Tobias Hell mit Ergänzungen von Daniela Schiefeneder · 2020-02-20 · Skriptum zur Vorlesung...
149
Skriptum zur Vorlesung Analysis 2 für Lehramtsstudierende Tobias Hell mit Ergänzungen von Daniela Schiefeneder Universität Innsbruck Sommersemester 2019
Transcript of Tobias Hell mit Ergänzungen von Daniela Schiefeneder · 2020-02-20 · Skriptum zur Vorlesung...

Skriptum zur Vorlesung
Analysis 2 für LehramtsstudierendeTobias Hell
mit Ergänzungen von Daniela Schiefeneder
Universität InnsbruckSommersemester 2019


Inhaltsverzeichnis
1. Integralrechnung in einer Veränderlichen 11.1. Wiederholung: Riemann-Integral . . . . . . . . . . . . . . . . . . . . . . . 11.2. Integrationsmethoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.3. Anwendungen des Integrals . . . . . . . . . . . . . . . . . . . . . . . . . . 71.4. Numerische Integration . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
I Differential- und Integralrechnung in mehreren Veränderlichen 15
2. Topologische Grundlagen 172.1. Normen auf Rd . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2. Offene und abgeschlossene Mengen . . . . . . . . . . . . . . . . . . . . . . 212.3. Stetigkeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4. Fixpunktsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
3. Kurven 293.1. Bogenlänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4. Differentialrechnung 354.1. Partielle Ableitungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 354.2. Totale Ableitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384.3. Taylor-Formel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434.4. Lokale Extrema . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 464.5. Newton-Verfahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.6. Extrema mit Nebenbedingungen . . . . . . . . . . . . . . . . . . . . . . . 49
5. Integralrechnung 535.1. Parameterintegrale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 535.2. Mehrdimensionales Riemann-Integral . . . . . . . . . . . . . . . . . . . . . 56
II GewöhnlicheDifferentialgleichungen 63
6. Differentialgleichungen: Einführung und Beispiele 656.1. Grundlegendes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
i

ii Inhaltsverzeichnis
7. Spezielle Skalare Differentialgleichungen 697.1. Differentialgleichungen mit trennbaren Variablen . . . . . . . . . . . . . . 697.2. Lineare Differentialgleichungen erster Ordnung . . . . . . . . . . . . . . . 71
8. Allgemeine Lösungstheorie 738.1. Satz von Picard-Lindelöf . . . . . . . . . . . . . . . . . . . . . . . . . . . . 738.2. Satz von Peano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 798.3. Globale Existenz und Eindeutigkeit . . . . . . . . . . . . . . . . . . . . . . 808.4. Stetige Abhängigkeit von den Daten . . . . . . . . . . . . . . . . . . . . . 848.5. Autonome Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
9. Lineare Systeme 899.1. Struktur und Darstellung des Lösungsraums . . . . . . . . . . . . . . . . . 899.2. Die Matrixexponentialfunktion . . . . . . . . . . . . . . . . . . . . . . . . 929.3. Lineare Systeme mit konstanten Koeffizienten . . . . . . . . . . . . . . . . 959.4. Skalare lineare Differentialgleichungen mit konstanten Koeffizienten . . . . 979.5. Lineare Systeme mit analytischen Koeffizienten . . . . . . . . . . . . . . . 989.6. Ableitung nach dem Anfangswert . . . . . . . . . . . . . . . . . . . . . . . 100
III Fourierreihen und Integraltransformationen 103
10.Fourier-Reihen 10510.1. Approximationssatz von Fejér . . . . . . . . . . . . . . . . . . . . . . . . . 10710.2. Wärmeleitung in einem Stab . . . . . . . . . . . . . . . . . . . . . . . . . . 11110.3. Partialbruchzerlegung des Cotangens . . . . . . . . . . . . . . . . . . . . . 11310.4. Punktweise Konvergenz nach Dirichlet . . . . . . . . . . . . . . . . . . . . 11410.5. Konvergenz im quadratischen Mittel . . . . . . . . . . . . . . . . . . . . . 117
11.Integraltransformationen 12111.1. Fourier-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12111.2. Laplace-Transformation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 125
A. Lebesgue-Integral 129
B. Inverse und implizite Funktionen 133
C. Integration in Kugelkoordinaten 139

Kapitel 1
Integralrechnung in einer Veränderlichen
1.1 Wiederholung: Riemann-Integral
Gegeben sei die Funktion f : [a, b]→ R. Wir wählen eine Zerlegung
Z : x0 = a < x1 < . . . < xn = b, n ∈ N,
von [a, b] und Stützstellen ξ = (ξ1, . . . , ξn) d. h. es gilt
∀ i = 1, . . . , n : ξi ∈ [xi−1, xi].
Für i = 1, . . . , n setzen wir∆xi := xi − xi−1.
Dann heißt
S(f,Z, ξ) :=
n∑i=1
f(ξi)∆xi
Riemann1-Summe von f zur Zerlegung Z und den Stützstellen ξ. Des Weiteren nenntman
|Z| := max ∆xi : i = 1, . . . , n
Feinheit der Zerlegung Z.
Definition 1.1 (Riemann-Integral)Eine Funktion f : [a, b]→ R heißt Riemann-integrierbar, wenn es ein I ∈ R mit
lim|Z|→0
S(f,Z, ξ) = I
gibt, d. h. für alle ε > 0 gibt es ein δ > 0, sodass für jede Zerlegung Z von [a, b] mitzugehörigen Stützstellen ξ gilt, dass
|Z| < δ ⇒ |S(f,Z, ξ)− I| < ε.
In diesem Fall heißt ˆ b
af(x) dx := I
das Riemann-Integral von f .1Georg Friedrich Bernhard Riemann, 1826–1866, deutscher Mathematiker
1

2 1. Integralrechnung in einer Veränderlichen
Theorem 1.2 (Hauptsatz der Differential- und Integralrechnung)Es sei F : [a, b]→ R eine Stammfunktion der stetigen Funktion f : [a, b]→ R. Dann ist
ˆ b
af(x) dx = F (b)− F (a) =: F (x)
∣∣∣ba.
Folgende unbestimmte Integrale haben wir bereits durch Differenzieren entsprechenderStammfunktion bestimmt:
(1)ˆ
1 dx = x+ C (2)ˆxα dx =
xα+1
α+ 1+ C , α 6= −1
(3)ˆ
dxx
= log |x|+ C (4)ˆ
ex dx = ex + C
(5)ˆ
sinx dx = − cosx+ C (6)ˆ
cosx dx = sinx+ C
(7)ˆ
dxcos2 x
= tanx+ C (8)ˆ
dxsin2 x
= cotx+ C
(9)ˆ
dx√1− x2
= arcsinx+ C (10)ˆ
dx1 + x2
= arctanx+ C
1.2 Integrationsmethoden
Theorem 1.3 (Partielle Integration)Es seien f, g ∈ C1(I), wobei I ⊂ R ein Intervall bezeichne. Dann gilt
ˆf(x)g′(x) dx = f(x)g(x)−
ˆf ′(x)g(x) dx.
Beweis. Die Behauptung folgt unmittelbar aus der Produktregel, denn es gilt
(f(x)g(x))′ = f ′(x)g(x) + f(x)g′(x).
Bemerkung 1.4Ist [a, b] ⊂ I , so erhält man für bestimmte Integrale die Formel
ˆ b
af(x)g′(x) dx = f(x)g(x)
∣∣∣ba−ˆ b
af ′(x)g(x) dx
für die partielle Integration.
Beispiel 1.5 (Zwei Beispiele zur partiellen Integration)

1. Integralrechnung in einer Veränderlichen 3
.
ˆxex dx = xex −
ˆex dx = (x− 1)ex + C
.
ˆlog x dx =
ˆ1 · log x dx = x log x−
ˆx
xdx = x(log x− 1) + C
Theorem 1.6 (Substitutionsregel)Es seien I, J ⊂ R zwei Intervalle sowie f : I → R eine stetige und g : J → R eine stetigdifferenzierbare Funktion mit g(J) ⊂ I. Dann gilt
ˆf (g(x)) g′(x) dx =
ˆf(y) dy
∣∣∣∣y=g(x)
.
Beweis. Ist F : I → R eine Stammfunktion von f , so gilt nach der Kettenregel
(F g)′(x) = F ′ (g(x)) g′(x) = f (g(x)) g′(x).
Demnach erhalten wirˆf (g(x)) g′(x) dx = (F g)(x) + C =
ˆf(y) dy
∣∣∣∣y=g(x)
.
Bemerkung 1.7Ist [a, b] ⊂ J , so lautet die Substitutionsregel für bestimmte Integrale
ˆ b
af (g(x)) g′(x) dx =
ˆ g(b)
g(a)f(y) dy.
Beispiel 1.8 (Beispiel zur Substitutionsregel)
ˆearctanx
1 + x2dx =
[y = arctanx, dy =
dx1 + x2
]=
ˆey dy = ey + C = earctanx + C .

4 1. Integralrechnung in einer Veränderlichen
Integration gebrochenrationaler Funktionen
Ist f = gh eine gebrochenrationale Funktion (d.h. g, h sind Polynome) und ist n bzw. m
der Grad des Polynoms p bzw. q, so nennen wir f unecht gebrochenrational, wenn n > m,ansonsten echt gebrochenrational. Die Integration einer gebrochenrationalen Funktionf = g
h erfolgt nach folgendem Vorgehen:
(1) Ist f unecht gebrochenrational, so zerlegt man zunächst f mittels Polynomdivisionin eine Polynomfunktion p und eine echt gebrochenrationale Funktion r, f = p+ r.
(2) Der echt gebrochenrationale Anteil wird in Partialbrüche zerlegt.
(3) Abschließend erfolgt die Integration der Polynomfunktion p sowie sämtlicher Par-tialbrüche.
Für die Partialbruchzerlegung einer echt gebrochenrationalen Funktion f = gh mit Poly-
nomen g und h lautet das Vorgehen:
(1) Ermittle die Produktdarstellung von h:
h(x) = c · (x− b1)k1 · · · (x− b1)k1q1(x)l1 · · · q1(x)l1
mit paarweise verschiedenen reellen Nullstellen bi der Vielfachheit ki und verschie-denen quadratischen Polynomen qj , die in R keine Nullstelle besitzen.
(2) Bilde zu jedem Linearfaktor (x− b) der Vielfachheit k Funktionen der Form
A1
x− b,
A2
(x− b)2, . . . ,
Ak(x− b)k
und zu jedem quadratischen Faktor q der Vielfachheit ` Funktionen der Form
B1x+ C1
q(x),B2x+ C2
q(x)2, . . . ,
B`x+ C`q(x)`
mit reellen Koeffizienten Aj , Bj , Cj .
(3) Berechnung der Koeffizienten mittels Koeffizientenvergleich/Zuhaltemethode bzw.Grenzwertmethode/Einsetzmethode.
Beispiel 1.9 . Wir wollen folgendes Integral berechnen:ˆ 1
0
x4 − 4
x3 − 3x− 2dx .
Da der Integrand eine unecht gebrochenrationale Funktion ist, führen wir zunächsteine Polynomdivision durch:
x4 − 4
x3 − 3x− 2= x+
4x2 + 2x
x3 − 3x− 2.

1. Integralrechnung in einer Veränderlichen 5
Aus der Faktorisierung des Nennerpolynoms x3 − 3x− 2 = (x+ 1)2 (x− 2) ergibtsich der Ansatz
4x2 + 2x
x3 − 3x− 2=
A1
x+ 1+
A2
(x+ 1)2+
B
x− 2.
Wir berechnen A1 = 53 , A2 = 1 und B = 4
3 . Damit ist
ˆ 1
0
x4 − 4
x3 − 3x− 2dx =
ˆ 1
0
(x+
5
3(x+ 1)+
1
(x+ 1)2+
4
3(x− 2)
)dx =
=
ˆ 1
0x dx+
ˆ 1
0
5
3(x+ 1)dx+
ˆ 1
0
1
(x+ 1)2dx+
ˆ 1
0
4
3(x− 2)dx =
=
[x2
2
]x=1
x=0
+
[53 log |x+ 1|
]x=1
x=0
+
[− 1
x+ 1
]x=1
x=0
+
[43 log |x− 2|
]x=1
x=0
=
= 1 +1
3log 2 .
. Nun wollen wir folgendes Integral berechnen:ˆ 1
0
x
(x− 2) (x2 + 1)dx.
Hier liegt eine echt gebrochenrationale Funktion vor, die Gleichung x2 + 1 = 0besitzt keine reellen Lösungen, wir machen daher den Ansatz
x
(x− 2) (x2 + 1)=
A
x− 2+Bx+ C
x2 + 1
und berechnen A = 25 , B = −2
5 und C = 15 . Damit ergibt sich
ˆ 1
0
x
(x− 2) (x2 + 1)dx =
ˆ 1
0
(2
5(x− 2)+−2x+ 1
x2 + 1
)dx =
=
ˆ 1
0
2
5(x− 2)dx−
ˆ 1
0
2x
5(x2 + 1)dx+
ˆ 1
0
1
(x2 + 1)dx =
=
[25 log |x− 2|
]x=1
x=0
+
[− 1
5log(x2 + 1)
]x=1
x=0
+
[15 arctan(x)
]x=1
x=0
=
=π
20− 3
5log 2 .

6 1. Integralrechnung in einer Veränderlichen
Spezielle Integralsubstitutionen
Tabelle 1.1 enthält eine Übersicht spezieller Substitutionen (a, b seien hierbei reelle Zah-len, r eine rationale Funktion).
Integraltyp Substitution neues Integral/Lösung
(A)´f(ax+ b) dx u = ax+ b 1
a
´f(u) du
(B)´f(x)f ′(x) dx u = f(x) 1
2 [f(x)]2 + C
(C)´ f ′(x)
f(x) dx u = f(x) log |f(x)|+ C
(D)´r(x,√a2 − x2) dx x = a · sinu
(E)´r(x,√a2 + x2) dx x = a · sinhu
(F)´r(x,√x2 − a2) dx x = a · coshu
(G)´r(sinx, cosx) dx u = tan
(x2
)Tabelle 1.1. Spezielle Substitutionen
Beispiel 1.10 . Mittels Formel (C) (diese wird auch als logarithmische Integrationbezeichnet) berechnen wir
ˆtanx dx = −
ˆ− sinx
cosxdx = − log | cosx|+ C .
.
ˆ 3
−3
√9− x2 dx =
[x = 3 sinu, dx = 3 cosu du
]=
=
ˆ π/2
−π/2
√9− 9 sin2 u · 3 cosu du = 9
ˆ π/2
−π/2cos2 u du = 9
2
ˆ π/2
−π/2(1 + cos(2u)) du
=9
2
[u+ 1
2 sin(2u)
]u=π/2
u=−π/2
=9π
2
.
ˆdx
sinx=
ˆdx
2 sin x2 cos x2
=
ˆ1
tan x2
· dx2 cos2 x
2
=

1. Integralrechnung in einer Veränderlichen 7
−4 −2 2 4
−4
−2
2
4
Abbildung 1.1. Fläche zwischen zwei Funktionsgraphen
=
[y = tan x
2 , dy =dx
2 cos2 x2
]=
ˆdyy
= log |y|+ C = log∣∣tan x
2
∣∣+ C
1.3 Anwendungen des Integrals
Flächenberechnungen
Geometrisch kann das bestimmte Integral´ ba f(x) dx bei stetigem Integranden als orien-
tierte Fläche zwischen dem Funktionsgraph und der x-Achse im Intervall [a, b] interpre-tiert werden, d.h. Flächeninhalte oberhalb der x-Achse werden addiert und die unterhalbder x-Achse subtrahiert. Die Gesamtfläche wird über
´a b|f(x)| dx berechnet. Allgemei-
ner lässt sich die Fläche zwischen den Graphen von zwei stetigen Funktionen f und gberechnen als
A =
ˆ b
a|f(x)− g(x)| dx .
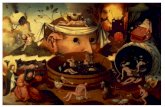
Beispiel 1.11Der Inhalt der Fläche, welche von den Graphen der beiden Funktionen f : R→ R : x 7→x3 − 4x und g : R→ R : x 7→ x eingeschlossen wird (vgl. Abbildung 1.1), berechnet sichüber
ˆ √5
−√
5
∣∣(x3 − 4x)− x∣∣ dx =
ˆ 0
−√
5
(x3 − 5x
)dx+
ˆ √5
0−(x3 − 5x
)dx =
25
2.

8 1. Integralrechnung in einer Veränderlichen
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
Abbildung 1.2. Approximation der Bogenlänge
Bogenlänge einer Kurve
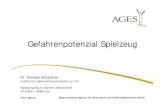
Es sei f : [a, b] → R stetig differenzierbar. Um die Länge L des Graphen einer Funktionf : [a, b]→ R zu berechnen, zerlegen wir das Intervall [a, b] in n Teilintervalle und appro-ximieren in jedem Teilintervall das Bogenstück durch die Sekante, vgl. Abbildung 1.2.Dieses Verfahren wird auch Polygonzugverfahren genannt. Genauer sei
Z : a = x0 < x1 < . . . < xn = b, n ∈ N,
eine Zerlegung von [a, b]. Dann lässt sich die Länge der Sekante sj im Intervall [xj−1, xj ]mithilfe des Satzes von Pythagoras berechnen als
sj =
√(xj − xj−1)2 + (f(xj)− f(xj−1))2.
Ist f differenzierbar, so existiert nach dem Mittelwertsatz der Differentialrechnung eineZwischenstelle ξj ∈ (xj−1, xj) mit f ′(ξj)(xj − xj−1) = f(xj) − f(xj−1) und mit derabkürzenden Schreibweise ∆xj := xj − xj−1 ergibt sich
sj =
√(∆xj)2 + (f ′(ξj) ∆xj)
2 =
√1 + (f ′(ξj))
2 ∆xj .
Damit ist die Länge des Polygonzugs gegeben durch
Ln =
n∑j=1
√1 + (f ′(ξj))
2 ∆xj
Ist f stetig differenzierbar, so ist die Funktion
g : [a, b]→ R : x 7→√
1 + f ′(x)2

1. Integralrechnung in einer Veränderlichen 9
stetig und somit integrierbar. Da
Ln = S(g,Z, ξ)
eine Riemann-Summe ist, gilt daher
L := limn→∞
Ln =
ˆ b
a
√1 + f ′(x)2 dx.
Wir haben also gezeigt:
Satz 1.12Ist f ∈ C1([a, b]), so ist die Bogenlänge L des Graphen der Funktion f im Intervall [a, b]gegeben durch
L =
ˆ b
a
√1 + f ′(x)2 dx .
Rotationskörper
Dreht man die Fläche unter einer stetigen Funktion f : [a, b] → [0,∞) um die x-Achse,dann erzeugt man einen Rotationskörper.
Satz 1.13Die Funktion f : [a, b]→ R sei stetig und nichtnegativ. Dann besitzt der Rotationskörper,der dadurch entsteht, dass der Graph von f um die x-Achse rotiert, das Volumen
V = 2π
ˆ b
0x (f(b)− f(x)) dx
Beweis. Für n ∈ N wählen wir eine beliebige Zerlegung Zn = (x0, . . . , xn) des Intervalls[a, b] mit Stützstellen ξ = (ξ1, . . . , ξn). In jedem Intervall [xj−1, xj ] wird das Volumen desTeilkörpers durch einen Drehzylinder mit Radius f(ξj) approximiert. Das Volumen einessolchen Zylinders ist πf(ξj)
2∆xj und wir erhalten
Vn =
n∑j=1
π (f(ξj))2 ∆xj
als Approximation für das Volumen des Rotationskörpers. Bei Vn handelt es sich um eineRiemann-Summe der integrierbaren Funktion
g : [a, b]→ R : x 7→ π (f(x))2
und somit erhalten wir
V = limn→∞
Vn = limn→∞
S(g,Zn, ξ) = π
ˆ b
0(f(x))2 dx
für das Volumen des Drehkörpers.

10 1. Integralrechnung in einer Veränderlichen
Beispiel 1.14Sei r > 0. Eine Kugel mit Radius r entsteht durch Rotation der Funktionf : [−r, r]→ R : x 7→
√r2 − x2 um die x-Achse und wir erhalten als Volumen:
V = π
ˆ r
−r(r2 − x2) dx = π
[r2x− 1
3x3
]x=r
x=−r
= 43πr
3 .
Auch der Flächeninhalt der Oberfläche eines Rotationskörpers lässt sich über ein eindi-mensionales Integral ausrechnen.
Satz 1.15Die Funktion f : [a, b] → R sei stetig differenzierbar und nichtnegativ. Die Mantelflächedes Rotationskörpers, der bei Drehung des Graphen von f um die x-Achse entsteht, istgegeben durch
M = 2π
ˆ b
af(x)
√1 + (f ′(x))2 dx .
Beweis. Übungsaufgabe.
1.4 Numerische Integration
Ein bestimmtes Integral´ ba f(x) dx haben wir bisher meist mithilfe des Hauptsatzes der
Differential- und Integralrechnung berechnet. Dieses Verfahren ist aber nicht immer an-wendbar:
. In vielen Fällen ist es schwer oder auch gar nicht möglich, eine Stammfunktionmithilfe elementarer Funktionen anzugeben. Beispielweise hat Joseph Liouville2
bewiesen, dass die Funktion x 7→ ex2 nicht elementar integrierbar ist.
. Der Integrand ist nicht explizit bekannt, sondern nur Näherungswerte an einigenStützstellen. Dieser Fall tritt vor allem in der Praxis bei Messungen auf.
Mit diesen Informationen soll das bestimmte Integral´ ba f(x) dx bestmöglich approxi-
miert werden. Die näherungsweise Berechnung von bestimmten Integralen bezeichnetman auch als numerische Quadratur.
Mittelpunktsregel
Eine einfache Quadraturformel ergibt sich direkt über die Definition des Integrals alsGrenzwert der Riemannsummen. Wählt man als Sützstelle den Mittelpunkt des Inter-valls, so erhalten wir als eine erste Quadraturformelˆ b
af(x) dx ≈ f
(a+ b
2
)(b− a) =: NM (f) .
2Joseph Liouville, 1809–1882, französischer Mathematiker

1. Integralrechnung in einer Veränderlichen 11
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
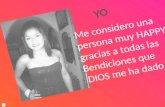
Abbildung 1.3. Mittelpunktsregel und zusammengesetzte Mittelpunktsregel
Das Integral wird also durch ein Rechteck approximiert, dessen Höhe durch den Funk-tionswert des Mittelpunkt des Intervalls bestimmt ist. Diese Näherung nennt man auchMittelpunktsregel.
Satz 1.16 (Fehler der Mittelpunktsregel)Es sei f ∈ C2([a, b]). Dann gilt für den Fehler∣∣∣∣ˆ b
af(x) dx−NM (f)
∣∣∣∣ ≤ (b− a)3
24maxx∈[a,b]
|f ′′(x)|
Beweis. Wir setzen m := a+b2 . Ist f ∈ C2([a, b]), so existiert für jedes x ∈ [a, b] nach dem
Satz von Taylor mit Lagrange-Restglied ein Wert ξx zwischen x und m, so dass
f(x) = f(m) + f ′(m)(x−m) +f ′′(ξx)
2(x−m)2 . (1.1)
Damit istˆ b
af(x) dx−NM (f) =
ˆ b
a(f(x)− f(m)) dx =
=
ˆ b
a
(f ′(m)(x−m) +
f ′′(ξx)
2(x−m)2
)dx =
ˆ b
a
f ′′(ξx)
2(x−m)2 dx .
Damit ergibt sich unter Verwendung der Dreiecksungleichung für Integrale∣∣∣∣ˆ b
af(x) dx−NM (f)
∣∣∣∣ =
∣∣∣∣ˆ b
a
f ′′(ξx)
2(x−m)2 dx
∣∣∣∣ ≤ ˆ b
a
∣∣∣∣f ′′(ξx)
2(x−m)2
∣∣∣∣ dx≤ 1
2maxx∈[a,b]
|f ′′(x)|ˆ b
a(x−m)2 dx =
(b− a)3
24maxx∈[a,b]
|f ′′(x)| .

12 1. Integralrechnung in einer Veränderlichen
Statt die Mittelpunktsregel auf das gesamte Integrationsintervall [a, b] anzuwenden, emp-fiehlt es sich, das Intervall in kleine Teilintervalle zu zerlegen und auf jedes Teilintervalldie Mittelpunktsregel anzuwenden. Bei Zerlegung in n gleichlange Teilintervalle, d.h.xk = a + k · h mit h = b−a
n für k = 0, . . . , n ∈ N, erhalten wir die zusammengesetzteMittelpunktsregel
Nm,z(f) = hn∑k=1
f
(xk−1 + xk
2
).
Auf jedem Teilintervall [xk−1, xk] gilt dann die Fehlerabschätzung aus Satz 1.16∣∣∣∣∣ˆ xk
xk−1
f(x) dx−NM (f)
∣∣∣∣∣ ≤ (xk − xk−1)3
24max
x∈[xk−1
,xk
]|f ′′(x)| = h3
24max
x∈[xk−1
,xk
]|f ′′(x)|
und damit erhalten wir die Fehlerabschätzung für die zusammengesetzte Mittelpunkts-regel:∣∣∣∣ˆ b
af(x) dx−NM (f)
∣∣∣∣ ≤ n∑k=1
h3
24max
x∈[xk−1
,xk
]|f ′′(x)| ≤ (b− a)
h2
24maxx∈[a,b]
|f ′′(x)|
Trapezregel
Anstelle eines Rechtecks kann der Flächeninhalt auch durch ein Trapez angenähert wer-den. Bei einem Trapez mit den Eckpunkten (a, 0), (b, 0), (b, f(b)) sowie (a, f(a)) ergibtsich als Flächeninhalt und damit als neue Quadraturformel
NT (f) = (b− a)f(a) + f(b)
2.
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
Abbildung 1.4. Trapezregel und zusammengesetzte Trapezregel

1. Integralrechnung in einer Veränderlichen 13
Satz 1.17 (Fehler der Trapezregel)Es sei f ∈ C2([a, b]). Dann gilt für den Fehler∣∣∣∣ˆ b
af(x) dx−NT (f)
∣∣∣∣ ≤ (b− a)3
12maxx∈[a,b]
|f ′′(x)|
Beweis. Wir definieren p : R → R : x 7→(x− a+b
2
)− (b−a)2
4 . Dann ist p(a) = p(b) = 0,p′(b) = b− a = −p′(a) und p′′(x) = 2 für alle x ∈ R. Wir rechnen
2
ˆ b
af(x) dx =
ˆ b
ap′′(x)f(x) dx p.I.
=[p′(x)f(x)
]bx=a−ˆ b
ap′(x)f ′(x) dx =
p.I.= p′(b)f(b)− p′(a)f(a)−
([p(x)f ′(x)
]bx=a−ˆ b
ap(x)f ′′(x) dx
)=
(b− a)(f(b) + f(a)) +
ˆ b
ap(x)f ′′(x) dx = NT (f) +
ˆ b
ap(x)f ′′(x) dx .
Damit ergibt sich unter Verwendung der Dreiecksungleichung für Integrale∣∣∣∣ˆ b
af(x) dx−NT (f)
∣∣∣∣ =
∣∣∣∣ˆ b
af ′′(x)p(x) dx
∣∣∣∣ ≤ ˆ b
a|f ′′(x)p(x)| dx (1.2)
≤ maxx∈[a,b]
|f ′′(x)|ˆ b
a|p(x)| dx =
(b− a)3
6maxx∈[a,b]
|f ′′(x)| .
Auch hier empfiehlt sich wieder die Anwendung der Trapezregel auf kleinere Teilinter-valle, wir erhalten die zusammengesetzte Trapezregel
NT,z(f) =h
2
n∑k=1
(f(xk−1) + f(xk)) = h
(1
2f(a) +
n−1∑k=1
f(xk) + f(b)
),
mit xk = a+ k · h, h = b−an , n ∈ N. Analog oben ergibt sich als Fehlerabschätzung∣∣∣∣ˆ b
af(x) dx−NT,z(f)
∣∣∣∣ ≤ (b− a)h2
12maxx∈[a,b]
|f ′′(x)|
Simpsonregel
Um das Integral einer Funktion f über dem Intervall [a, b] zu berechnen, haben wir beider Rechtecks- und bei der Trapezregel die gleiche Idee verfolgt, wir haben die Funktionersetzt durch ein Polynom 0.ter bzw. erster Ordnung und das Integral dieser Funktionberechnet. Diese Polynome stimmen in einem oder zwei Punkten mit der Funktion füberein. Bei der Simpson-Regel wählt man nun ein Polynom zweiten Grades, welches

14 1. Integralrechnung in einer Veränderlichen
1 2 3 4 5 6 7 8 9 10
1
2
3
4
5
6
7
8
Abbildung 1.5. Simpsonregel
mit der Funktion in den Punkten (a, f(a)), (b, f(b)) und (m, f(m)) mit m = a+b2 über-
einstimmen soll. Wir berechnen nun das Integral dieses Polynoms über dem Intervall[a, b] und erhalten als Näherung für das Integral
NS(f) =b− a
6
[f(a) + 4f
(a+ b
2
)+ f(b)
].
Wir geben (ohne Beweis) eine Fehlerabschätzung für die Simpsonregel an.
Satz 1.18 (Fehler der Simpsonregel)Es sei f ∈ C4([a, b]). Dann gilt für den Fehler∣∣∣∣ˆ b
af(x) dx−NS(f)
∣∣∣∣ ≤ (b− a)3
2880maxx∈[a,b]
|f (4)(x)|
Auch hier kann wieder die Simpsonregel auf kleine Teilintervalle angewandt werden, manerhält die zusammengesetzte Simpsonregel
NS,z(f) =h
6
n∑k=1
(f(xk−1) + 4f
(xk−1 + xk
2
)+ f(xk)
),
mit xk = a+ k · h, h = b−an , n ∈ N, und als Fehlerabschätzung∣∣∣∣ˆ b
af(x) dx−NS,z(f)
∣∣∣∣ ≤ (b− a)h4
2880maxx∈[a,b]
|f (4)(x)|
Weitere interpolatorische Quadraturformeln lassen sich auf ähnliche Weise ermitteln,indem man den Integranden durch ein Polynom ersetzt. Bei Gauß-Quadraturformelnwählt man neben den Approximation durch ein Polynom noch spezielle Gewichte undbesondere Auswertungsstellen und kann damit eine bessere Näherung erzielen.

