






Sprachen
Seiten
Rechtliche


© Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Innovationen, Industrie 4.0 und Zukunft der Arbeitsforschung
–
Neuroergonomische Gestaltung der Mensch-Roboter-Kooperation in der Montage
Prof. Dr.-Ing. Christopher M. Schlick

2 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Ausgewählte Forschungsschwerpunkte der
Arbeitswissenschaft
Arbeit in
der Industrie 4.0
Assistenzsysteme zur
ergonomischen Führung und
Überwachung von teilautonomen
Systemen
Head-Mounted Displays
und Wearable IT
Sensumotorische
Unterstützungssysteme
Mensch-Roboter-
Kooperation
Quellen: Fraunhofer IPA, Universität Bremen IAT, Audi AG, referenceforbusiness.com
Regulationskomplexe Teamarbeit
in Fertigung und Montage

3 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Klassischer Motoman
Knickarmroboter
Klassischer ABB
Knickarmroboter
Klassischer KuKa
Knickarmroboter
ABB: Frida DLR/KuKa: Justin Motoman: SDA10D
Einleitung
Anthropomorphismus in der Industrierobotik
4 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
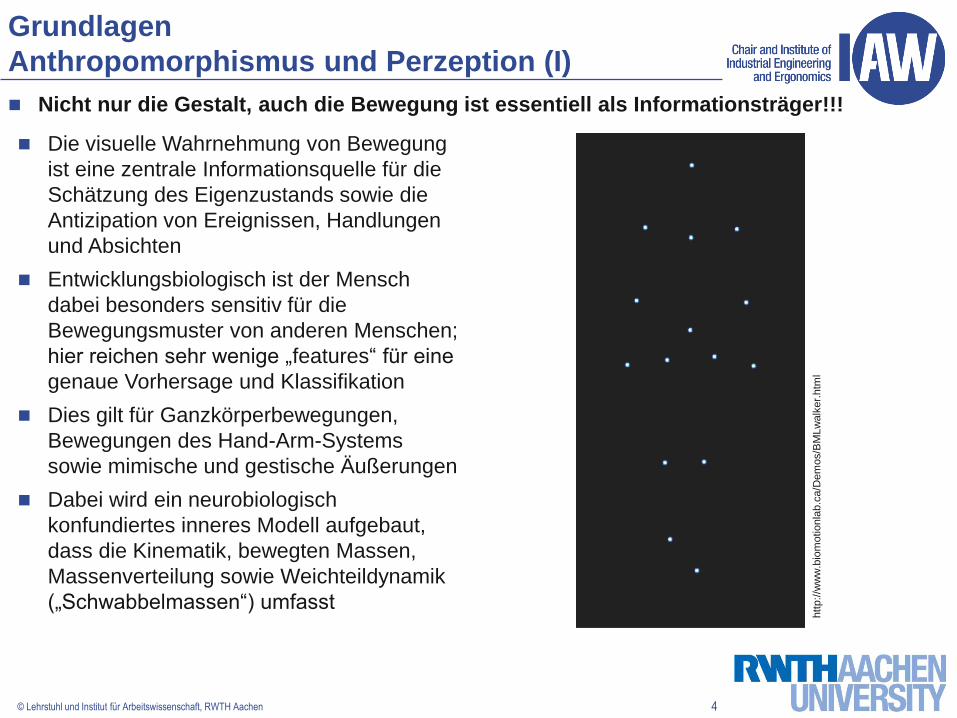
Nicht nur die Gestalt, auch die Bewegung ist essentiell als Informationsträger!!!
htt
p:/
/ww
w.b
iom
otio
nla
b.c
a/D
em
os/B
MLw
alk
er.
