Potenzial aktiver Fahrwerke zur Erhöhung der ...
56
Berichte der Bundesanstalt für Straßenwesen Fahrzeugtechnik Heft F 81 Potenzial aktiver Fahrwerke zur Erhöhung der Fahrsicherheit von Motorrädern
Transcript of Potenzial aktiver Fahrwerke zur Erhöhung der ...

Berichte derBundesanstalt für Straßenwesen
Fahrzeugtechnik Heft F 81
Ber
icht
e d
er B
und
esan
stal
t fü
r S
traß
enw
esen
Hef
tF
81
ISSN 0943-9307ISBN 978-3-86918-156-1
Potenzial aktiverFahrwerke zur Erhöhung
der Fahrsicherheitvon Motorrädern

Berichte derBundesanstalt für Straßenwesen
Potenzial aktiverFahrwerke zur Erhöhung
der Fahrsicherheitvon Motorrädern
Fahrzeugtechnik Heft F 81
von
Karsten WunramLutz Eckstein
Peter Rettweiler
RWTH AachenInstitut für Kraftfahrzeuge
Die Bundesanstalt für Straßenwesenveröffentlicht ihre Arbeits- und Forschungs-ergebnisse in der Schriftenreihe Berichte derBundesanstalt für Straßenwesen. Die Reihebesteht aus folgenden Unterreihen:
A -AllgemeinesB -Brücken- und IngenieurbauF -FahrzeugtechnikM-Mensch und SicherheitS -StraßenbauV -Verkehrstechnik
Es wird darauf hingewiesen, dass die unterdem Namen der Verfasser veröffentlichtenBerichte nicht in jedem Fall die Ansicht desHerausgebers wiedergeben.
Nachdruck und photomechanische Wieder-gabe, auch auszugsweise, nur mit Genehmi-gung der Bundesanstalt für Straßenwesen,Stabsstelle Presse und Öffentlichkeitsarbeit.
Die Hefte der Schriftenreihe Berichte derBundesanstalt für Straßenwesen könnendirekt beim Wirtschaftsverlag NW,Verlag für neue Wissenschaft GmbH,Bgm.-Smidt-Str. 74-76,D-27568 Bremerhaven,Telefon: (04 71) 9 45 44 - 0, bezogen werden.
Über die Forschungsergebnisse und ihreVeröffentlichungen wird in Kurzform imInformationsdienst Forschung kompakt berichtet.Dieser Dienst wird kostenlos abgegeben;Interessenten wenden sich bitte an dieBundesanstalt für Straßenwesen,Stabsstelle Presse und Öffentlichkeitsarbeit.
Impressum
Bericht zum Forschungsprojekt FE 82.328/2007:Einsatz von aktiven Fahrwerken bzw. geregelten Dämpfersystemenzur Erhöhung der Fahrsicherheit von Motorrädern
ProjektbetreuungPatrick Seiniger
HerausgeberBundesanstalt für StraßenwesenBrüderstraße 53, D-51427 Bergisch GladbachTelefon: (0 22 04) 43 - 0Telefax: (0 22 04) 43 - 674
RedaktionStabsstelle Presse und Öffentlichkeitsarbeit
Druck und VerlagWirtschaftsverlag NWVerlag für neue Wissenschaft GmbHPostfach 10 11 10, D-27511 BremerhavenTelefon: (04 71) 9 45 44 - 0Telefax: (04 71) 9 45 44 77Email: [email protected]: www.nw-verlag.de
ISSN 0943-9307ISBN 978-3-86918-156-1
Bergisch Gladbach, Dezember 2011
F 81
stachel
Rechteck

Kurzfassung – Abstract
Potenzial aktiver Fahrwerke für die Fahrsicher-heit von Motorrädern
16 % aller Verkehrstoten in Deutschland sind Mo-torradfahrer und die Anzahl stagniert auf diesemhohen Niveau [VIZ09]. Daher ist eine Verbesserungder Fahrsicherheit von Motorrädern zwingend erfor-derlich. Im Pkw leisten aktive bzw. verstellbareFahrwerksysteme einen positiven Beitrag zur Fahr-sicherheit und helfen, Unfälle zu vermeiden. Hierzuzählen neben den Fahrdynamikregelsystemen wieABS und ESP auch Verstelldämpfer und Stabilisa-torverstellsysteme. Dämpfer- und Stabilisatorsyste-me beeinflussen die dynamische Radlast und kön-nen insbesondere im ABS-Regelbereich die Fahrsi-cherheit erhöhen. Der Einfluss geregelter Dämpfer-systeme auf die Fahrsicherheit und den Komfort imPkw-Bereich ist in ausführlichen Untersuchungensowohl theoretisch als auch praktisch belegt[NIE07]. Im Kraftradbereich existieren zwar Unter-suchungen zu verstellbaren Dämpfersystemen,meist werden hier aber ausschließlich komfortori-entierte Kriterien betrachtet. Neben der Übertrag-barkeit der positiven Effekte, die im Pkw-Bereichhinsichtlich Komfort und Fahrsicherheit durch gere-gelte Dämpfersysteme erreicht werden, auf Krafträ-der ist der Einfluss geregelter Systeme auf die be-sonderen kraftradspezifischen Eigenschaften nochnicht ausführlich simulativ betrachtet worden. Daslabile System Kraftrad, das in Abhängigkeit derFahrgeschwindigkeit stark veränderliche Eigen-schaften bezüglich der Eigenstabilisierung auf-weist, neigt je nach Geschwindigkeitsbereich zu un-terschiedlichem Verhalten.
Die Zielsetzung dieser Arbeit liegt somit in derÜberprüfung der Übertragbarkeit der aus dem Pkw-Bereich bekannten Einflüsse geregelter Dämpfer-systeme auf Fahrkomfort und Fahrsicherheit imKraftradbereich. Weiter soll hierbei auf kraftradspe-zifische Fahrsituationen eingegangen werden, diein der Pkw-Forschung aufgrund des abweichen-den Systemverhaltens keine Berücksichtigung fin-den.
Die Untersuchung gliedert sich in die Parameterer-mittlung anhand eines Versuchsmotorrades, die Er-stellung und Validierung eines Mehrkörpersimulati-onsmodells unter Verwendung der Software VI Mo-torcycle für ADAMS/Car, die Definition, Auswahlund Umsetzung geeigneter Fahrmanöver sowie dieBeurteilung des Sicherheitsgewinns.
In der Simulationsumgebung VI Motorcycle(ADAMS/Car) wurden Schnittstellen geschaffen,um (semi-)aktive Fahrwerke einzubinden. Die ent-sprechenden Regelalgorithmen sowie die Umset-zung der Dämpferkonzepte wurden hierfür in MAT-LAB/Simulink aufgebaut. Im Rahmen dieser Unter-suchung wurden zahlreiche Regelalgorithmen undDämpferkonzepte modelliert und getestet.
Es wurde ein Fahrmanöverkatalog mit solchenFahrversuchen erstellt, die Potenzial für einen Si-cherheitsgewinn durch aktive Dämpfer erwartenlassen. Für die definierten Fahrmanöver wurden Si-mulationen aller entwickelten Regler und als Refe-renz auch eines passiven Dämpfersystems durch-geführt. Die Simulationsdaten wurden anhandvorab definierter Beurteilungskriterien ausgewertet.
Die Ergebnisse lassen Potenzial zur Steigerungvon Fahrsicherheit und Komfort vermuten. Die Er-kenntnisse aus dem Pkw-Bereich können in weitenTeilen auf den Kraftradbereich übertragen werden.Ein signifikanter Einfluss auf das heutige Unfallge-schehen von Motorrädern ist jedoch als unwahr-scheinlich einzuschätzen.
Potential of active suspensions with respect tomotorcycle safety
16% of all traffic fatalities in Germany aremotorcycle riders, and that percentage hasstagnated at this high level [VIZ09]. As such, animprovement in motorcycle safety is urgentlyneeded. Active and adjustable suspension systemsincrease driving safety and help to avoid accidentsin passenger cars. These systems includeadjustable dampers and stabilizer systems as wellas ABS and ESP systems. Damper and stabilizersystems influence the dynamic wheel load and canincrease driving safety, especially in case of activeABS control. The influence of active dampersystems on driving safety in passenger vehicles isboth theoretically and practically documented inextensive studies [NIE07]. While there have beenstudies on adjustable damper systems for two-wheeled vehicles, these generally only considercomfort-oriented criteria. Neither the applicability tothe motorcycle domain of the positive effects on
3

comfort and safety seen from active dampersystems in passenger cars nor the influence ofsuch systems on the special properties specific tomotorcycles have been thoroughly considered insimulations. The unstable motorcycle systemexhibits significantly different behavior at differentspeeds, including in its self-stabilizing properties.
The objective of this work was, thus, to test theextent to which the known influences of activedamper systems on passenger cars can betranslated to the motorcycle domain. Furthermore,motorcycle-specific situations were investigatedthat have not been considered in the passenger carresearch.
This study can be broken down into thedetermination of parameters using a testmotorcycle, the construction and validation of amulti-body simulation model using VI Motorcycle for ADAMS/Car, the definition, selection andimplementation of appropriate driving maneuvers,and an assessment of the safety improvement.
Interfaces for connecting (semi-)active suspensionswere created in the VI Motorcycle (ADAMS/Car)simulation environment. The corresponding controlalgorithms and the implementation of the damperconcepts were completed in MATLAB/Simulink.Numerous control algorithms and damper conceptswere modeled and tested within the framework ofthis study.
A catalogue was created containing drivingmaneuvers with the potential for a safetyimprovement through active dampers. All of thedeveloped controllers and a reference passivedamper system were simulated for each of thedefined driving maneuvers. The simulation datawas then evaluated using previously definedassessment criteria.
The results indicate that there is potenzial forimprovements in comfort and safety. Knowledgefrom passenger car research can be largelytranslated to the motorcycle domain. A significantinfluence on current motorcycle accident statisticsis, however, unlikely.
4
Inhalt
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . 7
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Zielsetzung . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Methodik . . . . . . . . . . . . . . . . . . . . . . . . 8
2 Stand der Technik . . . . . . . . . . . . . . . . 8
2.1 Begriffsdefinition der unterschiedlichenFahrwerkselemente . . . . . . . . . . . . . . . 8
2.2 Aufgaben der Federung und des Schwingungsdämpfers im Kraftfahr-zeug . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.3 Heutige Serien-Kraftradfahrwerke . . . . 10
2.3.1 Vorderradaufhängungen . . . . . . . . . . . . 10
2.3.2 Hinterradaufhängungen . . . . . . . . . . . . 12
2.3.3 Einstellmöglichkeiten an heutigen Serienfahrwerken . . . . . . . . . . . . . . . . . 13
2.3.4 Kraftradspezifische Fahrwerks-elemente . . . . . . . . . . . . . . . . . . . . . . . . 13
2.3.5 Serien-Fahrwerkseigenschaften des ika-Versuchsmotorrades Honda VFR . . . 14
2.4 Systeme im Pkw-Bereich . . . . . . . . . . . 14
2.5 Systeme im Kraftradbereich . . . . . . . . . 17
3 Parameterermittlung des Versuchs-motorrades Honda VFR 800 . . . . . . . 20
3.1 Fahrwerksgeometrie . . . . . . . . . . . . . . . 20
3.2 Messung der Einfederzustände . . . . . . 20
3.3 Trägheitsparameter . . . . . . . . . . . . . . . 21
3.3.1 Gesamtfahrzeugmessung (VIMM) . . . . 21
3.3.2 Trägheitsparameter der Einzel-komponenten (Schwingtisch) . . . . . . . . 23
3.4 Messung der Kinematik und Elasto-kinematik . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4.1 Adaptionen für die Vorderachs-messung . . . . . . . . . . . . . . . . . . . . . . . . 25
3.5 Dämpferkennlinien der passiven Seriendämpfer . . . . . . . . . . . . . . . . . . . 25
4 Simulationsumgebung . . . . . . . . . . . . 27
4.1 ADAMS . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2 Vorderradaufhängung . . . . . . . . . . . . . . 28
4.3 Hinterradaufhängung . . . . . . . . . . . . . . 28
4.4 Räder . . . . . . . . . . . . . . . . . . . . . . . . . . 29
4.5 Fahrer . . . . . . . . . . . . . . . . . . . . . . . . . . 30
4.6 Rahmen . . . . . . . . . . . . . . . . . . . . . . . . 30
4.7 Antriebstrang . . . . . . . . . . . . . . . . . . . . 30
4.8 Bremssystem . . . . . . . . . . . . . . . . . . . . 31
4.9 Reglerschnittstelle . . . . . . . . . . . . . . . . 31
4.10 Validierung des Simulationsmodells . . . 31
5 Definition und Auswahl der Fahr-manöver . . . . . . . . . . . . . . . . . . . . . . . . 31
5.1 Auswahl der Manöver . . . . . . . . . . . . . . 32
5.2 Bewertungskriterien . . . . . . . . . . . . . . . 33
5.2.1 Fahrkomfort . . . . . . . . . . . . . . . . . . . . . 33
5.2.2 Fahrsicherheit . . . . . . . . . . . . . . . . . . . . 33
6 Verstelldämpferkonzepte . . . . . . . . . . 33
6.1 Einbindung der Dämpferregelung in ADAMS Motorcycle . . . . . . . . . . . . . . . 34
6.2 Regelstrategien . . . . . . . . . . . . . . . . . . . 34
6.2.1 Passiver Dämpfer . . . . . . . . . . . . . . . . . 35
6.2.2 Sky-Hook-Regelansatz . . . . . . . . . . . . . 35
6.2.3 Ground-Hook-Regelansatz . . . . . . . . . . 36
6.2.4 Hybrider Regelansatz [AHM00] . . . . . . 37
6.2.5 Zweipunkt-Regler (MiniMax) . . . . . . . . . 37
6.2.6 Aktive Regelansätze . . . . . . . . . . . . . . . 38
6.3 Stellelemente . . . . . . . . . . . . . . . . . . . . 38
6.3.1 Passives Dämpferelement . . . . . . . . . . 39
6.3.2 Dämpferelement mit diskreten Kennlinien . . . . . . . . . . . . . . . . . . . . . . . 39
6.3.3 Stufenlos variierbares Dämpfer-element . . . . . . . . . . . . . . . . . . . . . . . . . 39
6.3.4 Aktives Stellelement . . . . . . . . . . . . . . . 39
7 Simulationsergebnisse der Fahrmanöver . . . . . . . . . . . . . . . . . . . . 39
7.1 Stationäre Fahrmanöver . . . . . . . . . . . . 39
7.1.1 Geradeausfahrt . . . . . . . . . . . . . . . . . . . 39
7.1.2 Kurvenfahrt . . . . . . . . . . . . . . . . . . . . . . 42
5

7.2 Dynamische Fahrmanöver . . . . . . . . . . 44
7.2.1 Fahrspurwechsel . . . . . . . . . . . . . . . . . 44
7.2.2 Bremsmanöver . . . . . . . . . . . . . . . . . . . 46
7.2.3 Highsider . . . . . . . . . . . . . . . . . . . . . . . . 47
7.2.4 Hochgeschwindigkeitspendeln . . . . . . . 49
8 Bewertung des Sicherheits-gewinns . . . . . . . . . . . . . . . . . . . . . . . . 50
9 Zusammenfassung und Ausblick . . . 50
10 Literatur . . . . . . . . . . . . . . . . . . . . . . . . 51
6

1 Einleitung
16 % aller Verkehrstoten in Deutschland sind Mo-torradfahrer und die Anzahl stagniert auf diesemhohen Niveau [VIZ09]. Daher ist eine Verbesserungder Fahrsicherheit von Motorrädern zwingend erfor-derlich. Im Pkw leisten aktive bzw. verstellbareFahrwerksysteme einen positiven Beitrag zur Fahr-sicherheit und helfen, Unfälle zu vermeiden. Hierzuzählen neben den Fahrdynamikregelsystemen wieABS und ESP auch Verstelldämpfer und Stabilisa-torverstellsysteme. Dämpfer- und Stabilisatorsyste-me beeinflussen die dynamische Radlast und kön-nen insbesondere im ABS-Regelbereich die Fahrsi-cherheit erhöhen.
Bei einer Übertragung der Wirkprinzipien geregelterDämpfer auf Motorräder wird eine Verbesserungder Fahrsicherheit erwartet. Daher ist es Ziel desForschungsvorhabens, das Potenzial von Radlast-veränderungen zur Fahrsicherheitserhöhung vonMotorrädern durch aktive Fahrwerke detailliert auf-zuzeigen.
1.1 Motivation
Der Einfluss geregelter Dämpfersysteme auf dieFahrsicherheit und den Komfort im Pkw-Bereich istin ausführlichen Untersuchungen sowohl theore-tisch als auch praktisch belegt [NIE07]. Im Kraftrad-bereich existieren zwar Untersuchungen zu ver-stellbaren Dämpfersystemen, meist werden hieraber ausschließlich komfortorientierte Kriterien be-trachtet.
Bei SARAVESI [SAR08] wurde ein Prototyp einesKraftrads mit verstellbaren Dämpfern aufgebautund im Rahmen von Prüfstandsversuchen auf dieSystemeigenschaften hinsichtlich unterschiedlicherStraßenanregungen untersucht, jedoch wurde hierdas Augenmerk auf die Aufbaureaktionen gelegt.Der Prototyp eines elektrorheologischen Ver-stelldämpfers, ausgeführt als Hinterachsfederbein,wurde bei FLUDICON [FLU10] entwickelt. Auchhier wurden Prüfstandsversuche des einzelnenDämpferelements auf einem servohydraulischenPrüfstand durchgeführt, die Umsetzung im Fahrver-such wurde noch nicht realisiert. Aussagen überden Einfluss der rheologischen Dämpfer auf dieFahrsicherheit werden hauptsächlich auf Basistheoretischer Überlegungen gemacht.
Neben der Übertragbarkeit der positiven Effekte,die im Pkw-Bereich hinsichtlich Komfort und Fahr-
sicherheit durch geregelte Dämpfersysteme er-reicht werden, auf Krafträder ist der Einfluss gere-gelter Systeme auf die besonderen kraftradspezi-fischen Eigenschaften noch nicht ausführlich si-mulativ betrachtet worden. Das labile SystemKraftrad, das in Abhängigkeit der Fahrgeschwin-digkeit stark veränderliche Eigenschaften bezüg-lich der Eigenstabilisierung aufweist, neigt je nachGeschwindigkeitsbereich zu unterschiedlichemVerhalten. Hier sind das Kippen bei niedriger Ge-schwindigkeit, das Flattern1 im mittleren Ge-schwindigkeitsbereich, der Highsider2 im mittlerenund hohen Geschwindigkeitsbereich sowie dasPendeln3 im hohen Geschwindigkeitsbereich zunennen.
Die Wirksamkeit geregelter Dämpfersysteme für dynamische Fahrmanöver kann nur gegebensein, wenn der Dämpfer in dem jeweiligen Fahrzu-stand auch Arbeit leistet. Übertragen auf die obengenannten Instabilitäten von Krafträdern ergibtsich für das Flattern und das Kippen aufgrund derverschwindend geringen Einfederbewegungenvermutlich kein Stabilisierungspotenzial durchVerstelldämpfer. Der Highsider hingegen mit den sehr hohen Einfederbewegungen lässt auf ein größeres Potenzial von Verstelldämpfernschließen. Das Pendelverhalten wird maßgeb-lich durch die Trägheitsparameter, Schwerpunkt-lagen und Reifenschräglaufsteifigkeiten beein-flusst. Die Pendelschwingung, die aber um alleHauptachsen des Kraftrades stattfindet, führtsomit auch zu Bewegungen der Dämpferelemen-te. Hieraus lässt sich schließen, dass auch dieVerwendung geregelter Dämpfer einen Einflussauf die Pendelschwingung von Krafträdern habenwird.
1.2 Zielsetzung
Die Zielsetzung dieser Arbeit liegt somit in derÜberprüfung der Übertragbarkeit der aus dem Pkw-Bereich bekannten Einflüsse geregelter Dämpfer-systeme auf Fahrkomfort und Fahrsicherheit imKraftradbereich. Weiter soll hierbei auf kraftradspe-zifische Fahrsituationen eingegangen werden, die
7
1 Schwingung der Vorderradaufhängung um die Lenkachse.2 Kippen des Motorrads über die Spurlinie entgegen der aktu-
ellen Schräglage.3 Kombinierte Schwingungen des gesamten Kraftrads um alle
Achsen.

in der Pkw-Forschung aufgrund des abweichen-den Systemverhaltens keine Berücksichtigung fin-den.
1.3 Methodik
Die simulative Betrachtung des Einflusses unter-schiedlicher Regelsysteme in Kombination mit ver-schiedenen Dämpferelementen im Kraftrad stelltden Kernpunkt dieser Arbeit dar.
Im Rahmen einer Literaturrecherche wird der heuti-ge Stand der Technik im Pkw und Motorradbereichbezüglich der relevanten Fahrwerkskomponentenaufgeführt. Hierbei werden mögliche Regler- undStellerelemente aufgezeigt. Die Erkenntnisse die-nen zur Modellierung und Auslegung der unter-schiedlichen Dämpfersysteme und Regelstrategienin MATLAB/Simulink.
Alle Dämpfer-/Reglerstrategien werden einemMehrkörpersimulationsmodell zur Verfügung ge-stellt. Das Mehrkörpermodell wird unter Verwen-dung der Software VI-Motorcycle für MSC/ADAMSerstellt. VI-Motorcycle bietet die Möglichkeit, vor-gefertigte Kraftradkomponenten mit den entspre-chenden Fahrzeugparametern anzupassen. Diebenötigten Parameter werden anhand unterschied-licher Messungen an diversen Prüfständen ermit-telt. Das Simulationsmodell bietet somit die Mög-lichkeit, beliebige Fahrmanöver nachzustellen und alle relevanten Fahrzustandsgrößen zu be-trachten.
Für die Durchführung der Simulationen wird einFahrmanöverkatalog unter Berücksichtigung kraft-radspezifischer Fahrzeugeigenschaften und dembesonderen Einfluss des Kraftradfahrers auf dasFahrverhalten erstellt. Durch die Auswahl geeigne-ter Fahrmanöver soll hierdurch ein möglichst brei-tes Spektrum an Fahrsituationen abgedeckt wer-den, um die Wirksamkeit geregelter Dämpfersyste-me aufzuzeigen.
2 Stand der Technik
Durch eine Literaturrecherche wird der aktuelleStand der Technik heutiger passiver, adaptiver, semiaktiver und aktiver Fahrwerkskomponentenzusammengestellt. Da in diesem Bereich auf dem Pkw-Sektor wesentlich höhere Forschungs-und Entwicklungsanstrengungen zu verzeichnen
sind, wird die Recherche sowohl für den Kraftrad-bereich als auch für den Pkw-Bereich durchge-führt. Hierdurch sollen auch mögliche Synergien inder Pkw und Kraftradforschung dargestellt wer-den.
Neben den heutzutage in Serienproduktion befind-lichen Kraftradfahrwerken werden auch unkonven-tionelle bzw. in geringen Stückzahlen vorkommen-de Fahrwerkskomponenten betrachtet. Gerade imBereich der Kraftradvorderradaufhängung existie-ren heutzutage unterschiedlichste Konzepte, die imHinblick auf die Implementierung von neuartigenFederungs- und Dämpfungssystemen hohe Unter-schiede bezüglich des Integrationsaufwands erwar-ten lassen. Ziel ist es somit, die im Kraftradbereichumgesetzten und umsetzbaren Fahrwerkselementezu identifizieren und die Funktionsweise darzustel-len.
2.1 Begriffsdefinition der unterschied-lichen Fahrwerkselemente
Fahrwerkssysteme können in passive, adaptive,semiaktive und aktive Fahrwerke unterteilt wer-den, die sich durch die mögliche Schaltfrequenzsowie den Energiebedarf unterscheiden.
Im Gegensatz zu passiven Systemen hängt beiden unkonventionellen Systemen die am Aufbauangreifende Kraft F nicht über eine einzige Kenn-linie vom Federweg z und der Federgeschwindig-keit der Bauelemente ab, sondern ist innerhalbgewisser Grenzen getrennt von diesen Größeneinstellbar. Eine Übersicht über geregelte Fede-rungssysteme gibt Bild 1.
Adaptive Systeme können gegenüber dem passi-ven System zusätzlich zwischen verschiedenenKennlinien der Bauelemente schalten, wobei je-doch die Kraftrichtung auch hier vom Vorzeichen
z•
8
Bild 1: Übersicht geregelter Federungs-/Dämpfungssysteme
des Federwegs und der Federgeschwindigkeit be-stimmt bleibt. Im semiaktiven Fall sind die Schalt-frequenzen größer als die charakteristischeSchwingungsdauer von Rad und Aufbau. DieDämpfkraft kann dynamisch gesteuert werden.Adaptives und semiaktives System benötigen Energie lediglich zur Ansteuerung der Steller undder Elektronik. Erst bei der aktiven Federung wirddie Kraft F zwischen Aufbau und Rad unabhängigvon der Einfederbewegung des Rades. Zur Auf-bringung der Stellkraft wird jedoch eine externeEnergiezufuhr erforderlich [WAL06].
Im Folgenden wird auf die Aufgaben der Feder- und Dämpferelemente sowie die Wirkketten imKraftfahrzeug eingegangen, um die möglichen Einflüsse verstellbarer Dämpferelemente aufzu-zeigen.
2.2 Aufgaben der Federung und desSchwingungsdämpfers im Kraft-fahrzeug
Die Aufgabe der Aufbaufederung besteht in derAbstützung des Aufbaus und der Schwingungs-entkopplung des Aufbaus von der Fahrbahnanre-gung. Dies wird durch eine im Verhältnis zurStraßenanregung niedrige Aufbaueigenfrequenzerreicht. Es besteht der Zielkonflikt, die vertikaleAufbaubewegung niedrig zu halten (niedrige Steifigkeit) und die Nick- bzw. bei Pkw auch Wank-winkel möglichst gering zu halten (hohe Steifig-keit).
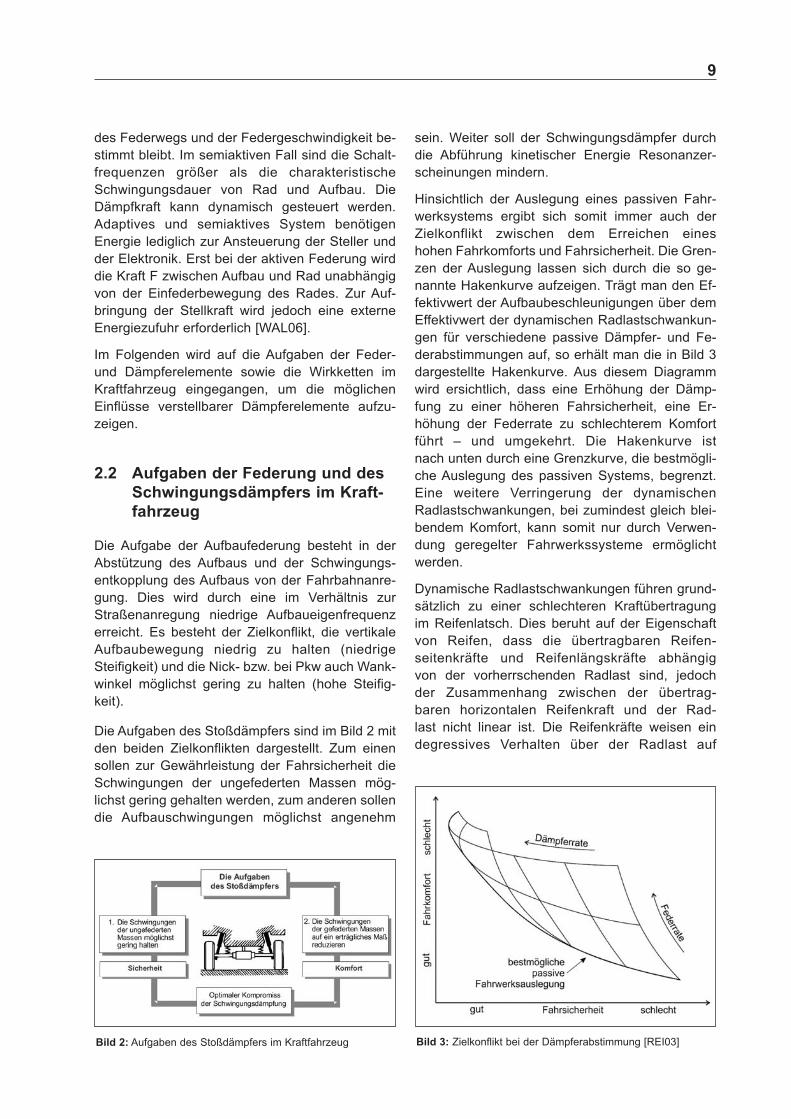
Die Aufgaben des Stoßdämpfers sind im Bild 2 mitden beiden Zielkonflikten dargestellt. Zum einensollen zur Gewährleistung der Fahrsicherheit dieSchwingungen der ungefederten Massen mög-lichst gering gehalten werden, zum anderen sollendie Aufbauschwingungen möglichst angenehm
sein. Weiter soll der Schwingungsdämpfer durchdie Abführung kinetischer Energie Resonanzer-scheinungen mindern.
Hinsichtlich der Auslegung eines passiven Fahr-werksystems ergibt sich somit immer auch derZielkonflikt zwischen dem Erreichen eines hohen Fahrkomforts und Fahrsicherheit. Die Gren-zen der Auslegung lassen sich durch die so ge-nannte Hakenkurve aufzeigen. Trägt man den Ef-fektivwert der Aufbaubeschleunigungen über demEffektivwert der dynamischen Radlastschwankun-gen für verschiedene passive Dämpfer- und Fe-derabstimmungen auf, so erhält man die in Bild 3dargestellte Hakenkurve. Aus diesem Diagrammwird ersichtlich, dass eine Erhöhung der Dämp-fung zu einer höheren Fahrsicherheit, eine Er-höhung der Federrate zu schlechterem Komfortführt – und umgekehrt. Die Hakenkurve ist nach unten durch eine Grenzkurve, die bestmögli-che Auslegung des passiven Systems, begrenzt.Eine weitere Verringerung der dynamischen Radlastschwankungen, bei zumindest gleich blei-bendem Komfort, kann somit nur durch Verwen-dung geregelter Fahrwerkssysteme ermöglichtwerden.
Dynamische Radlastschwankungen führen grund-sätzlich zu einer schlechteren Kraftübertragung im Reifenlatsch. Dies beruht auf der Eigenschaftvon Reifen, dass die übertragbaren Reifen-seitenkräfte und Reifenlängskräfte abhängig von der vorherrschenden Radlast sind, jedoch der Zusammenhang zwischen der übertrag-baren horizontalen Reifenkraft und der Rad-last nicht linear ist. Die Reifenkräfte weisen ein degressives Verhalten über der Radlast auf
9
Bild 2: Aufgaben des Stoßdämpfers im Kraftfahrzeug Bild 3: Zielkonflikt bei der Dämpferabstimmung [REI03]

