1 Wiederholung: Fadenpendel und mechanische … · 1 Wiederholung: Fadenpendel und mechanische...
26
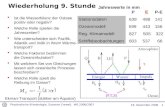
1 Wiederholung: Fadenpendel und mechanische Schwingungen 1.1 Ungedämpfter harmonischer Oszillator Ein Fadenpendel besteht aus einer Masse m, die am Abbildung 1.1 – Das (mathemati- sche) Fadenpendel. Ende eines Fadens der Länge aufgehängt ist. Der Fa- den wird dabei als masselos und die schwingende Masse als punktförmig betrachtet, so daß im wesentlichen den Schwerpunktsabstand angibt. Auf die Masse wirkt ihre Gewichtskraft im Schwerefeld: G = -mg e y (1.1) Diese kann in einen radialen Anteil G rad zerlegt wer- den, der in Richtung des Fadens zeigt, sowie in einen tangentialen Anteil G tan , der in Bahnrichtung zeigt. Die Kräfte sind in Abb. 1.1 veranschaulicht. Für ihre Beträge gilt: G rad = -mg cos θ G tan = -mg sin θ (1.2) Dabei beschreibt θ = θ(t) den zeitabhängigen Auslenkungswinkel des Pendelkörpers. Der zu- rückgelegte Weg des Pendels lässt sich im Bogenmaß berechnen durch s(t)= θ(t) (1.3) woraus unmittelbar die auf ihn wirkende Beschleunigung durch a tan (t)= d 2 s dt 2 = d 2 θ dt 2 (1.4) folgt. Für kleine Winkel lässt sich der Sinuswert des Winkels durch seinen Betrag im Bogenmaß nähern (lineare Näherung), dann gilt sin θ ≈ θ, so daß für die tangentiale Beschleunigung auf die Masse gilt: a tan (t) ≈-gθ(t) (1.5) Gleichsetzen von Gl. (1.4) und Gl. (1.5) liefert dann eine Bewegungsgleichung für die Pendel- masse, die sog. Differentialgleichung des harmonischen Oszillators : 1
Transcript of 1 Wiederholung: Fadenpendel und mechanische … · 1 Wiederholung: Fadenpendel und mechanische...
1 Wiederholung: Fadenpendel und mechanischeSchwingungen
1.1 Ungedämpfter harmonischer Oszillator
Ein Fadenpendel besteht aus einer Masse m, die am
Abbildung 1.1 – Das (mathemati-sche) Fadenpendel.
Ende eines Fadens der Länge ` aufgehängt ist. Der Fa-den wird dabei als masselos und die schwingende Masseals punktförmig betrachtet, so daß ` im wesentlichenden Schwerpunktsabstand angibt.
Auf die Masse wirkt ihre Gewichtskraft im Schwerefeld:
G = −mg ey (1.1)
Diese kann in einen radialen Anteil Grad zerlegt wer-den, der in Richtung des Fadens zeigt, sowie in einentangentialen Anteil Gtan, der in Bahnrichtung zeigt.Die Kräfte sind in Abb. 1.1 veranschaulicht. Für ihreBeträge gilt:
Grad = −mg cos θ Gtan = −mg sin θ (1.2)
Dabei beschreibt θ = θ(t) den zeitabhängigen Auslenkungswinkel des Pendelkörpers. Der zu-rückgelegte Weg des Pendels lässt sich im Bogenmaß berechnen durch
s(t) = ` θ(t) (1.3)
woraus unmittelbar die auf ihn wirkende Beschleunigung durch
atan(t) = d2s
dt2 = `d2θ
dt2 (1.4)
folgt. Für kleine Winkel lässt sich der Sinuswert des Winkels durch seinen Betrag im Bogenmaßnähern (lineare Näherung), dann gilt sin θ ≈ θ, so daß für die tangentiale Beschleunigung aufdie Masse gilt:
atan(t) ≈ −g θ(t) (1.5)
Gleichsetzen von Gl. (1.4) und Gl. (1.5) liefert dann eine Bewegungsgleichung für die Pendel-masse, die sog. Differentialgleichung des harmonischen Oszillators:
1

d2θ(t)dt2 = −g
`θ(t) (1.6)
Diese kann gelöst mit einem Lösungsansatz
θ(t) = θ0 cos (ωt+ φ0) (1.7)
mit der Amplitude θ0, der Kreisfrequenz ω und der Phasenverschiebung φ0 gelöst werden. Ein-setzen in Gl. (1.6) liefert dann:
− ω2θ0 sin (ωt+ φ0) = −g`θ0 sin (ωt+ φ0) ⇐⇒
(ω2 − g
`
)sin (ωt+ φ0) = 0 (1.8)
Da im allgemeinen der Sinus-Ausdruck nur für spezielle Werte von t den Wert 0 annimmt, mußder geklammerte Ausdruck identisch 0 sein, um die Differentialgleichung zu lösen. Man hat sodie Kreisfrequenz des Oszillators als
ω =√g
`=⇒ T = 2π
√`
g(1.9)
bestimmt. Die Amplitude und die Phasenverschiebung folgen, indem man die Anfangsbedingun-gen
θ(t = 0) = 10θ(t = 0) = 0
(1.10)
in den Ansatz Gl. (1.7) einsetzt und nachrechnet, als θ0 = 10 und φ0 = 0. Die Schwingung istdurch die blaue Kurve in Abb. 1.2 veranschaulicht.
