Polarimetrische Streuungseigenschaften und ... · Polarimetrische Streuungseigenschaften und...
317
Polarimetrische Streuungseigenschaften und Fokussierungsmethoden zur quantitativen Auswertung der polarimetischen SAR-Daten von der Fakult¨ at Elektrotechnik und Informationstechnik der Technischen Universit¨ at Chemnitz genehmigte Dissertation zur Erlangung des akademischen Grades Doktoringenieur Dr.-Ing. vorgelegt von Dipl.-Ing. Narathep Phruksahiran geboren am 10. September 1977 in Nakhon Si Thammarat, Thailand eingereicht am 11. Dezember 2012 Gutachter: Prof. Dr.rer.nat. Madhukar Chandra Prof. Dr.-Ing. Gerd Wanielik Tag der Verleihung: 5. M¨ arz 2013
Transcript of Polarimetrische Streuungseigenschaften und ... · Polarimetrische Streuungseigenschaften und...

Polarimetrische Streuungseigenschaftenund Fokussierungsmethoden zurquantitativen Auswertung derpolarimetischen SAR-Daten
von der Fakultat Elektrotechnik und Informationstechnik
der Technischen Universitat Chemnitz
genehmigte
Dissertation
zur Erlangung des akademischen Grades
Doktoringenieur
Dr.-Ing.
vorgelegt von
Dipl.-Ing. Narathep Phruksahiran
geboren am 10. September 1977 in Nakhon Si Thammarat, Thailand
eingereicht am 11. Dezember 2012
Gutachter: Prof. Dr.rer.nat. Madhukar ChandraProf. Dr.-Ing. Gerd Wanielik
Tag der Verleihung: 5. Marz 2013

Bibliografische Beschreibung
Phruksahiran, Narathep
Thema
Polarimetrische Streuungseigenschaften und Fokussierungsmethoden zurquantitativen Auswertung der polarimetrischen SAR-Daten
Dissertation an der Fakultat fur Elektrotechnik und Informationstechnik derTechnischen Universitat Chemnitz, Institut fur Hochfrequenztechnik undTheoretischen Elektrotechnik, Chemnitz
317 Seiten
126 Abbildungen
22 Tabellen
79 Literaturquellen
2

Referat
Das Radar mit synthetischer Apertur (Synthetic Aperture Radar - SAR) liefert einequasi-fotographische Abbildung der beleuchteten Bodenoberflache mit zusatzlichen In-formationen, die von der gesendeten und empfangenen Polarisation der Wellen abhangigsind. Eine nutzliche Anwendung der polarimetrischen SAR-Daten liegt bei der Klassi-fizierung der Bodenstruktur anhand der polarimetrischen Streuungseigenschaften.
In diesem Zusammenhang beschaftigt sich die vorliegende Arbeit mit der Entwick-lung und Untersuchung neuer polarimetrischen Fokussierungsfunktion fur die SAR-Datenverarbeitung mit Hilfe der polarimetrischen Ruckstreuungseigenschaft, die zueiner alternativen quantitativen Auswertung der polarimerischen SAR-Daten fuhrenkann. Die physikalische Optik Approximation wird fur die numerische Berechnung derruckgestreuten elektrischen Felder der kanonischen Ziele unter SAR-Geometrie unterBerucksichtigung der Polarisationslage verwendet. Aus den ruckgestreuten elektrischenFelder werden die polarimetrischen Radarruckstreuquerschnitte berechnet.
Ein SAR-Simulator wird zur Datenverarbeitung der E-SAR des DLR entwickelt. DerAnsatz des polarimetrischen Radarruckstreuquerschnittes ermoglicht die approximiertenumerische Berechnung der Ruckstreuungseigenschaften der kanonischen Ziele sowohlim kopolaren als auch im kreuzpolaren Polarisationsbetrieb.
Bei der SAR-Datenverarbeitung werden die Rohdatensatze durch die Referenzfunk-tion eines Punktzieles in der Entfernungsrichtung verarbeitet. Bei der Azimutkompres-sion werden die vier Referenzfunktionen, das heißt die Referenzfunktion eines Punkt-zieles, die polarimetrische Fokussierungsfunktion einer flachen Platte, die polarimetri-sche Fokussierungsfunktion eines Zweifach-Reflektors und die polarimetrische Fokus-sierungsfunktion eines Dreifach-Reflektors, eingesetzt.
Die qunatitativen Auswertung der SAR-Daten werden anhand des Pauli-Zerlegungst-heorems, der differentiellen Reflektivitat und des linearen Depolarisationsverhaltnisesdurchgefuhrt.
Schlagworter: Radar mit synthetischer Apertur (SAR), SAR-Datenverarbeitung,Range-Doppler Algorithmus, Pauli-Zerlegungstheorem, Differentielle Reflektivitat,Lineares Depolarisationsverhaltnis, Physikalische Optik Approximation,Wellen-Abstrahlung, Radarruckstreuquerschnitt
3


Inhaltsverzeichnis
Formelzeichen und Abkurzungen 7
1. Einleitung 13
2. Theoretische Grundlagen 192.1. Elektromagnetische Wellenausbreitung . . . . . . . . . . . . . . . . . . 19
2.1.1. Maxwellsche Gleichungen . . . . . . . . . . . . . . . . . . . . . . 192.1.2. Wellengleichung und monochromatische ebene Welle . . . . . . . 20
2.2. Polarisationsbeschreibung . . . . . . . . . . . . . . . . . . . . . . . . . 212.2.1. Stokes-Vektoren . . . . . . . . . . . . . . . . . . . . . . . . . . . 212.2.2. Jones-Vektoren und Komplexes Polarisationsverhaltnis . . . . . 222.2.3. Polarisationsellipse . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3. Beschreibung der Ruckstreuungseigenschaften . . . . . . . . . . . . . . 242.3.1. Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . 242.3.2. Physikalische Optik Approximation . . . . . . . . . . . . . . . . 252.3.3. Magnetisches Vektorpotential . . . . . . . . . . . . . . . . . . . 262.3.4. Radarruckstreuquerschnitt . . . . . . . . . . . . . . . . . . . . . 282.3.5. Streumatrix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292.3.6. Differentielle Reflektivitat und Lineares Depolarisationsverhaltnis 30
2.4. Allgemeines Radarprinzip . . . . . . . . . . . . . . . . . . . . . . . . . 312.4.1. Radargleichung . . . . . . . . . . . . . . . . . . . . . . . . . . . 312.4.2. Systemrauschen . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5. Aspekte der Signaltheorie . . . . . . . . . . . . . . . . . . . . . . . . . 342.5.1. Lineare Frequenzmodulation . . . . . . . . . . . . . . . . . . . . 342.5.2. Pulskompressionsprinzip und Matched Filter . . . . . . . . . . . 352.5.3. Matched Filter Ausgang vom LFM-Signal . . . . . . . . . . . . 37
2.6. Radar mit synthetischer Apertur (SAR) . . . . . . . . . . . . . . . . . 372.6.1. SAR-Geometrie . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.6.2. SAR-Entfernungsauflosung . . . . . . . . . . . . . . . . . . . . . 392.6.3. SAR-Azimutauflosung . . . . . . . . . . . . . . . . . . . . . . . 40
2.7. SAR-Rohdatengewinnung . . . . . . . . . . . . . . . . . . . . . . . . . 412.7.1. SAR-Signal in Entfernungsrichtung . . . . . . . . . . . . . . . . 422.7.2. SAR-Signal in Azimutrichtung . . . . . . . . . . . . . . . . . . . 43
2.8. SAR-Datenverarbeitung . . . . . . . . . . . . . . . . . . . . . . . . . . 452.8.1. Range-Doppler Algorithmus . . . . . . . . . . . . . . . . . . . . 452.8.2. Entfernungskompression . . . . . . . . . . . . . . . . . . . . . . 462.8.3. Azimutkompression . . . . . . . . . . . . . . . . . . . . . . . . . 472.8.4. Korrektur der Zielentfernungsanderung und Multilook-Verarbeitung 48
5

Inhaltsverzeichnis
2.9. Polarimetrisches SAR . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.9.1. Polarimetrisches SAR Prinzip . . . . . . . . . . . . . . . . . . . 522.9.2. Pauli-Zerlegungstheorem . . . . . . . . . . . . . . . . . . . . . . 53
3. Quantitative Auswertung mittels Polarimetrischer Auskunft 553.1. Konzept des entwickelten Verfahrens . . . . . . . . . . . . . . . . . . . 553.2. Felder im Sendemodus . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3.2.1. Horizotaler Sendemodus . . . . . . . . . . . . . . . . . . . . . . 593.2.2. Vertikaler Sendemodus . . . . . . . . . . . . . . . . . . . . . . . 60
3.3. Reflexion an der Oberflache . . . . . . . . . . . . . . . . . . . . . . . . 603.3.1. Reflexion bei der horizontalen Polarisation . . . . . . . . . . . . 623.3.2. Reflexion bei der vertikalen Polarisation . . . . . . . . . . . . . 62
3.4. Wellen-Abstrahlung vom Zielobjekt . . . . . . . . . . . . . . . . . . . . 633.4.1. Wellen-Abstrahlung im Fernfeldbereich . . . . . . . . . . . . . . 633.4.2. Wellen-Abstrahlung im Nahfeldbereich . . . . . . . . . . . . . . 65
3.5. Die polarimetrischen Streuungsauskunfte . . . . . . . . . . . . . . . . . 653.5.1. Horizontaler Empfangsmodus . . . . . . . . . . . . . . . . . . . 663.5.2. Vertikaler Empfangsmodus . . . . . . . . . . . . . . . . . . . . . 67
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung 694.1. Geometrie der vektoriellen Berechnung . . . . . . . . . . . . . . . . . . 694.2. Flache Platte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.2.1. Numerische Berechnung fur eine flache Platte . . . . . . . . . . 714.2.2. Simulationsergebnisse einer flachen Platte . . . . . . . . . . . . 72
4.3. Zweifach-Reflektor (Dihedral) . . . . . . . . . . . . . . . . . . . . . . . 764.3.1. Numerische Berechnung fur einen Zweifach-Reflektor . . . . . . 764.3.2. Simulationsergebnisse eines Zweifach-Reflektors . . . . . . . . . 78
4.4. Dreifach-Reflektor (Trihedral) . . . . . . . . . . . . . . . . . . . . . . . 844.4.1. Numerische Berechnung fur einen Dreifach-Reflektor . . . . . . 844.4.2. Simulationsergebnisse eines Dreifach-Reflektors . . . . . . . . . 87
4.5. Wissenschaftliche Schlussfolgerungen . . . . . . . . . . . . . . . . . . . 93
5. Experimentelle Untersuchungen 975.1. Anwendung auf die simulierten Daten . . . . . . . . . . . . . . . . . . . 97
5.1.1. Simulationsumgebung und Systemparameter . . . . . . . . . . . 975.1.2. Ergebnisse der Simulation mit einer flachen Platte . . . . . . . . 1005.1.3. Ergebnisse der Simulation mit einem Zweifach-Reflektor . . . . 1085.1.4. Ergebnisse der Simulation mit einem Dreifach-Reflektor . . . . . 1145.1.5. Wissenschaftliche Schlussfolgerungen . . . . . . . . . . . . . . . 120
5.2. Anwendung auf die experimentellen Rohdaten . . . . . . . . . . . . . . 1265.2.1. Beschreibung des verwendeten Datenmaterials . . . . . . . . . . 1265.2.2. Quantitative Datenauswertung ohne polarimetrische Fokussie-
rungsfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1275.2.3. Generierung der polarimetrischen Fokussierungsfunktion . . . . 1325.2.4. Quantitative Datenauswertung mit polarimetrischer Fokussierungs-
funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 135
6

Inhaltsverzeichnis
5.2.5. Wissenschaftliche Schlussfolgerungen . . . . . . . . . . . . . . . 148
6. Zusammenfassung und Ausblick 151
A. Numerische Berechnungen fur die flache Platte 157A.1. Die Fallunterscheidungen . . . . . . . . . . . . . . . . . . . . . . . . . . 157A.2. Einfache Reflexion (PO) . . . . . . . . . . . . . . . . . . . . . . . . . . 157
B. Numerische Berechnungen fur den Zweifach-Reflektor 163B.1. Die Fallunterscheidungen . . . . . . . . . . . . . . . . . . . . . . . . . . 163B.2. Einfache Reflexion (PO) . . . . . . . . . . . . . . . . . . . . . . . . . . 164B.3. Zweifache Reflexion (PO-PO) . . . . . . . . . . . . . . . . . . . . . . . 173B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO) . . . . . . . . . . . . 186
C. Numerische Berechnungen fur den Dreifach-Reflektor 199C.1. Die Fallunterscheidungen . . . . . . . . . . . . . . . . . . . . . . . . . . 199C.2. Einfache Reflexion (PO) . . . . . . . . . . . . . . . . . . . . . . . . . . 201C.3. Zweifache Reflexion (PO-PO) . . . . . . . . . . . . . . . . . . . . . . . 217C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO) . . . . . . . . . . . . 244
Literaturverzeichnis 294
Abbildungsverzeichnis 310
Tabellenverzeichnis 312
7

Formelzeichen und Abkurzungen
Formelzeichen~A VektorpotentialA EllipseamplitudeAe Effektive Antennenempfangsflachea Komplexe Zahl~B Magnetische KraftflußdichteB Bandbreiteb Komplexe ZahlC Krrelationsgewinnc Lichtgeschwindigkeitc Komplexe Zahl~D Elektrische Kraftflussdichted Komplexe Zahl~E Elektrische Feldstarke~E+0 Komplexe Vektoramplitude fur die hinlaufende Welle~E−0 Komplexe Vektoramplitude fur die rucklaufende Welle~Ei Einfallende elektrische Felder~Er Reflektierte elektrische Felder~Es Reflektierte elektrische Felder~Et Gesamte elektrische FelderE0x Amplitude der x-KomponenteE0y Amplitude der y-Komponentee, e⊥ EinheitsvektoreA, eW Polarisationsvektor der Antenne, der Welle~F KraftF Polarisationsanpassungsfaktorf Frequenzfc TragerfrequenzfD Dopplerverschiebungfprf Pulswiederholfrequenzf(t) MomentanfrequenzG Antennengewinn~g Stokes-Vektoreng0, g1, g2, g3 Stokes-Parameter~H Magnetische Feldstarke~H i Einfallende magnetische Felder~Hr Reflektierte magnetische Felder
9
Inhaltsverzeichnis
~Hs Reflektierte magnetische Felder~H t Gesamte magnetische Felderh horizontale Polarisationh Hoheh Impulsantwortha Referenzfunktion in Azimutrichtungha,PZ Referenzfunktion eines Punktzielesha,FP Polarimetrische Fokussierungsfunktion einer flachen Platteha,DH Polarimetrische Fokussierungsfunktion eines Zweifach-Reflektorsha,TH Polarimetrische Fokussierungsfunktion eines Dreifach-Reflektorshm Impulsantworthr Referenzfunktion in Entfernungsrichtung~J Elektrische Leitungsstromdichte~Js OberflachenstromKa Modulationsrate in AzimutrichtungKr Modulationsrate in Entfernungsrichtung~k Ausbreitungsvektork Wellenzahlk Boltzmann-Konstante
k Richtung des AusbreitungsvektorsL Lange der AntennenbewegungLa AntennenabmessungLdr Lineares DepolarisationsverhaltnisLs SystemverlustLsar Synthetische Aperturlange~M Magnetische Leitungsstromdichte~Ms Fiktive Magnetstromdichte an dem UbergangM Anzahl der AzimutabtastungN Anzahl der EntfernungsabtastungNsys Systemrauschleistungn NormalvektorPMDS Minimal detektierbare SignalleistungPr EmpfangsleistungPt SendeleistungPz Reflektierte Leistungp Reflektierte Polarisationp Sendesignalq Elektrische Ladungq Einfallende Polarisation~R Vektor von Quellenpunkt zum BeobachtungspunktR EntfernungR0 Entfernung entlang der AntennenhauptachseR00 Entfernung zwischen den NullwertstellenRx Empfangsmodus~r Ortsvektor
10
Inhaltsverzeichnis
~r Beobachtungspunkt~r′ Quellenspunkt~ri Ausbreitungsrichtung der einfallenden Welle~rr Ausbreitungsrichtung der reflektierten Weller EntfernungS StreuamplitudeS/N Signal-zu-Rausch AbstandSr Leistungsdichte am RadarempfangerSt LeistungsdichteSz Leistungsdichte am Zeilorts Echosignalsb Empfangenes Signal im BasisbandT PulswiederholintervalTa BeleuchtungszeitraumTsys Aquivalente SystemrauschtemperaturTx Sendemodust Zeitta Azimutzeittr Entfernungszeitu Radarposition~V Vektorfeld~v GeschwindigkeitV Volummenv Vertikale Polarisationv′ Volummenelementvr Radiale GeschwindigkeitWa AntennenabmessungWg Abgebildete Streifew Radarantennenbeleuchtungx Position entlang der x-Achsexf Weiteste Entfernungxn Naheste Entfernungxz Zielentfernung am Bodenx(t) Eingangssignaly Position entlang der y-Achsey(t) AusgangssignalZdr Differentielle Reflektivitatz Position entlang der z-Achseα Eine reele Konstanteβr Off-Nadir Winkelδ Phasendifferenzδsr Entfernungsauflosungδgr Entfernungsauflosung auf dem Bodenδx Nullphase in der x-Richtungδy Nullphase in der y-Richtungε Permittivitat
11
Inhaltsverzeichnis
η Wellenwiderstand des Mediumsθ Orientierungswinkelθa Offnungswinkel in Azimutrichtungθi Einfallender Winkelθr Offnungswinkel in Entfernungsrichtungθs Reflektierter Winkelλ Wellenlangeµ Permeabilitatρ Elektrische Ladungsdichteρ Polarisationsverhaltnisρs Oberflachenladungsdichteσ Elektrische Leitfahigkeitσ Radarruckstreuquerschnittτ Elliptizitatswinkelτp Impulsdauerφ Ellipseorierntierungswinkelφ Orientierungswinkelφi Einfallender Winkelφs Reflektierter Winkelϕ Skalarfeldω Kreisfrequenz∂∂t
Ableitung nach der Zeit
Abkurzungen
dBsm Decibels relative to one square meterCSA Canadian Space AgencyDLR Deutsches Zentrum fur Luft- und RaumfahrtE-SAR Das flugzeuggetragene SAR-System des DLRFFT Fast Fourier TransformFMCW Frequency Modulated Continuous WaveIFFT Invers Fast Fourier TransformLDR Lineares DepolarisationsverhaltnisLFM Lineare FrequenzmodulationPolSAR Polarimetrisches Radar mit synthetischer AperturRCMC Range Cell Migration CorrectionSAR Radar mit synthetischer AperturSLAR Side Looking Airborn RadarTBP Zeit-Bandbreite-ProduktTEM Transversale elektromagnetische WelleZDR Differentielle Reflektivitat
12
1. Einleitung
In der Zeit der Globalisierung und der internationalen Zusammenarbeit werden vieleTechnologien von den zahlreichen Forschungseinrichtungen und Unternehmen entwi-ckelt und verbessert, um das Leben im Alltag zu erleichtern und auch den Menschenin der Not zu helfen. Ein Vorteil der rasanten Entwicklung der Kommunikationstech-nologie und der Informationsvernetzung liegt daran, dass die verschiedenen Technolo-gien bei der Hilfeleistung in den Katastrophengebieten koordiniert eingesetzt werdenkonnen. Ein wichtiger Zweig in der Entwicklung liegt im Bereich der Fernerkundungmittels der Radarsensorik.
Der Begriff Radar ist die Abkurzung im Englischen und steht fur”Radio Detection
and Ranging“. Von diesem englischen Wort kann man die Hauptaufgabe eines Radar-systems bei der Entdeckung und der Positionsbestimmung von Zielobjekten mit Hilfevon elektromagnetischen Wellen erkennen.
Das Radar arbeitet nach dem allgemeinen Echoprinzip, bei dem die Energie oder dieSignale im aktiven Betrieb vom Radar gesendet und nach einer Verzogerungszeit wiederempfangen werden. Eine andere Gruppe vom Radar arbeitet im passiven Betrieb undempfangt die Signale, die von den anderen Quellen stammen. Die empfangene Energiekommt zum Teil direkt von dem beleuchteten Zielobjekt, das unterschiedlich auf dieeinfallenden Signale reagieren und reflektieren kann. Ein Teil der zuruckgekommenenEnergie wird auch von der Umgebung beeinflusst, z.B. Landschaft, Bebauung, Baume,Ausbreitungsmedium, dadurch werden die Signale mehrmals reflektiert und kommendann uber verschiedene Wege und Zeitverzogerung am Empfanger zuruck. Bei der ein-fachen Anwendung wird das Empfangssignal verstarkt und zum Signalprozessor zurAuswertung weitergeleitet. Durch die Signalverarbeitungsalgorithmen erhalt man ver-schiedenen Informationen je nach Radaranwendung, z.B. uber die Entfernung, die Ge-schwindigkeit oder die Reflektivitat des beleuchteten Zielobjektes.
Es gibt viele praktische Anwendungen fur Radar je nach Konfiguration, Frequenz undPolarisation, z.B. bei dem Luftverkehr, dem Schiffsverkehr, dem Straßen- und Schie-nenverkehr, der Erkundung und Beobachtung der Erdoberflache, der Meteorologie undder Fertigungsprozesse. Außerdem ist das Radar bei der militarischen Anwendungen,z.B. bei der Luftraumuberwachung und der Feuerleitung, auch zu finden.
Im Jahr 1951 hat Carl Wiley erfunden, dass die Doppler-Frequenz-Analyse zur Ver-besserung des Radarauflosungsvermogen vom luftgestutzten Seitensichtradar oder imEnglischen
”Side Looking Airborne Radar“ (SLAR) helfen kann, und in [71] patentiert.
Diese Erfindung hat zur Entwicklung des Radars mit synthetischer Apertur oder imEnglischen
”Synthetic Aperture Radar“ (SAR) gefuhrt. Die Technik des Radars mit
synthetischer Apertur wird hauptsachlich von der Radarsignalprozessierung in Azimu-trichtung abgeleitet. Die dabei entstehende synthetische Apertur ist dann langer alsdie physikalische Lange der eingesetzten Radarantenne.
Das Radar mit synthetischer Apertur ist gegenuber des optischen Verfahrens sehr
13
1. Einleitung
verbreitet in der Fernerkundungstechnologie, weil es zur Klasse der aktiven abbildendenRadare gehort, das heißt, dass das Radar uber eine eigene Beleuchtungsquelle verfugt,und in der Dunkelheit oder bei schlechter Sicht einsetzbar ist. Noch ein Vorteil, denein Radar mit synthetischer Apertur mit sich bringt, ist die Nutzung der elektroma-gnetischen Wellen in den Frequenzbereichen, die durch die Wolken und staubige Luftgut dringen konnen.
Die Radarfernerkundung arbeitet mit den von Zielobjekten reflektierten Signalen inder Form von elektromagnetischen Wellen, die stark von der Polarisation der Welleabhangig sind. In [7] und [42] wurde es gezeigt, dass die Losung der polarisations-abhangigen elektromagnetischen Streuungsaufgaben durch die Angliederung der Pola-risationsauskunfte in die mathematische Formulierung zu gewahrleisten ist.
In [8] und [9] wurde es berichtet, dass die Radar Polarimetrie, die Radar Interfero-metrie und Polarimetrische SAR Interferometrie als die aktuellen Forschungsthemen inder Mikrowellenfernerkundungstechnologie gelten, weil es die Ermittlung der genaue-ren Struktur, Orientierung, Symmetrie und Beschaffenheit des Radarzieles ermoglichenkann. Aus diesen Grunden gibt es weltweit zahlreiche Forschungen und Entwicklungenim Bereich von polarimetrischer Radarfernerkundung, um neue interessante Anwen-dungsaspekte in der Radarfernerkundung zu realisieren. In [17], [18] und [52] wird dasSAR-System bei der Wetterkunde zur Bestimmung der Regenrate benutzt. In [33] istein Beitrag zum Thema SAR bei der Hydrologie oder der Glaziologie. Bei der Geologieund bei der Messung der Erdoberflachenbewegung ist auch SAR-System einsetzbar,z.B. in [19]. Außerdem kann man das Radar mit synthetischer Apertur bei der For-schung uber die Bodeneigenschaften, z.B. in [67], [46] und [77] die Flachennutzung,die Forstwirtschaft, z.B. in [4], [10] und [78] oder fur den Stadtplanung, z.B. in [30]einsetzen. Obwohl das abbildende Radar gegen die Bodenrauhigkeit des Zielgebietesempfindlich ist, enthalten die vom Radar mit synthetischer Apertur bekommenen In-formationen keine Auskunft uber die echte Radarzielfarbe, dadurch kann man nichteine Kamera ahnliches Bild des Zieles gewinnen, um festzustellen, welche Art von Zie-lobjekten man zu tun hat oder was fur ein Gebiet das Radar beleuchtet hat.
Eine wichtige Anwendung des polarimetrischen Radars mit synthetischer Apertur(PolSAR) findet man in der Klassifizierung der Bodenoberflache. Die Analyse der po-larimetrischen Streumatrix kann zur Natureigenschaften von Zielobjekten und Bodeno-berflachen fuhren. Dazu wird die Klassifizierung mit Hilfe der Objektzerlegung durch-gefuhrt. In [12] wird eine Ubersicht von Zielzerlegungstheoremen dargestellt und in[48] werden die Zielzerlegungstheoreme in vier Hauptgruppen geteilt. Die erste Grup-pe basiert auf die Zweiteilung der Kennaugh Matrix [K], z.B. von Heuynen, Holm,Barnes und Yang. Die zweite Gruppe basiert auf die Modellierungszerlegung der Ko-varianz Matrix oder Koherenz Matrix, z.B. von Freeman und Durden und Yamaguchi.Die dritte Gruppe benutzt die Analyse des Eigenvektors oder Eigenwertes der der Ko-varianz Matrix oder Koharenz Matrix, z.B. von Cloude, Holm, van Zyl und Cloudeund Pottier. Und die letzte Gruppe beschaftigt sich mit der koharenten Zerlegung derStreumatrix [S], z.B. von Krogager, Cameron und Touzi.
Die Technik des Radars mit synthetischer Apertur beruht auf der Basis der koharentenSignalverarbeitung, deswegen ist es moglich, uber die inverse Streuungsanalyse derRohdaten und Zerlegung der prozessierten Daten eine nutzliche oder spezielle Anwen-dung zu realisieren. Es konnte es großer Vorteil sein, wenn man die Klassifizierung
14
schon wahrend der Prozessierung einbringen kann.
Ein Schlusselansatz fur diese Dissertation wurde in [1] und [2] veroffentlicht, dass diekoharente Zerlegung ein hohes Potential in der Anwendung von vollpolarimetrischenSAR-Daten hat und als eine Alternative oder eine Erganzung zur nicht koharentenTechnologie sein kann. Insbesondere im Hinblick auf die Bodenklassifizierung wurdenicht viel Aufmerksamkeit auf die koharenten Parameter aus der Streumatrix gerichtet.
Das eingesetzte Ziel in dieser Dissertation ist die Entwicklung und die Untersu-chung der neuen polarimetrischen Fokussierungsmethode mit Hilfe der polarimetrischenStreueigenschaften und der quantitativen Datenauswertung der kanonischen Streukorperzur verbesserten Klassifizierung der polarimetrischen SAR-Bilder.
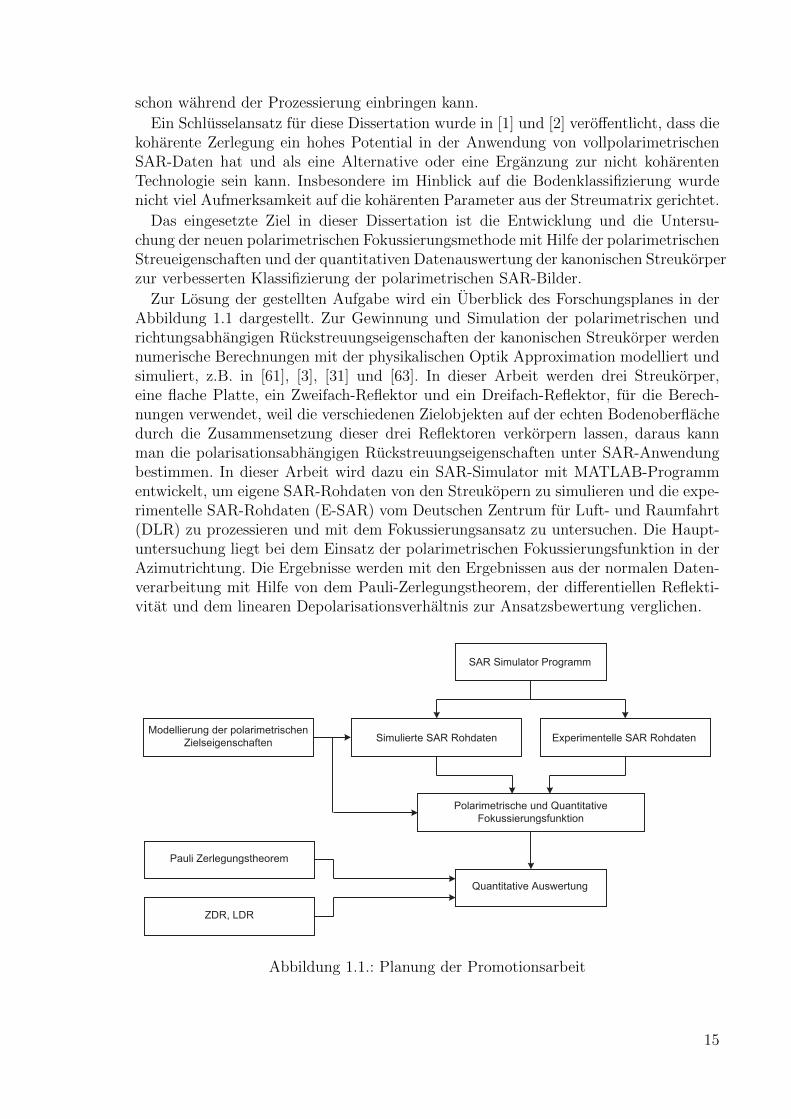
Zur Losung der gestellten Aufgabe wird ein Uberblick des Forschungsplanes in derAbbildung 1.1 dargestellt. Zur Gewinnung und Simulation der polarimetrischen undrichtungsabhangigen Ruckstreuungseigenschaften der kanonischen Streukorper werdennumerische Berechnungen mit der physikalischen Optik Approximation modelliert undsimuliert, z.B. in [61], [3], [31] und [63]. In dieser Arbeit werden drei Streukorper,eine flache Platte, ein Zweifach-Reflektor und ein Dreifach-Reflektor, fur die Berech-nungen verwendet, weil die verschiedenen Zielobjekten auf der echten Bodenoberflachedurch die Zusammensetzung dieser drei Reflektoren verkorpern lassen, daraus kannman die polarisationsabhangigen Ruckstreuungseigenschaften unter SAR-Anwendungbestimmen. In dieser Arbeit wird dazu ein SAR-Simulator mit MATLAB-Programmentwickelt, um eigene SAR-Rohdaten von den Streukopern zu simulieren und die expe-rimentelle SAR-Rohdaten (E-SAR) vom Deutschen Zentrum fur Luft- und Raumfahrt(DLR) zu prozessieren und mit dem Fokussierungsansatz zu untersuchen. Die Haupt-untersuchung liegt bei dem Einsatz der polarimetrischen Fokussierungsfunktion in derAzimutrichtung. Die Ergebnisse werden mit den Ergebnissen aus der normalen Daten-verarbeitung mit Hilfe von dem Pauli-Zerlegungstheorem, der differentiellen Reflekti-vitat und dem linearen Depolarisationsverhaltnis zur Ansatzsbewertung verglichen.
Abbildung 1.1.: Planung der Promotionsarbeit
15

1. Einleitung
An dieser Stelle werden die Kapitel der vorliegenden Dissertation in kurzer Form zurErklarung eigener Arbeitsweise und Problemskonfrontierung zusammengefasst.
Im Kapitel 2 werden das benotigte Grundwissen fur diese Forschungsarbeit in derAbbildung 1.1 zusammengefasst. Da das Radar mit der elektromagnetischen Reflexionam Zielobjekt arbeitet, beginnt das Kapitel zuerst mit den elektrotechnischen The-men uber die elektromagnetische Wellenausbreitung, die durch Maxwellschen Gleichun-gen beschrieben wird. Nach dem Losen der Wellengleichung kann man die elektrischeFeldstarke in Komponentendarstellung zerlegen. Durch die Uberlagerung der elektri-schen Komponenten entsteht die Polarisationslage entlang der Ausbreitungsrichtung.Wenn die elektromagnetische Welle auf ein Zielobjekt einfallt, wirkt dieses Objektwie eine elektromagnetische Quelle. Fur die Simulation der Wechselwirkung der ge-sendeten elektromagnetischen Wellen und Zielobjekten werden die physikalische OptikApproximation unter Berucksichtigung der Randbedingungen eingesetzt, und darausdie elektrische Feldstarke mit Hilfe des magnetischen Vektorpotentials berechnet. Diewichtige Eigenschaft eines Objektes ist im polarimetrischen Radarruckstreuquerschnittund in der polarimetrischen Streumatrix verkorpert. Im nachsten Abschnitt handelt essich um das Radarprinzip und Rauschen im Radarsystem. In der Praxis wird die Ener-gie in einer Wellenform gesendet, deswegen werden die theoretische Signalverarbeitungmit linear frequenzmoduliertem Signal erklart. Die Hauptuntersuchungen und Anwen-dungen in dieser Arbeit sind im Bereich des Radars mit synthetischer Apertur unterAnwendung des polarimetrischen Konzepts, deswegen wird es uber die SAR-Geometrieund die Gewinnung der SAR-Rohdaten besprochen. Danach folgt die Datenverarbei-tung mit dem Range-Doppler Algorithmus. Abschließend wird das polarimetrischenRadarprinzip und das Pauli-Zerlegungstheorem zur Auswertung der SAR-Bilder er-klart.
Das Kapitel 3 beginnt mit dem Konzept des entwickelten Verfahrens bezuglich derpolarimetrischen Fokussierungsfunktion fur die Datenverarbeitung. Fur die Berech-nung der gestreuten polarimetrischen Wellen benotigt man die Ausbreitungsrichtungund die vektoriellen Feldkomponenten, die in diesem Kapitel fur weitere Berechnungensowohl im horizontalen als auch im vertikalen Sendemodus festgelegt werden. Danachfolgen die Gleichungen zur Berechnung der gestreuten elektrischen Feldstarke, bei dersich die Ausbreitung im Fernfeldbereich und im Nahfeldbereich fur bestimmte Zweckeunterscheidet. Zum Schluss dieses Kapitels wird der Ansatz zur Simulation der polari-metrischen Streuauskunfte im horizontalen und vertikalen Empfangsmodus dargestellt.
Im Kapitel 4 werden zuerst die Geometrie und die Notation fur die Modellierung unddie Berechnung der Streuobjekte mit der physikalischen Optik Approximation darge-stellt. In dieser Arbeit wird eine Ausbreitung der ebenen Welle betrachtet, dabei istes zu beachten, dass die vektorielle Ausbreitung der Welle von der Position der Ra-darantenne relativ zur Position des Zielobjektes auf dem Beleuchtungsgebiet abhangtund fur jede Radarposition neu berechnet werden muss. Danach werden die numme-rischen Berechnungen der polarimetrischen Radarruckstreuquerschnitte von den dreiStreukopern gezeigt. Im Fall von einer flachen Platte gibt es nur die direkte Reflexi-on, bei der nur die Ausstrahlung im Fernfeld berechnet wird. Aber im Fall von demZweifach-Reflektor und dem Dreifach-Reflektor gibt es mehrere Fallunterscheidungenund die Berucksichtigung der Abstrahlung im Nahfeldbereich. In diesem Kapitel wer-den die Uberlegungen fur die Berechnungen der Radarruckstreuquerschnitte erklart
16

und die Simulationsergebnisse von den drei Streukorpern unter der SAR-Geometriedargestellt. Die ausfuhrlichen Fallunterscheidungen und mathematischen Herleitungenfur die Computerprogrammierung werden im Anhang A, B und C beschrieben.
Im Kapitel 5 werden die experimentellen Untersuchungen des neuen polarimetrischenFokussierungsverfahrens durchgefuhrt und dargestellt. Die experimentellen Untersu-chungen werden in zwei Hauptgruppen geteilt. Die erste Untersuchungsgruppe basiertauf die simulierten SAR-Rohdaten mit verschiedenen Szenarien, angefangen mit demeinzelnen Zielobjekt bis zur Simulation mit drei Zielobjekten. In der zweiten Untersu-chungsgruppe werden die experimentellen SAR-Rohdaten oder echten SAR-Rohdatenzur Untersuchung genommen. Bei der SAR-Datenverarbeitung werden die Rohda-tensatze durch die Referenzfunktion eines Punktzieles in der Entfernungsrichtung ver-arbeitet. Bei der Azimutkompression werden die vier Referenzfunktionen, das heißt dieReferenzfunktion eines Punktzieles, die polarimetrische Fokussierungsfunktion einerflachen Platte, die polarimetrische Fokussierungsfunktion eines Zweifach-Reflektors unddie polarimetrische Fokussierungsfunktion eines Dreifach-Reflektors, eingesetzt. Die Er-gebnisse nach der Azimutkompression werden durch das Pauli-Zerlegungstheorem, diedifferentielle Reflektivitat und das lineare Depolarisationsverhaltnis zur quantitativenDatenauswertung mitbewertet und dargestellt.
Im Kapitel 6 ist die Zusammenfassung der Arbeit, dabei werden die durchgefuhrtenArbeiten und die wichtigen Simulationsergebnisse zusammengefasst. Außerdem werdender wissenschaftlicher Ausblick und die interessanten Forschungsrichtungen mit Hilfedes quantitativen Streuungsverhaltens basierten Fokussierungsmethode dargestellt.
17

2. Theoretische Grundlagen
In diesem Kapitel werden die in dieser Arbeit benotigten theoretischen Grundlagen imBereich von der elektromagnetischen Wellenausbreitung, dem Radar mit synthetischerApertur Prinzip und der Datenverarbeitung beschrieben. Die betreffenden Literatur-stellen werden in jeweiligen Abschnitten verwiesen.
2.1. Elektromagnetische Wellenausbreitung
Das Radar arbeitet durch Senden und Empfangen von Energie in der Form von elektro-magnetischen Wellen, die in der Natur vorkommen und als physikalische Ereignisse zubetrachten sind. Um das Radarprinzip und die Radaranwendungen zu verstehen undumzusetzen, muss man sich zuerst mit der elektromagnetischen Feldtheorie befassen.Eine allgemeine Beschreibung von der elektrischen Feldstarke ~E und der magnetischenKraftflußdichte ~B ist die sogenannte Lorentzschen Gleichung als:
~F (~r, t) = q ~E (~r, t) + q[~v (~r, t)× ~B (~r, t)
]. (2.1)
Diese Gleichung stammt aus dem Experiment, bei dem eine Punktladung q mit derGeschwindigkeit ~v eine Kraft ~F an einem bestimmten Punkt ~r und Zeit t spurt, und istein Hinweis fur das gleichzeitige Vorhandensein von den elektrischen und magnetischenFeldstarken. Die elektromagnetische Feldtheorie gilt als Basis fur die mathematischeWellenbeschreibung, die fur die Modellierung der elektromagnetischen Wechselwirkungam Streukoper benutzt wird.
2.1.1. Maxwellsche Gleichungen
Die wichtigen Gleichungen in der Elektrotechnik, die die Gesetze uber die elektrischenund magnetischen Feldeigenschaften und die Zusammenhange zwischen den Materi-algroßen beinhalten, sind die sogenannten Maxwellschen Gleichungen und konnen inallgemeiner Differentialform fur ein lineares, isotropisches und dispersionsfreies Me-dium in Abhangigkeit von Raumkoordinaten ~r und Zeit t im Zeitbereich dargestelltwerden als, [48],[57]:
∇× ~E (~r, t) = −µ (~r, t)∂
∂t~H (~r, t)− ~M (~r, t) (2.2)
∇× ~H (~r, t) = ε (~r, t)∂
∂t~E (~r, t) + ~J (~r, t) (2.3)
∇ · ~E (~r, t) =ρ (~r, t)
ε(2.4)
∇ · ~B (~r, t) = 0 . (2.5)
19

2. Theoretische Grundlagen
Die obigen vier Gleichungen konnen in Integralform mit Hilfe von Stokes- undGaußschen-Satz zum Zweck der Integrallosung umgeschrieben werden. Neben den Max-wellschen Gleichungen gibt es die sogenannten Materialgleichungen wie folgt:
~J (~r, t) = σ (~r, t) ~E (~r, t) (2.6)
~D (~r, t) = ε (~r, t) ~E (~r, t) (2.7)
~B (~r, t) = µ (~r, t) ~H (~r, t) . (2.8)
Dabei sind ~H die magnetische Feldstarke, ~D die elektrische Kraftflußdichte, ρ dieelektrische Ladungsdichte, ~J die elektrische Leitungsstromdichte, ~M die fiktive magne-tische Leitungsstromdichte, σ die elektrische Leitfahigkeit, ε die Permittivitat und µdie Permeabilitat.
Die Maxwellschen Gleichungen beschreiben die elektromagnetischen Wellen in allge-meiner Form, aber fur die bestimmte Anwendung und Simulation werden diese Glei-chungen auch umgeformt, z.B. in die sogenannte Wellengleichung.
2.1.2. Wellengleichung und monochromatische ebene Welle
Die elektromagnetischen Wellen ist ein Ergebnis aus der Maxwellschen Theorie. Imquellenfreien Wellenausbreitungsraum gilt ∇ · ~E (~r, t) = 0. Unter der Voraussetzungder periodischen Zeitabhangigkeit der Form ejωt kann die Wellengleichung fur das elek-trische Feld aus den Gleichungen (2.2) und (2.3) abgeleitet werden als, [48],[57]:
∇2 ~E (~r) + ω2µε ~E (~r) = 0 . (2.9)
Dabei ist ω die Kreisfrequenz. Die Gleichung (2.9) heißt die Helmholtzsche Glei-chung und hat eine gebrauchliche Losung in einer Form von allgemeinen transversalenelektromagnetischen Wellen (TEM-Welle) als:
~E (~r, t) = ~E+0 e−j~k·~rejωt + ~E−0 e
j~k·~rejωt . (2.10)
Der Parameter ~E+0 ist die komplexe Vektoramplitude fur die hinlaufende Welle, ~E−0
ist die komplexe Vektoramplitude fur die rucklaufende Welle, ~k = kk ist der Aus-breitungsvektor bzw. Wellenzahl mit k = ω
√µε und ~r ist die Ortskoordinate. Die
Gleichungen (2.2) und (2.3) zeigen, dass die zeitvariierenden magnetischen Felder die
elektrischen Felder erzeugen und umgekehrt. So konnen die elektrischen Felder ~E oh-ne die Anwesenheit von den magnetischen Feldern ~H und umgekehrt nicht existieren.Daraus folgt, dass das begleitende Magnetfeld aus ~E (~r, t) berechnet werden kann als:
~H (~r, t) =
√ε
µ~k × ~E (~r, t) . (2.11)
Durch die Koordinatensystemauswahl kann die Wellenausbreitung entlang der z-Achse angenommen werden, so ergibt sich die Losung von elektromagnetischen Wellenim linearen, isotropischen und dispersionsfreien Ausbreitungsmedium als:
~E (z, t) = ~E+0 e−jkzejωt + ~E−0 e
jkzejωt . (2.12)
20
2.2. Polarisationsbeschreibung
Weil der Vektor ~E+0 von einer TEM-Welle senkrecht zur Ausbreitungsrichtung ist,
muss es auf der xy-Ebene liegen. Der elektrische Feldstarkevektor ~E (z, t) an einem Ort~r entlang der z-Achse zum Zeitpunkt t kann in der Komponentenform mit Ex (z, t),Ey (z, t) und Ez (z, t) im Fall vom verlustfreien Ausbreitungsraum geschrieben werdenals:
~E (z, t) =
Ex (z, t)Ey (z, t)Ez (z, t)
=
E0x cos (ωt− kz + δx)E0y cos (ωt− kz + δy)
0
. (2.13)
Dabei sind die Parameter E0x die Amplitude der x-Komponente, E0y die Amplitudeder y-Komponente, δx die Nullphase in x-Richtung und δy die Nullphase in y-Richtung.Die Komponenten Ex (z, t) und Ey (z, t) konnen unterschiedliche Große und Phasehaben, daraus folgt, dass die Uberlagerung der Komponenten zur Bildung der gesamtenelektrisichen Feldstarke ~E (z, t) fuhrt und die Polarisation der Welle beeinflusst.
2.2. Polarisationsbeschreibung
Wenn die elektromagnetische Welle sich entlang der Ausbreitungsrichtung bewegt,verfugt der elektrische Feldstarkevektor uber eine zeitliche Grundschwingungsform aufder zur Ausbreitungsrichtung stehenden Ebene. Diese wird als die Polarisation einerWelle bezeichnet und kann als die Kurve, die durch den Feldstarkevektorendpunkt aufder Ebene erzeugt wird, betrachtet werden.
2.2.1. Stokes-Vektoren
Fruher gab es nur inkoharente Systeme und man konnte nur die Leistung der einfal-lenden Welle messen. Mit den sogenannten Stokes-Parametern ist man in der Lage,den Polarisationszustand der Welle durch die Mittelwerte der Komponenten zu er-mitteln. Die Stokes-Vektoren ~g fur eine monochromatische Welle werden definiert als,[7],[48],[38]:
~g =
g0g1g2g3
=1
η
E2
0x + E20y
E20x − E
20y
2E0xE0y cos δ2E0xE0y sin δ
(2.14)
mit
g20 = g21 + g22 + g23. (2.15)
Dabei sind η der Wellenwiderstand des Mediums und δ = δy − δx die Phasendif-ferenz. Die Komponente der Stokes-Vektoren sind proportional zur Leistungsdichtedes jeweiligen Polarisationszustandes wie folgt: g0 ist proportional zu der gesamtenWellenleistungsdichte, g1 ist proportional zur Leistungsdichte der linear x- bzw. y- po-larisierten Komponenten, g2 ist proportional zur Leistungsdichte der um 45◦ oder 135◦
gedrehten Polarisation und g3 ist proportional zur Leistungsdichte der linksdrehendenbzw. rechtsdrehenden polarisierten Komponenten der Ebene-Welle.
21

2. Theoretische Grundlagen
2.2.2. Jones-Vektoren und Komplexes Polarisationsverhaltnis
Eine alternative Darstellung des elektrischen Feldstarkevektors mit Amplitude undPhase ist die sogenannte Jones-Vektoren Reprasentation. Aus der Gleichung (2.13)kann man die Jones-Vektoren definieren als, [7],[48]:
~E =
[E0x e
jδx
E0y ejδy
]. (2.16)
Man kann eine Polarisationslage einer elektromagnetischen Welle mit Hilfe von zweiDipolantennen, die auf der x- und y-Achse senkrecht zur Ausbreitungsrichtung posi-tioniert sind, beschreiben. Aus der Gleichung (2.12) und (2.13) erhalt man:
~E (z, t) =(xE0x e
jδx + yE0y ejδy)e−jkzejωt . (2.17)
Mit der Definition von einem komplexen Polarisationsverhaltnis ρ mit
ρ =E0y
E0x
ejδ (2.18)
und Phasendifferenz δ = δy − δx kann man die gesamte Welle als:
~E (z, t) = |Ex| ejδx√
1 + ρρ∗
1√1 + ρρ∗
[1ρ
]xy
︸ ︷︷ ︸
e
e−jkzejωt (2.19)
beschreiben. Die Information uber die Polarisationslage der Welle steckt im Einheits-vektor e. Mit der Definition
tan ν =E0y
E0x
(2.20)
erhalt man den Einheitsvektor e fur eine beliebige Polarisation in der Form:
e =1√
1 + ρρ∗
[1ρ
]=
1√1 + tan2 ν
[1
tan ν ejδ
]. (2.21)
Eine elektromagnetische Welle mit der entsprechenden orthogonalen Polarisation zume hat einen Einheitsvektor e⊥ in der Form:
e⊥ =1√
1 + ρρ∗
[−ρ∗
1
]. (2.22)
2.2.3. Polarisationsellipse
Die Abbildung 2.1 (a) ist die grafische Darstellung des elektrischen Feldstarkevektorsaus der Gleichung (2.13) in der spiralformigen Bahn entlang der Ausbreitungsrichtung.Je nach der Phasendifferenz δ = δy − δx und den Amplituden der Feldkomponentenerscheint die Schwingungsform auf der xy-Ebene, [7],[48]:
Die drei Großen A, φ und τ werden zur Geometriedarstellung der Ellipse wie in derAbbildung 2.1 (b) verwendet. Dabei ist A die Ellipsenamplitude und wird aus derEllipsenachse ermittelt als:
A =√E2
0x + E20y . (2.23)
22

2.2. Polarisationsbeschreibung
Abbildung 2.1.: Polarisationsellipsedarstellung: (a) Die Spur des elektrischen Feldvek-tors entlang der Ausbreitungsrichtung fur einen gegebenen Zeitpunkt,(b) Die Spur des elektrischen Feldvektor fur einen gegebenen Koordi-natenpunkt entlang der Ausbreitungsrichtung (z.B. z = 0)
Der Winkel φ zwischen Ellipsenhauptachse und x-Achse wird als Ellipsenorierntie-rungswinkel definiert als:
tan 2φ = 2E0xE0y
E20x − E2
0y
cos δ . (2.24)
Dieser Winkel liegt im Bereich φ ∈ [0, π]. Der Parameter τ ist der Elliptizitatswinkelund wird abgeleitet aus:
sin 2τ = 2E0xE0y
E20x − E2
0y
sin δ . (2.25)
Der Winkel τ liegt im Bereich τ ∈[−π
4, π4
]. Das Vorzeichen des Elliptizitatswinkel
dient zur Definition des Polarisationsdrehsinns mit 0 < τ < π/4 fur die linkshandigePolarisation und −π/4 < τ < 0 fur die rechtshandige Polarisation. Im Grunde genom-men kann man die Ellipse mit zwei Winkel φ und τ beschreiben. Der Große A hierdient zur exakten Maßbeschreibung.
Die Information uber die Polarisationslage der elektromagnetischen Welle und derAntenne ist wichtig fur die Anpassung bei der Radaranwendung. Im IEEE StandardDefinitions of Terms for Antennas, [79], wird der Polarisationsanpassungsfaktor F de-finiert und kann aus dem Innenprodukt zwischen dem Polarisationsvektor der AntenneeA und dem Polarisationsvektor der einfallenden Welle eW berechnet werden als:
F = |〈eA|eW 〉|2 . (2.26)
Die Notation fur das Innenprodukt 〈eA|eW 〉 ist wie ein Skalarprodukt, bei der einVektor konjungiert komplex sein wird. Die Polarisation zwischen der Antenne und dereinfallenden Welle ist angepasst, wenn der Polarisationsanpassungsfaktor gleich ein ist,
23
2. Theoretische Grundlagen
das bedeutet, dass die ganze Leistung empfangen werden kann. Und bei der orthogo-nalen Lage zwischen den beiden Polarisationsvektoren ergibt sich der Polarisationsan-passungsvektor als null raus, das heißt, dass es keinen Leistungsempfang gibt. DieseUberlegung ist sehr nutzlich bei der Radarkonfiguration oder bei der Untersuchung imBereich der Polarisation.
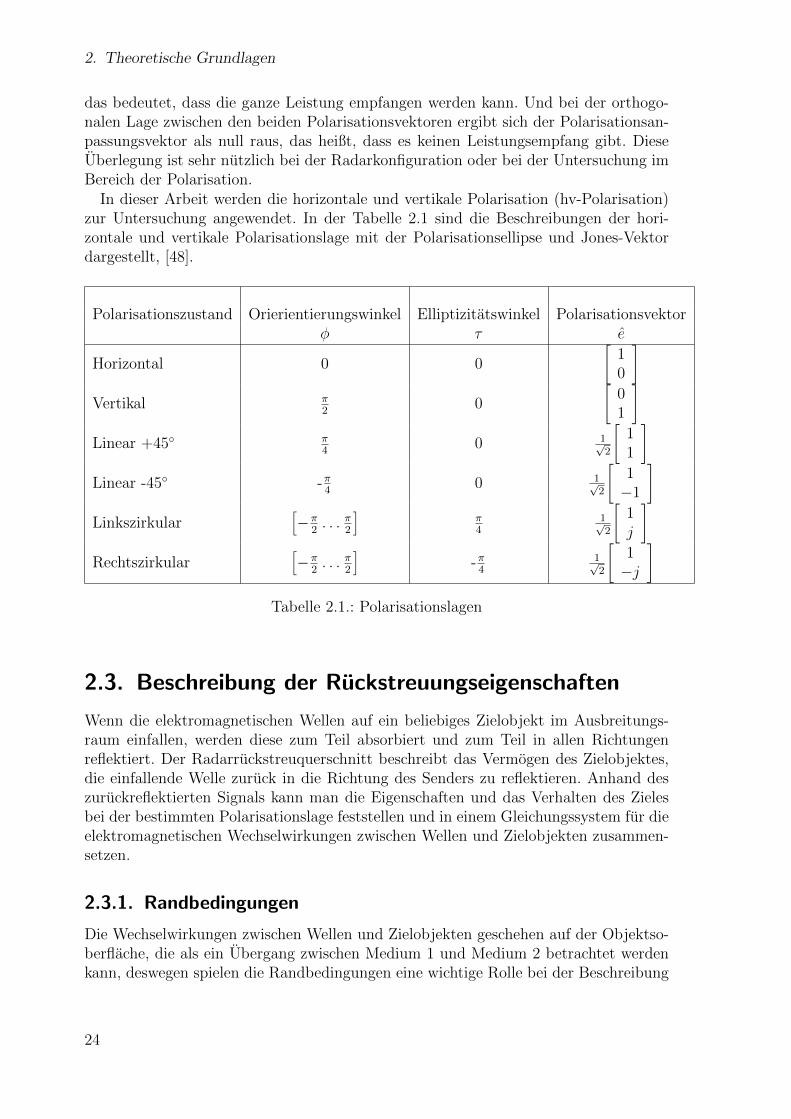
In dieser Arbeit werden die horizontale und vertikale Polarisation (hv-Polarisation)zur Untersuchung angewendet. In der Tabelle 2.1 sind die Beschreibungen der hori-zontale und vertikale Polarisationslage mit der Polarisationsellipse und Jones-Vektordargestellt, [48].
Polarisationszustand Orierientierungswinkel Elliptizitatswinkel Polarisationsvektorφ τ e
Horizontal 0 0
[10
]
Vertikal π2
0
[01
]
Linear +45◦ π4
0 1√2
[11
]
Linear -45◦ -π4
0 1√2
[1−1
]
Linkszirkular[−π
2. . . π
2
]π4
1√2
[1j
]
Rechtszirkular[−π
2. . . π
2
]-π4
1√2
[1−j
]
Tabelle 2.1.: Polarisationslagen
2.3. Beschreibung der Ruckstreuungseigenschaften
Wenn die elektromagnetischen Wellen auf ein beliebiges Zielobjekt im Ausbreitungs-raum einfallen, werden diese zum Teil absorbiert und zum Teil in allen Richtungenreflektiert. Der Radarruckstreuquerschnitt beschreibt das Vermogen des Zielobjektes,die einfallende Welle zuruck in die Richtung des Senders zu reflektieren. Anhand deszuruckreflektierten Signals kann man die Eigenschaften und das Verhalten des Zielesbei der bestimmten Polarisationslage feststellen und in einem Gleichungssystem fur dieelektromagnetischen Wechselwirkungen zwischen Wellen und Zielobjekten zusammen-setzen.
2.3.1. Randbedingungen
Die Wechselwirkungen zwischen Wellen und Zielobjekten geschehen auf der Objektso-berflache, die als ein Ubergang zwischen Medium 1 und Medium 2 betrachtet werdenkann, deswegen spielen die Randbedingungen eine wichtige Rolle bei der Beschreibung
24
2.3. Beschreibung der Ruckstreuungseigenschaften
der Ruckstreuungseigenschaften. Die Maxwellschen Gleichungen beschreiben die elek-trischen und magnetischen Felder und die von Objekten reflektierten Felder auf jedenPunkt im Ausbreitungsraum. Und diese Felder mussen die Randbedingungen an denMediumubergangen erfullen.
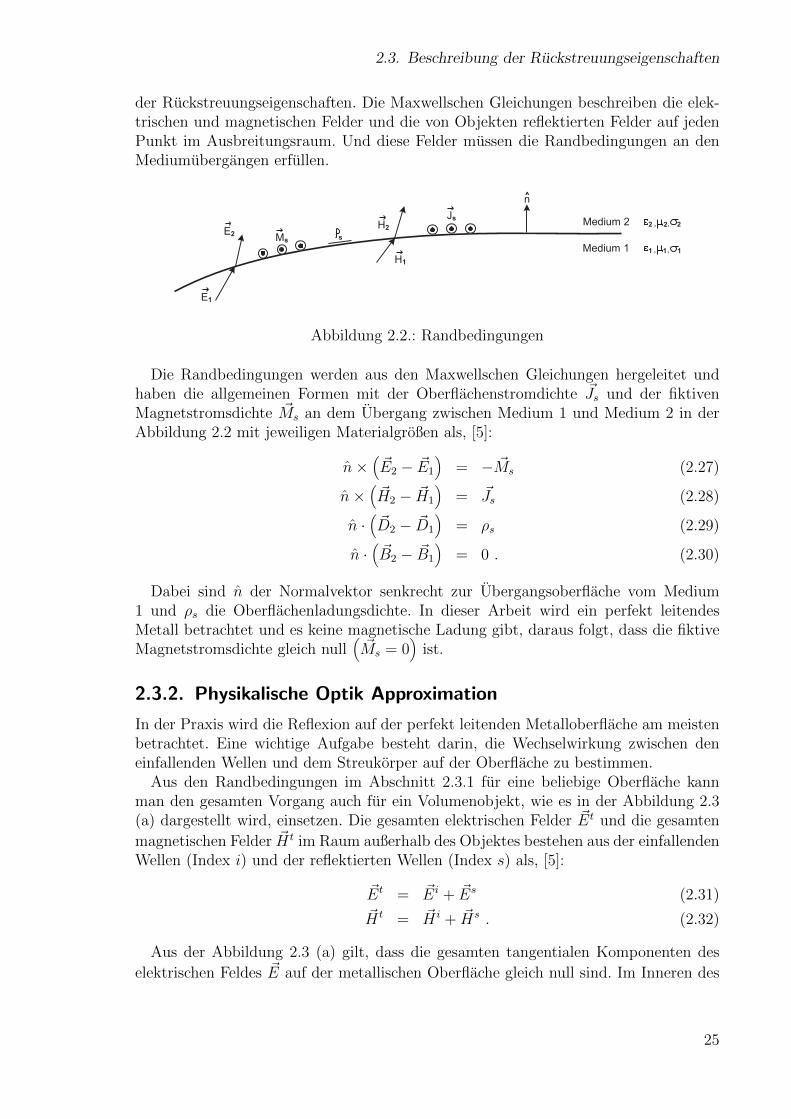
Abbildung 2.2.: Randbedingungen
Die Randbedingungen werden aus den Maxwellschen Gleichungen hergeleitet undhaben die allgemeinen Formen mit der Oberflachenstromdichte ~Js und der fiktivenMagnetstromsdichte ~Ms an dem Ubergang zwischen Medium 1 und Medium 2 in derAbbildung 2.2 mit jeweiligen Materialgroßen als, [5]:
n×(~E2 − ~E1
)= − ~Ms (2.27)
n×(~H2 − ~H1
)= ~Js (2.28)
n ·(~D2 − ~D1
)= ρs (2.29)
n ·(~B2 − ~B1
)= 0 . (2.30)
Dabei sind n der Normalvektor senkrecht zur Ubergangsoberflache vom Medium1 und ρs die Oberflachenladungsdichte. In dieser Arbeit wird ein perfekt leitendesMetall betrachtet und es keine magnetische Ladung gibt, daraus folgt, dass die fiktiveMagnetstromsdichte gleich null
(~Ms = 0
)ist.
2.3.2. Physikalische Optik Approximation
In der Praxis wird die Reflexion auf der perfekt leitenden Metalloberflache am meistenbetrachtet. Eine wichtige Aufgabe besteht darin, die Wechselwirkung zwischen deneinfallenden Wellen und dem Streukorper auf der Oberflache zu bestimmen.
Aus den Randbedingungen im Abschnitt 2.3.1 fur eine beliebige Oberflache kannman den gesamten Vorgang auch fur ein Volumenobjekt, wie es in der Abbildung 2.3(a) dargestellt wird, einsetzen. Die gesamten elektrischen Felder ~Et und die gesamten
magnetischen Felder ~H t im Raum außerhalb des Objektes bestehen aus der einfallendenWellen (Index i) und der reflektierten Wellen (Index s) als, [5]:
~Et = ~Ei + ~Es (2.31)
~H t = ~H i + ~Hs . (2.32)
Aus der Abbildung 2.3 (a) gilt, dass die gesamten tangentialen Komponenten des
elektrischen Feldes ~E auf der metallischen Oberflache gleich null sind. Im Inneren des
25

2. Theoretische Grundlagen
Abbildung 2.3.: Physikalische Optik Approximation: (a) Am Streukorper (b) Physika-lisches Aquivalent (Optik)
Objektes existiert keine Aktivitaten und es kann angenommen werden, dass ~E = 0,~B = 0, ~J = 0 und ~M = 0 sind. Aus der Gleichung (2.28) erhalt man, wie es in derAbbildung 2.3 (b) dargestellt wird, den Oberflachenstrom als:
~Js = n×(~H2 − ~H1
)= n×
(~H t)
= n×(~H i + ~Hs
)= n× ~H i + n× ~Hs . (2.33)
Im Fall von einer großen, flachen, perfekt leitenden Metalloberflache kann es ange-nommen werden, dass weil die tangentialen Komponenten der reflektierten magneti-schen Feldstarke ~Hs gleich die tangentialen Komponenten der einfallenden magneti-schen Feldstarke ~H i oder
(n× ~H i = n× ~Hs
)sind, daraus kann die Gleichung (2.33)
in der zusammengefassten Form beschrieben werden als:
~Js = 2n× ~H i . (2.34)
Aus der Gleichung (2.34) erkennt man, dass sich ein Oberflachenstrom ~Js auf derObjektoberflache aufgrund der einfallenden Wellen bildet und als eine Quelle wirkt. MitHilfe des Coulombschen Gesetzes, des Biot-Savartschen Gesetzes und des AmperschenGesetzes kann man die elektromagnetischen Feldstarken am Aufpunkt oder an derRadarantenne ermitteln. Eine andere Methode ist die Definition von Hilfsfeldern oderdas sogenannte Vektorpotential.
2.3.3. Magnetisches Vektorpotential
Fur die Anwendungen in der Radarfernerkundung werden die elektrischen Feldstarkenicht direkt auf der Zielobjektsoberflache gemessen sondern an der Radaranlage emp-fangen und verarbeitet. Im quellenfreien Raum gilt, dass die Divergenz von der ma-gnetischen Kraftflußdichte ~B stets null ist als, [5]:
∇ · ~B = 0 . (2.35)
Aus der mathematischen Vektoridentitat∇·(∇× ~V
)= 0 kann man das Vektorfeld ~B
mit einer Rotation von einem anderen Vektorfeld oder dem Vektorpotential ~A definieren
26

2.3. Beschreibung der Ruckstreuungseigenschaften
als:~B = µ ~H = ∇× ~A . (2.36)
Fur die Berechnung wird es angenommen, dass man eine Metalloberflache betrachtetund daraus folgt, dass σ =∞ und ~M = 0 sind. Nach dem Einsetzen in die MaxwellschenGleichung (2.2) mit der Vektoridentitat ∇× (−∇ϕ) = 0 erhalt man:
~E = −∇ϕ− ∂
∂t~A . (2.37)
Dabei ist ϕ ein Skalarfeld aus der Elektrostatik und spielt keine wichtige Rolle inder Hochfrequenztechnik, wenn die Frequenz sehr hoch ist. Setzt man die Gleichung(2.36) und die Gleichung (2.37) in die Gleichung (2.3) ein, erhalt man mit Hilfe derLorentzschen Bedingung, bei der es angenommen wird, dass
∇ · ~A = −µε ∂∂tϕ− µσϕ (2.38)
ist, und mit k2 = ω2µε die Gleichung fur ein verlustfreies Medium mit σ = 0 als:
∇2 ~A+ k2 ~A = −µ~J . (2.39)
Fur zeitharmonische Signale kann man den Term (∂/∂t) mit jω ersetzen und damiterhalt man die Gleichung (2.37) fur die elektrische Feldstarke in der Form:
~E = −∇ϕ− jω ~A = −jω ~A− j 1
ωµε∇(∇ · ~A
). (2.40)
Bei bestimmter Situation mit ziemlich langsamer Zeitanderung kann man den Term∂/∂t = 0 setzen und erhalt die Gleichung (2.39) als:
∇2 ~A = −µ~J . (2.41)
Die Gleichung (2.41) hat so eine Struktur wie die Poissonschen Gleichung in derForm:
∇2ϕ = −qε
(2.42)
und verfugt uber eine Standardlosung mit der Entfernung R zwischen der Quelle mitdem Volumen V und Beobachtungspunkt als:
ϕ =1
4πε
∫∫∫V
q
Rdv′ . (2.43)
So ergibt sich die Losung fur die Gleichung (2.41) als:
~A =µ
4π
∫∫∫V
~J
Rdv′ . (2.44)
Fur eine vollstandige Losung des Problems wird der Zeitterm in der Gleichung (2.39)mitberucksichtigt. Es fuhrt zu der zeitlichen Verzogerung eines Ablaufes oder der soge-nannten Retardierung. Das heißt, dass das Effekt im Beobachtungspunkt ~r = (x, y, z)
27
2. Theoretische Grundlagen
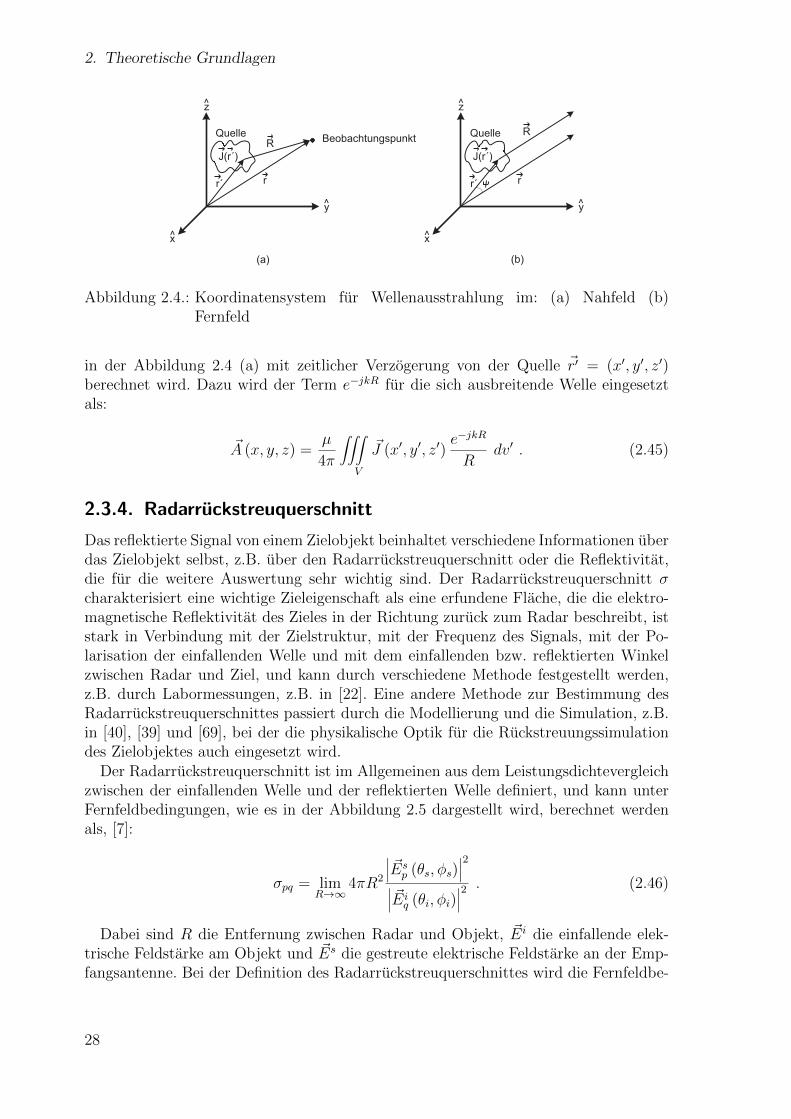
Abbildung 2.4.: Koordinatensystem fur Wellenausstrahlung im: (a) Nahfeld (b)Fernfeld
in der Abbildung 2.4 (a) mit zeitlicher Verzogerung von der Quelle ~r′ = (x′, y′, z′)berechnet wird. Dazu wird der Term e−jkR fur die sich ausbreitende Welle eingesetztals:
~A (x, y, z) =µ
4π
∫∫∫V
~J (x′, y′, z′)e−jkR
Rdv′ . (2.45)
2.3.4. Radarruckstreuquerschnitt
Das reflektierte Signal von einem Zielobjekt beinhaltet verschiedene Informationen uberdas Zielobjekt selbst, z.B. uber den Radarruckstreuquerschnitt oder die Reflektivitat,die fur die weitere Auswertung sehr wichtig sind. Der Radarruckstreuquerschnitt σcharakterisiert eine wichtige Zieleigenschaft als eine erfundene Flache, die die elektro-magnetische Reflektivitat des Zieles in der Richtung zuruck zum Radar beschreibt, iststark in Verbindung mit der Zielstruktur, mit der Frequenz des Signals, mit der Po-larisation der einfallenden Welle und mit dem einfallenden bzw. reflektierten Winkelzwischen Radar und Ziel, und kann durch verschiedene Methode festgestellt werden,z.B. durch Labormessungen, z.B. in [22]. Eine andere Methode zur Bestimmung desRadarruckstreuquerschnittes passiert durch die Modellierung und die Simulation, z.B.in [40], [39] und [69], bei der die physikalische Optik fur die Ruckstreuungssimulationdes Zielobjektes auch eingesetzt wird.
Der Radarruckstreuquerschnitt ist im Allgemeinen aus dem Leistungsdichtevergleichzwischen der einfallenden Welle und der reflektierten Welle definiert, und kann unterFernfeldbedingungen, wie es in der Abbildung 2.5 dargestellt wird, berechnet werdenals, [7]:
σpq = limR→∞
4πR2
∣∣∣ ~Esp (θs, φs)
∣∣∣2∣∣∣ ~Eiq (θi, φi)
∣∣∣2 . (2.46)
Dabei sind R die Entfernung zwischen Radar und Objekt, ~Ei die einfallende elek-trische Feldstarke am Objekt und ~Es die gestreute elektrische Feldstarke an der Emp-fangsantenne. Bei der Definition des Radarruckstreuquerschnittes wird die Fernfeldbe-
28

2.3. Beschreibung der Ruckstreuungseigenschaften
dingung angenommen, so dass die einfallende Welle eine ebene Welle uber das gesamteZielobjekt ist. Aber die gestreute Energie wird in allen Richtungen im Kugelkoordi-naten uber den Raumwinkel 4π verteilt. Aus der Definition erkennt man die Einheitvon einer Flache [m2], bei der man sich als eine Flache pro Raumwinkel oder Steradi-ant vorstellen kann. Der Radarruckstreuquerschnitt ist auch von der Polarisation dereinfallenden Welle und von der Richtung abhangig. Die Winkel (θi, φi) und (θs, φs)stellen die Richtung der einfallenden bzw. reflektierten Wellen dar. Die Buchstaben qund p in der Gleichung (2.46) stehen fur die Polarisationslage der einfallenden bzw.der reflektierten Welle. Im monostatischen Radarbetrieb wird es angenommen, dassder einfallende Winkel (θi, φi) und der reflektierte Winkel (θs, φs) gleich sind, darausfolgt, dass man der Radarruckstreuquerschnitt in der Gleichung (2.46) mit σpq (θ, φ)schreiben kann, um die Winkelabhangigkeit anzudeuten.
Abbildung 2.5.: Winkeldarstellung fur die einfallenden und reflektierten Wellen
2.3.5. Streumatrix
Die Reflexionseigenschaften eines Objektes konnen mit Hilfe der sogenannten Streu-matrix [S] beschrieben werden. Unter Fernfeldbedingungen kann auf das Objekt ein-
fallende elektromagnetische Welle ~Ei als eine Ebenewelle betrachtet werden und kannim Fall von hv-Polarisation in der Form beschrieben werden als, [38],[48]:
~Ei =
[Eih
Eiv
]=e−jkR
R
[E0h
E0v
]. (2.47)
Dabei ist R die Entfernung zwischen der Antenne und dem Streuobjekt, h undv bezeichnen die horizontale bzw. vertikale Polarisationsbasis. An der Objektober-flache wird die einfallende Welle reflektiert und gestreut. Die reflektierte elektrischeFeldstarke ~Es wird durch die Streuungsphanomene, die den Polarisationszustand von~Ei verandern, stark beeinflusst und kann an der Empfangsantenne mit der Streuglei-chung wie folgt dargestellt werden:
~Es =e−jkR
R[S] ~Ei (2.48)
29

2. Theoretische Grundlagen
mit
~Es =
[Esh
Esv
]=e−jkR
R
[Shh ShvSvh Svv
] [Eih
Eiv
]. (2.49)
Dabei ist [S] die Streumatrix und Spq sind die komplexen Streuamplituden. DieWellenausbreitungseffekte in Amplitude und in Phase werden in dem Term e−jkR/Rberucksichtigt. Aus der Gleichung (2.47) und (2.48) erhalt man unter Berucksichtigungder hin- und rucklaufenden Wellen in der Entfernung R die Gleichung[
Esh
Esv
]=e−j2kR
R2[S]
[E0h
E0v
]. (2.50)
Die Streumatrixkomponenten Spq stehen in Beziehung mit Radarruckstreuquerschnittσ aus der Gleichung (2.46) als:
σpq = 4π |Spq|2 (2.51)
und
[S] =
[Shh ShvSvh Svv
]=
1√4π
[ √σhh e
jϕhh√σhv e
jϕhv√σvh e
jϕvh√σvv e
jϕvv
]. (2.52)
Der andere Aspekt fur die Streumatrix gilt als eine vollstandige Ubertragung oderTransformation von den einfallenden Wellen ~Ei und den gestreuten Wellen ~Es und istfur bestimmte Zielobjekte und bestimmte Umgebung unterschiedlich. Das heißt, dassman die Objekte anhand der jeweiligen Streumatrix voneinander unterscheiden kann.
2.3.6. Differentielle Reflektivitat und LinearesDepolarisationsverhaltnis
Aufgrund der unterschiedlichen Reflexionseigenschaft der horizontal und vertikal po-larisierten elektromagnetischen Wellen von den nicht kugelformigen Streukopern oderTeilchen, es ist dann moglich, die grobe Struktur der Streukoper zu bestimmen. Mandefiniert ein Verhaltnis zwischen den reflektierten Energien entlang der horizontalenund vertikalen Polarisation im kopolaren Radarbetrieb als die differentielle Reflekti-vitat Zdr in der Form, [76]:
Zdr = 10 · log10
σhhσvv
. (2.53)
Die wichtige Aussage von der differentiellen Reflektivitat liegt daran, wie rund dieStreukorperstruktur ist. Wenn der Zdr-Wert gegen null ist, ist der Streukoper ziemlichkugelformig. Eine horizontalausgedehnte oder abgeplattete Struktur hat den Zdr-Wertgroßer als null und eine vertikalausgedehnte Struktur erweist den Zdr-Wert kleiner alsnull. Dadurch kann man die differentielle Reflektivitat benutzen, um Information uberdie Streukorperstruktur zu gewinnen.
Noch ein interessantes Verhaltnis, das man aus den Messergebnissen bilden kann,ist das sogenannte lineare Depolarisationsverhaltnis, bei dem die ko- und kreuzpolareRadarruckstreuquerschnitte zur Verhaltnisbildung benutzt werden in der Form, [20]:
Ldr = 10 · log10
σvhσhh
. (2.54)
30

2.4. Allgemeines Radarprinzip
Die Definition fur das lineare Depolarisationsverhaltnis kann durch das Verhaltniszwischen σhv und σvv auch gebildet werden, z.B. in [76]. In dieser Arbeit wird dieDefinition wie in der Gleichung (2.54) fur die Simulation eingesetzt. Obwohl die beidenGroßen viele Anwendungen im Wetterradar finden, kann es durchaus sein, dass sie einenutzliche Auskunft im Bereich der Datenauswertung fur das Radar mit synthetischerApertur zur Geltung bringen konnen.
2.4. Allgemeines Radarprinzip
Das Radarsystem basiert auf dem Echoprinzip, in dem das Signal gesendet und nachder Verzogerungszeit wieder empfangen wird. Das Sendesignal kann verschiedene Formannehmen, z.B. das Dauerstrichradar, das gepulste Radar, das gepulste Radar mit derModulation und das FMCW (Frequency Modulated Continuous Wave) Radar.
2.4.1. Radargleichung
In diesem Abschnitt wird die Radargleichung erlautert. Die Radargleichung stellt denZusammenhang zwischen den Eigenschaften der Radaranlage, Ziele und Radarumge-bung dar, beinhaltet die Systemparameter und ist ein wichtiger Bestandteil im Radar-systementwurf. In den Radarbuchern, z.B. in [38], [49] und [66] gibt es ausfuhrlicheEinfuhrungen zu diesem Thema. Die Abbildung 2.6 verkorpert die Herleitung der Ra-dargleichung von einem Ziel im monostatischen Betrieb, bei dem dieselbe Antenne zumSenden und Empfang eingesetzt wird.
Abbildung 2.6.: Allgemeines Radarprinzip
Am Anfang der Kette wird das Radarsignal uber eine Antenne mit der SendeleistungPt abgestrahlt. Im Fall von einem Isotropstrahler wird die Sendeleistung Pt in allenRaumrichtungen wie auf einer Kugeloberflache gleichmaßig verteilt. In der EntfernungR von der Antenne ergibt sich die Leistungsdichte St zu:
St =Pt
4πR2. (2.55)
In der Radarpraxis wird aber keinen Isotropstrahler benutzt sondern eine Antennemit der Eigenschaft, bei der die Signalenergie gebundelt in die Zielrichtung abgestrahltwird. Der Antennengewinn G wird als das Verhaltnis zwischen der Leistungsdichte mit
31

