Nanorobotics - tams. · PDF file- Aktuatoren müssen auf 3D-Struktur angebracht werden...
44
Nanorobotics Michael Gruczel
Transcript of Nanorobotics - tams. · PDF file- Aktuatoren müssen auf 3D-Struktur angebracht werden...

Nanorobotics
Michael Gruczel
2
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking (43)
3
Einleitung- Was ist Nanorobotik
Nanorobotik umfasst das Design die Fabrikation und das Programmieren von Robotern in Gesamtgroumlszligen im Sub-Mikrometer-bereich sowie der Manipulation von nanoskaligen Objekten mittels mikro- oder makroskopischen Robotern
Nanorobotik beschaumlftigt sich mit1 der Konstruktion von Robotern mit Gesamtgroumlszligen im nm Bereich oder
von Robotern in μm Groumlszligen aber mit nm-skaligen Komponenten2 Programmierung groumlszliger Nummern (Schwaumlrme) von solchen
Nanorobotern 3 Manipulation aund Assemblierung von nm-skaligen Objekten mit
makro- oder mikro-devices
(Uumlbersetzungen aus Requicha Nanorobots NEMS and Nanoassembly)
4
Einleitung- Warum Nanorobotic
- Groumlszlige vergleichbar mit biologischen Zellen und Organellen
=gt Health care monitoring fuumlr microorganisms cell repair
- Netzwerke von Millionen miteinander kommunizierender Knoten
5
Einleitung- aktueller Stand der Nanorobotic
- Fehlen von effektiven Prozessen um komplexe nanoskalige Objekte zu konstruieren
- Nanomanipulation mit Scanning Probe Microscopes (SPMs) bringt effektiven Ansatz um einzelne Strukturen bottom up zu konstruieren
- Einige Firmen arbeiten an Multi-tip Systemen
6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

2
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking (43)
3
Einleitung- Was ist Nanorobotik
Nanorobotik umfasst das Design die Fabrikation und das Programmieren von Robotern in Gesamtgroumlszligen im Sub-Mikrometer-bereich sowie der Manipulation von nanoskaligen Objekten mittels mikro- oder makroskopischen Robotern
Nanorobotik beschaumlftigt sich mit1 der Konstruktion von Robotern mit Gesamtgroumlszligen im nm Bereich oder
von Robotern in μm Groumlszligen aber mit nm-skaligen Komponenten2 Programmierung groumlszliger Nummern (Schwaumlrme) von solchen
Nanorobotern 3 Manipulation aund Assemblierung von nm-skaligen Objekten mit
makro- oder mikro-devices
(Uumlbersetzungen aus Requicha Nanorobots NEMS and Nanoassembly)
4
Einleitung- Warum Nanorobotic
- Groumlszlige vergleichbar mit biologischen Zellen und Organellen
=gt Health care monitoring fuumlr microorganisms cell repair
- Netzwerke von Millionen miteinander kommunizierender Knoten
5
Einleitung- aktueller Stand der Nanorobotic
- Fehlen von effektiven Prozessen um komplexe nanoskalige Objekte zu konstruieren
- Nanomanipulation mit Scanning Probe Microscopes (SPMs) bringt effektiven Ansatz um einzelne Strukturen bottom up zu konstruieren
- Einige Firmen arbeiten an Multi-tip Systemen
6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
3
Einleitung- Was ist Nanorobotik
Nanorobotik umfasst das Design die Fabrikation und das Programmieren von Robotern in Gesamtgroumlszligen im Sub-Mikrometer-bereich sowie der Manipulation von nanoskaligen Objekten mittels mikro- oder makroskopischen Robotern
Nanorobotik beschaumlftigt sich mit1 der Konstruktion von Robotern mit Gesamtgroumlszligen im nm Bereich oder
von Robotern in μm Groumlszligen aber mit nm-skaligen Komponenten2 Programmierung groumlszliger Nummern (Schwaumlrme) von solchen
Nanorobotern 3 Manipulation aund Assemblierung von nm-skaligen Objekten mit
makro- oder mikro-devices
(Uumlbersetzungen aus Requicha Nanorobots NEMS and Nanoassembly)
4
Einleitung- Warum Nanorobotic
- Groumlszlige vergleichbar mit biologischen Zellen und Organellen
=gt Health care monitoring fuumlr microorganisms cell repair
- Netzwerke von Millionen miteinander kommunizierender Knoten
5
Einleitung- aktueller Stand der Nanorobotic
- Fehlen von effektiven Prozessen um komplexe nanoskalige Objekte zu konstruieren
- Nanomanipulation mit Scanning Probe Microscopes (SPMs) bringt effektiven Ansatz um einzelne Strukturen bottom up zu konstruieren
- Einige Firmen arbeiten an Multi-tip Systemen
6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

