Riedle - Risikotheorie
94
Script zu Risikotheorie Markus Riedle Humboldt-Universit¨ at zu Berlin 23. November 2005
-
Upload
suzan-ozadam -
Category
Documents
-
view
860 -
download
13
Transcript of Riedle - Risikotheorie

Script zu
Risikotheorie
Markus Riedle
Humboldt-Universitat zu Berlin
23. November 2005

Inhaltsverzeichnis
1 Individuelles Modell 41.1 Das Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2 Verteilungen fur die Einzelrisiken und den Gesamtschaden . . . . . . 8
1.2.1 Gammaverteilung . . . . . . . . . . . . . . . . . . . . . . . . . 81.2.2 Inverse Gaussverteilung . . . . . . . . . . . . . . . . . . . . . 111.2.3 Lognormalverteilung . . . . . . . . . . . . . . . . . . . . . . . 14
2 Kollektives Modell 172.1 Das Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2 Schadenzahlverteilungen . . . . . . . . . . . . . . . . . . . . . . . . . 192.3 Approximation der Gesamtschadenverteilung . . . . . . . . . . . . . . 242.4 Approximation des individuellen Modells . . . . . . . . . . . . . . . . 272.5 Schadenhohenverteilungen . . . . . . . . . . . . . . . . . . . . . . . . 29
3 Risikoprozesse 363.1 Verteilungen fur den Schadenzahlprozess . . . . . . . . . . . . . . . . 373.2 Ruinwahrscheinlichkeiten im Cramer-Lundberg-Modell . . . . . . . . 38
3.2.1 Ruinwahrscheinlichkeiten . . . . . . . . . . . . . . . . . . . . . 383.2.2 Abschatzung der Ruinwahrscheinlichkeit im Cramer’schen Fall 403.2.3 Eine Integralgleichung . . . . . . . . . . . . . . . . . . . . . . 423.2.4 Erneuerungsgleichungen . . . . . . . . . . . . . . . . . . . . . 433.2.5 Asymptotik der Ruinwahrscheinlichkeiten im Cramer’schen Fall 443.2.6 Asymptotik der Ruinwahrscheinlichkeit bei subexponentiellen
Schadensverteilungen . . . . . . . . . . . . . . . . . . . . . . . 45
4 Pramienkalkulation 474.1 Nettorisikoprinzip . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 474.2 Pramienprinzipien auf Grundlage des Nettorisikoprinzips . . . . . . . 484.3 Implizit definierte Pramienprinzipien . . . . . . . . . . . . . . . . . . 49
4.3.1 Nullnutzenprinzip . . . . . . . . . . . . . . . . . . . . . . . . . 494.3.2 Exponentialprinzip . . . . . . . . . . . . . . . . . . . . . . . . 504.3.3 Schweizer Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . 514.3.4 Verlustfunktionenprinzip . . . . . . . . . . . . . . . . . . . . . 52
4.4 Das Percentile-Prinzip . . . . . . . . . . . . . . . . . . . . . . . . . . 534.5 Eigenschaften von Pramienprinzipien . . . . . . . . . . . . . . . . . . 54
5 Credibility Pramie 565.1 Heterogenes Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . 565.2 Buhlmann Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59

6 Simulation 646.1 Simulation von Zufallszahlen . . . . . . . . . . . . . . . . . . . . . . . 646.2 Simulation von Risikoprozessen . . . . . . . . . . . . . . . . . . . . . 666.3 Simulation der Ruinwahrscheinlichkeit . . . . . . . . . . . . . . . . . 67
6.3.1 Monte-Carlo Simulation . . . . . . . . . . . . . . . . . . . . . 686.3.2 Ruinwahrscheinlichkeit mittels Pollaczek-Khintchine Formel . 726.3.3 Via importance sampling . . . . . . . . . . . . . . . . . . . . . 746.3.4 Via bedingter Monte-Carlo-Simulation . . . . . . . . . . . . . 75
A Appendix 101A.1 Parameter von Verteilungen . . . . . . . . . . . . . . . . . . . . . . . 101A.2 Faltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104A.3 Laplace-Transformierte . . . . . . . . . . . . . . . . . . . . . . . . . . 106A.4 Erzeugende Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . 108
B Bedingter Erwartungswert 111
Literaturverzeichnis 115
3

1 Individuelles Modell
[4]; [6];[9];[19]; [20];[13]
1.1 Das Modell
Bei Eintreten des Versicherungsfalles entsteht gegenuber dem Versicherungsunter-nehmen eine Zahlungsforderung und es muss den vertraglich vereinbarten Betrag anden Versicherungsnehmer auszahlen. Jedoch kommt es nicht bei jedem Vertrag oderPolice des Unternehmens zwangslaufig zur Auszahlung und die Hohe der Auszah-lung hangt von dem tatsachlich eingetretenen Schaden ab. Der verursachte Schadenjedes Vertrages kann als ein Wert betrachtet werden, der dem Zufall unterworfenist, siehe auch Einleitung.
Definition 1.1
a) Eine nichtnegative Zufallsvariable X heißt Risiko.
b) Eine Menge Xk : k = 1, . . . , n von Risiken Xk heißt Portfolio.
Im individuellen Modell lasst sich ein Risiko Xk als der Schaden interpretieren,der sich aufgrund des k-ten Versicherungsvertrages (Police) in dem betrachtetenZeitraum, z.B. ein Jahr, ergibt. Offensichtlich ist dann die Gesamtsumme, die dasVersicherungsunternehmen in einem Jahr auszahlen muss, gleich der Summe Sn derRisiken X1, . . . , Xn.
Definition 1.2 Der Gesamtschaden eines Portfolios X1, . . . , Xn (im individuel-len Modell) ist die Zufallsvariable
Sn :=n∑
k=1
Xk.
Das Versicherungsunternehmen ist hoch interessiert an Aussagen uber die Verteilungder Zufallsvariablen Sn sowie deren Erwartungswert und Varianz, da viele Entschei-dungen auf diesen Kenngroßen basieren: Pramienkalkulation, Ruckversicherungsbei-trage, Ruckstellungen.Wir werden stets folgende Annahmen voraussetzen, ohne sie zu erwahnen:
• alle Zufallsvariablen X1, . . . , Xn sind auf demselben Wahrscheinlichkeitsraum(Ω,A , P ) definiert.
• Endlichkeit der Streuung VarXk;
Falls diese Voraussetzung nicht erfullt ist, so besitzen extrem hohe Schadeneine sehr hohe Wahrscheinlichkeit und man spricht von der “nicht Versicher-barkeit” des Risikos. Deshalb setzen wir stets voraus, dass E [X2
k ] < ∞ fur allek = 1, . . . , n gilt.
4

Desweiteren werden wir oft folgende Annahmen treffen:
• Unabhangigkeit der Risiken Xk.
Diese Annahme ist ublich, wenn sie auch in der Praxis oft verletzt wird, z.B.bei Hagelschaden. In den vergangenen Jahren wird zunehmend auch versucht,Risikomodelle ohne Voraussetzung der Unabhangigkeit zu verwenden.
• Identische Verteilung der Risiken Xk.
Von dieser Voraussetzung werden wir uns in einem gewissen Rahmen losenkonnen. Auch entspricht diese Annahme meist nicht der Realitat, z.B. beiverschiedenen Versicherungssummen der Hausratversicherung.
Wir betrachten zunachst den Einfluss der Erwartungswerte und Varianzen der Ri-siken auf den Gesamtschaden.
1) Nehmen wir den Idealfall eines homogenen Portfolios X1, . . . , Xn an, d.h dieRisiken Xk sind unabhangig und identisch verteilt mit
m := E [Xk] und s2 := VarXk fur alle k = 1, . . . , n.
In diesem Fall erhalt man
E [Sn] = nm und VarSn = ns2. (1)
2) In vielen Bereichen der Versicherungsbranche ist die oben getroffene Annah-me eines homogenen Portfolios gerechtfertigt, z.B. bei der PKW-Haftpflicht-versicherung. Anders jedoch ist die Situation, falls verschieden hohe Versiche-rungssummen durch die Risiken Xk, die weiterhin unabhangig sind, abgedecktwerden. In diesem Fall geht man von einem “Referenzrisiko” X0 mit einerVersicherungssumme u0 und
m :=1
u0
E [X0] und s2 :=1
u0
VarX0
aus. Man nimmt an, dass von einem Risiko Xk z.B. mit einer halb so großenVersicherungssumme wie bei dem Referenzrisiko X0 auch der ErwartungswertE [Xk] und die Varianz VarXk halbiert werden. Dies resultiert in der folgendenAnnahme:
E [Xk] = muk und VarXk = s2uk fur k = 1, . . . , n,
wobei uk > 0 die Versicherungssumme des Risikos Xk bezeichnet. Wird durch
v :=n∑
k=1
uk
5

die Gesamtversicherungssumme des Portfolios bezeichnet, so erhalt man
E [Sn] = vm und VarSn = vs2. (2)
Man beachte, dass in dem unter 2) diskutierten inhomogenen Modell stets auchdas homogene Modell enthalten ist, indem man uk = 1 fur alle k = 1, . . . , nsetzt.
In diesem Modell wird insbesondere auch die Varianz anteilig der Versiche-rungssumme modelliert. Anders dagegen, wenn wir Xk = uk
u0X0 angesetzt
hatten. Dann wurde VarXk =u2
k
u20VarX0 gelten.
Ein Vorteil der Zusammenfassung von Risiken verschiedener Personen durch einVersicherungsunternehmen, ist der so genannte Ausgleich im Kollektiv, den wir andem oben angenommenen inhomogenen Portfolio erlautern wollen. Mittels der Wertein (2) folgt
VarSn
(E [Sn])2=
vs2
(vm)2=
1
v
s2
m2.
Dies bedeutet, dass die Standardabweichung√
VarSn langsamer als der Erwartungs-wert E [Sn] bei sich vergroßernder Gesamtversicherungssumme v wachst. Mit derChebyschev-Ungleichung folgt fur jedes ε > 0:
P(|Sn −E [Sn]| > εE [Sn]
)6 1
ε2
s2
vm2,
d.h. die Wahrscheinlichkeit, dass der Gesamtschaden Sn um mehr als ε · 100% vonseinem Erwartungswert abweicht, wird bei wachsender Gesamtversicherungssum-me v kleiner. Durch die Zusammenfassung der Risiken werden also gunstige undungunstige Schadenverlaufe der Einzelrisiken nivelliert.Ein wesentlicher Bestandteil bei der Behandlung des individuellen Modells bestehtin der Konstruktion geeigneter stochastischer Modelle fur die Risiken Xk, so dassdie daraus resultierende Verteilung der Gesamtschadensumme in gewisser Weise mitBeobachtungen der vergangenen Jahre ubereinstimmt. Hierzu schatzt man aufgrundvon gesammelten Daten vergangener Beobachtungsperioden etwa den Erwartungs-wert und die Varianz der Verteilung des Gesamtschadens, um daraus Aussagen uberdas Verhalten von Sn in der aktuellen Periode treffen zu konnen. Diesem liegenjedoch einige Probleme zugrunde, wie z.B:
• eine nicht ausreichende Datenlage, um “gute” Schatzungen treffen zu konnen;
• die Verteilung von Sn verandert sich durch variierende Anzahl von Policen undsich verandernden Versicherungssummen von Jahr zu Jahr, siehe z. B. (2).
Eine weitere Diskussion dieser Problematiken und deren Losung findet man in [14,S. 43f].Waren die Verteilungen der Einzelrisiken Xk bekannt, so wurde man auch die Ver-teilung des Gesamtschadens zumindest aus mathematischer Sicht explizit kennen:
6

Theorem 1.3 Es sei X1, . . . , Xn ein Portfolio von unabhangigen Risiken Xk mitVerteilungen PXk
. Dann gilt fur die Verteilung PSn des Gesamtschadens Sn:
PSn = PX1 ∗ · · · ∗ PXn .
Jedoch sind im Allgemeinen die Verteilungen der Einzelrisiken nicht bekannt. Auf-grund einer zu geringen Beobachtungsanzahl von Realisierungen der Risiken dervergangenen Beobachtungsperioden lassen sich auch nicht unmittelbar Verteilungenangeben, die die Einzelrisiken ausreichend gut modellieren.Wir beenden diesen ersten Abschnitt mit der Vorstellung eines Algorithmus nachDePril (siehe z.B. [18]) zur Berechnung der Verteilung des Gesamtschadens mittelseines (spielerischen) Zahlenbeispiels aus [12]:
Beispiel 1.4 Man betrachtet ein Portfolio X1, . . . , Xn von Lebensversicherun-gen. Der potentielle Schaden des Risikos Xk ist die Versicherungssume uk, die imTodesfall ausgezahlt wird. Als mogliche Versicherungssummen uk nehmen wir indiesem Beispiel die Werte 1, 2, . . . , 5 an, die etwa fur 100000, . . . , 500000 Eurostehen. Jedem Versicherungsnehmer lasst sich aufgrund gewisser Vorinformationen,z.B. Alter, Beruf u.s.w., eine einjahrige Sterbewahrscheinlichkeit pk zuordnen. Damitbesitzt jedes Risiko Xk die Verteilung
PXk(uk) = P (Xk = uk) = pk und PXk
(0) = P (Xk = 0) = 1− pk.
Die folgende Tabelle ist aufgeschlusselt nach der Sterbewahrscheinlichkeit und derversicherten Summe. Die Eintrage geben die Anzahl der jeweiligen Vertrage an.
pk 1 2 3 4 50.000505 0 1 1 2 60.000525 1 0 2 7 00.000552 1 1 3 3 20.000587 0 1 3 3 30.000630 1 4 0 4 10.000680 2 2 2 2 20.000738 1 1 0 1 7
Es gibt z.B. 7 Policen uber eine Versiche-rungssumme 4, die jeweils eine Sterbewahr-scheinlichkeit von 0.000525 haben.
Man erhalt nun fur die Verteilungen PSkder k-ten Schadensumme Sk = X1+· · ·+Xk:
PS1 = PX1
PSk+1= PSk
∗ PXk+1.
7

Wie in Beispiel A.15.b folgt:
PSk+1(j) = P (Sk+1 = j)
=∞∑i=0
P (Sk = j − i)P (Xk+1 = i)
= P (Sk = j)P (Xk+1 = 0) + P (Sk = j − uk+1)P (Xk+1 = uk+1)
= P (Sk = j)(1− pk+1) + P (Sk = j − uk+1)pk+1.
Wird nun sukzessiv fur jedes k die Wahrscheinlichkeit P (Sk+1 = j) fur alle Wertej ∈ N0, die Sk+1 annehmen kann, berechnet, so gelangt man zu der Verteilung desGesamtschadens Sn.Das in diesem Beispiel vorgestellte Verfahren lasst sich erweitern auf den Fall, indem die Risiken endlich viele und nicht nur zwei Werte annehmen konnen. Jedochstoßt man trotz moderner Rechner ab gewissen Großen des Portfolios an die Grenzeder Berechenbarkeit.
1.2 Verteilungen fur die Einzelrisiken und den Gesamtscha-den
Zur Herleitung von realistischen Verteilungen des Gesamtschadens stellen wir in denbeiden folgenden Abschnitten mogliche Verteilungen PXk
der Einzelrisiken Xk vorund leiten die entsprechende Verteilung des Gesamtschadens daraus her. Hierbeigehen wir von den folgenden Uberlegungen aus:
• PXkist eine Verteilung auf (R+, B(R+));
• die “Hauptmasse” von PXkliegt in oder zumindest sehr dicht an der Null,
da in fast allen Bereichen der Schadenversicherung die Mehrzahl der Risikenschadenfrei bleiben oder nur sehr geringe Werte annehmen, sogenannte Baga-tellschaden.
• PXkist eine zweiparametrige Verteilung, da wir nur von einer Schatzung des
Erwartungswertes und der Varianz der Gesamtschadenverteilung ausgehen.
Um auf die Verteilung des Gesamtschadens schließen zu konnen, ist folgende Eigen-schaft von Nutzen:
• einfache Berechenbarkeit der Faltungspotenzen der Verteilungen der Einzelri-siken.
1.2.1 Gammaverteilung
In der Funktionentheorie wird die so genannte Gammafunktion auf der gesamtenkomplexen Ebene betrachtet und dort als meromorphe Funktion nachgewiesen, siehe
8

z. B. [8]. In unserem Fall dient sie der Normierung einer Dichte, wofur das Betrachtender Gammafunktion auf der positiven reellen Achse ausreicht. Dort besitzt sie eineIntegraldarstelllung, die wir als Definition nutzen.
Definition 1.5 Die Gammafunktion Γ ist gegeben durch:
Γ : (0,∞) → R, Γ(t) :=
∫ ∞
0
xt−1e−x dx.
0.5 1 1.5 2
1
2
3
4
5
6
α = 0.05
α = 0.2
α = 1α = 5
α = 25
α = 125
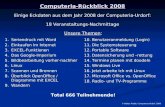
Abbildung 1: Dichte der Γ-Verteilung mit α = β fur verschiedene Werte
Eine Diskussion der Gammafunktion findet man z.B. in [8]. Einige wesentliche Ei-genschaften der Gammafunktion halten wir in dem folgenden Lemma fest:
Lemma 1.6 Fur die Gammafunktion Γ : (0,∞) → R gilt:
a) Γ(12) =
√π, Γ(1) = 1;
b) Γ(t + 1) = t Γ(t) fur alle t > 0;
c) Γ(n + 1) = n! fur alle n ∈ N.
Beweis: Siehe Kapitel VII.5 in [8]. 2
Wir definieren die in diesem Abschnitt betrachtete Gammaverteilung. Diese Vertei-lung wir haufig in Anwendung zur Modellierung der Risiken benutzt.
9

Definition 1.7 Die Gamma-Verteilung Γ(α, β) zu den Parametern α, β > 0 ist dieWahrscheinlichkeitsverteilung mit der Dichte
f(s) :=
βα
Γ(α)sα−1e−βs, fur s > 0,
0, fur s 6 0.
Bemerkung 1.8 Fur α = 1 entspricht die Gammaverteilung Γ(1, β) einer Expo-nentialverteilung zu dem Parameter β.
Lemma 1.9 Fur eine Γ(α, β)-verteilte Zufallsvariable X gilt:
a) E [X] =α
β, D VarX =
α
β2;
b) γ1(X) =2√α
, γ2(X) =6
α.
c) cX ∼ Γ(α, c−1β) fur c > 0.
d) ϕX(t) =
(β
β − it
)α
fur t ∈ R.
e) LX(t) =
(β
β + t
)α
fur t > −β.
In Abbildung (1) sind die Dichten von Gammaverteilungen fur verschiedene Parame-ter abgebildet. Das folgende Lemma fasst Eigenschaften der Dichte in Abhangigkeitdes Parameters α zusammen:
Lemma 1.10 Es bezeichne f = fα,β die Dichte einer Γ(α, β)-Verteilung. Dann gilt:
• fur α < 1 ist die Dichte f monoton fallend auf R+ mit f(0+) = ∞. DerModalwert ist 0.
• fur α = 1 ist die Dichte f monoton fallend auf R+ mit f(0+) = β. DerModalwert ist 0.
• fur α > 1 ist die Dichte f monoton wachsend auf [0, α−1β
) und monoton fallend
auf (α−1β
,∞) mit f(0+) = 0. Der Modalwert ist α−1β
.
Da gemaß unseren Uberlegungen zu Beginn dieses Abschnittes die großte Masse derVerteilungen der Risiken in oder nahe der Null liegen soll, bieten sich gemaß demvorangegangenen Lemma Parameterwerte α ∈ (0, 1) zur Modellierung der Verteilungder Einzelrisiken an.Als eine wunschenswerte Eigenschaft erwahnten wir die explizite Berechnungsmoglich-keit von Faltungen der Verteilungen der Risiken.
10

Theorem 1.11 Es seien Γ(αk, β) Gammaverteilungen zu den Parametern αk > 0fur k = 1, . . . , n und dem Parameter β > 0. Dann gilt:
Γ(α1, β) ∗ · · · ∗ Γ(αn, β) = Γ(α1 + · · ·+ αn, β).
Mittels der Gammaverteilung lasst sich ein nicht homogenes Portfolio X1, . . . , Xnvon unabhangigen Risiken modellieren. Wie in Abschnitt diskutiert, geht man voneinem Referenzrisiko X0 mit Versicherungssumme u0 und
m :=1
u0
E [X0] und s2 :=1
u0
VarX0
aus. Erwartungswert und Varianz eines Risikos Xk verhalten sich dann gemaß demAnteil der Versicherungssumme uk bezuglich der des Referenzrisikos.
Theorem 1.12 Es seien X1, . . . , Xn unabhangige, gammaverteilte Risiken mit
E [Xk] = muk und VarXk = s2uk
fur m, s2 > 0 und uk > 0 fur k = 1, . . . , n. Dann gilt fur den Gesamtschaden:
Sn ∼ Γ(
m2
s2 (u1 + · · ·+ un), ms2
).
Mit der Γ(α, β)-Verteilung haben wir eine Verteilung kennengelernt, deren Modal-wert fur α < 1 gleich Null ist. Auch ermoglicht diese Verteilung eine Modellierungeines nicht homogenen Portfolios von unabhangigen Risiken mit verschiedener Ver-sicherungssumme. Die Verteilung des Gesamtschaden ist wieder eine Gammavertei-lung.Ein wesentlicher Nachteil der Gammaverteilung ist, dass bei der Maximum-Likeli-hood-Methode keine explizite Auflosung nach dem Parameter α molich ist, siehez.B. [14].
1.2.2 Inverse Gaussverteilung
Der Nachteil der Gammaverteilung, den Parameter α nicht mittels einer Maximum-Likelihood-Methode schatzen zu konnen, lasst sich durch Modellierung der Risikendurch eine andere, sehr ahnliche Verteilung umgehen.
Definition 1.13 Die Inverse-Gauss-Verteilung IG(µ, λ) zu den Parametern µ, λ >0 ist die Wahrscheinlichkeitsverteilung mit der Dichte
f(s) :=
(λ
2πs3
)1/2exp
(−λ(s−µ)2
2µ2s
), fur s > 0,
0, fur s 6 0.
Wie bei der Gammaverteilung beginnen wir mit der Zusammenfassung einiger ein-fachen Eigenschaften der Inversen-Gauss-Verteilung:
11

0.5 1 1.5 2
2
4
6
8
λ = 0.05
λ = 0.2
λ = 0.5 λ = 5λ = 1
λ = 50
λ = 150
Abbildung 2: Dichte der IG-Verteilung fur µ = 1 und verschiedene λ
Lemma 1.14 Fur eine IG(µ, λ)-verteilte Zufallsvariable X gilt:
a) E [X] = µ, D VarX =µ3
λ;
b) γ1(X) = 3
õ
λ, γ2(X) = 15
µ
λ;
c) cX ∼IG(cµ, cλ) fur c > 0;
d) ϕX(t) = exp
(λ
µ
(1−
√1− λ−1(2µ2it)
))fur t ∈ R.
e) LX(t) = exp
(λ
µ
(1−
√1 + λ−1(2µ2t)
))fur t > 0.
Anders als bei der Gammaverteilung lasst sich die Verteilungsfunktion der Inversen-Gauss-Verteilung durch die Verteilungsfunktion der Standard-Normal-Verteilung aus-drucken. Deshalb ist keine zusatzliche Tabellierung der Verteilungsfunktion erfor-derlich. Aber aufgrund des Einsatzes von Computern ist dieses Argument fur dieInverse-Gauss-Verteilung gegenuber der Gammaverteilung unseres Erachtens heut-zutage von geringerer Bedeutung.
12