htm
l
Grundlagen
Anthropomorphismus und Perzeption (I)
Die visuelle Wahrnehmung von Bewegung
ist eine zentrale Informationsquelle für die
Schätzung des Eigenzustands sowie die
Antizipation von Ereignissen, Handlungen
und Absichten
Entwicklungsbiologisch ist der Mensch
dabei besonders sensitiv für die
Bewegungsmuster von anderen Menschen;
hier reichen sehr wenige „features“ für eine
genaue Vorhersage und Klassifikation
Dies gilt für Ganzkörperbewegungen,
Bewegungen des Hand-Arm-Systems
sowie mimische und gestische Äußerungen
Dabei wird ein neurobiologisch
konfundiertes inneres Modell aufgebaut,
dass die Kinematik, bewegten Massen,
Massenverteilung sowie Weichteildynamik
(„Schwabbelmassen“) umfasst
5 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
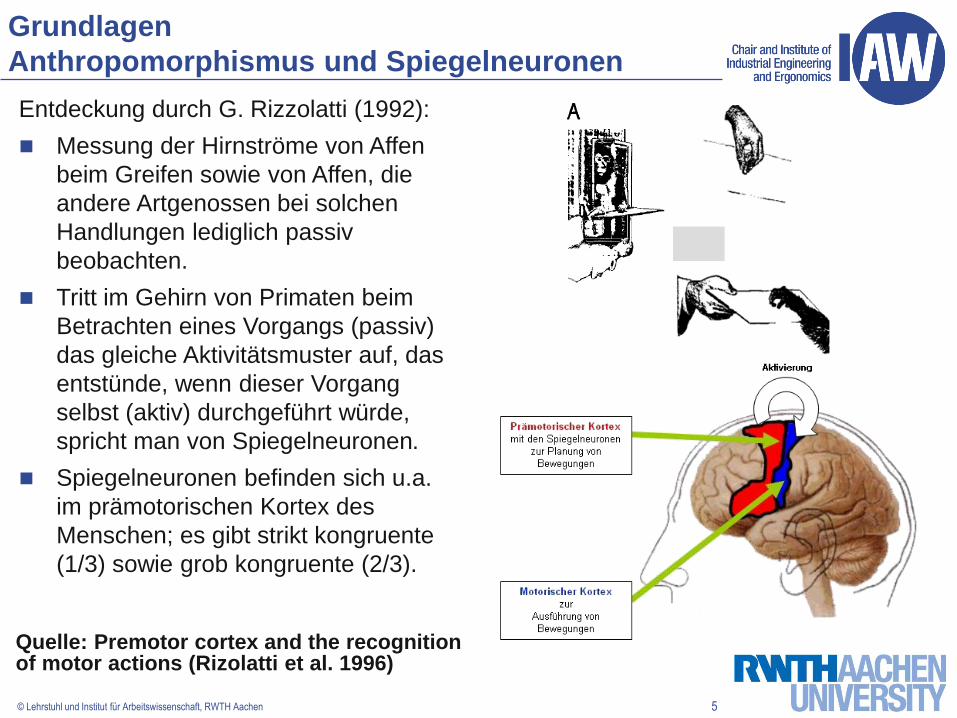
Entdeckung durch G. Rizzolatti (1992):
Messung der Hirnströme von Affen
beim Greifen sowie von Affen, die
andere Artgenossen bei solchen
Handlungen lediglich passiv
beobachten.
Tritt im Gehirn von Primaten beim
Betrachten eines Vorgangs (passiv)
das gleiche Aktivitätsmuster auf, das
entstünde, wenn dieser Vorgang
selbst (aktiv) durchgeführt würde,
spricht man von Spiegelneuronen.
Spiegelneuronen befinden sich u.a.
im prämotorischen Kortex des