Teil I
Differential- und Integralrech-nung in mehreren Veränderlichen
15


Kapitel 2
Topologische Grundlagen
Im Folgenden bezeichne K stets den Körper der reellen Zahlen R oder den Körper derkomplexen Zahlen C .
Definition 2.1 (Norm und normierter Raum)Es sei V ein K-Vektorraum. Die Abbildung
‖ · ‖ : V → [0,∞)
heißt Norm auf V , falls für alle x, y ∈ V und λ ∈ K gilt, dass
(N1) ‖x‖ = 0⇒ x = 0 , (Definitheit)
(N2) ‖λx‖ = |λ|‖x‖ , (absolute Homogenität)
(N3) ‖x+ y‖ ≤ ‖x‖+ ‖y‖ . (Dreiecksungleichung)
Das Paar (V, ‖ · ‖) nennt man normierten Raum, welchen man häufig wiederum mitV bezeichnet.
Bemerkung. Es sei (V, ‖ · ‖) ein normierter Raum.
. Die Abbildungd : V × V → [0,∞) : (x, y) 7→ ‖x− y‖
nennt man die von ‖·‖ induzierte Metrik auf V . Für x, y ∈ V ist d(x, y) = ‖x−y‖der Abstand zwischen x und y .
. Für alle x, y ∈ V gilt
|‖x‖ − ‖y‖| ≤ ‖x− y‖ . (Umgekehrte Dreiecksungleichung)
Beispiel 2.2 (Bereits bekannte Normen)Die folgenden Beispiele zeigen, dass wir bereits mit einigen Normen gearbeitet haben.
. Bei (R, | · |) handelt es sich um einen normierten Raum.
. Wir können C sowohl als R-Vektorraum als auch als C-Vektorraum auffassen. Inbeiden Fällen ist (C, | · |) ein normierter Raum.
17

18 2. Topologische Grundlagen
. Für D ⊂ R betrachten wir den R-Vektorraum V := f : D → R beschränkt .Dann handelt es sich bei der Supremumsnorm
‖ · ‖∞ : V → [0,∞) : f 7→ supx∈D|f(x)|
um eine Norm auf V .
Definition 2.3 (Äquivalenz von Normen)Die Normen ‖ · ‖ und ‖ · ‖∗ auf V heißen äquivalent, falls
∃ c, C > 0 ∀x ∈ V : c ‖x‖ ≤ ‖x‖∗ ≤ C ‖x‖ .
Bemerkung. Wie wir sehen werden, sind in einem endlichdimensionalen Vektorraumalle Normen äquivalent, ganz im Gegensatz zum unendlichdimensionalen Fall.
2.1 Normen auf Rd
Im Weiteren betrachten wir nun speziell den R-Vektorraum Rd , wobei d ∈ N .
Definition 2.4 (p-Normen)Die für p ∈ [1,∞) durch
‖x‖p :=
d∑j=1
|xj |p1/p
für x ∈ Rd
auf Rd definierte Norm heißt p-Norm und
‖x‖∞ := maxj=1,...,d
|xj | für x ∈ Rd
nennt man ∞-Norm oder Maximumsnorm.
Bemerkung. Dass es sich bei ‖ · ‖1 und ‖ · ‖∞ tatsächlich um Normen auf Rd handelt,ist leicht zu zeigen. Hingegen benötigen wir für den Nachweis der Dreiecksungleichungfür ‖ · ‖p einige Vorbereitungen, falls p ∈ (1,∞) .
Satz 2.5 (Hölder1-Ungleichung)Es seien p, q ∈ [1,∞] mit 1
p + 1q = 1 , wobei 1/∞ := 0 . Dann gilt für alle x, y ∈ Rd , dass
‖xy‖1 ≤ ‖x‖p‖y‖q .
1Otto Ludwig Hölder, 1859–1937, deutscher Mathematiker

2. Topologische Grundlagen 19
Beweis. Offenbar gilt
‖xy‖1 =
d∑j=1
|xjyj | ≤ maxj=1,...,d
|xj |d∑j=1
|yj | = ‖x‖∞‖y‖1 .
Wir müssen die Aussage also noch im Fall p, q ∈ (1,∞) zeigen. Des Weiteren gelteO.B. d.A. x, y 6= 0 .
Es seien s, t > 0 und λ ∈ (0, 1) . Da der Logarithmus eine konkave Funktion ist, folgt
log(λs+ (1− λ)t) ≥ λ log s+ (1− λ) log t = log(sλt1−λ
).
Damit erhalten wir
∀ a, b ≥ 0: ab ≤ ap
p+bq
q. (Youngsche Ungleichung)
Setzen wir aj :=|xj |‖x‖p und bj :=
|yj |‖y‖q , so folgt aus obiger Ungleichung
|xjyj |‖x‖p‖y‖q
≤ 1
p
|xj |p
‖x‖pp+
1
q
|yj |q
‖y‖qqfür j = 1 . . . , d . Summation über j liefert schließlich
‖xy‖1‖x‖p‖y‖q
≤ 1
p+
1
q= 1
und damit die Aussage.
Bemerkung. Speziell für p = q = 2 erhält man
∀x, y ∈ Rd : ‖xy‖1 ≤ ‖x‖2‖y‖2 . (Cauchy-Schwarz-Ungleichung)
Satz 2.6 (Minkowski2-Ungleichung)Es seien p ∈ [1,∞] und x, y ∈ Rd . Dann gilt
‖x+ y‖p ≤ ‖x‖p + ‖y‖p .
Beweis. Für p = 1 und p = ∞ ist die Aussage klar, wir betrachten daher den Fallp ∈ (1,∞) . Wählen wir q ∈ (1,∞) mit 1
p + 1q = 1 , so führt die Anwendung der Hölder-
Ungleichung auf
‖x+ y‖pp =d∑j=1
|xj + yj |︸ ︷︷ ︸≤|xj |+|yj |
|xj + yj |p−1 ≤∥∥x|x+ y|p−1
∥∥1
+∥∥y|x+ y|p−1
∥∥1≤
≤ (‖x‖p + ‖y‖p)∥∥|x+ y|p−1
∥∥q
= (‖x‖p + ‖y‖p) ‖x+ y‖p−1p
und damit ist die Aussage gezeigt.2Hermann Minkowski, 1864–1909, deutscher Mathematiker und Physiker

20 2. Topologische Grundlagen
Bemerkung. Für p ∈ [1,∞] handelt es sich bei ‖ · ‖p also tatsächlich um eine Normauf Rd . Die Norm ‖ · ‖2 wird auch euklidische3 Norm genannt.
Satz 2.7 (Äquivalenz von Normen in Rd)Auf Rd sind alle Normen äquivalent.
Beweis. Es genügt zu zeigen, dass jede Norm ‖ · ‖ auf Rd äquivalent zu ‖ · ‖∞ ist.
(1) Zuerst zeigen wir, dass es eine Konstante C > 0 mit
∀x ∈ Rd : ‖x‖ ≤ C‖x‖∞
gibt. Dazu bezeichne ej den j-ten Standardbasisvektor in Rd , wobei j = 1, . . . , d.Für alle x ∈ Rd gilt dann
‖x‖ =
∥∥∥∥∥d∑j=1
xjej
∥∥∥∥∥ ≤d∑j=1
|xj |‖ej‖ ≤ ‖x‖∞d∑j=1
‖ej‖ .
Wir erhalten also die gewünschte Aussage, indem wir C :=∑d
j=1 ‖ej‖ setzen.
(2) Dass es eine Konstante c > 0 mit
∀x ∈ Rd : c‖x‖∞ ≤ ‖x‖
gibt, zeigen wir indirekt. Die Widerspruchsannahme lautet also
∀K > 0 ∃x ∈ Rd : K‖x‖∞ > ‖x‖ .
Nun wählen wir zu n ∈ N ein xn ∈ Rd mit ‖xn‖∞ = 1 und ‖xn‖ < 1n . Für jedes
j = 1, . . . , d ist die Folge xn(j)n∈N ∈ RN beschränkt und besitzt daher nach demSatz von Bolzano-Weierstraß eine konvergente Teilfolge. Daher können wireine streng monoton wachsende Folge nkk∈N ∈ NN finden, sodass xnk(j)k∈Nfür j = 1, . . . , d konvergiert. Wir setzen
Lj := limk→∞
xnk(j) für j = 1, . . . , d .
Dann ist L 6= 0 und daher ‖L‖ > 0 . Nach (1) ist aber
‖xnk − L‖ ≤ C‖xnk − L‖∞ → 0 für k →∞
und somit nach der umgekehrten Dreiecksungleichung
limk→∞
‖xnk‖ = ‖L‖ > 0 .
Dies steht jedoch im Widerspruch zu ‖xnk‖ < 1nk
für alle k ∈ N .3Euklid von Alexandria, 360–280 v.Chr., griechischer Mathematiker

2. Topologische Grundlagen 21
Im Folgenden bezeichne ‖ · ‖ stets eine beliebige Norm auf Rd .
Definition 2.8 (Konvergenz von Folgen)Für eine Folge xnn∈N in Rd und L ∈ Rd setzen wir
limn→∞
xn = L :⇐⇒ limn→∞
‖xn − L‖ = 0 ⇐⇒ ∀ ε > 0 ∃N ∈ N ∀n ≥ N : ‖xn − L‖ < ε .
Die Folge xnn∈N heißt konvergent, falls ein L ∈ Rd mit limn→∞ xn = L existiert.
Bemerkung. Man beachte, dass die Definition der Konvergenz einer Folge nicht vonder Wahl der Norm abhängt.
Satz 2.9 (Konvergenz ⇔ komponentenweise Konvergenz)Es sei xnn∈N eine Folge in Rd und L ∈ Rd . Dann gilt
limn→∞
xn = L ⇐⇒ ∀ j = 1, . . . , d : limn→∞
xn(j) = Lj .
Beweis. Da alle Normen auf Rd äquivalent sind, genügt es die Aussage für ‖ · ‖∞ zuzeigen. Für die Maximumsnorm ist die Aussage aber offensichtlich.
Satz 2.10 (Satz von Bolzano-Weierstraß)Jede beschränkte Folge in Rd besitzt eine konvergente Teilfolge.
Beweis. Vgl. Beweis von Satz 2.7.
Bemerkung. Eine Folge xnn∈N in Rd heißt Cauchy-Folge, falls
∀ ε > 0 ∃N ∈ N ∀m,n ≥ N : ‖xm − xn‖ < ε .
Offenbar gilt auch in Rd , dass
xnn∈N konvergent ⇐⇒ xnn∈N Cauchy-Folge.
Die Vollständigkeit von R überträgt sich somit direkt auf Rd .
2.2 Offene und abgeschlossene Mengen
Es bezeichne ‖ · ‖ eine Norm auf Rd . Für ξ ∈ Rd und ε > 0 setzen wir
Bε(ξ) :=x ∈ Rd : ‖x− ξ‖ < ε
. (offene Kugel)
Eine Menge O ⊂ Rd heißt offen, falls
∀ ξ ∈ O ∃ ε > 0: Bε(ξ) ⊂ O .
Man nennt eine Menge A ⊂ Rd abgeschlossen, falls ihr Komplement Ac := Rd \A offenist. Für ξ ∈ Rd heißt U(ξ) ⊂ Rd Umgebung von ξ , wenn
∃ ε > 0: Bε(ξ) ⊂ U(ξ) .

22 2. Topologische Grundlagen
Satz 2.11 (Eigenschaften der Topologie)Wir setzen
T :=
O ⊂ Rd offen. (Topologie des Rd)
Dann gilt:
(1) Für jede Familie Oii∈I ∈ T I ist⋃i∈I Oi ∈ T .
(2) ∀O1, . . . ,On :⋂ni=1 Oi ∈ T
Beweis. Der Beweis verbleibt als Übung.
Bemerkung. Durch Komplementbildung erhält man direkt, dass beliebige Durch-schnitte und endliche Vereinigungen abgeschlossener Mengen wieder abgeschlossen sind.
Definition 2.12 (Randpunkt, Rand, Inneres und Abschluss)Es sei M ⊂ Rd .
. x ∈ Rd Randpunkt von M :⇐⇒ ∀ ε > 0: Bε(x) ∩M 6= ∅ ∧ Bε(x) ∩M c 6= ∅
. ∂M :=x ∈ Rd : x ist Randpunkt von M
(Rand)
.M := M \ ∂M (Inneres)
. M := M ∪ ∂M (Abschluss)
Satz 2.13 (Charakterisierung abgeschlosseneer Mengen mittels Folgen)Für A ⊂ Rd gilt
A abgeschlossen ⇐⇒ ∀xnn∈N ∈ AN konvergent : limn→∞
xn ∈ A .
Beweis. “⇒“: Es sei xnn∈N ∈ AN eine konvergente Folge. Wir setzen a := limn→∞ xn .Die Aussage zeigen wir indirekt, also treffen wir die Widerspruchsannahme a /∈ A . DaAc offen ist, gibt es ein ε > 0 , sodass Bε(a) ⊂ Ac . Da dann
∀n ∈ N : ‖xn − a‖ ≥ ε ,
steht dies allersdings im Widerspruch zu limn→∞ xn = a .
“⇐“: Angenommen, A wäre nicht abgeschlossen. Dann gibt es ein x ∈ Ac mit
∀ ε > 0: Bε(x) 6⊂ Ac .
Zu n ∈ N wählen wir nun xn ∈ A∩B1/n(x) . Die Folge xnn∈N ∈ AN konvergiert gegenx . Somit gilt nach Voraussetzung x ∈ A und offensichtlich steht dies im Widerspruchzur x ∈ Ac .

2. Topologische Grundlagen 23
Definition 2.14 (Kompaktheit in Rd)Eine Menge K ⊂ Rd heißt kompakt, falls K abgeschlossen und beschränkt ist.
Satz 2.15 (Charakterisierung von Kompaktheit mittels Folgen)Eine MengeK ⊂ Rd ist genau dann kompakt, wenn jede Folge inK einen Häufungspunktin K besitzt.
Beweis. “⇒“: Diese Richtung folgt unmittelbar aus dem Satz von Bolzano-Weier-straß und Satz 2.13.
“⇐“: Wir zeigen zuerst, dass K abgeschlossen ist. Dazu sei xnn∈N ∈ KN eine kon-vergente Folge, wir setzen L := limn→∞ xn . Dann existiert nach Voraussetzung einekonvergente Teilfolge xnkk∈N mit limk→∞ xnk ∈ K . Da jedoch
limk→∞
xnk = limn→∞
xn = L ,
folgt aus Satz 2.13 die Abgeschlossenheit von K .Angenommen, K wäre unbeschränkt. Dann gibt es eine Folge xnn∈N ∈ KN mit
∀n ∈ N : ‖xn‖ ≥ n ,
welche offenbar keinen Häufungspunkt besitzt.
Ohne Beweis geben wir hier noch den Überdeckungssatz an, welcher eine Charakte-risierung von Kompaktheit in Rd mittels offenen Überdeckungen liefert.
Satz 2.16 (Überdeckungssatz, Satz von Heine4-Borel5)Eine Menge K ⊂ Rd ist genau dann kompakt, wenn es zu jeder Familie Oii∈I ∈ T Imit
K ⊂⋃i∈I
Oi (offene Überdeckung von K)
Indizes i1, . . . , in ∈ I gibt, sodass
K ⊂n⋃j=1
Oij . (endliche Teilüberdeckung)
2.3 Stetigkeit
Wir übertragen nun das Konzept der Stetigkeit auf vektorwertige Funktionen in mehrerenVeränderlichen. Im Weiteren bezeichne ‖ · ‖Rd eine Norm auf Rd und ‖ · ‖Rk eine Normauf Rk .
4Heinrich Eduard Heine, 1821–1881, deutscher Mathematiker5Félix Édouard Justin Émile Borel, 1871–1956, französischer Mathematiker und Politker

24 2. Topologische Grundlagen
Definition 2.17 (Grenzwert)Gegeben sei die Funktion f : D ⊂ Rd → Rk sowie ξ ∈ D und η ∈ Rk. Die Funktion fhat in ξ ∈ D den Grenzwert η, limx→ξ f(x) = η, wenn gilt:
∀ ε > 0 ∃ δ > 0 ∀x ∈ D : (0 < ‖x− ξ‖Rd < δ ⇒ ‖f(x)− η‖Rk < ε) .
Definition 2.18 (Stetigkeit)Gegeben sei die Funktion f : D ⊂ Rd → Rk .
. Die Funktion f heißt stetig in ξ ∈ D , falls limx→ξ f(x) = f(ξ).
. Ist f in jedem Punkt ξ ∈ D stetig, so nennt man f stetig auf D .
Eine Funktion f : D → Rk ist also genau dann in ξ ∈ D stetig, wenn gilt:
∀ ε > 0 ∃ δ > 0 ∀x ∈ D : (‖x− ξ‖Rd < δ ⇒ ‖f(x)− f(ξ)‖Rk < ε) .
Satz 2.19 (Stetigkeit ⇔ komponentenweise Stetigkeit)Für eine Funktion f : D ⊂ Rd → Rk gilt, dass
f stetig in ξ ∈ D ⇐⇒ ∀ i = 1, . . . , k : fi : D → R stetig in ξ .
Beweis. Die Aussage erhält man unmittelbar, indem man auf dem Bildbereich Rk dieMaximumsnorm wählt.
Beispiel 2.20Es seien i, d ∈ N mit 1 ≤ i ≤ d. Wir betrachten die Projektion auf die i-te Komponente
pi : Rd → R : x 7→ xi.
Dann ist pi stetig: Sei ξ ∈ Rd beliebig, sei ε > 0. Wähle δ = ε. Dann ist für alle x ∈ Rdmit ‖x− ξ‖∞ < δ:
|pi(x)− pi(ξ)| = |xi − ξi| ≤ ‖x− ξ‖∞ < δ = ε.
Wie bereits in einer Veränderlichen, kann die Stetigkeit einer Funktion f : D ⊂ Rd → Rk
mittels Folgen charakterisiert werden:
f stetig in ξ ∈ D ⇐⇒ ∀xnn∈N ∈ DN mit limn→∞
xn = ξ : limn→∞
f(xn) = f(ξ)
Diese Charakterisierung werden wir nun für die Beweise nachfolgender Sätze verwenden.Zunächst stellt sich die Frage, wie man konkret Funktionen auf Stetigkeit untersucht.Wie im eindimensionalen Fall wollen wir dies in den meisten Fällen durch Zurückführenauf bekannte stetige Funktionen begründen.

2. Topologische Grundlagen 25
Satz 2.21 (Zusammensetzungen stetiger Funktionen sind stetig)Es sei D ⊂ Rd und ξ ∈ D sowie α ∈ R.
(1) Sind f, g : D → R stetig in ξ, so sind auch αf , f + g und f · g stetig in ξ.
(2) Sind f, g : D → R stetig in ξ und g(ξ) 6= 0, so ist auch fg stetig in ξ.
(3) Es sei B ⊂ Rk, f : D → B, g : B → R. Ist f in ξ und g in f(ξ) stetig, so ist auchg f : D → R in ξ stetig.
Beweis. Genau wie in Analysis 1.
Beispiel 2.22Die Funktion f : R2 → R : x 7→ cos(x1) + 2ex2 ist stetig.
Satz 2.23 (Stetige Funktionen bilden Kompakta auf Kompakta ab)Es sei K ⊂ Rd kompakt und f : K → Rk stetig. Dann ist f(K) kompakt.
Beweis. Es sei ynn∈N eine Folge in f(K) . Dann existiert eine Folge xnn∈N ∈ KN mitf(xn) = yn für alle n ∈ N . DaK kompakt ist, gibt es eine konvergente Teilfolge xnkk∈Nmit ξ := limk→∞ xnk ∈ K . Aus der Stetigkeit von f folgt, dass limk→∞ ynk = f(ξ) , alsoist f(K) kompakt.
Satz 2.24 (Satz vom Minimum und Maximum6)Es sei K ⊂ Rd kompakt und f : K → R stetig. Dann ist die Funktion f beschränkt undnimmt auf K ihr Minimum und Maximum an, d. h. es gibt xmin, xmax ∈ K mit
∀x ∈ K : f(xmin) ≤ f(x) ≤ f(xmax) .
Beweis. Das Bild f(K) ist kompakt, somit f beschränkt. Demnach existieren inf f(K)und sup f(K) . Aufgrund der Abgeschlossenheit von f(K) gilt inf f(K) ∈ f(K) undsup f(K) ∈ f(K) .
Wie auch im eindimensionalen Fall gibt es weitere Stetigkeitsbegriffe:
Definition 2.25Eine Funktion f : D ⊂ Rd → Rk heißt gleichmäßig stetig, falls
∀ ε > 0 ∃ δ > 0 ∀x, y ∈ D : (‖x− y‖Rd < δ ⇒ ‖f(x)− f(y)‖Rk < ε) .
Gleichmäßig stetige Funktionen sind stetig.
Satz 2.26 (Satz vom der gleichmäßigen Stetigkeit)Es sei K ⊂ Rd kompakt und f : K → Rk stetig. Dann ist die Funktion f gleichmäßigstetig.
6Satz von Weierstraß, Extremwertsatz

26 2. Topologische Grundlagen
Beweis. Genau wie in Analysis 1.
Definition 2.27Eine Funktion f : D ⊂ Rd → Rk heißt Lipschitz-stetig mit Lipschitz-Konstante L > 0 ,falls
∀x, y ∈ D : ‖f(x)− f(y)‖Rk ≤ L‖x− y‖Rd .
Offenbar ist jede Lipschitz-stetige Funktion stetig.
Wir betrachten nun speziell eine lineare Abbildungen f : Rd → Rk mit zugehörigerAbbildungsmatrix A ∈ Rk×d . Wählen wir die Maximumsnorm sowohl in Defintions- alsauch Bildbereich, so erhalten wir
‖f(x)‖∞ = ‖Ax‖∞ = maxi=1,...,k
∣∣∣∣∣d∑j=1
aijxj
∣∣∣∣∣ ≤ maxi=1,...,k
d∑j=1
|aij |︸ ︷︷ ︸=:C
‖x‖∞ = C‖x‖∞
für alle x ∈ Rd , woraus unmittelbar die Lipschitz-Stetigkeit von f folgt. Wir interessierenuns nun für die kleinste Konstante C ≥ 0 , für welche
∀x ∈ Rd : ‖Ax‖Rk ≤ C‖x‖Rd
gilt.
Definition 2.28 (Operatornorm)Für A ∈ Rk×d nennt man
‖A‖ = infC ≥ 0 ; ∀x ∈ Rd : ‖Ax‖Rk ≤ C‖x‖Rd
=
= sup‖Ax‖Rk : x ∈ Rd mit ‖x‖Rd = 1
die Operatornorm von A bezüglich der Normen ‖ · ‖Rd und ‖ · ‖Rk .
Bemerkung.
. Die Operatornorm ist eine Norm auf Rk×d .
. Man beachte, dass die Operatornorm von der Wahl der Normen in Definitions- undBildbereich abhängt.
. Wählt man für p ∈ [1,∞] speziell ‖ · ‖Rd = ‖ · ‖p und ‖ · ‖Rk = ‖ · ‖p , so bezeichnetman die Operatornorm von A ∈ Rk×d mit ‖A‖p .
Beispiel 2.29 (Spezielle Operatornormen)Es sei A ∈ Rk×d .

2. Topologische Grundlagen 27
. ‖A‖∞ = maxi=1,...,k
d∑j=1
|aij | (Zeilensummennorm)
. ‖A‖1 = maxj=1,...,d
k∑i=1
|aij | (Spaltensummennorm)
. ‖A‖2 =√
maxσ(ATA) (Spektralnorm)
2.4 Fixpunktsatz
Im Folgenden bezeichne ‖ · ‖ eine Norm auf Rd .
Definition 2.30 (Kontraktion)Es sei D ⊂ Rd . Eine Abbildung f : D → D wird Kontraktion auf D genannt, wenn fLipschitz-stetig mit Lipschitz-Konstante L ∈ (0, 1) ist.
Satz 2.31 (Banachscher7 Fixpunktsatz)Es sei A ⊂ Rd abgeschlossen mit A 6= ∅ und f : A→ A eine Kontraktion. Dann besitztf genau einen Fixpunkt, d. h.
∃!x∗ ∈ A : f(x∗) = x∗ .
Des Weiteren konvergiert für beliebiges x0 ∈ A die durch
xn+1 := f(xn) , n ∈ N0 , (Fixpunktiteration)
rekursiv definierte Folge xnn∈N0 gegen den Fixpunkt x∗ .
Beweis. Es bezeichne L ∈ (0, 1) eine Lipschitz-Konstante der Kontraktion f .
(1) Eindeutigkeit: Es seien x∗, y∗ ∈ A Fixpunkte von f . Wir nehmen an, dass x∗ 6= y∗ .Dann erhalten wir den Widerspruch
‖x∗ − y∗‖ = ‖f(x∗)− f(y∗)‖ ≤ L‖x∗ − y∗‖ < ‖x∗ − y∗‖ .
(2) Existenz: Für x0 ∈ A betrachten wir die durch die Fixpunktiteration definierteFolge xnn∈N0 . Dann gilt für n ∈ N , dass
‖xn+1 − xn‖ = ‖f(xn)− f(xn−1)‖ ≤ L‖xn − xn−1‖ ≤ . . . ≤ Ln‖x1 − x0‖ .
7Stefan Banach, 1892–1945, polnischer Mathematiker

28 2. Topologische Grundlagen
Für n ∈ N0 schreiben wir nun
xn+1 = x0 +
n∑k=0
(xk+1 − xk) . (Teleskopsumme)
Nach obiger Abschätzung konvergiert die Reihe∑∞
k=0(xk+1 − xk) nach dem Ma-jorantenkriterium. Wir setzen
x∗ := x0 +
∞∑k=0
(xk+1 − xk) .
Da A abgeschlossen ist, gilt x∗ ∈ A . Aus der Stetigkeit von f erhalten wir schließlich
f(x∗) = f( limn→∞
xn) = limn→∞
f(xn) = limn→∞
xn+1 = x∗ .

