
Einfuhrung in die¨ Funktionentheoriebaum/Skript/FT-SS08.pdfKapitel 12 Einfuhrung in die¨...
68
Kapitel 12 Einf ¨ uhrung in die Funktionentheorie Dozentin: Prof. Dr. Helga Baum Nach Vorlesungen im Wintersemester 2002 (2. Teil von Analysis III) und im Sommersemester 2008 (2. Teil von Analysis IIIb). 1. Ausarbeitung von Thomas Leistner Stand der Korrekturen: Korrigiert bis Kapitel 12.1 (06.06.2008 (Helga Baum)) 1
Transcript of Einfuhrung in die¨ Funktionentheoriebaum/Skript/FT-SS08.pdfKapitel 12 Einfuhrung in die¨...
Kapitel 12
Einfuhrung in die
Funktionentheorie
Dozentin: Prof. Dr. Helga Baum
Nach Vorlesungen im Wintersemester 2002 (2. Teil von Analysis III) und imSommersemester 2008 (2. Teil von Analysis IIIb).
1. Ausarbeitung von Thomas LeistnerStand der Korrekturen: Korrigiert bis Kapitel 12.1 (06.06.2008 (Helga Baum))
1
Inhaltsverzeichnis
12 Einfuhrung in die Funktionentheorie 112.1 Holomorphe Funktionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
12.1.1 Definition holomorpher Funktionen und erste Eigenschaften . . . . . . 312.1.2 Die Cauchy-Riemannschen-Differentialgleichungen . . . . . . . . . . . 612.1.3 Geometrische Interpretation holomorpher Abbildungen . . . . . . . . . 10
12.2 Komplexe Kurvenintegrale und Stammfunktionen . . . . . . . . . . . . . . . . 1212.3 Der Cauchysche Integralsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
12.3.1 Einfach–zusammenhangende topologische Raume . . . . . . . . . . . . 1912.3.2 Cauchyscher Integralsatz fur sternformige Gebiete . . . . . . . . . . . 2112.3.3 Cauchyscher Integralsatz fur einfach–zusammenhangende Gebiete . . . 24
12.4 Grundlegende Eigenschaften holomorpher Funktionen . . . . . . . . . . . . . 2812.4.1 Potenzreihenentwicklung holomorpher Funktionen . . . . . . . . . . . 2812.4.2 Eindeutigkeitssatz, Nullstellen und Fortsetzung . . . . . . . . . . . . . 3212.4.3 Weitere Eigenschaften holomorpher Abbildungen . . . . . . . . . . . . 3712.4.4 Die Exponentialabbildung als Uberlagerung . . . . . . . . . . . . . . . 3812.4.5 Index und Umlaufzahl von Wegen . . . . . . . . . . . . . . . . . . . . 4212.4.6 Hebung von holomorphen Abbildungen . . . . . . . . . . . . . . . . . 4412.4.7 Biholomorphe Abbildungen auf der Einheitskreisscheibe . . . . . . . . 46
12.5 Isolierte Singularitaten, Laurententwicklung und Residuensatz . . . . . . . . . 4812.5.1 Klassifikation isolierter Singularitaten . . . . . . . . . . . . . . . . . . 4812.5.2 Laurentreihenentwicklung . . . . . . . . . . . . . . . . . . . . . . . . . 5212.5.3 Residuen holomorpher Abbildungen in Singularitaten . . . . . . . . . 5612.5.4 Anwendung des Residuensatzes auf die Berechnung von Integralen . . 60
12.5.4.1 Trigonometrische Integrale . . . . . . . . . . . . . . . . . . . 6012.5.4.2 Uneigentliche Integrale . . . . . . . . . . . . . . . . . . . . . 61
12.5.4.3 Uneigentliche Integrale vom Typ∞∫−∞
g(x)eiαxdx . . . . . . . 63
12.5.5 Nullstellen und Polstellen meromorpher Funktionen . . . . . . . . . . 65
2

12.1 Holomorphe Funktionen
Die Funktionentheorie beschaftigt sich mit komplex-wertigen Funktionen, die auf offenenTeilmengen U der komplexen Zahlen definiert und dort komplex-differenzierbar sind. SolcheFunktionen f : U ⊂ C→ C nennt man holomorph oder komplex-analytisch. Die komplexenFunktionen exp(z), sin(z), cos(z), die wir bereits aus Analysis I kennen, sind z.B. holomorphauf C. Komplexe Potenzreihen mit positivem Konvergenzradius sind ebenfalls holomorphauf ihrem Konvergenzkreis.Wir werden im Laufe der Vorlesung sehen, dass holomorphe Funktionen sehr schonespezielle Eigenschaften haben, die sie wesentlich von den reell-differenzierbaren Funktionenunterscheiden. Im Gegensatz zu reell-differenzierbaren Funktionen kann man holomorpheFunktionen z.B. immer in eine Potenzreihe entwickeln. Daraus folgen weitere sehr starkeEigenschaften holomorpher Funktionen. Z.B. ist jede auf C holomorphe und beschrankteFunktion konstant. Eine holomorphe Funktion ist bereits durch ihr Verhalten im Lokaleneindeutig bestimmt und vieles andere mehr. Das Ziel dieses Kapitels der Vorlesung ist dasStudium der grundlegenden Eigenschaften holomorpher Funktionen f : U ⊂ C→ C.
12.1.1 Definition holomorpher Funktionen und erste Eigenschaften
Definition 12.1 Sei U ⊂ C offen. Eine Funktion f : U ⊂ C −→ C heißt in z0 ∈ U
komplex–differenzierbar, falls der Grenzwert
f ′(z0) := limz→z0
f(z)− f(z0)z − z0
in C existiert. Die komplexe Zahl f ′(z0) heißt Ableitung von f in z0.f : U ⊂ C −→ C heißt holomorph (auf U), falls f in jedem Punkt z0 ∈ U komplex–differen-zierbar ist.Die Funktion f ′ : z ∈ U ⊂ C→ f ′(z) ∈ C heißt Ableitung von f .
Im Folgenden bezeichnet U ⊂ C immer eine offene Menge !
Auf die vollig gleiche Weise wie im Reellen beweist man fur holomorphe Funktionen zunachstdie folgenden Eigenschaften:
1. Seien f, g : U ⊂ C −→ C holomorph. Dann sind auch f + g, f · g und fg (falls g 6= 0)
holomorph, und fur die jeweiligen Ableitungen gilt
(f + g)′ = f ′ + g′, (f · g)′ = f ′g + g′f und(
f
g
)′=
f ′g − fg′
g2.
2. Es gilt die Kettenregel: Sind f : U ⊂ C → V ⊂ C und g : V ⊂ C → C holomorph,so ist auch die Verknupfung g f : U ⊂ C −→ C holomorph, und fur die Ableitunggilt
(g f)′(z) = g′(f(z))f ′(z).
3. Ist f : U ⊂ C −→ C holomorph, so ist f stetig.
3

Beispiel: Sei
f(z) =N∑
n=0
an(z − z0)n mit an ∈ C
ein komplexes Polynom. Dann ist f : C −→ C holomorph und
f ′(z) =N∑
n=1
n an(z − z0)n−1.
Wir beweisen als ersten Satz die Holomorphie komplexer Potenzreihen auf ihrem Konver-genzkreis. Auch diesen Beweis kann man genauso fuhren, wie wir es fur reelle Potenzreihenals Anwendung des Differenzierbarkeitskriteriums der Grenzfunktion einer Folge differen-zierbarer Funktionen getan haben. Fur geben hier nochmal einen direkten Beweis an.
Satz 12.1 Sei f(z) =∞∑
n=0an(z − z0)n eine komplexe Potenzreihe um z0 ∈ C mit dem
Konvergenzradius %f > 0. Dann ist f : K(z0, %f ) ⊂ C −→ C holomorph, und es gilt
f ′(z) =∞∑
n=1
n an(z − z0)n−1.
Insbesondere gilt f ′(z0) = a1.
Beweis: OBdA konnen wir z0 = 0 annehmen. (Sonst betrachten wir f(z) = f(z − z0) undfuhren den Beweis darauf zuruck).
(1) Wir betrachten die formale erste Ableitung von f , d.h. die Reihe f1(z) =∞∑
n=1nanzn−1,
die wir durch Differenzieren unter dem Summenzeichen erhalten. Die Konvergenzradien %f1
und %f von f1 bzw. f stimmen uberein, denn es gilt
%f =1
lim supn→∞
n√|an|
und %f1 =1
lim supn→∞
n√
n|an|,
und limn→∞
n√
n = 1.
Ebenso haben die formale zweite Ableitung f2(z) =∞∑
n=2n(n − 1)anzn−2 und die Reihe
f2(z) =∞∑
n=2n(n− 1)|an|zn−2 den Konvergenzradius %f2 = %f2
= %f1 = %f .
(2) Es ist nun zu zeigen, dass f in jedem Punkt des Konvergenzkreises K(0, %f ) komplex–differenzierbar ist und dass die Ableitung von f mit der formalen Ableitung f1 uberein-stimmt. Mit anderen Worten, wir mussen beweisen, dass fur die Differenz zwischen Diffe-renzenquotient und formaler Ableitung fur alle z ∈ K(z0, %f ) gilt
f(z + h)− f(z)h
− f1(z) h→0−→ 0.
Dazu betrachten wir die einzelnen Summanden der Reihen. Mit dem Binomischen Satz gilt
(z + h)n − zn
h− nzn−1 =
1h
n∑
j=0
(n
j
)hjzn−j − zn
− nzn−1
4

=1h
n∑
j=1
(n
j
)hjzn−j − nzn−1
=n∑
j=2
(n
j
)hj−1zn−j = h
n∑
j=2
(n
j
)hj−2zn−j .
Wir schatzen diesen Term nun wie folgt ab:
∣∣n∑
j=2
(n
j
)hj−2zn−j
∣∣ ≤n∑
j=2
(n
j
)|h|j−2|z|n−j ≤ n(n− 1)(|h|+ |z|)n−2,
denn der Koeffizient von |h|j−2|z|n−j im mittleren Ausdruck ist gerade(nj
), rechts dagegen
n(n− 1)(n−2j−2
)= j(j − 1)
(nj
) ≥ (nj
). Somit folgt
∣∣ (z + h)n − zn
h− nzn−1
∣∣ ≤ hn(n− 1)(|h|+ |z|)n−2,
fur n ≥ 2. Fur n = 0 und n = 1 ist die linke Seite 0. Multipliziert man diese Gleichungenfur jedes n mit an und summiert uber n so erhalt man
∣∣N∑
n=0
an(z + h)n − anzn
h−
N∑n=1
nanzn−1∣∣ ≤ h
N∑n=2
n(n− 1)|an|(|h|+ |z|)n−2.
Sei z ∈ K(0, %f ). Wir wahlen h so klein, daß |z|+ |h| ∈ K(0, %f ). Dann gilt
N∑n=2
n(n− 1)|an|(|h|+ |z|)n−2 ≤ f2(|h|+ |z|).
Fur N →∞ folgt∣∣∣∣∣∞∑
n=0
an(z + h)n − anzn
h−
∞∑n=1
nanzn
︸ ︷︷ ︸f1(z)
∣∣∣∣∣ ≤ hf2(|h|+ |z|).
Da f2 stetig ist auf K(0, %f ), folgt fur h → 0
limh→0
f(z + h)− f(z)h
= f1(z)
fur alle z ∈ K(0, %f ). 2
Induktiv erhalt man die
Folgerung 12.1.1 Jede Potenzreihe f : K(0, %f ) −→ C mit f(z) =∞∑
n=0an(z − z0)n ist
auf ihrem Konvergenzkreis ∞–oft komplex–differenzierbar, und fur die k–fache komplexe
Ableitung f (k) gilt f (k)(z) =∞∑
n=k
n(n − 1) · . . . · (n − k + 1)an(z − z0)n−k. Insbesondere ist
f (k)(z0) = k!ak.
Daraus erhalen wir weitere Beispiele holomorper Funktionen:
1. f(z) = ez =∞∑
n=0
zn
n! ist holomorph auf C, und es gilt f ′(z) = ez.
5

2. f(z) = sin(z) =∞∑
n=0(−1)n z2n+1
(2n+1)! ist holomorph auf C, und es gilt f ′(z) = cos(z).
3. f(z) = cos(z) =∞∑
n=0(−1)n z2n
(2n)! ist holomorph auf C und f ′(z) = − sin(z).
12.1.2 Die Cauchy-Riemannschen-Differentialgleichungen
Als reeller normierter Vektorraum ist (C, | · |) = (R2, ‖ · ‖) , wobei z = x + iy ∈ C das Tupel(x, y) ∈ R2 beschreibt und fur den Betrag | · | in C bzw. die Euklidische Norm ‖ · ‖ in R2
|z| = ‖(x, y)‖ :=√
x2 + y2 gilt. (Wir setzen i = (0, 1), 1 = (1, 0)).Wir konnen also jede komplexe Funktion f : U ⊂ C→ C auch als reelle Funktion f : U ⊂R2 → R2 auffassen. Wir schreiben f dann je nach Bedarf in der folgenden Form
• f(z) = u(z) + iv(z) , wobei u, v : U ⊂ C→ R den Realteil bzw. den Imaginarteil vonf bezeichnen.
• f(x, y) = u(x, y) + iv(x, y)
• f(x, y) = (u(x, y), v(x, y)).
Wir wollen nun untersuchen, wie die reelle und die komplexe Differenzierbarkeit von f
zusammenhangen. Wir erinnern nochmal an die Definition der reellen Differenzierbarkeit:
Sei f : U ⊂ R2 → E eine Funktion von einer offenen Menge des R2 in einen reellen normiertenVektorraum E. f heißt in u ∈ U (reell)-differenzierbar, falls eine (reell)-lineare AbbildungL : R2 → E existiert, so dass
limh→0
‖f(u + h)− f(u)− L(h)‖E
‖h‖ = 0.
Die (reell)-lineare Abbildung L ist eindeutig bestimmt und heißt das Differential von f inu. Wir bezeichen das Differential von f in u im Folgenden mit
Dfu : R2 −→ E.
Ist f in u ∈ U (reell)-differenzierbar, so existieren die partiellen Ableitungen
∂f
∂x(u) := Dfu(1, 0) und
∂f
∂y(u) := Dfu(0, 1)
und es gilt
Dfu(h1, h2) = h1∂f
∂x(u) + h2
∂f
∂y(u).
Fur den uns interessierenden Fall ist nun E = C.
Satz 12.2 Eine Funktion f : U ⊂ C −→ C ist in z0 = x0 + iy0 ∈ U genau dann komplex-differenzierbar, wenn f in (x0, y0) reell-differenzierbar ist und die partiellen Ableitungen die
6

Cauchy–Riemannschen Differentialgleichungen erfullen:
∂f
∂x(z0) = −i
∂f
∂y(z0) (CR 1)
Fur die Ableitung gilt in diesem Fall
f ′(z0) =∂f
∂x(z0) = −i
∂f
∂y(z0).
Ist f = u + iv die Darstellung von f mit Realteil u und Imaginarteil v, so sind die Cauchy-Riemannschen Differentialgleichungen (CR 1) aquivalent zu ihrer reellen Form
∂u
∂x(x0, y0) =
∂v
∂y(x0, y0)
∂u
∂y(x0, y0) = −∂v
∂x(x0, y0) (CR 2)
Ist f in z0 = x0+iy0 ∈ U komplex-differenzierbar, so hat das Differential Dfz0 in komplexerSchreibweise die Form
Dfz0(h) = f ′(z0) · h.
Die Jacobi-Matrix von Dfz0 ist die Matrix
Df(x0,y0) =
(∂u∂x (x0, y0) ∂u
∂y (x0, y0)−∂u
∂y (x0, y0) ∂u∂x (x0, y0)
)
Beweis: (=⇒) Sei z0 = x0 + iy0 ∈ U und f in z0 komplex–differenzierbar. Dann existiertder Grenzwert f ′(z0) = lim
h→0
f(z0+h)−f(z0)h . Folglich gilt
limh→0h∈C
‖f(z0 + h)− f(z0)− f ′(z0) · h‖|h| = 0,
Die Abbildung Dfz0 : C→ CDfz0(h) := f ′(z0) · h
ist reell-linear. Folglich ist f in z0 reell-differenzierbar mit dem DifferentialDfz0(h) = f ′(z0) · h. Fur die partiellen Ableitungen gilt dann
∂f
∂x(z0) = Dfz0(1) = f ′(z0) · 1 = f ′(z0) und
∂f
∂y(z0) = Dfz0(i) = f ′(z0) · i.
Dies liefert die Cauchy-Riemannschen Differentialgleichung (CR 1). Vergleicht man den Real-und Imaginarteil der Gleichung (CR 1), so erhalt man (CR 2).
(⇐=) Sei f : U ⊂ R2 −→ R2 in z0 = (x0, y0) reell–differenzierbar und erfulle die CR–DGL(CR 1). Dann gilt mit h = h1 + ih2
Dfz0(h) =∂f
∂x(z0)h1 +
∂f
∂y(z0)h2 =
∂f
∂x(z0)h1 − i
∂f
∂y(z0) ih2
(CR1)=
∂f
∂x(z0)h
Damit ist aber
0 = limh→0
‖f(z0 + h)− f(z0)− ∂f∂x (z0)h‖
‖h‖=
∥∥∥ limh→0
f(z0 + h)− f(z0)h
− ∂f
∂x(z0)
∥∥,
7

Somit ist f in z0 komplex differenzierbar, und es gilt
f ′(z0) =∂f
∂x(z0).
2
Bezeichnung: Sei f : U ⊂ C −→ C auf U reell–differenzierbar, z = x + iy ∈ U ⊂ C. Danndefiniert man:
∂f
∂z:=
12
(∂f
∂x− i
∂f
∂y
): U ⊂ C −→ C
∂f
∂z:=
12
(∂f
∂x+ i
∂f
∂y
): U ⊂ C −→ C.
(12.1)
Aus dem Beweis von Satz 12.2 folgt dann
1. f : U ⊂ C −→ C ist genau dann holomorph, wenn f auf U reell–differenzierbar ist und
∂f
∂z≡ 0 (Cauchy-Riemannsche DGL).
2. Ist f : U ⊂ C −→ C holomorph, dann ist
f ′(z) =∂f
∂z.
Wir wollen nun einige einfache Folgerungen aus Satz 12.2 angeben. Dazu erinnern wir unsan den Laplace-Operator.
Definition 12.2 Wir betrachten den Rn mit den Koordinaten (x1, x2, . . . , xn). Sei U ⊂ Rn
offen. Der lineare Operator ∆ : C2(U ;C) −→ C0(U ;C)
∆h :=n∑
k=1
∂2h
∂x2k
heißt Laplace–Operator. Eine Funktion h ∈ C2(U ;C) heißt harmonisch, wenn ∆h = 0.
Im R2 mit den Koordinaten (x, y) ergibt dies mittels Einsetzen von (12.1) und dem Lemmavon Schwarz
∆h =∂2h
∂x2+
∂2h
∂y2= 4
∂2h
∂z∂z= 4
∂2h
∂z∂z.
Beispiel: Die Funktionen
h(x, y) = ax + by + c mit (x, y) ∈ R2
h(x, y) = ln 1x2+y2 mit (x, y) ∈ R2 \ (0, 0)
sind harmonisch.
Folgerung 12.1.2 Sei f : U ⊂ C −→ C holomorph und 2–mal stetig differenzierbar. Dannsind f , Re(f) und Im(f) harmonische Funktionen.
8