4
Einleitung- Warum Nanorobotic
- Groumlszlige vergleichbar mit biologischen Zellen und Organellen
=gt Health care monitoring fuumlr microorganisms cell repair
- Netzwerke von Millionen miteinander kommunizierender Knoten
5
Einleitung- aktueller Stand der Nanorobotic
- Fehlen von effektiven Prozessen um komplexe nanoskalige Objekte zu konstruieren
- Nanomanipulation mit Scanning Probe Microscopes (SPMs) bringt effektiven Ansatz um einzelne Strukturen bottom up zu konstruieren
- Einige Firmen arbeiten an Multi-tip Systemen
6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
5
Einleitung- aktueller Stand der Nanorobotic
- Fehlen von effektiven Prozessen um komplexe nanoskalige Objekte zu konstruieren
- Nanomanipulation mit Scanning Probe Microscopes (SPMs) bringt effektiven Ansatz um einzelne Strukturen bottom up zu konstruieren
- Einige Firmen arbeiten an Multi-tip Systemen
6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

6
0 Einleitung Nanorobotik
1 Nanoroboter
11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination2 Nanoassemblierung
21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

7
bull 11 Was sind Nanoroboter
Nanoroboter sind Roboter von der Groumlszlige von wenigen Mikrometern in allen 3 Dimensionen welche aus nanoskopischen Komponenten zusammengesetzt wurden Solche Komponenten beinhalten Sensoren Aktuatoren Antrieb Energie Kommunikation Schnittstellen Programmierung und Koordination
Anwendungen koumlnnte sein
- Medizinische nanodevices
- Interaktion mit Microorganismen
- inteligente Oberflaumlchen (Variable Rauheit)
8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

8
9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

9
Programmierungund
Koordination
Kommunikation
Kontrolle
Antrieb
Aktuatoren
Sensoren
Nanoroboter
10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

10
12 Sensoren
- Kuumlnstliche nanoskopische Sensoren existieren bisher nicht
- Nahe kommt
1Einige Mikron langes Nanotube veraumlndert seine Leitfaumlhigkeit in bestimmten Gasen
2 verschiedene mikroskopische Arme
- Problem
Natuumlrliche nanoskalige Sensoren (Bakterien) arbeiten mit Kontakt oder Interaktion mit Probe
(43)
11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

11
13 Aktuatoren
1Kuumlnstliche Molekulare Maschinen
- Energieversorgung uumlber Licht elektrisch oder chemisch dh kein Ein und Aus sondern nachfuumlllen von Treibstoff mit den Folgen von Schmutzprodukten
- Anatomisch praumlzise dh jedes Atom liegt in bestimmter Anordnung zu den anderen
- Beispiele
- Licht-angetriebenes Shuttle
- Rotationsmotor durch Bestrahlung durch Licht bestimmter Wellenlaumlnge
12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

12
13 Aktuatoren
1 Kuumlnstliche Molekulare Maschinen Probleme- Aktuatoren muumlssen auf 3D-Struktur angebracht werden
- Ladung muss aufgenommen werden
- Normalerweise ist der Gewinn unsicher
- Molekuumlle sind oft nicht fest
- Schmutzerzeugung bei Verbrauch
- Versorgung durch Licht beeinflusst Maschinen
- Kraumlfteentwicklung und Energiecharakteristiken sind noch unklar bei existierenden Maschinen
13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

13
13 Aktuatoren
2 Biomotoren
Vorteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Es gibt erfolgreiche Aufnahmen von Ladungen und Beispiele fuumlr erfolgreiches Anheften der Aktuatoren an Oberflaumlchen
Nachteile gegenuumlber kuumlnstlicher Molekulare Maschinen
- Groumlszliger
- Brauchen chemischen Treibstoff
- Geringere Standhaftigkeit
- Nur unter bestimmten Bedingungen einsetzbar
- Schwer zu kontrollieren
- Aufbau komplex und oft unklar
14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