Lemma 1.15 Fur die Verteilungsfunktion F = Fλ,µ der Inversen-GaussverteilungIG(µ, λ) gilt:
F (x) = Φ(µ(λx)−1/2(x− µ)) + e2λ/µΦ(−µ(λx)−1/2(x + µ)) fur x > 0,
wobei Φ die Verteilungsfunktion der Standardnormalverteilung bezeichnet.
Beweis: Siehe [5]. 2
Insbesondere wird durch dieses Lemma eine einfache Bestimmung der Quantile einerInversen-Gauss-Verteilung ermoglicht.Auch die Inverse-Gauss-Verteilung ist unimodal:
Lemma 1.16 Es sei f = fµ,λ die Dichte einer IG(µ, λ)-Verteilung. Dann gilt: f istmonoton wachsend auf [0, c) und monoton fallend auf (c,∞) wobei
c := µ
√1 +
(3µ
2λ
)2
− 3µ
2λ
.
Der Modalwert ist c.
Das Verhalten der Inversen-Gauss-Verteilung bei Faltung gibt das folgende Resultatan.
Theorem 1.17 Es seien IG(µk, λk) Inverse-Gauss-Verteilungen zu den Parame-tern µk > 0 und λk > 0 fur k = 1, . . . , n mit ζ = λkµ
−2k fur alle k = 1, . . . , n. Dann
gilt:
IG(µ1, λ1) ∗ · · · ∗ IV (µn, λn) = IG(µ1 + · · ·+ µn, ζ(µ1 + · · ·+ µn)2).
Auch mittels der Inversen-Gauss-Verteilung lasst sich ein nicht homogenes PortfolioX1, . . . , Xn von unabhangigen Risiken modellieren. Wie zuvor geht man von einemReferenzrisiko X0 mit Versicherungssumme u0 und
m :=1
u0
E [X0] und s2 :=1
u0
VarX0
aus. Erwartungswert und Varianz eines Risikos Xk verhalten sich dann gemaß demAnteil der Versicherungssumme uk an der des Referenzrisikos.
Theorem 1.18 Es seien X1, . . . , Xn unabhangige, Inverse-Gauss-verteilte Risikenmit
E [Xk] = muk und VarXk = s2uk
fur m, s2 > 0 und uk > 0 fur k = 1, . . . , n. Dann gilt fur den Gesamtschaden:
Sn ∼ IG(m(u1 + · · ·+ un), m3
s2 (u1 + · · ·+ un)2)
.
13

Bemerkung 1.19 Geht man von vorgegebenem Erwartungswert und Varianz aus,so lasst sich sowohl bei der Gammaverteilung wie auch bei der Inversen-Gauss-Verteilung eindeutig auf die jeweiligen Parameter schließen. Zum Vergleich der Gam-maverteilung und der Inversen-Gauss-Verteilungen betrachtet man deshalb zwei Zu-fallsvariablen X und Y , die entsprechend diesen Verteilungen verteilt sind, jedochmit demselben Erwartungswert und Varianz. Bestimmt man dann die Parameterder jeweiligen Verteilungen, lassen sich Schiefe und Exzess sowie Form der Dichtenmiteinander vergleichen.
Die Inverse-Gauss-Verteilung besitzt dieselben positiven Eigenschaften wie die Gam-maverteilung zur Modellierung der Verteilung der Einzelrisiken. Desweiteren besitztsie den Vorteil, dass beide Parameter sich mit der Maximum-Likelihood-Methodeschatzen lassen, siehe [14]Die Inverse-Gauss-Verteilung besitzt aber gewisse Nachteile, falls Erwartungswertund Varianz in einem engen Zusammenhang stehen, siehe ebenfalls [14].
1.2.3 Lognormalverteilung
In den zwei vorangegangenen Unterabschnitten haben wir die Gammaverteilung unddie Inverse-Gauss-Verteilung als eine realistische Verteilung fur den Gesamtschaden,ausgehend von denselben Verteilungen fur die Risiken, ermittelt. In diesem Abschnittbetrachten wir dagegen unmittelbar eine Verteilung fur den Gesamtschaden, ohnedie Verteilung der einzelnen Risiken zu beachten.
Definition 1.20 Die Lognormalverteilung LN(θ, σ2) zu den Parametern θ, σ2 > 0ist die Wahrscheinlichkeitsverteilung mit der Dichte
f(s) :=
1√
2πσ2s2exp
(− ((ln s)−θ)2
2σ2
)fur s > 0,
0, fur s 6 0.
Man erhalt eine LN(θ, σ2)-verteilte Zufallsvariable X durch Transformation einernormalverteilten Zufallsvariablen Y zu den Parametern θ und σ2, denn es gilt:
X := exp(Y ) ∼ LN(θ, σ2).
Deshalb lasst sich die Verteilungsfunktion der Lognormalverteilung mittels der Ver-teilungsfunktion Φ der Standardnormalverteilung angeben:
Lemma 1.21 Fur die Verteilungsfunktion Fθ,σ2 der Lognormalverteilung LN(θ, σ2)gilt:
Fθ,σ2(x) = Φ
((ln x)− θ
σ
)fur x > 0,
wobei Φ die Verteilungsfunktion der Standardnormalverteilung bezeichnet.
14

0.5 1 1.5 2
2
4
6
8
σ = 1.7
σ = 1.5
σ = 1 σ = 0.5
σ = 0.1
σ = 0.05
Abbildung 3: Dichte der LN-Verteilung mit exp(θ + σ2
2) = 1 und verschiedene σ
Einfache Eigenschaften der Lognormalverteilung konnen wir mittels Ruckfuhrungauf die Normalverteilung angeben. Jedoch lasst sich weder Laplace-Transformiertenoch charakteristische Funktion in einer geschlossenen Form angeben.
Lemma 1.22 Fur eine LN(θ, σ2)-verteilte Zufallsvariable X gilt:
a) E [X] = exp(θ + σ2
2), D VarX = exp(2θ + σ2)(exp(σ2)− 1);
b) γ1(X) = (exp(σ2) + 2)(exp(σ2)− 1)1/2,
γ2(X) = exp(4σ2) + 2 exp(3σ2) + 3 exp(2σ2)− 6;
c) cX besitzt eine LN(θ + ln c, σ2)-Verteilung fur c > 0.
Auch die Lognormalverteilung ist unimodal:
Lemma 1.23 Es sei f = fθ,σ2 die Dichte einer LN(θ, σ2)-Verteilung. Dann gilt: fist monoton wachsend auf (0, c) und monoton fallend auf (c,∞) wobei
c := exp(θ − σ2).
Der Modalwert ist c.
15

Bei Faltung der Lognormalverteilung verlasst man die Klasse der Lognormalver-teilungen, weshalb durch diese nur die Verteilung des Gesamtschadens und nichtauch der Einzelrisiken modelliert wird. Gerechtfertigt ist diese Modellierung durchdie Ahnlichkeit der Lognormalverteilung zu der Gammaverteilung und der Inversen-Gauss-Verteilung. Ein wesentlicher Vorteil der Lognormalverteilung ist die Moglich-keit der Ruckfuhrung auf die Normalverteilung, wodurch hervorragende statistischeMethoden zur Verfugung stehen. Einen weiteren Vorteil dieser Verteilung, “heavytailed” zu sein, werden wir spater kennen lernen. Nachteile der Lognormalvertei-lungen bestehen dadurch, dass die Laplace-Transformierte oder charakteristischeFunktion nicht in einer geschlossenen Form angegeben werden konnen.
16

2 Kollektives Modell
2.1 Das Modell
Bei der Behandlung des individuellen Modells steht die Modellierung des Erwar-tungswertes und der Varianz der Gesamtschadenverteilung im Vordergrund. Dazusetzten wir, bis auf verschiedene Versicherungssummen, ein homogenes Portfoliovoraus. Jedoch reicht die Kenntnis bzw. Schatzung von Erwartungswert und Vari-anz nicht aus, um die Verteilung des Gesamtschadens ausreichend beschreiben zukonnen, z.B. zur Tarifkalkulation. Auch kann in den meisten Situationen in der Pra-xis nicht von einem homogenen Portfolio ausgegangen werden. Letzteres ließe sichzwar durch Unterteilung des Versicherungsbestandes in homogene und unabhangi-ge Gruppen erzielen, jedoch resultiert dies in Gruppen mit zu geringer Große, umeffiziente Schatzmethoden anwenden zu konnen. Ohne die Annahme identischer Ver-teilungen, bzw. ahnlicher Verteilungen der Risiken, ist das individuelle Modell nursehr schwer handhabbar und wenige Aussagen konnen getroffen werden.Im kollektiven Modell (F. Lundberg, H. Cramer) wird versucht, die Beschrankungauf homogene Portfolios zu vermeiden. Bei diesem Modellierungsansatz wird nichtbeachtet, welches Risiko einen Schaden verursacht, sondern das gesamte Portfoliovon Risiken wird als Produzent einer zufalligen Anzahl von Schaden einer Beobach-tungsperiode betrachtet.Wie zuvor besteht ein Portfolio X1, . . . , Xn : k ∈ N aus Risiken Xk. Die Anzahlder Schaden einer Beobachtungsperiode wird modelliert durch eine ZufallsvariableN .
Definition 2.1 Eine Zufallsvariable N auf (N0,P(N0)) heißt Schadenzahl.
Zur Vermeidung von Definitionsschwierigkeiten gehen wir von einem unendlichenPortfolio Xk : k ∈ N aus. Dies stellt keine Beeintrachtigung des Modells dar,denn die Schadenzahl wird sicherlich so modelliert werden, dass mit einer zu ver-nachlassigenden Wahrscheinlichkeit die Schadenzahl uber der Hohe des realen Port-folios liegen kann.
Definition 2.2 Der Gesamtschaden eines Portfolios Xk : k ∈ N (im kollektivenModell) mit Schadenzahl N ist die Zufallsvariable
SN :=
∑Nk=1 Xk, falls N > 0,
0, falls N = 0.(3)
Bei der Behandlung des kollektiven Modells gehen wir wie teilweise zuvor von denfolgenden Annahmen aus:
• Endlichkeit der Streuung VarXk;
• alle Zufallsvariablen N,X1, X2, . . . sind auf demselben Wahrscheinlichkeits-raum (Ω, A , P ) definiert;
17

• Xk > 0 fur alle k ∈ N.
Desweiteren werden wir meistens auch folgende Voraussetzungen annehmen:
• N, X1, X2, . . . sind unabhangig;
Die Unabhangigkeit der Risiken diskutierten wir bereits bei Behandlung desindividuellen Modells. Die Unabhangigkeit der Schadenzahl und der Scha-denhohen kann als realistisch betrachtet werden, aber auch hier kann eine ge-nauere Betrachtung notwendig sein, z.B. Autohaftpflichtversicherung in einemWinter mit besonders viel vereisten Fahrbahnen: viele, jedoch kleine Schaden.
• X1, X2, . . . sind identisch verteilt;
Zunachst scheint dies unserer Motivation fur das kollektive Modell, der Ver-meidung der Annahme von homogenen Portfolios, zu widersprechen. Jedochwerden im kollektiven Modell die Schadenhohen nicht bestimmten Risiken zu-geordnet, sondern es wird die Gesamtheit aller Schaden betrachtet. Deshalbkann sehr wohl eine identische Verteilung der Risiken angenommen werden,wenn man sich die Realisierung dieser Verteilung als ein zweistufiges Expe-riment vorstellt: zunachst wird zufallig eine bestimmte Verteilung (aus einerKlasse von ahnlichen, jedoch verschiedenen Verteilungen) bestimmt, und dannwird eine Realisation dieser zufallig bestimmten Klasse ausgewahlt; siehe hier-zu die Behandlung von gemischten Verteilungen in Abschnitt 2.2.
Zufallsvariablen der Form (3) werden zusammengesetzte Summenvariablen (com-pound random variable) genannt und entsprechend ihre Verteilung zusammengesetz-te Summenverteilung.
Theorem 2.3 Es seien Xk : k ∈ N ein Portfolio unabhangiger, identisch ver-teilter Risiken mit Verteilung PX1 und N eine Schadenzahl. Dann gilt fur die zu-sammengesetzte Summenverteilung PSN
der Gesamtschadensumme SN :
PSN=
∞∑
k=0
P (N = k)P ∗kX1
.
In den meisten Fallen ist es nicht moglich, die zusammengesetzte Summenvertei-lung in einer expliziten Form zu bestimmen. Jedoch kann man deren Laplace-Transformierte mittels den Transformierten der Schadenzahl und der Risiken an-geben:
Theorem 2.4 Es seien Xk : k ∈ N ein Portfolio unabhangiger, identisch ver-teilter Risiken und N eine Schadenzahl.
a) Falls die jeweiligen Momente existieren, dann gilt:
E [SN ] = E [N ] E [X1] ,
VarSN = (VarN)(E [X1])2 + (E [N ])(VarX1).
18

b) Bezeichnet GN die erzeugende Funktion von N und LX1 und LSNdie jeweiligen
Laplace-Transformierten von X1 und SN , dann gilt:
LSN(t) = GN (LX1(t)) fur alle t > 0.
Beispiel 2.5 Wir betrachten ein Portefolio Xk : k ∈ N von unabhangigen, iden-tisch exponential verteilten Risiken Xk zu einem Parameter λ und einer geometrischverteilten Schadenzahl N :
P (N = k) = p(1− p)k fur k ∈ N0 .
Man erhalt fur den Gesamtschaden SN
E [SN ] =λ(1− p)
p, VarSN =
λ2(1− p)
p2+
λ(1− p)
p
und die Laplace-Transformierte des Gesamtschadens ergibt sich als:
LSN(t) =
p
1− (1− p)λ(λ + t)−1fur t > 0.
2.2 Schadenzahlverteilungen
Betrachtet man die Schadenzahl N als die Summe von laplaceverteilten Zufalls-variablen, die nur die Werte 0 oder 1 annehmen konnen, so ist N gemaß einerBinomialverteilung verteilt.
Definition 2.6 Eine Zufallsvariable N auf (N0, P(N0)) heißt binomialverteilt zuden Parametern p ∈ (0, 1) und m ∈ N, falls gilt:
P (N = k) =
0, fur k > m + 1,(
mk
)pk(1− p)m−k, fur k = 0, . . . , m
Als Notation fur die Binomialverteilung benutzen wir b(m, p).
Offensichtlich entspricht der Parameter m der Große des Portfolios. Erinnert sei andie folgende Eigenschaften der Binomialverteilung:
Lemma 2.7
a) Fur eine binomialverteilte Zufallsvariable N zu den Parametern p ∈ (0, 1) undm ∈ N gilt:
E [N ] = mp, VarN = mp(1− p).
19

b) Sind Nk, k = 1, . . . , n unabhangige, binomialverteilte Zufallsvariablen zu denParametern mk ∈ N und p ∈ (0, 1), so gilt:
N1 + · · ·+ Nn ∼ b(m1 + · · ·+ mn, p).
Die Binomialverteilung eignet sich zur Modellierung der Schadenzahlverteilung furkleine, homogene Bestande. Dagegen ist sie fur große Bestande ungeeignet, da dieVarianz dann sehr klein ausfallt. Desweiteren ist diese Verteilung wenig anpas-sungsfahig, da nur der Parameter p zur Modellierung dienen kann.Die Binomialverteilung kann fur kleine Werte von p sehr gut durch die Poissonver-teilung approximiert werden, siehe Beispiel A.25. Doch gerade kleine Werte von p,also Schaden, die nur mit einer sehr geringen Wahrscheinlichkeit auftreten, tretenin der Versicherungsbranche haufig auf. Wir betrachteten im Folgenden die Pois-sonverteilung als Modellierung der Schadenzahlverteilung. Dieses Modell ist die amhaufigste verwendete Verteilung der Schadenzahl im kollektiven Modell.
Definition 2.8 Eine Zufallsvariable N auf (N0,P(N0)) heißt poissonverteilt zumParameter (Intensitat) λ > 0, falls gilt:
P (N = k) =λk
k!e−λ fur k ∈ N0 .
Als Notation fur die Poissonverteilung benutzen wir π(λ).
Als Verteilung des Gesamtschadens eines Portefolios mit einer poissonverteiltenSchadenzahl N zum Parameter λ > 0 erhalt man gemaß Satz 2.3:
PSN=
∞∑
k=0
λk
k!e−λP ∗k
X1.
Die Verteilung von SN heißt dann Poisson-Summenverteilung (compound Poisson-distribution). Man erhalt unmittelbar aus Satz 2.4:
E [SN ] = λE [X1] , VarSN = λE[X2
1
].
Ist LX1 die Laplace-Transformierte von X1, so ergibt sich die Laplace-TransformierteLSN
von SN als:
LSN(t) = exp(λ(LX1(t)− 1)),
Beispiel 2.9 Es seien Xk : k ∈ N0 ein Portefolio unabhangiger, identisch expo-nentialverteilter Risiken zum Parameter κ > 0 und N eine poissonverteilte Schaden-zahl zum Parameter λ > 0. Man erhalt fur die Verteilung PSN
des GesamtschadensSN :
P (SN 6 x) =∞∑
k=0
λk
k!e−λP (X1 + . . . Xk 6 x)
=∞∑
k=0
λk
k!e−λ κn
(n− 1)!
∫ x
0
e−uκun−1 du.
20

Mittels Induktion zeigt man:
P (SN 6 x) = 1− e−(λ+κx)
∞∑
k=0
λk
k!
k−1∑j=0
(κx)j
j!.
Wir wiederholen noch die wichtigsten Eigenschaften der Poissonverteilung:
Lemma 2.10
a) Fur eine poissonverteilte Zufallsvariable N zum Parameter λ > 0 gilt:
E [N ] = λ, VarN = λ.
b) Sind Nk, k = 1, . . . , n unabhangige, poissonverteilte Zufallsvariablen zu denParametern λk, so gilt:
N1 + · · ·+ Nn ∼ π(λ1 + · · ·+ λn).
Zwar ist die Poissonverteilung auch wenig anpassungsfahig, da sie nur von einemParameter abhangt, jedoch ist sie leicht handzuhaben, da viele Rechnungen expli-zit ausgefuhrt werden konnen. Ein wesentlicher Vorteil der Poissonverteilung ist diefolgende Moglichkeit der Aufteilung eines inhomogenen Portfolios in mehrere homo-gene Portfolios.In vielen Situationen kann ein inhomogenes Portfolio aufgeteilt werden in m ver-schiedene Portfolios, die jeweils aus homogenen Risiken und einer poissonverteiltenSchadenzahl bestehen, z.B. in der PKW-Haftpflichtversicherung erfahrene und un-erfahrene Fahrer. Den verschiedenen Portfolios konnen unterschiedliche Risikover-teilungen Ql und unterschiedliche Schadenintensitaten λl der Schadenzahl Nl furl = 1, . . . , m zugrunde liegen. Jeder Gesamtschaden Sl der verschiedenen Portfoliosbesitzt dann die Verteilung:
PSl=
∞∑
k=0
λkl
k!e−λlQ∗k
l . (4)
Das Versicherungsunternehmen ist aber interessiert an der Summe der verschiedenenGesamtschaden.
Theorem 2.11 Es seien S1, . . . , Sm unabhangige Zufallsvariablen mit den Vertei-lungen
PSl=
∞∑
k=0
λkl
k!e−λlQ∗k
l
fur λl > 0 und Verteilungen Ql auf (R+,B(R+)).
21

Dann gilt fur S := S1 + · · ·+ Sm:
S ∼N∑
j=1
Yj,
wobei N eine poissonverteilte Zufallsvariable zu dem Parameter
λ := λ1 + · · ·+ λm
ist und Yj : j ∈ N unabhangige, identisch verteilte Zufallsvariablen sind mit derVerteilung:
PYj=
1
λ
m∑
k=1
λkQk.
Satz 2.11 besagt, dass ein Portfolio unabhangiger, identisch verteilter Risiken undeiner poissonverteilten Zufallsvariablen bezuglich den Verteilungen als die Zusam-menfassung mehrerer Portfolios mit unterschiedlich verteilten Risiken und Schaden-zahlen aufgefasst werden kann.Betrachtet man ein Portfolio uber mehrere Jahre hinweg, so sind oft trendarti-ge und oszillatorische Veranderungen der Schadenzahl zu beobachten. TrendartigeVeranderungen sind z.B. verbesserte Schadenverhutungsmaßnahmen wie Einbau vonSprinkelanlagen. Oszillatorische Veranderungen sind Schwankungen in der mittlerenSchadenzahl, wie z.B. regenarme Sommer fuhren zu einer Zunahme von Branden.Die oszillatorischen Veranderungen konnen modelliert werden, indem man den Para-meter λ einer poissonverteilten Schadenzahl als einen zufallig gewahlten Wert gemaßeiner spezifizierten Verteilung betrachtet. Diese Verteilung modelliert die oszillato-rischen Anderungen. Diese verbale Beschreibung resultiert in dem mathematischenBegriff der Poissonmischung:
Definition 2.12 Es sei µ eine Verteilung auf (R+,B(R+)). Dann wird durch
Q(k) =
∫
R+
θk
k!e−θ µ(dθ) fur k ∈ N0,
ein Wahrscheinlichkeitsmaß Q auf (N0,P(N0)) definiert. Das Maß Q heißt Pois-sonmischung bezuglich des Mischungsmaßes µ.
Bemerkung 2.13 Statt Poissonmischung kann man auch allgemeinere gemischteMaße erhalten. Es seien Θ eine Menge und (pθ)θ∈Θ eine Familie von Wahrschein-lichkeitsverteilungen auf (N0,P(N0)) sowie µ ein Maß auf einem Maßraum (Θ,A ).Dann wird (unter geeigneten Meßbarkeitsvoraussetzungen) durch
Q(k) :=
∫
Θ
pθ(k) µ(dθ) fur k ∈ N0,
die Mischung der Verteilungen (pθ)θ>0 bezuglich des Mischungsmaßes µ definiert.
22

Beispiel 2.14
a) Falls die Verteilung µ das Dirac-Maß in c > 0 ist, so ist die PoissonmischungQ bezuglich µ die Poissonverteilung zu dem Parameter c.
b) Falls die Verteilung µ eine Dichte f besitzt, so gilt fur das Mischungsmaß Qbezuglich µ:
Q(k) =
∫
R+
θk
k!e−θ f(θ) dθ fur k ∈ N0 .
c) Falls die Verteilung µ ein diskretes Maß ist mit µ(θj) = qj, so gilt fur dasMischungsmaß Q bezuglich µ:
Q(k) =∞∑
j=0
θkj
k!e−θj qj fur k ∈ N0 .
d) Es sei Q die gemischte Poissonverteilung bezuglich einer Γ(α, β)-Verteilung,d.h. es gilt:
Q(k) =
∫
R+
θk
k!e−θµ(dθ) =
βα
Γ(α)
∫ ∞
0
θk
k!e−θθα−1e−βθ dθ.
Dann ist Q eine negative Binomialverteilung zu den Parametern p = β(1+β)−1
und r = α.
Definition 2.15 Eine Zufallsvariable N auf (N0,P(N0)) heißt negativ-binomial-verteilt zu den Parametern p ∈ (0, 1) und r > 0, falls gilt:
P (N = k) =
(k + r − 1
k
)pr(1− p)k fur k ∈ N0 .
Als Notation fur die Negative-Binomial-Verteilung benutzen wir nb(r, p).
Die Negative-Binomialverteilung dient ebenfalls wie die Poissonverteilung sehr haufigzur Modellierung der Schadenzahlverteilung im kollektiven Modell. Eine weitere Ver-teilung, die man oft im Versicherungswesen benutzt, ist die so genannte Poisson-Inverse-Gauss-Verteilung, die sich als Poissonmischung bezuglich einer Inversen-Gauss-Verteilung als Mischungsmaß ergibt.Wir wollen uns noch mathematisch die Motivation zur Einfuhrung der Poissonmi-schung verdeutlichen. Dazu sei Q die Poissonmischung bezuglich µ. Auf dem Maß-raum (N0×R+, P(N0)⊗B(R+)) wird durch
P (k × B) :=
∫
B
θk
k!e−θ µ(dθ), k ∈ N0, B ∈ B(R+),
23

ein Wahrscheinlichkeitsmaß definiert. Ist (N, T ) ein Zufallsvektor mit der Wahr-scheinlichkeitsverteilung P , so ist N gemaß der Poissonmischung Q verteilt und esgilt:
P (N = k|T = θ) =θk
k!e−θ.
Das bedeutet, dass die Realisierung der Zufallsvariablen N als ein zweistufiges Ver-fahren vorstellbar ist:
1) Man realisiert die Zufallsvariable T gemaß der Verteilung µ;
2) Die Zufallsvariable N wird realisiert gemaß einer Poissonverteilung zu demParameter, der sich unter 1) als einen zufalligen Wert ergeben hat.
Theorem 2.16 Es seien Q die Poissonmischung bezuglich eines Maßes µ sowie Nund U zwei Zufallsvariablen mit den Verteilungen PN = Q und PU = µ. Dann gilt:
a) E [N ] = E [U ] und VarN = E [U ] + VarU.
b) LN(t) = LU(1− e−t) fur t > 0.
c) GN(t) = LU(1− t) fur |t| 6 1.
Bemerkung 2.17 Mit den Notationen des Korollars 2.16 betrachten wir noch denso genannten Dispersionskoeffizient einer Poissonmischung Q bzw. der Zufallsvaria-blen N :
VarN
E [N ]= 1 +
VarU
E [U ].
Falls µ = δc, dann ist Q die Poissonverteilung zu dem Parameter c. Folglich ist derDispersionsquotient von gemischten Poissonverteilungen genau dann minimal, wennQ eine Poissonverteilung ist.
2.3 Approximation der Gesamtschadenverteilung
In der Risikotheorie sind zahlreiche Approximationsverfahren fur die Gesamtscha-denverteilung entwickelt worden. In diesem Abschnitt stellen wir den bekanntestenAlgorithmus, das so genannte Panjer-Rekursionsverfahren, vor.Das Verfahren basiert auf der Annahme, dass die Verteilung der Schadenzahl einergewissen Rekursionsformel genugt.
Theorem 2.18 Es sei N eine Zufallsvariable auf (N0,P(N0)). Dann sind aquiva-lent:
1) N ist entweder binomial-, poisson-, negativ binomialverteilt oder P (N = 0) =1;
24

