Kapitel 1 Mechanik -...
14
Kapitel 1 Mechanik 1.1 Bestimmung der Erdbeschleunigung mit dem Pendel Aufgaben In diesem Experiment werden die Schwingungen eines physikalischen Pendels untersucht. Aus den Messungen der Schwingungsdauern bei verschiedenen Pendell¨ angen wird die Erdbeschleuni- gung ermittelt. Vorkenntnisse/Grundlagen : Schwerpunktssatz, Beschreibung von Schwingungen, Winkelgeschwindigkeit, Winkelbeschleuni- gung, Drehmoment, Tr¨ agheitsmoment, Direktionsmoment, einfache lineare Differentialgleichun- gen. Literatur : • Paul A.Tipler : Physik Spektrum Lehrbuch, ISBN 3-86025-122-8, S.379 - S.399 • W.Walcher : Praktikum der Physik Teubner Studienb¨ ucher Physik, ISBN 3-519-13038-6, S.83 - S.89 • F.Kohlrausch : Praktische Physik 1 ISBN 3-519-23001-1 S.62 - S.64 (Orts-und Zeitabh¨ angigkeit der Erdbeschleunigung) • F.Kohlrausch : Praktische Physik 3 ISBN 3-519-23000-3 S.293 - S.295 (Tabellenwerte der Erdbeschleunigung) 10
Transcript of Kapitel 1 Mechanik -...
Kapitel 1
Mechanik
1.1 Bestimmung der Erdbeschleunigung mit dem Pendel
Aufgaben
In diesem Experiment werden die Schwingungen eines physikalischen Pendels untersucht. Ausden Messungen der Schwingungsdauern bei verschiedenen Pendellangen wird die Erdbeschleuni-gung ermittelt.
Vorkenntnisse/Grundlagen :
Schwerpunktssatz, Beschreibung von Schwingungen, Winkelgeschwindigkeit, Winkelbeschleuni-gung, Drehmoment, Tragheitsmoment, Direktionsmoment, einfache lineare Differentialgleichun-gen.
Literatur :
• Paul A.Tipler : PhysikSpektrum Lehrbuch, ISBN 3-86025-122-8, S.379 - S.399
• W.Walcher : Praktikum der PhysikTeubner Studienbucher Physik, ISBN 3-519-13038-6, S.83 - S.89
• F.Kohlrausch : Praktische Physik 1ISBN 3-519-23001-1 S.62 - S.64 (Orts-und Zeitabhangigkeit der Erdbeschleunigung)
• F.Kohlrausch : Praktische Physik 3ISBN 3-519-23000-3 S.293 - S.295 (Tabellenwerte der Erdbeschleunigung)
10

1.1. BESTIMMUNG DER ERDBESCHLEUNIGUNG MIT DEM PENDEL 11
1.1.1 Das mathematische Pendel
Das einfache mathematische Pendel besteht aus einer punktformigen schweren Masse mS, die aneinem masselosen Faden der Lange l aufgehangt ist. In der Ruhelage bewirkt die SchwerkraftFg = mS ·g mit g als Erdbeschleunigung, dass das Pendel senkrecht hangt. Nach Auslenkung ausder Ruhelage um einen kleinen Winkel ϕmax (klein bedeutet hier sinϕmax ∼ ϕmax) bewirkt xFgein ruckstellendes Drehmoment, das das Pendel wegen seines Tragheitsmomentes in harmonischeSchwingungen versetzt. Die Bewegungsgleichung lautet
J · ϕ = −mS · g · l · sin(ϕ) ∼ −mS · g · l · ϕ (1.1)
wobei J = mT · l2 das Tragheitsmoment der tragen Masse mT in der Entfernung l vom Aufhang-punkt ist und die rechte Seite das rucktreibende Drehmoment darstellt; ϕ ist der momentaneAuslenkwinkel und ϕ = d2ϕ/dt2 die momentane Winkelbeschleunigung. Mit mT = mS (Ein-stein’sches Aquivalenzprinzip der Gleichheit von schwerer und trager Masse) wird die Bewegungunabhangig von den Massen :
ϕ = −gl· ϕ = −ω2 · ϕ (1.2)
Dies ist eine lineare, homogene Differentialgleichung zweiter Ordnung deren allgemeine Losungeine harmonische Schwingung darstellt :
ϕ(t) = A · cos(ωt) +B · sin(ωt) (1.3)
ω =√
gl
ist die Kreisfrequenz der Schwingung. Die Anfangsbedingungen legen die Integrations-
konstanten A und B fest. Mit ϕ(t = 0) = ϕmax und ϕ(t = 0) = 0 (Start der Pendelbewegungvom Auslenkwinkel ϕmax ohne Anfangswinkelgeschwindigkeit) ergibt sich
ϕ(t) = ϕmax · cos(ωt) (1.4)
Die Schwingungsdauer betragt
T =2π
ω= 2π ·
√l
g(1.5)
bzw.
T 2 = 4π2 · 1
g· l (1.6)
Das Quadrat der Schwingungsdauer wachst linear mit der Pendellange l.

