Präsentation für das Automationsforum 2013 zum...
15
Transcript of Präsentation für das Automationsforum 2013 zum...


Präsentation für das Automationsforum 2013 zum Thema:
Integrierte Automatisierung von Werkzeugmaschinen
Dr. Joachim Strobel, KUKA Roboter GmbH
KUKA.mxAutomationals Methode zur Roboter Integration
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 3
Automatisierungsumfeld 2013Aus der Krise werde der deutsche Werkzeugmaschinenbau gestärkt hervorgehen. Man habe hierzulande den Trend zu hoher Flexibilisierung und zu individuellen Automatisierungslösungen sehr frühzeitig aufgegriffen - und trage zur "atmenden Fabrik" bei, die Auslastungsschwankungen besser auffangen kann als starre Produktionslinien. (Carl Martin Welcker, VDW gemäß: „Springer for Professionals“ 2009)
1. „Klassische“ Automatisierungsargumente: • Verbesserung und Verstetigung der Qualität• Steigerung Produktion• Personaleinsparung• Entlastung von schwer zumutbaren Arbeitsvorgängenwerden ergänzt durch • „volatilitätstolerante“ atmende Produktion z.B. „dritte Schicht“• Alter(n)sgerechte Produktion
2. Highspeed Datenverbund der Fertigungskomponenten durch Realzeit-Ethernet Netzwerke (Profinet, Ethernet/IP, EtherCAT,….)erlauben
• Drastische Einsparungen funktionaler und sicherheitsgerichteterSignalverbindungen durch Wegfall von Hardware
