RAUMFAHRT- OBOTIK: SIMULATION UND ANWENDUNG · Objektlage z.B. Kamera-position Modelle Haptisches...
47
Bernd Schäfer 12 Jun 2007 RAUMFAHRT-ROBOTIK: SIMULATION UND ANWENDUNG Bernd Schäfer Deutsches Zentrum für Luft- und Raumfahrt, DLR Oberpfaffenhofen Institut für Robotik und Mechatronik (RM) D-82234 Wessling Workshop ‘Virtuelle Produktentwicklung für Raumfahrtsysteme‘ 12. Juni 2007, DLR Köln-Porz
Transcript of RAUMFAHRT- OBOTIK: SIMULATION UND ANWENDUNG · Objektlage z.B. Kamera-position Modelle Haptisches...

Bernd Schäfer12 Jun 2007
RAUMFAHRT-ROBOTIK: SIMULATION UND ANWENDUNG
Bernd SchäferDeutsches Zentrum für Luft- und Raumfahrt, DLR Oberpfaffenhofen
Institut für Robotik und Mechatronik (RM)D-82234 Wessling
Workshop ‘Virtuelle Produktentwicklung für Raumfahrtsysteme‘12. Juni 2007, DLR Köln-Porz

2 - Bernd Schäfer12 Jun 2007
• Bewegungssimulation Freiflieger mit Robotik• Bahnplanung für Einsatz eines Manipulators• Satelliten-Einfangen (TECSAS, DEOS)• Telepräsenz: semi-autonome Betriebsmoden• Rapid Prototyping für RF-Robotik Einsatz• Planetare Rover: Mobilität, Stabilität, raues Gelände• Grundlegende Untersuchungen zu RF-Robotik• Szenarien-Entwicklung: insb. für mobile Exploration
Themen für RF-Robotik

3 - Bernd Schäfer12 Jun 2007
Telepräsenz (augmented) : Haptisches & visuelles Feedback in der VR
M o v i e

4 - Bernd Schäfer12 Jun 2007
On-Orbit Servicing: Capturing Strategien
M o v i e

5 - Bernd Schäfer12 Jun 2007
Dynamik: Interaktion Satellit - Manipulator
M o v i e

6 - Bernd Schäfer12 Jun 2007
Planetare Rover: Mobilität & Stabilität
M o v i e

7 - Bernd Schäfer12 Jun 2007
M o v i e

8 - Bernd Schäfer12 Jun 2007
DLR 4-Finger Hand: A Multibody System 14 DOF
M o v i e

9 - Bernd Schäfer12 Jun 2007
WERKZEUGE für
1. Modellbildung & Simulation • Entwurf: geometrisch / kinematisch • Dynamisches Verhalten (Robot, Mobilität)
2. Optimierung: • Geometrie (Kompaktheit), • Kinematik (Manipulator, Rover), • Dynamik (Energie, µ-g, …)
3. Datenbasis: aus CAD, Interface-S/W4. Visualisierung & Animation

10 - Bernd Schäfer12 Jun 2007
Eingesetzte WERKZEUGE
1. Kommerziell • Simpack • Matlab / Simulink • Modelica / Dymola • ProEngineer, CATIA
2. Eigenentwicklung • Assembly Panel (Matlab basierend) • Telepräsenz-Aufgaben • Interfaces zu
- Eingabegeräte: 3D/6D Mouse, haptisch, … - Matlab, Simpack, Modelica, …

12 Jun 2007
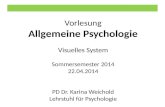
GraphischesRendering
HaptischesRendering
GraphischesAusgabegerät
HaptischesInterface
Mensch
1kHz
Bildinformation (Virtual Design 2)
Lage des Endeffektors
Kräfte
30Hz
Obj
ektla
ge z.B. Kamera-position
Modelle
Haptisches und visuelles Feedback in der VR für Montageuntersuchung und Training

12 - Bernd Schäfer12 Jun 2007
Haptische Interfaces
Mechanische Ansätze• Leichtbau
- geringer Trägheit- erhöhter Sicherheit- Performanzgewinn
• geringe Reibung und Elastizität• Entkopplung der Achsen
Regelungstechnische Ansätze• Reduktion der Rest-Trägheit:
- Kraftregelung- interne Sensorik- hochdynamischen Antgrieben
• Schwerkraftkompensation• Inverse Modelle (computed torque)

13 - Bernd Schäfer12 Jun 2007
Haptisches Rendering
Voxmap-PointShell™ (VPS) AlgorithmusZur schnellen Kollisionserkennung
Eigenschaften:• Konstante Berechnungszeit zur Kollisionserkennung während der Simulation• Berechnungszeit ist unabhängig von der Komplexität der Szene• Abtastraten von 1kHz für Kollisionserkennung und Kraftberechnug realisiert