2) es existieren a, b ∈ R, so dass gilt:
P (N = k) =
(a +
b
k
)P (N = k − 1) fur alle k ∈ N . (5)
Falls die Risiken nur Werte auf einem Gitter kh : k ∈ N0 fur h > 0 annehmen, gibtder folgende Satz einen Algorithmus zur Berechnung der Gesamtschadenverteilungan.
Theorem 2.19 Es seien Xk : k ∈ N ein Portfolio unabhangiger, identisch ver-teilter Risiken mit Werten in kh : k ∈ N0 fur ein h > 0 und N eine Schadenzahl,die der Formel (5) genugt. Dann gilt fur den Gesamtschaden SN :
P (SN = 0) = GN (P (X1 = 0)) ,
P (SN = kh) =1
1− aP (X1 = 0)
k∑j=1
(a +
jb
k
)P (X1 = jh)P (SN = (k − j)h)
fur k ∈ N .
Der vorangegangene Satz erlaubt eine exakte Berechnung der Verteilung des Ge-samtschadens, falls die Risiken nur Werte in kh : k ∈ N0 fur h > 0 annehmen.Dies erscheint zunachst plausibel, da die Schaden in Euro ausgezahlt werden. Jedochwerden die Verteilungen der Risiken fast immer durch absolut stetige Verteilungenmodelliert. Fur absolut stetig verteilte Risiken erhalt man ein Naherungsverfahren,indem die Risikoverteilung durch eine diskretisierte Verteilung, d.h. eine Verteilung,die auf solch einem Gitter kh : k ∈ N konzentriert ist, approximiert wird. Dannkann die Gesamtschadenverteilung dieser diskret verteilten Risiken exakt mittels derPanjer-Rekursion berechnet werden, und es liegt nahe, dadurch eine Naherung derursprunglichen Gesamtschadenverteilung zu erwarten, falls h klein genug gewahltwurde.Bei approximativen Verfahren ist naturlich eine Abschatzung des Fehlers zwischenwahrer und approximativer Losung von erheblicher Bedeutung, jedoch ist nicht im-mer offensichtlich, wie der Fehler gemessen werden kann. In unserem Fall mussdie “Distanz” zwischen zwei Verteilungen, also Wahrscheinlichkeitsmaßen, gemes-sen werden, wofur sich mehrere Begriffe anbieten.
Definition 2.20 Fur zwei Wahrscheinlichkeitsmaße Q1, Q2 auf (R,B(R)) heißt
d∞(Q1, Q2) := supx∈R
|Q1([x,∞))−Q2([x,∞))| (6)
die Supremumsdistanz der Verteilungen Q1 und Q2.
Erfolgt die Approximation einer Wahrscheinlichkeit eines Ereignisses stets durchgroßere Werte, so kann man dies als eine “vorsichtige” oder “konservative” Annahe-rung betrachten. In unserem Fall wird tatsachlich ein solches Monotonieverhaltenauftreten, das wir als eine partielle Ordnung auf dem Raum der Wahrscheinlich-keitsmaße definieren:
25

Definition 2.21 Fur zwei Wahrscheinlichkeitsmaße Q1, Q2 auf (R,B(R)) wirdfolgende Relation definiert:
Q1 6 Q2 ⇔ Q1([x,∞)) 6 Q2([x,∞)) fur alle x ∈ R . (7)
Lemma 2.22 Die in (7) definierte Relation ist eine Partialordnung auf dem Raumder Wahrscheinlichkeitsmaße auf (R,B(R)).
Der nachfolgende Satz uber die Diskretisierung basiert auf dem folgenden einfachenLemma:
Lemma 2.23 Fur zwei Wahrscheinlichkeitsmaße Q1, Q2 auf (R,B(R)) gilt:
a) Q1 6 Q2 =⇒ Q∗k1 6 Q∗k
2 fur alle k ∈ N.
b) Q2([x,∞))−Q1([x,∞)) 6 c =⇒ Q∗k2 ([x,∞))−Q∗k
1 ([x,∞)) 6 kc
fur alle k ∈ N.
In unserem Fall basiert der Fehler der Approximation auf der Diskretisierung der zu-grunde liegenden Verteilung der Risiken. Dieser Fehler ubertragt sich auf die Distanzzwischen wahrer und approximativer Gesamtschadenverteilung. Eine quantitativeAbschatzung dieses Fehlers gelingt durch das so genannte Konzentrationsmaß, dasaber kein Maß im Sinn der Wahrscheinlichkeitstheorie ist:
Definition 2.24 Es sei Q ein Wahrscheinlichkeitsmaß auf (R,B(R)). Dann heißtfur beliebiges β > 0
D(Q, β) := supx∈R
Q([x, x + β))
das β-Konzentrationsmaß von Q.
Bemerkung 2.25 Falls Q ein absolutstetiges Maß ist, dann gilt:
limβ→0
D(Q, β) = 0.
Es seien Xk : k ∈ N ein Portfolio unabhangiger, identisch verteilter Risiken mitVerteilungen Q := PX1 und einer Schadenzahl N . Der Gesamtschaden und seineVerteilung werde mit SN sowie PSN
bezeichnet. Die Risikoverteilungen Q werdenfur beliebiges h > 0 diskretisiert mittels der Verteilung Q:
Q(0) := 0,
Q(kh) := Q([(k − 1)h, kh)) fur k ∈ N .(8)
Man erhalt Risiken Xk mit der Verteilung Q durch die folgende Definition:
Xk(ω) := kh, falls X(ω) ∈ [(k − 1)h, kh).
26

Es ist Xk : k ∈ N0 ein Portfolio unabhangiger, identisch verteilter Risiken, dieWerte auf hk : k ∈ N0 annehmen. Erfullt N die Rekursionsformel (5), so gibt Satz2.19 die exakte Verteilung PSN
des Gesamtschadens SN dieses Portfolios an. DieseVerteilung PSN
kann als Approximation der eigentlichen GesamtschadenverteilungPSN
betrachtet werden, falls Q absolutstetig ist. Eine Fehlerabschatzung gibt derfolgende Satz an:
Theorem 2.26 Fur die Gesamtschadenverteilung PSNund die Gesamtschadenver-
teilung PSNbei Diskretisierung (8) der Risikoverteilungen PX1 gilt:
d∞(PSN
, PSN
)6 E [N ] D (PX1 , h) ,
PSN6 PSN
.
Bemerkung 2.27 Wegen Bemerkung 2.25 mussen die (identischen) Risikovertei-lungen PX1 absolutstetig sein, damit in Satz 2.26 gewahrleistet ist, dass der Fehlerbei kleiner werdender Diskretisierung, d.h. h → 0, kleiner wird.Um auch tatsachlich die Gesamtschadenverteilung PSN
mittels Satz 2.19 berechnenzu konnen, muss die Schadenzahl N der Rekursionsformel (5) genugen.
2.4 Approximation des individuellen Modells
Das individuelle Modell spiegelt die Realitat bei Einbeziehung von Bestandsdaten,also z.B. den Verteilungen der Einzelrisiken, besser wider als das kollektive Modell.Hierbei kann jedoch nicht von identisch verteilten Risiken ausgegangen werden, dennin die Modellierung jedes Risikos fließen moglichst viele individuelle Merkmale ein.Doch bei nicht identisch verteilten Risiken ist die Bestimmung der Verteilung desGesamtschadens Sn oft nicht moglich. Jedoch zeigen wir im Folgenden, dass dieVerteilung von Sn durch die Verteilung einer Zufallsvariablen SN approximiert wer-den, die den Gesamtschaden eines Portfolios im kollektiven Modell beschreibt. Daletzterem eine poissonverteilte Schadenzahl N zugrunde liegt, ermoglicht die Panjer-Rekursion eine exakte bzw. naherungsweise Angabe der Verteilung von SN und da-mit schließlich auch eine Approximation der Verteilung von Sn. Dieses Resultat, derNaherung der “exakten” Gesamtschadenverteilung durch die Gesamtschadenvertei-lung im kollektiven Modell, ist einer der Grunde fur die fundamentale Bedeutungdes kollektiven Modells (bei poissonverteilter Schadenzahl) in der Risikotheorie.
Definition 2.28 Fur Wahrscheinlichkeitsmaße Q1, Q2 auf (R, B(R)) heißt
dTV (Q1, Q2) := supB∈B(R)
|Q1(B)−Q2(B)|
Totalvariationsabstand von Q1 und Q2.
Der Totalvariationsabstand definiert durch die Abbildung
(Q1, Q2) 7→ dTV (Q1, Q2)
eine Metrik auf dem Raum der Wahrscheinlichkeitsmaße.
27

Beispiel 2.29
a) Fur Punktmaße Q1 =∑m
j=1 αjδxjund Q2 =
∑mj=1 βjδxj
mit αj, βj ∈ R+,xj ∈ R gilt:
dTV (Q1, Q2) =m∑
j=1
|αj − βj| .
b) Fur Maße Q1 und Q2 mit Dichten f1 und f2 gilt:
dTV (Q1, Q2) =
∫
R|f1(s)− f2(s)| ds.
In den folgenden zwei Lemmata halten wir einige einfache Eigenschaften des Total-variationsabstands fest.
Lemma 2.30 Fur zwei Wahrscheinlichkeitsmaße Q1 und Q2 auf (R,B(R)) gilt:
dTV (Q1, Q2) = supB∈B(R)
Q1(B)−Q2(B)
Lemma 2.31 Fur Wahrscheinlichkeitsmaße P1, . . . , Pn und Q1, . . . , Qn auf(R, B(R)) gilt:
dTV (P1 ∗ · · · ∗ Pn, Q1 ∗ · · · ∗Qn) 6 dTV (P1, Q1) + · · ·+ dTV (Pn, Qn).
Es sei X1, . . . , Xn ein Portfolio von unabhangigen, aber nicht notwendigerweiseidentisch verteilten Risiken, dessen Gesamtschaden Sn durch das individuelle Modellbeschrieben werde. Die in diesem Abschnitt vorgestellte Approximation der Gesamt-schadenverteilung PSn basiert auf der Idee, die Verteilung PXk
jedes Risikos Xk durcheine Verteilung Rk der Form (4) zu approximieren. Der Fehler dieser Approximationwird abgeschatzt durch den Totalvariationsabstand.
Theorem 2.32 Es sei X1, . . . , Xn ein Portfolio von unabhangigen Risiken Xk
mit Verteilungen
P (Xk ∈ B) = (1− qk)δ0(B) + qkQk(B) fur B ∈ B(R),
fur Verteilungen Qk und qk ∈ (0, 1) sowie mit Gesamtschaden Sn = X1 + · · ·+ Xn.Sind Z1, . . . , Zn unabhangige Zufallsvariablen mit den Verteilungen
PZk=
∞∑j=0
qjk
j!e−qkQ∗j
k ,
so gilt fur die Verteilungen von Sn und Tn :=n∑
j=1
Zj:
dTV (PSn , PTn) 6n∑
j=1
q2j .
28

Satz 2.32 erlaubt nun eine Naherung der Gesamtschadenverteilung im individuel-len Modell durch die Gesamtschadenverteilung in einem kollektiven Modell. Hierzuwird die Verteilung von Tn mittels Satz 2.11 identifiziert als eine zusammengesetzteSummenverteilung von identisch verteilten Risiken.
Korollar 2.33 Es sei X1, . . . , Xn ein Portfolio von unabhangigen Risiken Xk mitVerteilungen
P (Xk ∈ B) = (1− qk)δ0(B) + qkQk(B) fur B ∈ B(R)
fur Verteilungen Qk und qk ∈ (0, 1) sowie mit Gesamtschaden Sn = X1 + . . . Xn.Desweiteren seien Yk : k ∈ N ein Portfolio von unabhangigen, identisch verteiltenRisiken mit der Verteilung
PYk=
n∑j=1
qj
λPXj
, wobei λ :=n∑
j=1
qj,
und N eine Schadenzahl, die poissonverteilt ist zum Parameter λ, sowie
SN :=
∑Nj=1 Yj, falls N > 0,
0, falls N = 0.
Dann gilt fur die Verteilungen von Sn und SN :
dTV (PSn , PSN) 6
n∑
k=1
q2k.
2.5 Schadenhohenverteilungen
Bei der Diskussion moglicher Verteilungen des Gesamtschadens in Abschnitt 1.2erwahnten wir bereits, dass die meisten Schaden nur von einer geringen Hohe sind.Jedoch gerade die wenigen, aber sehr kostenintensiven Schaden sind oft fur ein Ver-sicherungsunternehmen relevant, da diese einen wesentlichen Anteil am Gesamtscha-den haben, z.B. mehr als 80%.Treten Schaden X extremer Hohe, so genannte Großschaden, mit einer nicht zuvernachlassigen Wahrscheinlichkeit auf, so konvergiert die Tailwahrscheinlichkeit
P (X > x)
nicht “zu schnell” gegen 0 fur wachsende Argumente x. In der Literatur gibt eskeine einheitliche Definition solcher Verteilungen, wenn auch die Unterschiede nurmarginal sind.
Definition 2.34 Eine Verteilung Q auf (R+,B(R+)) ist heavy-tailed, falls gilt:∫
R+
esx Q(dx) = ∞ fur alle s > 0.
29

Beispiel 2.35 Die Lognormalverteilung LN(θ, σ2) ist heavy-tailed.
Zunachst betrachten wir Verteilungen, die nicht heavy-tailed sind.
Lemma 2.36 Es sei Q eine Verteilung mit Verteilungsfunktion F . Dann sind aqui-valent:
1) es existieren s0, b > 0, so dass gilt:
1− F (x) 6 be−s0x fur alle x > 0;
2) es existiert s0 > 0, so dass gilt:∫
R+
esx Q(dx) < ∞ fur alle s 6 s0.
Beispiel 2.37
1) Die Normalverteilung ist nicht heavy-tailed.
2) Die Gammaverteilung Γ(α, β) ist nicht heavy-tailed.
3) Die Inverse-Gauss-Verteilung IG(µ, λ) ist nicht heavy-tailed.
Bemerkung 2.38
1. In Abschnitt 1.2 modellierten wir die Risikoverteilungen mittels der Gamma-und Inverse-Gauss-Verteilung, obwohl diese nicht heavy-tailed sind. Dies kanntrotzdem sinnvoll sein, wenn z.B. keine Schaden extremer Hohe zu erwartensind oder wenn bei der Modellierung andere Aspekte im Vordergrund stehen.Siehe hierzu [14, S. 92f]. Die ebenfalls in Abschnitt 1.2 vorgestellte Lognormal-verteilung ist heavy-tailed, modelliert also realistisch auch das Vorliegen vonGroßschaden.
2. Fur eine heavy-tailed Verteilung Q mit Verteilungsfunktion F gilt:
lim supx→∞
esx(1− F (x)) = ∞
fur jedes s > 0.
Eine hinreichende Bedingung fur eine Verteilung, um heavy-tailed zu sein, gibt dasnachfolgende Lemma an.
Lemma 2.39 Es sei Q eine Verteilung auf (R+,B(R+)) mit VerteilungsfunktionF . Falls
lim supx→∞
− ln(1− F (x))
x= 0
gilt, dann ist Q heavy-tailed.
30

Beispiel 2.40 Die Weibullverteilung W(r, c) zu den Parametern r, c > 0 besitztdie Dichte
f(s) :=
rcsr−1e−csr
, fur s > 0,
0, fur s 6 0.
Die Weibullverteilung ist fur r < 1 heavy-tailed.
Eine wichtige Klasse von heavy-tailed Verteilungen sind die so genannten subexpo-nentiellen Verteilungen.
Definition 2.41 Eine Verteilung Q auf (R+,B(R+)) mit Verteilungsfunktion Fheißt subexponentielle Verteilung, falls gilt:
limx→∞
1− (F ∗ F )(x)
1− F (x)= 2. (9)
Beispiel 2.42 Die Paretoverteilung P(α, c) zu den Parametern α, c > 0 besitzt dieDichte
f(s) :=
αc
(cs
)α+1, fur s > c,
0, fur s 6 c.
Die Paretoverteilung ist subexponentiell.
Am Ende dieses Abschnittes werden wir aufzeigen, dass die Bedingung (9) ein be-stimmtes asymptotisches Verhalten von Zufallsvariablen mit einer subexponentiellenVerteilung charakterisiert. Dies ist der eigentliche Kern der Definition von subexpo-nentiellen Verteilungen. Die folgende Bemerkung erklart zumindest, dass der Wert“2” in der Definition nicht willkurlich ist.
Bemerkung 2.43 Fur jede Verteilungsfunktion F gilt:
lim infx→∞
1− (F ∗ F )(x)
1− F (x)> 2.
Der Nachweis, dass jede subexponentielle Verteilung heavy-tailed ist, basiert aufdem folgenden Lemma.
Lemma 2.44 Es sei Q eine subexponentielle Verteilung auf (R+,B(R+)) mit Ver-teilungsfunktion F . Dann gilt
limx→∞
1− F (x− y)
1− F (x)= 1 fur alle y > 0.
Theorem 2.45 Jede subexponentielle Verteilung auf (R+,B(R+)) ist heavy-tailed.
31

Das folgende Resultat erklart, dass die Bedeutung der Definition von subexponenti-ellen Verteilungen nicht in der Ziffer “2” liegt, sondern in dem Verhaltnis zwischenPotenz und Faltung der Verteilungsfunktionen. Hier heraus ergibt sich dann unmit-telbar die Eigenschaft einer subexponentiellen Verteilung, die durch die Definitioncharakterisiert wird.
Theorem 2.46 Es sei Q eine Verteilung auf (R+, B(R+)) mit VerteilungsfunktionF . Dann sind aquivalent:
1) Q ist subexponentiell;
2) limx→∞
1− F ∗n(x)
1− F (x)= n fur alle n > 2.
Es seien Q eine subexponentielle Verteilung auf (R,B(R)) und X1, . . . , Xn un-abhangige Zufallsvariablen mit der Verteilung Q. Dann folgt aus Satz 2.46:
1 = limx→∞
1− F ∗n(x)
n(1− F (x))= lim
x→∞1− F ∗n(x)∑n−1
k=0 (F (x))k (1− F (x))= lim
x→∞1− F ∗n(x)
1− (F (x))n
fur n > 2. Aufgrund der Unabhangigkeit und der identischen Verteilung fur dieZufallsvariablen gilt:
P (X1 + · · ·+ Xn > x) = 1− F ∗n(x)
P (maxX1, . . . , Xn > x) = 1− (F (x))n
und damit erhalt man:
limx→∞
P (X1 + · · ·+ Xn > x)
P (maxX1, . . . , Xn > x)= 1. (10)
Das bedeutet, dass bei subexponentiellverteilten Zufallsvariablen die Tailwahrschein-lichkeit der Summe der Zufallsvariablen bestimmt wird durch die Tailwahrschein-lichkeit des Maximums der Zufallsvariablen.
Bemerkung 2.47 Sind X1, . . . , Xn die Risiken eines Portfolios, so bedeutet (10)gerade, dass sich die Tailwahrscheinlichkeit des Gesamtschadens asymptotisch wiedie Tailwahrscheinlichkeit des maximalen Schadens verhalt.
Wir betrachten jetzt die Verteilung des Gesamtschaden im kollektiven Modell beisubexponentiellverteilten Risiken. Zur Vereinfachung der Notationen benutzen wirdas so genannte Landausymbol fur Funktionen f , g : R→ R:
f = o(g) ⇐⇒ limt→∞
f(t)
g(t)= 0.
32

Theorem 2.48 Es seien Xk : k ∈ N ein Portefeuillo von unabhangigen Ri-siken, die identisch gemaß einer subexponentiellen Verteilung verteilt sind und Neine Schadenzahl mit
∞∑
k=0
P (N = k)(1 + ε)k < ∞
fur ein ε > 0. Dann gilt fur die Verteilung des Gesamtschadens:
P (SN > x) = E [N ] P (X1 > x)(1 + o(1)) fur x →∞.
Die Aussage des Satzes 2.48 besagt, dass die Tailwahrscheinlichkeit des Gesamtscha-dens durch E [N ] P (X1 > x) approximiert werden kann, wobei der relative Fehlerfur wachsendes x gegen Null konvergiert.
Empirische Methoden zur Erkennung von Verteilungen mit heavy-tails
Die Kenntnis, ob die Verteilung der Risiken eines Portfolios heavy tails besitzt, istfur Versicherungsunternehmen zur Vermeidung des Ruins von großer Bedeutung. Inder Praxis basiert diese Einschatzung auf den beobachteten Daten der vergangenenJahre. Im folgenden soll ein einfaches Verfahren vorgestellt werden.
Definition 2.49 Es sei X ein Risiko mit Verteilungsfunktion F . Die Funktion
H : R+ → R+, H(x) := − log(1− F (x))
heißt Hazard-Funktion von X.
Definition 2.50 Es sei X ein Risiko.
(a) Falls X ein diskretverteiltes Risiko ist, dann heißt
h : N0 → [0, 1], h(k) := P (X 6 k|X > k − 1)
die Hazard-Rate von X.
(b) Falls X ein stetigverteiltes Risiko mit Dichte f und Verteilungsfunktion F ist,dann heißt
h : I → R+ h(x) :=f(x)
1− F (x), I := y ∈ R : F (y) < 1,
die Hazard-Rate von X.
33

Bemerkung 2.51 Bei stetig verteiltem Risiko X gilt:
P (X 6 x + y |X > y) ≈ xh(y)
fur kleine x.
Bemerkung 2.52 Falls X geometrisch verteilt ist, dann gilt:
P (X 6 k + m |X > m) = P (X 6 k) fur alle k, m ∈ N0 .
Falls X zum Parameter λ > 0 exponentialverteilt ist, dann gilt
P (X 6 x + y |X > y) = P (X 6 x) fur alle x, y > 0.
Diese Eigenschaft dieser beiden Verteilungen wird Gedachtnislosigkeit genannt.
Beispiel 2.53
1. Bei Lebensversicherung modelliert X die Lebensdauer eines Versicherungsneh-mers in Jahren. Dann gibt die Hazard-Rate h(k) die Sterbewahrscheinlichkeitim Alter von k Jahren an, falls bereits das Alter von k Jahren (am Beginneines Beobachtungszeitraumes) erreicht wurde.
2. Bei Feuerversicherung bezeichnet X die Dauer eines Feuers. Dann ist xh(y)fur kleine x die Wahrscheinlichkeit, das Feuer nach der Zeit x unter Kontrollezu haben, falls es bereits y lang gebrannt hat. Die Hazard-Rate wird extinctionrate bezeichnet.
3. In der Zuverlassigkeitstheorie wird durch X die Funktionsdauer z.B. einerMaschine modelliert. Die Hazard-Rate wird Fehlerrate genannt.
Definition 2.54 Es sei X ein Risiko mit Verteilungsfunktion F und F (0) = 0. DieFunktion
eF : I → R+, eF (x) :=1
1− F (x)
∫ ∞
x
(1− F (y)) dy, I := y ∈ R : F (y) < 1,
heißt mittlere Rest-Hazard-Funktion von X.
Bemerkung 2.55
1. Die mittlere Rest-Hazard-Funktion und die Verteilungsfunktion sind durch diejeweils andere Funktion eindeutig bestimmt.
2. Die sogenannte Rest-Hazard-Funktion Ft eines Risikos X mit Verteilungsfunk-tion F ist definiert durch
Ft : R→ [0, 1], Ft(x) := P (X 6 t + x |X > t)
34

fur t > 0.
Die Rest-Hazard-Funktion Ft definiert eine Verteilungsfunktion. Fur den Er-wartungswert von Ft erhalt man
eF (t) = E[X − t |X > t].
Die mittlere Rest-Hazard-Funktion eF (t) kann als der Erwartungswert desRisikos X, das bereits den Wert t uberschritten hat, interpretiert werden.
Theorem 2.56 Es sei F eine Verteilungsfunktion mit einer Dichte f und F (0) = 0,deren erstes Moment existiert. Falls eF (x) →∞ fur x →∞, dann besitzt die zu Fgehorende Verteilung heavy tails.
Es seien X1, . . . , Xn unabhangige, identischverteilte Zufallsvariablen mit Verteilungs-funktion F . Die Funktion
Fn : R→ [0, 1], Fn(x) :=1
n
n∑
k=1
1(−∞,x](Xk)
heißt empirische Verteilungsfunktion zu X1, . . . , Xn.Nach dem starken Gesetz der großen Zahlen gilt
limn→∞
Fn(x) = F (x) P -f.s.
fur alle x ∈ R. Nach dem Satz von Glivenko-Cantelli gilt sogar:
limn→∞
supx∈R
|Fn(x)− F (x)| = 0 P -f.s.
Satz 2.56 legt folgende Methode nahe, aufgrund einer Beobachtung x1, . . . , xn derRisiken X1, . . . , Xn zu entscheiden, ob die Verteilung F heavy tails besitzt:
1.) Schatzung der mittleren Rest-Hazard-Funktion mittels
eFn(x) :=1
1− Fn(x)
∫ ∞
x
(1− Fn(y)) dy.
2.) Vergleich des asymptotischen Verhaltens von eFn mit dem Verhalten von eG
einer bekannten Verteilungsfunktion G. Ublicherweise wird G als die Vertei-lungsfunktion der Exponentialverteilung gewahlt.
Bei der hier vorgestellten Methode aufgrund der mittleren Rest-Hazard-Funktionauf das Vorliegen einer heavy-tailed Verteilung zu schließen, erfordert eine gewisseUmsicht.Da gerade wenige Beobachtungen der Risiken mit großen Werten x vorlie-gen, hangt das asymptotische Verhalten von eFn(x) stark von diesen wenigen Datenab.Es gibt noch zahlreiche andere Verfahren, um auf das Vorliegen einer heavy-tailedVerteilung zu schließen., wie z.B. QQ-Plots.
35