• Umsetzung neuer Optimierungsstrategien durch Anwendung jetzt möglicher Koordinierungs-bzw. Synchronisierungsmethoden zwischen den Komponenten.
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 4
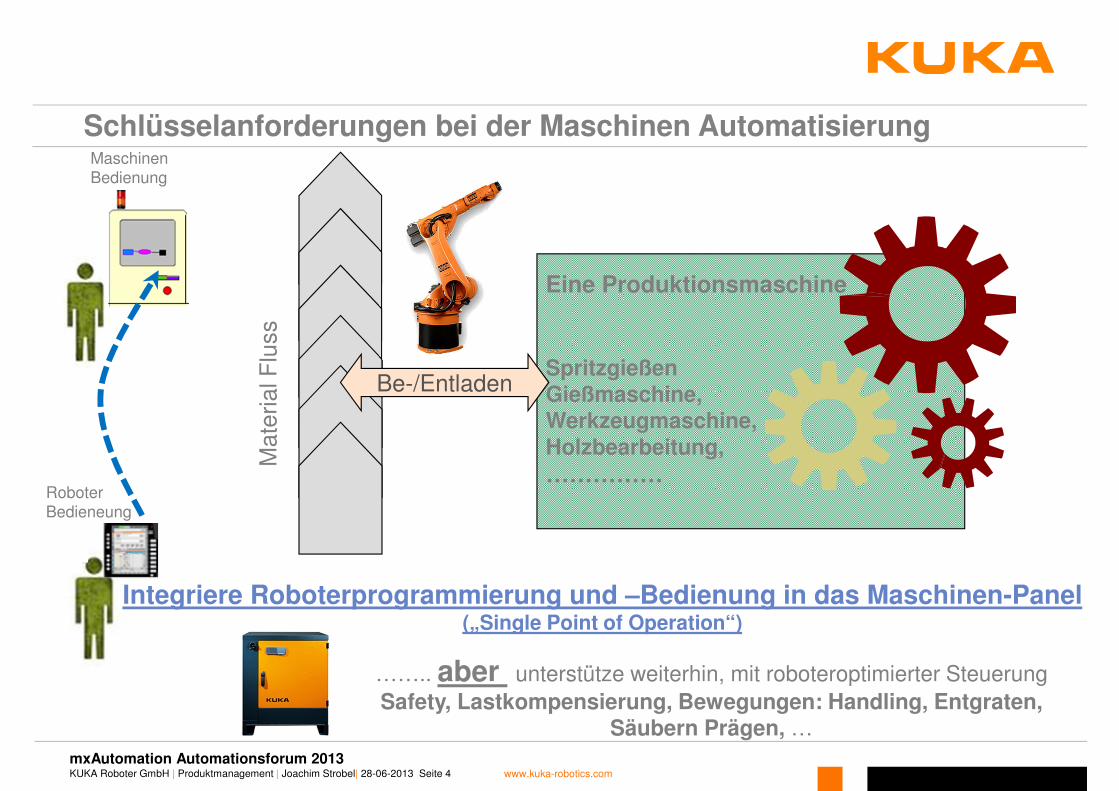
Eine Produktionsmaschine
SpritzgießenGießmaschine,Werkzeugmaschine,
Holzbearbeitung,
……………
Be- undEntladen
Mat
eria
l Flu
ss
MaschinenBedienung
Schlüsselanforderungen bei der Maschinen Automatisierung
Be-/Entladen
…….. aber unterstütze weiterhin, mit roboteroptimierter SteuerungSafety, Lastkompensierung, Bewegungen: Handling, Entgraten,
Säubern Prägen, …
RoboterBedieneung
Integriere Roboterprogrammierung und –Bedienung in das Maschinen-Panel(„Single Point of Operation“)
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 5
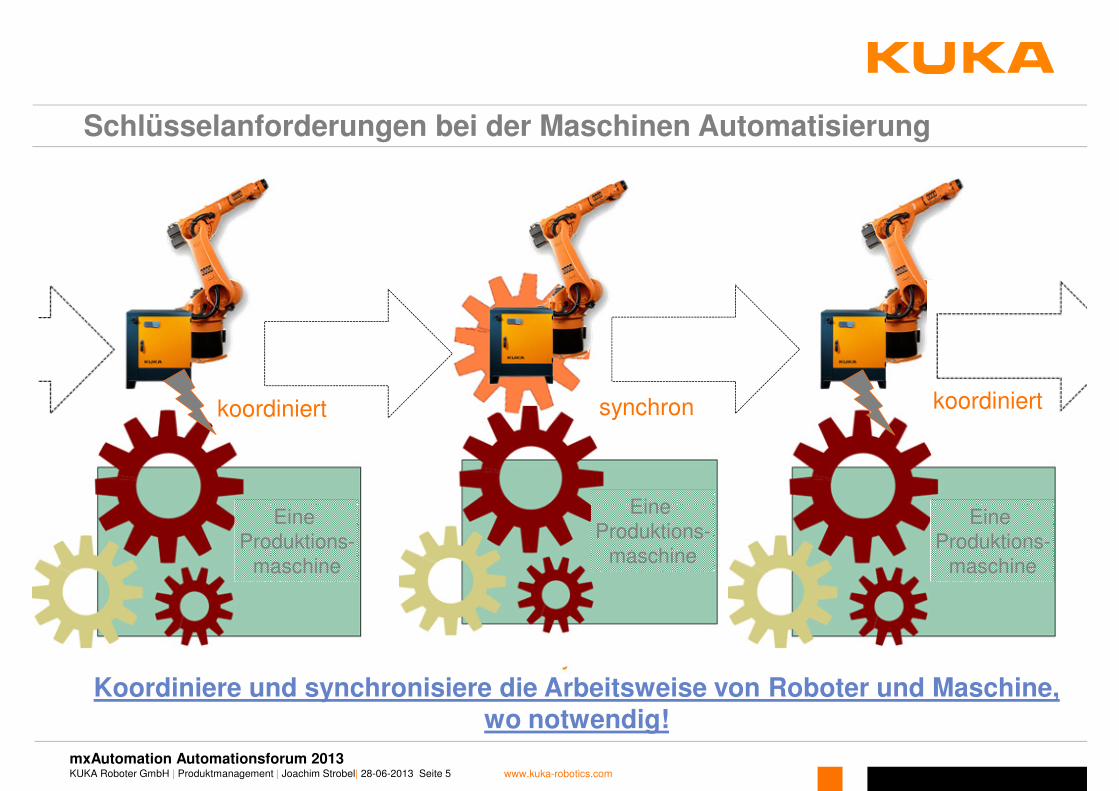
koordiniert synchron
Schlüsselanforderungen bei der Maschinen Automatisierung
Koordiniere und synchronisiere die Arbeitsweise von Roboter und Maschine,wo notwendig!
koordiniert
Eine Produktions-
maschine
Eine Produktions-
maschine
Eine Produktions-
maschine
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 6
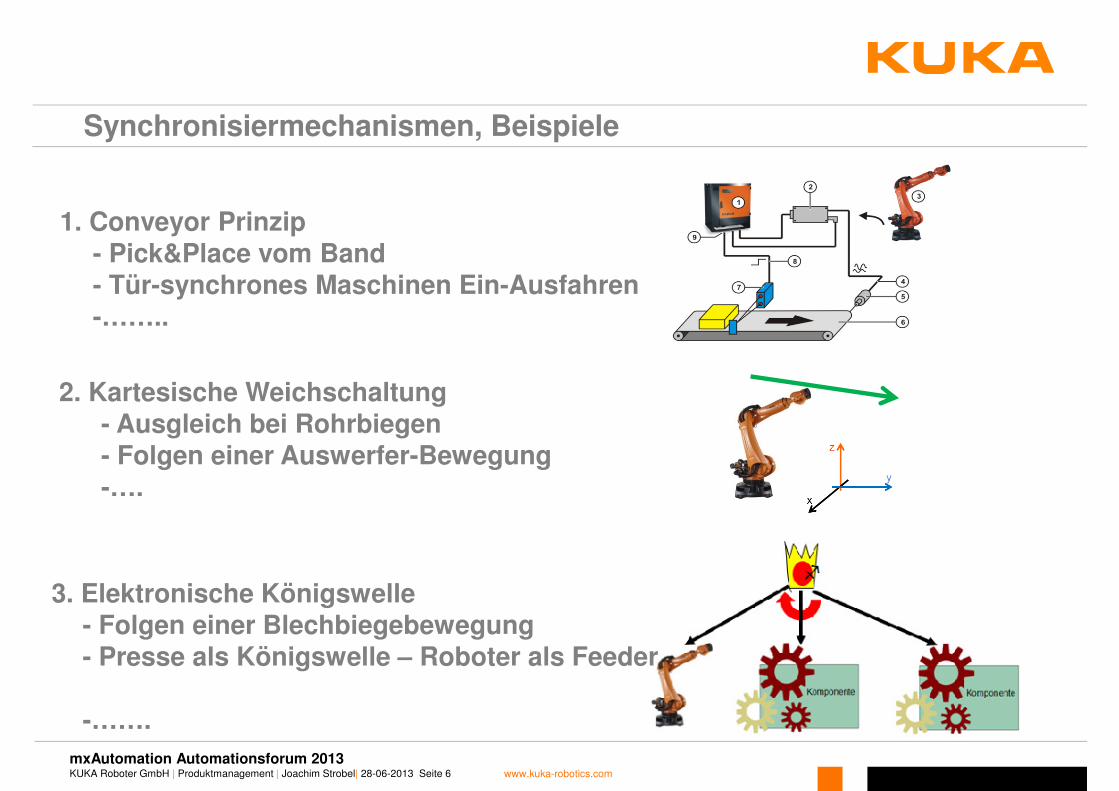
Synchronisiermechanismen, Beispiele
1. Conveyor Prinzip- Pick&Place vom Band- Tür-synchrones Maschinen Ein-Ausfahren
-……..