Kapitel 3
Kurven
Im Weiteren sei I ⊂ R stets ein Intervall und k ∈ N0 . Außerdem bezeichne ‖ · ‖ dieeuklidische Norm und 〈· | ·〉 das Standardskalarprodukt auf Rd .
Definition 3.1 (Weg)Eine stetige Abbildung
γ : I → Rd : t 7→ γ(t) =
γ1(t)...
γd(t)
heißt Weg in Rd .
Beispiel 3.2 (Parametrisierung einer Ellipse)Es seien a, b > 0 . Dann ist das Bild des Weges
γ : [0, 2π]→ R2 : t 7→[a cos tb sin t
]eine Ellipse mit den Halbachsen a, b , diese wird einmal im positiven Umlaufsinn durch-laufen.
Definition 3.3 (Ck-Weg)Ein Weg γ : I → Rd heißt Ck-Weg, wenn jede Komponentenfunktion
γj : I → R , j = 1, . . . , d ,
eine k-mal stetig differenzierbare Abbildung ist, in diesem Fall schreiben wir γ ∈ Ck(I;Rd) .Für einen Ck-Weg γ : I → Rd setzen wir
γ(i) :=[γ
(i)1 , . . . , γ
(i)d
]Tfür i = 1, . . . , k .
Bemerkung. Es sei γ : I → Rd ein Weg und t ∈ I .
. Ist γ ∈ C1(I;Rd) , so nennt man den Vektor
γ(t) := γ′(t)
Tangentialvektor oder Geschwindigkeitsvektor.
29

30 3. Kurven
. Gilt für den C1-Weg γ , dass γ(t) 6= 0 , so heißt
T (t) :=γ(t)
‖γ(t)‖
Tangenteneinheitsvektor.
. Falls γ ∈ C2(I;Rd) , wird γ(t) := γ′′(t) Beschleunigungsvektor genannt.
Definition 3.4 (Parameterwechsel)Es sei γ : I → Rd ein Weg und J ⊂ R ein weiteres Intervall. Dann nennt man eine stetigeBijektion
ϕ : J → I
einen Parameterwechsel und den Weg γ ϕ Umparametrisierung von γ .
. Der Parameterwechsel ϕ heißt orientierungserhaltend, falls ϕ streng monotonwachsend ist, ansonsten wird dieser orientierungsumkehrend genannt.
. Ist ϕ ein k-mal stetig differenzierbare Funktion, so nennt man ϕ einen Ck-Parameter-wechsel.
Auf der Menge der Ck-Wege definieren wir die Äquivalenzrelation ∼ wie folgt: Für zweiCk-Wege γ und η ist γ ∼ η , falls es einen orientierungserhaltenden Ck-Parameterwechselϕ gibt, sodass
γ = η ϕ .
Definition 3.5 (Kurve)Eine Äquivalenzklasse bezüglich ∼ von Ck-Wegen heißt Ck-Kurve.
Bemerkung. Eine Kurve C ist also eine Äquivalenzklasse von Wegen, welche sichdurch orientierungserhaltende Parameterwechsel ineinander überführen lassen. Ein Re-präsentant γ von C wird Parametrisierung der Kurve C genannt.
Definition 3.6 (Reguläre Wege und Kurven)Ein C1-Weg γ : I → Rd heißt regulär, falls
∀ t ∈ I : γ(t) 6= 0 .
Man nennt eine C1-Kurve C regulär, wenn sich C durch einen regulären Weg parame-trisieren lässt.
Bemerkung.
. Das Bild einer regulären Kurve ist im anschaulichen Sinne glatt.

3. Kurven 31
. Ist γ : I → R2 eine reguläre Parametrisierung der regulären ebenen Kurve C , sosetzen wir
N(t) :=1
‖γ(t)‖
[−γ2(t)γ1(t)
](Normaleneinheitsvektor)
für t ∈ I . Man nennt (T (t), N(t)) begleitendes Zweibein. Offensichtlich hängenT (t) und N(t) nicht von der gewählten Parametrisierung ab.
Beispiel 3.7 (Schnittwinkel zwischen Kurven)Es seien γ1 : I1 → Rd und γ2 : I2 → Rd zwei reguläre Wege sowie t1 ∈ I1 und t2 ∈ I2
mit γ1(t1) = γ2(t2) . Dann ist der Schnittwinkel ϑ ∈ [0, π] von γ1 und γ2 bei t1 und t2durch
cosϑ =〈γ1(t1) | γ2(t2)〉‖γ1(t1)‖‖γ2(t2)‖
gegeben.
Bemerkung.
. Ist C eine Kurve mit Parametrisierung γ : [a, b] → Rd , so erhält man mittels desorientierungserhaltenden Parmeterwechsels
ϕ : [0, 1]→ [a, b] : t 7→ a+ (b− a)t
die Paramatrisierungγ ϕ : [0, 1]→ Rd
der Kurve C . Es kann also von Vornherein angenommen werden, dass eine Para-metrisierung auf [0, 1] vorliegt.
. Für eine Kurve C mit Parametrisierung γ : [0, 1]→ Rd bezeichnet −C die Äquiva-lenzklasse des Weges
[0, 1]→ Rd : t 7→ γ(1− t) .
3.1 Bogenlänge
Es sei γ : [a, b]→ Rd eine Parametrisierung der Kurve C . Des Weiteren bezeichne
Z : a = t0 < t1 < . . . < tn = b , n ∈ N ,
eine Zerlegung von [a, b] . Die Länge des Polygonzugs durch die Punkte γ(t0), . . . , γ(tn)ist
L(γ,Z) :=
n∑i=1
‖γ(ti)− γ(ti−1)‖ .

32 3. Kurven
Man bezeichnet die Kurve C als rektifizierbar, falls der Grenzwert
lim|Z|→0
L(γ,Z) existiert.
In diesem Fall setzt man
LC := Lγ := lim|Z|→0
L(γ,Z) . (Länge der Kurve)
Man beachte, dass die Länge einer Kurve nicht von der gewählten Parametrisierungabhängt.
Definition 3.8 (Gleichmäßige Stetigkeit)Eine Funktion f : D ⊂ Rd → Rk heißt gleichmäßig stetig, wenn
∀ ε > 0 ∃ δ > 0 ∀x, y ∈ D : (‖x− y‖ < δ ⇒ ‖f(x)− f(y)‖ < ε) .
Satz 3.9 (Stetige Funktionen auf Kompakta sind gleichmäßig stetig)Es sei K ⊂ Rd kompakt und f : K → Rk stetig. Dann ist f gleichmäßig stetig.
Beweis. Angenommen, f wäre nicht gleichmäßig stetig. Dann gibt es ein ε > 0 , sodasswir für jedes n ∈ N zwei Punkte xn, yn ∈ K mit
‖xn − yn‖ < 1n und ‖f(xn)− f(yn)‖ ≥ ε
wählen können. Da K kompakt ist, existiert eine konvergente Teilfolge xnkk∈N mitξ := limk→∞ xnk ∈ K . Nun gilt
∀n ∈ N : ‖xn − yn‖ < 1n
und daher ist limk→∞ ynk = ξ , folglich
limk→∞
f(xnk) = f(ξ) = limk→∞
f(ynk) .
Dies steht jedoch im Widerspruch zu ‖f(xn)− f(yn)‖ ≥ ε für alle n ∈ N .
Satz 3.10 (Länge einer C1-Kurve)Eine C1-Kurve C ist rektifizierbar und
LC =
ˆ b
a‖γ(t)‖ dt ,
wobei γ : [a, b]→ Rd eine C1-Parametrisierung von C bezeichnet.

3. Kurven 33
Beweis. Es sei ε > 0 . Die Funktion
f : [a, b]→ R : t 7→ ‖γ(t)‖
ist stetig ist und daher integrierbar. Somit gibt es ein δ > 0 , sodass für jede Zerlegung
Z : a = t0 < t1 < . . . < tn = b , n ∈ N ,
von [a, b] mit |Z| < δ und zugehörigen Stützstellen ξ gilt, dass∣∣∣∣S(f,Z, ξ)−ˆ b
a‖γ(t)‖ dt
∣∣∣∣ < ε .
Aus der gleichmäßigen Stetigkeit von γ : [a, b] → Rd , folgt die Existenz eines δ > 0 mitδ < δ , sodass
∀ s, t ∈ [a, b] : (|s− t| < δ ⇒ ‖γ(s)− γ(t)‖∞ < ε) .
Es sei nun |Z| < δ . Für i = 1, . . . , n und j = 1, . . . , d folgt aus dem Mittelwertsatzder Differentialrechnung die Existenz eines ϑij ∈ (ti−1, ti) mit
γj(ti)− γj(ti−1) = γj(ϑij)∆ti ,
wobei ∆ti := ti − ti−1 . Dann ist
L(γ,Z) =n∑i=1
‖γ(ti)− γ(ti−1)‖ =n∑i=1
∥∥∥[γ1(ϑi1), . . . , γd(ϑid)]T∥∥∥ ∆ti
und somit
|S(f,Z, ξ)− L(γ,Z)| ≤n∑i=1
∣∣∣∥∥∥[γ1(ξi), . . . , γd(ξi)]T∥∥∥− ∥∥∥[γ1(ϑi1), . . . , γd(ϑid)]
T∥∥∥∣∣∣∆ti
≤n∑i=1
∥∥∥[γ1(ξi)− γ1(ϑi1), . . . , γd(ξi)− γd(ϑid)]T∥∥∥∆ti
<n∑i=1
ε√d∆ti = ε
√d(b− a) .
Folglich ist
LC = lim|Z|→0
L(γ,Z) =
ˆ b
a‖γ(t)‖ dt .
Für einen C1-Weg γ : [a, b]→ Rd nennt man
Lγ(t) :=
ˆ t
a‖γ(τ)‖ dτ für t ∈ [a, b]

34 3. Kurven
die Bogenlänge. Man beachte, dass [t 7→ Lγ(t)] stetig differenzierbar ist und
Lγ(t) = ‖γ(t)‖ .
Handelt es sich bei γ um einen regulären Weg, so ist [t 7→ Lγ(t)] zudem noch strengmonoton wachsend. Man sagt dann, dass der umparametrisierte Weg
[0, Lγ ]→ Rd : s 7→ γ(L−1γ (s)
)nach der Bogenlänge parametrisiert ist.
Beispiel 3.11 (Parametrisierung nach der Bogenlänge)Es sei c > 0 . Wir betrachten die Parametrisierung
γ : [0, 2π/c]→ R2 : t 7→[cos(ct)sin(ct)
]des Einheitskreises. Die Bogenlänge lautet
Lγ(t) :=
ˆ t
0‖γ(τ)‖ dτ = ct für t ∈ [0, 2π/c]
und daher repräsentiert
[0, 2π]→ R2 : s 7→ γ(sc
)=
[cos ssin s
]den nach der Bogenlänge parametrisierten Einheitskreis.

Kapitel 4
Differentialrechnung
In diesem Kapitel werden wir die Differentialrechnung auf Funktionen mehrerer Verän-derlicher erweitern.
4.1 Partielle Ableitungen
Für j = 1, . . . , d bezeichne ej den j-ten Standardbasisvektor des Rd . Weiters sei D ⊂ Rdoffen.
Definition 4.1 (Partielle Ableitungen skalarwertiger Funktionen)Es sei f : D → R eine skalarwertige Funktionen sowie j ∈ 1, . . . , d . Dann heißt f inξ ∈ D partiell nach der j-ten Variablen differenzierbar, falls der Grenzwert
∂jf(ξ) := limh→0
f(ξ + hej)− f(ξ)
h
existiert. Man nennt entsprechend ∂jf(ξ) die partielle Ableitung von f nach der j-tenVariablen im Punkt ξ .
Bemerkung.
. Für die partiellen Ableitungen im Punkt x = (x1, . . . , xd) ∈ D sind folgendeSchreibweisen üblich:
∂jf(x) =: ∂xjf(x) =:∂f
∂xj(x) =:
∂
∂xjf(x) =: fxj (x) .
. Die Funktion f : D → R heißt partiell differenzierbar, falls
∀ j = 1, . . . , d ∀ ξ ∈ D : ∂jf(ξ) existiert.
Wir schreiben f ∈ C1(D) , falls zudem noch alle partiellen Ableitungen stetig sindund nennen f dann stetig partiell differenzierbar.
. Für ξ ∈ D nennt man die durch
xj 7→ f(ξ1, . . . , ξj−1, xj , ξj+1, . . . , ξd)
gegebene Funktion j-te partielle Abbildung. Die Ableitung der j-ten partiellenAbbildung im Punkt ξj ist gerade die partielle Ableitung ∂jf(ξ) .
35

36 4. Differentialrechnung
Sind alle partiellen Ableitungen der Funktion f : D → R wiederum partiell differen-zierbar, so nennt man f zweimal partiell differenzierbar. Für die zweiten partiellenAbleitungen schreibt man
∂2j f :=
∂2f
∂x2j
:= ∂j (∂jf) und ∂ijf :=∂2f
∂xi∂xj:= ∂i (∂jf) für i, j = 1, . . . , d .
Man bezeichnet für k ∈ N die Abbildung f als k-mal partiell differenzierbar, fallsf eine (k − 1)-mal partiell differenzierbare Funktion ist und alle (k − 1)-ten partiellenAbleitungen partiell differenzierbar sind. Diese partiellen Ableitungen werden partielleAbleitungen k-ter Ordnung von f genannt.
Schließlich schreiben wir f ∈ Ck(D) , falls f eine k-mal partiell differenzierbare Funktionist und alle partiellen Ableitungen bis einschließlich k-ter Ordnung stetig sind und nennenf dann k-mal stetig partiell differenzierbar.
Beispiel 4.2 (Wellengleichung)Es sei c > 0 , ϕ : R → R zweimal differenzierbar und ψ : R → R differenzierbar . Dannerfüllt die Funktion
u : R2 → R : (t, x) 7→ 12 (ϕ(x+ ct) + ϕ(x− ct)) +
1
2c
ˆ x+ct
x−ctψ(η) dη
die Wellengleichung∂2t u− c2∂2
xu = 0
mit Anfangsbedingungen
u(0, x) = ϕ(x) und ∂tu(0, x) = ψ(x) für alle x ∈ R .
Satz 4.3 (Satz von Schwarz1)Ist f ∈ C2(D) , so gilt
∂ijf(ξ) = ∂jif(ξ)
für alle ξ ∈ D und i, j = 1, . . . , d .
Beweis. O.B. d.A. sei d = 2 , i = 1 und j = 2 . Da D offen ist, können wir zu ξ ∈ D einδ > 0 finden, sodass
x ∈ R2 : ‖x− ξ‖∞ < δ⊂ D .
Es sei nun h ∈ R mit |h| < δ . Die durch
F (x1) := f(x1, ξ2 + h)− f(x1, ξ2)
1Hermann Amandus Schwarz, 1843–1921, deutscher Mathematiker

4. Differentialrechnung 37
definierte Funktion ist zweimal stetig differenzierbar. Es ist
ddx1
F (x1) = ∂1f(x1, ξ2 + h)− ∂1f(x1, ξ2) .
Aus dem Mittelwertsatz folgt die Existenz eines ϑ1 ∈ R zwischen ξ1 und ξ1 + h mit
F (ξ1 + h)− F (ξ1) = F ′(ϑ1)h = h (∂1f(ϑ1, ξ2 + h)− ∂1f(ϑ1, ξ2)) .
Neuerliche Anwendung des Mittelwertsatzes liefert ein ϑ2 ∈ R zwischen ξ2 und ξ2+hmit
h (∂1f(ϑ1, ξ2 + h)− ∂1f(ϑ1, ξ2)) = h2∂2∂1f(ϑ1, ϑ2) .
Damit ist
f(ξ1 + h, ξ2 + h)− f(ξ1 + h, ξ2)− f(ξ1, ξ2 + h) + f(ξ1, ξ2) = h2∂2∂1f(ϑ1, ϑ2) .
Auf analoge Weise findet man ein η1 ∈ R zwischen ξ1 und ξ1 + h sowie ein η2 ∈ Rzwischen ξ2 und ξ2 + h mit
f(ξ1 + h, ξ2 + h)− f(ξ1 + h, ξ2)− f(ξ1, ξ2 + h) + f(ξ1, ξ2) = h2∂1∂2f(η1, η2) .
Für h 6= 0 gilt somit∂2∂1f(ϑ1, ϑ2) = ∂1∂2f(η1, η2)
und die Aussage folgt nun durch Bildung des Grenzwertes h→ 0 aufgrund der Stetigkeitvon ∂1∂2f und ∂2∂1f .
Bemerkung. Ist f eine k-mal stetig partiell differenzierbare Funktion, so kommt esalso bei sämtlichen partiellen Ableitungen bis einschließlich der k-ten nicht auf die Rei-henfolge an.
Wir betrachten nun die vektorwertige Funktion
f : D ⊂ Rd → Rk : x 7→ f(x) =
f1(x)...
fk(x) .
Dann heißt f partiell differenzierbar, falls alle Komponentenfuktionen fi : D → R ,i = 1, . . . , k , partiell differenzierbar sind. Höhere partielle Ableitungen werden analogdefiniert. Weiters schreiben wir f ∈ Cm(D;Rk) , falls es sich bei allen Komponenten vonf um m-mal stetig partiell differenzierbare Funktionen handelt.

38 4. Differentialrechnung
4.2 Totale Ableitung
Der Ableitung einer Funktion in einer Veränderlichen entspricht die totale Ableitung. ImWeiteren sei D ⊂ Rd wiederum als offen vorausgesetzt.
Definition 4.4 (Totale Differenzierbarkeit)Die Funktion f : D → Rk heißt in ξ ∈ D (total) differenzierbar, wenn es eine lineareAbbildung
L : Rd → Rk
gibt, sodass
limh→0
f(ξ + h)− f(ξ)− L(h)
‖h‖= 0 .
Die lineare Abbildung L wird mit df(ξ) bezeichnet und heißt Differential oder Ablei-tung von f im Punkt ξ . Die zugehörige Abbildungsmatrix bezüglich der Standardbasendes Rd und des Rk heißt Jacobi-Matrix und wird mit Jf (ξ) oder f ′(ξ) bezeichnet. Manbeachte, dass f ′(ξ) ∈ Rk×d .
Bemerkung.
. Die Funktion f : D → Rk ist genau dann in ξ ∈ D differenzierbar, falls es eineNullumgebung U(0) ⊂ Rd gibt, sodass
∀h ∈ U(0) : f(ξ + h) = f(ξ) + f ′(ξ)h+ ψ(h)‖h‖
für eine Funktion ψ : U(0)→ Rk mit limh→0 ψ(h) = 0 , also genau dann, wenn
f(ξ + h) = f(ξ) + f ′(ξ)h+ o(‖h‖) für h→ 0 .
. Ist f : D → Rk differenzierbar in ξ ∈ D , so ist f stetig in ξ . Denn offenbar gilt
limh→0
f(ξ + h) = limh→0
(f(ξ) + f ′(ξ)h+ o(‖h‖)
)= f(ξ) .
. Wir nennen f : D → Rk (total) differenzierbar, wenn f in allen Punkten ξ ∈ Ddifferenzierbar ist.
Der nachfolgende Satz zeigt insbesondere die Eindeutigkeit der Ableitung.
Satz 4.5 (Differenzierbar ⇒ partiell differenzierbar)Ist f : D → Rk in ξ differenzierbar, so ist f in ξ auch partiell differenzierbar und es gilt(
f ′(ξ))ij
= ∂jfi(ξ)
für alle i = 1, . . . , k und j = 1, . . . , d .

4. Differentialrechnung 39
Beweis. Es sei i ∈ 1, . . . , k und j ∈ 1, . . . , d . Aus der Differenzierbarkeit von f in ξfolgt
f(ξ + hej)− f(ξ) = f ′(ξ)hej + o(h) für h→ 0 .
Somit ist∂jfi(ξ) = lim
h→0
fi(ξ + hej)− fi(ξ)h
=(f ′(ξ)
)ij.
Beispiel 4.6 (Totale Ableitung)Wir bestimmen die Ableitung der Funktion
f : R2 → R2 : x 7→[
ex1x2x1 sinx2
].
Es ist
f ′(x) =
[∂1f1(x) ∂2f1(x)∂1f2(x) ∂2f2(x)
]=
[x2ex1x2 x1ex1x2sinx2 x1 cosx2
]für x ∈ R2.
Beispiel 4.7 (Tangentialebene)Es sei f : D ⊂ R2 → R in ξ ∈ D differenzierbar. Dann ist
f(x) = f(ξ) + f ′(ξ)(x− ξ) + o(‖x− ξ‖) =
= f(ξ) +[∂1f(ξ) ∂2f(ξ)
] [x1 − ξ1
x2 − ξ2
]+ o(‖x− ξ‖) =
= f(ξ) + ∂1f(ξ)(x1 − ξ1) + ∂2f(ξ)(x2 − ξ2) + o(‖x− ξ‖)
für x→ ξ . Man nennt die durch ξ1
ξ2
f(ξ)
+ λ1
10
∂1f(ξ)
+ λ2
01
∂2f(ξ)
, λ1, λ2 ∈ R ,
gebene Ebene die Tangentialebene an den Graphen von f im Punkt ξ .
Satz 4.8 (C1 ⇒ differenzierbar)Es sei f : D → Rk partiell differenzierbar und ξ ∈ D . Sind alle ersten partiellen Ablei-tungen von f in ξ stetig, so ist f in ξ differenzierbar.
Beweis. Wir definieren L : Rd → Rk vermöge
L(h) :=
d∑j=1
∂jf(ξ)hj für h ∈ Rd
und zeigen, dass
limh→0
f(ξ + h)− f(ξ)− L(h)
‖h‖= 0 .

40 4. Differentialrechnung
Dazu wählen wir ein δ > 0 , sodass ξ + h ∈ Rd : ‖h‖∞ < δ ⊂ D . Für h ∈ Rd mit‖h‖∞ < δ setze ξ(0) := ξ und
ξ(j) := ξ(j−1) + hjej für j = 1, . . . , d .
Dann ist ξ(d) = ξ + h und somit
f(ξ + h)− f(ξ) =d∑j=1
(f(ξ(j))− f
(ξ(j−1)
)).
Für j = 1, . . . , d und i = 1, . . . , k gibt es nach dem Mittelwertsatz (einer Veränderli-chen) ein ϑij zwischen ξ(j−1) und ξ(j) mit
fi(ξ(j))− fi
(ξ(j−1)
)= hj∂jfi(ϑij) .
Folglich ist
f(ξ + h)− f(ξ) =d∑j=1
hj
[∂jf1(ϑ1j), . . . , ∂jfk(ϑkj)
]Tund daher
f(ξ + h)− f(ξ)− L(h) =
d∑j=1
hj
[∂jf1(ϑ1j)− ∂jf1(ξ), . . . , ∂jfk(ϑkj)− ∂jfk(ξ)
]T.
Hieraus schließen wir
‖f(ξ+h)−f(ξ)−L(h)‖∞ ≤ ‖h‖∞d∑j=1
∥∥∥∥[∂jf1(ϑ1j)− ∂jf1(ξ), . . . , ∂jfk(ϑkj)− ∂jfk(ξ)]T∥∥∥∥
∞
und aus der Stetigkeit der partiellen Ableitungen in ξ erhalten wir damit die gewünschteAussage
limh→∞
f(ξ + h)− f(ξ)− L(h)
‖h‖∞= 0 .
Bemerkung. Eine Funktion f ∈ C1(D;Rk) ist also differenzierbar und
f ′ : D → Rk×d : x 7→ f ′(x)
stetig. Daher nennt man eine stetig partiell differenzierbare Funktion auch stetig diffe-renzierbar.
Zusammenfassend gilt die folgenden Implikationskette:
stetig partiell differenzierbar⇒ differenzierbar⇒ partiell differenzierbar

4. Differentialrechnung 41
Satz 4.9 (Kettenregel)Es seien f : D ⊂ Rd → Rk und g : D ⊂ Rm → D differenzierbar, wobei D offen sei.Dann ist auch f g differenzierbar und es gilt
(f g)′(ξ) = f ′(g(ξ))g′(ξ)
für alle ξ ∈ D .
Beweis. Es sei ξ ∈ D . Da f in g(ξ) differenzierbar ist, gilt
f (g(ξ) + k) = f (g(ξ)) + f ′ (g(ξ)) k + o(‖H‖) für H → 0 .
Aus der Differenzierbarkeit von g in ξ erhalten wir
g(ξ + h) = g(ξ) + g′(ξ)h+ o(‖h‖) für h→ 0 .
Somit ist
(f g) (ξ + h) = f(g(ξ) + g′(ξ)h+ o(‖h‖)︸ ︷︷ ︸
=:H(h)
)= f (g(ξ)) + f ′ (g(ξ))H(h) + o(‖H(h)‖) =
= (f g) (ξ) + f ′ (g(ξ)) g′(ξ)h+ o(‖h‖) für h→ 0 .
und somit f g in ξ differenzierbar.
Für x, y ∈ Rd bezeichnen wir im Folgenden mit
S(x, y) := x+ t(y − x) : t ∈ [0, 1]
die Verbindungsstrecke zwischen x und y .
Satz 4.10 (Mittelwertsatz)Es sei D ⊂ Rd offen und f : D → Rk differenzierbar. Für alle x, y ∈ D mit S(x, y) ⊂ Dgilt dann
∃ ξ1, . . . , ξk ∈ S(x, y) : f(x)− f(y) =
f′1(ξ1)...
f ′k(ξk)
(x− y) .
Beweis. Es seien x, y ∈ D mit S(x, y) ⊂ D und i ∈ 1, . . . , k . Wir setzen
g(t) := fi (y + t(x− y)) für t ∈ [0, 1] .
Anwendung des Mittelwertsatzes einer Veränderlichen liefert ein τ ∈ (0, 1) mit
g(1)− g(0) = g′(τ) .

42 4. Differentialrechnung
Nach der Kettenregel ist
g′(t) = f ′i (y + t(x− y)) (x− y)
und somit gilt für ξi := y + τ(x− y) , dass
fi(x)− fi(y) = f ′i(ξi)(x− y) .
Definition 4.11 (Konvexe Menge)Eine Menge M ⊂ Rd heißt konvex, falls
∀x, y ∈M : S(x, y) ⊂M .
Satz 4.12 (Schrankensatz)Es sei D ⊂ Rd offen und konvex sowie f : D → Rk differenzierbar und f ′ beschränkt.Dann gibt es eine Konstante C ≥ 0 mit
∀x, y ∈ D : ‖f(x)− f(y)‖ ≤ C‖x− y‖ .
Beweis. Die Aussage folgt unmittelbar aus dem Mittelwertsatz.
Definition 4.13 (Richtungsableitung)Es sei f : D ⊂ Rd → Rk und v ∈ Rd mit ‖v‖ = 1 . Sofern der Grenzwert
∂vf(ξ) := limh→0
f(ξ + hv)− f(ξ)
h
existiert, heißt dieser Richtungsableitung von f in Richtung v im Punkt ξ ∈ D .
Bemerkung. Die partiellen Ableitungen sind gerade die Richtungsableitungen in Rich-tung der Standardbasisvektoren.
Definition 4.14 (Gradient)Für eine partiell differenzierbare Funktion f : D ⊂ Rd → R heißt
∇f(ξ) :=
∂1f(ξ)...
∂df(ξ)
Gradient von f im Punkt ξ ∈ D .
Satz 4.15 (Darstellung der Richtungsableitung)Es sei f : D ⊂ Rd → R in ξ ∈ D differenzierbar sowie v ∈ Rd mit ‖v‖ = 1 . Dann ist
∂vf(ξ) = 〈∇f(ξ) | v〉 .