3 Risikoprozesse
In den vorangegangenen Abschnitten modellierten wir den Gesamtschaden einesPortfolios in einer bestimmten Zeitperiode, z.B. einem Jahr. In diesem Abschnittinteressieren wir uns fur die Wahrscheinlichkeit, dass der Gesamtschaden eines Versi-cherungsunternehmens die Einnahmen, z.B. monatlich gezahlte Pramien, ubertrifft.Da diese Ruinsituation nicht nur am Ende einer Beobachtungsperiode geschehenkann, fuhren wir noch eine zeitliche Komponente t ein, um die Anzahl der Schadenbis zum Zeitpunkt t modellieren zu konnen.
Definition 3.1 Es seien W1,W2, . . . positive Zufallsvariablen und
N(t) :=∞∑
k=1
1Tk6t fur t > 0 und Tk := W1 + · · ·+ Wk.
Dann heißt (N(t) : t > 0) Schadenzahlprozess und die Zufallsvariablen Wk Warte-zeiten.
Bemerkung 3.2 Der Prozess (N(t) : t > 0) heißt auch Sprung- oder Zahlprozess.
Ist Xk : k ∈ N ein Portfolio und gibt N(t) die Schadenzahl in diesem Portfoliozur Zeit t an, so wird der Gesamtschaden modelliert durch:
SN(t) :=
∑N(t)k=1 Xk, falls N(t) > 0,
0, falls N(t) = 0.
Wie zuvor in Kapitel 2 nehmen wir an:
• Endlichkeit der Streuung VarXk;
• die Zufallsvariablen N(t) fur alle t > 0 und X1, X2, . . . sind auf demselbenWahrscheinlichkeitsraum (Ω, A , P ) definiert;
• X1, X2, . . . und N(t) sind fur jedes t > 0 unabhangig;
• X1, X2, . . . sind unabhangig und identisch verteilt.
Fur festes t > 0 ubertragen sich die Aussagen aus Kapitel 2, z.B. Satz 2.4 lautet:
Theorem 3.3 Es seien Xk : k ∈ N ein Portfolio unabhangiger, identisch ver-teilter Risiken und (N(t) : t > 0) ein Schadenzahlprozess.
a) Falls die jeweiligen Momente existieren, dann gilt fur jedes t > 0:
E[SN(t)
]= E [N(t)] E [X1] ,
VarSN(t) = (VarN(t))(E [X1])2 + (E [N(t)])(VarX1).
b) Bezeichnet GN(t) die erzeugende Funktion von N(t) und LX1 und LSN(t)die
jeweiligen Laplace-Transformierten, dann gilt fur jedes t > 0:
LSN(t)(u) = GN(t) (LX1(u)) fur alle u > 0.
36

3.1 Verteilungen fur den Schadenzahlprozess
Bei Modellierung des Gesamtschadens in einem festen Zeitraum haben wir die Scha-denzahl unter anderem durch eine poissonverteilte Zufallsvariable modelliert. InAnalogie betrachten wir jetzt mit dem zusatzlichen zeitlichen Aspekt einen soge-nannten Poissonprozess.
Definition 3.4 Es seien W1,W2, . . . unabhangige Zufallsvariablen, die identisch ex-ponentialverteilt zu einem Parameter λ > 0 sind. Definiert man
N(t) :=∞∑
k=1
1Tk6t fur t > 0 und Tk := W1 + · · ·+ Wk,
dann heißt (N(t) : t > 0) (homogener) Poissonprozess mit Intensitat λ.
Es gibt zahlreiche aquivalente Charakterisierung von Poissonprozessen, von denenwir einige in dem folgenden Resultat auffuhren.
Theorem 3.5 Es sei N = (N(t) : t > 0) ein Zahlprozess. Dann sind aquivalent:
a) der Prozess N ist ein Poissonprozess mit Intensitat λ > 0;
b) der Prozess N besitzt folgende Eigenschaften:
i) N(t) ist fur jedes t > 0 poissonverteilt zum Parameter λt > 0;
ii) unabhangige Zuwachse:fur alle 0 6 t0 < t1 < · · · < tn und n ∈ N sind die Zuwachse
N(tt1)−N(t0), N(tt2)−N(tt1), . . . , N(tn)−N(tn−1)
unabhangig;
iii) stationare Zuwachse:fur alle 0 6 t0 < t1 < · · · < tn, n ∈ N und fur alle h > 0 hangen dieVerteilungen von
N(t1 + h)−N(t0 + h), . . . , N(tn + h)−N(tn−1 + h)
nicht von h ab.
c) Der Prozess N besitzt unabhangige, stationare Zuwachse und es gilt fur allet > 0:
P (N(t + h)−N(t) = 1) = λh + o(h) fur h 0;
P (N(t + h)−N(t) > 1) = o(h) fur h 0.
37

Bemerkung 3.6 Besitzt N = (N(t) : t > 0) unabhangige Zuwachse und ist furalle t > 0 die Verteilung von
N(t + h)−N(t)
unabhangig von t, so besitzt N auch stationare Zuwachse.
Definition 3.7 Ist Xk : k ∈ N ein Portfolio unabhangiger, identisch verteilterRisiken und (N(t) : t > 0) ein Poissonprozess, der unabhangig von X1, X2, . . . ist,und wird der Gesamtschaden zur Zeit t > 0 modelliert durch
SN(t) :=
∑N(t)k=1 Xk, falls N(t) > 0,
0, falls N(t) = 0,
so heißt dieses Modell Cramer-Lundberg-Modell.
In der Praxis sind Aussagen uber das dynamische Verhalten des Prozesses (SN(t) :t > 0) von Bedeutung. Nach Satz 2.3 ist die Verteilung von SN(t) fur jedes t > 0eindeutig bestimmt durch die Intensitat λ des Poissonprozesses und der Verteilungvon X1. Da wir im Folgenden meist nur an Aussagen uber die Verteilung von SN(t)
interessiert sind –und dabei diese als die Verteilung des Gesamtschadens in einemCramer-Lundberg-Modell vor Augen haben– ist folgende Definition zweckmaßig:
Definition 3.8 Es seien Xk : k ∈ N unabhangige, identisch verteilte Risikenund (N(t) : t > 0) ein Poissonprozess mit Intensitat λ > 0. Definiert man
SN(t) :=
∑N(t)k=1 Xk, falls N(t) > 0,
0, falls N(t) = 0,
so heißt (SN(t) : t > 0) zusammengesetzter Poissonprozess (compound Poisson pro-cess) mit Charakteristik (λ, FX1).
Bemerkung 3.9 Die zeitlich abhangige Schadenzahl eines Portfolios kann durchzahlreiche andere Prozesse als ein Poissonprozess modelliert werden, jedoch be-schranken wir uns in diesem Abschnitt auf diesen.
3.2 Ruinwahrscheinlichkeiten im Cramer-Lundberg-Modell
3.2.1 Ruinwahrscheinlichkeiten
Die Bilanz eines Versicherungsunternehmens zum Zeitpunkt t setzt sich zusammenaus dem Gesamtschaden SN(t) als Verlust und den bezahlten Versicherungspramienp(t) als Einnahmen. Es addiert sich noch ein Startkapital u > 0 dazu, mit dem dasUnternehmen zur Zeit t = 0 beginnt. Dies resultiert in der folgenden Definition:
38

Definition 3.10 Es seien Xk : k ∈ N ein Portfolio und (N(t) : t > 0) einSchadenzahlprozess. Definiert man fur eine Konstante u > 0 und eine monotonwachsende Funktion p : R+ → R+ mit p(0) = 0
R(t) := u + p(t)− SN(t), t > 0,
so heißt R = (R(t) : t > 0) Risikoprozess mit Anfangsrisikoreserve u. Falls p(t) = βtfur eine Konstante β > 0 gilt, dann heißt R klassischer Risikoprozess.
Der Ruin des Versicherungsunternehmens tritt ein, falls die Liquiditaten aufgebrachtsind, das heißt, falls R(t) < 0 fur ein t > 0. Naturlich ist das Versicherungsunterneh-men interessiert daran, die Wahrscheinlichkeit fur das Eintreten dieses Ereignissesmoglichst gering zu halten. Um dies zu realisieren, kann das Versicherungsunter-nehmen entweder die Pramien p(t) erhohen oder mit einem hoheren Startkapitalbeginnen. Den Einfluß der Pramien auf die Wahrscheinlichkeit des Ruins betrach-ten wir in Kapitel 4. In diesem Abschnitt sind wir interessiert an dem Verlauf desProzesses R in Abhangigkeit von dem Startkapital u.
Definition 3.11 Es sei (R(t) : t > 0) ein Risikoprozess mit Anfangsrisikoreserveu := R(0) > 0. Dann heißt
a) τ(u) := inft > 0 : R(t) < 0 Ruinzeit (des Risikoprozesses R);
b) ψ(u) := P (τ(u) < ∞) Ruinwahrscheinlichkeit (des Risikoprozesses R);
c) ϕ(u) := 1− ψ(u) Uberlebenswahrscheinlichkeit (des Risikoprozesses R).
Die (zufallige) Ruinzeit τ(u) muss keine endlichen Werte annehmen. Aus Ergebnis-sen in der Theorie von stochastischen Prozessen folgt, dass τ(u) eine Zufallsvariableist, also (F -B(R))-messbar ist.Man spricht auch von Ruinwahrscheinlichkeit in unendlicher Zeit (infinite-horizonruin), da gilt:
τ(u) < ∞ = inft>0
R(t) < 0 =⋃t>0
R(t) < 0 = R(t) < 0 fur ein t > 0
und das letzte Ereignis sich als das des Eintretens des Ruins in einer beliebig langenZeitspanne interpretieren lasst.
Lemma 3.12 Im Cramer-Lundberg-Modell gilt fur die Ruinwahrscheinlichkeit desklassischen Risikoprozesses fur alle u > 0:
ψ(u) = P
(supn∈N
Yn > u
)mit Yn :=
n∑
k=1
(Xk − βWk).
39

Lemma 3.12 erlaubt eine einfache Herleitung einer notwendigen Bedingung dafur,dass der Ruin nicht mit Wahrscheinlichkeit 1 eintritt. Denn nach dem starken Gesetzder großen Zahlen gilt:
limn→∞
1
nYn = E [X1]− βE [W1] P-f.s.
Falls also EX1 − βEW1 > 0 gilt, dann konvergiert Yn P-f.s. gegen ∞ und gemaßLemma 3.12 tritt der Ruin P-f.s. ein.Mittels Resultaten uber “zufallige Irrfahrten” lasst sich auch im Fall EX1−βEW1 =0 nachweisen, dass der Ruin P-f.s. eintritt. Fur ein Versicherungsunternehmen be-steht nur dann die Gelegenheit, die Ruinwahrscheinlichkeit zu verringern, fallsE [X1]−βE [W1] < 0 gilt. Diese Bedingung hat in der Literatur einen eigenen Namen:
Definition 3.13 Der klassische Risikoprozess im Cramer-Lundberg-Modell erfulltdie Nettoprofitbedingung, falls gilt:
E [X1 − βW1] < 0.
Definition 3.14 Im Cramer-Lundberg-Modell mit einem klassischen Risikoprozessheißt der Wert
ρ :=β
λµ− 1 :=
βE [W1]
E [X1]− 1
Sicherheitszuschlag (safety loading).
Bemerkung 3.15 Die Nettoprofitbedingung ist genau dann erfullt, wenn der Si-cherheitszuschlag postiv ist.
3.2.2 Abschatzung der Ruinwahrscheinlichkeit im Cramer’schen Fall
Definition 3.16 Im Cramer-Lundberg-Modell wird eine Konstante r > 0 Cramer-Lundberg-Koeffizient oder Anpassungskoeffizient genannt, falls gilt
E [exp(r(X1 − βW1))] = 1. (11)
Bemerkung 3.17
1) Falls die Nettoprofitbedingung erfullt ist, kann keine Konstante r < 0 existie-ren, die der Gleichung (11) genugt.
2) Offensichtlich ist in Definition 3.16 implizit gefordert, dass gilt:
∫ ∞
0
ery(1− FX1(y)) dy < ∞.
40

Dies ist aquivalent dazu, dass das exponentielle Moment E [exp(rX1)] des Ri-sikos X1 existiert und endlich ist. Aus der Markov-Ungleichung folgt:
P (X1 > x) = P (exp(rX1) > exp(rx))) 6 E [exp(rX1)] e−rx
fur alle x > 0. Die Existenz des Cramer-Lundberg-Koeffizienten schließt des-halb heavy-tailed Verteilungen der Risiken aus.
3) Nur in wenigen Fallen kann der Lundberg-Koeffizient explizit bestimmt wer-den. Es existieren aber verschiedene numerische, statistische oder graphischeVerfahren, um eine Naherung zu erhalten, siehe [18, S. 182].
Theorem 3.18 (Cramer-Lundberg-Ungleichung) Falls die Nettoprofitbedingung er-fullt ist und der Cramer-Lundberg-Koeffizient r > 0 existiert, dann gilt fur die Ruin-wahrscheinlichkeit:
ψ(u) 6 e−ru fur alle u > 0.
Beispiel 3.19 Wir betrachten zwei Portfolios Xk : k ∈ N und Yk : k ∈ N vonunabhangigen, identisch verteilten Risiken mit
P (Xk = 100) = p1, P (Xk = 0) = 1− p1, fur p1 :=1
100,
P (Yk = 10000) = p2, P (Yk = 0) = 1− p2, fur p2 :=1
10000,
Der Schadenzahlprozess (N(t) : t > 0) sei ein Poissonprozess mit Intensitat 1. AlsSicherheitszuschlag erhalt man ρ = β−1, weshalb die Pramie β großer als 1 gewahltwerden muss. Man erahlt
E[er(X1−βW1)
]= p1E
[er(X1−βW1)|X1 = 100
]+ (1− p1)E
[er(X1−βW1)|X1 = 0
]
= (p1e100r + 1− p1)
1
1 + rβ
und analog
E[er(Y1−βW1)
]= (p2e
10000r + 1− p1)1
1 + rβ
Aus diesen Gleichungen lasst sich numerisch r > 0 bei vorgegebenem β > 1 gemaßfolgender Tabellen bestimmen.
41

1. Portfolio (s1 = 100):
β 1.1 1.5
r 1.877 · 10−3 7.627 · 10−3
u 2823 695
2. Portfolio (s1 = 10000):
β 1.1 1.5
r 2.047 · 10−5 7.676 · 10−5
u 2.588 · 105 0.6903 · 105
3.2.3 Eine Integralgleichung
Ausgangspunkt fur die folgenden asymptotischen Betrachtungen der Ruinwahrschein-lichkeit ist eine Integralgleichung, die von der Funktion u 7→ ϕ(u) erfullt wird. DiesesResultat erfordert nicht die Existenz des Anpassungskoeffizienten.
Theorem 3.20 Im Cramer-Lundberg-Modell erfullt die Uberlebenswahrscheinlich-keit ϕ des klassischen Risikoprozesses die folgende Integralgleichung:
ϕ(u) = ϕ(0) +λ
β
∫ u
0
ϕ(u− x)(1− FX1(x)) dx fur alle u > 0.
Lemma 3.21 Im Cramer-Lundberg-Modell sei die Nettoprofitbedingung erfullt. Danngilt fur die Uberlebenswahrscheinlichkeit ϕ des klassischen Risikoprozesses:
ϕ : R+ → R+, ist monoton wachsend und
ϕ(0) =ρ
1 + ρ, lim
u→∞ϕ(u) = 1,
wobei ρ der Sicherheitszuschlag ρ = βλµ− 1 ist.
Definition 3.22 Es sei F eine Verteilungsfunktion mit F (0−) = 0, deren Erwar-tungswert mF > 0 existiert. Dann heißt die Funktion
F I : R+ → [0, 1], F I(x) :=
1
mF
∫ x
0(1− FX1(u)) (du), falls x > 0,
0, falls x < 0,
integrierte Tailverteilungsfunktion von F .
Bemerkung 3.23
1) F I ist eine Verteilungsfunktion.
42

2) Wir werden die integrierte Tailverteilungsfunktion der Risikoverteilung einesPortfolios Xk : k ∈ N betrachten, d.h.
F IX1
: R+ → [0, 1], F IX1
(x) :=1
EX1
∫ x
0
(1− FX1(u)) (du),
wobei FX1 die Verteilungsfunktion von PX1 bezeichnet.
Zusammen mit Lemma 3.21 kann mittels der integrierten TailverteilungsfunktionF I
X1die Integralgleichung in Satz 3.20 auf folgender Weise dargestellt werden:
ϕ(u) =ρ
1 + ρ+
1
1 + ρ
∫
[0,u]
ϕ(u− y) F IX1
(dy) fur alle u > 0.
Setzt man diese Gleichung in ψ(u) = 1− ϕ(u) ein, so erhalt man
ψ(u) =1
1 + ρ(1− F I
X1(u)) +
1
1 + ρ
∫
[0,u]
ψ(u− y) F IX1
(dy) fur u > 0. (12)
Diese Art von Integralgleichungen nennt man Volterra Integralgleichungen oder Er-neuerungsgleichungen. Der erste Begriff stammt aus dem Bereich der Theorie vonIntegralgleichungen, siehe z.B. [10], letzterer Begriff ist in der Risikotheorie ublich,siehe z.B. [1]. In dem folgenden Abschnitt betrachten wir diese Integralgleichungenkurz.
3.2.4 Erneuerungsgleichungen
Definition 3.24 Es seien f : R+ → R eine Funktion und µ ein Borel-Maß auf(R+,B(R+)). Dann heißt die Integralgleichung
z(t) =
∫
[0,t]
z(t− s) µ(ds) + f(t) fur alle t > 0, (13)
Erneuerungsgleichung.Falls µ(R+) < 1 gilt, so heißt die Erneuerungsgleichung defekt, falls µ(R+) = 1gewohnlich und falls µ(R+) > 1 exzessiv.Eine Funktion x : R+ → R, die der Gleichung (13) fur alle t > 0 genugt, heißtLosung der Erneuerungsgleichung.
Gleichungen der Form (13) werden auch als Faltungsintegralgleichungen bezeichnet.Im allgemeinen werden Maße µ zugelassen, die sowohl negative wie auch positiveWerte annehmen konnen, (signierte Maße).
Theorem 3.25 Es sei f : R+ → R eine lokal-beschrankte, messbare Funktion undµ ein lokal-endliches Borel-Maß. Dann existiert eine eindeutige, lokal-beschrankteLosung x : R+ → R von (13).
43

Beweis: Siehe [10, Theorem 2.3.5]. 2
In dem folgenden Lemma zitieren wir eines der wichtigsten Resultate der Erneue-rungstheorie.
Lemma 3.26 (Smith’ key renewal Lemma)Es seien f1 : R+ → (0,∞) eine monoton wachsende Funktion und f2 : R+ → R+
eine monoton fallende Funktion, so dass
∫ ∞
0
f1(s)f2(s) ds < ∞
und
lim suph→0
f1(u1 + u2)
f1(u1): u1 > 0, u2 ∈ [0, h]
= 1.
Falls f(u) = f1(u)f2(u) und µ ein Wahrscheinlichkeitsmaß ist, dann gilt fur dieLosung x der Integralgleichung (13):
limu→∞
x(u) =
1
mµ
∫∞0
f(u) du, falls mµ < ∞,
0, sonst,
wobei mµ der Erwartungswert der Verteilung µ bezeichnet.
Beweis: Siehe [18, Lemma 5.4.2]. 2
3.2.5 Asymptotik der Ruinwahrscheinlichkeiten im Cramer’schen Fall
Gemaß (12) erfullt die Ruinwahrscheinlichkeit ψ eine Erneuerungsgleichung, die je-doch defekt ist, da durch
µ(A) :=
∫
A
1
1 + ρF I
X1(dx) fur A ∈ B(R+),
kein Wahrscheinlichkeitsmaß µ definiert wird, denn µ(R+) = (1 + ρ)−1 < 1. Umjedoch trotzdem das asymptotische Verhalten der Ruinwahrscheinlichkeit mittelsLemma 3.26 bestimmen zu konnen, multiplizieren wir die Funktion F I
X1mit einer
Exponentialverteilung, so dass man durch
µ(A) :=
∫
A
erx 1
1 + ρF I
X1(dx) fur A ∈ B(R+),
ein Wahrscheinlichkeitsmaß erhalt. Wesentliche Voraussetzung hierfur ist die Exi-stenz des Anpassungskoeffizienten.
44

Theorem 3.27 (Cramer-Lundberg Approximation) Im Cramer-Lundberg-Modell seidie Nettoprofitbedingung erfullt und es existiere der Anpassungskoeffizient r > 0. Mit
m∗ :=λ
β
∫ ∞
0
xerx(1− FX1(x)) dx
gilt fur die Ruinwahrscheinlichkeit des klassischen Risikoprozesses,
a) falls m∗ < ∞:
limu→∞
ψ(u)eru =ρ
(1 + ρ)rm∗ .
b) falls m∗ = ∞:
limu→∞
ψ(u)eru = 0.
3.2.6 Asymptotik der Ruinwahrscheinlichkeit bei subexponentiellenSchadensverteilungen
Wesentliche Voraussetzung zur Bestimmung der Asymptotik der Ruinwahrschein-lickeit im vorangegangenen Abschnitt ist die Existenz des Anpassungskoeffizienten.Jedoch werden hierdurch heavy-tailed Verteilungen der Risiken ausgeschlossen. Indiesem Abschnitt betrachten wir die Asymptotik der Ruinwahrscheinlichkeit im Fallvon subexponentiell verteilten Risiken im Cramer-Lundberg Modell.Auch hier basiert das Resultat wieder auf der Eigenschaft der Uberlebenswahrschein-lichkeit gemaß Satz 3.20, Losung einer Integralgleichung zu sein. Zunachst kann dieLosung dieser Integralgleichung explizit angegeben werden:
Theorem 3.28 Im Cramer-Lundberg-Modell gilt fur die Ruinwahrscheinlichkeit ψdes klassischen Risikoprozesses:
ψ(u) =ρ
1 + ρ
∞∑
k=1
1
(1 + ρ)k(1− (F I
X1)∗k(u)) fur alle u > 0.
Bemerkung 3.29 Wir nennen eine Verteilungsfunktion subexponentiell, falls dieVerteilung, die durch diese Verteilungsfunktion bestimmt wird, subexponentiell ist.
Theorem 3.30 Im Cramer-Lundberg-Modell gelte die Nettoprofitbedingung. Fallsdie Verteilung der Risiken PX1 und deren integrierten Tailverteilungsfunktion sub-exponentiell sind, dann gilt fur die Ruinwahrscheinlichkeit ψ des klassischen Risi-koprozesses:
limu→∞
ψ(u)
1− F IX1
(u)=
1
ρ.
45