2. Kartesische Weichschaltung- Ausgleich bei Rohrbiegen- Folgen einer Auswerfer-Bewegung
-….
3. Elektronische Königswelle- Folgen einer Blechbiegebewegung- Presse als Königswelle – Roboter als Feeder
-…….
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 7
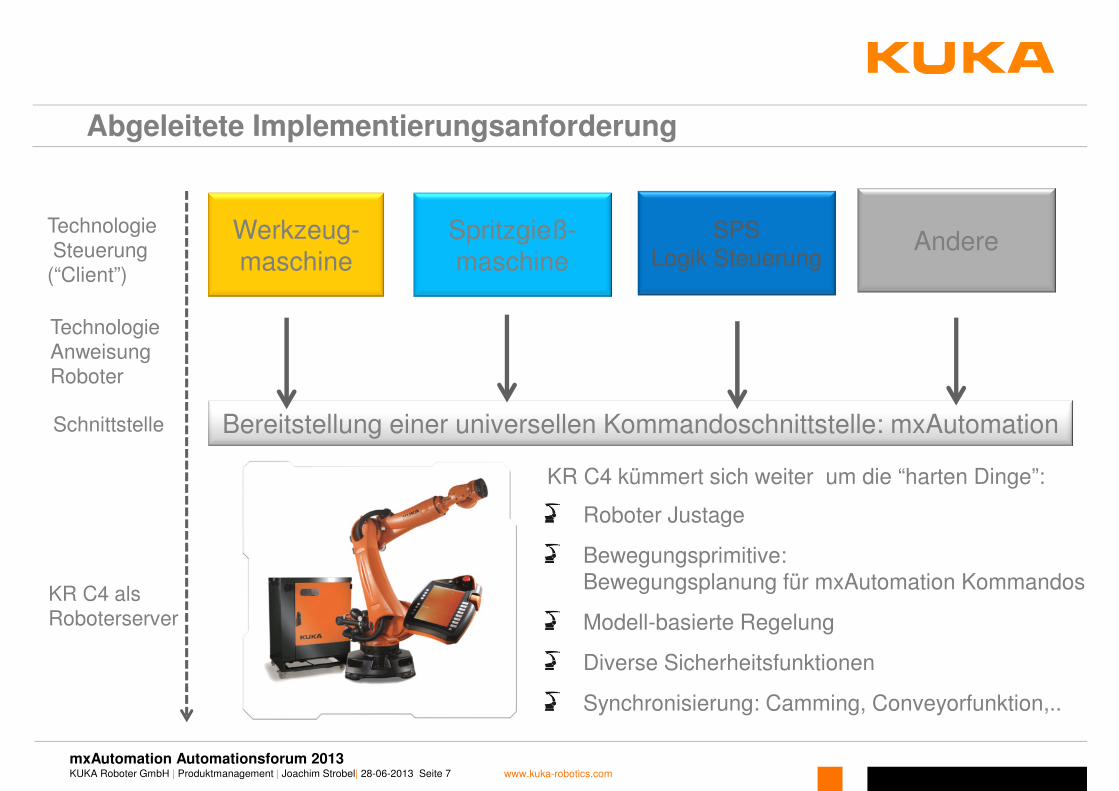
Werkzeug-maschine
Spritzgieß-maschine
SPSLogik Steuerung
Andere
Bereitstellung einer universellen Kommandoschnittstelle: mxAutomation
TechnologieAnweisungRoboter
KR C4 kümmert sich weiter um die “harten Dinge”:
Roboter Justage
Bewegungsprimitive: Bewegungsplanung für mxAutomation Kommandos
Modell-basierte Regelung
Diverse Sicherheitsfunktionen
Synchronisierung: Camming, Conveyorfunktion,..