1.2 Gedämpfter harmonischer Oszillator
Berücksichtigt man zusätzlich die Reibung, die auf die Masse wirkt, so muß auf der rechten Seitevon Gl. (1.6) noch ein Dämpfungsterm
aReib = −2γdθdt (1.11)
eingefügt werden. Dabei bezeichnet man γ als Reibungskoeffizienten. Man erhält dann die Dif-ferentialgleichung des gedämpften harmonischen Oszillators:
d2θ
dt2 + 2γdθdt + ω2
0θ = 0 (1.12)
Sie wird durch einen Ansatz
θ(t) = θ0 e−γt sin (ωgedt+ φ0) (1.13)
2
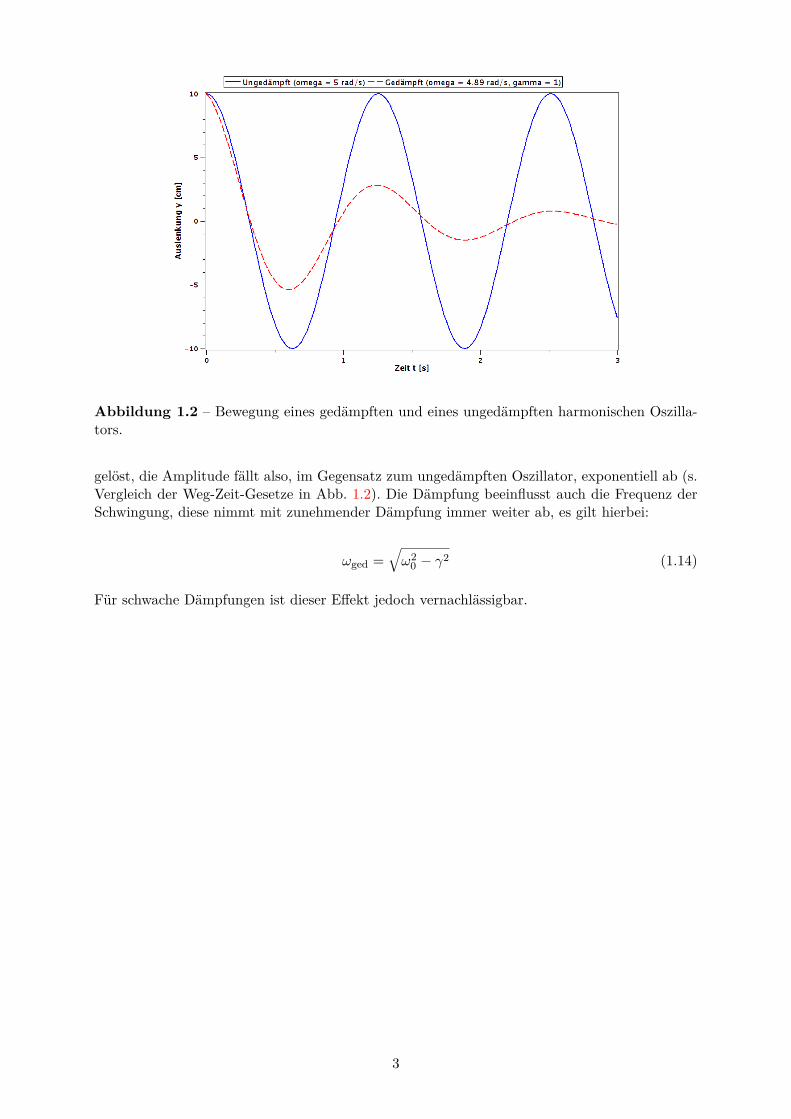
Abbildung 1.2 – Bewegung eines gedämpften und eines ungedämpften harmonischen Oszilla-tors.
gelöst, die Amplitude fällt also, im Gegensatz zum ungedämpften Oszillator, exponentiell ab (s.Vergleich der Weg-Zeit-Gesetze in Abb. 1.2). Die Dämpfung beeinflusst auch die Frequenz derSchwingung, diese nimmt mit zunehmender Dämpfung immer weiter ab, es gilt hierbei:
ωged =√ω2
0 − γ2 (1.14)
Für schwache Dämpfungen ist dieser Effekt jedoch vernachlässigbar.
3
2 Drehbewegungen
Man betrachtet einen Wägebalken, an dessen einer
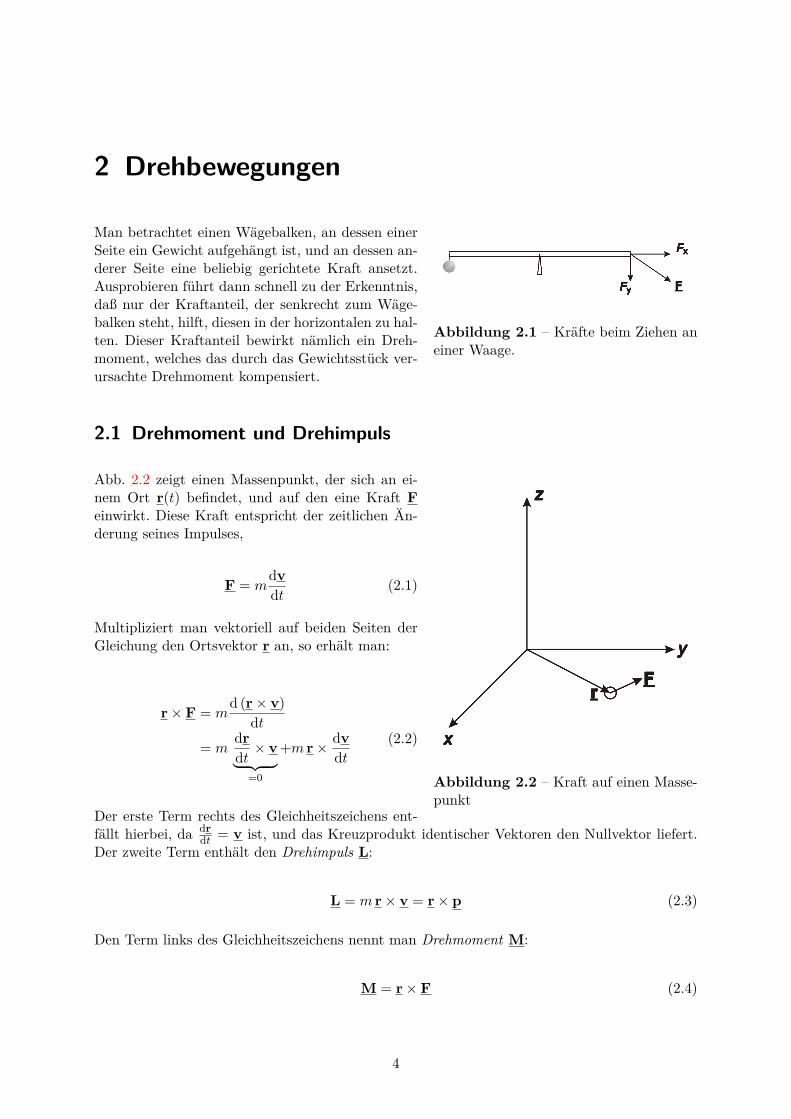
Abbildung 2.1 – Kräfte beim Ziehen aneiner Waage.
Seite ein Gewicht aufgehängt ist, und an dessen an-derer Seite eine beliebig gerichtete Kraft ansetzt.Ausprobieren führt dann schnell zu der Erkenntnis,daß nur der Kraftanteil, der senkrecht zum Wäge-balken steht, hilft, diesen in der horizontalen zu hal-ten. Dieser Kraftanteil bewirkt nämlich ein Dreh-moment, welches das durch das Gewichtsstück ver-ursachte Drehmoment kompensiert.