4. Differentialrechnung 43
Beweis. Wir setzeng(t) := f(ξ + tv)
für t ∈ R mit ξ + tv ∈ D . Dann ist
∂vf(ξ) = limh→0
g(h)− g(0)
h= g′(0) = f ′(ξ)v = 〈∇f(ξ) | v〉 .
Bemerkung. Bezeichnet α den zwischen ∇f(ξ) 6= 0 und v mit ‖v‖ = 1 eingeschlosse-nen Winkel, so gilt
∂vf(ξ) = 〈∇f(ξ) | v〉 = ‖∇f(ξ)‖ cosα .
Die Richtungsableitung wird daher genau dann maximal, wenn v = ∇f(ξ)‖∇f(ξ)‖ . Somit zeigt
der Gradient in Richtung des steilsten Anstiegs.
Für eine Funktion f : D ⊂ Rd → R und c ∈ R nennt man
Nc(f) := x ∈ D : f(x) = c
Niveaumenge von f zum Niveau c .
Satz 4.16 (Gradient ⊥ Niveaumenge)Es sei f : D ⊂ Rd → R differenzierbar und c ∈ Im f . Dann gilt für jeden differenzierbarenWeg γ : I → Nc(f) , dass
∀ t ∈ I : 〈∇f(γ(t)) | γ(t)〉 = 0 .
Beweis. Es sei γ : I → Nc(f) ein differenzierbarer Weg. Offenbar gilt
∀ t ∈ I : f (γ(t)) = c .
Nach der Kettenregel erhalten wirddtf (γ(t)) = f ′ (γ(t)) γ(t) = 〈∇f (γ(t)) | γ(t)〉 = 0 .
4.3 Taylor-Formel
Es sei D ⊂ Rd offen. Gegeben seien eine Funktion f ∈ Cn+1(D;R) und ξ, x ∈ D mitS(ξ, x) ⊂ D . Wir setzen h := x− ξ und definieren die Funktion g : [0, 1]→ R vermöge
g(t) := f(ξ + th) für t ∈ [0, 1] .
Dann ist g ∈ Cn+1([0, 1];R) und durch Anwendung des Satzes von Taylor für Funk-tionen einer Veränderlichen erhalten wir
g(1) =n∑
m=0
g(m)(0)
m!+g(n+1)(τ)
(n+ 1)!

44 4. Differentialrechnung
für ein τ ∈ [0, 1] . Anwendung der Kettenregel liefert
g′(t) = f ′(ξ + th)h =d∑j=1
∂jf(ξ + th)hj ,
g′′(t) =d∑j=1
(∂jf)′(ξ + th)hhj =d∑
j1,j2=1
∂j1∂j2f(ξ + th)hj1hj2 ,
...
g(n)(t) =
d∑j1,...,jn=1
∂j1 . . . ∂jnf(ξ + th)hj1 · . . . · hjn .
Wir definieren nun die multilineare Abbildung f (m)(ξ) durch
f (m)(ξ)(h(1), . . . , h(m)
):=
d∑j1,...,jm=1
∂j1 . . . ∂jmf(ξ)h(1)j1· . . . · h(m)
jm
für h(1), . . . , h(m) ∈ Rd , diese wird m-te Ableitung von f im Punkt ξ genannt. Setzenwir f (m)(ξ)hm := f (m)(ξ)(h, . . . , h) , so führt dies auf die Darstellung
f(ξ + h) =n∑
m=0
f (m)(ξ)
m!hm +
f (n+1)(ϑ)
(n+ 1)!hn+1 , (Taylor-Formel)
wobei ϑ := ξ + τh ∈ S(ξ, x) .
Bemerkung. Die durch
Tm(x ; f, ξ) :=
m∑k=0
f (k)(ξ)
k!(x− ξ)k , x ∈ Rd ,
für f ∈ Cn(D;R) , ξ ∈ D und m = 0, . . . , n definierte Polynomfunktion nennt man m-tesTaylor-Polynom von f mit Entwicklungspunkt ξ . Für α ∈ Nd
0 setzen wir
|α| :=d∑i=1
αi und α! :=d∏i=1
αi!
sowie∂α := ∂α1
1 . . . ∂αdd und xα := xα11 · . . . · x
αdd
für x ∈ Rd . Dann können wir das m-te Taylor-Polynom als
Tm(x ; f, ξ) =∑|α|≤m
∂αf(ξ)
α!(x− ξ)α
schreiben.

4. Differentialrechnung 45
Zusammengefasst haben wir Folgendes gezeigt.
Satz 4.17 (Satz von Taylor)Es sei f ∈ Cn+1(D;R) und ξ ∈ D . Dann gilt für alle x ∈ D mit S(x, ξ) ⊂ D , dass
f(x) = Tn(x ; f, ξ) +Rn(x ; f, ξ)
für ein ϑ ∈ S(ξ, x) und
Rn(x ; f, ξ) :=f (n+1)(ϑ)
(n+ 1)!hn+1 . (Lagrange-Restglied)
Bemerkung.
. Eine weitere Darstellung des Restglieds lautet
Rn(x ; f, ξ) =
ˆ 1
0
(1− t)n
n!f (n+1)(ξ + th)hn+1 dt ,
wobei h := x− ξ .
. Man erhält die Taylor-Formel für vektorwertige Funktionen unmittelbar durchkomponentenweise Anwendung des Satzes von Taylor für skalarwertige Funk-tionen. Beachtet werden sollte jedoch, dass im Allgemeinen in der LagrangeschenDarstellung des Restglieds nicht in jeder Komponente derselbe Zwischenpunkt ge-wählt werden kann.
Wie bereits für Funktionen einer Veränderlichen, ergibt sich nun unmittelbar folgendesKorollar.
Korollar 4.18 (Taylor-Formel, Qualitative Version)Es sei f ∈ Cn(D;Rk) und ξ ∈ D . Dann gilt
f(x) = Tn(x ; f, ξ) + o(‖x− ξ‖n) für x→ ξ .
Beispiel 4.19 (Hesse2-Matrix)Für f ∈ C2(D;R) und ξ ∈ D ist
T2(x ; f, ξ) = f(ξ) + f ′(ξ)(x− ξ) + 12f′′(ξ)(x− ξ)2 =
= f(ξ) + f ′(ξ)(x− ξ) + 12(x− ξ)THf (ξ)(x− ξ) ,
wobeiHf (ξ) := (∂ijf(ξ))di,j=1
die Hesse-Matrix von f im Punkt ξ genannt wird. Nach dem Satz von Schwarz istHf (ξ) symmetrisch.
2Otto Hesse, 1811–1874, deutscher Mathematiker

46 4. Differentialrechnung
4.4 Lokale Extrema
Wir wollen nun lokale Extrema von Funktionen in mehreren Veränderlichen bestimmenund charakterisieren. Wiederum sei D ⊂ Rd offen.
Definition 4.20 (Lokale Extrema)Es sei f : D → R und ξ ∈ D .
. Die Funktion f besitzt in ξ ein lokales Maximum, falls eine Umgebung U(ξ) ⊂ Dvon ξ existiert, sodass
∀x ∈ U(ξ) : f(x) ≤ f(ξ) .
. Man sagt, dass f in ξ ein lokales Minimum besitzt, wenn −f in ξ ein lokalesMaximum hat.
. Gilt für eine Umgebung U(ξ) ⊂ D von ξ , dass
f(x) < f(ξ) bzw. f(x) > f(ξ)
für alle x ∈ U(ξ)\ξ , so besitzt f in ξ ein isoliertes lokales Maximum bzw. einisoliertes lokales Minimum.
. Von einem lokalem Extremum spricht man, falls ein lokales Maximum oder Mi-nimum vorliegt.
Satz 4.21 (Notwendiges Kriterium für lokales Extremum)Es sei f : D → R partiell differenzierbar. Besitzt f in ξ ∈ D ein lokales Extremum, sogilt
∇f(ξ) = 0 .
Beweis. Es sei j ∈ 1, . . . , d . Wir setzen
g(t) := f(ξ + tej)
für t ∈ R mit ξ + tej ∈ D . Dann besitzt die differenzierbare Funktion g im Nullpunktnach Voraussetzung ein lokales Extremum. Daher ist
0 = g′(0) = ∂jf(ξ) .
Definition 4.22 (Stationärer Punkt)Es sei f : D → R in ξ ∈ D partiell differenzierbar. Dann heißt ξ stationärer Punktvon f , falls ∇f(ξ) = 0 .
Möchte man eine partiell differenzierbare Funktion auf lokale Extrema untersuchen, sogilt es also deren stationäre Punkte zu charakterisieren.

4. Differentialrechnung 47
Definition 4.23 (Definitheit)Es sei A ∈ Rd×d symmetrisch und
QA : Rd → R : x 7→ xTAx
die zugehörige quadratische Form. Dann ist A bzw. QA
. positiv definit :⇐⇒ ∀x ∈ Rd \ 0 : QA(x) > 0 ,
. negativ definit :⇐⇒ ∀x ∈ Rd \ 0 : QA(x) < 0 ,
. positiv semidefinit :⇐⇒ QA ≥ 0 ,
. negativ semidefinit :⇐⇒ QA ≤ 0 ,
. indefinit :⇐⇒ ∃x, y ∈ Rd : QA(x) > 0 > QA(y) .
Bemerkung. Die Definitheit einer symmetrischen Matrix A ∈ Rd×d lässt sich wie folgtcharakterisieren:
. A positiv definit ⇐⇒ alle Eigenwerte von A sind positiv,
. A negativ definit ⇐⇒ alle Eigenwerte von A sind negativ,
. A positiv semidefinit ⇐⇒ alle Eigenwerte von A sind nicht negativ,
. A negativ semidefinit ⇐⇒ alle Eigenwerte von A sind nicht positiv,
. A indefinit ⇐⇒ A hat sowohl positive als auch negative Eigenwerte.
Satz 4.24 (Hinreichende Kriterien für lokale Extrema)Es sei f ∈ C2(D;R) und ξ ∈ D mit ∇f(ξ) = 0 . Dann gilt:
(1) Hf (ξ) positiv definit ⇒ f hat isoliertes lokales Minimum in ξ
(2) Hf (ξ) negativ definit ⇒ f hat isoliertes lokales Maximum in ξ
(3) Hf (ξ) indefinit ⇒ f hat kein Extremum in ξ
Beweis. Die Aussagen folgen aus der Taylor-Formel, denn
f(ξ + h) = f(ξ) + f ′(ξ)h︸ ︷︷ ︸=0
+12h
THf (ξ)h+ o(‖h‖2) für h→ 0 .
Wir beweisen exemplarisch die erste Aussage, die Hesse-Matrix Hf (ξ) sei also positivdefinit. Es ist
f(ξ + h)− f(ξ) = 12h
THf (ξ)h+ ψ(h)

48 4. Differentialrechnung
mit ψ(h) = o(‖h‖2) für h→ 0 . Für den Restterm ψ gilt daher
∀ ε > 0 ∃ δ > 0 ∀h ∈ Bδ(0) : |ψ(h)| < ε‖h‖2 .
Nun betrachten wir die stetige Funktion
g : ∂B1(0)→ R : h 7→ hTHf (ξ)h .
Diese nimmt nach dem Satz vom Minimum und Maximum ihr Minimum an, wir setzen
α := minh∈∂B1(0)
g(h) > 0 .
Zu h ∈ Rd wähle h ∈ ∂B1(0) mit h = ‖h‖h . Dann ist
hTHf (ξ)h = ‖h‖2g(h) ≥ α‖h‖2 .
Wählen wir nun δ > 0 mit
∀h ∈ Bδ(0) : |ψ(h)| < α2 ‖h‖
2 ,
so gilt für h ∈ Rd mit 0 < ‖h‖ < δ , dass
f(ξ + h)− f(ξ) = 12h
THf (ξ)h︸ ︷︷ ︸≥α2 ‖h‖
2
+ ψ(h)︸︷︷︸>−α2 ‖h‖
2
> 0 .
Also gilt∀h ∈ Bδ(0) : f(ξ + h)− f(ξ) > 0
und somit besitzt f in ξ ein isoliertes lokales Minimum.
4.5 Newton-Verfahren
Es sei D ⊂ Rd offen. Wir wollen nun eine Nullstelle x∗ ∈ D einer gegebenen Funktionf : D ⊂ Rd → Rd bestimmen. Nehmen wir an, dass f ∈ C1(D;Rd) , so gilt nach derTaylor-Formel
0 = f(x∗) = f(x(0)
)+ f ′
(x(0)
)(x∗ − x(0)
)+ o(∥∥x∗ − x(0)
∥∥) für x(0) → x∗ .
Die Idee besteht nun darin, zu gegebenem x(0) den Restterm zu vernachlässigen und x(1)
so zu bestimmen, dass
f(x(0)
)+ f ′
(x(0)
)(x(1) − x(0)
)= 0 .

4. Differentialrechnung 49
Ist f ′(x∗) invertierbar, so erhält man
x(1) = x(0) −[f ′(x(0)
)]−1f(x(0)
)für x(0) nahe bei x∗ . Dies führt auf das als Newton-Verfahren bekannte Iterationsver-fahren
x(n+1) := x(n) −[f ′(x(n)
)]−1f(x(n)
)für n ∈ N0 .
Satz 4.25 (Lokal quadratische Konvergenz des Newton-Verfahrens)Es sei f ∈ C2(D;Rd) und x∗ ∈ D mit f(x∗) = 0 und det f ′(x∗) 6= 0 . Dann gibt es eineKonstante C > 0 mit
∀n ∈ N :∥∥x∗ − x(n)
∥∥ ≤ 1C
(C∥∥x∗ − x(0)
∥∥)2nfür x(0) hinreichend nahe bei x∗ .
Beweis. Es sei n ∈ N0 . Setzen wir en := x∗− x(n) , so gilt nach dem Satz von Taylor
0 = f(x∗) = f(x(n)
)+ f ′
(x(n)
)en +
ˆ 1
0(1− t)f ′′
(x(n) + ten
)e2n dt .
Ziehen wir davon0 = f
(x(n)
)+ f ′
(x(n)
)(x(n+1) − x(n)
)ab, dann führt dies auf
en+1 = −[f ′(x(n)
)]−1ˆ 1
0(1− t)f ′′
(x(n) + ten
)e2n dt .
In einer kompakten Umgebung von x∗ sind f ′ und f ′′ beschränkt, daher können wir eineKonstante C = C(f ′, f ′′) > 0 finden, sodass
‖en+1‖ ≤ C‖en‖2 .
Induktiv erhalten wir somit‖en‖ ≤ 1
C (C‖e0‖)2n .
4.6 Extrema mit Nebenbedingungen
Es sei D ⊂ Rd offen und f ∈ C1(D;R) . Weiters sei g ∈ C1(D;Rm) . Wir setzenM := g−1 (0) .

50 4. Differentialrechnung
Gesucht sind nun Maximal- bzw. Minimalstellen der Funktion f unter der Neben-bedingung g = 0 , d.h. Punkte ξ ∈ M , für die es eine Umgebung U ⊂ D von ξ gibt,sodass
f(x) ≤ f(ξ) bzw. f(x) ≥ f(ξ)
für alle x ∈ U ∩M gilt. Wir sagen dann, dass f in ξ ein Extremum unter der Nebenbe-dingung g = 0 besitzt.
Satz 4.26 (Lagrange-Multiplikatorenregel)Es sei 0 ∈ Rm ein regulärer Wert von g . Besitzt f in ξ ∈M ein lokales Extremum unterder Nebenbedingung g = 0 , so gilt
∇f(ξ) ∈ NξM ,
also existieren λ1, . . . , λm ∈ R mit
∇f(ξ) +m∑i=1
λi∇gi(ξ) = 0 .
Beweis. Es sei v ∈ TξM . Wir zeigen, dass 〈∇f(ξ) | v〉 = 0 und damit ∇f(ξ) ∈ NξM .Dazu wählen wir ein ε > 0 und einen C1-Weg γ : (−ε, ε)→M mit
γ(0) = ξ und γ(0) = v .
Nach Voraussetzung besitzt die Funktion
ϕ : (−ε, ε)→ R : t 7→ f (γ(t))
im Nullpunkt ein lokales Extremum und daher gilt
0 = ϕ′(0) = 〈∇f(ξ) | v〉 = 0 .
Bemerkung. Man beachte, dass die Lagrange-Multiplikatorregel nur in Um-gebungen anwendbar ist, in denen 0 ein regulärer Wert von g ist, also in einer Umgebungeines Punktes ξ ∈M mit
rang g′(ξ) = m.
Punkte, in denen dies nicht der Fall ist, müssen getrennt untersucht werden.
Bemerkung. (Anwendung der Lagrange-Multiplikatorenregel)Die Lagrange-Multiplikatorenregel kann wie folgt angewandt werden: Man betrachtet dieFunktion
Λ: D ×Rm → R : (x, λ) 7→ f(x) +
m∑i=1
λigi(x) (Lagrange-Funktion)

4. Differentialrechnung 51
und bestimmt die stationären Punkte von Λ , also die Menge
(ξ, λ) ∈ D ×Rm : ∇Λ(ξ, λ) = 0 .
Dann sind die Extremstellen von f unter der Nebenbedingung g = 0 aus
ξ ∈ D | ∃λ ∈ Rm : ∇Λ(ξ, λ) = 0
und der Menge jener Punkte, in denen rang g′ < m , auszuwählen.
Beispiel 4.27 (Extrema mit Nebenbedingung)Gesucht sind die Extrema der Funktion
f : R2 → R : (x, y) 7→ xy
auf S1 , also unter der Nebenbedingung g = 0 , wobei
g : R2 → R : (x, y) 7→ x2 + y2 − 1 .
Da 0 ein regulärer Wert von g ist, gilt es nun alle (x, y) ∈ S1 mit
∃λ ∈ R : ∇f(x, y) + λ∇g(x, y) = 0
zu bestimmen. Dies ist nur dann möglich, wenn ∇f(x, y) und ∇g(x, y) linear abhängigsind. Nun ist ∣∣∣∣y 2x
x 2y
∣∣∣∣ = 0 ⇐⇒ 2y2 − 2x2 = 0 ⇐⇒ |x| = |y|
und aus der Nebenbedingung x2 + y2 − 1 = 0 ergeben sich somit die stationären Punkte
1√2(1, 1), 1√
2(1,−1), 1√
2(−1, 1), 1√
2(−1,−1) .
Da S1 kompakt und f stetig ist, nimmt die Funktion f nach dem Satz vom Minimumund Maximum in 1√
2(1, 1) und 1√
2(−1,−1) ihr Maximum
f(
1√2, 1√
2
)= f
(− 1√
2,− 1√
2
)= 1
2
und in 1√2(−1, 1) und 1√
2(1,−1) ihr Minimum
f(− 1√
2, 1√
2
)= f
(1√2,− 1√
2
)= −1
2
auf S1 an.


Kapitel 5
Integralrechnung
5.1 Parameterintegrale
Integriert man eine von mehreren Variablen abhängige Funktion nur über eine Variable,so spricht man von einem Parameterintegral.
Beispiel 5.1Für s > −1 ist
ˆ 1
0xs dx =
xs+1
t+ 1
∣∣∣∣∣1
0
=1
1 + s.
Im Folgenden seien a, b, c, d reelle Zahlen mit a < b und c < d.
Satz 5.2 (Stetigkeit Parameterintegrale)Es sei und f : [a, b]×[c, d]→ R : (s, x) 7→ f(s, x) stetig. Dann ist die Funktion F : [a, b]→R : s 7→
´ dc f(s, x) dx stetig.
Beweis. Zunächst ist F wohldefiniert, da für jedes x ∈ [c, d] die Funktion s 7→ f(s, x)stetig und damit integrierbar ist. Da f stetig ist und [a, b]× [c, d] kompakt ist, ist f nachSatz 2.26 gleichmäßig stetig. Zu gegebenem ε > 0 existiert daher ein δ > 0 so dass füralle s, s0 ∈ [a, b] und x, x0 ∈ [c, d] mit ‖(s, x)− (s0, x0)‖ < δ gilt:
|f(s, x)− f(s0, x)| < ε
c− d. (∗)
Aus ‖(s, x) − (s0, x0)‖ < δ folgt ‖s − s0‖ < δ. Daher gilt für alle s, s0 ∈ [a, b] mit‖s− s0‖ < δ:
|F (s)− F (s0)| =∣∣∣∣ˆ d
cf(s, x) dx−
ˆ d
cf(s0, x) dx
∣∣∣∣ ≤ ˆ d
c|f(s, x)x− f(s0, x)| dx
(∗)< ε .
Ist der Integrand differenzierbar, so ist auch die durch das Parameterintegral definierteFunktion differenzierbar, und Integration und Differentiation dürfen vertauscht werden.
Satz 5.3 (Differenzierbarkeit Parameterintegrale)Es sei f : [a, b]× [c, d]→ R : (s, x) 7→ f(s, x) stetig, nach s stetig partiell differenzierbar.Dann ist die Funktion F : [a, b]→ R : s 7→
´ dc f(s, x) dx differenzierbar mit
F ′(s) =
ˆ d
c∂sf(t, x) dx .
53

54 5. Integralrechnung
Beweis. Für s, s0 ∈ [a, b] mit s 6= s0 ist
F (s)− F (s0)
s− s0=
´ dc (f(s, x)− f(s0, x)) dx
s− s0=
ˆ d
c
f(s, x)− f(s0, x)
s− s0dx .
Es sei ε > 0. Da ∂sf stetig und nach Satz 2.26 sogar gleichmäßig stetig ist, existiert δ > 0so dass für alle s, s0 ∈ [a, b] mit |s− s0| < δ und für alle x ∈ [c, d] gilt:
|∂sf(s, x)− ∂sf(s0, x)| < ε
d− c. (?)
Nach dem Mittelwertsatz der Differentialrechnung existiert τ zwischen s und s0 mitf(s, x)−f(s0, x) = ∂tf(τ, x) (s−s0). Für s, s0 ∈ [a, b] mit |s−s0| < δ ist auch |τ−s0| < δ,nach (? ) gilt
|∂sf(τ, x)− ∂sf(s0, x)| < ε
d− c.
Damit folgt, dass für s, s0 ∈ [a, b] mit 0 < |s− s0| < δ:∣∣∣∣F (s)− F (s0)
s− s0−ˆ d
c∂sf(s0, x) dx
∣∣∣∣ =
∣∣∣∣ˆ d
c
(f(s, x)− f(s0, x)
s− s0− ∂sf(s0, x)
)dx∣∣∣∣
≤ˆ d
c
∣∣∣∣(f(s, x)− f(s0, x)
s− s0− ∂sf(s0, x)
)∣∣∣∣ dx =
ˆ d
c|∂sf(τ, x)− ∂sf(s0, x)| dx
<
ˆ d
c
ε
d− cdx = ε.
Iterierte Integrale
Nach Satz 5.2 ist die Funktion F1(x) =´ dc f(x, y) dy stetig und das Integral der Funkti-
on F1 über das abgeschlossene Intervall [a, b] existiert. Ebenso ist die Funktion F2(y) =´ ba f(x, y) dx stetig und das Integral der Funktion F2 über das abgeschlossene Intervall
[c, d] existiert. Der folgende Satz zeigt, dass die beiden berechneten Integralwerte über-einstimmen.
Satz 5.4 (Satz von Fubini für Rechtecke)Es sei f : [a, b]× [c, d]→ R stetig. Dann gilt
ˆ b
a
(ˆ d
cf(x, y) dy
)dx =
ˆ d
c
(ˆ b
af(x, y) dx
)dy .
Beweis. Betrachte die Funktion
g : [a, b]× [c, d]→ R : (x, y) 7→ˆ y
cf(x, z) dz.

5. Integralrechnung 55
Dann ist g stetig und die Funktion g2 : [c, d] → R : y 7→ g(x, y) ist nach dem Haupt-satz der Differential- und Integralrechnung stetig differenzierbar mit g′2(y) = f(x, y) =∂yg(x, y).Mit Satz 5.3 folgt, dass die Funktion
G : [c, d]→ R : y 7→ˆ b
ag(x, y) dx
stetig differenzierbar ist mit
G′(y) =
ˆ b
a∂yg(x, y) dx =
ˆ b
af(x, y) dx .
Es folgt unter Verwendung des Hauptsatzes der Differential- und Integralrechnungˆ d
c
(ˆ b
af(x, y) dx
)dy =
ˆ d
cG′(y) dy = G(d)−G(c) = G(d) =
=
ˆ b
a
(ˆ d
cf(x, y) dy
)dx .
Beispiel 5.5Berechne
´Q y cos(x y) d(x, y) für Q = [0, π]× [0, 1].
Es empfiehlt sich, erst nach y zu integrieren:ˆQy cos(x y) d(x, y) =
ˆ 1
0
(ˆ π
0y cos(xy) dx
)dy =
ˆ 1
0
[sin(xy)
]πx=0
dy =
=
ˆ 1
0sin(πy) dy =
[− 1
πcos(πy)
]1
y=0=
2
π.
Uneigentliche Parameterintegrale
Wir wollen nun noch uneigentliche Parameterintegrale betrachten. Hier brauchen wiraber weitere Voraussetzungen, um Stetigkeit/Differenzierbarkeit der durch das Parame-terintegral definieren Funktion zu erhalten.
Satz 5.6 (Stetigkeit uneigentliche Parameterintegrale)Es sei f : [a, b] × [c, d) → R : (s, x) 7→ f(s, x) stetig. Weiters sei g : [c, d) → R stetig,nichtnegativ, uneigentlich integrierbar über [c, d). Ist |f(t, x)| ≤ g(x) für alle t ∈ [a, b]
und x ∈ [c, d), dann ist die Funktion F : K → R : s 7→´ ba f(s, x) dx stetig.
Satz 5.7 (Differenzierbarkeit uneigentliche Parameterintegrale)Es sei f : [a, b]× [c, d)→ R : (s, x) 7→ f(s, x) stetig und nach s stetig partiell differenzier-bar. Außerdem seien g, h : [c, d)→ R stetig, nichtnegativ, uneigentlich integrierbar über

56 5. Integralrechnung
[c, d), mit |f(t, x)| ≤ g(x) und |∂tf(t, x)| ≤ h(x) für alle t ∈ [a, b] und x ∈ [c, d). dann istdie Funktion F : K → R : s 7→
´ ba f(s, x) dx stetig differenzierbar mit
F ′(s) =
ˆ d
c∂sf(t, x) dx .
5.2 Mehrdimensionales Riemann-Integral
Die Idee des Riemann-Integrals lässt sich auf Funktionen in mehreren Variablen übertra-gen. Ein anderer Zugang zum Integralbegriff wird in Anhang A vorgestellt.
Integral über Quader
Wir führen im ersten Schritt Integrale über Quader ein:
Definition 5.8Es sei Q = [a1, b1]× . . . [ad, bd] ⊂ Rd mit ak < bk für k = 1, . . . , d ein Quader.
. IstZk : xk,0 = ai < xk,1 < . . . < xk,mk = bk, nk ∈ N,
eine Zerlegung von [ak, bk] für k = 1, . . . , d, so nennen wir Z := Z1 × . . .Zd eineZerlegung von Q.
. Ist f : Q → R eine beschränkte Funktion, so definieren wir für ik ∈ 1, . . . , nk,k = 1 . . . , d die Werte
Mi1,...,ik := sup f(y1, . . . , yd)| yk ∈ [xk,i−1, xk,i] für k = 1, . . . , dmi1,...,ik := inf f(y1, . . . , yd)| yk ∈ [xk,i−1, xk,i] für k = 1, . . . , d
sowie
O(f ;Z) :=
n1∑i1=1
. . .
nd∑id=1
Mi1,...,ik
d∏k=1
(xk,i − xk,i−1)
U(f ;Z) :=
n1∑i1=1
. . .
nd∑id=1
mi1,...,ik
d∏k=1
(xk,i − xk,i−1)
und nennen O(f,Z) die Obersumme und U(f,Z) die Untersumme von f bezüglichZ.

