pdf, 28.6 Mb
116
TECHNISCHE UNIVERSIT ¨ AT M ¨ UNCHEN WALTHER - MEISSNER - INSTITUT F ¨ UR TIEF - TEMPERATURFORSCHUNG BAYERISCHE AKADEMIE DER WISSENSCHAFTEN Aufbau und Charakterisierung eines Spektrometers f¨ ur magnetooptischen Kerr-Effekt Diplomarbeit von Matthias Pelkner Betreuer: Prof. Dr. Rudolf Gross M¨ unchen, November 2008
Transcript of pdf, 28.6 Mb

TECHNISCHE
UNIVERSITAT
MUNCHEN
WALTHER - MEISSNER -
INSTITUT FUR TIEF -
TEMPERATURFORSCHUNG
BAYERISCHE
AKADEMIE DER
WISSENSCHAFTEN
Aufbau und Charakterisierung eines
Spektrometers fur magnetooptischen
Kerr-Effekt
Diplomarbeit
von
Matthias Pelkner
Betreuer: Prof. Dr. Rudolf Gross
Munchen, November 2008


Inhaltsverzeichnis
1 Einleitung 1
2 Grundlagen 5
2.1 Magnetismus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.1 Ferromagnetismus . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2 Domanen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.3 Hysterese . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.1.4 Magnetische Anisotropien und das Stoner-Wohlfarth-Modell . . . 9
2.2 Magnetooptische Effekte . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2.2.1 Phanomenologischer Ansatz . . . . . . . . . . . . . . . . . . . . . 12
2.2.2 Magnetooptische Effekte und ihre Geometrien . . . . . . . . . . . 17
2.2.3 Herleitung des detektierten Diodensignals . . . . . . . . . . . . . 21
2.3 Magnetotransport . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.1 Anisotroper Magnetwiderstand und planarer Halleffekt . . . . . . 23
2.3.2 Riesenmagnetwiderstand . . . . . . . . . . . . . . . . . . . . . . . 24
3 Materialien und Probenstrukturierung 29
3.1 Materialien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.1 Substrate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3.1.2 Magnetische Materialien . . . . . . . . . . . . . . . . . . . . . . . 31
3.2 Verwendete Proben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4 Experimenteller Aufbau 37
4.1 MOKE bei Raumtemperatur . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.1.1 Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.1.2 Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
4.1.3 Charakterisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
4.2 MOKE in Verbindung mit einem Kryostatsystem . . . . . . . . . . . . . 49
4.2.1 Aufbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
4.2.2 Eigenschaften und Vergleich mit dem Raumtemperatur-Aufbau . 50
5 Experimentelle Ergebnisse 53
5.1 Ferromagnetische 3d-Ubergangsmetalle . . . . . . . . . . . . . . . . . . . 53
5.1.1 Permendur (Fe50Co50) . . . . . . . . . . . . . . . . . . . . . . . . 54
I

II Inhaltsverzeichnis
5.2 Ferrite . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
5.2.1 Fe3O4 auf MgO(001) und MgO(110) . . . . . . . . . . . . . . . . 67
5.2.2 Zink dotiertes Ferrit . . . . . . . . . . . . . . . . . . . . . . . . . 70
5.3 Spinventile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5.4 Multiferroische Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.4.1 Ni auf BaTiO3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
5.4.2 Fe3O4 auf BaTiO3 . . . . . . . . . . . . . . . . . . . . . . . . . . 87
6 Kerr-Mikroskopie 91
6.1 Aufbau und Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . 91
6.2 Ergebnisse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
7 Zusammenfassung und Ausblick 95
Literaturverzeichnis 99
Abbildungsverzeichnis
2.1 Magnetisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Domanen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.3 Ferromagnetische Hysterese . . . . . . . . . . . . . . . . . . . . . . . . . 8
2.4 Koordinatensystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.5 Magnetooptische Geometrien . . . . . . . . . . . . . . . . . . . . . . . . 18
2.6 Geometrie fur den longitudinalen und transversalen Kerr-Effekt . . . . . 21
2.7 Ersatzschaltbild fur den spinabhangigen Transport . . . . . . . . . . . . . 25
2.8 Spinventil mit zwei unterschiedlichen ferromagnetischen Schichten . . . . 27
3.1 Phasendiagramm von BaTiO3 . . . . . . . . . . . . . . . . . . . . . . . . 30
3.2 Kubische und tetragonale Gitterstruktur von BaTiO3 . . . . . . . . . . . 31
3.3 Hallbarmaske . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
4.1 Schema fur LMOKE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.2 Aufbau des Raumtemperatur-LMOKE-Systems . . . . . . . . . . . . . . 38
4.3 Magnetfeld vs. Strom . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.4 Beispiel fur eine MOKE-Hysterese . . . . . . . . . . . . . . . . . . . . . . 43
4.5 Intensitatsverlauf; Verlauf magnetooptisches Signal . . . . . . . . . . . . 44
4.6 Kontrast vs. Analysatorwinkel . . . . . . . . . . . . . . . . . . . . . . . . 45
4.7 Signal-Rausch-Verhaltnis fur FeCo . . . . . . . . . . . . . . . . . . . . . . 46
4.8 Kerr-Rotation fur FeCo . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4.9 MOKE-Hysterese-Kurven bei verschiedenen Analysatorwinkeln . . . . . . 48
4.10 MOKE mit einem Kryostaten . . . . . . . . . . . . . . . . . . . . . . . . 49
4.11 PMOKE-Messung mit Kryostat . . . . . . . . . . . . . . . . . . . . . . . 50
4.12 LMOKE-Messung mit Kryostat . . . . . . . . . . . . . . . . . . . . . . . 51
5.1 Vergleich der MOKE-Kurven von FeCo und Ni . . . . . . . . . . . . . . . 54
5.2 FeCo - MOKE-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . 55
5.3 FeCo - R(H)-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.4 FeCo - Berechnung der Magnetisierungsrichtung aus den MOKE-Daten . 57
5.5 FeCo - R(H)-Messungen: Summe der Langswiderstande beider Achsen der
Hallbar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
5.6 FeCo - winkelabhangige Magnetotransportmessungen fur 100, 16 und 10 mT 60
5.7 FeCo - Vergleich der verschiedenen Widerstande . . . . . . . . . . . . . . 62
III

IV Abbildungsverzeichnis
5.8 Ni - MOKE-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
5.9 Ni - R(H)-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
5.10 Ni - R(α)-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.11 MOKE-Messungen fur Fe3O4 auf MgO(001) . . . . . . . . . . . . . . . . 67
5.12 MOKE-Messungen fur Fe3O4 auf MgO(110) . . . . . . . . . . . . . . . . 68
5.13 Fe3O4 auf MgO(110) - Stoner-Wohlfarth-Simulation . . . . . . . . . . . . 69
5.14 Zn0.1Fe2.9O4-Hysteresemessungen - MOKE und SQUID . . . . . . . . . . 70
5.15 Zn0.5Fe2.5O4-Hysteresemessungen - MOKE und SQUID . . . . . . . . . . 71
5.16 Spinventil - MOKE-Messungen fur verschiedene Orientierungen der Film-
ebene zum Feld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
5.17 Spinventil - Langswiderstandsmessungen beider Achsen und Summe der
Langswiderstande . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
5.18 Spinventil - Vergleich von MOKE und Magnetotransport . . . . . . . . . 75
5.19 Spinventil - R(α)-Messungen bei einem festen Feld von 100 mT . . . . . 77
5.20 Spinventil - R(α)-Messungen bei einem festen Feld von 2,2 mT . . . . . . 78
5.21 Spinventil - winkelabhangige Berechnung des GMR-Effekts aus R(α)-Mes-
sungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
5.22 Strom-Spannungs-Kennlinie fur Ni auf BaTiO3 . . . . . . . . . . . . . . . 81
5.23 MOKE-Messung von Ni auf BaTiO3, Driftmessung . . . . . . . . . . . . 82
5.24 MOKE-Messungen von Ni auf BaTiO3 fur 0-Orientierungen . . . . . . . 83
5.25 Schematische Darstellung der Probe und der Domanen im BTO . . . . . 84
5.26 MOKE-Messungen von Ni auf BaTiO3 fur 90-Orientierungen . . . . . . 85
5.27 MB32 - remanente Magnetisierung . . . . . . . . . . . . . . . . . . . . . 86
5.28 Darstellung der Praparationsmessungen bei E = −50V/mm . . . . . . . 86
5.29 Strom-Spannungs-Kennlinie fur Fe3O4 auf BaTiO3 . . . . . . . . . . . . . 87
5.30 MOKE-Messungen fur Fe3O4 auf BaTiO3 fur die 0- und die 90-Orientierung 88
6.1 Aufbau Kerr-Mikroskopie . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
6.2 WebCam - Hysterese - Konturdiagramme . . . . . . . . . . . . . . . . . . 93

Tabellenverzeichnis
3.1 Zusammenstellung der verwendeten Proben . . . . . . . . . . . . . . . . 35
V

VI Tabellenverzeichnis

Kapitel 1
Einleitung
Mit dem 2007 an Peter Grunberg und Albert Fert fur die Entdeckung des Riesenmagnet-
widerstandseffektes (GMR1) [1, 2] verliehenen Nobelpreis wurde ein Bereich der physika-
lischen Grundlagenforschung gewurdigt, ohne den unsere heutige Informationsgesellschaft
mit ihrer Massendatenspeicherung und -verarbeitung undenkbar ware. Es wurde deutlich,
wie nah die Grundlagenforschung an den Problemstellungen der heutigen Gesellschaft ist
bzw. wie schnell aus neuen physikalischen Konzepten marktreife Produkte entstehen kon-
nen. So ließ sich durch das Verstandnis des GMR-Effektes die Massendatenspeicherung
auf magnetischen Datentragern revolutionieren. Jedoch sind dieser Technologie funda-
mentale Grenzen gesetzt, so dass in naher Zukunft mit den gegenwartigen Bauelementen
keine großen Fortschritte mehr erzielt werden konnen.
Fur ein weiteres Vorankommen in diesem Bereich sind neuartige, wegweisende Konzep-
te unumganglich. Eine Moglichkeit bietet die sogenannte Spintronik, die in Bauelementen
neben dem Ladungsfreiheitsgrad zusatzlich den Spinfreiheitsgrad berucksichtigt. Dadurch
sollte es moglich sein, neue, leistungsfahigere Bauelemente zu realisieren. Magnetische
Datenspeicherung erfordert Manipulation und Auslesen von Magnetisierungsmustern in
ferromagnetischen Schichten.
Die Manipulation der Magnetisierung in ferromagnetischen Schichten und somit der
Spins erfolgt in erster Linie durch ein von außen angelegtes Magnetfeld. Jedoch sind Ma-
gnetfelder bei immer kleiner werdenden Strukturen wegen des Streufeldes problematisch.
Zur Beeinflussung der Magnetisierung mussen andere Wege gefunden werden. Elektrische
Felder bieten einen Ansatz, da sie leicht auf kleinen Langenskalen zu implementieren sind.
Die Moglichkeit, die Magnetisierung durch ein elektrisches Feld reversibel zu beeinflussen,
ware dabei ein großer Fortschritt auf dem Weg zu neuen funktionalen Bauelementen.
Um Bauelemente auf Basis der Spintronik mit Hilfe von neuen physikalischen Konzep-
ten zu realisieren, ist ein grundlegendes Verstandnis der magnetischen Eigenschaften, wie
z.B. der magnetischen Anisotropie, unumganglich. Um dieses Verstandnis zu erhalten,
sind geeignete Messmethoden notwendig. Am Walther-Meißner-Institut (WMI) existier-
ten zu Beginn dieser Arbeit zur Bestimmung magnetischer Eigenschaften die SQUID-
Magnetometrie2, mit der es moglich ist, das magnetische Moment in Abhangigkeit von
1Giant Magneto Resistance2Superconducting Quantum Interference Device
1

2 Kapitel 1 Einleitung
der Temperatur sehr genau zu bestimmen, und Magnetkryostaten, mit denen Magneto-
transportmessungen durchgefuhrt werden. Bei letzteren ist es moglich, die magnetischen
Eigenschaften durch die magnetoresistiven Effekte zu bestimmen. Zusatzlich wurde ein
FMR3-Messplatz aufgebaut, der eine sensitive Messung der magnetischen Anisotropie
erlaubt.
Neben diesen Methoden spielen heutzutage die magnetooptischen Messmethoden - bei
metallischen Strukturen insbesondere der magnetooptische Kerr-Effekt (MOKE) [3] - ei-
ne wichtige Rolle bei der Charakterisierung der magnetischen Eigenschaften. Dabei wird
ausgenutzt, dass sich die Polarisationseigenschaften des Lichts durch die Wechselwirkung
mit einem magnetischen Medium verandern. Generell verwendet man linear polarisiertes
Licht, dessen Eigenschaften dem Experimentator bekannt sind. Nach der Wechselwir-
kung ist das Licht im Allgemeinen elliptisch polarisiert, wobei sich die Polarisationsachse
zusatzlich dreht. Diese Veranderung der Polarisationseigenschaften ist dabei direkt pro-
portional zum Betrag der Magnetisierung und kann mit Hilfe optischer Komponenten
detektiert werden.
Seit der Entdeckung magnetooptischer Effekte im vorletzten Jahrhundert durch Fara-
day [4] und Kerr [5] haben sich magnetooptische Messverfahren zu einer weit verbrei-
teten Messmethode entwickelt. So ist es moglich, mittels magnetooptischer Effekte die
Bandstruktur bzw. magnetooptische Spektren von ferromagnetischen Materialien zu un-
tersuchen und zu bestimmen bzw. mit theoretischen Vorhersagen zu vergleichen [3, 6].
Ein wesentlicher Vorteil der magnetooptischen Effekte besteht darin, dass durch die Aus-
wahl der Messgeometrie ein Zugang zu den Magnetisierungskomponenten entlang aller
drei Raumrichtungen besteht [7, 8]. Da es sich um eine optische Messmethode handelt,
liegt es nahe, die magnetischen Eigenschaften, d.h. die magnetischen Domanen, sicht-
bar zu machen. Zu den Ersten, denen dies gelang, gehorten Williams et al. [9]. Darauf
aufbauend entwickelte sich in rasantem Tempo die bildliche Darstellung der Domanen
an der Oberflache von ferromagnetischen Materialien auf Basis der magnetooptischen
Effekte [10, 11]. Als Weiterentwicklung der bildlichen Darstellungen werden heutzutage
dynamische Magnetisierungsprozesse mit zeitaufgelosten magnetooptischen Spektrome-
tern untersucht [12, 13].
Ziel dieser Diplomarbeit war es, ein magnetooptisches Kerr-Effekt-Spektrometer auf-
zubauen und zu charakterisieren, um diese Technik auch am WMI nutzen zu konnen.
Im Kapitel 2 werden die physikalischen Grundlagen des Magnetismus und der magneto-
optischen Effekte vorgestellt. Insbesondere wird eine Einfuhrung in die magnetooptischen
Kerr-Effekte gegeben. In Kapitel 3 erfolgt eine kurze Darstellung der verwendeten Mate-
rialsysteme sowie ihrer magnetischen und, soweit bekannt, magnetooptischen Eigenschaf-
ten. Auch wird die verwendete Hallbargeometrie fur die Magnetotransportmessungen
vorgestellt.
Kapitel 4 befasst sich mit dem Aufbau und der Charakterisierung des neuen Messplat-
3Ferrmagnetische Resonanz

3
zes, beides wesentliche Bestandteile dieser Diplomarbeit. Dabei werden die verwendeten
Komponenten und die durch die magnetischen Eigenschaften der Probe hervorgerufe-
ne Polarisationsanderung bzw. ihre Detektion genau beschrieben. Zusatzlich erfolgt eine
Abschatzung der Empfindlichkeit des Messaufbaus. Das Ende des Kapitels stellt erste
Messungen in Verbindung mit einem Magnetkryostaten vor. Hiermit lassen sich auch
temperaturabhangige Messungen bei hohen Feldern durchfuhren.
Kapitel 5 diskutiert exemplarisch erste Messungen der neuen Messapparatur an den
verschiedensten Materialsystemen. Ein besonderes Augenmerk gilt dabei dem Vergleich
der magnetooptischen Messungen mit simultan durchgefuhrten Magnetotransportmes-
sungen. Zusatzlich wurde bei den Magnetotransportmessungen untersucht, wie sich der
Anisotrope Magnetwiderstand (AMR) vom Riesenmagnetwiderstand (GMR) durch eine
geeignete Wahl der Hallbargeometrie trennen lasst. Auch multiferroische Heterostruktu-
ren ließen sich mit dem neuen Messplatz untersuchen und werden am Ende dieses Kapitels
vorgestellt.
In Kapitel 6 erfolgt eine kurze Einfuhrung in die Kerr-Mikroskopie anhand von grund-
legenden Experimenten. Schließlich werden die einzelnen Kapitel zusammengefasst dar-
gestellt und es wird ein Ausblick uber die weiteren Entwicklungsmoglichkeiten des nun
vorhandenen MOKE-Spektrometers gegeben.

4 Kapitel 1 Einleitung
Kapitel 2
Grundlagen
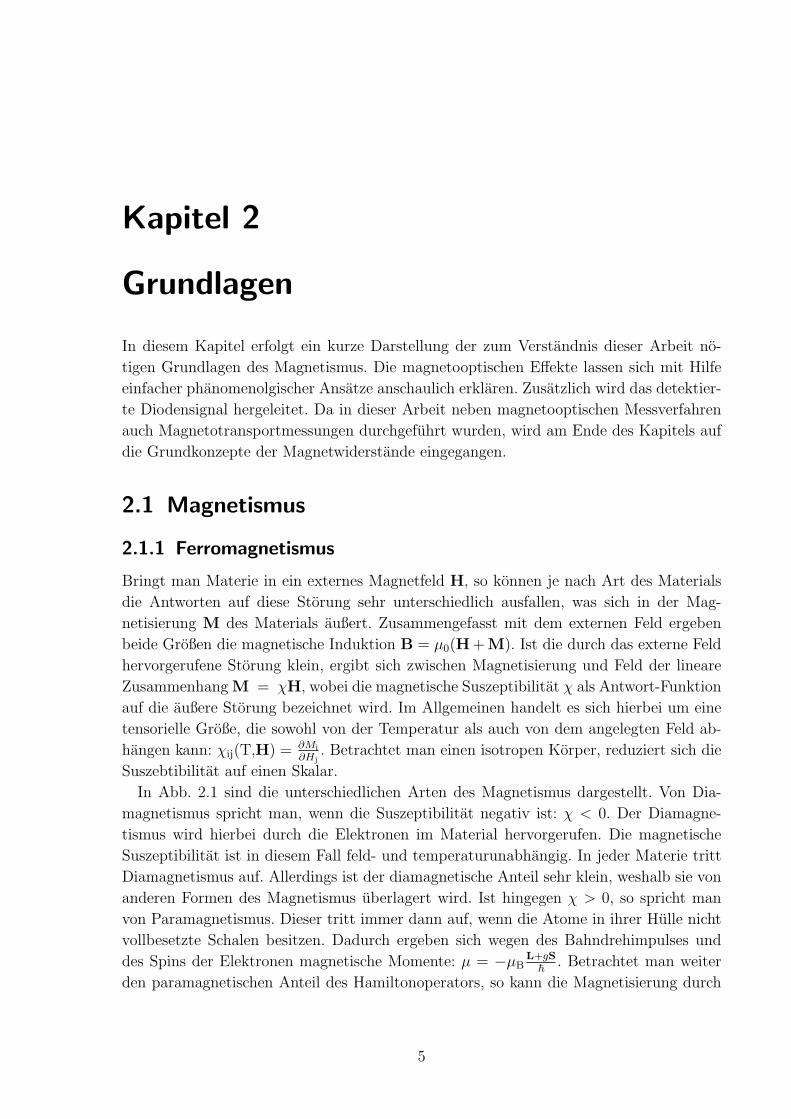
In diesem Kapitel erfolgt ein kurze Darstellung der zum Verstandnis dieser Arbeit no-
tigen Grundlagen des Magnetismus. Die magnetooptischen Effekte lassen sich mit Hilfe
einfacher phanomenolgischer Ansatze anschaulich erklaren. Zusatzlich wird das detektier-
te Diodensignal hergeleitet. Da in dieser Arbeit neben magnetooptischen Messverfahren
auch Magnetotransportmessungen durchgefuhrt wurden, wird am Ende des Kapitels auf
die Grundkonzepte der Magnetwiderstande eingegangen.
2.1 Magnetismus
2.1.1 Ferromagnetismus
Bringt man Materie in ein externes Magnetfeld H, so konnen je nach Art des Materials
die Antworten auf diese Storung sehr unterschiedlich ausfallen, was sich in der Mag-
netisierung M des Materials außert. Zusammengefasst mit dem externen Feld ergeben
beide Großen die magnetische Induktion B = µ0(H + M). Ist die durch das externe Feld
hervorgerufene Storung klein, ergibt sich zwischen Magnetisierung und Feld der lineare
Zusammenhang M = χH, wobei die magnetische Suszeptibilitat χ als Antwort-Funktion
auf die außere Storung bezeichnet wird. Im Allgemeinen handelt es sich hierbei um eine
tensorielle Große, die sowohl von der Temperatur als auch von dem angelegten Feld ab-
hangen kann: χij(T,H) = ∂Mi
∂Hj. Betrachtet man einen isotropen Korper, reduziert sich die
Suszebtibilitat auf einen Skalar.
In Abb. 2.1 sind die unterschiedlichen Arten des Magnetismus dargestellt. Von Dia-
magnetismus spricht man, wenn die Suszeptibilitat negativ ist: χ < 0. Der Diamagne-
tismus wird hierbei durch die Elektronen im Material hervorgerufen. Die magnetische
Suszeptibilitat ist in diesem Fall feld- und temperaturunabhangig. In jeder Materie tritt
Diamagnetismus auf. Allerdings ist der diamagnetische Anteil sehr klein, weshalb sie von
anderen Formen des Magnetismus uberlagert wird. Ist hingegen χ > 0, so spricht man
von Paramagnetismus. Dieser tritt immer dann auf, wenn die Atome in ihrer Hulle nicht
vollbesetzte Schalen besitzen. Dadurch ergeben sich wegen des Bahndrehimpulses und
des Spins der Elektronen magnetische Momente: µ = −µBL+gS
~ . Betrachtet man weiter
den paramagnetischen Anteil des Hamiltonoperators, so kann die Magnetisierung durch
5

6 Kapitel 2 Grundlagen
H
M
F
D
P
Abbildung 2.1: Unterschiedliche Antworten der Magnetisierung M auf ein extern angelegtes Magnetfeld.Hierbei zeigt die Kurve (D) Diamagnetismus, (P) Paramagnetismus und (F) Ferroma-gnetismus [14].
die Brillouin-Funktionen BJ beschrieben werden: M = MsatBJ(y) mit y ∝ BT
. Fur hohe
Temperaturen und kleine Felder lassen sich die Brillouin-Funktionen nahern und es gilt
fur die Suszeptibilitat das Curie-Gestz χ = CT
. Fur H = 0 gilt sowohl fur Para- wie fur
Diamagnetismus M = 0.
Besitzt die Magnetisierungskurve hingegen eine Hysterese, so spricht man von Ferro-
magnetismus. Hier besitzt der Festkorper auch im Nullfeld eine spontane Magnetisierung.
Diese entsteht durch ein korreliertes Elektronensystem, in dem sich durch eine langreich-
weitige Austauschwechselwirkung die Momente der Elektronen untereinander gegenseitig
beeinflussen und ausrichten. Die Austauschwechselwirkung kann direkt oder indirekt (Su-
peraustausch, Doppelaustausch, RKKY-Wechselwirkung, kinetischer Austausch [15, 16])
erfolgen. Diese Wechselwirkung lasst sich durch das Heisenberg-Modell darstellen und
man erhalt als Anteil im Hamiltonoperator:
HHeisenberg = −J∑
i,j(i<j)
Si · Sj (2.1)
Im Hamiltonoperatur werden nur die nachsten Nachbarn eines Elektrons berucksichtig.
Die Austauschkonstante J beschreibt hierbei die Starke der Wechselwirkung zwischen den
einzelnen Spins. Im ferromagnetischen Fall ist J > 0. Unterhalb einer bestimmten Tempe-
ratur TC (Curie-Temperatur) tritt spontane Magnetisierung auf. In diesem Fall existiert
im Nullfeld eine nicht verschwindende Magnetisierung M(H = 0) 6= 0. Fur Temperaturen
T > TC ist die Austauschwechselwirkung zu schwach und es liegt Paramagnetismus vor.
In diesem Temperaturbereich ist die magnetische Suszeptibilitat eines Ferromagneten fur
kleine Felder gegeben durch das Curie-Weiß-Gesetz:
χ =C
T − TC
(2.2)
Betrachtet man den Fall J < 0, so spricht man von einer antiferromagnetischen Kopp-

2.1 Magnetismus 7
lung, d.h. die benachbarten Spins richten sich antiparallel aus. Im Antiferromagnetismus
existieren zwei ferromagnetisch gekoppelte Untergitter. Der Betrag der Magnetisierung ist
in beiden Untergittern identisch. Diese Untergitter richten sich untereinander antiparallel
aus. Die Nettomagnetisierung ist dann M = 0. Sind die Betrage der Magnetisierung der
Untergitter unterschiedlich, so spricht man von Ferrimagnetismus. In diesem Fall erhalt
man eine nicht verschwindende Nettomagnetisierung. Der Antiferromagnetismus ist ein
Spezialfall des Ferrimagnetismus.
2.1.2 Domanen
(a) (b) (c)
Abbildung 2.2: (a) Eindomaniger, (b) zweidomaniger und (c) vieldomaniger Zustand aus [17]
Beim Ubergang von der paramagnetischen in die ferromagnetische Phase wird die
Symmetrie unterschiedlich gebrochen. Dadurch entstehen Bereiche, in denen die Mag-
netisierung in unterschiedliche Richtungen zeigt. Diese Bereiche werden als Domanen
bezeichnet. Wegen des Vorhandenseins solcher Domanen ist die Existenz von Ferroma-
gneten mit einer Nettomagnetisierung M = 0 moglich. Die einzelnen Domanen sind durch
Wande voneinander getrennt, in denen sich die Spins umorientieren. Diese Wande wer-
den je nach Art der Umorientierung als Bloch- oder Neel-Wande bezeichnet. Fur diese
Umorientierung muss Energie aufgewendet werden. Damit Domanenwande entstehen, ist
es also notwendig, dass an anderer Stelle die Energie minimiert wird. Betrachtet man den
eindomanigen Fall in Abb. 2.2(a), so wird deutlich, dass außerhalb des Ferromagneten ein
Streufeld entsteht, um den magnetischen Fluss zu schließen. Die Energie des Streufeldes
ist hierbei proportional zu B2. Um die Energie zu minimieren, entstehen die Domanen,
wodurch Streufelder vermieden werden. Der gunstigste Fall bezuglich Minimierung des
Streufelds liegt vor, wenn sich der magnetische Fluss innerhalb des Festkorpers schließt
und kein Streufeld existiert, wie in Abb. 2.2(c) zu sehen ist. Dabei ist zu betrachten, dass
neben der Streufeldenergie und der Wandenergie der Domanen weitere Energien wie die
8 Kapitel 2 Grundlagen
Anisotropieenergie usw. berucksichtigt werden mussen. Werden alle diese Energiebeitrage
berucksichtigt, so stellt sich der Zustand ein, bei dem die Energie minimal wird.
2.1.3 Hysterese
H
H- c
Ms
Mr
M
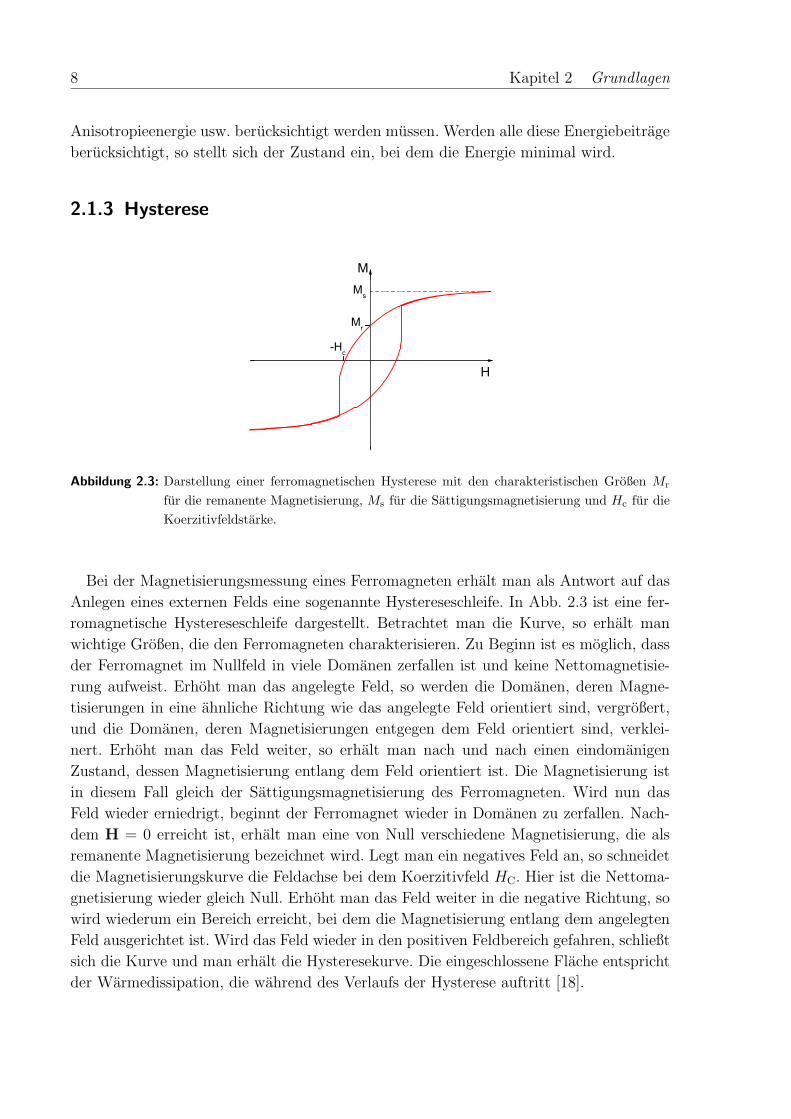
Abbildung 2.3: Darstellung einer ferromagnetischen Hysterese mit den charakteristischen Großen Mr
fur die remanente Magnetisierung, Ms fur die Sattigungsmagnetisierung und Hc fur dieKoerzitivfeldstarke.
Bei der Magnetisierungsmessung eines Ferromagneten erhalt man als Antwort auf das
Anlegen eines externen Felds eine sogenannte Hystereseschleife. In Abb. 2.3 ist eine fer-
romagnetische Hystereseschleife dargestellt. Betrachtet man die Kurve, so erhalt man
wichtige Großen, die den Ferromagneten charakterisieren. Zu Beginn ist es moglich, dass
der Ferromagnet im Nullfeld in viele Domanen zerfallen ist und keine Nettomagnetisie-
rung aufweist. Erhoht man das angelegte Feld, so werden die Domanen, deren Magne-
tisierungen in eine ahnliche Richtung wie das angelegte Feld orientiert sind, vergroßert,
und die Domanen, deren Magnetisierungen entgegen dem Feld orientiert sind, verklei-
nert. Erhoht man das Feld weiter, so erhalt man nach und nach einen eindomanigen
Zustand, dessen Magnetisierung entlang dem Feld orientiert ist. Die Magnetisierung ist
in diesem Fall gleich der Sattigungsmagnetisierung des Ferromagneten. Wird nun das
Feld wieder erniedrigt, beginnt der Ferromagnet wieder in Domanen zu zerfallen. Nach-
dem H = 0 erreicht ist, erhalt man eine von Null verschiedene Magnetisierung, die als
remanente Magnetisierung bezeichnet wird. Legt man ein negatives Feld an, so schneidet
die Magnetisierungskurve die Feldachse bei dem Koerzitivfeld HC. Hier ist die Nettoma-
gnetisierung wieder gleich Null. Erhoht man das Feld weiter in die negative Richtung, so
wird wiederum ein Bereich erreicht, bei dem die Magnetisierung entlang dem angelegten
Feld ausgerichtet ist. Wird das Feld wieder in den positiven Feldbereich gefahren, schließt
sich die Kurve und man erhalt die Hysteresekurve. Die eingeschlossene Flache entspricht
der Warmedissipation, die wahrend des Verlaufs der Hysterese auftritt [18].
2.1 Magnetismus 9
2.1.4 Magnetische Anisotropien und das Stoner-Wohlfarth-Modell
In einem ferromagnetischen Festkorper zeigen die Magnetisierung M und das externe
Magnetfeld H nicht notwendigerweise in die gleiche Richtung. Es zeigt sich, dass fur die
Lage der Magnetisierung energetisch gunstige bzw. ungunstige Richtungen im Festkorper
existieren. Diese Achsen werden als leicht bzw. hart bezeichnet. Der Ursprung fur die-
se Anisotropie sind Symmetriebruche, die durch die Form, Kristallstruktur oder durch
Verspannungen hervorgerufen werden konnen. Die magnetische Anisotropie lasst sich in
Form der freien Energie beschreiben. Die Magnetisierung wird sich im Allgemeinen so
orientieren, dass die freie Energie minimal wird. Im Nullfeld zum Beispiel wird sich die
Magnetisierung entlang der energetisch gunstigen leichten Achsen orientieren. Die freie
Energie setzt sich folgendermaßen zusammen:
Ftot = Fstat + Fentmag + Faniso. (2.3)
Die Beitrage zur freien Energie sind dabei die Zeeman-Energie (Fstat, auch magnetosta-
tische Energie genannt), die Entmagnetisierungsenergie (Fentmag) und die Anisotropie-
energie (Faniso). Wegen den letzten beiden Termen in Gl. (2.3) zeigen im Allgemeinen das
externe Magnetfeld H und die Magnetisierung M nicht in die gleiche Richtung. Die Ori-
entierungen der beiden Vektoren werden deshalb separat mit Hilfe von Polarkoordinaten
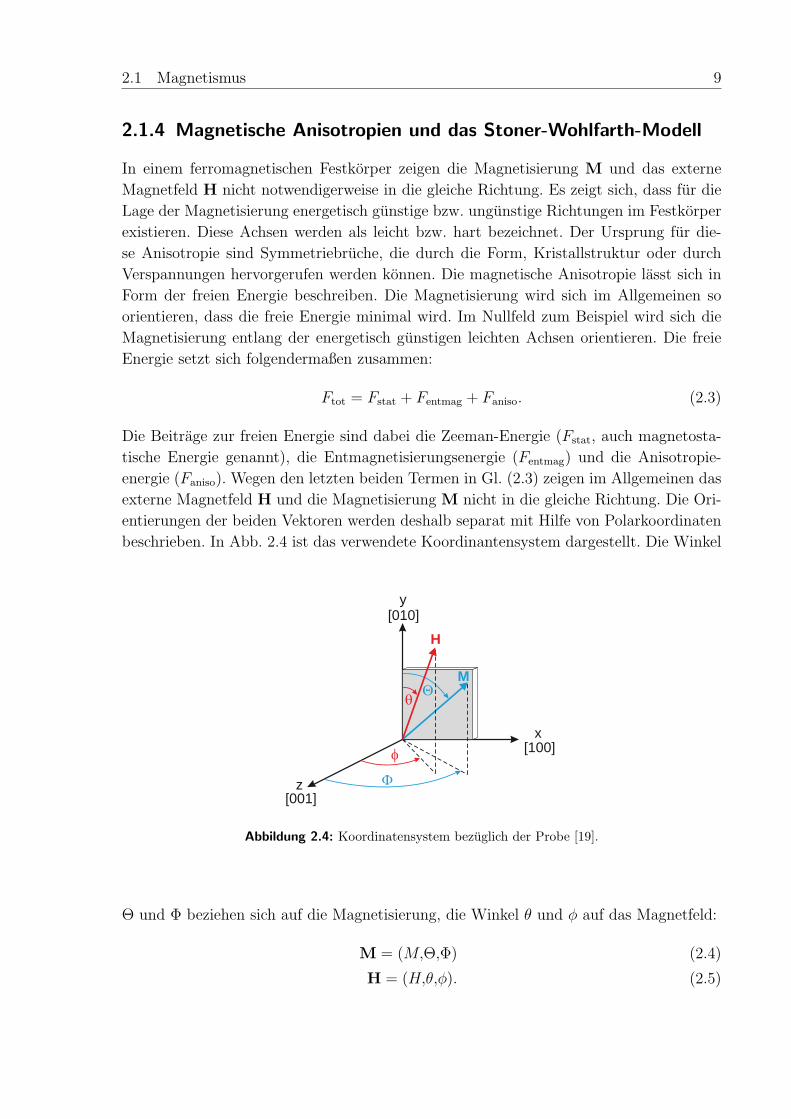
beschrieben. In Abb. 2.4 ist das verwendete Koordinantensystem dargestellt. Die Winkel
z[001]
x[100]
y[010]
H
M
Abbildung 2.4: Koordinatensystem bezuglich der Probe [19].
Θ und Φ beziehen sich auf die Magnetisierung, die Winkel θ und φ auf das Magnetfeld:
M = (M,Θ,Φ) (2.4)
H = (H,θ,φ). (2.5)

10 Kapitel 2 Grundlagen
Zeeman-Energie
Die magnetostatische Energie der Magnetisierung in einem externen Feld H ist gegeben
durch
Fstat = −µ0H ·M. (2.6)
Mit Hilfe des in Abb. 2.4 definierten Koordinatensystems lasst sich Gl. (2.6) zu
Fstat = −µ0HM(sin Θ sin Φ sin θ sinφ+ cos Θ cos θ + sin Θ cos Φ sin θ cosφ) (2.7)
umformen. Ohne weitere Beitrage in der freien Energie erhalt man das Energieminimum,
wenn die Magnetisierung parallel zum externen Feld liegt.
Entmagnetisierungsenergie
Dieser Beitrag - auch als Formanisotropie bezeichnet - reprasentiert die Energie des Streu-
feldes außerhalb der Probe. Er ist stark von der Form des ferromagnetischen Festkorpers
abhangig, weshalb z.B. in einem dunnen Film die Magnetisierung in der Filmebene liegt,
um die Energie zu minimieren. Der Entmagnetisierungsbeitrag lasst sich durch den Ent-
magnetisierungstensor N beschreiben:
Fentmag =µ0
2MNM. (2.8)
Allgemein ist die Spur von N gleich 1. Fur einen dunnen (001)-orientierten Film gilt in
guter Naherung Nxx ≈ Nyy ≈ 0 6= Nzz und es folgt:
Fentmag,Film =µ0
2M2 sin2 Θ cos2 Φ. (2.9)
Er beschreibt eine harte Achse senkrecht zur Filmebene.
Kristallanisotropie
Durch die Kristalleigenschaften der Probe wird die Kristallanisotropie hervorgerufen. Sie
besteht aus einem kubischen und einem uniaxialen Term. Der kubische Term Fc setzt
sich folgendermaßen zusammen [16]:
Fc = Kc1(α2xα
2y + α2
yα2z + α2
3α21) +Kc1α
21α
22α
23. (2.10)
Kc1 und Kc2 sind die kubischen Anisotropiekonstanten. Normalerweise gilt |Kc1| |Kc2|.αi = Mi/M sind die Richtungskosinusse fur die Magnetisierung und bezeichnen die Pro-
jektion Mi auf die i-te Achse. Mit dem oben definierten Koordinantensystem aus Abb. 2.4
ergibt sich:
Fc =1
4Kc1(sin2(2Θ) + sin4 θ sin2(2Φ)) +
1
16Kc2 sin2 θ sin2(2Θ) sin2(2Φ). (2.11)

