Proseminar 22: Theoretische Physik und …troms/teaching/WiSe1011/talks/Martin_ART_handout.pdf ·...
12
0 n - 1 n c (ct, x 1 ,x 2 ,x 3 ) c c Δs Δτ
Transcript of Proseminar 22: Theoretische Physik und …troms/teaching/WiSe1011/talks/Martin_ART_handout.pdf ·...

Proseminar 22: Theoretische Physik und Astroteilchenphysik
Allgemeine Relativitätstheorie
Einführung in die Grundlagen
Johannes Martin
21. November 2010
Hinweis: In diesem Dokument wird die Einstein'sche Summenkonvention benutzt: Über doppeltauftretende Indizes wird summiert, die Summen laufen dabei von 0 bis n− 1, wobei n der Dimension desRaumes (i.d.R. 4) entspricht.
1 Spezielle Relativitätstheorie
In diesem Abschnitt soll kurz das Wesentliche der Speziellen Relativitätstheorie wiedergegeben werden.In der Speziellen Relativitätstheorie wird postuliert, dass sich kein Teilchen schneller als mit
Lichtgeschwindigkeit c bewegen kann, und dass diese Geschwindigkeit von allen Beobachtern in einemInertialsystem gleich gemessen wird. Daraus resultieren die bekannten Eigenschaften, wie Zeitdilatationund Längenkontraktion.
Ein Punkt (ct, x1, x2, x3) in der vierdimensionalen Raumzeit bezeichnen wir als ein Ereignis. EinPfad oder eine Kurve, die ein Teilchen in der Raumzeit beschreibt, heiÿtWeltlinie. Da sich kein Teilchenschneller als mit c bewegen kann, können wir jedem Ereignis (oder auch jedem Punkt einer Weltlinie)einen Lichtkegel zuordnen, das ist ein Doppelkegel, dessen Ober�äche durch die möglichen Weltlinienvon sich mit c bewegenden Teilchen gegeben ist. Reale Teilchen können sich dann nur innerhalb diesesKegels bewegen.Vektoren (mit Startpunkt am Ereignis) innerhalb eines solchen Kegels heiÿen zeitartig, solche auf derKegelober�äche lichtartig (oder null), und solche auÿerhalb des Doppelkegels heiÿen raumartig, sieheAbb. 1.Können alle Punkte eines Weges oder einer Fläche mit zeitartigen Vektoren verbunden werden, so heiÿt
Abbildung 1: Lichtkegel in der Raumzeit, hier mit je einer Raum- und Zeitkomponente. Die Weltlinieeines Teilchens kann sich nur innerhalb der Lichtkegel be�nden.
der Weg bzw. die Fläche selbst zeitartig, und analog für die anderen De�nitionen.Eine wichtige Gröÿe ist das Raumzeit-intervall ∆s und davon abgeleitet die Eigenzeit ∆τ , welches
in der Allgemeinen Relativitätstheorie i.d.R. wie folgt geschrieben wird:
1

(∆s)2 = −(c∆t)2 + (∆x)2 + (∆y)2 + (∆z)2 (1)
(∆τ)2 = −(∆s)2 (2)
Dies beschreibt eine Invariante, d.h. der Ausdruck bleibt auch nach Koordinatentransformation (beidenen die Postulate erfüllt sind) invariant. Die Eigenzeit ist anschaulich die Zeit, die ein Beobachter misst,der sich auf einem geraden Weg zwischen Ereignissen bewegt. Dies kann mithilfe einer 4x4-Matrix η, dersogenannten Minkowski-Metrik1
η :=
−1 0 0 00 1 0 00 0 1 00 0 0 1
(3)
wie folgt geschrieben werden:
(∆s)2 = ηµν(∆xµ)(∆xν) (4)
⇒ ds2 = ηµνdxµdxν (5)
Wobei wir bereits die Einstein'sche Summenkonvention benutzt haben.Für nichtgerade Pfade gilt dann:
∆s =∫ √
ηµνdxµ(t)dt
dxν(t)dt
dt (6)
Alle möglichen Koordinatentransformationen (also solche, die das Raumzeitintervall invariant lassen)sind Lorentztransformationen Λ, für die gilt:
η = ΛT ηΛ
(Vgl. mit der Bedingung an Drehmatrizen im R3: 1 = RT 1R).Wie zuvor de�nieren wir die Geschwindigkeit als:
Uµ =dxµ
dτ(7)
Und aufgrund der Wahl von η gilt ηµνUµUν = −c2.
2 Einstein'sches Äquivalenzprinzip
In der Newton'schen Mechanik gilt:
~F = mtrage~a , ~Fgrav = −GmschwerM
r2~er (8)
Und man stellt fest, dass mtrage ∝ mschwer. Dies ist überraschend: Schlieÿlich beschreiben mtrage undmschwer zwei grundverschiedene Eigenschaften: Die eine gibt an, wie sehr sich ein Körper gegen Beschleu-nigung widersetzt (�wie schwierig es ist, ihn in Bewegung zu versetzen�), der andere bestimmt die Stärkeeiner bestimmten Kraft. Das diese proportional und damit äquivalent sind, ist nicht selbstverständlich.Das schwache Äquivalenzprinzip setzt nun diese beiden Massen gleich mtrage = mschwer. Darus folgtnach Newton:
a = −∇φ (9)
D.h. die träge Masse kürzt sich aus der Bewegungsgleichung heraus, und alle Körper bewegen sich auf dengleichen (bevorzugten) Kurven. Da nun die einer �beschleunigten Bewegung zugeordnete Masse� und die�gravitative Wechselwirkung zugeordnete Masse� gleich sind, kann man nun durch Bahnkurven vonMassen nicht unterscheiden, ob man sich in einem Schwerefeld oder in einem gleichförmigbeschleunigten Bezugssystem be�ndet. Das ist das schwache Äquivalenzprinzip.2
1Häu�g, besonders in der Speziellen Relativitätstheorie, wird eine andere Vorzeichenkonvention gewählt (alle Einträgemit −1 multipliziert).
2Man beachte, dass dies mit anderen Kräften nicht möglich ist: In einem elektromagnetischem Feld würden sich unter-schiedlich geladene Teilchen auf unterschiedlichen Bahnen bewegen, so dass man ein solches Feld von einer gleichförmigenBeschleunigung unterscheiden kann.