Abgeleitete Implementierungsanforderung
TechnologieSteuerung
(“Client”)
Schnittstelle
KR C4 alsRoboterserver
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 8
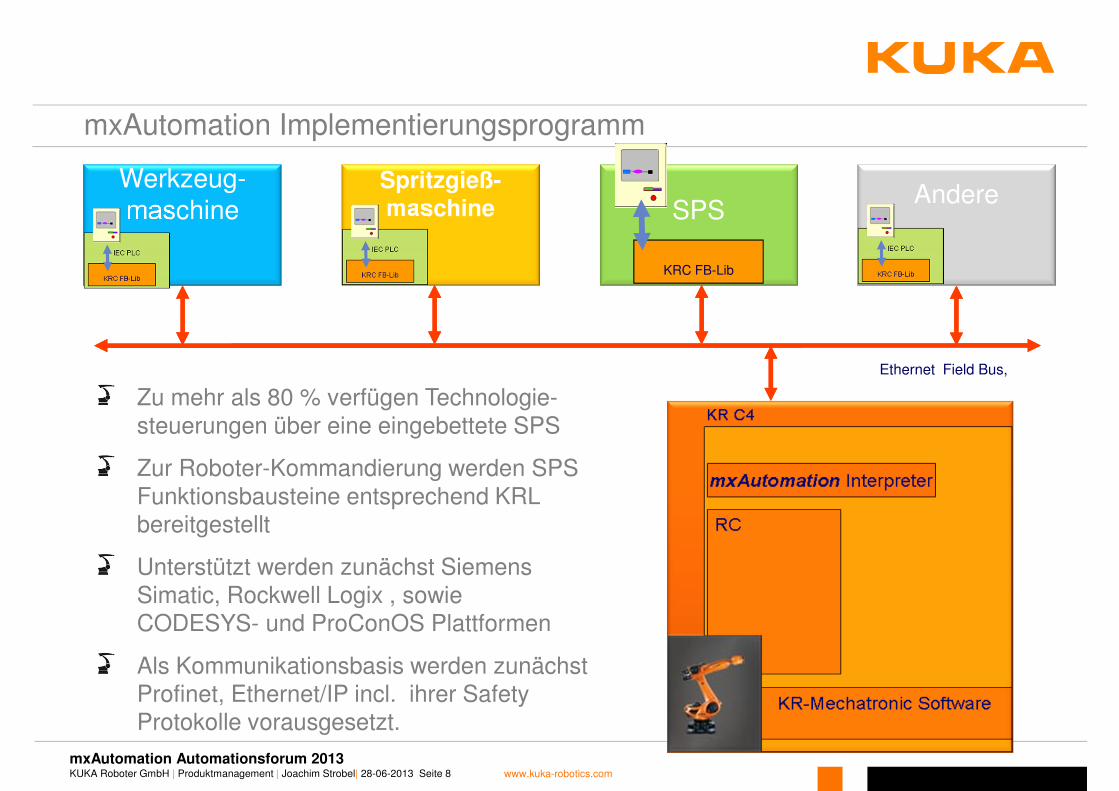
mxAutomation Implementierungsprogramm
Werkzeug-maschine
Spritzgieß-maschine SPS
Andere
KRC FB-Lib
Ethernet Field Bus,
Zu mehr als 80 % verfügen Technologie-steuerungen über eine eingebettete SPS
Zur Roboter-Kommandierung werden SPS Funktionsbausteine entsprechend KRL bereitgestellt
Unterstützt werden zunächst Siemens Simatic, Rockwell Logix , sowieCODESYS- und ProConOS Plattformen
Als Kommunikationsbasis werden zunächstProfinet, Ethernet/IP incl. ihrer Safety Protokolle vorausgesetzt.
