Interaktive Geoobjekterkennung in digitalen...
8
Interaktive Geoobjekterkennung in digitalen Höhenmodellen mittels Parametervisualisierung Marc-Oliver Löwner, Dirk Dörschlag, Lutz Plümer Institut für Kartographie und Geoinformation der Universität Bonn Zusammenfassung In dem hier vorgestellten Ansatz wird die Suche von natürlichen geomorphologischen Objekten durch eine lineare Überführung der semantisch de- finierten Suchkriterien in das RGB-Farbmodell in Verbindung mit einer dreidimensionalen Ansicht des Höhenmodells vorgeschlagen. Die Unterstützung der Geoobjekterkennung in einem digitalen Höhen- modell erfolgt dabei durch farbliche Hervorhebung der Pixel, an denen semantisch relevante Eigenschaf- ten einer Objektklasse vorhanden sind. Die Farbe des Pixels orientiert sich an dem definierten idealen Farbvektor der entsprechenden Geoobjektklasse. Die Länge des Farbvektors steht dabei in einem durch Rechenregeln definierten Zusammenhang mit Anzahl und Ausprägung der am Pixel zutreffenden Eigenschaften im Definitionsbereich der Geoobjekt- klasse. Sie wird maximal bei Koinzidenz aller Werte, die im Zentrum der definierten Werteintervalle der für eine Klasse notwendigen Eigenschaften stehen. Zu einer Richtungsänderung des Farbvektors am Ort kann es durch räumliche Überlagerung von Ei- genschaften mehrerer Klassen an diesem Ort kom- men. Die Farbwahl für die Geoobjektklassen ist dem- nach auch semantisch möglichst komplementär zu wählen und nur theoretisch unbegrenzt. In der Anwendung eines semantischen Modells nach Caine (1974) wird der entwickelte Ansatz ge- testet. Es zeigt sich, dass die zu visualisierenden morphologischen Parameter auch in der Überschnei- dung sinnvoll hervorgehoben werden können. 1 Einleitung Die Geomorphologie beschäftigt sich neben der nunmehr quantitativen Beschreibung der Erdober- fläche und ihrer Genese auch mit der Funktion die- ser Grenzschicht für die auf ihr ablaufenden Pro- zesse. Damit leistet sie wichtige Beiträge für die anwendungsortientierten Problemfelder der Inge- nieurwissenschaften und der Naturgefahrenanaly- se (Pike 1995). Der computergestützten geomor- phometrischen Analyse der Oberflächenformen kommt dabei ein immer stärkeres Gewicht zu (Wei- bel und Brändli 1995). Trotz intensiver Forschung in der Bereitstellung geomorphometrischer Parameter (zum Beispiel Flo- rinsky 1998, Schmidt et al. 1996) stellt die vollauto- matisierte Erkennung von Geoobjekten in digitalen Höhenmodellen ein bislang ungelöstes Problem dar. Die gefundenen Ansätze beschränken sich im We- sentlichen auf die Erkennung linearer Merkmale, wie Höhenkämme oder Tiefenlinien und deren Son- derformen zur Eingrenzung von Wassereinzugsge- bieten (zum Beispiel Brändli 1997) oder auf die Iden- tifikation von Formenelementen mit gleichen geo- morphometrischen Eigenschaften erster und zwei- ter Ableitung (Dikau 1998, Guth 1999). Während Erstes der tatsächlichen Findung ontologischer En- titäten der realen Geländeoberfläche dient, zielt Zweites vor allem auf die Identifikation von Struk- turen und Eigenschaften des Reliefs, deren räumli- che Ausdehnung sich nur unzureichend mit der von Objekten des Alltagswissens deckt. Es handelt sich vielmehr um die Bereitstellung für die Identifikati- on notwendiger Parameterfeldern. Die bis jetzt noch nicht überwundene Hürde bei der automatischen Erkennung von geomorphologi- schen Objekten ist neben der schwer zu fassenden Deutsche Gesellschaft für Kartographie, Kartographi- sche Schriften, Band 7: Visualisierung und Erschlie- ßung von Geodaten. Beiträge des Seminars GEOVIS 2003, 27.–28. Februar 2003, Hannover, 59–66
Transcript of Interaktive Geoobjekterkennung in digitalen...