2. Theoretische Grundlagen
der Radarantenne und mit der Leistungsdichte eines idealen Kugelstrahlers definiert.Die Leistungsdichte am Zielort Sz mit der Entfernung R ist dann gleich:
Sz =PtG
4πR2. (2.56)
Ein Teil von der einfallenden Sendeleistung wird vom Ziel absorbiert und zum Teilzum Radar zuruckreflektiert. Der Maß fur die Messung von zuruckreflektierten Leis-tung in der Richtung vom Radarempfanger ist der Radarruckstreuquerschnitt σ. DerRadarruckstreuquerschnitt von einem Ziel hat die Einheit von [m2] und gibt an, wiegroß das Ziel zum Radar erscheint. Die vom Ziel reflektierte Leistung ergibt sich zu:
Pz = Szσ . (2.57)
Aus der Gleichung (2.56) und (2.57) erhalt man die Leistungsdichte am Radar-empfanger Sr als:
Sr =PtGσ
(4π)2R4. (2.58)
Die Menge von der ankommenden Leistungsdichte, die von einer Antenne aufgenom-men wird, hangt von der effektiven Empfangsflache Ae der Radarantenne ab, so ist dieEmpfangsleistung gleich:
Pr = SrAe . (2.59)
Die effektive Empfangsflache der Antenne ist definiert durch:
Ae =λ2G
4π. (2.60)
Dabei sind λ = c/f die Wellenlange, f die Frequenz und c die Lichtgeschwindig-keit. Aber es gibt noch andere Einflussparameter, die bei der Radargleichung noch zuberucksichtigen sind. Man kann diese Einflusse, z.B. die Dampfung der Antennenlei-tung, die atmospharische Dampfung auf dem Ausbreitungsweg, als die gesamte Sys-temverluste Ls zusammenfugen. Wenn die gleiche Antenne fur die Sendung und denEmpfang von Radarsignalen eingesetzt wird, erhalt man die Empfangsleistung in derGleichung (2.59) als:
Pr =PtG
4πR2
σ
4πR2
λ2G
4πLs =
PtG2λ2σ
(4π)3R4Ls . (2.61)
Worin Ls ist wie folgt definiert:
Ls =(Pr)mit Dampfungseffekte
(Pr)ohne Dampfungseffekte. (2.62)
Die Gleichung (2.61) bezeichnet man als die Radargleichung in Abhangigkeit vonSystem und Zielobjektparametern.
32

2.4. Allgemeines Radarprinzip
2.4.2. Systemrauschen
In der Praxis wird das Empfangsignal mit dem Rauschen aus verschiedenen Quellenuberlagert. Das Rauschen ist ein regelloses, zufalliges und unerwunschtes Signal in al-len Frequenzen. Die Gleichung (2.61) beschreibt die komplette Empfangsleistung, aberverfugt keine Information daruber, ob die Empfangsleistung großer oder kleiner ist,als der Rauschpegel im Hintergrund. Es gibt in der Tat immer Rauschen im Radar-system. Die Rauschquelle sind sowohl die innere Rauschquelle, z.B. die Antenne, dieLeitung mit Dampfung, als auch die externe Rauschquelle, z.B. kosmisches Rauschen,die Atmosphare bis zum beabsichtigten Rauschen. Die Rauschleistung fur das gesam-te System kann durch eine aquivalente Rauschtemperatur des Systems Tsys gegebenwerden, daraus ergibt sich die Systemrauschleistung Nsys als:
Nsys = kTsysB . (2.63)
Dabei sind k = 1, 38 · 10−23 [Ws/K] die Boltzmann-Konstante, Tsys als absoluteTemperatur in Kelvin [K] und B die Bandbreite. Fur die Radarsignalverarbeitungbenotigt man eine minimale detektierbare Signalleistung am Eingang, namlich PMDS,damit die Ziele richtig detektiert werden konnen. Man definiert eine Systemkonstanteoder den sogenannten minimal zulassigen Signal-zu-Rausch-Abstand
(SN
)min
mit:
PMDS =(S
N
)min
Nsys . (2.64)
Bei dem Systementwurf kann man den Pegel von PMDS fur den erwunschten(SN
)min
festlegen. Wenn man die Gleichungen (2.61), (2.63) und (2.64) zusammenfugt, ergibtsich die Radargleichung mit Pr = PMDS zu:(
S
N
)min
=PtG
2λ2σLs(4π)3R4
maxkTsysB. (2.65)
Der Parameter Rmax bezeichnet man als die maximale Reichweite eines Radars. Nachder Umformung erhalt man die Radargleichung fur die Reichweitebestimmung als:
Rmax =
PtG2λ2σLs
(4π)3(SN
)min
kTsysB
14
. (2.66)
In der Radaranwendung, z.B. im gepulsten Radarsystem, bei dem die Pulssignalein Reihe nacheinander gesendet werden, gibt es auch eine Einschrankung in der Ent-fernungsrichtung oder die sogenannte eindeutige maximale Entfernung Rmax,eindeutig,die von dem Pulswiederholintervall T oder Pulswiederholfrequenz fprf = 1/T und derLichtgeschwindigkeit c abhangig ist, wie folgt:
Rmax,eindeutig =c
2fprf. (2.67)
Wenn das Radarsignal von einem bewegenden Zielobjekt reflektiert wird, entsteht diesogenannte Doppler-Verschiebung fD im Zusammenhang mit der radialen Geschwin-digkeit vr des Zielobjektes in der Form:
fD =2vrcf0 =
2vrλ0
. (2.68)
33
2. Theoretische Grundlagen
Ein gepulstes Radar misst die Doppler-Verschiebung von Puls zu Puls mit der Ab-tastfrequenz von T , dadurch gibt es einen Doppler-Einschrankung wegen des Nyquist-Shannonschen Abtasttheorems als:
fD,max =fprf
2. (2.69)
Aus der Gleichung (2.68) und (2.69) ergibt sich eine sogenannte Unscharferelationaus dem Produkt zwischen der eindeutigen maximalen Entfernung und der eindeutigenmaximalen Geschwindigkeit als einer Konstante, die durch die eingesetzte Frequenzfestgelegt wird, in der Form:
vr,max,eindeutigRmax,eindeutig =fprfλ0
4
c
2fprf=λc
8. (2.70)
Ein wichtiger Parameter in der Gleichung (2.66) ist die Systembandbreite B, die auchmit der Bandbreite des Signals verbunden ist, um das Radarsignal unverzerrt empfan-gen zu konnen, sollte die Systembandbreite mindest so groß wie die Signalbandbreitesein. Die Signalbandbreite hangt auch von der Wellenform und die Ausbreitungseffek-ten ab. Fur die Simulation ist es wichtig, eine genaue mathematische Beschreibung derWellenform festzulegen.
2.5. Aspekte der Signaltheorie
Die gesendete Energie in der Gleichung (2.61) verfugt uber verschiedene Wellenfor-me und Polarisationslagen, die man zum Zweck der Informationsauswertung oder derKodierung einsetzen kann. Um die reflektierten Daten richtig auswerten zu konnen,sollte man die mathematische Beschreibung und die Signaleigenschaften kennen. Einewichtige Wellenform in der Fernerkundung ist das linear frequenzmodulierte Signal.
2.5.1. Lineare Frequenzmodulation
Im Radarverfahren konnen verschiedene Wellenformen eingesetzt werden. Eine allge-meine mathematische Darstellung in komplexer Form ist:
x (t) = a (t) ejφ(t)ejωt . (2.71)
Dabei reprasentieren a (t) ejφ(t) den Modulationsanteil und ejωt den Trager mit demKreisfrequenz ω = 2πfct. Wenn man den Trager mit der Tragerfrequenz fc heraus-nimmt, bleibt dann nur der Modulationsanteil oder das sogenannte Basisbandsignalubrig, in dem die Information uber die Modulation, z.B. die Amplitudenmodulation,die Frequenzmodulation und die Phasenmodulation steckt.
Die Frequenzmodulation ist eine Modulationstechnik, bei der sich die Tragerfrequenzfc entsprechend des Basisbandsignals mit der Zeit t variiert. Im Fall von der linearenFrequenzmodulation (LFM) steigt oder fallt die Tragerfrequenz fc innerhalb der Im-pulsdauer τp zeitlich linear. So ergibt sich die Momentanfrequenz f (t) mit der linearenModulationsrate oder Chirp-Rate Kr als:
f (t) = fc +Krt . (2.72)
34
2.5. Aspekte der Signaltheorie
Durch die Multiplikation die Gleichung (2.72) mit 2π kann man die Momentanphaseaus 2πf (t) = ω (t) = d
dtφ (t) berechnen als:
d
dtφ (t) = 2πfc + 2πKrt
[φ (t)]t0 =
t∫0
(2πfc + 2πKrt) dt
φ (t) = 2πfct+ πKrt2 . (2.73)
Aus der Gleichung (2.71) und (2.73) kann man ein lineares frequenzmoduliertes Si-gnal schreiben als:
x (t) = a (t) rect
(t
τp
)e(j2πfct+jπKrt
2) . (2.74)
Dabei ist rect(tτp
)die recteckige Funktion mit |t| ≤ τp/2. Die Modulationsrate Kr
hat die Einheit von [Hz/s] und ist wie ein Maß fur die Frequenzanderung mit der Zeit.Das Frequenzintervall der Momentanfrequenz wahrend der Impulsdauer τp wird als dieBandbreite B bezeichnet. Fur das reale Signal ist die Bandbreite B des gesendetenImpulses gleich:
B = |Kr| τp . (2.75)
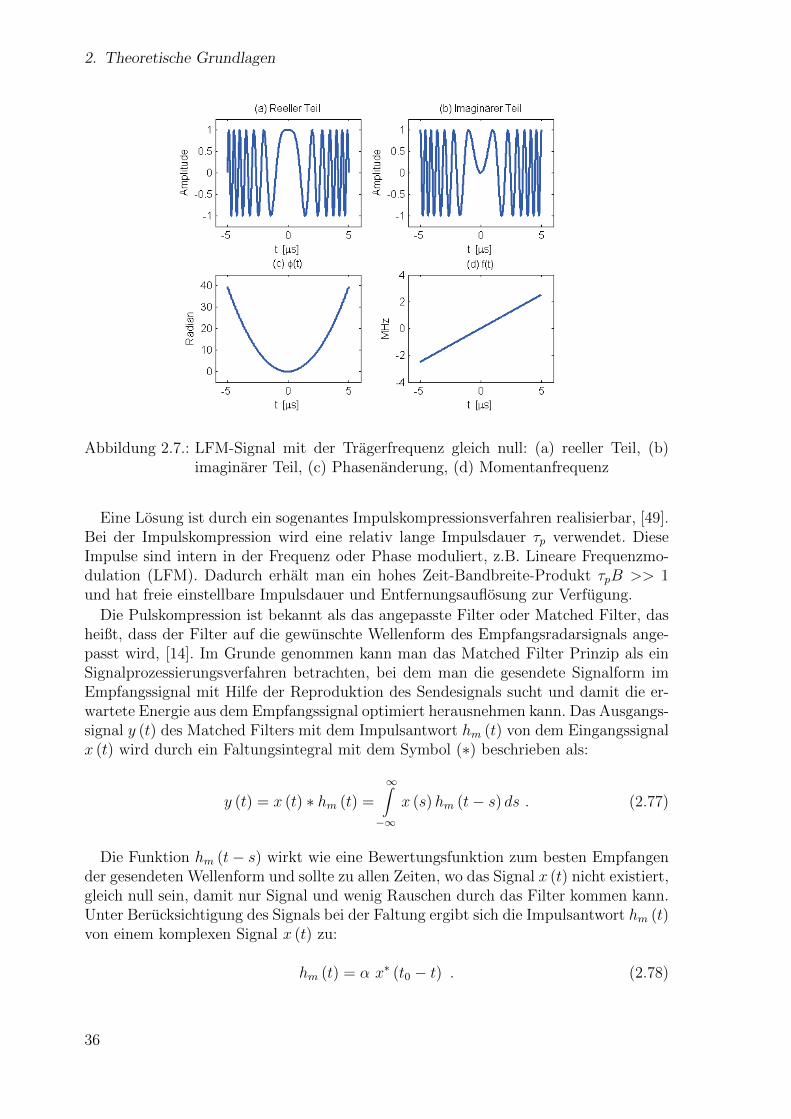
Die Abbildung 2.7 zeigt die graphische Darstellung von einem linear frequenzmodu-lierten Signal aus der Gleichung (2.74) mit der Tragerfrequenz gleich null. Die Abbil-dung 2.7 (a) zeigt den reellen Teil, (b) den imaginaren Teil, (c) die Phasenanderunggemaß der Gleichung (2.73) und (d) die Momentanfrequenz mit positiver Modulations-rate in der Gleichung (2.72).
Das Produkt zwischen der Signalbreite B und die Impulsdauer τp ist ein wichtigesdimensionsloses Parameter des Signals. Es ist das Zeit-Bandbreite-Produkt (TBP) undstellt als die effektive Breite des komprimierten Pulses dar mit:
TBP = |Kr| τ 2p = τpB . (2.76)
Bei der Radardatenverarbeitung spielt das Spektrum eines linearen frequenzmodu-lierten Signals eine wichtige Rolle. Das Spektrum eines LFM-Signals nahert sich mehrund mehr einem Rechteck mit steigendem Zeit-Bandbreite-Produkt an.
2.5.2. Pulskompressionsprinzip und Matched Filter
Aus der Gleichung (2.65) und (2.66) erkennt man, dass eine große oder erhohte Sen-deleistung Pt benotigt wird, um eine große Radarreichweite und ein großes Signal-zu-Rausch-Verhaltnis zu gewahrleisten. Um diese Forderung zu erfullen, muss man im Fallvon einem Pulsradar die Pulsspitzenleistung erhohen oder die Impulsdauer ausdehnen.Eine andere Forderung an das Radarsystem ist die bessere Entfernungsauflosung, diedurch eine kurze Pulsdauer zu verwirklichen ist. Diese beiden Forderungen stellen diegegenseitigen Bedingungen und konnen trotzdem erfullt werden, wenn man das expan-dierte Signal sendet und danach in die gewunschte Auflosung durch Signalverarbeitungkomprimiert.
35
2. Theoretische Grundlagen
Abbildung 2.7.: LFM-Signal mit der Tragerfrequenz gleich null: (a) reeller Teil, (b)imaginarer Teil, (c) Phasenanderung, (d) Momentanfrequenz
Eine Losung ist durch ein sogenantes Impulskompressionsverfahren realisierbar, [49].Bei der Impulskompression wird eine relativ lange Impulsdauer τp verwendet. DieseImpulse sind intern in der Frequenz oder Phase moduliert, z.B. Lineare Frequenzmo-dulation (LFM). Dadurch erhalt man ein hohes Zeit-Bandbreite-Produkt τpB >> 1und hat freie einstellbare Impulsdauer und Entfernungsauflosung zur Verfugung.
Die Pulskompression ist bekannt als das angepasste Filter oder Matched Filter, dasheißt, dass der Filter auf die gewunschte Wellenform des Empfangsradarsignals ange-passt wird, [14]. Im Grunde genommen kann man das Matched Filter Prinzip als einSignalprozessierungsverfahren betrachten, bei dem man die gesendete Signalform imEmpfangssignal mit Hilfe der Reproduktion des Sendesignals sucht und damit die er-wartete Energie aus dem Empfangssignal optimiert herausnehmen kann. Das Ausgangs-signal y (t) des Matched Filters mit dem Impulsantwort hm (t) von dem Eingangssignalx (t) wird durch ein Faltungsintegral mit dem Symbol (∗) beschrieben als:
y (t) = x (t) ∗ hm (t) =
∞∫−∞
x (s)hm (t− s) ds . (2.77)
Die Funktion hm (t− s) wirkt wie eine Bewertungsfunktion zum besten Empfangender gesendeten Wellenform und sollte zu allen Zeiten, wo das Signal x (t) nicht existiert,gleich null sein, damit nur Signal und wenig Rauschen durch das Filter kommen kann.Unter Berucksichtigung des Signals bei der Faltung ergibt sich die Impulsantwort hm (t)von einem komplexen Signal x (t) zu:
hm (t) = α x∗ (t0 − t) . (2.78)
36

2.6. Radar mit synthetischer Apertur (SAR)
Dabei ist α eine reelle, positive Konstante. Die Impulsantwort des Matched Filtersist gleich dem gespiegelten, konjungiert komplexen Sendesignal mit dem Symbol (∗)und ist um t0 verschoben. Die Zeitverzogerung t0 ist frei wahlbar und kann auch gleichnull gesetzt werden. Setzt man die Gleichung (2.78) in die Gleichung (2.77) erhalt mandas Ausgangssignal als:
y (t) = α
∞∫−∞
x (s)x∗ (s+ t0 − t) ds . (2.79)
Aus der Gleichung (2.79) kann der Matched Filter als die Korrelationsfunktion be-trachtet werden und gilt als Basis fur die Signalprozessierung.
2.5.3. Matched Filter Ausgang vom LFM-Signal
Das Signal am Ausgang eines Matched Filters fur ein linear frequenzmoduliertes Signalim Basisband mit der Tragerfrequenz fc = 0, t0 = 0 und Impulsdauer τp mit Hilfe vonGleichungen (2.74) und (2.79) ist, [14]:
y (t) = α
∞∫−∞
rect
(s
τp
)ejπKrs
2
rect
(s− tτp
)e−jπKr(s−t)
2
ds
= α (τp − |t|) rect
(t
2τp
)sinc [Krt (τp − |t|)] . (2.80)
Die Gleichung (2.80) kann in drei Teilgleichungen betrachtet werden. Der Term
rect(
t2τp
)grenzt die Signaldauer bei 2τp. Der Term (τp − |t|) andert sich langsam mit
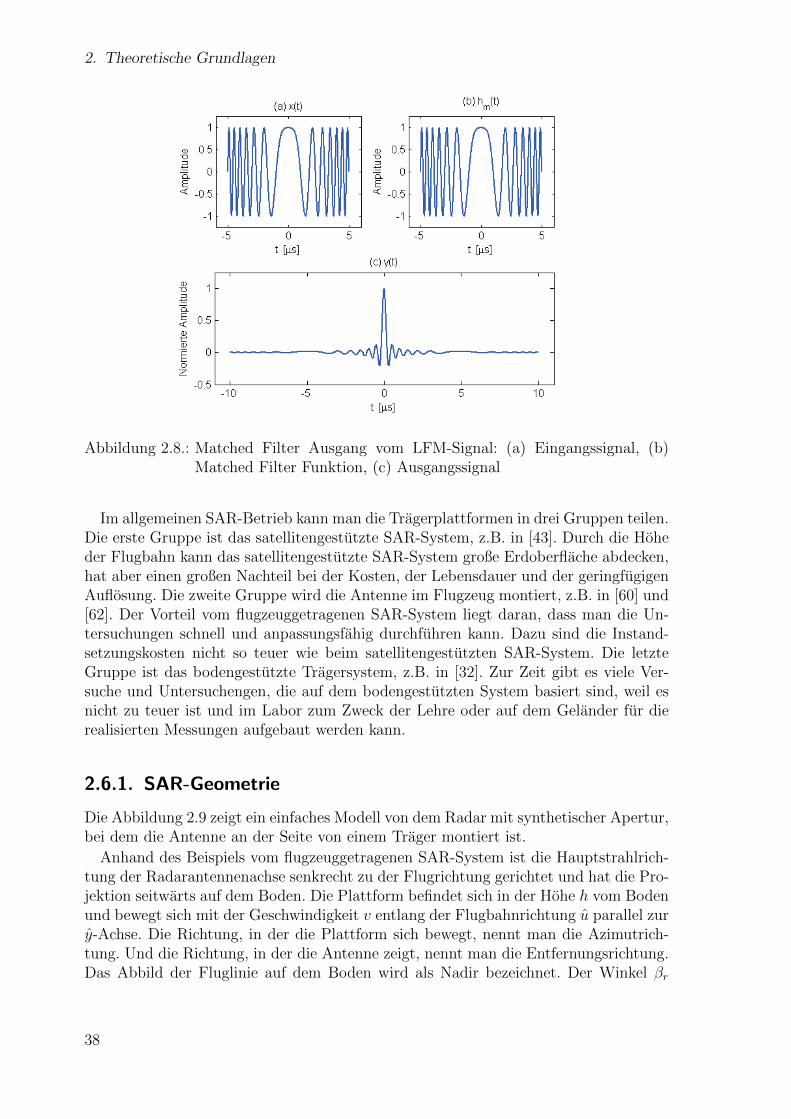
der Zeit t und bildet eine dreieckige Hullkurve. Und der dritte andert sich schnell mitder sinc-Funktion, die einen maximalen Wert bei t = 0 hat. Die Abbildung 2.8 (c) zeigtein Beispiel des Ausgangssignals des Matched Filters y (t) von einem linear frequenz-modulierten Signal x (t) in der Abbildung 2.8 (a) durch die Faltung mit der MatchedFilter Funktion hm (t) in der Abbildung 2.8 (b).
Man definiert den Korrelationsgewinn C aus dem Zeit-Bandbreite-Produkt des mo-dulierten Signals als ein Maß fur die Starke der Kompression mit:
C = 10 log10
(|Kr| τ 2p
)= 10 log10 (τpB) . (2.81)
2.6. Radar mit synthetischer Apertur (SAR)
Das Radar mit synthetischer Apertur (SAR) gehort zum aktiven Radarsystem miteigener Beleuchtungsquelle. Der Hauptunterschied zwischen einem Seitensichtradar mitrealer Apertur und einem Abbildungsradarsystem mit synthetischer Apertur ist eineerzeugte synthetische Apertur durch die Bewegung der Plattform entlang der Fluglinie.Das SAR-System kann in verschiedenen Abbildungsmodi betrieben werden. Es hangtvon der Systemkonfiguration ab, z.B. dem Streifenmodus, dem ScanSAR-Modus unddem Spotlight-Modus. Eine ausfuhrliche Einfuhrung in die SAR-Geometrie findet manin den Buchern, z.B. in [14], [16] und [38] sowie in den Veroffentlichungen, z.B. in [23]und [68].
37
2. Theoretische Grundlagen
Abbildung 2.8.: Matched Filter Ausgang vom LFM-Signal: (a) Eingangssignal, (b)Matched Filter Funktion, (c) Ausgangssignal
Im allgemeinen SAR-Betrieb kann man die Tragerplattformen in drei Gruppen teilen.Die erste Gruppe ist das satellitengestutzte SAR-System, z.B. in [43]. Durch die Hoheder Flugbahn kann das satellitengestutzte SAR-System große Erdoberflache abdecken,hat aber einen großen Nachteil bei der Kosten, der Lebensdauer und der geringfugigenAuflosung. Die zweite Gruppe wird die Antenne im Flugzeug montiert, z.B. in [60] und[62]. Der Vorteil vom flugzeuggetragenen SAR-System liegt daran, dass man die Un-tersuchungen schnell und anpassungsfahig durchfuhren kann. Dazu sind die Instand-setzungskosten nicht so teuer wie beim satellitengestutzten SAR-System. Die letzteGruppe ist das bodengestutzte Tragersystem, z.B. in [32]. Zur Zeit gibt es viele Ver-suche und Untersuchengen, die auf dem bodengestutzten System basiert sind, weil esnicht zu teuer ist und im Labor zum Zweck der Lehre oder auf dem Gelander fur dierealisierten Messungen aufgebaut werden kann.
2.6.1. SAR-Geometrie
Die Abbildung 2.9 zeigt ein einfaches Modell von dem Radar mit synthetischer Apertur,bei dem die Antenne an der Seite von einem Trager montiert ist.
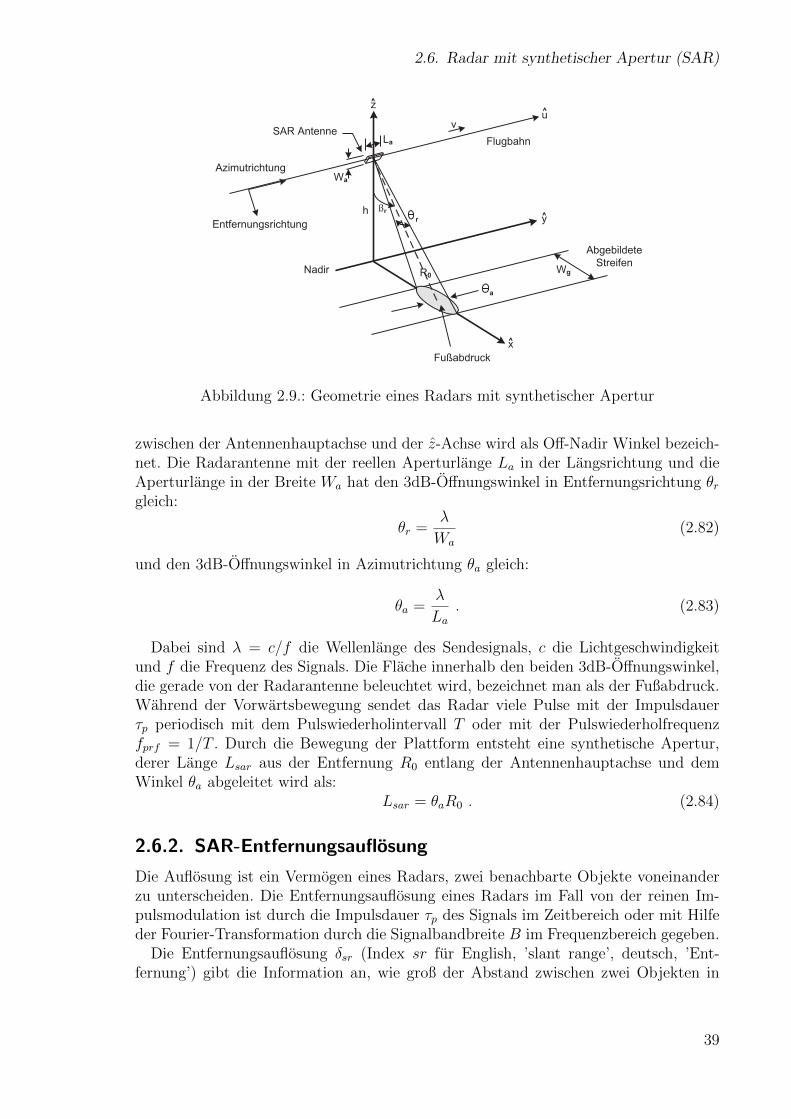
Anhand des Beispiels vom flugzeuggetragenen SAR-System ist die Hauptstrahlrich-tung der Radarantennenachse senkrecht zu der Flugrichtung gerichtet und hat die Pro-jektion seitwarts auf dem Boden. Die Plattform befindet sich in der Hohe h vom Bodenund bewegt sich mit der Geschwindigkeit v entlang der Flugbahnrichtung u parallel zury-Achse. Die Richtung, in der die Plattform sich bewegt, nennt man die Azimutrich-tung. Und die Richtung, in der die Antenne zeigt, nennt man die Entfernungsrichtung.Das Abbild der Fluglinie auf dem Boden wird als Nadir bezeichnet. Der Winkel βr
38
2.6. Radar mit synthetischer Apertur (SAR)
Abbildung 2.9.: Geometrie eines Radars mit synthetischer Apertur
zwischen der Antennenhauptachse und der z-Achse wird als Off-Nadir Winkel bezeich-net. Die Radarantenne mit der reellen Aperturlange La in der Langsrichtung und dieAperturlange in der Breite Wa hat den 3dB-Offnungswinkel in Entfernungsrichtung θrgleich:
θr =λ
Wa
(2.82)
und den 3dB-Offnungswinkel in Azimutrichtung θa gleich:
θa =λ
La. (2.83)
Dabei sind λ = c/f die Wellenlange des Sendesignals, c die Lichtgeschwindigkeitund f die Frequenz des Signals. Die Flache innerhalb den beiden 3dB-Offnungswinkel,die gerade von der Radarantenne beleuchtet wird, bezeichnet man als der Fußabdruck.Wahrend der Vorwartsbewegung sendet das Radar viele Pulse mit der Impulsdauerτp periodisch mit dem Pulswiederholintervall T oder mit der Pulswiederholfrequenzfprf = 1/T . Durch die Bewegung der Plattform entsteht eine synthetische Apertur,derer Lange Lsar aus der Entfernung R0 entlang der Antennenhauptachse und demWinkel θa abgeleitet wird als:
Lsar = θaR0 . (2.84)
2.6.2. SAR-Entfernungsauflosung
Die Auflosung ist ein Vermogen eines Radars, zwei benachbarte Objekte voneinanderzu unterscheiden. Die Entfernungsauflosung eines Radars im Fall von der reinen Im-pulsmodulation ist durch die Impulsdauer τp des Signals im Zeitbereich oder mit Hilfeder Fourier-Transformation durch die Signalbandbreite B im Frequenzbereich gegeben.
Die Entfernungsauflosung δsr (Index sr fur English, ’slant range’, deutsch, ’Ent-fernung’) gibt die Information an, wie groß der Abstand zwischen zwei Objekten in
39
2. Theoretische Grundlagen
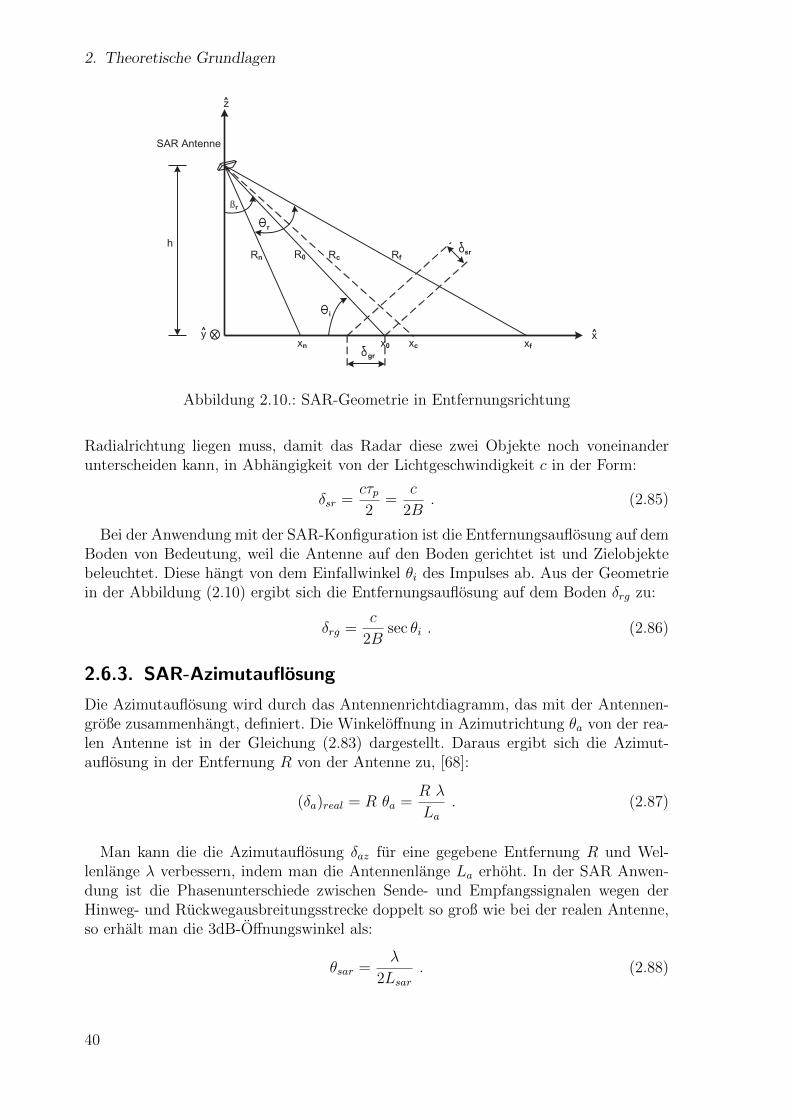
Abbildung 2.10.: SAR-Geometrie in Entfernungsrichtung
Radialrichtung liegen muss, damit das Radar diese zwei Objekte noch voneinanderunterscheiden kann, in Abhangigkeit von der Lichtgeschwindigkeit c in der Form:
δsr =cτp2
=c
2B. (2.85)
Bei der Anwendung mit der SAR-Konfiguration ist die Entfernungsauflosung auf demBoden von Bedeutung, weil die Antenne auf den Boden gerichtet ist und Zielobjektebeleuchtet. Diese hangt von dem Einfallwinkel θi des Impulses ab. Aus der Geometriein der Abbildung (2.10) ergibt sich die Entfernungsauflosung auf dem Boden δrg zu:
δrg =c
2Bsec θi . (2.86)
2.6.3. SAR-Azimutauflosung
Die Azimutauflosung wird durch das Antennenrichtdiagramm, das mit der Antennen-große zusammenhangt, definiert. Die Winkeloffnung in Azimutrichtung θa von der rea-len Antenne ist in der Gleichung (2.83) dargestellt. Daraus ergibt sich die Azimut-auflosung in der Entfernung R von der Antenne zu, [68]:
(δa)real = R θa =R λ
La. (2.87)
Man kann die die Azimutauflosung δaz fur eine gegebene Entfernung R und Wel-lenlange λ verbessern, indem man die Antennenlange La erhoht. In der SAR Anwen-dung ist die Phasenunterschiede zwischen Sende- und Empfangssignalen wegen derHinweg- und Ruckwegausbreitungsstrecke doppelt so groß wie bei der realen Antenne,so erhalt man die 3dB-Offnungswinkel als:
θsar =λ
2Lsar. (2.88)
40
2.7. SAR-Rohdatengewinnung
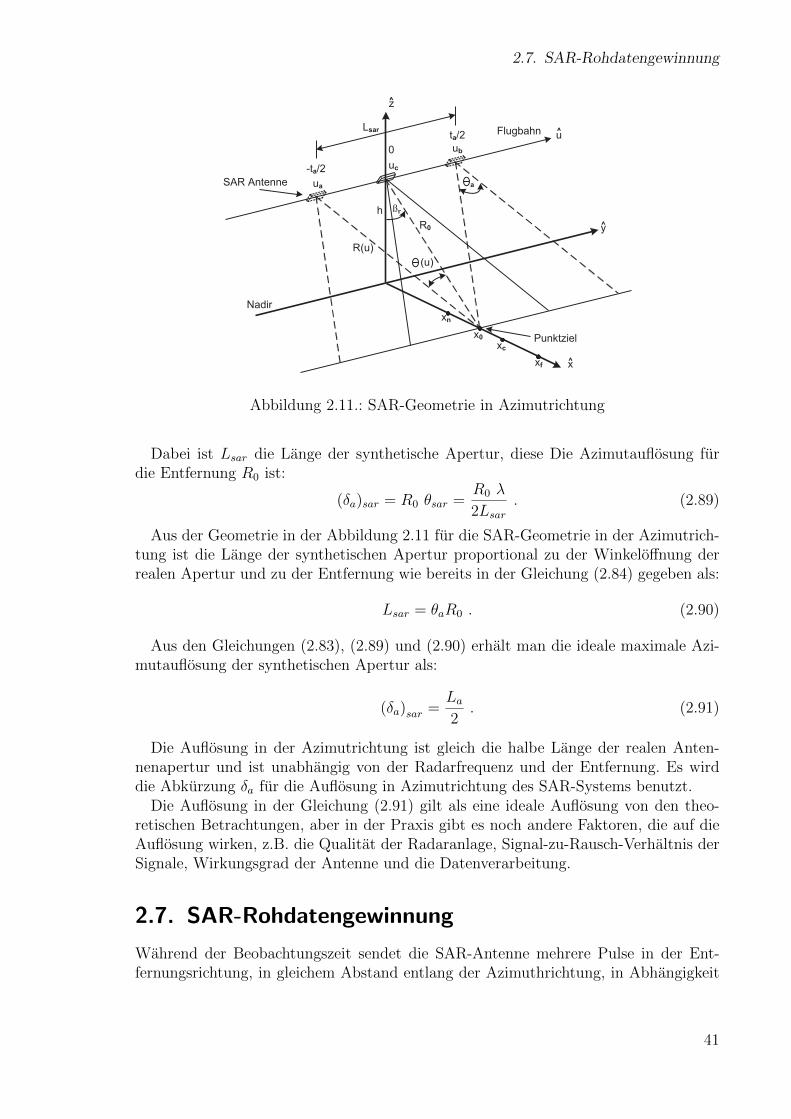
Abbildung 2.11.: SAR-Geometrie in Azimutrichtung
Dabei ist Lsar die Lange der synthetische Apertur, diese Die Azimutauflosung furdie Entfernung R0 ist:
(δa)sar = R0 θsar =R0 λ
2Lsar. (2.89)
Aus der Geometrie in der Abbildung 2.11 fur die SAR-Geometrie in der Azimutrich-tung ist die Lange der synthetischen Apertur proportional zu der Winkeloffnung derrealen Apertur und zu der Entfernung wie bereits in der Gleichung (2.84) gegeben als:
Lsar = θaR0 . (2.90)
Aus den Gleichungen (2.83), (2.89) und (2.90) erhalt man die ideale maximale Azi-mutauflosung der synthetischen Apertur als:
(δa)sar =La2. (2.91)
Die Auflosung in der Azimutrichtung ist gleich die halbe Lange der realen Anten-nenapertur und ist unabhangig von der Radarfrequenz und der Entfernung. Es wirddie Abkurzung δa fur die Auflosung in Azimutrichtung des SAR-Systems benutzt.
Die Auflosung in der Gleichung (2.91) gilt als eine ideale Auflosung von den theo-retischen Betrachtungen, aber in der Praxis gibt es noch andere Faktoren, die auf dieAuflosung wirken, z.B. die Qualitat der Radaranlage, Signal-zu-Rausch-Verhaltnis derSignale, Wirkungsgrad der Antenne und die Datenverarbeitung.
2.7. SAR-Rohdatengewinnung
Wahrend der Beobachtungszeit sendet die SAR-Antenne mehrere Pulse in der Ent-fernungsrichtung, in gleichem Abstand entlang der Azimuthrichtung, in Abhangigkeit
41
2. Theoretische Grundlagen
von der Position der Antenne u, der Geschwindigkeit v und der Pulswiederholfrequenzfprf aus. Die SAR-Signale entstehen durch die Wechselwirkungen zwischen den gesen-deten Impulsen und der Bodenreflektivitat des beleuchteten Gebietes. Zum Zweck derForschung wird ein Simulator entwickelt, um die SAR-Rohdaten von verschiedenen Ob-jekten zu gewinnen und zu prozessieren. Es gibt zahlreiche Veroffentlichungen uber dieModellierung und Prozessierung des SAR-Signals, z.B. in [73] wird ein mathematischesModell der satellitengestutzten SAR-Systemantwort prasentiert. In [24], [25], [26], [27]und [28] werden die dreidimensionalen Landschaften und Objekten simuliert. In [34]wird MATLAB-Programm zur Simulation eingesetzt, in [11] wird der Spotlight-Modussimuliert. In [51] geht es um die Studie der Schiffklassifikation mit Hilfe von graphi-scher Berechnung. In [37] wird die Abbildungsqualitat durch die Simulation bewertet,in [70] wird die Instabilitat der Plattform berucksichtigt. Andere Simulatorbeispielesind ein end-to-end SAR Simulator (DIONISOS) in [21], bei dem die dreidimensionaleGeometrie und die physikalische Eigenschaft eingesetzt werden. In [35] prasentiert istein Simulationsprogramm, das in der kanadischen Raumfahrtagentur (CSA) entwickeltwurde.
Die obengenannten Beispiele deuten darauf hin, dass die SAR-Simulatoren vielsei-tig einsetzbar sind und als ein wichtiger Baustein der SAR-Entwicklung beitragen. Indieser Arbeit wird ein SAR-Simulationsprogramm mit mathematischem Modell zurGewinnung der SAR-Rohdaten von verschiedenen Objekten und zur Prozessiering derexperimentellen SAR-Rohdaten des DLR (E-SAR) entwickelt.
2.7.1. SAR-Signal in Entfernungsrichtung
Man kann die SAR-Signale wie ein zweidimensionales Datenfeld betrachten. Das ammeisten benutzte Sendesignal p(tr) sind linear frequenzmodulierte Pulse und kann inder komplexen Form dargestellt werden als:
p (tr) = a (tr) e(j2πfctr+jπKrt2r) (2.92)
mit
a (tr) = rect
(trτp
); |tr| ≤ (τp/2) . (2.93)
Dabei sind die Parameter tr die Zeit in Entfernungsrichtung, a (tr) die rechteckformigeHullkurvenfunktion des gesendeten Signals, τp die Impulsdauer, fc die Tragerfrequenzund Kr die Modulationsrate. Nach dem Senden reflektiert das Signal auf dem Bodeninnerhalb der 3dB-Offnungswinkel θr, wie es in der Abbildung 2.10 dargestellt wird,kommt mit einer Verzogerungszeit zur Radarantenne zuruck und wird im bestimmtenZeitintervall von
[2Rnc,2Rfc
+ τp]
wie in der Abbildung 2.12 (a) vom Radar aufgenom-men.
Fur eine vereinfachte Simulation eines Punktzieles wird es angenommen, dass dieFlugbahn gerade ist und der Boden flach ist. Das Echosignal s (tr) von einem Punkt-zieles mit der Entfernung R0 und dem Radarruckstreuquerschnitt σ (θ, φ) (siehe Ab-bildung 2.5) unter Berucksichtigung von Antennenstrahlungsintensitat in der Entfer-nungsrichtung wr (θ, φ) lautet:
s (tr) = σ (θ, φ)wr (θ, φ) a
(tr − 2R0/c
τp
)e
(j2πfc(tr− 2R0
c )+jπKr(tr− 2R0c )
2). (2.94)
42

2.7. SAR-Rohdatengewinnung
Abbildung 2.12.: SAR-Signal in Entfernungsrichtung: (a) Zeitintervall (b) eindimensio-nales Datenfeld
Das Echosignal in der Gleichung (2.94) enthalt noch den hohen Frequenzanteil undwird zuerst auf Basisband mit Hilfe von dem Quadraturdemodulationsprozess umge-wandelt. Dabei wird das Echosignal durch den Mischer und Tiefpassfilter gesendet unddanach mit dem Analog-zu-Digital-Wandler abgetastet. Am Ausgang erhalt man diesogenannte I und Q Signale getrennt im reellen Kanal und imaginaren Kanal. Dasempfangene Signal im Basisband kann in der folgenden Form dargestellt werden:
sb (tr) = σ (θ, φ)wr (θ, φ) a
(tr − 2R0/c
τp
)e
(−j2πfc 2R0
c+jπKr(tr− 2R0
c )2). (2.95)
Diese Daten werden abgetast und in einer Reihe des Datenfeldes, wie es in der Abbil-dung 2.12 (b) dargestellt wird, zur Datenverarbeitung gespeichert. Der erste Abtastwertmit dem Index n = 1 entspricht dem reflektierten Signal von der nahersten EntfernungRn. Die Anzahl N hangt sowohl von der Abtastrate in der Entfernungsrichtung alsauch von der Breite (Swath) des beleuchteten Gebietes. In der Praxis kann man diesenBereich, definiert durch die 3-dB Strahlbreite, langer als das wirkliche Untersuchungs-gebiet definieren, damit das reflektierte Signal das Gebiet voll abdecken kann.
2.7.2. SAR-Signal in Azimutrichtung
Durch die Radarbewegung in der Azimutrichtung verandert sich auch die momentaneEntfernung R (u) zwischen der Antenne und dem Punktziel um ∆R von der kleins-ten Entfernung R0 zwischen der Antenne und dem Ziel. Aus der Geometrie in derAbbildung 2.13 ergibt sich die momentane Entfernung entlang der Fluglinie zu:
R (u) =√R2
0 + u2 . (2.96)
Die momentane Beobachtungszeit ta, mit −Ta2≤ ta ≤ Ta
2worin Ta ist die gesamte Be-
leuchtungszeit, des SAR-Radars ist die Zeit, in der das Ziel beleuchtet wird, und hangtvon dem Offnungswinkel der Antenne in der Azimutrichtung, der Entfernung des Zie-les, der Geschwindigkeit der Plattform, der Zielpositionen und dem Beobachtungsmodeab. Fur einen Punktziel in einem Streifenmodus betragt die gesamte Beobachtungszeit:
Ta =R0θav
. (2.97)
43
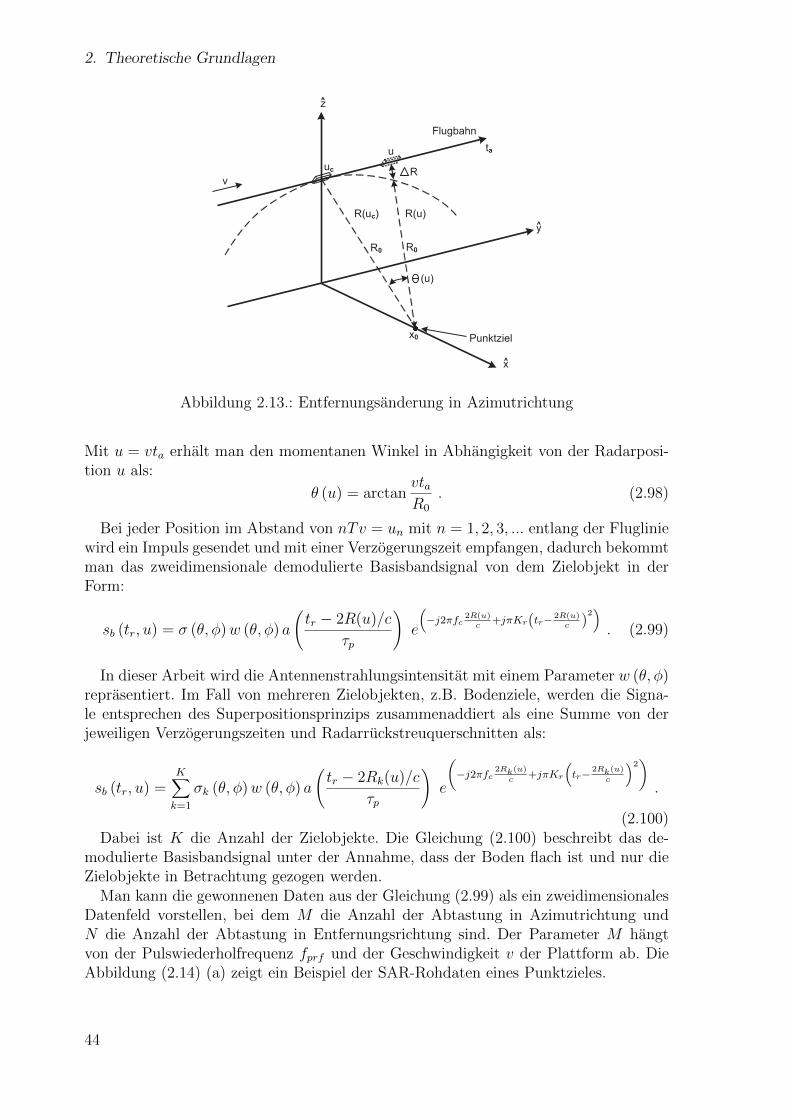
2. Theoretische Grundlagen
Abbildung 2.13.: Entfernungsanderung in Azimutrichtung
Mit u = vta erhalt man den momentanen Winkel in Abhangigkeit von der Radarposi-tion u als:
θ (u) = arctanvtaR0
. (2.98)
Bei jeder Position im Abstand von nTv = un mit n = 1, 2, 3, ... entlang der Flugliniewird ein Impuls gesendet und mit einer Verzogerungszeit empfangen, dadurch bekommtman das zweidimensionale demodulierte Basisbandsignal von dem Zielobjekt in derForm:
sb (tr, u) = σ (θ, φ)w (θ, φ) a
(tr − 2R(u)/c
τp
)e
(−j2πfc 2R(u)
c+jπKr(tr− 2R(u)
c )2). (2.99)
In dieser Arbeit wird die Antennenstrahlungsintensitat mit einem Parameter w (θ, φ)reprasentiert. Im Fall von mehreren Zielobjekten, z.B. Bodenziele, werden die Signa-le entsprechen des Superpositionsprinzips zusammenaddiert als eine Summe von derjeweiligen Verzogerungszeiten und Radarruckstreuquerschnitten als:
sb (tr, u) =K∑k=1
σk (θ, φ)w (θ, φ) a
(tr − 2Rk(u)/c
τp
)e
(−j2πfc
2Rk(u)
c+jπKr
(tr−
2Rk(u)
c
)2).
(2.100)Dabei ist K die Anzahl der Zielobjekte. Die Gleichung (2.100) beschreibt das de-
modulierte Basisbandsignal unter der Annahme, dass der Boden flach ist und nur dieZielobjekte in Betrachtung gezogen werden.
Man kann die gewonnenen Daten aus der Gleichung (2.99) als ein zweidimensionalesDatenfeld vorstellen, bei dem M die Anzahl der Abtastung in Azimutrichtung undN die Anzahl der Abtastung in Entfernungsrichtung sind. Der Parameter M hangtvon der Pulswiederholfrequenz fprf und der Geschwindigkeit v der Plattform ab. DieAbbildung (2.14) (a) zeigt ein Beispiel der SAR-Rohdaten eines Punktzieles.
44
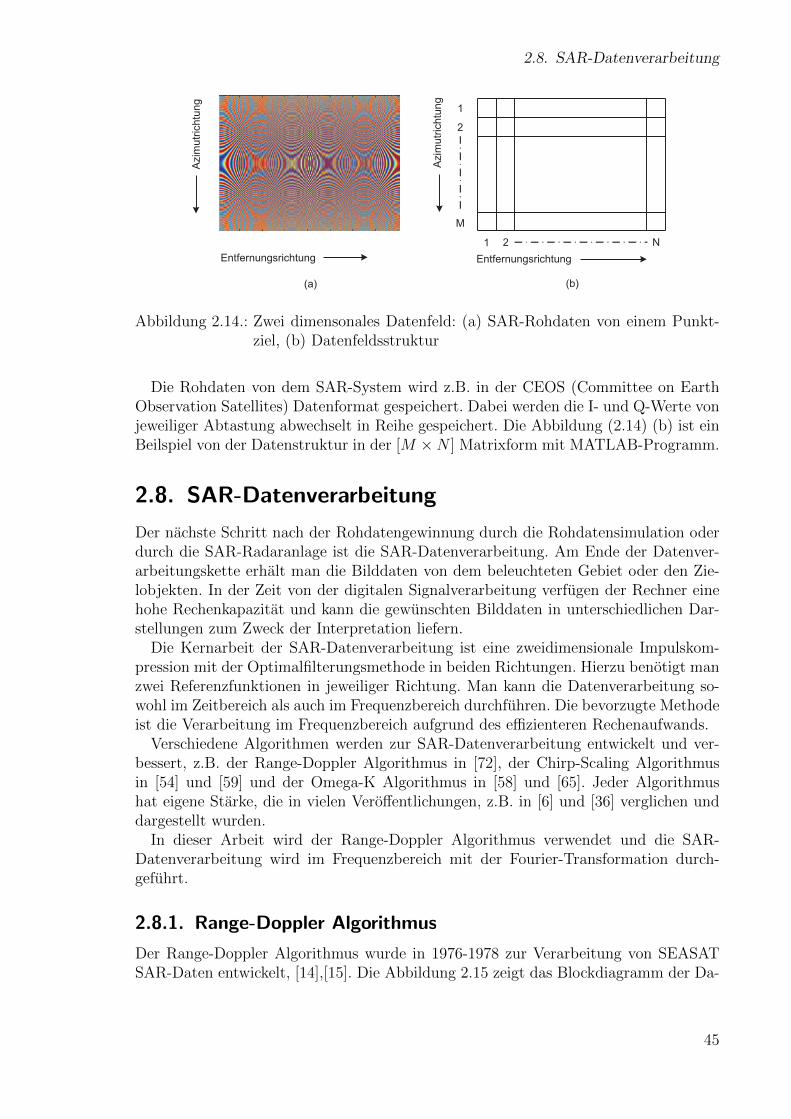
2.8. SAR-Datenverarbeitung
Abbildung 2.14.: Zwei dimensonales Datenfeld: (a) SAR-Rohdaten von einem Punkt-ziel, (b) Datenfeldsstruktur
Die Rohdaten von dem SAR-System wird z.B. in der CEOS (Committee on EarthObservation Satellites) Datenformat gespeichert. Dabei werden die I- und Q-Werte vonjeweiliger Abtastung abwechselt in Reihe gespeichert. Die Abbildung (2.14) (b) ist einBeilspiel von der Datenstruktur in der [M ×N ] Matrixform mit MATLAB-Programm.
2.8. SAR-Datenverarbeitung
Der nachste Schritt nach der Rohdatengewinnung durch die Rohdatensimulation oderdurch die SAR-Radaranlage ist die SAR-Datenverarbeitung. Am Ende der Datenver-arbeitungskette erhalt man die Bilddaten von dem beleuchteten Gebiet oder den Zie-lobjekten. In der Zeit von der digitalen Signalverarbeitung verfugen der Rechner einehohe Rechenkapazitat und kann die gewunschten Bilddaten in unterschiedlichen Dar-stellungen zum Zweck der Interpretation liefern.
Die Kernarbeit der SAR-Datenverarbeitung ist eine zweidimensionale Impulskom-pression mit der Optimalfilterungsmethode in beiden Richtungen. Hierzu benotigt manzwei Referenzfunktionen in jeweiliger Richtung. Man kann die Datenverarbeitung so-wohl im Zeitbereich als auch im Frequenzbereich durchfuhren. Die bevorzugte Methodeist die Verarbeitung im Frequenzbereich aufgrund des effizienteren Rechenaufwands.
Verschiedene Algorithmen werden zur SAR-Datenverarbeitung entwickelt und ver-bessert, z.B. der Range-Doppler Algorithmus in [72], der Chirp-Scaling Algorithmusin [54] und [59] und der Omega-K Algorithmus in [58] und [65]. Jeder Algorithmushat eigene Starke, die in vielen Veroffentlichungen, z.B. in [6] und [36] verglichen unddargestellt wurden.
In dieser Arbeit wird der Range-Doppler Algorithmus verwendet und die SAR-Datenverarbeitung wird im Frequenzbereich mit der Fourier-Transformation durch-gefuhrt.
2.8.1. Range-Doppler Algorithmus
Der Range-Doppler Algorithmus wurde in 1976-1978 zur Verarbeitung von SEASATSAR-Daten entwickelt, [14],[15]. Die Abbildung 2.15 zeigt das Blockdiagramm der Da-
45

2. Theoretische Grundlagen
tenverarbeitung mit dem Range-Doppler Algorithmus im Frequenzbereich. Die Ver-arbeitungen mit dem Range-Doppler Algorithmus kann in zwei Hauptgruppen geteiltwerden. Die erste Gruppe ist die Verarbeitung in Entfernungsrichtung oder die Ent-fernungskompression. Die zweite Gruppe ist die Verarbeitung in Azimutrichtung oderdie Azimutkompression. Die Daten werden mit der Referenzfunktion in der jeweiligenRichtung nach dem Matched Filter Prinzip gefaltet. Der Zusammenhang zwischen Zeit-und Frequenzbereich besteht darin, dass die Faltung im Zeitbereich einer Multiplikationim Frequenzbereich entspricht, [49] und [50].
Die SAR-Rohdaten und die Referenzfunktion werden zuerst mit FFT (Fast FourierTransform) Algorithmus in Frequenzbereich transformiert und mit einander multipli-ziert. Danach folgt die Rucktransformation in Zeitbereich mit IFFT (Invers Fast FourierTransform) Algorithmus. Man merke, dass RCMC (Range Cell Migration Correction)auch vorgenommen wird und im Abschnitt 2.8.4 definiert wird.
Abbildung 2.15.: Blockdiagramm der SAR-Datenverarbeitung mit dem Range-DopplerAlgorithmus
In mancher Literatur, z.B. in [38], wird von dem Transponieren der Daten zwischender Entfernungskompression und der Azimutkompression, die in der Abbildung 2.15nicht dabei ist, beschrieben. Durch die Verarbeitung mit MATLAB-Programm werdendie Daten bereits in Matrixform gespeichert und durch einen geeigneten Programmcodekann man in diesem Fall das Transponieren uberspringen.
2.8.2. Entfernungskompression
Die Entfernungskompression erfolgt durch die Faltung der Rohdaten mit der Referenz-funktion in der Entfernungsrichtung hr (tr). Aus dem Matched Filter Prinzip wird dieMatched Filter Funktion mit dem zeitlich gespiegelten, konjugiert komplexen Signaldefiniert. Fur ein linear frequenzmoduliertes Signal von einem Punktziel erhalt mandie Referenzfunktion in Entfernungsrichtung hr (tr) als:
hr (tr) = rect
(trτp
)e(−jπKrt
2r) mit |tr| ≤ (τp/2) . (2.101)
46

2.8. SAR-Datenverarbeitung
Die Entfernungskompression wird in jede Reihe (1, ...,M) des Datenfeldes in derAbbildung 2.14 (b) durchgefuhrt. Bei der Entfernungskompression kann mit einer Re-ferenzfunktion fur alle Reihen gearbeitet werden. Fur die Entfernungskompression istes wichtig, die genaue Wellenform des gesendeten Signals oder das simulierte Sende-signal und andere Parameter, z.B. die Modulationsrate und die Abtastrate zu wissen,damit die Referenzfunktion hr (tr) richtig gebildet werden kann.
2.8.3. Azimutkompression
Die Datenstruktur zur Bildung der Referenzfunktion ha (ta) in der Azimutrichtungentsteht durch die Bewegung der Plattform entlang der Fluglinie. Unter der Annahme,dass die Fluglinie gerade ist, wie es in der Abbildung 2.13 dargestellt wird, erhalt mandie momentane Entfernung zwischen Radar und Zielobjekt aus der Gleichung (2.96) ineine Taylorreihenentwicklung in der Form, [38]:
R (u) ≈ R0 +u2
2R0
. (2.102)
Unter Beachtung der zweifachen Ausbreitungsstrecke R (u) verfugt das Signal an derSAR-Antenne uber eine Phasenmodulation φ(ta) in Azimut mit u = vta als:
φ(ta) = −2π
λ2R (u) ≈ −4π
λ
(R0 +
u2
2R0
). (2.103)
Das Minuszeichen in der Gleichung (2.103) wird benutzt, weil die Phasenverzogerungabgezogen wird, um die Phase zu erhalten. Durch die Multiplikation mit 1/2π und dieAbleitung der Gleichung (2.103) nach der Zeit ta erhalt man den Frequenzverlauf derAzimutmodulation als:
fa (ta) = −2v2t2aλR0
. (2.104)
Im Fall von einer SAR-Radarkonfiguration mit einem Schielwinkel θsq, der als derWinkel zwischen der Antennenhauptstrahlrichtung und der x-Achse definiert ist, be-steht der Frequenzverlauf in Azimut aus zwei Terme als:
fa (ta) =2v sin θsq
λ− 2v2t2a
λR0
. (2.105)
Der erste Term in der Gleichung (2.105) wird als Dopplerschwerpunkt bezeichnet,und entspricht der Doppler-Frequenz-Verschiebung fD wegen der Bewegung in Azi-mutrichtung. Der zweite Term charakterisiert den linearen Frequenzverkauf mit derDopplerrate Ka. Daraus kann man die Azimutmodulation vollstandig beschreiben mitden folgenden Gleichungen:
fa (ta) = fD +Kata (2.106)
fD =2v sin θsq
λ(2.107)
Ka = − 2v2
λR0
. (2.108)
47
2. Theoretische Grundlagen
Daraus erhalt man die Referenzfunktion in Azimutrichtung im Fall von einem Punkt-ziel um die Beleuchtungszeit Ta als:
ha (ta) = rect(taTa
)ej(2πfDta−πKat
2a) mit |ta| ≤
Ta2. (2.109)
Die Azimutkompression wird in jede Spalte (1, ..., N) des Datenfeldes in der Abbil-dung 2.14 (b) durchgefuhrt. Bei der Azimutkompression hangt die Referenzfunktionha (ta) von der Entfernung R0 des Zielobjektes ab, deswegen wird fur jede Spalte dieentsprechende Referenzfunktion eingesetzt.
Die Abbildung 2.16 zeigt ein Beispiel der SAR-Datenverarbeitung mit dem RangeDoppler Algorithmus. Der SAR-Rohdatensatz wird mit einem experimentellen SAR-System des DLR (E-SAR) im L-Band aufgenommen. Die Abbildung 2.16 (a) sind dieBetragswerte der SAR-Rohdaten in dB in der Matrixform dargestellt. Hier kann mangrob erkennen, wo die stark reflektierten Signale im Vergleich zur Umgebung sind.Nach der Faltung mit der Referenzfunktion in der Entfernungsrichtung in der Abbil-dung 2.16 (d) und der Zurucktransformation in den Zeitbereich erhalt man die Ent-fernungskomprimierte Daten in der Abbildung 2.16 (b). Die krummen Linien sind dieFolge der Entfernungsanderung wahrend der Beleuchtungszeit, die durch die Korrekturder Zielentfernungsanderung behoben werden konnen. Die Referenzfunktionen in derAzimutrichtung werden fur einzelne Entfernung erzeugt, sowie in der Abbildung 2.16(e) angedeutet ist. Zum Schluss der Datenverarbeitung nach der Azimutkompressionentstehen die Endbilddaten, wie es in der Abbildung 2.16 (c) dargestellt wird.
2.8.4. Korrektur der Zielentfernungsanderung undMultilook-Verarbeitung
Zwei wichtige zusatzliche Verarbeitungsschritte in der Abbildung 2.15 zur Verbesse-rung der SAR-Bilder bei dem Range-Doppler Algorithmus sind die Korrektur der Zie-lentfernungsanderung (RCMC: Range Cell Migration Correction) und die Multilook-Verarbeitung.
Aus der Abbildung 2.13 kann man die Zielentfernungsanderung zwischen Plattformund Zielobjekt entlang der Fluglinie erkennen. Die Echosignale von demselben Zie-lobjekt erreichen die SAR-Antenne mit unterschiedlicher Verzogerungszeit und wer-den nicht in dieselbe Spalte des Datenfeldes gespeichert. Hier wird die Korrektur derZielentfernungsanderung in dem sogenannten Range-Doppler-Bereich durchgefuht, dasheißt, dass die Daten in der Entfernungsrichtung im Zeitbereich und die Daten in derAzimutrichtung im Frequenzbereich sind.
Bei der Korrektur der Zielentfernungsanderung werden die Abtastpunkte in Entfer-nungsrichtung entsprechend dem Abstand ∆R bezuglich der minimalen Entfernung R0
verschoben. Die Große der Entfernungsunterschiede fur jede Zeile M in der Daten-struktur ist gegeben durch, [14]:
∆RM =λ2R0fa (ta)
8v2. (2.110)
In der Praxis betragt die Abtastpunktverschiebung nicht genau eine ganze Zahl, des-wegen wird eine Interpolation durchgefuhrt, um die Amplitudenfehler im Signalverlauf
48
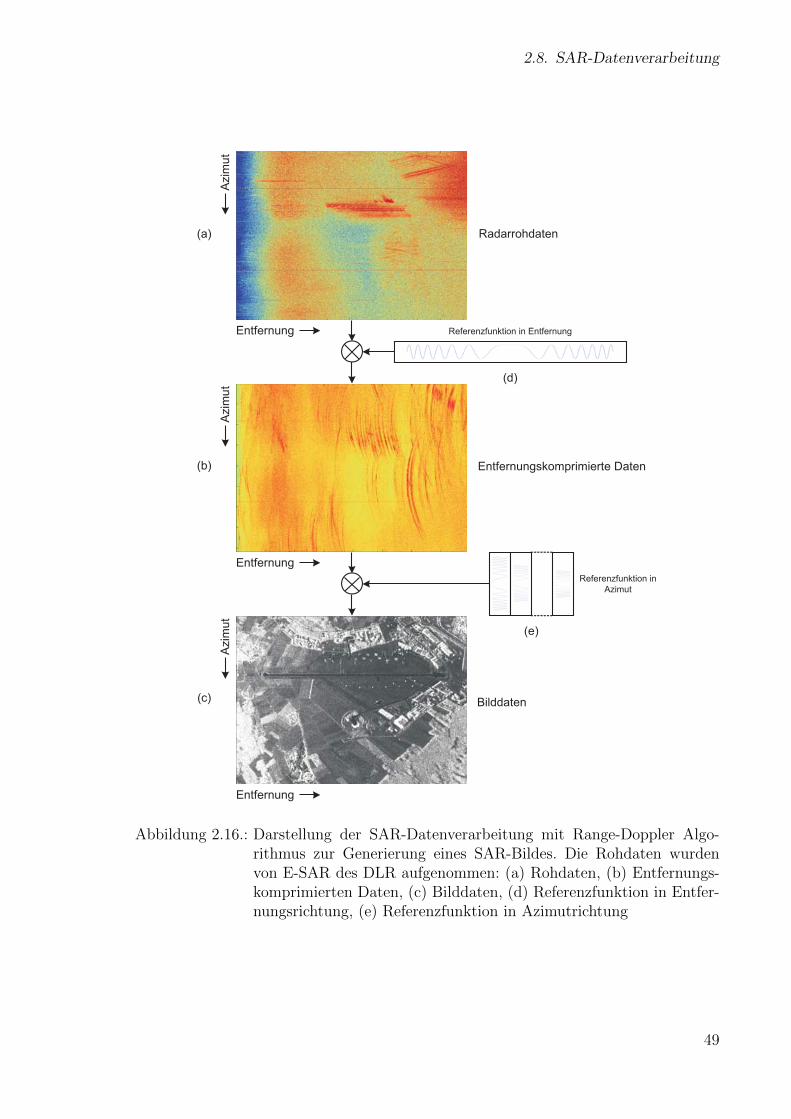
2.8. SAR-Datenverarbeitung
Abbildung 2.16.: Darstellung der SAR-Datenverarbeitung mit Range-Doppler Algo-rithmus zur Generierung eines SAR-Bildes. Die Rohdaten wurdenvon E-SAR des DLR aufgenommen: (a) Rohdaten, (b) Entfernungs-komprimierten Daten, (c) Bilddaten, (d) Referenzfunktion in Entfer-nungsrichtung, (e) Referenzfunktion in Azimutrichtung
49
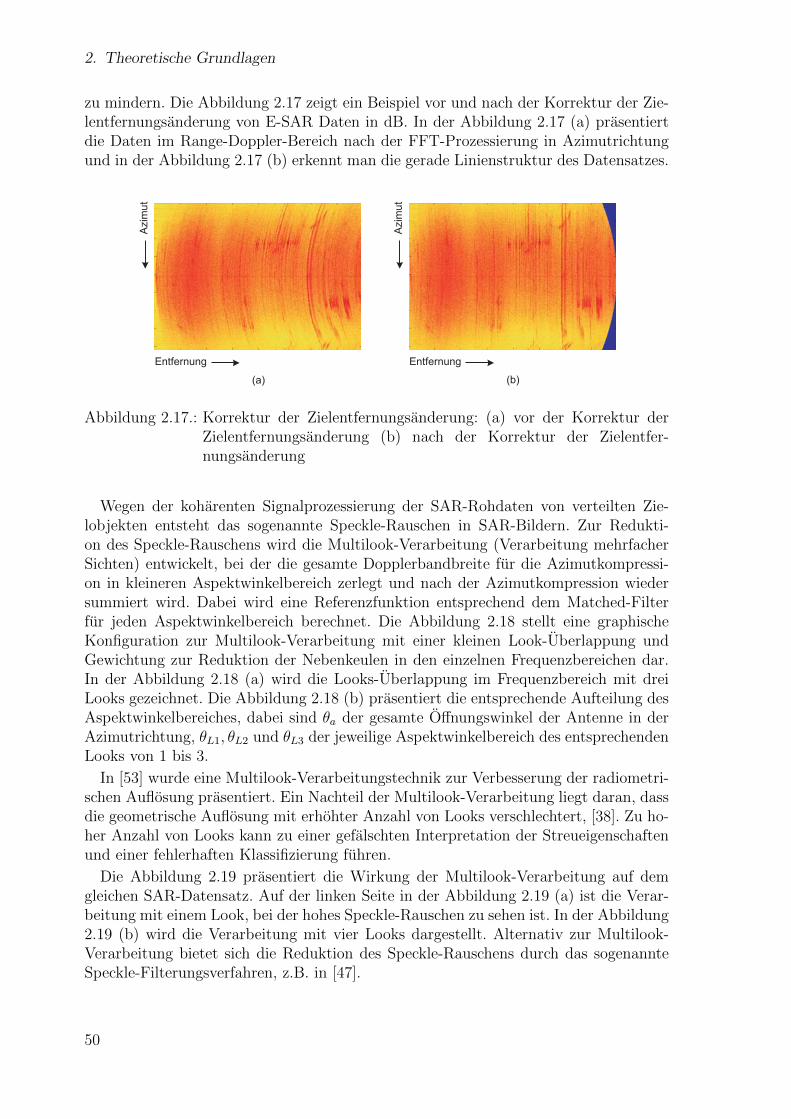
2. Theoretische Grundlagen
zu mindern. Die Abbildung 2.17 zeigt ein Beispiel vor und nach der Korrektur der Zie-lentfernungsanderung von E-SAR Daten in dB. In der Abbildung 2.17 (a) prasentiertdie Daten im Range-Doppler-Bereich nach der FFT-Prozessierung in Azimutrichtungund in der Abbildung 2.17 (b) erkennt man die gerade Linienstruktur des Datensatzes.
Abbildung 2.17.: Korrektur der Zielentfernungsanderung: (a) vor der Korrektur derZielentfernungsanderung (b) nach der Korrektur der Zielentfer-nungsanderung
Wegen der koharenten Signalprozessierung der SAR-Rohdaten von verteilten Zie-lobjekten entsteht das sogenannte Speckle-Rauschen in SAR-Bildern. Zur Redukti-on des Speckle-Rauschens wird die Multilook-Verarbeitung (Verarbeitung mehrfacherSichten) entwickelt, bei der die gesamte Dopplerbandbreite fur die Azimutkompressi-on in kleineren Aspektwinkelbereich zerlegt und nach der Azimutkompression wiedersummiert wird. Dabei wird eine Referenzfunktion entsprechend dem Matched-Filterfur jeden Aspektwinkelbereich berechnet. Die Abbildung 2.18 stellt eine graphischeKonfiguration zur Multilook-Verarbeitung mit einer kleinen Look-Uberlappung undGewichtung zur Reduktion der Nebenkeulen in den einzelnen Frequenzbereichen dar.In der Abbildung 2.18 (a) wird die Looks-Uberlappung im Frequenzbereich mit dreiLooks gezeichnet. Die Abbildung 2.18 (b) prasentiert die entsprechende Aufteilung desAspektwinkelbereiches, dabei sind θa der gesamte Offnungswinkel der Antenne in derAzimutrichtung, θL1, θL2 und θL3 der jeweilige Aspektwinkelbereich des entsprechendenLooks von 1 bis 3.
In [53] wurde eine Multilook-Verarbeitungstechnik zur Verbesserung der radiometri-schen Auflosung prasentiert. Ein Nachteil der Multilook-Verarbeitung liegt daran, dassdie geometrische Auflosung mit erhohter Anzahl von Looks verschlechtert, [38]. Zu ho-her Anzahl von Looks kann zu einer gefalschten Interpretation der Streueigenschaftenund einer fehlerhaften Klassifizierung fuhren.
Die Abbildung 2.19 prasentiert die Wirkung der Multilook-Verarbeitung auf demgleichen SAR-Datensatz. Auf der linken Seite in der Abbildung 2.19 (a) ist die Verar-beitung mit einem Look, bei der hohes Speckle-Rauschen zu sehen ist. In der Abbildung2.19 (b) wird die Verarbeitung mit vier Looks dargestellt. Alternativ zur Multilook-Verarbeitung bietet sich die Reduktion des Speckle-Rauschens durch das sogenannteSpeckle-Filterungsverfahren, z.B. in [47].
50
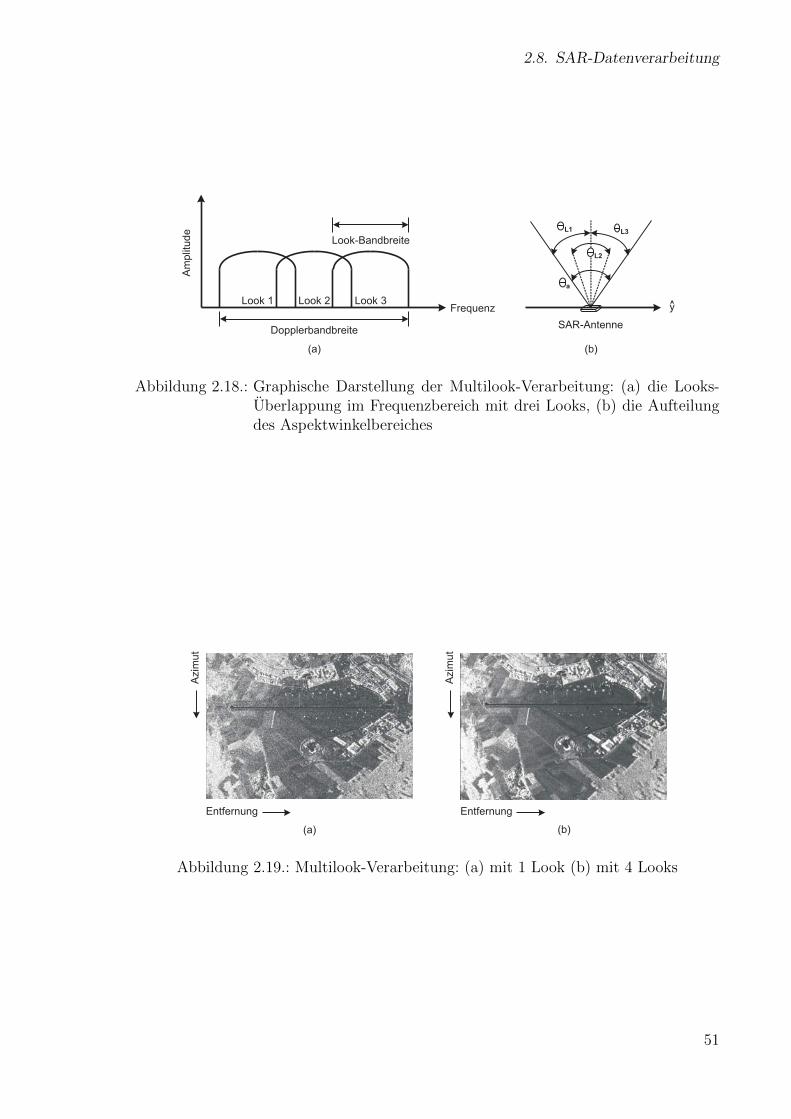
2.8. SAR-Datenverarbeitung
Abbildung 2.18.: Graphische Darstellung der Multilook-Verarbeitung: (a) die Looks-Uberlappung im Frequenzbereich mit drei Looks, (b) die Aufteilungdes Aspektwinkelbereiches
Abbildung 2.19.: Multilook-Verarbeitung: (a) mit 1 Look (b) mit 4 Looks
51

2. Theoretische Grundlagen
2.9. Polarimetrisches SAR
Bei der Radarpolarimetrie werden die Polarisationslagen der gesendeten und von Ob-jekten reflektieren elektromagnetischen Wellen in Betrachtung hinsichtlich der Gewin-nung, Prozessierung und Analyse der polarimetrischen Daten gezogen. Die Polarimetriespielt eine wichtige Rolle in der Radarfernerkundung und ist vielseitig einsetzbar. Einewichtige Anwendung des polarimetrischen Radars mit synthetischer Apertur ist dieKlassifizierung der Bodenoberflache, bei der die Zerlegungstheoreme eingesetzt wer-den. In [45] wurden die Methoden der Bodenoberflachenklassifizierung mit Hilfe derpolarimetrischen SAR-Daten verglichen. In dieser Arbeit wird ein koharentes Zerle-gungstheorem, das sogenannte Pauli-Zerlegungstheorem, zur Untersuchung verwendet.Bezuglich der weitergehenden Informationen uber die Zerlegungstheoreme sind auf dieeinschlagigen Literaturen verwiesen, z.B. fur die koharenten Zerlegungstheoreme in [44]und fur die nicht koharenten Zerlegungstheoreme in [13], [29], [74] und [75].
2.9.1. Polarimetrisches SAR Prinzip
Im Abschnitt 2.3.4 wurde es gezeigt, dass die vollstandigen Ruckstreuungseigenschafteneines Zielobjektes durch die Kombination von polarisationsabhangigen Sende- undEmpfangssignalen gemessen werden konnen.
Die Abbildung 2.20 zeigt ein Messschema fur einen polarimetrischen Radarbetriebin der horizontalen und vertikalen Basis (hv-Basis). Das Symbol Tx steht fur den Sen-demodus und Rx ist das Empfangszeitintervall.
Abbildung 2.20.: Messschema fur einen polarimetischen Radarbetrieb
Durch die Abwechslungen der Polarisationslage der Senden- und Empfangsperi-ode kann man die polarimetrische Auskunft bezuglich der Amplitude und der Pha-senanderung aus den gemessenen Messgroßen gewinnen. Unter der Anwendung vondem polarimetrischen Radarbetrieb beinhaltet die Empfangsleistung in der Gleichung(2.61) die polarisationsabhangige Messgroße in der Form von komplexer Spannung, dieals physikalische Interpretation betrachtet werden kann. Eine wichtige Information derkomplexen Spannung sind die komplexe Ruckstreuamplitude Spq, wie es in der Abbil-dung 2.20 dargestellt wird, die zur Klassifizierung des Zielobjektes eingesetzt werdenkann.
52
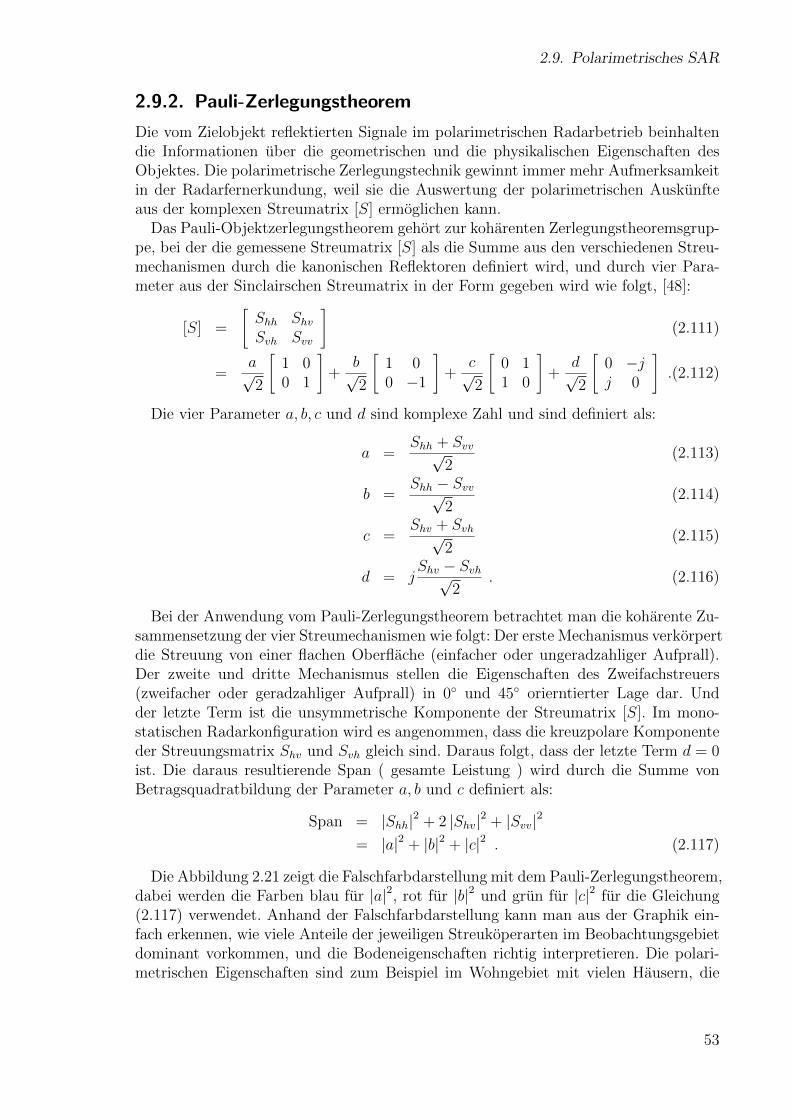
2.9. Polarimetrisches SAR
2.9.2. Pauli-Zerlegungstheorem
Die vom Zielobjekt reflektierten Signale im polarimetrischen Radarbetrieb beinhaltendie Informationen uber die geometrischen und die physikalischen Eigenschaften desObjektes. Die polarimetrische Zerlegungstechnik gewinnt immer mehr Aufmerksamkeitin der Radarfernerkundung, weil sie die Auswertung der polarimetrischen Auskunfteaus der komplexen Streumatrix [S] ermoglichen kann.
Das Pauli-Objektzerlegungstheorem gehort zur koharenten Zerlegungstheoremsgrup-pe, bei der die gemessene Streumatrix [S] als die Summe aus den verschiedenen Streu-mechanismen durch die kanonischen Reflektoren definiert wird, und durch vier Para-meter aus der Sinclairschen Streumatrix in der Form gegeben wird wie folgt, [48]:
[S] =
[Shh ShvSvh Svv
](2.111)
=a√2
[1 00 1
]+
b√2
[1 00 −1
]+
c√2
[0 11 0
]+
d√2
[0 −jj 0
].(2.112)
Die vier Parameter a, b, c und d sind komplexe Zahl und sind definiert als:
a =Shh + Svv√
2(2.113)
b =Shh − Svv√
2(2.114)
c =Shv + Svh√
2(2.115)
d = jShv − Svh√
2. (2.116)
Bei der Anwendung vom Pauli-Zerlegungstheorem betrachtet man die koharente Zu-sammensetzung der vier Streumechanismen wie folgt: Der erste Mechanismus verkorpertdie Streuung von einer flachen Oberflache (einfacher oder ungeradzahliger Aufprall).Der zweite und dritte Mechanismus stellen die Eigenschaften des Zweifachstreuers(zweifacher oder geradzahliger Aufprall) in 0◦ und 45◦ orierntierter Lage dar. Undder letzte Term ist die unsymmetrische Komponente der Streumatrix [S]. Im mono-statischen Radarkonfiguration wird es angenommen, dass die kreuzpolare Komponenteder Streuungsmatrix Shv und Svh gleich sind. Daraus folgt, dass der letzte Term d = 0ist. Die daraus resultierende Span ( gesamte Leistung ) wird durch die Summe vonBetragsquadratbildung der Parameter a, b und c definiert als:
Span = |Shh|2 + 2 |Shv|2 + |Svv|2
= |a|2 + |b|2 + |c|2 . (2.117)
Die Abbildung 2.21 zeigt die Falschfarbdarstellung mit dem Pauli-Zerlegungstheorem,dabei werden die Farben blau fur |a|2, rot fur |b|2 und grun fur |c|2 fur die Gleichung(2.117) verwendet. Anhand der Falschfarbdarstellung kann man aus der Graphik ein-fach erkennen, wie viele Anteile der jeweiligen Streukoperarten im Beobachtungsgebietdominant vorkommen, und die Bodeneigenschaften richtig interpretieren. Die polari-metrischen Eigenschaften sind zum Beispiel im Wohngebiet mit vielen Hausern, die
53