2.1 Drehmoment und Drehimpuls
Abb. 2.2 zeigt einen Massenpunkt, der sich an ei-
Abbildung 2.2 – Kraft auf einen Masse-punkt
nem Ort r(t) befindet, und auf den eine Kraft Feinwirkt. Diese Kraft entspricht der zeitlichen Än-derung seines Impulses,
F = mdvdt (2.1)
Multipliziert man vektoriell auf beiden Seiten derGleichung den Ortsvektor r an, so erhält man:
r× F = md (r× v)
dt
= mdrdt × v︸ ︷︷ ︸
=0
+m r× dvdt
(2.2)
Der erste Term rechts des Gleichheitszeichens ent-fällt hierbei, da dr
dt = v ist, und das Kreuzprodukt identischer Vektoren den Nullvektor liefert.Der zweite Term enthält den Drehimpuls L:
L = m r× v = r× p (2.3)
Den Term links des Gleichheitszeichens nennt man Drehmoment M:
M = r× F (2.4)
4

Aus dieser Betrachtung folgt auch, daß der Drehimpuls eine Erhaltungsgröße ist. Betrachtetman erneut Gl. (2.2) und setzt Gln. (2.3), (2.4) ein, so erhält man eine Gleichung analog zum2. Newton’schen Axiom:
M = dLdt (2.5)
2.2 Trägheitsmoment
Betrachtet man einen Massenpunkt auf einer kreisförmi-
Abbildung 2.3 – Veranschauli-chung der Kreisgeschwindigkeit.
gen Bahn mit Radius r (Ortsvektor r) und der Bahnge-schwindigkeit v, so kann ihm die Kreisgeschwindigkeit ωzugeordnet werden, die durch ω = r× v definiert ist.
Betrachtet man nun einen komplexen Körper, der aus vie-len Massepunkten mi aufgebaut ist, die durch Ortsvekto-ren ri adressiert werden und sich mit Bahngeschwindigkei-ten vi bewegen, so ergibt sich für den Drehimpuls diesesKörpers:
L =∑
imiri × v =
∑imiri × (ω × ri)
= ω
(∑imir
2i,⊥
)︸ ︷︷ ︸
=I
(2.6)
Den Ausdruck
I =∑
imir
2i,⊥ (2.7)
bezeichnet man als das Trägheitsmoment des Körpers. Mit ihm lassen sich analog zur Transla-tionsbewegung Rotationsenergie und Drehimpuls schreiben als:
L = I ω
Erot = 12mr
2⊥ω
2 = 12Iω
2 (2.8)
2.3 Das physikalische Pendel
Für einen ausgedehnten Körper kann man seinen Schwerpunkt (SP) definieren. Lagert man einenKörper außerhalb seines Schwerpunkts, wie in Abb. 2.4 gezeigt, so führt die im Schwerpunktangreifende Gewichtskraft G zu einem Drehmoment um den Drehpunkt (DP). Es gilt dann:
dLdt = d (IDP ω)
dt = IDPd2θ
dt2 (2.9)
5

In Analogie zum Fadenpendel kann man dann die Bewegungsgleichung für den Körper durcheine Drehmomentenbilanz aufstellen. Das Drehmoment ist dann gegeben durch:
Abbildung 2.4 – Dasphysikalische Pendel.
M = IDPd2θ(t)
dt2 = r×G = −mg ` sin θ(t) ≈ −mg ` θ(t) (2.10)
Dies ist wieder eine Differentialgleichung des harmonischen Oszilla-tors, man löst sie analog zu Gl. (1.6). Für die Kreisfrequenz findetsich diesmal