Interaktive Geoobjekterkennung in digitalenHöhenmodellen mittels Parametervisualisierung
Marc-Oliver Löwner, Dirk Dörschlag, Lutz PlümerInstitut für Kartographie und Geoinformation der Universität Bonn
ZusammenfassungIn dem hier vorgestellten Ansatz wird die Suchevon natürlichen geomorphologischen Objektendurch eine lineare Überführung der semantisch de-finierten Suchkriterien in das RGB-Farbmodell inVerbindung mit einer dreidimensionalen Ansicht desHöhenmodells vorgeschlagen. Die Unterstützungder Geoobjekterkennung in einem digitalen Höhen-modell erfolgt dabei durch farbliche Hervorhebungder Pixel, an denen semantisch relevante Eigenschaf-ten einer Objektklasse vorhanden sind. Die Farbedes Pixels orientiert sich an dem definierten idealenFarbvektor der entsprechenden Geoobjektklasse.Die Länge des Farbvektors steht dabei in einemdurch Rechenregeln definierten Zusammenhang mitAnzahl und Ausprägung der am Pixel zutreffendenEigenschaften im Definitionsbereich der Geoobjekt-klasse. Sie wird maximal bei Koinzidenz aller Werte,die im Zentrum der definierten Werteintervalle derfür eine Klasse notwendigen Eigenschaften stehen.Zu einer Richtungsänderung des Farbvektors amOrt kann es durch räumliche Überlagerung von Ei-genschaften mehrerer Klassen an diesem Ort kom-men. Die Farbwahl für die Geoobjektklassen ist dem-nach auch semantisch möglichst komplementär zuwählen und nur theoretisch unbegrenzt.
In der Anwendung eines semantischen Modellsnach Caine (1974) wird der entwickelte Ansatz ge-testet. Es zeigt sich, dass die zu visualisierendenmorphologischen Parameter auch in der Überschnei-dung sinnvoll hervorgehoben werden können.
1 EinleitungDie Geomorphologie beschäftigt sich neben dernunmehr quantitativen Beschreibung der Erdober-fläche und ihrer Genese auch mit der Funktion die-ser Grenzschicht für die auf ihr ablaufenden Pro-zesse. Damit leistet sie wichtige Beiträge für dieanwendungsortientierten Problemfelder der Inge-nieurwissenschaften und der Naturgefahrenanaly-se (Pike 1995). Der computergestützten geomor-phometrischen Analyse der Oberflächenformenkommt dabei ein immer stärkeres Gewicht zu (Wei-bel und Brändli 1995).
Trotz intensiver Forschung in der Bereitstellunggeomorphometrischer Parameter (zum Beispiel Flo-rinsky 1998, Schmidt et al. 1996) stellt die vollauto-matisierte Erkennung von Geoobjekten in digitalenHöhenmodellen ein bislang ungelöstes Problem dar.Die gefundenen Ansätze beschränken sich im We-sentlichen auf die Erkennung linearer Merkmale,wie Höhenkämme oder Tiefenlinien und deren Son-derformen zur Eingrenzung von Wassereinzugsge-bieten (zum Beispiel Brändli 1997) oder auf die Iden-tifikation von Formenelementen mit gleichen geo-morphometrischen Eigenschaften erster und zwei-ter Ableitung (Dikau 1998, Guth 1999). WährendErstes der tatsächlichen Findung ontologischer En-titäten der realen Geländeoberfläche dient, zieltZweites vor allem auf die Identifikation von Struk-turen und Eigenschaften des Reliefs, deren räumli-che Ausdehnung sich nur unzureichend mit der vonObjekten des Alltagswissens deckt. Es handelt sichvielmehr um die Bereitstellung für die Identifikati-on notwendiger Parameterfeldern.