Menschen; es gibt strikt kongruente
(1/3) sowie grob kongruente (2/3).
Quelle: Premotor cortex and the recognition of motor actions (Rizolatti et al. 1996)
Grundlagen
Anthropomorphismus und Spiegelneuronen
6 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
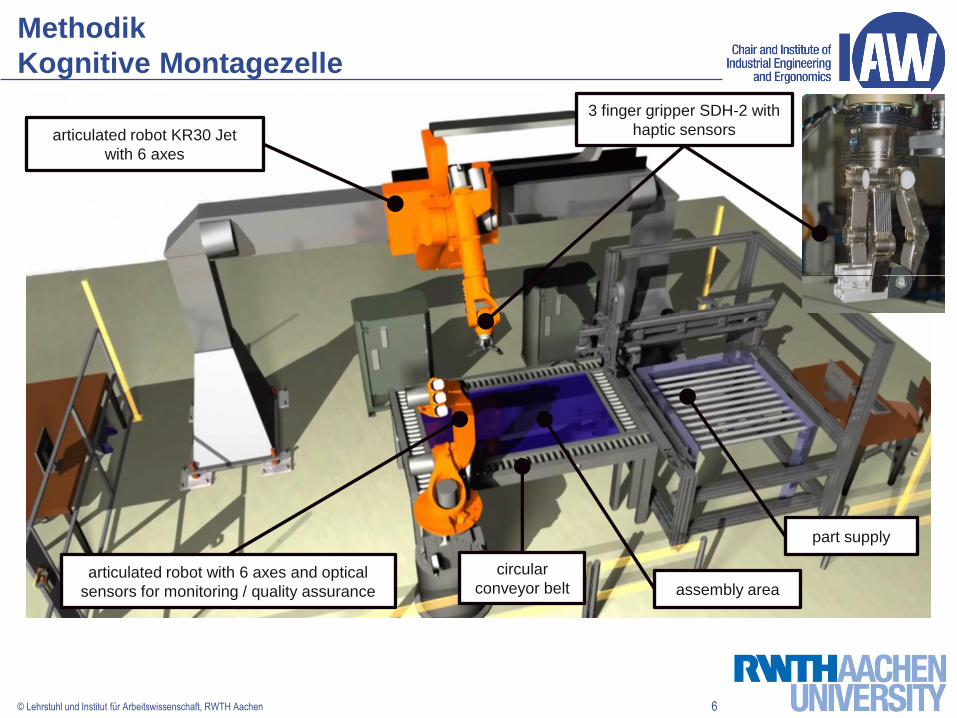
articulated robot KR30 Jet
with 6 axes
3 finger gripper SDH-2 with
haptic sensors
assembly area
circular
conveyor belt articulated robot with 6 axes and optical
sensors for monitoring / quality assurance
part supply
Methodik
Kognitive Montagezelle
7 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
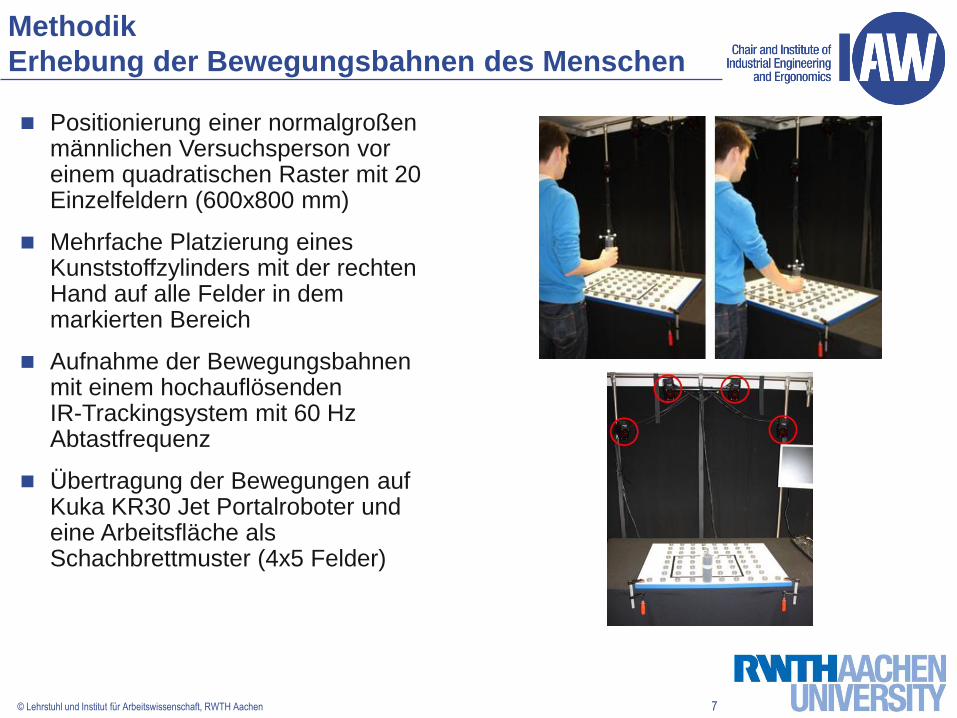
Positionierung einer normalgroßen männlichen Versuchsperson vor einem quadratischen Raster mit 20 Einzelfeldern (600x800 mm)
Mehrfache Platzierung eines Kunststoffzylinders mit der rechten Hand auf alle Felder in dem markierten Bereich
Aufnahme der Bewegungsbahnen mit einem hochauflösenden IR-Trackingsystem mit 60 Hz Abtastfrequenz
Übertragung der Bewegungen auf Kuka KR30 Jet Portalroboter und eine Arbeitsfläche als Schachbrettmuster (4x5 Felder)
Methodik
Erhebung der Bewegungsbahnen des Menschen
8 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Bewegungsübertragung
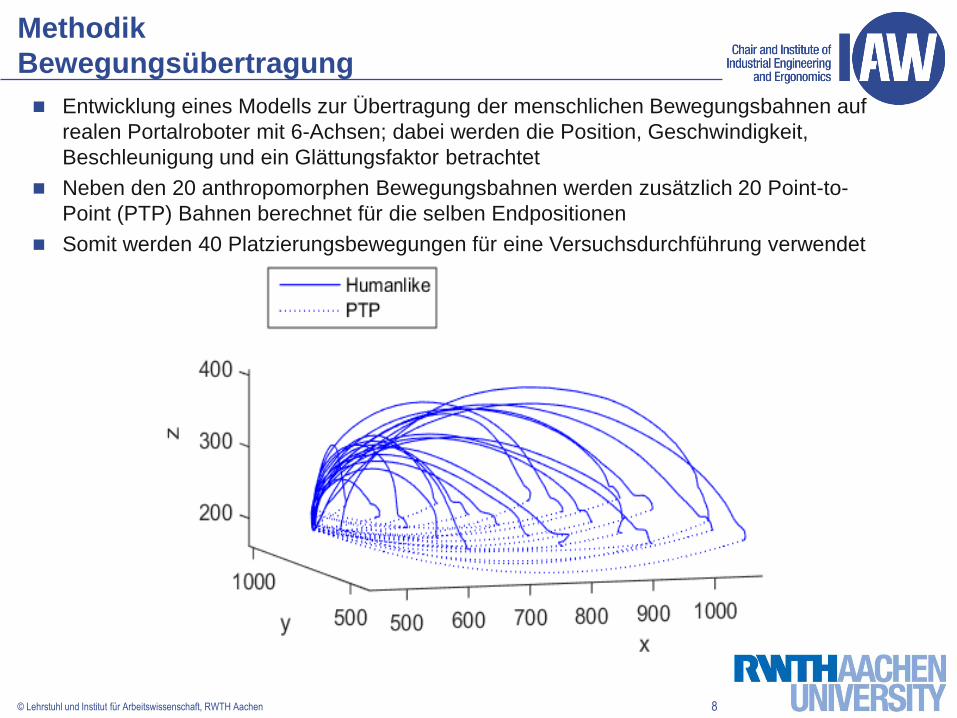
