Arithmetik & Algebra Aritmetica & Algebra max. punti: 45 ...

LINEARE ALGEBRA II
Ernst Bonecke
Universitat Hamburg
Juli 2016

V O R W O R T
Auch der zweite Teil beginnt mit Themen, die schon aus der Schule be-kannt sein durften: Skalarprodukt und Vektorprodukt im R3. Es wird aberschnell allgemeiner: Eigenwerte, orthogonale und unitare Gruppen sind eherkein Schulstoff. Das Tensorprodukt wird von vielen Studierenden oft als ab-strakt empfunden.
Dem Text liegt in den Paragraphen 6, 7, 8 und 9 das Buch [Fi] vonG.Fischer zugrunde. §6 ist erganzt durch einen Abschnitt uber spharischeGeometrie, nach dem Buch [Ko] von M.Koecher. Der Paragraph 10 uberklassische Gruppen ist eine Zusammenstellung aus den Buchern [HN] vonJ.Hilgert/K.-H.Neeb, [Hei] von W.Hein und einem Vorlesungstext [Ja] vonJ.C.Jantzen.
Vorausgesetzt werden die Paragraphen 1 bis 5 aus der Linearen AlgebraI. Erst in §10 werden Kenntnisse aus Topologie und Analysis vorausgesetzt,wie man sie etwa bei O.Forster, Analysis 2 und 3 ( [Fo2] , [Fo3] ), findet.Die benutzten Begriffe stehen zwar in §10, aber ohne weitere Beispiele undUbungsaufgaben kann man diese Kapitel aus der Analysis nicht lernen.
Ich denke, dass dieser Text fur Studierende im 2.Semester gut lesbar ist,und viele Erganzungen bringt, fur die in einer Vorlesung meist keine Zeit ist.
Hamburg, im Juli 2016
1

Inhaltsverzeichnis
§6 Vektorraume mit Skalarprodukt 4
6.1 Definition und elementare Eigenschaften 46.2 Orthonormalbasen 146.3 Matrizen Hermitescher Formen 186.4 Das Vektorprodukt im R3 216.5 Spharische Geometrie 256.6 Aufgaben 29
§7 Eigenwerte 33
7.1 Beispiele und Definitionen 337.2 Das charakteristische Polynom 367.3 Diagonalisierung 427.4 Potenzen eines Endomorphismus 507.5 Das Minimalpolynom einer Matrix 567.6 Die Jordansche Normalform 597.7 Aufgaben 78
§8 Das Tensorprodukt 82
8.1 Definition und Eigenschaften 828.2 Symmetrische und alternierende Tensoren 888.3 Tensoralgebra und außere Algebra 938.4 Aufgaben 98
§9 Endomorphismen von Vektorraumenmit Skalarprodukt 102
9.1 Orthogonale und unitare Endomorphismen 1029.2 Selbstadjungierte Endomorphismen 1159.3 Hauptachsentransformation 1229.4 Tragheitsgesetz von Sylvester 1329.5 Aufgaben 142
2

§10 Klassische Gruppen 145
10.1 Einiges zur Topologie im Rn 14510.2 Die allgemeine lineare Gruppe 15110.3 Untergruppen von GL(n,R) 15310.4 Die Struktur von GL(n,R) 15510.5 Die Struktur von GL(n,C) 16210.6 Die Quaternionengruppen 16410.7 Klassische Gruppen als Mannigfaltigkeiten 17110.8 Aufgaben 185
Literaturverzeichnis 189
Verzeichnis der Definitionen 190
3

§6 Vektorraume mit Skalarprodukt
6.1 Definition und elementare Eigenschaften
(6.1.1) Zur Motivation : Schon in Definition 1.4.3 hatten wir fur belie-
biges n ∈ N das kanonische Skalarprodukt im Rn definiert durch
〈x, y〉 := x1y1 + . . .+xnyn fur x = t(x1, . . . , xn) , y = t(y1, . . . , yn) ∈ Rn .
Zwei Vektoren x, y ∈ Rn wird also ein “Skalar” 〈x, y〉 ∈ R zugeordnet. MitHilfe dieses kanonischen Skalarprodukts hatten wir die Norm eines Vektorsx ∈ Rn definiert als
(∗) ‖x ‖ :=√〈x, x〉 ,
und fur x, y ∈ Rn hatten wir Orthogonalitat definiert durch
x⊥y :⇐⇒ 〈x, y〉 = 0 .
Mit diesem Beispiel beschaftigen wir uns noch in 6.1.10. Wir wollen aberallgemein “Skalarprodukte” auf moglicherweise unendlichdimensionalen Vek-torraumen definieren. Man braucht so etwasa) in der Funktionalanalysis (Theorie der Funktionen mit Werten in R) und
damit in der numerischen Mathematik,b) in der Physik, z.B. bei der mathematischen Formulierung der
Quantentheorie.Es geschieht deshalb keineswegs (nur) aus Freude an allgemeinen, abstraktenStrukturen, was wir im Folgenden machen.Noch etwas: Sehen wir uns die obige Formel (∗) an, so sehen wir: Wenn wirdie Norm eines Vektors x definieren wollen, mussen wir aus 〈x, x〉 die Qua-dratwurzel ziehen konnen. Wir betrachten daher nicht Vektorraume uberbeliebigen Korpern:
Vereinbarung 6.1.2 : In §6 werden wir unter K stets den Korper R der
reellen oder den Korper C der komplexen Zahlen verstehen. Fur z ∈ K seiz das Konjugiert-Komplexe von z , also
z = a− bi fur z = a+ bi ∈ C mit a, b ∈ R , bzw.
z = z fur z ∈ R .
4

Fur z ∈ K ist |z| der (reelle oder komplexe) Betrag von z . Fur z ∈ K soll
z > 0 stets bedeuten: z ∈ R ∧ z > 0 .
Entsprechend: z ≥ 0 :⇐⇒ (z ∈ R ∧ z ≥ 0).
Definition 6.1.3 : Sei V ein K−Vektorraum (also ein Vektorraum uber Roder C ). Eine Abbildung
s : V × V −→ K
heißt eine Sesquilinearfom (112
- fach linear) wenn fur alle u, v, w ∈ V undalle λ ∈ K gilt(H1) s(u+ v, w) = s(u,w) + s(v, w) ,
s(λu,w) = λs(u,w) ,d.h. s ist “linear als Funktion des 1.Arguments”, und
(H1) s(u, v + w) = s(u, v) + s(u,w) ,s(u, λw) = λs(u,w) ,d.h. s ist als Funktion des 2.Arguments “nicht so ganz” linear.
s heißt eine Hermitesche Form auf V , wenn zusatzlich fur alle u, v ∈ Vgilt(H2) s(u, v) = s(v, u) ,
d.h. wenn man die beiden Argumente vertauscht, erhalt man dasKonjugiert-Komplexe.
Bemerkung 6.1.4 : Sei s eine Hermitesche Form, dann folgt (H1) bereits
aus (H1) und (H2) :Seien u, v, w ∈ V und λ ∈ K, dann gilt
s(u, v + w)(H2)
= s(v + w, u)(H1)
= s(v, u) + s(w, u)
= s(v, u) + s(w, u)(H2)
= s(u, v) + s(u,w) ,
s(u, λv)(H2)
= s(λv, u)(H1)
= λ s(v, u)
= λ s(v, u)(H2)
= λ s(u, v) .
2
Folgerung 6.1.5 : Ist s eine Hermitesche Form auf einem R-Vektorraum V ,
so lautet (H2) :∀u, v ∈ V : s(u, v) = s(v, u) ,
5

und daraus und aus (H1) folgt
∀u, v ∈ V ∀λ ∈ R : s(u, λv) = λ s(u, v) .
Man nennt s in diesem Fall deshalb eine symmetrische Bilinearform aufV .
Bemerkung 6.1.6 : Man mochte, wie im Spezialfall des Rn mit dem
kanonischen Skalarprodukt, die Lange eines Vektors definieren durch
‖v‖ :=√s(v, v) .
Wurzeln kann man aber nur aus nichtnegativen , reellen Zahlen ziehen.Haben wir nun eine Hermitesche Form s auf einem C−Vektorraum V , sogilt nach (H2) fur v ∈ V immerhin
s(v, v) = s(v, v) , also s(v, v) ∈ R ,
aber das reicht uns nicht:
Definition 6.1.7 : Sei V ein K−Vektorraum und s eine Hermitesche Form
auf V . Gilt
(H 31
2) ∀ v ∈ V : s(v, v) ≥ 0 , so heißt s positiv semidefinit . Gilt
(H4) ∀ v ∈ V \ {0} : s(v, v) > 0 , so heißt s positiv definit .
Bemerkung 6.1.8 : Jede positiv definite hermitesche Form ist positiv
semidefinit, denn fur 0 ∈ V und 0 ∈ K gilt
0 = 0 · 0 , also nach (H1) :
s(0, 0) = s(0 · 0, 0) = 0 · s(0, 0) = 0 .
Definition 6.1.9 : Sei V ein K−Vektorraum. Eine positiv definite Hermi-
tesche Form s auf V heißt ein Skalarprodukt auf V , und (V, s) heißt,
a) falls K = R ist , ein euklidischer ,
b) falls K = C ist , ein unitarer Vektorraum.
Definition 6.1.10 : Sei n ∈ N , dann definieren wir fur
x = t(x1, . . . , xn) , y = t(y1, . . . , yn) ∈ Kn :
〈x, y〉 :=n∑j=1
xj · yj
6

und nennen 〈 , 〉 das kanonische oder Standard-Skalarprodukt im Kn .Man sieht, dass fur 〈 , 〉 die Regeln (H1) , (H2) erfullt sind, und wegen
〈x, x〉 =n∑j=1
xj · xj =n∑j=1
|xj|2
auch (H4). - Es wird damit deutlich, warum man in der Definition von 〈x, y〉ein uber die yj setzen muss !
Beispiel 6.1.11 : Seien a, b ∈ R , a < b und I[a, b] der C−Vektorraum der
integrierbaren Funktionen f auf dem Intervall
[a, b] := { x ∈ R | a ≤ x ≤ b } , also
f : [a, b] −→ C . Dann setzen wir
s : I[a, b]× I[a, b] −→ C ,
s(f, g) :=
b∫a
f(t) · g(t) dt .
s ist eine positiv semidefinite hermitesche Form, denn
s(f, f) =
b∫a
|f(t)|2 dt ≥ 0 .
s ist aber nicht positiv definit, denn nehmen wir z.B.
f : [a, b] −→ C , f(x) =
{1 fur x = a0 fur x 6= a
,
so ist f ∈ I[a, b] , denn f ist eine Treppenfunktion, f 6= 0 , aber
b∫a
|f(t)|2 dt = 0 , also s(f, f) = 0 .
Was Sie unter einer integrierbaren Funktion zu verstehen haben, lernen Siein der Analysis. Sie konnen darunter etwa “Regelfunktionen” verstehen, wiein [K1] , aber Sie konnen auch andere Integralbegriffe zugrunde legen.
Beispiel 6.1.12 : Der Vektorraum C[a, b] aller stetigen, komplexwertigen
Funktionen ist ein Untervektorraum von I[a, b] . Damit ist auch
s : C[a, b]× C[a, b] −→ C ,
7

s(f, g) =
b∫a
f(t) g(t) dt
definiert, und s ist ein Skalarprodukt, denn sei f ∈ C[a, b] , f 6= 0 , danngibt es ein t0 ∈ [a, b] mit f(t0) 6= 0 , also
h := |f(t0)|2 > 0 .
Auch t 7−→ |f(t)|2 ist stetig, mit Werten in R , und in der Analysis lerntman, dass es daher ein Intervall [c, d] mit
t0 ∈ [c, d] ⊂ [a, b] gibt und
|f(t)|2 ≥ h
2fur t ∈ [c, d], c < d, also
s(f, f) ≥d∫c
h
2dt =
h
2· (d− c) > 0 .
a c t0 d b
h
h
2
|f(t)|2
t
Definition 6.1.13 : Sei V ein K−Vektorraum mit einer positiv semidefini-ten hermiteschen Form s . Fur v ∈ V nennen wir
|| v || :=√s(v, v)
die Norm von v .
Cauchy-Schwarzsche Ungleichung 6.1.14 : Sei V ein K−Vektorraum
8

mit positiv semidefiniter Hermitescher Form s . Dann gilt fur alle v, w ∈ V :
| s(v, w) | ≤ || v || · ||w || .
Ist die Familie (v, w) linear abhangig, so gilt sogar das Gleichheitszeichen.Beweis : 1) Fur alle λ ∈ K gilt, da s positiv semidefinit ist:
0 ≤ s(v − λw, v − λw) = s(v, v)− λ s(w, v)− λ s(v, w) + λλs(w,w) ,
(∗) 0 ≤ s(v, v) − λ s(v, w) − λ s(v, w) + λλ s(w,w) .
a) Gilt s(v, v) = s(w,w) = 0 , so setzen wir
λ := s(v, w) in (∗) ein :
0 ≤ −s(v, w) s(v, w) − s(v, w) s(v, w) = −2 |s(v, w)|2 ,
und wegen | s(v, w) |2 ≥ 0 folgt | s(v, w) | = 0 . Da auch ||v|| = ||w|| = 0ist, gilt in diesem Fall die Ungleichung.b) Sind s(v, v) und s(w,w) nicht beide Null, so ist eins von beiden positiv.Sei etwa s(w,w) > 0 , dann setzen wir
λ :=s(v, w)
s(w,w)in (∗) ein, und multiplizieren mit s(w,w) :
0 ≤ s(v, v)s(w,w)− s(v, w)s(v, w)−s(v, w)s(v, w) + s(v, w)s(v, w) , also
| s(v, w)|2 ≤ s(v, v) s(w,w) ,
und wir wissen: Wenn R+ = { x ∈ R | x ≥ 0 } ist, ist die Wurzelfunktion√
: R+ −→ R+ , x 7−→√x monoton wachsend :
| s(v, w) | ≤ ||v|| ||w|| .
2) Ist (v, w) linear abhangig, so gilt
∃λ ∈ K : v = λw ∨ ∃λ ∈ K : w = λv .
Sei etwa v = λw mit λ ∈ K , also
||v||2 = s(v, v) = λλs(w,w) = |λ|2s(w,w) = |λ|2 ||w||2 ,
|s(v, w)| = |λ s(w,w)| = |λ| ||w||2 , also
|s(v, w)| = (|λ| ‖w‖) · ‖w‖ = ‖v‖ ‖w‖ .
2
9

Zusatz 6.1.15 : Sei V ein K−Vektorraum mit Skalarprodukt s , und seien
v, w ∈ V mit|s(v, w)| = ‖v‖ · ‖w‖ ,
so ist die Familie (v, w) linear abhangig.
Beweis : Sei λ := s(w,w) und µ := −s(v, w) , dann ist λ ∈ R , und
s(λv + µw, λv + µw) = λλs(v, v) + µµs(w,w) + λµs(v, w) + λµs(w, v)
= ‖w‖4 ‖v‖2 + |s(v, w)|2‖w‖2 − ‖w‖2|s(v, w)|2 − ‖w‖2|s(v, w)|2
= ‖w‖2 ( ‖w‖2‖v‖2 + ‖v‖2‖w‖2 − ‖v‖2‖w‖2 − ‖v‖2‖w‖2 ) = 0 ,
also λv + µw = 0 , da s positiv definit ist. Also ista) falls w = 0 ist: (v, w) linear abhangig, undb) falls w 6= 0 ist: λ = ‖w‖2 6= 0 , also (v, w) linear abhangig.
2
Satz 6.1.16 : Sei V ein K−Vektorraum mit positiv semidefiniter
Hermitescher Form s , und
‖v‖ :=√s(v, v) fur v ∈ V .
Dann gilt fur alle v, w ∈ V und alle λ ∈ K :(N1’) ‖v‖ ≥ 0(N2) ||λ v || = |λ| ‖v‖(N3) || v + w || ≤ ‖v‖ + ‖w‖ (Dreiecksungleichung) .
Ist s sogar positiv definit, so gilt statt (N1’)
(N1) ‖v‖ ≥ 0 ∧ ( ‖v‖ = 0 ⇐⇒ v = 0 ) .
Beweis : (N1’) folgt daraus, dass√s(v, v) ≥ 0 ist.
(N2) ||λ v || =√s(λv, λv) =
√λλ s(v, v) =
√|λ|2
√s(v, v) = |λ| ‖v‖ .
(N3) || v + w ||2 = s(v+w, v+w) = s(v, v) + s(v, w) + s(w, v) + s(w,w)
= ‖v‖2 + ‖w‖2 + s(v, w) + s(v, w)
= ‖v‖2 + ‖w‖2 + 2 Re s(v, w) ,
und da fur z ∈ C gilt : Re z ≤ |z| :
||v + w||2 ≤ ‖v‖2 + ‖w‖2 + 2 | s(v, w) | , und nach Cauchy-Schwarz:≤ ‖v‖2 + ‖w‖2 + 2‖v‖ ‖w‖ = (‖v‖+ ‖w‖)2 , also
||v + w|| ≤ ‖v‖+ ‖w‖ .
10

(N1) Ist s positiv definit, so gilt fur v 6= 0 : s(v, v) > 0 , also
‖v‖ > 0 .
2
Definition 6.1.17 : Ein K−Vektorraum Vmit einer Abbildung
‖ ‖ : V −→ R , die die Eigenschaften
(N1) ∀ v ∈ V : (‖v‖ ≥ 0 ∧ (‖v‖ = 0 ⇐⇒ v = 0)),
(N2) ∀ v ∈ V ∀λ ∈ K : ‖λv‖ = |λ| ‖v‖ ,
(N3) ∀ v, w ∈ V : ‖v+w‖ ≤ ‖v‖+‖w‖
hat, heißt ein normierter K−Vektorraum .
2
Mit Satz 6.1.16 bekommen wir daher:
Folgerung 6.1.18 : Jeder K−Vektorraum V mit Skalarprodukt s wird ein
normierter K−Vektorraum, wenn man
‖v‖ :=√s(v, v) fur v ∈ V setzt.
2
Folgerung 6.1.19 : Sei V ein K−Vektorraum mit positiv semidefiniter
Hermitescher Form s und ‖v‖ =√s(v, v) fur v ∈ V . Dann gilt fur alle
v, w ∈ V :a) || v + w ||2 = ‖v‖2 + ‖w‖2 + s(v, w) + s(w, v)
(Satz des Pythagoras) , undb) || v + w ||2 + || v − w ||2 = 2 (‖v‖2 + ‖w‖2 )
(Parallelogrammgleichung).Beweis als Ubungsaufgabe (6.1).
2
Bemerkung 6.1.20 : Nach Folgerung 6.1.18 wird jeder K−Vektorraum
V mit Skalarprodukt s ein normierter K−Vektorraum, wenn man die Normdurch
(∗) ‖v‖ :=√s(v, v) fur v ∈ V
11

definiert. Man kann nun umgekehrt fragen: Sei V ein normierter K−Vektorraum, gibt es dann auf V ein Skalarprodukt s , so dass (∗) gilt ? NachFolgerung 6.1.19 ist dann klar: Ist || || eine Norm auf V , die die Parallelo-grammgleichung nicht erfullt, so gibt es so ein s nicht. Ein Beispiel fur einennormierten K−Vektorraum, in dem die Parallelogrammgleichung nicht gilt,erhalten Sie als Ubungsaufgabe (6.2). Wenn fur ‖ ‖ die Parallelogramm-gleichung gilt, dann gibt es so ein s, der Beweis benutzt Argumente aus derAnalysis, siehe [ SG ] .
2
Man braucht die Cauchy-Schwarzsche Ungleichung, um Winkel zwischenVektoren zu definieren:
Definition 6.1.22 : Sei V ein euklidischer Vektorraum, also ein R−Vektor-
raum mit Skalarprodukt s . Seien v, w ∈ V \{0} , dann gilt nach Cauchy-Schwarz: ∣∣∣∣ s(v, w)
‖v‖ · ‖w‖
∣∣∣∣ ≤ 1 ,
und wegen s(v, w) ∈ R sogar
s(v, w)
‖v‖ · ‖w‖∈ [−1, 1] . Also ist
ϕ := arccoss(v, w)
‖v‖ · ‖w‖definiert, und es gilt ϕ ∈ [0, π] . ϕ heißt der Winkel zwischen denVektoren v und w. Wir wollen in diesem Abschnitt keine analytische Geo-metrie treiben und uns deshalb nicht allgemein mit Winkeln beschaftigen.Wir sehen aber :
ϕ =π
2⇐⇒ s(v, w) = 0 ,
die Vektoren v und w stehen genau dann aufeinander senkrecht, wenn ihr Ska-larprodukt 0 ist. s(v, w) = 0 gibt naturlich auch fur einen C−VektorraumSinn:
Definition 6.1.23 : Sei V ein K−Vektorraum mit Hermitescher Form s .Zwei Vektoren u, v ∈ V heißen zueinander senkrecht oder orthogonal, inZeichen: u⊥v , wenn
s(u, v) = 0 ist.
12

2
Wir betrachten dazu noch einmal unser
Beispiel 6.1.11: Im C−Vektorraum I[a, b] der integrierbaren Funktionen
f : [a, b] −→ C , a, b ∈ R , a < b , mit
s(f, g) =
b∫a
f(t) · g(t) dt sei
fa : [a, b] −→ C , fa(t) : =
{1 fur t = a0 fur t 6= a
,
dann gilt fur alle g ∈ I[a, b] :
fa(t) · g(t) =
{g(a) fur t = a0 fur t 6= a
, also
s(fa, g) = 0 , also
fa⊥ g fur alle g ∈ I[a, b] , aber fa 6= 0
2
Definition 6.1.24 : Eine Hermitesche Form s auf einem K− VektorraumV heißt nichtausgeartet, wenn es außer 0 keinen Vektor aus V gibt, derauf allen w ∈ V senkrecht steht, wenn also gilt
(H3) ∀ v ∈ V : (∀w ∈ V : s(v, w) = 0 =⇒ v = 0 ) .
Folgerung 6.1.25 : Sei V ein K−Vektorraum mit Hermitescher Form s .
Dann gilt:s positiv definit ⇐⇒ s nichtausgeartet und positiv semidefinit.
Beweis : “ =⇒ ” : Sei s positiv definit und v ∈ V ein Vektor mit
∀w ∈ V : s(v, w) = 0 ,
dann gilt insbesonderes(v, v) = 0 ,
also v = 0 . Also ist s nichtausgeartet, und positiv semidefinit nach Folge-rung 6.1.8.“ ⇐= ” : Ist s positiv semidefinit, so gilt fur alle v ∈ V :
s(v, v) ≥ 0 , und falls v = 0 ist : s(v, v) = 0 .
13

Ist nun v ∈ V mit s(v, v) = 0 , so gilt nach Cauchy-Schwarz fur alle w ∈ V :
| s(v, w) |2 ≤ ‖v‖2‖w‖2 = s(v, v) s(w,w) = 0 , also
| s(v, w) | = 0 , und damit
s(v, w) = 0 , fur alle w ∈ V .
Ist nun s nichtausgeartet, so folgt daraus v = 0 .
2
Hermitesche Formen, die nicht positiv semidefinit, aber immerhin noch nicht-ausgeartet sind, kommen in der Physik (und zwar in der Relativitatstheorie)vor:
Beispiel 6.1.26 : Fur a = t(a1, a2, a3, a4) , b = t(b1, b2, b3, b4) ∈ R4 setztman
s(a, b) :=3∑j=1
ajbj − a4b4 ,
dann ist s eine nichtausgeartete symmetrische Bilinearform auf dem R4 , dienicht positiv semidefinit ist.Beweis : Dass (H1) und (H2) fur s gelten, kann man leicht nachrechnen.Fur a = (0, 0, 0, 1) gilt
s(a, a) = −1 < 0 ,
also gelten (H 31
2) und (H4) nicht. Es gilt aber (H3) , denn sei a ∈ R4 und
∀ b ∈ R4 : s(a, b) = 0 ,
dann gilt insbesondere fur die kanonischen Basisvektoren ej , j ∈ 4, des R4:
s(a, ej) = 0 und damit a1 = a2 = a3 = −a4 = 0 ,
also a = 0 .
2
In der Relativitatstheorie interpretiert man hier die ersten drei Komponen-ten von a als Ort und a4 als Zeit.
6.2 Orthonormalbasen
Definition 6.2.1 : Sei V ein K−Vektorraum mit Skalarprodukt und (vj)j∈J
14

eine Familie von Vektoren aus V , J eine (nicht notwendig endliche) Menge.Dann heißt die Familie (vj)j∈Ja) ein Orthogonalsystem, wenn
vj⊥vk fur alle j, k ∈ J mit j 6= k ist,b) ein Orthonormalsystem, wenn sie ein Orthogonalsystem ist und
zusatzlich||vj|| = 1 fur alle j ∈ J gilt,
c) eine Orthogonalbasis , wenn sie ein Orthogonalsystem undeine Basis von V ist,
d) eine Orthonormalbasis, wenn sie ein Orthonormalsystem undeine Basis von V ist.
Beispiel 6.2.2 : Im K−Vektorraum Kn mit dem kanonischen Skalarpro-
dukt 〈 , 〉 ist die kanonische Basis (ej)j∈n eine Orthonormalbasis, dennes gilt fur j, l ∈ n : ej = (δkj)k∈n , also
〈ej, el〉 =n∑k=1
δkjδkl = δlj =
{1 fur j = l0 fur j 6= l
.
Beispiel 6.2.3 : Im K−Vektorraum K[X] aller Polynome mit Koeffizienten
aus K wird durch
s(f, g) :=
1∫−1
f(t) · g(t)dt
ein Skalarprodukt definiert. Die Legendre-Polynome
Pn(X) :=1
2n n!Dn(X2 − 1)n fur n ∈ N0 ,
wobei D die formale Ableitung eines Polynoms ist, also
D
(n∑j=0
αj Xj
)=
n−1∑j=0
(j + 1)αj+1Xj fur αj ∈ K ,
sind Polynome vom Grad n, fur jedes n ∈ N0 , und damit sieht man, dasssie eine Basis von K[X] bilden. (Pn(X))n∈N0 ist sogar eine Orthogonalba-sis, denn mit Methoden aus der Analysis (partieller Integration) kann manzeigen:
s(Pn, Pm) =
1∫−1
Pn(t)Pm(t) dt = 0 fur n 6= m ,
15

allerdings keine Orthonormalbasis, denn
s(Pn, Pn) =2
2n+ 1.
Nimmt man statt (Pn(X))n∈N0 aber die Familie (Qn(X))n∈N0 , die durch
Qn(X) :=
√2n+ 1
2· Pn(X)
definiert ist, so ist (Qn(X))n∈N0 sogar eine Orthonormalbasis von K[X].
Bemerkung 6.2.4 : Orthonormalbasen sind sehr praktisch: Ist V ein
K−Vektorraum mit Skalarprodukt s und Orthonormalbasis (vj)j∈n , n ∈ N ,so hat jedes v ∈ V eine eindeutig bestimmte Darsllung
v =n∑j=1
λj vj mit λj ∈ K ,
und man kann die λj leicht berechnen: Es ist fur k ∈ n:
s(v, vk) = s(n∑j=1
λj vj, vk) =n∑j=1
λj s(vj, vk) =n∑j=1
λj δjk = λk ,
also λk = s(v, vk).
2
Wie kann man sich nun zu einem gegebenem K−Vektorraum V mit Skalar-produkt s eine Orthonormalbasis verschaffen ? Der folgende Satz macht nichtnur eine Existenz-Aussage, sondern gibt auch ein Verfahren an, wie man soeine Basis schrittweise konstruieren kann. Man sollte daher den Beweis ver-stehen:
(6.2.5) Orthonormalisierungssatz von J.Gram und Erhard Schmidt :
Sei V ein K−Vektorraum mit Skalarprodukt s und
dimV = n ∈ N .
Dann lasst sich jedes Orthonormalsystem
(w1, . . . , wm) in V
mit 0 ≤ m ≤ n erganzen zu einer Orthonormalbasis
(w1, . . . , wm, . . . , wn) von V .
16

Beweis durch Induktion nach k := n−m :Induktionsanfang : Sei k = 0 , dann ist n = m , und das Orthonormal-system (wj)j∈n ist bereits eine Basis, denn es besteht aus n Vektoren, unddiese sind linear unabhangig: Aus
n∑j=1
αj wj = 0 mit αj ∈ K folgt fur k ∈ n :
0 = s
(n∑j=1
αj wj, wk
)=
n∑j=1
αj s(wj, wk) =n∑j=1
αj δjk = αk .
Hier ist der Satz also richtig; wir brauchen nichts zu erganzen.Induktionsschluss : Sei k ∈ N0 , und fur n−m = k sei der Satz richtig.Sei nun n−m = k + 1 ∈ N , dann ist
m = n− (k + 1) < n = dimV ,
fur W := span(wj)j∈m gilt dimW ≤ m < n , es gibt also einen Vektor
v ∈ V mit v /∈ span(wj)j∈m . Wir setzen
v :=m∑j=1
s(v, wj) · wj
( v ist die “Projektion von v nach W ”).
x3
x2
x1
vw
v
(In der Zeichnung
ist W die (x1, x2)−
Ebene und V = R3.)
Der Vektor v liegt in W , und
w := v − v
17

steht auf allen Vektoren aus W senkrecht, denn fur k ∈ m gilt
s(w,wk) = s(v, wk)− s
(m∑j=1
s(v, wj)wj, wk
)
= s(v, wk)−m∑j=1
s(v, wj) s(wj, wk)
= s(v, wk)−m∑j=1
s(v, wj) · δjk
= s(v, wk)− s(v, wk) = 0 .
Wegen v ∈ W , v /∈ W ist w 6= 0 . Wir konnen w daher “normieren”: Wirsetzen
wm+1 :=1
‖w‖w ,
dann haben wir ein Orthonormalsystem
(w1, . . . , wm, wm+1)
in V ; es ist n − (m + 1) = k , und wenn der Satz fur k richtig ist, kannman dieses Orthonormalsystem erganzen zu einer Orthonormalbasis
(w1, . . . , wm, wm+1, . . . , wn) von V .
2
Bemerkung : Die fur die praktische Rechnung bei der Konstruktion einerOrthonormalbasis wichtigen Schritte haben wir eingerahmt !
Folgerung 6.2.6 : Jeder endlichdimensionale K−Vektorraum V mit
Skalarprodukt besitzt eine Orthonormalbasis.Beweis : Die leere Familie (wj)j∈0 ist ein Orthonormalsystem in V , mankann also den Orthonormalisierungssatz mit m := 0 verwenden.
2
6.3 Matrizen Hermitescher Formen
Definition 6.3.1 : Sei V ein n−dimensionaler K−Vektorraum, n ∈ N ,
18

B = (v1, . . . , vn) eine Basis von V ,und s eine Hermitesche Form auf V , dann nennen wir
MB(s) := (s(vk, vj))(k,j)∈n×n ∈ M(n× n,K)
die darstellende Matrix von s bezuglich der Basis B .
2
Bemerkung 6.3.2 : Durch MB(s) ist s eindeutig festgelegt, denn seien
v, w ∈ V , dann hat man zu B = (v1, . . . , vn) eindeutig bestimmte Vektoren
x = t(x1, . . . , xn) , y = t(y1, . . . , yn) ∈ Kn mit
v =n∑k=1
xkvk , w =n∑j=1
yjvj , also
s(v, w) = s
(n∑k=1
xkvk,n∑j=1
yjvj
)=
n∑k=1
n∑j=1
xks(vk, vj)yj .
Setzen wirA := MB(s) , so wird
s(v, w) = tx · A · y ,
wenn wir unter y den Vektor
y := t(y1, . . . , yn)
verstehen. Hier ist A nicht irgendeine Matrix aus M(n×n,K) : Da s Hermi-tesch ist, gilt
s(vk, vj) = s(vj, vk) ,
fur A = (akj) = MB(s) also
akj = ajk :
Definition 6.3.3 : Eine Matrix A = (akj) ∈M(n×n,K) heißt Hermitesch,wenn
akj = ajk fur alle j, k ∈ n , also
A = tA
ist. Ist K = R , so bedeutet das
A = tA ,
19

eine Matrix mit dieser Eigenschaft heißt symmetrisch .
Folgerung 6.3.4 : Wir haben also bewiesen: Ist V ein K−Vektorraum mit
Basis B = (v1, . . . , vn) , und s eine Hermitesche Form auf V , so ist diedarstellende Matrix
A := (s(vk, vj)) Hermitesch.
Man sieht sofort, dass umgekehrt jede Hermitesche Matrix A = (akj) durch
s
(n∑k=1
xkvk,n∑j=1
yjvj
):=
n∑k,j=1
xk akj yj
eine hermitesche Form auf V definiert.
2
Es ware nun schon, wenn man der darstellenden Matrix MB(s) ansehenkonnte, ob s nichtausgeartet oder sogar positiv definit ist.
Satz 6.3.5 : Eine Hermitesche Form s auf einem endlichdimensionalen
K−Vektorraum V ist genau dann nichtausgeartet, wenn fur die darstellendeMatrix MB(s) bezuglich einer festen Basis B von V gilt
detMB(s) 6= 0 .
Beweis : Sei (v1, . . . , vn) eine Basis von V . Dann gilt:s ist ausgeartet
⇐⇒ ∃ v ∈ V \ {0} ∀w ∈ V : s(v, w) = 0⇐⇒ ∃ v ∈ V \ {0} ∀ j ∈ n : s(v, vj) = 0.
und da v =n∑k=1
αk vk mit (α1, . . . , αn) 6= 0 ist, gilt:
s ist ausgeartet
⇐⇒ ∃ (α1, . . . , αn) 6= 0∀ j ∈ n :n∑k=1
αks(vk, vj) = 0
⇐⇒ Die Zeilenvektoren von (s(vk, vj)) sind linear abhangig⇐⇒ det(s(vk, vj)) = 0.
2
Zumindest bei R-Vektorraumen mit symmetrischer Bilinearform s kann manan der Matrix MB(s) auch ablesen, ob s positiv definit ist, das ist dasHauptminoren- oder Hurwitz-Kriterium, das wir aber erst spater beweisenkonnen.
20

Wir fragen uns, wie sich die darstellende Matrix MB(s) bei einem Basis-wechsel verandert :
(6.3.6) Transformationssatz fur darstellende Matrizen
Hermitescher Formen:
Sei V ein n−dimensionaler K−Vektorraum mit Hermitescher Form s ,n ∈ N , und seien
A = (a1, . . . , an) , A′ = (a′1, . . . , a′n)
zwei Basen von V , dann hat man, wie in Bemerkung 4.4.16:
∀ j ∈ n : aj =n∑k=1
tkj a′k mit der Transformationsmatrix
MAA′( idV ) =: T = (tkj) ∈ GL(n,K) , also gilt
∀ j, l ∈ n : s(aj, al) = s
(n∑k=1
tkj a′k,
n∑r=1
trl a′r
)
=n∑k=1
n∑r=1
tkj trl s(a′k, a′r) =
n∑k=1
n∑r=1
tkj ·s(a′k, a′r)·trl ,
und nach Definition des Matrizenprodukts heißt das
MA(s) = tT ·MA′(s) · T , genauer:
MA(s) = tMAA′( idV ) ·MA′(s) ·MA
A′( idV ) .
(6.3.7) Beachten Sie, dass die Transformationsformel fur die Matrix einer
Hermiteschen Form anders ist als die Transformationsformel fur die Matrixlinearer Abbildungen: Hat man einen Endomorphismus F : V −→ V undzwei Basen A, (A)′ von V , sogilt nach 4.4.17 :
MAA (F ) = T−1 ·MA′
A′ (F ) · T mit T := MAA′( idV ) ,
dieser kleine Unterschied wird uns noch beschaftigen !
6.4 Das Vektorprodukt im R3
Schon in 1.6.3 hatten wir das Vektorprodukt im R3 definiert. Dem ist nichtviel hinzuzufugen, da man das Vektorprodukt nicht in anderen Vektorraumendefinieren kann. Aber Determinanten kannten wir damals noch nicht, und da
21

gibt es einige Zusammenhange:(6.4.1) Zur Wiederholung : Seien a =t (a1, a2, a3) , b =t (b1, b2, b3) ∈ R3 ,
dann war der Vektor
a×b := t
(det
(a2 b2a3 b3
), − det
(a1 b1a3 b3
), det
(a1 b1a2 b2
))∈ R3
das Vektorprodukt von a und b . - Wir hatten das damals naturlich ohneDeterminanten aufgeschrieben. Die Rechenregeln kennen Sie zum Teil:(6.4.2) Rechenregeln fur das Vektorprodukt : Seien a, b, c ∈ R3, λ ∈ Rund 〈 , 〉 das kanonische Skalarprodukt im R3. Dann gilta) 〈a× b, c〉 = det(a, b, c) ,
wobei (a, b, c) die Matrix mit den Spaltenvektoren a, b, c ist,b) a× b = −(b× a),c) a× a = 0,d) a× (b+ c) = a× b+ a× c ,e) a× (λb) = λ(a× b) ,f) 〈a, a× b〉 = 〈b, a× b〉 = 0 ,g) a× (b× c) = 〈a, c〉b− 〈a, b〉c Grassmann-Identitat,h) a× (b× c) + b× (c× a) + c× (a× b) = 0 Jacobi-Identitat,i) a× b = 0 ⇐⇒ die Familie (a, b) ist linear abhangig.Beweis : a) Entwicklung von
det
a1 b1 c1a2 b2 c2a3 b3 c3
nach der 3.Spalte ergibt die Behauptung.b), c ), f), i) folgen aus a) und daraus, dass det alternierend ist.d), e) folgen aus der Linearitat von det als Funktion der 2.Spalte.g) Hier muss man einfach stumpfsinnig ausrechnen:
a× (b× c) = a× (b2c3 − b3c2, b3c1 − b1c3, b1c2 − b2c1)= (a2(b1c2 − b2c1)− a3(b3c1 − b1c3),−a1(b1c2 − b2c1) + a3(b2c3 − b3c2),a1(b3c1 − b1c3)− a2(b2c3 − b3c2))
= ((a1c1 + a2c2 + a3c3)b1 − (a1b1 + a2b2 + a3b3)c1,(a1c1 + a2c2 + a3c3)b2 − (a1b1 + a2b2 + a3b3)c2,(a1c1 + a2c2 + a3c3)b3 − (a1b1 + a2b2 + a3b3)c3)
= 〈a, c〉b− 〈a, b〉c .
h) Nach g) gilt
a× (b× c) + b× (c× a) + c× (a× b) =
22

〈a, c〉b− 〈a, b〉c+ 〈b, a〉c− 〈b, c〉a+ 〈c, b〉a− 〈c, a〉b= 0 .
i) folgt wieder aus (6.4.1) und den Regeln fur Determinanten.
2
Bemerkung 6.4.3 :Fur das Vektorprodukt gilt also das Distributivgesetz(Regeln d),e)) und statt des Kommutativgesetzes die Regel b). Statt des As-soziativgesetzes hat man fur drei Faktoren die Jacobi-Identitat, Regel h).Ein Einselement in (R3,×) wird man vergeblich suchen - wegen Regel c).Nach Definition 4.9.2 ist also (R3,+,×, ω) keine (assoziative) R−Algebra.Man nennt einen Vektorraum mit einer Multiplikation ×, fur die das Dis-tributivgesetz und die Regeln c) und h) des vorigen Satzes gelten, eineLie-Algebra.
Satz 6.4.4: Fur alle a, b, c, d ∈ R3 gilt
〈a× b, c× d〉 = 〈a, c〉 〈b, d〉 − 〈b, c〉 〈a, d〉 .
Beweis : Nach der Grassmann-Identitat (6.4.2) g) gilt
〈a, c〉b − 〈b, c〉a = c× (b× a) .
Wir bilden auf beiden Seiten das Skalarprodukt mit d :
〈a, c〉 〈b, d〉 − 〈b, c〉 〈a, d〉 = 〈c× (b× a), d〉
(6.4.2) a)= det(c, b× a, d) = − det(c, d, b× a)
(6.4.2) a)= −〈c× d, b× a〉 = 〈a× b, c× d〉 .
2
Satz 6.4.5 : Fur alle a, b ∈ R3 gilt
〈a, b〉2 + ‖a× b‖2 = ‖a‖2 ‖b‖2 .
Das ist eine genauere Aussage als die Cauchy-Schwarzsche Ungleichung,die nur
〈a, b〉2 ≤ ‖a‖2 ‖b‖2
liefert !Beweis : Setzen wir c := a , d := b in (6.4.4) ein, so erhalten wir
〈a× b, a× b〉 = 〈a, a〉 〈b, b〉 − 〈b, a〉 〈a, b〉 , also
23

‖a× b‖2 + 〈a, b〉2 = ‖a‖2 ‖b‖2 .
2
(6.4.6) Geometrische Deutung des Vektorprodukts : Seien a, b ∈ R3 ,
a, b 6= 0 . Dann gilt(1) ‖a× b‖ = ‖a‖ ‖b‖ sinϕ , wobei
ϕ der Winkel zwischen a und b ist,(2) a× b ⊥ a und a× b ⊥ b ,(3) det(a, b, a× b) ≥ 0 . .
Beweis : (1) ‖a× b‖2(6.4.5)
= ‖a‖2 ‖b‖2 − 〈a, b〉2
= ‖a‖2 ‖b‖2 (1− cos2 ϕ) = ‖a‖2 ‖b‖2 sin2 ϕ ,
ϕ ∈ [0, π] , also sinϕ ∈ [0, 1] , und damit folgt die Behauptung.
(2) 〈a× b, a〉(6.4.2)
= det(a, b, a) = 0 , entsprechend fur b .
(3) det(a, b, a× b)(6.4.2)
= 〈a× b, a× b〉 = ‖a× b‖2 ≥ 0 .
2
Ist (a, b) linear unabhangig, so weiß man damit: a×b steht senkrecht auf dervon a und b aufgespannten Ebene im R3 und hat die Norm ‖a‖ ‖b‖ sinϕ.(3) macht eine Aussage, in welche Richtung der Vektor a × b zeigt. Manbraucht dazu den Begriff der Orientierung einer Basis des Rn :
Definition 6.4.7 : Sei (b1, . . . , bn) eine Basis des Rn . Sie heißt positiv
orientiert , wenn fur die Matrix mit den Spaltenvektoren b1, . . . , bn gilt :
det(b1, . . . , bn) > 0 .
Sei T diese Matrix, also tkj die k−te Komponente von bj , so gilt
∀ j ∈ n : bj =n∑k=1
tkj ek ,
T = MBK ( idV ) ist also die in Bemerkung 4.4.16 definierte Transformations-
matrix von der Basis (bj)j∈n zur kanonischen Basis (ek)k∈n . “(bj)j∈n positivorientiert” bedeutet dann, dass (bj)j∈n “genauso orientiert” ist wie die ka-nonische Basis. Speziell im R3 kann man beweisen:
Satz 6.4.8 : Eine Basis (b1, b2, b3) des R3 ist genau dann positiv orientiert,
24
wenn sie die “Rechte-Hand-Regel” erfullt : Zeigt b1 in die Richtung des Dau-mens, b2 in die des Zeigefingers, so zeigt b3 in die Richtung des Mittelfingersder rechten Hand.
2
Die Regel (6.4.6)(3) sagt dann: Ist (a, b) linear unabhangig, so ist(a, b, a × b) eine positiv orientierte Basis des R3 , erfullt also die Rechte-Hand-Regel .
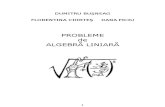
6.5 Spharische Geometrie
Sie ist fur das weitere Verstandnis der Linearen Algebra vielleicht nichtubermaßig wichtig, aber es gehort zur mathematischen Allgemeinbildung,dass man Entfernungen nicht nur anhand einer Wander- oder Autokarte,sondern auch insgesamt auf der Erdoberflache, die man naherungsweise alsKugeloberflache ansehen kann, ausrechnen kann. Wir nehmen zunachst maldie Kugel mit dem Radius 1 :
Definition 6.5.1 : Ein spharisches Dreieck ist eine positiv orientierte
Basis (a, b, c) des R3 mit‖a‖ = ‖b‖ = ‖c‖ = 1 .
c
baα
β
γB A
C
Als Seiten des Dreiecks (a, b, c) bezeichnet man die Winkel zwischen diesenVektoren, im Bogenmaß gemessen, also
A := arccos 〈b, c〉 ,B := arccos 〈a, c〉 ,
25