2

Einstein erweiterte dieses Prinzip zum Einstein'schen Äquivalenzprinzip: Aufgrund der Äquivalenzvon Energie und Masse (E = mc2) macht es Sinn, dies auf alle denkbaren Experimente zu erweitern:Es ist grundsätzlich unmöglich, durch lokale Experimente ein Schwerefeld zu messen (da esnicht von einer gleichförmigen Beschleunigung unterschieden werden kann).3
Da sich alle Partikel unter Ein�uÿ der Gravitation gleich verhalten, macht es Sinn, dies mehr als �im Hin-tergrund arbeitendes Phänomen�, oder als Eigenschaft der Raumzeit selbst zu modellieren. Wir sprechenalso nicht mehr von der Gravitation als Kraft, sondern als Krümmung des Raumes. Daher de�nierenwir nun unbeschleunigt als frei fallend. Insbesondere sind nun also auch Teilchen, die unter Ein�ussder Gravitation stehen �unbeschleunigt�.Inwiefern Raumkrümmung äquivalent ist zu einer wirkenden Kraft, kann man sich veranschaulichen, in-dem wir Teilchen auf dem Äquator einer Kugel betrachten, die sich beide �nach Norden� bewegen, d.h.parallel zueinander. Diese Teilchen werden sich am Nordpol tre�en. Beobachter auf der Kugelober�äche,die die Krümmung der Kugel nicht sehen können, müssen daher eine Kraft postulieren, um zu verstehen,warum sich die Teilchen tre�en (siehe Abb. 2)Eine direkte Folgerung daraus ist, dass wir nicht mehr wie bisher durch orthogonale, den Raum durch-
Abbildung 2: Äquivalenz der Beschreibung von Gravitationskraft und Krümmung. Teilchen, die sich amÄquator in gleiche Richtung bewegen können sich tre�en (links). Ein Beobachter, der die Krümmung derKugel nicht wahrnimmt, sieht nur, wie sich diese Teilchen aufeinanderbewegen, und muss daher eineattraktive Kraft postulieren (rechts).
Abbildung 3: Scheitern eines globalen Inertialsystems. Für das frei fallende Koordinatensystems scheintder ebenfalls frei fallende Massepunkt m beschleunigt zu werden. Bild nach Sean Carroll: Spacetimeand Geometry
kreuzende Stäbe ein Inertialsystem konstruieren können. Denn setzen wir dieses an einen frei fallendenPunkt im Raum, so wird in einer gewissen Entfernung davon ein ebenfalls frei fallender Massepunktscheinbar relativ zu unserem Inertialsystem beschleunigt (siehe Abb. 3). Solche für die Rechnung an-genehmen Inertialsysteme können also nur in einer (in�nitesimal kleinen) Umgebung eines Punktes pexistieren, und wir nennen ein solches System ein Lokales Inertialsystem. Solche sind sehr praktischund erleichtern viele Rechnungen.4
Da die Gravitation nun also einfach unsere Wahrnehmung der gekrümmten Raumzeit ist, gilt es nun, dieKrümmung selbst zu beschreiben. Dies geschieht mithilfe von di�erenzierbaren Mannigfaltigkeiten, wiedie Massen (und, wie wir sehen werden, Energien) den Raum krümmen, gibt die Einsteingleichung an.
3Tatsächlich di�erenziert man diese Formulierung noch: So bezieht sich das Einstein'sche Äquivalenzprinzip selbst nurauf nichtgravitative Gesetze, wohingegen das sogenannte Starke Äquivalenzprinzip auf alle physikalischen Gesetze aus-gedehnt ist
4Bereits aus diesem Äquivalenzprinzip kann man physikalische E�ekte ableiten, etwa die gravitative Rotverschiebung.Siehe z.B. Ausarbeitung von Tim Plath, oder Sean Carrol : Spacetime and Geometry, S. 53�.
3
3 Mannigfaltigkeiten
Haftungsausschluss: Die hier gegebene Einführung in Mannigfaltigkeiten geschieht nicht in der in derMathematik gestellten Sorgfalt. Der Abschnitt soll keine mathematisch umfassende Beschreibung diesesThemas sein, sondern lediglich den verwendeten Formalismus plausibel erscheinen lassen.
Mannigfaltigkeiten sind das Mittel der Wahl, um unsere gekrümmte Raumzeit zu beschreiben. DieDe�nition einer Mannigfaltigkeit ist auf den ersten Blick wenig hilfreich:
Eine Cp-Mannigfaltigkeit ist eine Menge M mit einem maximalen Cp-Atlas.
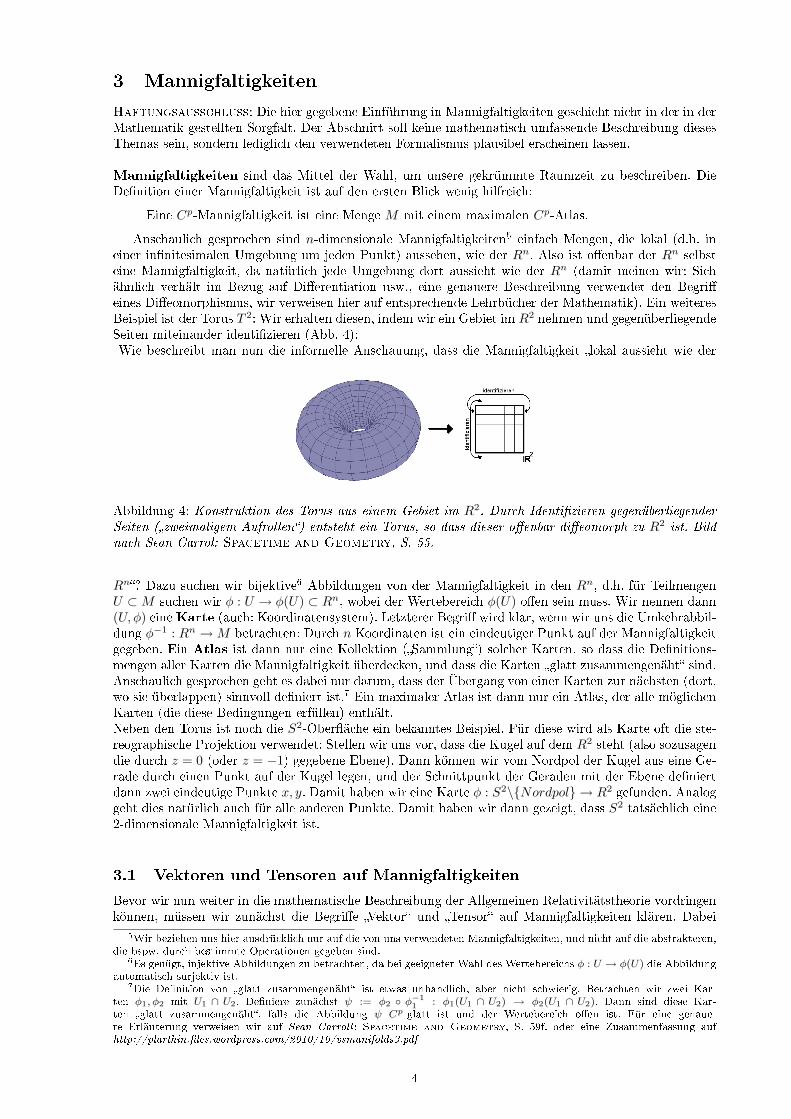
Anschaulich gesprochen sind n-dimensionale Mannigfaltigkeiten5 einfach Mengen, die lokal (d.h. ineiner in�nitesimalen Umgebung um jeden Punkt) aussehen, wie der Rn. Also ist o�enbar der Rn selbsteine Mannigfaltigkeit, da natürlich jede Umgebung dort aussieht wie der Rn (damit meinen wir: Sichähnlich verhält im Bezug auf Di�erentiation usw., eine genauere Beschreibung verwendet den Begri�eines Di�eomorphismus, wir verweisen hier auf entsprechende Lehrbücher der Mathematik). Ein weiteresBeispiel ist der Torus T 2: Wir erhalten diesen, indem wir ein Gebiet im R2 nehmen und gegenüberliegendeSeiten miteinander identi�zieren (Abb. 4):Wie beschreibt man nun die informelle Anschauung, dass die Mannigfaltigkeit �lokal aussieht wie der
Abbildung 4: Konstruktion des Torus aus einem Gebiet im R2. Durch Identi�zieren gegenüberliegenderSeiten (�zweimaligem Aufrollen�) entsteht ein Torus, so dass dieser o�enbar di�eomorph zu R2 ist. Bildnach Sean Carrol: Spacetime and Geometry, S. 55.