14 - Bernd Schäfer12 Jun 2007
OOS On-Orbit Servicing :Satellite Capturing
• Dynamik & Regelung (Mehrkörperdynamik, …) • Bahnplanung (t min, E min, …)• Kollisionsvermeidung• Risiko Detektion Design Stopper• Data Basis: I/F durch Intl. Kooperation (Japan, …)

15 - Bernd Schäfer12 Jun 2007
TECSAS / DEOS: Satellite Capture
Rendezvous & Docking, Capturing,
Dynamics Interaction between two satellites
and manipulator in between
Technology Satellite for Demonstration and Verification of
Space Systems

16 - Bernd Schäfer12 Jun 2007
Semi-Autonomous Grasping of Non-Cooperative Target

17 - Bernd Schäfer12 Jun 2007
Software Description

18 - Bernd Schäfer12 Jun 2007
Simulationsumgebung - Control Panel (s. nachfolgende Folie):Die 'control panel features' sind folgende:
1. The spacemouse can be used to control the chaser satellite base, thetarget satellite, the robot end-effector or a pointing hand, used to definethe end position of the end-effector for the point-to-point motionplanner;
2. The path planner can plan point-to-point and target-grasp motions;3. The target rotational motion is computer on-line and can be regulated
on the panel4. Two cameras can be selected by the used for viewing: a world view
and a view from a camera on the end-effector)

19 - Bernd Schäfer12 Jun 2007

20 - Bernd Schäfer12 Jun 2007
Satellite Capturing: OLEV - ConeXpress

21 - Bernd Schäfer12 Jun 2007
Matlab based with Contact Dynamics modules (own & Simpack)
M o v i e

22 - Bernd Schäfer12 Jun 2007
Grundlegende Untersuchungenzu RF-Robotik
• Manipulatorauslegung, Rapid Prototyping • Risiko Detektion Design Stopper• Geometrie & Kinematik (missionspezifisch)• Dynamik, Interaktion mit Satelliten & Rover• Inverse Kinematik, Inverse Dynamik• Redundanz: Erhöhung der Geschicklichkeit
und Ausfallsicherheit

23 - Bernd Schäfer12 Jun 2007
Manipulator Assembly Panel (Matlab/Simulink)Rapid Prototyping

24 - Bernd Schäfer12 Jun 2007
basic joint roll-pitch (or yaw) joint
yaw-pitch joint wrist joint
roll
roll
pitch pitch
roll
roll
symmetrical link asymmetrical linkroll axes dointersect
roll axes doNot intersect
Bibliothek (CAD-based design)

25 - Bernd Schäfer12 Jun 2007
Symmetrical robot design components
Asymmetrical robot design components

26 - Bernd Schäfer12 Jun 2007
Dat
abas
eM
odel
ing
Sim
ulat
ion
Modelica Classes CAD Files MechanicalInformations
Assembly Panel
VRML World
InverseKinematics
ModelicaRobot Model
C-Code /model.exe
ModelSimulation
SimpackRobot Model
SimpackRobot Graphics
Robot Online Control (Space Mouse) Inverse KinematicsMonitoringAnimation (Virtual Reality Toolbox)
Robot Online Control (Space Mouse) Inverse KinematicsModel Simulation Animation
DYM
OLA
/ D
YMO
SIM
MA
TLA
B
SIM
PAC
K
TrajectoriesController StructuresInverse KinematicsRobot Design Optimization
DDE
Database, Modeling and Simulation Environment

27 - Bernd Schäfer12 Jun 2007
M o v i e
Manipulator Deploymentfrom Stowed Configuration

28 - Bernd Schäfer12 Jun 2007
Visualisation of Joint (Motor) Torques
M o v i e

29 - Bernd Schäfer12 Jun 2007
( ) ( )L T
LagrangeMinimum NebenMultiplier bedingung
f− −
= + ⋅q λ h q
iq
1q
A
BB* Redundant Robot Redundant Robot respresp. .
KinematicsKinematics
1
6 1 7 16 7
†
(7 6)
: ( )( ) ( )
( )
JacobiMatrix
PseudoInverse
IK −
× × −×
−×
=∂
= ⋅ = ⋅∂
→ = ⋅
q f xf qx q J q q
q
q J q x
: ( )FK =x f q

30 - Bernd Schäfer12 Jun 2007
Constraints:• A B
AdesB
• Angular momentumconstant (non-holonomic)
• Linear Momentumconstant
Ang.Mom. = 0Lin.Mom. = 0
MMP
Free-flyer

31 - Bernd Schäfer12 Jun 2007
• Velocities• Accelerations• Reference Configuration
Optimization Criteria:
• Forces• Motor Torques
,i refqiqiqiF
iT
, base baseF T
• Satellite Basis:Forces & Torques
micro gravity
Inverse Kinetics !