Entwicklung eines Modells zur Übertragung der menschlichen Bewegungsbahnen auf
realen Portalroboter mit 6-Achsen; dabei werden die Position, Geschwindigkeit,
Beschleunigung und ein Glättungsfaktor betrachtet
Neben den 20 anthropomorphen Bewegungsbahnen werden zusätzlich 20 Point-to-
Point (PTP) Bahnen berechnet für die selben Endpositionen
Somit werden 40 Platzierungsbewegungen für eine Versuchsdurchführung verwendet
9 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Versuchsaufbau und Apparatus
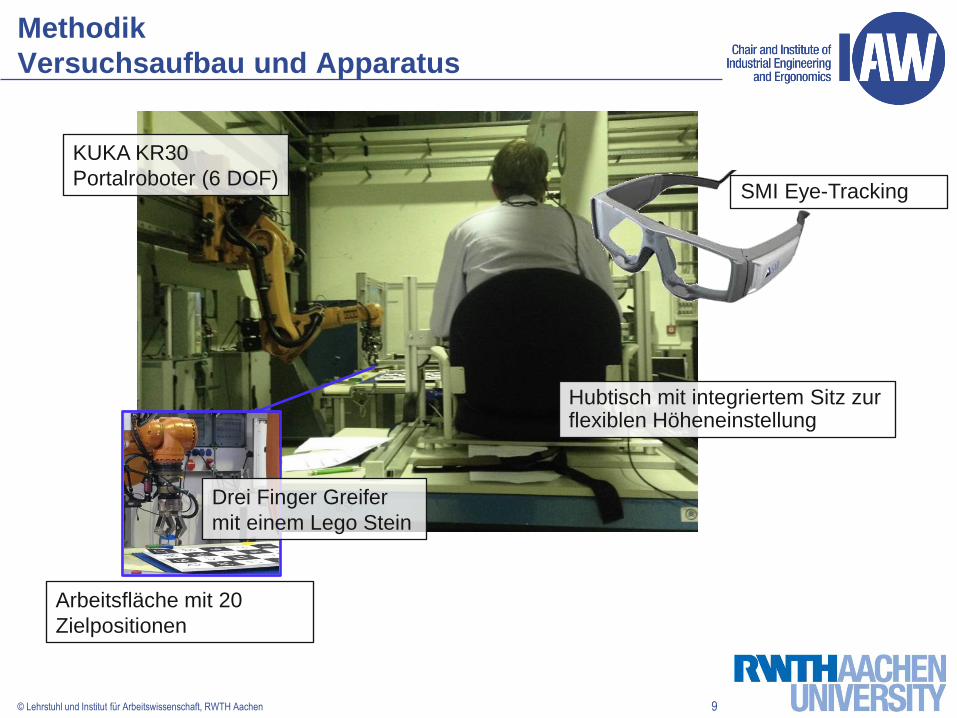
KUKA KR30
Portalroboter (6 DOF)
Drei Finger Greifer
mit einem Lego Stein
Hubtisch mit integriertem Sitz zur flexiblen Höheneinstellung
SMI Eye-Tracking
Arbeitsfläche mit 20
Zielpositionen
10 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Aufgabe
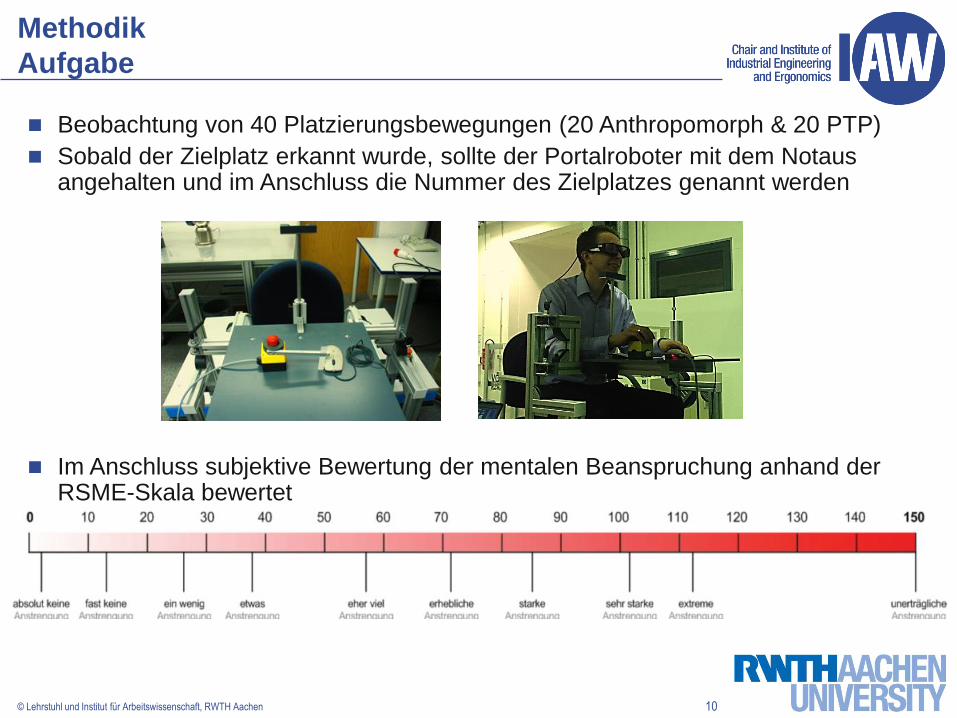
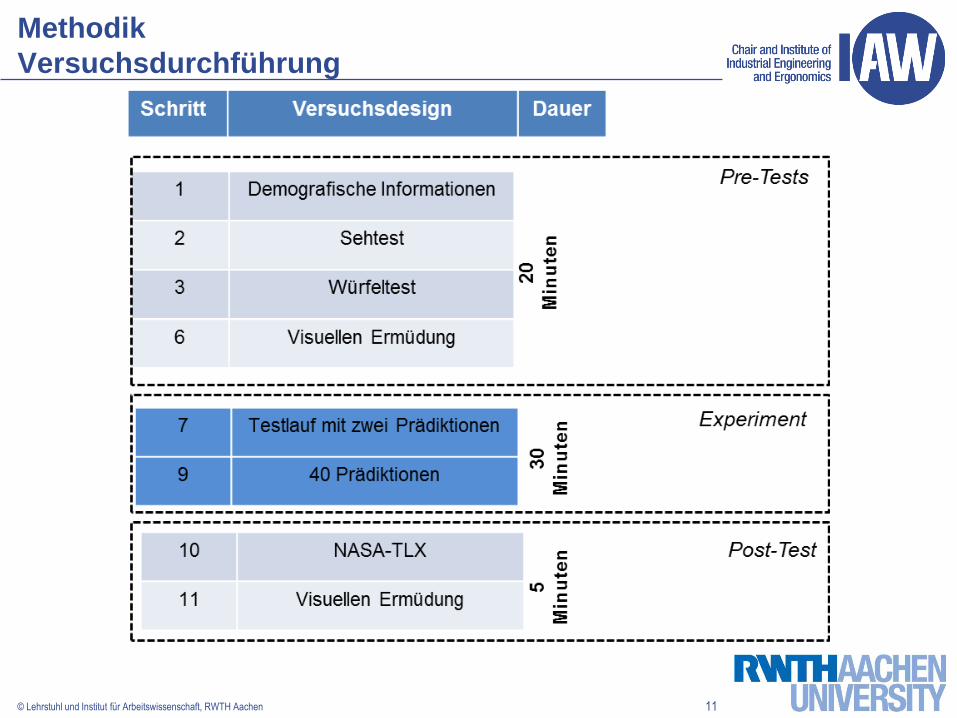
Beobachtung von 40 Platzierungsbewegungen (20 Anthropomorph & 20 PTP)
Sobald der Zielplatz erkannt wurde, sollte der Portalroboter mit dem Notaus angehalten und im Anschluss die Nummer des Zielplatzes genannt werden
Im Anschluss subjektive Bewertung der mentalen Beanspruchung anhand der RSME-Skala bewertet
11 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Versuchsdurchführung