Wesentliche Voraussetzung des vorangegangenen Satzes ist die geforderte Eigen-schaft der Risikoverteilung und deren integrierte Tailverteilungsfunktion, subexpo-nentiell zu sein. Im folgenden Satz zitieren wir hierfur eine hinreichende Bedingung.
Theorem 3.31 Es sei F eine Verteilungsfunktion auf [0,∞), fur die gilt:
limx→∞
∫ x
0
1− F (x− y)
1− F (x)(1− F (y)) dy = 2mF ,
wobei mF das erste Moment von F bezeichnet. Dann ist sowohl F wie auch ihreintegrierte Tailverteilungsfunktion F I subexponentiell.
Beweis: Siehe [18, Theorem 2.5.6]. 2
46

4 Pramienkalkulation
4.1 Nettorisikoprinzip
Ein Versicherungsunternehmen ubernimmt gegen Pramienzahlung des Versicherungs-nehmers ein spezifiziertes Risiko. Ist die Pramienzahlung zu hoch, so ist das Versiche-rungsunternehmen nicht konkurrenzfahig, ist sie zu niedrig, ist die Ruinwahrschein-lichkeit zu hoch. Die Kosten eines Versicherungsunternehmens kann man aufteilenin einen Anteil, der fur die Schadenszahlungen, Ruckversicherungen u.s.w. reser-viert ist, und einen Anteil zur Deckung der Kosten von Verwaltung, Personalkosten,Provisionen u.s.w. Wir werden (meistens) nicht die dynamische Entwicklung desbetrachteten Portfolios berucksichtigen. Deshalb gelte in diesem Abschnitt stets:
S : Ω → R bezeichne ein Risiko.
Das Risiko S kann entweder als der Gesamtschaden eines Portfolios oder aber auchals ein einziges Risiko interpretiert werden.Eine Pramie weist jedem Risiko S eine reellwertige Zahl zu. Mit der Bezeichnung
L0(Ω,A , P ) := X : Ω → R : X ist A –B(R)–messbar
erhalten wir folgende Definition:
Definition 4.1 Ein Pramienprinzip ist ein Funktional
p : L0(Ω,A , P ) → R∪∞.
Die Pramie fur ein Risiko S gemaß eines Pramienprinzips p ist p(S).
Die betrachteten Pramienprinzipien werden nur von der Verteilung PS und nichtvon S selbst abhangen, d.h. es hatte ausgereicht, das Pramienprinzip auf der Mengeder Verteilungen zu definieren.Nimmt ein Pramienprinzip p fur ein Risiko S den Wert ∞ an, so heißt S nichtversicherbar bezuglich p.Ein naheliegender Ansatz als Pramienprinzip ist, eine Pramie entsprechend demErwartungswertes des Risikos S zu verlangen:
Definition 4.2 Das Nettorisikoprinzip p ist definiert durch
p(S) := E [S] .
Bemerkung 4.3 In Abschnitt 3.2 haben wir bereits gesehen, dass zumindestens imCramer-Lundberg-Modell das Nettorisikoprinzip nicht geeignet ist. Denn in diesemFall ist die Nettoprofitbedingung nicht erfullt und der Ruin tritt mit Wahrschein-lichkeit 1 ein.
47

4.2 Pramienprinzipien auf Grundlage des Nettorisikoprin-zips
Da das Nettorisikoprinzip in den meisten Modellen in den Ruin fuhrt, wird diesesum einen proportionaler Zuschlag erhoht:
Definition 4.4 Das Erwartungswertprinzip p ist definiert durch
p(S) := (1 + κ)E [S] fur eine Konstante κ > 0.
Die Konstante κ wird Sicherheitszuschlag genannt.
Dieses Pramienprinzip erfordert nur die Kenntnis bzw. Schatzung des Erwartungs-wertes des Risikos S und ist deshalb einfach anzuwenden. Jedoch berucksichtigt dasErwartungswertprinzip nicht Schwankungen des Schadens: ist die Varianz Var(S)sehr groß, wird das Risiko S eventuell deutlich uber (1 + κ)E [S] liegen. Bei einerkleinen Varianz Var(S) erzielt das Versicherungsunternehmen mit hoher Wahrschein-lichkeit einen Gewinn. Im Extremfall ist Var(S) = 0 und S = E [S] gilt sogar P -f.s.
Definition 4.5 Das Varianzprinzip p ist definiert durch
p(S) := E [S] + δ VarS fur eine Konstante δ > 0.
Obwohl das Varianzprinzip Schwankungen berucksichtigt, ist es in dem folgendenSinn nicht “fair” gegenuber dem Versicherungsnehmer: denn Abweichungen des Ri-sikos S unterhalb des Erwartungswertes E [S] entsprechen kleinen Schaden, gehenjedoch im selben Umfang in das Varianzprinzip ein, wie Abweichungen uberhalb desErwartungswertes:
p(S) = E [S] + δ
∫
S>E[S](S −E [S])2 dP + δ
∫
S<E[S](E [S]− S)2 dP.
Beispiel 4.6
a) Falls S exponentialvereilt zu dem Parameter λ > 0 ist, dann gilt:
p(S) =1
λ+
δ
λ2(Varianzprinzip).
b) Falls S gammaverteilt zu den Parametern α, β > 0 ist, dann gilt:
p(S) =β
α+ δ
β
α2(Varianzprinzip).
Um nicht Großen verschiedener Dimensionen zu addieren, wird statt der Varianzdie Standardabweichung genutzt, um die Schwankungen des Gesamtschadens in diePramienkalkulation miteinzubeziehen:
Definition 4.7 Das Standardabweichungsprinzip p ist definiert durch
p(S) := E [S] + δ√
VarS fur eine Konstante δ > 0.
48

4.3 Implizit definierte Pramienprinzipien
4.3.1 Nullnutzenprinzip
Der “Nutzen”, dem ein Versicherungsunternehmen durch Ubernahme des Risikos Sbei einer Pramie p(S) entsteht, ergibt sich aus dem Wert u + p(S)− S, wobei u dieAnfangsrisikoreserve bezeichnet. Im Folgenden gehen wir davon aus, dass sich dieserNutzen durch einen numerischen Wert beziffern lasst.
Definition 4.8 Eine zweimal differenzierbare Funktion v : R → R heißt Nutzen-funktion (utility function), falls gilt:
v′(x) > 0 und v′′(x) 6 0 fur alle x ∈ R .
Oft wird allgemeiner von einer Nutzenfunktion nur gefordert, monoton wachsendund konkav zu sein.
Beispiel 4.9
a) v(x) := x, d.h. v = Id.
b) v(x) := 1− e−x.
c) Ist b > 0 eine Konstante, so ist
v(x) :=
x− x2
2b, falls x 6 b,
b2, falls x > b.
ein Beispiel einer Nutzenfunktion mit Sattigung.
Die Monotonie der Nutzenfunktion garantiert, dass ein zusatzlicher Gewinn zu einembestehenden Kapital mit einem hoheren Nutzen bewertet wird, als das Kapital ohneeinen Zugewinn. Aufgrund des konkaven Verlaufes wird der Nutzen, der sich durcheinen Gewinn bei einem bereits bestehenden hohen Kapital als geringer angesehen,als der Nutzen bei demselben Gewinn, jedoch bei einem kleineren Kapital.
Definition 4.10 Es seien u die Anfangsrisikoreserve und v eine Nutzenfunktion.Das Pramienprinzip p(·) = p(u, ·), fur das gilt
v(u) = E [v(u + p(S)− S)] , (14)
heißt Nullnutzenprinzip.
Bei Kalkulation der Pramie gemaß des Nullnutzenprinzips ist bei Ubernahme desRisikos S fur das Versicherungsunternehmen keinen anderen Nutzen zu erwarten,wie falls es das Risiko S nicht ubernimmt.
Beispiel 4.11
49

a) Fur v = Id erhalt man das Nettorisikoprinzip.
b) Fur v(x) = 1− e−ax fur ein a > 0 erhalt man
p(S) =1
alnE
[eaS
](Nullnutzenprinzip).
Dieses Pramienprinzip heißt Exponentialprinzip, das wir uns im folgenden Ab-schnitt ansehen werden.
Es muss keineswegs eine Funktion v existieren, die der Gleichung (14) genugt. In denbei uns behandelten Fallen ist das aber stets gewahrleistet, falls der entsprechendeErwartungswert existiert.Im Allgemeinen hangt das Nullnutzenprinzip von der Anfangsrisikoreserve u ab. Indiesem Fall beeinflusst die Anfangsrisikoreserve die Pramie. Es lassen sich jedochauch Nutzenfunktionen wahlen, fur die das Nullnutzenprinzip unabhangig von derAnfangsrisikoreserve ist, z.B.
v(x) = a + bx fur Konstanten a ∈ R, b > 0,
oder v(x) = a(1− e−bx) fur Konstanten a, b > 0.
In vielen Fallen lasst sich das Nullnutzenprinzip zu einer Nutzenfunktion nicht ex-plizit angeben. Einen Ansatz einer Approximation liefert das folgende Resultat.
Theorem 4.12 Es sei p das Nullnutzenprinzip zu u = 0 und einer Nutzenfunktionv, deren Taylorentwicklung
v(x) ≈ v(0) + v′(0)x + 12v′′(0)x2
fur x = p(S)− S “vernunftig” ist. Dann gilt
p(S) ≈ ES + 12
rV VarS,
falls rV := −v′′(0)
v′(0)“ausreichend klein” ist.
Bemerkung 4.13 Die Konstante rV := −v′′(0)
v′(0)heißt Risikoaversion des Versiche-
rers.
4.3.2 Exponentialprinzip
Das Exponentialprinzip ergibt sich als ein Spezialfall des Nullnutzenprinzips durchWahl der Nutzenfunktion
v(x) := 1− e−ax, x ∈ R,
fur eine Konstante a > 0. In diesem Fall lasst sich explizit das Nullnutzenprinzipbestimmen.
50

Definition 4.14 Das Pramienprinzip p mit
p(S) =1
alnE
[eaS
]
heißt Exponentialprinzip zum Parameter a > 0.
Man beachte, dass zum Exponentialprinzip keine Schaden mit einer heavy-tailedVerteilung versichert werden konnen.
Theorem 4.15 Falls E [exp (aS)] < ∞ fur alle a > 0 gilt, dann besitzt die Funktion
q : [0,∞) → R, q(a) =1
aln(E
[eaS
])
folgende Eigenschaften:
a) q ist monoton wachsend;
b) lima→0
q(a) = E [S];
c) lima→∞
q(a) = F−1(1) fur F−1(1) := infx ∈ R : F (x) = 1,wobei F die Verteilungsfunktion von S bezeichnet.
Jede beliebige Pramie, die einen Wert zwischen E [S] und F−1(1) annimmt, kanngemaß Satz 4.15 sich auch bei geeigneter Wahl des Parameters a aus dem Exponen-tialprinzip ergeben. Die Pramienzahlung erhoht sich bei wachsendem Parameter a,der auch Risikoaversion genannt wird. Insbesondere erhalt man fur a → 0 das Net-torisikoprinzip. Falls F−1(1) endlich ist, dann beziffert dieser Wert den maximalenGesamtschaden, und das Pramienprinzip
ρ(S) = F−1(1)
heißt Maximalschadenprinzip.
4.3.3 Schweizer Prinzip
Manchmal sind Pramienprinzipien von Interesse, die nicht von der Anfangsrisikore-serve abhangen. Dann interpretiert man den Wert S − p(S) als einen Verlust.
Definition 4.16 Eine zweimal differenzierbare Funktion w : R→ R heißt Verlust-funktion (loss function), falls gilt:
w′(x) > 0 und w′′(x) > 0 fur alle x ∈ R .
Die Forderungen an eine Verlustfunktion kann man wie bei der Nutzenfunktion unterBerucksichtigung der geanderten Perspektive erklaren.
51

Bemerkung 4.17
a) Eine Verlustfunktion w ist eine monoton wachsende, konvexe Funktion.
b) Falls v eine Nutzenfunktion ist, dann erhalt man durch
w(x) := −v(−x) fur alle x ∈ R,
eine Verlustfunktion.
Definition 4.18 Es seien w eine Verlustfunktion und z ∈ [0, 1]. Das Pramienprin-zip p, fur das gilt
w((1− z)p(S)) = E [w(S − zp(S))] , (15)
heißt Schweizer Prinzip zum Parameter z.
Falls das Versicherungsunternehmen den Anteil zS zu einer Pramie zp(S) ruckver-sichert und zp(S) eine gute Schatzung fur zS ist, dann bleibt dem Unternehmenein Risiko S − zp(S) zu einer Pramie (1 − z)p(S). Das Schweizer Prinzip fordert,dass bei entsprechender Gewichtung der zu erwartende Schaden von S − zp(S) derentsprechenden Pramie entspricht.
Beispiel 4.19
a) Fur z = 0 resultiert das Schweizer Prinzip in
E [w(S)] = w(p(S)).
Dieses Pramienprinzip wird Aquivalenzprinzip genannt.
b) Fur w(x) = eax und z = 0 entspricht das Schweizer Prinzip dem Exponential-prinzip.
c) Fur z = 1 und v(x) = −w(−x) erhalt man das Nullnutzenprinzip mit Nutzen-funktion v und Anfangsrisikorserve u = 0.
4.3.4 Verlustfunktionenprinzip
Das Eintreten eines Schadens s, d.h. eine Realisierung s des Risikos S, verursachtdem Versicherungsunternehmen in Abhangigkeit der Pramie einen Verlust. In diesemAbschnitt verallgemeinern wir den bisherigen Ansatz, und bewerten einen Verlustin Abhangigkeit des Risikos S und einer moglichen Pramie. Offensichtlich ist diePramie wunschenswert, die den auf dieser Weise quantifizierten Verlust minimiert.
Definition 4.20 Fur eine Funktion L : R2 → R wird ein Pramienprinzip p, furdas gilt
p(S) = argminq>0
E [L(S, q)] ,
Verlustfunktionenprinzip genannt.
52

Beispiel 4.21
a) Fur L(s, b) = (s− b)2 erhalt man p(S) = E [S]. Das Verlustfunktionenprinzipist identisch mit dem Nettorisikoprinzip;
b) Fur L(s, b) = (eas − eab)2 fur ein a > 0 erhalt man
p(S) =1
alnE
[eaS
].
Das Verlustfunktionenprinzip ist identisch mit dem Exponentialprinzip.
In vielen Fallen lasst sich zu einem Verlustfunktionenprinzip ein Nullnutzenprinzipfinden, so dass beide dasselbe Pramienprinzip erzeugen:
Theorem 4.22 Es seien v eine Nutzenfunktion mit v(0) = 0 und
L(s, b) :=
∫ b
s
v(t− s) dt.
Desweiteren existiere eindeutig das von v erzeugte Nullnutzenprinzip p mit Anfangs-risikoreserve u = 0. Dann ist das Nullnutzenprinzip p gleich dem von L erzeugtenVerlustfunktionenprinzip.
4.4 Das Percentile-Prinzip
Definition 4.23 Es sei F die Verteilungsfunktion einer Verteilung Q. Dann heißt
F−1 : [0, 1] → R, F−1(y) := infx : F (x) > y
Quantil-Funktion von F .
Existiert die inverse Funktion von F , dann stimmt die Quantil-Funktion mit derinversen Funktion uberein.
Definition 4.24 Es seien FS die Verteilungsfunktion des Risikos S und ε ∈ [0, 1].Das Percentileprinzip p zum Parameter ε ist definiert durch
p(S) := F−1(1− ε).
Fur das Percentileprinzip wird die Pramie zu einem vorgegebenen ε ∈ (0, 1) derartbestimmt, dass die Wahrscheinlichkeit dafur, dass der Schaden S großer als diePramie ist, geringer als ε ist.
Beispiel 4.25 Fur ε = 0 erhalt man das Maximalschadenprinzip.
53

4.5 Eigenschaften von Pramienprinzipien
Sowohl aus theoretischer als auch aus praktischer Sicht sollen Pramienprinzipien be-stimmte Eigenschaften besitzen. In der Literatur, z.B. [11], [21], werden zahlreicheEigenschaften diskutiert, von denen wir einige vorstellen. Es gibt jedoch keine ein-heitliche Ansicht daruber, nach welchen Kriterien Pramienprinzipien zu beurteilensind.
Definition 4.26 Es sei p ein Pramienprinzip.
a) p heißt translationsinvariant, falls fur alle c ∈ R gilt:
p(S + c) = p(S) + c fur alle Risiken S;
b) p heißt additiv, falls gilt:
p(S + U) = p(S) + p(U) fur alle unabhangigen Risiken S und U ;
c) p heißt subadditiv, falls gilt:
p(S + U) 6 p(S) + p(U) fur alle Risiken S und U ;
d) p heißt homogen, falls fur alle c ∈ R+ gilt:
p(cS) = cp(S) fur alle Risiken S;
e) p heißt erwartungswertubersteigend, falls gilt:
p(S) > E [S] fur alle Risiken S;
f) p heißt maximalschadenbegrenzt, falls gilt:
p(S) 6 uPS:= infx ∈ R : P (S 6 x) = 1 fur alle Risiken S;
Translationsinvarianz bedeutet, dass bei Erhohung des Risikos um einen festen Be-trag c, die Pramie sich um den selben Betrag erhoht.Homogenitat verhindert eine Arbitragemoglichkeit: denn ware die Pramie von 2Sgroßer als zweimal die Pramie von S, dann wurde man zweimal S versichern unddadurch einen Gewinn erzielen.Wie bei Homogenitat liegt bei Nichtvorliegen der Additivitat eine (theoretische)Arbitragemoglichkeit vor. Falls Subadditivitat vorliegt, kann ein hohes Risiko nichtfur eine geringere Pramie versichert werden, indem es als zwei oder mehr unterteilteRisiken versichert wird. Subadditivitat ist auch eine offensichtliche Konsequenz desAusgleichs im Kollektiv.
54

Die Eigenschaft einer Pramie, erwartungswertubersteigend zu sein, ist eine offen-sichtliche Forderung. Denn ein Versicherungsunternehmen wird den Ruin nur schwervermeiden konnen, wenn die Pramien unter dem zu erwartenden Schaden liegen. Um-gekehrt wird auch kein Versicherungsnehmer bereit sein, ein Risiko zu einer Pramiezu versichern, die uber dem maximalen Schaden liegt.In der folgenden Tabelle fassen wir zusammen, welche Eigenschaften die von unsbetrachteten Pramienprinzipien besitzen.
Theorem 4.27
a b c d e f
Nettorisikoprinzip ja ja ja ja ja ja
Erwartungswertprinzip nein ja ja ja ja nein
Varianzprinzip ja ja nein nein ja nein
Standardabweichungsprinzip ja nein ja ja ja nein
Nullnutzenprinzip ja nein nein nein ja ja
Exponentialprinzip ja ja ja nein ja ja
Schweizer Prinzip nein nein nein nein ja ja
Percentileprinzip ja nein nein ja nein ja
Maximalschadenprinzip ja ja ja ja ja ja
Außer den beiden “extremen” Pramienprinzipen, dem Nettorisikoprinzip und demMaximalschadenprinzip, erfullt keines der vorgestellten Prinzipien alle Eigenschaf-ten. In der Literatur findet man zahlreiche Diskussionen, welche Kriterien zu bevor-zugen sind.Ein anderer, intuitiv naheliegender, Ansatz fordert von einem betrachteten Prami-enprinzip, die Eigenschaften nur lokal fur eine relevante Familie von Verteilungenerfullen zu mussen.
Beispiel 4.28 Es sei F eine Menge von Verteilungen. Dann gilt fur das Erwar-tungswertprinzip p mit einem Sicherheitszuschlag κ:
p(S) 6 uPS= infx ∈ R : P (S 6 x) = 1 fur alle Risiken S mit PS ∈ F ;
falls gilt:
1 + κ 6 inf
uPS
E [S]: PS ∈ F
.
Das Erwartungswertprinzip p ist lokal maximalschadenbegrenzt.
55

5 Credibility Pramie
Einen anderen Ansatz zur Berechnung der Pramie als im vorigen Kapitel liegt derCredibility-Theorie zugrunde. Die Anzahl und Hohen der verursachten Schaden ei-nes Risikos der vergangenen Jahren gewahren eine Information, die zum Zeitpunktdes Vertragabschlusses nicht zur Verfugung standen. Diese Information lasst einengewissen Ruckschluß auf die Verteilung des entsprechenden Risikos zu und es istnaheliegend, diese Kenntnis in eine zukunftige Pramienberechnung miteinfließen zulassen.Dieses Kapitel lehnt sich an die entsprechenden Abschnitte in der Monographie vonMikosch [16] an.
5.1 Heterogenes Modell
Wir betrachten ein Portfolio X1, . . . , Xr von Risiken. Fur jedes Risiko Xi bezeichne(xi,1, . . . , xi,ni
) die Schaden der letzten ni Jahre. Diese Werte interpretieren wir alsRealisierungen von nichtnegativen Zufallsvariablen (Xi,1, . . . , Xi,ni
). Jedem RisikoXi wird ein zufalliger Parameter Θi zugeordnet, der die individuellen Eigenschaftendes i-ten Risikos spezifiziert. Die Zufallsvariable Θi wird Strukturparameter genannt.
Definition 5.1 Es seien Θ1, . . . , Θr Zufallsvariablen und (Xi,t)nit=1 eine Folge von
Risiken fur alle i = 1, . . . , r. Es wird
(Θ1, (X1,t)n1t=1), . . . , (Θr, (Xr,t)
nrt=1)
heterogenes Modell genannt, falls gilt:
a) die Zufallsvariablen Θ1, . . . , Θr sind unabhangig und identisch verteilt.
b) die Zufallsvariablen
(Θ1, (X1,t)n1t=1), . . . , (Θr, (Xr,t)
nrt=1)
sind unabhangig verteilt;
c) fur alle i = 1, . . . , r sind die Zufallsvariablen
Xi,1, . . . , Xi,ni
bedingt unter σ(Θ1, . . . , Θr) unabhangig und identisch verteilt.
d) die zweiten Momente existieren:
E |Θi|2 < ∞, E |Xi,t|2 < ∞ fur alle t = 1, . . . , ni, i = 1, . . . , r
56

Es stellt sich die Frage, wie eine Pramie fur das i-te Risiko in diesem Modell aufBasis der vergangenen Schadenverlaufe berechnet werden kann. Wir beschrankenuns auf einen Ansatz, der auf dem Nettopramienansatz des letzten Kapitels basiert:
µ(Θi) := E [Xi,1|Θi] fur i = 1, . . . , r.
Außer dem Nettopramienansatz werden auch weitere Pramienprinzipien des vergan-genen Kapitels in der Credibility-Theorie zur Modellierung benutzt, siehe z.B. [11].Wir beschranken uns hier jedoch auf das Nettopramienprinzip.Zunachst halten wir einige Eigenschaften fur das heterogene Modell fest:
Bemerkung 5.2
a) Die Risiken Xi,1, . . . , Xi,nisind aufgrund der Voraussetzung d) identisch ver-
teilt:
P (Xi,t 6 x) = E [P (Xi,t 6 x |Θi)] = E [P (Xi,1 6 x |Θi)]
fur alle t = 1, . . . , ni.
b) Die Risiken Xi,1, . . . , Xi,nisind nicht unabhangig:
Cov(Xi,s, Xi,t) = Var[µ(Θi)] fur s 6= t.
c) Allen Risiken unterliegt dieselbe Verteilung des Strukturparameters, jedochhangt der individuelle Schadenverlauf des i-ten Risikos von der RealisierungΘi(ω) ab.
Da wir E |Θi|2 < ∞ voraussetzen, konnen wir µ als eine Funktion der folgendenForm betrachten:
µ : L2(Ω,A , P ) → L2(Ω,A , P ), µ(Y ) = E [Xi,1|Y ] .
Insbesondere ist µ(Θi) ein Funktionswert in Abhangigkeit von Θi. Da wir jedochnur Realisierungen der Zufallsvariablen Xj,t fur t = 1, . . . , nj und allen j = 1, . . . , rkennen, suchen wir eine Approximation von µ(Θi) durch eine Zufallsvariable µi, dieeine Funktion der Schadenhistorien
X := (X1,1, . . . , X1,n1 , X2,1, . . . , Xr,nr)
ist. Definieren wir
B := σ(B1 ∪ · · · ∪Br) und Bi := σ(Xi,1, . . . , Xi,ni),
dann ist gemaß Lemma B.9 eine Funktion µi : Ω → R genau dann eine Funktionvon allen Xi,t fur t ∈ N und i = 1, . . . , r, falls gilt
µi : Ω → R ist (B−σ(R))–messbar.
57

