OVKW 2014 FT - 1 © Schweizerischer Samariterbund Sportverletzungen Handgelenk-Tapeverband.

ROBO-WRIST
Ottobock: Exclusive International Distributor
ROBO-WRIST Gebrauchsanweisung ……………………………………………………………………......... 4 Instructions for use ………………………………………………………………………….... 18 Instructions d‘utilisation ………………………………………........................................... 31 Istruzioni per l’uso …………………………………………………………………………..... 39 Instrucciones de uso ……………………......................................................................... 47 Manual de utilização ………………………………………………………………………….. 55 Gebruiksaanwijzing …………………………………………………………………………... 63 Bruksanvisning ……………………………………………………………………………….. 71 Brugsanvisning ………………………………………………………………………………... 78 Bruksanvisning ……………………………………………………………………………….. 85 Käyttöohje ……………………………………………………………………………………... 92 Руководство по применению ……………………………………….................................. 99
A
B
2

D
C
3

Legende Deutsch
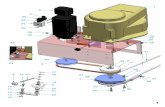
Abbildung 1 ROBO-WRIST Funktion
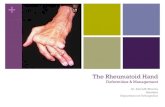
Abbildung 2 ROBO-WRIST Standardbauteile
Abbildung 3 ROBO-WRIST Zweiteiliger Titan-Adapter
Abbildung 4 ROBO-WRIST Laminierbeispiele Kugelgelenkeinsatz (hinein/heraus) Kugelgelenkknopf (drücken) Spannring (drehen) Betätigungsknopf (drücken/drehen) Innensechskantschrauben M2 x 3 mm Spannring Kugelgelenkeinsatz Kugelgelenk Kugelgelenkknopf Steg Kreuzschlitzschraube M2 x 3 mm Gleitringe Laminierbund Betätigungsknopf Feststellring Sperreinsatz
Stand: 26.03.2016 • Lesen Sie dieses Dokument vor Gebrauch des Produkts
aufmerksam durch. • Beachten Sie die Sicherheitshinweise, um Verletzungen und
Produktschäden zu vermeiden. • Weisen Sie den Benutzer in den sachgemäßen und gefahrlosen
Gebrauch des Produkts ein. • Bewahren Sie dieses Dokument auf.
B A
D C
INFORMATION
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
4
Bedeutung der Symbolik Warnungen vor möglichen schweren Unfall- und
Verletzungsgefahren. Warnungen vor möglichen Unfall- und Verletzungsgefahren.
Warnungen vor möglichen technischen Schäden.
Weitere Informationen zur Versorgung / Anwendung.
Bitte lesen Sie diese Gebrauchsanweisung aufmerksam durch. Beachten Sie insbesondere die angeführten Sicherheitshinweise!
1. Einzelteile 1.1 Einzelteile Verfügbare Einzelteile siehe Katalog.
1.2 Zubehör ROBO-WRIST
1011 - Mit Greifgerät verschraubter Kugelgelenkeinsatz 1012 - Der in Abbildung 3 dargestellte zweiteilige Titan-
Zubehöradapter dient zum Schutz des ROBO-WRIST Verbindungssystems vor übermäßigen Belastungen und Erschütterungen. Er muss beispielsweise beim Hämmern, bei schweren Hebearbeiten oder beim Ausüben von Extremsportarten wie etwa Gewichtheben, Wrestling oder Klettern verwendet werden. Diese Zubehörteile gehören nicht zum Lieferumfang und müssen gesondert bestellt werden.
2. Beschreibung 2.1 Verwendungszweck Das ROBO-WRIST 1001 Handgelenk ist ausschließlich für die exoprothetische Versorgung der oberen Extremität in Verbindung mit Otto Bock Armpassteilen zu verwenden.
INFORMATION
WARNUNG
VORSICHT
HINWEIS
INFORMATION
5
2.2 Einsatzgebiet Das ROBO-WRIST 1001 Handgelenk kann mit einem Otto Bock Kraftzughook, einem Arbeitshook oder mit einer Otto Bock Systemhand eingesetzt werden. Das ROBO-WRIST 1001 Handgelenk ist mit Standardversorgungen kompatibel.
2.3 Sicherheitshinweise Bitte geben Sie die nachfolgenden Sicherheitshinweise an Ihre Patienten weiter:
Unfallgefahr beim Führen eines Fahrzeugs. Ob und wie weit der Träger einer Prothese zum Führen eines Fahrzeugs in der Lage ist, kann pauschal nicht beantwortet werden. Dies hängt von der Art der Versorgung (Amputationshöhe, einseitig oder beidseitig, Stumpfverhältnisse, Bauart der Prothese) und den individuellen Fähigkeiten des Prothesenträgers ab. Es sind unbedingt die nationalen gesetzlichen Vorschriften zum Führen eines Kraftfahrzeugs zu beachten. Zudem sollte er aus versicherungsrechtlichen Gründen seine Fahrtüchtigkeit von einer autorisierten Stelle überprüfen und bestätigen lassen. Generell empfiehlt Otto Bock, das Fahrzeug von einem Fachbetrieb auf die jeweiligen Bedürfnisse umrüsten zu lassen (z. B. Lenkgabel, Automatikschaltung). Es sollte sichergestellt sein, dass ein risikoloses Fahren auch ohne funktionsfähige Prothese möglich ist.
Verletzungsgefahr durch falsche Bedienung. Wird der Betätigungsknopf (Abbildung 1) unbeabsichtigt betätigt, kann es zu einer Positionsänderung des Greifgeräts kommen.
HINWEIS
WARNUNG
6

Verletzungsgefahr durch Überbeanspruchung. Die überaus hohe Festigkeit des 3D-Verriegelungsmechanismus des ROBO-WRIST Handgelenks wurde hinreichend dokumentiert und darauf getestet, bei ordnungsgemäßer Verwendung den meisten vom Patienten ausgeübten Tätigkeiten standzuhalten. Um dennoch Schäden an der Aktuatoreinheit oder am Zitzen Teilstück bei der Ausübung von Extremsportarten zu vermeiden, muss der zweiteilige Titan-Adapter wie in Abschnitt 1.2 Zubehör beschrieben verwendet werden. Falls sich der Träger des ROBO-WRIST Handgelenks bei der Ausübung der genannten Sportarten nicht an die vorgeschriebene Verwendung des zweiteiligen Titan-Adapters hält, kann das Greifgerät geringfügig aus der festgelegten Winkelstellung verrutschen, unter Umständen sogar bis zum Anschlag am Spannring. In diesem Fall sollten die Verbindungsflächen, das Aktuator Gehäuse, die Aktuatorstifte und das Zitzen ähnliche Ball Teil unverzüglich auf Schäden geprüft werden. Sollte eines der beiden ineinandergreifenden Teile auf Grund der Fahrlässigkeit des Patienten beschädigt sein, sind die Kosten für den Ersatz des Aktuators bzw. der Stifte oder Zitzen Teilstück vom Patienten zu tragen und fallen nicht unter die umfassende 2-jährige ROBO-WRIST Garantie.
Korrosionsgefahr. Prothesenpassteile dürfen nicht Umgebungen ausgesetzt werden, die Korrosion an den Metallteilen auslösen, wie z. B. Süßwasser, Salzwasser und Säuren. Bei Einsatz eines Medizinproduktes unter diesen Umgebungsbedingungen erlöschen alle Ersatzansprüche gegen Otto Bock HealthCare.
Beschädigungen durch falsche Umgebungsbedingungen. Prothesenpassteile dürfen nicht intensivem Rauch, Staub, Vibrationen, Stößen oder großer Hitze ausgesetzt werden. Es dürfen weder feste
HINWEIS
HINWEIS
VORSICHT
7
Teilchen noch Flüssigkeiten in die Prothesenpassteile eindringen. Nichtbeachtung kann zu Fehlfunktionen und Beschädigungen der Prothese führen.
Beschädigung durch unzulässige Reinigungsmittel. Vermeiden Sie die Verwendung aggressiver Reinigungsmittel. Diese können zu Beschädigungen von Lagern, Dichtungen und Kunststoffteilen führen.
2.4 Funktion Das ROBO-WRIST Handgelenk ist nur in einer Ausführung sowie in einer Einheitsgröße erhältlich. Das ROBO-WRIST Handgelenk und einen Kugelgelenkeinsatz aus der Verpackung nehmen. Die Funktion ist in Abbildung 1 dargestellt. Den Kugelgelenkknopf drücken und den Kugelgelenkeinsatz in das Kugelgelenk stecken. Leicht drehen und kräftig bis zum Verrasten des Einsatzes im Kugelgelenk nach unten drücken. Durch vollständiges Hineindrücken des Betätigungsknopfes wird das ROBO-WRIST Handgelenk entriegelt. Den Kugelgelenkeinsatz festhalten und das Kugelgelenk in alle Richtungen bewegen. Den Spannring im und gegen den Uhrzeigersinn drehen. Auf das hör- und fühlbare Klicken achten. Auf die variable Kugelgelenkspannung achten. Das Kugelgelenk ermöglicht eine Extension/Flexion des Greifgerätes von max. 43 Grad bei gleichzeitiger Rotation von 360 Grad. Durch halbes Drücken des Betätigungsknopfes wird das Kugelgelenk mittels 3D-Verriegelung in verschiedensten Positionen gesperrt. Mit ein wenig Übung kann der Betätigungsknopf auch als Schlagschalter zur Ver- und Entriegelung des ROBO-WRIST Handgelenks eingesetzt werden, indem dieser gegen einen Körperteil wie Handfläche, Arm, Knie, Oberschenkel oder eine andere feste Fläche gestoßen wird. Durch eine 45-Grad-Drehung des Betätigungsknopfes im Uhrzeigersinn wird die unbeabsichtigte Verriegelung des ROBO-WRIST Handgelenks bei sportlicher Betätigung verhindert. Durch Drücken des Kugelgelenkknopfes und Herausziehen des
HINWEIS
8
Kugelgelenkeinsatzes kann das Greifgerät rasch gewechselt werden. Der in Abbildung 3 dargestellte zweiteilige Titan-Adapter kann in einer Tasche mitgenommen und bei Bedarf jederzeit verwendet werden. Der Sperreinsatz ist mit allen anderen ROBO-WRIST Einsätzen kompatibel, sollte aber im Idealfall nur in Verbindung mit dem Feststellring verwendet werden. Nach dem Aufstecken kann der Feststellring sekundenschnell auf den Einsatz gedreht werden. Bei festem Sitz auf dem Spannring wird das Kugelgelenk gerade gehalten und hält nunmehr schweren Schlägen oder Erschütterungen stand.
3. Technische Daten
Artikelnummer ROBO-WRIST 1001 Gewicht [g] 165 Gesamthöhe [mm] 41
4. Handhabung 4.1 Montage Die Gewinde des Kugelgelenkeinsatzes und des Greifgeräts mit Aceton reinigen und ablüften lassen. Anschließend das Gewinde des Greifgeräts mit Loctite® 601 636K14 benetzen. Den Kugelgelenkeinsatz nun bis zum Anschlag auf das Gewinde des Greifgeräts aufdrehen.
Beschädigung durch falsche Handhabung des Klebstoffs. Um eine sichere Verklebung zu gewährleisten, sind die entsprechenden Flächen vor dem Bestreichen mit Klebstoff mit Aceton zu entfetten. Die entfetteten Stellen dürfen nicht mehr berührt und müssen nach dem Abtrocknen des Acetons sofort mit Klebstoff bestrichen werden.
Beachten Sie die Sicherheits- und Verarbeitungshinweise des Klebstoffherstellers.
INFORMATION
HINWEIS
9
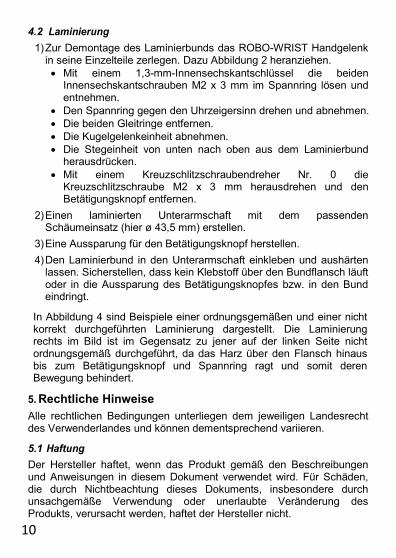
4.2 Laminierung 1) Zur Demontage des Laminierbunds das ROBO-WRIST Handgelenk
in seine Einzelteile zerlegen. Dazu Abbildung 2 heranziehen. • Mit einem 1,3-mm-Innensechskantschlüssel die beiden
Innensechskantschrauben M2 x 3 mm im Spannring lösen und entnehmen.
• Den Spannring gegen den Uhrzeigersinn drehen und abnehmen. • Die beiden Gleitringe entfernen. • Die Kugelgelenkeinheit abnehmen. • Die Stegeinheit von unten nach oben aus dem Laminierbund
herausdrücken. • Mit einem Kreuzschlitzschraubendreher Nr. 0 die
Kreuzschlitzschraube M2 x 3 mm herausdrehen und den Betätigungsknopf entfernen.
2) Einen laminierten Unterarmschaft mit dem passenden Schäumeinsatz (hier ø 43,5 mm) erstellen.
3) Eine Aussparung für den Betätigungsknopf herstellen. 4) Den Laminierbund in den Unterarmschaft einkleben und aushärten
lassen. Sicherstellen, dass kein Klebstoff über den Bundflansch läuft oder in die Aussparung des Betätigungsknopfes bzw. in den Bund eindringt.
In Abbildung 4 sind Beispiele einer ordnungsgemäßen und einer nicht korrekt durchgeführten Laminierung dargestellt. Die Laminierung rechts im Bild ist im Gegensatz zu jener auf der linken Seite nicht ordnungsgemäß durchgeführt, da das Harz über den Flansch hinaus bis zum Betätigungsknopf und Spannring ragt und somit deren Bewegung behindert.
5. Rechtliche Hinweise Alle rechtlichen Bedingungen unterliegen dem jeweiligen Landesrecht des Verwenderlandes und können dementsprechend variieren.
5.1 Haftung Der Hersteller haftet, wenn das Produkt gemäß den Beschreibungen und Anweisungen in diesem Dokument verwendet wird. Für Schäden, die durch Nichtbeachtung dieses Dokuments, insbesondere durch unsachgemäße Verwendung oder unerlaubte Veränderung des Produkts, verursacht werden, haftet der Hersteller nicht.
10

5.2 CE-Konformität Das Produkt erfüllt die Anforderungen der europäischen Richtlinie 93/42/EWG für Medizinprodukte. Aufgrund der Klassifizierungskriterien nach Anhang IX dieser Richtlinie wurde das Produkt in die Klasse I eingestuft. Die Konformitätserklärung wurde deshalb vom Hersteller in alleiniger Verantwortung gemäß Anhang VII der Richtlinie erstellt.
6. ROBO-GELENK-Garantie Auf Ihr ROBO-WRIST Handgelenk wird für Herstellungsfehler eine umfassende 2-jährige Garantie gewährt. Teile, die auf Grund von ungewöhnlichem vorzeitigen Verschleiß die ordnungsgemäße Funktion beeinträchtigen, werden unverzüglich kostenlos ausgetauscht. Absichtlicher unsachgemäßer Gebrauch oder mutwillige Beschädigung ist nicht abgedeckt.
6.1 Ersatzteile und Werkzeuge • Innensechskantschlüssel zu 1,3 mm und 2,0 mm • 1 Ersatzdichtring für Kugelgelenk • 1 starke Spiralfeder (verstärkt die auf den Betätigungsknopf
wirkende Kraft)
11

ROBO-WRIST Fragebogen
Holen Sie vor dem Einsenden Ihres ROBO-WRIST Handgelenks zu Service- oder Reparaturzwecken die Genehmigung des Herstellers unter nachstehenden Kontaktinformationen ein. Füllen Sie den folgenden Fragebogen aus und legen Sie diesen Ihrer Sendung bei.
1. Wann haben Sie das ROBO-WRIST Handgelenk erhalten?
2. Ist die Farbe der Stegeinheit im Inneren des Laminierbunds grau?
Ja Nein
3. Wurde das Handgelenk ordnungsgemäß sauber gehalten?
Ja Nein
4. Ist Staub, Schmutz oder Ruß sichtbar? Ja Nein
5. Ändert sich die Spannung des Kugelgelenks durch Drehen des Spannrings im und gegen den Uhrzeigersinn?
Ja Nein
6. Wird das Kugelgelenk durch vollständiges Hineindrücken des Betätigungsknopfes entriegelt und lässt sich frei bewegen?
Ja Nein
7. Bleibt die Aktuatoreinheit nach vollständigem Hineindrücken des Betätigungsknopfes bis zum erneuten Drücken des Knopfes unten?
Ja Nein
12
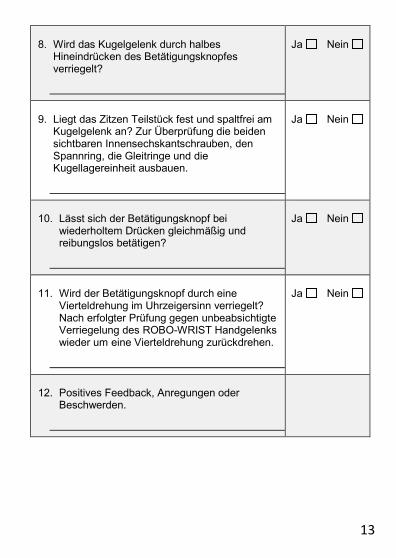
8. Wird das Kugelgelenk durch halbes Hineindrücken des Betätigungsknopfes verriegelt?
Ja Nein
9. Liegt das Zitzen Teilstück fest und spaltfrei am Kugelgelenk an? Zur Überprüfung die beiden sichtbaren Innensechskantschrauben, den Spannring, die Gleitringe und die Kugellagereinheit ausbauen.
Ja Nein
10. Lässt sich der Betätigungsknopf bei wiederholtem Drücken gleichmäßig und reibungslos betätigen?
Ja Nein
11. Wird der Betätigungsknopf durch eine Vierteldrehung im Uhrzeigersinn verriegelt? Nach erfolgter Prüfung gegen unbeabsichtigte Verriegelung des ROBO-WRIST Handgelenks wieder um eine Vierteldrehung zurückdrehen.
Ja Nein
12. Positives Feedback, Anregungen oder Beschwerden.
13