ω =√mg `
IDP(2.11)
Hierbei bezeichnet IDP das Trägheitsmoment bezüglich der Drehach-se. Dieses lässt sich aus dem Satz von Steiner berechnen:
IDP = ISP +Ma2 (2.12)
mit dem Trägheitsmoment bei Rotation um den Schwerpunkt, ISP, der Masse M des Körpersund dem Abstand a der Verbindungslinie von Dreh- und Schwerpunkt.
2.4 Der Mathieu-Oszillator
Ein interessanter Fall ist nun der, daß man die Gewichtskraft des Körpers “moduliert”. Diesentspricht dem Ingangsetzen einer Schaukel durch eine ständige Auf- und Abbewegung desSchaukelnden, also einer Modulation der Schwerpunktlage.
Mathematisch lässt sich dieses Verhalten durch Addition einer modulierten Beschleunigung zumSchwerefeld erfassen, man erhält die “effektive Schwerkraft”:
geff(t) = g + a sin Ωt (2.13)
Man erhält dann die Differentialgleichung:
I d2θ(t)dt2 + 2γ′dθ(t)dt +m`θ(t) (g + a sin Ωt) (2.14)
Division durch I liefert dann die Differentialgleichung des sog. Mathieu-Oszillators:
d2θ(t)dt2 + 2 γdθ(t)
dt + ω20
(1 + a
gsin Ωt
)= 0 (2.15)
mit der Anregungsfrequenz Ω. Diese Differentialgleichung ist analytisch nicht lösbar.
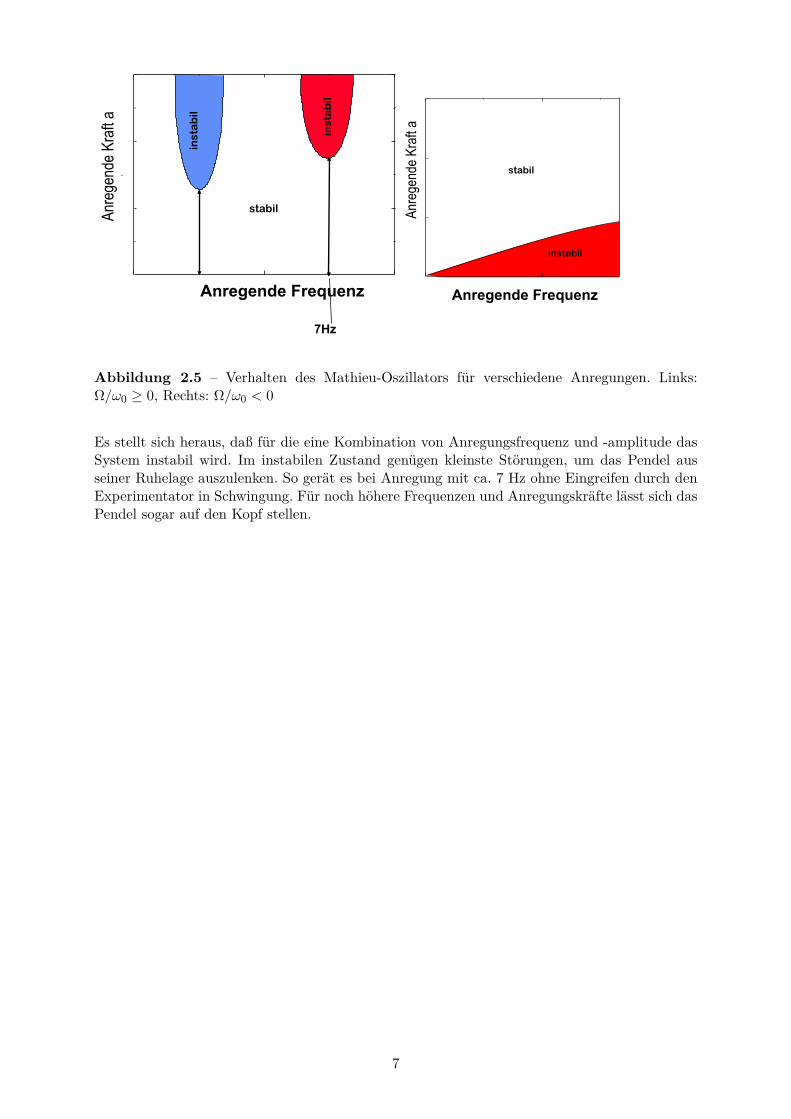
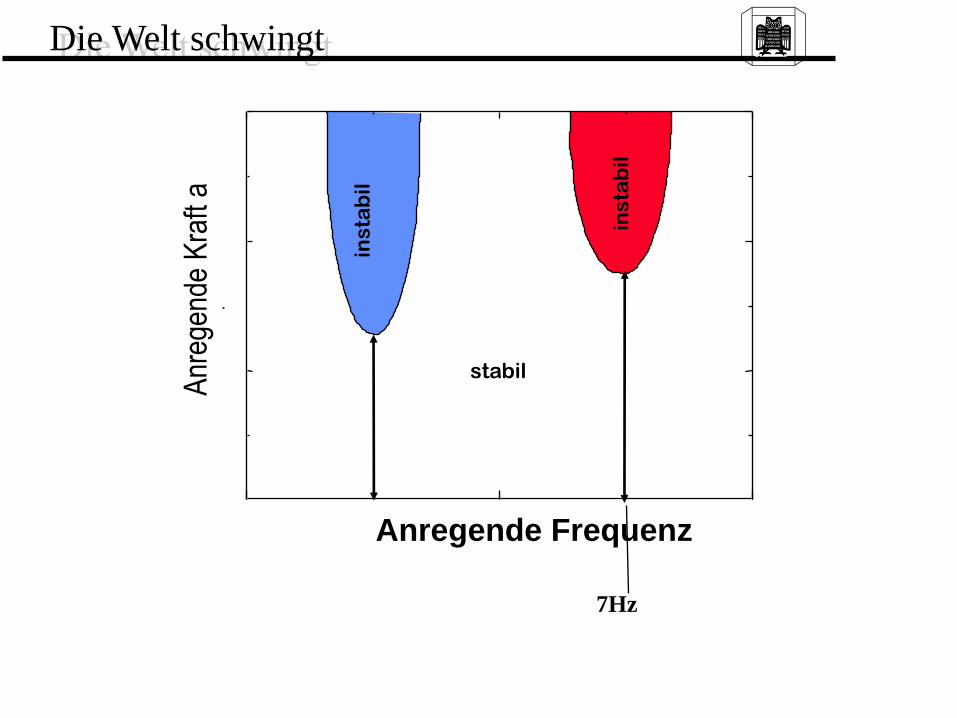
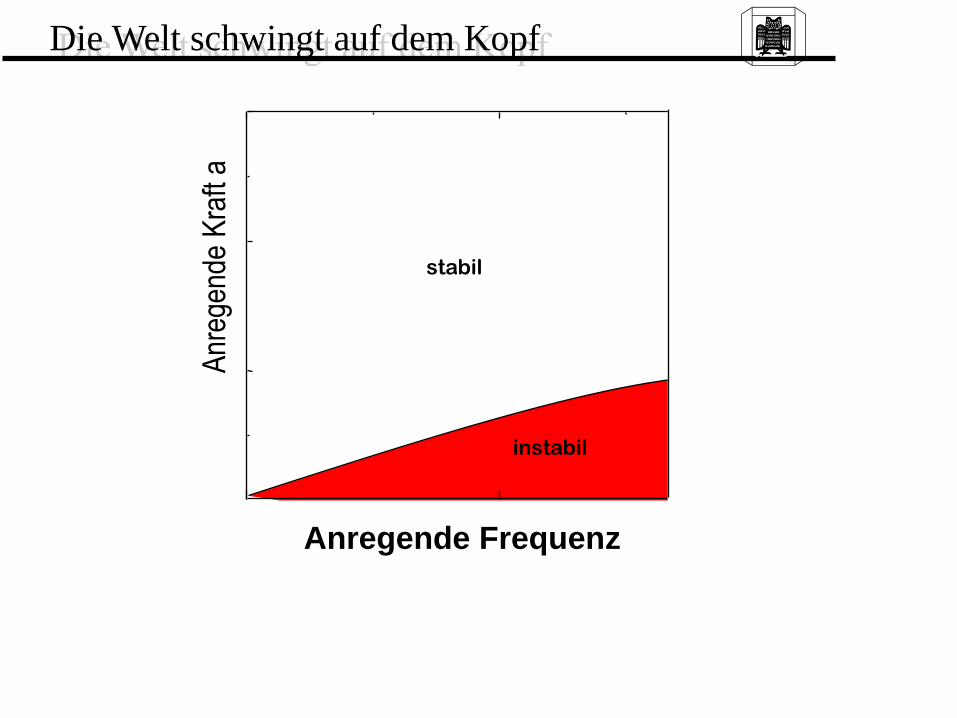
Man kann allerdings für verschiedene Werte der Anregungsfrequenz Ω und der Anregungsam-plitude a das Verhalten des Systems auf (In-)stabilität hin untersuchen, die Ergebnisse sind inAbb. 2.5 zusammengefasst.
6
Anre
gend
e Kra
ft a
stabil
Anregende Frequenz
inst
ab
il
inst
ab
il 7Hz
Anre
gend
e Kra
ft a
stabil
instabil
Anregende Frequenz
Abbildung 2.5 – Verhalten des Mathieu-Oszillators für verschiedene Anregungen. Links:Ω/ω0 ≥ 0, Rechts: Ω/ω0 < 0
Es stellt sich heraus, daß für die eine Kombination von Anregungsfrequenz und -amplitude dasSystem instabil wird. Im instabilen Zustand genügen kleinste Störungen, um das Pendel ausseiner Ruhelage auszulenken. So gerät es bei Anregung mit ca. 7 Hz ohne Eingreifen durch denExperimentator in Schwingung. Für noch höhere Frequenzen und Anregungskräfte lässt sich dasPendel sogar auf den Kopf stellen.
7
Experimente zur
Selbstorganisation
Modelle für den Kosmos und
die belebte Natur
Das Phänomen
Wellen Wirbel Wanderdünen
Aus: www-imk.physik.uni-karlsruhe.de
Kosmologische Strukturen
Modell des Urknalls Numerische Simulation der Supernova 1987A
Chemie und Biologie?
Belousov-Zabatinski (chemische Reaktion)
Schleimpilze (Dictyostelium)
Physik und Biologie?