2.1 Magnetismus 11
Die Verspannungsanisotropie oder auch magnetoelastische Anisotropie betragt im Falle
einer uniaxialen Verspannung in [001]-Richtung
Fu = Bεzzα2z. (2.12)
εzz ist die zz-Komponente des Dehnungstensors und B eine Proportionalitatskonstante.
Mit dem in Abb. 2.4 definierten Koordinatensystem ergibt sich
Fu = Ku,strain(1− sin2 Θ cos2 Φ) (2.13)
mit der uniaxialen Anisotropiekonstante Ku,strain.
Weitere Symmetriereduzierungen, die in eine uniaxiale Anisotropie mit gleicher Win-
kelbeziehung wie in Gl. (2.13) resultieren (z.B. die Oberflachenanisotropie), lassen sich in
einer effektiven uniaxialen Anisotropiekonstante
Ku,[001] = Ku,strain + . . . (2.14)
zusammenfassen.
Betrachtet man die Winkelbeziehungen der einzelnen Anisotropiebeitrage, so fallt auf,
dass sowohl der uniaxiale als auch der Entmagnetisierungs-Beitrag zur freien Energie die
gleiche Winkelbeziehung besitzen. Man fasst deshalb die Vorfaktoren zu einer effektiven,
uniaxialen Anisotropiekonstante zusammen:
Ku,[001],eff =1
2µ0M
2 −Ku,[001]. (2.15)
Ist die Probe in der Filmebene verspannt, so erhalt man als zusatzlichen Energiebeitrag
z.B. fur die [010]-Richtung:
Fu,[010] = Ku,[010] cos2 Θ. (2.16)
Fur die gesamte freie Energie ergibt sich:
Ftot = Fstat + Fentmag + Fc + Fu (2.17)
= −µ0HM(sin Θ sin Φ sin θ sinφ+ cos Θ cos θ + sin Θ cos Φ sin θ cosφ)1
4Kc1(sin2(2Θ) + sin4 θ sin2(2Φ)) +
1
16Kc2 sin2 θ sin2(2Θ) sin2(2Φ)
Ku,[001],eff(sin2 Θ cos2 Φ− 1
2) +Ku,[010] cos2 Θ.
Stoner-Wohlfarth-Modell
Mit Hilfe des Stoner-Wohlfarth-Modells lassen sich Magnetisierungskurven fur eine ein-
domanige Probe mit einer uniaxialen Anisotropie berechnen [15, 20]. Liegen die Magne-
tisierung M und das externe Feld H in der Filmebene, was gleichbedeutend mit Φ = 90
und φ = 90 ist, und existiert keine kubische Anisotropie, so erhalt man fur Gl. (2.18)

12 Kapitel 2 Grundlagen
folgenden Ausdruck:
Ftot = −µ0HM(sin Θ sin θ + cos Θ cos θ) +Ku,[010] cos2 Θ. (2.18)
Die trigonometrischen Funktionen im Zeeman-Term in Gl. (2.18) lassen sich zu sin Θ sin θ+
cos Θ cos θ = cos(Θ − θ) umformen. Um die Magnetisierungskurve aus Gl. (2.18) zu be-
rechnen, muss die freie Energie minimiert werden:
∂F
∂Θ= 0 und
∂2F
∂Θ2> 0. (2.19)
Die berechneten Magnetisierungskurven werden mit den experimentellen Kurven vergli-
chen. Um die Anisotropiekonstante zu bestimmen, werden iterativ Werte fur die An-
isotropiekonstante in die Gl. (2.18) eingesetzt, bis der Fehler zwischen Experiment und
Modell minimal wird [21].
2.2 Magnetooptische Effekte
2.2.1 Phanomenologischer Ansatz
Magnetooptische Effekte werden durch den komplexwertigen Dielektrizitatstensor ε be-
schrieben. Der Tensor besitzt im isotropen Medium bei Abwesenheit außerer Felder iden-
tische Diagonalelemente. Die Nichtdiagonalelemente sind in diesem Fall gleich Null, wo-
durch der Tensor durch einen Skalar beschrieben werden kann. Treten außere Felder
in Erscheinung, so treten neben den Diagonalelementen auch asymmetrische Nichtdia-
gonalelemente auf. Diese Nichtdiagonalelemente sind fur die magnetooptischen Effekte
verantwortlich. Die mikroskopische Ursache fur magnetooptische Effekte sind die Aus-
tauschwechselwirkung und die Spin-Bahn-Wechselwirkung [22, 23, 24, 25]. Diese quan-
tenmechanischen Effekte sind fur das quantitative Verstandnis wichtig, bieten aber keinen
leicht verstandlichen Zugang. Um dennoch ein qualitativ anschauliches Bild fur die Form
des Tensors und somit fur die magnetooptischen Effekte zu erhalten, kann man sich bei
der Beschreibung des Tensors auf ein klassisches Oszillatormodell beschranken [26, 3, 27].
Die Elektronen sind mit der Resonanzfrequenz ω0 in einem harmonischen Potenzial
gebunden und besitzen folgende Bewegungsgleichung:
mer +meΓr +meω20r = −eE− eµ0r×H. (2.20)
Dabei sind me die Elektronenmasse, e die Elementarladung, Γ die Dampfungskonstan-
te. E ist ein oszillierendes elektrische Feld und µ0H ein statisch von außen angelegtes
Magnetfeld. Der zweite Term innerhalb der Gleichung 2.20 ist der Dampfungsterm, die
beiden letzten Terme nach dem Gleichheitszeichen entsprechen der elektrischen Kraft,
die durch die eingestrahlte Welle hervorgerufen wird, und der Lorentzkraft. Durch das

2.2 Magnetooptische Effekte 13
elektrische Feld bewegen sich die Elektronen mit der Kreisfrequenz ω, sodass man mit
dem Ansatz r = r0e−iωt die Bewegungsgleichung umformen kann:
−meω2r0 − imeΓr0 +meω
20r0 = −eE− ieµ0ωr0 ×H. (2.21)
Fur die folgende Betrachtung wird angenommen, dass µ0H ‖ ez ist. Fur die x- und
die y-Richtungen ergeben sich daraus zwei gekoppelte Gleichungen, die vom angelegten
Magnetfeld abhangen. Fur die z-Richtung hingegen erhalt man fur die Auslenkung eine
vom Magnetfeld unabhangige Form. Mit der Larmor-Frequenz ωL = eµ0Hz
2mecergeben sich
fur die einzelnen Komponenten von r folgende Beziehungen:
rx =e
me
−(ω20 − ω2 − iωΓ)Ex − 2iωωLEy
(ω20 − ω2 − iωΓ)2 − 4ω2ω2
L
(2.22)
ry =e
me
−(ω20 − ω2 − iωΓ)Ey + 2iωωLEx
(ω20 − ω2 − iωΓ)2 − 4ω2ω2
L
(2.23)
rz =−eEz
me(ω20 − ω2 − iωΓ)
. (2.24)
Durch die Auslenkung der Elektronen aus der Gleichgewichtslage wird ein Dipolmoment
p induziert. Fur ein Ensemble von N Elektronen bzw. N Dipolmomenten pro Volumen
V definiert man die makroskopische, komplexwertige Polarisation P.
P = pN/V = erN/V. (2.25)
P und die elektrische Feldstarke E sind uber den dielektrischen Tensor miteinander ver-
bunden:
P = (ε− ε01)E. (2.26)
Daraus folgen die einzelnen Komponenten des dielektrischen Tensors zu
εxx = εyy = 1 +e2N
ε0meV
ω20 − ω2 − iωΓ
(ω20 − ω2 − iωΓ)2 − 4ω2ω2
L
(2.27)
εzz = 1 +e2N
ε0meV
1
(ω20 − ω2 − iωΓ)
(2.28)
εxy = −εyx =e2N
ε0meV
iωωL(ω2
0 − ω2 − iωΓ)2 − 4ω2ω2L
. (2.29)
Insgesamt erhalt man fur einen Festkorper mit einem in z-Richtung angelegten Magnet-
feld folgende Form fur den Dielektrizitatstensor ε:
ε =
εxx εxy 0
−εxy εxx 0
0 0 εzz
. (2.30)

14 Kapitel 2 Grundlagen
Zur Vereinfachung wird angenommen, dass εxx = εzz = n2 gilt, wobei n der komplexe
Brechungsindex ist. Diese Naherung ist zulassig, da die Larmor-Frequenz (< 100 GHz)
im Vergleich zu den optischen Frequenzen im sichtbaren Bereich (≈ 1014 Hz) viel kleiner
ist. Dadurch fallt der −4ω2ω2L-Term im Nenner von εxx weg, und man erhalt den gleichen
Ausdruck wie fur εzz. Oft werden in der Literatur die Nichtdiagonalelemente des Dielek-
trizitatstensors mit der komplexartigen Voigt-Konstante Q (auch als magnetooptische
Konstante bezeichnet) ausgedruckt [28]:
Q = iεxyεxx
. (2.31)
In ihr sind die magnetischen Eigenschaften des Festkorpers enthalten.
Fur die Elemente des Dielektrizitatstensors gilt allgemein die Onsager-Relation [29]:
εik(H) = −εki(−H). (2.32)
Daraus folgt fur die Diagonalelemente, dass sie in gerader Ordnung von H abhangen,
wodurch sich eine Umkehr des Magnetfeldes nur auf die Nichtdiagonalelemente auswirkt.
Der oben betrachtete Fall gilt fur ein in z-Richtung angelegtes Feld, wodurch die Mag-
netisierung ebenfalls in z-Richtung des Koordinatensystems (xyz) liegt. Betrachtet man
den Fall, dass die Magnetisierung in eine andere Richtung zeigt, so ist es notwendig,
das Koordinatensystem fur das Streuproblem zu wechseln, damit die Magnetisierung im
neuen System entlang der neuen Achse in die z′-Richtung zeigt und die Konstanten der
Kerr-Effekte berechnet werden konnen bzw. die oben hergeleiteten Formeln weiterhin
gelten [30, 8]. Die Koordinatentransformation wird uber zwei Euler-Winkel realisiert, um
das neue Koordinatensystem (x′y′z′) zu erhalten. Die Euler-Winkel sind der Winkel α,
welcher das neue System um die x-Achse, und der Winkel β, welcher das System um
die y-Achse rotiert. Diese zwei Winkel sind ausreichend, um die z′-Achse in jede belie-
bige Richtung zu transformieren. Fur den ε-Tensor erhalt man nun folgenden Ausdruck
[30, 8, 31]:
ε = ε0
1 −iQmz iQmy
iQmz 1 −iQmx
−iQmy iQmx 1
= ε0
1 −iQ cosα cos β −iQ sinα cos β
iQ cosα cos β 1 −iQ sin β
iQ sinα cos β iQ sin β 1
(2.33)

2.2 Magnetooptische Effekte 15
mit
mx =Mx
Ms
= sin β
my =My
Ms
= − sinα cos β (2.34)
mz =Mz
Ms
= cosα cos β.
In Gleichung (2.34) sind die Richtungen der Magnetisierungskomponenten im Koordina-
tensystem (xyz) uber die Eulerwinkel definiert.
Nachdem der Dielektrizitatstensor naher betrachtet wurde, wird im folgenden be-
stimmt, wie sich dieser auf die elektromagnetischen Wellen auswirkt. Dafur muss die
Wellengleichung hergeleitet werden. Zu Beginn benotigt man die Maxwell-Gleichungen,
die als Grundlage der phanomenologischen Optik dienen [32]:
divD = ρ (2.35)
divB = 0 (2.36)
rotE = −∂B∂t
(2.37)
rotH = j +∂D
∂t. (2.38)
Neben diesen Gleichungen sind des Weiteren die Materialgleichungen von Bedeutung:
D = εE = ε0εrE = ε0E + P (2.39)
B = µH = µ0µrH = µ0(H + M) (2.40)
j = σE. (2.41)
In diesen Gleichungen sind D die dielektrische Verschiebung, E die elektrische Feldstarke,
B die magnetische Flussdichte, H die magnetische Feldstarke und j die Stromdichte. ε, µ
und σ sind die Dielektrizitats-, Permeabilitats- und Leitfahigkeitstensoren 2. Stufe, wel-
che die Materialeigenschaften beschreiben. ε0 ist die Dielektrizitatskonstante (elektrische
Feldkonstante) und µ0 ist die Permeabilitat (magnetische Feldkonstante). Sie sind mit
der Lichtgeschwindigkeit c uber die Beziehung c = 1√ε0µ0
miteinander verbunden. P ist
die dielektrische Polarisation (elektrisches Dipolmoment pro Einheitsvolumen) und M ist
die Magnetisierung (magnetisches Dipolmoment pro Einheitsvolumen). Sie sind uber die
elektrische und die magnetische Suszeptibilitat mit den erzeugenden Feldern verknupft:
P = ε0χeE (2.42)
M = χmH. (2.43)

16 Kapitel 2 Grundlagen
Dadurch folgt fur die relativen Dielektrizitats- und Permeabilitatstensoren:
εr = 1 + χe (2.44)
µr = 1 + χm. (2.45)
Mit diesen Gleichungen ist es moglich, die Wellengleichung fur das elektrische Feld zu
bestimmen
∇× (∇× E) = −µ(σ∂E
∂t+ ε
∂2E
∂t2
). (2.46)
Es wird angenommen, dass kein Strom im Festkorper fließt und nur durch das Wechselfeld
Strome induziert werden. Zusatzlich wird angenommen, dass die Wellen in ebener Form
vorliegen.
E = E0ei(k·r−ωt). (2.47)
Mit Hilfe dieses Ansatzes lassen sich die Differentialgleichungen durch folgende Verknup-
fungen ersetzen: ∇· =⇒ ik·, ∇× =⇒ ik× und ∂∂t
=⇒ −iω. Daraus folgt fur die Wellen-
gleichung unter Anwendung der Kontinuitatsgleichung folgender Zusammenhang [33]:[ω2µε+ (kk)− k2
]E = 0. (2.48)
(kk) ist hierbei ein Tensor 2. Stufe, es handelt sich hierbei um eine Dyade. Im sichtbaren
Bereich gilt fur den Permeabilitatstensor µ(ω) = 1 [23], weshalb er nicht weiter beruck-
sichtigt werden muss. Mit der Wellennormalenrichtung k/ |k| liefert die Determinante in
den eckigen Klammern zwei Losungen fur den komplexen Brechungsindex n±. Bei der
Losung wird nun folgendermaßen vorgegangen. Im anisotropen Medium liegen E und D
nicht mehr entlang derselben Achse, dadurch steht aber E auch nicht mehr senkrecht
zur Ausbreitungsrichtung entlang k. Dadurch ist die Wellengleichung in der vorliegenden
Form nicht mehr geeignet. Es wird ausgenutzt, dass D und k senkrecht zueinander stehen
und dass E = ε−1D gilt. Daraus erhalt man mit der Wellengleichung die Brechungsindi-
zes. Zum Beispiel erhalt man im Fall, dass sich die Welle parallel zum Feld ausbreitet,
fur die Brechungsindizes [34]:
n± = εxx ± εxy. (2.49)
Um die Effekte in Reflexion zu berechnen, werden die Randbedingungen an der Grenz-
flache zwischen zwei Medien betrachtet. Es gilt, dass die Tangentialkomponenten von E
und H und die Normalkomponenten von D und B an der Grenzflache stetig sind. Zusatz-
lich mussen die Tangentialkomponenten der Wellenvektoren an der Grenzflache erhalten
bleiben. Diese Bedingung fuhrt zum Reflexions- und zum Brechungs-Gesetz von Snellius.
Man erhalt
n1 sin θ1 = n2 sin θ2, (2.50)
wobei n1 der Brechungsindex und θ1 der Einfallswinkel im Medium 1 ist und n2 und θ2 im
Medium 2. Bei der Bestimmung der Reflexionseigenschaften einer Trennflache zwischen

2.2 Magnetooptische Effekte 17
zwei Medien teilt man das elektrische Feld der einfallenden Lichtwelle in zwei Komponen-
ten auf. Die eine Komponente schwingt senkrecht zur Einfallsebene des Lichts und wird
mit Es bezeichnet, die andere schwingt innerhalb der Einfallsebene und lautet Ep. Mit
Hilfe dieses Koordinatensystems, den Stetigkeitsbedingungen an der Grenzflache und der
Wellengleichung lassen sich die Fresnelkoeffizienten rss, rsp, rps und rpp, die das Verhaltnis
der Amplituden des einfallenden und reflektierten elektrischen Feldes der elektromagne-
tischen Wellen angeben, berechnen [35]. Die einfallende und die reflektierte Lichtwelle E
und E′′ sind uber eine Reflexionsmatrix S miteinander verknupft:(E ′′sE ′′p
)=
(rssrsp
rpsrpp
)(EsEp
). (2.51)
2.2.2 Magnetooptische Effekte und ihre Geometrien
Die magnetooptischen Effekte lassen sich je nach Art ihrer Geometrie unterscheiden. Der
alteste bekannte Effekt ist der im Jahre 1846 von Faraday entdeckte und nach ihm be-
nannte Faraday-Effekt. Hierbei wird die Polarisation einer durch einen magnetisierten
Korper transmittierten Welle verandert. In Abb. 2.5(a) ist der transmittierte Lichtstrahl
dargestellt. Die Magnetisierung innerhalb des Festkorpers liegt senkrecht zur Oberflache.
An der Oberflache kommt es zur zirkularen Doppelbrechung, das bedeutet, dass die einfal-
lende Welle im Festkorper als Summe aus zwei gegensatzlich laufenden zirkularen Wellen
mit unterschiedlichem Brechungsindex n± betrachtet werden muss. Dadurch kommt es
zu einer unterschiedlichen Ausbreitung beider Wellen innerhalb des magnetisierten Fest-
korpers. Sie legen innerhalb der Probe mit der Dicke d unterschiedliche optische Wege
zuruck, wodurch beim Verlassen der Probe zwischen beiden Wellen ein Gangunterschied
von ∆ = d<(n+−n−) besteht [33]. Diesem Gangunterschied entspricht eine Anderung des
relativen Phasenwinkels und man erhalt fur die Faraday-Rotation φFaraday = πλd(n+−n−).
In Materialien, die nicht ferromagnetisch sind, ist die Faraday-Rotation proportional zum
extern angelegten Magnetfeld φFaraday = V dH mit der Verdet-Konstante V [26]. Neben
der Drehung fuhren die komplexwertigen Brechungsindizes zu einer unterschiedlichen
Dampfung der beiden Wellen. Bei Austritt besitzen beiden Wellen eine unterschiedliche
Amplitude, weshalb die Superposition beider zu einer elliptisch polarisierten Welle fuhrt.
Um den Faraday-Effekt messen zu konnen, darf die Probe nicht zu dick sein, damit noch
ausreichend Licht die Probe nach der Transmission verlasst. Neben dem Faraday-Effekt
existieren noch weitere Effekte in Transmission. Bei dem Voigt- und dem Cotton-Mouton-
Effekt liegt die Magnetisierung parallel zur Oberflache.
Magnetooptische Effekte in Reflexion wurden von John Kerr im Jahre 1878 entdeckt.
Sie sind in Abb. 2.5(b) dargestellt. Es gibt drei verschiedene Effekte, welche uber aus-
gezeichnete Richtungen der Magnetisierung zur Einfallsebene und zur Oberflache defi-
niert sind, den polaren, den longitudinalen und den transversalen Kerr-Effekt. In diesen
Geometrien wird die Polarisation der einfallenden Lichtwelle bezuglich der Einfallsebene
definiert. Dabei wird die Komponente des elektrischen Feldes, die senkrecht zur Einfall-

18 Kapitel 2 Grundlagen
Abbildung 2.5: (a) Darstellung des Faraday-Effekts (transmittierter Lichtstrahl) und des polaren Kerr-Effekts (reflektierter Lichtstrahl) bei senkrecht zur Oberflache vorliegender Magneti-sierung. In (b) sind die drei Effekte in Reflexion dargestellt. Dabei handelt es sich imersten Bild um den polaren Kerr-Effekt, bei dem die Magnetisierung senkrecht zur Ober-flache orientiert ist. Im mittleren Bild ist der longitudinale Kerr-Effekt dargestellt, beidem die Magnetisierung parallel zur Oberflache und parallel zur Einfallsebene orien-tiert ist. Im unteren Bild von (b) ist der transversale Kerr-Effekt, bei dem ebenfalls dieMagnetisierung parallel zur Oberflache aber senkrecht zur Einfallsebene orientiert ist,dargestellt [36].

2.2 Magnetooptische Effekte 19
sebene steht, mit s und mit p die Komponente, die parallele zur Einfallsebene orientiert
ist, bezeichnet.
Der polare Kerr-Effekt liegt vor, wenn die Magnetisierung senkrecht zur Oberflache
der Probe orientiert ist (siehe oberes Schaubild in Abb. 2.5(b)). In dieser Orientierung
ergeben sich die Fresnel-Koeffizienten zu [8]:
rpss =n1 cos θ1 − n2 cos θ2
n1 cos θ1 + n2 cos θ2
(2.52)
rppp =n2 cos θ1 − n1 cos θ2
n2 cos θ1 + n1 cos θ2
(2.53)
rpsp = rpps =in1n2Q cos θ1
(n1 cos θ1 + n2 cos θ2)(n2 cos θ1 + n1 cos θ2). (2.54)
Verwendet man fur den einfallenden Strahl, welcher linear polarisiert ist, s- bzw. p-
polarisiertes Licht, so erhalt man direkt aus den Fresnel-Koeffizienten die Rotation φKerr
und die Elliptizitat ηKerr der reflektierten Lichtwelle
φs,polarKerr + iηs,polar
Kerr = −rpsrss
=in1n2Q cos θ1
(n2 cos θ1 + n1 cos θ2)(n1 cos θ1 − n2 cos θ2)(2.55)
φp,polarKerr + iηp,polar
Kerr =rsprpp
=in1n2Q cos θ1
(n1 cos θ1 + n2 cos θ2)(n2 cos θ1 − n1 cos θ2). (2.56)
Aus diesem Zusammenhang wird deutlich, dass man die großte Kerr-Rotation der Pola-
risation bei senkrechter Inzidenz wegen cos(θ1 = 0) = 1 erhalt.
Beim longitudinalen Kerr-Effekt liegt die Magnetisierung in der Einfallsebene parallel
zur Oberflache (zweites Schaubild in Abb. 2.5(b)). Dadurch ergeben sich folgende Fresnel-
Koeffizienten [8]
rlss =n1 cos θ1 − n2 cos θ2
n1 cos θ1 + n2 cos θ2
(2.57)
rlpp =n2 cos θ1 − n1 cos θ2
n2 cos θ1 + n1 cos θ2
(2.58)
rlsp = −rlps =in1n2Q cos θ1 tan θ2
(n1 cos θ1 + n2 cos θ2)(n2 cos θ1 + n1 cos θ2). (2.59)
Fur die Kerr-Rotation und die Kerr-Elliptizitat erhalt man folgende Werte:
φs,lKerr + iηs,lKerr = −rpsrss
=in1n2Q cos θ1 tan θ2
(n2 cos θ1 + n1 cos θ2)(n1 cos θ1 − n2 cos θ2)(2.60)
φp,lKerr + iηp,lKerr =rsprpp
=in1n2Q cos θ1 tan θ2
(n1 cos θ1 + n2 cos θ2)(n2 cos θ1 − n1 cos θ2). (2.61)
Aus diesen Beziehungen wird ersichtlich, dass sich wegen des zusatzlichen Terms tan θ2
im Zahler des Kerr-Winkels die Eigenschaften zum polaren Kerr-Effekt verandern. In der

20 Kapitel 2 Grundlagen
longitudinalen Konfiguration wird bei senkrechter Inzidenz kein magnetooptischer Effekt
gemessen. Mit zunehmendem Einfallswinkel θ1 nimmt auch der Winkel im Medium 2,
θ2, zu, wodurch sich der tan vergroßert. Da der cos θ1 jedoch abnimmt, konkurrieren die
beiden Funktionen miteinander, wodurch die Kerr-Rotation bei einem durch die Probe-
neigenschaften bestimmten Winkel ein Maximum besitzt. Mit weiter zunehmendem θ1
nimmt dann die Kerr-Rotation wieder ab, bis sie bei θ1 = 90 wieder den Wert 0 erreicht.
Betrachtet man den Kerr-Winkel fur den polaren und den longitudinalen Fall, so unter-
scheiden sich die Kerr-Winkel lediglich durch den zusatzlichen tan θ2 im Zahler. Dadurch
wird jedoch ersichtlich, dass die Kerr-Rotation durch den polaren Kerr-Effekt viel großer
ist als die des longitudinalen Kerr-Effekts. Es ergibt sich ein Unterschied von etwa einer
Großenordnung [35].
Der transversale Kerr-Effekt (drittes Schaubild in Abb. 2.5), bei dem die Magneti-
sierung parallel zur Oberflache aber senkrecht zur Einfallsebene orientiert ist, unterschei-
det sich sehr von den beiden vorherigen Effekten. So erhalt man in dieser Geometrie
innerhalb der Reflexionsmatrix lediglich Diagonalelemente, da die Nichtdiagonalelemente
gleich Null sind [8].
rtss =n1 cos θ1 − n2 cos θ2
n1 cos θ1 + n2 cos θ2
(2.62)
rtpp =n2 cos θ1 − n1 cos θ2
n2 cos θ1 + n1 cos θ2
+ i2n1n2Q cos θ1 sin θ2
(n2 cos θ1 + n1 cos θ2)2(2.63)
rtsp = rtps = 0, (2.64)
Aus den Fresnel-Koeffizienten fur den transversalen Kerr-Effekt wird deutlich, dass durch
diese Orientierung keine Rotation der Polarisationsebene gemessen werden kann, da nur
die Nichtdiagonalelemente eine Rotation hervorrufen. Zusatzlich ist zu erkennen, dass eine
Veranderung der Magnetisierung auf die s-polarisierte Komponente in erster Naherung
keine Auswirkung hat. Bei p-polarisiertem Licht hingegen ist der Reflexionskoefizient rppproportional zu Q und somit proportional zur Magnetisierung. Dadurch ist die Intensitat
der p-Welle bei einem absorbierenden Medium von der Magnetisierungsrichtung abhangig.
Eine Veranderung der Magnetisierung innerhalb des Festkorpers fuhrt somit zu einer
Anderung der Intensitat der reflektierten Welle. Diese Anderung in der Intensitat kann
auch ohne Analysator gemessen werden. Mit Hilfe dieses Effekts ist es moglich, die Voigt-
Konstante zu bestimmen, da das Signal direkt von Q abhangt [26].
Betrachtet man wieder den Fall, das der Magnetisierungsvektor anteilig alle drei Rich-
tungen besitzt, so muss die Reflexionsmatrix in Gleichung (2.51) um alle drei Effekte
erweitert werden. Man erhalt die Reflexionsmatrix aus der Summe der einzelnen Matri-
zen aller drei Falle [30].
Sgesamt = m2pS
p(Q/mp) +m2l S
l(Q/ml) +m2tS
t(Q/mt). (2.65)
mp, ml und mt sind die Magnetisierungskomponenten aus Gl. (2.34). Das Argument Q/m
2.2 Magnetooptische Effekte 21
bedeutet, dass uberall dort, wo in den Koeffizienten ein Q vorkommt, Q/m eingesetzt
werden muss. Dadurch erhalt man eine Beziehung, mit der man das E-Feld der Lichtwelle
nach der Reflexion bestimmen kann.
2.2.3 Herleitung des detektierten Diodensignals
?e
?e
Probe
Mt Ml
yp
a
S
p
^
^
y
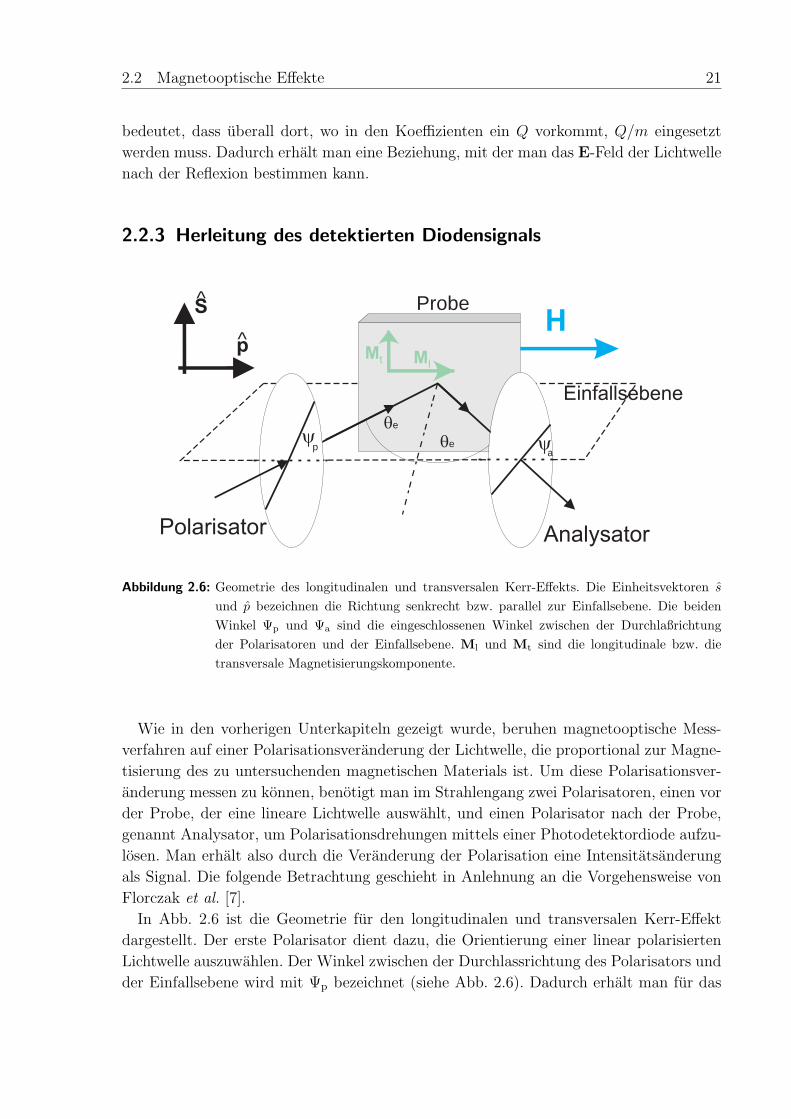
Abbildung 2.6: Geometrie des longitudinalen und transversalen Kerr-Effekts. Die Einheitsvektoren s
und p bezeichnen die Richtung senkrecht bzw. parallel zur Einfallsebene. Die beidenWinkel Ψp und Ψa sind die eingeschlossenen Winkel zwischen der Durchlaßrichtungder Polarisatoren und der Einfallsebene. Ml und Mt sind die longitudinale bzw. dietransversale Magnetisierungskomponente.
Wie in den vorherigen Unterkapiteln gezeigt wurde, beruhen magnetooptische Mess-
verfahren auf einer Polarisationsveranderung der Lichtwelle, die proportional zur Magne-
tisierung des zu untersuchenden magnetischen Materials ist. Um diese Polarisationsver-
anderung messen zu konnen, benotigt man im Strahlengang zwei Polarisatoren, einen vor
der Probe, der eine lineare Lichtwelle auswahlt, und einen Polarisator nach der Probe,
genannt Analysator, um Polarisationsdrehungen mittels einer Photodetektordiode aufzu-
losen. Man erhalt also durch die Veranderung der Polarisation eine Intensitatsanderung
als Signal. Die folgende Betrachtung geschieht in Anlehnung an die Vorgehensweise von
Florczak et al. [7].
In Abb. 2.6 ist die Geometrie fur den longitudinalen und transversalen Kerr-Effekt
dargestellt. Der erste Polarisator dient dazu, die Orientierung einer linear polarisierten
Lichtwelle auszuwahlen. Der Winkel zwischen der Durchlassrichtung des Polarisators und
der Einfallsebene wird mit Ψp bezeichnet (siehe Abb. 2.6). Dadurch erhalt man fur das

22 Kapitel 2 Grundlagen
elektrische Feld der Lichtwelle nach Passieren des Polarisators folgenden Ausdruck:
E = E0 cos Ψpp + E0 cos Ψps. (2.66)
Die Einheitsvektoren p und s zeigen hierbei parallel bzw. senkrecht zur Einfallsebene.
Nach dem Polarisator trifft die Lichtwelle auf die Oberflache der Probe und wird re-
flektiert. Bei der Reflexion verandert sich die Polarisation des eingestrahlten linear po-
larisierten Lichtes. Diese Veranderung wird mathematisch durch die Reflexionsmatrix S
ausgedruckt. Es wird im folgenden angenommen, dass die Magnetisierungen in dunnen
Filmen innerhalb der Filmebene parallel zur Oberflache liegen und keine polare Kompo-
nente existiert. Dadurch mussen bei der Reflexionsmatrix nur die longitudinale und die
transversale Komponente betrachtet werden. Fur diese Komponenten gilt m2l + m2
t = 1.
Die Streumatrix reduziert sich somit zu
Sgesamt = m2tS
t(Q/mt) +m2l S
l(Q/ml). (2.67)
Nach der Reflexion an der magnetischen Probe erhalt man somit fur das elektrische Feld
der Lichtwelle
E ′p = (m2t rtpp +m2
l rlpp)E0 cos Ψp +m2
l rlpsE0 sin Ψp (2.68)
E ′s = m2l rlspE0 cos Ψp + rlssE0 sin Ψp. (2.69)
Der reflektierte Lichtstrahl passiert nun den Analysator, wodurch nur die Komponente,
die parallel zur Transmissionsachse liegt, durchgelassen wird. Der Winkel zwischen der
Transmissionsachse und der Einfallsebene wird mit Ψa bezeichnet.
E ′′ = E ′s sin Ψa + E ′p cos Ψa. (2.70)
Dadurch erhalt man fur das gesamte elektrische Feld folgenden Ausdruck:
E ′′ = E0
[(m2
t rtpp +m2
l rlpp) cos Ψp cos Ψa +m2
l rlps sin(Ψp −Ψa) + rlss sin Ψp sin Ψa
].
(2.71)
Der erzeugte Photostrom an der Photodiode ist proportional zur Intensitat des Lichts und
somit proportional zum Quadrat des elektrischen Feldes. Man erhalt fur die normalisierte
Intensitat
I/I0 =∣∣m2
t rtpp +m2
l rlpp
∣∣2 cos2 Ψp cos2 Ψa +∣∣m2
l rlps
∣∣2 sin2(Ψp −Ψa) +∣∣rlss∣∣2 sin2 Ψp sin2 Ψa
+[(m2
t rtpp +m2
l rlpp)m
2l rl∗ps + c.c.
]cos Ψp cos Ψa sin(Ψp −Ψa) (2.72)
+[(m2
t rtpp +m2
l rlpp)r
l∗ss + c.c.
]sin Ψp sin Ψa cos Ψp cos Ψa
+[rlssm
2l rl∗ps + c.c.
]sin Ψp sin Ψa sin(Ψp −Ψa).
Dieser Ausdruck erscheint im ersten Moment sehr kompliziert. Es lassen sich aber durch

2.3 Magnetotransport 23
die Wahl des Polarisatorwinkels drei Falle finden, mit denen Gleichung (2.73) vereinfacht
werden kann. Ψp = 0 vereinfacht die Gleichung, wodurch beide Magnetisierungskompo-
nenten gemessen werden. Fur Ψa = Ψp ist die Intensitat lediglich von der Magnetisie-
rungskomponente mt senkrecht zur Einfallsebene abhangig. Der fur uns interessante Fall
ist, wenn Ψp = 90 gilt, und somit mit s-polarisiertem Licht gearbeitet wird. In diesem
Fall vereinfacht sich Gleichung (2.73) zu
I/I0 =∣∣m2
l rlps
∣∣2 sin2(90−Ψa)
+∣∣rlss∣∣2 sin2 Ψa +
[rlssm
2l rl∗ps + c.c.
]sin Ψa sin(90 −Ψa). (2.73)
In Gleichung (2.73) kommen nur longitudinale Magnetisierungskomponenten vor. Da
wir lediglich die longitudinale Magnetisierung betrachten wollen, wird ausschließlich s-
polarisiertes Licht innerhalb dieser Arbeit verwendet.
2.3 Magnetotransport
Neben der Untersuchung von dunnen ferromagnetischen Filmen mit Hilfe magnetoop-
tischer Effekte ist es Ziel dieser Diplomarbeit, zusatzlich Magnetotransportmessungen
durchzufuhren und sie mit den mittels MOKE ermittelten Daten zu vergleichen. Die
Magnetwiderstande besitzen je nach Art sehr unterschiedliche Eigenschaften, mit deren
Hilfe man viel uber die magnetischen Eigenschaften des Festkorpers lernen kann. Zuerst
werden die durch Anisotropie hervorgerufenen Widerstandseffekte dargestellt. Zusatzlich
erfolgt am Ende dieses Unterkapitels eine kurze Einfuhrung in die Grundlagen des Rie-
senmagnetwiderstandes (GMR) eines Mehrlagensystems.
2.3.1 Anisotroper Magnetwiderstand und planarer Halleffekt
Aufgrund der Spin-Bahn-Wechselwirkung hangt der Widerstand in einem Ferromagneten
von der Richtung der Magnetisierung zur Stromrichtung ab. So ergibt sich fur eine zur
Stromrichtung senkrechte Magnetisierung ein Widerstand ρ⊥, der sich von dem Wider-
stand ρ|| fur zur Stromrichtung parallele Magnetisierung unterscheidet. Allgemein gilt
ρ|| > ρ⊥ [37]. Wegen dieser Anisotropie der Richtung wird der Magnetwiderstand ani-
sotroper Magnetwiderstand (AMR) genannt. Die Ursache fur diese Anisotropie ist die
nicht kugelsymmetrische Ladungsverteilung der außeren Atomschale. Diese Ladungsver-
teilung besitzt durch die Elektronen ein ausgerichtetes Spinmoment. Wird die Magneti-
sierung und somit das Spinmoment durch ein von außen angelegtes Magnetfeld gedreht,
so dreht sich auch die Ladungsverteilung. Dadurch andert sich der Streuquerschnitt fur
die Leitungselektronen, wodurch es zu unterschiedlichen Widerstanden kommt. Wird an-
genommen, dass die Magnetisierung innerhalb des ferromagnetischen Filmes liegt, so
konnen Hall-Effekte vernachlassigt werden. Der Ladungstransport wird durch das Ohm-
sche Gesetz beschrieben, E = ρj, wobei wegen der nicht spharischen Ladungsverteilung
24 Kapitel 2 Grundlagen
der spezifische Widerstand ρ eine tensorielle Große ist. Daraus folgt fur den senkrechten
Fall E⊥ = ρ⊥j⊥ und fur den parallelen Fall E|| = ρ||j||. Betrachtet man hingegen eine
Stromrichtung, die weder senkrecht noch parallel zur Magnetisierung liegt, so folgt fur
das Ohmsche Gesetz: (Ex
Ey
)=
(+ρxx
+ρxy
−ρxy
+ρyy
)(Jx
Jy
). (2.74)
Die hier auftretenden Nebendiagonalelemente im Widerstandstensor spiegeln das zur
Stromrichtung transversale elektrische Feld wider. Dieser Effekt wird als planarer Hall-
Effekt (PHE; auch außergewohnlicher oder Pseudo-Hall-Effekt genannt) bezeichnet. Die-
ser planare Hall-Effekt (er ist im eigentlichen Sinne kein wirklicher Hall-Effekt) ist sym-
metrisch zur H- und M-Inversion und somit eine gerade Funktion. Das bedeutet, dass
fur Magnetisierungen und die um 180 dazu antiparallel orientierten Magnetisierungen
der gleiche Widerstand auftritt, und sich das Vorzeichen, wie dies beim normalen Hall-
Effekt der Fall ist, nicht umkehrt. Betrachtet man eine Orientierung der Stromrichtung,
die mit der Magnetisierungsrichtung den Winkel γ einschließt, so erhalt man fur den
longitudinalen und den transversalen Widerstand folgende Beziehung [38]:
ρxx = ρ⊥ + (ρ|| − ρ⊥) cos2(β) (2.75)
ρxy = (ρ|| − ρ⊥)1
2sin(2β). (2.76)
In den eigentlichen Transportmessungen, bei denen ein konstanter Strom Idrive an der
Probe anliegt, wird ein Spannungssignal aufgezeichnet. Um diese Spannungssignale in
die spezifischen Widerstande ρxx und ρxy umzurechnen, wird wie folgt vorgegangen:
ρxx = Rxxbd
l= Vxx
bd
lIdrive
(2.77)
ρxy = Rxyd = Vxyd
Idrive
. (2.78)
2.3.2 Riesenmagnetwiderstand
Der Riesenmagnetwiderstand (GMR) tritt im Gegensatz zum AMR lediglich in ferroma-
gnetischen Schichtstrukturen aus mindestens zwei ferromagnetischen Schichten auf. Bei
Widerstandsmessungen von Schichtsystemen stellt man fest, dass der Widerstand groß
bzw. klein ist, wenn die Magnetisierungen der Schichten zueinander antiparallel bzw.
parallel stehen. Einen einfachen Zugang bietet ein Zwei-Spin-Kanal-Modell [39].
Wird ein Schichtsystem aus nicht magnetischen und ferromagnetischen Ubergangsme-
tallen betrachtet, so ergeben sich an der Fermikante fur die ferromagnetischen Schichten
unterschiedliche Zustandsdichten fur Majoritats- und fur Minoritatsspins. Der Ladungs-
transport wird hauptsachlich durch die 4s-Elektronen getragen. Befindet sich zusatzlich
an der Fermikante eine hohe 3d-Zustandsdichte, so wird eine hohe Rate von 4s-Elektronen
in die 3d-Zustande gestreut. Dadurch wird aber ein kleinerer Transportstrom erreicht und
2.3 Magnetotransport 25
Abschnitt 5.2 SPINELEKTRONIK 155
(a)
ρρ+
ρ+
ρ− ρ
ρρ−ρ
ddm
(b)
ρρ+
ρ−
ρ+ ρ
ρρ−ρ
ddm
Abbildung 5.13: Magnetische Vielschichtstruktur fur antiparallele (a) und parallele (b) Magnetisierungs-orientierung und Ersatzschaltbilder fur die resultierenden Widerstande der zwei Spinsorten. Die Großedes Widerstands ist durch die Flache der Symbole angedeutet. Fur die ferromagnetische Konfigurationfuhrt die Reihenschaltung der geringen Widerstande des Majoritatskanals zu einem insgesamt kleinerenWiderstand.
so erhalten wir einen positiven GMR-Effekt (aufgrund des negativen magnetoresistiven Ef-fekts, ρp < ρap). Mit Hilfe von (5.2.1) und (5.2.2) ergibt sich in dieser einfachsten Betrachtungdas Ergebnis
GMR =ρap − ρp
ρp=
(ρ+ − ρ−)2
4ρ+ρ−. (5.2.4)
Wir sehen also, dass wir immer dann einen großen magnetoresistiven Effekt erhalten, wenn dieStreuraten und damit die spezifischen Widerstande stark davon abhangen, ob die Spinrichtungparallel oder antiparallel zur Magnetisierungsrichtung in den Schichten ist.
Um anschaulich zu verstehen, wie wir in Schichtstrukturen aus magnetischen und nicht-magnetischen Ubergangsmetallen eine stark unterschiedliche Streurate erhalten, je nachdemob die Spinrichtung der zum Transport beitragenden Ladungstrager parallel oder antiparal-lel zur Magnetisierungsrichtung ist, betrachten wir Abb. 5.14. Wir haben bereits in Kapitel 2gelernt, dass zum Transport in Ubergangsmetallen hauptsachlich die 4s-Elektronen beitragen,da diese eine wesentlich geringere effektive Masse als die 3d-Elektronen besitzen. Wir habenweiter gelernt, dass fur die Streuzeit allerdings die Dichte der 3d-Zustande am Fermi-Niveaumaßgebend ist. Falls wir eine hohe 3d-Zustandsdichte haben, erhalten wir eine starke Streuungder 4s-Elektronen in die 3d-Zustande und dadurch eine hohe Streurate und einen großen spezi-fischen Widerstand. Dies ist in Abb. 5.14 schematisch dargestellt. Da die 3d-Zustandsdichte inder ferromagnetischen Schicht durch die Austauschkopplung aufgespalten ist, erhalten wir fureine bestimmte Spinrichtung stark unterschiedliche Streuraten fur entgegengesetzte Magneti-sierungsrichtungen. Dies kann wiederum direkt in die in Abb. 5.13 gezeigten Ersatzschaltbilderubertragen werden.
Berucksichtigen wir den endlichen Widerstandsbeitrag ρ der nicht-magnetischen Schicht, so
2004
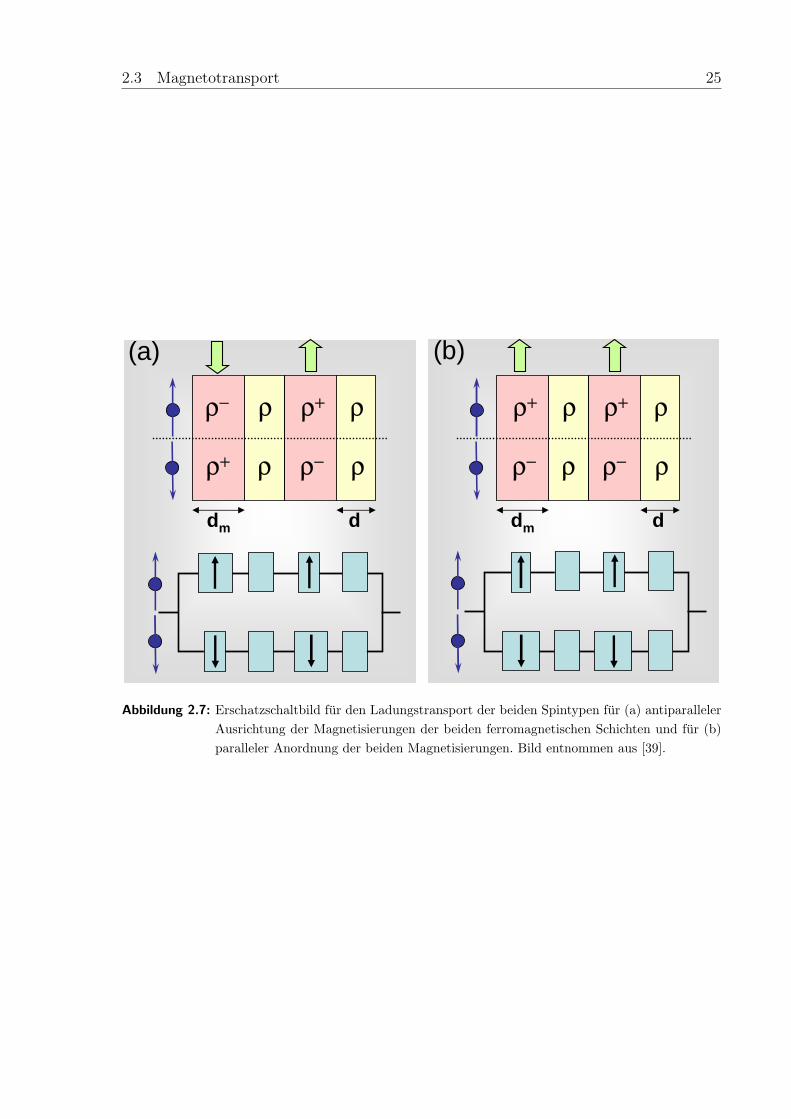
Abbildung 2.7: Erschatzschaltbild fur den Ladungstransport der beiden Spintypen fur (a) antiparallelerAusrichtung der Magnetisierungen der beiden ferromagnetischen Schichten und fur (b)paralleler Anordnung der beiden Magnetisierungen. Bild entnommen aus [39].