12 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Hypothesen
Angenommen wurde, dass die Prädiktionszeit für die anthropomorphen Bewegungen trotz der einfachen Kinematik des Portalroboters kürzer ist als für PTP-Bewegungen:
H1: Prädiktionszeitanthropomorph < PrädiktionszeitPTP
Angenommen wurde, dass bei anthropomorphen Bewegungen weniger Prädiktionsfehler auftreten:
H2: Prädiktionsfehleranthropomorph < PrädiktionsfehlerPTP
Angenommen wurde, dass bei anthropomorphen Bewegungen eine geringere mentale Beanspruchung auftritt:
H3: Beanspruchunganthropomorph < BeanspruchungPTP
13 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Methodik
Stichprobe und experimentelle Variablen
Teilnehmer
20 männliche Probanden mit technischem Schwerpunkt
Zwischen 19 und 31 Jahren (MW: 25,90 Jahre, SD: 3,61)
90% haben Erfahrungen mit Simulationsumgebungen
65% haben Erfahrungen mit Industrierobotern
Unabhängige Variablen
Bewegungsart: 1) Anthropomorph, 2) PTP
Position für die Platzierung: Feld 1 bis Feld 20
Abhängige Variablen
Prädiktionszeit
Prädiktionsergebnis (korrekt, inkorrekt oder fehlend)
Mentale Beanspruchung (RSME)
14 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
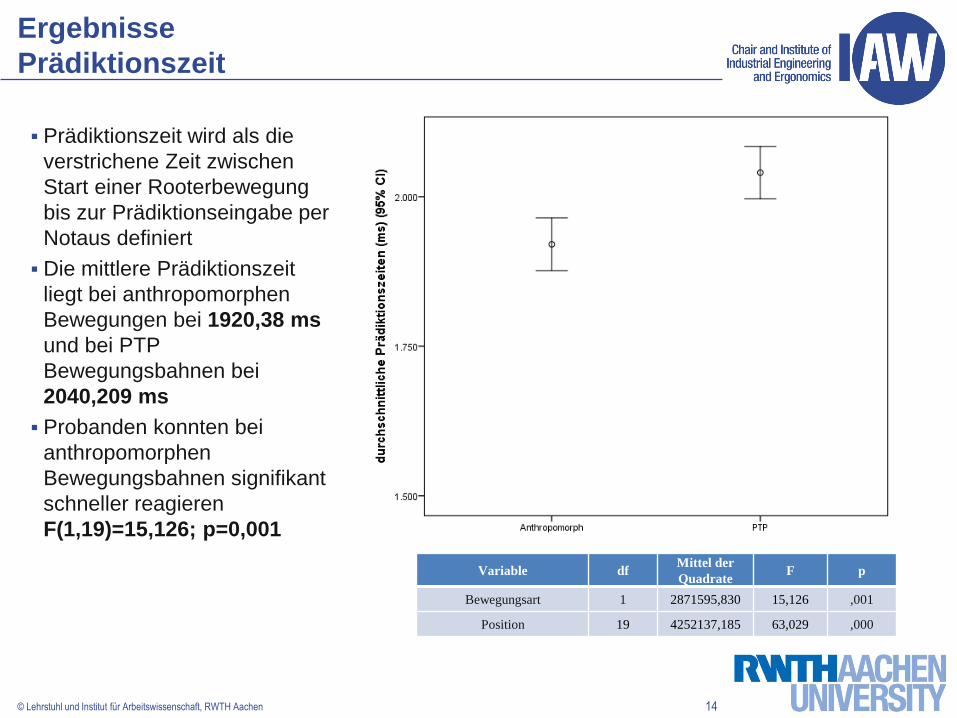
Ergebnisse
Prädiktionszeit