12 KAPITEL 1. MECHANIK
1.1.2 Das physikalische Pendel
Die Beqwegungsgleichung fur ein physikalisches Pendel, d.h. eines ausgedehnten, massebehaftetenSystems, das um einen Aufhangepunkt bzw. um eine Achse schwingen kann, ist formal mit derdes mathematischen Pendels identisch :
J · ϕ = −m · g · ls · ϕ = −ω2 · ϕ (1.7)
bzw.· ϕ = −ω2 · ϕ (1.8)
Mit ω2 = (2πT
)2 wird die Schwingungsdauer T dann
T 2 =1
g· 4π2 · J
mls(1.9)
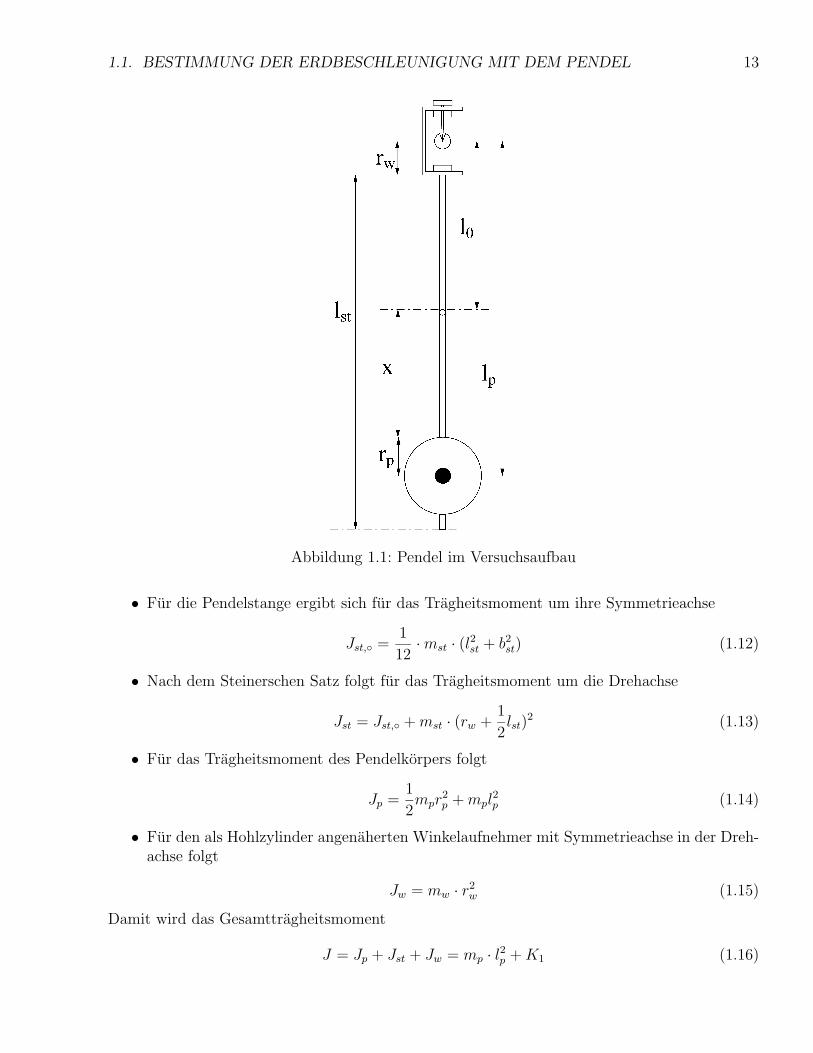
Das rucktreibende Drehmoment wird wieder von der Schwerkraft erzeugt. Nach dem Schwer-punktssatz verhalt sich das System so, als ob die Gesamtmasse m im Schwerpunkt konzentriertist. Demgemass ist ls die Distanz von Aufhangepunkt bzw. Drehachse zum Schwerpunkt S. DieTragheit ist gegeben durch das Gesamttragheitsmoment J um die Drehachse. Das vorliegen-de physikalische Pendel besteht aus dem Winkelaufnehmer-Profil, der Pendelstange und demzylindrischen Pendelkorper (Abb. 1.1).
Bestimmung des Schwerpunktes
• Die Pendelstange der Masse mst hat einen uber die Gesamtlange lst konstanten Querschnitt;ihr Schwerpunkt S liegt in der Stangenmitte. Die Entfernung von S von der Drehachse istlst/2 + rw, wobei rw die Distanz von Drehachse zum Anfang der Stange ist.Die Breite derStange (senkrecht zur Drehachse) ist bst.
• Der Schwerpunkt des zylindrischen Pendelkorpers der Masse mp liegt im Zentrum desZylinders; seine Entfernung von der Drehachse ist lp.
• Das Winkelaufnehmerprofil der Gesamtmasse mw wird als symmetrischer Hohlzylinder an-genahert, wobei die Symmetrieachse die Drehachse ist. Der Schwerpunkt wird also als inder Drehachse liegend angenommen.
Fur die Lage des Gesamtschwerpunktes ergibt sich damit
m · ls = (1
2· lst + rw) ·mst + lp ·mp (1.10)
Bestimung des Gesamttragheitsmomentes
Das Tragheitsmoment J einer Massenverteilung bezuglich einer Drehachse ist gegeben durch denAusdruck
J =∫r2dm (1.11)
wobei r die Entfernung des Massenelementes dm von der Drehachse ist und uber die gesamteVerteilung integriert wird.
