
Skript zur Vorlesung SS 2008 -...
77
Materialtheorie Skript zur Vorlesung SS 2008 Institut für Mechanik Technische Universität Berlin Martin Schargott 18.07.2008
Transcript of Skript zur Vorlesung SS 2008 -...
Materialtheorie Skript zur Vorlesung SS 2008
Institut für Mechanik Technische Universität Berlin
Martin Schargott
18.07.2008
2
1. Plastische Deformation von Metallen ............................................................................ 4
1.1. Kristallgitter ...................................................................................................................... 4
1.1. Zugproben plastisch deformierbarer Materialien ............................................................ 6
1.2. Theoretische Festigkeitsgrenze ......................................................................................... 6
2. Versetzungen .................................................................................................................. 7
2.1. Versetzung als Grenze einer Schubzone: Der Burgersvektor .......................................... 8
2.2. Stufen- und Schraubenversetzungen ................................................................................ 8
2.3. Annihilation von Versetzungen ......................................................................................... 9
2.4. Die Peach-Köhler-Kraft .................................................................................................. 10
2.5. Die Linienspannung einer Versetzung ............................................................................ 10
2.6. Versetzungsreaktionen .................................................................................................... 12
2.7. Wechselwirkungen von Versetzungen ............................................................................ 12
2.8. Skalare Versetzungsdichte .............................................................................................. 12
2.9. Biegung eines Versetzungssegmentes .............................................................................. 13
2.10. Wie kommen Versetzungen in einen Kristall? ............................................................... 13
2.11. Stapelfehler und Partialversetzungen ............................................................................. 14
2.12. Messung und Abbildung von Versetzungen ................................................................... 14
3. Verfestigungsmechanismen ......................................................................................... 18
3.1. Übersicht .......................................................................................................................... 18
3.2. Punktdefekte, Fremdatome ............................................................................................. 18
3.3. Ausscheidungen ............................................................................................................... 19
3.4. Versetzungen anderer Gleitsysteme (Waldversetzungen) .............................................. 20
3.5. Weitreichende Spannungsfelder von Versetzungen ....................................................... 21
3.6. Gleichzeitige Wirkung von mehreren Verfestigungsmechanismen ............................... 21
3.7. Mikroplastische Deformation ......................................................................................... 21
3.8. Sprünge, kinks und jogs .................................................................................................. 21
3.9. Versetzungsklettern ......................................................................................................... 22
3.10. Speicherung von Versetzungen ....................................................................................... 22
3.11. Speicherung von Versetzungen in einkristallinen Metallen ........................................... 23
3.12. Verfestigung eines einkristallinen Metalls ...................................................................... 24
3.13. Verfestigung eines polykristallinen Metalls .................................................................... 24
3.14. Vernichtung von Versetzungen ....................................................................................... 24
3.15. Verteilung von Versetzungen in Schubzonen; Spannungskonzentrationen .................. 26
3.16. Skaleneffekte ................................................................................................................... 26
3.17. Geschwindigkeitsabhängigkeit der plastischen Deformation und Kriechen ................. 28
3.18. Superversetzungen in geordneten Mischkristallen ......................................................... 28
3.19. Superlegierungen ............................................................................................................. 30
3
4. Riss, Bruch und Ermüdung ......................................................................................... 31
4.1. Das Griffith-Bruchkriterium. ......................................................................................... 31
4.1.5. Griffith-Kriterium für dünne Schichten und dünne Fasern ...................................... 33
4.2. Spannungskonzentration in einer Probe mit einer Kerbe .............................................. 33
4.3. Tieftemperaturversprödung (und andere Versprödungsarten). .................................... 33
4.4. Kinetische Theorie des Bruchs nach Zhurkov (1957) .................................................... 34
4.5. Ermüdung ........................................................................................................................ 35
5. Verbundwerkstoffe ....................................................................................................... 37
5.1. Festigkeit-Sprödigkeit-Dilemma ..................................................................................... 37
5.2. Kraftfluß in faserverstärkten Verbundwerkstoffen ....................................................... 37
5.3. Bio- und Nanokomposite ................................................................................................. 37
5.4. Thermozyklisches Kriechen ............................................................................................ 39
6. Formgedächtnislegierungen ........................................................................................ 41
6.1. Deformation bei Phasentransformation ......................................................................... 41
6.2. Phasenübergang 1. Art: Die Clausius-Clapeyron-Gleichung ......................................... 41
6.3. Parameter des Phasenübergangs Austenit - Martensit .................................................. 42
6.4. Mikrostrukturen bei verschiedenen Temperaturen ....................................................... 43
6.5. Die Effekte von Formgedächtnislegierungen .................................................................. 44
6.6. Modellierung von Formgedächtnislegierungen als Phasenübergang 2. Art .................. 46
6.7. Thermodynamische Eigenschaften ................................................................................. 48
6.8. Analytische Untersuchungen des Modells ...................................................................... 49
6.9. Typische thermomechanische Belastungsfälle ................................................................ 50
6.10. Numerische Untersuchung des Modells .......................................................................... 52
6.11. Anwendungen von Formgedächtnislegierungen............................................................. 55
7. Elastomere / Gummi .................................................................................................... 58
7.1. Einführung ...................................................................................................................... 58
7.2. Thermodynamische Effekte und Thermodynamik von Gummi .................................... 58
7.3. Statistische Theorie von Gummi ..................................................................................... 59
7.4. Ein- und zweiachsige Deformationen .............................................................................. 61
7.5. Viskoelastische Eigenschaften von Gummi .................................................................... 63
7.6. Energiedissipation in einem viskoelastischen Material .................................................. 65
7.7. Einfluss der Temperatur ................................................................................................. 68
7.8. Prony-Reihen ................................................................................................................... 70
7.9. Zusammenhang zwischen Spannungsrelaxation und komplexem Modul ..................... 72
7.10. Gedächtnisfunktion ......................................................................................................... 72
7.11. Gummireibung ................................................................................................................ 75
4
Übersicht Eigenschaften von Werkstoffen Folgende Eigenschaften sind von Interesse:
• Elastizität (homogen und unabhängig von Mikromechanismen) • Viskosität (homogen, stark temperaturabhängig) • Plastizität – manchmal erwünscht (Umformung), manchmal unerwünscht (Stabilität, Versa-
gen) – auf mikroskopischer Skala immer stark heterogen • Wichtig für Festigkeit, insbesondere Dauerfestigkeit:
o Bruchzähigkeit o Kriechen o Ermüdung o Langzeitfestigkeit
• Korrosion • Reibung, Verschleiß bei Kontakt und Gleiten • Optische, elektrische und magnetische Eigenschaften • Funktionseigenschaften
o Formgedächtnis o Piezoeffekt o Magnetostriktion
• … Skalen, welche die Eigenschaften bestimmen Atomare Skala: Bindungsarten
• Kovalente Bindungen (z.B. Diamant) • Metallische Bindungen (z.B. Kupfer) • Ionenkristalle (z.B. Kochsalz, NaCl) • Molekülkristalle (z.B. Eis) • Polymermoleküle • Fremdatome und Defekte
o Zwischengitteratome o Leerstellen o Topologische Defekte o …
Mikroskala: • Phasenzusammensetzungen • Phasen- und Einkristallgrenzen • Versetzungsnetzwerke
Mesoskala: • Werkstoff -„Konstruktion“ • Verbundwerkstoffe
1. Plastische Deformation von Metallen Ein großer Teil dieser Vorlesung beschäftigt sich mit der plastischen Deformation von Metallen, Le-gierungen und intermetallischen Verbindungen, die entweder durch Gleiten (gewöhnliche plastische Deformation) oder durch Phasentransformation (Formgedächtnislegierungen) deformiert werden. In den meisten Fällen geht es um polykristalline und mehrphasige Materialien.
1.1. Kristallgitter Um die plastische Deformation zu verstehen, schauen wir uns zunächst an, wie einfache Kristalle aufgebaut sind. Die Atome sind auf periodisch wiederkehrenden Plätzen in einem sog. Kristallgitter verteilt. Eine sog. Einheitszelle wird dabei in alle drei Raumrichtungen periodisch fortgesetzt und bildet so das gesamte Gitter. Allerdings müssen nicht alle Plätze eines Gitters besetzt sein. Wir wollen hier nur die vier wichtigsten Gitter ansprechen:
5
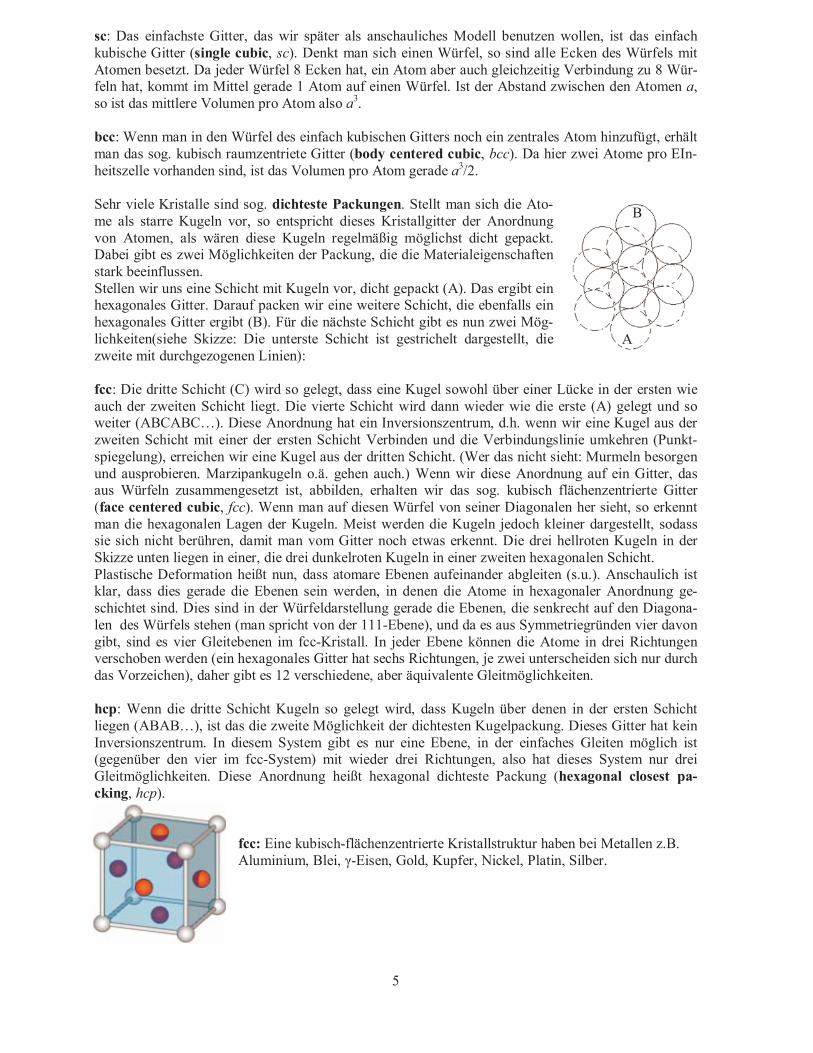
sc: Das einfachste Gitter, das wir später als anschauliches Modell benutzen wollen, ist das einfach kubische Gitter (single cubic, sc). Denkt man sich einen Würfel, so sind alle Ecken des Würfels mit Atomen besetzt. Da jeder Würfel 8 Ecken hat, ein Atom aber auch gleichzeitig Verbindung zu 8 Wür-feln hat, kommt im Mittel gerade 1 Atom auf einen Würfel. Ist der Abstand zwischen den Atomen a, so ist das mittlere Volumen pro Atom also a3. bcc: Wenn man in den Würfel des einfach kubischen Gitters noch ein zentrales Atom hinzufügt, erhält man das sog. kubisch raumzentriete Gitter (body centered cubic, bcc). Da hier zwei Atome pro EIn-heitszelle vorhanden sind, ist das Volumen pro Atom gerade a3/2. Sehr viele Kristalle sind sog. dichteste Packungen. Stellt man sich die Ato-me als starre Kugeln vor, so entspricht dieses Kristallgitter der Anordnung von Atomen, als wären diese Kugeln regelmäßig möglichst dicht gepackt. Dabei gibt es zwei Möglichkeiten der Packung, die die Materialeigenschaften stark beeinflussen. Stellen wir uns eine Schicht mit Kugeln vor, dicht gepackt (A). Das ergibt ein hexagonales Gitter. Darauf packen wir eine weitere Schicht, die ebenfalls ein hexagonales Gitter ergibt (B). Für die nächste Schicht gibt es nun zwei Mög-lichkeiten(siehe Skizze: Die unterste Schicht ist gestrichelt dargestellt, die zweite mit durchgezogenen Linien): fcc: Die dritte Schicht (C) wird so gelegt, dass eine Kugel sowohl über einer Lücke in der ersten wie auch der zweiten Schicht liegt. Die vierte Schicht wird dann wieder wie die erste (A) gelegt und so weiter (ABCABC…). Diese Anordnung hat ein Inversionszentrum, d.h. wenn wir eine Kugel aus der zweiten Schicht mit einer der ersten Schicht Verbinden und die Verbindungslinie umkehren (Punkt-spiegelung), erreichen wir eine Kugel aus der dritten Schicht. (Wer das nicht sieht: Murmeln besorgen und ausprobieren. Marzipankugeln o.ä. gehen auch.) Wenn wir diese Anordnung auf ein Gitter, das aus Würfeln zusammengesetzt ist, abbilden, erhalten wir das sog. kubisch flächenzentrierte Gitter (face centered cubic, fcc). Wenn man auf diesen Würfel von seiner Diagonalen her sieht, so erkennt man die hexagonalen Lagen der Kugeln. Meist werden die Kugeln jedoch kleiner dargestellt, sodass sie sich nicht berühren, damit man vom Gitter noch etwas erkennt. Die drei hellroten Kugeln in der Skizze unten liegen in einer, die drei dunkelroten Kugeln in einer zweiten hexagonalen Schicht. Plastische Deformation heißt nun, dass atomare Ebenen aufeinander abgleiten (s.u.). Anschaulich ist klar, dass dies gerade die Ebenen sein werden, in denen die Atome in hexagonaler Anordnung ge-schichtet sind. Dies sind in der Würfeldarstellung gerade die Ebenen, die senkrecht auf den Diagona-len des Würfels stehen (man spricht von der 111-Ebene), und da es aus Symmetriegründen vier davon gibt, sind es vier Gleitebenen im fcc-Kristall. In jeder Ebene können die Atome in drei Richtungen verschoben werden (ein hexagonales Gitter hat sechs Richtungen, je zwei unterscheiden sich nur durch das Vorzeichen), daher gibt es 12 verschiedene, aber äquivalente Gleitmöglichkeiten. hcp: Wenn die dritte Schicht Kugeln so gelegt wird, dass Kugeln über denen in der ersten Schicht liegen (ABAB…), ist das die zweite Möglichkeit der dichtesten Kugelpackung. Dieses Gitter hat kein Inversionszentrum. In diesem System gibt es nur eine Ebene, in der einfaches Gleiten möglich ist (gegenüber den vier im fcc-System) mit wieder drei Richtungen, also hat dieses System nur drei Gleitmöglichkeiten. Diese Anordnung heißt hexagonal dichteste Packung (hexagonal closest pa-cking, hcp).
fcc: Eine kubisch-flächenzentrierte Kristallstruktur haben bei Metallen z.B. Aluminium, Blei, γ-Eisen, Gold, Kupfer, Nickel, Platin, Silber.
B
A
6
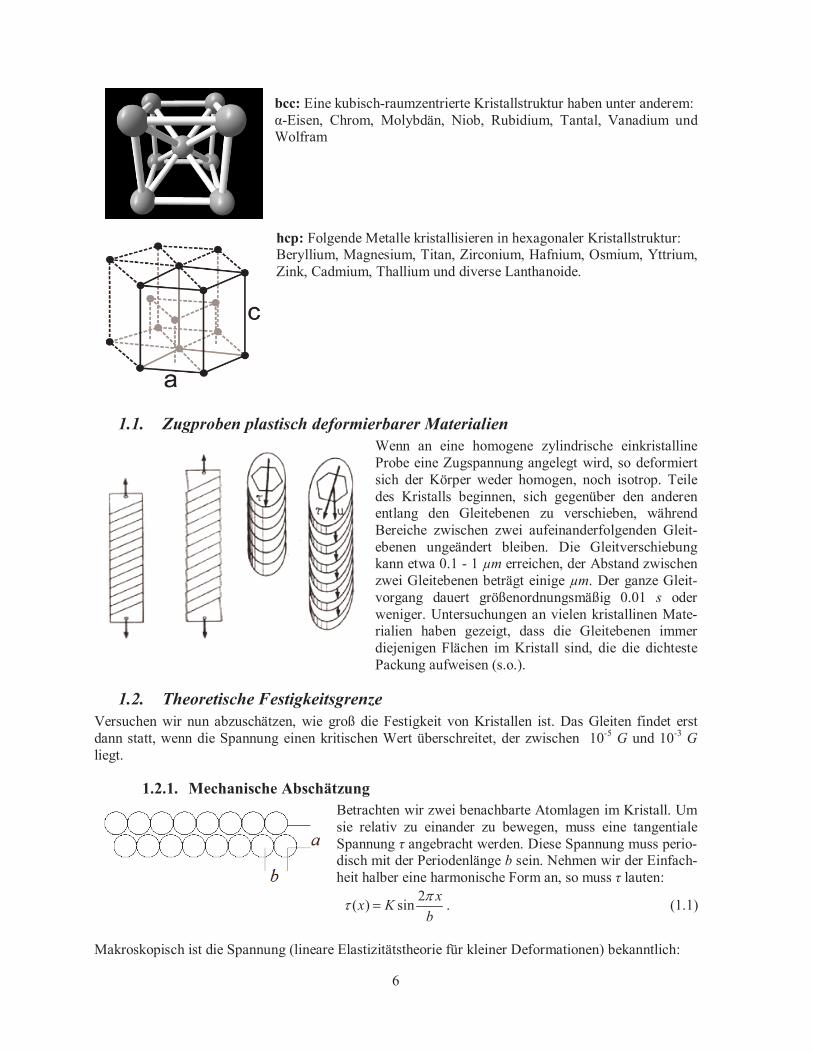
bcc: Eine kubisch-raumzentrierte Kristallstruktur haben unter anderem: α-Eisen, Chrom, Molybdän, Niob, Rubidium, Tantal, Vanadium und Wolfram hcp: Folgende Metalle kristallisieren in hexagonaler Kristallstruktur: Beryllium, Magnesium, Titan, Zirconium, Hafnium, Osmium, Yttrium, Zink, Cadmium, Thallium und diverse Lanthanoide.
1.1. Zugproben plastisch deformierbarer Materialien Wenn an eine homogene zylindrische einkristalline Probe eine Zugspannung angelegt wird, so deformiert sich der Körper weder homogen, noch isotrop. Teile des Kristalls beginnen, sich gegenüber den anderen entlang den Gleitebenen zu verschieben, während Bereiche zwischen zwei aufeinanderfolgenden Gleit-ebenen ungeändert bleiben. Die Gleitverschiebung kann etwa 0.1 - 1 µm erreichen, der Abstand zwischen zwei Gleitebenen beträgt einige µm. Der ganze Gleit-vorgang dauert größenordnungsmäßig 0.01 s oder weniger. Untersuchungen an vielen kristallinen Mate-rialien haben gezeigt, dass die Gleitebenen immer diejenigen Flächen im Kristall sind, die die dichteste Packung aufweisen (s.o.).
1.2. Theoretische Festigkeitsgrenze Versuchen wir nun abzuschätzen, wie groß die Festigkeit von Kristallen ist. Das Gleiten findet erst dann statt, wenn die Spannung einen kritischen Wert überschreitet, der zwischen 10-5 G und 10-3 G liegt.
1.2.1. Mechanische Abschätzung Betrachten wir zwei benachbarte Atomlagen im Kristall. Um sie relativ zu einander zu bewegen, muss eine tangentiale Spannung τ angebracht werden. Diese Spannung muss perio-disch mit der Periodenlänge b sein. Nehmen wir der Einfach-heit halber eine harmonische Form an, so muss τ lauten:
2
( ) sinx
x Kb
πτ = . (1.1)
Makroskopisch ist die Spannung (lineare Elastizitätstheorie für kleiner Deformationen) bekanntlich:
7
x
G Ga
τ γ= = . (1.2)
Bei kleinen Verschiebungen x gilt andererseits für unsere angenommene periodische Spannung:
2
2x a x
K Kb b a
πτ π= . (1.3)
Aus dem Vergleich beider Ansätze folgt: / 2K Gb aπ= . Die maximale Spannung, die der Kristall
aushalten kann (wenn der Sinus zu 1 wird), ist also max 2
bK G
aτ
π= = . Für das hexagonale Gitter (wie
oben gezeigt) ist / 2 / 3 1,15b a = ≈ , somit ergibt sich für die theoretische Festigkeit:
max
10,18
3K G Gτ
π= = ≈ . (1.4)
Im dreidimensionalen Fall ergibt sich ein etwas anderes Ergebnis, aber schon diese einfache Abschät-zung zeigt, dass die theoretische Festigkeitsgrenze mehrere Größenordnungen über der gemessenen Festigkeit realer Kristalle liegt.
1.2.2. Thermodynamische Abschätzung Große lokale Spannungen können nicht nur zum Gleiten, sondern auch zum spannungsbedingten "Schmelzen" führen. Damit dieser Prozess spontan stattfinden kann, muss die Energieverminderung durch Verschwinden elastischer Energie gleich der Energievergrößerung durch Schmelzen sein:
2
2q
G
τρ = , wobei q die spezifische Schmelzwärme, τ die Tangentialspannung, ρ die Dichte und G
der Schubmodul sind. Für die kritische Schubspannung ergibt sich:
max 2Gqτ ρ= (1.5)
Mit den Werten 52,7 10 /q J kg= ⋅ , 37,8 10ρ = ⋅ 3/kg m , 980 10G Pa= ⋅ ergibt sich für Eisen
11max 2 0,18 10 0.23Gq Pa Gτ ρ= = ⋅ ≈ (1.6)
Auch mit dieser Abschätzungsmethode kommen wir auf ca. 1/5 des Schubmoduls als theoretische Festigkeitsgrenze. Reale Fließgrenzen aller Werkstoffe betragen meist nur einen Bruchteil der theore-tischen Festigkeitsgrenze. Die Ursache hierfür liegt in der (falschen) Annahme, dass sich in der me-chanischen Abschätzung alle Atome einer Ebene gleichzeitig verschieben. Dies ist aber nicht der Fall. Es bilden sich Defekte aus lokalen Verschiebungen. (Verglichen z.B. mit einem Teppich, den man als ganzes nicht über eine Ebene ziehen kann, wohl aber dadurch verschieben, dass man eine „lokale“ Falte bildet und diese dann fortbewegt.) Diese Defekte, die die Träger der plastischen Deformation sind, nennt man Versetzungen.
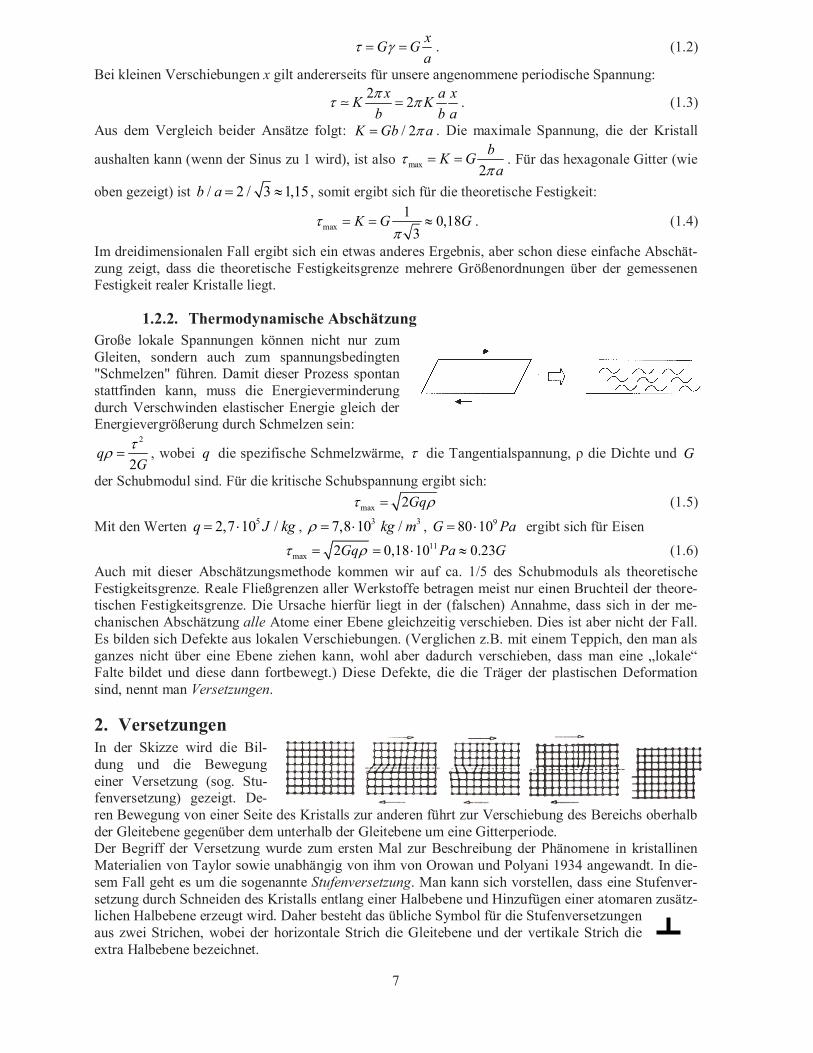
2. Versetzungen In der Skizze wird die Bil-dung und die Bewegung einer Versetzung (sog. Stu-fenversetzung) gezeigt. De-ren Bewegung von einer Seite des Kristalls zur anderen führt zur Verschiebung des Bereichs oberhalb der Gleitebene gegenüber dem unterhalb der Gleitebene um eine Gitterperiode. Der Begriff der Versetzung wurde zum ersten Mal zur Beschreibung der Phänomene in kristallinen Materialien von Taylor sowie unabhängig von ihm von Orowan und Polyani 1934 angewandt. In die-sem Fall geht es um die sogenannte Stufenversetzung. Man kann sich vorstellen, dass eine Stufenver-setzung durch Schneiden des Kristalls entlang einer Halbebene und Hinzufügen einer atomaren zusätz-lichen Halbebene erzeugt wird. Daher besteht das übliche Symbol für die Stufenversetzungen aus zwei Strichen, wobei der horizontale Strich die Gleitebene und der vertikale Strich die extra Halbebene bezeichnet.
8
2.1. Versetzung als Grenze einer Schubzone: Der Burgersvektor Eine andere Definition einer Versetzung hebt ihre unmittelbare Verbindung zwischen den Versetzun-gen und dem plastische Gleiten hervor. Ein Kristallgitter hat folgende offensichtliche Eigenschaft:
Wenn wir einen Teilbereich des Kristallgitters oberhalb einer möglichen Gleitebene gegenüber dem zweiten genau um eine Gitterperiode ver-schieben, so ändert sich der Zustand des Kris-talls nicht.
In einem makroskopisch großen Kristall sollte es möglich sein, diese Verschiebung in einem begrenz-ten Gebiet der Gleitebene auszuführen, so dass nach der Verschiebung sowohl im Bereich, wo die Verschiebung stattgefunden hat, als auch im Bereich, wo keine stattgefunden hat, das beinahe ideale Kristallgitter wiederhergestellt ist. Der verschobene Bereich wird von dem nicht verschobenen Bereich durch eine geschlossene Grenze getrennt, die wir als Versetzungslinie be-zeichnen. Der verschobene Bereich pflanzt sich weiter fort, zusammen mit der Weiterbewegung dieser Grenze – die Versetzung bewegt sich dann. Offenbar ist eine Verschiebung, bei der innerhalb des verschobenen Gebietes keine Defekte zurückbleiben, nur gleich bestimmten Gitterperioden. Dieser Verschiebungsvektor ist also diskret. Er heißt Burgersvektor der Versetzung. Aus der gegebenen Definition kann man sofort die wichtigsten Eigenschaften von Verset-zungen herleiten:
• Der Burgersvektor der Versetzung bleibt entlang einer Versetzungslinie konstant. • Die Versetzungen sind linienhafte Objekte. • Sie können im Inneren eines Kristalls nicht enden. • Der Burgersvektor liegt immer in der Gleitebene einer Versetzung.
Bemerkung: Durch Wachstum (also nicht Gleiten) können auch Versetzungen entstehen, die diese Bedingungen nicht erfüllen.
2.2. Stufen- und Schraubenversetzungen Eine Versetzung kann lokal immer durch drei Vektoren charakterisiert werden:
l : Der Linienvektor l (Einheitsvektor) zeigt immer in Richtung der Versetzungslinie. Man beachte, dass die Orientierung Konvention ist und willkürlich festgelegt werden kann.
b : Der Burgersvektor b gibt die Größe der Verschiebung an. Meist ist dies ein atomarer Abstand.
Dieser Vektor hat also eine bestimmte Länge Seine Orientierung ist an die von l gebunden. m : Dieser Vektor ist der Normalen-(Einheits-)vektor der Gleitebene.
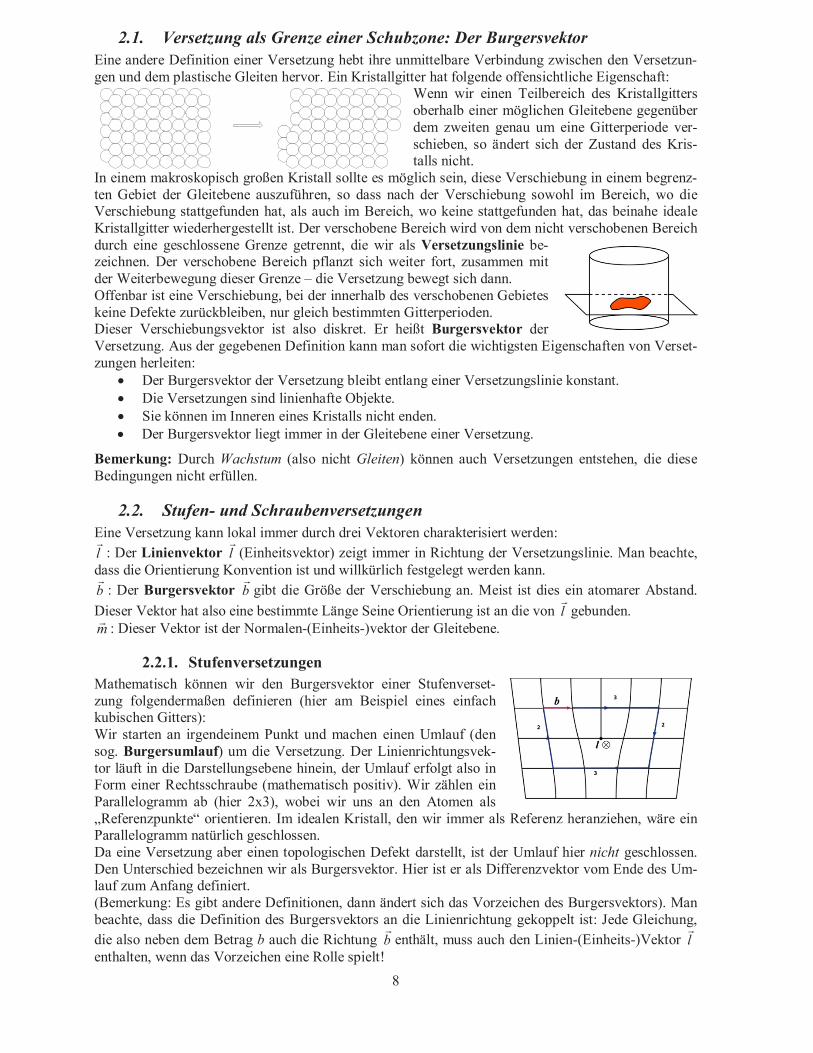
2.2.1. Stufenversetzungen Mathematisch können wir den Burgersvektor einer Stufenverset-zung folgendermaßen definieren (hier am Beispiel eines einfach kubischen Gitters): Wir starten an irgendeinem Punkt und machen einen Umlauf (den sog. Burgersumlauf) um die Versetzung. Der Linienrichtungsvek-tor läuft in die Darstellungsebene hinein, der Umlauf erfolgt also in Form einer Rechtsschraube (mathematisch positiv). Wir zählen ein Parallelogramm ab (hier 2x3), wobei wir uns an den Atomen als „Referenzpunkte“ orientieren. Im idealen Kristall, den wir immer als Referenz heranziehen, wäre ein Parallelogramm natürlich geschlossen. Da eine Versetzung aber einen topologischen Defekt darstellt, ist der Umlauf hier nicht geschlossen. Den Unterschied bezeichnen wir als Burgersvektor. Hier ist er als Differenzvektor vom Ende des Um-lauf zum Anfang definiert. (Bemerkung: Es gibt andere Definitionen, dann ändert sich das Vorzeichen des Burgersvektors). Man beachte, dass die Definition des Burgersvektors an die Linienrichtung gekoppelt ist: Jede Gleichung, die also neben dem Betrag b auch die Richtung b enthält, muss auch den Linien-(Einheits-)Vektor l enthalten, wenn das Vorzeichen eine Rolle spielt!
9
Für Stufenversetzungen ist erkennbar, dass der Burgersvektor in der Gleitebene liegt, und der Norma-
leneinheitsvektor auf dieser Gleitebene ist gegeben durch b l
mb
×= (er zeigt also in Richtung der –
anschaulich - eingeschobenen Ebene). Die „Herstellung“ einer Stufenversetzung können wir uns so vorstellen, dass wir den Körper entlang der Gleitebene „aufschneiden“ und die obere Hälfte bis zur Linie der Versetzung (= Schnittlinie = Ende des geschnittenen Bereichs) um einen atomaren Abstand nach rechts verschieben. Die Verschiebung erfolgt also senkrecht zur Schnittlinie (daher ist der Bur-gersvektor selbstverständlich auch senkrecht zum Linienrichtungsvektor).
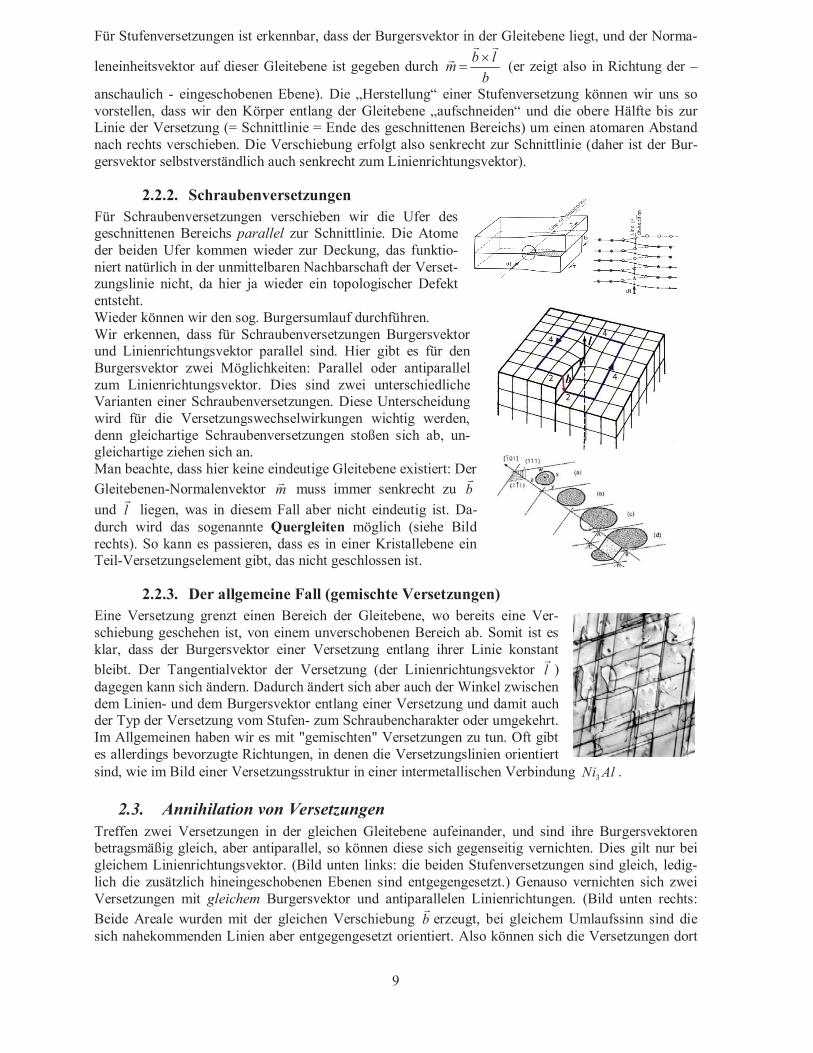
2.2.2. Schraubenversetzungen Für Schraubenversetzungen verschieben wir die Ufer des geschnittenen Bereichs parallel zur Schnittlinie. Die Atome der beiden Ufer kommen wieder zur Deckung, das funktio-niert natürlich in der unmittelbaren Nachbarschaft der Verset-zungslinie nicht, da hier ja wieder ein topologischer Defekt entsteht. Wieder können wir den sog. Burgersumlauf durchführen. Wir erkennen, dass für Schraubenversetzungen Burgersvektor und Linienrichtungsvektor parallel sind. Hier gibt es für den Burgersvektor zwei Möglichkeiten: Parallel oder antiparallel zum Linienrichtungsvektor. Dies sind zwei unterschiedliche Varianten einer Schraubenversetzungen. Diese Unterscheidung wird für die Versetzungswechselwirkungen wichtig werden, denn gleichartige Schraubenversetzungen stoßen sich ab, un-gleichartige ziehen sich an. Man beachte, dass hier keine eindeutige Gleitebene existiert: Der Gleitebenen-Normalenvektor m muss immer senkrecht zu b
und l liegen, was in diesem Fall aber nicht eindeutig ist. Da-durch wird das sogenannte Quergleiten möglich (siehe Bild rechts). So kann es passieren, dass es in einer Kristallebene ein Teil-Versetzungselement gibt, das nicht geschlossen ist.
2.2.3. Der allgemeine Fall (gemischte Versetzungen) Eine Versetzung grenzt einen Bereich der Gleitebene, wo bereits eine Ver-schiebung geschehen ist, von einem unverschobenen Bereich ab. Somit ist es klar, dass der Burgersvektor einer Versetzung entlang ihrer Linie konstant bleibt. Der Tangentialvektor der Versetzung (der Linienrichtungsvektor l ) dagegen kann sich ändern. Dadurch ändert sich aber auch der Winkel zwischen dem Linien- und dem Burgersvektor entlang einer Versetzung und damit auch der Typ der Versetzung vom Stufen- zum Schraubencharakter oder umgekehrt. Im Allgemeinen haben wir es mit "gemischten" Versetzungen zu tun. Oft gibt es allerdings bevorzugte Richtungen, in denen die Versetzungslinien orientiert sind, wie im Bild einer Versetzungsstruktur in einer intermetallischen Verbindung 3Ni Al .
2.3. Annihilation von Versetzungen Treffen zwei Versetzungen in der gleichen Gleitebene aufeinander, und sind ihre Burgersvektoren betragsmäßig gleich, aber antiparallel, so können diese sich gegenseitig vernichten. Dies gilt nur bei gleichem Linienrichtungsvektor. (Bild unten links: die beiden Stufenversetzungen sind gleich, ledig-lich die zusätzlich hineingeschobenen Ebenen sind entgegengesetzt.) Genauso vernichten sich zwei Versetzungen mit gleichem Burgersvektor und antiparallelen Linienrichtungen. (Bild unten rechts: Beide Areale wurden mit der gleichen Verschiebung b erzeugt, bei gleichem Umlaufssinn sind die sich nahekommenden Linien aber entgegengesetzt orientiert. Also können sich die Versetzungen dort