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 9
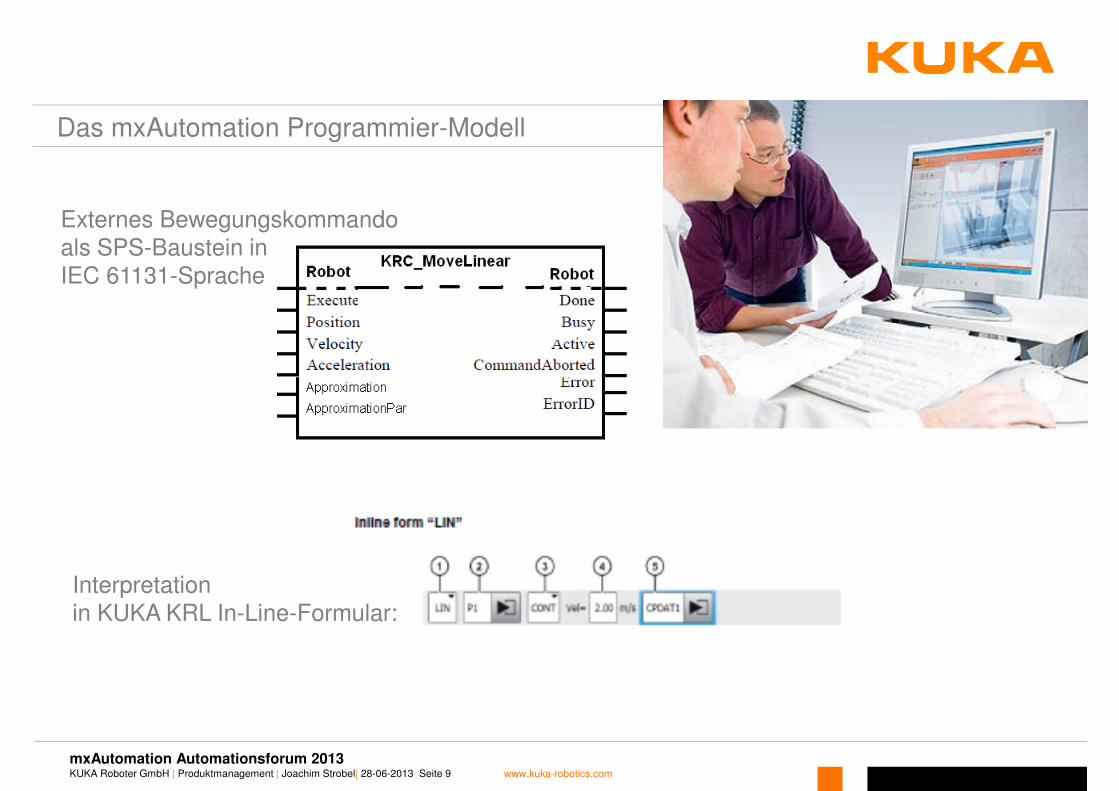
Interpretationin KUKA KRL In-Line-Formular:
Externes Bewegungskommandoals SPS-Baustein in IEC 61131-Sprache
Das mxAutomation Programmier-Modell
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 10
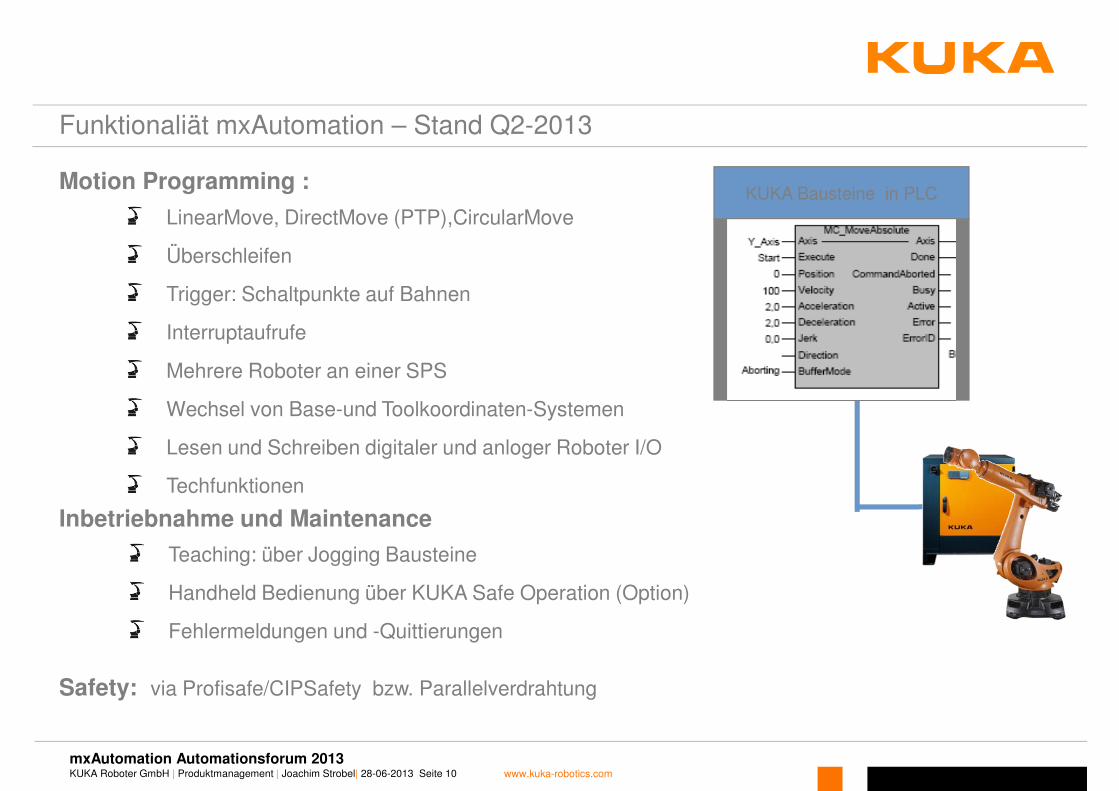
Funktionaliät mxAutomation – Stand Q2-2013
Motion Programming :
Inbetriebnahme und Maintenance
Safety: via Profisafe/CIPSafety bzw. Parallelverdrahtung
KUKA Bausteine in PLC
LinearMove, DirectMove (PTP),CircularMove
Überschleifen
Trigger: Schaltpunkte auf Bahnen
Interruptaufrufe
Mehrere Roboter an einer SPS
Wechsel von Base-und Toolkoordinaten-Systemen
Lesen und Schreiben digitaler und anloger Roboter I/O
Techfunktionen
Teaching: über Jogging Bausteine
Handheld Bedienung über KUKA Safe Operation (Option)
Fehlermeldungen und -Quittierungen
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 11
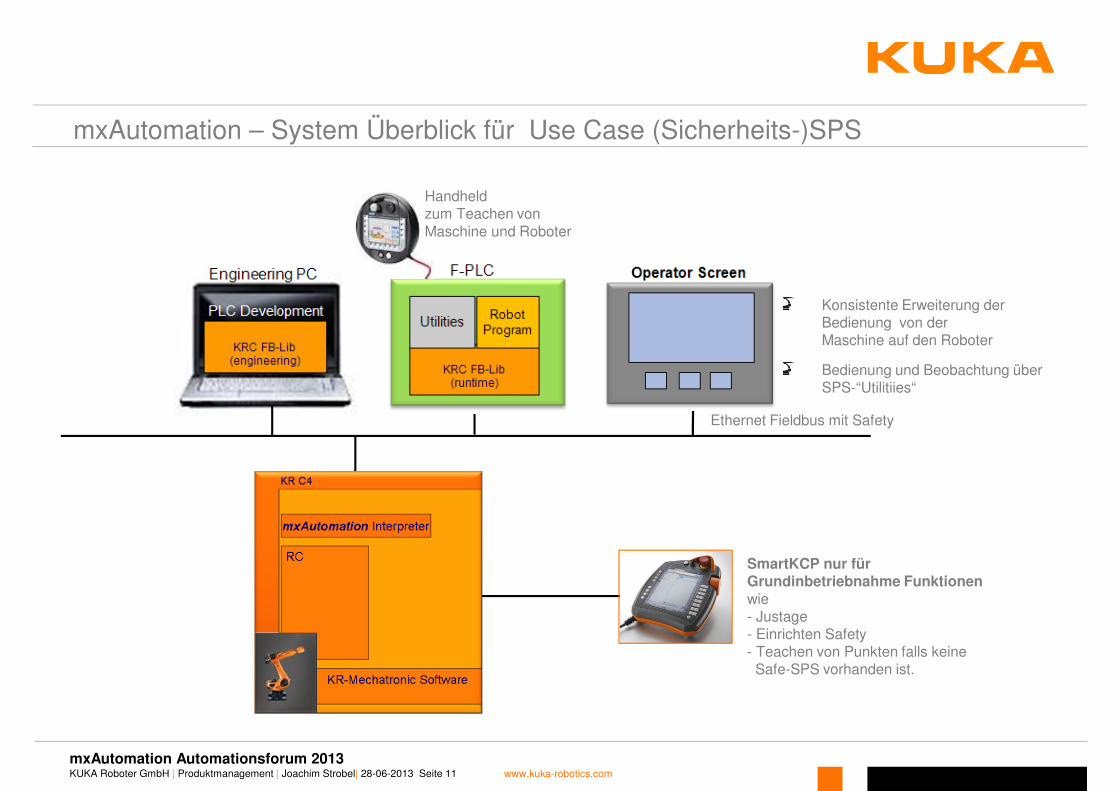