Beweis: Fur die holomorphe Funktion f gilt ∂f∂z = 0. Daraus folgt ∂2f
∂z∂z = 0 . Da f zweimalstetig differenzierbar ist, erhalt man daraus
∆f =∂2f
∂z∂z= 0.
Ist f = u + iv, so gilt per Definition ∆f = ∆u + i∆v. D.h. f ist genau dann harmonisch,wenn u = Re(f) und v = Im(f) harmonisch sind. 2
Folgerung 12.1.3 Sei f : U ⊂ C −→ C holomorph und U offen und zusammenhangend.Nimmt f nur reelle oder nur rein-imaginare Werte an, dann ist f konstant.
Beweis: OBdA sei f(x + iy) = u(x, y) = Re(f) ∈ R und v ≡ 0. Aus den CR–DGL folgt∂u∂x = ∂v
∂y = 0 und ∂u∂y = − ∂v
∂x = 0. Somit ist grad(u) =(
∂u∂x , ∂u
∂y
)= 0 auf U ⊂ C. Da U
zusammenhangend ist, ist u konstant (siehe Analysis II). Also ist f konstant. 2
Folgerung 12.1.4 Sei f : U ⊂ C −→ C holomorph, U offen und zusammenhangend. Dannist der Imaginarteil von f durch den Realteil von f bis auf eine additive Konstante eindeutigbestimmt.
Beweis: Seien f, g : U ⊂ C −→ C holomorphe Funktionen mit Re(f) = Re(g). Zu zeigenist, dass Im(f) = Im(g)+c, wobei c ein Konstante ist. Dazu betrachten wir die holomorpheFunktion F = g − f : U ⊂ C −→ C . Dann ist Re(F ) = 0 und nach Folgerung 12.1.3 ist F
konstant. 2
Folgerung 12.1.5 Sei f : U ⊂ C −→ C holomorph, U ⊂ C offen und zusammenhangendund f ′ ≡ 0. Dann ist f konstant
Beweis: Fur das reelle Differential gilt Dfz(h) = f ′(z) · h = 0. Damit ist Df(z) ≡ 0 furalle z und somit f = const. 2
Definition 12.3 Eine Abbildung f : U ⊂ C −→ U ⊂ C zwischen zwei offenen Mengen U
und U heißt biholomorph, falls
1. f : U −→ U bijektiv ist und
2. f : U −→ U und f−1 : U −→ U holomorph sind.
Beispiel: Mobiustransformationen
Sei A :=
(a b
c d
)∈ Gl(2,C) . Die Abbildung
ΦA : U = C \ z ∈ C | cz + d = 0 −→ U = C \ z ∈ C | −cz + a = 0z 7−→ az+b
cz+d .
9

heißt Mobiustransformation und ist biholomorph. Die inverse Abbildung ist gegeben durch:
Φ−1A = ΦA−1 : C \ z ∈ C | −cz + a = 0 −→ C \ z ∈ C | cz + d = 0
z 7−→ dz−b−cz+a ,
Definition 12.4 Zwei offene Teilmengen U, U ⊂ C heißen biholomorph, falls eine biholo-morphe Abbildung f : U ⊂ C −→ U ⊂ C existiert.
Es gilt der Riemannsche Abbildungsatz [1859]:(Zitat):Jede einfach–zusammenhangende offene Menge U 6= C ist biholomorph zur Einheitskreis-scheibe z ∈ C | |z| < 1.
12.1.3 Geometrische Interpretation holomorpher Abbildungen
Sei f : U ⊂ C −→ C eine holomorphe C1-Funktion. Fur das Differential von f in z ∈ U gilt
detDfz = det
(ux uy
vx vy
)(z) CR= det
(ux uy
−uy ux
)(z) = ux(z)2 + uy(z)2 = |f ′(z)|2
Aus dem Satz uber den lokalen Diffeomorphismus folgt, dass eine stetig differenzierbareholomorphe Funktion f genau dann ein lokaler Diffeomorphismus ist, wenn f ′(z) 6= 0 furalle z ∈ U gilt.Wir wollen nun die Holomorphiebedingung geometrisch interpretieren. Fur lokale Diffeo-morphismen beschreibt sie die Winlkeltreue der Abbildung.
Wir betrachten nun zwei regulare C1-Kurven γ, δ : (−ε, ε) −→ R2, die sich in z ∈ C ∼= R2
schneiden: γ(0) = δ(0) = z.
γ
z
δUnter dem Schnittwinkel von γ und δ inz versteht man den (nichtorientierten)Winkel
^z(γ, δ) ∈ [0, π]
definiert durch
cos(^z(γ, δ)) =〈γ′(0), δ′(0)〉
‖γ′(0)‖ · ‖δ′(0)‖ .
Definition 12.5 Sei f : U ⊂ C −→ C ein lokaler Diffeomorphismus.
1. f heißt winkeltreu, falls fur beliebige sich in z schneidende regulare Kurven γ und δ
gilt^z(γ, δ) = ^f(z)(f(γ), f(δ)).
10

2. f heißt orientierungserhaltend, falls fur die Jacobi-Determinante gilt
det (Dfz(e1), Dfz(e2)) = det(∂f
∂x(z),
∂f
∂y(z)) > 0.
D.h. ist (a1, a2) eine positiv-orientierte Basis im R2, so ist (Dfz(a1), Dfz(a2))ebenfalls eine positiv-orientierte Basis.
Satz 12.3 Sei f : U ⊂ C −→ C ein lokaler Diffeomorphismus. Dann ist f : U ⊂ C −→ Cgenau dann holomorph, wenn f winkeltreu und orientierungserhaltend ist.
Beweis:1.) Wir beweisen zunachst die folgende Behauptung:
f ist winkeltreu ⇐⇒es existiert ein λ ∈ C0(u) mit〈Dfz(v), Dfz(w)〉 = λ2(z)〈v, w〉
fur alle z ∈ U, v, w ∈ R2,
(12.2)
(Man nennt einen lokalen Diffeomorphismus, der die rechte Seite von (12.2) erfullt, lokalkonform).
Beweis von (12.2): Aus der rechten Seite von (12.2) folgt
cos(^(v, w)) = 〈v,w〉‖v‖‖w‖ = 〈Dfz(v),Dfz(w)〉
‖Dfz(v)‖‖Dfz(w)‖ = cos(^(Dfz(v), Dfz(w)).
f ist also winkeltreu.
Sei andererseits f winkeltreu. Dann gilt insbesondere fur zwei orthogonale Vektoren a1, a2 ∈R2 (a1⊥a2), dass Dfz(a1) und Dfz(a2) ebenfalls senkrecht zueinander stehen. Sei nun(e1, e2) eine Orthonormalbasis in R2. Da f ein lokaler Diffeomorphismus ist, gilt
σi(z) := 〈Dfz(ei), Dfz(ei)〉 > 0
fur i = 1, 2. Aus (e1 + e2) ⊥ (e1− e2) folgt (Dfz(e1)+Dfz(e2)) ⊥ (Df(z)(e1)−Df(z)(e2)),und somit ist
0 = 〈Dfz(e1) + Dfz(e2), Dfz(e1)−Dfz(e2)〉= σ1(z)− σ2(z).
d.h. σ1(z) = σ2(z) fur alle z ∈ U .Nun definiert man λ ∈ C0(U) durch λ2(z) = σ1(z) = σ2(z). Es gilt λ(z) > 0 fur alle λ ∈ U .Aus der Basisdarstellung von v, w ∈ R2 folgt:
〈Dfz(v), Dfz(w)〉 = λ2(z)〈v, w〉 ∀u,w ∈ R2, z ∈ U.
Da f eine C1-Funktion ist, ist λ stetig. Damit ist f lokal konform.
2.) Sei nun f : U ⊂ C −→ C ein lokaler Diffeomorphismus. DAnn erhalt man mit Hilfe der
11

soeben bewiesenen Eigenschaft die folgenden Aquivalenzen: die folgenden
f ist winkeltreu und orientierungserhaltend
1.)⇐⇒ es existiert ein λ ∈ C0(U) mit1
λ2(z)Dfz : R2 −→ R2 ist eine orientierungserhaltende, orthogonale Abbildung.
⇐⇒ die zugehorige Matrix 1λ(z)2
(∂u∂x (z) ∂u
∂y (z)∂v∂x (z) ∂v
∂y (z)
)ist aus SO(2) (d.h. eine Drehung).
⇐⇒ 1λ(z)2
(∂u∂x (z) ∂u
∂y (z)∂v∂x (z) ∂v
∂y (z)
)=
(cosϕ − sin ϕ
sin ϕ cosϕ
)fur einen Drehwinkel ϕ
⇐⇒ ∂u∂x (z) = ∂v
∂y (z) und ∂u∂y (z) = − ∂v
∂x (z) (CR–Dgl)
⇐⇒ f ist holomorph.
2
12.2 Komplexe Kurvenintegrale und Stammfunktionen
In diesen Abschnitt untersuchen wir die Frage, welche komplexen Funktionen f : U ⊂ C −→C eine Stammfunmktion besitzen.
Definition 12.6 Sei f : U ⊂ C −→ C eine Funktion. Eine Funktion F : U ⊂ C −→ Cheißt Stammfunktion von f auf U , falls F : U ⊂ C −→ C holomorph ist und F ′ = f gilt.
Fur reelle Funktionen hatten wir das Folgende gezeigt:
Ist f : [a, b] ⊂ R −→ E eine stetige Funktion mit Werten in einem BanachraumE, dann hat f eine Stammfunktion F : [a, b] ⊂ R −→ E, die durch das Riemann-Integral gegeben ist:
F (x) =
x∫
a
f(t)dt.
F : I ⊂ R −→ E war differenzierbar und es galt F ′ = f .
Im Komplexen gilt das nicht! D.h. es existieren stetige Funktionen f : U ⊂ C −→ C ohneStammfunktion.Um Stammfunktionen zu finden, definiert man zunachst das Kurvenintegral einer stetigenFunktion.
Definition 12.7 Sei U ⊂ C offen, γ : [a, b] ⊂ R −→ U eine C1-Kurve mit Werten in U ,f : U ⊂ C −→ C stetig. Das Kurvenintergral von f langs γ ist das folgende (Riemann-)Integral:
∫
γ
f(z) dz :=
b∫
a
f(γ(t)) γ′(t)︸ ︷︷ ︸stetig
dt.
12

Ist γ : [a, b] ⊂ R −→ U eine stuckweise C1-Kurve, d.h. γ ist stetig und es existiert eineUnterteilung γ = a = t0 < t1 < ... < tn = b, so daß γ|[tν−1,tν ] eine C1-Kurve ist furν = 1, ..., n, dann setzt man
∫
γ
f(z) dz :=n∑
ν=1
∫
γ|[tν−1,tν ]
f(z) dz.
Bezeichnung: Im folgenden nennen wir eine stuckweise C1-Kurve einen Weg.
Beispiel 1: Seien z0, z1 ∈ U, z0 6= z1 und z0z1 = (1− t)z0 + tz1|t ∈ [0, 1] ⊂ U bezeichnedie Strecke zwischen z0 und z1, d.h. z0z1 bezeichne die Kurve
γ = z0z1 : [0, 1] −→ U
t 7−→ (1− t)z0 + tz1.
Es gilt γ′(t) = z1 − z0, und somit ist
∫
z0z1
dz =
1∫
0
γ′(t) dt =
1∫
0
(z1 − z0) dt = z1 − z0. (12.3)
Beispiel 2: Sei ∂K(z0, r) = z ∈ C ∣∣|z − z0| = r. ∂K(z0, r) der Kreis vom Radius r,parametrisiert durch
γ : [0, 2π] −→ Ct 7−→ z0 + re2πit
Dann gilt das Folgende∫
γ
(z − z0)n dz =
0 : n ∈ Z \ −12πi : n = −1
. (12.4)
Diese Formel beweist man wie folgt:
∫
γ
(z − z0)n dz = r
1∫
0
rne2πint · 2πie2πit dt
= rn+12πi ·1∫
0
e2πi(n+1)t dt
=
rn+12πi2πi(n+1) (e
2πi(n+1)·1 − e2πi(n+1)·0) = 0, n 6= −1
2πi, n = −1.
Wir betrachten nun die Verknupfung von zwei Wegen γ : [a, b] −→ U und δ : [c, d] −→ U ,wobei gilt γ(b) = δ(c). Diese wird definiert als der (nacheinander durchlaufene) Weg
γ ∗ δ : [0, 1] −→ U
t 7−→
γ(a + 2t(b− a)), 0 ≤ t ≤ 12
δ(c + (2t− 1)(d− c)), 12 ≤ t ≤ 1.
Wir beweisen nun
13

Satz 12.4 (Eigenschaften komplexer Kurvenintegrale)Seien f, g : U −→ C stetige Abbildungen und γ, δ : I −→ U Wege in U . Dann gilt:
1.∫
γ
(f + g)(z) dz =∫
γ
f(z) dz +∫
γ
g(z) dz,
∫
γ
c · g(z) dz = c ·∫
γ
g(z) dz, c ∈ C∫
γ∗δ
f(z) dz =∫
γ
f(z) dz +∫
δ
f(z) dz
2.∣∣∣∫
γ
f(z) dz∣∣∣ ≤ max
t∈I|f(γ(t))| · l(γ) , wobei l(γ) :=
b∫
a
‖γ′(t)‖ dt die Lange von γ
bezeichnet.
3. Fur gleichmaßig konvergente Funktionenfolgen fn, wobei fn : U ⊂ C −→ C stetig
sind fur alle n ∈ N, ist∫
γ
mit∞∑
n=1und lim
n→∞vertauschbar.
4. Es gilt die Invarianz gegenuber Parametertransformationen:
Sei γ : I ⊂ R −→ U ein Weg, τ : I −→ I eine Parametertransformation und γ : I −→U definiert durch γ = γ τ. Dann gilt
∫
γ
f(z) dz = sgn(τ ′) ·∫
γ
f(z) dz,
d.h.
∫
γ
f(z) dz =
∫
γ
f(z) dz , falls τ die Durchlaufrichtung erhalt,
−∫
γ
f(z) dz , falls τ die Durchlaufrichtung umkehrt.
5. Es gilt die Transformationsregel:
Seien f : U ⊂ C −→ C stetig, g : U −→ U holomorph mit stetiger Ableitungg′ : U −→ U und γ : I ⊂ R −→ U ein Weg, dann gilt
∫
γ
(f g)(z)g′(z) dz =∫
gγ
f(w) dw.
6. Zusammenhang zwischen Stammfunktion und Kurvenintegral:
Sei f : U −→ C stetig und F : U ⊂ C −→ C eine Stammfunktion von f , dann gilt
∫
γ
f(z) dz = F (γ(b))− F (γ(b)). (12.5)
D.h. fur eine Funktion f mit Stammfunktion hangt das Kurvenintegral nur vom An-fangspunkt γ(a) und vom Endpunkt γ(b) ab, nicht jedoch vom Verlauf von γ selbst.Insbesondere ist das Kuvenintegral uber geschlossenen Wegen gleich null.
14

Beispiel: Wir betrachten ein Beispiel zum Punkt 6., und zwar die Funktionf : U = C \ 0 ⊂ C −→ C mit f(z) = 1
z . Hatte f eine Stammfunktion auf U , soware fur γ = e2πit, 0 ≤ t ≤ 2π das Integral
∫γ
f(z) dz = f(1) − f(1) = 0. Es gilt aber nach
(12.4), daßs∫
|z|=1
f(z) dz = 2πi 6= 0 ,d.h. f kann keine Stamfunktion haben.
Beweis von Satz 12.4: 1.-3. folgen aus den Eigenschaften des Riemann-Integrals. Ebensofolgt 4. aus der Formel fur Koordinatentransformationen des Riemann-Integrals. 5. wird mitHilfe der Kettenregel bewiesen und verbleibt als Ubungsaufgabe. Wir beweisen6.) Sei F eine Stammfunktion von f , d.h. F ′ = f . Damit ist
∫γ
f(z) dz =b∫
a
f(γ(t))γ′(t) dt =b∫
a
(F ′(γ(t))γ′(t) dt
=b∫
a
(F γ)′(t) dt (Kettenregel)
= (F γ)(b)− (F γ)(a)
2
Definition 12.8 Eine offene und zusammenhangende Menge U ⊂ C heißt Gebiet.
Bemerkung: Wir hatten die folgenden topologischen Eigenschaften kenengelernt:
• Sei X ein topologischer (metrischer) Raum. Ist A ⊂ X bogenzusammenhangend, soist A auch zusammenhangend.(Die Umkehrung gilt i.A. nicht.)
• Ist X = Rn, U ⊂ X offen und zusammenhangend, so gilt: U ist bogenzusam-menhangend (Analysis II).
• Damit ist U ⊂ C ein Gebiet genau dann, wenn U offen und bogenzusammenhangendist.
Satz 12.5 Sei U ⊂ C ein Gebiet, f : U ⊂ C −→ C stetig. Dann sind folgende Aussagenaquivalent:
1. f besitzt eine Stammfunktion
2. Das Kurvenintegral∫γ
f(z) dz uber jeden geschlossenen Weg γ (d.h. γ(a) = γ(b)) ist
null.
3. Das Integral von f uber jeden in U verlaufenden Weg γ hangt nur vom Anfangspunktγ(a) und Endpunkt γ(b) ab.
Beweis:(1.=⇒ 2.) Satz 12.4, Punkt 6.(2.=⇒ 3.) Seien γ, δ : [0, 1] −→ U
zwei Wege in U mit γ(0) = δ(0), so-wie γ(1) = δ(1).Behauptung:
∫
γ
f(z) dz =∫
δ
f(z) dz.
δ
γ
γ(1) = δ(1)
γ(0) = δ(0)
15

Beweis: Sei δ− der ruckwarts durchlaufene Weg δ:
δ− : [0, 1] −→ U
δ−(t) := δ(1− t).
Dann ist γ ∗ δ− : [0, 1] −→ U ein geschlossener Weg in U . Nach 2. gilt nun:∫
γ∗δ−f(z)dz = 0
Satz 12.4 =∫
γ
f(z)dz +∫
δ−
f(z)dz =∫
γ
f(z)dz −∫
δ
f(z)dz.
Damit ist also∫γ
f(z)dz =∫δ
f(z)dz
(3.=⇒ 1.) Sei z∗ ∈ U fixiert. Sei
F (z) :=
z∫
z∗
f(z)dz,
das Kurvenintegral entlang eines beliebigen Weges von z∗ nach z in U . Da solch ein Integralvon f nach 3. nur von γ(z∗) und γ(z) abhangig ist und nicht von γ, ist F : U ⊂ C −→ Ckorrekt definiert.Behauptung: F ist komplex–differenzierbar und F ′ = f .
Sei z0 ∈ U beliebig, fest. Es ist zuzeigen, daß F in z diffenrenzier-bar ist und F ′(z0) = f(z0). DaU offen ist, existiert eine KugelK(z0, ρ) ⊂ U . Sei z ∈ K(z1, ρ) ⊂U . U
γz0
z
z∗
Dann gilt fur F
F (z) =
z∫
z∗
f(ξ)dξ =
z0∫
z∗
f(ξ)dξ +
z∫
z0
f(ξ)dξ
= F (z0) +∫
z0z
f(z0)dξ +∫
z0z
(f(ξ)− f(z0))dξ
︸ ︷︷ ︸=:r(z)
= F (z0) + f(z0)∫
z0z
dξ + r(z)
(12.3)= F (z0) + f(z0)(z − z0) + r(z).
Somit erhalt man, daßF (z)− F (z0)
z − z0= f(z0) +
r(z)z − z1
.
Es bleibt zu zeigen, daß limz→z1r(z)z−z1
= 0, denn dann gilt limz→z1F (z)−F (z1)
z−z1= f(z1).
16

Da nun f in z0 stetig ist, existiert fur alle ε > 0 ein 0 < δ < ρ so, daß
|f(z)− f(z0)| < ε fur alle z ∈ U mit |z − z0| < δ.
Damit ist
|r(z)| ≤ ε
∫
z1z
dξ = ε|z − z0| fur alle z ∈ U mit |z − z0| < δ.
D.h. aber, daß ∣∣∣F (z)− F (z0)z − z0
− f(z0)∣∣∣ ≤ ε.
und somitlim
z→z0
F (z)− F (z0)z − z0
= f(z0).
Also ist F fur alle z0 ∈ U komplex differenzierbar und es gilt F ′(z0) = f(z0). 2
Um die Existenz von Stammfunktionen nachzuweisen, mußte man also fur alle geschlossenenWege γ nachweisen, daß
∫γ
f(z) dz = 0 gilt. Fur spezielle Gebiete U ∈ C genugt es jedoch,
dies auch nur fur spezielle Wege zu zeigen. Dabei wird es sich um sternformige Gebiete undderen Rander handeln.
Definition 12.9 Eine Teilmenge a ⊂ C heißt sternformigfalls ein z1 ∈ A existiert, so daß fur alle z ∈ A die Streckez1z in A enthalten ist. z1 heißt Zentrum von A.
z1
Beispiele:
1. Eine konvexe Menge A ⊂ C ist sternformig. Dabei ist jeder Punkt von A ein Zentrum.
2. Die “geschlitzte Ebene” C− := C \ z ∈ C | z ∈ R, z ≤ 0 ist sternformig aber nichtkonvex. Die Zentren von C− sind alle z ∈ R+.
3. Die “punktierte Ebene” C∗ := C \ 0 ist nicht sternformig. Kreisringe sind nichtsternformig.
Definition 12.10 (Dreieckswege) Seien z1, z2, z3 ∈ C gegeben. Die Menge
4 = 4(z1, z2, z3) = t1z1 + t2z2 + t3z3|t1 + t2 + t3 = 1, 0 ≤ ti ≤ 1, i = 1, 2, 3
ist das Dreieck in C mit den Ecken z1, z2, z3.Mit ∂4 (“Dreiecksweg”) sei der folgende, in z1 geschlossene Weg bezeichnet:
∂4 : [0, 3] −→ U
∂4(t) :=
z2 + (1− t)(z1 − z2) , t ∈ [0, 1]z3 + (2− t)(z2 − z3) , t ∈ [1, 2]z1 + (3− t)(z3 − z1) , t ∈ [2, 3]
= (z1z2 ∗ z2z3) ∗ z3z1 (modulo Umparametrisierung).
17