(Bild 4). Es ist somit ersichtlich, dass ein Reifenunter Einwirkung einer sinusförmigen Radlast-schwankung um den Wert der statischen Radlastzwangsläufig nicht die gleiche mittlere Reifenkrafthervorruft wie ein Reifen, auf den nur die statischeRadlast einwirkt. Der Effektivwert der Reifenkräftewird somit mit steigender Anregungsfrequenz abnehmen. Um die Fahrsicherheit von Fahrzeugenzu optimieren, ist daher aus Sicht des Reifens die Minimierung der Radlastschwankungen not-wendig.
2.3 Heutige Serien-Kraftradfahrwerke
2.3.1 Vorderradaufhängungen
Heutige Kraftradvorderradaufhängungen lassensich nach ihrem Lenksystem in die zwei Haupt-gruppen Steuerkopflenkung und Achsschenkellen-kung aufteilen. Steuerkopflenkungen zeichnen sichdadurch aus, dass die Lenkbewegung durch dasSchwenken der gesamten Radaufhängung um dieLenkachse realisiert wird. Hieraus resultieren so-wohl die Entkopplung von Lenk- und Federbewe-gung als auch ein hohes Massenträgheitsmomentum die Lenkachse.
Achsschenkellenkungen zeichnen sich hinge-gen dadurch aus, dass nur ein kleiner Teil der Radaufhängung, der Achsschenkel und seine di-rekten Anbauteile, geschwenkt werden. Hierausresultiert neben einem geringeren Massenträg-heitsmoment4 um die Lenkachse allerdings auch
ein hoher konstruktiver Aufwand zur Entkoppelungdes Lenkers vom Vorderrad. Zu den Steuerkopf-lenkungen zählen die Teleskopgabel (Bild 5), dasTelelever-System (Bild 6) sowie die geschobe-ne/gezogene Längsschwinge (Bild 7 und Bild 8),wobei der weitverbreitetste Vertreter heutiger Vorderradaufhängungen die Teleskopgabel ist.Längsschwingen werden noch teilweise in Rollernund aufgrund der höheren Seitensteifigkeit derRadaufhängung in Seitenwagengespannen, beidenen prinzipbedingt höhere Querkräfte in die Radaufhängung eingeleitet werden, verbaut. DieTelelever-Vorderradführung bietet als Besonder-heit die Trennung von Radführung und Fede-rung/Dämpfung.
Eine heutige in Serie produzierte Achsschenkellen-kung, die Duolever (Bild 9), orientiert sich an einer Bauform des britischen Ingenieurs NormanHossak. Hierbei bilden zwei Längslenker zusam-men mit dem Radträger/Achsschenkel ein Vierge-lenkgetriebe. Die Längslenker sind hierbei über Ku-gelgelenke mit dem Rahmen verbunden und dieFederung/Dämpfung wird über ein zentrales Feder-bein übernommen [BMW09].
In Tabelle 1 sind die verschiedenen Vorderrad-führungen im Vergleich unter Berücksichtigung derwichtigsten Zielkonflikte aufgelistet. Bezüglich derImplementierung alternativer Dämpfungssystemein vorhandene Vorderradführungen sind Vorteile fürSysteme mit zentralem Federbein zu erwarten. Hierist vorstellbar, dass für Vorderrad- und Hinter-radaufhängung ähnliche Feder-/Dämpferelemente
10
Bild 4: Seitenführungskraft in Abhängigkeit des Schräglaufwin-kels und der Radlast [WAL06]
Bild 5: Prinzipskizze Teleskopgabel
4 Ein niedriges MTM um die Lenkachse verringert die Pendel-neigung des Kraftrades.
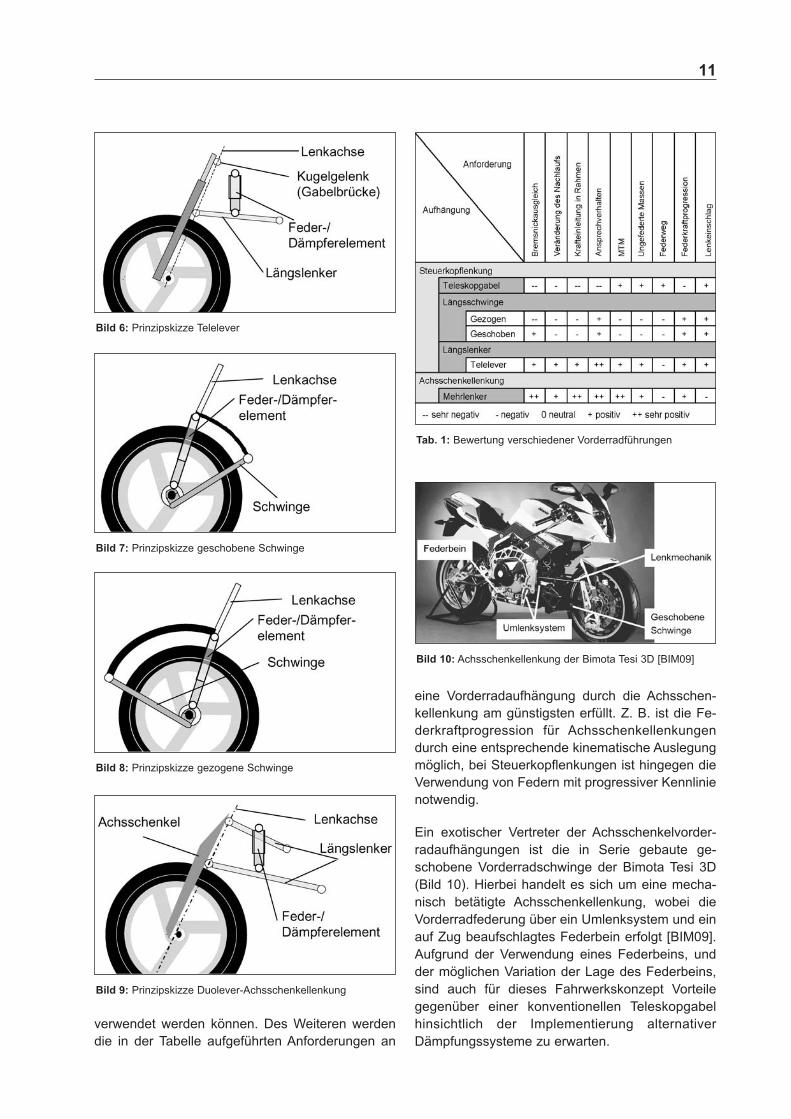
verwendet werden können. Des Weiteren werdendie in der Tabelle aufgeführten Anforderungen an
eine Vorderradaufhängung durch die Achsschen-kellenkung am günstigsten erfüllt. Z. B. ist die Fe-derkraftprogression für Achsschenkellenkungendurch eine entsprechende kinematische Auslegungmöglich, bei Steuerkopflenkungen ist hingegen dieVerwendung von Federn mit progressiver Kennlinienotwendig.
Ein exotischer Vertreter der Achsschenkelvorder-radaufhängungen ist die in Serie gebaute ge-schobene Vorderradschwinge der Bimota Tesi 3D(Bild 10). Hierbei handelt es sich um eine mecha-nisch betätigte Achsschenkellenkung, wobei dieVorderradfederung über ein Umlenksystem und einauf Zug beaufschlagtes Federbein erfolgt [BIM09].Aufgrund der Verwendung eines Federbeins, undder möglichen Variation der Lage des Federbeins,sind auch für dieses Fahrwerkskonzept Vorteile gegenüber einer konventionellen Teleskopgabelhinsichtlich der Implementierung alternativer Dämpfungssysteme zu erwarten.
11
Bild 6: Prinzipskizze Telelever
Bild 7: Prinzipskizze geschobene Schwinge
Bild 8: Prinzipskizze gezogene Schwinge
Bild 9: Prinzipskizze Duolever-Achsschenkellenkung
Tab. 1: Bewertung verschiedener Vorderradführungen
Bild 10: Achsschenkellenkung der Bimota Tesi 3D [BIM09]

2.3.2 Hinterradaufhängungen
Für die Umsetzung alternativer Dämpfungskonzep-te in der Hinterradaufhängung gilt, ebenso wie fürdie Vorderradaufhängung, dass der zur Verfügungstehende Bauraum möglichst groß sowie die An-zahl der notwendigen Elemente möglichst geringsein sollte. Systeme mit 2 Feder-/Dämpferelemen-ten bringen hier den Nachteil mit sich, dass ausSymmetriegründen beide Elemente mit dem alter-nativen Dämpferkonzept ausgeführt werden soll-ten. Im Folgenden werden die unterschiedlichenHinterradaufhängungen aufgezeigt, um die Um-setzbarkeit von alternativen Dämpfungssystemenaufzuzeigen.
Im Gegensatz zu der Anzahl ausgeführter Vorder-radaufhängungen finden im Kraftradbereich aus-schließlich gezogene Schwingen als Hinterradauf-hängung Anwendung. Unterschiede ergeben sichim Wesentlichen durch den angewendeten Sekun-därantrieb und durch die Ausführung der Schwingeals Einarm- oder Zweiarmschwinge. Da Fahrzeugemit Kardanantrieb das Antriebsmoment ungünstigan der Schwinge abstützen, hat BMW als Gegen-maßnahme die Paralever-Schwinge eingeführt.Hier wird durch ein zweites Kardangelenk ein zu-sätzlicher Freiheitsgrad freigegeben, der über einezusätzliche Strebe am Aufbau abgestützt wird undsomit das Antriebsmoment nicht von der Schwingeabgestützt wird. Hierdurch wird der so genannte„Fahrstuhleffekt“, das Anheben und Absenken desFahrzeugs beim Beschleunigen und beim Last-wechsel, verhindert.
Weitere Unterschiede ergeben sich durch die Fe-derbeinanbindung, hier ist zwischen den Bau-weisen mit einem Federbein und mit zwei symme-trisch zur Fahrzeuglängsachse angeordneten Fe-derbeinen zu unterscheiden. Die Anbindung desZentralfederbeins ist in der Regel auf der Symme-trielinie des Fahrzeugs vorgesehen, wobei die Be-festigung direkt oder indirekt über eine Umlenkungan der Schwinge erfolgen kann. Als weitere Bau-form bindet die so genannte Cantileverschwingedas Federbein über einen an der Schwinge in Ver-tikalrichtung ausgerichteten Hebelarm ein, wobeidas Feder-/Dämpferelement sich schräg-/flachlie-gend am Rahmen abstützt. Eine Mischform ausEinarmschwinge und Cantileverbauweise ist in Bild11 zu sehen.
Ein weiterer Vertreter ist die so genannte Triebsatz-schwinge. Sie trägt Motor und Getriebe oder wirdaus dem Motor-/Getriebegehäuse als Einarm-schwinge gebildet, typische Vertreter sind hier Mo-torroller. Die Triebsatzschwinge bringt prinzipbe-dingt hohe ungefederte Massen mit sich, die sichnegativ auf die dynamischen Radlastschwankun-gen auswirken, aber aus Kosten- und Package-gründen in Kauf genommen werden.
Neben den Schwingungsdämpfern der Standard-Federbeine existieren in Einzelfällen auch Rota-tionsdämpfer wie bei der Suzuki TL 1000 S. Bei derSuzuki kommt ein von einer Hebelumlenkungbetätigter Rotationsdämpfer zum Einsatz, der zwi-schen den Schwingenarmen direkt hinter demSchwingendrehpunkt positioniert ist. Eine ähnliche
12
Bild 11: Einarmschwinge mit Zentralfederbein (links) [BMW10] und Zweiarmschwinge mit zwei Federbeinen (rechts) [KAW10]

Entwicklung ist das RCS- (Rotary Damper Compo-site Spring-) Federungssystems der Firma Öhlins.Die schwere Stahlschraubenfeder wird hier zusätz-lich durch einen deutlich leichteren, glasfiberver-stärkten Kunststoffstab ersetzt, der an einem Endefest in der Schwinge und am anderen Ende fest amRahmen eingespannt ist und sich beim Ein- undAusfedern durchbiegt [MOT09].
2.3.3 Einstellmöglichkeiten an heutigen Serienfahrwerken
Da das Verhältnis von Nutzlast zu Fahrzeugleerge-wicht von Krafträdern sehr hoch ist, ist die Anpas-sung der Federungs-/Dämpfereinstellung an denBeladungszustand von hoher Bedeutung. Heutzu-tage besteht bei einem Großteil der Serienfahrwer-ke die Möglichkeit, die Federvorspannung des Hin-terachsfederbeins zu variieren. Hierdurch kann mitrecht einfachen Mitteln – oft kann die Einstellungüber eine Schraube am Federbein oder auch überein Handrad durchgeführt werden – das Verhältnisvon Negativfederweg zu Positivfederweg angepas-st werden. Auf die Federkennlinie hat diese Maß-nahme keinen Einfluss. In der Praxis zeigt sich al-lerdings häufig, dass die Fahrzeugführer die vor-handenen Einstellmöglichkeiten nicht nutzen. Fürdie Vorderradfederung sind nur selten Einstellmög-lichkeiten zur Variation der Federvorspannung vor-gesehen. Häufig werden Originalgabelfedern vomEndverbraucher durch solche mit progressiverKennlinie ersetzt, teilweise wird als kostengünstigeLösung auch die Federvorspannung durch Verwen-dung von Distanzhülsen in der Teleskopgabel vari-iert.
Die manuelle Verstellung der Zugstufe der Hinter-radfederbeine in verschiedenen Abstufungen ist
heutzutage ebenfalls Stand der Technik. Dies wirdin den meisten Fällen über ein Einstellrad am Fe-derbein vorgenommen. Die Druckstufenverstellungist bei einigen Serienfahrwerken ebenfalls über Ein-stellräder am Ausgleichsbehälter des Hinterradfe-derbeins möglich.
Die Dämpfung und die Federvorspannung des Luft-feder-/Dämpferbeins der BMW G 650 X könnenüber den Luftdruck stufenlos eingestellt werden. Inder BMW K- und R-Baureihe wird das System ESA(Electronic Suspension Adjustment), die erste elek-tronische Fahrwerkseinstellung im Motorradbau, inSerie verbaut. Dieses System ermöglicht es demFahrer, das Fahrwerk seines Motorrads per Knopf-druck auf Fahrstil, Beladung des Motorrades unddie jeweiligen Streckenverhältnisse abzustimmen.Hierbei können Federvorspannung und Dämpfer-charakteristik durch ein Bedienelement am Lenkerverändert werden. Beim vorderen ESA-Federbeinwird dabei die Zugstufendämpfung, beim hinterenFederbein die Zug- und die Druckstufe justiert. DieEinstellung selbst übernehmen am Dämpfer ange-brachte Schrittmotoren, ebenso wird die Federvor-spannung durch Stellmotoren geändert. Dabeiwählt die Elektronik die zur eingestellten Feder-basis passende Dämpferrate. Feder- und Dämpfer-charakteristik sind damit aufeinander abgestimmt[BMW09]. In Bild 12 ist die Explosionszeichnungeines ESA-Federbeins zu sehen.
Honda bietet mit dem System HMAS (Honda MultiAction System) sowohl Teleskopgabeln als auchHinterachsfederbeine mit stufenlos einstellbarerVorspannung und verstellbarer Zug- und Druckstu-fe an [HON09].
2.3.4 Kraftradspezifische Fahrwerkselemente
Neben den klassischen Fahrwerkselementen tretenim Kraftradbereich weitere Komponenten auf. EinBeispiel hierfür sind Lenkungsdämpfer, die das si-cherheitsunkritische Lenkerflattern und das sicher-heitskritische Hochgeschwindigkeitspendeln positivbeeinflussen. Lenkungsdämpfer werden in Formvon hydraulischen Schwingungsdämpfern umge-setzt. Das System HESD der Firma Honda, einelektronisch geregelter Lenkungsdämpfer, wird imSerieneinsatz verbaut. Es wird abhängig von derFahrzeuggeschwindigkeit die Dämpfung ange-passt, um einerseits Hochgeschwindigkeitspendelnzu vermeiden und andererseits das Handling imniedrigen Geschwindigkeitsbereich nicht zu ver-schlechtern.
13
Bild 12: BMW ESA-Federbein [BMW10]
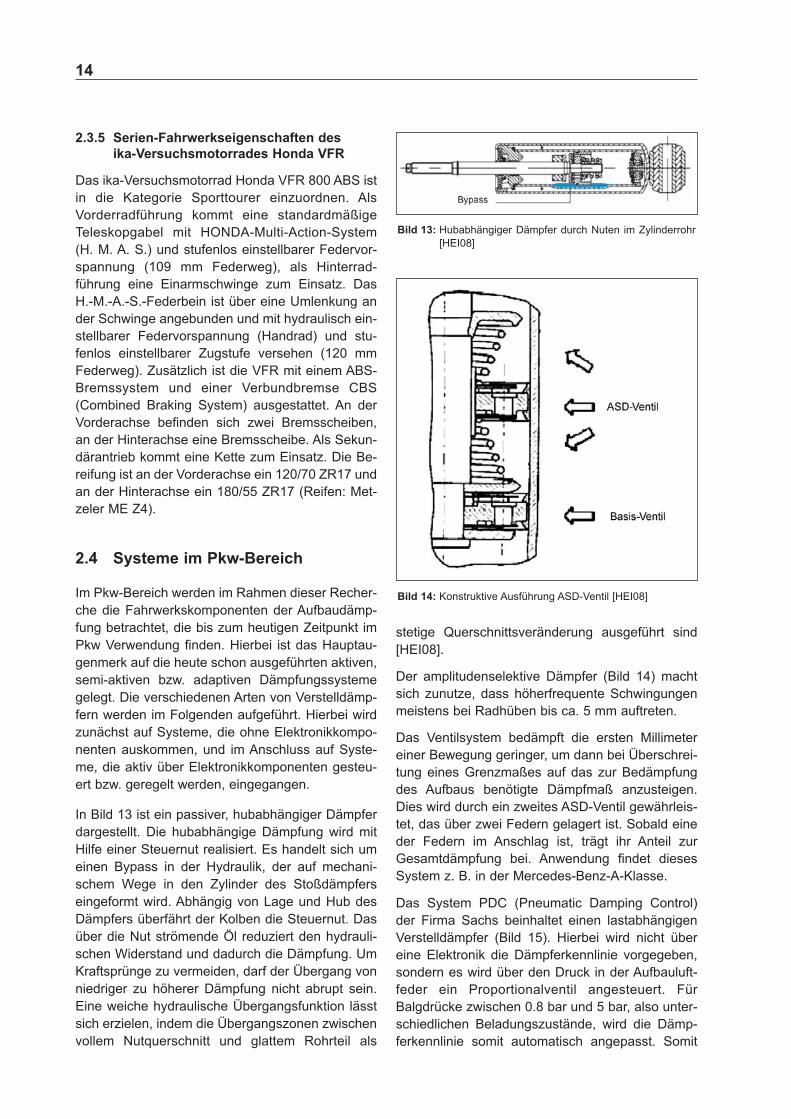
2.3.5 Serien-Fahrwerkseigenschaften des ika-Versuchsmotorrades Honda VFR
Das ika-Versuchsmotorrad Honda VFR 800 ABS istin die Kategorie Sporttourer einzuordnen. Als Vorderradführung kommt eine standardmäßige Teleskopgabel mit HONDA-Multi-Action-System (H. M. A. S.) und stufenlos einstellbarer Federvor-spannung (109 mm Federweg), als Hinterrad-führung eine Einarmschwinge zum Einsatz. Das H.-M.-A.-S.-Federbein ist über eine Umlenkung ander Schwinge angebunden und mit hydraulisch ein-stellbarer Federvorspannung (Handrad) und stu-fenlos einstellbarer Zugstufe versehen (120 mmFederweg). Zusätzlich ist die VFR mit einem ABS-Bremssystem und einer Verbundbremse CBS(Combined Braking System) ausgestattet. An derVorderachse befinden sich zwei Bremsscheiben,an der Hinterachse eine Bremsscheibe. Als Sekun-därantrieb kommt eine Kette zum Einsatz. Die Be-reifung ist an der Vorderachse ein 120/70 ZR17 undan der Hinterachse ein 180/55 ZR17 (Reifen: Met-zeler ME Z4).
2.4 Systeme im Pkw-Bereich
Im Pkw-Bereich werden im Rahmen dieser Recher-che die Fahrwerkskomponenten der Aufbaudämp-fung betrachtet, die bis zum heutigen Zeitpunkt imPkw Verwendung finden. Hierbei ist das Hauptau-genmerk auf die heute schon ausgeführten aktiven,semi-aktiven bzw. adaptiven Dämpfungssystemegelegt. Die verschiedenen Arten von Verstelldämp-fern werden im Folgenden aufgeführt. Hierbei wirdzunächst auf Systeme, die ohne Elektronikkompo-nenten auskommen, und im Anschluss auf Syste-me, die aktiv über Elektronikkomponenten gesteu-ert bzw. geregelt werden, eingegangen.
In Bild 13 ist ein passiver, hubabhängiger Dämpferdargestellt. Die hubabhängige Dämpfung wird mitHilfe einer Steuernut realisiert. Es handelt sich umeinen Bypass in der Hydraulik, der auf mechani-schem Wege in den Zylinder des Stoßdämpferseingeformt wird. Abhängig von Lage und Hub desDämpfers überfährt der Kolben die Steuernut. Dasüber die Nut strömende Öl reduziert den hydrauli-schen Widerstand und dadurch die Dämpfung. UmKraftsprünge zu vermeiden, darf der Übergang vonniedriger zu höherer Dämpfung nicht abrupt sein.Eine weiche hydraulische Übergangsfunktion lässtsich erzielen, indem die Übergangszonen zwischenvollem Nutquerschnitt und glattem Rohrteil als
stetige Querschnittsveränderung ausgeführt sind[HEI08].
Der amplitudenselektive Dämpfer (Bild 14) machtsich zunutze, dass höherfrequente Schwingungenmeistens bei Radhüben bis ca. 5 mm auftreten.
Das Ventilsystem bedämpft die ersten Millimetereiner Bewegung geringer, um dann bei Überschrei-tung eines Grenzmaßes auf das zur Bedämpfungdes Aufbaus benötigte Dämpfmaß anzusteigen.Dies wird durch ein zweites ASD-Ventil gewährleis-tet, das über zwei Federn gelagert ist. Sobald eineder Federn im Anschlag ist, trägt ihr Anteil zur Gesamtdämpfung bei. Anwendung findet diesesSystem z. B. in der Mercedes-Benz-A-Klasse.
Das System PDC (Pneumatic Damping Control)der Firma Sachs beinhaltet einen lastabhängigenVerstelldämpfer (Bild 15). Hierbei wird nicht übereine Elektronik die Dämpferkennlinie vorgegeben,sondern es wird über den Druck in der Aufbauluft-feder ein Proportionalventil angesteuert. FürBalgdrücke zwischen 0.8 bar und 5 bar, also unter-schiedlichen Beladungszustände, wird die Dämp-ferkennlinie somit automatisch angepasst. Somit
14
Bild 13: Hubabhängiger Dämpfer durch Nuten im Zylinderrohr[HEI08]
Bild 14: Konstruktive Ausführung ASD-Ventil [HEI08]
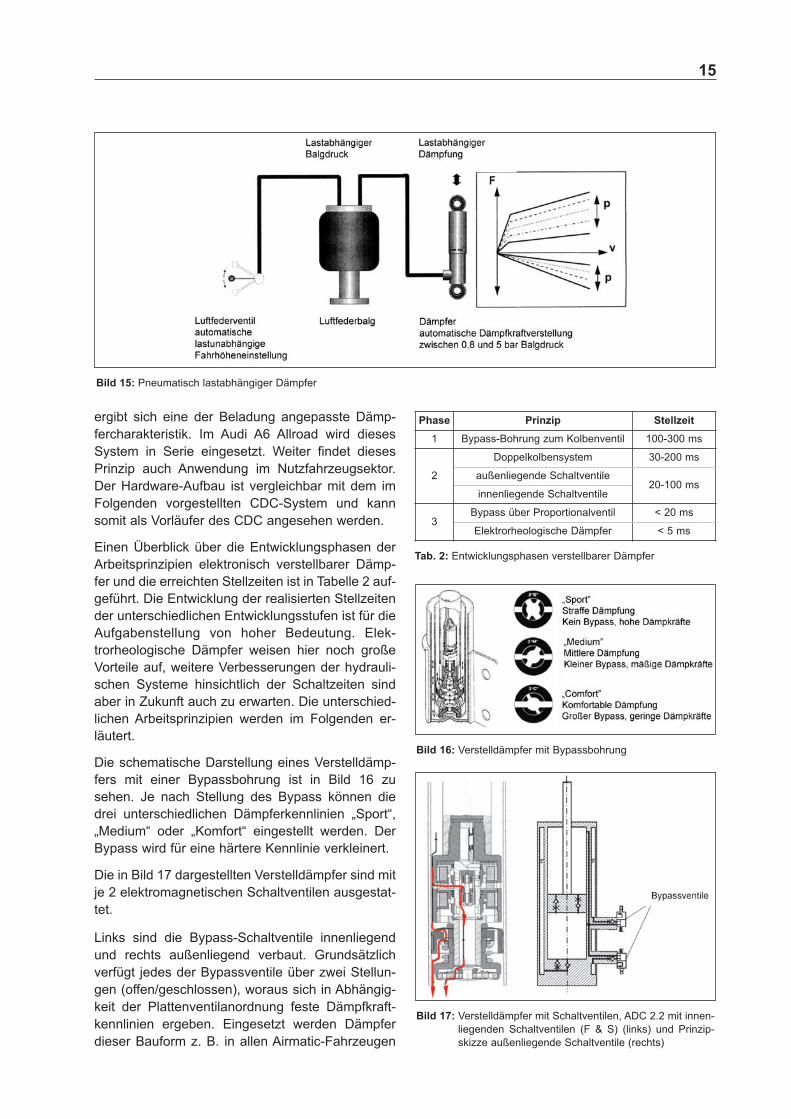
ergibt sich eine der Beladung angepasste Dämp-fercharakteristik. Im Audi A6 Allroad wird dieses System in Serie eingesetzt. Weiter findet diesesPrinzip auch Anwendung im Nutzfahrzeugsektor.Der Hardware-Aufbau ist vergleichbar mit dem imFolgenden vorgestellten CDC-System und kannsomit als Vorläufer des CDC angesehen werden.
Einen Überblick über die Entwicklungsphasen derArbeitsprinzipien elektronisch verstellbarer Dämp-fer und die erreichten Stellzeiten ist in Tabelle 2 auf-geführt. Die Entwicklung der realisierten Stellzeitender unterschiedlichen Entwicklungsstufen ist für dieAufgabenstellung von hoher Bedeutung. Elek-trorheologische Dämpfer weisen hier noch großeVorteile auf, weitere Verbesserungen der hydrauli-schen Systeme hinsichtlich der Schaltzeiten sindaber in Zukunft auch zu erwarten. Die unterschied-lichen Arbeitsprinzipien werden im Folgenden er-läutert.
Die schematische Darstellung eines Verstelldämp-fers mit einer Bypassbohrung ist in Bild 16 zusehen. Je nach Stellung des Bypass können diedrei unterschiedlichen Dämpferkennlinien „Sport“,„Medium“ oder „Komfort“ eingestellt werden. DerBypass wird für eine härtere Kennlinie verkleinert.
Die in Bild 17 dargestellten Verstelldämpfer sind mitje 2 elektromagnetischen Schaltventilen ausgestat-tet.
Links sind die Bypass-Schaltventile innenliegendund rechts außenliegend verbaut. Grundsätzlichverfügt jedes der Bypassventile über zwei Stellun-gen (offen/geschlossen), woraus sich in Abhängig-keit der Plattenventilanordnung feste Dämpfkraft-kennlinien ergeben. Eingesetzt werden Dämpferdieser Bauform z. B. in allen Airmatic-Fahrzeugen
15
Bild 15: Pneumatisch lastabhängiger Dämpfer
Bild 16: Verstelldämpfer mit Bypassbohrung
Bild 17: Verstelldämpfer mit Schaltventilen, ADC 2.2 mit innen-liegenden Schaltventilen (F & S) (links) und Prinzip-skizze außenliegende Schaltventile (rechts)
Tab. 2: Entwicklungsphasen verstellbarer Dämpfer
Phase Prinzip Stellzeit
1 Bypass-Bohrung zum Kolbenventil 100-300 ms
2
Doppelkolbensystem 30-200 ms
außenliegende Schaltventile20-100 ms
innenliegende Schaltventile
3Bypass über Proportionalventil < 20 ms
Elektrorheologische Dämpfer < 5 ms
(S-Klasse, E-Klasse, GL) von Mercedes Benz. Hierkönnen vier verschiedene Kennlinien (Komfort,Hart, Skyhook auf (Druck weich, Zug hart),Skyhook ab (Druck hart, Zug weich)) geschaltetwerden.
Bild 18 zeigt einen Verstelldämpfer mit elektroma-gnetisch geregeltem Proportionalventil. Hierbei wirdüber das geregelte Bypassventil eine stufenlose Ein-stellung der Dämpferkennlinie erreicht. Ausführun-gen dieser Bauart werden sowohl mit externem By-passventil als auch mit im Dämpferkolben integrier-tem Bypassventil angeboten. Beispiele für diesesSystem sind z. B. das Sachs CDC, ThyssenKruppBilstein DampTronic sowie Tenneco Monroe CES.
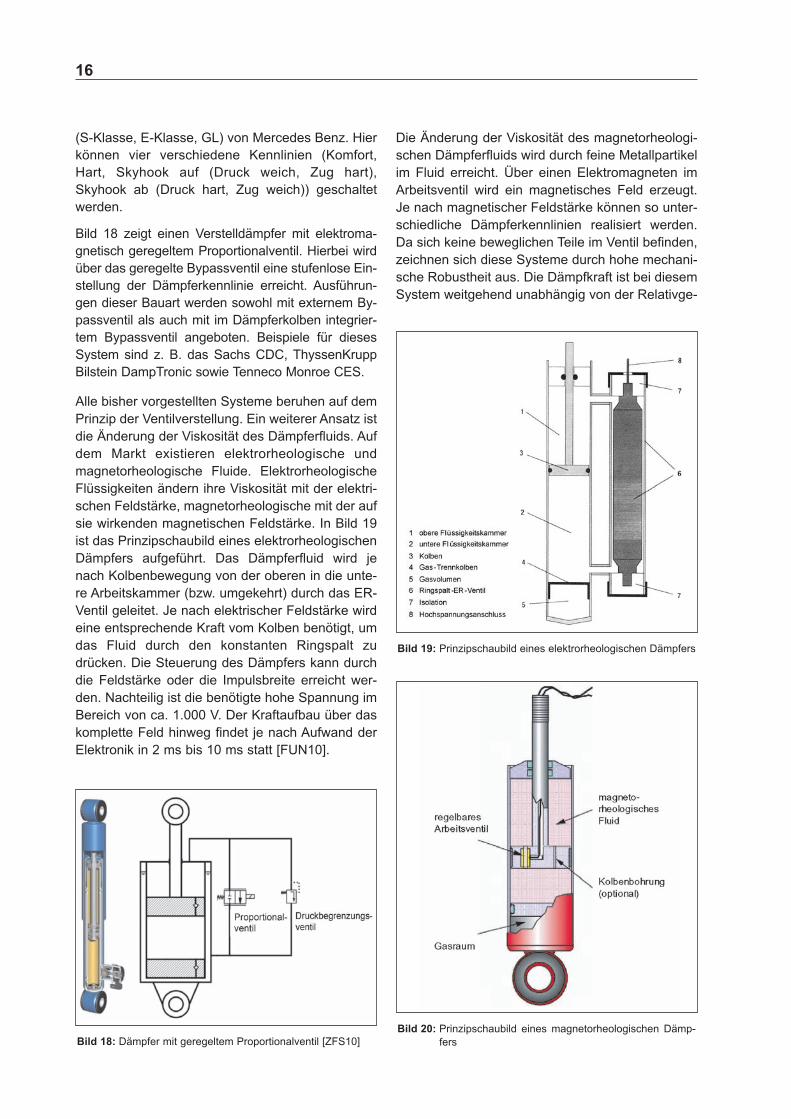
Alle bisher vorgestellten Systeme beruhen auf demPrinzip der Ventilverstellung. Ein weiterer Ansatz istdie Änderung der Viskosität des Dämpferfluids. Aufdem Markt existieren elektrorheologische und magnetorheologische Fluide. ElektrorheologischeFlüssigkeiten ändern ihre Viskosität mit der elektri-schen Feldstärke, magnetorheologische mit der aufsie wirkenden magnetischen Feldstärke. In Bild 19ist das Prinzipschaubild eines elektrorheologischenDämpfers aufgeführt. Das Dämpferfluid wird jenach Kolbenbewegung von der oberen in die unte-re Arbeitskammer (bzw. umgekehrt) durch das ER-Ventil geleitet. Je nach elektrischer Feldstärke wirdeine entsprechende Kraft vom Kolben benötigt, umdas Fluid durch den konstanten Ringspalt zudrücken. Die Steuerung des Dämpfers kann durchdie Feldstärke oder die Impulsbreite erreicht wer-den. Nachteilig ist die benötigte hohe Spannung imBereich von ca. 1.000 V. Der Kraftaufbau über daskomplette Feld hinweg findet je nach Aufwand derElektronik in 2 ms bis 10 ms statt [FUN10].
Die Änderung der Viskosität des magnetorheologi-schen Dämpferfluids wird durch feine Metallpartikelim Fluid erreicht. Über einen Elektromagneten imArbeitsventil wird ein magnetisches Feld erzeugt.Je nach magnetischer Feldstärke können so unter-schiedliche Dämpferkennlinien realisiert werden.Da sich keine beweglichen Teile im Ventil befinden,zeichnen sich diese Systeme durch hohe mechani-sche Robustheit aus. Die Dämpfkraft ist bei diesemSystem weitgehend unabhängig von der Relativge-
16
Bild 18: Dämpfer mit geregeltem Proportionalventil [ZFS10]
Bild 19: Prinzipschaubild eines elektrorheologischen Dämpfers
Bild 20: Prinzipschaubild eines magnetorheologischen Dämp-fers