mxAutomation – System Überblick für Use Case (Sicherheits-)SPS
Ethernet Fieldbus mit Safety
SmartKCP nur fürGrundinbetriebnahme Funktionen
wie- Justage- Einrichten Safety- Teachen von Punkten falls keine Safe-SPS vorhanden ist.
Handheldzum Teachen vonMaschine und Roboter
Konsistente Erweiterung der Bedienung von derMaschine auf den Roboter
Bedienung und Beobachtung überSPS-“Utilitiies“

www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 12
Sinumerik 840d sl
EingebetteteS7 – SPS Eingebetteter
NC-Kern+Antrieb
Eingebettete SinumerikBedientafel
KRC FB-Lib(runtime)
Siemens HT8 für Maschinen- und Roboterbedienung
Antriebswerte zurWerkzeugmaschine
Option: Sinumerik Integrate
Run MyRobot
Benötigtes Produkt von Siemens:
• SINUMERIK Integrate Run MyRobot
• Ist eine SINUMERIK Option für 840 D sl.
• Ermöglicht Roboter Programmierungüber die Sinumerik Zyklen RMR_xxx.spf
mxAutomation – System Überblick Use Case Sinumerik/Handling
Nur für internen Gebrauch / © Siemens AG 2012. Alle Rechte vorbehalten.