Kundenkontaktinformation: Herstellerkontaktinformation::
Name:
Adresse:
Telefon:
E-Mail:
Medical Bionics Inc.
51203 Range Road 265
Spruce Grove Alberta
Kanada T7Y1E7
Telefon: +1 780 907-3222
Email: [email protected]
14
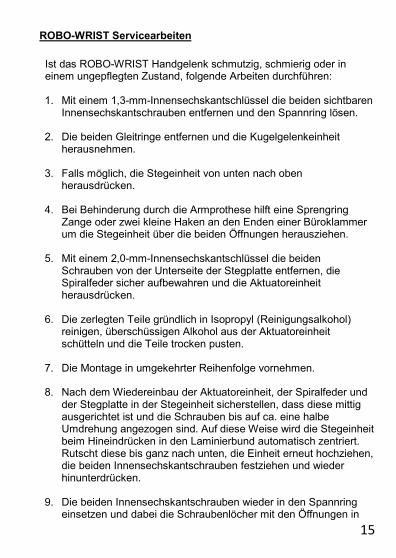
ROBO-WRIST Servicearbeiten
Ist das ROBO-WRIST Handgelenk schmutzig, schmierig oder in einem ungepflegten Zustand, folgende Arbeiten durchführen:
1. Mit einem 1,3-mm-Innensechskantschlüssel die beiden sichtbaren Innensechskantschrauben entfernen und den Spannring lösen.
2. Die beiden Gleitringe entfernen und die Kugelgelenkeinheit herausnehmen.
3. Falls möglich, die Stegeinheit von unten nach oben herausdrücken.
4. Bei Behinderung durch die Armprothese hilft eine Sprengring Zange oder zwei kleine Haken an den Enden einer Büroklammer um die Stegeinheit über die beiden Öffnungen herausziehen.
5. Mit einem 2,0-mm-Innensechskantschlüssel die beiden Schrauben von der Unterseite der Stegplatte entfernen, die Spiralfeder sicher aufbewahren und die Aktuatoreinheit herausdrücken.
6. Die zerlegten Teile gründlich in Isopropyl (Reinigungsalkohol) reinigen, überschüssigen Alkohol aus der Aktuatoreinheit schütteln und die Teile trocken pusten.
7. Die Montage in umgekehrter Reihenfolge vornehmen.
8. Nach dem Wiedereinbau der Aktuatoreinheit, der Spiralfeder und der Stegplatte in der Stegeinheit sicherstellen, dass diese mittig ausgerichtet ist und die Schrauben bis auf ca. eine halbe Umdrehung angezogen sind. Auf diese Weise wird die Stegeinheit beim Hineindrücken in den Laminierbund automatisch zentriert. Rutscht diese bis ganz nach unten, die Einheit erneut hochziehen, die beiden Innensechskantschrauben festziehen und wieder hinunterdrücken.
9. Die beiden Innensechskantschrauben wieder in den Spannring einsetzen und dabei die Schraubenlöcher mit den Öffnungen in
15
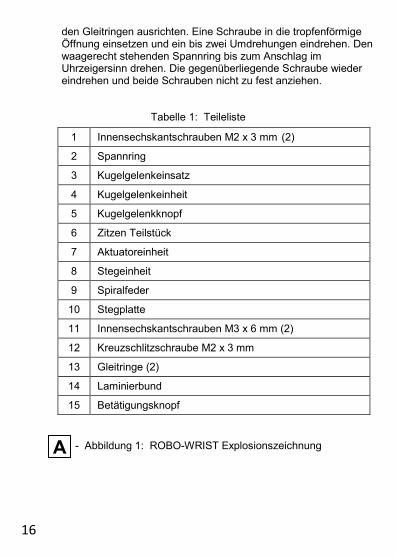
den Gleitringen ausrichten. Eine Schraube in die tropfenförmige Öffnung einsetzen und ein bis zwei Umdrehungen eindrehen. Den waagerecht stehenden Spannring bis zum Anschlag im Uhrzeigersinn drehen. Die gegenüberliegende Schraube wieder eindrehen und beide Schrauben nicht zu fest anziehen.
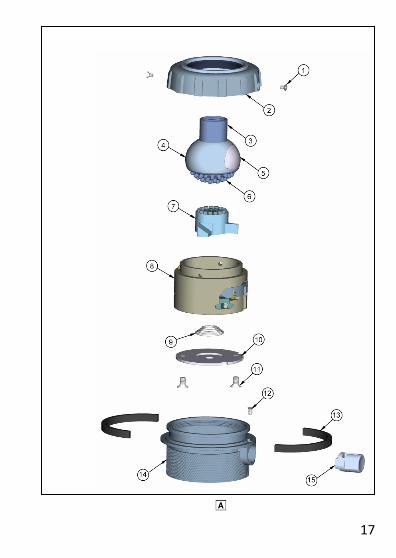
Tabelle 1: Teileliste
1 Innensechskantschrauben M2 x 3 mm (2) 2 Spannring
3 Kugelgelenkeinsatz
4 Kugelgelenkeinheit
5 Kugelgelenkknopf
6 Zitzen Teilstück
7 Aktuatoreinheit
8 Stegeinheit
9 Spiralfeder
10 Stegplatte
11 Innensechskantschrauben M3 x 6 mm (2)
12 Kreuzschlitzschraube M2 x 3 mm
13 Gleitringe (2)
14 Laminierbund
15 Betätigungsknopf
- Abbildung 1: ROBO-WRIST Explosionszeichnung A
16
17

Legend English
Figure 1 ROBO-WRIST Operation
Figure 2 ROBO-WRIST Standard Components
Figure 3 ROBO-WRIST 2-Part Titanium Adapter Figure 4 ROBO-WRIST Lamination Examples
Ball Insert (in & out) Ball Button (push) Tension Ring (turn) Actuating Button (push & turn) Socket Screws M2 x 3mm Tension Ring Ball Insert
Ball Ball Button Web Phillips Screw M2 x 3mm Slip Rings Laminating Collar Actuating Button Locking Ring Locking Insert
Last update: 2016-03-26 • Please read this document carefully before using the product. • Follow the safety instructions to avoid injuries and damage to the product. • Instruct the user in the proper and safe use of the product. • Please keep this document in a safe place
INFORMATION
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
18
Explanation of Symbols Warnings regarding possible risks of severe accident or injury.
Warnings regarding possible risks of accident or injury.
Warnings regarding possible technical damage.
Additional information on the fitting/use.
Please read these instructions for use carefully and pay special attention to the safety instructions!
1. Single components 1.1 Single components For available single components refer to the catalogue.
1.2 Accessories ROBO-WRIST
1011 - Ball Insert screwed to Terminal Device 1012 - The 2-part Titanium Adapter accessory in Figure 3 isdesigned
to protect the ROBO-WRIST interlinking system from excessive strain and shock. It must be used when hammering, performing heavy lifting or performing extreme sports such as weight lifting, wrestling or rock climbing to name a few. These accessories are not included and must be ordered separately.
2. Description 2.1 Indications for use The 1001 ROBO-WRIST is to be used solely for the exoprosthetic fitting of the upper extremities in combination with Otto Bock arm components.
2.2 Field of application The 1001 ROBO-WRIST can be used in combination with an Otto Bock Cable-Activated Hook, an All-Purpose Hook or an Otto Bock System Hand. The 1001 ROBO-WRIST accepts standard fittings.
INFORMATION
WARNING
CAUTION
NOTICE
INFORMATION
19
2.3 Safety instructions Please make your patients aware of the following safety instructions:
Risk of accident when driving a motor vehicle. The ability of prosthesis users to drive a vehicle is determined on a case-by-case basis. Factors include the type of fitting (amputation level, unilateral or bilateral, residual limb conditions, design of the prosthesis) and the amputee‘s abilities. All persons are required to observe their country’s national and state driving laws when operating motor vehicles. For insurance purposes, drivers should have their driving ability examined and approved by an authorized test centre. For maximum safety and convenience, Otto Bock recommends that, at the very least, a specialist evaluates the need for any adaptations to the car (such as installing a steering fork, automatic shift). Risk-free driving should be ensured even when the prosthesis is not functioning.
Risk of injury as a result of improper manipulation. Inadvertent activation of the Actuating Button (Figure 1) can cause the Terminal Device to change position.
Risk of injury as a result of excessive strain. The ROBO-WRIST’s superior strength of the 3D interlocking technology has been well documented and tested to withstand most any task subjected to by the patient if used correctly. However, to guard against damage to the actuator assembly or the ball nipple race when performing extreme sports, the 2-part Titanium Adapter must be used as described in section 1.2 Accessories. Should the bearer of the ROBO-WRIST violate the rule of using the 2-part Titanium Adapter while engaging in such sports, the terminal device could slip somewhat from its assigned angular position, potentially as far as touching the Tension Ring. Following such
CAUTION
CAUTION
WARNING
20
occurrence, the interlocking surfaces, Actuator, Actuator Pins and Ball Nipple Race should immediately be inspected for damage. Should damage have occurred to either of the 2 interlocking parts, due to negligence by the patient, the cost of replacing the Actuator and/or Pins or the Ball Nipple Race will have to be carried by the patient and is not covered by the comprehensive 2-year ROBO-WRIST warranty.
Risk of corrosion. Prosthetic components must not be exposed to corrosive elements such as fresh water, salt water, and acids. Using this medical product in such environmental conditions will render all claims against Otto Bock HealthCare null and void.
Damage caused by inappropriate environmental conditions. Prosthetic components must not be subjected to intense smoke, dust, vibrations, shocks, or high temperatures. Do not allow debris or liquids to get into the prosthetic components. Failure to follow these instructions can lead to malfunctioning and damage to the prosthesis.
Damage caused by improper cleaning agents. Do not use any ag- gressive cleaning agents, since they could cause damage to bearings, seals and plastic parts.
2.4 Function The ROBO-WRIST is available in only one design. One size fits all. Remove the ROBO-WRIST and one Ball Insert from the Shipping Box. Refer to Figure 1 for an illustration of the function. Press the Ball Button and insert the Ball Insert into the Ball. Twist slightly and push down hard until the Insert clicks into the Ball. Pushing the Actuating Button all the way in unlocks the ROBO-WRIST.
NOTICE
NOTICE
NOTICE
21

Hold the Ball Insert and move the Ball left-right-up-down. Turn the Tension Ring clockwise and anti clockwise. Notice the audible tactile clicking sound. Observe the variable Ball tension. The Ball can be moved 86 degrees from side to side on a 360 degree periphery. Pushing the Actuating Button half way locks the ball in hundreds of locking positions in 3D. With a bit of feeling, the Actuating Button can also be used as a Bump-Switch to lock or unlock the ROBO-WRIST by bumping it against a body part such as the palm of hand, arm, knee, thigh or other firm surface. Turning the Actuating Button 45 degrees clockwise prevents the inadvertent locking of the ROBO-WRIST during sporting activities. Pushing the Ball Button and pulling out the Ball Insert allows for rapid exchange of Terminal devices. The 2-part Titanium Adapter shown in Figure 3 can be carried in a pocket for use whenever necessary. The Locking Insert is compatible with any other ROBO-WRIST Insert but is best used only in conjunction with the Locking Ring. Once inserted, the Locking Ring can be spun onto the Insert in seconds, thus keeping the ball straight when seated firmly atop the Tension Ring, but no longer vulnerable to heavy blows or shock.
3. Technical data
Article number 1001 ROBO-WRIST Weight [g] 165 Total height [mm] 41
4. Handling 4.1 Assembly Clean the threads of the Ball Insert and the terminal device with acetone and let air dry. Next, apply a little bit of 636K14 Loctite 601 to the thread of the terminal device. Now screw the Ball Insert onto the threads of the terminal device up to the stop.
22
Risk of damage as a result of improper handling of the glue. To en-sure a solid bond, the respective areas must be degreased with acetone before applying the adhesive. Once you have degreased the areas, do not touch them anymore and immediately apply the adhesive to the surfaces after the acetone has dried.
Follow all safety and processing instructions of the adhesive manufacturer.
4.2 Lamination 1) Disassemble the ROBO-WRIST so that the Laminating Collar is a
separate part. Refer to Figure 2 as a guide. • Using a 1.3 mm Allen Wrench, unscrew and remove the two M2
x 3mm Socket Screws secured into the Tension Ring. • Unscrew the Tension Ring counter clockwise and remove. • Remove the two Slip Rings. • Remove the Ball Joint Assembly. • Remove the Web Assembly by pushing up through the bottom of
the Laminating Collar. • Using a #0 Phillips Screw Driver unscrew and remove the one
M2 x 3mm Phillips Screw and remove the Actuating Button. 2) Fabricate a laminated forearm socket using the matching lamination
form (here ø 43.5 mm). 3) Recess a slot for the Actuating Button. 4) Glue the Laminating Collar into the forearm socket and let cure.
Make sure that no adhesive extends beyond the Collar flange or enters the Actuating Button hole or inside the Collar.
Figure 4 shows an example of a good and bad lamination job. The one on the left is good but the one on the right is bad since the resin
INFORMATION
NOTICE
23

extends beyond the flange and touches the Actuating Button and Tension Ring and thereby impeding their movement.
5. Legal information All legal conditions are subject to the respective national laws of the country of use and may vary accordingly.
5.1 Liability The manufacturer will only assume liability if the product is used in accor- dance with the descriptions and instructions provided in this document. The manufacturer will not assume liability for damage caused by disregard of this document, particularly due to improper use or unauthorised modi- fication of the product.
5.2 CE conformity This product meets the requirements of the European Directive 93 / 42 / EEC for medical devices. This product has been classified as a class I device according to the classification criteria outlined in Annex IX of the directive. The declaration of conformity was therefore created by the manufacturer with sole responsibility according to Annex VII of the directive.
6. ROBO-WRIST Warranty A 2-Year Comprehensive Warranty against any defects in Workmanship protects your ROBO-WRIST. Any parts that impede its function due to abnormal premature wear will promptly be replaced free of charge. Deliberate physical abuse or willful destruction is not covered.
6.1 Spare Parts & Tools • Allen Keys; 1.3mm and 2.0mm • 1 Spare Ball O-Ring • 1 Strong Coil-Spring (puts more force on the actuating button)
24
ROBO-WRIST Questionnaire
Request authorization using the manufacture contact information below before sending in your ROBO-WRIST for service or repair. Complete the following questionnaire and include it with your shipment.
1. How long ago did you get the ROBO?
2. Is the Web Assembly inside the laminating collar grey colored?
Yes No
3. Has the Wrist Joint been kept neat & clean? Yes No
4. Is there any dust, dirt or grime visible? Yes No
5. Does the ball tension change by turning the Tension Ring clockwise & anti-clockwise?
Yes No
6. Does the Ball unlock and move freely when pushing the Actuating Button all the way in?
Yes No
7. After pushing the Actuating Button all the way in, does the Actuator Assembly stay down unless the Actuating Button is depressed again?
Yes No
8. Does the Ball lock when pushing the Actuating Button only half way in?
Yes No
25
9. Is the Nipple Ball Race tight against the Ball with no gap? To check, remove the 2 visible socket-head screws, Tension Ring, Slip Rings and Ball Assembly.
Yes No
10. Does Actuating Button move consistently and smoothly when pressed repeatedly?
Yes No
11. Does the Actuating Button lock when turned clockwise ¼ turn? Once checked and tested against the inadvertent locking of the ROBO, turn it back ¼ turn.
Yes No
12. Please describe any positive feedback, suggestions or complaints.
26
Customer Contact Information: Manufacturer Contact Information:
Name:
Address:
Phone:
E-Mail:
Medical Bionics Inc.
51203 Range Road 265
Spruce Grove Alberta
Canada T7Y1E7
Phone: +1 780 907-3222
Email: [email protected]
27
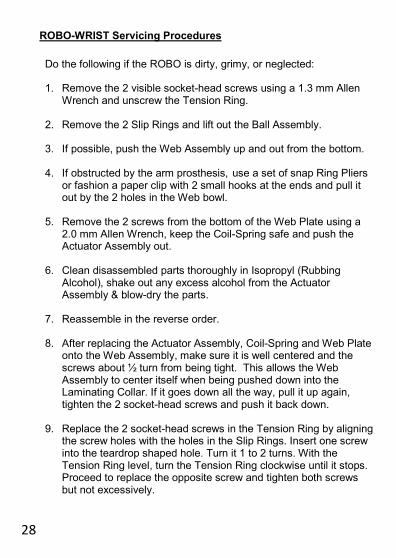
ROBO-WRIST Servicing Procedures
Do the following if the ROBO is dirty, grimy, or neglected:
1. Remove the 2 visible socket-head screws using a 1.3 mm Allen Wrench and unscrew the Tension Ring.
2. Remove the 2 Slip Rings and lift out the Ball Assembly.
3. If possible, push the Web Assembly up and out from the bottom.
4. If obstructed by the arm prosthesis, use a set of snap Ring Pliers or fashion a paper clip with 2 small hooks at the ends and pull it out by the 2 holes in the Web bowl.
5. Remove the 2 screws from the bottom of the Web Plate using a 2.0 mm Allen Wrench, keep the Coil-Spring safe and push the Actuator Assembly out.
6. Clean disassembled parts thoroughly in Isopropyl (Rubbing Alcohol), shake out any excess alcohol from the Actuator Assembly & blow-dry the parts.
7. Reassemble in the reverse order.
8. After replacing the Actuator Assembly, Coil-Spring and Web Plate onto the Web Assembly, make sure it is well centered and the screws about ½ turn from being tight. This allows the Web Assembly to center itself when being pushed down into the Laminating Collar. If it goes down all the way, pull it up again, tighten the 2 socket-head screws and push it back down.
9. Replace the 2 socket-head screws in the Tension Ring by aligning the screw holes with the holes in the Slip Rings. Insert one screw into the teardrop shaped hole. Turn it 1 to 2 turns. With the Tension Ring level, turn the Tension Ring clockwise until it stops. Proceed to replace the opposite screw and tighten both screws but not excessively.
28
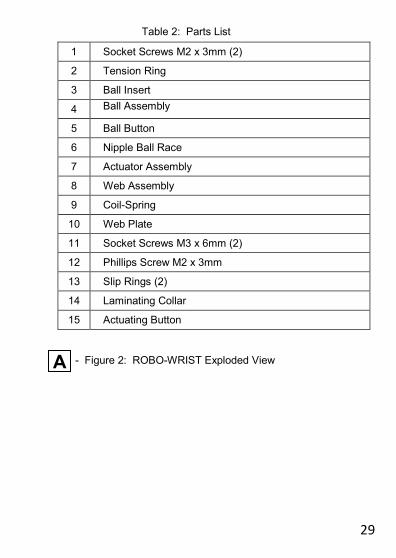
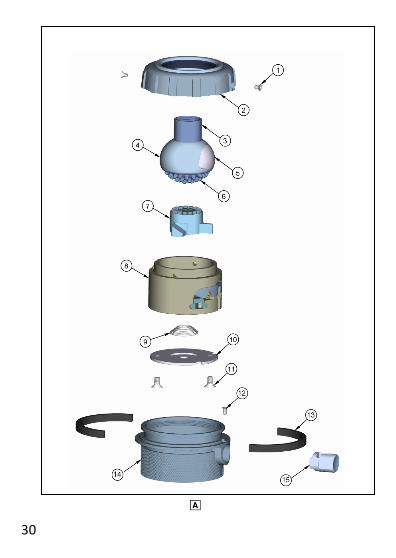
Table 2: Parts List
1 Socket Screws M2 x 3mm (2)
2 Tension Ring
3 Ball Insert
4 Ball Assembly
5 Ball Button
6 Nipple Ball Race
7 Actuator Assembly
8 Web Assembly
9 Coil-Spring
10 Web Plate
11 Socket Screws M3 x 6mm (2)
12 Phillips Screw M2 x 3mm
13 Slip Rings (2)
14 Laminating Collar
15 Actuating Button
- Figure 2: ROBO-WRIST Exploded View A
29
30