C := arccos 〈a, b〉 .Als Winkel zwischen diesen Seiten bezeichnet man die Winkel zwischen dendurch (a, b) , (b, c) bzw. (a, c) aufgespannten Ebenen, also die Winkel zwi-schen zwei Vektoren, die auf diesen Ebenen senkrecht stehen:
α := arccos〈a× c, a× b〉‖a× c‖ ‖a× b‖
,
β := arccos〈b× a, b× c〉‖b× a‖ ‖b× c‖
,
γ := arccos〈c× b, c× a〉‖c× b‖ ‖c× a‖
.
Wie in der Geometrie in der Ebene sucht man nun Beziehungen zwischenA,B,C, α, β, γ , so dass man von diesen sechs Zahlen die restlichen ausrech-nen kann, wenn man drei davon kennt. Unsere Regeln fur das Vektorproduktsind dabei sehr nutzlich, z.B. bei
Hilfssatz 6.5.2 : Das spharische Dreieck (a, b, c) sei wie in 6.5.1 definiert.Dann gilt
det(a, b, c) = sinα · sinB · sinC .
Beweis : Seien zunachst a, b, c, d ∈ R3 beliebig. Dann gilt nach der Grass-mann-Identitat 6.4.2 g) :
(a× b)× (c× d) = < a× b, d > c− < a× b, c > d
und nach Regel (6.4.2) a) ist das gleich
. . . = det(a, b, d) c − det(a, b, c) d .
Also gilt fur unser spharisches Dreieck (a, b, c) :
(a× b)× (a× c) = det(a, b, c) a wegen det(a, b, a) = 0 ,
also| det(a, b, c)| = | det(a, b, c)| ‖a‖ = ‖ det(a, b, c) a‖
= ‖(a× b)× (a× c)‖(6.4.6)(1)
= ‖a× b‖ ‖a× c‖ · sinα(6.4.6)(1)
= sinC · sinB · sinα ,
und wegen α,B,C ∈ [0, π] , und da (a, b, c) positiv orientiert ist, folgt
det(a, b, c) = sinC · sinB · sinα .
26
2
6.5.3 : Sinus - Satz : Im spharischen Dreieck, mit den Bezeichnungen aus6.5.1, gilt
sinα
sinA=
sin β
sinB=
sin γ
sinC.
Beweis : Nach Hilfssatz 6.5.2 gilt
sinα
sinA=
det(a, b, c)
sinA sinB sinC,
und das andert sich nicht, wenn man a, b, c zyklisch vertauscht.
2
Die folgenden beiden Satze folgen aus den Rechenregeln fur das Vektorpro-dukt :
6.5.4 : 1. Cosinus - Satz : Im spharischen Dreieck gilt
cosA = cosB · cosC + sinB · sinC · cosα
2
6.5.5 : 2. Cosinus - Satz : Im spharischen Dreieck gilt
sinC · cosB = sinB · cosC · cosα + sinA · cos β .
Beweis als Aufgabe (6.9).
2
6.5.6 : Entfernung auf der Erde : In erster Naherung kann man anneh-
men, dass die Erde eine Kugel mit dem Radius
R = 6378km
27

λϕ
P
N
S
A
M0
K
ist. Man gibt Punkte P auf dem Breitenkreis K auf der Erde durch zwei Ko-ordinaten an, namlich die (nordliche bzw. sudliche) Breite ϕ , vom AquatorA aus gerechnet, und die (ostliche bzw. westliche) Lange λ , gerechnet vomNullmeridian M0 .
Lange und Breite werden im Winkelmaß gemessen, z.B.:
Berlin Madrid LuandaLange 13,4o o.L. 3,8o w.L. 3,3o o.L.Breite 52,5o n.B. 40,4o n.B. 8,9o s.B.
Zahlt man sudliche Breite und westliche Lange negativ, so ist−90o ≤ ϕ ≤ 90o und −180o < λ ≤ 180o .
Die Entfernung zwischen zwei Punkten b, c auf der Erde erhalt man durchBetrachtung des durch b, c und den Nordpol a gebildeten spharischen Drei-ecks,
28

cγ
a
b
α
β
a
b
A
CB
A
mit Hilfe des 1. Cosinus - Satzes: Hat b die Koordinaten (λ1, ϕ1) und c dieKoordinaten (λ2, ϕ2) , so ist
B = 90o − ϕ2 ,C = 90o − ϕ1 , also
cosA = cos(90o−ϕ2) cos(90o−ϕ1) + sin(90o−ϕ2) sin(90o−ϕ1) cos(λ2− λ1)
cosA = sinϕ1 sinϕ2 + cosϕ2 cosϕ1 cos(λ2 − λ1) .
Daraus kann man A im Bogenmaß ausrechnen und muss das Ergebnis nochmit dem Erdradius multiplizieren; das ist dann die Entfernung zwischen denPunkten b und c auf der Erdoberflache.
(6.6) Aufgaben
(6.1) Beweisen Sie die Folgerung 6.1.19 (Satz des Pythagoras und Paral-lelogrammgleichung).
(6.2) Zeigen Sie, dass durch
‖x‖ := max { |xj| | j ∈ 3 } fur x = t(x1, x2, x3) ∈ R3
eine Norm auf R3 definiert ist, fur die die Parallelogrammgleichungnicht gilt.
29

(6.3) Sind die folgenden Abbildungen
s : R2 × R2 −→ R
a) bilinear , b) symmetrisch ,und falls beides zutrifft,c) positiv semidefinit , d) ein Skalarprodukt ?
Fur a = (a1, a2) , b = (b1, b2) sei s(a, b) :=α) a1b2−a2b1 , β) 2a1b1 +a1b2 +a2b1 +2a2b2 .
Falls s ein Skalarprodukt ist, geben Sie zwei Vektoren v, w ∈ R2 anmit s(v, w) = 0 und s(v, v) = s(w,w) = 1 .
(6.4) Zeigen Sie, dass durchs(a, b) := a1b1+4a2b2+3a3b3+ia1b2−ia2b1+a1b3+a3b1−ia2b3+ia3b2
fur a = t(a1, a2, a3) , b = t(b1, b2, b3) ∈ C3
ein Skalarprodukt auf C3 definiert ist.
(6.5) Sei V ein K−Vektorraum mitnichtausgearteter Hermitescher Form s , K = R oder C . Zeigen Sie:a) Fur jedes a ∈ V ist durch
ϕa : V −→ K , ϕa(x) := s(x, a)eine lineare Abbildung definiert, d.h. es ist ϕa ∈ V ∗ .
b) Ist V endlichdimensional, so istϕ : V −→ V ∗ , ϕ(a) := ϕa
ein “Semi-Isomorphismus” von V auf V ∗ , d.h. ϕ ist bijektiv,und es gilt fur alle a, b ∈ V , α ∈ K :ϕ(a+ b) = ϕ(a) + ϕ(b) , ϕ(α a) = αϕ(a) .
c) Sei U ein Untervektorraum von V , dann setzt manU o := { λ ∈ V ∗ | ∀u ∈ U : λ(u) = 0 } undU⊥ := { v ∈ V | ∀u ∈ U : s(u, v) = 0 } .
U⊥ heißt das orthogonale Komplement von U .Zeigen Sie : Ist V endlichdimensional, so gibt es einenSemi-Isomorphismus von U⊥ auf U o .
(6.6) Sei V ein K−Vektorraum mit Skalarprodukt s ,K = R oder C , undU ein Untervektorraum von V . Dann hatten wir in Aufgabe (6.5) c)das orthogonale Komplement U⊥ von U definiert. Zeigen Sie, dass fur
30

Untervektorraume U1, U2, U von V gilt:a) (U1 + U2)
⊥ = U⊥1 ∩ U⊥2 und U⊥1 + U⊥2 ⊂ (U1 ∩ U2)⊥
b) Sei dim V = n ∈ N0 , dann giltdim U⊥ = n− dim U , V = U ⊕ U⊥ ,(U⊥)⊥ = U und U⊥1 + U⊥2 = (U1 ∩ U2)
⊥ .
(6.7) SeiK ein Korper, n ∈ N . Fur eine MatrixA ∈M(n× n,K) nennt man
tr A :=n∑j=1
ajj die Spur von A . Zeigen Sie:
a) tr : M(n× n,K) −→ K ist K−linear.b) Fur alle A,B ∈M(n× n,K) gilt
tr (A ·B) = tr (B · A) ,und falls B ∈ GL(n,K) ist , auch
tr (B · A ·B−1) = tr A .c) Sei K = R oder C , dann ist durch
s(A,B) := tr (A ·t B)ein Skalarprodukt auf M(n× n,K) definiert.
d) Die Menge U der Diagonalmatrizen ist ein Untervektorraum vonM(n× n,C). Berechnen Sie das orthogonale Komplement U⊥.
(6.8) Sei V die Menge der beschrankten Folgen reeller Zahlen, also
V = { (an)n∈N ∈ F(N,R) | ∃ c ∈ R ∀n ∈ N : |an| ≤ c } .
Zeigen Sie :a) V ist ein R−Vektorraum.
b) Durch s((an)n∈N, (bn)n∈N) :=∞∑n=1
anbnn2
ist ein Skalarprodukt auf V definiert.
c) Es gibt einen echten Untervektorraum U von V (also U⊂6= V )
mit U⊥ = {0} .Elementare Kenntnisse uber Folgen und Reihen mussen verwendetwerden !
(6.9) Sei (a, b, c) ein spharisches Dreieck. Zeigen Sie, dass mit denBezeichnungen aus Definition 6.5.1 gilta) cosA = cosB · cosC + sinB · sinC · cosα ,b) sinC · cosB = sinB · cosC · cosα + sinA · cos β .
31

(6.10) Philadelphia und Peking liegen auf demselben Breitenkreis: 40o n.B.Ihre Langen sind
Philadelphia : 75o w.L., Peking : 117o o.L.Wie groß ist die Strecke (in km, gerundet), die ein Flugzeug vonPhiladelphia nach Peking fliegt, wenn esa) langs des Breitenkreises,b) uber den Nordpol, also langs der Meridiane,c) auf dem kurzesten Weg fliegt ?d) Wie groß ist der Startwinkel α zum Breitenkreis in Philadelphia
beim Flug auf der kurzesten Strecke?Gehen Sie von einer kugelformigen Erde mit Radius 6378 km aus.
32

§7 Eigenwerte
7.1 Beispiele und Definitionen
Definition 7.1.1 : Sei K ein (beliebiger) Korper und V ein K− Vektor-raum. Sei F ein Endomorphismus von V , also F ∈HomK(V, V ) . EinElement λ ∈ K heißt ein Eigenwert von F , wenn es ein v ∈ V \{0} gibt,so dass gilt
F (v) = λv .
Jedes von 0 verschiedene v ∈ V , das diese Gleichung erfullt, heißt einEigenvektor von F zum Eigenwert λ .
(7.1.2) Beachten Sie, dass 0 ∈ K ein Eigenwert sein kann, dass aber
0 ∈ V definitionsgemaß kein Eigenvektor ist !
7.1.3 Beispiele : Sei V := C∞(R) der R−Vektorraum aller beliebig oft dif-
ferenzierbaren Funktionen f : R −→ R, unda) D : V −→ V , D(f) := f ′ die Differentiation. D ist R−linear. Manfragt sich: Gibt es eine Funktion f ∈ C∞(R), deren Ableitung proportionalzu f ist, fur die also
f ′ = λ f
mit einem λ ∈ R gilt ? So eine Funktion kennen Sie:
f(x) := eλx .
Also ist jedes λ ∈ R ein Eigenwert von D .
b) Auch D2 : V −→ V , D2(f) := f ′′ ist R−linear. Fur λ ≥ 0 sind dieFunktionen f± mit
f±(x) := e±√λx
Eigenvektoren zum Eigenwert λ. Fur λ < 0 sind g1 und g2,
g1(x) := sin(√−λ · x) und g2(x) := cos(
√−λ · x)
Eigenvektoren zum Eigenwert λ . Wiederum: Jedes λ ∈ R ist ein Eigenwertvon D2.
Bemerkung : In den letzten Beispielen war V unendlichdimensional. Wirwollen erst mal die Theorie fur endlichdimensionale Vektorraume kennenler-nen. Dazu das folgende Beispiel: Sei
F : R2 −→ R2 , F
(x1x2
):=
(1 00 −1
)·(x1x2
),
33

dann sehen wir:
F (e1) = 1 · e1 : e1 ist Eigenvektor zum Eigenwert 1 ,
F (e2) = −1 · e2 : e2 ist Eigenvektor zum Eigenwert − 1 .
2
Wenn die Matrix von F bezuglich einer festen Basis eine Diagonalmatrix ist,kann man die Eigenwerte besonders leicht ausrechnen :
Definition 7.1.4 : Sei K ein Korper , V ein K−Vektorraum ,dimK V = n ∈ N und F ein Endomorphismus von V . F heißtdiagonalisierbar, wenn es eine Basis von V gibt, die aus Eigenvektoren vonF besteht.
(7.1.5) Vorsicht: Wenn es eine Basis von V gibt, die aus Eigenvektoren
von F besteht, heißt das nicht, dass jeder Vektor aus V ein Eigenvektor vonF ist, denn eine Linearkombination von Eigenvektoren (zu verschiedenenEigenwerten) ist i.A. kein Eigenvektor !
Folgerung 7.1.6 : Ist dimK V = n ∈ N , so ist ein
F ∈ EndK(V ) = HomK(V, V )
genau dann diagonalisierbar, wenn es eine Basis
B = (v1, . . . , vn) von V
gibt, so dass MBB (F ) eine Diagonalmatrix ist, also
MBB (F ) =
λ1 0. . .
0 λn
mit λ1, . . . , λn ∈ K .
Beweis : MBB (F ) =
λ1 0. . .
0 λn
ist gleichbedeutend mit
F (vj) = λjvj fur alle j ∈ n .
2
Hilfssatz 7.1.7 : Sei K ein Korper, V ein K−Vektorraum und
F ∈ EndK V. Sind v1, . . . , vm Eigenvektoren zu paarweise verschiedenen
34

Eigenwerten λ1, . . . , λm von F , so ist (vj)j∈m linear unabhangig. Insbeson-dere: Ist dimK V = n ∈ N und hat F n paarweise verschiedene Eigen-werte λ1, . . . , λn , so ist F diagonalisierbar.Beweis durch Induktion nach m :Induktionsanfang : Ist m = 1 , so ist (vj)j∈1 linear unabhangig wegenv1 6= 0 .Induktionsschluss : Sei m ∈ N , m ≥ 2 , und fur m−1 sei der Satz richtig.Sei nun
(∗) α1v1 + . . .+ αmvm = 0
mit α1, . . . , αm ∈ K , dann gilt(1) wenn man (∗) mit λm multipliziert:
λmα1v1 + . . . λmαmvm = 0 ,
(2) wenn man F auf (∗) anwendet:
α1λ1v1 + . . . αmλmvm = 0 , also
m−1∑j=1
αj(λj − λm) vj = 0
und wenn der Satz fur m− 1 richtig ist, folgt wegen λj 6= λm :
α1 = . . . = αm−1 = 0 ,
und aus (∗) und vm 6= 0 dann noch
αm = 0 .
Also ist (v1, . . . , vm) linear unabhangig.
2
Satz 7.1.8 : Sei V ein K−Vektorraum mit dimk V = n ∈ N und
F ∈ EndKV . F ist genau dann diagonalisierbar, wenn es zur Matrix
A = MAA (F )
bezuglich einer beliebigen Basis A von V eine Matrix S ∈ GL(n,K) gibt,so dass S−1 · A · S eine Diagonalmatrix ist.Beweis : “ =⇒ ” : Sei F diagonalisierbar. Dann gibt es nach Definition7.1.4 eine Basis B von V , so dass
B := MBB (F )
35

eine Diagonalmatrix ist. Sei A = MAA (F ) die Matrix von F bezuglich
der Basis A , dann gibt es nach Bemerkung 4.4.16 (angewendet auf denSpezialfall V = W ) eine Matrix S ∈ GL(n,K) mit
MBB (F ) = S−1 · MA
A (F ) · S .
“ ⇐= ”: Sei S ∈ GL(n,K) und S−1 · A · S eine Diagonalmatrix, danngehen wir von der Basis A = (ak)k∈n uber zur Basis B = (bj)j∈n , diedurch
bj :=n∑k=1
skj ak mit (skj) = S
definiert ist. Nach Bemerkung 4.4.16 ist dannS−1 · A · S die Matrix von Fbezuglich B . Nach Folgerung 7.1.6 ist nun F diagonalisierbar.
2
Definition 7.1.9 : Sei V ein K−Vektorraum, F ∈ EndKV und λ ∈ K.
Dann heißtEig(F, λ) := { v ∈ V | F (v) = λ v }
der Eigenraum von F bezuglich λ.
Folgerung 7.1.10 : Sei V ein K−Vektorraum, F ∈ EndKV und λ ∈ K.
Dann gilta) Eig(F, λ) ist ein Untervektorraum von V .b) λ ist ein Eigenwert von F ⇐⇒ Eig(F, λ) 6= {0}.c) Eig(F, λ) \ {0} ist die Menge der Eigenvektoren von F zu λ.d) Eig(F, λ) = ker (F − λ idV ).e) Fur λ1, λ2 ∈ K mit λ1 6= λ2 gilt Eig(F, λ1)∩ Eig(F, λ2) = {0}.Beweis : a) - d) folgen unmittelbar aus Definition 7.1.8 .e) Fur v ∈ Eig(F, λ1)∩ Eig(F, λ2) gilt
F (v) = λ1v und F (v) = λ2v , also 0 = (λ1 − λ2)v ,
also v = 0 wegen λ1 6= λ2.
2
7.2 Das charakteristische Polynom
Bemerkung 7.2.1 : Die Frage ist nun, wie bekommt man die Eigenwerte
eines gegebenen F ∈ EndKV , wenn dimK V = n ∈ N ist. Dann sind furein λ ∈ K die Aussagen
36

(i) λ ist ein Eigenwert von F ,(ii) det(F − λ idV ) = 0gleichbedeutend.Beweis : Es gilt: λ ist Eigenwert von F
⇐⇒ ∃ v ∈ V \ {0} : F (v) = λ v⇐⇒ ∃ v ∈ V \ {0} : (F − λ idV )(v) = 0⇐⇒ ker (F − λ idV ) 6= {0}⇐⇒ F − λ idV ist kein Automorphismus von V(5.4.3)⇐⇒ det(F − λ idV ) = 0 .
2
Bemerkung 7.2.2 : Im Gegensatz zur Gleichung F (v) = λ v , in der man
λ, aber auch v , nicht kennt, haben wir nun eine Gleichung, in der λ alseinzige Unbekannte vorkommt. λ ist also genau dann Eigenwert von F , wennλ eine Nullstelle der Funktion
PF (t) := det(F − t · idV )
ist. Nach Definition 5.4.1 rechnet man det(F − t · idV ) aus, indem man furF zu einer Basis A von V ( es ist egal, welche Basis man nimmt) die MatrixMA
A (F − t · idV ) ausrechnet. Es ist MAA ( idV ) = En , also
MAA (t idV ) = t En , wenn n = dimV ist. Ist A := MA
A (F ) , dann ist
det(F − t idV ) = det(A− t En)
= det
a11 − t a12 a13 . . . a1na21 a22 − t a23 . . . a2na31 a32 a33 − t . . . a3n...
......
...an1 an2 an3 . . . ann − t
eine Polynomfunktion von t. Besser betrachtet man das entsprechend defi-nierte Polynom:
Definition 7.2.3 : Sei K ein Korper und n ∈ N .
a) Sei V ein K−Vektorraum mit dimK V = n und F ∈ EndK(V ) , soheißt
PF (X) := det(F −X idV )
das charakteristische Polynom von F .
37

b) Ist A ∈M(n× n,K) , so heißt λ ein Eigenwert von A , wenn esein a ∈ Kn \ {0} gibt mit A · a = λ a , und
PA(X) := det(A−X · En)
heißt das charakteristische Polynom der Matrix A und a einEigenvektor von A zum Eigenwert λ.
2
Bemerkungen 7.2.4 :
1) PA(X) ist also die Determinante der Matrix
A−X En ∈M(n× n,K[X]) ,
also eine Matrix mit Eintragen aus einem kommutativen Ring. NachDefinition 5.2.1 geht das.
2) Wenn man PA(X) nach der Leibniz-Formel (oder anders) ausrechnet,erhalt man
PA(X) = (a11 −X) · . . . · (ann −X) + g(X) ,
wobei g(X) ein Polynom aus K[X] mit deg g(X) ≤ n − 2 bzw. 0 ist,und ausmultiplizieren ergibt
PA(X) = (−1)nXn + (a11 + . . .+ ann)(−1)n−1Xn−1 +n−2∑k=0
αkXk ,
mit αk ∈ K , also ist PA(X) ein Polynom vom Grad n. Den Koeffizi-enten von Xn−1 haben wir gerade ausgerechnet: Er ist
(−1)n−1 · trA mit trA :=n∑k=1
akk , der Spur von A .
Den Koeffizienten α0 erhalt man, indem man 0 fur X einsetzt:
α0 = PA(0) = det(A− 0 · En) = detA .
3) Man erhalt also die Eigenwerte λ von A, indem man die Nullstellen λdes charakteristischen Polynoms
PA(X) = det(A−X En) ∈ K[X]
ermittelt. Da PA(X) ein Polynom vom Grad n ist, kann die Bestim-mung der Nullstellen schwierig sein - wenn denn uberhaupt Nullstellenexistieren, was z.B. fur K = R fraglich ist.
38

4) In 5.4 haben wir gesehen: Ist F ∈ EndKV , so ist
det(F −X idV ) = det(A−X En) mit A = MAA (F )
davon unabhangig, welche Basis A wir nehmen, wir erhalten in jedemFall dieselbe Determinante: Ersetzen wir die Basis A durch die BasisB, so erhalten wir nach 4.4.17 :
MBB (F ) =: B = S · A · S−1 mit S := MA
B ( idV ) ∈ GL(n.K) ,
und man sieht auch hier wie in 5.4.1 :
det(B−X·En) = det(S·A·S−1−X·S·En·S−1) = det(S·(A−X En)·S−1)
= detS · det(A−X En)(detS)−1 = det(A−X En) .
Man kann das auch so formulieren:
Definition 7.2.5 : Zwei Matrizen A,B ∈ M(n × n,K) heißen ahnlich ,wenn es ein S ∈ GL(n,K) gibt mit
B = S · A · S−1 .
2
Dann haben ahnliche Matrizen also gleiche Eigenwerte.
Folgerung 7.2.6 : 1) Hat man einen Eigenwert λ einer Matrix
A ∈M(n×n,K) gefunden, so ist die Berechnung von Eigenvektoren v dazueinfach:
(A− λEn) · v = 0
ist ein lineares homogenes Gleichungssystem mit n Gleichungen in den nUnbekannten v1, . . . , vn , und wegen det(A − λEn) = 0 hat dieses Glei-chungssystem nichttriviale Losungen.2) Hat man ein F ∈EndKV , dimK V = n ∈ N , und einen Eigenwert λ vonF , und will man einen Eigenvektor v ∈ V zu λ bestimmen, so wahlt mansich eine Basis A = (a1, . . . , an) von V , bestimmt nach 1) einen Eigenvektory = t(y1, . . . , yn) ∈ Kn von
A := MAA (F ) , dann ist
v :=n∑j=1
yjaj ein Eigenvektor von F .
Folgerung 7.2.7 : Ist dimV = n ∈ N und A die Matrix von F bezuglich
39

einer festen Basis A von V , so ist
dim Eig(F, λ)
die Dimension des Losungsraums des linearen homogenen Gleichungssystems
(A− λEn) · x = 0 .
Beispiel 7.2.8 : Sei
A =
0 −1 1−3 −2 3−2 −2 3
∈ M(3× 3,R) ,
so ist das charakteristische Polynom von A :
det(A−X E3) = det
−X −1 1−3 −2−X 3−2 −2 3−X
= (−X)·det
(−2−X 3−2 3−X
)+1·det
(−3 3−2 3−X
)+1·det
(−3 −2−X−2 −2
)= X(2 +X)(3−X)− 6X − 9 + 3X + 6 + 6− 4− 2X
= −X3 +X2 +X − 1 .
Eine Nullstelle dieses Polynoms ist λ1 = 1 . Wenn man durch X − 1 divi-diert, erhalt man
−X3 +X2 +X − 1 = (X − 1) · (−X2 + 1) ,
dadurch erhalt man als weitere Nullstellen
λ2 = 1 und λ3 = −1 .
Wir haben alo PA(X) = −(X − 1)2 · (X + 1) .1 und −1 sind also die einzigen Eigenwerte von A . Wir wollen noch dieEigenvektoren zu diesen Eigenwerten bestimmen, also die Vektorenv ∈ R3 \ {0} mit
A · v = ±1 v .
Gesucht sind also die nichttrivialen Losungen v ∈ R3 der linearen homogenenGleichungssysteme
(A− (±1)E3) · v = 0 ,
40

was mit den Methoden aus §4 kein Problem ist:a) Fur λ1,2 = 1 haben wir
A− 1E3 =
−1 −1 1−3 −3 3−2 −2 2
.
Wenn wir das auf Zeilenstufenform bringen, sehen wir:
Rg(A− 1E3) = 1 , also dim Eig(A, 1) = 3− 1 = 2 ,
und Elemente aus v ∈ Eig(A, 1) erhalten wir aus
−v1 − v2 + v3 = 0 ,
also v2, v3 ∈ R beliebig, v1 = −v2 + v3 .b) Fur λ3 = −1 haben wir
A+ 1E3 =
1 −1 1−3 −1 3−2 −2 4
.
Wenn wir das auf Zeilenstufenform bringen, sehen wir :
Rg(A+ 1E3) = 2 , also dim Eig(A,−1) = 3− 2 = 1 ,
und Vektoren v ∈ Eig(A,−1) erhalten wir aus
v1 − v2 + v3 = 0 ∧ −4v2 + 6v3 = 0 ,
also v3 ∈ R beliebig, v2 =3
2v3 , v1 =
1
2v3 .
2
Beispiel 7.2.9 : Sei α ∈ [0, 2π) und A :=
(cosα − sinαsinα cosα
),
dann sind die Eigenwerte von A bzw. von
fA : R2 −→ R2 , fA(x) := A · x
die Nullstellen von
PA(X) = det
(cosα−X − sinα
sinα cosα−X
)
41

= (cosα−X)2+sin2 α = X2−2 cosα·X+1 .
Nullstellen λ1,2 erhalten wir aus
λ1,2 = cosα±√
cos2 α− 1 ,
was nur fur cosα = ±1, also α = 0 oder α = π, Losungen in R ergibt. Dasist anschaulich klar: fA beschreibt eine Drehung um α , und nur fur α = 0oder π gibt es Geraden durch 0 , die in sich selbst abgebildet werden.
2
7.3 Diagonalisierung
Wir haben in Def.7.1.4 definiert, was ein diagonalisierbarer Endomorphismusvon V ist, und Satz 7.1.7 war schon mal ein Kriterium fur Diagonalisierbar-keit. Wir fassen das zusammen alsSatz 7.3.1 : Sei V einK−Vektorraum, n ∈ N, dimK V = n und F ∈EndKV .Dann gilt:
(1) Ist F diagonalisierbar, so gibt es λ1, . . . , λn ∈ K, so dass
PF (X) = (−1)n (X − λ1) · . . . · (X − λn)
ist, d.h. das charakteristische Polynom von F zerfallt in Linearfaktoren.
(2) Gibt es paarweise verschiedene λ1, . . . , λn ∈ K, so dass
PF (X) = (−1)n (X − λ1) · . . . · (X − λn)
ist, so ist F diagonalisierbar.
Beweis : (1) Ist F diagonalisierbar, so gibt es eine Basis B von V , so dassMB
B (F ) eine Diagonalmatrix ist:
∃λ1, . . . , λn ∈ K : MBB (F ) =
λ1 0. . .
0 λn
,
also ist PF (X) = (λ1 −X) · . . . · (λn −X) .(2) In diesem Fall hat PF (X) n verschiedene Nullstellen λ1, . . . , λn, die dieEigenwerte von F sind, und zu diesen hat man Eigenvektoren v1, . . . , vn.Nach Hilfssatz 7.1.7 ist B := (v1, . . . , vn) linear unabhangig, also eine Basisvon V , und es ist
MBB (F ) =
λ1 0. . .
0 λn
eine Diagonalmatrix. 2
42

Bemerkung 7.3.2 : Nach Satz 7.3.1 bleibt die Frage offen, ob F diagonali-
sierbar ist, wenn PF (X) ein Produkt von Linearfaktoren ist, von denen einigemehrfach vorkommen: Sei also
PF (X) = (−1)n(X − λ1)r1 · . . . · (X − λk)rk
mit paarweise verschiedenen λ1, . . . , λk ∈ K ,
1 ≤ rj ≤ n fur j ∈ k und r1 + . . .+ rk = n .
Den Exponenten rj des Faktors (X − λj) nennen wir die Vielfachheit derNullstelle λj von PF (X); wir setzen
µ(PF , λj) := rj .
2
In 7.1.8 haben wir den Eigenraum Eig(F, λj) definiert:Hilfssatz 7.3.3 : Sei V ein endlichdimensionaler K−Vektorraum,
F ∈ EndKV und λ ein Eigenwert von F , dann gilt
1 ≤ dim Eig(F, λ) ≤ µ(PF , λ) .
Beweis : Sei (vj)j∈s eine Basis von Eig(F, λ) . Da λ ein Eigenwert von Fist. ist
1 ≤ s = dim Eig(F, λ) .
Wir erganzen (vj)j∈s zu einer Basis
A = (v1, . . . , vs, vs+1, . . . , vn) von V .
Sei A die Matrix von F bezuglich B , dann wird
A := MAA (F ) =
λ 0 |
. . . | ∗0 λ |− − − + −
0 | A′
sZeilen
s Spalten ,
mit einer quadratischen Matrix A′. Dabei bedeutet ∗ irgendetwas. Dascharakteristische Polynom kann man damit ausrechnen, etwa indem mannach der 1. bis s−ten Spalte entwickelt:
PF (X) = det(A−X En) = (λ−X)s · det(A′ −X En−s) .
43

In det(A′−X En−s) kann der Linearfaktor λ−X vorkommen, jedenfalls ist
µ(PF , λ) ≥ s = dim Eig(F, λ) .
2
Beispiel 7.3.4 : Sei
A :=
(1 10 1
)∈M(2× 2,R) , dann ist
PA(X) = det
(1−X 1
0 1−X
)= (1−X)2 = (X − 1)2 ,
PA(X) zerfallt in Linearfaktoren, es ist µ(PA, 1) = 2 . Andererseits ist
Eig(A, 1) = Los(A− 1E2, 0)
=
{x ∈ R2
∣∣ ( 0 10 0
)·(x1x2
)=
(00
) }={x ∈ R2
∣∣ x2 = 0}
= R · e1 ,
also dim Eig(A, 1) = 1 < 2 .
2
Nach dem folgenden Satz ist dieses A nicht diagonalisierbar:
Satz 7.3.5 : Sei K ein Korper, V ein endlichdimensionaler K−Vektorraum
und F ∈ EndKV . Dann sind folgende Aussagen gleichbedeutend:(1) F ist diagonalisierbar .(2) a) das charakteristische Polynom PF ist ein Produkt von
Linearfaktoren , undb) fur alle Eigenwerte λ von F gilt dim Eig (F, λ) = µ(PF , λ) .
(3) Sind λ1, ·, λk die paarweise verschiedenen Eigenwerte von F , so ist
V = Eig(F, λ1)⊕ . . .⊕ Eig(F, λk) .
Beweis : (0) : Ist F diagonalisierbar, so haben wir eine Basis von V , die ausEigenvektoren von F besteht. Seien λ1, . . . , λk die paarweise verschiedenenEigenwerte von F , und fur j ∈ k sei
(∗) (v(j)1 , . . . , v(j)sj ) eine Basis von Eig(F, λj) ,
44

also sj = dim Eig(F, λj) . Dann ist
(∗∗) B := (v(1)1 , . . . , v(1)s1
, . . . , v(k)1 , . . . , v(k)sk
)
linear unabhangig, denn aus
k∑j=1
sj∑lj=1
µ(j)ljv(j)lj
= 0 mit µ(j)lj∈ K folgt
k∑j=1
1 ·
sj∑lj=1
µ(j)ljv(j)lj
︸ ︷︷ ︸∈ Eig(F, λj)
= 0 ,
und nach Hilfssatz 7.1.7 geht das wegen 1 6= 0 nur, falls in den Klammernkeine Eigenvektoren stehen, also gilt
∀ j ∈ k :
sj∑lj=1
µ(j)ljv(j)lj
= 0 ,
und nach (∗) folgt
∀ j ∈ k ∀ lj ∈ sj : µ(j)lj
= 0 .
Sei nun n := dimK V .(1) =⇒ (2) : Ist F diagonalisierbar, so haben wir eine Basis von V , dieaus Eigenvektoren von F besteht. Ordnet man sie passend an, so ist es eineBasis B der Form aus (∗∗) aus (0). Dann ist n = s1 + . . . + sk . Dascharakteristische Polynom von F ist
PF (X) = (−1)n(X − λ1)r1 · . . . · (X − λk)rk ,
also gilt a) von (2), und fur rj = µ(PF , λj) gilt nach 7.3.3 : sj ≤ rj , also
n = s1 + . . .+ sk↓≤ r1 + . . .+ rk = degPF (X) = n
und hier ↓ gilt Gleichheit nur, falls sj = rj fur alle j ∈ k gilt, alsogilt b) von (2).(2) =⇒ (3) : Seien λ1, . . . , λk die verschiedenen Eigenwerte von F , danngilt nach a) von (2) :
PF (X) = (−1)n(X − λ1)r1 · . . . · (X − λk)rk mit r1, . . . , rk ∈ N ,
45

und r1 + . . .+ rk = n = dimV . Fur j ∈ k sei
(v(j)1 , . . . , v(j)sj ) eine Basis von Eig(F, λj) ,
dann gilt nach b) : sj = rj . Die in (∗∗) angegebene Familie B ist linearunabhangig, mit
s1 + . . .+ sk = r1 + . . .+ rk = n
Elementen, also eine Basis von V . Nach Satz 4.7.5 (1) ist
V = Eig(F, λ1)⊕ . . .⊕ Eig(F, λk) .
(3) =⇒ (1) : Wenn die letzte Gleichung gilt, haben wir eine Basis von V ,die aus Eigenvektoren von F besteht. Also ist F diagonalisierbar.
2
Mit diesem Satz bzw. dem Beweis dazu erhalt man ein
(7.3.6) Praktisches Verfahren zur Diagonalisierung eines
F ∈ EndKV :
Sei V ein K−Vektorraum , dimK V = n ∈ N .1.Schritt : Man nehme eine beliebige Basis A von V , berechne
A := MAA (F ) , und damit PF (X) = PA(X) ,
bestimme also das charakteristische Polynom PF von F und versuche, eineLinearfaktorzerlegung von PF zu finden (was fur n ≥ 3 schwierig werdenkann). Wenn man sicher ist, dass das nicht geht, ist F nicht diagonalisierbar,wegen Satz 7.3.1(1). Fur die Nullstellen λ von PF (X) kann man auch
µ(PF , λ)
ablesen. Wenn man eine Linearfaktorzerlegung angeben kann, kommt daszweite Hindernis :2.Schritt : Man bestimmt fur jeden Eigenwert λ von F die Dimension vonEig(F, λ) , also die Dimension des Losungsraums des linearen homogenenGleichungssystems
(A− λEn) · x = 0 .
Wenn dann fur alle Eigenwerte λ
µ(PF , λ) = dim Eig(F, λ)
46

gilt, ist F nach Satz 7.3.5 diagonalisierbar, und man bestimmt Basen al-ler Eig(F, λ) . Diese Eigenvektoren bilden zusammen eine Basis B von V,bezuglich der die Matrix B := MB
B (F ) Diagonalform hat. Es gilt nachBemerkung 4.4.16 :
B = S · A · S−1 mit S := MAB( idV ) ∈ GL(n,K) .
S−1 =: (tlj) ist also die Transformationsmatrix des Basiswechsels von A zuB. Nach Formel (4.4.17) gilt , wenn
A = (al)l∈n , B = (bj)j∈n ist :
bj =n∑l=1
tlj al
Die Spaltenvektoren der Matrix S−1 sind also die “Koordinatenvektoren”der neuen Basisvektoren bj bezuglich der gegebenen alten Basis A .
2
Beispiel 7.3.7: Sei F : R3 −→ R3 gegeben durch
F (x) := A · x mit A :=
1 1 11 1 11 1 1
,
dann ist F linear, und die Matrix von F bezuglich der kanonischen BasisK = (e1, e2, e3) des R3 ist A. Man rechnet aus:
PF (X) = −X3 + 3X2 = −X2(X − 3) ,
die Eigenwerte sind also
0 mit µ(PF , 0) = 2 und 3 mit µ(PF , 3) = 1 ,
Es ist dim Eig(F, 3) = 1, und wegen
Rg(A− 0 · E3) = RgA = 1
ist dim Eig (F, 0) = 3− 1 = 2, und die Vielfachheit µ(PF , 0) war auch 2.Nach Satz 7.3.5 ist F diagonalisierbar. Wir berechnen Eigenvektoren von Fzum Eigenwert(i) 0, dazu bringen wir A− 0 · E3 auf Zeilenstufenform:
A− 0 · E3 =
1 1 11 1 11 1 1
→ 1 1 1
0 0 00 0 0
,
47

und das lineare Gleichungssystem x1 + x2 + x3 = 0 hat −101
,
−110
als Basis des Losungsraums. Das ist also eine Basis von Eig (F, 0),(ii) 3 , dazu bringen wir A− 3 · E3 auf Zeilenstufenform:
A− 3 · E3 =
−2 1 11 −2 11 1 −2
→ 1 1 −2
0 3 −30 −3 3
→ 1 1 −2
0 1 −10 0 0
.
Das zugehorige lineare Gleichungssystem x1 + x2 − 2x3 = 0 , x2 − x3 = 0hat 1
11
als Basis des Losungsraums. Das ist also eine Basis von Eig (F, 3). Sei nun
B = (b1, b2, b3) :=
−101
,
−110
,
111
,
dann ist
B := MBB (F ) =
0 0 00 0 00 0 3
,
und es giltB = S · A · S−1 mit S = MK
B ( idR3)
(tkj) := S−1 erhalt man wegen
S−1 = MBK ( idR3) und bj =
3∑k=1
tkjek
als Matrix mit den Basisvektoren der Eigenraume als Spalten :
S−1 =
−1 −1 10 1 11 0 1
.
48

Wir berechnen die inverse Matrix
S =1
3
−1 −1 2−1 2 −11 1 1
und machen die Probe:
S−1 · S = E3 , S · A · S−1 =
0 0 00 0 00 0 3
.
2
Bemerkung 7.3.8 : Sei V ein endlichdimensionaler K−Vektorraum und
seien F,G ∈ EndKV diagonalisierbar. Dann kann man fragen, ob es einegemeinsame Basis von V gibt, bezuglich der F undG durch Diagonalmatrizenbeschrieben werden. Man nennt dann F und G simultan diagonalisierbar.Die Frage ist also: Sei B eine Basis von V und seien
A := MBB (F ) , B := MB
B (G) ,
gibt es dann ein (gemeinsames) S ∈GL(n,K), so dass
D = S · A · S−1 und D = S ·B · S−1
Diagonalmatrizen sind? Nun sind zwei Diagonalmatrizen vertauschbar, d.h.es gilt D · D = D ·D , und damit dann auch
A ·B = S−1 ·D ·S ·S−1 · D ·S = S−1 ·D · D ·S = S−1 · D ·D ·S = B ·A ,
also sind auch A und B vertauschbar und damit F und G. Diese Bedingungist aber auch hinreichend fur die simultane Diagonalisierbarkeit von F undG :Satz 7.3.9 : Zwei diagonalisierbare Endomorphismen F,G ∈ EndK(V ) sindgenau dann simultan diagonalisierbar, wenn gilt:
F ◦G = G ◦ F .
Beweis : Sei also F ◦G = G◦F . Wir haben nach Satz 7.3.5 die Zerlegungenin die direkten Summen von Eigenraumen
V =k⊕j=1
Eig(F, λj) und V =r⊕l=1
Eig(G, µl) .
49