Industry Sector
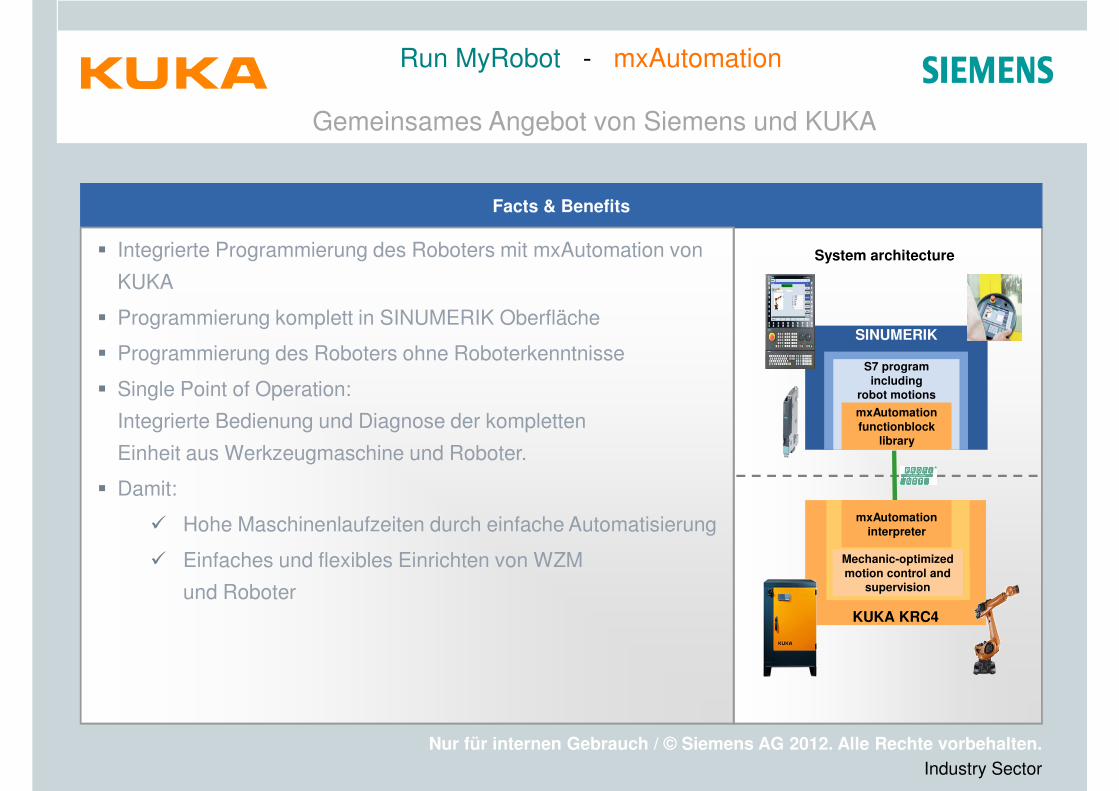
SINUMERIK
S7 program
including
robot motions
mxAutomation
functionblock
library
KUKA KRC4
mxAutomation
interpreter
Mechanic-optimized
motion control and
supervision
Facts & Benefits
� Integrierte Programmierung des Roboters mit mxAutomation von
KUKA
� Programmierung komplett in SINUMERIK Oberfläche
� Programmierung des Roboters ohne Roboterkenntnisse
� Single Point of Operation:
Integrierte Bedienung und Diagnose der kompletten
Einheit aus Werkzeugmaschine und Roboter.
� Damit:
� Hohe Maschinenlaufzeiten durch einfache Automatisierung
� Einfaches und flexibles Einrichten von WZM
und Roboter
System architecture
Run MyRobot - mxAutomation
Gemeinsames Angebot von Siemens und KUKA