5. Integralrechnung 57
. Das Oberintegral O(f) bzw. das Unterintegral U(f) von f ist definiert als
O(f) := inf O(f,Z)|Z Zerlegung von QU(f) := sup U(f,Z)|Z Zerlegung von Q
Definition 5.9Es sei Q = [a1, b1] × . . . [ad, bd] ⊂ Rd mit ak < bk für k = 1, . . . , d. Eine beschränkteFunktion f : Q → R heißt Riemann-integrierbar, wenn Ober- und Unterintegral von fübereinstimmen. In diesem Fall definieren wirˆ
Qf(x) dx := O(f) = U(f).
Viele Eigenschaften des eindimensionalen Riemann-Integrals übertragen sich auf dasmehrdimensionale Riemann-Integral:
Satz 5.10Es sei Q ⊂ Rd ein Quader, f, g : Q→ R Riemann-integrierbar, λ, µ ∈ R. Dann gilt
(1) λf + µg ist Riemann-integrierbar mitˆQ
(λf(x) + µg(x)) ddx = λ
ˆQf(x) dx+ µ
ˆQg(x) dx . [Linearität]
(2) Ist f(x) ≤ g(x) für alle x ∈ Q, so istˆQf(x) dx ≤
ˆQg(x) dx . [Monotonie]
(3) Ist Q = Q1 ∪Q2, wobei Q1, Q2 bis auf Randpunkte disjunkt sind, so istˆQf(x) dx =
ˆQ1
f(x) dx+
ˆQ2
f(x) dx . [Bereichsadditivität]
Das Riemann-Integral lässt sich in vielen Fällen über eindimensionale iterierte Integraleberechnen.
Satz 5.11 (Satz von Fubini)Es sei Q = [a1, b1]× . . . [ad, bd] ⊂ Rd mit ak < bk für k = 1, . . . , d. Weiter sei f : Q→ R
stetig. Dann giltˆQf(x, y) d(x, y) =
ˆ b1
a1
. . .
ˆ bn
an
f(x1, . . . , xn) dx1 . . . dxn .
Dabei kommt es auf die Integrationsreihenfolge nicht an.

58 5. Integralrechnung
Integrale über beschränkte Bereiche
Wir erweitern im nächsten Schritt den Integralbegriff auf beschränkte Integrationsberei-che.
Definition 5.12Es sei ∅ 6= D ⊂ Rd beschränkt und Q ⊂ Rd ein Quader mit D ⊂ Q. Zu einer beschränk-ten Funktion f : D → R definieren wir
f∗ : D → R : x 7→
f(x), x ∈ D,0, x ∈ Q ⊂ D.
Wir nennen die Funktion f Riemann-integrierbar über D, wenn die Funktion f∗ Riemann-integrierbar über Q ist, und definieren in diesem Fallˆ
Df(x) dx :=
ˆQf∗(x) dx .
Die Definition ist unabhängig von der Wahl des Quaders Q.
Definition 5.13Es sei ∅ 6= D ⊂ Rd beschränkt. Dann nennen wir D messbar, wenn
vol(D) :=
ˆDχ(x) dx
existiert, wobei χ : D → R : x 7→ 1 sei. Man nennt dann vol(D) das Volumen von D imRd. Ist D messbar mit vol(D) = 0, so bezeichnen wir D als Nullmenge.
Bemerkung. Man kann zeigen:
. Ist D ⊂ Rd kompakt, dann ist D messbar genau dann, ∂D Nullmenge ist.
. Ist D ⊂ Rd kompakt und messbar, und f : D → R stetig, so ist f Riemann-integrierbar über D.
5.2.1 Normalbereiche
Wir betrachten nun Bereiche, die durch stetige Funktionen beschränkt werden.
Definition 5.14Wir nennen B ⊂ Rd Normalbereich, wenn sich D (nach eventueller Änderung der Rei-henfolge der Variablen) schreiben lässt als
B = (x, y) ∈ Q×R | g(x) ≤ y ≤ h(x)
für einen Quader Q ⊂ Rd−1 und stetige Funktionen g, h : Q → R mit g(x) ≤ h(x) füralle x ∈ Q.

5. Integralrechnung 59
Integrale von Funktionen über Normalgebiete können dann wieder als iterierte Integraleaufgefasst werden.
Satz 5.15 (Satz von Fubini für Normalbereiche)Es sei B ein Normalbereich, f : B → R eine stetige Funktion. Dann ist f über Bintegrierbar, und es gilt:
ˆBf(x, y) d(x, y) =
ˆQ
(ˆ h(x)
g(x)f(x, y) dy
)dx .
Speziell im zweidimensionalen Fall nennen wir B einen horizontalen Normalbereich, wennes a, b ∈ R mit a < b und stetige Funktionen g, h : [a, b]→ R gibt mit
B = (x, y) ∈ R2 | a ≤ x ≤ b, g(x) ≤ y ≤ h(x) .
Ist f : B → R stetig, so ist
ˆBf(x, y) d(x, y) =
ˆ b
a
(ˆ h(x)
g(x)f(x, y) dy
)dx .
Wir nennen B ⊂ R2 einen vertikalen Normalbereich, wenn es c, d ∈ R mit c < d undstetige Funktionen l, r : [a, b]→ R gibt mit
B = (x, y) ∈ R2 | l(y) ≤ x ≤ r(y), c ≤ y ≤ d .
Für eine stetige Funktion f : B → R ist in diesem Fall
ˆBf(x, y) d(x, y) =
ˆ d
c
(ˆ r(y)
l(y)f(x, y) dx
)dy .
Lässt sich der Normalbereich als vertikaler und auch als horizontaler Normalbereich an-geben, so liefern beide iterierten Integral nach dem Satz von Fubini den selben Wert.
Beispiel 5.16SeiM der von der Normalparabel und der Winkelhalbierenden beschränkte Bereich, undf : M → R : (x, y) 7→ x2 − y2.Als horizontaler Normalbereich lässt sich M angeben als
M = (x, y) ∈ R2 | 0 ≤ x ≤ 1, x2 ≤ y ≤ x.
Damit erhalten wir:ˆMf(x, y) d(x, y) =
ˆ 1
0
(ˆ x
x2(x2 − y2) dy
)dx =

60 5. Integralrechnung
−0.2 0.2 0.4 0.6 0.8 1 1.2−0.2
0.2
0.4
0.6
0.8
1
1.2
=
ˆ 1
0
(1
3x6 − x4 +
2
3x2
)dx =
1
70.
Als vertikaler Normalbereich lässt sich M angeben als
M = (x, y) ∈ R2 | 0 ≤ y ≤ 1, y ≤ x ≤ √y
und wir berechnen
ˆMf(x, y) d(x, y) =
ˆ 1
0
(ˆ √yy
(x2 − y2) dx
)dy =
=
ˆ 1
0
(1
3y√y − y2√y +
2
3y3
)dy =
1
70.
5.2.2 Transformationsformel
Die Transformationsformel ist eine Verallgemeinerung der Substitutionsformel auf Funk-tionen in mehreren Veränderlichen.
Satz 5.17 (Transformationsformel)Es sei D ⊂ Rd kompakt und ψ : D → Rd eine injektive, stetig differenzierbare Funktion,für welche die Determinante der Funktionalmatrix nirgends verschwindet, detψ′(x) 6= 0für alle x ∈ D. Weiters sei f : ψ → R stetig. Dann gilt
ˆψ(D)
f(y) dy =
ˆDf(ψ(x)) | detψ′(x)| dx .

5. Integralrechnung 61
Diese Aussage gilt auch noch, wenn die Injektivität von ψ auf einer Nullmenge verletztwird oder wenn die Determinante der Funktionalmatrix auf einer Nullmenge verschwin-det und sonst ihr Vorzeichen nicht ändert.Wichtige Spezialfälle im Zusammenhang mit der Transformationsformel sind die Trans-formationen in Polar-, Zylinder- und Kugelkoordinaten.
. Die Polarkoordinatenabbildung ist gegeben durch
ψ : [0,∞)× [0, 2π)→ R : (r, ϑ) 7→[r cosϕr sinϕ
].
Die Funktionaldeterminante ist det(ψ′(r, ϑ)) = r.
. Die Zylinderkoordinatenabbildung ist gegeben durch
ψ : [0,∞)× [0, 2π)×R→ R : (r, ϕ, z) 7→
r cosϕr sinϕz
.Die Funktionaldeterminante ist det(ψ′(r, ϑ, z)) = r.
. Die Kugelkoordinatenabbildung ist gegeben durch
ψ : [0,∞)× [0, 2π)× [0, π]→ R : (r, ϑ, ϑ) 7→
r cosϕ sinϑr sinϕ sinϑr cosϑ
.Die Funktionaldeterminante ist det(ψ′(r, ϑ)) = r2 sinϑ.
Beispiel 5.18 (Polarkoordinaten)Es sei D = (x, y) ∈ R2 | 1 ≤ x2 + y2 ≤ 4, x ≥ 0, y ≥ 0 und f : R→ R : x 7→
√x2 + y2.
Es liegt nahe, Polarkoordinaten zu wählen: ψ : (x, ϕ) 7→[r cosϕr sinϕ
]. Dann ist g(Q) = D
für Q = [1, 2] × [0, π/2] und mit der Transformationsformel sowie dem Satz von Fubinifolgt
ˆD
√x2 + y2 d(x, y) =
ˆQf(ψ(r, ϕ))r d(r, ϕ) =
=
ˆ 2
1
(ˆ π/2
0
√r2 cos2 ϕ+ r2 sin2 ϕ r dϕ
)dr =
=
ˆ 2
1
(ˆ π/2
0r2 dϕ
)dr =
7π
6.

62 5. Integralrechnung
Beispiel 5.19 (Gaußsches Fehlerintegral)Es sei DR = (x, y) ∈ R2 | x2 + y2 ≤ R für R > 0 und f : R2 → R : x 7→ e−x2−y2 . MitPolarkoordinaten erhalten wirˆDR
e−x2−y2 d(x, y) =
ˆ R
0
(ˆ 2π
0e−r
2r dϕ
)dr = 2π
ˆ R
0
(ˆ 2π
0e−r
2r dϕ
)dr =
= 2π
[−1
2e−r
2
]r=Rr=0
= π(
1− e−R2).
In kartesischen Koordinaten erhalten wir für das Integral über ein Quadrat QS :=[−S, S]× [−S, S] der Länge 2S mithilfe des Satzes von FubiniˆQS
e−x2−y2 d(x, y) =
ˆ S
−S
(ˆ S
−Se−x
2−y2 dx)
dy =
ˆ S
−Se−y
2
(ˆ S
−Se−x
2dx)
dy =
=
(ˆ S
−Se−x
2dx) (ˆ S
−Se−y
2dy)
=
(ˆ S
−Se−x
2dx)2
.
Im Grenzfall wird über die ganze Ebene integriert, und wir erhalten
limS→∞
(ˆ[−S,S]
e−x2dx
)2
= limS→∞
ˆQS
e−x2−y2 d(x, y)
= limR→∞
ˆDR
e−x2−y2 d(x, y) = lim
R→∞π(
1− e−R2)
= π
und folglich ˆ ∞−∞
e−x2dx =
√π .
Aus Symmetriegründen ist ˆ ∞0
e−x2dx =
√π
2.

Teil II
GewöhnlicheDifferentialgleichungen
63


Kapitel 6
Differentialgleichungen: Einführung undBeispiele
In diesem einführenden Kapitel werden wir neben ersten Definitionen spezielle Typenvon Differentialgleichungen, welche bereits aus Analysis 1 bekannt sind, vgl. [Hel17,Kapitel 5], genauer untersuchen.
6.1 Grundlegendes
Bei einem System gewöhnlicher Differentialgleichungen n-ter Ordnung handeltes sich um d Gleichungen der Form
F(t, x, x′, x′′, . . . , x(n)
)= 0 , (DGlg)
wobei d, n ∈ N und die Funktion F : Ω ⊂ R×Rd(n+1) → Rd gegeben sind. Ist d = 1 , sospricht man von einer gewöhnlichen Differentialgleichung. Unter einer Lösung von(DGlg) verstehen wir eine auf einem Intervall I ⊂ R definierte und n-mal differenzierbareFunktion µ : I → Rd mit
(t, µ(t), µ′(t), µ′′(t), . . . , µ(n)(t)
)∈ Ω für alle t ∈ I , welche
∀ t ∈ I : F(t, µ(t), µ′(t), µ′′(t), . . . , µ(n)(t)
)= 0
erfüllt.
Beispiel 6.1 (Kreisgleichung)Wir betrachten die skalare gewöhnliche Differentialgleichung
xx′ + t = 0 .
Dann istµ : (−1, 1)→ R : t 7→
√1− t2
eine Lösung dieser Differentialgleichung.
Lässt sich (DGlg) nach x(n) auflösen, also als
x(n) = f(t, x, x′, x′′, . . . , x(n−1)
)
65

66 6. Differentialgleichungen: Einführung und Beispiele
mit f : D ⊂ R ×(Rd)n → Rd schreiben, so nennen wir obige Differentialgleichung ex-
plizit, während (DGlg) als implizit bezeichnet wird.
Reduktion auf ein System erster Ordnung. Betrachten wir das System
x(n) = f(t, x, x′, x′′, . . . , x(n−1)
)gewöhnlicher Differentialgleichungen in expliziter Form und setzen
y :=
xx′
x′′
...x(n−1)
sowie g(t, y) :=
y2
y3...yn
f(t, y)
,
so führt dies auf das Differentialgleichungssystem
y′ = g(t, y)
erster Ordnung von nd Gleichungen. Ist ν : I →(Rd)n eine Lösung von y′ = g(t, y) ,
dann ist µ := ν1 eine Lösung des ursprünglichen Systems x(n) = f(t, x, x′, x′′, . . . , x(n−1)
)und umgekehrt. Lösungen des Systems erster Ordnung und des reduzierten Systems n-ter Ordnung entsprechen einander also eineindeutig. Daher werden wir in vielen Fälleno. B. d.A. Systeme erster Ordnung der Form
x′ = f(t, x)
mit f : D ⊂ R×Rd → Rd betrachten.
Bemerkung. In diesem Kontext ist anstelle von x′ auch die Schreibweise x gebräuch-lich.
Anfangswertproblem. Wir betrachten das System
x′ = f(t, x)
erster Ordnung mit f : D ⊂ R×Rd → Rd . Verlangen wir für (t0, x0) ∈ D zusätzlich vonjeder Lösung µ : I → Rd , dass µ(t0) = x0 , so spricht man von einem Anfangswertpro-blem, für welches wir
x′ = f(t, x) , x(t0) = x0
schreiben. Man nennt dann x(t0) = x0 die Anfangsbedingung sowie t0 die Anfangs-zeit und x0 den Anfangswert. Zusammengefasst verstehen wir unter einer Lösung desobigen Anfangswertproblems eine auf einem Intervall I ⊂ R mit t0 ∈ I definierte unddifferenzierbare Funktion µ : I → Rd , welche die folgenden drei Bedingungen erfüllt:

6. Differentialgleichungen: Einführung und Beispiele 67
(1) ∀ t ∈ I : (t, µ(t)) ∈ D
(2) ∀ t ∈ I : µ′(t) = f (t, µ(t))
(3) µ(t0) = x0
Geometrische Darstellung. Wir betrachten wiederum das System
x′ = f(t, x)
erster Ordnung mit f : D ⊂ R×Rd → Rd und eine Lösung µ : I → Rd , d. h.
∀ t ∈ I : µ′(t) = f (t, µ(t)) .
Dann ist der GraphΓ(µ) = (t, µ(t)) : t ∈ I ⊂ D
das Bild einer differenzierbaren Kurve Cµ und diese wird Lösungskurve oder Inte-gralkurve genannt. Die Menge aller Lösungskurven wird auch als Lösungsportraitbezeichnet.
Die Lösungskurven lassen sich in das sogenannte Richtungsfeld einpassen, welchesdurch
D → R×Rd : (t, x) 7→[
1f(t, x)
]gegeben ist. Des Weiteren bezeichnet man die Niveaumengen
Nc(f) = (t, x) ∈ D : f(t, x) = c für c ∈ R
als Isoklinen1.
1Kurven gleicher Steigung


Kapitel 7
Spezielle Skalare Differentialgleichungen
7.1 Differentialgleichungen mit trennbaren Varia-blen
Es seien I, J ⊂ R zwei offene Intervalle sowie f ∈ C(I;R) und g ∈ C(J ;R) . Weiters gelte
∀x ∈ J : g(x) 6= 0 .
Wir betrachten die Differentialgleichung
x′ = f(t)g(x)
mit trennbaren Variablen.
Satz 7.1 (Existenz und Eindeutigkeit für trennbare Variablen)Für alle (t0, x0) ∈ I × J besitzt das Anfangswertproblem
x′ = f(t)g(x) , x(t0) = x0
eine eindeutige lokale Lösung, d. h. es gibt ein α > 0 und eine eindeutig bestimmte Lösungµ : (t0 − α, t0 + α) → J des Anfangswertproblems. Ist F eine Stammfunktion von f aufI und G eine Stammfunktion von 1/g auf J , so erhält man diese Lösung, indem man
G(x)− F (t) = G(x0)− F (t0)
bei (t0, x0) nach x auflöst.
Beweis. Existenz: Wir setzen h(t, x) := G(x)−F (t)−G(x0) +F (t0) für (t, x) ∈ I×J .Da
∂xh(t0, x0) = G′(x0) =1
g(x0)6= 0 ,
gibt es nach dem Satz B.5 über implizite Funktionen offene Umgebungen U ⊂ Ivon t0 und V ⊂ J von x0 und eine Funktion µ ∈ C1(U ;V ) mit
∀ (t, x) ∈ U × V : x = µ(t)⇔ h(t, x) = 0⇔ G(x)− F (t) = G(x0)− F (t0) .
Implizites Differenzieren führt auf
µ′(t) = −∂1h(t, µ(t))
∂2h(t, µ(t))=
F ′(t)
G′(µ(t))= f(t)g(µ(t))
69

70 7. Spezielle Skalare Differentialgleichungen
für alle t ∈ U .
Eindeutigkeit: Es sei α > 0 und µ : (t0 − α, t0 + α) → R eine Lösung des Anfangs-wertproblems. Wir setzen
F (t) :=
ˆ t
t0
f(τ) dτ und G(x) :=
ˆ x
x0
dξg(ξ)
für t ∈ I und x ∈ J . Da µ′(t) = f(t)g(µ(t)) für alle t ∈ (t0 − α, t0 + α) , ist
ˆ t
t0
µ′(τ)
g(µ(τ))dτ =
ˆ t
t0
f(τ) dτ
und die Substitutionsformel führt auf
G(µ(t)) =
ˆ µ(t)
x0
dηg(η)
=
ˆ t
t0
f(τ) dτ = F (t) .
Aus G′(x) = 1/g(x) 6= 0 für alle x ∈ J folgt, dass G streng monoton und insbesondereH : J → G(J) : x 7→ G(x) bijektiv ist. Also ist
µ(t) = H−1(F (t))
für alle t ∈ (t0 − α, t0 + α) . Dies zeigt die Eindeutigkeit.
Beispiel 7.2 (Kreisgleichung)Wir betrachten nochmals die Differentialgleichung
xx′ + t = 0.
Aus ˆx dx+
ˆt dt = 1
2x2 + 1
2 t2 + C, C ∈ R,
erhalten wirx2 + t2 = C, C ∈ R.
Für C > 0 setzen wir R :=√C, dann führt dies auf die Lösungen
µ1 : (−R,R)→ R : t 7→√R2 − t2 und µ2 : (−R,R)→ R : t 7→ −
√R2 − t2
der Differentialgleichung.

7. Spezielle Skalare Differentialgleichungen 71
7.2 Lineare Differentialgleichungen erster Ordnung
Auf einem Intervall I ⊂ R betrachten wir die lineare Differentialgleichung
x′ = f(t)x+ g(t)
erster Ordnung, wobei f, g ∈ C(I;R) .
Satz 7.3 (Existenz und Eindeutigkeit für lineare Dglg. erster Ordnung)Für alle (t0, x0) ∈ I ×R besitzt das Anfangswertproblem
x′ = f(t)x+ g(t) , x(t0) = x0
die eindeutige Lösung µ : I → R gegeben druch
µ(t) = eF (t)x0 +
ˆ t
t0
eF (t)−F (τ)g(τ) dτ (Variation-der-Konstanten-Formel)
für t ∈ I , wobei F (t) :=´ tt0f(τ) dτ .
Beweis. Existenz: Durch Differenzieren verifiziert man leicht, dass es sich bei µ um eineLösung des Anfangswertproblems handelt.
Eindeutigkeit: Es genügt für x0 ∈ R die Eindeutigkeit der Lösung
µ0 : I → R : t 7→ eF (t)x0
des homogenen Anfangswertproblems
x′ = f(t)x , x(t0) = x0
zu zeigen. Dazu sei η0 : I → R eine weitere Lösung. Auf I gilt dann
η′0 = fη0 ⇐⇒ e−F(η′0 − fη0
)= 0 ⇐⇒ d
dte−F η0 = 0
η0(t0)=x0⇐⇒ η0 = eFx0 = µ0 .


Kapitel 8
Allgemeine Lösungstheorie
In diesem Kapitel werden wir unter anderem die Frage beantworten, unter welchen Vor-aussetzungen auf die Existenz und Eindeutigkeit einer Lösung des Anfangswertproblems
x′ = f(t, x) , x(t0) = x0 (AWP)
geschlossen werden kann, wobei d ∈ N sowie f : D ⊂ R × Rd → Rd und (t0, x0) ∈ D .Darüber hinaus werden wir uns, sofern eine eindeutige Lösung existiert, mit der stetigenAbhängigkeit der Lösung von (AWP) von den Daten, also der rechten Seite und demAnfangswert, beschäftigen.
8.1 Satz von Picard-Lindelöf
Im Fall einer stetigen rechten Seite f ist (AWP) äquivalent zu einer zugehörigen Inte-gralgleichung, dies ist Inhalt des folgenden Lemmas.
Lemma 8.1 (AWP ↔ Integralgleichung)Es sei f stetig und I ⊂ R ein Intervall mit t0 ∈ I . Dann ist die stetige Funktionµ : I → Rd genau dann eine Lösung von (AWP), wenn
∀ t ∈ I : µ(t) = x0 +
ˆ t
t0
f (τ, µ(τ)) dτ .
Beweis. Die Aussage folgt unmittelbar aus dem Hauptsatz der Differential- undIntegralrechnung, vgl. [Hel17, Satz 4.13 und Satz 4.16, S. 95/96].
Bemerkung. Man beachte, dass die Erfüllung der Integralgleichung natürlich implizitauch bedeutet, dass (t, µ(t)) ∈ D für alle t ∈ I .
Picard1-Iteration. Für eine stetige rechte Seite f wollen wir nun ausgehend vonder Integralgleichung
µ(t) = x0 +
ˆ t
t0
f (τ, µ(τ)) dτ
eine Lösung von (AWP) konstruieren. Dazu setzen wir µ0(t) :≡ x0 und
µk+1(t) := x0 +
ˆ t
t0
f (τ, µk(τ)) dτ für k ∈ N0 . ((k + 1)-te Picard-Iterierte)
1Charles Émile Picard, 1856–1941, französischer Mathematiker
73

74 8. Allgemeine Lösungstheorie
Im Fall, dass wir die gleichmäßige Konvergenz von µkk∈N0 auf einem entsprechendenIntervall nachweisen können, erhalten wir mit µ∞(t) := limk→∞ µk(t) eine Lösung von(AWP), da dann
µ∞(t) = limk→∞
µk+1(t) = x0 + limk→∞
ˆ t
t0
f (τ, µk(τ)) dτ = x0 +
ˆ t
t0
f (τ, µ∞(τ)) dτ .
Beispiel 8.2 (Picard-Iterierte)Für das skalare Anfangswertproblem
x′ = tx , x(0) = 1
erhalten wir für die Picard-Iteration
µk(t) =k∑j=0
t2j
2jj!, k ∈ N0 ,
und offenbar giltµ∞(t) = e t
2/2 für alle t ∈ R .
Da µkk∈N0 auf jedem Kompaktum gleichmäßig gegen µ∞ konvergiert, ist µ∞ eineLösung des Anfangswertproblems.
Euler-Verfahren. Eines der einfachsten numerischen Verfahren zur Lösung vonAnfangswertproblemen ist das Euler-Verfahren. Man erhält es, indem man das beider Picard-Iteration auftretende Integral mit der linken Rechtecksregel approximiert.Genauer geht man wie folgt vor: Man wählt für T > t0 und N ∈ N eine Zerlegung
Z : t0 < t1 < . . . < tN = T
des Intervalls [t0, T ] und setzt hn := tn+1 − tn für n = 0, . . . , N − 1 . Wir nehmen nunan, dass das Anfangswertproblem (AWP) eine eindeutige Lösung auf [t0, T ] besitzt undbezeichenn diese mit µ : [t0, T ]→ Rd . Die linke Rechtecksregel führt auf
µ(t1) = x0 +
ˆ t0+h0
t0
f (τ, µ(τ)) dτ ≈ x0 + h0f(t0, x0)
für t ∈ [t0, T ] . Man approximiert also µ(t1) durch den Funktionswert der Tangente anden Graphen von µ zum Zeitpunkt t . Dieser Vorgehensweise folgend, setzt man y0 := x0
undyn+1 := yn + hnf(tn, yn) für n = 0, . . . , N − 1
und das dadurch definierte Einschrittverfahren heißt (explizites) Euler-Verfahren.

8. Allgemeine Lösungstheorie 75
Beispiel 8.3 (Anwendung des Euler-Verfahrens)Für α ∈ R betrachten wir das skalare Anfangswertproblem
x′ = αx , x(0) = 1 .
Wählen wir für T ∈ R und N ∈ N die äquidistante Zerlegung
Z : tn := t0 + n TN , n = 0, . . . , N ,
so erhalten wiryn =
(1 + αT
N
)n für n = 0, . . . , N
und schließlich ist
limN→∞
yN = limN→∞
(1 + αT
N
)N= eαT = µ(T ) .
Das Euler-Verfahren konvergiert also in diesem Fall gegen die Lösung des Anfangs-wertproblems.
Für den Fall, dass die stetige rechte Seite f Lipschitz-stetig in der zweiten Komponenteist, weisen wir nun die Eindeutigkeit einer Lösung nach. Dazu benötigen wir das folgende,vielseitig einsetzbare Lemma als Vorbereitung.
Lemma 8.4 (Gronwall2-Lemma)Es sei I ⊂ R ein Intervall und t0 ∈ I sowie ϕ : I → [0,∞) eine stetige Funktion mit
∀ t ∈ I : ϕ(t) ≤ C + L
∣∣∣∣ˆ t
t0
ϕ(τ) dτ∣∣∣∣ (?)
für Konstanten C,L ≥ 0 . Dann gilt
∀ t ∈ I : ϕ(t) ≤ CeL|t−t0| .
Beweis. O.B. d.A. sei I ⊂ [t0,∞) . Für t ∈ I setzen wir
η(t) := C + L
ˆ t
t0
ϕ(τ) dτ ,
dann ist η′(t) = Lϕ(t) und[t 7→ η(t)e−Lt
]monoton fallend, denn mit (?) erhalten wir
Lϕ(t) = η′(t) ≤ Lη(t) und daher ist
ddtη(t)e−Lt = e−Lt
(η′(t)− Lη(t)
)≤ 0 .
Folglich gilt
ϕ(t)e−Lt(?)
≤ η(t)e−Lt ≤ η(t0)e−Lt0 = Ce−Lt0
und somit ist ϕ(t) ≤ CeL(t−t0) .2Thomas Hakon Grönwall, 1877–1932, schwedischer Mathematiker

76 8. Allgemeine Lösungstheorie
Satz 8.5 (Eindeutigkeit)Es sei f : D ⊂ R×Rd → Rd stetig und global Lipschitz-stetig in der zweiten Komponente,d. h.
∃L ≥ 0 ∀ (t, x), (t, y) ∈ D : ‖f(t, x)− f(t, y)‖ ≤ L‖x− y‖ .
Sind µ, η : I → Rd zwei Lösungen von (AWP) , dann ist µ = η .
Beweis. Für t ∈ I ist
‖µ(t)− η(t)‖ =
∥∥∥∥ˆ t
t0
[f (τ, µ(τ))− f (τ, η(τ))] dτ∥∥∥∥ ≤
∆-Unglg.≤
∣∣∣∣ˆ t
t0
‖f (τ, µ(τ))− f (τ, η(τ))‖ dτ∣∣∣∣ ≤ L ∣∣∣∣ˆ t
t0
‖µ(τ)− η(τ)‖ dτ∣∣∣∣ .
Setzen wir ϕ(t) := ‖µ(t)− η(t)‖ , so erhalten wir mit C := 0 die Ungleichung
ϕ(t) ≤ C + L
∣∣∣∣ˆ t
t0
ϕ(τ) dτ∣∣∣∣
für alle t ∈ I . Nach dem Gronwall-Lemma gilt daher
∀ t ∈ I : ‖µ(t)− η(t)‖ = ϕ(t) ≤ CeL|t−t0| = 0 ,
also ist µ = η .
Satz 8.6 (Picard-Lindelöf3, quantitative Version)Es seien (t0, x0) ∈ R × Rd und a, r > 0 sowie Za,r := [t0 − a, t0 + a] × Br(x0) . Weiterssei f : Za,r → Rd stetig und global Lipschitz-stetig in der zweiten Komponente, d. h. esexistiere ein L ≥ 0 mit
∀ (t, x), (t, y) ∈ Za,r : ‖f(t, x)− f(t, y)‖ ≤ L‖x− y‖ .
Dann existiert genau eine Lösung µ : [t0 − α, t0 + α]→ Rd von (AWP), wobei
α := mina, rM
mit M := max ‖f(t, x)‖ : (t, x) ∈ Za,r
und r/M :=∞ , falls M = 0 .
Beweis. Im Fall M = 0 ist f ≡ 0 und µ :≡ x0 die gesuchte, eindeutige Lösung. Dahernehmen wir im Weiteren an, dass M > 0 . Der Beweis erfolgt nun in drei Schritten.
Schritt 1: (Eindeutigkeit)
3Ernst Leonard Lindelöf, 1870–1946, finnischer Mathematiker

8. Allgemeine Lösungstheorie 77
Die Eindeutigkeit haben wir unter diesen Voraussetzungen bereits in Satz 8.5 gezeigt.
Schritt 2: (Wohldefiniertheit der Picard-Iteration)
Für t ∈ [t0 − α, t0 + α] setzen wir
µ0(t) := x0 und µk+1(t) := x0 +
ˆ t
t0
f (τ, µk(τ)) dτ , k ∈ N0 ,
wobei wir die Wohldefiniertheit überprüfen müssen. Es gilt also sicherzustellen, dass
∀ k ∈ N0 ∀ τ ∈ [t0 − α, t0 + α] : (τ, µk(τ)) ∈ Za,r .
Für k = 0 ist dies offenbar erfüllt, da (t0, x0) ∈ Za,r . Nun erhält man induktiv für k ∈ Nund t ∈ [t0 − α, t0 + α] , dass
‖µk(t)− x0‖ =
∥∥∥∥ˆ t
t0
f (τ, µk−1(τ)) dτ∥∥∥∥ ∆-Unglg.
≤∣∣∣∣ˆ t
t0
‖f (τ, µk−1(τ))‖ dτ∣∣∣∣ ≤
≤∣∣∣∣ˆ t
t0
M dτ∣∣∣∣ ≤M |t− t0| ≤Mα ≤ r .
Schritt 3: (Gleichmäßige Konvergenz der Picard-Iteration)
Wir beweisen zunächst mittels vollständiger Induktion über k , dass
∀ t ∈ [t0 − α, t0 + α] : ‖µk+1(t)− µk(t)‖ ≤MLk|t− t0|k+1
(k + 1)!(?)
für alle k ∈ N0 .
(IA) k = 0: ‖µ1(t)− µ0(t)‖ =
∥∥∥∥ˆ t
t0
f(τ, x0) dτ∥∥∥∥ ≤M |t− t0| X
(IS) Es sei k ∈ N0 und es gelte (?). (IV)
k → k + 1:
‖µk+2(t)− µk+1(t)‖ ≤∣∣∣∣ˆ t
t0
‖f (τ, µk+1(τ))− f (τ, µk(τ))‖ dτ∣∣∣∣ ≤
≤ L∣∣∣∣ˆ t
t0
‖µk+1(τ)− µk(τ)‖ dτ∣∣∣∣ (IV)≤ MLk+1
(k + 1)!
∣∣∣∣ˆ t
t0
|τ − t0|k+1 dτ∣∣∣∣ =
= MLk+1 |t− t0|k+2
(k + 2)!