Die bis jetzt noch nicht überwundene Hürde beider automatischen Erkennung von geomorphologi-schen Objekten ist neben der schwer zu fassenden
Deutsche Gesellschaft für Kartographie, Kartographi-sche Schriften, Band 7: Visualisierung und Erschlie-ßung von Geodaten. Beiträge des Seminars GEOVIS2003, 27.–28. Februar 2003, Hannover, 59–66

60 Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
Grenzunschärfe natürlicher räumlicher Phänome-ne (Burrough und Frank 1996, Jaquez et al.2000) eine für die Entwicklung von Modellen un-abdingbare fachliche Definition der zu suchendenEntitäten (zum Beispiel Pike 1995, Dehn et al.2001). Die Semantik von Geoobjekten ist aktuellerForschungsgegenstand des GraduiertenkollegsDas Relief – eine strukturierte und veränderli-che Grenzfläche an der Universität Bonn (http://slide.giub.uni-bonn.de/Kolleg/).
Ohne eine hinreichende Lösung der semantischenFragestellung und der darauf aufbauenden Model-lierung der Geländeoberfläche mit dem Ziel effekti-ver Suchalgorithmen für komplexe Geoobjekte er-folgt die Arbeit des Anwenders, nämlich die Sucheund Kartierung geomorphologischer Entitäten ineinem Geographischen Informationssystem, manu-ell durch Digitalisierung von mehr oder mindersichtbaren Grenzen in Luftbild und Höhenmodell.Eine vom Anwender intuitiv oder systematisch ent-wickelte Semantik wird dabei für jedes fraglicheObjekt erneut angewendet.
Zur interaktiven Identifikation von geomorpholo-gischen Objekten kann die Visualisierung in der De-finition von Worboys (1995) einen wichtigen Bei-trag leisten. Dabei liegt der Schwerpunkt der Visua-lisierung nicht in der explorativen Datenerkundung(zum Beispiel Wise et al. 1996), sondern in der op-tisch prägnanten Heraushebung der für das vomAnwender definierte semantische Modell relevan-ten Stellen eines digitalen Höhenmodells. Dies sindinsbesondere innerhalb definierter Intervalle liegen-de Feldvariablen, deren Werte sich in Abhängig-keit des Ortes verändern. Geomorphologisch rele-vante Eigenschaften wie Hangneigung, horizonta-le Wölbung oder auch Insolation lassen sich durchFilter direkt aus dem Höhenmodell gewinnen (Sha-ry 1995). Auf Attribute mit Boolschen Eigenschaf-ten soll an dieser Stelle nicht näher eingegangenwerden.
In dem hier vorgestellten Ansatz wird für eine gege-bene Anzahl von Objekten und die sie definieren-den Eigenschaften mittels des RGB-Farbmodells(Haberäcker 1995) eine farbliche Hervorhebungsemantisch kohärenter Pixel dargestellt.
2 Farbliche Visualisierung durchParameter
Die Unterstützung der Geoobjekterkennung in ei-nem digitalen Höhenmodell wird hier durch die li-neare Überführung einer semantischen Definitionin das RGB-Farbmodell erreicht. Die farbliche Her-vorhebung eines Pixels erfolgt an den Stellen, andenen semantisch relevante Eigenschaften einerObjektklasse vorhanden sind. Die Farbe des Pixelsorientiert sich an dem definierten idealen Farbvek-tor der entsprechenden Geoobjektklasse. Die Län-ge des Farbvektors steht dabei in einem durch Re-chenregeln definierten Zusammenhang mit Anzahlund Ausprägung der am Pixel zutreffenden Eigen-schaften im Definitionsbereich der Geoobjektklas-se. Sie wird maximal bei Koinzidenz aller Werte, dieim Zentrum der definierten Werteintervalle der füreine Klasse notwendigen Eigenschaften stehen. Zueiner Richtungsänderung des Farbvektors am Ortkann es durch räumliche Überlagerung von Eigen-schaften mehrerer Klassen an diesem Ort kommen.Die Farbwahl für die Geoobjektklassen ist demnachauch semantisch möglichst komplementär zu wäh-len und nur theoretisch unbegrenzt.