2. Theoretische Grundlagen
Abbildung 2.21.: Die polarimetrischen SAR-Bilddaten der polarimetrischen E-SARRohdatensatze des DLR mit dem Pauli-Zerlegungstheorem durch dieFalschfarbdarstellung; blau fur |a|2, rot fur |b|2 und grun fur |c|2
eine Struktur von einem Zweifach-Reflektor haben, erkennt man, dass die rote Farbeim Bild dominiert ist. Die grune Farbe ist im Waldgebiet zu erkennen. Und dort, woes die weiße Farbe gibt, deutet auf einen simultanen Mechanismus der Ruckstreuungder drei betrachteten Polarisationen, wie es in der Gleichung (2.117) dargestellt wird.
54

3. Quantitative Auswertung mittelsPolarimetrischer Auskunft
In diesem Kapitel werden das Konzept des entwickelten Verfahrens zur Gewinnung derpolarimetrischen Fokussierungsfunktion und die in dieser Arbeit angewendeten Ansatzezur Bestimmung der polarimetrischen Radarruckstreuquerschnitte erlautert.
3.1. Konzept des entwickelten Verfahrens
Die mathematische Modellierung der reflektierten Signale von einem Punktziel odervon mehreren Streukorpern unter der SAR-Geometrie dient zur Simulation der SAR-Rohdaten fur die bestimmte Untersuchungsumgebung oder zum Entwurf und zur An-passung der Betriebsparameter eines neuen SAR-Systems, dabei wird es oft angenom-men, dass der Boden flach ist und es nur die vorgegebenen Zielobjekte bei den festge-legten Positionen gibt. In [23], [38] und [73] kann das reflektierte Signal s (u, r) in derPraxis in Abhangigkeit von der Position u entlang der Azimutrichtung und der Ent-fernung r durch die zweidimensionale Faltung (∗) zwischen der gesamten Reflektivitatσ (u, r) von dem aktuellen beleuchteten Gebiet und der zweidimensionalen Impulsant-wort h (u, r) eines Punktzieles im Basisband nach der Demodulation mit Quadratur-kanalen beschrieben werden als:
s (u, r) = σ (u, r) ∗ h (u, r) . (3.1)
Die zweidimensionale Impulsantwort ist das reflektierte Signal eines SAR-Systems,wenn die Punktziel-Reflektivitat gleich ein gesetzt wird, und kann aus zwei Teilenbeschrieben werden in der Form:
h (u, r) = h1 (u, r) ∗ h2 (u, r) (3.2)
mith1 (u, r) = a (r) ejϕr(r) δ (u) (3.3)
undh2 (u, r) = w (u) e−j
4πR(u)λ δ (r −R (u)) . (3.4)
Die Funktion h1 (u, r) reprasentiert die Wellenform des gesendeten Signals mit derHullkurve a (r) und der Phasenmodulation ejϕr(r) des gesendeten Impulses. Dabei ist δdie Dirac-Funktion. Die Funktion h2 (u, r) stellt die Gleichung von der Zielverzogerungmit den Phasen, die proportional zur aktuellen Entfernung R (u) sind, dar, und ent-spricht der Modulation in der Azimutrichtung. Der Parameter w (u) steht fur die Ra-darantennenbeleuchtung bei der Position u.
55

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
Die rekonstruierte Daten S (u, r) kann durch das Matched-Filterprinzip mit den zeit-invertierten Funktionen h−11 (u, r) und h−12 (u, r) gewonnen werden als:
S (u, r) = s (u, r) ∗ h−11 (u, r) ∗ h−12 (u, r) (3.5)
=[[σ (u, r) ∗ h1 (u, r) ∗ h2 (u, r) ∗ h−11 (u, r)
]∗ h−12 (u, r)
]. (3.6)
Dabei sind h−11 (u, r) die zeit-invertierte Funktion von der Funktion h1 (u, r) undh−12 (u, r) die zeit-invertierte Funktion von der Funktion h2 (u, r).
Aus der Gleichung (3.6) erkennt man, dass die gesamte Reflektivitat ein Haupt-bestandteil der rekonstruierten Bilddaten ist, dass man am Ende der Datenverarbei-tung als Bilddaten von dem beleuchteten Gebiet bezeichnet. In der digitalen SAR-Datenverarbeitung werden zwei Referenzfunktionen zur Kompression aus dieser Im-pulsantwort gebaut und getrennt in der Entfernungskompression und in der Azimut-kompression eingesetzt. Im Fall von einem Punktziel erhalt man die beiden Referenz-funktionen wie in den Gleichungen (2.101) und (2.109).
Abbildung 3.1.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) im:(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisationsbetrieb
Die Abbildung 3.1 zeigt einen direkten Vergleich zwischen den Betragswerten der,insgesamt vier, kopolar und kreuzpolar polarisierten SAR-Bilddatensatze, die mit demRadar mit synthetischer Apertur des DLR (E-SAR) im L-Band aufgenommen wur-den, nach der Datenprozessierung mit dem Range-Doppler Algorithmus, bei der dieRohdaten von demselben Beleuchtungsgebiet stammen aber mit den unterschiedlichen
56

3.1. Konzept des entwickelten Verfahrens
Polarisationslagen aufgenommen werden. Anhand der unterschiedlichen Farbe in dB-Darstellung kann man erkennen, dass die Reflektivitat oder der Betragswert des emp-fangenen Signals im polarimetrischen SAR-Betrieb stark von der Polarisationslage undvon der einfallenden und gestreuten Wellenausbreitung abhangig sind. So kann mandie Gleichung (3.1) mit polarisationsabhangigen Parameter schreiben als:
spq (u, r) = σpq (u, r) ∗ h (u, r) . (3.7)
Die mathematische Beschreibung fur die rekonstruierten Daten im polarimetrischenSAR-Betrieb ist dann gleich:
Spq (u, r) =[[σpq (u, r) ∗ h1 (u, r) ∗ h2 (u, r) ∗ h−11 (u, r)
]∗ h−12 (u, r)
]. (3.8)
Aus diesen Uberlegungen wird es in dieser Arbeit einen Ansatz zur polarimetri-schen Fokussierungsfunktion in der SAR-Datenverarbeitung gemacht. Aus der Glei-chung (2.78) und (2.109) wird eine neue polarisationsabhangige Fokussierungsfunktionin der Azimutrichtung fur bestimmte Streukorper definiert als:
ha,pq (u, r, ta) = rect(taTa
)[σpq (u, r)] ej(2πfDta−πKat
2a)
= rect(taTa
) [σhh (u, r) σhv (u, r)σvh (u, r) σvv (u, r)
]ej(2πfDta−πKat
2a) . (3.9)
Die Interpretation von der Gleichung (3.9) ist die Anwendung der entsprechendenpolarisierten Referenzfunktion fur den kopolaren und kreuzpolaren Polarisationsbetriebbei der SAR-Datenverarbeitung. Diese Funktion basiert auf die allgemeine Referenz-funktion in der Azimutrichtung im Fall von einem Punktziel und die polarisiertenRadarruckstreuquerschnitten fur das bestimmte Zielobjekt bei der jeweiligen Positionu und der Entfernung r wahrend des Beleuchtungszeitraums Ta.
Dadurch sollten die bestimmten Zielobjekte mit der entsprechenden polarimetrischenReflektivitat auf der Bodenoberflache hervorgehoben werden. Die markanten Objektefur die Untersuchung sind eine flache Platte, ein Zweifach-Reflektor und ein Dreifach-Reflektor, weil diese Streukorper die allgemeine Struktur der Bodenoberflache darstel-len konnen. Die flache Platte stellt eine flache Oberflachenstruktur, z.B. eine Wiese,eine Fluglandebahn und eine Straße, dar. Die Waldrander und solche Strukturen, dieeine senkrechte Form annehmen, werden durch den Zweifach-Reflektor reprasentiert.In dem Stadtgebiet, wo viele Gebauden zu finden sind, kann die Strukturen als einDreifach-Reflektor dargestellt werden.
Die Ergebnisse der polarimetrischen Fokussierungsfunktion konnen mit dem Ob-jektzerlegungstheorem untersucht werden. Ein ausgewahltes Zerlegungstheorem ist dasPauli-Zerlegungstheorem, bei dem die Streumechanismen in vier Komponenten zerlegtwerden und mit Falschfarbdarstellung die Anteile der jeweiligen Streumechanismenreprasentiert werden konnen.
Die wichtigen Parameter fur die polarimetrische Fokussierung in der Azimutkompres-sion sind die polarimetrischen Radarruckstreuquerschnitten [σpq], die per Definition inder Gleichug (2.46) aus den einfallenden elektrischen Feldstarken und den gestreuten
57

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
elektrischen Feldstarken bestimmt werden konnen. Zur Gewinnung der polarimetri-schen Reflektivitat [σpq] werden die Berechnungsschritte in der Abbildung 3.2 darge-stellt. Zuerst werden die Ausbreitungsrichtung und die einfallende elektromagnetischeWelle in der jeweiligen Polarisationslage definiert. In dieser Arbeit werden die horizon-tale und vertikale Polarisation eingesetzt. Mit Hilfe der physikalischen Optik Approxi-mation und des magnetischen Vektorpotentials werden die gestreuten elektromagneti-schen Wellen von den Streukopern berechnet und in der Form von den polarimetrischenRadarruckstreuquerschnitten [σpq] interpretiert.
Abbildung 3.2.: Konzept des entwickelten Verfahrens
Aufgrund der Geometrie der flachen Platte, des Zweifach-Reflektors und des Dreifach-Reflektors, existieren die Streumechanismen sowohl im Fernfeld- als auch im Nahfeld-bereich. Im Fall von einer flachen Platte kann man nur die gestreuten Felder im Fernfeldin Betracht ziehen. Aber fur den Zweifach-Reflektor und den Dreifach-Reflektor ist esdann sinnvoll die beiden Bereiche zu berucksichtigen, weil die gestreute magnetischeFeldstarke von einer Platte die Oberflachenstromdichte auf der benachbarten Platteverursacht. Diese Oberflachenstromdichte wirkt wiederum wie eine zusatzliche Quel-le fur das Vektorpotential ~A und bringt danach weitere Beitrage fur die elektrischenFeldstarken am Beobachtungspunkt oder an der Empfangsantenne im Radarbetrieb.
3.2. Felder im Sendemodus
Aus dem Konzept des entwickelten Verfahrens in der Abbildung 3.2 werden zwei Polari-sationslagen in dieser Arbeit untersucht. Ein wichtiger Bestandteil bei der Losung desdreidimensionalen Szenarios unter der SAR-Geometrie ist die Positionsbestimmungder beteiligten Komponenten. Unter Fernfeldbedingungen kann die elektromagneti-sche Welle als eine ebene Welle betrachtet werden, daraus folgt, dass die elektrischeFeldstarke und die magnetische Feldstarke senkrecht zur Ausbreitungsrichtung ~ri ste-hen und in x-, y- und z-Komponenten zerlegt werden konnen. Aus diesen Uberlegungenwerden die Konventionen fur die folgenden Berechnungen mit horizontal polarisiertenWellen und vertikal polarisierten Wellen fur die einfallenden elektrischen Feldstarkenund magnetischen Feldstarken entsprechend der Koordinatennotation in der Abbildung3.3 (a) und (b) fur die weiteren Berechnungen festgelegt. Die Radarantenne und dasZielobjekt werden in einem gemeinsamen kartesischen Koordinatensystem mit x−, y−und z-Achsen mit dem Ursprung O zugeordnet. Die u-Richtung ist die Fluglinie in derAzimutbewegung, die parallel zur y-Achse verlauft.
58
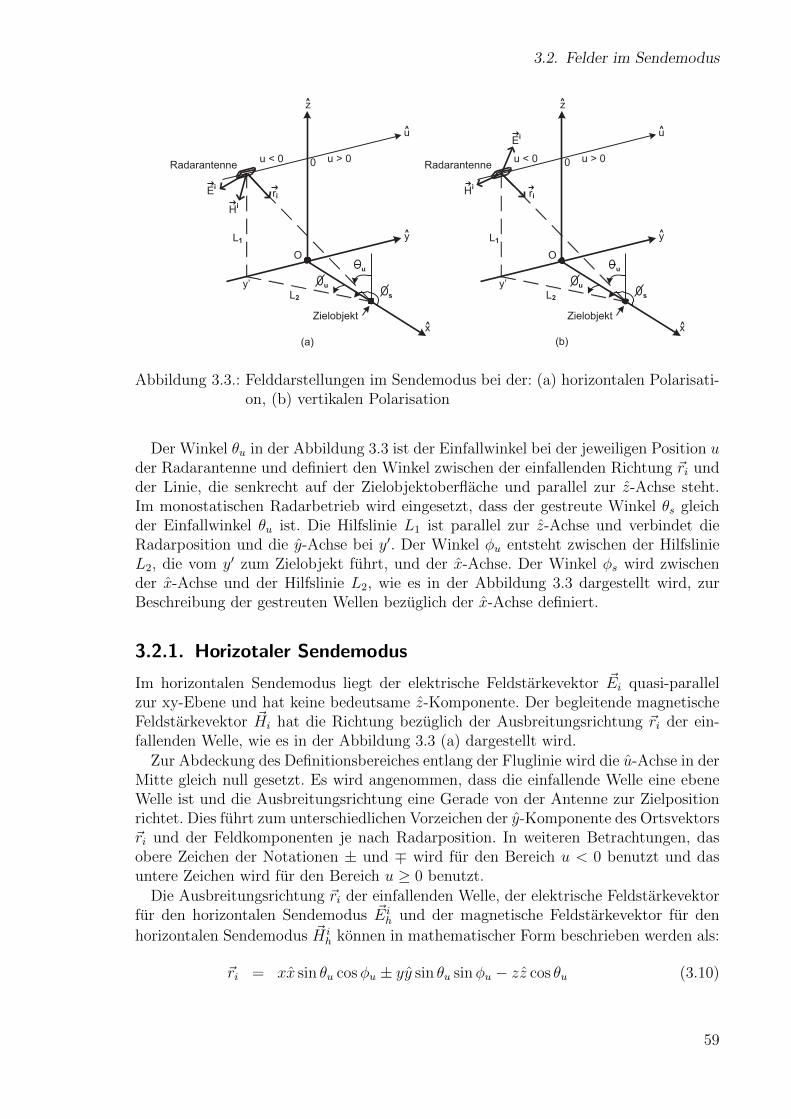
3.2. Felder im Sendemodus
Abbildung 3.3.: Felddarstellungen im Sendemodus bei der: (a) horizontalen Polarisati-on, (b) vertikalen Polarisation
Der Winkel θu in der Abbildung 3.3 ist der Einfallwinkel bei der jeweiligen Position uder Radarantenne und definiert den Winkel zwischen der einfallenden Richtung ~ri undder Linie, die senkrecht auf der Zielobjektoberflache und parallel zur z-Achse steht.Im monostatischen Radarbetrieb wird eingesetzt, dass der gestreute Winkel θs gleichder Einfallwinkel θu ist. Die Hilfslinie L1 ist parallel zur z-Achse und verbindet dieRadarposition und die y-Achse bei y′. Der Winkel φu entsteht zwischen der HilfslinieL2, die vom y′ zum Zielobjekt fuhrt, und der x-Achse. Der Winkel φs wird zwischender x-Achse und der Hilfslinie L2, wie es in der Abbildung 3.3 dargestellt wird, zurBeschreibung der gestreuten Wellen bezuglich der x-Achse definiert.
3.2.1. Horizotaler Sendemodus
Im horizontalen Sendemodus liegt der elektrische Feldstarkevektor ~Ei quasi-parallelzur xy-Ebene und hat keine bedeutsame z-Komponente. Der begleitende magnetischeFeldstarkevektor ~Hi hat die Richtung bezuglich der Ausbreitungsrichtung ~ri der ein-fallenden Welle, wie es in der Abbildung 3.3 (a) dargestellt wird.
Zur Abdeckung des Definitionsbereiches entlang der Fluglinie wird die u-Achse in derMitte gleich null gesetzt. Es wird angenommen, dass die einfallende Welle eine ebeneWelle ist und die Ausbreitungsrichtung eine Gerade von der Antenne zur Zielpositionrichtet. Dies fuhrt zum unterschiedlichen Vorzeichen der y-Komponente des Ortsvektors~ri und der Feldkomponenten je nach Radarposition. In weiteren Betrachtungen, dasobere Zeichen der Notationen ± und ∓ wird fur den Bereich u < 0 benutzt und dasuntere Zeichen wird fur den Bereich u ≥ 0 benutzt.
Die Ausbreitungsrichtung ~ri der einfallenden Welle, der elektrische Feldstarkevektorfur den horizontalen Sendemodus ~Ei
h und der magnetische Feldstarkevektor fur den
horizontalen Sendemodus ~H ih konnen in mathematischer Form beschrieben werden als:
~ri = xx sin θu cosφu ± yy sin θu sinφu − zz cos θu (3.10)
59

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
~Eih = E0 (±x sinφu − y cosφu) e
−j~k·~ri (3.11)
~H ih =
E0
η(−x cos θu cosφu ∓ y cos θu sinφu − z sin θu) e
−j~k·~ri (3.12)
3.2.2. Vertikaler Sendemodus
Im vertikalen Sendemodus liegt der magnetische Feldstarkevektor ~Hi parallel zur xy-Ebene und hat keine z-Komponente. Der begleitende elektrische Feldstarkevektor ~Eihat die Richtung bezuglich der Ausbreitungsrichtung ~ri, wie es in der Abbildung 3.3(b) dargestellt wird.
Die Ausbreitungsrichtung ~ri der einfallenden Welle, der elektrische Feldstarkevektorfur den vertikalen Sendemodus ~Ei
v und der magnetische Feldstarkevektor fur den ver-
tikalen Sendemodus ~H iv konnen in mathematischer Form beschrieben werden als:
~ri = xx sin θu cosφu ± yy sin θu sinφu − zz cos θu (3.13)
~Eiv = E0 (x cos θu cosφu ± y cos θu sinφu + z sin θu) e
−j~k·~ri (3.14)
~H iv =
E0
η(±x sinφu − y cosφu) e
−j~k·~ri (3.15)
Die beiden Sendemodi haben einen unterschiedliche magnetische Feldstarkevektor~Hi. Diese werden dann unterschiedliche Beitrage bei der Kreuzproduktbildung mitdem Normalvektor n hinzufugen. Dies gilt als erster Hinweis, dass die Oberflache beiden unterschiedlichen Sendemodi auch unterschiedlich betrachtet wird und wiederumunterschiedliche Reflektivitaten nachweisen wird.
3.3. Reflexion an der Oberflache
Nach dem Aufprall werden die einfallenden elektromagnetischen Wellen von der Me-talloberflache entsprechend des Reflexionsgesetzes reflektiert. In dieser Arbeit wird einZweifach-Reflektor auch untersucht. Die Struktur von einem Zweifach-Reflektor bestehtaus zwei ebenen Platten, die senkrecht zu einander stehen. Eine Platte liegt parallelzur xy-Ebene und eine andere Platte steht senkrecht zur xy-Ebene. Aus der Glei-chung (2.34) erkennt man, dass die Richtung der einfallenden magnetischen Feldstarke~Hi relativ zur dem Normalvektor n der Platte eine wichtige Rolle bei der Kreuzpro-duktsbildung zur Berechnung der Oberflachenstromdichte ~Js spielt. Deswegen mussendie reflektierten Feldvektoren auch definiert werden, weil die reflektierte elektrischeFeldstarke ~Er und magnetische Feldstarke ~Hr entlang der Richtung ~rr von einer Platteals die einfallenden Wellen auf die andere Platte bei der zweiten (zweifachen) Reflexionfungieren werden.
Aus diesen Uberlegungen werden die Richtungen der reflektierten elektromagneti-schen Wellen sowohl im horizontalen Sendemodus als auch im vertikalen Sendemodusunter Berucksichtigung der Plattenlage, ob die Platte auf der xy-Ebene oder auf der yz-Ebene liegt, mit der Notation in der Abbildung 3.4 und in der Abbildung 3.5 festgelegt.
60
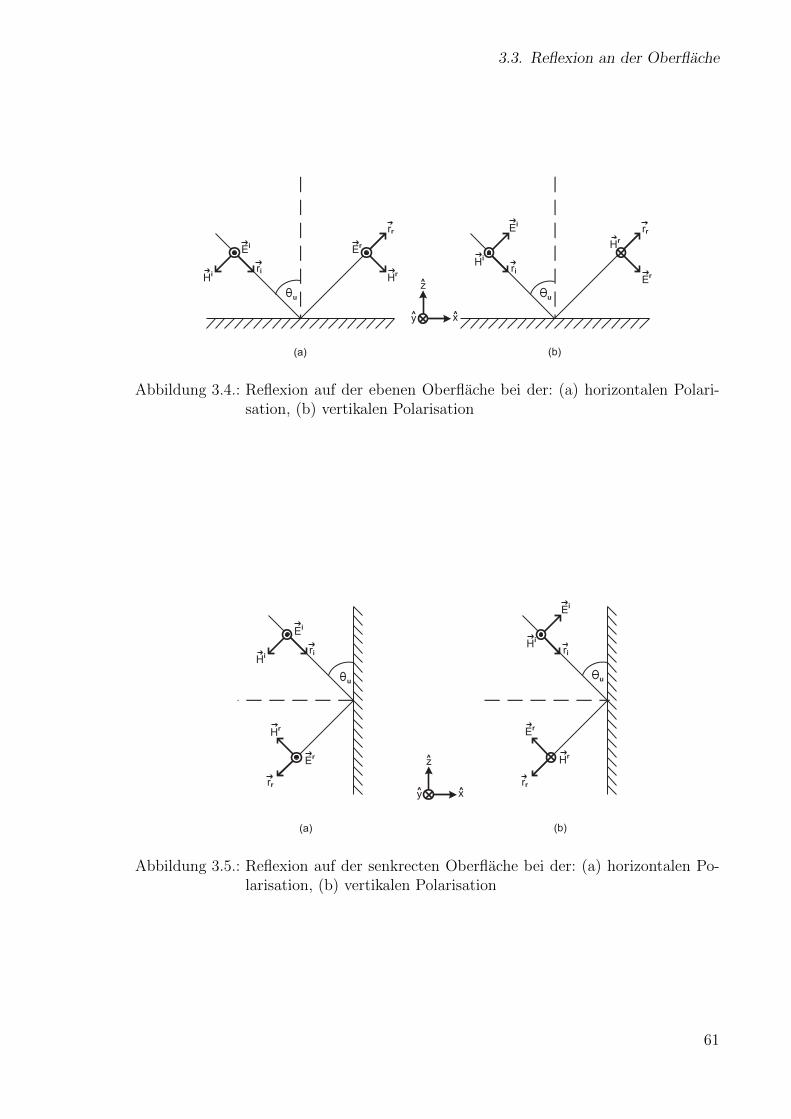
3.3. Reflexion an der Oberflache
Abbildung 3.4.: Reflexion auf der ebenen Oberflache bei der: (a) horizontalen Polari-sation, (b) vertikalen Polarisation
Abbildung 3.5.: Reflexion auf der senkrecten Oberflache bei der: (a) horizontalen Po-larisation, (b) vertikalen Polarisation
61

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
3.3.1. Reflexion bei der horizontalen Polarisation
Aus der gegebenen Geometrie in der Abbildung 3.3 (a) wird die Reflexion im Fallvon dem horizontalen Sendemodus auf der xy-Ebene in der Abbildung 3.4 (a) darge-stellt, daraus erhalt man die vektoriellen Komponenten der Ausbreitungsrichtung derder Reflexion ~rr, des elektrischen Feldstarkevektors nach der Reflexion im horizonta-len Sendemodus ~Er
h und des magnetischen Feldstarkevektors nach der Reflexion im
horizontalen Sendemodus ~Hrh als:
~rr = xx sin θu cosφu ± yy sin θu sinφu + zz cos θu (3.16)
~Erh = E0 (±x sinφu − y cosφu) e
−j~k·~rr (3.17)
~Hrh =
E0
η(x cos θu cosφu ± y cos θu sinφu − z sin θu) e
−j~k·~rr . (3.18)
Fur eine senkrecht zur xy-Ebene stehende Platte in der Abbildung 3.5 (a) erhalt mandie reflektierten Feldvektoren im horizontalen Sendemodus nach der Reflexion auf derOberflache in der Form:
~rr = −xx sin θu cosφu ± yy sin θu sinφu − zz cos θu (3.19)
~Erh = E0 (∓x sinφu − y cosφu) e
−j~k·~rr (3.20)
~Hrh =
E0
η(−x cos θu cosφu ± y cos θu sinφu + z sin θu) e
−j~k·~rr . (3.21)
Hier wird der Winkel θu zwischen der Ausbreitungsrichtung ~ri und der Platteno-berflache definiert, damit die Gleichung so einheitlich berechnet werden kann, es hatkeine Wirkung auf die physikalische Interpretation, weil diese in der Gleichung bereitsberucksichtigt wird.
3.3.2. Reflexion bei der vertikalen Polarisation
Aus der gegebenen Geometrie in der Abbildung 3.3 (b) und der Abbildung 3.4 (b) furdie Reflexion einer vertikalpolarisierten Welle auf einer xy-Ebene erhalt man die ma-thematische Beschreibung der reflektierten Feldstarken, der Ausbreitungsrichtung derReflexion ~rr, des elektrischen Feldstarkevektors nach der Reflexion im vertikalen Sen-demodus ~Er
v und des magnetischen Feldstarkevektors nach der Reflexion im vertikalen
Sendemodus ~Hrv als:
~rr = xx sin θu cosφu ± yy sin θu sinφu + zz cos θu (3.22)
~Erv = E0 (x cos θu cosφu ± y cos θu sinφu − z sin θu) e
−j~k·~rr (3.23)
~Hrv =
E0
η(∓x sinφu + y cosφu) e
−j~k·~rr . (3.24)
Aus der Abbildung 3.5 (b) erhalt man die reflektierten Feldvektoren auf einer yz-Ebene bezuglich der Richtung ~rr bei der vertikalen Polarisation nach der Reflexion aufder Oberflache wie folgt:
~rr = −xx sin θu cosφu ± yy sin θu sinφu − zz cos θu (3.25)
62
3.4. Wellen-Abstrahlung vom Zielobjekt
~Erv = E0 (−x cos θu cosφu ± y cos θu sinφu + z sin θu) e
−j~k·~rr (3.26)
~Hrv =
E0
η(±x sinφu + y cosφu) e
−j~k·~rr . (3.27)
Diese mathematischen Gleichungen zur Beschreibung der vektoriellen Feldgroßenwerden bei der Modellierung und bei der Berechnungen der Radarruckstreuquerschnittemit der physikalischen Optik Approximation eingesetzt.
3.4. Wellen-Abstrahlung vom Zielobjekt
Mit Hilfe der physikalischen Optik Approximation im Abschnitt 2.3.3 kann die vek-torielle Oberflachenstromdichte ~Js aufgrund der einfallenden magnetischen Feldstarke~H i bestimmt werden. Es wurde im Abschnitt 2.3.3 gezeigt, dass die gestreute elek-trische Feldstarke ~Es an einem beliebigen Beobachtungspunkt ~r wegen der Ober-flachenstromdichte ~Js von einer Quelle am Punkt ~r′ mit Hilfe des sogenannten ma-gnetischen Vektorpotentials ~A berechnet werden kann.
In dieser Arbeit wird die Wellen-Abstrahlung vom Zielobjekt in zwei Bereichen,das heißt, die Wellen-Abstrahlung im Fernfeldbereich und die Wellen-Abstrahlung imNahfeldbereich, berechnet.
3.4.1. Wellen-Abstrahlung im Fernfeldbereich
Unter Fernfeldsbedingungen kann es angenommen werden, dass der Entfernungsvektor~R parallel zum Beobachtungspunktsvektor ~r verlauft. Mit der Approximation wie inder Abbildung 2.4 (b) betragt die Entfernung fur die weitere Berechnungen mit demWinkel ψ zwischen ~r′ und ~r, als [5]:
R ={r − r′ cosψ fur Phasenanderungr fur Amplitudenanderung .
(3.28)
Im Fall von Oberflachenintegral reduziert sich die Gleichung (2.45) mit der Appro-ximation in der Gleichung (3.28) auf:
~A (x, y, z) =µ
4π
∫∫S
~Js (x′, y′, z′)e−jkR
Rds′ (3.29)
≈ µe−jkr
4πr~N (3.30)
mit~N =
∫∫S
~Js (x′, y′, z′) ejkr′ cosψ ds′ . (3.31)
Das elektrische Feld aus der Gleichung (2.37) im Fernfeldbereich kann berechnetwerden aus:
~Es = −jω ~A (3.32)
63

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
und mit guter Naherung in Komponentendarstellung im Kugelkoordinatensystem r, θ, φmit:
Esr ≈ 0 (3.33)
Esθ ≈ −jke
−jkr
4πrηNθ (3.34)
Esφ ≈ −jke
−jkr
4πrηNφ . (3.35)
Mit Hilfe der Notation in der Abbildung 2.5 und der Koordinatentransformationkann man die Parameter Nθ und Nφ im Kugelkoordinatensystem aus den ParameternJx, Jy und Jz im kartesischen Koordinatensystem beschrieben als:
Nθ =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′ (3.36)
Nφ =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′ . (3.37)
Das Oberflachenelement ds′ im kartesischen Koordinatensystem kann in drei Lagenwie in der Abbildung 3.6 mit (a) ds′ = dx′dy′ fur die Berechnung auf der xy-Ebene,(b) ds′ = dy′dz′ fur die Berechnung auf der yz-Ebene und (c) ds′ = dx′dz′ fur dieBerechnung auf der xz-Ebene geteilt werden.
Abbildung 3.6.: Kartesische Konvention fur die Streuanalyse in der: (a) xy-Ebene, (b)yz-Ebene, (c) xz-Ebene
Daraus kann man den unterschiedlichen Pfad in den Gleichungen (3.36) und (3.37)in der mathematischen Form schreiben als:
r′ cosψ = ~r′ · r ⇒ von der Abbildung 3.6 (a)
= (xx′ + yy′) · (x sin θs cosφs + y sin θs sinφs + z cos θs)
= x′ sin θs cosφs + y′ sin θs sinφs (3.38)
r′ cosψ = ~r′ · r ⇒ von der Abbildung 3.6 (b)
= (yy′ + zz′) · (x sin θs cosφs + y sin θs sinφs + z cos θs)
= y′ sin θs sinφs + z′ cos θs (3.39)
r′ cosψ = ~r′ · r ⇒ von der Abbildung 3.6 (c)
= (xx′ + zz′) · (x sin θs cosφs + y sin θs sinφs + z cos θs)
= x′ sin θs cosφs + z′ cos θs (3.40)
64
3.5. Die polarimetrischen Streuungsauskunfte
Im Grunde genommen befindet sich die Empfangsantenne im Fernfeldbereich relativzu den Quellen oder den Reflektoren. Aber im Fall von z.B. der Zweifach-Reflektorentsteht nach dem ersten Aufprall die Oberflachenstromdichte ~Js auf der Platte unddiese verursacht die magnetische Feldstarke ~H auf der anderen Platte, die sich imNahfeldbereich von der ersten Platte befindet. Deswegen sollte die Wechselwirkung imNahfeldbereich auch mitberucksichtigt werden.
3.4.2. Wellen-Abstrahlung im Nahfeldbereich
Im Nahfeldbereich gibt es noch keine ebene Wellenform, das heißt, dass die Richtungender Feldvektoren von der Position zwischen dem Quellpunkt ~r′ und dem Beobachtungs-punkt ~r abhangig sind. Aus der Gleichung (2.36) und (2.45) erhalt man die magnetische
Feldstarke ~H aufgrund des Vektorpotentials ~A als, [5]:
~H (x, y, z) =1
µ∇× ~A (x, y, z) =
1
4π∇×
∫∫∫V
~J (x′, y′, z′)e−jkR
Rdv′ . (3.41)
Daraus ergibt sich die magnetische Feldstarke ~H i am Beobachtungspunkt ~r mit demAbstandvektor ~R = ~r − ~r′ = RR als:
~H i (x, y, z) = − 1
4π
∫∫∫V
(R× ~J (x′, y′, z′)
) 1 + jkR
R2e−jkR dx′dy′dz′ . (3.42)
Unter der Annahme, dass die Quelle eine Oberflachen in der jeweiligen Ebenen wiein der Abbildung 3.6 ist, wird die Gleichung (3.42) in Komponentendarstellung fur dieweitere Berechnungen wie folgt dargestellt:
H ix (x, y, z) =
1
4π
∫∫S
[(z − z′) Jy − (y − y′) Jz]1 + jkR
R3e−jkR ds′ (3.43)
H iy (x, y, z) =
1
4π
∫∫S
[(x− x′) Jz − (z − z′) Jx]1 + jkR
R3e−jkR ds′ (3.44)
H iz (x, y, z) =
1
4π
∫∫S
[(y − y′) Jx − (x− x′) Jy]1 + jkR
R3e−jkR ds′ . (3.45)
Durch die Gleichungen (3.43)-(3.45) konnen die Berechnungen fur die komplizier-teren Objektsstruktur vereinfacht werden, in dem man zuerst die Oberflachen in diekartesischen Ebenen zerlegt und danach das Superpositionsprinzip benutzt, um diegesamte Feldstarke zu berechnen.
3.5. Die polarimetrischen Streuungsauskunfte
Aus den Gleichungen (3.33)-(3.35) ist man in der Lage, die gestreuten elektrischenFeldstarken im Kugelkoordinatensystem relativ zur Objektoberflache zu berechnen. Indieser Arbeit werden die elektromagnetischen Wechselwirkungen in der hv-Basis vorge-nommen, deswegen besteht die nachste Aufgabe darin, wie man die gestreuten Felder
65

3. Quantitative Auswertung mittels Polarimetrischer Auskunft
in der hv-Basis betrachten kann. Im Ruckblick auf den elektrischen Feldstarkevektor~E (~r) in der Gleichung (2.13) ist es bekannt, dass der elektrische Feldstarkevektor indrei Komponenten aus Ex, Ey und Ez zusammengesetzt wird. Diese drei Komponentendienen auch der Polarisationsbeschreibung in der Gleichung (2.16).
Aus diesen Uberlegungen wird einen Ansatz in dieser Arbeit gemacht, dass die ge-streuten Felder Es
r , Esθ und Es
φ auch die Anteile in Esx, E
sy und Es
z haben konnen und indie erwunschte hv-Basis dargestellt werden konnen. Mit Hilfe der Vektorrechnung kannman die Komponenten im Kugelkoordinatensystem ins kartesische Koordinatensystemumrechnen, so erhalt man die Komponenten wie folgt:
Esx = Es
r sin θs cosφs + Esθ cos θs cosφs − Es
φ sinφs (3.46)
Esy = Es
r sin θs sinφs + Esθ cos θs sinφs + Es
φ cosφs (3.47)
Esz = Es
r cos θs − Esθ sin θs . (3.48)
Ein weiterer Ansatz wird fur die Modellierung in dieser Arbeit angenommen, dass diey-Komponente fur den horizontalen Empfangsmodus und die z-Komponente fur denvertikalen Empfangsmodus eingesetzt werden, das heisst, dass ~Es
h = ~Esy und ~Es
v = ~Esz
sind. Unter dieser Annahme werden die polarimetrischen Radarruckstreuquerschnittein der Gleichung (2.46) fur die jeweilige Polarisationslage bestimmt mit, [55]:
σhh (u, r) = 4πr2
∣∣∣ ~Esh (θs, φs)
∣∣∣2∣∣∣ ~Eih (θi, φi)
∣∣∣2 = 4πr2
∣∣∣ ~Esy (θs, φs)
∣∣∣2∣∣∣ ~Eih (θi, φi)
∣∣∣2 (3.49)
σvh (u, r) = 4πr2
∣∣∣ ~Esv (θs, φs)
∣∣∣2∣∣∣ ~Eih (θi, φi)
∣∣∣2 = 4πr2
∣∣∣ ~Esz (θs, φs)
∣∣∣2∣∣∣ ~Eih (θi, φi)
∣∣∣2 (3.50)
σhv (u, r) = 4πr2
∣∣∣ ~Esh (θs, φs)
∣∣∣2∣∣∣ ~Eiv (θi, φi)
∣∣∣2 = 4πr2
∣∣∣ ~Esy (θs, φs)
∣∣∣2∣∣∣ ~Eiv (θi, φi)
∣∣∣2 (3.51)
σvv (u, r) = 4πr2
∣∣∣ ~Esv (θs, φs)
∣∣∣2∣∣∣ ~Eiv (θi, φi)
∣∣∣2 = 4πr2
∣∣∣ ~Esz (θs, φs)
∣∣∣2∣∣∣ ~Eiv (θi, φi)
∣∣∣2 . (3.52)
Dabei verkorpert der Parameter u die Position der Radarantenne entlang der Flug-linie in der Abbildung 3.3 und der relative Winkel zwischen Radarantenne und Ziel-objekt. Dadurch erhalt man sowohl die polarimetrischen als auch richtungsabhangigenRadarruckstreuquerschnitten.
3.5.1. Horizontaler Empfangsmodus
Die gestreuten elektrischen Feldstarken im horizontalen Empfangsmodus in der Glei-chung (3.49) und in der Gleichung (3.51) fur die weitere Berechnung ergeben:
∣∣∣ ~Esh
∣∣∣2 = ~Esh · ~Es∗
h = ~Esy · ~Es∗
y
=[y(Esθ cos θs sinφs + Es
φ cosφs)]·[y(Esθ cos θs sinφs + Es
φ cosφs)∗]
66
3.5. Die polarimetrischen Streuungsauskunfte
=
[y
(−je−jkr kη
4πrNθ cos θs sinφs − je−jkr
kη
4πrNφ cosφs
)]
·[y
(jejkr
kη
4πrN∗θ cos θs sinφs + jejkr
kη
4πrN∗φ cosφs
)]
=
[−je−jkry
(kη
4πrNθ cos θs sinφs +
kη
4πrNφ cosφs
)]
·[jejkry
(kη
4πrNθ cos θs sinφs +
kη
4πrNφ cosφs
)∗]
=
∣∣∣∣∣ kη4πr(Nθ cos θsφs +Nφ cosφs)
∣∣∣∣∣2
. (3.53)
In dieser und der folgenden Betrachtung spielt die Esr naturlich keine Rolle, weil die-
se Komponente nicht von der Empfangsantenne registriert wird und vernachlassigbarklein ist.
3.5.2. Vertikaler Empfangsmodus
Die gestreuten elektrischen Feldstarken im vertikalen Empfangsmodus in der Gleichung(3.50) und in der Gleichung (3.52) fur die weitere Berechnung ergeben:∣∣∣ ~Es
v
∣∣∣2 = ~Esv · ~Es∗
v = ~Esz · ~Es∗
z
= [z (−Esθ sin θs)] · [z (−Es
θ sin θs)∗]
=
[z
(je−jkr
kη
4πrNθ sin θs
)]·[z
(je−jkr
kη
4πrNθ sin θs
)∗]
=
[je−jkrz
(kη
4πrNθ sin θs
)]·[−jejkrz
(kη
4πrN∗θ sin θs
)]
=
∣∣∣∣∣ kη4πr(Nθ sin θs)
∣∣∣∣∣2
. (3.54)
Durch diesen Ansatz fur die beiden Empfangsmodi kann es dazu fuhren, dass mandie Reflektivitat in der kopolaren und kreuzpolaren Polarisationslage erhalt.
67


4. Zielobjektmodellierung undRuckstreumatrizenberechnung
In diesem Kapitel werden die Geometrie fur die numerischen Berechnungen der Ra-darruckstreuquerschnitte von den kanonischen Zielobjekten unter des bodengestutztenRadars mit synthetischer Apertur definiert und die Simulationsergebnisse nach dernumerischen Herleitung prasentiert.
Die Endergebnisse der numerischen Berechnungen in den jeweiligen Fallen gelten alsdie Grundbasis fur die weiteren Berechnungen und Simulationen mit dem Rechnerpro-gramm MATLAB. Mit diesem hohen Aufwand durch die zahlreichen Fallunterschei-dungen bei der vektoriellen mathematischen Berechnung sollten die Genauigkeit unddie Nutzbarkeit der Ergebnisse erhoht und die Rechenzeit fur den Rechner reduziertwerden.
4.1. Geometrie der vektoriellen Berechnung
Zur Demonstration der polarimetrischen Radarruckstreuquerschnitte σpq nach eigenemAnsatz im Kapitel 3 werden zuerst die Geometrie fur ein bodengestutztes Radar mitsynthetischer Apertur und die Radarsystemparameter festgelegt. Die Abbildung 4.1 istdie graphische Darstellung der simulierten Geometrie eines bodengestutzten Radarsmit synthetischer Apertur mit den Parametergroßen in der Tabelle 4.1.
Abbildung 4.1.: Geometrie fur die Modellierung von dem bodengestutzten SAR-System
69
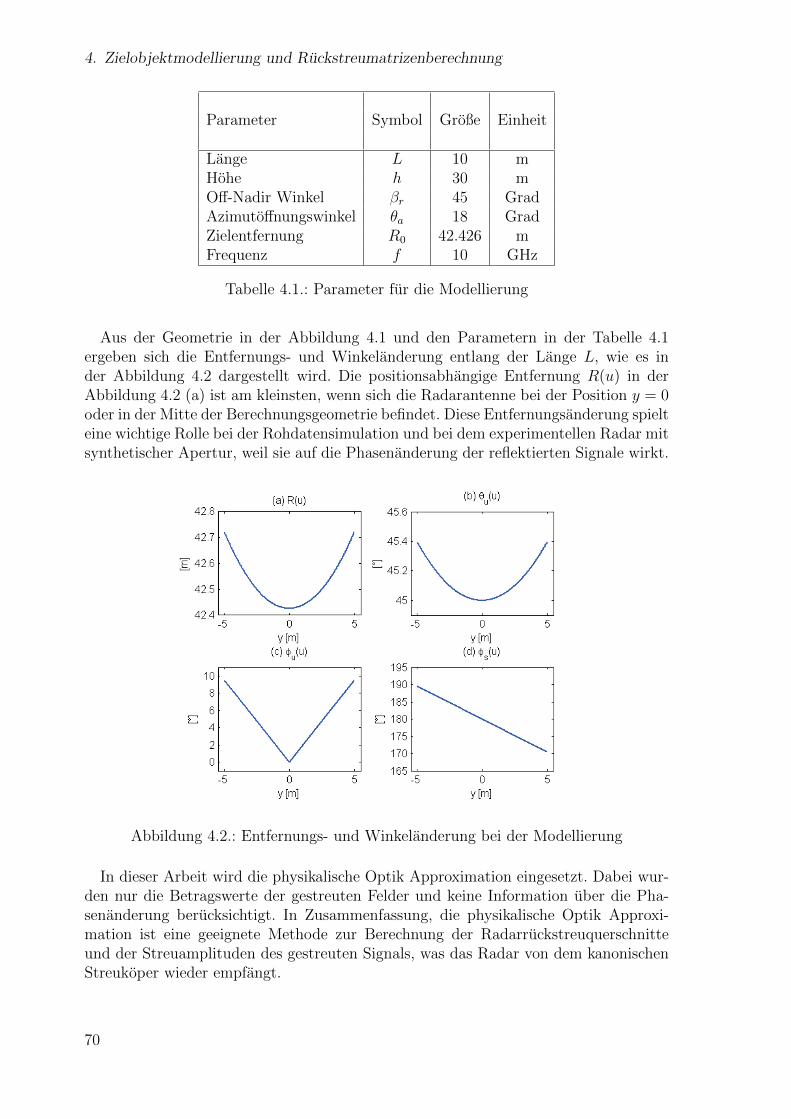
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Parameter Symbol Große Einheit
Lange L 10 mHohe h 30 mOff-Nadir Winkel βr 45 GradAzimutoffnungswinkel θa 18 GradZielentfernung R0 42.426 mFrequenz f 10 GHz
Tabelle 4.1.: Parameter fur die Modellierung
Aus der Geometrie in der Abbildung 4.1 und den Parametern in der Tabelle 4.1ergeben sich die Entfernungs- und Winkelanderung entlang der Lange L, wie es inder Abbildung 4.2 dargestellt wird. Die positionsabhangige Entfernung R(u) in derAbbildung 4.2 (a) ist am kleinsten, wenn sich die Radarantenne bei der Position y = 0oder in der Mitte der Berechnungsgeometrie befindet. Diese Entfernungsanderung spielteine wichtige Rolle bei der Rohdatensimulation und bei dem experimentellen Radar mitsynthetischer Apertur, weil sie auf die Phasenanderung der reflektierten Signale wirkt.
Abbildung 4.2.: Entfernungs- und Winkelanderung bei der Modellierung
In dieser Arbeit wird die physikalische Optik Approximation eingesetzt. Dabei wur-den nur die Betragswerte der gestreuten Felder und keine Information uber die Pha-senanderung berucksichtigt. In Zusammenfassung, die physikalische Optik Approxi-mation ist eine geeignete Methode zur Berechnung der Radarruckstreuquerschnitteund der Streuamplituden des gestreuten Signals, was das Radar von dem kanonischenStreukoper wieder empfangt.
70
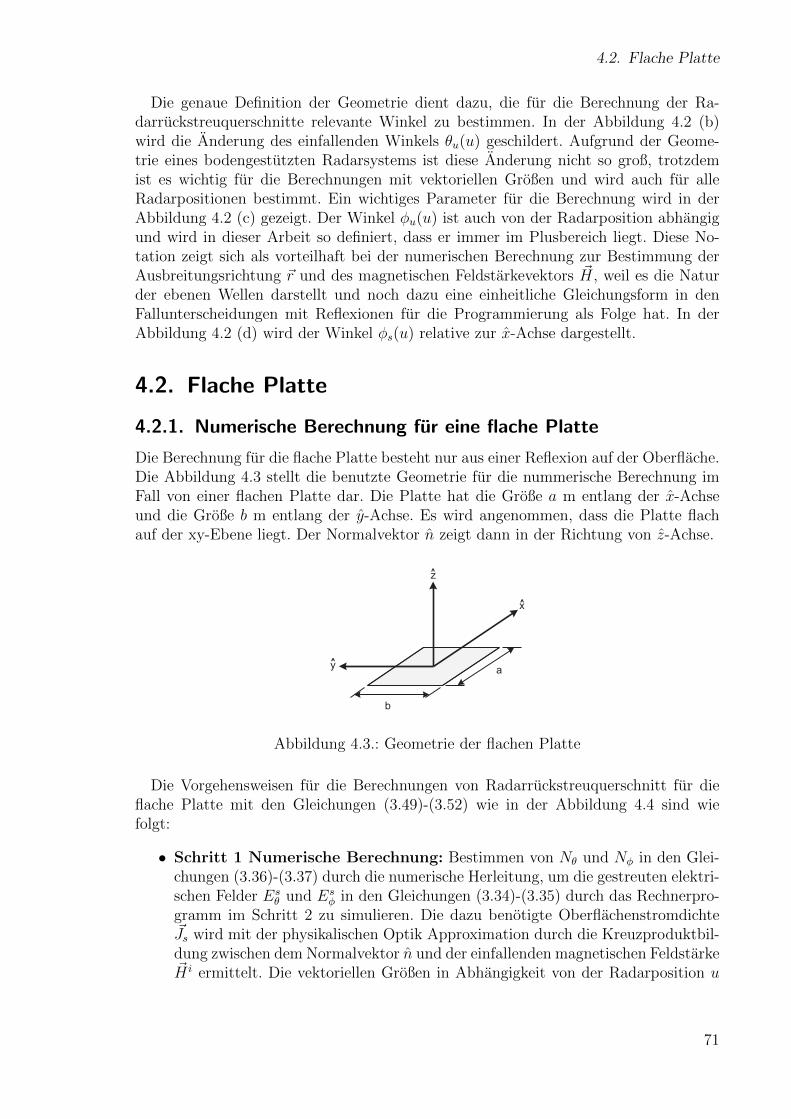
4.2. Flache Platte
Die genaue Definition der Geometrie dient dazu, die fur die Berechnung der Ra-darruckstreuquerschnitte relevante Winkel zu bestimmen. In der Abbildung 4.2 (b)wird die Anderung des einfallenden Winkels θu(u) geschildert. Aufgrund der Geome-trie eines bodengestutzten Radarsystems ist diese Anderung nicht so groß, trotzdemist es wichtig fur die Berechnungen mit vektoriellen Großen und wird auch fur alleRadarpositionen bestimmt. Ein wichtiges Parameter fur die Berechnung wird in derAbbildung 4.2 (c) gezeigt. Der Winkel φu(u) ist auch von der Radarposition abhangigund wird in dieser Arbeit so definiert, dass er immer im Plusbereich liegt. Diese No-tation zeigt sich als vorteilhaft bei der numerischen Berechnung zur Bestimmung derAusbreitungsrichtung ~r und des magnetischen Feldstarkevektors ~H, weil es die Naturder ebenen Wellen darstellt und noch dazu eine einheitliche Gleichungsform in denFallunterscheidungen mit Reflexionen fur die Programmierung als Folge hat. In derAbbildung 4.2 (d) wird der Winkel φs(u) relative zur x-Achse dargestellt.
4.2. Flache Platte
4.2.1. Numerische Berechnung fur eine flache Platte
Die Berechnung fur die flache Platte besteht nur aus einer Reflexion auf der Oberflache.Die Abbildung 4.3 stellt die benutzte Geometrie fur die nummerische Berechnung imFall von einer flachen Platte dar. Die Platte hat die Große a m entlang der x-Achseund die Große b m entlang der y-Achse. Es wird angenommen, dass die Platte flachauf der xy-Ebene liegt. Der Normalvektor n zeigt dann in der Richtung von z-Achse.
Abbildung 4.3.: Geometrie der flachen Platte
Die Vorgehensweisen fur die Berechnungen von Radarruckstreuquerschnitt fur dieflache Platte mit den Gleichungen (3.49)-(3.52) wie in der Abbildung 4.4 sind wiefolgt:
• Schritt 1 Numerische Berechnung: Bestimmen von Nθ und Nφ in den Glei-chungen (3.36)-(3.37) durch die numerische Herleitung, um die gestreuten elektri-schen Felder Es
θ und Esφ in den Gleichungen (3.34)-(3.35) durch das Rechnerpro-
gramm im Schritt 2 zu simulieren. Die dazu benotigte Oberflachenstromdichte~Js wird mit der physikalischen Optik Approximation durch die Kreuzproduktbil-dung zwischen dem Normalvektor n und der einfallenden magnetischen Feldstarke~H i ermittelt. Die vektoriellen Großen in Abhangigkeit von der Radarposition u
71
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
werden bereits im Kapitel 3 geschildert. Die ausfuhrliche numerische Berechnungfur die polarimetrischen gestreuten Feldstarke von der flachen Platte wird imAnhang A beschrieben.
• Schritt 2 Im Rechnerprogramm: Benutzen den Ansatz in den Gleichungen(3.53)-(3.54), um die polarimetrischen Radarruckstreuquerschnitten σpq in denGleichungen (3.49)-(3.52) zu simulieren.
Abbildung 4.4.: Numerische Berechnungen fur die flache Platte
4.2.2. Simulationsergebnisse einer flachen Platte
Die Abbildung 4.5 zeigt die Simulationsergebnisse einer flachen Platte mit der Abmes-sung a = 1 m und b = 1 m mit den Gleichungen und den Fallunterscheidungen imAnhang A. Fur die Notation, bitte siehe auch die Abbildung 2.5.
In den folgenden dreidimensionalen Darstellungen der Simulationsergebnissen zeigtdie x-Achse die Position des Zielobjektes in der Geometrie, die in der Abbildung 4.1dargestellt wird. Die y-Achse ist die Radarposition entlang der u-Achse. Die z-Achseist ein Maß fur die simulierten σpq-Werte.
Der polarisationsabhangige Radarruckstreuquerschnitt in der Abbildung 4.5 (a) istdas Ergebnis von der hh-Polarisation. Der maximal Wert liegt in der Mitte der Be-rechnungsgeometrie und fallt stark ab, wenn sich der Winkel φu von null weggeht.Das Ergebnis fur σvv in der Abbildung 4.5 (d) hat auch einen ahnlichen Kurvenver-lauf wie das Ergebnis fur σhh. Die beiden Kurven sind im kopolaren Betrieb, trotzdemergeben sich zu den unterschiedlichen Werten als Ergebnis. Im Fall von kreuzpolarenPolarisationen sind die Kurven unterschiedlich geformt. Das Ergebnis fur σhv in derAbbildung 4.5 (b) hat die maximalen Werte nicht in der Mitte der Messungsgeometriewie im kopolaren Betrieb. Durch den Ansatz zur Berechnung der polarimetrischen Ra-darruckstreuquerschnitten ergibt sich zum unsymmetrischen Kurvenverlauf von σvh inder Abbildung 4.5 (c), obwohl die Werte sehr klein sind, gelten auch als interessanteund markante Aspekte dieser kreuzpolaren Polarisation im Rahmen der physikalischenOptik Approximation.
Die Abbildung 4.6 stellt die Ergebnisse in dBsm (decibels relative to one square me-ter) dar. Die Kurven fur die kopolaren Polarisationsberechnungen in der Abbildung 4.6(a) und (d) sind symmetrisch und zeigen den starken Abfall, wenn die relative Richtungzwischen Radarantenne und Zielposition nicht parallel zur x-Achse ist. Die Ergebnissevon den kreuzpolaren Polarisationsberechnungen in der Abbildung 4.6 (b) und (c) sindrelative sehr klein im Vergleich zu den kopolaren Polarisationsberechnungen, deswe-gen werden sie oft als vernachlassigbar klein angenommen. Aufgrund der koharenten
72
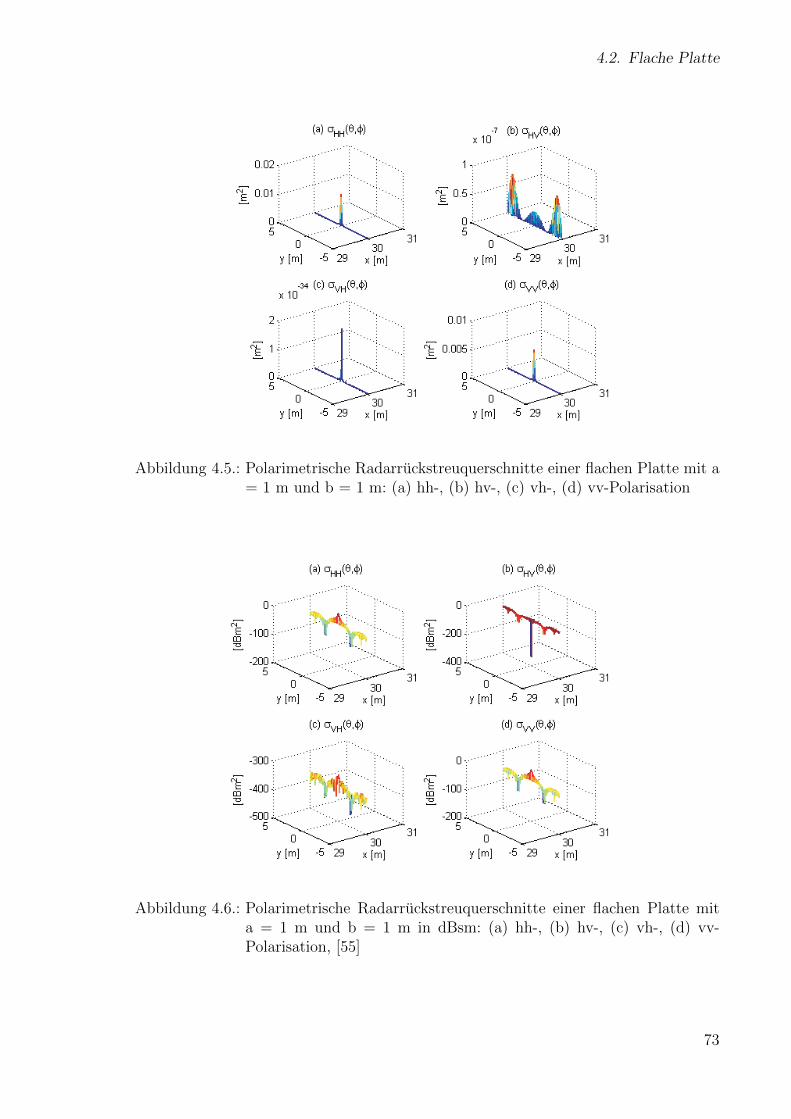
4.2. Flache Platte
Abbildung 4.5.: Polarimetrische Radarruckstreuquerschnitte einer flachen Platte mit a= 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 4.6.: Polarimetrische Radarruckstreuquerschnitte einer flachen Platte mita = 1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation, [55]
73

4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Integrationsverarbeitung der Radardaten kann es hinzufuhren, dass diese kleine Bei-trage auch messbare Wirkung in Endbilddaten oder bei der Analyse der Radarrohdatenbringen konnen, wenn man die differentielle Reflektivitat und das lineare Depolarisa-tionsverhaltnis mitberucksichtigt. Daruber hinaus, flache Ziele großer als 1 m2 werdenerwartungsgemaß hohere σpq-Werte aufweisen.
Die Tabelle 4.2 prasentiert die Maimalwerte der Simulationsergebnisse der polari-metrischen Radarruckstreuquerschnitte einer einfachen Platte (1 m2) in der jeweiligenPolarisationslage in dBsm, damit man den Unterschied der Werte direkt miteinandervergleichen kann. Ein interessantes Ergebnis liegt bei den Simulationswerten in hh- undvv-Polarisation. Hier bekommt man den Unterschied ungefahr 3 dBsm im kopolarenRadarbetrieb. Mit deutlichem Abstand in der vh-Polarisation bekommt man sehr klei-nen Maximalert im Vergleich zu den anderen Polarisationslagen. Am geringsten ist derMaximalwert im vh-Polarisationsbetrieb.
Polarisationslage Maximalwert in dBsm
hh -19,58hv -75,97vh -337,40vv -22,59
Tabelle 4.2.: Maximalwerte der Simulationsergebnisse von einer flachen Platte
Die differentielle Reflektivitat Zdr einer flachen Platte in der Abbildung 4.7 (a) hatdie positiven Werte, das heißt, dass das Zielobjekt eine mehr horizontale Strukturnachweist. Diese Berechnungsergebnisse sind im Anklang mit der Definition der diffe-rentiellen Reflektivitat und bestatigen den Ansatz der polarimetrischen Berechnungen,bei der die Komponente der gestreuten elektrischen Feldstarken in horizontalen undvertikalen Komponenten eingesetzt werden konnen. Der Kurvenverlauf von dem li-nearen Depolarisationsverhaltnis Ldr in der Abbildung 4.7 (b) zeigt die starke undunregelmaßige Schwingung, die als eine besondere Eigenschaft der flachen Platte seinkann. Ein wichtiger Hinweis aus den Ergebnissen liegt daran, dass der Ansatz zumBeitrag in der kreuzpolaren Polarisationslage fuhrt.
Zum Vergleich der Richtigkeit und Validierung der Annahme werden die Simulati-onsergebnisse aus [3] und eigene Simulationsergebnisse in der Abbildung 4.8 verglichen.Der Hauptunterschied besteht darin, dass die maximalen Werte der gesamten gestreu-ten Felder in [3] aus den Teilkomponenenten gebildet wird als:
Es =
√(Es
r)2 + (Es
θ)2 +
(Esφ
)2. (4.1)
Und der monostatische Radarruckstreuquerschnitt fur eine flache Platte kann mitder Große a und b, dem Einfallwinkel θi und Phasenkonstante β berechnet werden als:
σ = 4π
(ab
λ
)2
cos2 θi
[sin (βb sin θi)
βb sin θi
]2. (4.2)
74

4.2. Flache Platte
Abbildung 4.7.: Zdr- und Ldr-Werte einer flachen Platte in dB: (a) Zdr-Werte, (b) Ldr-Werte
Abbildung 4.8.: Vergleich der Simulationsergebnisse (a) aus [3], (b) eingene Simulation;fur eine flache Platte mit a = 0,17 m und b = 0,17 m bei einer Frequenzvon 10 GHz
75

4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Das Simulationsergebnis aus [3] mit a = 17 cm, b = 17 cm und der Frequenz 10GHz wird in der Abbildung 4.8 (a) prasentiert. Und in der Abbildung 4.8 (b) ist dasSimulationsergebnis mit der hh-Polarisation. Die Strukturen der beiden Kurven sindahnlich, das heißt, dass sie das Maximum in der Mitte bei θi = 0◦ haben und starkabfallen, wenn der Einfallwinkel von 90◦ abweicht. Die numerische Berechnung mit derGleichung (4.2) fur den Einfallwinkel θi = 0◦ ergibt σ = 10, 67 dBsm. Bei der eigenenSimulation in der hh-Polarisation mit den gleichen Parametern betragt der σhh-Wertbei θi = 0◦ gleich 8,78 dBsm. Dabei kann man die akzeptable Abweichung von 17,71%zwischen den beiden Werten erkennen.
Der Bereich von Einfallwinkel zwischen [−15◦, 15◦] ist am interessantesten fur dieSAR-Anwendung, weil die Offnungswinkel in der Azimutrichtung auch in diesem Be-reich liegt. Das Ergebnis in der Abbildung 4.8 (b) gilt als eine Bestatigung dafur, dassder Ansatz mit den polarimetischen Radarruckstreuquerschnitten fur weitere Untersu-chungen anwendbar ist.
4.3. Zweifach-Reflektor (Dihedral)
4.3.1. Numerische Berechnung fur einen Zweifach-Reflektor
Die Geometrie fur den Zweifach-Reflektor wird in der Abbildung 4.9 dargestellt. Furdie nummerische Berechnung werden die Parameter a = 1 m und b = 1 m gesetzt.Ein Zweifach-Reflektor kann als eine Zusammensetzung von zwei flachen Platten, diesenkrecht zueinander stehen, betrachtet werden. In [31] wurde die numerische Analysedes Radarruckstreuquerschnittes von einem Zweifach-Reflektor mit Hilfe der physika-lischen Optik Approximation prasentiert. Die Ruckstreumechanismen fur die Reflexio-nen wurden in drei Berechnungsgruppen gegliedert wie folgt: die einfache Reflexion mitPO-Methode, die zweifache Reflexion mit PO-PO-Methode und die dreifache Reflexionmit GO-PO-PO-Methode. Dabei stehen PO fur die physikalische Optik und GO furdie geometrische Optik. Aus der Geometrie werden die Reflexionen fur diese Arbeit indrei Gruppen gegliedert und berechnet wie folgt:
Abbildung 4.9.: Geometrie des Zweifach-Reflektors
1. Einfache Reflexion mit der physikalischer Optik Approximation (PO) in derAbbildung 4.10 (a): Hier wird die physikalische Optik Approximation zur Berech-
nung der gestreuten elektrischen Feldstarke ~Es aufgrund der direkten einfallenden
76

4.3. Zweifach-Reflektor (Dihedral)
magnetischen Feldstarke ~H i eingesetzt. Es wird die Notation R1 und R2 fur diedirekten gestreuten Felder von der Platte Nr.1 und von der Platte Nr.2 in derAbbildung 4.9 benutzt. Im Fall R1 ist die Berechnung gleich der Fall fur eine fla-che Platte auf der xy-Ebene. Fur die direkten Aufprall auf die Platte Nr.2 wirddie Berechnung mit Hilfe der Abbildung 3.5 durchgefuhrt, weil die Lage der Plat-te relative zur Ausbreitungsrichtung berucksichtigt wird. Die einfache Reflexion(PO) wird mit Ri-Art mit i = 1, 2 bezeichnet.
2. Zweifache Reflexion mit PO-PO in der Abbildung 4.10 (b): Die Uberlegungbei der zweifachen Reflexion im Fallbeispiel mit der Notation R21 liegt daran,dass die einfallende Welle auf die Platte Nr.1 eine Oberflachenstromdichte ~Js1bildet, diese bewirkt dann magnetische Feldstarke ~Hs2 auf der Platte Nr.2, dieim Nahfeldbereich berechnet wird. Die magnetische Feldstarke ~Hs2 verursacht dieOberflachenstromdichte ~Js2, die dann die gestreute elektrische Feldstarke ~Es ander Radarantenne im Fernfeld verursacht. Aus der gleichen Uberlegung existiertnoch eine Reflexionsberechnung mit der Notation R12. Die zweifache Reflexion(PO-PO) wird mit Rij-Art mit i, j = 1, 2 bezeichnet.
3. Dreifache Reflexion mit spiegelnder Reflexion-PO-PO in der Abbildung 4.10(c): Dieser Reflexionsfall ist die ausgedehnte Version aus der zweifachen Reflexion.Um die Naturereignisse moglich realistisch nachzubilden, wird in diese Arbeit diedreifache Reflexion mitberucksichtigt. Aus der Abbildung 4.10 (c) ist es moglich,dass die einfallende elektromagnetische Welle zuerst auf die Platte Nr.1 fallt unddann in der Richtung auf die Platte Nr.2 nach dem Reflexionsgesetz weiter re-flektiert. Dadurch entsteht die Richtungsanderung der Ausbreitungsrichtung undder elektromagnetischen Feldstarke, die auf die Platte Nr.2 einfallt und die Ober-flachenstromdichte ~Js2 verursacht. Hier wird es angenommen, dass diese Ober-flachenstromdichte auf der Platte Nr.2 die magnetische Feldstarke ~Hs1 auf derPlatte Nr.1 im Nahfeldbereich verursacht. Und zum Schluss entsteht die gestreu-ten elektrischen Feldstarke im Fernfeld aufgrund der Oberflachenstromdichte ~Js1auf der Platte Nr.1. Diese Ereignisse werden mit der Notation R121 gekennzeich-net, und fur den umgekehrten Fall wird die Notation R212 benutzt. Die dreifacheReflexion (spiegelnd-PO-PO) wird mit Rijk-Art mit i, j, k = 1, 2 bezeichnet.
Abbildung 4.10.: Numerische Berechnungen fur den Zweifach-Reflektor (a) EinfacheReflexion (PO), (b) Zweifache Reflexion (PO-PO), (c) Dreifache Re-flexion (spiegelnd-PO-PO)
77
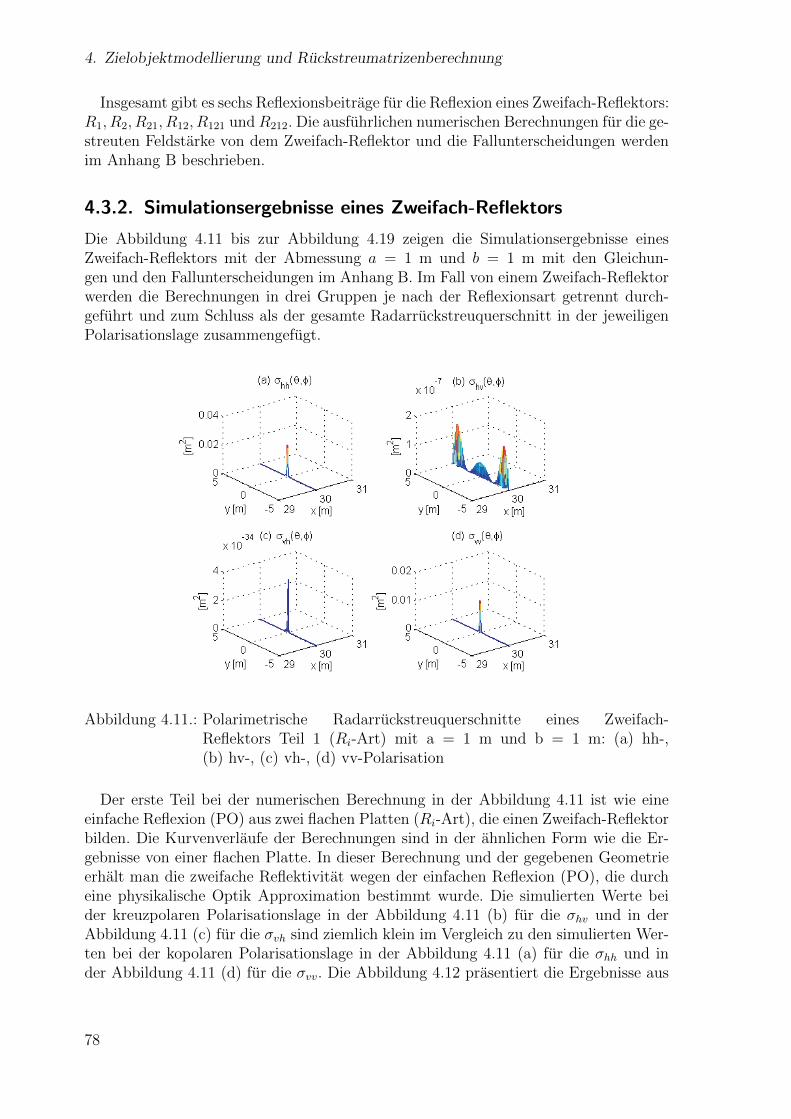
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Insgesamt gibt es sechs Reflexionsbeitrage fur die Reflexion eines Zweifach-Reflektors:R1, R2, R21, R12, R121 und R212. Die ausfuhrlichen numerischen Berechnungen fur die ge-streuten Feldstarke von dem Zweifach-Reflektor und die Fallunterscheidungen werdenim Anhang B beschrieben.
4.3.2. Simulationsergebnisse eines Zweifach-Reflektors
Die Abbildung 4.11 bis zur Abbildung 4.19 zeigen die Simulationsergebnisse einesZweifach-Reflektors mit der Abmessung a = 1 m und b = 1 m mit den Gleichun-gen und den Fallunterscheidungen im Anhang B. Im Fall von einem Zweifach-Reflektorwerden die Berechnungen in drei Gruppen je nach der Reflexionsart getrennt durch-gefuhrt und zum Schluss als der gesamte Radarruckstreuquerschnitt in der jeweiligenPolarisationslage zusammengefugt.
Abbildung 4.11.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 1 (Ri-Art) mit a = 1 m und b = 1 m: (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation
Der erste Teil bei der numerischen Berechnung in der Abbildung 4.11 ist wie eineeinfache Reflexion (PO) aus zwei flachen Platten (Ri-Art), die einen Zweifach-Reflektorbilden. Die Kurvenverlaufe der Berechnungen sind in der ahnlichen Form wie die Er-gebnisse von einer flachen Platte. In dieser Berechnung und der gegebenen Geometrieerhalt man die zweifache Reflektivitat wegen der einfachen Reflexion (PO), die durcheine physikalische Optik Approximation bestimmt wurde. Die simulierten Werte beider kreuzpolaren Polarisationslage in der Abbildung 4.11 (b) fur die σhv und in derAbbildung 4.11 (c) fur die σvh sind ziemlich klein im Vergleich zu den simulierten Wer-ten bei der kopolaren Polarisationslage in der Abbildung 4.11 (a) fur die σhh und inder Abbildung 4.11 (d) fur die σvv. Die Abbildung 4.12 prasentiert die Ergebnisse aus
78
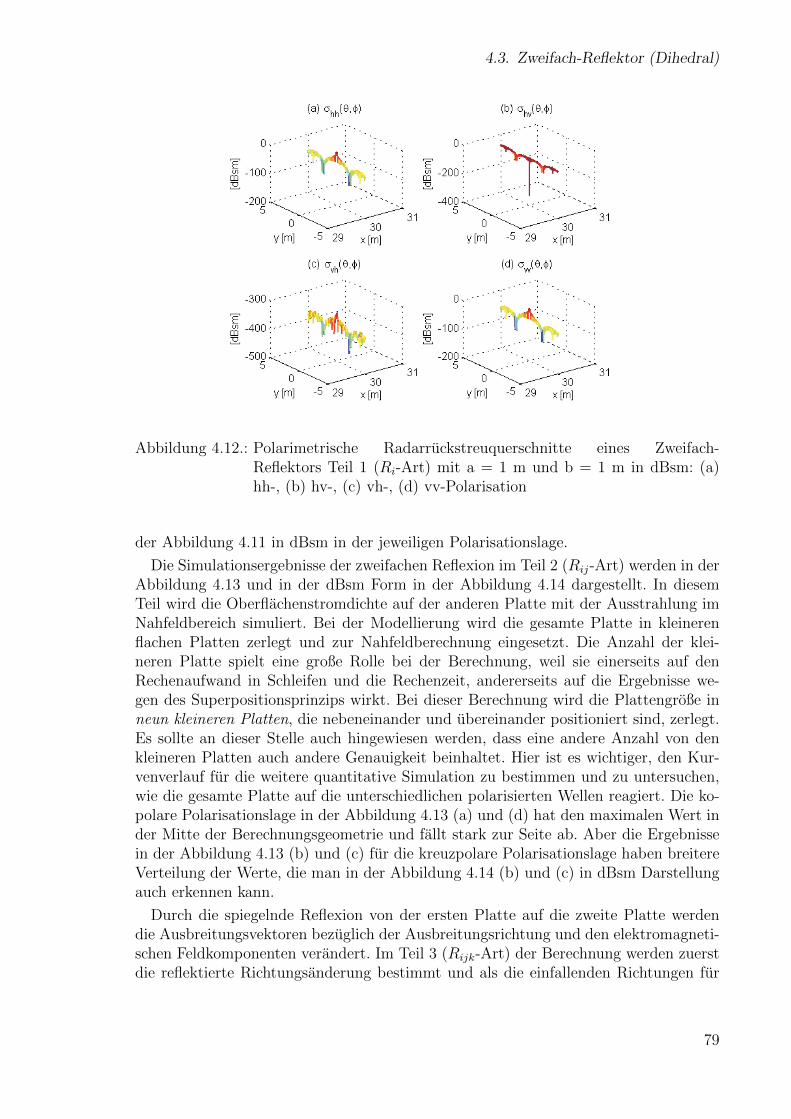
4.3. Zweifach-Reflektor (Dihedral)
Abbildung 4.12.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 1 (Ri-Art) mit a = 1 m und b = 1 m in dBsm: (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
der Abbildung 4.11 in dBsm in der jeweiligen Polarisationslage.
Die Simulationsergebnisse der zweifachen Reflexion im Teil 2 (Rij-Art) werden in derAbbildung 4.13 und in der dBsm Form in der Abbildung 4.14 dargestellt. In diesemTeil wird die Oberflachenstromdichte auf der anderen Platte mit der Ausstrahlung imNahfeldbereich simuliert. Bei der Modellierung wird die gesamte Platte in kleinerenflachen Platten zerlegt und zur Nahfeldberechnung eingesetzt. Die Anzahl der klei-neren Platte spielt eine große Rolle bei der Berechnung, weil sie einerseits auf denRechenaufwand in Schleifen und die Rechenzeit, andererseits auf die Ergebnisse we-gen des Superpositionsprinzips wirkt. Bei dieser Berechnung wird die Plattengroße inneun kleineren Platten, die nebeneinander und ubereinander positioniert sind, zerlegt.Es sollte an dieser Stelle auch hingewiesen werden, dass eine andere Anzahl von denkleineren Platten auch andere Genauigkeit beinhaltet. Hier ist es wichtiger, den Kur-venverlauf fur die weitere quantitative Simulation zu bestimmen und zu untersuchen,wie die gesamte Platte auf die unterschiedlichen polarisierten Wellen reagiert. Die ko-polare Polarisationslage in der Abbildung 4.13 (a) und (d) hat den maximalen Wert inder Mitte der Berechnungsgeometrie und fallt stark zur Seite ab. Aber die Ergebnissein der Abbildung 4.13 (b) und (c) fur die kreuzpolare Polarisationslage haben breitereVerteilung der Werte, die man in der Abbildung 4.14 (b) und (c) in dBsm Darstellungauch erkennen kann.
Durch die spiegelnde Reflexion von der ersten Platte auf die zweite Platte werdendie Ausbreitungsvektoren bezuglich der Ausbreitungsrichtung und den elektromagneti-schen Feldkomponenten verandert. Im Teil 3 (Rijk-Art) der Berechnung werden zuerstdie reflektierte Richtungsanderung bestimmt und als die einfallenden Richtungen fur
79
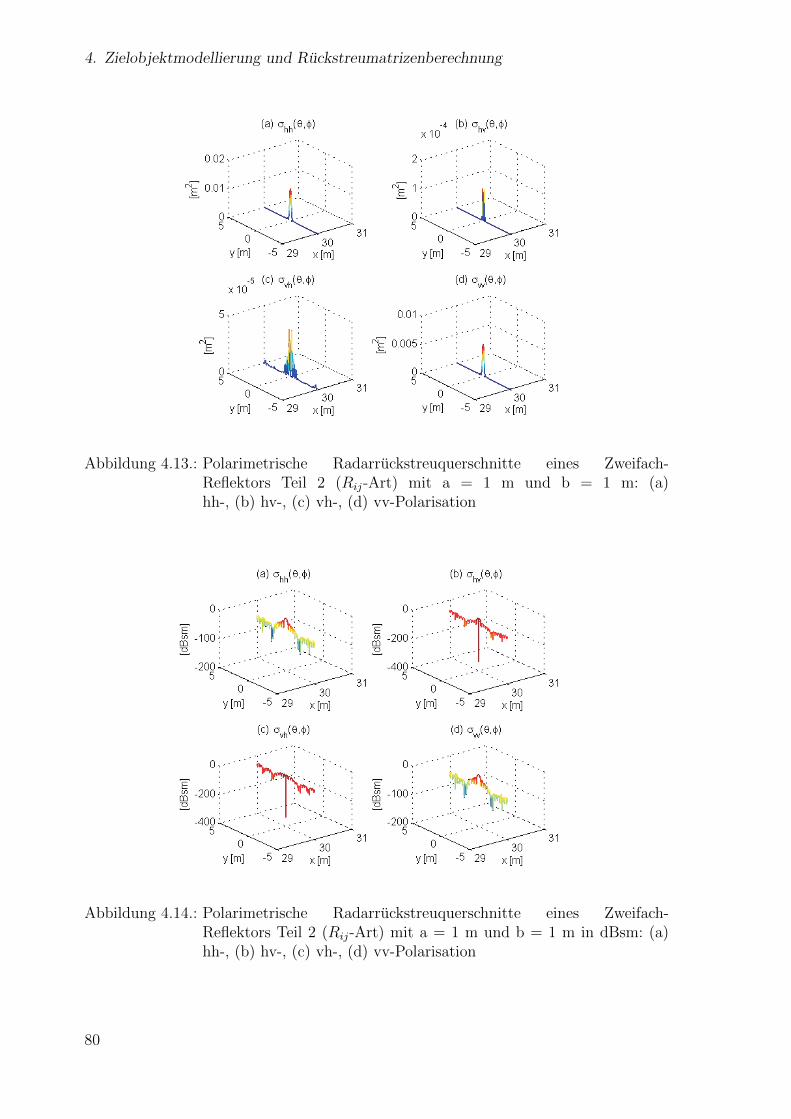
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Abbildung 4.13.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 2 (Rij-Art) mit a = 1 m und b = 1 m: (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 4.14.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 2 (Rij-Art) mit a = 1 m und b = 1 m in dBsm: (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
80
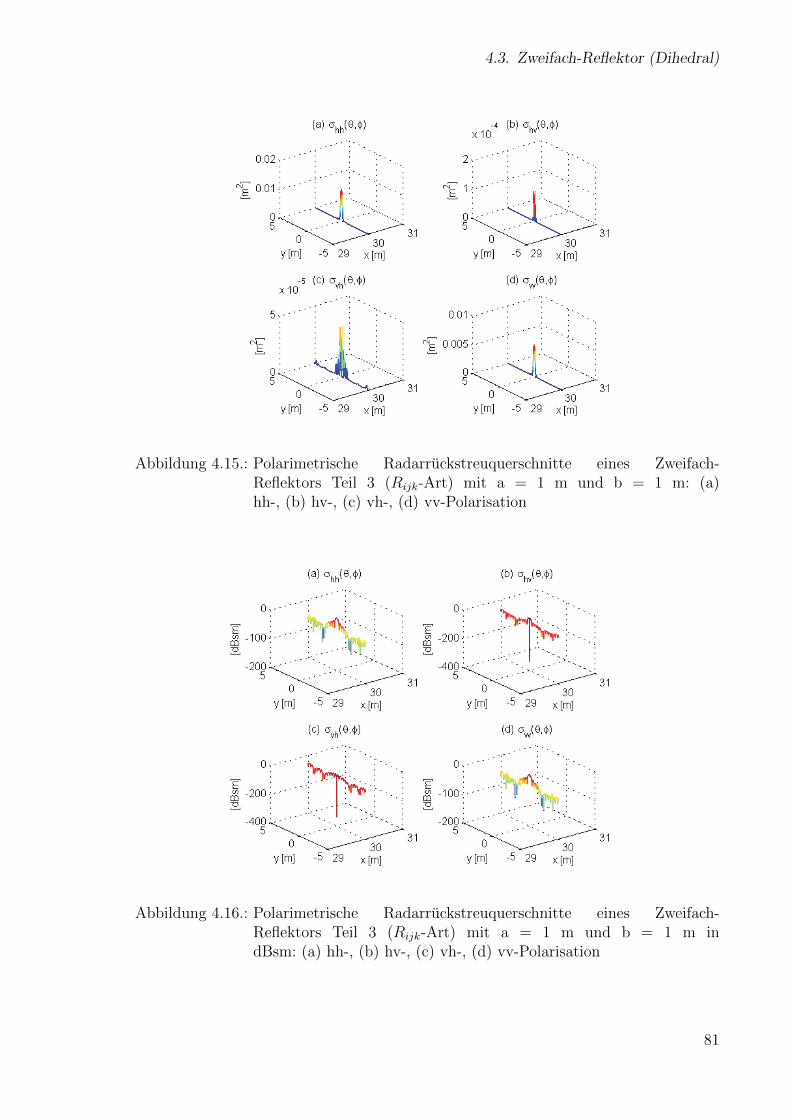
4.3. Zweifach-Reflektor (Dihedral)
Abbildung 4.15.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 3 (Rijk-Art) mit a = 1 m und b = 1 m: (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 4.16.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil 3 (Rijk-Art) mit a = 1 m und b = 1 m indBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
81