Eiskristalle
(dentritisches Wachstum)
Bakterienkultur
Modelle
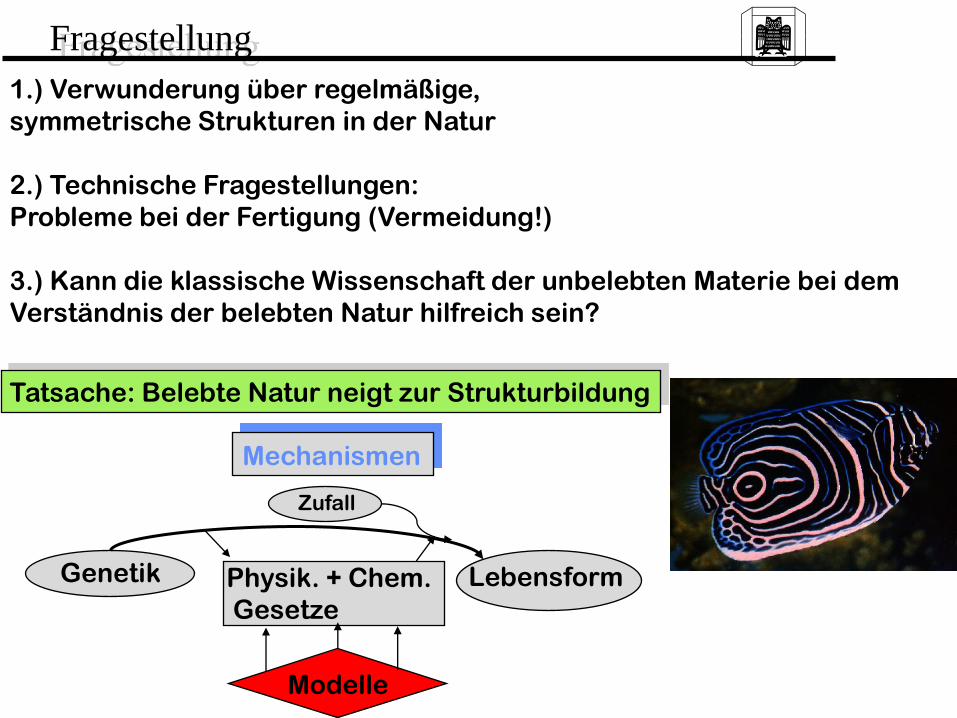
Fragestellung
1.) Verwunderung über regelmäßige,
symmetrische Strukturen in der Natur
2.) Technische Fragestellungen:
Probleme bei der Fertigung (Vermeidung!)
3.) Kann die klassische Wissenschaft der unbelebten Materie bei dem
Verständnis der belebten Natur hilfreich sein?
Tatsache: Belebte Natur neigt zur Strukturbildung
Mechanismen
Genetik
Zufall
Physik. + Chem.
Gesetze
Lebensform
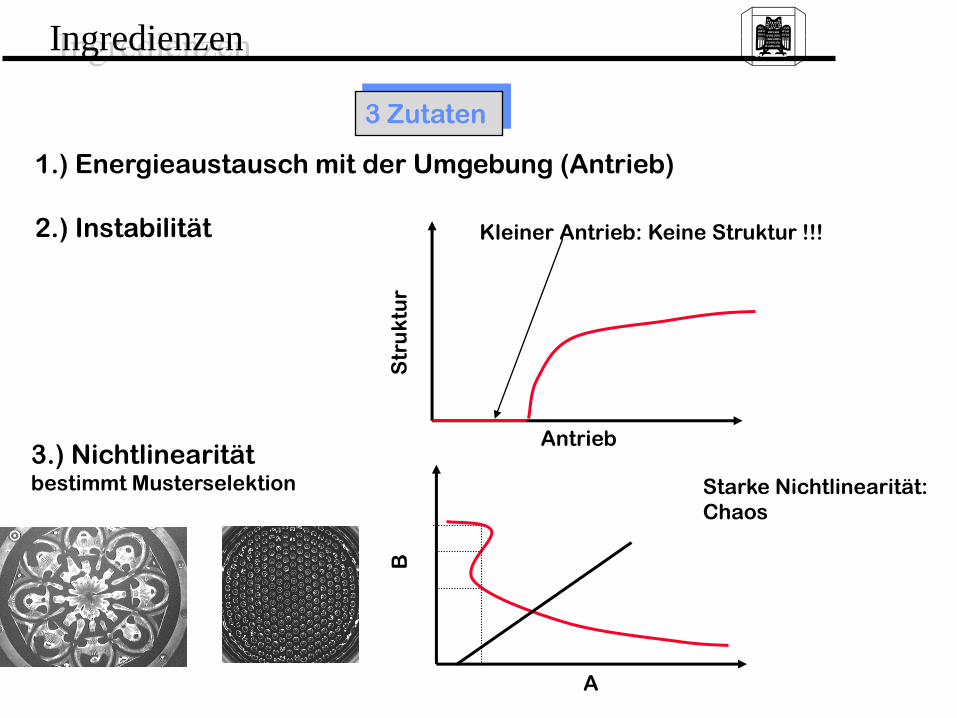
Ingredienzen
1.) Energieaustausch mit der Umgebung (Antrieb)
2.) Instabilität
3 Zutaten
3.) Nichtlinearität bestimmt Musterselektion
Antrieb
Str
uk
tur
B
A
Kleiner Antrieb: Keine Struktur !!!