Légende Français
Figure 1 Fonctionnement de ROBO-WRIST
Figure 2 Composants standards ROBO-WRIST
Figure 3 Adaptateur titanique ROBO-WRIST de 2 parties
Figure 4 Exemples de laminage par ROBO-WRIST Insertion sphérique (pose et enlèvement) Touche à bout sphérique (à appuyer) Anneau de serrage (tournant) Bouton de marche (à appuyer et tourner) Vis à tête hexagonale M2 x 3 mm Anneau de serrage Insertion sphérique Boule Touche sphérique Disque Vis cruciforme M2 x 3 mm Bagues collectrices Cône de laminage Bouton de marche Anneau de blocage Insertion de blocage
Date de la dernière mise à jour: 2016-03-27 • Veuillez lire attentivement l’intégralité de ce document avant
d’utiliser le produit. • Respectez les consignes de sécurité afin d’éviter toute blessure et
endommagement du produit. • Apprenez à l’utilisateur à bien utiliser son produit et informez-le
des consignes de sécurité. • Conservez ce document.
INFORMATION
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
31
Signification des symboles Mises en garde contre les éventuels risques
d’accidents et de blessures graves. Mises en garde contre les éventuels risques d’accidents et
de blessures. Mises en garde contre les éventuels dommages techniques.
Autres informations relatives à l’appareillage/l’utilisation.
Veuillez lire attentivement le présent mode d’emploi. Respectez tout particulièrement les consignes de sécurité!
1. Pièces détachées 1.1 Pièces détachées Les pièces détachées disponibles figurent dans le catalogue.
1.2 Accessoires ROBO-WRIST
1011 - L’insertion sphérique est vissée dans le dispositif terminal 1012 - L’adaptateur titanique à 2 parties sur la figure 3 est conçu
pour la protection du système d’embrayage ROBO-WRIST de la contrainte excessive et des chocs. Il faut l’utiliser lors du travail avec le marteau, du levage de charges lourdes ou des exercices des sports extrêmes tels que dynamophilie, lutte ou escalade. Ces composants ne sont pas inclus, il faut les commander à part.
2. Description 2.1 Champ d’application Les 1001 ROBO-WRIST sont exclusivement destinées à l’appareillage exo prothétique des membres supérieurs en association avec des prothèses de bras Otto Bock.
INFORMATION
AVERTISSEMENT
ATTENTION
AVIS
INFORMATION
32
2.2 Domaine d’application Les 1001 ROBO-WRIST peuvent être utilisées en combinaison avec un crochet de traction mécanique Otto Bock, d’un ustensile de travail ou d’un système de main Otto Bock. Pour 1001 ROBO-WRIST convient l’armature électrique standard.
2.3 Consignes de sécurité Veuillez communiquer les consignes de sécurité suivantes à vos patients:
Risque d’accident en cas d’utilisation dans un véhicule
automobile. Il n’existe pas de réponse générale à la question de savoir si et combine de temps le porteur d’une prothèse est capable de conduire un véhicule. Cela dépend du type d’appareillage (niveau d’amputation unilatéral ou bilatéral, état du moignon et conception de la prothèse) et des capacités individuelles du porteur. Respectez impérativement les directives légales relatives à la conduit d’un véhicule automobile en vigueur dans votre pays et faites controller et certifier votre aptitude à la conduite par une instance agréée (pour des questions d’assurance). En général, Otto Bock recommande de faire adapter le véhicule aux besoins de l’utilisateur par une entreprise spécialisée (pose d’une fourche de direction, démarrage automatique, par ex.). Il convient de s’assurer qu’une conduite sans risque est possible même lorsque la prothèse n’est pas opérationnelle.
Risque de blessures occasionnées par un emploi incorrect. En cas d’activation accidentelle du Bouton de marche (Figure 1), le Dispositif terminal peut changer de position.
ATTENTION
AVERTISSEMENT
33
Risque de traumatisme par la contrainte excessive. Résistance élevée de la technologie de blocage 3D de ROBO-WRIST, les données documentaires et les résultats d’essais prouve la résistance pratiquement à toutes charges subies du patient à la condition d’une bonne utilisation. Cependant pour la protection de l’organe de puissance et du raccord sphérique des dommages lors des exercices des sports extrêmes il faut utiliser l’adaptateur titanique à 2 parties décrit dans le paragraphe 1.2 Composants. En cas de non-respect par le propriétaire de ROBO-WRIST de la règle d’usage de l’adaptateur titanique à 2 parties lors des exercices sportifs le dispositif terminal peut glisser de la position angulaire prévue et même toucher l’anneau de serrage. Dans ce cas il faut vérifier immédiatement des dommages éventuels sur les surfaces de blocage, le dispositif d’entraînement, les tiges de butée et le raccord sphérique. Si une de 2 parties de blocage est endommagée par négligence du patient les frais de remplacement du dispositif d’entraînement, des tiges, et/ou du raccord sphérique sont à la charge du patient, et la garantie complexe de 2 ans pour ROBO-WRIST ne les couvre pas.
Risque de corrosion. Veuillez éviter de placer les composants de la prothèse dans des milieux pouvant provoquer des corrosions des parties métalliques, comme l’eau douce, l’eau salée et les acides. Une utilisation du dispositif médical dans les conditions mentionnées décharge Otto Bock HealthCare de toute responsabilité.
Dégradations occasionnées par des conditions environnementales inadaptées. Protégez les composants prothétiques de la fumée dense ou de la poussière, des vibrations, des chocs ou des chaleurs excessives. Veillez à ce qu’aucune particule solide ni aucun liquide ne puisse pénétrer dans la prothèse. Le non respect de ces consignes peut entraîner un dysfonctionnement et des dégradations de la prothèse.
AVIS
AVIS
ATTENTION
34
Dégradations occasionnées par l’utilisation d’un détergent non adapté. Ne pas utiliser de détergents agressifs. Ceux-ci peuvent en effet endommager les supports, les joints ainsi que les éléments en plastique.
2.4 Fonction ROBO-WRIST n’est disponible qu’en une seule version et une taille. Enlever ROBO-WRIST et une insertion sphérique de l’emballage. Sur la figure 1 est spécifiée l’illustration de fonctionnement. Appuyer sur le bouton et mettre une insertion sphérique dans la boule. Tourner un peut et appuyer avec effort dessous jusqu’à l’enclenchement de l’insertion dans la boule. A l’appui du bouton de marche à fond, ROBO-WRIST se déverrouille. Maintenir l’insertion sphérique et déplacer la boule à gauche-à droite- en haut-en bas. Tourner l’anneau de serrage dans le sens horlogique et antihorlogique jusqu’à l’enclenchement. Observer la contrainte variable de la boule. La boule peut être déplacée à 86 degrés d’un côté à l’autre périphérique ment à 360 degrés. A l’appui du bouton de marche à la moitié, la boule sera bloquée dans une des centaines positions de blocage 3D. Lorsque vous vous habituerez au dispositif, vous pourrez utiliser le bouton de marche comme commutateur pas à pas pour bloquer et débloquer ROBO-WRIST, en appliquant ses з surfaces du corps, par exemple, sur la peau de la main, à l’avant-bras, genou, hanche ou une autre surface rigide. En tournant le bouton de marche à 45 degrés dans le sens horlogique cela aidera à protéger ROBO-WRIST du blocage accidentiel lors des exercices sportifs. On peut changer vite les dispositifs terminaux par appui de la touche sphérique et enlèvement de l’insertion sphérique. L’adaptateur titanique à 2 parties est spécifié sur la figure 3, on peut le porter dans la poche et utiliser en cas de nécessité. L’insertion de
AVIS
35
blocage est compatible avec une autre insertion de ROBO-WRIST, cependant il est optimal de ne l’utiliser qu’avec un anneau de blocage. Après l’insertion l’anneau de blocage peut être mis dans l’insertion en quelques secondes en maintenant la boule en position droite et la posant fermement au-dessus de l’anneau de serrage, comme ça elle sera protégée des chocs et des dommages forts.
3. Données techniques
Référence de l’article 1001 ROBO-WRIST Poids [g] 165 Hauteur totale [en mm] 41
4. Usage 4.1 Montage Nettoyer les filetages des insertions sphériques et de l’élément de préhension à l’aide d’acétone et les laisser aérer. Enduire ensuite le filetage de l’élément de préhension de Loctite 636K14 601. Visser désormais les insertion sphérique sur le filetage de l’élément de préhension jusqu’à la butée.
Dégradations occasionnées par une mauvaise manipulation de la colle. Pour une application sûre, dégraisser les surfaces concernées avec de l’acétone avant de les enduire de colle. Ne plus toucher les endroits dégraissés. Les enduire de colle dès que l’acétone a fini de sécher.
Respectez les consignes de sécurité et de traitement du fabricant de la colle.
4.2 Laminage 1) Désassembler ROBO-WRIST pour séparer le cône de laminage. Se
référer à la figure 2.
INFORMATION
AVIS
36
• A l’aide d’une clé Allen 1,3 mm dévisser et enlever deux vis à tête hexagonale M2 x 3 mm, fixés sur l’anneau de serrage.
• Dévisser l’anneau de serrage dans le sens antihorlogique et l’enlever.
• Enlever deux anneaux frotteurs. • Enlever la tête sphérique assemblée. • Enlever l’ensemble de disque. Appuyer sur la couvercle
inférieure en aluminium ou l’enlever du cône de laminage à l’aide de 2 trous dans le vase du disque.
• A l’aide d’une tourne—vis cruciforme №0 dévisser et enlever un vis cruciforme M2 x 3 mm ainsi que le bouton de marche.
2) Faire un onglet laminé sur l’avant-bras à l’aide d’une forme appropriée pour laminage (ici ø 43,5 mm).
3) Faire une cannelure pour le bouton de marche. 4) Coller le cône de laminage dans la poche sur l’avant-bras et le
laisser se fermer. Contrôler que la colle ne déborde pas les brides du cône et ne tombe pas dans le trou pour le bouton de marche ou à l’intérieur du cône.
Sur la figure 4 est montré l’exemple du laminage correcte et incorrecte. A guache est montré le laminage correcte, à droite celui incorrecte, car la résine a débordé les brides et touche le bouton de marche et l’anneau de serrage en empêchant leur déplacement.
5. Informations légales Toutes les conditions légales sont soumises à la législation nationale du pays d’utilisation concerné et peuvent donc présenter des variations en conséquence.
5.1 Responsabilité Le fabricant est responsable si le produit est utilisé conformément aux descriptions et instructions de ce document. Le fabricant décline toute responsabilité pour les dommages découlant d’un non-respect de ce document, notamment d’une utilisation non conforme ou d’une modification non autorisée du produit.
5.2 Conformité CE Ce produit répond aux exigences de la directive européenne 93/42/CEE relative aux dispositifs médicaux. Le produit a été classé dans la classe
37
I sur la base des critères de classification d’après l’annexe IX de cette directive. La déclaration de conformité a donc été établie par le fabricant sous sa propre responsabilité, conformément à l’annexe VII de la directive.
6. Garantie pour ROBO-WRIST Votre ROBO-WRIST est couvert de la garantie de 2 ans contre tout défaut de fabrication. Toute pièce empêchant le bon fonctionnement du dispositif à cause de l’usure anormale anticipée sera remplacée dans les meilleurs délais, gratuitement. La garantie ne couvre pas l’exploitation physique abusive ou destruction intentionnelle.
6.1 Pièces détachées et outils • Clés Allen; 1,3 mm et 2,0 mm • 1 anneau sphérique de rechange • 1 ressort résistant dans la bobine (aide à appuyer plus fort sur le
bouton de marche)
38
Segni convenzionali Italiano
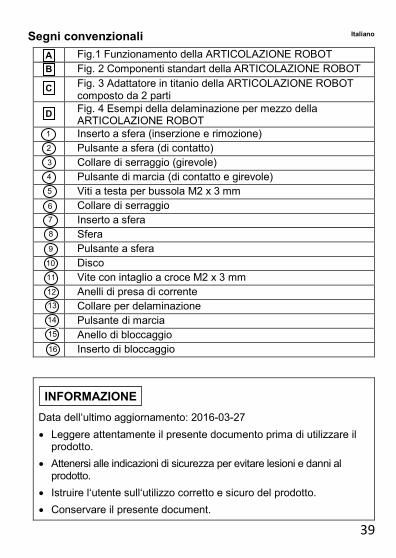
Fig.1 Funzionamento della ARTICOLAZIONE ROBOT
Fig. 2 Componenti standart della ARTICOLAZIONE ROBOT
Fig. 3 Adattatore in titanio della ARTICOLAZIONE ROBOT composto da 2 parti
Fig. 4 Esempi della delaminazione per mezzo della ARTICOLAZIONE ROBOT
Inserto a sfera (inserzione e rimozione) Pulsante a sfera (di contatto) Collare di serraggio (girevole) Pulsante di marcia (di contatto e girevole) Viti a testa per bussola M2 x 3 mm Collare di serraggio Inserto a sfera Sfera Pulsante a sfera Disco Vite con intaglio a croce M2 x 3 mm Anelli di presa di corrente Collare per delaminazione Pulsante di marcia Anello di bloccaggio Inserto di bloccaggio
Data dell‘ultimo aggiornamento: 2016-03-27 • Leggere attentamente il presente documento prima di utilizzare il
prodotto. • Attenersi alle indicazioni di sicurezza per evitare lesioni e danni al
prodotto. • Istruire l‘utente sull‘utilizzo corretto e sicuro del prodotto. • Conservare il presente document.
C
INFORMAZIONE
B A
D
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
39

Significato dei simboli utilizzati Avvisi relativi a possibili gravi pericoli di incidente e lesioni.
Avvisi relativi a possibili pericoli di incidente e lesioni.
Avvisi relativi a possibili guasti tecnici.
Ulteriori informazioni relative a trattamento / applicazione.
Leggete attentamente le presenti istruzioni d’uso. Attenetevi in particolare alle norme di sicurezza indicate!
1. Singoli componenti 1.1 Singoli componenti Per i singoli componenti disponibili, consultare il catalogo.
1.2 Accessori ARTICOLAZIONE ROBOT
1011 - Inserto a sfera e’ avvitato nel Dispositivo d’estremita’. 1012 - Adattatore in titanio composto da 2 parti, rappresentato nella
fig. 3, e’ progettato per difendere il sistema di accoppiamento della ARTICOLAZIONE ROBOT dalle sovratensioni e dagli urti. Bisogna usarlo per lavori con martello, per sollevamento dei carichi pesanti o per pratiche degli sport estremi tali come powerlifting, lotta od arrampicata. Questi accessori non fanno parte del kit. Bisogna ordinarli separatamente.
2. Descrizione 2.1 Campo d’impiego Il 1001 ARTICOLAZIONE ROBOT sono indicate esclusivamente per l’esoprotesizzazione di arto superiore in combinazione con componenti di braccio Otto Bock.
INFORMAZIONE
AVVERTENZA
ATTENZIONE
AVVISO
INFORMAZION
40

2.2 Campo di applicazione Il 1001 ARTICOLAZIONE ROBOT possono essere impiegati con un hook Otto Bock con azionamento a cavo, con un attrezzo da lavoro oppure con una mano sistema Otto Bock. Per ARTICOLAZIONE ROBOT 1001 e’ adatta la guarnitura elettrica standard.
2.3 Indicazioni per la sicurezza Informate i pazienti sulle seguenti norme di sicurezza::
Pericolo di incidente con l’impiego in autoveicoli. Nessuna regola valida in assoluto è in grado di stabilire fino a che punto un portatore di protesi sia in grado di condurre un autoveicolo. Ciò dipende dal tipo di protesi (livello di amputazione, unilaterale o bilaterale, condizione del moncone, costruzione della protesi) e dalle capacità individuali del portatore di protesi di arto superiore. Osservate sempre le norme nazionali relative alla conduzione di autoveicoli vigenti nei rispettivi paesi e, per motivi di carattere assicurativo, lasciate verificare e confermare la vostra idoneità alla guida dalle autorità di competenza. In generale, la Otto Bock consiglia che uno specialista valuti la necessità di adattare l’autoveicolo con uno speciale equipaggiamento adatto alle esigenze del portatore di protesi (ad es. volante con pomo, cambio automatico). È necessario accertarsi di essere in grado di guidare in modo sicuro anche senza protesi funzionante.
Pericolo di lesioni per utilizzo scorretto. Con la pressione involontaria del Pulsante di marcia (fig. 1), il Dispositivo d’estremita’ puo’ cambiare la sua posizione.
AVVERTENZA
ATTENZIONE
41
Rischio di trauma a causa di sovratensione. La tecnologia di bloccaggio tridimensionale di resistenza elevata, usata nell’ARTICOLAZIONE ROBOT, secondo i dati documentali ed i risultati delle prove, resiste praticamente a tutti gli sforzi, ai quali la sottopone il paziente, a condizione que sia usata in modo corretto. Pero’ per difendere il gruppo di presa di moto od il gruppo di nipplo a sfera dalle lesioni, durante le pratiche degli sport estremi, bisogna usare l’addattatore in titanio composto da 2 parti, descritto nella comma 1.2 Accessori. Qualora il proprietario dell’ARTICOLAZIONE ROBOT trasgredisca la regola d’uso dell’adattatore in titanio composto da 2 parti, durante le pratiche dello sport il Dispositivo d’estremita’ puo’ sfuggire dalla posizione angolare per lui predisposta e perfino toccare il collare di serraggio. Se succede questo, bisogna controllare immediatamente l'eventuale presenza di danni sulle superficie di bloccaggio, sul comando, sui perni di fissaggio e sul nipplo a sfera. Se in una delle 2 parti di bloccaggio si verifichi un guasto, causato dalla negligenza del paziente, le spese di sostituzione del comando, perni e/o nipplo a sfera spattano al paziente, e la garanzia complessiva di 2 anni per ARTICOLAZIONE ROBOT non copre queste spese.
Pericolo di corrosione. I componenti protesici non devono essere esposti ad ambienti corrosivi per le parti metalliche come, ad esempio, acqua dolce, acqua salata e acidi. In caso di utilizzo di un articolo medical nelle suddette condizioni ambientali, decadono tutti i diritti alla sostituzione nei confronti di Otto Bock HealthCare.
Danneggiamento per condizioni ambientali sfavorevoli. I component protesici non vanno esposti a fumo intenso o polvere, a vibrazioni, urti o a fonti di forte calore. Evitate che sostanze solide o liquide penetrino all’interno dei componenti. La mancata osservanza di
AVVISO
AVVISO
ATTENZIONE
42
quanto sopra riportato può causare malfunzionamenti e danni alla protesi.
Danneggiamento derivati dall’impiego di detergenti non adeguati. Evitate l’utilizzo di detergenti aggressivi. Essi possono causare danni ai cuscinetti, alle guarnizioni e alle parti in plastica.
2.4 Funzione L’ARTICOLAZIONE ROBOT e’ presentata in un solo disegno ed in una dimensione. Tirare l’ARTICOLAZIONE ROBOT e un inserto a sfera fuori dall’imballaggio. La figura 1 illustra il principio del funzionamento. Premere il pulsante a sfera ed mettere l’inserto a sfera dentro la sfera. Girare un po’ e con forza premere verso il basso fino a che l’inserto non schiocchi dentro la sfera. Con la pressione del pulsante di marcia fino in fondo l’ARTICALAZIONE ROBOT si sblocca. Tenere fermo l’inserto a sfera e spostare la sfera a sinistra – a destra – verso l’alto – verso il basso. Girare il collare di serraggio nel senso orario ed antiorario fino allo schiocco percepibile. Osservare la tensione alternativa della sfera. Si puo’ spostare la sfera a 86⁰ da un lato all’altro per la periferia di 360⁰. Con la pressione del pulsante di marcia a meta’ la sfera si blocca in una delle cento posizioni di blocco in tre dimenzioni. Abituandosi un po’ al dispositivo, si potra’ usare il pulsante di marcia come commutatore passo passo per bloccare e sbloccare l’ARTICOLAZIONE ROBOT, premendo il pulsante alla superficie del corpo, ad esempio, alla palma di mano, all’antibraccio, al ginocchio, all’anca o ad un’altra superficie robusta. Girando il pulsante a 45⁰ nel senso orario, aiutiamo a difendere l’ARTICOLAZIONE ROBOT dal bloccaggio involontario durante le pratiche dello sport. I dispositivi d’estremita’ possono essere velocemente sostituiti premendo il pulsante a sfera e tirando fuori l’inserto a sfera.
AVVISO
43
L’adattatore in titanio composto da 2 parti, presentato in figura 3, possiamo portare dietro nella tasca e usarlo quando e’ necessario. L’inserto di bloccaggio e’ compatibile con qualsiasi altro inserto della ARTICOLAZIONE ROBOT, pero’ e’ previsto il suo uso ottimale solo con l’anello di bloccaggio. Dopo aver fatto l’inserzione si puo’ mettere l’anello di bloccaggio nell’inserto in pochi secondi, tenendo la sfera ferma e dritta, si lo piazziamo ben fisso sopra il collare di serraggio. In questa posizione la sfera sara’ difesa contra gli urti e scosse forti.
3. Dati tecnici
Codice articolo 1001 ARTICOLAZIONE DEL ROBOT Peso [g] 165 Altezza complessiva [mm] 41
4. Utilizzo 4.1 Montaggio Pulire con acetone le viti filettate del inserto a sfera e con perno scanalato del Greifer, lasciando evaporare il liquido. Applicare al filettatura del Greifer con Loctite 636K14. Infine avvitare insert a sfera fino all’arresto della vite filettata del Greifer.
Danneggiamento da utilizzo improprio del collante. Per garantire un fissaggio sicuro, prima di stendere la colla pulire le superfici da incollare con dell’acetone per rimuovere eventuali residui di grasso. Non toccare più le parti sgrassate e, una volta asciugato l’acetone,mstendervi immediatamente la colla.
Osservate le indicazioni per la sicurezza e sull’uso fornite dal produttore della colla.
INFORMAZIONE
AVVISO
44