schwindigkeit des Kolbens, und es können somitwie auch beim elektrorheologischen Dämpfer sehrhohe Kräfte bei geringen Dämpfergeschwindigkei-ten erreicht werden. Ein wesentlicher Nachteil sinddie hohen Kosten für das magnetorheologischeFluid. Hier muss mit 50 US$/l-180 US$/l bei Abnah-me von großen, in der Automobilindustrie üblichenMengen gerechnet werden. Realistische Stellzeitenfür einen magnetorheologischen Dämpfer liegen imBereich unter 10 ms [LOR10].
Aktive Fahrwerke können aufgeteilt werden in Sys-teme, bei denen das Fahrzeug anstatt auf einerAufbaufeder auf der Ölsäule eines Hydraulikzylin-ders steht, sowie in Systeme, bei denen über Hy-draulikzylinder zusätzlich zu einer Aufbaufeder undeinem Aufbaudämpfer aktiv Kräfte gestellt werdenkönnen (Bild 21). Letzteres wird auch als Federfuß-punktverstellung bezeichnet. Im Wesentlichen un-terscheiden sich die beiden Systeme durch diebenötigte Energie und durch den Frequenzbereichin dem sie arbeiten. Federfußpunktverstellungen ar-beiten in einem Frequenzbereich bis 5 Hz undbenötigen ca. 6 KW Leistung, vollaktive Systemekönnen den Frequenzbereich bis auf 20 Hz auswei-ten. Ein Mittelklasse-Pkw benötigt hierfür aber eineLeistung von ca. 20 KW. Aus den fehlenden Dämp-fern des vollaktiven Systems ergibt sich als Nachteilein schlechterer Abrollkomfort. Ein Beispiel für eineim Serieneinsatz befindliche Federfußpunktverstel-lung ist das System Active Body Control (ABC) vonMercedes Benz. Die Federbeine sind hier mit Plun-ger-Zylindern ausgestattet, die die Federvorspan-nung der Aufbaufeder je nach Fahrsituation vari-ieren. Unter Verwendung des Skyhook-Algorithmuskönnen die Aufbaubewegungen Huben, Nicken undWanken auf ein Minimum reduziert werden. DasSteuergerät wird hierbei mit Informationen über denaktuellen Fahrzustand (Beschleunigungssensoren,Lenkwinkel, etc.), das Fahrzeugniveau und das
Druckniveau in den Federbeinen versorgt. Über ser-vohydraulische Ventile wird der Soll-Ölstrom demjeweiligen Zylinder zugeführt.
2.5 Systeme im Kraftradbereich
Im Rahmen dieser Recherche werden vorrangig dieFahrwerkskomponenten betrachtet, die bis zumheutigen Zeitpunkt im Kraftrad Verwendung finden.Im Kraftradbereich existieren im Serieneinsatzheute lediglich manuell vom Fahrer einstellbare Systeme zur Beeinflussung der Federung und derDämpfung. In Kapitel 2.3.3 sind aktuelle Einstell-möglichkeiten passiver Motorradfahrwerke aufge-führt. Im Rahmen der Patentrecherche sind aller-dings auch Patente bzw. Offenlegungsschriften ak-tiver Systeme im Kraftradbereich vorgefunden wor-den. Innovative passive Dämpfersysteme, wie z. B.das Luftfederdämpferbein der BMW Enduro G650Xchallenge lassen Bestrebungen der Hersteller indie Richtung neuer Systeme deutlich erkennen.
Der Aufbau eines Luftfederdämpfers ist in Bild 22anhand einer Prinzipskizze dargestellt. Aufgrund
17
Bild 21: Schematische Darstellung vollaktives Fahrwerk (links); langsam aktives Fahrwerk, Serienschaltung mit passiver Feder(rechts)
Bild 22: Prinzipskizze Luftfederdämpferelement

der Eigenschaften des Dämpfergases Luft entstehtbei hoher Belastung des Dämpfers ein progressi-ves Verhalten. Des Weiteren besteht die Möglich-keit, durch Anpassung des Innendruckes eine Ni-veauregulierung und eine Anpassung der Dämpfer-charakteristik entsprechend dem Beladungszu-stand zu erreichen.
Das passive, auf Knopfdruck einstellbare Feder-dämpfersystem ESA von BMW ist ebenfalls eindeutlicher Schritt in die Richtung adaptiver Motor-radfahrwerke. Ein weiteres Patent der Firma BMW,ein Federdämpferelement bestehend aus einerStahlfeder, mehreren Elastomerfedern und einempassiven Dämpfer mit veränderbarer Federkennli-nie, ist als Prinzipskizze in Bild 23 dargestellt. Nachdieser Erfindung wird nicht die Vorspannung, son-dern durch Zuschalten einzelner Elastomerfederndie Federkennlinie variiert.
An der TU München wurde im Rahmen einer Arbeitunter Verwendung eines passiv verstellbaren Fe-derbeins ein semiaktiv verstellbares Federbein auf-gebaut. Mit Hilfe von Schrittmotoren werden dieEinstellmöglichkeiten der Zug- und Druckstufe desDämpfers angesteuert. Die Einstellung des Fahr-werks wird anhand der Position des Fahrzeugs auf
einer fest definierten Route vorgenommen. Die Po-sition soll hierbei über GPS-Koordinaten bestimmtwerden und die Einstellung unter Berücksichtigungempirisch ermittelter Straßendaten vorgenommenwerden. Es ist sicherlich nicht zu erwarten, dassdiese Anwendung für den Straßeneinsatz durch-führbar ist, allerdings ist anhand dieses Beispielssehr gut zu sehen, dass mit heutigen Komponentenund relativ überschaubarem Aufwand eine Dämp-ferverstellung realisierbar ist.
Das Patent der Firma K2 Bike Inc. beinhaltetSchwingungsdämpfer für Mountainbikes und Kraft-räder mit Bypassventilen in verschiedenen Aus-führungen. Beispielhaft ist eine Querschnittszeich-nung eines der aufgeführten Federbeine in Bild 25zu sehen.
Eine Vorderradteleskopgabel mit kontinuierlich re-gelbaren Dämpfungselementen wird in einer Offen-legungsschrift [ZFF10] von der ZF FriedrichshafenAG vorgestellt. Hierbei wird in einem oder beiden
18
Bild 23: Prinzipskizze Federbein mit Elastomerzusatzfeder[BMW08]
Bild 24: Federbein mit Schrittmotoren der TU München[TUM08]

Dämpferrohren ein entsprechend verstellbaresDämpferelement vorgesehen.
Die Ausführung einer Federfußpunktverstellung ander Hinterachse eines Motorrades ist von der FirmaDucati patentiert. Hierbei wird über eine Umlenkungin Serie zum Standard-Federbein ein hydraulischerAktuator verbaut. Das System soll zur Reduzierungdes Nickwinkels während Bremsmanövern verwen-det werden (s. Bild 26).
Ein Gebrauchsmuster der Firma Münch MotorradTechnik (MMT) beschreibt allgemeine Systeme, dieAktuatoren beinhalten, die die Lage eines Fahr-werkselements (insbesondere Schwinge und Tele-skopgabel) relativ zum Rahmen verändern können.Der Aktuator kann hierbei elektrisch, mechanisch,hydraulisch, pneumatisch oder eine Kombinationaus diesen Möglichkeiten sein. Weiter wird der Ak-tuator mit Daten eines Sensors, der vor oder hinterdem Fahrzeug die Straße abtastet, gesteuert[MMT00].
Das EDS-Fahrwerk der Firma WP Suspensions(Bild 27, links) ermöglicht dem Fahrer, das Fahr-werk seines Motorrades durch Bedienung der EDS-Steuerung am Cockpit, ähnlich dem ESA-Systemvon BMW, auf die Beladung des Motorrades unddie jeweiligen Streckenverhältnisse abzustimmen.Per Knopfdruck kann der Fahrer die Feder-Dämp-
fer-Charakteristik sowohl des vorderen als auchdes hinteren Federbeins variieren. Die Federvor-spannung wird vor Beginn der Fahrt eingestellt[WPO09]. Rechts in Bild 27 ist ein Nachrüstfeder-bein der Firma WP Suspensions mit hydraulischerNiveauregulierung abgebildet. Bei dieser Bauartbesteht die Möglichkeit, sowohl die Zugstufe als
19
Bild 25: Federbein mit Bypass [KZW98]
Bild 26: Federfußpunktverstellung an einer Hinterradschwinge[DUC01]
Bild 27: Federbein mit hydraulischer Niveauregulierung (links),verstellbare Nachrüstfederbeine (rechts) [WPO09]

auch die Druckstufe einzustellen, wobei letztere ge-trennt für unterschiedliche Dämpfergeschwindig-keitsbereiche eingestellt werden kann.
SAVARESI [SAV08] beschreibt einen prototypischumgesetzten semiaktiven Dämpfer für die Hinter-achse unter Verwendung eines elektrohydrauli-schen Ventils. Die Untersuchungen zeigen die Vor-teile und das Potenzial dieser Systeme hauptsäch-lich unter Betrachtung der Aufbaubeschleunigungund somit des Fahrkomforts. Das verwendete Pro-totypendämpferelement kann alle Werte zwischender minimalen und maximalen Dämpferrate stellen,wird aber in den Regelstrategien der Ausführungennur mit der minimalen und maximalen Dämpferratebetrieben.
In einer Offenlegungsschrift der BMW AG [BMW07]wird ein System zur Beseitigung des Hochge-schwindigkeitspendeln bei einem einspurigen Kraft-fahrzeug beschrieben. Hierbei wird neben unter-schiedlichen Eingriffsmöglichkeiten in die Längsdy-namik des Fahrzeugs auch die Eingriffsmöglichkeitin die Dämpfereinstellungen und Einfederzuständeals mögliche Verminderungsmaßnahme in Betrachtgezogen.
Der schon in Kapitel 2.3.4 beschriebene adaptiveLenkungsdämpfer HESD der Firma Honda soll andieser Stelle noch einmal erwähnt werden, da ernach der vorliegenden Literaturrecherche die einzi-ge, in Serie auf dem Markt befindliche Fahrwerks-komponente für Motorräder ist, die kontinuierlich an fahrdynamische Fahrzeuggrößen angepasstwird.
3 Parameterermittlung des Versuchsmotorrades HondaVFR 800
Im Folgenden werden die Ergebnisse der Parame-terermittlung zur Parametrierung des Simulations-modells aufgeführt. Neben den Trägheitsparame-tern des Gesamtsystems sowie einzelner Kompo-nenten wurden alle charakteristischen Punkte undAchsen vermessen, um ein möglichst realistischesund zum realen Motorrad vergleichbares Modellaufzubauen.
Insbesondere sind dies
• Einfederzustände und Fahrwerksgeometrie,
• Massen und Massenträgheitsmomente,
• Elastokinematik der Radführung,
• Feder- und Dämpfungskennlinien des passivenSerienfahrwerks.
3.1 Fahrwerksgeometrie
Für die Parametrierung des Simulationsmodellssind die Abmessungen der einzelnen Fahrwerks-komponenten sowie deren relative Lage zueinan-der im Raum von sehr großer Bedeutung. Aus die-sem Grund werden alle wichtigen Fahrzeug-/Fahr-werkskomponenten sowie deren Anbindungspunk-te mit Hilfe eines Kamera-Messsystems der Fa.GOM einzeln optisch vermessen. Die Genauigkeitdes verwendeten Messsystems ist mit 0,02 mm Ab-weichung pro Meter Messstrecke angegeben.
3.2 Messung der Einfederzustände
Als grundlegende Basis für weitere Untersuchun-gen werden zunächst die statischen Radlasten füralle unterschiedliche Beladungszustände des Kraft-rads gemessen. Hierfür werden Radlastwaagen derFirma Trögele aus dem Pkw-Bereich verwendet.Die Genauigkeit dieser Waagen ist mit 0,5 kg proMessplatte angegeben.
Die Vermessung der Federwege und Radlasten inNormallage bei verschiedenen Fahrzeugkonfigura-tionen erfolgt mit nach Herstellervorgabe eingestell-tem Luftdruck. Die Einfederzustände werden alsReferenz für die weiteren Prüfstandsmessungenund die Parametrierung des Simulationsmodellsmittels Maßbands festgehalten.
Für die in Tabelle 3 definierten Beladungszuständeergeben sich somit die in Tabelle 4 dargestelltenstatischen Radlasten und Einfederzustände.
Der Radstand des unbeladenen Fahrzeugs beträgt1.470 mm. Die Radstände der weiteren Einfederzu-stände ergeben sich mit diesem Wert aus denAchskinematikmessungen.
Weiter sind die Massen der FahrzeugkomponentenVorderrad (mit Bremsscheiben), Hinterrad, Tele-skopgabel (inkl. Gabelbrücke und Lenker ohne Ar-maturen) sowie der Hinterradschwinge (inkl.Bremsscheibe und Kettenrad) ermittelt und in Ta-belle 5 dargestellt.
Die Masse des Rahmens mit Motor ist durch Sub-traktion der Einzelkomponenten berechnet.
20

3.3 Trägheitsparameter
Das dynamische Fahrzeugverhalten ist stark vonden Trägheitsparametern abhängig. In der Simula-tionsumgebung können aus diesem Grund jedemBauteil entsprechende Parameter zugeordnet wer-den. Hierfür werden die Trägheitsparameter desGesamtfahrzeugs mit dem am ika verfügbaren
Prüfstand (Vehicle Inertia Measurement Machine,VIMM, [GOE07]) und die der einzelnen Fahrzeug-komponenten mit einem Schwingtisch gemessen.Es werden die zuvor definierten Beladungszustän-de für das Gesamtfahrzeug berücksichtigt.
3.3.1 Gesamtfahrzeugmessung (VIMM)
Die von der VIMM gemessenen Trägheitsparame-ter sind die Masse (m), die Lage des Schwerpunk-tes in horizontaler (xS, yS) und vertikaler (zS) Rich-tung und die drei Massenträgheitsmomente um dieLängs- (IXX), die Quer- (IYY) und die Hochachse(IZZ). Der Prüfstand besteht im Wesentlichen auseiner Plattform, die in einem zentralen Gelenksphärisch gelagert ist und mittels dreier hydrauli-scher Aktuatoren in beliebige Drehbewegungenversetzt werden kann. Insbesondere können Dreh-bewegungen um die Längsachse (Wanken), um dieQuerachse (Nicken) und die Hochachse (Gieren)
21
Tab. 3: Definition der Beladungszustände/Fahrzeugkonfigurationen
Nr. Beladungszustand Beschreibung
1 Kraftrad, vollgetankt, 1/1 Tank
2 Kraftrad, Fahrer (86 kg), 1/1 Tank
3 Kraftrad, Fahrer (86 kg), 2 Seitenkoffer (2 x 13 kg), 1/1 Tank
4 Kraftrad, Fahrer (86 kg), Beifahrer (77,5 kg), 1/1 Tank
5 Kraftrad, Fahrer (86 kg), Beifahrer (77,5 kg), 2 Seitenkoffer (2 x 13 kg), 1/1 Tank
Tab. 4: Definition der Beladungszustände/Fahrzeugkonfigurationen
Masse [kg] Einfederzustand [mm]
Nr. Beladungszustand Gesamtfahrzeug Vorderachse Hinterachse Vorderachse* Hinterachse**
1 254 120 124 665,5 504,5
2 340 152 188 666,5 477
3 367 150 217 669 463,5
4 417,5 155 262,5 663,5 448,5
5 447,5 153 294,5 664,5 442,5
* Gemessen: Länge der Teleskopgabel vom Radmittelpunkt zur Lenkerbrücke
** Gemessen: Mittelwert der Abstände zwischen Fahrbahn und Soziusfußrasten
Tab. 5: Massen der einzelnen Komponenten
Bauteil Masse [kg]
Rahmen (incl. Motor, Tank) 192,8
Hinterrad 11,1
Vorderrad (incl. Bremscheiben) 13,5
Teleskopgabel (incl. Lenker, Gabelbrücke) 15,8
Hinterachsschwinge (incl. Bremsscheibe, Kettenrad)
14,1

realisiert werden. Das Bild 28 zeigt eine Prinzip-skizze des Prüfstandes.
Der Messaufbau der Motorradplattform sowie einePrinzipskizze ist in Bild 29 dargestellt. Der Einfe-derzustand des Motorrades wird hierbei über Ver-klemmungen von vertikal angeordneten Linear-führungen gewährleistet. In Querrichtung wird das
Motorrad mit Hilfe von Spanngurten fest gegen denPrüfstandsrahmen verspannt.
Der Prüfstand ist mit Sensorik ausgestattet, die Be-wegungen und Kräfte, die auf die Plattform wirken,misst. Mit Hilfe einer speziellen Auswertelogik wer-den die Trägheitsparameter durch Invertierung desräumlichen Drallsatzes berechnet.
Da der Einfluss des Fahrers auf die Trägheitspara-meter sehr hoch ist, werden die Messungen miteinem realistischen Fahrerdummy durchgeführtwerden.
Dieser Fahrerdummy entspricht in seinen Abmaßen,Schwerpunktlage und Massen der einzelnen Körper-teile dem eines 50%-Mannes, siehe [SHI82]. DieserDummy verfügt über fixierbare Gelenke. Somit be-steht auch die Möglichkeit, unterschiedliche Körper-haltungen des Fahrers einzustellen.
Die Ersatzpuppe hat eine Gesamtgröße von 1.760mm und ein Gewicht von 75,6 kg. Für die einzelnenKörperteile ergeben sich die in Tabelle 7 angege-benen Werte für Gewicht und Schwerpunktlage.
22
Bild 28: Prinzipskizze des Prüfstandes
Bild 29: Prinzipskizze Motorradplattform und MessaufbauVIMM (Beladungszustand 1)
Tab. 6: Zu ermittelnde Trägheitsparameter
Trägheitsparameter Formelzeichen Einheit
Masse m kg
Schwerpunktlage sx, sy , sz mm
Massenträgheitsmoment Ix, Iy , Iz kg/m2
Tab. 7: Anthropometrische Daten des Fahrerdummys
Körperteil Anzahl Gewicht [kg]Schwerpunkt-abstand1 [mm]
Kopf 1 5,3 2002
Rumpf 1 32,5 219
Oberschenkel 2 9,1 178
Unterschenkel 2 3,8 165
Fuß 2 1,5 107
Oberarm 2 2,3 126
Unterarm 2 1,5 100
Hand 2 0,8 -
Gesamtmasse 75,6
Daten aus [SHI82]1 gemessen vom höherliegenden Gelenkpunkt2 gemessen vom unteren Gelenkpunkt
3.3.2 Trägheitsparameter der Einzel-komponenten (Schwingtisch)
Neben den Trägheitsparametern des Gesamtfahr-zeugs sind die Trägheitsparameter der Komponen-ten, die einen rotatorischen Freiheitsgrad gegen-über dem Fahrzeugaufbau besitzen, von Interesse.Die Komponenten Vorderrad, Teleskopgabel, Hin-terrad und Hinterradschwinge werden hierfür ge-trennt vom Motorrad gemessen. Zur Ermittlung derTrägheitsmomente wird ein Schwingtisch verwen-det.
Der Schwingtisch lässt im Gegensatz zum VIMM-Prüfstand nur Drehungen um seine Hochachse zu.Hierfür ist die Prüfplattform reibungsarm um dieHochachse drehbar an dem Prüfstand gelagert.Der Drehfreiheitsgrad der Prüfplattform ist überzwei zusätzliche Federn begrenzt. Der Schwing-tisch stellt somit einen ungedämpften Einmassen-drehschwinger dar. Aus der gemessenen Schwing-zeit wird das Massenträgheitsmoment um die je-weilige Drehachse berechnet.
Für den Schwingtisch und für den Kalibrierkörperergibt sich ein Direktionsmoment von Dr = 30,73 kgrad-1.
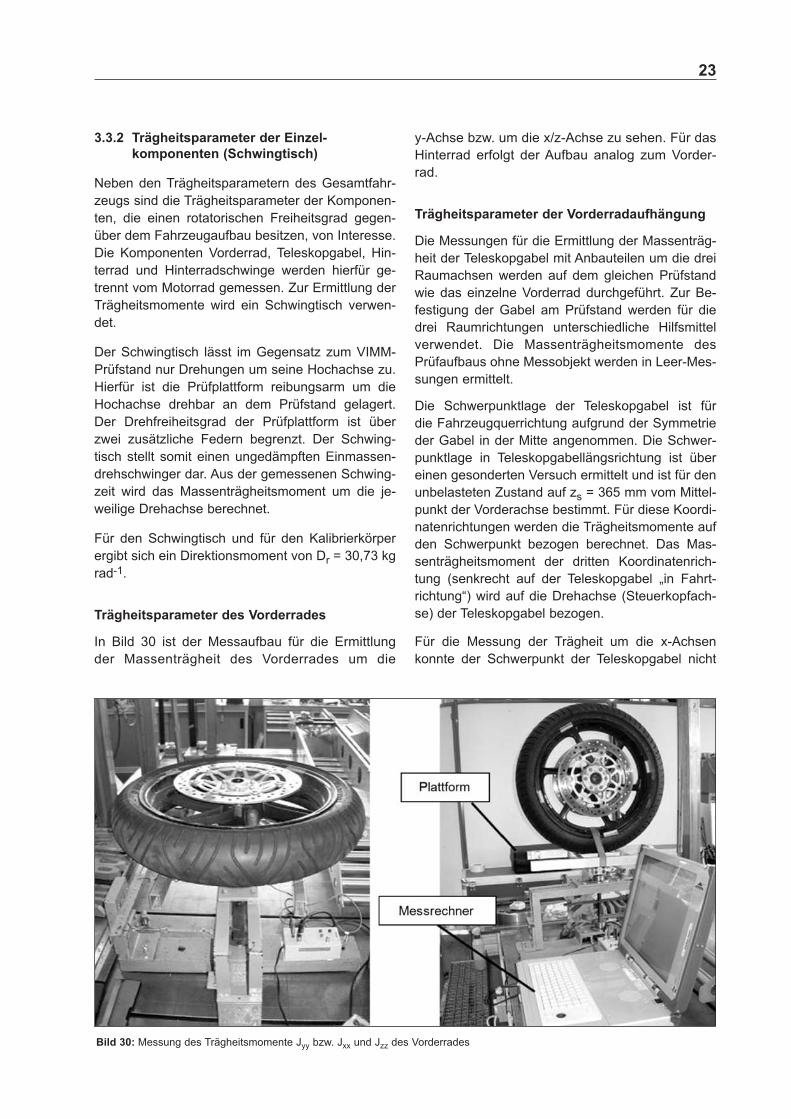
Trägheitsparameter des Vorderrades
In Bild 30 ist der Messaufbau für die Ermittlung der Massenträgheit des Vorderrades um die
y-Achse bzw. um die x/z-Achse zu sehen. Für dasHinterrad erfolgt der Aufbau analog zum Vorder-rad.
Trägheitsparameter der Vorderradaufhängung
Die Messungen für die Ermittlung der Massenträg-heit der Teleskopgabel mit Anbauteilen um die dreiRaumachsen werden auf dem gleichen Prüfstandwie das einzelne Vorderrad durchgeführt. Zur Be-festigung der Gabel am Prüfstand werden für diedrei Raumrichtungen unterschiedliche Hilfsmittelverwendet. Die Massenträgheitsmomente desPrüfaufbaus ohne Messobjekt werden in Leer-Mes-sungen ermittelt.
Die Schwerpunktlage der Teleskopgabel ist für die Fahrzeugquerrichtung aufgrund der Symmetrie der Gabel in der Mitte angenommen. Die Schwer-punktlage in Teleskopgabellängsrichtung ist übereinen gesonderten Versuch ermittelt und ist für denunbelasteten Zustand auf zs = 365 mm vom Mittel-punkt der Vorderachse bestimmt. Für diese Koordi-natenrichtungen werden die Trägheitsmomente aufden Schwerpunkt bezogen berechnet. Das Mas-senträgheitsmoment der dritten Koordinatenrich-tung (senkrecht auf der Teleskopgabel „in Fahrt-richtung“) wird auf die Drehachse (Steuerkopfach-se) der Teleskopgabel bezogen.
Für die Messung der Trägheit um die x-Achsenkonnte der Schwerpunkt der Teleskopgabel nicht
23
Bild 30: Messung des Trägheitsmomente Jyy bzw. Jxx und Jzz des Vorderrades

auf der Drehachse positioniert werden. Der Ab-stand des Schwerpunktes von der Drehachse isthier zs = 0,0975 m. Mittels des entsprechendenSteineranteils werden die ermittelten Trägheitsmo-mente umgerechnet.
Trägheitsparameter der Hinterradschwinge
Für die Hinterachsschwinge ist nur das Massen-trägheitsmoment um die y-Achse gemessen wor-den, welches auf die Schwingendrehachse bezo-gen wird. Auf die anderen Koordinatenrichtungenwurde verzichtet, da die Schwinge relativ zum Mo-torrad um diese Koordinatenachsen keine Bewe-gung durchführt.
In Tabelle 8 sind alle ermittelten Trägheitstensorenim Überblick dargestellt.
3.4 Messung der Kinematik und Elastokinematik
Für die Parametrierung der Fahrzeugfedern in derSimulationsumgebung ist die Messung der Feder-kennlinien der Vorder- und Hinterachsfederelemen-te notwendig. Diese Kennwerte werden unter Ver-wendung des ika-K & C (-Kinematics & Compliance-)Prüfstands gemessen. Hierbei ist es möglich, dieEinfederbewegung und die resultierenden Radauf-standskräfte zu messen. Zusätzlich können nebender Achskinematik, der erzwungenen Bewegungdes Rades beim Ein- und Ausfedern, auch elastoki-nematische Eigenschaften der Radaufhängung, dieRadstellungsänderungen durch Elastizitäten im Radaufhängungspunkt beim Einleiten von Kräf-ten, gemessen werden. Hierbei werden Kräfte in Längs-, Quer- und Vertikalrichtung eingeleitet.
24
Tab. 8: Zusammenfassung aller gemessenen Massenträgheitsmomente
Fahrzeugkomponente Massenträgheitsmoment
Gesamtfahrzeug (leer)
Gesamtfahrzeug (mit Fahrer)
Gesamtfahrzeug (mit Fahrer und Gepäck)
Vorderrad
Hinterrad
Teleskopgabel (teleskopgabelfestes Koordinatensystem)
Teleskopgabel (motorradfestes Koordinatensystem)
Hinterradschwinge (um Schwingendrehachse) Jy Hinterradschwinge = 3,293 kgm2
Hinterradschwinge und Rad (um Schwingendrehachse) Jy Schwing + Rad = 7,276 kgm2