4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
die zweite Platte eingesetzt. Bei der Bestimmung der Oberflachenstromdichte spieltdie Richtung der einfallenden magnetischen Feldstarken eine wichtige Rolle. Durch dienumerische Berechnung ergeben die Ergebnisse, wie es in der Abbildung 4.15 und inder Abbildung 4.16 dargestellt wird. In diesem Teil werden auch die numerischen Be-rechnungen im Nahfeldbereich durchgefuhrt, dabei werden die gesamte Platte auch inneun kleineren Platte zum Zweck der richtungsabhangigen magnetischen Wellenaus-strahlungsbeitrage zerlegt.
Abbildung 4.17.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors mit a = 1 m und b = 1 m: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
Die Abbildung 4.17 und die Abbildung 4.18 zeigen die gesamten Simulationsergeb-nisse σhh, σhv, σvh und σvv von einem Zweifach-Reflektor aus den Teil 1 bis 3. DieKurvenstrukturen von der kopolaren Polarisationslage haben die maximalen Werte inder Mitte der Simulationsgeometrie, wie alle Teilberechnungen. Aber die Kurvenstruk-turen von der kreuzpolaren Polarisationslage sind ausgepragt durch die zweifache unddie dreifache Reflexionsberechnung. Wenn ein Zweifach-Reflektor großer ist, als diefur die Simulation eingesetzten Werte, wird es auch mehr Reflektivitat mit eigenenquantitativen richtungsabhangigen und polarisierten Eigenschaften zuruckliefern.
In der Tabelle 4.3 werden die Simulationsergebnisse von einem Zweifach-Reflektor inder jeweiligen Polarisationslage und in der Teilberechnung dargestellt. Die Maximal-werte in der kopolaren Polarisation, das heißt hh- und vv-Polarisation, liegen 3,01 dBsmvoneinander. Im Fall der kreuzpolaren Polarisation, das heißt hv- und vh-Polarisation,betragt der Maximalwert von der hv-Polarisation 4,20 dBsm hoher als der Maximalwertvon der vh-Polarisation.
In der Abbildung 4.19 sind die differentielle Reflektivitat Zdr und das lineares De-polarisationsverhaltnis Ldr eines Zweifach-Reflektors dargestellt. Die Kurve von der
82

4.3. Zweifach-Reflektor (Dihedral)
Abbildung 4.18.: Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors mit a = 1 m und b = 1 m in dBsm: (a) hh-, (b)hv-, (c) vh-, (d) vv-Polarisation, [55]
Polarisationslage Maximalwert in dBsmTeil 1 (Ri-Art) Teil 2 (Rij-Art) Teil 3 (Rijk-Art) Teil 1+2+3
hh -16,57 -19,68 -19,58 -13,56hv -74,10 -39,60 -40,83 -37,67vh -334,30 -43,94 -45,65 -41,87vv -19,58 -22,68 -22,59 -16,57
Tabelle 4.3.: Maximalwerte der Simulationsergebnisse von einem Zweifach-Reflector
83

4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
differentiellen Reflektivitat in der Abbildung 4.19 (a) ist im Gegensatz zur differenti-ellen Reflektivitat einer flachen Platte wie eine Gerade entlang der Fluglinie. Und beider Betrachtung der Kurve des linearen Depolarisationsverhaltnises erkennt man keineunregelmaßige Schwingung wie bei der flachen Platte. Diese beiden Parameter zeigendie wichtigen polarmetrischen Ruckstreueigenschaften des Zweifach-Reflektor unter deruntersuchten SAR-Geometie.
Abbildung 4.19.: Zdr-Werte und Ldr-Werte eines Dreifach-Reflektors in dB: (a) Zdr-Werte, (b) Ldr-Werte
4.4. Dreifach-Reflektor (Trihedral)
4.4.1. Numerische Berechnung fur einen Dreifach-Reflektor
Ein Dreifach-Reflektor verkorpert die Struktur eines Gebaudes im Stadtgebiet oder eineahnliche Struktur in der Untersuchungsumgebung. Die Geometrie fur den Dreifach-Reflektor wird in der Abbildung 4.20 dargestellt. Alle Seiten des Dreifach-Reflektorswerden in dieser Simulation gleich gesetzt.
Der Oberflachennormalvektor n ist ein wichtiger Parameter bei der Berechnung derOberflachenstromdichte mit Hilfe der physikalischen Optik Approximation. Wie es inder Abbildung 4.21 zu sehen ist, durch die schrage Lage des Dreifach-Reflektors relativzur Koordinatenachse werden die Normalvektoren der jeweiligen Platte bezuglich desWinkels ϕ zwischen der y-Achse und der Platte Nr.2 definiert wie folgt:
np1 = z (4.3)
np2 = −x cosϕ+ y sinϕ (4.4)
np3 = −x sinϕ− y cosϕ . (4.5)
84

4.4. Dreifach-Reflektor (Trihedral)
Abbildung 4.20.: Geometrie des Dreifach-Reflektors
Abbildung 4.21.: Normalvektor der Platten
Abbildung 4.22.: Nummerische Berechnungen fur den Dreifach-Reflektor (a) EinfacheReflexion (PO), (b) Zweifache Reflexion (PO-PO), (c) Dreifache Re-flexion (spiegelnd-POPO)
85
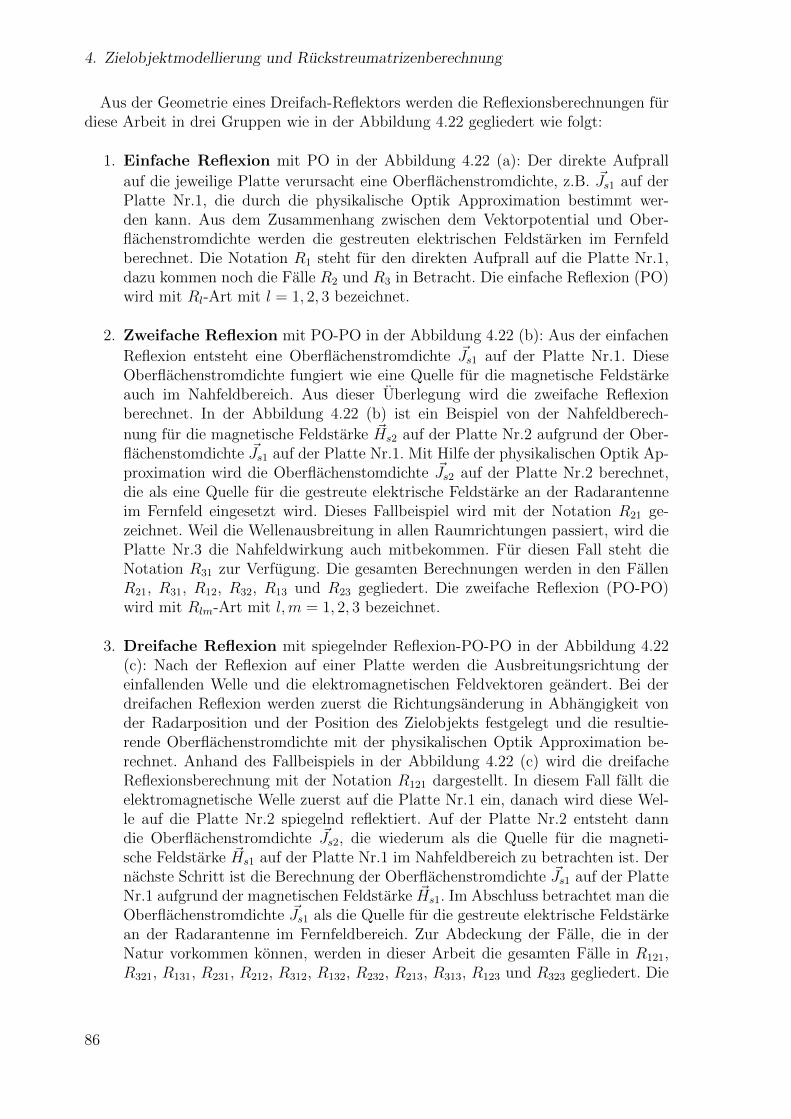
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Aus der Geometrie eines Dreifach-Reflektors werden die Reflexionsberechnungen furdiese Arbeit in drei Gruppen wie in der Abbildung 4.22 gegliedert wie folgt:
1. Einfache Reflexion mit PO in der Abbildung 4.22 (a): Der direkte Aufprall
auf die jeweilige Platte verursacht eine Oberflachenstromdichte, z.B. ~Js1 auf derPlatte Nr.1, die durch die physikalische Optik Approximation bestimmt wer-den kann. Aus dem Zusammenhang zwischen dem Vektorpotential und Ober-flachenstromdichte werden die gestreuten elektrischen Feldstarken im Fernfeldberechnet. Die Notation R1 steht fur den direkten Aufprall auf die Platte Nr.1,dazu kommen noch die Falle R2 und R3 in Betracht. Die einfache Reflexion (PO)wird mit Rl-Art mit l = 1, 2, 3 bezeichnet.
2. Zweifache Reflexion mit PO-PO in der Abbildung 4.22 (b): Aus der einfachen
Reflexion entsteht eine Oberflachenstromdichte ~Js1 auf der Platte Nr.1. DieseOberflachenstromdichte fungiert wie eine Quelle fur die magnetische Feldstarkeauch im Nahfeldbereich. Aus dieser Uberlegung wird die zweifache Reflexionberechnet. In der Abbildung 4.22 (b) ist ein Beispiel von der Nahfeldberech-
nung fur die magnetische Feldstarke ~Hs2 auf der Platte Nr.2 aufgrund der Ober-flachenstomdichte ~Js1 auf der Platte Nr.1. Mit Hilfe der physikalischen Optik Ap-proximation wird die Oberflachenstomdichte ~Js2 auf der Platte Nr.2 berechnet,die als eine Quelle fur die gestreute elektrische Feldstarke an der Radarantenneim Fernfeld eingesetzt wird. Dieses Fallbeispiel wird mit der Notation R21 ge-zeichnet. Weil die Wellenausbreitung in allen Raumrichtungen passiert, wird diePlatte Nr.3 die Nahfeldwirkung auch mitbekommen. Fur diesen Fall steht dieNotation R31 zur Verfugung. Die gesamten Berechnungen werden in den FallenR21, R31, R12, R32, R13 und R23 gegliedert. Die zweifache Reflexion (PO-PO)wird mit Rlm-Art mit l,m = 1, 2, 3 bezeichnet.
3. Dreifache Reflexion mit spiegelnder Reflexion-PO-PO in der Abbildung 4.22(c): Nach der Reflexion auf einer Platte werden die Ausbreitungsrichtung dereinfallenden Welle und die elektromagnetischen Feldvektoren geandert. Bei derdreifachen Reflexion werden zuerst die Richtungsanderung in Abhangigkeit vonder Radarposition und der Position des Zielobjekts festgelegt und die resultie-rende Oberflachenstromdichte mit der physikalischen Optik Approximation be-rechnet. Anhand des Fallbeispiels in der Abbildung 4.22 (c) wird die dreifacheReflexionsberechnung mit der Notation R121 dargestellt. In diesem Fall fallt dieelektromagnetische Welle zuerst auf die Platte Nr.1 ein, danach wird diese Wel-le auf die Platte Nr.2 spiegelnd reflektiert. Auf der Platte Nr.2 entsteht danndie Oberflachenstromdichte ~Js2, die wiederum als die Quelle fur die magneti-sche Feldstarke ~Hs1 auf der Platte Nr.1 im Nahfeldbereich zu betrachten ist. Dernachste Schritt ist die Berechnung der Oberflachenstromdichte ~Js1 auf der PlatteNr.1 aufgrund der magnetischen Feldstarke ~Hs1. Im Abschluss betrachtet man dieOberflachenstromdichte ~Js1 als die Quelle fur die gestreute elektrische Feldstarkean der Radarantenne im Fernfeldbereich. Zur Abdeckung der Falle, die in derNatur vorkommen konnen, werden in dieser Arbeit die gesamten Falle in R121,R321, R131, R231, R212, R312, R132, R232, R213, R313, R123 und R323 gegliedert. Die
86
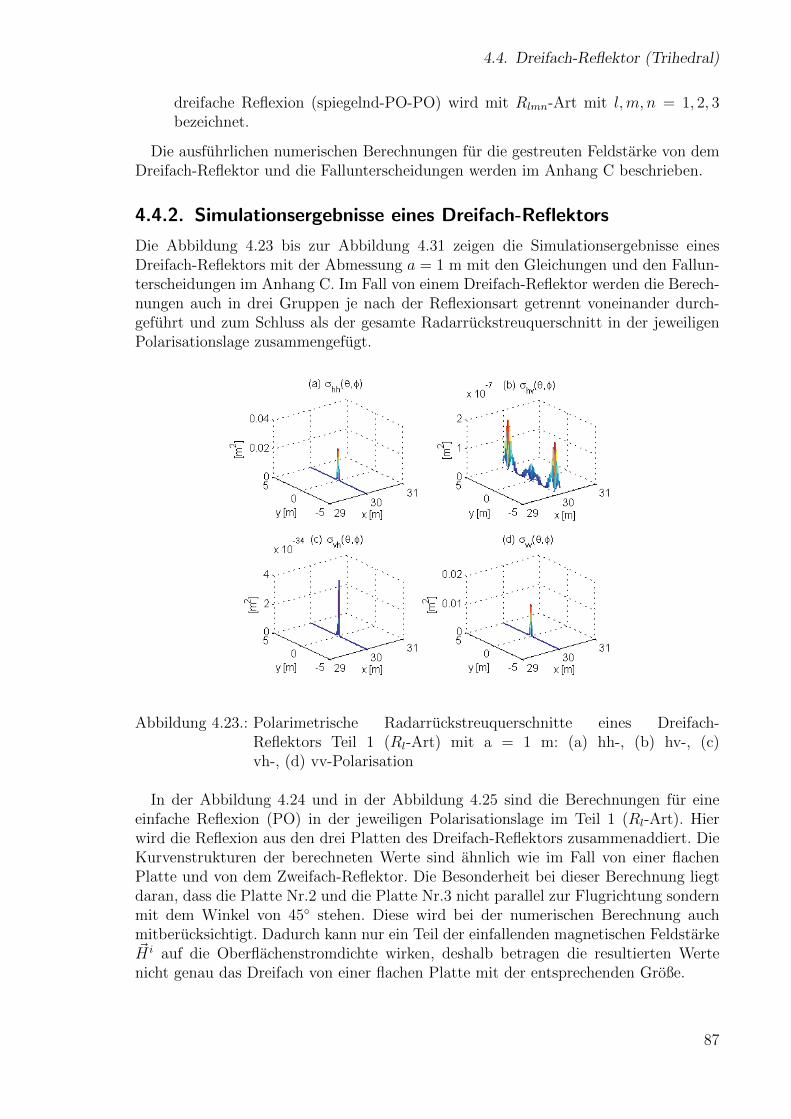
4.4. Dreifach-Reflektor (Trihedral)
dreifache Reflexion (spiegelnd-PO-PO) wird mit Rlmn-Art mit l,m, n = 1, 2, 3bezeichnet.
Die ausfuhrlichen numerischen Berechnungen fur die gestreuten Feldstarke von demDreifach-Reflektor und die Fallunterscheidungen werden im Anhang C beschrieben.
4.4.2. Simulationsergebnisse eines Dreifach-Reflektors
Die Abbildung 4.23 bis zur Abbildung 4.31 zeigen die Simulationsergebnisse einesDreifach-Reflektors mit der Abmessung a = 1 m mit den Gleichungen und den Fallun-terscheidungen im Anhang C. Im Fall von einem Dreifach-Reflektor werden die Berech-nungen auch in drei Gruppen je nach der Reflexionsart getrennt voneinander durch-gefuhrt und zum Schluss als der gesamte Radarruckstreuquerschnitt in der jeweiligenPolarisationslage zusammengefugt.
Abbildung 4.23.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 1 (Rl-Art) mit a = 1 m: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
In der Abbildung 4.24 und in der Abbildung 4.25 sind die Berechnungen fur eineeinfache Reflexion (PO) in der jeweiligen Polarisationslage im Teil 1 (Rl-Art). Hierwird die Reflexion aus den drei Platten des Dreifach-Reflektors zusammenaddiert. DieKurvenstrukturen der berechneten Werte sind ahnlich wie im Fall von einer flachenPlatte und von dem Zweifach-Reflektor. Die Besonderheit bei dieser Berechnung liegtdaran, dass die Platte Nr.2 und die Platte Nr.3 nicht parallel zur Flugrichtung sondernmit dem Winkel von 45◦ stehen. Diese wird bei der numerischen Berechnung auchmitberucksichtigt. Dadurch kann nur ein Teil der einfallenden magnetischen Feldstarke~H i auf die Oberflachenstromdichte wirken, deshalb betragen die resultierten Wertenicht genau das Dreifach von einer flachen Platte mit der entsprechenden Große.
87
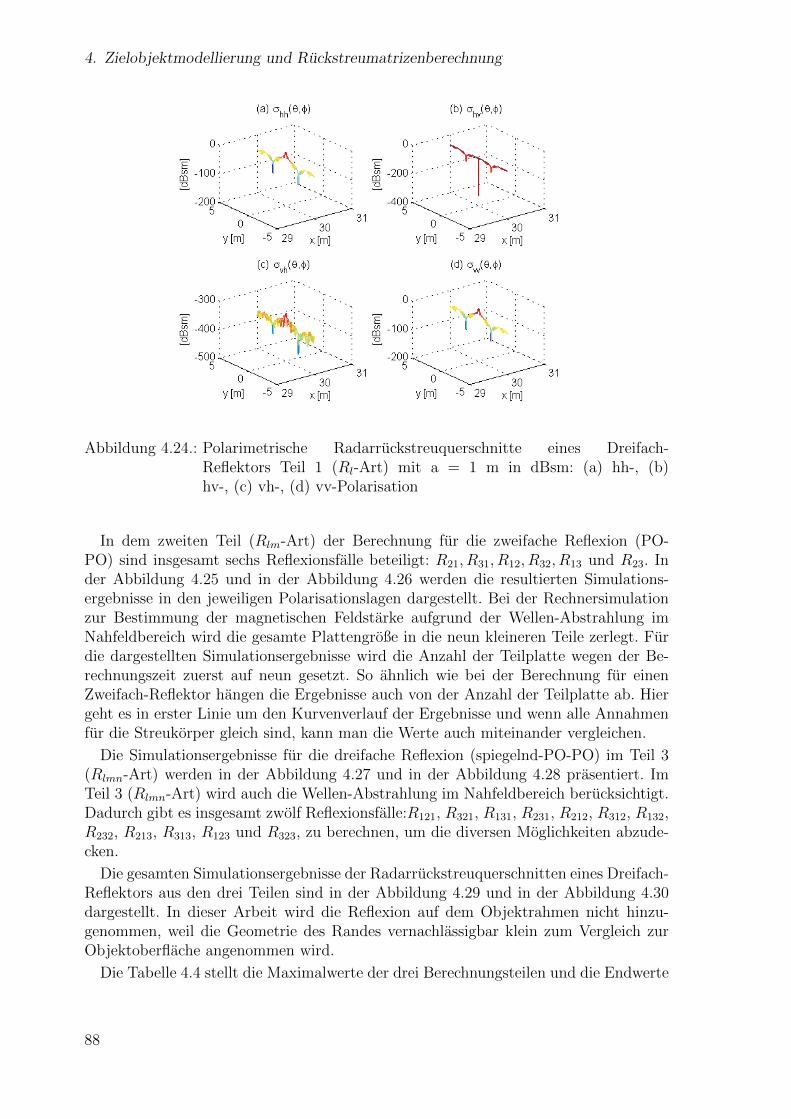
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Abbildung 4.24.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 1 (Rl-Art) mit a = 1 m in dBsm: (a) hh-, (b)hv-, (c) vh-, (d) vv-Polarisation
In dem zweiten Teil (Rlm-Art) der Berechnung fur die zweifache Reflexion (PO-PO) sind insgesamt sechs Reflexionsfalle beteiligt: R21, R31, R12, R32, R13 und R23. Inder Abbildung 4.25 und in der Abbildung 4.26 werden die resultierten Simulations-ergebnisse in den jeweiligen Polarisationslagen dargestellt. Bei der Rechnersimulationzur Bestimmung der magnetischen Feldstarke aufgrund der Wellen-Abstrahlung imNahfeldbereich wird die gesamte Plattengroße in die neun kleineren Teile zerlegt. Furdie dargestellten Simulationsergebnisse wird die Anzahl der Teilplatte wegen der Be-rechnungszeit zuerst auf neun gesetzt. So ahnlich wie bei der Berechnung fur einenZweifach-Reflektor hangen die Ergebnisse auch von der Anzahl der Teilplatte ab. Hiergeht es in erster Linie um den Kurvenverlauf der Ergebnisse und wenn alle Annahmenfur die Streukorper gleich sind, kann man die Werte auch miteinander vergleichen.
Die Simulationsergebnisse fur die dreifache Reflexion (spiegelnd-PO-PO) im Teil 3(Rlmn-Art) werden in der Abbildung 4.27 und in der Abbildung 4.28 prasentiert. ImTeil 3 (Rlmn-Art) wird auch die Wellen-Abstrahlung im Nahfeldbereich berucksichtigt.Dadurch gibt es insgesamt zwolf Reflexionsfalle:R121, R321, R131, R231, R212, R312, R132,R232, R213, R313, R123 und R323, zu berechnen, um die diversen Moglichkeiten abzude-cken.
Die gesamten Simulationsergebnisse der Radarruckstreuquerschnitten eines Dreifach-Reflektors aus den drei Teilen sind in der Abbildung 4.29 und in der Abbildung 4.30dargestellt. In dieser Arbeit wird die Reflexion auf dem Objektrahmen nicht hinzu-genommen, weil die Geometrie des Randes vernachlassigbar klein zum Vergleich zurObjektoberflache angenommen wird.
Die Tabelle 4.4 stellt die Maximalwerte der drei Berechnungsteilen und die Endwerte
88

4.4. Dreifach-Reflektor (Trihedral)
Abbildung 4.25.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 2 (Rlm-Art) mit a = 1 m: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
Abbildung 4.26.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 2 (Rlm-Art) mit a = 1 m in dBsm: (a) hh-, (b)hv-, (c) vh-, (d) vv-Polarisation
89
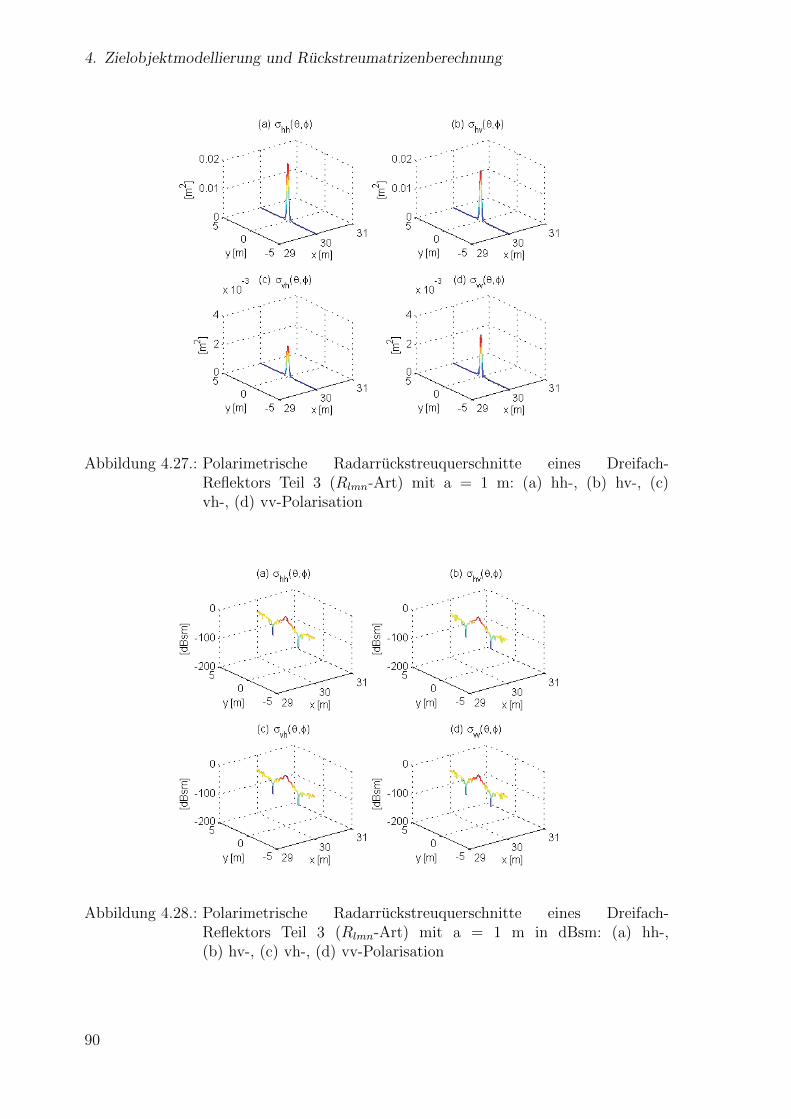
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Abbildung 4.27.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 3 (Rlmn-Art) mit a = 1 m: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
Abbildung 4.28.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil 3 (Rlmn-Art) mit a = 1 m in dBsm: (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation
90

4.4. Dreifach-Reflektor (Trihedral)
Abbildung 4.29.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors mit a = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 4.30.: Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors mit a = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation, [55]
91
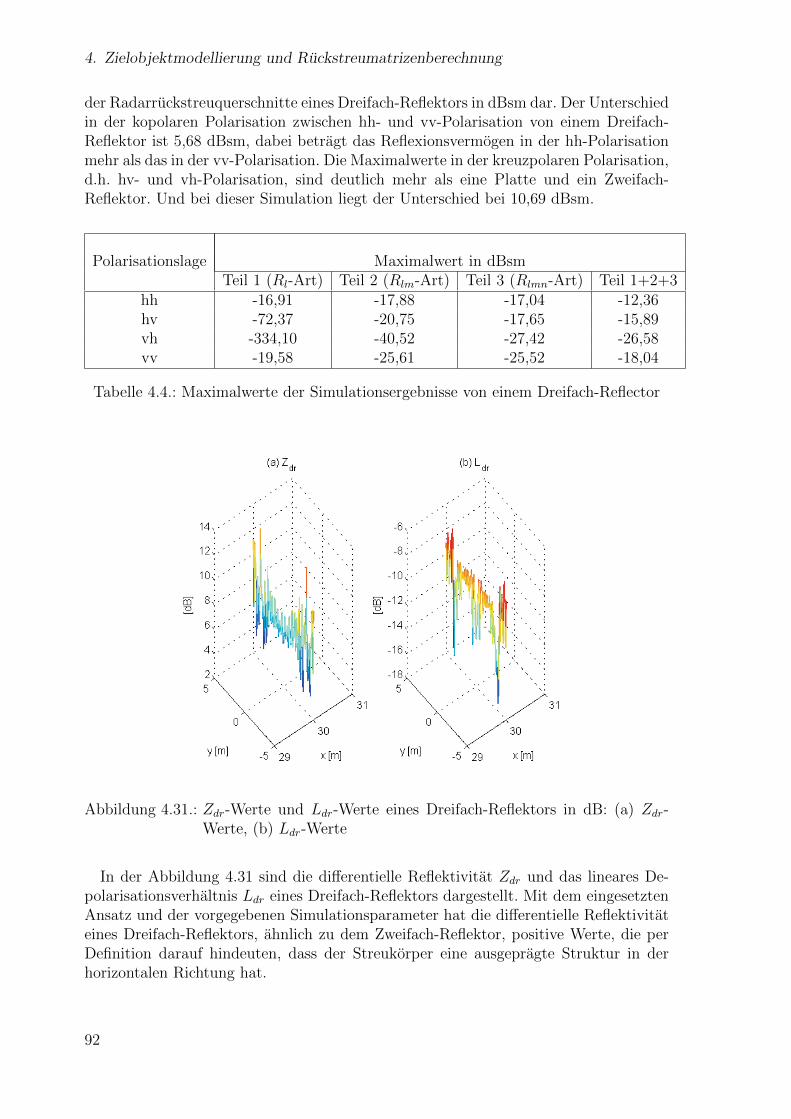
4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
der Radarruckstreuquerschnitte eines Dreifach-Reflektors in dBsm dar. Der Unterschiedin der kopolaren Polarisation zwischen hh- und vv-Polarisation von einem Dreifach-Reflektor ist 5,68 dBsm, dabei betragt das Reflexionsvermogen in der hh-Polarisationmehr als das in der vv-Polarisation. Die Maximalwerte in der kreuzpolaren Polarisation,d.h. hv- und vh-Polarisation, sind deutlich mehr als eine Platte und ein Zweifach-Reflektor. Und bei dieser Simulation liegt der Unterschied bei 10,69 dBsm.
Polarisationslage Maximalwert in dBsmTeil 1 (Rl-Art) Teil 2 (Rlm-Art) Teil 3 (Rlmn-Art) Teil 1+2+3
hh -16,91 -17,88 -17,04 -12,36hv -72,37 -20,75 -17,65 -15,89vh -334,10 -40,52 -27,42 -26,58vv -19,58 -25,61 -25,52 -18,04
Tabelle 4.4.: Maximalwerte der Simulationsergebnisse von einem Dreifach-Reflector
Abbildung 4.31.: Zdr-Werte und Ldr-Werte eines Dreifach-Reflektors in dB: (a) Zdr-Werte, (b) Ldr-Werte
In der Abbildung 4.31 sind die differentielle Reflektivitat Zdr und das lineares De-polarisationsverhaltnis Ldr eines Dreifach-Reflektors dargestellt. Mit dem eingesetztenAnsatz und der vorgegebenen Simulationsparameter hat die differentielle Reflektivitateines Dreifach-Reflektors, ahnlich zu dem Zweifach-Reflektor, positive Werte, die perDefinition darauf hindeuten, dass der Streukorper eine ausgepragte Struktur in derhorizontalen Richtung hat.
92
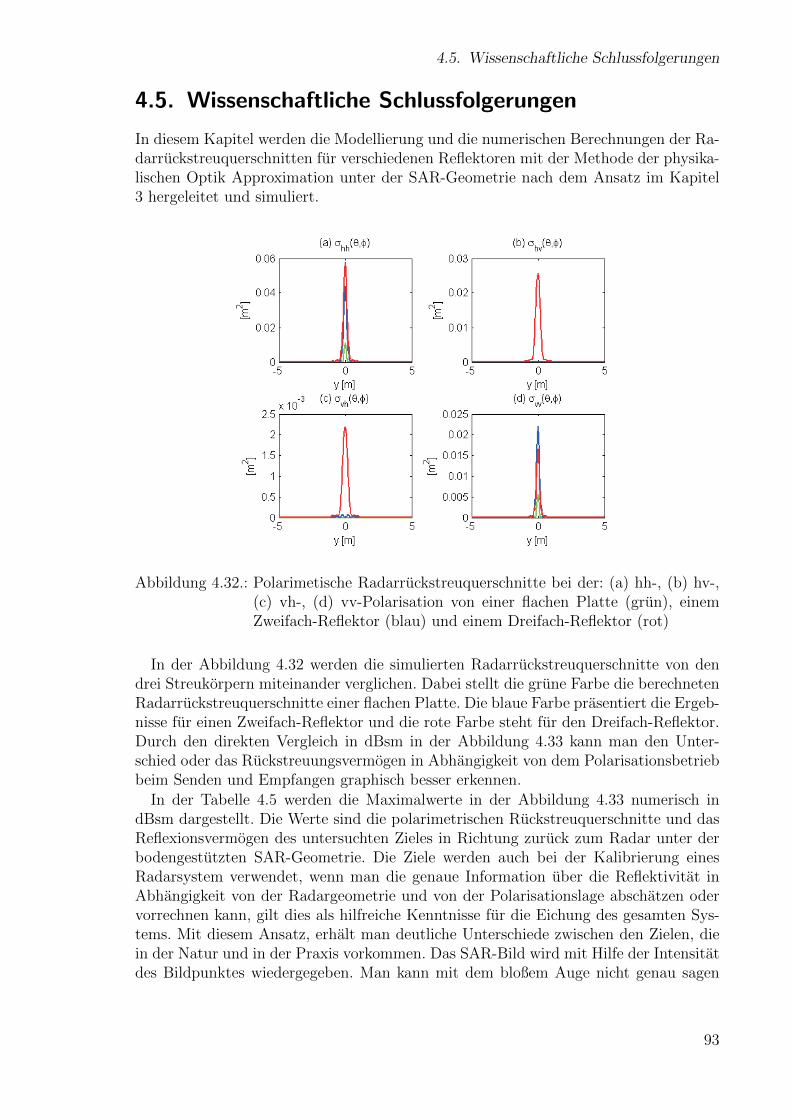
4.5. Wissenschaftliche Schlussfolgerungen
4.5. Wissenschaftliche Schlussfolgerungen
In diesem Kapitel werden die Modellierung und die numerischen Berechnungen der Ra-darruckstreuquerschnitten fur verschiedenen Reflektoren mit der Methode der physika-lischen Optik Approximation unter der SAR-Geometrie nach dem Ansatz im Kapitel3 hergeleitet und simuliert.
Abbildung 4.32.: Polarimetische Radarruckstreuquerschnitte bei der: (a) hh-, (b) hv-,(c) vh-, (d) vv-Polarisation von einer flachen Platte (grun), einemZweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot)
In der Abbildung 4.32 werden die simulierten Radarruckstreuquerschnitte von dendrei Streukorpern miteinander verglichen. Dabei stellt die grune Farbe die berechnetenRadarruckstreuquerschnitte einer flachen Platte. Die blaue Farbe prasentiert die Ergeb-nisse fur einen Zweifach-Reflektor und die rote Farbe steht fur den Dreifach-Reflektor.Durch den direkten Vergleich in dBsm in der Abbildung 4.33 kann man den Unter-schied oder das Ruckstreuungsvermogen in Abhangigkeit von dem Polarisationsbetriebbeim Senden und Empfangen graphisch besser erkennen.
In der Tabelle 4.5 werden die Maximalwerte in der Abbildung 4.33 numerisch indBsm dargestellt. Die Werte sind die polarimetrischen Ruckstreuquerschnitte und dasReflexionsvermogen des untersuchten Zieles in Richtung zuruck zum Radar unter derbodengestutzten SAR-Geometrie. Die Ziele werden auch bei der Kalibrierung einesRadarsystem verwendet, wenn man die genaue Information uber die Reflektivitat inAbhangigkeit von der Radargeometrie und von der Polarisationslage abschatzen odervorrechnen kann, gilt dies als hilfreiche Kenntnisse fur die Eichung des gesamten Sys-tems. Mit diesem Ansatz, erhalt man deutliche Unterschiede zwischen den Zielen, diein der Natur und in der Praxis vorkommen. Das SAR-Bild wird mit Hilfe der Intensitatdes Bildpunktes wiedergegeben. Man kann mit dem bloßem Auge nicht genau sagen
93

4. Zielobjektmodellierung und Ruckstreumatrizenberechnung
Abbildung 4.33.: Polarimetische Radarruckstreuquerschnitte in dBsm bei der: (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation von einer flachen Platte (grun),einem Zweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot),[55]
oder bestimmen, was fur ein Ziel es sein kann. Anhand der unterschiedlichen Maximal-werte aus der Tabelle 4.5 und des Kurvenverlaufs in der Abbildung 4.33 ist man in derLage, die einzelnen Kalibrierungsziele nach der SAR-Datenverarbeitung voneinanderzu unterscheiden und zu bestimmen.
Polarisationslage Maximalwert in dBsmFlache Platte Zweifach-Reflektor Dreifach-Reflektor
hh -19,58 -13,56 -12,36hv -75,97 -37,67 -15,89vh -337,40 -41,87 -26,58vv -22,59 -16,57 -18,04
Tabelle 4.5.: Maximalwerte der Simulationsergebnisse des jeweiligen Zieles
In der Abbildung 4.34 werden die differentielle Reflktivitat Zdr und das lineares De-polarisationsverhaltnis Ldr der drei Streukorpern verglichen, dabei sind die rote Farbefur den Dreifach-Reflektor, die blaue Farbe fur den Zweifach-Reflektor und die gruneFarbe fur eine flache Platte. Die differentielle Reflektivitat Zdr von einer flachen Platteund von einem Zweifach-Reflektor liegen im Bereich von 3 dB und haben eine gera-de Kurve in der Mitte der Simulationsgeometrie. Die differentielle Reflektivitat vondem Dreifach-Reflektor hat einen schwingenden Kurvenverlauf und ist großer als diedifferentielle Reflektivitat von anderen zwei Reflektoren. Daher kann Zdr-Signatur aus
94

4.5. Wissenschaftliche Schlussfolgerungen
Abbildung 4.34.: Zdr-Werte und Ldr-Werte von einer flachen Platte (grun), einemZweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot) in dB:(a) Zdr-Werte, (b) Ldr-Werte
bebauten Gebieten starke Schwankungen aufweisen. Aber bei dem linearen Depola-risationsverhaltnis Ldr sind die Werte von einem Zweifach-Reflektor und von einemDreifach-Reflektor nahe beieinander im Vergleich zu den Werten von einer flachenPlatte.
Die dargestellten Simulationsergebnisse deuten darauf hin, dass die SAR-Geometriegroße Wirkung auf das polarimetrische Ruckstreuungsvermogen eines bestimmten Zie-les hat, weil sich die Richtungen der Wellenausbreitung der einfallenden Welle entlangder Antennenbewegung andauernd andern, verandern sich auch die Richtungen dervektoriellen Feldkomponenten, die als Basis fur die Berechnungen des polarimetrischenRadarruckstreuquerschnittes entsprechend der Polarisationslage im Sende- und Emp-fangsmodus dienen.
Aus den numerischen Berechnungen und den Simulationsergebnissen der polarimetri-schen Radarruckstreuquerschnitte kann man besondere Eigenschaften der kanonischenStreukoper erkennen und diesen Ansatz fur weitere interessante Anwendungen in Ra-darfernerkundung, insbesondere bei der Zielzerlegung, benutzen.
95

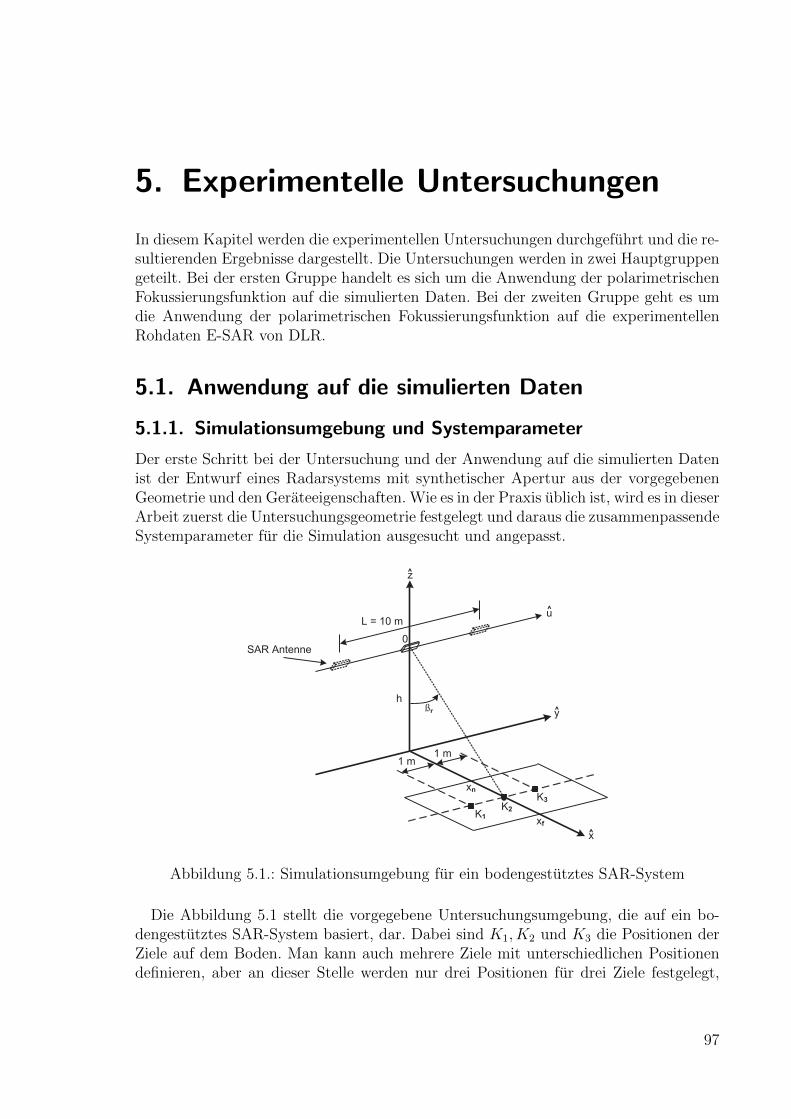
5. Experimentelle Untersuchungen
In diesem Kapitel werden die experimentellen Untersuchungen durchgefuhrt und die re-sultierenden Ergebnisse dargestellt. Die Untersuchungen werden in zwei Hauptgruppengeteilt. Bei der ersten Gruppe handelt es sich um die Anwendung der polarimetrischenFokussierungsfunktion auf die simulierten Daten. Bei der zweiten Gruppe geht es umdie Anwendung der polarimetrischen Fokussierungsfunktion auf die experimentellenRohdaten E-SAR von DLR.
5.1. Anwendung auf die simulierten Daten
5.1.1. Simulationsumgebung und Systemparameter
Der erste Schritt bei der Untersuchung und der Anwendung auf die simulierten Datenist der Entwurf eines Radarsystems mit synthetischer Apertur aus der vorgegebenenGeometrie und den Gerateeigenschaften. Wie es in der Praxis ublich ist, wird es in dieserArbeit zuerst die Untersuchungsgeometrie festgelegt und daraus die zusammenpassendeSystemparameter fur die Simulation ausgesucht und angepasst.
Abbildung 5.1.: Simulationsumgebung fur ein bodengestutztes SAR-System
Die Abbildung 5.1 stellt die vorgegebene Untersuchungsumgebung, die auf ein bo-dengestutztes SAR-System basiert, dar. Dabei sind K1, K2 und K3 die Positionen derZiele auf dem Boden. Man kann auch mehrere Ziele mit unterschiedlichen Positionendefinieren, aber an dieser Stelle werden nur drei Positionen fur drei Ziele festgelegt,
97
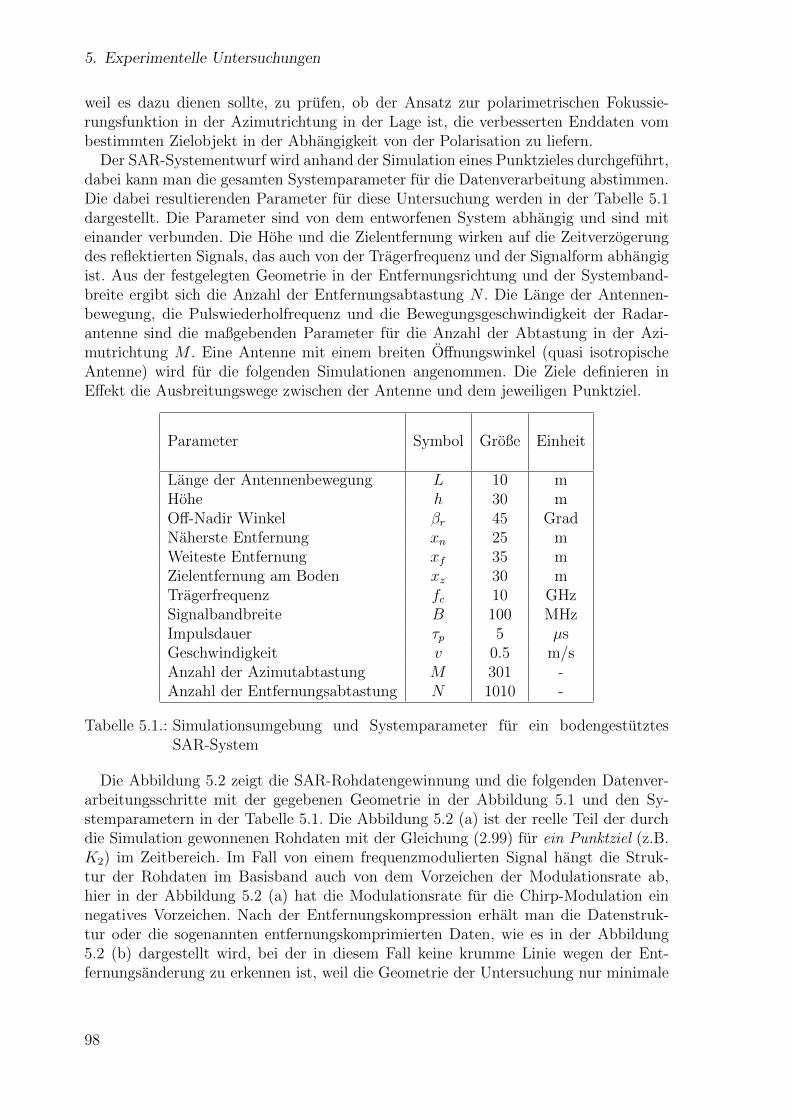
5. Experimentelle Untersuchungen
weil es dazu dienen sollte, zu prufen, ob der Ansatz zur polarimetrischen Fokussie-rungsfunktion in der Azimutrichtung in der Lage ist, die verbesserten Enddaten vombestimmten Zielobjekt in der Abhangigkeit von der Polarisation zu liefern.
Der SAR-Systementwurf wird anhand der Simulation eines Punktzieles durchgefuhrt,dabei kann man die gesamten Systemparameter fur die Datenverarbeitung abstimmen.Die dabei resultierenden Parameter fur diese Untersuchung werden in der Tabelle 5.1dargestellt. Die Parameter sind von dem entworfenen System abhangig und sind miteinander verbunden. Die Hohe und die Zielentfernung wirken auf die Zeitverzogerungdes reflektierten Signals, das auch von der Tragerfrequenz und der Signalform abhangigist. Aus der festgelegten Geometrie in der Entfernungsrichtung und der Systemband-breite ergibt sich die Anzahl der Entfernungsabtastung N . Die Lange der Antennen-bewegung, die Pulswiederholfrequenz und die Bewegungsgeschwindigkeit der Radar-antenne sind die maßgebenden Parameter fur die Anzahl der Abtastung in der Azi-mutrichtung M . Eine Antenne mit einem breiten Offnungswinkel (quasi isotropischeAntenne) wird fur die folgenden Simulationen angenommen. Die Ziele definieren inEffekt die Ausbreitungswege zwischen der Antenne und dem jeweiligen Punktziel.
Parameter Symbol Große Einheit
Lange der Antennenbewegung L 10 mHohe h 30 mOff-Nadir Winkel βr 45 GradNaherste Entfernung xn 25 mWeiteste Entfernung xf 35 mZielentfernung am Boden xz 30 mTragerfrequenz fc 10 GHzSignalbandbreite B 100 MHzImpulsdauer τp 5 µsGeschwindigkeit v 0.5 m/sAnzahl der Azimutabtastung M 301 -Anzahl der Entfernungsabtastung N 1010 -
Tabelle 5.1.: Simulationsumgebung und Systemparameter fur ein bodengestutztesSAR-System
Die Abbildung 5.2 zeigt die SAR-Rohdatengewinnung und die folgenden Datenver-arbeitungsschritte mit der gegebenen Geometrie in der Abbildung 5.1 und den Sy-stemparametern in der Tabelle 5.1. Die Abbildung 5.2 (a) ist der reelle Teil der durchdie Simulation gewonnenen Rohdaten mit der Gleichung (2.99) fur ein Punktziel (z.B.K2) im Zeitbereich. Im Fall von einem frequenzmodulierten Signal hangt die Struk-tur der Rohdaten im Basisband auch von dem Vorzeichen der Modulationsrate ab,hier in der Abbildung 5.2 (a) hat die Modulationsrate fur die Chirp-Modulation einnegatives Vorzeichen. Nach der Entfernungskompression erhalt man die Datenstruk-tur oder die sogenannten entfernungskomprimierten Daten, wie es in der Abbildung5.2 (b) dargestellt wird, bei der in diesem Fall keine krumme Linie wegen der Ent-fernungsanderung zu erkennen ist, weil die Geometrie der Untersuchung nur minimale
98

5.1. Anwendung auf die simulierten Daten
Entfernungsanderung hat. Nach der Azimutkompression ergeben sich die Bilddaten inder Form einer zweidimensionalen Impulsantwort, dabei sind die Abbildung 5.2 (c)eine zweidimensionale Darstellung und die Abbildung 5.2 (d) eine dreidimensionaleDarstellung der Impulsantwort.
Diese Impulsantwort spielt eine wichtige Rolle bei dem Systementwurf, weil es dieInformationen uber die Qualitat des SAR-Bildes, z.B. die geometrische Auflosung unddie Unterdruckung der Nebenzipfel, liefern kann. Je schmaler die Impulsantwort ist,desto besser ist die Auflosung. Zur Verbesserung der Nebenzipfelunterdruckung wirdin der Praxis eine sogenannte Gewichtungsfunktion in die Referenzfunktion eingebaut.Bei diesen Untersuchungen wird es auf die Gewichtungsfunktionen verzichtet, weil es zueiner fehlerhaften Auswertung der polarimetrischen Fokussierungsfunktion gegenuberder normalen Referenzfunktion fuhren kann. Es wird aber in Kauf genommen, dass dieBilddaten hohere Nebenzipfel als die Ergebnisse mit der Gewichtungsfunktion habenkonnen.
Abbildung 5.2.: SAR-Datenverarbeitung mit der gegebenen Geometrie in der Abbil-dung 5.1 und den Systemparameter in der Tabelle 5.1: (a) Rohdaten,(b) Nach der Entfernungskompression, (c) Endergebnis in zweidimen-sionaler Darstellung, (d) Endergebnis in dreidimensionaler Darstellung
In der Abbildung 5.3 werden die Ergebnisse aus der Simulation mit drei Punktzielenbei den Positionen K1, K2 und K3 dargestellt. Im reellen Teil in der Abbildung 5.3(a) ist die Uberlagerung durch die Reflexionen der drei Punktziele zu erkennen, beider die Gleichung (2.100) zur Simulation benutzt wird. In der Abbildung 5.3 (b) istdie entfernungskomprimierten Daten im Zeitbereich. In dieser Untersuchung liegen diePunktziele jeweils mit dem Abstand 1 m voneinander. Aus der Abbildung 5.3 (c) undder Abbildung 5.3 (d) erkennt man die klare Trennung zwischen den Impulsantwortender drei Punktziele in Azimutrichtung.
99
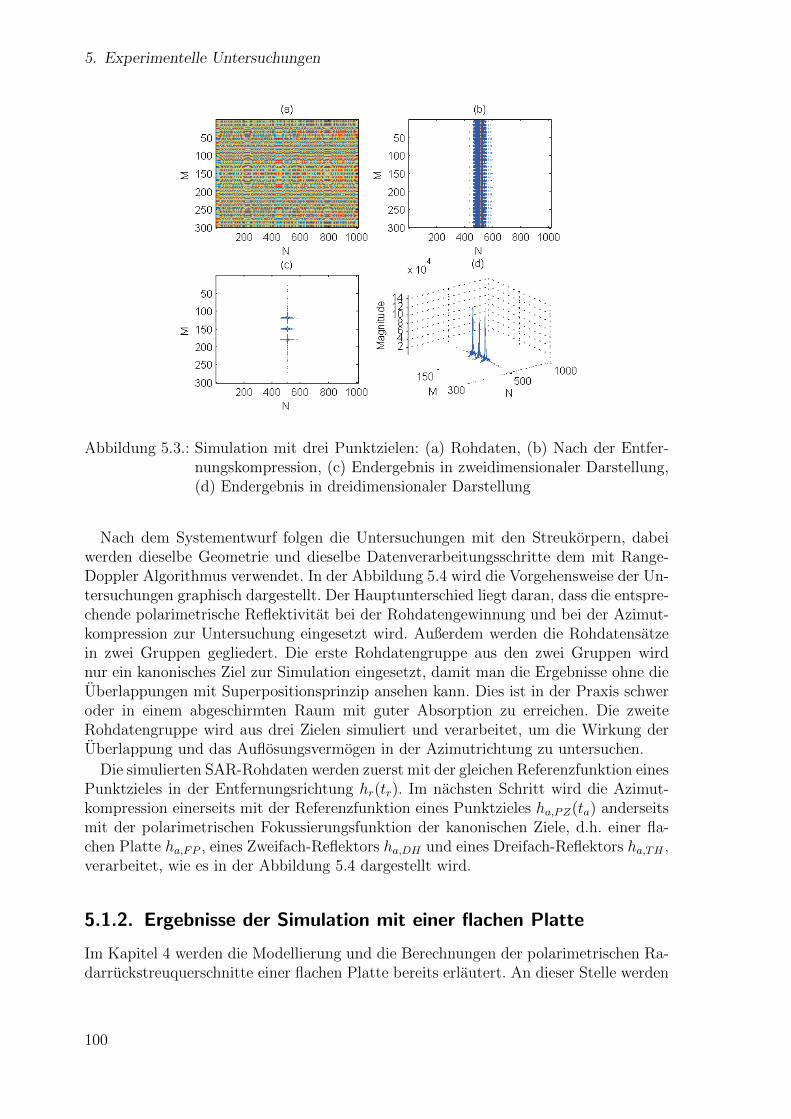
5. Experimentelle Untersuchungen
Abbildung 5.3.: Simulation mit drei Punktzielen: (a) Rohdaten, (b) Nach der Entfer-nungskompression, (c) Endergebnis in zweidimensionaler Darstellung,(d) Endergebnis in dreidimensionaler Darstellung
Nach dem Systementwurf folgen die Untersuchungen mit den Streukorpern, dabeiwerden dieselbe Geometrie und dieselbe Datenverarbeitungsschritte dem mit Range-Doppler Algorithmus verwendet. In der Abbildung 5.4 wird die Vorgehensweise der Un-tersuchungen graphisch dargestellt. Der Hauptunterschied liegt daran, dass die entspre-chende polarimetrische Reflektivitat bei der Rohdatengewinnung und bei der Azimut-kompression zur Untersuchung eingesetzt wird. Außerdem werden die Rohdatensatzein zwei Gruppen gegliedert. Die erste Rohdatengruppe aus den zwei Gruppen wirdnur ein kanonisches Ziel zur Simulation eingesetzt, damit man die Ergebnisse ohne dieUberlappungen mit Superpositionsprinzip ansehen kann. Dies ist in der Praxis schweroder in einem abgeschirmten Raum mit guter Absorption zu erreichen. Die zweiteRohdatengruppe wird aus drei Zielen simuliert und verarbeitet, um die Wirkung derUberlappung und das Auflosungsvermogen in der Azimutrichtung zu untersuchen.
Die simulierten SAR-Rohdaten werden zuerst mit der gleichen Referenzfunktion einesPunktzieles in der Entfernungsrichtung hr(tr). Im nachsten Schritt wird die Azimut-kompression einerseits mit der Referenzfunktion eines Punktzieles ha,PZ(ta) anderseitsmit der polarimetrischen Fokussierungsfunktion der kanonischen Ziele, d.h. einer fla-chen Platte ha,FP , eines Zweifach-Reflektors ha,DH und eines Dreifach-Reflektors ha,TH ,verarbeitet, wie es in der Abbildung 5.4 dargestellt wird.
5.1.2. Ergebnisse der Simulation mit einer flachen Platte
Im Kapitel 4 werden die Modellierung und die Berechnungen der polarimetrischen Ra-darruckstreuquerschnitte einer flachen Platte bereits erlautert. An dieser Stelle werden
100
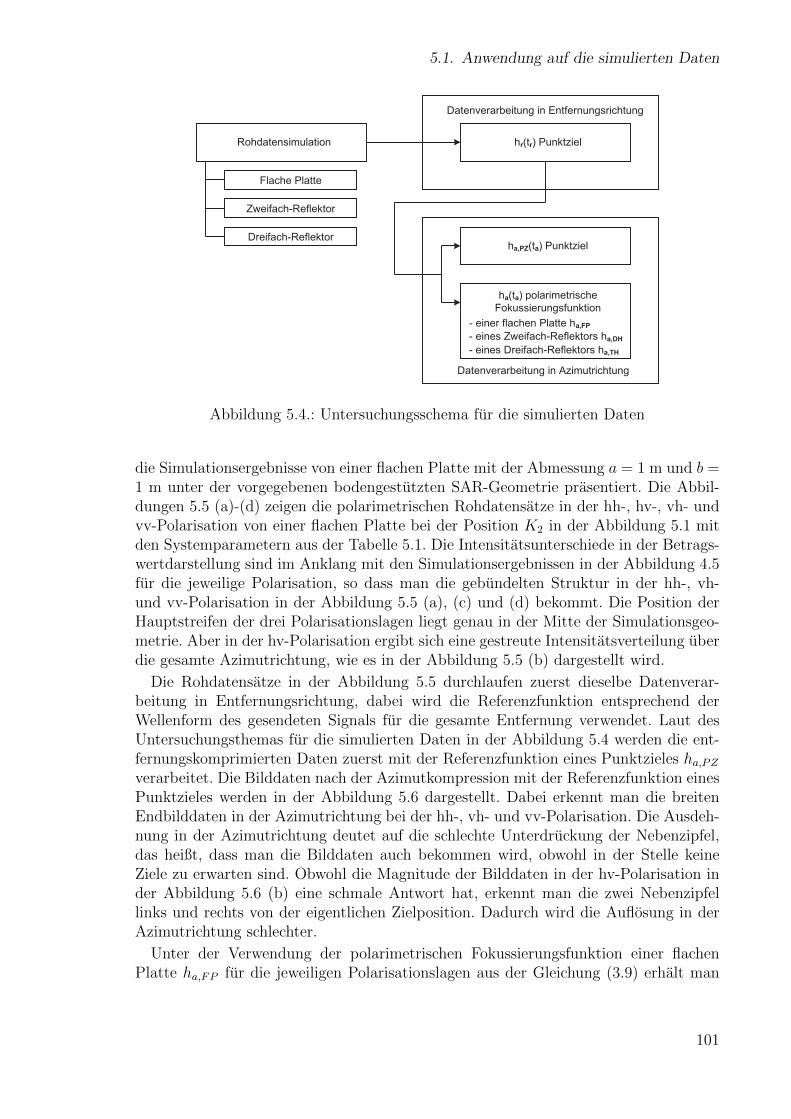
5.1. Anwendung auf die simulierten Daten
Abbildung 5.4.: Untersuchungsschema fur die simulierten Daten
die Simulationsergebnisse von einer flachen Platte mit der Abmessung a = 1 m und b =1 m unter der vorgegebenen bodengestutzten SAR-Geometrie prasentiert. Die Abbil-dungen 5.5 (a)-(d) zeigen die polarimetrischen Rohdatensatze in der hh-, hv-, vh- undvv-Polarisation von einer flachen Platte bei der Position K2 in der Abbildung 5.1 mitden Systemparametern aus der Tabelle 5.1. Die Intensitatsunterschiede in der Betrags-wertdarstellung sind im Anklang mit den Simulationsergebnissen in der Abbildung 4.5fur die jeweilige Polarisation, so dass man die gebundelten Struktur in der hh-, vh-und vv-Polarisation in der Abbildung 5.5 (a), (c) und (d) bekommt. Die Position derHauptstreifen der drei Polarisationslagen liegt genau in der Mitte der Simulationsgeo-metrie. Aber in der hv-Polarisation ergibt sich eine gestreute Intensitatsverteilung uberdie gesamte Azimutrichtung, wie es in der Abbildung 5.5 (b) dargestellt wird.
Die Rohdatensatze in der Abbildung 5.5 durchlaufen zuerst dieselbe Datenverar-beitung in Entfernungsrichtung, dabei wird die Referenzfunktion entsprechend derWellenform des gesendeten Signals fur die gesamte Entfernung verwendet. Laut desUntersuchungsthemas fur die simulierten Daten in der Abbildung 5.4 werden die ent-fernungskomprimierten Daten zuerst mit der Referenzfunktion eines Punktzieles ha,PZverarbeitet. Die Bilddaten nach der Azimutkompression mit der Referenzfunktion einesPunktzieles werden in der Abbildung 5.6 dargestellt. Dabei erkennt man die breitenEndbilddaten in der Azimutrichtung bei der hh-, vh- und vv-Polarisation. Die Ausdeh-nung in der Azimutrichtung deutet auf die schlechte Unterdruckung der Nebenzipfel,das heißt, dass man die Bilddaten auch bekommen wird, obwohl in der Stelle keineZiele zu erwarten sind. Obwohl die Magnitude der Bilddaten in der hv-Polarisation inder Abbildung 5.6 (b) eine schmale Antwort hat, erkennt man die zwei Nebenzipfellinks und rechts von der eigentlichen Zielposition. Dadurch wird die Auflosung in derAzimutrichtung schlechter.
Unter der Verwendung der polarimetrischen Fokussierungsfunktion einer flachenPlatte ha,FP fur die jeweiligen Polarisationslagen aus der Gleichung (3.9) erhalt man
101

5. Experimentelle Untersuchungen
Abbildung 5.5.: Reelle Rohdaten einer flachen Platte mit a = 1 m und b = 1 m in der(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 5.6.:”Magnitude“ der Endergebnisse einer flachen Platte mit der Referenz-
funktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation
102
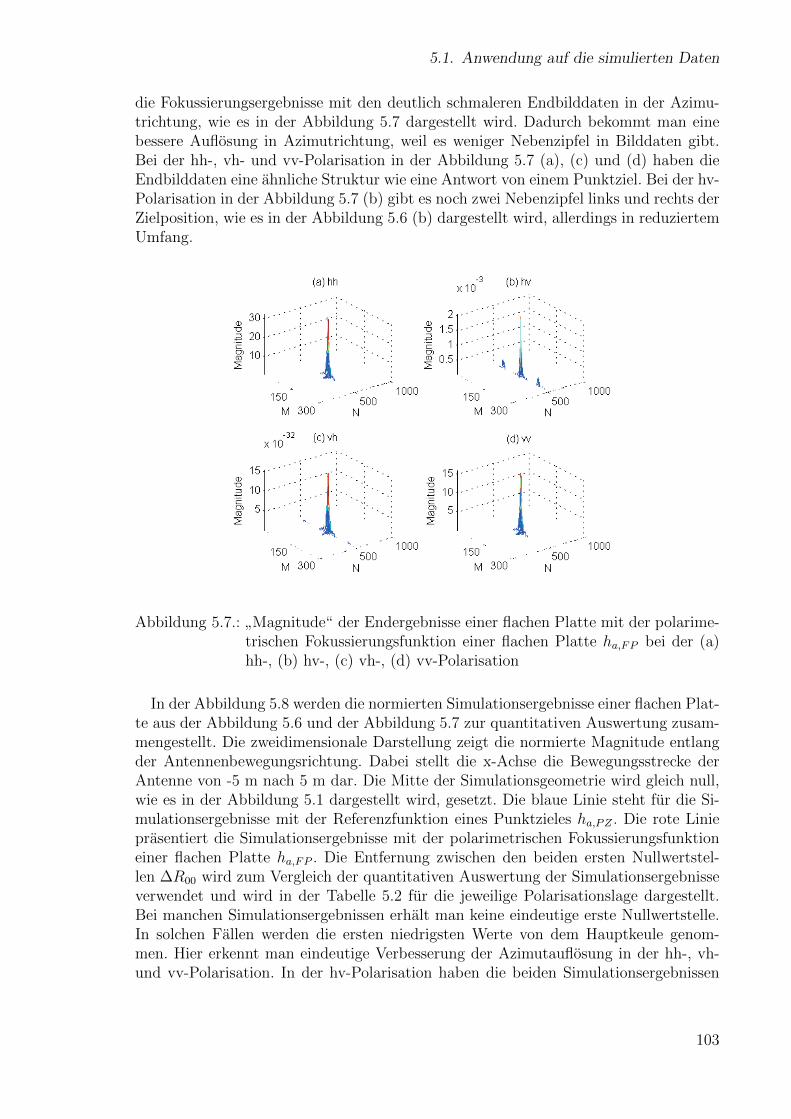
5.1. Anwendung auf die simulierten Daten
die Fokussierungsergebnisse mit den deutlich schmaleren Endbilddaten in der Azimu-trichtung, wie es in der Abbildung 5.7 dargestellt wird. Dadurch bekommt man einebessere Auflosung in Azimutrichtung, weil es weniger Nebenzipfel in Bilddaten gibt.Bei der hh-, vh- und vv-Polarisation in der Abbildung 5.7 (a), (c) und (d) haben dieEndbilddaten eine ahnliche Struktur wie eine Antwort von einem Punktziel. Bei der hv-Polarisation in der Abbildung 5.7 (b) gibt es noch zwei Nebenzipfel links und rechts derZielposition, wie es in der Abbildung 5.6 (b) dargestellt wird, allerdings in reduziertemUmfang.
Abbildung 5.7.:”Magnitude“ der Endergebnisse einer flachen Platte mit der polarime-
trischen Fokussierungsfunktion einer flachen Platte ha,FP bei der (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
In der Abbildung 5.8 werden die normierten Simulationsergebnisse einer flachen Plat-te aus der Abbildung 5.6 und der Abbildung 5.7 zur quantitativen Auswertung zusam-mengestellt. Die zweidimensionale Darstellung zeigt die normierte Magnitude entlangder Antennenbewegungsrichtung. Dabei stellt die x-Achse die Bewegungsstrecke derAntenne von -5 m nach 5 m dar. Die Mitte der Simulationsgeometrie wird gleich null,wie es in der Abbildung 5.1 dargestellt wird, gesetzt. Die blaue Linie steht fur die Si-mulationsergebnisse mit der Referenzfunktion eines Punktzieles ha,PZ . Die rote Linieprasentiert die Simulationsergebnisse mit der polarimetrischen Fokussierungsfunktioneiner flachen Platte ha,FP . Die Entfernung zwischen den beiden ersten Nullwertstel-len ∆R00 wird zum Vergleich der quantitativen Auswertung der Simulationsergebnisseverwendet und wird in der Tabelle 5.2 fur die jeweilige Polarisationslage dargestellt.Bei manchen Simulationsergebnissen erhalt man keine eindeutige erste Nullwertstelle.In solchen Fallen werden die ersten niedrigsten Werte von dem Hauptkeule genom-men. Hier erkennt man eindeutige Verbesserung der Azimutauflosung in der hh-, vh-und vv-Polarisation. In der hv-Polarisation haben die beiden Simulationsergebnissen
103
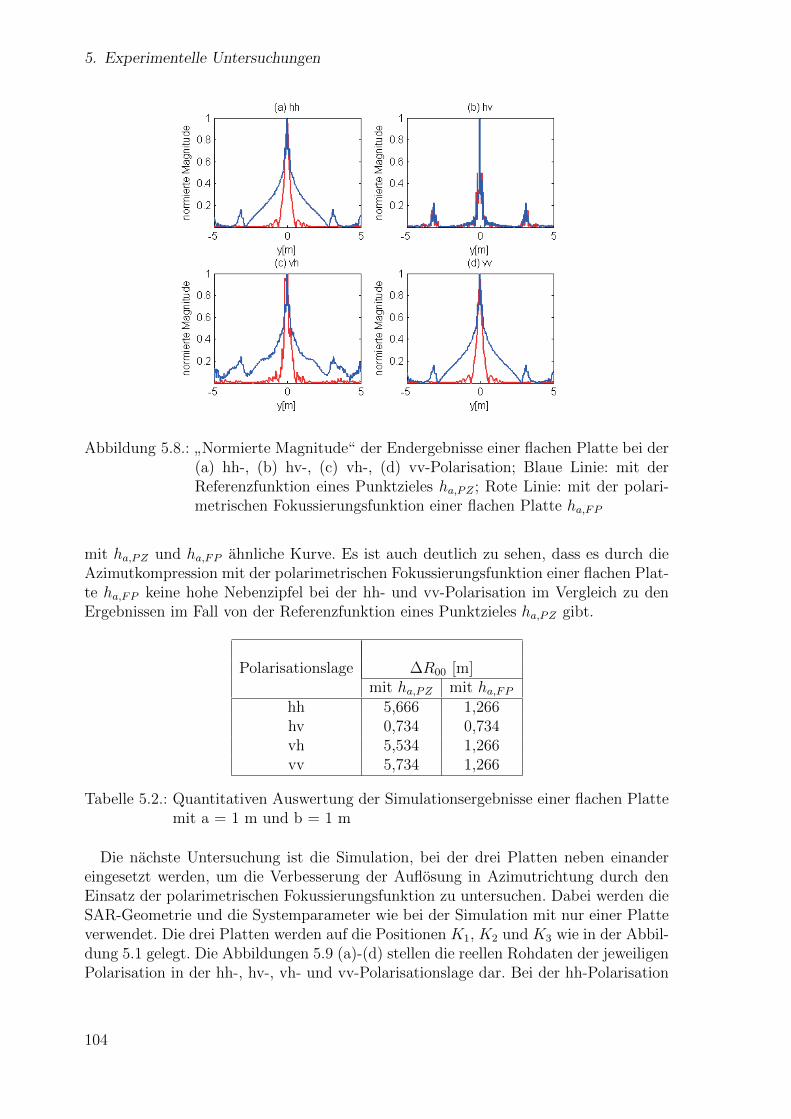
5. Experimentelle Untersuchungen
Abbildung 5.8.:”Normierte Magnitude“ der Endergebnisse einer flachen Platte bei der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polari-metrischen Fokussierungsfunktion einer flachen Platte ha,FP
mit ha,PZ und ha,FP ahnliche Kurve. Es ist auch deutlich zu sehen, dass es durch dieAzimutkompression mit der polarimetrischen Fokussierungsfunktion einer flachen Plat-te ha,FP keine hohe Nebenzipfel bei der hh- und vv-Polarisation im Vergleich zu denErgebnissen im Fall von der Referenzfunktion eines Punktzieles ha,PZ gibt.
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,FP
hh 5,666 1,266hv 0,734 0,734vh 5,534 1,266vv 5,734 1,266
Tabelle 5.2.: Quantitativen Auswertung der Simulationsergebnisse einer flachen Plattemit a = 1 m und b = 1 m
Die nachste Untersuchung ist die Simulation, bei der drei Platten neben einandereingesetzt werden, um die Verbesserung der Auflosung in Azimutrichtung durch denEinsatz der polarimetrischen Fokussierungsfunktion zu untersuchen. Dabei werden dieSAR-Geometrie und die Systemparameter wie bei der Simulation mit nur einer Platteverwendet. Die drei Platten werden auf die Positionen K1, K2 und K3 wie in der Abbil-dung 5.1 gelegt. Die Abbildungen 5.9 (a)-(d) stellen die reellen Rohdaten der jeweiligenPolarisation in der hh-, hv-, vh- und vv-Polarisationslage dar. Bei der hh-Polarisation
104

5.1. Anwendung auf die simulierten Daten
in der Abbildung 5.9 (a) gibt es drei Hauptstreifen entsprechend der Zielposition. Die-selben Strukturen gibt es auch in der vh- und vv-Polarisation in der Abbildung 5.9 (c)und (d). In der hv-Polarisation bekommt man eine gestreute Intensitatsverteilung wiein der Abbildung 5.5 (b), dabei kann man die Uberlagerung in der Abbildung 5.9 (b)durch mehrere Ziele erkennen.
Abbildung 5.9.: Reelle Rohdaten von drei flachen Platten mit a = 1 m und b = 1 m inder (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Bei der Simulation mit den drei Platten werden die Untersuchungen nach der Entfer-nungskompression einerseits durch die Referenzfunktion eines Punktzieles andererseitsdurch die polarimetrische Fokussierungsfunktion einer flachen Platte durchgefuhrt. DieAbbildung 5.10 prasentiert die Endbilddaten nach der Faltung mit der Referenzfunk-tion eines Punktzieles. In den vier Polarisationslagen kann man die Stelle, bei der dieMagnituden am starksten sind, noch erkennen. Aber dabei gibt es auch breite Neben-zipfel in der Azimutrichtung. Diese sind eindeutig mehr als im Fall von nur einer Platteund fuhren zu der schlechteren Auflosung in der Azimutrichtung.
Die Abbildung 5.11 zeigt die Endbilddaten nach der Verarbeitung in der Azimutrich-tung mit der polarimetrischen Fokussierungsfunktion einer flachen Platte. Man kanndeutlich erkennen, dass die Enddatenstrukturen bessere Auflosung in Azimutrichtungim Vergleich zu den Ergebnissen in der Abbildung 5.10 in jeder Polarisationslage haben.
Die Abbildung 5.12 prasentiert die normierten Simulationsergebnisse von drei fla-chen Platten aus der Abbildung 5.10 und der Abbildung 5.11. Die rote Linie prasentiertdie Simulationsergebnisse mit der polarimetrischen Fokussierungsfunktion einer flachenPlatte ha,FP . Die blaue Linie steht fur die Simulationsergebnisse mit der Referenzfunk-tion eines Punktzieles ha,PZ . Hier wird die Entfernung zwischen den beiden erstenNullwertstellen ∆R00 oder den niedrigsten Werten der Hauptkeule in der Mitte derSimulationsgeometrie in der Abbildung 5.1 zum Vergleich der quantitativen Auswer-
105

5. Experimentelle Untersuchungen
Abbildung 5.10.:”Magnitude“ der Endergebnisse von drei flachen Platten mit der Re-
ferenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
Abbildung 5.11.:”Magnitude“ der Endergebnisse von drei flache Platten mit der pola-
rimetrischen Fokussierungsfunktion einer flachen Platte ha,FP bei der(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
106