4.2 Delaminazione 1) Smontate la ARTICOLAZIONE ROBOT in modo tale da separare il
collare di delaminazione. Per informazioni usare la figura 2. • Per mezzo della chiave a bussola a 1,3 mm svitare e tirare fuori
due viti a testa per bussola M2 x 3 mm, fissate sul collare di serraggio.
• Svitare il collare di serraggio nel senso antiorario e smontarlo. • Smontare due anelli della presa di corrente. • Smontare il sopporto a sfera che e’ la parte del kit di montaggio. • Smontare il gruppo del disco. Premere sulla calotta inferiore in
alluminio e smontarla dal collare di delaminazione per due fori che si trovano nella coppa del disco.
• Per mezzo di cacciavite a crociera №0 svitare e smontare una vite a crociera M2 x 3 mm, nonche’ smontare il pulsante di marcia.
2) Fare un alloggiamento delaminato per l’antibraccio per mezzo di una idonea forma di delaminazione (qui’ ø 43,5 mm).
3) Fare un incavo per il pulsante di marcia. 4) Incollare il collare di delaminazione nella tasca per l’antibraccio e
lasciatela consolidare. Controllare che la colla non esca oltre i limiti della flangia del collare e non capiti nel foro del pulsante di marcia o dentro il collare.
Nella figura 4 e’ mostrato l’esempio della delaminazione corretta e sbagliata. A sinistra si vede la delaminazione corretta e a destra quella sbagliata, giacche la resina e’ uscita oltre i limiti della flangia e sta’ toccando il pulsante di marcia ed il collare di serraggio, ostacolando il loro movimento.
5. Note legali Tutte le condizioni legali sono soggette alla legislazione del rispettivo paese di appartenenza dell’utente e possono quindi essere soggette a modifiche.
5.1 Responsabilità Il produttore risponde se il prodotto è utilizzato in conformità alle descrizioni e alle istruzioni riportate in questo documento. Il produttore non risponde in caso di danni derivanti dal mancato rispetto di quanto contenuto in questo documento, in particolare in caso di utilizzo improprio o modifiche non permesse del prodotto..
45
5.2 Conformità CE Il prodotto è conforme ai requisiti previsti dalla direttiva europea 93/42/CEE relativa ai prodotti medicali. In virtù dei criteri di classificazione ai sensi dell’allegato IX della direttiva di cui sopra, il prodotto è stato classificato sotto la classe I. La dichiarazione di conformità è stata pertanto emessa dal produttore, sotto la propria unica responsabilità, ai sensi dell’allegato VII della direttiva.
6. Garanzia per ARTICOLAZIONE ROBOT La Sua ARTICOLAZIONE ROBOT e’ coperta dalla garanzia complessiva di 2 anni contro qualsiasi difetto di produzione. Tutte le parti che ostacolano il funzionamento del dispositivo a causa dell’usura anomala intempestiva, vengono sostituite immediatamente e gratuitamente. La garanzia non copre i casi delle sollecitazioni fisiche malintenzionate, nonche’ i casi della distruzione intenzionale del dispositivo.
6.1 Pezzi ed utensili di ricambio • Chiavi a bussola; 1,3 mm и 2,0 mm • 1 anello a sfera di scrota • 1 molla robusta nella bobina (che aiuta a premere con piu’ forza
il pulsante di marcia)
46
Simbología Español
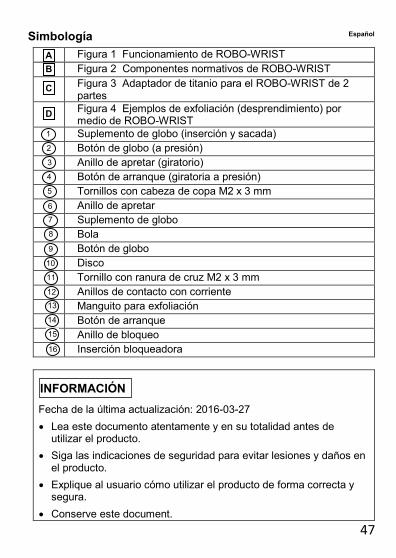
Figura 1 Funcionamiento de ROBO-WRIST
Figura 2 Componentes normativos de ROBO-WRIST
Figura 3 Adaptador de titanio para el ROBO-WRIST de 2 partes
Figura 4 Ejemplos de exfoliación (desprendimiento) por medio de ROBO-WRIST
Suplemento de globo (inserción y sacada) Botón de globo (a presión) Anillo de apretar (giratorio) Botón de arranque (giratoria a presión) Tornillos con cabeza de copa M2 x 3 mm Anillo de apretar Suplemento de globo Bola Botón de globo Disco Tornillo con ranura de cruz M2 x 3 mm Anillos de contacto con corriente Manguito para exfoliación Botón de arranque Anillo de bloqueo Inserción bloqueadora
Fecha de la última actualización: 2016-03-27 • Lea este documento atentamente y en su totalidad antes de
utilizar el producto. • Siga las indicaciones de seguridad para evitar lesiones y daños en
el producto. • Explique al usuario cómo utilizar el producto de forma correcta y
segura. • Conserve este document.
INFORMACIÓN
B A
D
C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
47
Significado de los símbolos Advertencias sobre posibles riesgos de accidentes y
lesiones. Advertencias sobre posibles riesgos de accidentes y
lesiones.
Advertencias sobre posibles daños técnicos.
Más información sobre la protetización / aplicación.
Lea este manual de instrucciones atentamente y en su totalidad. ¡Preste especial atención a las advertencias de seguridad enunciadas!
1. Componentes 1.1 Componentes Componentes disponibles, véase el catálogo.
1.2 Accesorios ROBO-WRIST
1011 - Inserción de globo está atornillada dentro del Dispositivo Extremo
1012 - Adaptador de titanio de 2 partes como se muestra en la figura 3 está diseñado para protección del sistema de acoplamiento de ROBO-WRIST contra tensión excesiva y choques. Se utiliza al trabajar con martillo, levantar cargas pesadas o para practicar deportes extrémales, como levantamiento de pesos, lucha o escalada. Esos componentes no forman parte del lote, hay que encargarlos aparte.
INFORMACIÓN
ADVERTENCIA
ATENCIÓN
AVISO
INFORMACIÓN
48
2. Descripción 2.1 Uso Las 1001 ROBO-WRIST se emplean exclusivamente para la exoprotetización de las extremidades superioresen combinación con las piezas de ajuste para brazo de Otto Bock.
2.2 Field of application Las 1001 ROBO-WRIST se utilizan con un garfio de tracción mecánica de Otto Bock, con un dispositivo de trabajo o con una mano de sistema de Otto Bock. Para el lote de 1001 ROBO-WRIST conviene el armazón eléctrico estándar.
2.3 Advertencias de seguridad Por favor, informe a sus usuarios sobre las siguientes advertencias de seguridad:
Riesgo de accidente al usarse en un vehículo. No se puede dar una respuesta generalizada a si el portador de una prótesis puede o no conducir un vehículo y en qué medida puede hacerlo. Esto dependerá del tipo de protetización (altura de la amputación, unilateral o bilateral, condiciones del muñón, modelo de la prótesis) y de las facultades específicas del portador de la prótesis. Observe siempre las normas nacionales para la conducción de vehículos y, por razones legales en materia de seguros, acuda a un organismo autorizado que compruebe y confirme su capacidad de conducción. Por lo general, Otto Bock recomienda que una empresa especializada adapte el vehículo a las necesidades correspondientes del conductor (p. ej.: la barra de dirección, el cambio automático). Debe garantizarse una conducción sin riesgos, incluso si la prótesis no funciona.
Riesgo de lesiones debido a un manejo incorrecto. Al presionar involuntariamente el Botón de arranque (figura 1), el Dispositivo Extremo puede cambiar su posición.
ATENCIÓN
ADVERTENCIA
49
Riesgo de trauma por consecuencia de tensión excesiva. Firmeza elevada de tecnología de bloqueo tridimensional en el ROBO-WRIST, según los datos documentales y resultados de pruebas, resiste prácticamente cualesquier cargas, a las que se lo somete el propio paciente, en caso de su uso correcto. Pero, para proteger la unidad de accionador de fuerza o el niple de bola contra daños al practicar deportes exremales, se debe utilizar el adaptador de titanio de 2 partes, descrito en el capítulo 1.2 Accesorios. Si el propietario del ROBO-WRIST admite cualquier violación de la regla de uso del adaptador de titanio, que consiste de 2 partes, durante los ejercicios o práctica de deporte, el dispositivo extremo puede deslizarse y salir de la posición angular destinada para el mismo, o incluso tocar el anillo de apretar. Si eso pasa, se debe inmediatamente comprobar las superficies de bloqueo, el accionador, las clavijas de retención y el niple de bola y asegurarse de que ellos no tengan daños. Si en cualquiera de las dos partes de bloqueo acontece daño, causado por negligencia del paciente, entonces el mismo paciente tendrá que cubrir los gastos de cambio del accionador, clavijas y/o niple de bola, y en este caso la garantía compleja de ROBO-WRIST no concierne a ellos.
Riesgo de corrosión. Las piezas de la prótesis no deben exponerse a lugares que provoquen la corrosión de las partes metálicas, como por ejemplo agua dulce, agua salada y ácidos. Si se utiliza el producto médico en estas condiciones ambientales se extinguirán todos los derechos de reclamación contra Otto Bock Health Care.
Daños causados por unas condiciones ambientales inadecuadas. Las piezas de la prótesis no deben exponerse a humo intenso, a
AVISO
AVISO
ATENCIÓN
50
polvo, a vibraciones, a golpes ni a temperaturas altas. No deben penetrar partículas sólidas ni líquidos. Si esto no se tiene en cuenta, se puede producir un fallo en el funcionamiento o daños en la prótesis.
Daños causados por un producto de limpieza inadecuado. Evite utilizar productos de limpieza agresivos. Éstos pueden dañar los rodamientos, las juntas y las piezas de plástico.
2.4 Función El ROBO-WRIST está presentado solo en una construcción y en un tamaño. Saque el ROBO-WRIST y una inserción de globo desde el embalaje. En la figura 1 se presenta la ilustración del trabajo. Presione el botón de globo, insertando la inserción de globo dentro de la bola. Gírela un poco y luego presione abajo con fuerza hasta que la inserción no se quede cerrada en la bola. Presionando el botón hasta el tope, el ROBO-WRIST queda desbloqueado. Mantenga la inserción de globo y mueva la bola a la izquierda-derecha-arriba-abajo. Haga girar el anillo de apretar en sentido de reloj y contra sentido de reloj hasta que se produzca un click sensible. Observe un poco la tensión alterna de bola. La bola se puede desplazar a 86 grados de un lado al otro por la periferia en 360 grados. Al presionar el botón de arranque hasta la mitad, la bola quedará bloqueada en una de centenas de posiciones de bloqueo en tres dimensiones. Acostrumbrándose un poco al dispositivo, se puede utilizar el botón de arranque con un interruptor por pasos para bloqueo y desbloqueo del ROBO-WRIST, apretándolo a la superficie del cuerpo, por ejemplo a la palma de la mano, al antebrazo, rodilla, cadera u otra superficie dura. Al volver el botón de arranque a los 45 grados en sentido de reloj, eso puede proteger el ROBO-WRIST contra algún bloqueo involuntario al practicar deporte. Los dispositivos extremos se puede cambiar rápido por presionar el
AVISO
51
botón de bola y sacar la inserción de globo. El adaptador de titanio de 2 partes, presentado en la figura 3, se pude llevar consigo en el bolsillo y usar en caso de necesidad. La inserción de bloqueo es compatible con cualquier otra inserción del ROBO-WRIST, pero es recomendable utilizarla solo con relación del anillo de bloqueo. Después de la inserción, el anillo de bloqueo se puede colocar en la inserción por algunos segundos, manteniendo la bola directamente, al ponerlo firme arriba del anillo de apretar, pero con esto el adaptador estará protegido contra choques fuertes y sacudidas.
3. Datos técnicos
Número de artículo 1001 ROBO-WRIST Peso [g] 165 Altura total [mm] 41
4. Manejo 4.1 Montaje Limpie las roscas de los inserción de globo y del elemento de prensado con acetona y deje que se evapore. A continua ción, humedezca la rosca del elemento de prensado con 636K14 Loctite 601. Now screw the inserción de globo sobre la rosca del elemento de prensado hasta el tope.
Daños debido a una manipulación incorrecta del pegamento. Para garantizar una adhesión segura, las superficies correspondientes se han desengrasado con acetona antes de ser aplicadas con un pegamento. Las partes desengrasadas no deben volver a tocarse y han de untarse con pegamento después de que se haya evaporado la acetona.
Follow all safety and processing instructions of the adhesive manufacturer.
INFORMACIÓN
AVISO
52