14
14 Antrieb
- Schwimmen leichter als gehen
- Reynolds Nummer als Maszlig fuumlr die Empfindlichkeit gegenuumlber Stoumlrungen
Re = ρ V Lη wobei ρ = spez Masse
V = charakteristische Geschwindigkeit
L = charakteristische Laumlnge
η = Viskositaumlt
Fisch V = 1ms L = 10cm =gt Ordnung 10 hoch 5
Bakterium V = 10 μms L = 1 μm =gt Ordnung 10 hoch -5
=gt Diffusionsgeschwindigkeit interessanter
- Diffusionsgeschwindigkeit (Zufallslauf)
Distanz = radic (2 Diffusionskoeffizient t)
=gt kleines Molekuuumll legt im Wasser bei Raumtemperatur in 05 msek 1μm zuruumlck aber nach 14 Stunden nur 1 cm
=gt nur schnell fuumlr kleine Distanzen
15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

15
16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

16
15 Kontrolle
Primitive Kontrolle denkbar zB
- Brainbergacutes Vehicle (2 Motoren2 Sensoren 2 Motoren)
- Bakterium E Coli
- wechselnd Bewegung entlang einer Linie und Zufallsorientierung
- Bewegung ist laumlnger falls sich die Konzentration von bestimmten Stoffen erhoumlht
- Bewegungsdauer verkuumlrzt sich falls sich dieKonzentration von bestimmten Stoffen senkt
17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

17
16 Kommunikation
- keine Antennen
- alternative Kommunikationsformen zB
Manche Bakterien geben Chemikalien ab wodurch andere Bakterien wissen wie viele Bakterien in der Naumlhe sind
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
18
17 Programmierung und Koordination
- Gebraucht werden verteilte Koordinationsschemata welche auf lokalen Inputs und Algorithmen beruhen
- Reale Beispiele nur ungenau geklaumlrt
- Beispiel Immunsystem
- Rezeptoren koumlnnen verschiedene Liganden binden
- Sensor antwortet auf verschiedene Stimuli
- Agenten erzeugen verschiedene Effekte
- verschiedene Agenten haben gleichen Effekt
- Kontext-abhaumlngige Entscheidungen
- Zufallsgenerierung von neuen SensorenRezeptoren
19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

19
Inhalt0 Einleitung Nanorobotik
1 Nanoroboter11 Was sind Nanoroboter
12 Sensoren
13 Aktuatoren
14 Antrieb
15 Kontrolle
16 Kommunikation
17 Programmierung und Koordination
2 Nanoassemblierung21 SPM
211 STM
212 AFM
22 Manipulation
221 Pushing
222 Pulling
223 Picking Placing
224 Linking
20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

20
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
(43)
21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

21
21 SPM
- 3 Freiheitsgrade (xyz)
- z ist genau
- x y ungenau wegen Piezos und fehlendem Feedback
- Atomgenaue Manipulation besser bei 4K (Bei Raumtemperatur Drift von 1 Atom pro Sekunde)
- Manipulation durch Sensor
- Roboterkoordinaten ungleich Aufgabenkoordinaten wegen relativer Bewegung des Sensors und der Probe zueinander (Moumlglichkeit der relativen Bewegung durch Beobachtung von bestimmten Merkmalen)
- Scan durch line-scans
22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