Rn�? Dazu suchen wir bijektive6 Abbildungen von der Mannigfaltigkeit in den Rn, d.h. für TeilmengenU ⊂M suchen wir φ : U → φ(U) ⊂ Rn, wobei der Wertebereich φ(U) o�en sein muss. Wir nennen dann(U, φ) eineKarte (auch: Koordinatensystem). Letzterer Begri� wird klar, wenn wir uns die Umkehrabbil-dung φ−1 : Rn →M betrachten: Durch n Koordinaten ist ein eindeutiger Punkt auf der Mannigfaltigkeitgegeben. Ein Atlas ist dann nur eine Kollektion (�Sammlung�) solcher Karten, so dass die De�nitions-mengen aller Karten die Mannigfaltigkeit überdecken, und dass die Karten �glatt zusammengenäht� sind.Anschaulich gesprochen geht es dabei nur darum, dass der Übergang von einer Karten zur nächsten (dort,wo sie überlappen) sinnvoll de�niert ist.7 Ein maximaler Atlas ist dann nur ein Atlas, der alle möglichenKarten (die diese Bedingungen erfüllen) enthält.Neben den Torus ist noch die S2-Ober�äche ein bekanntes Beispiel. Für diese wird als Karte oft die ste-reographische Projektion verwendet: Stellen wir uns vor, dass die Kugel auf dem R2 steht (also sozusagendie durch z = 0 (oder z = −1) gegebene Ebene). Dann können wir vom Nordpol der Kugel aus eine Ge-rade durch einen Punkt auf der Kugel legen, und der Schnittpunkt der Geraden mit der Ebene de�niertdann zwei eindeutige Punkte x, y. Damit haben wir eine Karte φ : S2\{Nordpol} → R2 gefunden. Analoggeht dies natürlich auch für alle anderen Punkte. Damit haben wir dann gezeigt, dass S2 tatsächlich eine2-dimensionale Mannigfaltigkeit ist.
3.1 Vektoren und Tensoren auf Mannigfaltigkeiten
Bevor wir nun weiter in die mathematische Beschreibung der Allgemeinen Relativitätstheorie vordringenkönnen, müssen wir zunächst die Begri�e �Vektor� und �Tensor� auf Mannigfaltigkeiten klären. Dabei
5Wir beziehen uns hier ausdrücklich nur auf die von uns verwendeten Mannigfaltigkeiten, und nicht auf die abstrakteren,die bspw. durch bestimmte Operationen gegeben sind.
6Es genügt, injektive Abbildungen zu betrachten, da bei geeigneter Wahl des Wertebereichs φ : U → φ(U) die Abbildungautomatisch surjektiv ist.
7Die De�nition von �glatt zusammengenäht� ist etwas unhandlich, aber nicht schwierig. Betrachten wir zwei Kar-ten φ1, φ2 mit U1 ∩ U2. De�niere zunächst ψ := φ2 ◦ φ−1
1 : φ1(U1 ∩ U2) → φ2(U1 ∩ U2). Dann sind diese Kar-ten �glatt zusammengenäht�, falls die Abbildung ψ Cp-glatt ist und der Wertebereich o�en ist. Für eine genaue-re Erläuterung verweisen wir auf Sean Carroll : Spacetime and Geometry, S. 59f. oder eine Zusammenfassung aufhttp://plarthin.�les.wordpress.com/2010/10/vsmanifolds3.pdf
4
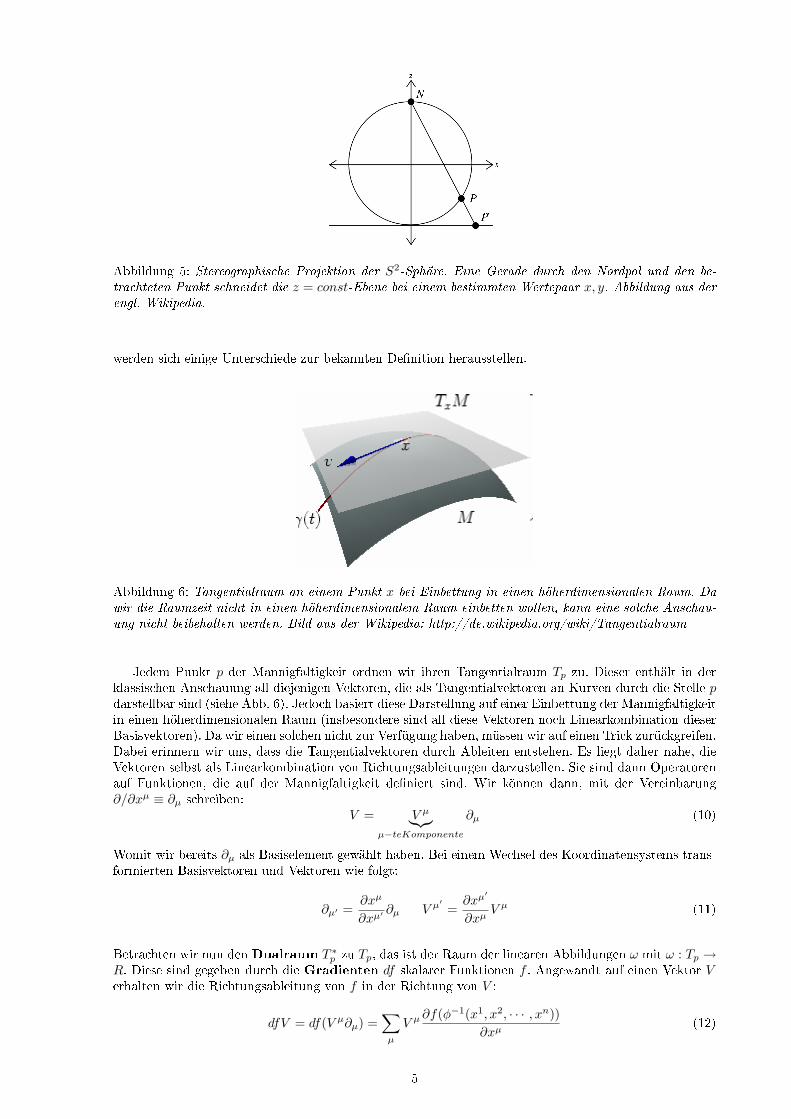
Abbildung 5: Stereographische Projektion der S2-Sphäre. Eine Gerade durch den Nordpol und den be-trachteten Punkt schneidet die z = const-Ebene bei einem bestimmten Wertepaar x, y. Abbildung aus derengl. Wikipedia.