Starke Nichtlinearität:
Chaos
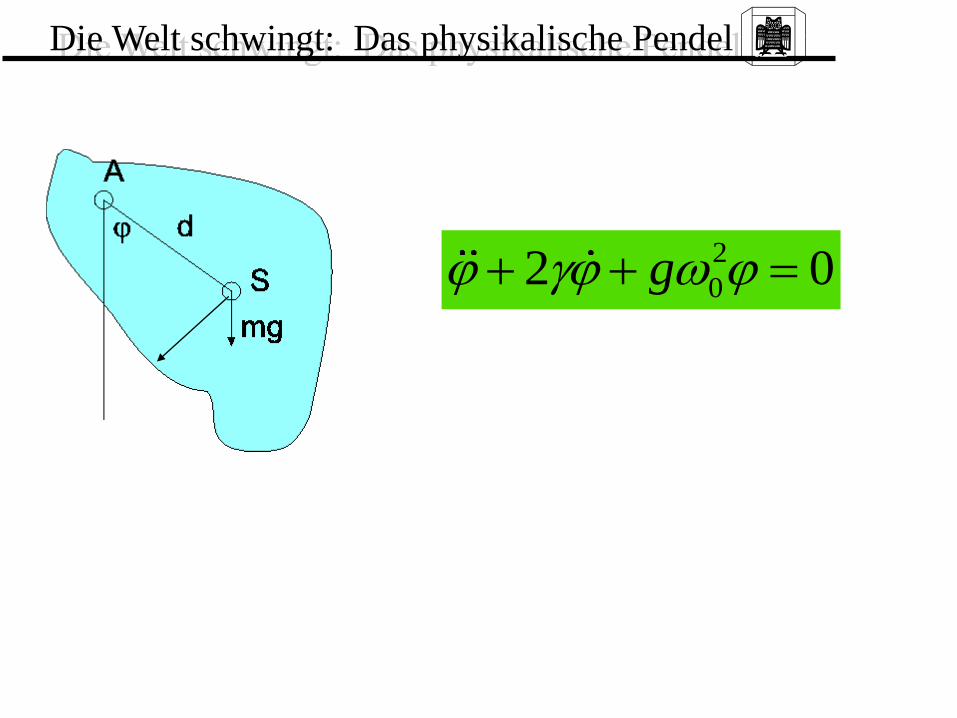
Die Welt schwingt: Das physikalische Pendel
2
02 0g
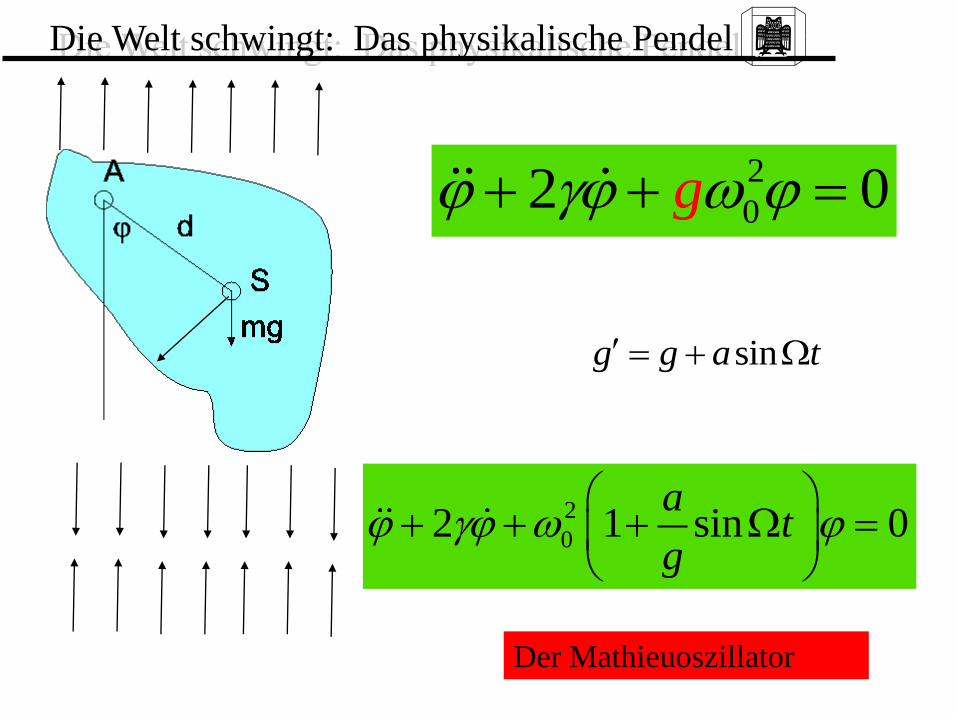
Die Welt schwingt: Das physikalische Pendel
sing g a t
2
02 0g
2
02 1 sin 0a
tg
Der Mathieuoszillator
Die Welt schwingt
Anr
egen
de K
raft
a
stabil
Anregende Frequenz
ins
tab
il
ins
tab
il
7Hz
Die Welt schwingt auf dem Kopf
Anr
egen
de K
raft
a
stabil
instabil
Anregende Frequenz
Wellen:2 Beispiele
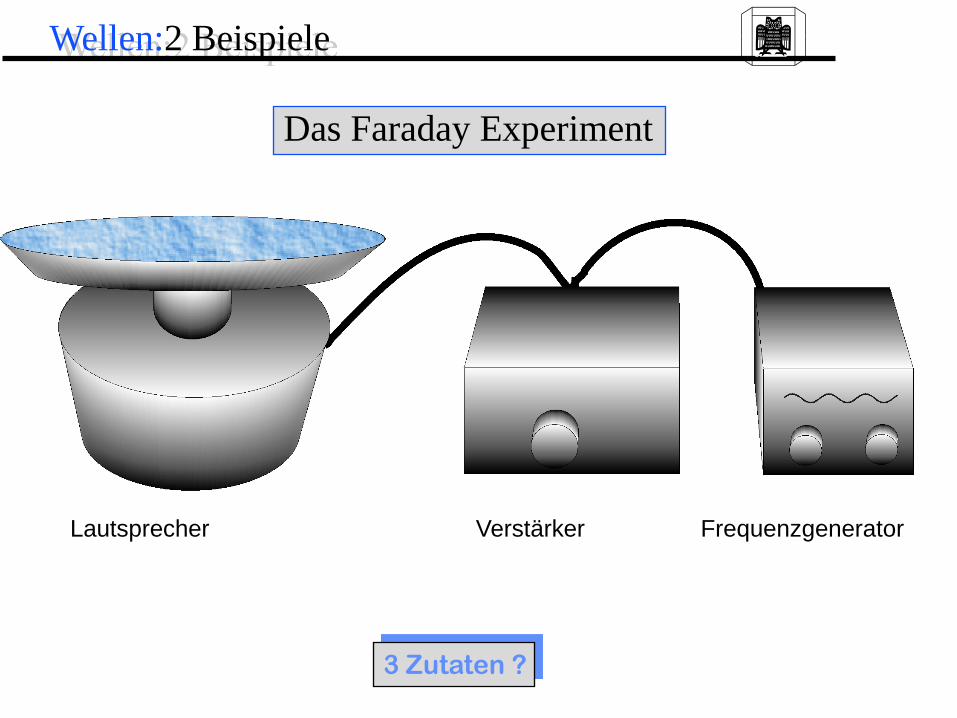