www.kuka-robotics.commxAutomation Automationsforum 2013 KUKA Roboter GmbH | Produktmanagement | Joachim Strobel| 28-06-2013 Seite 14
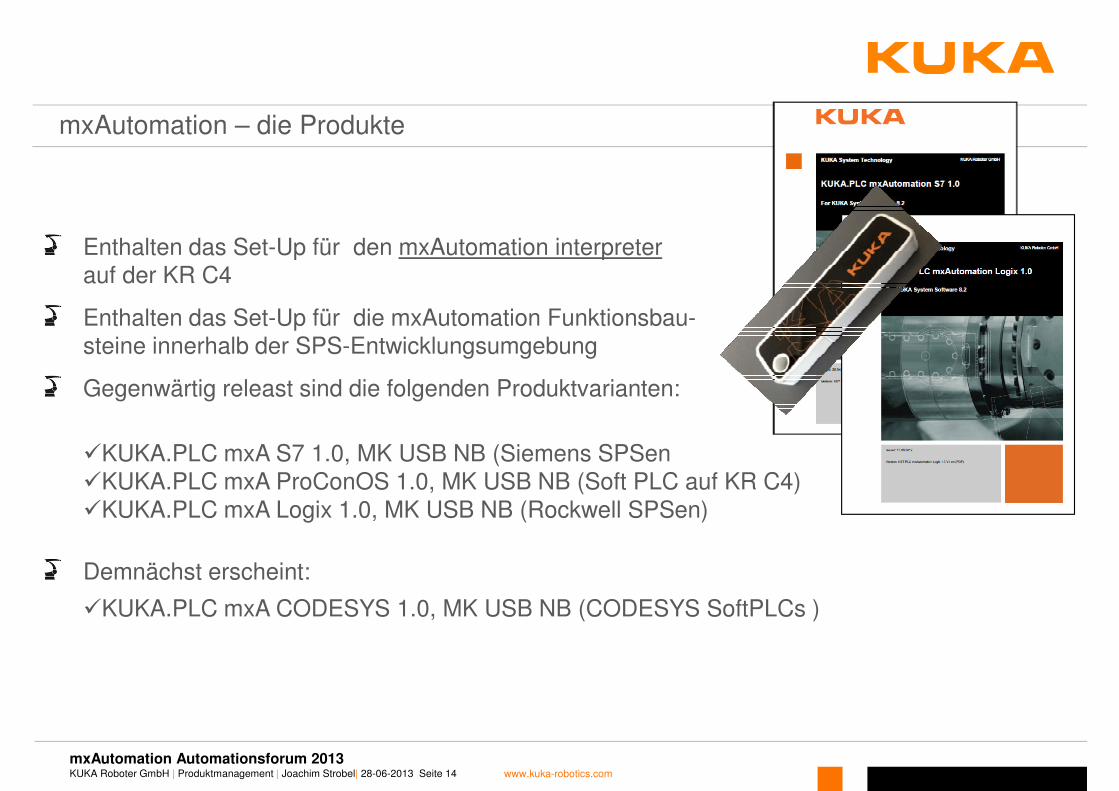
mxAutomation – die Produkte
Enthalten das Set-Up für den mxAutomation interpreterauf der KR C4
Enthalten das Set-Up für die mxAutomation Funktionsbau-steine innerhalb der SPS-Entwicklungsumgebung
Gegenwärtig releast sind die folgenden Produktvarianten:
�KUKA.PLC mxA S7 1.0, MK USB NB (Siemens SPSen�KUKA.PLC mxA ProConOS 1.0, MK USB NB (Soft PLC auf KR C4)�KUKA.PLC mxA Logix 1.0, MK USB NB (Rockwell SPSen)
Demnächst erscheint:
�KUKA.PLC mxA CODESYS 1.0, MK USB NB (CODESYS SoftPLCs )
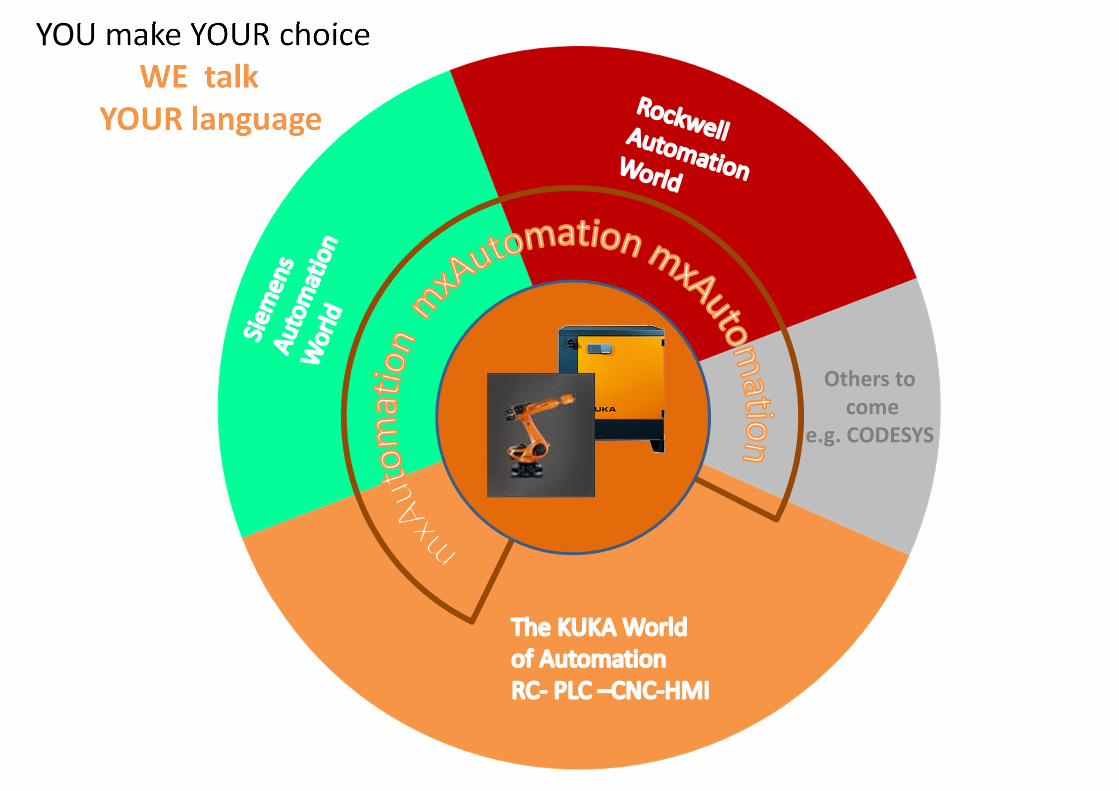
YOU make YOUR choice
WE talk
YOUR language
Others to
come
e.g. CODESYS