22
23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

23
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
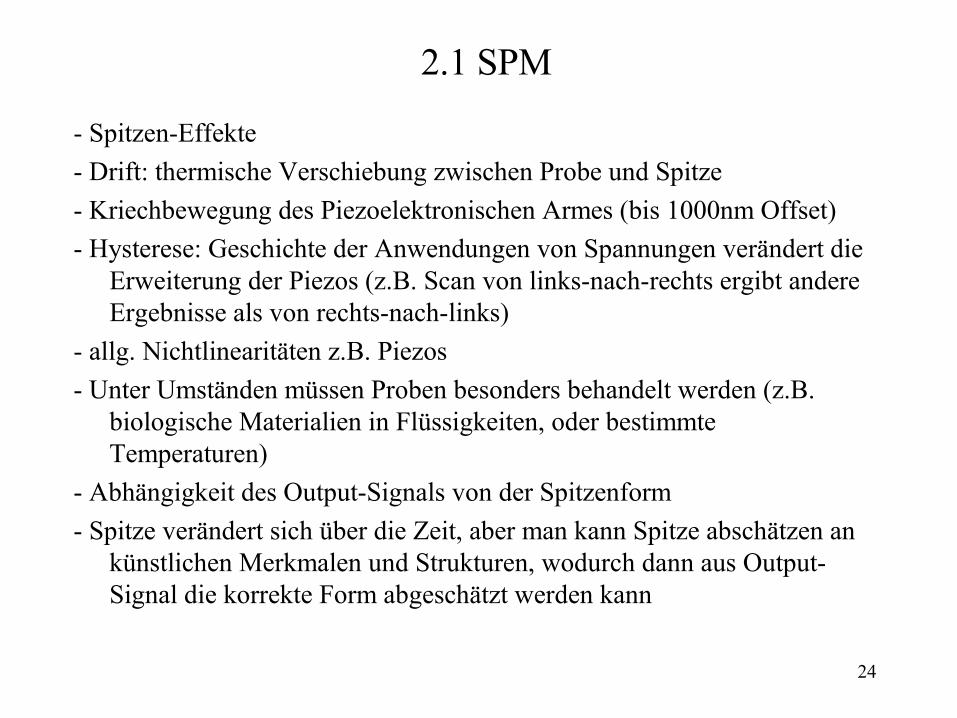
24
21 SPM
- Spitzen-Effekte
- Drift thermische Verschiebung zwischen Probe und Spitze
- Kriechbewegung des Piezoelektronischen Armes (bis 1000nm Offset)
- Hysterese Geschichte der Anwendungen von Spannungen veraumlndert die Erweiterung der Piezos (zB Scan von links-nach-rechts ergibt andere Ergebnisse als von rechts-nach-links)
- allg Nichtlinearitaumlten zB Piezos
- Unter Umstaumlnden muumlssen Proben besonders behandelt werden (zB biologische Materialien in Fluumlssigkeiten oder bestimmte Temperaturen)
- Abhaumlngigkeit des Output-Signals von der Spitzenform
- Spitze veraumlndert sich uumlber die Zeit aber man kann Spitze abschaumltzen an kuumlnstlichen Merkmalen und Strukturen wodurch dann aus Output-Signal die korrekte Form abgeschaumltzt werden kann
25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

25
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

26
211 STM
- Erfunden in den fruumlhen 80er von Binning und Rohrer im zuumlricher IBM-Labor
- Quantum-mechanischer Effekt (genannt Tunneling) sorgt fuumlr das Springen von Elektronen auf die Spitze =gt Spannung
- Versuch Spannung konstant zu halten durch Feedback
- Arbeiten normalerweise bei UHV (Ultra High Vakuum) und 4K Temperatur
27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