Werden einer Geoobjektklasse O für die Identifika-tion notwendige Eigenschaften zugeordnet, ergibtsich die Wahrscheinlichkeit des Auftretens einerEntität dieser Klasse aus der Addition der gefun-denen Eigenschaften an einem Ort. Analog könnendiesen Eigenschaften Wertebereiche einzelner Farb-ebenen zugeordnet werden, die in Anwendung ei-ner Rechenvorschrift die für eine Klasse vorbe-stimmte Farbe ergeben. Allgemein kann der Farb-vektor einer Objektklasse co
���
wie (1) notiert wer-den:
Die Berechnung der einzelnen Farbwerte c als Re-präsentanten einer Eigenschaft E eines Objektes Oerfolgt in Abhängigkeit vom semantischen Modell,
co
c
c
c
O
r
O
g
O
b
=
( )1

61Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
dem die Definition der Geoobjektklasse zugrundeliegt. Handelt es sich hierbei um Intervalle von Feld-variablen, kann die Berechnung des Wertes für eineEigenschaft beim Pixel P, der Eigenschaftswert derObjektklasse c
E für eine Farbebene i nach (2) erfol-
gen.
Hierbei ist Dmax die Differenz zwischen Mittelwertund unterem bzw. oberem Schwellenwert, E
Pmin,
bzw. EPmax eines Intervalls der Eigenschaft E
Pixel
an diesem Ort (Abb. 1).
Die Grenzen und die damit verbundene Größe desIntervalls sind allein vom semantischen Modell derGeoobjektklasse und der dadurch definierten Ei-genschaft abhängig. Liegt der Wert der Eigenschaft
des Pixels EP im Zentrum des durch die semanti-
sche Definition gegebenen Werteintervalls, istDmax - D maximal. Der Beitrag dieser Eigenschaftc
E zur definierten Farbe der Objektklasse muss also
zunächst 255 sein.
Ohne an dieser Stelle vertieft auf die Diskussionvon unscharfen Grenzen von natürlichen Geoobjek-ten eingehen zu können (Burrough und Frank1996), kann es notwendig sein, die Eigenschaftendes semantischen Modells mit Intervallcharakterum einen anpassbaren Puffer zu erweitern. Dies hatden Vorteil, auch Bereiche des Höhenmodells farb-lich hervorzuheben, die dem Modell direkt nichtentsprechen. Der Benutzers kann dann durch sei-ne Interaktion die Grenzfindung durchführen. B istdamit nicht vom semantischen Modell abhängig,sondern von der Maßgabe des Anwenders.
Da eine Objektklasse in der Regel durch mehr alseine Eigenschaft definiert ist, müssen die durch (2)erhaltenen Eigenschaftswerte so gemittelt werden,dass der dadurch erhaltene vorläufige Farbwert derFarbebene i im Wertebereich von c
i in (1) liegt.
Kommt im Sinne des semantischen Modells derGeoobjektklasse noch eine inhaltliche Gewichtungder einzelnen Eigenschaften hinzu, kann ein ge-wichtetes Mittel wie in (3) gerechnet werden, wo-bei m
j das Produkt der Anzahl der Eigenschafts-
werte und der Gewichte darstellt.
Nun muss der so gewonnene Farbwert der Farb-ebene i noch auf die der Objektklasse zugeordne-ten Farbebenenwert der Visualisierung skaliert wer-den. Die Berechnung des Skalierungsgewichtes m
i
erfolgt in (4).EPixelE minP E maxP
cE
{
B
{
B
{ Dmax{
255
semantischer Definitionsbereich des Objektes
c minE
E optP
Abb. 1: Verlauf von cE in Abhängigkeit des Werteinter-
valls der Eigenschaft EPixel
und des Buffers B mit f = 2
c
c m
mi
i
E
j
E
j
jj
E
j
=⋅∑
∑
#
# ( )3
mc c
ci
i
O
i
O
i
O= −max min
max( )4
c c Bc c
B
E
E
i Ef E E
f
P
= + − + ⋅−
+( )
0
0
min ( max )max min
max∆ ∆
∆
falls << −− ≤ ≤ +
> +
≤ ≤
E B
falls E B E E B
sonst E E B
mit c
P
P P P
P P
E
i
min
min max
max
0 2555
2
100
und i r g b
und B b
∈{ }
=⋅
⋅
, ,
max∆(2)

62 Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
Da 0 ≤ mi ≤ , wird die für die entsprechende Ob-
jektklasse O definierte untere Grenze cmin desWertebereiches der Farbebene i dem Produkt derGewichtung hinzuaddiert (5).
Wird einer Objektklasse beispielsweise die Far-be Orange mit c
rmax = 255, c
gmax = 127, c
bmax =
0 und crmin = c
gmin = c
rmin = 0 zugewiesen, ist
mr = 1, m
g = 0.5 und m
b = 0.