10
gegenseitig vernichten. Anschaulich werden die beiden verschobenen Gebiete einfach verbunden,
indem der Zwischenraum nun ebenfalls um b verschoben wird.
2.4. Die Peach-Köhler-Kraft Versetzungen können durch den Kristall laufen. Dafür ist aber eine treibende Kraft nötig. Diese ent-steht, wenn von außen ein Spannungsfeld aufgebracht wird. Allerdings laufen die Versetzungen nicht sofort los, sie müssen erst eine Art „Haftreibung“ überwinden, d.h. die Schubspannung muss erst einen Wert fτ überwinden.
Wie groß ist nun die auf eine Versetzungsli-nie wirkende Kraft? Im Modellkristall mit der Höhe H, der Breite B und der Dicke d wird eine Stufenversetzung mit der Länge l=d erzeugt. Diese wandert durch den Kris-tall. Das Bild zeigt nur schematisch, was passiert, in Wirklichkeit ist dem ganzen Prozess noch eine elastische Deformation überlagert. Nehmen wir also an, dass wir eine große Scherspannung τ angelegt haben, bevor die Versetzung anfängt zu laufen. Eine Erhöhung der Spannung führt nun zum Laufen der Versetzung bis zum Ende des Kristalls. Die zusätzlich erforderliche Scherdeformation zur Erhö-hung der Spannung wurde dadurch abgebaut, da nun ja nur die ursprüngliche Deformation vorhanden ist (im Bild ist diese abgezogen, daher ist am Anfang und am Ende gar keine elastische Deformation zu sehen). Wir können nun die Kraft auf die Versetzung berechnen. denn zum einen haben wir Arbeit verrichtet, um die zusätzlich elastische Deformation hervorzurufen, andererseits wird gerade diese Arbeit verwendet, um die Versetzung von links nach rechts laufen zu lassen. Es gilt also folgende Gleichung, wenn wir noch annehmen, dass die Spannung τ annähernd konstant bleibt:
, also: L L
bW V BHD f DB f b
Hτγ τ τ= = = = . (2.1)
Dabei ist V das Volumen, γ die zusätzlich aufgebrachte Scherdeformation und Lf die Kraft auf die
Versetzung pro Längeneinheit! Lf DB ist also gerade die Arbeit der Versetzung bei konstanter Kraft.
Die Kraft Lf bτ= ist die sogenannte Peach-Köhler-Kraft und beschreibt die Kraft auf eine Einheits-länge einer Versetzung, wenn am Ort der Versetzung die Spannung τ beträgt. (Man beachte, dass dies nicht immer die Spannung sein muss, die von außen an der Kristall angelegt wurde.) Eine genauere Betrachtung erfordert eine tensorielle Darstellung. Es ist anschaulich klar, dass die Peach-Köhler-Kraft immer senkrecht zur Versetzungslinie sein muss. Der vektorielle Ausdruck für die Peach-Köhler-Kraft ist
( )Lf l bσ= × ⋅ , (2.2)
wobei σ der volle Spannungstensor am Ort der Versetzung ist. Durch das Kreuzprodukt ist sicherge-stellt, dass die Kraft immer senkrecht zur Versetzungslinie wirkt.
2.5. Die Linienspannung einer Versetzung Wie oben gesehen wirken elastische Spannungsfelder auf Versetzungen. Umgekehrt aber erzeugen Versetzungen aufgrund ihrer Topologie auch Spannungsfelder im umgebenden Material. Mit einer Versetzung hängt also eine zusätzliche Energie zusammen, die proportional zur Länge der Versetzungslinie ist. Diese resultiert aus der Tatsache, dass sich die Atome in der Näher des topologi-schen Defekts „Versetzung“ nicht auf ihrer energetisch günstigsten Lage befinden, sondern eine höhe-re potentielle Energie besitzen. Bezieht man die Energie einer Versetzung auf eine Einheitslänge, so erhält man einheitenmäßig eine Kraft. Dies ist die sogenannte Linienspannung. Eine Verlängerung der Versetzungslänge erfordert
11
Arbeit, ähnlich dem Verlängern einer gespannten Saite. Daher ist die Linienspannung gleich der Kraft, mit der eine Versetzungslinie "gespannt" ist.
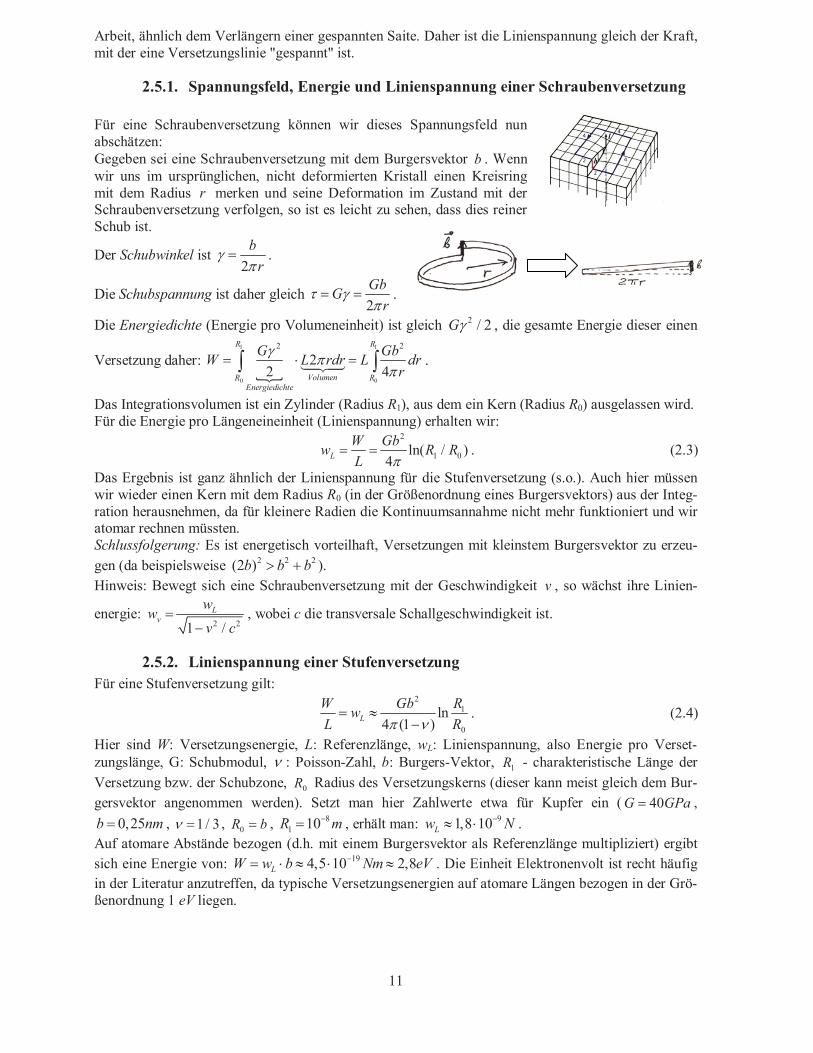
2.5.1. Spannungsfeld, Energie und Linienspannung einer Schraubenversetzung Für eine Schraubenversetzung können wir dieses Spannungsfeld nun abschätzen: Gegeben sei eine Schraubenversetzung mit dem Burgersvektor b . Wenn wir uns im ursprünglichen, nicht deformierten Kristall einen Kreisring mit dem Radius r merken und seine Deformation im Zustand mit der Schraubenversetzung verfolgen, so ist es leicht zu sehen, dass dies reiner Schub ist.
Der Schubwinkel ist 2
b
rγ
π= .
Die Schubspannung ist daher gleich 2
GbG
rτ γ
π= = .
Die Energiedichte (Energie pro Volumeneinheit) ist gleich 2 / 2Gγ , die gesamte Energie dieser einen
Versetzung daher: 1 1
0 0
2 2
22 4
R R
VolumenR REnergiedichte
G GbW L rdr L dr
r
γ ππ
= ⋅ =∫ ∫ .
Das Integrationsvolumen ist ein Zylinder (Radius R1), aus dem ein Kern (Radius R0) ausgelassen wird. Für die Energie pro Längeneineinheit (Linienspannung) erhalten wir:
2
1 0ln( / )4L
W Gbw R R
L π= = . (2.3)
Das Ergebnis ist ganz ähnlich der Linienspannung für die Stufenversetzung (s.o.). Auch hier müssen wir wieder einen Kern mit dem Radius R0 (in der Größenordnung eines Burgersvektors) aus der Integ-ration herausnehmen, da für kleinere Radien die Kontinuumsannahme nicht mehr funktioniert und wir atomar rechnen müssten. Schlussfolgerung: Es ist energetisch vorteilhaft, Versetzungen mit kleinstem Burgersvektor zu erzeu-
gen (da beispielsweise 2 2 2(2 )b b b> + ). Hinweis: Bewegt sich eine Schraubenversetzung mit der Geschwindigkeit v , so wächst ihre Linien-
energie: 2 21 /L
v
ww
v c=
−, wobei c die transversale Schallgeschwindigkeit ist.
2.5.2. Linienspannung einer Stufenversetzung Für eine Stufenversetzung gilt:
2
1
0
ln4 (1 )L
RW Gbw
L Rπ ν= ≈
−. (2.4)
Hier sind W: Versetzungsenergie, L: Referenzlänge, wL: Linienspannung, also Energie pro Verset-zungslänge, G: Schubmodul, ν : Poisson-Zahl, b: Burgers-Vektor, 1R - charakteristische Länge der
Versetzung bzw. der Schubzone, 0R Radius des Versetzungskerns (dieser kann meist gleich dem Bur-gersvektor angenommen werden). Setzt man hier Zahlwerte etwa für Kupfer ein ( 40G GPa= ,
0,25b nm= , 1 / 3ν = , 0R b= , 81 10R m−= , erhält man: 91,8 10Lw N−≈ ⋅ .
Auf atomare Abstände bezogen (d.h. mit einem Burgersvektor als Referenzlänge multipliziert) ergibt sich eine Energie von: 194,5 10 2,8LW w b Nm eV−= ⋅ ≈ ⋅ ≈ . Die Einheit Elektronenvolt ist recht häufig in der Literatur anzutreffen, da typische Versetzungsenergien auf atomare Längen bezogen in der Grö-ßenordnung 1 eV liegen.
12
2.6. Versetzungsreaktionen
Beim Zusammentreffen zweier Versetzungen mit Burgersvektoren 1b und 2b kann sich eine Verset-
zung mit dem Burgersvektor 3 1 2b b b= + bilden. Das passiert allerdings nur dann, wenn dies energe-
tisch vorteilhaft ist (s.o.), d.h. wenn 2 2 23 1 2b b b< + . Umgekehrt kann eine Versetzung mit dem Bur-
gersvektor 3 1 2b b b= + in zwei Versetzungen zerfallen. Dafür muss die Bedingung 2 2 23 1 2b b b> + er-
füllt sein. Solche Umwandlungen nennt man Versetzungsreaktionen. Versetzungsreaktionen sind auch zwischen Teilversetzungen (s.u.) möglich. Als Ergebnis einer Reaktion können Versetzungen mit einem Burgersvektor entstehen, der keiner leichten Gleitebene im Gitter angehört. Dadurch entstehen nicht bewegliche, sogenannte Lomer-Cottrell-Versetzungen.
2.7. Wechselwirkungen von Versetzungen Versetzungen erzeugen ein elastisches Spannungsfeld. Andererseits wirkt auf Versetzungen in einem Spannungsfeld die Peach-Köhler-Kraft. Daraus folgt, dass eine Versetzung auf eine andere über das elastische Spannungsfeld wechselwirkt und beide aufeinander Kräfte ausüben.
2.7.1. Wechselwirkung von Schraubenversetzungen Zwei Schraubenversetzungen mit gleichen (parallelen) Burgersvektoren stoßen sich mit der Kraft pro Längeneinheit
2
2l
Gbf b
rτ
π= = (2.5)
ab, wobei wir hier für die Spannung das oben berechnete Spannungsfeld einer Schraubenversetzung eingesetzt haben. Versetzungen mit entgegengesetzten (antiparallelen) Burgersvektoren ziehen sich mit der gleichen Kraft an. Das kann zur Annihilation führen.
2.7.2. Wechselwirkung von Stufenversetzungen
Für Stufenversetzungen ist es einfacher, die Kraft zwischen ihnen in einen radialen und einen Winkel-Anteil aufzuteilen. Zwei parallel gelagerte Stufenversetzungen (wobei sich eine im Koordinatenurs-prung befindet) mit den Burgersvektoren b1 und b2 wechselwirken mit der Kraft:
1 2 1 2 und sin 22 (1 ) 2 (1 )r
b b b bG Gf f
r rϕ ϕπ ν π ν
= =− −
. (2.6)
Die Projektion auf die Gleitebene ist gleich
1 2 cos cos 22 (1 )x
b bGf
rϕ ϕ
π ν=
−. (2.7)
Sie wird Null für / 2ϕ π= und / 4ϕ π= . Für beide Winkel verschwindet die Kraft, die Lagen müs-sen aber nicht stabil sein. Die erste Lage entspricht einem stabilen Gleichgewicht für gleichgerichtete Burgersvekto-ren. Die Stufenversetzungen lagern sich bevorzugt übereinander an. Dies führt zur Bildung von Kleinwinkelkorngrenzen. Die zweite Lage ist stabil für antiparallele Burgersvektoren. Sie führt zur Bildung von Versetzungsdipolen. Die Versetzungen lagern sich hier bevorzugt in 45°-Winkeln an.
Versetzungsdipole sind nach außen hin „neutral“:
Wenn man einen Burgersumlauf macht, der beide Versetzungslinien enthält, so ist das Ergebnis null. Dennoch erzeugen diese Dipole ein Spannungsfeld, das nach außen hin aber schneller abfällt als das Spannungsfeld einer einzelnen Versetzung.
2.8. Skalare Versetzungsdichte Um Versetzungen zu beschreiben, wird oft die skalare Versetzungsdichte als Gesamtlänge aller Ver-setzungen pro Volumen definiert:
13
Gesamtlänge aller Versetzungen
Volumenρ = . (2.8)
Man beachte, dass die skalare Versetzungsdichte die Einheit 1/m2 hat. Für Versetzungen mit parallelen Linienrichtungen kann man sich diese Größe auch als Zahl der Versetzungen pro Fläche, die eine Testfläche senkrecht zur Linienrichtung durchstoßen, vorstellen. Die Gesamtlänge aller Versetzungen ist eine wichtige Größe, denn sie stellt eine thermodynamische Zustandsgröße dar. Das ist wichtig, denn der Vorgang der plastischen Deformation ist ein dynami-scher Prozess, der weg- und zeitabhängig ist.
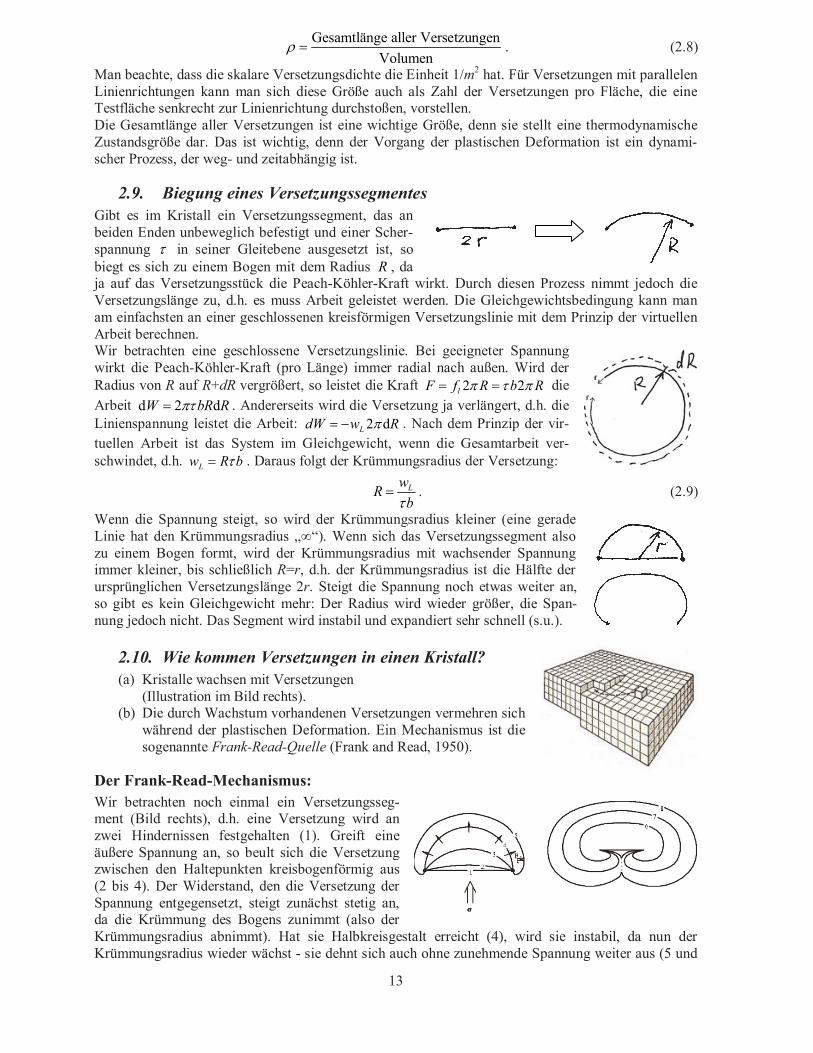
2.9. Biegung eines Versetzungssegmentes Gibt es im Kristall ein Versetzungssegment, das an beiden Enden unbeweglich befestigt und einer Scher-spannung τ in seiner Gleitebene ausgesetzt ist, so biegt es sich zu einem Bogen mit dem Radius R , da ja auf das Versetzungsstück die Peach-Köhler-Kraft wirkt. Durch diesen Prozess nimmt jedoch die Versetzungslänge zu, d.h. es muss Arbeit geleistet werden. Die Gleichgewichtsbedingung kann man am einfachsten an einer geschlossenen kreisförmigen Versetzungslinie mit dem Prinzip der virtuellen Arbeit berechnen. Wir betrachten eine geschlossene Versetzungslinie. Bei geeigneter Spannung wirkt die Peach-Köhler-Kraft (pro Länge) immer radial nach außen. Wird der Radius von R auf R+dR vergrößert, so leistet die Kraft 2 2lF f R b Rπ τ π= = die Arbeit d 2 dW bR Rπτ= . Andererseits wird die Versetzung ja verlängert, d.h. die Linienspannung leistet die Arbeit: 2 dLdW w Rπ= − . Nach dem Prinzip der vir-tuellen Arbeit ist das System im Gleichgewicht, wenn die Gesamtarbeit ver-schwindet, d.h. Lw R bτ= . Daraus folgt der Krümmungsradius der Versetzung:
LwR
bτ= . (2.9)
Wenn die Spannung steigt, so wird der Krümmungsradius kleiner (eine gerade Linie hat den Krümmungsradius „∞“). Wenn sich das Versetzungssegment also zu einem Bogen formt, wird der Krümmungsradius mit wachsender Spannung immer kleiner, bis schließlich R=r, d.h. der Krümmungsradius ist die Hälfte der ursprünglichen Versetzungslänge 2r. Steigt die Spannung noch etwas weiter an, so gibt es kein Gleichgewicht mehr: Der Radius wird wieder größer, die Span-nung jedoch nicht. Das Segment wird instabil und expandiert sehr schnell (s.u.).
2.10. Wie kommen Versetzungen in einen Kristall? (a) Kristalle wachsen mit Versetzungen
(Illustration im Bild rechts). (b) Die durch Wachstum vorhandenen Versetzungen vermehren sich
während der plastischen Deformation. Ein Mechanismus ist die sogenannte Frank-Read-Quelle (Frank and Read, 1950).
Der Frank-Read-Mechanismus: Wir betrachten noch einmal ein Versetzungsseg-ment (Bild rechts), d.h. eine Versetzung wird an zwei Hindernissen festgehalten (1). Greift eine äußere Spannung an, so beult sich die Versetzung zwischen den Haltepunkten kreisbogenförmig aus (2 bis 4). Der Widerstand, den die Versetzung der Spannung entgegensetzt, steigt zunächst stetig an, da die Krümmung des Bogens zunimmt (also der Krümmungsradius abnimmt). Hat sie Halbkreisgestalt erreicht (4), wird sie instabil, da nun der Krümmungsradius wieder wächst - sie dehnt sich auch ohne zunehmende Spannung weiter aus (5 und
14
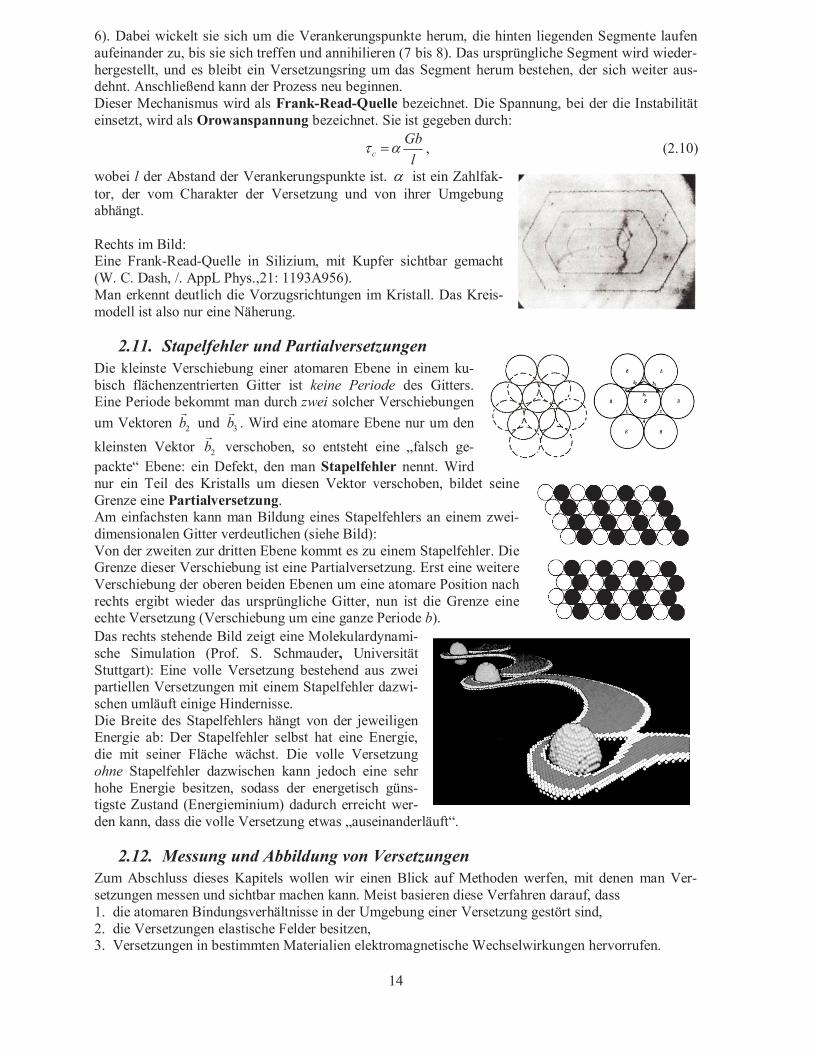
6). Dabei wickelt sie sich um die Verankerungspunkte herum, die hinten liegenden Segmente laufen aufeinander zu, bis sie sich treffen und annihilieren (7 bis 8). Das ursprüngliche Segment wird wieder-hergestellt, und es bleibt ein Versetzungsring um das Segment herum bestehen, der sich weiter aus-dehnt. Anschließend kann der Prozess neu beginnen. Dieser Mechanismus wird als Frank-Read-Quelle bezeichnet. Die Spannung, bei der die Instabilität einsetzt, wird als Orowanspannung bezeichnet. Sie ist gegeben durch:
c
Gb
lτ α= , (2.10)
wobei l der Abstand der Verankerungspunkte ist. α ist ein Zahlfak-tor, der vom Charakter der Versetzung und von ihrer Umgebung abhängt. Rechts im Bild: Eine Frank-Read-Quelle in Silizium, mit Kupfer sichtbar gemacht (W. C. Dash, /. AppL Phys.,21: 1193A956). Man erkennt deutlich die Vorzugsrichtungen im Kristall. Das Kreis-modell ist also nur eine Näherung.
2.11. Stapelfehler und Partialversetzungen Die kleinste Verschiebung einer atomaren Ebene in einem ku-bisch flächenzentrierten Gitter ist keine Periode des Gitters. Eine Periode bekommt man durch zwei solcher Verschiebungen
um Vektoren 2b und 3b . Wird eine atomare Ebene nur um den
kleinsten Vektor 2b verschoben, so entsteht eine „falsch ge-packte“ Ebene: ein Defekt, den man Stapelfehler nennt. Wird nur ein Teil des Kristalls um diesen Vektor verschoben, bildet seine Grenze eine Partialversetzung. Am einfachsten kann man Bildung eines Stapelfehlers an einem zwei-dimensionalen Gitter verdeutlichen (siehe Bild): Von der zweiten zur dritten Ebene kommt es zu einem Stapelfehler. Die Grenze dieser Verschiebung ist eine Partialversetzung. Erst eine weitere Verschiebung der oberen beiden Ebenen um eine atomare Position nach rechts ergibt wieder das ursprüngliche Gitter, nun ist die Grenze eine echte Versetzung (Verschiebung um eine ganze Periode b). Das rechts stehende Bild zeigt eine Molekulardynami-sche Simulation (Prof. S. Schmauder, Universität Stuttgart): Eine volle Versetzung bestehend aus zwei partiellen Versetzungen mit einem Stapelfehler dazwi-schen umläuft einige Hindernisse. Die Breite des Stapelfehlers hängt von der jeweiligen Energie ab: Der Stapelfehler selbst hat eine Energie, die mit seiner Fläche wächst. Die volle Versetzung ohne Stapelfehler dazwischen kann jedoch eine sehr hohe Energie besitzen, sodass der energetisch güns-tigste Zustand (Energieminium) dadurch erreicht wer-den kann, dass die volle Versetzung etwas „auseinanderläuft“.
2.12. Messung und Abbildung von Versetzungen Zum Abschluss dieses Kapitels wollen wir einen Blick auf Methoden werfen, mit denen man Ver-setzungen messen und sichtbar machen kann. Meist basieren diese Verfahren darauf, dass 1. die atomaren Bindungsverhältnisse in der Umgebung einer Versetzung gestört sind, 2. die Versetzungen elastische Felder besitzen, 3. Versetzungen in bestimmten Materialien elektromagnetische Wechselwirkungen hervorrufen.
15
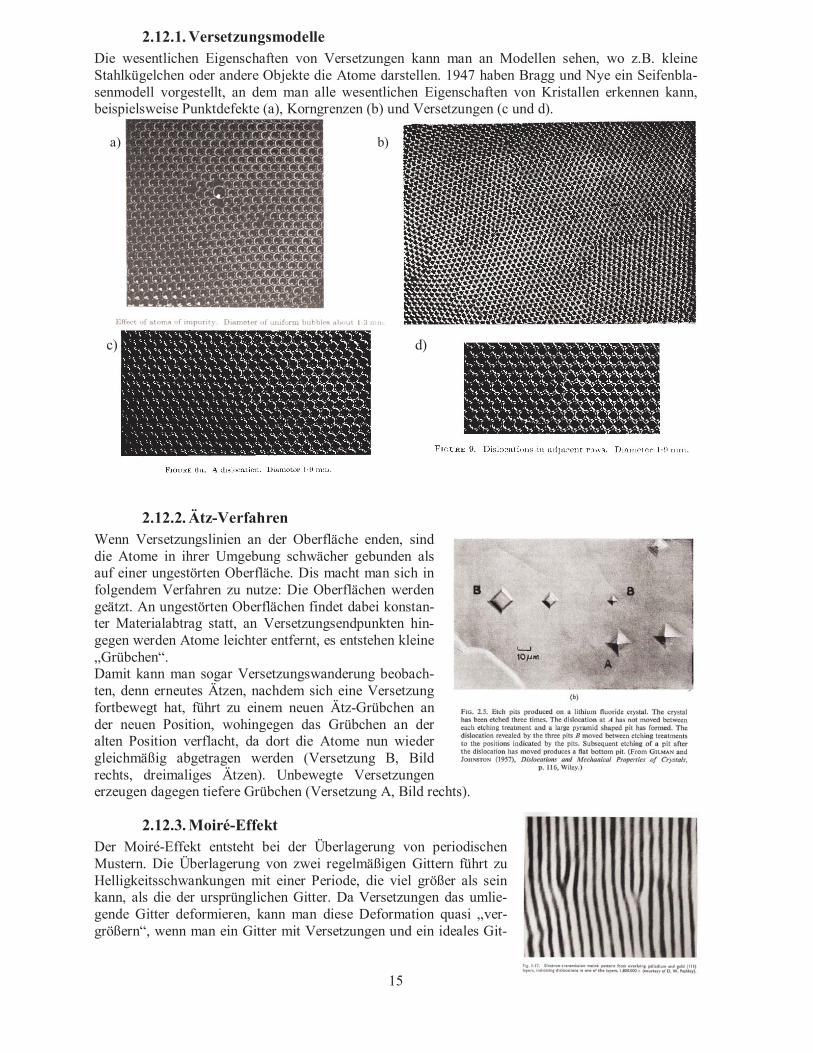
2.12.1. Versetzungsmodelle Die wesentlichen Eigenschaften von Versetzungen kann man an Modellen sehen, wo z.B. kleine Stahlkügelchen oder andere Objekte die Atome darstellen. 1947 haben Bragg und Nye ein Seifenbla-senmodell vorgestellt, an dem man alle wesentlichen Eigenschaften von Kristallen erkennen kann, beispielsweise Punktdefekte (a), Korngrenzen (b) und Versetzungen (c und d).
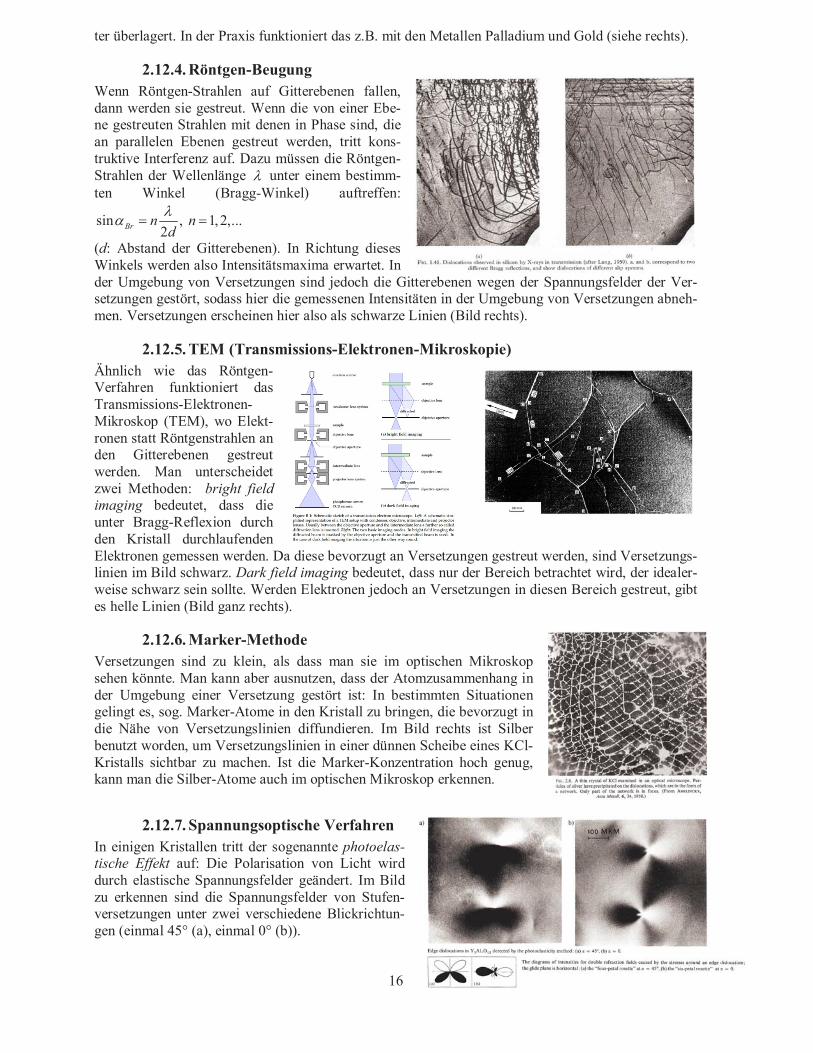
2.12.2. Ätz-Verfahren Wenn Versetzungslinien an der Oberfläche enden, sind die Atome in ihrer Umgebung schwächer gebunden als auf einer ungestörten Oberfläche. Dis macht man sich in folgendem Verfahren zu nutze: Die Oberflächen werden geätzt. An ungestörten Oberflächen findet dabei konstan-ter Materialabtrag statt, an Versetzungsendpunkten hin-gegen werden Atome leichter entfernt, es entstehen kleine „Grübchen“. Damit kann man sogar Versetzungswanderung beobach-ten, denn erneutes Ätzen, nachdem sich eine Versetzung fortbewegt hat, führt zu einem neuen Ätz-Grübchen an der neuen Position, wohingegen das Grübchen an der alten Position verflacht, da dort die Atome nun wieder gleichmäßig abgetragen werden (Versetzung B, Bild rechts, dreimaliges Ätzen). Unbewegte Versetzungen erzeugen dagegen tiefere Grübchen (Versetzung A, Bild rechts).
2.12.3. Moiré-Effekt Der Moiré-Effekt entsteht bei der Überlagerung von periodischen Mustern. Die Überlagerung von zwei regelmäßigen Gittern führt zu Helligkeitsschwankungen mit einer Periode, die viel größer als sein kann, als die der ursprünglichen Gitter. Da Versetzungen das umlie-gende Gitter deformieren, kann man diese Deformation quasi „ver-größern“, wenn man ein Gitter mit Versetzungen und ein ideales Git-
a) b)
c) d)
16
ter überlagert. In der Praxis funktioniert das z.B. mit den Metallen Palladium und Gold (siehe rechts).
2.12.4. Röntgen-Beugung Wenn Röntgen-Strahlen auf Gitterebenen fallen, dann werden sie gestreut. Wenn die von einer Ebe-ne gestreuten Strahlen mit denen in Phase sind, die an parallelen Ebenen gestreut werden, tritt kons-truktive Interferenz auf. Dazu müssen die Röntgen-Strahlen der Wellenlänge λ unter einem bestimm-ten Winkel (Bragg-Winkel) auftreffen:
sin , 1,2,...2Br n n
d
λα = =
(d: Abstand der Gitterebenen). In Richtung dieses Winkels werden also Intensitätsmaxima erwartet. In der Umgebung von Versetzungen sind jedoch die Gitterebenen wegen der Spannungsfelder der Ver-setzungen gestört, sodass hier die gemessenen Intensitäten in der Umgebung von Versetzungen abneh-men. Versetzungen erscheinen hier also als schwarze Linien (Bild rechts).
2.12.5. TEM (Transmissions-Elektronen-Mikroskopie) Ähnlich wie das Röntgen-Verfahren funktioniert das Transmissions-Elektronen-Mikroskop (TEM), wo Elekt-ronen statt Röntgenstrahlen an den Gitterebenen gestreut werden. Man unterscheidet zwei Methoden: bright field imaging bedeutet, dass die unter Bragg-Reflexion durch den Kristall durchlaufenden Elektronen gemessen werden. Da diese bevorzugt an Versetzungen gestreut werden, sind Versetzungs-linien im Bild schwarz. Dark field imaging bedeutet, dass nur der Bereich betrachtet wird, der idealer-weise schwarz sein sollte. Werden Elektronen jedoch an Versetzungen in diesen Bereich gestreut, gibt es helle Linien (Bild ganz rechts).
2.12.6. Marker-Methode Versetzungen sind zu klein, als dass man sie im optischen Mikroskop sehen könnte. Man kann aber ausnutzen, dass der Atomzusammenhang in der Umgebung einer Versetzung gestört ist: In bestimmten Situationen gelingt es, sog. Marker-Atome in den Kristall zu bringen, die bevorzugt in die Nähe von Versetzungslinien diffundieren. Im Bild rechts ist Silber benutzt worden, um Versetzungslinien in einer dünnen Scheibe eines KCl-Kristalls sichtbar zu machen. Ist die Marker-Konzentration hoch genug, kann man die Silber-Atome auch im optischen Mikroskop erkennen.
2.12.7. Spannungsoptische Verfahren In einigen Kristallen tritt der sogenannte photoelas-tische Effekt auf: Die Polarisation von Licht wird durch elastische Spannungsfelder geändert. Im Bild zu erkennen sind die Spannungsfelder von Stufen-versetzungen unter zwei verschiedene Blickrichtun-gen (einmal 45° (a), einmal 0° (b)).
17
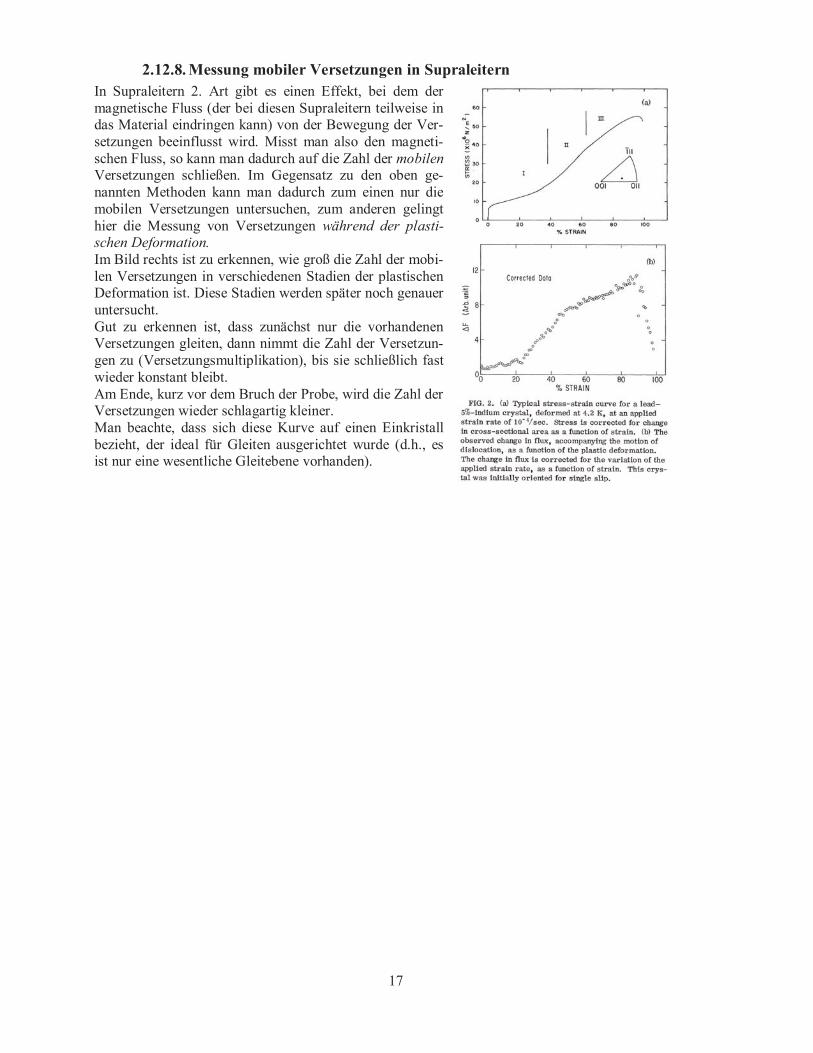
2.12.8. Messung mobiler Versetzungen in Supraleitern In Supraleitern 2. Art gibt es einen Effekt, bei dem der magnetische Fluss (der bei diesen Supraleitern teilweise in das Material eindringen kann) von der Bewegung der Ver-setzungen beeinflusst wird. Misst man also den magneti-schen Fluss, so kann man dadurch auf die Zahl der mobilen Versetzungen schließen. Im Gegensatz zu den oben ge-nannten Methoden kann man dadurch zum einen nur die mobilen Versetzungen untersuchen, zum anderen gelingt hier die Messung von Versetzungen während der plasti-schen Deformation. Im Bild rechts ist zu erkennen, wie groß die Zahl der mobi-len Versetzungen in verschiedenen Stadien der plastischen Deformation ist. Diese Stadien werden später noch genauer untersucht. Gut zu erkennen ist, dass zunächst nur die vorhandenen Versetzungen gleiten, dann nimmt die Zahl der Versetzun-gen zu (Versetzungsmultiplikation), bis sie schließlich fast wieder konstant bleibt. Am Ende, kurz vor dem Bruch der Probe, wird die Zahl der Versetzungen wieder schlagartig kleiner. Man beachte, dass sich diese Kurve auf einen Einkristall bezieht, der ideal für Gleiten ausgerichtet wurde (d.h., es ist nur eine wesentliche Gleitebene vorhanden).
18
3. Verfestigungsmechanismen
3.1. Übersicht Folgende Mechanismen behindern ein Versetzungsgleiten: 1. Knotenbildung (Vernetzungshärtung). Netzwerke von „verhakten“ Versetzungen machen ein
Material spröder, weil dadurch die Versetzungsbewegung gehemmt wird. Netzwerke werden vor allem bei der Bearbeitung eines Materials gebildet („work hardening“).
2. Korngrenzenhärtung. Beim Auftreffen einer wandernden Versetzung auf eine Grenze zwischen zwei gegeneinander missorientierten Kristallkörnern ist die Periodizität gestört, die ursprüngliche Gleitebene setzt sich nicht „nahtlos“ fort. Der Grad der Behinderung hängt von der Größe der Missorientierung ab.
3. Fremdatome - insbesondere mit deutlich unterschiedlicher Größe – stellen ein Hindernis beim Versetzungsgleiten dar. Dieser Effekt wird - durch das ein Fremdatom umgebende Spannungsfeld - noch verstärkt und kann zum Festhalten („pinning“) der Versetzung führen (Beispiel: Legieren von Cu mit Sn).
4. Dispersionshärtung. Größere dispergierte Teilchen stellen stärkere Hindernisse dar: Das Gleiten wird von nahe beieinander liegenden Teilchen behindert. Weitere Versetzungsringe werden er-zeugt („Orowan“-Mechanismus).
5. Ausscheidungshärtung. Wandernde Versetzungen bleiben an ausgeschiedenen Partikeln (mit einer anderen Struktur) hängen. (Beispiel: Cu-Al: bei hohen Temperaturen feste Lösung, bei tiefen Temperaturen Ausscheidungen von Partikeln mit CuAl2-Strukur). Dieser Mechanismus ist natür-lich in mehrphasigen Materialien besonders wirksam.
6. Legierungshärtung. In geordneten Legierungen führt eine einzelne Versetzung zu einer (energie-reicheren) Antiphasendomäne. Erst eine zweite folgende Versetzung baut diese Domänengrenze wieder ab. Versetzungspaare sind aber weniger beweglich („Superversetzung“).
7. In mehrphasigen Systemen lassen sich gezielt Mikrostrukturen durch „Tailoring“ (= geeignete Temperatur-Zeitbehandlung) erzeugen, die durch die Phasenchemie, die Transformationskinetik, die atomaren Strukturen und die Größenverteilung der ausgeschiedenen Phasen bestimmt werden. Beispiel: „Stahl“ (Fe + C), in dem die Koexistenz einer Reihe struktureller Phasen (Austenit, Mar-tensit, Ferrit, Zementit u.a.), mehr oder minder große Kohlenstoffausscheidungen, spezielle Gefü-ge („Martensit“-Gefüge) und innere Spannungen (und auch Zulegierungen) die Eigenschaften der jeweiligen Stahlsorte bestimmen.
8. Transformationshärtung. Viele Verbindungen durchlaufen Phasentransformationen. Eventuell koexistierende Phasen führen zu Mikrostrukturen, die eine Härtung bedingen.
Unabhängig vom Mechanismus ist bei vielen Verfestigungsmechanismen gleich, dass verschiedene Defekte im idealen Kristall zusätzliche Spannungsfelder erzeugen, die von den Versetzungen über-wunden werden müssen. Daher sind die kritischen Spannungen, die von verschiedenen Defekten er-zeugt werden, von Interesse.
3.2. Punktdefekte, Fremdatome Sitzt an einem Gitterplatz ein Fremdatom mit einem etwas größeren Radius als die Gitteratome, so erzeugt es eine radiale Verschiebung ur. Betrachten wir eine Kugel mit dem Radius r um das Fremd-atom. Durch dieses entsteht im Abstand r die radiale Verschiebung ur, sodass diese Kugel jetzt eine Volumenänderung erfährt:
3 3 24 4( ) 4
3 3r rV r u r r uπ π πΔ = + − ≈ . (3.1)
Daraus folgt die radiale Verschiebung: 24r
Vu
rπΔ
= , wenn man das Überschussvolumen VΔ kennt.
Die radiale Spannungskomponente ist:
32 (1 )rr
E V
rσ
π νΔ
= −+
(3.2)

19
Ist die Konzentration der Fremdatome /n N V= , so kann der mittlere Radius zwischen ihnen als 1/31 / n abgeschätzt werden. Der mittlere Abstand zwischen einer gleitenden Versetzung und einem
Fremdatom ist ( )1/31 / 2l n≈ . Die auf die Versetzung wirkende Spannung hat also die Größenordnung:
f E Vnσ = Δ (3.3)
Sie ist umso größer, je größer die Konzentration der Fremdatome und das Extravolumen des Fremd-atoms sind. Die Möglichkeit, die zum Gleiten einer Versetzung benötigte Spannung (und damit die Festigkeit) durch diesen Mechanismus zu erhöhen, ist jedoch begrenzt durch die thermodynamische Stabilität der festen Lösung (irgendwann erfolgt die Ausscheidung einer zweiten Phase). Eine hohe Nichtgleichgewichtskonzentration kann z.B. durch Abschrecken erreicht werden.
3.3. Ausscheidungen Trifft eine Versetzung auf ein Hindernis, so kann sie es entweder schneiden (das ist z.B. der Fall bei kleinen kohärenten Ausscheidungen, Bild links) oder es umlaufen (Bild rechts).
3.3.1. Starke Hindernisse Wenn die Hindernisse nicht leicht durchschnitten werden können, z.B. weil ihre Gitterebenen nicht zu dem Gitter des Metalls passen (inkohärente Auscheidungen), werden sie umlaufen. Sind die Hindernisse klein, und ist der mittlere Abstand zwischen ihnen l (gemessen in der Gleitebene der Versetzung), so läuft die Versetzung um sie herum (einschließlich Annihilation von zusammen-treffenden Teilen), wenn ihr Krümmungsradius von der Größenordnung l wird. Dafür ist die Spannung
1 0ln( / )4
Lw GbR R
lb lτ
π= = erforderlich.
Sei nun r der mittlere Abstand zwischen Ausscheidungen (im Volumen), a ihr Radius, 3n r−≈ ihre Konzentration und l wieder der Abstand zwischen Aus-
scheidungen in einer Gleitebene. Es ist leicht zu sehen1, dass 3 2
1a
r l≈ . Daraus
folgt 3/2 1/2/l r a≈ . Für die Spannung, die zum Umlauf nötig ist, bekommen wir:
1/ 2 1/2 1/ 2
1/ 2 1/ 21 03/2
ln( / )4
L L Lw w a w a n GbR R a n
lb br bτ
π= = ≈ ≈ . (3.4)
Sie ist proportional zur Quadratwurzel aus der Konzentration der Ausscheidungen.
3.3.2. Schwache Hindernisse Bei schwachen Hindernissen (z.B. kohärente Ausscheidungen, deren Git-terebenen mehr oder weniger gut zu denen des Ursprungsmaterials passen, oder auch andere Versetzungen) kann es sein, dass sie bereits bei einem Umlaufwinkel kleiner 180° durchschnitten werden. Die auf das Hindernis wirkende Kraft ist gleich ( )2 sin / 2F f ϕ= (siehe Bild rechts).
Daraus ergibt sich der kritische Winkel, bei welchem das Hindernis durch-
1 Wir teilen das Volumen in Scheiben der Fläche A und der Dicke 2a ein. Wir zählen in jeder dieser Scheiben alle Hindernis-se, deren Mittelpunkt in dieser Scheibe liegt. Dadurch ist sicher gestellt, dass alle Teilchen nur einmal gezählt werden. Die Dichte der Teilchen pro Fläche A ist ungefähr 1/l2, also liegen im Mittel A/ l2 Teilchen in einer Scheibe. Daraus folgt:
2
3 3 2
/ 1 1
2
A l an
aA r r l≈ ≈ ⇒ ≈ . Da dies alles nur Abschätzungen sind, können wir auf den Faktor ½ verzichten.