Dann gilt der
Satz 12.6 (Existenzkiterium fur Stammfunktionen fur sternformige Gebiete)Seien U ⊂ C ein sternformiges Gebiet mit Zentrum z∗, f : U ⊂ C −→ C stetig. Fur denRand jedes Dreiecks mit z∗ als Ecke gelte:
∫
∂4
f(z)dz = 0.
Dann ist ∫
γ
f(z)dz = 0
fur jeden geschlossenen Weg γ in U . D.h f hat eine Stammfunktion, und diese ist gegebendurch
F (z) :=∫
z∗z
f(ξ)dξ.
Beweis: Definiere fur z ∈ U
F (z) :=∫
z∗z
f(ξ)dξ.
Da U sternformig ist, ist z∗z ∈ U , d.h. F ist wohl definiert.Wir zeigen wie im Satz 12.5, daß F holomorph ist und F ′ =f gilt.Sei z0 ∈ U und ρ > 0, so daß gilt z ∈ K(z0, ρ) ⊂ U .Betrachte das Dreieck 4 = 4(z∗, z0, z) ⊂ U .
U
z∗z0
z
Dann gilt
0 =∫
∂4
f(ξ)dξ =∫
z∗z0∗z0z∗zz∗
f(ξ)dξ
=∫
z∗z0
f(ξ)dξ +∫
z0z
f(ξ)dξ +∫
zz∗
f(ξ)dξ
= −F (z0) +∫
z0z
f(ξ)dξ + F (z)
Damit ist
F (z) = F (z0) +∫
z1z
f(ξ)dξ,
und somit folgt wie im Beweis von Satz 12.5, daß F komplex differenzierbar ist und F ′ = f
gilt. 2
12.3 Der Cauchysche Integralsatz
Dieser Abschnitt hat die folgende Aussage zum Ziel:
18

Sei U ⊂ C ein einfach-zusammenhangendes Gebiet und f : U ⊂ C −→ Cholomorph, so gilt ∫
γ
f(z)dz = 0
fur alle geschlossenen Wege γ in U , d.h. f hat auf U eine Stammfunktion.
12.3.1 Einfach–zusammenhangende topologische Raume
Wir fuhren zunachst zwei Bezeichnungen fur topologische (metrische) Raume ein.
Definition 12.11 Sei X ein topologischer Raum, x0, x1 ∈ X. Dann bezeichne
Ω(X; x0, x1) := ω : [0, 1] −→ X | ω ist stetig, ω(0) = x0, ω(1) = x1die Menge aller stetigen Wege von x0 nach x1,
Ω(X; x0) := Ω(X; x0, x0)
die Menge aller in x0 geschlossenen, stetigen Wege.
Wir fuhren nun den in der Topologie wesentlichen Begriff der Homotopie ein.
Definition 12.12 Zwei Wege ω, σ ∈ Ω(X; x0, x1) heißen homotop in Ω(X; x0, x1) (also mitfixiertem Anfangs- und Endpunkt), falls eine stetige Abbildung
H : [0, 1]× [0, 1] −→ X
(t, s) 7−→ Hs(t) = H(t, s)
existiert, mit
1. Hs ∈ Ω(X; x0, x1) fur alle s ∈ [0, 1],
2. H0 = ω (d.h. H(t, 0) = ω(t)),
3. H1 = σ (d.h. H(t, 1) = σ(t)).
H heißt Homotopie zwischen ω und σ. Bezeichnung: ω ∼ σ
Homotopie ist eine Aquivalenzrelation auf Ω(X; x0, x1).
Beispiel: Sei A ⊂ Rn konvex, ω, σ ∈Ω(A;x0, x1). Dann sind ω und σ homotop inΩ(A;x0, x1) fur beliebige x0, x1 ∈ A. Dabeiist die Homotopie gegeben durch die Verbin-dungsgerade zwischen σ(t) und ω(t):
Hs(t) := sσ(t) + (1− s)ω(t).
ω
σ
Hs(t)
σ(t) = H1(t)
ω(t) = H0(t)
Mittels der Aquivalenzrelation der Homotopie definieren wir eine Gruppe.
Definition 12.13 Sei X ein topologischer Raum, x0 ∈ X. Dann heißt die Menge
π1(X; x0) := Ω(X;x0)/∼Fundamentalgruppe von X bezuglich x0.
19

Es gilt:
1. π1(X; x0) ist eine Gruppe
• mit dem Produkt
[ω] · [σ] := [ω ∗ σ]
(ω ∗ σ)(t) :=
ω(2t) , 0 ≤ t ≤ 1
2
σ(2t− 1) , 12 < t ≤ 1,
• dem Einselement e = [cx0 ] mit cx0(t) ≡ x0,
• und dem Inversen [ω]−1 := [ω−], wobei ω− : [0, 1] −→ X, ω−(t) = ω(1− t).
2. Ist X bogenzusammenhangend und x0, x1 ∈ X, so sind π1(X; x0) und π1(X; x1) iso-morph. Dabei definiert jedes η ∈ Ω(X; x0, x1) einen Gruppenisomorphismus
φη : π1(X; x0) −→ π1(X;x1)[ω] 7−→ [η− ∗ ω ∗ η] .
D.h. fur bogenzusammenhangende Gebiete ist die Angabe des fixierten Punktes un-wesentlich, und man kann ihn in der Bezeichnung weglassen.
Definition 12.14 Ein topologischer Raum heißt einfach-zusammenhangend, falls gilt:
1. X ist bogenzusammenhangend (insbesondere π1(X;x0) = π1(X) fur alle x0.)
2. π1(X) = 1 = e. D.h. jeder in x0 geschlossene Weg ω ist “zusammenziehbar”, d.h.homotop zum konstanten Weg e. Solche Wege heißen “nullhomotop”.
Beipiel 1: Eine beliebige Teilmenge X := A ⊂ C mit der induzierten Metrik ist nichtunbedingt einfach–zusammenhangend. π1(A; x0) mißt die Zahl der Locher in A.
So gilt fur X := C \ 0 daßπ1(X; x0) 6= 1. Spater werdenwir zeigen, daß π1(X; x0) = Z
x0
0
Ist X = C \ p1, . . . , pk mitpi ∈ C, so ist π1(X;x0) eine nichtabelsche freie Gruppe mit k Er-zeugenden.
x0
p1
p2
p3
p4
Beispiel 2: Jedes sternformige Gebiet U ⊂ C ist einfach-zusammenhangend. Sei z∗ einZentrum von U. U ist bogenzusammenhangend, da jeder Punkt z ∈ U mit z∗ verbunden
20

werden kann. Es bleibt zu zeigen, daß jeder in z∗ geschlossene Weg homotop zumkonstanten Weg cz∗ , cz∗(t) ≡ z∗ ist. Die Homotopie zwischen ω und cz∗ ist
Hs(t) = H(t, s) = (1− s)ω(t) + sz∗
H ist stetig und H([0, 1]× [0, 1]) ⊂ U , da U sternformig ist. H leistet das Verlangte:
H(0, s) = H(1, s),H(t, 0) = ω(t),H(t, 1) = cz∗ .
Beispiel 3: Es gelten die folgenden Beziehungen:
π1(S1) = Z,
π1(C \ 0) = Z,
π1(Sn) = 1 ∀n ≥ 2.
12.3.2 Cauchyscher Integralsatz fur sternformige Gebiete
Wir werden nun den Cauchyschen Intergralsatz beweisen. Dieser wurde zuerst von Cauchy1825 fur Rechteckgebiete bewiesen (veroffentlicht 1874!). Der verhaltnismaßig einfache Be-weis, den wir hier angeben, stammt von Goursat und ist aus dem Jahre 1883. Er basiert aufeinem Satz, der auch unter dem Namen “Fundamentallemma der Funktionentheorie”oder “Lemma von Goursat” bekannt ist.
Satz 12.7 (Cauchysche Integralformel fur Dreieckswege [Goursat, 1883]) SeienU ⊂ C offen und f : U ⊂ C −→ C holomorph. Fur den Rand jedes Dreiecks 4 ⊂ U giltdann ∫
∂4f(z)dz = 0.
Beweis: Sei 4 ⊂ U ein beliebiges Dreieck in U . Wirteilen 4 in vier Teildreiecke 4ν , ν = 1, . . . , 4 durchVerbinden der Mittelpunkte der Seiten von 4 undorientieren 4ν genauso wie 4, d.h. alle Rander derTeildreiecke werden in demselben Umlaufsinn durch-laufen wie 4. z1 z2
z3
ªª ª
ª
Man hat dann folgenden Eigenschaften.
• Fur die Langen der Dreiecke gilt L(∂4ν) = 12L(∂4) fur ν = 1, . . . , 4.
• Unter Beachtung der Orientierung erhalt man
∫
∂4
f(z)dz =4∑
ν=1
∫
∂4ν
f(z)dz,
da die Innenkanten zweimal in entgegengesetzter Richtung durchlaufen werden.
21

Sei 41 = 4ν0 das Dreieck, fur das∣∣ ∫
∂4νf(z)dz
∣∣ maximal wird, d.h.
∣∣∫
∂4
f(z)dz∣∣ ≤ 4
∣∣∫
∂41
f(z)dz∣∣.
Zerlege 41 analog zu 4 in vier Teildreiecke und wahle ein 42 davon aus, usw. Man erhalteine Folge von Dreiecken 4,41,42,43, . . . mit
4 ⊃ 41 ⊃ 42 ⊃ · · · .
Fur diese Folge gilt:
• 4n ist abgeschlossen,
• Fur die Langen gilt
L(∂4n) =12L(∂4n−1) = . . . =
12n
L(∂4). (12.6)
• Fur die Integrale gilt:
∣∣∫
∂4
f(z)dz∣∣ ≤
4∑ν=1
∣∣∫
∂4ν
f(z)dz∣∣
≤ 4 · ∣∣∫
∂41
f(z)dz∣∣ ≤ . . . ≤ 4n
∣∣∫
∂4n
f(z)dz∣∣. (12.7)
• Fur den Durchmesser jedes Dreiecks D aus dieser Folge gilt:
diam D = maxz,w∈D
|z − w| ≤ L(∂D).
Damit istdiam (4n) ≤ L(∂4n) =
12n
L(∂4),
so daß fur den Grenzwert gilt:
limn→0
diam (4n) = 0. (12.8)
Nun besagt der Satz von Cantor fur vollstandige, metrische Raume (Kapitel 2, Satz 2.30,Verallgemeinerung der Intervallschachtelung), daß, wenn ein vollstandiger, metrischer RaumX und eine Folge von abgeschlossenen, nichtleeren Teilmengen An ⊂ X mit · · · ⊃ An ⊃An+1 ⊃ · · · und diam(An) n→∞−→ 0 gegeben sind,
⋂∞n=1 An gleich einem Punkt ist.
D.h. fur die Folge von Dreiecken existiert ein z0 mit
∞⋂n=1
4n = z0.
Nach Voraussetzung ist f : U ⊂ C −→ C ist in z0 komplex–differenzierbar. Es existiert alsoeine Funktion r, so daß
f(z)− f(z0) = f ′(z0)(z − z0) + r(z) mit limz→z0
r(z)z − z0
= 0.
22

Wir betrachten nun die lineare Funktion
G(z) := f ′(z0)(z − z0) + f(z0) = f(z)− r(z).
Eine lineare Funktion hat eine Stammfunktion, weil jedes Polynom eine Stammfunktion hat.Also hat auch G eine Stammfunktion, und es gilt nach Satz 12.4
0 =∫
∂4n
G(z)dz =∫
∂4n
(f(z)− r(z))dz
und damit aufgrund von (12.7)
∣∣∫
∂4
f(z)dz∣∣ (12.7)
≤ 4n∣∣
∫
∂4n
f(z)dz∣∣ = 4n
∣∣∫
∂4n
r(z)dz∣∣.
Wir zeigen nun, daß dieses Integral gegen null geht.Sei ε > 0. Wegen der Konvergenz des Restgliedes limz→z0
r(z)z−z0
= 0, existiert ein δ > 0, sodaß
|r(z)| ≤ ε · |z − z0| fur alle z ∈ K(z0, δ).
Da diam (4n) −→ 0 existiert ein n0 mit
z0 ∈ 4n ⊂ K(z0, δ) fur alle n ≥ n0.
Sei nun z ∈ 4n beliebig fur n ≥ n0. So hat man zunachst
|z − z0| ≤ diam (4n) ≤ L(∂4n) ≤ 12n
L(∂4),
und erhalt als Restgliedabschatzung
|r(z)| ≤ ε · 12n
L(∂4) fur n ≥ n0 und z ∈ 4n.
Also gilt aufgrund von Satz 12.4, Punkt 2., daß∣∣
∫
∂4n
r(z)dz∣∣ ≤ ε
2n· L(∂4) · L(∂4n) =
14n
ε · (L(∂4))2.
Schließlich erhalt man fur das Intergral von f
∣∣∫
∂4
f(z)dz∣∣ ≤ 4n
∣∣∫
∂4n
r(z)dz∣∣ ≤ 4n · 1
4nε · (L(∂4))2
= ε · (L(∂4))2 fur alle ε > 0.
D.h. aber, daß∫
∂4f(z)dz = 0. 2
Als Folgerung erhalt man den Cauchyschen Intergralsatz fur sternformige Gebiete U .
Satz 12.8 (Cauchyscher Intergralsatz fur sternformige Gebiete) Seien U ⊂ Csternformig und f : U ⊂ C −→ C holomorph. Dann gilt:∫
γ
f(z)dz ≡ 0
fur jeden geschlossenen Weg γ in U . (Insbesondere besitzt f eine Stammfunktion auf U .)
Beweis: Nach Satz 12.7 gilt fur jeden Dreiecksweg ∂4 mit 4 ∈ U , daß∫
∂4f(z)dz = 0. Aus
Satz 12.6 folgt dann die Behauptung. 2
23

12.3.3 Cauchyscher Integralsatz fur einfach–zusammenhangende
Gebiete
Um den Cauchyschen Integralsatz fur einfach–zusammenhangende Gebiete zu beweisen, er-weitern wir zunachst die Definition des Kurvenintegrals auf stetige Kurven aus. Dazu ap-proximiert man man eine stetige Kurve hinreichend durch Polygonzuge, die ja stuckweiseC1 sind.
Lemma 12.3.1 Sei γ : [a, b] ⊂ R −→ U ⊂ C eine stetige Kurve. Dann existiert eineUnterteilung P = a = t0 < t1 < · · · < tn = b von [a, b] und ein ε > 0, so daß
γ([tν−1, tν ]) ⊂ K(γ(tν−1), ε) ∩K(γ(tν), ε)︸ ︷︷ ︸konvexe Menge
⊂ U
fur ν = 1, . . . , n.
Beweis: In Analysis I hatten wir die Lebesgue-Zahl kennengelernt und folgende Behauptungbewiesen:
Seien K kompakt und U offen mit K ⊂ U . Dann existiert eine Lebesgue-Zahlε > 0 zu (K, U), d.h. es gilt fur alle x ∈ K, daß K(x, ε) ⊂ U.
Diese wurde wie folgt ermittelt: Zu jedem x ∈ K ⊂ U existiert ein ε(x) > 0 mitK(x, 2ε(x)) ∈ U . Da nun K kompakt ist, gilt K ⊂ ∪p
i=1K(xi, ε(xi)). Dann istε := mini=1,...,p ε(xi) eine Lebesgue-Zahl, denn K(x, ε) ⊂ K(xj , 2ε(xj)) fur einj.
Nun ist γ([a, b]) kompakt, weil [a, b] kompakt und γ stetig ist. Sei ε > 0 die Lebesgue-Zahlvon (γ([a, b]), U). Damit ist
K(γ(t), ε) ⊂ U fur alle t ∈ [a, b].
Da [a, b] kompakt ist, ist γ : [a, b] ⊂ R −→ C gleichmaßig stetig, d.h. es existiert ein δ > 0,so daß
|γ(s)− γ(t)| < ε fur alle |s− t| < δ.
Wir wahlen eine Unterteilung P von [a, b] mit ‖P‖ = maxν=1,...,n |tν − tν−1| < δ. Dann ist|γ(tν−1)− γ(tν)| < ε und somit
γ([tν−1, tν ]) ⊂ K(γ(tν−1), ε) ∩K(γ(tν−1), ε) ⊂ U.
2
Bezeichnung: Ist γ : [a, b] ⊂ R −→ C stetig und P = a = t0 <
t1 < · · · < tn = b eine Unterteilung von [a, b]. Dann bezeichneγP den Polygonzug, der durch P definiert wird:
γP = γ(t0)γ(t1) ∗ γ(t1)γ(t2) ∗ · · · ∗ γ(tn−1)γ(tn).
γ(t2)
γ(t1)
γ(t3)γ(b)
γ(a)
Lemma 12.3.2 Seien γ : [a, b] ⊂ R −→ U ⊂ C stetig, wobei U offen ist, und P eineUnterteilung wie in Lemma 12.3.1, f : u ⊂ C −→ C holomorph. Dann ist das Kurvenintegral
∫
γP
f(z)dz =n∑
ν=1
∫
γ(tν−1)γ(tν)
f(z)dz
24

unabhangig von der Wahl von P.Ist γ : [a, b] ⊂ R −→ C stuckweise C1, so gilt
∫
γ
f(z)dz =∫
γP
f(z)dz
fur alle Unterteilungen P wie in Lemma 12.3.1.
Beweis: Sei γ eine stuckweise C1-Kurve und γ([tν−1, tν ]) in einer konvexen Teilmenge vonU enthalten. Mit Satz 12.7 kann man nun das Integral uber γ∣∣[tν−1,tν ]
uber den Strecken
γ(tν−1), γ(tν) berechnen, d.h.∫
γ∣∣[tν−1,tν ]
f(z)dz =∫
γ(tν−1)γ(tν)
f(z)dz
und somit ∫
γ
f(z) dz =∫
γP
f(z) dz.
Seien weiter γ stetig und P und P Untertei-lungen wie in Lemma 12.3.1. Mit P ∨ P istdie Unterteilung in alle Punkte aus P und Pgemeint. Man ersetzt zunachst die Streckenaus P durch Strecken aus P ∨ P und danndiese durch Strecken aus P. Da man immerin konvexen Gebieten bleibt, andert sich derWert des Integrals nach Satz 12.7 nicht. 2
γPγPγP∨P
Dies rechtfertigt die folgende Definition:
Definition 12.15 Seien U ⊂ C offen, γ : [a, b] ⊂ R −→ U ⊂ C stetig und f : U ⊂ C −→ Cholomorph. Dann ist das Kurvenintegral von f uber γ definiert durch:
∫
γ
f(z)dz :=∫
γP
f(z)dz,
wobei P eine Unterteilung aus Lemma 12.3.1 ist.
Bemerkung: Dann gilt der Cauchysche Integralsatz 12.8 auch fur stetige Kurven.
Seien Q := [0, 1]× [0, 1] das Einheitsquadrat und H : Q −→ U ⊂ C stetig, wobei U offen ist.Unter H|∂Q verstehen wir die folgende stetige Kurve in U :
H|∂Q(t) :=
H(t, 0) , t ∈ [0, 1]H(1, t− 1) , t ∈ [1, 2]H(3− t, 1) , t ∈ [2, 3]H(0, 4− t) , t ∈ [3, 4].
25

Lemma 12.3.3 Sind U ⊂ C offen, f : U ⊂ C −→ C holomorph und H : Q −→ U stetig, sogilt ∫
H|∂Q
f(z)dz = 0.
Beweis: Man zerlege Q in n2 Teilquadrate Qµν der Seitenlange 1n . Da Q kompakt ist, ist
auch H(Q) kompakt. Sei ε > 0 die Lebesgue-Zahl von (H(Q), U). D.h. K(H(q), ε) ⊂ U furalle q ∈ Q.Sei die Unterteilung von Q so fein (d.h. n so groß), daß fur die Teilquadrate Qµν gilt
H(Qµν) ⊂ K(H(qµν), ε)︸ ︷︷ ︸konvex
⊂ U,
wobei qµν der Mittelpunkt von Qµν ist. Nach Satz 12.8 gilt nun∫
H|∂Qµν
f(z)dz = 0,
da H(Qµν) in einer konvexen Menge liegt und H|∂Qµνgeschlossen ist.
Wegen der Orientierung der Zerlegung treten nun die Wege im Inneren von Q zweimal inentgegengesetzter Orientierung auf (siehe Skizze bei den Dreiecken), woraus folgt
n∑µ,ν=1
∫
H|∂Qµν
f(z)dz =∫
H|∂Q
f(z)dz.
Damit ergibt sich jedoch die Behauptung. 2
Satz 12.9 (Cauchyscher Integralsatz fur einfach-zusammenhangende Gebiete)Sei U ⊂ C ein einfach-zusammenhangendes Gebiet, f : U ⊂ C −→ C holomorph undγ : [0, 1] −→ U eine stetige, geschlossene Kurve. Dann gilt:
∫
γ
f(z)dz = 0.
Insbesondere hat jede holomorphe Funktion f auf einfach-zusammenhangenden Gebieteneine Stammfunktion.
Beweis: Sei x0 = γ(0) = γ(1). Da U einfach-zusammenhangend ist, ist γ homotop zumkonstanten Weg cx0 , cx0(t) ≡ x0. D.h. es existiert eine stetige Abbildung H : Q −→ U mit
H(t, 0) = γ(t)
H(t, 1) = x0
H(0, s) = H(1, s) = x0
Damit ist
H∣∣∂Q(t) =
γ(t) , t ∈ [0, 1]x0 , t ∈ [1, 4]
26