Variable df Mittel der
Quadrate F p
Bewegungsart 1 2871595,830 15,126 ,001
Position 19 4252137,185 63,029 ,000
Prädiktionszeit wird als die
verstrichene Zeit zwischen
Start einer Rooterbewegung
bis zur Prädiktionseingabe per
Notaus definiert
Die mittlere Prädiktionszeit
liegt bei anthropomorphen
Bewegungen bei 1920,38 ms
und bei PTP
Bewegungsbahnen bei
2040,209 ms
Probanden konnten bei
anthropomorphen
Bewegungsbahnen signifikant
schneller reagieren
F(1,19)=15,126; p=0,001
15 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Ergebnisse
Prädiktionsfehler
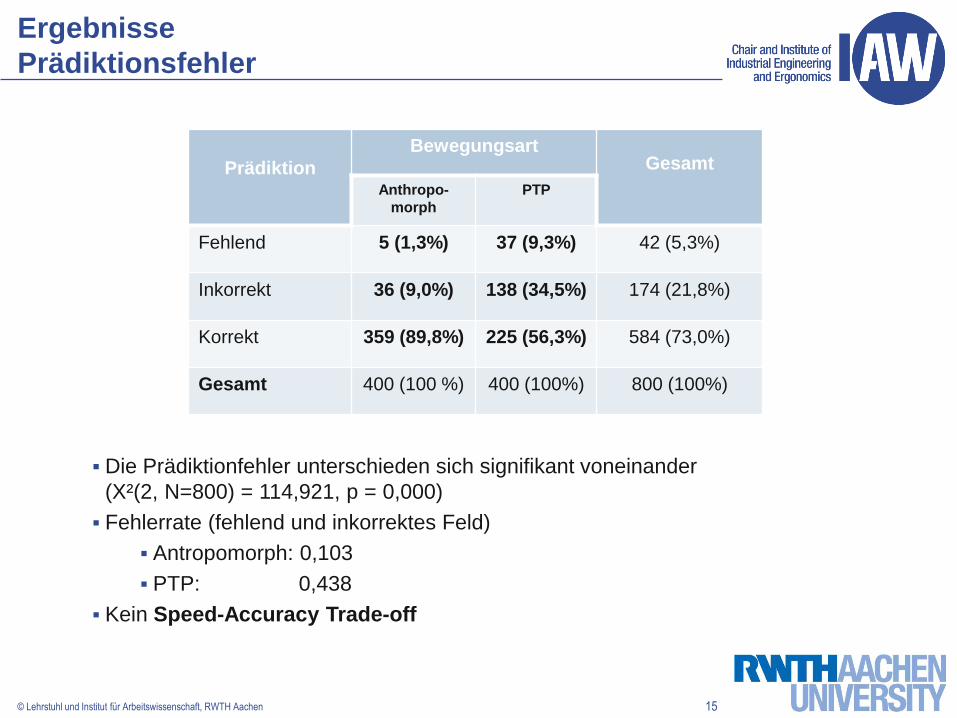
Die Prädiktionfehler unterschieden sich signifikant voneinander
(X²(2, N=800) = 114,921, p = 0,000)
Fehlerrate (fehlend und inkorrektes Feld)
Antropomorph: 0,103
PTP: 0,438
Kein Speed-Accuracy Trade-off
Prädiktion
Bewegungsart
Gesamt
Anthropo-
morph
PTP
Fehlend 5 (1,3%) 37 (9,3%) 42 (5,3%)
Inkorrekt 36 (9,0%) 138 (34,5%) 174 (21,8%)
Korrekt 359 (89,8%) 225 (56,3%) 584 (73,0%)
Gesamt 400 (100 %) 400 (100%) 800 (100%)
16 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Ergebnisse
Mentale Beanspruchung
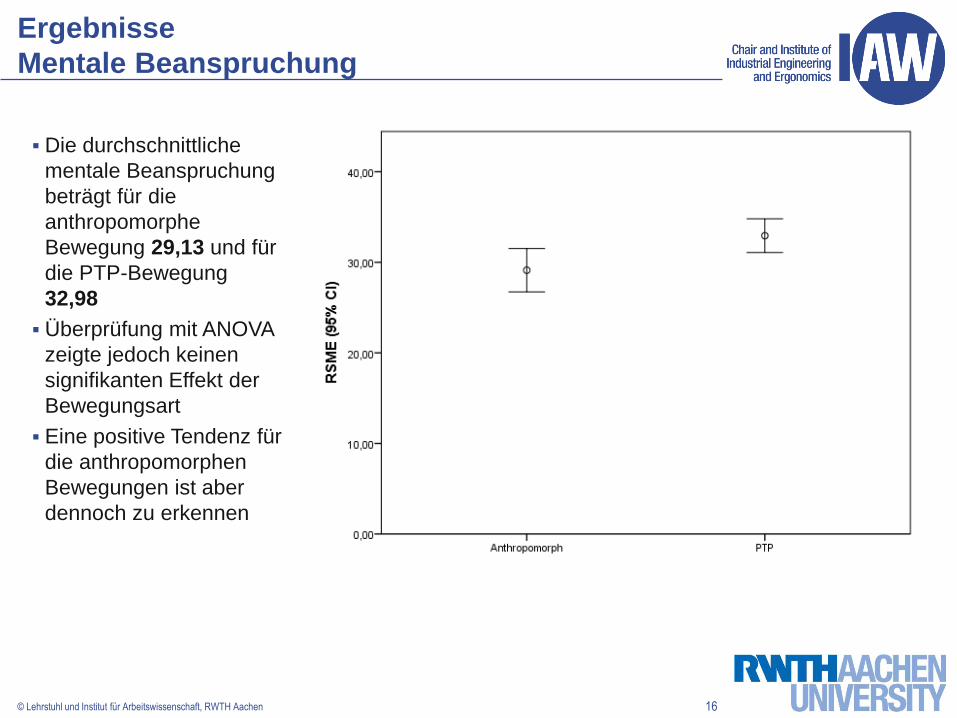
Die durchschnittliche
mentale Beanspruchung
beträgt für die
anthropomorphe
Bewegung 29,13 und für
die PTP-Bewegung