Der K & C-Prüfstand arbeitet nach dem Prinzip desgefesselten Aufbaus. Das Fahrzeug wird übereinen speziellen Hilfsrahmen, der an der Schwin-genlagerung und am Lenkkopf befestigt wird, aufdem Prüfstand fixiert. Durch die Wahl dieser Befes-tigungspunkte ist sichergestellt, dass keine Steifig-keiten des Motorradrahmens mitgemessen werden.Des Weiteren werden auch alle im realen Fahrbe-trieb auftretenden Kräfte über diesen Lastpfadübertragen. Der Aufbau ist dem Bild 31 zu entneh-men.
Die Fahrzeugräder werden für die Messung durchRadersatzsysteme ersetzt. Für die Vorderachsewird hierbei eine Ersatzachse verwendet.
Der Messrechner des Prüfstands zeichnet nebender eingeleiteten Kraft und dem Weg die Bewegungdes Radmittelpunktes auf. Diese wird über ein opti-sches Messsystem der Firma Metris, den WheelTracker, ermittelt. Der Lenkfreiheitsgrad wird, wieauch bei Pkw-Messungen, unter Verwendung vonSpanngurten, die an den Lenkerenden befestigtsind, festgesetzt.
3.4.1 Adaptionen für die Vorderachsmessung
Für die Vorderachse wurde eine Ersatzachse ver-wendet, der Messaufbau mit Ersatzachse ist in Bild32 und der gesamte Messaufbau für die Vorder-achsmessungen in Bild 33 zu sehen.
Zur Einleitung der Längskräfte müssen sowohl ander Vorder- als auch an der Hinterachse die resul-tierenden Kräfte abgestützt werden. Die Längskräf-te werden durch geeignete Hilfskonstruktionen ge-genüber dem Motorrad aufgenommen.
3.5 Dämpferkennlinien der passivenSeriendämpfer
Da der Kern dieser Arbeit das Potenzial geregelterFahrzeugdämpfer aufzeigen soll, ist die genaueKenntnis der Eigenschaften der passiven Serien-dämpfer von großer Bedeutung. Dementspre-chend werden die passiven Dämpferelemente am servohydraulischen Prüfstand des ika vermes-sen.
25
Bild 31: K & C-Prüfstand mit Motorrad Honda VFR
Bild 32: Ersatz-Vorderachse mit Radersatzsystem und Wheel-Tracker-Probe
Bild 33: Messung der Vorderachse am K & C-Prüfstand

Der Prüfstand (Bild 34) besteht hierbei aus einemhöhenverstellbaren Joch, einem Hydraulikzylinderund einem Kraftaufnehmer. Für die Anbindung derDämpfer werden Adaptierungen verwendet, diegleichzeitig eine querkraftfreie Einspannung reali-sieren. Die Dämpfung der Teleskopgabel wird hier-bei nur für ein Tauchrohr ermittelt.
Für die Messung kommt eine Prüfprozedur zur An-wendung, welche sich an die VDA-Spitzenwert-Me-thode anlehnt. Während bei der VDA-Spitzenwert-Methode [ATZ79] eine Amplitude von 50 mm ver-wendet wird, beträgt die Amplitude bei den hierdurchgeführten Messungen nur 25 mm für die Tele-skopgabel und 10 mm für das Hinterradfederbein.
Als Nulllage ist der Einfederzustand mit Fahrer ein-gestellt.
Die Kraft- und Wegsignale werden während derMessung gemessen und abgespeichert.
Aus den Daten werden anschließend automatisiertdie Arbeitsdiagramme (Bild 35) erstellt, welche dieDämpferkraft FD über den Hub des Schwingungs-dämpfers darstellen. Die Feder-/Dämpferelementewurden für die Messungen nicht getrennt. Hier-durch ergeben sich im Arbeitsdiagramm verschobe-ne Kennlinien. Die verwendeten Kennlinien werdenspäter in der Auswertung von der Kraftkomponenteder Federkraft bereinigt.
Aus den Daten von Kraft und Weg innerhalb des In-tervalls, welches die Schwingung charakterisiert,werden dann die für das Arbeitsdiagramm und dieKennlinie relevanten Daten in einer gesondertenDatei gespeichert. Die Anregungsfrequenz wird nunnach folgender Formel bestimmt:
Gl. 1
Dabei ist tmax die Zeit, an der die Schwingungendet, tmin gibt den Beginn der Schwingung an. Mitder Anregungsfrequenz und den Wegewerten indem bestimmten Intervall kann nach der Formel
Gl. 2
die Kolbenstangengeschwindigkeit berechnet wer-den. Analog zu den Zeitwerten entspricht smax demEndwert der Schwingung und smin dem Anfangs-wert. Die resultierenden Schwingungsdämpfer-kennlinien sind in Bild 36 dargestellt.
26
Bild 34: Schwingungsdämpferprüfstand (Beispiel)
Bild 35: Arbeitsdiagramm Teleskopgabel (links) und Hinterachsfederbein (rechts)

4 Simulationsumgebung
4.1 ADAMS
Die Simulationsrechnungen in dieser Untersu-chung werden in der Simulationsumgebung VI-Motorcycle durchgeführt, bei der es sich um einekraftradspezifische Erweiterung des Mehr-Körper-Simulationspaketes ADAMS/Car handelt. Bei(Mehr-Körper-System-)Modellen (MKS) werdendie Grundelemente eines mechanischen Systemsidealisiert als starre Körper betrachtet, die durchdie Lage ihres Schwerpunktes, ihre Masse sowiedie Trägheitsmomente vollständig bestimmt wer-den. Zwischen Körpern beziehungsweise einemKörper und dem Inertialsystem können Zwangsbe-dingungen (z. B. Gelenke) eingeführt wer-den, die je nach Typ eine gewisse Anzahl von Freiheitsgraden einschränken. Eine Übersicht der für die Aufgabenstellung relevanten Freiheits-grade ist in Tabelle 9 dargestellt. Außerdem kön-nen Kräfte und Momente definiert werden, die aufeinzelne Körper oder zwischen zwei Körpern wirken.
ADAMS erlaubt die Erstellung eines allgemei-nen MKS-Modells aus vorgegebenen Bibliotheks-elementen (beispielweise Starrkörper, Gelenke,Federn) und dessen grafische Darstellung. VI-Mo-torcycle setzt auf ADAMS/Car auf und erweitertdiese Simulationsumgebung um Elemente zurDarstellung und Analyse von einspurigen Kraft-fahrzeugen (Bild 37).
Durch einen integrierten für Motorräder geeigne-ten Fahrerregler ist eine Vielzahl an Open- undClosed-Loop-Manövern darstellbar.
27
Bild 36: Dämpferkennlinien der Vorderachse und der Hinter-achse
Tab. 9: Übersicht Freiheitsgrade der Komponenten
Komponente Eigenschaften
Gesamtfahrzeug
3 Rotatorische Freiheitsgrade (Gieren, Nicken, Rollen)
3 Translatorische Freiheitsgrade (x, y, z)
Vorderradaufhängung(Teleskopgabel)
1 Rotatorischer Freiheitsgrad (Lenkwinkel)
1 Translatorischer Freiheitsgrad(Einfederung)
Feder-Dämpfer-elemente VA
1 Translatorischer Freiheitsgrad(Einfederung, gekoppelt mit Vorderradaufhängung)
Hinterradaufhängung(Einarmschwinge)
1 Rotatorischer Freiheitsgrad
Feder-Dämpfer-element HA
1 Translatorischer Freiheitsgrad(Einfederung)
2 Rotatorische Freiheitsgrade (Anbindungspunkte), gekoppeltmit Hinterradaufhängung
Fahrerkörper
2 Freiheitsgrade: Bewegung derArme Parametrierbare Größen: Koordinaten der Verbindungs-punkte Hand-Lenker, Fuß-Fußraste, Torso-Rahmen sowie Rücken-winkel, Nackenwinkel, Ellbogen-winkel und Kniewinkel sind para-metrisch einstellbar
Bild 37: Grafische Repräsentation des MKS-Motorradmodellsin VI-Motorcycle
Das im Rahmen dieses Berichtes entwickelte Si-mulationsmodell verfügt über 9 unabhängige Frei-heitsgrade am Fahrzeug und 2 unabhängige Frei-heitsgrade des Fahrers (Bewegung der Arme). DieSitzposition des Fahrers ist frei parametrierbar. Esergeben sich somit in Summe 11 Freiheitsgrade fürFahrzeug und Fahrer.
4.2 Vorderradaufhängung
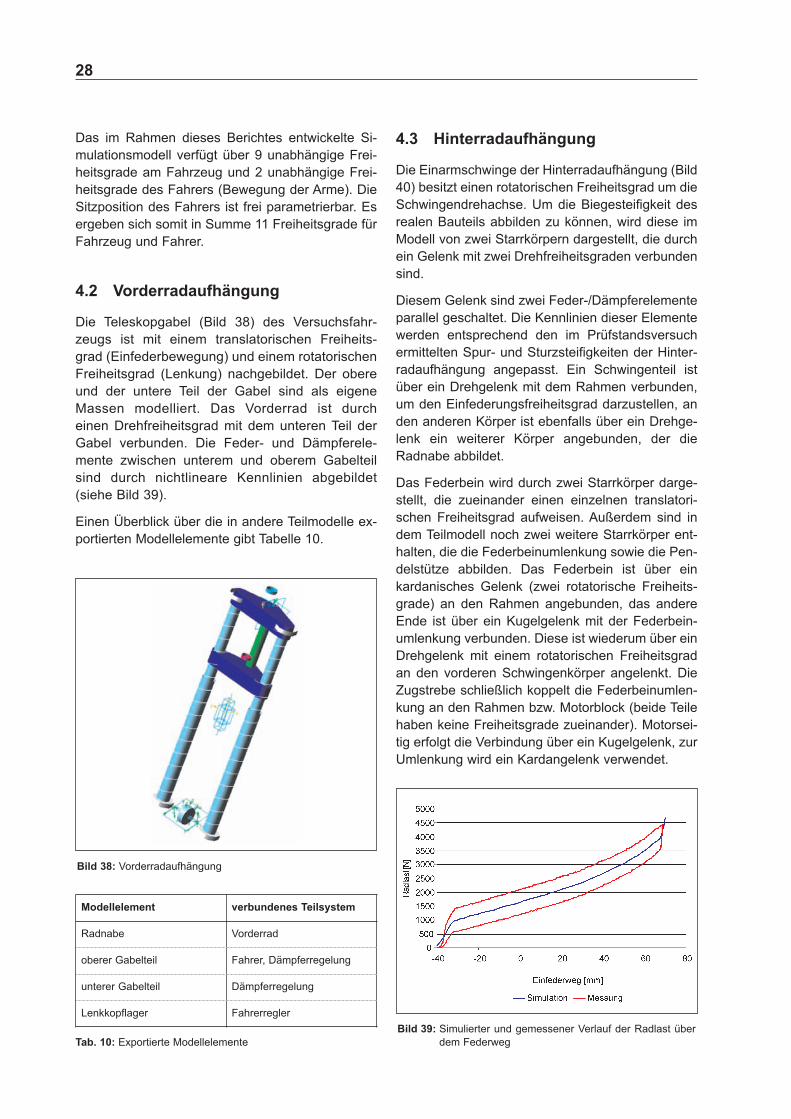
Die Teleskopgabel (Bild 38) des Versuchsfahr-zeugs ist mit einem translatorischen Freiheits-grad (Einfederbewegung) und einem rotatorischenFreiheitsgrad (Lenkung) nachgebildet. Der obereund der untere Teil der Gabel sind als eigene Massen modelliert. Das Vorderrad ist durch einen Drehfreiheitsgrad mit dem unteren Teil derGabel verbunden. Die Feder- und Dämpferele-mente zwischen unterem und oberem Gabelteilsind durch nichtlineare Kennlinien abgebildet(siehe Bild 39).
Einen Überblick über die in andere Teilmodelle ex-portierten Modellelemente gibt Tabelle 10.
4.3 Hinterradaufhängung
Die Einarmschwinge der Hinterradaufhängung (Bild40) besitzt einen rotatorischen Freiheitsgrad um dieSchwingendrehachse. Um die Biegesteifigkeit desrealen Bauteils abbilden zu können, wird diese imModell von zwei Starrkörpern dargestellt, die durchein Gelenk mit zwei Drehfreiheitsgraden verbundensind.
Diesem Gelenk sind zwei Feder-/Dämpferelementeparallel geschaltet. Die Kennlinien dieser Elementewerden entsprechend den im Prüfstandsversuchermittelten Spur- und Sturzsteifigkeiten der Hinter-radaufhängung angepasst. Ein Schwingenteil istüber ein Drehgelenk mit dem Rahmen verbunden,um den Einfederungsfreiheitsgrad darzustellen, anden anderen Körper ist ebenfalls über ein Drehge-lenk ein weiterer Körper angebunden, der dieRadnabe abbildet.
Das Federbein wird durch zwei Starrkörper darge-stellt, die zueinander einen einzelnen translatori-schen Freiheitsgrad aufweisen. Außerdem sind indem Teilmodell noch zwei weitere Starrkörper ent-halten, die die Federbeinumlenkung sowie die Pen-delstütze abbilden. Das Federbein ist über einkardanisches Gelenk (zwei rotatorische Freiheits-grade) an den Rahmen angebunden, das andereEnde ist über ein Kugelgelenk mit der Federbein-umlenkung verbunden. Diese ist wiederum über einDrehgelenk mit einem rotatorischen Freiheitsgradan den vorderen Schwingenkörper angelenkt. DieZugstrebe schließlich koppelt die Federbeinumlen-kung an den Rahmen bzw. Motorblock (beide Teilehaben keine Freiheitsgrade zueinander). Motorsei-tig erfolgt die Verbindung über ein Kugelgelenk, zurUmlenkung wird ein Kardangelenk verwendet.
28
Bild 38: Vorderradaufhängung
Tab. 10: Exportierte Modellelemente
Modellelement verbundenes Teilsystem
Radnabe Vorderrad
oberer Gabelteil Fahrer, Dämpferregelung
unterer Gabelteil Dämpferregelung
Lenkkopflager Fahrerregler
Bild 39: Simulierter und gemessener Verlauf der Radlast überdem Federweg

Zwischen oberem und unterem Teil des Feder-beins wirken zwei Kraftelemente, um die Fede-rungs- und Dämpfungseigenschaften darzustel-len. Hierfür werden die im Versuch ermittelteDämpferkennlinie und der am Achsmessstand er-mittelte radbezogene Verlauf der Radlast überdem Radfederweg verwendet. Bedingt durch denasymmetrischen Aufbau der Schwinge werdendurch Federbewegungen auch Sturzänderungenhervorgerufen. Bild 41 zeigt den gemessenen undsimulierten Verlauf des Sturzes über dem Feder-weg.
Einen Überblick über die in anderen Teilmodellenverwendeten Modellelemente gibt Tabelle 11.
4.4 Räder
Die Modelle von Vorder- und Hinterrad ent-halten jeweils einen Starrkörper, der die Massenund Trägheitseigenschaften der Felge und starr mit der Felge gekoppelten Reifenteile be-schreibt. Auf diesen Starrkörper wirkt ein Kraft-element mit sechs Freiheitsgraden, das die durchdas Reifenmodell berechneten Kräfte aufprägt(Bild 42).
Als Reifenmodell wird das FTire- (Flexible-Ring- Tire-Model-)Modell verwendet (siehe [GIP99]).Dabei handelt es sich um ein physikalisches Reifenmodell, das sich durch seine Abbildungs-güte, auch hochfrequenter Phänomene, und die detaillierte Darstellung des Reifen-Fahr-bahn-Kontaktes neben der Abbildung sämt-licher Handlingeigenschaften insbesondere auchfür vertikaldynamische Fragestellungen eig-net.
Die Reifenstruktur wird dabei diskretisiert durchverschiedene Steifigkeiten und Dämpfungen cha-rakterisiert (siehe Bild 43). Die für den Gürtel rele-vanten Eingangsparameter und Ausgabegrößensind in Bild 42 dargestellt.
Neben den strukturdynamischen Eigenschaftendes Modells zur Abbildung von Hindernisüber-fahrten und zur Simulation des Einflusses vonStraßenunebenheiten auf Fahrverhalten undSchwingungsverhalten sind die Elemente des Rei-fenlaufstreifens mit Reibungseigenschaften ver-sehen. Durch diese wird die Kraftübertragung zurStraße abgebildet.
29
Bild 40: Hinterradaufhängung
Bild 41: Gemessene und simulierte Sturzänderung (HA) überdem Einfederweg
Tab. 11: Exportierte Modellelemente
Modellelement verbundenes Teilsystem
Radnabe Hinterrad, Antriebstrang
Federbein, oberer Teil Dämpferregelung
Federbein, unterer Teil DämpferregelungBild 42: Eingangs- und Rechengrößen des FTire-Reifensimula-
tionsmodells [GIP10]

4.5 Fahrer
Dieses Teilmodell dient der Abbildung der Masseund der Trägheitseigenschaften des Fahrers (Bild44).
Die Körperteile Hand, Unterarm, Oberarm, Fuß,Unterschenkel, Oberschenkel, Torso sowie Kopfsind als einzelne durch Gelenke verbundene Starr-körper abgebildet. Die Fußkörper sind starr mit demRahmen verbunden. Die Verbindung des Torsoszum Rahmen ist durch ein Drehgelenk mit überla-gerter Zwangsbewegung dargestellt, sodass sichwährend einer Simulation auch Verlagerungen desKörpers relativ zum Fahrzeug realisieren lassen.Für die Handkörper ist eine starre Verbindung zurLenkung realisiert.
4.6 Rahmen
Dieser Körper repräsentiert sämtliche nicht in denanderen Systemen berücksichtigten Massen undTrägheiten.
4.7 Antriebstrang
Das Modell des Antriebsstrangs (Bild 45) enthälteinen Starrkörper, der die Masse- und Trägheitsei-genschaften von Motor und Getriebe abbildet. Die-ser ist starr mit dem Rahmen des Fahrzeugs ge-koppelt. Mit diesem Körper verbunden ist der Ge-triebeausgang, der einen Drehfreiheitsgrad ge-genüber der Motor-/Getriebeeinheit aufweist. Zwi-schen diesen beiden Körpern wirkt das Antriebs-moment, dessen aktueller Wert aus Gas- undGanganforderung des Fahrerreglers, der Motor-drehzahl sowie dem hinterlegten Motorkennfeld er-rechnet wird. Auf Getriebeausgang und Radnabeder hinteren Radaufhängung wirken zwei Kraftele-
mente, die alle Aktions- und Reaktionskräfte einesKettentriebes abbilden und so das Antriebsmomentauf das Hinterrad übertragen.
30
Bild 43: Verschiedene Steifigkeiten zur Beschreibung der Reifenstruktur [GIP10]
Bild 44: Fahrer
Bild 45: Antriebstrang
4.8 Bremssystem
Zur Darstellung des Bremsystems wird jeweils par-allel zur Radlagerung der Achsaufhängungssyste-me ein Moment definiert. Die Bremsmomente wer-den dabei berechnet aus aktueller Bremsanforde-rung des Fahrerreglers, der vorgegebenen Brems-kraftverteilung sowie dem maximalen Kraftschluss-potenzial der jeweiligen Bremse.
4.9 Reglerschnittstelle
Dieses Teilmodell dient als Schnittstelle zu denDämpferregelungssystemen, die in externen, in derSoftware MATLAB/Simulink erstellten Bibliothekenhinterlegt werden.
In dem Modell ist ein Körper enthalten, der über einKardangelenk an den Rahmen angebunden ist unddurch Sperrung der verbleibenden zwei rotatori-schen Freiheitsgrade gegenüber dem Inertial-system stets parallel zur dessen x-y-Ebene gehal-ten wird. Dieser Körper wird an den Koordinatendes Gesamtschwerpunktes des Fahrzeugs positio-niert. Durch Messung der Bewegungen dieses Kör-pers zum einen relativ zum Fahrzeug, zum anderenrelativ zum Inertialsystem lässt sich somit der Be-wegungszustand des Fahrzeugs bestimmen. Dieso ermittelten Positionen, Geschwindigkeiten undBeschleunigungen werden an das Modell derDämpferregelung übergeben und können dort alsEingangsgrößen für die Regelung verwendet wer-den.
Aus den Teilmodellen der Radaufhängungen wer-den die zum jeweiligen Zeitschritt aktuellen Feder-wege und -geschwindigkeiten übergeben, die ent-sprechenden Dämpferkräfte extern bestimmt und als Kraft an die Radaufhängung zurückgege-ben.
4.10 Validierung des Simulations-modells
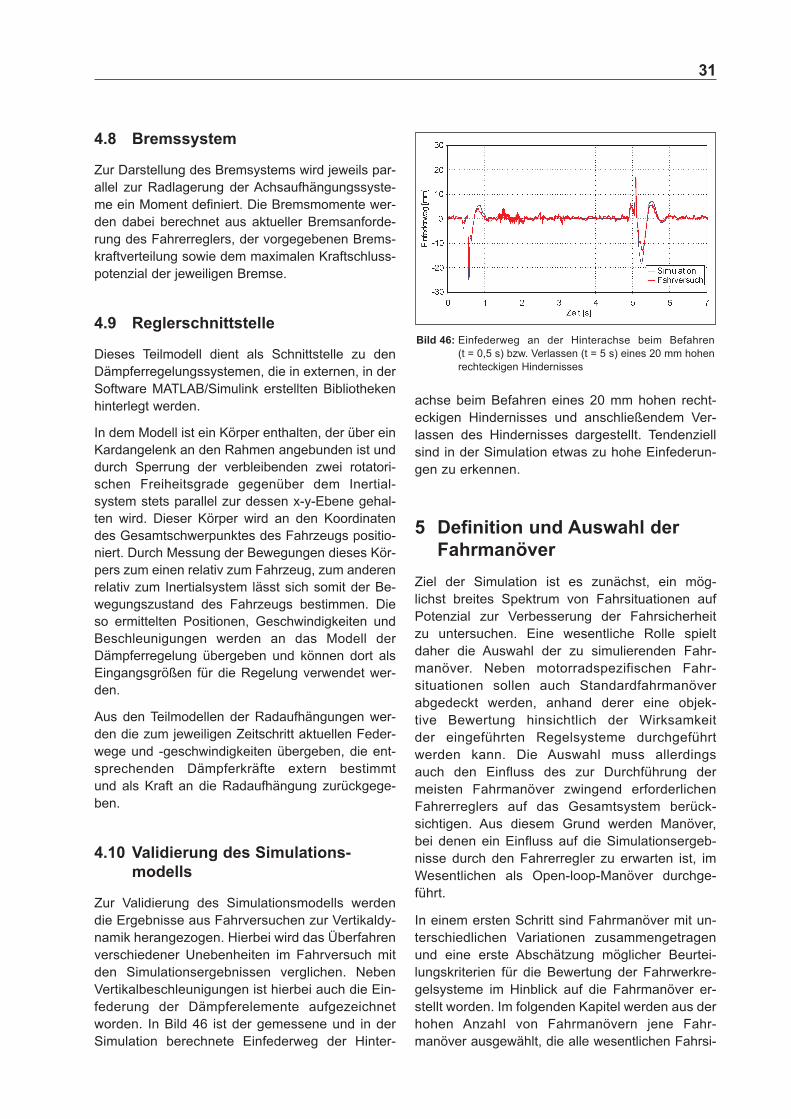
Zur Validierung des Simulationsmodells werdendie Ergebnisse aus Fahrversuchen zur Vertikaldy-namik herangezogen. Hierbei wird das Überfahrenverschiedener Unebenheiten im Fahrversuch mitden Simulationsergebnissen verglichen. NebenVertikalbeschleunigungen ist hierbei auch die Ein-federung der Dämpferelemente aufgezeichnetworden. In Bild 46 ist der gemessene und in derSimulation berechnete Einfederweg der Hinter-
achse beim Befahren eines 20 mm hohen recht-eckigen Hindernisses und anschließendem Ver-lassen des Hindernisses dargestellt. Tendenziellsind in der Simulation etwas zu hohe Einfederun-gen zu erkennen.
5 Definition und Auswahl derFahrmanöver
Ziel der Simulation ist es zunächst, ein mög-lichst breites Spektrum von Fahrsituationen aufPotenzial zur Verbesserung der Fahrsicherheit zu untersuchen. Eine wesentliche Rolle spieltdaher die Auswahl der zu simulierenden Fahr-manöver. Neben motorradspezifischen Fahr-situationen sollen auch Standardfahrmanöver abgedeckt werden, anhand derer eine objek-tive Bewertung hinsichtlich der Wirksamkeit der eingeführten Regelsysteme durchgeführt werden kann. Die Auswahl muss allerdings auch den Einfluss des zur Durchführung der meisten Fahrmanöver zwingend erforderlichenFahrerreglers auf das Gesamtsystem berück-sichtigen. Aus diesem Grund werden Manöver, bei denen ein Einfluss auf die Simulationsergeb-nisse durch den Fahrerregler zu erwarten ist, imWesentlichen als Open-loop-Manöver durchge-führt.
In einem ersten Schritt sind Fahrmanöver mit un-terschiedlichen Variationen zusammengetragenund eine erste Abschätzung möglicher Beurtei-lungskriterien für die Bewertung der Fahrwerkre-gelsysteme im Hinblick auf die Fahrmanöver er-stellt worden. Im folgenden Kapitel werden aus derhohen Anzahl von Fahrmanövern jene Fahr-manöver ausgewählt, die alle wesentlichen Fahrsi-
31
Bild 46: Einfederweg an der Hinterachse beim Befahren (t = 0,5 s) bzw. Verlassen (t = 5 s) eines 20 mm hohenrechteckigen Hindernisses
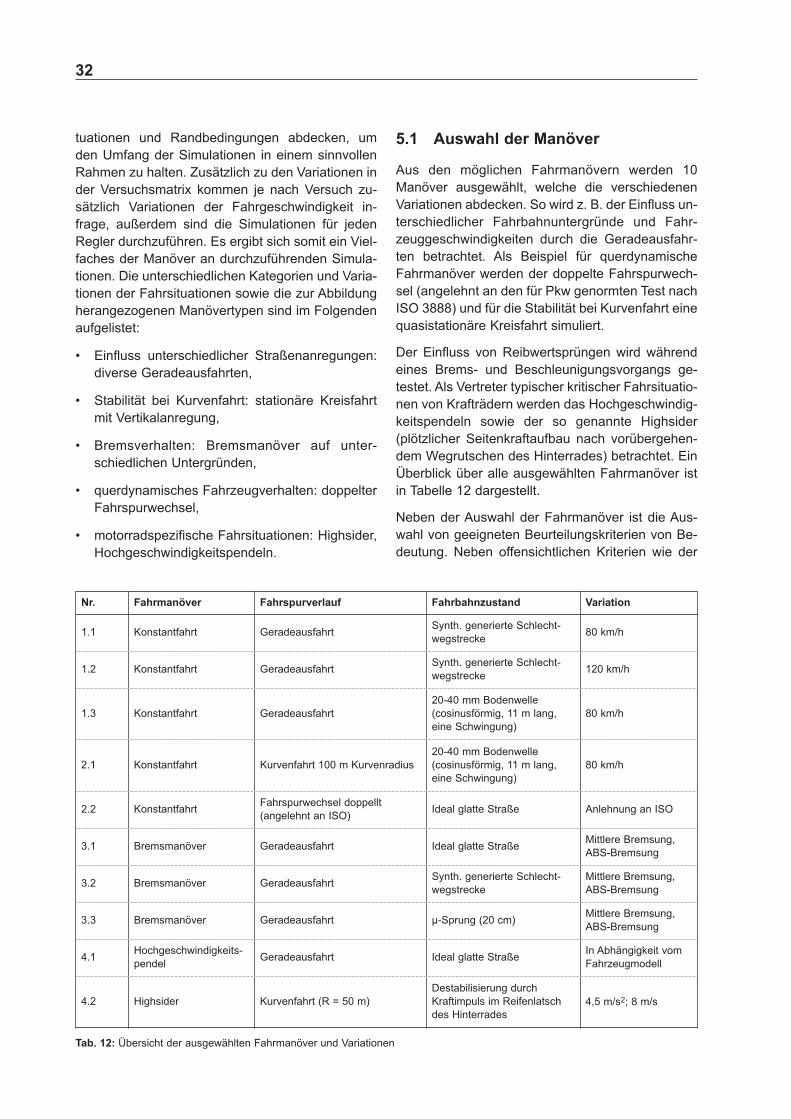
tuationen und Randbedingungen abdecken, umden Umfang der Simulationen in einem sinnvollenRahmen zu halten. Zusätzlich zu den Variationen inder Versuchsmatrix kommen je nach Versuch zu-sätzlich Variationen der Fahrgeschwindigkeit in-frage, außerdem sind die Simulationen für jedenRegler durchzuführen. Es ergibt sich somit ein Viel-faches der Manöver an durchzuführenden Simula-tionen. Die unterschiedlichen Kategorien und Varia-tionen der Fahrsituationen sowie die zur Abbildungherangezogenen Manövertypen sind im Folgendenaufgelistet:
• Einfluss unterschiedlicher Straßenanregungen:diverse Geradeausfahrten,
• Stabilität bei Kurvenfahrt: stationäre Kreisfahrtmit Vertikalanregung,
• Bremsverhalten: Bremsmanöver auf unter-schiedlichen Untergründen,
• querdynamisches Fahrzeugverhalten: doppelterFahrspurwechsel,
• motorradspezifische Fahrsituationen: Highsider,Hochgeschwindigkeitspendeln.
5.1 Auswahl der Manöver
Aus den möglichen Fahrmanövern werden 10Manöver ausgewählt, welche die verschiedenenVariationen abdecken. So wird z. B. der Einfluss un-terschiedlicher Fahrbahnuntergründe und Fahr-zeuggeschwindigkeiten durch die Geradeausfahr-ten betrachtet. Als Beispiel für querdynamischeFahrmanöver werden der doppelte Fahrspurwech-sel (angelehnt an den für Pkw genormten Test nachISO 3888) und für die Stabilität bei Kurvenfahrt einequasistationäre Kreisfahrt simuliert.
Der Einfluss von Reibwertsprüngen wird währendeines Brems- und Beschleunigungsvorgangs ge-testet. Als Vertreter typischer kritischer Fahrsituatio-nen von Krafträdern werden das Hochgeschwindig-keitspendeln sowie der so genannte Highsider(plötzlicher Seitenkraftaufbau nach vorübergehen-dem Wegrutschen des Hinterrades) betrachtet. EinÜberblick über alle ausgewählten Fahrmanöver istin Tabelle 12 dargestellt.
Neben der Auswahl der Fahrmanöver ist die Aus-wahl von geeigneten Beurteilungskriterien von Be-deutung. Neben offensichtlichen Kriterien wie der
32
Tab. 12: Übersicht der ausgewählten Fahrmanöver und Variationen
Nr. Fahrmanöver Fahrspurverlauf Fahrbahnzustand Variation
1.1 Konstantfahrt GeradeausfahrtSynth. generierte Schlecht-wegstrecke
80 km/h
1.2 Konstantfahrt GeradeausfahrtSynth. generierte Schlecht-wegstrecke
120 km/h
1.3 Konstantfahrt Geradeausfahrt20-40 mm Bodenwelle (cosinusförmig, 11 m lang,eine Schwingung)
80 km/h
2.1 Konstantfahrt Kurvenfahrt 100 m Kurvenradius20-40 mm Bodenwelle (cosinusförmig, 11 m lang,eine Schwingung)
80 km/h
2.2 KonstantfahrtFahrspurwechsel doppellt (angelehnt an ISO)
Ideal glatte Straße Anlehnung an ISO
3.1 Bremsmanöver Geradeausfahrt Ideal glatte StraßeMittlere Bremsung, ABS-Bremsung
3.2 Bremsmanöver GeradeausfahrtSynth. generierte Schlecht-wegstrecke
Mittlere Bremsung, ABS-Bremsung
3.3 Bremsmanöver Geradeausfahrt µ-Sprung (20 cm)Mittlere Bremsung, ABS-Bremsung
4.1Hochgeschwindigkeits-pendel
Geradeausfahrt Ideal glatte StraßeIn Abhängigkeit vomFahrzeugmodell
4.2 Highsider Kurvenfahrt (R = 50 m)Destabilisierung durch Kraftimpuls im Reifenlatschdes Hinterrades
4,5 m/s2; 8 m/s