1.1. BESTIMMUNG DER ERDBESCHLEUNIGUNG MIT DEM PENDEL 13
Abbildung 1.1: Pendel im Versuchsaufbau
• Fur die Pendelstange ergibt sich fur das Tragheitsmoment um ihre Symmetrieachse
Jst, =1
12·mst · (l2st + b2
st) (1.12)
• Nach dem Steinerschen Satz folgt fur das Tragheitsmoment um die Drehachse
Jst = Jst, +mst · (rw +1
2lst)
2 (1.13)
• Fur das Tragheitsmoment des Pendelkorpers folgt
Jp =1
2mpr
2p +mpl
2p (1.14)
• Fur den als Hohlzylinder angenaherten Winkelaufnehmer mit Symmetrieachse in der Dreh-achse folgt
Jw = mw · r2w (1.15)
Damit wird das Gesamttragheitsmoment
J = Jp + Jst + Jw = mp · l2p +K1 (1.16)
14 KAPITEL 1. MECHANIK
Der erste Term auf der rechten Seite ist dominant, fur K1 ergibt sich
K1 = mst · (1
3l2st + rwlst +
1
12b2st + r2
w) +mw · r2w +
1
2mpr
2p (1.17)
Damit ergibt sich fur das Quadrat der Schwingungsdauer (s.Gl.(8) und Gl.(9))
T 2 =4π2
g·mpl
2p +K1
mplp +K2
(1.18)
mit
K2 = (1
2lst + rw) ·mst (1.19)
Nach Division von Zahler und Nenner in Gl.(17) durch mp wird
T 2 =4π2
g·l2p + K1
mp
lp + K2
mp
(1.20)
Die Grossen K1
mpund K2
mpsind kleine, aber keineswegs vernachlassigbare Korrekturen.
Bestimung der Erdbeschleunigung g
Die Messung der Erdbeschleunigung g kan auf zweierlei Wegen erfolgen. Zum einen konnen dieSchwingungsdauern fur verschiedene Werte von lp = l0+x+rp (s.Abb. 1.1) gemessen werden. MitHilfe einer sogenannten Tiefenlehre wird zunachst der Abstand l0 genau vermessen und dann derAbstand x. Zur Auswertung wird der Ausdruck T 2·(l0+x+rp+
K2
mp) gegen (l0+x+rp)
2 aufgetragen.
Aus der Steigung der Geraden wird g ermittelt. Aus dem Achsenabschnitt ergibt sich ein Wertfur K1 der mit dem berechneten verglichen werden kann. Die Massen und die geometrischenGrossen zur Bestimmung der Korrekturfaktoren K1 und K2 werden zuvor gemessen.Eine weitere Moglichkeit g zu bestimmen besteht darin, das Pendel als mathematisches Pendelzu behandeln, und den systematischen Fehler, der durch das Tragheitsmoment JSt und dasRuckstellmoment DSt · ϕ der Stange auftritt, zu minimieren.Man geht dabei so vor, daß zunachst die