werden sich einige Unterschiede zur bekannten De�nition herausstellen.
Abbildung 6: Tangentialraum an einem Punkt x bei Einbettung in einen höherdimensionalen Raum. Dawir die Raumzeit nicht in einen höherdimensionalem Raum einbetten wollen, kann eine solche Anschau-ung nicht beibehalten werden. Bild aus der Wikipedia: http://de.wikipedia.org/wiki/Tangentialraum
Jedem Punkt p der Mannigfaltigkeit ordnen wir ihren Tangentialraum Tp zu. Dieser enthält in derklassischen Anschauung all diejenigen Vektoren, die als Tangentialvektoren an Kurven durch die Stelle pdarstellbar sind (siehe Abb. 6). Jedoch basiert diese Darstellung auf einer Einbettung der Mannigfaltigkeitin einen höherdimensionalen Raum (insbesondere sind all diese Vektoren noch Linearkombination dieserBasisvektoren). Da wir einen solchen nicht zur Verfügung haben, müssen wir auf einen Trick zurückgreifen.Dabei erinnern wir uns, dass die Tangentialvektoren durch Ableiten entstehen. Es liegt daher nahe, dieVektoren selbst als Linearkombination von Richtungsableitungen darzustellen. Sie sind dann Operatorenauf Funktionen, die auf der Mannigfaltigkeit de�niert sind. Wir können dann, mit der Vereinbarung∂/∂xµ ≡ ∂µ schreiben:
V = V µ︸︷︷︸µ−teKomponente
∂µ (10)
Womit wir bereits ∂µ als Basiselement gewählt haben. Bei einem Wechsel des Koordinatensystems trans-formierten Basisvektoren und Vektoren wie folgt:
∂µ′ =∂xµ
∂xµ′∂µ V µ
′=∂xµ
′
∂xµV µ (11)
Betrachten wir nun den Dualraum T ∗p zu Tp, das ist der Raum der linearen Abbildungen ω mit ω : Tp →R. Diese sind gegeben durch die Gradienten df skalarer Funktionen f . Angewandt auf einen Vektor Verhalten wir die Richtungsableitung von f in der Richtung von V :
dfV = df(V µ∂µ) =∑µ
V µ∂f(φ−1(x1, x2, · · · , xn))
∂xµ(12)
5

Als Basis wählen wir die Gradienten der Koordinatenfunktionen dxµ. Daraus folgt dann das Transforma-tionsverhalten:
dxµ′
=∂xµ
′
∂xµdxµ ωµ′ =
∂xµ
∂xµ′ωµ (13)
Umgekehrt ist es natürlich möglich, Vektoren V als lineare Abbildung einer 1-Form ω nach R aufzufassen,mit genau der selben Wirkung wie in (12).Tensoren sind multilineare Abbildungen, die mehrere 1-Formen und Vektoren in die reellen Zahlenabbilden. Genauer gesagt ist ein (k, l)-Tensor eine Abbildung
T : T ∗p × · × T ∗p︸ ︷︷ ︸k−Mal
×Tp × · · ·Tp︸ ︷︷ ︸l−Mal
→ R
die linear in jedem ihrer Argumente ist. Beispielsweise sind 1-Formen also (0, 1)-Tensoren (denn sie bilden1 Vektor auf R ab). Wie oben beschrieben kann man aber genausogut Vektoren als lineare Abbildungenvon 1-Formen nach R au�assen, daher sind Vektoren (1, 0)-Formen.Die Hintereinanderausführung von Tensoren gelingt mit dem Tensorprodukt. So ist das Tensorproduktdes (k1, l1)-Tensors T mit dem (k2, l2)-Tensor S ein (k1 + k2, l1 + l2)-Tensor gegeben durch:
T ⊗ S(df1, · · · , dfk1 , V1, · · · , Vl1 , dfk1+1, · · · , dfk1+k2 , Vl1+1, · · · , Vl1+l2) =T (df1, · · · , dfk1 , V1, · · · , Vl1) · S(dfk1+1, · · · , dfk1+k2 , Vl1+1, · · · , Vl1+l2)
Damit können wir nun eine Basis für den Vektorraum der (k, l)-Tensoren konstruieren, da ja Vektoren(1, 0)-Tensoren und 1-Formen (0, 1)-Tensoren bilden. Basiselemente sind dann gegeben durch:
∂µ1 ⊗ · · · ⊗ ∂µk ⊗ dxµ1 ⊗ · · · ⊗ dxµl
Für jeden Faktor gibt es in n Dimensionen genau n Möglichkeiten. In der vierdimensionalen Raumzeitist der (k, l)-Tensorraum daher 4k+l-dimensional.Da Tensoren linear in jedem Argument sind, sind Tensoren eindeutig durch ihr Wirken auf die Basisvek-toren bestimmt. Wir schreiben dann für die zugehörige Komponente
Tµ1···µkν1···νl = T (dxµ1 , · · · , dxµk , ∂ν1 , · · · , ∂νl) (14)
Nicht von der unterschiedlichen Reihenfolge irritieren lassen: Als Argument kommen zunächst 1-Formen,aber als Basiselemente zunächst Vektoren (die als Tensor aufgefasst ja 1-Formen abbilden).Bei Tensoren ist die Reihenfolge der Indizes wichtig. Ein oberer Index deutet darauf hin, dass an diezugehörige Stelle in den Argumenten eine 1-Form gehört, ein unterer Index auf einen Vektor. Daherkommt es auf die Reihenfolge an. Die Indizes müssen auch nicht sortiert sein, bspw. ist:
Tµ1ν1µ2 = T (dxµ1 , ∂ν1 , dx
µ2)
Tensoren besitzen ein besonderes Transformationsverhalten, welches aus ihrer Linearität folgt. Fürjeden oberen Index erhalten wir einen Ausdruck ∂xµ
′i/∂xµi , für jeden unteren ein ∂xνi/∂xν
′i :
Tµ′1···µ
′kν′1···ν′l =
∂xµ′1
∂xµ1· · · ∂x
µ′k
∂xµk· ∂x
ν1
∂xν′1· · · ∂x
νl
∂xν′1· Tµ1···µk
ν1···νl (15)
Häu�g werden Tensoren sogar als Ansammlung von Zahlen mit diesem Transformationsverhalten de�-niert.