allgemeinen Fahrzeugstabilität (Fahrzeug stürztbzw. stürzt nicht) werden weitere objektive Gütekri-terien zur Bewertung der Systeme herangezogen,die in der Simulationsumgebung aus sämtlichenfahrdynamischen Fahrzeuggrößen berechnet wer-den können.
5.2 Bewertungskriterien
Zur Beurteilung der Güte der unterschiedlichenDämpfer- und Regelungskonzepte werden entspre-chende Kriterien definiert, durch die sowohl auf denFahrkomfort als auch auf die Fahrsicherheit ge-schlossen werden kann.
Da der Reifen als Bindeglied zwischen Fahrzeugund Fahrbahn eine wesentliche Rolle spielt und esein Ziel der Regelsysteme sein soll, durch die Mini-mierung der Radlastschwankungen die Fahrsicher-heit zu erhöhen, ist es sinnvoll, die vorliegendenReifennormalkräfte zur Beurteilung heranzuziehen.Da neben der Reduzierung der Radlastschwankun-gen auch die Beruhigung des Fahrzeugaufbausvon Interesse ist, kann über die Aufbaubewegun-gen, sowohl rotatorisch als auch translatorisch, undAufbaugeschwindigkeiten die Güte der Fahrwerkre-gelung beurteilt werden. Als Kriterium für Brems-manöver auf unebener Fahrbahn können sowohlder absolute Bremsweg als auch die mittlereLängsbeschleunigung verwendet werden.
5.2.1 Fahrkomfort
Grundsätzlich wird zur Beurteilung des Komforts dievertikale Aufbaubeschleunigung herangezogen.Dafür wird zum einen jeweils der quadratische Mit-telwert analog zur Radlast (siehe Gl. 3) gebildet,zum anderen wird ein frequenzbewerteter Mittelwertberechnet. Der frequenzbewertete Mittelwert wirdverwendet, da der Mensch in Abhängigkeit der An-regungsfrequenz Beschleunigungen unterschiedlichwahrnimmt (s. a. [VDI02]). Zusätzlich können nachVDI-Richtlinie für das menschliche Wohlbefindenauch die Nickbeschleunigung und die Rollbeschleu-nigung ausgewertet werden. Dementsprechendwerden je nach Anregungsrichtung die Beschleuni-gungen in den für den Mensch stärker spürbarenFrequenzbereichen unterschiedlich gewichtet.
5.2.2 Fahrsicherheit
Eine für die Fahrsicherheit maßgebliche Größe istdie dynamische Radlastschwankung. Auch hier
wird als Beurteilungsgröße, wie aus der Literatur[NIE07] bekannt, der quadratische Mittelwert nachGl. 3 gebildet, wobei Fz,dyn die aktuelle Raldastohne die statische Komponente ist. Weiter sind, jenach Fahrmanöver, auch andere Beurteilungs-größen ein Ausdruck für die Fahrsicherheit.
Gl. 3
Für Bremsmanöver bieten sich der Anhaltewegbzw. der Weg bis zum Erreichen einer bestimmtenGeschwindigkeit, die mittlere Längsbeschleunigungsowie eine eventuell eintretende Drehbewegungum die Fahrzeughochachse an. Für den Fahrspur-wechsel und die Kurvenfahrt sind die maximal mög-liche Durchfahrgeschwindigkeit sowie der Regel-aufwand des Fahrers (Lenkwinkel/Lenkmoment)geeignete Beurteilungskriterien. Die Darstellungder Ergebnisse für die unterschiedlichen Regler-konfigurationen erfolgt im Hakenkurvendiagramm.Hierbei wird der jeweilige Kennwert für die Komfort-beurteilung über dem Kennwert der Sicherheitsbe-urteilung aufgetragen. Die optimalen Punkte der je-weiligen Regler (niedrigste Radlastschwankungenbei höchstem Komfort) werden zur besseren Ver-gleichbarkeit in einem Diagramm aufgetragen.Hierbei werden die jeweiligen Kennwerte auf denoptimalen Kennwert des passiv gedämpften Systems normiert. So ist eine relative Verbesse-rung/Verschlechterung hinsichtlich des Komfortsund des jeweiligen Sicheheitskriteriums ersichtlich.
6 Verstelldämpferkonzepte
Da auch im Kraftradbereich Bauteil- und Produkti-onskosten eine große Rolle spielen und insbeson-dere das Package und Zusatzgewicht bei Krafträ-dern von höchster Bedeutung sind, soll das Poten-zial unterschiedlicher Systeme von der einfachenVerstelldämpferlösung bis hin zum aufwändigenAktuatorsystem betrachtet werden. So kann sicher-gestellt werden, dass der Aufwand und der Nutzeneines Systems in der richtigen Relation stehen.Außerdem ist gerade im Kraftradsektor die Kun-denakzeptanz neuer Systeme als schwierig anzu-sehen.
In der Literatur sind drei wesentliche Grundformenfür geregelte Dämpfersysteme bekannt. Somit wer-den neben der passiven Feder-/Dämpferabstim-
33
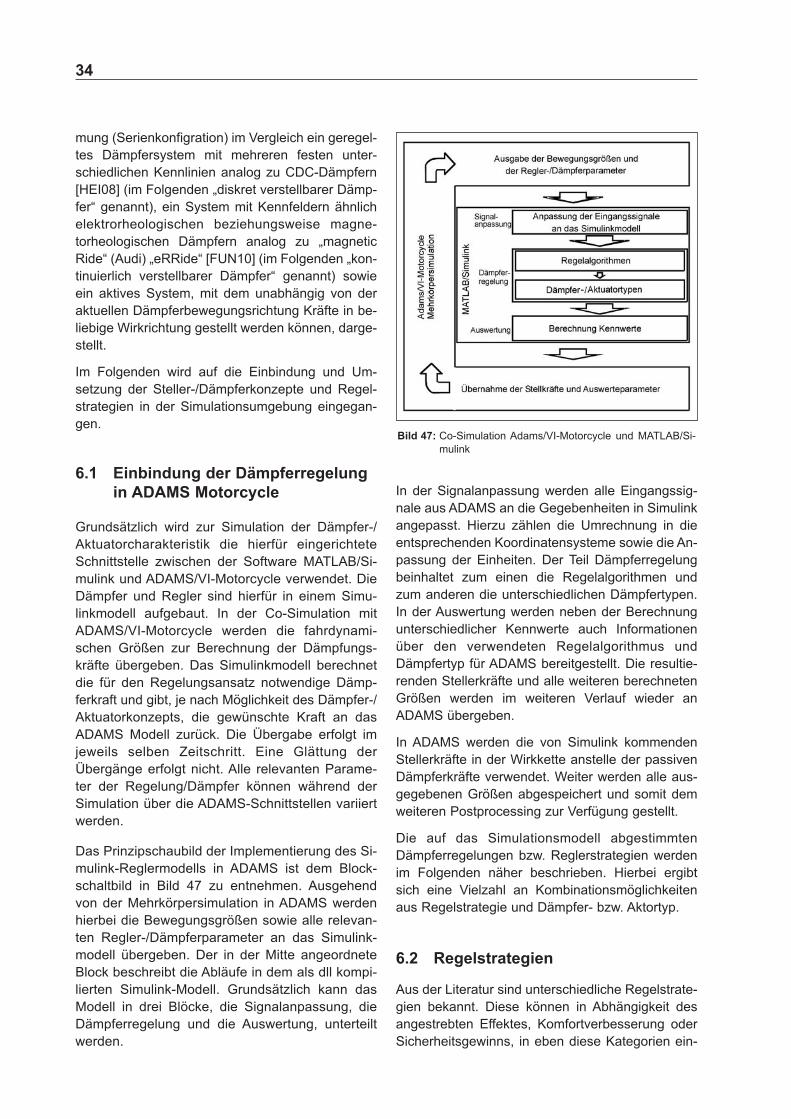
mung (Serienkonfigration) im Vergleich ein geregel-tes Dämpfersystem mit mehreren festen unter-schiedlichen Kennlinien analog zu CDC-Dämpfern[HEI08] (im Folgenden „diskret verstellbarer Dämp-fer“ genannt), ein System mit Kennfeldern ähnlichelektrorheologischen beziehungsweise magne-torheologischen Dämpfern analog zu „magneticRide“ (Audi) „eRRide“ [FUN10] (im Folgenden „kon-tinuierlich verstellbarer Dämpfer“ genannt) sowieein aktives System, mit dem unabhängig von deraktuellen Dämpferbewegungsrichtung Kräfte in be-liebige Wirkrichtung gestellt werden können, darge-stellt.
Im Folgenden wird auf die Einbindung und Um-setzung der Steller-/Dämpferkonzepte und Regel-strategien in der Simulationsumgebung eingegan-gen.
6.1 Einbindung der Dämpferregelungin ADAMS Motorcycle
Grundsätzlich wird zur Simulation der Dämpfer-/Aktuatorcharakteristik die hierfür eingerichteteSchnittstelle zwischen der Software MATLAB/Si-mulink und ADAMS/VI-Motorcycle verwendet. DieDämpfer und Regler sind hierfür in einem Simu-linkmodell aufgebaut. In der Co-Simulation mitADAMS/VI-Motorcycle werden die fahrdynami-schen Größen zur Berechnung der Dämpfungs-kräfte übergeben. Das Simulinkmodell berechnetdie für den Regelungsansatz notwendige Dämp-ferkraft und gibt, je nach Möglichkeit des Dämpfer-/Aktuatorkonzepts, die gewünschte Kraft an dasADAMS Modell zurück. Die Übergabe erfolgt im jeweils selben Zeitschritt. Eine Glättung der Übergänge erfolgt nicht. Alle relevanten Parame-ter der Regelung/Dämpfer können während derSimulation über die ADAMS-Schnittstellen variiertwerden.
Das Prinzipschaubild der Implementierung des Si-mulink-Reglermodells in ADAMS ist dem Block-schaltbild in Bild 47 zu entnehmen. Ausgehendvon der Mehrkörpersimulation in ADAMS werdenhierbei die Bewegungsgrößen sowie alle relevan-ten Regler-/Dämpferparameter an das Simulink-modell übergeben. Der in der Mitte angeordneteBlock beschreibt die Abläufe in dem als dll kompi-lierten Simulink-Modell. Grundsätzlich kann dasModell in drei Blöcke, die Signalanpassung, dieDämpferregelung und die Auswertung, unterteiltwerden.
In der Signalanpassung werden alle Eingangssig-nale aus ADAMS an die Gegebenheiten in Simulinkangepasst. Hierzu zählen die Umrechnung in dieentsprechenden Koordinatensysteme sowie die An-passung der Einheiten. Der Teil Dämpferregelungbeinhaltet zum einen die Regelalgorithmen undzum anderen die unterschiedlichen Dämpfertypen.In der Auswertung werden neben der Berechnungunterschiedlicher Kennwerte auch Informationenüber den verwendeten Regelalgorithmus undDämpfertyp für ADAMS bereitgestellt. Die resultie-renden Stellerkräfte und alle weiteren berechnetenGrößen werden im weiteren Verlauf wieder anADAMS übergeben.
In ADAMS werden die von Simulink kommendenStellerkräfte in der Wirkkette anstelle der passivenDämpferkräfte verwendet. Weiter werden alle aus-gegebenen Größen abgespeichert und somit demweiteren Postprocessing zur Verfügung gestellt.
Die auf das Simulationsmodell abgestimmtenDämpferregelungen bzw. Reglerstrategien werdenim Folgenden näher beschrieben. Hierbei ergibtsich eine Vielzahl an Kombinationsmöglichkeitenaus Regelstrategie und Dämpfer- bzw. Aktortyp.
6.2 Regelstrategien
Aus der Literatur sind unterschiedliche Regelstrate-gien bekannt. Diese können in Abhängigkeit desangestrebten Effektes, Komfortverbesserung oderSicherheitsgewinns, in eben diese Kategorien ein-
34
Bild 47: Co-Simulation Adams/VI-Motorcycle und MATLAB/Si-mulink
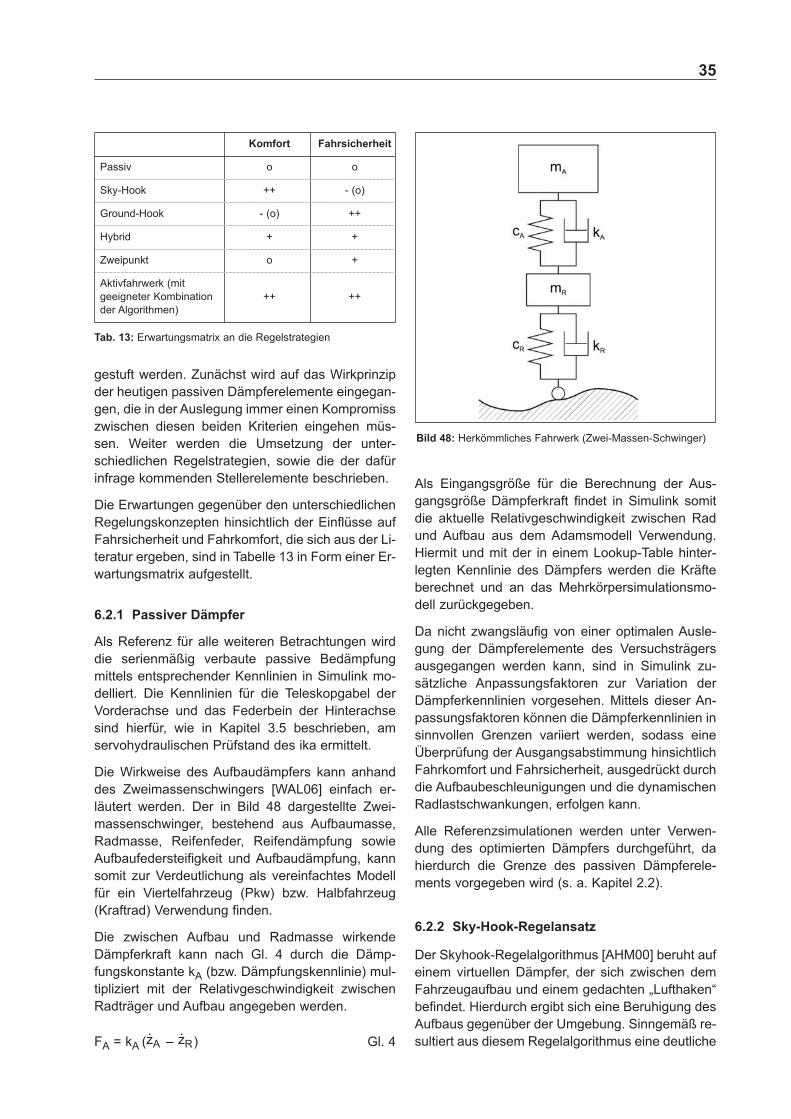
gestuft werden. Zunächst wird auf das Wirkprinzipder heutigen passiven Dämpferelemente eingegan-gen, die in der Auslegung immer einen Kompromisszwischen diesen beiden Kriterien eingehen müs-sen. Weiter werden die Umsetzung der unter-schiedlichen Regelstrategien, sowie die der dafürinfrage kommenden Stellerelemente beschrieben.
Die Erwartungen gegenüber den unterschiedlichenRegelungskonzepten hinsichtlich der Einflüsse aufFahrsicherheit und Fahrkomfort, die sich aus der Li-teratur ergeben, sind in Tabelle 13 in Form einer Er-wartungsmatrix aufgestellt.
6.2.1 Passiver Dämpfer
Als Referenz für alle weiteren Betrachtungen wirddie serienmäßig verbaute passive Bedämpfung mittels entsprechender Kennlinien in Simulink mo-delliert. Die Kennlinien für die Teleskopgabel derVorderachse und das Federbein der Hinterachsesind hierfür, wie in Kapitel 3.5 beschrieben, am servohydraulischen Prüfstand des ika ermittelt.
Die Wirkweise des Aufbaudämpfers kann anhanddes Zweimassenschwingers [WAL06] einfach er-läutert werden. Der in Bild 48 dargestellte Zwei-massenschwinger, bestehend aus Aufbaumasse,Radmasse, Reifenfeder, Reifendämpfung sowieAufbaufedersteifigkeit und Aufbaudämpfung, kannsomit zur Verdeutlichung als vereinfachtes Modellfür ein Viertelfahrzeug (Pkw) bzw. Halbfahrzeug(Kraftrad) Verwendung finden.
Die zwischen Aufbau und Radmasse wirkendeDämpferkraft kann nach Gl. 4 durch die Dämp-fungskonstante kA (bzw. Dämpfungskennlinie) mul-tipliziert mit der Relativgeschwindigkeit zwischenRadträger und Aufbau angegeben werden.
FA = kA ( – ) Gl. 4
Als Eingangsgröße für die Berechnung der Aus-gangsgröße Dämpferkraft findet in Simulink somitdie aktuelle Relativgeschwindigkeit zwischen Radund Aufbau aus dem Adamsmodell Verwendung.Hiermit und mit der in einem Lookup-Table hinter-legten Kennlinie des Dämpfers werden die Kräfteberechnet und an das Mehrkörpersimulationsmo-dell zurückgegeben.
Da nicht zwangsläufig von einer optimalen Ausle-gung der Dämpferelemente des Versuchsträgersausgegangen werden kann, sind in Simulink zu-sätzliche Anpassungsfaktoren zur Variation derDämpferkennlinien vorgesehen. Mittels dieser An-passungsfaktoren können die Dämpferkennlinien insinnvollen Grenzen variiert werden, sodass eineÜberprüfung der Ausgangsabstimmung hinsichtlichFahrkomfort und Fahrsicherheit, ausgedrückt durchdie Aufbaubeschleunigungen und die dynamischenRadlastschwankungen, erfolgen kann.
Alle Referenzsimulationen werden unter Verwen-dung des optimierten Dämpfers durchgeführt, dahierdurch die Grenze des passiven Dämpferele-ments vorgegeben wird (s. a. Kapitel 2.2).
6.2.2 Sky-Hook-Regelansatz
Der Skyhook-Regelalgorithmus [AHM00] beruht aufeinem virtuellen Dämpfer, der sich zwischen demFahrzeugaufbau und einem gedachten „Lufthaken“befindet. Hierdurch ergibt sich eine Beruhigung desAufbaus gegenüber der Umgebung. Sinngemäß re-sultiert aus diesem Regelalgorithmus eine deutlichezR
•zA•
35
Tab. 13: Erwartungsmatrix an die Regelstrategien
Komfort Fahrsicherheit
Passiv o o
Sky-Hook ++ - (o)
Ground-Hook - (o) ++
Hybrid + +
Zweipunkt o +
Aktivfahrwerk (mit geeigneter Kombinationder Algorithmen)
++ ++
Bild 48: Herkömmliches Fahrwerk (Zwei-Massen-Schwinger)
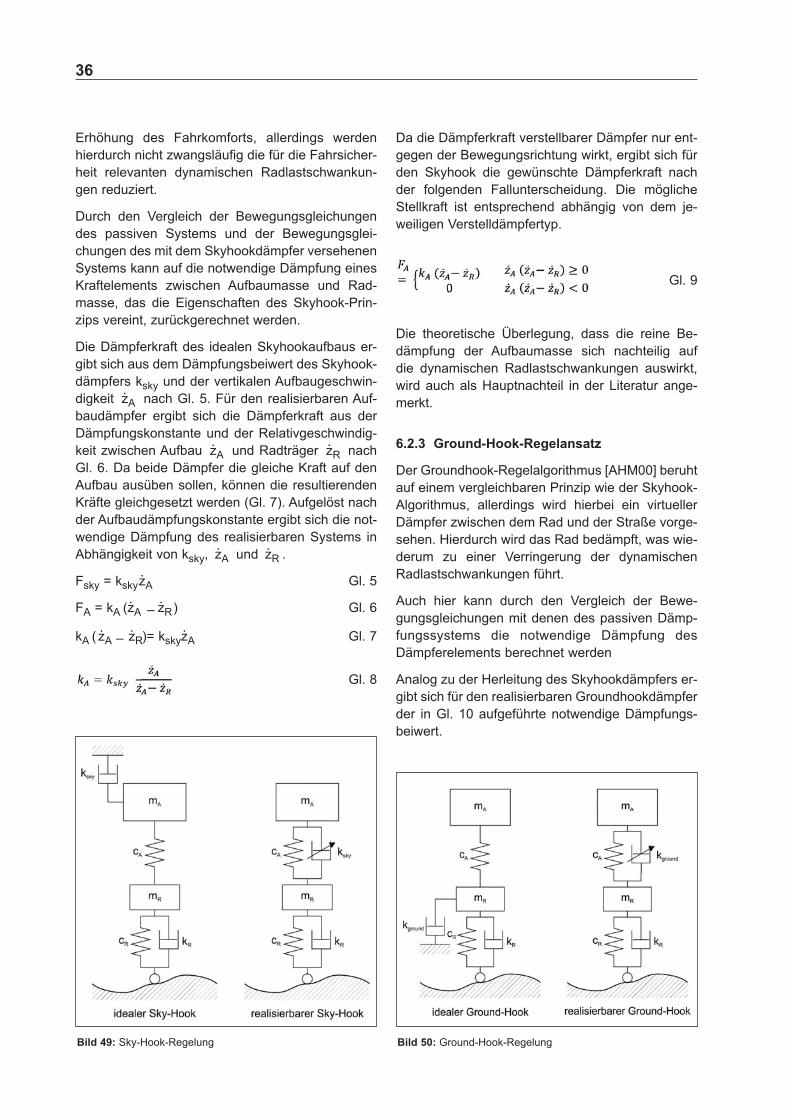
Erhöhung des Fahrkomforts, allerdings werdenhierdurch nicht zwangsläufig die für die Fahrsicher-heit relevanten dynamischen Radlastschwankun-gen reduziert.
Durch den Vergleich der Bewegungsgleichungendes passiven Systems und der Bewegungsglei-chungen des mit dem Skyhookdämpfer versehenenSystems kann auf die notwendige Dämpfung einesKraftelements zwischen Aufbaumasse und Rad-masse, das die Eigenschaften des Skyhook-Prin-zips vereint, zurückgerechnet werden.
Die Dämpferkraft des idealen Skyhookaufbaus er-gibt sich aus dem Dämpfungsbeiwert des Skyhook-dämpfers ksky und der vertikalen Aufbaugeschwin-digkeit nach Gl. 5. Für den realisierbaren Auf-baudämpfer ergibt sich die Dämpferkraft aus derDämpfungskonstante und der Relativgeschwindig-keit zwischen Aufbau und Radträger nachGl. 6. Da beide Dämpfer die gleiche Kraft auf denAufbau ausüben sollen, können die resultierendenKräfte gleichgesetzt werden (Gl. 7). Aufgelöst nachder Aufbaudämpfungskonstante ergibt sich die not-wendige Dämpfung des realisierbaren Systems inAbhängigkeit von ksky, und .
Fsky = ksky Gl. 5
FA = kA ( – ) Gl. 6
kA ( – )= ksky Gl. 7
Gl. 8
Da die Dämpferkraft verstellbarer Dämpfer nur ent-gegen der Bewegungsrichtung wirkt, ergibt sich fürden Skyhook die gewünschte Dämpferkraft nachder folgenden Fallunterscheidung. Die möglicheStellkraft ist entsprechend abhängig von dem je-weiligen Verstelldämpfertyp.
Gl. 9
Die theoretische Überlegung, dass die reine Be-dämpfung der Aufbaumasse sich nachteilig auf die dynamischen Radlastschwankungen auswirkt,wird auch als Hauptnachteil in der Literatur ange-merkt.
6.2.3 Ground-Hook-Regelansatz
Der Groundhook-Regelalgorithmus [AHM00] beruhtauf einem vergleichbaren Prinzip wie der Skyhook-Algorithmus, allerdings wird hierbei ein virtuellerDämpfer zwischen dem Rad und der Straße vorge-sehen. Hierdurch wird das Rad bedämpft, was wie-derum zu einer Verringerung der dynamischenRadlastschwankungen führt.
Auch hier kann durch den Vergleich der Bewe-gungsgleichungen mit denen des passiven Dämp-fungssystems die notwendige Dämpfung desDämpferelements berechnet werden
Analog zu der Herleitung des Skyhookdämpfers er-gibt sich für den realisierbaren Groundhookdämpferder in Gl. 10 aufgeführte notwendige Dämpfungs-beiwert.
zA•zR
•zA•
zR•zA
•
zA•
zR•zA
•
zR•zA
•
zA•
36
Bild 49: Sky-Hook-Regelung Bild 50: Ground-Hook-Regelung