Der Farbwert aus (5) kann nur dann direkt einemPixel zugeordnet werden, wenn keine Eigenschaf-ten von anderen Geoobjektklassen an diesem Ortidentifiziert worden sind. Ist dies der Fall, berech-net sich der Farbwert eines Pixels nach (6)
Dabei wird der maximale Wert aus den Werten derFarbebene aller Geoobjektklassen für die Visua-lisierung des Pixels verwendet. Kommen die Ei-genschaften aller Objektklassen mit c
imax = 255
einer Farbebene maximal vor, wird das Pixel weiß,ist keine Eigenschaft vorhanden, bleibt es schwarz.
3 Visualisierung der dreiHaldentypen nach Caine
Der hier beschriebene Visualisierungsansatz wirdzunächst auf die Hangkomponenten des AlpinenHochgebirgssystems, Blocksturz-Halde, Alluvi-ale Halde, Lavinen-Halde (Caine 1974) ange-wendet. Für die Differenzierung der drei Haldenty-pen schlägt Caine ein semantisches Konzept vor,das eine Differenzierung von geomorphologischen
Objekten mittels zweier Parameter ermöglicht(Tab. 1). Die Eigenschaften Hangneigung undWölbung als zweite partielle Ableitung der Höhe(Shary 1995) sind direkt aus der Höhenfunktioneines digitalen Höhenmodells abgeleitete Primi-tive und somit Feldvariablen. Die Differenzierungder einzelnen Geoobjektklassen erfolgt dabeidurch Werteintervalle der einzelnen Eigenschaf-ten. Die Visualisierung der Geoobjektklassen voll-zieht sich nach dem hier vorgestellten Ansatz durchÜberführung der Werte der Parameter am Pixel,die innerhalb des durch das semantische Modellgegebenen Intervalls liegen, in die entsprechen-den Farbwerte. Dabei wurde den Geoobjektklas-sen jeweils eine im RGB-Farbmodell komplemen-täre Farbe zugeordnet.
Bei Ansicht der Tabelle 1 fällt auf, dass der Wer-tebereich der Wölbung nur relativ definiert ist. Derhier verwendete Algorithmus zur Berechnung derWölbung durch ArcGIS liefert für konkave, alsonach innen gewölbte Gebiete negative Werte. Dierelative Einteilung in drei Klassen wurde dadurcherreicht, dass die Wahl der zwei Klassengrenzenetwa gleichverteilte Anteile im bearbeiteten Höhen-modell liefert. Als Höhenmodell stand ein Höhen-gitter des Turtmanntales (Schweiz) mit einer Ras-tergröße von 25 m zur Verfügung.
Das hier vorgestellte Verfahren zur Parametervi-sualisierung wurde in ArcGIS verwirklicht, die nach(2) berechneten Farbwerte eines Parameters wur-den in eine TIFF-Datei geschrieben. Die Kombina-tion mehrerer Parameter einer Geoobjektklasse wur-de nach (5), die Kombination mehrerer Geoob-jektklassen nach (6) berechnet und ebenfalls alsTIFF-Datei gespeichert. Um eine anschauliche Vi-sualisierung zu realisieren, wurden die TIFF-Bil-der über das digitale Höhenmodell gelegt.
Neigung Objekt Wölbung Farbe37 – 40° Blocksturzhalde konkav Rot30 – 40° Alluviale Halde +konkav Grün3 – 30° Lawinenhalde ++konkav Blau
Tab. 1: Semantische Klassifizierung von Schutthalden nachCaine (1974)
c c m c
mit c c c c
i
O
i i
O
i
O
i
O
i
O
i
O
i
O
= ⋅ +
∈ +{ }min ( )
min, min ,..., max
5
1
c
c
c
c
P
O
r
O
g
O
b
=
max
max
max
( )6

63Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
3.1 Die Visualisierung der Geoobjekt-klasse Alluviale Halde
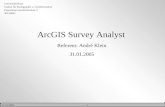
Als Beispiel für die Visualisierung einer Geoobjekt-klasse des semantischen Modells soll hier die Klas-se der Alluvialen Halde dienen. Sie ist durch zweiParameterintervalle, der Hangneigung zwischen 30und 40° und der Wölbung +konkav, definiert. Ab-bildung 2 zeigt das Ergebnis der Visualisierung mit-tels oben beschriebenem Verfahren. E
pmin wurde
auf 100, B auf 10 und f auf 2 gesetzt.