20
geschnitten wird: ( )max 2 sin / 2cF f ϕ= .
Der mittlere Abstand zwischen zwei Hindernissen, auf denen ein Verset-
zungssegment hängt, ist gleich ( )1/32l SR= (nach Labusch), wobei S die
mittlere Fläche pro Stopper ist (bei Versetzungen ist dies 21/S lρ≈ ≈ ). Dies kann man so sehen: In der Skizze (rechts) ist die Fläche pro Stopper etwa l2. Die effektive Fläche ist jedoch in etwa so groß, wie die Fläche des gebogenen Versetzungssegmentes oberhalb der gestrichelten Linie. Diese kann sich ja nicht zu einem Halbkreis ausbilden, da vorher schon Hinder-
nisse durchschnitten wurden. Diese Fläche ist abzuschätzen: 1
2S hl≈ . Dabei ergibt sich h zu:
2 22 für .
2 8
l lh R R l R
R
⎛ ⎞= − − ≈⎜ ⎟
⎝ ⎠ Also ist ( )
31/3
2 216
lS l SR
R≈ ⇒ ≈ , was bis auf den Faktor 2 der
Beziehung von Labusch entspricht. Wenn das Versetzungssegment bis zum kritischen Winkel gebo-
gen ist, so kann man aus sin2 2
c l
R
ϕ= zusammen mit der Labusch-Beziehung den kritischen Radius
berechnen (hier unter der Annahme, dass die schwachen Hindernisse Versetzungen sind, die durch-
schnitten werden): 3/2 1/ 2 3/21 2sin 2 sin
2 2c c
cR S
ϕ ϕρ≈ ≈ .
Die zur Erzeugung dieser Krümmung erforderliche Spannung ist gleich:
3/2 1/21 0 1 0ln( / ) ln( / )sin
4 2 2cL
c c
w Gb GbR R R R
R b R
ϕτ ρπ π
⎛ ⎞= = = ⎜ ⎟⎝ ⎠
(3.5)
Dies schreibt man in der allgemeinen Form:
1/2Gbτ α ρ= (3.6)
Hier ergibt unsere Abschätzung: 3/21 0
1ln( / )sin
2 2cR R
ϕαπ
⎛ ⎞= ⎜ ⎟⎝ ⎠
.
3.4. Versetzungen anderer Gleitsysteme (Waldversetzungen) Im Allgemeinen sind in einem metallischen Kristall bereits nach einer geringen plastischen Deformation mehrere Gleitsysteme aktiv. Versetzungen eines „fremden“ Gleitsystems stellen für andere Versetzungen Hindernisse (sog. „Wald“-Versetzungen, englisch: forest dislocations) dar. Der mittlere Abstand zwischen den Wald-Versetzungen berechnet sich aus 2 2l N L= und 3/LN L ρ=
⇒ 1/2l ρ−≈ . Die „Umlaufspannung“ ist daher:
1/2
1/21 0ln( / )
4L Lw w Gb
R Rlb lb
ρτ ρπ
= = = (3.7)
Dies schreibt man wieder in der Form:
1/2Gbτ α ρ= , (3.8)
wobei 1 0ln( / )
4
R Rαπ
≈ . Da auch andere Beiträge zur Verfestigung diese Abhängigkeit
1/2ρ aufweisen (s.o.), betrachtet man α als einen phänomenologischen Koeffizien-ten, den man empirisch ermittelt. Seine Größenordnung kann aber auch analytisch abgeschätzt werden:
Für 60 10R m−≈ , 10
2 2,5 10R m−≈ ⋅ erhält man 0.66α ≈ , was tatsächlich ein typischer
Wert ist. Für schwache Hindernisse ergibt sich ungefähr ( )3/20.66sin cα ϕ≈ (siehe
oben). Im Bild rechts (Versetzungsdichte in Kupfer vs. kritische Spannung) erkennt
21
man, das dieser Zusammenhang auch gemessen wird (man beachte die doppelt-logarithmische Skala:
Die Steigung ist 2, das bedeutet: 1/2ln 2lnρ τ τ ρ⇒∼ ∼ ).
3.5. Weitreichende Spannungsfelder von Versetzungen Eine Versetzung erzeugt im Abstand r von ihrer Achse ein Spannungsfeld der Größenordnung
2
GbG
rτ γ
π= = . Auch wenn eine andere Versetzung so verläuft, dass sie die erste Versetzung nicht
schneiden muss, muss dieses Spannungsfeld beim „Vorbeilaufen“ durch die äußere Spannung über-wunden werden. Da der halbe Abstand r zwischen zwei Versetzungen von der Größenordnung
1/2 / 2ρ− ist, ist dafür die Spannung
1/2Gbτ ρπ
≈ (3.9)
erforderlich. Auch dieser Beitrag hat die Form 1/2Gbτ α ρ= mit 0,3α ≈ .
3.6. Gleichzeitige Wirkung von mehreren Verfestigungsme-chanismen
Man unterscheidet grob zwei Fälle. Kommen die Verfestigungsmechanismen von der gleichen räumlichen Skala, und sind die Hindernisse von vergleichbarer Festigkeit, so summiert man "quadratisch". D.h. wären die kritischen Spannun-
gen bei alleiniger Wirkung nur eines Mechanismus 1σ bzw. 2σ , so wird die
kritische Spannungen nach der Regel 2 21 2cσ σ σ≈ + berechnet. Haben sie sehr
unterschiedliche Festigkeit und/oder kommen von verschiedenen Skalen, so summiert man sie linear: 1 2cσ σ σ≈ + . Oft kann man schreiben: 1/2
F Gbτ τ α ρ= + .
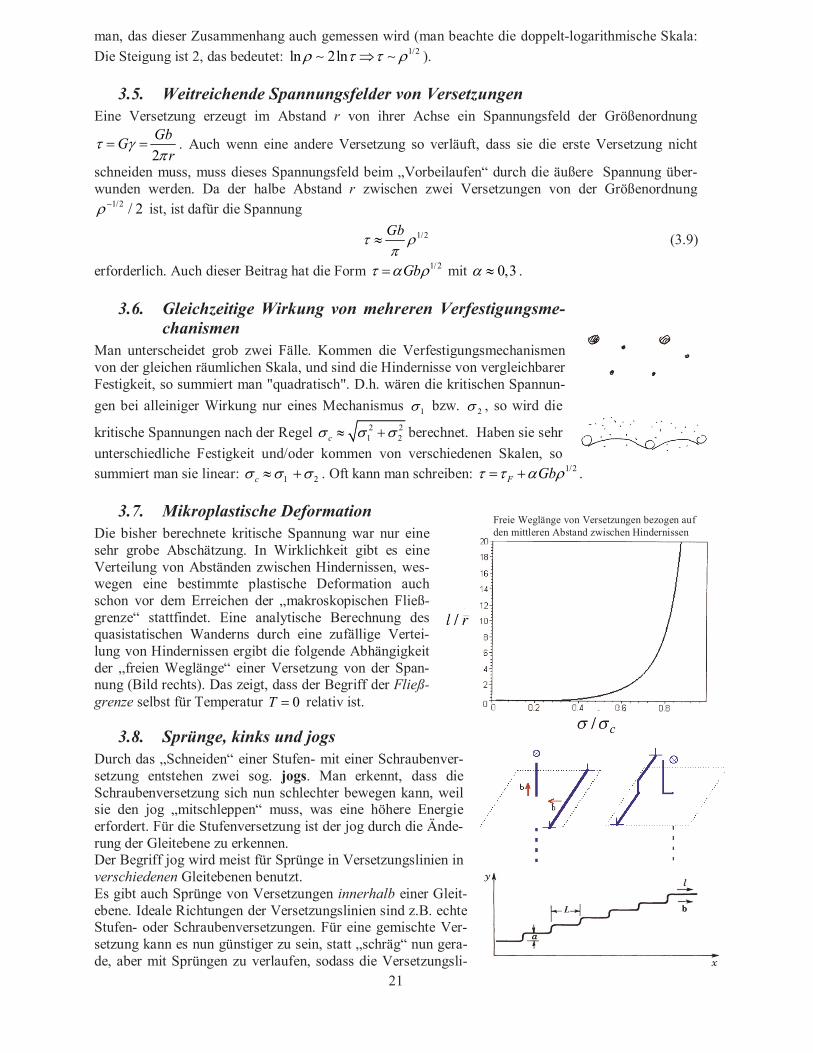
3.7. Mikroplastische Deformation Die bisher berechnete kritische Spannung war nur eine sehr grobe Abschätzung. In Wirklichkeit gibt es eine Verteilung von Abständen zwischen Hindernissen, wes-wegen eine bestimmte plastische Deformation auch schon vor dem Erreichen der „makroskopischen Fließ-grenze“ stattfindet. Eine analytische Berechnung des quasistatischen Wanderns durch eine zufällige Vertei-lung von Hindernissen ergibt die folgende Abhängigkeit der „freien Weglänge“ einer Versetzung von der Span-nung (Bild rechts). Das zeigt, dass der Begriff der Fließ-grenze selbst für Temperatur 0T = relativ ist.
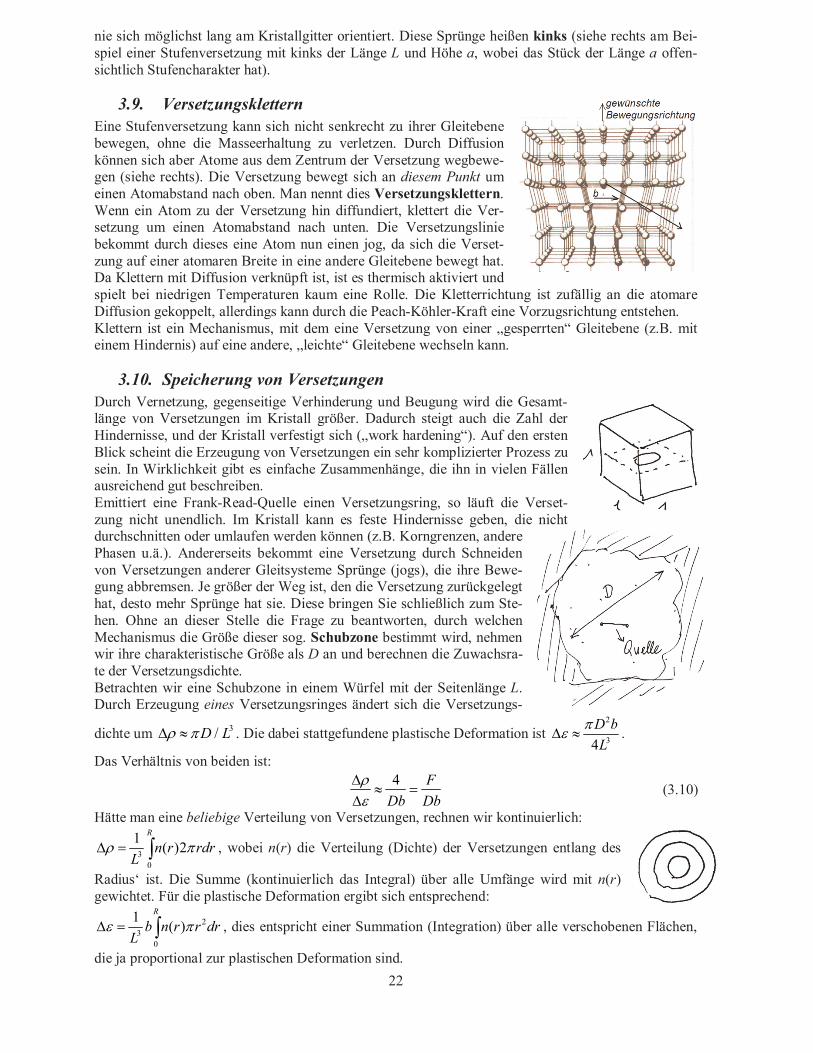
3.8. Sprünge, kinks und jogs Durch das „Schneiden“ einer Stufen- mit einer Schraubenver-setzung entstehen zwei sog. jogs. Man erkennt, dass die Schraubenversetzung sich nun schlechter bewegen kann, weil sie den jog „mitschleppen“ muss, was eine höhere Energie erfordert. Für die Stufenversetzung ist der jog durch die Ände-rung der Gleitebene zu erkennen. Der Begriff jog wird meist für Sprünge in Versetzungslinien in verschiedenen Gleitebenen benutzt. Es gibt auch Sprünge von Versetzungen innerhalb einer Gleit-ebene. Ideale Richtungen der Versetzungslinien sind z.B. echte Stufen- oder Schraubenversetzungen. Für eine gemischte Ver-setzung kann es nun günstiger zu sein, statt „schräg“ nun gera-de, aber mit Sprüngen zu verlaufen, sodass die Versetzungsli-
Freie Weglänge von Versetzungen bezogen auf den mittleren Abstand zwischen Hindernissen
22
nie sich möglichst lang am Kristallgitter orientiert. Diese Sprünge heißen kinks (siehe rechts am Bei-spiel einer Stufenversetzung mit kinks der Länge L und Höhe a, wobei das Stück der Länge a offen-sichtlich Stufencharakter hat).
3.9. Versetzungsklettern Eine Stufenversetzung kann sich nicht senkrecht zu ihrer Gleitebene bewegen, ohne die Masseerhaltung zu verletzen. Durch Diffusion können sich aber Atome aus dem Zentrum der Versetzung wegbewe-gen (siehe rechts). Die Versetzung bewegt sich an diesem Punkt um einen Atomabstand nach oben. Man nennt dies Versetzungsklettern. Wenn ein Atom zu der Versetzung hin diffundiert, klettert die Ver-setzung um einen Atomabstand nach unten. Die Versetzungslinie bekommt durch dieses eine Atom nun einen jog, da sich die Verset-zung auf einer atomaren Breite in eine andere Gleitebene bewegt hat. Da Klettern mit Diffusion verknüpft ist, ist es thermisch aktiviert und spielt bei niedrigen Temperaturen kaum eine Rolle. Die Kletterrichtung ist zufällig an die atomare Diffusion gekoppelt, allerdings kann durch die Peach-Köhler-Kraft eine Vorzugsrichtung entstehen. Klettern ist ein Mechanismus, mit dem eine Versetzung von einer „gesperrten“ Gleitebene (z.B. mit einem Hindernis) auf eine andere, „leichte“ Gleitebene wechseln kann.
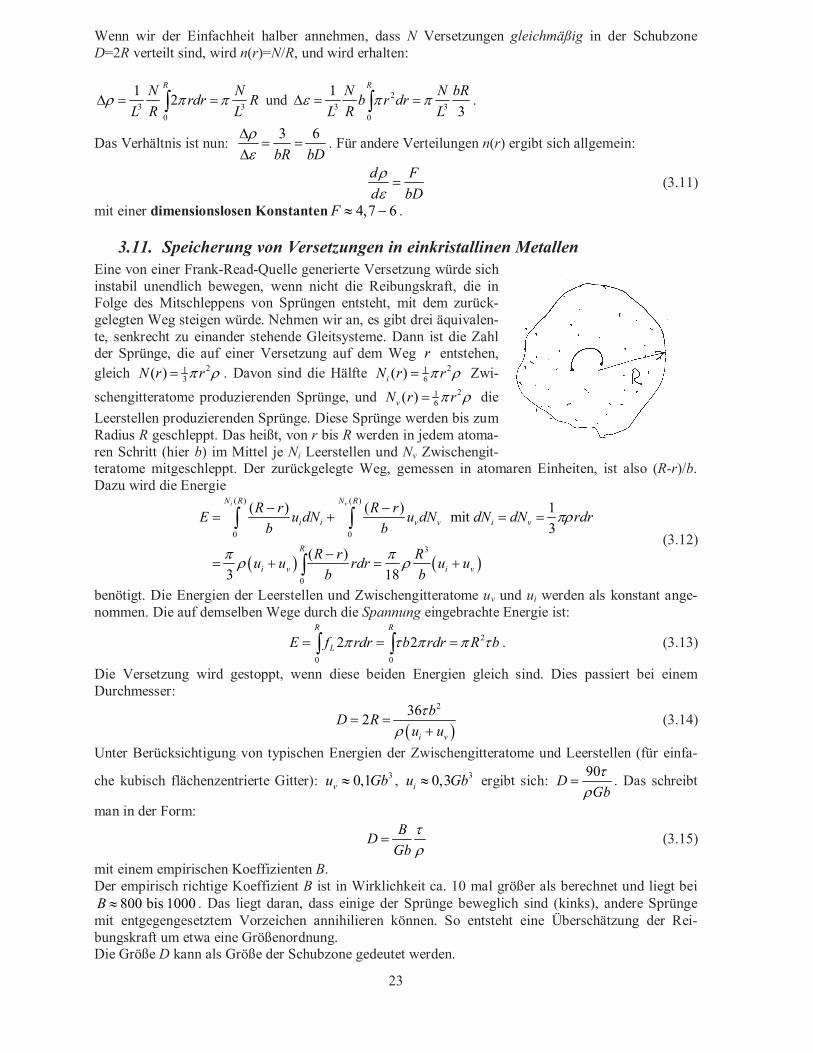
3.10. Speicherung von Versetzungen Durch Vernetzung, gegenseitige Verhinderung und Beugung wird die Gesamt-länge von Versetzungen im Kristall größer. Dadurch steigt auch die Zahl der Hindernisse, und der Kristall verfestigt sich („work hardening“). Auf den ersten Blick scheint die Erzeugung von Versetzungen ein sehr komplizierter Prozess zu sein. In Wirklichkeit gibt es einfache Zusammenhänge, die ihn in vielen Fällen ausreichend gut beschreiben. Emittiert eine Frank-Read-Quelle einen Versetzungsring, so läuft die Verset-zung nicht unendlich. Im Kristall kann es feste Hindernisse geben, die nicht durchschnitten oder umlaufen werden können (z.B. Korngrenzen, andere Phasen u.ä.). Andererseits bekommt eine Versetzung durch Schneiden von Versetzungen anderer Gleitsysteme Sprünge (jogs), die ihre Bewe-gung abbremsen. Je größer der Weg ist, den die Versetzung zurückgelegt hat, desto mehr Sprünge hat sie. Diese bringen Sie schließlich zum Ste-hen. Ohne an dieser Stelle die Frage zu beantworten, durch welchen Mechanismus die Größe dieser sog. Schubzone bestimmt wird, nehmen wir ihre charakteristische Größe als D an und berechnen die Zuwachsra-te der Versetzungsdichte. Betrachten wir eine Schubzone in einem Würfel mit der Seitenlänge L. Durch Erzeugung eines Versetzungsringes ändert sich die Versetzungs-
dichte um 3/D Lρ πΔ ≈ . Die dabei stattgefundene plastische Deformation ist 2
34
D b
L
πεΔ ≈ .
Das Verhältnis von beiden ist:
4 F
Db Db
ρε
Δ≈ =
Δ (3.10)
Hätte man eine beliebige Verteilung von Versetzungen, rechnen wir kontinuierlich:
30
1( )2
R
n r rdrL
ρ πΔ = ∫ , wobei n(r) die Verteilung (Dichte) der Versetzungen entlang des
Radius‘ ist. Die Summe (kontinuierlich das Integral) über alle Umfänge wird mit n(r) gewichtet. Für die plastische Deformation ergibt sich entsprechend:
23
0
1( )
R
b n r r drL
ε πΔ = ∫ , dies entspricht einer Summation (Integration) über alle verschobenen Flächen,
die ja proportional zur plastischen Deformation sind.
23
Wenn wir der Einfachheit halber annehmen, dass N Versetzungen gleichmäßig in der Schubzone D=2R verteilt sind, wird n(r)=N/R, und wird erhalten:
3 30
12
RN Nrdr R
L R Lρ π πΔ = =∫ und 2
3 30
1
3
RN N bRb r dr
L R Lε π πΔ = =∫ .
Das Verhältnis ist nun: 3 6
bR bD
ρε
Δ= =
Δ. Für andere Verteilungen n(r) ergibt sich allgemein:
d F
d bD
ρε= (3.11)
mit einer dimensionslosen Konstanten 4,7 6F ≈ − .
3.11. Speicherung von Versetzungen in einkristallinen Metallen Eine von einer Frank-Read-Quelle generierte Versetzung würde sich instabil unendlich bewegen, wenn nicht die Reibungskraft, die in Folge des Mitschleppens von Sprüngen entsteht, mit dem zurück-gelegten Weg steigen würde. Nehmen wir an, es gibt drei äquivalen-te, senkrecht zu einander stehende Gleitsysteme. Dann ist die Zahl der Sprünge, die auf einer Versetzung auf dem Weg r entstehen, gleich 21
3( )N r rπ ρ= . Davon sind die Hälfte 216( )iN r rπ ρ= Zwi-
schengitteratome produzierenden Sprünge, und 216( )vN r rπ ρ= die
Leerstellen produzierenden Sprünge. Diese Sprünge werden bis zum Radius R geschleppt. Das heißt, von r bis R werden in jedem atoma-ren Schritt (hier b) im Mittel je Ni Leerstellen und Nv Zwischengit-teratome mitgeschleppt. Der zurückgelegte Weg, gemessen in atomaren Einheiten, ist also (R-r)/b. Dazu wird die Energie
( ) ( )
( ) ( )
0 0
3
0
( ) ( ) 1 mit
3
( )
3 18
i vN R N R
i i v v i v
R
i v i v
R r R rE u dN u dN dN dN rdr
b b
R r Ru u rdr u u
b b
πρ
π πρ ρ
− −= + = =
−= + = +
∫ ∫
∫ (3.12)
benötigt. Die Energien der Leerstellen und Zwischengitteratome uv und ui werden als konstant ange-nommen. Die auf demselben Wege durch die Spannung eingebrachte Energie ist:
2
0 0
2 2R R
LE f rdr b rdr R bπ τ π π τ= = =∫ ∫ . (3.13)
Die Versetzung wird gestoppt, wenn diese beiden Energien gleich sind. Dies passiert bei einem Durchmesser:
( )
2362
i v
bD R
u u
τρ
= =+
(3.14)
Unter Berücksichtigung von typischen Energien der Zwischengitteratome und Leerstellen (für einfa-
che kubisch flächenzentrierte Gitter): 30,1vu Gb≈ , 30,3iu Gb≈ ergibt sich: 90
DGb
τρ
= . Das schreibt
man in der Form:
B
DGb
τρ
= (3.15)
mit einem empirischen Koeffizienten B. Der empirisch richtige Koeffizient B ist in Wirklichkeit ca. 10 mal größer als berechnet und liegt bei
800 bis 1000B ≈ . Das liegt daran, dass einige der Sprünge beweglich sind (kinks), andere Sprünge mit entgegengesetztem Vorzeichen annihilieren können. So entsteht eine Überschätzung der Rei-bungskraft um etwa eine Größenordnung. Die Größe D kann als Größe der Schubzone gedeutet werden.
24
3.12. Verfestigung eines einkristallinen Metalls Wir nehmen nun an, dass zum einen die Gleichung für die Speicherung von Versetzungen gilt: d F
d bD
ρε≈ , zum anderen schreiben wir als typische Größe der Schubzone:
BD
Gb
τρ
= .
Weiterhin können wir die kritische Spannung abschätzen zu: 1/2Gbτ α ρ= . Daraus folgt:
1/2d F
d bB
ρ ρε α= (3.16)
Dies ist eine Differentialgleichung für die Funktion ( )ρ ε . Ihre Lösung lautet:
1/2 1/20 2
F
bBρ ρ ε
α= + (3.17)
Für die Spannung ergibt sich mit 1/ 2Gbτ α ρ= :
0 2
GF
Bτ τ ε= + (3.18)
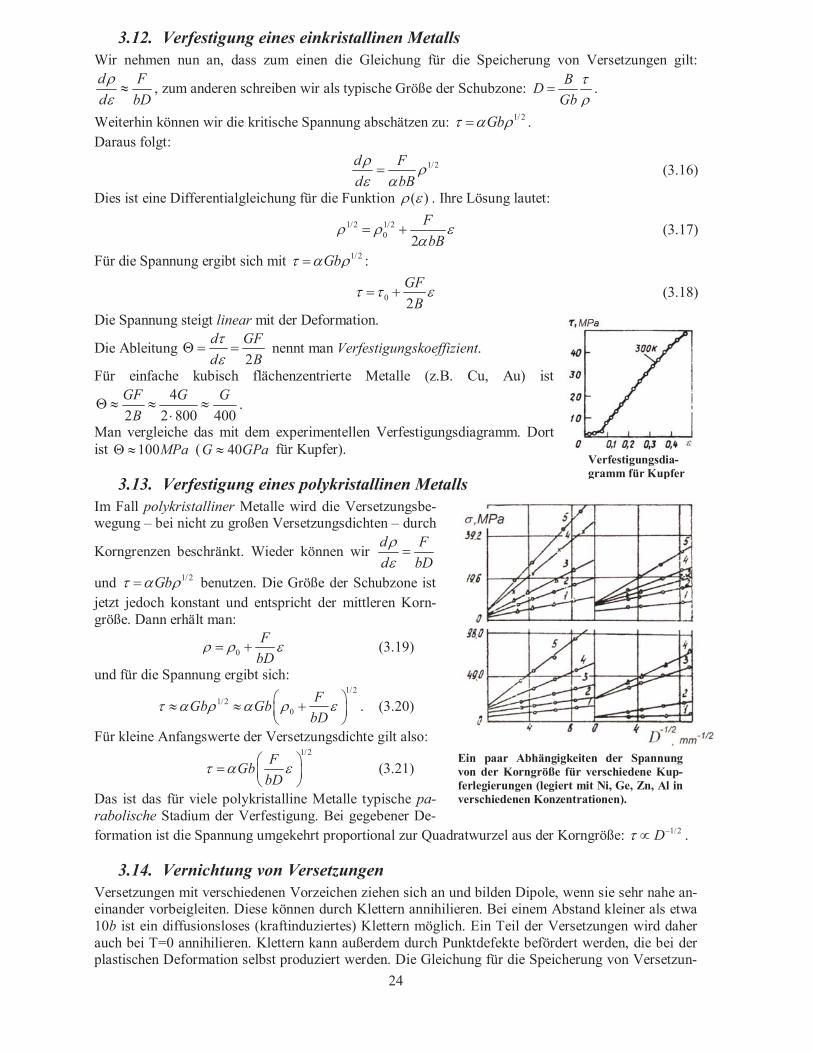
Die Spannung steigt linear mit der Deformation.
Die Ableitung 2
d GF
d B
τε
Θ = = nennt man Verfestigungskoeffizient.
Für einfache kubisch flächenzentrierte Metalle (z.B. Cu, Au) ist 4
2 2 800 400
GF G G
BΘ ≈ ≈ ≈
⋅.
Man vergleiche das mit dem experimentellen Verfestigungsdiagramm. Dort ist 100MPaΘ ≈ ( 40G GPa≈ für Kupfer).
3.13. Verfestigung eines polykristallinen Metalls Im Fall polykristalliner Metalle wird die Versetzungsbe-wegung – bei nicht zu großen Versetzungsdichten – durch
Korngrenzen beschränkt. Wieder können wir d F
d bD
ρε=
und 1/2Gbτ α ρ= benutzen. Die Größe der Schubzone ist jetzt jedoch konstant und entspricht der mittleren Korn-größe. Dann erhält man:
0
F
bDρ ρ ε= + (3.19)
und für die Spannung ergibt sich:
1/2
1/20
FGb Gb
bDτ α ρ α ρ ε⎛ ⎞≈ ≈ +⎜ ⎟
⎝ ⎠. (3.20)
Für kleine Anfangswerte der Versetzungsdichte gilt also:
1/2
FGb
bDτ α ε⎛ ⎞= ⎜ ⎟
⎝ ⎠ (3.21)
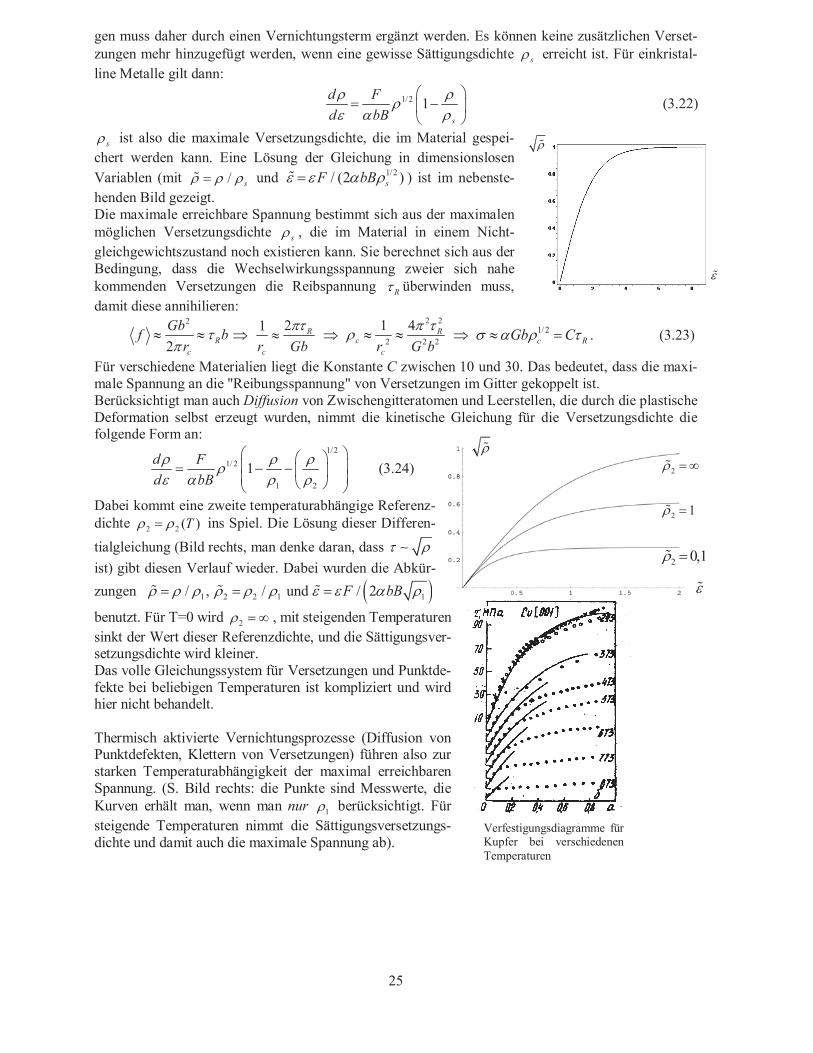
Das ist das für viele polykristalline Metalle typische pa-rabolische Stadium der Verfestigung. Bei gegebener De-formation ist die Spannung umgekehrt proportional zur Quadratwurzel aus der Korngröße: 1/2Dτ −∝ .
3.14. Vernichtung von Versetzungen Versetzungen mit verschiedenen Vorzeichen ziehen sich an und bilden Dipole, wenn sie sehr nahe an-einander vorbeigleiten. Diese können durch Klettern annihilieren. Bei einem Abstand kleiner als etwa 10b ist ein diffusionsloses (kraftinduziertes) Klettern möglich. Ein Teil der Versetzungen wird daher auch bei T=0 annihilieren. Klettern kann außerdem durch Punktdefekte befördert werden, die bei der plastischen Deformation selbst produziert werden. Die Gleichung für die Speicherung von Versetzun-
Verfestigungsdia-gramm für Kupfer
Ein paar Abhängigkeiten der Spannung von der Korngröße für verschiedene Kup-ferlegierungen (legiert mit Ni, Ge, Zn, Al in verschiedenen Konzentrationen).
25
gen muss daher durch einen Vernichtungsterm ergänzt werden. Es können keine zusätzlichen Verset-zungen mehr hinzugefügt werden, wenn eine gewisse Sättigungsdichte sρ erreicht ist. Für einkristal-line Metalle gilt dann:
1/2 1s
d F
d bB
ρ ρρε α ρ
⎛ ⎞= −⎜ ⎟
⎝ ⎠ (3.22)
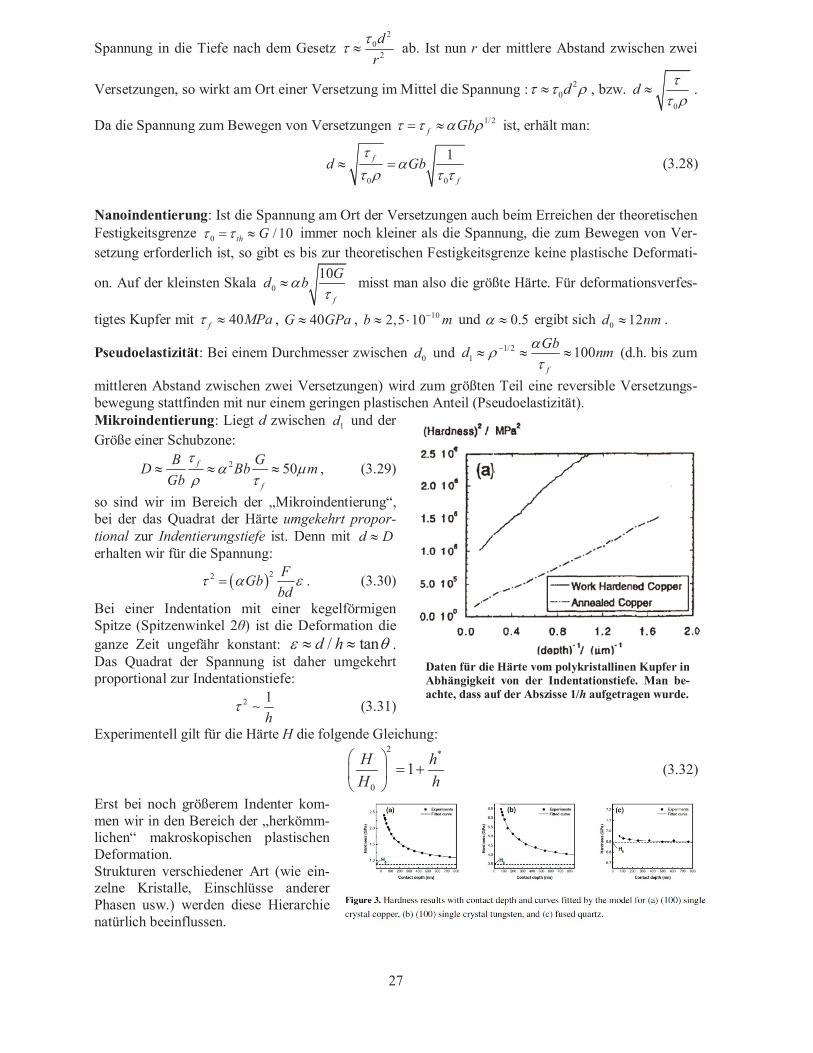
sρ ist also die maximale Versetzungsdichte, die im Material gespei-chert werden kann. Eine Lösung der Gleichung in dimensionslosen Variablen (mit / sρ ρ ρ= und 1/2/ (2 )sF bBε ε α ρ= ) ist im nebenste-henden Bild gezeigt. Die maximale erreichbare Spannung bestimmt sich aus der maximalen möglichen Versetzungsdichte sρ , die im Material in einem Nicht-gleichgewichtszustand noch existieren kann. Sie berechnet sich aus der Bedingung, dass die Wechselwirkungsspannung zweier sich nahe kommenden Versetzungen die Reibspannung Rτ überwinden muss, damit diese annihilieren:
2
2 Rc
Gbf b
rτ
π≈ ≈ ⇒
21 R
cr Gb
πτ≈ ⇒
2 2
2 2 2
41 Rc
cr G b
π τρ ≈ ≈ ⇒ 1/2c RGb Cσ α ρ τ≈ = . (3.23)
Für verschiedene Materialien liegt die Konstante C zwischen 10 und 30. Das bedeutet, dass die maxi-male Spannung an die "Reibungsspannung" von Versetzungen im Gitter gekoppelt ist. Berücksichtigt man auch Diffusion von Zwischengitteratomen und Leerstellen, die durch die plastische Deformation selbst erzeugt wurden, nimmt die kinetische Gleichung für die Versetzungsdichte die folgende Form an:
1/2
1/ 2
1 2
1d F
d bB
ρ ρ ρρε α ρ ρ
⎛ ⎞⎛ ⎞⎜ ⎟= − − ⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠
(3.24)
Dabei kommt eine zweite temperaturabhängige Referenz-dichte 2 2 ( )Tρ ρ= ins Spiel. Die Lösung dieser Differen-
tialgleichung (Bild rechts, man denke daran, dass τ ρ∼ist) gibt diesen Verlauf wieder. Dabei wurden die Abkür-
zungen ( )1 2 2 1 1/ , / und / 2F bBρ ρ ρ ρ ρ ρ ε ε α ρ= = =
benutzt. Für T=0 wird 2ρ =∞ , mit steigenden Temperaturen sinkt der Wert dieser Referenzdichte, und die Sättigungsver-setzungsdichte wird kleiner. Das volle Gleichungssystem für Versetzungen und Punktde-fekte bei beliebigen Temperaturen ist kompliziert und wird hier nicht behandelt. Thermisch aktivierte Vernichtungsprozesse (Diffusion von Punktdefekten, Klettern von Versetzungen) führen also zur starken Temperaturabhängigkeit der maximal erreichbaren Spannung. (S. Bild rechts: die Punkte sind Messwerte, die Kurven erhält man, wenn man nur 1ρ berücksichtigt. Für steigende Temperaturen nimmt die Sättigungsversetzungs-dichte und damit auch die maximale Spannung ab).
Verfestigungsdiagramme für Kupfer bei verschiedenen Temperaturen
ρ
ε
ε
2ρ =∞ρ
2 1ρ =
2 0,1ρ =

26
3.15. Verteilung von Versetzungen in Schubzonen; Spannungskonzentrationen Laufen mehrere Versetzungen nacheinander und wird die Bewegung der ersten Versetzung verhindert, so bilden sie Versetzungsgruppen von der Art, wie im Bild gezeigt. Man sieht, dass die Verteilung der Versetzungen nicht gleichmäßig ist. Bei der Berechnung der Verteilung nimmt man oft an, dass sich jede Versetzung unter der Wirkung anderer Versetzungen im Gleichgewicht ist, d.h. die Reib-spannungen werden vernachlässigt. Es ist leicht zu verstehen, dass diese Versetzungsverteilung als tangentialer Riss be-trachtet werden kann, da bei einem solchen die Risshälften gegeneinander verschoben sind, genau wie bei Versetzungen. Zur Berechnung der in der Schubzone auftretenden Spannun-gen betrachten wir einen Schnitt der Länge l in einem elasti-schen Kontinuum. Das Kontinuum wird nun einer tangentia-len Spannung τ ausgesetzt. Es kann gezeigt werden, dass die relative Verschiebung der Rissufer durch die Funktion:
( )2 22(1 )( ) / 2u x l x
G
ν τ−= − (3.25)
beschrieben wird, wobei x von –l/2 bis + l/2 entlang des Risses läuft. Die resultierende Spannungsver-teilung ergibt sich zu:
1/ 2
/ 21
/ 2xy
x l
x lσ τ
⎡ ⎤+⎛ ⎞= −⎢ ⎥⎜ ⎟−⎝ ⎠⎢ ⎥⎣ ⎦ (3.26)
Die größte Verschiebung gibt es im Zentrum des Risses: max
(1 )(0)
lu u
G
ν τ−= = . Stellt man sich nun
vor, dass diese Verschiebung durch N Burgersvektoren b zustande kommt, so erhält man die Zahl der
Versetzungen in der Schubzone: max 2(1 )2
u lN
b Gb
ν τ−= = . Der Faktor 2 entsteht, da zu jeder Verset-
zung eine zweite mit entgegengesetztem Burgersvektor vorhanden sein muss, damit die Verschiebung an den Enden des Risses null wird. N/2 misst also gerade die Zahl der Versetzungsdipole. Da die Riss-
länge gerade einer Schubzone entspricht, können wir B
D lGb
τρ
= = ansetzen und erhalten für die Zahl
der Versetzungen die Abschätzung: 22 (1 ) 70 600N Bα ν≈ − ≈ ÷ (3.27) Am Rande der Schubzone gibt es eine Spannungskon-zentration max Nσ τ≈ . Diese Spannungskonzentration ist die Hauptursache für die Bildung von Mikrorissen und einen späteren Bruch.
3.16. Skaleneffekte
Aus der Vorstellung über Versetzungen als Träger der plastischen Deformation ergibt sich eine Hierarchie von räumlichen Skalen. Untersuchen wir diese exem-plarisch am Beispiel einer Indentierung. Wird ein elastisches Medium mit einem zylindrischen Stempel mit dem Durchmesser d belastet (siehe Skizze), so fällt die
Nano- Pseudo- Mikro- Makro- indentierung elastizität indentierung plastizität (theoretische (H~1 / h) Grenze)
10nm 100nm 10-100μm
27
Spannung in die Tiefe nach dem Gesetz 2
02
d
r
ττ ≈ ab. Ist nun r der mittlere Abstand zwischen zwei
Versetzungen, so wirkt am Ort einer Versetzung im Mittel die Spannung : 20dτ τ ρ≈ , bzw.
0
dττ ρ
≈ .
Da die Spannung zum Bewegen von Versetzungen 1/2f Gbτ τ α ρ= ≈ ist, erhält man:
0 0
1f
f
d Gbτ
ατ ρ τ τ
≈ = (3.28)
Nanoindentierung: Ist die Spannung am Ort der Versetzungen auch beim Erreichen der theoretischen Festigkeitsgrenze 0 / 10th Gτ τ= ≈ immer noch kleiner als die Spannung, die zum Bewegen von Ver-setzung erforderlich ist, so gibt es bis zur theoretischen Festigkeitsgrenze keine plastische Deformati-
on. Auf der kleinsten Skala 0
10
f
Gd bα
τ≈ misst man also die größte Härte. Für deformationsverfes-
tigtes Kupfer mit 40f MPaτ ≈ , 40G GPa≈ , 102,5 10b m−≈ ⋅ und 0.5α ≈ ergibt sich 0 12d nm≈ .
Pseudoelastizität: Bei einem Durchmesser zwischen 0d und 1/21 100
f
Gbd nm
αρτ
−≈ ≈ ≈ (d.h. bis zum
mittleren Abstand zwischen zwei Versetzungen) wird zum größten Teil eine reversible Versetzungs-bewegung stattfinden mit nur einem geringen plastischen Anteil (Pseudoelastizität). Mikroindentierung: Liegt d zwischen 1d und der Größe einer Schubzone:
2 50f
f
B GD Bb m
Gb
τα μ
ρ τ≈ ≈ ≈ , (3.29)
so sind wir im Bereich der „Mikroindentierung“, bei der das Quadrat der Härte umgekehrt propor-tional zur Indentierungstiefe ist. Denn mit d D≈erhalten wir für die Spannung:
( )22 FGb
bdτ α ε= . (3.30)
Bei einer Indentation mit einer kegelförmigen Spitze (Spitzenwinkel 2θ) ist die Deformation die ganze Zeit ungefähr konstant: / tand hε θ≈ ≈ . Das Quadrat der Spannung ist daher umgekehrt proportional zur Indentationstiefe:
2 1
hτ ∼ (3.31)
Experimentell gilt für die Härte H die folgende Gleichung:
2 *
0
1H h
H h
⎛ ⎞= +⎜ ⎟
⎝ ⎠ (3.32)
Erst bei noch größerem Indenter kom-men wir in den Bereich der „herkömm-lichen“ makroskopischen plastischen Deformation. Strukturen verschiedener Art (wie ein-zelne Kristalle, Einschlüsse anderer Phasen usw.) werden diese Hierarchie natürlich beeinflussen.
Daten für die Härte vom polykristallinen Kupfer in Abhängigkeit von der Indentationstiefe. Man be-achte, dass auf der Abszisse 1/h aufgetragen wurde.