26 Kapitel 2 Grundlagen
der Widerstand nimmt zu. Befinden sich an der Fermikante keine freien 3d-Zustande, so
werden die Transportelektronen nicht gestreut und man erhalt einen hohen Transport-
strom und einen kleinen Widerstand. Dieser Sachverhalt lasst sich mit einem Ersatz-
schaltbild darstellen. In Abb. 2.7(a) sind die ferromagnetischen Schichten antiparallel
ausgerichtet. Dadurch werden beide Spinarten beim Ladungstransport gleich stark ge-
streut und man erhalt fur den Widerstand:
ρap =
(1
ρ+ + ρ−+
1
ρ+ + ρ−
)−1
=ρ+ + ρ−
2. (2.79)
Fur den in Abb 2.7(b) dargestellten Fall, dass die ferromagnetischen Schichten parallel
ausgerichtet sind, erhalt man fur den einen Spinkanal eine kleine Streurate und somit
einen kleinen Widerstand. Fur den anderen Kanal jedoch ist der Ladungstransportstrom
durch die hohe Streurate der 4s-Elektronen in 3d-Zustande kleiner und es ergibt sich ein
hoher Widerstand. Man erhalt insgesamt fur den Widerstand der parallelen Ausrichtung
ρp =
(1
2ρ++
1
2ρ−
)−1
=2ρ+ρ−
ρ+ρ−. (2.80)
Der GMR-Effekt wird uber diese zwei Widerstande definiert und es gilt:
GMR =ρap − ρp
ρp
. (2.81)
Bei einer Widerstandsmessung eines Vielfachschichtsystems wird neben dem GMR immer
auch ein AMR gemessen. Dieser ist jedoch im Allgemeinen kleiner als der GMR und wird
somit vom GMR uberlagert.
Um einen GMR in einem Schichtsystem zu realisieren, gibt es verschiedene Ansatzmog-
lichkeiten. Die Entdeckung des GMR durch Peter Grunberg und Albert Fert (Nobelpreis
2007) beruht auf einem Schichtsystem aus Fe- und Cr-Schichten [40]. Uber eine Zwi-
schenschichtkopplung richten sich die benachbarten ferromagnetischen Fe-Schichten in
Abhangigkeit von der Zwischenschichtdicke d von Cr gegenseitig entweder antiparallel
oder parallel aus [39]. Um die Zwischenschichtkopplung mikroskopisch zu erklaren, wur-
den die verschiedensten Modelle vorgeschlagen, die auf unterschiedlichen Ansatzen basie-
ren (RKKY-Modell [41], freies Elektronenmodell [42], Loch-Confinement [43], Anderson-
bzw. sd-Mischungsmodell [44]). Der gegenwertig akzeptierte Mechanismus fur die Zwi-
schenschichtkopplung basiert auf Quanteninterferenz-Effekten [45, 46].
Um ein Schichtsystem, das die Magnetisierungen uber die Zwischenschichtkopplung
ausrichtet, herzustellen, mussen hohe Anforderungen an die Wachstumtechnologie gestellt
werden. Wird unsauber gearbeitet, konnen Fehler in der Zwischenschicht zu geometrisch
bedingten Kopplungsarten fuhren (Pinholes, Orange-Peel, Dipol-Dipol-Wechselwirkung).
Will man auf die Zwischenschichtkopplung verzichten, lassen sich so genannte Spinventil-
Strukturen realisieren. Dabei ist die nichtmagnetische Zwischenschicht so dick, dass es

2.3 Magnetotransport 27
zu keiner Zwischenschichtkopplung kommt. Um dennoch eine antiparallele Ausrichtung
der Magnetisierungen zu erreichen, lassen sich zwei verschiedene Verfahren anwenden.
Zum einen ist es moglich, die Magnetisierung von einer der beiden ferromagnetischen
Schichten durch eine antiferromagnetische Pinningschicht festzuhalten, wahrend die an-
dere in kleinen Magnetfeldern rotieren kann. Zum anderen lasst sich ein Schichtsystem
aus zwei unterschiedlichen ferromagnetischen Schichten mit unterschiedlichen Koerzitiv-
feldern Hc1 6= Hc2 verwenden. Die letzte Moglichkeit wurde in dieser Arbeit naher be-
trachtet. In Abb. 2.8 ist ein Schichtsystem aus zwei unterschiedlichen ferromagnetischen
N
Fm2
Fm1 Hc1 HHc2
H
R
M
Abbildung 2.8: Darstellung einer Mehrlagenstruktur mit zwei unterschiedlichen ferromagnetischenSchichten, fur die Hc1 < Hc2 gilt. Zusatzlich sind schemenhaft die Magnetisierungs-und die Widerstandskurve fur ein solches System dargestellt.
Schichten dargestellt. Die Zwischenschicht ist dabei dick genug, damit keine Zwischen-
schichtkopplung existiert. Zusatzlich sind sowohl eine Widerstandskurve als auch eine
Magnetisierungskurve anschaulich skizziert. Liegt ein hohes externes Feld an, so sind
beide ferromagnetischen Schichten gesattigt und die Magnetisierungen zeigen in dieselbe
Richtung, weshalb ein kleiner Widerstand gemessen wird. Senkt man das Feld ab bzw.
kehrt man die Richtung des Feldes um und erhoht den Betrag des Feldes bis zum ersten
Koerzitivfeld, bei dem sich die Magnetisierung der einen Schicht umkehrt, so liegen die
Magnetisierungen antiparallel zueinander, wodurch der Widerstand groß wird. Erhoht
man den Betrag des Feldes weiter bis zum zweiten Koerzitivfeld, klappt auch die zweite
Magnetisierung in dieselbe Richtung wie das angelegte Feld. In diesem Fall liegen die
Magnetisierungen parallel zueinander, weshalb der Widerstand wieder klein ist.

28 Kapitel 2 Grundlagen

Kapitel 3
Materialien und Probenstrukturierung
In diesem Kapitel erfolgt eine kurze Beschreibung der verwendeten Proben. Es handelt
sich um ferromagnetische dunne Schichten auf einkristallinen Substraten. Dabei werden
die kristallinen und die magnetischen Eigenschaften zusammengefasst. Am Ende dieses
Kapitels wird die Probenstrukturierung mit der dabei verwendeten Hallbarstruktur er-
lautert.
3.1 Materialien
3.1.1 Substrate
MgO
MgO kristallisiert in einer fcc-Gitterstruktur mit einer zwei-atomigen Basis aus Mg und
O und zahlt somit zu den NaCl-Strukturen. Die kubische Gitterkonstante betragt bei RT
a = b = c = 4,212 A [47], weshalb MgO hervorragend als Substrat fur das epitaktische
Wachstum von Magnetit-Filmen und Zink dotierten Magnetit-Filmen geeignet ist, deren
Gitterkonstanten zwischen aFe3O4 = 8,396 A und aZnFe2O4 = 8,445 A betragen [48]. Sie
sind somit etwa doppelt so groß wie die von MgO, weshalb beim Wachstum eine Einheits-
zelle vier MgO-Einheitszellen uberdeckt. Dabei resultiert eine Gitterfehlanpassung von
Magnetit auf MgO von lediglich -0,33% und somit eine tensile Verspannung des Films in
der Ebene, solange die Filmdicke nicht die kritische Dicke uberschreitet.
Bariumtitanat - BaTiO3
Bariumtitanat (BTO) ist ein Ferroelektrikum bei Raumtemperatur und besitzt eine hohe
Permittivitat, weshalb es als Dielektrikum in Kondensatoren Anwendung findet [49]. We-
gen seiner ferroelektrischen Eigenschaften wird es auch als Ferroelektrikum in multiferroi-
schen Heterostrukturen verwendet. Die Eigenschaften dieses Materials sind schon seit lan-
gem bekannt und wurden in den letzten Jahrzehnten umfassend untersucht [50, 51, 52, 53].
BaTiO3 besitzt drei strukturelle Phasenubergange. In Abb. 3.1 sind die Gitterkon-
stanten als Funktion von der Temperatur dargestellt. Bei hohen Temperaturen uber der
Curietemperatur von TC ≈ 393 K beginnend liegt die paraelektrische, unpolare Phase mit
29

30 Kapitel 3 Materialien und Probenstrukturierung
1 0 0 1 5 0 2 0 0 2 5 0 3 0 0 3 5 0 4 0 0 4 5 0
0 . 3 9 8
0 . 3 9 9
0 . 4 0 0
0 . 4 0 1
0 . 4 0 2
0 . 4 0 3
0 . 4 0 4
T cT 1
a = b = c
a
b = c
c
a = b
r h o m b o -e d r i s c h
o r t h o -r h o m b i s c h
t e t r a g o n a l
Git
terko
nstan
ten a,
b, c
(nm)
T ( K )
k u b i s c h
a = b = c
T 2 T 2 ’ T 1 ’
Abbildung 3.1: Darstellung der Temperaturabhangigkeit der Gitterkonstanten von Bariumtitanat. Dabeisind die Phasenubergangstemperaturen und die einzelnen Phasen farblich gekennzeich-net. Innerhalb der Phasenubergange sind die hysteretischen Verlaufe dargestellt. (aus[14])
kubischer Perowskitstruktur vor, bei der alle drei Gitterkonstanten den gleichen Wert be-
sitzen. Wird die Temperatur unter Tc abgesenkt, erhalt man einen Phasenubergang von
der paraelektrischen zur ferroelektrischen Phase. Dabei wird eine der kubischen Achsen
(c-Achse) auf Kosten der anderen (a, b) vergroßert, wodurch die Gitterstruktur tetrago-
nal wird. Wird die Temperatur weiter abgesenkt, so findet ab einer Temperatur T1 der
Ubergang von der tetragonalen Phase zur orthorhombischen und ab einer Temperatur
T2 der Ubergang zur rhomboedrischen statt, wobei BTO weiterhin ferroelektrisch bleibt.
Dabei verhalt sich BaTiO3 bei diesen Ubergangstemperaturen hysteretisch und die Kris-
tallstruktur ergibt sich in diesen Temperaturbereichen aus der Temperaturvorgeschichte
der Probe. So findet beim Erwarmen der Probe von tiefen Temperaturen der Phasen-
ubergang von der rhomboedrischen zur orthorhombischen Phase bei T ′2 > T2 und der
Ubergang von der orthorhombischen zur tetragonalen Phase bei T ′1 > T1 statt.
Bei Raumtemperatur liegt die tetragonale Phase vor. In Abb. 3.2 sind die unpolare
kubische und die polare tetragonale Phase dargestellt. In der tetragonalen Phase resul-
tiert die Ferroelektrizitat aus der Verschiebung des Ti4+-Ions aus dem Symmetriezentrum
entlang der c-Achse, wodurch die c-Achse zur polaren Achse wird. Insgesamt existieren
in der tetragonalen Phase 6 aquivalente 〈100〉-Richtungen, weshalb drei verschiedene Ar-
ten von Domanen existieren. Liegt die polare c-Achse entlang der [001]-Achse, spricht
man von c-Domanen. Analog dazu erhalt man a1-Domanen, bei denen die polare c-Achse
parallel zur [100]-Achse liegt, und a2-Domanen mit c|| [010].

3.1 Materialien 31
kubisch tetragonal
6 möglicheVerschiebungs-
4+richtungen für Ti
Abbildung 3.2: Gitterstruktur von BaTiO3 in der kubischen und tetragonalen Phase. In der tetragona-len Phase ist schematisch die Verschiebung des Ti4+-Ions entlang der polaren c-Achsedargestellt (aus [54]).
3.1.2 Magnetische Materialien
3d-Ubergangsmetalle
Die drei Elemente Fe, Co und Ni (3d-Ubergangsmetalle) sind die metallischen Elemente,
die bei Raumtemperatur Ferromagnetismus mit einer hohen Sattigungsmagnetisierung
zeigen. Es handelt sich um Band-Ferromagnetismus des 3d-Elektronenbandes [18]. Die
Curie-Temperaturen betragen fur Fe Tc,Fe = 1043 K, fur Co Tc,Co = 1388 K und fur
Ni Tc,Ni = 627,2 K [55]. Die Kristallstruktur von Fe entspricht dem bcc-Gitter (auch
als α-Fe bezeichnet) mit den Gitterkonstanten aα−Fe = bα−Fe = cα−Fe = 2,87 A[56].
Neben dem bcc-Gitter ist es auch moglich, dass Fe in ein fcc-Gitter kondensiert (als γ-
Fe bezeichnet), bei niedrigen Temperaturen jedoch ist γ-Fe instabil. Die leichte Achse
fur α-Fe liegt entlang der 〈100〉-Richtung. Co besitzt unterhalb von Tc zwei strukturelle
Phasen. Unterhalb von T ≈ 700 K entspricht die Kristallstruktur dem hcp-Gitter mit der
leichten Achse entlang der 〈0001〉-Achse und den Gitterkonstanten ahcp−Co = bhcp−Co =
2,51 A und chcp−Co = 4,07 A [56]. Oberhalb von T ≈ 700 K erhalt man fcc-Co, wobei die
leichte Achse in die 〈111〉-Richtung zeigt. Ni hingegen kristallisiert in ein fcc-Gitter mit
den Gitterkonstanten aNi = bNi = cNi = 3,524 A[56]. Die leichte Achse liegt entlang der
〈111〉-Richtung.
Binare Verbindungen aus den ferromagnetischen 3d-Ubergangsmetallen finden vielfal-
tigen Einsatz in der Industrie. So wird z.B. die Verbindung Fe20Ni80 wegen ihres weich-
magnetischen Charakters in Transformatoren eingesetzt. Ein weiteres binares Material-
system ist Fe1−xCox, das drei strukturelle Phasenubergange besitzt. Bis zu einer Co-
Konzentration von x = 78% liegt ein bcc-Gitter vor, zwischen x = 78 . . . 95% erhalt man
ein fcc-Gitter und fur x > 95% das fur Co typische hcp-Gitter [57]. Die Richtung der
leichten Achse andert sich mit zunehmender Co-Konzentration bei etwa x ≈ 42% von der
fur Fe typischen 〈100〉-Richtung zur 〈111〉-Richtung [57]. In dieser Arbeit wurde ein Film

32 Kapitel 3 Materialien und Probenstrukturierung
aus Fe50Co50, auch Permendur genannt, betrachtet.
Da in dieser Arbeit die magnetischen Eigenschaften mit Hilfe von optischen Messme-
thoden untersucht wurden, werden, soweit bekannt, die magnetooptischen und optischen
Konstanten angegeben. FeCo besitzt bei der verwendeten Wellenlange des Lasers von
670 nm einen Brechungsindex von n = 2.81 + i3.25 und die zugehorige Voigtkonstante
(Kap. 2.2) betragt Q = −0.0187 + i0.0065 [58]. Fur Nickel erhalt man folgende optische
Konstanten: n = 3.81 + i3.58 und Q = 0.0177− i0.0063 [59, 60].
Fur die Sattigungsmagnetisierungen erhalt man bei T = 0 K fur Fe 2,22µB/F.E., fur
Co 1,72µB/F.E. und fur Ni 0,61µB/F.E. [61].
Ferrite - Magnetit und Zinkferrit
Ferrite gehoren zu den ferrimagnetischen Oxiden und besitzen als Basis die chemische
Formel M2+O·Fe3+2 O3, welche als Spinellstruktur1 bezeichnet werden. Die kleinste kubi-
sche Einheitszelle besteht aus 8 Formeleinheiten. M2+ ist ein divalentes Ion, welches auf
zwei unterschiedlichen Gitterplatzen Platz nehmen kann, den tetraedrisch koordinierten
A-Platze, die von 4 Sauerstoffionen umgeben sind, und den oktaedrisch koordinierten B-
Platzen, welche sechs Sauerstoffnachbarn besitzen. Es gibt in der Einheitszelle insgesamt
8 tetraedrisch und 16 oktaedrisch koordinierte Gitterplatze. Je nachdem, ob sich das di-
valente Ion auf dem Tetraeder- oder Oktaederplatz befindet, spricht man vom normalen
bzw. inversen Spinell. Die Sauerstoffionen, die im Vergleich zu den Kationen groß sind, bil-
den ein fcc-Gitter. Je nach der Auswahl der divalenten Atome erhalt man entweder hart-
oder weichmagnetische Ferrite. Das ferrimagnetische Magnetit (Fe3O4) ist der bekann-
teste Vertreter dieser Gruppe und gehort zu den inversen Spinellen, da sich das divalente
Eisenion Fe2+ auf einem Oktaederplatz befindet. Der Ferrimagnetismus kommt durch die
Wechselwirkung der A- und B-Untergitter zustande. Die magnetischen Momente bilden
sich innerhalb eines Untergitters parallel und zwischen den Untergittern antiparallel aus.
Substituiert man in Magnetit Fe mit einem gewissen Anteil x eines nicht-magnetischen
Elementes, z.B. Zink, konnen die magnetischen Eigenschaften verandert werden, um sie
so fur neue Anwendungen in der Spinelektronik nutzbar zu machen. Zink-Ferrit selbst
gehort zu den normalen Spinellen (Zn2+ befindet sich auf einem A-Platz) und ist antifer-
romagnetisch [16, 62].
Magnetit ist der alteste bekannte, magnetische Festkorper. Die chemische Formel kann
folgendermaßen geschrieben werden:(Fe3+
)A
(Fe2+ · Fe3+
)B
O4 (inverser Spinell). Auf-
grund der Kristallenergie bilden sich entlang bestimmter Achsen Richtungen aus, in denen
die Magnetisierung bevorzugt liegt , und solche, in denen das nicht der Fall ist (magne-
tische Anisotropie). Diese Achsen liegen entlang der 〈111〉-, 〈110〉- und 〈100〉-Richtung
und werden als leichte, mittelschwere bzw. harte Achsen bezeichnet.
Wie oben bereits erwahnt, konnen die Eigenschaften von Magnetit durch Substitution
1Ferrite besitzen eine ahnliche chemische Formel wie das naturlich vorkommende Mineral Spinell(MgAl2O4).
3.2 Verwendete Proben 33
mit einem zweiten Element verandert werden. In Magnetit befinden sich auf dem A-Platz
8 Fe3+-Ionen mit einer Elektronenkonfiguration von 3d5 und einem Gesamtmoment von
5µB2, auf dem B-Platz befinden sich sowohl 8 Fe3+-Ionen als auch 8 Fe2+-Ionen (3d6)
mit einem Moment von 4µB. Da die Momente der beiden Untergitter antiparallel stehen,
ergibt sich ein Netto-Moment pro Formeleinheit fur Magnetit zu 4µB fur T = 0. Betrachtet
man ein substituiertes Ferrit wie Zink dotiertes Magnetit ((Fe3+1−xZn2+
x )AO(Fe3+1+xFe2+
1−x)BO3
[63]) mit unterschiedlichem Zinkgehalt, so kann fur das magnetische Moment ein theo-
retischer Wert berechnet werden. Hierbei ist zu beachten, dass es sich bei Zinkferrit um
einen normalen und bei Magnetit um einen inversen Spinell handelt und es ergibt sich
folgender Zusammenhang fur das Moment pro Formeleinheit [18]:
M = (1 + x) 5 + (1− x) 4µB − (1− x) 5µB = 4 + 6xµB. (3.1)
Theoretisch sollte sich somit bei einer Zink-Konzentration (Zink besitzt wegen einer vol-
len 3d-Schale (3d10) kein Moment) von x = 1 ein magnetisches Moment pro Formeleinheit
von 10µB ergeben. Experimentell wird beobachtet, dass das Moment bis zu einer Konzen-
tration von x = 0,4...0,5 anwachst und danach wieder abfallt und bei x = 1 verschwindet
bzw. Zinkferrit antiferromagnetisch wird [64, 65]. Dieses Verhalten wurde von Yafet et
al. [66] durch eine triangulare Anordnung der Spins erklart. Ishikawa et al. [67] hingegen
erklarten dieses Verhalten mit superparamagnetischen Spinclustern, die durch Unterbre-
chung der Austauschkopplung durch die nicht magnetischen Zn-Ionen entstehen.
3.2 Verwendete Proben
Die Filme, die zur Verfugung standen, wurden zum einen mit”Pulsed Laser Deposi-
tion” (PLD; z.B. epitaktisches ZnxFe3−xO4) und zum anderen mit Elektronenstrahl-
Verdampfung (abgekurzt mit EVAP; z.B. polykristallines FeCo) hergestellt (siehe Ta-
belle 3.1). Fur die Magnetotransport-Messungen wurde ein Teil der Proben strukturiert.
In Abb. 3.3 ist die verwendete Hallbargeometrie mit den Abstanden eingezeichnet. Die
Breite der Hallbar betragt 100 µm, der Abstand zwischen den Langswiderstandsabgriffen
ist 200 µm. Die Proben wurden vor dem Belacken mit Aceton und Isopropanol gerei-
nigt. Um eine gleichmaßige Verteilung zu gewahrleisten, wurde die Probe in der Bela-
ckungsschleuder bei hoher Rotation mit dem Lack benetzt. Vor dem Belichten mit einer
Hg-Dampflampe erfolgt ein hardbake, um den Lack auszuharten. Nach dem Belichten
wird die Probe in eine Entwicklerlosung gegeben, in der der belichtete Teil des Lacks
erhalten bleibt und sich die nichtbelichteten Anteile von der Probe losen. In der Argon-
Ionenstrahl-Atzanlage wird der nicht vom Lack bedeckte Teil des Films durch Atzen vom
Substrat entfernt. Nach dem Atzvorgang wird der restliche Lack entfernt und die Probe
kann fur die Magnetotransportmessungen kontaktiert werden.
2µB ≡ e~2m = 9,274× 10−24 J
T ist das Bohrsche Magneton

34 Kapitel 3 Materialien und Probenstrukturierung
200 µm
100 µm
1000 µm
Abbildung 3.3: Verwendete Hallbar-Geometrie mit Abmessungen.
Eine Zusammenstellung der verwendeten Proben und deren Eigenschaften findet sich
in der Tabelle 3.1.
Die Proben fur diese Arbeit wurden mir freundlicherweise von Andreas Brandlmaier
(B080623A, B080623B, NG2 und MA4), Stephan Geprags (MB32 und MB35), Deepak
Venkateshvaran (DV6 und DV12), Andrea Nielsen (M72) und von der Universitat Re-
gensburg (G1) zur Verfugung gestellt.
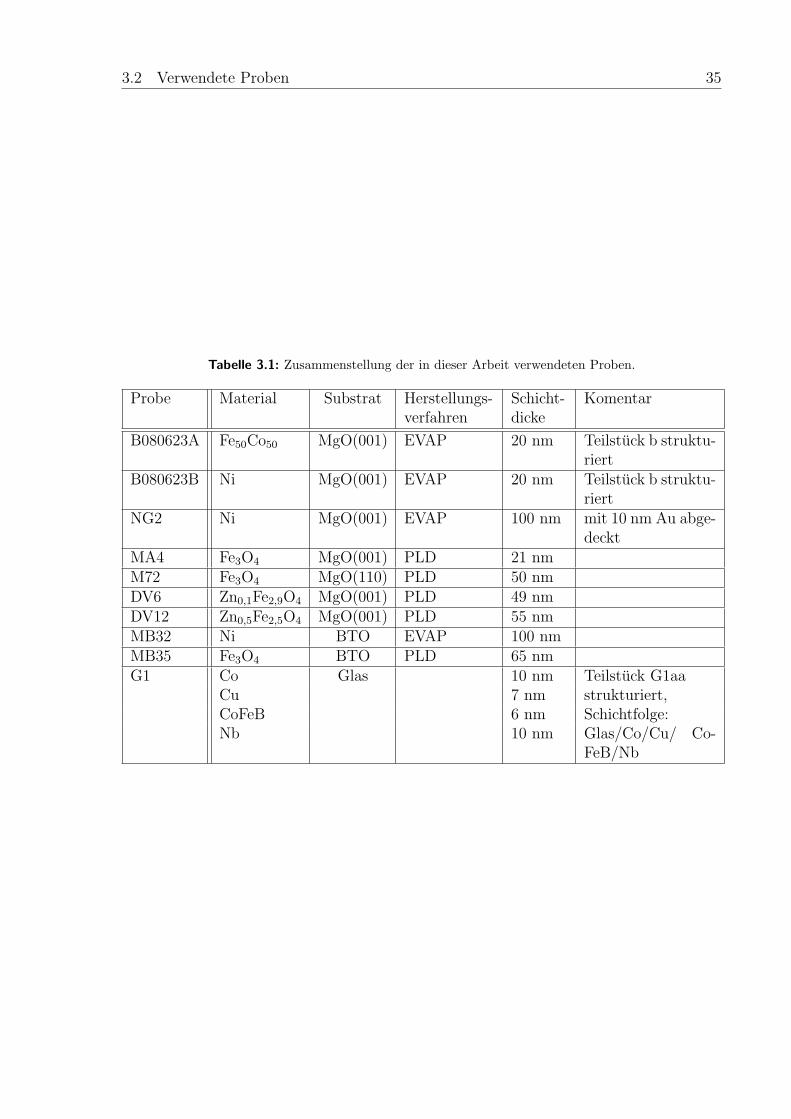
3.2 Verwendete Proben 35
Tabelle 3.1: Zusammenstellung der in dieser Arbeit verwendeten Proben.
Probe Material Substrat Herstellungs-verfahren
Schicht-dicke
Komentar
B080623A Fe50Co50 MgO(001) EVAP 20 nm Teilstuck b struktu-riert
B080623B Ni MgO(001) EVAP 20 nm Teilstuck b struktu-riert
NG2 Ni MgO(001) EVAP 100 nm mit 10 nm Au abge-deckt
MA4 Fe3O4 MgO(001) PLD 21 nmM72 Fe3O4 MgO(110) PLD 50 nmDV6 Zn0,1Fe2,9O4 MgO(001) PLD 49 nmDV12 Zn0,5Fe2,5O4 MgO(001) PLD 55 nmMB32 Ni BTO EVAP 100 nmMB35 Fe3O4 BTO PLD 65 nmG1 Co Glas 10 nm Teilstuck G1aa
Cu 7 nm strukturiert,CoFeB 6 nm Schichtfolge:Nb 10 nm Glas/Co/Cu/ Co-
FeB/Nb

36 Kapitel 3 Materialien und Probenstrukturierung

Kapitel 4
Experimenteller Aufbau
Ein wesentlicher Teil dieser Arbeit bestand darin, ein Raumtemperatur-LMOKE-System
aufzubauen und zu charakterisieren. In diesem Kapitel erfolgt nach einer Beschreibung
der prinzipiellen Funktionsweise zentraler Komponenten des Aufbaus und der zur An-
steuerung bzw. zum Auslesen entwickelten Software eine Charakterisierung des Systems.
Derzeit wird das MOKE-System in einen Magnetkryostaten integriert, der neben tem-
peraturabhangigen Messungen sowie Messungen bei wesentlich hoheren Feldern auch die
Detektion des polaren Kerr-Effekts ermoglicht. Aufbau und erste Testergebnisse werden
am Ende des Kapitels beschrieben.
4.1 MOKE bei Raumtemperatur
Wie in Kapitel 2 schon kurz dargestellt wurde, beruhen die magnetooptischen Effekte
auf einer Drehung der Polarisation des eingestrahlten Lichtes. Fur den LMOKE-Aufbau
ist die Funktionsweise schematisch in Abb. 4.1 dargestellt. Um eine Polarisationsdrehung
messen zu konnen, muss das Licht vor der Probe linear polarisiert werden. Aus diesem
Grund wird in den Strahlengang zwischen der Lichtquelle und der Probe ein Polarisator
eingebaut. In unserem Aufbau verwenden wir s-polarisiertes Licht, um nur auf die longi-
tudinale Magnetisierungskomponente (longitudinal bedeutet parallel zur Oberflache und
θ θ
Abbildung 4.1: Schema fur den longitudinalen Kerr-Effekt-Messaufbau.
37

38 Kapitel 4 Experimenteller Aufbau
zur Einfallsebene) der Probe sensitiv zu sein (siehe Kapitel 2.2). Das bedeutet, dass die
Durchlassrichtung des Polarisators senkrecht zur Einfallsebene steht. Nach der Reflexi-
on an der Probe wird ein zweiter Polarisator, der Analysator, benotigt, um die bei der
Reflexion aufgetretene Drehung der Polarisation messen zu konnen. Im Allgemeinen sind
die Polarisationsdrehungen sehr klein. Um die Polarisationsdrehung dennoch auflosen zu
konnen, stehen Polarisator und Analysator in fast gekreuzter Stellung zueinander, d.h.,
dass die Durchlassrichtung des Analysators senkrecht zu der des Polarisators steht. In
Laserdiode &-versorgung
Biprisma
Elektromagnet
Probenhalterung
LinseLinse
Alugehäuse
Hallsonde
Polarisator Analysator
Abbildung 4.2: Foto des wahrend dieser Arbeit aufgebauten LMOKE-Systems.
Abb. 4.2 ist das am WMI aufgebaute Raumtemperatur-LMOKE dargestellt. Die einzel-
nen Komponenten, die im folgenden beschrieben werden, sind auf Schienen angebracht,
welche ebenso wie das Magnetsystem auf einer Aluminiumplatte festgeschraubt sind.
4.1.1 Komponenten
Laserdiode, Biprisma, Neutrale-Dichtefilter
Als Lichtquelle wird eine Laserdiode der Firma Sanyo verwendet. Dabei handelt es sich
um eine AlGaInP-Halbleiterdiode, die Licht mit einer Wellenlange von 670 nm und ei-
ner Leistung von 7 mW emittiert. Die Versorgung erfolgt durch ein Lasertreibermodul
(LD1100, ThorLabs), das durch eine Ruckkoppelschleife uber die in die Laserdiode inte-
grierte Monitor-Photodiode eine konstante Ausgangsleistung des Lasers gewahrleistet.

4.1 MOKE bei Raumtemperatur 39
Durch die Laserdiode wird ein elliptisches Strahlprofil mit einem Aspektverhaltnis des
elliptischen Strahls von ca. 4:1 erzeugt. Um dieses in ein rundes Strahlprofil umwandeln zu
konnen, wird ein amorphes Biprisma verwendet, welches die kleine Halbachse der Ellipse
aufweitet.
Da die Lichtleistung der Laserdiode nicht direkt beeinflusst werden kann, geschieht
dies indirekt uber einen Neutrale-Dichtefilter (ND-Filter) der Firma ThorLabs. Hierbei
handelt es sich um ein BK7-Glas-Substrat, dass mit einer metallischen Schicht bedeckt
ist. Es werden ND-Filter mit unterschiedlichen Dampfungswerten (ND1 bedeutet eine
Abschwachung der Lichtintensitat auf 10%, ND2 auf 1% usw.) angeboten.
Polarisatoren
Bei den Polarisatoren handelt es sich um Glan-Thompson-Polarisatoren aus Kalzit der
Firma Edmund Optics mit einem Extinktionskoeffizienten von ε = 10−6. Dadurch wird
gewahrleistet, das die transmittierte Welle nach Durchqueren des Polarisators entlang der
Durchlassrichtung linear polarisiert ist. Hierbei wird der außerordentliche Strahl bezuglich
der Polarisatorgeometrie transmittiert, und der ordentliche Strahl wird abgelenkt.
Linsen
Um den Laserstrahl punktformig auf die Photodiode abzubilden, werden zwei konvexe
Linsen von ThorLabs in den Strahlengang eingebaut. Eine Linse, deren Abstand von der
Probe der Linsenbrennweite f = 50 cm entspricht, bildet den in der Laserdiode erzeugten
parallelen Lichtstrahl punktformig auf die zu untersuchende Probe ab. Der Durchmesser
des erzeugten Spots auf der Probenoberflache betragt einige hundert µm.
Um den Laserstrahl punktformig auf die Photodiode abzubilden, wird eine Punkt-
auf-Punkt-Abbildung realisiert. Dafur wird zwischen Probe und Detektor eine Linse im
jeweiligen Abstand 2f gesetzt. Diese Abstandsbeziehung folgt aus der Linsengleichung
fur dunne Linsen [68]:
1
f=
1
g+
1
bmit g = b ⇒ g = b = 2f. (4.1)
Elektromagnet
Das Magnetfeld wird durch einen Elektromagneten erzeugt. Das verwendete Eisenjoch
besteht aus Baustahl und wurde am WMI gefertigt. Die Polschuhe sind austauschbar,
wodurch man je nach Bedarf die Polflache variieren kann.
Die beiden in Reihe geschalteten Spulen von PHYSWE besitzen 300 Windungen und
einen ohmschen Widerstand von jeweils R = 0.8 Ω. Die maximale Stromstarke, die diesen
Spulen zugefuhrt werden darf, betragt 4 A. Die Spulen werden durch ein bipolares Kepco
Bop 20-20 Netzgerat versorgt. Bei einem typischen Polschuhabstand von etwa 12 bis
15 mm lassen sich mit diesem System Magnetfelder bis maximal 200 mT erzeugen.