D.h. H|∂Q = γ ∗ cx0 ∗ cx0 ∗ cx0 , somit ist
∫
H|∂Q
f(z)dz
︸ ︷︷ ︸=0 nach Lemma 12.3.3
=∫
γ
f(z)dz + 3∫
cx0
f(z)dz
︸ ︷︷ ︸=0
,
und man erhalt die Behauptung. 2
Bemerkung: Einfach-zusammenhangende Gebiete sind die allgemeinste Klasse von Gebie-ten, auf denen jede holomorphe Funktion nach C eine Stammfunktion besitzt.
Satz 12.10 Seien U ⊂ C offen und f : U ⊂ C −→ C holomorph. Weiter seien α, β ∈Ω(U ; x0, x1) homotop in Ω(U ;x0, x1). Dann gilt:
∫
α
f(z)dz =∫
β
f(z)dz.
Beweis: Sei H : Q −→ U eine Homotopie von α nach β in Ω(U ; x0, x1). Damit ist (moduloUmparametrisierung) H|∂Q = α ∗ β− und somit
0 =∫
H|∂Q
f(z)dz =∫
α∗β−f(z)dz
=∫
α
f(z)dz +∫
β−
f(z)dz
=∫
α
f(z)dz −∫
β
f(z)dz.
2
Spezialfalle
Sei z0 ∈ C fixiert. Mit |z − z0| = r bezeichnen wir die Kurve
γr : [0, 1] −→ C,
γr(t) = z0 + r exp(2πit).
Diese ist immer entgegen dem Uhrzeigersinn parametrisiert.
Folgerung 12.3.1 Seien U ⊂ C offen, f : U ⊂ C −→ C holomorph und cl K(z0, r) ⊂ U .Dann gilt ∫
|z−z0|=r
f(z)dz = 0.
Beweis: cl K(z0, r) liegt in einer konvexen Menge K(z0, r + ε). Dann ist dieser Satz eineFolgerung aus Satz 12.8. 2
27
Folgerung 12.3.2 Seien U ⊂ C offen und der Kreisring R = z ∈ C |r ≤ |z−z0| ≤ R ⊂ U
eine Teilmenge von U . Dann gilt∫
|z−z0|=r
f(z) dz =∫
|z−z0|=R
f(z) dz.
Beweis: Die Behauptung gilt aufgrund von Satz 12.10, da γr homotop ist zu γR. 2
Folgerung 12.3.3 Seien U offen, K(z0, r) ⊂ K(z1, R), cl K(z1, R) \ K(z0, r) ⊂ U undf : U ⊂ C −→ C holomorph. Dann gilt
∫
|z−z0|=r
f(z)dz =∫
|z−z1|=R
f(z)dz.
Beweis: Aufgrund von cl K(z1, R) \K(z0, r) ⊂ U sind wieder |z− z0| = r und |z− z1| = R
homotop und damit die Integrale gleich. 2
12.4 Grundlegende Eigenschaften holomorpher Funk-
tionen
12.4.1 Potenzreihenentwicklung holomorpher Funktionen
In diesem Abschnitt wollen wir aquivalente Bedingungen fur Holomorphie kennenlernen, mitder folgenden Aussage als Ziel:
Jede holomorphe Funktion f : U ⊂ C −→ C ist lokal in eine Potenzreiheentwickelbar.
Dazu beweisen wir zunachst die Cauchysche Integralformel. Wir wissen bereits, daß fur dasIntegral uber den Kreis gilt
∫|z−z0|=r
1z−z0
dz = 2πi. Dies wird nun verallgemeinert.
Satz 12.11 (Cauchysche Integralformel [Cauchy, 1831]) Sei U ⊂ C offen, f : U ⊂C −→ C holomorph, z0 ∈ U und r > 0, so daß clK(z0, r) ⊂ U . Dann gilt fur alle ξ ∈K(z0, r):
f(ξ) =1
2πi
∫
|z−z0|=r
f(z)z − ξ
dz. (12.9)
Beweis: Sei 0 < ε < r, so daß clK(ξ, ε) ⊂ K(z0, r). Dann ist die Funktion
z ∈ U \ ξ 7−→ f(z)z − ξ
holomorph auf U \ ξ. Nun ist U \ ξ eine offene Umgebung von cl K(z0, r) \K(ξ, ε). Ausder Folgerung 12.3.3 erhalten wir fur alle ε
∫
|z−z0|=r
f(z)z − ξ
dz =∫
|z−ξ|=ε
f(z)z − ξ
dz.
28

Wir berechnen nun das Integral auf der rechten Seite. Dazu parametrisieren wir |z − ξ| = ε
durch die Kurve
γ(t) = ξ + εe2πit, fur t ∈ [0, 1] und erhalten
γ′(t) = 2πitεe2πit.
Damit ergibt sich
∫
|z−ξ|=ε
f(z)z − ξ
dzper def.
= 2πiε
1∫
0
f(ξ + εe2πit) · e2πit
εe2πitdt
= 2πi
1∫
0
f(ξ + εe2πit) dt
= 2πi
1∫
0
(f(ξ + εe2πit)− f(ξ)
)dt
︸ ︷︷ ︸Behauptung: ε→0−→ 0
+2πi
1∫
0
f(ξ) dt
︸ ︷︷ ︸=2πif(ξ)
(12.10)
Wir betrachten also
∣∣∣1∫
0
(f(ξ + εe2πit)− f(ξ)
)dt
∣∣∣ ≤1∫
0
|f(ξ + εe2πit)− f(ξ)| dt
≤ maxt∈[0,1]
|f(ξ + εe2πit)− f(ξ)|︸ ︷︷ ︸
ε→0−→0 da f stetig
·1∫
0
dt
︸ ︷︷ ︸=1
.
Damit gilt die Behauptung. 2
Als Folgerung erhalt man den
Satz 12.12 (Mittelwertsatz fur holomorphe Funktionen) Sei U ⊂ C ein Gebiet, f :U ⊂ C −→ C holomorph, cl K(z0, r) ⊂ U . Dann gilt
f(z0) =
1∫
0
f(z0 + re2πit
)dt.
Der Beweis ergibt sich aus der Formel (12.10) im Beweis von Satz 12.11. 2
Anwendung: Integralberechnung mit Cauchyscher Integralformel
Wir betrachten das Integral
I =∫
|z−1|=1
z
z2 − 4z + 3· ez dz.
Um dieses Integral zu berechnen, fuhren wir eine Partialbruchzerlegung durch:
p(z) = z2 − 4z + 3 = (z − 1)(z − 3).
29

Damit istz
z2 − 4z + 3= −1
2· 1z − 1
+32· 1z − 3
.
und man errechnet fur das Integral
I = −12
∫
|z−1|=1
ez
z − 1dz +
32
∫
|z−1|=1
ez
z − 3dz
︸ ︷︷ ︸= 0,
da ez
z−3 holomorph aufUmgebung der Einheits-kreisscheibe um 1
= −12· 2πie
= −πie.
Jede Potenzreihe ist auf ihrem Konvergenzradius holomorph. Es gilt auch die Umkehrung.
Satz 12.13 (Potenzreihenentwicklungssatz) Sei f : U ⊂ C −→ C holomorph, U ⊂ Coffen und z0 ∈ U . Sei f : U ⊂ C −→ C holomorph und z0 ∈ U . Sei weiterhin
% := dist(z0, ∂U) = infz∈∂U
|z − z0| > 0.
Dann existiert genau eine Potenzreihe∞∑
n=0cn(z − z0)n, so daß
1. der Konvergenzradius von∞∑
n=0cn(z − z0)n ist großer oder gleich %,
2. f(z) =∞∑
n=0cn(z − z0)n fur alle z mit |z − z0| < %,
3. fur alle r mit 0 < r < % gilt
cn =1
2πi
∫
∂K(z0,r)
f(z)(z − z0)n+1
dz =f (n)(z0)
n!.
Man kann also jede holomorphe Funktion f auf Int(K(z0, %)) in eine Potenzreihe entwickeln,deren Koeffizienten durch 3. gegeben sind.Fur n = 0 ist 3. die Cauchysche Integralformel, da f(z0) = c0.
Beweis:
Eindeutigkeit: Sei∞∑
n=0cn(z − z0)n eine Potenzreihe mit f(z) =
∞∑n=0
cn(z − z0)n fur alle
z, mit |z − z0| < %. Mit der Folgerung aus Satz 12.1 gilt dann, daß f beliebig oftkomplex-differenzierbar ist und
cn =1n!
f (n)(z0)
gilt. Damit sind die cn und auch die Potenzreihe eindeutig durch f bestimmt.
30

Existenz: Es ist zu zeigen, daß fur alle z mit |z − z0| < % und r mit 0 < r < % gilt, daß
f(z) =∞∑
n=0
1
2πi
∫
|w−z0|=r
f(w)(w − z0)n+1
dw
(z − z0)n.
Sei z ∈ U und |z − z0| < %. Wir wahlen ein r mit 0 < r < %. Dann gilt mit derCauchyschen Integralformel fur |z − z0| < r:
f(z) =1
2πi
∫
|w−z0|=r
f(w)w − z
dw =1
2πi
∫
|w−z0|=r
f(w)w − z0
· 11− z−z0
w−z0
dw.
Da |w − z0| = r > |z − z0|, ist∣∣∣ z−z0w−z0
∣∣∣ < 1. Fur die geometrische Reihe gilt dann
∞∑n=0
(z − z0
w − z0
)n
=1
1− z−z0w−z0
.
Wir erhalten somit
f(z) =1
2πi
∫
|w−z0|=r
∞∑n=0
f(w)(w − z0)n+1
dw · (z − z0)n.
Die geometrische Reihe ist nun holomorph und konvergiert gleichmaßig auf |w−z0| = r.Wir konnen also Integral und Summe vertauschen, und es folgt
f(z) =1
2πi
∞∑n=0
( ∫
|w−z0|=r
f(w)(w − z0)n+1
dw)(z − z0)n.
2
Aus den Satzen 12.1 und 12.12 erhalt man insbesondere:
Satz 12.14 Sei f : U ⊂ C −→ C holomorph. Dann gilt
1. f ist beliebig oft komplex–differenzierbar und
f (n)(z0) =n!2πi
∫
|z−z0|=r
f(z)(z − z0)n+1
dz
fur alle r < % = dist(z0, ∂U) (Cauchy–Formel).
2. f ist in eine komplexe Taylorreihe zu entwickeln:
f(z) =∞∑
n=0
f (n)(z0)n!
(z − z0)n, fur alle z mit |z − z0| < %.
3. f ∈ C∞(U), d.h. es existieren beliebige reelle Ableitungen, die stetig sind.
31
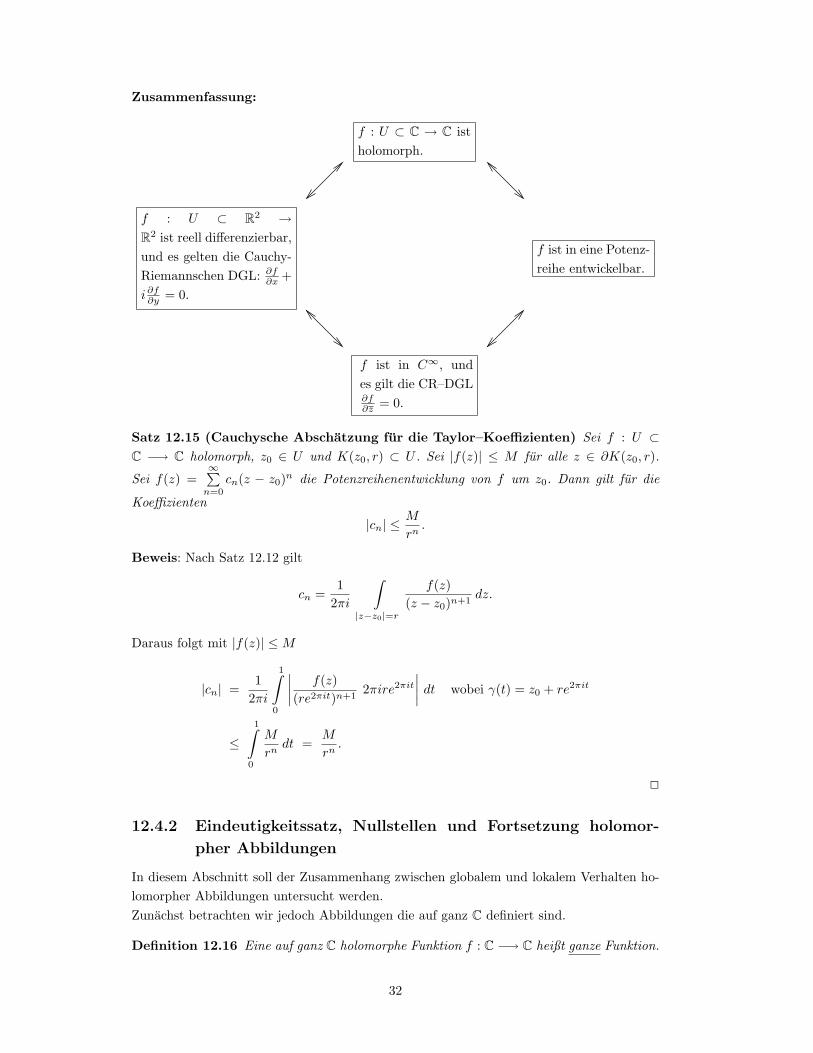
Zusammenfassung:
f : U ⊂ C → C istholomorph.
f : U ⊂ R2 →R2 ist reell differenzierbar,und es gelten die Cauchy-Riemannschen DGL: ∂f
∂x +i∂f
∂y = 0.
f ist in eine Potenz-reihe entwickelbar.
f ist in C∞, undes gilt die CR–DGL∂f∂z = 0.
Satz 12.15 (Cauchysche Abschatzung fur die Taylor–Koeffizienten) Sei f : U ⊂C −→ C holomorph, z0 ∈ U und K(z0, r) ⊂ U . Sei |f(z)| ≤ M fur alle z ∈ ∂K(z0, r).
Sei f(z) =∞∑
n=0cn(z − z0)n die Potenzreihenentwicklung von f um z0. Dann gilt fur die
Koeffizienten
|cn| ≤ M
rn.
Beweis: Nach Satz 12.12 gilt
cn =1
2πi
∫
|z−z0|=r
f(z)(z − z0)n+1
dz.
Daraus folgt mit |f(z)| ≤ M
|cn| =1
2πi
1∫
0
∣∣∣∣f(z)
(re2πit)n+12πire2πit
∣∣∣∣ dt wobei γ(t) = z0 + re2πit
≤1∫
0
M
rndt =
M
rn.
2
12.4.2 Eindeutigkeitssatz, Nullstellen und Fortsetzung holomor-
pher Abbildungen
In diesem Abschnitt soll der Zusammenhang zwischen globalem und lokalem Verhalten ho-lomorpher Abbildungen untersucht werden.Zunachst betrachten wir jedoch Abbildungen die auf ganz C definiert sind.
Definition 12.16 Eine auf ganz C holomorphe Funktion f : C −→ C heißt ganze Funktion.
32

Satz 12.16 (Satz von Liouville) Sei f : C −→ C auf ganz C holomorph (i.e. ganz) undbeschrankt. Dann ist f konstant.
Beweis: Sei f(z) =∞∑
n=0anzn die Potenzreihenentwicklung von f um z0 = 0. Nach Voraus-
setzung ist diese konvergent auf ganz C, und wegen der Beschranktheit existiert ein M ∈ R+
mit |f(z)| ≤ M fur alle z ∈ C. Mit Satz 12.15 gilt daher fur jede Kugel K(0, r) und jedesn ∈ N, daß
|an| ≤ M
rn.
Fur r →∞ folgt an = 0 fur alle n ≥ 1 und folglich f(z) = a0 = f(0). 2
Anwendung: Fundamentalsatz der Algebra. Sei
P (z) = a0 + a1z + a2z2 + . . . + anzn
ein komplexes Polynom, das nicht konstant ist. Dann existiert eine Nullstelle z0 ∈ Cmit P (z0) = 0.
Beweis: Angenommen P (z) 6= 0 fur alle z ∈ C. Dann ist G(z) = 1P (z) holomorph auf
C und es gilt
|G(z)| = 1|a0 + a1z + . . . + anzn| =
1|zn|︸︷︷︸
|z|→∞−→ 0
· 1| a0zn + a1
zn−1 + . . . + an|︸ ︷︷ ︸|z|→∞−→ 1
|an|
.
G ist also eine beschrankte, auf C holomorphe Funktion. Nach dem Satz 12.16 vonLiouville ist G konstant und folglich gilt P (z) ≡ P (0) = a0. Dies ist ein Widerspruchzur Voraussetzung. 2
Satz 12.17 (Eindeutigkeitssatz) Sei f : U ⊂ C −→ C holomorph und U ⊂ C ein Gebiet.Es sei mindestens eine der folgenden drei Voraussetzungen erfullt
1. Es existiert eine offene Teilmenge D ⊂ U , so daß f |D ≡ 0.
2. Es existiert ein z0 ∈ U , so daß f (n)(z0) = 0 fur alle n ∈ N.
3. Es existiert eine gegen z0 ∈ U konvergente Folge zn∞n=1 zn ∈ U , mit f(zn) = 0 furalle n ∈ N \ 0.
Dann gilt f ≡ 0 auf U .
Beweis:(A) Wir zeigen zunachst die Aquivalenz der drei Bedingungen. 1.) impliziert offensichtlich2.) und 3.). Aus 2.) folgt 1.) nach dem Potenzreihenentwicklungsatz. Wir zeigen noch, daß3.) ebenfalls 1.) impliziert. Dazu beweisen wir die folgende
Behauptung: Sei zn∞n=1 eine Folge mit zn → z0 und f(zn) = 0 wie in 3.). Dann existierteine Umgebung D von z0, so daß f |D ≡ 0.
33

Beweis: Wir entwickeln F um z0 in eine Potenzreihe:
f(z) =∞∑
n=0
an(z − z0)n auf int K(z0, r).
Da f stetig ist, folgtf(z0) = lim
n→∞f(zn) = 0,
also a0 = 0. Wir zeigen nun induktiv, daß auch alle anderen Koeffizienten verschwin-den. Seien a0, . . . ak = 0, k ≥ 0. Es ist zu zeigen, daß ak+1 = 0 gilt. Nach Induktions-voraussetzung gilt
f(z) :=∞∑
n=k+1
an(z − z0)n−k−1 =f(z)
(z − z0)k+1
fur alle z mit 0 < |z − z0| < r. Da die Potenzreihe von f stetig ist, gilt
ak+1 = f(z0) = limn→∞
f(zn) = limn→∞
f(zn)(zn − z0)k+1
= 0,
da f(zn) = 0 fur alle n ∈ N. Folglich ist f |int K(z0,r) ≡ 0.
(B) Hier zeigen wir die folgende Behauptung:
Ist f∣∣D ≡ 0 fur eine offene Menge D ⊂ U , so ist f ≡ 0 auf U .
Sei dazu
M := z ∈ U | Es existiert eine Umgebung D(z), so daß f∣∣D(z)= 0.
Fur diese gilt dann:
• M 6= ∅ wegen Teil (A) aufgrund der Voraussetzung,
• M ist offen nach Definition,
• M ist abgeschlossen: Sei z0 ∈ clUM ⊂ U , dann existieren aufgrund der Definition desAbschlusses zn ∈ M , mit zn → z0. Fur zn gilt dann f(zn) = 0. Nach Teil (A) existiertdann eine Umgebung D(z0) ⊂ U mit f |D(z0) = 0. Damit ist z0 ∈ M . Somit ist M
abgeschlossen.
Da nach Voraussetzung U zusammenhangend ist, folgt M = U . Somit gilt f ≡ 0 auf ganzU . 2
Satz 12.18 (Isoliertheit der Nullstellen) Sei f : U ⊂ C −→ C holomorph, U ein Gebietund f 6≡ 0. Dann sind die Nullstellen von f isoliert, d.h. ist f(z0) = 0, so existiert eineUmgebung D(z0) ⊂ U mit f(z) 6= 0 fur alle z ∈ D(z0) \ z0.
Beweis: Angenommen f(z0) = 0 und z0 ist nicht isoliert. Dann existiert fur alle n einzn ∈ K(z0,
1n ) \ z0 mit f(zn) = 0 und wir erhalten eine Folge zn → z0 aus U mit zn 6= z0.
Wegen Satz 12.17 folgt f ≡ 0 auf U . Dies ist ein Widerspruch zur Voraussetzung. 2
Eine andere Formulierung des Identitatssatzes 12.17 ist offensichtlich:
34