Dann gilt
(∗) G(Eig(F, λj)) ⊂ Eig(F, λj) ,
denn aus x ∈Eig(F, λj) folgt F (x) = λx, und wegen F ◦G = G ◦ F dann
F (G(x)) = G(F (x)) = G(λx) = λG(x) .
Wir zeigen nun, dass fur jeden Eigenwert µl von G der Eigenraum Eig(G, µl)in die direkte Summe
(∗∗) Eig(G, µl) =k⊕j=1
(Eig(F, λj)∩Eig(G, µl))
zerlegt werden kann. Sei dazu
x ∈ Eig(G, µl) und x =k∑j=1
xj mit xj ∈ Eig(F, λj) .
Wir wollen zeigen : xj ∈ Eig(G, µl) fur alle Eigenwerte λj von F : Es gilt
(∗∗∗)k∑j=1
µlxj = µl x = G(x) =k∑j=1
G(xj) ,
wobei nach (∗) gilt:G(xj) ∈ Eig(F, λj). Da V die direkte Summe der Eig(F, λj)ist, sind die Summanden in (∗∗∗) eindeutig bestimmt; wir haben
µlxj = G(xj) , also xj ∈ Eig(G, µl) .
Mit (∗∗) haben wir gezeigt:
V =r⊕l=1
k⊕j=1
(Eig(F, λj) ∩ Eig(G, µl)) .
Wir nehmen uns nun Basen in diesen direkten Summanden. Die Vektorendieser Basis sind dann Eigenvektoren sowohl von F als auch von G .
2
7.4 Potenzen eines Endomorphismus
Unser Ziel ist der Satz von Cayley-Hamilton . Dazu vorher:
Definition 7.4.1 : Sei V ein K−Vektorraum und F ∈ EndKV . Dann defi-
50

nieren wir rekursiv:
F 0 := idV , F n+1 := F n ◦ F fur n ∈ N0 ,
F n ist also die n−fache Hintereinanderausfuhrung von F .
7.4.2 Zur Motivation: Sei dimV = n ∈ N , B eine Basis von V und
A := MBB (F ) ,
dann liegt A im K−Vektorraum M(n×n,K), der die Dimension n2 hat. Dien2 + 1 Potenzen A0, . . . , An
2sind also linear abhangig, es gibt eine Gleichung
n2∑j=0
αj Aj = 0 mit αj ∈ K ,
in der nicht alle αj = 0 sind, anders ausgedruckt: es gibt ein Polynom
P (X) =n2∑j=0
αj ·Xj ∈ K[X] mit deg P (X) ≤ n2,
das 0 ergibt, wenn man fur die Unbestimmte X die Matrix A einsetzt: Aj
ist definiert, A0 = En . Statt A kann man ebenso gut F einsetzen, dennMB
B (F j) = Aj , es gilt also auch
P (F ) = 0 .
Die Sache ist nun: Man braucht gar nicht erst ein Polynom vom Grad n2, das0 ergibt, wenn man F bzw. A einsetzt, es gibt sogar ein Polynom vom Gradn , das das tut, es ist (wer hatte es gedacht?) das charakteristische PolynomPF (X).
Spezialfall 7.4.3 : Sei dimK V = n , F ∈EndKV diagonalisierbarmit paarweise verschiedenen Eigenwerten λ1, . . . , λk , und
Q(X) := (X − λ1) · . . . · (X − λk) .
Es gibt eine Basis aus Eigenvektoren von F zu V . Fasst man die Summandenaus je einem Eigenraum Eig (F, λj) zusammen, so erhalt man zu jedemv ∈ V eine Darstellung
v =k∑j=1
vj mit vj ∈ Eig(F, λj) .
51

Wir bilden nun Q(F )(v) und benutzen, dass man Potenzen von F vertau-schen kann, dann erhalten wir
Q(F )(v) =k∑j=1
Q(F )(vj)
=k∑j=1
(F−λ1 idV )◦. . .◦ (F − λj idV )◦. . .◦(F−λk idV )◦(F − λj idV )(vj)︸ ︷︷ ︸= 0
= 0 ,
wobei das bedeutet, dass man den darunter stehenden Faktor wegzu-lassen hat. Nun gilt
PF (X) = (−1)n · (X − λ1)r1 · . . . · (X − λk)rk
mit rj = µ(PF , λj) ∈ N , also gilt auch
PF (F )(v) = 0 fur alle v ∈ V , also
PF (F ) = 0 . 2
Bemerkung 7.4.4 : Fur diagonalisierbares F haben wir damit den Satz
von Cayley-Hamilton bewiesen, und sogar noch etwas mehr: Sei T (X) einTeiler von obigem Q(X) mit deg T (X) < degQ(X), dann kommt mindestenseiner der Faktoren X − λl , l ∈ k, nicht in T (X) vor. Sei etwa
T (X) = (X − λ1) · . . . · (X − λl) · . . . · (X − λk) ,
dann gilt fur einen Eigenvektor vl zu λl :
T (F )(vl) = (F − λ1 idV ) ◦ . . . ◦ (F − λl idV ) ◦ . . . ◦ (F − λk idV )(vl)
(λl − λ1) · . . . · (λl − λl) · . . . · (λl − λk) · vl 6= 0 ,
also T (F ) 6= 0. Wir kommen darauf im Zusammenhang mit dem “Minimal-polynom” zuruck.
2
- Fur nicht notwendig diagonalisierbares F werden wir erst mal etwas formal:
Definition 7.4.5 : a) Sei K ein Korper und V ein K−Vektorraum, dann ist
das “Einsetzen von F ∈ EndKV in ein Polynom”, d.h. die Abbildung
ΦF : K[X] −→ EndKV ,
52

P (X) =∞∑j=0
αjXj 7−→ P (F ) =
∞∑j=0
αjFj
ein Homomorphismus von Ringen und auch von K−Vektorraumen (wasnachzurechnen ware). Das Bild ist
K[F ] := { P (F ) | P ∈ K[X] }
=
{∞∑j=0
αjFj
∣∣∣∣∣ ∀ j ∈ N0 : αj ∈ K ∧ ∀′j ∈ N0 : αj = 0
},
und K[F ] ist ein kommutativer Unterring von (EndKV,+, ◦), mit Eins-element idV .b) Man kann das auch fur n × n−Matrizen statt fur Endomorphismen ma-chen: Sei n ∈ N , A ∈M(n× n,K), dann ist
K[A] :=
{∞∑j=0
αjAj
∣∣∣∣∣ ∀ j ∈ N0 : αj ∈ K ∧ ∀′ j ∈ N0 : αj = 0
}
ein kommutativer Unterring von (M(n× n,K),+, ·), mit EinselementEn .
(7.4.6) Satz von Cayley-Hamilton : Sei V ein endlichdimensionaler
K−Vektorraum, F ∈ EndKV und PF ∈ K[X] das charakteristische Polynomvon F . Dann ist
PF (F ) = 0 ∈ EndKV .
Fur Matrizen A ∈M(n× n,K) , n ∈ N , bedeutet das
PA(A) = 0 ∈M(n× n,K) .
(7.4.7) Vorsicht : a) Man muss hier aufpassen, was mit PA(A) gemeint
ist, sonst kommt man zu einem kurzen, aber unsinnigen, “Beweis”:
PA(X) = det(A−X · En) =⇒ PA(A) = det(A− A · En) = 0 ;
das ist schon deshalb unsinnig, weil hier die 0 ∈ K, nicht die0 ∈M(n× n,K), herauskommt. Mit PA(A) ist gemeint, dass man zunachstdas Polynom PA(X) ausrechnet und dann Potenzen von A einsetzt.b) Trotzdem muss man hier die Determinante einer Matrix bilden, derenEintrage Elemente aus K[A] sind. Das ist der entscheidende Grund, weshalbwir in §5 Determinanten von Matrizen aus M(n × n,R) betrachtet haben,wobei R ein kommutativer Ring war, nicht nur von Matrizen aus
53

M(n× n,K) , K ein Korper.
- Zum Beweis mussen wir noch etwas nachholen, was wir auch schon bei derFormel fur die inverse Matrix in §5 hatten definieren konnen:
Definition 7.4.8 : Sei R ein kommutativer Ring, n ∈ N , n ≥ 2 und
B = (bjk)(j,k)∈n×n ∈M(n× n,R). Dann heißt
B# :=((−1)j+k det B′kj
)(j,k)∈n×n ,
wobei B′kj die Matrix ist, die man aus B durch Streichen der k−ten Zeileund der j−ten Spalte erhalt, die zu B komplementare Matrix.
2
- Man beachte die Reihenfolge der Indizes: Es ist
B# = (cjk) mit cjk = (−1)j+k detB′kj ,
wir hatten das schon bei der Formel in Satz 5.3.4 fur die inverse Matrix, aberhier setzen wir nicht voraus, dass B invertierbar ist. Wie beim Beweis vonSatz 5.3.4 erhalt man aus dem Laplaceschen Entwicklungssatz die
Folgerung 7.4.9 : Fur jedes B ∈M(n× n,R) , n ≥ 2 gilt
B# ·B = B ·B# = (detB)En .
Bemerkung 7.4.10 : SeiK ein Korper, n ∈ N , n ≥ 2 und A ∈M(n×n,K).
SeiB := A−X En ∈M(n× n,K[X]),
dann gilt fur (b#jk) := B# : Jedes b#jk ist ein Polynom in X vom Grad ≤ n−1oder 0 .
2
(7.4.11) Beweis des Satzes von Cayley-Hamilton : Es genugt, den Satz
fur Matrizen A ∈M(n× n,K) zu beweisen, denn fur F ∈ EndKV istPF (F ) = PA(A) , wobei A die Matrix von F bezuglich irgendeiner Basis vonV ist. - Sei
n = 1, also A = (a11) , dann ist PA(X) = a11 −X , und
PA(A) = a11 · A0 − A1 = a11E1 − (a11) = 0.
Sei nunn ≥ 2, dann setzen wir
B(X) := t(A−X En) ∈M(n× n,K[X]) .
54

In der Diagonale von B(X) stehen Polynome vom Grad 1 , außerhalb Ele-mente aus K . Es ist(1) detB(X) = PA(X) ∈ K[X] .Nun setzen wir A statt X in B(X) ein, dann mussen wir an die Konstantenden Faktor En setzen und erhalten
B(A) =
a11En − A a21En . . . an1Ena12En a22En − A . . . an2En
......
. . ....
a1nEn a2nEn . . . annEn − A
∈M(n× n,K[A]) .
Wir konnen diese Matrix multiplizieren mit einem Spaltenvektor, dessenKomponenten Spaltenvektoren aus Kn sind. Insbesondere gilt fur die (alsSpaltenvektoren geschriebenen) kanonischen Basisvektoren e1, . . . , en vonKn :
(2) B(A) ·
e1...en
=
a11e1 − A · e1 + a21e2 + . . .+ an1en...
a1ne1 + . . .+ an−1,nen−1 + annen − A · en
=
0...0
,
wegen A · ej = aj =n∑k=1
akjek . Sei nun B(X)# die in 7.4.8 definierte
komplementare Matrix zu B(X), dann ist B(X)# ∈ M(n × n,K[X]), unddie Eintrage von B(X)# sind Polynome in X vom Grad ≤ n−1 oder 0. NachFolgerung 7.4.9 gilt
B(X)#·B(X) = det(B(X))·En(1)= PA(X)·En =
PA(X) . . . 0. . .
0 . . . PA(X)
.
Setzen wir nun A fur X ein, und multiplizieren mit
e1...en
∈ (Kn)n , so
folgt PA(A) 0. . .
0 PA(A)
· e1
...en
= B(A)#·B(A)·
e1...en
(2)=
0...0
,
55

also∀ j ∈ n : PA(A) · ej = 0 .
PA(A) ist also eine Matrix, in der alle Spalten gleich 0 ∈ Kn sind, also
PA(A) = 0 .
2
7.5 Das Minimalpolynom einer Matrix
Bemerkung 7.5.1 : Sei n ∈ N , K ein Korper, A ∈M(n×n,K), und PA(X)
das charakteristische Polynom von A , dann sagte Satz 7.4.6:
PA(A) = 0 .
Aber: Sei etwa
A :=
2 0 00 2 00 0 3
∈M(3× 3,R) ,
dann ist PA(X) = (2 − X)2 · (3 − X) , degPA(X) = 3 , aber A ist auchschon “Nullstelle” des Polynoms
(2−X) · (3−X) vom Grad 2 .
PA(X) ist also nicht notwendig das Polynom kleinsten Grades, das 0 ergibt,wenn man A einsetzt. Dasselbe kann man fur ein F ∈ EndKV fragen.
Bemerkung 7.5.2 : Sei V ein K−Vektorraum, dimK V = n ∈ N, und
F ∈ EndKV . Dann hatten wir in 7.4.5 definiert:
ΦF : K[X] −→ EndKV ,
ΦF (P (X)) := P (F ) ,
undker ΦF = { P (X) ∈ K[X] | P (F ) = 0 ∈ EndKV }
ist nach Satz 3.1.10 ein Ideal im Ring K[X]. Wir hatten in Satz 3.3.16 be-wiesen, dass K[X] ein euklidischer Ring ist (das war Beispiel (3.3.18)(2) ),und aus Satz 3.3.19 folgt dann: Es gibt ein m(X) ∈ K[X] mit
ker ΦF = (m(X)) = { f(X) ·m(X) | f(X) ∈ K[X] } .
56

Nach dem Satz von Cayley-Hamilton besteht ker Φ nicht nur aus demNullpolynom, denn PF (X) ∈ ker Φ und degPF (X) = n. Wir konnen alsodie Gradformel 3.3.12 anwenden und erhalten dann fur jedes Polynomg(X) ∈ ker Φ \ {0}:
deg g(X) ≥ degm(X) .
Das Polynom m(X) mit (m(X)) = ker Φ ist nicht eindeutig bestimmt, esgilt
(m(X)) = (λ ·m(X)) fur jedes λ ∈ K \ {0} .
Wir konnen λ so wahlen, dass wir ein Polynom MF (X) mit Leitkoeffizient 1erhalten, das dann eindeutig bestimmt ist. Fassen wir das noch einmal zu-sammen:
Satz und Definition 7.5.3 : Sei V ein K−Vektorraum,
dimK V = n ∈ N, und F ∈ EndKV . Dann haben wir ein eindeutig bestimm-tes Polynom MF (X) ∈ K[X] \ {0} mit den folgenden Eigenschaften :(1) MF (F ) = 0 .(2) MF (X)ist normiert.(3) Zu jedem P (X) ∈ K[X] mit P (F ) = 0 gibt es ein Q(X) ∈ K[X] mit
P (X) = MF (X) ·Q(X) .
MF (X) heißt das Minimalpolynom von F .
Sei A ∈M(n× n,K), dann haben wir
fA : Rn −→ Rn , fA(x) := A · x ,
dann nennen wir MA(X) := MfA(X) das Minimalpolynom der MatrixA .
2
Aus der Definition des Minimalpolynoms und dem Satz vonCayley-Hamilton erhalten wir die
Folgerung 7.5.4 : Sei K ein Korper, n ∈ N , A ∈M(n× n,K). Dann gilt
fur das Minimalpolynom MA von A :MA teilt PA, d.h. ∃Q(X) ∈ K[X] : PA(X) = Q(X) ·MA(X) .
Fur ein F ∈ EndKV , dimK V = n ∈ N, bedeutet das:MF teilt PF .
2
57

Beispiel 7.5.5 : Sei dimK V = n , F ∈ EndKV diagonalisierbar, mit k ver-
schiedenen Eigenwerten λ1, . . . , λk , dann haben wir in 7.4.3 gesehen: Fur
P (X) := (X − λ1) · . . . · (X − λk)
gilt P (F ) = 0, und nach 7.4.4 gilt fur jeden Teiler T (X) von P (X) mit
deg T (X) < degP (X) : T (F ) 6= 0 .
Also ist P (X) das Minimalpolynom von F :
MF (X) = (X − λ1) · . . . · (X − λk) .
Aber nur, wenn k = n ist, also wenn alle Eigenwerte die Vielfachheit 1haben, ist das auch das charakteristische Polynom. Es kann also durchaussein (wie im Beispiel aus 7.5.1), dass MF (X) ein echter Teiler von PF (X) ist.Fur diagonalisierbares F wissen wir also, dass in MF (X) alle Linearfaktorenvon PF (X) mindestens einmal vorkommen. Fur beliebiges F folgt das aus
Satz 7.5.6 : Sei K ein Korper, V ein n−dimensionaler K−Vektorraum,
F ∈EndK(V ) . Dann gilt:
PF (X) teilt MF (X)n .
Beweis : Es genugt, den Satz statt fur F fur eine Matrix A ∈M(n×n,K)zu beweisen. Es ist
MA(X) = Xm +m∑j=1
αjXm−j ∈ K[X]
mit m ∈ N und αj ∈ K fur j ∈ m. Fur k ∈ {0, 1, . . . ,m− 1} sei
Bk := Ak +k∑j=1
αjAk−j , und sei
B(X) :=m∑k=1
Bk−1Xm−k ∈ (K[A])[X] .
Dann gilt fur alle k ∈ m− 1 :
(1) Bk−A ·Bk−1 = Ak +k∑j=1
αjAk−j −Ak −
k−1∑j=1
αjAk−j = αkEn ,
58

und
(2) A ·Bm−1 = A · (Am−1 +m−1∑j=1
αjAm−1−j)
= Am +m−1∑j=1
αjAm−j = MA(A)− αmEn = −αmEn .
Mit der Definition von B(X) folgt
(A−XEn) ·B(X) = A ·B(X)−XB(X)
=m∑k=1
A ·Bk−1Xm−k −
m∑k=1
Bk−1Xm+1−k ,
man beachte hierbei, dass man stets in dem kommutativen Ring (K[A])[X]rechnet, denn auch die Matrizen Bk gehoren zu K[A] , also
(A−X · En) ·B(X) =m∑k=1
A ·Bk−1Xm−k −
m−1∑k=0
BkXm−k
=m−1∑k=1
(A ·Bk−1 −Bk)Xm−k + A ·Bm−1 −B0X
m
(1),(2)= −
m−1∑k=1
αkEn ·Xm−k − αmEn − EnXm
= −MA(X) · En ,
also nach dem Determinanten-Multiplikationssatz 5.3.6 :
det(A−XEn) · detB(X) = (−MA(X))n detEn ,
PA(X) · detB(X) = (−1)n (MA(X))n .
2
7.6 Die Jordansche Normalform
Vorbemerkung 7.6.1: Sei K ein Korper, n ∈ N , V ein n−dimensionaler
K−Vektorraum und F ∈ EndKV . Dann gilt nach Satz 7.3.5:F ist diagonalisierbar ⇐⇒
a) das charakteristische Polynom PF ist ein Produkt vonLinearfaktoren , und
59

b) fur alle Eigenwerte λ von F gilt dim Eig (F, λ) = µ(PF , λ) .
Auf welche (einfachere) Form kann man die Matrix von F bringen, wenn nurdie Bedingung a) erfullt ist ? Das interessiert uns insbesondere deshalb, weilin C[X] nach dem Fundamentalsatz der Algebra (3.5.13) jedes Polynom einProdukt von Linearfaktoren ist, weil also a) fur K = C in jedem Fall gilt.Was macht man also, wenn fur einen Eigenwert λ von F
dim Eig(F, λ) < µ(PF , λ)
gilt? Man muss dann den Raum Eig(F, λ) vergroßern :
Definition 7.6.2 : Sei K ein Korper, n ∈ N , V ein n−dimensionaler
K−Vektorraum, F ∈ EndKV und λ ∈ K ein Eigenwert von F mit
µ(PF , λ) = r ,
r sei also die Vielfachheit von λ. Dann nennen wir
Hau (F, λ) := ker (F − λ idV )r
den Hauptraum von F zum Eigenwert λ .
2
Fur r ≥ 1 gilt
ker (F − λ idV ) ⊂ ker (F − λ idV )r , also
Eig(F, λ) ⊂ Hau(F, λ) .
Um den entscheidenden Satz zu formulieren, brauchen wir die
Definition 7.6.3 : Sei V ein K−Vektorraum, G ∈ EndKV . G heißt
nilpotent, wenn es ein m ∈ N gibt mit
Gm = 0 .
Entsprechend: Sei n ∈ N und A ∈ M(n× n,K) . A heißt nilpotent , wennes ein m ∈ N mit Am = 0 gibt.
2
Unser Ziel ist der Beweis von
Satz 7.6.4 : Sei n ∈ N , V ein K−Vektorraum mit dimK V = n ,
60

F ∈ EndKV , und PF sei ein Produkt von Linearfaktoren,
PF (X) = (−1)n(X − λ1)r1 · . . . · (X − λk)rk
mit paarweise verschiedenen λ1, . . . , λk ∈ K und r1, . . . , rk ∈ N. Fur j ∈ ksei
Vj := Hau(F, λj)
der Hauptraum von F zum Eigenwert λj. Dann gilt(1) F (Vj) ⊂ Vj und dimVj = rj fur alle j ∈ k ,(2) V = V1 ⊕ . . .⊕ Vk ,(3) es gibt FD, FN ∈ EndKV mit F = FD + FN und
a) FD ist diagonalisierbar,b) FN ist nilpotent,c) FD ◦ FN = FN ◦ FD .
2
Wir brauchen einige Vorbereitungen:
Bemerkung 7.6.5 : Sei V ein endlichdimensionaler K−Vektorraum und
G ∈ EndKV , dann gilt fur die Kerne und Bilder der Potenzen von G offenbar
{0} ⊂ ker G ⊂ ker G2 ⊂ . . . ⊂ ker Gl ,
V ⊃ G(V ) ⊃ G2(V ) ⊃ . . . ⊃ Gl(V )
fur alle l ∈ N, und nach der Dimensionsformel 4.3.13 :
dim ker Gl + dimGl(V ) = dimV .
Bei den angegebenen Ketten kann nicht stets⊂6= stehen, da die Dimension
von V endlich ist, es gibt also ein l ∈ N0 mit
ker Gl = ker Gl+1 .
Damit erhalt man das
(7.6.6) Lemma von Fitting : Sei n ∈ N , V ein n−dimensionaler
K−Vektorraum, G ∈ EndKV . Wir setzen
d := min{l ∈ N0 | ker Gl = ker Gl+1
},
U := ker Gd , W := Gd(V ) .
61

Dann gilt:(1) d = min
{l ∈ N0 | Gl(V ) = Gl+1(V )
}(2) ∀ j ∈ N0 :
(ker Gd+j = ker Gd ∧Gd+j(V ) = Gd(V )
).
(3) G(U) ⊂ U ∧ G(W ) ⊂ W .
(4)(G∣∣U
)d= 0 ∧ G
∣∣W
ist ein Isomorphismus.
(5) Fur das Minimalpolynom von G∣∣U
gilt: MG
∣∣U
(X) = Xd .
(6) V = U ⊕W , r := dimU ≥ d , dimW = n− r ,und es gibt eine Basis B von V , so dass
MBB (G) =
N | 0−− + −−
0 | C
ist mit C ∈ GL(n− r,K)
und nilpotentem N ∈M(r × r,K).Beweis : (0) Wir haben fur jedes l ∈ N0 :
ker Gl ⊂ VGl
−→ Gl(V )∩
∣∣∣∣ ∪ker Gl+1 ⊂ V
Gl+1
−→ Gl+1(V )
Wenden wir die Dimensionsformel 4.3.13 an auf Glund Gl+1, so folgt:
Gl+1(V ) = Gl(V )
⇐⇒ dimGl+1(V ) = dimGl(V )⇐⇒ dim ker Gl+1 = dim ker Gl
⇐⇒ ker Gl+1 = ker Gl
Damit folgt schon mal (1).(2) folgt durch Induktion nach j : Fur j = 0 ist (2) trivial. Fur beliebigesj ∈ N0 gilt, wenn (2) fur j richtig ist:
x ∈ ker Gd+j+1
=⇒ Gd+1(Gj(x)) = 0=⇒ Gj(x) ∈ ker Gd+1 = ker Gd
=⇒ Gd(Gj(x)) = 0=⇒ x ∈ ker Gd+j ,
und ker Gd+j ⊂ ker Gd+j+1 sowieso, also :
ker Gd+j+1 = ker Gd+j (IV)= ker Gd
62

und nach (0) auch
Gd+j+1(V ) = Gd+j(V )(IV)= Gd(V ) .
(3) Fur x ∈ U = ker Gd gilt Gd(x) = 0 , also
Gd(G(x)) = Gd+1(x) = G(Gd(x)) = G(0) = 0 , also G(x) ∈ U .
Fur y ∈ Gd(V ) gilt G(y) ∈ Gd+1(V ) = Gd(V ) .
(4) Nach (3) ist G∣∣U∈ EndKU , und G
∣∣W∈ EndKW . Fur x ∈ U = ker Gd
gilt Gd(x) = 0 , also(G∣∣U
)d(x) = 0.
Aus Gd+1(V ) = Gd(V ) folgt, dass G∣∣W
: W −→ W surjektiv, also nachder Dimensionsformel ein Isomorphismus, ist.
(5) Aus (4) folgt, dass Xd ein Polynom ist, das 0 ∈ EndKU ergibt, wenn manG∣∣U
einsetzt. Es gibt keinen Teiler kleineren Grades von Xd, der 0 ergibt,
wenn man G∣∣U
einsetzt: Fur d = 0 ist das klar. Anderenfalls nehmen wir an,(G∣∣U
)d−1= 0
dann ware
Gd−1(x) = 0 fur x ∈ U = ker Gd , also
x ∈ ker Gd−1 , also ker Gd ⊂ ker Gd−1 ,
und ker Gd−1 ⊂ ker Gd sowieso, also ker Gd = ker Gd−1 , Widerspruch zurDefinition von d . Also ist
MG
∣∣U
(X) = Xd .
(6) Sei v ∈ V , dann ist Gd(v) ∈ Gd(V )(2)= G2d(V ), also
∃ v′ ∈ V : Gd(v) = G2d(v′) .
Es ist v = v −Gd(v′) +Gd(v′) mit
Gd(v −Gd(v′)) = Gd(v)−G2d(v′) = 0 , also
u := v −Gd(v′) ∈ ker Gd , und
v = u+Gd(v′) ∈ U +W ,
63

und wenn u ∈ U ∩W ist, gilt: ∃w ∈ V : u = Gd(w) , also
0 = Gd(u) = G2d(w) , w ∈ ker G2d (2)= ker Gd ,
also u = Gd(w) = 0 . Also haben wir
V = U ⊕W .
Sei r = dimU , dann haben wir also Basen
(b1, . . . , br) von U und (br+1, . . . , bn) von W , so dass
B := (b1, . . . , br, br+1, . . . , bn)
eine Basis von V ist, bezuglich der MBB (F ) die gewunschte Form hat.
2
Folgerung 7.6.7 : Sei dimK V = n ∈ N und F ∈ EndKV .
Dann sind folgende Aussagen gleichbedeutend:(i) F ist nilpotent.(ii) Es gibt ein k mit 1 ≤ k ≤ n und F k = 0.(iii) Es gibt eine Basis B von V , so dass MB
B (F ) eine echte obereDreiecksmatrix 0 ∗
. . .
0 0
ist.
(iv) PF (X) = (−1)nXn .Beweis : (i) =⇒ (ii) : Ist F nilpotent, so haben wir ein m ∈ N mit Fm = 0,also
V = ker Fm = ker Fm+1 . Fur
k := min{l ∈ N0 | ker F l = ker F l+1
}gilt dann k ≤ m, und nach 7.6.6 (2)
ker Fm = ker F k , also ker F k = V , F k = 0 ,
und k ≤ n nach (7.6.6)(6) .
(ii) =⇒ (iii) : Mit d := min{l ∈ N | ker F l = V
}haben wir
{0}⊂6= ker F
⊂6= ker F 2
⊂6= . . .
⊂6= ker F d = V ,
64

wobei wir (7.6.6)(2) benutzt haben: Hatten wir ein s ≤ d− 1 mit
ker F s = ker F s+1 , so ware schon ker F s = ker F d = V .
Nach dem Basiserganzungssatz erhalten wir eine Basis
B := (b1, . . . , bj1 , . . . , bj2 , . . . , bjd) von V mit
b1, . . . , bj1 ∈ ker F ,bj1+1, . . . , bj2 ∈ ker F 2 \ ker F ,
...bjd−1+1, . . . , bjd ∈ ker F d \ ker F d−1.
WegenF ( ker F l) ⊂ ker F l−1 fur l ∈ d
(insbesondere: F ( ker F ) ⊂ ker idV = {0}) gilt dann
F (bk) ∈ span(b1, . . . , bk−1) fur alle k ∈ n ,
und das heißt: MBB (F ) ist eine echte obere Dreiecksmatrix .
(iii) =⇒ (iv) ist klar: Fur eine echte obere Dreiecksmatrix A ist
PA(X) = det
−X ∗. . .
0 −X
= (−1)nXn .
(iv) =⇒ (i) : Aus PF (X) = (−1)nXn folgt nach Cayley-Hamilton :
(−1)nF n = 0 ,
also ist F nilpotent.
2
Damit kann man das Lemma von Fitting noch etwas verbessern:
(7.6.8) Zusatz zum Lemma von Fitting : Sei V ein K−Vektorraum,
dimK V = n ∈ N und G ∈ EndKV . Sei
d = min{l ∈ N0 | ker Gl = ker Gl+1
},
U := ker Gd und r := dimU , dann gilt
65

(7) r = µ(PG, 0) ,bzw. r = 0, falls 0 kein Eigenwert von G ist.Beweis : Nach (6) aus (7.6.6) haben wir eine Basis B von V , so dass
MBB (G) =
N | 0−− + −−
0 | C
ist mit C ∈ GL(n− r,K)
und nilpotentem N ∈M(r × r,K).Mit der Determinanten-Regel (D9) folgt
PG(X) = PG
∣∣U
(X) · PG
∣∣W
(X)
fur W := Gd(V ). Nach 7.6.7 gilt
PG
∣∣U
(X) = (−1)rXr ,
also PG(X) = Xr ·Q(X) mit Q(X) = ±PG
∣∣W
(X) , Da G∣∣W
nach (7.6.6)(4)
ein Isomorphismus ist, hat G∣∣W
nicht 0 als Eigenwert, also: X teilt nichtQ(X) , Xr ist die hochste Potenz von X, die PG(X) teilt, also
r = µ(PG, 0) .
2
Bemerkung 7.6.9 : Machen wir uns noch einmal klar, was Lemma 7.6.6
und Zusatz 7.6.8 fur die in 7.6.2 definierten Hauptraume bedeuten:Sei dimK V = n , F ∈ EndKV und
PF (X) = (−1)n (X − λ1)r1 · . . . · (X − λk)rk mit r1, . . . , rk ∈ N ,
dann war fur j ∈ k :
Hau(F, λj) = ker (F − λj idV )rj ,
fur Gj := F − λj idV also
rj = dim ker Gdjj nach 7.6.8(7), wobei
dj = min{l ∈ N0 | ker Gl
j = ker Gl+1j
}war, und
dj ≤ dim ker Gdjj = rj nach 7.6.6(6) ,
66

ker Gdjj = ker G
rjj nach 7.6.6(2) , also
dim Hau(F, λj) = rj .
Damit fuhren wir nun den
(7.6.10) Beweis von Satz 7.6.4 : (1),(2) Sei n := dimk V. Wir haben
(∗) PF (X) = (−1)n(X−λ1)r1·. . .·(X−λk)rk
mit r1, . . . , rk ∈ N und k ∈ N0, wir machen Induktion nach k :
Induktionsanfang: Sei k = 1 , also
PF (X) = (λ−X)r mit λ ∈ K , r ∈ N . Wir setzen
G := F − λ idV .
In (7.6.6) hatten wir Untervektorraume U,W von V definiert mit
V = U ⊕W mit G(U) ⊂ U und G(W ) ⊂ W ,
und dimU = µ(PG, 0) nach Zusatz 7.6.8. Wegen
PF (X) = PG(X − λ) ist µ(PG, 0) = µ(PF , λ) = r ,
also dimU = r . Im Beweis von 7.6.8 haben wir gesehen:
PG(X) = PG
∣∣U
(X) ·Q(X)
mit PG
∣∣U
(X) = (−1)rXr und dem Polynom Q(X) = PG
∣∣W
(X) , das von
X nicht geteilt wird. Setzen wir wieder F statt G ein, so folgt
(λ−X)r = (−1)r(X − λ)r ·Q(X − λ) ,
woraus folgt: degQ(X) = 0 , also dimW = 0. Also ist
V = U = ker (F − λ idV )d(**)= ker (F − λ idV )r = Hau(F, λ) ,
wobei d in (7.6.6) definiert war, und wir bei (∗∗) noch (7.6.6)(2) benutzthaben.
Induktionsschluss: Sei k ∈ N , k ≥ 2 , und fur k − 1 sei der Satz richtig. Seinun PF (X) das in (∗) angegebene Polynom. Sei
G := F − λ1 idV ,
67

so ist die Matrix von G (bzgl. irgendeiner Basis von V ) einfach die Matrixvon F , bei der in der Diagonale uberall λ1 abgezogen wird,
PG(X) = PF (X + λ1) , also
µ(PG, 0) = µ(PF , λ1) = r1 .
Nach 7.6.9 haben wir
V = Hau(F, λ1)⊕W1 .
G bildet Hau(F, λ1) und W1 in sich selbst ab, also gilt fur F = G + λ1 idVauch
F (Hau(F, λ1)) ⊂ Hau(F, λ1) , F (W1) ⊂ W1 .
Bei passender Wahl der Basis B von V , also
B = (v1, , . . . , vr1 , vr1+1, . . . , vn)
mit v1, . . . , vr1 ∈ Hau(F, λ1) , vr1+1, . . . , vn ∈ W1 ,
und wenn man die Matrix MBB (F ) ansieht, erhalt man
PF
∣∣W
(X) = (−1)n−r1(X − λ2)r2 · . . . · (X − λk)rk .
F∣∣W
hat also nur noch k − 1 Eigenwerte, und dafur konnen wir die Indukti-onsvoraussetzung anwenden.
(3) Auf den Vj := Hau(F, λj) ist
Gj = (F − λj idV )∣∣Vj
nilpotent nach Definition von Hau(F, λj) und nach (7.6.6)(4), denn
Gdjj = 0 mit dj ≤ rj .
Nach 7.6.7 hat man zu Gj bezuglich einer passenden Basis von Vj eine echteobere Dreiecksmatrix
Nj ∈M(rj × rj, K) ,
und die Matrix von F∣∣Vj
ist dann
λjEj +Nj .
68

Insgesamt erhalt man dann fur V eine Basis B, fur die
MBB (F ) = D +N mit
D :=
λ1E1 | 0−− +
.. .
+ −−0 | λkEk
undN :=
N1 | 0−− +
.. .
+ −−0 | Nk
gilt. D ist eine Diagonalmatrix, N ist nilpotent, und es gilt
D ·N = N ·D =
λ1N1 | 0−−− +
.. .
+ −−−0 | λkNk
.
2
Bemerkung 7.6.11 : Man kann nicht nur beweisen, dass es eine Basis B
von V gibt, bezuglich der
MBB (F ) =
λ1E1 +N1 | 0−−− +
.. .
+ −−−0 | λkEk +Nk
ist, mit echten oberen Dreiecksmatrizen Nj , sondern man kann auchnoch die Basis so wahlen, dass die Nj in kleinere Kastchen der Form
Js :=
0 1 0
0 1
0. . .. . . 1
0
∈M(s× s,K) , s ∈ N
zerfallen; wie gesagt: Jedes Nj in evtl. mehrere solche Kastchen mit s Zeilenund Spalten. s = 1 bedeutet dabei: Js = (0). Sei F ∈ EndKV ,
69

r1 = µ(PF , λ1), dann konnen also fur λ1E1 +N1 die r1 × r1−Matrizenλ1 1 0
0 λ1. . .. . . . . .
. . . 10 λ1
,
λ1 0 0
0 λ1. . .. . . . . .
. . . 00 λ1
,
vorkommen, aber oberhalb der Diagonale auch alle Kombinationen von 0 und1. - Wir folgen nun dem Beweis von [Fi] :
(7.6.12) Konstruktion der Jordanschen Normalform
Sei V ein K−Vektorraum, dimK V = n ∈ N , F ∈ EndK V undPF zerfalle in Linearfaktoren
PF (X) = (−1)n (X − λ1)r1 · . . . · (X − λk)rk mit r1, . . . rk ∈ N ,
λ1, . . . , λk ∈ K . Sei
Vj := Hau(F, λj) := ker (F − λj idV )rj fur j ∈ k .
Dann haben wir nach Satz 7.6.4 (2) :
V = V1 ⊕ . . .⊕ Vk .
Es gibt nun eine Basis von Vj, so dass F |Vj bezuglich dieser Basis von Vj dieMatrix
λjEj +Nj
hat, mit einer echten oberen DreiecksmatrixNj (siehe etwa Teil (3) des Bewei-ses von Satz 7.6.4). Nj ist dann die Matrix des nilpotenten Endomorphismus
G|Vj := F |Vj − λj idVj ,
und wir mussen nur noch zeigen, dass man bezuglich einer passenden Basisvon Vj fur G|Vj eine Matrix erhalt, die in der Diagonale Jordan-Kastchen der
70

in Bemerkung 7.6.11 angegebenen Form hat :
(7.6.13) Konstruktion der Jordan-Kastchen auf den Hauptraumen
Bei festem j lassen wir den Index j weg:SeiG := F−λ idV , Ul := ker Gl fur l ≥ 0 und d := min
{l ∈ N0 | Gl = 0
},
dann haben wir die Kette
{0} = U0 ⊂ U1 ⊂ . . . ⊂ Ud−1 ⊂ Ud = V .
Da d minimal ist, sind alle Inklusionen echt. Zunachst zwei Vorbemerkungen:
(1) Fur 1 ≤ l ≤ d ist−1G (Ul−1) = Ul, insbesondere G(Ul) ⊂ Ul−1 .
Das folgt aus
v ∈−1G (Ul−1)⇐⇒ G(v) ∈ Ul−1 ⇐⇒ 0 = Gl−1(G(v)) = Gl(v)⇐⇒ v ∈ Ul .
Anwendung von G auf die Gleichung Ul =−1G (Ul−1) ergibt
G(Ul) = G(−1G (Ul−1) ⊂ Ul−1 ,
und hier steht i.A. nur ⊂ , nicht = .
(2) Ist l ∈ N und W ein Untervektorraum von V mit W ∩ Ul = {0} , soist G
∣∣W
injektiv.Denn wegen ker G = U1 ⊂ Ul gilt W ∩ ker G = {0}.
Damit konstruieren wir nun rekursiv eine direkte Summenzerlegung vonV = Hau(F, λ): Zunachst wahlen wir ein Wd ⊂ V mit
V = Ud = Ud−1 ⊕Wd ,
etwa, indem wir eine Basis von Ud−1 suchen, sie zu einer Basis von V erganzenund den von den neuen Basiselementen aufgespannten Raum als Wd nehmen.Aus (1) folgt G(Wd) ⊂ Ud und
G(Wd) ∩ Ud−2 = {0} ,
denn sei y ∈ Wd und G(y) ∈ Ud−2, dann ist Gd−1(y) = 0 , also y ∈ Ud−1 ,und Ud−1 ∩Wd = {0}. Also gibt es eine Zerlegung
Ud−1 = Ud−2 ⊕Wd−1 mit G(Wd) ⊂ Wd−1 .
71

Die Iteration dieses Verfahrens ergibt folgendes Schema, wobei jeder ↓ eineAnwendung von G zeigt:
Ud↓
Ud−1 ⊕ Wd
↓ ↓Ud−2 ⊕ Wd−1 ⊕ Wd
↓ ↓ ↓...
......
U1 ⊕ W2 ⊕ W3 ⊕ . . . ⊕ Wd
↓ ↓ ↓ ↓U0 ⊕ W1 ⊕ W2 ⊕ . . . ⊕ Wd−1 ⊕ Wd
Jede Zeile ist dabei eine Zerlegung von V . Wegen U0 = {0} gilt insbesondere
V = W1 ⊕W2 ⊕ . . .⊕Wd .
Wegen (2) sind die Restriktionen von G in der Kette
Wd −→ Wd−1 −→ . . . −→ W1
injektiv. Daher konnen wir, beginnend bei Wd, durch schrittweise Erganzungder Basen aller Wl dann insgesamt eine Basis von V nach folgendem Schemaerhalten:
w(d)1 , . . . , w
(d)sd ,
G(w(d)1 ), . . . , G(w
(d)sd ), w
(d−1)1 , . . . , w
(d−1)sd−1 ,
. . . . . . . . .
Gd−1(w(d)1 ), . . . , Gd−1(w
(d)sd ), Gd−2(w
(d−1)1 ), . . . , Gd−2(w
(d−1)sd−1 ), . . . , w
(1)1 , . . . , w
(1)s1
Diese Basiselemente ordnet man nun so an: Man nimmt die 1.Spalte die-ser Tabelle, von unten nach oben, dann die 2.Spalte, von unten nach oben,bis zur letzten Spalte. Es gilt wegen w
(d)1 ∈ ker Gd = Hau(F, λ) , also
F (Gd−1(w(d)1 )) = λGd−1(w
(d)1 ) :
G(Gd−1(w(d)1 )) = Gd(w
(d)1 ) = 0, also F (Gd−1(wd))) = λGd−1(w(d)) ,
G(Gd−2(w(d)1 )) = Gd−1(w
(d)1 ), also F (Gd−2(w
(d)1 )) = Gd−1(w
(d)1 )+λGd−2(w
(d)1 ) ,
. . .
G(G(w(d)1 )) = G2(w
(d)1 ), also F (G(w
(d)1 )) = G2(w
(d)1 ) + λG(w
(d)1 ) ,
72