4.2 Exfoliación 1) Desarme el ROBO-WRIST así que separar el manguito para
exfoliación. Para referencia, aproveche la figura 2. • Por medio de la llave de copa de 1,3 mm destornille y saque dos
tornillos de cabeza de copa M2 x 3 mm, fijados en el anillo de apretar.
• Destornille el anillo de apretar contra sentido de reloj y sáquelo. • Saque dos anillos de contacto. • Saque todo el conjunto del soporte de bola. • Saque la unidad de disco. Presione la tapa inferior de aluminio o
sáquela desde el manguito de exfoliación por medio de 2 orificios en la copa del disco.
• Por medio del destornillador de cruce № 0 destornille y saque un tornillo con cruce M2 x 3 mm, así como saque el botón de arranque.
2) Haga un nido desprendido en el antebrazo por medio de una forma conveniente para desprender (exfoliación) (aqui ø 43,5 mm).
3) Haga una ranura para el botón de arranque. 4) Encole el manguito que se desprende en el bolsillo de antebrazo y
déjelo que se cierre. Compruebe que la cola no salga fuera de los límites del manguito y no entre en el orificio para botón de arranque o dentro del manguito.
En la figura 4 se muestra un ejemplo de desprendimiento (exfoliación) correcto e incorrecto. A la izquierda se muestra un desprendimiento correcto, y a la derecha - incorrecto, porque la pega salió fuera del manguito, tocando el botón de arranque y el anillo de apretar, obstaculizando su movimiento.
5. Aviso legal Todas las disposiciones legales se someten al derecho imperativo del país correspondiente al usuario y pueden variar conforme al mismo.
5.1 Responsabilidad El fabricante se hace responsable si este producto es utilizado conforme a lo descrito e indicado en este documento. El fabricante no se responsabiliza de los daños causados debido al incumplimiento de este documento y, en especial, por los daños derivados de un uso indebido o una modificación no autorizada del producto.
53
5.2 Conformidad CE El producto cumple las exigencias de la Directiva europea 93/42/CEE relative a productos sanitarios. Sobre la base de los criterios de clasificación según el anexo IX de la directiva, el producto se ha clasificado en la clase I. La declaración de conformidad ha sido elaborada por el fabricante bajo su propia responsabilidad según el anexo VII de la directiva.
6. Garantía para el ROBO-WRIST Su ROBO-WRIST está protegido por la garantía de 2 años contra cualquier defecto admitido por el fabricante. Cualesquier partes que obstaculicen el funcionamiento del dispositivo por su desgaste anticipado anomal, se reemplazan rápido y gratis. La garantía no cubre el caso de abuso físico intencionado o destrucción intencionada.
6.1 Piezas de recambio y herramientas • Llaves de copa; 1,3 mm y 2,0 mm • 1 anillo de globo de reserva • 1 resorte firme en bobina (ayuda a apretar más fuerte el botón
de arranque)
54
Simbología Português
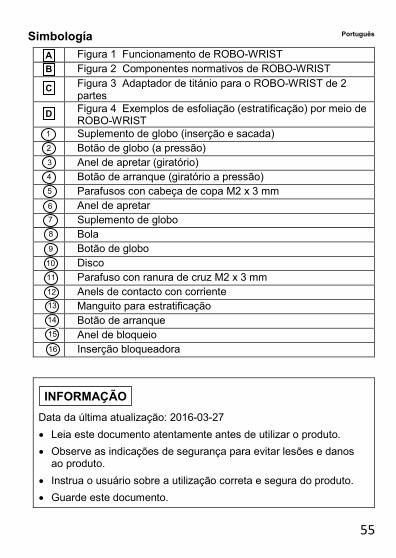
Figura 1 Funcionamento de ROBO-WRIST
Figura 2 Componentes normativos de ROBO-WRIST
Figura 3 Adaptador de titánio para o ROBO-WRIST de 2 partes
Figura 4 Exemplos de esfoliação (estratificação) por meio de ROBO-WRIST
Suplemento de globo (inserção e sacada) Botão de globo (a pressão) Anel de apretar (giratório) Botão de arranque (giratório a pressão) Parafusos con cabeça de copa M2 x 3 mm Anel de apretar Suplemento de globo Bola Botão de globo Disco Parafuso con ranura de cruz M2 x 3 mm Anels de contacto con corriente Manguito para estratificação Botão de arranque Anel de bloqueio Inserção bloqueadora
Data da última atualização: 2016-03-27 • Leia este documento atentamente antes de utilizar o produto. • Observe as indicações de segurança para evitar lesões e danos
ao produto. • Instrua o usuário sobre a utilização correta e segura do produto. • Guarde este documento.
INFORMAÇÃO
B A
D
C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
55
Significado dos símbolos Avisos de possíveis perigos de acidentes e ferimentos
Avisos de possíveis perigos de acidentes e ferimentos.
Avisos de possíveis danos técnicos.
Mais informação sobre a colocação / aplicação.
Leia este manual de instruções com atenção. Preste especial atenção às indicações de segurança mencionadas!
1. Peças individuais 1.1 Peças individuais For Consulte o catálogo para ver as peças individuais disponíveis
1.2 Acessórios ROBO-WRIST
1011 - Inserção de globo está aparafusada dentro do Dispositivo Extremo
1012 - Adaptador de titánio de 2 partes como se mostra na figura 3 está desenhado para proteção do sistema de acoplamento do ROBO-WRIST contra tensão excesiva e choques. Se utileza para trabalhar con martelo, levantar cargas pesadas ou para praticar deportes extremais, como levantamento de pesos, luta oo escalada. Esos componentes não formam parte do lote, é preciso encargá-los aparte.
2. Descrição 2.1 Objectivo 1001 ROBO-WRIST to be used solely for the exoprosthetic fitting of the upper extremities in combination with Otto Bock arm components.
2.2 Field of application
INFORMAÇÃO
ATENÇÃO
CUIDADO
AVISO
INFORMAÇÃO
56
Os 1001 ROBO-WRIST destinam-se exclusivamente ao tratamento protésico das extremidades superiores e devem ser utilizados juntamente com peças de adaptação de braço da Otto Bock. Para o lote de 1001 ROBO-WRIST será conveniente o armazão elétrico estándar.
2.3 Indicações de segurança Transmita as seguintes indicações de segurança ao seu paciente:
Perigo de acidente ao conduzir um veículo. A questão relativa à aptidão de condução de um portador de uma prótese não pode ser resolvida de modo padronizado. Depende do tipo de tratamento (altura da amputação, unilateral ou bilateral, condições do coto, concepção da prótese) e das capacidades individuais do portador da prótese de braço. É fundamental que as regulamentações legais nacionais para a condução de veículos sejam observadas e que, para fins de seguro, se verifique junto às autoridades competentes autorizadas a sua capacidade de conduzir. Por regra, a Otto Bock recomenda que o veículo seja equipado mediante as necessidades, numa loja da especialidade (p. ex. forquilha da direcção, caixa automática). Deve-se certificar que é possível uma condução sem riscos, mesmo sem a prótese estar a funcionar.
Perigo de ferimento devido a operação errada. Ao pressionar involuntariamente o Botão de arranque (figura 1), o Dispositivo Extremo pode cambiar su posição.
CUIDADO
ATENÇÃO
57
Risco de trauma por consecuencia de tensão excesiva. Firmeza elevada de tecnología de bloqueio tridimensional no ROBO-WRIST, segundo os datos documentais e resultados de provas, resiste praticamente quaisquer cargas, as que admite para o mesmo dispositivo o paciente, caso de seu uso correto. Mas, para proteger a unidade de accionador de forza ou o niple de bola contra danos ao praticar deportes exremais, se deve utilezar o adaptador de titánio de 2 partes, descrito no capítulo 1.2 Acessórios. Se o proprietário do ROBO-WRIST admite qualquer violação da regra de uso do adaptador de titánio, que consiste de 2 partes, durante os exercicios oo prática de deporte, o dispositivo extremo pode deslezar e sair da posição angular destinada para o mesmo, ou incluso tocar o anel de apretar. Ao passar isso, se deve imediatamente comprovar as superfícies de bloqueio, o accionador, as clavijas de retenção e o niple de bola, assegurándose de que elas no tenhan danos. Se em qualquera das duas partes de bloqueio acontece o dano, causado por negligéncia do paciente, então o mesmo paciente terá que cubrir os gastos de cámbio de accionador, clavijas e/ou niple de bola, e em este caso toda a garantía de ROBO-WRIST não cubre a essas peças.
Perigo de corrosão. As peças de adaptação da prótese não devem ser sujeitadas a ambientes que possam provocar corrosão nas peças de metal, como p. ex. água doce, água salgada e ácidos. Ao utilizar um produto medicinal em ambientes com estas condições extingue-se qualquer direito à substituição pela Otto Bock HealthCare.
Danos provocados por condições desfavoráveis. As peças de adaptação da prótese não podem ser expostas a fumo intenso ou pó, nem a vibrações, pancadas ou calor extremo. Deve-se evitar a entrada de líquido e pequenos objectos fixos. Caso contrário, podem verificar-se anomalias e danos na prótese.
CUIDADO
AVISO
AVISO
58
Danos provocados por detergentes inadequados. Evite a utilização de produtos de limpeza agressivos. Estes podem levar a danos de mancais, vedações e peças de material plástico.
2.4 Função O ROBO-WRIST está apresentado somente numa construção e em um tamanho. Saque o ROBO-WRIST e uma inserção de globo desde a embalagem. Na figura 1 se apresenta a ilustração do trabalho. Pressione o botão de globo, insertando a inserção de globo dentro da bola. Faça girar um pouco e depois pressione abaixo com forza até que a inserção não se quede cerrada na bola. Pressionando o botão até o tope, o ROBO-WRIST queda desbloqueado. Mantenha a inserção de globo, movendo a bola para a esquerda-direita-acima-abaixo. Faça girar o anel de apretar no sentido de relógio e contra o sentido de relógio até que se produzca um click. Observe um pouco a tensão alterna da bola. A bola pode desplazar aos 86 graus de um lado para o outro pela periferia em 360 graus. Ao pressionar o botão de arranque até a mitade, a bola quedará bloqueada numa das centenas de posições de bloqueio em tres dimensões. Acostrumbrándose um pouco ao dispositivo, se pode utilezar o botão de arranque con um interruptor por passos para bloqueio e desbloqueio do ROBO-WRIST, apretándolo para a superfície do corpo, por exemplo para a palma de mão, o antebraço, joelho, cadeira ou outra superfície dura. Ao volver o botão de arranque aos 45 graus no sentido de relógio, isso pode proteger o ROBO-WRIST contra algum bloqueio involuntário ao praticar deporte. Os dispositivos extremos se pode cambiar rápido, pressionando o botão de bola e sacando a inserção de globo. O adaptador de titánio de 2 partes, apresentado na figura 3, se pode
AVISO
59
levar consigo na algibeiral e usar em caso de necessidade. A inserção de bloqueio é compatível com qualquer outra inserção do ROBO-WRIST, mas é recomendável utilezá-la só com relação do anel de bloqueio. Depois de estar insertado, o anel de bloqueio se pode colocar na inserção por algums segundos, ao manter a bola direitamente, mantendo firme para cima do anel de apretar, mas assim o adaptador estará protegido contra choques fortes e sacudidas.
3. Dados técnicos
Número do artigo 1001 ROBO-WRIST Peso [g] 165 Altura total [mm] 41
4. Manuseamento 4.1 Manuseamento Limpar com acetona as roscas dos inserção de globo do elemento de preensão, e deixar secar. A seguir, humedecer a rosca do elemento de preensão com Loctite 601 636K14. Parafuso agora a inserção de globo até ao encosto na rosca do elemento de preensão.
Danos provocados pelo manuseamento incorrecto da cola. Para assegurar uma colagem segura, as superfícies correspondentes devem ser desengorduradas com acetona antes da aplicação da cola. Não é permitido voltar a tocar nas superfícies desengorduradas e a cola deve ser aplicada imediatamente depois de a acetona secar.
Tenha em atenção as indicações de segurança e de utilização do fabricante da cola.
4.2 Estratificação 1) Desarme o ROBO-WRIST assim que separar o manguito para
estratificação. Para referéncia, aproveite a figura 2.
INFORMAÇÃO
AVISO
60
• Por meio da chave de copa de 1,3 mm desaparafuse e saque dois parafusos de cabeça de copa M2 x 3 mm, fixados no anel de apretar.
• Desaparafuse o anel de apretar contra o sentido de relógio e sáque-lo.
• Saque dois aneis de contacto. • Saque todo o conjunto do soporte de bola. • Saque a unidade de disco. Pressione a tapa inferior de alumínio
ou sáque-la desde o manguito de estratificação por meio de 2 orifícios na copa do disco.
• Por meio do desandador (chave de fenda) de cruce № 0 deaparafuse e saque um parafuso com cruce M2 x 3 mm, assim como saque o botão de arranque.
2) Faça um ninho desprendido no antebraço por meio de uma forma conveniente para desprender (estratificar) (aquí ø 43,5 mm).
3) Faça uma ranura para o botão de arranque. 4) Encole o manguito que se desprende na algibeira de antebraço,
deixando cerrar. Comprovar que a cola não deve sair fora dos límites do manguito e que não entre no orifício para botão de arranque ou dentro do manguito.
Na figura 4 se mostra um exemplo de estratificação correto e incorreto. A esquerda se mostra uma estratificação correta, e a direita - incorreta, porque a pega saiu fora do manguito, tocando o botão de arranque e o anel de apretar, obstaculizando seu movimento.
5. Notas legais Todas as condições legais estão sujeitas ao respectivo direito em vigor no país em que o produto for utilizado e podem variar correspondentemente.
5.1 Responsabilidade O fabricante se responsabiliza, se o produto for utilizado de acordo com as descrições e instruções contidas neste documento. O fabricante não se responsabiliza por danos causados pela não observância deste documento, especialmente aqueles devido à utilização inadequada ou à modificação do produto sem permissão.
5.2 Conformidade CE
61
Este produto preenche os requisitos da Diretiva europeia 93/42/CEE para dispositivos médicos. Com base nos critérios de classificação dispostos no anexo IX desta Diretiva, o produto foi classificado como pertencente à Classe I. A Declaração de Conformidade, portanto, foi elaborada pelo fabricante, sob responsabilidade exclusiva, de acordo com o anexo VII da Diretiva.
6. Garantía para o ROBO-WRIST Seu ROBO-WRIST está protegido pela garantia de 2 anos contra qualquer defeito admitido pelo fabricante. Quaisquer partes que obstaculicem o funcionamento do dispositivo por seu desgaste anticipado anomal, se reemplazam rápido e grátis. A garantía não cubre o caso de abuso físico intencionado ou destrução intencionada.
6.1 Peças de recámbio e herramentas • Chaves de copa; 1,3 mm e 2,0 mm • 1 anel de globo de reserva • 1 resorte firme em bobina (ajuda apretar mais forte o botão de
arranque)
62
Legende Nederlands
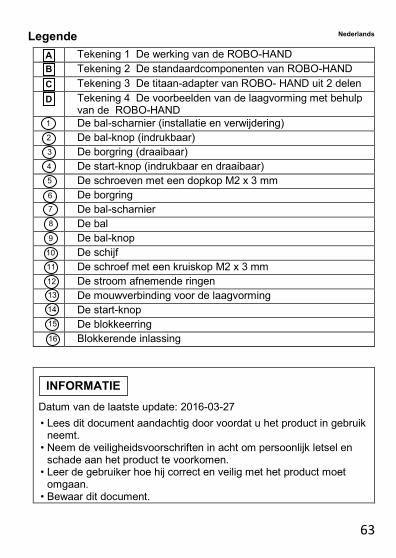
Tekening 1 De werking van de ROBO-HAND
Tekening 2 De standaardcomponenten van ROBO-HAND
Tekening 3 De titaan-adapter van ROBO- HAND uit 2 delen
Tekening 4 De voorbeelden van de laagvorming met behulp van de ROBO-HAND
De bal-scharnier (installatie en verwijdering) De bal-knop (indrukbaar) De borgring (draaibaar) De start-knop (indrukbaar en draaibaar) De schroeven met een dopkop M2 x 3 mm De borgring De bal-scharnier De bal De bal-knop De schijf De schroef met een kruiskop M2 x 3 mm De stroom afnemende ringen De mouwverbinding voor de laagvorming De start-knop De blokkeerring Blokkerende inlassing
Datum van de laatste update: 2016-03-27 • Lees dit document aandachtig door voordat u het product in gebruik
neemt. • Neem de veiligheidsvoorschriften in acht om persoonlijk letsel en
schade aan het product te voorkomen. • Leer de gebruiker hoe hij correct en veilig met het product moet
omgaan. • Bewaar dit document.
INFORMATIE
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
63
Betekenis van de gebruikte symbolen Waarschuwingen voor mogelijke ernstige ongevallen-
en letselrisico’s. Waarschuwingen voor mogelijke ongevallen- en
letselrisico’s. Waarschuwingen voor mogelijke technische schade.
Nadere informatie over het gebruik.
Lees deze gebruiksaanwijzing s.v.p. aandachtig door. Neem in het bijzonder de hierin opgenomen veiligheidsvoorschriften in acht!
1. Onderdelen 1.1 Onderdelen Voor de beschikbare onderdelen wordt verwezen naar de catalogus.
1.2 Accessoires ROBO-HAND
1011 - De balscharnier is ingedraaid in het Terminaal 1012 - De titaan-adapter uit 2 delen op tekening 3 is ontworpen voor
de besherming van de aanhechtingsysteem van de ROBO-HAND tegen overmatige spanning en slagen. Het moet gebruikt worden tijdens het werk met een hammer, opheffing van zware gewichten of tijdens de beoefening van de extreme sporten, zoals power lifting, wrestling of rotsklimmen. Deze onderdelen maken geen deel uit van de standaardcomplectaties en moeten afzonderlijk besteld worden.
INFORMATIE
WAARSCHUWING
VOORZICHTIG
LET OP
INFORMATIE
64
2. Beschrijving 2.1 Gebruiksdoel De 1001 ROBO-HAND polsscharnieren met kogelvergrendeling mogen uitsluitend worden gebruikt als onderdeel van exoprothesen voor de bovenste ledematen in combinatie met Otto Bock onderdelen voor armprothesen.
2.2 Field of application De 1001 ROBO-HAND polsscharnieren met kogelvergrendeling kunnen worden gebruikt in combinatie met een Otto Bock haak, een werktuig of een Otto Bock systeemhand. Bij 1001 ROBO-HAND past de standaard electro-fitting.
2.3 Veiligheidsvoorschriften Geef de onderstaande veiligheidsvoorschriften s.v.p. door aan uw patiënten.
Gevaar voor ongevallen bij gebruik in een motorvoertuig. Op de vraag of en in hoeverre de drager van een prothese in staat is een voertuig te besturen, kan geen algemene geldend antwoord worden gegeven. Dit hangt af van de aard van de prothese en de handicap (amputatieniveau, eenzijdig of tweezijdig, conditie van de stomp, constructie van de prothese) en van de individuele vaardigheden van de drager van de armprothese. Houd u beslist aan de nationale wettelijke voorschriften voor het besturen van motorvoertuigen en laat om verzekeringsrechtelijke redenen door een daartoe geautoriseerde instantie controleren of en bevestigen dat u in staat bent een motorvoertuig te besturen. Over het algemeen adviseert Otto Bock het voertuig door een daarin gespecialiseerd bedrijf te laten aanpassen aan de individuele situatie van de prothesedrager (bijv. door montage van een stuurvork, automatische transmissie). Het moet absoluut gewaarborgd zijn dat het voertuig ook zonder risico’s kan worden bestuurd, wanneer de prothese niet functioneert.
WAARSCHUWING
65

Gevaar voor verwonding door een verkeerde bediening. Wanneer de ontgrendeling per ongeluk wordt bediend, kan het grijpinstrument losraken.
De risico op een trauma door overmatige belasting. De verhoogde stevigheid van de technologie van driedimensionele blokkering in de ROBO-HAND, in overeenkomst met de documentele gegevens en proefresultaten, is in staat om praktisch alle belastingen te weerstaan, waaraan het door de patient onderworpen kan worden onder de voorwaarde van zijn juiste toepassing. Alhoewel, voor de bescherming van de actuator of van de balpunt tegen de beschadiging tijdens de beoefening van extreme sporten, moet de titaan-adapter uit 2 delen, beschreven in paragraaf 1.2 Spaarstukken, ook gebruikt worden. Als de eigenaar van de ROBO-HAND de gebruiksregels van de titaan-adapter, welke uit 2 delen bestaat, tijdens de beoefening van sport schendt, het terminaal kan uit de bestemde hoek-houding wegslippen en zelfs de spanring aanraken. In een dergelijk geval moet men onmiddellijk de blokkerende vlakken, de aandrijving, de borgpennen en het balpunt controleren voor de aanwezigheid van eventuele beschadigingen. Als in om het even welk van de twee blokkerende delen een beschadiging ontstaat wegens de nalatigheid van de patient, de onkosten i.v.m. de vervanging van de aandrijving, pennen en/of de balpunt worden door de patient gedekt en het wordt niet gedekt door de 2-jaar lange complexe garantie voor de ROBO-HAND.
Corrosiegevaar. Zorg ervoor dat prothesedelen niet worden blootgesteld aan invloeden die corrosie van metalen onderdelen veroorzaken, zoals zoet water, zout water en zuren. Bij gebruik van medische hulpmiddelen onder deze omgevingscondities komen alle aanspraken op vergoeding jegens Otto Bock HealthCare te vervallen.
VOORZICHTIG
LET OP
VOORZICHTIG
66

Beschadiging door ongunstige omgevingscondities. Prothesedelen mogen niet worden blootgesteld aan intensieve rook of stof, trillingen, schokken of grote hitte. Er mogen geen vaste deeltjes of vloeistoffen in de prothesedelen binnendringen. Bij niet-inachtneming van dit voorschrift bestaat het risico dat de prothese niet goed meer werkt of beschadigd raakt.
Beschadiging door verkeerde reinigingsmiddelen. Vermijd het gebruik van agressieve reinigingsmiddelen. Deze kunnen de lagers, afdichtingen en kunststofdelen beschadigen.
2.4 Functie De ROBO-HAND is voorgesteld slechts door 1 constructie en in 1 maat. Haal de ROBO-HAND en 1 bal-scharnier uit de verpakking. Op de tekening 1 ziet u een illustratie van zijn werking. Duw op de bal-knop en steek de bal-scharnier in de bal. Draai het een beetje en duw het krachtig naar beneden, totdat de bal-scharnier in de bal “vastklikt”. Als u de start-knop volledig induwt, wordt de ROBO-HAND gedeblokkeerd. Houdt de balscharnier vast en verplaats de bal van links naar rechts en van boven naar beneden. Draai de spanring kloksgewijs en tegen-kloksgewijs totdat u een duidelijke “klik” waarneemt. Kijk naar de variabele aanspanning van de bal. De bal kan 86 graden van kant tot kant verplaatst worden in een periferie van 360 graden. Als men de start-knop half indrukt, wordt de bal geblokkeerd in een van de hondereden blokkeer-posities in de drie dimensies. Eens gewend aan het toestel, kan men de start-knop gebruiken als een stapsgewijze schakelaar voor de blokkering en deblokkering van de ROBO-HAND, terwijl men het tegen, bijvoorbeeld, zijn palm, voorarm, knie, been of een ander lichaamsoppervlakte aandrukt.
LET OP
LET OP
67
Als men de start-knop met 45 graden kloksgewijs zou draaien, dit zal helpen om de ROBO-HAND tegen een ongewenste blokkering tijdens de sportbeoefening te beschermen. De terminalen kunnen snel vervangen worden door het aadrukken van de bal-knop en verwijdering van de bal-scharnier. De titaan-adapter uit 2 delen, zoals getoond op de tekening 3, kan men in zijn broekzak meedragen en, indien nodig, gebruiken. De blokkerende mouwverbinding is compatiebel met om het even welke andere verbinding van de ROBO-HAND, maar optimal zou het samen met de blokkeerring moeten gebruikt worden. Na de installatie, kan men de blokkeerring in de slot binnen loutere seconden plaatsen door de bal recht te houden, terwijl het stevig bovenop de spanring vastgehouden wordt. Maar, hierbij zou het tegen de sterke stoten en trillingen beschermd worden.
3. Technische gegevens
Productcode 1001 ROBO-HAND Gewicht [g] 165 Totale hoogte [mm] 41
4. Toepassing 4.1 Montage Reinig de schroefdraad van de bal-scharnier en het grijpinstrument met aceton en laat de onderdelen uitdampen. Bestrijk de schroefdraad van het grijpinstrument vervolgens met 636K14 Loctite 601. Draai daarna de bal-scharnier op de schroefdraad van het grijpinstrument.
Beschadiging door een verkeerd gebruik van de lijm. Om er zeker van te kunnen zijn dat het polsscharnier goed vast komt te zitten, moeten de vlakken die worden vastgelijmd, voordat ze met lijm worden bestreken, worden ontvet met aceton. De ontvette vlakken mogen daarna niet meer worden aangeraakt, maar moeten zodra de aceton droog is, met lijm worden bestreken.
LET OP
68
Neem de veiligheidsvoorschriften en de verwerkingsinstructies van de lijmfabrikant in acht.
4.2 De onthechting 1) Haal de ROBO-HAND uit elkaar om de onthechtingsmouw te
verwijderen. N.B.: volg de handelingswijze, zoals voorgesteld op tekening 2.. • Met behulp van een dopsleutel van 1,3 mm draai los en
verwijder de twee schroeven met een dopkop M2 x 3 mm, die op de spanring zitten.
• Draai de spanring los in de tegenklokzin en verwijder het. • Verwijder de twee stroomafnemers. • Verwijder de bal-steun. • Verwijder de schijf-slot. Klik op de onderste aluminium deksel of
verwijder het van de onthechtingsmouw met behulp van de twee openingen in de bol van de schijf.
• Met behulp van een Phillips schroevendraaier maat 0 draai los en verwijder een schroef met kruissleuf van M2 x 3 mm los en verwijder ook de start-knop.
2) Maakt de onthechte slot op de voorarm met behulp van de passende vorm voor de onthechting (hier - ø 43,5 mm).
3) Maak een sleuf voor de start-knop. 4) Plak de onthechtingsmouw in de slot op de voorarm en laat het
helen. Controleer dat de lijm niet buiten de grenzen van de mouw-flens zou verspreiden en in de opening van de start-knop of binnen de mouw zou betrappen.
Op de tekening 4 vindt u voorbeelden van juiste en onjuiste onthechting. Links is een voorbeeld van de juiste onthechting en rechts – van de onjuiste, omdat daar de hars buiten de grensen van de flens verspreid is en de start-knop samen met de spanring aanraakt en belemmert hun verplaatsing.
INFORMATIE
69
5. Juridische informatie Op alle juridische bepalingen is het recht van het land van gebruik van toepassing. Daarom kunnen deze bepalingen van land tot land variëren.
5.1 Aansprakelijkheid De fabrikant is aansprakelijk, wanneer het product wordt gebruikt volgens de beschrijvingen en aanwijzingen in dit document. Voor schade die wordt veroorzaakt door niet-naleving van de aanwijzingen in dit document, in het bijzonder door een verkeerd gebruik of het aanbrengen van niet-toegestane veranderingen aan het product, is de fabrikant niet aansprakelijk.
5.2 CE-conformiteit Het product voldoet aan de eisen van de Europese richtlijn 93/42/EEG betreffende medische hulpmiddelen. Op grond van de classificatiecriteria volgens bijlage IX van deze richtlijn is het product ingedeeld in klasse I. De verklaring van overeenstemming is daarom door de fabrikant geheel onder eigen verantwoordelijkheid opgemaakt volgens bijlage VII van de richtlijn.
6. De garantie ROBO-HAND
Een volledige garantie voor 2 jaar tegen eventuele productie gebreken wordt samen met uw ROBO-HAND aangeboden. Alle onderdelen die als gevolg van abnormale vroegtijdige slijtage de werking van uw ROBO-HAND belemmeren, worden onmiddellijk en kosteloos vervangen. De opzettelijke fysische mishandeling of opzettelijke vernietiging zijn niet gedekt door de verzekering.
6.1 Reserveonderdelen & gereedschap: • inbussleutels: 1.3mm + 2.0 mm • 1 reserve bolvormige afdichtingsring • 1 stevige springveer in de spoel (helpt om de start-knop sterker
aan te drukken)
70
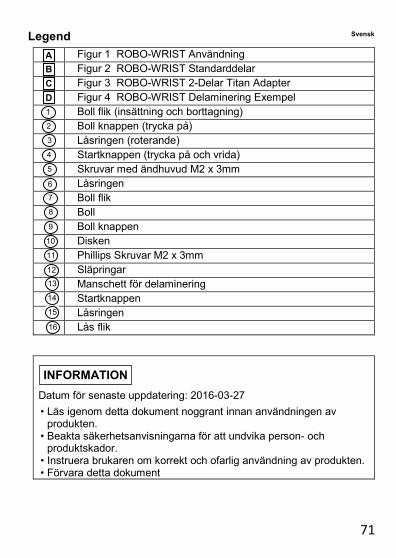
Legend Svensk
Figur 1 ROBO-WRIST Användning
Figur 2 ROBO-WRIST Standarddelar
Figur 3 ROBO-WRIST 2-Delar Titan Adapter Figur 4 ROBO-WRIST Delaminering Exempel
Boll flik (insättning och borttagning) Boll knappen (trycka på) Låsringen (roterande) Startknappen (trycka på och vrida) Skruvar med ändhuvud M2 x 3mm Låsringen Boll flik
Boll Boll knappen Disken Phillips Skruvar M2 x 3mm Släpringar Manschett för delaminering Startknappen Låsringen Lås flik
Datum för senaste uppdatering: 2016-03-27 • Läs igenom detta dokument noggrant innan användningen av
produkten. • Beakta säkerhetsanvisningarna för att undvika person- och
produktskador. • Instruera brukaren om korrekt och ofarlig användning av produkten. • Förvara detta dokument
INFORMATION
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
71
Symbolernas betydelse Varningshänvisning beträffande möjliga svåra olycks- och
skaderisker.
Varningshänvisning beträffande olycks- och skaderisker.
Varningshänvisning beträffande möjliga tekniska skador.
Tips angående skötsel och hantering.
Var god läs igenom denna bruksanvisning uppmärksamt. Beakta framför allt säkerhetstipsen!
1. Separata delar 1.1 Separata delar För tillgängliga separa delar, se katalog.
1.2 Tillbehör ROBO-WRIST
1011 - Boll flik skruvas in i Terminalanordningen 1012 - 2-Delar Titan Adapter tillbehör på Figuren 3 är utformad för att
skydda ROBO-WRIST sammankoppling system från överbelastning och chock. Det måste användas när hamrar, utför tunga lyft eller utför extrema sporter som tyngdlyftning, brottning eller bergsklättring. Dessa tillbehör ingår inte och måste beställas separat.
2. Beskrivning 2.1 Användning De 1001 ROBO-WRIST med kulspärr, är uteslutande avsedda att användas för protesförsörjning av de övre extremiteterna tillsammans med Otto Bock armkomponenter.
INFORMATION
VARNING
OBSERVERA
OBS
INFORMATION
72
2.2 Användningsområde De 1001 ROBO-WRIST kan användas tillsammans med en Otto Bock hook, ett arbetsverktyg eller med en systemhand från Otto Bock. För 1001 ROBO-WRIST är lämplig standard elektronisk armatur.
2.3 Säkerhetstips Var god vidarebefordra nedanstående säkerhetstips till brukaren:
Olycksrisk vid framförande av ett fordon. Om, och i vilken utsträckning en brukare av armprotes är lämpad att framföra ett fordon måste avgöras från fall till fall. Avgörande faktorer är typen av protesförsörjning (amputationsnivå, en- eller dubbelsidig försörjning, stumpförhållanden, protesens komponenter och inriktning etc.,) och den individuella förmågan hos brukaren själv. Det är nödvändigt att beakta de nationellt lagstiftade bestämmelser som gäller för framförandet av ett fordon i respektive land. Låt en auktoriserad myndighet kontrollera och testa din körduglighet ur försäkringssynpunkt. För maximal säkerhet och bekvämlighet rekommenderar Otto Bock att en specialist utvärderar behovet av speciella anpassningar av fordonet (automatväxel etc.,) Det måste säkerställas att fordonet alltid kan framföras riskfritt, även utan en fungerande protes.
Skaderisk genom överbelastning. Oavsiktlig aktivering av Startknappen (Figur 1) kan leda till ändring av säte av Terminalanordningen.
Risk för skador på grund av hög spänning. Den ökade hållfastheten hos tredimensionella blockering teknik av ROBO-WRIST enligt dokumentation och resultaten av testerna, tål nästan alla villkor som har ålagt av patienten, vid förutsättning av korrekt användning. Men för att skydda manövreringsenheten eller bollen pin från skador orsakade
OBSERVERA
OBSERVERA
VARNING
73