5.1. Anwendung auf die simulierten Daten
Abbildung 5.12.:”Normierte Magnitude“ der Endergebnisse von drei flachen Platten
bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie:mit der Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit derpolarimetrischen Fokussierungsfunktion einer flachen Platte ha,FP
tung der Simulationsergebnisse verwendet. Die resultierenden Entfernungen ∆R00 inder jeweiligen Polarisationslage werden in der Tabelle 5.3 dargestellt.
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,FP
hh 1,534 0,8hv 0,466 0,466vh 1,666 0,666vv 1,666 0,866
Tabelle 5.3.: Quantitativen Auswertung der Simulationsergebnisse von drei flachen fla-chen Platte mit a = 1 m und b = 1 m
Durch die zweidimensionale Darstellung der Simulationsergebnisse in der Abbildung5.12 erkennt man die breite Verteilung der Magnitude nach der Azimutkompression mitder Referenzfunktion eines Punktzieles in hh-, vh- und vv-Polarisation. Dadurch kannes keine eindeutige Bestimmung der Zielposition gemacht werden, weil die Uberlagerungder Seitenkeulen hoch ist. Die Verbesserung der Eindeutigkeit erhalt man durch denEinsatz der polarimetrischen Fokussierungsfunktion. Man erhalt genau die drei Haupt-keulen in der vorgegebenen Position.
Diese Untersuchungen belegen, dass kanonischer Streuer mit Hilfe der Polarisations-eigenschaften besser fokussiert werden kann.
107

5. Experimentelle Untersuchungen
5.1.3. Ergebnisse der Simulation mit einem Zweifach-Reflektor
In diesem Abschnitt werden die Ergebnisse der Simulation mit einem Zweifach-Reflektordargestellt. Bei dieser Untersuchung mit einem Zweifach-Reflektor werden ebenfalls diebodengestutzte SAR-Geometrie in der Abbildung 5.1 und die Systemparameter in derTabelle 5.1 verwendet. Die Geometrie des Zweifach-Reflektors entspricht der Abbildung4.9, dabei werden der Parameter a = 1 m und der Parameter b = 1 m gesetzt.
Abbildung 5.13.: Reelle Rohdaten eines Zweifach-Reflektors mit a = 1 m und b = 1 min der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Die Abbildung 5.13 prasentiert die simulierten Rohdatensatze von einem Zweifach-Reflektor in der hh-, hv-, vh- und vv-Polarisation. Man erkennt die Unterschiede vonden Rohdaten einer flachen Platte in der Abbildung 5.5, insbesondere bei der hv-und vh-Polarisation. Der Grund fur diese Unterschiede liegt bei der polarimetrischenEigenschaft des eingesetzten Reflektors. Die Rohdatenstrukturen in der Abbildung 5.13spiegelt sich von den Ruckstreuquerschnitten in der Abbildung 4.17.
In der Abbildung 5.14 (a)-(d) werden die Bilddaten aus den Rohdaten in der Abbil-dung 5.13 nach der Azimutkompression, bei der die Referenzfunktion eines Punktzielesha,PZ eingesetzt wird, je nach der Polarisationslage dargestellt. Bei der hh- und vv-Polarisation in der Abbildung 5.14 (a) und in der Abbildung 5.14 (d) erkennt maneine breite Bilddatenstruktur in der Azimutrichtung. Im Gegensatz dazu erhalt maneine schmalere Struktur bei der hv- Polarisation in der Abbildung 5.14 (b) und bei dervh-Polarisation in der Abbildung 5.14 (c), dabei gibt es aber große Nebenzipfel linksund rechts der Hauptkeule.
Die polarimetrische Fokussierungsfunktion eines Zweifach-Reflektors ha,DH wird alsnachstes bei der Azimutkompression eingesetzt und die resultierenden Ergebnisse wer-den in der Abbildung 5.15 prasentiert. Man kann eine Verbesserung der Auflosung inder Azimutrichtung deutlich erkennen. In jeden Polarisationslagen bekommt man eine
108

5.1. Anwendung auf die simulierten Daten
Abbildung 5.14.:”Magnitude“ der Endergebnisse eines Zweifach-Reflektors mit der Re-
ferenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation
Abbildung 5.15.:”Magnitude“ der Endergebnisse eines Zweifach-Reflektors mit der po-
larimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DHbei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
109
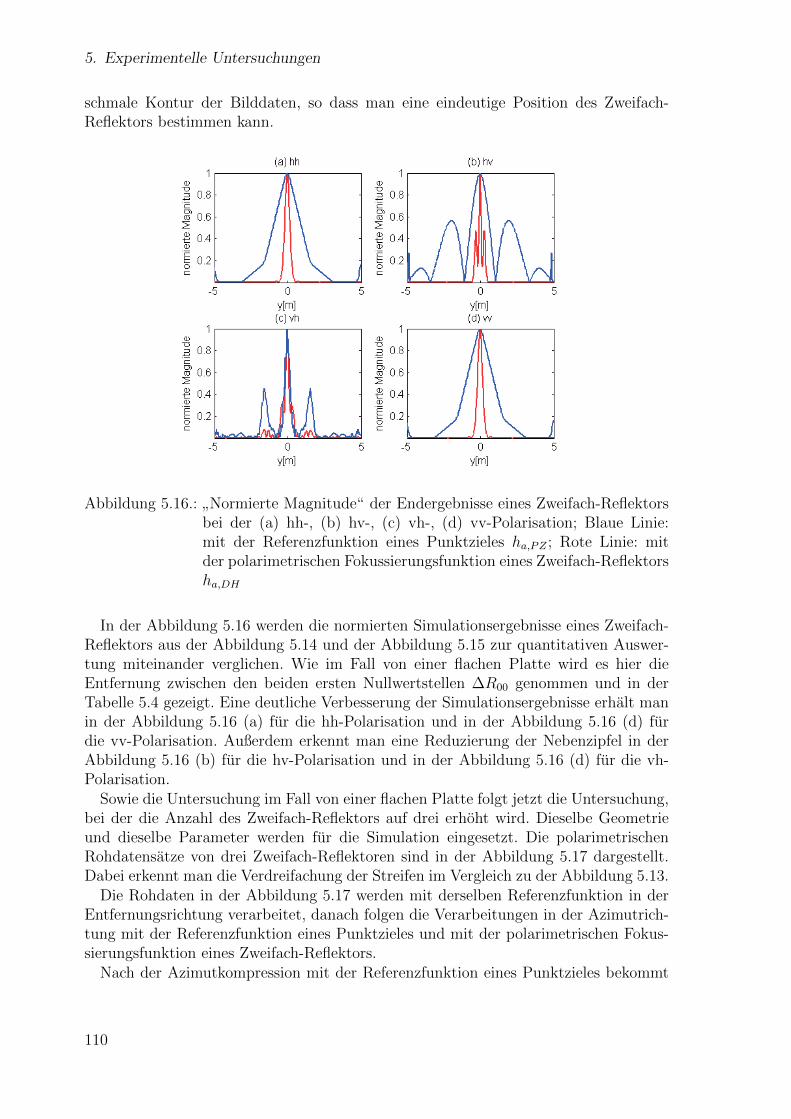
5. Experimentelle Untersuchungen
schmale Kontur der Bilddaten, so dass man eine eindeutige Position des Zweifach-Reflektors bestimmen kann.
Abbildung 5.16.:”Normierte Magnitude“ der Endergebnisse eines Zweifach-Reflektors
bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie:mit der Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mitder polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektorsha,DH
In der Abbildung 5.16 werden die normierten Simulationsergebnisse eines Zweifach-Reflektors aus der Abbildung 5.14 und der Abbildung 5.15 zur quantitativen Auswer-tung miteinander verglichen. Wie im Fall von einer flachen Platte wird es hier dieEntfernung zwischen den beiden ersten Nullwertstellen ∆R00 genommen und in derTabelle 5.4 gezeigt. Eine deutliche Verbesserung der Simulationsergebnisse erhalt manin der Abbildung 5.16 (a) fur die hh-Polarisation und in der Abbildung 5.16 (d) furdie vv-Polarisation. Außerdem erkennt man eine Reduzierung der Nebenzipfel in derAbbildung 5.16 (b) fur die hv-Polarisation und in der Abbildung 5.16 (d) fur die vh-Polarisation.
Sowie die Untersuchung im Fall von einer flachen Platte folgt jetzt die Untersuchung,bei der die Anzahl des Zweifach-Reflektors auf drei erhoht wird. Dieselbe Geometrieund dieselbe Parameter werden fur die Simulation eingesetzt. Die polarimetrischenRohdatensatze von drei Zweifach-Reflektoren sind in der Abbildung 5.17 dargestellt.Dabei erkennt man die Verdreifachung der Streifen im Vergleich zu der Abbildung 5.13.
Die Rohdaten in der Abbildung 5.17 werden mit derselben Referenzfunktion in derEntfernungsrichtung verarbeitet, danach folgen die Verarbeitungen in der Azimutrich-tung mit der Referenzfunktion eines Punktzieles und mit der polarimetrischen Fokus-sierungsfunktion eines Zweifach-Reflektors.
Nach der Azimutkompression mit der Referenzfunktion eines Punktzieles bekommt
110

5.1. Anwendung auf die simulierten Daten
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,DH
hh 6,066 1,2hv 2,066 0,266vh 1,066 0,466vv 6,066 1,134
Tabelle 5.4.: Quantitativen Auswertung der Simulationsergebnisse eines Zweifach-Reflektors mit a = 1 m und b = 1 m
Abbildung 5.17.: Reelle Rohdaten von drei Zweifach-Reflektoren mit a = 1 m und b =1 m in der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
111
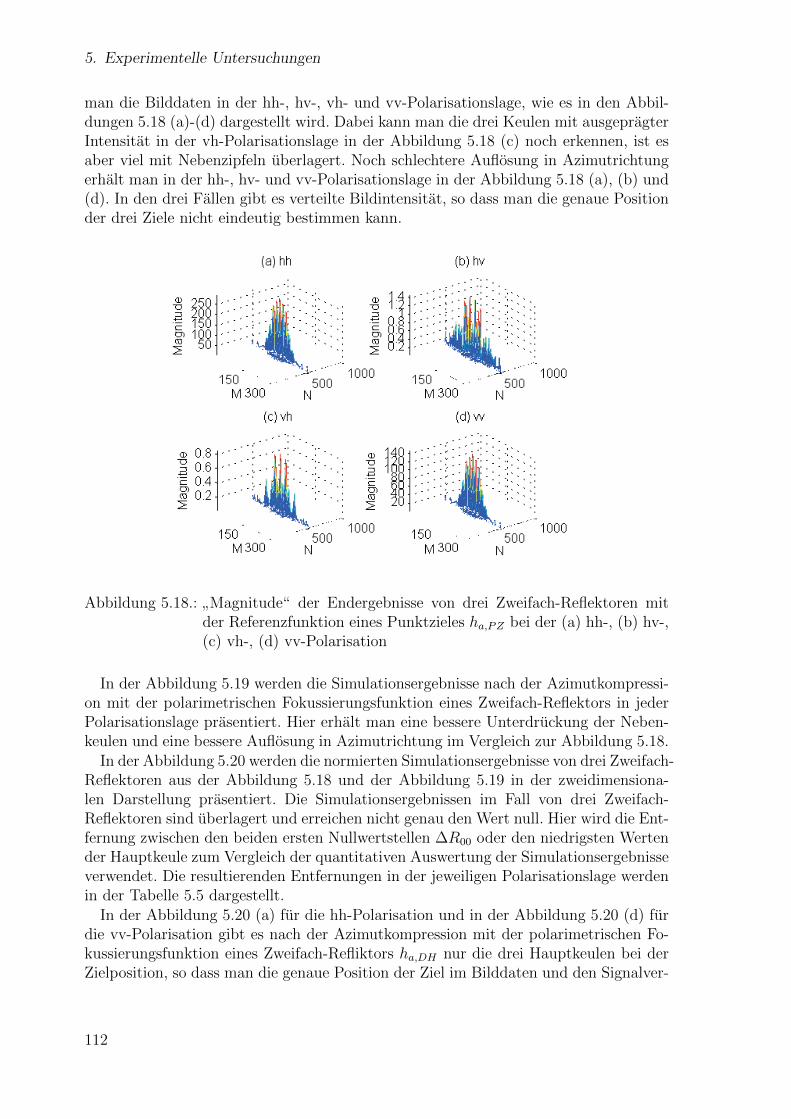
5. Experimentelle Untersuchungen
man die Bilddaten in der hh-, hv-, vh- und vv-Polarisationslage, wie es in den Abbil-dungen 5.18 (a)-(d) dargestellt wird. Dabei kann man die drei Keulen mit ausgepragterIntensitat in der vh-Polarisationslage in der Abbildung 5.18 (c) noch erkennen, ist esaber viel mit Nebenzipfeln uberlagert. Noch schlechtere Auflosung in Azimutrichtungerhalt man in der hh-, hv- und vv-Polarisationslage in der Abbildung 5.18 (a), (b) und(d). In den drei Fallen gibt es verteilte Bildintensitat, so dass man die genaue Positionder drei Ziele nicht eindeutig bestimmen kann.
Abbildung 5.18.:”Magnitude“ der Endergebnisse von drei Zweifach-Reflektoren mit
der Referenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-,(c) vh-, (d) vv-Polarisation
In der Abbildung 5.19 werden die Simulationsergebnisse nach der Azimutkompressi-on mit der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektors in jederPolarisationslage prasentiert. Hier erhalt man eine bessere Unterdruckung der Neben-keulen und eine bessere Auflosung in Azimutrichtung im Vergleich zur Abbildung 5.18.
In der Abbildung 5.20 werden die normierten Simulationsergebnisse von drei Zweifach-Reflektoren aus der Abbildung 5.18 und der Abbildung 5.19 in der zweidimensiona-len Darstellung prasentiert. Die Simulationsergebnissen im Fall von drei Zweifach-Reflektoren sind uberlagert und erreichen nicht genau den Wert null. Hier wird die Ent-fernung zwischen den beiden ersten Nullwertstellen ∆R00 oder den niedrigsten Wertender Hauptkeule zum Vergleich der quantitativen Auswertung der Simulationsergebnisseverwendet. Die resultierenden Entfernungen in der jeweiligen Polarisationslage werdenin der Tabelle 5.5 dargestellt.
In der Abbildung 5.20 (a) fur die hh-Polarisation und in der Abbildung 5.20 (d) furdie vv-Polarisation gibt es nach der Azimutkompression mit der polarimetrischen Fo-kussierungsfunktion eines Zweifach-Refliktors ha,DH nur die drei Hauptkeulen bei derZielposition, so dass man die genaue Position der Ziel im Bilddaten und den Signalver-
112
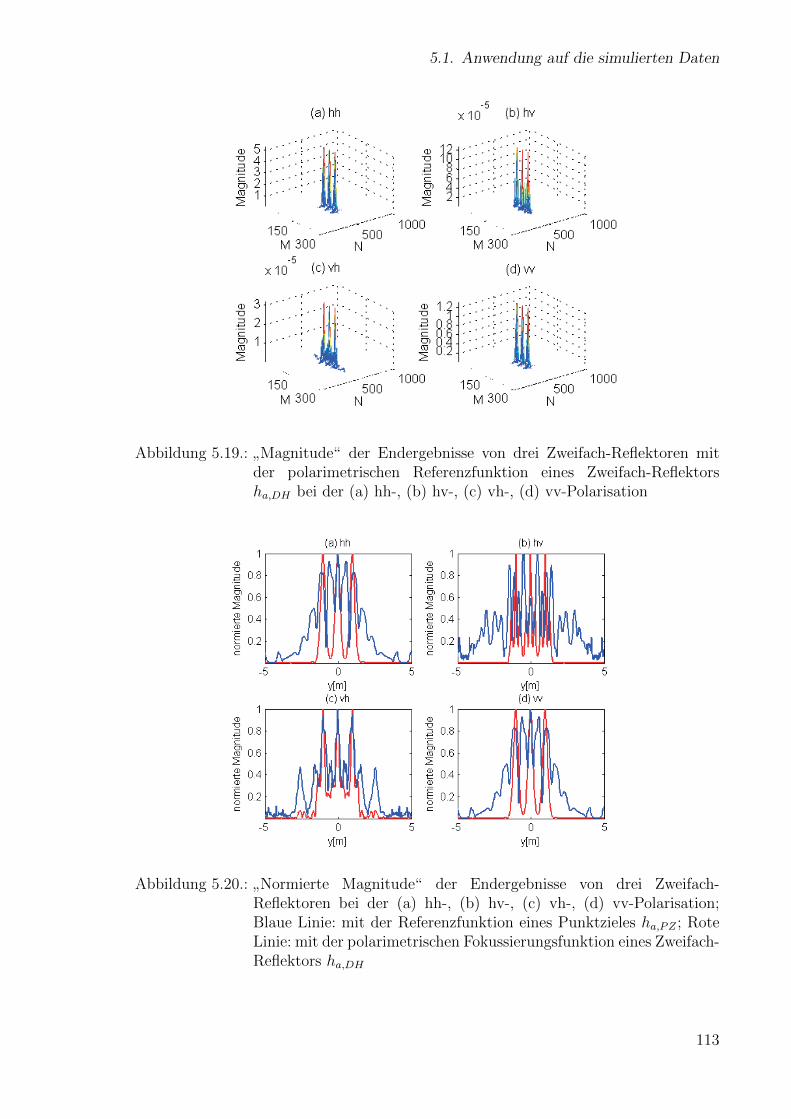
5.1. Anwendung auf die simulierten Daten
Abbildung 5.19.:”Magnitude“ der Endergebnisse von drei Zweifach-Reflektoren mit
der polarimetrischen Referenzfunktion eines Zweifach-Reflektorsha,DH bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 5.20.:”Normierte Magnitude“ der Endergebnisse von drei Zweifach-
Reflektoren bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation;Blaue Linie: mit der Referenzfunktion eines Punktzieles ha,PZ ; RoteLinie: mit der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH
113
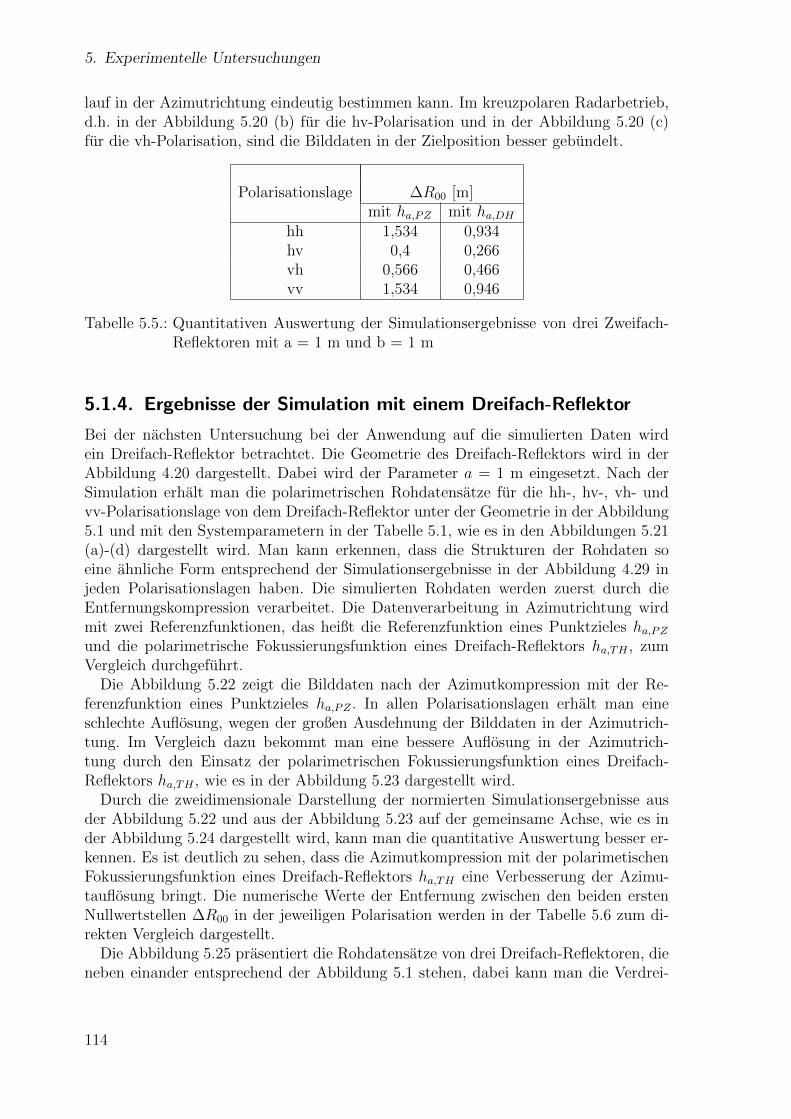
5. Experimentelle Untersuchungen
lauf in der Azimutrichtung eindeutig bestimmen kann. Im kreuzpolaren Radarbetrieb,d.h. in der Abbildung 5.20 (b) fur die hv-Polarisation und in der Abbildung 5.20 (c)fur die vh-Polarisation, sind die Bilddaten in der Zielposition besser gebundelt.
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,DH
hh 1,534 0,934hv 0,4 0,266vh 0,566 0,466vv 1,534 0,946
Tabelle 5.5.: Quantitativen Auswertung der Simulationsergebnisse von drei Zweifach-Reflektoren mit a = 1 m und b = 1 m
5.1.4. Ergebnisse der Simulation mit einem Dreifach-Reflektor
Bei der nachsten Untersuchung bei der Anwendung auf die simulierten Daten wirdein Dreifach-Reflektor betrachtet. Die Geometrie des Dreifach-Reflektors wird in derAbbildung 4.20 dargestellt. Dabei wird der Parameter a = 1 m eingesetzt. Nach derSimulation erhalt man die polarimetrischen Rohdatensatze fur die hh-, hv-, vh- undvv-Polarisationslage von dem Dreifach-Reflektor unter der Geometrie in der Abbildung5.1 und mit den Systemparametern in der Tabelle 5.1, wie es in den Abbildungen 5.21(a)-(d) dargestellt wird. Man kann erkennen, dass die Strukturen der Rohdaten soeine ahnliche Form entsprechend der Simulationsergebnisse in der Abbildung 4.29 injeden Polarisationslagen haben. Die simulierten Rohdaten werden zuerst durch dieEntfernungskompression verarbeitet. Die Datenverarbeitung in Azimutrichtung wirdmit zwei Referenzfunktionen, das heißt die Referenzfunktion eines Punktzieles ha,PZund die polarimetrische Fokussierungsfunktion eines Dreifach-Reflektors ha,TH , zumVergleich durchgefuhrt.
Die Abbildung 5.22 zeigt die Bilddaten nach der Azimutkompression mit der Re-ferenzfunktion eines Punktzieles ha,PZ . In allen Polarisationslagen erhalt man eineschlechte Auflosung, wegen der großen Ausdehnung der Bilddaten in der Azimutrich-tung. Im Vergleich dazu bekommt man eine bessere Auflosung in der Azimutrich-tung durch den Einsatz der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH , wie es in der Abbildung 5.23 dargestellt wird.
Durch die zweidimensionale Darstellung der normierten Simulationsergebnisse ausder Abbildung 5.22 und aus der Abbildung 5.23 auf der gemeinsame Achse, wie es inder Abbildung 5.24 dargestellt wird, kann man die quantitative Auswertung besser er-kennen. Es ist deutlich zu sehen, dass die Azimutkompression mit der polarimetischenFokussierungsfunktion eines Dreifach-Reflektors ha,TH eine Verbesserung der Azimu-tauflosung bringt. Die numerische Werte der Entfernung zwischen den beiden erstenNullwertstellen ∆R00 in der jeweiligen Polarisation werden in der Tabelle 5.6 zum di-rekten Vergleich dargestellt.
Die Abbildung 5.25 prasentiert die Rohdatensatze von drei Dreifach-Reflektoren, dieneben einander entsprechend der Abbildung 5.1 stehen, dabei kann man die Verdrei-
114

5.1. Anwendung auf die simulierten Daten
Abbildung 5.21.: Reelle Rohdaten eines Dreifach-Reflektors mit a = 1 m in der (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 5.22.:”Magnitude“ der Endergebnisse eines Dreifach-Reflektors mit der Re-
ferenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation
115

5. Experimentelle Untersuchungen
Abbildung 5.23.:”Magnitude“ der Endergebnisse eines Dreifach-Reflektors mit der po-
larimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,THbei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 5.24.:”Normierte Magnitude“ der Endergebnisse eines Dreifach-Reflektors
bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie:mit der Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mitder polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektorsha,TH
116
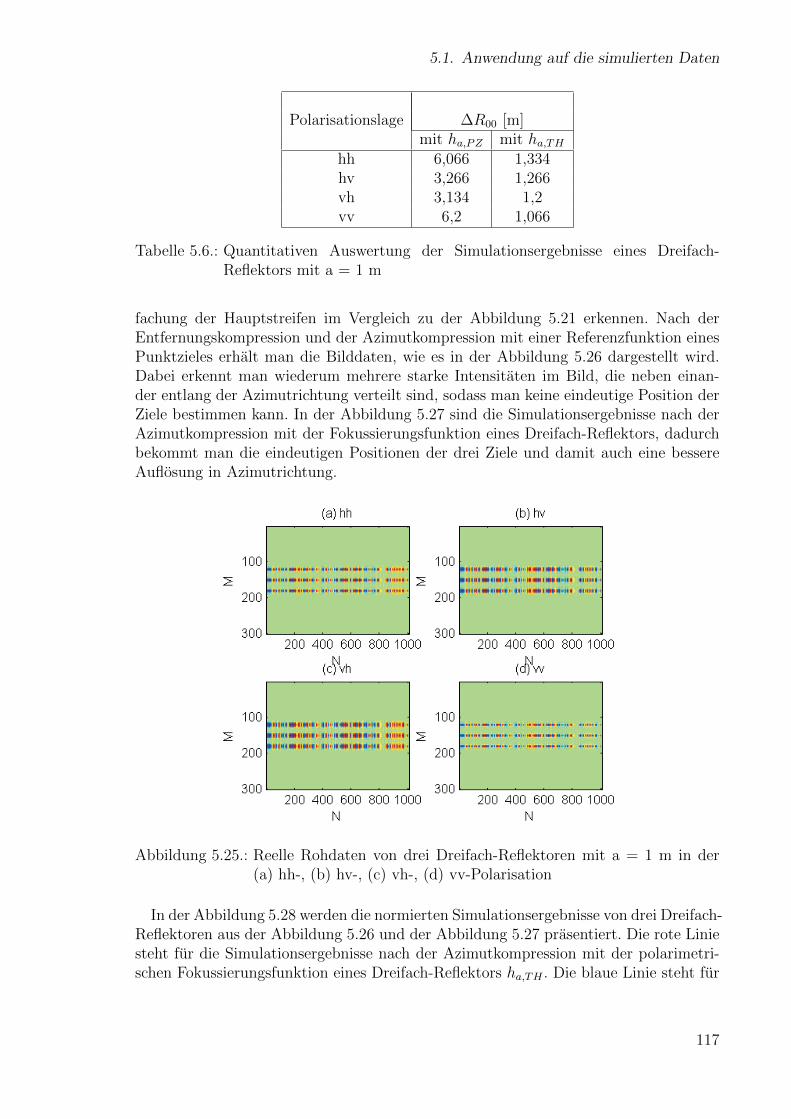
5.1. Anwendung auf die simulierten Daten
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,TH
hh 6,066 1,334hv 3,266 1,266vh 3,134 1,2vv 6,2 1,066
Tabelle 5.6.: Quantitativen Auswertung der Simulationsergebnisse eines Dreifach-Reflektors mit a = 1 m
fachung der Hauptstreifen im Vergleich zu der Abbildung 5.21 erkennen. Nach derEntfernungskompression und der Azimutkompression mit einer Referenzfunktion einesPunktzieles erhalt man die Bilddaten, wie es in der Abbildung 5.26 dargestellt wird.Dabei erkennt man wiederum mehrere starke Intensitaten im Bild, die neben einan-der entlang der Azimutrichtung verteilt sind, sodass man keine eindeutige Position derZiele bestimmen kann. In der Abbildung 5.27 sind die Simulationsergebnisse nach derAzimutkompression mit der Fokussierungsfunktion eines Dreifach-Reflektors, dadurchbekommt man die eindeutigen Positionen der drei Ziele und damit auch eine bessereAuflosung in Azimutrichtung.
Abbildung 5.25.: Reelle Rohdaten von drei Dreifach-Reflektoren mit a = 1 m in der(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
In der Abbildung 5.28 werden die normierten Simulationsergebnisse von drei Dreifach-Reflektoren aus der Abbildung 5.26 und der Abbildung 5.27 prasentiert. Die rote Liniesteht fur die Simulationsergebnisse nach der Azimutkompression mit der polarimetri-schen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH . Die blaue Linie steht fur
117
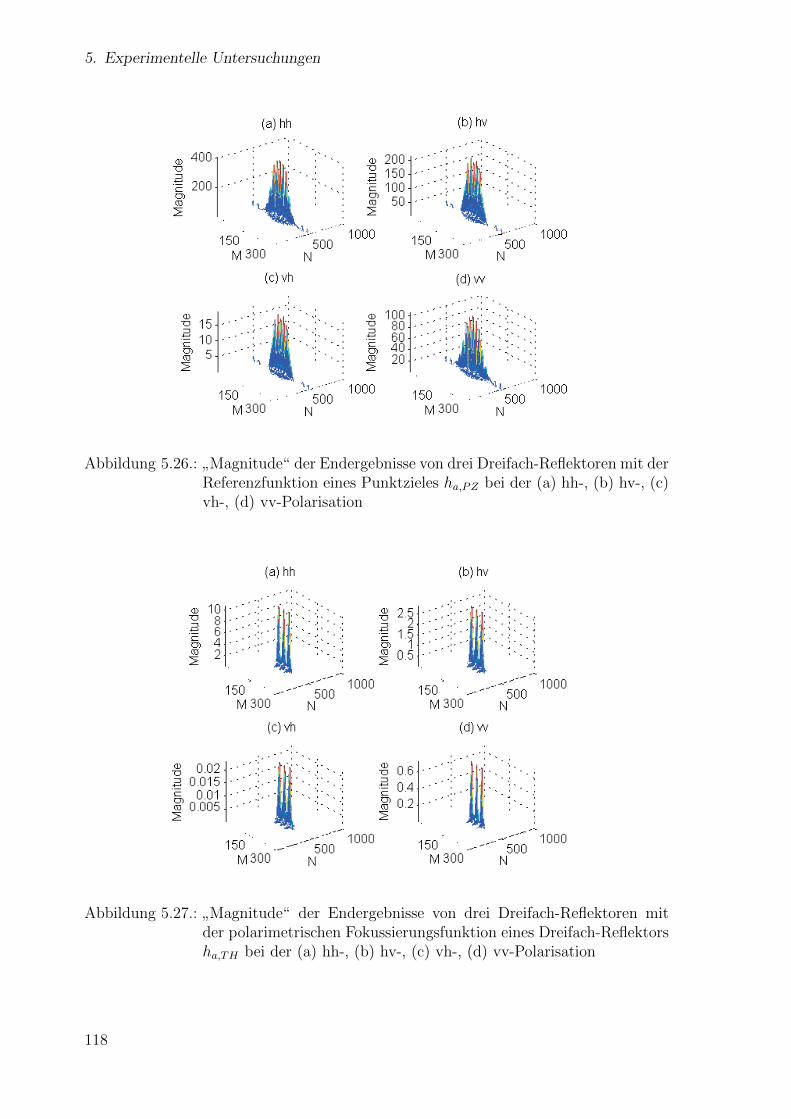
5. Experimentelle Untersuchungen
Abbildung 5.26.:”Magnitude“ der Endergebnisse von drei Dreifach-Reflektoren mit der
Referenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation
Abbildung 5.27.:”Magnitude“ der Endergebnisse von drei Dreifach-Reflektoren mit
der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektorsha,TH bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
118
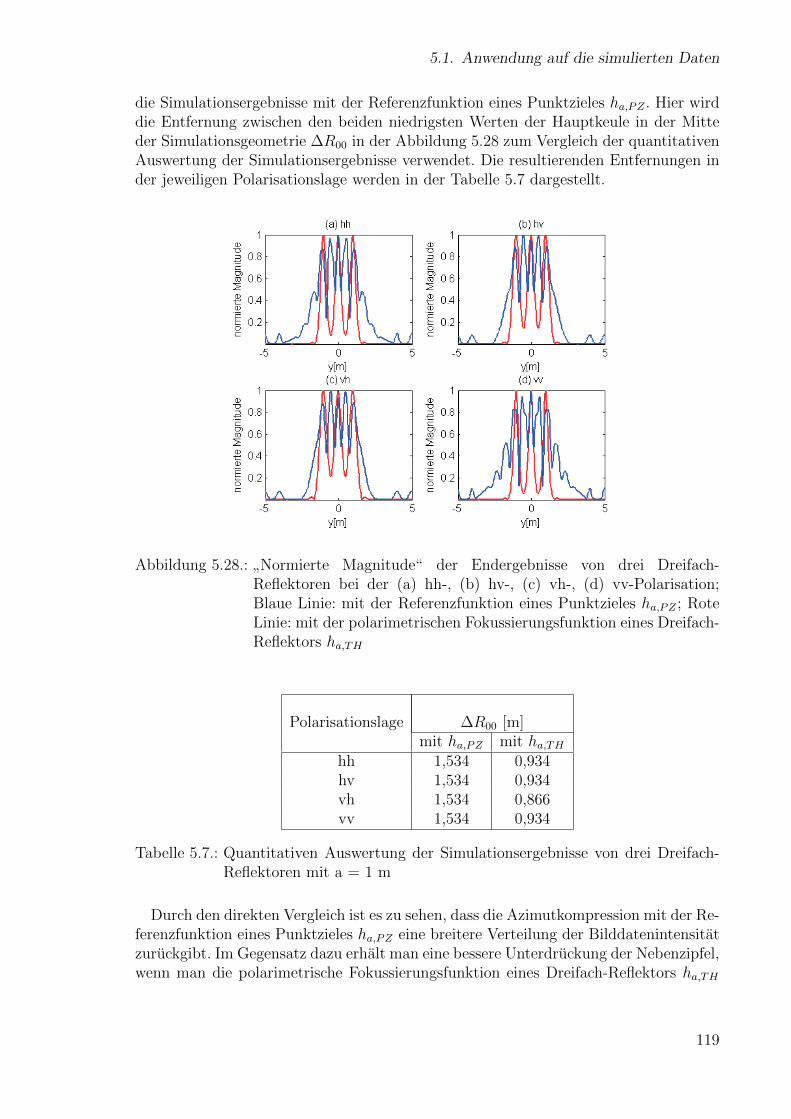
5.1. Anwendung auf die simulierten Daten
die Simulationsergebnisse mit der Referenzfunktion eines Punktzieles ha,PZ . Hier wirddie Entfernung zwischen den beiden niedrigsten Werten der Hauptkeule in der Mitteder Simulationsgeometrie ∆R00 in der Abbildung 5.28 zum Vergleich der quantitativenAuswertung der Simulationsergebnisse verwendet. Die resultierenden Entfernungen inder jeweiligen Polarisationslage werden in der Tabelle 5.7 dargestellt.
Abbildung 5.28.:”Normierte Magnitude“ der Endergebnisse von drei Dreifach-
Reflektoren bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation;Blaue Linie: mit der Referenzfunktion eines Punktzieles ha,PZ ; RoteLinie: mit der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH
Polarisationslage ∆R00 [m]mit ha,PZ mit ha,TH
hh 1,534 0,934hv 1,534 0,934vh 1,534 0,866vv 1,534 0,934
Tabelle 5.7.: Quantitativen Auswertung der Simulationsergebnisse von drei Dreifach-Reflektoren mit a = 1 m
Durch den direkten Vergleich ist es zu sehen, dass die Azimutkompression mit der Re-ferenzfunktion eines Punktzieles ha,PZ eine breitere Verteilung der Bilddatenintensitatzuruckgibt. Im Gegensatz dazu erhalt man eine bessere Unterdruckung der Nebenzipfel,wenn man die polarimetrische Fokussierungsfunktion eines Dreifach-Reflektors ha,TH
119

5. Experimentelle Untersuchungen
einsetzt. Aus dem Kurvenverlauf in allen Polarisationslagen erkennt man eine Ver-besserung der Azimutauflosung, dadurch ist eine genaue Bestimmung der Zielpositionmoglich.
5.1.5. Wissenschaftliche Schlussfolgerungen
In diesem Abschnitt werden die polarimetrischen Rohdatensatze von kanonischen Zie-len, das heißt, eine Platte, ein Zweifach-Reflektor und ein Dreifach-Reflektor, mit Hilfedes eigenen Radarruckstreuquerschnittes in Abhangigkeit von der Radarposition un-ter der bodengestutzten SAR-Geometrie generiert. Dabei wird ein SAR-Simulator furein bodengestutzt SAR-System zuerst programmiert, damit man die geeigneten Sy-stemparameter, z.B. die Wellenform, die Frequenz und die Pulslange, untersuchen undverwenden kann.
Mit der durchgefuhrten dreidimensionalen Darstellung der Simulationsergebnissenerkennt man die gesamte Struktur der Endbilddaten sowohl in der Entfernungsrichtungals auch in der Azimutrichtung. In dieser Arbeit wird die polarimetrische Fokussie-rungsfunktion in der Azimutrichtung eingesetzt. Es ist dann sinnvoll, die Simulations-ergebnisse in der zweidimensionalen Darstellung zum direkten Vergleich zu betrachten,dadurch ist man besser in der Lage, die Vorteile bezuglich der Azimutauflosung durchden Einsatz der polarimetrischen Fokussierungsfunktion graphisch zu erkennen.
Zur Untersuchung der Wirkung der polarimetischen Fokussierungsfunktion auf dieEndbilddaten werden die gewonnenen Rohdaten einerseits mit der Referenzfunktioneines Punktzieles, andererseits mit der polarimetrischen Fokussierungsfunktion des je-weiligen Zielobjektes verarbeitet. Die Abbildungen 5.29 - 5.34 stellen den direktenVergleich der Simulationsergebnisse zwischen der Azimutkompression mit der Refe-renzfunktion eines Punktzieles und der Azimutkompression mit der polarimetrischenFokussierungsfunktion des jeweiligen Zieles.
Weil die Intensitaten der Endbilddaten in den zwei Untersuchungsfallen nicht gleichsind, werden die simulierten Werte mit dem eigenen Maximalwert normiert und an-schließend in dB-Wert dargestellt, damit man die Ergebnisse mit einander vergleichenkann. Die blaue Linie in den Abbildungen 5.29 - 5.34 wird fur die normierten Simula-tionsergebnisse mit der Referenzfunktion eines Punktzieles verwendet. Die rote Liniein den Abbildungen 5.29 - 5.34 steht fur die Simulationsergebnisse mit der polarime-trischen Fokussierungsfunktion. Die x-Achse stellt die Abtastpunkte in der Azimutbe-wegung entlang der u-Achse in der Abbildung 5.1 dar. Die y-Achse zeigt die dB-Werteder normierten Simulationsergebnisse.
Die Abbildung 5.29 prasentiert den zweidimensionalen direkten Vergleich der Simu-lationsergebnisse aus der Abbildung 5.6 und der Abbildung 5.7 fur eine flache Plattein der normierten dB-Wertdarstellung. Die Abbildung 5.30 stellt den zweidimensio-nalen direkten Vergleich der Simulationsergebnisse aus der Abbildung 5.10 und derAbbildung 5.11 von drei flachen Platten in der normierten dB-Wertdarstellung dar.Die Abbildung 5.31 zeigt den zweidimensionalen direkten Vergleich der Simulationser-gebnisse aus der Abbildung 5.14 und der Abbildung 5.15 eines Zweifach-Reflektors inder normierten dB-Wertdarstellung. In der Abbildung 5.32 wird der zweidimensionaledirekte Vergleich der Simulationsergebnisse aus der Abbildung 5.18 und der Abbildung5.19 von drei Zweifach-Reflektoren in der normierten dB-Wertdarstellung prasentiert.
120

5.1. Anwendung auf die simulierten Daten
Abbildung 5.29.: Normierte Simulationsergebnisse einer”flachen Platte“ in der (a) hh-
, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polari-metrischen Fokussierungsfunktion einer flachen Platte ha,FP
Abbildung 5.30.: Normierte Simulationsergebnisse von drei”flachen Platten“ in der (a)
hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polari-metrischen Fokussierungsfunktion einer flachen Platte ha,FP
121
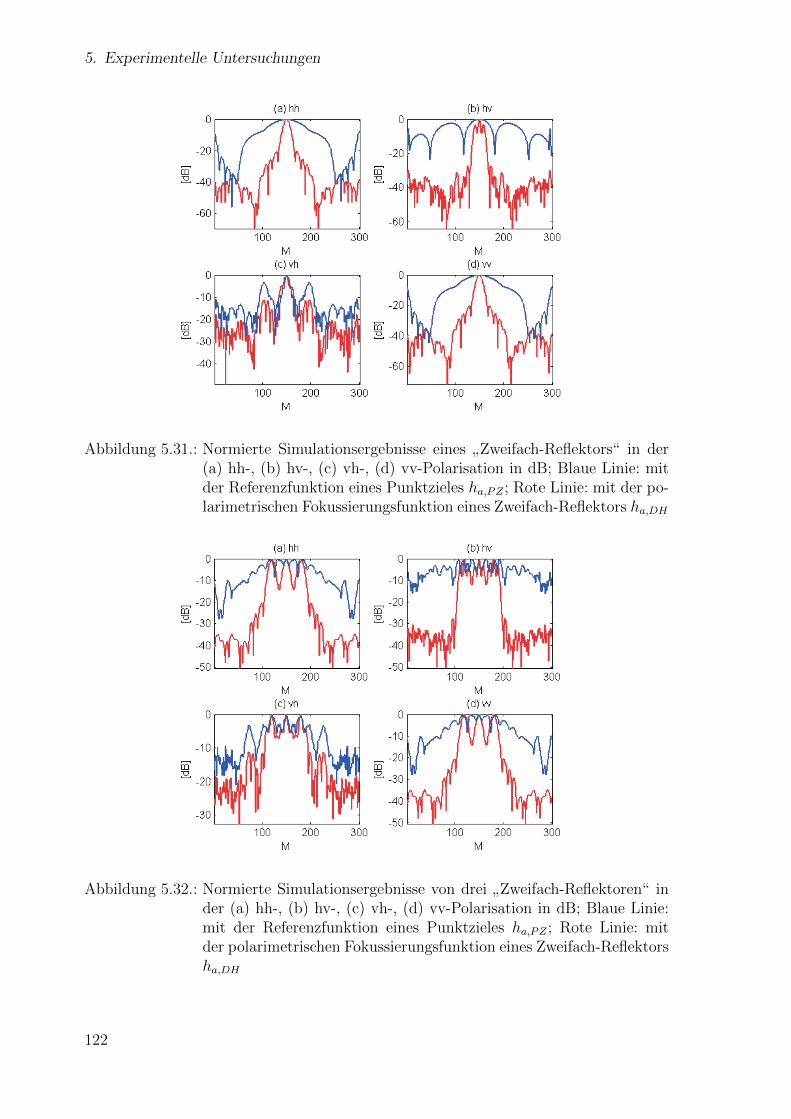
5. Experimentelle Untersuchungen
Abbildung 5.31.: Normierte Simulationsergebnisse eines”Zweifach-Reflektors“ in der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mitder Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der po-larimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH
Abbildung 5.32.: Normierte Simulationsergebnisse von drei”Zweifach-Reflektoren“ in
der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie:mit der Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mitder polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektorsha,DH
122
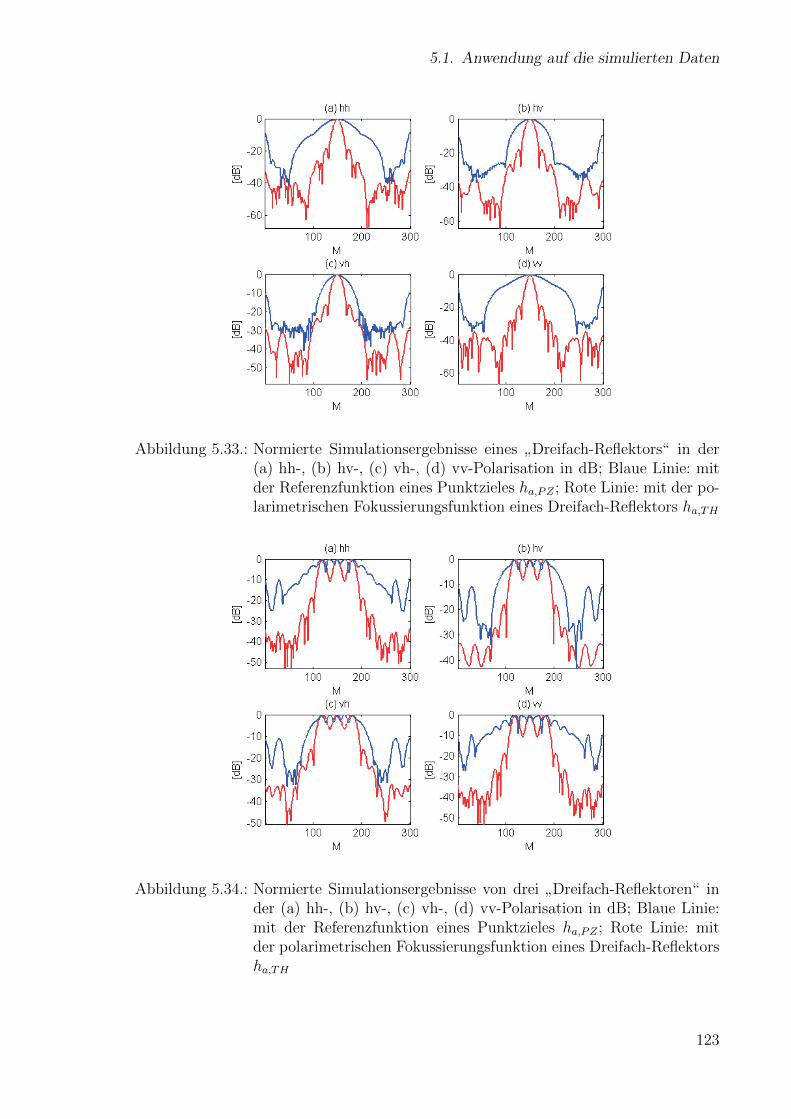
5.1. Anwendung auf die simulierten Daten
Abbildung 5.33.: Normierte Simulationsergebnisse eines”Dreifach-Reflektors“ in der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mitder Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der po-larimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH
Abbildung 5.34.: Normierte Simulationsergebnisse von drei”Dreifach-Reflektoren“ in
der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie:mit der Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mitder polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektorsha,TH
123
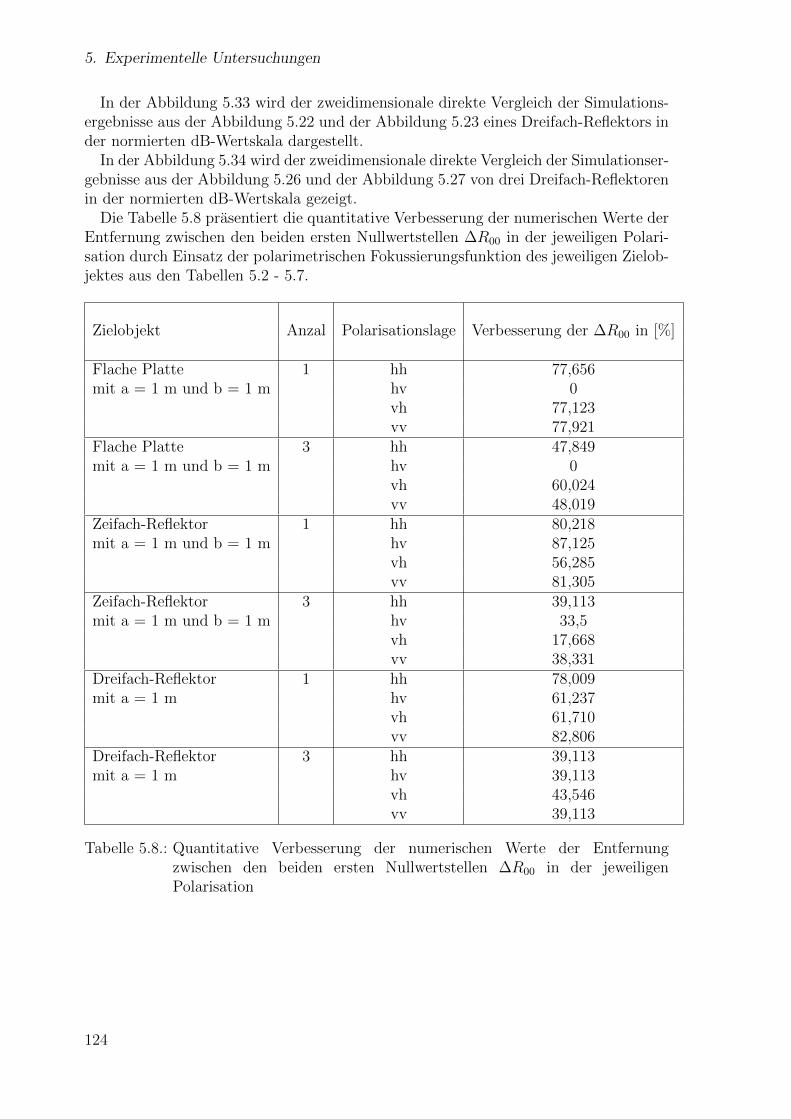
5. Experimentelle Untersuchungen
In der Abbildung 5.33 wird der zweidimensionale direkte Vergleich der Simulations-ergebnisse aus der Abbildung 5.22 und der Abbildung 5.23 eines Dreifach-Reflektors inder normierten dB-Wertskala dargestellt.
In der Abbildung 5.34 wird der zweidimensionale direkte Vergleich der Simulationser-gebnisse aus der Abbildung 5.26 und der Abbildung 5.27 von drei Dreifach-Reflektorenin der normierten dB-Wertskala gezeigt.
Die Tabelle 5.8 prasentiert die quantitative Verbesserung der numerischen Werte derEntfernung zwischen den beiden ersten Nullwertstellen ∆R00 in der jeweiligen Polari-sation durch Einsatz der polarimetrischen Fokussierungsfunktion des jeweiligen Zielob-jektes aus den Tabellen 5.2 - 5.7.
Zielobjekt Anzal Polarisationslage Verbesserung der ∆R00 in [%]
Flache Platte 1 hh 77,656mit a = 1 m und b = 1 m hv 0
vh 77,123vv 77,921
Flache Platte 3 hh 47,849mit a = 1 m und b = 1 m hv 0
vh 60,024vv 48,019
Zeifach-Reflektor 1 hh 80,218mit a = 1 m und b = 1 m hv 87,125
vh 56,285vv 81,305
Zeifach-Reflektor 3 hh 39,113mit a = 1 m und b = 1 m hv 33,5
vh 17,668vv 38,331
Dreifach-Reflektor 1 hh 78,009mit a = 1 m hv 61,237
vh 61,710vv 82,806
Dreifach-Reflektor 3 hh 39,113mit a = 1 m hv 39,113
vh 43,546vv 39,113
Tabelle 5.8.: Quantitative Verbesserung der numerischen Werte der Entfernungzwischen den beiden ersten Nullwertstellen ∆R00 in der jeweiligenPolarisation
124

5.1. Anwendung auf die simulierten Daten
Durch die Untersuchungen und Simulationsergebnissen, wie es in der Abbildung 5.4erklart wird, und in den Abbildungen 5.29 - 5.34 dargestellt wird, lassen sich folgendeErkenntnisse und Vorteile erkennen.
• Bei dem SAR-Systementwurf spielen viele Parameter eine wichtige Rolle. Um einfunktionierendes System zu bauen, wird ein Simulator benotigt, damit man dieGerateeigenschaften und die digitale Signalverarbeitung abstimmen kann. Dabeiwird es oft anhand eines Punktzieles in der Mitte der Messungsgeometrie fur dieRohdatengewinnung und die anschließende Datenverarbeitung in Entfernungs-richtung und in Azimutrichtung durchgefuhrt.
• Unter den gleichen Simulationsumgebungen und Systemparametern ergeben sichunterschiedliche polarimetrische Rohdatensatze, je nach dem eingesetzten Zielob-jekt und der Polarisationslage. Durch den Vergleich zwischen den Rohdatensatzenvon einem bestimmten Zielobjekt (kanonisches Objekt) bei der Simulation miteinem Ziel und bei der Simulation mit drei gleichen nebeneinander positionier-ten Zielen kann man die Konturbildung des Ruckstreuquerschnittes des Zielesunter SAR-Geometrie und die Uberlagerung der reflektierten Signale von denbenachbarten Zielen erkennen.
• Durch die ubliche Azimutkompression mit der Referenzfunktion eines Punktzie-les gibt es keine eindeutige Positionsbestimmung im Fall von der Simulation mitdrei Zielen, die neben einander in Azimutrichtung positioniert sind. Das fuhrt zurschlechten Auflosung bei der gegebenen Simulationsgeometrie. Mit dem Einsatzder polarimetrischen Fokussierungsfunktion erhalt man in dieser Arbeit großeVerbesserung der Azimutauflosung bezuglich der Positionsbestimmung der ein-gesetzten Ziele, wie es in der Tabelle 5.8 gezeigt wird.
Die Simulationsergebnisse in diesem Abschnitt mit kanonischen Zielen bestatigen denAnsatz des polarimetrischen Radarruckstreuquerschnittes des jeweiligen Zielobjektesund deuten darauf hin, dass die entwickelte polarimetrische Fokussierungsfunktion zueiner besseren Azimutauflosung bei den gegebenen Simulationsumgebungen fuhrt undbei der Anwendung auf die echten SAR-Rohdaten einen Vorteil bei der Zielzerlegungbringen kann.
Außerdem die bessere Unterdruckung der Nebenzipfel in Endbilddaten und die un-terschiedlichen Kurvenstrukturen in Abhangigkeit von dem eingesetzten Ziel konnenviele nutzliche Anwendungen bei der Untersuchung, Abstimmung und Kalibrierungder Radarsystemparameter sowohl die Gerate als auch die Programmierung zur SAR-Datenverarbeitung finden.
125
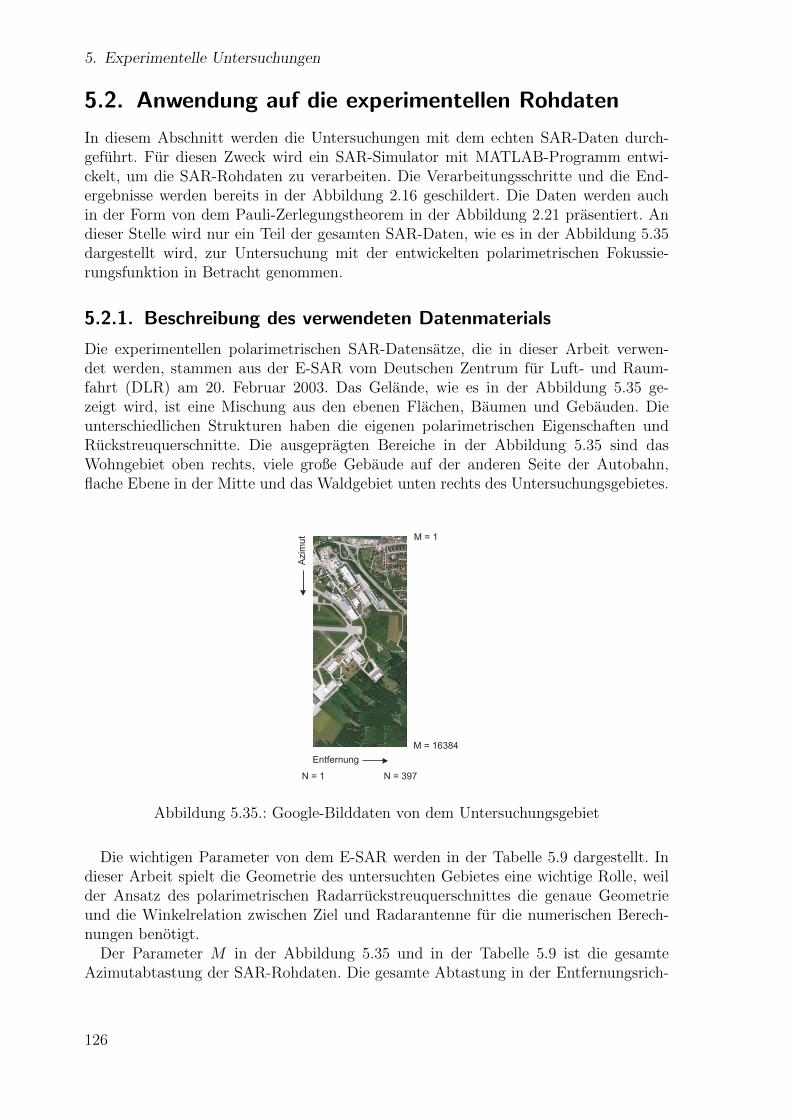
5. Experimentelle Untersuchungen
5.2. Anwendung auf die experimentellen Rohdaten
In diesem Abschnitt werden die Untersuchungen mit dem echten SAR-Daten durch-gefuhrt. Fur diesen Zweck wird ein SAR-Simulator mit MATLAB-Programm entwi-ckelt, um die SAR-Rohdaten zu verarbeiten. Die Verarbeitungsschritte und die End-ergebnisse werden bereits in der Abbildung 2.16 geschildert. Die Daten werden auchin der Form von dem Pauli-Zerlegungstheorem in der Abbildung 2.21 prasentiert. Andieser Stelle wird nur ein Teil der gesamten SAR-Daten, wie es in der Abbildung 5.35dargestellt wird, zur Untersuchung mit der entwickelten polarimetrischen Fokussie-rungsfunktion in Betracht genommen.
5.2.1. Beschreibung des verwendeten Datenmaterials
Die experimentellen polarimetrischen SAR-Datensatze, die in dieser Arbeit verwen-det werden, stammen aus der E-SAR vom Deutschen Zentrum fur Luft- und Raum-fahrt (DLR) am 20. Februar 2003. Das Gelande, wie es in der Abbildung 5.35 ge-zeigt wird, ist eine Mischung aus den ebenen Flachen, Baumen und Gebauden. Dieunterschiedlichen Strukturen haben die eigenen polarimetrischen Eigenschaften undRuckstreuquerschnitte. Die ausgepragten Bereiche in der Abbildung 5.35 sind dasWohngebiet oben rechts, viele große Gebaude auf der anderen Seite der Autobahn,flache Ebene in der Mitte und das Waldgebiet unten rechts des Untersuchungsgebietes.
Abbildung 5.35.: Google-Bilddaten von dem Untersuchungsgebiet
Die wichtigen Parameter von dem E-SAR werden in der Tabelle 5.9 dargestellt. Indieser Arbeit spielt die Geometrie des untersuchten Gebietes eine wichtige Rolle, weilder Ansatz des polarimetrischen Radarruckstreuquerschnittes die genaue Geometrieund die Winkelrelation zwischen Ziel und Radarantenne fur die numerischen Berech-nungen benotigt.
Der Parameter M in der Abbildung 5.35 und in der Tabelle 5.9 ist die gesamteAzimutabtastung der SAR-Rohdaten. Die gesamte Abtastung in der Entfernungsrich-
126
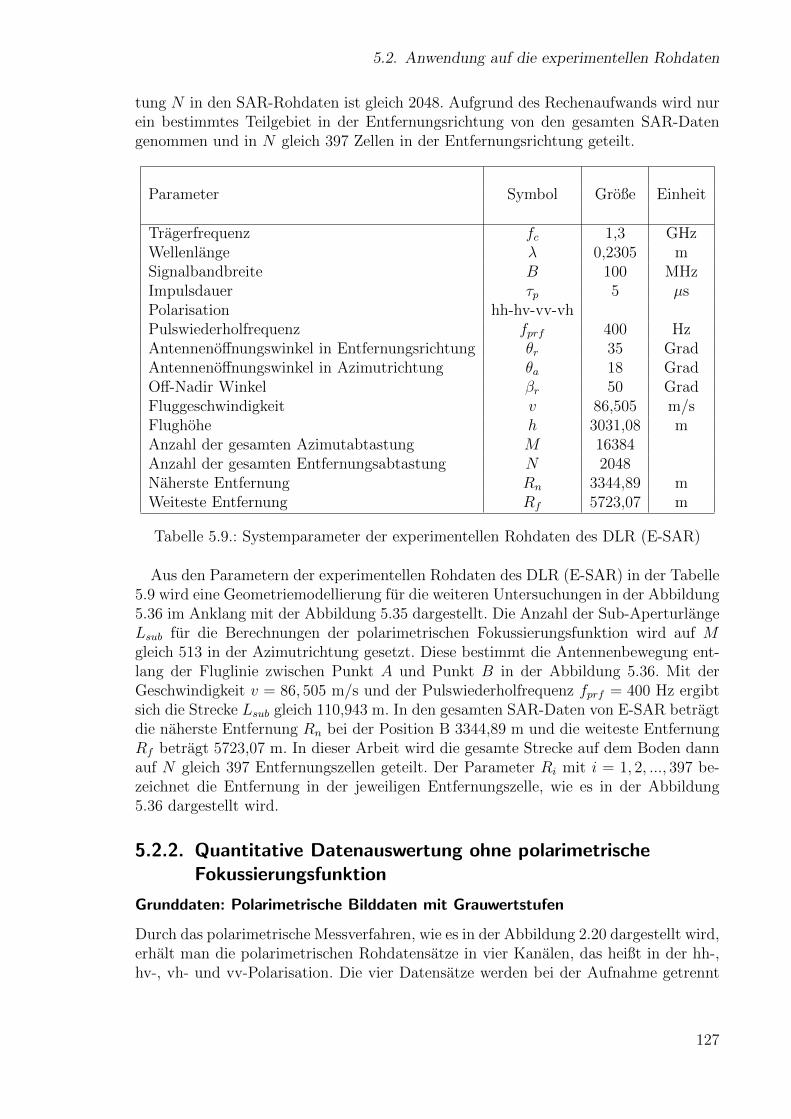
5.2. Anwendung auf die experimentellen Rohdaten
tung N in den SAR-Rohdaten ist gleich 2048. Aufgrund des Rechenaufwands wird nurein bestimmtes Teilgebiet in der Entfernungsrichtung von den gesamten SAR-Datengenommen und in N gleich 397 Zellen in der Entfernungsrichtung geteilt.
Parameter Symbol Große Einheit
Tragerfrequenz fc 1,3 GHzWellenlange λ 0,2305 mSignalbandbreite B 100 MHzImpulsdauer τp 5 µsPolarisation hh-hv-vv-vhPulswiederholfrequenz fprf 400 HzAntennenoffnungswinkel in Entfernungsrichtung θr 35 GradAntennenoffnungswinkel in Azimutrichtung θa 18 GradOff-Nadir Winkel βr 50 GradFluggeschwindigkeit v 86,505 m/sFlughohe h 3031,08 mAnzahl der gesamten Azimutabtastung M 16384Anzahl der gesamten Entfernungsabtastung N 2048Naherste Entfernung Rn 3344,89 mWeiteste Entfernung Rf 5723,07 m
Tabelle 5.9.: Systemparameter der experimentellen Rohdaten des DLR (E-SAR)
Aus den Parametern der experimentellen Rohdaten des DLR (E-SAR) in der Tabelle5.9 wird eine Geometriemodellierung fur die weiteren Untersuchungen in der Abbildung5.36 im Anklang mit der Abbildung 5.35 dargestellt. Die Anzahl der Sub-AperturlangeLsub fur die Berechnungen der polarimetrischen Fokussierungsfunktion wird auf Mgleich 513 in der Azimutrichtung gesetzt. Diese bestimmt die Antennenbewegung ent-lang der Fluglinie zwischen Punkt A und Punkt B in der Abbildung 5.36. Mit derGeschwindigkeit v = 86, 505 m/s und der Pulswiederholfrequenz fprf = 400 Hz ergibtsich die Strecke Lsub gleich 110,943 m. In den gesamten SAR-Daten von E-SAR betragtdie naherste Entfernung Rn bei der Position B 3344,89 m und die weiteste EntfernungRf betragt 5723,07 m. In dieser Arbeit wird die gesamte Strecke auf dem Boden dannauf N gleich 397 Entfernungszellen geteilt. Der Parameter Ri mit i = 1, 2, ..., 397 be-zeichnet die Entfernung in der jeweiligen Entfernungszelle, wie es in der Abbildung5.36 dargestellt wird.
5.2.2. Quantitative Datenauswertung ohne polarimetrischeFokussierungsfunktion
Grunddaten: Polarimetrische Bilddaten mit Grauwertstufen
Durch das polarimetrische Messverfahren, wie es in der Abbildung 2.20 dargestellt wird,erhalt man die polarimetrischen Rohdatensatze in vier Kanalen, das heißt in der hh-,hv-, vh- und vv-Polarisation. Die vier Datensatze werden bei der Aufnahme getrennt
127
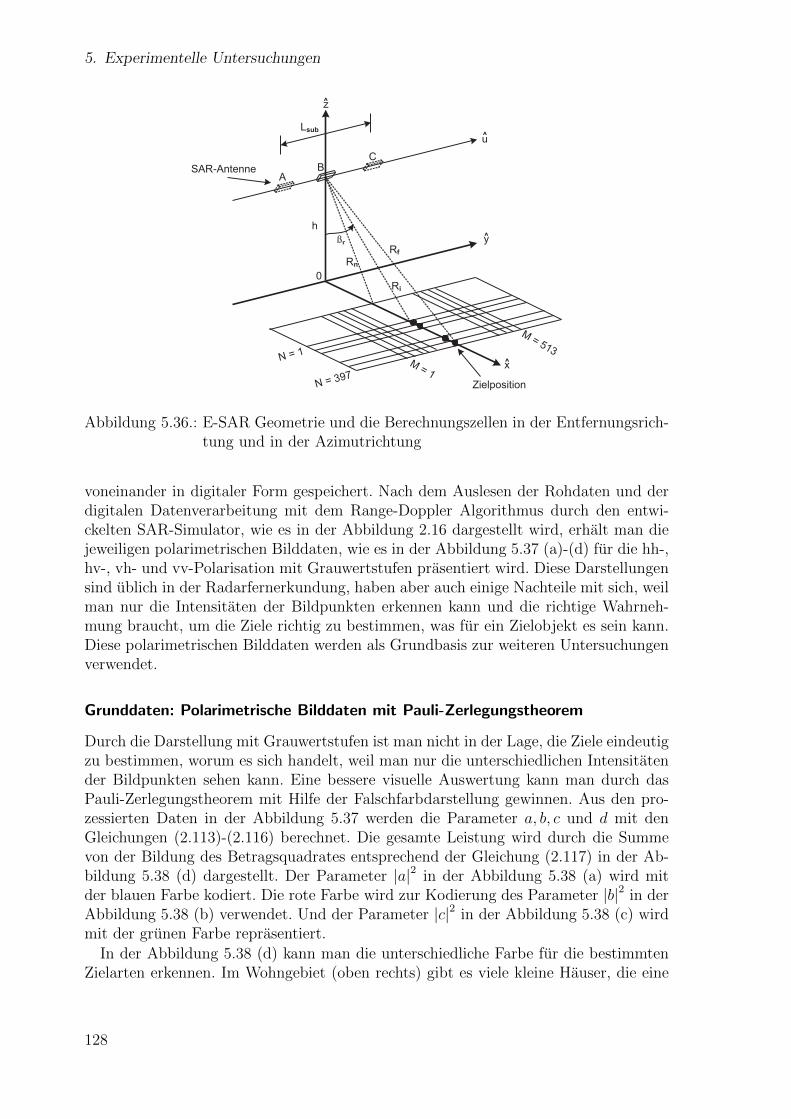
5. Experimentelle Untersuchungen
Abbildung 5.36.: E-SAR Geometrie und die Berechnungszellen in der Entfernungsrich-tung und in der Azimutrichtung
voneinander in digitaler Form gespeichert. Nach dem Auslesen der Rohdaten und derdigitalen Datenverarbeitung mit dem Range-Doppler Algorithmus durch den entwi-ckelten SAR-Simulator, wie es in der Abbildung 2.16 dargestellt wird, erhalt man diejeweiligen polarimetrischen Bilddaten, wie es in der Abbildung 5.37 (a)-(d) fur die hh-,hv-, vh- und vv-Polarisation mit Grauwertstufen prasentiert wird. Diese Darstellungensind ublich in der Radarfernerkundung, haben aber auch einige Nachteile mit sich, weilman nur die Intensitaten der Bildpunkten erkennen kann und die richtige Wahrneh-mung braucht, um die Ziele richtig zu bestimmen, was fur ein Zielobjekt es sein kann.Diese polarimetrischen Bilddaten werden als Grundbasis zur weiteren Untersuchungenverwendet.
Grunddaten: Polarimetrische Bilddaten mit Pauli-Zerlegungstheorem
Durch die Darstellung mit Grauwertstufen ist man nicht in der Lage, die Ziele eindeutigzu bestimmen, worum es sich handelt, weil man nur die unterschiedlichen Intensitatender Bildpunkten sehen kann. Eine bessere visuelle Auswertung kann man durch dasPauli-Zerlegungstheorem mit Hilfe der Falschfarbdarstellung gewinnen. Aus den pro-zessierten Daten in der Abbildung 5.37 werden die Parameter a, b, c und d mit denGleichungen (2.113)-(2.116) berechnet. Die gesamte Leistung wird durch die Summevon der Bildung des Betragsquadrates entsprechend der Gleichung (2.117) in der Ab-bildung 5.38 (d) dargestellt. Der Parameter |a|2 in der Abbildung 5.38 (a) wird mitder blauen Farbe kodiert. Die rote Farbe wird zur Kodierung des Parameter |b|2 in derAbbildung 5.38 (b) verwendet. Und der Parameter |c|2 in der Abbildung 5.38 (c) wirdmit der grunen Farbe reprasentiert.
In der Abbildung 5.38 (d) kann man die unterschiedliche Farbe fur die bestimmtenZielarten erkennen. Im Wohngebiet (oben rechts) gibt es viele kleine Hauser, die eine
128

5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.37.: Polarimetrische Bliddaten mit Grauwertstufen in der (a) hh-, (b) hv-,(c) vv-, (d) vh-Polarisation, [56]
Abbildung 5.38.: Polarimetrische Bliddaten mit dem Pauli-Zerlegungstheorem: (a) |a|2mit blauer Farbe, (b) |b|2 mit roter Farbe, (c) |c|2 mit gruner Farbe,(d) RGB-Plot, [56]
129
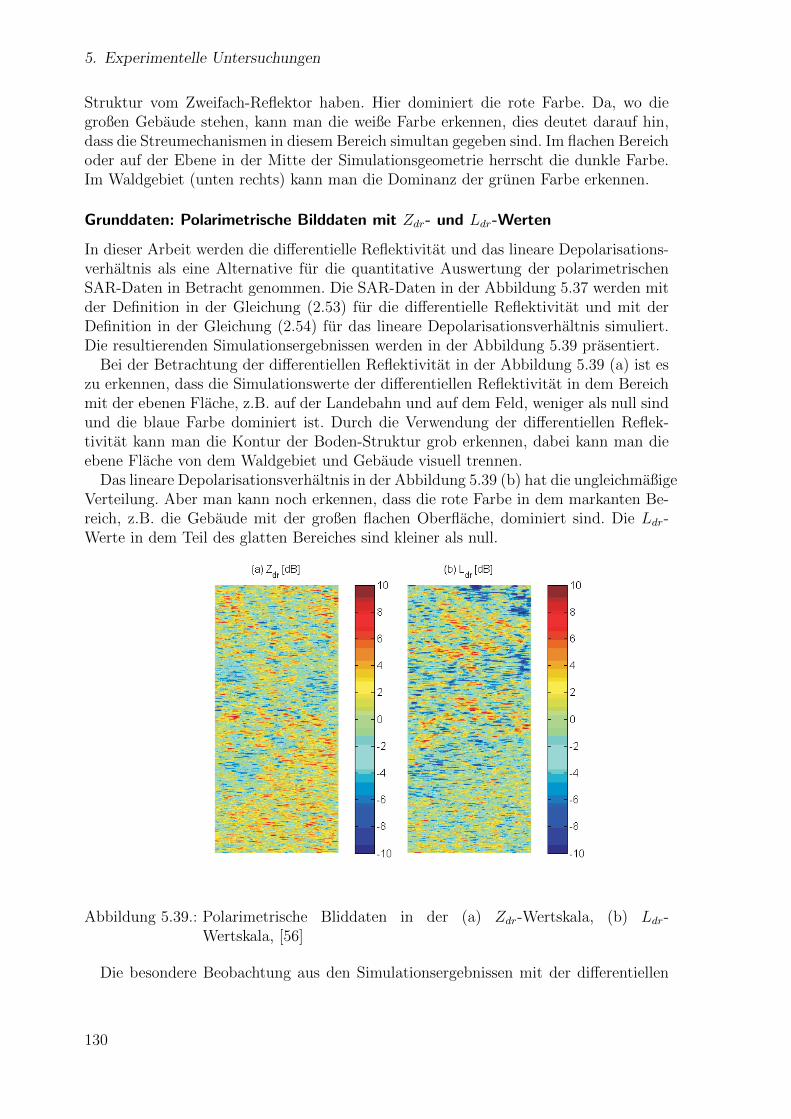
5. Experimentelle Untersuchungen
Struktur vom Zweifach-Reflektor haben. Hier dominiert die rote Farbe. Da, wo diegroßen Gebaude stehen, kann man die weiße Farbe erkennen, dies deutet darauf hin,dass die Streumechanismen in diesem Bereich simultan gegeben sind. Im flachen Bereichoder auf der Ebene in der Mitte der Simulationsgeometrie herrscht die dunkle Farbe.Im Waldgebiet (unten rechts) kann man die Dominanz der grunen Farbe erkennen.
Grunddaten: Polarimetrische Bilddaten mit Zdr- und Ldr-Werten
In dieser Arbeit werden die differentielle Reflektivitat und das lineare Depolarisations-verhaltnis als eine Alternative fur die quantitative Auswertung der polarimetrischenSAR-Daten in Betracht genommen. Die SAR-Daten in der Abbildung 5.37 werden mitder Definition in der Gleichung (2.53) fur die differentielle Reflektivitat und mit derDefinition in der Gleichung (2.54) fur das lineare Depolarisationsverhaltnis simuliert.Die resultierenden Simulationsergebnissen werden in der Abbildung 5.39 prasentiert.
Bei der Betrachtung der differentiellen Reflektivitat in der Abbildung 5.39 (a) ist eszu erkennen, dass die Simulationswerte der differentiellen Reflektivitat in dem Bereichmit der ebenen Flache, z.B. auf der Landebahn und auf dem Feld, weniger als null sindund die blaue Farbe dominiert ist. Durch die Verwendung der differentiellen Reflek-tivitat kann man die Kontur der Boden-Struktur grob erkennen, dabei kann man dieebene Flache von dem Waldgebiet und Gebaude visuell trennen.
Das lineare Depolarisationsverhaltnis in der Abbildung 5.39 (b) hat die ungleichmaßigeVerteilung. Aber man kann noch erkennen, dass die rote Farbe in dem markanten Be-reich, z.B. die Gebaude mit der großen flachen Oberflache, dominiert sind. Die Ldr-Werte in dem Teil des glatten Bereiches sind kleiner als null.
Abbildung 5.39.: Polarimetrische Bliddaten in der (a) Zdr-Wertskala, (b) Ldr-Wertskala, [56]
Die besondere Beobachtung aus den Simulationsergebnissen mit der differentiellen
130

5.2. Anwendung auf die experimentellen Rohdaten
Reflektivitat und dem linearen Depolarisationsverhaltnis liegt im stadtischen Bereichrechts oberhalb in den Bilddaten, da kann man erkennen, dass die Zdr-Werte mehr alsnull und die Ldr-Werte kleiner als null sind.
Fur eine bessere Datenauswertung fur die differentielle Reflektivitat und das lineareDepolarisationsverhaltnis wird eine neue Falschfarbdarstellung in der Abbildung 5.40eingesetzt. Dabei werden die positiven Werte gleich 1 und die negativen Werte gleich-1 gesetzt. Man erhalt dann durch diese Darstellung eine klare Werttrennung, wie esin der Abbildung 5.40 (a) fur die differentielle Reflektivitat und in der Abbildung 5.40(b) fur das lineare Depolarisationsverhaltnis dargestellt wird.
Abbildung 5.40.: Polarimetrische Bliddaten in der normierten (a) Zdr-Wertskala, (b)Ldr-Wertskala, [56]
Durch den Vergleich zwischen der Simulationsergebnisse in der Abbildung 5.40 unddem Untersuchungsbild in der Abbildung 5.35 kann man eine grobe Entscheidung uberdie besondere Bodenstruktur in vier Fallen gliedern, wie folgt:
1. +Zdr und +Ldr: Die Bereiche, die einen positiven Zdr- und positive Ldr–Wertehaben konnen, sind großere Gebaude.
2. +Zdr und −Ldr: Im Wohngebiet mit den Hausern oder Dorfern mit einer charak-teristischen Zweifach-Reflektor-Struktur konnen die Zdr-Werte positiv sein unddie Ldr-Werte konnen die negativen Werte haben.
3. −Zdr und +Ldr: In diesem Fall, ist es nicht genau quantitativ bestimmbar, wasdie Oberflachenbeschaffenheit und die Art des Zieles sind.
4. −Zdr und −Ldr: Die Simulationsergebnisse zeigen auch, dass die ebene Flacheund Felder die negativen Werte von Zdr und Ldr haben konnen.
131