Gl. 10
Da die Dämpferkraft verstellbarer Dämpfer nur ent-gegen der Bewegungsrichtung wirkt, ergibt sich fürden Groundhook die gewünschte Dämpferkraftnach der folgenden Fallunterscheidung. Die mögli-che Stellkraft ist auch hier abhängig von dem je-weiligen Verstelldämpfertyp.
Gl. 11
Da sich der Groundhookansatz auf die Minimierungder dynamischen Radlastschwankungen konzen-triert und die Bedämpfung des Aufbaus unberück-sichtigt bleibt, ist hier eine deutliche Verschlechte-rung des Komforts zu erwarten.
6.2.4 Hybrider Regelansatz [AHM00]
Da der reine Skyhook- und der reine Groundhook-Regleransatz auf den ersten Blick jeweils nur zurBedämpfung des Aufbaus bzw. des Radträgersgeeignet sind, ist eine Kombination aus diesenbeiden Regelansätzen zur Lösung des Zielkonflik-tes zwischen der Minimierung der Radlastschwan-kungen und der Aufbaubeschleunigung nahelie-gend. Der ideale und realisierbare Aufbau des sogenannten hybriden Systems ist Bild 51 zu ent-nehmen.
Der hybride Ansatz basiert somit auf der Kombina-tion der beiden Regelalgorithmen über einen Ge-wichtungsfaktor αHybrid. Hierbei werden die not-wendige Dämpfungskomponente des Skyhook-Algorithmus mit dem Faktor αHybrid und die Kompo-nente des Groundhook-Algorithmus mit dem Faktor (1-αHybrid) multipliziert und im Anschluss zusam-mengefasst. Über den Faktor αHybrid kann somitdas Verhältnis zwischen Ground- und Skyhook-algorithmus variiert werden. Die notwendige Dämp-ferkraft für den Hybriddämpfer ergibt sich aus denrelevanten Geschwindigkeiten αsky und αgrounddem Faktor αHybrid und dem Faktor (1-αHybrid)sowie der Dämpfungskonstante Khybrid nach Gl. 12bis Gl. 14.
Gl. 12
Gl. 13
Gl. 14
Nach Gl. 12 ergeben sich für αHybrid = 1 ein reinerSkyhookalgorithmus und für αHybrid = 0 ein reinerGroundhookalgorithmus. Für den Wert für Khybridmuss somit ein Kompromiss zwischen Skyhookund die Groundhook-Regelstrategie eingegan-gen werden. Die optimale Einstellung wird durcheine Parametervariation in der Simulation ermit-telt. Anhand des Hakenkurvendiagramms kann die optimale Einstellung ermittelt werden. In Kom-bination mit dem Simulationsmodell stellt sich ein KHybrid von 0,85 als optimal heraus. Aus diesem Wert resultiert somit eine deutlich stärkereGewichtung des Skyhook-Anteils. Da die Simula-tionen mit dem reinen Groundhook im Vergleichzum reinen Skyhook deutlich schlechtere Er-gebnisse liefern, ist diese Gewichtung nahelie-gend.
6.2.5 Zweipunkt-Regler (MiniMax)
Dem Zweipunkt-Regler [NIE07] wird von einemübergeordneten Beobachter in Abhängigkeit desBewegungszustandes ein Radlastwunsch bereitge-stellt, den dieser versucht zu erfüllen. Frühere Un-tersuchungen bei [REI03] haben ergeben, dass beieinem Bremsmanöver Verstelldämpfer mit vielendiskreten Dämpferkennlinien in der Mehrheit der
37
Bild 51: Hybrid-Regelung
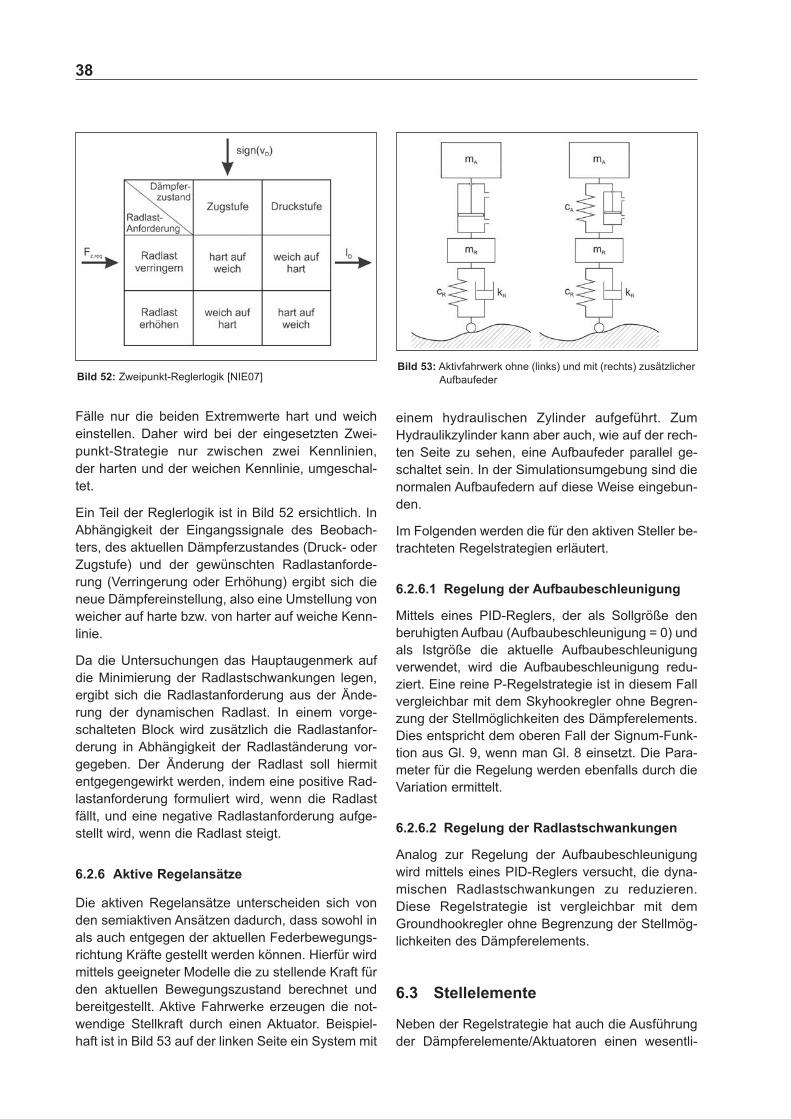
Fälle nur die beiden Extremwerte hart und weicheinstellen. Daher wird bei der eingesetzten Zwei-punkt-Strategie nur zwischen zwei Kennlinien, der harten und der weichen Kennlinie, umgeschal-tet.
Ein Teil der Reglerlogik ist in Bild 52 ersichtlich. InAbhängigkeit der Eingangssignale des Beobach-ters, des aktuellen Dämpferzustandes (Druck- oderZugstufe) und der gewünschten Radlastanforde-rung (Verringerung oder Erhöhung) ergibt sich dieneue Dämpfereinstellung, also eine Umstellung vonweicher auf harte bzw. von harter auf weiche Kenn-linie.
Da die Untersuchungen das Hauptaugenmerk aufdie Minimierung der Radlastschwankungen legen,ergibt sich die Radlastanforderung aus der Ände-rung der dynamischen Radlast. In einem vorge-schalteten Block wird zusätzlich die Radlastanfor-derung in Abhängigkeit der Radlaständerung vor-gegeben. Der Änderung der Radlast soll hiermitentgegengewirkt werden, indem eine positive Rad-lastanforderung formuliert wird, wenn die Radlastfällt, und eine negative Radlastanforderung aufge-stellt wird, wenn die Radlast steigt.
6.2.6 Aktive Regelansätze
Die aktiven Regelansätze unterscheiden sich vonden semiaktiven Ansätzen dadurch, dass sowohl inals auch entgegen der aktuellen Federbewegungs-richtung Kräfte gestellt werden können. Hierfür wirdmittels geeigneter Modelle die zu stellende Kraft fürden aktuellen Bewegungszustand berechnet undbereitgestellt. Aktive Fahrwerke erzeugen die not-wendige Stellkraft durch einen Aktuator. Beispiel-haft ist in Bild 53 auf der linken Seite ein System mit
einem hydraulischen Zylinder aufgeführt. Zum Hydraulikzylinder kann aber auch, wie auf der rech-ten Seite zu sehen, eine Aufbaufeder parallel ge-schaltet sein. In der Simulationsumgebung sind dienormalen Aufbaufedern auf diese Weise eingebun-den.
Im Folgenden werden die für den aktiven Steller be-trachteten Regelstrategien erläutert.
6.2.6.1 Regelung der Aufbaubeschleunigung
Mittels eines PID-Reglers, der als Sollgröße denberuhigten Aufbau (Aufbaubeschleunigung = 0) undals Istgröße die aktuelle Aufbaubeschleunigungverwendet, wird die Aufbaubeschleunigung redu-ziert. Eine reine P-Regelstrategie ist in diesem Fallvergleichbar mit dem Skyhookregler ohne Begren-zung der Stellmöglichkeiten des Dämpferelements.Dies entspricht dem oberen Fall der Signum-Funk-tion aus Gl. 9, wenn man Gl. 8 einsetzt. Die Para-meter für die Regelung werden ebenfalls durch dieVariation ermittelt.
6.2.6.2 Regelung der Radlastschwankungen
Analog zur Regelung der Aufbaubeschleunigungwird mittels eines PID-Reglers versucht, die dyna-mischen Radlastschwankungen zu reduzieren.Diese Regelstrategie ist vergleichbar mit dem Groundhookregler ohne Begrenzung der Stellmög-lichkeiten des Dämpferelements.
6.3 Stellelemente
Neben der Regelstrategie hat auch die Ausführungder Dämpferelemente/Aktuatoren einen wesentli-
38
Bild 52: Zweipunkt-Reglerlogik [NIE07]Bild 53: Aktivfahrwerk ohne (links) und mit (rechts) zusätzlicher
Aufbaufeder

chen Einfluss auf die Eigenschaften des Regel-systems. Die unterschiedlichen Steller für die Er-zeugung der Dämpfkräfte sind im Folgenden auf-geführt.
Die Erwartungen gegenüber den unterschiedlichenStellerkonzepten hinsichtlich der Umsetzung derRegelstrategien, die sich aus der Literatur [AHM00]ergeben, sind in Tabelle 14 in Form einer Erwar-tungsmatrix aufgestellt.
6.3.1 Passives Dämpferelement
Das passive Dämpferelement ist durch eine Kenn-linie pro Dämpfer realisiert. Die Kennlinien basierenauf den am servohydraulischen Prüfstand gemes-senen Kennlinien und sind in der Simulationsumge-bung durch eine Parametervariation optimiert, umeine optimale passive Dämpferabstimmung der Re-ferenzkonfiguration zu gewährleisten.
6.3.2 Dämpferelement mit diskreten Kennlinien
Für das CDC-ähnliche Dämpferelement wird ausverschiedenen passiven Dämpferkennlinien einVerstelldämpferkennfeld generiert, sodass entspre-chend der notwendigen Kraft die geeignete Kenn-linie aus dem Kennfeld durch den Regelalgorithmusverwendet werden kann. Die Anzahl der Kennlinienist in diesem Fall aus praktischen Gründen auf 10festgelegt worden.
6.3.3 Stufenlos variierbares Dämpferelement
Stufenlos variierbare Dämpfer (vergleichbar mitelektrorheologischen/magnetorheologischen Dämp-fern) können in den Grenzen ihres Kennfeldes zujeder Zeit auch jeden Zwischenpunkt zwischen derminimalen und maximalen Kennlinie entgegen derDämpferbewegungsrichtung stellen. Das verwen-dete Kennfeld für die vorderen und den hinterenDämpfer ist zur besseren Vergleichbarkeit durchdie gleichen Minimal- und Maximalwerte wie dasKennfeld des CDC-Dämpfers begrenzt. Die mögli-
chen Minimal- und Maximalwerte sind bewussthöher als aus der Literatur bekannt angesetzt, ummögliche Weiterentwicklungen der Dämpferele-mente in der Zukunft in die Untersuchung mit ein-zubeziehen.
6.3.4 Aktives Stellelement
Der aktive Steller kann im Gegensatz zu den vo-rangegangenen Stellelementen auch in seiner aktuellen Bewegungsrichtung Kräfte stellen. ImDämpfermodell wird die mögliche Stellkraft lediglichdurch einen minimalen und maximalen Wert (±10 kN) begrenzt.
7 Simulationsergebnisse derFahrmanöver
Zur Beurteilung der einzelnen Fahrwerkskonfigura-tionen wurde der in Kapitel 5 dargestellte Fahr-manöverkatalog festgelegt. Die Manöver gliedernsich in stationäre und dynamische Manöver, wobeiunterschiedliche Fahrbahnanregungen Verwen-dung finden. Für die Abstimmung der einzelnen Re-gelstrategien und Dämpferkonzepte wurden nebenden im Fahrmanöverkatalog aufgeführten Anregun-gen weitere synthetische Straßenanregungen ver-wendet. Die Darstellung der Ergebnisse erfolgt fürausgewählte Manöver jeweils im Zeitbereich sowieals Vergleich der berechneten Kennwerte in einemDiagramm.
7.1 Stationäre Fahrmanöver
Die stationären Fahrmanöver beinhalten die Gera-deausfahrt auf unterschiedlichen Straßenprofilensowie das konstante Durchfahren einer Kurve miteiner Bodenwelle. Tabelle 15 beinhaltet noch ein-mal die Eckdaten der stationären Fahrmanöver ausKapitel 5, die im Folgenden betrachtet werden.
7.1.1 Geradeausfahrt
Die Manöver zur Geradeausfahrt werden neben derReferenzsimulation auf ideal glattem Untergrundauf synthetisch generierten Schlechtwegstreckendurchgeführt. Die Schlechtwegstrecken sind nachdem Verfahren von UECKERMANN [UEC05] er-stellt und beschreiben eine mittlere und eineschlechte Schlechtwegstrecke. Zusätzlich wirdauch das Überfahren von Einzelanregungen (kon-
39
Tab. 14: Erwartungsmatrix an die Stellertypen
Umsetzung der Regelstrategien
Passiv Keine Regelung
Diskretes Dämpferelement o
Stufenloses Dämpferelement +
Aktiver Steller ++

kave und konvexe Bodenwelle mit 30 mm Höheund 11 m Länge, Kante mit 20 mm Höhe) simuliert.Diese in Bezug auf die Fahrsicherheit unkritischenFahrmanöver können in erster Linie das Potenzialder unterschiedlichen Regler und Steller hinsicht-lich des Komforts aufzeigen.
Zunächst wird die Überfahrt konkaver und konvexerBodenwellen betrachtet. Die Simulationen zu die-ser Straßenanregung wurden zusätzlich zu der imFahrmanöverkatalog angegebenen Geschwindig-keit von 80 km/h auch mit 120 km/h gerechnet. Ausdiesem Geschwindigkeitsunterschied ergibt sichsomit bei der gleichen Wellenlänge der sinusförmi-gen Bodenwelle eine um 50 % höhere Anregungs-frequenz. Die Ergebnisse der Simulationen zeigenfür die unterschiedlichen Geschwindigkeiten sowiedie konkave und konvexe Anregung je nach Regler-und Dämpfertypen die gleichen Tendenzen. Dievertikalen Aufbaubewegungen werden unter derVerwendung des Skyhook-Algorithmus und des hy-briden Algorithmus in Kombination mit den kontinu-ierlich und den diskret verstellbaren Dämpfern, wiein Bild 54 für die konvexe Bodenwelle dargestellt,deutlich verringert. Zu erkennen ist, dass der Auf-bau mit der Skyhook Regelstrategie besser in Ruhegehalten wird als mit dem hybriden Regler. DerSkyhook in Kombination mit dem kontinuierlich ver-stellbaren Dämpfer führt sogar dazu, dass nahezukein Überschwinger in die der Anregung entgegen-gesetzte Richtung auftritt. Analog zum Aufbauwegergeben sich ähnliche Ergebnisse für die Nickbe-wegung des Aufbaus (Bild 55), wobei der Skyhook-Algorithmus mit diskret verstellbaren Dämpfern diebesten Ergebnisse liefert.
Für das Empfinden des Fahrzeugführers ist jedochdie entsprechende Aufbaubeschleunigung (Bild 56)maßgebend [VDI02]. Dem Zeitschrieb kann ent-nommen werden, dass auch hier der Skyhook-Algo-rithmus in Kombination mit den kontinuierlich ver-stellbaren Dämpfern die besten Ergebnisse liefert.
Die vertikale Aufbaubeschleunigung wird in demMoment, in dem das Fahrzeug die Bodenwelle wie-der nach oben fährt, in diesem Fall im Maximalwertum den Faktor 2 reduziert. Der Maximalwert desÜberschwingers nach dem Überfahren der Boden-welle wird sogar noch stärker reduziert. Zur Beurtei-lung der Fahrsicherheit ist in Bild 57 die dynamischeÄnderung der Radlast an der Hinterachse aufge-tragen. Die geregelten Dämpfersysteme zeigen
40
Tab. 15: Überblick der stationären Fahrmanöver
Nr. Fahrmanöver Fahrspurverlauf Fahrbahnzustand Variation
1.1 Konstantfahrt GeradeausfahrtSynth. generierte Schlecht-wegstrecke
80 km/h
1.2 Konstantfahrt GeradeausfahrtSynth. generierte Schlecht-wegstrecke
120 km/h
1.3 Konstantfahrt Geradeausfahrt20-40 mm Bodenwelle (cosinusförmig, 11 m lang,eine Schwingung)
80 km/h
2.1 Konstantfahrt Kurvenfahrt 100 m Kurvenradius20-40 mm Bodenwelle (cosinusförmig, 11 m lang,eine Schwingung)
80 km/h
Bild 54: Vertikaler Aufbauweg bei der Überfahrt einer konvexenBodenwelle mit 120 km/h
Bild 55: Nickbewegung des Aufbaus bei der Überfahrt (konka-ve Bodenwelle, 120 km/h)

während des Herunterfahrens an der Bodenwelleeine etwas stärkere Entlastung des Rades, führenallerdings im späteren Verlauf zu etwas geringerenAmplituden in der Radlastschwankung. Die Verläufefür die konvexe Bodenwelle und die weiteren Ge-schwindigkeiten verhalten sich vergleichbar zu denhier gezeigten Verläufen. An der Vorderachse erge-ben sich für den Skyhook mit dem diskreten Dämp-ferelement starke Schwingungen im Verlauf der dy-namischen Radlast.
Zur Beurteilung der Qualität der Regelung und desDämpferkonzeptes sind diverse Kennwerte ausden Zeitverläufen, wie in Kapitel 5.2 beschrieben,abgeleitet worden. Hierbei sind die Kennwerte auf
den Wert des passiven Systems bezogen, und esergibt sich somit für die passive Konfiguration füralle Kennwerte der Wert eins. Der Wert null ent-spricht somit 100 % Verbesserung, der Wert 2 stellt100 % Verschlechterung gegenüber der passivenKonfiguration dar. Die zuvor aus den Zeitverläufenhergeleiteten Ergebnisse können auch anhand derhier berechneten Kennwerte abgeleitet werden. Fürdas dargestellte Manöver ergibt sich somit für beideKennwerte eine Verbesserung unter Verwendungder aufgeführten Regler.
Für die Geradeausfahrt mit konkaver und kon-vexer Bodenwelle sowie das Manöver mit den Schlechtwegstrecken sind in Tabelle 16 und
41
Bild 56: Aufbaubeschleunigung bei der Überfahrt (konkave Bodenwelle, 120 km/h)
Bild 57: Radlaständerung bei der Überfahrt (konkave Boden-welle, 120 km/h)
Tab. 16: Bezogene Kennwerte Geradeausfahrt mit Bodenwelle
Kennwert Bezogene VertikalbeschleunigungStrecke Bodenwelle konkav Bodenwelle konvex
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 0,62 0,56 0,62 0,58skyhook disk. 0,63 0,58 0,63 0,55hybrid kont. 0,64 0,53 0,73 0,68hybrid disk. 0,62 0,54 0,65 0,53
groundh. kont. 0,91 0,84 0,87 1,04Kennwert Bezogene Radlastschwankung V AStrecke Bodenwelle konkav Bodenwelle konvex
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 0,47 0,59 0,65 0,60skyhook disk. 0,69 0,56 0,52 0,65hybrid kont. 0,63 0,59 0,78 0,69hybrid disk. 0,61 0,59 0,61 0,59
groundh. kont. 1,25 0,83 1,11 1,09Kennwert Bezogene Radlastschwankung HAStrecke Bodenwelle konkav Bodenwelle konvex
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 0,73 1,00 0,75 1,05skyhook disk. 0,75 1,01 0,73 1,01hybrid kont. 0,75 0,84 0,76 0,93hybrid disk. 0,72 0,86 0,79 0,90
groundh. kont. 0,66 0,56 0,53 0,90

Tabelle 17 Kennwerte der Vertikalbeschleunigungund der Radlastschwankungen an Vorder- und Hin-terachse aufgetragen.
Für das Überfahren der Bodenwelle ergeben sichhier fast ausschließlich Verbesserungen unter Ver-wendung der geregelten Systeme. Für dieSchlechtwegstrecken ist eine Verbesserung desKomforts zu erkennen, die Radlastschwankungennehmen hingegen fast ausschließlich zu.
In diesem Kapitel wurden die Ergebnisse für die si-mulierten Geradeausfahrmanöver vorgestellt. Hier-bei konnte nachgewiesen werden, dass derSkyhookregler sowie der Hybridregler in Kombinati-on mit kontinuierlich und diskret verstellbarenDämpfern zu einer Verbesserung der vertikalenAufbaubeschleunigung und der Nickbeschleuni-gung des Aufbaus und somit zur Verbesserung desFahrkomforts führen. Hinsichtlich der Fahrsicher-heit ergab sich für das Überfahren der Bodenwelleeine Verringerung der dynamischen Radlast-schwankungen, für die unterschiedlichen Schlecht-wegstrecken ergab sich eine Vergrößerung der dy-namischen Radlastschwankungen.
7.1.2 Kurvenfahrt
Die Kurvenfahrmanöver werden, neben der Refe-renzsimulation auf ideal glattem Untergrund, beimÜberfahren einer Einzelanregungen (sinusförmigeBodenwelle 30 mm Höhe, 11 m Länge) simuliert.Die Simulationen werden ohne Fahrerregler durch-geführt, hierdurch kann der Effekt der Dämpferkon-
zepte unabhängig vom Einfluss des Fahrerreglersbetrachtet werden. Der Fahrerregler für die Querre-gelung wird hierbei vor dem Überfahren der Un-ebenheit deaktiviert. Der Fokus der Betrachtung beider stationären Kurvenfahrt liegt in der Stabilitätdes Kraftrades. Dieses Fahrmanöver kann in ersterLinie das Potenzial der unterschiedlichen Reglerund Steller hinsichtlich der verbleibenden Rege-lungsanforderungen an den Fahrer beim Durchfah-ren einer Kurve mit einer Unebenheit aufzeigen.Die fahrdynamischen Größen Radlastschwankun-gen, Seitenkraftschwankungen sowie Aufbaube-schleunigungen sind eine Kenngröße für das Po-tenzial der unterschiedlichen Regler und Steller.
In Bild 58 ist der Zeitverlauf der dynamischen Rad-lastschwankung bei der Überfahrt der Bodenwellenin der Kurve mit deaktiviertem Fahrerregler darge-stellt. Dem Bild ist zu entnehmen, dass die geregel-ten Dämpfer, wie auch bei der Geradeausfahrt mitBodenwelle, die direkte Radlastschwankung auf-grund der Unebenheit reduzieren, wobei die Spit-zenwerte nicht deutlich geringer werden, die Maxi-malwerte aber nur für einen deutlich kürzeren Zeit-raum anhalten. Im weiteren Verlauf ist zu sehen,dass die Radlastschwankungen der Konfigurationmit dem passiven Dämpfer nach dem Überfahrender Bodenwelle langsamer abklingen.
Aufgrund der Unebenheit wird das Fahrzeugsystemzu einer Schwingung angeregt. Diese Schwingungüberträgt sich auf das Lenksystem des Fahrzeugs,wobei das Fahrzeug durch die entgegenwirkendenKreiselmomente stabil gehalten wird. Dem Zeitver-
42
Tab. 17: Bezogene Kennwerte Geradeausfahrt auf Schlechtwegstrecke
Kennwert Bezogene VertikalbeschleunigungStrecke wlp48 wlp82
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 0,61 0,77 0,57 0,76skyhook disk. 0,68 0,83 0,72 0,86hybrid kont. 1,49 1,40 1,39 1,69
Kennwert Bezogene Radlastschwankung V AStrecke wlp48 wlp82
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 1,20 1,17 1,18 1,09skyhook disk. 1,08 1,03 1,12 1,04hybrid kont. 1,02 0,99 0,94 1,16
Kennwert Bezogene Radlastschwankung HAStrecke wlp48 wlp82
Geschwindigkeit 80 km/h 120 km/h 80 km/h 120 km/hpassiv passiv 1,00 1,00 1,00 1,00
skyhook kont. 1,10 0,84 1,15 1,12skyhook disk. 1,01 0,86 1,11 1,06hybrid kont. 1,56 1,59 1,56 1,37

lauf des Lenkwinkels in Bild 59 ist zu entnehmen,dass das Fahrzeug unter Verwendung von geregel-ten Dämpfern eine höhere Dämpfung bezüglichdieser Schwingung aufweist. Da hier aufgrund derWechselwirkung zwischen Lenkwinkel, der darausresultierenden Kursänderung und der Änderungder Seitenkraft im Kraftrad zwangsläufig auch eineentsprechende Änderung der wirksamen Reifen-kraft in Fahrzeugvertikalrichtung und somit aucheine Dämpferkraftänderung resultieren, ist die Be-einflussbarkeit dieser Schwingung durch geregelteDämpfer naheliegend.
Die Schwingungen des Gesamtfahrzeugs übertra-gen sich naturgemäß auf alle weiteren fahrdynami-schen Größen, wie auch auf die in Bild 60 darge-stellte vertikale Aufbaubeschleunigung. Hier ist eineVerbesserung des Aufbaubeschleunigungsverlaufsim direkten Bereich der Unebenheit unter Verwen-dung des Hybrid- und des Skyhook-Reglers zu er-kennen. Auch hier ist ein deutlich schnelleres Ab-klingen der Schwingung erkennbar. Der Nickwinkelund der Rollwinkel zeigen hier ein sehr ähnlichesVerhalten.
Zur Beurteilung der Qualität der Regelung und desDämpferkonzeptes sind diverse Kennwerte ausden Zeitverläufen, wie in Kapitel 5.2 beschrieben,abgeleitet worden. Hierbei sind die Kennwerte aufden Wert des passiven Systems bezogen, und esergibt sich somit für die passive Konfiguration füralle Kennwerte der Wert eins. Der Wert null ent-spricht somit 100 % Verbesserung, der Wert 2 stellt100 % Verschlechterung gegenüber der passivenKonfiguration dar. Die zuvor aus den Zeitverläufenhergeleiteten Ergebnisse können auch anhand derhier berechneten Kennwerte abgeleitet werden. InTabelle 18 sind die Kennwerte für die Kurvenfahrtmit Bodenwelle aufgetragen.
43
Bild 58: Dynamische Radlastschwankung des Hinterrades(Kurvenfahrt, Bodenwelle, 80 km/h)
Bild 59: Lenkwinkelverlauf (Kurvenfahrt, Bodenwelle, 80 km/h)
Bild 60: Vertikale Aufbaubeschleunigung (Kurvenfahrt, Boden-welle, 80 km/h)
Tab. 18: Bezogene Kennwerte Bodenwellenüberfahrt in Kurve
Kennwert
BezogeneVertikal-
beschleu-nigung
BezogeneRadlast-schwan-kung VA
BezogeneRadlast-schwan-kung HA
StreckeBoden-welle
Boden-welle
Boden-welle
passiv passiv 1,00 1,00 1,00
skyhook kont. 0,64 0,81 0,68
skyhook disk. 0,76 1,50 0,68
hybrid kont. 0,74 1,05 0,78
hybrid disk. 0,74 1,06 0,78
groundh. kont. 1,06 1,24 1,04
groundh. disk. 1,06 1,24 1,04
PID_vz aktiv 1,45 1,22 1,42
PID_fz aktiv 5,32 7,77 3,35
minimax kont. 1,07 1,15 1,06
komp aktiv 1,07 1,28 0,99
skyhook kont. 0,85 0,86 0,86
skyhook disk. 0,97 1,66 0,88