av extrema sporter, bör du använda 2 delar titanadapter, som beskrivs i avsnitt 1.2 Components. Om ägaren av ROBO-WRIST bryter mot regeln hur använda 2 delar titanadapter, medan idrottar, kan terminalanordningen glida ur dess avsedda vinkelläge, och till och med röra klämringen. Om detta händer ska du omedelbart kontrollera låsytan på enheten, låsstift och boll nippel för skador. Om i någon av de två sammankopplade delar uppstår skador som orsakats av vårdslöshet av patienten, kostnaden för att ersätta enheten, stift och/eller boll nippel täcks av patienten, och ROBO-WRIST två års omfattande garanti omfattar det inte.
Korrosionsrisk. Proteskomponenter får inte utsättas för omgivningar som skulle kunna utlösa korrosion på metalldelarna, som t ex., sötvatten, saltvatten och syror. Skulle produkten användas under dessa förutsättningar, försvinner varje anspråk på garanti gentemot Otto Bock HealthCare.
Skador genom felaktiga förhållanden. Proteskomponenter får inte utsättas för intensiv rök, damm, hög värme, mekaniska vibrationer eller stötar. Var noga med att varken fasta partiklar eller vätska kan tränga in i protesen. Skulle dessa säkerhetstips inte följas, kan felaktig function av protesen bli följden.
Skador på grund av felaktiga rengöringsmedel. Undvik en användning med aggressiva rengöringsmedel. Dessa kan skada lager, tätningar och plastdelar.
2.4 Funktion ROBO-WRIST företrädas endast i en designyta och i samma storlek. Ta bort ROBO-WRIST och en Boll fick ur påsen.
OBS
OBS
OBS
74
Figur 1 är en illustration av arbetet. Tryck på boll knappen och sätta boll flik i bollen. Vända lätt och kraftfullt tryck nedåt tills fliken snäpper fast i Bollen. Om du trycker på startknappen tills den stoppar, ROBO-WRIST låsas upp. Håll Boll flik och flytta bollen till vänster och höger och uppåt och nedåt. Vrid låsringen medsols och motsols tills det klickar på plats. Titta på variabel spänning av bollen. Bollen kan förflyttas på 86 grader från sida till sida längs periferin av 360 grader. Om du trycker på startknappen halvvägs, är bollen låst i ett av de hundratals lås positioner i tre dimensioner. Man behöver lite tid att vänja sig till enheten ock startknappen kan användas som stegbrytaren för att låsa och låsa upp ROBO-WRIST genom att trycka den till kropp yta, såsom handflatan, underarm, knä, höft eller annan fast yta. Om att vända startknappen för 45 grader medsols, kommer det att hjälpa till att skydda ROBO-WRIST från oavsiktlig lås inom idrotten. Terminalerna kan bytas snabbt genom att trycka på boll knappen och ta ut boll flik. 2 delar Titan adapter, som visas i Figur 3, kan du bära i fickan och använda vid behov. Låsinsatsen är kompatibel med någon annan ROBO-WRIST flik, men det är optimalt att använda endast i samband med låsringen. Efter införande kan låsringen placeras i flik för några sekunder, man håller bollen rakt om ordentligt placeras den på toppen av låsringen, men den kommer att skyddas från stötar och slag.
3. Tekniska uppgifter
Artikelnummer 1001 ROBO-WRIST Vikt [g] 165 Total höjd [mm] 41
4. Handhavande 4.1 Montering Gängan till Boll och hand/krok rengörs och luftas med aceton. Därefter befuktas handens/krokens gänga med Loctite 601, 636K14. De Boll nu skruva till stoppet på handens/krokens gänga.
75
Skador genom felaktig hantering av limmet. För att garantera en säker limning, måste motsvarande ytor avfettas med aceton innan limmet stryks på. De avfettade ytorna får inte beröras och måste genast bestrykas med lim efter att de har torkat.
Beakta noga säkerhetstips och bearbetningshänvisningar från limtillverkaren.
4.2 Delaminering 1) Demontera ROBO-WRIST så att separera manschett för
delaminering. För referens, använd Figur 2. • Använd insexnyckel 1,3 mm och skruva och ta bort de två
skruvarna från det främre huvudet M2 x 3 mm fast på låsringen. • Avlägsna låsringen motsols och ta bort det • Ta bort de två släpringar. • Ta bort kullänken I enheten. • Ta bort drivenheten. Tryck på baksidan av aluminiumhölje eller
ta bort det från manschett för delaminering med hjälp av 2 hål i drivenheten.
• Använd en skruvmejsel med ett tvärstycke №0 och skruva och ta bort en skruv från tvärstycket M2 x 3 mm och ta bort startknappen.
2) Gör lösgörplatsen på underarmen med en lämplig form för delaminering (här ø 43,5 mm).
3) Gör en fördjupning för startknappen. 4) Lim manschett för delaminering på underarmen fickan och låta det
läka. Kontrollera att limmet inte har gått längre än flänsen av manschett och fick inte i enheten hålet på startknappen eller insidan av manschetten.
På Figur 4 visas ett exempel på rätt och fel delaminering. Till vänster visas rätt delaminering och till höger visas fel delaminering, eftersom
OBS
INFORMATION
76

hartset har flyttat utanför flänsen och vidrör startknappen och låsringen, vilket förhindrar deras rörelse
5. Juridisk information Alla juridiska villkor är underställda lagstiftningen i det land där produkten används och kan därför variera.
5.1 Ansvar Tillverkaren ansvarar om produkten används enligt beskrivningarna och anvisningarna i detta dokument. För skador som uppstår till följd av att detta dokument inte beaktats ansvarar tillverkaren inte.
5.2 CE-överensstämmelse Produkten uppfyller kraven för medicintekniska produkter i EG-direktivet 93/42/EEG. På grund av klassificeringskriterierna enligt bilaga IX i direktivet har produkten placerats i klass I. Förklaringen om överensstämmelse har därför skapats av tillverkaren som enskilt ansvar enligt bilaga VII i direktivet.
6. Garanti för ROBO-WRIST Din ROBO-WRIST skyddar omfattande två års garanti mot alla fel gjorts under produktionen. De delar som förhindrar drift av anordningen på grund av onormalt tidigt slitage, snabbt och kostnadsfritt bytas ut. Garantin täcker inte avsiktlig misshandel eller avsiktlig förstörelse.
6.1 Reservdelar och verktyg • Slut nycklar; 1,3 mm och 2,0 mm • en reserv sfärisk ring • en stark fjäder i spolen (hjälper mer trycka på startknappen )
77
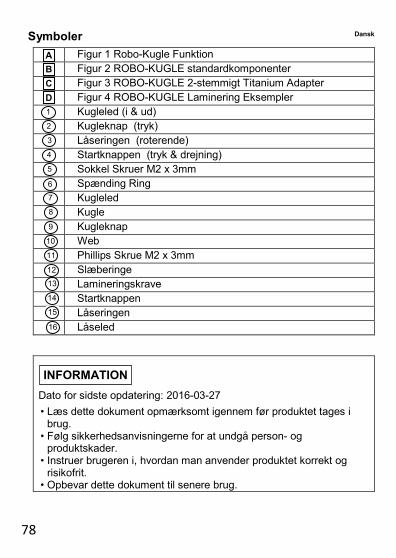
Symboler Dansk
Figur 1 Robo-Kugle Funktion
Figur 2 ROBO-KUGLE standardkomponenter
Figur 3 ROBO-KUGLE 2-stemmigt Titanium Adapter
Figur 4 ROBO-KUGLE Laminering Eksempler Kugleled (i & ud) Kugleknap (tryk) Låseringen (roterende) Startknappen (tryk & drejning) Sokkel Skruer M2 x 3mm Spænding Ring Kugleled
Kugle Kugleknap Web Phillips Skrue M2 x 3mm Slæberinge Lamineringskrave Startknappen Låseringen Låseled
Dato for sidste opdatering: 2016-03-27 • Læs dette dokument opmærksomt igennem før produktet tages i
brug. • Følg sikkerhedsanvisningerne for at undgå person- og
produktskader. • Instruer brugeren i, hvordan man anvender produktet korrekt og
risikofrit. • Opbevar dette dokument til senere brug.
INFORMATION
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
78
Symbolernes betydning Advarsler om risiko for alvorlig ulykke eller personskade.
Advarsler om risiko for ulykke eller personskade.
Advarsler om mulige tekniske skader.
Yderligere oplysninger om forsyning / brug.
Læs venligst denne betjeningsvejledning omhyggeligt igennem. Vær særligt opmærksom på de anførte sikkerhedsanvisninger!
1. Komponenter 1.1 Komponenter Se kataloget mht. komponenter, der kan leveres.
1.2 Tilbehør ROBO-KUGLE
1011 - Kugleled skruet til Tilkoblingsanordning 1012 - 2-stemmigt Titanium Adapter i figur 3 er designet til at
beskytte ROBOT-WRIST sikringsanlæg fra stor belastning og stød. Den skal bruges ved hammering, udføring af tunge løft eller udføring af ekstrem sport såsom vægtløftning, brydning eller klatring. Dette tilbehør er ikke inkluderet og skal bestilles separat.
2. Beskrivelse 2.1 Anvendelsesformål Det 1001 ROBO-KUGLE må kun anvendes til eksoprotesebehandling af øvre ekstremiteter i forbindelse med Otto Bock armkomponenter.
2.2 Field of application Det 1001 ROBO-KUGLE kan anvendes med et Otto Bock hooktræk, arbejdsudstyr eller med en Otto Bock systemhånd. 1001 ROBO-KUGLE accepterer standardbeslag.
INFORMATION
ADVARSEL
FORSIGTIG
BEMÆRK
INFORMATION
79
2.3 Sikkerhedsanvisninger Giv de efterfølgende sikkerhedsanvisninger videre til din patient:
Risiko for ulykker ved brug i biler. Om og hvor vidt brugeren af en protese er i stand til at køre bil, kan ikke besvares generelt. Dette er afhængigt af forsyningens type (amputationssted, ensidig eller tosidig, stumpforhold, protesens konstruktionstype) og de specielle evner hos armprotesens bruger. Overhold under alle omstændigheder de nationale lovmæssige forskrifter om bilkørsel, og af forsikringsretslige grunde skal din køreevne testes og godkendes hos en autoriseret instans. Generelt anbefaler Otto Bock at få bilen tilpasset til de pågældende behov af et autoriseret værksted (f.eks. styretøj, automatgear). Det skal sikres, at risikofri kørsel også er mulig uden funktionsdygtig protese.
Risiko for tilskadekomst på grund af forkert betjening. Utilsigtet aktivering af betjeningsknappen (figur 1) kan forårsage terminalindretningen at skifte position.
Risiko for skade som følge af for stor belastning. Robo-kugle har overlegen styrke af 3D sikringsanlæg teknologien der er veldokumenteret og testet til at modstå de fleste opgave den udsættes for af patienten, hvis de anvendes korrekt. Men for at sikre sig mod skader på aktuator montering eller boldens nippelløb, når du udfører ekstrem sport, skal den 2-del Titanium Adapter bruges som beskrevet i afsnit 1.2 Tilbehør Skulle bæreren af ROBO-HÅNDLED overtræder reglen om at bruge 2-del Titanium Adapter for disse sportsgrene, kunne terminalenheden glide noget fra sin tildelte vinkelposition, potentielt så langt som at røre Spænding Ring. Efter en sådan hændelse, sikringsanlæg flader,
FORSIGTIG
FORSIGTIG
ADVARSEL
80
Aktuator, Aktuator Pins og Ball Nippel Race bør straks efterses for skader. Skulle skade opstået på en af de 2 sikringsanlæg dele, på grund af uagtsomhed af patienten, vil omkostningerne ved at udskifte den aktuator og/eller Pins eller Ball Nippel Race skal bæres af patienten og er ikke omfattet af den omfattende 2 årig ROBO-Håndled garanti.
Korrosionsrisiko. Protesekomponenter må ikke udsættes for omgivelser, der kan udløse korrosion på metaldelene, f.eks. ferskvand, saltvand eller syrer. Ved brug af et medicinprodukt under sådanne omgivelsesbetingelser bortfalder alle erstatningskrav mod Otto Bock HealthCare.
Beskadigelse på grund af forkerte omgivelsesbetingelser. Protesekomponenter må ikke udsættes for intensiv røg eller støv, mekaniske vibrationer, stød eller høj varme. Hverken faste smådele eller væsker må trænge ind. Manglende overholdelse kan føre til fejlfunktion og beskadigelse af protesen.
Beskadigelse på grund af forkerte rengøringsmidler. Undgå anvendelse af skarpe rengøringsmidler. Disse kan medføre beskadigelse af lejer, pakninger og plastdele.
2.4 Funktion Robo-håndleddet er tilgængelig i kun én design. En størrelse passer alle. Fjern ROBO-håndled og en Ball Indsæt fra Shipping Box. Der henvises til Figur 1 for en illustration af funktionen. Tryk Ball knappen og indsæt Ball Sæt ind i bolden. Twist lidt og presse hårdt ned, indtil Indsæt klikker på bolden. Presser betjeningsknappen hele vejen i låser ROBO-håndled. Hold Ball Indsæt og flytte bolden venstre-højre-op-ned.
BEMÆRK
BEMÆRK
BEMÆRK
81
Drej Spænding Ring med uret og mod uret. Bemærk den hørbare taktile kliklyd. Overhold den variable Ball spænding. Bolden kan flyttes 86 grader fra side til side på en 360 graders periferi. Presser betjeningsknappen halvvejs låser bolden i hundredvis af låsestillinger i 3D. Med en smule følelse, kan betjeningsknappen også bruges som et bump-switch for at låse eller låse ROBO-HÅNDLED ved at støde den mod en kropsdel, såsom hule hånd, arm, knæ, lår eller anden fast overflade. Drejning betjeningsknappen 45 grader med uret forhindrer utilsigtet låsning af ROBO-WRIST under sportsaktiviteter. Skubbe Ball knappen og trække Ball Insert giver mulighed for hurtig udveksling af Terminal enheder. Det 2-del Titanium Adapter vist i figur 3 kan bæres i en lomme til brug når det er nødvendigt. Den Låsning Insert er kompatibel med enhver anden ROBO-HÅNDLED Insert, men er bedst kun anvendes sammen med låseringen. Når den er indsat, kan låseringen spindes på Indsæt i sekunder, og dermed holde bolden lige når siddende fast på toppen af Spændinger Ring, men ikke længere sårbare over for kraftige slag eller stød.
3. Tekniske data
Artikelnummer 1001 ROBO-HÅNDLED Vægt [g] 165 Totalhøjde [mm] 41
4. Håndtering 4.1 Montering Rengør gevindene af Kugleled og and with the gripping element with acetone and allow it to evaporate. Fugt derefter gribeelementets gevind med 636K14 Loctite 601. Nu skrues Kugleled på gevindet af terminalindretningen til anslag.
82