Die Visualisierung des Parameters Hangneigung fürdie Geoobjektklasse Alluviale Halde ergibt erwar-tungsgemäß eine große Anzahl der eingefärbtenPixel. Auch wird mit dem Wert 255 der maximaleWert der Leuchtkraft in der grünen Farbebene er-reicht. Dies ist auf das große Intervall von 30 – 40°zurückzuführen. Anders, aber ebenfalls erwartungs-gemäß ist das Ergebnis der Wölbung. Der Aus-schnitt der Abbildung 2 zeigt einen Hangbereichim oberen Teil eines hochalpinen Tales. KonkaveFlächen sind hier nicht zu erwarten. Auch liegt mitdem höchsten Farbwert von 213 die Leuchtkraftder Pixel unter der der Hangneigung.
Abbildung 3 zeigt die Visualisierung der Geoob-jektklasse Alluviale Halde unter Berücksichti-gung der beiden Eigenschaften Hangneigung undWölbung nach (6).
Es fällt auf, dass die Leuchtkraft der visualisier-ten Pixel durch die Anwendung der Mittelung derFarbwerte zweier Parameter nach (3) abgenom-men hat. Der maximale Wert des grünen Farbka-nals liegt nunmehr bei 127. Dies ist nach Sichtder Abbildung 2 verständlich, da es kaum zu Koinzi-denz der beiden geforderten Parameter kommt.
3.2 Die Variation des Puffers BDas in Kapitel 2 gezeigte Verfahren zur Visualisie-rung von Geoobjektklassen mittels Parametervisua-lisierung lässt neben der Anwendung eines seman-tischen Modells auch eine Beeinflussung dessel-ben zu. Während c
Emin bzw. c
Emax sowie der Form-
faktor f in (2) nur die Intensität und den Verlauf derLeuchtkraft einer Farbebene beeinflussen, wird überden in (2) verwendeten Puffer B das semantischeModell direkt beeinflusst. Definiert als Prozentsatzdes Intervalls 2∆max, der zur unteren und oberenGrenze des die Geoobjektklasse definierenden Pa-rameters hinzuaddiert wird, erweitert er das Werte-intervall, in dem ein Pixel als zur Klasse hinzu gehö-rig erkannt wird.
Die Abbildung 4 zeigt die Visualisierung der Hang-neigung der Geoobjektklasse Alluviale Halde mitc
Bmin=150 und f=2. Der Puffer B wurde von 10
(oben links) auf 40 (unten rechts) variiert.
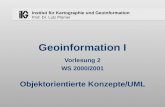
Es fällt auf, dass die Anzahl der Pixel, die alssemantisch relevant erkannt und damit auch visu-alisiert werden, mit zunehmendem Wert von B zu-nimmt. Die Zahl der farblich hervorgehobenen Pi-xel im gesamten Datensatz steigt von 369476 beiB=10 auf 517704 mit B=40. Dies ist insbesonderein der unteren linken Ecke der Einzelbilder zu er-kennen. Dieser Effekt liegt in der direkten Ver-größerung des Intervalls der als zur Geoobjekt-klasse gehörenden Parameterwerte. Trotz der Er-
Abb. 2: Visualisierung der Alluvialen Halde mit B=10und f=2. Links: Parameter Hangneigung; rechts: Parame-ter Wölbung
Abb. 3: Visualisierung der Alluvialen Halde mit B=10 undf=2 unter Berücksichtigung der beiden Parameter Hang-neigung und Wölbung.

64 Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
weiterung des semantischen Modells scheint eineleichte Vergrößerung der Summe aller erkanntenPixel sinnvoll. Dies ist dadurch begründet, dassder Anwender der Visualisierung auf Stellen desHöhenmodells hingewiesen werden soll, in denendas Vorkommen einer Eigenschaft und damit ei-nes Objektes seiner Definition wahrscheinlich ist.Die abschließende Bewertung liegt dann beimBearbeiter.