Schwingungsfrequenz der Stange allein bestimmt wird.Danach wird die Masse an der Stelle angebracht, an der die Kombination Stange/Pendel dieselbeEigenfrequenz hat wie die Stange allein. In diesem Fall beeinflussen sich Masse und Stange nicht,und man kann die Formeln fur das mathematische Pendel verwenden.Dies ist auch leicht aus den Gleichungen zu ersehen. Fur die Stange allein gilt:
ω2st =
JstDst
(1.21)
Fur die Masse allein gilt:
ω2m =
JmDm
(1.22)
Man beachte, daß Jm nicht das Tragheitsmoment des mathematischen Pendels mit Masse m ist,sondern zusatzlich das Tragheitsmoment des Vollzylinders um die Zylinderachse enthalt ( Jm =Jp, s.Gl. 1.14). Das physikalische Pendel, bestehend aus Stange und Masse hat die Eigenfrequenz:
ω2p =
Jst + JmDst +Dm
= ω2m ·
1 + JstJm
1 + DstDm
= ω2st ·
1 + JmJst
1 + DmDst
(1.23)
1.1. BESTIMMUNG DER ERDBESCHLEUNIGUNG MIT DEM PENDEL 15
Hat man nun das Pendel so eingestellt, daß ωp = ωst gilt, so sieht man aus Gl.1.23, daß dannauch gelten muß: Jst
Jm= Dst
Dm. Umgeformt ergibt sich:
JmDm
=JstDst
⇔ ω2m = ω2
st = ω2p (1.24)
1.1.3 Versuchsaufbau und Durchfuhrung
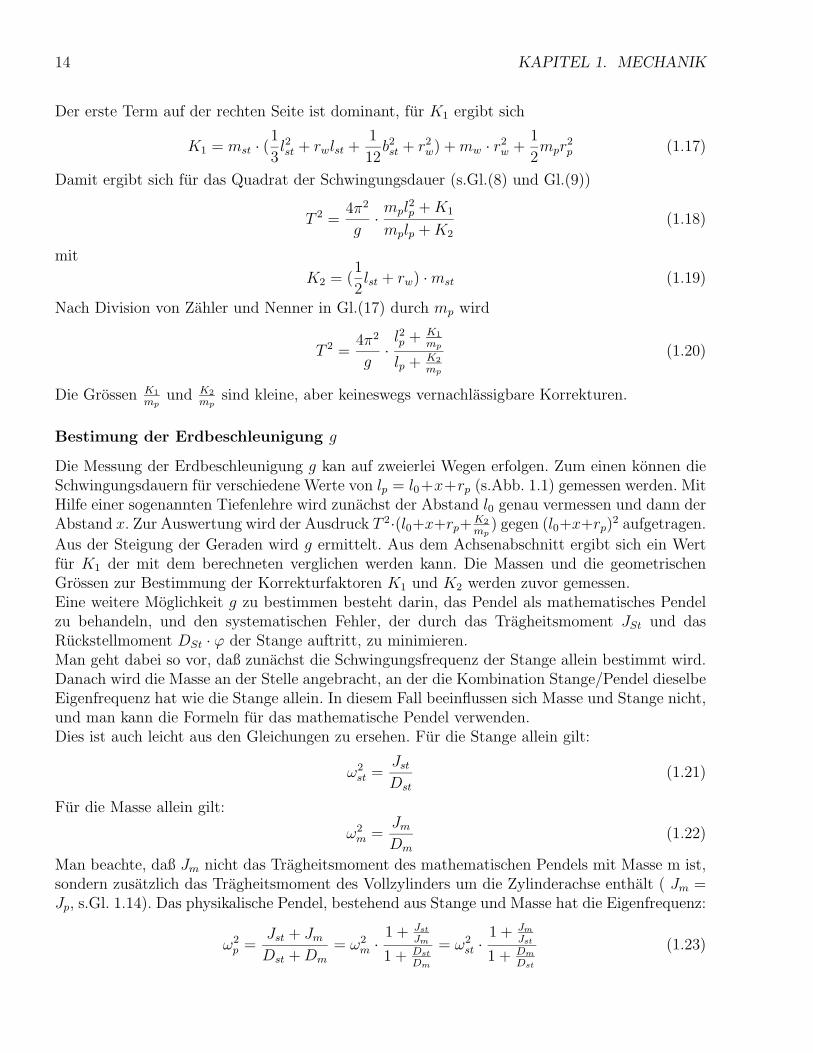
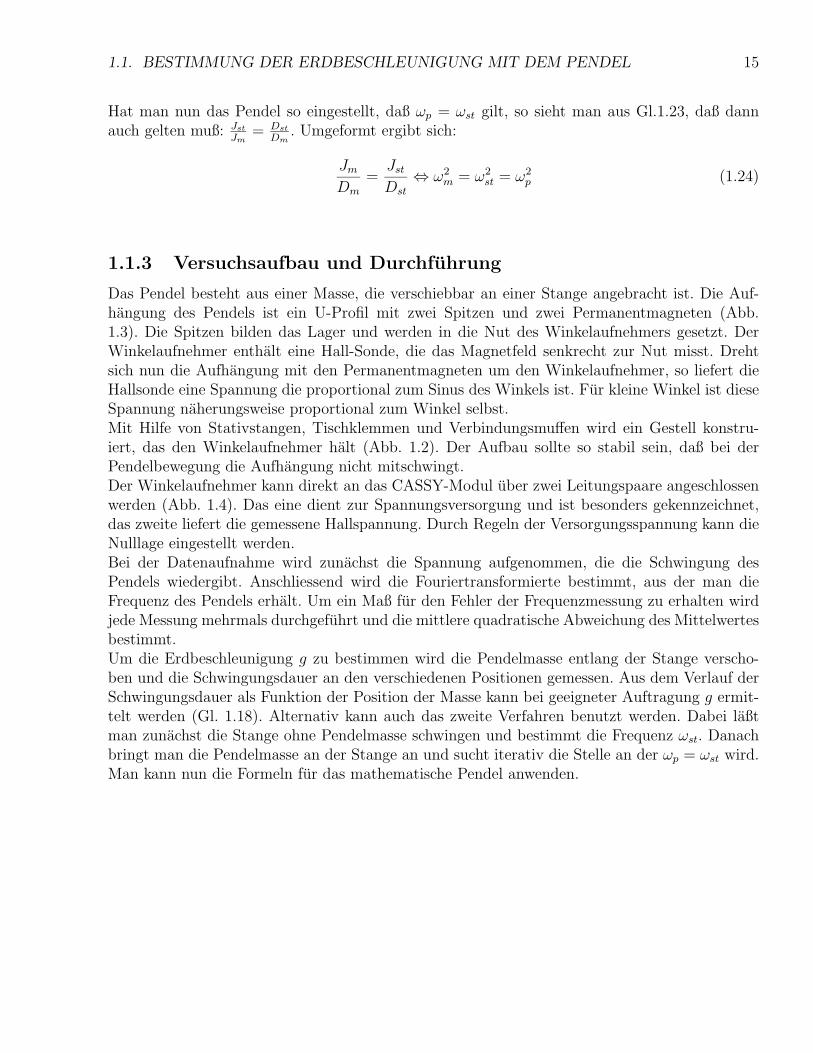
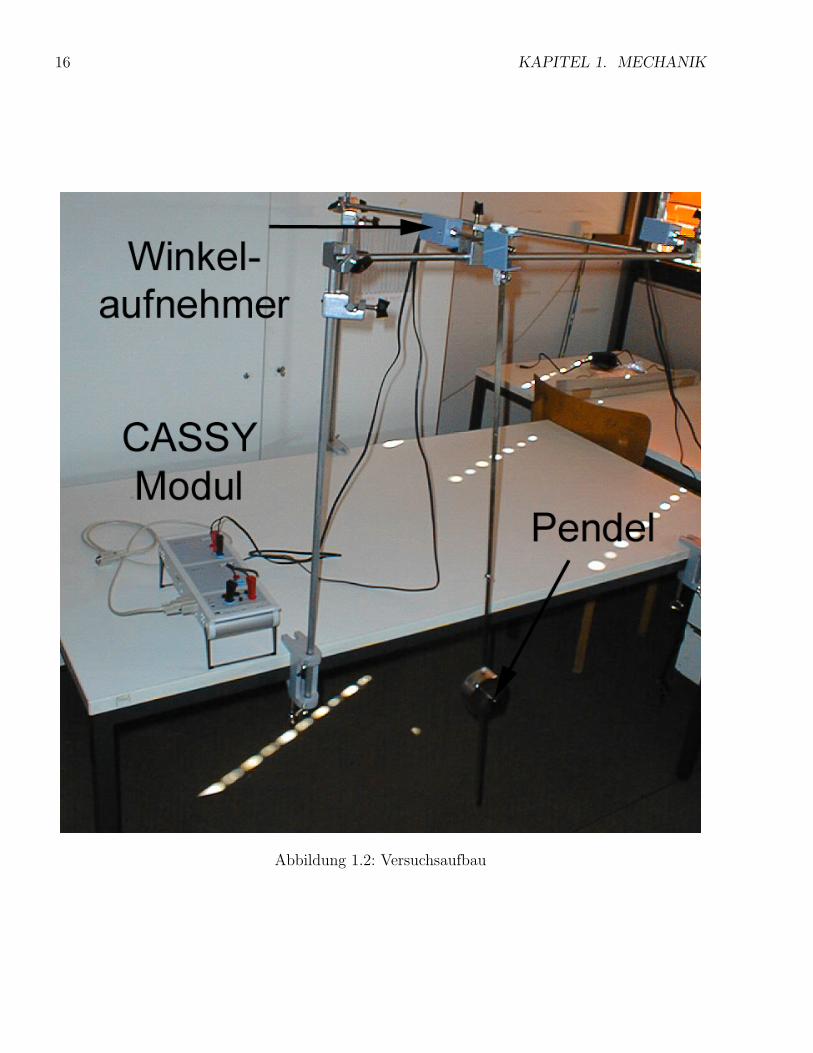
Das Pendel besteht aus einer Masse, die verschiebbar an einer Stange angebracht ist. Die Auf-hangung des Pendels ist ein U-Profil mit zwei Spitzen und zwei Permanentmagneten (Abb.1.3). Die Spitzen bilden das Lager und werden in die Nut des Winkelaufnehmers gesetzt. DerWinkelaufnehmer enthalt eine Hall-Sonde, die das Magnetfeld senkrecht zur Nut misst. Drehtsich nun die Aufhangung mit den Permanentmagneten um den Winkelaufnehmer, so liefert dieHallsonde eine Spannung die proportional zum Sinus des Winkels ist. Fur kleine Winkel ist dieseSpannung naherungsweise proportional zum Winkel selbst.Mit Hilfe von Stativstangen, Tischklemmen und Verbindungsmuffen wird ein Gestell konstru-iert, das den Winkelaufnehmer halt (Abb. 1.2). Der Aufbau sollte so stabil sein, daß bei derPendelbewegung die Aufhangung nicht mitschwingt.Der Winkelaufnehmer