Es ist jetzt naheliegend von unserer Schatzung µi ebenfalls zu fordern, dass ihrzweites Moment E |µi|2 endlich ist. Dann bietet sich zur Quantifizierung des Fehlersder Approximation die Norm in L2(Ω, A , P ) an. Da B ⊆ A erhalten wir:
ρ : L2(Ω,B, P ) → L2(Ω,A , P ), ρ(Y ) := E |µ(Θi)− Y |2 .
Bei Schatzung von µ(Θi) durch eine Zufallsvariable Y wird ρ(Y ) als der mittlerequadratische Fehler bezeichnet.Unsere Aufgabe lasst sich jetzt folgendermaßen formulieren:gesucht ist eine reellwertige Zufallsvariable µi ∈ L2(Ω, B, P ), so dass gilt:
ρ(µi) = minρ(Y ) : fur alle Y ∈ L2(Ω,B, P ). (16)
Falls eine P -f.s. eindeutige Losung existiert, nennen wir diese Credibility-Pramieaufgrund der Schadenhistorie (Xi,1, . . . , Xi,ni
).
Theorem 5.3 Im heterogenen Modell existiert eine P -f.s. eindeutige Losung µi von(16). Diese Losung µi ist gegeben durch:
µi = E [ µ(Θi) | Bi] P -f.s.,
mit einem mittleren quadratischen Fehler
ρ(µi) = E [Var(µ(Θi) | Bi)] .
Obwohl wir uber allen Funktionen, die B-messbar sind, minimieren, ist der Schatzerµi fur µ(Θi) nur eine Funktion von Xi,1, . . . , Xi,ni
bzw. (Bi−B(R))–messbar. Dasbedeutet, dass die Schadenverlaufe der anderen Risiken des Portfolios keine Rolle beider Pramienberechnung fur das i-te Risiko spielen. Dies liegt an der Voraussetzungb) in der Definition 5.1.Im folgenden Lemma verzichten wir auf den Index i. Desweiteren bezeichne δn dasZahlmaß auf Nn
0 und λk das Lebesguemaß auf (Rk, B(Rk)).
Lemma 5.4 Im heterogenen Modell besitze der Zufallsvektor (X, Θ) mit X :=(X1, . . . , Xn) eine gemeinsame Dichte bezuglich eines Produktmaßes µ × ν, wobeiµ × ν entweder dem Maß δn × λ oder λn × λ entspricht. Desweiteren bezeichnefΘ die Dichte von Θ bezuglich λ und h : R → R sei eine messbare Funktion mitE |h(Θ)| < ∞.
1) falls µ× ν = δn × λ, dann gilt fur x = (x1, . . . , xn) ∈ Nn0 :
E [h(Θ)|X] = E [h(Θ)|X = x] |x=X ,
wobei
E [h(Θ)|X = x]
=1
P (X = x)
∫h(y)fΘ(y)P (X1 = x1|Θ = y) · · ·P (Xn = xn|Θ = y) dy,
fur alle x mit P (X = x) > 0.
58

2) falls µ× ν = λn × λ, dann gilt fur x = (x1, . . . , xn) ∈ Rn:
E [h(Θ)|X] = E [h(Θ)|X = x] |x=X ,
wobei
E [h(Θ)|X = x] =1
fX(x)
∫
fΘ>0h(y)fΘ(y)
fX1,Θ(x1, y)
fΘ(y)· · · fXn,Θ(xn, y)
fΘ(y)dy
fur alle x mit fX(x) > 0. Es bezeichnet fX die Dichte von X bezuglich λ sowiefXi,Θ die gemeinsame Dichte von (Xi, Θ) bezuglich λ2.
Beispiel 5.5 Der Strukturparameter Θ sei Γ(α, β)–verteilt und es gelte
P (Xt = k |Θ = θ) =θk
k!e−θ fur k ∈ N0, θ > 0,
und t = 1, . . . , n. Da E [Xt |Θ = θ] = θ erhalt man
µ(Θ) = E [Xt |Θ] = Θ.
Eine einfache Rechnung ergibt fur x = (x1, . . . , xn)
E [Θ |X = x] =C(x)
x1! · · ·xn!
∫y yα+
Pnj=1 xj−1e−(β+n)y dy
fur eine Konstante C(x), die nur von x abhangt. Aus Lemma 5.4 folgt:
µ = E [ µ(Θ) |X1, . . . , Xni] =
α +∑n
k=1 Xk
β + n
mit einem mittleren quadratischen Fehler
ρ(µ) =α
β
1
β + n
5.2 Buhlmann Modell
In vielen Situationen ist es nicht moglich, den Schatzer µi gemaß Satz 5.3 zu be-stimmen. Man vereinfacht daher das Problem, indem nicht mehr der Schatzer ge-sucht wird, der den mittleren quadratischen Fehler unter allen Zufallsvariablen Yin L2(Ω,B, P ) minimiert, sondern nur noch unter allen linearern Zufallsvariablen ,d.h. die in dem Raum
L := L (Ω,B) := Z : Ω → R : Z = a0 + aTX, a0 ∈ R, a ∈ Rm (17)
liegen mit m := n1 + · · ·+ nr. Offensichtlich gilt L ⊆ L2(Ω, B, P ).
59

Unsere Aufgabe lasst sich jetzt folgendermaßen formulieren:gesucht ist eine reellwertige Zufallsvariable µ∗i ∈ L (Ω,B), so dass gilt:
E |µ(Θi)− µ∗i |2 = minE |µ(Θi)− Z|2 : fur alle Z ∈ L (Ω,B) (18)
Falls eine P -f.s. eindeutige Losung existiert, nennen wir diese linearisierte Credibility-Pramie aufgrund der Schadenhistorie (Xi,1, . . . , Xi,ni
).Da wir das Problem vereinfacht haben, konnen wir das Modell etwas verallgemei-nern.
Definition 5.6 Es seien Θ1, . . . , Θr Zufallsvariablen und (Xi,t)nit=1 eine Folge von
Risiken fur alle i = 1, . . . , r. Es wird
(Θ1, (X1,t)n1t=1), . . . , (Θr, (Xr,t)
nrt=1)
Buhlmann Modell genannt, falls gilt:
a) die Zufallsvariablen Θ1, . . . , Θr sind unabhangig und identisch verteilt.
b) die Zufallsvariablen
(Θ1, (X1,t)n1t=1), . . . , (Θr, (Xr,t)
nrt=1)
sind unabhangig;
c) fur alle i = 1, . . . , r sind die Zufallsvariablen
Xi,1, . . . , Xi,ni
bedingt unter σ(Θ1, . . . , Θr) unabhangig mit P -f.s. denselben bedingten Vari-anzen und Erwartungswerten:
µ(Θi) := E [Xi,t |Θi] v(Θi) := VarXi,t |Θi P -f.s.
d) die zweiten Momente existieren:
E |Θi|2 < ∞, E |Xi,t|2 < ∞ fur alle t = 1, . . . , ni, i = 1, . . . , r
Wir fuhren noch folgende Notationen ein:
µ := E [µ(Θi)] , λ := Varµ(Θi), ϕ := E [v(Θi)] .
Wegen der Bedingung a) hangen diese diese Großen tatsachlich nicht von i ab. Wirfassen noch einige weitere einfache Eigenschaften im folgenden Lemma zusammen:
Lemma 5.7 Im Buhlmann Modell gelten fur i = 1, . . . , r und s, t = 1, . . . , ni:
a) E [Xi,t] = µ und VarXi,t = ϕ + λ;
60

b) Cov(Xi,t, Xi,s) =
λ + ϕ, fur t = s,
λ, fur t 6= s,;
c) Cov(µ(Θi), Xj,t) =
λ, fur i = j,
0, fur i 6= j.
Der folgende Satz gibt nun in expliziter Form den Schatzer µ∗i an, der den minimalenquadratischen Fehler unter allen anderen Zufallsvariablen in L besitzt.
Theorem 5.8 Im Buhlmann Modell existiert eine P -f.s. eindeutige Losung µ∗i von(18). Diese Losung µ∗i ist gegeben durch:
µ∗i = (1− c)µ +c
ni
ni∑
k=1
Xi,k fur c :=niλ
ϕ + niλ.
Der mittlere quadratische Fehler fur µ∗i ergibt sich als:
ρ(µ∗i ) = (1− c)λ.
Wie zuvor bei der allgemeinen Credibility Pramie im heterogenen Modell hangt dieLosung µ∗i von (18) gemaß Satz 5.8 nur von dem i-ten Schadenverlauf und nicht vonallen Schadenverlaufe ab.Fur den Beweis von Satz 5.8, siehe auch [16], definieren wir:
Y := (Y1, . . . . . . , Ym)
:= (X1,1, . . . , X1,ni︸ ︷︷ ︸:=X1
, . . . , Xr,1, . . . , Xr,nr︸ ︷︷ ︸:=Xr
),
mit m := n1 + · · · + nr. Zur Vereinfachung der Notationen definieren wir noch dieZufallsvariable
Λ := µ(Θi)
fur festes i ∈ 1, . . . , r und fuhren folgende Notationen fur einige Momente undKovarianzen ein:
Y :=
Y1...
Ym
, E [Y ] :=
E [Y1]
...E [Ym]
,
ΣΛ,Y :=
Cov(Λ, Y1)...
Cov(Λ, Ym)
ΣY :=
Cov(Y1, Y1) . . . Cov(Y1, Ym)... . . .
...Cov(Y1, Y1) . . . Cov(Y1, Ym)
.
61

Das folgende Resultat gilt fur einen beliebigen Zufallsvektor Y, ohne dass dieser imZusammenhang mit dem Buhlmann Modell stehen muss. Um das Resultat entspre-chend formulieren zu konnen, fuhren wir noch den Raum
L (Ω,Y) := Z : Ω → R : Z = a0 + aTY, a0 ∈ R, a ∈ Rnein, der offensichtlich identisch zu dem in (17) definierten Raum ist. Jedoch konnenwir jetzt den folgenden Satz formulieren, ohne auf das Buhlmann Modell Bezug zunehmen.
Theorem 5.9 Es seien Λ, Y1, . . . , , Ym Zufallsvariablen mit E |Λ|2 < ∞ undE |Yi|2 < ∞ fur i = 1, . . . , m sowie Y := (Y1, . . . , Ym)T . Desweiteren bezeichne(a0, a)T ∈ R×Rm eine beliebige Losung von
a0 = E [Λ]− aTE [Y ] ,
ΣTΛ,Y = aT ΣY .
Dann gelten fur die Zufallsvariable
Y := a0 + aTY
folgende Aussagen:
a) der mittlere quadratische Fehler von Y ist
E∣∣∣Λ− Y
∣∣∣2
= Var(Λ)− aT ΣY a
und die rechte Seite hangt nicht von der spezielen Wahl (a0, a) ab.
b) fur alle Z ∈ L (Ω,Y) gilt:
E∣∣∣Λ− Y
∣∣∣2
6 E |Λ− Z|2 .
c) falls det ΣY 6= 0, dann ist
Y = E [Λ] + Σ−1Λ,Y Σ−1
Y (Y −E [Y ])
die P -f.s. eindeutige Zufallsvariable in L (Ω,Y), fur die gilt:
E∣∣∣Λ− Y
∣∣∣2
= minE |Λ− Z|2 : fur alle Z ∈ L (Ω,Y)
.
Beispiel 5.10 Berechnen wir fur das Beispiel 5.5 die linearisierte Credibility Pra-mie, erhalten wir:
µ = E [Θ] =α
β,
λ = VarΘ =α
β2,
ϕ = E [VarX1 |Θ] =α
β.
62

Man erhalt somit:
µ∗ =
(1− n
β + α
)E [Θ] +
n
β + α
1
n
n∑
k=1
Xk.
Dies entspricht gerade der (allgemeinen) Credibility Pramie, wie in Beispiel 5.5 be-rechnet.
63

6 Simulation
In vielen Situationen kann die Verteilung des Gesamtschadens und erst recht dieRuinwahrscheinlichkeit fur ein Portfolio nicht explizit berechnet werden. Desweite-ren finden in der Praxis komplizierte Modelle Anwendung, die analytisch nicht hand-habbar sind. In solchen Situationen konnen Simulationen eingesetzt werden. Dabeiwerden auf Computern zufallige Zahlen erzeugt, die z.B. als Schaden interpretiertwerden. Mit diesen Zahlen konnen neue Modelle virtuell getestet oder statistischausgewertet werden.In diesem Kapitel werden wir Algorithmen vorstellen, um Risikoprozesse und Ruin-wahrscheinlichkeiten zu simulieren.
6.1 Simulation von Zufallszahlen
Viele statistische oder mathematische Computerprogramme beinhalten Funktionenzur Erzeugung von Zufallszahlen, die gemaß relevanten Verteilungen verteilt sind.Jedoch ist man schnell mit der Notwendigkeit konfrontiert, Zufallsgroßen einer Ver-teilung simulieren zu mussen, die unbekannt ist bzw. deren Simulation nicht bereit-gestellt wird.Ein Computer kann als deterministische Maschine sicherlich keine Zufallszahlen er-zeugen. Es gibt jedoch verschiedene Verfahren, die ausgehend von einer ersten Zahl,dem sogenannten Keim (seed), eine deterministische Konstruktion einer Folge vonZahlen angeben, die mehr oder weniger gut als Realsierung einer Gleichverteilunginterpretiert werden konnen. Diese Zahlen nennt man Pseudo-Zufallszahlen. Da dieFolge der Zahlen nur vom Wert des Keims abhangt, erhalt man bei derselben Wahldes Keims dieselbe Folge von Zahlen, wodurch die Wiederholung einer Simulationz.B. unter abgeanderten Bedingungen mit denselben Zahlen moglich ist. In den mei-sten Programmen ist dem Nutzer uberlassen, ob er einen Keim angibt. Wenn keinKeim angegeben wird, dann wird eine Zahl “zufallig” ausgewahlt, z.B. der Wert derNanosekunde, in dem das Programm gestartet wurde.Die Anzahl der Zahlen, die durch solch eine Konstruktion fur alle erlaubten Keimeerhalten werden konnen, ist endlich. Die normierten Zahlen werden als die Simula-tion einer auf [0, 1] gleichverteilten Zufallsvariablen interpretiert.Die meisten Generatoren von Zufallszahlen sind von der folgenden Form:
Beispiel 6.1 Ausgehend vom Keim X0 definiert man
Xk+1 := aXk + c mod m fur k ∈ N,
fur Konstanten a, c, m ∈ N. Dabei wird m sehr groß gewahlt. Die Zahlen Xi+1
m
werden als Realisationen von auf [0, 1] gleichverteilten Zufallszahlen interpretiert.Man beachte, dass die Qualitat der so erzeugten Pseudo-Zufallszahlen sehr starkvon der Wahl der Konstanten a und m abhangen.
64

Beispiel von zwei Folgen X0, X1, . . . fur sehr kleine Zahlen m und a:
m = 13, a = 2, c = 0 : 1, 2, 4, 8, 3, 6, 12, 11, 9, 5, 10, 7, 1;
m = 13, a = 4, c = 0 : 1, 4, 3, 12, 9, 10, 1 oder 2, 8, 6, 11, 5, 7, 2.
Wir gehen im Folgenden davon aus, dass uns eine ausreichend gute Folge von Reali-sierungen von unabhangigen, auf [0, 1] gleichverteilten Zufallsvariablen zur Verfugungstehen. Das folgende Resultat ist Basis von vielen Algorithmen zur Erzeugung vonZufallszahlen.
Korollar 6.2 Es seien F eine Verteilungsfunktion mit Quantifunktion F−1 und Ueine auf [0, 1]-gleichverteilte Zufallsvariable. Dann ist F−1(U) eine Zufallsvariablemit Verteilungsfunktion F .
Der Umkehr-Algorithmus zur Erzeugung einer Zufallsvariable Z mit der Verteilungs-funktion F gestaltet sich dann in folgender Form:
(1) erzeuge U ∼ R[0, 1];
(2) gib Z := F−1(U) zuruck;
Beispiel 6.3 Die Paretoverteilung besitzt die Dichte
f : R→ R, f(x) = abax−(a+1) 1[b,∞)(x)
fur Parameter a, b > 0. Falls U eine auf [0, 1] gleichverteilte Zufallsvariable ist, dannist bU−1/a paretoverteilt zu den Parametern a und b
Fur viele Verteilungen kann die Quantilfunktion nicht explizit angegeben werden.Dann kann der Umkehr-Algorithmus nicht angewandt werden oder ist nicht effizi-ent. Ein anderes Verfahren zur Erzeugung einer Zufallsvariablen einer bestimmtenVerteilung mit einer Dichte ist das Verwerfungsverfahren von John v. Neumann.Desweiteren kann man fur viele Verteilungen effiziente Algorithmen durch Ausnut-zen spezieller Eigenschaften der Verteilungen erhalten. Viele Verfahren findet manz.B. in den Monographien [15] und [17]. Als ein Beispiel erwahnen wir die folgendeMethode zur Erzeugung von zwei unabhangigen, standard normalverteilten Zufalls-variablen.
Beispiel 6.4 (Box-Muller Methode) Wir gehen zunachst den umgekehrten Wegund betrachten zwei unabhangige, standardnormalverteilte Zufallsvariablen X undY . Geht man zu den Polarkoordinaten (R, Θ) des zufalligen Vektors (X,Y ) uber,so kann man leicht nachweisen, dass R und Θ unabhangig sind und die folgendenVerteilungen besitzen:
R2 ∼ exp(0.5), Θ ∼ R[0, 2π).
65

Aus den Polarkoordinaten (r, ϕ) erhalt man die kartesische Koordinaten mittelsfolgender Abbildung zuruck:
G : R2 → R2, G
(r
ϕ
):=
(r cos ϕ
r sin ϕ
).
Damit konnen wir folgenden Algorithmus formulieren, um zwei unabhangige, stan-dardnormalverteilte Zufallsvariablen X und Y zu erhalten:
(1) erzeuge zwei unabhangige, auf [0, 1] gleichverteilte Zufallsvariablen U und V ;
(2) definiere
R :=√−2 log U, Θ := 2πV.
(3) gebe folgende Zufallsvariablen zuruck:
X := R cos Θ, Y := R sin Θ.
6.2 Simulation von Risikoprozessen
In diesem Abschnitt beschaftigen wir uns mit der Simulation von Risikoprozessen,wie wir sie in Kapitel 3 eingefuhrt haben:
R = (R(t) : t > 0), mit R(t) = u + βt− SN(t),
wobei N = (N(t) : t > 0) einen Zahlprozess und SN(t) den Gesamtschaden einesPortfolios Xk : k ∈ N von unabhangigen, identisch verteilten Risiken bezeichnet.Fur den Geamtschaden der Form
SN(t) :=
N(t)∑
k=1
Xk, falls N(t) > 0,
0, falls N(t) = 0,
nehmen wir wie ublich an, dass der Zahlprozess N und die Risiken Xk unabhangigsind. Deshalb konnen diese Zufallsvariablen getrennt voneinander simuliert werdenund man kann den Risikoprozess R(t) wahrend der Zeit [0, T ] durch folgenden Al-gorithmus simulieren:
(1) setze T0 = 0, R(0) = u;
(2) wiederhole folgende Schritte fur k = 1, 2, . . . bis Tk > T :
(i) erzeuge Wk gemaß der Verteilung der Wartezeiten von N ;
(ii) setze Tk = Tk−1 + Wk;
(iii) erzeuge Xk gemaß der Verteilung der Risiken;
66

(iv) setze
R(t) =
R(Tk−1) + β(t− Tk−1), falls t ∈ (Tk−1, Tk),
R(Tk−1) + βWk −Xk, falls t = Tk;
(3) gebe (R(t) : t ∈ [0, T ]) zuruck.
Aus diesem Algorithmus erhalt man einfach den Spezialfall eines Poissonprozesses:
Beispiel 6.5 Um einen Poissonprozess N = (N(t) : t > 0) der Intensitat λ bis zurZeit T > 0 zu simulieren, kann man den folgenden Algorithmus nutzen:
(1) setze T0 = 0, N(0) = 0;
(2) wiederhole folgende Schritte fur k = 1, 2, . . . bis Tk > T :
(i) erzeuge eine exponentialverteilte Zufallsvariable Wk zum Parameter λ;
(ii) setze Tk = Tk−1 + Wk;
(3) setze N(t) :=∞∑
k=1
1Tk6t fur t ∈ [0, T ]
Fur andere Verfahren zur Simulation von Poissonprozessen siehe auch [17].
Eine Verallgemeinerung des Poissonprozesses ist der sogenannte Erneuerungspro-zess. Dies ist ein Zahlprozess, fur den die Wartezeiten W1,W2, . . . als unabhangigund identisch verteilt vorausgesetzt werden. Auch solch ein Prozess kann mittels desAlgorithmus in Beispiel 6.5 simuliert werden, indem die Zufallsvariable W entspre-chend der vorausgesetzten Verteilung simuliert wird.
6.3 Simulation der Ruinwahrscheinlichkeit
In diesem Abschnitt stellen wir die sogenannte Monte-Carlo-Simulation der Ruin-wahrscheinlichkeit eines Risikoprozesses mit Anfangsrisikoreserve u vor. Wir werdennur das Cramer-Lundberg-Modell betrachten.Es bezeichne stets Xk : k ∈ N das zugrundeliegende Portfolio von unabhangigen,identisch verteilten Risiken mit Verteilungsfunktion FX1 . Der Risikoprozess (R(t) :t > 0) ist definiert durch
R(t) := u + βt− SN(t) fur t > 0.
Die Ruinwahrscheinlichkeit ψ ist definiert durch
ψ(u) := P (Q(u) < 0) mit Q(u) = infu + βt− SN(t) : t > 0.
67

6.3.1 Monte-Carlo Simulation
Die klassische Monte-Carlo Simulation bezeichnet die approximative Naherung einesWertes fur den Erwartungswert E [Y ] einer Zufallsvariablen Y durch Realisierungenvon n unabangigen Zufallsvariablen Y1, . . . , Yn mit der Verteilung PY . Mittels desstarken Gesetzes der großen Zahlen schließt man:
Yn :=1
n
n∑
k=1
Yk → E [Y ] P -f.s. fur n →∞.
Wir bezeichnen Yk als klassische Monte-Carlo-Simulation fur E [Y ] und die Zufalls-variable Yn als klassischer Monte-Carlo-Schatzer fur E [Y ]. Die Varianz des Monte-Carlo-Schatzers Yn ergibt sich zu:
VarYn =1
nVarY. (19)
Um die Varianz des Monte-Carlo-Schatzers zu reduzieren, werden wir statt Simu-lationen von Zufallsvariablen mit derselben Verteilung wie Y auch Simulationenvon unabhangigen Zufallsvariablen X1, . . . , Xn mit E [Y ] = E [X1] und identischer,jedoch zu PY verschiedener, Verteilung betrachten. Denn es gilt auch hier:
Xn :=1
n
n∑
k=1
Xk → E [Y ] P -f.s. fur n →∞.
Die Zufallsvariablen Xk nennen wir Monte-Carlo-Simulation fur E [Y ] und die Sum-me Xn nennen wir Monte-Carlo-Schatzer fur E [Y ]. Offensichtlich besitzt Xn dieVarianz:
VarXn =1
nVarX1. (20)
Beispiel 6.6 (Simulation der Ruinwahrscheinlichkeit in endlicher Zeit) Die Monte-Carlo-Methode erlaubt unmittelbar eine Simulation der Ruinwahrscheinlichkeit inendlicher Zeit. Bezeichnet R = (R(t) : t > 0) den Risikoprozess, dann definiert mandie Zufallsvariable
Y := 1QT <0 fur QT := inft∈[0,T ]
R(t). (21)
Mit den Algorithmen des Abschnittes 6.2 konnen wir den Risikoprozess R in demendlichen Zeitintervall [0, T ] simulieren und damit durch eine klassische Monte-Carlo-Simulation eine Naherung fur E [Y ] = P (QT < 0) erhalten. Jedoch ist aufdieser Weise keine klassische Monte-Carlo-Simulation der Ruinwahrscheinlichkeit inunendlicher Zeit, wir sie in Abschnitt 3 betrachtet haben, moglich. Denn wir konnenden Risikoprozess R nicht in unendlicher Zeit simulieren.
68