27
211 STM
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
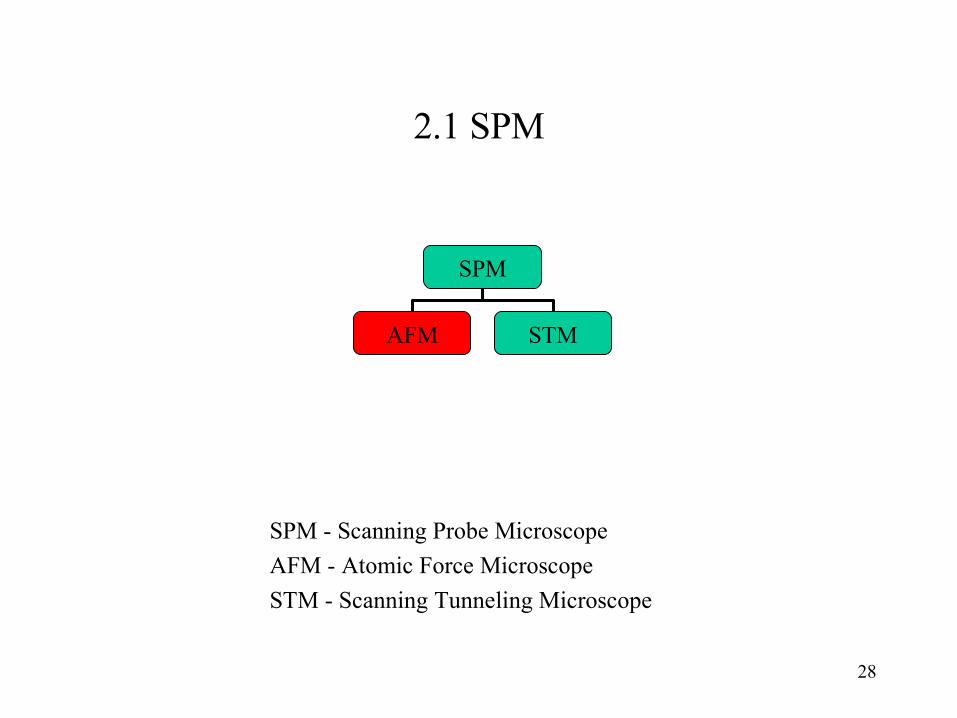
28
21 SPM
SPM - Scanning Probe Microscope
AFM - Atomic Force Microscope
STM - Scanning Tunneling Microscope
SPM
AFM STM
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
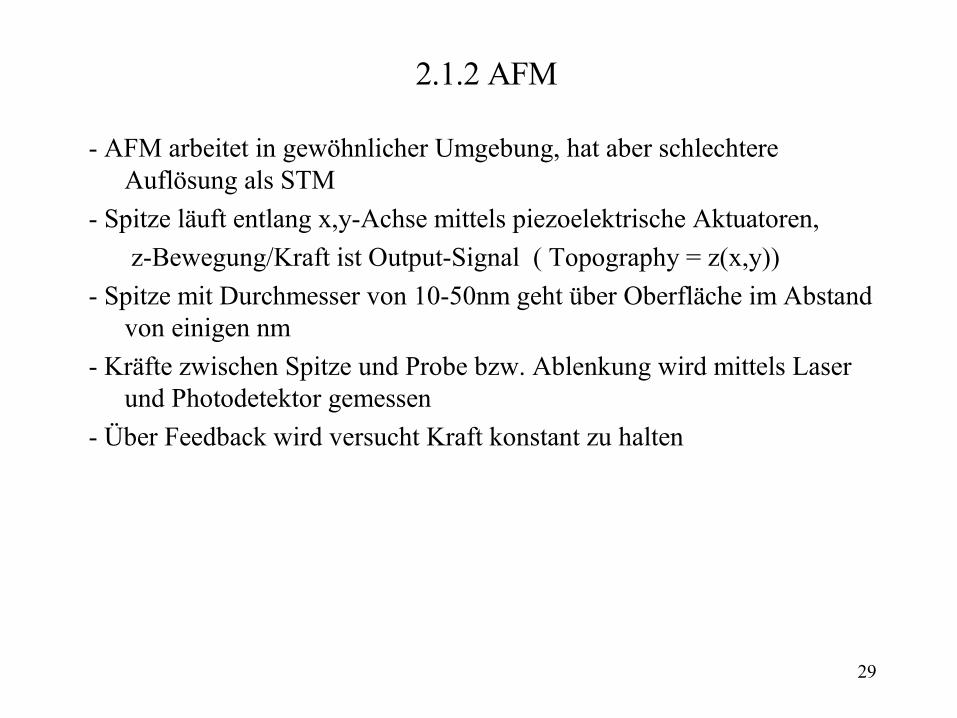
29
212 AFM
- AFM arbeitet in gewoumlhnlicher Umgebung hat aber schlechtere Aufloumlsung als STM
- Spitze laumluft entlang xy-Achse mittels piezoelektrische Aktuatoren
z-BewegungKraft ist Output-Signal ( Topography = z(xy))
- Spitze mit Durchmesser von 10-50nm geht uumlber Oberflaumlche im Abstand von einigen nm
- Kraumlfte zwischen Spitze und Probe bzw Ablenkung wird mittels Laser und Photodetektor gemessen
- Uumlber Feedback wird versucht Kraft konstant zu halten
30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

30
212 AFM
(43)
31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

31
32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

32
212 AFM
- Kontaktmodus
- Im Ruumlckschlagsbereich wird uumlber Feedback die Kraft konstant gehalten
- Beschaumldigungen von fragilen Bereichen und Proben
- Spitze erschoumlpft schnell
- Ruumlckschlag ist low-frequency
- Stoumlrungen sind low-frequency
33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

33
34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

34
Linking
PickingPlacing
Pulling
Pushing Manipulationen
35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

35
221 Pushing
Pushing mittels DFM (Dynamic Force Microscope)
- Vibrierender Arm
- Weniger Folgeprobleme wegen geringerer Krafteinwirkung
- Im Kontaktmodus beruumlhrt Spitze die Probe bei jeder Oszilation
- Im Nicht-Kontaktmodus osziliert Spitze uumlber Probe
36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

36
37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

37
221 Pushing
Pushing mittels Scannen ohne Feedback
- Samuelson (STM Ausschalten des Feedbacks)
- Schaefer (Perdue UniversitySTM Ausschalten des Feedbacks)
- USC (mittels single line scan ohne Feedback im AFM)
Fuumlhrt oft zu Beschaumldigungen der Oberflaumlche und der Spitze
(43)
38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