kann direkt an das CASSY-Modul uber zwei Leitungspaare angeschlossenwerden (Abb. 1.4). Das eine dient zur Spannungsversorgung und ist besonders gekennzeichnet,das zweite liefert die gemessene Hallspannung. Durch Regeln der Versorgungsspannung kann dieNulllage eingestellt werden.Bei der Datenaufnahme wird zunachst die Spannung aufgenommen, die die Schwingung desPendels wiedergibt. Anschliessend wird die Fouriertransformierte bestimmt, aus der man dieFrequenz des Pendels erhalt. Um ein Maß fur den Fehler der Frequenzmessung zu erhalten wirdjede Messung mehrmals durchgefuhrt und die mittlere quadratische Abweichung des Mittelwertesbestimmt.Um die Erdbeschleunigung g zu bestimmen wird die Pendelmasse entlang der Stange verscho-ben und die Schwingungsdauer an den verschiedenen Positionen gemessen. Aus dem Verlauf derSchwingungsdauer als Funktion der Position der Masse kann bei geeigneter Auftragung g ermit-telt werden (Gl. 1.18). Alternativ kann auch das zweite Verfahren benutzt werden. Dabei laßtman zunachst die Stange ohne Pendelmasse schwingen und bestimmt die Frequenz ωst. Danachbringt man die Pendelmasse an der Stange an und sucht iterativ die Stelle an der ωp = ωst wird.Man kann nun die Formeln fur das mathematische Pendel anwenden.
16 KAPITEL 1. MECHANIK
Abbildung 1.2: Versuchsaufbau
1.1. BESTIMMUNG DER ERDBESCHLEUNIGUNG MIT DEM PENDEL 17
Abbildung 1.3: Aufhangung des Pendels
Abbildung 1.4: Anschluss des Winkelaufnehmers
18 KAPITEL 1. MECHANIK
1.2 Schwingungen von gekoppelten Pendeln
Aufgaben
In diesem Experiment werden die Schwingungen von zwei Pendeln untersucht, die durch eineFeder miteinander gekoppelt sind. Fur verschiedene Kopplungsstarken werden die Schwingungs-dauern der beiden Grundschwingungen sowie der Schwebung des Systems gemessen und dieSchwebungsdauer mit der Erwartung verglichen.
Vorkenntnisse/Grundlagen :
Federverhalten (Hooke’sches Gesetz),Beschreibung von Schwingungen, Winkelgeschwindigkeit,Winkelbeschleunigung, Drehmoment, Tragheitsmoment, Direktionsmoment, einfache lineare Dif-ferentialgleichungen.