3 Zutaten ?
Das Faraday Experiment
Lautsprecher Verstärker Frequenzgenerator
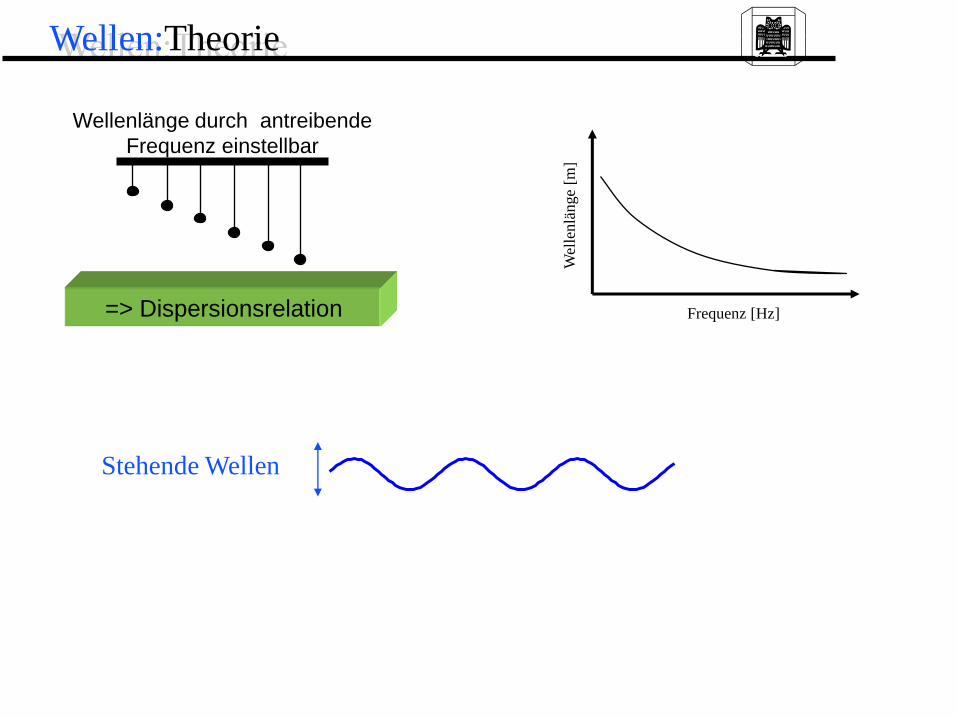
Wellen:Theorie
Wellenlänge durch antreibende
Frequenz einstellbar
=> Dispersionsrelation Frequenz [Hz]
Wel
lenlä
nge
[m]
Stehende Wellen
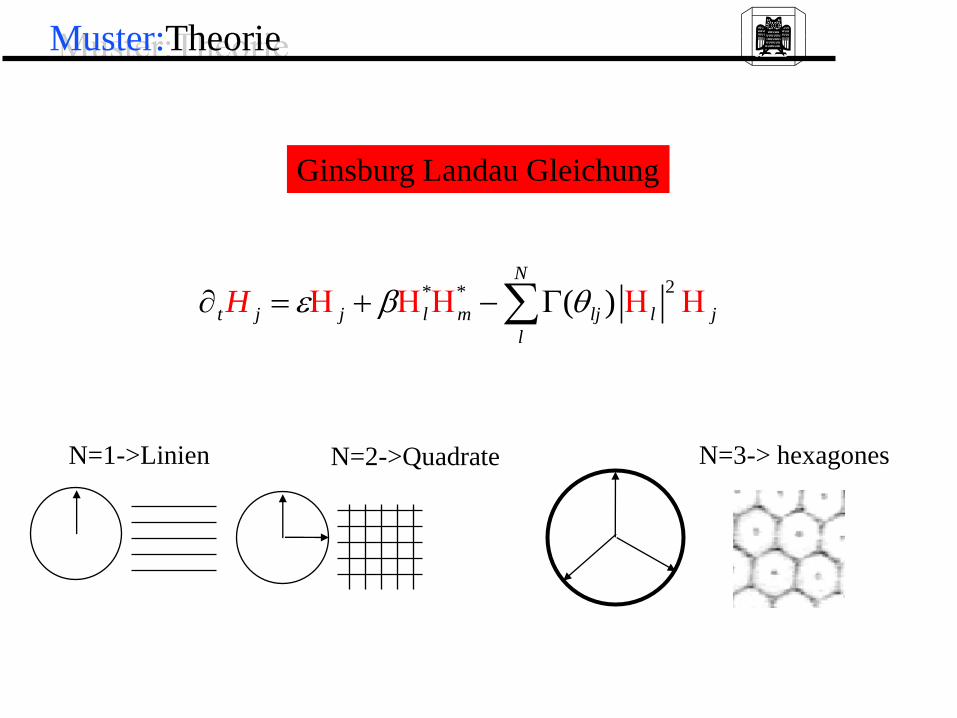
Muster:Theorie
N=1->Linien N=2->Quadrate N=3-> hexagones
Ginsburg Landau Gleichung
2* * ( )N
t j j l m lj l j
l
H
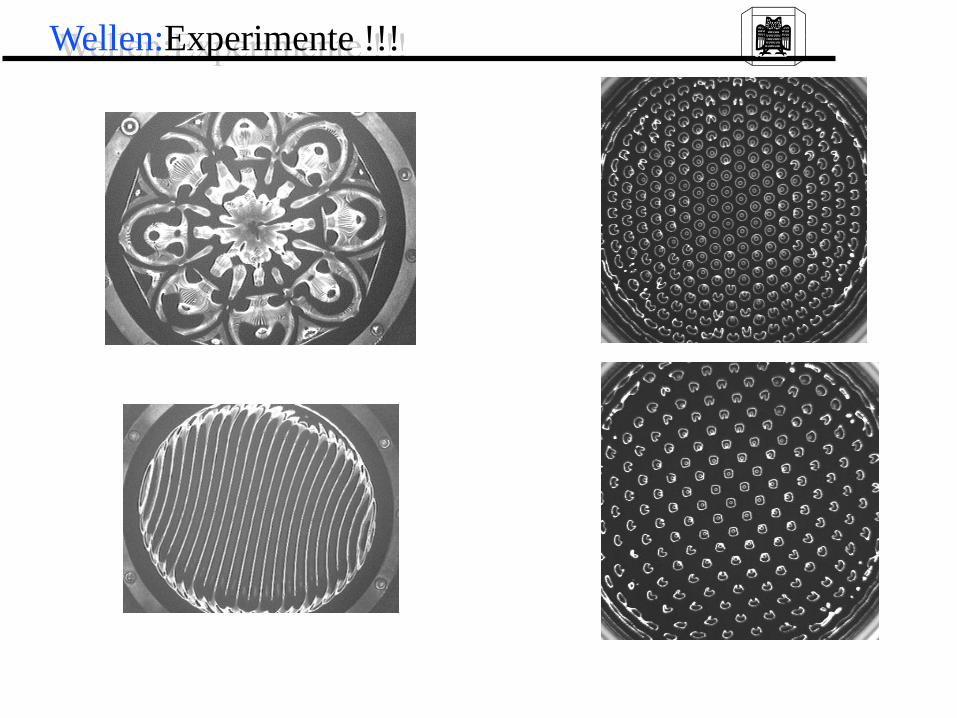
Wellen:Experimente !!!
