitt A im gesamten Kreis konstant ist, folgt daraus
wegen Φ=BA, B=BM=BFe. Berücksichtigt man weiterhin, dass B=BL=µLHL, so ergibt sich aus
(22)
(23) ML Hl
Bδ
μ−=
Zusammen mit der BH-Kurve des Permanentmagneten BM=BM(HM) ergibt sich ein
Gleichungssystem, das sich nach B auflösen lässt. Da die BH-Kurve jedoch nichtlinear ist,
muss diese Lösung numerisch oder, wie in Abbildung 3-8 dargestellt, graphisch erfolgen.
Befindet sich der Arbeitspunkt hinter dem Knick der BH-Kurve, so ist ein Reduktion der
Remanenz und damit eine dauerhafte Schwächung des Permanentmagneten die Folge. Bei
NdFeB-Magneten (Neodym-Eisen-Bor), verläuft die BH-Kurve im gesamten zweitenQuadranten näherungsweise linear, so dass man sie durch

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 25/27
24
(24) MMR M HBB μ+=
beschreiben kann. Löst man das Gleichungssystem (23),(24), so erhält man die
Kreisinduktion.
(25)
ML
MR
l1
1BB δ
μ
μ+
=
Da µM≈µL, wird diese Beziehung vom Verhältnis aus Luftspaltlänge und Magnetlänge δ/lM
bestimmt. Ist der Luftspalt im Verhältnis zur Magnetlänge sehr klein, so herrscht im Kreis in
etwa die Remanenzinduktion BR . Sind Luftspalt- und Magnetlänge gleich, so herrscht etwa
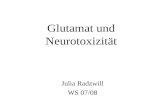
BR /2. In Abb. 3-9 ist (25) als Funktion von δ/lM dargestellt.
0
0,2
0,4
0,6
0,8
1
0 1 2 3 δ/lM
B/BR
Abb. 3-9 Magnetische Induktion B als Funktion des Verhältnisses aus
Luftspaltlänge und Magnetlänge für einen permanentmagnetischen Kreis
3.9 Magnetkräfte
Es gibt zwei Arten von Kräften die durch Magnetfelder verursacht werden:
• Lorentzkraft
• Reluktanz- oder Maxwellkraft
Erstere wirkt auf bewegte Ladungen, während letztere auf dem Bestreben magnetischer
Systeme beruht, die Gesamtfeldenergie zu reduzieren. An dieser Stelle soll nur auf die
Reluktanzkraft eingegangen werden, da sie in der Aktorik genutzt wird.
3.9.1 Reluktantzkräfte
Jedes physikalische System, dessen Energiegehalt W sich durch die mechanische
Verschiebung einer Komponente reduzieren lässt, übt eine Kraft F auf diese Komponente in
der entsprechenden Richtung aus. Dies wird durch den Arbeitssatz ausgedrückt:

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 26/27
25
(26) )x(WradgFr
r
−=
Hierin ist xr
der Ortvektor der betrachteten Komponente.
In (26) liegt die Ursache für die Reluktanzkraft begründet. Da µ in (8) im Nenner steht,
verursacht ein durch Luft verlaufendes Magnetfeld viel höhere Energiedichten als ein durchEisen verlaufendes. Permanentmagnete haften deshalb an Weicheisen, weil dadurch das
Volumen des durch Luft verlaufenden Feldes und damit die Gesamtfeldenergie minimiert
wird.
Beispiel 3: Haltekraft eines Hufeisenmagneten
Für viele Systeme ist die Feldverteilung nicht analytisch berechenbar. Eine Ausnahme stellt
die Haltekraft eines Hufeisenmagneten nach Abbildung 3-10 dar.
N S
x
Permanentmagnet
Joch
F
A/2
Abb. 3-10 Haltekraft eines Hufeisenmagneten
Bei sehr kleinen Luftspalten x herrscht im Kreis näherungsweise die Remanenzinduktion des
Permanentmagneten. Außerdem bleibt die Feldenergie im Eisen dann unabhängig von x
konstant. Deshalb genügt es, nur die Feldenergie im Luftspalt zu betrachten.
Diese ergibt sich nach (8) und (9) zu
(27) AxB
2
1dV
B
2
1)x(W
VL
2
R
L
2
R ∫ μ=
μ=
mit der gesamten Berührfläche A zwischen Magnet und Joch (in Abbildung 3-10 über zwei
Teilflächen A/2 verteilt). In diesem Fall wird aus der Vektorgleichung (26) eine skalare
Gleichung. Dadurch wird aus dem Gradienten eine einfache Differentiation nach x. Für den
Betrag von F gilt damit
(28) AB
2
1Ax
B
2
1
xF
L
2
R
L
2
R
μ=⎟
⎟ ⎠
⎞⎜⎜⎝
⎛
μ∂∂
=
oder ausgedrückt durch den Fluss
(29) A2
1F
L
2
R
μ
Φ= .

5/11/2018 Maxwell WS 08-09 - slidepdf.com
http://slidepdf.com/reader/full/maxwell-ws-08-09 27/27
26
3.9.2 Maxwellsche Zugkraftformel
Da das Joch, auf welches die Magnetkraft wirkt, nichts von der Existenz des
Permanentmagneten wissen kann, muss die Ursache der Kraft im Feld an sich begründet sein.
Sie wird letztlich durch den Austritt des B-Feldes aus einem hochpermeablen Material in Luft
verursacht. Deshalb müssen die Zusammenhänge (28), (29) ganz allgemein für jedes
ungesättigte Weicheisenteil aus dem Feldlinien austreten, gelten. Dieser Zusammenhang wird
als Maxwellsche Zugkraftformal bezeichnet.
(30) =μ
= AB
2
1F
L
2
A2
1
L
2
μΦ
Hierin bezieht sich B auf die durch die Oberfläche A des Teils tretende Induktion. Gelingt es,
die Feldverteilung um ein Weicheisenteil zu berechnen, so kann die Kraftwirkung mit Hilfe
von (30) für die gesamte Oberfläche einer Komponente bilanziert und so die resultierende
Reluktanzkraft berechnet werden. Diese Art der Kraftberechnungen ist in den entsprechenden
numerischen Computerprogrammen zur Feldberechnung implementiert. An dieser Stellen sei
noch einmal darauf hingewiesen, dass mögliche Fehler einer rein analytischen Berechnung
der Zugkraft bei der Bestimmung des magnetischen Flusses entstehen, da sich, wie bereits
erwähnt, die Verluste durch Streuflüsse analytisch schwer quantifizieren lassen und die nicht-
linearen Materialeigenschaften berücksichtigt werden müssen.