Beispiel 6.7 Monte-Carlo-Simulationen lassen sich auch zur Schatzung von Inte-gralen der Form
I1 :=
∫ 1
0
g(x) dx
verwenden. Fur eine auf [0, 1] gleichverteilte Zufallsvariable U gilt E [g(U)] = I1.Sind U1, . . . , Un unabhanigige, auf [0, 1] gleichverteilte Zufallsvariablen, erhalt manden klassischen Monte-Carlo-Schatzer
1
n
n∑
k=1
g(Uk).
Allgemeiner konnen auf dieser Weise Integrale der Form
I2 :=
∫
Rh(x)f(x) dx
mit einer Wahrscheinlichkeitsdichte f geschatzt werden. Hierzu wird eine Monte-Carlo-Simulation fur E [h(X)] ausgefuhrt, wobei X eine Zufallsvariable mit Dichtef ist.Insbesondere wird die Monte-Carlo-Simulation zur Schatzung von hoch dimensiona-len Integralen genutzt.
Um die Varianz (19) der klassischen Monte-Carlo-Simulation zu verringern, stellenwir einige varianzreduzierende Methoden vor.bedingte Monte-Carlo-Simulation: Es seien X eine Monte-Carlo-Simulation furY mit E [X] = E [Y ] und Z eine weitere Zufallsvariable, die gleichzeitig simuliertwerden kann. Dann ist
X ′ := E [X |Z]
ebenfalls eine Monte-Carlo-Simulation fur E [Y ], denn es gilt:
E [X ′] = E [E [X |Z]] = E [X] = E [Y ] .
Desweiteren besitzt X ′ geringere Varianz als X:
VarX ′ = VarE [X |Z] 6 VarE [X |Z] +E [VarX |Z] = VarX.
Importance Sampling: Diese Methode basiert auf der Idee, den “wichtigen” Wer-ten von Y großeres Gewicht zu geben.Die Zufallsvariable Y sei auf (Ω,A , P ) definiert und besitze die Verteilung PY .Zur Simulation von E[Y ] = EP [Y ] werden in der klassischen Monte-Carlo-Methodeunabhangige Zufallsvariablen Yk auf demselben Wahrscheinlichkeitsraum bezuglichdesselben Wahrscheinlichkeitsmaßes P simuliert. Beim Importance Sampling werdendie Zufallsvariablen Yk jedoch bezuglich eines anderen Wahrscheinlichkeitsmaßes Q
69

simuliert und es wird von einer weiteren Zufallsvariablen Z ausgegangen, so dassgilt
EP [Y ] :=
∫Y dP =
∫ZY dQ =: EQ[ZY ].
Es werden die Zufallsvariablen (Z1, Y1), . . . , (Zn, Yn) gemaß des Wahrscheinlichkeits-maßes Q simuliert und
Yn :=1
n
n∑
k=1
ZkYk
als Monte-Carlo-Schatzer fur E[Y ] genutzt. Es gilt dann
limn→∞
Yn = EQ[ZY ] = EP [Y ] Q-f.s.
Als Varianz erhalt man
VarQ[Yn] =1
nVarQ[ZY ] =
1
n
(EQ[Z2Y 2]− (EP [Y ])2
).
Mit der Wahl Z = EP [Y ] (Y )−1 wurde man sogar die Varianz 0 erhalten, jedochsetzt dies die Kenntnis von EP [Y ] voraus, das gerade der Wert ist, den wir simulierenwollen.Allgemein kann aber je nach Wahl der Zufallsvariablen Z eine Varianzreduktionerzielt werden.
Beispiel 6.8 Es sei Ω = R und X(ω) = ω eine Zufallsvariable auf dem Wahrschein-lichkeitsraum (Ω,B(R), P ). Das Wahrscheinlichkeitsmaß P besitze die Dichte f . Fureine meßbare Funktion ϕ : R → R suchen wir eine Approximation von E[Y ] mitY := ϕ(X). Fur eine beliebige Dichte g definiert man die Zufallsvariable Z(ω) :=f(X(ω))/g(X(ω)) sowie das Maß Q auf (Ω, B(R)) durch Q(A) :=
∫A
g(x) dx furalle A ∈ B(R). Falls die Menge ω : g(ω) = 0 eine P -Nullmenge ist, dann gilt
EQ[ZY ] = EQ[Zϕ(X)] =
∫
Ω
f(X(ω))
g(X(ω))ϕ(X(ω)) Q(dω)
=
∫
Ω
f(ω)
g(ω)ϕ(ω)g(ω) dω
=
∫
Ω
f(ω)ϕ(ω) dω = EP [ϕ(X)] = EP [Y ].
Durch unabhangige Simulationen Z1, . . . , Zn von Z und X1, . . . , Xn bezuglich derVerteilung Q erhalt man den Monte-Carlo-Schatzer
Yn :=1
n
n∑
k=1
ZkYk → EP [Y ] Q-f.s.
70

Als Varianz ergibt sich
Var[Yn] =1
n
∫
R
(f(x)
g(x)− EP [Y ]
)2
g(x) dx.
Je nach Wahl der Funktion g kann diese Varianz geringer als bei der klassischenMonte-Carlo-Simulation ausfallen.
Speziell in unserem Kontext, der Simulation von Ruinwahrscheinlichkeiten, sind wirmit dem Problem der Simulation von seltenen Ereignissen (rare events) konfrontiert.Denn die uns interessierende Große p := ψ(u), die Ruinwahrscheinlichkeit, ist imAllgemeinen sehr klein, ca. 10−3. Fur eine Simulation der Ruinwahrscheinlichkeitsetzen wir wie in in Beispiel 6.6
Y := 1Q(u)<0,
jedoch mit einem unendlichen Zeithorizont. Konnten wir eine klassische Monte-Carlo-Simulation von Y durchfuhren, so hatte diese die Varianz
VarY = p(1− p).
Bei abnehmendem p verringert sich zwar die Varianz, jedoch ist dieser Wert p sowiesosehr klein. Deshalb ist von großerer Bedeutung die relative Abweichung:
√VarY
p=
√p(1− p)
p→∞ fur p → 0.
Im Folgenden fuhren wir ein Qualitatskriterium einer Monte-Carlo-Methode fur sel-tene Ereignise ein.
Definition 6.9 Es seien A(u) Ereignisse, die von einem Paremeter u > 0 abhangen,so dass
limu→∞
P (A(u)) = 0,
und X(u) Monte-Carlo-Simulationen fur P (A(u)).
1) Es besitzt (X(u))u>0 einen beschrankten relativen Fehler (bounded relative er-ror), falls gilt:
lim supu→∞
VarX(u)
(P (A(u)))2< ∞.
2) Es ist (X(u))u>0 logarithmisch effizient (logarithmically efficient), falls gilt:
lim supu→∞
VarX(u)
(P (A(u)))2−ε< ∞ fur alle ε > 0.
71

Bemerkung 6.10
1) Falls die Folge (X(u))u>0 logarithmisch effizient ist, dann gilt:
lim infu→∞
ln VarX(u)
ln P (A(u))> 2.
2) Ein klassisches Monte-Carlo-Verfahren kann nie logarithmisch effizient sein.
3) Damit ein Monte-Carlo-Schatzer Xn fur E [Y ] mit Wahrscheinlichkeit von min-destens 1 − α nicht um mehr als k% von E [Y ] abweicht, sind approximativmindestens
n = k2u21−α/2
VarX1
(E [Y ])2
Simulationen notwendig, wobei u1−α/2 das 1− α2-Quantil der Standardnormal-
verteilung bezeichnet. Ein beschrankter relativer Fehler bedeutet also, dass dienotwendige Anzahl von Simulationen, um eine relative Genauigkeit des Monte-Carlo-Schatzers zu garantieren, beschrankt bei kleiner werdendemE [Y ] bleibt.
Beispiel 6.11 Fur Ruinwahrscheinlichkeiten ist das Ereignis Q(u) < 0 abhangigvon der Anfangsrisikoreserve u:
A(u) := Q(u) < 0 = τ(u) < ∞,
wobei τ(u) die Ruinzeit bezeichnet. Falls die Nettoprofitbedingung erfullt ist, dannbezeichnet A(u) ein seltenes Ereignis im Sinn von Definition 6.9, da P (A(u)) → 0fur u →∞.
6.3.2 Ruinwahrscheinlichkeit mittels Pollaczek-Khintchine Formel
Eine Simulation der Ruinwahrscheinlichkeit ψ(u) erhalten wir durch eine Monte-Carlo-Simulation der Zufallsvariablen
Y = 1Q(u)<0 .
Jedoch kann diese Monte-Carlo-Simulaton keine klassische Simulation sein, da dieseeine Simulation des Risikoprozesses R in unendlicher Zeit erfordert. Die in die-sem Abschnitt vorgestellten Simulationen basieren auf der Darstellung der Ruin-wahrscheinlichkeit ψ gemaß Satz 3.28. Fur die Uberlebenswahrscheinlichkeit ϕ(u) =1− ψ(u) gilt:
ϕ(u) =ρ
1 + ρ
∞∑
k=0
1
(1 + ρ)k(F I
X1)∗k(u).
72

Dies entspricht gerade der Verteilungsfunktion des Gesamtschadens SM eines Port-folios Zk : k ∈ N von unabhangigen Risiken Zk, die gemaß der integriertenVerteilungsfunktion F I
X1verteilt sind, und einer Schadenzahl M , die geometrisch
verteilt ist zu dem Parameter r = (1 + ρ)−1. Denn nach Satz 2.3 gilt:
P (SM 6 u) =∞∑
k=0
P (M = k)P (Z1 + . . . Zk 6 u)
= (1− r)∞∑
k=0
rk(F IX1
)∗k(u)
= ϕ(u) (22)
und folglich ψ(u) = P (SM > u).Unter Ausnutzung dieser Gleichheit erhalt man folgenden Algorithmus zur Simula-tion der Zufallsvariablen Y :
(1) erzeuge eine Zufallsvariable M , die zum Parameter r = (1 + ρ)−1 geometrischverteilt ist;
(2) erzeuge unabhangige Z1, . . . , ZM mit Verteilungsfunktion F IX1
;
(3) setze Y = 1, falls SM > u, sonst 0.
Durch n-malige Anwendung dieses Algorithmus erhalt man n Monte-Carlo-Simu-lationen Y1, . . . , Yn fur E [Y ]. Der klassische Monte-Carlo-Schatzer ist
Yn =1
n
n∑
k=1
Yk.
Bemerkung 6.12
1) Als eine klassische Monte-Carlo-Simulation kann diese Simulation nicht loga-rithmisch effizient sein fur das Ereignis SM > u und damit auch nicht furψ(u). Wie in Bemerkung 6.10.2) erhalt man:
lim supu→∞
VarY1
ψ(u)= 1
2) Dieses Verfahren basiert auf der Pollaczek-Khintchine Formel, die wiederumauf die Eigenschaft der Ruinwahrscheinlichkeit zuruckzufuhren ist, Losung derIntegralgleichung (12) zu sein. Jedoch sind fur die Approximation der Losungdieser Integralgleichung zahlreiche numerische Verfahren bekannt.
73

6.3.3 Via importance sampling
Setzt man die Existenz des Cramer-Lundberg-Koeffizienten voraus, kann man eineSimulationsmethode fur die Ruinwahrscheinlichkeit gewinnen, die einen beschrank-ten relativen Fehler besitzt. Dieser Algorithmus basiert auf der Methode des “im-portance samplings”. Grundlage dieser Methode ist das folgende Resultat:
Theorem 6.13 Falls der Cramer-Lundberg-Koeffizient r > 0 existiert, definiereman
λr := λMX1(r), Pr,X1(dx) :=1
MX1(r)erxPX1(dx).
a) Es existiert ein Wahrscheinlichkeitsmaß Pr, so dass (SN(t) : t > 0) bezuglichdieses Maßes Pr ein zusammengesetzter Poissonprozess mit Charakteristik(λr, Pr,X1) ist.
b) Mit der Bezeichnung Er fur den Erwartungswertoperator bezuglich des MaßesPr gilt:
ψ(u) := P (τ(u) < ∞) = Er
[e−r(SN(τ(u))−βτ(u)) 1τ(u)<∞
].
Beweis: Siehe [2, Ch. III.5]. 2
Zur Erinnerung und Beachtung:• λ bezeichnet die Intensitat des Poissonprozesses;• MX1 bezeichnet die momenterzeugende Funktion von X1;• zusammgengesetzter Poissonprozess ist in Definition 3.8 definiert;• τ(u) ist eine Zufallsvariable, die sogenannte Ruinzeit, vgl. Stochastik 2 Stoppzeit;• mit SN(τ(u)) wird die Zufallsvariable SN(t) zum Zeitpunkt t = τ(u) bezeichnet, derIndex ist also ebenfalls vom Zufall abhangig.
Fur die Monte-Carlo-Simulation mittels importance sampling erhalt man folgendenAlgorithmus:
(1) bestimme den Cramer-Lundberg-Koeffizienten r > 0 und definiere λr sowiePr,X1 ;
(2) setze Y = 0;
(3) wiederhole folgende Schritte bis u− Y < 0:
(i) erzeuge eine zum Parameter λr exponentialverteilte Zufallsvariable W ;
(ii) erzeuge eine Zufallsvariable X gemaß der Verteilung Pr,X1 ;
(iii) setze Y := Y + X − βW ;
(4) gebe Z := e−rY zuruck:
Theorem 6.14 Die nach diesem Algorithmus gewonnene Monte-Carlo-Simulationhat einen beschrankten relativen Fehler.
74

6.3.4 Via bedingter Monte-Carlo-Simulation
Die Simulationen dieses Abschnittes basieren auf der varianzreduizierenden Metho-de der bedingten Monte-Carlo-Simulation. Auf diesem Weg werden wir eine Monte-Carlo-Simulation erhalten, die logarithmisch effizent ist, falls die integrierte Vertei-lungsfunktion F I
X1vom Pareto-Typ ist. Man kann zeigen, dass dies der Fall ist, falls
die Verteilung der Risiken vom Pareto-Typ sind, z.B. Paretoverteilung.Wie zuvor nutzen wir die Darstellung der Ruinwahrscheinlichkeit als die Tailver-teilungsfunktion des Gesamtschadens SM eines Portfolios von Risken Zk mit derVerteilung F I
X1und geometrisch verteilter Schadenzahl M aus. Bedingt man unter
den ersten M − 1 Risiken erhalt man:
ψ(u) = P (Z1 + · · ·+ ZM > u)
= E [P (Z1 + · · ·+ ZM > u |Z1, . . . , ZM−1)]
= E[1− F I
X1(u− Z1 − · · · − ZM−1)
].
Als einen Algorithmus zur Simulation von ψ(u) bietet sich an:
(1) erzeuge eine Zufallsvariable M , die zum Parameter q = (1 + ρ)−1 geometrischverteilt ist;
(2) erzeuge unabhangige Z1, . . . , ZM−1 mit Verteilungsfunktion F IX1
;
(3) setze Y1(u) := 1− F IX1
(u− Z1 − · · · − ZM−1);
Obwohl dieser Algorithmus varianzreduzierend ist, da es eine bedingte Monte-Carlo-Simulation ist, erhalten wir jedoch dasselbe asymptotische Verhalten dieses Algorith-mus bei subexponentiellverteilten Risiken wie die klassische Monte-Carlo-Simulationdes Abschnittes 6.3.2:
Korollar 6.15 Die integrierte Verteilungsfunktion F IX1
und die VerteilungsfunktionFX1 der Risiken seien subexponentiell. Dann gilt fur die Varianz
limu→∞
lnVarY1(u)
ln ψ(u)= 1.
Beweis: Siehe [3] . 2
Das Korollar 6.15 zeigt, dass der oben vorgestellte Algorithmus nicht logarithmischeffizient sein kann. Wir verbessern diesen Algorithmus durch Ausnutzung einer we-sentlichen Eigenschaft von subexponentiellen Verteilungen: die Tailverteilung derSumme verhalt sich asypmptotisch wie die Tailverteilung des maximalen Schadens,siehe (10).Fur beliebige reellwertige Zufallsvariablen Z1, . . . , Zn bezeichne
Z(1), . . . , Z(n)
75

die Zufallsvariablen in geordneter Folge, so dass Z(1) 6 . . . 6 Z(n) gilt. Diese Rei-henfolge hangt naturlich von ω ∈ Ω ab, jedoch lasst sich leicht nachweisen, dass dieMeßbarkeit erhalten bleibt.
Lemma 6.16 Es seien Z1, . . . , Zn unabhangige, identisch verteilte Risiken mit Ver-teilungsfunktion F I
X1und
S(m) :=m∑
k=1
Z(k) fur m 6 n.
Dann besitzt Sn := Z1 + · · ·+ Zn die folgende Tailverteilungsfunktion:
P (Sn > u) = E[1− F I
X1(maxu− S(n−1), Z(n−1))1− F I
X1(Z(n−1))
].
Damit erhalten wir folgenden Algorithmus:
(1) erzeuge eine Zufallsvariable M , die zum Parameter p = (1 + ρ)−1 geometrischverteilt ist;
(2) erzeuge unabangige Z1, . . . , ZM mit Verteilungsfunktion F IX1
;
(3) setze H(u) := u− Z(1) − · · · − Z(M−1);
(4) setze
Y2(u) :=1− F I
X1(maxH, Z(M−1))
1− F IX1
(Z(M−1)).
Dieser Algorithmus lasst sich jetzt als logarithmisch effizient nachweisen, falls die in-tegrierte Verteilungsfunktion der Verteilungsfunktion der zugrundeliegenden Risikeneine Verteilung vom Pareto-Typ ist.
Theorem 6.17 Die integrierte Verteilungsfunktion F IX1
der Risikoverteilung sei vomPareto-Typ. Dann gilt fur die Varianz
lim infu→∞
lnVarY2(u)
ln ψ(u)> 2.
76

A Appendix
A.1 Parameter von Verteilungen
In einer Einfuhrung zur Wahrscheinlichkeitstheorie betrachtet man eine reellwertigeZufallsvariable X als eine messbare Abbildung von einem Wahrscheinlichkeitsraum(Ω,A , P ) in den Raum (R, B(R)), auf dem das Bildmaß oder die Wahrscheinlich-keitsverteilung PX induziert wird. Wie oft in der Wahrscheinlichkeitstheorie sindwir hier nicht an den zufalligen Werten ω ∈ Ω interessiert, sondern nur an denWerten X(ω) oder sogar meistens nur an der Verteilung PX von X. Deshalb ver-nachlassigt man den zugrundegelegten Wahrscheinlichkeitsraum und betrachtet nurdie induzierten Wahrscheinlichkeitsverteilungen.
Definition A.1
a) Ein Wahrscheinlichkeitsmaß Q auf (R,B(R)) heißt Verteilung.
b) Besitzt eine reellwertige Zufallsvariable X die (Wahrscheinlichkeits-)VerteilungQ, so schreiben wir
X ∼ Q.
Außer dem Erwartungswert und der Varianz einer Zufallsvariablen gibt es noch zahl-reiche andere Parameter, die die zugrunde liegende Verteilung beschreiben. Zunachstnahe liegend sind hohere Momente.
Definition A.2 Es sei Q eine Verteilung und X eine Zufallsvariable mit der Ver-teilung Q. Falls fur ein k ∈ N
∫
R|x|k Q(dx) < ∞
gilt, dann heißt
a) mk := E[Xk
]=
∫
Rxk Q(dx) das k-te (gewohnliche) Moment von Q oder X.
b) µk := E (X −E [X])k =
∫
R(x −m1)
k Q(dx) das k-te zentrierte Moment von
Q oder X.
Bemerkung A.3 Fur den Erwartungswert einer reellwertigen Zufallsvariablen aufeinem Wahrscheinlichkeitsraum (Ω, A , P ) mit der Verteilung PX gilt:
E [X] =
∫
Ω
X(ω) P (dω) =
∫
RxPX(dx).
101

Das letzte Integral kann man, unabhangig von der Zufallsvariablen X, als einen Wertbetrachten, der von der Verteilung PX definiert wird. Deshalb spricht man auchvon dem Erwartungswert einer Verteilung, ohne eine Zufallsvariable zu benennen.Entsprechendes gilt fur die hoheren Momente.
Mittels der binomischen Formel erhalt man unmittelbar folgenden Zusammenhangzwischen den gewohnlichen und zentrierten Momenten:
Lemma A.4 Es sei Q eine Verteilung mit∫
R|x|k Q(dx) < ∞,
fur ein k ∈ N. Dann folgt fur die gewohnlichen und zentrierten Momente:
µk =k∑
j=0
(k
j
)(−1)k−jmjm
k−j1
mit m0 := 1.
Bei einer symmetrischen Verteilung, d.h Q(m1+A) = Q(m1−A) fur alle A ∈ B(R),ist das dritte zentrierte Moment Null, falls es existiert. Durch geeignete Normierungdieses Moments erweist sich der resultierende Quotient invariant bezuglich Standar-disierung bzw. dimensionslos.
Definition A.5 Es sei Q eine Verteilung, deren drittes Moment µ3 existiert undendlich ist. Dann heißt
γ1(Q) :=µ3√µ3
2
die Schiefe der Verteilung (nach Charlier). Falls X eine Zufallsvariable mit derVerteilung Q ist, so benutzen wir die Notation γ1(X).
Als eine weitere Große fuhren wir den Exzess einer Verteilung ein, der mittels desvierten zentrierten Moments definiert ist. Der Exzess gibt den Grad der Steilheiteiner Verteilung an. Durch Normierung erhalt man wieder die Invarianz bezuglichStandardisierung und durch eine affine Verschiebung wird erreicht, dass der Exzessder Standardnormalverteilung sich als 0 ergibt.
Definition A.6 Es sei Q eine Verteilung, deren viertes Moment µ4 existiert undendlich ist. Dann heißt
γ2(Q) :=µ4
µ22
− 3
der Exzess der Verteilung. Falls X eine Zufallsvariable mit der Verteilung Q ist, sobenutzen wir die Notation γ2(X).
102

Mesokurtisch γ2 = 0 Leptokurtisch γ2 > 0Platykurtisch γ2 < 0
Abbildung 4: Dichten von Verteilungen mit verschiedenen Exzessen
Eine weitere Kenngroße von Verteilungen ist der Median.
Definition A.7 Es sei X eine Zufallsvariable mit der Verteilung Q. Dann heißtdie Zahl m = m(Q) ∈ R, fur die gilt
P (X 6 m) > 1
2und P (X > m) > 1
2
Median von X oder Q.
Bemerkung A.8 Der Median muss nicht eindeutig sein.
Beispiel A.9
a) Es sei X eine Zufallsvariable mit
P (X = 0) = 0.5, P (X = 10) = 0.5.
Dann sind alle Zahlen m ∈ [0, 10] Mediane von X.
b) Der (eindeutige) Median der Normalverteilung N(µ, σ2) ist µ.
Eine Verteilung muss ihren “Masseschwerpunkt” weder beim Erwartungswert nochbeim Median haben.
Definition A.10
a) Es sei X eine stetig verteilte Zufallsvariable mit der Verteilung Q, die dieDichte f besitze. Dann heißt jedes relative Maximum mod=mod(X) der Dichtef Modalwert von X oder Q.
103

b) Es sei X eine diskret verteilte Zufallsvariable mit pk = P (X = xk) fur k ∈ N0.Dann heißt jedes pk0 Modalwert mod=mod(X) von X oder Q, fur das gilt:
pk0 > pk0−1 und pk0 > pk0+1.
Im Falle von Randpunkten wird nur die jeweilige definierte Seite betrachtet.
Falls nur ein Modalwert einer Verteilung existiert, so wird die Verteilung unimodalgenannt. Entsprechend werden die Begriffe bimodal und multimodal benutzt.
Bemerkung A.11 Der Modalwert muss nicht eindeutig sein.
Beispiel A.12
a) Die Poissonverteilung π(λ) besitzt die Modalwerte λ und λ − 1, falls λ ∈ N,und ansonsten den Modalwerte [λ]. ([·] Gauss-Klammer).
b) Die Binomialverteilung b(n, p) besitzt die Modalwerte
r ∈ N : p(n + 1)− 1 6 r 6 p(n + 1).
c) Die Normalverteilung N(µ, σ2) besitzt den (eindeutigen) Modalwert µ.
A.2 Faltung
Sind X und Y zwei unabhangige, reellwertige Zufallsvariablen, so ist X+Y eine neueZufallsvariable. Die Verteilung PX+Y von X + Y ist die Faltung der VerteilungenPX und PY von X und Y , d.h.
PX+Y (A) = P (X + Y ∈ A) =
∫
RPX(A− x) PY (dx).
fur A ∈ B(R).
Definition A.13
a) Es seien R und Q zwei Verteilungen auf (R,B(R)). Dann heißt die Verteilung
R ∗Q : B(R) → [0, 1], R ∗Q(A) :=
∫
RR(A− u) Q(du) fur A ∈ B(R)
Faltung von R und Q, wobei A− c := y ∈ R : y + c ∈ A fur jedes c ∈ R.
b) Es seien F und G zwei Verteilungsfunktionen auf R. Dann heißt die Funktion
F ∗G : R→ [0, 1], F ∗G(x) :=
∫
RF (x− u) G(du) fur alle x ∈ R,
Faltung von F und G, wobei das Integral als Lebesgue-Stieltjes-Integral zuverstehen ist.
104