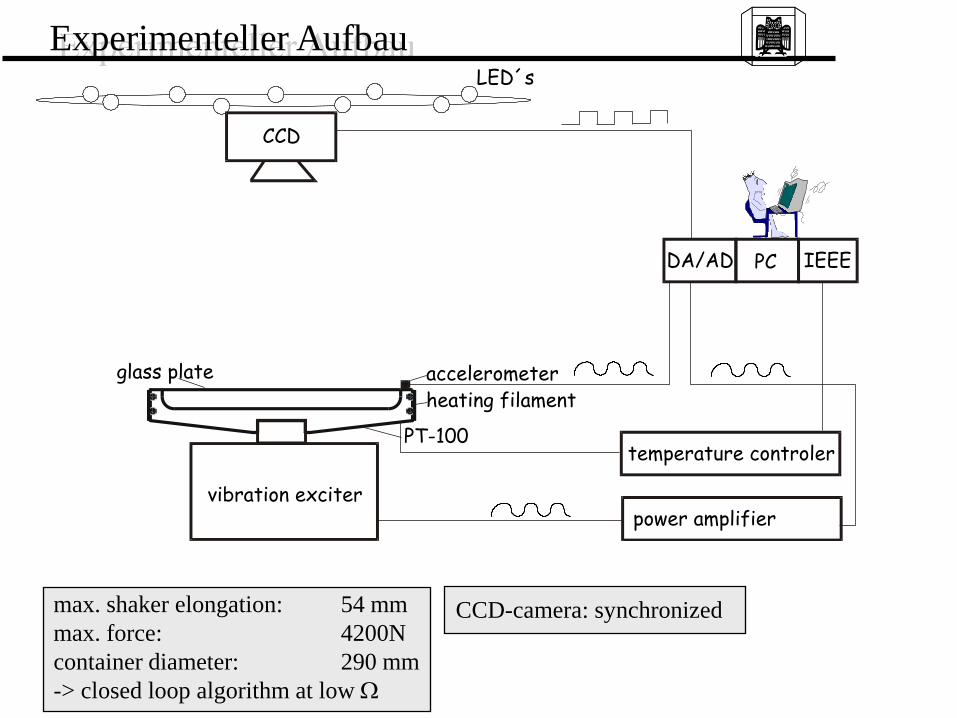
Experimenteller Aufbau
glass plate
vibration exciter
PT-100
accelerometer
CCD
heating filament
DA/AD
temperature controler
IEEE
power amplifier
PC
LED´s
max. shaker elongation: 54 mm
max. force: 4200N
container diameter: 290 mm
-> closed loop algorithm at low
CCD-camera: synchronized
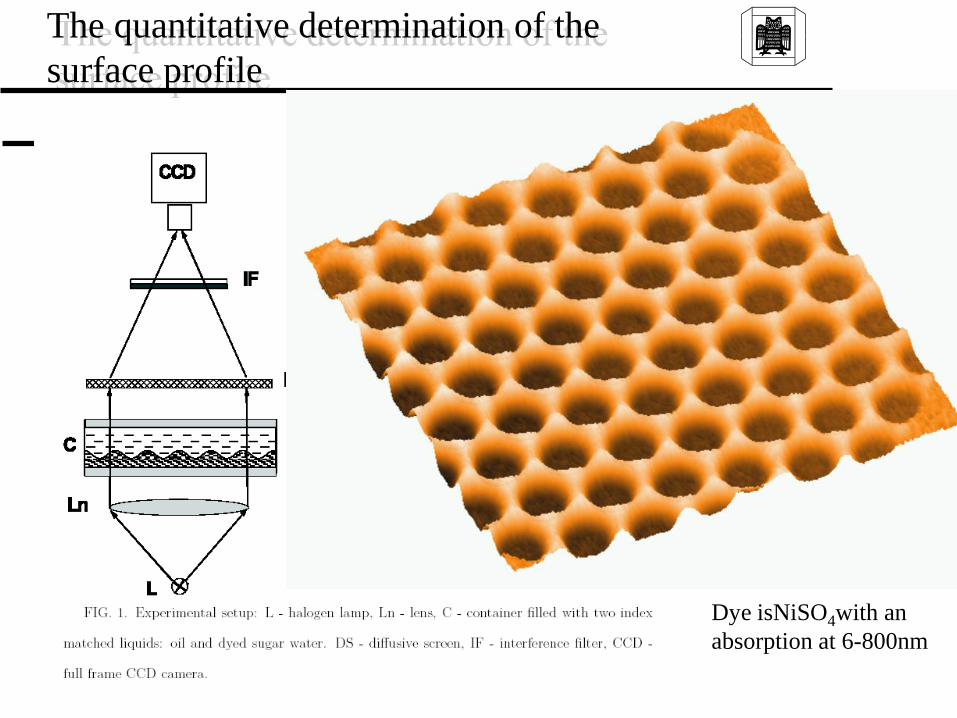
The quantitative determination of the
surface profile
Dye isNiSO4with an
absorption at 6-800nm
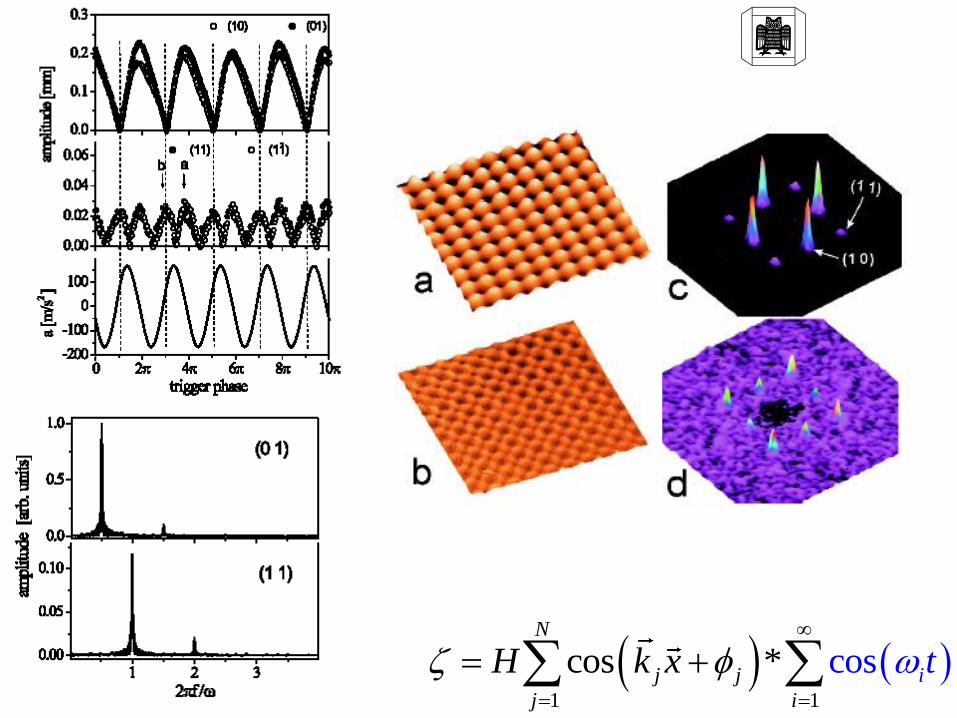
1 1
cos * oscN
j j
j i
itH k x