28
3.17. Geschwindigkeitsabhängigkeit der plastischen Deformation und Kriechen Bisher haben wir stillschweigend plastische Deformation am absoluten Temperaturnullpunkt betrach-tet. Bei endlicher Temperatur können sich Versetzungen auch infolge thermischer Fluktuationen und Diffusion von den Hindernissen „befreien“. Da diese Prozesse durch thermische Fluktuationen bedingt
sind, ist ihre Intensität dem Arrhenius-Faktor 0 /U kTe− proportional, wobei 0U die Aktivierungsener-
gie, k die Boltzmannsche Konstante und T die absolute Temperatur sind. Das einfachste Modell für die thermisch aktivierte Deformation wird durch folgende Gleichung beschrieben:
0 0/ ( ( ))/0
cU kT V kTe e σ σ εε ν − −≈ . (3.33)
0V ist hier das sogenannte Aktivierungsvolumen und 12 13 10 10 10 sν −−∼ die charakteristische
Schwingungsfrequenz eines Versetzungssegmentes. ( )cσ ε ist die athermische Fließgrenze, d.h. die
Spannung, bei der makroskopische plastische Deformation für 0T = beginnt.
3.17.1. Logarithmisches Kriechen
Haben wir es mit einem Material mit linearer Verfestigung zu tun: ( )cσ ε ε≈ Θ , und wird es mit
konstanter Spannung belastet, so nimmt die „Kriechgleichung“ die folgende Form an:
0 0/ ( )/0
U kT V kTe e σ εε ν − −Θ≈ . Ihre Integration ergibt 0 0 0
00
1V U V
kT kT kTkT
e e e tV
ε σ
νΘ
−⎛ ⎞− =⎜ ⎟Θ ⎝ ⎠
und daher:
0 0
00
0
ln 1U V
kT kTVkT
e e tV kT
σ
ε ν−⎛ ⎞Θ
= +⎜ ⎟Θ ⎝ ⎠ (3.34)
Das ist sogenanntes logarithmisches Kriechen.
3.17.2. Stationäres Kriechen. Bei endlicher Temperatur müssen in dem Gleichungssystem für die Spannung und Speicherung von Versetzungen auch die Vernichtungsterme berücksichtigt werden. Das Gleichungssystem nimmt dann die folgende Form:
0 0/ ( ( ))/0
cU kT V kTe e
t
σ σ ρε νρ ρρ εε
− −≈∂ ∂
= +∂ ∂
(3.35)
mit einer eigenen Gleichung für die Änderung der
Versetzungsdichte an. Wenn 0t
ρ ρρ εε∂ ∂
= + =∂ ∂
ist,
bleibt die Deformationsgeschwindigkeit bei gegebe-ner Spannung konstant (stationäres Kriechen).
3.18. Superversetzungen in geordneten Mischkristallen Viele metallische Elemente können geordnete oder ungeordnete Legierungen bilden. In dieser Vorle-sung werden thermodynamische Aspekte der Legierungsbildung nicht betrachtet. Abhängig von der chemischen Zusammen-setzung können Metalle verschiedene Struktu-ren bilden. Zwei davon sind nebenstehend gezeigt. Sind die Radien und die Elektroneneigenschaf-ten der Atome sehr ähnlich, so geht die Struk-tur bei erhöhten Temperaturen in einen nicht-geordneten Zustand über (z.B. bei T=550°C für 3Fe Al , T=400°C für CuAu, T=210°C für
3Au Cu ).
Struktur vom Typ CuAu (B2)
Struktur vom Typ 3
Cu Au (2
L1 )
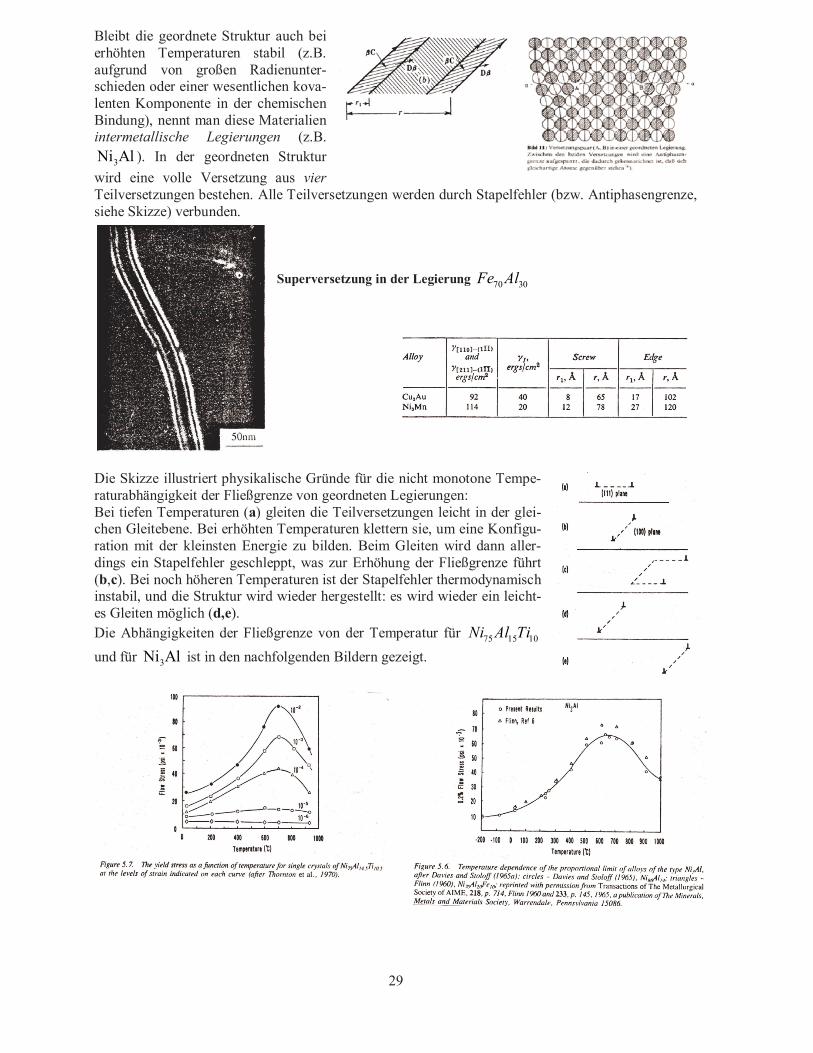
29
Bleibt die geordnete Struktur auch bei erhöhten Temperaturen stabil (z.B. aufgrund von großen Radienunter-schieden oder einer wesentlichen kova-lenten Komponente in der chemischen Bindung), nennt man diese Materialien intermetallische Legierungen (z.B.
3Ni Al ). In der geordneten Struktur
wird eine volle Versetzung aus vier Teilversetzungen bestehen. Alle Teilversetzungen werden durch Stapelfehler (bzw. Antiphasengrenze, siehe Skizze) verbunden.
Superversetzung in der Legierung 70 30Fe Al
Die Skizze illustriert physikalische Gründe für die nicht monotone Tempe-raturabhängigkeit der Fließgrenze von geordneten Legierungen: Bei tiefen Temperaturen (a) gleiten die Teilversetzungen leicht in der glei-chen Gleitebene. Bei erhöhten Temperaturen klettern sie, um eine Konfigu-ration mit der kleinsten Energie zu bilden. Beim Gleiten wird dann aller-dings ein Stapelfehler geschleppt, was zur Erhöhung der Fließgrenze führt (b,c). Bei noch höheren Temperaturen ist der Stapelfehler thermodynamisch instabil, und die Struktur wird wieder hergestellt: es wird wieder ein leicht-es Gleiten möglich (d,e). Die Abhängigkeiten der Fließgrenze von der Temperatur für 75 15 10Ni Al Ti
und für 3Ni Al ist in den nachfolgenden Bildern gezeigt.
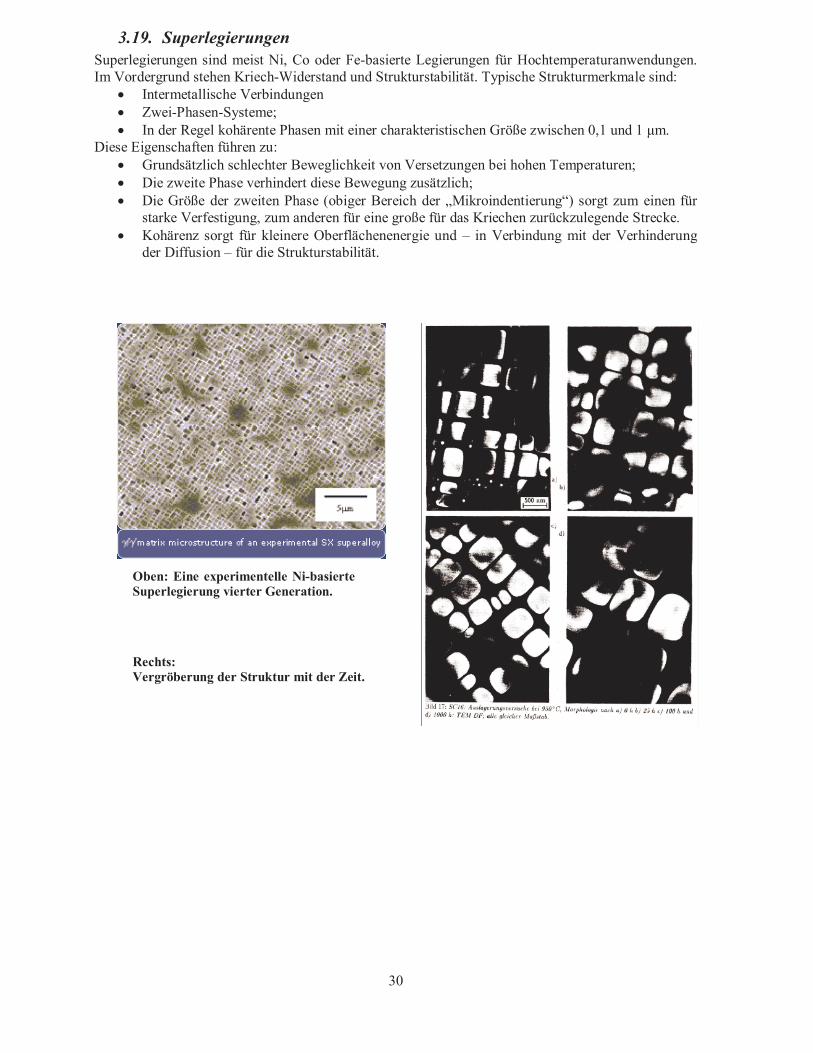
30
3.19. Superlegierungen Superlegierungen sind meist Ni, Co oder Fe-basierte Legierungen für Hochtemperaturanwendungen. Im Vordergrund stehen Kriech-Widerstand und Strukturstabilität. Typische Strukturmerkmale sind:
• Intermetallische Verbindungen • Zwei-Phasen-Systeme; • In der Regel kohärente Phasen mit einer charakteristischen Größe zwischen 0,1 und 1 μm.
Diese Eigenschaften führen zu: • Grundsätzlich schlechter Beweglichkeit von Versetzungen bei hohen Temperaturen; • Die zweite Phase verhindert diese Bewegung zusätzlich; • Die Größe der zweiten Phase (obiger Bereich der „Mikroindentierung“) sorgt zum einen für
starke Verfestigung, zum anderen für eine große für das Kriechen zurückzulegende Strecke. • Kohärenz sorgt für kleinere Oberflächenenergie und – in Verbindung mit der Verhinderung
der Diffusion – für die Strukturstabilität.
Rechts: Vergröberung der Struktur mit der Zeit.
Oben: Eine experimentelle Ni-basierte Superlegierung vierter Generation.

31
4. Riss, Bruch und Ermüdung
4.1. Das Griffith-Bruchkriterium. Dem Bruch einer metallischen Probe geht in der Regel eine erhebliche plastische Deformation mit mehrmaligen Änderungen von Versetzungsstruktur und anschließender Speicherung von Mikrorissen voraus. Der Bruch selbst ist bei einem zähen Material lediglich das letzte Stadium, in dem einzelne Mikrorisse zu einem Riss zusammenfließen. Der Bruchprozess ist daher ein komplizierter Prozess mit mehreren Stadien.
4.1.1. Sprödbruch Wir beginnen mit dem Bruch von spröden Materialien, was aus theoretischer Sicht einfacher ist. Der Zugang wird aber formal auch auf zähe Werkstoffe angewandt. Betrachten wir einen elastischen Körper mit einem Riss mit dem Durchmesser L und berechnen die Spannung, die erforderlich ist, um diesen Riss im „geöffneten“ Zustand halten zu können. Wir berechnen Energie des Systems verglichen mit dem Zustand, in dem der Riss geschlossen ist. Beim Trennen der Rissufer wird Arbeit geleistet, denn es muss eine freie Oberfläche geschaffen werden. Diese hat jedoch eine höhere Energie, da atomare Bindungen an der Oberfläche im Gegen-satz zum Inneren des Körpers gestört sind. Durch die Oberflächenenergie (Energie pro Fläche γ ) wird somit die Energie des Systems erhöht, und zwar für den Riss im Beispiel um
( )22 / 2Lγπ . Dabei fällt aber die Normalspannung an den Rissufern von 0σ auf Null ab, was zur
Verkleinerung der elastischen Energie führt. Wenn wir annehmen, dass die elastische Energiedichte 20
2w
E
σ= nun in einem Volumen (Kugel) mit Radius L fehlt, so ist die gesamte Energie nun:
2 32
0 42
2 2 3 2
L LW
E
σγπ π⎛ ⎞ ⎛ ⎞= −⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠ (4.1)
Eine Änderung der Risslänge bewirkt nun eine Kraft ( )dW
F LdL
= − auf den Riss, die den Riss entwe-
der schließt (stabil) oder weiter öffnet (instabil). Die kritische Rissgröße erhalten wir, wenn die Kraft (Ableitung der Energie) zu null wird. Einem Gleichgewicht entspricht also das Minimum der Energie:
2
20( ) 0 24
dW EF L L L
dL E L
σ γπγ π σ= − = − + = ⇒ = (4.2)
Daraus folgt für die Größenordnung der kritischen Spannung (bis auf einen von der jeweiligen Geo-metrie abhängigen Geometriefaktor g der Größenordnung 1):
0
E Eg
L L
γ γσ = ≈ (4.3)
Das ist das berühmte Griffith-Kriterium. Durch genauere Rechnung bzw. andere Rissgeometrien können sich verschiedene Vorfaktoren g ergeben, das qualitative Verhalten bleibt jedoch erhalten. Für unsere Abschätzungen im weiteren Verlauf werden wir 1g ≈ approximieren.
4.1.2. Effektive Oberflächenenergie, Bruchzähigkeit Diese Energie-Überlegung ist aber nur dann gültig, wenn die Energie nicht anderswo verschwindet. Bei einem Metall gibt es bei Trennung von Rissufern große plastische Deformation, bei der viel Ener-gie dissipiert wird. Es stellt sich heraus, dass man das Griffith-Kriterium auch in solchen Fällen an-
wenden kann, wobei man aber eine effektive Oberflächenenergie *γ benutzen muss:
*
0
E
L
γσ ≈ (4.4)
Die sog. Bruchzähigkeit wird meist über den sog. Spannungskonzentrationsfaktor angegeben:
K g Lσ π= , mit einem Geometriefaktor g der Größenordnung 1.
32
Der Zusammenhang zwischen *γ und K ist daher: *K Eπγ≈ . Bei ungefähr gleicher Härte von Stahl
und Glass ist die Bruchzähigkeit des Stahls ungefähr um den Faktor 50 größer (d.h. seine effektive Oberflächenenergie ist etwa 2500 mal größer als seine wirkliche Oberflächenenergie), was die Ursa-che für sehr unterschiedliche mechanische Eigenschaften dieser Werkstoffe ist.
4.1.3. Spannungskonzentration an einer Rissspitze Die Gleichgewichtsgleichung für ein elastisches Konti-nuum kann vereinfacht als 0, ( 1..3)iu iΔ = = geschrieben werden. Für die Bruchmode III (siehe rechts) ist das sogar eine exakte Gleichung, die wir hier lösen wollen. In zylindrischen Koordinaten nimmt diese Gleichung die
Form 2
2 2
1 10i i
i
u uu r
r r r r φ∂ ∂∂ ⎛ ⎞Δ = + =⎜ ⎟∂ ∂ ∂⎝ ⎠
an. Es ist leicht zu
sehen, dass jede Funktion der Form cos( )iu rα αφ= Lösung dieser Gleichung ist. Sie muss allerdings
noch die Randbedingung ( , 0) ( , 2 )i iu r u rφ φ π= = − = erfüllen. Daraus folgt 1 / 2α = , 1/2iu r∝ und
1/2ur
rσ −∂∝ ∝∂
. Dieser Verlauf erklärt sich physikalisch durch die Vergrößerung der Spannungskon-
zentration an der Rissspitze. Die Spannung im Abstand r von der Rissspitze hat die Größenordnung
0( ) /r l rσ σ≈ . Beim brüchigen Material erreicht sie ihr Maximum für r b= , wobei b ein atomarer
Abstand ist. Ist diese Spannung gleich der theoretischen Festigkeitsgrenze auf Zug thσ , so öffnet sich
der Riss weiter. Daraus folgt 0 /th l bσ σ≈ und damit 0 th
b
lσ σ≈ .
Ein Vergleich mit dem Griffith-Kriterium ergibt für die theoretische Grenze:
th
E
b
γσ ≈ (4.5)
4.1.4. Anwendungen des Griffith-Kriteriums
Mit der Griffith-Gleichung *
0
E
L
γσ ≈ kann man viele Effekte verstehen, die mit Bruch zu tun haben:
a) Einfluss von oberflächenaktiven Substanzen auf die Bruchfestigkeit. Oberflächenaktive Stoffe werden z.B. beim Bohren von harten Gesteinen eingesetzt und senken die Oberflächenspannung.
b) Verzögerter Bruch (auch statische Ermüdung genannt): Bruch nach langer Wirkungszeit einer Zugspannung, die zum schnellen Bruch alleine nicht ausreicht. Der Mechanismus besteht in der Absorption von Gasen oder anderen Substanzen an der Oberfläche und ihre Migration in Mikro-risse. Die Geschwindigkeit des Risswachstums ist dabei beschränkt durch die Geschwindigkeit der Diffusionsprozesse. Nachdem der Riss die kritische Länge erreicht, bricht das Stück "plötzlich".
c) Rebinder-Effekt: Zinkblech wird brüchig, wenn es durch Quecksilber benetzt wird (Änderung der Oberflächenenergie). Zum Teil hängt damit auch die Wasserstoffversprödung zusammen.
d) Der Riss öffnet sich nur unter Einwirkung einer Zugspannung. Wird in der Oberflächenschicht eine Druckvorspannung erzeugt, so verhindert dies das Öffnen von Oberflächenrissen (z.B. Be-schichtung mit einem Material mit kleinerem thermischen Dehnungskoeffizienten bei erhöhter Temperatur oder Sandbestrahlung).
e) Die Festigkeit von massiven Glas-Proben wird durch Mikrorisse (an der Oberfläche) von ungefähr 1µm Tiefe bestimmt. Durch sorgfältiges Ätzen kann man Festigkeit von massivem Glass bis zu der von Fasern erhöhen.
f) Ausreichend dünne Fasern (kleine L) sind fester und können die theoretische Festigkeit erreichen. Ein entlang einer Achse beanspruchtes Material ist also fester, wenn es aus dünnen Fasern besteht.
g) Ioffe-Effekt: Kochsalz wird plastisch, wenn es im warmen Wasser deformiert wird. Die Mikroris-se an der Oberfläche lösen sich auf, und die Bruchfestigkeit für Sprödbruch wird größer als die plastische Fließgrenze.
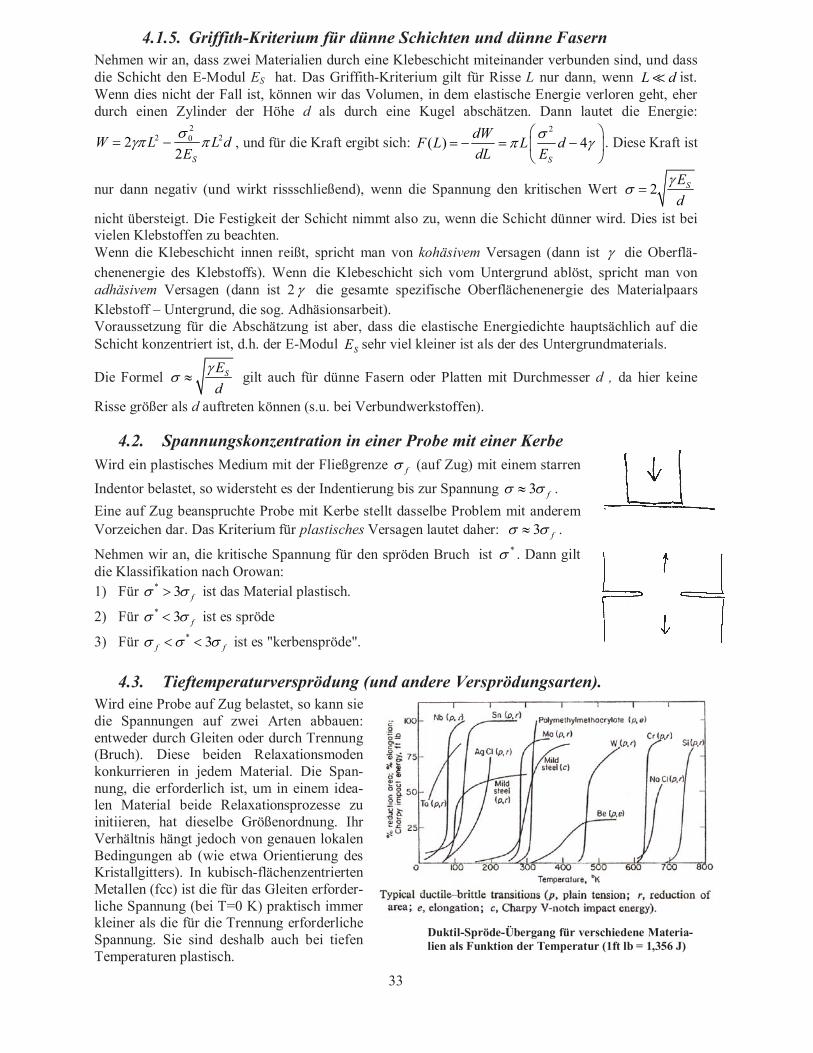
33
4.1.5. Griffith-Kriterium für dünne Schichten und dünne Fasern Nehmen wir an, dass zwei Materialien durch eine Klebeschicht miteinander verbunden sind, und dass die Schicht den E-Modul ES hat. Das Griffith-Kriterium gilt für Risse L nur dann, wenn L d ist. Wenn dies nicht der Fall ist, können wir das Volumen, in dem elastische Energie verloren geht, eher durch einen Zylinder der Höhe d als durch eine Kugel abschätzen. Dann lautet die Energie:
22 202
2 S
W L L dE
σγπ π= − , und für die Kraft ergibt sich: 2
( ) 4S
dWF L L d
dL E
σπ γ
⎛ ⎞= − = −⎜ ⎟
⎝ ⎠. Diese Kraft ist
nur dann negativ (und wirkt rissschließend), wenn die Spannung den kritischen Wert 2 SE
d
γσ =
nicht übersteigt. Die Festigkeit der Schicht nimmt also zu, wenn die Schicht dünner wird. Dies ist bei vielen Klebstoffen zu beachten. Wenn die Klebeschicht innen reißt, spricht man von kohäsivem Versagen (dann ist γ die Oberflä-chenenergie des Klebstoffs). Wenn die Klebeschicht sich vom Untergrund ablöst, spricht man von adhäsivem Versagen (dann ist 2 γ die gesamte spezifische Oberflächenenergie des Materialpaars Klebstoff – Untergrund, die sog. Adhäsionsarbeit). Voraussetzung für die Abschätzung ist aber, dass die elastische Energiedichte hauptsächlich auf die Schicht konzentriert ist, d.h. der E-Modul SE sehr viel kleiner ist als der des Untergrundmaterials.
Die Formel SE
d
γσ ≈ gilt auch für dünne Fasern oder Platten mit Durchmesser d , da hier keine
Risse größer als d auftreten können (s.u. bei Verbundwerkstoffen).
4.2. Spannungskonzentration in einer Probe mit einer Kerbe Wird ein plastisches Medium mit der Fließgrenze fσ (auf Zug) mit einem starren
Indentor belastet, so widersteht es der Indentierung bis zur Spannung 3 fσ σ≈ .
Eine auf Zug beanspruchte Probe mit Kerbe stellt dasselbe Problem mit anderem Vorzeichen dar. Das Kriterium für plastisches Versagen lautet daher: 3 fσ σ≈ .
Nehmen wir an, die kritische Spannung für den spröden Bruch ist *σ . Dann gilt die Klassifikation nach Orowan: 1) Für * 3 fσ σ> ist das Material plastisch.
2) Für * 3 fσ σ< ist es spröde
3) Für * 3f fσ σ σ< < ist es "kerbenspröde".
4.3. Tieftemperaturversprödung (und andere Versprödungsarten). Wird eine Probe auf Zug belastet, so kann sie die Spannungen auf zwei Arten abbauen: entweder durch Gleiten oder durch Trennung (Bruch). Diese beiden Relaxationsmoden konkurrieren in jedem Material. Die Span-nung, die erforderlich ist, um in einem idea-len Material beide Relaxationsprozesse zu initiieren, hat dieselbe Größenordnung. Ihr Verhältnis hängt jedoch von genauen lokalen Bedingungen ab (wie etwa Orientierung des Kristallgitters). In kubisch-flächenzentrierten Metallen (fcc) ist die für das Gleiten erforder-liche Spannung (bei T=0 K) praktisch immer kleiner als die für die Trennung erforderliche Spannung. Sie sind deshalb auch bei tiefen Temperaturen plastisch.
Duktil-Spröde-Übergang für verschiedene Materia-lien als Funktion der Temperatur (1ft lb = 1,356 J)
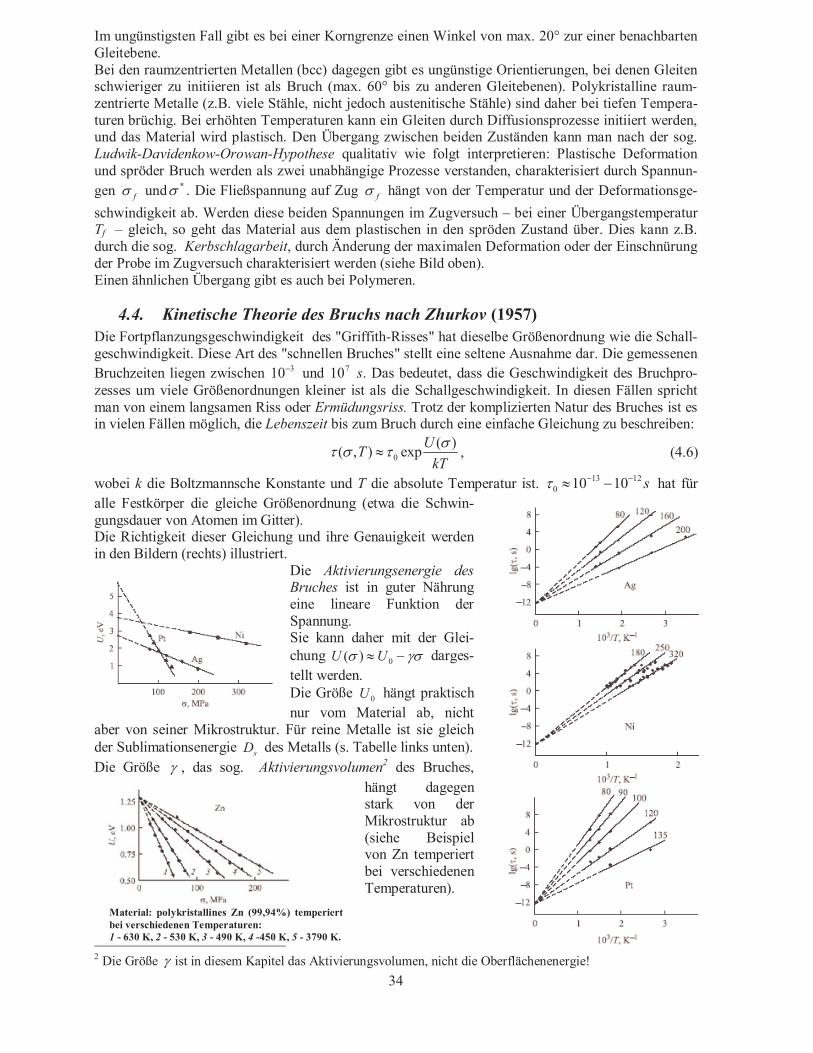
34
Im ungünstigsten Fall gibt es bei einer Korngrenze einen Winkel von max. 20° zur einer benachbarten Gleitebene. Bei den raumzentrierten Metallen (bcc) dagegen gibt es ungünstige Orientierungen, bei denen Gleiten schwieriger zu initiieren ist als Bruch (max. 60° bis zu anderen Gleitebenen). Polykristalline raum-zentrierte Metalle (z.B. viele Stähle, nicht jedoch austenitische Stähle) sind daher bei tiefen Tempera-turen brüchig. Bei erhöhten Temperaturen kann ein Gleiten durch Diffusionsprozesse initiiert werden, und das Material wird plastisch. Den Übergang zwischen beiden Zuständen kann man nach der sog. Ludwik-Davidenkow-Orowan-Hypothese qualitativ wie folgt interpretieren: Plastische Deformation und spröder Bruch werden als zwei unabhängige Prozesse verstanden, charakterisiert durch Spannun-gen fσ und *σ . Die Fließspannung auf Zug fσ hängt von der Temperatur und der Deformationsge-
schwindigkeit ab. Werden diese beiden Spannungen im Zugversuch – bei einer Übergangstemperatur Tf – gleich, so geht das Material aus dem plastischen in den spröden Zustand über. Dies kann z.B. durch die sog. Kerbschlagarbeit, durch Änderung der maximalen Deformation oder der Einschnürung der Probe im Zugversuch charakterisiert werden (siehe Bild oben). Einen ähnlichen Übergang gibt es auch bei Polymeren.
4.4. Kinetische Theorie des Bruchs nach Zhurkov (1957) Die Fortpflanzungsgeschwindigkeit des "Griffith-Risses" hat dieselbe Größenordnung wie die Schall-geschwindigkeit. Diese Art des "schnellen Bruches" stellt eine seltene Ausnahme dar. Die gemessenen Bruchzeiten liegen zwischen 310− und 710 s. Das bedeutet, dass die Geschwindigkeit des Bruchpro-zesses um viele Größenordnungen kleiner ist als die Schallgeschwindigkeit. In diesen Fällen spricht man von einem langsamen Riss oder Ermüdungsriss. Trotz der komplizierten Natur des Bruches ist es in vielen Fällen möglich, die Lebenszeit bis zum Bruch durch eine einfache Gleichung zu beschreiben:
0
( )( , ) exp
UT
kT
στ σ τ≈ , (4.6)
wobei k die Boltzmannsche Konstante und T die absolute Temperatur ist. 13 120 10 10 sτ − −≈ − hat für
alle Festkörper die gleiche Größenordnung (etwa die Schwin-gungsdauer von Atomen im Gitter). Die Richtigkeit dieser Gleichung und ihre Genauigkeit werden in den Bildern (rechts) illustriert.
Die Aktivierungsenergie des Bruches ist in guter Nährung eine lineare Funktion der Spannung. Sie kann daher mit der Glei-chung 0( )U Uσ γσ≈ − darges-tellt werden. Die Größe 0U hängt praktisch nur vom Material ab, nicht
aber von seiner Mikrostruktur. Für reine Metalle ist sie gleich der Sublimationsenergie sD des Metalls (s. Tabelle links unten). Die Größe γ , das sog. Aktivierungsvolumen2 des Bruches,
hängt dagegen stark von der Mikrostruktur ab (siehe Beispiel von Zn temperiert bei verschiedenen Temperaturen).
2 Die Größe γ ist in diesem Kapitel das Aktivierungsvolumen, nicht die Oberflächenenergie!
Material: polykristallines Zn (99,94%) temperiert bei verschiedenen Temperaturen: 1 - 630 K, 2 - 530 K, 3 - 490 K, 4 -450 K, 5 - 3790 K.
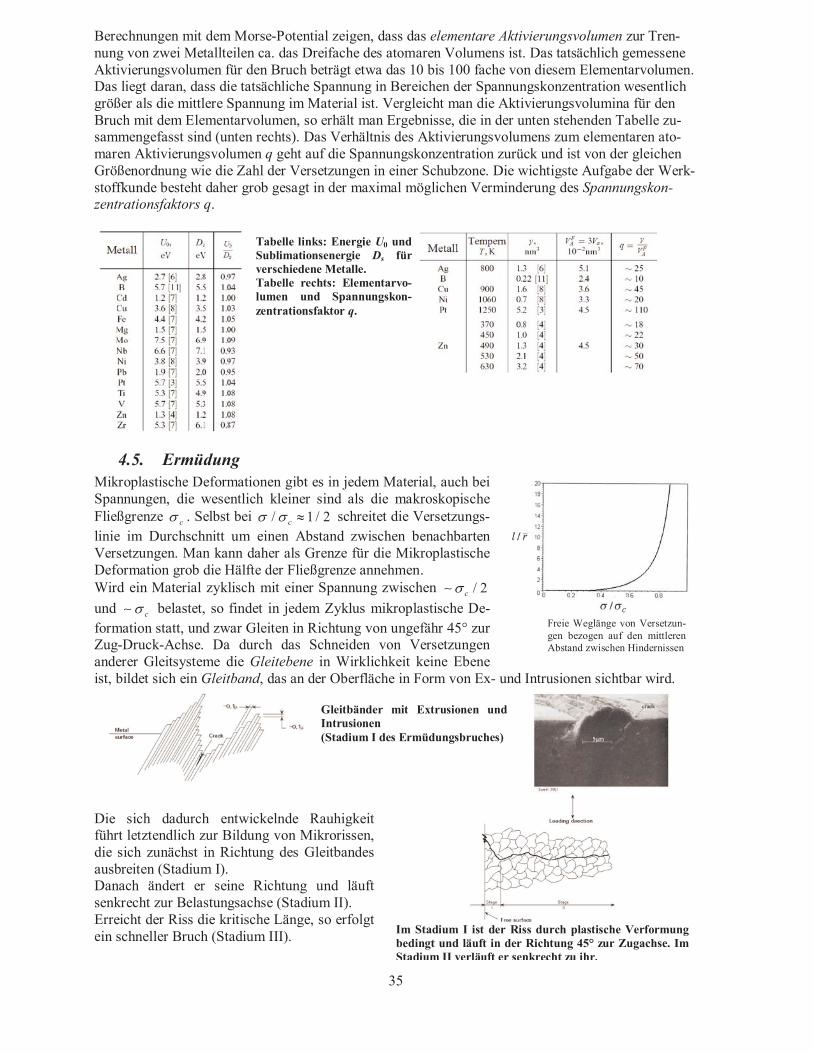
35
Berechnungen mit dem Morse-Potential zeigen, dass das elementare Aktivierungsvolumen zur Tren-nung von zwei Metallteilen ca. das Dreifache des atomaren Volumens ist. Das tatsächlich gemessene Aktivierungsvolumen für den Bruch beträgt etwa das 10 bis 100 fache von diesem Elementarvolumen. Das liegt daran, dass die tatsächliche Spannung in Bereichen der Spannungskonzentration wesentlich größer als die mittlere Spannung im Material ist. Vergleicht man die Aktivierungsvolumina für den Bruch mit dem Elementarvolumen, so erhält man Ergebnisse, die in der unten stehenden Tabelle zu-sammengefasst sind (unten rechts). Das Verhältnis des Aktivierungsvolumens zum elementaren ato-maren Aktivierungsvolumen q geht auf die Spannungskonzentration zurück und ist von der gleichen Größenordnung wie die Zahl der Versetzungen in einer Schubzone. Die wichtigste Aufgabe der Werk-stoffkunde besteht daher grob gesagt in der maximal möglichen Verminderung des Spannungskon-zentrationsfaktors q.
4.5. Ermüdung Mikroplastische Deformationen gibt es in jedem Material, auch bei Spannungen, die wesentlich kleiner sind als die makroskopische Fließgrenze cσ . Selbst bei / 1 / 2cσ σ ≈ schreitet die Versetzungs-linie im Durchschnitt um einen Abstand zwischen benachbarten Versetzungen. Man kann daher als Grenze für die Mikroplastische Deformation grob die Hälfte der Fließgrenze annehmen. Wird ein Material zyklisch mit einer Spannung zwischen / 2cσ∼
und cσ∼ belastet, so findet in jedem Zyklus mikroplastische De-formation statt, und zwar Gleiten in Richtung von ungefähr 45° zur Zug-Druck-Achse. Da durch das Schneiden von Versetzungen anderer Gleitsysteme die Gleitebene in Wirklichkeit keine Ebene ist, bildet sich ein Gleitband, das an der Oberfläche in Form von Ex- und Intrusionen sichtbar wird.
Die sich dadurch entwickelnde Rauhigkeit führt letztendlich zur Bildung von Mikrorissen, die sich zunächst in Richtung des Gleitbandes ausbreiten (Stadium I). Danach ändert er seine Richtung und läuft senkrecht zur Belastungsachse (Stadium II). Erreicht der Riss die kritische Länge, so erfolgt ein schneller Bruch (Stadium III).
Tabelle links: Energie U0 und Sublimationsenergie Ds für verschiedene Metalle. Tabelle rechts: Elementarvo-lumen und Spannungskon-zentrationsfaktor q.
Freie Weglänge von Versetzun-gen bezogen auf den mittleren Abstand zwischen Hindernissen
Im Stadium I ist der Riss durch plastische Verformung bedingt und läuft in der Richtung 45° zur Zugachse. Im Stadium II verläuft er senkrecht zu ihr.
Gleitbänder mit Extrusionen und Intrusionen (Stadium I des Ermüdungsbruches)
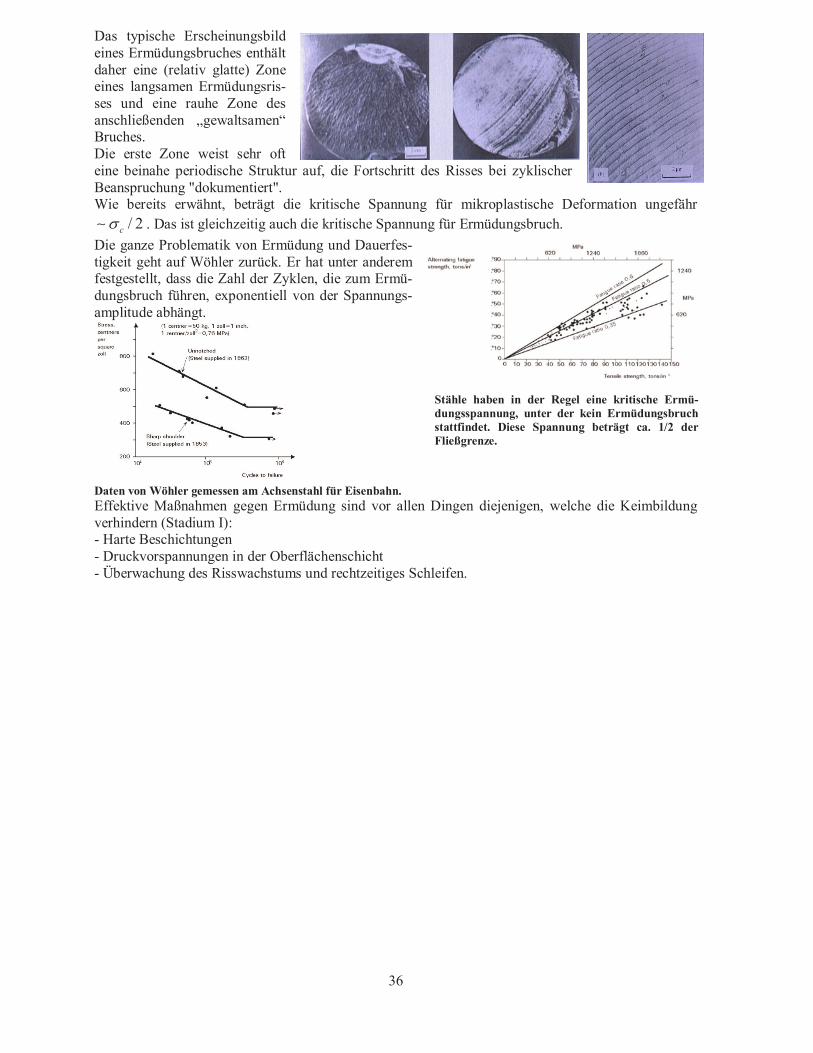
36
Das typische Erscheinungsbild eines Ermüdungsbruches enthält daher eine (relativ glatte) Zone eines langsamen Ermüdungsris-ses und eine rauhe Zone des anschließenden „gewaltsamen“ Bruches. Die erste Zone weist sehr oft eine beinahe periodische Struktur auf, die Fortschritt des Risses bei zyklischer Beanspruchung "dokumentiert". Wie bereits erwähnt, beträgt die kritische Spannung für mikroplastische Deformation ungefähr
/ 2cσ∼ . Das ist gleichzeitig auch die kritische Spannung für Ermüdungsbruch.
Die ganze Problematik von Ermüdung und Dauerfes-tigkeit geht auf Wöhler zurück. Er hat unter anderem festgestellt, dass die Zahl der Zyklen, die zum Ermü-dungsbruch führen, exponentiell von der Spannungs-amplitude abhängt.
Daten von Wöhler gemessen am Achsenstahl für Eisenbahn. Effektive Maßnahmen gegen Ermüdung sind vor allen Dingen diejenigen, welche die Keimbildung verhindern (Stadium I): - Harte Beschichtungen - Druckvorspannungen in der Oberflächenschicht - Überwachung des Risswachstums und rechtzeitiges Schleifen.
Stähle haben in der Regel eine kritische Ermü-dungsspannung, unter der kein Ermüdungsbruch stattfindet. Diese Spannung beträgt ca. 1/2 der Fließgrenze.