Satz 12.19 Seien f, g : U ⊂ C −→ C holomorph auf einem Gebiet U . Dann sind folgendeBedigungen aquivalent:
1. f ≡ g auf U .
2. Die Menge z ∈ U |f(z) = g(z) hat einen Haufungspunkt.
3. Es gibt einen Punkt z ∈ U mit f (n)(z0) = g(n)(z0) fur alle n ∈ N.
Beweis: Man wendet den Satz 12.17 auf f − g an. 2
Satz 12.20 (Eindeutigkeit der analytischen Fortsetzung) Sei A ⊂ C ein Gebiet undD ⊂ U eine beliebige Teilmenge, D 6= ∅ mit mindestens einem Haufungspunkt in U . Seif : D ⊂ C −→ C eine beliebige Funktion auf D. Wenn eine holomorphe Fortsetzung F :U ⊂ C −→ C von f , d.h. mit F∣∣D = f existiert, dann ist diese eindeutig bestimmt.
Beweis: Angenommen, es existieren zwei holomorphe Fortsetzungen F1, F2. Wendet manPunkt 3 aus Satz 12.19 an, so folgt die Behauptung. 2
Bemerkung: Zwei holomorphe Abbildungen stimmen also schon uberein, wenn sie aufeinem Wegstuckchen oder einer Folge zn ∈ U mit zn → z0 ∈ U ubereinstimmen. Dies ist imReellen naturlich ganz anders. Man kann reelle C∞-Funktionen beliebig abandern, ohne dieWerte außerhalb der Anderung zu verandern.Insbesondere zeigt das, daß man reelle Funktionen wie exp, sin, cos, . . .auf genau eine Weise ins Komplexe fortsetzen kann.
Weiterhin gilt der
Satz 12.21 Sei I ⊂ R ein offenes Intervall. Eine Funktion f : I ⊂ R −→ R besitzt genaudann eine holomorphe Fortsetzung auf ein Gebiet U ⊂ C, I ⊂ U , wenn f auf I reell-analytisch ist.
Beweis:(=⇒) Sei F : U ⊂ C −→ C holomorph und F∣∣I = f . Dann laßt sich F in x0 in eine komplexe
Taylorreihe um x0 ∈ I ⊂ U entwickeln:
F (z) =∞∑
n=0
cn(z − x0)n
auf K(x0, ρ) ⊂ U , ρ > 0. Da nun F∣∣I = f gilt F (n)(x0) = f(x0). Damit ist F∣∣I die Taylorreihe
von f um x0.(⇐=) Sei f : I ⊂ R −→ R reell-analytisch. D.h. zu jedem x ∈ I existiert ein ε(x) > 0, sodaß (x− ε(x), x + ε(x)) ⊂ I und f∣∣(x−ε(x),x+ε(x))
ist in eine Taylorreihe
Fx(y) :=∞∑
n=0
c(x)n (y − x)n
35

zu entwickeln. Diese Taylorreihe Fx definiert nun eine holomorphe Fortsetzung
Fx : K(x, ε(x)) ⊂ C −→ C
z 7−→∞∑
n=0c(x)n (z − x)n
Wir definieren nun
U := ∪x∈IK(x, ε(x)).
Auf dem Durchschnitt zwei-er Kugeln K(x1, ε(x1)) undK(x2, ε(x2)) stimmen dann Fx1
und Fx2 uberein.
x1 x2
Damit definiert man eine holomorphe Funktion
F : U ⊂ C −→ Cz 7−→ Fx(z), falls z ∈ K(x0ε(x0)).
2
Satz 12.22 (Maximum–Prinzip) Sei f : U ⊂ C −→ C holomorph und nichtkonstant,U ⊂ C ein Gebiet. Dann nimmt |f | auf U kein Maximum an. (Die Maxima liegen auf demRand ∂U , falls sie existieren).D.h. jede holomorphe Funktion, die in einem Gebiet ein lokales Maximum annimmt, istkonstant.
Beweis: Angenommen es existiert ein z0 ∈ U , so daß |f(z0)| ≥ |f(z)| fur alle z ∈ U . Wirwahlen nun ein ε > 0, so daß cl K(z0, ε) ⊂ U . Aus dem Mittelwertsatz folgt dann
f(z0) =1∫0
f(z0 + εe2πit) dt, d.h.
|f(z0)| ≤1∫0
|f(z0 + εe2πit)︸ ︷︷ ︸≤|f(z0)|
| dt ≤1∫0
|f(z0)| dz = |f(z0)|
fur alle ε und t ∈ [0, 1]. Damit erhalt man
|f(z0)| = |f(z0 + re2πit)| fur alle ε0 > 0, ε0 ≤ ε, t ∈ [0, 1]
und somit |f(z)| = |f(z0)| fur alle z ∈ K(z0, ρ),
d.h. |f | ≡ const auf K(z0, ρ). Da nun f holomorph ist, zeigt man leicht, daß auch f ≡ const
auf K(z0, ρ) (UA 57).Wir betrachten nun die Funktion f = f − f(z0). Dann ist f ≡ 0 auf K(z0, ρ) ⊂ U undsomit ist mit Satz 12.17 f ≡ 0 auf U , d.h. f auf U konstant. 2
Minimumprinzip: Sei U ⊂ C ein Gebiet und f : U −→ C holomorph, nicht konstant.Besitzt f in z0 ∈ U ein lokales Minimum, so ist f(z0) = 0.
Beweisidee: Angenommen f(z0) 6= 0. Dann ist 1f : U ⊂ C −→ C holomorph und hat ein
lokales Maximum in z0. Damit ist aber 1f = const. 2
36

12.4.3 Weitere Eigenschaften holomorpher Abbildungen
Satz 12.23 (Satz von Morera, Umkehrung des Cauchyschen Integralsatzes) Seif : U ⊂ C −→ C stetig, U ⊂ C offen, und es gelte fur jedes Dreieck 4 ⊂ U daß
∫
∂4
f(z) dz = 0.
Dann ist f : U ⊂ C −→ C holomorph.
Beweis: Holomorphie ist eine lokale Bedingung, d.h. es genugt zu zeigen, daß die Behaup-tung fur U = K(z0,4) (d.h. U sternformig) gilt. Dann folgt aus der Voraussetzung und Satz12.6, daß f auf U eine Stammfunktion F besitzt, F holomorph ist und F ′ = f . Nach Satz12.14 ist F beliebig oft komplex–differenzierbar. Damit ist F ′ = f komplex-differenzierbar,d.h. holomorph. 2
Eine wichtige Anwendung gibt der folgende Satz.
Satz 12.24 (Schwarzsches Spiegelungsprinzip) Sei R2+ = z ∈ C | Im(z) ≥ 0, U
offen im Halbraum R2+. U bezeichne die Menge aller zu einer Zahl aus U konjugierten Zahlen
z ∈ C | z ∈ U. Sei weiterhin f : U ⊂ C −→ C eine Funktion mit den Eigenschaften
1. f : U ⊂ C −→ C ist stetig,
2. f : U0 := U ∩ z ∈ U |Im(z) > 0 −→ C ist holomorph,
3. f∣∣U∩R hat nur reelle Werte.
Dann ist die Funktion
f : U ∪ U ⊂ C −→ C
z 7−→
f(z) fur z ∈ U
f(z) fur z ∈ U
wohldefiniert und holomorph.
Beweis: Sei U0 die Konjugation von U0. Wir betrachten die Abbildung τ(z) := z auf C.Die Funktion
f∣∣U0= τ f τ : U0 −→ C
ist dann holomorph auf der offenen Menge U0 (siehe Ubungsaufgabe Nr. 45).
37
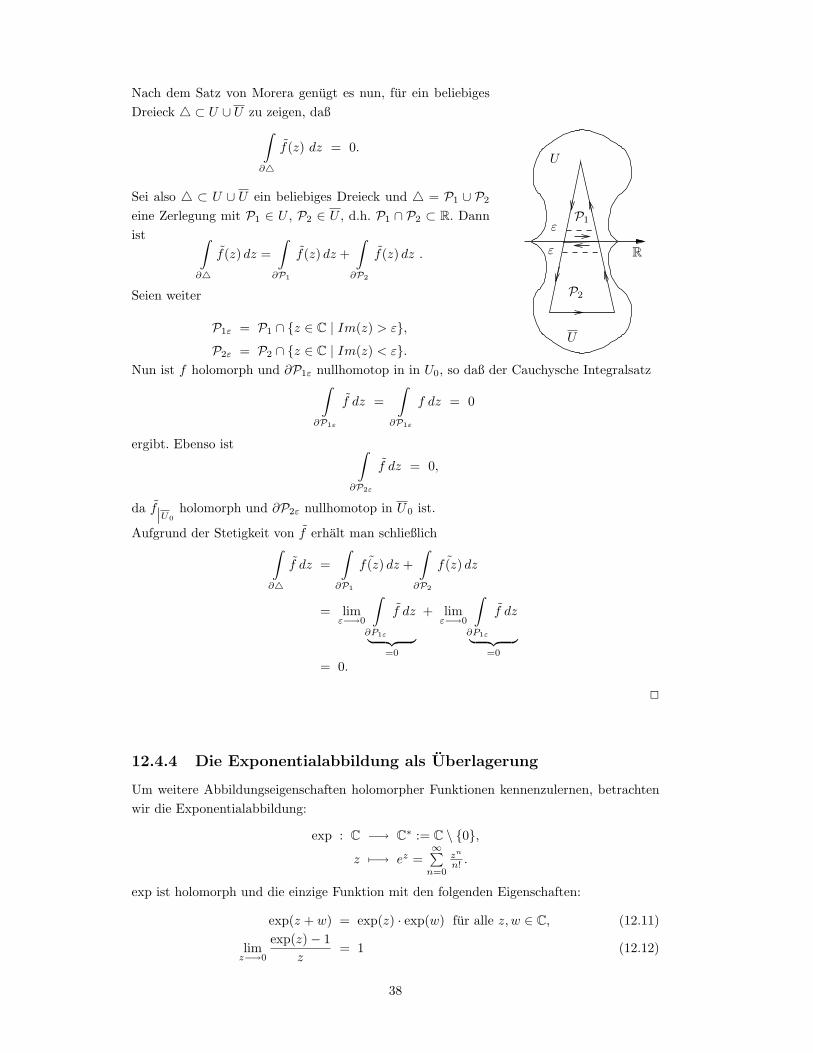
Nach dem Satz von Morera genugt es nun, fur ein beliebigesDreieck 4 ⊂ U ∪ U zu zeigen, daß
∫
∂4
f(z) dz = 0.
Sei also 4 ⊂ U ∪ U ein beliebiges Dreieck und 4 = P1 ∪ P2
eine Zerlegung mit P1 ∈ U , P2 ∈ U , d.h. P1 ∩ P2 ⊂ R. Dannist ∫
∂4
f(z) dz =∫
∂P1
f(z) dz +∫
∂P2
f(z) dz .
Seien weiter
P1ε = P1 ∩ z ∈ C | Im(z) > ε,P2ε = P2 ∩ z ∈ C | Im(z) < ε.
P2
U
U
ε
ε R
P1
Nun ist f holomorph und ∂P1ε nullhomotop in in U0, so daß der Cauchysche Integralsatz∫
∂P1ε
f dz =∫
∂P1ε
f dz = 0
ergibt. Ebenso ist ∫
∂P2ε
f dz = 0,
da f∣∣U0holomorph und ∂P2ε nullhomotop in U0 ist.
Aufgrund der Stetigkeit von f erhalt man schließlich∫
∂4
f dz =∫
∂P1
˜f(z) dz +∫
∂P2
˜f(z) dz
= limε−→0
∫
∂P1ε
f dz
︸ ︷︷ ︸=0
+ limε−→0
∫
∂P1ε
f dz
︸ ︷︷ ︸=0
= 0.
2
12.4.4 Die Exponentialabbildung als Uberlagerung
Um weitere Abbildungseigenschaften holomorpher Funktionen kennenzulernen, betrachtenwir die Exponentialabbildung:
exp : C −→ C∗ := C \ 0,z 7−→ ez =
∞∑n=0
zn
n! .
exp ist holomorph und die einzige Funktion mit den folgenden Eigenschaften:
exp(z + w) = exp(z) · exp(w) fur alle z, w ∈ C, (12.11)
limz−→0
exp(z)− 1z
= 1 (12.12)
38

Außerdem ist ez = 1 genau dann, wenn z ∈ 2πiZ.
Wir wollen nun diese Funktion umkehren und be-trachten dazu den Parallelstreifen
S := z ∈ C | − π < Im(z) ≤ π.
Auf diesem Streifen ist exp∣∣S : S −→ C∗ bijektiv,
denn es ist:
πiiR
R0
−πi
• ez = ew ⇐⇒ ez−w = 1 ⇐⇒ z − w ∈ 2πiZ, d.h. exp∣∣S ist injektiv,
• fur z ∈ C∗ ist z = eiϕ mit ϕ = arg(z), r = |z| > 0 und damit r = es. D.h. aber, daßz = es · eiϕ = es+iϕ mit s ∈ R und ϕ ∈ (−π, π]. Damit ist exp∣∣S surjektiv.
Also existiert zu jedem z ∈ C∗ genau ein w ∈ S mit ew = z.Bezeichnung: w := log(z) heißt Hauptwert des Logarithmus von z. D.h.
log = (exp∣∣S)−1 : C∗ −→ S ∈ C.
Bemerkung:
1. Ist eξ = z, so ist ξ = log(z) + 2πik.
2. Ist z ∈ R, so ist log(z) = ln(z).
3. Fur z ∈ C∗ ist log(z) = ln(|z|) + i arg(z).
4. Der Streifen S ist nicht offen. Betrachtet man die offenen Menge
S0 := z ∈ C | −π < Im(z) < π ∈ C,
so ist exp(S0) = C− := C \ x ∈ R|x ≤ 0︸ ︷︷ ︸:=L
.
πiiR
R0
−πi
iR
R0
C−expS0
log
Wir wollen nun zeigen, daß log : C− −→ S0 holomorph ist. Dazu zur Erinnerung die kom-plexe Fassung des Satzes uber implizite Funktionen.
Satz 12.25 (Satz uber implizite holomophe Funktionen) Sei f : U ⊂ C −→ C holo-morph, U ⊂ C offen.
1. Ist z0 ∈ U mit f ′(z0) 6= 0, so existiert eine Umgebung U0(z0) ⊂ U von z0, so daßf∣∣∣U0(z0)
injektiv ist.
2. Sei f : U ⊂ C −→ C injektiv und f ′(z) 6= 0 ∀z ∈ U . Dann ist f(U) ⊂ C offen, f
ist bijektiv von U −→ f(U) und f−1 : f(U) ⊂ C −→ C ist holomorph, und es gilt(f−1)′(f(z)) = 1
f ′(z) .
39

Beweis: Man betrachtet f als lokalen Diffeomorphismus f : U ⊂ R2 −→ R2. Dann istf ′(z0)=Df(z0) : R2 −→ R2, und es gilt f ′(z0) 6= 0 genau dann, wenn Df(z0) maximalenRang hat. 2
Satz 12.26 Der Hauptzweig des Logarithmus log : C∗ −→ C ist holomorph auf der ge-schlitzten Ebene C− := C \ x ∈ R | x ≤ 0, und es gilt:
log′(z) =1z.
(D.h. log ist auf C− Stammfunktion von 1z )
Beweis: Sei f(z) = ez auf S0 =: U . Dann ist f injektiv auf U , denn es gilt f ′(z) = ez 6= 0fur alle z ∈ C. Aus Satz 12.25 folgt dann: log = f−1 ist holomorph und (log)′(ez) = 1
ez , d.h.fur alle w ∈ C− gilt (log)′(w) = 1
w 2
Bemerkung: Es ist zwar log : C− −→ C holomorph, doch auf der Menge L := z ∈R | z < 0 ist log zwar definiert aber nicht stetig. log macht beim Duchqueren von L einenSprung von 2πi, denn es ist
log(z) = ln |z|+ i arg(z) mit − π < arg(z) < π.
D.h. aber fur
a ∈ R, a < 0 =⇒ arg(a) = π
C 3 z → a mit Im(z) > 0 =⇒ arg(z) z→a−→ π
C 3 z → a mit Im(z) < 0 =⇒ arg(z) z→a−→ −π
Fur a ∈ R, a < 0 gilt dann
limz→a
Im(z)>0
log(z) = log |a|+ πi
limz→a
Im(z)<0
log(z) = log |a| − πi.
Die Taylorreihe von log : C− −→ S0 Sei z0 ∈ C−, L := z ∈ R | z < 0. Dann ist
log(z) =∞∑
n=0
log(n)(z0)n!
(z − z0)n,
log′(z0) =1z0
,
log′′ =−1z2
...
log(n)(z) = (−1)n−1(n− 1)!1zn
.
Damit ist die Taylorreihe von log gegeben durch
log(z) = log(z0) +∞∑
n=1
(−1)n−1
n · zn0
· (z − z0)n
40

auf K(z0, dist(z0, L)︸ ︷︷ ︸ρ
). Weiterhin gilt:
1. Diese Potenzreihe konvergiert auf K(z0, |z0|), denn log(z0)+∞∑
n=1
(−1)n−1
nzn0
· (z−z0)n hat
den Konvergenzradius
ρ =1
limn−→∞ |an+1an
| = |z0|,
und es gilt
limn→∞
|an+1
an| = lim
n→∞
∣∣∣∣(−1)n · n · zn
0
(n + 1)zn+10 (−1)n−1
∣∣∣∣ =1|z0| · lim
n−→∞n
n + 1=
1|z0| .
2. Ist Re(z0) < 0, so ist dist(z0, L) < |z0|, d.h. der Konvergenzbereich der Potenzreiheist grosser als der Bereich, auf dem log mit der Potenzreihe ubereinstimmt! Da log aufL einen Sprung hat, stimmt die Reihe auf der Menge w ∈ K(z0, |z0|) | Im(w) > 0mit log uberein und auf der Menge w ∈ K(z0, |z0|) | Im(w) < 0 nicht.
Wir beweisen nun eine wichtge Eigenschaft der Exponentialabbildung exp : C −→ C∗, undzwar, daß es sich dabei um eine Uberlagerung handelt.
Definition 12.17 Sei f : E −→ B eine stetige Abbildung zwischen metrischen (topologi-schen) Raumen. Dann heißt f : E −→ B Uberlagerung, falls gilt:
1. f ist surjektiv.
2. Zu jedem x ∈ B existiert eine Umgebung U(x) ⊂ B, so daß
f−1(U(x)) =⋃
j∈IVj ,
mit Vj ⊂ E offen, paarweise disjunkt und
f∣∣Vj: Vj −→ U(x) ist ein Homoomorphismus.
U(x)
V1
x
f−1(x)V3
V2
B
E
Bezeichnungen: B heißtBasisraum, E Totalraum, U(x)korrekt uberlagerte Umgebungund Vj Blatter uber U(x).
Satz 12.27 exp : C −→ C∗ ist eine Uberlagerung (mit abzahlbar unendlich vielen Blattern).
Beweis: Sei z ∈ C−. Dann wahlt man U(z) = C−. Dann ist
exp−1(C−) =⋃
k∈Zz ∈ C | Im(z) ∈ (−π + 2πk, π + 2πk)︸ ︷︷ ︸
:=Vk
= disjunkte Vereinigung von parallelen Streifen.
41
exp |Vk : Vk −→ U(z) = C ist sogar eine biholomorphe Abbildung: (exp |−1Vk
)′ = log +2πik
Sei z ∈ L. Dann setzt man U(z) = C+ := C \ x ∈ R|x ≥ 0. Es ist
exp−1(U(z)) =⋃
k∈Zz ∈ C | Im(z) ∈ (2πk, (2k + 2)π)︸ ︷︷ ︸
:=Wk
= disjunkte Vereinigung von parallelen Streifen.
Auf dem Parallelstreifen laßt sich exp stetig und sogar holomorph umkehren. 2
Betrachtet man nur die Argumente, so erhalt man
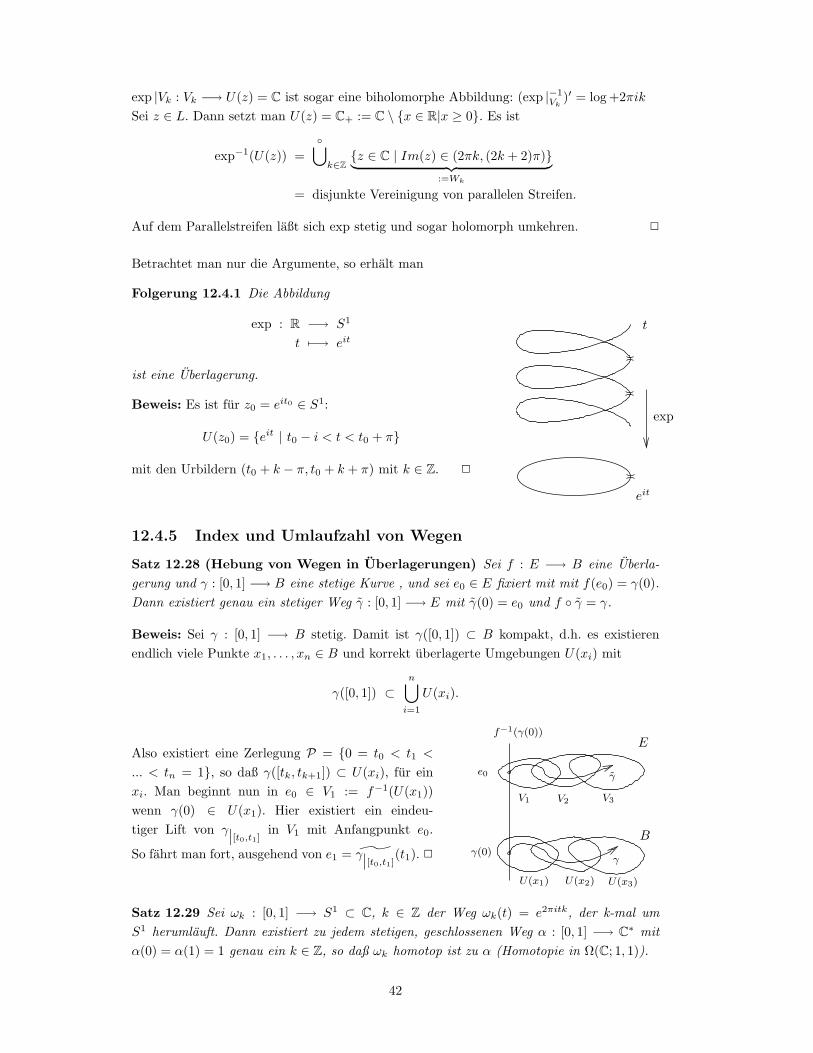
Folgerung 12.4.1 Die Abbildung
exp : R −→ S1
t 7−→ eit
ist eine Uberlagerung.
Beweis: Es ist fur z0 = eit0 ∈ S1:
U(z0) = eit | t0 − i < t < t0 + π
mit den Urbildern (t0 + k − π, t0 + k + π) mit k ∈ Z. 2
exp
eit
t
12.4.5 Index und Umlaufzahl von Wegen
Satz 12.28 (Hebung von Wegen in Uberlagerungen) Sei f : E −→ B eine Uberla-gerung und γ : [0, 1] −→ B eine stetige Kurve , und sei e0 ∈ E fixiert mit mit f(e0) = γ(0).Dann existiert genau ein stetiger Weg γ : [0, 1] −→ E mit γ(0) = e0 und f γ = γ.
Beweis: Sei γ : [0, 1] −→ B stetig. Damit ist γ([0, 1]) ⊂ B kompakt, d.h. es existierenendlich viele Punkte x1, . . . , xn ∈ B und korrekt uberlagerte Umgebungen U(xi) mit
γ([0, 1]) ⊂n⋃
i=1
U(xi).
Also existiert eine Zerlegung P = 0 = t0 < t1 <
... < tn = 1, so daß γ([tk, tk+1]) ⊂ U(xi), fur einxi. Man beginnt nun in e0 ∈ V1 := f−1(U(x1))wenn γ(0) ∈ U(x1). Hier existiert ein eindeu-tiger Lift von γ∣∣[t0,t1]
in V1 mit Anfangpunkt e0.
So fahrt man fort, ausgehend von e1 = γ∣∣[t0,t1](t1). 2
Bγ(0)
e0
f−1(γ(0))E
γ
V3V2V1
U(x1) U(x2) U(x3)
γ
Satz 12.29 Sei ωk : [0, 1] −→ S1 ⊂ C, k ∈ Z der Weg ωk(t) = e2πitk, der k-mal umS1 herumlauft. Dann existiert zu jedem stetigen, geschlossenen Weg α : [0, 1] −→ C∗ mitα(0) = α(1) = 1 genau ein k ∈ Z, so daß ωk homotop ist zu α (Homotopie in Ω(C; 1, 1)).
42