G(w(d)1 ) = G(w
(d)1 ), also F (w
(d)1 ) = G(w
(d)1 ) + λw
(d)1 .
Bezuglich dieser Basis von Hau (F, λ) hat F∣∣Hau(F,λ)
die Matrix
λ 1 |λ
. . . | 0
. . . 1 |λ | 0
−− −− −− −− +.. .
0. . . 0
+ −−| λ
d Zeilen
1 Zeile ,
wobei der 1. “Jordan-Block” mit d Zeilen und Spalten genau sd−mal vor-kommt, . . . , der letzte “Jordan-Block” mit 1 Zeile und Spalte genau s1−mal.Ist nun V = Kn und F (x) = A · x , so schreibt man sich die Vektoren ausder Basis B , die aus allen diesen Basisvektoren der Vj besteht, nacheinanderfur j = 1, . . . , k , als Spalten in eine Matrix T−1 . Die Matrix
B := T · A · T−1
heißt dann die Jordansche Normalform von A .
2
Wir wollen uns das nochmal als konkrete Handlungsanweisung aufschreiben:
(7.6.14) Praktisches Verfahren zur Konstruktion der Jordan-Basis
Sei V ein K−Vektorraum, dimK V = n ∈ N , F ∈ EndK V undPF zerfalle in Linearfaktoren
PF (X) = (−1)n (X − λ1)r1 · . . . · (X − λk)rk mit r1, . . . rk ∈ N ,
λ1, . . . , λk ∈ K . Sei
Vj := Hau(F, λj) := ker (F − λj idV )rj fur j ∈ k .
Fur jedes j ∈ k machen wir nun zwei Schritte, wobei wir hier bei festem jden Index j weglassen :1.Schritt: Konstruktion einer Basis von Hau(F, λ): Wir haben
{0}⊂6= ker (F − λ idV )
⊂6= . . .
⊂6= ker (F − λ idV )d = Hau(F, λ)
73

mit einem d ≤ r . Wir suchen Basisvektoren
b1, . . . , bl1 von ker (F − λ idV ) , erganzen sie durch
bl1+1, . . . , bl2 ∈ ker (F − λ idV )2 \ ker (F − λ idV )zu einer Basis von ker (F − λ idV )2 ,
. . .
und erganzen schließlich die Basis
(b1, . . . , bld−1) von ker (F − λ idV )d−1
durch Vektoren bld−1+1, . . . , bld ∈ ker (F − λ idV )d \ ker (F − λ idV )d−1 zu
einer Basis (b1, . . . , bld−1, . . . , bld) von Hau(F, λ) .
2.Schritt: Verbesserung der Basis von Hau(F, λ):
Die zuletzt gefundenen Basisvektoren aus ker (F−λ idV )d\ ker (F−λ idV )d−1
nennen wirw
(d)1 , . . . , w(d)
sd,
und wenden darauf
G := F − λ idV an, dann liegen
G(w(d)1 ), . . . , G(w(d)
sd) in ker Gd−1 ,
sind dort auch linear unabhangig (Beweis siehe 7.6.13) , man nimmt sie alsneue Basisvektoren, ersetzt dadurch genau so viele der Basisvektoren
bld−2+1, . . . , bld−1aus ker Gd−1 \ ker Gd−2
und erhalt dadurch Basisvektoren
G(w(d)1 ), . . . , G(w(d)
sd), w
(d−1)1 , . . . , w(d−1)
sd−1aus ker Gd−1 \ ker Gd−2 .
Wiederum wenden wir darauf G an. Nach d Schritten erhalten wir eineBasis von Hau(F, λ) der Form
w(d)1 , . . . , w
(d)sd ,
G(w(d)1 ), . . . , G(w
(d)sd ), w
(d−1)1 , . . . , w
(d−1)sd−1 ,
. . . . . . . . .
Gd−1(w(d)1 ), . . . , Gd−1(w
(d)sd ), Gd−2(w
(d−1)1 ), . . . , Gd−2(w
(d−1)sd−1 ), . . . , w
(1)1 , . . . , w
(1)s1
Diese Basiselemente ordnet man nun so an: Man nimmt die 1.Spalte die-ser Tabelle, von unten nach oben, dann die 2.Spalte, von unten nach oben,
74

bis zur letzten Spalte. Es gilt wegen w(d)1 ∈ ker Gd = Hau(F, λ) , also
F (Gd−1(w(d)1 )) = λGd−1(w
(d)1 ) :
G(Gd−1(w(d)1 )) = Gd(w
(d)1 ) = 0, also F (Gd−1(wd))) = λGd−1(w(d)) ,
G(Gd−2(w(d)1 )) = Gd−1(w
(d)1 ), also F (Gd−2(w
(d)1 )) = Gd−1(w
(d)1 )+λGd−2(w
(d)1 ) ,
. . .
G(G(w(d)1 )) = G2(w
(d)1 ), also F (G(w
(d)1 )) = G2(w
(d)1 ) + λG(w
(d)1 ) ,
G(w(d)1 ) = G(w
(d)1 ), also F (w
(d)1 ) = G(w
(d)1 ) + λw
(d)1 .
Bezuglich dieser Basis von Hau (F, λ) hat F∣∣Hau(F,λ)
die Matrix
λ 1 |λ
. . . | 0
. . . 1 |λ | 0
−− −− −− −− +.. .
0. . . 0
+ −−| λ
d Zeilen
1 Zeile ,
wobei der 1. “Jordan-Block” mit d Zeilen und Spalten genau sd−mal vor-kommt, . . . , der letzte “Jordan-Block” mit 1 Zeile und Spalte genau s1−mal.Ist nun V = Kn und F (x) = A · x , so schreibt man sich die Vektoren ausder Basis B , die aus allen diesen Basisvektoren der Vj besteht, nacheinanderfur j = 1, . . . , k , als Spalten in eine Matrix T−1 . Die Matrix
B := T · A · T−1
ist dann die Jordansche Normalform von A .
2
− In der Praxis (d.h. bei Ubungsaufgaben, bei denen n klein ist), sehen dieBasen der Vj nicht so gewaltig aus wie im “2.Schritt” angegeben. Dazu einnichttriviales, aber dennoch ubersichtliches
75

Beispiel 7.6.15 : Sei F : R7 −→ R7 , F (x) := A · x mit
A :=
2 3 0 0 0 0 00 2 3 0 0 0 00 0 2 0 0 0 00 0 0 3 0 0 00 0 0 0 2 0 00 0 0 0 0 2 10 0 0 0 0 0 2
,
so ist PF (X) = −(X − 2)6 · (X − 3) . Fur λ2 := 3 haben wir
µ(PF , 3) = 1 = dim Eig(F, 3) , es ist
Eig(F, 3) = R · e4 .
Fur λ1 := 2 ist Hau(F, 2) = ker (F − 2 idR7)6 , und wir stellen fest:
ker (F − 2 idR7) =
x ∈ R7
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
0 3 0 0 0 0 00 0 3 0 0 0 00 0 0 0 0 0 00 0 0 1 0 0 00 0 0 0 0 0 00 0 0 0 0 0 10 0 0 0 0 0 0
· x = 0
=
{x ∈ R7
∣∣ x2 = x3 = x4 = x7 = 0}
= span(e1, e5, e6) ,
dim ker (F − 2 idR7) = 3 < 6 = µ(PF , 2) ,
also ist F nicht diagonalisierbar. Um ker (F − 2 idR7)2 zu berechnen, qua-drieren wir die Matrix von F − 2 idR7 :
(A− 2E7)2 =
0 0 9 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 1 0 0 00 0 0 0 0 0 00 0 0 0 0 0 00 0 0 0 0 0 0
,
damit wird ker (F − 2 idR7)2 = span(e1, e5, e6, e2, e7) . Die Matrix von(F − 2 idR7)3 ist schließlich die Diagonalmatrix
diag(0, 0, 0, 1, 0, 0, 0) ,
76

d.h. in der Diagonale steht (0, 0, 0, 1, 0, 0, 0) , und außerhalb der Diagonale0 . Also ist
ker (F − 2 idR7)3 = span( e1, e5, e6︸ ︷︷ ︸∈ ker (F − 2 idR7)
, e2, e7
︸ ︷︷ ︸∈ ker (F − 2 idR7)2
, e3
︸ ︷︷ ︸∈ ker (F − 2 idR7)3
) ,
und wegen dim ker (F − 2 idR7)3 = 6 = µ(PF , 2) ist ker (F − 2 idR7)3 derHauptraum Hau(F, 2) . Hier ist also r = 6 , d = 3 .Nun fangen wir an mit
w(3)1 := e3 und bilden fur G := F − 2 idR7 :
G(w(3)1 ) = 3 e2 .
Wir suchen uns ein Element b aus {e2, e7} , so dass (3 e2, b) eine Basis vonspan(e2, e7) ist; so erhalten wir
w(3)1 = e3 ,
G(w(3)1 ) = 3 e2 , w
(2)1 := e7
und wenden auf die letzten beiden Vektoren wieder G an:
G2(w(3)1 ) = 3G(e2) = 9 e1 , G(w
(2)1 ) = G(e7) = e6 ,
also ist unsere Basis von Hau (F, 2) :
w(3)1 = e3 ,
G(w(3)1 ) = 3 e2 , w
(2)1 = e7 ,
G2(w(3)1 ) = 9 e1 , G(w
(2)1 ) = e6 , w
(1)1 := e5 ,
die wir in der beschriebenen Weise anordnen. Dazu kommen noch die Basender ubrigen Hauptraume, in diesem Fall die Basis (e4) von Hau (F, 3) . Wirsetzen
B := (9 e1, 3 e2, e3, e6, e7, e5, e4)
und erhalten mit diesen Spalten die Transformationsmatrix
T−1 := (9 e1 , 3 e2 , e3 , e6 , e7 , e5 , e4) , was
T =
(1
9e1 ,
1
3e2 , e3 , e7 , e6 , e4 , e5
)77

ergibt. Damit wird
T · A · T−1 =
2 1 0 |0 2 1 | 00 0 2 | 0− − − + − − −|
| 2 1 || 0 2 | 0|− − − + − −|
0 | 2 ||− − + −
| 3
,
und das ist die Jordansche Normalform von A .
(7.7) Aufgaben
(7.1) Bestimmen Sie die Eigenwerte der folgenden Matrizen aus M(3×3,R):
A =
3 0 −515−1 0
1 1 −2
, B =
5 6 20 −1 −81 0 −2
, C =
−1 0 1−1 3 0−4 13 −1
.
Sind diese Matrizen diagonalisierbar ? Kann man Sie auf JordanscheNormalform bringen ? Geben Sie passende Basen des R3 an, bezuglichdenen die transformierte Matrix diese Form hat.
(7.2) Bestimmen Sie die komplexen Eigenwerte der folgenden Matrizen :
A =
1 2 1 22 3 2 30 0 −1 −10 0 2 1
, B =
1 2 0−2 −3 −41 1 1
,
C =
(cosα sinα− sinα cosα
), α ∈ R , D =
(i 12 3i
).
(7.3) a) SeiK ein Korper, n ∈ N , n ≥ 2 , a1, . . . , an−1 ∈ K . Zeigen Sie :
78

Die Matrix
A :=
0 0 0 . . . 0 −a01 0 0 . . . 0 −a10 1 0 . . . 0 −a2...
. . . . . ....
.... . . 0
...0 . . . 0 1 −an−1
hat das charakteristische PolynomPA(X) = (−1)n (Xn + an−1X
n−1 + . . .+ a1X + a0) .b) Geben Sie eine Matrix A ∈M(2× 2,Z) an mit
A3 = E2 und A 6= E2 .c) K habe unendlich viele Elemente, und P (X) sei ein Polynom
mit degP (X) = n, dann gibt es unendlich viele MatrizenA ∈M(n× n,K) mit
P (A) = 0 .
(7.4) Sei V ein endlichdimensionaler Vektorraum. Sei ϕ ∈ V ∗ , ϕ 6= 0gegeben und h 6= 0 , h ∈ ker ϕ . Sei F : V −→ V die durch
F (v) := v + ϕ(v)hdefinierte lineare Abbildung. Bestimmen Sie die Eigenwerte und dieDeterminante von F .
(7.5) Sei R ein kommutativer Ring mit 1 . Zeigen Sie, dass furA ∈M(2× 2, R) gilt
A2 − (trA) · A+ detA · E2 = 0 ,
a) durch direkte Rechnung ,b) fur den Fall, dass R ein Korper ist, mit dem Satz von
Cayley - Hamilton !
(7.6) Berechnen Sie die Minimalpolynome folgender Matrizen ausM(3× 3,C) :
a)
1 3 33 1 3−3 −3 −5
, b)
0 0 γ1 0 β0 1 α
mit α, β, γ ∈ C .
(7.7) Sei n ∈ N , K ein Korper. Eine Matrix A ∈ M(n × n,K) , A 6= 0heißt idempotent , wenn A2 = A ist. Zeigen Sie fur eine idempotente
79

Matrix A :a) Es gibt ein r ∈ n mit
PA(X) = (1−X)r · (−X)n−r .
b) Sei fA : Kn −→ Kn , fA(x) := A · x , dann gilt
Kn = fA(Kn)⊕ ker fA .
c) Es gibt ein S ∈ GL(n,K) , so dass
S−1 · A · S =
Er 0
0 0
ist, mit dem r aus a) , und es ist r = RgA .
(7.8) Geben Sie Transformationsmatrizen T−1 ∈ GL(3,R) an, so dass
(∗) B := T · A · T−1
Diagonalform hat, und rechnen Sie nach, dass (∗) gilt, fur A :=
a)
−1 0 0−3 −2 −26 6 5
, b)
2 2 31 2 12 −2 1
,
c)
−5 0 76 2 −6−4 0 6
.
(7.9) Sei K ein Korper. Bestimmen Sie alle Eigenwerte und einen zugehori-gen Eigenvektor des K−Vektorraum-Endomorphismus
F : K[X] −→ K[X] ,
a) F (P (X)) := X ·D(P (X)) ,
b) F (P (X)) := X2 ·D2(P (X)) +X ·D(P (X)) ,
fur P (X) ∈ K[X] , wobei D die in Aufgabe (3.4) definierte Ableitungeines Polynoms ist. Wie viele Eigenwerte sind das
α) fur K = R , β) fur K = Z/(5) ?
(7.10) a) Sei K ein Korper mit char K 6= 2 und A ∈M(2× 2, K) mitA2 = E2 . Zeigen Sie: Es gilt
A = E2 oder A = −E2
oder ∃S ∈ GL(2, K) : S · A · S−1 =
(1 00 −1
).
80

b) Zeigen Sie, dass die Aussage aus a) fur K = Z/2Z nicht gilt.
(7.11) Geben Sie zu den folgenden Matrizen A :=
a)
3 1 10 4 21 −1 5
, b)
2 −1 20 −2 −80 2 6
Transformationsmatrizen T−1 ∈ GL(3,R) an, so dass
(∗) B := T · A · T−1
Jordansche Normalform hat, und rechnen Sie nach, dass (∗) gilt.
81

§8 Das Tensorprodukt
8.1 Definition und Eigenschaften
(8.1.1) Vorbemerkung: Im nachsten Paragraphen brauchen wir die Kom-
plexifizierung eines R−Vektorraums. Man kann sie zwar auch ohne das Ten-sorprodukt einfuhren, aber das wirkt dann sehr kunstlich. - Wir halten unshier an das Buch von [Fi] .Bilineare Abbildungen sind uns schon bei den Determinanten und beim Ska-larprodukt begegnet. Hier mussen wir die Definition etwas allgemeiner fassen:
Definition 8.1.2 : SeiK ein beliebiger Korper und seien U, V,W Vektorraume
uber K. Dann heißt eine Abbildung
ξ : V ×W −→ U
K− bilinear, wenn fur jedes feste v ∈ V und jedes w ∈ W die Abbildungen
ξv : W −→ U , w 7−→ ξ(v, w) und
ξw : V −→ U , v 7−→ ξ(v, w)
K− linear sind. - Man kann nachrechnen, dass die Menge
Bil(V,W ;U) := { ξ : V ×W −→ U | ξ ist K − bilinear }
wieder ein K−Vektorraum ist.Beispiel 8.1.3 : Sei d ∈ N und seien V := W := K[X]d und U := K[X]2d
die K−Vektorraume der Polynome in X vom Grad ≤ d bzw ≤ 2d, mit Basen
(1, X, . . . , Xd) bzw. (1, X, . . . , X2d) und
ξ : K[X]d ×K[X]d −→ K[X]2d , (P,Q) 7−→ P ·Q ,wobei · das in 3.3.10 definierte Produkt ist, so sieht man, dass ξ bilinear ist.Es gilt
ξ(Xj, Xk) = Xj+k ,
also liegt eine Basis von K[X]2d in Bild(ξ) := ξ(K[X]d × K[X]d). DiesesBild ist aber kein Untervektorraum von K[X]2d : Sei etwa d = 1 und
K = Q, dann ist X2 − 2 /∈ Bild(ξ), obwohl X2,−2 ∈ Bild(ξ) sind,
K = R, dann ist X2 + 1 /∈ Bild(ξ) , obwohl X2, 1 ∈ Bild(ξ) sind.
82

Bemerkung und Vereinbarung 8.1.4 : In Satz 4.4.10 hatten wir gese-hen, dass eine lineare Abbildung durch die Funktionswerte der Elementeeiner Basis eindeutig bestimmt ist. Wir wollen das auf bilineare Abbildungenubertragen. Man beachte dazu: Sind (vj)j∈J und (wl)l∈L Basen von V bzw.W , so bilden die
(vj, 0), j ∈ J zusammen mit den (0, wl), l ∈ L
eine Basis von V ×W , denn sei (v, w) ∈ V ×W , dann sind v und w Summen
v =∑j∈J
αjvj und w =∑l∈L
βlwl
mit αj, βl ∈ K, wobei fast alle αj, βl Null sind: Wir wollen kunftig
v =∑j∈J
′αjvj , w =
∑l∈L
′βlwl
fur solche endlichen Summen schreiben. Dann ist
(v, w) =∑j∈J
′αj(vj, 0) +
∑k∈L
′βk(0, wk) ,
womit gezeigt ist, dass die (vj, 0), j ∈ J mit den (0, wl), l ∈ L ein Erzeugen-densystem von V ×W bilden, und die lineare Unabhangigkeit ist auch klar.Dagegen ist die Familie
((vj, wl))(j,l)∈J×L
im allgemeinen weder ein Erzeugendensystem von V × W noch linear un-abhangig.- Die Basiselemente
(vj, 0) , j ∈ J , (0, wl) , l ∈ L von V ×W
werden von jeder bilinearen Abbildung V × W −→ U auf 0 abgebildet.Durch die Funktionswerte der Elemente einer Basis von V ×W kann maneine bilineare Abbildung also nicht charakterisieren. Wir erinnern uns aberan die darstellende Matrix einer symmetrischen Bilinearform aus Definition6.3.1. Das folgende ist eine Verallgemeinerung davon:
Bemerkung 8.1.5: Seien V und W Vektorraume uber dem Korper K, mit
Basen(vj)j∈J bzw. (wl)l∈L .
Ist U ein weiterer K−Vektorraum, so gibt es zu jeder vorgegebenen Familie(ujl)(j,l)∈J×L von Elementen aus U genau eine bilineare Abbildung
ξ : V ×W −→ U mit ξ(vj, wl) = ujl fur alle (j, l) ∈ J × L .
83

Beweis : Sei (v, w) ∈ V ×W , dann gibt es eindeutig bestimmte λj, µl ∈ Kmit
v =∑j∈J
′λjvj , w =
∑l∈L
′µlwl.
Wenn es ein bilineares ξ mit den geforderten Eigenschaften gibt, folgt
ξ(v, w) = ξ(∑j∈J
′λjvj,
∑l∈L
′µlwl) =
∑j∈J,l∈L
′λjµlξ(vj, wl) =
∑j∈J,l∈L
′λjµlujl .
Damit ist gezeigt, dass es hochstens eine solche Abbildung gibt.Umgekehrt: Wir definieren ξ durch
ξ(v, w) :=∑
j∈J,l∈L
′λjµlujl
und zeigen, dass auf diese Weise eine Abbildung von V ×W nach U definiertist, die bilinear ist. Dazu halten wir w fest. Dann sieht man, dass
ξw : V −→ U , v =∑j∈J
′λjvj 7−→
∑j∈J,l∈L
′λjµlujl
linear ist. Analog erhalt man, dass fur festes v ∈ V die Abbildung
ξv : W −→ U , w =∑l∈L
′µlwl 7−→
∑j∈J,l∈L
′λjµlujl
linear ist. Damit haben wir die Existenz einer solchen Abbildung gezeigt.
2
Definition 8.1.6 : Seien V und W Vektorraume uber K, mit Basen
(vj)j∈J bzw. (wl)l∈L .
a) Im K−Vektorraum
F(J × L,K) = {τ : J × L −→ K} sei
V⊗KW := { τ : J × L −→ K | ∀′(j, l) ∈ J × L : τ(j, l) = 0 } ,
die Menge derjenigen τ , die ungleich 0 nur fur endlich viele (j, l) sind.V ⊗K W ist ein Untervektorraum von F(J × L,K) , also ein K−Vektorraum. Man nennt V⊗KW das Tensorprodukt derK−VektorraumeV und W , und die Elemente von V ⊗K W Tensoren.
84

b) Wir konnen sofort eine Basis von V ⊗K W angeben (und uns damitdas Tensorprodukt besser vorstellen): Fur (j, l) ∈ J ×L sei vj ⊗wl dieAbbildung, die an der einzigen Stelle (j, l) den Wert 1 hat und sonstden Wert 0, dann ist
(vj ⊗ wl)(j,l)∈J×L eine Basis von V ⊗K W ,
denn fur beliebiges τ ∈ V ⊗K W gilt
τ =∑
j∈J,l∈L
′τ(j, l) vj ⊗ wl ,
also haben wir ein Erzeugendensystem. Ist
τ :=∑
j∈J,l∈L
′αjlvj ⊗ wl = 0 ,
so gilt τ(j, l) = 0, da die Nullabbildung uberall den Wert 0 hat, alsoαjl = 0 fur alle (j, l).- Fur endlichdimensionale V,W folgt damit
dimk(V ⊗k W ) = dimk V · dimkW .
c) Durch
η : V ×W −→ V ⊗K W , η(vj, wl) := vj ⊗ wl
wird nach Bemerkung 8.1.5 genau eine bilineare Abbildung von V ×Win V ⊗K W definiert. Seien
v =∑j∈J
′λjvj ∈ V , w =
∑l∈L
′µlwl ∈ W ,
dann haben wir wegen der Bilinearitat von η:
η(v, w) = η(∑j∈J
′λjvj,
∑l∈L
′µlwl) =
∑j∈J,l∈L
′λjµlvj ⊗ wl .
Wir setzen nun allgemein fur v ∈ V , w ∈ W :
v ⊗ w := η(v, w) .
85

Theorem 8.1.7 : Seien V und W Vektorraume uber K . Dann hat dasTensorprodukt V ⊗KW , zusammen mit der in 8.1.6 c) definierten bilinearenAbbildung
η : V ×W −→ V ⊗K W
die folgende universelle Eigenschaft : Zu jedem K−Vektorraum U zusam-men mit einer bilinearen Abbildung
ξ : V ×W −→ U
gibt es genau eine lineare Abbildung
ξ⊗ : V ⊗K W −→ U mit ξ = ξ⊗ ◦ η .
Man hat also das kommutative Diagramm :
V ×W U
V ⊗K W
ξ
η ∃1 ξ⊗
Beweis : Ist ein bilineares ξ : V ×W −→ U gegeben, so setzen wir furgegebene Basen
(vj)j∈J bzw. (wl)l∈L
von V bzw. W :ujl := ξ(vj, wl) ∈ U .
Wegen der Bedingung ξ = ξ⊗ ◦ η muss
ξ⊗(vj ⊗ wl) = ujl
sein. Nach Satz 4.4.10 gibt es genau eine lineare Abbildung ξ⊗ mit dieserEigenschaft, und es gilt
ξ⊗
( ∑j∈J,l∈L
′αjl(vj ⊗ wl)
)=
∑j∈J,l∈L
′αjlujl .
86

Also ist ξ⊗(v ⊗ w) = ξ(v, w) fur alle (v, w) ∈ V ×W , und damit
ξ⊗ ◦ η = ξ .
2
- Aus der Bilinearitat von η folgen sofort die grundlegenden
(8.1.8) Rechenregeln fur Tensoren: Wird η : V ×W −→ V ⊗kW wie
in (8.1.6) definiert und ist
v ⊗ w := η(v, w) ,
so gilt fur v, v′ ∈ V,w,w′ ∈ W und λ ∈ K:a) v ⊗ w + v′ ⊗ w = (v + v′)⊗ w , v ⊗ w + v ⊗ w′ = v ⊗ (w + w′) ,b) (λ v)⊗ w = v ⊗ (λw) = λ (v ⊗ w) .
2
(8.1.9) Beachten Sie : a) Eine beliebige Summe
v ⊗ w + v′ ⊗ w′
kann auch mit den Regeln aus (8.1.8) im alllgemeinen nicht zu einem Pro-dukt v′′ ⊗ w′′ mit v′′ ∈ V,w′′ ∈ W zusammengezogen werden. Merken wiruns: Tensoren sind endliche Summen∑
j∈J,l∈L
′αjl(vj ⊗ wl) ,
mit αjl ∈ K , wenn man Basen (vj)j∈J von V , (wl)l∈L von W hat, bzw.
k∑r=1
ar ⊗ br mit k ∈ N0 , ar ∈ V , br ∈ W .
In Aufgabe (8.2) werden wir uns noch damit beschaftigen, wann man einenTensor als Produkt a⊗ b mit a ∈ V, b ∈ W schreiben kann.b) Die Regel b) aus (8.1.8) kann man so lesen, dass das K in V ⊗KW angibt,dass man Skalare λ aus K uber das Zeichen ⊗ ziehen kann.
(8.1.10) Beispiel : Sei V := W := K[X] der Vektorraum der Polynome
in einer Unbestimmten uber K und U := K[X1, X2] der Vektorraum derPolynome in zwei Unbestimmten uber K. Dann ist die Abbildung
ξ : K[X]×K[X] −→ K[X1, X2] , (P (X), Q(X)) 7−→ P (X1) ·Q(X2)
87

bilinear (aber nicht surjektiv). Wegen der universellen Eigenschaft (8.1.7)gibt es eine lineare Abbildung
ξ⊗ : K[X]⊗K K[X] −→ K[X1, X2] , Xj ⊗X l 7−→ Xj1 ·X l
2 .
Nun bilden die Monome Xj1 ·X l
2 mit j, l ∈ N0 eine Basis von K[X1, X2] ,also ist ξ⊗ ein Isomorphismus. Wir hatten den Polynomring K[X1, X2] alsoauch auf diese Weise aus K[X] konstruieren konnen.
(8.1.11) Beispiel : Sei W ein beliebiger R−Vektorraum und V der
R−Vektorraum C, mit Basis (1, i), dann haben wir die bilineare Abbildung
C×W −→ C⊗R W , (λ,w) 7→ λ⊗ w .
Sei (wj)j∈J eine Basis von W . Dann bilden die
1⊗ wj , i⊗ wj , j ∈ J
eine R−Basis von C⊗RW . Jedes w∗ ∈ C⊗RW lasst sich also in eindeutigerWeise schreiben als
w∗ =∑j∈J
′αj(1⊗wj) +
∑j∈J
′βj(i⊗wj) =
∑j∈J
′(αj + βji)⊗wj =
∑j∈J
′λj ⊗wj
mit αj, βj ∈ R und λj ∈ C. Nun machen wir C⊗RW zu einem C−Vektorraumdurch die Abbildung
C×(C⊗RW ) −→ C⊗RW ,
(λ ,∑j∈J
′λj ⊗ wj
)7→∑j∈J
′λ·λj⊗wj .
C ⊗R W wird so zu einem C−Vektorraum mit C−Basis (1 ⊗ wj)j∈J . Mannennt WC := C⊗R W die Komplexifizierung von W .Man hat noch die R−lineare Abbildung
W −→ C⊗R W , w 7→ 1⊗ w .
Sie ist injektiv, also ist ihr Bild 1 ⊗W isomorph zu W . Man kann also Wauffassen als reellen Untervektorraum von WC.
8.2 Symmetrische und alternierende Tensoren
Das Tensorprodukt ist nicht kommutativ: Selbst wenn V = W ist, gilt furv, v′ ∈ V im allgemeinen v ⊗ v′ 6= v′ ⊗ v:
Definition 8.2.1 : Sind V und U Vektorraume uber K , so heißt eine bili-neare Abbildung
ξ : V × V −→ U
88

symmetrisch , wenn ∀ v, v′ ∈ V : ξ(v, v′) = ξ(v′, v) , und
alternierend , wenn ∀ v ∈ V : ξ(v, v) = 0 gilt.
Bemerkung 8.2.2 : Ist ξ alternierend, so gilt
∀ v, v′ ∈ V : ξ(v, v′) = −ξ(v′, v) ,
und wenn char K 6= 2 ist , folgt aus dieser Aussage umgekehrt, dass ξ alter-nierend ist.Beweis : Das folgt daraus, dass fur alle v, v′ ∈ V gilt
ξ(v + v′, v + v′) = ξ(v, v) + ξ(v′, v) + ξ(v, v′) + ξ(v′, v′) .
2
Definition 8.2.3 : Sei V ein K−Vektorraum, dann setzen wir
S(V ) := span(v ⊗ v′ − v′ ⊗ v)v,v′∈V ⊂ V ⊗K V ,
A(V ) := span(v ⊗ v)v∈V ⊂ V ⊗K V .
Damit kann man sehen, ob eine bilineare Abbildung symmetrisch oder alter-nierend ist:
Lemma 8.2.4 : Fur jedes bilineare ξ : V × V −→ U gilt:
ξ ist symmetrisch ⇐⇒ S(V ) ⊂ ker ξ⊗ ,
ξ ist alternierend ⇐⇒ A(V ) ⊂ ker ξ⊗ .
Beweis : Das folgt aus den Gleichungen
ξ(v.v′)− ξ(v′, v) = ξ⊗(v ⊗ v′)− ξ⊗(v′ ⊗ v) = ξ⊗(v ⊗ v′ − v′ ⊗ v) ,
ξ(v, v) = ξ⊗(v ⊗ v) .
2
Mit Hilfe der universellen Eigenschaft des Tensorprodukts beweisen wir nundie Existenz des außeren Produkts V ∧ V :
Theorem 8.2.5 : Zu jedem K−Vektorraum V gibt es einen K−VektorraumV ∧ V zusammen mit einer alternierenden Abbildung
∧ : V × V −→ V ∧ V
89

und folgender universeller Eigenschaft: Zu jedem K−Vektorraum W zusam-men mit einer alternierenden Abbildung
ξ : V × V −→ W
gibt es genau eine lineare Abbildung ξ∧ derart, dass das Diagramm
V × V W
V ∧ V
ξ
∧ ∃1 ξ∧
kommutiert, d.h. es gilt ξ = ξ∧ ◦ ∧.Ist (v1, . . . vn) eine Basis von V , so ist
vj ∧ vl := ∧(vj, vl) mit 1 ≤ j < l ≤ n
eine Basis von V ∧ V und damit
dim(V ∧ V ) =
(n2
)=
n(n− 1)
2.
Beweis : a) Sei A(V ) der in (8.2.3) definierte Untervektorraum von V ⊗K V ,dann bilden wir den Quotienten-Vektorraum
V ∧ V := (V ⊗K V )/A(V ) .
Sei ρ : V ⊗K V −→ V ∧ V der kanonische Nebenklassenepimorphismus,dann setzen wir ∧ := ρ ◦ η, wobei η in 8.1.6 c)definiert war. Fur v, v′ ∈ Vist dann also
v ∧ v′ := ∧(v, v′) = ρ(η(v, v′)) = ρ(v ⊗ v′) .
Die Abbildung ∧ ist bilinear und nach Lemma 8.2.4 auch alternierend.Zum Beweis der universellen Eigenschaft betrachten wir folgendes Diagramm:
90

V × V
WV ⊗K V
V ∧ V
ξ
ξ∧
∧ξ⊗
η
ρ
(∗)
Zu ξ gibt es nach Theorem 8.1.7 das eindeutig bestimmte lineare ξ⊗ , undnach dem Homomorphiesatz (4.3.11) fur Vektorraume ein eindeutig bestimm-tes ξ∧ mit ξ∧ ◦ρ = ξ⊗ , wegen A(V ) ⊂ ker ξ⊗. Nach der Definition der Abb.∧ sind alle drei inneren Dreiecke von (∗) dann kommutative Diagramme, unddamit auch das ganze Diagramm (∗). Fur alle v, v′ ∈ V gilt also
ξ∧(v ∧ v′) = ξ(v, v′) ,
ξ∧ ist also eindeutig bestimmt.b) Wir mussen nur noch die Behauptung uber die Basis von V ∧ V zeigen:Da V ⊗V von den Tensoren vj⊗vl , j, l ∈ n, erzeugt wird, erzeugen die vj∧vlden Raum V ∧ V . Wegen
vj ∧ vj = 0 und vj ∧ vl = −vl ∧ vj
bilden schon die
(n2
)Produkte
vj ∧ vl mit j < l
ein Erzeugendensystem. Um zu zeigen, dass sie linear unabhangig sind, ge-
ben wir eine lineare Abbildung von V ∧ V in den
(n2
)− dimensionalen
Vektorraum
KN mit N :=
(n2
)an, dessen kanonische Basis wir mit
(ejl)1≤j<l≤n
91

bezeichnen. Wir konstruieren dazu eine alternierende Abbildungξ : V × V −→ KN folgendermaßen: Seien
v =n∑j=1
λjvj und v′ =n∑l=1
µlvl
gegebene Elemente aus V , dann nehmen wir in der Matrix
A :=
(λ1 . . . λnµ1 . . . µn
)die 2× 2− Unterdeterminanten
ajl := λjµl − λlµj .
Dann ist durch
ξ(v, v′) :=∑j<l
ajlejl
eine alternierende Abbildung gegeben. Wegen der in a) bewiesenen univer-sellen Eigenschaft ist dann
ξ∧(vj ∧ vl) = ξ(vj, vl) = ejl .
Hat man nun eine Gleichung∑j<l
γjlvj ∧ vl = 0 mit γjl ∈ K ,
so wendet man darauf ξ∧ an, und aus der linearen Unabhangigkeit derejl , j < l , folgt, dass alle γjl Null sind. Die so erhaltene Abbildung
ξ∧ : V ∧ V −→ KN
ist also ein Isomorphismus; damit kann man sich V ∧V auch besser vorstellen.
2
Da die Abbildung ∧ alternierend ist, hat man die folgenden
(8.2.6) Rechenregeln fur das außere Produkt : Fur alle
v, v′, w, w′ ∈ V und λ ∈ K gilta) (v + v′) ∧ w = v ∧ w + v′ ∧ w , v ∧ (w + w′) = v ∧ w + v ∧ w′ ,
92

b) (λv) ∧ w = v ∧ (λw) = λ(v ∧ w) ,c) v ∧ v = 0 , v ∧ v′ = −v′ ∧ v .
2
(8.2.7) Beachten Sie, dass wegen der Regel (8.2.6) c) das außere Produkt
V ∧W fur zwei verschiedene Vektorraume V,W keinen Sinn ergibt.
8.3 Tensoralgebra und außere Algebra
Definition 8.3.1 : Sei k ∈ N und V1, . . . , Vk,W Vektorraume uber K. EineAbbildung
ξ : V1 × . . .× Vk −→ W
heißt multilinear oder k−fach linear, wenn fur jedes j ∈ k und fest gewahl-te vl ∈ Vl , l ∈ k \ {j} die Abbildung
Vj −→ W , v 7→ ξ(v1, . . . , vj−1, v, vj+1, . . . , vk)
K−linear ist.
2
Analog zu Theorem 8.1.7 beweist man das
Theorem 8.3.2 : Sei k ∈ N und V ,1 . . . , Vk,W seien K−Vektorraume. Dann
gibt es einen K−Vektorraum
V1 ⊗K . . .⊗K Vk
zusammen mit einer k−fach linearen Abbildung
η : V1× . . .×Vk −→ V1⊗K . . .⊗K Vk , (v1, . . . , vk) 7→ v1⊗ . . .⊗vk ,
so dass es zu jeder k−fach linearen Abbildung
ξ : V1 × . . .× Vk −→ W
genau eine lineare Abbildung ξ⊗ gibt, so dass das Diagramm
93

V1 × . . .× Vk W
V1 ⊗K . . .⊗K Vk
ξ
η ∃1 ξ⊗
kommutativ wird. Sind alle Vj endlichdimensional, mit Basen
(v(j)1 , . . . , v(j)rj ) , j ∈ k
so bilden die Produkte
v(1)l1⊗ . . .⊗ v(k)lk
mit 1 ≤ lj ≤ rj fur j ∈ k
eine Basis von V1 ⊗K . . .⊗K Vk, und es ist
dimV1 ⊗K . . .⊗K Vk = dimV1 · . . . · dimVk.
2
Bemerkung 8.3.3 : Ein wichtiger Spezialfall ist folgender: Sei V ∗ der Dual-
raum von V und seien p, q ∈ N0 , dann setzt man
T := V ∗ ⊗K . . .⊗K V ∗︸ ︷︷ ︸p−mal
⊗K V ⊗K . . .⊗K V︸ ︷︷ ︸q−mal
.
Ein Element von T heißt ein p−fach kovarianter und q−fachkontravarianter Tensor . In der Physik begegnet einem meist die Basisdar-stellung solcher Tensoren: Sei (v1, . . . , vn) eine Basis von V und (v1, . . . , vn)die dazu duale Basis von V ∗. Dann ist jedes Element von T eine eindeutigeLinearkombination∑
j1,...,jp,l1,...,lq
αl1...lqj1...jp
vj1 ⊗ . . .⊗ vjp ⊗ vl1 ⊗ . . .⊗ vlq
mit j1, . . . , jp, l1, . . . , lq ∈ n und αl1...lqj1...jp
∈ K . Physiker schreiben meistnur diese Koeffizienten hin, was keine Probleme ergibt, falls man von einer
94

festen Basis (v1, . . . , vn) ausgeht. Das ist etwa so, wie wenn man statt einerlinearen Abbildung die entsprechende Matrix betrachtet.
Definition 8.3.4 : a) Es kann sein, dass in der Definition 8.3.1 und in Satz8.3.2 alle Vj , j ∈ k gleich einem V sind. Dann schreiben wir
V ⊗k := V ⊗K . . .⊗K V︸ ︷︷ ︸k−mal
.
b) Eine k−fach lineare Abbildung
ξ : V k −→ W
heißt
symmetrisch , wenn fur jede Permutation σ ∈ Sk gilt:
ξ(v1, . . . , vk) = ξ(vσ(1), . . . , vσ(k)),
alternierend , wenn ξ(v1, . . . , vk) = 0 ist, falls es ein Paar(j, l) ∈ k × k gibt mit j 6= l und vj = vl.
2
Analog zu (8.2.2) beweist man dieBemerkung 8.3.5 : Ist ξ alternierend und σ ∈ Sk , so gilt
ξ(vσ(1), . . . , vσ(k)) = sign (σ) · ξ(v1, . . . , vk) .
2
Definition 8.3.6: Sei V ein K−Vektorraum, dann setzen wir noch
V ⊗0 := K .
In der direkten Summe
T (V ) := V ⊗0 ⊕ V ⊗1 ⊕ V ⊗2 ⊕ . . .
definieren wir ein Produkt ⊗, indem wir fur
v1 ⊗ . . .⊗ vj ∈ V ⊗j , w1 ⊗ . . .⊗ wl ∈ V ⊗l setzen:v1 ⊗ . . . ⊗ vj ⊗ w1 ⊗ . . . ⊗ wl := v1 ⊗ . . . ⊗ vj ⊗ w1 ⊗ . . . ⊗ wl ,
falls j, l ∈ N sind,
95