40 Kapitel 4 Experimenteller Aufbau
Hallsonde
Bei der Hallsonde, mit der das angelegte Magnetfeld gemessen wird, handelt es sich um
das Modell 475 DSP der Firma LakeShore. Insgesamt bietet dieses Modell drei verschiede-
ne Auflosungsstufen. Allerdings schranken die Integrationskonstanten fur eine Messung
bei einer hohen Auflosung die Auslesegeschwindigkeit stark ein. In unserem Fall ist es
ausreichend, mit der niedrigsten Auflosung von 3 Stellen (0,1 mT) zu messen. Neben den
Feldmessungen lassen sich zusatzlich mit der Hallsonde Temperaturmessungen durchfuh-
ren.
Der Vorteil des Modells 475 DSP besteht darin, dass die Versorgung der Spulen direkt
uber einen analogen Ausgang gesteuert werden kann. Dabei ist die ausgegebene Spannung
proportional zur gemessenen Feldstarke, wodurch das Gaussmeter Felder durch Regelung
der Spannung sehr genau anfahren kann. Allerdings ist die Geschwindigkeit, mit der die
einzelnen Felder angefahren werden, im Vergleich zur direkten Ansteuerung des Netzgera-
tes erheblich geringer. Aus diesem Grund wird, solange man auf eine exakte Ansteuerung
der Feldpunkte verzichten kann, das Netzgerat direkt und nicht uber das Gauss-Meter
angesteuert.
Photodiode
Der Photodetektor der Firma EO-Systems verwendet eine Si-Halbleiter-Photodiode (S-
025-H mit einem Durchmesser von 2,5 mm) mit integrierter Signalverstarkung, welche
durch ein bipolares Netzgerat (Agilent, Typ E3630A) versorgt wird. Der detektierbare
Wellenlangenbereich betragt 300 bis 1000 nm. Die aktive Detektorflache misst 2,5 mm im
Durchmesser. Zur Verbesserung des Signal-Rausch-Verhaltnisses wird ein Interferenzfilter
vor der Diode angebracht, welcher die Intensitat außerhalb eines Wellenlangenbereichs
von 10 nm um die zentrale Wellenlange um bis zu 4 Großenordnungen abschwacht. Um
weiteres Streulicht zu unterdrucken, wird ein Aluminiumgehause uber die Diode gestellt.
4.1.2 Software
Die Ansteuerung der Messgerate uber einen IEEE-Bus sowie die Datenerfassung und
-weiterverarbeitung wurden mit der Programmiersprache LabView realisiert.
Das MOKE-Messprogramm besteht im wesentlichen aus drei Teilen. In der Anfangs-
prozedur wird eine Liste mit Ansteuerungspunkten fur das Magnetfeld erzeugt. Diese
Liste kann flexibel gestaltet werden. Das bedeutet, dass sie in Bereiche mit unterschiedli-
cher Auflosung unterteilt werden kann. Statt einer Erzeugung innerhalb des Programms
ist es moglich, eine Datei mit einer vorher erzeugten Messroutine einzulesen.
Innerhalb der Messprozedur werden nun nacheinander die einzelnen Messpunkte an-
gefahren. Nach der Ansteuerung eines jeden Messpunktes erfolgt das Auslesen des Ma-
gnetfeldes und der Photodiode. Zusatzlich konnen je nach Bedarf weitere Messgerate
angesprochen und ausgelesen werden. Die ermittelten Werte lassen sich graphisch dar-

4.1 MOKE bei Raumtemperatur 41
stellen und gleichzeitig nach dem Auslesen in eine Messdatei schreiben. Dies hat den
Vorteil, dass bei einer Storung die vorher gemessenen Daten abgespeichert wurden und
nicht verloren gehen. Ein weiterer Bestandteil des Programm ist eine Mittelungsroutine,
welche bei mehreren Messdurchlaufen die Daten mittelt, graphisch darstellt und in eine
zusatzliche Datei schreibt.
Nach dem Abschluss der Messroutine wird die Messdatei geschlossen. In der Endroutine
lasst sich das Netzgerat der Spulen in einen bestimmten Endzustand versetzen. So ist es
moglich, beim letzten angefahrenen Feldwert zu verweilen, auf den Startfeldwert zu fahren
oder die Netzversorgung auf Null herunterzufahren.
Will man mehrere Messungen nacheinander durchfuhren, ist es von Vorteil, das MOKE-
Messprogramm in ein Sequenzprogramm zu implementieren. Diese Sequenz beinhaltet
als Bibliothek alle fur eine Messprozedur wichtigen Programme. Zur Ansteuerung wird
eine Textdatei eingelesen, deren Befehle nun nacheinander aufgerufen bzw. abgearbeitet
werden. Dadurch ist es moglich, den Messprozess zu automatisieren und zu beschleunigen.
Das MOKE-Messprogramm wurde im Laufe der Zeit weiterentwickelt, sodass es mitt-
lerweile auch fur andere Messsysteme verwendet werden kann. Hierbei sei auf die Werk-
studententatigkeit bzw. den -bericht von Andreas Brenneis am WMI verwiesen [69].
4.1.3 Charakterisierung
Magnetfeld des Elektromagneten
Das am WMI gebaute Eisenjoch fur den Elektromagneten besteht aus herkommlichem
Baustahl. In Abb. 4.3 ist die Magnetfeldstarke als Funktion des Stroms durch die Spulen
dargestellt. Die austauschbaren Polschuhe, ebenfalls aus Baustahl gefertigt, besitzen eine
kreisrunde Austrittsflache mit einem Durchmesser von Ø = 15 mm. Der Abstand der
Polschuhe betragt d = 12 mm, kann aber je nach Bedarf zwischen 0 und 22 mm variiert
werden.
Es zeigt sich, dass wegen des verwendeten Materials eine Hysterese auftritt. Aus die-
sem Grund ist es nicht moglich, einen linearen Zusammenhang zwischen der Feldstarke
und dem angelegten Strom anzunehmen. Dadurch wird das Anfahren von bestimmten
Magnetfeldstarken, welche indirekt uber die Einteilung von Strombereichen erfolgt, er-
schwert, da sowohl fur den up wie fur den down sweep die Einteilung separat durchgefuhrt
werden muss.
In Abb. 4.3 sind die gemessenen Feldstarken fur zwei unterschiedliche Positionen der
Hallsonde zwischen den Polschuhen dargestellt. Die Probe befindet sich in der Mitte
zwischen den Polschuhen. Aus diesem Grund ist es nur moglich, das angelegte Magnetfeld
in der Nahe eines Polschuhs zu messen. Die schwarze Kurve stellt die Magnetfeldwerte
dar, die die Hallsonde direkt beim Polschuh gemessen hat, die rote wurde in der Mitte
aufgenommen. Da die Magnetfeldlinien nicht geradlinig von dem einen zum anderen Pol
verlaufen, wird in der Mitte ein kleineres Feld gemessen als am Rand. Dabei betragt
der Magnetfeldwert an der Position 2 uber den gesamten Verlauf 94 % des Wertes an

42 Kapitel 4 Experimenteller Aufbau
4202-4-
002-
001-
0
001
002
µ 0H (m
T)
)A( I
1 noitisoP
2 noitisoPP2 P1
12mm
Abbildung 4.3: Magnetfeldstarke als Funktion des Spulenstroms fur zwei verschiedene Abstande derHallsonde von den Polschuhen. Der Abstand der Polschuhe betragt d = 12 mm und derDurchmesser der kreisrunden Polschuhflache Ø = 15 mm.
der Position 1. Die maximalen Feldstarken betragen hierbei µ0HP1,max = 202 mT an
der Position 1 bzw. µ0HP2,max = 189 mT an der Position 2. Diese Felder reichen fur
die im Rahmen dieser Arbeit untersuchten ferromagnetischen Filme aus, um die in der
Filmebene liegende Magnetisierung zu drehen.
Zusatzlich zu der Hysterese und den leicht unterschiedlichen Feldern, abhangig von
der Position zwischen den Polschuhen, muss auch die durch die Spulen in das Eisenjoch
deponierte Warme berucksichtigt werden. Durch die Zufuhrung von hohen Stromen am
Limit der Spulen (Imax = 4 A) werden diese und somit auch das Eisenjoch erwarmt.
Dadurch ist eine konstante Temperatur am Probenort zwischen den Polen nicht mehr
gewahrleistet.
Empfindlichkeit
Wie im Kapitel 2 dargestellt, beruhen magnetooptische Effekte auf einer durch Wech-
selwirkung mit magnetischen Materialien verursachten Polarisationsdrehung des Lichtes,
welche mit Hilfe von Polarisatoren und einer Photodiode detektiert werden konnen. Die
beiden Parameter, mit denen in unserem Aufbau die Eigenschaften der gemessenen ma-
gnetooptischen Signale beeinflusst werden konnen, sind zum einen der Analysatorwinkel
Ψa, um den der Analysator aus der gekreuzten Stellung mit dem Polarisator, d.h. aus
Ausloschung verdreht ist, und zum anderen der Einfallswinkel θe zwischen dem Strahl
und der Probennormalen.
Zur Charakterisierung des Aufbaus wurde ein 20 nm dicker Fe50Co50-Film auf MgO
(Probe B080623A) verwendet. Der Vorteil von FeCo besteht darin, dass es ein großes
magnetooptisches Signal zeigt. Eine vergleichbare Analyse wurde ebenfalls fur Ni durch-
gefuhrt. Ein analoges Verhalten zu FeCo konnte beobachtet werden, weshalb auf eine
Darstellung verzichtet wird.

4.1 MOKE bei Raumtemperatur 43
In Abb. 4.4 ist beispielhaft eine MOKE-Hysterese der oben genannten Probe darge-
stellt. Um das Auflosungsvermogen und somit die Empfindlichkeit des Aufbaus bestim-
men zu konnen, muss zum einen das Signal-zu-Rausch-Verhaltnis Smo/N , das als Maß
fur die Auflosung dient, und zum anderen als Messgroße die Drehung der Polarisation,
d.h die Kerr-Rotation φKerr, quantifiziert werden. Die im folgenden gezeigten Messungen
wurden bei einem Einfallswinkel von θe = 40 und mit s-polarisiertem Licht durchgefuhrt.
θe = 40 ist der großte, in diesem Aufbau realisierbare Einfallswinkel, mit dem gearbeitet
werden kann. Dies ist geometrisch durch die Polschuhe bedingt. Wie spater in Abb 4.8
gezeigt, erhalt man hier das großte magnetooptische Signal.
- 7 5 - 5 0 - 2 5 0 2 5 5 0 7 5
0 , 2 8
0 , 3 0
0 , 3 2
0 , 3 4
MOKE
Sign
al (V)
µ0 H ( m T )
S m o
Abbildung 4.4: Exemplarische Darstellung einer MOKE-Hysterese-Kurve in Abhangigkeit des externangelegten Magnetfelds.
Fur eine Kerr-Rotation ±φKerr, welche proportional zum Betrag der Magnetisierung ist
[30, 70], und einen bestimmten Analysatorwinkel Ψa ist die detektierte Intensitat gegeben
durch das Malussche Gesetz [71, 70, 11]:
I(±M) = I0 sin2(Ψa ± φKerr) + Ir. (4.2)
Hierbei handelt es sich bei I0 um die von der Probe reflektierte Intensitat und bei Ir um
die Untergrundintensitat, die bei gekreuzter Stellung der Polarisatoren noch gemessen
wird. Aus Ir/I0 = ε ergibt sich der Extinktionskoeffizient des optischen Systems. Dieser
entspricht in einem System, in dem Depolarisationseffekte vernachlassigt werden kon-
nen, dem Extinktionskoeffizienten der Polarisatoren [70]. Mussen Depolarisationseffekte
berucksichtigt werden, nimmt der Extinktionskoeffizient zu.
In Abb. 4.5(a) ist der experimentell gemessene Verlauf I(+M) und I(−M) uber Ψa
aufgetragen. Dabei handelt es sich um die gemessenen Intensitaten im gesattigten Feld-
bereich, im dem das MOKE-Signal konstant ist, fur beide Feldrichtungen. Der Analysa-
torwinkel Ψa wurde fur die Messung zwischen −5 bis +5 variiert. Die Messergebnisse

44 Kapitel 4 Experimenteller Aufbau
I (w.E.
)
Ψa
I ( - M )
I ( + M )
( a ) ( b )
S mo (w
.E.)
Ψa
Abbildung 4.5: (a): Intensitatsverlauf in Abhangigkeit des Analysatorwinkels Ψa fur I(+M) und I(−M).(b): Linearer Verlauf des magnetooptischen Signals in Abhangigkeit vom Analysatorwin-kel Ψa.
spiegeln dabei den sin2-Verlauf nach Gleichung (4.2) wider. Dennoch ist schon in dem
gezeigten Ausschnitt in Abb. 4.5(a) zu sehen, dass der Untergrund I0 fur I(+M) und
fur I(−M) nicht identisch ist, was durch die oben schon erwahnten Depolarisations-
und Doppelbrechungseffekte der optischen Komponenten hervorgerufen wird, wie z.B.
die nicht perfekte Ausloschung der Polarisatoren, eine nicht perfekte Justage, bei der der
Laserstrahl nicht exakt senkrecht auf die optischen Komponenten trifft, etc.
Bei beiden Winkeln in Gl. (4.2) handelt es sich um sehr kleine Großen, weshalb eine
Kleinwinkelnaherung erlaubt ist. Man erhalt sin2(Ψa + φKerr) ≈ (Ψa + φKerr)2. Mit Hilfe
dieser Naherung lasst sich das magnetooptische Signal Smo, welches in Abb. 4.4 ebenfalls
dargestellt ist, folgendermaßen berechnen:
Smo = I(+M)− I(+M) = I0 sin2(Ψa + φKerr)− I0 sin2(Ψa − φKerr) ≈ 4I0ΨaφKerr. (4.3)
Hierbei handelt es sich bei Smo um den Hub zwischen den beiden Extrema der Hysterese.
Der lineare Zusammenhang zwischen Ψa und Smo, der sich aus der Rechnung ergibt, ist
in Abb. 4.5(b) gezeigt. Wie in der Abbildung zu sehen ist, geht die Gerade nicht durch
den Ursprung. Dies liegt daran, dass es sich bei dem detektierten Licht um elliptisch
polarisiertes Licht und nicht um linear polarisiertes Licht handelt.
Eine weitere wichtige Große bei der Charakterisierung ist die normierte Intensitat IKerr:
IKerr =I(+M)− I(−M)
12(I(+M) + I(−M))
=Smo
I. (4.4)

4.1 MOKE bei Raumtemperatur 45
Aus den oben angenommenen Naherungen folgt:
IKerr ≈(Ψa + φKerr)
2 − (Ψa − φKerr)2
Ψ2a + Ir
I0
=4φKerrΨa
Ψ2a + ε
. (4.5)
Es lasst sich zeigen, dass IKerr bei einem bestimmten Analysatorwinkel Ψa,max extremal
wird:∂IKerr
∂Ψa
= 0 ⇒ Ψa,max =√ε. (4.6)
Mit Hilfe dieser Beziehung und Gleichung (4.5) lasst sich IKerr folgendermaßen in eine
normierte, von der Kerr-Rotation φKerr unabhangige Große umwandeln:
IKerr =2 Ψa
Ψa,max
( Ψa
Ψa,max)2 + 1
2φKerr√ε
⇒ IKerr
IKerr,m
=2 Ψa
Ψa,max
( Ψa
Ψa,max)2 + 1
. (4.7)
Hierbei ist IKerr,m = 2φKerr√ε
. Dieser Zusammenhang ist fur FeCo in Abb. 4.6 dargestellt.
Die rote Kurve ist eine Simulation anhand von Gleichung (4.7). Um diese zu simulieren,
- 3 0 - 2 0 - 1 0 0 1 0 2 0 3 0
0 , 0
0 , 5
1 , 0
I Kerr/I Ke
rr,max
Ψa /Ψa , m a x
S i m u l a t i o n
M e s s u n g
Abbildung 4.6: Darstellung des normierten Kontrastes uber den normierten Analysatorwinkel (Symbole)mit zugehorigem Fit (rote Linie).
benotigt man den Extinktionskoeffizienten ε als Fitparameter, da Ψa,max aus diesem be-
rechnet wird. Es wurde ein Wert von ε = 4,5 × 10−6 angenommen. Wie in Abb. 4.6
gezeigt, erhalt man fur die Messungen ein vergleichbares Verhalten zur Simulation. Die
Unterschiede von IKerr,m innerhalb der Messung zwischen der rechten und linken Seite
- vom Minimum aus gesehen - ergeben sich wiederum aus den Depolarisationseffekten
und der elliptischen Polarisation des Lichtes. Man erhalt aus der Rechnung einen Ana-
lysatorwinkel fur den optimalen Kontrast von Ψa,max ≈ 0.13. Die Messung ergibt einen
optimalen Winkel von Ψa,max,exp = 0.14, der mit der Simulation ubereinstimmt.
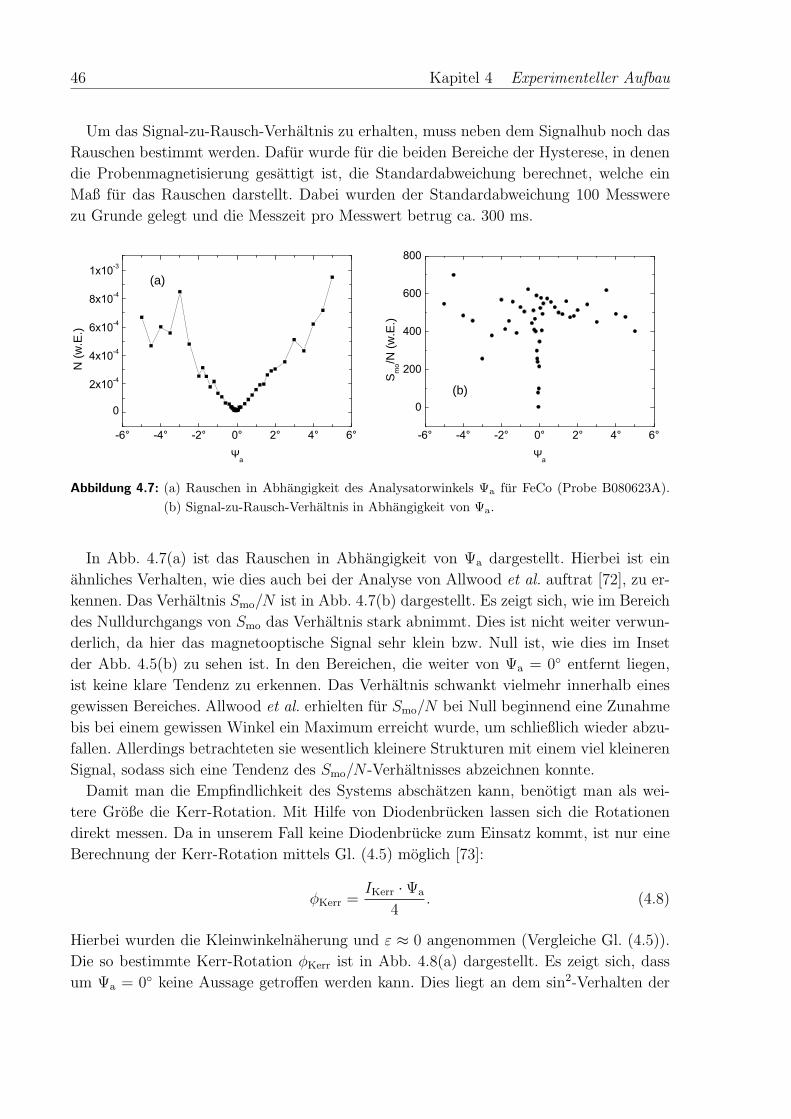
46 Kapitel 4 Experimenteller Aufbau
Um das Signal-zu-Rausch-Verhaltnis zu erhalten, muss neben dem Signalhub noch das
Rauschen bestimmt werden. Dafur wurde fur die beiden Bereiche der Hysterese, in denen
die Probenmagnetisierung gesattigt ist, die Standardabweichung berechnet, welche ein
Maß fur das Rauschen darstellt. Dabei wurden der Standardabweichung 100 Messwere
zu Grunde gelegt und die Messzeit pro Messwert betrug ca. 300 ms.
N (w.E
.)
Ψa
( a )
S mo/N
(w.E.
)
Ψa
( b )
Abbildung 4.7: (a) Rauschen in Abhangigkeit des Analysatorwinkels Ψa fur FeCo (Probe B080623A).(b) Signal-zu-Rausch-Verhaltnis in Abhangigkeit von Ψa.
In Abb. 4.7(a) ist das Rauschen in Abhangigkeit von Ψa dargestellt. Hierbei ist ein
ahnliches Verhalten, wie dies auch bei der Analyse von Allwood et al. auftrat [72], zu er-
kennen. Das Verhaltnis Smo/N ist in Abb. 4.7(b) dargestellt. Es zeigt sich, wie im Bereich
des Nulldurchgangs von Smo das Verhaltnis stark abnimmt. Dies ist nicht weiter verwun-
derlich, da hier das magnetooptische Signal sehr klein bzw. Null ist, wie dies im Inset
der Abb. 4.5(b) zu sehen ist. In den Bereichen, die weiter von Ψa = 0 entfernt liegen,
ist keine klare Tendenz zu erkennen. Das Verhaltnis schwankt vielmehr innerhalb eines
gewissen Bereiches. Allwood et al. erhielten fur Smo/N bei Null beginnend eine Zunahme
bis bei einem gewissen Winkel ein Maximum erreicht wurde, um schließlich wieder abzu-
fallen. Allerdings betrachteten sie wesentlich kleinere Strukturen mit einem viel kleineren
Signal, sodass sich eine Tendenz des Smo/N -Verhaltnisses abzeichnen konnte.
Damit man die Empfindlichkeit des Systems abschatzen kann, benotigt man als wei-
tere Große die Kerr-Rotation. Mit Hilfe von Diodenbrucken lassen sich die Rotationen
direkt messen. Da in unserem Fall keine Diodenbrucke zum Einsatz kommt, ist nur eine
Berechnung der Kerr-Rotation mittels Gl. (4.5) moglich [73]:
φKerr =IKerr ·Ψa
4. (4.8)
Hierbei wurden die Kleinwinkelnaherung und ε ≈ 0 angenommen (Vergleiche Gl. (4.5)).
Die so bestimmte Kerr-Rotation φKerr ist in Abb. 4.8(a) dargestellt. Es zeigt sich, dass
um Ψa = 0 keine Aussage getroffen werden kann. Dies liegt an dem sin2-Verhalten der

4.1 MOKE bei Raumtemperatur 47
φ Ke
rr
Ψa
( a )
φ Kerr
θE i n f a l l
S i m u l a t i o n
φK e r r , e x p / 2
φK e r r , e x p
M e s s u n g
( b )
Abbildung 4.8: (a) Berechnung der Kerr-Rotation φKerr fur FeCo abhangig vom Analysatorwinkel Ψa.(b) Darstellung der gemessenen (schwarz) und simulierten (rot) Daten fur die Kerr-Rotation φKerr in Abhangigkeit vom Einfallswinkel θEinfall.
Intensitat. Im Bereich um Ψa = 0 verhalt sich die Intensitat fur kleine Rotationen der
Polarisation nicht mehr linear, sodass sich ein asymmetrisches Verhalten innerhalb der
Messkurve, wie dies spater in Abb. 4.9 dargestellt ist, ergibt. Betrachtet man Gl. (4.8)
und Abb. 4.6 genauer, folgt, dass die aus der Gleichung ermittelte Rotation erst in dem
Bereich, in dem sich der Verlauf von IKerr einem linearen Verlauf annahert, konstant
ist. Aus diesem Grund muss fur die Berechnung der Rotation aus den Messergebnissen
Ψa >> φKerr gelten [70].
In Abb. 4.8(b) ist die Kerr-Rotation in Abhangigkeit vom Einfallswinkel dargestellt.
Die Abnahme der Kerr-Rotation hin zu kleineren θe folgt aus Gl. (2.61), bei der die Kerr-
Rotation aus den Fresnel-Koeffizienten berechnet wird und fur s-polarisiertes Licht gilt,
dass φKerr ∝ sin(θe) cos(θe) ist [74]. Um die Kerr-Rotation in Abb. 4.8(b) zu simulieren
(rote Kurve), benotigt man die optischen Konstanten fur FeCo bei einer Wellenlange von
670 nm. Fur FeCo erhalt man n = 2.81 + i3.25 und Q = −0.0187 + i0.0065 [58]. Es zeigt
sich, dass die simulierte Kurve und die aus den gemessenen Daten berechnete um einen
Faktor 2 voneinander abweichen. Dieses Verhalten kann wieder durch Depolarisations-
effekte, wie dies auch in Abb. 4.5 zu sehen ist, erklart werden. Dennoch lasst sich die
Großenordnung und das Verhalten der Kerr-Rotation gut abschatzen.
Aus dieser nun abgeschatzten Rotation und dem Verhaltnis Smo/N kann eine Abschat-
zung der Empfindlichkeit erfolgen. Da das Signal-zu-Rausch-Verhaltnis außerhalb des
Bereiches um Ψa = 0 zwischen 700 und 250 schwankt, wurde zur Ermittelung der Emp-
findlichkeit der kleinste Wert, also Smo/N = 250, angenommen. Bei einem Einfallswinkel
von θe = 40 erhalt man aus der Messung eine Kerr-Rotation von φKerr = 0.06. Teilt
man 2φKerr durch das Smo/N -Verhaltnis, so erhalt man eine Empfindlichkeit von ungefahr
5 × 10−4 Grad. Andere Gruppen berichten von einem besseren Auflosungsvermogen bis
zu 10−5 Grad. Jedoch benutzen sie zusatzliche Polarisations-Modulationstechniken, mit

48 Kapitel 4 Experimenteller Aufbau
denen empfindlichere Messsysteme erreicht werden konnen [75, 76]. Auch werden in der
Literatur keine Aussagen uber die Messzeit gegeben, weshalb der Vergleich problematisch
ist. Um die Empfindlichkeit in unserem Aufbau zu reduzieren, sind weitere Komponenten
notig. So kann die Empfindlichkeit mit Faraday-Modulatoren und LockIn-Technik gestei-
gert werden [77]. Shelton et al. berichten sogar von einem Messaufbau zur Untersuchung
von Gasen, mit dem Kerr-Rotationen bis zu 3 nrad ≈ 1 × 10−8 Grad aufgelost werden
konnten [78].
- 4 0 - 2 0 0 2 0 4 0
- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
- 3 0 0 3 0
6 , 0
6 , 3
6 , 6
6 , 9
µ
ΨΨΨ
µ
µ
Ψ
Abbildung 4.9: (a) Vergleich normierter Hysteresekurven bei unterschiedlichen Ψa. (b) Kurve fur denFall, bei dem I(+M) ≈ I(−M) eintritt.
Im folgenden soll noch kurz auf die schon erwahnte Asymmetrie der ermittelten Hys-
teresekurven bei verschiedenen Analysatorwinkeln eingegangen werden. Hierzu sind in
Abb. 4.9 einige Kurven exemplarisch dargestellt. In (a) ist zu sehen, wie sich der Ana-
lysatorwinkel auf die Hysterese auswirkt. Dabei ist zu erkennen, dass die Kurven in der
Nahe Ψa = 0 nicht symmetrisch verlaufen, wie dies schon weiter oben erwahnt wurde.
Der Grund ist, dass sich die Intensitat fur kleine Drehungen der Polarisation in diesem
Bereich nicht mehr linear verhalt.
Aus den oben erfolgten Betrachtungen lassen sich nun folgende Schlusse ziehen. Ins-
besondere sollte Ψa hinreichend groß gewahlt werden, um ein symmetrisches Messsignal
zu gewahrleisten. Bei der Betrachtung des Rauschverhaltnisses konnte keine klare Ten-
denz beobachtet werden, wodurch man bei der Wahl des Analysatorwinkels bis auf den
Bereich um Null nicht eingeschrankt ist. Da die magnetooptischen Signale bzw. IKerr von
ferromagnetischen Filmen auch bei großen Werten von Ψa ausreichen, ist es nicht wichtig,
beim Winkel Ψa,max der maximalen Kerr-Intensitat IKerr (in der Kerr-Mikroskopie heißt
diese Große Kontrast) zu messen. Der maximale Kontrast ist erst dann von Bedeutung,
wenn man Domanen bildlich aufnehmen will, da in diesem Fall der Kontrast wesentlich
dazu beitragt, Domanen mit unterschiedlichen Magnetisierungsrichtungen unterscheiden
zu konnen.
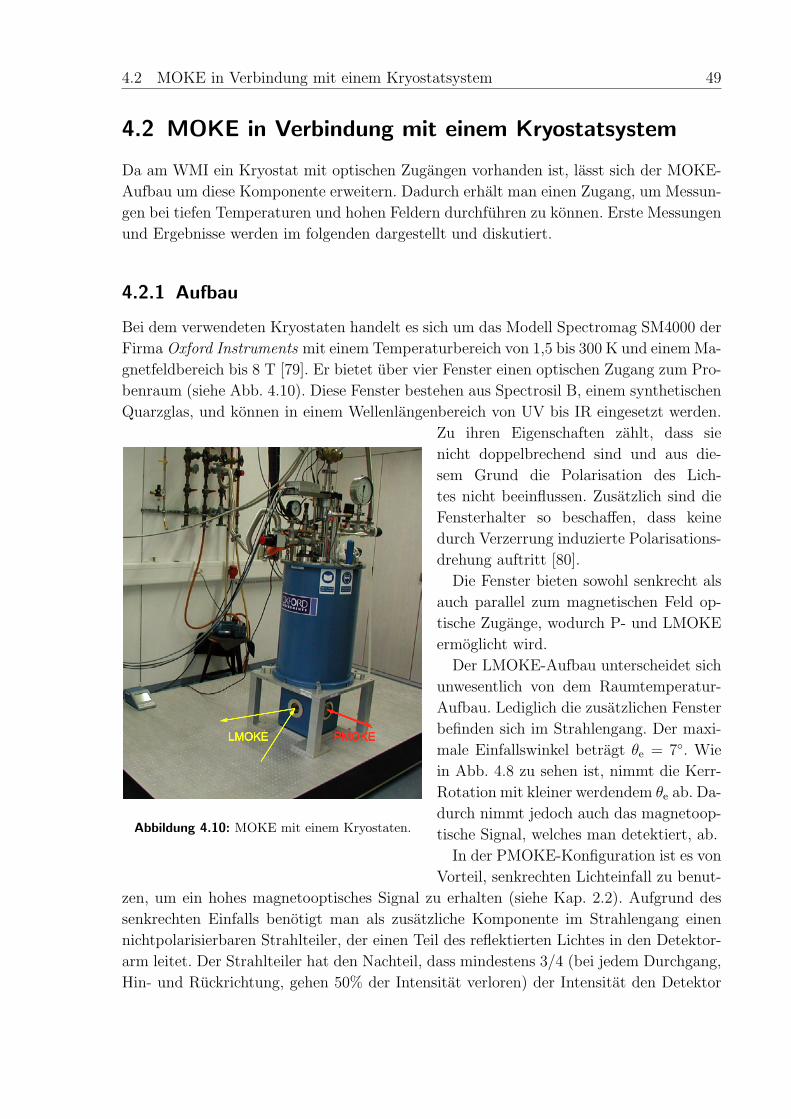
4.2 MOKE in Verbindung mit einem Kryostatsystem 49
4.2 MOKE in Verbindung mit einem Kryostatsystem
Da am WMI ein Kryostat mit optischen Zugangen vorhanden ist, lasst sich der MOKE-
Aufbau um diese Komponente erweitern. Dadurch erhalt man einen Zugang, um Messun-
gen bei tiefen Temperaturen und hohen Feldern durchfuhren zu konnen. Erste Messungen
und Ergebnisse werden im folgenden dargestellt und diskutiert.
4.2.1 Aufbau
Bei dem verwendeten Kryostaten handelt es sich um das Modell Spectromag SM4000 der
Firma Oxford Instruments mit einem Temperaturbereich von 1,5 bis 300 K und einem Ma-
gnetfeldbereich bis 8 T [79]. Er bietet uber vier Fenster einen optischen Zugang zum Pro-
benraum (siehe Abb. 4.10). Diese Fenster bestehen aus Spectrosil B, einem synthetischen
Quarzglas, und konnen in einem Wellenlangenbereich von UV bis IR eingesetzt werden.
LMOKE PMOKE
Abbildung 4.10: MOKE mit einem Kryostaten.
Zu ihren Eigenschaften zahlt, dass sie
nicht doppelbrechend sind und aus die-
sem Grund die Polarisation des Lich-
tes nicht beeinflussen. Zusatzlich sind die
Fensterhalter so beschaffen, dass keine
durch Verzerrung induzierte Polarisations-
drehung auftritt [80].
Die Fenster bieten sowohl senkrecht als
auch parallel zum magnetischen Feld op-
tische Zugange, wodurch P- und LMOKE
ermoglicht wird.
Der LMOKE-Aufbau unterscheidet sich
unwesentlich von dem Raumtemperatur-
Aufbau. Lediglich die zusatzlichen Fenster
befinden sich im Strahlengang. Der maxi-
male Einfallswinkel betragt θe = 7. Wie
in Abb. 4.8 zu sehen ist, nimmt die Kerr-
Rotation mit kleiner werdendem θe ab. Da-
durch nimmt jedoch auch das magnetoop-
tische Signal, welches man detektiert, ab.
In der PMOKE-Konfiguration ist es von
Vorteil, senkrechten Lichteinfall zu benut-
zen, um ein hohes magnetooptisches Signal zu erhalten (siehe Kap. 2.2). Aufgrund des
senkrechten Einfalls benotigt man als zusatzliche Komponente im Strahlengang einen
nichtpolarisierbaren Strahlteiler, der einen Teil des reflektierten Lichtes in den Detektor-
arm leitet. Der Strahlteiler hat den Nachteil, dass mindestens 3/4 (bei jedem Durchgang,
Hin- und Ruckrichtung, gehen 50% der Intensitat verloren) der Intensitat den Detektor

50 Kapitel 4 Experimenteller Aufbau
nicht erreichen.
4.2.2 Eigenschaften und Vergleich mit dem
Raumtemperatur-Aufbau
PMOKE
In der polaren Kerr-Konfiguration wird das Magnetfeld senkrecht zur Probenoberflache
angelegt (Kapitel 2.2). Das einfallende Licht ist s-polarisiert.
- 2 - 1 0 1 20 , 3 20 , 3 40 , 3 60 , 3 80 , 4 00 , 4 20 , 4 40 , 4 60 , 4 80 , 5 0
- 2 - 1 0 1 20 , 20 , 40 , 60 , 81 , 01 , 21 , 41 , 6
µ
Ψ
Ψ
µ
Ψ
Abbildung 4.11: (a) MOKE-Messung von FeCo in polarer Konfiguration. (b) Transmissionsmessung derFenster in polarer Konfiguration.
Bei der verwendeten Probe handelt es sich wiederum um FeCo (B080623A). Sie wurde
mit Silberleitlack auf den Probenhalter aufgeklebt. Die Messungen erfolgten bei Raum-
temperatur. Die Feldabhangigkeit der Magnetisierung bei einer Messung einer FeCo-
Probe zeigt einen B2-Verlauf (Abb. 4.11(a)), verdeutlicht durch den Fit (rot). Um der
Ursache auf den Grund zu gehen, wurde die Probe wieder ausgebaut, um den Effekt der
Fenster zu messen. Hierzu passiert der Laserstrahl den Kryostaten vollstandig. Dieser
wird nach dem Verlassen von einem Spiegel zuruck reflektiert, wodurch der Strahl den
Kryostaten ein zweites Mal durchquert. Die Transmissionseffekte der Fenster sind in Abb.
4.11(b) dargestellt. Es zeigte sich wiederum fur unterschiedliche Ψa reproduzierbar eine
B2-Abhangigkeit analog zur PMOKE-Messung an FeCo (Abb. 4.11(b)). Da es sich, wie
oben erwahnt, um ein Fenstermaterial handelt, dass keine Polarisationsrotation hervor-
rufen sollte, ist diese Beobachtung noch nicht verstanden. Andere Gruppen, die ebenfalls
mit einem Spectromag PMOKE messen, berichten, dass auch sie aufgrund der Fenster
ein uberlagertes Messsignal erhalten. Jedoch handelt es sich bei der Uberlagerung um den
linearen Faraday-Effekt. Dieser wird schließlich durch eine separate Messung der Fenster
bestimmt und von der Messung abgezogen, um das eigentliche Messsignal zu erhalten
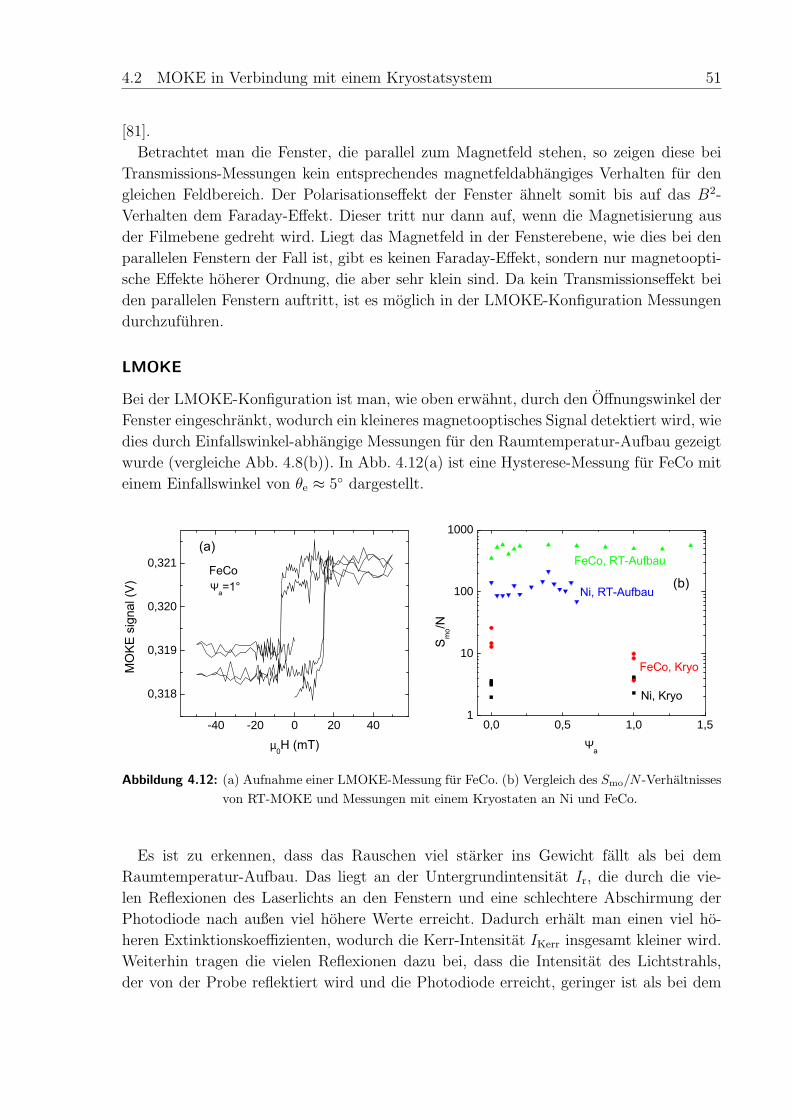
4.2 MOKE in Verbindung mit einem Kryostatsystem 51
[81].
Betrachtet man die Fenster, die parallel zum Magnetfeld stehen, so zeigen diese bei
Transmissions-Messungen kein entsprechendes magnetfeldabhangiges Verhalten fur den
gleichen Feldbereich. Der Polarisationseffekt der Fenster ahnelt somit bis auf das B2-
Verhalten dem Faraday-Effekt. Dieser tritt nur dann auf, wenn die Magnetisierung aus
der Filmebene gedreht wird. Liegt das Magnetfeld in der Fensterebene, wie dies bei den
parallelen Fenstern der Fall ist, gibt es keinen Faraday-Effekt, sondern nur magnetoopti-
sche Effekte hoherer Ordnung, die aber sehr klein sind. Da kein Transmissionseffekt bei
den parallelen Fenstern auftritt, ist es moglich in der LMOKE-Konfiguration Messungen
durchzufuhren.
LMOKE
Bei der LMOKE-Konfiguration ist man, wie oben erwahnt, durch den Offnungswinkel der
Fenster eingeschrankt, wodurch ein kleineres magnetooptisches Signal detektiert wird, wie
dies durch Einfallswinkel-abhangige Messungen fur den Raumtemperatur-Aufbau gezeigt
wurde (vergleiche Abb. 4.8(b)). In Abb. 4.12(a) ist eine Hysterese-Messung fur FeCo mit
einem Einfallswinkel von θe ≈ 5 dargestellt.
- 4 0 - 2 0 0 2 0 4 0
0 , 3 1 8
0 , 3 1 9
0 , 3 2 0
0 , 3 2 1
0 , 0 0 , 5 1 , 0 1 , 51
1 0
1 0 0
1 0 0 0
"
µ
Ψ%
Ψ
!$ !$
##
##
Abbildung 4.12: (a) Aufnahme einer LMOKE-Messung fur FeCo. (b) Vergleich des Smo/N -Verhaltnissesvon RT-MOKE und Messungen mit einem Kryostaten an Ni und FeCo.
Es ist zu erkennen, dass das Rauschen viel starker ins Gewicht fallt als bei dem
Raumtemperatur-Aufbau. Das liegt an der Untergrundintensitat Ir, die durch die vie-
len Reflexionen des Laserlichts an den Fenstern und eine schlechtere Abschirmung der
Photodiode nach außen viel hohere Werte erreicht. Dadurch erhalt man einen viel ho-
heren Extinktionskoeffizienten, wodurch die Kerr-Intensitat IKerr insgesamt kleiner wird.
Weiterhin tragen die vielen Reflexionen dazu bei, dass die Intensitat des Lichtstrahls,
der von der Probe reflektiert wird und die Photodiode erreicht, geringer ist als bei dem

52 Kapitel 4 Experimenteller Aufbau
Raumtemperatur-Aufbau. Dadurch ist aber auch das magnetooptische Signal Smo viel
kleiner.
Betrachtet man lediglich das Rauschen normiert auf die Spannung, die an der Diode
anliegt, d.h. das Rauschen bei einem festen Spannungswert und vergleicht dieses mit
dem Rauschen bei gleicher Spannung des Raumtemperatur-Aufbaus, lasst sich zwischen
Raumtemperatur- und Kryostat-Aufbau kein wesentlicher Unterschied erkennen, d.h. das
Rauschen N bleibt im Vergleich zum Raumtemperatur-Aufbau bis auf kleine Abweichun-
gen gleich. Insgesamt nimmt also Smo/N um einige Großenordnungen ab, wie dies in Abb.
4.12(b) verglichen mit Raumtemperaturmessungen fur einige Ψa dargestellt ist.
Um ein besseres Signal bzw. eine kleinere Untergrundintensitat zu erreichen, benotigt
man in erster Linie eine bessere Abschirmung der Photodiode. Auch sollten Blenden in
den Strahlengang der von den Fenstern reflektierten Lichtstrahlen gestellt werden, damit
diese nicht die Photodiode erreichen.