Beweis: Sei α : [0, 1] −→ C∗. Da exp : C −→ C∗ eine Uberlagerung ist, existiert nach Satz12.28 genau ein Lift α : [0, 1] −→ C mit α(0) = 0, exp(α) = α. Fur diesen gilt
eα(1) = α(1) = 1 und damit α(1) = 2πik mit k ∈ Z.
Da nun C konvex ist, existiert eine Homotopie zwischen α und dem Weg σk : [0, 1] −→ Cmit σk(t) = 2πik:
H : [0, 1]× [0, 1] −→ C(t, s) 7−→ (1− s)α(t) + sσk(t)
H(t, 0) = α(t)H(t, 1) = σk(t).
Dann ist Hs ∈ Ω(C; 0, 2πik). Setzt man nun
H := exp H : [0, 1]× [0, 1] −→ C∗,
dann istH(t, 0) = exp H(t, 0) = eα(t) = α(t)H(t, 1) = exp σk(t) = e2πikt = ωk(t),
und es ist Hs ∈ Ω(C∗; 1, 1). Damit ist H eine Homotopie zwischen α und wk im RaumΩ(C∗; 1, 1). 2
Definition 12.18 Sei α : [0, 1] −→ C∗ ein in 1 geschlossener Weg. Die Zahl k ∈ Z fur diegilt α(1) = 2πik heißt Index von α. (α ∼ ωk heißt, daß man k– mal um 0 ∈ C herumlauft,wenn man α durchlauft.)
Definition 12.19 Sei α eine geschlossene stuckweise C∞–Kurve, deren Bild z ∈ C nichtenthalt. Dann heißt
χ(α; z) :=1
2πi
∫
α
1ξ − z
dξ
die Umlaufzahl von α um z ∈ C.
Ist z = 0 so ist α ∼ ωk. Fur ωk rechnet man aber leicht aus, daß
χ(ωk, 0) =1
2πi
∫
ωk
1ξ
dξ = k.
Wegen der Homotopie von α und ωk hat man aber
Index(α) =1
2πi
∫
α
1ξ
dξ =1
2πi
∫
ωk
1ξ
dξ = k.
Satz 12.30 Fur die Fundamentalgruppe von S1 gilt
π1(S1) = Z.
Beweis: Man hat den Gruppenisomorphismus
π1(S1, 1) −→ Z,
[α] = [wk] 7−→ k.
2
43

12.4.6 Hebung von holomorphen Abbildungen
Bisher hatten wir nur die Lifts von Wegen bezuglich der Uberlagerung exp betrachtet. Nunwollen wir auf die Hebung von holomorphen Abbildungen eingehen.
Satz 12.31 Sei U ⊂ C einfach–zusammenhangend und f : U ⊂ C −→ C∗ holomorph. Dannexistiert eine holomorphe Funktion h : U ⊂ C −→ C mit
f(z) = exp(h(z)).
(Man nennt h den holomorphen Zweig des Logarithmus von f auf U .)
Beweis: Wir mussen zeigen, daß eine holomorphe Funktion h existiert, so daß das folgendeDiagramm kommutiert:
Ch ↓ exp
U ⊂ C −→ C∗.f
Da f : U ⊂ C −→ C∗ holomorph ist, ist auch f ′ : U ⊂ C −→ C holomorph (Folgerungaus dem Potenzreihensatz). Somit ist f ′
f : U ⊂ C −→ C holomorph. Da nun U einfach–
zusammenhangend ist, hat f ′
f : U ⊂ C −→ C eine Stammfunktion F : U ⊂ C −→ C(Cauchyscher Integralsatz). F ist holomorph und F ′ = f ′
f . Man betrachtet dann die Abbil-dung
G : U ⊂ C −→ CG(z) := exp(F (z))
f(z) .
G ist holomorph, und es gilt wegen F ′ = f ′
f
G′(z) =eF (z) · F ′(z) · f(z)− f ′(z) · eF (z)
f2(z)≡ 0
Da U zusammenhangend ist, ist G(z) ≡ const ∈ C∗, d.h. G(z) = ew0 , mit w0 ∈ C. Damit istew0f(z) = eF (z) und schließlich f(z) = eF (z)−w0 . Man hat also h := F − w0 : U ⊂ C −→ Cist holomorph mit f = exp h. 2
Bemerkung zur TopologieSei π : W −→ B eine Uberlagerung und f : X −→ B stetigmit f(x0) = b0. Fixiert man ein e0 ∈ E mit π(e0) = b0, dannexistiert eine Hebung H der Abbildung f mit h(x0) = e0 undπ h = f genau dann, wenn f#(π1(X, x0)) ⊂ π1(E, e0), wobei
E 3 e0
h ↓ π
x0 ∈ X −→ B 3 b0.
f
f# : π1(X, x0) −→ π1(B, f(x0))w −→ [f(w)]
ein stetiger, durch f induzierter Gruppenhomomorphismus ist.Satz 12.31 ist dann ein Spezielfall dieses Hebungskriteriums fur Uberlagerungen mit star-ken Bedingungen an die Funktion f , denn man setzt voraus, daß sowohl X = U einfach–zusammenhangend — d.h. π1(U, x0) = 0 — ist als auch E = C — d.h. π1(C) = 0.
44

Satz 12.32 Sei f : U ⊂ C −→ C∗ holomorph und U einfach zusammenhangend. Dannexistiert fur jedes n ∈ N eine holomorphe Funktion H : U ⊂ C −→ C∗ mit
H(z)n = f(z)
fur alle z ∈ U. (H heißt holomorphe n–te Wurzel von f auf U .)
Beweis: Sei h : U ⊂ C −→ C der holomorphe Logarithmus von f , d.h. f(z) = eh(z). Danndefiniert H(z) := exp
(1nh(z)
)eine auf U holomorphe Funktion mit
H(z)n =(e
1n h(z)
)n
= eh(z) = f(z),
d.h. Hn = f . 2
Satz 12.33 (Lokales Abbildungsverhalten von holomorphen Funktionen) Sei f :U ⊂ C −→ C holomorph, nicht konstant, aber mit f(0) = 0 fur 0 ∈ U . Dann existiert einn ∈ N und eine Umgebung von U0 um 0, so daß
f(z) = f0(z)n
fur alle z ∈ U0 gilt, wobei f0 : U0 −→ f0(U0) biholomorph ist.
Beweis: Wir betrachten die Potenzreihenentwicklung von f um z0 := 0:
f(z) = zn (an + an+1z + an+2z2 + · · ·)︸ ︷︷ ︸
=:h(z)
mit an 6= 0.
auf K(0, ρ), ρ = dist(0, ∂U). h sei auf K(0, ρ) holomorph und von null verschieden. Nach Satz12.32 existiert eine holomorphe Wurzel von h auf K(0, ρ), d.h. eine holomorphe Funktionf1 : K(0, ρ) −→ C∗ mit
f1(z)n = h(z) fur alle z ∈ K(0, ρ).
Damit ist aberf(z) = (z · f1(z)︸ ︷︷ ︸
:=f0(z)
)n.
f0(z) := z · f1(z) ist dann eine holomorphe Wurzel von f auf K(0, ρ). Aber es gilt nochmehr.Behauptung: f0 ist biholomorph um 0.Es ist
f ′0(z) = f1(z) + zf ′1(z) d.h.
f ′0(0) = f1(0)
f ′0(0)n = f1(0)n = h0 = an 6= 0.
D.h. aber, daß f ′0(0) 6= 0. Da nun f ′0 holomorph und damit stetig ist, existiert eineKreisscheibe K(0, ρ′) ⊂ K(0, ρ) mit f ′0(z) 6= 0 auf K(0, ρ′). Damit ist aber f0 biholomorphauf K(0, ρ′) nach Satz 12.25. 2
45

Satz 12.34 (Gebietstreue holomorpher Funktionen) Sei f : U ⊂ C −→ C holomorphund nicht konstant, U ein Gebiet. Dann ist f(U) ⊂ C ebenfalls ein Gebiet.
Beweis: Da f stetig und U zusammenhangend ist, ist f(U) zusammenhangend. Es genugtzu zeigen, daß f(U) offen ist.Sei z0 ∈ U und f(z0) ∈ f(U). Wir betrachten
f : U := z − z0|z ∈ U −→ Cf(w) = f(w + z0)− f(z0).
Dann ist f holomorph auf U und f(0) = 0. Nach Satz 12.33 existiert eine Umgebung U0(0)und eine biholomorphe Funktion f0 : U0 −→ f(U0) mit
f(z) = f0(z)n fur z ∈ U0.
Da f−1 holomorph und damit stetig ist, ist f0(u0) offen. Dann existiert eine KreisscheibeK(0, ρ) ⊂ f0(U0).Fur die Potenzfinktion pn(z) = zn gilt dann
pn(K(0, ρ)) = K(0, ρn)
und somit
V := K(0, ρn) ⊂ pnf0 (U0) = f(U0)
⊂ f(U).
Wir haben also eine Umgebung um 0 ∈ f(U) gefunden. Damit ist V +f(z0) eine Umgebungvon f(z0) in f(u). 2
12.4.7 Biholomorphe Abbildungen auf der Einheitskreisscheibe
Mit dem letzten Teil dieses Abschnittes verfolgen wir das Ziel:
Bestimme alle biholomorphen Abbildungen auf der Einheitskreisscheibe K(0, 1) =: D2 !
Satz 12.35 (Schwarz’sches Lemma [H.A.Schwarz, 1869]) Sei f : D2 −→ D2 holo-morph und f(0) = 0. Dann gilt:
1. |f(z)| ≤ |z| fur alle z ∈ D2.
2. |f ′(0)| ≤ 1.
Beweis: Betrachte die Potenzreihenentwicklung von f um 0 auf D2 = K(0, 1) mit demKonvergenzradius dist(0, ∂D2) = 1 :
f(z) =∞∑
n=0
an zn mit der Ableitung
f ′(z) =∞∑
n=1
n an zn−1.
46

Da f(0) = 0 ist a0 = 0. Deshalb ist die Funktion
g : D2 −→ C
g(z) :=
f(z)
z fur z 6= 0f ′(0) fur z = 0.
auf D2 holomorph und hat die Taylorreihe
g(z) = a1z + a2z2 + a3z
3 + . . . .
Nach Voraussetzung ist f(D2) ⊂ D2, d.h. |f(z)| < 1 fur alle z ∈ D2. Damit ist
|g(z)| =∣∣∣∣f(z)
z
∣∣∣∣ <1z
fur alle z ∈ D2 \ 0.
Sei r ∈ (0, 1) fixiert. Dann ist |g(z)| < 1r auf ∂K(0, r). Da |g| stetig ist, hat g auf ∂K(0, r)
ein globales Maximum. Da nun aber g holomorph ist, wird das Maximum auf ∂K(0, r)angenommen (Maximumsprinzip, Satz 12.22). Somit ergibt sich
=⇒ |g(z)| < 1r ∀z ∈ K(0, r), r ∈ (0, 1)
r→1=⇒ |g(z)| < 1 ∀z ∈ D2
=⇒|f(z)| < |z| fur alle z ∈ D2 und|g(0) = |f ′(0)| < 1
2
Folgerung 12.4.2 Ist f : D2 −→ D2 biholomorph mit f(0) = 0. Dann existiert ein ξ ∈ S1
mitf(z) = ξ · z fur alle z ∈ D2.
(D.h. f ist eine Drehung um 0 um den Winkel φ, wenn ξ = eiφ. (Wenn z = |z|eiψ, dann istξ · z = |z|ei(φ+ψ).)
Beweis: Da f, f−1 holomorph mit Fixpunkt 0 folgt aus dem Satz 12.34
|f(z)| ≤ |z| ∀z ∈ D2 und|f−1(z)| ≤ |z| ∀z ∈ D2.
Das ergibt jedoch|z| =
∣∣f−1(f(z))∣∣ ≤ |f(z)| ≤ |z|
und damit |f(z)| = |z| fur alle z ∈ D2. Dann gilt fur
g(z) :=
f(z)
z fur z 6= 0f ′(0) fur z = 0
daß |g(z)| = 1 fur alle z ∈ D2 \ 0. Nun ist g holomorph und damit stetig, und daher|g(z)| ≡ 1 auf D2. Wie man leicht sieht, hat dies g = const auf D2 zur Folge. Sei alsog(z) ≡ ξ, dann ist f(z) = ξ · z. 2
47

Wir betrachten nun die spezielle Mobiustransformation zu einem fixierten a ∈ D2:
ϕa(z) =z − a
az − 1, d.h. ϕa = φA mit A =
(1 −a
a −1
).
Dann gilt
1. ϕa(0) = a,
2. ϕa(a) = 0,
3. ϕ2a = id (d.h. ϕa ist eine Involution) und damit ϕ−1 = ϕa,
4. ϕa : D2 −→ D2, denn es ist
ϕa(D2) ⊂ D2 ⇐⇒ |ϕa(z)|2 ≤ 1
⇐⇒ |z − a| < |az − 1|⇐⇒ |z − a|2 < |az − 1|2 = |1− az|2
⇐⇒ (z − a)(z − a) < (1− az)(1− az)
⇐⇒ 0 <(1− |a|2) (
1− |z|2) .
Die letzte Zeile ist aber richtig, da a, z ∈ D2.
Somit ist ϕa : D2 −→ D2 eine biholomorphe Involution, die 0 und a vertauscht.
Satz 12.36 Sei f : D2 −→ D2 biholomorph. Dann existiert ein ξ ∈ S1 und ein a ∈ D2, sodaß
f(z) = ξ · φa(z) = ξ · z − a
az − 1.
Beweis: Sei a := f−1(0) ∈ D2. Dann ist f ϕa : D2 −→ D2 biholomorph und(f ϕa)(0) = f(a) = 0. Nach Folgerung 12.4.2 existiert ein ξ ∈ S1 mit f · ϕa(z) = ξ · zDamit ist aber f(z) = ξ · ϕ−1
a (z) = ξ · ϕa(z). 2
12.5 Isolierte Singularitaten, Laurententwicklung und
Residuensatz
12.5.1 Klassifikation isolierter Singularitaten
Definition 12.20 Sei U ⊂ C offen, z0 ∈ U , f : U \z0 ⊂ C −→ C holomorph. Dann heißtz0 isolierte Singularitat von f . Sei z0 eine isolierte Singularitat. Dann heißt z0
hebbare Singularitat, falls f zu einer holomorphen Funktion f : U ⊂ C −→ C fortsetzbarist.
Pol von f , falls z0 keine hebbare Singularitat ist, aber ein n > 0 existiert, so daß dieFunktion f(z)(z − z0)n in z0 eine hebbare Singularitat hat. Das kleinste n ∈ N mitdieser Eigenschaft heißt Ordnung des Pols z0.
wesentliche Singularitat von f , falls z0 nicht hebbar und kein Pol ist.
48

Eine Funktion f : U ⊂ C −→ C heißt meromorph, falls f auf U \ z1, ..., zn holomorph istund z1, ..., zn ∈ U sind Polstellen von f .
Beispiele
1. f(z) = sin zz ist auf C \ 0 −→ C holomorph und hat in z0 = 0 eine hebbare Singula-
ritat.sin z
z=
∞∑n=0
(−1)n z2n
(2n + 1)!
ist die holomorphe Fortsetzung von sin zz auf C. (Es ist sin z =
∞∑n=0
(−1)n z2n+1
(2n+1)! ).
2. f(z) = 1z hat in z = 0 eine Polstelle 1.Ordnung.
3. f(z) = exp( 1z ) ist auf C \ 0 holomorph und hat in z0 eine wesentliche Singularitat,
da f(z) =∞∑
n=0
1n!z
−n.
Wir wollen nun das Verhalten holomorpher Funktionen in der Nahe von isolierten Singula-ritaten charakterisieren.
Satz 12.37 (Riemannscher Hebbarkeitssatz [1851]) Sei f : U \ z0 ⊂ C −→ C ho-lomorph. Die Singularitat z0 ∈ U ist genau dann hebbar, wenn ein ρ > 0 existiert, so daßK(z0, ρ) ⊂ U und f∣∣K(z0,ρ)\z0
beschrankt ist.
Beweis:(=⇒) Die holomorphe Fortsetzung f von f ist stetig und daher auf der kompakten Menge∂K(z0, ρ) beschrankt.(⇐=) Sei f auf clK(z0, ρ) beschrankt. Wir nehmen oBdA an, daß z0 = 0 (ansonsten ver-schieben wir z0 wie im Beweis von Satz 12.34).Wir betrachten die Funktion
h : U ⊂ C −→ C
h(z) :=
z2f(z) fur z 6= 00 fur z = 0.
h ist dann differenzierbar auf U \ z0, h ist aber auch differenzierbar in z0 = 0, denn es giltaufgrund der Grenzwertsatze:
limz−→0
h(z)− h(0)z
= limz−→0
z2f(z)z
= limz−→0
z · f(z) = 0.
Damit existiert aber h′(0) = 0. Somit ist h holomorph auf U . Wir entwicklen nun h umz = 0 in eine Potenzreihe:
h(z) =∞∑
n=0
anzn.
Da h(0) = h′(0) = 0 ist a0 = a1 = 0. Also ist
h(z) = z2 ·∞∑
n=0
an+2zn
︸ ︷︷ ︸=:f(z)
.
49