λ⊗ w := w ⊗ λ := λw , falls λ ∈ K = V ⊗0 , w ∈ V ⊗l , l ∈ N0 ist.
T (V ) mit dem so definierten Produkt heißt die Tensoralgebra von V .
2
Dass die Axiome einer K−Algebra aus Def. 4.9.2 erfullt sind, kann mannachrechnen. Man sieht, dass T (V ) als K−Vektorraum unendlichdimensionalist.
Wir verallgemeinern nun noch das außere Produkt von zwei auf k Faktoren:
Lemma 8.3.7 : Sei k ∈ N und V ein K−Vektorraum. In V ⊗k sei AkV der
Untervektorraum
Ak(V ) := span(v1 ⊗ . . .⊗ vk)∃ (j,l)∈k×k:(j 6=l∧vj = vl) ,
dann gilt fur jedes k−fach lineare ξ : V k −→ W :
ξ alternierend ⇐⇒ Ak(V ) ⊂ ker ξ⊗ .
Theorem 8.3.8 : Zu einem K−Vektorraum V und einer Zahl k ∈ N gibt eseinen K−Vektorraum ΛkV zusammen mit einer alternierenden Abbildung
∧ : V k −→ ΛkV ,
so dass es zu jeder alternierenden Abbildung
ξ : V k −→ W
genau eine lineare Abbildung ξ∧ gibt, derart dass das Diagramm
V k W
ΛkV
ξ
∧ ∃1 ξ∧
kommutativ wird. Ist (v1, . . . , vn) eine Basis von V , so bilden die Produkte
vj1 ∧ . . . ∧ vjk mit 1 ≤ j1 < . . . < jk ≤ n
96

eine Basis von ΛkV . Damit ist dann
dim ΛkV =
(nk
).
Beweis : Man setztΛkV := V k/
Ak(V )
und nimmt als ∧ den kanonischen Nebenklassenepimorphismus
∧ : V k −→ V k/Ak(V )
.
Der Beweis, dass die
vj1 ∧ . . . ∧ vjk mit 1 ≤ j1 < . . . < jk ≤ n
eine Basis bilden, ist dann eine Verallgemeinerung des Beweises von Theorem
8.2.5 : Man setzt N :=
(nk
)und nimmt den KN mit der kanonischen Basis
ej1...jk , 1 ≤ j1 < . . . < jk ≤ n .
Sei wj =n∑l=1
λjlvl, dann nimmt man die (k × n)−Matrix A := (λjl), und
die zu den Spalten j1, . . . , jk gebildeten (k× k)−Unterdeterminanten von A.
2
(8.3.9) Beachten Sie, dass
(nk
)= 0 ist fur k > n , also ΛkV = 0 fur
k > dimV .
Definition 8.3.10 : Sei V ein K−Vektorraum, dimK V = n . Wir setzen
Λ0V := K und
Λ V := Λ0V ⊕ Λ1V ⊕ . . .⊕ Λn V .
Dann ist
dimk Λ V =n∑k=0
(nk
)= 2n .
Wir definieren ein Produkt ∧ in Λ V : Fur
α ∈ K = Λ0V und v1 ∧ . . . ∧ vj ∈ ΛjV setzen wir
α ∧ (v1 ∧ . . . ∧ vj) := α(v1 ∧ . . . ∧ vj) ,
97

fur j ∈ N0 , und fur j, l ∈ N :
(v1 ∧ . . . ∧ vj) ∧ (w1 ∧ . . . ∧ wl) := v1 ∧ . . . ∧ vj ∧ w1 ∧ . . . ∧ wl .
Λ V mit dem so definierten Produkt heißt die außere Algebra oder dasDachprodukt von V .
2
(8.3.11) Rechenregeln fur das Dachprodukt : Seien j, l, k ∈ N0,
ω ∈ ΛjV , σ ∈ ΛlV , τ ∈ ΛkV , dann gilta) (ω ∧ σ) ∧ τ = ω ∧ (σ ∧ τ) ,b) ω ∧ σ = (−1)jlσ ∧ ω .
(8.4) Aufgaben
(8.1) Seien V,W Vektorraume uber dem Korper K, mit Basen
(v1, . . . , vn) bzw. (w1, . . . , wm) . Zeigen Sie:
a) (vj ⊗ wl)(j,l)∈n×m ist eine Basis von V ⊗K W .b) ∀ v ∈ V,w ∈ W : v ⊗ w = 0 ⇐⇒ v = 0 ∨ w = 0.
(8.2) V und W seien K−Vektorraume und η die kanonische Abbildung
η : V ×W −→ V ⊗K W , (v, w) 7→ v ⊗ w .
Sei Q := η(V ×W ) . Zeigen Sie:a) Q ist ein “Kegel” , d.h. es gilt:
λ ∈ K, y ∈ Q =⇒ λy ∈ Q .
b) Seien (v1, . . . , vn), (w1, . . . , wm) Basen von V bzw. W , dann istein beliebiger Tensor aus V ⊗K W eine Linearkombination
y =n∑j=1
m∑l=1
γjlvj ⊗ wl mit γjl ∈ K .
Als “reinen Tensor” bezeichnet man einen Tensor der Form a ⊗ b mita ∈ V, b ∈ W , also eine Linearkombination
n∑j=1
m∑l=1
αjβlvj ⊗ wl mit αj, βl ∈ K .
Zeigen Sie: Obiges y ist genau dann ein reiner Tensor, wenn die Koef-fizientenmatrix (γjl) den Rang 0 oder 1 hat.c) Ist η injektiv oder surjektiv ?
98
(8.3) Fur zwei K−Algebren A,B ist A⊗KB ein K−Vektorraum. Zeigen Sie:Wenn man
(a⊗ b) · (a′ ⊗ b′) := (a · a′)⊗ (b⊗ b′) fur a, a′ ∈ A, b, b′ ∈ B
setzt, wird A⊗K B eine K−Algebra.
(8.4) Sei V ein K−Vektorraum und T ⊃ K eine Korpererweiterung von K .Dann wird T ein K− Vektorraum, wenn man fur λ ∈ K, a ∈ Tλa als das Produkt λ · a in T definiert.
Damit ist dann derK−Vektorraum T⊗KV definiert. Zeige, dass T⊗KVein T−Vektorraum wird,, wenn man fur a, b ∈ T und v ∈ V
a(b⊗ v) := (a · b)⊗ v
setzt. Wenn (vj)j∈J eine K−Basis von V und (al)l∈L eine K−Basis vonT ist, wird
(al ⊗ vj)(l,j)∈L×J eine K − Basis von T ⊗K V .
Wenn die Dimensionen endlich sind, folgt
dimK T ⊗K V = dimK T · dimK V , dimT T ⊗K V = dimK V .
Die Abbildung
ϕ : V −→ K ⊗K V , v 7→ 1⊗ v ,
wobei 1 das Einselement vonK ist, ist einK−Vektorraum-Isomorphismus.(Die Komplexifizierung eines R−Vektorraums in Beispiel (8.1.11) istein Spezialfall dieser Konstruktion.)
(8.5) Seien V,W euklidische bzw. unitare Vektorraume, mit Skalarprodukten〈 , 〉V bzw. 〈 , 〉W . Zeigen Sie, dass es genau ein Skalarprodukt〈 , 〉V⊗KW auf V ⊗K W gibt, so dass fur alle v, v′ ∈ V , w,w′ ∈ Wgilt
〈v ⊗ w, v′ ⊗ w′〉V⊗KW = 〈v, v′〉V · 〈w,w′〉W .
(8.6) Analog zu Theorem 8.2.5 kann man ein symmetrisches Produkt ei-nes K−Vektorraums V mit sich selbst definieren: Zeigen Sie: Zu V gibtes einen K−Vektorraum V ∨V zusammen mit einer symmetrischen Ab-bildung
∨ : V × V −→ V ∨ V ,
99

die folgende universelle Eigenschaft erfullt: Zu jedem K−VektorraumW zusammen mit einer symmetrischen Abbildung ξ : V ×V −→ Wgibt es genau eine lineare Abbildung ξ∨ derart, dass das Diagramm
V × V W
V ∨ V
ξ
∨ ∃1 ξ∨
kommutiert. Ist (v1, . . . , vn) eine Basis von V , so ist durch
vj ∨ vl := ∨(vj, vl) mit j ≤ l
eine Basis von V ∨ V gegeben. Damit ist
dim(V ∨ V ) =
(n+ 1
2
)=
n(n+ 1)
2.
(8.7) Bestimmen Sie die Dimension von Kern und Bild der folgenden linea-ren Abbildung, und geben Sie Basen von Kern und Bild an :a) f : R3 ⊗R R3 −→ R3 , v ⊗ w 7→ v × w ,
wobei “×” hier das Vektorprodukt bezeichne.b) Fur n ∈ N:f : Rn ⊗R Rn −→ R , v ⊗ w 7→ 〈v, w〉 .
(8.8) Sei V ein K−Vektorraum, char K 6= 2 und V ∗ sein Dualraum. Seik ∈ N und seien
ϕ1, . . . , ϕk ∈ V ∗ , v1, . . . , vk ∈ V .
Dann definiert man
(ϕ1 ∧ . . . ∧ ϕk)(v1, . . . , vk) := det(ϕj(vl))(j,l)∈k×k
Sei nun V ein vierdimensionalerK−Vektorraum mit Basis (e1, e2, e3, e4)und dazu dualer Basis (η1, η2, η3, η4) von V ∗.
100
(i) Sind die Vektoren
x1 = e1∧e2∧e4+e2∧e1∧e3, x2 = e2∧e4∧e3−e1∧e4∧e3, x3 = e2∧e1∧e4linear unabhangig in Λ3 V ?
(ii) Berechnen Sie den Wert der 2-Form (η1 − η3) ∧ (η2 + η4) auf demElement (e1 − e3, e2 + e4) ∈ V × V .
(8.9) Im R3 mit der kanonischen Basis (e1, e2, e3) sei (η1, η2, η3) die dazuduale Basis in (R3)∗. Zeigen Sie mit der Def. aus Aufgabe (8.8), dassfur a, b ∈ R3
(η2 ∧ η3, η3 ∧ η1, η1 ∧ η2)(a, b) = a× b
das Vektorprodukt von a und b ist .
101

§9 Endomorphismen von Vektorraumen mit
Skalarprodukt
Vorbemerkung: Vielleicht ist Ihnen aufgefallen, dass wir in §6 uberhaupt
noch keine “strukturerhaltenden Abbildungen” definiert haben. Das wollenwir jetzt nachholen, und die Ergebnisse aus §7 werden uns die Arbeit erleich-tern.
9.1 Orthogonale und unitare Endomorphismen
Unter den Endomorphismen eines Vektorraums mit Skalarprodukt wollen wirinsbesondere diejenigen untersuchen, die Langen zwischen den Vektoren undWinkel zwischen ihnen nicht verandern:Definition 9.1.1 : Sei V ein K−Vektorraum mit einem Skalarprodukt s ,K = R oder C. Eine lineare Abbildung F ∈ HomK(V, V ) heißt eineIsometrie (fur K = R auch orthogonale , fur K = C auch unitarelineare Abbildung), wenn
∀ v, w ∈ V : s(F (v), F (w)) = s(v, w) gilt.
Bemerkung 9.1.2 : Sei V ein K−Vektorraum mit Skalarprodukt s ,
V 6= {0} , ‖ ‖ die durch ‖v‖ :=√s(v, v) definierte Norm und
F ∈ EndKV orthogonal bzw. unitar. Dann gilta) ∀ v ∈ V : ‖F (v)‖ = ‖v‖ .b) Ist λ ein Eigenwert von F , so ist |λ| = 1 .c) ∀ v, w ∈ V : (v⊥w ⇐⇒ F (v)⊥F (w)) .d) F ist injektiv.e) Ist F bijektiv, so ist F−1 wieder eine Isometrie.f) Ist V endlichdimensional, so ist F bijektiv.Beweis : a) und c) sind triviale Folgerungen aus Definition 9.1.1.b) Sei v 6= 0 und λ ∈ K , und es gelte
F (v) = λ v , dann folgt nach a) :
‖v‖ = ‖F (v)‖ = ‖λ v‖ = |λ| · ‖v‖
und wegen ‖v‖ 6= 0 : |λ| = 1 .d) Sei v ∈ ker F , dann ist F (v) = 0 , also
0 = ‖F (v)‖a)= ‖v‖ , also v = 0 .
102

Nach Bemerkung 4.3.4 ist F injektiv.e) Ist F bijektiv, so hat man die - ebenfalls lineare - Umkehrfunktion
F−1 : V −→ V , und es gilt
∀ v, w ∈ V : s(F−1(v), F−1(w)) = s(F (F−1(v)), F (F−1(w))) = s(v, w) ,
also ist auch F−1 eine Isometrie.f) Nach der Dimensionsformel (Satz 4.3.13) gilt
dimF (V ) = dimV − dim ker Fd)= dimV ,
also F (V ) = V , und damit ist F sogar surjektiv.
2
Bemerkung 9.1.3 : Wir interessieren uns fur die Matrizen, die ein
orthogonales bzw. unitares F beschreiben. Man hat sie nur fur endlichdimen-sionales V , und in diesem Fall ist F ein Automorphismus, also fur jede BasisB von V :
MBB (F ) invertierbar.
Nach dem Orthonormalisierungssatz findet man sogar eine OrthonormalbasisB von V : Sei
B = (v1, . . . , vn)
eine Orthonormalbasis von V , dann gilt
∀ j, k ∈ n : δjk = s(vj, vk) = s(F (vj), F (vk))
= s
(n∑r=1
arjvr,
n∑l=1
alkvl
)=
n∑r,l=1
arjalks(vr, vl)
n∑r,l=1
arjalkδrl =n∑l=1
aljalk .
Zu A := (alk) sei A := (alk) , dann gilt also
tA · A = En ,
bzw. wenn wir die Transponierte dieses Produkts bilden:
tA · A = En , A−1 = tA , also auch A ·t A = En :
103

Definition 9.1.4 : Sei n ∈ N . Eine Matrixa) A ∈ GL(n,R) heißt orthogonal , falls
A−1 = tA ,
b) A ∈ GL(n,C) heißt unitar , falls
A−1 = tA ist.
2
Bewiesen haben wir in Bemerkung 9.1.3 Teile von
Satz 9.1.5 : Sei V ein euklidischer bzw. unitarer K−Vektorraum,dimK V <∞, und B eine Orthonormalbasis von V . Dann gilt
F ist orthogonal (bzw. unitar)⇐⇒ MBB (F )ist orthogonal (bzw. unitar) .
Bewiesen haben wir in 9.1.3: “ =⇒ ”, aber “ ⇐= ” folgt auch aus derRechnung in 9.1.3: Ist
MBB (F ) orthogonal (bzw.unitar), so gilt, wenn B = (v1, . . . , vn) ist:
s(vj, vk) = s(F (vj), F (vk)) fur alle j, k ∈ n ,
und damit auch fur alle Linearkombinationen von (v1, . . . , vn):
s(v, w) = s(F (v), F (w)) .
2
Definition und Satz 9.1.6 : Die Mengen
O(n) := { A ∈ GL(n,R) | A−1 = tA } ,
SO(n) := { A ∈ O(n) | detA = 1 } und
U(n) :={A ∈ GL(n,C) | A−1 = tA
}sind bezuglich der Matrizenmultiplikation Gruppen. Sie heißen orthogonale,spezielle orthogonale bzw. unitare Gruppe.
Beweis : a) Nach Definition ist U(n) ⊂ GL(n,C), und
E−1n = En = En = tEn , also En ∈ U(n) , also U(n) 6= ∅.
Fur A,B ∈ U(n) ist
t(A ·B−1) = t(A·B−1) = t(B−1)·t(A)(*)= (tB)−1·tA = (B−1)−1·A−1 = (A·B−1)−1 ,
104
also A·B−1 ∈ U(n) . Also ist U(n) eine Untergruppe von GL(n,C). UberlegenSie sich, warum die Gleichung (∗) gilt !b) Lasst man in a) uberall weg, so erhalt man den Beweis, dass O(n) eineUntergruppe von GL(n,R) ist.c) SO(n) ⊂ O(n) gilt nach Definition, und En ∈ SO(n) . Fur A,B ∈ SO(n)gilt
det(A ·B−1) = detA · (detB)−1 = 1 · 1 = 1 ,
also A ·B−1 ∈ SO(n).
2
Bemerkung 9.1.7 : Fur orthogonale bzw. unitare Matrizen A gilt
tA · A = En , also
1 = det(tA) · detA = detA · detA = | detA |2 ,
also | detA | = 1 . In R gibt es fur detA also nur die beiden MoglichkeitendetA = 1 oder detA = −1 , also ist
O(n) = SO(n) ∪ { A ∈ O(n) | detA = −1 } .
Bemerkung 9.1.8 : Sei n ∈ N . Fur ein A ∈M(n× n,K) sind folgende
Aussagen gleichbedeutend:
(i) A ist orthogonal bzw. unitar.
(ii) Die Spalten von A bilden eine Orthonormalbasis des Kn mit dem ka-nonischen Skalarprodukt 〈 , 〉 .
(iii) Die Zeilen von A bilden eine Orthonormalbasis des Kn mit dem kano-nischen Skalarprodukt 〈 , 〉 .
Beweis : (ii) =⇒ (i) : Fur die Spalten aj von A gilt
〈aj, ak〉 = δjk , also t(aj) · ak = δjk ,
n∑l=1
aljalk = δjk , also tA · A = En , t(A) · A = En .
(iii) =⇒ (i) : Fur die Zeilen aj von A gilt
〈aj, ak〉 = δjk , also aj ·t ak = δjk ,
105

n∑l=1
ajlakl = δjk , also A ·t A = En .
(i) =⇒ (ii),(iii) : Fur orthogonales bzw. unitares A ist | detA| = 1 ,also detA 6= 0 , also bilden die Spaltenvektoren von A eine Basis von Kn ,die Zeilenvektoren auch. Aus
tA · A = En folgt 〈aj, ak〉 = δjk , und ausA ·t A = En folgt 〈aj, ak〉 = δjk , fur j, k ∈ n .
2
(9.1.9) O(n) fur n ≤ 3: Fur
n = 1 ist GL(1,R) = { (a) | a 6= 0 } , also
O(1) = {±E1} , SO(1) = {E1} . Sei nun
n = 2 und
A =
(a cb d
)∈ O(2) .
Nach Bemerkung 9.1.8 (ii) gilt a2 + b2 =
⟨(ab
),
(ab
)⟩= 1 , also
|a| ≤ 1 . Wir konnen alsoα′ := arccos a
setzen, dann ist cosα′ = a und α′ ∈ [0, π]. Es ist
b2 = 1− a2 = 1− cos2 α′ = sin2 α′ , also
b = ± sinα′ .
Ist b = sinα′ , so setzen wir α := α′ . Ist b = − sinα′ , so ist
b = sin(−α′) , a = cosα′ = cos(−α′) ,
wir setzen nun α := −α′ ∈ [−π, 0] , und haben in jedem Fall ein α ∈ [−π, π]mit
a = cosα , b = sinα .
Fur
(cd
)folgt aus
⟨(ab
),
(cd
)⟩= 0 und
⟨(cd
),
(cd
)⟩= 1 :
(cd
)=
(−ba
)oder
(cd
)=
(b−a
).
106

Im ersten Fall haben wir
(1) A =
(cosα − sinαsinα cosα
)mit α ∈ [−π, π] ,
und das liegt in SO(2) , und im 2.Fall:
(2) A =
(cosα sinαsinα − cosα
)mit α ∈ [−π, π] ,
und das liegt in O(2)\ SO(2) . Wir sehen:
(1) Fur A ∈ SO(2) und x =
(x1x2
)∈ R2 ist
A · x =
(cosα · x1 − sinα · x2sinα · x1 + cosα · x2
)der um den Winkel α gedrehte Vektor x . A beschreibt eine Drehung desR2. Es ist
PA(X) = (X − cosα)2 + sin2 α = X2 − 2 cosα ·X + 1 ,
und das hat reelle Nullstellen nur fur cosα = ±1 , also α ∈ {0,±π}. Dasist anschaulich klar: Nur bei einer Drehung um 0o oder 180o gibt es Geradendurch den Nullpunkt, die von der Drehung fest gelassen werden.(2) Fur A ∈ O(2)\ SO(2) hat man
PA(X) = (cosα−X)(− cosα−X)− sin2 α = X2 − 1 = (X − 1)(X + 1) ,
wir haben die Eigenwerte ±1 und dazu die Eigenvektoren
zum Eigenwert 1 : v =
(sinα
1− cosα
),
zum Eigenwert −1 : w =
(cosα− 1
sinα
).
Es gilt 〈v, w〉 = 0 , w wird von A auf sein Negatives und v auf sich selbstabgebildet. A beschreibt eine Spiegelung des R2 an der zu w senkrechtenGeraden R · v . Sei nunn = 3 : Ist F : R3 −→ R3 orthogonal, so hat das charakteristische Poly-nom PF den Grad 3, und damit, wie man aus der Analysis (Zwischenwert-satz!) weiß, mindestens eine Nullstelle λ1 ∈ R. Nach Bemerkung 9.1.2 b) ist
107

|λ1| = 1 , also λ1 = ±1. Dazu haben wir einen Eigenvektor w1 6= 0, vondem wir auch noch annehmen konnen, dass er normiert ist,
‖w1‖ = 1 .
Nach dem Orthonormalisierungssatz konnen wir w1 erganzen zu einer Ortho-normalbasis
B = (w1, w2, w3) des R3 . Sei
W := span(w2, w3) ,
so ist W die zu w1 senkrechte Ebene durch 0, und nach Bemerkung 9.1.2 c)stehen F (w2), F (w3) senkrecht auf
F (w1) = λ1w1 = ±w1 , also gilt
F (W ) ⊂ W .
Also hat MBB (F ) die Form
A :=
λ1 | 0 0−− + −− −− −−0 |
| A′
0 |
,
und es ist ±1 = detA = λ1 · detA′ = (±1) · detA′ , also detA′ = ±1 ,und wegen A ∈O(3) : A′ ∈ O(2). Nun unterscheiden wir drei Falle : Seidet F = 1 , λ1 = −1 , dann ist detA′ = −1 . A′ und damit A hat dieEigenwerte λ2 = 1 und λ3 = −1 , und man kann w2 und w3 als normierteEigenvektoren von A zu diesen Eigenwerten wahlen. Bezuglich dieser Basis(w1, w2, w3) wird
A =
−1 0 00 1 00 0 −1
. Sei
det F = 1 , λ1 = +1 , so ist detA′ = +1 , also gibt es ein α ∈ [−π, π] mit
A =
1 0 00 cosα − sinα0 sinα cosα
.
108

Im Fall detF = 1 hat F also in jedem Fall einen Eigenwert 1 . Istdet F = −1 , so kann man w1, w2, w3 so wahlen, dass F bezuglichB = (w1, w2, w3) die Matrix
A = MBB (F ) =
1 0 00 1 00 0 −1
hat, oder
A =
−1 0 00 cosα − sinα0 sinα cosα
mit α ∈ [−π, π] .
2
Fur n = 2 hatten wir alle Matrizen A ∈ O(2) bestimmt. Fur n = 3 ha-ben wir uns nur uberlegt, wie die Matrix A eines orthogonalen F ∈ EndRR3
bezuglich einer passenden Basis aussieht, d.h. hier haben wir nur Nor-malformen von Matrizen aus O(3) bestimmt. Das machen wir nun fur be-liebiges n , wobei der Fall K = C leichter geht, da man in C den Fundamen-talsatz der Algebra hat :
Theorem 9.1.10 : Sei V ein unitarer Vektorraum, dimC V = n ∈ N0 undF ein unitarer Endomorphismus von V . Dann besitzt V eine Orthonormalba-sis, die aus Eigenvektoren von F besteht. Insbesondere ist F diagonalisierbar.Beweis durch Induktion nach n = dimV : Fur n = 0 ist nichts zu beweisen.Sei nun n ∈ N. Nach dem Fundamentalsatz der Algebra (3.5.13) zerfallt je-des Polynom aus C[X] in Linearfaktoren. Insbesondere gibt es λ1, . . . , λn ∈ Cmit
PF (X) = (−1)n(X − λ1) · . . . · (X − λn) ,
und λ1, . . . , λn sind die Eigenwerte von F . Sei s das Skalarprodukt in V .Zu λ1 konnen wir einen Eigenvektor v1 mit ‖ v1 ‖ = 1 finden. Sei W dasorthogonale Komplement zu Cv1 (siehe Aufgabe 6.5), d.h.
W := { w ∈ V | s(v1, w) = 0 } .
Wir behaupten nun:
(∗) F (W ) = W .
Beweis von (∗) : Nach Bemerkung 9.1.2 e) ist F ein Isomorphismus, alsobildet F linear unabhangige Vektoren ab auf linear unabhangige Vektoren.Es genugt also, zu zeigen:
F (W ) ⊂ W ,
109

denn wenn (w1, . . . , wk) eine Basis von W ist, ist (F (w1), . . . , F (wk)) linearunabhangig, also eine Basis von W , und damit
W = span(F (w1), . . . , F (wk)) = F (W ) .
Sei also w ∈ W . Es ist F (v1) = λ1v1 mit |λ1| = 1, also λ1 6= 0. Es gilt also
s(v1, F (w)) =1
λ1s(λ1v1, F (w)) =
1
λ1s(F (v1), F (w)) =
1
λ1s(v1, w) =
1
λ1·0 = 0,
also F (w) ∈ W ,womit dann (∗) bewiesen ist.Nun setzen wir
G := F∣∣W
: W −→ W .
W ist mit s∣∣W×W auch wieder ein unitarer Vektorraum,
dimW = n− 1 nach dem Orthonormalisierungssatz,
und G ist ein unitarer Endomorphismus auf W . Auf G und W konnenwir die Induktionsvoraussetzung anwenden: Es gibt eine Orthonormalbasis(v2, . . . , vn) von W , bestehend aus Eigenvektoren von G , also
G(vj) = λjvj mit λj ∈ C , also auch
F (vj) = λjvj fur j ∈ {2, . . . , n} .
Nach Definition von W stehen die vj , j ∈ {2, . . . , n}, auf v1 senkrecht, alsoist
(v1, . . . , vn) eine Orthonormalbasis von V ,
bestehend aus Eigenvektoren von F .
2
Fur Matrizen erhalt man daraus das
Korollar 9.1.11 : Sei n ∈ N . Zu jedem A ∈U(n) gibt es ein S ∈U(n) mit
tS · A · S =
λ1 0. . .
0 λn
,
wobei die λj ∈ C sind mit |λj| = 1 fur j ∈ n .Beweis : Sei F : Cn −→ Cn , F (x) := A · x , dann ist
A = MKK (F ) ,
110

wobei K die kanonische Basis des Cn ist. K ist eine Orthonormalbasis desCn mit dem kanonischen Skalarprodukt 〈 , 〉 , also istF ein unitarerEndomorphismus des Cn nach Satz 9.1.5. Nach Theorem 9.1.10 gibt es nuneine Orthonormalbasis
B = (v1, . . . , vn) des Cn mit 〈 , 〉 ,
die aus Eigenvektoren von F besteht :
∃λ1, . . . , λn ∈ C ∀ j ∈ n : (F (vj) = λjvj ∧ |λj| = 1 ) ,
letzteres nach Bemerkung 9.1.2 b). Also ist
B := MBB (F ) =
λ1 0. . .
0 λn
,
und nach der Transformationsformel (4.4.17) fur lineare Abbildungen gilt
MBB (F ) = S−1 · MK
K (F ) · S , also B = S−1 · A · S , mit
S := MKB (idCn) ∈ GL(n,C) ,
also nach den Formeln in Bemerkung 4.4.16 : S = (skj) mit
vj =n∑k=1
skjek .
Da sowohl B als auch K Orthonormalbasen von Cn sind, gilt fur r, j ∈ n :
δrj = 〈vr, vj〉 = 〈n∑l=1
slrel,n∑k=1
skjek〉
=n∑
l,k=1
slrskj〈el, ek〉 =n∑
l,k=1
slrskjδlk =n∑k=1
skrskj , also
tS · S = En , also S ∈ U(n) , also S−1 = tS ,
B = tS · A · S .
2
Bemerkung 9.1.12 : a ) Wie man zu gegebenem unitaren F eine Orthonor-
malbasis aus Eigenvektoren ausrechnet, ist klar: Man berechnet die Eigen-werte, dazu die Eigenraume, und man muss Basen dieser Eigenraume noch
111

orthonormalisieren.b) Eine orthogonale Abbildung eines euklidischen Vektorraums kann mannicht in jedem Fall diagonalisieren. Wir haben schon in den Fallen n = 2, 3gesehen: Es konnen Kastchen der Form(
cosα − sinαsinα cosα
)in der Diagonale auftreten. Der folgende Satz sagt, dass aber auch nichtsSchlimmeres passieren kann:
Theorem 9.1.13 : Sei V ein euklidischer Vektorraum, dimR V = n ∈ N0 ,
und F ein orthogonaler Endomorphismus von V . Dann besitzt V eine Or-thonormalbasis B derart, dass
MBB (F ) =
1. . .
1 0−1
. . .
−1
0 A1
. . .
Ak
ist, wobei fur j ∈ k
Aj =
(cosϑj − sinϑjsinϑj cosϑj
)∈ SO(2) ist mit ϑj ∈ (0, 2π) \ {π} .
F ist also charakterisiert durch die Anzahl r der Eigenwerte +1 , die Anzahls der Eigenwerte −1, sowie die Winkel ϑ1, . . . , ϑk , wobei
r + s+ 2k = dimV ist.
- Zum Beweis brauchen wir das folgende Lemma, bei dem gar nicht benutztwird, dass V ein Skalarprodukt hat:
Lemma 9.1.14 : Sei V ein R-Vektorraum mit dimR V = n und
F ∈ EndRV . Dann gibt es einen Untervektorraum W von V mit
F (W ) ⊂ W und 1 ≤ dimW ≤ 2 .
112

Beweis : Wir benutzen den Fundamentalsatz der Algebra: In C[X] zerfalltdas charakteristische Polynom
PF (X) =n∑j=0
αjXj ∈ R[X] in Linearfaktoren
PF (X) = (−1)nn∏k=1
(X − λk) mit λk ∈ C .
Es kann sein, dass eins der λk , etwa λ1 , in R liegt, dann hat F einen reellenEigenwert λ1 und dazu einen Eigenvektor v1 ∈ V \ {0} , und fur
W := Rv1 gilt F (W ) ⊂ W , dimW = 1 .
Nun seien alle λ ∈ {λ1, . . . , λk} ∈ C \ R . Dann ist λ 6= λ,
PF (λ) =n∑j=0
αjλj
=n∑j=0
αjλj
=n∑j=0
αjλj = PF (λ) = 0 = 0 ,
wegen αj ∈ R. Also sind λ und λ 6= λ Nullstellen von PF (X) in C, und inPF (X) hat man den “ quadratischen Faktor”
(X − λ) · (X − λ) = X2 − (λ+ λ)X + λλ = X2 − 2 Re(λ)X + |λ|2 ,
der in R[X] liegt. Also ist n = 2m gerade, man hat in R[X] :
PF (X) =m∏l=1
Ql(X) mit Ql(X) := X2 + blX + cl ∈ R[X] , bl, cl ∈ R .
Sei v ∈ V \ {0} beliebig, dann gilt nach Cayley-Hamilton :
0 = PF (F )(v) = (Q1(F ) ◦ . . . ◦Qm(F ))(v) .
Es gibt also ein eindeutig bestimmtes j ∈ m mit
w := (Qj+1(F ) ◦ . . . ◦Qm(F ))(v) 6= 0 und Qj(F )(w) = 0
(wobei w := v gesetzt wird, falls j = m ist). Wir setzen
W := span(w,F (w)) ,
dann ist F (w) ∈ W , und aus Qj(F )(w) = 0 folgt, wennQj(X) = X2 + bjX + cj ist:
F (F (w)) + bjF (w) + cjw = 0 , also auch
113

F (F (w)) ∈ span(w,F (w)) = W .
Also gilt F (W ) ⊂ W . Da F keinen Eigenwert hat, ist (w,F (w)) linear un-abhangig, also dimW = 2.
2
Beweis von Theorem 9.1.13 durch Induktion nach n := dimV : Fur
n = 0 ist nichts zu beweisen. Sei n ∈ N, und fur n − 1 sei der Satz richtig.Nach Lemma 9.1.14 gibt es einen Untervektorraum W von V mit
1 ≤ dimV ≤ 2 und F (W ) ⊂ W .
F ist orthogonal, also nach Bemerkung 9.1.2 d) injektiv, also ist fur eineBasis (w1) bzw. (w1, w2)von W auch (F (w1)) bzw. (F (w1), F (w2)) linearunabhangig, also
dimF (W ) = dimW , also F (W ) = W .
Nach Bemerkung 9.1.2 e) haben wir die ebenfalls orthogonale Umkehrfunk-tion F−1 : V −→ V . Sei
W⊥ := { v ∈ V | ∀w ∈ W : s(w, v) = 0 } ,
wobei s das Skalarprodukt in V ist, dann gilt fur w ∈ W und v ∈ W⊥ :
s(F (v), w) = s(F−1(F (v)), F−1(w)) = s(v, F−1(w)) = 0
wegen F−1(W ) ⊂ W , also gilt
F (W⊥) = W⊥ .
Wir haben also zwei orthogonale Abbildungen
G := F∣∣W
: W −→ W und H := F∣∣W⊥
: W⊥ −→ W⊥ .
Wegen dimW ≥ 1 ist dimW⊥ ≤ dimV − 1 , also konnen wir auf W⊥ dieInduktionsvoraussetzung anwenden: W⊥ hat eine Basis B′ der gewunschtenArt.
a) Es gebe einen 1-dimensionalen Untervektorraum W von V mitF (W ) ⊂ W , also W = span(v) mit v 6= 0, dann ist v ein Eigenvektorvon F , zu einem Eigenwert, der nach Bemerkung 9.1.2 b) gleich 1 oder−1 ist. Und umgekehrt gilt: Hat F einen Eigenwert, so ist er ±1 , undfur einen Eigenvektor v dazu ist F (Rv) ⊂ Rv . Man fugt dieses v zurBasis B′ hinzu, an passender Stelle, so dass der Eigenwert ±1 an dierichtige Stelle in der Matrix MB
B (F ) kommt, dann hat die so gefundeneBasis B die gewunschten Eigenschaften.
114

b) F habe keine Eigenwerte, es gebe also keine 1-dimensionalen Unter-vektorraume, die von F in sich abgebildet werden. Sei dann W einUntervektorraum von V mit dimW = 2 und F (W ) ⊂ W , so gibtes nach 9.1.9 (n = 2) eine Orthonormalbasis A = (v1, v2) von W ,bezuglich der MA
A (G) die Form(cosϑ − sinϑsinϑ cosϑ
)∈ SO(2)
mit ϑ ∈ (−π, π) oder ϑ ∈ (0, 2π) hat, aber nicht ϑ = 0 oder π, da Fkeine Eigenwerte hat. Man fuge (v1, v2) am Schluss zur Basis B′ hinzu,dann hat MB
B (F ) die gewunschte Form .
2
Wie bei Satz 9.1.10 kann man auch hier eine Formulierung fur Matrizenangeben:
Korollar 9.1.15 : Sei n ∈ N. Zu jedem A ∈ O(n) gibt es ein S ∈O(n) mit
tS · A · S =
1. . .
1 0−1
. . .
−1
0 A1
. . .
Ak
,
ist, wobei fur j ∈ k
Aj =
(cosϑj − sinϑjsinϑj cosϑj
)∈ SO(2) ist mit ϑj ∈ (0, 2π) \ {π} .
Der Beweis ist analog zu dem von Korollar 9.1.11.
2
9.2 Selbstadjungierte Endomorphismen
Sie sind auch deshalb interessant, weil ihre Matrizen symmetrisch bzw. Her-mitesch sind, und wir wollen wissen, ob solche Matrizen diagonalisierbar sind:
115

Definition 9.2.1 : Sei V ein K−Vektorraum mit Skalarprodukt s , K = Roder C. Ein Endomorphismus F von V heißt selbstadjungiert , wenn
∀ v, w ∈ V : s(F (v), w) = s(v, F (w))
ist, d.h. man kann F genauso gut an das 1.Argument wie an das 2.Argumentschreiben.
Satz 9.2.2 : Sei V ein K−Vektorraum mit Skalarprodukt s ,dimK V = n ∈ N und
B eine Orthonormalbasis von V . Dann gilt:F selbstadjungiert ⇐⇒ MB
B (F ) ist symmetrisch ( fur K = R )bzw. MB
B (F ) ist Hermitesch ( fur K = C ) .Beweis : Sei B = (v1, . . . , vn) und
A := MBB (F ) , dann gilt
∀ k ∈ n : F (vk) =n∑j=1
ajkvj , also :
F selbstadjungiert ⇐⇒
∀ l, k ∈ n : s(F (vl), vk) = s(vl, F (vk)) ⇐⇒
∀ l, k ∈ n :n∑j=1
ajls(vj, vk) =n∑j=1
ajks(vl, vj) ⇐⇒
∀ l, k ∈ n :n∑j=1
ajlδjk =n∑j=1
ajkδlj ⇐⇒
∀ l, k ∈ n : akl = alk ⇐⇒
A = tA ⇐⇒ A ist symmetrisch bzw. Hermitesch.
2
Lemma 9.2.3 : a) Ist F ∈ EndKV selbstadjungiert, so sind (auch furK = C) alle Eigenwerte von F reell.b) Ist n ∈ N und A ∈ M(n × n,K) symmetrisch bzw. Hermitesch, so sindalle Eigenwerte von A reell.Beweis : a) Sei F (v) = λv mit v 6= 0 , so gilt
λs(v, v) = s(λv, v) = s(F (v), v) = s(v, F (v)) = λs(v, v) ,
116

also λ = λ .b) Wir nehmen den Kn mit dem kanonischen Skalarprodukt. Allgemein giltfur v = t(v1, . . . , vn) , w = t(w1, . . . , wn) ∈ Kn :
〈A · v, w〉 =
⟨(n∑j=1
aljvj
)l∈n
, w
⟩=
n∑l,j=1
aljvjwl
=
⟨v,
(n∑l=1
aljwl
)j∈n
⟩= 〈v,tA · w〉 ,
also fur symmetrisches bzw. Hermitesches A :
〈A · v, w〉 = 〈v, A · w〉 ,
und wenn A · v = λv ist, mit v 6= 0 , dann folgt
λ〈v, v〉 = 〈λv, v〉 = 〈Av, v〉 = 〈v, Av〉 = 〈v, λv〉 = λ〈v, v〉 ,
also λ = λ .
2
Naturlich folgt b) auch aus a) mit Satz 9.2.2, aber es ist gut, die Rechnungkonkret fur Matrizen gesehen zu haben.
Theorem 9.2.4 : F sei ein selbstadjungierter Endomorphismus eines K−Vektorraums V mit Skalarprodukt s , dimK V = n ∈ N. Dann gibt es eineOrthonormalbasis B von V , die aus Eigenvektoren von F besteht.Beweis : Sei K = C . Dann konnen wir den Fundamentalsatz der Algebraanwenden: Es gibt λ1, . . . , λn ∈ C mit
PF (X) = (−1)n(X − λ1) · . . . · (X − λn) .
Die λj, j ∈ n, sind die Eigenwerte von F , also nach Lemma 9.2.3:
λj ∈ R fur alle j ∈ n .
Nun machen wir Induktion nach n : Fur n = 1 haben wir einen Eigenvektorv1 zum Eigenwert λ1 , und wir konnen ‖ v1 ‖ = 1 erreichen. Sei nun n ≥ 2 ,und fur n − 1 sei der Satz richtig. Sei dimV = n , dann wahlen wir zu λneinen Eigenvektor vn mit ‖ vn ‖ = 1 und setzen
W := { w ∈ V | s(vn, w) = 0 } .
117

Es gilt F (W ) ⊂ W , denn fur w ∈ W gilt
s(vn, F (w)) = s(F (vn), w) = λn s(vn, w) = 0 .
F∣∣W
ist auch wieder selbstadjungiert, F∣∣W∈ EndKW , und nach Indukti-
onsvoraussetzung gibt es eine Orthonormalbasis (v1, . . . , vn−1) von W , dieaus Eigenvektoren von F
∣∣W
, also aus Eigenvektoren von F , besteht. Dannist (v1, . . . , vn−1, vn) eine Basis von V aus Eigenvektoren von F .b) Fur K = R geht der Beweis genau so, wenn man sich zuvor uberlegt, dassauch in diesem Fall das charakteristische Polynom PF (X)in Linearfaktorenzerfallt. Dazu wahlen wir uns eine beliebige Orthonormalbasis B von V .Nach Satz 9.2.2 ist
A := MBB (F ) ∈M(n× n,R) symmetrisch.
Nun ist M(n × n,R) ⊂ M(n × n,C) , und als Matrix in M(n × n,C) ist Aauch hermitesch. Nach a) zerfallt PA(X) in C in Linearfaktoren:
PA(X) = (−1)n(X − λ1) · . . . · (X − λn) ,
wobei wir wissen: λ1, . . . , λn ∈ R. Nun ist PF (X) = PA(X) .
2
Bemerkung 9.2.5 : Wenn man sich genau uberlegt, was man bei b) ge-
macht hat, ist es Folgendes: Wir haben die Matrix A ∈M(n×n,R) aufgefasstals Matrix eines Endomorphismus FC der Komplexifizierung
VC = C⊗R V
des R−Vektorraums V . Die Komplexifizierung VC von V haben wir in (8.1.11)eingefuhrt. Nimmt man sich eine R−Basis
(vj)j∈J von V , so ist
(1⊗ vj)j∈Jeine C−Basis von VC . Damit hat man bei endlicher Dimension
dimC VC = dimR V , dimR VC = 2 · dimR V ,
denn die 1⊗ vj , i⊗ vj , j ∈ J , bilden eine R−Basis von VC.
118

a) Das Skalarprodukt s von V kann man durch
sC(a⊗ v , b⊗ w) := a b · s(v, w) fur a, b ∈ C , v, w ∈ V
auf VC fortsetzen. Das kann man direkt nachrechnen, es folgt aber auchaus Aufgabe 8.5, denn
a b fur a, b ∈ C
ist das kanonische Skalarprodukt auf C1 .
b) Sei F ∈ EndRV . Dann kann man F fortsetzen zu einem C−Endomorphismus
FC : VC −→ VC durch FC(a⊗v) := a⊗F (v) fur a ∈ C , v ∈ V .
Die C−Linearitat von FC kann man nachrechnen, und FC ist eine Fort-setzung von F , wenn man
R⊗R V mit V , also 1⊗ v mit v
identifiziert:
FC(v) = FC(1⊗ v) = 1⊗ F (v) = F (v) .
c) Hat nun V ein Skalarprodukt s und ist F selbstadjungiert, so gilt fura, b ∈ C , v, w ∈ V :
sC(FC(a⊗ v), b⊗ w) = sC(a⊗ F (v), b⊗ w) = a b · s(F (v), w) =
ab · s(v, F (w)) = sC(a⊗ v, b⊗ F (w)) = sC(a⊗ v, FC(b⊗ w)) .
Also ist auch FC selbstadjungiert.
d) Sei nun V endlichdimensional, B = (v1, . . . , vn) eine R−Basis von Vund F ∈ EndRV , mit der durch
F (vj) =n∑l=1
aljvl
definierten n× n−Matrix A = (alj) ∈M(n× n,R). Dann gilt furFC : VC −→ VC :
FC(1⊗ vj) = 1⊗ F (vj) = 1⊗n∑l=1
aljvl =n∑l=1
alj(1⊗ vl) .
Bezuglich der C-Basis C := (1⊗ vj)j∈J von VC gilt also
MCC (FC) = A = MB
B (F ) .
Insofern ist das, was wir beim Beweis, Teil b), vom Theorem 9.2.4gemacht haben, durchaus gerechtfertigt.
119

Beachten Sie bitte, dass wir alle Definitionen fur Tensorprodukte (in a),b), c) ) nur fur die erzeugenden Tensoren mit nur einem Summanden hinge-schrieben haben, und dass die Elemente des Tensorprodukts endliche Sum-men solcher “reinen” Tensoren sind. Bei a) und b) muss man sich auch nochmit Hilfe der Definition des Tensorprodukts uberlegen, dass FC und sC wohl-definiert sind, d.h. wenn man a⊗v mit a ∈ C durch λa⊗λ−1v mit λ ∈ R\{0}ersetzt, kommt dasselbe heraus!Korollar 9.2.6 : Ist A ∈ M(n × n,K) eine symmetrische Matrix, so gibtes eine orthogonale bzw. unitare Matrix S , so dass
tS · A · S =
λ1 0. . .
0 λn
mit λ1, . . . , λn ∈ R ist .
Der Beweis geht ahnlich wie der von Korollar 9.1.11 : Theorem 9.2.4 sagtzunachst nur, dass es ein S ∈GL(n,K) mit
S−1 · A · S =
λ1 0. . .
0 λn
gibt, aber S ist die Transformationsmatrix von der kanonischen Basis K desKn zu der nach Theorem 9.2.4 existierenden OrthonormalbasisB = (v1, . . . , vn) des Kn ; es gilt also
vj =n∑l=1
sljel ,
die Spaltenvektoren sj von S sind also die vj , bilden also eine Orthonor-malbasis von Kn , und nach Bemerkung 9.1.3 ist S orthogonal bzw. unitar.
2
Fur den Fall, dass Sie den Beweis des Theorems 9.2.4 fur K = R, der dieKomplexifizierung VC des R−Vektorraums V benutzt, undurchsichtig finden,bietet [Fi] noch einen Beweis an, der Hilfsmittel aus der Analysis benutzt undden wir uns mal anschauen wollen. Der Beweis von Theorem 9.2.4 ging mitInduktion nach dimV ; fur Teil b) reicht daher fur den Induktionsschluss dasLemma 9.2.7 : Jede symmetrische Matrix A ∈M(n×n,R) hat einen reellenEigenwert.Beweis : Sei q : Rn −→ R , q(x) := tx · A · x , dann ist
q(x1, . . . , xn) =n∑l=1
(xl ·
n∑j=1
aljxj
)=
n∑l,j=1
aljxlxj
120

eine Polynomfunktion in den n Variablen x1, . . . , xn , also stetig. Die Sphare
S = { x ∈ Rn | ‖x ‖ = 1 }
ist abgeschlossen und beschrankt im Rn, also kompakt. Also nimmt q auf Sein Maximum an: Es gibt ein v ∈ S mit
q(v) ≥ q(x) , also tvAv ≥t xAx fur alle x ∈ S .
Wir zeigen:
(∗) Fur w ∈ S mit v⊥w ist auch Av⊥w .
Wir konnen dann v zu einer Orthonormalbasis des Rn mit 〈 , 〉 erganzen:Sei
(v, v2, . . . , vn) diese Orthonormalbasis und
W := span(v2, . . . , vn) ,
dann gibt es α1, . . . , αn ∈ R mit
Av = α1v +n∑j=2
αjvj , 〈v, vj〉 = 0 fur j ≥ 2 ,
nach (∗) also auch〈Av, vj〉 = 0 fur j ≥ 2 ,
〈α1v +n∑j=2
αjvj , vl〉 = 0 fur l ≥ 2 ,
αl = 0 fur l ≥ 2 , also
Av = α1v ,
also v ein Eigenvektor von A .Beweis von (∗): Fur w ∈ S mit v⊥w und τ ∈ (0, 1] sei σ :=
√1− τ 2 und
x := σ v + τ w , dann ist
〈x, x〉 = σ2〈v, v〉+ τ 2〈w,w〉 = σ2 + τ 2 = 1 ,
also x ∈ S , also
tvAv ≥t xAx = 〈x , Ax〉 = σ2〈v,Av〉+τ 2〈w,Aw〉+στ〈v, Aw〉+στ〈w,Av〉 ,
und da A symmetrisch ist:
(1− σ2)〈v,Av〉 − τ 2〈w,Aw〉 ≥ 2στ〈v,Aw〉 ,
121