32,98
Überprüfung mit ANOVA
zeigte jedoch keinen
signifikanten Effekt der
Bewegungsart
Eine positive Tendenz für
die anthropomorphen
Bewegungen ist aber
dennoch zu erkennen
17 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Ausblick
Anthrobot
menschliche Attributetechnische Attribute
• Bewegung mittels klassischer „Point to Point“-Methode
• Bewegung mittels klassischer „Point to Point“-Methode mit
berechneter Ellbogenposition
• Messtechnisch erfasste Handbewegung des Menschen und
berechnete Ellbogenposition
• Messtechnisch erfasste Handbewegung und Ellbogenposition
men
schlic
hte
chn
isch
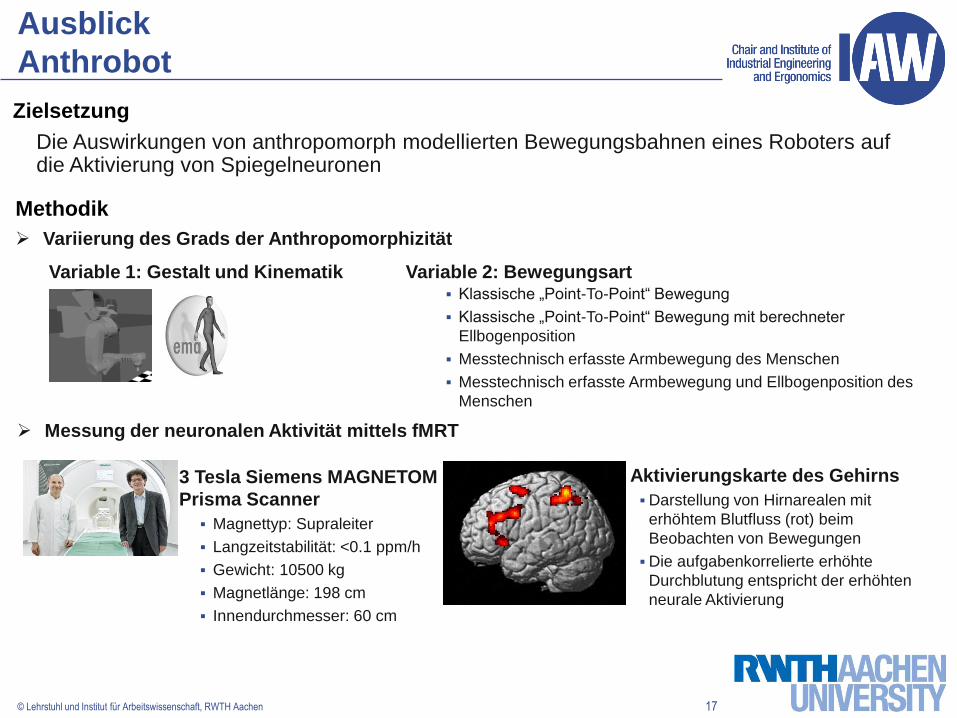
Variable 1: Gestalt und Kinematik Variable 2: Bewegungsart Klassische „Point-To-Point“ Bewegung
Klassische „Point-To-Point“ Bewegung mit berechneter
Ellbogenposition
Messtechnisch erfasste Armbewegung des Menschen
Messtechnisch erfasste Armbewegung und Ellbogenposition des
Menschen
Zielsetzung
Die Auswirkungen von anthropomorph modellierten Bewegungsbahnen eines Roboters auf die Aktivierung von Spiegelneuronen
Methodik
Variierung des Grads der Anthropomorphizität
Messung der neuronalen Aktivität mittels fMRT
3 Tesla Siemens MAGNETOM
Prisma Scanner
Magnettyp: Supraleiter
Langzeitstabilität: <0.1 ppm/h