Aufgrund der folgenden Bemerkung ist eine vertiefte Kenntnis des Lebesgue-Stieltjes-Integrals nicht notwendig, um die Faltung von Verteilungsfunktionen zu behandeln.
Bemerkung A.14 Es bezeichne F und G die Verteilungsfunktionen von zwei Ver-teilungen R und Q. Dann ist die Faltung F ∗G gerade die Verteilungsfunktion derVerteilung R ∗Q, d.h.:
(F ∗G)(x) =
∫ x
−∞(R ∗Q)(ds) = (R ∗Q)((−∞, x]).
Beispiel A.15
a) Es seien X und Y unabhangige, poissonverteilte Zufallsvariablen zu den Pa-rametern λ1, λ2 > 0. Dann besitzt die Zufallsvariable X + Y eine Poissonver-teilung zu dem Parameter λ1 + λ2.
b) Es seien R und Q diskrete Verteilungen auf S = yk : k ∈ N0 ⊆ R, d.h.
R(S) = 1 und Q(S) = 1.
Dann ist die Faltung R ∗Q eine diskrete Verteilung auf
T = xl : es existiert i ∈ N0, so dass xl − yi ∈ Sund ist gegeben durch
(R ∗Q)(xl) =∞∑
k=0
R(xl − yk)Q(yk).
c) Es seien R und Q Verteilungen mit Dichten f und g. Dann besitzt die FaltungR ∗Q ebenfalls eine Dichte und ist gegeben durch
(R ∗Q)(A) =
∫
A
(∫
Rf(x− y)g(y) dy
)dx fur alle A ∈ B(R).
Die Faltung erweist sich als assoziativ, d.h. es gilt fur Verteilungen Qk, k = 1, 2, 3:
(Q1 ∗Q2) ∗Q3 = Q1 ∗ (Q2 ∗Q3).
Deshalb konnen wir folgende vereinfachende Notation einfuhren:
Definition A.16
a) Es sei Q eine Verteilung. Dann heißt
Q∗n := Q ∗ · · · ∗Q fur n ∈ N,
n-fache Faltung von Q. Wir setzen Q∗0 := δ0.
b) Es sei F eine Verteilungsfunktion. Dann heißt
F ∗n := F ∗ · · · ∗ F fur n ∈ N,
n-fache Faltung von F . Wir setzen F ∗0 := 10.
105

A.3 Laplace-Transformierte
Ahnlich wie die charakteristische Funktion in eineindeutiger Weise eine Verteilungbeschreibt, gibt es noch weitere Integraltransformierte. Die in diesem Abschnittbetrachtete Laplace-Transformierte eignet sich insbesondere bei Verteilungen, dieauf der positiven Achse [0,∞) konzentriert sind.
Definition A.17 Es sei Q eine Verteilung auf (R+, B(R+)). Dann heißt
LQ : [0,∞) → R, LQ(t) :=
∫
R+
e−ts Q(ds)
Laplace-Transformierte von Q.Falls X eine Zufallsvariable mit Verteilung Q ist, so nennt man LX := LQ Laplace-Transformierte von X.
Falls das Integral fur ein t0 < 0 existiert, so ist die Laplace-Transformierte sogar auf[t0,∞) definiert.Ist LX die Laplace-Transformierte einer Zufallsvariablen X, dann gilt offensichtlich
LX(t) = E [exp(−tX)] fur t > 0.
Beispiel A.18
a) Die Binomialverteilung b(n, p) besitzt die Laplace-Transformierte
Lb(n,p)(t) = (1− p + pe−t)n fur t ∈ R .
b) Die Poissonverteilung π(λ) besitzt die Laplace-Transformierte
Lπ(λ)(t) = exp(λ(e−t − 1)) fur t ∈ R .
c) Die Exponentialverteilung Exp(θ) besitzt die Laplace-Transformierte
LExp(θ)(t) =θ
θ + tfur t > −θ.
Eigenschaften der charakteristischen Funktionen gelten analog fur die Laplace-Trans-formierte.
Theorem A.19 Es sei LX die Laplace-Transformierte einer nichtnegativen Zufalls-variablen X mit Verteilungsfunktion F . Dann gilt:
a) LX ist stetig in [0,∞) und beliebig oft differenzierbar in (0,∞) mit
L(k)X (t) :=
dk
dtkLX(t) = (−1)kE
[Xk exp(−tX)
]fur k = 0, 1, . . . .
106

b) die folgende Umkehrformel:
F (x) = limn→∞
∑
k6nx
(−1)k nk
k!L(k)(n)
fur alle x ∈ y > 0 : F ist stetig in y.c) die Verteilung von X ist eindeutig durch LX bestimmt.
Beweis: Siehe [7, S. 435]. 2
Mittels der Laplace-Transformierten lassen sich die Momente der zugrundeliegendenVerteilung einfach bestimmen:
Theorem A.20 Es sei X eine nichtnegative Zufallsvariable mit Laplace-Transfor-mierter LX . Dann sind fur jedes k ∈ N aquivalent:
1) E|X|k < ∞.
2) L(k)X (0+) := lim
t0L
(k)X (t) existiert und E
[Xk
]= (−1)k L
(k)X (0+).
Beispiel A.21
a) Fur eine b(n, p)-verteilte Zufallsvariable X gilt:
E [X] = −L(1)X (0+) = −(−pn(1− p + pe−t)n−1e−t)|t=0 = pn.
b) Fur eine π(λ)-verteilte Zufallsvariable X gilt:
E [X] = −L(1)X (0+) = −(−λ exp(−t) exp(λ(e−t − 1)))|t=0 = λ.
c) Fur eine Exp(θ)-verteilte Zufallsvariable X gilt:
E [X] = −L(1)X (0+) = −
(− θ
(θ + t)2
)|t=0 =
1
θ.
In der Risikotheorie wird oft der folgende Faltungssatz angewandt:
Theorem A.22 Es seien P und Q zwei Verteilungen auf (R+,B(R+)) mit Laplace-Transformierten LP und LQ. Dann gilt fur die Laplace-Transformierten LP∗Q vonP ∗Q:
LP∗Q(t) = LP (t)LQ(t) fur alle t > 0.
Beispiel A.23 Es seien X1 und X2 poissonverteilte Zufallsvariablen zu den Para-metern λ1, λ2 > 0. Dann ist X1 + X2 poissonverteilt zu dem Parameter λ1 + λ2.
107

Die Laplace-Transformierte erweist sich ebenfalls nutzlich zur Verifikation der schwa-chen Konvergenz von Verteilungen:
Theorem A.24 Es seien Xn, X nichtnegative Zufallsvariablen mit Laplace-Trans-formierten Ln, L. Dann gilt:
Xnw→ X fur n →∞ ⇐⇒ lim
n→∞Ln(t) = L(t) fur alle t > 0.
Beweis: Siehe [7]. 2
Beispiel A.25 Es seien Xn fur n ∈ N binomialverteilte Zufallsvariablen zu denParametern n ∈ N und pn ∈ (0, 1):
P (Xn = k) =
(n
k
)pk
n(1− pn)n−k fur k = 0, 1, . . . , n.
Falls die Grenzwertaussage
limn→∞
npn = λ fur ein λ > 0
gilt, dann konvergiert (Xn)n∈N schwach gegen eine poissonverteilte Zufallsgroße zumParameter λ.
Im Zusammenhang mit der Stochastik wird die Laplace-Transformierte in der Mo-nographie von Feller [7] eingefuhrt. Klassische Literatur ist die Monographie vonDotsch.Weitere Literatur:
• G. Doetsch. Anleitung zum praktischen Gebrauch der Laplace-Transformierteund der Z- Transformation. Munchen: R. Oldenbourg Verlag, 1989.
• P. P. G. Dyke. An introduction to Laplace transforms and Fourier series.London: Springer, 2000.
• J. L. Schiff. The Laplace transform: Theory and applications. New York:Springer, 1999.
A.4 Erzeugende Funktion
Bei diskret verteilten Zufallsvariablen ist noch eine weitere Transformierte ublich.
Definition A.26 Es sei Q eine diskrete Verteilung auf N0 mit qk := Q(k) furk ∈ N0. Dann heißt die Potenzreihe
GQ(s) :=∞∑
k=0
skqk
108

erzeugende Funktion von Q.Fur eine diskret verteilte Zufallsvariable X mit Werten in N0 und Wahrscheinlich-keitsverteilungen pk := P (X = k) fur k ∈ N0 heißt die Potenzreihe
GX(s) := E[sX
]=
∞∑
k=0
skpk
erzeugende Funktion von X.
Beispiel A.27
1) Es sei X eine Poisson verteilte Zufallsvariable zu dem Parameter λ > 0. Danngilt
GX(s) = eλ(s−1) fur s ∈ R .
2) Es sei X eine geometrisch verteilte Zufallsvariable zu dem Parameter p ∈ (0, 1).Dann gilt
GX(s) =p
1− (1− p)sfur |s| 6 1
1− p.
Bemerkung A.28
1) Die erzeugende Funktion existiert mindestens fur |s| 6 1.
2) Man beachte, dass die erzeugende Funktion eine Potenzreihe ist. Ist r derKonvergenzradius der erzeugenden Funktion G, dann ist G differenzierbar auf(−r, r).
3) Der Definitionsbereich bzw. Konvergenzradius r der erzeugenden Funktionlasst sich z.B. uber die Cauchy-Hadamard-Formel bestimmen:
r =1
lim supk→∞(pk)1/k.
Fur die erzeugende Funktion gelten analoge Aussagen wie fur die Laplace-Trans-formierte. Insbesondere ist die Verteilung durch die erzeugende Funktion eindeutigbestimmt, was in diesem Fall sich sehr einfach durch Differentiation ergibt.
Theorem A.29 Es sei X eine Zufallsvariable mit Werten in N0 und erzeugenderFunktion G. Dann gilt
P (X = k) =G
(k)X (0)
k!fur alle k ∈ N0 .
109

Die erzeugende Funktion ist wie die Laplace-Transformierte sehr nutzlich zur Be-rechnung der Momente:
Theorem A.30 Es sei X eine Zufallsvariable mit Werten in N0 und erzeugenderFunktion G. Falls fur ein k ∈ N die (einseitigen) Ableitungen
G(k)(1−) := lims1
G(k)(s)
existieren, dann folgt:
E [X(X − 1) . . . (X − k + 1)] = G(k)(1−).
110

B Bedingter Erwartungswert
Es sei H ein Hilbertraum mit Skalarprodukt 〈·, ·〉 und dazugehoriger Norm ‖h‖ =√〈h, h〉 fur h ∈ H.
Definition B.1 Es sei U ⊆ H. Eine Projektion auf U ist eine Abbildung
π : H → H mit π π = π und π(H) = U.
Theorem B.2 Es sei U ⊆ H ein abgeschlossener, nicht-leerer Unterraum von H.Dann existiert genau eine lineare Projektion π : H → H auf U , so dass gilt:
‖π(x0)− x0‖ = inf‖y − x0‖ : y ∈ U fur alle x0 ∈ H.
Die Projektion π besitzt folgende Eigenschaften:
a) Id−π ist Projektion auf U⊥,
wobei U⊥ := v ∈ H : 〈v, u〉 = 0 fur alle u ∈ U;b) H lasst sich als direkte Summe darstellen: H = U ⊕ U⊥.
Wir wenden diese einfachen Resultate der Funktionalanalysis an, um den bedingtenErwartungswert zu definieren.Es seien (Ω,A , P ) ein Wahrscheinlichkeitsraum und D ⊆ A eine Teil-σ-Algebra.Dann ist der Raum
L2(Ω,A , P ) := X : Ω → R : X ist A –B(R)–messbar und E |X|2 < ∞/Nein Hilbertraum bezuglich des Skalarprodukts
〈X,Y 〉 := E [XY ] =
∫
Ω
X(ω)Y (ω) P (dω)
und der Raum
L2(Ω, D , P ) := Y : Ω → R : Y ist D–B(R)–messbar und E |Y |2 < ∞/Nist ein abgeschlossener Unterraum von L2(Ω,A , P ), wobei
N := X : Ω → R : X ist A –B(R)–messbar und X = 0 P-f.s..Dies rechtfertigt unsere folgende Definition:
Definition B.3 Es seien X eine Zufallsvariable mit E |X|2 < ∞ und D ⊆ A eineTeil-σ-Algebra. Dann heißt die lineare Projektion
π : L2(Ω, A , P ) → L2(Ω,A , P ) auf L2(Ω, D , P )
bedingter Erwartungswert von X unter D .Als Notation fuhren wir ein: E [X | D ] := π(X).Man definiert die bedingte Wahrscheinlichkeit auf folgender Weise:
P (X ∈ A | D) := E [1A(X) |D ] fur alle A ∈ B(R).
111

Bemerkung B.4 Der bedingte Erwartungswert E [X | D ] ist eine Aquivalenzklassein dem Quotientenraum L2(Ω, D , P ). In unserer Sprech– und Schreibweise werdenwir aber nicht unterscheiden, wenn wir uns auf einen beliebigen Reprasentantendieser Aquivalenzklasse beziehen. In diesem Sinn ist der bedingte ErwartungswertE [X |D ] eine Zufallsvariable auf dem Wahrscheinlichkeitsraum (Ω, D , P |D) und alleAussagen fur den bedingten Erwartungswert konnen nur P -f.s. getroffen werden.
Bemerkung B.5
a) Der bedingte Erwartungswert existiert fur jede Zufallsvariable X mit E |X|2 <∞ und ist P -fast sicher eindeutig.
b) Man kann den bedingten Erwartungswert auch fur Zufallsvariablen X mitE |X| < ∞ definieren. (Auch bei Fortschreiten des hier eingeschlagenen Weges).
Eine wesentliche Eigenschaft des bedingten Erwartungswertes ergibt sich (hier) di-rekt aus der Definition als Projektion und Satz B.2:
Theorem B.6 Es seien X eine Zufallsvariable mit E |X|2 < ∞ und D ⊆ A eineTeil-σ-Algebra. Dann gilt:
E |E [X | D ]−X|2 = infE |Y −X|2 : fur alle Y ∈ L2(Ω,D , P ).
Der bedingte Erwartungswert E [X | D ] lasst sich als eine Vergroberung der Zufalls-variablen X verstehen, die nur noch die “Informationen” der kleineren σ-AlgebraD wiedergibt. Oft mochte man aber bedingen unter den “Informationen”, die eineandere Zufallsvariable Y bereitstellt.
Definition B.7
1) Es sei (Ω′, A ′) ein Messraum und T : Ω → Ω′ eine Abbildung. Dann heißt
σ(T ) := T−1(A′) : A′ ∈ A ′
die von der Abbildung T erzeugte σ-Algebra in Ω.
2) Es seien (Ωi,A i), i ∈ I, eine Familie von Messraumen und Ti : Ω → Ωi,i ∈ I, eine Familie von Abbildungen. Dann heißt
σ(Ti : i ∈ I) := σ
(⋃i∈I
σ(Ti)
)
die von den Abbildungen Ti erzeugte σ-Algebra in Ω (vgl. Notationen mitMaß- und Integrationstheorie).
112

Definition B.8 Es seien X eine Zufallsvariable mit E |X|2 < ∞. Ist (Ω′,A ′) einMessraum und Y : Ω → Ω′ eine Zufallsvariable, dann heißt
E [X |Y ] := E [X | σ(Y )]
bedingter Erwartungswert von X unter Y .
Lemma B.9 (Faktorisierung)Es seien (Ω′,A ′) ein Messraum und
Y : (Ω,A ) → (Ω′,A ′)
eine Zufallsvariable. Fur eine beliebige Funktion Z : Ω → R sind aquivalent:
a) Z ist (9σ(Y )–B(R))–messbar;
b) es existiert eine messbare Funktion g : (Ω′,A ′) → (R,B(R)) mit Z = g Y .
Bemerkung B.10 Da der bedingte ErwartungswertE [X |Y ] σ(Y )-B(R) messbarist, existiert eine Borel-messbare Funktion g : (Ω′, A ′) → (R, B(R)), so dass gilt:
E [X |Y ] = g(Y ).
Im folgenden Satz geben wir einige einfache Eigenschaften des bedingten Erwar-tungswertes wieder.
Theorem B.11 Es seien X und Y reellwertige Zufallsvariablen und E |X|2 < ∞sowie D ⊆ A eine Teil-σ-Algebra. Dann gelten:
a) E [E [X | D ]] = E [X].
b) falls X D-messbar ist: E [X | D ] = X P -f.s.;
c) fur a, b ∈ R und E |Y |2 < ∞:E [aX + bY | D ] = aE [X | D ] + bE [Y | D ] P -f.s.;
d) falls Y D-messbar ist und E |XY |2 < ∞: E [XY | D ] = Y E [X | D ] P -f.s.;
e) falls E ⊆ D Teil-σ-Algebra: E [X |E ] = E [E [X | D ] |E ] P -f.s.
Definition B.12 Es seien X1, . . . , Xn reellwertige Zufallsvariablen und D ⊆ Aeine Teil-σ-Algebra.
a) Die Zufallsvariablen X1, . . . , Xn werden bedingt unter D unabhangig genannt,falls gilt:
P (X1 6 x1, . . . , Xn 6 xn | D) = P (X1 6 x1 | D) · · ·P (Xn 6 xn | D) P-f.s.
fur alle x1, . . . , xn ∈ R.
113

b) Die Zufallsvariablen X1, . . . , Xn werden bedingt unter D identisch verteilt ge-nannt, falls gilt:
P (X1 6 x | D) = P (Xj 6 x | D) P-f.s.
fur alle x ∈ R und j = 1, . . . , n.
Weder mussen unabhangige Zufallsvariablen bedingt unabhangig sein, noch gilt diesumgekehrt, wie wir im folgenden Beispiel skizzieren.
Beispiel B.13 Es seien X1, X2, X3 unabhangige, identisch verteilte Zufallsvariablenmit
P (Xi = 1) = p und P (Xi = 0) = 1− p fur i = 1, 2, 3
und p ∈ (0, 1). Desweiteren definiere man
Sk :=k∑
i=1
Xi fur k = 1, 2, 3.
Wir lassen hier die genaue Begrundung aus, wie wir von Eigenschaften der herkomm-lichen, unter einem Ereignis bedingten Wahrscheinlichkeit, z.B. P (X1 = 1, X2 =1 |S2 = 1), was eine Zahl ist, auf Eigenschaften der bedingten Wahrscheinlichkeit,z.B. P (X1 = 1, X2 = 1 |S2), die eine Zufallsvariable ist, schließen konnen.
a) Es gilt:
P (X1 = 1 |S2 = 1) > 0, P (X2 = 1 |S2 = 1) > 0,
jedoch erhalt man
P (X1 = 1, X2 = 1 |S2 = 1) = 0.
Deshalb sind X1, X2 nicht unter σ(S2) bedingt unabhangig.
b) Einfache Rechnungen zeigen:
P (S1 = i, S3 = j |S2 = k) = P (S1 = i |S2 = k)P (S3 = j |S2 = k)
fur alle i ∈ 0, 1, k ∈ 0, 1, 2 und j ∈ 0, . . . , 3. Folglich sind S1 undS3 bedingt unter σ(S2) unabhangig. Jedoch sind S1 und S3 sicherlich nichtunabhangig (im herkommlichen Sinn).
114

Literatur
[1] G. Alsmeyer. Erneuerungstheorie. Analyse stochastischer Regenerationssche-mata. Stuttgart: B. G. Teubner, 1991.
[2] S. Asmussen. Ruin probabilities. Singapore: World Scientific., 1997.
[3] S. Asmussen and K. Binswanger. Simulation of ruin probabilities for subexpo-nential claims. Astin Bulletin, 27:297–318, 1997.
[4] N. L Bowers, H. U. Gerber, J. C. Hickman, D. A. Jones, and C. J. Nesbitt.Actuarial mathematics. Itasca: The Society of Actuaries, 1986.
[5] R. S. Chhikara and J. L. Folks. The inverse Gaussian distribution: theory,methodology, and applications. New York: Marcel Dekker, 1989.
[6] P. Embrechts, C. Kluppelberg, and T. Mikosch. Modelling extremal events forinsurance and finance. Berlin: Springer, 1997.
[7] W. Feller. An introduction to probability theory and its applications. Vol. II.New York: John Wiley and Sons, 1966.
[8] W. Fischer and I. Lieb. Funktionentheorie. Wiesbaden: Vieweg, 1992.
[9] H. U. Gerber. An introduction to mathematical risk theory. Philadelphia: S.S. Huebner Foundation, 1979.
[10] G. Gripenberg, S.-O. Londen, and O. Staffans. Volterra integral and functionalequations. Cambridge: Cambridge University Press, 1990.
[11] W.-R. Heilmann. Grundbegriffe der Risikotheorie. Karlsruhe: Verlag Versiche-rungswirtschaft e.V., 1987.
[12] C. Hipp and R. Michel. Risikotheorie: stochastische Modelle und statistischeMethoden. Karlsruhe: Verlag Versicherungswirtschaft, 1990.
[13] R. Kaas, M. Goovaerts, J. Dhaene, and M. Denuit. Modern actuarial risktheory. Boston: Kluwer Academic Publishers, 2003.
[14] T. Mack. Schadenversicherungsmathematik. Karlsruhe: Verlag Versicherungs-wirtschaft, 1996.
[15] N. Madras. Lectures on Monte Carlo methods. Providence, RI: American Ma-thematical Society, 2002.
[16] T. Mikosch. Non-life insurance mathematics. An introduction with stochasticprocesses. Berlin: Springer, 2004.
[17] B. D. Ripley. Stochastic simulation. New York: John Wiley & Sons, 1987.
115

[18] T. Rolski, H. Schmidli, V. Schmidt, and J. Teugels. Stochastic processes forinsurance and finance. Chichester: Wiley, 1999.
[19] K. D. Schmidt. Lectures on risk theory. Stuttgart: B. G. Teubner , 1996.
[20] E. Straub. Non-life insurance mathematics. Berlin: Springer-Verlag, 1988.
[21] K. Wolfsdorf. Versicherungsmathematik. Teil 2. Stuttgart : B. G. Teubner,1988.
116

IndexAlgorithmus
DePril, 7Panjer-Rekursionsverfahren, 23
Anpassungskoeffizient, 39Ausgleich im Kollektiv, 6
bedingtidentisch verteilt, 113unabhangig, 113
bedingter Erwartungswert, 111Binomialverteilung, 18Buhlmann Modell, 59
Cramer-LundbergKoeffizient, 39Modell, 37
Dispersionskoeffizient, 23
empirische Verteilungsfunktion, 34Erwartunswertprinzip, 47erzeugende Funktion, 108Exponentialprinzip, 50Exzess, 102
Faltung, 104Fehler
beschrankter relativer, 70effizient logarithmisch, 70
Gammaverteilung, 10, 29Gesamtschaden
individuelles Modell, 4kollektives Modell, 16
HazardFunktion, 32mittlere Rest, 33Rate, 32
heavy-tailed, 28heterogenes Modell, 55
integrierte Tailverteilungsfunktion, 41Inverse-Gauss-Verteilung, 11, 29
Konzentrationsmaß, 25
Laplace-Transformierte, 106Lognormalverteilung, 14, 29
Maximalschadenprinzip, 50Median, 103Mischung von Verteilungen, 21Modalwert, 103Moment, 101Monte-Carlo
bedingte, 68Definition, 67importance sampling, 68
Negative Binomialverteilung, 22Nettoprofitbedingung, 39Nettorisikoprinzip, 46Nullnutzenprinzip, 48Nutzenfunktion, 48
Paretoverteilung, 30Percentileprinzip, 52Poisson-Summenverteilung, 19Poissonmischung, 21Poissonprozess
homogener, 36zusammengesetzter, 37
Poissonverteilung, 19Portfolio
Definition, 4homogenes, 5
Pramienprinzip, 46
Quantil-Funktion, 52
Risiko, 4Risikoaversion, 50Risikoprozess, 38Ruinwahrscheinlichkeit, 38Ruinzeit, 38
Schadenzahl, 16Schadenzahlprozess, 35Schiefe, 102Schweizer Prinzip, 51Sicherheitszuschlag, 39
117

subexponentielle Verteilung, 30Supremumsdistanz, 24
Tailwahrscheinlichkeit, 28Totalvariationsabstand, 26
Uberlebenswahrscheinlichkeit, 38
Varianzprinzip, 47Verlustfunktion, 50Verlustfunktionenprinzip, 51Verteilung, 101
Wartezeiten, 35Weibullverteilung, 30
zusammengesetzte Summenvariablen, 17
118