5. Experimentelle Untersuchungen
5.2.3. Generierung der polarimetrischen Fokussierungsfunktion
Aus dem Untersuchungsschema in der Abbildung 5.4 werden die Untersuchungen mitder polarimetrischen Fokussierungsfunktion durchgefuhrt. Im Kapitel 3 wird der An-satz zur polarimetrischen Fokussierungsfunktion in der SAR-Datenverarbeitung in derGleichung (3.9) erlautert. Ein Hauptbestandteil dieser Gleichung ist der polarimetri-sche Radarruckstreuquerschnitt, der mit der Gleichung (2.46) definiert wird und durchdie Gleichungen (3.49)-(3.52) fur die jeweilige Polarisationslage berechnet werden kann.An dieser Stelle werden die polarimetrischen Radarruckstreuquerschnitte der kanoni-schen Ziele, das heißt, einer Platte mit der Abmessung a = 2 m und b = 2 m, einesZweifach-Reflektors mit der Abmessung a = 2 m und b = 2 m und eines Dreifach-Reflektors mit der Abmessung a = 2 m, fur die E-SAR Geometrie in der Abbildung5.36 und mit den Systemparametern in der Tabelle 5.9 generiert.
Fur die Berechnungen der polarimetrischen Radarruckstreuquerschnitte wird dasZielposition auf der x-Achse zwischen den Entfernungszellen N = 1 bis N = 397 gelegt,wie es in der Abbildung 5.36 dargestellt wird. Die SAR-Antennenpositionen werdenauf der u-Achse zwischen den Azimutzellen M = 1 bis M = 513 definiert. Aus dieserSimulationsumgebung ergeben sich die polarimetrischen Radarruckstreuquerschnitteinsgesamt 513 Werte entlang der Antennenbewegung fur jede Entfernungszelle N . DieseErgebnisse bilden dann eine Struktur fur die Reflektivitat der kanonischen Ziele in derAzimutrichtung je nach der Polarisationslage und Entfernung entlang der x-Achse.
Fur die numerische Berechnung de polarimetrischen Radarruckstreuquerschnitte deskanonischen Zieles, das heißt, einer flachen Platte, eines Zweifach-Reflektors und einesDreifach-Reflektors, wird die physikalische Optik Approximation verwendet. Im Kapitel4 wurde die numerische Berechnung bereits erlautert. In diesem Abschnitt werden danndie neue SAR-Geometrie, die Zielabmessung und die Systemparameter in der Tabelle5.9 berucksichtigt.
Die Geometrie von einer flachen Platte fur die numerische Berechnung der polari-metrischen Radarruckstreuquerschnitte, wie es in der Abbildung 4.3 dargestellt wird,ist mit a = 2 m und b = 2 m. Die Abbildung 5.41 prasentiert die polarimetrischenRadarruckstreuquerschnitte σpq(u, r) einer
”flachen Platte“ in (a) hh-, (b) hv-, (c) vh-
und (d) vv-Polarisation in dBsm. Die Simulationsergebnissen in der jeweiligen Polarisa-tionslage haben einen ahnlichen Kurvenverlauf in der Azimutrichtung wie die Simula-tionsergebnisse in der Abbildung 4.6. Der Maximalwert bei der kopolaren Polarisation(hh und vv) liegt in der Mitte der jeweiligen Entfernungszelle. Wie erwartet, betra-gen die Simulationsergebnisse bei der kreuzpolaren Polarisation (hv und vh) geringereWerte als im kopolaren Fall.
Die Geometrie von einem Zweifach-Reflektor fur die numerische Berechnung derpolarimetrischen Radarruckstreuquerschnitte, wie es in der Abbildung 4.9 dargestelltwird, ist mit a = 2 m und b = 2 m. Die Simulationsergebnisse der polarimetrischenRadarruckstreuquerschnitte eines Zweifach-Reflektors werden in der Abbildung 5.42dargestellt. Die Simulationsergebnisse der jeweilgen Polarisationslage in der Abbildung5.42 haben eine ahnliche Struktur in der Azimutrichtung wie die Simulationsergebnisseeines Zweifach-Reflektors in der Abbildung 4.18. Ein Merkmal der Simulationsergeb-nisse der polarimetrischen Radarruckstreuquerschnitte eines Zweifach-Reflektors findetman in der kreuzpolarisationsbetrieb, das heißt die hv- und vh-Polarisation in der Ab-
132

5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.41.: Polarimetrische Radarruckstreuquerschnitte σpq(u, r) einer”flachen
Platte“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation
bildung 5.42 (b) und (c). Ein Merkmal der Simulationsergebnisse der polarimetrischenRadarruckstreuquerschnitte eines Zweifach-Reflektors findet man in der kreuzpolarisa-tionsbetrieb, das heißt die hv- und vh-Polarisation in der Abbildung 5.42 (b) und inder Abbildung 5.42 (c). Hier erkennt man einen Signalschwund in der Mitte der Si-mulationsgeometrie, wo die Antennenhauptstrahlrichtung quasi-senkrecht zur y-Achserichtet und wo der Winkel φu (siehe Abbildung 4.1) ungefahr null ist.
Die Geometrie von einem Dreifach-Reflektor fur die numerische Berechnung der po-larimetrischen Radarruckstreuquerschnitte, wie es in der Abbildung 4.20 dargestelltwird, ist mit a = 2 m. In der Abbildung 5.43 werden die Simulationsergebnisse der po-larimetrischen Radarruckstreuquerschnitte eines Dreifach-Reflektors prasentiert. Hiererkennt man eine Kontinuitat der Simulationswerte in jeden Polarisationslagen so-wohl in der Entfernungsrichtung als auch in der Azimutrichtung. Hier erkennt man dieSchwankungen der Werte auch in der Entfernungsrichtung. Dies deutet darauf, dass derEinfallwinkel in der Entfernungsrichtung der jeweiligen Entfernungszelle große Wirkungauf die polarimetrischen Radarruckstreuquerschnitte sowohl im kopolaren als auch imkreuzpolaren Radarbetrieb hat.
Die Tabelle 5.10 prasentiert die Maximalwerte der Simulationsergebnisse der polari-metrischen Radarruckstreuquerschnitte σpq(u, r) einer einfachen Platte, eines Zweifach-Reflektors und eines Dreifach-Reflektors in der jeweiligen Polarisationslage in dBsm.
Die dargestellten Simulationsergebnisse in diesem Abschnitt sind fur diese Simu-lationsumgebungen und diese Systemparameter bestimmt. Mit Sicherheit erhalt manandere Simulationswerte, wenn man die Geometrie und die Systemparameter fur die
133
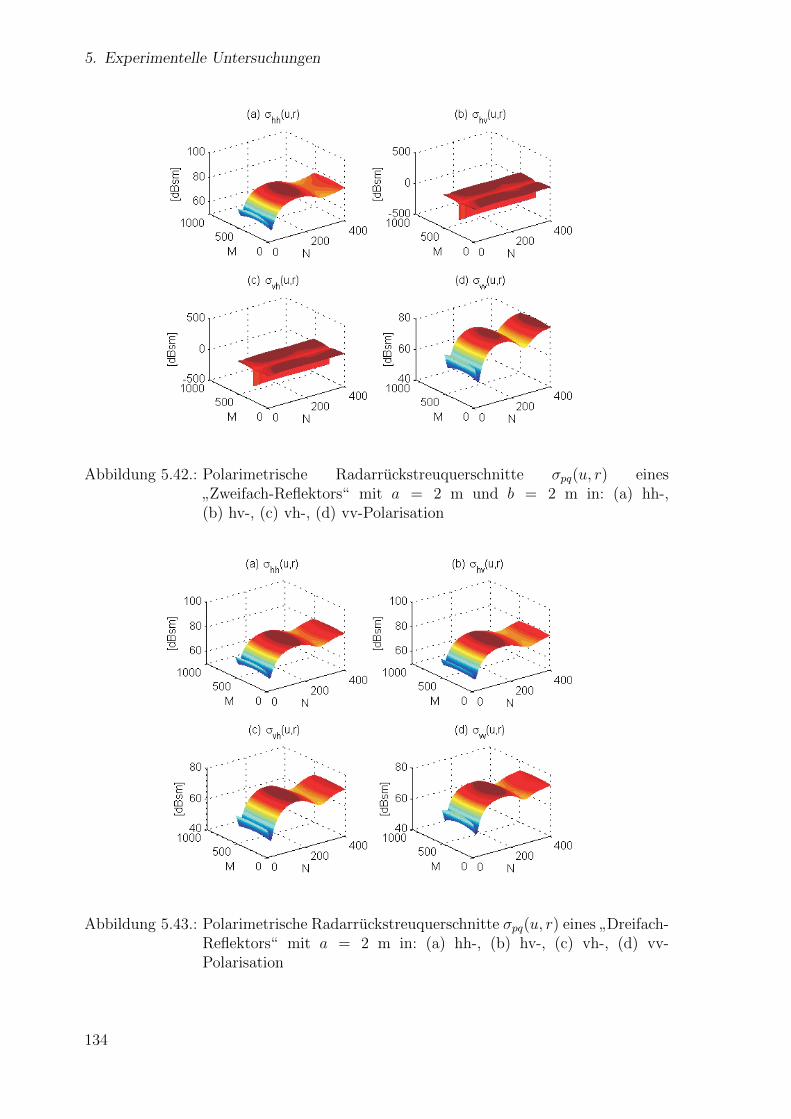
5. Experimentelle Untersuchungen
Abbildung 5.42.: Polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines
”Zweifach-Reflektors“ mit a = 2 m und b = 2 m in: (a) hh-,
(b) hv-, (c) vh-, (d) vv-Polarisation
Abbildung 5.43.: Polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines”Dreifach-
Reflektors“ mit a = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation
134

5.2. Anwendung auf die experimentellen Rohdaten
Polarisationslage Maximalwert σpq(u, r) in dBsmFlache Platte Zweifach-Reflektor Dreifach-Reflektor
hh 62,49 80,42 81,23hv 13,83 40,69 80,78vh -254,20 36,14 72,00vv 60,53 78,66 75,11
Tabelle 5.10.: Maximalwerte der Simulationsergebnisse von einer flachen Platte mita = 2 m und b = 2 m, einem Zweifach-Reflektor mit a = 2 m und b = 2m, einem Dreifach-Reflektor mit a = 2 m
numerische Berechnung andert. Diese Simulationsergebnisse der polarimetrischen Ra-darruckstreuquerschnitte bestatigen den Ansatz fur die Berechnung der polarimetri-schen Radarruckstreuquerschnitte σpq im Kapitel 3 und die Modellierung der kanoni-schen Ziele im Kapitel 4.
Die wellenformige Struktur langs der Entfernungsrichtung beziehungsweise die Quer-streifen langs der Azimutrichtung, wo die Simulationsergebnisse kleinere Werte im Ver-gleich zu dem Maximalwert haben, in den Abbildungen 5.41-5.43 sind wegen der Streu-ungsabhangigkeit zustande gekommen, die interessehalber berucksichtig werden. Es hataber keine Bedeutung bezuglich der Signalverarbeitung in der Entfernungsrichtung.
Fur die folgenden SAR-Datenverarbeitung im nachsten Abschnitt werden die Simu-lationsergebnissen der drei kanonischen Zielen mit eigenem Maximalwert der jeweiligenEntfernungszelle N normiert, so dass die wellenformige Struktur entlang der Entfer-nungsrichtung keine Wirkung auf die Azimutkompression hat. Dadurch entsteht diespezifische Struktur der polarimetrischen Radarruckstreuquerschnitte entlang der Azi-mutrichtung fur jede Entfernungszelle N und wird dann in der Gleichung (3.9) furdie Azimutkompression mit der polarimetrischen Fokussierungsfunktion eingesetzt. Dienormierten Simulationsergebnisse aus den Abbildungen 5.41-5.43 sind in den Abbildun-gen 5.44-5.46 dargestellt.
5.2.4. Quantitative Datenauswertung mit polarimetrischerFokussierungsfunktion
Die Simulationsergebnisse der polarimetrischen Radarruckstreuquerschnitte der kano-nischen Ziele werden zur Generierung der polarimetrischen Fokussierungsfunktion, wiees in der Gleichung (3.9) erklart wird, eingesetzt. In diesem Abschnitt werden diepolarimetrischen SAR-Datensatze des DLR (E-SAR) zuerst mit der Referenzfunktioneines Punktzieles in der Entfernungsrichtung verarbeitet. Bei der Azimutkompressionwerden die SAR-Daten mit den vier verschiedenen Fokussierungsfunktionen in der Azi-mutrichtung, das heißt die Referenzfunktionen eines Punktzieles ha,PZ , einer flachenPlatte ha,FP , eines Zweifach-Reflektors ha,DH und eines Dreifach-Reflektors ha,TH , ver-arbeitet.
Die Bilddaten in der hh-Polarisation nach der Azimutkompression mit der Referenz-funktion eines Punktzieles ha,PZ werden in der Abbildung 5.47 (a) prasentiert. In der
135
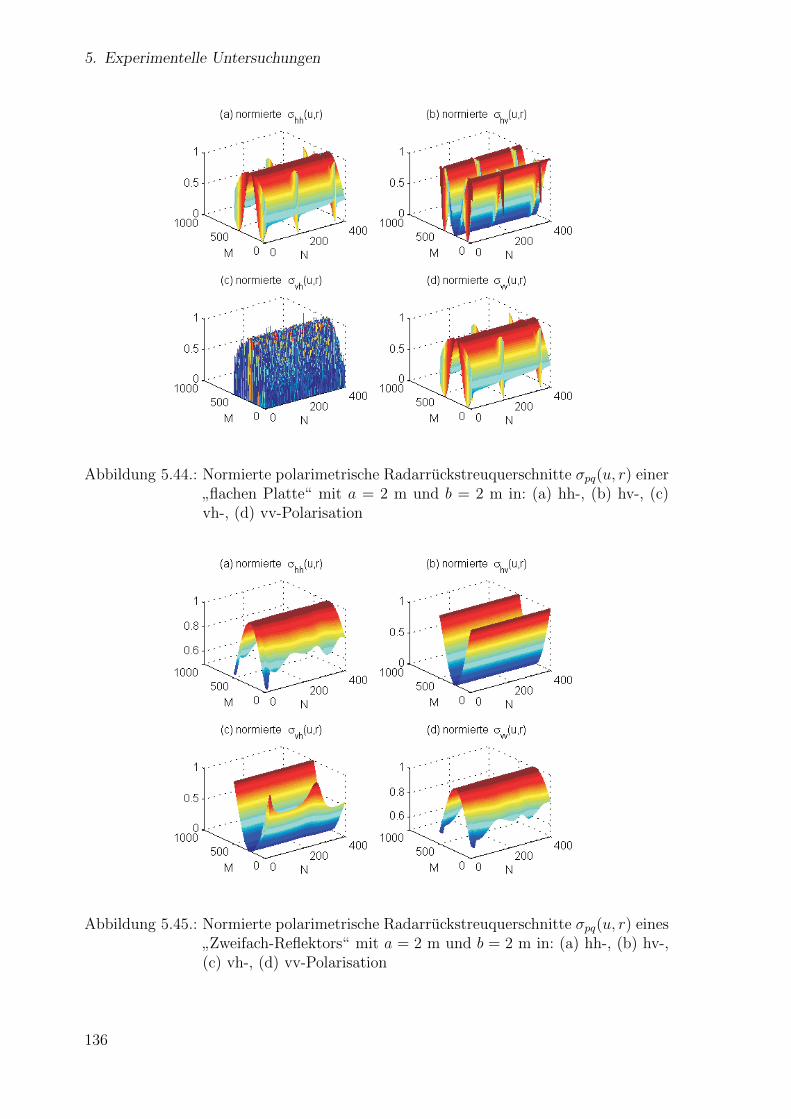
5. Experimentelle Untersuchungen
Abbildung 5.44.: Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) einer
”flachen Platte“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c)
vh-, (d) vv-Polarisation
Abbildung 5.45.: Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines
”Zweifach-Reflektors“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-,
(c) vh-, (d) vv-Polarisation
136

5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.46.: Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines
”Dreifach-Reflektors“ mit a = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d)
vv-Polarisation
Abbildung 5.47 (b) werden die Bilddaten nach der Azimutkompression mit der po-larimerischen Fokussierungsfunktion einer flachen Platte ha,FP dargestellt. Durch denEinsatz der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DHerhalt man die Bilddaten, wie es in der Abbildung 5.48 (a) dargestellt ist. Die vierteFokussierungsfunktion werden aus den polarimetrischen Radarruckstreuquerschnitteneines Dreifach-Reflektors ha,TH gewonnen. Diese gibt die Bilddaten nach der Azimut-kompression, wie es in der Abbildung 5.48 (b) dargestellt wird.
Die Simulationsergebnisse in der hv-Polarisation werden in den Abbildungen 5.49-5.50 prasentiert. Diese SAR-Rohdaten werden einerseits mit der Referenzfunktion einesPunktzieles anderseits mit der polarimetrischen Fokussierungsfunktion verarbeitet. Inder Abbildung 5.49 (a) sind die Bilddaten, die durch eine Referenzfunktion eines Punkt-zieles ha,PZ prozessiert werden. Bei der Anwendung der polarimetrischen Fokussierungs-funktion einer flachen Platte ha,FP erhalt man die Bilddaten, wie es in der Abbildung5.49 (b) dargestellt wird. Nach der Azimutkompression mit der polarimetrischen Fo-kussierungsfunktion eines Zweifach-Reflektors ha,DH erhalt man die Bilddaten, wie esin der Abbildung 5.50 (a) dargestellt wird. Die polarimetrische Fokussierungsfunktioneines Dreifach-Reflektors ha,TH wird bei der Datenverarbeitung von den Bilddaten inder Abbildung 5.50 (b) verwendet.
In den Abbildungen 5.51-5.52 werden die Simulationsergebnisse durch die vier Re-ferenzfunktionen, das heißt die Referenzfunktion eines Punktzieles ha,PZ in der Abbil-dung 5.51 (a), die Fokussierungsfunktion einer flachen Platte ha,FP in der Abbildung5.51 (b), die Fokussierungsfunktion eines Zweifach-Reflektors ha,DH in der Abbildung
137
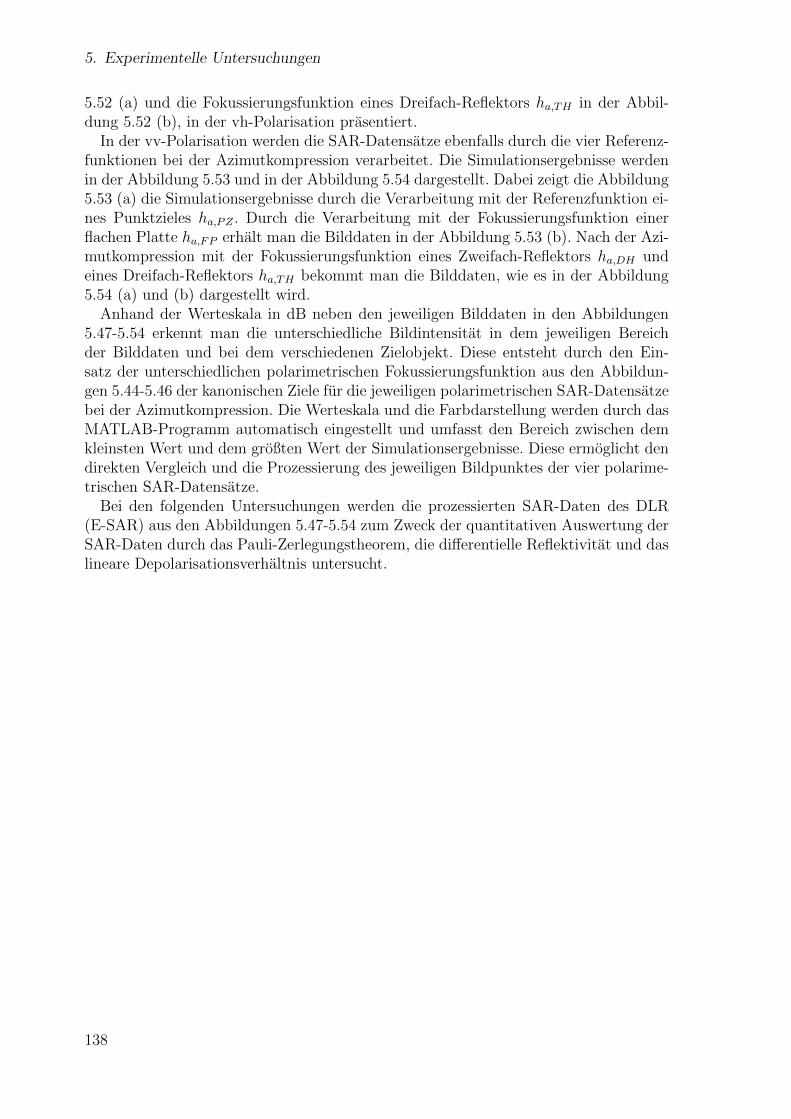
5. Experimentelle Untersuchungen
5.52 (a) und die Fokussierungsfunktion eines Dreifach-Reflektors ha,TH in der Abbil-dung 5.52 (b), in der vh-Polarisation prasentiert.
In der vv-Polarisation werden die SAR-Datensatze ebenfalls durch die vier Referenz-funktionen bei der Azimutkompression verarbeitet. Die Simulationsergebnisse werdenin der Abbildung 5.53 und in der Abbildung 5.54 dargestellt. Dabei zeigt die Abbildung5.53 (a) die Simulationsergebnisse durch die Verarbeitung mit der Referenzfunktion ei-nes Punktzieles ha,PZ . Durch die Verarbeitung mit der Fokussierungsfunktion einerflachen Platte ha,FP erhalt man die Bilddaten in der Abbildung 5.53 (b). Nach der Azi-mutkompression mit der Fokussierungsfunktion eines Zweifach-Reflektors ha,DH undeines Dreifach-Reflektors ha,TH bekommt man die Bilddaten, wie es in der Abbildung5.54 (a) und (b) dargestellt wird.
Anhand der Werteskala in dB neben den jeweiligen Bilddaten in den Abbildungen5.47-5.54 erkennt man die unterschiedliche Bildintensitat in dem jeweiligen Bereichder Bilddaten und bei dem verschiedenen Zielobjekt. Diese entsteht durch den Ein-satz der unterschiedlichen polarimetrischen Fokussierungsfunktion aus den Abbildun-gen 5.44-5.46 der kanonischen Ziele fur die jeweiligen polarimetrischen SAR-Datensatzebei der Azimutkompression. Die Werteskala und die Farbdarstellung werden durch dasMATLAB-Programm automatisch eingestellt und umfasst den Bereich zwischen demkleinsten Wert und dem großten Wert der Simulationsergebnisse. Diese ermoglicht dendirekten Vergleich und die Prozessierung des jeweiligen Bildpunktes der vier polarime-trischen SAR-Datensatze.
Bei den folgenden Untersuchungen werden die prozessierten SAR-Daten des DLR(E-SAR) aus den Abbildungen 5.47-5.54 zum Zweck der quantitativen Auswertung derSAR-Daten durch das Pauli-Zerlegungstheorem, die differentielle Reflektivitat und daslineare Depolarisationsverhaltnis untersucht.
138

5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.47.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) inder hh-Polarisation nach der Azimutkompression mit (a) der Refe-renzfunktion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fo-kussierungsfunktion einer flachen Platte (ha,FP )
Abbildung 5.48.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in derhh-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b)der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors(ha,TH)
139

5. Experimentelle Untersuchungen
Abbildung 5.49.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) inder hv-Polarisation nach der Azimutkompression mit (a) der Refe-renzfunktion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fo-kussierungsfunktion einer flachen Platte (ha,FP )
Abbildung 5.50.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in derhv-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b)der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors(ha,TH)
140
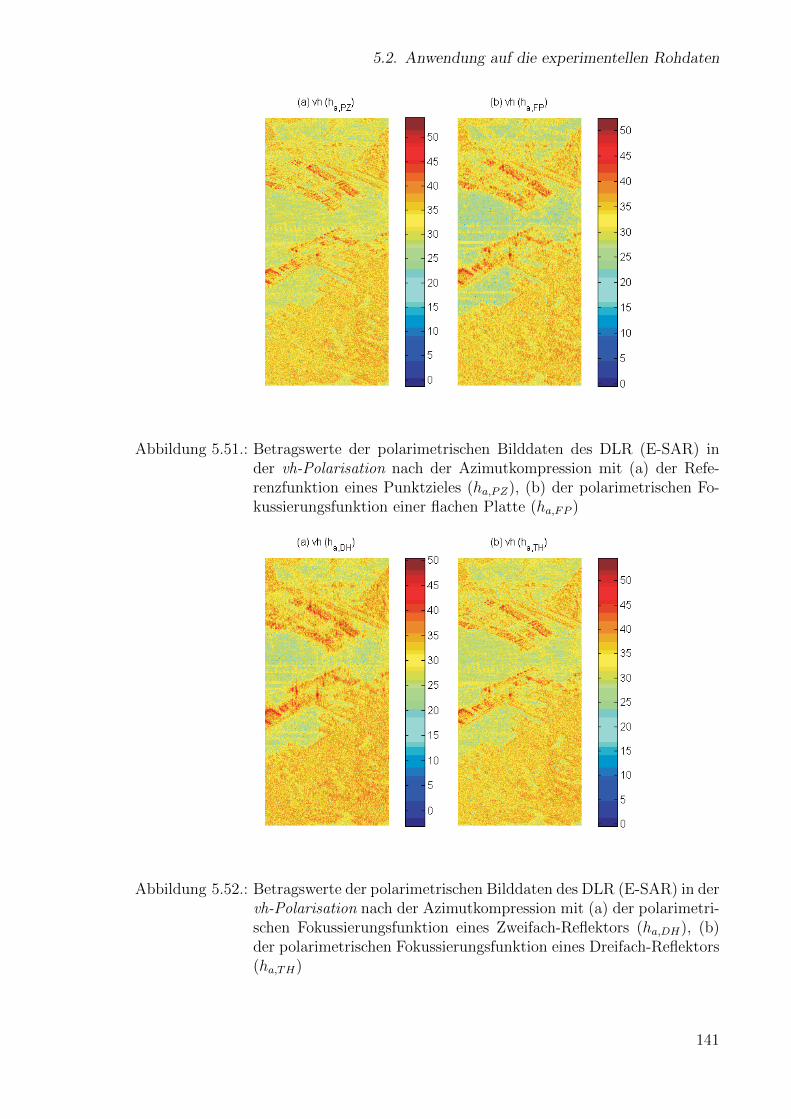
5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.51.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) inder vh-Polarisation nach der Azimutkompression mit (a) der Refe-renzfunktion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fo-kussierungsfunktion einer flachen Platte (ha,FP )
Abbildung 5.52.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervh-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b)der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors(ha,TH)
141

5. Experimentelle Untersuchungen
Abbildung 5.53.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) inder vv-Polarisation nach der Azimutkompression mit (a) der Refe-renzfunktion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fo-kussierungsfunktion einer flachen Platte (ha,FP )
Abbildung 5.54.: Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervv-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b)der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors(ha,TH)
142

5.2. Anwendung auf die experimentellen Rohdaten
Quantitative Datenauswertung mit Pauli-Zerlegungstheorem
Bei dem Pauli-Zerlegungstheorem werden die vier Parameter a, b, c und d, wie es inden Gleichungen (2.113)-(2.116) beschrieben wird, zur Bildung eines polarimetrischenSAR-Bildes mit Falschfarbdarstellung eingesetzt.
Die Abbildung 5.55 prasentiert die polarimetrischen Bilddaten mit Falschfarbdar-stellung durch Pauli-Zerlegungstheorem nach der Azimutkompression mit der Refe-renzfunktion eines Punktzieles ha,PZ in der Abbildung 5.55 (a). Die polarimetrischeFokussierungsfunktion einer flachen Platte ha,FP wird fur die Simulationsergebnissein der Abbildung 5.55 (b) verwendet. In der Abbildung 5.56 (a) wird das polari-metrische Bild nach dem Einsatz der polarimetrischen Fokussierungsfunktion einesZweifach-Reflektors (ha,DH) bei der Azimutkompression dargestellt. Die Abbildung5.56 (b) prasentiert die Simulationsergebnisse des Pauli-Zerlegungstheorems mit derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH .
Abbildung 5.55.: Polarimetrische Bilddaten mit Pauli-Zerlegungstheorem nach derAzimutkompression mit (a) der Referenzfunktion eines Punktzieles(ha,PZ), (b) der polarimetrischen Fokussierungsfunktion einer flachenPlatte (ha,FP )
Durch eine visuelle Auswertung erkennt man eine Dominanz der Farbe”Violett“
in der Abbildung 5.55 (b) nach der Azimutkompression mit der polarimetischen Fo-kussierungsfunktion einer flachen Platte ha,FP und in der Abbildung 5.56 (a) nachder Azimutkompression mit der polarimetischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH .
In der Abbildung 5.57 wird ein Histogramm zur quantitativen Auswertung der SAR-Bilddaten mit dem Pauli-Zerlegungstheorem prasentiert. Die x-Achse ist der Farb-balken oder der Wertebereich der Farbe zwischen 0 und 255. Die y-Achse zeigt dieHaufigkeit der jeweiligen Farbe. Dabei werden die Grundfarben, das heißt Rot, Grun
143
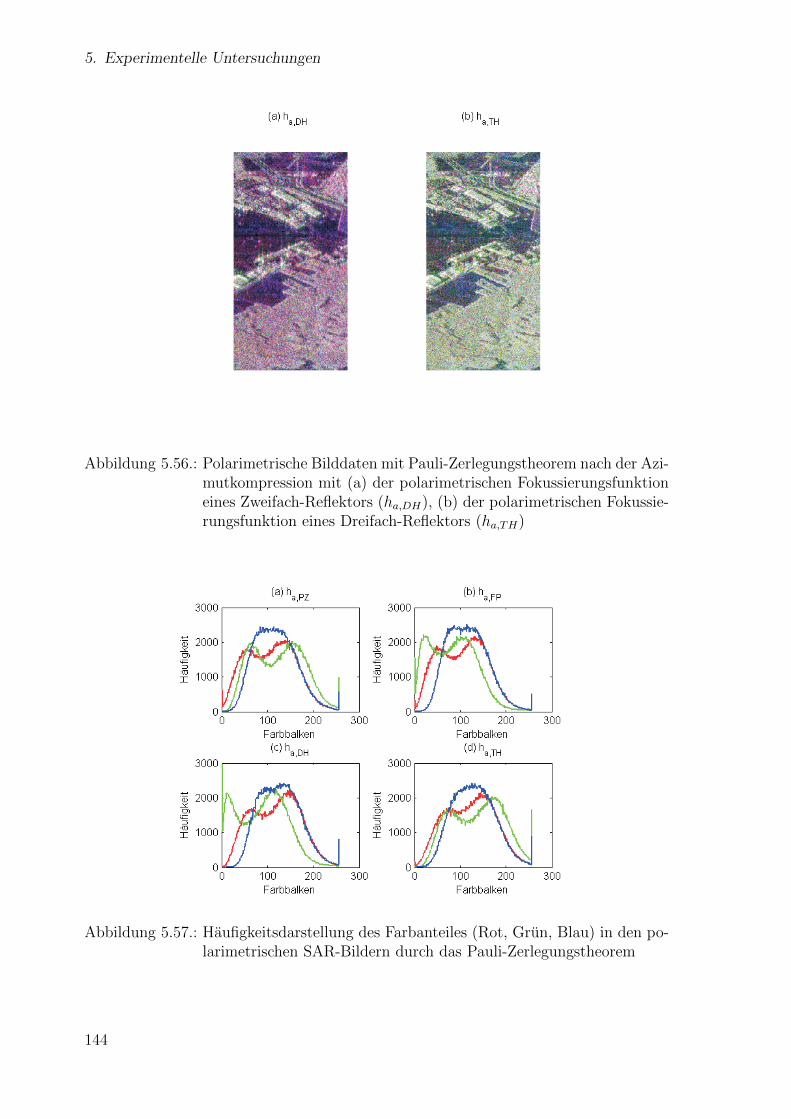
5. Experimentelle Untersuchungen
Abbildung 5.56.: Polarimetrische Bilddaten mit Pauli-Zerlegungstheorem nach der Azi-mutkompression mit (a) der polarimetrischen Fokussierungsfunktioneines Zweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussie-rungsfunktion eines Dreifach-Reflektors (ha,TH)
Abbildung 5.57.: Haufigkeitsdarstellung des Farbanteiles (Rot, Grun, Blau) in den po-larimetrischen SAR-Bildern durch das Pauli-Zerlegungstheorem
144
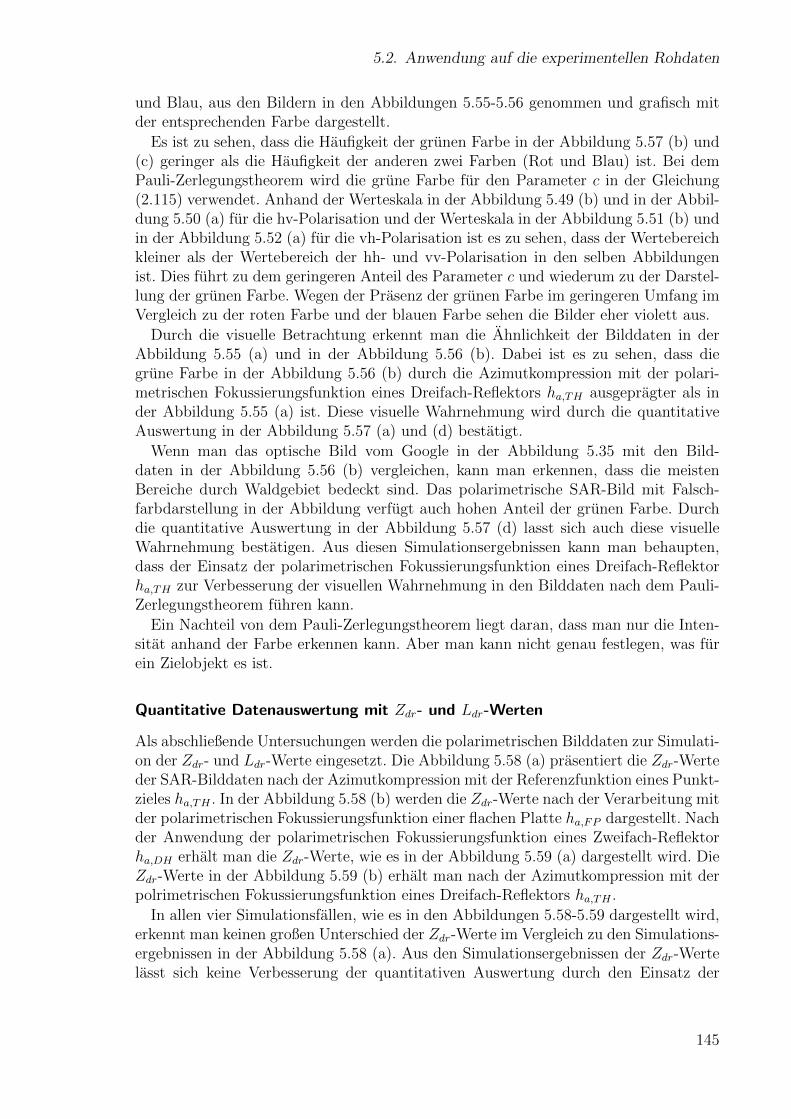
5.2. Anwendung auf die experimentellen Rohdaten
und Blau, aus den Bildern in den Abbildungen 5.55-5.56 genommen und grafisch mitder entsprechenden Farbe dargestellt.
Es ist zu sehen, dass die Haufigkeit der grunen Farbe in der Abbildung 5.57 (b) und(c) geringer als die Haufigkeit der anderen zwei Farben (Rot und Blau) ist. Bei demPauli-Zerlegungstheorem wird die grune Farbe fur den Parameter c in der Gleichung(2.115) verwendet. Anhand der Werteskala in der Abbildung 5.49 (b) und in der Abbil-dung 5.50 (a) fur die hv-Polarisation und der Werteskala in der Abbildung 5.51 (b) undin der Abbildung 5.52 (a) fur die vh-Polarisation ist es zu sehen, dass der Wertebereichkleiner als der Wertebereich der hh- und vv-Polarisation in den selben Abbildungenist. Dies fuhrt zu dem geringeren Anteil des Parameter c und wiederum zu der Darstel-lung der grunen Farbe. Wegen der Prasenz der grunen Farbe im geringeren Umfang imVergleich zu der roten Farbe und der blauen Farbe sehen die Bilder eher violett aus.
Durch die visuelle Betrachtung erkennt man die Ahnlichkeit der Bilddaten in derAbbildung 5.55 (a) und in der Abbildung 5.56 (b). Dabei ist es zu sehen, dass diegrune Farbe in der Abbildung 5.56 (b) durch die Azimutkompression mit der polari-metrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH ausgepragter als inder Abbildung 5.55 (a) ist. Diese visuelle Wahrnehmung wird durch die quantitativeAuswertung in der Abbildung 5.57 (a) und (d) bestatigt.
Wenn man das optische Bild vom Google in der Abbildung 5.35 mit den Bild-daten in der Abbildung 5.56 (b) vergleichen, kann man erkennen, dass die meistenBereiche durch Waldgebiet bedeckt sind. Das polarimetrische SAR-Bild mit Falsch-farbdarstellung in der Abbildung verfugt auch hohen Anteil der grunen Farbe. Durchdie quantitative Auswertung in der Abbildung 5.57 (d) lasst sich auch diese visuelleWahrnehmung bestatigen. Aus diesen Simulationsergebnissen kann man behaupten,dass der Einsatz der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektorha,TH zur Verbesserung der visuellen Wahrnehmung in den Bilddaten nach dem Pauli-Zerlegungstheorem fuhren kann.
Ein Nachteil von dem Pauli-Zerlegungstheorem liegt daran, dass man nur die Inten-sitat anhand der Farbe erkennen kann. Aber man kann nicht genau festlegen, was furein Zielobjekt es ist.
Quantitative Datenauswertung mit Zdr- und Ldr-Werten
Als abschließende Untersuchungen werden die polarimetrischen Bilddaten zur Simulati-on der Zdr- und Ldr-Werte eingesetzt. Die Abbildung 5.58 (a) prasentiert die Zdr-Werteder SAR-Bilddaten nach der Azimutkompression mit der Referenzfunktion eines Punkt-zieles ha,TH . In der Abbildung 5.58 (b) werden die Zdr-Werte nach der Verarbeitung mitder polarimetrischen Fokussierungsfunktion einer flachen Platte ha,FP dargestellt. Nachder Anwendung der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektorha,DH erhalt man die Zdr-Werte, wie es in der Abbildung 5.59 (a) dargestellt wird. DieZdr-Werte in der Abbildung 5.59 (b) erhalt man nach der Azimutkompression mit derpolrimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH .
In allen vier Simulationsfallen, wie es in den Abbildungen 5.58-5.59 dargestellt wird,erkennt man keinen großen Unterschied der Zdr-Werte im Vergleich zu den Simulations-ergebnissen in der Abbildung 5.58 (a). Aus den Simulationsergebnissen der Zdr-Wertelasst sich keine Verbesserung der quantitativen Auswertung durch den Einsatz der
145

5. Experimentelle Untersuchungen
polarimetrischen Fokussierungsfunktion im Vergleich zu den Zdr-Werten, die bei derAzimutkompression mit der Referenzfunktion eines Punktzieles verarbeitet wurden,feststellen.
Abbildung 5.58.: Polarimetrische Bilddaten mit Zdr-Werte nach der Azimutkompres-sion mit (a) der Referenzfunktion eines Punktzieles (ha,PZ), (b) derpolarimetrischen Fokussierungsfunktion einer flachen Platte (ha,FP )
Die Simulationsergebnissen zur quantitativen Auswertung der SAR-Daten mit Hil-fe des linearen Depolarisationsverhaltnises Ldr werden in den Abbildungen 5.60-5.61prasentiert. Dabei prasentiert die Abbildung 5.60 (a) die Ldr-Werte nach der Azimut-kompression mit einer Referenzfunktion eines Punktzieles ha,PZ . Durch den Einsatz derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH erhalt man dieSimulationsergebnisse, wie es in der Abbildung 5.61 (b) dargestellt wird. Die Ldr-Wertein den obengenannten zwei Fallen haben eine ahnliche Verteilung.
Eine interessante Kenntnis findet man in der Abbildung 5.60 (b), bei der die Azi-mutkompression mit der polarimetrischen Fokussierungsfunktion einer flachen Platteha,FP durchgefuhrt wird. Man kann erkennen, dass die flachen Bereiche, z.B. auf derLandebahn und auf der Wiese, die Ldr-Werte deutlich weniger als null haben, so dassman eine erkennbare Trennlinie zwischen den flachen Bereichen und den Bereichen mitGebauden und Baumen machen kann. Eine andere Moglichkeit, um die Kontur der Bo-denoberflache zu machen, erhalt man durch die Ldr-Werte nach der Azimutkompressionmit der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektor ha,DH , wie esin der Abbildung 5.61 (a) dargestellt wird. Hier ist es deutlich zu sehen, dass nur diegroßen Gebaude den positiven Ldr-Wert haben. Auf dem flachen Bereich erhalt man dieLdr-Werte deutlich weniger als null. Das Wohngebiet hat auch den negativen Ldr-Wert.
146
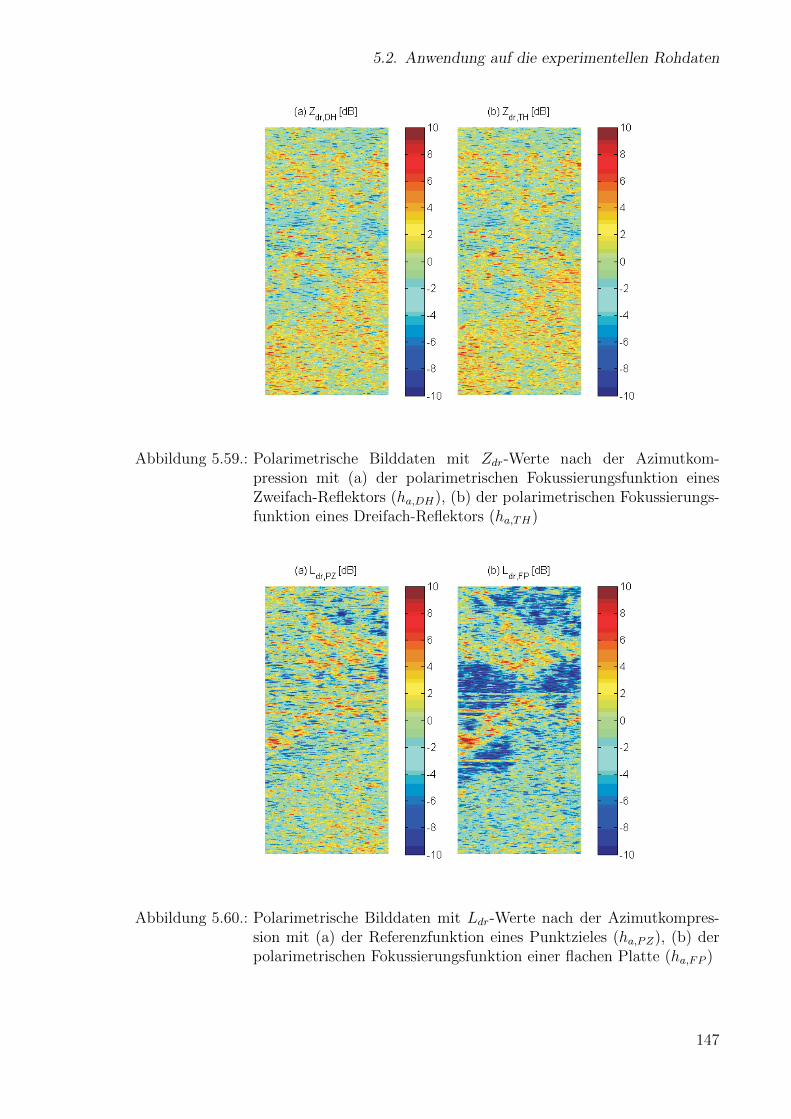
5.2. Anwendung auf die experimentellen Rohdaten
Abbildung 5.59.: Polarimetrische Bilddaten mit Zdr-Werte nach der Azimutkom-pression mit (a) der polarimetrischen Fokussierungsfunktion einesZweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussierungs-funktion eines Dreifach-Reflektors (ha,TH)
Abbildung 5.60.: Polarimetrische Bilddaten mit Ldr-Werte nach der Azimutkompres-sion mit (a) der Referenzfunktion eines Punktzieles (ha,PZ), (b) derpolarimetrischen Fokussierungsfunktion einer flachen Platte (ha,FP )
147
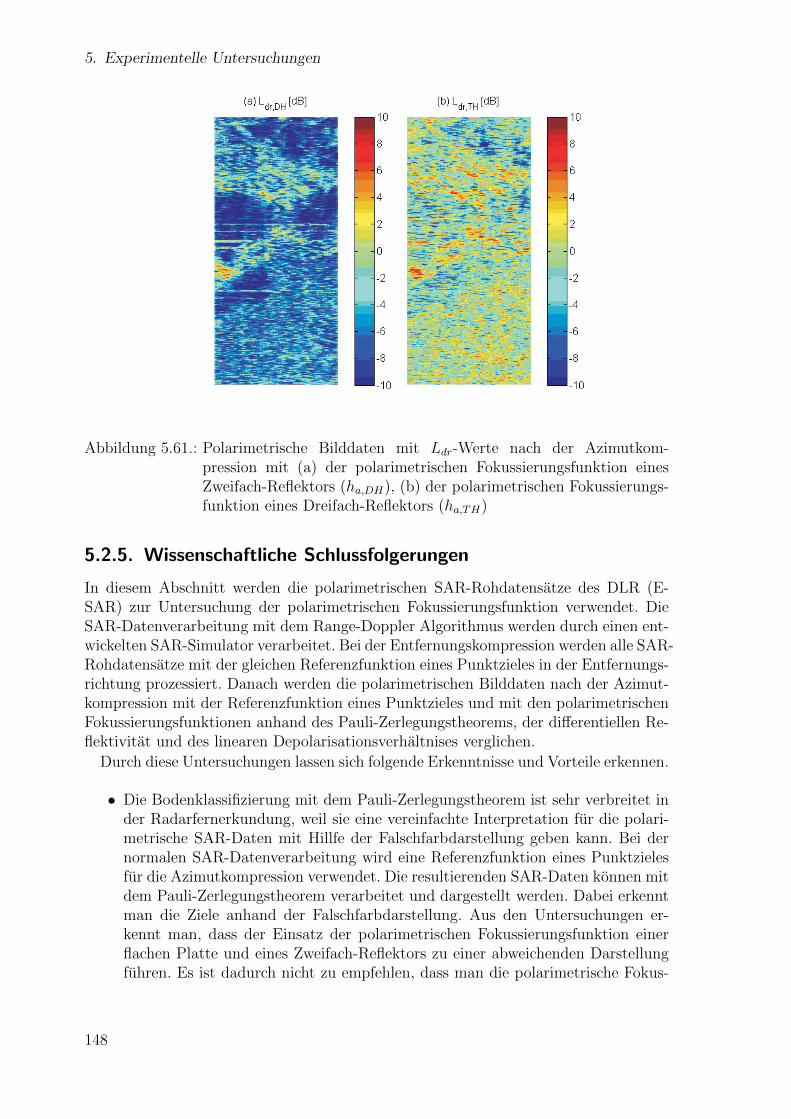
5. Experimentelle Untersuchungen
Abbildung 5.61.: Polarimetrische Bilddaten mit Ldr-Werte nach der Azimutkom-pression mit (a) der polarimetrischen Fokussierungsfunktion einesZweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussierungs-funktion eines Dreifach-Reflektors (ha,TH)
5.2.5. Wissenschaftliche Schlussfolgerungen
In diesem Abschnitt werden die polarimetrischen SAR-Rohdatensatze des DLR (E-SAR) zur Untersuchung der polarimetrischen Fokussierungsfunktion verwendet. DieSAR-Datenverarbeitung mit dem Range-Doppler Algorithmus werden durch einen ent-wickelten SAR-Simulator verarbeitet. Bei der Entfernungskompression werden alle SAR-Rohdatensatze mit der gleichen Referenzfunktion eines Punktzieles in der Entfernungs-richtung prozessiert. Danach werden die polarimetrischen Bilddaten nach der Azimut-kompression mit der Referenzfunktion eines Punktzieles und mit den polarimetrischenFokussierungsfunktionen anhand des Pauli-Zerlegungstheorems, der differentiellen Re-flektivitat und des linearen Depolarisationsverhaltnises verglichen.
Durch diese Untersuchungen lassen sich folgende Erkenntnisse und Vorteile erkennen.
• Die Bodenklassifizierung mit dem Pauli-Zerlegungstheorem ist sehr verbreitet inder Radarfernerkundung, weil sie eine vereinfachte Interpretation fur die polari-metrische SAR-Daten mit Hillfe der Falschfarbdarstellung geben kann. Bei dernormalen SAR-Datenverarbeitung wird eine Referenzfunktion eines Punktzielesfur die Azimutkompression verwendet. Die resultierenden SAR-Daten konnen mitdem Pauli-Zerlegungstheorem verarbeitet und dargestellt werden. Dabei erkenntman die Ziele anhand der Falschfarbdarstellung. Aus den Untersuchungen er-kennt man, dass der Einsatz der polarimetrischen Fokussierungsfunktion einerflachen Platte und eines Zweifach-Reflektors zu einer abweichenden Darstellungfuhren. Es ist dadurch nicht zu empfehlen, dass man die polarimetrische Fokus-
148
5.2. Anwendung auf die experimentellen Rohdaten
sierungsfunktion einer flachen Platte und eines Zweifach-Reflektors fur das Pauli-Zerlegungstheorem zu verwenden. Im Gegensatz dazu, bietet sich der Einsatz derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors.
• Aus den Untersuchungen haben sich die zwei quantitativen Parameter aus derWetterradarmessung, das heißt, die differentiellen Reflektivitat (Zdr) und daslineare Depolarisationsverhaltnis (Ldr), als eine alternative Methode zur Klas-sifizierung der Bodenoberflache. Eine markante Kenntnis erhalt man von demWohngebiet, wo es viele Hauser mit der Struktur eines Zweifach-Reflektors gibt.Hier wird man positive Zdr-Werte und negative Ldr-Werte erkennen. Aus denSimulationsergebnissen in der Abbildung 5.60 (b) und in der Abbildung 5.61 (a)bieten sich die Ldr-Werte, nach der Azimutkompression mit der polarimetrischenFokussierungsfunktion einer flachen Platte ha,FP und mit der polarimetrischenFokussierungsfunktion eines Zweifach-Reflektors ha,DH , als eine alternative Klas-sifizierung der Bodenoberflache, wenn man die flachen Bereiche suchen mochte.In den beiden Fallen sind die Ldr-Werte auf dem flachen Bereich der Bilddatendeutlich weniger als null. Dadurch kann man eine deutliche Trennlinie zwischenden Bereichen mit Gebauden oder Baumen und den flachen Bereich erkennen.
• Der Dreifach-Reflektor (Trihedral) eignet sich sehr fur die polarimetrische Kali-brierung, weil er hohe Reflektivitat in allen Polarisationslagen zuruckgibt. Furden koplaren Betrieb kommt der Zweifach-Reflektor (Dihedral) auch in Frage,hat aber geringere Reflektivitat im kreuzpolaren Radarbetrieb. In der Praxiswird eine Oberflache, die viel großer als die eingesetzten Ziele sind, gleichzeitigvon der Antenne beleuchtet, so dass die Reflektivitat von der flachen Ebene imkreuzpolaren Radarbetrieb sehr groß sein kann.
• Die Simulationsergebnisse in den Abbildungen 5.41-5.43 sind Beispiele dafur, wiedie Ruckstreuungseigenschaften beziehungsweise der Radarruckstreuquerschnittein der jeweiligen Entfernungszelle unter SAR-Geometrie sind. Eine wichtige Kennt-nis von diesen Untersuchungen kann in der Kalibrierung eines SAR-Systems mitdem kanonischen Zielobjekt umgesetzt werden. Bei der Systemkalibrierung mitHilfe eines bestimmten Zieles kann man die gunstige und geeignete Position desZieles bezuglich der Flugrichtung der Tragerplattform vorrechnen.
Es sollte darauf hingewiesen werden, dass diese Werte aus den bestimmten Simu-lationsparametern und der SAR-Umgebung gewonnen worden sind. Die numerischeBerechnung stutzt sich auf eine gute Approximation der physikalischen Naturereignis-sen. Aufgrund des Rechenaufwandes wurde die gesamte Plattenseite in neun kleinerenTeilplatten zerlegt, um die vektorielle Berechnung im Nahfeldbereich zu gewahrleisten.Die andere Anzahl der Teilplatten ergibt auch andere Genauigkeit der simulierten Wer-te.
An dieser Stelle muss es noch betont werden, dass die SAR-Datenverarbeitung mitdem Range-Doppler Algorithmus nur mit einem Look und mit einer Sub-Apertur durch-gefuhrt wird. Es kann sein, dass andere Faktoren die Simulationsergebnissen beeinflus-sen, z.B. das Speckle-Rauschen.
149

6. Zusammenfassung und Ausblick
Zusammenfassung
In dieser Dissertation wurden neue polarimetrische Fokussierungsfunktionen der ka-nonischen Ziele, das heißt einer flachen Platte, eines Zweifach-Reflektors und einesDreifach-Reflektors, fur die SAR-Datenverarbeitung mit Hilfe der polarimetrischenRuckstreuungseigenschaften entwickelt und untersucht, die zu einer alternativen quan-titativen Auswertung der polarimerischen SAR-Daten fuhren kann. Um die neue pola-rimetrische Fokussierungsfunktion fur die Azimutkompression zu untersuchen, wurdeneinerseits eigene SAR-Rohdaten generiert andererseits die echten SAR-Rohdaten desDLR (E-SAR) prozessiert. Mit Hilfe des Pauli-Zerlegungstheorems, der differentiellenReflektivitat und des linearen Depolarisationsverhaltnises wurde die quantitative Aus-wertung durchgefuhrt.
Die wesentlichen Aufgaben dieser Dissertation bestanden einerseits in der Entwick-lung eines SAR-Simulators fur die Gewinnung der SAR-Rohdaten und fur die Ver-arbeitung der polarimetrischen SAR-Rohdaten des DLR (E-SAR) andererseits in dernumerischen Berechnung der polarimetrischen Ruckstreuungseigenschaft der kanoni-schen Ziele zur Bildung der entwickelten polarimetrischen Fokussierungsfunktion.
Zu Beginn dieser Dissertation wurden die Motivation und das Forschungsvorhabenin der Einleitung dargestellt. Aufbauend auf der einleitenden Problembeschreibungwurden die behandelten Themen, das entwickelte Verfahren bezuglich der polarime-trischen Fokussierungsfunktion, die Modellierung fur die numerische Berechnung derRuckstreuungseigenschaft der kanonischen Ziele und die Simulationsergebnisse im Fol-genden zusammengefasst.
Erstens wurden die benotigten theoretischen Grundlagen im Kapitel 2 eingefuhrt.Zur numerischen Berechnung der polarimetrischen Ruckstreuungseigenschaft wurdendie mathematische Beschreibung der elektromagnetischen Wellenausbreitung und diePolarisationsbeschreibung eingefuhrt. Der Radarruckstreuquerschnitt ist im Allgemei-nen aus dem Leistungsdichtevergleich zwischen der einfallenden Welle und der reflek-tierten Welle definiert. Zur Bestimmung der reflektierten Welle wurden die physikali-sche Optik Approximation und das magnetische Vektorpotential erlautert. Fur den Auf-bau eines SAR-Simulators ist ein grundlegendes Verstandnis von dem allgemeinen Ra-darprinzip, dem Aspekt der Signaltheorie, dem Radar mit synthetischer Apertur (SAR)notwendig, welche in diesem Kapitel eingefuhrt wurden. Die SAR-Datenverarbeitungmit dem Range-Doppler Algorithmus wurde fur die Verarbeitung und Untersuchungder polarimetrischen Fokussierungsfunktion verwendet und in diesem Kapitel erklart.Zur quantitativen SAR-Datenauswertung wurden das Pauli-Zerlegungstheorem, die dif-ferentielle Reflektivitat und das lineare Depolarisationsverhaltnis in diesem Kapitelaufgezeigt.
Zweitens wurde im Kapitel 3 ein Konzept des entwickelten Verfahrens zur quantita-
151
6. Zusammenfassung und Ausblick
tiven Auswertung mittels polarimetrischer Auskunft prasentiert. Basierend auf der ma-thematischen Modellierung der reflektierten Signale in der SAR-Geometrie wurde einAnsatz zur polarimetrischen Fokussierungsfunktion in der SAR-Datenverarbeitung ent-lang der Azimutrichtung entwickelt und in diesem Kapitel eingefuhrt. In dieser Disser-tation wurden zwei Polarisationslagen, das heißt die horizontale und vertikale Polarisa-tion, untersucht. Die vektorielle Große des elektrischen Feldes, des magnetischen Feldesund der Ausbreitungsrichtung fur die numerische Berechnung wurde hier beschrieben.Nach der Reflexion an der Oberflache andern sich auch die Richtungen der elektroma-gnetischen Felder, welche in diesem Kapitel mitberucksichtigt wurden. Die elektroma-gnetische Streuung von einem Zielobjekt entsteht sowohl im Nahfeldbereich als auchim Fernfeldbereich. Um die Ruckstreuungseigenschaft zu berechnen, wurde die mathe-matische Beschreibung der entstandenen Felder in beiden Bereichen eingefuhrt. EinAnsatz fur die Modellierung der polarisationsabhangigen Radarruckstreuquerschnitteim horizontalen und vertikalen Empfangsmodus wurde in diesem Kapitel erlautert.
Drittens wurden die Zielobjektmodellierung und die numerische Berechnung derpolarimetischen Radarruckstreuquerschnitte der kanonischen Ziele im Kapitel 4 ein-gefuhrt. Zuerst wurde die Geometrie fur die Modellierung eines bodengestutzten SAR-Systems fur die folgenden Berechnungen definiert. In dieser Dissertation wurden dreikanonischen Ziele, das heißt eine flache Platte, ein Zweifach-Reflektor und ein Dreifach-Reflektor verwendet. Aufgrund der unterschiedlichen Geometrie des jeweiligen Ziel-objektes wurde die numerische Berechnung in Gruppen gegliedert, um die Genauig-keit und die Nutzbarkeit der Ergebnisse zu bekommen. Im Fall einer flachen Plat-te wurde nur eine einfache Reflexion mit der physikalischen Optik Approximation(PO) berucksichtigt. Die ausfuhrliche numerische Berechnung fur die polarimetrischegestreute Feldstarke von einer flachen Platte wurde im Anhang A beschrieben. Beidem Zweifach-Reflektor wurde die numerische Berechnung aufgrund der Geometriein drei Gruppen geteilt, wie folgt: eine Reflexion mit PO, zweifache Reflexion mitPO-PO und dreifache Reflexion mit spiegelnder Reflexion-PO-PO. Insgesamt wurdensechs Reflexionsbeitrage eingefuhrt. Die ausfuhrliche numerische Berechnung fur diepolarimetrische gestreute Feldstarke eines Zweifach-Reflektors wurde im Anhang B be-schrieben. Ein Dreifach-Reflektor besteht aus drei Platten, die senkrecht zu einanderstehen, dadurch wurden die numerische Berechnung ebenfalls in drei Gruppen geteilt,das heißt eine Reflexion mit PO, zweifache Reflexion mit PO-PO und dreifache Re-flexion mit spiegelnder Reflexion-PO-PO. Die ausfuhrliche numerische Berechnung dergesamten einundzwanzig Reflexionsbeitrage fur die polarimetrische gestreute Feldstarkeeines Dreifach-Reflektors wurde im Anhang C beschrieben.
Die dargestellten Simulationsergebnisse in diesem Kapitel sind die polarimetrischenRuckstreuquerschnitte des untersuchten Zieles in Richtung zuruck zur SAR-Antenneunter der bodengestutzten SAR-Geometrie entlang der Azimutrichtung. Die Simulati-onsergebnisse deuten darauf hin, dass die SAR-Geometrie eine große Wirkung auf dieRuckstreuquerschnitte, weil sich die Richtung zwischen Radar und Ziel innerhalb derBeleuchtungszeit andauernd andert, so dass die vektoriellen Feldkomponenten fur jedeAntennenposition auch neu berechnet werden mussen. Durch diese Untersuchung kannman eine genaue Information uber die winkelabhangige Reflektivitat eines bestimmtenZieles in Abhangigkeit von der SAR-Geometrie und der Polarisationslage abschatzenund vorrechnen. Die resultierenden Informationen gelten als hilfreiche Kenntnisse, die
152

bei der Eichung des gesamten Systems eingesetzt werden konnen.
Zusatzliche Information wurde anhand der differentiellen Reflektivitat und des linea-ren Depolarisationsverhaltnises gewonnen. Diese ist dann spezifisch fur die vorgegebeneSimulationsgeometrie und die Abmessung der kanonischen Ziele.
Es muss betont werden, dass die numerische Berechnung der Wellen-Abstrahlungvon dem Zielobjekt sowohl im Fernfeldbereich als auch im Nahfeldbereich in Betrachtgezogen wurde. Fur die numerische Berechnung im Nahfeldbereich von dem Zweifach-Reflektor und von dem Dreifach-Reflektor wurden die Plattenseiten in neun kleinerenTeilen zerlegt. Die Teilstreuungen werden mit dem Uberlagerungsprinzip mit einanderaddiert und als Endergebnisse prasentiert. Da es sich bei den numerischen Teilberech-nungen um die Integralrechnungen handelt, ist der Rechenaufwand der Streuungsei-genschaften von der Anzahl der Teilplatten stark abhangig. Die andere Anzahl derTeilplatten wird andere Genauigkeit beinhalten. In dieser Arbeit geht es an der erstenLinie um den Nachbau der Ruckstreuungseigenschaften von den kanonischen Zielen inder Natur mit guter Approximation.
Viertens wurden die experimentellen Untersuchungen im Kapitel 5 durchgefuhrt unddie Ergebnisse prasentiert. Die Untersuchungen wurden in zwei Hauptgruppen geglie-dert, das heißt die Untersuchung mit den simulierten Daten und die Untersuchung mitden echten SAR-Daten des DLR (E-SAR). Bei der experimentellen Untersuchung mitden simulierten Daten im Abschnitt 5.1 wurde zuerst eine Simulationsumgebung furein bodengestutztes SAR-System definiert. Aus der SAR-Geometrie wurde ein SAR-Simulator entwickelt, um die SAR-Rohdaten zu generieren und zu verarbeiten. Dabeiwurden die Systemparameter, z.B. die Wellenform, die Frequenz, die Geschwindigkeitder Antennenbewegung, die Pulswiederholfrequenz und die Abtastrate, miteinanderangepasst und fur die folgenden Untersuchungen verwendet.
In dieser Dissertation wurden die SAR-Rohdaten von den kanonischen Zielen un-ter der Annahme, dass der Boden flach ist und das Ziel stationar ist, simuliert undverarbeitet. Die gewonnenen SAR-Rohdaten wurden mit der Referenzfunktion einesPunktzieles in der Entfernungskompression verarbeitet. Bei der Azimutkompressionwurden die SAR-Rohdaten einerseits mit der Referenzfunktion eines Punktzieles an-dererseits mit der polarimetischen Fokussierungsfunktion des jeweiligen kanonischenZieles verarbeitet. Die Untersuchungen wurden sowohl mit einem Ziel als auch mit dreiZielen, die neben einander entlang der Azimutrichtung gelegt wurden, durchgefuhrt.
Aus den Simulationsergebnissen wurde der Ansatz zur Bestimmung der polarime-tischen Radarruckstreuquerschnitte der kanonischen Ziele bestatigt. Eine markanteKenntnis in diesem Kapitel liegt daran, dass die entwickelte polarimetrische Fokus-sierungsfunktion zu einer besseren Azimutauflosung im Vergleich zu den Ergebnissennach der Azimutkompression mit einer Referenzfunktion eines Punktzieles fuhrt. Au-ßerdem erhalt man durch den Einsatz der polarimetrischen Fokussierungsfunktion auchdie bessere Unterdruckung der Nebenzipfel in den Endbilddaten. Die spezifische Kur-venstruktur, die von dem eingesetzten Zielobjekt und von der Polarisation abhangigist, kann bei der Untersuchung, Abstimmung, Kalibrierung der Radarsystemparameterund den anderen Anwendungen in Betracht gezogen werden.
Fur die weiteren Untersuchungen in Aschnitt 5.2 wurden die polarimetrischen SAR-Daten genommen. Die verwendeten Radardaten stammten von dem flugzeuggetragenenSAR-System E-SAR des DLR. Zuerst wurde die Datenauswertung ohne polarimetrische
153

6. Zusammenfassung und Ausblick
Fokussierungsfunktion durchgefuhrt. Dabei wurden polarimetrischen SAR-Bilddatenanhand des Pauli-Zerlegungstheorems, der differentiellen Reflektivitat und des linearenDepolarisationsverhaltnises quantitative ausgewertet. Durch die Falschfarbdarstellungmit den Grundfarben (Rot, Blau, Grun) entsprechend des Pauli-Zerlegungstheoremswurde das sogenannte RGB-Bild erzeugt, bei dem man die verschiedenen Zielobjek-te nach der Farbe bestimmen kann. Die differentielle Reflektivitat und das linea-re Depolarisationsverhaltnis haben sich als eine alternative Methode zur Bodenober-flachenklassifizierung gezeigt. Anhand des Vorzeichens der beiden Parameter lasst sicheine grobe Entscheidung uber die besondere Bodenstruktur machen, z.B. im Wohnge-biet sind die Werte der differentiellen Reflektivitat positiv und das lineare Depolarisa-tionsverhaltnis negativ sein.
Im nachsten Schritt wurden die polarimetrischen Fokussierungsfunktionen der ka-nonischen Ziele berechnet. Dabei wurden die Geometrie und die Systemparameter desE-SAR eingesetzt. Fur jede Entfernungszelle wurde eine polarimetrische Fokussierungs-funktion mit Hilfe der polarimetrischen Radarruckstreuquerschnitte des jeweiligen Zie-lobjektes simuliert und bei der Azimutkompression eingesetzt.
Aus den Simulationsergebnissen der polarimetrischen Radarruckstreuquerschnittewurde eine wellenformige Struktur entlang der Entfernungsrichtung erkannt. Diese sindwegen der Winkelabhangigkeit zustande gekommen und gelten als nutzliche Informa-tion bei dem Entwurf eines Experimentes zur Messung der Reflektivitat eines Zielesunter SAR-Geometrie.
Die normierten polarimetrischen Radarruckstreuquerschnitte wurden zur Bildungder polarimetrischen Fokussierungsfunktion verwendet, damit nur die Struktur derReflektivitat entlang der Azimutrichtung in Betracht gezogen wurde. Zum Vergleichwurden die polarimetrischen SAR-Daten durch vier Referenzfunktionen in Azimutrich-tung, das heißt die Referenzfunktion eines Punktzieles, eine polarimetrische Fokussie-rungsfunktion einer flachen Platte, eine polarimetrische Fokussierungsfunktion einesZweifach-Reflektors und eine polarimetrische Fokussierungsfunktion eines Dreifach-Reflektors, verarbeitet. Die quantitative Auswertung wurde mit Hilfe des Pauli-Zerlegu-ngstheorems, der differentiellen Reflektivitat und des linearen Depolarisationsverhaltnisdurchgefuhrt.
Aus den Simulationsergebnissen nach dem Pauli-Zerlegungstheorem lassen sich fol-gende Erkenntnisse bestimmen. Durch die Azimutkompression mit der polarimetrischenFokussierungsfunktion einer flachen Platte und eines Dreifach-Reflektors ergibt sichkleinere Bildintensitat im kreuzpolaren Radarbetrieb im Vergleich zu der Bildinten-sitat im koploaren Betrieb. Deswegen wurde das SAR-Bild mit Falschfarbdarstellungunterschiedlich als das SAR-Bild, das durch die Referenzfunktion eines Punktzielesin Azimutrichtung verarbeitet wurde. Die polarimetrische Fokussierungsfunktion einesDreifach-Reflektors hat sich als geeignet bezuglich der Klassifizierung mit dem Pauli-Zerlegungstheorem.
Im nachsten Schritt wurden die differentielle Reflektivitat und das lineare Depola-risationsverhaltnis zur quantitativen Auswertung der SAR-Daten betrachtet. Aus denSimulationsergebnissen wurde gezeigt, dass die Simulationswerte der differentiellen Re-flektivitat im flachen Gebiet in den Bilddaten weniger als null sind, so dass man einegrobe Trennlinie zwischen den flachen Gebieten und den Gebieten mit Hausern undBaumen ziehen kann.
154

Ein interessantes Ergebnis wurde durch die Werte des linearen Depolarisations-verhaltnises festgestellt. Eine deutlichere Trennlinie zwischen den flachen Gebieten undden Gebieten mit Hausern und Baumen wurde gezeigt, wenn die Azimutkompressionmit der polarimetrischen Fokussierungsfunktion einer flachen Platte durchgefuhrt wur-de. Es ist auch zu sehen, dass die Gebaude mit großer Dachflache mehr hervorgehobenwurden, wenn die Azimutkompression mit der polarimetrischen Fokussierungsfunktioneines Zweifach-Reflektors durchgefuhrt wurde.
Ausblick
Das polarimetrische Radar mit synthetischer Apertur liefert eine sehr nutzliche An-wendung der polarimetrischen Streuungseigenschaft, insbesondere die Anwendung beider Klassifizierung der Bodenoberflache.
Die entwickelte polarimetische Fokussierungsfunktion ist geeignet fur die Azimut-kompression bezuglich der verbesserten Auflosung, wenn sich nur ein Zielobjekt aufeinem breiten Feld oder auf einer flachen Ebene befindet, wie es durch die simuliertenDaten prasentiert wird. Der Ansatz der polarimetrischen Radarruckstreuquerschnitteund die numerische Berechnung der reflektierten Felder vom Zielobjekt konnten nochweiterentwickelt werden, indem man die simulierten Werte mit dem Ergebnis aus derMessung vergleicht und andere Anzahl der Teilplatten bei der Nahfeldberechnung ver-wendet, dadurch konnte man mehr Genauigkeit und geringere Zeitaufwand erreichen.Dabei sollte man viel Wert auf die Streustruktur in der Azimutrichtung fur die jeweiligeEnfernung legen, so dass man das System und die Datenverarbeitung kalibrieren undein bestimmtes Zielobjekt besser hervorrufen konnte.
In dieser Dissertation wurde nur ein Untersuchungsgebiet fur die quantitative SAR-Datenauswertung eingesetzt. Durch Kombination der Simulationsergebnisse anhandder differentiellen Reflektivitat und des linearen Depolarisationsverhaltnis ergibt sicheine alternative Methode zur Bodenklassifizierung, insbesondere nach der Azimutkom-pression mit der polarimetrischen Fokussierungsfunktion. Um diese Methode aussage-kraftiger zu machen sollte man mehrere SAR-Datensatze prozessieren und die Genau-igkeit der Klassifizierung untersuchen. Dabei sollte man in die Richtung der Bilddaten-verarbeitung blicken, da die Falschfarbdarstellung und die Farbskala zur quantitativenSAR-Datenauswertung eine wichtige Rolle spielen. Eine geeignete Filterungsmethodekonnte eingesetzt werden, um die Bilddaten besser interpretieren zu konnen.
155

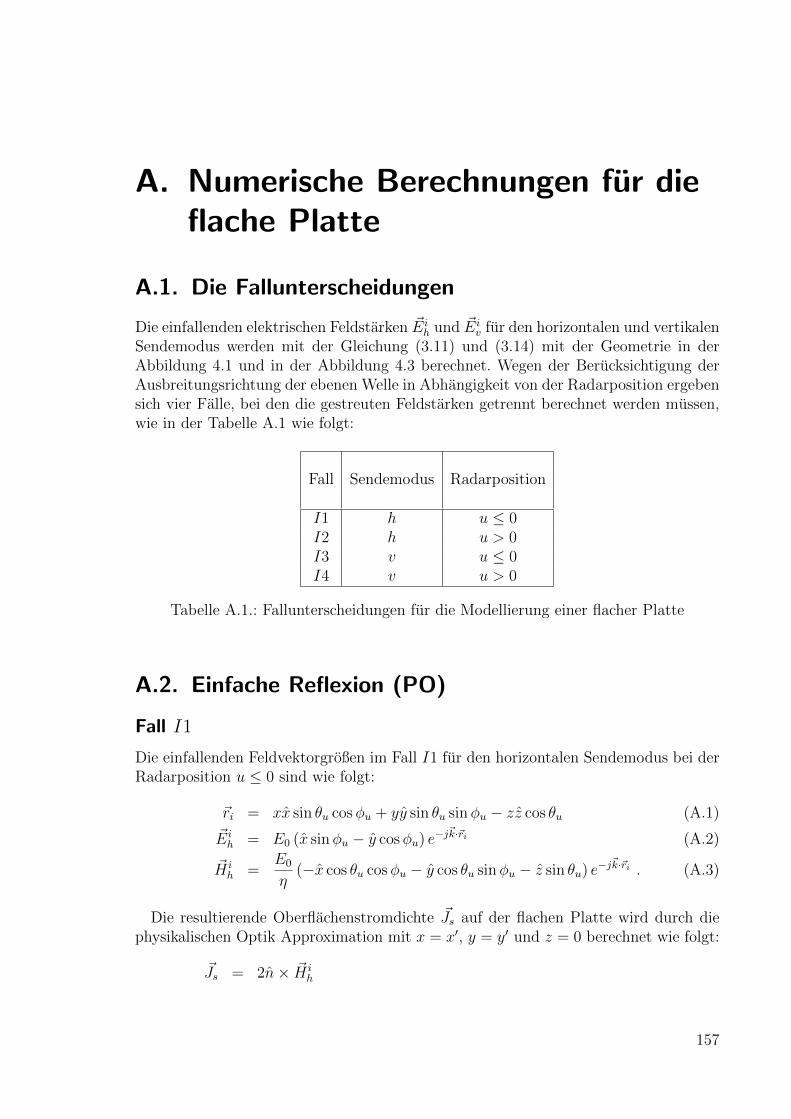
A. Numerische Berechnungen fur dieflache Platte
A.1. Die Fallunterscheidungen
Die einfallenden elektrischen Feldstarken ~Eih und ~Ei
v fur den horizontalen und vertikalenSendemodus werden mit der Gleichung (3.11) und (3.14) mit der Geometrie in derAbbildung 4.1 und in der Abbildung 4.3 berechnet. Wegen der Berucksichtigung derAusbreitungsrichtung der ebenen Welle in Abhangigkeit von der Radarposition ergebensich vier Falle, bei den die gestreuten Feldstarken getrennt berechnet werden mussen,wie in der Tabelle A.1 wie folgt:
Fall Sendemodus Radarposition
I1 h u ≤ 0I2 h u > 0I3 v u ≤ 0I4 v u > 0
Tabelle A.1.: Fallunterscheidungen fur die Modellierung einer flacher Platte
A.2. Einfache Reflexion (PO)
Fall I1
Die einfallenden Feldvektorgroßen im Fall I1 fur den horizontalen Sendemodus bei derRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (A.1)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (A.2)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (A.3)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Js = 2n× ~H ih
157
A. Numerische Berechnungen fur die flache Platte
= 2z × E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (A.4)
Fur weitere Berechnung wird die mathematische Gleichung eingesetzt wie folgt:
c/2∫−c/2
ejαzdz = c · sinc(α
2c). (A.5)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I1 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cos θu sinφu cos θs cosφs − cosθu cosφu cos θs sinφs)
· sinc (XI1) sinc (YI1) . (A.6)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I1 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs) sinc (XI1) sinc (YI1)(A.7)
mit
XI1 =ka
2(− sin θu cosφu + sin θs cosφs) (A.8)
YI1 =kb
2(− sin θu sinφu + sin θs sinφs) . (A.9)
158

A.2. Einfache Reflexion (PO)
Fall I2
Die einfallenden Feldvektorgroßen im Fall I2 fur den horizontalen Sendemodus bei derRadarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (A.10)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (A.11)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (A.12)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Js = 2n× ~H ih
= 2z × E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (A.13)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· sinc (XI2) sinc (YI2) . (A.14)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
159

A. Numerische Berechnungen fur die flache Platte
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cos θu sinφu sinφs − cos θu cosφu cosφs) sinc (XI2) sinc (YI2) (A.15)
mit
XI2 =ka
2(− sin θu cosφu + sin θs cosφs) (A.16)
YI2 =kb
2(sin θu sinφu + sin θs sinφs) . (A.17)
Fall I3
Die einfallenden Feldvektorgroßen im Fall I3 fur den vertikalen Sendemodus bei derRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (A.18)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (A.19)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (A.20)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Js = 2n× ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (A.21)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I3 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
· sinc (XI3) sinc (YI3) . (A.22)
160

A.2. Einfache Reflexion (PO)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I3 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cosφu sinφs + sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cosφu sinφs + sinφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cosφu sinφs + sinφu cosφs) sinc (XI3) sinc (YI3) (A.23)
mit
XI3 =ka
2(− sin θu cosφu + sin θs cosφs) (A.24)
YI3 =kb
2(− sin θu sinφu + sin θs sinφs) . (A.25)
Fall I4
Die einfallenden Feldvektorgroßen im Fall I4 fur den vertikalen Sendemodus bei derRadarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (A.26)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (A.27)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (A.28)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Js = 2n× ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (A.29)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
161

A. Numerische Berechnungen fur die flache Platte
=∫ ∫Sp1
2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· sinc (XI4) sinc (YI4) . (A.30)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cosφu sinφs − sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cosφu sinφs − sinφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cosφu sinφs − sinφu cosφs) sinc (XI4) sinc (YI4) (A.31)
mit
XI4 =ka
2(− sin θu cosφu + sin θs cosφs) (A.32)
YI4 =kb
2(sin θu sinφu + sin θs sinφs) . (A.33)
162
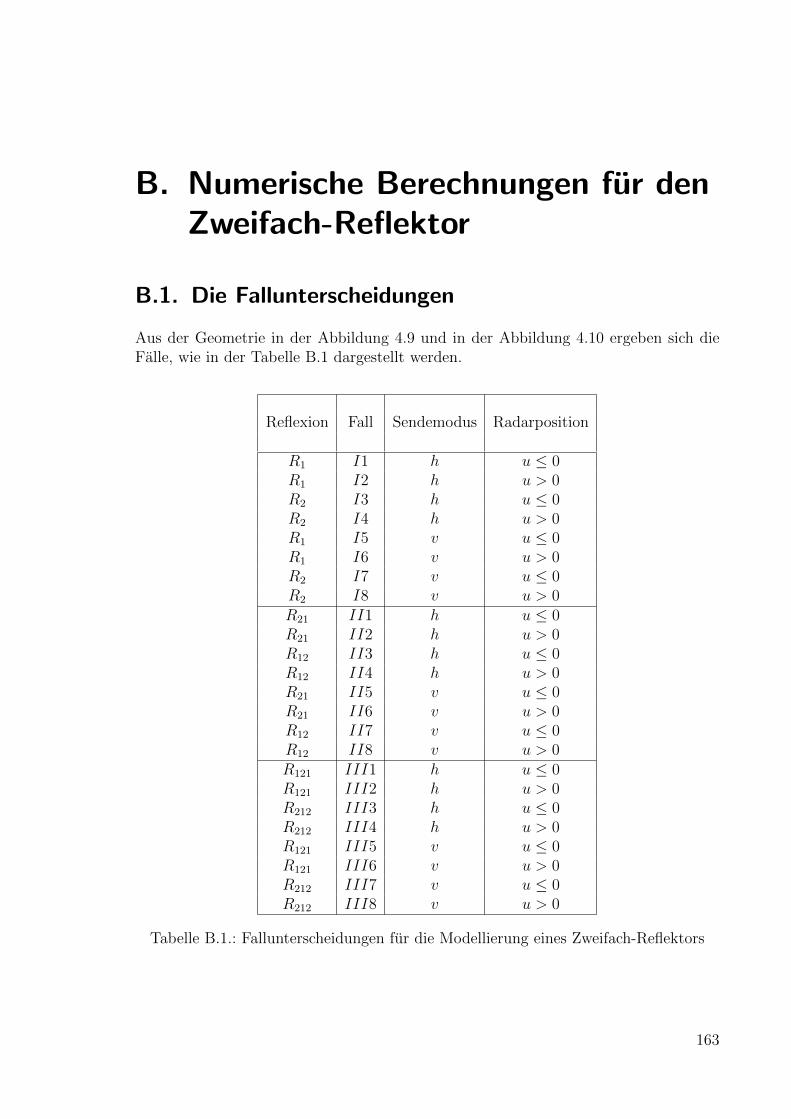
B. Numerische Berechnungen fur denZweifach-Reflektor
B.1. Die Fallunterscheidungen
Aus der Geometrie in der Abbildung 4.9 und in der Abbildung 4.10 ergeben sich dieFalle, wie in der Tabelle B.1 dargestellt werden.
Reflexion Fall Sendemodus Radarposition
R1 I1 h u ≤ 0R1 I2 h u > 0R2 I3 h u ≤ 0R2 I4 h u > 0R1 I5 v u ≤ 0R1 I6 v u > 0R2 I7 v u ≤ 0R2 I8 v u > 0R21 II1 h u ≤ 0R21 II2 h u > 0R12 II3 h u ≤ 0R12 II4 h u > 0R21 II5 v u ≤ 0R21 II6 v u > 0R12 II7 v u ≤ 0R12 II8 v u > 0R121 III1 h u ≤ 0R121 III2 h u > 0R212 III3 h u ≤ 0R212 III4 h u > 0R121 III5 v u ≤ 0R121 III6 v u > 0R212 III7 v u ≤ 0R212 III8 v u > 0
Tabelle B.1.: Fallunterscheidungen fur die Modellierung eines Zweifach-Reflektors
163