Literatur :
• Paul A.Tipler : PhysikSpektrum Lehrbuch, ISBN 3-86025-122-8, S.379 - S.399
• W.Walcher : Praktikum der PhysikTeubner Studienbucher Physik, ISBN 3-519-13038-6, S.89 - S.98
1.2.1 Die Bewegungsgleichung fur das gekoppelte Pendel
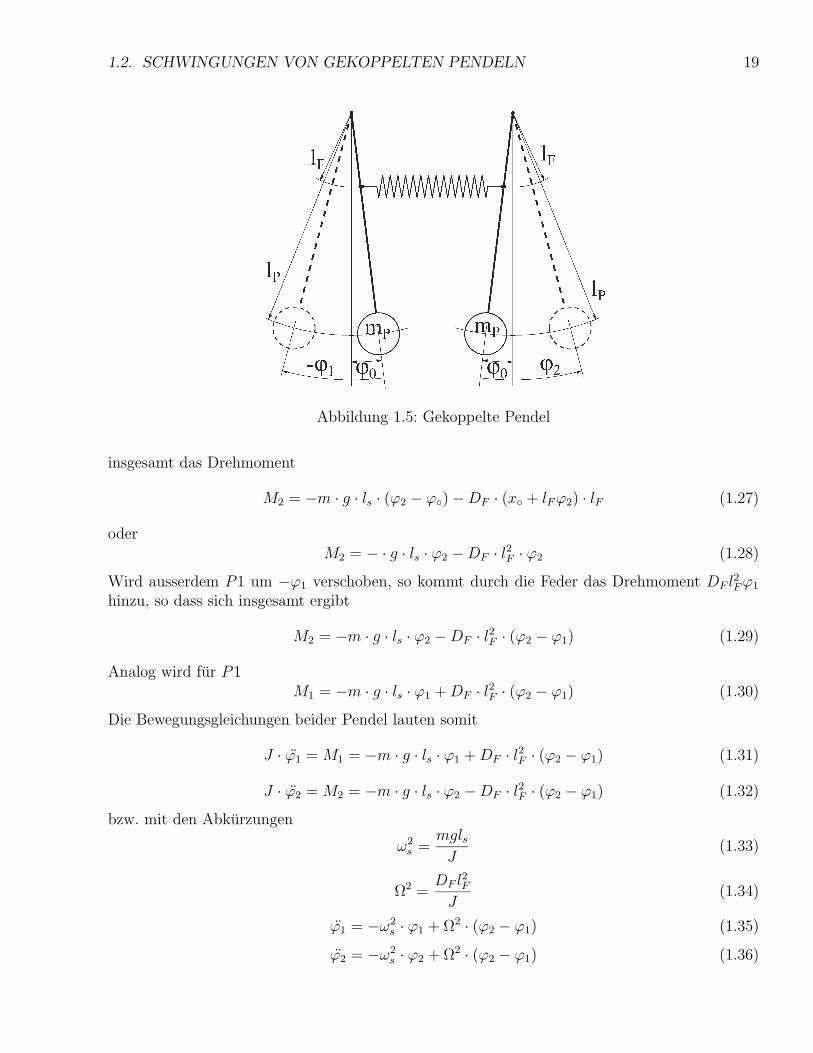
Die Anordnung ist schematisch dargestellt in Abb. 1.5. Die Kopplungsfeder ist befestigt in derEntfernung lF von den Drehachsen. Die (identischen) physikalischen Pendel P1 und P2 werdenso montiert, dass die Feder bei Ruhestellung der Pendel gespannt ist. Dadurch hangen die Pendelin der Ruhestellung (im Gleichgewicht) nicht in der vertikalen V , sondern um den Winkel ϕnach innen. Das durch die Feder erzeugte Drehmoment ist
MF, = −DF · x · lF (1.25)
wobei DF die Federkonstante und x ihre Verlangerung gegenuber dem entspannten Zustandist. In der Ruhestellung ist MF, entgegengesetzt gleich dem durch die Schwerkraft erzeugtenDrehmoment
MS, = m · g · ls · ϕ (1.26)
wobei ls die Entfernung des Schwerpunktes jedes der beiden Pendel von seiner Drehachse und mdie Gesamtmasse jedes Pendels bedeuten. Wird P2 um ϕ2 aus der Nullage ausgelenkt, so wirkt
1.2. SCHWINGUNGEN VON GEKOPPELTEN PENDELN 19
Abbildung 1.5: Gekoppelte Pendel
insgesamt das Drehmoment
M2 = −m · g · ls · (ϕ2 − ϕ)−DF · (x + lFϕ2) · lF (1.27)
oderM2 = − · g · ls · ϕ2 −DF · l2F · ϕ2 (1.28)
Wird ausserdem P1 um −ϕ1 verschoben, so kommt durch die Feder das Drehmoment DF l2Fϕ1
hinzu, so dass sich insgesamt ergibt
M2 = −m · g · ls · ϕ2 −DF · l2F · (ϕ2 − ϕ1) (1.29)
Analog wird fur P1M1 = −m · g · ls · ϕ1 +DF · l2F · (ϕ2 − ϕ1) (1.30)
Die Bewegungsgleichungen beider Pendel lauten somit
J · ϕ1 = M1 = −m · g · ls · ϕ1 +DF · l2F · (ϕ2 − ϕ1) (1.31)
J · ϕ2 = M2 = −m · g · ls · ϕ2 −DF · l2F · (ϕ2 − ϕ1) (1.32)
bzw. mit den Abkurzungen
ω2s =
mglsJ
(1.33)
Ω2 =DF l
2F
J(1.34)
ϕ1 = −ω2s · ϕ1 + Ω2 · (ϕ2 − ϕ1) (1.35)
ϕ2 = −ω2s · ϕ2 + Ω2 · (ϕ2 − ϕ1) (1.36)

20 KAPITEL 1. MECHANIK
Dies ist ein System gekoppelter linearer Differentialgleichungen. Die Losung wird mit Hilfe derSubstitutionen α = ϕ2 +ϕ1, β = ϕ2−ϕ1 erreicht : Summe und Differenz der beiden Gleichungen(24 ) und (25 ) fuhren auf die einfachen Differentialgleichungen