3.2 Metrik
Die Metrik gµν ist ein spezieller, symmetrischer (0, 2)-Tensor (d.h. gµν = gνµ). Sie dient dazu, Längen undSkalarprodukt auf unseren gekrümmten Räumen zu de�nieren, wie wir bereits in der �achen Raumzeitgesehen haben, in der die Minkowski-Metrik (3) verwendet wird. Zunächst de�nieren wir die inverseMetrik, die wir mit hochgestellten Indizes erhalten:
gµσgσν = δµν (16)
D.h. wenn gµν als Matrix geschrieben wird, ist gµν das Inverse dieser Matrix.Mit der Metrik wird das Raumzeitintervall zu:
ds2 = gµνdxµdxν (17)
6

Mithilfe der Metrik können Indizes von Tensoren erhöht oder erniedrigt werden:
gµhλTµ1···µk
ν1···νl = Tµ1···µh−1λµh+1···µk
ν1···νl (18)
gνhλTµ1···µkν1···νl = Tµ1···µk
ν1···νh−1λ
νh+1···νl(19)
Damit kann schlieÿlich das Skalarprodukt de�niert werden8, für das gilt:
gµνUµV ν = UνV
ν (20)
Das Skalarprodukt eines Vektors mit sich selbst ist < 0, falls es sich um einen zeitartigen Vektor handelt,= 0 bei einem lichtartigen, und > 0 bei einem raumartigen Vektor. Die Komponenten der Metrik hängenin der Regel vom Punkt der Mannigfaltigkeit ab, an der wir sie betrachten, bspw.:
ds2 = dr2 + r2dθ2 + r2 sin2(θ)dφ2 (21)
Dabei handelt es sich um die Metrik, die in Kugelkoordinaten verwendet wird. Diese beschreibt aber auchden ungekrümmten Raum R3! Die Metrik allein in dieser Form scheint noch nicht ausreichend zu sein,um sofortige Aussagen darüber zu tre�en, ob der Raum gekrümmt ist oder nicht. Es ist aber wenigstensmöglich, an einem Punkt durch geeignete Wahl von Koordinaten, die Metrik in ihre Diagonalform zubringen. In der ART sieht sie dann aus wie die Minkowski-Metrik. Mehr noch, selbst die partiellenAbleitungen verschwinden:
gµν(p) = ηµν ∂σgµν = 0 (22)
Solche Koordinaten heiÿen lokale Inertialkoordinaten.9 Solche Koordinaten sind praktisch, da es ein-fach ist, in diesen zu rechnen. Kann das Ergebnis dann noch als Tensor geschrieben werden, so gilt esin allen Koordinatensystemen, da der Ausdruck dann wie die Tensoren korrekt transformieren. Für einBeispiel verweisen wir auf Sean Carroll : Spacetime and Geometry, S. 75.
4 Kovariante Ableitung und Geodätengleichung
Die partielle Ableitung eines Tensors ist im Allgemeinen kein Tensor, da sie nicht wie ein Tensor trans-formiert: Die partielle Ableitung der Jacobi-Matrix (d.h. der beim Transformieren auftretenden Terme)ist im Allgemeinen nicht null, und verschwinden daher nicht.Um dies zu korrigieren, verwendet man n (n × n)-Matrizen (Γσ)µν . Für jeden oberen Index erhält manein �Plus Korrekturterm�, für jeden unteren ein �Minus Korrekturterm�. Partiell abgeleitet wird immernur einmal:
∇σTµ1···µkν1···νl = ∂σT
µ1···µkν1···νl (23)
+ Γµ1σλT
λµ2···µkν1···νl + Γµ2
σλTµ1λµ3···µk
ν1···νl + · · ·− Γλσν1T
µ1µ2···µkλν2···νl − Γλσν2T
µ1µ2···µkν1λν3···νl − · · ·
Die kovariante Ableitung macht aus einem (k, l)-Tensor einen (k, l + 1)-Tensor.Denkbar sind viele solcher Symbole Γ, die diese Anforderungen erfüllen (n3 unabhängige Komponenten).Fordert man zusätzlich, dass das Symbol symmetrish in den unteren Indizes ist, und dass∇σgµν (metrischeKompatabilität) gelten soll, so erhält man die Christo�elsymbole:
Γσµν =12gσρ(∂µgνρ + ∂νgρµ − ∂ρgµν) (24)
Diese ist z.B. kompatibel mit der Metrik, d.h. ∇σgµν = 0.Die kovariante Ableitung erfüllt noch eine ganze Reihe anderer Eigenschaften, insbesondere ist sie linearund erfüllt die Leibnitz-Regel (Produktregel).Jetzt können wir dasMinimal coupling principle10 angeben. Wir erhalten aus einem Ausdruck, der inder �achen Raumzeit (oder lokalen Inertialkoordinaten) gilt, einen allgemeingültigen, indem wir in demAusdruck:
8Dabei erfüllt dieses Skalarprodukt nicht alle in der Mathematik geforderten Eigenschaften, z.B. ist es nicht positiv-de�nit.