In diesem Kapitel wurden die Ergebnisse des Über-fahrens einer Bodenunebenheit in Form einer Bo-denwelle während einer Kurvenfahrt dargestellt.Zusammenfassend konnte für dieses Manöver eineVerringerung der Schwankungen der resultieren-den dynamischen Fahrzeuggrößen durch den Ein-satz geregelter Dämpfer gegenüber dem passivenSystem aufgezeigt werden.
7.2 Dynamische Fahrmanöver
Die dynamischen Fahrmanöver beinhalten dieFahrmanöver 2.2 bis 4.2. Hierbei wird dasManöver 2.2 „doppelter Fahrspurwechsel“ zur Be-trachtung des Einflusses der Dämpferregelungenauf das querdynamische Fahrverhalten herange-zogen. Die Bremsmanöver 3.1 bis 3.3 auf unter-schiedlichen Straßenbedingungen werden zur Be-urteilung der Einflüsse der Regelsysteme auf daslängsdynamische Fahrzeugverhalten verwendet.Die Manöver 4.1 und 4.2 sollen den Einfluss aufdie motorradspezifischen kritischen Fahrmanöveraufzeigen.
7.2.1 Fahrspurwechsel
Der doppelte Fahrspurwechsel wurde an den ISO-Fahrspurwechsel für Pkw angelehnt. Der Sollver-lauf und der Istverlauf für eine Fahrgeschwindig-keit von 24 m/s für das Fahrzeug sind in Bild 61 zusehen. Für die Festlegung der Durchfahrge-schwindigkeit wurden vorab Simulationen mit un-terschiedlichen Geschwindigkeiten im Bereich von10 m/s bis 30 m/s variiert. Da auch bei diesemFahrmanöver der Fahrerregler höchste Bedeutunghat, werden für den Vergleich der verschiedenenRegler nur Simulationen mit einer Fahrzeugge-
schwindigkeit verwendet, bei der die Fahrzeugtra-jektorie und die Regelvorgänge des Fahrerreglersfür alle Regler-/Dämpferkonzepte in sehr engenGrenzen liegen.
Höhere Geschwindigkeiten führen zu nicht ver-gleichbaren Ergebnissen, da der Fahrerregler nichtden gleichen Kurs für alle Regler-/Dämpfertypennachfahren kann. Im Folgenden werden die Ergeb-nisse für eine Fahrzeuggeschwindigkeit von 24 m/s(~ 86 km/h) betrachtet.
Der Fokus der Betrachtung für das Manöver soll auf den Radlastschwankungen, den Seiten-kraftschwankungen und den Aufbaubeschleuni-gungen beim Durchfahren des Manövers liegen.Reduktionen der Schwankungen dieser fahr-dynamischen Größen bei gleicher Trajektorie undgleichem Fahrerreglerverhalten können hier dasPotenzial aufzeigen, ob z. B. eine höhere Durchfahrtgeschwindigkeit unter Verwendung der Regelsysteme möglich ist. In Bild 62 und Bild 63 sind vergleichend die Lenkwinkel und Schräglagewinkel des Motorrades für die
44
Bild 61: Sollverlauf Trajektorie und Istverlauf Trajektorie für 24 m/s
Bild 62: Lenkmomentverlauf (doppelter Spurwechsel, 24 m/s)
Bild 63: Schräglagewinkel (doppelter Spurwechsel, 24 m/s)
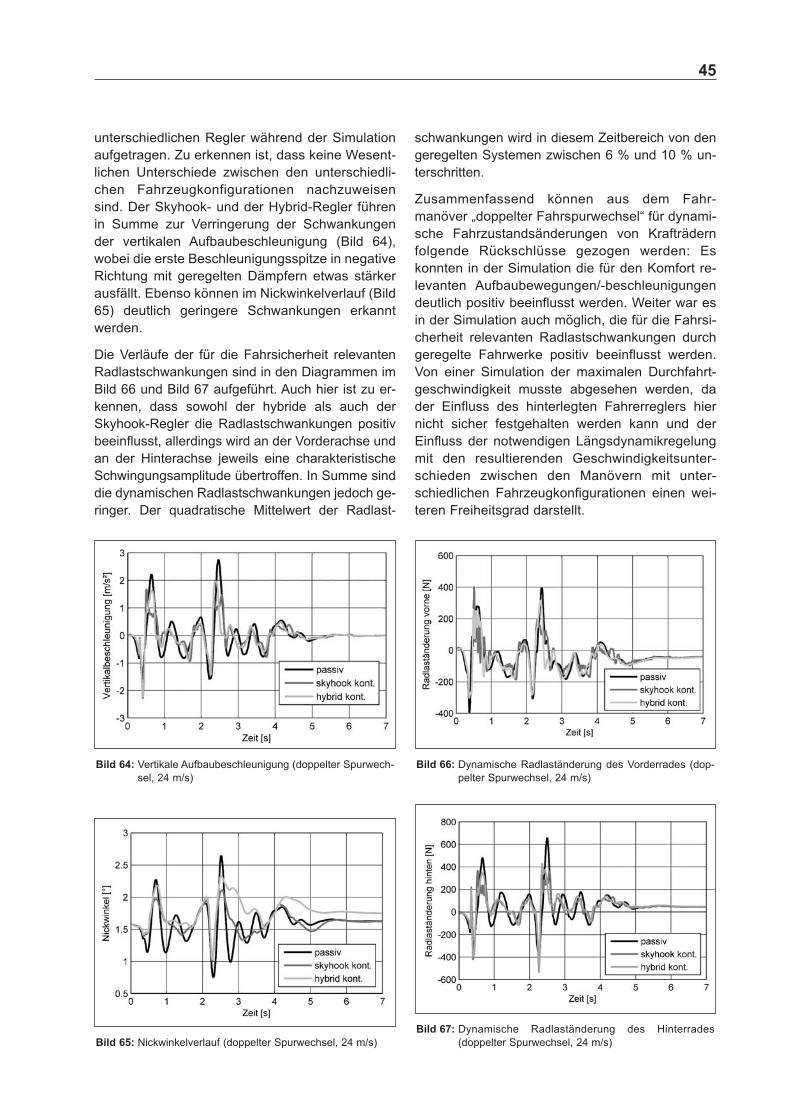
unterschiedlichen Regler während der Simulationaufgetragen. Zu erkennen ist, dass keine Wesent-lichen Unterschiede zwischen den unterschiedli-chen Fahrzeugkonfigurationen nachzuweisensind. Der Skyhook- und der Hybrid-Regler führenin Summe zur Verringerung der Schwankungender vertikalen Aufbaubeschleunigung (Bild 64),wobei die erste Beschleunigungsspitze in negativeRichtung mit geregelten Dämpfern etwas stärkerausfällt. Ebenso können im Nickwinkelverlauf (Bild65) deutlich geringere Schwankungen erkanntwerden.
Die Verläufe der für die Fahrsicherheit relevantenRadlastschwankungen sind in den Diagrammen imBild 66 und Bild 67 aufgeführt. Auch hier ist zu er-kennen, dass sowohl der hybride als auch derSkyhook-Regler die Radlastschwankungen positivbeeinflusst, allerdings wird an der Vorderachse undan der Hinterachse jeweils eine charakteristischeSchwingungsamplitude übertroffen. In Summe sinddie dynamischen Radlastschwankungen jedoch ge-ringer. Der quadratische Mittelwert der Radlast-
schwankungen wird in diesem Zeitbereich von dengeregelten Systemen zwischen 6 % und 10 % un-terschritten.
Zusammenfassend können aus dem Fahr-manöver „doppelter Fahrspurwechsel“ für dynami-sche Fahrzustandsänderungen von Krafträdernfolgende Rückschlüsse gezogen werden: Eskonnten in der Simulation die für den Komfort re-levanten Aufbaubewegungen/-beschleunigungendeutlich positiv beeinflusst werden. Weiter war esin der Simulation auch möglich, die für die Fahrsi-cherheit relevanten Radlastschwankungen durchgeregelte Fahrwerke positiv beeinflusst werden.Von einer Simulation der maximalen Durchfahrt-geschwindigkeit musste abgesehen werden, dader Einfluss des hinterlegten Fahrerreglers hiernicht sicher festgehalten werden kann und derEinfluss der notwendigen Längsdynamikregelungmit den resultierenden Geschwindigkeitsunter-schieden zwischen den Manövern mit unter-schiedlichen Fahrzeugkonfigurationen einen wei-teren Freiheitsgrad darstellt.
45
Bild 64: Vertikale Aufbaubeschleunigung (doppelter Spurwech-sel, 24 m/s)
Bild 65: Nickwinkelverlauf (doppelter Spurwechsel, 24 m/s)
Bild 66: Dynamische Radlaständerung des Vorderrades (dop-pelter Spurwechsel, 24 m/s)
Bild 67: Dynamische Radlaständerung des Hinterrades (doppelter Spurwechsel, 24 m/s)

7.2.2 Bremsmanöver
Die Bremsmanöver werden auf der ideal glattenStraße, einer Schlechtwegstrecke und auf einerideal glatten Straße mit einem schlagartig einset-zenden 200 mm langen Reibwertsprung von µ = 1auf µ = 0,3 und wieder zurück simuliert. Der Reib-wertsprung ist so platziert, dass er kurz nach Be-ginn der Bremsung auftritt. Die Bremsmanöver wer-den als eine Vollbremsung im ABS-Regelbereichdargestellt.
Hierbei soll durch die Simulation auf der ideal glat-ten Straße der Einfluss der Stellerelemente auf denKraftaufbau an den Rädern beurteilt werden. Dasschlagartige Betätigen der Bremse führt im erstenMoment zu einer starken Nickbewegung des Fahr-zeugs, eventuell mit dynamischem Überschwinger.Dieses Phänomen kann durch ein geeignetesDämpferverhalten stark beeinflusst werden. Weiterkann ein schlagartiges Betätigen der Bremse unterentsprechenden Rahmenbedingungen (Reibwert,etc.) zum kurzzeitigen Überbremsen des Vorderra-des führen, da der Aufbau der Bremskraft am Raddeutlich schneller als die Radlastverlagerung zurVorderachse hin geschieht. Gängige ABS-Systemeerkennen in diesem Fall einen zu hohen Schlupfund reduzieren infolgedessen an dem entspre-chenden Rad den Bremsdruck, mit der Folge, dassin diesem Moment nicht die maximale Verzögerungausgenutzt wird. Aufgrund der noch sehr hohenFahrzeuggeschwindigkeit ergibt sich hieraus eineentsprechend große Verlängerung des Brems-weges. Ohne ABS-System reduziert sich derSchlupf aufgrund der Radlastverlagerung und derdaraus folgenden höheren übertragbaren Längs-kraft am Vorderrad im Verlauf der Bremsung. Wenndie Betätigung der Bremse nicht manuell verringertwird, ergibt sich in diesem Fall ein kürzerer Brems-weg als mit ABS. Diese Problematik kann durch dieReduzierung des Gradienten des Bremsdrucks,also eine langsamere Betätigung der Bremse, kompensiert werden. Es ist zu erwarten, dass dieBeurteilung dieser Phänomene anhand der Simula-tion auf der ideal glatten Straße unter Verwendungder unterschiedlichen Steller und Regler entspre-chend gute Ergebnisse liefert, da durch die Dämp-ferelemente direkt die Einfederbewegung und somitder Kraftaufbau am Vorderrad beeinflusst werdenkönnen. Regelstrategien, die die Beruhigung derAufbaubewegungen als Ziel haben, sind an dieserStelle bestrebt, die Einfederbewegung zu minimie-ren, und werden somit die Dämpferkraft erhöhen,was wiederum zu einem schnelleren Aufbau der dy-
namischen Radlast und somit zu einer geringerenNeigung des dynamischen Überbremsens des Vor-derrades führt. Die Simulation einer Bremsung aufeiner Schlechtwegstrecke führt zunächst zu größe-ren Radlastschwankungen des Gesamtsystemsund kann aus diesem Grund den Einfluss geringe-rer Radlastschwankungen, hervorgerufen durchgeregelte Dämpfersysteme, auf den Bremsweg zei-gen. Der schlagartige, kurzzeitige Reibwertabfallauf ideal glatter Straße kann das Potenzial bezüg-lich des Überfahrens von nassen Fahrbahnmarkie-rungen oder rutschigen Straßenabschnitten (Sand,Öl etc.) aufzeigen. Neben dem niedrigen Reibwertund dem daraus resultierenden Schlupf ergebensich beim erneuten Treffen auf den hohen Reibwertein schlagartiger Anstieg der Bremskraft und somitebenfalls eine Nickbewegung.
Das Hauptkriterium für die Beurteilung der Brems-manöver ist der zurückgelegte Bremsweg sowie die an einem vordefinierten Wegpunkt vorherr-schende Fahrzeugrestgeschwindigkeit. DieseGrößen sowie die absolute und prozentuale Abwei-chung von der Fahrzeugkonfiguration mit passiverAbstimmung sind in der Tabelle 19 aufgelistet. Hier-bei werden nur die Konfigurationen aufgelistet, dieentweder besser als das passive System oder zu-mindest ähnliche Ergebnisse erzielt haben. Deut-lich schlechtere Konfigurationen sollen hier nichtbetrachtet werden.
Die Ergebnisse für eine Vollbremsung im ABS-Regelbereich aus 40 m/s (144 km/h, ideal glatte Straße und Reibwertsprung) und 27,7 m/s(100 km/h, Schlechtwegstrecke) werden im Folgen-den vorgestellt. Aus der Tabelle wird ersichtlich,dass bei allen vorgegebenen Straßenprofilen eineVerbesserung der Bremswege erreicht werdenkann. Auf der ideal glatten Straße konnte bei derAbbremsung aus 40 m/s bis zum Erreichen derAuswertegeschwindigkeit von 5 m/s eine Verkür-zung des Bremsweges um 1,8 m erreicht werden.Die Restgeschwindigkeit nach 160 m zurückgeleg-ter Strecke (Bremsbeginn bei ca. 80 m Wegstrecke)konnte ebenfalls von 7,25 m/s auf 4,48 m/s gesenktwerden. Für die ideal glatte Straße mit Reibwert-sprung ergeben sich hier noch stärkere Verbesse-rungen. Bei der Schlechtwegstrecke ergeben sichschon bei einer Ausgangsgeschwindigkeit von 100 km/h Verbesserungen von bis zu 1,82 mBremswegverkürzung. Es ist somit ersichtlich, dassfür die Verzögerung im ABS-Regelbereich deutlicheVerbesserungen des Bremswegs zu erwarten sind.
46

In diesem Kapitel wurde auf die Ergebnisse derBremsmanöver mit verschiedenen Straßenunter-gründen eingegangen. Es konnte gezeigt werden,dass die Nutzung einiger der verwendeten geregel-ten Dämpfersysteme einen positiven Einfluss aufden Bremsweg hat. Hierbei ist anzumerken, dassdies nur für den ABS-Regelbereich gilt und dassdiese Tendenz für alle simulierten Straßenprofile zuerkennen ist.
7.2.3 Highsider
Die Unfallart „Highsider“ beschreibt den Sturz desMotorrades beim schlagartigen Aufbau der Seiten-
kraft nach vorherigem Verlust der Seitenführung amHinterrad. Beim Befahren einer Kurve kann auf-grund eines wechselnden Fahrbahnbelags oderauch durch zu frühes, starkes und/oder schlagarti-ges Beschleunigen das noch mögliche Seitenkraft-potenzial des Reifens kleiner werden, als es für dieAufrechterhaltung des Fahrzustandes notwendigist. Wenn nun das Hinterrad ausbricht, das Fahr-zeug somit an Schräglage zunimmt und dann plötz-lich der Reibwert zwischen Straße und Reifen zu-nimmt oder die Längskraft des Reifens z. B. durchGaswegnahme oder Ziehen der Kupplung abnimmt,kann es zu einem schlagartigen Aufbau der Seiten-kraft am Hinterrad kommen. In diesem Fall werden
47
Tab. 19: Bremswege und Restgeschwindigkeiten für unterschiedliche ABS-Bremsmanöver
Ideal glatte Straße, V0 = 144 km/h
Differenzbremsweg bei v = 5 m/s
(relativ zum passiven Fahrzeug)
Differenzgeschwindigkeit nach s = 80 m
(relativ zum passiven Fahrzeug)
Steller Differenz Prozentual Differenz passiv
ground_disk 1,38 m 1,69 % 1,63 m/s
hyb_disk 0,27 m 0,33 % 0,37 m/s
sky_kont (Konfig. 1) 0,05 m 0,06 % 0,10 m/s
passiv 0,00 m 0,00 % 0,00 m/s
sky_kont (Konfig. 2) -0,38 m -0,47 % -0,47 m/s
sky_disk (Konfig. 1) -0,41 m -0,50 % -0,47 m/s
sky_disk (Konfig. 2) -0,99 m -1,21 % -1,36 m/s
aktiv (kombiniert) -1,38 m -1,69 % -2,00 m/s
hyb_kont -1,80 m -2,21 % -2,77 m/s
Schlechtwegstrecke, V0 = 100 km/h
Differenzbremsweg bei v = 5 m/s
(relativ zum passiven Fahrzeug)
Differenzgeschwindigkeit nach s = 80 m
(relativ zum passiven Fahrzeug)
Steller Differenz Prozentual Differenz passiv
hyb_kont 1,42 m 3,38 % 1,43 m/s
passiv 0,00 m 0,00 % 0,00 m/s
sky_disk -0,15 m -0,36 % -0,23 m/s
hyb_disk -0,39 m -0,94 % -0,49 m/s
sky_kont (Konfig. 1) -0,80 m -1,90 % -0,93 m/s
sky_kont (Konfig. 2) -1,82 m -4,32 % -2,49 m/s
Ideal glatte Straße mit Reibwertsprung (20 cm), V 0 = 144 km/h
Differenzbremsweg bei v = 5 m/s
(relativ zum passiven Fahrzeug)
Differenzgeschwindigkeit nach s = 60 m
(relativ zum passiven Fahrzeug)
Steller Differenz Prozentual Differenz passiv
sky_disk 2,21 m 2,67 % 2,17 m/s
passiv 0,00 m 0,00 % 0,00 m/s
aktiv (kombiniert) -0,45 m -0,54 % -0,58 m/s
hyb_kont -2,63 m -3,17 % -3,38 m/s
sky_kont -2,68 m -3,24 % -3,43 m/s
aktiv_vz -2,88 m -3,47 % -3,79 m/s

die Aufbaufedern des Fahrzeugs stark komprimiert,das Fahrzeug richtet sich auf und in dem Moment,wenn das Fahrzeug sich über die Vertikale aufge-richtet hat, entspannt sich die Aufbaufeder schlag-artig. Der Fahrer wird nun regelrecht vom Fahrzeugkatapultiert und fliegt vor dem Fahrzeug in kur-venäußere Richtung. Dies führt häufig, insbesonde-re bei späterer Kollision des Fahrers mit dem Mo-torrad, zu sehr schweren Verletzungen.
Es ist zu erwarten, dass man dieses Phänomen mitsemiaktiven/aktiven Systemen positiv beeinflussenkann. Hierfür ist vorstellbar, dass man den Seiten-kraftaufbau mit Hilfe des Verstelldämpfers beein-flusst und somit einen weicheren Übergang schafft,den der Fahrer noch abfangen kann. Eine weitereMöglichkeit stellt auch das Verhindern der starkenFedervorspannung durch eine sehr harte Druckstu-fen-Dämpfereinstellung in Kombination mit demVerhindern der schlagartigen Freigabe der Feder-energie durch eine harte Zugstufen-Dämpferein-stellung dar. Es ist denkbar, dass ein Regelalgorith-mus, wie der Skyhookalgorithmus, der versucht,den Aufbau in Ruhe zu halten, hier genau die ge-wünschten Effekte erzielen kann. Letzten Endeswird der Skyhookalgorithmus versuchen, der ersten Einfederbewegung durch eine harte Dämp-ferkennlinie entgegenzuwirken. Im Anschluss wirder der schnellen Ausfederbewegung aus dem glei-chen Grund durch eine harte Dämpferkennlinie ent-gegenwirken.
Im Rahmen dieser Arbeit wurden unterschiedlicheMethoden getestet, um das Manöver Highsidermöglichst realistisch abzubilden. Problematisch istan dieser Stelle wiederum der Einfluss des Fahrer-reglers. Die Darstellung des Fahrmanövers mit de-aktiviertem Fahrerregler ist an dieser Stelle aller-dings nicht als sinnvoll zu erachten, da das Fahr-manöver somit zwangsläufig zum Sturz führt. ImFolgenden sollen durchgeführte Ansätze zur Abbil-dung des Manövers vorgestellt werden, die Ergeb-nisse sollen hierbei allerdings nur aufzeigen, dasses möglich ist, das Manöver grundsätzlich in der Si-mulation abzubilden.
Als Fahrmanöver wird für die Untersuchung einestationäre Kurvenfahrt durchgeführt. Die Geschwin-digkeit ist in Abhängigkeit des Kurvenradius unddes Reibwertes so gewählt, dass das Reifenseiten-kraftpotenzial noch nicht voll ausgenutzt wird.
Um den Highsider darzustellen, werden im Folgen-den zwei Vorgehensweisen verwendet, die einmöglichst realitätsnahes Fahrzeugverhalten hervor-
rufen sollen. In beiden Fällen wird das Hinterraddes Fahrzeugs schlagartig mit einer zusätzlichenSeitenkraft im Reifenlatsch belastet, die dazu führt,dass das Reifenseitenkraftpotenzial überschrittenwird und somit das Heck des Fahrzeugs nach kur-venaußen ausbricht. Das Fahrzeug verhält sichdabei ähnlich wie in der Realität bei einem Reib-wertabfall oder bei schlagartigem Beschleunigen inder Kurve und dem daraus resultierenden zu nied-rigen Reifenseitenkraftpotenzial. Im ersten Versuch(Typ 1) wird nach der Destabilisierung die Kraftschlagartig zurückgenommen. Dies soll das Auftref-fen auf den wieder hohen Reibwert oder dasZurücknehmen der Längsbeschleunigung in derRealität darstellen. Im zweiten Fall (Typ 2) wirdmehr Seitenkraft zurückgenommen als vorher auf-gegeben wurde. Daraus resultiert eine Kraft inRichtung kurveninnen. Diese Kraft stellt eine er-höhte Seitenkraft dar und bewirkt, dass sich dasFahrzeug noch schneller aufrichtet. Dies simuliertz. B. Situationen, in denen das bereits gleitendeFahrzeug auf einen deutlich höheren Reibwert alsvorher trifft. Die Fahrzeugreaktionen sind in diesemFall noch stärker und schwerer zu kontrollieren alsim ersten Fall. Diese Kraft wird kurzzeitig späterebenfalls wieder zurückgenommen. Alle Kräfte werden rampenförmig in 0,1 s aufgebaut und auchmit dieser Geschwindigkeit wieder abgebaut. DieHöhe der Kraft richtet sich nach dem Kurvenradiusund der Geschwindigkeit und wird nach einer theo-retischen Abschätzung empirisch in der Simulationuntermauert. Hierbei ergibt sich die Problematik,dass zu hohe Kräfte zum so genannten Lowsiderund zu niedrige Kräfte nicht zu einer ausreichendenDestabilisierung führen.
Im Folgenden werden die Zeitverläufe desSchräglagewinkels für die beiden Manöver darge-stellt (Bild 68 und Bild 69). Neben der passivenDämpferabstimmung ist zusätzlich auch der gleicheVersuch mit hybrider Reglerstruktur in den Dia-grammen eingezeichnet. In den Schräglagewinkel-verläufen beider Manöver ist zu erkennen, dass dasFahrzeug mit den passiven Dämpferelementen so-fort nach dem Aufbringen der Kraft (T = 3 s) durchdas Wegrutschen des Hinterrades den Rollwinkelvergrößert und im Anschluss, nach Zurücknahmeder Zusatzkraft, sich aufgrund des höheren Seiten-kraftpotenzials aufrichtet und zur anderen Seitekippt. Unter Verwendung der hybriden Reglerstruk-tur tritt in dieser Kombination kein Sturz auf.
Interessant sind auch die während des Manöversgenutzten Dämpfereinstellungen der geregelten
48

Systeme. Auffällig ist hier, dass fast ausschließlichdie Grenzkennlinien Verwendung gefunden haben,wobei in der Druckstufe fast immer die maximaleKraft zur jeweiligen Geschwindigkeit und in derZugstufe mit wenigen Ausnahmen die minimalenund maximalen Kennlinien gestellt wurden. Dieslässt sich durch das Bestreben der Regler, die ver-tikalen Bewegungen des Fahrzeugs (Fahrzeug-hochachse) zu minimieren, erklären.
Grundsätzlich konnte gezeigt werden, dass die Ab-bildung des Manövers Highsider in der gewähltenSimulationsumgebung möglich ist. Aufgrund desverwendeten Fahrerreglers ist ein Rückschluss aufdie Relevanz der erzielten Ergebnisse fragwürdig.Eine Aussage, wie hoch der Einfluss geregelterFahrwerke auf das Fahrmanöver ist, kann somitnoch nicht gegeben werden.
7.2.4 Hochgeschwindigkeitspendeln
Die Abbildung und Validierung des ManöversHochgeschwindigkeitspendeln in der Simulations-
umgebung sind mit den vorliegenden Messdatendes Versuchsfahrzeugs zu diesem Zeitpunkt nichtsicher möglich. Ein Vergleich des realen Fahrzeug-verhaltens bei Hochgeschwindigkeitspendeln mitdem des Simulationsmodells konnte im Rahmendieser Studie nicht erfolgen. Auf den Simulationenbasierende belastbare Aussagen sind aus diesemGrund nicht möglich. Es soll dennoch kurz auf dieVorgehensweise der Umsetzung eingegangenwerden.
Die Fahrmanöver „Hochgeschwindigkeitspendeln“werden auf der ideal glatten Fahrbahn simu-liert. Die Fahrzeuggeschwindigkeiten werden hierfür in einem Geschwindigkeitsbereich größer140 km/h angesetzt. Um das Fahrzeug zu desta-bilisieren, wird ein Lenkimpuls von 0,1 s Daueraufgegeben. Die Amplitude des Lenkwinkelim-pulses wird dabei so groß gewählt, dass mit derpassiven Fahrzeugkonfiguration eine Pendel-schwingung entsteht, die sich gerade noch nichtselber weiter aufschwingt. Die Fahrzeuggeschwin-digkeit wird zusätzlich in mehreren Schritten biszur maximalen Fahrzeuggeschwindigkeit angeho-ben.
Da es sich bei dem Hochgeschwindigkeitspendelnum eine kombinierte Schwingung des gesamtenSystems Kraftrad um alle Fahrzeugachsen han-delt, resultieren aus diesem Fahrzustand Einfe-derbewegungen, die direkt über die Fahr-zeugdämpfer beeinflusst werden können. Auchwenn die hierfür verantwortliche Nickschwingungnicht die Ursache für das Phänomen Pendeln ist,ist es naheliegend, dass die Bedämpfung derNickschwingung Rückwirkungen auf die weiterenFahrzeugschwingungen haben wird. Die Haupt-schwingungen des Fahrzeugs sind die Schwin-gung um die Vertikalachse und somit auch um dieLängsachse. Die daraus resultierenden Vertikal-kraftschwankungen führen zu einer vertikalen Auf-baubewegung und somit zur Änderung des Einfe-derzustandes.
Die Beeinflussbarkeit der Pendelschwingungdurch verstellbare Dämpfersysteme wird auch ineiner Offenlegungsschrift [BMW07] als möglicheMaßnahme angedacht.
Bezüglich des Fahrzustandes Hochgeschwindig-keitspendeln kann folgendes Fazit gezogen wer-den: Es sind weitergehende Untersuchungen, mitgenauerer Kenntnis des realen Systemverhaltens,zur sicheren Beurteilung notwendig.
49
Bild 68: Schräglagewinkel bei Highsidermanöver (Typ 1, vx =54 km/h, ay = 4,5 m/s2)
Bild 69: Schräglagewinkel bei Highsidermanöver (Typ 2, vx =72 km/h, ay = 8 m/s2)