38
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
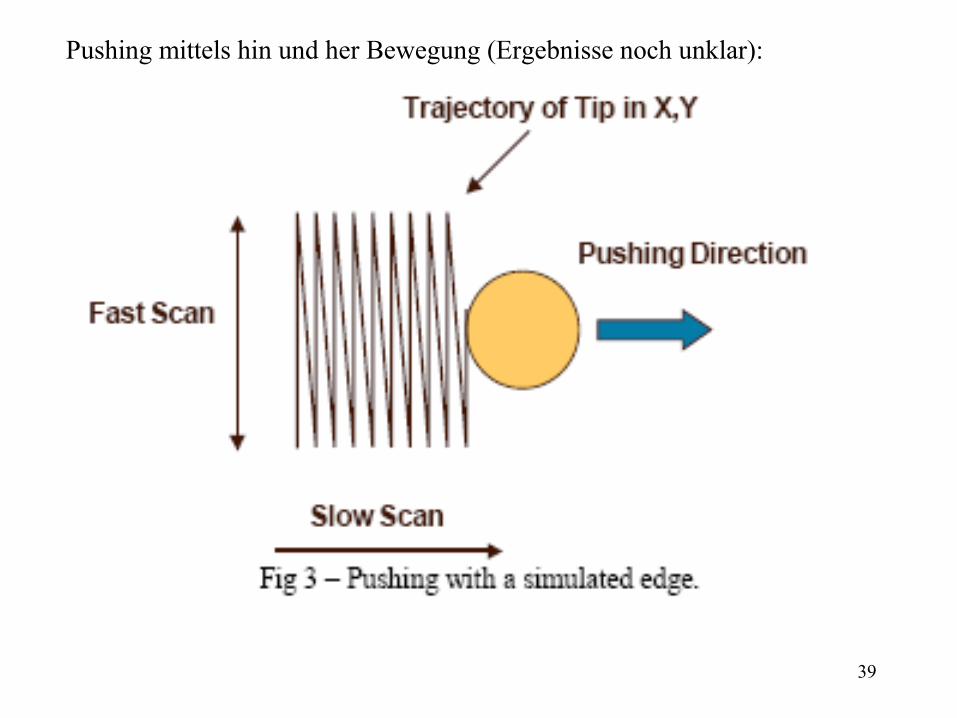
39
Pushing mittels hin und her Bewegung (Ergebnisse noch unklar)
40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

40
222 Pulling
- Spitze wird in anziehende Naumlhe gebracht
zB
- Eigler mit STM in UHV4K (Xenonatome auf Nickel)
- Guumlntherodt C60-Inseln auf Sodiumchloridoberflaumlche in UHV bei Raumtemperatur in modifizierten AFM
41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

41
223 Picking Placing
- Eigler hat sich mit der Spitze Xenon-Atomen auf einer Platinoberflaumlche genaumlhrt bis diese vom Tip absorbiert wurden (STM UHV 4K)
- Eigler hat Xenon-Atome von Nickeloberflaumlche durch Stromimpulse auf die Spitze aufgenommen (STM UHV bei 4K)
- MO bei IBM Yorktown erreichte Aufnahme mittels Spannung auf Spitze (UHV)
- Fuumlr Picking und Placing mittels Stromimpulsen sind leitfaumlhige Materialien noumltig
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)
42
224 Linking
- Linken durch bestimmte organische Molekuumlle
- Verbinden durch Positionieren
- Verbundene Gruppe verschieben
- Zusaumltzliches Material dazwischen legen
- Verschmelzen durch Erhitzung
- Linken auf durch Auftragen von Silanschicht auf positionierte Molekuumlle welche nur am Substrat haften bleiben und anschlieszligende Oxidation
- 3D durch Schichtung von 2D Ebenen welche zunaumlchst mit Opferschicht bezogen werden welche am Ende entfernt wird
43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

43
Hauptinformationsquelle Schriften von
44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)

44
Fragen
Diskussion
Gefahr und Moumlglichkeiten
durch bdquounsichtbareldquo Nanoroboter
(43)




![Mihaela Albu Mihaela.albu@upb.ro Vorlesung: Sensoren und Aktuatoren 2013-2014 Sensoren und Akt[uat]oren Sensoren und Akt[uat]oren Vorlesungen und Labor.](https://static.fdokument.com/doc/165x107/55204d7349795902118c6873/mihaela-albu-mihaelaalbuupbro-vorlesung-sensoren-und-aktuatoren-2013-2014-sensoren-und-aktuatoren-sensoren-und-aktuatoren-vorlesungen-und-labor.jpg)