3.3 Visualisierung allerGeoobjektklassen
Das in Kapitel 4 vorgestellte semantische Modellnach Caine definiert drei Geoobjektklassen mit zweisich teilweise überschneidenden Eigenschaftsin-tervallen. Ziel der in Kapitel 2 vorgestellten Visuali-sierung ist es, Stellen im Höhenmodell hervorzuhe-ben, in denen ein Vorkommen der Objekte dieserKlassen wahrscheinlich ist. Dafür sind den Klas-sen die im RGB-Farbmodell komplementären Far-ben Rot, Grün und Blau zugeordnet worden. Tre-ten alle Eigenschaften nur einer Geoobjektklassean einer Stelle auf, so wird diese in derentsprechenden Farbe visualisiert. Treten nichtalle Eigenschaften oder Eigenschaften andererKlassen an einer Stelle auf, kommt es zu einer ge-ringeren Leuchtkraft bzw. zu Mischfarben.
Abbildung 5 zeigt die Visualisierung aller Geoob-jektklassen des vorgestellten semantischen Mo-
dells. Nahezu allen Pixel des hier gezeigten Aus-schnittes sind Farbwerte zugeordnet. Vereinzelteschwarze Pixel finden sich nur in der linken Bild-mitte. Dass so viele Pixel erkannt und damit visu-alisiert wurden, liegt vor allem an der großzügi-gen Definition der Geoobjektklasse Lawinenhal-de, für die das Werteintervall für den ParameterHangneigung von 5 – 30° vom semantischen Mo-dell vorgegeben ist (Tab. 1). Neben unterschied-lich starken Ausprägungen komplementärer Far-ben kommt es besonders an den Hängen zu Misch-farben. Dabei dominant ist Orange, was die Über-schneidung der gültigen Hangneigungsintervallefür die Klassen Alluviale Halde und Block-sturzhalde widerspiegelt. Ein leicht ins Violet ge-hendes Rot am Talboden verdeutlicht das Zusam-mentreffen der für die Alluviale Halde notwendi-gen Wölbung in Kombination mit der Hangnei-gung der Lavinenhalde. Dem Betrachter werdenalso Hinweise auf das Auftreten der für ihn relevan-ten Parameter und deren Koinzidenz gegeben.
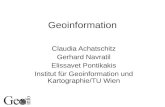
Um die Exploration eines digitalen Geländemo-dells nochmals zu erleichtern, ist in Abbildung 6der Ausschnitt eines transparenten Luftbildes überdie in Abbildung 5 gezeigte Visualisierung gelegtworden. Dadurch ist eine Verifizierung des in Ka-pitel 4 vorgestellten semantischen Modells durchden erfahrenen Anwender ermöglicht.
Ein entscheidendes Ergebnis der in Abbildung 6gezeigten Darstellung ist, dass das semantische
Abb. 4: Visualisierung des Parameter Hangneigung derGeoobjektklasse Alluviale Halde mit c
bmin=150 und f=2.
Von oben links nach unten rechts wird der Puffer B von10 in Zehnerschritten auf 40 erhöht.
Abb. 5: Visualisierung aller Geoobjektklassen mit cEmin =
150 und f = 2

65Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
Modell nach Caine natürlich auch an den Stellendie definierten Objektklassen visualisiert, an de-nen die Geländeoberfläche aus anstehendem Felsoder gar aus Eis und nicht aus Schutt aufgebautist. Eine Verfeinerung des semantischen Modells,etwa durch die Definition eine Rauhigkeitswer-tes, ließe sich mit der hier vorgestellten Methodeaber ebenso visualisieren.