37
5. Verbundwerkstoffe
5.1. Festigkeit-Sprödigkeit-Dilemma Wie wir schon diskutiert haben, konkurrieren in jedem Material zwei Prozesse: plastisches Gleiten und Bruch. Stoffe ohne komplizierte mehrphasige Struktur sind daher in der Regel entweder plastisch (kfz-Metalle, krz-Metalle bei erhöhten Temperaturen) oder brüchig (Keramiken, krz-Metalle bei tiefen Temperaturen). Das Bestreben, sehr große Festigkeit unter Beibehaltung hoher Plastizität zu erreichen, lässt sich nur durch Verbundwerkstoffe realisieren. Wir widmen uns im weiteren einer aufmerksame-ren Untersuchung von faserverstärkten Verbundwerkstoffen.
5.2. Kraftfluß in faserverstärkten Verbundwerkstoffen Die Wirkung eines Verbundwerkstoffes kann man qualitativ mit der nebenstehenden Skizze verstehen. Sind sehr steife Fasern (Keramik) oder kleine Platten in eine zähe Matrix bzw. eine Matrix mit einem niedrigen elastischen Koeffizienten eingebettet, so sind die Fasern zum größten Teil auf Zug belastet, während die Matrix auf Schub belastet ist. Diese Tatsache kann man benutzen, um die Vorteile von Materia-lien mit verschiedener Steifigkeit und Festigkeit auf Zug und Schub zu kombinieren. Im weiteren Verlauf schauen wir uns ein Beispiel an:
5.3. Bio- und Nanokomposite Viele natürliche biologische Materialien, wie z.B. Zähne, Knochen, Muscheln u.a. sind Verbundwerk-stoffe mit der oben beschriebenen Konstruktionsweise: harte, dünne Fasern oder Platten sind in eine weiche Eiweiß-Matrix eingebettet. Die Dicke der Platten bezeichnen wir mit 1d , ihre Länge mit L
und Breite b, die Dicke der Eiweiß-Schicht mit 2d .
Das Verhältnis 1/L dρ = nennt man Längenverhältnis (aspect ratio) der Teilchen.
Das Verhältnis 1
1 2
d
d dΦ =
+ stellt (in dieser 2D-Darstellung) den Volumenanteil der
Platten dar. Die Kraft in der Längsrichtung wird praktisch nur über die steifen Platten bis zu ihrem Ende weitergegeben und danach praktisch nur durch Scherkräfte in der Matrix. Man kann die Platten und die Matrix als reihengeschaltete Federn mit den Stei-
figkeiten 11 1
bdc E
L= und 2 2
24
bLc G
d= (die "4" folgt aus einer genaueren Berechnung) betrachten.
1E ist der E-Modul der Platten und 2G der Schubmodul der Matrix. Die gesamte Steifigkeit ist:
2
1 2 1 1 2
1 1 1 1 4 dL
c c c E bd G bL= + = + . Der E-Modul des Verbundes ist somit gleich:
( ) ( ) ( )1 2 1 2 2 1 2
21 1 2
1 1 4b d d d d d d d
E cL E d G L
+ + += = + oder
2 21 2
1 1 4(1 )
E E G ρ−Φ
= +Φ Φ
.
Diese Gleichung wird auch durch Finite-Elemente-Rechnungen bestätigt. Sie zeigt, dass die große Steifigkeit vieler Biokomposite vor allem durch das große Längenverhältnis der harten Teilchen be-dingt ist.
5.3.1. Optimales Längenverhältnis Wichtig ist, dass das Verhältnis der Zugspannungen in Fasern zu den Schubspannungen in der Matrix die Größenordnung 1/L d , d.h. das Längenverhälniss der Fasern/Platten ist. Wenn die Matrix bei
Schubspannungen cτ versagt, die Faser bei Zugspannungen cσ , so erreichen beide ungefähr gleich-zeitig den kritischen Wert, wenn:
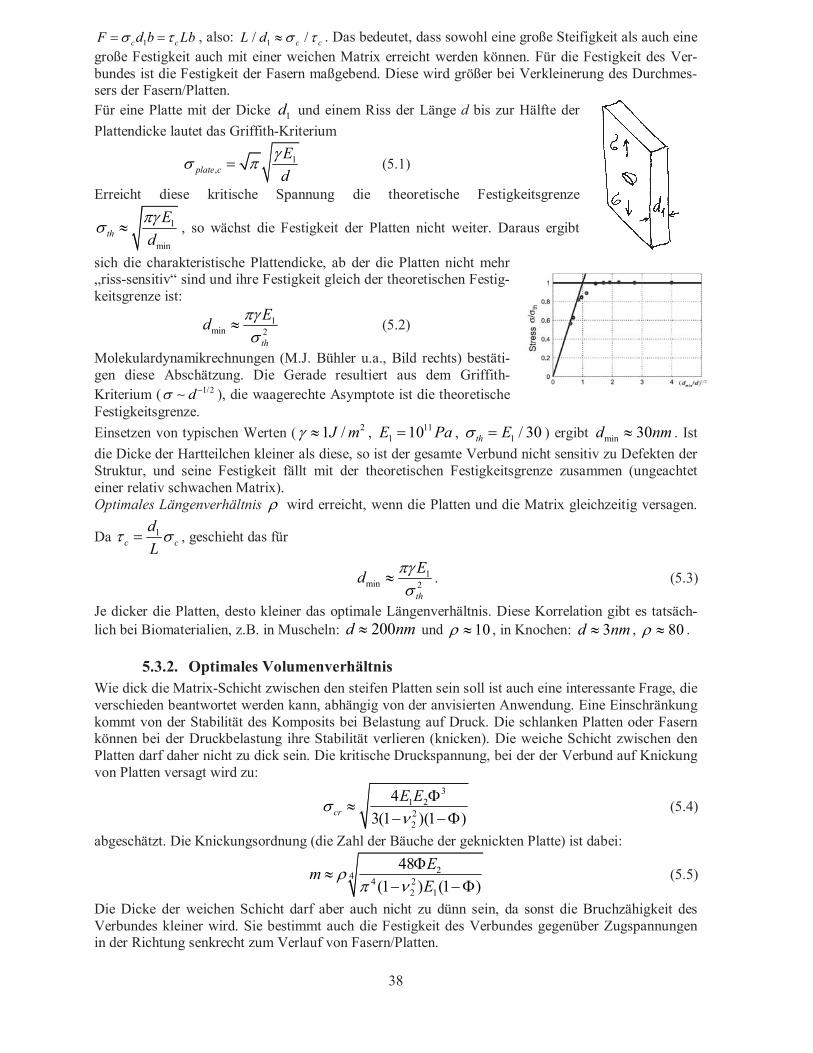
38
1c cF d b Lbσ τ= = , also: 1/ /c cL d σ τ≈ . Das bedeutet, dass sowohl eine große Steifigkeit als auch eine große Festigkeit auch mit einer weichen Matrix erreicht werden können. Für die Festigkeit des Ver-bundes ist die Festigkeit der Fasern maßgebend. Diese wird größer bei Verkleinerung des Durchmes-sers der Fasern/Platten. Für eine Platte mit der Dicke 1d und einem Riss der Länge d bis zur Hälfte der
Plattendicke lautet das Griffith-Kriterium
1,plate c
E
d
γσ π= (5.1)
Erreicht diese kritische Spannung die theoretische Festigkeitsgrenze
1
minth
E
d
πγσ ≈ , so wächst die Festigkeit der Platten nicht weiter. Daraus ergibt
sich die charakteristische Plattendicke, ab der die Platten nicht mehr „riss-sensitiv“ sind und ihre Festigkeit gleich der theoretischen Festig-keitsgrenze ist:
1min 2
th
Ed
πγσ
≈ (5.2)
Molekulardynamikrechnungen (M.J. Bühler u.a., Bild rechts) bestäti-gen diese Abschätzung. Die Gerade resultiert aus dem Griffith-Kriterium ( 1/2dσ −∼ ), die waagerechte Asymptote ist die theoretische Festigkeitsgrenze.
Einsetzen von typischen Werten ( 21 /J mγ ≈ , 111 10E Pa= , 1 / 30th Eσ = ) ergibt min 30d nm≈ . Ist
die Dicke der Hartteilchen kleiner als diese, so ist der gesamte Verbund nicht sensitiv zu Defekten der Struktur, und seine Festigkeit fällt mit der theoretischen Festigkeitsgrenze zusammen (ungeachtet einer relativ schwachen Matrix). Optimales Längenverhältnis ρ wird erreicht, wenn die Platten und die Matrix gleichzeitig versagen.
Da 1c c
d
Lτ σ= , geschieht das für
1min 2
th
Ed
πγσ
≈ . (5.3)
Je dicker die Platten, desto kleiner das optimale Längenverhältnis. Diese Korrelation gibt es tatsäch-lich bei Biomaterialien, z.B. in Muscheln: 200d nm≈ und 10ρ ≈ , in Knochen: 3d nm≈ , 80ρ ≈ .
5.3.2. Optimales Volumenverhältnis Wie dick die Matrix-Schicht zwischen den steifen Platten sein soll ist auch eine interessante Frage, die verschieden beantwortet werden kann, abhängig von der anvisierten Anwendung. Eine Einschränkung kommt von der Stabilität des Komposits bei Belastung auf Druck. Die schlanken Platten oder Fasern können bei der Druckbelastung ihre Stabilität verlieren (knicken). Die weiche Schicht zwischen den Platten darf daher nicht zu dick sein. Die kritische Druckspannung, bei der der Verbund auf Knickung von Platten versagt wird zu:
3
1 222
4
3(1 )(1 )cr
E Eσν
Φ≈
− −Φ (5.4)
abgeschätzt. Die Knickungsordnung (die Zahl der Bäuche der geknickten Platte) ist dabei:
24
4 22 1
48
(1 ) (1 )
Em
Eρ
π νΦ
≈− −Φ
(5.5)
Die Dicke der weichen Schicht darf aber auch nicht zu dünn sein, da sonst die Bruchzähigkeit des Verbundes kleiner wird. Sie bestimmt auch die Festigkeit des Verbundes gegenüber Zugspannungen in der Richtung senkrecht zum Verlauf von Fasern/Platten.
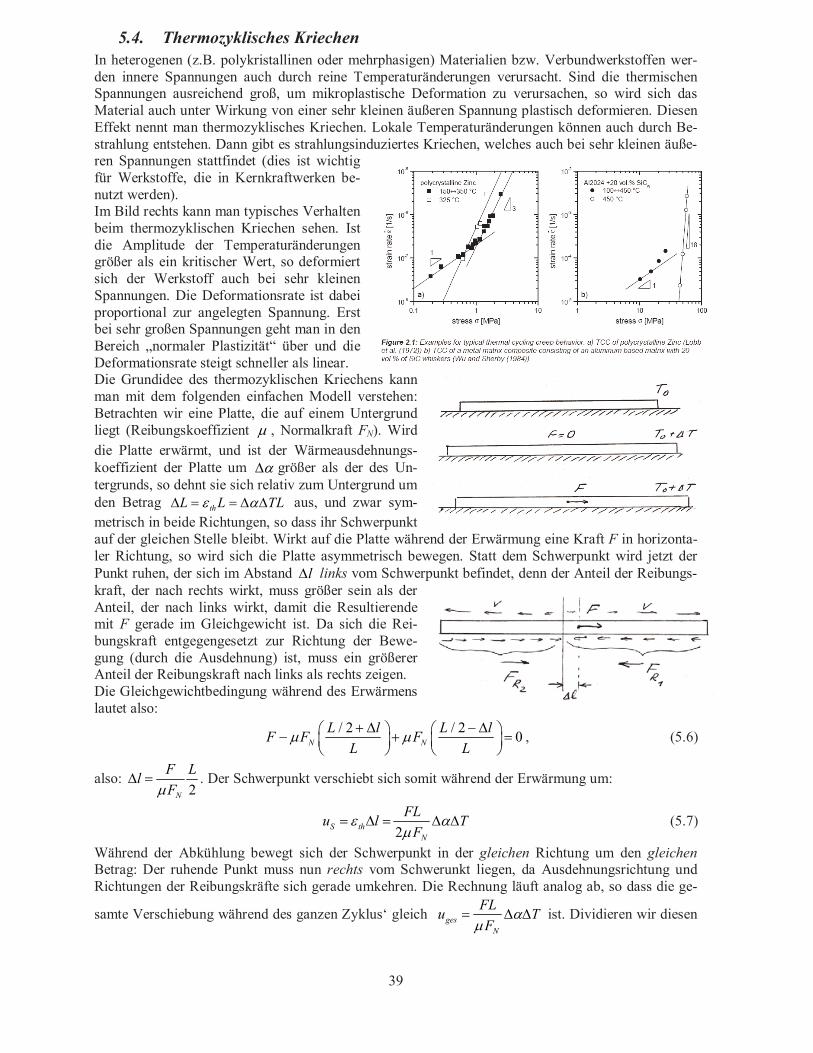
39
5.4. Thermozyklisches Kriechen In heterogenen (z.B. polykristallinen oder mehrphasigen) Materialien bzw. Verbundwerkstoffen wer-den innere Spannungen auch durch reine Temperaturänderungen verursacht. Sind die thermischen Spannungen ausreichend groß, um mikroplastische Deformation zu verursachen, so wird sich das Material auch unter Wirkung von einer sehr kleinen äußeren Spannung plastisch deformieren. Diesen Effekt nennt man thermozyklisches Kriechen. Lokale Temperaturänderungen können auch durch Be-strahlung entstehen. Dann gibt es strahlungsinduziertes Kriechen, welches auch bei sehr kleinen äuße-ren Spannungen stattfindet (dies ist wichtig für Werkstoffe, die in Kernkraftwerken be-nutzt werden). Im Bild rechts kann man typisches Verhalten beim thermozyklischen Kriechen sehen. Ist die Amplitude der Temperaturänderungen größer als ein kritischer Wert, so deformiert sich der Werkstoff auch bei sehr kleinen Spannungen. Die Deformationsrate ist dabei proportional zur angelegten Spannung. Erst bei sehr großen Spannungen geht man in den Bereich „normaler Plastizität“ über und die Deformationsrate steigt schneller als linear. Die Grundidee des thermozyklischen Kriechens kann man mit dem folgenden einfachen Modell verstehen: Betrachten wir eine Platte, die auf einem Untergrund liegt (Reibungskoeffizient μ , Normalkraft FN). Wird die Platte erwärmt, und ist der Wärmeausdehnungs-koeffizient der Platte um αΔ größer als der des Un-tergrunds, so dehnt sie sich relativ zum Untergrund um den Betrag thL L TLε αΔ = = Δ Δ aus, und zwar sym-metrisch in beide Richtungen, so dass ihr Schwerpunkt auf der gleichen Stelle bleibt. Wirkt auf die Platte während der Erwärmung eine Kraft F in horizonta-ler Richtung, so wird sich die Platte asymmetrisch bewegen. Statt dem Schwerpunkt wird jetzt der Punkt ruhen, der sich im Abstand lΔ links vom Schwerpunkt befindet, denn der Anteil der Reibungs-kraft, der nach rechts wirkt, muss größer sein als der Anteil, der nach links wirkt, damit die Resultierende mit F gerade im Gleichgewicht ist. Da sich die Rei-bungskraft entgegengesetzt zur Richtung der Bewe-gung (durch die Ausdehnung) ist, muss ein größerer Anteil der Reibungskraft nach links als rechts zeigen. Die Gleichgewichtbedingung während des Erwärmens lautet also:
/ 2 / 2
0N N
L l L lF F F
L Lμ μ+ Δ − Δ⎛ ⎞ ⎛ ⎞− + =⎜ ⎟ ⎜ ⎟
⎝ ⎠ ⎝ ⎠, (5.6)
also: 2N
F Ll
FμΔ = . Der Schwerpunkt verschiebt sich somit während der Erwärmung um:
2S th
N
FLu l T
Fε α
μ= Δ = Δ Δ (5.7)
Während der Abkühlung bewegt sich der Schwerpunkt in der gleichen Richtung um den gleichen Betrag: Der ruhende Punkt muss nun rechts vom Schwerunkt liegen, da Ausdehnungsrichtung und Richtungen der Reibungskräfte sich gerade umkehren. Die Rechnung läuft analog ab, so dass die ge-
samte Verschiebung während des ganzen Zyklus‘ gleich gesN
FLu T
Fα
μ= Δ Δ ist. Dividieren wir diesen
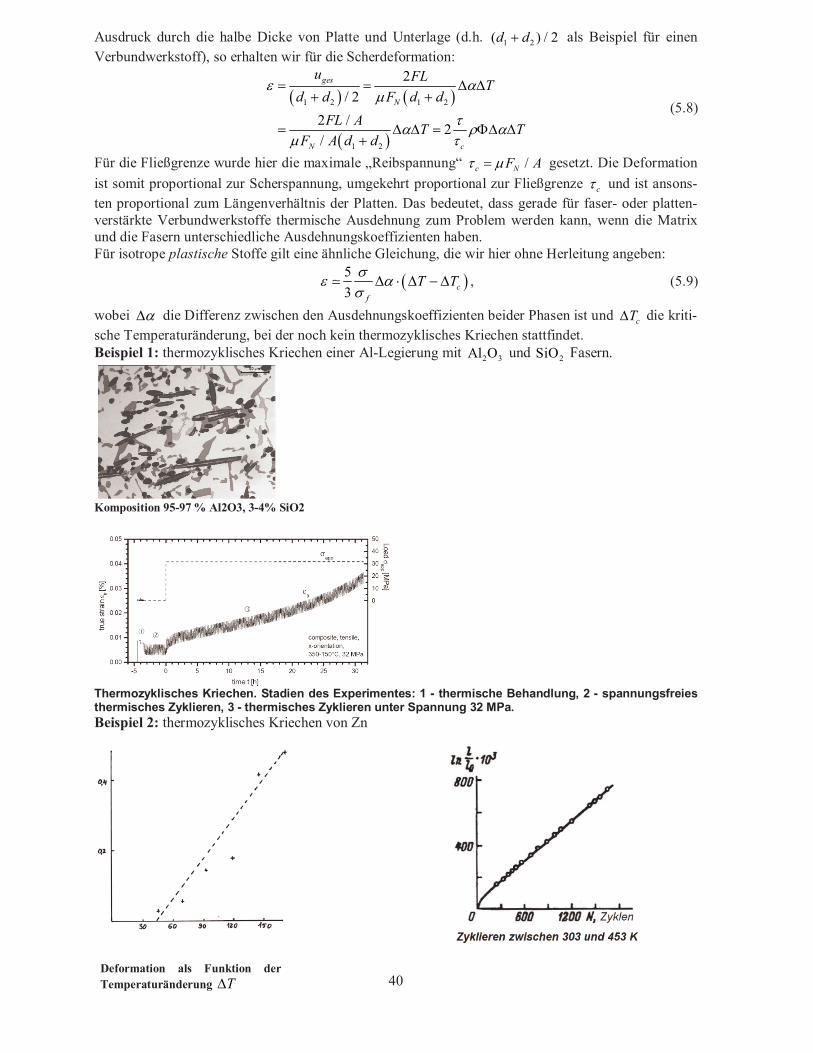
40
Ausdruck durch die halbe Dicke von Platte und Unterlage (d.h. 1 2( ) / 2d d+ als Beispiel für einen Verbundwerkstoff), so erhalten wir für die Scherdeformation:
( ) ( )
( )
1 2 1 2
1 2
2
/ 2
2 /2
/
ges
N
N c
u FLT
d d F d d
FL AT T
F A d d
ε αμ
τα ρ αμ τ
= = Δ Δ+ +
= Δ Δ = ΦΔ Δ+
(5.8)
Für die Fließgrenze wurde hier die maximale „Reibspannung“ /c NF Aτ μ= gesetzt. Die Deformation
ist somit proportional zur Scherspannung, umgekehrt proportional zur Fließgrenze cτ und ist ansons-ten proportional zum Längenverhältnis der Platten. Das bedeutet, dass gerade für faser- oder platten-verstärkte Verbundwerkstoffe thermische Ausdehnung zum Problem werden kann, wenn die Matrix und die Fasern unterschiedliche Ausdehnungskoeffizienten haben. Für isotrope plastische Stoffe gilt eine ähnliche Gleichung, die wir hier ohne Herleitung angeben:
( )5
3 cf
T Tσε ασ
Δ ⋅ Δ − Δ , (5.9)
wobei αΔ die Differenz zwischen den Ausdehnungskoeffizienten beider Phasen ist und cTΔ die kriti-sche Temperaturänderung, bei der noch kein thermozyklisches Kriechen stattfindet. Beispiel 1: thermozyklisches Kriechen einer Al-Legierung mit 2 3Al O und 2SiO Fasern.
Komposition 95-97 % Al2O3, 3-4% SiO2
Thermozyklisches Kriechen. Stadien des Experimentes: 1 - thermische Behandlung, 2 - spannungsfreies thermisches Zyklieren, 3 - thermisches Zyklieren unter Spannung 32 MPa. Beispiel 2: thermozyklisches Kriechen von Zn
Deformation als Funktion der Temperaturänderung TΔ

41
6. Formgedächtnislegierungen
6.1. Deformation bei Phasentransformation Viele Stoffe können bei Änderung von thermodynamischen Parametern (Temperatur und Druck) ihren Zustand vom flüssigen zum kristallinen und im weiteren Verlauf auch zwischen verschiedenen kristal-linen Zuständen ändern. Diese Phasentransformationen sind meistens auch mit einer Volumenände-rung verbunden (Volumendeformation). Beim Übergang zwischen verschiedenen kristallinen Phasen kann der Deformationstensor auch eine allgemeinere Form haben. Solche Transformationen können zur Änderung der makroskopischen Form des Körpers führen. Formgedächtnislegierungen sind Stoffe, die einen Phasenübergang zeigen mit einem De-formationstensor, der sich nicht auf reine Volumenänderung zurückführen lässt. Solche Phasenüber-gänge weisen z.B. folgende Legierungen auf: Man erkennt, dass die Hochtemperaturphase von hoher Symmetrie ist, Sie heißt Auste-nit, während die Tieftemperaturphase von geringer Symmetrie ist, als Martensit be-zeichnet wird. Wie jede Phasentransforma-tion kann auch der Übergang zwischen zwei kristallinen Phasen von 1. oder 2. Art sein. Die Transformation in der verbreitetsten Formgedächtnislegierung - dem Nitinol - ist vor erster Art.
6.2. Phasenübergang 1. Art: Die Clausius-Clapeyron-Gleichung Die Temperatur des Phasenüberganges zwischen festem und flüssigem Zustand hängt bekanntlich vom Druck ab. Diese Abhängigkeit wird durch die Clausuius-Clapeyron-Gleichung gegeben, die wir hier kurz herleiten wollen. Beide Phasen werden durch ihr chemisches Potential beschrieben. Die Gibbsche Form mit chemi-schem Potential lautet: dU TdS pdV dNμ= − + (6.1)
Legendre-Transformation auf die Gibbsche Enthalpie mit G U TS pV= − + führt auf:
( , , )dG p T N SdT Vdp dNμ= − + + (6.2) Man kann zeigen, dass nun G Nμ= gilt. Wenn wir Entropie S und Volumen V auf N beziehen (d.h. Übergang zu spezifischen Größen s und v), so erhält man also: ( , )d p T sdT vdpμ = − + (6.3) Aus dem Vergleich dieser Formel mit dem totalen Differential von ( , )p Tμ , nämlich:
( , )d p T dT dpT p
μ μμ ∂ ∂= +∂ ∂
, (6.4)
folgt:
und s vT p
μ μ∂ ∂= − =
∂ ∂ (6.5)
Wir betrachten nun einen Phasenübergang erster Art, z.B. flüssig-fest. Der Phasenübergang erster Art findet bei konstanter Temperatur statt. Beide Phasen sind genau dann im Gleichgewicht, wenn ihre chemischen Potentiale gleich sind. Dann muss aber gelten: ( , ) ( , )I IIp T p Tμ μ= . Da Temperatur und Druck in beiden Phasen gleich sein müssen, ist dies eine implizite Gleichung für die Funktion p(T): Wenn wir am Übergang sind und die Temperatur T ist, so ist der Druck festgelegt. Umgekehrt gilt aber auch: wenn wir den Druck verändern, muss sich auch die Temperatur T, bei der der Phasenüber-gang stattfindet, ändern, bis wir wieder an dem Punkt sind, wo ( , ) ( , )I IIp T p Tμ μ= ist. Den Zusam-
Legierung Kristalline Klassen vor und nach Übergang
Zahl äquivalen-ter Orientie-rungen
1x xTi Ni − ("Nitinol") kubisch → trigonal 4
2Ni Al kubisch → tetragonal 3
14 4Cu Al Ni− − kubisch → orthorombisch 6
40Cu Zn− kubisch → monoklin 12
2ZrO Kubisch → tetragonal → monoklin
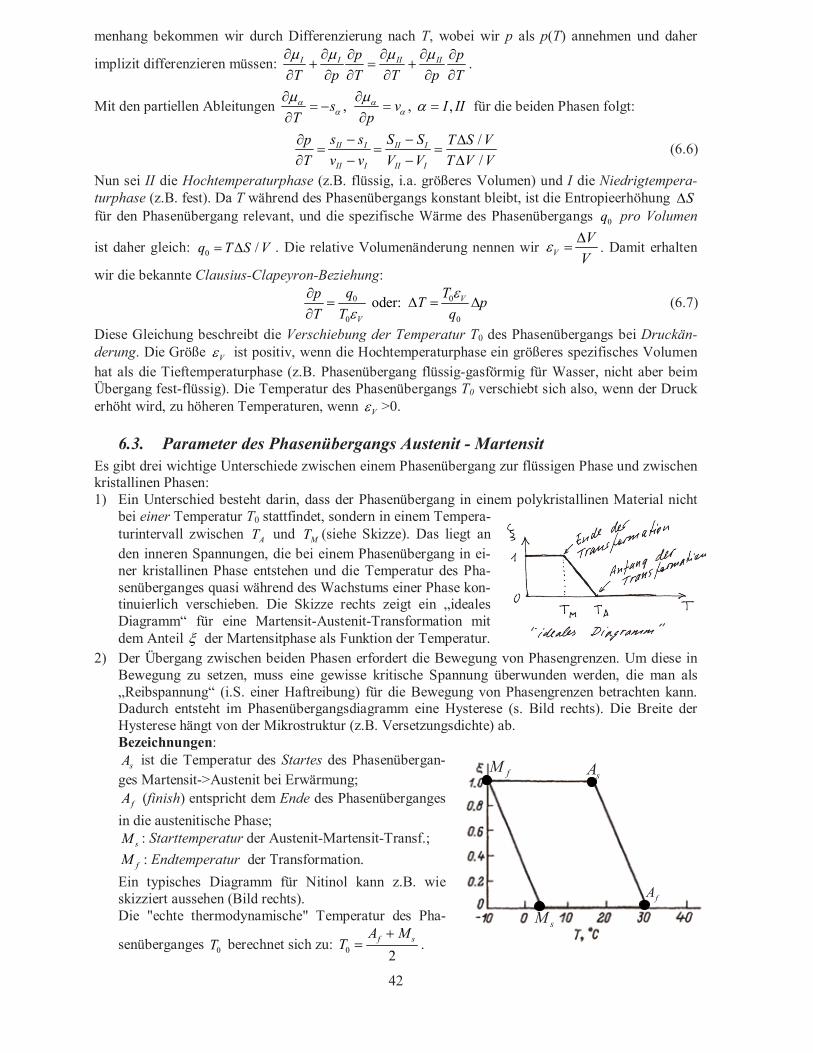
42
menhang bekommen wir durch Differenzierung nach T, wobei wir p als p(T) annehmen und daher
implizit differenzieren müssen: I I II IIp p
T p T T p T
μ μ μ μ∂ ∂ ∂ ∂∂ ∂+ = +
∂ ∂ ∂ ∂ ∂ ∂.
Mit den partiellen Ableitungen , , ,s v I IIT pα α
α αμ μ
α∂ ∂
= − = =∂ ∂
für die beiden Phasen folgt:
/
/II I II I
II I II I
s s S Sp T S V
T v v V V T V V
− −∂ Δ= = =
∂ − − Δ (6.6)
Nun sei II die Hochtemperaturphase (z.B. flüssig, i.a. größeres Volumen) und I die Niedrigtempera-turphase (z.B. fest). Da T während des Phasenübergangs konstant bleibt, ist die Entropieerhöhung SΔ für den Phasenübergang relevant, und die spezifische Wärme des Phasenübergangs 0q pro Volumen
ist daher gleich: 0 /q T S V= Δ . Die relative Volumenänderung nennen wir V
V
Vε Δ
= . Damit erhalten
wir die bekannte Clausius-Clapeyron-Beziehung:
0 0
0 0
oder: V
V
q TpT p
T T q
εε
∂= Δ = Δ
∂ (6.7)
Diese Gleichung beschreibt die Verschiebung der Temperatur T0 des Phasenübergangs bei Druckän-derung. Die Größe Vε ist positiv, wenn die Hochtemperaturphase ein größeres spezifisches Volumen hat als die Tieftemperaturphase (z.B. Phasenübergang flüssig-gasförmig für Wasser, nicht aber beim Übergang fest-flüssig). Die Temperatur des Phasenübergangs T0 verschiebt sich also, wenn der Druck erhöht wird, zu höheren Temperaturen, wenn Vε >0.
6.3. Parameter des Phasenübergangs Austenit - Martensit Es gibt drei wichtige Unterschiede zwischen einem Phasenübergang zur flüssigen Phase und zwischen kristallinen Phasen: 1) Ein Unterschied besteht darin, dass der Phasenübergang in einem polykristallinen Material nicht
bei einer Temperatur T0 stattfindet, sondern in einem Tempera-turintervall zwischen AT und MT (siehe Skizze). Das liegt an den inneren Spannungen, die bei einem Phasenübergang in ei-ner kristallinen Phase entstehen und die Temperatur des Pha-senüberganges quasi während des Wachstums einer Phase kon-tinuierlich verschieben. Die Skizze rechts zeigt ein „ideales Diagramm“ für eine Martensit-Austenit-Transformation mit dem Anteil ξ der Martensitphase als Funktion der Temperatur.
2) Der Übergang zwischen beiden Phasen erfordert die Bewegung von Phasengrenzen. Um diese in Bewegung zu setzen, muss eine gewisse kritische Spannung überwunden werden, die man als „Reibspannung“ (i.S. einer Haftreibung) für die Bewegung von Phasengrenzen betrachten kann. Dadurch entsteht im Phasenübergangsdiagramm eine Hysterese (s. Bild rechts). Die Breite der Hysterese hängt von der Mikrostruktur (z.B. Versetzungsdichte) ab. Bezeichnungen:
sA ist die Temperatur des Startes des Phasenübergan-ges Martensit->Austenit bei Erwärmung;
fA (finish) entspricht dem Ende des Phasenüberganges
in die austenitische Phase;
sM : Starttemperatur der Austenit-Martensit-Transf.;
fM : Endtemperatur der Transformation.
Ein typisches Diagramm für Nitinol kann z.B. wie skizziert aussehen (Bild rechts). Die "echte thermodynamische" Temperatur des Pha-
senüberganges 0T berechnet sich zu: 0 2f sA M
T+
= .
fA
sA
sM
fM

43
3) Der Phasenübergang zwischen kristallinen Phasen wird durch den Distorsionstensor ikD charakte-risiert, welcher die Formänderung bei der Transformation charakterisiert. Der Distorsionstensor wird wie folgt definiert: Ist ( )u r die Verschiebung eines Punktes mit der Anfangslage r beim
Phasenübergang, so gilt: kik
i
uD
x
∂=∂
. Der Deformationstensor ist definitionsgemäß der symmetri-
sche Teil des Distorsionstensors: ( )1 12 2
k iik ik ki
i k
u uD D
x xε
⎛ ⎞∂ ∂= + = +⎜ ⎟∂ ∂⎝ ⎠
. Außerdem können zwischen
den Phasen Schubspannungen auftreten, sodass der Druck als skalare Größe nicht ausreicht, es muss der volle Spannungstensor verwendet werden. Wir erhalten daher:
0 0
0
TT
q
εσΔ = − Δ (6.8)
In diesem Fall beschreibt 0ε die Formänderung 0 II Iε ε ε= − beim Übergang von der Hochtempe-raturphase („II“, Austenit) in die Niedrigtemperaturphase („I“, Martensit). Formal kann man diese Gleichung nicht benutzen, da die Voraussetzungen der Herleitung nicht erfüllt sind. (Druck und Temperatur sollten konstant und im Gleichgewicht überall gleich sein. Während das beim reinen Druckzustand möglich ist, können wir die Schubspannungen zwischen den kristallinen Phasen nicht beeinflussen.) Dennoch funktioniert diese Gleichung: Legt man an die Formgedächtnislegie-rung eine Spannung an, so verschiebt sich die Übergangstemperatur um TΔ . In diesem Fall müs-sen wir das gesamte Phasendiagramm (die komplette Hysterese, s.u.) verschieben. Da es mehrere Martensitphasen gibt, die verschiedene Vorzeichen von 0ε aufweisen können, verschiebt sich das Diagramm für eine der Martensitphasen nach rechts, für eine andere nach links.
6.4. Mikrostrukturen bei verschiedenen Temperaturen Der Übergang von der Hochtemperaturphase in die Tieftemperaturphase verläuft wie folgt: Beim Er-reichen der kritischen Temperatur des Überganges Austenit→Martensit entstehen - wie bei jedem Übergang erster Art - kleine Keime der zweiten Phase (Martensit), die bei weiterer Temperaturabnah-me wachsen, so dass die Struktur eine austenitische Matrix mit Einschlüssen von Martensit darstellt. Bei der Temperatur, die dem Ende des Übergangs entspricht, hat sich der ganze Austenit in Martensit verwandelt. Wird die Temperatur nun wieder erhöht, so kann es zwei verschiedenen Prozesse geben: entweder entwickeln sich die Martensit-Kristalle zurück (Bild unten) oder in der Martensitmatrix ent-stehen Keime von Austenit. Bei weiterer Temperaturzunahme wachsen sie bis sie das ganze Volumen eingenommen haben. Im Bereich zwischen dem Anfang und dem Ende des Phasenüberganges stellt die Struktur ein Gemisch aus zwei Phasen dar. Die Martensit-Einzelkristalle sind dabei zufällig orien-tiert, so dass die Probe insgesamt keine Deformation aufweist (außer eventuell einer geringen Volu-mendeformation).
Martensitic plate groups in CuAl14Ni4.2 (wt%) single crystal in austenitic matrix. (http://www.smaterial.com/SMA/crystall/crystall.html)
Growth and decay of a martensitic arrow in an austenitic matrix upon cooling and subsequent heat-ing.CuAl14Ni4.2 (wt%) single crystal. (http://www.smaterial.com/SMA/crystall/crystall.html)

44
6.5. Die Effekte von Formgedächtnislegierungen
6.5.1. Das Zwei-Phasenmodell Wir betrachten nun ein Modell-Material mit nur zwei möglichen Martensitvarianten. Die Austenitpha-se soll jeweils als symmetrische Phase (Quadrat) symbolisiert werden. Beschränken wir die Phasen-Deformationen auf zwei komplementäre Schubdeformationen, so sehen diese wie im Bild rechts aus (die Span-nungen in der Clausius-Clapeyron-Formel (6.8) sind dann entsprechend Schubspannungen). Die Phasen-Deformation der Phase 1 (und die zu-gehörige Richtung der Schubspannung) wollen wir als positiv anneh-men, die der Phase 2 entsprechend negativ. Noch einfacher kann man sich das Modell für Zugdeformation vorstel-len. Die Austenitphase ist wieder die symmetrische Hochtemperatur-phase (Quadrat), die Martensitphasen (Niedrigtemperaturphasen) wer-den als Rechtecke dargestellt (Bild rechts). Die Phase 1 betrachten wir wieder als positiv (Deformation mit vertikaler Ausdehnung werden wie Zugspannungen in vertikaler Richtung positiv gezählt), dement-sprechend ist Martensitphase 2 negative zu berücksichtigen. Wenn wir nun noch die Clausius-Clapeyron-Formel vereinfachen und berücksichtigen, dass wir bei der Berechnung der Phasen-Deformation von der Austenitphase als Re-ferenzzustand ausgehen, so ist:
0 0 0 0
0 0
für Phase 1, und für Phase 2.T T
T Tq q
ε εσ σΔ = Δ Δ = − Δ (6.9)
Was passiert nun unter dem Einfluss äußerer Spannungen? Unter Spannung wird sich das gesamte Phasendiagramm in den Bereich der höheren oder niedrigeren Temperaturen verschieben. Dadurch ändert sich der Anteil des Martensits. Das Vorzeichen dieser Änderung hängt aber von der relativen Deformation 0ε± jedes einzelnen Martensitkristalls ab. Das bedeutet, dass Martensitkristalle mit einer
„günstigen“ Orientierung wachsen werden, während andere mit „ungünstigen“ Orientierungen schrumpfen. Im Falle von Zugspannungen ist dies für unser Modell natürlich Phase 1, da hier 0 0ε ≥ .
Dies führt dazu, dass die gesamte Distorsion im Material nun nicht gleich Null wird: es entsteht eine makroskopische Deformation, die durch Phasentransformation verursacht wird, weil der Anteil einer der beiden Martensitphasen überwiegt. Wird eine so große Spannung angelegt, dass das ganze Materi-al in eine Martensitphase übergeht, so ist die makroskopische Deformation ε gleich der Phasen-Deformation, hier z.B. 0ε . Bei Nitinol kann diese „Phasendeformation“ 8 bis 10% erreichen.
Diskutieren wir nun qualitativ die wichtigsten Eigenschaften von Formgedächtnislegierungen. Dazu benötigen wir nur die Clausius-Clapeyron-Formel und die Phasendiagramme für die Austenit-Martensit-Umwandlung: Zunächst liegen die Diagramme für beide Martensitvarianten quasi übereinander, wenn keine Span-nung angelegt ist, d.h. beide Phasen wachsen mit gleicher Wahrscheinlichkeit, die makroskopische Deformation ist 0, da sich die Phasen-Deformationen der Martensitphasen im Mittel gegenseitig kom-pensieren (die beiden Phasen wachsen bis zu einem Anteil von je 1 / 2ξ = ). Ist eine Spannung angelegt, verschieben sich die Phasendiagramme beider Phasen nach Clausius-Clapeyron um TΔ , aber eines nach rechts (+), eines nach links (-). Damit lassen sich nun die ver-schiedenen Effekte von Formgedächtnislegierungen verstehen.
6.5.2. Pseudoelastizität
Ist die Legierung auf eine Temperatur höher als fA erwärmt, so befindet
sich ihr ganzes Volumen im austenitischen Zustand. Wird nun eine Span-nung angelegt, verschiebt sich ein Diagramm nach links (nämlich das, wo die Phasen-Deformation der angelegten Spannung entgegengesetzt ist), das andere nach rechts (diese Verschiebung ist rechts skizziert). Ist die Spannung nun so groß, dass sich das ganze Diagramm in den Bereich
0ε
0ε
0ε−
0ε−
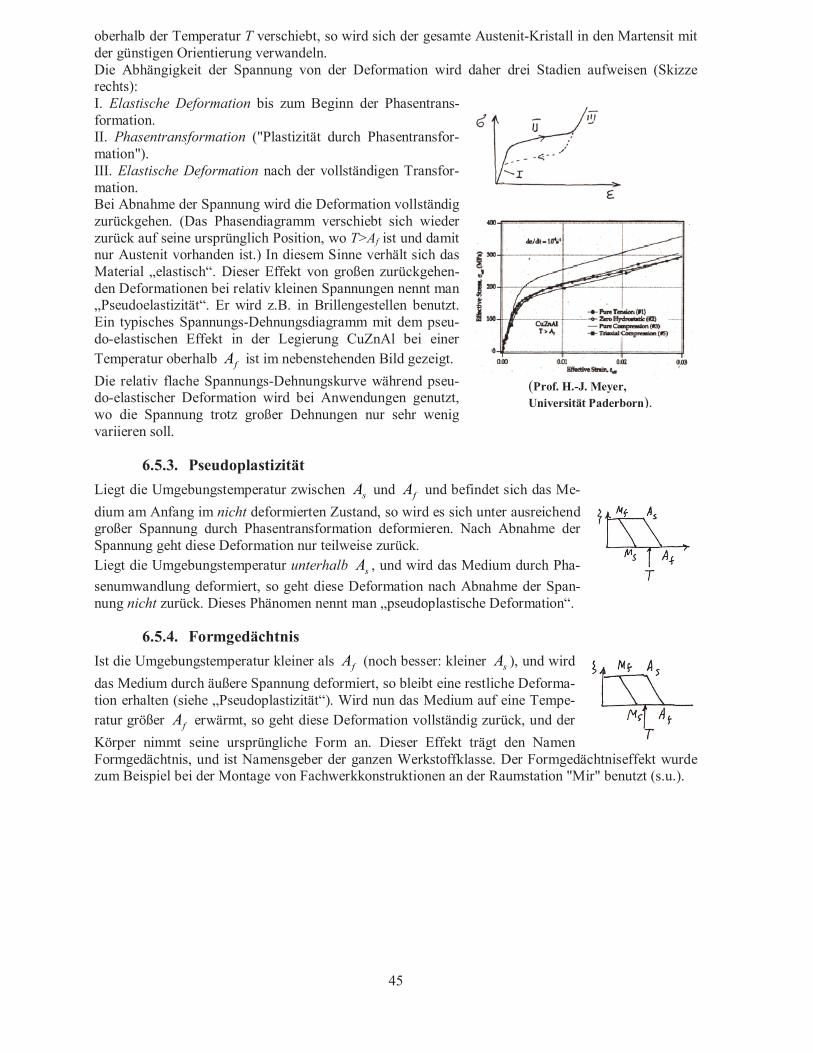
45
oberhalb der Temperatur T verschiebt, so wird sich der gesamte Austenit-Kristall in den Martensit mit der günstigen Orientierung verwandeln. Die Abhängigkeit der Spannung von der Deformation wird daher drei Stadien aufweisen (Skizze rechts): I. Elastische Deformation bis zum Beginn der Phasentrans-formation. II. Phasentransformation ("Plastizität durch Phasentransfor-mation"). III. Elastische Deformation nach der vollständigen Transfor-mation. Bei Abnahme der Spannung wird die Deformation vollständig zurückgehen. (Das Phasendiagramm verschiebt sich wieder zurück auf seine ursprünglich Position, wo T>Af ist und damit nur Austenit vorhanden ist.) In diesem Sinne verhält sich das Material „elastisch“. Dieser Effekt von großen zurückgehen-den Deformationen bei relativ kleinen Spannungen nennt man „Pseudoelastizität“. Er wird z.B. in Brillengestellen benutzt. Ein typisches Spannungs-Dehnungsdiagramm mit dem pseu-do-elastischen Effekt in der Legierung CuZnAl bei einer Temperatur oberhalb fA ist im nebenstehenden Bild gezeigt.
Die relativ flache Spannungs-Dehnungskurve während pseu-do-elastischer Deformation wird bei Anwendungen genutzt, wo die Spannung trotz großer Dehnungen nur sehr wenig variieren soll.
6.5.3. Pseudoplastizität
Liegt die Umgebungstemperatur zwischen sA und fA und befindet sich das Me-
dium am Anfang im nicht deformierten Zustand, so wird es sich unter ausreichend großer Spannung durch Phasentransformation deformieren. Nach Abnahme der Spannung geht diese Deformation nur teilweise zurück. Liegt die Umgebungstemperatur unterhalb sA , und wird das Medium durch Pha-
senumwandlung deformiert, so geht diese Deformation nach Abnahme der Span-nung nicht zurück. Dieses Phänomen nennt man „pseudoplastische Deformation“.
6.5.4. Formgedächtnis
Ist die Umgebungstemperatur kleiner als fA (noch besser: kleiner sA ), und wird
das Medium durch äußere Spannung deformiert, so bleibt eine restliche Deforma-tion erhalten (siehe „Pseudoplastizität“). Wird nun das Medium auf eine Tempe-ratur größer fA erwärmt, so geht diese Deformation vollständig zurück, und der
Körper nimmt seine ursprüngliche Form an. Dieser Effekt trägt den Namen Formgedächtnis, und ist Namensgeber der ganzen Werkstoffklasse. Der Formgedächtniseffekt wurde zum Beispiel bei der Montage von Fachwerkkonstruktionen an der Raumstation "Mir" benutzt (s.u.).
(Prof. H.-J. Meyer, Universität Paderborn).
46
6.5.5. Reaktive Spannungen Ein weiterer Effekt entsteht, wenn der Rückgang der Phasendeformation bei Erwärmung verhindert wird. Da das Material die Form nicht ändern kann, ergeben sich die sogenannten reaktiven Spannun-gen. Diese können z.B. in Aktuatoren verwendet werden.
6.6. Modellierung von Formgedächtnislegierungen als Phasenübergang 2. Art Wir haben gesehen, dass der Phasenübergang für bestimmte Formgedächtnislegierungen (z.B. Nitinol) von erster Art ist. Da aber innere Spannungen auftreten, die verhindern, dass der Phasenübergang bei einer bestimmten Temperatur geschieht, können die verschiedenen Phasen über ein ganzes Tempera-turintervall koexistieren. Dies kann als Phasenübergang zweiter Art modelliert werden. Dazu ist ein sog. Ordnungsparameter notwendig, der in unserem Modell z.B. der Anteil einer Martensitphase ξoder auch die dazu gehörende Deformation sein kann.
6.6.1. Phasenübergänge zweiter Art Die Idee zur Beschreibung von Phasenübergängen zweiter Art stammt von Landau: Ein gegebenes System wird im thermody-namischen Gleichgewicht immer zu der Konfiguration gelangen, die zu dem Minimum der freien Energie F gehört. Wenn diese Energie von einem Ordnungsparameter λ abhängt, kann folgen-des passieren: Entweder, die Energie hat ihr Minimum bei 0λ = , dann wird das System auch den Zustand einnehmen, der zu 0λ = gehört. Um die Stelle 0λ = können wir die freie Energie nach einem Poly-nom mit nur geraden Potenzen entwickeln, da sie immer nach unten beschränkt sein muss, wie im Bild rechts (oben) gezeigt. Bei einer anderen Temperatur kann nun aber die freie Energie anders aussehen, z.B. so, wie in Bild rechts (unten) gezeigt: Das Minimum liegt nun bei cλ = ± , wobei meist das positive Vorzei-chen gewählt wird, weil nur der Betrag von λ eine Rolle spielt. Die Veränderung von Bild 1 nach Bild 2 geschieht durch Tempe-raturänderung. Aus diesen Überlegungen kann man nun die Form der freien Energie angeben: 2 4
0 0( )F F b T T aλ λ= + − + (6.10)
Kopie des auf der sowjetischen Raum-station "Mir" aufgebauten Fachwerkes: Universität St.-Petersburg.
cT T<
cT T>
c
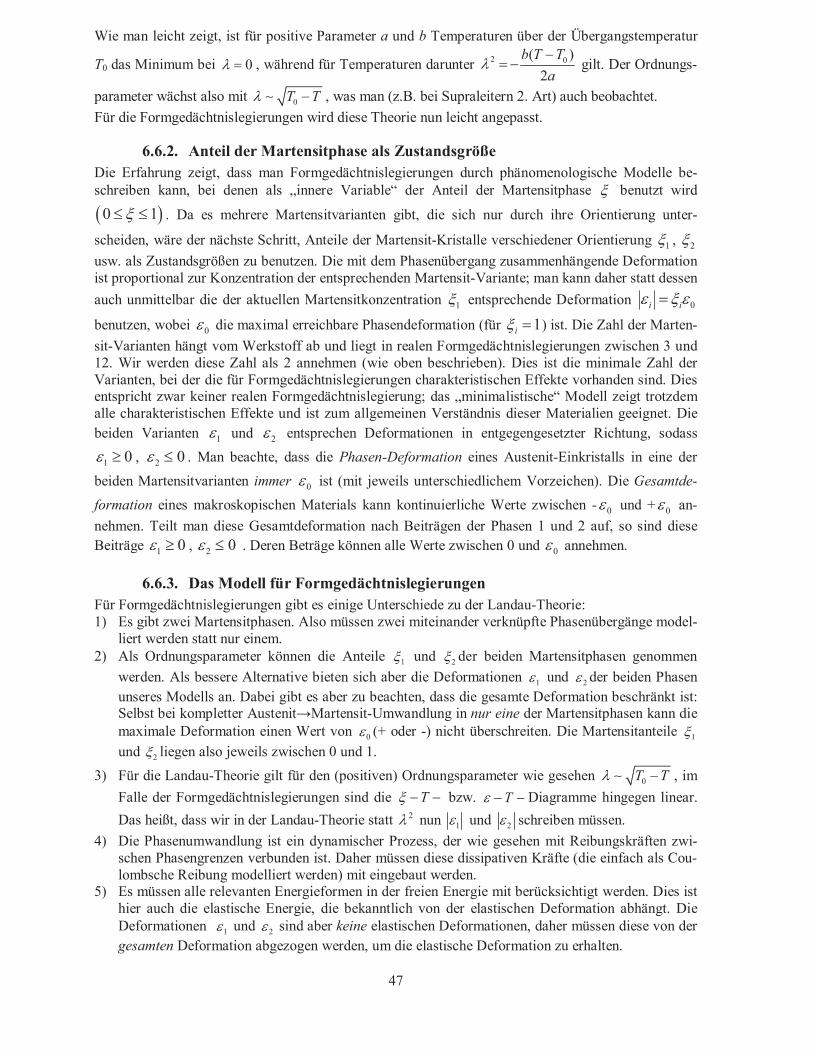
47
Wie man leicht zeigt, ist für positive Parameter a und b Temperaturen über der Übergangstemperatur
T0 das Minimum bei 0λ = , während für Temperaturen darunter 2 0( )
2
b T T
aλ −
= − gilt. Der Ordnungs-
parameter wächst also mit 0T Tλ −∼ , was man (z.B. bei Supraleitern 2. Art) auch beobachtet.
Für die Formgedächtnislegierungen wird diese Theorie nun leicht angepasst.
6.6.2. Anteil der Martensitphase als Zustandsgröße Die Erfahrung zeigt, dass man Formgedächtnislegierungen durch phänomenologische Modelle be-schreiben kann, bei denen als „innere Variable“ der Anteil der Martensitphase ξ benutzt wird
( )0 1ξ≤ ≤ . Da es mehrere Martensitvarianten gibt, die sich nur durch ihre Orientierung unter-
scheiden, wäre der nächste Schritt, Anteile der Martensit-Kristalle verschiedener Orientierung 1ξ , 2ξusw. als Zustandsgrößen zu benutzen. Die mit dem Phasenübergang zusammenhängende Deformation ist proportional zur Konzentration der entsprechenden Martensit-Variante; man kann daher statt dessen
auch unmittelbar die der aktuellen Martensitkonzentration 1ξ entsprechende Deformation 0i iε ξ ε=
benutzen, wobei 0ε die maximal erreichbare Phasendeformation (für 1iξ = ) ist. Die Zahl der Marten-
sit-Varianten hängt vom Werkstoff ab und liegt in realen Formgedächtnislegierungen zwischen 3 und 12. Wir werden diese Zahl als 2 annehmen (wie oben beschrieben). Dies ist die minimale Zahl der Varianten, bei der die für Formgedächtnislegierungen charakteristischen Effekte vorhanden sind. Dies entspricht zwar keiner realen Formgedächtnislegierung; das „minimalistische“ Modell zeigt trotzdem alle charakteristischen Effekte und ist zum allgemeinen Verständnis dieser Materialien geeignet. Die beiden Varianten 1ε und 2ε entsprechen Deformationen in entgegengesetzter Richtung, sodass
1 0ε ≥ , 2 0ε ≤ . Man beachte, dass die Phasen-Deformation eines Austenit-Einkristalls in eine der
beiden Martensitvarianten immer 0ε ist (mit jeweils unterschiedlichem Vorzeichen). Die Gesamtde-
formation eines makroskopischen Materials kann kontinuierliche Werte zwischen - 0ε und + 0ε an-
nehmen. Teilt man diese Gesamtdeformation nach Beiträgen der Phasen 1 und 2 auf, so sind diese Beiträge 1 0ε ≥ , 2 0ε ≤ . Deren Beträge können alle Werte zwischen 0 und 0ε annehmen.
6.6.3. Das Modell für Formgedächtnislegierungen Für Formgedächtnislegierungen gibt es einige Unterschiede zu der Landau-Theorie: 1) Es gibt zwei Martensitphasen. Also müssen zwei miteinander verknüpfte Phasenübergänge model-
liert werden statt nur einem. 2) Als Ordnungsparameter können die Anteile 1ξ und 2ξ der beiden Martensitphasen genommen
werden. Als bessere Alternative bieten sich aber die Deformationen 1ε und 2ε der beiden Phasen unseres Modells an. Dabei gibt es aber zu beachten, dass die gesamte Deformation beschränkt ist: Selbst bei kompletter Austenit→Martensit-Umwandlung in nur eine der Martensitphasen kann die maximale Deformation einen Wert von 0ε (+ oder -) nicht überschreiten. Die Martensitanteile 1ξ
und 2ξ liegen also jeweils zwischen 0 und 1.
3) Für die Landau-Theorie gilt für den (positiven) Ordnungsparameter wie gesehen 0T Tλ −∼ , im
Falle der Formgedächtnislegierungen sind die Tξ − − bzw. Tε − − Diagramme hingegen linear.
Das heißt, dass wir in der Landau-Theorie statt 2λ nun 1ε und 2ε schreiben müssen.
4) Die Phasenumwandlung ist ein dynamischer Prozess, der wie gesehen mit Reibungskräften zwi-schen Phasengrenzen verbunden ist. Daher müssen diese dissipativen Kräfte (die einfach als Cou-lombsche Reibung modelliert werden) mit eingebaut werden.
5) Es müssen alle relevanten Energieformen in der freien Energie mit berücksichtigt werden. Dies ist hier auch die elastische Energie, die bekanntlich von der elastischen Deformation abhängt. Die Deformationen 1ε und 2ε sind aber keine elastischen Deformationen, daher müssen diese von der gesamten Deformation abgezogen werden, um die elastische Deformation zu erhalten.