B. Numerische Berechnungen fur den Zweifach-Reflektor
B.2. Einfache Reflexion (PO)
Fall R1 − I1
Die einfallenden Feldvektorgroßen im Fall R1− I1 auf die Platte Nr.1 fur den horizon-talen Sendemodus und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.1)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (B.2)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.3)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (B.4)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I1 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cos θu sinφu cos θs cosφs − cosθu cosφu cos θs sinφs)
· sinc (XI1) sinc (YI1) . (B.5)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I1 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
164

B.2. Einfache Reflexion (PO)
=2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
· sinc (XI1) sinc (YI1) (B.6)
mit
XI1 =ka
2(− sin θu cosφu + sin θs cosφs) (B.7)
YI1 =kb
2(− sin θu sinφu + sin θs sinφs) . (B.8)
Fall R1 − I2
Die einfallenden Feldvektorgroßen im Fall R1− I2 auf die Platte Nr.1 fur den horizon-talen Sendemodus und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.9)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (B.10)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.11)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (B.12)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
165

B. Numerische Berechnungen fur den Zweifach-Reflektor
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· sinc (XI2) sinc (YI2) . (B.13)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cos θu sinφu sinφs − cos θu cosφu cosφs) sinc (XI2) sinc (YI2) (B.14)
mit
XI2 =ka
2(− sin θu cosφu + sin θs cosφs) (B.15)
YI2 =kb
2(sin θu sinφu + sin θs sinφs) . (B.16)
Fall R2 − I3
Die einfallenden Feldvektorgroßen im Fall R2− I3 auf die Platte Nr.2 fur den horizon-talen Sendemodus und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.17)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (B.18)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.19)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x)× E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
0− sin θu
cos θu sinφu
ejk(−y′ sin θu sinφu+z′ cos θu) . (B.20)
166

B.2. Einfache Reflexion (PO)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,I3 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
2E0
η(− sin θu cos θs sinφs − cos θu sinφu sin θs)
· ejk(−y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− sin θu cos θs sinφs − cos θu sinφu sin θs)
·b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− sin θu cos θs sinφs − cos θu sinφu sin θs)
· sinc (YI3) sinc (ZI3) . (B.21)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,I3 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
2E0
η(− sin θu cosφs)
· ejk(−y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− sin θu cosφs)
·b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− sin θu cosφs) sinc (YI3) sinc (ZI3) (B.22)
mit
YI3 =kb
2(− sin θu sinφu + sin θs sinφs) (B.23)
ZI3 =ka
2(cos θu + cos θs) . (B.24)
Fall R2 − I4
Die einfallenden Feldvektorgroßen im Fall R2− I4 auf die Platte Nr.2 fur den horizon-talen Sendemodus und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.25)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (B.26)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.27)
167

B. Numerische Berechnungen fur den Zweifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x)× E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
0− sin θu
− cos θu sinφu
ejk(y′ sin θu sinφu+z′ cos θu) . (B.28)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,I4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
2E0
η(− sin θu cos θs sinφs + cos θu sinφu sin θs)
· ejk(y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− sin θu cos θs sinφs + cos θu sinφu sin θs)
·b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− sin θu cos θs sinφs + cos θu sinφu sin θs)
· sinc (YI4) sinc (ZI4) . (B.29)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man
Nφ,I4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
2E0
η(− sin θu cosφs)
· ejk(−y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− sin θu cosφs)
·b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− sin θu cosφs) sinc (YI4) sinc (ZI4) (B.30)
mit
YI4 =kb
2(sin θu sinφu + sin θs sinφs) (B.31)
ZI4 =ka
2(cos θu + cos θs) . (B.32)
168

B.2. Einfache Reflexion (PO)
Fall R1 − I5
Die einfallenden Feldvektorgroßen im Fall R1−I5 auf die Platte Nr.1 fur den vertikalenSendemodus und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.33)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (B.34)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (B.35)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (B.36)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I5 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
· sinc (XI5) sinc (YI5) . (B.37)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I5 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cosφu sinφs + sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cosφu sinφs + sinφu cosφs)
169

B. Numerische Berechnungen fur den Zweifach-Reflektor
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cosφu sinφs + sinφu cosφs) sinc (XI5) sinc (YI5) (B.38)
mit
XI5 =ka
2(− sin θu cosφu + sin θs cosφs) (B.39)
YI5 =kb
2(− sin θu sinφu + sin θs sinφs) . (B.40)
Fall R1 − I6
Die einfallenden Feldvektorgroßen im Fall R1−I6 auf die Platte Nr.1 fur den vertikalenSendemodus und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.41)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (B.42)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (B.43)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (B.44)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· sinc (XI6) sinc (YI6) . (B.45)
170

B.2. Einfache Reflexion (PO)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
2E0
η(− cosφu sinφs − sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cosφu sinφs − sinφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2abE0
η(− cosφu sinφs − sinφu cosφs) sinc (XI6) sinc (YI6) (B.46)
mit
XI6 =ka
2(− sin θu cosφu + sin θs cosφs) (B.47)
YI6 =kb
2(sin θu sinφu + sin θs sinφs) . (B.48)
Fall R2 − I7
Die einfallenden Feldvektorgroßen im Fall R2−I7 auf die Platte Nr.2 fur den vertikalenSendemodus und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.49)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (B.50)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (B.51)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x)× E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
00
cosφu
ejk(−y′ sin θu sinφu+z′ cos θu) . (B.52)
Aus der Gleichung (3.36) und (3.39) fur die xy-Ebene erhalt man:
Nθ,I7 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
171

B. Numerische Berechnungen fur den Zweifach-Reflektor
=∫ ∫Sp2
2E0
η(− cosφu sin θs)
· ejk(−y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− cosφu sin θs)
·b/2∫−b/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− cosφu sin θs) sinc (YI7) sinc (ZI7) . (B.53)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I7 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (B.54)
mit
YI7 =kb
2(− sin θu sinφu + sin θs sinφs) (B.55)
ZI7 =ka
2(cos θu + cos θs) . (B.56)
Fall R2 − I8
Die einfallenden Feldvektorgroßen im Fall R2−I8 auf die Platte Nr.2 fur den vertikalenSendemodus und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.57)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (B.58)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (B.59)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x)× E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
00
cosφu
ejk(y′ sin θu sinφu+z′ cos θu) . (B.60)
Aus der Gleichung (3.36) und (3.39) fur die xy-Ebene erhalt man:
Nθ,I8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
172

B.3. Zweifache Reflexion (PO-PO)
=∫ ∫Sp2
2E0
η(− cosφu sin θs)
· ejk(y′ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
=2E0
η(− cosφu sin θs)
·b/2∫−b/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2abE0
η(− cosφu sin θs) sinc (YI8) sinc (ZI8) . (B.61)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I7 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (B.62)
mit
YI8 =kb
2(sin θu sinφu + sin θs sinφs) (B.63)
ZI8 =ka
2(cos θu + cos θs) . (B.64)
B.3. Zweifache Reflexion (PO-PO)
Fall R21 − II1
Die einfallenden Feldvektorgroßen im Fall R21− II1 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.65)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (B.66)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.67)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (B.68)
173

B. Numerische Berechnungen fur den Zweifach-Reflektor
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.69)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.70)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.71)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.72)
In dieser Arbeit wird es angenommen, dass die resultierende magnetische Feldsatrkeauf der Platte Nr.2 aus der Summe der Teilkomponenten von dem jeweiligen Gitter-punkt entsteht wie folgt:
~H ip2 =
N∑n=1
H ixp2
N∑n=1
H iyp2
N∑n=1
H izp2
. (B.73)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.74)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,II1 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YII1) sinc (ZII1) . (B.75)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,II1 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
174

B.3. Zweifache Reflexion (PO-PO)
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YII1) sinc (ZII1) (B.76)
mit
YII1 =kb
2(sin θs sinφs) (B.77)
ZII1 =ka
2(cos θs) . (B.78)
Fall R21 − II2
Die einfallenden Feldvektorgroßen im Fall R21− II2 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.79)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (B.80)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.81)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (B.82)
Wenn man die Komponenten der Oberflachenstromdichte ~Js1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.83)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.84)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.85)
175

B. Numerische Berechnungen fur den Zweifach-Reflektor
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.86)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.87)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,II2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YII2) sinc (ZII2) . (B.88)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,II2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YII2) sinc (ZII2) (B.89)
mit
YII2 =kb
2(sin θs sinφs) (B.90)
ZII2 =ka
2(cos θs) . (B.91)
Fall R12 − II3
Die einfallenden Feldvektorgroßen im Fall R12− II3 fur den horizontalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.92)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (B.93)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.94)
176

B.3. Zweifache Reflexion (PO-PO)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x)× E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
0− sin θu
cos θu sinφu
ejk(−y′ sin θu sinφu+z′ cos θu) . (B.95)
Wenn man die Komponenten der Oberflachenstromdichte ~Js2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
]
·1 + jkR
R3e−jkR dxp2dyp2 (B.96)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.97)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.98)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.99)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.100)
Aus der Gleichung (3.36) und (3.39) fur die xy-Ebene erhalt man:
Nθ,II3 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XII3) sinc (YII3) . (B.101)
177

B. Numerische Berechnungen fur den Zweifach-Reflektor
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,II3 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XII3) sinc (YII3) (B.102)
mit
XII3 =ka
2(sin θs cosφs) (B.103)
YII3 =kb
2(sin θs sinφs) . (B.104)
Fall R12 − II4
Die einfallenden Feldvektorgroßen im Fall R12− II4 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.105)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (B.106)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (B.107)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x)× E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
0− sin θu
− cos θu sinφu
ejk(y′ sin θu sinφu+z′ cos θu) . (B.108)
Wenn man die Komponenten der Oberflachenstromdichte ~Js2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
](B.109)
·1 + jkR
R3e−jkR dxp2dyp2 (B.110)
178

B.3. Zweifache Reflexion (PO-PO)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.111)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.112)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.113)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.114)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,II4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XII4) sinc (YII4) . (B.115)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,II4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XII4) sinc (YII4) (B.116)
mit
XII4 =ka
2(sin θs cosφs) (B.117)
YII4 =kb
2(sin θs sinφs) . (B.118)
179
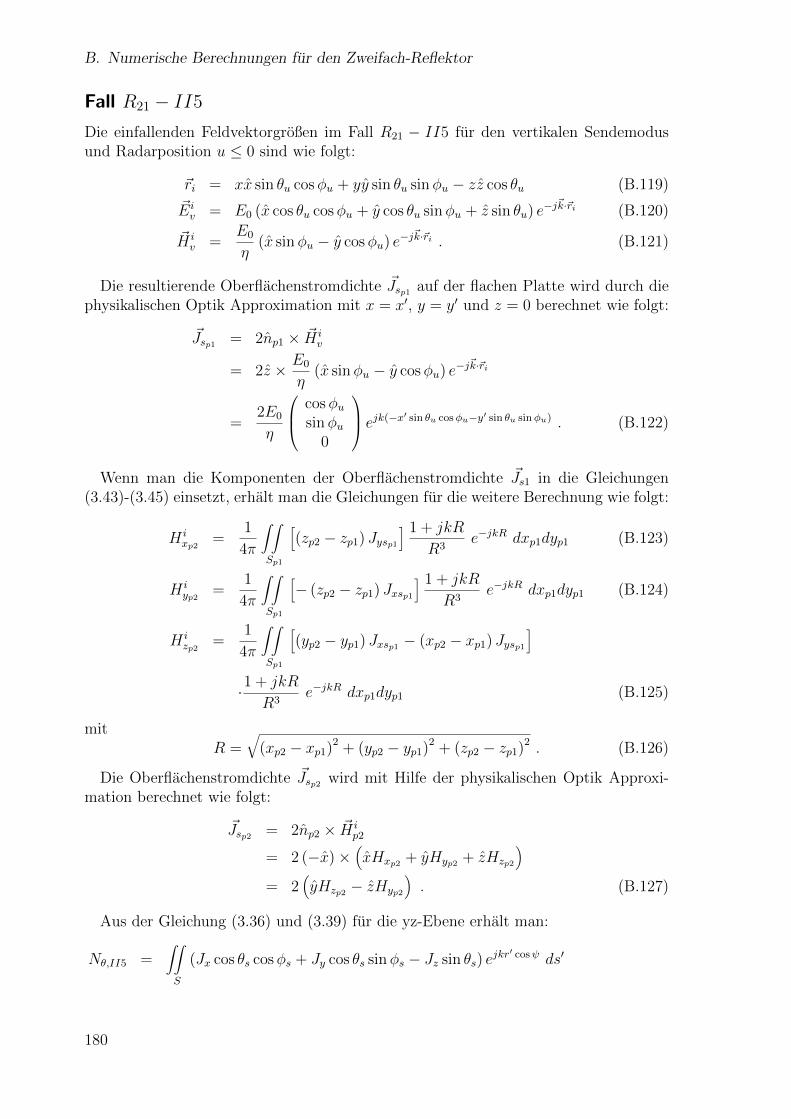
B. Numerische Berechnungen fur den Zweifach-Reflektor
Fall R21 − II5
Die einfallenden Feldvektorgroßen im Fall R21 − II5 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.119)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (B.120)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (B.121)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (B.122)
Wenn man die Komponenten der Oberflachenstromdichte ~Js1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.123)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.124)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.125)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.126)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.127)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,II5 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
180

B.3. Zweifache Reflexion (PO-PO)
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YII5) sinc (ZII5) . (B.128)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,II5 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YII5) sinc (ZII5) (B.129)
mit
YII5 =kb
2(sin θs sinφs) (B.130)
ZII5 =ka
2(cos θs) . (B.131)
Fall R21 − II6
Die einfallenden Feldvektorgroßen im Fall R21 − II6 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.132)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (B.133)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (B.134)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (B.135)
181

B. Numerische Berechnungen fur den Zweifach-Reflektor
Wenn man die Komponenten der Oberflachenstromdichte ~Js1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.136)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.137)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.138)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.139)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.140)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,II6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YII6) sinc (ZII6) . (B.141)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,II6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YII6) sinc (ZII6) (B.142)
182

B.3. Zweifache Reflexion (PO-PO)
mit
YII6 =kb
2(sin θs sinφs) (B.143)
ZII6 =ka
2(cos θs) . (B.144)
Fall R12 − II7
Die einfallenden Feldvektorgroßen im Fall R12 − II7 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.145)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (B.146)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (B.147)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x)× E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
00
cosφu
ejk(−y′ sin θu sinφu+z′ cos θu) . (B.148)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.149)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.150)
H izp1
= 0 (B.151)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.152)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.153)
183

B. Numerische Berechnungen fur den Zweifach-Reflektor
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,II7 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XII7) sinc (YII7) . (B.154)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,II7 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XII7) sinc (YII7) (B.155)
mit
XII7 =ka
2(sin θs cosφs) (B.156)
YII7 =kb
2(sin θs sinφs) . (B.157)
Fall R12 − II8
Die einfallenden Feldvektorgroßen im Fall R12 − II8 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.158)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (B.159)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (B.160)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
184

B.3. Zweifache Reflexion (PO-PO)
= 2 (−x)× E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
00
cosφu
ejk(y′ sin θu sinφu+z′ cos θu) . (B.161)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.162)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.163)
H izp1
= 0 (B.164)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.165)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.166)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,II8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XII8) sinc (YII8) . (B.167)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,II8 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
185

B. Numerische Berechnungen fur den Zweifach-Reflektor
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XII8) sinc (YII8) (B.168)
mit
XII8 =ka
2(sin θs cosφs) (B.169)
YII8 =kb
2(sin θs sinφs) . (B.170)
B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R121 − III1
Aus der Abbildung 4.10 (c) und 3.4 (a) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u ≤ 0 aus der Gleichung (3.16)-(3.18) definiert als:
~rr = xx sin θu cosφu + yy sin θu sinφu + zz cos θu (B.171)
~Erh = E0 (x sinφu − y cosφu) e
−j~k·~rr (B.172)
~Hrh =
E0
η(x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~rr . (B.173)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~Hrh
= 2 (−x)× E0
η(x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~rr
=2E0
η
0− sin θu
− cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu) . (B.174)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
]
·1 + jkR
R3e−jkR dyp2dzp2 (B.175)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2 (B.176)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2 (B.177)
186

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.178)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.179)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,III1 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XIII1) sinc (YIII1) . (B.180)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,III1 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XIII1) sinc (YIII1) (B.181)
mit
XIII1 =ka
2(sin θs cosφs) (B.182)
YIII1 =kb
2(sin θs sinφs) . (B.183)
Fall R121 − III2
Aus der Abbildung 4.10 (c) und 3.4 (a) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u > 0 aus der Gleichung (3.16)-(3.18) definiert als:
~rr = xx sin θu cosφu − yy sin θu sinφu + zz cos θu (B.184)
187

B. Numerische Berechnungen fur den Zweifach-Reflektor
~Erh = E0 (−x sinφu − y cosφu) e
−j~k·~rr (B.185)
~Hrh =
E0
η(x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~rr . (B.186)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~Hrh
= 2 (−x)× E0
η(x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~rr
=2E0
η
0− sin θu
cos θu sinφu
ejk(y′ sin θu sinφu−z′ cos θu) . (B.187)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
]
·1 + jkR
R3e−jkR dxp2dyp2 (B.188)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.189)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.190)
mit
R =√
(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.191)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.192)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,III2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)
188

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XIII2) sinc (YIII2) . (B.193)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,III2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XIII2) sinc (YIII2) (B.194)
mit
XIII2 =ka
2(sin θs cosφs) (B.195)
YIII2 =kb
2(sin θs sinφs) . (B.196)
Fall R212 − III3
Aus der Abbildung 4.10 (c) und 3.5 (a) werden die einfallenden Felder auf die PlatteNr.1 fur die Radarposition u ≤ 0 aus der Gleichung (3.19)-(3.21) definiert als:
~rr = −xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.197)
~Erh = E0 (−x sinφu − y cosφu) e
−j~k·~rr (B.198)
~Hrh =
E0
η(−x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~rr . (B.199)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~Hrh
= 2z × E0
η(−x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~rr
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(x′ sin θu cosφu−y′ sin θu sinφu) . (B.200)
189

B. Numerische Berechnungen fur den Zweifach-Reflektor
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.201)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.202)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.203)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.204)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.205)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,III3 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YIII3) sinc (ZIII3) . (B.206)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,III3 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YIII3) sinc (ZIII3) (B.207)
190

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
mit
YIII3 =kb
2(sin θs sinφs) (B.208)
ZIII3 =ka
2(cos θs) . (B.209)
Fall R212 − III4
Aus der Abbildung 4.10 (c) und 3.5 (a) werden die einfallenden Felder auf die PlatteNr.1 fur die Radarposition u > 0 aus der Gleichung (3.19)-(3.21) definiert als:
~rr = −xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.210)
~Erh = E0 (x sinφu − y cosφu) e
−j~k·~rr (B.211)
~Hrh =
E0
η(−x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~rr . (B.212)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~Hrh
= 2z × E0
η(−x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~rr
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(x′ sin θu cosφu+y′ sin θu sinφu) . (B.213)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.214)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.215)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.216)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.217)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.218)
191

B. Numerische Berechnungen fur den Zweifach-Reflektor
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,III4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YIII4) sinc (ZIII4) . (B.219)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,III4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YIII4) sinc (ZIII4) (B.220)
mit
YIII4 =kb
2(sin θs sinφs) (B.221)
ZIII4 =ka
2(cos θs) . (B.222)
Fall R121 − III5
Aus der Abbildung 4.10 (c) und 3.4 (b) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u ≤ 0 aus der Gleichung (3.22)-(3.24) definiert als:
~rr = xx sin θu cosφu + yy sin θu sinφu + zz cos θu (B.223)
~Erv = E0 (x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~rr (B.224)
~Hrv =
E0
η(−x sinφu + y cosφu) e
−j~k·~rr . (B.225)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~Hrv
= 2 (−x)× E0
η(−x sinφu + y cosφu) e
−j~k·~rr
=2E0
η
00
− cosφu
ejk(−y′ sin θu sinφu−z′ cos θu) . (B.226)
192

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.227)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.228)
H izp1
= 0 (B.229)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.230)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
)(B.231)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,III5 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XIII5) sinc (YIII5) . (B.232)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,III5 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XIII5) sinc (YIII5) (B.233)
193

B. Numerische Berechnungen fur den Zweifach-Reflektor
mit
XIII5 =ka
2(sin θs cosφs) (B.234)
YIII5 =kb
2(sin θs sinφs) . (B.235)
Fall R121 − III6
Aus der Abbildung 4.10 (c) und 3.4 (b) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u > 0 aus der Gleichung (3.22)-(3.24) definiert als:
~rr = xx sin θu cosφu − yy sin θu sinφu + zz cos θu (B.236)
~Erv = E0 (x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~rr (B.237)
~Hrv =
E0
η(x sinφu + y cosφu) e
−j~k·~rr . (B.238)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = 0, y = y′ und z = z′ berechnet wie folgt:
~Jsp2 = 2np2 × ~Hrv
= 2 (−x)× E0
η(x sinφu + y cosφu) e
−j~k·~rr
=2E0
η
00
− cosφu
ejk(y′ sin θu sinφu−z′ cos θu) . (B.239)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.240)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dyp2 (B.241)
H izp1
= 0 (B.242)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (B.243)
Die Oberflachenstromdichte ~Jsp1 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)×(xHxp1 + yHyp1 + zHzp1
)= 2
(−xHyp1 + yHxp1
). (B.244)
194

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,III6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp1
(Jxsp1 cos θs cosφs + Jysp1 cos θs sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)sinc (XIII6) sinc (YIII6) . (B.245)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,III6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp1
(−Jxsp1 sinφs + Jysp1 cosφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=(2Hxp1 cosφs + 2Hyp1 sinφs
)·a/2∫−a/2
ejk(x′ sin θs cosφs) dx′
b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
= 2ab(Hxp1 cosφs +Hyp1 sinφs
)sinc (XIII6) sinc (YIII6) (B.246)
mit
XIII6 =ka
2(sin θs cosφs) (B.247)
YIII6 =kb
2(sin θs sinφs) . (B.248)
Fall R212 − III7
Aus der Abbildung 4.10 (c) und 3.5 (b) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u ≤ 0 aus der Gleichung (3.25)-(3.27) definiert als:
~rr = −xx sin θu cosφu + yy sin θu sinφu − zz cos θu (B.249)
~Erv = E0 (−x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~rr (B.250)
~Hrv =
E0
η(x sinφu + y cosφu) e
−j~k·~rr . (B.251)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~Hrv
195

B. Numerische Berechnungen fur den Zweifach-Reflektor
= 2z × E0
η(x sinφu + y cosφu) e
−j~k·~rr
=2E0
η
− cosφusinφu
0
ejk(x′ sin θu cosφu−y′ sin θu sinφu) . (B.252)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.253)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.254)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.255)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.256)
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.257)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,III7 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YIII7) sinc (ZIII7) . (B.258)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,III7 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
196

B.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YIII7) sinc (ZIII7) (B.259)
mit
YIII7 =kb
2(sin θs sinφs) (B.260)
ZIII7 =ka
2(cos θs) . (B.261)
Fall R212 − III8
Aus der Abbildung 4.10 (c) und 3.5 (b) werden die einfallenden Felder auf die PlatteNr.2 fur die Radarposition u > 0 aus der Gleichung (3.25)-(3.27) definiert als:
~rr = −xx sin θu cosφu − yy sin θu sinφu − zz cos θu (B.262)
~Erv = E0 (−x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~rr (B.263)
~Hrv =
E0
η(−x sinφu + y cosφu) e
−j~k·~rr . (B.264)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~Hrv
= 2z × E0
η(−x sinφu + y cosφu) e
−j~k·~rr
=2E0
η
− cosφu− sinφu
0
ejk(x′ sin θu cosφu+y′ sin θu sinφu) . (B.265)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.266)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (B.267)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (B.268)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (B.269)
197

B. Numerische Berechnungen fur den Zweifach-Reflektor
Die Oberflachenstromdichte ~Jsp2 wird mit Hilfe der physikalischen Optik Approxi-mation berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x)×(xHxp2 + yHyp2 + zHzp2
)= 2
(yHzp2 − zHyp2
). (B.270)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene erhalt man:
Nθ,III8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cos θs sinφs − Jzsp2 sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hyp2 sin θs + 2Hzp2 cos θs sinφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hyp2 sin θs +Hzp2 cos θs sinφs
)sinc (YIII8) sinc (ZIII8) . (B.271)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene erhalt man:
Nφ,III8 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫ ∫Sp2
(Jysp2 cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
=(2Hzp2 cosφs
) b/2∫−b/2
ejk(y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θs) dz′
= 2ab(Hzp2 cosφs
)sinc (YIII8) sinc (ZIII8) (B.272)
mit
YIII8 =kb
2(sin θs sinφs) (B.273)
ZIII8 =ka
2(cos θs) . (B.274)
198
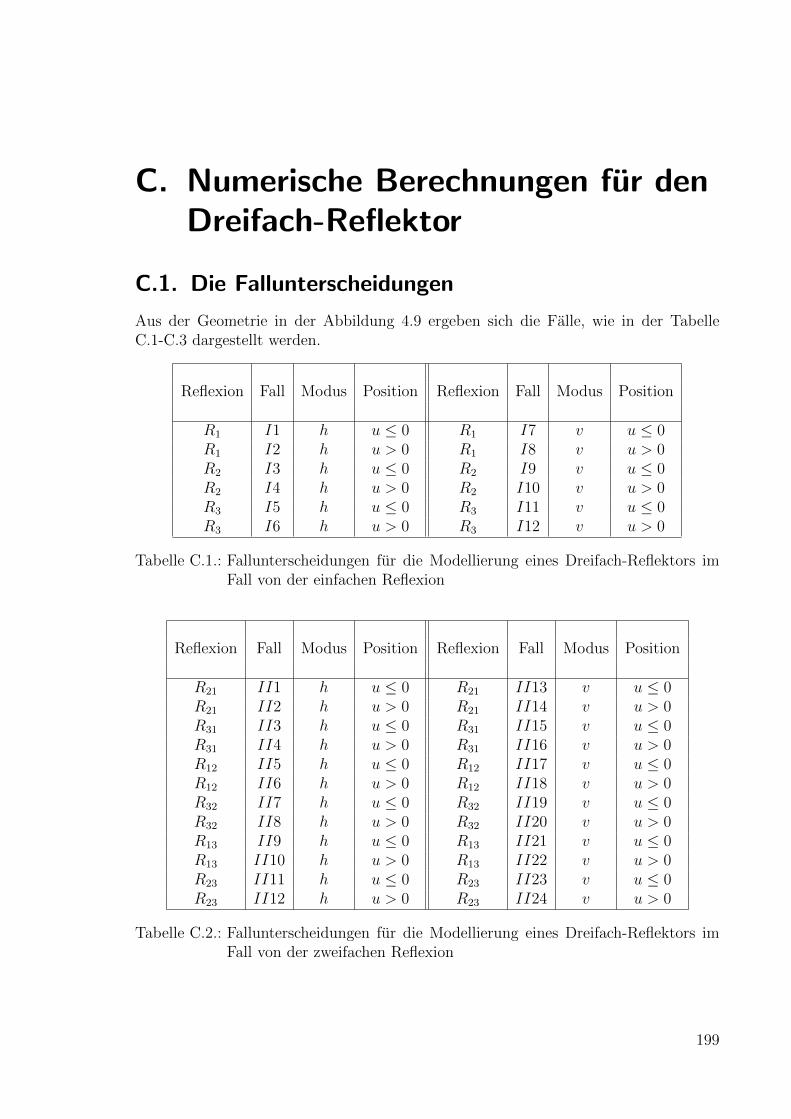
C. Numerische Berechnungen fur denDreifach-Reflektor
C.1. Die Fallunterscheidungen
Aus der Geometrie in der Abbildung 4.9 ergeben sich die Falle, wie in der TabelleC.1-C.3 dargestellt werden.
Reflexion Fall Modus Position Reflexion Fall Modus Position
R1 I1 h u ≤ 0 R1 I7 v u ≤ 0R1 I2 h u > 0 R1 I8 v u > 0R2 I3 h u ≤ 0 R2 I9 v u ≤ 0R2 I4 h u > 0 R2 I10 v u > 0R3 I5 h u ≤ 0 R3 I11 v u ≤ 0R3 I6 h u > 0 R3 I12 v u > 0
Tabelle C.1.: Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der einfachen Reflexion
Reflexion Fall Modus Position Reflexion Fall Modus Position
R21 II1 h u ≤ 0 R21 II13 v u ≤ 0R21 II2 h u > 0 R21 II14 v u > 0R31 II3 h u ≤ 0 R31 II15 v u ≤ 0R31 II4 h u > 0 R31 II16 v u > 0R12 II5 h u ≤ 0 R12 II17 v u ≤ 0R12 II6 h u > 0 R12 II18 v u > 0R32 II7 h u ≤ 0 R32 II19 v u ≤ 0R32 II8 h u > 0 R32 II20 v u > 0R13 II9 h u ≤ 0 R13 II21 v u ≤ 0R13 II10 h u > 0 R13 II22 v u > 0R23 II11 h u ≤ 0 R23 II23 v u ≤ 0R23 II12 h u > 0 R23 II24 v u > 0
Tabelle C.2.: Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der zweifachen Reflexion
199

C. Numerische Berechnungen fur den Dreifach-Reflektor
Reflexion Fall Modus Position Reflexion Fall Modus Position
R121 III1 h u ≤ 0 R121 III25 v u ≤ 0R121 III2 h u > 0 R121 III26 v u > 0R321 III3 h u ≤ 0 R321 III27 v u ≤ 0R321 III4 h u > 0 R321 III28 v u > 0R131 III5 h u ≤ 0 R131 III29 v u ≤ 0R131 III6 h u > 0 R131 III30 v u > 0R231 III7 h u ≤ 0 R231 III31 v u ≤ 0R231 III8 h u > 0 R231 III32 v u > 0R212 III9 h u ≤ 0 R212 III33 v u ≤ 0R212 III10 h u > 0 R212 III34 v u > 0R312 III11 h u ≤ 0 R312 III35 v u ≤ 0R312 III12 h u > 0 R312 III36 v u > 0R132 III13 h u ≤ 0 R132 III37 v u ≤ 0R132 III14 h u > 0 R132 III38 v u > 0R232 III15 h u ≤ 0 R232 III39 v u ≤ 0R232 III16 h u > 0 R232 III40 v u > 0R213 III17 h u ≤ 0 R213 III41 v u ≤ 0R213 III18 h u > 0 R213 III42 v u > 0R313 III19 h u ≤ 0 R313 III43 v u ≤ 0R313 III20 h u > 0 R313 III44 v u > 0R123 III21 h u ≤ 0 R123 III45 v u ≤ 0R123 III22 h u > 0 R123 III46 v u > 0R323 III23 h u ≤ 0 R323 III47 v u ≤ 0R323 III24 h u > 0 R323 III48 v u > 0
Tabelle C.3.: Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der dreifachen Reflexion
200

C.2. Einfache Reflexion (PO)
C.2. Einfache Reflexion (PO)
Fall R1 − I1
Die einfallenden Feldvektorgroßen im Fall R1 − I1 fur den horizontalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.1)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.2)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.3)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.4)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I1 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2a2E0
η(cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· sinc (XI1) sinc (YI1) . (C.5)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I1 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
201

C. Numerische Berechnungen fur den Dreifach-Reflektor
=2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2a2E0
η(− cos θu sinφu sinφs − cos θu cosφu cosφs)
· sinc (XI1) sinc (YI1) (C.6)
mit
XI1 =ka
2(− sin θu cosφu + sin θs cosφs) (C.7)
YI1 =ka
2(− sin θu sinφu + sin θs sinφs) . (C.8)
Fall R1 − I2
Die einfallenden Feldvektorgroßen im Fall R1 − I2 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.9)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.10)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.11)
Die resultierende Oberflachenstromdichte ~Js auf der Platte Nr.1 wird durch die phy-sikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
= 2z × E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.12)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
202

C.2. Einfache Reflexion (PO)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2a2E0
η(− cos θu sinφu cos θs cosφs − cos θu cosφu cos θs sinφs)
· sinc (XI2) sinc (YI2) . (C.13)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
·a/2∫−a/2
ejk(−x′ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(−y′ sin θu sinφu+y′ sin θs sinφs) dy′
=2a2E0
η(cos θu sinφu sinφs − cos θu cosφu cosφs)
· sinc (XI2) sinc (YI2) (C.14)
mit
XI2 =ka
2(− sin θu cosφu + sin θs cosφs) (C.15)
YI2 =ka
2(sin θu sinφu + sin θs sinφs) . (C.16)
Fall R2 − I3
Die einfallenden Feldvektorgroßen im Fall R2 − I3 fur den horizontalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.17)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.18)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.19)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih
203
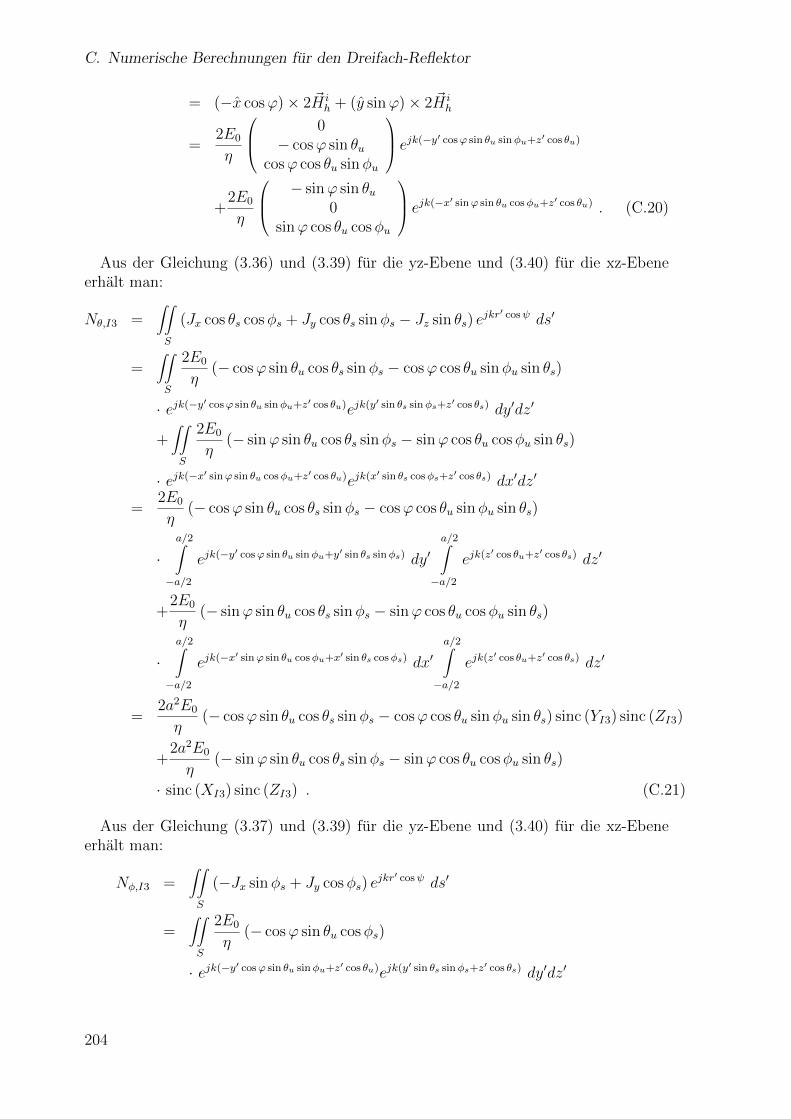
C. Numerische Berechnungen fur den Dreifach-Reflektor
= (−x cosϕ)× 2 ~H ih + (y sinϕ)× 2 ~H i
h
=2E0
η
0− cosϕ sin θu
cosϕ cos θu sinφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.20)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I3 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ sin θu cos θs sinφs − cosϕ cos θu sinφu sin θs)
· ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2E0
η(− cosϕ sin θu cos θs sinφs − cosϕ cos θu sinφu sin θs)
·a/2∫−a/2
ejk(−y′ cosϕ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
+2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
·a/2∫−a/2
ejk(−x′ sinϕ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2a2E0
η(− cosϕ sin θu cos θs sinφs − cosϕ cos θu sinφu sin θs) sinc (YI3) sinc (ZI3)
+2a2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
· sinc (XI3) sinc (ZI3) . (C.21)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I3 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ sin θu cosφs)
· ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
204

C.2. Einfache Reflexion (PO)
+∫∫S
2E0
η(sinϕ sin θu sinφs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2E0
η(− cosϕ sin θu cosφs)
·a/2∫−a/2
ejk(−y′ cosϕ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
+2E0
η(sinϕ sin θu sinφs)
·a/2∫−a/2
ejk(−x′ sinϕ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2a2E0
η(− cosϕ sin θu cosφs) sinc (YI3) sinc (ZI3)
+2a2E0
η(sinϕ sin θu sinφs) sinc (XI3) sinc (ZI3) (C.22)
mit
XI3 =ka
2(− sinϕ sin θu cosφu + sin θs sinφs) (C.23)
YI3 =ka
2(− cosϕ sin θu sinφu + sin θs sinφs) (C.24)
ZI3 =ka
2(cos θu + cos θs) . (C.25)
Fall R2 − I4
Die einfallenden Feldvektorgroßen im Fall R2 − I4 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.26)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.27)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.28)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih
= (−x cosϕ)× 2 ~H ih + (y sinϕ)× 2 ~H i
h
=2E0
η
0− cosϕ sin θu
− cosϕ cos θu sinφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
205

C. Numerische Berechnungen fur den Dreifach-Reflektor
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.29)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ sin θu cos θs sinφs + cosϕ cos θu sinφu sin θs)
· ejk(y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2E0
η(− cosϕ sin θu cos θs sinφs + cosϕ cos θu sinφu sin θs)
·a/2∫−a/2
ejk(y′ cosϕ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
+2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
·a/2∫−a/2
ejk(−x′ sinϕ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2a2E0
η(− cosϕ sin θu cos θs sinφs + cosϕ cos θu sinφu sin θs) sinc (YI4) sinc (ZI4)
+2a2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu cosφu sin θs)
· sinc (XI4) sinc (ZI4) . (C.30)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ sin θu cosφs)
· ejk(y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(sinϕ sin θu sinφs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2E0
η(− cosϕ sin θu cosφs)
206

C.2. Einfache Reflexion (PO)
·a/2∫−a/2
ejk(y′ cosϕ sin θu sinφu+y′ sin θs sinφs) dy′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
+2E0
η(sinϕ sin θu sinφs)
·a/2∫−a/2
ejk(−x′ sinϕ sin θu cosφu+x′ sin θs cosφs) dx′
a/2∫−a/2
ejk(z′ cos θu+z′ cos θs) dz′
=2a2E0
η(− cosϕ sin θu cosφs) sinc (YI4) sinc (ZI4)
+2a2E0
η(sinϕ sin θu sinφs) sinc (XI4) sinc (ZI4) (C.31)
mit
XI4 =ka
2(− sinϕ sin θu cosφu + sin θs sinφs) (C.32)
YI4 =ka
2(cosϕ sin θu sinφu + sin θs sinφs) (C.33)
ZI4 =ka
2(cos θu + cos θs) . (C.34)
Fall R3 − I5
Die einfallenden Feldektorgroßen im Fall R3−I5 fur den horizontalen Sendemodus undRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.35)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.36)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.37)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
sinϕ cos θu sinφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.38)
207

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I5 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu sinφu sin θs)
· ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(cosϕ sin θu cos θs cosφs + cosϕ cos θu cosφu sin θs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ sin θu cos θs sinφs − sinϕ cos θu sinφu sin θs) sinc (YI5) sinc (ZI5)
+2a2E0
η(cosϕ sin θu cos θs cosφs + cosϕ cos θu cosφu sin θs)
· sinc (XI5) sinc (ZI5) . (C.39)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I5 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− sinϕ sin θu cosφs)
· ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− cosϕ sin θu sinφs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ sin θu cosφs) sinc (YI5) sinc (ZI5)
+2a2E0
η(− cosϕ sin θu sinφs) sinc (XI5) sinc (ZI5) (C.40)
mit
XI5 =ka
2(− cosϕ sin θu cosφu + sin θs sinφs) (C.41)
YI5 =ka
2(− sinϕ sin θu sinφu + sin θs sinφs) (C.42)
ZI5 =ka
2(cos θu + cos θs) . (C.43)
208

C.2. Einfache Reflexion (PO)
Fall R3 − I6
Die einfallenden Feldvektorgroßen im Fall R3 − I6 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.44)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.45)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.46)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
− cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.47)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− sinϕ sin θu cos θs sinφs + sinϕ cos θu sinφu sin θs)
· ejk(y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(cosϕ sin θu cos θs cosφs + cosϕ cos θu cosφu sin θs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ sin θu cos θs sinφs + sinϕ cos θu sinφu sin θs) sinc (YI6) sinc (ZI6)
+2a2E0
η(cosϕ sin θu cos θs cosφs + cosϕ cos θu cosφu sin θs)
· sinc (XI6) sinc (ZI6) . (C.48)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
209

C. Numerische Berechnungen fur den Dreifach-Reflektor
=∫∫S
2E0
η(− sinϕ sin θu cosφs)
· ejk(y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− cosϕ sin θu sinφs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ sin θu cosφs) sinc (YI6) sinc (ZI6)
+2a2E0
η(− cosϕ sin θu sinφs) sinc (XI6) sinc (ZI6) (C.49)
mit
XI6 =ka
2(− cosϕ sin θu cosφu + sin θs sinφs) (C.50)
YI6 =ka
2(sinϕ sin θu sinφu + sin θs sinφs) (C.51)
ZI6 =ka
2(cos θu + cos θs) . (C.52)
Fall R1 − I7
Die einfallenden Feldvektorgroßen im Fall R1− I7 fur den vertikalen Sendemodus undRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.53)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.54)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.55)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−jk~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.56)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I7 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
210

C.2. Einfache Reflexion (PO)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2a2E0
η(cosφu cos θs cosφs + sinφu cos θs sinφs)
· sinc (XI7) sinc (YI7) . (C.57)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I7 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosφu sinφs + sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2a2E0
η(− cosφu sinφs + sinφu cosφs) sinc (XI7) sinc (YI7) (C.58)
mit
XI7 =ka
2(− sin θu cosφu + sin θs cosφs) (C.59)
YI7 =ka
2(− sin θu sinφu + sin θs sinφs) . (C.60)
Fall R1 − I8
Die einfallenden Feldvektorgroßen im Fall R1− I6 fur den vertikalen Sendemodus undRadarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.61)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.62)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.63)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−jk~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.64)
Aus der Gleichung (3.36) und (3.38) fur die xy-Ebene erhalt man:
Nθ,I8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
211

C. Numerische Berechnungen fur den Dreifach-Reflektor
=∫∫S
2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· ejk(−x′ sin θu cosφu+y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2a2E0
η(cosφu cos θs cosφs − sinφu cos θs sinφs)
· sinc (XI8) sinc (YI8) . (C.65)
Aus der Gleichung (3.37) und (3.38) fur die xy-Ebene erhalt man:
Nφ,I8 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosφu sinφs − sinφu cosφs)
· ejk(−x′ sin θu cosφu−y′ sin θu sinφu)ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
=2a2E0
η(− cosφu sinφs − sinφu cosφs) sinc (XI8) sinc (YI8) (C.66)
mit
XI8 =ka
2(− sin θu cosφu + sin θs cosφs) (C.67)
YI8 =ka
2(sin θu sinφu + sin θs sinφs) . (C.68)
Fall R2 − I9
Die einfallenden Feldvektorgroßen im Fall R2− I9 fur den vertikalen Sendemodus undRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.69)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.70)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.71)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.72)
212

C.2. Einfache Reflexion (PO)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I9 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ cosφu sin θs)
· ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(sinϕ sinφu sin θs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− cosϕ cosφu sin θs) sinc (YI9) sinc (ZI9)
+2a2E0
η(sinϕ sinφu sin θs) sinc (XI9) sinc (ZI9) . (C.73)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I9 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.74)
mit
XI9 =ka
2(− sinϕ sin θu cosφu + sin θs sinφs) (C.75)
YI9 =ka
2(− cosϕ sin θu sinφu + sin θs sinφs) (C.76)
ZI9 =ka
2(cos θu + cos θs) . (C.77)
Fall R2 − I10
Die einfallenden Feldvektorgroßen im Fall R2−I10 fur den vertikalen Sendemodus undRadarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.78)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.79)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.80)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
213
C. Numerische Berechnungen fur den Dreifach-Reflektor
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.81)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I10 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− cosϕ cosφu sin θs)
· ejk(y′ cosϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− sinϕ sinφu sin θs)
· ejk(−x′ sinϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− cosϕ cosφu sin θs) sinc (YI10) sinc (ZI10)
+2a2E0
η(− sinϕ sinφu sin θs) sinc (XI10) sinc (ZI10) . (C.82)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man
Nφ,I10 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.83)
mit
XI10 =ka
2(− sinϕ sin θu cosφu + sin θs sinφs) (C.84)
YI10 =ka
2(cosϕ sin θu sinφu + sin θs sinφs) (C.85)
ZI10 =ka
2(cos θu + cos θs) . (C.86)
Fall R3 − I11
Die einfallenden Feldvektorgroßen im Fall R3−I11 fur den vertikalen Sendemodus undRadarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.87)
214

C.2. Einfache Reflexion (PO)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.88)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.89)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.90)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I11 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− sinϕ cosφu sin θs)
· ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(− cosϕ sinφu sin θs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ cosφu sin θs) sinc (YI11) sinc (ZI11)
+2a2E0
η(− cosϕ sinφu sin θs) sinc (XI11) sinc (ZI11) . (C.91)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I11 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.92)
mit
XI11 =ka
2(− cosϕ sin θu cosφu + sin θs sinφs) (C.93)
YI11 =ka
2(− sinϕ sin θu sinφu + sin θs sinφs) (C.94)
ZI11 =ka
2(cos θu + cos θs) . (C.95)
215

C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall R3 − I12
Die einfallenden Feldvektorgroßen im Fall R3−I12 fur den vertikalen Sendemodus undRadarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.96)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.97)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.98)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.99)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,I12 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
2E0
η(− sinϕ cosφu sin θs)
· ejk(y′ sinϕ sin θu sinφu+z′ cos θu)ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η(cosϕ sinφu sin θs)
· ejk(−x′ cosϕ sin θu cosφu+z′ cos θu)ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
=2a2E0
η(− sinϕ cosφu sin θs) sinc (YI12) sinc (ZI12)
+2a2E0
η(cosϕ sinφu sin θs) sinc (XI12) sinc (ZI12) . (C.100)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,I12 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.101)
216

C.3. Zweifache Reflexion (PO-PO)
mit
XI12 =ka
2(− cosϕ sin θu cosφu + sin θs sinφs) (C.102)
YI12 =ka
2(sinϕ sin θu sinφu + sin θs sinφs) (C.103)
ZI12 =ka
2(cos θu + cos θs) . (C.104)
C.3. Zweifache Reflexion (PO-PO)
Fall R21 − II1 und R21 − II2
Die einfallenden Feldvektorgroßen im Fall R21− II1 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.105)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.106)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.107)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.108)
Die einfallenden Feldektorgroßen im Fall R21−II2 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.109)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.110)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.111)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.112)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung fur die
217

C. Numerische Berechnungen fur den Dreifach-Reflektor
zwei Falle wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.113)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.114)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.115)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.116)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.117)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II1,2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)· sinc (YII1,2) sinc (ZII1,2)
+ 2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)· sinc (XII1,2) sinc (ZII1,2) . (C.118)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II1,2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
218

C.3. Zweifache Reflexion (PO-PO)
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YII1,2) sinc (ZII1,2)
+ 2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XII1,2) sinc (ZII1,2) (C.119)
mit
XII1,2 =ka sinϕ
2(sin θs sinφs) (C.120)
YII1,2 =ka cosϕ
2(sin θs sinφs) (C.121)
ZII1,2 =ka
2(cos θs) . (C.122)
Fall R31 − II3 und R31 − II4
Die einfallenden Feldvektorgroßen im Fall R31− II3 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.123)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.124)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.125)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
=2E0
η
cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.126)
Die einfallenden Feldektorgroßen im Fall R31−II4 fur den horizontalen Sendemodusauf die Platte Nr.1 und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.127)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.128)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.129)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H ih
=2E0
η
− cos θu sinφu− cos θu cosφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.130)
219
C. Numerische Berechnungen fur den Dreifach-Reflektor
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.131)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.132)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.133)
mitR =
√(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.134)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.135)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II3,4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII3,4) sinc (ZII3,4)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XII3,4) sinc (ZII3,4) . (C.136)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II3,4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
220

C.3. Zweifache Reflexion (PO-PO)
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YII3,4) sinc (ZII3,4)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)sinc (XII3,4) sinc (ZII3,4) (C.137)
mit
XII3,4 =ka cosϕ
2(sin θs sinφs) (C.138)
YII3,4 =ka sinϕ
2(sin θs sinφs) (C.139)
ZII3,4 =ka
2(cos θs) . (C.140)
Fall R12 − II5 und R12 − II6
Die einfallenden Feldvektorgroßen im Fall R12− II5 fur den horizontalen Sendemodusauf die Platte Nr.2 und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.141)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.142)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.143)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih = (−x cosϕ)× 2 ~H i
h + (y sinϕ)× 2 ~H ih
=2E0
η
0− cosϕ sin θu
cosϕ cos θu sinφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.144)
Die einfallenden Feldektorgroßen im Fall R12−II6 fur den horizontalen Sendemodusauf die Platte Nr.2 und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.145)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.146)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.147)
221
C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih = (−x cosϕ)× 2 ~H i
h + (y sinϕ)× 2 ~H ih
=2E0
η
0− cosϕ sin θu
− cosϕ cos θu sinφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.148)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.149)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2 − (zp1 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.150)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp1 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.151)
(C.152)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.153)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.154)
222

C.3. Zweifache Reflexion (PO-PO)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II5,6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XII5,6) sinc (YII5,6) . (C.155)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II5,6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XII5,6) sinc (YII5,6) (C.156)
mit
XII5,6 =ka
2(sin θs sinφs) (C.157)
YII5,6 =ka
2(sin θs sinφs) . (C.158)
Fall R32 − II7 und R32 − II8
Die einfallenden Feldvektorgroßen im Fall R32− II7 fur den horizontalen Sendemodusauf die Platte Nr.2 und Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.159)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.160)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.161)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih = (−x cosϕ)× 2 ~H i
h + (y sinϕ)× 2 ~H ih
=2E0
η
0− cosϕ sin θu
cosϕ cos θu sinφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.162)
223
C. Numerische Berechnungen fur den Dreifach-Reflektor
Die einfallenden Feldektorgroßen im Fall R32−II8 fur den horizontalen Sendemodusauf die Platte Nr.2 und Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.163)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.164)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.165)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ih
= 2 (−x cosϕ+ y sinϕ)× ~H ih = (−x cosϕ)× 2 ~H i
h + (y sinϕ)× 2 ~H ih
=2E0
η
0− cosϕ sin θu
− cosϕ cos θu sinφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
− sinϕ sin θu0
sinϕ cos θu cosφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.166)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[(zp3 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.167)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2 − (zp3 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.168)
H izp3
=1
4π
∫ ∫Sp2
[− (xp3 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp3 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.169)
(C.170)
mitR =
√(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.171)
224

C.3. Zweifache Reflexion (PO-PO)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.172)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II7,8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII7,8) sinc (ZII7,8)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XII7,8) sinc (ZII7,8) . (C.173)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II7,8 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YII7,8) sinc (ZII7,8)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)sinc (XII7,8) sinc (ZII7,8) (C.174)
mit
XII7,8 =ka cosϕ
2(sin θs sinφs) (C.175)
YII7,8 =ka sinϕ
2(sin θs sinφs) (C.176)
ZII7,8 =ka
2(cos θs) . (C.177)
225

C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall R13 − II9 und R13 − II10
Die einfallenden Feldvektorgroßen im Fall R13− II9 fur den horizontalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.178)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.179)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.180)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
sinϕ cos θu sinφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
− cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.181)
Die einfallenden Feldektorgroßen im Fall R13−II10 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.182)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.183)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.184)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
− cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.185)
226

C.3. Zweifache Reflexion (PO-PO)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[(zp1 − zp3) Jysp3 − (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.186)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3 − (zp1 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.187)
H izp1
=1
4π
∫ ∫Sp3
[− (xp1 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(yp1 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.188)
(C.189)
mitR =
√(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.190)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.191)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II9,10 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XII9,10) sinc (YII9,10) . (C.192)
227

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II9,10 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XII9,10) sinc (YII9,10) (C.193)
mit
XII9,10 =ka
2(sin θs sinφs) (C.194)
YII9,10 =ka
2(sin θs sinφs) . (C.195)
Fall R23 − II11 und R23 − II12
Die einfallenden Feldvektorgroßen im Fall R23−II11 fur den horizontalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.196)
~Eih = E0 (x sinφu − y cosφu) e
−j~k·~ri (C.197)
~H ih =
E0
η(−x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.198)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
sinϕ cos θu sinφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
− cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.199)
Die einfallenden Feldektorgroßen im Fall R23−II12 fur den horizontalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.200)
~Eih = E0 (−x sinφu − y cosφu) e
−j~k·~ri (C.201)
~H ih =
E0
η(−x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~ri . (C.202)
228

C.3. Zweifache Reflexion (PO-PO)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ih
= 2 (−x sinϕ− y cosϕ)× ~H ih
= (−x sinϕ)× 2 ~H ih + (−y cosϕ)× 2 ~H i
h
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
cosϕ sin θu0
− cosϕ cos θu cosφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.203)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[(zp2 − zp3) Jysp3 − (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.204)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3 − (zp2 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.205)
H izp2
=1
4π
∫ ∫Sp3
[− (xp2 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(yp2 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.206)
(C.207)
mitR =
√(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.208)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
229

C. Numerische Berechnungen fur den Dreifach-Reflektor
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.209)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II11,12 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)· sinc (YII11,12) sinc (ZII11,12)
+ 2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)· sinc (XII11,12) sinc (ZII11,12) . (C.210)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II11,12 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YII11,12) sinc (ZII11,12)
+ 2a2 sinϕ(−2Hzp2 sinϕ sinφs
)· sinc (XII11,12) sinc (ZII11,12) (C.211)
mit
XII11,12 =ka sinϕ
2(sin θs sinφs) (C.212)
YII11,12 =ka cosϕ
2(sin θs sinφs) (C.213)
ZII11,12 =ka
2(cos θs) . (C.214)
230

C.3. Zweifache Reflexion (PO-PO)
Fall R21 − II13 und R21 − II14
Die einfallenden Feldvektorgroßen im Fall R21 − II13 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.215)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.216)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.217)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalische Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.218)
Die einfallenden Feldektorgroßen im Fall R21 − II14 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.219)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.220)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.221)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalische Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.222)
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.223)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.224)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.225)
231

C. Numerische Berechnungen fur den Dreifach-Reflektor
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.226)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.227)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II13,14 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)· sinc (YII13,14) sinc (ZII13,14)
+ 2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)· sinc (XII13,14) sinc (ZII13,14) . (C.228)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II13,14 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YII13,14) sinc (ZII13,14)
+ 2a2 sinϕ(−2Hzp2 sinϕ sinφs
)· sinc (XII13,14) sinc (ZII13,14) (C.229)
232

C.3. Zweifache Reflexion (PO-PO)
mit
XII13,14 =ka sinϕ
2(sin θs sinφs) (C.230)
YII13,14 =ka cosϕ
2(sin θs sinφs) (C.231)
ZII13,14 =ka
2(cos θs) . (C.232)
Fall R31 − II15 und R31 − II16
Die einfallenden Feldvektorgroßen im Fall R31 − II15 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.233)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.234)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.235)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalische Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφusinφu
0
ejk(−x′ sin θu cosφu−y′ sin θu sinφu) . (C.236)
Die einfallenden Feldektorgroßen im Fall R31 − II16 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.237)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.238)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.239)
Die resultierende Oberflachenstromdichte ~Js auf der flachen Platte wird durch diephysikalische Optik Approximation mit x = x′, y = y′ und z = 0 berechnet wie folgt:
~Jsp1 = 2np1 × ~H iv
= 2z × E0
η(−x sinφu − y cosφu) e
−j~k·~ri
=2E0
η
cosφu− sinφu
0
ejk(−x′ sin θu cosφu+y′ sin θu sinφu) . (C.240)
233
C. Numerische Berechnungen fur den Dreifach-Reflektor
Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die Gleichungen(3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.241)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.242)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.243)
mitR =
√(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.244)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.245)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II15,16 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII15,16) sinc (ZII15,16)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XII15,16) sinc (ZII15,16) . (C.246)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II15,16 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
234

C.3. Zweifache Reflexion (PO-PO)
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YII15,16) sinc (ZII15,16)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XII15,16) sinc (ZII15,16) (C.247)
mit
XII15,16 =ka cosϕ
2(sin θs sinφs) (C.248)
YII15,16 =ka sinϕ
2(sin θs sinφs) (C.249)
ZII15,16 =ka
2(cos θs) . (C.250)
Fall R12 − II17 und R12 − II18
Die einfallenden Feldvektorgroßen im Fall R12 − II17 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.251)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.252)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.253)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.254)
Die einfallenden Feldektorgroßen im Fall R12 − II18 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.255)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.256)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.257)
235

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.258)
Im Computerprogrammierung kann man die Symbole gemeisam fur die zwei Falleeinsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in die Glei-chungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnungwie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.259)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.260)
H izp1
= 0 (C.261)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.262)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.263)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II17,18 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
236

C.3. Zweifache Reflexion (PO-PO)
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XII17,18) sinc (YII17,18) . (C.264)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II17,18 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XII17,18) sinc (YII17,18) (C.265)
mit
XII17,18 =ka
2(sin θs sinφs) (C.266)
YII17,18 =ka
2(sin θs sinφs) . (C.267)
Fall R32 − II19 und R32 − II20
Die einfallenden Feldvektorgroßen im Fall R32 − II19 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.268)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.269)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.270)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(−y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.271)
237

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die einfallenden Feldektorgroßen im Fall R32 − II20fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.272)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.273)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.274)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H iv
= 2 (−x cosϕ+ y sinϕ)× ~H iv
= (−x cosϕ)× 2 ~H iv + (y sinϕ)× 2 ~H i
v
=2E0
η
00
cosϕ cosφu
ejk(y′ cosϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
sinϕ sinφu
ejk(−x′ sinϕ sin θu cosφu+z′ cos θu) . (C.275)
Im Computerprogrammierung kann man die Symbole gemeisam fur die zwei Falleeinsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Glei-chungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnungwie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.276)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.277)
H izp3
= 0 (C.278)
mitR =
√(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.279)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
238

C.3. Zweifache Reflexion (PO-PO)
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
00
−2Hyp3 sinϕ
+
00
2Hxp3 cosϕ
. (C.280)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II19,20 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs
)sinc (YII19,20) sinc (ZII19,20)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs
)· sinc (XII19,20) sinc (ZII19,20) . (C.281)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II19,20 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.282)
mit
XII19,20 =ka cosϕ
2(sin θs sinφs) (C.283)
YII19,20 =ka sinϕ
2(sin θs sinφs) (C.284)
ZII19,20 =ka
2(cos θs) . (C.285)
Fall R13 − II21 und R13 − II22
Die einfallenden Feldvektorgroßen im Fall R13 − II21 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.286)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.287)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.288)
239

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.289)
Die einfallenden Feldvektorgroßen im Fall R13−II22 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.290)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.291)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.292)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.293)
Im Computerprogrammierung kann man die Symbole gemeinsam fur die zwei Falleeinsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Glei-chungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnungwie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.294)
240

C.3. Zweifache Reflexion (PO-PO)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.295)
H izp1
= 0 (C.296)
mitR =
√(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.297)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.298)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II21,22 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XII21,22) sinc (YII21,22) . (C.299)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II21,22 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XII21,22) sinc (YII21,22) (C.300)
mit
XII21,22 =ka
2(sin θs sinφs) (C.301)
YII21,22 =ka
2(sin θs sinφs) . (C.302)
241

C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall R23 − II23 und R23 − II24
Die einfallenden Feldvektorgroßen im Fall R23 − II23 fur den vertikalen Sendemodusund Radarposition u ≤ 0 sind wie folgt:
~ri = xx sin θu cosφu + yy sin θu sinφu − zz cos θu (C.303)
~Eiv = E0 (x cos θu cosφu + y cos θu sinφu + z sin θu) e
−j~k·~ri (C.304)
~H iv =
E0
η(x sinφu − y cosφu) e
−j~k·~ri . (C.305)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(−y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.306)
Die einfallenden Feldvektorgroßen im Fall R23−II24 fur den vertikalen Sendemodusund Radarposition u > 0 sind wie folgt:
~ri = xx sin θu cosφu − yy sin θu sinφu − zz cos θu (C.307)
~Eiv = E0 (x cos θu cosφu − y cos θu sinφu + z sin θu) e
−j~k·~ri (C.308)
~H iv =
E0
η(−x sinφu − y cosφu) e
−j~k·~ri . (C.309)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H iv
= 2 (−x sinϕ− y cosϕ)× ~H iv
= (−x sinϕ)× 2 ~H iv + (−y cosϕ)× 2 ~H i
v
=2E0
η
00
sinϕ cosφu
ejk(y′ sinϕ sin θu sinφu+z′ cos θu)
+2E0
η
00
− cosϕ sinφu
ejk(−x′ cosϕ sin θu cosφu+z′ cos θu) . (C.310)
242

C.3. Zweifache Reflexion (PO-PO)
Im Computerprogrammierung kann man die Symbole gemeinsam fur die zwei Falleeinsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die Glei-chungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berechnungwie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.311)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.312)
H izp2
= 0 (C.313)
mitR =
√(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.314)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
00
−2Hyp2 cosϕ
+
00
−2Hxp2 sinϕ
. (C.315)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,II23,24 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs
)sinc (YII23,24) sinc (ZII23,24)
+ 2a2 sinϕ(Hxp2 sinϕ sin θs
)sinc (XII23,24) sinc (ZII23,24) .(C.316)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,II23,24 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
243

C. Numerische Berechnungen fur den Dreifach-Reflektor
= 0 (C.317)
mit
XII23,24 =ka sinϕ
2(sin θs sinφs) (C.318)
YII23,24 =ka cosϕ
2(sin θs sinφs) (C.319)
ZII23,24 =ka
2(cos θs) . (C.320)
C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fur die dreifache Reflexion werden zuerst die reflektierten Felder in den jeweilgen Si-tuationen in der Tabelle C.4 definiert, um die Herleitung zu erleitern. Fur die weitereUntersuchungen wird der Winkel ϕ in der Abbilding 4.21 gleich 45◦ gesetzt. In dieserArbeit wird angenommen, dass der Offnungswinkel der Radarantenne in der Azimutri-chung den Maximalwert von 30◦ ist, das heißt, dass der Maximalwert vom Winkel φuin der Berechnung nicht mehr als 15◦ uberschreiten wird. Die gesamte Herleitung wirdφr = 2ϕ− φu eingesetzt.
Fall von nach Position Fall von nach Position
Gh1 P1 P2 u ≤ 0 Gh2 P1 P2 u > 0Gh3 P1 P3 u ≤ 0 Gh4 P1 P3 u > 0Gh5 P2 P1 u ≤ 0 Gh6 P2 P1 u > 0Gh7 P2 P3 u ≤ 0 Gh8 P2 P3 u > 0Gh9 P3 P1 u ≤ 0 Gh10 P3 P1 u > 0Gh11 P3 P2 u ≤ 0 Gh12 P3 P2 u > 0Gv1 P1 P2 u ≤ 0 Gv2 P1 P2 u > 0Gv3 P1 P3 u ≤ 0 Gv4 P1 P3 u > 0Gv5 P2 P1 u ≤ 0 Gv6 P2 P1 u > 0Gv7 P2 P3 u ≤ 0 Gv8 P2 P3 u > 0Gv9 P3 P1 u ≤ 0 Gv10 P3 P1 u > 0Gv11 P3 P2 u ≤ 0 Gv12 P3 P2 u > 0
Tabelle C.4.: Die reflektierte Felder in den jeweilgen Situationen im Fall von der drei-fachen Reflexion
Fall Gh1 und Gh3
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.1 auf die Platte Nr.2 und Nr.3 in derAbbildung C.1 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Die
244

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
reflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφu + yy sin θu sinφu + zz cos θu (C.321)
~Erh = E0 (x sinφu − y cosφu) e
−j~k·~rr (C.322)
~Hrh =
E0
η(x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~rr . (C.323)
Fall Gh2 und Gh4
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.1 auf die Platte Nr.2 und Nr.3 in derAbbildung C.1 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφu − yy sin θu sinφu + zz cos θu (C.324)
~Erh = E0 (−x sinφu − y cosφu) e
−j~k·~rr (C.325)
~Hrh =
E0
η(x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~rr . (C.326)
Abbildung C.1.: Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v1und Gh,v3, (b) Gh,v2 und Gh,v4
Fall Gh5 und Gh7
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.2 auf die Platte Nr.1 und Nr.3 in derAbbildung C.2 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = −xx sin θu cosφr + yy sin θu sinφr − zz cos θu (C.327)
~Erh = E0 (−x sinφr − y cosφr) e
−j~k·~rr (C.328)
~Hrh =
E0
η(−x cos θu cosφr + y cos θu sinφr + z sin θu) e
−j~k·~rr . (C.329)
245
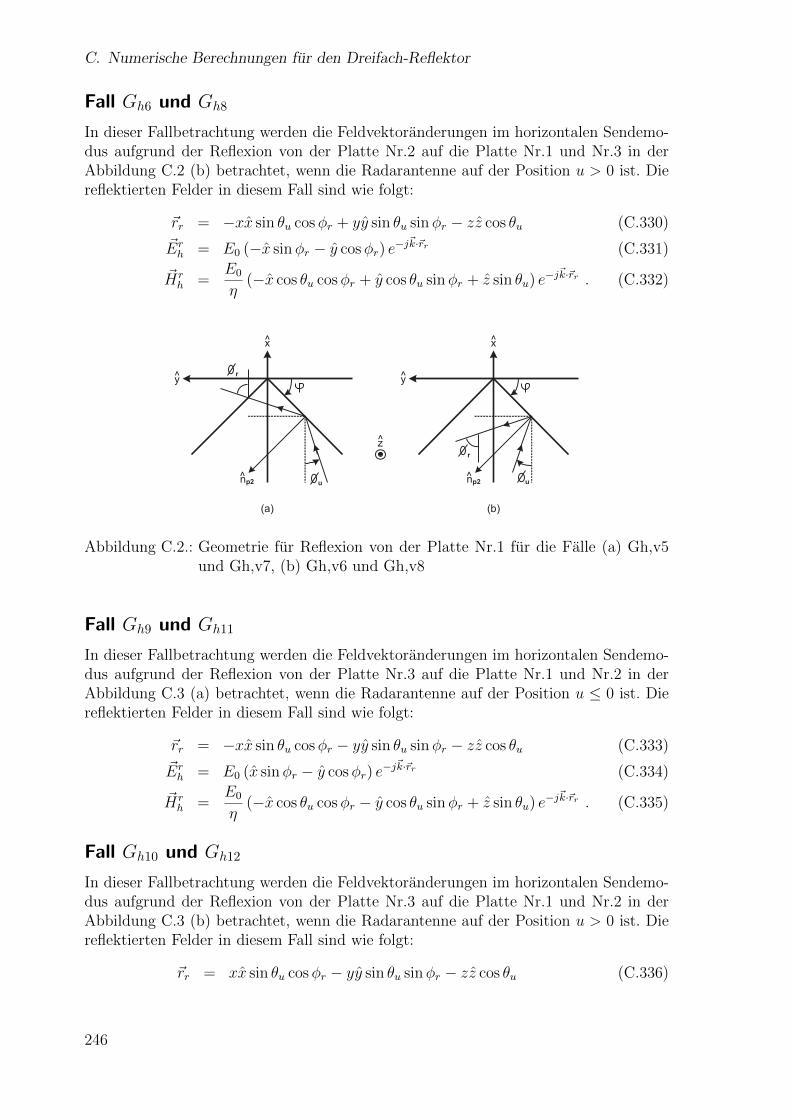
C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall Gh6 und Gh8
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.2 auf die Platte Nr.1 und Nr.3 in derAbbildung C.2 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = −xx sin θu cosφr + yy sin θu sinφr − zz cos θu (C.330)
~Erh = E0 (−x sinφr − y cosφr) e
−j~k·~rr (C.331)
~Hrh =
E0
η(−x cos θu cosφr + y cos θu sinφr + z sin θu) e
−j~k·~rr . (C.332)
Abbildung C.2.: Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v5und Gh,v7, (b) Gh,v6 und Gh,v8
Fall Gh9 und Gh11
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.3 auf die Platte Nr.1 und Nr.2 in derAbbildung C.3 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = −xx sin θu cosφr − yy sin θu sinφr − zz cos θu (C.333)
~Erh = E0 (x sinφr − y cosφr) e
−j~k·~rr (C.334)
~Hrh =
E0
η(−x cos θu cosφr − y cos θu sinφr + z sin θu) e
−j~k·~rr . (C.335)
Fall Gh10 und Gh12
In dieser Fallbetrachtung werden die Feldvektoranderungen im horizontalen Sendemo-dus aufgrund der Reflexion von der Platte Nr.3 auf die Platte Nr.1 und Nr.2 in derAbbildung C.3 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφr − yy sin θu sinφr − zz cos θu (C.336)
246

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
~Erh = E0 (x sinφr + y cosφr) e
−j~k·~rr (C.337)
~Hrh =
E0
η(x cos θu cosφr − y cos θu sinφr + z sin θu) e
−j~k·~rr . (C.338)
Abbildung C.3.: Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v9und Gh,v11, (b) Gh,v10 und Gh,v12
Fall Gv1 und Gv3
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.1 auf die Platte Nr.2 und Nr.3 in der Ab-bildung C.1 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφu + yy sin θu sinφu + zz cos θu (C.339)
~Erv = E0 (x cos θu cosφu + y cos θu sinφu − z sin θu) e
−j~k·~rr (C.340)
~Hrv =
E0
η(−x sinφu + y cosφu) e
−j~k·~rr . (C.341)
Fall Gv2 und Gv4
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.1 auf die Platte Nr.2 und Nr.3 in der Ab-bildung C.1 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφu − yy sin θu sinφu + zz cos θu (C.342)
~Erv = E0 (x cos θu cosφu − y cos θu sinφu − z sin θu) e
−j~k·~rr (C.343)
~Hrv =
E0
η(x sinφu + y cosφu) e
−j~k·~rr . (C.344)
247

C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall Gv5 und Gv7
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.2 auf die Platte Nr.1 und Nr.3 in der Ab-bildung C.2 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Diereflektierten Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφr + yy sin θu sinφr − zz cos θu (C.345)
~Erv = E0 (x cos θu cosφr + y cos θu sinφr + z sin θu) e
−j~k·~rr (C.346)
~Hrv =
E0
η(x sinφr − y cosφr) e
−j~k·~rr . (C.347)
Fall Gv6 und Gv8
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.2 auf die Platte Nr.1 und Nr.3 in der Ab-bildung C.2 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierte Felder in diesem Fall sind wie folgt:
~rr = −xx sin θu cosφr + yy sin θu sinφr − zz cos θu (C.348)
~Erv = E0 (−x cos θu cosφr + y cos θu sinφu + z sin θu) e
−j~k·~rr (C.349)
~Hrv =
E0
η(x sinφr + y cosφr) e
−j~k·~rr . (C.350)
Fall Gv9 und Gv11
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.3 auf die Platte Nr.1 und Nr.2 in der Ab-bildung C.3 (a) betrachtet, wenn die Radarantenne auf der Position u ≤ 0 ist. Diereflektierte Felder in diesem Fall sind wie folgt:
~rr = −xx sin θu cosφr − yy sin θu sinφr − zz cos θu (C.351)
~Erv = E0 (−x cos θu cosφr − y cos θu sinφr + z sin θu) e
−j~k·~rr (C.352)
~Hrv =
E0
η(−x sinφr + y cosφr) e
−j~k·~rr . (C.353)
Fall Gv10 und Gv12
In dieser Fallbetrachtung werden die Feldvektoranderungen im vertikalen Sendemodusaufgrund der Reflexion von der Platte Nr.3 auf die Platte Nr.1 und Nr.2 in der Ab-bildung C.3 (b) betrachtet, wenn die Radarantenne auf der Position u > 0 ist. Diereflektierte Felder in diesem Fall sind wie folgt:
~rr = xx sin θu cosφr − yy sin θu sinφr − zz cos θu (C.354)
~Erv = E0 (x cos θu cosφr − y cos θu sinφu + z sin θu) e
−j~k·~rr (C.355)
~Hrv =
E0
η(−x sinφr − y cosφr) e
−j~k·~rr . (C.356)
248

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R121 − III1 und R121 − III2
Aus dem Fall Gh1 und Gh2 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gh1 = 2np2 × ~HrGh1
= 2 (−x cosϕ+ y sinϕ)× ~HrGh1
= (−x cosϕ)× 2 ~HrGh1
+ (y sinϕ)× 2 ~HrGh1
=2E0
η
0− cosϕ sin θu
− cosϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
− sinϕ sin θu0
− sinϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.357)
und
~Jsp2,Gh2 = 2np2 × ~HrGh2
= 2 (−x cosϕ+ y sinϕ)× ~HrGh2
= (−x cosϕ)× 2 ~HrGh2
+ (y sinϕ)× 2 ~HrGh2
=2E0
η
0− cosϕ sin θu
cosϕ cos θu sinφu
ejk(y′ sin θu sinφu−z′ cos θu)
+2E0
η
− sinϕ sin θu0
− sinϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) . (C.358)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.359)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2 − (zp1 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.360)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp1 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.361)
249

C. Numerische Berechnungen fur den Dreifach-Reflektor
(C.362)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.363)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.364)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III1,2 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII1,2) sinc (YIII1,2) . (C.365)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III1,2 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII1,2) sinc (YIII1,2) (C.366)
mit
XIII1,2 =ka
2(sin θs sinφs) (C.367)
YIII1,2 =ka
2(sin θs sinφs) . (C.368)
Fall R321 − III3 und R321 − III4
Aus dem Fall Gh1 und Gh2 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gh1 = 2np2 × ~HrGh1
= 2 (−x cosϕ+ y sinϕ)× ~HrGh1
250

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
= (−x cosϕ)× 2 ~HrGh1
+ (y sinϕ)× 2 ~HrGh1
=2E0
η
0− cosϕ sin θu
− cosϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
− sinϕ sin θu0
− sinϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.369)
und
~Jsp2,Gh2 = 2np2 × ~HrGh2
= 2 (−x cosϕ+ y sinϕ)× ~HrGh2
= (−x cosϕ)× 2 ~HrGh2
+ (y sinϕ)× 2 ~HrGh2
=2E0
η
0− cosϕ sin θu
cosϕ cos θu sinφu
ejk(y′ sin θu sinφu−z′ cos θu)
+2E0
η
− sinϕ sin θu0
− sinϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) . (C.370)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[(zp3 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.371)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2 − (zp3 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.372)
H izp3
=1
4π
∫ ∫Sp2
[− (xp3 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp3 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.373)
(C.374)
mitR =
√(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.375)
251

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.376)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III3,4 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YIII3,4) sinc (ZIII3,4)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII3,4) sinc (ZIII3,4) . (C.377)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man
Nφ,III3,4 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII3,4) sinc (ZIII3,4)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)sinc (XIII3,4) sinc (ZIII3,4) (C.378)
mit
XIII3,4 =ka cosϕ
2(sin θs sinφs) (C.379)
YIII3,4 =ka sinϕ
2(sin θs sinφs) (C.380)
ZIII3,4 =ka
2(cos θs) . (C.381)
252
C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R131 − III5 und R131 − III6
Aus dem Fall Gh3 und Gh4 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.2 als:
~Jsp3,Gh3 = 2np3 × ~HrGh3
= 2 (−x sinϕ− y cosϕ)× ~HrGh3
= (−x sinϕ)× 2 ~HrGh3
+ (−y cosϕ)× 2 ~HrGh3
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
cosϕ sin θu0
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.382)
und
~Jsp3,Gh4 = 2np3 × ~HrGh4
= 2 (−x sinϕ− y cosϕ)× ~HrGh4
= (−x sinϕ)× 2 ~HrGh4
+ (−y cosϕ)× 2 ~HrGh4
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
cosϕ sin θu0
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) . (C.383)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[(zp1 − zp3) Jysp3 − (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.384)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3 − (zp1 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.385)
H izp1
=1
4π
∫ ∫Sp3
[− (xp1 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
253

C. Numerische Berechnungen fur den Dreifach-Reflektor
+1
4π
∫ ∫Sp3
[(yp1 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.386)
(C.387)
mit
R =√
(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.388)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.389)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III5,6 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII5,6) sinc (YIII5,6) . (C.390)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III5,6 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII5,6) sinc (YIII5,6) (C.391)
mit
XIII5,6 =ka
2(sin θs sinφs) (C.392)
YIII5,6 =ka
2(sin θs sinφs) . (C.393)
254
C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R231 − III7 und R231 − III8
Aus dem Fall Gh3 und Gh4 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gh3 = 2np3 × ~HrGh3
= 2 (−x sinϕ− y cosϕ)× ~HrGh3
= (−x sinϕ)× 2 ~HrGh3
+ (−y cosϕ)× 2 ~HrGh3
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
cosϕ sin θu0
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.394)
und
~Jsp3,Gh4 = 2np3 × ~HrGh4
= 2 (−x sinϕ− y cosϕ)× ~HrGh4
= (−x sinϕ)× 2 ~HrGh4
+ (−y cosϕ)× 2 ~HrGh4
=2E0
η
0− sinϕ sin θu
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
cosϕ sin θu0
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.395)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[(zp2 − zp3) Jysp3 − (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.396)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3 − (zp2 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.397)
H izp2
=1
4π
∫ ∫Sp3
[− (xp2 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
255

C. Numerische Berechnungen fur den Dreifach-Reflektor
+1
4π
∫ ∫Sp3
[(yp2 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.398)
(C.399)
mitR =
√(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.400)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.401)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III7,8 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII7,8) sinc (ZIII7,8)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII7,8) sinc (ZIII7,8) . (C.402)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III7,8 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII7,8) sinc (ZIII7,8)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII7,8) sinc (ZIII7,8) (C.403)
256