α = −ω2s · α (1.37)
β = −(ω2s + 2Ω2) · β = −ω2
sf · β (1.38)
mit den Losungenα(t) = ϕ2(t) + ϕ1(t) = A · sin(ωst) +B · cos(ωsf t) (1.39)
β(t) = ϕ2(t)− ϕ1(t) = C · sin(ωst) +D · cos(ωsf t) (1.40)
Die Konstanten werden durch die Anfangsbedingungen festgelegt. Liegen beim Start der Bewe-gung keine Anfangswinkelgeschwindigkeiten vor, d.h. ϕ2(t = 0) = 0 und ϕ1(t = 0) = 0, so wirdA = C = 0 und aus der Summe der Gleichungen (32) und (33) wird
2ϕ2(t) = B · cos(ωst) +D · cos(ωsf t) (1.41)
2ϕ1(t) = B · cos(ωst)−D · cos(ωsf t) (1.42)
Werden die Pendel aus den Positionen ϕ1(t = 0) = ϕmax und ϕ2(t = 0) = ϕmax gestartet, sowird D = 0 und B = 2ϕmax und die Pendel schwingen gleichsinnig gemass
ϕ2(t) = ϕmax · cos(ωst) (1.43)
ϕ1(t) = ϕmax · cos(ωst) (1.44)
mit der Kreisfrequenz ωs, d.h. der Kreisfrequenz jedes Pendels ohne Kopplung.Werden die Pendel aus den entgegengesetzten Positionen ϕ1(t = 0) = −ϕmax, ϕ2(t = 0) = +ϕmaxgestartet, so wird B = 0 und D = 2ϕmax und die Pendel schwingen gegensinnig :
ϕ2(t) = ϕmax · cos(ωsf t) (1.45)
ϕ1(t) = −ϕmax · cos(ωsf t) (1.46)
mit der Kreisfrequenz ωsf :ω2sf = ω2
s + 2Ω2 (1.47)
Wird die Schwingung mit Pendel P1 mit ϕ1(t = 0) = ϕmax und Pendel P2 in Ruheposition,ϕ2(t = 0) = 0 gestartet, so wird B = D = ϕmax und
ϕ2(t) =1
2ϕmax · cos(ωst) +
1
2ϕmax · cos(ωsf t) (1.48)
ϕ1(t) =1
2ϕmax · cos(ωst)−
1
2ϕmax · cos(ωsf t) (1.49)
Jedes Pendel schwingt mit einer Uberlagerung von zwei verschiedenen Frequenzen. Mit Hilfe einesAdditionstheorems fur trigonometrische Funktionen lassen sich die Gleichungen umschreiben in
ϕ1(t) = ϕmax · cos(ωsf − ωs
2t) · cos(
ωsf + ωs2
t) (1.50)

1.2. SCHWINGUNGEN VON GEKOPPELTEN PENDELN 21
ϕ2(t) = ϕmax · sin(ωsf − ωs
2t) · sin(
ωsf + ωs2
t) (1.51)
Mit den Abkurzungen
ωk =ωsf + ωs
2(1.52)
ωsch =ωsf − ωs
2(1.53)
wird darausϕ1(t) = ϕmax · cos(ωscht) · cos(ωkt) (1.54)
ϕ2(t) = ϕmax · sin(ωscht) · sin(ωkt) (1.55)
Die Bewegung jedes der beiden Pendel besteht also aus der Uberlagerung zweier Schwingungenmit den Kreisfrequenzen ωsch und ωk. Sie kann als Schwingung der hoheren Frequenz ωk angesehenwerden, die mit der niedrigeren Frequenz ωsch moduliert ist. Diese Erscheinung wird Schwebunggenannt.