Gewicht: 10500 kg
Magnetlänge: 198 cm
Innendurchmesser: 60 cm
Aktivierungskarte des Gehirns
Darstellung von Hirnarealen mit
erhöhtem Blutfluss (rot) beim
Beobachten von Bewegungen
Die aufgabenkorrelierte erhöhte
Durchblutung entspricht der erhöhten
neurale Aktivierung
18 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Zusammenfassung und Ausblick
Anthrobot – Ergebnisse der Pilotstudie
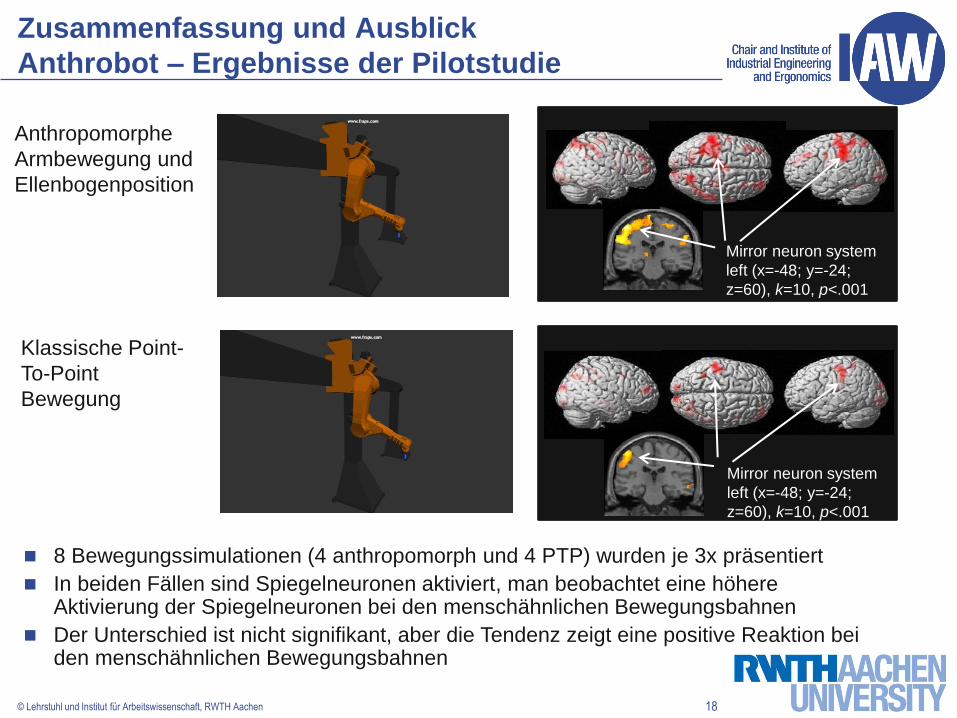
Anthropomorphe
Armbewegung und
Ellenbogenposition
Mirror neuron system
left (x=-48; y=-24;
z=60), k=10, p<.001
Klassische Point-
To-Point
Bewegung
Mirror neuron system
left (x=-48; y=-24;
z=60), k=10, p<.001
8 Bewegungssimulationen (4 anthropomorph und 4 PTP) wurden je 3x präsentiert
In beiden Fällen sind Spiegelneuronen aktiviert, man beobachtet eine höhere Aktivierung der Spiegelneuronen bei den menschähnlichen Bewegungsbahnen
Der Unterschied ist nicht signifikant, aber die Tendenz zeigt eine positive Reaktion bei den menschähnlichen Bewegungsbahnen

19 © Lehrstuhl und Institut für Arbeitswissenschaft, RWTH Aachen
Vielen Dank für Ihre Aufmerksamkeit!
Prof. Dr.-Ing. Christopher M. Schlick
Lehrstuhl und Institut für Arbeitswissenschaft der RWTH Aachen University
Telefon: +49 241 80 99440
Mail: [email protected]
Top Related