78 8. Allgemeine Lösungstheorie
Nun zeigen wir, dass µkk∈N0 auf [t0−α, t0+α] gleichmäßig konvergiert. Dazu verwendenwir die Teleskopsumme
µk(t)− x0 =k−1∑j=0
(µj+1(t)− µj(t)) für k ∈ N .
Mit (?) erhalten wir für die Reihe∑∞
j=0 (µj+1(t)− µj(t)) eine konvergente Majoranteunabhängig von t und daher konvergiert diese auf [t0 − α, t0 + α] nach dem Konver-genzkriterium von Weierstraß gleichmäßig, siehe [Hel17, Satz 8.7, S. 139]. Alsokonvergiert auch µk gleichmäßig auf [t0 −α, t0 +α] . Für t ∈ [t0 −α, t0 +α] setzen wir
µ∞(t) := limk→∞
µk(t) .
Man beachte, dass Γ(µ∞) ⊂ Za,r . Als gleichmäßiger Grenzwert stetiger Funktionen istµ∞ ebenfalls stetig, vgl. [Hel17, Satz 8.4, S. 138]. Für alle k ∈ N0 und t ∈ [t0−α, t0 +α]gilt, dass
‖f (t, µk(t))− f (t, µ∞(t))‖ ≤ L ‖µk(t)− µ∞(t)‖ ,
konvergiert auch f (·, µk(·))k∈N0gleichmäßig auf [t0 − α, t0 + α] . Nach dem Satz über
die Vertauschung von Integration und Grenzwert bei gleichmäßiger Konvergenz, siehe[Hel17, Satz 8.5, S. 138], gilt
µ∞(t) = limk→∞
µk+1(t) = x0 + limk→∞
ˆ t
t0
f (τ, µk(τ)) dτ = x0 +
ˆ t
t0
f (τ, µ∞(τ)) dτ
für alle t ∈ [t0−α, t0 +α] und folglich ist µ∞ nach Lemma 8.1 eine Lösung von (AWP).
Bemerkung. Anstatt die gleichmäßige Konvergenz nachzuweisen, kann auch mit demSatz von Lebesgue argumentiert werden, vgl. [Hel13a, Satz 3.26, S. 125]. Einen alter-nativen Beweis, welcher den Banachschen Fixpunktsatz verwendet, werden wir inAnalysis 4 kennenlernen.
Beispiel 8.7 (Anwendung des Satzes von Picard-Lindelöf)Das skalare Anfangswertproblem
x′ = sin(tx) , x(t0) = x0
besitzt für alle (t0, x0) ∈ R2 eine eindeutig Lösung auf ganz R , denn für alle a, r > 0ist die rechte Seite [(t, x) 7→ sin(tx)] auf Za,r stetig und Lipschitz-stetig bezüglich derzweiten Komponente, da diese stetig differenzierbar ist. Da
∀ (t, x) ∈ R2 : | sin(tx)| ≤ 1 ,
folgt damit die Aussage.

8. Allgemeine Lösungstheorie 79
Wir nennen f : D ⊂ R×Rd → Rd lokal Lipschitz-stetig in der zweiten Komponente,wenn für alle (t, x) ∈ D eine Umgebung U von (t, x) existiert, sodass f |U∩D globalLipschitz-stetig in der zweiten Komponente ist.
Korollar 8.8 (Satz von Picard-Lindelöf, qualitative Version)Es sei D ⊂ R×Rd offen und f : D ⊂ R×Rd → Rd stetig sowie lokal Lipschitz-stetig inder zweiten Komponente. Dann hat für alle (t0, x0) ∈ D das Anfangswertproblem (AWP)eine eindeutige lokale Lösung, d. h. es gibt ein α > 0 , sodass (AWP) auf [t0 − α, t0 + α]genau eine Lösung besitzt.
Beweis. Da wir nach Voraussetzung a, r > 0 finden können, sodass
Za,r = [t0 − a, t0 + a]×Br(x0) ⊂ D
und f auf Za,r stetig sowie bezüglich der zweiten Komponente global Lipschitz-stetig ist,folgt die Aussage unmittelbar aus Satz 8.6.
8.2 Satz von Peano
Nachfolgender Satz, welcher in Analysis 4 bewiesen werden wird, liefert die Existenzeiner Lösung im Fall einer lediglich stetigen rechten Seite. Allerdings besitzt das Anfangs-wertproblem dann im Allgemeinen keine eindeutige Lösung mehr, vgl. Beispiel 8.10.
Satz 8.9 (Peano4, quantitative Version)Es seien (t0, x0) ∈ R × Rd und a, r > 0 sowie Za,r := [t0 − a, t0 + a] × Br(x0) . Weiterssei f : Za,r → Rd stetig. Dann existiert mindestens eine Lösung µ : [t0 − α, t0 + α]→ Rd
von (AWP), wobei
α := mina, rM
mit M := max ‖f(t, x)‖ : (t, x) ∈ Za,r
und r/M :=∞ , falls M = 0 .
Beweis. Für den Beweis wird der Satz von Arzelà-Ascoli benötigt, welchen wir inAnalysis 4 behandeln werden.
Beispiel 8.10 (Undendlich viele Lösungen)Für alle a, b ∈ R mit a ≤ b ist µa,b : R→ R gegeben durch
µa,b(t) :=
127(t− a)3 , t ≤ a ,0 , a < t < b ,127(t− b)3 , t ≥ b ,
für t ∈ R eine Lösung des Anfangswertproblems
x′ =3√x2 , x(0) = 0 .
4Giuseppe Peano, 1858–1932, italienischer Mathematiker

80 8. Allgemeine Lösungstheorie
8.3 Globale Existenz und Eindeutigkeit
Wir stellen uns nun die Frage, ob ein Intervall maximaler Länge existiert, auf dem dasAnfangswertproblem (AWP) eine eindeutige Lösung besitzt. Die Antwort liefert nachfol-gender Satz.
Satz 8.11 (Globaler Existenz- und Eindeutigkeitssatz)Es sei D ⊂ R × Rd offen und f : D → Rd stetig sowie lokal Lipschitz-stetig in derzweiten Komponente. Dann existiert für alle (t0, x0) ∈ D ein eindeutig bestimmtes offenesIntervall Imax := (t−, t+) ⊂ R mit t0 ∈ Imax , sodass
(1) das Anfangswertproblem (AWP) eine eindeutige Lösung µmax : Imax → Rd besitzt,
(2) jede auf einem Intervall I ⊂ R gegebene Lösung die Einschränkung von µmax aufI ist.
Beweis. Wir unterteilen den Beweis in vier Schritte.
Schritt 1: (Konstruktion der maximalen Lösung)
Nach dem Satz von Picard-Lindelöf existieren
t− := inf a ∈ R : (AWP) hat eine Lösung auf [a, t0]
undt+ := sup b ∈ R : (AWP) hat eine Lösung auf [t0, b]
in R . Wir setzen Imax := (t−, t+) und zeigen, dass (AWP) auf Imax eindeutig lösbar ist.Dazu betrachten wir das Intervall
In :=[t− + 1
n , t+ −1n
]für n ≥ N und N ∈ N hinreichend groß im Fall, dass t− und t+ endlich sind. Ansonstenersetzen wir die entsprechende Intervallgrenze durch n bzw. −n . Für jedes n ≥ N besitztdann (AWP) eine Lösung µn auf In . Um eine Lösung auf Imax zu erhalten, setzen wir
µmax(t) := µn(t)
für t ∈ Imax und n ≥ N mit t ∈ In . Es gilt nun zu überprüfen, ob µmax tatsächlichwohldefiniert ist. Dazu zeigen wir, dass
µn = µn+1
∣∣In
für alle n ≥ N .
Es sei n ≥ N . Angenommen, es gibt ein s ∈ In mit µn(s) 6= µn+1(s) . Wir betrachtendie stetige Funktion u : In → [0,∞) gegeben durch
u(t) := ‖µn(t)− µn+1(t)‖ für t ∈ In .

8. Allgemeine Lösungstheorie 81
Offenbar gilt dann u(s) > 0 . O. B. d.A. sei s > t0 . Die Menge
t ∈ [t0, s] : u(t) = 0 = u−1 (0) ∩ [t0, s]
ist kompakt und daher existiert
tmax := max t ∈ [t0, s] : u(t) = 0
und es gilt tmax < s . Nach dem Satz von Picard-Lindelöf hat (AWP) auf einemIntervall [tmax − α, tmax + α] mit α > 0 genau eine Lösung und daher gilt µn = µn+1 ineiner Umgebung von tmax – offensichtlich ein Widerspruch.
Schritt 2: (Lösungseigenschaft und Eindeutigkeit der maximalen Lösung)
Die Definition von µmax impliziert, dass µmax eine Lösung von (AWP) auf Imax ist. Umdie Eindeutigkeit nachzuweisen, nehmen wir an, µ wäre eine weitere Lösung auf Imax mitµ 6= µmax . Dann würde ein s ∈ Imax mit ‖µ(s)− µmax(s)‖ > 0 existieren und dies führtwie im ersten Schritt des Beweises unmittelbar auf einen Widerspruch.
Schritt 3: (Maximalität des Lösungsintervalls)
Es sei I ⊂ R ein Intervall und µ : I → Rd eine Lösung von (AWP) auf I . Dann giltI ⊂ [t−, t+] . Ist t− bzw. t+ endlich, so ist t− /∈ I bzw. t+ /∈ I , denn ansonsten würdeman mit Satz von Picard-Lindelöf einen Widerspruch erhalten. Also gilt I ⊂ Imax .
Ist t0 ∈ I , so folgt, wie in Schritt 1 des Beweises, dass µ|I = µmax|I . Aufgrund derStetigkeit der Lösungen gilt dann µ = µmax|I . Im Fall, dass t0 ∈ ∂I , können wir mitdem Satz von Picard-Lindelöf µ auf ein Intervall J ⊃ I fortsetzen, sodass t0 ∈ Jund damit greift wiederum obige Argumentation.
Schritt 4: (Eindeutigkeit des maximalen Lösungsintervalls)
Wäre I ⊂ R nun ein weiteres Intervall mit den genannten Eigenschaften, so folgt ausebendiesen, dass I ⊂ Imax und Imax ⊂ I , also I = Imax .
Bemerkung. Man nennt in der Situation des obigen Satzes Imax das maximale Lö-sungsintervall und µmax die maximale Lösung. Allgemeiner werden wir außerdemmit Imax(t0, x0) das maximale Lösungsintervall und mit µmax(· ; t0, x0) die maximale Lö-sung zu den Anfangswerten (t0, x0) ∈ D bezeichnen. Unter der allgemeinen Lösungder Differentialgleichung
x′ = f(t, x)

82 8. Allgemeine Lösungstheorie
versteht man die für (t0, x0) ∈ D und t ∈ Imax(t0, x0) definierte Funktion
µ(t ; t0, x0) := µmax(t ; t0, x0) .
Wie man sich leicht überzeugt, gilt für alle (t0, x0) ∈ D sowie s, t ∈ Imax(t0, x0) , dass
Imax (s, µ(s ; t0, x0)) = Imax(t0, x0)
undµ (t ; s, µ(s ; t0, x0)) = µ(t ; t0, x0) . (Kozyklus-Eigenschaft)
Definition 8.12 (Abstand zu einer Menge)Ist M ⊂ Rd eine nichtleere Menge und ξ ∈ Rd , so bezeichnet
dist(ξ,M) := infx∈M‖ξ − x‖2
den Abstand von ξ zu M .
Satz 8.13 (Randverhalten der maximalen Lösung)Es sei D ⊂ R×Rd offen und f : D → Rd stetig sowie lokal Lipschitz-stetig in der zweitenKomponente. Ist t− bzw. t+ endlich, so gilt für die maximale Lösung µmax : Imax → Rd
von (AWP)‖µmax(t)‖ → ∞ oder dist ((t, µmax(t)), ∂D)→ 0
für t ↓ t− bzw. t ↑ t+ , wobei zweiteres nur auftreten kann, wenn ∂D 6= ∅ .
Beweis. Wir setzen γ(t) := (t, µmax(t)) für t ∈ Imax und treffen für den Fall t+ <∞ dieWiderspruchsannahme, dass weder ‖µmax(t)‖ → ∞ noch dist (γ(t), ∂D) → 0 für t ↑ t+ .Dann gibt es eine Folge tnn∈N mit Werten in Imax und tn ↑ t+ für n → ∞ sowieKonstanten M, δ > 0 mit
∀n ∈ N : γ(tn) ∈ K
wobeiK := (t, x) ∈ D : ‖x‖ ≤M,dist ((t, x), ∂D) ≥ δ .
Wir setzen nun
K := (t, x) ∈ D : ‖x‖ ≤ 2M,dist ((t, x), ∂D) ≥ δ/2 .
undm := sup
y∈K‖f(y)‖ .
Für h < minMm ,
δ/21+m
gilt
∀n ∈ N ∀ t ∈ [tn, tn + h] : γ(t) ∈ K ,

8. Allgemeine Lösungstheorie 83
denn
‖µmax(t)‖ ≤ ‖µmax(tn)‖+ ‖µmax(t)− µmax(tn)‖ ≤M +
∣∣∣∣ˆ t
tn
f(γ(τ)) dτ∣∣∣∣ < 2M
und
dist (γ(t), ∂D) ≥ dist (γ(tn), ∂D)− ‖γ(t)− γ(tn)‖ ≥ δ − h(1 +m) > δ2 .
Man beachte, dass aufgrund der Stetigkeit von γ obige Ungleichungen bei festem n ∈ Nzeigen, dass γ(t) für alle t ∈ [tn, tn + h] für kleines h > 0 im Inneren von K liegt. Damitliegt aber γ(t) für alle t ∈ [tn, tn + h] mit t < t+ im Inneren von K . Wählen wir nunN ∈ N mit t+ − tn < h für alle n ≥ N , so erhalten wir
∀n ≥ N ∀ t ∈ [tn, t+) : γ(t) ∈ K .
Da für n ≥ N somitˆ t+
tn
‖f (γ(τ)) ‖ dτ ≤ (t+ − tn)m <∞ ,
können wir µmax(t+) durch
µmax(t+) := x0 +
ˆ t+
t0
f(γ(τ)) dτ
definieren. Folglich existiert γ(t+) := limt↑t+ γ(t) und da K abgeschlossen ist, schließenwir auf γ(t+) ∈ K . Mit dem Satz von Picard-Lindelöf folgt die Existenz eines ε > 0 ,sodass eine Lösung auf [t+, t+ + ε] existiert und dies steht offensichtlich im Widerspruchzur Definition von t+ . Für t ↓ t− geht man analog vor.
Satz 8.14 (Linear beschränkte rechte Seite)Es seien I ⊂ R ein offenes Intervall und D := I × Rd sowie f : D → Rd stetig undlokal Lipschitz-stetig bezüglich der zweiten Komponente. Des Weiteren sei f linear be-schränkt, d. h. es extistieren stetige Funktionen α, β : I → [0,∞) mit
∀ (t, x) ∈ D : ‖f(t, x)‖ ≤ α(t) + β(t)‖x‖ .
Dann gilt für alle (t0, x0) ∈ D und das maximale Lösungsintervall Imax zu (AWP), dassImax = I .
Beweis. Wir treffen die Widerspruchsannahme Imax I . Dann gilt O.B. d.A. für t+ <∞ , dass
limt↑t+‖µmax(t)‖ =∞ .

84 8. Allgemeine Lösungstheorie
Wir setzen J := [t0, t+] und
α0 := maxt∈J
α(t) sowie β0 := maxt∈J
β(t) .
Für t ∈ [t0, t+) gilt dann
‖µmax(t)‖ ≤ ‖x0‖+
ˆ t
t0
‖f(τ, µmax(τ))‖ dτ ≤ ‖x0‖+
ˆ t
t0
(α(τ) + β(τ)‖µmax(τ)‖) dτ ≤
≤ ‖x0‖+ α0(t+ − t0) + β0
ˆ t
t0
‖µmax(τ)‖ dτ .
Mit C := ‖x0‖+ α0(t+ − t0) liefert das Gronwall-Lemma
∀ t ∈ [t0, t+) : ‖µmax(t)‖ ≤ Ceβ0(t+−t0) ,
also ist µmax(t) für t ↑ t+ beschränkt – Widerspruch.
Korollar 8.15 (Globale Existenz und Eindeutigkeit für lineare Systeme)Es seien I ⊂ R ein offenes Intervall sowie A : I → Rd×d und g : I → Rd stetig. Für alle(t0, x0) ∈ I ×Rd besitzt dann das Anfangswertproblem
x′(t) = A(t)x+ g(t) , x(t0) = x0
eine eindeutige Lösung auf I .
Beweis. Die rechte Seite ist offenbar lokal Lipschitz-stetig bezüglich der zweiten Kompo-nente und die lineare Beschränktheit folgt aus
‖A(t)x+ g(t)‖ ≤ ‖A(t)‖‖x‖+ ‖g(t)‖ für (t, x) ∈ I ×Rd .
Daher folgt die Aussage unmittelbar aus Satz 8.14.
8.4 Stetige Abhängigkeit von den Daten
Wir zeigen nun, dass kleine Abweichungen in den Daten zu kleinen Abweichungen derLösung führen. Dies wird schließlich die Wohlgestelltheit des Anfangswertproblems
x′ = f(t, x) , x(t0) = x0
für eine stetige und bezüglich der zweiten Komponente lokal Lipschitz-stetige rechte Seitef : D ⊂ R×Rd → Rd zeigen, d. h. das Anfangswertproblem erfüllt dann folgendes:
. Existenz

8. Allgemeine Lösungstheorie 85
. Eindeutigkeit
. Stetige Abhängigkeit von den den Daten
Satz 8.16 (Stetige Abhängigkeit vom Anfangswert)Es sei D ⊂ R×Rd offen und f : D → Rd stetig sowie bezüglich der zweiten Komponenteglobal Lipschitz-stetig mit Lipschitz-Konstante L ≥ 0 . Für alle (t0, x0), (t0, x0) ∈ D giltdann
∀ t ∈ Imax(t0, x0) ∩ Imax(t0, x0) : ‖µ(t; t0, x0)− µ(t; t0, x0)‖ ≤ ‖x0 − x0‖eL|t−t0| .
Beweis. Wir setzen C := ‖x0 − x0‖ sowie
ϕ(t) := ‖µ(t; t0, x0)− µ(t; t0, x0)‖
für t ∈ Imax(t0, x0) ∩ Imax(t0, x0) und erhalten
ϕ(t) ≤ ‖x0 − x0‖+
∥∥∥∥ˆ t
t0
[f (τ, µ(τ ;x0))− f (τ, µ(τ ; x0))] dτ∥∥∥∥ ≤ C + L
∣∣∣∣ˆ t
t0
ϕ(τ) dτ∣∣∣∣ .
Daher folgt die Aussage aus dem Gronwall-Lemma.
Bemerkung. Man beachte, dass nach dem Satz von Picard-Lindelöf
Imax(t0, x0) ∩ Imax(t0, x0) 6= ∅
gilt.
Satz 8.17 (Stetige Abhängigkeit von der rechten Seite)Es sei D ⊂ R×Rd offen und f : D → Rd stetig sowie bezüglich der zweiten Komponenteglobal Lipschitz-stetig mit Lipschitz-Konstante L ≥ 0 . Weiters sei f : D → Rd stetig undfür ein Intervall I ⊂ R bezeichne µ : I → Rd die Lösung bzw. µ : I → Rd eine Lösungdes Anfangswertproblems
x′ = f(t, x) bzw. x′ = f(t, x)
mit Anfangsbedingung x(t0) = x0 , wobei (t0, x0) ∈ D . Ist ε > 0 derart, dass
∀ (t, x) ∈ D :∥∥∥f(t, x)− f(t, x)
∥∥∥ < ε ,
so gilt dann∀ t ∈ I : ‖µ(t)− µ(t)‖ ≤ ε|t− t0|eL|t−t0| .

86 8. Allgemeine Lösungstheorie
Beweis. Dass die beiden Lösungen µ und µ beide auf einem Intervall I 6= ∅ definiertwerden können, folgt aus dem Satz von Picard-Lindelöf und dem Satz von Peano.Setzen wir ϕ(t) := ‖µ(t)− µ(t)‖ für t ∈ I und C := ε|t− t0| , so folgt mit
ϕ(t) ≤∣∣∣∣ˆ t
t0
∥∥∥f(τ, µ(τ))− f(τ, µ(τ))∥∥∥ dτ
∣∣∣∣ ≤≤∣∣∣∣ˆ t
t0
‖f(τ, µ(τ))− f(τ, µ(τ))‖ dτ∣∣∣∣+
∣∣∣∣ˆ t
t0
∥∥∥f(τ, µ(τ))− f(τ, µ(τ))∥∥∥ dτ
∣∣∣∣ ≤≤ L
∣∣∣∣ˆ t
t0
ϕ(τ) dτ∣∣∣∣+ C
die Aussage aus dem Gronwall-Lemma.
8.5 Autonome Systeme
Ein Differentialgleichungssystemx′ = F (x) (AS)
mit stetiger rechter Seite F : D ⊂ Rd → Rd nennt man autonom. Jedes nichtautonomeSystem
y′ = f(t, y)
kann in ein automes System umgeschrieben werden, indem man
x(t) :=
[t
y(t)
]und F (t) :=
[1
f(t, y(t))
]setzt und offenbar entsprechen Lösungen der beiden Systeme einander eineindeutig. ImWeiteren sei F stets lokal Lipschitz-stetig.
Betrachten wir nun für t0 ∈ R und x0 ∈ D das zu (AS) zugehörige Anfangswertpro-blem, so können aufgrund der Translationsinvarianz o. B. d.A. annehmen, dass t0 = 0 .In weiterer Folge betrachten wir also das Anfangswertproblem
x′ = F (x) , x(0) = x0
und bezeichnen dessen maximale Lösung mit [t 7→ ϕt(x0)] . Da wir stets Null als Startzeitwählen, setzen wir Imax(x0) := Imax(0, x0) . Man nennt
ϕ : (t, x) ∈ R×D : t ∈ Imax(x) → D : (t, x) 7→ ϕt(x)
den vom Vektorfeld F erzeugten Fluss.

8. Allgemeine Lösungstheorie 87
Bemerkung. Man nennt F : D ⊂ Rd → Rd vollständig, falls
∀x0 ∈ D : Imax(x0) = R .
Ist F vollständig, so gilt:
(1) ϕ0 = idD
(2) ∀ s, t ∈ R : ϕt ϕs = ϕs+t (Gruppeneigenschaft)
Die Familie ϕtt∈R wird als die von F erzeugte Einparameter-Gruppe bezeichnet.Falls zudem F ∈ C1(D;Rd) und D offen, dann ist ϕt : D → D für alle t ∈ R einDiffeomorphismus.
Für x0 ∈ D nennt manT (x0) := ϕ (Imax(x0), x0) ⊂ D
Trajektorie von (AS) durch x0 . Die Menge aller Trajektorien wird als Phasenporträtbezeichnet.
Satz 8.18 (Klassifikation von Trajektorien)Es sei x0 ∈ D und F lokal Lipschitz-stetig. Dann trifft auf die maximale Lösung desAnfangswertproblems
x′ = F (x) , x(0) = x0 ,
also auf ϕ(· , x0) : Imax(x0)→ Rd , sowie die zugehörige Trajektorie T (x0) genau eine derfolgenden Aussagen zu:
(1) Es gilt Imax(x0) = R und ϕ(· , x0) ist konstant, also T (x0) = x0 .
(2) Das maximale Lösungsintervall ist Imax(x0) = R und ϕ(· , x0) nichtkonstant undperiodisch, also T (x0) das Bild einer geschlossenen Kurve.
(3) Die maximale Lösung ϕ(· , x0) ist injektiv, also T (x0) das Bild einer doppelpunkt-freien Kurve.
Beweis. Es sei ϕ(· , x0) : Imax(x0) → Rd nicht injektiv. Wir zeigen, dass ϕ(· , x0) dannperiodisch ist. Insbesondere beinhaltet dies dann auch den Fall, dass ϕ(· , x0) konstantist. Dazu wählen wir t1, t2 ∈ Imax(x0) = (t−, t+) mit t1 6= t2 und ϕ(t1 , x0) = ϕ(t2 , x0) .Dann ist
η : (t− − t1 + t2, t+ − t1 + t2)→ Rd : t 7→ ϕ(t+ t1 − t2 , x0)
die maximale Lösung von
x′ = F (x) , x(t2) = ϕ(t2 , x0)

88 8. Allgemeine Lösungstheorie
und somitt− − t1 + t2 = t− und t+ − t1 + t2 = t+ .
Da t1 6= t2 , ist dies allerdings nur dann möglich, wenn t− = −∞ und t+ =∞ , also wennImax(x0) = R . Des Weiteren gilt nun
∀ t ∈ R : ϕ(t , x0) = ϕ(t+ t1 − t2 , x0) ,
also ist ϕ(· , x0) periodisch mit Periode |t1 − t2| > 0 .