1.2.2 Messgrossen
Der Messung zuganglich sind die Schwingungsdauern :
Ts =2π
ωs(1.56)
Tsf =2π
ωsf(1.57)
Tk =2π
ωk=
4π
ωsf + ωs(1.58)
Tsch =2π
ωsch=
4π
ωsf − ωs(1.59)
Durch Einsetzen von ωs und ωsf ergeben sich folgende Beziehungen zwischen den Schwingungs-dauern :
Tk = 2 · TsTsfTs + Tsf
(1.60)
Tsch = 2 · TsTsfTs − Tsf
(1.61)
Als Kopplungsgrad κ des Pendelsystems wird das Verhaltnis
κ =Ω2
ω2s + Ω2
=DF l
2F
mgls +DF l2F(1.62)
definiert. Mit ω2sf = ω2
s + 2Ω2 folgt
κ =12(ω2
sf − ω2s)
12(ω2
sf + ω2s)
=T 2s − T 2
sf
T 2s + T 2
sf
(1.63)
22 KAPITEL 1. MECHANIK
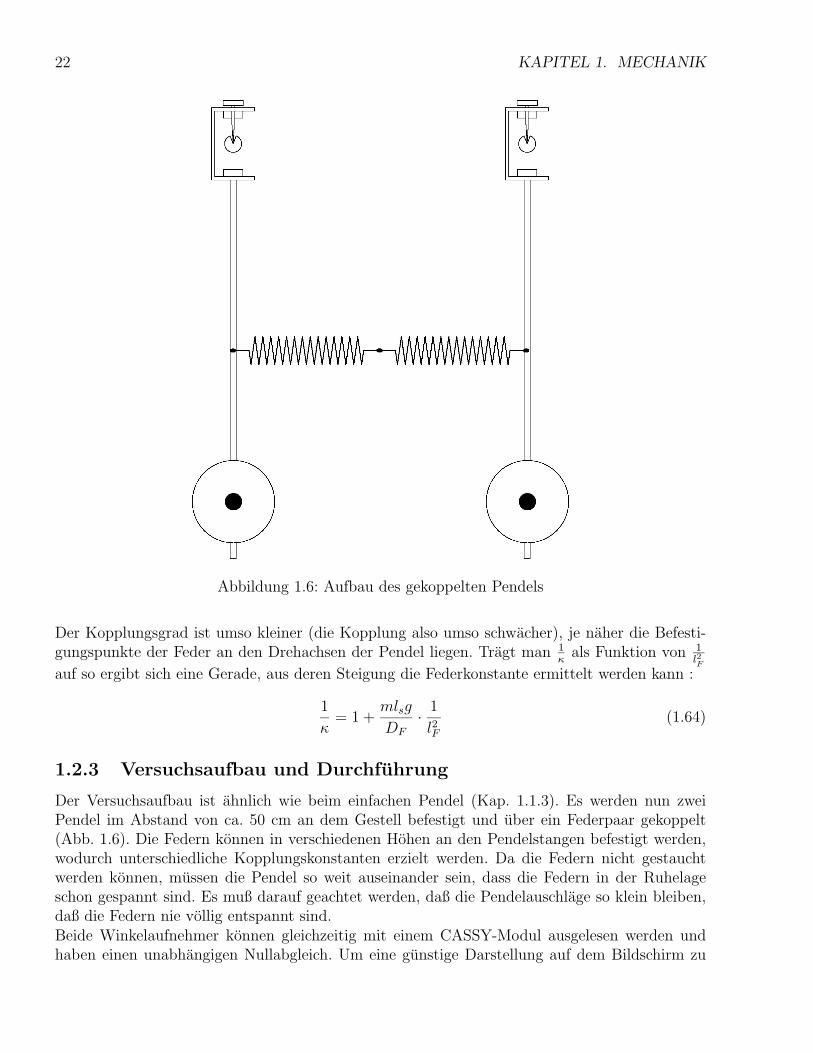
Abbildung 1.6: Aufbau des gekoppelten Pendels
Der Kopplungsgrad ist umso kleiner (die Kopplung also umso schwacher), je naher die Befesti-gungspunkte der Feder an den Drehachsen der Pendel liegen. Tragt man 1
κals Funktion von 1
l2Fauf so ergibt sich eine Gerade, aus deren Steigung die Federkonstante ermittelt werden kann :
1
κ= 1 +
mlsg
DF
· 1
l2F(1.64)
1.2.3 Versuchsaufbau und Durchfuhrung
Der Versuchsaufbau ist ahnlich wie beim einfachen Pendel (Kap. 1.1.3). Es werden nun zweiPendel im Abstand von ca. 50 cm an dem Gestell befestigt und uber ein Federpaar gekoppelt(Abb. 1.6). Die Federn konnen in verschiedenen Hohen an den Pendelstangen befestigt werden,wodurch unterschiedliche Kopplungskonstanten erzielt werden. Da die Federn nicht gestauchtwerden konnen, mussen die Pendel so weit auseinander sein, dass die Federn in der Ruhelageschon gespannt sind. Es muß darauf geachtet werden, daß die Pendelauschlage so klein bleiben,daß die Federn nie vollig entspannt sind.Beide Winkelaufnehmer konnen gleichzeitig mit einem CASSY-Modul ausgelesen werden undhaben einen unabhangigen Nullabgleich. Um eine gunstige Darstellung auf dem Bildschirm zu

1.2. SCHWINGUNGEN VON GEKOPPELTEN PENDELN 23
erzielen, kann die Nulllage eines Pendels entweder durch die Versorgungsspannung des Winkel-aufnehmers oder durch Einstellung eines Offsets in der CASSY-Software verschoben werden.Es werden die Pendelausschlage aufgenommen und die Fouriertransformierten bestimmt. Imallgemeinen Fall erhalt man eine Schwebung, die eine Uberlagerung aus zwei Schwingungenmit dicht benachbarten Frequenzen ist. Im Fourierspektrum erkennt man deshalb zwei Spitzen,die mit wachsender Kopplungsstarke zusammenrucken. Lasst man die Pendel gleichsinnig (inPhase) schwingen, so taucht nur die kleinere der beiden Frequenzen auf. Schwingen die Pendelgegensinnig, so erhalt man im Spektrum nur die Spitze der hoheren Frequenz. Um den Fehlerder Frequenzmessung zu erhalten wird eine Messung mehrmals durchgefuhrt und die mittlerequadratische Abweichung zum Mittelwert bestimmt.Aus den gemessenen Frequenzen wird der Kopplungsgrad κ bestimmt (Gl.1.63). Außerdem wer-den die Abstande lF zwischen dem Aufhangepunkt des Pendels und der Befestigung der Federgemessen. Tragt man 1
κgegen 1
l2Fauf, so erhalt man eine Gerade, aus deren Steigung man die
Federkonstante ermitteln kann (Gl. 1.64).