Kapitel 5
Experimentelle Ergebnisse
In diesem Kapitel erfolgt eine Untersuchung verschiedener Materialsysteme mit dem
MOKE-Messaufbau, der im vorangegangenen Kapitel detailliert charakterisiert wurde.
Simultane Detektion anhand magnetooptischer Messungen und Magnetotransportmes-
sungen ermoglichen eine eingehende Analyse der magnetischen Eigenschaften sowie Un-
tersuchungen der Korrelation beider Messmethoden.
Eingangs erfolgt eine Diskussion der schon im Kapitel 4 zur Charakterisierung des
Aufbaus verwendeten 3d-Ubergangsmetalle. Anschließend werden die am WMI bereits
intensiv charakterisierten Ferrite Fe3O4 und ZnxFe3−xO4 bezuglich ihrer Eigenschaften
untersucht. Weiterhin wurden im Laufe dieser Arbeit Heterostrukturen untersucht. Hier-
bei werden sowohl Spinventil-Schichtstrukturen aus ferromagnetischen und nichtmagne-
tischen metallischen Filmen als auch multiferroische Schichtsysteme - dunne ferroma-
gnetische Schichten auf ferroelektrischen Substraten - naher betrachtet. Die Messungen
wurden alle bei Raumtemperatur durchgefuhrt.
5.1 Ferromagnetische 3d-Ubergangsmetalle
Um einen ersten Uberblick der untersuchten Materialsysteme zu geben, ist in Abb. 5.1 die
Spannung der MOKE-Detektordiode fur einen Nickel-Film auf MgO(001) mit einer Dicke
von 20 nm (Probe B080623B, schwarz) und fur einen Fe50Co50-Film auf MgO(001) mit
ebenfalls 20 nm Schichtdicke (Probe B080623A, rot) dargestellt. Beide Filme wurden mit-
tels Elektronenstrahl-Verdampfung von Andreas Brandlmaier hergestellt. Die Messungen
wurden bei einem Analysatorwinkel von Ψa = 1 mit s-polarisiertem Licht durchgefuhrt.
Es ist zu erkennen, dass das magnetooptische Signal von FeCo viel großer als das der
Ni-Probe ist. Im folgenden werden, da uber die Absolutwerte der Magnetisierung keine
Aussage getroffen werden kann, die Kurven auf ±1 normiert.
Bevor mit der Diskussion begonnen wird, erfolgt eine Abschatzung der Eindringtiefe
des Laserlichts mit einer Wellenlange von λ = 670 nm. Die Eindringtiefe ist hierbei die
Strecke, bei der der Betrag der elektrischen Feldstarke um den Faktor 1/e bezogen auf
den maximalen Wert an der Grenzflache abgefallen ist. Sie kann uber folgende Gleichung
53

54 Kapitel 5 Experimentelle Ergebnisse
- 7 5 - 5 0 - 2 5 0 2 5 5 0 7 50 . 2 6
0 . 2 8
0 . 3 0
0 . 3 2
0 . 3 4
MOKE
signa
l (V)
µ0 H ( m T )
N i
F e C o
Abbildung 5.1: Detektiertes magnetooptisches Signal (Spannungssignal an der MOKE-Detektordiode)fur FeCo- und Ni-Dunnfilm bei einem Analysatorwinkel von Ψa = 1.
abgeschatzt werden [32]:
δ =
√2
ωσµ=
√2ρ
ωµrµ0
. (5.1)
Die spezifischen Widerstande fur FeCo und Ni werden den spater angefuhrten Transport-
daten entnommen: ρFeCo ≈ 7×10−7Ωm und ρNi ≈ 6×10−7Ωm. Die relative Permeabilitat
betragt fur FeCo µr,FeCo ≈ 6000 und fur Ni µr,FeCo ≈ 2500 [82]. Man erhalt fur die Ein-
dringtiefe:
δFeCo ≈ 0,26 nm (5.2)
δNi ≈ 0,37 nm. (5.3)
Diese theoretischen Werte sind viel kleiner als die Filmdicken der in dieser Arbeit ver-
wendeten ferromagnetischen Filme. Auch wird deutlich, dass bei der Charakterisierung
der magnetischen Eigenschaften von Metallen durch magnetooptische Messverfahren le-
diglich die Kerr-Effekte in Frage kommen. Fur Transmissionsmessungen ist die transmit-
tierte Intensitat schon bei sehr kleinen Schichtdicken so gering, dass Veranderungen der
Polarisation nicht mehr aufgelost werden konnen.
5.1.1 Permendur (Fe50Co50)
In Abb. 5.2 sind MOKE-Messungen von polykristallinem FeCo (Probe B080623A) fur
verschiedene Orientierungen des externen Magnetfeldes in der Filmebene (α = 0, 45, 90
und 180) dargestellt. Die Winkel wurden so gewahlt, dass fur α = 0 das extern angelegte
Magnetfeld entlang einer Außenkante der Probe orientiert ist. Aus dem Diagramm ist zu
entnehmen, dass mit MOKE keine Anisotropie aufgelost werden konnte. Die ermittelte
Koerzitivfeldstarke betragt fur alle vier Richtungen des Feldes etwa µ0H0 = 11 mT. In
der Literatur werden je nach Herstellungsprozess Koerzitivfelder zwischen 5 und 13 mT
angegeben [83, 84].

5.1 Ferromagnetische 3d-Ubergangsmetalle 55
- 2 0 - 1 0 0 1 0 2 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0αααα
µ
µ
Abbildung 5.2: MOKE-Messungen fur eine 20 nm dicke FeCo-Schicht fur verschiedene Orientierungendes externen Magnetfeldes innerhalb der Filmebene.
Magnetooptik und Magnetotransport
Simultan zu Messungen der MOKE-Hysteresekurven wurden Magnetotransportmessun-
gen durchgefuhrt. Ziel dabei war die Analyse der Korrelation beider Messmethoden zum
vertiefenden Verstandnis der MOKE-Messungen und Untersuchung des anisotropen Ma-
gnetwiderstands an sich. In Abb. 5.3(a)-(c) ist die Hallbar mit der Stromrichtung bezug-
lich der jeweiligen Feldrichtung dargestellt. In den Schaubildern sind die Langswiderstan-
de der einzelnen Achsen ρxx,1 und ρxx,2, sowie der Langswiderstand ρxx,3, der vom ersten
Abgriff von ρxx,1 bis zum zweiten Abgriff von ρxx,2 gemessen wird, eingezeichnet. Zusatz-
lich ist es moglich, die Querwiderstande beider Achsen, angedeutet durch Striche, zu mes-
sen. Der verwendete konstante Treibestrom betragt bei den folgenden R(H)-Messungen,
bei denen die Langswiderstande ρxx,1 fur die Achse 1 und ρxx,2 fur die Achse 2 gemessen
wurden, Idrive = 0,1 mA.
In Abb. 5.3(d)-(f) sind sowohl die Magnetotransportmessungen als auch die zugeho-
rigen Simulationen, auf die spater naher eingegangen wird, gezeigt. Betrachtet man die
Bereiche, in denen der Film gesattigt ist, so erhalt man ein Minimum im Langswider-
stand der Achse 1 in der 0-Konfiguration. Hier steht die Magnetisierung senkrecht zur
Stromrichtung, was sich in einem kleineren Widerstand außert (siehe Kapitel 2.3.1). Der
gemessene Widerstand betragt hierbei ρ(0,Achse1) = ρ⊥,1 = 67,23 µΩcm. Wird die
Probe um 90 in-plane gedreht, wie dies in Abb. 5.3(c) angedeutet ist, erhalt man fur
den Langswiderstand, bei dem die Magnetisierungs- und die Stromrichtung im gesat-
tigten Feldbereich parallel ausgerichtet sind, ρ(90,Achse1) = ρ||,1 = 67,47 µΩcm. Ver-
gleicht man beide Werte miteinander, so folgt das typische Verhalten fur den AMR, dass
ρ||,1 > ρ⊥,1 gilt. Analog lassen sich so fur die Achse 2 diese beiden Langswiderstande
bestimmen, wobei sich hier die Widerstande wegen der 90-Geometrie der Hallbar ge-
nau umgekehrt verhalten. Man erhalt fur die Widerstande im gesattigten Feldbereich
ρ(90,Achse2) = ρ⊥,2 = 67,80 µΩcm und ρ(0,Achse2) = ρ||,2 = 67,54 µΩcm. Die un-
terschiedlichen Widerstandswerte aus den beiden Achsen werden auf einen leicht unter-

56 Kapitel 5 Experimentelle Ergebnisse
jjjj
jj
HH
)a(
0552052-05-276
376
476
576
α °0 =
α °09 =
ρ xx,1 (n
Ωm
)
µ0 )Tm( H
)d( 1 eshcA noitalumiS
noitalumiS
0552052-05-576
676
776
876
noitalumiS
α °0 =
α °09 =
ρ xx,2 (n
Ωm
)
µ0 )Tm( H
)e( 2 eshcA
noitalumiS
0552052-05-276
376
476
576
676
776
876
noitalumiSH
α °54 =
ρ xx (n
Ωm
)
µ0 )Tm( H
f)( noitalumiS
2 eshcA
1 eshcA
HH HHα = 0° α = 45° α = 90°
ρxx,
1 ρxx,1
ρxx,1
ρxx,2
ρxx,2
ρxx,2
ρxx,3
)b( )c(
200 200 µµmm
g)(
Laserspot
Abbildung 5.3: Darstellung der Orientierung der Hallbar bezuglich des Magnetfelds sowie der einzelnenAbgriffe zur Widerstandsmessung fur (a) α = 0, (b) α = 45 und (c) α = 90. (d)Langswiderstand ρxx,1 der Achse 1 fur α = 0 (schwarz) und fur α = 90 (rot). Zusatzlichsind fur beide Messkurven Simulationen eingezeichnet (grau fur α = 0 und orange furα = 90). (e) Analog Darstellung der Langswiderstande mit den Simulationen fur dieAchse 2. (f) Langswiderstande beider Achsen bei α = 45. (g) Strukturierte Probe(B080623A, 20 nm FeCo) und Position des Laserspots wahrend der Messungen.
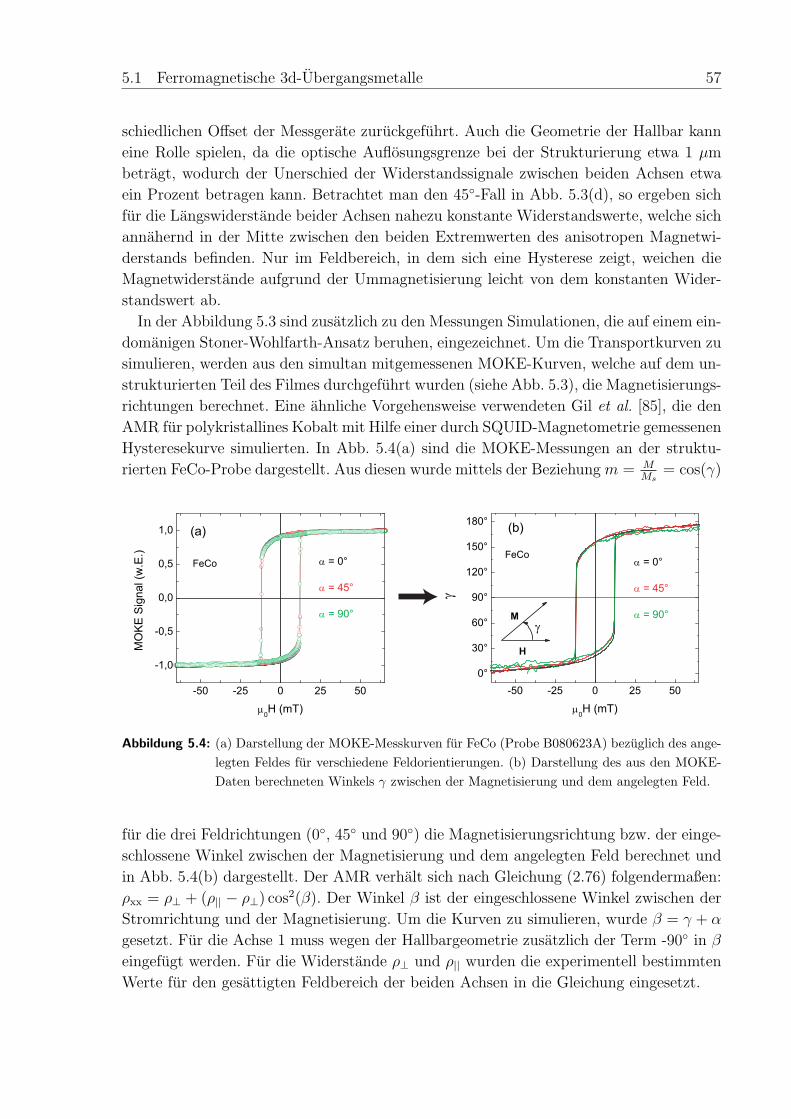
5.1 Ferromagnetische 3d-Ubergangsmetalle 57
schiedlichen Offset der Messgerate zuruckgefuhrt. Auch die Geometrie der Hallbar kann
eine Rolle spielen, da die optische Auflosungsgrenze bei der Strukturierung etwa 1 µm
betragt, wodurch der Unerschied der Widerstandssignale zwischen beiden Achsen etwa
ein Prozent betragen kann. Betrachtet man den 45-Fall in Abb. 5.3(d), so ergeben sich
fur die Langswiderstande beider Achsen nahezu konstante Widerstandswerte, welche sich
annahernd in der Mitte zwischen den beiden Extremwerten des anisotropen Magnetwi-
derstands befinden. Nur im Feldbereich, in dem sich eine Hysterese zeigt, weichen die
Magnetwiderstande aufgrund der Ummagnetisierung leicht von dem konstanten Wider-
standswert ab.
In der Abbildung 5.3 sind zusatzlich zu den Messungen Simulationen, die auf einem ein-
domanigen Stoner-Wohlfarth-Ansatz beruhen, eingezeichnet. Um die Transportkurven zu
simulieren, werden aus den simultan mitgemessenen MOKE-Kurven, welche auf dem un-
strukturierten Teil des Filmes durchgefuhrt wurden (siehe Abb. 5.3), die Magnetisierungs-
richtungen berechnet. Eine ahnliche Vorgehensweise verwendeten Gil et al. [85], die den
AMR fur polykristallines Kobalt mit Hilfe einer durch SQUID-Magnetometrie gemessenen
Hysteresekurve simulierten. In Abb. 5.4(a) sind die MOKE-Messungen an der struktu-
rierten FeCo-Probe dargestellt. Aus diesen wurde mittels der Beziehung m = MMs
= cos(γ)
0552052-05-
0,1-
5,0-
0,0
5,0
0,1
α °0 =
α °54 =
α °09 =
MO
KE
Sig
nal (
w.E
.)
µ0 )Tm( H
)a(
oCeF
0552052-05-°0
°03
°06
°09
°021
°051
°081
γ
µ0 )Tm( H
Mγ
H
)b(
oCeFα °0 =
α °54 =
α °09 =
Abbildung 5.4: (a) Darstellung der MOKE-Messkurven fur FeCo (Probe B080623A) bezuglich des ange-legten Feldes fur verschiedene Feldorientierungen. (b) Darstellung des aus den MOKE-Daten berechneten Winkels γ zwischen der Magnetisierung und dem angelegten Feld.
fur die drei Feldrichtungen (0, 45 und 90) die Magnetisierungsrichtung bzw. der einge-
schlossene Winkel zwischen der Magnetisierung und dem angelegten Feld berechnet und
in Abb. 5.4(b) dargestellt. Der AMR verhalt sich nach Gleichung (2.76) folgendermaßen:
ρxx = ρ⊥ + (ρ|| − ρ⊥) cos2(β). Der Winkel β ist der eingeschlossene Winkel zwischen der
Stromrichtung und der Magnetisierung. Um die Kurven zu simulieren, wurde β = γ + α
gesetzt. Fur die Achse 1 muss wegen der Hallbargeometrie zusatzlich der Term -90 in β
eingefugt werden. Fur die Widerstande ρ⊥ und ρ|| wurden die experimentell bestimmten
Werte fur den gesattigten Feldbereich der beiden Achsen in die Gleichung eingesetzt.
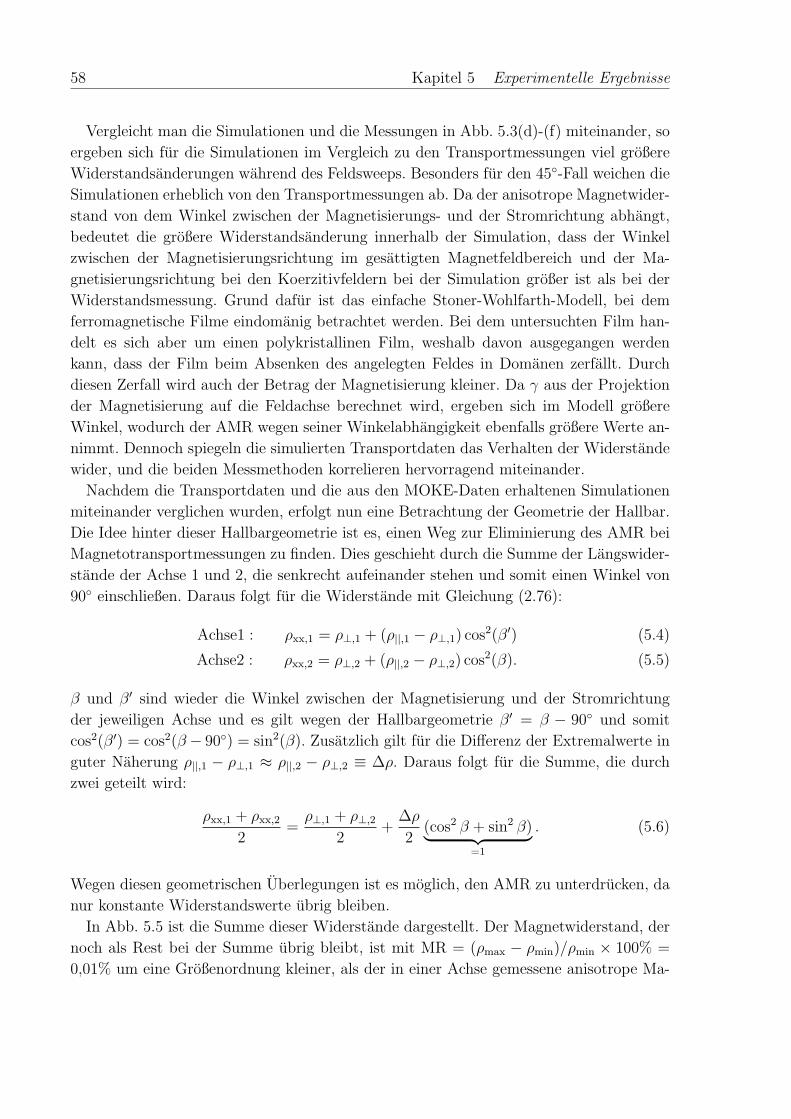
58 Kapitel 5 Experimentelle Ergebnisse
Vergleicht man die Simulationen und die Messungen in Abb. 5.3(d)-(f) miteinander, so
ergeben sich fur die Simulationen im Vergleich zu den Transportmessungen viel großere
Widerstandsanderungen wahrend des Feldsweeps. Besonders fur den 45-Fall weichen die
Simulationen erheblich von den Transportmessungen ab. Da der anisotrope Magnetwider-
stand von dem Winkel zwischen der Magnetisierungs- und der Stromrichtung abhangt,
bedeutet die großere Widerstandsanderung innerhalb der Simulation, dass der Winkel
zwischen der Magnetisierungsrichtung im gesattigten Magnetfeldbereich und der Ma-
gnetisierungsrichtung bei den Koerzitivfeldern bei der Simulation großer ist als bei der
Widerstandsmessung. Grund dafur ist das einfache Stoner-Wohlfarth-Modell, bei dem
ferromagnetische Filme eindomanig betrachtet werden. Bei dem untersuchten Film han-
delt es sich aber um einen polykristallinen Film, weshalb davon ausgegangen werden
kann, dass der Film beim Absenken des angelegten Feldes in Domanen zerfallt. Durch
diesen Zerfall wird auch der Betrag der Magnetisierung kleiner. Da γ aus der Projektion
der Magnetisierung auf die Feldachse berechnet wird, ergeben sich im Modell großere
Winkel, wodurch der AMR wegen seiner Winkelabhangigkeit ebenfalls großere Werte an-
nimmt. Dennoch spiegeln die simulierten Transportdaten das Verhalten der Widerstande
wider, und die beiden Messmethoden korrelieren hervorragend miteinander.
Nachdem die Transportdaten und die aus den MOKE-Daten erhaltenen Simulationen
miteinander verglichen wurden, erfolgt nun eine Betrachtung der Geometrie der Hallbar.
Die Idee hinter dieser Hallbargeometrie ist es, einen Weg zur Eliminierung des AMR bei
Magnetotransportmessungen zu finden. Dies geschieht durch die Summe der Langswider-
stande der Achse 1 und 2, die senkrecht aufeinander stehen und somit einen Winkel von
90 einschließen. Daraus folgt fur die Widerstande mit Gleichung (2.76):
Achse1 : ρxx,1 = ρ⊥,1 + (ρ||,1 − ρ⊥,1) cos2(β′) (5.4)
Achse2 : ρxx,2 = ρ⊥,2 + (ρ||,2 − ρ⊥,2) cos2(β). (5.5)
β und β′ sind wieder die Winkel zwischen der Magnetisierung und der Stromrichtung
der jeweiligen Achse und es gilt wegen der Hallbargeometrie β′ = β − 90 und somit
cos2(β′) = cos2(β − 90) = sin2(β). Zusatzlich gilt fur die Differenz der Extremalwerte in
guter Naherung ρ||,1 − ρ⊥,1 ≈ ρ||,2 − ρ⊥,2 ≡ ∆ρ. Daraus folgt fur die Summe, die durch
zwei geteilt wird:
ρxx,1 + ρxx,2
2=ρ⊥,1 + ρ⊥,2
2+
∆ρ
2(cos2 β + sin2 β)︸ ︷︷ ︸
=1
. (5.6)
Wegen diesen geometrischen Uberlegungen ist es moglich, den AMR zu unterdrucken, da
nur konstante Widerstandswerte ubrig bleiben.
In Abb. 5.5 ist die Summe dieser Widerstande dargestellt. Der Magnetwiderstand, der
noch als Rest bei der Summe ubrig bleibt, ist mit MR = (ρmax − ρmin)/ρmin × 100% =
0,01% um eine Großenordnung kleiner, als der in einer Achse gemessene anisotrope Ma-

5.1 Ferromagnetische 3d-Ubergangsmetalle 59
- 5 0 - 2 5 0 2 5 5 06 7 , 4 8
6 7 , 5 0
6 7 , 5 2
6 7 , 5 4
(ρ
ρ
µ
Ω
µ
α
α
α
≅
Abbildung 5.5: Summe der Langswiderstande ρxx fur verschiedene Orientierungen des externen Magnet-feldes.
gnetwiderstand von AMR = (ρ|| − ρ⊥)/ρ⊥ × 100% = 0,4%. Daraus folgt wiederum, dass
die Summation der beiden Achsen eine hervorragende Methode ist, um den anisotropen
Magnetwiderstandsanteil wahrend der Widerstandsmessung zu minimieren.
Zusatzlich zu R(H)-Messungen lassen sich auch R(α)-Messungen durchfuhren, bei de-
nen die Probe in einem konstanten Magnetfeld rotiert. Da sich bei der Drehung der
reflektierte Laserspot aufgrund einer leicht verkippten Probenhalterung bzw. einer nicht
plan aufgeklebten Probe mitbewegt, kann, da die Messung automatisiert erfolgt, kein
MOKE-Signal mit detektiert werden. Die Messungen wurden in einem Winkelbereich
von 400 mit einem angelegten Strom von Idrive = 2 mA durchgefuhrt. Dieser hohe Strom
wurde gewahlt, um auch Querwiderstandsmessungen aufzulosen.
In Abb. 5.6(a),(b) sind die spezifischen Langswiderstande der beiden Achsen fur Ma-
gnetfelder von 10, 16 und 100 mT dargestellt. Vor jeder Messung wurde die Probe bei
einem festen Winkel von α = −90 prapariert, d.h. es wurde in dieser Richtung ein
Feld von 100 mT angelegt, um die Probe zu sattigen, bevor das fur die Messung rele-
vante Feld eingestellt wurde. Der gemessene Verlauf der Kurven entspricht dem eines
cos2 β, wie nach Gl. 2.76 fur den AMR zu erwarten war, wobei die beiden Diagramme
in Abb. 5.6(a),(b) wegen der Geometrie der Hallbar um 90 zueinander verdreht sind.
Bei den beiden Messungen mit einem kleineren externen Magnetfeld sind hysteretische
Effekte zu erkennen, da in diesem Bereich der ferromagnetische Film in Domanen zerfallt.
Es ist ebenfalls moglich, aus den R(α)-Messungen den AMR zu bestimmen. Dieser wird
aus dem Maximum und dem Minimum der Kurve errechnet. Es ergibt sich ein Wert von
AMR = (ρmax − ρmin)/ρmin × 100% = 0,4%, der das Ergebnis aus den R(H)-Messungen
bestatigt. Zusatzlich sind Driftprozesse der Langswiderstande in Abb. 5.6(a) fur den
100 mT-Fall zu erkennen. Durch die hohen Strome, die zum Erreichen hoher Felder notig
sind, werden die Spulen im Magnetsystem stark erhitzt. Dadurch nimmt die Temperatur
auch am Probenort zu, wodurch der Widerstand ebenfalls großer wird.
Die Querwiderstandsmessungen spiegeln ebenfalls den sin(2β)-Verlauf (Gl. 2.76) fur

60 Kapitel 5 Experimentelle Ergebnisse
0
03
0609
021
051
081
012
042072
003
033
Tm 001Tm 61Tm 01
1 eshcA )a(
,976
,086
,186
0
03
0609
021
051
081
012
042072
003
033
,976
,086
,186
ρ xx,2 (µ
Ωcm
)
2 eshcA )b( Tm 001Tm 61Tm 01
0,1-
0
0,1
0
03
0609
021
051
081
012
042072
003
033
0,1-
0
0,1
1 eshcA )c( Tm 001Tm 61Tm 01
0,7
0,8
0,9
0
03
0609
021
051
081
012
042072
003
033
0,6
0,7
0,8
0,9
2 eshcA )d( Tm 001Tm 61Tm 01
ρ xy,2 (µ
Ωcm
)
,876
,776
,676
,676
,776
,876
ρ xx,1 (µ
Ωcm
)ρ xy
,1 (µ
Ωcm
)
Abbildung 5.6: R(α)-Messungen fur (a) den Langswiderstand ρxx der Achse 1 und fur (b) ρxx der Achse2 und (c) Querwiderstande ρxy der Achse 1 und (d) ρxy der Achse 2 bei jeweils 100, 16und 10 mT.

5.1 Ferromagnetische 3d-Ubergangsmetalle 61
eine polykristalline Probe wider (Abb. 5.6(c),(d)). Auch hier ist bei kleineren Feldern der
hysteretische Verlauf zu erkennen.
Vergleicht man die Summe der Langswiderstande geteilt durch 2 (ρxx,1 + ρxx,2)/2 mit
dem Langswiderstand ρxx,3, dessen erster Kontakt sich auf der Achse 1 und der zweite
sich auf der Achse 2 befindet (siehe Abb. 5.3(a)) und somit die Ecke mit einschließt, so ist
der Abb. 5.7(a) zu entnehmen, dass der Hub ∆ρxx,3 = ρmax,xx,3 − ρmin,xx,3 großer als der
Hub der halben Summe der beiden Langswiderstande ρxx,Achse1 und ρxx,Achse2 ist. Hierbei
spielt die Ecke eine entscheidende Rolle, da hier die Richtung des Stromverlaufs weder
der Richtung der Achse 1 noch der der Achse 2 entspricht, sondern dazwischen liegen
wird. Das Verhaltnis von ∆ρxx,3 zu ∆ρxx,1 (bzw. ∆ρxx,2) betragt in etwa 1:3,6 (siehe
Abb. 5.7(b)).
Es ist auch zu erkennen, dass die ρxx,3-Kurve zur Kurve des Langswiderstands ρxx,1 um
45 verschoben ist. Das wiederum deutet darauf hin, dass die Stromrichtung innerhalb der
Ecke mit der Stromrichtung in der Achse 1 wegen der Definition des AMR (Kap. 2.3.1)
einen Winkel von 45 einschließt. Nimmt man in einem sehr einfachen Modell an, dass
der gesamte Strom in der Mitte der Hallbar verlauft (Abb. 5.7(c)), legt dieser insgesamt
zwischen den beiden Kontakten eine Strecke von 571 µm zuruck. Es wird angenommen,
dass sich der AMR der Langswiderstande der beiden Achsen bis auf einen sehr klei-
nen Anteil kompensiert, wie dies schon bei der Summe in Abb. 5.5 fur die Widerstande
ρxx(Achse1) und ρxx(Achse2) der Fall war. Dieser Restanteil ist allerdings sehr gering im
Vergleich zum gemessenen Widerstand ρxx,3. Das bedeutet wiederum, dass der Hauptteil
des gemessenen Widerstands ρxx,3 durch die Ecke der Hallbar hervorgerufen wird.
Der Strom legt in der Ecke bei dem in Abb. 5.7(c) angenommenen Stromverlauf ei-
ne Strecke von 71 µm zuruck. Bestimmt man das Verhaltnis aus dieser Strecke und der
Strecke, die der Strom bei den Langswiderstanden der einzelnen Achsen zurucklegt, so
ergibt sich 71 µm : 200 µm = 1 : 2,8. Dieses Verhaltnis ist kleiner als das Verhalt-
nis der Widerstande, woraus folgt, dass der zuruckgelegte Weg in der Ecke kleiner sein
muss. Dennoch spiegeln die Verhaltnisse und die 45-Verschiebung der ρxx,3-Kurve zu
den Langswiderstandskurven die Idee des Stromverlaufs sehr gut wider. Will man also
den AMR unterdrucken, reicht es nicht aus, lediglich den Langswiderstand ρxx,3 zu mes-
sen. Vielmehr ist es wichtig, die Langswiderstande der beiden Achsen zu messen und
miteinander zu vergleichen bzw. die Summe aus beiden zu bilden.
Das 3d-Ubergangsmetall Ni
In dieser Arbeit wurden Ni-Filme (Probe B080623B, auf MgO(001), Dicke 20 nm, und
NG2, auf MgO(001), Dicke 100 nm, abgedeckt mit 10 nm Au) neben FeCo zur Charakteri-
sierung des MOKE-Aufbaus verwendet. Zusatzlich wurden ebenfalls Transportmessungen
durchgefuhrt, um die vorher gewonnenen Daten fur Permendur mit einem zweiten Ma-
terialsystem abzugleichen. Die in Abb. 5.8 dargestellten magnetooptischen Messkurven
zeigen fur verschiedene Orientierungen der Probe zum angelegten Feld eine Anisotropie

62 Kapitel 5 Experimentelle Ergebnisse
250 µm250 µm
~71 µm)c(
HH
j
°003°002°001°0°001-
87,76
08,76
28,76
48,76
68,76
88,76
ρ 3,xx Tm 001 : Tm 61Tm 01
ρ xx (µ
Ωcm
)
α
)a( ρ( 1,xx +ρ 2,xx : 2/) Tm 001Tm 61 Tm 01
°003°002°001°0°001-5,76
6,76
7,76
8,76
9,76ρ( 1,xx +ρ 2,xx 2/)
ρ 3,xx
)b( Tm 001
ρ xx (µ
Ωcm
)
α
ρ 1,xx
Abbildung 5.7: (a) Vergleich der Summe der Langswiderstande ρxx der Achse 1 und der Achse 2 mitdem Widerstand ρxx,3. (b) Fur 100 mT Vergleich der Langswiderstande. (c) EinfachesModell zum Verlauf des Stromes durch die Hallbar.

5.1 Ferromagnetische 3d-Ubergangsmetalle 63
- 5 0 5- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
αααα
µ
µ≈
Abbildung 5.8: MOKE-Messungen fur einen 20 nm Ni-Film in Abhangigkeit von der Magnetfeldstarkefur verschiedene Orientierungen des externen Feldes.
in der Filmebene, die durch das Magnetfeld in der Elektronenstrahl-Verdampfungsanlage
beim Wachstum entsteht. So entspricht der Verlauf fur die α = 0- und α = 180-Richtung
dem einer leichten Achse, hin zur α = 45- und α = 90-Richtung wird der Kurvenver-
lauf zunehmend harter. Daraus folgt, dass eine uniaxiale Anisotropie in der Filmebene
vorliegt. Die Koerzitivfeldstarke betragt µ0Hc = 1,5 mT. In der Literatur lassen sich je
nach Wachstumsparameter und Substratmaterial Koerzitivfeldstarken fur aufgedampfte
Ni-Schichten von 20 nm Dicke zwischen 2 mT ≤ µ0Hc ≤ 10 mT [86] manchmal sogar bis
zu µ0Hc ≈ 30 mT finden [87].
In Abb. 5.9(a) sind die R(H)-Messungen fur die Achse 1 von 0 bis 90 in 15-Schritten
dargestellt (0 bedeutet hierbei, dass die Achse 1 senkrecht zum angelegten Feld orientiert
ist bzw. dass die Achse 2 parallel zum Feld liegt; vergleiche hierzu Abb. 5.3), analog in (b)
fur die Achse 2. Der angelegte Strom betragt bei diesen Messungen Idrive = 0,1 mA. Wie
in den Messungen fur FeCo wird ein AMR-Verhalten im Kurvenverlauf in Abb. 5.9(a)
und (b) fur beide Achsen beobachtet. Simultan durchgefuhrte MOKE-Messungen liefer-
ten ein nicht verwertbares Signal, da das Rauschen gegenuber dem magnetooptischen
Signal zu groß war. Aus diesem Grund ist es nicht moglich, die Magnetisierung zu be-
rechnen, und es muss auf eine Simulation des Magnetwiderstandes verzichtet werden.
Die spezifischen Widerstande fur den Feldbereich, in dem der Film gesattigt ist, betra-
gen ρ(90,Achse1) = ρ⊥,1 = 58,70 µΩcm und ρ(0,Achse1) = ρ||,1 = 59,17 µΩcm bzw.
ρ(0,Achse2) = ρ⊥,2 = 58,95 µΩcm und ρ(90,Achse2) = ρ||,2 = 59,40 µΩcm. Der Un-
terschied in den Langswiderstanden beruht wiederum auf den verwendeten Geraten und
deren Offsets. Man erhalt fur den AMR einen Wert von 0,8 %. Yi et al. [87] erhielten bei
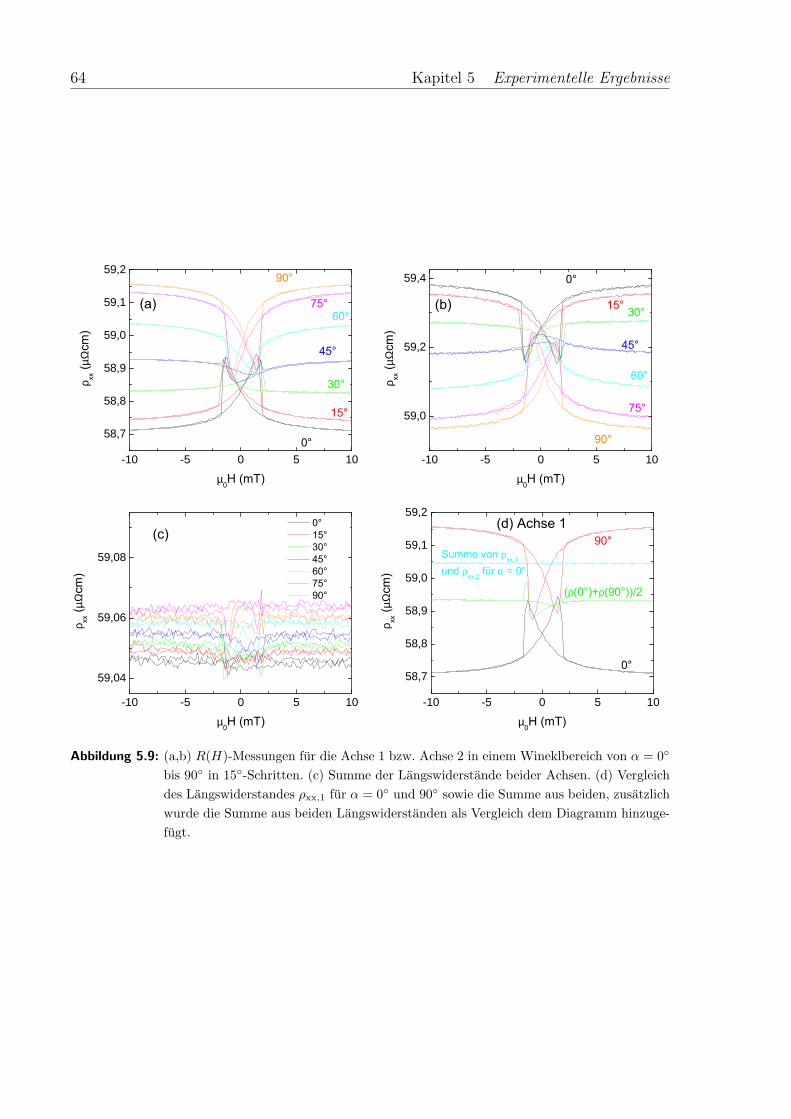
64 Kapitel 5 Experimentelle Ergebnisse
- 1 0 - 5 0 5 1 05 8 , 7
5 8 , 8
5 8 , 9
5 9 , 0
5 9 , 1
5 9 , 2
- 1 0 - 5 0 5 1 0
5 9 , 0
5 9 , 2
5 9 , 4
- 1 0 - 5 0 5 1 05 9 , 0 4
5 9 , 0 6
5 9 , 0 8
- 1 0 - 5 0 5 1 05 8 , 7
5 8 , 8
5 8 , 9
5 9 , 0
5 9 , 1
5 9 , 2
$
$ $
$
ρ ##µ
Ω
µ
$
$
$
$
$
$ $
ρ ##µ
Ω
µ
$
$
$
$$$$ $$$
ρ ##µ
Ω
µ
$
ρ ##µ
Ω
µ
$
ρ$ρ$
!"ρ##!ρ##%α$
Abbildung 5.9: (a,b) R(H)-Messungen fur die Achse 1 bzw. Achse 2 in einem Wineklbereich von α = 0
bis 90 in 15-Schritten. (c) Summe der Langswiderstande beider Achsen. (d) Vergleichdes Langswiderstandes ρxx,1 fur α = 0 und 90 sowie die Summe aus beiden, zusatzlichwurde die Summe aus beiden Langswiderstanden als Vergleich dem Diagramm hinzuge-fugt.