48
Damit können wir nun die freie Energie für Formgedächtnislegierungen in Analogie zur Landau-Theorie aufbauen:
( ) ( )( ) ( )
2
1 2 2 210 1 2 1 222
F E b T Tε ε ε
ε ε γ ε ε− −
= + − + + + (6.11)
Der erste Term ist die elastische Energiedichte, dann folgen je zwei Terme, die linear und quadratisch
in den beiden Ordnungsparametern sind. Man beachte, dass hier ja statt 2iλ ε→ gewählt wurde, daher
muss man Beträge schreiben, um die Positivität zu gewährleisten. Der letzte Term enthält quadratische Ausdrücke in den Phasendeformationen iε . Diese kann man als Energie interpretieren, und zwar als die Arbeit, die nötig ist, um gegen die Eigenspannungen bei der Transformation zu deformieren. Die elastischen Spannungen berechnen sich zu:
( )1 2Eσ ε ε ε= − − (6.12)
6.7. Thermodynamische Eigenschaften Betrachten wir zunächst den spannungsfreien Fall ( 0σ = ). Für 0T T> hat die freie Energie ein Mini-
mum bei 1 2 0ε ε= = , denn es gilt z.B. für 1ε :
1 1
2
21 10 0
0 und 0F F
ε εε ε
= =
∂ ∂= >
∂ ∂ (6.13)
Für 0T T< wird ein Minimum angenommen bei:
( )1 2 0
bT Tε ε
γ= − = − (6.14)
Allerdings müssen wir hier noch die Beschränkung der maximal möglichen Phasen-Deformation be-achten. Bei der Endtemperatur der direkten martensitischen Transformation Mf gilt, wenn beide Pha-sen gleichzeitig wachsen:
( )01 2 2 s f
bM M
εε ε
γ= − = = − (6.15)
Der Temperaturunterschied vom Beginn der Transformation bis zum Ende ist gerade (Ms - Mf). Die maximale erreichbare Phasentransformation ist somit gleich
( )0
2s f
bM Mε
γ= − .
Beschränkung des Martensitanteils. Nach dem Erreichen der maximalen Konzentration kann die Mar-tensitkonzentration nicht weiter wachsen, da 1 2 0ε ε ε+ ≤ . Diese Forderung kann im
Modell formal durch Einführung einer zusätzlichen Energie 1 2
0GrenzF f
ε εε
⎛ ⎞+= ⎜ ⎟
⎝ ⎠
erfüllt werden, wobei ( )f x eine "Wandfunktion" ist. Diese Funktion wird nur für die numerischen Berechnungen benutzt.
6.7.1. Innere Reibung Die Entwicklung der Phasenstruktur geschieht durch Bewegung von Phasengrenzen, bei deren Bewe-gung aber Kräfte auf sie einwirken, die den Charakter einer „trockenen“ (Coulombschen) Reibung haben. Für solche Kräfte ist die Leistung der Energiedissipation D proportional zum Betrag der De-
formationsgeschwindigkeit: ( )0 1 2D σ ε ε= + . 0σ ist hier die innere „trockene“ Reibungsspannung.
6.7.2. Bewegungsgleichungen
Die Gleichgewichtsgleichungen für das System lauten: 0i i
F D
ε ε∂ ∂
+ =∂ ∂
. Die Form der Funktion i
D
ε∂∂
ist
in dem nebenstehenden Bild skizziert.

49
Auflösung dieser Gleichung nach iε ergibt
0sgniii
F Ffε σ
εε⎛ ⎞ ⎛ ⎞∂ ∂= − ⎜ ⎟ ⎜ ⎟∂∂ ⎝ ⎠⎝ ⎠
,
wobei f die oben eingeführte "Wandfunktion" ist. Bei numerischer Realisation kann man ( )f z z.B. als
eine große Potenz von z wählen: 100( )f z const z= ⋅ (Bild ganz rechts). Da es zwei Phasen gibt, erhalten wir auch zwei Bewegungsgleichungen:
0 1 1 0 1
0 2 2 0 2
( ) sgn sgn 0
( )sgn sgn 0
b T T
b T T
σ ε γε σ εσ ε γε σ ε− + − + + =
− + − + + = (6.16)
Dabei wurde die von außen angelegte Spannung bereits eingesetzt.
6.8. Analytische Untersuchungen des Modells Die Parameter b , 0T und γ des phänomenologischen Modells können durch die vier charakteristische
Temperaturen, die minimale Phasendeformation 0ε sowie die innere Reibungsspannung 0σ ausged-
rückt werden. Wir nehmen an, dass immer 1 0ε ≥ , 2 0ε ≤ . Damit können wir die Beträge teilweise
auflösen. Man beachte aber, dass für die Deformationsgeschwindigkeiten beide Vorzeichen vorkom-men können, da sie sowohl wachsen als auch schrumpfen können. Die Bewegungsgleichungen lauten:
0 1 0 1
0 2 0 2
( ) sgn 0
( ) sgn 0
b T T
b T T
σ γε σ εσ γ ε σ ε− + − + + =
− − − − + = (6.17)
Als 0T kann der Mittelwert zwischen fA und sM gewählt werden:
0 2f sA M
T+
= (6.18)
Bei einer Temperaturerhöhung aus dem martensitischen Zustand mit 1 2 0 / 2ε ε ε= = (d.h. beide
Martensitphasen kommen gleich häufig vor und beanspruchen jeweils genau die Hälfte) wird dieser Zustand solange stabil bleiben, solange die verallgemeinerten thermodynamischen Kräfte 1/U ε∂ ∂
und 2/U ε∂ ∂ betragsmäßig die Reibspannung nicht übersteigen, d.h. solange
( )0 1 0 0 0 0( ) ( ) ( ) s fb T T b T T b T T b M Mγε γε σ− + = − + = − + − < (6.19)
Daraus folgt: ( )0 0s s fb A T M M σ− + − = oder ( ) 02 22 s f s f
bA A M M σ− + − = .
Unter Berücksichtigung der Eigenschaft, dass f s s fA M A M− = − (6.20)
(was wir für dieses Modell immer als Vereinfachung annehmen), ergibt sich:
( )
02
s f
bA M
σ=
− (6.21)
Beim Abkühlen aus dem austenitischen Zustand mit 1 2 0ε ε= = wird dieser Zustand solange stabil
bleiben, bis die verallgemeinerten thermodynamischen Kräfte 1/U ε∂ ∂ und 2/U ε∂ ∂ die Reibspan-
nung nicht übersteigen, d.h. solange 0 1 0 0( )sign ( )b T T b T Tε σ− = − < .
Daraus folgt ( ) 02 f s
bA M σ− = . Es ergibt sich dieselbe Gleichung für b wie oben, vorausgesetzt dass
f s s fA M A M− = − gilt. Aus ( )0
2s f
bM Mε
γ= − und
( )02
s f
bA M
σ=
−folgt für γ :
/ iD ε∂ ∂

50
( )( )
0
0
4 s f
s f
M M
A M
σγ
ε
−=
− (6.22)
Aus den Gleichgewichtsgleichungen 0 1 0 1( ) sgn 0b T Tσ γε σ ε− + − + + = folgt, dass das Anlegen einer
Spannung σ zur Temperaturverschiebung Tb
σΔ = des Phasengleichgewichtes führt. Ein Vergleich
mit der Clausius-Clapeyron-Gleichung 00
0
TT
qε σΔ = führt zur Relation:
0
0 0
qb
T ε= (6.23)
6.9. Typische thermomechanische Belastungsfälle
6.9.1. Maximale Phasendeformation Berechnen wir die maximale Phasendeformation in Abhängigkeit von der Spannung. Die Gleichge-wichtsgleichungen (6.17) für die beiden Martensitvarianten während der direkten Transformation
1 0ε > , 2 0ε < sind nun:
0 1 0
0 2 0
( ) 0
( ) 0.
b T T
b T T
σ γε σσ γε σ− + − + + =
− − − + − = (6.24)
Addieren beider Gleichungen ergibt
( )( )1 2 1 2 0
0
2
2
s f
s f
A M
M M
σ σε ε ε ε εγ σ
−+ = − = =
−.
6.9.2. Beginn der Phasentransformation Gegeben sei ein Material im austenitischen Zustand. Bei welcher Spannung beginnt die Phasentrans-formation (und somit Phasendeformation)? Lösung. Nehmen wir an, dass die angelegte Spannung positiv ist, dann wird auch die Deformation positiv sein: es wird sich bevorzugt die Martensitvariante mit 1 0ε > bilden, dabei ist 1 0ε > . Die
Gleichgewichtsgleichung 0 1 0 1( ) sgn 0b T Tσ γε σ ε− + − + + = nimmt im austenitischen Zustand
1 0ε = + die Form 0 0( ) 0b T Tσ σ− + − + = an. Daraus folgt: 0 0( )b T Tσ σ= − + .
Unter Berücksichtigung der Relationen ( ) ( )
0 02 2
s f f s
bA M A M
σ σ= =
− − und 0 2
f sA MT
+= erhalten
wir den Beginn der Phasentransformation bei der Spannung:
02 s
f s
T M
A Mσ σ −=
− (6.25)
6.9.3. Minimale Spannung, für die maximale Deformation erreicht wird Bei welcher minimalen Spannung wird die maximale mögliche Deformation bei direkter Transforma-tion erreicht? Bei welcher Temperatur wird diese Deformation erreicht? Lösung: Maximale Deformation bei Abkühlung aus dem austenitischen Zustand ist durch
( )( )1 2 0 0
0 2
s f
s f
A M
M M
σε ε ε εσ
−+ = =
− gegeben. Daraus folgt:
02 s f
s f
M M
A Mσ σ
−=
− (6.26)
Die Gleichgewichtsgleichung 0 1 0 1( ) sgn 0b T Tσ γε σ ε− + − + + = nimmt daher die Form:

51
0 0 0 02 ( ) 0s f
s f
M Mb T T
A Mσ γε σ
−− + − + + =
− (6.27)
an. Mit den Ausdrücken für b, T0 und ( )( )
0
0
4 s f
s f
M M
A M
σγ
ε
−=
− sowie mit Gl.(6.20) berechnet sich die
Temperatur zu:
1 10 2 22 2 0
.
s f s f s f
f
M M T T M M A M
T M
− + + − + − + − =
⇒ = (6.28)
6.9.4. Reaktive Spannungen Wird nun die Probe in dem Zustand mit maximaler Deformation gespannt und erwärmt bis zur Tem-peratur T, wie weit geht die Transformation Martensit-Austenit? Bei welcher Temperatur endet die Transformation? Lösung: In diesem Fall gilt 0ε ε= , 1 0ε < .
Die Gleichgewichtsgleichung 1 0 1 0 1( ) ( ) sgn 0E b T Tε ε γε σ ε− − + − + + = nimmt nun die Form
0 1 0 1 0( ) ( ) 0E b T Tε ε γε σ− − + − + − = an. Daraus folgt für die martensitische Deformation 1ε :
000 0 0 00 0 0
1
2 21 22
.
f
f s f sf s
A TT TT T E EEA M A MA M
E E E
ε σ ε σε σ σε
γ γ γ
⎛ ⎞ ⎛ ⎞−−− + − ++ − ⎜ ⎟ ⎜ ⎟⎜ ⎟ ⎜ ⎟− −− ⎝ ⎠ ⎝ ⎠= = =+ + +
(6.29)
Für fT A= ergibt sich nun beispielsweise: 01
E
E
εεγ
=+
, die Spannung ist dabei gleich:
( )
( )00
0
4 s f
s f
M ME
E A M
σγ εσ γεγ
−= ≈ =
+ −. (6.30)
Für 0 90MPaσ = , 9fM C= − ° , 3sM C= ° , 17sA C= ° , 30fA C= ° , 0ε =0.06, erhalten wir
01,8σ σ≈ . Vollständiger Übergang endet bei 1 0ε = , daher bei einer Temperatur:
( )0
02f f s
ET A A M
εσ
= + − . (6.31)
Für die oben genannten Parameter erhalten wir
60 6 27
30 5702 9
T C C C⋅ ⋅
= ° + ° = °⋅
. (6.32)
Frage: Wie gibt man einer Formgedächtnislegierung ihre Hochtemperaturform? Lösung: Die Formgedächtnislegierung wird in den gewünschten Zustand gebracht und (gut) fixiert. Die reaktiven Spannungen müssen so groß sein, dass sie die Fließgrenze erreichen. Wir haben gese-hen, dass dies für maximale Deformation bei fester Einspannung auf jeden Fall bei T=570°C erreicht wird, denn die theoretische Spannung wäre hier für unser Beispiel 0 5, 4E GPaσ ε= ≈ , (6.33)
was die Fließgrenze bei weitem übersteigt.
6.9.5. Berechnung eines Aktuators Der größte Teil der auf den Formgedächtnislegierungen basie-renden Aktuatoren besteht aus zwei Elementen: ein Element (Stab, Platte, Feder) aus der Formgedächtnislegierung und ein elastisches Element (bzw. eine konstante Gewichtskraft, wie im ersten Bild rechts).
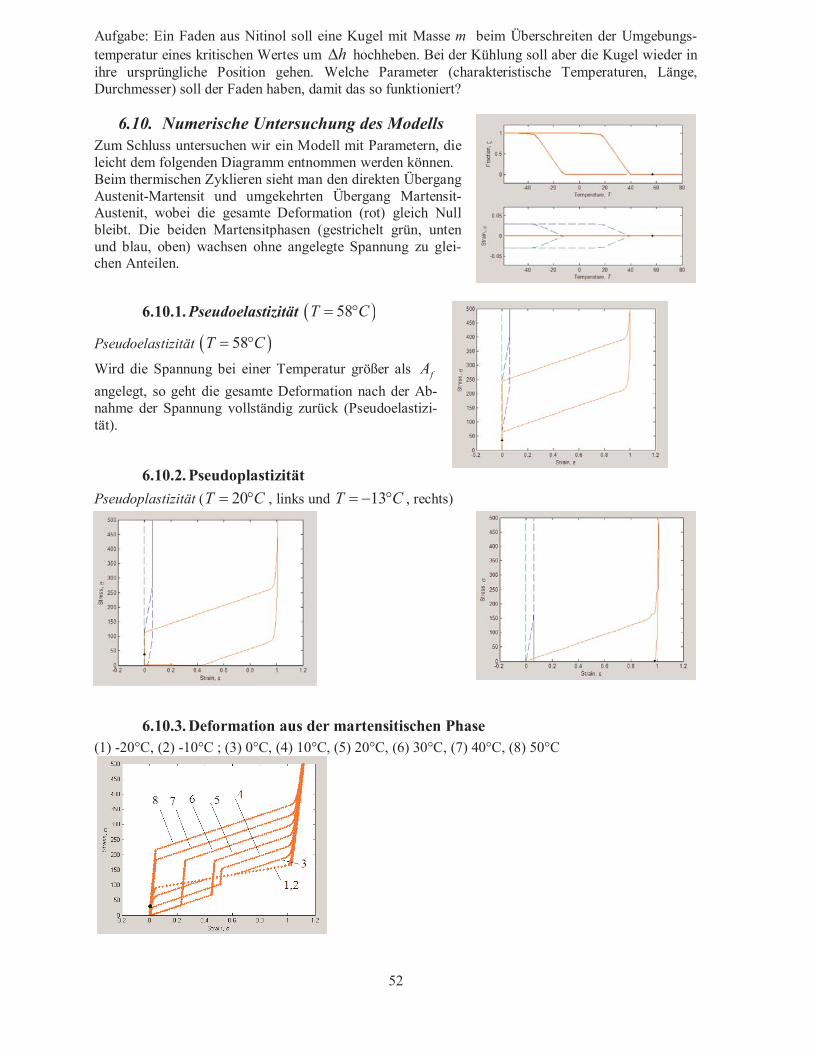
52
Aufgabe: Ein Faden aus Nitinol soll eine Kugel mit Masse m beim Überschreiten der Umgebungs-temperatur eines kritischen Wertes um hΔ hochheben. Bei der Kühlung soll aber die Kugel wieder in ihre ursprüngliche Position gehen. Welche Parameter (charakteristische Temperaturen, Länge, Durchmesser) soll der Faden haben, damit das so funktioniert?
6.10. Numerische Untersuchung des Modells Zum Schluss untersuchen wir ein Modell mit Parametern, die leicht dem folgenden Diagramm entnommen werden können. Beim thermischen Zyklieren sieht man den direkten Übergang Austenit-Martensit und umgekehrten Übergang Martensit-Austenit, wobei die gesamte Deformation (rot) gleich Null bleibt. Die beiden Martensitphasen (gestrichelt grün, unten und blau, oben) wachsen ohne angelegte Spannung zu glei-chen Anteilen.
6.10.1. Pseudoelastizität ( )58T C= °
Pseudoelastizität ( )58T C= °
Wird die Spannung bei einer Temperatur größer als fA
angelegt, so geht die gesamte Deformation nach der Ab-nahme der Spannung vollständig zurück (Pseudoelastizi-tät).
6.10.2. Pseudoplastizität
Pseudoplastizität ( 20T C= ° , links und 13T C= − ° , rechts)
6.10.3. Deformation aus der martensitischen Phase (1) -20°C, (2) -10°C ; (3) 0°C, (4) 10°C, (5) 20°C, (6) 30°C, (7) 40°C, (8) 50°C
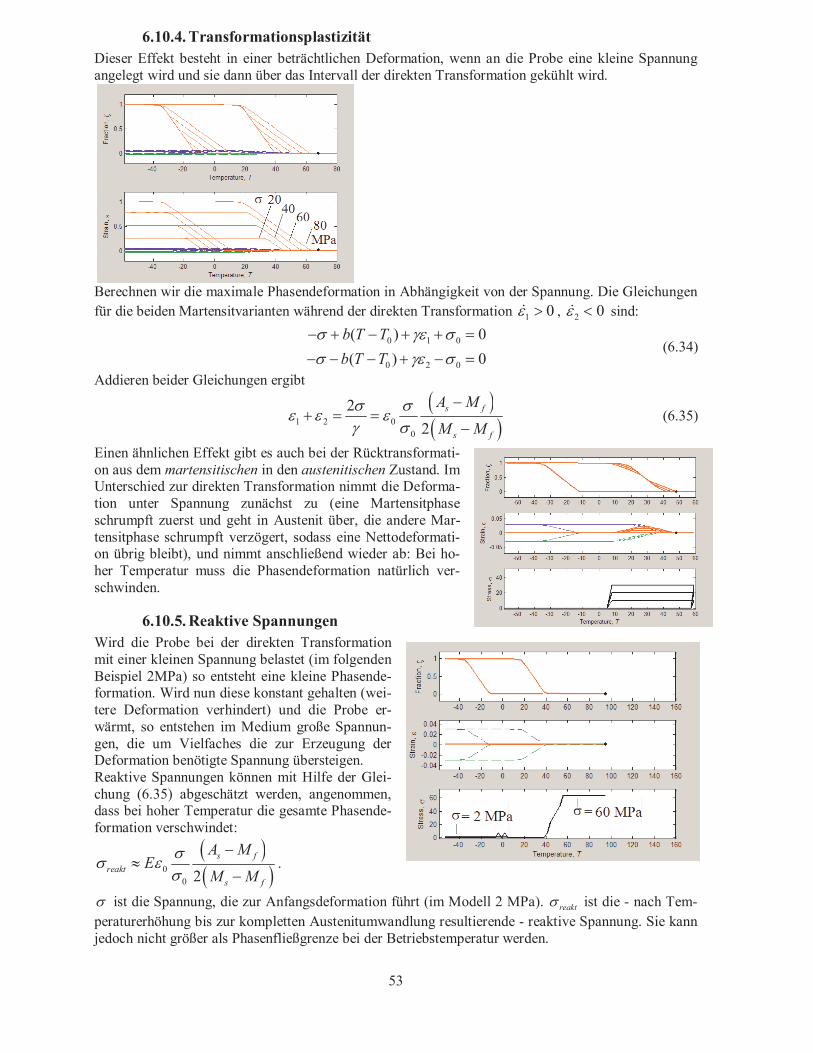
53
6.10.4. Transformationsplastizität Dieser Effekt besteht in einer beträchtlichen Deformation, wenn an die Probe eine kleine Spannung angelegt wird und sie dann über das Intervall der direkten Transformation gekühlt wird.
Berechnen wir die maximale Phasendeformation in Abhängigkeit von der Spannung. Die Gleichungen für die beiden Martensitvarianten während der direkten Transformation 1 0ε > , 2 0ε < sind:
0 1 0
0 2 0
( ) 0
( ) 0
b T T
b T T
σ γε σσ γε σ− + − + + =
− − − + − = (6.34)
Addieren beider Gleichungen ergibt
( )( )1 2 0
0
2
2
s f
s f
A M
M M
σ σε ε εγ σ
−+ = =
− (6.35)
Einen ähnlichen Effekt gibt es auch bei der Rücktransformati-on aus dem martensitischen in den austenitischen Zustand. Im Unterschied zur direkten Transformation nimmt die Deforma-tion unter Spannung zunächst zu (eine Martensitphase schrumpft zuerst und geht in Austenit über, die andere Mar-tensitphase schrumpft verzögert, sodass eine Nettodeformati-on übrig bleibt), und nimmt anschließend wieder ab: Bei ho-her Temperatur muss die Phasendeformation natürlich ver-schwinden.
6.10.5. Reaktive Spannungen Wird die Probe bei der direkten Transformation mit einer kleinen Spannung belastet (im folgenden Beispiel 2MPa) so entsteht eine kleine Phasende-formation. Wird nun diese konstant gehalten (wei-tere Deformation verhindert) und die Probe er-wärmt, so entstehen im Medium große Spannun-gen, die um Vielfaches die zur Erzeugung der Deformation benötigte Spannung übersteigen. Reaktive Spannungen können mit Hilfe der Glei-chung (6.35) abgeschätzt werden, angenommen, dass bei hoher Temperatur die gesamte Phasende-formation verschwindet:
( )( )0
0 2
s f
reakt
s f
A ME
M M
σσ εσ
−≈
−.
σ ist die Spannung, die zur Anfangsdeformation führt (im Modell 2 MPa). reaktσ ist die - nach Tem-peraturerhöhung bis zur kompletten Austenitumwandlung resultierende - reaktive Spannung. Sie kann jedoch nicht größer als Phasenfließgrenze bei der Betriebstemperatur werden.
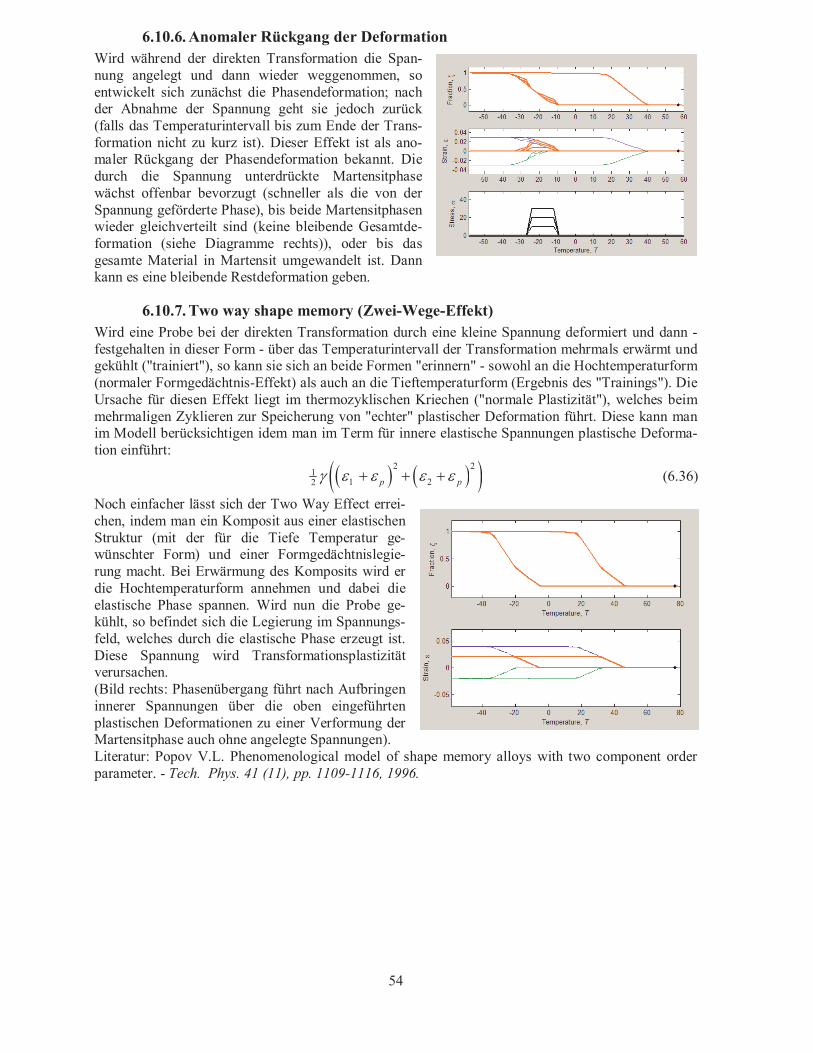
54
6.10.6. Anomaler Rückgang der Deformation Wird während der direkten Transformation die Span-nung angelegt und dann wieder weggenommen, so entwickelt sich zunächst die Phasendeformation; nach der Abnahme der Spannung geht sie jedoch zurück (falls das Temperaturintervall bis zum Ende der Trans-formation nicht zu kurz ist). Dieser Effekt ist als ano-maler Rückgang der Phasendeformation bekannt. Die durch die Spannung unterdrückte Martensitphase wächst offenbar bevorzugt (schneller als die von der Spannung geförderte Phase), bis beide Martensitphasen wieder gleichverteilt sind (keine bleibende Gesamtde-formation (siehe Diagramme rechts)), oder bis das gesamte Material in Martensit umgewandelt ist. Dann kann es eine bleibende Restdeformation geben.
6.10.7. Two way shape memory (Zwei-Wege-Effekt) Wird eine Probe bei der direkten Transformation durch eine kleine Spannung deformiert und dann - festgehalten in dieser Form - über das Temperaturintervall der Transformation mehrmals erwärmt und gekühlt ("trainiert"), so kann sie sich an beide Formen "erinnern" - sowohl an die Hochtemperaturform (normaler Formgedächtnis-Effekt) als auch an die Tieftemperaturform (Ergebnis des "Trainings"). Die Ursache für diesen Effekt liegt im thermozyklischen Kriechen ("normale Plastizität"), welches beim mehrmaligen Zyklieren zur Speicherung von "echter" plastischer Deformation führt. Diese kann man im Modell berücksichtigen idem man im Term für innere elastische Spannungen plastische Deforma-tion einführt:
( ) ( )( )2 21
1 22 p pγ ε ε ε ε+ + + (6.36)
Noch einfacher lässt sich der Two Way Effect errei-chen, indem man ein Komposit aus einer elastischen Struktur (mit der für die Tiefe Temperatur ge-wünschter Form) und einer Formgedächtnislegie-rung macht. Bei Erwärmung des Komposits wird er die Hochtemperaturform annehmen und dabei die elastische Phase spannen. Wird nun die Probe ge-kühlt, so befindet sich die Legierung im Spannungs-feld, welches durch die elastische Phase erzeugt ist. Diese Spannung wird Transformationsplastizität verursachen. (Bild rechts: Phasenübergang führt nach Aufbringen innerer Spannungen über die oben eingeführten plastischen Deformationen zu einer Verformung der Martensitphase auch ohne angelegte Spannungen). Literatur: Popov V.L. Phenomenological model of shape memory alloys with two component order parameter. - Tech. Phys. 41 (11), pp. 1109-1116, 1996.
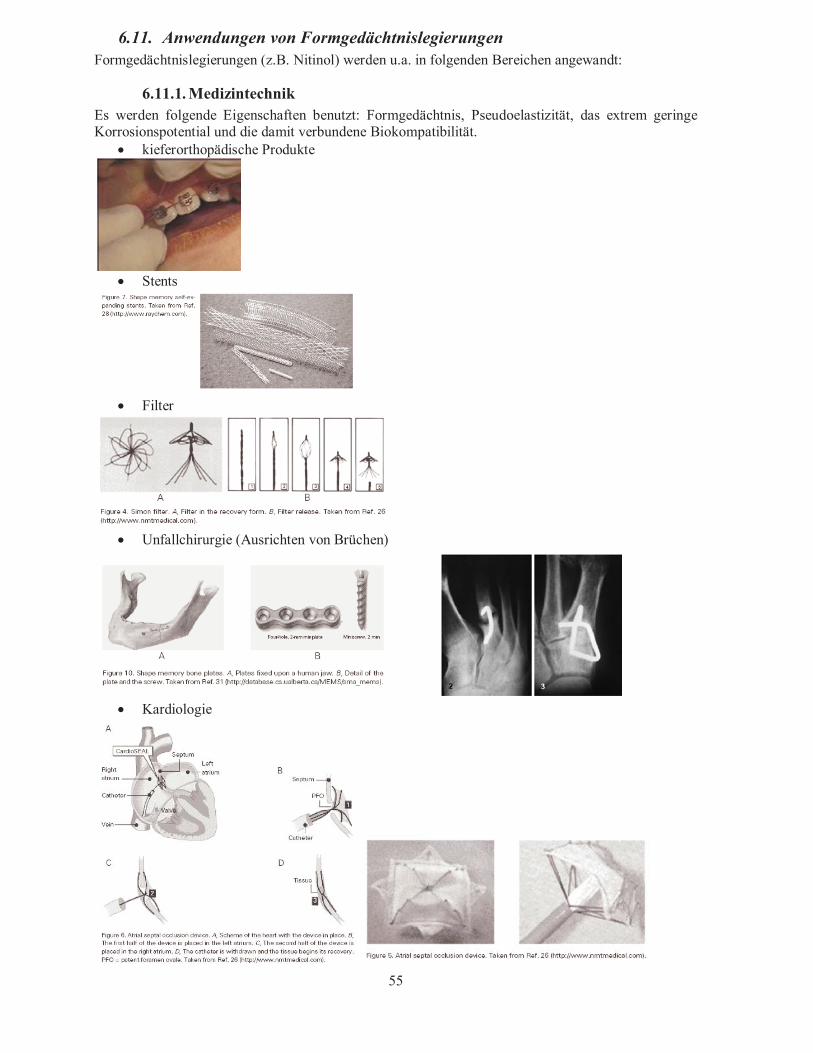
55
6.11. Anwendungen von Formgedächtnislegierungen Formgedächtnislegierungen (z.B. Nitinol) werden u.a. in folgenden Bereichen angewandt:
6.11.1. Medizintechnik Es werden folgende Eigenschaften benutzt: Formgedächtnis, Pseudoelastizität, das extrem geringe Korrosionspotential und die damit verbundene Biokompatibilität.
• kieferorthopädische Produkte
• Stents
• Filter
• Unfallchirurgie (Ausrichten von Brüchen)
• Kardiologie
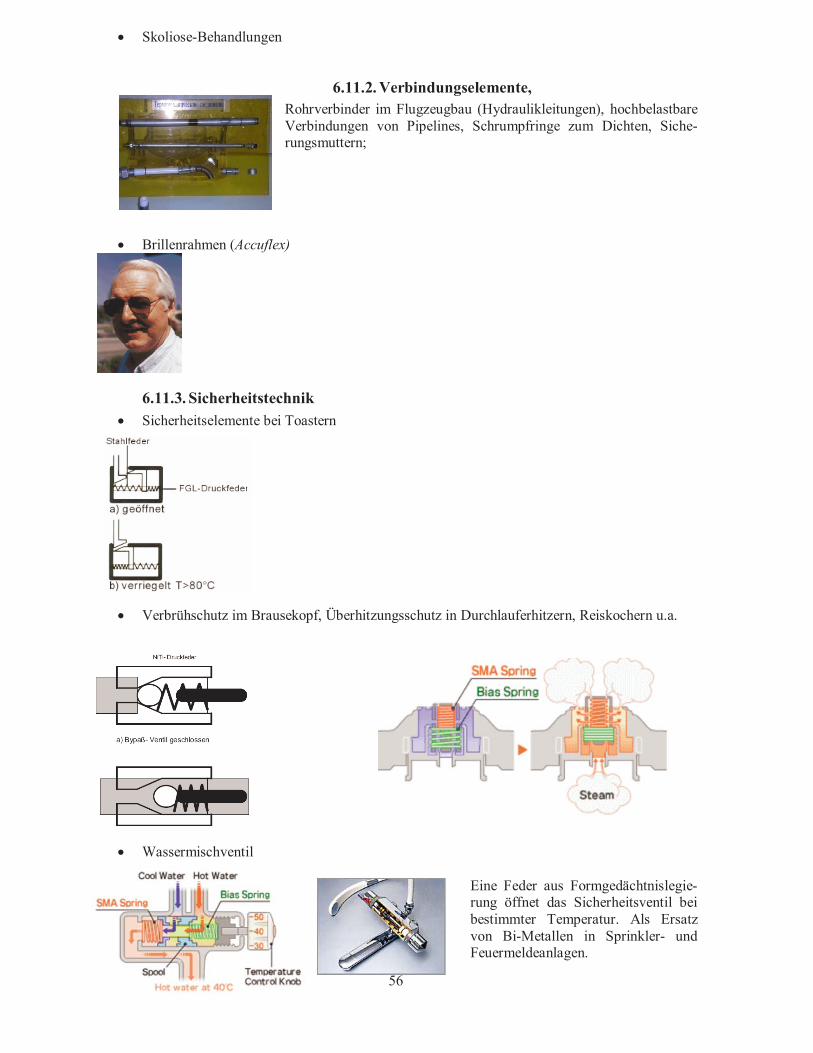
56
• Skoliose-Behandlungen
6.11.2. Verbindungselemente, Rohrverbinder im Flugzeugbau (Hydraulikleitungen), hochbelastbare Verbindungen von Pipelines, Schrumpfringe zum Dichten, Siche-rungsmuttern;
• Brillenrahmen (Accuflex)
6.11.3. Sicherheitstechnik • Sicherheitselemente bei Toastern
• Verbrühschutz im Brausekopf, Überhitzungsschutz in Durchlauferhitzern, Reiskochern u.a.
• Wassermischventil
Eine Feder aus Formgedächtnislegie-rung öffnet das Sicherheitsventil bei bestimmter Temperatur. Als Ersatz von Bi-Metallen in Sprinkler- und Feuermeldeanlagen.
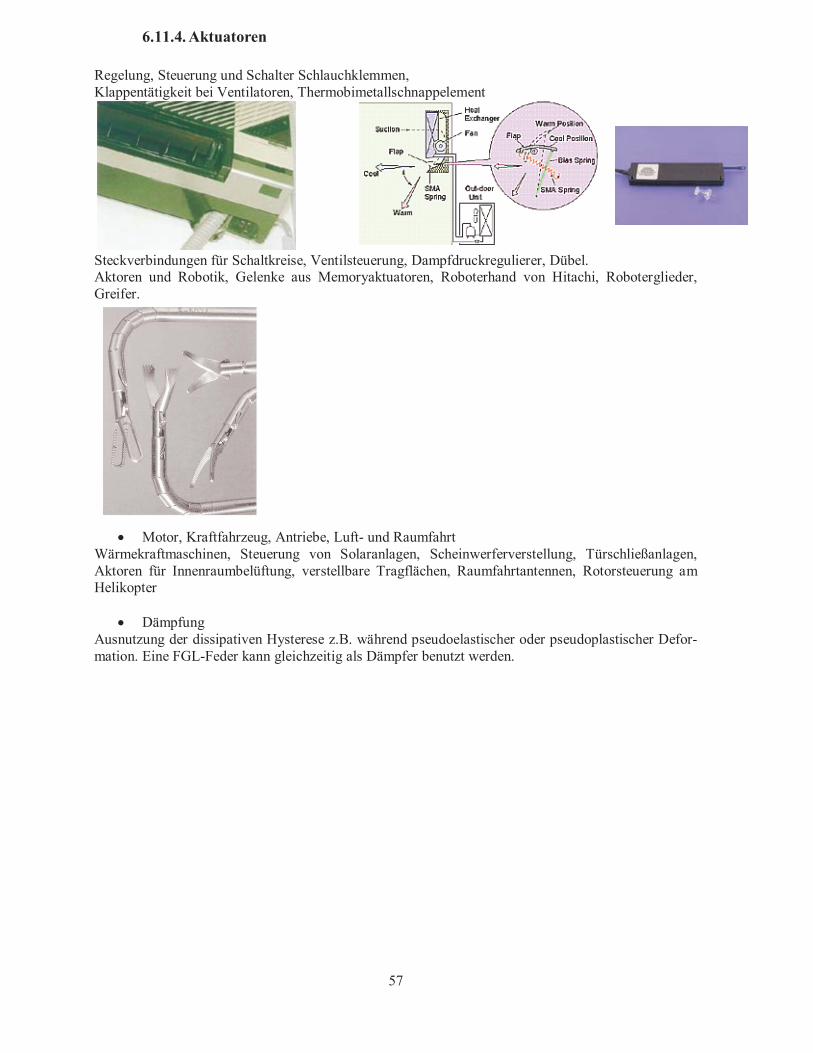
57
6.11.4. Aktuatoren Regelung, Steuerung und Schalter Schlauchklemmen, Klappentätigkeit bei Ventilatoren, Thermobimetallschnappelement
Steckverbindungen für Schaltkreise, Ventilsteuerung, Dampfdruckregulierer, Dübel. Aktoren und Robotik, Gelenke aus Memoryaktuatoren, Roboterhand von Hitachi, Roboterglieder, Greifer.
• Motor, Kraftfahrzeug, Antriebe, Luft- und Raumfahrt
Wärmekraftmaschinen, Steuerung von Solaranlagen, Scheinwerferverstellung, Türschließanlagen, Aktoren für Innenraumbelüftung, verstellbare Tragflächen, Raumfahrtantennen, Rotorsteuerung am Helikopter
• Dämpfung Ausnutzung der dissipativen Hysterese z.B. während pseudoelastischer oder pseudoplastischer Defor-mation. Eine FGL-Feder kann gleichzeitig als Dämpfer benutzt werden.