Beskadigelse på grund af forkert håndtering af klæbemidlet. For at garantere en sikker sammenklæbning, skal de tilsvarende flader rengøres for fedt med acetone før klæbemidlet påføres. De rengjorte steder må ikke mere berøres og skal omgående forsynes med klæbemiddel efter tørring af acetonen.
Følg klæbemiddelproducentens sikkerheds- og forarbejdning sanvisninger
4.2 Laminering 1) Adskil ROBO-Håndled så Laminering kraven er en separat del. Der
henvises til Figur 2 som en vejledning. • Ved hjælp af en 1,3 mm Allen skrue, skru og fjern de to M2 x 3
mm sokkel Skruer sikret i Spænding Ring. • Skru Spænding Ring mod uret og fjern. • Fjern de to slæberinge. • Fjern Paritetiske Forsamling Ball. • Tag Web forsamling. Skub på bunden Aluminum dækning eller
løfte den ud af Laminering Collar af de 2 huller i web skål. • Brug en №0 Phillips skruetrækker skru og fjern ene M2 x 3 mm
Phillips skrue og fjern betjeningsknappen.
2) Fabriker en lamineret underarm sokkel ved hjælp af matchende laminering formen (her ø 43,5 mm).
3) Indskær en slot til betjeningsknappen.
4) Lim Lamineringskraven ind underarmen stikket og lad helbredelse. Sørg for, at ingen klæbemiddel strækker sig ud over kraven flange eller kommer ind i aktuatorfart Knaphul eller inde i kraven.
Figur 4 viser et eksempel på en god og dårlig laminering job. Den ene til venstre er god, men den til højre er dårligt, da harpiksen strækker sig ud over flangen og rører betjeningsknappen og Spænding Ring og dermed hæmmer deres bevægelser.
BEMÆRK
INFORMATION
83
5. Juridiske oplysninger Alle retlige betingelser er undergivet det pågældende brugerlands lovbestemmelser og kan variere tilsvarende.
5.1 Ansvar Producenten påtager sig kun ansvar, hvis produktet anvendes overensstemmelse med beskrivelserne og anvisningerne i dette dokument. Producenten påtager sig intet ansvar for skader, som er opstået ved tilsidesættelse af dette dokument og især forårsaget af ukorrekt anvendelse eller ikke tilladt ændring af produktet.
5.2 CE-overensstemmelse Produktet opfylder kravene i det europæiske direktiv 93/42/EØF om medicinsk udstyr. Produktet er klassificeret i klasse I på baggrund af klassificeringskriterierne i henhold til dette direktivs bilag IX. Derfor har producenten eneansvarligt udarbejdet overensstemmelseserklæringen I henhold til direktivets bilag VII
6. ROBO-KUGLE Garanti En 2-års omfattende garanti mod eventuelle fejl i Forarbejdning beskytter din ROBO-KUGLE. Enhver del, der hindrer dens funktion på grund af unormal tidlig slitage vil straks blive udskiftet gratis. Bevidst fysisk misbrug eller forsætlig ødelæggelse er ikke omfattet.
6.1 Reservedele og værktøj • Allen nøgler; 1.3mm og 2.0mm • 1 Reserv Kugle O-ring • 1 Stærk bøjning-fjeder (lægger mere kraft på aktiveringsknap)
84

Symboler Norsk
Figur 1 Hvordan fungerer ROBO-WRIST
Figur 2 Standardelementer ROBO-WRIST
Figur 3 Titanadapter ROBO-WRIST av 2 deler
Figur 4 Eksempler på stratifisering med hjelp av ROBO-WRIST
Kuleskål (innsetting of fjerning) Kuleknapp (trykkeknapp) Klemring (roterende) Startknapp (trykk-roterende) Socket skruer M2 x 3 mm Klemring Kuleskål Kule Kuleknapp Skive Filips skrue M2 x 3 mm Strømsamlere Mansjett for stratifisering Startknapp Låsering Låseskål
Dato for siste oppdatering: 2016-03-27 • Les nøye gjennom dette dokumentet før du tar i bruk produktet. • Vennligst overhold sikkerhetsanvisningene for å unngå person-
skader og skader på produktet. • Instruer brukeren i riktig og farefri bruk av produktet. • Ta vare på dette dokumentet.
INFORMASJON
B A
D
C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
85
Symbolenes mening Advarsler mot mulig fare for alvorlige ulykker og
personskader. Advarsler mot mulige ulykker og personskader.
Advarsler mot mulige tekniske skader.
Ytterligere informasjon om vedlikehold / bruk.
Vennligst les nøye gjennom bruksanvisningen. Vær spesielt oppmerksom på de angitte sikkerhetsanvisningene!
1. Enkeltdeler 1.1 Enkeltdeler For bestillingsbare enkeltdeler, se katalog.
1.2 Tilbehør ROBO-WRIST
1011 - Kuleskålen er skrudd inn i dataterminalutstyr 1012 - Titanadapter av 2 deler som er vist på figur 3 er designet for å
beskytte koblingssystemet ROBO-WRIST mot overdreven strømbelastning og støt. Det bør brukes når man arbeider med en hammer, løfter tung last eller driver med ekstrem idrett som vektløfting, bryting eller fjellklatring. Disse delene er ikke inkludert i sett og må bestilles separat.
2. Beskrivelse 2.1 Bruksområde De 1001 ROBO-WRIST skal utelukkende brukes til eksoprotetisk utstyring av øvre ekstremitet sammen med med Otto Bock-armdeler
2.2 Anvendelsesområde De 1001 ROBO-WRIST kan brukes sammen med en Otto Bock kraft-
INFORMASJON
ADVARSEL
FORSIKTIG
LES DETTE
INFORMASJON
86
trekkrok, et arbeidsapparat eller en Otto Bock systemhånd. Standard elektrisk armatur passer godt for 1001 ROBO-WRIST.
2.3 Safety instructions Vennligst gi følgende sikkerhetsanvisninger videre til dine pasienter:
Ulykkesrisiko ved bruk i bil. Om og hvor mye brukeren av en protese er i stand til å føre bil, kan ikke besvares med et generelt svar. Dette avhenger av protesens art (amputasjonshøyde, enkelt- eller tosidig, stumpforhold og protesens konstruksjon) og brukerens individuelle ferdigheter. Nasjonale juridiske forskriftene for føring av bil må absolutt overholdes og din kjøredyktighet bør kontrolleres og bekreftes av en autorisert instans av forsikringsrettslige årsaker. Generelt anbefaler Otto Bock at kjøretøyet blir ombygd til de aktuelle behovene (med f.eks. kjøregaffel eller automatgir) av en fagbedrift. Det bør sikres at risikofri kjøring er mulig også uten funksjonsdyktig protese.
Fare for personskade på grunn av feilbetjening. Hvis man utilsiktet trykker på startknappen (figur 1), kan dataterminalutstyr endre sin stilling.
Skaderisiko på grunn av overdreven strømbelastning. Ifølge dokimentasjon og testresultater ved riktig bruk kan ekstra høy styrke av teknologi for tredimensjonal blokkering i ROBO-WRIST motstå nesten alle slags belastninger som pasient utsetter den for. Men for å beskytte driften eller kulenippelen mot skader når man driver med ekstrem idrett må man bruke titanadapter av 2 deler som er beskrevet i avsnitt 1.2 Deler. Hvis eier av ROBO-WRIST bryter reglene for bruk av titanadapter av 2 deler når driver med idrett, kan dataterminalutstyret skli ut av sin
FORSIKTIG
FORSIKTIG
ADVARSEL
87

vinkelposisjon og til og med kan røre klemringen. Hvis det skjer må man straks kontrollere at det er ikke noen skader på alle blokkerende overflater, driften, låsestifter og kulenippelen. Hvis det oppstår skade i noen av 2 blokkerende overflater forårsaket av pasients uaktsomhet, da blir kostnader for å erstatte drift, stifter og/eller kulenippel dekket av pasienten, mens 2-årig kompleksgaranti ROBO-WRIST dekker ikke disse kostnadene.
Korrosjonsfare. Protese-tilpasningsdeler skal ikke utsettes for elementer som kan forårsake korrosjon på metalldelene, som f.eks. ferskvann, saltvann og syrer. Kommer dette medisinske produktet i kontakt med slike element, blir alle erstatningskrav mot Otto Bock HealthCare ugyldige.
Skade på grunn av feil miljøforhold. Protese-tilpasningsdeler skal ikke utsettes for intens røyk, støv, vibrasjoner, støt eller sterk varme. Verken små partikler eller væsker må trenge inn. Overholdes ikke dette, kan det føre til feilfunksjoner og skader på protesen.
Skade på grunn av feil rengjøringsmiddel. Unngå bruk av sterke rengjøringsmidler. Disse kan føre til skader på lagre, pakninger og plastdeler.
2.4 Funksjon ROBO-WRIST finnes bare i én design og i én størrelse. Ta ROBO-WRIST og kuleskål ut av emballasjen. Figur 1 viser hvordan utstyret fungerer. Trykk på kuleknapp og sett kuleskål inn i kule. Dreie den lett og trykk kraftig på den inntil det klikker og kuleskålen setter fast i kulen. Hvis man trykker på startknappen til det ytterste blir ROBO-WRIST deblokkert. Hold kuleskålen og beveg kulen til venstre/høyre/opp/ned.
LES DETTE
LES DETTE
LES DETTE
88
Roter klemringen med sola og mot sola til det klikker. Kontroller vekselstrømspenning på kulen. Kulen kan beveges på 86 grader fra side til side langs omkretsen på 360 grader. Hvis man trykker på startknappen bare halvveis, blir kulen blokkert i en av hundrevis blokkeringsposisjoner i tre dimensjoner. Etter at du blir vant til utstyret kan du bruke startknappen som step-bryter for å blokkere og deblokkere ROBO-WRIST med å trykke det til overflaten av kroppen, for eksempel håndflaten, underarmen, kne, hofte eller annen fast overflate. Hvis man dreier startknappen 45 grader med sola, kan det hjelpe med å beskytte ROBO-WRIST mot utilsiktet blokkering når man driver med idrett. Dataterminalytstyr kan raskt erstattes med å trykke på kuleknappen og ta kuleskålen ut. Titanadapter av 2 deler som er vist på figur 3, kan man ta med seg i lomma og bruke når det blir behov for det. Låseskålen er kompatibel med alle andre skålene ROBO-WRIST, men det er optimalt å bruke den bare sammen med låseringen. Låseringen kan plasseres inn i skålen i noen få sekunder med å holde kulen i rett stilling hvis den er fast plassert på toppen av klemringen, men den blir beskyttet mot sterk støt og ristelse.
3. Tekniske data
Artikkelnummer 1001 ROBO-WRIST Vekt [g] 165 Samlet høyde [mm] 41
4. Håndtering 4.1 Montering Rengjør gjengene til kuleskålen og dennes gripe-element med aceton og la dem lufttørkes. Smør inn gripe-elementets gjenger med 636K14 Loctite 601. Skru så kuleskålen på gripe-elementets gjenger til anslaget.
Skade på grunn av feilhåndtering av limet. For å garantere sicker
LES DETTE
89
liming, skal de aktuelle flatene avfettes med aceton før limet strykes på. De avfettede områdene må ikke berøres og limet må påføres så fort acetonet er tørket.
Overhold limprodusentens sikkerhets- og arbeidsanvisninger.
4.2 Stratifisering 1) Demonter ROBO-WRIST slik at det blit mulig å løsne stratifiserende
mansjett. For referanse se figur 2. • Bruk unbrakonøkkel på 1,3 mm for å skrue av og ta ut to socket
skruene som sitter fast på klemringen. • Skru av klemringen mot sola og ta den av. • Ta to strømsamlere av. • Ta kulelageren av. • Ta skiveknute av. Trykk på nedre aluminiumlokk eller ta den av
fra stratifiserende masnjett med hjelp av 2 huler i skiveskålen. • Bruk en krysskrutrekker №0 for å skru av og ta av en krysskrue
M2 x 3 mm, også ta startknappen av. 2) Lag på underarmen din stratifisert hulrom med hjelp av passende
form for stratifisering (her ø 43,5 mm). 3) Lag et spor for startknappen. 4) Lim stratifiserende mansjett inn i lomma på underarmen og vent til
den heles. Kontroller at limet ikke går utover mansjettflensen og ikke går inn i hull for startknappen eller inn i mansjetten.
Figur 4 viser eksempel på riktig og galt stratifisering. Venstre figur viser riktig stratifisering, mens høyre fugur viser galt stratifisering fordi harpiks gikk utover flansen og berører startknappen og klemringen noe som hindrer deres bevegelse.
5. Juridiske merknader Alle juridiske vilkår er underlagt de aktuelle lovene i brukerlandet og kan variere deretter.
5.1 Ansvar
INFORMASJON
90
Produsenten påtar seg ansvar når produktet blir brukt i samsvar med beskrivelsene og anvisningene i dette dokumentet. Produsenten påtar seg ikke ansvar for skader som oppstår som følge av at anvisningene I dette dokumentet ikke har blitt fulgt, spesielt ved feil bruk eller ikke tillatte endringer på produktet.
5.2 CE-samsvar Produktet oppfyller kravene i EU-direktiv 93/42/EØF om medisinsk utstyr. Produktet er klassifisert i klasse I på bakgrunn av klassifiseringskriteriene i henhold til dette direktivets vedlegg IX. Samsvarserklæringen er derfor utstedt av produsenten med eneansvar i henhold til direktivets vedlegg VII.
6. Garanti for ROBO-WRIST 2-årig full garanti beskytter deres ROBO-WRIST mot alle slags produksjonsfeil. Alle deler som hindrer fungering av utstyret på grunn av altfor tidlig slitasje skal raskt og gratis erstattes. Garantien gjelder ikke tilfeller av skadelig fysisk påvirkning eller bevisst ødeleggelse.
6.1 Reservedeler og verktøy • Unbrakonøkler; 1,3 mm og 2,0 mm • 1 reservekulering • 1 hard spiralfjær (som hjelper med å kraftig trykke på
startknappen)
91

Käytetty symbolit Suomi
Kuva 1. ROBO-WRISTin työ
Kuva 2. ROBO-WRIST-in vakiokomponentit
Kuva 3. ROBO-WRIST-in titaani 2 osainen sovitin
Kuva 4. Jakautumisen keroksiin esimerkkeja ROBO-WRIST-in avulla
Pallo insertti (insertio ja poisto) Pallo painike (työnnä) Kiristysrengas (käänne) Käynnistyspainiketta (työnnä-sorvaus) Kuusiokolo ruuvit M2 x 3 mm Kiristysrengas Pallo insertti Pallo Pallo painike Levy Ristipäisetruuvit M2 x 3 mm Liukurenkaat Mansetti delaminointiin Käynnistyspainiketta Lukitusrengas Lukitus insertti
Viimeisimmän päivityksen pvm: 2016-03-27 • Lue tämä asiakirja huolellisesti läpi ennen tuotteen käyttöä. • Huomioi turvaohjeet välttääksesi tapaturmia ja tuotevahinkoja. • Instruct Perehdytä käyttäjä tuotteen asianmukaiseen ja
vaarattomaan käyttöön. • Säilytä tämä asiakirja.
TIEDOT
D
C B A
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
92
Käyttöohjeen symbolien selitys Mahdollisia vakavia tapaturma- ja loukkaantumisvaaroja
koskevia varoituksia.
Mahdollisia tapaturma- ja loukkaantumisvaaroja koskevia varoituksia.
Mahdollisia teknisiä vaurioita koskevia varoituksia.
Hoitoa / käyttöä koskevia lisätietoja.
Pyydämme lukemaan huolellisesti tämän käyttöohjeen. Huomioi erityisesti ilmoitetut turvaohjeet!
1. Yksittäisosat 1.1 Yksittäisosat Katso luettelosta saatavissa olevat yksittäisosat.
1.2 Lisävarusteet ROBO-WRIST
1011 - Pallo insertti ruuvattu Terminaalim Laiteen 1012 - 2 osainen titaani sovitin kuviossa 3 on kehitetty erityisesti
ROBO-WRIST kytkintä jarjestelmän suojeluun liiallisen rasitusta ja iskuilta. Sitä tulisi käyttää työskenneltäessä vasaralla, raskaiden kuormien nostettaessa tai lajeiten tehdessään, kuten painonnosto, paini tai kalliokiipeilyä. Nämä komponentit eivät sisälly settiin, niitä on tilattava erikseen.
2. Kuvaus 2.1 Käyttötarkoitus Hte 1001 ROBO-WRIST on tarkoitettu käytettäväksi yksinomaan yläraajojen eksoproteettiseen eli ulkoisen proteesin sovitukseen yhdistettynä Otto Bockin käsivarren komponentteihin.
TIEDOT
VAROITUS
HUOMIO
HUOMAUTUS
TIEDOT
93
2.2 Käyttöalue Hte 1001 ROBO-WRIST voidaan käyttää yhdistettynä Otto Bockin voimavetokoukkuun, työvälineeseen tai Otto Bockin järjestelmäkäteen. 1001 ROBO-WRIST-lle sopii standardi sähkötarvikkeet.
2.3 Turvaohjeet Pyydämme luovuttamaan seuraavat turvaohjeet potilaille:
Tapaturmanvaara käytettäessä moottoriajoneuvossa. Kysy-mykseen siitä, voiko proteesin käyttäjä kuljettaa ajoneuvoa ja missä määrin hän voi tämän tehdä, ei voida antaa yleispätevää vastausta. Se riippuu sovitustavasta (amputaatiokorkeus, yksi- vai molemmin-puolinen, tyngän olosuhteet, proteesin malli) ja käsiproteesin käyttäjän yksilöllisistä kyvyistä. Pyydämme ehdottomasti ottamaan huomioon moottoriajoneuvon kuljetusta koskevat kansalliset lakimääräykset ja vakuutu-soikeudellisista syistä tarkistuttamaan ja vahvistuttamaan ajokelpoisuuden valtuutetun tahon toimesta. Otto Bock suosittelee yleisesti muuttamaan ajoneuvon varustusta kulloinkin kyseisiin tarpeisiin tähän erikoistuneessa autoliikkeessä (esim. ohjaushaarukka, automaattivaihteisto). Vaaraton ajo myös ilman toimintakelpoista proteesia tulisi varmistaa.
Vääränlaisen käytön aiheuttama loukkaantumisvaara. Käynnistys painiketän tahaton painamista (kuva1),voi vaihtaa päätelaiten asennon.
Loukkaantumisvaara liiallisen jännitteen seurauksena. ROBO-WRIST kolmiulotteisen lukitus teknologian lisääntynyt vahvuus asiapaperi tositteiden ja kokemusten mukaan kestää melkein kaikki mitään kuormitukset, mikä potilas altistuu se, oikein käytön ehdolla. Kuitenkin, käyttölaiteen yksikön tai palloniippeli vahingon suojelemiseksi, tulee
HUOMIO
HUOMIO
VAROITUS
94