Kapitel 9
Lineare Systeme
In diesem Kapitel beschäftigen wir uns nun mit linearen Systemen
x′ = A(t)x+ g(t) , (LS)
wobei die auf einem Intervall I ⊂ R definierten Funktionen
A : I → Rd×d und g : I → Rd
als stetig vorausgesetzt werden. In Korollar 8.15 haben wir bereits gezeigt, dassfür jede Anfangszeit t0 ∈ I und jeden Anfangswert x0 ∈ Rd das zugehörige Anfangs-wertproblem eine eindeutige Lösung auf ganz I besitzt, welche wir im Folgenden mitµg(· ; t0, x0) : I → Rd bezeichnen werden.
Man nennt (LS) homogen, falls g ≡ 0 , ansonsten inhomogen. Mit
L (g) :=µ ∈ C1(I;Rd) : ∀ t ∈ I : µ′(t) = A(t)µ(t) + g(t)
bezeichnen wir die Lösungsmenge von (LS), dann ist L (0) die Lösungsmenge der zuge-hörigen homogenen Gleichung.
9.1 Struktur und Darstellung des Lösungsraums
Superpositionsprinzip. Es seien g1, g2 ∈ C(I;Rd) . Dann gilt für µ1 ∈ L (g1) undµ2 ∈ L (g2) sowie α1, α2 ∈ R , dass
α1µ1 + α2µ2 ∈ L (α1g1 + α2g2) .
Insbesondere ist L (0) ein R-Vektorraum.
Satz 9.1 (Algebraische Struktur des Lösungsraums linearer Systeme)
(1) Für jedes t0 ∈ I istRd → L (0) : x0 7→ µ0(· ; t0, x0) (?)
ein Isomorphismus.
(2) Es ist L (0) ≤ C1(I;Rd) und dim L (0) = d .
89

90 9. Lineare Systeme
(3) Für jedes µg ∈ L (g) gilt
L (g) = µg + L (0) = µg + µ0 : µ0 ∈ L (0)
und man nennt in diesem Kontext µg eine partikuläre Lösung des inhomogenenSystems. Also ist L (g) ein d-dimensionaler affiner Unterraum von C1(I;Rd) .
Beweis. Die Linearität von (?) folgt aus dem Superpositionsprinzip, die Bijektivität ausder eindeutigen Lösbarkeit des zugehörigen Anfangswertproblems. Damit sind (1) und(2) gezeigt.
(3) „⊃“: Zu η ∈ µg + L (g) gibt es ein µ0 ∈ L (0) mit η = µg + µ0 und nach demSuperpositionsprinzip ist dann η ∈ L (g + 0) .„⊂“: Für η ∈ L (g) setze µ0 := η − µg und schließe mit dem Superpositionsprinzipµ0 ∈ L (g − g) = L (0) . Dann ist η = µg + µ0 ∈ µg + L (0) .
Satz 9.2 (Lineare Unabhängigkeit von Lösungen)Es seien n ∈ N mit n ≤ d und µ1, . . . , µn ∈ L (0) . Dann sind folgende Aussagenäquivalent:
(1) µ1, . . . , µn sind linear unabhängig
(2) ∀ t0 ∈ I : µ1(t0), . . . , µn(t0) sind linear unabhängig
(3) ∃ t0 ∈ I : µ1(t0), . . . , µn(t0) sind linear unabhängig
Beweis. Für alle t0 ∈ I und j = 1, . . . , n gilt
∀ t ∈ I : µj(t) = µ0 ((t; t0, µj(t0)) .
Da Rd → L (0) : x0 7→ µ0(· ; t0, x0) für jedes t0 ∈ I ein Isomorphismus ist, folgen damitdie Äquivalenzen.
Eine Basis von L (0) nennt man auch ein Fundamentalsystem. Für t0 ∈ I wird dieeindeutige Lösung des matrixwertigen Anfangswertproblems
x′ = A(t)x , x(t0) = Id
Resolvente genannt und mit R(· , t0) bezeichnet.
Satz 9.3 (Resolvente und Variation der Konstanten)Es sei t0 ∈ I .
(1) Für alle s, t ∈ I gilt
R(t, s)R(s, t0) = R(t, t0) und R−1(t, s) = R(s, t) .

9. Lineare Systeme 91
(2) Für alle t ∈ I und x0 ∈ Rd ist
µg(t ; t0, x0) = R(t, t0)x0 +
ˆ t
t0
R(t, τ)g(τ) dτ . (Variation der Konstanten)
Beweis. (1) Aus
ddtR(t, t0)R−1(s, t0) = A(t)R(t, t0)R−1(s, t0) und R(t, t0)R−1(s, t0)
∣∣t=s
= Id
folgt R(t, t0)R−1(s, t0) = R(t, s) und damit der erste Teil der Aussage, womit man un-mittelbar auf
R−1(t, s) = R−1(t, s)R(t, t) = R−1(t, s)R(t, s)R(s, t) = R(s, t)
und die zweite Aussage schließt.
(2) Wir setzen µ(t) := R(t, t0)x0 +´ tt0R(t, τ)g(τ) dτ für t ∈ I . Dann folgt die Aussage
unter Verwendung der Produktregel aus
µ′(t) = A(t)R(t, t0)x0 +ddtR(t, t0)
ˆ t
t0
R(t0, τ)g(τ) dτ = A(t)µ(t) + g(t)
und µ(t0) = x0 .
Herleitung der Variation-der-Konstanten-Formel. Es sei t0 ∈ I undx0 ∈ Rd . Die Lösung des homogenen Anfangswertproblems ist durch
µ0(t; t0, x0) = R(t, t0)x0 für t ∈ I
gegeben. Um das inhomogene Anfangswertproblem zu lösen, machen wir den Ansatz
µ(t) := R(t, t0)C(t) für t ∈ I
mit einer noch zu bestimmenden Funktion C ∈ C1(I;Rd) . Es wird also der Anfangswertx0 „variiert“. Einsetzen führt auf
µ′(t) = A(t)R(t, t0)C(t) +R(t, t0)C ′(t) = A(t)µ(t) +R(t, t0)C ′(t)!
= A(t)µ(t) + g(t)
und wir erhalten das Anfangswertproblem
C ′ = R(t0, t)g(t) , C(t0) = x0 ,
dessen Lösung offenbar durch
C(t) = x0 +
ˆ t
t0
R(t0, τ)g(τ) dτ

92 9. Lineare Systeme
für t ∈ I gegeben ist. Demnach ist
µ(t) = R(t, t0)x0 +
ˆ t
t0
R(t, τ)g(τ) dτ
für t ∈ I und insbesondere µ = µg(·; t0, x0) .
Satz 9.4 (Wronski1-Determinante)Es sei t0 ∈ I . Für t ∈ I setzen wir
W (t) := detR(t, t0) . (Wronski-Determinante)
Dann gilt für alle t ∈ I , dassW ′(t) = W (t) trA(t)
und daher
W (t) = exp
(ˆ t
t0
trA(τ) dτ).
Beweis. Wir setzen R := R(t, t0) sowie A := A(t) und bezeichnen mit Ri die i-te Zeilevon R für i = 1, . . . , d . Nach der Produktregel erhalten wir
W ′(t) =d∑i=1
∣∣∣∣∣∣∣∣∣∣∣∣
R1...R′i...Rd
∣∣∣∣∣∣∣∣∣∣∣∣=
d∑i=1
∣∣∣∣∣∣∣∣∣∣∣∣
R1...
Ai−R...Rd
∣∣∣∣∣∣∣∣∣∣∣∣=
d∑i,j=1
Aij
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣
R1...
Ri−1
RjRi+1...Rd
∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣∣= trAdetR .
Mit W (t0) = detR(t0, t0) = det Id = 1 folgt damit die Aussage.
9.2 Die Matrixexponentialfunktion
Wir betrachten die homogene lineare Differentialgleichung
x′ = Ax
für A ∈ Rd×d . Ist d = 1 , so ist
µ0(t ; t0, x0) = e (t−t0)Ax0 für alle t, t0, x0 ∈ R .
1Josef Hoëné-Wronski, 1776–1853, polnischer Mathematiker

9. Lineare Systeme 93
Wir wir nun sehen werden, lässt sich dies auf den Fall d > 1 direkt übertragen. Dazuwerden wir nun die Matrixexponentialfunktion
[t 7→ e tA
]definieren.
Es sei A ∈ Rd×d . Wir setzen
e tA :=∞∑n=0
tn
n!An für t ∈ R .
Man beachte, dass die Reihe bezüglich jeder Norm auf Rd×d konvergiert, denn aufgrundder Submultiplikativität einer Operatornorm ‖ · ‖ gilt
∀n ∈ N0 :
∥∥∥∥ tnn!An∥∥∥∥ ≤ |t|nn!
‖A‖n
und somit konvergiert e tA nach dem Majorantenkriterium absolut bezüglich dieserOperatornorm ‖ · ‖ und aufgrund der Äquivalenz der Normen auf Rd×d auch für jedeandere Norm.
Bemerkung. Man beachte, dass eine matrixwertige Reihe genau dann konvergiert,wenn sie elementweise konvergiert.
Beispiel 9.5 (Bestimmung einer Matrixexponentialfunktion)Für
A :=
[0 10 0
]gilt An = 0 für alle n ∈ N0 mit n ≥ 2 , es handelt sich bei A also um eine nilpotenteMatrix. Folglich ist
e tA = I + tA =
[1 t0 1
]für t ∈ R . Man beachte, dass
e tA 6=[e0 e t
e0 e0
].
Satz 9.6 (Ableitung der Matrixexponentialfunktion)Für A ∈ Rd×d ist die Matrixexponentialfunktion
[t 7→ e tA
]auf ganz R differenzierbar
und es giltddt
e tA = Ae tA = e tAA .
Beweis. Aufgrund der lokal gleichmäßigen Konvergenz gilt
ddt
e tA =
∞∑n=0
Anddttn
n!= A
∞∑n=1
tn−1
(n− 1)!An−1 = A
∞∑n=0
tn
n!An = Ae tA
und ebensoddt
e tA = e tAA .

94 9. Lineare Systeme
Ist A ∈ Rd×d , so ist nach obigem Satz die Revolvente zu x′ = Ax durch
R(t, t0) = e (t−t0)A
und der von A erzeugte Fluss durch
ϕ(t, x0) = e tAx0
für t ∈ R und x0 ∈ Rd gegeben. Für t0 ∈ R und x0 ∈ Rd lautet die Lösung desAnfangswertproblem
x′ = Ax , x(t0) = x0
folglich µ0(t; t0, x0) = e (t−t0)Ax0 für t ∈ R .
Satz 9.7 (Eigenschaften der Matrixexponentialfunktion)Für A,B ∈ Rd×d und s, t ∈ R gilt:
(1) AB = BA⇒ e tAe tB = e t(A+B)
(2) e tAesA = e (t+s)A
(3)(e tA)−1
= e−tA
Beweis. (1) Wir setzenM(t) := e tAe tB für t ∈ R .
Dann ist M(0) = I und
M ′(t) = AM(t) +M(t)BAB=BA
= (A+B)M(t)
und folgich M(t) = e t(A+B) für alle t ∈ R .
Aussagen (2) und (3) folgen unmittelbar aus (1).
Satz 9.8 (Resolvente und Matrixexponentialfunktion)Es sei I ⊂ R ein Intervall. Wir betrachten das lineare System
x′ = A(t)x+ g(t)
mit A ∈ C(I;Rd×d) und g ∈ C(I;Rd) . Gilt
∀ t ∈ I : A(t)
ˆ t
t0
A(τ) dτ =
(ˆ t
t0
A(τ) dτ)A(t) ,
so ist
R(t, t0) = exp
(ˆ t
t0
A(τ) dτ)
für alle t0, t ∈ I .

9. Lineare Systeme 95
Beweis. Es ist
ddt
exp
(ˆ t
t0
A(τ) dτ)
=
∞∑n=0
1
n!
ddt
(ˆ t
t0
A(τ) dτ)n
= A(t) exp
(ˆ t
t0
A(τ) dτ)
und daher folgt mit exp(´ t
t0A(τ) dτ
)∣∣∣t=t0
= Id , dass
exp
(ˆ t
t0
A(τ) dτ)
= R(t, t0) für t ∈ I .
9.3 Lineare Systeme mit konstanten Koeffizienten
Nach Satz 9.6 ist jede Spalte von[t 7→ e tA
]Lösung von
x′ = Ax
und da e0A = Id , ist
L (0) =
d⊕j=1
[t 7→
(e tA)−j
].
Satz 9.9 (Berechnung der Matrixexponentialfunktion)Es seien A ∈ Rd×d und t ∈ R . Dann gilt:
(1) ∀T ∈ GLd(R) : e tA = T e tT−1ATT−1
(2) Es sei n ∈ N mit n ≤ d und A habe Blockdiagonalgestalt A = diag(A1, . . . , An) .Dann ist
e tA = diag(e tA1 , . . . , e tAn
).
Beweis. (1) Für T ∈ GLd(R) setzen wir
M(t) := T e tT−1ATT−1 , t ∈ R .
Dann ist M Lösung des Anfangswertproblems
x′ = Ax , x(0) = I
und folglich M(t) = e tA für alle t ∈ R .
(2) Der Beweis dieser Aussage verbleibt als Übung.

96 9. Lineare Systeme
Berechnung der Matrixexponentialfunktion mittels JordanscherNormalform. Es sei A ∈ Rd×d . Wie aus der Linearen Algebra bekannt ist, gibtes ein T ∈ GLd(C) und ein n ∈ N mit
T−1AT = diag(J1, . . . , Jn) . (Jordansche Normalform)
Für j = 1, . . . , n ist dabei
Jj :=
λ 1 0
. . . . . .. . . 1
0 λj
, (Jordan-Kästchen)
wobei λ ein Eigenwert von A ist. Es sei j ∈ 1, . . . , n und t ∈ R . Ist m ∈ N mitJj ∈ Cm×m , so setzen wir
Pj :=
0 1 0
. . . . . .. . . 1
0 0
∈ Rm×m und Dj := λIm ,
dann ist Jj = Pj +Dj und da PjDj = DjPj , folglich
e tJj = e tDje tPj = e tλ
1 t t2
2 . . . tm−1
(m−1)!
. . . . . . . . ....
. . . . . . t2
2
0. . . t
1
.
Daher kann die Matrixexponentialfunktion durch
e tA = T e tT−1ATT−1 = T diag
(e tJ1 , . . . , e tJn
)T−1
berechnet werden.
Variation der Konstanten im Fall konstanter Koeffizienten. Es seienA ∈ Rd×d und I ⊂ R ein Intervall sowie g ∈ C(I;Rd) . Wir betrachten das inhomogenelineare System
x′ = Ax+ g(t)

9. Lineare Systeme 97
mit konstanten Koeffizienten. Weiters sei (t0, x0) ∈ I × Rd . In diesem Fall gilt fürdie Resolvente R(t, t0) = e (t−t0)A und damit erhalten wir mit der Variation-der-Konstanten-Formel
µg(t; t0, x0) = e (t−t0)Ax0 +
ˆ t
t0
e (t−τ)Ag(τ) dτ
für t ∈ I .
9.4 Skalare lineare Differentialgleichungen mit kon-stanten Koeffizienten
Wir betrachten die homogene skalare Differentialgleichung
y(n) + cn−1y(n−1) + . . .+ c1y
′ + c0y = 0 (SL)
wobei n ∈ N und c0, . . . , cn−1 ∈ R . Setzt man
x :=
y...
y(n−1)
und A :=
0 1 0 . . . 00 0 1 . . . 0...
. . . . . ....
0 . . . . . . 0 1−c0 −c1 −c2 . . . −cn−1
,
so führt dies auf das äquivalente System
x′ = Ax .
Dann sind die Eigenwerte von A gerade die Nullstellen (mit Vielfachheiten) des zu (SL)gehörigen charakteristischen Polynoms
χA(λ) = λn + cn−1λn−1 + . . .+ c1λ+ c0 ∈ C[λ] .
Samtliche Aussagen über das System x′ = Ax übertragen sich nun unmittelbar auf dieskalare Gleichung (SL).
Bemerkung. Dies erklärt, warum und wie man durch den Ansatz
y = eλt , λ ∈ C ,
die allgemeine Lösung von (SL) erhält.

98 9. Lineare Systeme
9.5 Lineare Systeme mit analytischen Koeffizienten
Es sei I ⊂ R ein Intervall und t0 ∈ I sowie A : I → Rd×d analytisch, d. h. A besitzt diePotenzreihendarstellung
A(t) =∞∑n=0
An(t− t0)n
mit Koeffizienten An ∈ Rd×d für n ∈ N0 und für den Konvergenzradius ρ(A, t0) gilt
ρ(A, t0) ≥ dist(t0, ∂I) .
Wir betrachten nun das lineare System
x′ = A(t)x
mit analytischen Koeffizienten und wir werden zeigen, dass die Lösung jedes zugehörigenAnfangswertproblems analytisch auf I ist. Dazu benötigen wir folgende Lemmata.
Lemma 9.10 (Cauchyprodukt)Es seien αnn∈N0 ∈ RN0 und βnn∈N0 ∈ RN0 sowie die beiden Reihen
∞∑n=0
αn und∞∑n=0
βn
absolut konvergent. Dann ist∞∑n=0
(n∑j=0
αjβn−j
)absolut konvergent (Cauchy-Produkt)
und es gilt ( ∞∑n=0
αn
)·
( ∞∑n=0
βn
)=∞∑n=0
(n∑j=0
αjβn−j
).
Beweis. Für jedes N ∈ N ist
N∑n=0
∣∣∣∣∣∣n∑j=0
αjβn−j
∣∣∣∣∣∣ ≤( ∞∑n=0
|αn|
)·
( ∞∑n=0
|βn|
)
und daher die Reihe∑∞
n=0
(∑nj=0 αjβn−j
)absolut konvergent. Nach dem Umord-
nungssatz gilt somit∞∑n=0
(n∑j=0
αjβn−j
)=
∞∑n=0
∞∑j=0
αnβj
( ∞∑n=0
αn
)·
( ∞∑n=0
βn
).

9. Lineare Systeme 99
Bemerkung. Obiger Satz überträgt sich direkt auf den mehrdimensionalen Fall, alsowenn etwa die Folgen Werte in Rd×d annehmen.
Lemma 9.11 (Abschätzung für Potenzreihen)Es seien αnn∈N0 ∈ (Rd)N0 und t0 ∈ R . Existieren Konstanten L,M > 0 mit
∀n ∈ N0 : ‖αn+1‖ ≤M
(n+ 1)Ln
n∑j=0
Lj‖αj‖ ,
so ist die Potenzreihe∞∑n=0
αn(t− t0)n
für alle t ∈ (t0 − L, t0 + L) absolut konvergent.
Beweis. Mittels vollständiger Induktion über n zeigt man, dass
∀n ∈ N :n∑j=0
Lj‖αj‖ ≤‖α0‖n!
n∏j=1
(j +ML)
und insgesamt erhält man damit
∀n ∈ N : ‖αn+1‖ ≤M‖α0‖
(n+ 1)!Ln
n∏j=1
(j +ML) := βn+1 .
Setzen wir weiters β0 := ‖α0‖ sowie β1 := ‖α1‖ , dann folgt für t ∈ (t0 − L, t0 + L) aus
limn→∞
∣∣∣∣βn+1(t− t0)n+1
βn(t− t0)n
∣∣∣∣ = limn→∞
n+ML
n+ 1
|t− t0|L
=|t− t0|L
< 1
nach dem Quotientenkriterium die absolute Konvergenz der Reihe
∞∑n=0
βn(t− t0)n .
Aus dem Majorantenkriterium schließen wir nun auf die absolute Konvergenz von∑∞n=0 αn(t− t0)n , denn
∀n ∈ N0 : ‖αn‖ ≤ βn .
Satz 9.12 (Analytizität der Lösung)Es sei (t0, x0) ∈ I × Rd . Ist A : I → Rd×d analytisch, so ist die maximale Lösungµ : I → Rd des Anfangswertproblems
x′ = A(t)x , x(t0) = x0 (LSA)

100 9. Lineare Systeme
analytisch und besitzt die Potenzreihendarstellung
µ(t) =∞∑n=0
cn(t− t0)n
mit Koeffizienten cn ∈ Rd für n ∈ N0 und Konvergenzradius ρ(µ, t0) ≥ ρ(A, t0) .
Beweis. Wir setzen formal die Reihendarstellung in die Differentialgleichung ein underhalten mit der Formel für das Cauchy-Produkt
0!
=∞∑n=0
(n+ 1)cn+1(t− t0)n −
( ∞∑n=0
An(t− t0)n
)( ∞∑n=0
cn(t− t0)n
)=
=∞∑n=0
((n+ 1)cn+1 −
n∑j=0
An−jcj
)(t− t0)n .
Daher setzen wir c0 := x0 und definieren rekursiv
cn+1 :=1
n+ 1
n∑j=0
An−jcj für n ∈ N0 .
Es sei L < ρ(A, t0) . Dann ist AnLnn∈N0 eine Nullfolge und somit beschränkt durcheine Konstante M > 0 . Folglich gilt
‖cn+1‖ ≤1
n+ 1
n∑j=0
‖An−j‖‖cj‖ ≤M
(n+ 1)Ln
n∑j=0
Lj‖cj‖
und damit folgt die Aussage aus Lemma 9.11.
Bemerkung. Nach obigem Satz erhält man die Lösung des Anfangswertproblems(LSA), indem man den Potenzreihenansatz
µ(t) =∞∑n=0
cn(t− t0)n
in die Differentialgleichung einsetzt und anschließend die Koeffizienten cnn∈N mittelsKoeffizientenvergleich bestimmt – dies kann in der Praxis allerdings durchaus herausfor-dernd sein.
9.6 Ableitung nach dem Anfangswert
Die stetige Abhängigkeit der Lösung von den Daten haben wir bereits gezeigt. Nunwerden wir die differenzierbare Abhängigkeit der Lösung vom Anfangswert untersuchen.

9. Lineare Systeme 101
Satz 9.13 (Ableitung nach dem Anfangswert)Es sei D ⊂ R × Rd offen und die stetige Funktion f : D → Rd bezüglich der zweitenKomponente stetig differenzierbar. Dann ist für alle (t0, x0) ∈ D und t ∈ Imax(t0, x0) dieAbbildung
[x 7→ µ(t ; t0, x)]
stetig differenzierbar und setzen wir
R(t ; t0, x0) := ∂xµ(t ; t0, x0) , (parameterabhängige Resolvente)
so gilt außerdem
∂tR(t ; t0, x0) = ∂xf (t, µ(t ; t0, x0))R(t ; t0, x0) . (Variationsgleichung)
Da R(t0 ; t0, x0) = Id , handelt sich bei R(t ; t0, x0) also um die Resolvente zu y′ = A(t)ymit A(t) := ∂xf (t, µ(t ; t0, x0)) .
Beweis. Für x nahe bei x0 setzen wir
η(t) := µ(t ; t0, x)− µ(t ; t0, x0) .
Dann ist
η′(t) = f (t, µ(t ; t0, x))− f (t, µ(t ; t0, x0)) = ∂xf (t, µ(t ; t0, x0)) η(t) + g(t, x) ,
wobei g(t, x) = o(‖x − x0‖) für x → x0 aufgrund der stetigen Abhängigkeit der Lösungvom Anfangswert. Bezeichnet R(t ; t0, x0) die Resolvente des obigen linearen Systems, soerhalten wir mit der Variation-der-Konstanten-Formel
η(t) = R(t ; t0, x0)(x− x0) +
ˆ t
t0
R(t ; τ, x0)g(τ, x) dτ
mit´ tt0R(t ; t0, x0)g(τ, x) dτ = o(‖x−x0‖) für x→ x0 , wie man leicht mittels Anwendung
der Dreiecksungleichung einssieht.


Teil III
Fourierreihen und Integraltrans-formationen
103


Kapitel 10
Fourier-Reihen
Eine Funktion f : R→ C heißt periodisch mit Periode p > 0, falls
∀x ∈ R : f(x+ p) = f(x).
Ist f eine p-periodische Funktion, dann wird durch
f(x) := f( p
2πx), x ∈ R,
eine periodische Funktion f mit Periode 2π definiert. Daher werden wir im Weiteren eineFunktion als periodisch bezeichnen, wenn diese periodisch mit Periode 2π ist.
Beispiel 10.1 (Trigonometrische Polynome)Es sei n ∈ N0 und ck ∈ C für k = −n, . . . , n. Dann nennt man die durch
pn(x) :=n∑
k=−ncke ikx, x ∈ R,
definierte periodische Funktion ein trigonometrisches Polynom n-ter Ordnung.
Beispiel 10.2 (Integral trigonometrische Polynome)Für k ∈ Z \ 0 ist ˆ 2π
0e ikx dx =
1
ike ikx
∣∣∣2π0
= 0.
Daher gilt für ein trigonometrisches Polynom
pn : R→ C : x 7→n∑
k=−ncke ikx,
dass
ck =1
2π
ˆ 2π
0pn(x)e−ikx dx für k = −n, . . . , n.
Definition 10.3 (Fourier1-Koeffizienten und Fourier-Reihe)Die Funktion f : R → C sei periodisch und auf [0, 2π] integrierbar. Für k = −n, . . . , nheißt
ck(f) :=1
2π
ˆ 2π
0f(x)e−ikx dx
1Jean-Baptiste-Joseph Fourier, französischer Mathematiker, 1768–1830
105

106 10. Fourier-Reihen
der k-te Fourier-Koeffizient von f . Die Folge der Partialsummen
Fn[f ](x) :=n∑
k=−nck(f)e ikx, n ∈ N0,
wird mit
F [f ](x) :=∞∑
k=−∞ck(f)e ikx
bezeichnet und heißt Fourier-Reihe von f .
Bemerkung 10.4Es stellt sich nun die Frage, inwiefern eine Funktion sich durch ihre Fourier-Reihe dar-stellen lässt. Kann f in der Form
f(x) =
∞∑k=−∞
cke ikx
dargestellt werden und konvergiert die Reihe gleichmäßig, so gilt jedenfalls für allem ∈ Z,dass
cm(f) =1
2π
ˆ 2π
0f(x)e−imx dx =
1
2π
ˆ 2π
0
∞∑k=−∞
cke i (k−m)x dx
=1
2π
∞∑k=−∞
ˆ 2π
0cke i (k−m)x dx = cm.
Die Fourier-Reihe von f wird im Allgemeinen jedoch nicht gleichmäßig gegen f konver-gieren, sogar nicht einmal punktweise.
Wir betrachten nun den C-Vektorraum
Fp := f : R→ C periodisch und auf [0, 2π] integrierbar .
Dann wird durch
〈f | g〉 :=1
2π
ˆ 2π
0f(x)g(x) dx für f, g ∈ Fp
ein Skalarprodukt auf Fp definiert. Man beachte, dass 〈· | ·〉 nicht positiv definit ist. Wei-ters bezeichnen wir mit
‖f‖2 :=√〈f | f〉 für f ∈ Fp
die durch dieses Skalarprodukt induzierte Halbnorm. Insbesondere erfüllt ‖ · ‖2 die Drei-ecksungleichung, d. h. für alle f, g ∈ Fp gilt
‖f + g‖2 ≤ ‖f‖2 + ‖g‖2.