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
mit
XIII7,8 =ka sinϕ
2(sin θs sinφs) (C.404)
YIII7,8 =ka cosϕ
2(sin θs sinφs) (C.405)
ZIII7,8 =ka
2(cos θs) . (C.406)
Fall R212 − III9 und R212 − III10
Aus dem Fall Gh5 und Gh6 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.2 als:
~Jsp1,Gh5 = 2np1 × ~HrGh5
= 2z × ~HrGh5
=2E0
η
− cos θu sinφrcos θu cosφr
0
ejk(−x′ sin θu cosφr−y′ sin θu sinφr) (C.407)
und
~Jsp1,Gh6 = 2np1 × ~HrGh6
= 2z × ~HrGh6
=2E0
η
− cos θu sinφr− cos θu cosφr
0
ejk(x′ sin θu cosφr−y′ sin θu sinφr) . (C.408)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.409)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.410)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.411)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.412)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
257

C. Numerische Berechnungen fur den Dreifach-Reflektor
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.413)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III9,10 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII9,10) sinc (ZIII9,10)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII9,10) sinc (ZIII9,10) . (C.414)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III9,10 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII9,10) sinc (ZIII9,10)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII9,10) sinc (ZIII9,10)(C.415)
mit
XIII9,10 =ka sinϕ
2(sin θs sinφs) (C.416)
YIII9,10 =ka cosϕ
2(sin θs sinφs) (C.417)
ZIII9,10 =ka
2(cos θs) . (C.418)
258

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R312 − III11 und R312 − III12
Aus dem Fall Gh5 und Gh6 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.2 als:
~Jsp1,Gh5 = 2np1 × ~HrGh5
= 2z × ~HrGh5
=2E0
η
− cos θu sinφrcos θu cosφu
0
ejk(−x′ sin θu cosφr−y′ sin θu sinφr) (C.419)
und
~Jsp1,Gh6 = 2np1 × ~HrGh6
= 2z × ~HrGh6
=2E0
η
− cos θu sinφr− cos θu cosφu
0
ejk(x′ sin θu cosφr−y′ sin θu sinφr) (C.420)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.421)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.422)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.423)
mit
R =√
(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.424)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.425)
259

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III11,12 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII11,12) sinc (ZII11,12)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII11,12) sinc (ZIII11,12) . (C.426)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III11,12 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII11,12) sinc (ZIII11,12)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XIII11,12) sinc (ZIII11,12) (C.427)
mit
XIII11,12 =ka cosϕ
2(sin θs sinφs) (C.428)
YIII11,12 =ka sinϕ
2(sin θs sinφs) (C.429)
ZIII11,12 =ka
2(cos θs) . (C.430)
Fall R132 − III13 und R132 − III14
Aus dem Fall Gh7 und Gh8 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gh7 = 2np3 × ~HrGh7
= 2 (−x sinϕ− y cosϕ)× ~HrGh7
260

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
= (−x sinϕ)× 2 ~HrGh7
+ (−y cosϕ)× 2 ~HrGh7
=2E0
η
0sinϕ sin θu
− sinϕ cos θu sinφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
− cosϕ sin θu0
cosϕ cos θu cosφr
ejk(−x′ sin θu cosφr+z′ cos θu) (C.431)
und
~Jsp3,Gh8 = 2np3 × ~HrGh8
= 2 (−x sinϕ− y cosϕ)× ~HrGh8
= (−x sinϕ)× 2 ~HrGh8
+ (−y cosϕ)× 2 ~HrGh8
=2E0
η
0sinϕ sin θu
− sinϕ cos θu sinφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
− cosϕ sin θu0
− cosϕ cos θu cosφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.432)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[(zp1 − zp3) Jysp3 − (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.433)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3 − (zp1 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.434)
H izp1
=1
4π
∫ ∫Sp3
[− (xp1 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(yp1 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.435)
(C.436)
mitR =
√(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.437)
261

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.438)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III13,14 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII13,14) sinc (YIII13,14) . (C.439)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III13,14 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII13,14) sinc (YIII13,14)(C.440)
mit
XIII13,14 =ka
2(sin θs sinφs) (C.441)
YIII13,14 =ka
2(sin θs sinφs) . (C.442)
Fall R232 − III15 und R232 − III16
Aus dem Fall Gh7 und Gh8 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gh7 = 2np3 × ~HrGh7
= 2 (−x sinϕ− y cosϕ)× ~HrGh7
= (−x sinϕ)× 2 ~HrGh7
+ (−y cosϕ)× 2 ~HrGh7
262

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
=2E0
η
0sinϕ sin θu
− sinϕ cos θu sinφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
− cosϕ sin θu0
cosϕ cos θu cosφr
ejk(−x′ sin θu cosφr+z′ cos θu) (C.443)
und
~Jsp3,Gh8 = 2np3 × ~HrGh8
= 2 (−x sinϕ− y cosϕ)× ~HrGh8
= (−x sinϕ)× 2 ~HrGh8
+ (−y cosϕ)× 2 ~HrGh8
=2E0
η
0sinϕ sin θu
− sinϕ cos θu sinφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
− cosϕ sin θu0
− cosϕ cos θu cosφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.444)
Bei der Computerprogrammierung kann man die Symbole gemeisam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[(zp2 − zp3) Jysp3 − (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.445)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3 − (zp2 − zp3) Jxsp3
]
· 1 + jkR
R3e−jkR dxp3dzp3 (C.446)
H izp2
=1
4π
∫ ∫Sp3
[− (xp2 − xp3) Jysp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(yp2 − yp3) Jxsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.447)
(C.448)
mit
R =√
(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.449)
263

C. Numerische Berechnungen fur den Dreifach-Reflektor
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.450)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III15,16 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII15,16) sinc (ZIII15,16)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII15,16) sinc (ZIII15,16) . (C.451)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III15,16 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII15,16) sinc (ZIII15,16)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII15,16) sinc (ZIII15,16)(C.452)
mit
XIII15,16 =ka sinϕ
2(sin θs sinφs) (C.453)
264

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
YIII15,16 =ka cosϕ
2(sin θs sinφs) (C.454)
ZIII15,16 =ka
2(cos θs) . (C.455)
Fall R213 − III17 und R213 − III18
Aus dem Fall Gh9 und Gh10 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp1,Gh9 = 2np1 × ~HrGh9
= 2z × ~HrGh9
=2E0
η
cos θu sinφr− cos θu cosφr
0
ejk(x′ sin θu cosφr+y′ sin θu sinφr) (C.456)
und
~Jsp1,Gh10 = 2np1 × ~HrGh10
= 2z × ~HrGh10
=2E0
η
cos θu sinφrcos θu cosφr
0
ejk(−x′ sin θu cosφr+y′ sin θu sinφr) (C.457)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.458)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.459)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.460)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.461)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.462)
265

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III17,18 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII17,18) sinc (ZIII17,18)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII17,18) sinc (ZIII17,18) . (C.463)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III17,18 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII17,18) sinc (ZIII17,18)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII17,18) sinc (ZIII17,18)(C.464)
mit
XIII17,18 =ka sinϕ
2(sin θs sinφs) (C.465)
YIII17,18 =ka cosϕ
2(sin θs sinφs) (C.466)
ZIII17,18 =ka
2(cos θs) . (C.467)
Fall R313 − III19 und R313 − III20
Aus dem Fall Gh9 und Gh10 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp1,Gh9 = 2np1 × ~HrGh9
= 2z × ~HrGh9
=2E0
η
cos θu sinφr− cos θu cosφr
0
ejk(x′ sin θu cosφr+y′ sin θu sinφr) (C.468)
266

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
und
~Jsp1,Gh10 = 2np1 × ~HrGh10
= 2z × ~HrGh10
=2E0
η
cos θu sinφrcos θu cosφr
0
ejk(−x′ sin θu cosφr+y′ sin θu sinφr) (C.469)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.470)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.471)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.472)
mitR =
√(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.473)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.474)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III19,20 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)
267

C. Numerische Berechnungen fur den Dreifach-Reflektor
· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII19,20) sinc (ZII19,20)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII19,20) sinc (ZIII19,20) . (C.475)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III19,20 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII19,20) sinc (ZIII19,20)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XIII19,20) sinc (ZIII19,20) (C.476)
mit
XIII19,20 =ka cosϕ
2(sin θs sinφs) (C.477)
YIII19,20 =ka sinϕ
2(sin θs sinφs) (C.478)
ZIII19,20 =ka
2(cos θs) . (C.479)
Fall R123 − III21 und R123 − III22
Aus dem Fall Gh11 und Gh12 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gh11 = 2np2 × ~HrGh11
= 2 (−x cosϕ+ y sinϕ)× ~HrGh11
= (−x cosϕ)× 2 ~HrGh11
+ (y sinϕ)× 2 ~HrGh11
=2E0
η
0cosϕ sin θu
cosϕ cos θu sinφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
sinϕ sin θu0
sinϕ cos θu cosφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.480)
und
~Jsp2,Gh12 = 2np2 × ~HrGh12
= 2 (−x cosϕ+ y sinϕ)× ~HrGh12
= (−x cosϕ)× 2 ~HrGh2
+ (y sinϕ)× 2 ~HrGh12
268

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
=2E0
η
0cosϕ sin θu
cosϕ cos θu sinφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
sinϕ sin θu0
− sinϕ cos θu cosφr
ejk(−x′ sin θu cosφr+z′ cos θu) . (C.481)
Bei der Computerprogrammierung kann man die Symbole gemeisam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[(zp1 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.482)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2 − (zp1 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.483)
H izp1
=1
4π
∫ ∫Sp2
[− (xp1 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp1 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.484)
(C.485)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.486)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.487)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III21,22 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
269

C. Numerische Berechnungen fur den Dreifach-Reflektor
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII21,22) sinc (YIII21,22) . (C.488)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III21,22 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII21,22) sinc (YIII21,22)(C.489)
mit
XIII21,22 =ka
2(sin θs sinφs) (C.490)
YIII21,22 =ka
2(sin θs sinφs) . (C.491)
Fall R323 − III23 und R323 − III24
Aus dem Fall Gh11 und Gh12 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gh11 = 2np2 × ~HrGh11
= 2 (−x cosϕ+ y sinϕ)× ~HrGh11
= (−x cosϕ)× 2 ~HrGh11
+ (y sinϕ)× 2 ~HrGh11
=2E0
η
0cosϕ sin θu
cosϕ cos θu sinφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
sinϕ sin θu0
sinϕ cos θu cosφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.492)
und
~Jsp2,Gh12 = 2np2 × ~HrGh12
= 2 (−x cosϕ+ y sinϕ)× ~HrGh12
= (−x cosϕ)× 2 ~HrGh2
+ (y sinϕ)× 2 ~HrGh12
=2E0
η
0cosϕ sin θu
cosϕ cos θu sinφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
sinϕ sin θu0
− sinϕ cos θu cosφr
ejk(−x′ sin θu cosφr+z′ cos θu) (C.493)
270

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[(zp3 − zp2) Jysp2 − (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.494)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2 − (zp3 − zp2) Jxsp2
]
· 1 + jkR
R3e−jkR dxp2dzp2 (C.495)
H izp3
=1
4π
∫ ∫Sp2
[− (xp3 − xp2) Jysp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(yp3 − yp2) Jxsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.496)
(C.497)
mit
R =√
(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.498)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.499)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III23,24 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)
271

C. Numerische Berechnungen fur den Dreifach-Reflektor
· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YIII23,24) sinc (ZIII23,24)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII23,24) sinc (ZIII23,24) . (C.500)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III23,24 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII23,24) sinc (ZIII23,24)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XIII23,24) sinc (ZIII23,24) (C.501)
mit
XIII23,24 =ka cosϕ
2(sin θs sinφs) (C.502)
YIII23,24 =ka sinϕ
2(sin θs sinφs) (C.503)
ZIII23,24 =ka
2(cos θs) . (C.504)
Fall R121 − III25 und R121 − III26
Aus dem Fall Gv1 und Gv2 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gv1 = 2np2 × ~HrGv1
= 2 (−x cosϕ+ y sinϕ)× ~HrGv1
= (−x cosϕ)× 2 ~HrGv1
+ (y sinϕ)× 2 ~HrGv1
=2E0
η
00
− cosϕ cosφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
sinϕ sinφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.505)
272

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
und
~Jsp2,Gv2 = 2np2 × ~HrGv2
= 2 (−x cosϕ+ y sinϕ)× ~HrGv2
= (−x cosϕ)× 2 ~HrGv2
+ (y sinϕ)× 2 ~HrGv2
=2E0
η
00
− cosϕ cosφu
ejk(y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
− sinϕ sinφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.506)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.507)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.508)
H izp1
= 0 (C.509)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.510)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.511)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III25,26 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
273

C. Numerische Berechnungen fur den Dreifach-Reflektor
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII25,26) sinc (YIII25,26) . (C.512)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III25,26 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII25,26) sinc (YIII25,26)(C.513)
mit
XIII25,26 =ka
2(sin θs sinφs) (C.514)
YIII25,26 =ka
2(sin θs sinφs) . (C.515)
Fall R321 − III27 und R321 − III28
Aus dem Fall Gv1 und Gv2 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gv1 = 2np2 × ~HrGv1
= 2 (−x cosϕ+ y sinϕ)× ~HrGv1
= (−x cosϕ)× 2 ~HrGv1
+ (y sinϕ)× 2 ~HrGv1
=2E0
η
00
− cosϕ cosφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
sinϕ sinφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.516)
und
~Jsp2,Gv2 = 2np2 × ~HrGv2
= 2 (−x cosϕ+ y sinϕ)× ~HrGv2
= (−x cosϕ)× 2 ~HrGv2
+ (y sinϕ)× 2 ~HrGv2
=2E0
η
00
− cosϕ cosφu
ejk(y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
− sinϕ sinφu
ejk(−x′ sin θu cosφu−z′ cos θu) . (C.517)
274

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.518)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.519)
H izp3
= 0 (C.520)
mit
R =√
(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.521)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalischen Optik Approximation mit der Vektornotation in der Abbildung 4.21berechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
00
−2Hyp3 sinϕ
+
00
2Hxp3 cosϕ
. (C.522)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III27,28 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs
)sinc (YIII27,28) sinc (ZIII27,28)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs
)· sinc (XIII27,28) sinc (ZIII27,28 .) (C.523)
275

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III27,28 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.524)
mit
XIII27,28 =ka cosϕ
2(sin θs sinφs) (C.525)
YIII27,28 =ka sinϕ
2(sin θs sinφs) (C.526)
ZIII27,28 =ka
2(cos θs) . (C.527)
Fall R131 − III29 und R131 − III30
Aus dem Fall Gv3 und Gv4 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gv3 = 2np3 × ~HrGv3
= 2 (−x sinϕ− y cosϕ)× ~HrGv3
= (−x sinϕ)× 2 ~HrGv3
+ (−y cosϕ)× 2 ~HrGv3
=2E0
η
00
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.528)
und
~Jsp3,Gv4 = 2np3 × ~HrGv4
= 2 (−x sinϕ− y cosϕ)× ~HrGv4
= (−x sinϕ)× 2 ~HrGv4
+ (−y cosϕ)× 2 ~HrGv4
=2E0
η
00
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.529)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
276

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.530)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.531)
H izp1
= 0 (C.532)
mitR =
√(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.533)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0 .
(C.534)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III29,30 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII29,30) sinc (YIII29,30) . (C.535)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III29,30 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII29,30) sinc (YIII29,30)(C.536)
mit
XIII29,30 =ka
2(sin θs sinφs) (C.537)
YIII29,30 =ka
2(sin θs sinφs) . (C.538)
277
C. Numerische Berechnungen fur den Dreifach-Reflektor
Fall R231 − III31 und R231 − III32
Aus dem Fall Gv3 und Gv4 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gv3 = 2np3 × ~HrGv3
= 2 (−x sinϕ− y cosϕ)× ~HrGv3
= (−x sinϕ)× 2 ~HrGv3
+ (−y cosϕ)× 2 ~HrGv3
=2E0
η
00
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.539)
und
~Jsp3,Gv4 = 2np3 × ~HrGv4
= 2 (−x sinϕ− y cosϕ)× ~HrGv4
= (−x sinϕ)× 2 ~HrGv4
+ (−y cosϕ)× 2 ~HrGv4
=2E0
η
00
− sinϕ cos θu sinφu
ejk(−y′ sin θu sinφu−z′ cos θu)
+2E0
η
00
cosϕ cos θu cosφu
ejk(−x′ sin θu cosφu−z′ cos θu) (C.540)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.541)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.542)
H izp2
= 0 (C.543)
mit
R =√
(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.544)
278

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
00
−2Hyp2 cosϕ
+
00
−2Hxp2 sinϕ
. (C.545)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III31,32 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs
)sinc (YIII31,32) sinc (ZIII31,32)
+2a2 sinϕ(Hxp2 sinϕ sin θs
)sinc (XIII31,32) sinc (ZIII31,32) .(C.546)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III31,32 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.547)
mit
XIII31,32 =ka sinϕ
2(sin θs sinφs) (C.548)
YIII31,32 =ka cosϕ
2(sin θs sinφs) (C.549)
ZIII31,32 =ka
2(cos θs) . (C.550)
Fall R212 − III33 und R212 − III34
Aus dem Fall Gv5 und Gv6 erhalt man die Oberflachenstromdichte ~Jsp1 auf der PlatteNr.1 als:
~Jsp1,Gv5 = 2np1 × ~HrGv5
= 2z × ~HrGv5
=2E0
η
cosφrsinφr
0
ejk(−x′ sin θu cosφr−y′ sin θu sinφr) (C.551)
279

C. Numerische Berechnungen fur den Dreifach-Reflektor
und
~Jsp1,Gv6 = 2np1 × ~HrGv6
= 2z × ~HrGv6
=2E0
η
− cosφrsinφr
0
ejk(x′ sin θu cosφr−y′ sin θu sinφr) . (C.552)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.553)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.554)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.555)
mitR =
√(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.556)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.557)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III33,34 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)
280

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII33,34) sinc (ZIII33,34)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII33,34) sinc (ZIII33,34) . (C.558)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III33,34 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII33,34) sinc (ZIII33,34)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII33,34) sinc (ZIII33,34)(C.559)
mit
XIII33,34 =ka sinϕ
2(sin θs sinφs) (C.560)
YIII33,34 =ka cosϕ
2(sin θs sinφs) (C.561)
ZIII33,34 =ka
2(cos θs) . (C.562)
Fall R312 − III35 und R312 − III36
Aus dem Fall Gv5 und Gv6 erhalt man die Oberflachenstromdichte ~Jsp1 auf der PlatteNr.1 als:
~Jsp1,Gv5 = 2np1 × ~HrGv5
= 2z × ~HrGv5
=2E0
η
cosφrsinφr
0
ejk(−x′ sin θu cosφr−y′ sin θu sinφr) (C.563)
und
~Jsp1,Gv6 = 2np1 × ~HrGv6
= 2z × ~HrGv6
=2E0
η
− cosφrsinφr
0
ejk(x′ sin θu cosφr−y′ sin θu sinφr) . (C.564)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in die
281

C. Numerische Berechnungen fur den Dreifach-Reflektor
Gleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.565)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.566)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.567)
mitR =
√(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.568)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.569)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III35,36 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII35,36) sinc (ZII35,36)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII35,36) sinc (ZIII35,36) . (C.570)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man
Nφ,III35,36 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
282

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII35,36) sinc (ZIII35,36)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XIII35,36) sinc (ZIII35,36) (C.571)
mit
XIII35,36 =ka cosϕ
2(sin θs sinφs) (C.572)
YIII35,36 =ka sinϕ
2(sin θs sinφs) (C.573)
ZIII11,12 =ka
2(cos θs) . (C.574)
Fall R132 − III37 und R132 − III38
Aus dem Fall Gv7 und Gv8 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gv7 = 2np3 × ~HrGv7
= 2 (−x sinϕ− y cosϕ)× ~HrGv7
= (−x sinϕ)× 2 ~HrGv7
+ (−y cosϕ)× 2 ~HrGv7
=2E0
η
00
sinϕ cosφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
cosϕ sinφr
ejk(−x′ sin θu cosφr+z′ cos θu) (C.575)
und
~Jsp3,Gv8 = 2np3 × ~HrGv8
= 2 (−x sinϕ− y cosϕ)× ~HrGv8
= (−x sinϕ)× 2 ~HrGv8
+ (−y cosϕ)× 2 ~HrGv8
=2E0
η
00
− sinϕ cosφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
cosϕ sinφr
ejk(x′ sin θu cosφr+z′ cos θu) . (C.576)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in die
283

C. Numerische Berechnungen fur den Dreifach-Reflektor
Gleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp1 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.577)
H iyp1
=1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[(xp1 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.578)
H izp1
= 0 (C.579)
mitR =
√(xp1 − xp3)2 + (yp1 − yp3)2 + (zp1 − zp3)2 . (C.580)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
(C.581)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III37,38 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII37,38) sinc (YIII37,38) . (C.582)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III37,38 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII37,38) sinc (YIII37,38)(C.583)
284

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
mit
XIII37,38 =ka
2(sin θs sinφs) (C.584)
YIII37,38 =ka
2(sin θs sinφs) . (C.585)
Fall R232 − III39 und R232 − III40
Aus dem Fall Gv7 und Gv8 erhalt man die Oberflachenstromdichte ~Jsp3 auf der PlatteNr.3 als:
~Jsp3,Gv7 = 2np3 × ~HrGv7
= 2 (−x sinϕ− y cosϕ)× ~HrGv7
= (−x sinϕ)× 2 ~HrGv7
+ (−y cosϕ)× 2 ~HrGv7
=2E0
η
00
sinϕ cosφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
cosϕ sinφr
ejk(−x′ sin θu cosφr+z′ cos θu) (C.586)
und
~Jsp3,Gv8 = 2np3 × ~HrGv8
= 2 (−x sinϕ− y cosϕ)× ~HrGv8
= (−x sinϕ)× 2 ~HrGv8
+ (−y cosϕ)× 2 ~HrGv8
=2E0
η
00
− sinϕ cosφr
ejk(−y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
cosϕ sinφr
ejk(x′ sin θu cosφr+z′ cos θu) . (C.587)
Bei der Computerprogrammierung kann man die Symbole gemeisam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
+1
4π
∫ ∫Sp3
[− (yp2 − yp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.588)
H iyp2
=1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dyp3dzp3
285

C. Numerische Berechnungen fur den Dreifach-Reflektor
+1
4π
∫ ∫Sp3
[(xp2 − xp3) Jzsp3
] 1 + jkR
R3e−jkR dxp3dzp3 (C.589)
H izp2
= 0 (C.590)
mitR =
√(xp2 − xp3)2 + (yp2 − yp3)2 + (zp2 − zp3)2 . (C.591)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
00
−2Hyp2 cosϕ
+
00
−2Hxp2 sinϕ
. (C.592)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III39,40 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs
)sinc (YIII39,40) sinc (ZIII39,40)
+2a2 sinϕ(Hxp2 sinϕ sin θs
)sinc (XIII39,40) sinc (ZIII39,40) .(C.593)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III39,40 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.594)
mit
XIII39,40 =ka sinϕ
2(sin θs sinφs) (C.595)
YIII39,40 =ka cosϕ
2(sin θs sinφs) (C.596)
ZIII39,40 =ka
2(cos θs) . (C.597)
286
C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
Fall R213 − III41 und R213 − III42
Aus dem Fall Gv9 und Gv10 erhalt man die Oberflachenstromdichte ~Jsp1 auf der PlatteNr.1 als:
~Jsp1,Gv9 = 2np1 × ~HrGv9
= 2z × ~HrGv9
=2E0
η
− cosφr− sinφr
0
ejk(x′ sin θu cosφr+y′ sin θu sinφr) (C.598)
und
~Jsp1,Gv10 = 2np1 × ~HrGv10
= 2z × ~HrGv10
=2E0
η
cosφr− sinφr
0
ejk(−x′ sin θu cosφr+y′ sin θu sinφr) . (C.599)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp2
=1
4π
∫ ∫Sp1
[(zp2 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.600)
H iyp2
=1
4π
∫ ∫Sp1
[− (zp2 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.601)
H izp2
=1
4π
∫ ∫Sp1
[(yp2 − yp1) Jxsp1 − (xp2 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.602)
mit
R =√
(xp2 − xp1)2 + (yp2 − yp1)2 + (zp2 − zp1)2 . (C.603)
Die resultierende Oberflachenstromdichte ~Jsp2 auf der Platte Nr.2 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp2 = 2np2 × ~H ip2
= 2 (−x cosϕ+ y sinϕ)× ~H ip2
= (−x cosϕ)× 2 ~H ip2 + (y sinϕ)× 2 ~H i
p2
=
02Hzp2 cosϕ−2Hyp2 cosϕ
+
2Hzp2 sinϕ0
−2Hxp2 sinϕ
. (C.604)
287

C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III41,42 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp2 cosϕ sin θs + 2Hzp2 cosϕ cos θs sinφs
)·ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hxp2 sinϕ sin θs + 2Hzp2 sinϕ cos θs cosφs
)·ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(Hyp2 cosϕ sin θs +Hzp2 cosϕ cos θs sinφs
)·sinc (YIII41,42) sinc (ZIII41,42)
+2a2 sinϕ(Hxp2 sinϕ sin θs +Hzp2 sinϕ cos θs cosφs
)·sinc (XIII41,42) sinc (ZIII41,42) . (C.605)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III41,42 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp2 cosϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
2E0
η
(−2Hzp2 sinϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 cosϕ(2Hzp2 cosϕ cosφs
)sinc (YIII41,42) sinc (ZIII41,42)
+2a2 sinϕ(−2Hzp2 sinϕ sinφs
)sinc (XIII41,42) sinc (ZIII41,42)(C.606)
mit
XIII41,42 =ka sinϕ
2(sin θs sinφs) (C.607)
YIII41,42 =ka cosϕ
2(sin θs sinφs) (C.608)
ZIII41,42 =ka
2(cos θs) . (C.609)
Fall R313 − III43 und R313 − III44
Aus dem Fall Gv9 und Gv10 erhalt man die Oberflachenstromdichte ~Jsp1 auf der PlatteNr.1 als:
~Jsp1,Gv9 = 2np1 × ~HrGv9
= 2z × ~HrGv9
=2E0
η
− cosφr− sinφr
0
ejk(x′ sin θu cosφr+y′ sin θu sinφr) (C.610)
288

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
und
~Jsp1,Gv10 = 2np1 × ~HrGv10
= 2z × ~HrGv10
=2E0
η
cosφr− sinφr
0
ejk(−x′ sin θu cosφr+y′ sin θu sinφr) . (C.611)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp1 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp1
[(zp3 − zp1) Jysp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.612)
H iyp3
=1
4π
∫ ∫Sp1
[− (zp3 − zp1) Jxsp1
] 1 + jkR
R3e−jkR dxp1dyp1 (C.613)
H izp3
=1
4π
∫ ∫Sp1
[(yp3 − yp1) Jxsp1 − (xp3 − xp1) Jysp1
]
·1 + jkR
R3e−jkR dxp1dyp1 (C.614)
mitR =
√(xp3 − xp1)2 + (yp3 − yp1)2 + (zp3 − zp1)2 . (C.615)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
02Hzp3 sinϕ−2Hyp3 sinϕ
+
−2Hzp3 cosϕ0
2Hxp3 cosϕ
. (C.616)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III43,44 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs + 2Hzp3 sinϕ cos θs sinφs
)· ejk(y′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)
289

C. Numerische Berechnungen fur den Dreifach-Reflektor
· ejk(x′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs +Hzp3 sinϕ cos θs sinφs
)sinc (YII43,44) sinc (ZII43,44)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs − 2Hzp3 cosϕ cos θs cosφs
)· sinc (XIII43,44) sinc (ZIII43,44) . (C.617)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III43,44 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hzp3 sinϕ cosφs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(2Hzp3 cosϕ sinφs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(2Hzp3 sinϕ cosφs
)sinc (YIII43,44) sinc (ZIII43,44)
+ 2a2 cosϕ(2Hzp3 cosϕ sinφs
)· sinc (XIII43,44) sinc (ZIII43,44) (C.618)
mit
XIII43,44 =ka cosϕ
2(sin θs sinφs) (C.619)
YIII43,44 =ka sinϕ
2(sin θs sinφs) (C.620)
ZIII43,44 =ka
2(cos θs) . (C.621)
Fall R123 − III45 und R123 − III46
Aus dem Fall Gv11 und Gv12 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gv11 = 2np2 × ~HrGv11
= 2 (−x cosϕ+ y sinϕ)× ~HrGv11
= (−x cosϕ)× 2 ~HrGv11
+ (y sinϕ)× 2 ~HrGv11
=2E0
η
00
− cosϕ cosφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
sinϕ sinφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.622)
und
~Jsp2,Gv12 = 2np2 × ~HrGv12
= 2 (−x cosϕ+ y sinϕ)× ~HrGv12
= (−x cosϕ)× 2 ~HrGv2
+ (y sinϕ)× 2 ~HrGv12
290

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
=2E0
η
00
cosϕ cosφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
sinϕ sinφr
ejk(−x′ sin θu cosφr+z′ cos θu) . (C.623)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp2 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp1
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.624)
H iyp1
=1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp1 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.625)
H izp1
= 0 (C.626)
mitR =
√(xp1 − xp2)2 + (yp1 − yp2)2 + (zp1 − zp2)2 . (C.627)
Die resultierende Oberflachenstromdichte ~Jsp1 auf der Platte Nr.1 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp1 = 2np1 × ~H ip1
= 2 (z)× ~H ip1
=
−2Hyp1
2Hxp1
0
. (C.628)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III45,46 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cos θs sinφs − 2Hyp1 cos θs cosφs
)· ejk(x′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(Hxp1 cos θs sinφs −Hyp1 cos θs cosφs
)· sinc (XIII45,46) sinc (YIII45,46) . (C.629)
291
C. Numerische Berechnungen fur den Dreifach-Reflektor
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III45,46 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
=∫∫S
(2Hxp1 cosφs + 2Hyp1 sinφs
)ejk(x
′ sin θs cosφs+y′ sin θs sinφs) dx′dy′
= 2a2(2Hxp1 cosφs + 2Hyp1 sinφs
)sinc (XIII45,46) sinc (YIII45,46)(C.630)
mit
XIII45,46 =ka
2(sin θs sinφs) (C.631)
YIII45,46 =ka
2(sin θs sinφs) . (C.632)
Fall R323 − III47 und R323 − III48
Aus dem Fall Gv11 und Gv12 erhalt man die Oberflachenstromdichte ~Jsp2 auf der PlatteNr.2 als:
~Jsp2,Gv11 = 2np2 × ~HrGv11
= 2 (−x cosϕ+ y sinϕ)× ~HrGv11
= (−x cosϕ)× 2 ~HrGv11
+ (y sinϕ)× 2 ~HrGv11
=2E0
η
00
− cosϕ cosφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
sinϕ sinφr
ejk(x′ sin θu cosφr+z′ cos θu) (C.633)
und
~Jsp2,Gv12 = 2np2 × ~HrGv12
= 2 (−x cosϕ+ y sinϕ)× ~HrGv12
= (−x cosϕ)× 2 ~HrGv2
+ (y sinϕ)× 2 ~HrGv12
=2E0
η
00
cosϕ cosφr
ejk(y′ sin θu sinφr+z′ cos θu)
+2E0
η
00
sinϕ sinφr
ejk(−x′ sin θu cosφr+z′ cos θu) . (C.634)
Bei der Computerprogrammierung kann man die Symbole gemeinsam fur die zweiFalle einsetzen. Wenn man die Komponenten der Oberflachenstromdichte ~Jsp3 in dieGleichungen (3.43)-(3.45) einsetzt, erhalt man die Gleichungen fur die weitere Berech-nung wie folgt:
H ixp3
=1
4π
∫ ∫Sp2
[− (yp1 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
292

C.4. Dreifache Reflexion (spiegelnde Reflexion-PO-PO)
+1
4π
∫ ∫Sp2
[− (yp3 − yp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.635)
H iyp3
=1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dyp2dzp2
+1
4π
∫ ∫Sp2
[(xp3 − xp2) Jzsp2
] 1 + jkR
R3e−jkR dxp2dzp2 (C.636)
H izp3
= 0 (C.637)
mit
R =√
(xp3 − xp2)2 + (yp3 − yp2)2 + (zp3 − zp2)2 . (C.638)
Die resultierende Oberflachenstromdichte ~Jsp3 auf der Platte Nr.3 wird durch diephysikalische Optik Approximation mit der Vektornotation in der Abbildung 4.21 be-rechnet wie folgt:
~Jsp3 = 2np3 × ~H ip3
= 2 (−x sinϕ− y cosϕ)× ~H ip3
= (−x sinϕ)× 2 ~H ip3 + (−y cosϕ)× 2 ~H i
p3
=
00
−2Hyp3 sinϕ
+
00
2Hxp3 cosϕ
. (C.639)
Aus der Gleichung (3.36) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nθ,III47,48 =∫∫S
(Jx cos θs cosφs + Jy cos θs sinφs − Jz sin θs) ejkr′ cosψ ds′
=∫∫S
(2Hyp3 sinϕ sin θs
)ejk(y
′ sin θs sinφs+z′ cos θs) dy′dz′
+∫∫S
(−2Hxp3 cosϕ sin θs
)ejk(x
′ sin θs cosφs+z′ cos θs) dx′dz′
= 2a2 sinϕ(Hyp3 sinϕ sin θs
)sinc (YIII47,48) sinc (ZIII47,48)
+ 2a2 cosϕ(−2Hxp3 cosϕ sin θs
)· sinc (XIII47,48) sinc (ZIII47,48) . (C.640)
Aus der Gleichung (3.37) und (3.39) fur die yz-Ebene und (3.40) fur die xz-Ebeneerhalt man:
Nφ,III47,48 =∫∫S
(−Jx sinφs + Jy cosφs) ejkr′ cosψ ds′
= 0 (C.641)
293
C. Numerische Berechnungen fur den Dreifach-Reflektor
mit
XIII47,48 =ka cosϕ
2(sin θs sinφs) (C.642)
YIII47,48 =ka sinϕ
2(sin θs sinφs) (C.643)
ZIII47,48 =ka
2(cos θs) . (C.644)
294
Literaturverzeichnis
[1] V. Alberga, E. Krogager, M. Chandra und G. Wanielik, “Potential of coherent de-compositions in SAR polarimetry and interferometry,” Proceedings of IGARSS’04,vol. 3, pp. 1792-1795, September 2004.
[2] V. Alberga, D. Staykova, E. Krogager, A. Danklmayer und M. Chandra, “Compari-son of methods for extracting and utilizing radar target characteristic parameters,”Proceedings of IGARSS’05, vol. 3, pp. 2019-2022, Juli 2005.
[3] L.A. Andrade, E.L. Nohara, G.G. Peixoto, M.C. Rezende und I.M. Martin, “Backs-cattering analysis of flat plate and dihedral corner reflectors using PO and com-parison with RCS measurements in anechoic chamber ,” Proceedings of the 2003SBMO/IEEE MTT-S International, vol. 2, pp. 719-724, September 2003.
[4] M. Arii, J.J. van Zyl und Y. Kim, “A general characterization for polarimetricscattering from vegetation canopies,” IEEE Trans. Geosci. Remote Sensing, vol.48, no. 9, pp. 3349-3357, September 2010.
[5] C.A. Balanis, Advanced Engineering Electromagnetics. New Jersey: John Wiley &Sons, Inc., 1989.
[6] R. Bamler, “A comparison of range-Doppler and wavenumber domain SAR focu-sing algorithms,” IEEE Trans. Geosci. Remote Sensing, vol. 30, no. 4, pp. 706-713,Juli 1992.
[7] W.-M. Boerner, M.B. El-Arini, C.Y. Chan und P.M. Mastoris, “Polarization de-pendence in electromagnetic inverse problems,” IEEE Trans. Antennas Propagat.,vol. ap-29, no. 2, pp. 262-271, Marz 1981.
[8] W.-M. Boerner, “Recent advances in extra-wide-band polarimetry, interferome-try and polarimetric interferometry in synthetic aperture remote sensing and itsapplications,” IEE Proc.-Radar Sonar Navig., vol. 150, no. 3, pp. 113-124, Juni2003.
[9] W-M. Boerner, “Recent Advancements of Radar Remote Sensing; Air- and Space-borne Multimodal SAR Remote Sensing in Forestry & Agriculture, Geology, Geo-physics (Volcanology and Tectonology): Advances in P0L-SAR, IN-SAR, PO-LinSAR and POL-DIFF-IN-SAR Sensing and Imaging with Applications to En-vironmental and Geodynamic Stress-change Monitoring,” Microwave Conference,2007. APMC 2007. Asia-Pacific., pp. 1-4, Dezember 2007.
[10] A.T. Caicoya, F. Kugler, K. Papathanassiou, P. Biber und H. Pretzsch, “Biomassestimation as a function of vertical forest structure and forest height. Potentialand limitations for radar remote sensing,” Proceedings of EUSAR 2010, Juni 2010.
295
Literaturverzeichnis
[11] S. Cimmino, G. Franceschetti, A. Iodice, D. Riccio und G. Ruello, “Efficient spot-light SAR raw signal simulation of extended scenes,” IEEE Trans. Geosci. RemoteSensing, vol. 41, no. 10, pp. 2329-2337, Oktober 2003.
[12] S.R. Cloude und E. Pottier, “A review of target decomposition theorems in radarpolarimetry,” IEEE Trans. Geosci. Remote Sensing, vol. 34, no. 2, pp. 498-518,Marz 1996.
[13] S.R. Cloude und E. Pottier, “An entropy based classification scheme for landapplications of polarimetric SAR,” IEEE Trans. Geosci. Remote Sensing, vol. 35,no. 1, pp. 68-78, Januar 1997.
[14] I.G. Cumming und F.H. Wong, Digital Processing of Synthetic Aperture RadaData: Algorithms and Implementation. Norwood, MA: Artech House, 2005.
[15] I.G. Cumming und J.R. Bennett, “Digital processing of SEASAT SAR data,”Proceedings of ICASSP’79, vol. 4, pp. 710-718, April 1979.
[16] J.C. Curlander und R.N. Mc Donough, Synthetic Aperture Radar: Systems andSignal Processing. New York: Wiley, 1991.
[17] A. Danklmayer, B.J. Doring, M. Schwerdt und M. Chandra, “Assessment of atmo-spheric propagation effects in SAR images,” IEEE Trans. Geosci. Remote Sensing,vol. 47, no. 10, pp. 3507-3518, Oktober 2009.
[18] A. Danklmayer und M. Chandra, “Precipitation effects for X- and Ka-band SAR,”Proceedings of EUSAR 2010, Juni 2010.
[19] F. Dell’Acqua, D. Polli und S. Ferrari, “Spaceborne support to post-earthquakeoperations: detection of sparse man-made features in wide-scale safety inspection,”Proceedings of EUSAR 2010, Juni 2010.
[20] D.A. De Wolf, H.W.J. Russchenberg und L.P. Ligthart, “Cross-polarized radarreflections from wet snow and ice droplets at weather radar wavelengths,” IEEETrans. Antennas Propagat., vol. 38, no. 11, pp. 1843-1847, November 1990.
[21] R. Dumont, C. Guedas, E. Thomas, F. Cellier und G. Donias, “DIONISOS. Anend-to-end SAR simulator,” Proceedings of EUSAR 2010, Juni 2010.
[22] R.B. Dybdal, “Radar cross section measurements,” Proceedings of the IEEE, vol.75, no. 4, pp. 498-516, April 1987.
[23] C. Elachi, T. Bicknell, R.L. Jordan und C. Wu, “Spaceborne synthetic-apertureimaging radars: applications, techniques, and technology,” Proceedings of the IE-EE, vol. 70, no. 10, pp. 1174-1209, Oktober 1982.
[24] G. Franceschetti, M. Migliaccio, D. Riccio, und C. Schirinzi, “SARAS: A syntheticaperture radar (SAR) raw signal simulator,” IEEE Trans. Geosci. Remote Sensing,vol. 30, no.1, pp. 110-123, Januar 1992.
296
Literaturverzeichnis
[25] G. Franceschetti, M. Migliaccio, und D. Riccio, “SAR raw signal simulation ofactual ground sites described in terms of sparse input data,” IEEE Trans. Geosci.Remote Sensing, vol. 32, no.6, pp. 1160-1169, November 1994.
[26] G. Franceschetti, A. Iodice, D. Riccio, und G. Ruello, “SAR raw signal simulationfor urban structures,” IEEE Trans. Geosci. Remote Sensing, vol. 41, no.9, pp.1986-1994, September 2003.
[27] G. Franceschetti, R. Guida, A. Iodice, D. Riccio, und G. Ruello, “Efficient simula-tion of hybrid stripmap/spotlight SAR raw signals from extended scenes,” IEEETrans. Geosci. Remote Sensing, vol. 42, no.10, pp. 2385-2396, November 2004.
[28] G. Franceschetti, A. Iodice, S. Perna, und D. Riccio, “Efficient simulation of air-borne SAR raw data of extended scenes,” IEEE Trans. Geosci. Remote Sensing,vol. 44, no.10, pp. 2851-2860, Oktober 2006.
[29] A. Freeman und S.L. Durden, “A three-component scattering model for polarime-tric SAR data,” IEEE Trans. Geosci. Remote Sensing, vol. 36, no. 3, pp. 963-973,Mai 1998.
[30] C. Freitas, L. Soler, S.J.S. Sant’Anna, L.V. Dutra, J.R. dos Santos, J.C. Mura undA.H. Correia, “Land use and land cover mapping in the Brazilian Amazon usingpolarimetric airborne P-band SAR data,” IEEE Trans. Geosci. Remote Sensing,vol. 46, no. 10, pp. 2956-2970, Oktober 2008.
[31] T. Griesser und C.A. Balanis, “Backscatter analysis of dihedral corner reflectorsusing physical optics and the physical theory of diffraction,” IEEE Trans. Anten-nas Propagat., vol. ap-35, no.10, pp. 1137-1147, Oktober 1987.
[32] T. Hamasaki, L. Ferro-Famil, E. Pottier und M. Sato, “Applications of polarimetricinterferometric ground-based SAR (GB-SAR) system to environment monitoringand disaster prevention,” Proceedings of EURAD 2005, Oktober 2005.
[33] S. Hensley, C. Jones, D. Moller, B. Chapman, T. Michel, M. Simard, R. Mueller-schoen, G. Sadowy, H. Zebker und M. Simons, “Ice studies using UAVSAR L-bandand Ka-band data,” Proceedings of EUSAR 2010, Juni 2010.
[34] Z. Hongyuan, Z. Yunhua und J. Jingshan, “Synthetic aperture radar simulationsystem based on Matlab,” Antennas, Propagation and EM Theory, 2000. Pro-ceedings. ISAPE 2000. 5th International Symposium on, pp. 130 - 133, August2000.
[35] Y.-H. Huang, G. Seguin und N. Sultan, “Multi-frequency and multi-polarizationSAR system analysis with simulation software developed at CSA,” Proceedings ofIGARSS’97, vol. 1, pp. 536-538, August 1997.
[36] W. Hughes, K. Gault und G.J. Princz, “A comparison of the Range-Doppler andChirp Scaling algorithms with reference to RADARSAT,” Proceedings of IGAR-SS’96, vol. 2, pp. 1221-1223, Mai 1996.
297
Literaturverzeichnis
[37] C.H. Jung, M.S. Choi, und Y.K. Kwag, “Parameter based SAR simulator for imagequality evaluation,” Proceedings of IGARSS 2007, pp. 1599-1602, Juli 2007.
[38] H. Klausing und W. Holpp , Radar mit Realer und Synthetischer Apertur: Kon-zeption und Realisierung. Munchen, Wien: Oldenbourg, 2000.
[39] D. Klement, J. Preisser und V. Stein, “Special problems in applying the physicaloptics method for backscatter computations of complicated objects,” IEEE Trans.Antennas Propagat., vol. 36, no. 2, pp. 228-237, Februar 1988.
[40] E.F. Knott, “A progression of high-frequency RCS prediction techniques,” Pro-ceedings of IEEE, vol. 73, no. 2, pp. 252-264, Februar 1985.
[41] E.C. Koeniguer, N. Trouve und J. Praks, “A review about alternatives to classicalpolarimetric SAR parameters,” Proceedings of EUSAR 2010, Juni 2010.
[42] A.B. Kostinski und W.-M. Boerner, “On foundations of radar polarimetry,” IEEETrans. Antennas Propagat., vol. ap-34, no. 12, pp. 1395-1404, Dezember 1986.
[43] G. Krieger, A. Moreira, H. Fiedler, I. Hajnsek, M. Werner, M. Younis und M.Zink, “TanDEM-X: A satellite formation for high-resolution SAR interferometry,”IEEE Trans. Geosci. Remote Sensing, vol. 45, no. 11, pp. 3317-3341, November2007.
[44] E. Krogager, “New decomposition of the radar target scattering matrix,” Electro-nics Letters, vol. 26, no. 18, pp. 1525-1527, August 1990.
[45] E. Krogager, D. Staykova, V. Alberga, A. Danklmayer und M. Chandra, “Compa-rison of Methods for Classification of Land Cover using Poarimetric SAR data,”Proceedings of EUSAR 2006, Mai 2006.
[46] M. Kseneman und D. Gleich, “Soil moisture estimation using empirical modelsupgraded with SOMs on TerraSAR-X data,” Proceedings of EUSAR 2010, Juni2010.
[47] J.S. Lee, M.R. Grunes, D.L. Schuler, E. Pottier und L. Ferro-Famil, “Scattering-model-based speckle filtering of polarimetric SAR data,” IEEE Trans. Geosci.Remote Sensing, vol. 44, no. 1, pp. 176-187, Januar 2006.
[48] J.S. Lee und E. Pottier, Polarimetric radar imaging : from basics to applications.Boca Raton: Taylor & Francis Group, 2009.
[49] A. Ludloff, Praxiswissen Radar und Radarsignalverarbeitung. Vieweg-Verlag, 3.Auflage, 2002.
[50] H.D. Luke, Signalubertragung, Grundlagen der Digitalen und Analogen Nachrich-tenubertragungssysteme. Berlin: Springer, 7. Auflage, 1999.
[51] G. Margarit, J. J. Mallorqui, J. M. Rius und J. Sanz-Marcos, “On the usage ofGRECOSAR, an orbital polarimetric SAR simulator of complex targets, to vesselclassification studies,” IEEE Trans. Geosci. Remote Sensing, vol. 44, no. 12, pp.3517-3526, Dezember 2006.
298
Literaturverzeichnis
[52] F.S. Marzano, S. Mori and J.A. Weinman, “Evidence of rainfall signatures on X-band synthetic aperture radar imagery over land,” IEEE Trans. Geosci. RemoteSensing, vol. 48, no. 2, pp. 950-964, Februar 2010.
[53] A. Moreira, “Improved multilook techniques applied to SAR and SCANSARimagery,” IEEE Trans. Geosci. Remote Sensing, vol. 29, no. 4, pp. 529-534, Juli1991.
[54] A. Moreira, J. Mittermayer und R. Scheiber, “Extended chirp scaling algorithmfor air- and spaceborne SAR data processing in stripmap and ScanSAR imagingmodes,” IEEE Trans. Geosci. Remote Sensing, vol. 34, no. 5, pp. 1123-1136, Sep-tember 1996.
[55] N. Phruksahiran und M. Chandra, “Polarimetric radar cross section under SARgeometry,” In Kleinheubacher Tagung, September 2012 ( accepted for Advancesin Radio Science : Stand 11.12.2012 ).
[56] N. Phruksahiran und M. Chandra, “Quantitative data analysis of ESAR data,” InKleinheubacher Tagung, September 2012 ( accepted for Advances in Radio Science: Stand 11.12.2012 ).
[57] D.M. Pozar, Microwave Engineering. New Jersey: John Wiley & Sons, Inc., 3.ed,2005.
[58] X. Qiu, D.Hu und C. Ding, “An Omega-K algorithm with phase error compen-sation for bistatic SAR of a translational invariant case,” IEEE Trans. Geosci.Remote Sensing, vol. 46, no. 8, pp. 2224-2232, August 2008.
[59] R.K. Raney, H. Runge, R. Bamler, I.G. Cumming und F.H. Wong, “Precision SARprocessing using chirp scaling,” IEEE Trans. Geosci. Remote Sensing, vol. 32, no.4, pp. 786-799, Juli 1994.
[60] A. Reigber und A. Moreira, “First demonstration of airborne SAR tomographyusing multibaseline L-band data,” IEEE Trans. Geosci. Remote Sensing, vol. 38,no. 5, pp. 2142 - 2152, September 2000.
[61] R.A. Ross, “Radar cross section of rectangular flat plates as a function of aspectangle,” IEEE Trans. Antennas Propagat., vol. 14, no. 3, pp. 329-335, Mai 1966.
[62] P.A. Rosen, S. Hensley, K. Wheeler, G. Sadowy, T. Miller, S. Shaffer, R. Muel-lerschoen, C. Jones, S. Madsen und H. Zebker, “UAVSAR: New NASA AirborneSAR System for Research,” IEEE Aerospace and Electronic Systems Magazine,vol. 22, no. 11, pp. 21-28, November 2007.
[63] K. Sarabandi, und T.C. Chiu, “Optimum corner reflectors for calibration of ima-ging radars,” IEEE Trans. Antennas Propagat., vol. 44, no. 10, pp. 1348-1361,Oktober 1996.
[64] D.R. Sheen, A. Freeman und E.S. Kasischke, “Phase calibration of polarimetricradar images,” IEEE Trans. Geosci. Remote Sensing, vol. 27, no. 6, pp. 719-731,November 1989.
299

Literaturverzeichnis
[65] H.S. Shin und J.T. Lim, “Omega-k algorithm for airborne forward-looking bistaticspotlight SAR imaging,” IEEE Geosci. Remote Sensing Letters, vol. 6, no. 2, pp.312-316, April 2009.
[66] M. Skolnik, Introduction to Radar Systems. Boston: McGraw-Hill, 3.ed, 2006.
[67] F. Ticconi, M. Martone, T. Jagdhuber und I. Hajnsek, “Investigation of fully pola-rimetric TerraSAR-X data for soil parameters estimation,” Proceedings of EUSAR2010, Juni 2010.
[68] K. Tomiyasu, “Tutorial review of synthetic-aperture radar (SAR) with applicationsto imaging of the ocean surface,” Proceedings of the IEEE, vol. 66, no. 5, pp. 563-583, Mai 1978.
[69] C. Uluisik, G. Cakir, M. Cakir und L. Sevgi, “Radar cross section (RCS) modelingand simulation, part 1: a tutorial review of definitions, strategies, and canonicalexamples,” IEEE Antennas and Propagation Magazine, vol. 50, no. 1, pp. 115-126,Februar 2008.
[70] M. Vandewal, R. Speck, und H. Suß, “Efficient SAR raw data generation inclu-ding low squint angles and platform instabilities,” IEEE Geoscience and RemoteSensing Letters, vol. 5, no. 1, pp. 26-30, Januar 2008.
[71] C.A. Wiley, “Pulse doppler radar methods and apparatus,” United States Patent,no. 3,196,436, Juli 1965.
[72] J.J.M. de Wit, A. Meta und P. Hoogeboom, “Modified range-Doppler processingfor FM-CW synthetic aperture radar,” IEEE Geosci. Remote Sensing Letters, vol.3, no. 1, pp. 83-87, Januar 2009.
[73] C. Wu, K.Y. Liu, und M. Jin, “Modeling and a correlation algorithm for space-borne SAR signals,” IEEE Transsaction on Aerospace and Electronics Systems,vol.aes 18, no. 5, pp. 563-575, September 1982.
[74] Y. Yamaguchi, T. Moriyama, M. Ishido und H. Yamada, “Four-component scat-tering model for polarimetric SAR image decomposition,” IEEE Trans. Geosci.Remote Sensing, vol. 43, no. 8, pp. 1699-1706, August 2005.
[75] Y. Yamaguchi, A. Sato, W.-M. Boerner, R. Sato und H. Yamada, “Four-component scattering power decomposition with rotation of coherency matrix,”IEEE Trans. Geosci. Remote Sensing, vol. 49, no. 6, pp. 2251-2258, Juni 2011.
[76] F.J. Yanovsky, H.W.J. Russchenberg, L.P.Ligthart und V.S. Fomichev, “Micro-wave Doppler-polarimetric technique for study of turbulence in precipitation,”Proceedings of IGARSS’00, vol. 5, pp. 2296-2298, Juli 2000.
[77] Z.S. Zhou, W.-M. Boerner und M. Sato, “Development of a ground-based pola-rimetric broadband SAR system for noninvasive ground-truth validation in ve-getation monitoring,” IEEE Trans. Geosci. Remote Sensing, vol. 42, no. 9, pp.1803-1810, September 2004.
300

Literaturverzeichnis
[78] Z.S. Zhou, E. Lehmann und P. Caccetta, “The use of ALOS-PALSAR data associa-ted with landsat imagery for precise forest mapping: Tasmanian pilot,” Proceedingsof EUSAR 2010, Juni 2010.
[79] “IEEE Standard Definitions of Terms for Antennas,” IEEE Standards 145-1993,Marz 1993.
301

Abbildungsverzeichnis
1.1. Planung der Promotionsarbeit . . . . . . . . . . . . . . . . . . . . . . . 15
2.1. Polarisationsellipsedarstellung: (a) Die Spur des elektrischen Feldvektorsentlang der Ausbreitungsrichtung fur einen gegebenen Zeitpunkt, (b) DieSpur des elektrischen Feldvektor fur einen gegebenen Koordinatenpunktentlang der Ausbreitungsrichtung (z.B. z = 0) . . . . . . . . . . . . . . 23
2.2. Randbedingungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.3. Physikalische Optik Approximation: (a) Am Streukorper (b) Physikali-
sches Aquivalent (Optik) . . . . . . . . . . . . . . . . . . . . . . . . . . 262.4. Koordinatensystem fur Wellenausstrahlung im: (a) Nahfeld (b) Fernfeld 282.5. Winkeldarstellung fur die einfallenden und reflektierten Wellen . . . . . 292.6. Allgemeines Radarprinzip . . . . . . . . . . . . . . . . . . . . . . . . . 312.7. LFM-Signal mit der Tragerfrequenz gleich null: (a) reeller Teil, (b) ima-
ginarer Teil, (c) Phasenanderung, (d) Momentanfrequenz . . . . . . . . 362.8. Matched Filter Ausgang vom LFM-Signal: (a) Eingangssignal, (b) Mat-
ched Filter Funktion, (c) Ausgangssignal . . . . . . . . . . . . . . . . . 382.9. Geometrie eines Radars mit synthetischer Apertur . . . . . . . . . . . . 392.10. SAR-Geometrie in Entfernungsrichtung . . . . . . . . . . . . . . . . . . 402.11. SAR-Geometrie in Azimutrichtung . . . . . . . . . . . . . . . . . . . . 412.12. SAR-Signal in Entfernungsrichtung: (a) Zeitintervall (b) eindimensiona-
les Datenfeld . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 432.13. Entfernungsanderung in Azimutrichtung . . . . . . . . . . . . . . . . . 442.14. Zwei dimensonales Datenfeld: (a) SAR-Rohdaten von einem Punktziel,
(b) Datenfeldsstruktur . . . . . . . . . . . . . . . . . . . . . . . . . . . 452.15. Blockdiagramm der SAR-Datenverarbeitung mit dem Range-Doppler
Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 462.16. Darstellung der SAR-Datenverarbeitung mit Range-Doppler Algorith-
mus zur Generierung eines SAR-Bildes. Die Rohdaten wurden von E-SAR des DLR aufgenommen: (a) Rohdaten, (b) Entfernungskomprimier-ten Daten, (c) Bilddaten, (d) Referenzfunktion in Entfernungsrichtung,(e) Referenzfunktion in Azimutrichtung . . . . . . . . . . . . . . . . . . 49
2.17. Korrektur der Zielentfernungsanderung: (a) vor der Korrektur der Zie-lentfernungsanderung (b) nach der Korrektur der Zielentfernungsanderung 50
2.18. Graphische Darstellung der Multilook-Verarbeitung: (a) die Looks-Uberlappungim Frequenzbereich mit drei Looks, (b) die Aufteilung des Aspektwin-kelbereiches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
2.19. Multilook-Verarbeitung: (a) mit 1 Look (b) mit 4 Looks . . . . . . . . 512.20. Messschema fur einen polarimetischen Radarbetrieb . . . . . . . . . . . 52
303

Abbildungsverzeichnis
2.21. Die polarimetrischen SAR-Bilddaten der polarimetrischen E-SAR Roh-datensatze des DLR mit dem Pauli-Zerlegungstheorem durch die Falsch-farbdarstellung; blau fur |a|2, rot fur |b|2 und grun fur |c|2 . . . . . . . 54
3.1. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) im: (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisationsbetrieb . . . . . . . . . . . . . 56
3.2. Konzept des entwickelten Verfahrens . . . . . . . . . . . . . . . . . . . 58
3.3. Felddarstellungen im Sendemodus bei der: (a) horizontalen Polarisation,(b) vertikalen Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . 59
3.4. Reflexion auf der ebenen Oberflache bei der: (a) horizontalen Polarisa-tion, (b) vertikalen Polarisation . . . . . . . . . . . . . . . . . . . . . . 61
3.5. Reflexion auf der senkrecten Oberflache bei der: (a) horizontalen Pola-risation, (b) vertikalen Polarisation . . . . . . . . . . . . . . . . . . . . 61
3.6. Kartesische Konvention fur die Streuanalyse in der: (a) xy-Ebene, (b)yz-Ebene, (c) xz-Ebene . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
4.1. Geometrie fur die Modellierung von dem bodengestutzten SAR-System 69
4.2. Entfernungs- und Winkelanderung bei der Modellierung . . . . . . . . . 70
4.3. Geometrie der flachen Platte . . . . . . . . . . . . . . . . . . . . . . . . 71
4.4. Numerische Berechnungen fur die flache Platte . . . . . . . . . . . . . . 72
4.5. Polarimetrische Radarruckstreuquerschnitte einer flachen Platte mit a= 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . 73
4.6. Polarimetrische Radarruckstreuquerschnitte einer flachen Platte mit a =1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation,[55] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.7. Zdr- und Ldr-Werte einer flachen Platte in dB: (a) Zdr-Werte, (b) Ldr-Werte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.8. Vergleich der Simulationsergebnisse (a) aus [3], (b) eingene Simulation;fur eine flache Platte mit a = 0,17 m und b = 0,17 m bei einer Frequenzvon 10 GHz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4.9. Geometrie des Zweifach-Reflektors . . . . . . . . . . . . . . . . . . . . . 76
4.10. Numerische Berechnungen fur den Zweifach-Reflektor (a) Einfache Re-flexion (PO), (b) Zweifache Reflexion (PO-PO), (c) Dreifache Reflexion(spiegelnd-PO-PO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.11. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil1 (Ri-Art) mit a = 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4.12. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil1 (Ri-Art) mit a = 1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.13. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil2 (Rij-Art) mit a = 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
4.14. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil2 (Rij-Art) mit a = 1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
304
Abbildungsverzeichnis
4.15. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil3 (Rijk-Art) mit a = 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.16. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors Teil3 (Rijk-Art) mit a = 1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.17. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors mita = 1 m und b = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . 82
4.18. Polarimetrische Radarruckstreuquerschnitte eines Zweifach-Reflektors mita = 1 m und b = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation, [55] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
4.19. Zdr-Werte und Ldr-Werte eines Dreifach-Reflektors in dB: (a) Zdr-Werte,(b) Ldr-Werte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
4.20. Geometrie des Dreifach-Reflektors . . . . . . . . . . . . . . . . . . . . . 85
4.21. Normalvektor der Platten . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.22. Nummerische Berechnungen fur den Dreifach-Reflektor (a) Einfache Re-flexion (PO), (b) Zweifache Reflexion (PO-PO), (c) Dreifache Reflexion(spiegelnd-POPO) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
4.23. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil1 (Rl-Art) mit a = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . 87
4.24. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil1 (Rl-Art) mit a = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.25. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil2 (Rlm-Art) mit a = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . 89
4.26. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil2 (Rlm-Art) mit a = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
4.27. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil3 (Rlmn-Art) mit a = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation 90
4.28. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors Teil3 (Rlmn-Art) mit a = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.29. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors mita = 1 m: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . 91
4.30. Polarimetrische Radarruckstreuquerschnitte eines Dreifach-Reflektors mita = 1 m in dBsm: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation, [55] . . 91
4.31. Zdr-Werte und Ldr-Werte eines Dreifach-Reflektors in dB: (a) Zdr-Werte,(b) Ldr-Werte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.32. Polarimetische Radarruckstreuquerschnitte bei der: (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation von einer flachen Platte (grun), einem Zweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot) . . . . . . . . . . . 93
4.33. Polarimetische Radarruckstreuquerschnitte in dBsm bei der: (a) hh-, (b)hv-, (c) vh-, (d) vv-Polarisation von einer flachen Platte (grun), einemZweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot), [55] . . . 94
305

Abbildungsverzeichnis
4.34. Zdr-Werte und Ldr-Werte von einer flachen Platte (grun), einem Zweifach-Reflektor (blau) und einem Dreifach-Reflektor (rot) in dB: (a) Zdr-Werte, (b) Ldr-Werte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.1. Simulationsumgebung fur ein bodengestutztes SAR-System . . . . . . . 97
5.2. SAR-Datenverarbeitung mit der gegebenen Geometrie in der Abbildung5.1 und den Systemparameter in der Tabelle 5.1: (a) Rohdaten, (b) Nachder Entfernungskompression, (c) Endergebnis in zweidimensionaler Dar-stellung, (d) Endergebnis in dreidimensionaler Darstellung . . . . . . . 99
5.3. Simulation mit drei Punktzielen: (a) Rohdaten, (b) Nach der Entfer-nungskompression, (c) Endergebnis in zweidimensionaler Darstellung,(d) Endergebnis in dreidimensionaler Darstellung . . . . . . . . . . . . 100
5.4. Untersuchungsschema fur die simulierten Daten . . . . . . . . . . . . . 101
5.5. Reelle Rohdaten einer flachen Platte mit a = 1 m und b = 1 m in der(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . 102
5.6.”Magnitude“ der Endergebnisse einer flachen Platte mit der Referenz-
funktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
5.7.”Magnitude“ der Endergebnisse einer flachen Platte mit der polarimetri-
schen Fokussierungsfunktion einer flachen Platte ha,FP bei der (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . 103
5.8.”Normierte Magnitude“ der Endergebnisse einer flachen Platte bei der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mit der Re-ferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarimetri-schen Fokussierungsfunktion einer flachen Platte ha,FP . . . . . . . . . 104
5.9. Reelle Rohdaten von drei flachen Platten mit a = 1 m und b = 1 m inder (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . 105
5.10.”Magnitude“ der Endergebnisse von drei flachen Platten mit der Refe-
renzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
5.11.”Magnitude“ der Endergebnisse von drei flache Platten mit der polari-
metrischen Fokussierungsfunktion einer flachen Platte ha,FP bei der (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . 106
5.12.”Normierte Magnitude“ der Endergebnisse von drei flachen Platten bei
der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion einer flachen Platte ha,FP . . . . . . . . 107
5.13. Reelle Rohdaten eines Zweifach-Reflektors mit a = 1 m und b = 1 m inder (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . 108
5.14.”Magnitude“ der Endergebnisse eines Zweifach-Reflektors mit der Re-
ferenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
5.15.”Magnitude“ der Endergebnisse eines Zweifach-Reflektors mit der pola-
rimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH beider (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . 109
306
Abbildungsverzeichnis
5.16.”Normierte Magnitude“ der Endergebnisse eines Zweifach-Reflektors bei
der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH . . . . . 110
5.17. Reelle Rohdaten von drei Zweifach-Reflektoren mit a = 1 m und b = 1m in der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . 111
5.18.”Magnitude“ der Endergebnisse von drei Zweifach-Reflektoren mit der
Referenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
5.19.”Magnitude“ der Endergebnisse von drei Zweifach-Reflektoren mit der
polarimetrischen Referenzfunktion eines Zweifach-Reflektors ha,DH beider (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . 113
5.20.”Normierte Magnitude“ der Endergebnisse von drei Zweifach-Reflektoren
bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mitder Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der pola-rimetrischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH . . 113
5.21. Reelle Rohdaten eines Dreifach-Reflektors mit a = 1 m in der (a) hh-,(b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . 115
5.22.”Magnitude“ der Endergebnisse eines Dreifach-Reflektors mit der Refe-
renzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
5.23.”Magnitude“ der Endergebnisse eines Dreifach-Reflektors mit der pola-
rimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH beider (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . 116
5.24.”Normierte Magnitude“ der Endergebnisse eines Dreifach-Reflektors bei
der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH . . . . . 116
5.25. Reelle Rohdaten von drei Dreifach-Reflektoren mit a = 1 m in der (a)hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . 117
5.26.”Magnitude“ der Endergebnisse von drei Dreifach-Reflektoren mit der
Referenzfunktion eines Punktzieles ha,PZ bei der (a) hh-, (b) hv-, (c)vh-, (d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
5.27.”Magnitude“ der Endergebnisse von drei Dreifach-Reflektoren mit der
polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,THbei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . . . . . . 118
5.28.”Normierte Magnitude“ der Endergebnisse von drei Dreifach-Reflektoren
bei der (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation; Blaue Linie: mitder Referenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der pola-rimetrischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH . . . 119
5.29. Normierte Simulationsergebnisse einer”flachen Platte“ in der (a) hh-,
(b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit der Referenz-funktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarimetrischenFokussierungsfunktion einer flachen Platte ha,FP . . . . . . . . . . . . . 121
307

Abbildungsverzeichnis
5.30. Normierte Simulationsergebnisse von drei”flachen Platten“ in der (a)
hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion einer flachen Platte ha,FP . . . . . . . . 121
5.31. Normierte Simulationsergebnisse eines”Zweifach-Reflektors“ in der (a)
hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH . . . . . 122
5.32. Normierte Simulationsergebnisse von drei”Zweifach-Reflektoren“ in der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Zweifach-Reflektors ha,DH . . . . . 122
5.33. Normierte Simulationsergebnisse eines”Dreifach-Reflektors“ in der (a)
hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH . . . . . 123
5.34. Normierte Simulationsergebnisse von drei”Dreifach-Reflektoren“ in der
(a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation in dB; Blaue Linie: mit derReferenzfunktion eines Punktzieles ha,PZ ; Rote Linie: mit der polarime-trischen Fokussierungsfunktion eines Dreifach-Reflektors ha,TH . . . . . 123
5.35. Google-Bilddaten von dem Untersuchungsgebiet . . . . . . . . . . . . . 126
5.36. E-SAR Geometrie und die Berechnungszellen in der Entfernungsrichtungund in der Azimutrichtung . . . . . . . . . . . . . . . . . . . . . . . . . 128
5.37. Polarimetrische Bliddaten mit Grauwertstufen in der (a) hh-, (b) hv-,(c) vv-, (d) vh-Polarisation, [56] . . . . . . . . . . . . . . . . . . . . . . 129
5.38. Polarimetrische Bliddaten mit dem Pauli-Zerlegungstheorem: (a) |a|2mit blauer Farbe, (b) |b|2 mit roter Farbe, (c) |c|2 mit gruner Farbe, (d)RGB-Plot, [56] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
5.39. Polarimetrische Bliddaten in der (a) Zdr-Wertskala, (b) Ldr-Wertskala,[56] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
5.40. Polarimetrische Bliddaten in der normierten (a) Zdr-Wertskala, (b) Ldr-Wertskala, [56] . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 131
5.41. Polarimetrische Radarruckstreuquerschnitte σpq(u, r) einer”flachen Plat-
te“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation133
5.42. Polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines”Zweifach-
Reflektors“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c) vh-,(d) vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
5.43. Polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines”Dreifach-Reflektors“
mit a = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation . . . . . . 134
5.44. Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) einer”fla-
chen Platte“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
5.45. Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines”Zweifach-
Reflektors“ mit a = 2 m und b = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d)vv-Polarisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
308
Abbildungsverzeichnis
5.46. Normierte polarimetrische Radarruckstreuquerschnitte σpq(u, r) eines”Dreifach-
Reflektors“ mit a = 2 m in: (a) hh-, (b) hv-, (c) vh-, (d) vv-Polarisation 1375.47. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in der
hh-Polarisation nach der Azimutkompression mit (a) der Referenzfunk-tion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fokussierungs-funktion einer flachen Platte (ha,FP ) . . . . . . . . . . . . . . . . . . . 139
5.48. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in derhh-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors (ha,TH) 139
5.49. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in derhv-Polarisation nach der Azimutkompression mit (a) der Referenzfunk-tion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fokussierungs-funktion einer flachen Platte (ha,FP ) . . . . . . . . . . . . . . . . . . . 140
5.50. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in derhv-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors (ha,TH) 140
5.51. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervh-Polarisation nach der Azimutkompression mit (a) der Referenzfunk-tion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fokussierungs-funktion einer flachen Platte (ha,FP ) . . . . . . . . . . . . . . . . . . . 141
5.52. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervh-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors (ha,TH) 141
5.53. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervv-Polarisation nach der Azimutkompression mit (a) der Referenzfunk-tion eines Punktzieles (ha,PZ), (b) der polarimetrischen Fokussierungs-funktion einer flachen Platte (ha,FP ) . . . . . . . . . . . . . . . . . . . 142
5.54. Betragswerte der polarimetrischen Bilddaten des DLR (E-SAR) in dervv-Polarisation nach der Azimutkompression mit (a) der polarimetri-schen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) derpolarimetrischen Fokussierungsfunktion eines Dreifach-Reflektors (ha,TH) 142
5.55. Polarimetrische Bilddaten mit Pauli-Zerlegungstheorem nach der Azi-mutkompression mit (a) der Referenzfunktion eines Punktzieles (ha,PZ),(b) der polarimetrischen Fokussierungsfunktion einer flachen Platte (ha,FP )143
5.56. Polarimetrische Bilddaten mit Pauli-Zerlegungstheorem nach der Azi-mutkompression mit (a) der polarimetrischen Fokussierungsfunktion ei-nes Zweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussierungs-funktion eines Dreifach-Reflektors (ha,TH) . . . . . . . . . . . . . . . . 144
5.57. Haufigkeitsdarstellung des Farbanteiles (Rot, Grun, Blau) in den pola-rimetrischen SAR-Bildern durch das Pauli-Zerlegungstheorem . . . . . 144
5.58. Polarimetrische Bilddaten mit Zdr-Werte nach der Azimutkompressionmit (a) der Referenzfunktion eines Punktzieles (ha,PZ), (b) der polari-metrischen Fokussierungsfunktion einer flachen Platte (ha,FP ) . . . . . 146
309
Abbildungsverzeichnis
5.59. Polarimetrische Bilddaten mit Zdr-Werte nach der Azimutkompressi-on mit (a) der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussierungsfunktion einesDreifach-Reflektors (ha,TH) . . . . . . . . . . . . . . . . . . . . . . . . . 147
5.60. Polarimetrische Bilddaten mit Ldr-Werte nach der Azimutkompressionmit (a) der Referenzfunktion eines Punktzieles (ha,PZ), (b) der polari-metrischen Fokussierungsfunktion einer flachen Platte (ha,FP ) . . . . . 147
5.61. Polarimetrische Bilddaten mit Ldr-Werte nach der Azimutkompressi-on mit (a) der polarimetrischen Fokussierungsfunktion eines Zweifach-Reflektors (ha,DH), (b) der polarimetrischen Fokussierungsfunktion einesDreifach-Reflektors (ha,TH) . . . . . . . . . . . . . . . . . . . . . . . . . 148
C.1. Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v1 undGh,v3, (b) Gh,v2 und Gh,v4 . . . . . . . . . . . . . . . . . . . . . . . . 245
C.2. Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v5 undGh,v7, (b) Gh,v6 und Gh,v8 . . . . . . . . . . . . . . . . . . . . . . . . 246
C.3. Geometrie fur Reflexion von der Platte Nr.1 fur die Falle (a) Gh,v9 undGh,v11, (b) Gh,v10 und Gh,v12 . . . . . . . . . . . . . . . . . . . . . . 247
310

Tabellenverzeichnis
2.1. Polarisationslagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.1. Parameter fur die Modellierung . . . . . . . . . . . . . . . . . . . . . . 704.2. Maximalwerte der Simulationsergebnisse von einer flachen Platte . . . . 744.3. Maximalwerte der Simulationsergebnisse von einem Zweifach-Reflector 834.4. Maximalwerte der Simulationsergebnisse von einem Dreifach-Reflector . 924.5. Maximalwerte der Simulationsergebnisse des jeweiligen Zieles . . . . . . 94
5.1. Simulationsumgebung und Systemparameter fur ein bodengestutztes SAR-System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5.2. Quantitativen Auswertung der Simulationsergebnisse einer flachen Plat-te mit a = 1 m und b = 1 m . . . . . . . . . . . . . . . . . . . . . . . . 104
5.3. Quantitativen Auswertung der Simulationsergebnisse von drei flachenflachen Platte mit a = 1 m und b = 1 m . . . . . . . . . . . . . . . . . 107
5.4. Quantitativen Auswertung der Simulationsergebnisse eines Zweifach-Reflektorsmit a = 1 m und b = 1 m . . . . . . . . . . . . . . . . . . . . . . . . . 111
5.5. Quantitativen Auswertung der Simulationsergebnisse von drei Zweifach-Reflektoren mit a = 1 m und b = 1 m . . . . . . . . . . . . . . . . . . 114
5.6. Quantitativen Auswertung der Simulationsergebnisse eines Dreifach-Reflektorsmit a = 1 m . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
5.7. Quantitativen Auswertung der Simulationsergebnisse von drei Dreifach-Reflektoren mit a = 1 m . . . . . . . . . . . . . . . . . . . . . . . . . . 119
5.8. Quantitative Verbesserung der numerischen Werte der Entfernung zwi-schen den beiden ersten Nullwertstellen ∆R00 in der jeweiligen Polari-sation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
5.9. Systemparameter der experimentellen Rohdaten des DLR (E-SAR) . . 1275.10. Maximalwerte der Simulationsergebnisse von einer flachen Platte mit
a = 2 m und b = 2 m, einem Zweifach-Reflektor mit a = 2 m und b = 2m, einem Dreifach-Reflektor mit a = 2 m . . . . . . . . . . . . . . . . . 135
A.1. Fallunterscheidungen fur die Modellierung einer flacher Platte . . . . . 157
B.1. Fallunterscheidungen fur die Modellierung eines Zweifach-Reflektors . . 163
C.1. Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der einfachen Reflexion . . . . . . . . . . . . . . . . . . . . . . 199
C.2. Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der zweifachen Reflexion . . . . . . . . . . . . . . . . . . . . . 199
C.3. Fallunterscheidungen fur die Modellierung eines Dreifach-Reflektors imFall von der dreifachen Reflexion . . . . . . . . . . . . . . . . . . . . . 200
311

Tabellenverzeichnis
C.4. Die reflektierte Felder in den jeweilgen Situationen im Fall von der drei-fachen Reflexion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244
312

Versicherung
Hiermit versichere ich, dass ich die vorliegende Arbeit ohne unzulassige Hilfe Dritterund ohne Benutzung anderer als der angegebenen Hilfsmittel angefertigt habe, Dieaus fremden Quellen direkt oder indirekt ubernommenen Gedanken sind als solchekenntlich gemacht.Bei der Auswahl und Auswertung des Materials sowie bei der Herstellung der Disser-tation habe ich Unterstutzungsleistungen von folgenden Personen erhalten:
keine.
Weitere Personen waren an der Abfassung der vorliegenden Arbeit nicht beteiligt. DieHilfe eines Promotionsberaters habe ich nicht in Anspruch genommen. Weitere Per-sonen haben von mir keine geldwerten Leistungen fur die Arbeiten erhalten, die imZusammenhang mit dem Inhalt der vorgelegten Dissertation stehen.Die Arbeit wurde bisher weder im Inland noch im Ausland in gleicher oder ahnlicherForm einer anderen Prufungsbehorde vorgelegt.
Chemnitz, den 11. Dezember 2012 Narathep Phruksahiran
313

Thesen
1. Das Ziel dieser Dissertation ist die Entwicklung und die Untersuchung der neuenpolarimetrische Fokussierungsfunktion mit Hilfe der polarimetrischen Ruckstreuu-ngseigenschaften der kanonischen Ziele unter der Geometrie des Radars mit syn-thetischer Apertur.
2. Bei der numerischen Berechnung der Streuungseigenschaften eines Zweifach-Refle-ktors und eines Dreifach-Reflektors mussen die Reflexion sowohl im Fernfeldbe-reich als auch im Nahfeldbereich in Betracht gezogen werden.
3. Die Geometrie des Radars mit synthetischer Apertur hat eine große Wirkung aufdie numerische Berechnung der polarimetrischen Radarruckstreuquerschnitte derkanonischen Ziele mit der physikalischen Optik Approximation.
4. Die neue polarimetrische Fokussierungsfunktion basiert auf die Referenzfunktioneines Punktzieles und das Matched-Filter-Prinzip. Dabei wird der polarimetri-sche Radarruckstreuquerschnitt der kanonischen Ziele als Faktor fur die jeweiligePolarisationslage eingesetzt.
5. Die Simulationsergebnisse der polarimetrischen Radarruckstreuquerschnitte furein bestimmtes Ziel hat eine spezifische Struktur entlang der Azimutrichtung jenach der Simulationsumgebung und Systemparameter.
6. Der Einsatz der entwickelten polarimetrischen Fokussierungsfunktion in der Azi-mutkompression fuhrt zu einer verbesserten Auflosung in der Azimutrichtung beiden simulierten SAR-Rohdaten.
7. Der Einsatz der polarimetrischen Fokussierungsfunktion eines Dreifach-Reflektorkann zur Verbesserung der visuellen Wahrnehmung in den Bilddaten nach demPauli-Zerlegungstheorem, insbesondere das Waldgebiet mit der grunen Farbe,fuhren kann.
8. Durch die quantitative Auswertung der SAR-Daten mit der differentiellen Reflek-tivitat kann man grobe Trennlinie zwischen den flachen Bereichen und den Berei-chen mit Gebauden und Baumen. Eine deutlichere Trennlinie durch die quanti-tative Auswertung mit dem linearen Depolarisationsverhaltnis nach der Azimut-kompression mit der polarimetrishen Fokussierungsfunktion einer flachen Plat-te. Durch den Einsatz der polarimetrische Fokussierungsfunktion eines Zweifach-Reflektors kann die Struktur der großen Gebaude nach der Auswertung mit demlinearen Depolarisationsverhaltnis besser hervorgehoben werden.
315

Lebenslauf
Personliche Daten
Name: Narathep PhruksahiranGeburtstag: 10 September 1977Geburtsort: Nakhon Si ThammaratStaatsangehorigkeit: Thai
Studium
10/2000 - 12/2003 Universitat der Bundeswehr MunchenSudiengang: Elektrotechnik und Informationstechnik
Berufliche Tatigkeiten
01/2004 - 04/2006 Zugfuhrer und Kompaniechef in derFernmeldebataillon 102
05/2006 - 09/2009 Dozent, Fakultat fur Elektrotechnik,Akademische Abteilung,Chulachomklao Royal Military Akademie
seit 09/2009 Assistenz-Professor der Akademischen Abteilung,Chulachomklao Royal Military Akademie
seit 10/2009 Promotionsstudent,Studentische und Wissenschaftliche Hilfskraft,Professur Hochfrequenztechnik und TheoretischeElektrotechnik, TU Chemnitz
Chemnitz, den 11. Dezember 2012 Narathep Phruksahiran
317