5.1 Ferromagnetische 3d-Ubergangsmetalle 65
Raumtemperatur fur ihre gesputterten Ni-Filme fur einen 100 nm dicken Film ebenfalls
einen AMR von 0,8 %. Vergleicht man die spezifischen Widerstande mit denen von Yi
et al., so ergeben sich vergleichbare Werte. Fur einen 15 nm dicken Film erhielten sie
einen spezifischen Widerstand von ρ = 35 µΩcm, der etwas kleiner ist, als unserer von
ρ ≈ 59 µΩcm. In Abb. 5.9(c) ist die Summe (ρxx,Achse1 + ρxx,Achse2)/2 dargestellt. Man
sieht, dass die Summe zu einem nahezu geradlinigen Verlauf fuhrt, und der AMR durch
die Bildung der Summe der Langswiderstande beider Achsen eliminiert werden kann.
In Abb. 5.9(d) ist die Summe der Langswiderstande der Achse 1 fur 0 und 90 dar-
gestellt. Zum Vergleich ist zusatzlich die Summe der Langswiderstande von Achse 1
und Achse 2 fur 0 eingezeichnet. Es zeigt sich, dass aufgrund von Inhomogenitaten des
Magnetfeldes wegen der unterschiedlichen Stellung der Probe zwischen den Polschuhen
(durch das Drehen der Probe veranderte sich die Position zwischen den Polschuhen) die
Summation aus den Messungen fur 0 und 90 nicht sinnvoll ist.
In Abb. 5.10(a) und (b) sind die Ergebnisse einer R(α)-Messung fur die Achsen 1 bzw.
2 fur Felder von µ0H = 1,6, 2, 5 und 30 mT dargestellt. Wie schon bei FeCo lasst sich
auch hier fur den gesattigten Fall erkennen, dass die Magnetisierung dem Feldverlauf folgt
und die Kurven den cos2 β-Verlauf widerspiegeln. Bei niedrigerem Feld zeigen die Kurven
wieder einen hysteretischen Verlauf, hier spielen wieder Domanen- und Anisotropieeffekte
eine Rolle. Zusatzlich werden dadurch die dargestellten Polarkurven leicht verdreht. So
liegt das Maximum ρ|| der Achse 1 fur den 1,6 mT-Fall nicht mehr bei α = 90, wie
dies bei 30 mT der Fall ist, sondern fur die Drehung der Probe im Uhrzeigersinn bei
αmax = 107 und entgegen dem Uhrzeigersinn bei αmax = 95.
Die in Abb. 5.10(c) und (d) dargestellten Kurven fur die Querwiderstande zeigen eben-
falls das typische AMR-Verhalten und es ergibt sich das fur die Querwiderstande bekannte
sin(2β)-Verhalten. Aus den R(α)-Messungen erhalt man ebenfalls ein AMR von 0,8%.
In Abb. 5.10(e) und (f) sind die Summen der beiden Achsen fur die Langs- bzw. fur
die Querwiderstande bei einem angelegten externen Magnetfeld von µ0H = 5 mT dar-
gestellt. Zusatzlich wurde zum Vergleich der Langs- bzw. Querwiderstande einer Achse
sowie der Langswiderstand ρxx,3 eingefugt. Es zeigt sich, dass die Summen sowohl fur
(ρxx,Achse1 + ρxx,Achse2)/2 als auch fur (ρxy,Achse1 + ρxy,Achse2)/2 nahezu konstant im Ver-
gleich zu den Widerstanden einer Achse sind. Das Verhaltnis zwischen ∆ρxx,3 und dem
eines Langswiderstands einer Achse ∆ρxx,1 (bzw. ∆ρxx,2) betragt wieder 1 : 3,6. Es spie-
gelt das gleiche Verhalten, dass bei der FeCo-Messung zu sehen war, wider. Dadurch ist
mittels eines zweiten Materialsystems erwiesen, dass der Widerstand ρxx,3 alleine nicht
ausreicht, um ein vom AMR nicht uberlagertes Messsignal zu erhalten und man immer
beide Achsen separat messen und die Summe aus beiden Widerstanden bilden muss. Au-
ßerdem deutet die Korrelation aus zwei verschiedenen Materialsystemen darauf hin, dass
dieser Effekt ein rein geometrischer Effekt bedingt durch die Hallbargeometrie ist.
Es konnte fur die 3d-Ubergangsmetalle bzw. eine binare Verbindung aus Fe und Co
gezeigt werden, wie sich der AMR bei einer L-Geometrie der Hallbar verhalt. Zusatz-
lich zu diesen Magnetotransportmessungen ergeben die MOKE-Messungen ein großes
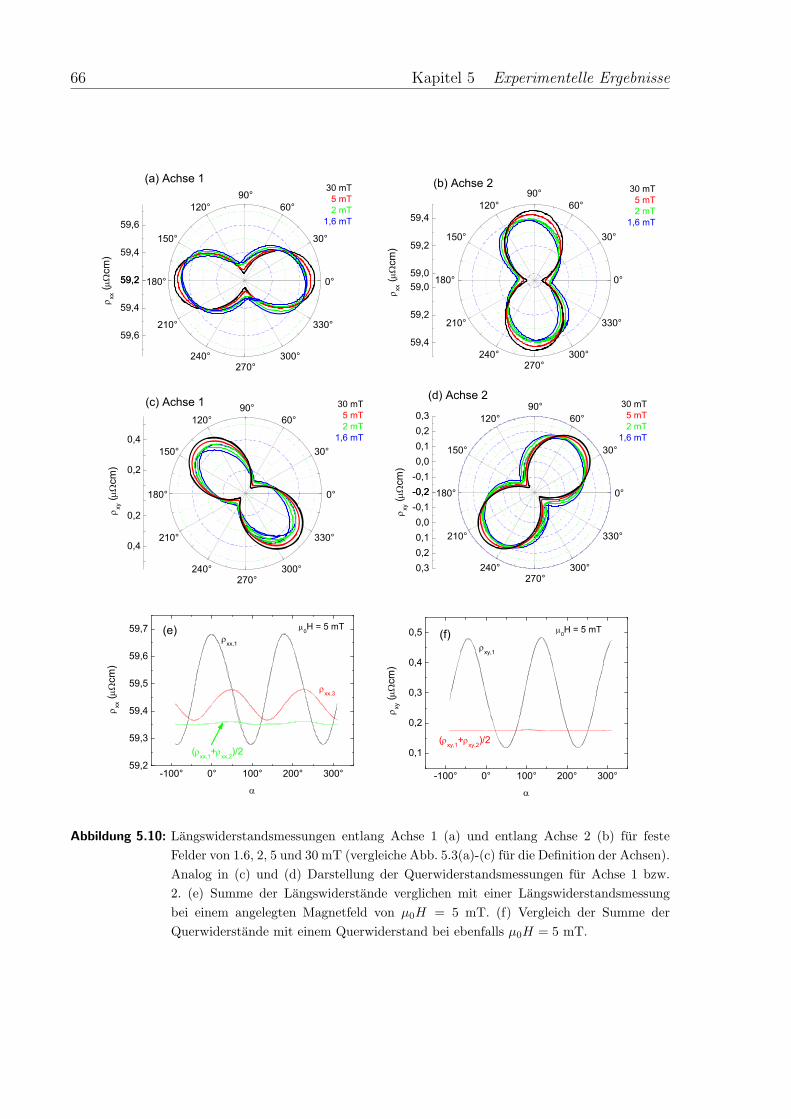
66 Kapitel 5 Experimentelle Ergebnisse
Tm 03 Tm 5Tm 2Tm 6,1
) Achse 1a( ) Achse 2b( Tm 03 Tm 5Tm 2Tm 6,1
) Achse 1c( Tm 03 Tm 5Tm 2Tm 6,1
Tm 03 Tm 5Tm 2Tm 6,1
) Achse 2d(
2,0-1,0-0,01,02,03,0
2,0-1,0-0,01,02,03,0
2,95
4,95
6,95
2,95
4,95
6,95
ρ xx (µ
Ωcm
)
2,0
4,0
2,0
4,0
ρ xy (µ
Ωcm
)
0,95
2,95
4,95
°0
°03
°06°09
°021
°051
°081
°012
°042°072
°003
°033
0,95
2,95
4,95
ρ xx (µ
Ωcm
)
°0
°03
°06°09
°021
°051
°081
°012
°042°072
°003
°033
°0
°03
°06°09
°021
°051
°081
°012
°042°072
°003
°033
°0
°03
°06°09
°021
°051
°081
°012
°042°072
°003
°033
ρ xy (µ
Ωcm
)
°003°002°001°0°001-2,95
3,95
4,95
5,95
6,95
7,95
ρ 3,xx
ρ xx (µ
Ωcm
)
α
ρ 1,xx
(ρ 1,xx +ρ 2,xx 2/)
µ0 Tm 5 = H)e(
°003°002°001°0°001-
1,0
2,0
3,0
4,0
5,0 )f( µ0 Tm 5 = H
ρ xy (µ
Ωcm
)
α
ρ 1,yx
(ρ 1,yx +ρ 2,yx 2/)
Abbildung 5.10: Langswiderstandsmessungen entlang Achse 1 (a) und entlang Achse 2 (b) fur festeFelder von 1.6, 2, 5 und 30 mT (vergleiche Abb. 5.3(a)-(c) fur die Definition der Achsen).Analog in (c) und (d) Darstellung der Querwiderstandsmessungen fur Achse 1 bzw.2. (e) Summe der Langswiderstande verglichen mit einer Langswiderstandsmessungbei einem angelegten Magnetfeld von µ0H = 5 mT. (f) Vergleich der Summe derQuerwiderstande mit einem Querwiderstand bei ebenfalls µ0H = 5 mT.

5.2 Ferrite 67
magnetooptisches Signal. Dies ist zum einen auf die optischen Eigenschaften der 3d-
Ubergangsmetalle als auch auf deren ferromagnetische Eigenschaften, d.h. ihrer hohen
Magnetisierung, zuruckzufuhren.
5.2 Ferrite
Neben den 3d-Ubergangsmetallen wurden auch magnetische Oxide mit Spinell-Struktur
[16] mit dem magnetooptischen Kerr-Effekt untersucht. Diese Materialien besitzen zwei
antiparallel ausgerichtete ferromagnetische Untergitter und sind ferrimagnetisch. Der
Spinell Magnetit (Fe3O4) ist das alteste bekannte magnetische Material [16]. Mit Hilfe
von magnetooptischen Messverfahren wurde sowohl Fe3O4 auf MgO(001) (von Andreas
Brandlmaier mit PLD gewachsen) als auch auf MgO(110) (von Andrea Nielsen mit PLD
gewachsen) untersucht. Durch Substituieren mit Zn2+ ist es moglich, die magnetischen
Eigenschaften von Magnetit zu beeinflussen [63]. Im Abschnitt 5.2.2 werden deshalb Zink-
ferrite mit unterschiedlichen Zn-Konzentrationen mit magnetooptischen Verfahren naher
betrachtet.
5.2.1 Fe3O4 auf MgO(001) und MgO(110)
- 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
MOKE
Sign
al (w
.E.)
µ0 H ( m T )
H I I [ 1 0 0 ]
H I I [1 1 0 ]
µ0 H C = 2 1 m Tµ0 H C = 1 9 m T
Abbildung 5.11: MOKE-Messung eines 21 nm dicken Fe3O4-Films auf MgO(001) (Probe M4Ad) furH || [100] und H || [110].
Je nach der Auswahl des Substrats ist es moglich, Magnetit-Dunnfilme mit verschiede-
nen Kristallorientierungen in der Ebene zu betrachten. Als Substrat dient hierzu MgO(001)
bzw. MgO(110). Die Gitterkonstante fur Magnetit betragt a = 8,396 A, die von MgO
betragt a = 4,213 A [47] und ist somit in etwa um die Halfte kleiner als die von Magnetit.
In Abb. 5.11 sind MOKE-Messungen an einer 21 nm dicken Fe3O4-Schicht auf MgO(001)
sowohl fur H || [100] (schwarz) als auch fur H || [110] (rot) dargestellt. Magnetit besitzt
wegen der lokalen Umgebung der magnetischen Momente eine Kristallanisotropie, die
sich fur Volumenkristalle in einer leichten, mittelschweren und harten Richtung entlang

68 Kapitel 5 Experimentelle Ergebnisse
der kristallographischen 〈111〉-,〈110〉- bzw. 〈100〉-Richtungen außert [88, 89]. Innerhalb
der (001)Filmebene liegen demnach 2 aquivalente mittelschwere und 2 harte Achsen.
Die beiden Hysterese-Kurven in Abb. 5.11 zeigen einen vergleichbaren Verlauf, ledig-
lich ihre Koerzitivfelder unterscheiden sich. Sie liegen bei µ0Hc,[100] = 21 mT bzw. bei
µ0Hc,[110] = 19 mT. Eine kubische Anisotropie ließ sich hingegen aus dem Verlauf der
Magnetisierungskurven nicht ermitteln. Der Film besitzt eine sehr geringe Schichtdicke
von 20 nm und liegt somit unterhalb der kritischen Schichtdicke, wodurch die kubische
Anisotropie abnimmt [47]. Um sehr kleine Anisotropiekonstanten noch bestimmen zu
konnen, mussen FMR-Messungen durchgefuhrt werden, da diese Methode sehr sensitiv
ist und deshalb wesentlich besser geeignet ist als MOKE [19, 90]. Der Literaturwert der
kubischen Anisotropie betragt Kc1 = −1,1× 104 J/m3 [91, 92].
Wird Magnetit auf MgO(110) gewachsen, so liegt in der Filmebene eine uniaxiale An-
isotropie mit einer leichten Achse entlang 〈110〉 und einer harten Achse entlang 〈100〉,die in der Filmebene orthogonal zueinander stehen, vor [93]. Diese uniaxiale Anisotro-
pie resultiert aus einer tensilen Verspannung in der Filmebene und einer komprensiven
Verspannung senkrecht zur Filmoberflache [93]. In Abb. 5.12(a) sind die mit MOKE ge-
messenen Hysteresen fur verschiedene Winkel dargestellt, wobei fur α = 0 das angelegte
Magnetfeld entlang der leichten Achse, d.h. entlang 〈110〉, orientiert ist. Es zeigt sich klar
eine uniaxiale Anisotropie. Die Koerzitivfelder ergeben sich fur α = 0 zu µ0Hc = 41 mT
und fur α = 90 zu µ0Hc = 13 mT. Zusatzlich sind in Abb. 5.12(b) fur die leichte
und harte Richtung von Andrea Nielsen durchgefuhrte SQUID-Messungen zum Vergleich
gezeigt [94], deren Koerzitivfelder geringfugig großer sind. Dieses Verhalten lasst sich
nicht genau erklaren, weshalb eine Magnetfeld-Kalibration beider Messgerate durchge-
fuhrt werden muss. Dennoch bestatigen die MOKE-Messungen das gleiche Verhalten der
durch SQUID ermittelten Hysteresekurven fur α = 0 und fur α = 90. Da es sich um
00105005-001-0.1-
5.0-
0.0
5.0
0.1
°0 °02 °54 °07 °09
MO
KE
Sig
nal (
w.E
.)
µ0 )Tm( H
µ0HC Tm 14 = µ0HC Tm 31 =
00105005-001-0.1-
5.0-
0.0
5.0
0.1
M/M
s
µ0 )Tm( H
µ0HC Tm 74 = µ0HC Tm 51 =
(a) (b) α = 0°
α = 90°
Abbildung 5.12: a) MOKE-Messungen einer 50 nm dicken Fe3O4-Schicht auf MgO(110) (Probe Mb72b)fur verschiedene Orientierungen der Feldrichtung innerhalb der Filmebene. (b) SQUID-Messungen fur die leichte und harte Achse durchgefuhrt von Andrea Nielsen [94].

5.2 Ferrite 69
ein uniaxiales System handelt, ist es moglich, die Anisotropiekonstante mit Hilfe des
Stoner-Wohlfarth-Modells zu bestimmen (siehe 2.1.4). Hierzu wird aus der freien Ener-
giegleichung (Gl. (2.18) in Kap. 2.1.4) mit zwei Termen, dem uniaxialen Anisotropieterm
und der Zeeman-Energie, die Magnetisierungsrichtung in Abhangigkeit vom Magnetfeld
berechnet. Der Fit-Parameter ist die uniaxiale Anisotropiekonstante. Durch Vergleich der
berechneten mit den gemessenen Hysteresekurven lasst sich so die Anisotropie-Konstante
bestimmen. In Abb. 5.13(a) ist die Simulation fur die 45-Richtung exemplarisch mit der
gemessenen Hysterese verglichen. Durch Abgleich der Simulation mit der Messung fur
µ
α
µ
α
Abbildung 5.13: a) MOKE-Messung fur α = 45. Zusatzlich ist eine Stoner-Wohlfarth-Simulation ein-gezeichnet. Der Fit-Parameter - die uniaxiale Anisotropiekonstante - betragt Ku/Ms =33 mT. (b) Darstellung der Koerzitivfelder aus der Messung (schwaze Symbole) und ausder Stoner-Wohlfarth-Simulation fur Ku/Ms = 33 mT (rote Symbole) in Abhangigkeitvon der Orientierung des Films zum angelegten externen Magnetfeld.
mehrere Richtungen erhalt man eine uniaxiale Anisotropiekonstante von Ku
Ms= 33 mT.
Vergleicht man diesen Wert mit dem aus einer FMR-Messung,Ku,FMR
Ms= 48 mT [94], ist
zu erkennen, dass der Wert aus dem Stoner-Wohlfarth-Modell, bei dem ein eindomani-
ger Zustand angenommen wird, viel kleiner ist. Hierbei spielt wieder die im Modell nicht
berucksichtigte Bildung von Domanen bei kleinen Feldern eine Rolle. Mit Hilfe dieses Mo-
dells ist es aber dennoch moglich, die Großenordnung und das Verhalten der Anisotropie
abzuschatzen.
Fur Magnetit lasst sich somit feststellen, dass mit MOKE quantitativ die Anisotropie-
Konstante fur einen epitaktisch gewachsenen Film auf MgO(110) bestimmt werden konn-
te. Auch stellt der Vergleich der mit MOKE gemessenen Magnetisierungskurven mit den
SQUID-Messungen heraus, wie die beiden Messsysteme miteinander korrelieren. Jedoch
stellte sich aufgrund der schlechteren Reflektivitat von Magnetit [95] ein starker ver-
rauschtes Signal bei den MOKE-Messungen gegenuber den MOKE-Messungen von FeCo
ein.

70 Kapitel 5 Experimentelle Ergebnisse
5.2.2 Zink dotiertes Ferrit
Am WMI wurde von Deepak Venkateshvaran Zink substituiertes Magnetit mit unter-
schiedlichen Zinkkonzentrationen gewachsen (siehe auch Kap. 3). Um die magnetischen
Eigenschaften, die in seiner Arbeit am WMI untersucht wurden [96], abzurunden, wurde
versucht, mit Hilfe von MOKE Anisotropien zu messen.
In Abb. 5.14(a) sind fur die [100]- und [110]-Richtungen MOKE-Messungen fur ei-
- 1 0 0 - 5 0 0 5 0 1 0 0
- 0 , 5
0 , 0
0 , 5
- 1 0 0 - 5 0 0 5 0 1 0 0
- 0 , 5
0 , 0
0 , 5 ( b )( a )
µ0 H c = 2 3 m Tµ0 H c = 2 3 m T
MOKE
Sign
al (w
.E.)
µ0 H ( m T )
H I I [1 1 0 ]
H I I [1 0 0 ]
Z n 0 . 1 F e 2 . 9 O 4 Z n 0 . 1 F e 2 . 9 O 4
M/M s
µ0 H ( m T )
µ0 H c = 2 6 m T
H I I [ 1 0 0 ]
Abbildung 5.14: (a) MOKE-Messungen von Zn0.1Fe2.9O4 auf MgO(001) (Probe DV6) in Abhangigkeitvom angelgeten Feld fur H || [100] und H || [110]. (b) SQUID-Messung bei Raumtempe-ratur [96].
ne Zn0,1Fe2,9O4-Probe (DV6, 49 nm) und analog in (b) eine SQUID-Kurve dargestellt.
Die Koerzitivfelder ergeben sich zu µ0Hc = 23 mT, wobei sie wieder leicht von dem mit
SQUID gemessenen Koerzitivfeld von µ0Hc = 26 mT abweichen. Mit Hilfe von MOKE las-
sen sich keine Anisotropien erkennen. In der Literatur hingegen wird fur Volumenproben
gleicher Konzentration von einer nicht verschwindenden kubischen Ansiotropie berichtet.
Der Literaturwert betragt fur eine Konzentration von x = 0,1 Kc1 = −1× 104 J/m3 [92].
Miyata bzw. Stoppels et al. berichten von einer kubischen Anisotropie erster Ordnung
bei Raumtemperatur, die mit zunehmender Zink-Konzentration abnimmt und fur x = 1
verschwindet [48, 92]. Jedoch betrachteten die oben genannten Autoren Volumenproben
und nicht dunne Filme. Die Gitterkonstante von Zn1Fe2O4 betragt aZn1Fe2O4 = 8,44 A,
die fur Magnetit betragt aFe3O4 = 8,39 A. Der hier betrachtete Film besitzt eine Zink-
Konzentration von x = 0,1, d.h. die Gitterkonstante wird zwischen der von Magnetit
und Zinkferrit liegen. Dadurch ist die Gitterfehlanpassung geringer und pseudomorphes
Wachstum kann langer andauern [47], wodurch die Anisotropie abnimmt und mit MOKE
nicht messbar ist, sondern nur mit FMR bestimmt werden kann.
In Abb. 5.15(a) sind MOKE-Messungen fur eine Zn0,5Fe2,5O4-Probe (DV12, 55 nm) und
analog dazu in (b) SQUID-Daten dargestellt. Das Koerzitivfeld liegt fur beide Richtungen
bei µ0Hc = 11 mT und unterscheidet sich unwesentlich von der SQUID-Messung. Da die
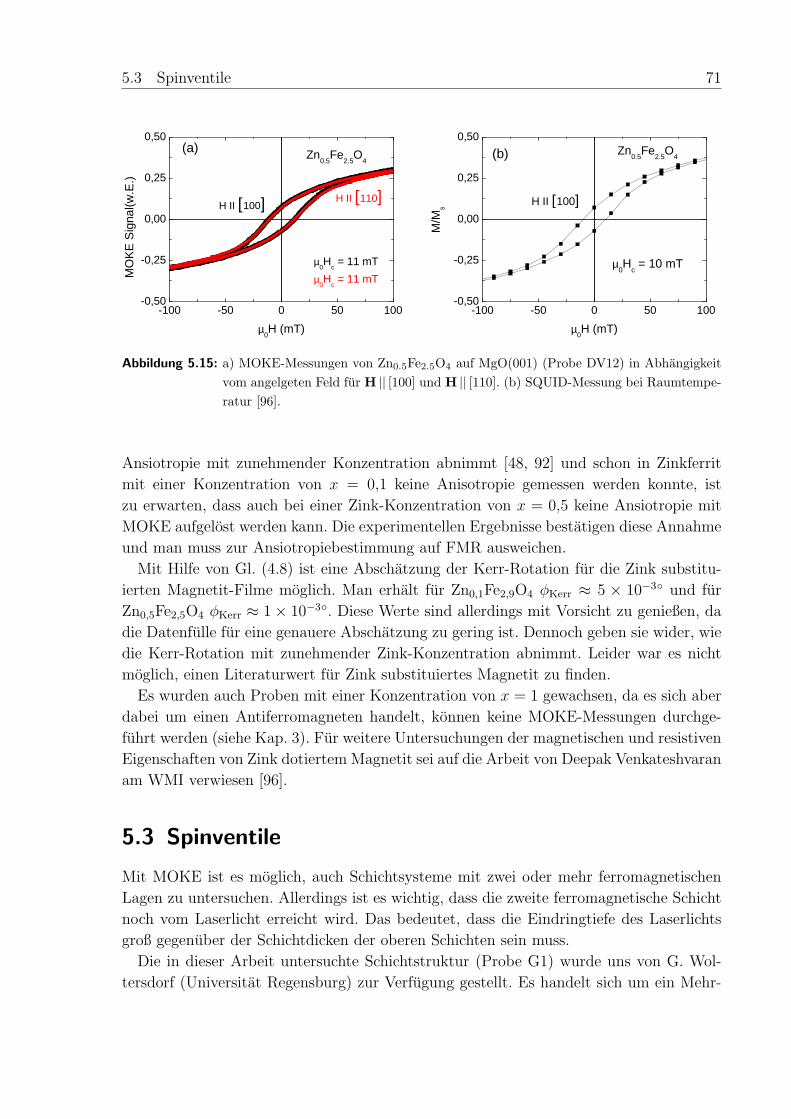
5.3 Spinventile 71
- 1 0 0 - 5 0 0 5 0 1 0 0- 0 , 5 0
- 0 , 2 5
0 , 0 0
0 , 2 5
0 , 5 0
- 1 0 0 - 5 0 0 5 0 1 0 0- 0 , 5 0
- 0 , 2 5
0 , 0 0
0 , 2 5
0 , 5 0
H I I [1 1 0 ]
MO
KE Si
gnal(
w.E.)
µ0 H ( m T )
Z n 0 . 5 F e 2 . 5 O 4
H I I [1 0 0 ]
µ0 H c = 1 1 m Tµ0 H c = 1 1 m T
( a ) Z n 0 . 5 F e 2 . 5 O 4( b )
µ0 H c = 1 0 m T
H I I [ 1 0 0 ]
M/M s
µ0 H ( m T )
Abbildung 5.15: a) MOKE-Messungen von Zn0.5Fe2.5O4 auf MgO(001) (Probe DV12) in Abhangigkeitvom angelgeten Feld fur H || [100] und H || [110]. (b) SQUID-Messung bei Raumtempe-ratur [96].
Ansiotropie mit zunehmender Konzentration abnimmt [48, 92] und schon in Zinkferrit
mit einer Konzentration von x = 0,1 keine Anisotropie gemessen werden konnte, ist
zu erwarten, dass auch bei einer Zink-Konzentration von x = 0,5 keine Ansiotropie mit
MOKE aufgelost werden kann. Die experimentellen Ergebnisse bestatigen diese Annahme
und man muss zur Ansiotropiebestimmung auf FMR ausweichen.
Mit Hilfe von Gl. (4.8) ist eine Abschatzung der Kerr-Rotation fur die Zink substitu-
ierten Magnetit-Filme moglich. Man erhalt fur Zn0,1Fe2,9O4 φKerr ≈ 5 × 10−3 und fur
Zn0,5Fe2,5O4 φKerr ≈ 1× 10−3. Diese Werte sind allerdings mit Vorsicht zu genießen, da
die Datenfulle fur eine genauere Abschatzung zu gering ist. Dennoch geben sie wider, wie
die Kerr-Rotation mit zunehmender Zink-Konzentration abnimmt. Leider war es nicht
moglich, einen Literaturwert fur Zink substituiertes Magnetit zu finden.
Es wurden auch Proben mit einer Konzentration von x = 1 gewachsen, da es sich aber
dabei um einen Antiferromagneten handelt, konnen keine MOKE-Messungen durchge-
fuhrt werden (siehe Kap. 3). Fur weitere Untersuchungen der magnetischen und resistiven
Eigenschaften von Zink dotiertem Magnetit sei auf die Arbeit von Deepak Venkateshvaran
am WMI verwiesen [96].
5.3 Spinventile
Mit MOKE ist es moglich, auch Schichtsysteme mit zwei oder mehr ferromagnetischen
Lagen zu untersuchen. Allerdings ist es wichtig, dass die zweite ferromagnetische Schicht
noch vom Laserlicht erreicht wird. Das bedeutet, dass die Eindringtiefe des Laserlichts
groß gegenuber der Schichtdicken der oberen Schichten sein muss.
Die in dieser Arbeit untersuchte Schichtstruktur (Probe G1) wurde uns von G. Wol-
tersdorf (Universitat Regensburg) zur Verfugung gestellt. Es handelt sich um ein Mehr-

72 Kapitel 5 Experimentelle Ergebnisse
lagensystem mit zwei ferromagnetischen Schichten, welche auf Glas aufgesputtert wur-
den: Glas/Co(10nm)/Cu(7nm)/CoFeB(6nm)/Nb(10nm). Es handelt sich hierbei um ein
Spinventil, bei dem die ferromagnetischen Schichten voneinander entkoppelt sind, d.h.
die Zwischenschicht aus Cu ist dick genug, so dass keine Austauschwechselwirkung zwi-
schen den beiden ferromagnetischen Schichten stattfinden kann (Kap. 2.3.2). Durch die
unterschiedlichen Koerzitivfelder der beiden ferromagnetischen Schichten erhalt man Ma-
gnetfeldbereiche, in denen die Magnetisierungen nahezu antiparallel zueinander stehen,
wodurch man einen GMR-Effekt in der Widerstandsmessung erhalt (siehe Kap. 2.3.2).
Die Probe wurde fur die Arbeit in mehrere Teile gesagt. Das Teilstuck G1aa wurde mit
der schon in Kap. 5.1 verwendeten Hallbargeometrie fur Magnetotransportmessungen
strukturiert. An dem unstrukturierten Teilstuck G1bc sind MOKE-Messungen durchge-
fuhrt worden.
- 1 5 - 1 0 - 5 0 5 1 0 1 5- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
" ( '%
%α+→&(α+→" (
$
")
µ#
%α+→&(α+→" ( α
H
" ( '%
α+α+
⇒ $!"*) '$$" ($ '$+
Abbildung 5.16: (a) MOKE-Messungen fur α = 25, 50, 115 und 140. Fur α = 0 liegt das angelegteFeld parallel zur Außenkante, bei der ein kleiner Fehler zu sehen ist (siehe Zeichnung).α = 25 entspricht der leichten und α = 115 der harten Achse der CoFeB-Schicht,sowie α = 50 der harten und α = 140 der leichten Achse der Co-Schicht. (b) Schemader Orientierungen der leichten Achsen beider ferromagnetischer Schichten.
Das Teilstuck G1bc wurde uber einen Bereich von α = −20 bis 200 in 5-Schritten
gedreht und vermessen, wobei α = 0 so gewahlt wurde, das eine Außenkante, die einen
kleinen Fehler besitzt, parallel zum Feld steht (siehe Zeichnung in Abb. 5.16(a)). In
Abb. 5.16(a) sind die Messkurven dargestellt, bei denen die Feldachse mit den leich-
ten bzw. harten Achsen der beiden ferromagnetischen Schichten zusammenfallt. Um die
Schaltfelder den einzelnen ferromagnetischen Schichten zuordnen zu konnen, wurden mit
FMR die uniaxialen Anisotropiekonstanten ermittelt. Durch eine separate FMR-Messung
an einem Co-Film und den Vergleich mit den ermittelten Werten fur die Schichtstruktur
konnten die Schaltfelder den beiden Schichten zugeordnet werden. Aus der FMR ging
hervor, dass fur Co die uniaxiale in-plane AnisotropieKu,Co
Ms= 4,7 mT und fur CoFeB
Ku,CoFeB
Ms= 0,7 mT betragt. Da eine hohere Anisotropie gleichzeitig zu einer hoheren

5.3 Spinventile 73
Koerzitivfeldstarke fuhrt, entspricht das großere Schaltfeld der Co-Schicht. Fur die leich-
te Achse erhalt man eine Koerzitivfeldstarke von µ0Hc,Co,leicht = 3 mT. Analog ist die
Koerzitivfeldstarke der CoFeB-Schicht fur parallel angelegtes Feld zur leichten Richtung
µ0Hc,CoFeB,leicht = 0,5 mT. Die Koerzitivfelder der beiden harten Richtungen lassen sich
hingegen nicht eindeutig bestimmen.
Die MOKE-Analyse zeigt weiter, dass die leichten Achsen der beiden Schichten einen
Winkel von etwa 65 einschließen. Dieser Sachverhalt wurde in der Abb. 5.16 mit ei-
nem Schemabild der leichten Achsen dargestellt. Eine von Manuel Schwarz durchgefuhr-
te FMR-Messung bestatigt dieses Ergebnis. Hier wurde ein Winkel zwischen den beiden
leichten Achsen von ungefahr 68 ermittelt [90].
Um auch Magnetotransportmessungen durchfuhren zu konnen, wurde ein Teilstuck
(G1aa) mit der Hallbar-Maske, die schon bei den 3d-Ubergangsmetallen (Abschnitt 5.1)
verwendet wurde, strukturiert (Kap. 3.2). Wie in Abschnitt 5.1 diskutiert, wurden sowohl
R(H)- als auch R(α)-Messungen durchgefuhrt. Es ist sehr wohl bekannt, dass die ein-
zelnen Magnetwiderstande (MR) sehr unterschiedlich auf die Magnetisierungsrichtungen
reagieren. Der Widerstandsanteil ∆ρGMR cos(β1 − β2) mit dem eingeschlossenen Win-
kel β1 zwischen der Magnetisierungsrichtung und der Stromrichtung der ersten Schicht
und analog β2 der zweiten Schicht wird durch die Magnetisierungsrichtungen der bei-
den Schichten zueinander hervorgerufen und ist am großten, wenn die Magnetisierungen
der beiden ferromagnetischen Schichten antiparallel zueinander stehen und am gerings-
ten bei paralleler Konfiguration. Er ist unabhangig von der Stromrichtung (Kap. 2.3.2).
Der Widerstandsanteil ∆ρAMR cos2(β1) bzw. ∆ρAMR cos2(β2), der durch den anisotropen
Magnetwiderstand hervorgerufen wird, hangt hingegen von dem Winkel zwischen der Ma-
gnetisierungsrichtung und der Stromrichtung ab (Kap. 2.3.1). Da der AMR wie der GMR
im Langswiderstand gemessen werden, erhalt man bei der Magnetotransportmessung eine
Uberlagerung beider Widerstande und es ergibt sich als Gesamtwiderstand [97]:
ρ(β1,β2) = ρ0 +1
2∆ρGMR cos(β1 − β2) + ∆ρAMR cos2 β1 + ∆ρAMR cos2 β2. (5.7)
Der Querwiderstand (PHE) hingegen hangt allein von den Richtungen der Magnetisierung
zur Stromrichtung ab (siehe Kap. 2.3.1), wird nicht uberlagert und hat sich als eine
hervorragende Methode zur Untersuchung der Magnetisierung etabliert [98, 99, 100].
In Abb. 5.17(a) und (b) sind die Landswiderstande ρxx,1 der Achse 1 und ρxx,2 der Achse
2 dargestellt. Der in der Zeichnung in Abb. 5.17(a) dargestellte Winkel α′ wird von der
Feldachse und der Achse 1 der Hallbar eingeschlossen. Zusatzlich sind der Stromverlauf
und die Langswiderstande ρxx,1 und ρxx,2 der beiden Achsen eingezeichnet. Die Probe
wurde zwischen den Messungen in 15-Schritten in einem Winkelbereich von α′ = −15
bis 195 rotiert. Der Winkel α′ wurde deshalb neu eingefuhrt, da die Achse der Hallbar
nicht parallel zur Außenkante der Probe verlauft.
Die Lage der leichten Achsen konnte mit Hilfe simultan durchgefuhrter MOKE-Messun-
gen auf der Hallbar und mit den in der vorherigen MOKE-Analyse des Teilstucks G1bc

74 Kapitel 5 Experimentelle Ergebnisse
3 2 . 0
3 2 . 1
3 2 . 2
- 1 5 - 1 0 - 5 0 5 1 0 1 53 8 . 2
3 8 . 3
3 8 . 4
3 8 . 5
3 8 . 6
- 1 5 - 1 0 - 5 0 5 1 0 1 53 5 . 1
3 5 . 2
3 5 . 3
3 5 . 4ρ
ρ µ
Ω
H
αρ
ρ µ
Ω
µ
ρ ρ
µΩ
µ
ρρ
⇒
Abbildung 5.17: (a) Langswiderstandsmessungen des Spinventils (Probe G1aa) fur Feldorientierungenentlang der leichten und harten Achsen beider Schichten fur die Achse 1. (b) Langswi-derstandsmessungen des Spinventils (Probe G1aa) fur Feldorientierungen entlang derleichten und harten Achsen beider Schichten fur die Achse 2. (c) Summe der Langswi-derstande der beiden Achsen der Hallbar.
gewonnenen Ergebnissen ermittelt werden. Mit dem oben definierten Winkelsystem zwi-
schen Achse 1 und Feldachse ergeben sich folgende Orientierungen der leichten bzw.
harten Achsen: Fur CoFeB erhalt man fur die leichte Achse einen Winkel von α′ = 135
und fur die harte Achse α′ = 45. Fur die Co-Schicht ergibt sich analog α′ = 60 fur die
leichte Achse und α′ = 150 fur die harte Achse. Daraus folgt, dass die leichten Achsen
einen Winkel von ungefahr 75 einschließen. Der Unterschied zu den MOKE- und FMR-
Messungen am Teilstuck G1bc folgt aus der großen Schrittweite von ∆α′ = 15, um die
die Probe zwischen den Messungen gedreht wurde.
In Abschnitt 5.1 wurde das Verhalten des AMR bei einer FeCo- bzw Ni-Probe studiert.
Es ergab sich, dass durch die Wahl der Hallbargeometrie der AMR wahrend der Mes-
sung durch Summation der Langswiderstande beider Achsen unterdruckt werden kann.
Wie oben und in Kap. 2.3 erwahnt, hangt der AMR lediglich von der Orientierung der
Magnetisierung und der Stromrichtung ab. Beide Schichten agieren hier vollkommen frei
voneinander. Der GMR hingegen hangt von den Richtungen der Magnetisierungen beider
Schichten zueinander ab. Die Stromrichtung spielt keine Rolle (Kap. 2.3,[100, 101]). Aus
diesem Grund wirkt sich die Hallbargeometrie lediglich auf den AMR aus, weshalb sich
durch Summation der Langswiderstande der AMR-Anteil aufhebt und der GMR-Anteil
als Signal erhalten bleibt.
In Abb. 5.17(c) ist die Summe aus beiden Langswiderstanden fur die leichten und harten

5.3 Spinventile 75
Richtungen dargestellt. Fur den Fall, dass das angelegte Feld entlang der leichten Achse
der Co-Schicht zeigt (rote Kurve, 60), ergibt sich als Wert (ρmax − ρmin)/ρmin × 100% =
0,70%. Fur die einzelnen Achsen erhalt man fur die Achse 1 ∆ρ/ρmin = 0,56% und
fur die Achse 2 ∆ρ/ρmin = 0,80%. Dieser Unterschied zwischen den beiden Achsen wird
durch den anisotropen Magnetwiderstand hervorgerufen, weshalb die Bildung der Summe
wichtig ist, um den GMR abschatzen zu konnen.
MCo
MCoFeB
2
3
4
leichte AchseCo
leichte AchseCoFeB
1:MCo
MCoFeB
5:MCo
MCoFeB
HH01505-01-
461
661
861
071
271
MO
KE
Sig
nal (
mV
)
µ0 )Tm( H
)b(
1 23
4
5
01505-01-
00,23
80,23
61,23
ρ xx,1 (µ
Ωcm
)
µ0 )Tm( H
)a(
5
4
3
2
1
)c(
Abbildung 5.18: (a) Magnetotransportmesskurve bei α = 60 fur den up-sweep. (b) Simultan gemesseneMOKE-Hysteresekurve fur den up-sweep. (c) Darstellung der einzelnen Schritte derAnderung der Magnetisierungsrichtungen durch Pfeile. Durchgezogene Pfeile stehenfur eine koharente Rotation und gestrichelte Pfeile fur abrupte Sprunge. Die einzelnenSchritte 1,2,3,4 und 5 sind in den Abbildungen farblich gekennzeichnet.
Dieser hohe Widerstandseffekt bei 60 erklart sich durch die Lage der leichten Achsen.
In Abb. 5.18(a) und (b) sind die Magnetotransportkurve der Achse 1 und die simultan
aufgenommene MOKE-Kurve fur den up-sweep dargestellt. Das Rauschen der MOKE-
Messkurve ist dadurch bedingt, dass die Messung direkt auf der Hallbar durchgefuhrt
wurde. In Abb. 5.18(c) sind die Rotationsprozesse der Magnetisierungen beider Schichten
schematisch dargestellt. Die leichte Achse der Co-Schicht liegt entlang der Feldrichtung.
Bei hoher Feldstarke beginnend im negativen Feldbereich liegen die Magnetisierungen
beider Schichten parallel zum angelegten Feld (Schritt 1 in den Abbildungen). Wird das
Feld abgesenkt, beginnt die Magnetisierung der CoFeB-Schicht in die Richtung der leich-
ten Achse von CoFeB zu rotieren (Schritt 2, rot). Durch die Rotation nimmt sowohl das
magnetooptische Signal als auch der Widerstand zu. Nimmt der Betrag der Feldstar-

76 Kapitel 5 Experimentelle Ergebnisse
ke im positiven Feldbereich wieder zu, so rotiert die Magnetisierung der CoFeB-Schicht
in die Richtung des Feldes (Schritt 3, grun), weshalb das magnetooptische Signal und
der Widerstand weiter zunehmen. Bevor das Koerzitivfeld der Co-Schicht erreicht wird,
stehen die Magnetisierungen der beiden Schichten nahezu antiparallel, weshalb hier der
großte Widerstand gemessen wird. Durch weiteres Erhohen der Feldstarke klappt auch
die Magnetisierung von Co in die Richtung des angelegten Feldes (verdeutlicht durch
die blaue, gestrichelte Linie bei Schritt 4 in Abb. 5.18(c)). Hier nimmt das magnetoop-
tische Signal sprunghaft zu. Der Widerstand hingegen nimmt sprunghaft ab, da beide
Magnetisierungen wieder parallel zueinander stehen.
Betrachtet man hingegen die Konfiguration, bei der die harte Achse der Co-Schicht
parallel zur Feldachse steht (blaue Kurve, 150), so dominiert die Rotation der Co-
Magnetisierung den MR. Mit Abnahme des Feldes rotieren beide Achsen in die Richtung
ihrer jeweiligen leichten Achsen. Beim Erreichen des Koerzitivfeldes von CoFeB klappt
diese Magnetisierung um, was in dem Sprung zu erkennen ist. Hier ist der MR am groß-
ten. Nimmt das Feld in die negative Richtung zu, rotieren beide Magnetisierungen wieder
in die Richtung des angelegten Feldes, was sich in einer Abnahme des MR zeigt.
Betrachtet man den Fall, dass die harte Achse der CoFeB-Schicht entlang der Feldachse
orientiert ist (schwarze Kurve, 45), so zeigt sich ein vergleichbarer Verlauf zu dem Fall,
dass die leichte Achse von Co entlang der Feldachse orientiert ist. Das liegt daran, das
die leichten Achsen einen Winkel von 68 einschließen. Da aber in diesem Fall die leichte
Achse der Co-Schicht nicht exakt in die Richtung des angelegten Feldes zeigt, rotiert
auch in dieser Schicht die Magnetisierung mit Abnahme des Feldes in die leichte Achse.
Auch hier sind die einzelnen Widerstandseffekte unterschiedlich und es ergibt sich fur
die Achse 1 ∆ρ/ρmin = 0,553% und fur die Achse 2 ∆ρ/ρmin = 0,80%. Fur die Summe
aus Langswiderstanden erhalt man als Wert ∆ρ/ρmin = 0,69%. Dieser Effekt ist mit
dem fur 60 vergleichbar. Zusatzlich ist zu erwahnen, dass die Koerzitivfelder bei der
45-Orientierung nicht identisch sind. Dieser Effekt ist nicht verstanden.
Liegt die leichte Richtung der CoFeB-Schicht entlang der Feldachse (grune Kurve,
135), erhalt man einen sehr kleinen MR. Das liegt an der Orientierung der leichten Ach-
se der Co-Schicht. Mit der Abnahme des Feldes rotiert die Magnetisierung dieser Schicht
in die leichte Achse. Da die leichten Achsen einen Winkel von etwa 70 einschliessen,
wird nach dem Erreichen des Koerzitivfeldes von CoFeB und somit nach dem Umklap-
pen dieser Magnetisierung der maximale Winkel zwischen den beiden Magnetisierungen
hochstens 110 betragen. Er wird eher kleiner sein, da mit Zunahme des Feldes entgegen
der vorliegenden Magnetisierungsrichtung die Magnetisierung aus der leichten Achse her-
ausgedreht wird. Beim Erreichen des Koerzitivfeldes rotiert auch diese Magnetisierung
sprunghaft in Richtung des angelgten Feldes. Dadurch allerdings wird auch der MR klei-
ner ausfallen, was in Abb. 5.17 zu erkennen ist.
Insgesamt lasst sich feststellen, dass es sehr wohl wichtig ist, die Summe der beiden
Achsen zu bilden, um fur ausgezeichnete Richtungen (45 und 60) den GMR-Effekt des
Spinventils abzuschatzen. Die Ergebnisse lassen sich mit R(α)-Messungen, wie am Ende

5.3 Spinventile 77
dieses Abschnitts gezeigt, bestatigen.
Zur weiteren Untersuchung wurden R(α)-Messungen durchgefuhrt. Hierfur rotiert die
zu untersuchende Probe in einem konstanten Magnetfeld um 400 in 1-Schritten im Uhr-
zeigersinn. Nach Erreichen der Endposition rotiert sie wieder mit der gleichen Schrittwei-
te entgegen dem Uhrzeigersinn in die Ausgangsstellung zuruck. Vor Beginn der Messung
wurde die Probe bei fester Winkelstellung α mit einem Magnetfeld von µ0H = 100 mT
gesattigt. Danach wurde das Magnetfeld auf das fur die Messung vorgesehene Feld ab-
gesenkt. Durch Variieren der Anfangsstellung lasst sich die Probe bei unterschiedlichen
Winkeln bezuglich der Feldorientierung vor Beginn der Messung sattigen. Die interessan-
ten Magnetfeldbereiche der R(α)-Messungen sind zum einen der Bereich, in dem die
beiden Schichten der Probe gesattigt sind (µ0H = 100 mT), wodurch es moglich ist, den
AMR des Schichtsystems zu bestimmen. Zum anderen ist es der Feldbereich zwischen den
beiden Koerzitivfeldern (0,5 mT ≤ µ0H ≤ 3 mT), bei dem die Magnetisierung der einen
Schicht in Richtung des Magnetfeldes bei der Drehung verbleibt und die andere sich mit
der Probe entlang ihrer leichten Achse mitbewegt. In diesem Bereich ist es moglich, den
GMR-Effekt mit Hilfe geometrischer Beziehungen der MR-Effekte abzuschatzen [97].
ρ xx (nΩ
m)
α
ρ xy (nΩ
m)
α
Abbildung 5.19: (a) Langswiderstandsmessung ρxx(α) des Mehrlagensystems (G1aa) in Abhangigkeitvon α fur verschiedene Anfangspositionen, bei denen die Probe vor Beginn der Messunggesattigt wird, bei einem festen Feld von µ0Hc = 100 mT. (b) analog Querwiderstands-messungen ρxy(α) bei µ0Hc = 100 mT.
In Abb. 5.19(a) sind die Langswiderstandsmessungen bei einem Magnetfeld von µ0H =
100 mT fur mehrere Anfangspositionen dargestellt. Da sich wahrend der Messungen, die
sich uber mehrere Tage erstreckten, die Temperatur im Raum anderte und nicht konstant
war, erhalt man fur die Messungen von ρxx unterschiedliche Offset-Widerstande. Das
Auseinanderdriften der Widerstandsmesskurven zwischen Anfangs- und Endwert ergibt
sich wiederum aus der durch die Spulen in das Magnetsystem deponierten Warme, die
sich am Probenort bemerkbar macht.