2σ〈v, Aw〉 ≤ τ · (〈v,Av〉 − 〈w,Aw〉) .
Indem wir gegebenenfalls w durch −w ersetzen, konnen wir 〈v, Aw〉 ≥ 0erreichen. Ware nun 〈v,Aw〉 > 0, so wurden wir τ gegen 0 (und damitσ gegen 1) gehen lassen (also wieder Analysis benutzen), und wurden links2〈v, Aw〉 > 0 , rechts 0 erhalten, Widerspruch. Also ist
〈v,Aw〉 = 0 , also Aw⊥v .
2
9.3 Hauptachsentransformation
(9.3.1) Zur Wiederholung : Sei V ein R−Vektorraum. Dann hatten wir
in 6.1.3 und 6.1.5 festgelegt: Eine Abbildung
s : V × V −→ R
mit den Eigenschaften: Fur alle u, v, w ∈ V und alle λ ∈ R gilt(H1) s(u+ v, w) = s(u,w) + s(v, w) ,
s(λu,w) = λs(u,w) ,d.h. s ist “linear als Funktion des 1.Arguments”, und
(H2) s(u, v) = s(v, u) ,heißt eine symmetrische Bilinearform auf V .Man kann das auch fur einen beliebigen KorperK machen. Man beachte aber,dass dann s auf einem C−Vektorraum (außer fur s = 0 ) keine HermitescheForm ist. Auch die darstellende Matrix einer symmetrischen Bilinearform sauf einem K−Vektorraum V mit
dimK V = n ∈ N
und Basis B = (v1, . . . , vn) kann man wie in 6.3.1 definieren:
MB(s) := (s(vk, vj))(k,j)∈n×n .
MB(s) ist dann eine symmetrische n × n− Matrix. Wir hatten in (6.3.6)schon einen Transformationssatz fur darstellende Matrizen symmetrischerBilinearformen hergeleitet, fur K = R : Sei
A = (a1, . . . , an)
eine weitere Basis von V , und
∀ j ∈ n : aj =n∑k=1
tkjvk , T := (tkj)
122

so gilt
MA(s) = tT ·MB(s) · T .
(9.3.2) Die Frage ist nun: Gibt es zu einer gegebenen symmetrischen Bi-
linearform s auf einem n−dimensionalen K−Vektorraum V eine Basis A,so dass MA(s) eine Diagonalmatrix ist, d.h. gibt es eine Orthogonalbasis Avon V (wenn schon nicht eine Orthonormalbasis von V , die man z.B. furK = R und nicht positiv definites s auch nicht erwarten kann) , also eineBasis A = (a1, . . . , an) mit
s(ak, aj) = 0 fur k 6= j?
Wir konnen dazu unsere Satze uber symmetrische Matrizen und deren Dia-gonalisierung anwenden, dazu aber gleich eine
(9.3.3) Warnung: Sei B ∈M(n× n,K) und λ ein Eigenwert von B , also
det(B − λEn) = 0, dann folgt nicht, dass auch
tT ·B · T den Eigenwert λ hat,
das charakteristische Polynom andert sich bei dieser Transformation. Nur imFall tT = T−1, fur K = R also im Fall T ∈ O(n), andern sich die Eigenwertenicht. Wir wollen sehen, auf welche Form man B durch die Transformation
B 7−→t T ·B · T
bringen kann,(1) mit T ∈O(n) , (2) mit T ∈ GL(n,R),im Fall K = R :
(9.3.4) Hauptachsentransformation symmetrischer reeller Matrizen
Sei s eine symmetrische Bilinearform auf dem Rn , n ∈ N , und
A = MK(s) = (s(ek, ej)) ∈M(n× n,R)
die Matrix von s bezuglich der kanonischen Basis K = (e1, . . . , en) des Rn.
(1) Es gibt eine Orthonormalbasis B von Rn mit 〈 , 〉 , die aus Eigen-vektoren von A besteht, d.h. es ist
B = (w1, . . . , wn) mit 〈wk, wj〉 = δkj fur k, j ∈ n ,
123
A · wj = λjwj mit λj ∈ R fur j ∈ n , so dass
MB(s) =
λ1 0. . .
0 λn
ist,
also s(wk, wj) = δkj · λk fur k, j ∈ n .
(2) Es gibt eine Basis B′ des Rn, so dass ist, mit
MB′(s) =
|Em |
| 0− − − + − − − −|
| || −El || ||− − − − + − − −
0 || 0|
=: D′
m, l ≥ 0 , m+ l ≤ n. Es gibt also ein T ′ ∈ GL(n,R) mit
D′ = tT ′ · A · T ′ .
Beweis : (1) Da s symmetrisch ist, ist A = MK(s) symmetrisch. Nach Ko-rollar 9.2.6 gibt es eine Matrix S ∈O(n), so dass
tS · A · S =
λ1 0. . .
0 λn
=: D
eine Diagonalmatrix ist, wobei die Diagonalelemente von D die Eigenwertevon A sind. Die Spaltenvektoren w1, . . . , wn von S bilden wegen S ∈O(n)eine bezuglich 〈 , 〉 orthonormale Basis B von Rn, und wegen
wj =n∑k=1
skjek
ist S = MBK ( idRn) , also nach dem Transformationssatz 6.3.6 bzw. 9.3.1 :
tS ·MK(s) · S = MB(s) ,
124

also MB(s) = D , also
s(wk, wj) = δkj · λk fur k, j ∈ n.
(2) Wir konnen die Basis B noch so anordnen, dass
λ1, . . . , λm > 0 , λm+1, . . . , λm+l < 0 , λm+l+1 = . . . = λn = 0
gilt. Wir setzen dann
w′k :=
1√|λk|
wk fur k ≤ m+ l
wk fur k > m+ l .
Dann ist B′ := (w′1, . . . , w′n) eine Basis des Rn und bezuglich 〈 , 〉 eine
Orthogonalbasis, denn
〈w′k, w′k〉 =
1
|λk|fur k ≤ m+ l
1 fur k > m+ l,
〈w′k, w′j〉 = 0 fur k 6= j .
Bezuglich s gilt
s(w′k, w′k) =
1
λks(wk, wk) =
1
λk· λk = 1 fur 1 ≤ k ≤ m
1
|λk|· λk = −1 fur m+ 1 ≤ k ≤ m+ l
0 fur k > m+ l
,
und s(w′k, w′j) = 0 fur k 6= j , also ist MB′(s) die in der Behauptung ange-
gebene Matrix D′, und nach dem Transformationssatz 6.3.6 gibt es einT ′ ∈ GL(n,R) mit
D′ = tT ′ · A · T ′ .
2
Bevor wir daraus einige Folgerungen ziehen und die Ergebnisse vom Rn aufeinen beliebigen R−Vektorraum V verallgemeinern, noch etwas
9.3.5 Zur Motivation : Sie haben sich vielleicht gefragt, warum wir hiervon “Hauptachsentransformation” geprochen haben. Dazu folgendesBeispiel: Die Matrix
A :=
(α ββ α
)∈M(2× 2,R)
125

ist symmetrisch, also ist durch
s(x, y) := 〈x , Ay〉 = α(x1y1 + x2y2) + β(x1y2 + x2y1)
eine symmetrische Bilinearform s mit MK(s) = A gegeben, es ist
PA(X) = X2 − 2αX + (α2 − β2) ,
also hat A die Eigenwerte λ1 = α + β und λ2 = α − β , mit den Eigen-vektoren
w1 =1√2
(11
), w2 =
1√2
(−11
),
die eine Orthonormalbasis B von R2 mit 〈 , 〉 bilden. Setzen wir
S :=1√2
(1 −11 1
),
das ist die Matrix mit den Spalten wj, und sei
v =2∑
k=1
xkek =2∑j=1
zjwj ∈ R2 , so sieht man
(x1x2
)= S ·
(z1z2
).
Man interessiert sich nun in der analytischen Geometrie fur die durch s de-finierte quadratische Form
q(x) := s(x, x) = αx21 + 2βx1x2 + αx22
und die Menge
C :={x ∈ R2
∣∣ q(x) = 1}
, dann gilt
q(x) = q(Sz) = 〈Sz,ASz〉 = 〈z, (tSAS)z〉
= tz ·(α + β 0
0 α− β
)· z
= (α + β)z21 + (α− β)z22 .
Beschreibt man die Menge C also nicht durch die Koordinaten x1, x2 bezuglichder kanonischen Basis, sondern durch die Koordinaten z1 , z2 ihrer Punktebezuglich B , so wird
C ={x = z1w1 + z2w2 ∈ R2
∣∣ (α + β)z21 + (α− β)z22 = 1}
,
126

und die letzte Gleichung ist insofern einfacher als die Gleichung q(x) = 1,als darin kein “gemischter” Term, also kein Summand µz1z2 mit µ 6= 0,vorkommt. C lasst sich nun leicht untersuchen: Man kann die Gleichungnoch mit −1 multiplizieren, also
α + β ≥ 0 annehmen.
Wenn wir die “Entartungsfalle” α+ β = 0 oder α− β = 0 mal außer Achtlassen, konnen wir
a :=1√α + β
und b :=1√|α− β|
setzen, dann wird
C =
{z1w1 + z2w2 ∈ R2
∣∣ z21a2± z22b2
= 1
}und wir sehen: Fur λ1, λ2 > 0 ist C eine Ellipse, fur λ1 > 0 , λ2 < 0 eineHyperbel, mit den “Hauptachsen” w1 und w2 :
w2
e2
w1
e1
ba
127

a
b
w2
e2
w1
e1
Definition 9.3.6 : Eine symmetrische Matrix A ∈M(n× n,R) heißt
positiv definit, wenn
∀x ∈ Rn \ {0} : 〈x,Ax〉 = tx · A · x > 0
gilt.
2
Sie lernen es in der Analysis: Sei
f : Rn −→ R zweimal stetig differenzierbar
und der Gradient grad f(x) = 0 . Ist die Hesse-Matrix
Hessf (x) := (∂
∂xj
∂
∂xkf(x))j,k∈n
positiv definit, so hat f in x ein isoliertes lokales Minimum. Man sucht des-halb nach Kriterien fur die positive Definitheit einer symmetrischen MatrixA , man mochte schließlich nicht immer
〈x,Ax〉 fur alle x ∈ Rn \ {0}
ausrechnen:
128

Korollar 9.3.7 : Eine symmetrische Matrix A ∈M(n×n,R) ist genau dann
positiv definit, wenn ihre Eigenwerte λ1, . . . , λn alle positiv sind.Beweis : Nach (9.3.4)(1) gibt es eine Orthonormalbasis
B = (w1, . . . , wn) des Rn , so dass fur
s : Rn × Rn −→ R , s(x, y) := 〈x,Ay〉 gilt
MB(s) =
λ1 0. . .
0 λn
, also s(wj, wk) = δjkλj fur j, k ∈ n,
wobei die λj die Eigenwerte von A sind. Zu x ∈ Rn gibt es µ1, . . . , µn ∈ Rmit
x = µ1w1 + . . .+ µnwn , also
〈x,Ax〉 = s(x, x) = s
(n∑j=1
µjwj,n∑k=1
µkwk
)
=n∑
j,k=1
µjµks(wj, wk) =n∑j=1
µ2jλj ,
und dieser Ausdruck ist genau dann großer 0 fur alle x ∈ Rn \ {0}, wennλ1, . . . , λn > 0 sind.
2
- Um dieses Kriterium anzuwenden, muss man die Eigenwerte, also die Null-stellen des charakteristischen Polynoms von A , berechnen. Es reicht aber,sich die Koeffizienten des charakteristischen Polynoms anzusehen, das wirdSatz 9.3.10. Um ihn zu beweisen, sehen wir uns zunachst beliebige Polynomean:
Definition 9.3.8 : Sei K ein beliebiger Korper,n ∈ N und
f(X) = Xn +n−1∑j=0
αjXj
ein normiertes Polynom, das in Linearfaktoren zerfallt, es gebe alsoλ1, . . . , λn ∈ K mit
f(X) = (X − λ1) · . . . · (X − λn) .
129

Ausmultiplizieren ergibt
α0 := (−1)nλ1 · . . . · λnα1 := (−1)n−1(λ2 · . . . · λn + λ1 · λ3 · . . . · λn + . . .+ λ1 · . . . · λn−1),. . .αn−2 := λ1λ2 + . . .+ λ1λn + λ2λ3 + . . .+ λ2λn + . . .+ λn−1λn,αn−1 := −(λ1 + . . .+ λn) .
Um das besser zu verstehen, definieren wir dieelementarsymmetrischen Funktionen
sk(λ1, . . . , λn) :=∑
1≤j1<...<jk≤n
λj1 · . . . · λjk fur k ∈ n− 1 ∪ {0} .
Die Summe hat so viele Summanden, wie es Moglichkeiten gibt, k verschiede-
ne Indizes j1, . . . , jk aus n auszuwahlen, also
(nk
)Summanden. Fur unser
Polynom f gilt dann
αk = (−1)n−ksn−k(λ1, . . . , λn) .
Das ist der Wurzelsatz von Vieta, den Sie fur n = 2 aus der Schulekennen.
2
- Fur K = R gibt es nun einen Zusammenhang zwischen den Vorzeichen derαk und denen der Nullstellen λk:
(9.3.9) Vorzeichenregel: Sei n ∈ N,
f(X) = Xn + αn−1Xn−1 + . . .+ α1X + α0 ∈ R[X]
ein normiertes Polynom mit α0 6= 0, das in R[X] in Linearfaktoren zerfallt,also
f(X) = (X − λ1) · . . . · (X − λn) mit λ1, . . . , λn ∈ R .
Dann gilt
a) Genau dann sind alle λj negativ, wenn alle Koeffizienten αj positivsind.
b) Genau dann sind alle λj positiv, wenn die Vorzeichen der αj alternie-rend sind, genauer: wenn
(−1)n−jαj > 0 fur j = 0, . . . , n− 1 ist.
130

Beweis : a) “⇐=”: Ist λ ∈ R und λ ≥ 0 , so ist
f(λ) = λn + αn−1λn−1 + . . .+ α0 ≥ α0 > 0,
also λ keine Nullstelle von f . Also sind alle Nullstellen λj negativ .b) “=⇒ ”: Seien alle λj negativ, so gilt mit den Bezeichnungen aus 9.3.8 :
sk(λ1, λn)
{> 0, falls k gerade,< 0, falls k ungerade ist,
und damit
αk = (−1)n−ksn−k(λ1, . . . , λn) > 0 fur alle k = 0, . . . , n− 1 .
b) Man wende a) an auf das Polynom
f−(X) := (−1)nf(−X) ,
dann folgt b) direkt aus a).
2
- Wir wenden das nun an fur symmetrische Matrizen und ihre Eigenwerte:
Satz 9.3.10 : Sei A ∈M(n× n,R) eine symmetrische Matrix und
PA(X) = (−1)nXn + βn−1Xn−1 + . . .+ β1X + β0
ihr charakteristisches Polynom. Dann gilt
A positiv definit ⇐⇒ (∗) ∀ j ∈ n− 1 ∪ {0} : (−1)jβj > 0 .
Beweis : f(X) := (−1)nPA(X) = Xn + (−1)nβn−1Xn−1 + . . . + (−1)nβ0
ist ein normiertes Polynom. Zunachst: Ist β0 = 0 , so ist 0 ein Eigenwert undA nicht positiv definit, und umgekehrt: Ist 0 ein Eigenwert, so gilt β0 = 0,und (∗) ist falsch.Wir konnen uns also auf den Fall β0 6= 0 beschranken und darauf die Vorzei-chenregel 9.3.9 anwenden. Fur die Koeffizienten αj aus 9.3.9 gilt dann
αj = (−1)nβj , und
(−1)n−jαj = (−1)jβj .
2
131

9.4 Tragheitsgesetz von Sylvester
Bemerkung 9.4.1 : Wir haben schon in Definition 4.7.5 gelernt, was die in-
nere direkte Summe von Untervektorraumen ist: Sei V ein K−Vektorraum,W1, . . . ,Wr seien Untervektorraume von V . Dann heißt V die innere direkteSumme von W1, . . . ,Wr , geschrieben:
V = W1 ⊕ . . .⊕Wr =r⊕j=1
Wj ,
wenn es zu jedem w ∈ V ein eindeutig bestimmtes r−tupel
(w1, . . . , wr) ∈ W1 × . . .×Wr gibt mit
w = w1 + . . .+ wr .
Hat man einenK−Vektorraum mit symmetrischer Bilinearform, so kann manvon so einer Zerlegung noch mehr verlangen:
Definition 9.4.2 : Sei V ein K−Vektorraum mit einer symmetrischen Bili-
nearform s , K ein beliebiger Korper, oder V ein C−Vektorraum mit Her-mitescher Form s. Sind V1, . . . , Vr Unterraume von V mit
V = V1 ⊕ . . .⊕ Vr , und gilt auch noch
s(vj, vk) = 0 fur alle vj ∈ Vj , vk ∈ Vk mit j 6= k ,
so heißt V die orthogonale direkte Summe der Vj , j ∈ r , und wir schrei-ben
V = V1©⊥ . . .©⊥ Vr .
Definition 9.4.3 : Sei V ein K−Vektorraum und s eine symmetrische Bili-nearform auf V . Dann nennen wir
V0 := { v ∈ V | ∀w ∈ V : s(v, w) = 0 }
den Ausartungsraum von s.
2
Man sieht sofort:
Folgerung 9.4.4 : Sei V ein K−Vektorraum mit symmetrischer Bilinear-
form s . Dann gilt:a) V0 ist ein Untervektorraum von V .b) s ist nichtausgeartet ⇐⇒ V0 = {0}
132

(wobei wir den Begriff “nichtausgeartet” in Def.6.2.1 nur fur K = R definierthatten, aber dort kann man auch einen beliebigen Korper nehmen.)
2
Direkt aus Satz 9.3.4 folgt
Korollar 9.4.5 : Sei n ∈ N , s eine symmetrische Bilinearform auf dem Rn
und W0 ihr Ausartungsraum. Dann gibt es Untervektorraume W+ und W−von Rn , so dass
Rn = W+©⊥ W−©⊥ W0 ist, und
∀w ∈ W+ \ {0} : s(w,w) > 0 ,
∀w ∈ W− \ {0} : s(w,w) < 0 ,
∀w ∈ W0 ∀ v ∈ V : s(w, v) = 0 ,
und die Zerlegung ist orthogonal bezuglich s und dem kanonischen Skalar-produkt 〈 , 〉.Beweis : Nach dem Satz 9.3.4 uber die Hauptachsentransformation gibt eseine Basis
B′ = (w1, . . . , wm, wm+1, . . . , wm+l, wm+l+1, . . . , wn)
des Rn , so dass
MB′(s) =
|Em |
| 0− − − + − − − −|
| || −El || ||− − − − + − − −
0 || 0|
ist. Mit
W+ := span(w1, . . . , wm) ,W− := span(wm+1, . . . , wm+l) ,
W := span(wm+l+1, . . . , wn)
133

sehen wir:
Rn = W+©⊥ W−©⊥ W ,
∀w ∈ W+ \ {0} : s(w,w) > 0 , ∀w ∈ W− \ {0} : s(w,w) < 0 , und
∀w ∈ W ∀ v ∈ Rn : s(w, v) = 0 ,
also W ⊂ W0 , , wobei W0 der Ausartungsraum von s ist. Sei v ∈ W0, dannist v eine Linearkombination von B′ :
v =n∑j=1
αjwj mit αj ∈ R .
Fur alle j ∈ m+ l gilt dann
0 = s(v, wj) =n∑k=1
αks(wk, wj) = ±αj
(und zwar +αj fur j ≤ m, −αj fur j > m ) , also αj = 0 , also
v =n∑
j=m+l+1
αjwj ∈ W .
Also ist W = W0 .
2
Fur einen beliebigen K−Vektorraum V , auch wenn K = R ist, hat mandiesen Satz nicht, schon deshalb, weil man kein kanonisches Skalarprodukthat. Wir beweisen immerhin den
(9.4.6) Orthogonalisierungssatz : Sei V ein endlichdimensionaler Vek-
torraum uber einem Korper K mit char K 6= 2 und
s : V × V −→ K
eine symmetrische Bilinearform. Dann gibt es eine Basis
B = (v1, . . . , vn) von V mit
s(vj, vk) = 0 fur j, k ∈ n mit j 6= k .
Fur die durchq : V −→ K , q(v) := s(v, v)
134

definierte quadratische Form heißt das: Es gibt α1, . . . , αn ∈ K mit
q(v) = α1ξ21 + . . .+ αnξ
2n fur v =
n∑j=1
ξjvj .
Beweis durch Induktion nach n := dimV : Fur n = 0 oder 1 ist nichtszu beweisen. Sei nun n ∈ N , und fur n sei die Behauptung richtig. SeidimV = n+ 1. Gilt
q(v) = 0 fur alle v ∈ V , so gilt wegen
s(v, w) =1
2(q(v + w)− q(v)− q(w)) fur alle v, w ∈ V :
s(v, w) = 0 fur alle v, w ∈ V ,
und wir konnen jede Basis B von V nehmen. Anderenfalls gibt es ein v1 ∈ Vmit q(v1) 6= 0 . Wir setzen
W := { w ∈ W | s(v1, w) = 0 } ,
das ist ein Untervektorraum von V , und wir behaupten:
V = Kv1 ⊕W . Dazu zeigen wir:
Kv1 ∩W = {0} : Sei v ∈ Kv1 ∩W , dann ist
v = λv1 mit λ ∈ K und 0 = s(v1, v) = λs(v1, v1) = λq(v1) ,
also λ = 0 , also v = 0 , und
Kv1 +W = V : Sei v ∈ V , dann setzen wir
v′ :=s(v1, v)
s(v1, v1)v1 , dann ist
v = v′ + (v − v′) mit v′ ∈ Kv1 und
s(v1, v − v′) = s(v1, v)− s(v1, v)
s(v1, v1)s(v1, v1) = 0 , also
v − v′ ∈ W , also v ∈ Kv1 +W .
Sei s′ die Restriktion von s auf W ×W . Dann gibt es wegen dimW = neine Basis (v2, . . . , vn+1) von W mit
s′(vj, vk) = 0 fur j, k ∈ {2, . . . , n+ 1} mit j 6= k ,
135

und wenn wir B := (v1, . . . , vn+1) nehmen, haben wir eine Basis von V mit
s(vj, vk) = 0 fur j, k ∈ n+ 1 mit j 6= k .
2
Fur Matrizen ergibt sich daraus das
Korollar 9.4.7 : Zu jeder symmetrischen Matrix A ∈M(n× n,K) ,
char K 6= 2 , gibt es ein S ∈ GL(n,K) mit
tS · A · S =
α1 0. . .
0 αn
,
wobei α1, . . . , αn aber nicht eindeutig bestimmt sind.
2
Folgerung 9.4.8 : Wir uberlegen uns, wie man den Orthogonalisierungssatz
9.4.6 fur den Fall K = R benutzen kann. Man hat dann fur j, k ∈ n :
s(vj, vk) = αj δjk mit αj ∈ R ,
und man kann die Elemente der Basis (v1, . . . , vn) so numerieren, dassαj > 0 fur j = 1, . . . ,m,αj < 0 fur j = m+ 1, . . . ,m+ l,αj = 0 fur j = m+ l + 1, . . . , n
gilt, mit gewissen Zahlen m, l ∈ N0 . Wie im Beweis von Korollar 9.4.5 setztman
W+ := span(w1, . . . , wm) ,W− := span(wm+1, . . . , wm+l) ,
W := span(wm+l+1, . . . , wn) ,dann hat man die bezuglich s orthogonale Zerlegung
V = W+©⊥ W−©⊥ W mit
(∗)
∀w ∈ W+ \ {0} : s(w,w) > 0 ,∀w ∈ W− \ {0} : s(w,w) < 0 ,
∀w ∈ W ∀ v ∈ V : s(w, v) = 0 ,
und wie im Beweis von 9.4.5 kann man zeigen: W ist der AusartungsraumV0 von s . Das Problem dabei ist, dass die Untervektorraume W+ und W−durch die Eigenschaft (∗) nicht eindeutig bestimmt sind, sondern davon
136

abhangen, welche Orthonormalbasis B = (v1, . . . , vn) von V wir gewahlthaben. Nur der Ausartungsraum V0 ist unabhangig von der Basis. Der Satzvon Sylvester sagt, dass wenigstens die Dimensionen von W+ und W−nicht von der Basis abhangen:
(9.4.9) Tragheitsgesetz von Sylvester : Sei V ein endlichdimensionaler
R−Vektorraum mit einer symmetrischen Bilinearform s. Hat man Zerlegun-gen
V = V+©⊥ V−©⊥ V0 = W+©⊥ W−©⊥ V0 ,
wobei V0 der Ausartungsraum von s ist und
∀ v ∈ V+ \ {0} : s(v, v) > 0 ,∀ v ∈ W+ \ {0} : s(v, v) > 0 ,
∀ v ∈ V− \ {0} : s(v, v) < 0 ,∀ v ∈ W− \ {0} : s(v, v) < 0 ,
dann giltdimV+ = dimW+ , dimV− = dimW− .
Beweis : Sei
m := dimV+ , m′ := dimW+ , l := dimV− , l
′ := dimW− .
Nach Definition der direkten Summe, nach Satz 4.7.1 und Bemerkung 4.7.6haben wir
m+ l = dimV − dimV0 = m′ + l′ .
Es genugt also, l = l′ zu zeigen, dann folgt auch m = m′. Angenommen, esgibt ein
v ∈ V+ ∩ (W− + V0) , v 6= 0 , dann folgt
s(v, v) > 0 und ∃w− ∈ W− ∃ v0 ∈ V0 : v = w− + v0 ,
sicherlich w− 6= 0, denn sonst ware s(v, v) = 0 , nicht > 0. Also gilt
s(v, v) = s(w−, w−) + 2 s(w−, v0) + s(v0, v0) = s(w−, w−) < 0 ,
Widerspruch. Also ist V+ ∩ (W− + V0) = 0 , wir haben nachAufgabe (4.5) b):
dimV+ + dim(W− + V0) = dim(V+ + W− + V0) ,
und wegen W− ∩ V0 = {0} ist, wieder nach Aufgabe (4.5) b) :
dim(W− + V0) = dimW− + dimV0 , also
dimV+ + dimW− + dimV0 ≤ dimV = n , also
137

m + l′ ≤ n− dimV0 ,
l′ ≤ n−m− dimV0 = l .
analog zeigt man l ≤ l′ , also ist l = l′ .
2
Bemerkung 9.4.10 : Hat man einen R−Vektorraum V mit
dimR V = n , zwei Basen A und B von V , also die TransformationsmatrixS := MB
A ( idV ) ∈ GL(n,R) , und
• F ∈ EndRV , so gilt nach (4.4.17):
MBB (F ) = S−1 ·MA
A (F ) · S ,
und daher: MAA (F ) und MB
B (F ) haben die gleichen Eigenwerte,
• eine symmetrische Bilinearform s auf V , so gilt nach dem Transfor-
mationssatz (6.3.6) :
MB(s) = tS ·MA(s) · S ,
MB(s) und MA(s) haben i.A. nicht die gleichen Eigenwerte, aberdas Tragheitsgesetz von Sylvester sagt immerhin, dass sich die Vor-zeichen der Eigenwerte und die Vielfachheit des Eigenwerts 0 nichtandern. Das ist das nachste Korollar. − Naturlich: Ist die Transfor-mationsmatrix S orthogonal, also tS = S−1 , so haben MB(s) undMA(s) die gleichen Eigenwerte.
Korollar 9.4.11 : Sei n ∈ N , A ∈M(n× n,R) symmetrisch und
S ∈ GL(n,R) . Dann haben
A und tS · A · S ,
mit Vielfachheit gezahlt, die gleichen Anzahlen positiver und negativer Ei-genwerte.Beweis : Sei
s(x, y) := 〈x,Ay〉 fur x, y ∈ Rn ,
dann ist A = MK(s) , wobei K die kanonische Basis von Rn ist, und tS ·A ·Sdie Matrix MB(s) fur eine andere Basis B. Nach Folgerung 9.4.8 kann manmit A und mit tS · A · S Zerlegungen
Rn = V+©⊥ V−©⊥ V0 und Rn = W+©⊥ W−©⊥ V0
138

konstruieren, so dass
∀ v ∈ V+ \ {0} : s(v, v) > 0 , ∀ v ∈ W+ \ {0} : s(v, v) > 0 ,
∀ v ∈ V− \ {0} : s(v, v) < 0 , ∀ v ∈ W− \ {0} : s(v, v) < 0 ,
gilt, und nach Sylvester gilt
dimV+ = dimW+ , dimV− = dimW− .
Nach Satz 9.3.4 sind diese Zahlen gerade die Anzahlen der positiven bzw.negativen Eigenwerte (mit Vielfachheit gezahlt) von MK(s) bzw. MB(s).
2
- Wir wollen uns zum Schluss dieses Kapitels noch einmal mit positiv defini-ten Matrizen beschaftigen und ein Kriterium beweisen, das man auch in derAnalysis benutzen kann, um zu zeigen, dass die Hesse-Matrix positiv definitist:
(9.4.12) Definition : Sei n ∈ N , K ein Korper und A ∈M(n× n,K).
Fur k ∈ n heißen die Matrizen
Ak :=
a11 . . . a1k...
...ak1 . . . akk
∈M(k × k,K) ,
also die Matrizen, die aus der linken oberen “Ecke” von A mit k Zeilen undSpalten bestehen, die Hauptminoren von A .
(9.4.13) Hauptminoren-Kriterium fur Definitheit: Fur eine symmetri-
sche Matrix A ∈M(n× n,R)gilt:
A positiv definit ⇐⇒ detAk > 0 fur alle k ∈ n .
Beweis : “ =⇒ ” Nach dem Korollar 9.3.7 gibt es ein S ∈GL(n,R) mit
tS · A · S =
α1 0. . .
0 αn
mit
αj = 〈ej,t S · A · S · ej〉 = 〈S · ej, A · (S · ej)〉 > 0 ,
139

denn A ist positiv definit, und fur die kanonischen Basisvektoren ej ist auchS · ej 6= 0 . Also ist
det(tS · A · S) =n∏j=1
αj > 0 , also
detA · (detS)2 > 0 , also auch: (∗) detA > 0 .
Es ist A = MK(s) fur
s : Rn × Rn −→ R , s(x, y) := 〈x,Ay〉 , also ist
Ak = MK(s∣∣Vk×VK
) fur Vk := span(e1, . . . , ek) ⊂ Rn ,
und auch s∣∣Vk×Vk
ist positiv definit. Also folgt nach (∗):
detAk > 0 fur alle k ∈ n .
“ ⇐= ” durch Induktion nach n : Fur n = 1 ist die Behauptung sofort zusehen. Sei n ∈ N , n ≥ 2, und fur n − 1 sei die Behauptung richtig. Sei nunA ∈M(n× n,R) symmetrisch mit
(∗∗) detAk > 0 fur alle k ∈ n− 1 ,
dann ist die Matrix An−1 positiv definit nach Induktionsvoraussetzung. NachKorollar 4.9.11 gibt es ein T ∈GL(n− 1,R), so dass
tT · An−1 · T =
α1 0. . .
0 αn
ist, mit αj > 0 fur j ∈ n− 1 .
Setzen wir nun
T ′ :=
| 0
T | ...| 0
− − − + −0 . . . 0 | 1
∈ GL(n,R) , so wird
tT ′ · A · T ′ =
α1 0 | β1
. . . | ...0 αn | βn−1− − − + −β1 . . . βn−1 | βn
=: B
140

mit β1, . . . , βn ∈ R . Nach Voraussetzung (∗∗) ist detA = detAn > 0, alsoauch
detB = detA · (detT ′)2 > 0 .
Wir setzen
S :=
| γ1
En−1 | ...| γn−1
− − − + −0 . . . 0 | 1
mit γj := − βjαj
,
dann ist S ∈ GL(n,R), und (Sie rechnen es bitte nach):
tS ·B · S =
α1 0
. . .
αn−10 αn
mit αn := βn −n−1∑j=1
β2j
αj.
Nun ist detA = detAn > 0 , detB > 0 , also auch
α1 · . . . · αn−1 · αn = det(tS ·B · S) = detB · (detS)2 > 0 ,
α1, . . . , αn−1 > 0 , also auch αn > 0 . Fur die Vektoren aus der BasisB := (T ′ · S · e1, . . . , T ′ · S · en) gilt also
〈T ′ · S · ej, A · (T ′ · S · el)〉 = 〈ej,t S ·t T ′ · A · T ′ · S · el〉
=
⟨ej,
α1 0. . .
0 αn
el
⟩= δjlαj ,
also fur x =n∑j=1
ξj · T ′Sej ∈ Rn \ {0} :
〈x,A · x〉 =n∑j=1
ξ2j · αj > 0 ,
also ist A positiv definit.
2
141

(9.5) Aufgaben
(9.1) a) Sei A ∈SO(3) und F : R3 −→ R3 , F (x) := A · x .Nach Theorem 9.1.13 gibt es eine OrthonormalbasisB = (v1, v2, v3) des R3 und ein α ∈ [0, 2π) , so dass
MBB (F ) =
1 0 00 cosα − sinα0 sinα cosα
ist .
Sei A 6= E3 . Zeigen Sie, dass Rv1 und cosα dann eindeutig bestimmtsind. Tipp: Es ist tr A = 1 + 2 cosα nach Aufgabe (6.7) b).Rv1 heißt die Drehachse , α der Drehwinkel von F bzw. A .
b) Zeigen Sie, dass die Matrizen A :=
a)1
7
2 3 63 −6 26 2 −3
, b)1
25
20 0 −15−9 20 −1212 15 16
in SO(3) liegen. Berechnen Sie Drehachse und Drehwinkel dieserMatrizen.
(9.2) a) Fur einen Ring (R,+, ·) hatten wir in (4.9.4) das Zentrum Z(R)definiert. Das geht aber auch fur eine Gruppe (G, ·) : Man nennt
Z(G) := { x ∈ G | ∀ y ∈ G : x · y = y · x }
das Zentrum von (G, ·) .a) Zeigen Sie, dass Z(G) ein Normalteiler von G ist.b) Zeigen Sie: Z(O(n)) = {En,−En} fur n ∈ N .
(9.3) Seien A,B ∈O(n) , n ungerade. Zeigen Sie:
det((A−B)(A+B)) = 0 .
142

(9.4) Finden Sie zu
A :=
1 −4 2−4 1 −22 −2 −2
∈ M(3× 3,R)
eine Matrix S ∈O(3) , so dass tS · A · S Diagonalform hat.
(9.5) Zeigen Sie, dass
U :=1
2
(1 + i 1 + i−1− i 1 + i
)zu U(2) gehort, und geben Sie eine Matrix S ∈ U(2) an, so dasstS · U · S Diagonalform hat.
(9.6) Zu der symmetrischen Bilinearform
s : R4 × R4 −→ R ,
s(a, b) := 2a1b2 + 2a2b1 + a1b3 + a3b1 − a2b4 − a4b2 − 2a3b4 − 2a4b3
fur a = t(a1, a2, a3, a4) , b = t(b1, b2, b3, b4) ∈ R4 finde man eine BasisB des R4 , so dass
MB(s) =
α1 0
α2
α3
0 α4
ist, mit αj ∈ {1,−1, 0} .
(9.7) Sei a ∈ Rn , ‖a‖ = 1 . Zeigen Sie fursa : Rn −→ Rn , sa(x) := x− 2〈a, x〉 a :
a) sa(a) = −a , und sei Ha,0 := { x ∈ Rn | 〈x, a〉 = 0 } ,dann gilt ∀x ∈ Ha,0 : sa(x) = x .sa heißt deshalb Spiegelung des Rn an derHyperebene Ha,0 .
b) Die Matrix von sa bezuglich der kanonischen Basis K istSa := MK
K (sa) = En − 2 a ·t a , und es giltS2a = En , tSa = Sa , Sa ∈O(n)\SO(n) .
c) Geben Sie die Matrix MKK (F ) der Spiegelung F des R3 an der
Ebene
E0;a,b := { λa+ µb | λ, µ ∈ R }
143

mit a := t(2, 1,−2) , b := t(1, 1, 3) an.
144

§10 Klassische Gruppen
10.1 Einiges zur Topologie im Rn
(10.1.1) Vorbemerkung : Im letzten Paragraphen haben wir einige Unter-
gruppen von GL(n,K) , K = R oder C, und die algebraischen Eigenschaftenihrer Elemente (Diagonalisierbarkeit, Normalformen) kennengelernt. Damitist die Theorie dieser Gruppen aber keineswegs zu Ende: Man kann aus diesenGruppen metrische und damit topologische Raume machen. Wir wollen denAnfang dieser Theorie kennenlernen. Das gehort schon mehr zur Analysis,und deshalb setzen wir hier voraus, dass der Leser die grundlegenden Begrif-fe und Satze aus der Theorie der metrischen Raume kennt. Man findet dasin jedem Analysis-Lehrbuch. Einige Grundbegriffe wollen wir hier wiederho-len, damit Sie sie nachschlagen konnen. Aber die Theorie der topologischenRaume konnen Sie an Hand dieser Kurzfassung nicht lernen:
Definition 10.1.2 : Sei M eine Menge. Es gebe eine Abbildung
d : M ×M −→ R mit den Eigenschaften(M1) ∀x, y ∈M : (d(x, y) = 0 ⇐⇒ x = y) ,(M2) ∀x, y ∈M : d(x, y) = d(y, x) ,(M3) ∀x, y, z ∈M : d(x, z) ≤ d(x, y) + d(y, z) .Dann heißt M (genauer: das Paar (M,d)) ein metrischer Raum, mitMetrik d .
2
Bemerkung 10.1.3 : Jeder normierte K−Vektorraum V , mit Norm ‖ ‖,wird ein metrischer Raum, wenn man die Metrik
d : V × V −→ R durch
d(x, y) := ‖x− y‖ fur x, y ∈ V
definiert.
Definition 10.1.4 : Eine Menge T heißt ein topologischer Raum, wennes eine Menge O von Teilmengen von T gibt mit den Eigenschaften:
(T1) ∅ ∈ O und T ∈ O.
(T2) Fur eine Familie (Tj)j∈I von Mengen Tj ∈ O mit einer beliebigen In-dexmenge I ist
⋃j∈I
Tj ∈ O .
145

(T3) Fur eine Familie (Tj)j∈n , n ∈ N , von endlich vielen Mengen Tj ∈ O
istn⋂j=1
Tj ∈ O.
Die Mengen aus O heißen offene Mengen in T .
2
Bemerkung 10.1.5 : Jeder metrische Raum M mit Metrik d wird ein to-
pologischer Raum (M,O), wenn man fur eine Teilmenge T von M definiert:
T ∈ O ⇐⇒ ∀x ∈ T ∃ ε > 0 : { y ∈M | d(x, y) < ε } ⊂ T .
Definition 10.1.6 : Sei (X,O) ein topologischer Raum. Eine Teilmenge A
von M heißt abgeschlossen , wenn ihr Komplement
{MA = M \ A
offen ist.
2
In einem metrischen Raum (nicht in einem beliebigen topologischen Raum)kann man definieren, was eine konvergente Folge ist:
Definition 10.1.7: Sei (M,d) ein metrischer Raum, x ∈M und (xk)k∈N eine
Folge von Elementen aus M . Dann sagt man: Die Folge (xk)k∈Nkonvergiert gegen x, in Zeichen:
limk→∞
xk = x , wenn gilt:
∀ ε > 0 ∃ k0 ∈ N ∀ k > k0 : d(xk, x) < ε .
2
Damit erhalt man folgenden Satz, den wir haufig zum Nachweis benutzen,dass eine Teilmenge A eines metrischen Raums abgeschlossen ist:
Satz 10.1.8: Sei M ein metrischer Raum. Eine Teilmenge A von M ist ge-
nau dann abgeschlossen, wenn gilt: Ist (xk)k∈N eine Folge von Elementenxk ∈ A, die gegen ein x ∈M konvergiert, so liegt x schon in A.
2
Definition 10.1.9 : Seien (X,O) und (Y,O′) topologische Raume und
146

f : X −→ Y . f heißt stetig , wenn gilt
∀U ∈ O′ :−1f (U) ∈ O .
Gleichbedeutend damit ist: Fur jede abgeschlossene Teilmenge A von Y ist
das Urbild−1f (A) abgeschlossen in X .
Die Abbildung f heißt ein Homomorphismus, wenn sie bijektiv, stetig undauch f−1 : Y −→ X stetig ist.
2
Fur metrische Raume benutzen wir meist denSatz 10.1.10 : Seien M und M ′ metrische Raume. Eine Abbildungf : M −→ M ′ ist genau dann stetig, wenn fur jedes x ∈ M und jedeFolge (xk)k∈N in M gilt
limk→∞
xk = x =⇒ limk→∞
f(xk) = f(x) .
2
Definition 10.1.11 : Sei X ein topologischer Raum und C ⊂ X. C heißtkompakt, wenn es zu jeder Familie (Uj)j∈I von offenen Mengen Uj (mitbeliebiger Indexmenge I) und
C ⊂⋃j∈I
Uj
bereits eine endliche Teilmenge J von I gibt mit
C ⊂⋃j∈J
Uj .
2
Fur den Nachweis der Kompaktheit benutzen wir im Folgenden den
Satz 10.1.12 : Sei V ein endlichdimensionaler normierter Vektorraum uberR oder C, ‖ ‖ die Norm in V und C ⊂ V . Dann ist C genau dann kompakt,wenn C abgeschlossen ist und beschrankt. Letzteres soll heißen: Es gibt einc ≥ 0 mit
∀x ∈ C : ‖x‖ ≤ c .
2
Fur kompakte Mengen hat man den folgendenSatz 10.1.13 (Satz vom Minimum und Maximum) : Sei C ein kom-
147

pakter topologischer Raum und f : C −→ R stetig. Dann gibt esx1, x2 ∈ C mit
∀x ∈ C : f(x1) ≤ f(x) ≤ f(x2) .
2
Bemerkung 10.1.14 : Hat man auf einem endlichdimensionalen K−Vektorraum
V zwei verschiedene Normen ‖ ‖1 und ‖ ‖2 , so sind die durch
d1(x, y) := ‖x− y‖1 und d2(x, y) := ‖x− y‖2
definierten Metriken verschieden. Die dadurch definierten offenen Mengensind aber die gleichen:
Definition 10.1.15: Sei V ein K−Vektorraum, mit zwei Normen ‖ ‖1 und
‖ ‖2 . Diese beiden Normen heißen aquivalent , wenn es Konstantenc, C ∈ R, c, C > 0, gibt mit
(∗) ∀x ∈ V : c‖x‖1 ≤ ‖x‖2 ≤ C‖x‖1 .
Beispiel 10.1.16 : Im Rn haben wir die Maximum-Norm
‖x‖∞ := max { |xj| | j ∈ n }
und nach Folgerung 6.1.18 die euklidische Norm
‖x‖2 :=
√√√√ n∑j=1
x2j fur x := t(x1, . . . , xn) .
Die beiden Normen sind aquivalent, denn es gilt
‖x‖∞ ≤ ‖x‖2 ≤√n‖x‖∞ .
Folgerung 10.1.17 : Sei V ein K−Vektorraum mit zwei aquivalenten Nor-
men ‖ ‖1 und ‖ ‖2. Dann sind die durch ‖ ‖1 und ‖ ‖2 definierten of-fenen Mengen in V die gleichen.Beweis : Sei T ⊂ V offen bzgl. ‖ ‖1, also T ∈ O1, und x ∈ T . Es gelte (∗)aus 10.1.15. Dann gibt es ein ε > 0 mit
{ y ∈ V | ‖x− y‖1 < ε } ⊂ T .
Mit ε′ := ε · c gilt dann
{ y ∈ V | ‖x− y‖2 < ε′ } ⊂{
y ∈ V | ‖x− y‖1 <1
c· c · ε
}148