9Wie man diese �ndet, soll nicht Thema dieser Ausarbeitung sein, trotzdem soll es kurz angedeutet werden: DurchBetrachten von Geodäten x(λ) durch p, die an dieser Stelle V als Tangentenvektor besitzen, kann man durch Auswertendieser Geodäten an einer späteren Stelle jedem Vektor einen eindeutigen Punkt q = x(λ + ∆λ) der Mannigfaltigkeitzuordnen. Mithilfe einer solchen Konstruktion �ndet man solche Koordinaten. Siehe dazu bspw. Sean Carroll : Spacetimeand Geometry, S. 111
10Auch häu�g �comma goes to semicolon�-Regel, die sich auf hier nicht verwendete Notationen bezieht
7
• Die Minkowskimetrik η durch die allgemeine Metrik g ersetzen
• Partielle Ableitungen ∂µ durch die kovariante ∇µ ersetzen
• sicherstellen, dass nur Tensoren vorkommen
Damit erhalten wir leicht die Geodätengleichung. In der �achen Raumzeit bewegen sich Teilchen, aufdie keine Kraft wirkt, auf Geraden:
d2xµ
dτ2= 0 (25)
Die zweite Ableitung ist aber kein Tensor (die erste hingegen ist ein Tensor, nämlich der Geschwindig-keitsvektor). Verwenden wir die allgemeine Kettenregel, so erhalten wir den Ausdruck:
dxν
dτ∂νdxµ
dτ= 0 (26)
Anwenden des Minimal-Coupling-Principles bedeutet nun, dass wir ∂µ durch ∇µ ersetzen. Damit:
dxν
dτ∇ν
dxµ
dτ
Def.∇=
d2xµ
dλ2+ Γµρσ
dxρ
dλ
dxσ
dλ= 0 (27)
Die letzte Gleichung ist die Geodätengleichung. Sie beschreibt, wie sich frei fallende Teilchen bewegen,und entspricht der Gleichung a = −∇φ in der Newtonschen Theorie.
4.1 Paralleltransport
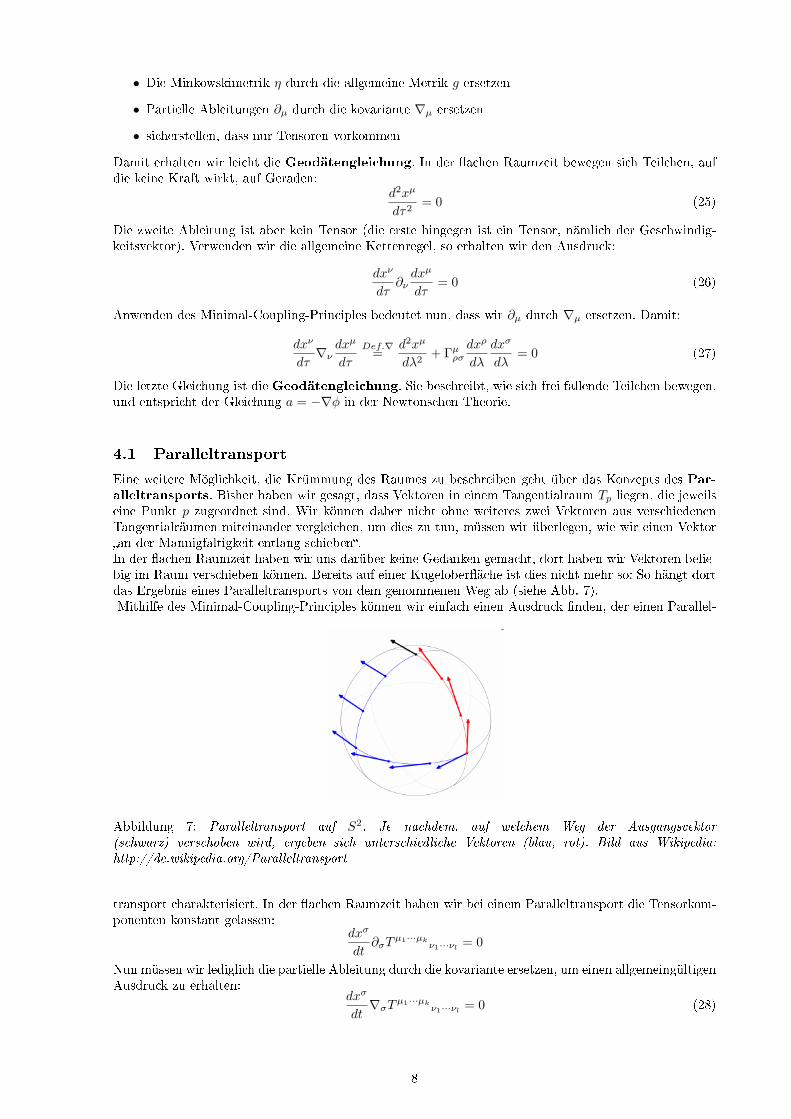
Eine weitere Möglichkeit, die Krümmung des Raumes zu beschreiben geht über das Konzepts des Par-alleltransports. Bisher haben wir gesagt, dass Vektoren in einem Tangentialraum Tp liegen, die jeweilseine Punkt p zugeordnet sind. Wir können daher nicht ohne weiteres zwei Vektoren aus verschiedenenTangentialräumen miteinander vergleichen, um dies zu tun, müssen wir überlegen, wie wir einen Vektor�an der Mannigfaltigkeit entlang schieben�.In der �achen Raumzeit haben wir uns darüber keine Gedanken gemacht, dort haben wir Vektoren belie-big im Raum verschieben können. Bereits auf einer Kugelober�äche ist dies nicht mehr so: So hängt dortdas Ergebnis eines Paralleltransports von dem genommenen Weg ab (siehe Abb. 7).Mithilfe des Minimal-Coupling-Principles können wir einfach einen Ausdruck �nden, der einen Parallel-
Abbildung 7: Paralleltransport auf S2. Je nachdem, auf welchem Weg der Ausgangsvektor(schwarz) verschoben wird, ergeben sich unterschiedliche Vektoren (blau, rot). Bild aus Wikipedia:http://de.wikipedia.org/Paralleltransport
transport charakterisiert. In der �achen Raumzeit haben wir bei einem Paralleltransport die Tensorkom-ponenten konstant gelassen:
dxσ
dt∂σT
µ1···µkν1···νl = 0
Nun müssen wir lediglich die partielle Ableitung durch die kovariante ersetzen, um einen allgemeingültigenAusdruck zu erhalten:
dxσ
dt∇σTµ1···µk
ν1···νl = 0 (28)
8

Dies ist die Paralleltransportgleichung. Damit lässt sich beispielsweise ausrechnen, wie sich die Kom-ponenten V µ eines Vektors ändern, wenn er entlang des Weges x(t) paralleltransportiert wird.11
4.2 Riemanntensor
Wir haben gesehen, dass die Raumkrümmung dazu führt, dass sich Tensorkomponenten bei einem Par-alleltransport wegabhängig ändern. Dies geschieht auch auf geschlossenen Kurven, und ist ein Maÿ, dieKrümmung zu charakterisieren.Um dies mathematisch zu fassen, betrachten wir den Kommutator [∇µ,∇ν ] zweier kovarianter Ableitun-gen. Dies gibt den Unterschied des erhaltenen Tensors, würde er erst entlang der µ-Richtung, dann derν-Richtung paralleltransportiert zu dem Tensor, den wir durch Paralleltransport in der anderen Reihen-folge erhielten. Dies liegt daran, da nach der Paralleltransportgleichung die kovariante Ableitung entlangeiner Richtung, in die er paralleltransportiert wird, gerade null ist (und somit als Bezugspunkt für in�-nitesimale Veränderungen dienen kann). Rechnet man dies aus, unter Benutzung der Leibnitz-Regel undLinearität, so erhält man für einen Vektor:
[∇µ,∇ν ]V ρ = (∂µΓρνσ − ∂νΓρµσ + ΓρµλΓλνσ − ΓρνλΓλµσ)︸ ︷︷ ︸=:Rρσµν
V ρ − (Γλµν − Γλνµ)︸ ︷︷ ︸=:Tλµν
∇λV ρ (29)
Damit haben wir den Riemanntensor (oder Riemannschen Krümmungstensor) Rρσµν de�niert12. DerTensor T , der ebenfalls auftaucht, ist der Torsionstensor, der ebenfalls bedeutsam ist, aber hier nichtweiter behandelt werden soll.