Nun ist aber
f(z) =∞∑
n=0
an+2zn =: f(z) auf U \ 0,
d.h. f : V ⊂ C −→ C ist die holomorphe Fortsetzung von f in z0 = 0. 2
Folgerung 12.5.1 Sei f : U \ z0 ⊂ C −→ C holomorph und stetig in z0 fortsetzbar, soist f auch holomorph in z0 fortsetzbar.
Satz 12.38 (Charakterisierung der Pole n-ter Ordnung, n ≥ 1) Sei f : U \ z0 ⊂C −→ C holomorph. Dann sind folgende Aussagen aquivalent:
1. z0 ist Pol n-ter Ordnung von f
2. Es existiert eine holomorphe Funktion h : U ⊂ C −→ C, so daß h(z0) 6= 0 und
f(z) =h(z)
(z − z0)nauf U \ z0.
3. Es existieren ein ρ > 0 und Konstanten M, M ∈ R+, so daß
M
|z − z0|n ≤ |f(z)| ≤ M
|z − z0|nfur alle z ∈ K(z0, ρ) \ z0.
Beweis:(1.=⇒ 2.) Nach Definition hat (z− z0)nf(z) in z0 eine hebbare Singularitat, d.h. es existierteine holomorphe Funktion h : U ⊂ C −→ C mit h(z) = (z− z0)n · f(z) fur alle z ∈ U \ z0.Angenommen h(z0) ware gleich null. Sei h(z) =
∞∑n=0
cn(z−z0)n die Potenzreihenentwicklung
von h um z0. Dann ist c0 = 0 und somit
h(z) = (z − z0)( ∞∑
n=0
cn+1(z − z0)n
︸ ︷︷ ︸=:h(z)
).
Daraus folgt h(z) = (z − z0)n−1f(z) auf K(z0, dist(z0, ∂U)), also setzt h die Funktion(z − z0)n−1f(z) in z0 holomorph fort. Dies widerspricht der Minimalitat von n.(2.=⇒ 3.) Da h(z0) 6= 0, existiert ein ρ > 0, so daß |h(z)| ≥ M > 0 fur alle z ∈ K(z0, ρ). Nunist h(z) = (z − z0)nf(z) auf U \ z0. h ist stetig auf U und somit beschrankt in K(z0, ρ).Sei |h(z)| ≤ M fur alle z ∈ K(z0, ρ) mit M ∈ R+. Also hat man
M
|z − z0|n ≤ |f(z)| ≤ M
|z − z0|nfur alle z ∈ K(z0, ρ) \ z0.(3.=⇒ 1.) Wegen
∣∣∣f(z)(z − z0)n∣∣∣ ≤ M fur alle z ∈ K(z0, ρ) \ z0
ist f(z)(z − z0)n in einer Umgebung von z0 beschrankt und hat damit nach Satz 12.37 einehebbare Singularitat in z0. Also ist z0 eine Polstelle. 2
50

Folgerung 12.5.2 Ist z0 ∈ U ein Pol der holomorphen Funktion f : U \ z0 ⊂ C −→ C,so gilt limz−→z0 |f(z)| = +∞
Dies ist richtig, da
|f(z)| ≥ M
|z − z0|nz−→z0−→ +∞.
Bemerkung: Sei h : U ⊂ C −→ C die holomorphe Fortsetzung von f(z)(z− z0)n in z = z0.Dann ist h(z0) 6= 0, da |h(z)| ≥ M > 0 fur alle z ∈ K(z0, ρ). Damit ist aber z0 ein Pol n-terOrdnung.
Satz 12.39 (Casorati, Weierstraß) Sei f : U \ z0 ⊂ C −→ C holomorph, z0 ∈ U . z0
ist genau dann eine wesentliche Singularitat von f , wenn fur jede Umgebung V (z0) ⊂ U dasBild f(V (z0) \ z0) dicht in C liegt.
Beweis:(=⇒) Sei V eine in U enthaltene Umgebung von z0. Angenommen, das Bild f(V \ z0)liegt nicht dicht in C. Dann gibt es eine komplexe Zahl b ∈ C und ein ε > 0, so daß
|f(z)− b| ≥ ε ∀z ∈ V \ z0.
Dann ist die Funktionh(z) :=
1f(z)− b
auf V \z0 definiert und beschrankt. Nach dem Riemannschen Hebbarkeitssatz (Satz 12.37)ist h holomorph in z = z0 fortsetzbar. Wir bezeichnen diese Fortsetzung ebenfalls mit h.Da die Funktion h holomorph auf V ist, kann man sie in einer Umgebung von z0 in einePotenzreihe entwickeln:
h(z) =∞∑
n=0
an(z − z0)n.
Da h nicht identisch null ist, existiert ein kleinster Index k, fur den der Koeffizient ak indieser Entwicklung nicht null ist. Bezeichne h die durch die Potenzreihe
h(z) =∞∑
n=k
an(z − z0)n−k
definierte holomorphe Funktion. Dann ist h(z) = (z − z0)k · h(z) und h(z0) = ak 6= 0, undwir erhalten
(z − z0)kf(z) =1
h(z)+ (z − z0)k b ∀z ∈ V \ z0.
Dies zeigt: Ist k = 0, so ist z0 eine hebbare Singularitat. Ist k ≥ 1, so ist z0 ein Pol derOrdnung k. Dies widerspricht der Voraussetzung, dass z0 eine wesentliche Singularitat ist.
(⇐=) Wenn f(V \ z0) fur jede Umgebung V von z0 dicht in in C ist, so kann f wederbeschrankt um z0 sein noch kann der Betrag |f(z)| gegen +∞ konvergieren, wenn z gegenz0 konvergiert. Die isolierte Singularitat z0 von f ist also weder hebbar (Satz 12.37) nochein Pol (Satz 12.38). 2
Information: Es gilt sogar noch mehr als der Satz 12.39. Und zwar der
51

Satz 12.40 (Großer Satz von Picard) Ist f : U \ z0 ⊂ C −→ C holomorph und z0
eine wesentliche Singularitat von f , dann sind fur jede Umgebung V (z0) ⊂ U nur zwei Fallemoglich:
1. f(V (z0) \ z0) = C oder
2. f(V (z0) \ z0) = C \ Punkt.
Das Bild nimmt also jeden Wert mit hochstens einer Ausnahme an.
Zusammenfassung (Klassifikation der Singularitaten):Sei f : U \ z0 ⊂ C −→ C holomorph, z0 isolierte Singularitat. Dann gilt:
1. z0 hebbar ⇐⇒ f ist in einer Umgebung von z0 beschrankt.
2. z0 hat einen Pol in z0 ⇐⇒ limz−→z0 |f(z)| = +∞.
3. z0 hat eine wesentliche Singularitat in z0 ⇐⇒ f(V (z0) \ z0) =
CC \ p , d.h.
das Bild liegt dicht in C.
12.5.2 Laurentreihenentwicklung
Eine holomorphe Funktion f : U \ z0 −→ C mit isolierter Singularitat laßt sich im All-gemeinen nicht in eine Taylorreihe entwickeln, aber in eine sogenannte Laurentreihe. Dieselaßt sich formal schreiben als
+∞∑n=−∞
an(z − z0)n.
Definition 12.21 Eine Laurentreihe um z0 ∈ C ist ein Paar von Reihen( ∞∑
n=1
a−n(z − z0)−n
︸ ︷︷ ︸Hauptteil der Laurentreihe
,
∞∑n=1
an(z − z0)n
︸ ︷︷ ︸Nebenteil der Laurentreihe
), an ∈ C.
Formal schreibt man dafur∞∑
n=−∞an(z − z0)n.
Eine Laurentreihe heißt konvergent in z ∈ C, falls sowohl der Haupteil, als auch der Nebenteilin z ∈ C konvergiert. Der Grenzwert ist die Summe der entsprechenden Grenzwerte.
Satz 12.41 Ist die Potenzreihe∞∑
n=1a−nwn auf K(0, 1
r ) und die Potenzreihe∞∑
n=0anwn auf
K(0, R) konvergent, dann konvergiert die Laurentreihe∞∑
n=−∞an(z−z0)n auf dem Ringgebiet
Rr,R(z0) := z ∈ C ∣∣ r < |z − z0| < R.
Beweis: Der Hauptteil konvergiert fur alle w ∈ C mit |w| < 1r . w = (z − z0)−1 Dann
konvergiert der Hauptteil fur alle z ∈ C mit 1|z−z0| < 1
r , d.h. mit |z − z0| > r. 2
52

Satz 12.42 (Laurentreihenentwicklungssatz) Sei f : Rr,R(z0) := z ∈ C ∣∣r < |z −z0| < R ⊂ C −→ C holomorph. Dann existiert eine eindeutig bestimmte, auf dem RingRr,R(z0) konvergente Laurentreihe um z0 mit
f(z) =+∞∑
n=−∞an(z − z0)n.
Dabei gilt
an =1
2πi
∫
|z−zo|=ρ
f(z)(z − z0)n+1
dz,
wobei ρ > 0 mit r < ρ < R. Insbesondere gilt auf Rr,R(z0)
f(z) = h
(1
z − z0
)+ g(z − z0),
wobeig : K(0, R) −→ C holomorph
g(w) =∑n=1
an wn,
h : K(0, 1r ) −→ C holomorph
h(w) =∑n=1
a−n wn.
Beweis: Sei z ∈ Rr,R(z0) undr < ρ < σ < R, so daß z ∈Rρ,σ(z0). Dann setzt man D =clRρ,σ(z0) und teilt den Ring inzwei Teile D = D1 ∪ D2, mitz ∈ D1. Der Rand von D ist danngleich zwei Kreisen mit den ent-gegengesetzten Orientierungen:
∂D = S+σ (z0) ∪ S−ρ (z0).
Mit Hilfe der Cauchyschen Inte-gralformel und dem CauchyschenIntegralsatz erhalt man dann
Rr,R
D1
D2
z0
z
r
R
σρ
Rρ,σ
f(z) Satz 12.11=1
2πi
∫
|w−z|=ε
f(w)|w − z| dw, wobei K(z, ε) ⊂ D1
=1
2πi
∫
∂D1
f(w)|w − z| dw, da |w − z| = ε ∼ ∂D1
und1
2πi
∫
∂D2
f(w)|w − z| dw
Satz 12.9= 0,
da f(w)|w−z| holomorph auf einer Umgebung von D2. Damit hat man also
f(z) =1
2πi
( ∫
∂D1
f(w)|w − z| dw +
∫
∂D2
f(w)|w − z| dw
︸ ︷︷ ︸=0
)
53

=1
2πi
∫
∂D
f(w)|w − z| dz
=1
2πi
∫
|w−z0|=σ
f(w)|w − z| dw − 1
2πi
∫
|w−z|=ρ
f(w)|w − z| dw.
Wir betrachten die beiden Integranden
1. Sei σ = |w − z0| > |z − z0|. Dann ist
1w − z
=1
w − z0· 1
1− z − z0
w − z0︸ ︷︷ ︸|.|<1
=1
z − z0·
∞∑n=0
( z − z0
w − z0
)n
︸ ︷︷ ︸geometrische Reihe
.
2. Sei ρ = |w − z0| < |z − z0|1
w − z=
1z − z0
· 1z−z0z−z0
− 1= − 1
z − z0· 1
1− w − z0
z − z0︸ ︷︷ ︸|.|<1
= − 1z − z0
·∞∑
n=0
(z − z0
w − z0
)n
︸ ︷︷ ︸geometrische Reihe
.
Insgesamt hat man also
f(z) =1
2πi
( ∫
|w−zo|=σ
f(w)z − z0
·∞∑
n=0
(z − z0)n
(w − z0)ndw
+∫
|w−zo|=ρ
f(w)(z − z0)
·∞∑
n=0
(z − z0)n
(w − z0)ndw
)
=∞∑
n=0
(1
2πi
∫
|w−z0|=σ
f(w)(w − z0)n+1
dw
)
︸ ︷︷ ︸an
(z − z0)n
+∞∑
n=0
(1
2πi
∫
|w−z0|=ρ
f(w)(w − z0)−n
dw
)
︸ ︷︷ ︸a−(n+1)
(z − z0)−(n+1),
da die Potenzreihen auf kompakten Mengen gleichmaßig konvergieren. Mit σ −→ ρ ergibtsich die Behauptung. 2
Bevor wir eine Folgerung aus diesem Satz angeben, soll anhand eines Beispieles daraufhingewiesen werden, daß die Laurentreihenentwicklung vom Ringgebiet abhangt.Beispiel: Wir betrachten die Funktion
f : C \ 1, 3 −→ Cf(z) := 2
z2−4z+3 = 11−z + 1
z−3 .
54

Diese ist holomorph. Wir betrachten nun die Laurententwicklung auf drei verschiedenenRinggebieten um z0 = 0.
1. Laurententwicklung von f um z0 = 0 auf R0,1(0) = K(0, 1) \ 0:
Fur |z| < 1 ist1
1− z=
∞∑n=0
zn die geometrische Reihe und
1z − 3
= −13
(1
1− 13
)= −1
3
∞∑n=0
zn
3n.
Somit ist auf K(0, 1) \ 0: f(z) =∞∑
n=0
(1− 1
3n+1
)zn,
d.h. auf dem Ringgebiet R0,1(0) ist die Laurentreihe gleich der Taylorreihe.
2. Laurententwicklung von f um z0 = 0 auf R1,3(0) = z ∈ C ∣∣1 < |z| < 3:
Fur |z| > 1 gilt:1
1− z= −1
z
(1
1− 1z
)= −1
z
∞∑n=0
(1z
)n
= −∞∑
n=0
z−(n+1).
Fur |z| < 3 hat man:1
z − 3= −1
3
∞∑n=0
zn
3n= −
∞∑n=0
zn
3n+1.
Damit ist auf R1,3(0): f(z) = −∞∑
n=1
z−n −∞∑
n=0
13n+1
zn.
3. Laurententwicklung von f um z0 = 0 auf R3,∞(0) = z ∈ C ∣∣ |z| > 3:
Hier erhalt man fur |z| > 3:1
1− z= −
∞∑n=0
z−(n+1) und
1z − 3
=1z
(1
1− 3z
)=
1z
∞∑n=0
3n · z−n.
Damit ist auf R3,∞: f(z) =∞∑
n=0
(3n − 1)z−(n+1).
Wir wollen nun den Typ einer isolierten Singularitat durch die Laurentreihe beschreiben.
Folgerung 12.5.3 (Klassifikation von Singularitaten mittels Laurentreihen) Seif : U \ z0 ⊂ C −→ C holomorph, mit der isolierten Singularitat z0 ∈ U . Sei K(z0, R) ∈ U
und
f(z) =∞∑
n=−∞an (z − z0)n
die Laurentreihenentwicklung von f auf dem Ringgebiet R0,R(z0) = z ∈ C∣∣0 < |z − z0| <
R = K(z0, R) \ z0, mit R := dist(z0, ∂U). Dann gilt das Folgende:
1. z0 ist hebbare Singularitat von f genau dann, wenn an = 0 fur alle n < 0. (D.h. dieLaurentreihe ist die Taylorreihe.)
2. z0 ist Pol k-ter Ordnung mit (k ≥ 1) genau dann, wenn a−n = 0 fur n > k unda−n 6= 0 fur n ≤ k.
3. z0 ist wesentliche Singularitat genau dann, wenn an 6= 0 fur unendlich viele n < 0.
55

12.5.3 Residuen holomorpher Abbildungen in Singularitaten
Definition 12.22 Sei f : U \ z0 −→ C holomorph und f(z) =∞∑
n=−∞an(z − z0)n die
Laurentreihe von f um z0 auf z ∈ C∣∣0 < |z−z0| < dist(z0, ∂U). Dann heißt der Koeffizient
a−1 das Residuum von f in z0:
Res(f ; z0) := a−1 =1
2πi
∫
|z−z0|=ρ
f(z) dz.
Wir wollen nun eine Residuenformel fur Funktionen mit endlich vielen Singularitaten her-leiten:
f : U \ z1, ...zn −→ C, und∫
α
f(z) dz = ?
Erinnerung: Sei z0 ∈ C. Sei α : I ⊂ R −→ C eine geschlossene Kurve, deren Bild z0 nichtenthalt. Dann hatten wir die Umlaufzahl von α um z0 wie folgt definiert
χ(α; z0) :=1
2πi
∫
α
1z − z0
dz.
Diese mißt, wie oft α z0 umrundet, denn es galt der Satz 12.29, der besagte, daß
α ∼ z0 + re2πikt = z0 + r · wk(t) fur ein k ∈ Z
mit χ(α; z0) = k.Mit Hilfe dieser Umlaufzahl kann man nun definieren, was man unter dem Inneren und demAußeren einer Kurve versteht.
Definition 12.23
Int(α) = z0 ∈ C \ Im(α)∣∣ χ(α; z0) 6= 0
heißt Inneres oder Innengebiet von α.
Ext(α) = z0 ∈ C \ Im(α)∣∣ χ(α; z0) = 0
heißt Außeres oder Außengebiet von α.
Dann gilt der Hauptsatz dieses Abschnittes.
Satz 12.43 (Residuensatz [Cauchy, 1826]) Sei U ⊂ C einfach–zusammenhangend,z1, ..., zn ∈ U paarweise verschieden, α : I ⊂ R −→ U \ z1, ...zn sei eine geschlosseneKurve, und sei f : U \ z1, ...zn ⊂ C −→ C holomorph. Dann gilt die Residuenformel:
∫
α
f(z) dz = 2πi
n∑
j=1
Res(f ; zj) · χ(α; zj).
Beweis: Wir entwickeln f um jede Singularitat zj auf K(zj , ρj)\zj = 0 < |z−zj | < ρjin eine Laurentreihe
f(z) =∞∑
n=−∞a(j)
n (z − zj)n,
wobei ρj > 0 so klein gewahlt ist, daß 0 < |z− zj | < ρj keine weitere Singularitat enthalt.
56

Der jeweilige Hauptteil hj(w) =∞∑
k=1
a(j)−kwk definiert eine auf C \ zj holomorphe Funktion
z 7−→ hj
(1
z − z0
)=
∞∑
k=1
a(j)−k(z − zj)−k.
Die Funktion
g(z) := f(z)−∞∑
k=1
hj
(1
z − zj
)
ist dann holomorph auf U \ z1, ...zn und hat in z1, . . . zn hebbare Singularitaten, d.h. laßtsich holomorph in die Singularitaten fortsetzen (mittels des Nebenteils der Laurentreihe.)Mit dem Cauchyschen Integralsatz und Integralformel hat man dann zunachst
0 =∫
α
g(z) dz =∫
α
f(z) dz −n∑
j=1
∫
α
hj
(1
z − zj
)dz,
und somit∫
α
f(z) dz =n∑
j=1
∫
α
hj
(1
z − zj
)dz
=n∑
j=1
∫
α
∞∑
k=1
a(j)−k
(z − zj)kdz
=n∑
j=1
∞∑
k=1
a(j)−k
∫
α
1(z − zj)k
dz.
Da nun α ∼ zj + rωl in U \ zj mit ωl(t) := re2πitl, so ist
∫
α
1(z − zj)k
dz =∫
ωl
1(z − zj)k
dz =
0 fur k > 12πik fur k = 1
(siehe (12.4) in Beispiel 2, erster Abschnitt). Doch damit ergibt sich nun
∫
α
f(z) dz = 2πik ·n∑
j=1
a(j)−1 =
n∑
j=1
a(j)−1
∫
α
1w − zj
= 2πi ·n∑
j=1
Res(f ; zj) · χ(α; zj).
2
Bemerkungen:
1. In der Residuenformel liefern nur diejenigen Singularitaten im Innern von α einenBeitrag.
2. Die Residuenformel verallgemeinert den Cauchyschen Integralsatz, wenn z1, . . . , zn
hebbare Singularitaten sind.
57

3. Ist f : U ⊂ C −→ C holomorph, z0 ∈ U , so ist die Funktion
h : U \ z0 −→ Ch(z) = f(z0)
z−z0
holomorph auf U \ z0 und Res(h; z0) = f(z0), denn es ist
f(z) =∞∑
n=0
an(z − z0)n d.h. f(z0) = a0 und
h(z) =a0
z − z0+ a1 + a2(z − z0) + . . .
und damit Res(h; z0) = a0 = f(z0).
Somit ergibt sich ∫
α
h(z) dz = 2πiRes(h; z0)︸ ︷︷ ︸=f(z0)
χ(α; z0),
und man erhalt eine Verallgemeinerung der Cauchyformel:
12πi
∫
α
f(z)z − z0
dz = f(z0) · χ(α; z0).
Berechnung von Residuen
Residuen sind durch Integrale gegeben:
Res(f ; z0) =1
2πi
∫
|z−z0|=ρ
f(z) dz.
Oft kann man sie algebraisch berechnen.
1. Man entwickelt f in z0 in eine Laurentreihe und kann a−1 = Res(f ; z0) ablesen (manbenutzt bekannte Reihen).
2. Rechenregeln fur Polstellen erster Ordnung:
(a) Sei f : U \ z0 ⊂ C −→ C holomorph, z0 Polstelle 1. Ordnung. Dann ist
Res(f ; z0) = limz−→z0
(z − z0) · f(z),
denn es ist
f(z) =a−1
z − z0+ a0 + a1(z − z0) + · · · und somit
(z − z0)f(z) = a−1 + (z − z0)(a0 + · · ·).
(b) Seien
g : U ⊂ C −→ C holomorph mit g(z0) 6= 0,
h : U ⊂ C −→ C holomorph mit h(z0) = 0, h′(z0) 6= 0.
58