4 DiskussionDer hier vorgestellte Ansatz der interaktivenGeoobjekterkennung durch Parametervisualisie-rung ermöglich die direkte anwendergesteuerteÜberführung eines semantischen Modells in eineVisualisierung durch Überlagerung von Farbebe-nen und Farbintensitäten. Dabei erfolgt die farbli-che Hervorhebung der Pixel an für das durch denAnwender definierte semantische Modell relevan-ten Stellen. Die Richtung des Farbvektors am Pi-
xel orientiert sich an dem vom Anwender definier-ten idealen Farbvektor der entsprechenden Geo-objektklasse. Die Länge des Vektors steht dabeiin einem durch Rechenregeln definierten Zusam-menhang mit Anzahl und Ausprägung der am Pixelzutreffenden Eigenschaften im Definitionsbereichder Geoobjektklasse. Ein Problem, aber auch eineweitere Anwendung, ergibt sich aus der Definiti-on des semantischen Modells. Ist dies unzurei-chend, wird keine sinnvolle Visualisierung des di-gitalen Geländemodells erfolgen können. Auf deranderen Seite ergibt sich daraus aber auch der di-rekte visuelle Vergleich zweier semantisch diffe-rierender Modelle und eine Überprüfung ihrerGüte durch den Anwender. Das durch Caine gege-bene semantische Modell muss wegen seiner Ein-geschränktheit in der Parameterzahl als pro-blematisch gesehen werden, eine vollständige Dif-ferenzierung der Objekte ist daher nicht zu erwar-ten.
Abb. 6: Overlay eines transparenten Luftbildes mit der Visualisierung aller Geoobjekte

66 Löwner/Dörschlag/Plümer, Interaktive Geoobjekterkennung in digitalen Höhenmodellen
Neben dem semantischen Modell ist die Daten-granularität ein entscheidender Faktor für die Güteder Visualisierung. Das hier verwendete Höhen-modell mit der Rastergröße von 25 m muss alsnicht optimal angesehen werden, zudem diese Auf-lösung auch die Ableitung der morphometrischenParameter negativ beeinflusst.
Die vorgestellten Beispiele der Visualisierung vongeomorphometerischen Parametern zeigen trotz derdiskutierten Einschränkungen schlüssige Ergebnis-se. Der präsentierte Visualisierungsansatz unter-stützt die Suche nach Geoobjekten in Abhängig-keit des semantischen Modells.
5 LiteraturBrändli, M. (1997): Modelle und Algorithmen für dieExtraktion geomorphologischer und hydrologischer Ob-jekte aus digitalen Geländemodellen. In: GeoprocessingReihe 32, Zürich.
Burrough, P. A., Frank, A. U. (Hrsg.) (1996): Geographicobjects with indeterminate boundaries. In: GISDATA 2,Taylor & Francis, London.
Caine, N. (1974): The geomorphic processes of the alpi-ne environment. In: Ives, Barry (ed.): Arctic and alpineEnvironments, 721–748.
Dehn, M. Gärtner H., Dikau, R. (2001): Principles ofsemantic modeling of landform structures. In: Computersand Geosciences Vol. 27, No. 8, 1005–1010.
Dikau, R. (1989): The application of a digital relief modelto landform analysis in geomorphology. In: Raper (ed.):
Three-dimensional applications in Geographical Informa-tion Systems. Taylor & Francis, London.
Florinsky, I. V. (1998): Combined analysis of digital ter-rain models and remotely sensed data in landscape inve-stigations. In: Progress in Physical Geography, Vol. 22,33–60.
Guth, P. L. (1999): Quantifying and visualizing terrain fa-bric from digital elevation models. In: Proceedings of the4th International Conference on Geocomputation.
Jaquez, G. M., Maruca, S., Fortin, M.-J. (2000): Fromfields to objects: A review of geographic boundary ana-lysis. In: Journal of Geographical Systems Vol. 2, 221–241.
Pike, R. J. (1995): Geomorphometry – progress, practice,and prospect. Z. Geomorph. N. F. Suppl. Vol 101, 221–238.
Schmidt, J., Merz, B., Dikau, R. (1996): Morphologicalstructure and hydrological process modeling. In: Z. Geo-morph. N. F, Vol. 112, 55–66.
Shary, P.A. (1995): Land surface in gravity points classi-fication by a complete system of curvatures. Mathema-tical Geology v. 27, no. 3, 373–390.
Weibel, R., Brändli, M. (1995): Adaptive methods forthe refinement of digital terrain models for geomorpho-metric applications. In: Z. Geomorph. N. F. Suppl.-Bd.,Vol. 101, 13–30.
Wise, S., Haining, H., Signoretta, P. (1998): The visuali-zation of area-based spatial data. In: AGOCG/ESRC ini-tiative on computer Graphics, 1998.
Worboys, M. F. (1995): Geographic Information Sys-tems: a computing perspective. Taylor & Francis, London.