Aus dem Riemanntensor erhält man den Riccitensor durch Verjüngen, d.h. Summieren über einenoberen und unteren Index:
Rµν = Rλµλν (30)
Der Ricciskalar ist die Spur dieses Tensors:
R = Rµµ = gµνRµν (31)
Die Tensoren haben u.a. folgende Symmetrieeigenschaften13:
Rρσµν = −RσρµνRρσµν = −RρσνµRρσµν = Rµνρσ
∇[λRρσ]µν = 0Rµν = −Rνµ
∇µRρµ =12∇ρR
Und aufgrund dieser besitzt der Riemanntensor n2(n2 − 1)/12 freie Parameter. Also sind 1-dimensionaleRäume nicht gekrümmt (kein freier Parameter!), 2-dimensionale durch einen Wert eindeutig charakteri-siert (Ricciskalar genügt!). Die vierdimensionale Raumzeit hat somit 20 Parameter.
5 Einsteingleichung
Wir haben nun eine Idee, wie sich Teilchen in gekrümmten Räumen bewegen. Nun müssen wir quan-ti�zieren, wie die Krümmung des Raumes zustande kommt. Diesen Zusammenhang wird uns die Ein-steingleichung geben. Um sie nachzuvollziehen, überlegen wir zunächst, dass wir die Raumkrümmungbenutzen wollen, um das Phänomen der Gravitation zu beschreiben, die in der Newton'schen Mecha-nik durch Massen verursacht wird. Da Massen und Energie äquivalent zueinander sind, werden wir diesauf Energieformen verallgemeinern. Da wir schon wissen, wie wir die Raumkrümmung als (0, 2)-Tensor(den Riccitensor) beschreiben, müssen wir also nun einen sinnvollen Tensor �nden, der mit der Energiezusammenhängt.
11Auch damit lässt sich die Geodätengleichung herleiten. Eine andere De�nition einer Geodäten lautet: Eine Geodäte isteine Kurve, die ihren eigenen Tangentialvektor dx
dλparalleltransportiert. Einsetzen dieses Vektors in die Paralleltransport-
gleichung gibt dann genau die Geodätengleichung.12Der Vollständigkeit halber soll hier eine häu�g verwendete Notation genannt werden. Als Funktion von drei Vektorfeldern
X,Y, Z kann die Wirkung des Riemanntensors geschrieben werden als R(X,Y )Z = ∇X∇Y Z − ∇Y∇XZ − ∇[X,Y ]Z. Mitder gleichen Methode erhält man T (X,Y ) = ∇XY −∇YX − [X,Y ].
13Da wir die Christo�elsymbole so gewählt haben, dass ∇σgµν = 0 gilt, können wir ∇µ = gµν∇ν bilden.
9

5.1 Energie-Impuls-Tensor
Der Energie-Impuls-Tensor beschreibt die Verteilung von Energie und Impulsen im Gesamtsystem (wo-hingegen p ja stets nur die Werte für ein Teilchen angibt). Die De�nition des Energie-Impuls-TensorsTµν lautet:
Die Komponente Tµν des Energieimpulstensors gibt den Fluss von pµ durch eine Fläche mitxν = const. an
Also steht in der 0, 0-ten Komponente o�enbar die Energiedichte, denn die 0-te Komponente von penthält die Energie, und die Bedingung x0 = t = const. bedeutet, dass wir das Universum zu einemfesten Zeitpunkt betrachten. Hingegen ist bspw. die T 22-Komponente die y-Komponente der Kraft proFlächenelement in die y-Richtung, dies ist also der Druck py.Der Tensor ist symmetrisch! Die verschiedenen Erhaltungssätze, etwa Energie- und Impulserhaltung folgenaus der Formulierung im ungekrümmten Raum ∂µT
µν = 0 mithilfe des Minimal-Coupling-Principles:
∇µTµν = 0 (32)
5.1.1 Beispiel: Staub
Betrachten wir zunächst Staub, also eine Ansammlung an Teilchen gleicher Masse m, die sich relativzueinander in Ruhe be�nden, d.h. ihr Impuls ist in ihrem Ruhsystem p = (mc, 0, 0, 0). Damit kann wg.der Symmetrie nur die 0, 0-Komponente von null verschieden sein, und in ihrem Ruhsystem gilt:
T =
n ·mc2 0 0 0
0 0 0 00 0 0 00 0 0 0
Wobei wir mit n die Teilchenzahldichte bezeichnen, so dass n ·mc2 die Energiedichte beschreibt.Wir müssen diesen Ausdruck nun als Tensor schreiben. Mit U = (c, 0, 0, 0) folgt dann einfach:
n ·m︸ ︷︷ ︸=:ρ
c2 = ρU0U0
So dass als Vermutung naheliegt:Tµν = ρUµUν (33)
Wie eine explizite Berechnung leicht zeigt, ergibt dies im Ruhsystem tatsächlich obige Werte für Tµν . Dadieser Ausdruck nur Tensoren enthält, gilt dieser allgemein.