Dann hat f = gh : U \ z0 ⊂ C −→ C in z0 eine Polstelle 1. Ordnung und es gilt
Res(f ; z0) =g(z0)h′(z0)
.
Um diese Formel zu beweisen, betrachtet man die Taylorentwicklung von h undg um z0:
h(z) = h(z0)︸ ︷︷ ︸=0
+ h′(z0)︸ ︷︷ ︸6=0
(z − z0) +h′′(z0)
2!(z − z0)2 + . . . .
g(z) = g(z0)︸ ︷︷ ︸6=0
+g′(z0)(z − z0) + . . . .
Damit ist
limz→z0
(z − z0)f(z) = limz→z0
(z − z0)g(z)f(z)
= limz→z0
(g(z0) + g′(z0)(z − z0) + . . .
h′(z0) + h′′(z0)2! (z − z0) + . . .
)
=g(z0)h′(z0)
.
D.h. (z − z0)f(z) ist in z0 stetig fortsetzbar und hat somit einen Pol erster Ord-nung. Außerdem gilt
Res(f ; z0) =g(z0)h′(z0)
.
3. Rechenregeln fur Polstellen hoherer Ordnung: Sei f : U \ z0 ⊂ C −→ C holomorph,z0 Polstelle k-ter Ordnung. Sei g die holomorphe Funktion, die (z−z0)kf(z) holomorphin z = z0 fortsetzt. Dann gilt
Res(f ; z0) = limz−→z0
1(k − 1)!
g(k−1)(z0).
Zum Beweis betrachtet man die Laurentreihe von f :
f(z) =a−k
(z − z0)k+ . . . +
a−1
z − z0+ a0 + a1(z − z0) + . . . , d.h.
g(z) = (z − z0)kf(z)
= a−k + a−k+1(z − z0) + . . . + a0(z − z0)k + . . . und somit
g(k−1)(z) = (k − 1)! a−1 + a0(k(k − 1) · · · ·)(z − z0) + . . . .
Damit istlim
z−→z0g(k−1)(z) = g(k−1)(z0) = (k − 1)!a−1
d.h. Res(f ; z0) = a−1 = 1(k−1)!g
(k−1)(z0).
Beispiel 1: f(z) = 11+z2 hat Singularitaten in i,−i. Wir wollen Res(f ; i) berechnen. Es
ist f(z) = 1z−i
1z+i , d.h. f(z) hat in i einen Pol erster Ordnung. Fur das Residuum
berechnet man dann
Res(f ; i) = limz−→i
(z − i)f(z) = limz−→i
1z + i
=12i
.
59

Beispiel 2: f(z) = z2
1+z4 hat eine Singularitat in z0 = ei π4 . Man setzt g(z) = z2 d.h.
g(z0) = ei π2 = i = z2
0 6= 0. Fur h(z) := 1 + z4 ist dagegen h(z0) = 0 und h′(z0) =4z3
0 = 4e3i4 π 6= 0. Damit hat f in z0 einen Pol erster Ordnung, und man erhalt
Res(f ; z0) =g(z0)h′(z0)
=z20
4z30
=1
4 z0=
14· e−i π
4 .
Beispiel 3: f(z) = 1sin z hat Singularitaten in z0 = kπ fur k ∈ Z. Mit g(z) := 1 und
h(z) := sin(z) ist g(z0) = 1 6= 0, h(z0) = 0 und h′(z0) = cos z0 = (−1)k. Damit hat f
in z0 einen Pol erster Ordnung, und es ist
Res(f ; kπ) = (−1)k.
12.5.4 Anwendung des Residuensatzes auf die Berechnung von In-
tegralen
Sei f : I ⊂ R −→ C. Wir wollenb∫
a
f(x) dx berechnen.
Dazu betrachtet man F : U ⊂ C −→ C und berechnet
∫
α
F (z) dz =
b∫
a
F (γ(t))γ′(t)︸ ︷︷ ︸f(t)
dt +∫
α1
F (z) dz
︸ ︷︷ ︸gegen 0 abschatzen
=∑
zj ist Singularitat
Res(F ; z0) · 2πi · χ(F, z0).
12.5.4.1 Trigonometrische Integrale
Hier wollen wir Integrale der Form
I :=
2π∫
0
f(cos t, sin t) dt
berechnen, wobei f = PQ , mit P, Q ∈ C[Z] und Q ohne Nullstellen auf z ∈ C | |z| = 1,
eine komplex-rationale Funktion ist.
Satz 12.44 Sei f = PQ eine rationale Funktion, Q habe keine Nullstelle auf |z| = 1. Dann
ist
2π∫
0
f(cos t, sin t) dt = 2π∑
zj∈M
Res(f , zj),
wobei: f :=1zf
(12
(z +
1z
),
12i
(z − 1
z
))
und M : = z ∈ C | |z| < 1 und z ist Nullstelle von Q
Beweis: Wir schreiben I als komplexes Kurvenintegral uber |z| = 1, d.h.
z := ei t = cos t + i sin t mit 0 ≤ t ≤ 2π.
60

Dann istcos t = eit+e−it
2 = z+z−1
2
sin t = eit−e−it
2 = z−z−1
2 ,
und man erhalt
∫
|z|=1
f(z) dz =
2π∫
0
f(eit)ieit dt
(Residuensatz) = = (γ(t) = eit eine Parametrisierung von |z| = 1)
i
2π∫
0
f(cos t, sin t) dt 2πi∑
M
Res(f ; z0).
Das ist aber die Behauptung. 2
Beispiel: Sei I :=2π∫0
dt1−2p cos t+p2 mit p ∈ C, |p| 6= 1. Also ist
f(x, y) =1
1− 2px + p2und damit
f(z) =1z· 11− p(z + z−1) + p2
=1
(z − p)(1− pz).
D.h. f hat genau einen Pol erster Ordnung z0 ∈ K(0, 1) , namlich
z0 =
p , falls |p| < 11p , falls |p| > 1 .
Man berechnet das Residuum in beiden Fallen
• |p| < 1: Hier ist Res(f ; p) = 11−p2 und damit
I = 2πRes(f ; p) =2π
1− p2.
• |p| > 1: Es gilt Res(f ; 1p ) = lim
z−→ 1p
pz−1p · 1
z−p · 11−pz = − 1
p · 11p−p
. Damit ist
I = 2π ·Res(f ;1p) =
2π
p2 − 1.
12.5.4.2 Uneigentliche Integrale
Hier betrachten wir Integrale der Form
∞∫
−∞f(x) dx
Erinnerung:
61

• Uneigentliche Integrale waren wie folgt definiert:∞∫
−∞f(x) dx := lim
r−→∞
r∫
0
f(x) dx + lims−→−∞
0∫
s
f(x) dx,
falls beide Grenzwerte existieren.
• Wenn∞∫−∞
f(x) dx existiert, so gilt
∞∫
−∞f(x) dx = lim
R−→∞
R∫
−R
f(x) dx
︸ ︷︷ ︸Kann oft mit Hilfedes Residuensatzesberechnet werden.
:= Cauchyscher Hauptwert.
• Wir kennen das folgende Kriterium fur die Existenz des uneigentlichen Integrals:
Ist f : R −→ C stetig, und es existiert ein k > 1, so daß |xkf(x)| ≤ C = const fur alle
x ∈ R, dann existiert∞∫−∞
f(x) dx.
Satz 12.45 Seien Q,P ∈ C[z] Polynome mit deg Q ≥ deg P + 2 und Q habe keine reellenNullstellen. Sei f := P
Q : C \ NS von Q −→ C, dann gilt
∞∫
−∞f(x) dx = 2πi
∑
zj∈M
Res(f ; zj), (12.13)
wobei M := z ∈ C | z ist NS von Q mit Im(z) > 0.Beweis: Fur rationale Funktionen gilt (Wachstumslemma), daß Konstanten R und C exi-stieren, so daß
∣∣∣∣P (z)Q(z)
∣∣∣∣ ≤ C|z|deg P−deg Q fur alle |z| ≥ R.
Da nun Q auf R keine Nullstellen hat und deg Q ≥ deg P + 2, so erhalt man
|x2 · f(x)| ≤ const fur alle x ∈ R.
Damit ist limz→∞ z · f(z) = 0, d.h.∞∫−∞
f(x)dx existiert und ist durch den Hauptwert
∞∫
−∞f(x)dx = lim
R→∞
R∫
−R
f(x)dx
zu berechnen.
Wir wahlen nun R > 0 so groß, daß alle Null-stellen von Q in K(0, R) liegen. Seien
σR(t) := t mit t ∈ [−R,R]γR(t) := Re2πit mit t ∈ [0, 1
2 ]
die Wege auf dem Rand des Halbkreises. ......................
..................
................
...............
..................
......................................
...........................
........................
...........................................
........................................
.................. ................... .................. .................. .................. .................. ................... .................. ..................... ................... ................ .............. .............
........................
........................
...
......................................
..................
...............
................
..........
........
..........
..........
.
z1
z2
z3
0−R RσR
¸
-
¾
R γR
62

Aus dem Residuensatz folgt dann∫
σR∗γR
f(z) dz =∫
σR
f(z) dz +∫
γR
f(z) dz = 2πi∑
zj∈M
Res(f ; zj).
Nun ist
∫
σR
f(z) dz =
R∫
−R
f(t) dt und
∣∣∫
γR
f(z) dz∣∣ ≤
=π·R︷ ︸︸ ︷l(γR) · max
|z|=R|f(z)|
= π max|z|=R
|z · f(z)|.︸ ︷︷ ︸
R→∞−→ 0, da deg Q ≥ deg P + 2
Damit ist
∞∫
−∞f(x) dx = lim
R→∞
R∫
−R
f(t) dt
= limR→∞
∫
σR
f(z) dz
= limR→∞
∫
σR∗γR
f(z) dz − limR→∞
∫
γR
f(z) dz
︸ ︷︷ ︸=0
= 2πi∑
zj∈M
Res(f ; zj)
2
Es gilt jedoch die noch allgemeinere Aussage von
Satz 12.46 Sei f : C \ z1, ..., zn ⊂ C −→ C holomorph, zj /∈ R mit limz−→∞
z · f(z) = 0.
Dann gilt limR−→∞
R∫−R
f(z) dz = 2πi∑
Im(zj)>0
Res(f ; zj). 2
12.5.4.3 Uneigentliche Integrale vom Typ∞∫
−∞g(x)eiαxdx mit α ∈ R∗
Hier gilt
Satz 12.47 Sei g : C \ z1, ..., zn ⊂ C −→ C holomorph, zj /∈ R, paarweise verschieden,und es gelte lim
z−→∞g(z) = 0. Dann gilt
∞∫
−∞g(x)eiαx dx =
2πi∑
Im(z)>0
Res(g(z)eiαz; zj), falls α > 0
2πi∑
Im(z)<0
Res(g(z)eiαz; zj), falls α < 0
63

Beweis: Wir suchen wieder einen ge-eigneten Weg. Dazu betrachten wir dasQuadrat mit den Eckpunkten
s , s + iq , −r + iq , −r
mit q = r + s. Nun unterscheiden wirzwei Falle. 0−r s
γ1
Q
iq γ2
γ3
α > 0: Wir wahlen r und s so groß, daß alle zj mit Im(zj) > 0 in Q liegen. Dann gilt
s∫
−r
g(x)eiαx dx +∫
γ1∗γ2∗γ3
g(x)eiαx dx = 2πi∑
Im(zj)>0
Res(f ; zj).
Der Satz ist nun bewiesen, wenn man die folgende Behauptung zeigen kann.
Behauptung: Iν =∫
γν
g(x)eiαx dxr,s→∞−→ 0 fur ν = 1, 2, 3. (12.14)
Dazu setzen wir |g|ν := maxz∈Im(γν) |g(z)|.Wir berechnen nun die drei Integrale. Als erstes das Integral uber dem Weg γ1(t) =s + ti, mit t ∈ [0, q).
|I1| =∣∣∣
q∫
0
g(s + it) · e(is−t)α · i dt∣∣∣
≤ |g|1 ·q∫
0
e−tαdt
= |g|1 · 1α
(−e−qα + 1)
α·q>0
≤ |g|1 · 1α
.
Da nun limz→∞ g(z) = 0, ist lims→∞maxt∈[0,q] |g(s + it)| = 0. Somit erhalt man
lims→∞
|I1| = 0.
Fur den Weg γ−3 (t) = −r + it mit t ∈ [0, q] erhalt man analog
|I3| =∣∣∣
q∫
0
g(−r + it) · e(−ir−t)α · i dt∣∣∣
≤ |g|3 · 1α
.
Somit ist aufgrund von limr→∞ |g|3 = 0 wiederum
limr→∞
|I3| = 0.
64

Als letztes betrachten wir den Weg γ−2 (t) = t + iq mit t ∈ [−r, s]. Hier erhalt man
|I2| =∣∣∣
s∫
−r
g(t + iq) · e(it−q)α dt∣∣∣
≤ maxt∈[−r,s]
∣∣g(t + iq) · eitα∣∣
︸ ︷︷ ︸=|g(t+iq)|
·e−qα · (r + s)
= |g|2 · q · e−qα
≤ |g|2 , sobald q so groß ist, daß q < eqα.
Nun ist wiederum limr,s→∞ |g|2 = 0. Damit ist die Behauptung gezeigt.
α > 0: Der Beweis erfolgt analog mit q < 0. 2
Bemerkung: Diese Transformation
g : R→ R 7−→ g : R→ R mit
g(α) :=
∞∫
−∞g(x)eiαx dx
heißt Fouriertransformation.
Beispiel: Wir betrachten den Spezialfall, daß g rational ist
g(z) =P (z)Q(z)
mit P, Q ∈ C[z], deg P ≤ deg Q− 1.
Wir wollen das uneigentliche Integral fur g(z) = 1z−ib berechnen. Fur das Integral gilt dann
I =
∞∫
−∞
eiαx
x− ibdx =
2πie−αb, falls Re(b) > 00 falls Re(b) < 0.
Sei α ∈ R+, b ∈ Cmit Re(b) 6= 0, b = u+iv. Die Funktion g(z) = 1z−ib hat dann offensichtlich
eine Singularitat in z0 = ib = −v + iu. Wir betrachten nun zwei Falle.
• u > 0: Hier erhalt man
I = 2πi Res
(eiαz
z − ib, ib
)
= 2πie−α·b
1
(wegen
g(z0)h′(z0
).
• u < 0: Hier ist I = 0, da die Singularitat z0 = −v+ iu ist, d.h. man hat kein Residuumauf Im(z) > 0.
12.5.5 Nullstellen und Polstellen meromorpher Funktionen
Ziel dieses Abschnittes ist eine Aussage uber die Beziehung zwischen der Anzahl der Pol-stellen und der Anzahl der Nullstellen einer meromorphen Funktion.Wir wiederholen zunachst die Definition einer meromorphen Funktion.
65

Definition 12.24 Sei U ⊂ C offen. Dann heißt f : U −→ C∞ meromorph, falls
1. f : U \ f−1(∞) ⊂ C −→ C ist holomorph und
2. f−1(∞) ist diskret in U und besteht nur aus Polstellen.
D.h. eine meromorphe Funktion ist holomorph bis auf isolierte Polstellen.Wir betrachten zu einem z0 ∈ U die Laurentreihenentwicklung
f(z) =∞∑
k=−∞ak(z − z0)k.
Ist z0 keine wesentliche Singularitat, dann existiert ein minimales k ∈ Z mit ak 6= 0. Dieses
k = mink | ak 6= 0 := ord(f ; z0)
heißt Ordnung von f in z0.
• Ist z0 eine Nullstelle von f , d.h. f(z0) = 0, so ist
f(z) = (z − z0)k( ak︸︷︷︸6=0
+ak+1(z − z0) + . . . )
mit k = ord(f ; z0) die Ordnung in der Nullstelle z0.
• Ist z0 ein Pol k-ter Ordnung, dann ist
f(z) =a−k
(z − z0)k+ . . . +
a−1
z − z0+ a0 + . . . )
mit −k = ord(f ; z0) die Ordnung des Pols.
Beispiele fur meromorphe Funktionen
1. Rationale Funktionen f = PQ : C −→ C∞ mit P, Q ∈ C[z] sind meromorph. Ist
Q(z) = (z − z1)m1 · . . . · (z − zr)mr
P (z) = (z − w1)n1 · . . . · (z − ws)ns
mit wi 6= zj die Zerlegung in Linearfaktoren, so sind
wj die Nullstellen von f mit ord(f ;wj) = nj und
zj die Polstellen von f mit ord(f ; zj) = −mj .
2. Die Funktion f(z) = cot πz = cos πzsin πz ist meromorph aber nicht rational. Es gilt
Polstellen von f = Nullstellen von sin πz = Z,
Nullstellen von f = Nullstellen von cosπz = Z+ 12 .
Betrachtet man nun die Taylorreihen um z0 = n
sin πz = (−1)nπ(z − n) + . . .
cos πz = (−1)n + π(z − n)2 + . . .
so istπ · cot πz =
1π· 1z − n
+ Potenzreihe in (z − n).
Somit gilt fur jedes n ∈ Z daß ord(f ; n) = 1.
66

Wir beweisen nun
Satz 12.48 Sei U ⊂ C einfach–zusammenhamngend und f : U −→ C eine meromorpheFunktion mit den Nullstellen a1, . . . , an ∈ U und den Polstellen b1, . . . , bm ∈ U . Dann giltfur jede geschlossen Kurve α in U , deren Bild weder eine Nullstelle noch eine Polstelleenthalt, daß
12πi
∫
α
f ′(z)f(z)
dz =n∑
ν=1
ord(f ; aν)χ(f ; aν) +m∑
µ=1
ord(f ; bµ)χ(f ; bµ).
Bemerkung: f ′
f heißt logarithmische Ableitung von f .
Beweis: Ist f : U −→ C meromorph, so ist f ′
f holomorph außerhalb der Nullstellen undPolstellen von f .Sei nun z0 ∈ U und ord(f ; z0) = k ∈ Z. Dann gilt in einer Umgebung k(z0, ρ)
f(z) =6=0︷︸︸︷ak ·(z − z0)k
︸ ︷︷ ︸ausklammern!
(1 +
∞∑
k=1
bk(z − z0)k
)
f(z) = k · ak · (z − z0)k−1
(1 +
∞∑
k=1
ck(z − z0)k
).
Dies ergibt
f ′(z)f(z)
=k
z − z0
(1 +
∑∞k=1 ck(z − z0)k
1 +∑∞
k=1 bk(z − z0)k
)
︸ ︷︷ ︸=: h(z)
holomorph mit h(z0) = 1 undh(z) = 1 +
∑∞k=1 dk(z − z0)k.
=k
z − z0+ Taylorreihe.
Man hat also die folgende Beziehung
Ist z0 Nullstelle oder Polstelle mit ord(f ; z0) = k, dann ist
Res
(f ′
f, z0
)= k = ord(f ; z0).
Fur alle anderen z0 ist Res(
f ′
f , z0
)= 0.
Aus dem Residuensatz ergibt sich dann
12πi
∫
α
f ′(z)f(z)
dz =∑
Nullstellen aν
Res(f ′
f, aν) · χ(f ; aν)
+∑
Pole bµ
Res(f ′
f, bµ) · χ(f ;mµ)
=∑
Nullstellen aν
ord(f ; aν) · χ(f ; aν)
+∑
Pole bµ
ord(f ; bµ) · χ(f ;mµ).
67

2
Als Folgerung erhalt man die
Anzahlformel fur Null- und Polstellen:
Sei f : U ⊂ C −→ C∞ meromorph mit endlich vielen Nullstellen und Polstellen. Wir fuhrenfolgende Bezeichnungen ein:
Nf (0) :=∑
aν Nullstelle
ord(f ; aν)
= Gesamtzahl der Nullstellen (mit Vielfachheit),
Nf (∞) :=∑
bµ Polstelle
ord(f ; bµ)
= Gesamtzahl der Polstellen mit Ordnung des Pols.
Dann gilt
Folgerung 12.5.4 Sei f : U ⊂ C −→ C∞ meromorph mit den Nullstellen a1, . . . , an undPolstellen b1 . . . bm und α eine geschlossen Kurve in U , die jede Polstelle und jede Nullstellegenau einmal umlauft. Dann gilt
12πi
∫
α
f ′(z)f(z)
dz = Nf (0)−Nf (∞).
Folgerung 12.5.5 Sei f : U ⊂ C −→ C holomorph und α eine geschlossen Kurve in U ,auf deren Bild keine Nullstellen von f liegen, und die jede Nullstelle genau einmal umlauft.Dann gilt
Nf (0) = χ(f α; 0) ∈ Z= Umlaufzahl von f α um 0.
Beweis: Wir benutzen die Transformationsformel fur Integrale. Sei
g : U −→ U holomorph,α : I −→ U ein Weg,F : U −→ C holomorph.
Dann gilt ∫
gαF (z) dz =
∫
α
F (g(z)) · g′(z) dz.
Wir wenden dies nun auf g := f , F := 1z und α wie in den Voraussetzungen an und erhalten
12πi
∫
fα
1z
dz =1
2πi
∫
α
1f(z)
· f ′(z) dz
= =
χ(f α; 0) Nf (0).
2
68


