78 Kapitel 5 Experimentelle Ergebnisse
In dem 100 mT-Bereich ist es nun moglich, den AMR des Systems abzuschatzen, da
in diesem Bereich die beiden Schichten gesattigt sind und in Richtung des Magnetfeldes
verweilen, wahrend sich die Stromrichtung entlang der Achsen mit der Probe mitdreht.
In (b) sind die Querwiderstandsmessungen dargestellt. Bei beiden Widerstanden ist das
AMR-Verhalten zu erkennen, was sich am cos2 β-Verlauf des Langswiderstands und am
sin(2β)-Verlauf des Querwiderstands zeigt (Kap. 2.3.1). Betrachtet man das Minimum
und das Maximum innerhalb der Messung eines Langswiderstands in Abb. 5.19, so erhalt
man fur den AMR: AMR = ρmax−ρmin
ρmin× 100% = 0,24%.
Betrachtet man die Kurven, die bei unterschiedlichen Winkeln prapariert wurden, so
ist zu erkennen, dass sie sowohl fur den Langswiderstand als auch fur den Querwider-
stand nahtlos ineinander ubergehen, wenn man von den unterschiedlichen Offsets bei den
Langswiderstanden absieht. D.h. die unterschiedlichen Anfangspositionen wirken sich bei
hohen Feldern nicht auf den Verlauf des Widerstandes aus, da beide ferromagnetische
Schichten gesattigt sind. Innerhalb der Querwiderstande sind keine Offsets zu sehen. Das
liegt daran, dass der PHE nur ein sehr kleines Hintergrundsignal besitzt und sich ther-
mische Fluktuationen kaum auf das Signal auswirken [98].
ρ xx (nΩ
m)
α
ρ xy (nΩ
m)
α
Abbildung 5.20: (a) Langswiderstandsmessung ρxx(α) des Mehrlagensystems (G1aa) in Abhangigkeitvon α fur verschiedene Anfangspositionen, bei denen die Probe vor Beginn der Messunggesattigt wird, bei einem festen Feld von µ0Hc = 2,2 mT. (b) analog Querwiderstands-messungen ρxy(α) bei µ0Hc = 2,2 mT.
Betrachtet man in Abb. 5.20(a) und (b) die Widerstandsmessungen bei einem Feld
von µ0H = 2,2 mT, so erhalt man ein vollkommen anderes Verhalten. In diesem Bereich
verweilt die Magnetisierung der einen ferromagnetischen Schicht bei der Rotation entlang
der Richtung des angelegten Feldes, wahrend sich die zweite (Co-Schicht) mit der Probe
entlang ihrer leichten Achse mitdreht. Betrachtet man die Kurven der Widerstande, so ist
zu erkennen, dass, je nachdem bei welcher Richtung die Probe gesattigt wurde, die Mag-
netisierung der Co-Schicht beim Absenken des Feldes unterschiedlich in die leichte Achse

5.3 Spinventile 79
rotiert. Dieses Verhalten zeigt sich bei der -150-Messkurve, deren Extrema um 180 zu
den Extrema der anderen Messkurven verschoben ist. Das bedeutet, dass die Magneti-
sierung der Co-Schicht bei der -150-Messkurve in die entgegengesetzte Richtung entlang
der leichten Achse zeigt. Betrachtet man die Messkurven weiter, ist deutlich ein dem cos
ahnliches Verhalten des GMR zu erkennen, auch wenn durch leichte Verdrehungen der
Magnetisierung der Co-Schicht aus der leichten Achse die Kurvenform nicht genau der
eines cos entspricht. Die Kurven besitzen sowohl im Langs- als auch im Querwiderstand ei-
ne 360-Periode. Dieses Verhalten fur den Querwiderstand ist allerdings ein Widerspruch
zur Definition des PHE, der auch in einem Spinventil wegen sin(2β) 180-periodisch sein
muss. Wahrscheinlich handelt es sich hierbei um ein Artefakt, dennoch sind weitere Mes-
sungen notig. Auch sollten neue Spinventil-Schichten hergestellt und kontaktiert werden,
um weitere Ergebnisse zu erhalten und mit den hier vorliegenden zu vergleichen.
Aus den Extrema in den Langswiderstanden lasst sich der MR bestimmen und man
erhalt MR = 0,78%. Dieser Wert beinhaltet allerdings sowohl AMR- als auch GMR-
Anteile.
Um den GMR abschatzen zu konnen, ist es notwendig, sich die Eigenschaften des AMR
und des GMR zu nutze zu machen. Der AMR besitzt eine 180-Periode und der GMR eine
360-Periode [97]. Miller et al. schlagen folgende Vorgehensweise vor, um den GMR aus
den R(α)-Messungen zu erhalten [97]. Definiert man ein ∆ρGMR als Differenz zwischen
dem Maximum und dem Minimum des GMR und ebenso ∆ρAMR fur den AMR, so erhalt
man folgende Beziehung fur den Gesamtwiderstand:
ρ(β1,β2) = ρ0 +1
2∆ρGMR cos(β1 − β2) + ∆ρAMR cos2 β1. (5.8)
Die beiden Winkel β1 (CoFeB) und β2 (Co) sind die Winkel zwischen den jeweiligen
Magnetisierungsrichtungen der beiden Schichten und der Stromrichtung. Diese Naherung
gilt nur dann, wenn das Schaltfeld der Co-Schicht großer als das vorherrschende angelegte
Feld ist. Es wird somit angenommen, dass die Magnetisierung entlang der leichten Rich-
tung wahrend der Drehung verbleibt. Betrachtet man den Fall, dass die Magnetisierung
der Co-Schicht in der Filmebene um 180 gedreht ist, so erhalt man folgende Beziehung
fur den Widerstand:
ρ(β1,β2 + 180) = ρ0 −1
2∆ρGMR cos(β1 − β2) + ∆ρAMR cos2 β1. (5.9)
In beiden Gleichungen ist der AMR-Anteil der Co-Schicht in ρ0 enthalten, weil der Win-
kel der Magnetisierung zum Strom bei der Drehung konstant bleibt und somit auch der
AMR-Anteil dieser Schicht konstant ist. Bildet man die Differenz zwischen beiden Ori-
entierungen der Magnetisierung der zweiten Schicht entlang der leichten Achse, so erhalt
man folgenden Zusammenhang:
∆ρ = ρ(β1,β2)− ρ(β1,β2 + 180) = ∆ρGMR cos(β1 − β2). (5.10)

80 Kapitel 5 Experimentelle Ergebnisse
Aus diesen Uberlegungen ist es nun moglich, aus den R(α)-Messungen den GMR wie folgt
zu berechnen [97]. Zuerst benotigt man einen Satz an Daten, in denen sowohl Hin- wie
Ruckrichtung vorhanden sind. Nun wahlt man einen Winkel als Anfangsstellung aus. In
dem hier beschriebenen Fall wurde aus der -50-Messung (Anfangsposition) als Anfangs-
wert 150 ausgewahlt. Betrachtet man die Hinrichtung, in der die Magnetisierung der
ersten Schicht mit dem Magnetfeld um 200 im Uhrzeigersinn rotiert und die Ruckrich-
tung, wieder von 150 ausgehend, in der die Magnetisierung der Co-Schicht gegen den
Uhrzeigersinn bis -50 rotiert, so erhalt man aus der Differenz beider Messkurven den
GMR-Effekt. Diese Vorgehensweise wurde von Miller et al. vorgeschlagen [97]. In Abb.
5.21 ist diese Differenz aus dem Datensatz der -50-Messung dargestellt. Man erhalt einen
∆GMR
(%)
α
G M R = 0 , 7 1 %
Abbildung 5.21: Berechnung des GMR-Effekts ausR(α)-Messungen, die bei einem festen Magnetfeld vonµ0Hc = 2,2 mT durchgefuhrt wurden. Die Winkelangaben sind willkurlich gewahlt.
GMR von: GMR = 0,71%. Vergleicht man diesen Wert mit der Summe der Langswider-
stande der -150-Konfiguration bei den R(H)-Messungen, bei denen das Feld entlang der
leichten Achse der Co-Schicht orientiert ist, so ergibt sich in beiden Fallen der gleiche
MR-Effekt. Daraus folgt, das die Idee der Hallbargeometrie in der Tat sinnvoll gewahlt
ist, um so den AMR vom GMR wahrend der Messung durch Summation der Langswider-
stande zu trennen. Der MR der R(α)-Messungen bei 2,2 mT betragt MR = 0,78% und
ist großer als der GMR. Hierbei spielt allerdings die Tatsache eine Rolle, dass der GMR
vom AMR uberlagert wird.
5.4 Multiferroische Systeme
Im folgenden Kapitel werden multiferroische Schichtsysteme, bestehend aus einer ferro-
elektrischen und einer ferromagnetischen Schicht, behandelt. In dem vorliegenden Fall

5.4 Multiferroische Systeme 81
dienen BaTiO3-Einkristall-Substrate als Ferroelektrikum. Auf diesem wurden ferroma-
gnetische Schichten wie Fe3O4 oder Ni gewachsen. Durch die Eigenschaften des ferro-
elektrischen Substrats lassen sich die magnetischen Eigenschaften der daruber liegenden
Schicht durch das Anlegen einer Spannung, wodurch Verzerrungen in die ferromagne-
tische Schicht induziert werden, beeinflussen. Im Folgenden werden die Ergebnisse, die
anhand magnetooptischer Messmethoden gewonnen wurden, dargestellt und diskutiert.
5.4.1 Ni auf BaTiO3
Die auf das BaTiO3-Substrat aufgebrachte ferromagnetische Schicht aus dem 3d-Uber–
gangsmetall Ni besitzt eine Dicke von 100 nm (Probe MB32b, 100 nm Ni abgedeckt
mit einer 5 nm Au-Schicht auf der oberen Seite des BaTiO3-Einkristall, zusatzliche Au-
Schicht auf der Unterseite des BTO-Substrats als Elektrode). Diese Filme wurden mir
von Stephan Geprags zur Verfugung gestellt. Die elektrischen Kontakte wurden auf der
Unterseite durch eine Gold-Schicht und auf der oberen ferromagnetischen Schicht uber
einen mit Leitsilber aufgeklebten Draht realisiert, wodurch ein elektrisches Feld out-of-
plane angelegt werden kann (siehe Zeichnung in Abb. 5.22(a)).
0040020002-004-
5-
0
5
01
51
I (nA
)
)mc/V( E
Ec mm/V 05 =
Ec mm/V 04- =
I,V
(a)
0040020002-004-
04-
02-
0
02
I (nA
)
)mm/V( E
mm/V 22..81
mm/V 27-
mm/V 821-..231-
(b)
Abbildung 5.22: (a) Strom-Spannungs-Kennlinie fur Ni auf BaTiO3 (Probe MB32b) von Stephan Ge-prags durchgefuhrt. (b) Vor den MOKE-Messungen durchgefuhrte Strom-Spannungs-Kennlinie fur Ni auf BaTiO3.
In Abb. 5.22(a) und (b) sind die Strom-Spannungs-Kennlinien, die 2-Punkt gemes-
sen wurden, in Abhangigkeit des angelegten elektrischen Feldes dargestellt. Die Messung
wurde bei einem Feld von E = 400 V/mm gestartet und dann mit einem konstanten ∆E
abgesenkt. Nach Erreichen von E = −400 V/mm wurde das elektrische Feld mit dem glei-
chen ∆E wieder erhoht, bis der Startwert E = 400 V/mm erreicht war. In Abb. 5.22(a)
ist eine von Stephan Geprags durchgefuhrte Strom-Spannungs-Kennlinienmessung darge-
stellt. Die Koerzitivfelder, bei denen sich die Polarisation des ferroelektrischen Substrats
umdreht - sichtbar durch den hohen Verschiebestrom -, traten bei elektrischen Feldern

82 Kapitel 5 Experimentelle Ergebnisse
von E = −40 V/mm fur den down-sweep bzw. bei E = 50 V/mm fur den up-sweep
auf. Die elektrischen Koerzitivfelder verhalten sich hierbei asymmetrisch. Der Ursprung
dieses Verhaltens liegt in den unterschiedlich verwendeten Elektrodenmaterialien (Gold
auf der unteren Seite und die Ni-Schicht auf der oberen). In Abb. 5.22(b) ist die Strom-
Spannungs-Kennlinienmessung, die vor den MOKE-Messungen durchgefuhrt wurde, dar-
gestellt. Es ergab sich, dass sich die Koerzitivfelder durch einen zusatzlich auftretenden
hohen Verschiebestrom bei etwa E ≈ −130 V/mm verschoben haben. Man erhalt fur
Koerzitivfelder Werte von ungefahr E = −72 V/mm und E ≈ 20 V/mm, die in das
Diagramm mit eingezeichnet wurden. Der große Verschiebestrom, der bei einem Feld von
E ≈ −130 V/mm beobachte wird und bei den vorherigen Messungen nicht auftrat, lasst
sich nicht erklaren.
- 2 0 0 - 1 0 0 0 1 0 0 2 0 0
7 1
7 2
7 3
MOKE
Sign
al (m
V)
µ0 H ( m T )
D r i f t i n 2 5 m i n
S t a r t
Abbildung 5.23: MOKE-Messung von Ni auf BaTiO3 (Probe MB32b) wahrend einer Dauer von 25 Minu-ten. Die Messung wurde bei einem elektrischen Feld von E = 400 V/mm durchgefuhrt.
In Abb. 5.23 ist eine MOKE-Messung dargestellt, bei der die Messung direkt nach
dem Anlegen eines elektrischen Feldes von E = 400 V/mm gestartet wurde. Deutlich
ist nach dem Starten der Messung eine Drift des magnetooptischen Signals zu erken-
nen. Die Messung lief uber einen Zeitraum von 25 Minuten. Der Grund fur die Drift ist,
dass sich die ferroelektrischen Domanen von BaTiO3 durch das Anlegen des elektrischen
Feldes ausrichten und in ihren Endzustand relaxieren [54]. Da sich nach jeder Spannungs-
anderung die ferroelektrischen Domanen im Substrat erst ausrichten mussen, muss mit
der MOKE-Messung gewartet werden, bis die Drift und somit die Bewegung der Doma-
nen nachlasst. Je nach Orientierung der Probe zum externen Magnetfeld und angelegter
Spannung variierte die Wartezeit zwischen wenigen Minuten und einigen Stunden.
In Abb. 5.24(a) und (b) sind der down- wie der up-sweep fur 0-Orientierung darge-
stellt. Hierbei bedeutet die 0-Orientierung, dass das Feld entlang der kleineren Außen-
kante orientiert ist, wie der Zeichnung in Abb. 5.24(a) zu entnehmen ist. Generell wurde
die MOKE-Messreihe fur diese Heterostruktur in Abhangigkeit vom extern angelegten
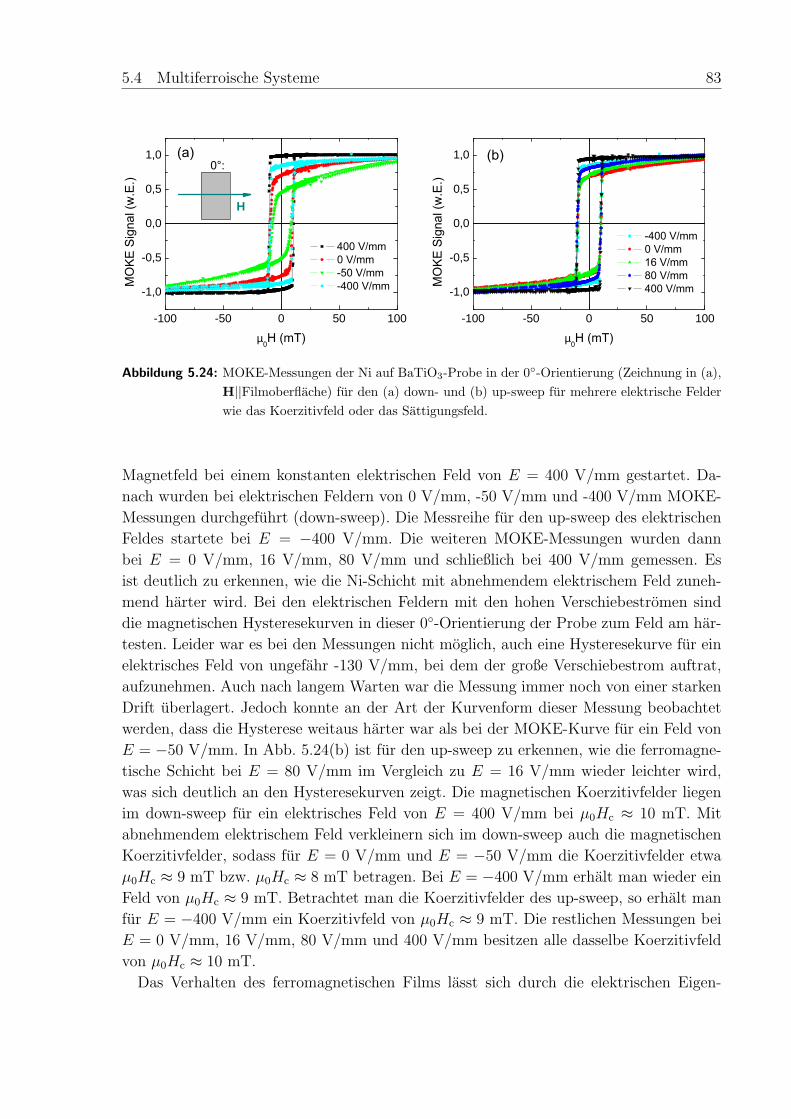
5.4 Multiferroische Systeme 83
- 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
- 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
µ
H
µ
Abbildung 5.24: MOKE-Messungen der Ni auf BaTiO3-Probe in der 0-Orientierung (Zeichnung in (a),H||Filmoberflache) fur den (a) down- und (b) up-sweep fur mehrere elektrische Felderwie das Koerzitivfeld oder das Sattigungsfeld.
Magnetfeld bei einem konstanten elektrischen Feld von E = 400 V/mm gestartet. Da-
nach wurden bei elektrischen Feldern von 0 V/mm, -50 V/mm und -400 V/mm MOKE-
Messungen durchgefuhrt (down-sweep). Die Messreihe fur den up-sweep des elektrischen
Feldes startete bei E = −400 V/mm. Die weiteren MOKE-Messungen wurden dann
bei E = 0 V/mm, 16 V/mm, 80 V/mm und schließlich bei 400 V/mm gemessen. Es
ist deutlich zu erkennen, wie die Ni-Schicht mit abnehmendem elektrischem Feld zuneh-
mend harter wird. Bei den elektrischen Feldern mit den hohen Verschiebestromen sind
die magnetischen Hysteresekurven in dieser 0-Orientierung der Probe zum Feld am har-
testen. Leider war es bei den Messungen nicht moglich, auch eine Hysteresekurve fur ein
elektrisches Feld von ungefahr -130 V/mm, bei dem der große Verschiebestrom auftrat,
aufzunehmen. Auch nach langem Warten war die Messung immer noch von einer starken
Drift uberlagert. Jedoch konnte an der Art der Kurvenform dieser Messung beobachtet
werden, dass die Hysterese weitaus harter war als bei der MOKE-Kurve fur ein Feld von
E = −50 V/mm. In Abb. 5.24(b) ist fur den up-sweep zu erkennen, wie die ferromagne-
tische Schicht bei E = 80 V/mm im Vergleich zu E = 16 V/mm wieder leichter wird,
was sich deutlich an den Hysteresekurven zeigt. Die magnetischen Koerzitivfelder liegen
im down-sweep fur ein elektrisches Feld von E = 400 V/mm bei µ0Hc ≈ 10 mT. Mit
abnehmendem elektrischem Feld verkleinern sich im down-sweep auch die magnetischen
Koerzitivfelder, sodass fur E = 0 V/mm und E = −50 V/mm die Koerzitivfelder etwa
µ0Hc ≈ 9 mT bzw. µ0Hc ≈ 8 mT betragen. Bei E = −400 V/mm erhalt man wieder ein
Feld von µ0Hc ≈ 9 mT. Betrachtet man die Koerzitivfelder des up-sweep, so erhalt man
fur E = −400 V/mm ein Koerzitivfeld von µ0Hc ≈ 9 mT. Die restlichen Messungen bei
E = 0 V/mm, 16 V/mm, 80 V/mm und 400 V/mm besitzen alle dasselbe Koerzitivfeld
von µ0Hc ≈ 10 mT.
Das Verhalten des ferromagnetischen Films lasst sich durch die elektrischen Eigen-

84 Kapitel 5 Experimentelle Ergebnisse
Ni90° Domänen-wände
180° Domänen-wände
Abbildung 5.25: (a) Schematische Darstellung der Probe und Richtung des angelegten elektrischen Fel-des. (b) Domanenkonfiguration fur den Fall, dass kein elektrisches Feld an die Probeangelegt ist. (c) Eindomaniger Zustand fur E > Ec. (aus [102])
schaften des BaTiO3-Substrats erklaren. Beim Abscheiden des ferromagnetischen Ni-
Films existierten im ferroelektrischen Substrat sowohl c- als auch a-Domanen, wie in
Abb. 5.25(b) dargestellt. Im ferromagnetischen Dunnfilm existiert zudem uniaxiale An-
isotropie in der Filmebene. Legt man nun ein elektrisches Feld out-of-plane an, nehmen
die a-Domanen ab, bis bei hohen Feldern nur noch c-Domanen vorliegen und der BTO-
Einkristall eindomanig ist (Abb. 5.25) [54]. Dadurch wird allerdings der ferromagnetische
Film verspannt, wodurch sich die leichte Achse in der Filmebene dreht [102]. Die 0-
Orientierung ist so gewahlt, dass durch das Anlegen des elektrischen Feldes und durch
Zunahme der c-Domanen die leichte Achse in Richtung des angelegten Feldes gedreht
wird. Mit abnehmendem Feld rotiert die leichte Achse aus der Feldachse heraus, wodurch
die Hysteresen harter werden. Dieses Verhalten lasst sich anhand der MOKE-Messkurven
erkennen.
Betrachtet man nun hingegen die gleiche Probe um 90 in der Filmebene gedreht, so ist
in Abb. 5.26(a) und (b) zu erkennen, wie sich das Verhalten umkehrt. Nun ist der Ni-Film
bei hohen elektrischen Feldern hart. Auch hier war die Drift fur die elektrischen Felder
von E = 400 V/mm und -400 V/mm sehr groß und es musste sehr lange gewartet werden,
bis die Drift klein war. Betrachtet man den up-sweep, so zeigt sich, dass nach Erreichen
des Koerzitivfelds, bei dem der ferromagnetische Film am leichtesten ist, die ferromagne-
tischen Eigenschaften mit zunehmendem elektrischem Feld wieder harter werden. Dieses
Verhalten ist deutlich an der Messkurve bei einem Feld von E = 80 V/mm zu beobachten.
Die Koerzitivfelder in dieser Konfiguration liegen fur die elektrischen Felder, bei denen
sich der Ferromagnet leichter verhalt, sowohl fur den down- als auch fur den up-sweep bei

5.4 Multiferroische Systeme 85
- 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
- 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
µ
H
µ
Abbildung 5.26: MOKE-Messungen der Ni auf BaTiO3-Probe in der 90-Orientierung fur den (a) down-und (b) up-sweep fur mehrere elektrische Felder wie das Koerzitivfeld oder das Satti-gungsfeld.
µ0Hc ≈ 8 mT. Bei den hohen elektrischen Feldern lassen sich keine Koerzitivfelder mit
Hilfe von MOKE bestimmen. In dieser Konfiguration liegt bei hohen Feldern die leichte
Achse senkrecht zum angelegten Feld, weshalb hier die MOKE-Hysterese am hartesten
ist. Mit Abnahme des elektrischen Feldes wird die leichte Achse aus dieser Orientierung
wegen der Verspannung in der Filmebene gedreht. Dadurch steht sie nicht mehr senkrecht
zum Feld und die Hysteresekurve wird leichter.
Das Verhalten der beiden Orientierungen lasst sich auch durch die remanente Magne-
tisierung darstellen (Abb. 5.27). Dabei wird deutlich, dass sich die beiden Orientierungen
gegenlaufig verhalten.
Betrachtet man die Hysteresemessungen fur Ni auf BaTiO3 bei einer Orientierung (0)
sowohl fur den up- als auch fur den down-sweep, so sind fur E = 0 V/mm keine Unter-
schiede zu erkennen. Geht man aber zu einem der beiden elektrischen Koerzitivfelder (z.B.
E = −50 V/mm) und betrachtet die Magnetisierungskurve bei diesem sowohl fur den up
als auch fur den down-sweep, so ist in Abb. 5.28(a) und (b) zu erkennen, wie die rema-
nenten Magnetisierungen fur up und down unterschiedlich sind. Die Koerzitivfelder liegen
fur up und down bei einem elektrischen Feld von E = −50 V/mm bei µ0Hc ≈ 8 mT, fur
ein Feld von E = 400 V/mm bei µ0Hc ≈ 9 mT. Die unterschiedlichen Kurvenverlaufe fur
E = −50 V/mm in Abhangigkeit vom vorher angelegten elektrischen Feld deuten darauf
hin, dass die durch Verspannung gedrehte leichte Achse in beiden Fallen unterschiedlich
orientiert ist. Das wiederum bedeutet, dass die Verspannung nicht die gleiche ist, weshalb
das Verhaltnis der a- zu den c-Domanen verschieden sein muss.

86 Kapitel 5 Experimentelle Ergebnisse
- 4 0 0 - 2 0 0 0 2 0 0 4 0 00 , 0 0
0 , 2 5
0 , 5 0
0 , 7 5
1 , 0 0
Abbildung 5.27: Darstellung der remanenten Magnetisierung in Abhangigkeit vom angelegten elektri-schen Feld fur 0 (schwarz) und 90 (rot).
- 2 0 - 1 5 - 1 0 - 5 0 5 1 0 1 5 2 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
- 4 0 0 - 2 0 0 0 2 0 0 4 0 00 , 5 0
0 , 7 5
1 , 0 0
1 , 2 5
MOKE
Sign
al (w
.E.)
µ0 H ( m T )
4 0 0 V / m m- 5 0 V / m m- 5 0 V / m mn a c h - E s
- 5 0 V / m m- 5 0 V / m mn a c h + E s
( a ) ( b )
-E s = -4
00 V/
mm
E = -5
0 V/m
m
M reman
ent (w
.E.)
E ( V / m m )
+Es =
400 V
/mm
Abbildung 5.28: (a) Darstellung der MOKE-Messungen bei E = −50 V/mm fur up- und down-sweepund zusatzlich als Vergleich eine MOKE-Messung bei E = 400 V/mm. (b) Darstellungder remanenten Magnetisierung.

5.4 Multiferroische Systeme 87
5.4.2 Fe3O4 auf BaTiO3
Ebenfalls wurde ein multiferroisches System mit Fe3O4 als ferromagnetischer Schicht un-
tersucht (Probe MB35b, 65 nm, von Stephan Geprags mit PLD auf BaTiO3 epitaktisch
gewachsen). Die fur Ni gewonnenen Ergebnisse lassen sich so mit einem zweiten System
vergleichen. Vor den MOKE-Messungen wurde wiederum eine IV-Kennlinie mittels ei-
ner 2-Punkt-Messung aufgenommen, die in Abb. 5.29 dargestellt ist. Die Kontakte sind
hierbei auf der unteren Seite des BTO-Substrats durch eine Au-Schicht und auf der obe-
ren Seite durch den Magnetitfilm realisiert. Die IV-Messung wurde wie auch bei der
0040020002-004-
2,0-
0,0
2,0
4,0
6,0
8,0
0,1
I (µA
)
)mm/V( E
E ≈ mm/V 03
E ≈ mm/V 01
I,V
Abbildung 5.29: Strom-Spannungs-Kennlinie fur Fe3O4 auf BaTiO3 (Probe MB35b).
Ni-Probe beginnend bei einem elektrischen Feld von E = +400 V/mm bis zu einem Feld
von E = −400 V/mm und danach wieder zuruck auf den Startwert mit einer Schrittweite
von ∆E = ±1 V/mm durchgefuhrt. Es ergaben sich fur den down-sweep ein Schaltfeld
von etwa E ≈ −30 V/mm und fur den up-sweep E = +10 V/mm, deutlich an den
Verschiebestromen zu erkennen.
In Abb. 5.30 sind die Messungen sowohl fur die 0-Orientierung, die wieder so ge-
wahlt wurde, dass bei hohen elektrischen Feldern die ferromagnetische Schicht leicht ist
und bei niedrigen hart, als auch die 90-Konfiguration mit ihrem umgekehrten Verhalten
dargestellt. In (a) ist der down-sweep und in (b) der up-sweep fur die 0-Konfiguration
dargestellt. In beiden Fallen zeigt sich, dass sowohl bei E = 0 V/mm als auch bei den
beiden elektrischen Schaltfeldern E = 10 V/mm fur den up-sweep und E = −30 V/mm
fur den down-sweep die Magnetisierungsmessungen harter sind als bei den hohen Feldern
ahnlich wie schon fur Ni beobachtet, bei denen nur c-Domanen im BaTiO3-Substrat vor-
herrschen und die leichte Achse parallel zur Feldachse des angelegten Magnetfeldes liegt.
Die Koerzitivfelder liegen im Bereich von µ0Hc ≈ 62 mT.
Betrachtet man hingegen den Fall, bei dem die Probe um 90 gedreht wurde, zeigen
sich fur die Bereiche um E = 0 V/mm Stufen in der Hysteresekurve im up- sowie im
down-sweep. Die Koerzitivfelder liegen im Bereich von µ0Hc ≈ 56 mT und fur kleine

88 Kapitel 5 Experimentelle Ergebnisse
- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
- 1 0 0 - 5 0 0 5 0 1 0 0 1 5 0- 1 5 0 - 1 0 0 - 5 0 0 5 0 1 0 0- 1 , 0
- 0 , 5
0 , 0
0 , 5
1 , 0
µ
µ
Abbildung 5.30: MOKE-Messungen der Fe3O4 auf BaTiO3-Probe in der 0-Orientierung fur den (a)down- und (b) up-sweep sowie fur die 90-Orientierung fur den (c) down- und (d)up-sweep.

5.4 Multiferroische Systeme 89
elektrische Felder liegen die zweiten Schaltfelder bei µ0Hc ≈ 77 mT. Dieses Verhalten,
das dem eines Schichtsystems mit zwei ferromagnetischen Schichten und unterschiedlichen
Koerzitivfeldern ahnelt, ist bis jetzt nicht verstanden. Es kann auch nicht ausgeschlossen
werden, dass es sich dabei um ein Artefakt handelt.
Es lasst sich feststellen, dass ebenfalls fur multiferroische Schichtstrukturen MOKE
eine hervorragende Mess- und Charkterisierungsmethode ist. So ist es moglich, die fer-
romagnetische Schicht eingehend auf ihre magnetischen Eigenschaften in Abhangigkeit
vom Ferroelektrikum zu analysieren.

90 Kapitel 5 Experimentelle Ergebnisse

Kapitel 6
Kerr-Mikroskopie
In der Magnetooptik werden magnetische Informationen uber eine Veranderung der Ei-
genschaften des polarisierten Lichtes gemessen. Statt nur die durch Polarisationsdrehung
hervorgerufene Intensitatsveranderung mit Hilfe einer Photodiode zu messen, ist es auch
moglich, die magnetooptischen Eigenschaften bildlich darzustellen. Domanen konnen so
uber bildverarbeitende Verfahren sichtbar gemacht werden. Fruher fotografierte man die
Proben bei bestimmten Feldern [103]. Heutzutage ist es dank moderner Bildverarbei-
tungstechnik sowie hochauflosender Kameras und schneller Computer moglich, sogar dy-
namische Prozesse im Pikosekundenbereich aufzunehmen und darzustellen [104, 105, 12].
Um Kerr-Mikroskopie auch am WMI zu etablieren, wurden erste grundlegende Ver-
suche durchgefuhrt. Diese ersten Ergebnisse werden in diesem Kapitel dargestellt und
diskutiert.
6.1 Aufbau und Komponenten
Fur Kerr-Mikroskopie benotigt man neben den Komponenten des in Kap. 4 beschriebe-
nen Kerr-Aufbaus zusatzlich eine Kamera, deren Auflosung groß genug sein muss, um
mit entsprechender Optik Domanen abzubilden. In Abb. 6.1(a) ist ein einfacher Auf-
bau fur Kerr-Mikroskopie dargestellt. Als Grundlage dient wiederum der longitudinale
Kerr-Effekt. Dadurch kann durch einen Kontrastunterschied zwischen zwei Domanen mit
unterschiedlichen Magnetisierungsrichtungen unterschieden werden. Der Kontrast ist fur
Domanenmagnetisierungen, die antiparallel zueinander stehen, am großten. Dadurch er-
scheinen sie als helle und dunkle Bereiche im aufgenommenen Bild [10, 106].
Der Abb. 6.1(a) ist zu entnehmen, dass sich zwischen dem Laser und der Probe keine
Linse befindet. Der Grund dafur ist, dass wir die gesamte Probenoberflache mit kolli-
miertem Licht ausleuchten. Zwischen Probe und Kamera befindet sich eine Linse, um
durch geeigneten Abstand eine Vergroßerung eines Bereiches der beleuchteten Proben-
oberflache zu erreichen. In Abb. 6.1(b) ist der Kamerachip dargestellt. Es handelt sich
um eine schon etwas altere WebCam der Firma Logitech, die einen CCD-Chip mit einem
Auflosungsvermogen von 280 × 320 Pixel enthalt. Zusatzlich besitzt der CCD-Chip drei
unterschiedliche Farbkanale mit einer Farbtiefe von jeweils 8 Bit pro Pixel. Die dahin-
91

92 Kapitel 6 Kerr-Mikroskopie
Magnet
AnalysatorPolarisator
Linse
LaserWebCam Logitech WebCam
(b)(a)
Abbildung 6.1: (a) Schemabild des Aufbaus. (b) Verwendeter CCD-Chip einer handelsublichen Internet-WebCam
ter geschaltete Elektronik ist sehr einfach gehalten, wodurch die Geschwindigkeit, Bilder
aufzunehmen, beschrankt ist. In Magnetic Domains von A. Hubert und R. Schafer [11]
wird beschrieben, wie man durch die Auswahl zusatzlicher optischer Komponenten sowie
leicht unterschiedlicher Aufbauarten die Eigenschaften eines Kerr-Mikroskop verandern
kann. So ist es moglich, je nach Bedarf ein hochauflosendes oder ein hoch empfindliches
Mikroskop zu erhalten.
Um die aufgenommenen Bilder zu verarbeiten, wird die Vorgehensweise, wie sie Hubert
bzw. Rave et al. [10, 106] beschrieben haben, verwendet. Hierbei wird vor der eigentlichen
Messung ein Referenzbild aufgenommen. Es bietet sich an, dieses bei außeren Magnet-
feldstarken, in denen die Probe gesattigt ist, aufzunehmen. Wahrend der Messung wird
nun dieses Bild verwendet, um ein Differenzbild zu erzeugen, d.h. das gemessene Bild
wird bei jedem angefahrenen Magnetfeld vom Referenzbild abgezogen. Pro Feldstarken-
wert wurden insgesamt 10 Bilder aufgenommen, uber die gemittelt wurde. Dadurch wird
insgesamt eine Verminderung des Rauschens erreicht. Zusatzlich wurde integral uber das
gesamte gemittelte Bild die Intensitat aus den Farbkanalen aller Pixel aufsummiert. Da-
durch erhalt man zusatzlich zu den Bildaufnahmen eine Hysteresekurve.