käyttää 2 osainen titaani sovitin, kuvattu osastossa- 1.2 Työkalukerta. Jos ROBO-WRIST robotin omistaja rikkoo 2 osainen titaani sovitin käyttöohjetta, harjoittaessa, päätelaite voi luiskahtaa hänelle tarkoitetun kulman asennosta ja jopa koskea kiristysrenkaan. Jos näin tapahtuu, tulee välittömästi tarkistaa lukituspinnat, käyttölaite, lukitustapit ja pallo nänni vahingon ilmestymiseen. Jos jokin kahdesta lukitusosista syntyy vahinko, potilan huolimattomuudesta aiheuttama, käyttölaiteen, tapien ja/tai pallo nippelin korvauskustannukset kattaa potilas, ja ROBO-WRIST robotin kahden vuotinen takuu niitä ei koskee.
Syöpymisvaara. Proteesin soviteosia ei saa altistaa ympäristöolosuhteille, jotka saavat aikaan metalliosien korroosiota, esim. makealle/suolattomalle vedelle, suolaiselle merivedelle ja hapoille. Mikäli lääkinnällistä tuotetta käytetään tällaisissa ympärist-öolosuhteissa, kaikki Otto Bock HealthCare-yhtiöön kohdistuvat takuuvaatimukset raukeavat.
Vääränlaisten ympäristöolosuhteiden aiheuttamat vauriot. Proteesin soviteosia ei saa altistaa voimakkaalle savulle tai pölylle eikä värähtelyille, iskuille tai suurelle kuumuudelle. Osien sisään ei saa päästää mitään kiinteitä hiukkasia eikä nesteitä. Tämän määräyksen noudattamatta jättäminen saattaa aiheuttaa proteesin toimintahäiriöitä ja vaurioita.
Vääränlaisten puhdistusaineiden aiheuttamat vauriot. Vältä aggressiivisten puhdistusaineiden käyttöä. Ne saattavat vaurioittaa laakereita, tiivisteitä ja muoviosia.
HUOMAUTUS
HUOMAUTUS
HUOMAUTUS
95
2.4 Toiminta ROBO-WRIST robotti esitetty vain yhdellä mallillä ja yhdellä koolla. Ota ulos pakkausesta ROBO-WRIST ja yksi pallo nippeli. Kuvassa 1 esitetty työn kuvaus. Paina pallo painike ja aseta sisään pallo insertio palloon. ROBO-WRIST vapautuu painamalla painiketta tukeen asti. Pidä pallo insertti ja siirrä pallo vasen-oikea-ylös-alas. Kierrä lukitusrengas myötäpäivään ja vastapäivään, selvä napsauteen. Tarkistaa pallon muuttuvä jännite. Voidaan siirtää palloa puolelta toiseen 86 astetta periferian pitkin 360 astetta. Painamalla käynnistyspainiketta puoliväliin, pallo menee lukkoon kolmiulotteissa yhdessä sadoista lukitusasennosta. Laitteen vähän tottumalla, käynnistyspainikettä voidaan käyttää askel- kytkinnäksi ROBO-WRIST lukitukseen ja vapautumiseen, painamalla se kehon pinnalle, esimerkiksi, kämmenellä, kyynärvarsi, polvi-, lonkka- tai muu kiinteä pintaan. Käynnistyspainikkeen käännös 45 astetta myötäpäivään, auttaa ROBO-WRIST robotin suojelemaan tahaton lukitsemista urheilun harjoittaessa. Päätelaitteet voidaan nopeasti korvata painamalla pallo nappain ja pallon insertin ottamalla ulos.
Titaani sovitin, joka koostunut kahdesta osista, esitetty kuviossa 3, voidaan kantaa taskussa ja käyttää tarvittaessa. Lukitus insertti on yhteensopiva tahansa muun ROBO-WRIST insertin kanssa, mutta optimaalisesti se käyttää vain lukitus rengas yhteydessä. Lisäyksen jälkeen, lukitusrengas voidaan sijoittaa insertiin muutamalla sekunnilla, pitämällä pallon suora, jos se sijoittaa vahvasti kiristysrengas päällä , mutta samalla se tulee suojattuna kolhuilta ja iskuilta.
3. Tekniset tiedot
Tuotenumero 1001 ROBO-WRIST Paino [g] 165 Kokonaiskorkeus [mm] 41
96
4. Käsittely 4.1 Asennus Puhdista kierre pallo insertti ja kierteet asetonilla ja anna niiden tuulettua. Kostuta sen jälkeen tartuinlaitteen kierre tuotteella 636K14 Loctite 601. Kierrä sitten uratappi tartuinelementin kierteelle vasteeseen asti.
Liiman vääränlaisten käsittelyn aiheuttamat vauriot. Varman liimauksen takaamiseksi on vastaavilta pinnoilta poistettava rasva asetonilla ennen liiman sivelemistä. Pintoihin, joista on poistettu rasva, ei saa enää koskea ja niille on siveltävä liimaa heti asetonin kuivuttua.
Huomioi liiman valmistajan turva- ja käsittelyohjeet.
4.2 Delaminointi 1) Pura ROBO-WRIST, delaminointi mansetin irrottamiseen.
Viitauksena käytä kuva 2. • Kuusiokoloavain 1,3mm käyttämällä ruuvaa irti kaksi
kuusioolopäiset ruuvia M2x3mm, kiinnitetty kiristysrenkaalla . • Ruuvaa irti kiristysrengas kääntämällä vastapäivään ja poista
se. • Irrota kaksi liukkurenkaita. • Irrota pallonivelen kokoonpanoa. • Irrota levyn yksikkö. Paina alla oleva alumiini kanteen, tai irrota
se delaminoinin manseetista levyn kulhon olevien 2 reikien avulla.
• Ristipäinen ruuvimisselin No 0 avulla ruuva irti yksi ristipäistä ruuveista M2 x 3 mm, sekä irrota käynnistyspainike.
2) Tee delaminoinnin pesä kyynärpään päällä sopivan muoton käyttämällä delaminointi varten (tässä ø 43,5 mm)
3) Tee uraa käynnistyspainiketta varten.
TIEDOT
HUOMAUTUS
97
4) Liimaa delaminoinnin mansetti kyynärvarren taskuun ja anna sen parantua. Tarkista, että liima ei ylittää mansetin pintaa ja ei osunut käynnistyspainiketta reikaan , tai mansettiin .
Kuvio 4 esittää oikean ja väärän delaminoinnin esimerkkejä. Vasemmalla näkyy oikea delaminointia, ja vasemmalla puolella väärä, koska hartsi liikkui laipan yli ja koskee käynnistyspainiketta ja kiristysrengas,näin estäen niiden liikuminen.
5. Oikeudelliset ohjeet Kaikki oikeudelliset ehdot ovat kyseisen käyttäjämaan omien lakien alaisia ja voivat vaihdella niiden mukaisesti.
5.1 Vastuu Valmistaja on vastuussa, jos tuotetta käytetään tähän asiakirjaan sisältyvien kuvausten ja ohjeiden mukaisesti. Valmistaja ei vastaa vahingoista, jotka aiheutuvat tämän asiakirjan noudattamatta jättämisestä, varsinkin epäasianmukaisesta käytöstä tai tuotteen luvattomasta muuttamisesta.
5.2 CE-yhdenmukaisuus Tuote on lääkinnällisistä laitteista annetun eurooppalaisen direktiivin 93/42/ETY vaatimusten mukainen. Tämän direktiivin liitteen IX mukaisten luokituskriteerien perusteella tuote on luokiteltu kuuluvaksi luokkaan I. Valmistaja on sen vuoksi laatinut vaatimustenmukais-uusvakuutuksen yksin vastuullisena direktiivin liitteen VII mukaisesti. 6.Takuu ROBO-WRIST Sinun ROBO-WRIST-suojelee kompleksin kahden vuotinen takuu tahansa vahingosta tuotannossa tekemä. Kaikki osat, jotka estävät laitteen toiminnan epätavallista ennenaikaista kulumisten takia, korvataan ilmaiseksi ja nopeasti. Takuu ei kattaa tahallinen fyysisen väkivaltaan tai tahallinen tuhoamiseen.
6.1 Varaosat ja työkalut • Kuusiokolopäiset avaimet; 1,3 mm ja 2,0 mm • 1 vara pallomainen rengas • 1 vahva jousi kelassa (se auttaa vahvemmin painaa
käynnistyspainikeen)
98
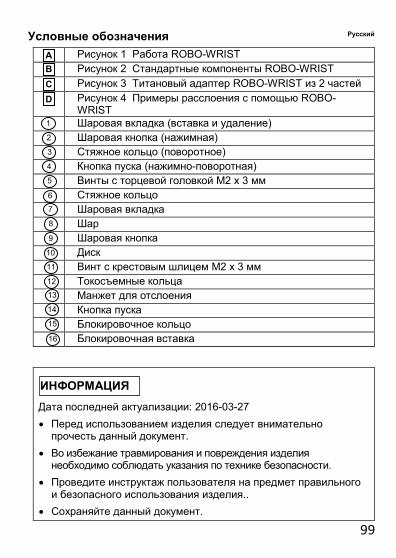
Условные обозначения Русский
Рисунок 1 Работа ROBO-WRIST
Рисунок 2 Стандартные компоненты ROBO-WRIST
Рисунок 3 Титановый адаптер ROBO-WRIST из 2 частей
Рисунок 4 Примеры расслоения с помощью ROBO-WRIST
Шаровая вкладка (вставка и удаление) Шаровая кнопка (нажимная) Стяжное кольцо (поворотное) Кнопка пуска (нажимно-поворотная) Винты с торцевой головкой M2 x 3 мм Стяжное кольцо Шаровая вкладка Шар Шаровая кнопка Диск Винт с крестовым шлицем M2 x 3 мм Токосъемные кольца Манжет для отслоения Кнопка пуска Блокировочное кольцо Блокировочная вставка
Дата последней актуализации: 2016-03-27 • Перед использованием изделия следует внимательно
прочесть данный документ. • Во избежание травмирования и повреждения изделия
необходимо соблюдать указания по технике безопасности. • Проведите инструктаж пользователя на предмет правильного
и безопасного использования изделия.. • Сохраняйте данный документ.
ИНФОРМАЦИЯ
B A
D C
1
2
3
4
5
6
7
8
9
10
11
12
13
14 15
16
99
Значение символов Предупреждения о возможной опасности несчастного
случая или получения тяжелых травм.
Предупреждения о возможной опасности несчастного случая или получения травм.
Предупреждения о возможных технических повреждениях.
Дополнительная информация по назначению / применению.
Пожалуйста, внимательно ознакомьтесь с данной инструкцией по использованию. Обратите особое внимание на приведенные в ней указания по технике безопасности!
1. Отдельные детали 1.1 Отдельные детали For available single components refer to the catalogue.
1.2 Необходимые дополнительные детали ROBO-WRIST
1011 - Шаровая вставка вкручена в Оконечное устройство 1012 - Титановый адаптер из 2 частей на рисунке 3 разработан
для защиты системы сцепления ROBO-WRIST от избыточного напряжения и ударов. Ее следует использовать при работе с молотком, поднятии тяжелых грузов либо при занятиях экстремальными видами спорта, такими как пауэрлифтинг, борьба или скалолазание. Эти комплектующие не входят в комплект, и их нужно заказывать отдельно.
2. Описание 2.1 Назначение Шарниры запястья со сферическим фиксатором 1001 ROBO-WRIST
ИНФОРМАЦИЯ
ОСТОРОЖНО
ВНИМАНИЕ
УВЕДОМЛЕНИЕ
ИНФОРМАЦИЯ
100

пр-ва Отто Бокк предназначены исключительно для использования в протези- ровании верхних конечностей в комбинации с соответствующими ком- плектующими пр-ва Отто Бокк.
2.2 Область применения Шарниры запястья со сферическим фиксатором 1001 ROBO-WRIST могут ис- пользоваться вместе с комплектующими, используемыми для тяговых протезов пр-ва Отто Бокк, с системными кистями Отто Бокк или хуками.. Для 1001 ROBO-WRIST подходит стандартная электроарматура.
2.3 Указания по технике безопасности Просьба проинформировать пациента о нижеследующих указаниях по технике безопасности:
Опасность аварии при использовании в транспортном средстве. На вопрос, будет ли пациент с протезом руки в состоянии водить транспортное средство и на какие расстояния, не может быть дано однозначного ответа. Это зависит от вида протезирования (высоты ампутации, односторонняя или двухсторонняя ампутация, длины культи, конструкции протеза) и от индивидуальных способностей пациента. Обязательно соблюдайте национальные Правила дорожного движения. В целях выполнения страховых обязательств проверьте Вашу при- годность к управлению транспортным средством в уполномоченной организации и получите соответствующее подтверждение. В общем случае компания Отто Бокк рекомендует переоснастить автомобиль на специализированном предприятии в соответствии с Вашими потребностями (например, оснастить его рулевой вилкой или автоматической коробкой передач). Необходимо убедиться в том, что безопасность при вождении обеспечивается также и без функционирующего протеза.
ОСТОРОЖНО
101
Опасность получения травмы вследствие неправильного ис- пользования. При неумышленном нажатии Кнопки пуска (рисунок 1), Оконечное устройство может изменить положение.
Риск травмы вследствие избыточного напряжения. Повышенная прочность технологии трехмерного блокирования в ROBO-WRIST, согласно документальным данным и результатам испытаний, выдерживает практически любые нагрузки, которым его подвергает пациент, при условии его правильного применения. Однако, для защиты узла силового привода или шарового ниппеля от повреждений при занятиях экстремальными видами спорта, следует использовать титановый адаптер из 2 частей, описанный в разделе 1.2 Комплектующие. Если владелец ROBO-WRIST нарушит правило использования титанового адаптера, состоящего из 2 частей, при занятиях спортом, оконечное устройство может выскользнуть из предназначенного для него углового положения и даже дотронуться до стяжного кольца. Если это произойдет, следует незамедлительно проверить блокирующие поверхности, привод, стопорные штифты и шаровой ниппель на предмет повреждений. Если в любой из 2 блокировочных частей возникнет повреждение, вызванное халатностью пациента, расходы на замену привода, штифтов и/или шарового ниппеля покрывает пациент, а 2-летняя комплексная гарантия ROBO-WRIST на них не распространяется.
Опасность коррозии. Не допускается подвергать детали протезов воздействию среды, приводящей к коррозии металлических частей, как например, пресная или соленая вода, кислоты. При эксплуатации медицинского изделия в указанных условиях компания Otto Bock HealthCare снимает с себя обязательства по его замене.
УВЕДОМЛЕНИЕ
ВНИМАНИЕ
ВНИМАНИЕ
102
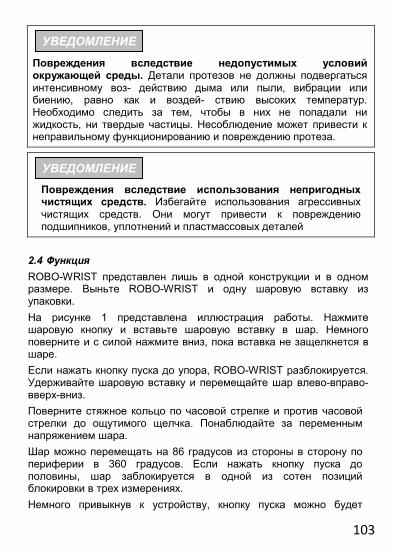
Повреждения вследствие недопустимых условий окружающей среды. Детали протезов не должны подвергаться интенсивному воз- действию дыма или пыли, вибрации или биению, равно как и воздей- ствию высоких температур. Необходимо следить за тем, чтобы в них не попадали ни жидкость, ни твердые частицы. Несоблюдение может привести к неправильному функционированию и повреждению протеза.
Повреждения вследствие использования непригодных чистящих средств. Избегайте использования агрессивных чистящих средств. Они могут привести к повреждению подшипников, уплотнений и пластмассовых деталей
2.4 Функция ROBO-WRIST представлен лишь в одной конструкции и в одном размере. Выньте ROBO-WRIST и одну шаровую вставку из упаковки. На рисунке 1 представлена иллюстрация работы. Нажмите шаровую кнопку и вставьте шаровую вставку в шар. Немного поверните и с силой нажмите вниз, пока вставка не защелкнется в шаре. Если нажать кнопку пуска до упора, ROBO-WRIST разблокируется. Удерживайте шаровую вставку и перемещайте шар влево-вправо-вверх-вниз. Поверните стяжное кольцо по часовой стрелке и против часовой стрелки до ощутимого щелчка. Понаблюдайте за переменным напряжением шара. Шар можно перемещать на 86 градусов из стороны в сторону по периферии в 360 градусов. Если нажать кнопку пуска до половины, шар заблокируется в одной из сотен позиций блокировки в трех измерениях. Немного привыкнув к устройству, кнопку пуска можно будет
УВЕДОМЛЕНИЕ
УВЕДОМЛЕНИЕ
103
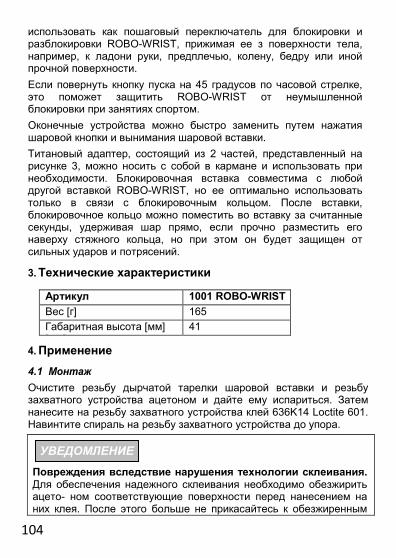
использовать как пошаговый переключатель для блокировки и разблокировки ROBO-WRIST, прижимая ее з поверхности тела, например, к ладони руки, предплечью, колену, бедру или иной прочной поверхности. Если повернуть кнопку пуска на 45 градусов по часовой стрелке, это поможет защитить ROBO-WRIST от неумышленной блокировки при занятиях спортом. Оконечные устройства можно быстро заменить путем нажатия шаровой кнопки и вынимания шаровой вставки. Титановый адаптер, состоящий из 2 частей, представленный на рисунке 3, можно носить с собой в кармане и использовать при необходимости. Блокировочная вставка совместима с любой другой вставкой ROBO-WRIST, но ее оптимально использовать только в связи с блокировочным кольцом. После вставки, блокировочное кольцо можно поместить во вставку за считанные секунды, удерживая шар прямо, если прочно разместить его наверху стяжного кольца, но при этом он будет защищен от сильных ударов и потрясений.
3. Технические характеристики
Артикул 1001 ROBO-WRIST Вес [г] 165 Габаритная высота [мм] [ ]
41
4. Применение 4.1 Монтаж Очистите резьбу дырчатой тарелки шаровой вставки и резьбу захватного устройства ацетоном и дайте ему испариться. Затем нанесите на резьбу захватного устройства клей 636K14 Loctite 601. Навинтите спираль на резьбу захватного устройства до упора.
Повреждения вследствие нарушения технологии склеивания. Для обеспечения надежного склеивания необходимо обезжирить ацето- ном соответствующие поверхности перед нанесением на них клея. После этого больше не прикасайтесь к обезжиренным
УВЕДОМЛЕНИЕ
104
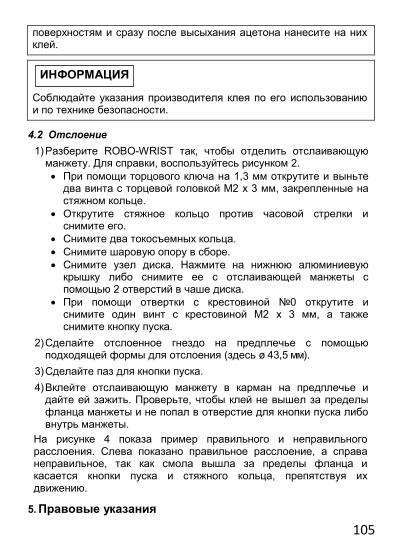
поверхностям и сразу после высыхания ацетона нанесите на них клей.
Соблюдайте указания производителя клея по его использованию и по технике безопасности.
4.2 Отслоение 1) Разберите ROBO-WRIST так, чтобы отделить отслаивающую
манжету. Для справки, воспользуйтесь рисунком 2. • При помощи торцового ключа на 1,3 мм открутите и выньте
два винта с торцевой головкой M2 x 3 мм, закрепленные на стяжном кольце.
• Открутите стяжное кольцо против часовой стрелки и снимите его.
• Снимите два токосъемных кольца. • Снимите шаровую опору в сборе. • Снимите узел диска. Нажмите на нижнюю алюминиевую
крышку либо снимите ее с отслаивающей манжеты с помощью 2 отверстий в чаше диска.
• При помощи отвертки с крестовиной №0 открутите и снимите один винт с крестовиной M2 x 3 мм, а также снимите кнопку пуска.
2) Сделайте отслоенное гнездо на предплечье с помощью подходящей формы для отслоения (здесь ø 43,5 мм).
3) Сделайте паз для кнопки пуска. 4) Вклейте отслаивающую манжету в карман на предплечье и
дайте ей зажить. Проверьте, чтобы клей не вышел за пределы фланца манжеты и не попал в отверстие для кнопки пуска либо внутрь манжеты.
На рисунке 4 показа пример правильного и неправильного расслоения. Слева показано правильное расслоение, а справа неправильное, так как смола вышла за пределы фланца и касается кнопки пуска и стяжного кольца, препятствуя их движению.
5. Правовые указания
ИНФОРМАЦИЯ
105
На все правовые указания распространяется право той страны, в которой используется изделие, поэтому эти указания могут варьировать.
5.1 Ответственность Производитель несет ответственность в том случае, если изделие используется в соответствии с описаниями и указаниями, приведенными в данном документе. Производитель не несет ответственности за ущерб, возникший вследствие пренебрежения положениями данного документа, в особенности при ненадлежащем использовании или несанкционированном изменении изделия.
5.2 Соответствие стандартам ЕС Данное изделие отвечает требованиям европейской Директивы 93/42/ЕЭС по медицинской продукции. В соответствии с критериями классификации, приведенными в Приложении IX указанной Директивы, изделию присвоен класс I. В этой связи Декларация о соответствии была составлена производителем под свою исключительную ответственность согласно Приложению VII указанной Директивы.
6. Гарантия на ROBO-WRIST Ваш ROBO-WRIST защищает комплексная 2-летняя гарантия от любого брака, допущенного при производстве. Любые части, препятствующие работе устройства из-за аномального досрочного износа, оперативно и бесплатно заменяются. Гарантия не распространяется на умышленное физическое злоупотребление или умышленное уничтожение.
6.1 Запасные части и инструменты • Торцовые ключи; 1,3 мм и 2,0 мм • 1 запасное шаровое кольцо • 1 прочная пружина в катушке (помогающая сильнее
нажимать на кнопку пуска)
106

107

Medical Bionics Inc. 51203 Range Road 265 Spruce Grove Alberta Canada T7Y1E7 Phone: +1 780 907-3222 Email: [email protected]
Leitner AG Amselweg 1 CH - 3292 Busswil Switzerland
108