58
7. Elastomere / Gummi
7.1. Einführung Elastomere sind Stoffe, die ähnliche Eigenschaften haben wie natürlicher Gummi, d.h. sie können um das Mehrfache ihrer Anfangslänge gedehnt werden und stellen ihre Form vollständig wieder her. Die Elastizität von Elastomeren ist überwiegend bedingt durch Entropieänderung, was bereits William Thomson (Lord Kelvin) (1857) und Joule (1859) experimentell festgestellt haben, indem sie zwei thermoelastische Effekte entdeckt haben: 1. Eine durch ein Gewicht gedehnte Gummiprobe zieht sich bei Erwärmung (reversibel) zusammen; 2. Eine Gummiprobe erwärmt sich bei Dehnung und kühlt sich bei Abnahme der Spannung ab. Der reversible Charakter der Dehnung ist bedingt durch die Vernetzung von Polymermolekülen, die verhindert, dass die Polymermoleküle aneinander vorbei gleiten. Die Segmente zwischen den Vernetzungspunkten enthalten typischerweise mehrere Hundert von Polymersegmenten. Die Vernetzung mit Schwefel (Vulkanisation) wurde 1839 von Charles Goodyear entdeckt.
7.2. Thermodynamische Effekte und Thermodynamik von Gummi Auf dem nebenstehenden Bild aus einer klassischen Arbeit von Anthony, Caston und Guth (1942) erkennt man folgenden Zusammenhang: Bei kleinen Dehnungen ( 0/ 1.1L Lλ = < ) nimmt die Spannung bei konstanter Dehnung ab, wenn die Probe erwärmt wird. Bei größeren Dehnungen nimmt die Spannung bei Erwärmung jedoch zu. Diese Änderung ist als thermoelastische Inversion bekannt. Die Ursache dafür liegt in der thermischen Dehnung: Würde man die Länge auf die wirkliche Gleichgewichtslänge bei gegebener Temperatur normieren, gäbe es diesen Effekt nicht, und die Spannung würde immer mit der Temperatur steigen. Dies ist eine für die Entropieelastizität charakteristi-sche Eigenschaft. Widmen wir uns zunächst der Thermodynamik: Wir betrachten ein Stück Gummi, dass in einer Rich-tung auf Zug belastet wird. In guter Näherung bleibt das Volumen dabei konstant, d.h. der Querschnitt wird sich ändern. Die Gibbsche Form ist für dieses Beispiel: dU TdS PdL= + (7.1) TdS ist die zugeführte Wärme und PdL die durch die (Zug-)Kraft P bei Längenänderung dL geleis-tete Arbeit. Die freie Energie über die Legrendre-Transformation definiert als F U TS= − (7.2) Ihr Differential ist gleich dF PdL SdT= − (7.3) Die partiellen Ableitungen von F nach L und T sind:
und T L
F FP S
L T
∂ ∂= = −
∂ ∂ (7.4)
Da die Reihenfolge der partiellen Ableitungen nicht wichtig ist: 2 2F F
L T T L
∂ ∂=
∂ ∂ ∂ ∂, folgt daraus:
L T
P S
T L
∂ ∂= −
∂ ∂ (7.5)
Für die Kraft erhält man also:
λ ↓
( )T K
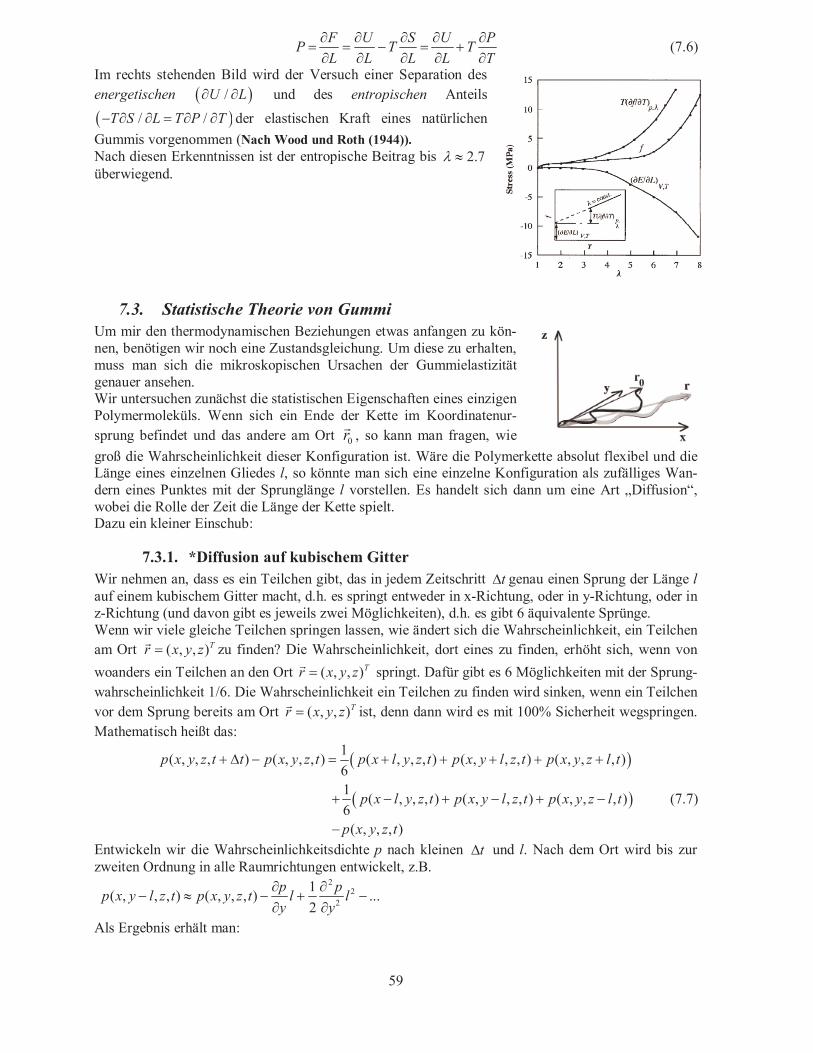
59
F U S U P
P T TL L L L T
∂ ∂ ∂ ∂ ∂= = − = +∂ ∂ ∂ ∂ ∂
(7.6)
Im rechts stehenden Bild wird der Versuch einer Separation des energetischen ( )/U L∂ ∂ und des entropischen Anteils
( )/ /T S L T P T− ∂ ∂ = ∂ ∂ der elastischen Kraft eines natürlichen
Gummis vorgenommen (Nach Wood und Roth (1944)). Nach diesen Erkenntnissen ist der entropische Beitrag bis 2.7λ ≈ überwiegend.
7.3. Statistische Theorie von Gummi Um mir den thermodynamischen Beziehungen etwas anfangen zu kön-nen, benötigen wir noch eine Zustandsgleichung. Um diese zu erhalten, muss man sich die mikroskopischen Ursachen der Gummielastizität genauer ansehen. Wir untersuchen zunächst die statistischen Eigenschaften eines einzigen Polymermoleküls. Wenn sich ein Ende der Kette im Koordinatenur-sprung befindet und das andere am Ort 0r , so kann man fragen, wie
groß die Wahrscheinlichkeit dieser Konfiguration ist. Wäre die Polymerkette absolut flexibel und die Länge eines einzelnen Gliedes l, so könnte man sich eine einzelne Konfiguration als zufälliges Wan-dern eines Punktes mit der Sprunglänge l vorstellen. Es handelt sich dann um eine Art „Diffusion“, wobei die Rolle der Zeit die Länge der Kette spielt. Dazu ein kleiner Einschub:
7.3.1. *Diffusion auf kubischem Gitter Wir nehmen an, dass es ein Teilchen gibt, das in jedem Zeitschritt tΔ genau einen Sprung der Länge l auf einem kubischem Gitter macht, d.h. es springt entweder in x-Richtung, oder in y-Richtung, oder in z-Richtung (und davon gibt es jeweils zwei Möglichkeiten), d.h. es gibt 6 äquivalente Sprünge. Wenn wir viele gleiche Teilchen springen lassen, wie ändert sich die Wahrscheinlichkeit, ein Teilchen am Ort ( , , )Tr x y z= zu finden? Die Wahrscheinlichkeit, dort eines zu finden, erhöht sich, wenn von
woanders ein Teilchen an den Ort ( , , )Tr x y z= springt. Dafür gibt es 6 Möglichkeiten mit der Sprung-wahrscheinlichkeit 1/6. Die Wahrscheinlichkeit ein Teilchen zu finden wird sinken, wenn ein Teilchen vor dem Sprung bereits am Ort ( , , )Tr x y z= ist, denn dann wird es mit 100% Sicherheit wegspringen. Mathematisch heißt das:
( )
( )
1( , , , ) ( , , , ) ( , , , ) ( , , , ) ( , , , )
61
( , , , ) ( , , , ) ( , , , )6
( , , , )
p x y z t t p x y z t p x l y z t p x y l z t p x y z l t
p x l y z t p x y l z t p x y z l t
p x y z t
+ Δ − = + + + + +
+ − + − + −
−
(7.7)
Entwickeln wir die Wahrscheinlichkeitsdichte p nach kleinen tΔ und l. Nach dem Ort wird bis zur zweiten Ordnung in alle Raumrichtungen entwickelt, z.B.
2
22
1( , , , ) ( , , , ) ...
2
p pp x y l z t p x y z t l l
y y
∂ ∂− ≈ − + −
∂ ∂
Als Ergebnis erhält man:

60
2 2 2 2
2 2 2
1
6
p l p p p
t t x y z
⎛ ⎞∂ ∂ ∂ ∂= + +⎜ ⎟∂ Δ ∂ ∂ ∂⎝ ⎠
(7.8)
Dies ist eine Diffusionsgleichung mit dem Diffusionskoeffizienten 21
6
lD
t=
Δ, d.h. wir haben die mi-
kroskopischen Sprünge eines Teilchens mit einer makroskopischen Gleichung verknüpft. Für diese isotrope Diffusionsgleichung gibt es nun folgende Lösung:
( )
2
43/2
1( , )
4
r
Dtp r t eDtπ
−= (7.9)
Das ist die Wahrscheinlichkeit, ein Teilchen am Ort r zu finden, wenn es bei t=0 am Ort 0r = gestar-tet ist. Der Mittelwert der Abweichung vom Ursprung r ist 0, der quadratische Mittelwert jedoch
nicht. Man erhält nämlich:
2
2 2 4
0
: ( , ) 4 ( , ) 6V
lr r p r t dV r p r t dr Dt
tπ
∞
= = = =Δ∫ ∫ (7.10)
7.3.2. Entropie von langen Ketten Nun kommen wir zurück auf unsere Polymerketten. Wir starten am Ort 0 und berechnen den mittleren quadratischen Abstand des Endes der Kette von diesem Punkt. Wir nehmen der Einfachheit halber an, dass die Kettenglieder die Länge l haben. Alle Glieder sollen mit rechten Winkeln verbunden sein, d.h. wenn wir die Glieder vom Start bis zum Ende verfolgen, erhalten wir ein Bild, was analog ist zum Sprung eines Teilchens auf kubischem Gitter. (Die Beschränkung auf rechte Winkel kann fallengelas-sen werden, das wird aber hier nicht gemacht. Eine Betrachtung mit Winkelabhängigkeit findet sich im Buch von I. Müller.) Der einzige Unterschied ist, dass es nun keine Zeitschritte gibt, sondern m Schritte werden ohne Zeiteinheit einfach abgezählt. Das heißt, nun ist hier tΔ durch 1 zu ersetzen und t durch m. Für den Quadratischen Mittelwert können wir jetzt also schreiben:
2 2 20 : 6r r Dm ml= = = (7.11)
Das heißt, in der Gleichung für die Wahrscheinlichkeitsverteilung p müssen wir die Ersetzung
20
1
6Dt Dm r→ = (7.12)
vornehmen und erhalten für die Wahrscheinlichkeitsverteilung für den mittleren quadratischen Ab-stand r2 der beiden Kettenenden:
2
20
3/2 3
2
20
3( )
2
r
rp r erπ
−⎛ ⎞= ⎜ ⎟⎝ ⎠
(7.13)
Diese Gleichung gilt allerdings nur im Grenzfall großer m, d.h. für m→∞ . Diese Wahrscheinlichkeitsverteilung sagt uns, wie häufig eine Konfiguration mit Kettenenden-Abstand r anzutreffen ist. Diese Antreffwahrscheinlichkeit ist über die Formel ( )ln ( )BS k Zp r= (7.14)
direkt mit der Entropie verbunden. Z ist hier die Anzahl möglicher Konformationen. Wir setzen dies in die freie Energie ein:
( )ln ( )BF TS k T Zp r= − = − (7.15)
Somit erhalten wir:
( )2 2 22
0 02 20 0
33
2 2B B
x y zrF F k T F k T
r r
+ += + = + (7.16)
wobei alle Konstanten in F0 gesteckt wurden (man beachte die Logarithmusregeln). Der Wert r02
charakterisiert den ungespannten Zustand des Moleküls (also seine wahrscheinlichste Form). Wird jetzt eine dreiachsige Deformation eingeführt gemäß 1 0x xλ= , 2 0y yλ= , 3 0z zλ= , so ändert sich die
freie Energie wie folgt:
61
2 2 2 2 2 2
1 0 2 0 3 00 2
0
3( )
2B
x y zF F k T
r
λ λ λ+ += + (7.17)
Die Differenz zwischen beiden Energien ist gleich
( )2 2 21 2 3
13
2 BF k T λ λ λΔ = + + − (7.18)
Die freie Energie der gesamten Probe ist daher gleich
( )2 2 21 2 3
13
2totF NkT λ λ λ= + + − (7.19)
N ist hier die Gesamtzahl der Moleküle.
7.4. Ein- und zweiachsige Deformationen Die Energie Gl.(7.19) wollen wir nun für zwei Arten von Deformationszuständen betrachten: Den einachsigen (der für alle folgenden Kapitel als Beispiel-Deformation verwendet werden wird) und den zweiachsigen, der z.B. für die Berechnung von Luftballons relevant ist. Für die Dichte der freien Energie können wir schreiben:
( )2 2 20 1 2 3
0
1( )
2 B
Ff f T nk T
Vλ λ λ= = + + + (7.20)
0 0 0
N Nn
A L V= = ist die Konzentration der Polymermoleküle.
7.4.1. Einachsige Deformationen Betrachten wir jetzt als Sonderfall eine einachsige Deformation eines Quaders mit Seitenlängen
0 0 01 2 3, , L L L , wobei wir annehmen, dass sich das Volumen des Materials nicht ändert:
1 2 31 2 30 0 0
0 1 2 3
1L L LV
V L L Lλ λ λ= = = ⋅ ⋅ (7.21)
Unter Berücksichtigung der Symmetrie 2 3 tλ λ λ= = und mit der Bezeichnung 1λ λ= erhalten wir:
1/tλ λ= und damit für die freie Energie:
20
1 2
2 BF F Nk T λλ
⎛ ⎞= + +⎜ ⎟⎝ ⎠
(7.22)
Die Kraft ergibt sich durch Ableitung der freien Energie nach der Länge 0
1 1 0: :L L L Lλ λ= = = :
2
0
1 23
2 B
F F LP Nk T
L L L L
λ λλ λ λ
⎛ ⎞⎛ ⎞∂ ∂ ∂ ∂ ∂⎛ ⎞= = = + − ⋅ ⎜ ⎟⎜ ⎟⎜ ⎟∂ ∂ ∂ ∂ ∂⎝ ⎠⎝ ⎠ ⎝ ⎠ (7.23)
also:
2
0
1BNk TP
Lλ
λ⎛ ⎞= −⎜ ⎟⎝ ⎠
. (7.24)
Dies ist sozusagen die Zustandsgleichung für den Gummiquader – vergleichbar mit der Zustandsglei-chung für ideale Gase. Für die Spannung müssen wir beachten, dass sich der Querschnitt ändert, denn es gilt ja:
0 0
0
V AVA
L Lλ λ= = = . (7.25)
Es ergibt sich:
2 22
0 0 0 0
1 1BB
t
Nk TP P Pnk T
A A A L Aσ λ λ λ
λ λ λ⎛ ⎞ ⎛ ⎞= = = = − = −⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
(7.26)
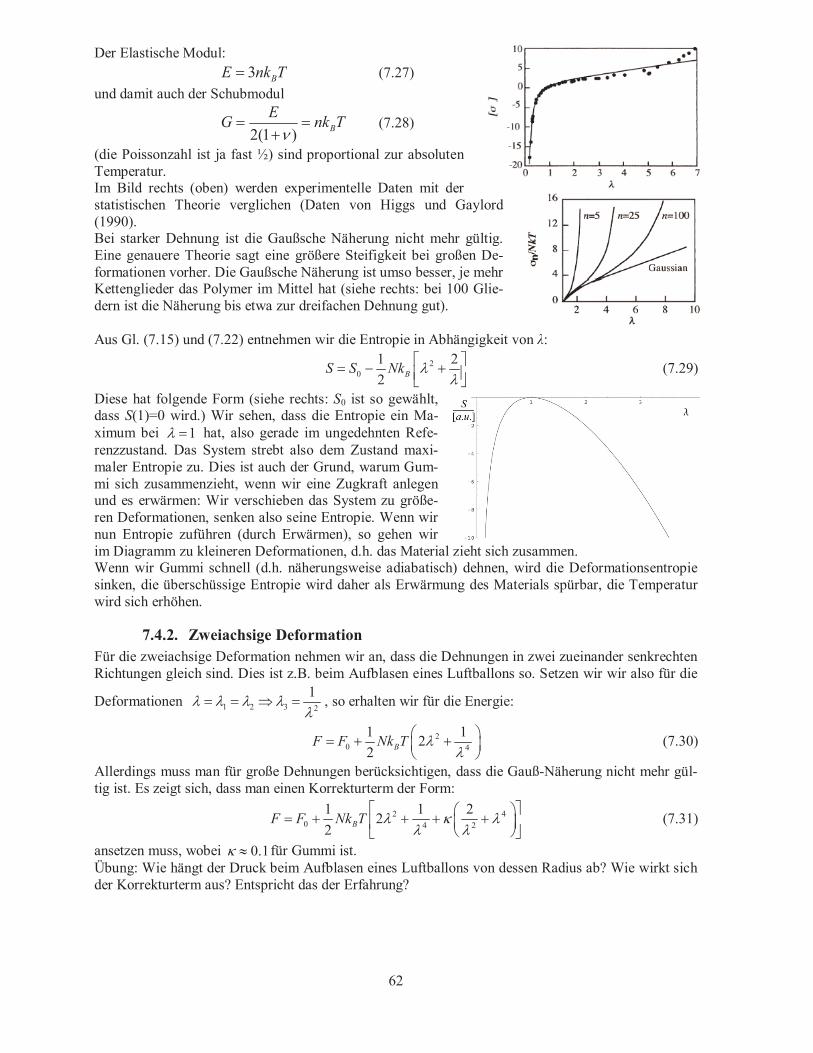
62
Der Elastische Modul: 3 BE nk T= (7.27)
und damit auch der Schubmodul
2(1 ) B
EG nk T
ν= =
+ (7.28)
(die Poissonzahl ist ja fast ½) sind proportional zur absoluten Temperatur. Im Bild rechts (oben) werden experimentelle Daten mit der statistischen Theorie verglichen (Daten von Higgs und Gaylord (1990). Bei starker Dehnung ist die Gaußsche Näherung nicht mehr gültig. Eine genauere Theorie sagt eine größere Steifigkeit bei großen De-formationen vorher. Die Gaußsche Näherung ist umso besser, je mehr Kettenglieder das Polymer im Mittel hat (siehe rechts: bei 100 Glie-dern ist die Näherung bis etwa zur dreifachen Dehnung gut). Aus Gl. (7.15) und (7.22) entnehmen wir die Entropie in Abhängigkeit von λ:
20
1 2
2 BS S Nk λλ
⎡ ⎤= − +⎢ ⎥⎣ ⎦ (7.29)
Diese hat folgende Form (siehe rechts: S0 ist so gewählt, dass S(1)=0 wird.) Wir sehen, dass die Entropie ein Ma-ximum bei 1λ = hat, also gerade im ungedehnten Refe-renzzustand. Das System strebt also dem Zustand maxi-maler Entropie zu. Dies ist auch der Grund, warum Gum-mi sich zusammenzieht, wenn wir eine Zugkraft anlegen und es erwärmen: Wir verschieben das System zu größe-ren Deformationen, senken also seine Entropie. Wenn wir nun Entropie zuführen (durch Erwärmen), so gehen wir im Diagramm zu kleineren Deformationen, d.h. das Material zieht sich zusammen. Wenn wir Gummi schnell (d.h. näherungsweise adiabatisch) dehnen, wird die Deformationsentropie sinken, die überschüssige Entropie wird daher als Erwärmung des Materials spürbar, die Temperatur wird sich erhöhen.
7.4.2. Zweiachsige Deformation Für die zweiachsige Deformation nehmen wir an, dass die Dehnungen in zwei zueinander senkrechten Richtungen gleich sind. Dies ist z.B. beim Aufblasen eines Luftballons so. Setzen wir wir also für die
Deformationen 1 2 3 2
1λ λ λ λλ
= = ⇒ = , so erhalten wir für die Energie:
20 4
1 12
2 BF F Nk T λλ
⎛ ⎞= + +⎜ ⎟⎝ ⎠
(7.30)
Allerdings muss man für große Dehnungen berücksichtigen, dass die Gauß-Näherung nicht mehr gül-tig ist. Es zeigt sich, dass man einen Korrekturterm der Form:
2 40 4 2
1 1 22
2 BF F Nk T λ κ λλ λ
⎡ ⎤⎛ ⎞= + + + +⎜ ⎟⎢ ⎥⎝ ⎠⎣ ⎦ (7.31)
ansetzen muss, wobei 0.1κ ≈ für Gummi ist. Übung: Wie hängt der Druck beim Aufblasen eines Luftballons von dessen Radius ab? Wie wirkt sich der Korrekturterm aus? Entspricht das der Erfahrung?

63
7.5. Viskoelastische Eigenschaften von Gummi
7.5.1. Komplexe Federzahlen Vorbemerkung: Im weiteren Verlauf werden wir mit komplexen Größen arbeiten. Das vereinfacht viele Rechnungen enorm, setzt aber voraus, dass man einige Regeln beachtet. Komplexe Ansätze, um z.B. Differentialgleichungen zu lösen, erfordern, dass man am Ende der Berechnung (in der man i.a. komplex rechnen kann) zu einem reellen Endergebnis kommt. Daher muss beispielsweise eine komp-lexe Verschiebung der Form 0ˆ ˆ( ) i tu t u e ω= (das „^“ deutet an, dass es sich um komplexe Größen han-delt) zum Schluss in eine reelle Funktion umgewandelt werden. Dies kann auf zwei Arten geschehen: Entweder, man nimmt nur den Realteil als „wahre“ Lösung:
( )*0 0 0 0 0
1ˆ ˆ ˆ ˆ ˆ( ) : Re( ) Re( )cos Im( )sin
2i t i t i tu t u e u e u e u t u tω ω ω ω ω−= = + = − .
Oder man definiert, dass zu der komplexen Lösung immer die konjugiert komplexe addiert werden
soll, was fast auf das gleiche hinausläuft ( ( )*0 0 0 0ˆ ˆ ˆ ˆ( ) : 2Re( )cos 2Im( )sini t i tu t u e u e u t u tω ω ω ω−= + = − ) -
bis auf einen Faktor 2, sodass immer darauf zu achten ist, welche Version in der jeweiligen Literatur gerade benutzt wird. Wir wollen hier die 1. Variante wählen, d.h. der Realteil unserer Funktionen ist die „wahre“ reelle Lösung. Betrachten wir nun einfache Verbindungselemente, die periodisch angeregt werden sollen: Feder und Dämpfer. Für eine linearelastische Feder ohne innere Dissipation gilt bekanntlich das Hookesche Gesetz: F cx= (7.32) Den Proportionalitätskoeffizienten c nennen wir Federzahl oder auch Fe-dersteifigkeit. Betrachten wir jetzt einen linearen Dämpfer: F dx= (7.33) Betrachten wir nun harmonische Anregungen, d.h. periodische Anregung mit einer Frequenz mittels einer Kraft 0 cosF F tω= .
Schreiben wir diese Kraft in komplexer Form 0ˆ i tF F e ω= (passend zu unserer Konvention
( )0 0( ) Re cosi tF t F e F tω ω= = mit reellem F0) und suchen die Lösung in der Form 0ˆ ˆ i tx x e ω= . Das
Ergebnis lautet: ˆ ˆ( ) ( )F t id x tω= , d.h. die Kraft ist zu jedem Zeitpunkt proportional zur Auslenkung, wie bei einer Feder. Der Koeffizient ˆdc idω= , (7.34)
der die Kraft mit der Auslenkung verbindet, ist jetzt aber komplex und hängt von der Frequenz ab. Wir nennen ihn komplexe, frequenz-abhängige Federzahl oder -steifigkeit. Für ein allgemeines lineares mechanisches System (d.h. ein beliebig kompliziertes System aufgebaut
aus linearen Federn und Dämpfern) gilt bei einer Erregerkraft 0i tF e ω ein linearer Zusammenhang:
ˆ ˆ ˆ( ) ( ) ( )F t c x tω= (7.35)
wobei ˆ( )c ω nun die komplexe Federzahl des Systems ist. Diese Gleichung gilt allerdings nur bei einer
Anregung mit der Frequenz ω . In expliziter Form lautet sie 0 0ˆ ˆ( )i t i tF e c x eω ωω= . Bestimmen wir
Beträge der auf der linken und rechten Seite stehenden komplexen Funktionen, so erhalten wir
0 0ˆ ˆ( )i t i tF e c x eω ωω⋅ = ⋅ ⋅ . Da 1i te ω ≡ , ergibt sich 0 0ˆ ˆ( )F c xω= ⋅ , d.h. die Schwingungsampli-
tuden der Kraft und der Verschiebung sind durch den Betrag der komplexen Federzahl verbunden. Die komplexe Federzahl bestimmt somit vollständig die Amplitude von erzwungenen Schwingungen. Die Phasenverschiebungen φ sind in den komplexen Koeffizienten über die Darstellung ˆ ˆ ia a e ϕ= (7.36)
einer komplexen Zahl durch Betrag und Phase verschlüsselt.

64
7.5.2. Komplexer Schubmodul
In ähnlicher Weise lassen sich komplexer Elastizitätsmodul ( )E ω und komplexer Schubmodul ( )G ω definieren. Wenn σ die Spannung ist und ε die elastische Dehnung und wir die Spannung periodisch
ändern – in komplexer Darstellung 0ˆ i te ωσ σ= – so besteht zwischen der (Schub-) Spannung und der
(Schub-) Deformation ein linearer Zusammenhang der Form:
( )0 0ˆ ˆi t i te G eω ωσ ω ε= (7.37)
wobei ( ) ( ) ( )ˆ ˆ ˆRe ImG G i Gω ω ω= + der komplexer elastischer Schubmodul ist.
Den Realteil des komplexen Moduls nennt man Speichermodul , den Imaginärteil Verlustmodul. Für einen linearelastischen Körper gilt für die Scherdeformation nach dem Hookeschen Gesetz:
Gσ ε= . Der komplexe Modul hat in diesem Fall nur einen Realteil, und dieser ist gleich G .
Für reine Scherung einer linear viskosen Flüssigkeit gilt dv
dzσ η= .
Für eine periodische Bewegung 0ˆ( ) i tu z l u e ω= = gilt somit:
0ˆ( )ˆˆ ( ) ( )i tudv t
t i e i tdz l
ωσ η η ω ωηε= = = (7.38)
Der komplexe Modul hat in diesem Fall nur einen imaginären Teil: ˆRe 0G = , ˆImG ωη= .
7.5.3. Rheologische Modelle
Bei einer Parallelschaltung von zwei Federn mit den Federzahlen 1c und 2c ergibt sich eine Feder mit
der Federzahl 1 2c c c= + . Bei einer Reihenschaltung gilt 1 2
1 2 1 2
1 1 1 c cc
c c c c c= + ⇒ =
+.
Ähnliche Schaltungen kann man auch für Kontinua benutzen, dann müssen die Steifigkeiten durch Module ersetzt werden. Wir wollen nun ein Feder-Dämpfer-Modell aufbauen, das die wichtigsten dynamischen Eigenschaften von Gummi bei periodischer Beanspruchung enthält. Diese sind: 1. 0ω ≈ : Man misst einen kleinen elastischen Modul (quasistatische Deformation) und kaum Dissipa-tion, d.h. der Dämpfungsanteil ist sehr klein. 2. ω→∞ : Man misst einen sehr großen Modul (typischerweise 1000mal so groß wie bei quasistati-scher Beanspruchung), und ebenfalls keine nennenswerte Dissipation. 3. Bei mittleren Frequenzen misst man mittlere Module, gleichzeitig aber auch starke Dissipation. Diese Eigenschaften resultieren aus der Tatsache, dass die Molekülketten sich nur in endlichen Zeiten ver- und ent-„knäulen“ können: Bei langsamen Deformationen können die Ketten der Deformation folgen und die elastischen Eigen-schaften sind entropiebestimmt (siehe oben). Bei sehr schnellen Deformationen können die Ketten nicht folgen, es wird ein sehr hoher Modul ge-messen. Bei „mittelschnellen“ Deformationen (wobei vom jeweiligen Material abhängt, welche Frequenzen das sind) können die Ketten unter Zeitverzögerung folgen, durch die ständige Kettenbewegung wird jedoch viel Energie dissipiert: Es gibt eine hohe innere Reibung. Diese Eigenschaften eines Gummiblocks sollen nun qualita-tiv durch eines der folgenden rheologischen Modelle be-schrieben werden (siehe Bild rechts). Im Fall a ist der komplexe Modul des Gesamtsystems gleich:
( )2 1
1 2
ˆ ( )a
c c idc
c c id
ωω
ω+
=+ +
, im Fall b ist er gleich:
21
2
ˆ ( )b
c idc c
c id
ωωω
= ++
. ba
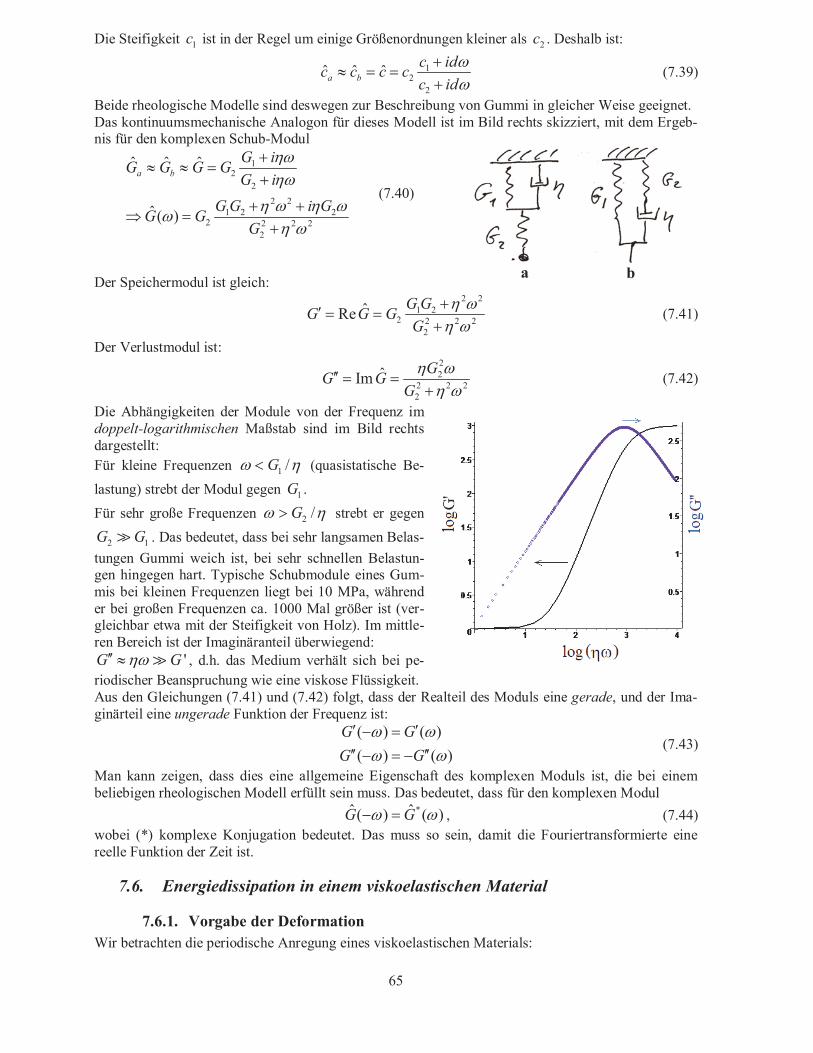
65
Die Steifigkeit 1c ist in der Regel um einige Größenordnungen kleiner als 2c . Deshalb ist:
12
2
ˆ ˆ ˆa b
c idc c c c
c id
ωω
+≈ = =
+ (7.39)
Beide rheologische Modelle sind deswegen zur Beschreibung von Gummi in gleicher Weise geeignet. Das kontinuumsmechanische Analogon für dieses Modell ist im Bild rechts skizziert, mit dem Ergeb-nis für den komplexen Schub-Modul
12
2
2 21 2 2
2 2 2 22
ˆ ˆ ˆ
ˆ ( )
a b
G iG G G G
G i
G G i GG G
G
ηωηω
η ω η ωωη ω
+≈ ≈ =
+
+ +⇒ =
+
(7.40)
Der Speichermodul ist gleich:
2 2
1 22 2 2 2
2
ˆReG G
G G GG
η ωη ω+′ = =+
(7.41)
Der Verlustmodul ist:
22
2 2 22
ˆImG
G GG
η ωη ω
′′ = =+
(7.42)
Die Abhängigkeiten der Module von der Frequenz im doppelt-logarithmischen Maßstab sind im Bild rechts dargestellt: Für kleine Frequenzen 1 /Gω η< (quasistatische Be-
lastung) strebt der Modul gegen 1G .
Für sehr große Frequenzen 2 /Gω η> strebt er gegen
2 1G G . Das bedeutet, dass bei sehr langsamen Belas-
tungen Gummi weich ist, bei sehr schnellen Belastun-gen hingegen hart. Typische Schubmodule eines Gum-mis bei kleinen Frequenzen liegt bei 10 MPa, während er bei großen Frequenzen ca. 1000 Mal größer ist (ver-gleichbar etwa mit der Steifigkeit von Holz). Im mittle-ren Bereich ist der Imaginäranteil überwiegend:
'G Gηω′′ ≈ , d.h. das Medium verhält sich bei pe-riodischer Beanspruchung wie eine viskose Flüssigkeit. Aus den Gleichungen (7.41) und (7.42) folgt, dass der Realteil des Moduls eine gerade, und der Ima-ginärteil eine ungerade Funktion der Frequenz ist:
( ) ( )
( ) ( )
G G
G G
ω ωω ω
′ ′− =′′ ′′− = −
(7.43)
Man kann zeigen, dass dies eine allgemeine Eigenschaft des komplexen Moduls ist, die bei einem beliebigen rheologischen Modell erfüllt sein muss. Das bedeutet, dass für den komplexen Modul
*ˆ ˆ( ) ( )G Gω ω− = , (7.44) wobei (*) komplexe Konjugation bedeutet. Das muss so sein, damit die Fouriertransformierte eine reelle Funktion der Zeit ist.
7.6. Energiedissipation in einem viskoelastischen Material
7.6.1. Vorgabe der Deformation Wir betrachten die periodische Anregung eines viskoelastischen Materials:
ba