8 Bewertung des Sicherheits-gewinns
Die Ergebnisse der vorliegenden Untersuchunghaben gezeigt, dass für die ausgewählten Fahrsi-tuationen in Kombination mit den aufgebauten Reg-lern sowie den Dämpfer-/Stellerelementen positiveEinflüsse auf das Fahrverhalten aufgezeigt werdenkönnen. Die aus dem Pkw-Bereich bekannten Ef-fekte auf Fahrkomfort und Fahrsicherheit für dasÜberfahren von Unebenheiten und für Brems-manöver können grundsätzlich auch im Kraftradbe-reich bestätigt werden. Die erwartete Auswirkungauf das Unfallgeschehen ist jedoch vergleichsweisegering.
Der minimale Bremsweg eines Motorrades wirddurch die übertragbaren Reifenkräfte bestimmt.Analysen von Motorradunfällen zeigen aber, dassder minimale Bremsweg in der Realität selten er-reicht wird und damit nur ein Einfluss auf das Ent-stehen von Motorradunfällen ist.
Für die Bremsmanöver kann aufgrund der Kenn-werte Bremsweg und Restgeschwindigkeit eineAussage bezüglich des Sicherheitsgewinns ge-macht werden. Im ABS-Regelbereich eines generi-schen ABS-Systems ergab sich in der SimulationBremswegverbesserungspotenzial. Der Bremswegwurde für optimale Fahrbedingungen im Mittel um 2 bis 4 % verkürzt. Da diese optimalen Bedingun-gen im realen Unfallgeschehen selten auftreten,wird kein signifikanter Einfluss auf die Unfallsituati-on von Motorrädern erwartet. Auch konnte das ver-wendete ABS-Reglermodell nicht anhand von Ver-gleichen mit Realfahrten validiert werden. Der Ein-fluss der Kombination von realen ABS-Regelsyste-men und geregelten Dämpfersystemen zeigt aberPotenzial und sollte gerade in der Verbindung wei-ter untersucht werden.
Komfortverbesserungen lassen sich nicht ohne tie-fergehende Untersuchungen als Potenzial für Un-fallreduktion quantifizieren – der Effekt ist stark fah-rerabhängig.
Für das Manöver doppelter Fahrspurwechsel sowiedie Manöver Hochgeschwindigkeitspendeln undHighsider können zu diesem Zeitpunkt keine ver-lässlichen Aussagen gemacht werden. Potenzial füreine Verschiebung der fahrdynamischen Grenzendieser Fahrsituationen durch geregelte Systemewird anhand theoretischer Überlegungen und fürden Fahrspurwechsel auch anhand von Simu-lationsergebnissen erwartet, ein signifikanter Ein-
fluss auf das Unfallgeschehen erscheint aber auch hier unwahrscheinlich, da diese Unfalltypenim Unfallgeschehen einen geringen Stellenwerthaben.
9 Zusammenfassung und Ausblick
Der vorliegende Bericht beschäftigt sich mit demPotenzial (semi-) aktiver Fahrwerke im Motorrad.Die Untersuchung gliedert sich in die Parameterer-mittlung anhand eines Versuchsmotorrades, die Er-stellung und Validierung eines Mehrkörpersimulati-onsmodells unter Verwendung der Software VI Motorcycle für ADAMS/Car, die Definition, Auswahlund Umsetzung geeigneter Fahrmanöver sowie dieBeurteilung des Sicherheitsgewinns.
Für das Versuchsmotorrad Honda VFR 800 ABSsind umfangreiche Messungen durchgeführt wor-den. Die Trägheitsparameter (Massen und Massen-trägheitsmomente) des Gesamtfahrzeugs und derrelevanten einzelnen Komponenten wurden an un-terschiedlichen Prüfständen ermittelt. Zusätzlichwurden alle notwendigen Punkte, wie Lagerstellenund die Abmessungen der einzelnen Komponen-ten, mit Hilfe eines optischen Messsystems erfasstund in ein geeignetes Koordinatensystem über-führt. Die Kennlinien der Aufbaufederung und derAufbaudämpfer wurden am Achsmessprüfstandund servohydraulischen Prüfstand aufgezeichnet.Für die Validierung des MKS-Modells wurde dasVersuchsfahrzeug mit Messtechnik zur Erfassungder vertikaldynamischen Fahrzeuggrößen ausge-stattet, und es wurden geeignete Fahrversuchedurchgeführt. Das Simulationsmodell zeigt zumin-dest für die durchgeführten Fahrversuche ausrei-chende Übereinstimmung mit der Realität.
In der Simulationsumgebung VI Motorcycle(ADAMS/Car) wurden Schnittstellen geschaffen,um (semi-)aktive Fahrwerke einzubinden. Die ent-sprechenden Regelalgorithmen sowie die Umset-zung der Dämpferkonzepte wurden hierfür in Mat-lab/Simulink aufgebaut. Im Rahmen dieser Unter-suchung wurden zahlreiche Regelalgorithmen undDämpferkonzepte modelliert und getestet.
Es wurde ein Fahrmanöverkatalog mit solchenFahrversuchen erstellt, die Potenzial für einen Si-cherheitsgewinn durch aktive Dämpfer erwartenlassen. Für die definierten Fahrmanöver wurden Si-mulationen aller entwickelten Regler und als Refe-
50

renz auch eines passiven Dämpfersystems durch-geführt. Die Simulationsdaten wurden anhandvorab definierter Beurteilungskriterien ausgewertet.Die Ergebnisse lassen Potenzial zur Steigerungvon Fahrsicherheit und Komfort vermuten. Ein sig-nifikanter Einfluss auf das Unfallgeschehen vonMotorrädern ist jedoch unwahrscheinlich.
Das Fahrmanöver Geradeausfahrt auf verschiede-nen Straßenprofilen konnte das grundsätzliche Potenzial bezüglich der Erhöhung des Komfortsund der Verringerung der Radlastschwankungenaufzeigen. Für das Überfahren einer Bodenwellekonnten sowohl Komfort als auch Radlastschwan-kungen verbessert werden. Auf einer Schlechtweg-strecke konnte der Fahrkomfort gegenüber dempassiven System ebenfalls verbessert werden, al-lerdings bei Verschlechterung der Radlastschwan-kungen. Die Simulation der konstanten Kurvenfahrtmit dem Überfahren einer Bodenwelle liefert eben-falls Potenzial unter Verwendung der geregeltenDämpfer. Die fahrdynamischen Größen Radlast-schwankungen und Vertikalbeschleunigung könnenhier erkennbar reduziert werden, wodurch sich dasSchwingungsverhalten des Fahrzeugs bei entspre-chender Anregung verbessert. Ebenfalls kann fürdas dynamische Manöver „doppelter Fahrspur-wechsel“ eine Verringerung der Amplituden derRadlastschwankungen und vertikalen Aufbaube-schleunigung im Zeitverlauf bei ansonsten glei-chem Fahrzeugverhalten erwartet werden.
Die durchgeführten Bremsmanöver auf unter-schiedlichen Untergründen zeigen unter Verwen-dung der geregelten Systeme nur für Bremsungenmit Verzögerung im ABS-Regelbereich Vorteile.Bremswegverkürzungen im Bereich von 2 bis 4 %können unter idealen Bedingungen erwartet wer-den.
Ein signifikanter Einfluss auf das Unfallgeschehenkann aus diesen Erkenntnissen aber nicht abgelei-tet werden.
Mögliche Verbesserungen der Fahrsituationen Highsider und Hochgeschwindigkeitspendeln kön-nen zu diesem Zeitpunkt aufgrund von Schwierig-keiten mit dem Simulationsmodell noch nicht be-lastbar nachgewiesen werden.
Die Qualität der Reglerauslegung, die auch im Rah-men dieser Untersuchung einen großen Stellenwerthatte, ist ein wesentlicher Faktor für das Ergebnis.Auf die jeweilige Fahrsituation optimierte Reglerab-stimmungen einhergehend mit der Erkennung der
Fahrsituation können sicherlich Vorteile für dieFahrsicherheit und den Komfort bringen, die Ein-flüsse sind allerdings sehr stark vom realen Verhal-ten des Fahrers abhängig.
Die Umsetzung von semiaktiven Fahrwerken imMotorradbereich ist mit dem heutigen Stand derTechnik realisierbar. Vorstellbar sind abgewandelteSysteme aus dem Pkw-Bereich wie magnetorheo-logische (Serienstand im Pkw-Bereich) oder elek-trorheologische Dämpfer. Ebenfalls sind Ver-stelldämpfer mit diskreten Kennlinien (z. B. CDC)denkbar und technisch umsetzbar. Hydraulische,vollaktive Fahrwerke sind aufgrund des hohen Energiebedarfs und des hohen Systemgewichts im Motorradsektor eher schwer vorstellbar. Das Potenzial vollaktiver Fahrwerke unter Verwendunggeeigneter vorausschauender Umfeldsensorikwurde in dieser Untersuchung nicht betrachtet,kann aber sicherlich ebenfalls zusätzlichen Nutzenbringen.
10 Literatur
[AHM00] AHMADIAN, M., PARE, C. A.: AQuarter-Car Experimental Analysis of Alternative Semiactive Control Methods. Journalof Intelligent Material Systems and Structures,2000
[ATZ79] ATZ – Automobiltechnische Zeitschrift Nr.81, 1979
[Bim09] Bimota-Homepage http://www.bimota.de/,2009
[BMW10] BMW-Motorrad www.press.bmwgroup.com, 2010
[BMW08] BMW AG Fahrzeug, insbesondere Motor-rad, mit einem Federbein mit einstellbarer Federrate, EP 1958802 A1, Europäische Patent-anmeldung, 2008
[BMW07] BMW AG System zur Beseitigung vonHochgeschwindigkeitspendeln bei einem ein-spurigen Kraftfahrzeug und Motorrad mit einemderartigen System, DE 10 2005 047 145 A1 Of-fenlegungsschrift. Deutsches Patent- und Mar-kenamt, 2007
[BRA08] BRAND, W.: Fahrtechnische Anforderun-gen an Vorder- und Hinterradaufhängungen von Krafträdern. Vortrag ika, RWTH Aachen,2008
51
[COS02] COSSALTER, V.: Motorcycle Dynamics.Padova, 2002
[DUC01] Ducati Motor Holding S. p. A.: Motorcyclewith active rear suspension unit providing improved braking. Europäisches Patent EP1197361 B1, 2001
[DUD03] DUD, H.; BERKNER, S.; HOFFMANN, J.:Querdynamikregelung für Pkw mit aktivem Fahr-werk. Automatisierungstechnik 51, OldenbourgVerlag, 2003
[FRO05] FRÖHLICH, M.; NYENHUIS, M.: Entwick-lung und Untersuchung eines Zustandsbeob-achters für ein semiaktives Fahrwerkregel-system. Tagungsband fahrwerk.tech 2005, Gar-ching bei München, 2005
[FOR03] FORKE, E.; GAJEWSKI, R.: PraxisheftZweiradsicherheit, ifz e. V., Essen, 2003
[FUN10] FUNKE, J.: Elektrorheologische Ver-stelldämpfer als Grundlage für semiaktive Mo-torradfahrwerke. Tagungsband der 8. Int. Motor-radkonferenz, ifz, Köln, 2010
[GAU01] GAUPP, W.; WOBBEN, D.; HORN, M.;SEEMANN, M.: Sicherheitsbelange aktiverFahrdynamikregelungen, BASt-Bericht HeftF33, 2001
[GIP99] GIPSER, M.: FTire, a New Fast Tire Modelfor Ride Comfort Simulations. InternationalAdams User’s Conference, Berlin, 1999
[GIP10] http://www.cosin.eu/prod_FTire, Home-page, 2010
[GOE07] GOERTZ, H.: Neuer Prüfstand für Träg-heitsmomente von Fahrzeugen. ATZ, Nr. 01,2007
[HEI08] HEIßING, B.; ERSOY, M.: Fahrwerkhand-buch. Vieweg und Teubner, Wiesbaden, 2008
[HON09] BMW-Motorrad. Homepage: www.Honda.de, 2009
[HOH09] HOHENBICHLER, N.; SIX, K.: Potenzialeaktiver und semiaktiver Skyhook-Regelgesetzein der Sekundärstufe von Schienenfahrzeugen,Oldenbourg Verlag, Automatisierungstechnik54, 2006
[HOL04] HOLZMANN, H.; HAHN, K.-M.: Einsatzvon HIL-Simulation im Entwicklungsprozess vonmodernen Fahrwerkregelsystemen am Beispiel
Integrated Chassis Control. Opel, Rüsselsheim,2004
[KAR74] KARNOPP, D.; CROSBY, M. J.; HARWOOD, R. A.: Vibration Control UsingSemi-Active Force Generators. Journal of Engineering for Industry, 1974
[KAW10] www.kawasaki.de, Homepage, 2010
[KHA07] KHAJAVI, M. N.; ABDOLLAHI, V.: Comparison between Optimized Passive Vehicle Suspension and Semi Active FuzzyLogic Controlled Suspension System RegardingRide and Handling. World Academy of Science,Engineering and Technology, 2007
[KHU09] ABU-KHUNDHAIR, A.; MURESAN, R.;YANG S. X.: Fuzzy Control of Semi-Active Automotive Suspensions. IEEE Int. Conferenceon Mechatronics and Automation, Changchun,2009
[KZW98] K2 Bike Inc., Stoßdämpfer mit variablerBypassdämpfung. Europäisches Patent EP1030982 B1, 1998
[KOL05] KOLETZKO, C.: Konzept eines Querreg-lers für ein semiaktives Verstelldämpfersystemunter Berücksichtigung einer aktiven Wankstabi-lisierung. Fahrwerk.tech, München, 2005
[LOR10] LORD Corp., http://www.lord.com/Products-and-Solutions/Magneto-Rheological (MR).xml
[MIT04] MITSCHKE, M.; WALLENTOWITZ H.: Dy-namik der Kraftfahrzeuge, Springer, Berlin, 2004
[MOT09] BMW-Motorrad-Homepage: www.motorradonline.de, 2009
[MOT09] Motorrad fahren – gut und sicher, DVR,ifz, 2009
[MMT00] Münch Motorrad Technik GmbH (MMT),Fahrzeug mit aktivem Fahrwerk, Gebrauchs-musterschrift, Gebrauchsmuster DE 20017267U1, 2000
[NIE06] NIEMZ, T.: Reducing Braking Distance byControl of Semi-Active Suspension, VDI VerlagGmbH, Düsseldorf, 2007 (Dissertation TUDarmstadt)
[RAU07] RAU, M.: Koordination aktiver Fahrwerk-Regelsysteme zur Beeinflussung der Querdyna-mik mittels Verspannungslenkung. Dissertation,Universität Stuttgart, 2007
52

[RAU07] REISSING, J.; WAGNER, H.-A.; JAH-REIß, H.-J.; BACHMANN, J.; MÜLLER, P.: Integral ABS and ASC – New Riding DynamicControl Systems from BMW Motorrad. Development Trends of Motorcycles III, Ta-gungsband, HdT, 2006
[REI03] REICHEL, J.: Untersuchung zum Einflussstufenlos verstellbarer Schwingungsdämpfer auf das instationäre Bremsen von Personenwa-gen. VDI-Verlag GmbH, FortschrittsberichteVDI, 2003
[ROP08] ROPPENECKER, G.: Systemdynamikund Regelung von Kraftfahrzeugen, Vorlesung.Friedrich-Alexander-Universität Erlangen-Nürn-berg, 2008
[SAR09] SARAMI, S.: Development and Evaluationof a Semi-active Suspension System for FullSuspension Tractors. Dissertation, TU Berlin,September 2009
[SAV08] SAVARESI, S. M.: Semi-Active ControlStrategies for High-Performance MotorcycleThe International Federation of Automatic Control, Seoul (Korea), July 6-11 2008
[SCH03] SCHÜRR, H.: Variable Dämpfung CDC imSystemverbund Fahrwerkregelung: Auswirkun-gen auf die Längs- und Querdynamik. Fahr-werk.tech, München, 2003
[SHI82] SHIBHI, F.: Bestimung der Sitzposition und Körperhaltung von Zweiradfahrern für cha-rakteristische Zweirad- /Fahrerplatzkonfiguratio-nen. Forschungsbericht des Landes Nordrhein-Westfalen. Westdeutscher Verlag, Aachen, 1982
[STO10] STOFFREGEN, J.: Motorradtechnik, Vie-weg + Teubner Verlag, Wiesbaden, 2010
[TUM08] BIANCALE, R.; KLOTZ, R.; YUAN, B.: A Semi Active Suspension System for Motor-bikes, Labor, TU München, 2008
[UNS04] UNSAL, M.; NIEZRECKI, C.; CRANE, C.:Two Semi-Active Approaches for Vibration Isolation, Departement of Mechanical Engineering, University of Florida, 2004
[UEC05] UECKERMANN, A.: Das bewerteteLängsprofil, Straße und Autobahn, 1/2005,Kirschbaum Verlag, 2005
[VDI02] VDI-Richtlinie 2057: Einwirkung mechani-scher Schwingungen auf den Menschen, Norm-CD, Stand 2007
[VIZ09] Verkehr in Zahlen, DIW, Berlin, 2009
[WAL05] WALLENTOWITZ, H.: Krafträder, Um-druck zur Vorlesung Krafträder, RWTH Aachen,2006
[WAL06] WALLENTOWITZ, H.: Vertikal-/Querdyna-mik von Kraftfahrzeugen, Umdruck zur Vorle-sung Fahrzeugtechnik II, RWTH Aachen, 2006
[WAL06] WALLENTOWITZ, H.; MURRENHOFF,H.: Vorlesung Fuidtechnik für mobile Anwendun-gen, RWTH Aachen, 2006
[WIS92] WISSELMANN, D.: Motorrad-Fahrdyna-mik-Simulation, Modellbildung, Validierung undAnwendung, VDI Verlag, Düsseldorf, 1992
[WPO09] WP Suspensions, Homepage:http://www.wp-germany.com, 2009
[ZFF10] ZF Friedrichshafen AG, Vorderrad-Feder-gabel für ein Zweiradfahrzeug, DE 10 2009 021525 A1, Offenlegungsschrift, Deutsches Patent-und Markenamt, 2010
[ZFS10] ZF Sachs: http://www.zf.com/brands/con tent/de/sachs/homepage_sachs/homepage.jsp
53

Schriftenreihe
Berichte der Bundesanstaltfür Straßenwesen
Unterreihe „Fahrzeugtechnik“
F 22: Schadstoffemissionen und Kraftstoffverbrauch bei kurzzei-tiger MotorabschaltungBugsel, Albus, Sievert 10,50
F 23: Unfalldatenschreiber als Informationsquelle für die Unfall-forschung in der Pre-Crash-PhaseBerg, Mayer 19,50
F 24: Beurteilung der Sicherheitsaspekte eines neuartigen Zwei-radkonzeptesKalliske, Albus, Faerber 12,00
F 25: Sicherheit des Transportes von Kindern auf Fahrrädern und in FahrradanhängernKalliske, Wobben, Nee 11,50
F 26: Entwicklung eines Testverfahrens für Antriebsschlupf-Re-gelsystemeSchweers 11,50
F 27: Betriebslasten an FahrrädernVötter, Groß, Esser, Born, Flamm, Rieck 10,50
F 28: Überprüfung elektronischer Systeme in KraftfahrzeugenKohlstruck, Wallentowitz 13,00
F 29: Verkehrssicherheit runderneuerter ReifenTeil 1: Verkehrssicherheit runderneuerter PKW-ReifenGlaeserTeil 2: Verkehrssicherheit runderneuerter Lkw-ReifenAubel 13,00
F 30: Rechnerische Simulation des Fahrverhaltens von Lkw mit BreitreifenFaber 12,50
F 31: Passive Sicherheit von Pkw bei Verkehrsunfällen – Fahr-zeugsicherheit '95 – Analyse aus Erhebungen am UnfallortOtte 12,50
F 32: Die Fahrzeugtechnische Versuchsanlage der BASt – Ein-weihung mit Verleihung des Verkehrssicherheitspreises 2000 am 4. und 5. Mai 2000 in Bergisch Gladbach 14,00
F 33: Sicherheitsbelange aktiver FahrdynamikregelungenGaupp, Wobben, Horn, Seemann 17,00
F 34: Ermittlung von Emissionen im Stationärbetrieb mit dem Emissions-Mess-FahrzeugSander, Bugsel, Sievert, Albus 11,00
F 35: Sicherheitsanalyse der Systeme zum Automatischen FahrenWallentowitz, Ehmanns, Neunzig, Weilkes, Steinauer,Bölling, Richter, Gaupp 19,00
F 36: Anforderungen an Rückspiegel von Krafträdernvan de Sand, Wallentowitz, Schrüllkamp 14,00
F 37: Abgasuntersuchung - Erfolgskontrolle: Ottomotor – G-KatAfflerbach, Hassel, Schmidt, Sonnborn, Weber 11,50
F 38: Optimierte Fahrzeugfront hinsichtlich des Fußgänger-schutzesFriesen, Wallentowitz, Philipps 12,50
F 39: Optimierung des rückwärtigen Signalbildes zur Reduzierung von Auffahrunfällen bei GefahrenbremsungGail, Lorig, Gelau, Heuzeroth, Sievert 19,50
F 40: Entwicklung eines Prüfverfahrens für Spritzschutzsystemean KraftfahrzeugenDomsch, Sandkühler, Wallentowitz 16,50
F 41: Abgasuntersuchung: DieselfahrzeugeAfflerbach, Hassel, Mäurer, Schmidt, Weber 14,00
F 42: Schwachstellenanalyse zur Optimierung des Notausstieg-systems bei ReisebussenKrieg, Rüter, Weißgerber 15,00
F 43: Testverfahren zur Bewertung und Verbesserung von Kin-derschutzsystemen beim Pkw-SeitenaufprallNett 16,50
F 44: Aktive und passive Sicherheit gebrauchter LeichtkraftfahrzeugeGail, Pastor, Spiering, Sander, Lorig 12,00
F 45: Untersuchungen zur Abgasemission von Motorrädern im Rahmen der WMTC-AktivitätenSteven 12,50
F 46: Anforderungen an zukünftige Kraftrad-Bremssysteme zur Steigerung der FahrsicherheitFunke, Winner 12,00
F 47: Kompetenzerwerb im Umgang mit Fahrerinformation-ssystemenJahn, Oehme, Rösler, Krems 13,50
F 48: Standgeräuschmessung an Motorrädern im Verkehr und bei der Hauptuntersuchung nach § 29 StVZOPullwitt, Redmann 13,50
F 49: Prüfverfahren für die passive Sicherheit motorisierter Zwei-räderBerg, Rücker, Bürkle, Mattern, Kallieris 18,00
F 50: Seitenairbag und KinderrückhaltesystemeGehre, Kramer, Schindler 14,50
F 51: Brandverhalten der Innenausstattung von ReisebussenEgelhaaf, Berg, Staubach, Lange 16,50
F 52: Intelligente RückhaltesystemeSchindler, Kühn, Siegler 16,00
F 53: Unfallverletzungen in Fahrzeugen mit AirbagKlanner, Ambos, Paulus, Hummel, Langwieder, Köster 15,00
F 54: Gefährdung von Fußgängern und Radfahrern an Kreu-zungen durch rechts abbiegende LkwNiewöhner, Berg 16,50
F 55: 1st International Conference on ESAR „Expert Symposium on Accident Research“ – Reports on the ESAR-Conference on 3rd/4th September 2004 at Hannover Medical School 29,00
54
2001
2002
2000
1997
1998
2003
2004
2005
1999

Alle Berichte sind zu beziehen beim:
Wirtschaftsverlag NWVerlag für neue Wissenschaft GmbHPostfach 10 11 10D-27511 BremerhavenTelefon: (04 71) 9 45 44 - 0Telefax: (04 71) 9 45 44 77Email: [email protected]: www.nw-verlag.de
Dort ist auch ein Komplettverzeichnis erhältlich.
F 56: Untersuchung von Verkehrssicherheitsaspekten durch die Verwendung asphärischer AußenspiegelBach, Rüter, Carstengerdes, Wender, Otte 17,00
F 57: Untersuchung von Reifen mit Notlaufeigenschaften Gail, Pullwitt, Sander, Lorig, Bartels 15,00
F 58: Bestimmung von NutzfahrzeugemissionsfaktorenSteven, Kleinebrahm 15,50
F 59: Hochrechnung von Daten aus Erhebungen am UnfallortHautzinger, Pfeiffer, Schmidt 15,50
F 60: Ableitung von Anforderungen an Fahrerassistenzsysteme aus Sicht der Verkehrssicherheit Vollrath, Briest, Schießl, Drewes, Becker
16,50
F 61: 2nd International Conference on ESAR „Expert Symposium on Accident Research“ – Reports on the ESAR-Conference on 1st/2nd September 2006 at Hannover Medical School 30,00
F 62: Einfluss des Versicherungs-Einstufungstests auf die Be-lange der passiven SicherheitRüter, Zoppke, Bach, Carstengerdes 16,50
F 63: Nutzerseitiger Fehlgebrauch von FahrerassistenzsystemenMarberger 14,50
F 64: Anforderungen an Helme für Motorradfahrer zur Motor-radsicherheitDieser Bericht liegt nur in digitaler Form vor und kann kostenpflichtig unter www.nw-verlag.de heruntergeladen werden.Schüler, Adoplh, Steinmann, Ionescu 22,00
F 65: Entwicklung von Kriterien zur Bewertung der Fahrzeugbe-leuchtung im Hinblick auf ein NCAP für aktive FahrzeugsicherheitManz, Kooß, Klinger, Schellinger 17,50
F 66: Optimierung der Beleuchtung von Personenwagen und NutzfahrzeugenJebas, Schellinger, Klinger, Manz, Kooß 15,50
F 67: Optimierung von Kinderschutzsystemen im PkwWeber 20,00
F 68: Cost-benefit analysis for ABS of motorcyclesBaum, Westerkamp, Geißler 20,00
F 69: Fahrzeuggestützte Notrufsysteme (eCall) für die Verkehrs-sicherheit in DeutschlandAuerbach, Issing, Karrer, Steffens 18,00
F 70: Einfluss verbesserter Fahrzeugsicherheit bei Pkw auf die Entwicklung von LandstraßenunfällenGail, Pöppel-Decker, Lorig, Eggers, Lerner, Ellmers 13,50
F 71: Erkennbarkeit von Motorrädern am Tag – Untersuchun- gen zum vorderen SignalbildBartels, Sander 13,50
F 72: 3rd International Conference on ESAR „Expert Symposium on Accident Research“ – Reports on the ESAR-Conference on 5th/6th September 2008 at Hannover Medical School 29,50
F 73: Objektive Erkennung kritischer Fahrsituationen von Mo-torrädernSeiniger, Winner 16,50
F 74: Auswirkungen des Fahrens mit Tempomat und ACC auf das FahrerverhaltenVollrath, Briest, Oeltze 15,50
2006 F 75: Fehlgebrauch der Airbagabschaltung bei der Beförderung von Kindern in KinderschutzsystemenMüller, Johannsen, Fastenmaier 15,50
F 76: Schutz von Fußgängern beim Scheibenanprall IIDieser Bericht liegt nur in digitaler Form vor und kann kostenpflichtig unter www.nw-verlag.de heruntergeladen werden.Bovenkerk, Gies, Urban 19,50
F 77: 4th International Conference on ESAR „Expert Symposium on Accident Research“ Dieser Bericht liegt nur in digitaler Form vor und kann kostenpflichtig unter www.nw-verlag.de heruntergeladen werden. 29,50
F 78: Elektronische Manipulation von Fahrzeug- und Infrastruk-tursystemenDittmann, Hoppe, Kiltz, Tuchscheerer 17,50
F 79: Internationale und nationale Telematik-Leitbilder und ITS-Architekturen im StraßenverkehrBoltze, Krüger, Reusswig, Hillebrand 22,00
F 80: Untersuchungskonzepte für die Evaluation von Systemen zur Erkennung des FahrerzustandsEichinger 15,00
F 81: Potenzial aktiver Fahrwerke zur Erhöhung der Fahrsicherheit von MotorrädernWunram, Eckstein, Rettweiler 15,50
2007
55
2008
2009
2010
2011