5.1.2 Beispiel: Flüssigkeit
Zusätzlich zu dem obigen Term müssen wir nun noch den Druck p berücksichtigen, der bekanntermaÿenisotrop ist. Daraus folgt, dass der Energieimpulstensor nur Einträge auf der Diagonalen haben kann, dakeine Impulskomponente durch eine orthogonale Fläche treten kann. Desweiteren muss der Druck wg.der Isotropie gleich sein, d.h. px = py = pz = p. Also gilt im Ruhsystem:
T =
ρc2 0 0 00 p 0 00 0 p 00 0 0 p
Wieder gilt es, diesen Ausdruck als Tensor zu schreiben. Da wir auf den unteren Diagonalen +p stehenhaben wollen, können wir diese in lokalen Inertialkoordinaten (g = η) mit pgµν erzeugen. Damit erhaltenwir im Ruhsystem:
T =
−p 0 0 00 p 0 00 0 p 00 0 0 p
Da wir schon gesehen haben, dass (a/c2UµUν) im Ruhsystem einfach a in die 0, 0-Komponente schreibt,können wir recht simpel die fehlenden Terme erraten:
Tµν = (ρ+p
c2)UµUν + pgµν (34)
Das ist der Energie-Impuls-Tensors der idealen Flüssigkeit, welche in vielen kosmologischen Mo-dellen verwendet wird.
10

5.2 Einsteingleichung
Wir können nun die Einsteingleichung aufstellen. Wir folgen hier der Darstellung von Carroll, und wollensie zunächst nur plausibel machen. Eine explizite Herleitung wäre durch die Minimierung der Wirkunggegeben, dies wollen wir hier aber nicht tun14.Da in der Newtonschen Mechanik das Gravitationsfeld durch Massen erzeugt wurde, setzen wir wg. derÄquivalenz von Energie und Masse den Energie-Impuls-Tensor als Verursacher der Raumkrümmung an,die ja durch den Riccitensor beschrieben wird. Naiver Ansatz wäre daher15:
Rµν?= κTµν
Dieser Ausdruck kann aber nicht stimmen, wie das Bilden der Divergenz zeigt:
∇µTµν = 0 6= 12∇νR = ∇µRµν
Wobei wir im letzten Schritt die Symmetrieeigenschaften benutzt haben.Wir können also nicht einfach Rµν ansetzen. Wir bilden aus dem Riccitensor mithilfe der Metrik denEinsteintensor:
Gµν = Rµν −12Rgµν (35)
Für diesen gilt wg. ∇σgµν = 0:
∇µGµν∇lin.= ∇µRµν︸ ︷︷ ︸
= 12∇νR
−12∇µRgµν =
12∇νR−
12
((∇µR)gµν +R (∇µgµν)︸ ︷︷ ︸=0
) = 0 (36)
Damit ist der Einsteintensor ein guter Kandidat für unseren Ansatz:
Gµν = Rµν −12Rgµν = κTµν (37)
Bilden der Spur auf beiden Seiten gibt folgende äquivalente Formulierung:
Rµν = κ(Tµν −12Tgµν) (38)
Fordert man, dass dies im Grenzwert kleiner Geschwindigkeiten und statischer Felder die NewtonschenGleichungen ergibt, so folgt der Wert für κ und damit:
Rµν −12Rgµν =
8πGc4
Tµν (39)
Bilden der Spur auf beiden Seiten gibt folgende äquivalente Formulierung:
Rµν =8πGc4
(Tµν −12Tgµν) (40)
5.3 Forderung der Newtonschen Näherung: Bestimmung der Konstanten κ
Hier soll kurz beschrieben werden, wie die Forderung, dass sich im Newtonschen Grenzfall die altenGleichungen ergeben, zur Bestimmung der Konstanten dienen kann. �Newtonscher Grenzfall� bedeutet,dass das Feld statisch ist ∂0gµν = 0 und dass die Geschwindigkeit klein gegen die Lichtgeschwindigkeitist, d.h.:
dx1,2,3
dτ<<
dt
dτ(41)
Damit wird aus der Geodätengleichung (27) (beachte: x0 = ct):
d2xµ
dτ2+ Γµ00c
2(dt
dτ)2 = 0 (42)
Nach der Vorschrift für die Christo�elsymbole (24) ist wg. ∂0gµν = 0:
Γµ00 =12gµλ(∂0gλ0 + ∂0g0λ − ∂λg00)
= −12gµλ∂λg00
14Für eine solche Darstellung, siehe z.B. Sean Carroll: Spacetime and Geometry, S. 159�.15Dabei ist natürlich Tµν = gµσgνρTσρ.
11

Da in der Newtonschen Näherung das Feld schwach ist, können wir eine schwache Störung ansetzen:
gµν = ηµν + hµν (43)
Im Folgenden wollen wir immer nur zur ersten Ordnung in h rechnen. Zunächst �nden wir für die inverseMetrik:
gµν = ηµν − hµν︸︷︷︸=ηµρηνσhρσ
(44)
Damit ist in erster Ordnung in h die Geodätengleichung einfach:
d2xµ
dτ2=
12c2ηµλ∂λh00(
dt
dτ)2 (45)
Woraus sofort d2t/dτ2 = 0 folgt, also hängen t und τ linear voneinander ab. Da die Minkowskimetriklinear ist, und in den drei raumartiken Komponenten den Wert +1 hat, folgt aus der Geodätengleichungfür µ = 1, 2, 3 durch Division mit dt/dτ :
d2xi
dt2=
12c2∂ih00 (46)
Oder, in etwas bekannterer Schreibweise
~a =12c2∇h00 (47)
Setzen wir also h00 = −2Φ/c2 an, erhalten wir genau die Newtonsche Gleichung (8)! Für einen einzelnen,sphärisch symmetrischen Körper folgt Φ = −GMr .Im Newtonschen Grenzfall können wir mit dem Energie-Impuls-Tensor von Staub rechnen. In dessenRuhsystem gilt U = (c, 0, 0, 0). In erster Ordnung in h ist dann wie vorher T00 = ρc2 und alle anderenKomponenten sind null. Daher ist die Spur einfach T = −ρc2. Einsetzen in (38) gibt für die einziginteressante Komponente (µ = ν = 0):
R00 =12κρc2 (48)
Dabei ist R00 = Rλ0λ00 eine Summierung über den Riemanntensor. Ausrechnen gibt:
R00 = −12δij∂i∂jh00 = −1
2∆h00 (49)
Gleichsetzen der letzten beiden Gleichungen gibt mit dem eben erhaltenen Zusammenhang h00 = −2Φ/c2.
∆Φ = −κ2c4ρ (50)
Was nur dann die Newtonschen Gleichungen ergibt, wenn κ = 8πGc4 .
12