= { y ∈ V | ‖x− y‖1 < ε } ⊂ T ,
also T ∈ O2 . Ahnlich zeigt man : O2 ⊂ O1.
2
Was uns die Arbeit im Folgenden erleichtert: Es gilt
Satz 10.1.18 : Je zwei Normen auf einem endlichdimensionalen K−Vektor-
raum V sind aquivalent.Beweis : a) Sei zunachst V = Rn. Es genugt zu zeigen, dass eine beliebigeNorm ‖ ‖ aquivalent ist zur Maximum-Norm.
(i) Sei (e1, . . . , en) die kanonische Basis. Fur x =n∑j=1
xjej gilt dann
‖x‖ ≤n∑j=1
|xj|‖ej‖ ≤ C‖x‖∞ mit C :=n∑j=1
‖ej‖ .
(ii) Die “Einheitssphare”
S := { x ∈ Rn | ‖x‖∞ = 1 }
ist abgeschlossen und beschrankt im Rn mit ‖ ‖∞ , also kompakt. Die Funk-tion
f : Rn −→ R , f(x) := ‖x‖ist wegen
| ‖x‖ − ‖y‖ | ≤ ‖x− y‖ ≤ C · ‖x− y‖∞ fur x, y ∈ Rn
eine stetige Funktion von Rn mit ‖ ‖∞ nach R mit | |. Nach dem Satz vomMinimum und Maximum nimmt die Funktion f auf S ihr Minimum und ihrMaximum an, wir haben
c := inf { ‖x‖ | x ∈ S } = min { ‖x‖ | x ∈ S } > 0
und M := max { ‖x‖ | x ∈ S } ,
also 0 < c ≤ M < ∞ . Sei nun y ∈ Rn \ {0} beliebig, dann isty
‖y‖∞∈ S ,
also‖ y
‖y‖∞‖ ≥ c , also ‖y‖ ≥ c‖y‖∞ .
Letzteres gilt auch fur y = 0.b) Sei nun V ein beliebiger endlichdimensionaler K− Vektorraum, mit zweiNormen ‖ ‖ und ‖ ‖∗. Wir haben dann einen R−Vektorraumisomorphismus
ϕ : Rn −→ V .
149

Fur x ∈ Rn setzen wir
‖x‖ϕ := ‖ϕ(x)‖ und ‖x‖∗ϕ := ‖ϕ(x)‖∗ ,
auf diese Weise haben wir Normen auf dem Rn: Nach a) gibt es Konstantenc, C > 0, so dass fur alle x ∈ Rn gilt
c‖x‖ϕ ≤ ‖x‖∗ϕ ≤ C‖x‖ϕ .
Da ϕ surjektiv ist, bedeutet das
∀ y ∈ V : c‖y‖ ≤ ‖y‖∗ ≤ C‖y‖ . 2
Auch das Folgende ist Ihnen sicher bekannt. Wir wiederholen es, weil wir esofters brauchen:
Definition 10.1.19 : Sei M ein metrischer Raum, mit Metrik d, und T eine
Teilmenge von M . Dann ist T mit der eingeschrankten Metrik
d∣∣T×T : T × T −→ R , (x, y) 7−→ d(x, y)
ein metrischer Raum. d∣∣T×T heißt die von M auf T induzierte Metrik.
2
Satz 10.1.20 : Sei M ein metrischer Raum und T ⊂M mit der von M in-
duzierten Metrik. Dann sind die offenenen Mengen V in T genau die Mengen,zu denen es eine offene Menge U in M gibt mit
V = U ∩ T .
2
Definition 10.1.21 : Sei T ein topologischer Raum. T heißt
(a) zusammenhangend, wenn ∅ und T die einzigen Teilmengen von Tsind, die sowohl offen als auch abgeschlossen sind,
(b) wegzusammenhangend, wenn es fur alle x, y ∈ T einen Weg, d.h.eine stetige Abbildung f des Intervalls
[0, 1] = { α ∈ R | 0 ≤ α ≤ 1 }
nach T mit f(0) = x , f(1) = y gibt.
150
Bemerkung 10.1.22 : Ist der topologische Raum T wegzusammenhangend,
so ist er zusammenhangend.
2
10.2 Die allgemeine lineare Gruppe
Aus Definition 4.4.9 kennen wir die allgemeine lineare Gruppe GL(n,K)fur K = R oder C, das war die Gruppe der invertierbaren Matrizen ausM(n× n,K) :
Definition 10.2.1 : Fur Matrizen A ∈ M(n × n,K) definieren wir dieOperator-Norm als
‖A‖op := sup { ‖A · v‖2 | v ∈ Kn, ‖v‖2 ≤ 1 } ,
wobei ‖ ‖2 die euklidische Norm im Rn ist (aber im Hinblick auf Satz 10.1.8ist es bei Fragen zu Konvergenz oder Stetigkeit egal, welche Norm wir im Rn
wahlen).
Behauptung 10.2.2 : Die Matrizenmultiplikation
µ∗ : M(n× n,K)×M(n× n,K) −→ M(n× n,K)
ist stetig, wenn man auf M(n × n,K) die Topologie nimmt, die man durchdie Operatornorm erhalt.Beweis : Sei ε > 0 und seien A,B ∈ M(n × n,K) mit ‖A‖op, ‖B‖op < ε ,dann gilt
‖A ·B‖op = sup { ‖A ·B · x‖2 | ‖x‖2 ≤ 1 }
≤ sup { ‖A · y‖2 | ‖y‖2 ≤ ‖B‖op }
= ‖B‖op sup { ‖A · y‖2 | ‖y‖2 ≤ 1‖ } = ‖B‖op‖A‖op < ε2 .
Damit folgt die Stetigkeit von µ∗ in (0, 0), aber auch in einem beliebigen(A0, B0), denn es folgt fur ‖A− A0‖op < ε, ‖B −B0‖op < ε :
‖A ·B − A0 ·B0‖op = ‖A · (B −B0) + (A− A0) ·B0‖op
≤ ‖A‖op‖B −B0‖op + ‖A− A0‖op‖B0‖op ≤ (‖A0‖op + ε)ε+ ε‖B0‖op .
2
Bemerkung 10.2.3 : Sei n ∈ N, dann gilt
(i) GL(n,K) = { A ∈M(n× n,K) | detA 6= 0 } ,
151

(ii) GL(n,K) ist offen in M(n× n,K) .
Beweis : (i) wissen wir aus Folgerung 5.4.3 .(ii) Sei A = (ajk) ∈M(n× n,K) mit ‖A‖op < ε , dann gilt auch
∀ j, k ∈ n : |ajk| < ε .
Damit zeigt man, dass
det : M(n× n,K) −→ K , (akj) 7−→∑σ∈Sn
signσ · a1σ(1) · . . . anσ(n)
stetig ist, bezuglich ‖ ‖op in M(n×n,K) und | | in K . Dann ist GL(n,K)nach (i) das Urbild der in K offenen Menge { y ∈ K | y 6= 0 } , also offenin M(n× n,K).
2
Behauptung 10.2.4: Die Matrizenmultiplikation
µ : GL(n,K)×GL(n,K) −→ GL(n,K) , (A,B) 7−→ A ·B ,
und die Inversion
ι : GL(n,K) −→ GL(n,K) , A 7−→ A−1
sind stetig.Beweis : Die Restriktion µ der nach 10.2.2 stetigen Abbildung
µ∗ : M(n× n,K)×M(n× n,K) −→ M(n× n,K)
auf GL(n,K) × GL(n,K) ist tatsachlich eine Abbildung nach GL(n,K), daGL(n,K) eine Gruppe ist. Damit ist µ stetig. Zur Inversion: Nach Satz 5.3.4haben wir fur A ∈ GL(n,K):
A−1 = (ckj) mit ckj = (detA)−1 · (−1)k+j detA′jk ,
wobei A′jk die Matrix ist, die aus A durch Streichen der j−ten Zeile undk−ten Spalte entstanden ist. Da det und die Abbildung
K∗ −→ K∗ , λ 7−→ λ−1
stetig sind, ist auch ι stetig.
2
152

Definition 10.2.5 : Eine Gruppe (G, ·), die zugleich ein topologischer Raumist, heißt eine topologische Gruppe, wenn gilt
µ : G×G −→ G , µ(g, h) := g · h fur g, h ∈ G , ist stetig,
ι : G −→ G , ι(g) := g−1 ist stetig.
2
Die Behauptung 10.2.4 zeigt also:
Satz 10.2.6 : GL(n,K), mit der Topologie als Teilraum des metrischen RaumsM(n× n,K), ist eine topologische Gruppe.
2
10.3 Untergruppen von GL(n,R)
Definition 10.3.1 : Sei s : Rn × Rn −→ R eine (nicht notwendig sym-metrische) bilineare Abbildung. Dann setzen wir
OM(s) := { A ∈M(n× n,R) | ∀ v, w ∈ Rn : s(A · v,A · w) = s(v, w) } .
Behauptung 10.3.2 :
(i) OM(s) ist abgeschlossen in M(n× n,R).
(ii) O(s) := OM(s)∩ GL(n,R) ist eine Untergruppe von GL(n,R).
(iii) Sei B := MK(s) die darstellende Matrix von s bezuglich derkanonischen Basis K = (ej)j∈n, d.h. B = (s(ej, ek)). Dann gilt alsos(v, w) = tv ·B · w fur v, w ∈ Rn. Es gilt dann
A ∈ OM(s) ⇐⇒ B = tA ·B · A .
(iv) Wenn s nichtausgeartet ist, gilt OM(s) = O(s) .
Beweis : (i) Wir zeigen zunachst, dass s : Rn×Rn −→ R stetig ist: Miteiner ahnlichen Rechnung wie im Beweis von 10.2.2 erhalt man furB = MK(s) und v, w, v′, w′ ∈ Rn :
|s(v, w)− s(v′, w′)| ≤
‖v‖2 ‖B‖op ‖w − w′‖2 + ‖v − v′‖2 ‖B‖op(‖w′ − w‖2 + ‖w‖2) ,
153

woraus die Stetigkeit von s folgt. Sei nun (Ak)k∈N eine Folge aus OM(s) , diein M(n× n,R) gegen ein A konvergiert, dann konvergiert also
s(v, w) = s(Akv, Akw) = s((Ak−A)v, Akw)+s(Av, (Ak−A)w)+s(Av,Aw)
gegen 0 + 0 + s(Av,Aw). Also ist mit Ak auch der Grenzwert A ∈ OM(s),und damit ist OM(s) abgeschlossen nach Satz 10.1.8.(ii) sieht man leicht.(iii) Es gilt A ∈ OM(s) genau dann, wenn
∀ v, w ∈ Rn : tvBw = t(Av)B(Aw) = tvtABAw
gilt, und das ist gleichbedeutend mit B = tABA.(iv) s ist genau dann nichtausgeartet, wenn B invertierbar ist. Der Beweisdafur geht wie der Beweis von Satz 6.3.5, bei dem wir (unnotigerweise) vor-ausgesetzt hatten, dass s symmetrisch ist. Fur nichtausgeartetes s haben wiralso nach (iii)
En = (B−1 ·t A ·B) · A fur alle A ∈ OM(s) ,
also ist jedes A ∈OM(s) invertierbar und gehort damit zu O(s) .
2
Beispiel 10.3.3 : Sei s(v, w) = tv ·B · w mit
B =
Ep | 0−− + −−0 | −Eq
mit p, q ∈ N0, wobei Em die Einsmatrix aus M(m×m,R) bezeichnet. Dannheißt
O(p, q) := O(s)
eine pseudo-orthogonale Gruppe. Ein Spezialfall ist
O(n) := O(n, 0) ,
das ist die uns aus Def. 9.1.6 bekannte orthogonale Gruppe. Dafur ist s daskanonische Skalarprodukt 〈 , 〉.Beispiel 10.3.4 : Die symplektische Gruppe Sp(p,R) erhalten wir furn = 2p und die darstellende Matrix
B :=
0 | −Ep−− + −−Ep | 0
.
154

Die Gruppe Sp(p,R) besteht aus den Blockmatrizen
M =
A | B−− + −−C | D
mit MatrizenA,B,C,D ∈M(p×p,R), die die folgenden Gleichungen erfullen:
tC · A−t A · C = 0 ,tD ·B −t B ·D = 0 ,tA ·D −t C ·B = Ep .
Beispiel 10.3.5 : Normalteiler in GL(n,R) sind
(i) GL(n,R)+ := { A ∈ GL(n,R) | detA > 0 } ,
(ii) SL(n,R) := { A ∈ GL(n,R) | detA = 1 } .SL(n,R) heißt spezielle lineare Gruppe .
Beispiel 10.3.6 : Untergruppen von GL(n,R) sind auch
(i) N := { A ∈ GL(n,R) | ∀ j, k ∈ n : (ajj = 1 ∧ (j > k =⇒ ajk = 0)) } ,
(ii) D := { A ∈ GL(n,R) | ∀ j 6= k : ajk = 0 } ,
(iii) D ·N = { A ∈ GL(n,R) | ∀ j > k : ajk = 0 } .
- Es gibt auch endliche Untergruppen von GL(n,R) :
Beispiel 10.3.7 :
Sn :=
{A ∈ GL(n,R) | ajk ∈ {0, 1} ∧
n∑k=1
ajk =n∑j=1
ajk = 1
}ist die Gruppe der Permutationen der kanonischen Basis (e1, . . . , en) des Rn.Sie ist isomorph zur in 2.2.10 definierten Gruppe (Sn, ◦).10.4 Die Struktur von GL(n,R)
In 4.9.4 hatten wir das Zentrum eines Ringes definiert. Das geht fur Gruppengenau so:Definition 10.4.1 : Sei (G, ·) eine Gruppe. Dann heißt
Z(G) := { g ∈ G | ∀h ∈ G : g · h = h · g }
das Zentrum von (G, ·) .
155

(10.4.2) Abkurzungen , die wir im Folgenden brauchen, sind
R∗ := R \ {0} ,
R∗+ := { x ∈ R | x > 0 } ,
fur a, b ∈ R , a < b : (a, b) := { x ∈ R | a < x < b } .
Behauptung 10.4.3 : Z(GL(n,R)) = R∗ · En.
Den Beweis fuhren wir mit folgendem Lemma zuruck auf Satz 4.9.5 :
Lemma 10.4.4 : GL(n,R) ist dicht in M(n× n,R), d.h. jedesA ∈M(n× n,R) ist Grenzwert einer Folge (Ak)k∈N mit Ak ∈ GL(n,R).Beweis : Sei A ∈M(n× n,R) und
r := min { |λ| ∈ R | λ ist Eigenwert von A , λ 6= 0 }
falls A von 0 verschiedene Eigenwerte hat, bzw. r := 1 sonst.Fur alle s ∈ (0, r) ist dann A− sEn invertierbar. Es ist
lims→0
(A− sEn) = A ,
also jedes A ∈M(n×n,R) Grenzwert einer Folge von Matrizen aus GL(n,R).
2
Beweis von Behauptung 10.4.3 : Fur A ∈M(n× n,R) folgt aus
∀B ∈M(n× n,R) : A ·B = B · A
nach Satz 4.9.5 : A ∈ R · En. Nach Lemma 10.4.4 folgt dann furA ∈ Z(GL(n,R)) :
A ∈ R∗ · En .
2
Behauptung 10.4.5 : Die Abbildung
f : R∗+ × SL(n,R) −→ GL(n,R)+ , (r, A) 7−→ r1nA
ist ein Homomorphismus und ein Gruppen-Homomorphismus.Beweis : Sei
g : GL(n,R)+ −→ R∗+ × SL(n,R) , A 7−→ (detA,1
(detA)1n
A) ,
156

dann gilt
(g ◦ f)(r, A) = (r, A) und (f ◦ g)(A) = A .
f und g sind also bijektiv, und aus den Formeln entnimmt man die Stetigkeitvon f und g. f ist also ein Homomorphismus. Dass f ein Gruppenhomomor-phismus ist, sieht man auch an der Definition von f .
2
Bemerkung 10.4.6 : GL(n,R) ist die disjunkte Vereinigung der beiden of-
fenen Teilmengen GL(n,R)+ und
GL(n,R)− := { A ∈ GL(n,R) | detA < 0 } .
Es gilt : GL(n,R)− = A0·GL(n,R)+ , wobei
A0 :=
−1 | 0−− + −−0 | En−1
.
Aus dieser Gleichung folgt noch, dass GL(n,R)+ und GL(n,R)− homoomorphsind.
2
Schreibweise 10.4.7 : Sei n ∈ N und K ein Korper. Fur die Diagonalmatrix
A ∈M(n× n,K) mit den Diagonalelementen a1, . . . , an schreiben wir
diag(a1, . . . , an) .
Satz 10.4.8 (Cartan-Zerlegung) : Jedes A ∈ GL(n,R) lasst sich in ein-
deutiger Weise als Produkt A = C · P mit C ∈ O(n) und P ∈ PDS(n,R)schreiben, wobei mit
PDS(n,R) ={C ∈ GL(n,R) | tC = C , Spec(C) ⊂ R∗+
}die Menge der positiv definiten symmetrischen Matrizen bezeichnet werdeund Spec(C) die Menge aller Eigenwerte von C ist.Beweis : Wir zeigen zunachst die Existenz der Zerlegung. Es isttA · A ∈PDS(n,R), denn fur alle v ∈ Rn gilt
〈tA · A · v, v〉 = 〈A · v, A · v〉 = ‖A · v‖22 ≥ 0 ,
157

also sind alle Eigenwerte von tA ·A nicht negativ. Sie sind sogar alle positiv,denn wegen det(tA · A) 6= 0 ist 0 kein Eigenwert. Mit Hauptachsentransfor-mation (Satz 9.3.4, Teil (1)) finden wir ein H ∈ O(n) mit
H−1 ·t A · A ·H = diag(d1, . . . , dn) und dj > 0 .
Wir setzen nun λj :=√dj und P := H·diag(λ1, . . . , λn) · H−1 , dann gilt
P ∈PDS(n,R), und die Matrix C := A · P−1 erfullt
tC · C = (tH)−1 · diag(1
λ1, . . . ,
1
λn) ·t H ·t A · A ·H · diag(
1
λ1, . . . ,
1
λn) ·H−1
= H ·H−1 = En .
Das beweist: C ∈O(n).Zum Nachweis der Eindeutigkeit nehmen wir an, dass wir zwei solche Zerle-gungen
A = C · P und A = C ′ · P ′
haben. Dann gilt
tA · A = P ′ · (C ′)−1 · C ′ · P ′ = (P ′)2
und damit
(∗) tA·A·P ′ = (P ′)2·P ′ = P ′·tA·A .
Man wahle nun ein Polynom f(X) ∈ R[X] mit f(dj) = λj. Setzt man dieMatrix tA · A in dieses Polynom f ein, so findet man
f(tA · A) = H · diag(f(d1), . . . , f(dn)) ·H−1 = P .
Nach (∗) ist P ′ mit tA · A vertauschbar, also auch mit f(tA · A) fur jedesPolynom f , und nach der letzten Gleichung dann auch mit P , es gilt alsoP · P ′ = P ′ · P . Nach Satz 7.3.9 sind P und P ′ simultan diagonalisierbar,mit den positiven Eigenwerten in der Diagonale. Wegen
(P ′)2 = tA · A = P 2
folgt daraus P = P ′ und schließlich C = C ′.
2
Bemerkung 10.4.9 : PDS(n,R) ist keine Untergruppe von GL(n,R) undkein Untervektorraum von M(n × n,R) , aber naturlich ein Teilraum des
158

metrischen Raums GL(n,R)!
Satz 10.4.10 : Die Abbildung
Φ : O(n)× PDS(n,R) −→ GL(n,R) , (C,P ) 7−→ C · P
ist ein Homoomorphismus.
- Vor dem Beweis noch das
Lemma 10.4.11 : O(n) ist kompakt.
Beweis : Fur C ∈ O(n) gilt
‖C‖2op = sup{‖C · v‖22
∣∣ ‖v‖2 ≤ 1}
= sup { 〈C · v , C · v〉 | ‖v‖2 ≤ 1 }
= sup { 〈v, v〉 | ‖v‖ ≤ 1 } = 1 ,
also ist O(n) beschrankt in M(n× n,R). Nach Behauptung 10.3.2 ist
O(n) = OM(s) fur das kanonische Skalarprodukt s = 〈 , 〉
abgeschlossen in M(n×n,R). Also ist O(n) kompakt in M(n×n,R), und mitSatz 10.1.20 sieht man, dass O(n) auch kompakt als Teilmenge von GL(n,R)ist.
2
Beweis von Satz 10.4.10: Nach Satz 10.4.8 ist Φ bijektiv, und stetig nachBehauptung 10.2.4. Wir zeigen nun, dass das Urbild jeder abgeschlossenenMenge unter Φ−1, also das Bild jeder abgeschlossenen MengeA ⊂ O(n)× PDS(n,R), abgeschlossen in GL(n,R) ist, dann haben wir auchdie Stetigkeit von Φ−1: Seien also (Cm)m∈N , (Pm)m∈N Folgen in O(n) bzw.PDS(n,R), so dass die Folge
(Cm · Pm)m∈N =: (Gm)m∈N gegen ein C · P =: G ∈ GL(n,R) konvergiert,
dann hat die Folge (Cm)m∈N wegen der Kompaktheit von O(n) einen Haufungs-punkt C ′ ∈ O(n). Es gibt also eine Teilfolge (Cmk
)k∈N , die gegen C ′ konver-giert. Wir setzen
(∗) P ′ := (C ′)−1 ·G .
Damit konvergiert
(Pmk)n∈N = (C−1mk
·Gmk)n∈N gegen P ′ .
159

Man sieht nun, dass die Menge der positiv semidefiniten symmetrischen Ma-trizen, also der A ∈M(n× n,R) mit
tA = A und ∀ v ∈ Rn : 〈v, A · v〉 ≥ 0 ,
abgeschlossen ist. Also ist P ′ positiv semidefinit, und sogar positiv definitwegen (∗) und C ′, G ∈ GL(n,R), also auch detP ′ 6= 0. Damit folgt dannP ′ ∈ PDS(n,R). Aus
G = C · P und G = C ′ · P ′
und der Eindeutigkeit der Cartan-Zerlegung folgt dann C ′ = C undP ′ = P . Damit folgt, dass C der einzige Haufungspunkt von (Cm)m∈N ist.Also konvergiert
(Cm)m∈N gegen C und damit auch (Pm)m∈N gegen P .
2
Satz 10.4.12 : Sei A0 wie in Bemerkung 10.4.6 definiert. Dann gilt
(i) O(n) ist die disjunkte Vereinigung von
SO(n) = O(n) ∩ SL(n,R) und A0 · SO(n) .
(Siehe auch Bemerkung 9.1.7.) Beide Teile sind offen und abgeschlossenin O(n) . ( Also ist O(n) nicht zusammenhangend. )
(ii) SO(n) ist wegzusammenhangend.
Beweis : (i) folgt direkt aus
A0 · SO(n) = { A ∈ O(n) | detA = −1 } ,
und: SL(n,R) = { A ∈M(n× n,R) | detA = 1 } ist als Urbild unterder stetigen Abbildung
det : M(n× n,R) −→ R
der abgeschlossenen Menge {1} abgeschlossen in M(n×n,R) , also ist SO(n)abgeschlossen in O(n) , ebenso:
A0 · SO(n) = { A ∈ O(n) | detA = −1 } .
160

SO(n) und A0· SO(n) sind Komplemente voneinander in O(n), also auchoffen in O(n).(ii) Sei C ∈ SO(n). Nach Korollar 9.1.15 gibt es ein S ∈ O(n), so dass
tS · C · S =
Er−Es 0
A1
0. . .
Ak
,
ist, mit Kastchen
Aj =
(cos θj − sin θjsin θj cos θj
)fur j ∈ {1, . . . , k} .
Wegen C ∈ SO(n) ist s gerade. Wegen(−1 00 −1
)=
(cosπ − sin πsin π cos π
)hat tS · C · S die Form
tS · C · S =
Er 0
A1
. . .
0 Al
mit r + 2l = n. Nun ist
fθ : [0, 1] −→ SO(2) , t 7−→(
cos(1− t)θ − sin(1− t)θsin(1− t)θ cos(1− t)θ
)eine stetige Abbildung, also ein Weg, der(
cos θ − sin θsin θ cos θ
)mit E2
verbindet. Also verbindet
f : [0, 1] −→ SO(n) , t 7−→
Er 0
fθ1(t). . .
0 fθl(t)
161

in SO(n) die Matrix tS ·C · S = S−1 ·C · S mit En . Somit lasst sich auchC mit S · En · S−1 = En verbinden. SO(n) ist also wegzusammenhangend.
2
10.5 Die Struktur von GL(n,C)
Bemerkung 10.5.1 : Fur die komplexe allgemeine lineare Gruppe
GL(n,C) := { A ∈M(n× n,C) | detA 6= 0 }
gehen viele Satze ahnlich wie fur GL(n,R). Man beachte aber, dass das ka-nonische Skalarprodukt im Cn durch
〈x, y〉 =n∑j=1
xj · yj fur x = (xj) , y = (yj)j∈n
gegeben ist. Auf Cn betrachtet man nicht Bilinearformen, sondernSesquilinearformen s , siehe Definition 6.1.3.
Bemerkung 10.5.2 : Sei s : Cn × Cn −→ C eine Sesquilinearform und
UM(s) := { A ∈M(n× n,C) | ∀ v, w ∈ Cn : s(A · v,A · w) = s(v, w) } .
Dann gelten fur U(s) := UM(s)∩ GL(n,C) dieselben Aussagen wie in Be-hauptung 10.3.2, wobei man dort R durch C und “transponiert” durch “trans-poniert konjugiert komplex” zu ersetzen hat.
Beispiel 10.5.3 : Analog zum reellen Fall erhalt man
die pseudounitaren Gruppen U(p, q) ,die komplexe symplektische Gruppe Sp(p,C) ,und die Gruppe SL(n,C).
Bemerkung 10.5.4 : Es gilt Z(GL(n,C)) = C∗ ·En ( mit C∗ = C \ {0} ).
Anders als in Bemerkung 10.4.6 gilt aber
Behauptung 10.5.5 : GL(n,C) ist wegzusammenhangend.
Beweis : Fur A,H ∈ GL(n,C) ist
z 7−→ det(zA+ (1− z)H)
eine komplexe Polynomfunktion, die nicht das Nullpolynom ist, also nur end-lich viele Nullstellen hat. { z ∈ C | det(zA+ (1− z)H) = 0 } ist daherabgeschlossen in C, und
GL(n,C) ∩ { zA+ (1− z)H | z ∈ C }
162

ist offen in GL(n,C) und (siehe Aufgabe (10.1)) wegzusammenhangend, alsoauch zusammenhangend.
2
Im Unterschied zu Satz 10.4.12 gilt hier:
Satz 10.5.6 : U(n) ist zusammenhangend und kompakt.
Beweis : (1) Sei A ∈ U(n). Dann haben wir ϕ1, . . . , ϕn ∈ R und ein S ∈U(n)mit
tS · A · S =
eiϕ1 0. . .
0 eiϕn
nach Korollar 9.1.11. Dann ist
f : [0, 1] −→ U(n) , t 7−→
ei(1−t)ϕ1 0. . .
0 ei(1−t)ϕn
ein Weg in U(n), der tS · A · S mit En verbindet, und
t 7−→ S · f(t) · S−1
verbindet A mit En . Also ist U(n) wegzusammenhangend und damit zusam-menhangend.(2) Die Kompaktheit von U(n) zeigt man wie bei O(n), siehe auch Bemer-kung 10.5.2.
2
Analog zu Satz 10.4.10 hat man auch in GL(n,C) eine Cartan-Zerlegung:
Bemerkung 10.5.7 : Sei
PDH(n,C) := { A ∈ GL(n,C) | A ist positiv definit und Hermitesch } ,
dann ist die Abbildung
Φ : U(n)× PDH(n,C) −→ GL(n,C) , (C,P ) 7−→ C · P
ein Homoomorphismus.
2
163

(10.6) Die Quaternionengruppen
Bemerkung 10.6.1 : Außer M(n × n,R) und M(n × n,C) hat man auchdie Menge der Matrizen mit Eintragen aus H, dem Schiefkorper der Quater-nionen. Wir hatten ihn in Def. 4.9.7 eingefuhrt als
H =
{ (u v−v u
) ∣∣∣∣ u, v ∈ C}
⊂ M(2× 2,C) .
und festgestellt: H ist eine assoziative, nicht-kommutative Unteralgebra derR− Algebra (M(2× 2,C),+, ·, ω) mit
dimR H = 4 .
Jedes Element aus H \ {0} besitzt bezuglich · ein Inverses.Wir sehen noch etwas genauer hin als in Abschnitt 4.9 :
Definition und Behauptung 10.6.2 : Fur
q :=
(u v−v u
)∈ H
setzen wir
q :=
(u −vv u
),
dann ist : H −→ H eine Involution, d.h. fur p, q ∈ H gilt
(1) p · q = q·p , q = q .
Fur das in 4.9.7 definierte N(q) gilt dann
q · q = N(q) · E2 mit N(q) ∈ R , N(q) ≥ 0 ,
woraus man
q−1 =1
N(q)· q fur q 6= 0
sieht. H ist eine echte Teilmenge von M(2× 2,C). Es gilt
(2) H ={A ∈M(2× 2,C) | A · J = J · A
},
mit J =
(0 1−1 0
)und
164

A :=
(a b
c d
)fur A =
(a bc d
), a, b, c, d ∈ C .
Beweis : (1) und (2) rechnet man leicht nach. Der Rest steht schon in 4.9.7.
2
Wir kommen nun zu n × n−Matrizen mit Elementen aus H . In unsererSchreibweise mit H ⊂M(2×2,C) sind das dann Matrizen aus M(2n×2n,C),die aus Kastchen Cjk ∈M(2× 2,C) mit
Cjk · J = J · Cjk fur j, k ∈ n
bestehen. Der Deutlichkeit halber werden wir hier etwas formaler:
Definition und Satz 10.6.3 : Fur n ∈ N sei `n die Abbildung, die einern× n− Matrix (qjk) ∈M(n× n,H) die 2n× 2n−Matrix mit den2× 2−Kastchen qjk ∈M(2× 2,C) zuordnet, also
`n : M(n× n,H) −→M(2n× 2n,C) , (qjk) 7−→
q11 | . . . | q1n−− + + −−
......
−− + + −−qn1 | . . . | qnn
Dann gilt:
(a) Das Bild von M(n× n,H) unter `n ist
`n(M(n×n,H)) ={A ∈M(2n× 2n,C) | A · Jn = Jn · A
},
wobei Jn die 2n× 2n− Matrix mit n Kastchen J in der Diagonale ist.
(b) Die Abbildung `n ist ein injektiver R−Algebren-Homomorphismus.
Beweis : (a) folgt aus (2) von 10.6.2,(b) folgt daraus, dass es egal ist, ob man zwei Matrizen elementweise multi-pliziert, oder kastchenweise. Man schreibe sich das mal hin, etwa fur n = 2.
2
Wie fur R oder C definiert man nun
Definition 10.6.4 : Sei n ∈ N. Dann setzt man
GL(n,H) := { A ∈M(n× n,H) | A ist invertierbar } .
165

2
Mit Satz 10.6.3 (b) erhalt man den
Satz 10.6.5 : Die Abbildung
GL(n,H) −→{A ∈ GL(2n,C) | A−1 · Jn · A = Jn
}, A 7−→ `n(A)
ist ein Gruppen-Isomorphismus.
2
Man mochte nun, wie bei R oder C, invertierbare Matrizen dadurch charakte-risieren, dass ihre Determinante ungleich 0 ist. Nun haben wir Determinantenvon Matrizen aus nicht-kommutativen Ringen nicht definiert, und man kanndie Definitionen aus §5 nicht ohne weiteres ubertragen: Fur
A :=
(I JI J
)∈M(2× 2,H)
soll die Determinante 0 sein und nicht I · J − J · I = 2K. Wiederum hilftes, das Ganze in M(2n× 2n,C) zu betrachten:
Definition 10.6.6 : Sei n ∈ N und A ∈M(n× n,H). Dann setzen wir
detCA := det(`n(A)) .
Da `n ein Homomorphismus bezuglich der Multiplikation ist, und mit demDeterminanten-Multiplikationssatz erhalten wir den Teil (a) von
Satz 10.6.7 :
(a) Fur A,B ∈M(n× n,H) gilt
detC(A ·B) = (detCA)(detCB) .
(b) GL(n,H) = { A ∈M(n× n,H) | detCA 6= 0 } .
Beweis : (b) Ist A invertierbar, so haben wir
A−1 ∈M(n× n,H) mit A · A−1 = E2n , also
detCA · detCA−1 = 1 , also detCA 6= 0 .
Ist A nicht invertierbar, so ist `n(A) ∈M(2n× 2n,C) nicht invertierbar(siehe Aufgabe (10.5)), also detCA = 0 .
2
166
Wir brauchen nun den Satz, dass man jede Matrix aus M(n × n,H) durchMultiplikation mit Elementarmatrizen auf Diagonalform bringen kann. DerBeweis ist im Wesentlichen derselbe wie der von Satz 4.5.2. Wir wiederholenihn aber, um zu sehen, dass man dabei auf das Kommutativgesetz fur dieMultiplikation verzichten kann. Zunachst als Wiederholung die
Definition 10.6.8 : Sei n ∈ N. Fur k, j ∈ n und (nun) λ ∈ H sei
(I) falls λ 6= 0 ist:
Sk(λ) :=
E2 0. . .
... 0E2 0
0 . . . 0 λ 0 . . . 00 E2
0...
. . .
0 E2
←− k − te Zeile ,
↑k−te Spalte.
Es ist Sk(λ) ∈M(n× n,H) , sogar Sk(λ) ∈GL(n,H) wegen
Sk(λ) · Sk(λ−1) = Sk(λ−1) · Sk(λ) = E2n .
(II) Qjk(λ) :=
E2 0. . . 0
... 0E2 0
0 . . . 0 E2 0 . . . 0 λ 0 . . . 0E2 0
. . ....
E2 00 E2 0
0 E2...
. . .
0 E2
←− k − te Zeile ,
↑j−te Spalte.
Es ist Qjk(λ) ∈ GL(n,H) wegen Qj
k(λ) ·Qjk(−λ) = Qj
k(−λ) ·Qjk(λ) = E2n .
Bemerkung 10.6.9 : Wie in Hilfssatz 4.5.10 gilt: Fur A ∈M(n× n,H) ist
• Sk(λ) · A die Matrix, in der die k-te Zeile von A von links (!) mit λmultipliziert ist,
167
• Qjk(λ) ·A die Matrix, in der die von links mit λ multiplizierte j−te Zeile
zur k−ten Zeile addiert ist.
Satz 10.6.10 : Zu jedem A ∈ GL(n,H) gibt es ein Produkt B vonElementarmatrizen Qj
k(λ) , λ ∈ H , j 6= k , und ein q ∈ H \ {0} mit
A = B · Sn(q) .
Beweis : Wir verwenden die Sprechweise aus Bemerkung 10.6.9: SeiA = (αkj) ∈ GL(n,H). Falls α21 = 0 ist, gibt es ein k 6= 2 mit αk1 6= 0.Addition der k−ten Zeile zur zweiten ergibt eine Matrix (αkj) mit α21 6= 0.Wir konnen also im Weiteren von α21 6= 0 ausgehen.Addition des (E2−α11) ·α−121 −fachen der zweiten Zeile zur ersten ergibt eineMatrix (αkj) mit α11 = E2 . Man addiere das (−αk1)−fache der ersten Zeilezur k−ten, k > 1, dann erhalt man eine Matrix der Form
E2 | ∗ . . . ∗−− + −− −− −−0 |... | C0 |
wobei ∗ irgendetwas bedeutet, und C ∈ GL(n−1,H) ist. Wenn man fortfahrt,erhalt man eine obere Dreiecksmatrix, in der die ersten n − 1 Diagonalele-mente gleich dem Einselement E2 von H sind, und das letzte gleich einemq ∈ H \ {0}. Durch Addition passender Vielfachen der k−ten Zeilen, k > 2,zu den Vorhergehenden erhalt man eine Diagonalmatrix mit E2 in den Zeilen1, . . . , n − 1 und αnn = q . Fasst man die verwendeten Matrizen Qj
k(λ) zueinem Produkt C ′ zusammen, so folgt
Sn(q−1) · C ′ · A = E2n und damit A = C ′−1 · Sn(q) ,
wobei auch B := C ′−1 ein Produkt von Elementarmatrizen vom Typ (II)ist.
2
Folgerung 10.6.11 : detC ist eine surjektive Abbildung von M(n× n,H)
auf R+ = { β ∈ R | β ≥ 0 } . detC ist ein surjektiver Gruppenhomomor-phismus von GL(n,H) auf (R∗+, ·).Beweis : Nach Satz 10.6.10 haben wir fur A ∈ GL(n,H):
A = B · Sn(q) ,
168

wobei B ein Produkt von Elementarmatrizen vom Typ (II) ist. Solche Ma-trizen haben die C−Determinante 1, und nach Satz 10.6.7 (a) ist auchdetCB = 1 , also
detCA = detCSn(q) .
Ist q =
(u v−v u
)mit u, v ∈ C , so ist
detC(Sn(q)) = uu+ vv = |u|2 + |v|2 > 0 ,
wobei jeder Wert aus R∗+ angenommen werden kann. Dass detC ein Grup-penhomomorphismus ist, folgt aus Satz 10.6.7 (a). Schließlich gilt nach Satz10.6.7 (b) noch
detCA = 0 ⇐⇒ A ∈M(n× n,H) \GL(n,H) .
2
Den Satz 10.6.10 haben wir vor allem bewiesen, um zu zeigen:
Satz 10.6.12 : GL(n,H) ist wegzusammenhangend als Teilraum des 4n-dimensionalen normierten R−Vektorraums M(2n× 2n,C).
Beweis : Sei A ∈GL(n,H). Nach Satz 10.6.10 ist
A = B · Sn(q) ,
wobei B ein Produkt von Elementarmatrizen vom Typ (II) und Sn(q) mitq ∈ H eine Elementarmatrix vom Typ (I) ist. Es reicht zu zeigen, dass manjede dieser Matrizen mit einem Weg in GL(n,H) mit dem Einselement E2n
verbinden kann. Das Produkt dieser Wege verbindet dann A mit E2n:(a) Zunachst fur die Matrizen Qj
k(λ) vom Typ (II) : Die Abbildung
ϕjk : [0, 1] −→ GL(n,H) , t 7−→ Qjk((1− t)λ)
ist stetig und hat ϕjk(0) = Qjk(λ) , ϕjk(1) = E2n .
(b) Nun fur die Matrizen Sn(q) , q ∈ H : Es ist “anschaulich” klar, man kannes aber auch nachrechnen (siehe Aufgabe (10.6)): H \ {0} ist, wie R4 \ {0},wegzusammenhangend. Es gibt also einen Weg
ϕ0 : [0, 1] −→ H \ {0} mit ϕ0(0) = q , ϕ0(1) = E2 .
Dann setzen wir
ϕn : [0, 1] −→ GL(n,H) , t 7−→ Sn(ϕ0(t)) .
169

Es ist dann ϕn(t) ∈ GL(n,H) , und ϕn(0) = Sn(q) , ϕn(1) = Sn(E2) = E2n.Und ϕn ist stetig.
2
Naheliegend ist die folgende
Definition 10.6.13 : Fur n ∈ N setzen wir
SL(n,H) := { A ∈ GL(n,H) | detCA = 1 } .
2
Wie in Satz 10.6.5 erhalt man
Satz 10.6.14 : Die Abbildung
SL(n,H) −→{A ∈ SL(2n,C) | A−1 · Jn · A = Jn
}, A 7−→ `n(A)
ist ein Gruppen-Isomorphismus.
2
Den Satz 10.6.10 kann man fur SL(n,H) statt GL(n,H) etwas modifizieren.Man berucksichtige dabei, dass fur
q =
(u v−v u
)∈ H = M(1× 1,H) mit u, v ∈ C gilt :
detCq = |u|2 + |v|2 = N(q) :
Satz 10.6.15 : Zu jedem A ∈ SL(n,H) gibt es ein Produkt B vonElementarmatrizen Qj
k(λ) , λ ∈ H , j 6= k , und ein q ∈ H mit N(q) = 1 und
A = B · Sn(q) .
Beweis : Das folgt aus Satz 10.6.10 und dem Determinanten-Multiplikationssatz10.6.7 (a) .
2
Satz 10.6.16 : SL(n,H) ist wegzusammenhangend.Beweis : Die Elementarmatrizen Qj
k(λ) gehoren zu SL(n,H), und das giltauch fur die Verbindungswege dieser Matrizen mit E2n, so wie wir sie inTeil (a) des Beweises von Satz 10.6.10 definiert hatten. Komplizierter ist dasmit der Matrix Sn(q) : Wir hatten uns uberzeugt, dass der in Teil (b) des
170