32 - Bernd Schäfer12 Jun 2007
M o v i e
Example of a Redundant Mobile System, Modeling and Simulating the Kinematics and Dynamics:3-Legged Mobile System, resembling ESA‘s EUROBOT for ISS

33 - Bernd Schäfer12 Jun 2007
EUR
OB
OT
M o v i e

34 - Bernd Schäfer12 Jun 2007
BEE
TLE
–Pl
anet
ary
Wal
king
Rob
ot M o v i e

35 - Bernd Schäfer12 Jun 2007
Planetare Exploration:Mobilität und Geschicklichkeit
• Einsatzszenarien entwickeln (Experimente)• Mobilität und Stabilität:
Missionserfolg, Sicherheit• Interaktion Rad – Boden:
raues Gelände, Terramechanik• Geometrie und Kinematik• Risiko Detektion Design Stopper

36 - Bernd Schäfer12 Jun 2007
Aurora-Programm der ESA:ExoMars > 2013
Lokomotion: gehen, hüpfen, fliegen, …, fahren (Räder, Ketten)
Biologisch inspiriert: Krabbler
ExoMarsSoleroNanokhod
MER
Beetle

37 - Bernd Schäfer12 Jun 2007
Manipulation und Geschicklichkeit
4-Finger Hand:DLR-HIT / Fa. Schunk
anthropomorphes, universelles
Greifwerkzeug

38 - Bernd Schäfer12 Jun 2007
Integration zu einem hochflexiblen Gesamtsystem
JUSTIN: 2-Arm Torso Robonaut
LBR-3:13 kg Gewicht15 kg Payload150 Watt 1.20 m lang
Rovonaut
Multisensorieller Kopf: Stereokamera, Laserscanner, Lichtschnittprojektor (Laser)

39 - Bernd Schäfer12 Jun 2007
DLR
2-A
rmTo
rso
= Ju
stin
M o v i e

40 - Bernd Schäfer12 Jun 2007
Mov
ie: R
ovon
aut
M o v i e

41 - Bernd Schäfer12 Jun 2007
M o v i e
Planetary Rover - ExoMars: Modeling and Simulating Contact Dynamics during Motion

42 - Bernd Schäfer12 Jun 2007
Planetary Rover,ExoMars: Modeling and SimulatingContactDynamicsbased uponCAD grid models

43 - Bernd Schäfer12 Jun 2007

44 - Bernd Schäfer12 Jun 2007
Zusammenhang Modelica ↔ Dymola
Dymola(Kommerzielles Programm von Dynasim):Graphischer Editor für Modelica Modelle
Dymola: Übersetzung von Modelicanach C (Symbolische Transformationen), + simulieren + plotten, Animation
Modelica(freie Spezifikation):Textuelles Format umModell + Graphik + Animation von Komponenten zu definieren

45 - Bernd Schäfer12 Jun 2007
Modelica is a free modeling language for physical system models consisting of components from different engineering domains (www.Modelica.org/library.html). A powerful commercial tool (Dymola) is available for model editing and simulations. Modelica is eligible for object oriented modeling of physical systems consisting of components from different engineering domains. Many free and commercial Modelica libraries are available (multi body, flexible bodies, optimization, control design, amongst many others). Incorporation in Simulink and download to a hardware platform for real time execution is easily to be accomplished (with Dymolas Simulinkexport). The latter is meaningful since the tool chain for real time implementation of the model based controller is ready.
Moreover, the use of Modelica is pushed by the 2006 decision of DassaultSystèmes (DS) to select the open standard, Modelica, to be at the core of DS’open strategy. DS, a world leader in 3D and Product Lifecycle Management (PLM) solutions, presented its CATIA Systems strategy, putting embedded systems modeling at the heart of CATIA. CATIA Systems is based on behavior-driven simulation using Modelica and Dymola.
MOPS (Multi-Objective Parameter Synthesis) for both, robust controller designs and for parameter optimization, developed at DLR. Realistic (control law) design is a multidisciplinary task involving the simultaneous minimisation of many design criteria in the presence of various constraints. Typically, the different criteria and constraints are evaluated using computational models developed for different engineering disciplines or resulting from different modelling formalisms. MOPS explicitly supports the usage of different multidisciplinary models (or multi-models) to evaluate the design criteria.
Structure of SIMPACK – MOPS and overview of process and file interfaces

46 - Bernd Schäfer12 Jun 2007
Simpack – Modelica / Dymola interface

47 - Bernd Schäfer12 Jun 2007
Simpack – in the concurrent engineering process