6.2 Ergebnisse 93
6.2 Ergebnisse
Nachdem oben der Ablauf der Messung und die Bildverarbeitung beschrieben wurden,
sind in Abb. 6.2 die Ergebnisse fur eine Ni-Probe (NG2: Au (10 nm)/Ni (100 nm)/MgO)
dargestellt. In Abb. 6.2(a) ist die Hystereskurve, die aus der Summation der Intensitaten
aller Pixel und Farbkanale bestimmt wurde, gezeigt. Zusatzlich sind die beiden Feldwerte
in der Hysterese mit Pfeilen markiert, bei denen in Abb. 6.2(b) und (c) die Intensitaten
der einzelnen Pixel in einem Konturdiagramm dargestellt sind.
0201001-02-03-
6,4
7,4
8,4
9,4
Inte
nsitä
t (w
.E.)
µ0 )Tm( H
Bild 1
Bild 2
(a)
02304206108
08
061
042
lexiP
Pix
el
00,01-
000,6-
000,2-
000,2
000,6
00,01
02304206108
08
061
042
lexiP
Pix
el
(c) Bild 2
1 1 mmmm1 1 mmmm
(b) Bild 1
Abbildung 6.2: (a) Hysterese durch Summation der Intensitat aller Pixel und ihrer Farbkanale. (b,c)Konturdiagramme der gemessenen Intensitaten aller Pixel bei zwei unterschiedlichen,integralen Magnetisierungsrichtungen.
Der grune Punkt, der in Abb. 6.2(b) und (c) zu sehen ist, ist ein mit einem Filzstift
markierter Bereich. Dieser Punkt diente uns als Referenz, um ein scharfes Bild auf dem
CCD-Chip abzubilden und um die erreichte Vergroßerung abzuschatzen. Die Auflosung
betragt etwa 20 µm pro Pixel. Fur eine hohere Auflosung muss der Abstand der Kamera

94 Kapitel 6 Kerr-Mikroskopie
zur Probe gemaß der Linsen- und Abbildungsgleichung vergroßert werden. Da wir aber
durch die Abmessungen des experimentellen Aufbaus limitiert sind, kann eine Vergroße-
rung auch durch ein Objektiv, wie es in Digitalkameras verwendet wird, erzielt werden.
Betrachtet man die beiden Bilder in Abb. 6.2(b) und (c), so ist deutlich ein Kontrast-
unterschied in der Intensitat zu sehen. Leider war es mit den einfachen Mitteln nicht
moglich, Domanen abzubilden, was neben dem Rauschen auf die schlechte Auflosung
zuruckzufuhren ist. Gil et al. haben in einem 20 nm dicken polykristallinen Co-Film Do-
manengroßen von 10 µm auflosen konnen [85]. Zusatzlich berichteten sie, dass bei einem
dickeren Film die Breite der Domanen abnimmt. Falls auch in unserem Ni-Film ahnlich
große Domanen auftreten, werden wir diese mit der gegenwartig vorhanden Ausstattung
nicht auflosen konnen (Auflosung ∼ 20µm).
Bei einem Mikroskop ist die kleinste raumliche Auflosung proportional zur Wellenlange
und umgekehrt proportional zur numerischen Apertur (NA) mit NA = n sinα, wobei α
der halbe Offnungswinkel und n der Brechungsindex des zwischen Probe und Objetivlinse
befindlichen Mediums ist, sodass in Luft NA < 1 gilt [68]. In unserem Aufbau ist der
Offnungswinkel sehr klein, weshalb die NA sehr klein ist. Die minimale Strukturauflosung
dmin ist gegeben durch [68]:
dmin =λ
2 ·NA. (6.1)
Um eine hohe Auflosung in unserem Aufbau zu erhalten, muss entweder ein Laser mit
einer viel kleineren Wellenlange verwendet oder die NA vergroßert werden. Dies geschieht
entweder mit einem transparenten Medium mit hohem Brechungsindex n zwischen Objekt
und Linse oder uber ein Objetivsystem, mit dem der Abstand zwischen Objekt und Linse
verkleinert werden kann, wodurch der Offnunsgwinkel zunimmt.
Wie der obigen Darstellung zu entnehmen ist, ist es schon mit einfachen Mitteln mog-
lich, Kontrastunterschiede aufzunehmen. Um eine bessere und rauschfreiere Auflosung zu
bekommen, mussen sowohl die Optik mit Hilfe zusatzlicher Komponenten weiter opti-
miert als auch eine bessere Kamera verwendet werden.
Kapitel 7
Zusammenfassung und Ausblick
Magnetooptische Messverfahren eignen sich hervorragend zur Charakterisierung der ma-
gnetischen Eigenschaften von ferromagnetischen Filmen. Betrachtet man die Polarisati-
onseigenschaften einer an einem magnetischen Festkorper reflektierten Lichtwelle, so wer-
den die magnetooptischen Effekte als magnetooptische Kerr-Effekte (MOKE) bezeichnet.
Dabei wird die durch die Magnetisierung des Festkorpers hervorgerufene Polarisations-
anderung der einfallenden linear polarisierten Welle detektiert und untersucht. Dieses
Messverfahren besticht durch einen sehr einfachen Messaufbau. Es lassen sich mit dieser
Messmethode ortsaufgelost magnetische Eigenschaften untersuchen und auch Dunnfilme
mit lediglich einigen Monolagen Filmdicke konnen noch vermessen werden. Die Kennt-
nisse magnetischer Eigenschaften sind fur die Grundlagenforschung und fur technische
Anwendungen von herausragender Bedeutung, da nur eine genaue Kenntnis zu neuen
bahnbrechenden Konzepten fur die Entwicklung neuer Bauelemente, namentlich in der
Spintronik, fuhrt.
Im Rahmen dieser Arbeit wurde ein Spektrometer fur longitudinale MOKE-Messungen
bei Raumtemperatur am Walther-Meißner-Institut (WMI) aufgebaut und charakterisiert.
Mit Hilfe dieses Aufbaus wurden dann exemplarisch verschiedene Materialsysteme be-
trachtet, wobei zusatzlich ein Vergleich mit anderen Messmethoden erfolgte. Dabei ließ
sich eine Korrelation zwischen MOKE, Ferromagnetischer Resonanz (FMR) und Magne-
totransport herstellen. Des weiteren bildeten Vorversuche mit einer einfachen WebCam
die Grundlage fur kunftige Experimente, um auch Kerr-Mikroskopie am WMI zu imple-
mentieren.
Aufbau
Die Realisierung eines MOKE-Messplatzes am WMI war der Hauptbestandteil dieser
Diplomarbeit. Dabei wurde neben dem Aufbau mit Hilfe kommerzieller Komponenten
zusatzlich ein eigens im Haus gefertigtes Magnetsystem verwendet. Fur die Ansteuerung
uber IEEE-Bus-Schnittstellen wurde ein MOKE-Messprogramm geschrieben. Es wurde
im Laufe der Zeit weiterentwickelt, so dass es ohne Weiteres auf andere Messapparaturen
anwendbar ist. Hierbei wurde besonders darauf Wert gelegt, das MOKE-Messprogramm
in ein Sequenz-Programm zu implementieren, um die Messung zu automatisieren.
95
96 Kapitel 7 Zusammenfassung und Ausblick
Als Lichtquelle dient eine Laserdiode mit einer Wellenlange von 670 nm. Zwischen
der Probe und der Lichtquelle befindet sich ein Polarisator. Linear polarisertes Licht
trifft nach Durchqueren des Polarisators auf die Probe und wird reflektiert. Zwischen
der Probe und der Photodiode steht ein zweiter Polarisator, Analysator genannt, der die
Detektion der Polarisationsdrehung ermoglicht.
Die Charakterisierung des Messaufbaus erfolgte durch Reflexionsmessungen an einem
FeCo-Film. Dieses Material besitzt wegen seiner optischen Eigenschaften ein großes ma-
gnetooptisches Signal bei der verwendeten Laserwellenlange von 670 nm. Die Analyse
wurde mit s-polarisiertem Licht (die Durchlassrichtung des ersten Polarisators steht senk-
recht zur Einfallsebene, Ψp = 90) durchgefuhrt, wodurch die magnetooptische Messung
nur auf die longitudinale Magnetisierungskomponente, die parallel zur Oberflache der
Probe und parallel zur Einfallsebene liegt, sensitiv ist. Der Charakterisierung liegen zwei
Parameter zu Grunde, die variiert werden konnen. Zum Einen ist dies der Analysator-
winkel Ψa und zum Anderen der Einfallswinkel θe.
Der Analysatorwinkel wurde bei der Charakterisierung zwischen +5 und −5 vari-
iert, wobei Ψa = 0 bedeutet, dass die Durchlassrichtungen des Analysators und des
Polarisators senkrecht zueinander stehen. Dabei konnten die magnetooptischen Großen,
wie das magnetooptische Signal, die normierte Kerr-Intensitat und Kerr-Rotation, genau
untersucht werden. Fur das magnetooptische Signal, d.h. die Differenz der Intensitaten
fur beide Magnetisierungen im gesattigten Feldbereich, ließ sich der lineare Verlauf in
Abhangigkeit vom Analysatorwinkel Ψa demonstrieren. Zusatzlich wurde die normierte
Kerr-Intensitat (in der Kerr-Mikroskopie”Kontrast”genannt) aus dem magnetooptischen
Signal und der gemittelten Intensitat in Abhangigkeit von Ψa bestimmt. Dabei stellte
sich bei einem Analysatorwinkel von Ψa = 0,14 der maximale Kontrast in unserem
Messaufbau ein. Das bedeutet, dass hier der großte Unterschied des magnetooptischen
Signals bezogen auf die gemittelte Intensitat erreicht wird. Das ist besonders fur die
Kerr-Mikroskopie von Interesse, da bei diesem Winkel der starkste Kontrast zwischen
Domanen mit unterschiedlicher Magnetisierungsrichtung erreicht wird.
Um die Empfindlichkeit des Systems abzuschatzen, erfolgte die Bestimmung des Rau-
schens anhand der gemessenen Intensitaten in einem Magnetfeldbereich, in dem die Mag-
netisierung der Probe gesattigt ist. Daraus konnte mit dem magnetooptischen Signal das
Signal-zu-Rausch-Verhaltnis bestimmt werden. Es ergab sich, dass bei sehr kleinen Ψa
das Verhaltnis klein ist und bei |Ψa| ≥ 0,5 innerhalb 250 ≤ Smo/N ≤ 700 schwankt.
Dabei zeichnete sich fur große Analysatorwinkel keine klare Tendenz ab.
Als weiterer Parameter wurde der Einfallswinkel θe des Lichts variiert. Aus diesen
Messungen wurde die Kerr-Rotation φKerr, die durch die Magnetisierung hervorgerufen
wird, bestimmt. Dem theoretisch erwarteten Verlauf folgend nahm die Rotation φKerr mit
zunehmendem θe zu. Der maximal einstellbare Einfallswinkel ist durch die Geometrie des
Aufbaus sowie der Polschuhe limitiert und betragt in unserem Aufbau 40. Fur θe = 40
erhalt man ein φKerr von etwa 0,06. Zusammen mit dem Signal-zu-Rausch-Verhaltnis
ergibt sich damit die Empfindlichkeit des Messaufbaus zu ca. 5 × 10−4 Grad. Wird ein

97
Vergleich mit anderen Gruppen herangezogen, so zeigt sich, dass der Messaufbau nur um
eine Großenordnung schlechter ist als der beste berichtete Wert von anderen Gruppen.
Jedoch ist hierbei zu berucksichtigen, dass im Aufbau auf LockIn-Technik verzichtet wird,
wodurch eine weitere Verbesserung des Signal-zu-Rausch-Verhaltnisses moglich ist. Auch
wird in der Literatur keine Aussagen uber die Messzeit getroffen, weshalb der Vergleich
problematisch ist.
Die Polarisatorgeometrie bedingt einen großen Analysatorwinkel. Bei kleinen Analy-
satorwinkeln ist die detektierte Intensitat in Abhangigkeit von der Kerr-Rotation wegen
des Malusschen Gesetz nicht linear. Um fur die Kerr-Rotation einen linearen Verlauf zu
erhalten, darf der Analysatorwinkel nicht zu klein sein. Nur so kann als Messsignal fur die
ferromagnetische Hysterese ein symmetrisches Signal gewahrleistet werden. In unserem
Aufbau sollte, wenn auf den maximalen Kontrast verzichtet werden kann, der Analysa-
torwinkel mindestens Ψa = 0,4 betragen, da ab diesem Winkel der sin2 Ψa-Verlauf der
Intensitat fur kleine Auslenkungen gut durch eine Gerade genahert werden kann. Auch
hier ist das magnetooptische Signal fur die untersuchten Materialsysteme immer noch
ausreichend groß.
MOKE an dunnen Filmen
Kapitel 4 zeigt, dass der Messaufbau voll funktionstuchtig ist und mit ihm ohne weite-
res ferromagnetische Filme untersucht werden konnen. Da es ein Ziel ist, am WMI in
Zukunft auch verstarkt Spinventil-Strukturen zu untersuchen, wurden simultan zu den
MOKE-Messungen Magnetotransportmessungen, fur die eine Strukturierung der Probe
notwendig war, durchgefuhrt und beide Messungen miteinander verglichen. Dabei ergab
sich, dass der Anisotrope Magnetwiderstand (AMR) durch Ausnutzung seiner cos2 β-
Abhangigkeit um mindestens eine Großenordnung unterdruckt werden kann. In zukunfti-
gen Messungen an einem Spinventil lasst sich somit der Riesenmagnetwiderstand (GMR)
aus den Magnetotransportkurven extrahieren. Die Strukturierung der Proben in Hallbars
mit L-Form erlaubt tatsachlich eine Trennung des AMR vom GMR. Zusatzlich konnte aus
MOKE und Ferromagnetischer Resonanz (FMR) die relative Lage der leichten Achsen
der Spinventilstruktur bestimmt werden.
Neben polykristallinen Filmen wurden auch von Andreas Brandlmaier, Andrea Niel-
sen und Deepak Venkateshvaran in der PLD1-Anlage hergestellte einkristalline Ferrit-
Proben mit MOKE untersucht. Hier ergab sich allerdings fur Magnetit-Filme und Zink
substituierte Magnetit-Filme, gewachsen auf MgO(001), dass keine in-plane Anisotropie
mit Hilfe von MOKE messbar war. Lediglich ein Magnetitfilm auf MgO(110) zeigte in
der MOKE-Messung eine deutliche Anisotropie. Das Stoner-Wohlfarth-Modell diente zur
quantitativen Bestimmung der Anisotropie-Konstanten. Im Vergleich zu FMR sind die
mit MOKE bestimmten Anisotropiekonstanten kleiner. Um die Ergebnisse fur den Ma-
gnetitfilm auf MgO(110) weiter zu verfolgen, sollten auch Zink substituierte Magnetitfilme
1Pulsed Laser Deposition
98 Kapitel 7 Zusammenfassung und Ausblick
auf MgO(110) hergestellt und untersucht werden.
Schließlich wurden auch ferromagnetische Filme auf ferroelektrischen BaTiO3-Substraten
mit MOKE untersucht. Solche multiferroischen Systeme sind von großem Interesse, da
sich durch das Anlegen einer Spannung an das Ferroelektrikum die aufgebrachte ferro-
magnetische Schicht verspannt, wodurch die magnetische Anisotropie manipuliert wird.
Deutlich konnte diese Anisotropiemanipulation mit MOKE aufgelost werden.
Kerr-Mikroskopie
Da es sich bei MOKE um ein optisches Messverfahren handelt, liegt es nahe, die Mag-
netisierung der ferromagnetischen Filme und somit ihre Domanen bildlich darzustellen.
Im letzten Kapitel dieser Arbeit wurden erste grundlegende Versuche in Richtung Kerr-
Mikroskopie unternommen. Dabei konnte schon mit sehr einfachen Mitteln ein deutlicher
Kontrastunterschied in der Intensitat zwischen unterschiedlichen Magnetisierungsrichtun-
gen gemessen werden. Allerdings reichte das Auflosungvermogen der Kamera nicht aus,
um auch kleine Domanen abzubilden. Aus diesem Grund ist es wichtig, eine neue effizien-
tere Kamera zu beschaffen sowie die zwischen Objekt und Kamera befindliche Optik zu
optimieren, damit Kerr-Mikroskopie am WMI erfolgen kann. Es ware auch in Betracht
zu ziehen, den Aufbau zu erweitern, dass sich auch dynamische Magnetisierungsprozesse
zeitaufgelost messen ließen.
Um die Apparatur weiter zu verbessern, sind zusatzliche Komponenten im Aufbau no-
tig. So lassen sich mit Hilfe von LockIn-Technik und Faraday-Modulatoren Verbesserun-
gen des Signal-zu-Rausch-Verhaltnisses erreichen. Um auch die transversale Magnetisie-
rungskomponente besser untersuchen zu konnen, ist ein Vektormagnetsystem vorteilhaft.
Die Experimente mit einem Magnetkryostaten sollten ebenfalls weiter verfolgt werden,
um auch die polare Magnetisierungskomponente untersuchen zu konnen.
Abschließend ist festzustellen, dass ein voll funktionstuchtiges MOKE-Spektrometer am
WMI vorhanden ist. Dadurch ist die Charakterisierung und Untersuchung magnetischer
Eigenschaften dunner ferromagnetischer Filme durch ein weiteres Messverfahren moglich.

Literaturverzeichnis
[1] Baibich, M. N., J. M. Broto, A. Fert, F. Nguyen Van Dau, F. Petroff,
P. Etienne, G. Creuzet, A. Friederich und J. Chazelas: Giant Magne-
toresistance of (001)Fe/(001)Cr Magnetic Superlattices. Physical Review Letters,
61(21):2472–2475, Nov 1988.
[2] Binasch, G., P. Grunberg, F. Saurenbach und W. Zinn: Enhanced magne-
toresistance in layered magnetic structures with antiferromagnetic interlayer ex-
change. Physical Review B, 39(7):4828–4830, Mar 1989.
[3] Oppeneer, P.M.: Handbook of Magnetic Materials Vol.13 - chapter 3 - Magneto-
optic Kerr spectra. Elsevier Science, 2001.
[4] Faraday, M.: Experimental Researches. Philosophical Transactions of the Royal
Society of London, 136:1, 1846.
[5] Kerr, J.: On rotation of the plane of polarization by reflection from the pole of a
magnet. Philosophical Magazine, 3:321, 1877.
[6] Antonov, V. N., B. N. Harmon, V. P. Antropov, A. Ya. Perlov und
A. N. Yaresko: Electronic structure and magneto-optical Kerr effect of Fe3O4
and Mg2+- or Al3+-substituted Fe3O4. Physical Review B, 64(13):134410, Sep
2001.
[7] Florczak, J.M. und E.D. Dahlberg: two magnetization components by the
magneto-optical Kerr effect. Journal of Applied Physics, 67:7520, 1990.
[8] Yang, Z.J. und M.R. Scheinfein: Combined three-axis surface magneto-optical
Kerr effects in the study of surface and ultrathin-film magnetism. Journal of Applied
Physics, 74:6810–6823, 1993.
[9] Williams, H.J., F.G. Foster und E.A. Wood: Observation of Magnetic Do-
mains by the Kerr Effect. Physical Review, 82:119–120, 1951.
[10] Hubert, A.: Kerroptische Mikroskopie. 24. IFF-Ferienkurs Julich, 24:34.1, 1993.
[11] A. Hubert, R. Schafer: Magnetic Domains. Springer-Verlag, Berlin, 1998.
99

100 Literaturverzeichnis
[12] Barman, A., S. Wang, J.D. Maas, A.R. Hawkins, S. Kwon, A. Liddle,
J. Bokor und H. Schmidt: Magneto-optical Observation of Picosecond Dynamics
of Single Nanomagnets. Nano Letters, 6:2939–2944, 2006.
[13] Koopmans, B., M. van Kampen, J.T. Kohlhepp und W.J.M. de Jonge:
Ultrafast Magneto-Optics in Nickel: Magnetism or Optics? Physical Review Letters,
85:844, 2000.
[14] Althammer, Matthias: Magneto-galvanische Effekte und Verspannungen in
dunnen ferromagnetischen Filmen. Diplomarbeit, Technische Universitat Munchen,
2007.
[15] Blundell, Stephen: Magnetism in Condensed Matter. Oxford University Press
Inc., New York, 2001.
[16] Morrish, A.H.: The physical principles of magnetism. John Wiley & Sons, 1965.
[17] Gross, R: Magnetismus. Lecture Notes, 2004.
[18] Chikazumi, Soshin: Physics of Ferromagnetism. Oxford University Press, New
York, 2002.
[19] Brandlmaier, Andreas: Magnetische Anisotropie in dunnen Schichten aus Ma-
gnetit. Diplomarbeit, Walther-Meißner-Institut, 2006.
[20] Tannous, C. und J. Gieraltowski: The Stoner-Wohlfarth model of Ferroma-
gnetism: Static properties. arXiv physics, Seite 0607117, 2006.
[21] Morley, N.A., M.R.J. Gibbs, E. Ahmad, I. Will und Y.B. Xu: MOKE
hysteresis loop method of determining the anisotropy constants of ferromagnetic
thin films: fe on GaAs(100) with overlayers of Au and Cr. Journal of Magnetism
and Magnetic Materials, 300:436–444, 2006.
[22] Argyres, Petros N.: Theory of the Faraday and Kerr Effects in Ferromagnetics.
Physical Review, 97(2):334–345, Jan 1955.
[23] Pershan, P.S.: Magneto-Optical Effects. Journal of Applied Physics, 38:1482–
1490, 1967.
[24] Erskine, J. L. und E. A. Stern: Magneto-Optic Kerr Effects in Gadolinium.
Physical Review B, 8(3):1239–1255, Aug 1973.
[25] Oppeneer, P.M., T. Maurer, J. Sticht und J. Kubler: Ab initio calculated
magneto-optical Kerr effect of ferromagnetic metals: Fe and Ni. Physical Review
B, 45:10924–10933, 1992.

Literaturverzeichnis 101
[26] Freisner, M. J.: A Survey of Magnetooptic Effects. IEEE Transaction on Ma-
gnetics, 4:152–161, 1968.
[27] Voigt, Woldemar: Magneto- und Elektrooptik. Teubner-Verlag, Leipzig, 1908.
[28] You, C.-Y. und S.-C. Shin: Generalized analytic formulae for magneto-optical
Kerr-effects. Journal of Applied Physics, 84:541–546, 1998.
[29] Landau, L.D. und E.M. Lifschitz: Elektrodynamik der Kontinua. Akademie-
Verlag, Berlin, 1967.
[30] Hunt, R.P.: Magneto-Optic Scattering from Thin Solid Films. Journal of Applied
Physics, 38:1652, 1966.
[31] Zak, J., E. R. Moog, C. Liu und S. D. Bader: Magneto-optics of multilayers
with arbitrary magnetization directions. Physical Review B, 43(8):6423–6429, Mar
1991.
[32] Jackson, John David: Klassische Elktrodynamik, 3. Auflage. Walter de Gruyter-
Verlag, Berlin, 2002.
[33] Bechthold, P.S.: Magnetooptische Effekte: Phanomenologische Beschreibung
und Anwendungen. 30. IFF-Ferienkurs Julich, 30:C8.1, 1999.
[34] Schroder, Marc-Andreas: Magnetooptische Kerr-Effekte im VUV an Eisen
und Eisensystemen. Doktorarbeit, Universitat Hamburg, 2000.
[35] Vollmer, R.: Lineare und nichtlineare Magnetooptik an ultradunnen ferromagne-
tischen Schichten und Vielfachschichten. 30. IFF Ferienkurs Julich, Seite C7.1,
1999.
[36] Bauer, Andreas: Far-Field and Near-Field Magneto-optical Microscopy of Ul-
trathin Films. Habilitationsschrift, Freie Universitat Berlin, 2000.
[37] McGuire, T.R. und R.I. Potter: Anisotropic Magnetoresistance in Ferroma-
gnetic 3d Alloys. IEEE Transaction on Magnetics, 11:1018–1038, 1975.
[38] Thompson, D.A., L.T. Romankiw und A.F. Mayadas: Thin Film Magne-
toresistors in Memory, Storage, and Related Applications. IEEE Transaction on
Magnetics, 11:1039, 1975.
[39] Gross, R. und A. Marx: Spinelektronik. Lecture Notes, 2004.
[40] Grunberg, P., R. Schreiber, Y. Pang, Brodsky. M.B. und H. Sowers:
Layered Magnetic Structures: Evidence for Antiferromagnetic Coupling of Fe Layers
across Cr Interlayers. Physical Review Letters, 57:2442, 1986.

102 Literaturverzeichnis
[41] Yafet, Y.: Ruderman-Kittel-Kasuya-Yosida range function of a one-dimensional
free-electron gas. Physical Review B, 36:3948, 1987.
[42] Barnas, J.: Coupling between two ferromagnetic films through an non-magnetic
metallic layer. Journal of Magnetism and Magnetic Materials, 111:L215, 1992.
[43] Edwards, D.M., J. Mathon, R.B. Muniz und M.S. Phan: Oscillations of
the exchange in magnetic multilayers as an analog of de Haas van Alphen effect.
Physical Review Letters, 67:493, 1991.
[44] Wang, Y., P.M. Levy und J.L. Fry: Interlayer magnetic coupling in Fe/Cr
multilayered structures. Physical Review Letters, 65:2732, 1990.
[45] Bruno, P.: Interlayer exchange coupling: a unified physical picture. Journal of
Magnetism and magnetic Materials, 121:248, 1993.
[46] Stilles, M.D.: Exchange coupling in magnetic heterostructures. Physical Review
B, 48:7238, 1993.
[47] Kale, S., S.M. Bhagat, S.E. Lofland, T. Scabarozi, S.B. Ogale,
A. Orozco, S.R. Shinde, T. Venkatesan, B. Hannoyer, B. Mercey und
W. Prellier: Film thickness and temperature dependence of the magnetic proper-
ties of pulsed-laser deposited Fe3O4 films on different substrates. Physical Review
B, 64:205413, 2001.
[48] Miyata, N.: Ferromagnetic Crystalline Anisotropy of MeFe2O4-Fe3O4 Ferrite So-
lid Solutions. Journal of the Physical Society of Japan, 16:1291, 1961.
[49] Benedict, T.S. und J.L. Durand: Dielectric Properties of Single Domain Cry-
stals of BaTiO3 at Microwave Frequencies. Physical Review, 109:1091–1093, 1958.
[50] Hippel, A. von: Ferroelectricity, Domain Structure, and Phase Transition of Ba-
rium Titanate. Reviews of Modern Physics, 22:221, 1950.
[51] Wieder, H.H.: Ferroelectric Hysteresis in Barium Titanate Single Crystals. Jour-
nal of Applied Physics, 26:1479, 1955.
[52] Landauer, R., D.R. Young und M.E. Drougard: Polarization Reversal in
the Barium Titanate Hysteresis Loop. Journal of Applied Physics, 27:752, 1956.
[53] Hooton, J.A. und W.J. Merz: Etch Patterns and Ferroelectric Domains in
BaTiO3 Single Crystals. Physical Review, 98(2):409–413, Apr 1955.
[54] Pantel, Daniel: Dielektrische und magnetische Eigenschaften multifunktionaler
Dunnschichtstrukturen. Diplomarbeit, Walther-Meißner-Institut, 2008.

Literaturverzeichnis 103
[55] Kittel, Charles: Einfuhrung in Festkorperphysik. Oldenburg Verlag Munchen,
9. Auflage, 1991.
[56] Ashcroft, N.W.: Festkorperphysik. Oldenburg Verlag Munchen, 2001.
[57] Shih, J.W.: Magnetic Properties of Iron-Cobalt Single Crystals. Physical Review,
46:139, 1934.
[58] Xu, Y.B., Q.Y. Jin, Y. Zhai, M. Lu, Y.Z. Miao, Q.S. Bie und H.R. Zhai:
Complex magneto-optical Kerr rotation of Fe, FeCo/Co multilayer films. Journal
of Applied Physics, 74:3470–3474, 1993.
[59] Herrmann, Th., K. Ludge, Richter W., K. G. Georgarakis, P. Pou-
lopoulos, R. Nunthel, J. Lindner, M. Wahl und N. Esserand: Optical
anisotropy and magneto-optical properties of Ni on preoxidized Cu(110). Physical
Review B, 73:134408, 2006.
[60] Palik, E.D.: Handbook of Optical Constants of Solids. Academic Press, New York,
1985.
[61] O´Handley, Robert C.: Modern Magnetic Materials - Principles and Applica-
tions. John Wiley & Sons, Inc., 2000.
[62] Smit, J. und H.P.J. Wijn: Ferrites - Physical Properties of Ferrimagnetic Oxides
in Relation to their Technical Applications. Philips Technical Library, 1959.
[63] Takaobushi, J., H. Tanaka, T. Kawai, S. Ueda, J.-J. Kim, M. Kobata,
E. Ikenaga, M. Yabashi, K. Kobayashi, Y. Nishino, D. Miwa, K. Tama-
saku und T. Ishikawa: Fe3−xZnxO4 thin films as tunable high Curie temperature
ferromagnetic semiconductor. Applied Physics Letters, 89:242507, 2006.
[64] Li, Y., Q. Li, M. Wen, Y. Zhang, Y. Zhai, Z. Xie, F. Xu und S. Wei:
Magnetic properties and local structure studies of Zn doped ferrites. Journal of
Electron Spectroscopy and Related Phenonema, 160:1–6, 2007.
[65] Venkateshvaran, D., M. Althammer, A. Nielsen, S. Geprags, M.S.R.
Rao, S.T.B. Gonnenwein, M. Opel und R. Gross: Epitaxial ZnxFe3−xO4 Thin
Films: A Spintronic Material with Tunable Electrical and Magnetic Properties. ar-
Xiv, 0808:3642, 2008.
[66] Yafet, Y. und C. Kittel: Antiferromagnetic Arrangements in Ferrites. Physical
Review, 87:290, 1952.
[67] Ishikawa, Y.: Superparamagnetism in the ZnFe2O4-NiFe2O4 System. Journal of
the Physical Society of Japan, 17:1877–1883, 1962.

104 Literaturverzeichnis
[68] Hecht: Optik. Oldenburg Verlag Munchen, 2005.
[69] Brenneis, Andreas: Dokumentation zu LabVIEW-Programmen um den MOKE-
Versuchsaufbau. Werkstudentenbericht, Walther-Meißner-Institut, 2008.
[70] Bader, S.D. und J.L. Erskine: Ultrathin Magnetic Structures - Magneto-Optical
Effects in Ultrathin Magnetic Structures. Springer Berlin, 2005.
[71] Ballentine, C.A., R.L. Fink, J Araya-Pochet und J.L. Erskin: Exploring
Magnetic Properties of Ultrathin Epitaxial Magnetic Strustures Using Magneto-
Optical Techniques. Applied Physics A, 49:459–466, 1989.
[72] Allwood, D.A., G. Xiong, M.D. Cooke und R.P Cowburn: Magneto-optical
Kerr effect analysis of magnetic nanostructures. Journal of Physic D: Applied
Physic, 36:2175–2182, 2003.
[73] Moog, E. R., C. Liu, S. D. Bader und J. Zak: Thickness and polarization
dependence of the magnetooptic signal from ultrathin ferromagnetic films. Physical
Review B, 39(10):6949–6956, Apr 1989.
[74] Hunt, R.P.: Contrast Enhancement of the Transverse Kerr Effect. Journal of
Applied Physics, 38:1215–1216, 1967.
[75] Yaresko, A.N., L. Uba, S. Uba und A.Ya. Perlov: Magneto-optical Kerr
spectroscopy of palladium. Physical Review B, 58:7648, 1998.
[76] Kato, Y.K., R.C. Myers und D.D. Gossard, A.C. Awschalom: Observation
of the Spin Hall Effect in Semiconductors. Science, 306:1910, 2004.
[77] Hornauer, H., T.M. Atmono und K. Roll: A Kerr Magnetometer usinfg Fara-
day Modulation Technique. Journal of Magnetism and Magnetic Materials, 83:551–
552, 1990.
[78] Shelton, D.P. und R.E. Cameron: Nanoradian sensitivity Kerr effect appara-
tus. Review of Scientific Instruments, 53:430, 1988.
[79] Instruments, Oxford: Product Guide Spectromag SM4000.
[80] Instruments, Oxford: Windows for Optical Cryostats Guide.
[81] Knorr, Nikolaus: Magnetische Eigenschaften atomar geschichteter Eisen/Gold-
Vielfachschichten. Diplomarbeit, Universitat Kaiserslautern, 1998.
[82] Fergen, Immanuel: Entwicklung, Herstellung und Charakterisierung weichma-
gnetischer Dunnschichten fur Hochfrequenz-Anwendungen. Doktorarbeit, Universi-
tat Karlsruhe, 2003.

Literaturverzeichnis 105
[83] Zoriasatain, S., F. Azarkharman, S.A. Sebt und M. Akhavan: Magnetic
anisotropies in FeCo fine particles. Journal of Magnetism and Magnetic Materials,
300:525–531, 2006.
[84] Cooke, M.D., M.R.J. Gibbs und R.F. Pettifer: Sputter deposition of com-
positional gradient magnetostrictive FeCo based thin films. Journal of Magnetism
and Magnetic Materials, 231:175–180, 2001.
[85] Gil, W., D. Gorlitz, M. Horisberger und J Kotzler: Magnetoresistan-
ce anisotropy of polycrystalline cobalt films: Geometrical-size and domain effects.
Physical Review B, 72:134401, 2005.
[86] Landolt und Bornstein: Zahlenwerte und Funktionen aus Physik, Chemie,
Astronomie, Geophysik und Technik, Band 9. Springer-Verlag Berlin, 6. Auflage,
1962.
[87] Yi, J.B., Y.Z. Zhou, J. Ding, G.M. Chow, Z.L. Dong, T. White, X.Y. Gao,
A.T.S. Wee und X.J. Yu: An investigation of structure, magnetic properties and
magnetoresistance of Ni films prepared by sputtering. Journal of Magnetism and
Magnetic Materials, 284:303–311, 2004.
[88] Kakol, Z. und J.M. Honig: Influence of deviations from ideal stoichiometry on
the anisotropy parameters of magnetite Fe3(1−δ)O4. Physical Review B, 40:9090–
9097, 1989.
[89] Wiechec, A., J. Korecki, B. Handke, Z. Kakol, D. Owoc, D.A. Antolak
und A. Kozlowski: Uniaxial anisotropy in magnetite thin films - Magnetization
studies. Physica B, 382:147–150, 2006.
[90] Schwarz, Manuel: Aufbau und Charakterisierung eines FMR-Spektrometers fur
X- und K-Band. Diplomarbeit, Walther-Meißner-Institut, 2008.
[91] Bickford, L.R.: Ferromagnetic Resonance Absorption Magnetit. Physical Re-
view, 78:449–457, 1950.
[92] Stoppels, D., P.G.T. Boonen, U. Enz und L.A.H. van Hoof: Monocrystalli-
ne high-saturation magnetization ferrites for video recording head application: I. Zn
ferrous ferrites. Journal of Magnetism and Magnetic Materials, 37:116–122, 1983.
[93] Margulies, D.T., F.T. Prarker, F.E. Spada, R.S. Goldman, J. Li, R. Sin-
clair und A.E. Berkowitz: Anomalous moment and anisotropy behavior in
Fe3O4 films. Physical Review B, 53:9175–9187, 1996.
[94] Nielsen, Andrea. Doktorarbeit, Walther-Meißner-Institut, 2008.

106 Literaturverzeichnis
[95] Schlegel, A., S.F. Alvarado und P. Wachter: Optical properties of magnetite
(Fe3O4). Journal of Physics C. Solid State Physics, 12:1157, 1979.
[96] Venkateshvaran, Deepak: Fabrication and Characterization of ZnxFe3−xO4
Epitaxial Films. Diplomarbeit, Walther-Meißner-Institut Garching, Indian Insti-
tute of Technology Madras, 2008.
[97] Miller, B.H., E.Y. Chen und E.D. Dahlberg: A method separating the giant
magnetoresistance and the anisotropic magnetoresistance in multilayers. Journal of
Applied Physics, 73:6384, 1993.
[98] Lu, Z.Q., G. Pan und W.Y. Lai: Planar Hall effect in NiFe/NiMn bilayers.
Journal of Applied Physics, 90:1414–1418, 2001.
[99] Ko, T.W., B.K. Park, J.H. Lee, K. Rhie, M.Y. Kim und J.R. Rhee: Planar
Hall effect of glass/Fe 70 A/[Co 21 A/Cu 25 A]20 multilayers. Journal of Magnetism
and Magnetic Materials, 198-199:64–66, 1999.
[100] Adeyeye, A.O., M.T. Win, T.A. Tan, G.S. Ghong, V. Ng und T.S. Low:
Planar Hall effect and magnetoresistance in Co/Cu multilayer films. Sensors and
Actuators A, 116:95–102, 2004.
[101] Huang, J.C.A., Y.H. Lee, Y.M. Hu und T.C. Chang: Studies of anisotro-
pic and giant magnetoresistance in Co/Cu(111) epitaxial multilayers. Journal of
Applied Physics, 79:6276–6278, 1996.
[102] Weiler, Matthias: Magnetization control in multiferroic heterostructures. Di-
plomarbeit, Walther-Meißner-Institut, 2007.
[103] Dove, D.B.: Photography of Magnetic Domains Using the Transverse Kerr Effect.
Journal of Applied Physics, 34:2067, 1963.
[104] Li, X.F., J. Bao, J. Zhang, G. Chen und C. Gao: An imaging system for high-
throughput magneto-optical Kerr effect characterization of combinatorial materials
libraries. Measurement Science and Technology, 18:2039–2042, 2007.
[105] Neudert, A., J. McCord, D. Chumakov, R. Schafer und L. Schultz:
Small-amplitude magnetization dynamics in permalloy elements investigated by
time-resolved wide-field Kerr microscopy. Physical Review B, 71:134405, 2005.
[106] Rave, W., R. Schafer und A. Hubert: Quantitative observation of magnetic
Domains with the magneto-optical Kerr effect. Journal of Magnetism and Magnetic
Materials, 65:7–14, 1987.
Danksagung
Abschließend sei allen, die mich auf meinem Weg wahrend dieser Arbeit unterstutzt und
mir Mut zugesprochen sowie zum Gelingen dieser Arbeit beigetragen haben, sehr herzlich
gedankt. Im besonderen gilt mein Dank:
Prof. Dr. Rudolf Gross fur die Moglichkeit, diese Diplomarbeit am Walther-Meißner-
Institut anfertigen zu durfen. Fur Diskussionen und Erklarungen sei ihm gedankt. Aber
auch fur die vielen, unterhaltsamen Anekdoten, die jedes Mal zur Auflockerung der At-
mosphare beitrugen.
Dr. Sebastian T. B. Gonnenwein sei im besonderen fur die Geduld, die er mir entgegen-
brachte, die kritische Begleitung dieser Diplomarbeit und die hervorragende Betreuung
gedankt. Es war fur mich faszinierend, mit welchem Ideenreichtum und mit welcher Beob-
achtungsgabe er es immer wieder schaffte, neue Impulse fur diese Arbeit zu geben. Auch
sei ihm fur die Korrekturen meiner Diplomarbeit gedankt.
Andreas Brandlmaier fur die exzellente Betreuung meiner Arbeit. Durch seine Liebe zum
Detail wurden immer neue Fragestellungen aufgeworfen und gelost, und brachten mich
so immer ein kleines Stuck weiter. Auch sei ihm fur seine grenzenlose Hilfsbereitschaft zu
danken. Er half mir in jeder Lage und zu jeder Zeit immer sofort, wenn Probleme oder
Fragen auftraten. Auch fur die Bereitstellung seiner Proben fur diese Arbeit bedanke ich
mich.
Dr. Matthias Opel fur die Hilfsbereitschaft in allen Bereichen und fur die schone At-
mosphare. Auch sei ihm fur die immer wieder aufmunternden Worte, wenn mich die
Motivation mal wieder im Stich gelassen hatte, gedankt.
Stephan Geprags fur die Bereitstellung der BTO-Proben und fur die Hilfe und Diskussion
bei den Ferroelektrika.
Manuel Schwarz, meinem Diplomandenmitstreiter in der MMagnetikerGruppe, fur die
kleine Einfuhrung in FMR.
Matthias Althammer fur die Einfuhrung in LabVIEW und sonstige Fragestellungen be-
zuglich Programmierung sowie den die immer wieder aufmunternden Worte.
Mathias Weiler fur die Hilfe bei der Probenstrukturierung und fur die bereitwillige Be-
antwortung meiner vielen Fragen.
107

Andrea Nielsen fur die Bereitstellung der Proben und fur die schone Sightseeing-Tour in
Berlin.
Allen anderen Mitgliedern der MMagnetikerGruppe am WMI fur die gute Zusammenar-
beit.
Dr. Georg Woltersdorf fur die Bereitstellung der Spinventil-Probe und der Demonstration,
wie einfach MOKE doch sein kann.
Thomas Brenninger, dem Meister der CAD-Zeichnungen, fur die schnelle Hilfe bei tech-
nischen Fragen sowie fur die Entwurfe fur unsere Magnetsysteme.
Allen technischen Angestellten, insbesondere Robert Muller, Helmut Thies und seiner
Werkstatt-Crew, die immer wieder Zeit fanden, um fur mich auf die schnelle ein neues
Bauteil anzufertigen. Auch dem Reinigungspersonal sei fur die angenehme Atmosphare
bei der Arbeit gedankt.
Allen Doktoranden und Diplomanden am WMI.
Allen meinen Freunden, die immer ein offenes Ohr fur meine Probleme hatten, wenn ich
mal wieder am Rande der Verzweiflung war, und ohne deren Unterstutzung ich nicht
soweit gekommen ware. Fur die vielen gemeinsamen Stunden, die wir zusammen hatten
und in denen ich mich immer ein wenig ablenken konnten.
Meiner Familie, ohne deren Unterstutzung dieses Studium nicht moglich gewesen ware,
sei herzlichst gedankt. Fur ihre in jeder Hinsicht erdenkliche Hilfe, fur die ich jeden Tag
dankbar bin.
108

![Juli_2015 [PDF, 9.00 MB]](https://static.fdokument.com/doc/165x107/585697421a28ab6e328bb868/juli2015-pdf-900-mb.jpg)