66
0 0ˆ( ) cos i tt t e ωε ε ω ε ε= ⇒ = (7.45)
Diese führt zu der Spannung:
0ˆˆ ( ) i tG e ωσ ε ω= (7.46)
Wir können nun die mittlere Leistungsdichte P berechnen. Die spitzen Klammern stehen dabei für die zeitliche Mittelwertbildung, die z.B. über eine ganze Periode der Bewegung ausgeführt werden kann. Für die Leistung dürfen wir allerdings nur die Realteile nehmen:
( ) ( )( )( )
0 0
20
2 20
0 1/2
20
ˆ( ) ( ) Re ( ) Re
cos sin sin
cos sin sin
1( )
2
i t i tP t t G e i e
G t G t t
G t t G t
G
ω ωσ ε ω ε ε ω
ε ω ω ω ω
ωε ω ω ω
ω ωε
= =
= =
′ ′′= − −
⎛ ⎞⎜ ⎟′ ′′= − +⎜ ⎟⎝ ⎠
′′=
(7.47)
Die Energiedissipation hängt demnach unmittelbar mit dem Imaginärteil des komplexen Moduls zu-sammen, daher auch die Bezeichnung Verlustmodul. Im oben untersuchten rheologischen Modell gilt
22
2 2 22
ˆImG
G GG
η ωη ω
′′ = =+
(7.48)
Die mittlere Leistungsdichte (Energiedissipation pro Zeiteinheit pro Volumeneinheit) ist somit gleich
2 2 22 0
2 2 22
1
2
GP
G
η ω εη ω
=+
(7.49)
7.6.2. Vorgabe der Spannung Berechnen wir die Energiedissipation pro Einheitsvolumen unter der Einwirkung der Spannung
0ˆ i te ωσ σ= (7.50)
Für die elastische (komplexe) Deformation ergibt sich
*
0 02
ˆ ( )ˆ
ˆ ˆ( ) ( )
i t i te G e
G G
ω ωσ ω σεω ω
= = (7.51)
Und damit für die Leistungsdichte bei vorgegebener Spannung:
( ) ( )
( )
*
0 0 2
20
2
202
ˆ( ) Re Re
ˆ
cos sin cosˆ
1
2
i t i tGP t t e i e
G
t G t G tG
G
G
ω ωσ ε σ σ ω
σ ω ω ω ω
ωσ
⎛ ⎞⎜ ⎟= = ⎜ ⎟⎜ ⎟⎝ ⎠
′ ′′= − +
′′=
(7.52)
7.6.3. Messung komplexer Module Wird ein lineares viskoelastisches Material periodisch mit der Kreisfrequenz ω deformiert 0 cos tε ε ω= (7.53)
und der Spannungsverlauf im eingeschwungenen Zustand aufgezeichnet (den man auch in der Form
( ) ( )0 0 0ˆ ˆRe Re cos( )i t i i te e e tω α ωσ σ σ σ ω α= = = + (7.54)
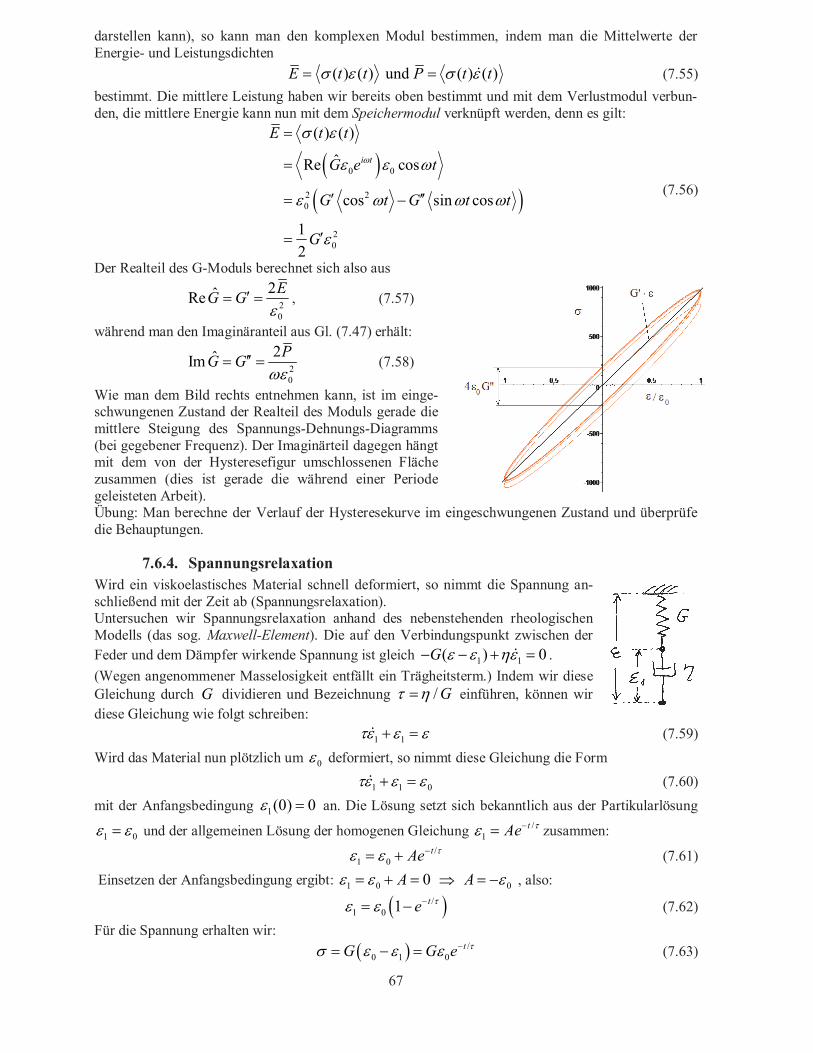
67
darstellen kann), so kann man den komplexen Modul bestimmen, indem man die Mittelwerte der Energie- und Leistungsdichten
( ) ( ) und ( ) ( )E t t P t tσ ε σ ε= = (7.55)
bestimmt. Die mittlere Leistung haben wir bereits oben bestimmt und mit dem Verlustmodul verbun-den, die mittlere Energie kann nun mit dem Speichermodul verknüpft werden, denn es gilt:
( )( )
0 0
2 20
20
( ) ( )
ˆRe cos
cos sin cos
1
2
i t
E t t
G e t
G t G t t
G
ω
σ ε
ε ε ω
ε ω ω ω
ε
=
=
′ ′′= −
′=
(7.56)
Der Realteil des G-Moduls berechnet sich also aus
20
2ˆReE
G Gε
′= = , (7.57)
während man den Imaginäranteil aus Gl. (7.47) erhält:
20
2ˆImP
G Gωε
′′= = (7.58)
Wie man dem Bild rechts entnehmen kann, ist im einge-schwungenen Zustand der Realteil des Moduls gerade die mittlere Steigung des Spannungs-Dehnungs-Diagramms (bei gegebener Frequenz). Der Imaginärteil dagegen hängt mit dem von der Hysteresefigur umschlossenen Fläche zusammen (dies ist gerade die während einer Periode geleisteten Arbeit). Übung: Man berechne der Verlauf der Hysteresekurve im eingeschwungenen Zustand und überprüfe die Behauptungen.
7.6.4. Spannungsrelaxation Wird ein viskoelastisches Material schnell deformiert, so nimmt die Spannung an-schließend mit der Zeit ab (Spannungsrelaxation). Untersuchen wir Spannungsrelaxation anhand des nebenstehenden rheologischen Modells (das sog. Maxwell-Element). Die auf den Verbindungspunkt zwischen der Feder und dem Dämpfer wirkende Spannung ist gleich 1 1( ) 0G ε ε ηε− − + = .
(Wegen angenommener Masselosigkeit entfällt ein Trägheitsterm.) Indem wir diese Gleichung durch G dividieren und Bezeichnung / Gτ η= einführen, können wir diese Gleichung wie folgt schreiben: 1 1τε ε ε+ = (7.59)
Wird das Material nun plötzlich um 0ε deformiert, so nimmt diese Gleichung die Form
1 1 0τε ε ε+ = (7.60)
mit der Anfangsbedingung 1(0) 0ε = an. Die Lösung setzt sich bekanntlich aus der Partikularlösung
1 0ε ε= und der allgemeinen Lösung der homogenen Gleichung /1
tAe τε −= zusammen:
/1 0
tAe τε ε −= + (7.61)
Einsetzen der Anfangsbedingung ergibt: 1 0 0Aε ε= + = ⇒ 0A ε= − , also:
( )/1 0 1 te τε ε −= − (7.62)
Für die Spannung erhalten wir:
( ) /0 1 0
tG G e τσ ε ε ε −= − = (7.63)
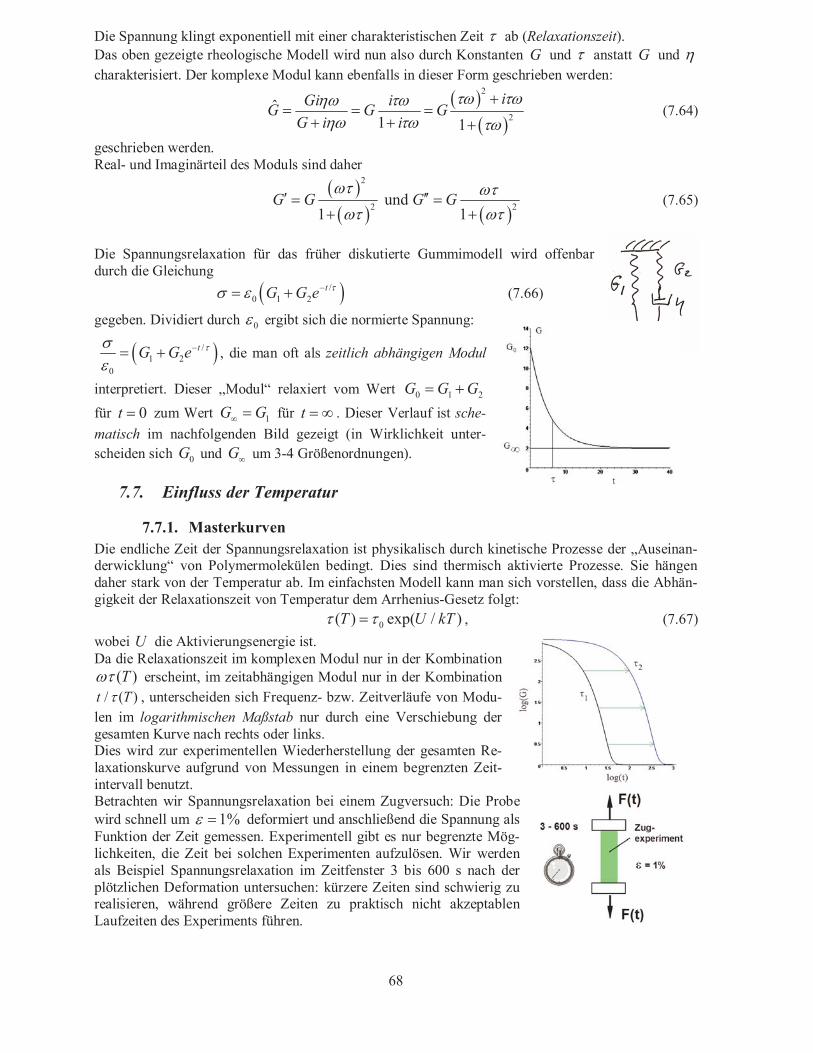
68
Die Spannung klingt exponentiell mit einer charakteristischen Zeit τ ab (Relaxationszeit). Das oben gezeigte rheologische Modell wird nun also durch Konstanten G und τ anstatt G und η charakterisiert. Der komplexe Modul kann ebenfalls in dieser Form geschrieben werden:
( )
( )
2
2ˆ
1 1
iGi iG G G
G i i
τω τωηω τωηω τω τω
+= = =
+ + + (7.64)
geschrieben werden. Real- und Imaginärteil des Moduls sind daher
( )( ) ( )
2
2 2 und
1 1G G G G
ωτ ωτωτ ωτ
′ ′′= =+ +
(7.65)
Die Spannungsrelaxation für das früher diskutierte Gummimodell wird offenbar durch die Gleichung
( )/0 1 2
tG G e τσ ε −= + (7.66)
gegeben. Dividiert durch 0ε ergibt sich die normierte Spannung:
( )/1 2
0
tG G e τσε
−= + , die man oft als zeitlich abhängigen Modul
interpretiert. Dieser „Modul“ relaxiert vom Wert 0 1 2G G G= +
für 0t = zum Wert 1G G∞ = für t = ∞ . Dieser Verlauf ist sche-
matisch im nachfolgenden Bild gezeigt (in Wirklichkeit unter-scheiden sich 0G und G∞ um 3-4 Größenordnungen).
7.7. Einfluss der Temperatur
7.7.1. Masterkurven Die endliche Zeit der Spannungsrelaxation ist physikalisch durch kinetische Prozesse der „Auseinan-derwicklung“ von Polymermolekülen bedingt. Dies sind thermisch aktivierte Prozesse. Sie hängen daher stark von der Temperatur ab. Im einfachsten Modell kann man sich vorstellen, dass die Abhän-gigkeit der Relaxationszeit von Temperatur dem Arrhenius-Gesetz folgt: 0( ) exp( / )T U kTτ τ= , (7.67)
wobei U die Aktivierungsenergie ist. Da die Relaxationszeit im komplexen Modul nur in der Kombination
( )Tωτ erscheint, im zeitabhängigen Modul nur in der Kombination / ( )t Tτ , unterscheiden sich Frequenz- bzw. Zeitverläufe von Modu-
len im logarithmischen Maßstab nur durch eine Verschiebung der gesamten Kurve nach rechts oder links. Dies wird zur experimentellen Wiederherstellung der gesamten Re-laxationskurve aufgrund von Messungen in einem begrenzten Zeit-intervall benutzt. Betrachten wir Spannungsrelaxation bei einem Zugversuch: Die Probe wird schnell um 1%ε = deformiert und anschließend die Spannung als Funktion der Zeit gemessen. Experimentell gibt es nur begrenzte Mög-lichkeiten, die Zeit bei solchen Experimenten aufzulösen. Wir werden als Beispiel Spannungsrelaxation im Zeitfenster 3 bis 600 s nach der plötzlichen Deformation untersuchen: kürzere Zeiten sind schwierig zu realisieren, während größere Zeiten zu praktisch nicht akzeptablen Laufzeiten des Experiments führen.
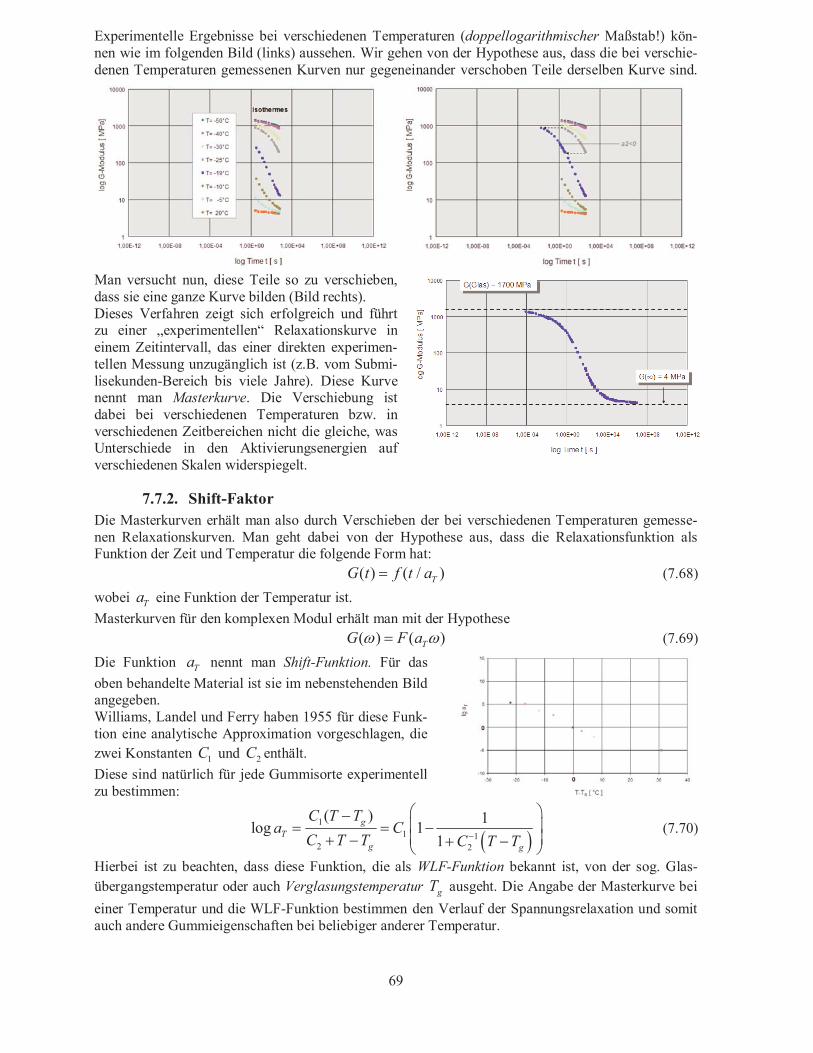
69
Experimentelle Ergebnisse bei verschiedenen Temperaturen (doppellogarithmischer Maßstab!) kön-nen wie im folgenden Bild (links) aussehen. Wir gehen von der Hypothese aus, dass die bei verschie-denen Temperaturen gemessenen Kurven nur gegeneinander verschoben Teile derselben Kurve sind.
Man versucht nun, diese Teile so zu verschieben, dass sie eine ganze Kurve bilden (Bild rechts). Dieses Verfahren zeigt sich erfolgreich und führt zu einer „experimentellen“ Relaxationskurve in einem Zeitintervall, das einer direkten experimen-tellen Messung unzugänglich ist (z.B. vom Submi-lisekunden-Bereich bis viele Jahre). Diese Kurve nennt man Masterkurve. Die Verschiebung ist dabei bei verschiedenen Temperaturen bzw. in verschiedenen Zeitbereichen nicht die gleiche, was Unterschiede in den Aktivierungsenergien auf verschiedenen Skalen widerspiegelt.
7.7.2. Shift-Faktor Die Masterkurven erhält man also durch Verschieben der bei verschiedenen Temperaturen gemesse-nen Relaxationskurven. Man geht dabei von der Hypothese aus, dass die Relaxationsfunktion als Funktion der Zeit und Temperatur die folgende Form hat: ( ) ( / )TG t f t a= (7.68)
wobei Ta eine Funktion der Temperatur ist.
Masterkurven für den komplexen Modul erhält man mit der Hypothese ( ) ( )TG F aω ω= (7.69)
Die Funktion Ta nennt man Shift-Funktion. Für das
oben behandelte Material ist sie im nebenstehenden Bild angegeben. Williams, Landel und Ferry haben 1955 für diese Funk-tion eine analytische Approximation vorgeschlagen, die zwei Konstanten 1C und 2C enthält.
Diese sind natürlich für jede Gummisorte experimentell zu bestimmen:
( )1
1 12 2
( ) 1log 1
1g
Tg g
C T Ta C
C T T C T T−
⎛ ⎞−⎜ ⎟= = −⎜ ⎟+ − + −⎝ ⎠
(7.70)
Hierbei ist zu beachten, dass diese Funktion, die als WLF-Funktion bekannt ist, von der sog. Glas-übergangstemperatur oder auch Verglasungstemperatur gT ausgeht. Die Angabe der Masterkurve bei
einer Temperatur und die WLF-Funktion bestimmen den Verlauf der Spannungsrelaxation und somit auch andere Gummieigenschaften bei beliebiger anderer Temperatur.
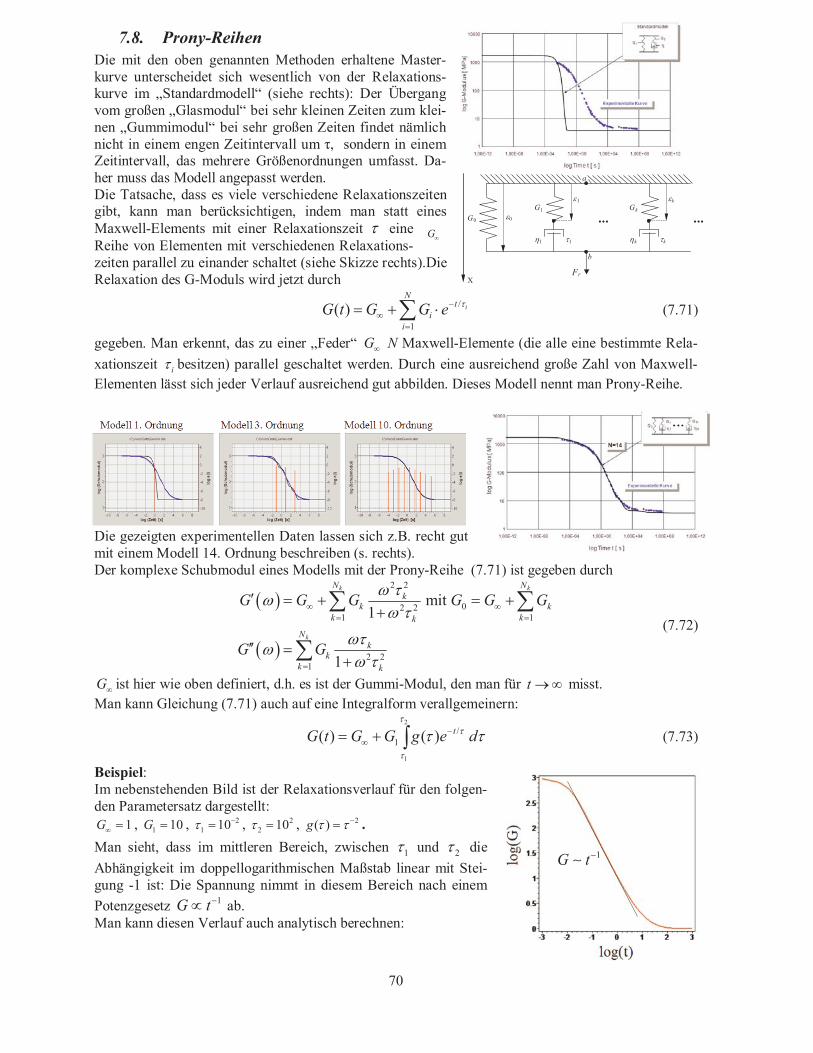
70
7.8. Prony-Reihen Die mit den oben genannten Methoden erhaltene Master-kurve unterscheidet sich wesentlich von der Relaxations-kurve im „Standardmodell“ (siehe rechts): Der Übergang vom großen „Glasmodul“ bei sehr kleinen Zeiten zum klei-nen „Gummimodul“ bei sehr großen Zeiten findet nämlich nicht in einem engen Zeitintervall um τ, sondern in einem Zeitintervall, das mehrere Größenordnungen umfasst. Da-her muss das Modell angepasst werden. Die Tatsache, dass es viele verschiedene Relaxationszeiten gibt, kann man berücksichtigen, indem man statt eines Maxwell-Elements mit einer Relaxationszeit τ eine Reihe von Elementen mit verschiedenen Relaxations-zeiten parallel zu einander schaltet (siehe Skizze rechts).Die Relaxation des G-Moduls wird jetzt durch
/
1
( ) i
Nt
ii
G t G G e τ−∞
=
= + ⋅∑ (7.71)
gegeben. Man erkennt, das zu einer „Feder“ G∞ N Maxwell-Elemente (die alle eine bestimmte Rela-
xationszeit iτ besitzen) parallel geschaltet werden. Durch eine ausreichend große Zahl von Maxwell-Elementen lässt sich jeder Verlauf ausreichend gut abbilden. Dieses Modell nennt man Prony-Reihe.
Die gezeigten experimentellen Daten lassen sich z.B. recht gut mit einem Modell 14. Ordnung beschreiben (s. rechts). Der komplexe Schubmodul eines Modells mit der Prony-Reihe (7.71) ist gegeben durch
( )
( )
2 2
02 21 1
2 21
mit 1
1
k k
k
N Nk
k kk kk
Nk
kk k
G G G G G G
G G
ω τωω τ
ωτωω τ
∞ ∞= =
=
′ = + = ++
′′ =+
∑ ∑
∑ (7.72)
G∞ ist hier wie oben definiert, d.h. es ist der Gummi-Modul, den man für t →∞ misst. Man kann Gleichung (7.71) auch auf eine Integralform verallgemeinern:
2
1
/1( ) ( ) tG t G G g e dτ
τ
τ
τ τ−∞= + ∫ (7.73)
Beispiel: Im nebenstehenden Bild ist der Relaxationsverlauf für den folgen-den Parametersatz dargestellt:
1G∞ = , 1 10G = , 21 10τ −= , 2
2 10τ = , 2( )g τ τ −= .
Man sieht, dass im mittleren Bereich, zwischen 1τ und 2τ die
Abhängigkeit im doppellogarithmischen Maßstab linear mit Stei-gung -1 ist: Die Spannung nimmt in diesem Bereich nach einem
Potenzgesetz 1G t−∝ ab. Man kann diesen Verlauf auch analytisch berechnen:
Fr
η1
G0
b
a
ε1 G1
ηk
εk Gk
...
τ1 τk
ε0
X
...
1G t−∼
G∞
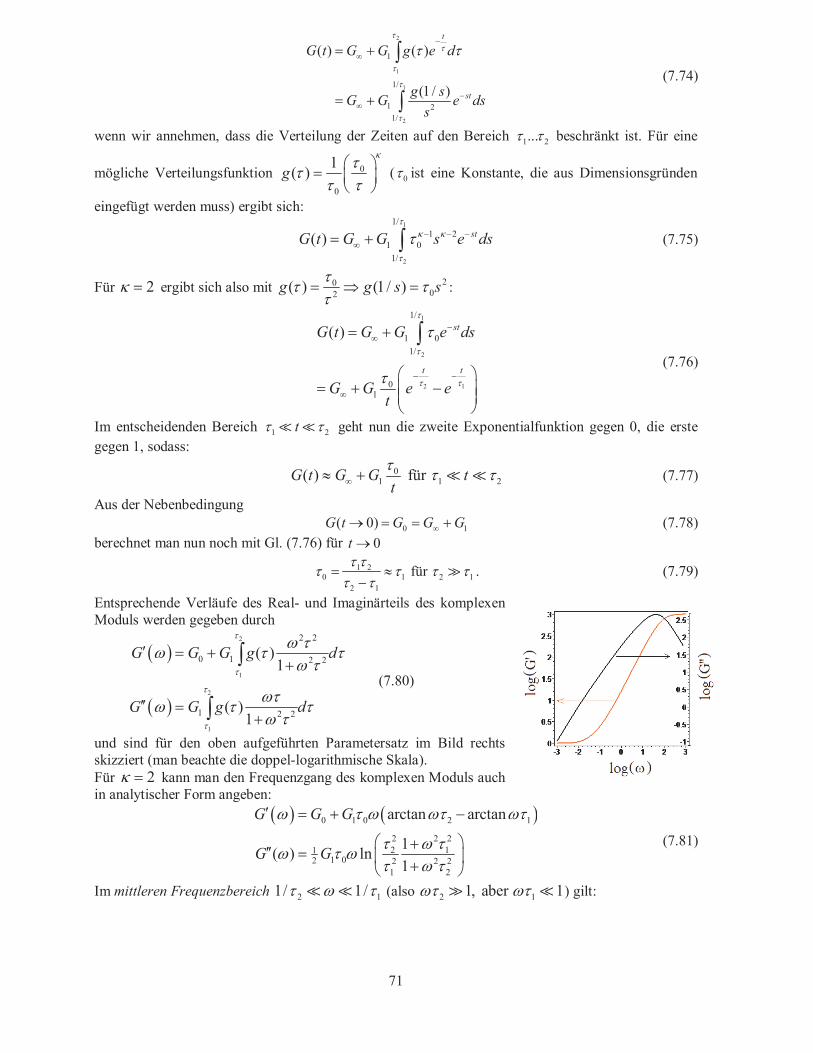
71
2
1
1
2
1
1/
1 21/
( ) ( )
(1 / )
t
st
G t G G g e d
g sG G e ds
s
ττ
τ
τ
τ
τ τ−
∞
−∞
= +
= +
∫
∫ (7.74)
wenn wir annehmen, dass die Verteilung der Zeiten auf den Bereich 1 2...τ τ beschränkt ist. Für eine
mögliche Verteilungsfunktion 0
0
1( )g
κτττ τ
⎛ ⎞= ⎜ ⎟⎝ ⎠
( 0τ ist eine Konstante, die aus Dimensionsgründen
eingefügt werden muss) ergibt sich:
1
2
1/1 2
1 0
1/
( ) stG t G G s e dsτ
κ κ
τ
τ − − −∞= + ∫ (7.75)
Für 2κ = ergibt sich also mit 2002
( ) (1/ )g g s sττ ττ
= ⇒ = :
1
2
2 1
1/
1 0
1/
01
( ) st
t t
G t G G e ds
G G e et
τ
τ
τ τ
τ
τ
−∞
− −
∞
= +
⎛ ⎞= + −⎜ ⎟⎜ ⎟
⎝ ⎠
∫ (7.76)
Im entscheidenden Bereich 1 2tτ τ geht nun die zweite Exponentialfunktion gegen 0, die erste gegen 1, sodass:
01 1 2( ) für G t G G t
t
τ τ τ∞≈ + (7.77)
Aus der Nebenbedingung 0 1( 0)G t G G G∞→ = = + (7.78) berechnet man nun noch mit Gl. (7.76) für 0t →
1 20 1 2 1
2 1
für τ τ
τ τ τ ττ τ
= ≈−
. (7.79)
Entsprechende Verläufe des Real- und Imaginärteils des komplexen Moduls werden gegeben durch
( )
( )
2
1
2
1
2 2
0 1 2 2
1 2 2
( )1
( )1
G G G g d
G G g d
τ
τ
τ
τ
ω τω τ τω τ
ωτω τ τω τ
′ = ++
′′ =+
∫
∫ (7.80)
und sind für den oben aufgeführten Parametersatz im Bild rechts skizziert (man beachte die doppel-logarithmische Skala). Für 2κ = kann man den Frequenzgang des komplexen Moduls auch in analytischer Form angeben:
( ) ( )0 1 0 2 1
2 2 22 11
1 02 2 2 21 2
arctan arctan
1( ) ln
1
G G G
G G
ω τ ω ωτ ωτ
τ ω τω τ ωτ ω τ
′ = + −
⎛ ⎞+′′ = ⎜ ⎟+⎝ ⎠
(7.81)
Im mittleren Frequenzbereich 2 11/ 1/τ ω τ (also 2 11, aber 1ωτ ωτ ) gilt:

72
( )
( )1 0
1 0 1
2( ) ln 1/
G G G
G G
πω τ ω
ω τ ω ωτ
∞′ = +
′′ = (7.82)
7.9. Zusammenhang zwischen Spannungsrelaxation und komplexem Modul Für ein einzelnes Maxwell-Element ist der komplexe Schubmodul gleich
1c
iG iG G
G i i
ηω ωτηω ωτ
= =+ +
(7.83)
Die Spannungsrelaxation erfolgt nach dem Gesetz /0( ) / tG t Ge τσ ε −= = mit / Gτ η= .
Es ist leicht zu sehen, dass aufgrund der Fouriertransformation
( 1/ )
0 0
1 1 1
2 2 (1 / ) 2 1
t i ti t e
e e dti i
ω τωτ τ
π π τ ω π ωτ
∞∞ − +− − −= =
+ +∫ (7.84)
der komplexe Schubmodul als Integral
0
( ) i tcG i G t e dtωω
∞−= ∫ (7.85)
berechnet werden kann. Offenbar gilt das auch für eine beliebige Zahl von parallel geschalteten Max-well-Elementen. Somit kann der komplexe Modul aus Experimenten zur Spannungsrelaxation ermit-telt werden.
7.10. Gedächtnisfunktion
7.10.1. Zeitabhängiger Modul Wir rufen uns noch einmal kurz der zeitabhängigen Modul ins Ge-dächtnis: Wird ein Gummiblock zum Zeitpunkt t t′= schnell um 0ε
deformiert, so relaxiert die Spannung anschließend nach dem Gesetz: 0( ) ( )t G t tσ ε ′= − (7.86)
Die Funktion ( )G t t′− ist also der zeitabhängige Modul.
7.10.2. Komplexer Modul Für den komplexen Modul galten folgende Zusammenhänge bei fester Frequenz:
0 0
ˆ ˆˆ ( ) ( ) ( ) bei periodischer Anregung, daher:
ˆ ˆˆ ( ) ( ) ( )i t i t
t G t
e G eω ω
σ ω ε
σ ω ω ε ω
=
= (7.87)
Die komplexen Amplituden hängen i.a. von der Frequenz ab.
7.10.3. Gedächtnisfunktion Wenn wir nun die Gleichung (7.87) benutzen, um Anregungen bei verschiedenen Frequenzen zu über-lagern, so müssen wir über alle Frequenzen integrieren und erhalten die Fouriertransformationen der Spannung, der Deformation und des komplexen Moduls (die wir hier K(t) nennen wollen):
ˆ( ) ( )
ˆ( ) ( )
ˆ( ) : ( )
i t
i t
i t
t e d
t e d
K t G e d
ω
ω
ω
σ σ ω ω
ε ε ω ω
ω ω
∞
−∞
∞
−∞
∞
−∞
=
=
=
∫
∫
∫
(7.88)

73
Das Materialgesetz für periodische Anregungen lässt sich nun ebenfalls fouriertransformieren:
ˆ ˆˆ ( ) ( ) ( )
1( ) ( ) ( )
2
G
t K t d
σ ω ω ε ω
σ τ ε τ τπ
∞
−∞
=
⇓
= −∫
(7.89)
Hier wurde der Faltungssatz benutzt3. Die Funktion ( )K t τ− wird auch Gedächtnisfunktion genannt, denn im Integral von Gl.(7.89) wird
über alle Deformationen ( )ε τ zu früheren Zeiten integriert, die Funktion K gewichtet dabei, wie stark
die „Vergangenheit“ der Deformation in die Berechnung der Spannung eingehen muss. Ist ( )K t τ− also ungleich null für tτ < , so spielen frühere Deformationen eine Rolle, man sagt, das Material habe ein „Gedächtnis“. Offensichtlich ist diese Beschreibung im Zeitbereich absolut äquivalent zur Bere-rechnung der Spannungen in Frequenzraum mit komplexen, frequenzabhängigen Moduln. Da die Zukunft für die Berechnung natürlich nicht herangezogen werden darf, muss die Funktion K die wich-tige Kausalitätsbedingung erfüllen:
( ) 0 für , bzw.
( ) 0 für 0
K t t
K z z
τ τ− = >= <
(7.90)
K muss also für negative Argumente verschwinden, und Gl.(7.89) wird zu:
1
( ) ( ) ( )2
t
t K t dσ τ ε τ τπ−∞
= −∫ (7.91)
7.10.4. Zusammenhänge der Materialgrößen Wir haben nun mehrere Möglichkeiten, das viskoelastische Verhalten von Gummi zu beschreiben:
1. Mit einem komplexen G-Modul ˆ ( )G ω
2. Mit einer Gedächtnisfunktion ˆ( ) ( ) i tK t G e dωω ω∞
−∞
= ∫
3. Mit einem zeitabhängigen Modul ( )zaG t Der zeitabhängige Modul hängt mit den ersten beiden Größen natürlich auch zusammen. Für die Mes-sung des zeitabhängigen Moduls wird ja eine Deformation der Form
0 für 0( )
0 für 0
tt
t
εε
≥⎧ ⎫= ⎨ ⎬<⎩ ⎭
(7.92)
aufgebracht. Unter Benutzung der Gl.(7.86) und Gl.(7.91) erhält man:
0 0 0
( ) 1 1( ) ( ) ( )
2 2
t t
za
tG t K t d K t dt
στ τ
ε π π= = − =∫ ∫ (7.93)
Man könnte also darauf schließen, dass
1
( ) ( )2 zaK t G tπ
= , (7.94)
sodass für die Fouriertransformationen gelten würde4
ˆ ˆ( ) 2 ( )zaG i Gω π ω ω= , (7.95) wie wir oben bereits gesehen haben (vgl. Gl.(7.85)).
3 Der Faktor 1 / 2π kommt bei der Transformation vom Zeit- in den Frequenzbereich ins Spiel, da der Ansatz
der Darstellung von zeitlichen Funktionen über komplexe harmonische Funktionen i te ω keine Konstante enthielt. 4 Zeitableitung im Zeitbereich entspricht Multiplikation mit iω im Frequenzbereich.

74
7.10.5. Die Diracsche Deltafunktion Allerdings kann es sein, dass ( )K t keine normale Funktion ist, sondern eine Distribution. Das sieht man, wenn man reine Elastizität ohne viskose Dämpfung betrachtet. Hier sollte ja gelten: ( ) ( ) mit .t G t G constσ ε∞ ∞= = (7.96) Mit der Gedächtnisfunktion folgt daher:
1( ) ( ) ( ) ( )
2
Sei ( ) 2 ( )
( ) ( ) ( )
t K t d G t
K t G f t
f t d t
σ τ ε τ τ επτ π τ
τ ε τ τ ε
∞
∞−∞
∞
∞
−∞
= − =
− = −
⇒ − =
∫
∫
(7.97)
Wir suchen also eine „Funktion“, die aus der Funktion ( )ε τ den Funktionswert zum Zeitpunkt t he-rausprojiziert. Das ist die sogenannte Delta-Funktion, die eigentlich eine Distribution ist. Diese wird immer über ein Integral definiert. Die Definition der Deltafunktion ist:
( ) ( ) ( )t d tδ τ ε τ τ ε∞
−∞
− =∫ , (7.98)
und sie ist damit genau die Funktion, die wir gesucht haben. Man kann sie sich als schmale Rechteck-funktion vorstellen, deren Breite gegen null und deren Höhe unendlich wird, denn die Deltafunktion muss folgende Eigenschaft haben:
( ) 1dδ τ τ∞
−∞
=∫ , (7.99)
was sofort aus der Definition (7.98) folgt, wenn ( ) 1ε τ = und t=0 gesetzt wird. Somit können wir aus der Gedächtnisfunktion ( )K t einen nicht-zeitabhängigen Modul herausziehen
( ) 2 ( ) ( )K t G t K tπ δ∞= + (7.100) und erhalten für die Spannung:
1( ) ( ) ( )
2
1( ) ( ) ( )
2
t K t d
G t K t d
σ τ ε τ τπ
ε τ ε τ τπ
∞
−∞
∞
∞−∞
= −
= + −
∫
∫ (7.101)
Jetzt ergibt sich also für einen zeitabhängigen Modul ( ) ( )G t G R t∞= + mit einer für t →∞ übrigblei-
benden Spannung 0( )t Gσ ε∞→∞ = :
0
0
0
1( ) ( )
2
1( ) ( )
2
( ) 2 ( )
t
t
t G K d
R t K d
K t R t
σ τ τ επ
τ τπ
π
∞
⎛ ⎞= +⎜ ⎟⎝ ⎠
⇒ =
⇒ =
∫
∫ (7.102)
Man erkennt wieder: Aus der Messung des Relaxationsverhaltens (zeitabhängiger Modul) kann die Gedächtnisfunktion hergeleitet werden, und daraus wiederum der komplexe Modul über Fouriertrans-formation. Oder umgekehrt. Nebenbemerkung: Die Eigenschaften der Deltafunktion braucht man, um die oben benutzten Sätze der Fouriertransformation zu beweisen (z.B. das Faltungsintegral). Es gilt (anschaulich, ohne Beweis):
1 ( ) 1 ( )
2
1 1 1( ) ( )
2 2 2
i t i t
i t i t
e d e dt
t e dt t e d
ω ω
ω ω
δ ω ω δ ωπ
δ δ ωπ π π
∞ ∞−
−∞ −∞
∞ ∞−
−∞ −∞
= ⇔ =
= ⇔ =
∫ ∫
∫ ∫ (7.103)

75
7.10.6. Wichtige Eigenschaften des komplexen Moduls Zum Abschluss seien noch einmal die wichtigsten Eigenschaften aufgeführt, die ein komplexer Modul in der Realität (und damit auch im Modell) aufweisen muss. Dies sind grundlegende Eigenschaften:
1. Die Fouriertransformierte des komplexen Moduls ist die reellwertige Gedächtnisfunktion. Da-
her folgt für den komplexen Modul ˆ ( ) ( ) ( )G G iGω ω ω′ ′′= + :
*ˆ ˆ( ) ( ) bzw.
( ) ( ) und
( ) ( )
G G
G G
G G
ω ωω ωω ω
− =′ ′− =′′ ′′− = −
(7.104)
2. Die Gedächtnisfunktion ( )K t muss für negative Argumente verschwinden, da sonst das Kau-salitätsprinzip (Reihenfolge von Ursache und Wirkung) verletzt ist. Die Folgen daraus sind etwas komplizierter zu berechnen (die Berechnung findet sich in den meisten Büchern zur Funktionentheorie), das Ergebnis lautet: Real- und Imaginärteil des komplexen Moduls sind nicht unabhängig voneinander, sondern müssen den sogenannten Kramers-Kronig-Relationen genügen:
( )
2
0 2 20
2 20
2 1 ( )( )
2 ( )( )
G zG G dz
z z
G zG dz
z
ωωπ ω
ωωπ ω
∞
∞
′′′ = +
−
′′′ = −
−
∫
∫ (7.105)
Das H im Integralzeichen steht für das Cauchy-Hauptwertintegral (d.h. man nähert sich Pol-stellen symmetrisch an, damit sich Unendlichkeitsstellen gegenseitig aufheben können). Übung: Zeigen Sie die Gültigkeit dieser Formeln z.B. für das Maxwell-Element (für das G0=0 ist, und achten Sie auf die Polstellen bei der Integration im Sinne des Hauptwertintegrals. Ein Tip: Partialbruchzerlegung hilft.)
7.11. Gummireibung Die Reibung von Gummi auf rauhen Oberflächen unterscheidet sich von der Festkörperreibung. Die wesentlichen Reibeigenschaften von Gummi kommen nämlich durch die innere Reibung im Gummi zustande, also durch Dissipation aufgrund des Verlustmoduls G′′ . Um das zu demonstrieren, schauen wir uns ein einfaches Modell an. Zunächst definieren wir den Reibkoeffizienten über die Verlustleistung. Der Reibkoeffizient kann ja im Allgemeinen von der Geschwindigkeit abhängen, die Reibkraft daher auch. Für die Verlustleitung bei einem Reibversuch mit konstanter Geschwindigkeit erhalten wir also: ( )RP F v v= ⋅ (7.106) Für den Reibkoeffizienten können wir daher schreiben:
R
N N
F P
F F vμ = = (7.107)
Die Dichte der mittleren Verlustleistung bei periodischer Anregung haben wir oben bereits berechnet:
20
1( )
2P G ω ωε′′= (7.108)
Nun stellen wir uns vor, dass ein Gummiblock über eine Oberfläche mit harmonischer Höhenvariation
0
2( ) cos
xh x h
πλ
⎛ ⎞= ⎜ ⎟⎝ ⎠
(7.109)
mit einer Wellenlänge λ gezogen wird und mit einer mittleren Spannung 0σ gedrückt wird. Wir be-trachten einen Ausschnitt der Fläche 2A λ≈ , (7.110) sodass wir für die Größenordnung der Normalkraft 2
0NF σ λ≈ (7.111) erhalten. Für die Gesamtleistung brauchen wir noch das Volumen, in dem die Dissipation stattfindet. Auch für dieses nehmen wir die Größenordnung
H
H
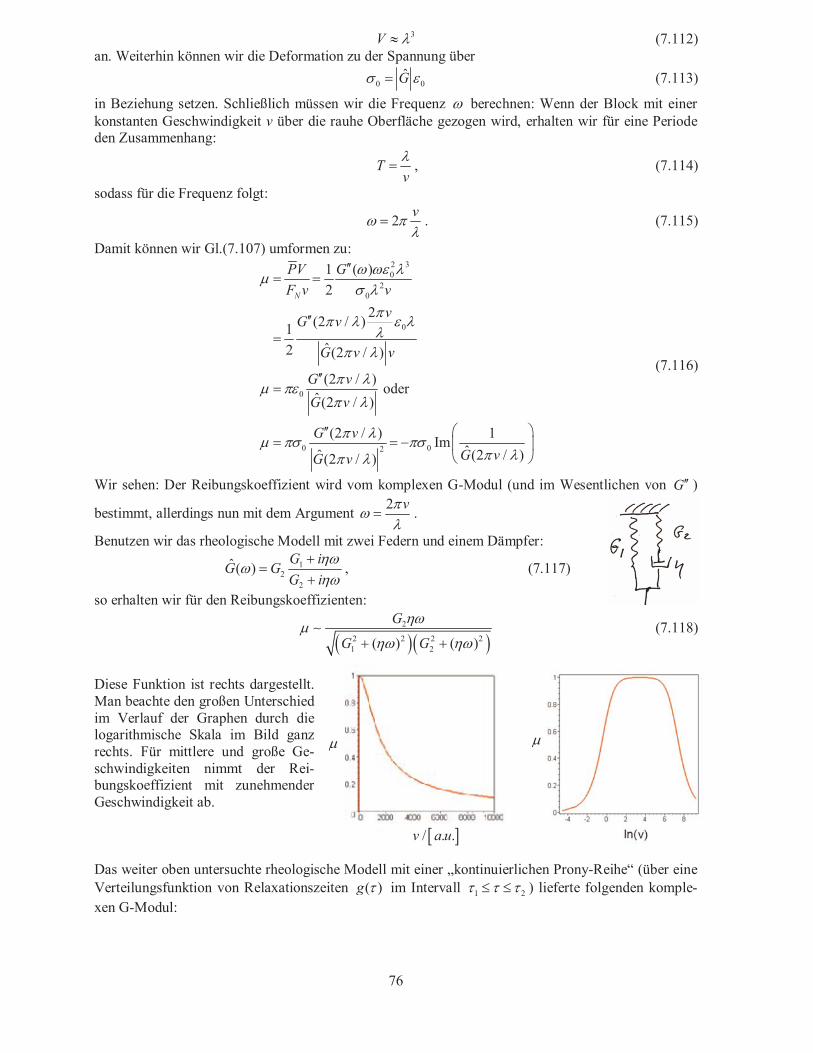
76
3V λ≈ (7.112) an. Weiterhin können wir die Deformation zu der Spannung über
0 0Gσ ε= (7.113)
in Beziehung setzen. Schließlich müssen wir die Frequenz ω berechnen: Wenn der Block mit einer konstanten Geschwindigkeit v über die rauhe Oberfläche gezogen wird, erhalten wir für eine Periode den Zusammenhang:
Tv
λ= , (7.114)
sodass für die Frequenz folgt:
2vω πλ
= . (7.115)
Damit können wir Gl.(7.107) umformen zu:
2 30
20
0
0
0 02
( )1
2
( / )1ˆ2 ( / )
( / ) oder
ˆ ( / )
( / ) 1Im
ˆˆ ( / )( / )
N
GPV
F v v
vG v
G v v
G v
G v
G v
G vG v
ω ωε λμσ λ
ππ λ ε λλ
π λ
π λμ πε
π λ
π λμ πσ πσπ λπ λ
′′= =
2′′ 2=
2
′′ 2=
2
⎛ ⎞′′ 2= = − ⎜ ⎟
2⎝ ⎠2
(7.116)
Wir sehen: Der Reibungskoeffizient wird vom komplexen G-Modul (und im Wesentlichen von G′′ )
bestimmt, allerdings nun mit dem Argument 2 vπωλ
= .
Benutzen wir das rheologische Modell mit zwei Federn und einem Dämpfer:
12
2
ˆ ( )G i
G GG i
ηωω
ηω+
=+
, (7.117)
so erhalten wir für den Reibungskoeffizienten:
( )( )
2
2 2 2 21 2( ) ( )
G
G G
ηωμηω ηω+ +
∼ (7.118)
Diese Funktion ist rechts dargestellt. Man beachte den großen Unterschied im Verlauf der Graphen durch die logarithmische Skala im Bild ganz rechts. Für mittlere und große Ge-schwindigkeiten nimmt der Rei-bungskoeffizient mit zunehmender Geschwindigkeit ab. Das weiter oben untersuchte rheologische Modell mit einer „kontinuierlichen Prony-Reihe“ (über eine Verteilungsfunktion von Relaxationszeiten ( )g τ im Intervall 1 2τ τ τ≤ ≤ ) lieferte folgenden komple-xen G-Modul:
μ μ
[ ]/ . . v a u
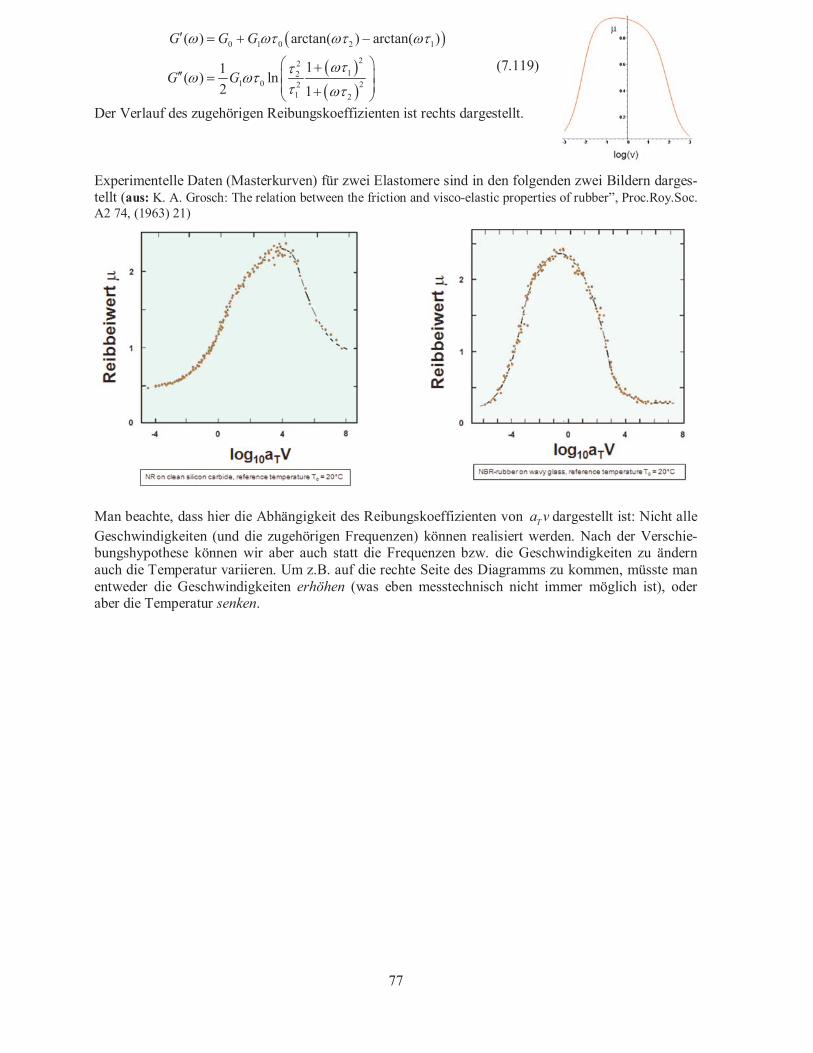
77
( )( )( )
0 1 0 2 1
2212
1 0 221 2
( ) arctan( ) arctan( )
11( ) ln
2 1
G G G
G G
ω ωτ ωτ ωτ
ωττω ωττ ωτ
′ = + −
⎛ ⎞+′′ ⎜ ⎟=
⎜ ⎟+⎝ ⎠
(7.119)
Der Verlauf des zugehörigen Reibungskoeffizienten ist rechts dargestellt. Experimentelle Daten (Masterkurven) für zwei Elastomere sind in den folgenden zwei Bildern darges-tellt (aus: K. A. Grosch: The relation between the friction and visco-elastic properties of rubber”, Proc.Roy.Soc. A2 74, (1963) 21)
Man beachte, dass hier die Abhängigkeit des Reibungskoeffizienten von Ta v dargestellt ist: Nicht alle Geschwindigkeiten (und die zugehörigen Frequenzen) können realisiert werden. Nach der Verschie-bungshypothese können wir aber auch statt die Frequenzen bzw. die Geschwindigkeiten zu ändern auch die Temperatur variieren. Um z.B. auf die rechte Seite des Diagramms zu kommen, müsste man entweder die Geschwindigkeiten erhöhen (was eben messtechnisch nicht immer möglich ist), oder aber die Temperatur senken.


