Beweises von 10.6.10 definierte Verbindungsweg ϕn in GL(n,H) liegt, aberer liegt nicht notwendig in SL(n,H). Wir suchen uns einen anderen Weg undbenutzen dazu Polarkoordinaten im R4 (siehe etwa [K2]): Zu
q =
(u v−v u
)mit u, v ∈ C und N(q) = |u|2 + |v|2 = 1
gibt es drei “Winkel” ψ1, ψ2, ψ3 mit
−π < ψ1 ≤ π , −π2< ψ2 ≤
π
2, −π
2< ψ3 ≤
π
2und
u = cosψ1 cosψ2 cosψ3+i sinψ1 cosψ2 cosψ3, v = sinψ2 cosψ3+i sinψ3 .
Setzt man nun
ϕ : [0, 1] −→ SL(n,H) , ϕ(t) := Sn(q(t)) mit q(t) :=
(u(t) v(t)
−v(t) u(t)
),
u(t) := cos(1−t)ψ1 cos(1−t)ψ2 cos(1−t)ψ3+i sin(1−t)ψ1 cos(1−t)ψ2 cos(1−t)ψ3,
v(t) := sin(1− t)ψ2 cos(1− t)ψ3 + i sin(1− t)ψ3 .
so sieht man, dass ϕ stetig ist und in SL(n,H) verlauft, mit ϕ(0) = Sn(q)und ϕ(1) = E2n.(Anmerkung: Das ist im Grunde der Beweis, dass die Einheitssphare im R4
wegzusammenhangend ist.)
2
10.7 Klassische Gruppen als Mannigfaltigkeiten
Wir wollen sehen, dass gewisse klassische Gruppen Untermannigfaltigkeitendes n2-dimensionalen R−Vektorraums M(n× n,R) sind. Die folgende Defi-nition gehort naturlich in die Analysis, siehe etwa [Fo3]:
Definition 10.7.1 : Seien k, d ∈ N. Eine Teilmenge M ⊂ Rk heißt eined−dimensionale Untermannigfaltigkeit, wenn es zu jedem Punkt a ∈Meine offene Teilmenge U ⊂ Rk mit a ∈ U und stetig differenzierbare Funktio-nen
f1, . . . , fk−d : U −→ R
gibt, so dass gilt
(a) M ∩ U = { x ∈ U | f1(x) = . . . = fk−d(x) = 0 } ,
171

(b) Rg∂(f1, . . . , fk−d)
∂(x1, . . . , xk)(a) = k − d .
Dabei bezeichnet
∂(f1, . . . , fk−d)
∂(x1, . . . , xk)=
∂f1∂x1
. . .∂f1∂xk
......
∂fn−k∂x1
. . .∂fn−k∂xk
die Funktionalmatrix von f = (f1, . . . , fn−k).Beispiel 10.7.2 : Sei D offen in Rk, dann ist D eine k−dimensionale Un-
termannigfaltigkeit von Rk.Beweis : In der Def. 10.7.1 kann man U := D nehmen. fj fur j ∈ ∅ brauchtman nicht zu definieren.
2
Beispiel 10.7.3 : Nach Bemerkung 10.2.3 ist GL(n,K) offen in M(n×n,K),also ist
GL(n,R) eine Untermannigfaltigkeit der Dimension n2 ,GL(n.C) eine Untermannigfaltigkeit der Dimension 2n2 uber R .
Definition 10.7.4 : Seien U, V ⊂ Rn offene Mengen. Eine Abbildung
F : U −→ V
heißt ein Diffeomorphismus , falls F bijektiv ist und sowohl F als auchF−1 stetig differenzierbar sind.
2
Zum Nachweis, dass eine Menge M eine Untermannigfaltigkeit ist, verwendenwir den
Satz 10.7.5 : Sei Wk ⊂ Rn der k−dimensionale Untervektorraum
Wk := { (x1, . . . , xn) ∈ Rn | xk+1 = . . . = xn = 0 } .
Eine Teilmenge M ⊂ Rn ist genau dann eine k−dimensionale Untermannig-faltigkeit, wenn es zu jedem a ∈M eine offene Teilmenge U ⊂ Rn mit a ∈ Uund einen Diffeomorphismus
F : U −→ V
172

auf eine offene Menge V ⊂ Rn gibt, so dass gilt
F (M ∩ U) = Wk ∩ V .
2
Hilfssatz 10.7.6 : Sei G eine Untergruppe von GL(n,K) , K = R oder C.Wenn es offene Mengen
U1 ⊂M(n× n,K) mit En ∈ U1 und
U0 ⊂M(n× n,K) mit 0 ∈ U0 ,
einen Diffeomorphismusψ : U0 −→ U1
und einen R−Untervektorraum V von M(n× n,K) gibt mit
ψ−1(G ∩ U1) = U0 ∩ V und ψ(0) = En ,
so ist G eine Untermannigfaltigkeit von M(n× n,K) der Dimension dimR V.Beweis : (a) Wir setzen
k := dimR V ,
m := n2 fur K = R , m := 2n2 fur K = C .
Ist (v1, . . . , vk) eine Basis von V und (e1, . . . , em) die kanonische Basis vonRm ∼= M(n× n,K) , so ist durch
ρ : V −→ Wk , vj 7−→ ej
eine lineare Abbildung von V auf
Wk = { (x1, . . . , xm) ∈ Rm | xk+1 = . . . = xm = 0 }
definiert, die sich zu einem Vektorraum-Isomorphismus
ρ : M(n× n,K) −→ Rm
fortsetzen lasst. ρ ist dann ein Diffeomorphismus, es gibt eine offene MengeU ′ ⊂ Rm mit
ρ(U0 ∩ V ) = U ′ ∩Wk .
ρ ◦ ψ−1 : U1 −→ U ′
ist ein Diffeomorphismus mit
ρ ◦ ψ−1(G ∩ U1) = U ′ ∩Wk .
173

(b) Sei nun g ∈ G beliebig. Die Abbildung
ψg : M(n× n,K) −→ M(n× n,K) , ψg(h) := g · h
ist ein Diffeomorphismus von M(n× n,K) auf sich, also ist
Ug := { g · h | h ∈ U1 }
eine offene Teilmenge von M(n× n,K) mit g ∈ Ug , und
ϕ := ρ ◦ ψ−1 ◦ ψ−1g : Ug −→ M(n× n,K)
ist ein Diffeomorphismus mit
ϕ(Ug ∩G) = U ′ ∩Wk .
Nach Satz 10.7.5 ist G eine k−dimensionale Untermannigfaltigkeit vonM(n× n,K).
2
Satz 10.7.7 : SL(n,K) := { A ∈M(n× n,K) | detA = 1 } ist inGL(n,K) eine Untermannigfaltigkeit der Dimension
n2 − 1 fur K = R , bzw.2(n2 − 1) fur K = C .
Beweis : Fur A = (akj) ∈M(n× n,K) und k, j ∈ n setzen wir
dkj , tkj : M(n× n,K) −→ K ,
dkj(A) := detA′kj , tkj(A) := akj ,
wobei A′kj die in 5.3.1 definierte Matrix ist, die aus A durch Streichen derk−ten Zeile und j−ten Spalte entsteht. Entwicklung von detA nach der1.Zeile von A liefert also
(1) detA =n∑j=1
(−1)1+jt1j(A)·d1j(A) ,
fur alle A ∈M(n× n,K). Es ist d11(En) = 1, und da d11 (als Polynomfunk-tion mehrerer Variablen) stetig ist, ist
(2) U1 := { A ∈M(n× n,K) | d11(A) 6= 0 }
174

eine offene Menge in M(n× n,K) mit En ∈ U1 . Fur alle A ∈ U1 gilt
(3) t11(A) = d11(A)−1
(detA−
n∑j=2
(−1)1+jt1j(A) · d1j(A)
).
Die Abbildung
ψ′ : M(n× n,K) −→ M(n× n,K) , a11 . . . a1n...
...an1 . . . ann
7−→
detA a12 . . . a1na21 a22 a2n...
...an1 an2 . . . ann
,
bei der a11 durch detA ersetzt wird, ist differenzierbar. Sie bildet U1 in sichab, denn es gilt
d11(ψ′(A)) = d11(A) .
Nach (3) kann man fur A ∈ U1 das Element a11 = t11(A) aus ψ′(A) berech-nen, man hat also zu ψ′ die inverse Abbildung
ψ′−1 : U1 −→ U1 , B :=
b a12 . . . a1na21 a22 . . . a2n...
...an1 an2 . . . ann
7−→
7−→
d11(B)−1(b−
n∑j=2
(−1)1+ja1jd1j(B)) a12 . . . a1n
a21 a22 . . . a2n...
...an1 an2 . . . ann
und diese Abbildung ist auch differenzierbar. Also ist ψ′
∣∣U1
ein Diffeomor-phismus von U1 auf U1. Da U1 offen ist, ist auch
U0 := { A− En | A ∈ U1 }
offen, und enthalt die 0 ∈M(n× n,K) . Die Abbildung
ψ : U0 −→ U1 , A 7−→ ψ′−1(En + A)
ist ein Diffeomorphismus mit
(4) ψ−1(SL(n,K) ∩ U1) = { A ∈ U0 | t11(A) = 0 } ,
175

denn fur A ∈ SL(n,K) ∩ U1 gilt
detA = 1 und d11(A) 6= 0 , also
ψ−1(A) = ψ′(A)− En und t11(ψ′(A)− En) = 0 ,
und fur A ∈ U0 mit t11(A) = 0 gilt
ψ(A) = ψ′−1(En + A) ∈ U1 ,
t11(En + A) = 1 ,
und nach Definition von ψ′ heißt das
det(ψ′−1(En + A)) = 1 .
Also ist ψ(A) ∈ U1∩ SL(n,K) .Damit ist (4) bewiesen, wir haben
ψ−1(SL(n,K) ∩ U1) = U0 ∩ V mit
V := { A ∈M(n× n,K) | a11 = 0 } ,
und das ist ein R−Untervektorraum von M(n× n,K) der Dimension n2 − 1(fur K = R) bzw. 2n2 − 2 (fur K = C ) . Nach Hilfssatz 10.7.6 folgt dieBehauptung.
2
Hilfssatz 10.7.8 : Sei F ∈M(n× n,K) invertierbar. Dann ist
G :={B ∈M(n× n,K) | tB · F ·B = F
}eine Untergruppe von GL(n,K) ,
V :={A ∈M(n× n,K) | tA · F + F · A = 0
}ist ein Untervektorraum von M(n × n,K), und G ist eine Untermannigfal-tigkeit der Dimension dimR V .Beweis : Dass G Untergruppe von GL(n,K) und V Untervektorraum vonM(n×n,K) ist, rechnet man nach. Den Rest zeigt man mit Hilfssatz 10.7.6:
U0 := { A ∈M(n× n,K) | det(En − A) 6= 0 }
ist eine offene Teilmenge von M(n× n,K) mit 0 ∈ U0 , und
U1 := { B ∈M(n× n,K) | det(En +B) 6= 0 }
176

ist offen mit En ∈ U1 . Die Abbildungen
σ : U0 −→ M(n× n,K) , A 7−→ (En + A) · (En − A)−1 ,
τ : U1 −→ M(n× n,K) , B 7−→ −(En −B) · (En +B)−1
sind differenzierbar, da sie stetig partiell differenzierbar sind. Wir zeigen nun:
(∗) σ(U0) ⊂ U1 , τ(U1) ⊂ U0 , σ ◦ τ = idU1 , τ ◦ σ = idU0 ,
damit folgt dann, dass σ als Abbildung von U0 auf U1 ein Diffeomorphismusist.Der Beweis von (∗) ist einfach Bruchrechnung fur Matrizen: Fur alle A ∈ U0
gilt
En + σ(A) = (En − A) · (En − A)−1 + (En + A) · (En − A)−1
= 2 · (En − A)−1 ,
alsodet(En + σ(A)) = 2n det(En − A)−1 6= 0 ,
also σ(A) ∈ U1 , und es ist
En−σ(A) = (En−A)·(En−A)−1−(En+A)·(En−A)−1 = −2A·(En−A)−1 ,
alsoA = −(En − σ(A)) · (En + σ(A))−1 = τ(σ(A)) .
Andererseits gilt fur alle B ∈ U1 : det(En +B) 6= 0 und
σ(τ(B)) = σ(−(En −B) · (En +B)−1)
= (En− (En−B) · (En +B)−1) · (En + (En−B) · (En +B)−1)−1
= (En+B−(En−B)) ·(En+B)−1 ·(En+B) ·(En+B+(En−B))−1
= (2B)·(2En)−1 = B .
Damit ist (∗) bewiesen. Wir behaupten nun:
(∗∗) G ∩ U1 = σ(V ∩ U0) ,
damit folgt dann die Behauptung aus Hilfssatz 10.7.7.Beweis von (∗∗): Sei A ∈ U0. Dann gilt
σ(A) ∈ G⇐⇒ t((En + A)(En − A)−1) · F · (En + A)(En − A)−1 = F⇐⇒ t(En − A)−1 · (En +t A) · F · (En + A) · (En − A)−1 = F⇐⇒ (En +t A) · F · (En + A) = (En −t A) · F · (En − A)⇐⇒ F +t A · F + F · A+t A · F · A = F −t A · F − F · A+t A · F · A⇐⇒ 2(tA · F + F · A) = 0⇐⇒ tA · F + F · A = 0⇐⇒ A ∈ V .
177

Damit und mit (∗) ist (∗∗) bewiesen.
2
Fur F kann man nun passende Matrizen einsetzen: Fur F := En erhalt manim Fall K = R:
Satz 10.7.9 : O(n) ist eine Untermannigfaltigkeit von GL(n,R) der
Dimensionn(n− 1)
2.
Beweis : Fur das V aus Hilfssatz 10.7.8 erhalt man
V ={A ∈M(n× n,R) | tA = −A
},
also die Menge der schiefsymmetrischen reellen n× n−Matrizen. Eine Basisbilden die Matrizen
Ekj − Ejk fur k > j , k, j ∈ n ,
das sindn(n− 1)
2Basiselemente. (Dabei war
Ekj = (δkr · δjs)(r,s)∈n×n .)
2
Satz 10.7.10 : Sei O(n,C) := { A ∈M(n× n,C) | tA · A = En } , soist O(n,C) eine Untermannigfaltigkeit von GL(n,C) der Dimension n(n− 1)uber R.
Beweis : Ahnlich wie in Satz 10.7.9 ist
V ={A ∈M(n× n,C) | tA = −A
},
und das ist ein Vektorraum der Dimensionn(n− 1)
2uber C, also
dimR V = n(n− 1) .
2
Bemerkung 10.7.11 : In Beispiel 10.3.3 hatten wir fur p, q ∈ N0 mit
p+ q = n die pseudo-orthogonalen Gruppen
O(p, q) ={A ∈M(n× n,R) | tA · Fp,q · A = Fp,q
}
178

mit Fp,q :=
Ep | 0−− + −−0 | −Eq
.
Fp,q ist in M(n × n,R) invertierbar, man kann also F := Fp,q in Hilfssatz10.7.8 einsetzen und erhalt
Satz 10.7.12 : Fur n ∈ N und p, q ∈ N0 mit p+ q = n sei
O(p, q) ={A ∈M(n× n,R) | tA · Fp,q · A = Fp,q
}.
Dann ist O(p, q) eine Untermannigfaltigkeit von GL(n,R) der Dimensionn(n− 1)
2.
Beweis : Hier ist
V ={A ∈M(n× n,R) | tA · Fp,q = −Fp,q · A
}.
Fur A = (akj) ∈ V gilt damit
akk = 0 fur k ∈ n ,
und fur k, j ∈ n mit k 6= j :
akj = −ajk , falls k, j ∈ p oder k, j ∈ n \ p ,
akj = ajk , falls (k > p ∧ j ≤ p) oder (k ≤ p ∧ j > p) .
Das bedeutet (wie bei den schiefsymmetrischen Matrizen in Satz 10.7.9 ),
dass man genau dien(n− 1)
2Elemente unterhalb der Diagonale frei wahlen
kann, also
dimV =n(n− 1)
2,
und nach Hilfssatz 10.7.8 ist O(p, q) eine Untermannigfaltigkeit der Dimen-
sionn(n− 1)
2.
2
Bemerkung 10.7.13 : Sei s eine nicht-ausgeartete symmetrische
Bilinearform auf dem Kn. Dann gibt es nach Korollar 9.2.6 eine BasisB = (b1, . . . , bn) von Kn , so dass
MB(s) = (s(bk, bj)) = (λjδkj)
179

eine Diagonalmatrix ist, wobei alle λj 6= 0 sind, da s nichtausgeartet ist. Es
gibt also µj ∈ C mit µ2j =
1
λj.
(a) Sei K = C. Fur
A = (a1, . . . , an) mit aj := µjbj ist
MA(s) = (s(ak, aj)) = En .
Betrachten wir nun die Gruppe der Matrizen MAA (f) aller“bezuglich s ortho-
gonalen Abbildungen” des Cn, d.h. der
f ∈ HomC(Cn,Cn) mit s(f(v), f(w)) = s(v, w) fur alle v, w ∈ Cn ,
so sehen wir, dass das die Gruppe O(n,C) ist, die wir in Satz 10.7.11 definierthatten.
(b) Sei K = R . Dann gibt es nach (9.3.4), und da s nichtausgeartet ist, eineBasis
A = (a1, . . . , an) von Rn , so dass
MA(s) = (s(ak, aj)) = Fp,q
ist. Die Gruppe der Matrizen MAA (f) aller
f ∈ HomR(Rn,Rn) mit ∀ v, w ∈ Rn : s(f(v), f(w)) = s(v, w)
ist hier die in 10.3.3 definierte Gruppe O(p, q).
(c) Hat man nun eine beliebige Basis C von Kn und f ∈ HomK(Kn,Kn), sogilt
MCC (f) = T · MA
A (f) · T−1
mit einer Transformationsmatrix T ∈ GL(n,K), die von f nicht abhangt. DieGruppe der Matrizen MC
C (f) aller bezuglich s orthogonalen Abbildungen desKn auf sich ist also gleich
T ·O(n,C) · T−1 bzw. T ·O(p, q) · T−1 .
Nun ist fur festes T ∈GL(n,K) die Abbildung
M(n× n,K) −→ M(n× n,K) , A 7−→ T · A · T−1
ein Diffeomorphismus. Also ist die Gruppe der Matrizen aller bezuglich sorthogonalen Abbildungen bei jeder Basis eine Untermannigfaltigkeit vonGL(n,K) der Dimension
n(n− 1) fur K = C , bzw.
180

n(n− 1)
2fur K = R .
2
Bemerkung 10.7.14 : Sei s eine schiefsymmetrische Bilinearform auf demKn, also
s(v, w) = −s(w, v) fur alle v, w ∈ Kn ,
so zeigen Sie in Aufgabe (10.7), dass es eine Basis (ak)k∈n von Kn gibt, sodass
(s(ak, aj)) =
0 1 |−1 0 | 0− − +
.. .
0 + − − −|| 0 1 || −1 0 ||− − − −|
0. . .
0
ist. Ist zusatzlich s nichtausgeartet, so hat man keine Zeilen, in denen nur
Nullen stehen, und p =n
2Kastchen
|− − − −|| 0 1 || −1 0 ||− − − −|
in der Diagonale. Dann ist also
n = 2p gerade,
und wenn man die Basiselemente anders numeriert, kann man erreichen, dass
(s(ak, aj)) = Jp :=
0 | Ep− + −−Ep | 0
mit 0 ∈ M(p × p,K) wird. Wie in Bemerkung 10.7.13 (c) kann man sichuberlegen, dass ein Basiswechsel die Dimension der Untermannigfaltigkeit
181

nicht andert; wir konnen also annehmen, dass (ak)k∈n die kanonische Basisdes Kn ist. Dann ist die Gruppe
{ B ∈ GL(n,K) | ∀ a, b ∈ Kn : s(B · a,B · b) = s(a, b) }
gleich der in Hilfssatz 10.7.8 definierten Gruppe G, mit
F := Jp .
Fur K = R kennen wir diese Gruppe aus Beispiel 10.3.4 : Es ist die sym-plektische Gruppe Sp(p,R). Das geht aber auch fur K = C:
Satz 10.7.15 : Die symplektische Gruppe
Sp(p,K) ={A ∈ GL(2p,K) | tA · Jp · A = Jp
}ist eine Untermannigfaltigkeit der Dimension
2(2p2 + p) fur K = C bzw.
2p2 + p fur K = Rvon GL(2p,K).Beweis : In Hilfssatz 10.7.8 mussen wir dimR V fur
V :={A ∈M(n× n,K) | tA · Jp = −Jp · A
}fur n = 2p
berechnen. Schreibt man sich A als Kastchenmatrix
A =
A1 | A2
− + −A3 | A4
mit Aj ∈M(p× p,K) fur j ∈ 4
auf, so bedeutet A ∈ V : −tA3 | tA1
− + −−tA4 | tA2
=
−A3 | −A4
− + −A1 | A2
,
und das gilt genau dann, wenn
A3 = tA3 , A2 = tA2 , A4 = −tA1
ist. A2 und A3 kann man also beliebig aus K−Vektorraumen der Dimensionp(p+ 1)
2wahlen, und A1 ∈M(p× p,K) beliebig. Also ist
dimK V = 2 · p(p+ 1)
2+ p2 = 2p2 + p .
182

2
Nach den orthogonalen und symplektischen Gruppen fehlen uns nur noch dieunitaren Gruppen:
Bemerkung 10.7.16 : Sei K = C, dann betrachten wir fur F ∈ GL(n,C)die Gruppe
G :={B ∈M(n× n,C) | tB · F ·B = F
}.
Wie in Hilfssatz 10.7.8 zeigt man, dass G eine Untergruppe von GL(n,C) ist,dass
V :={A ∈M(n× n,C) | tA · F + F · A = 0
}ein R−Untervektorraum von M(n×n,C) ist, und dass G eine Untermannig-faltigkeit von GL(n,C) der Dimension
dimR V
ist. Fur F = En wird G = U(n) die in 9.1.6 definierte unitare Gruppe.Andere Gruppen erhalt man mit der Matrix Fp,q aus Bemerkung 10.7.11:
Definition und Satz 10.7.17 : Fur n ∈ N und p, q ∈ N0 mit p+ q = n sei
U(p, q) :={B ∈M(n× n,C) | tB · Fp,q ·B = Fp,q
},
dann ist U(p, q) eine Untermannigfaltigkeit von GL(n,C) der Dimension n2
uber R . Speziell gilt das fur
U(n) = U(n, 0) = U(0, n) .
Beweis : Zu berechnen ist dimR V von
V ={A ∈M(n× n,C) | tA · Fp,q = −Fp,q · A
}.
Wir setzen A als Kastchenmatrix der Form
A =
A1 | B1
− + −tB2 | A2
an, mit A1 ∈M(p×p,C) , A2 ∈M(q×q,C) und B1, B2 ∈M(p×q,C), dannist A ∈ V gleichbedeutend mit tA1 | −B2
− + −tB1 | −tA2
=
−A1 | −B1
−− + −−tB2 | A2
, also mit
183

A1 = −tA1 , A2 = −tA2 , B1 = B2 .
Man kann B2 ∈M(p× q,C) beliebig wahlen,
dimRM(p× q,C) = 2pq .
Sei A1 = (akj) , dann bedeutet A1 = −tA1 :
akj = −ajk fur k 6= j und Re akk = 0 ,
also ist
dimR{A1 ∈M(p× p,C) | A1 = −tA1
}= p+ 2 · p(p− 1)
2= p2 .
Insgesamt wird
dimR V = p2 + q2 + 2pq = (p+ q)2 = n2 .
2
Definition 10.7.18 : Eine Lie-Gruppe ist eine Mannigfaltigkeit G , die
auch eine Gruppe ist, so dass die Multiplikation
µ : G×G −→ G , (g, h) 7−→ g · h
und das Invertieren
ι : G −→ G , g 7−→ g−1
differenzierbar sind.
2
Folgerung 10.7.19 : Die Gruppen GL(n,K) sind Mannigfaltigkeiten, und
zwar offene Teilmengen des n2− ( fur K = C : 2n2− ) dimensionalenR−Vektorraums M(n× n,K). Fur g, h ∈ GL(n,K) gilt
tkj(g · h) =n∑l=1
tkl(g) · tlj(h) und
tkj(g−1) = (−1)k+j(det g)−1djk(g) ,
also sind die n2 Komponenten der Funktionen µ und ι differenzierbare Funk-tionen der 2n2 bzw. n2 Variablen tkj(g) ( und tkj(h) ). Also sind µ und ι
184

differenzierbar, also sind die GL(n,K) Lie-Gruppen. Die Restriktionen diffe-renzierbarer Abbildungen auf Untermannigfaltigkeiten sind wieder differen-zierbar, also folgt aus den in 10.7 bewiesenen Satzen:
Satz 10.7.20 : Alle Gruppen SL(n,K) , O(n,C) , O(p, q) , Sp(p,K) und
U(p, q) sind Lie-Gruppen.
2
(10.8) Aufgaben
(10.1) Zeigen Sie: Fur jedes α ∈ R ist
fα : [0, 1] −→ C , t 7−→ t+ iα sin πt
ein Weg in C , der 0 und 1 verbindet, und außer 0 und 1 haben dieseverschiedenen Wege keine Punkte gemeinsam, d.h. es gilt
fα((0, 1)) ∩ fβ((0, 1)) = ∅ fur α 6= β .
Beweisen Sie damit, dass es fur A,H ∈GL(n,C) einen Weg f inM(n× n,C) gibt, der A mit H verbindet und keinen Punkt der endli-chen Menge { z ∈ C | det(zA+ (1− z)H) = 0 } trifft.
(10.2) (a) Seien V1 und V2 normierte K−Vektorraume, mit Normen ‖ ‖1 bzw.‖ ‖2 . Zeigen Sie: Eine lineare Abbildung F : V1 −→ V2 ist genaudann stetig, wenn es ein M ∈ R , M ≥ 0, gibt mit
(∗) ∀x ∈ V1 : ‖F (x)‖2 ≤ M ·‖x‖1 .
‖F‖op = sup { ‖f(x)‖2 | ‖x‖1 ≤ 1 } ist die kleinstmogliche Zahl M ,fur die (∗) gilt.(b) Sei V = C∞([0, 1]) der Vektorraum der beliebig oft differenzierba-ren Funktionen von [0, 1] nach R , mit
‖f‖ := sup { |f(x)| | x ∈ [0, 1] } .
Sei D : V −→ V die Differentiation, also D(f) := f ′ die Ableitungvon f ∈ V . Zeigen Sie, dass D nicht stetig ist.
185

(10.3) (Zur Gruppe O(1, 1) :) (a) Sei A ∈O(1, 1), d.h. A ∈GL(2,R) und esgelte:
(∗) ∀ v, w ∈ R2 : t(A·v)·(
1 00 −1
)·A·w = tv·
(1 00 −1
)·w ,
dann ist (∗) gleichbedeutend mit
tA ·(
1 00 −1
)· A =
(1 00 −1
)oder auch
tA ·(
1 00 −1
)=
(1 00 −1
)· A−1 .
(b) Fur A ∈O(1, 1) gilt detA ∈ {±1}. Setzt man
SO(1, 1) := { A ∈ O(1, 1) | detA = 1 } ,
O−(1, 1) := { A ∈ O(1, 1) | detA = −1 } ,
so ist O(1, 1) die disjunkte Vereinigung von SO(1, 1) und O−(1, 1) . Esist
SO(1, 1) =
{ (a bb a
) ∣∣∣∣ a2 − b2 = 1
}.
Aus a2 − b2 = 1 folgt a2 ≥ 1 , also a ≥ 1 oder a ≤ −1 . Wir setzen
SO+(1, 1) :=
{ (a bb a
) ∣∣∣∣ a2 − b2 = 1 , a ≥ 1
}.
Zeigen Sie, dass es zu jedem A ∈SO+(1, 1) ein t ∈ R gibt mit
A =
(cosh t sinh tsinh t cosh t
),
und dass die Matrizen A ∈SO+(1, 1) genau die Matrizen aus O(1, 1)sind, die sich durch einen Weg mit E2 verbinden lassen.(c) Zeigen Sie, dass die Abbildung
R −→ SO+(1, 1) , t 7−→(
cosh t sinh tsinh t cosh t
)ein Isomorphismus der Gruppe (R,+) auf die Gruppe (SO+(1, 1), ·) ist,und SO+(1, 1) ist ein kommutativer Normalteiler in O(1, 1).
186

(10.4) Sei p ∈ N und Sp(p,R) die in 10.3.4 definierte symplektische Gruppe,dann haben wir mit der Matrix
B :=
0 | −Ep−− + −−Ep | 0
die durch s(x, y) := tx ·B · y definierte Bilinearform s auf R2p. ZeigenSie fur dieses s :(a) Fur alle x, y ∈ R2p gilt
s(x, x) = 0 und s(x, y) = −s(y, x) .
(b) Fur a ∈ R2p und α ∈ R heißt
σa,α : R2p −→ R2p , x 7−→ x− αs(a, x)a
eine symplektische Transvektion . Zu a gibt es ein a2 ∈ R2p mit
s(a, a2) = 1 .
Erganzen wir (a, a2) durch Vektoren a3, . . . , a2p ∈ span(a, a2)⊥ zu einer
Basis (a, a2, . . . , a2p) des R2p, so ist die Matrix von σa,α bezuglich dieserBasis:
Sa,α :=
1 −α |
| 00 1 |−− −− −− + −−
0 | E2p−2
(c) Fur festes a ∈ R2n \ {0} ist
α 7−→ Sa,α
ein injektiver Gruppenhomomorphismus von (R,+) in die Gruppe (Sp(p,R), ·).(d) Fur alle α ∈ R , a ∈ R2p ist
detSa,α = 1 , und E2p − Sa,α ist nilpotent.
(10.5) Zeigen Sie fur A ∈M(n×n,H): Ist `n(A) invertierbar in M(2n×2n,C),so ist A invertierbar.
187
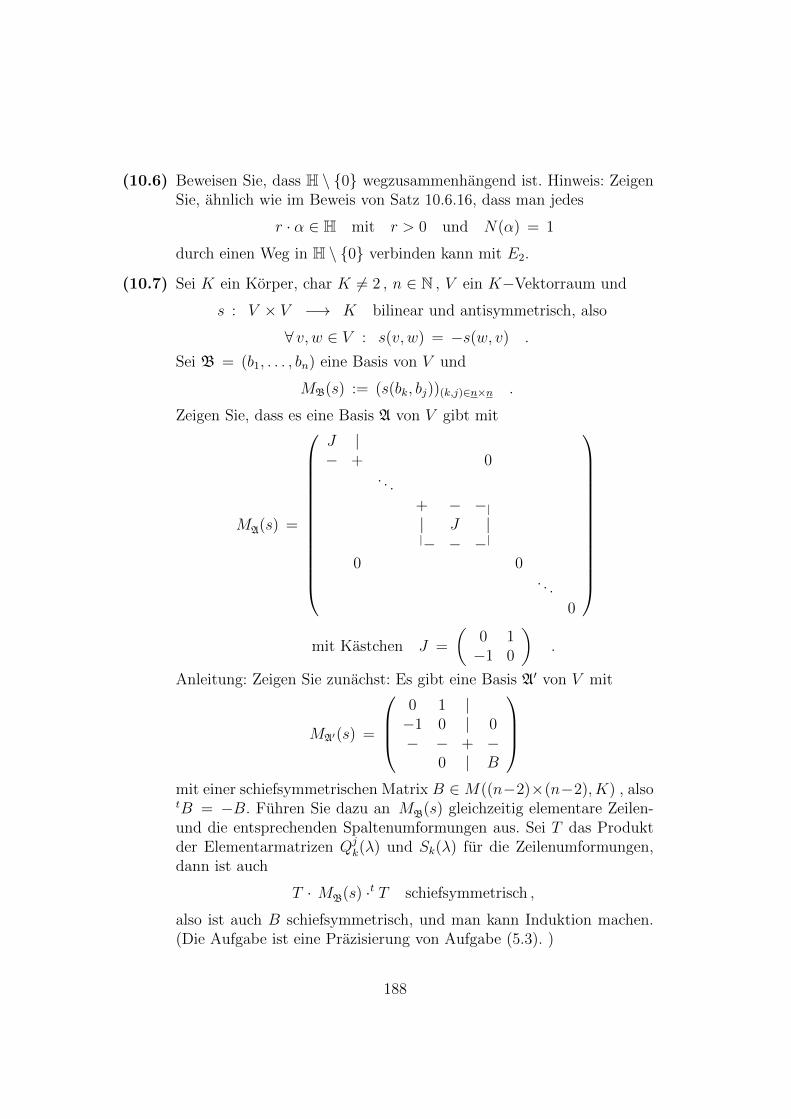
(10.6) Beweisen Sie, dass H \ {0} wegzusammenhangend ist. Hinweis: ZeigenSie, ahnlich wie im Beweis von Satz 10.6.16, dass man jedes
r · α ∈ H mit r > 0 und N(α) = 1
durch einen Weg in H \ {0} verbinden kann mit E2.
(10.7) Sei K ein Korper, char K 6= 2 , n ∈ N , V ein K−Vektorraum und
s : V × V −→ K bilinear und antisymmetrisch, also
∀ v, w ∈ V : s(v, w) = −s(w, v) .
Sei B = (b1, . . . , bn) eine Basis von V und
MB(s) := (s(bk, bj))(k,j)∈n×n .
Zeigen Sie, dass es eine Basis A von V gibt mit
MA(s) =
J |− + 0
. . .
+ − −|| J ||− − −|
0 0. . .
0
mit Kastchen J =
(0 1−1 0
).
Anleitung: Zeigen Sie zunachst: Es gibt eine Basis A′ von V mit
MA′(s) =
0 1 |−1 0 | 0− − + −
0 | B
mit einer schiefsymmetrischen Matrix B ∈M((n−2)×(n−2), K) , alsotB = −B. Fuhren Sie dazu an MB(s) gleichzeitig elementare Zeilen-und die entsprechenden Spaltenumformungen aus. Sei T das Produktder Elementarmatrizen Qj
k(λ) und Sk(λ) fur die Zeilenumformungen,dann ist auch
T · MB(s) ·t T schiefsymmetrisch ,
also ist auch B schiefsymmetrisch, und man kann Induktion machen.(Die Aufgabe ist eine Prazisierung von Aufgabe (5.3). )
188
Empfehlenswerte Literatur
zur Linearen Algebra :
[Fi] Gerd Fischer : Lineare Algebra, eine Einfuhrung fur Studienanfanger.18.Auflage, Springer 2014.
[SG] Hannes Stoppel, Birgit Griese : Ubungsbuch zur LinearenAlgebra. 8.Auflage, Springer 2015.
[HW] Bertram Huppert, Wolfgang Willems : Lineare Algebra,2., uberarbeitete und erweiterte Auflage, Vieweg+Teubner 2010.
[Ko] Max Koecher : Lineare Algebra und analytische Geometrie.4.Auflage, Springer Berlin 1997.
[KM] H.-J.Kowalsky, G.O.Michler : Lineare Algebra.12., uberarbeitete Auflage, De Gruyter Lehrbuch, Berlin 2008.
[RW] M.Roczen und H.Wolter, W.Pohl, D.Popescu, R.Laza:Lineare Algebra individuell, Online Ver. 0.62, 20.3.2010.
zur Analysis :
[K1] Konrad Konigsberger: Analysis 1, 6.Auflage, Springer-Lehrbuch2004.
[K2] Konrad Konigsberger: Analysis 2, 5.Auflage, Springer-Lehtbuch2004.
[Fo1] Otto Forster : Analysis 1, 12. Auflage, Springer 2016.[Fo2] Otto Forster : Analysis 2, 10.Auflage, Springer 2013.[Fo3] Otto Forster : Analysis 3, 7.Auflage, Springer 2012.[He] Harro Heuser : Lehrbuch der Analysis, Teil 1. 17.Auflage, Springer
2009.
zur Algebra :
[Bo] Siegfried Bosch : Algebra, 6.Auflage, Springer-Lehrbuch 2006.[Hei] Wolfgang Hein : Einfuhrung in die Struktur- und Darstellungs-
theorie der klassischen Gruppen, Springer 1990.[HN] Joachim Hilgert, Karl-Hermann Neeb : Lie-Gruppen und
Lie-Algebren, Vieweg 1991.[Ja] Nathan Jacobson : Basic Algebra I, 2nd edition, Dover Publications
2009.[Ja] Jens Carsten Jantzen : Lineare Algebra und Analytische Geometrie
III,Vorlesungsskript, Universitat Hamburg W.S. 1986/87.[KM] Chr.Kapfinger, K.Meyberg : Algebra, 3.Auflage, Springer
Spektrum 2013.
189
Verzeichnis der Definitionen
Abkurzungen: e : einer, eines , v : von
A D
abgeschlossene Menge 146 Dachprodukt 98ahnliche Matrizen 39 darstellende Matrix e.aquivalente Normen 148 Hermiteschen Form 19außere Algebra 98 definit, positiv 6außeres Produkt 89 definit, positiv semi- 6alternierende k−fach diagonalisierbar 34
lineare Abbildung 95 diagonalisierbar,simultan 49alternierender Tensor 89 Diffeomorphismus 172Ausartungsraum 132 direkte Summe, orthogonale 132
Drehachse 142Drehung 107
B Drehwinkel 142Dreieck, sphrisches 24
bilinear 82 Dreiecksungleichung 10Bilinearform, symmetrische 6Breite, geographische 28
E
CEigenraum 36
Cartan-Zerlegung 157 Eigenvektor 33Cauchy-Schwarzsche Ungleichung 9 Eigenwert 33, 38Cayley-Hamilton, Satz v. 53 elementarsymmetrische Funktion 130charakteristisches Polynom 37,38 Entfernung auf der Erde 27Cosinus-Satze im spharischen euklidische Norm 148
Dreieck 27 euklidischer Vektorraum 6
190

F J
-fach linear 93 Jacobi-Identitat 22Fitting, Lemma v. 61 Jordansche Normalform 73Form, Hermitesche 5Funktion, elementarsymmetrische 130
K
Gkanonisches Skalarprodukt 7Kompakte Teilmenge 147
Gram-Schmidt, Komplement, orthogonales 30Orthogonalisierungssatz v. 16 komplementare Matrix 54
Grassmann-Identitat 22 komplexe symplektische Gruppe 162Komplexifizierung 88kontravarianter Tensor 94
H konvergente Folge 146kovarianter Tensor 94
Hauptachsentransformation 123Hauptminor 139
-enkriterium 139 LHauptraum 60Hermitesche Form 5Hermitesche Matrix 19 Lange, geographische 28Hesse-Matrix 128 Legendre-Polynom 15Homoomorphismus 147 Lie-Algebra 23Hyperebene, Spiegelung an 143 Lie-Gruppe 184
I
induzierte Metrik 150Intervall 7Involution 164Isometrie 102
191
M P
Matrix, darstellende 19 Parallelogrammgleichung 11Matrix, Hermitesche 19 Polynom, charakteristisches 37, 38Matrix, symmetrische 20 positiv definit 6Maximum-Norm 148 positiv definiteMetrik 145 symmetrische Matrix 128metrischer Raum 145 positiv orientiert 24Minimalpolynom 57 positiv semidefint 6Minimum und Maximum,Satz v. 147 pseudo-orthogonale Gruppe 154Monom 88 pseudo-unitare Gruppe 162multilineare Abbildung 94 pythagoras, Satz des 11
N Q
nichtausgeartet 13 quadratische Form 126nilpotent 60 Quaternionengruppen 164normierter Vektorraum 11
RO
Raum, metrischer 145offene Menge 146 Raum, topologischer 145Operator-Norm 151orientiert, positiv 24 orthogonal 13Orthogonalbasis 15orthogonale direkte Summe 152orthogonale Gruppe 104orthogonale lineare Abbildung 102orthogonale Matrix 104orthogonales Komplement 30Orthogonalisierungssatz fur
symmetrische Bilinearformen 134Orthogonalsystem 15Orthonormalbasis 15Ortonormalisierungssatz v.
Gram-Schmidt 16Orthonormalsystem 15
192
S noch T
Seite im spharischen Dreieck 25 Transformationssatz furselbstadjungierter Endomorphismus 116 darstellende Matrizen 21senkrecht 12 Transvektion, symplektische 187Sesquilinearform 5simultan diagonalisierbar 49Sinus-Satz im spharischen Dreieck 27 USkalarprodukt 6- , kanonisches 7- , Standard- 7 Ungleichung, Cauchy-Schwarzsche 9spezielle lineare Gruppe 155 unitare Gruppe 104spezielle orthogonale Gruppe 104 unitare lineare Abbildung 102spharisches Dreieck 25 unitare Matrix 104Spiegelung 107 unitarer Vektorraum 6- an Hyperebene 143 universelle Eigenschaft 86Spur 31,38 Untermannigfaltigkeit 171stetige Funktion 147Summe, orthogonale direkte 132Sylvestersches Tragheitsgesetz 137 Vsymmetrische Bilinearform 6symmetrische k−fach lineare Abbildung 95symmetrische Matrix 20 Vektorprodukt 21symmetrischer Tensor 89 Vielfachheit e.Nullstelle 43symmetrisches Produkt 99 Vieta, Wurzelsatz v. 130symplektische Gruppe 154 Vorzeichenregel 130symplektische Gruppe, komplexe 162symplektische Transvektion 187
W
Twegzusammenhangend 150Winkel im spharischen Dreieck 26
Tensor 84 Winkel zwischen Vektoren 12Tensor, reiner 98 Wurzelsatz von Vieta 130Tensoralgebra 96Tensorprodukt 84topologische Gruppe 153 Ztopologischer Raum 145Tragheitsgesetz von Sylvester 137 Zentrum e.Gruppe 142,155
zusammenhangend 150
193