10. Fourier-Reihen 107
Für k ∈ Z definieren wir die Funktion
ek : R→ C : x 7→ ek(x) := e ikx.
Dann lassen sich die Fourier-Koeffizienten einer Funktion f ∈ Fp schreiben als
ck(f) = 〈f | ek〉.
Für k, ` ∈ Z gilt außerdem〈ek | e`〉 = δk`,
also ist (ek)k∈Z ein Orthonormalsystem.
10.1 Approximationssatz von Fejér
Für n ∈ N0 nennt man
Dn :=n∑
k=−nek
den Dirichlet-Kern n-ter Ordnung und für n ∈ N heißt
Fn :=1
n
n−1∑k=0
Dk
Fejér2-Kern n-ter Ordnung. Die Faltung zweier periodischer Funktionen f, g ∈ Fp defi-nieren wir vermöge
(f ∗ g)(x) :=1
2π
ˆ 2π
0f(t)g(x− t) dt =
1
2π
ˆ π
−πf(t)g(x− t) dt, x ∈ R.
Beispiel 10.5 (Faltung und Fourier-Koeffizienten)Für f ∈ Fp, k ∈ Z und x ∈ R gilt
(f ∗ ek)(x) =1
2π
ˆ 2π
0f(t)e ik(x−t) dt = ck(f)ek(x).
Also istf ∗ ek = ck(f)ek,
die Funktion ek ist somit eine Eigenfunktion mit zugehörigem Eigenwert ck(f) des linea-ren Operators
Af : Fp → Fp : g 7→ f ∗ g. 2Leopold Fejér, 1880–1959, ungarischer Mathematiker

108 10. Fourier-Reihen
Für f ∈ Fp und n ∈ N0 gilt also
Fn[f ] = f ∗Dn.
Des Weiteren nennt man
σnf := f ∗ Fn =1
n
n−1∑k=0
f ∗Dk
das n-te Fejér-Polynom von f .
Lemma 10.6 (Cesàro3-Mittel)Es sei (an)n∈N ∈ CN eine konvergente Folge. Für n ∈ N setzen wir
sn :=1
n
n∑k=1
ak. (Cesàro-Mittel)
Dann giltlimn→∞
sn = limn→∞
an.
Beweis. Übungsaufgabe.
Bemerkung 10.7Aus der Konvergenz der Cesàro-Mittel folgt im Allgemeinen nicht die Konvergenz derursprünglichen Folge. Konvergiert jedoch die Fourier-Reihe einer Funktion f ∈ Fp imPunkt x ∈ R, so gilt jedenfalls
F [f ](x) = limn→∞
(f ∗Dn)(x) = limn→∞
σnf(x).
Lemma 10.8 (Darstellung der Dirichlet- und Fejér-Kerne)Für x ∈ R \ 2πZ und n ∈ N gilt
Dn =sin((n+ 1
2)x)
sin x2
und Fn(x) =1
n
(sin nx
2
sin x2
)2
.
Beweis. Man erhält die Darstellungen durch Verwendung der Formel für die endlichegeometrischen Reihe.
Lemma 10.9 (Fejér-Kerne = Dirac-Folge)Die Folge Fnn∈N der Fejér-Kerne bildet eine Dirac-Folge auf [−π, π], d. h.
(F1) ∀n ∈ N : Fn ≥ 0,3Ernesto Cesàro, 1859–1906, italienischer Mathematiker

10. Fourier-Reihen 109
(F2) ∀n ∈ N : 12π
´ π−π Fn(t) dt = 1,
(F3) ∀ ε > 0 ∀ r ≤ π ∃N ∈ N ∀n ≥ N :
ˆ[−π,π]\[−r,r]
Fn(t) dt < ε.
Beweis. Die Aussagen folgen unmittelbar aus Lemma 10.8.
Theorem 10.10 (Approximationssatz von Fejér)Es sei f ∈ Fp.
(1) Existieren im Punkt x ∈ R die einseitigen Grenzwerte
f(x−) := limy↑x
f(y) und f(x+) := limy↓x
f(y),
so gilt
limn→∞
σnf(x) =f(x−) + f(x+)
2.
(2) Im Fall, dass f stetig ist, konvergiert (σnf)n∈N gleichmäßig auf ganz R gegen f .
Beweis. ähnlich wie der Beweis von Satz 8.12 aus [Hel17, Kapitel 8].
Korollar 10.11 (Darstellungssatz)Es sei f ∈ Fp. Existieren im Punkt x ∈ R die Grenzwerte f(x−) und f(x+) und ist dieFourier-Reihe F [f ](x) konvergent, so gilt
F [f ](x) =f(x−) + f(x+)
2.
Beweis. Unter den obigen Voraussetzungen ist
F [f ](x) = limn→∞
Fn[f ](x) = limn→∞
σnf(x) =f(x−) + f(x+)
2.
Ist f ∈ Fp reellwertig, so wählt man häufig eine Cosinus-Sinus-Darstellung der Fourier-Polynome bzw. Fourier-Reihe. Man erhält diese indem man verwendet, dass
e ikx = cos(kx) + i sin(kx) für k ∈ Z, x ∈ R.
Dies führt für n ∈ N und x ∈ R auf
Fn[f ](x) =a0(f)
2+
n∑k=1
(ak(f) cos(kx) + bk(f) sin(kx)
)

110 10. Fourier-Reihen
mitak(f) = ck(f) + c−k(f) für k ∈ N0 und bk(f) = i (ck(f)− c−k(f))
für k ∈ N. Für die Koeffezienten ergibt sich damit die Darstellung
ak(f) =1
π
ˆ π
−πf(x) cos(kx) dx für k ∈ N0
und
bk(f) =1
π
ˆ π
−πf(x) sin(kx) dx für k ∈ N.
Insbesondere gilt
f ungerade⇒ ∀ k ∈ N0 : ak(f) = 0,
f gerade⇒ ∀ k ∈ N : bk(f) = 0.
Beispiel 10.12 (Bestimmung und Konvergenz einer Fourier-Reihe)Wir betrachten die 2π-periodische Funktion f : R → R mit f(kπ) = 0 für k ∈ Z undf(x) = signx für x ∈ (−π, π). Da f ungerade ist, gilt ak(f) = 0 für alle k ∈ N0. Fürk ∈ N gilt
bk(f) =1
π
ˆ π
−πsign(x) sin(kx) dx =
2
π
ˆ π
0sin(kx) dx =
4kπ , k ungerade,0, k gerade.
Damit erhalten wir die Fourier-Reihe
F [f ](x) =4
π
∞∑k=1
sin ((2k − 1)x)
2k − 1.
Dass F [f ](x) für alle x ∈ R konvergiert, kann etwa mit dem Dirichlet-Kriterium gezeigtwerden. Inbesondere gilt daher
1 = f(π2
)=
4
π
∞∑k=1
(−1)k+1
2k − 1,
also ist∞∑k=0
(−1)k
2k + 1=π
4. (Leibniz-Reihe)

10. Fourier-Reihen 111
10.2 Wärmeleitung in einem Stab
Wir betrachten einen dünnen Stab der Länge L > 0 und modellieren diesen durch dasIntervall [0, L]. Die Temperatur u(t, x) zum Zeitpunkt t > 0 im Punkt x ∈ (0, L) desStabes genügt der sogenannten Wärmeleitungsgleichung
∂tu(t, x) = a∂2xu(t, x), t > 0, x ∈ (0, L),
wobei a > 0 die Temperaturleitfähigkeit des homogenen Materials bezeichne. Durch dieWahl entsprechender Einheiten und mittels linearer Transformation können wir erreichen,dass L = π und a = 1 gilt. Wir betrachten also die partielle Differentialgleichung
∂tu(t, x) = ∂2xu(t, x), t > 0, x ∈ (0, π). (WLG)
Weiters schreiben wir homogene Dirchichlet-Randbedingungen
∀ t > 0: u(t, 0) = u(t, π) = 0 (Randbedingungen)
vor und nehmen an, dass die Temperaturverteilung zum Zeitpunkt t = 0 bekannt ist,also
∀x ∈ [0, π] : u(0, x) = f(x), (Anfangsbedingung)
wobei die integrierbare Funktion f : [0, π]→ R vorgegeben sei.
Separationsansatz. Wir konstruieren nun Lösungen der Form
u(t, x) = T (t) ·X(x).
Einsetzen dieses Ansatzes in die Wärmeleitungsgleichung (WLG) führt auf
T ′(t)
T (t)=X ′′(x)
X(x).
Setzen wir λ := T ′(1)T (1) , so erhalten wir die beiden gewöhnlichen Differentialgleichungen
T ′(t) = λT (t) und X ′′(x) = λX(x).
Wir nehmen nun an, dass es ein α > 0 mit α2 = −λ gibt, denn ansonsten könnendie Randbedingungen nicht erfüllt werden. Die allgemeine Lösung von X ′′(x) = λX(x)lautet dann
X(x) = c1 cos(αx) + c2 sin(αx), c1, c2 ∈ R.
Die Randbedingungen besagen
X(0) = X(π) = 0,

112 10. Fourier-Reihen
daher ist c1 = 0 und α ∈ Z. Für jedes k ∈ N ist also
Xk(x) := sin(kx)
eine Lösung, welche die Randbedingungen erfüllt. (Da die Sinusfunktion ungerade ist,genügt es k ∈ N zu betrachten.)
Bemerkung 10.13Für jedes k ∈ N ist die Funktion Xk eine Eigenfunktion zum Eigenwert λk := −k2 desDifferentialoperators
d2
dx2:f ∈ C2([0, π]) : f(0) = f(π) = 0
→ C([0, π]) : f 7→ f ′′.
Für k ∈ N ergibt sich für T nun die Differentialgleichung
T ′(t) = −k2T (t).
Dann istTk(t) := e−k
2t
eine Lösung dieser Differentialgleichung. Jede Funktion
uk(t, x) := Tk(t)Xk(x) = e−k2t sin(kx)
ist somit eine Lösung der Wärmeleitungsgleichung (WLG), welche die Randbedingungenerfüllt. Aufgrund der Linearität der Gleichung gilt dies auch für jede Linearkombination
n∑k=1
bkuk(t, x) =
n∑k=1
bke−k2t sin(kx),
wobei n ∈ N und bk ∈ R für k = 1, . . . , n.
Erfüllen der Anfangsbedingung. Damit wir die Anfangsbedingung erfüllen können,setzen wir nun die Lösung als Fourier-Sinus-Reihe
u(t, x) =
∞∑k=1
bke−k2t sin(kx)
an. Setzen wir in die Anfangsbedingung ein, so erhalten wir
u(0, x) =∞∑k=1
bk sin(kx)!
= f(x),
die Koeffizienten bk sind also gerade die Fourier-Sinus-Koeffizienten von f . Wir treffenalso nun die Annahme, dass sich f als Fourier-Sinus-Reihe darstellen lässt und erhaltenentsprechend
bk = bk(f) =2
π
ˆ π
0f(x) sin(kx) dx, k ∈ N.

10. Fourier-Reihen 113
Theorem 10.14 (Formale Lösung der Wärmeleitungsgleichung)Es sei f : [0, π] → R integrierbar. Dann besitzt das Anfangswertproblem der Wärmelei-tungsgleichung mit homogenen Dirichlet-Randbedingungen∂tu(t, x) = ∂2
xu(t, x), t > 0, x ∈ (0, π),
u(t, 0) = u(t, π) = 0, t > 0,
u(0, x) = f(x), x ∈ [0, π],
die formale Lösung
u(t, x) =∞∑k=1
bk(f)e−k2t sin(kx), t > 0, x ∈ (0, π).
Bemerkung 10.15Für gegebenes f gilt es zu untersuchen, ob es sich bei dieser formalen Lösung um einetatsächliche Lösung im klassischen Sinn handelt. Dazu muss das Konvergenzverhaltender Reihe untersucht werden, also das Verhalten der Fourier-Sinus-Koeffizienten von f .
Beispiel 10.16 (Anfangswert f ≡ 1)Wir betrachten den Anfangswert f : [0, π] → R : x 7→ 1. In Beispiel 10.12 haben wirbereits für x ∈ (0, π) gezeigt, dass
F [f ](x) =4
π
∞∑k=1
sin ((2k − 1)x)
2k − 1.
Die Lösung der Wärmeleitungsgleichung lautet daher
u(t, x) =4
π
∞∑k=1
sin ((2k − 1)x)
2k − 1e−(2k−1)2t, t > 0, x ∈ (0, π).
10.3 Partialbruchzerlegung des Cotangens
Für a ∈ R\Z betrachten wir die 2π-periodische Funktion f : R→ R mit f(x) = cos(ax)für x ∈ [−π, π]. Es ist
∀ k ∈ N : bk(f) = 0,
da f gerade ist, und ferner
ak =2
π
ˆ π
0cos(ax) cos(kx) dx =
sin(aπ)
π(−1)k
(1
a+ k+
1
a− k
)für k ∈ N0, wobei bei der Integration verwendet wurde, dass
2 cos(ax) cos(kx) = cos(a+ k)x+ cos(a− k)x.

114 10. Fourier-Reihen
Wir erhalten somit die Fourier-Reihe
F [f ](x) =sin(aπ)
π
[1
a+
∞∑k=1
(−1)k(
1
a+ k+
1
a− k
)cos(kx)
].
Nach dem Majorantenkriterium ist die Reihe für alle x ∈ R absolut konvergent, denn∣∣∣∣(−1)k(
1
a+ k+
1
a− k
)cos(kx)
∣∣∣∣ ≤ 2|a||k2 − a2|
= O(k−2
)für k →∞.
Also gilt
cos(ax) =sin(aπ)
π
[1
a+∞∑k=1
(−1)k(
1
a+ k+
1
a− k
)cos(kx)
]für alle x ∈ [−π, π] nach dem Darstellungssatz und speziell für x = π folgt
π cot(aπ) =1
a+∞∑k=1
(1
a+ k+
1
a− k
),
die sogenannte Partialbruchzerlegung des Cotangens.
10.4 Punktweise Konvergenz nach Dirichlet
Definition 10.17 (Einseitige Ableitungen)Es sei f : R→ C eine Funktion und x ∈ R, sodass die einseitigen Grenzwerte f(x−) undf(x+) existieren. Dann setzen wir
f ′(x−) := limt↑x
f(t)− f(x−)
t− xund f ′(x+) := lim
t↓x
f(t)− f(x+)
t− x.
Lemma 10.18 (Riemann-Lebesgue4-Lemma)Für eine Funktion f ∈ Fp gilt
limk→∞
ck(f) = 0.
Beweis. Wir müssen zeigen, dass
limk→∞
ˆ 2π
0f(x)e−ikx dx = 0.
(i) Für c ∈ C und a < b ist
limk→∞
ˆ b
ac e−ikx dx = lim
k→∞
ick
(e−ikb − e−ika
)︸ ︷︷ ︸
beschränkt
= 0.
4Henri Léon Lebesgue, 1878–1941, französischer Mathematiker

10. Fourier-Reihen 115
(ii) Es sei ε > 0. Da f integrierbar auf [0, 2π] ist, können wir eine Zerlegung
Z : 0 = x0 < x1 < . . . < xn = b, n ∈ N,
von [0, 2π] finden, sodass
ˆ 2π
0|f(x)− g(x)| dx < ε,
wobei
g(x) :=n∑j=1
f(xj)χ[xj−1,xj)(x) für x ∈ [0, 2π]. (Treppenfunktion)
Nach (i) gilt
limk→∞
ˆ 2π
0g(x)e−ikx dx = 0
und aus∣∣∣∣ˆ 2π
0f(x)e−ikx dx−
ˆ 2π
0g(x)e−ikx dx
∣∣∣∣ ≤ ˆ 2π
0|f(x)− g(x)| dx < ε
folgt somit
limk→∞
ˆ 2π
0f(x)e−ikx dx = 0.
Lemma 10.19 (Riemannsches Lemma)Für eine integrierbare Funktion f : [a, b]→ R gilt
limα→∞
ˆ b
af(x) sin(αx) dx = 0.
Beweis. Der Beweis erfolgt in kompleter Analogie zu jenem des Riemann-Lebesgue-Lemmas.
Lemma 10.20 (Dirichletsches Lemma)Es sei f : [−π, π]→ R eine integrierbare Funktion, für welche die Grenzwerte
f ′(0−) und f ′(0+) existieren.
Dann gilt
Fn[f ](0) =1
2π
ˆ π
−πf(t)Dn(t) dt→ f(0−) + f(0+)
2für n→∞.

116 10. Fourier-Reihen
Beweis. Wir zeigen
limn→∞
1
2π
ˆ π
0f(t)Dn(t) dt =
f(0+)
2.
Da 12π
´ π0 Dn(t) dt = 1
2 für alle n ∈ N gilt, folgt nach dem Riemannschen Lemma
1
2π
ˆ π
0f(t)Dn(t) dt− f(0+)
2=
1
2π
ˆ π
0[f(t)− f(0+)]Dn(t) dt
=1
2π
ˆ π
0
f(t)− f(0+)
t
t
sin t2︸ ︷︷ ︸
integrierbar auf [0, π]
sin(n+ 1
2
)t dt n→∞−→ 0.
Analog zeigt man
limn→∞
1
2π
ˆ 0
−πf(t)Dn(t) dt =
f(0−)
2.
Beispiel 10.21 (Si(x)→ π/2, x→∞)Wir zeigen
limx→∞
Si(x) =
ˆ ∞0
sin t
tdt =
π
2.
Das uneigentliche Integral existiert, denn für R ≥ 1 ist
ˆ R
1
sin t
tdt partiell
= cos(1)− cosR
R−ˆ R
1
cos t
t2dt
und´∞
1cos tt2
existiert nach dem Majorantenkriterium, da´∞
1dtt2
eine konvergente Majo-rante ist. Wir wenden nun das Dirichletsche Lemma wie folgt an:
limx→∞
Si(x) = limn→∞
ˆ (n+1/2)π
0
sin t
tdt = lim
n→∞
ˆ π
0
sin(n+ 1/2)t
tdt
=π
2limn→∞
1
2π
ˆ π
−π
sin(t/2)
t/2Dn(t) dt =
π
2.
Theorem 10.22 (Punktweise Konvergenz nach Dirichlet)Es sei f ∈ Fp und x ∈ R, sodass die Ableitungen
f ′(x−) und f ′(x+) existieren.
Dann konvergiert F [f ](x) und es gilt
F [f ](x) =f(x−) + f(x+)
2.

10. Fourier-Reihen 117
Beweis. Nach dem Dirichletschen Lemma ist
limn→∞
Fn[f ](x) = limn→∞
1
2π
ˆ π
−πf(x− t)Dn(t) dt =
f(x−) + f(x+)
2.
Definition 10.23 (Stückweise stetig differenzierbar)Man bezeichnet eine Funktion f : [a, b] → C als stückweise stetig differenzierbar , wennes eine Zerlegung a = x0 < x1 < . . . < xn = b und Funktionen fj ∈ C1 ([xj−1, xj ]) fürj = 1, . . . , n gibt, sodass
∀ j = 1, . . . , n : f |(xj−1,xj)= fj .
Theorem 10.24 (Konvergenz der Fourier-Reihe einer stückweisen C1-Funktion)Es sei f ∈ Fp stückweise stetig differenzierbar.
(1) Ist [a, b] ⊂ R ein Intervall, auf welchem f stetig ist, so gilt
Fn[f ]→ f gleichmäßig auf [a, b].
(2) Für alle x ∈ R gilt
F [f ](x) =f(x−) + f(x+)
2.
Beweis. Nach Satz 10.22 konvergiert F [f ](x) für alle x ∈ R, insbesondere folgt die zweiteAussage. Außerdem gilt
limn→∞
Fn[f ] = limn→∞
σnf
und daher folgt die erste Aussage aus dem Approximationssatz von Fejér.
10.5 Konvergenz im quadratischen Mittel
Für n ∈ N0 bezeichnen wir mit
Tn :=
n∑
k=−nγkek : γk ∈ C für k = −n, . . . , n
den Raum der trigonometrischen Polynome vom Grad kleiner gleich n.
Theorem 10.25 (Minimaleigenschaft der Fourier-Polynome)Es sei f ∈ Fp und n ∈ N0. Dann gilt für alle pn ∈ Tn mit pn 6= Fn[f ], dass
‖f −Fn[f ]‖2 < ‖f − pn‖2
und weiters
‖f −Fn[f ]‖22 = ‖f‖22 −n∑
k=−n|ck(f)|2.

118 10. Fourier-Reihen
Beweis. Es sei pn =∑n
k=−n γkek. Dann ist
‖f − pn‖22 = 〈f − pn | f − pn〉 = ‖f‖22 − 〈pn | f〉 − 〈f | pn〉+ ‖pn‖22
= ‖f‖22 −n∑
k=−n|ck(f)|2 +
n∑k=−n
|ck(f)− γk|2 .
Folglich ist
‖f − pn‖2 minimal ⇐⇒ ∀ k = −n, . . . , n : γk = ck(f) ⇐⇒ pn = Fn[f ].
Korollar 10.26 (Besselsche5 Ungleichung)Für f ∈ Fp gilt
∞∑k=−∞
|ck(f)|2 ≤ ‖f‖22.
Bemerkung. Die Besselsche Ungleichung besagt gerade, dass die Folge (ck(f))k∈Z derFourier-Koeffizienten im Folgenraum `2 der quadratisch summierbaren Folgen liegt.
Definition 10.27 (Konvergenz im quadratischen Mittel)Gegeben sei (fn : [a, b]→ C)n∈N eine Folge integrierbarer Funktionen und eine weitereintegrierbare Funktion f : [a, b]→ C. Dann konvergiert (fn)n∈N im quadratischen Mittelgegen f , falls
limn→∞
ˆ b
a|fn(x)− f(x)|2 dx = 0.
Bemerkung. Speziell konvergiert (fn)n∈N ∈ FNp genau dann im quadratischen Mittelgegen f ∈ Fp auf [−π, π], wenn
limn→∞
‖fn − f‖2 = 0.
Theorem 10.28 (Konvergenz von Fourier-Reihen im quadratischen Mittel)Für f ∈ Fp ist
limn→∞
‖Fn[f ]− f‖2 = 0
und inbesondere gilt die Gleichung
‖f‖22 =∞∑
k=−∞|ck(f)|2. (Parsevalsche Gleichung)
5Friedrich Wilhelm Bessel, 1784–1846, deutscher Mathematiker

10. Fourier-Reihen 119
Beweis. Schritt 1: Die Funktion f sei stetig. Nach dem Approximationssatz von Fejérgilt zu ε > 0 für das trigonometrische Polynom pn := σnf ∈ Tn, dass
∀x ∈ R : |pn(x)− f(x)| <√ε.
Aufgrund der Minimaleigenschaft der Fourier-Polynome ist dann
‖Fn[f ]− f‖2 ≤ ‖pn − f‖2 < ε.
Schritt 2: Es sei ε > 0. Dann gibt es eine stetige 2π-periodische Funktion g mit
‖f − g‖2 < ε.
Nach dem ersten Beweisschritt können wir ein N ∈ N finden, sodass
∀n ≥ N : ‖Fn[g]− g‖2 < ε.
Außerdem gilt für jedes h ∈ Fp und alle n ∈ N0, dass
‖Fn[h]‖2 ≤ ‖Fn[h]− h‖2 + ‖h‖2 ≤ 2‖h‖2.
Für alle n ∈ N mit n ≥ N erhalten wir damit
‖Fn[f ]− f‖2 ≤ ‖f − g‖2 + ‖Fn[g]− g‖2 + ‖Fn[f − g]‖2 < 2ε+ 2‖f − g‖2 < 4ε.
Bemerkung. Verwendet man die Cosinus-Sinus-Darstellung der Fourier-Reihe
F [f ](x) =a0(f)
2+∞∑k=1
(ak(f) cos(kx) + bk(f) sin(kx)) ,
so lautet die Parsevalsche Gleichung
1
π
ˆ π
−π|f(x)|2 dx =
|a0(f)|2
2+
∞∑k=1
(|ak(f)|2 + |bk(f)|2
).
Beispiel 10.29 (∑∞
k=11k2
= π2
6 ). Für x ∈ (0, 2π) gilt
π − x2
=∞∑k=1
sin(kx)
k
und daher folgt aus der Parsevalschen Gleichung∞∑k=1
1
k2=
1
π
ˆ 2π
0
(π − x
2
)2
dx =π2
6.


Kapitel 11
Integraltransformationen
In diesem Kapitel werden wir uns mit Integraltransformationen beschäftigen, genauermit der Fourier- und der Laplacetransformation.
11.1 Fourier-Transformation
Es sei p > 0 und f : R→ C eine p-periodische Funktion sowie auf [0, p] integrierbar. Fürk ∈ Z ist dann
ck(f) =1
p
ˆ p/2
−p/2f(t)e−i 2πk
pt dt
der k-te Fourier-Koeffizient von f . Ist etwa f stückweise C1 , so gilt nach der punktweisenKonvergenz nach Dirichlet, vgl. Satz 10.22,
F [f ](x) =
∞∑k=−∞
ck(f)e i 2πkpx
=∞∑
k=−∞e i 2πk
px 1
p
ˆ p/2
−p/2f(t)e−i 2πk
pt dt =
f(x+) + f(x−)
2
für x ∈ R . In einem Stetigkeitspunkt x ∈ R von f ist dann insbesondere F [f ](x) = f(x)und setzen wir nun ξk := 2πk
p für k ∈ Z und ∆ξ = 2πp sowie
F (ξ) := e iξxˆ p/2
−p/2f(t)e−iξt dt für ξ ∈ R ,
dann gilt
f(x) = F [f ](x) =1
2π
∞∑k=−∞
F (ξk)∆ξ .
Sofern das uneigentliche Integral existiert, erhalten wir
f(x) = limp→∞
1
2π
∞∑k=−∞
F (ξk)∆ξ =1
2π
ˆ ∞−∞
e iξxˆ ∞−∞
f(t)e−iξt dt dξ .
Dies motiviert folgende Definition.
Definition 11.1 (Fourier-Transformation)Eine lokal integrierbare Funktion f : R→ C heißt im Punkt ξ ∈ R Fourier-transformierbar,falls
F [f ](ξ) :=
ˆ ∞−∞
f(t)e−iξt dt
121

122 11. Integraltransformationen
existiert. In diesem Fall nennt man F [f ](ξ) Fourier-Transformierte von f in ξ . Füreine lokal integrierbare Funktion g : R→ C setzen wir
F−1[g](t) := limp→∞
1
2π
ˆ p
−pe iξtg(ξ) dξ (Hauptwert)
für t ∈ R , sofern der Grenzwert existiert.
Es stellt sich natürlich die Frage, unter welchen Voraussetzungen an f : R→ C wir
F−1[F [f ]](t) = f(t) für t ∈ R
schließen können.
Satz 11.2 (Fourier-Transformierte einer abolsut integrierbaren Funktion)Eine absolut integrierbare Funktion f : R → C ist Fourier-transformierbar und es giltF [f ] ∈ C0(R;C) = g ∈ C(R;C) : limt→∞ g(t) = limt→−∞ g(t) = 0 .
Beweis. Für alle ξ ∈ R istˆ ∞−∞
∣∣∣e−iξtf(t)∣∣∣ dt =
ˆ ∞−∞|f(t)| dt <∞
und folglich die Konvergenz des uneigentlichen Integrals´∞−∞ e−ξtf(t) dt gleichmäßig in
ξ . Daher ist f ∈ C(R;C) . Mit dem Riemannschen Lemma, Lemma folgt
limξ→∞
F [f ](ξ) = limξ→∞
(ˆ ∞−∞
sin(ξt+ π/2)f(t) dt− iˆ ∞−∞
sin(ξt)f(t) dt)
= 0
und analog limξ→−∞F [f ](ξ) = 0 .
Dass F [f ] ∈ C0(R;C) für f ∈ L1(R;C) , ist auch als Riemann-Lebesgue-Lemma bekannt.
Beispiel 11.3 (Fourier-Transformierte eines Rechtecksimpuls)Wir bestimmen die Fourier-Transformierte der Funktion f := χ[−1/2,1/2] . Für ξ ∈ R mitξ 6= 0 ist
F [f ](ξ) =
ˆ 1/2
−1/2e−iξt dt =
e−iξt
−iξ
∣∣∣∣1/2t=−1/2
=sin(ξ/2)
ξ/2.
Aus der absoluten Integrierbarkeit von f folgt die Stetigkeit von F [f ] und daher ist
F [f ](0) = limξ→0F [f ](ξ) = lim
ξ→0
sin(ξ/2)
ξ/2= 1 .
Satz 11.4 (Fourier-Transformierte einer stückweisen C1-Funktion)Ist f : R→ C absolut integrierbar und stückweise C1 , so gilt
F−1 [F [f ]] (t) =f(t+) + f(t−)
2für alle t ∈ R .

11. Integraltransformationen 123
Beweis. Es sei t ∈ R . Für p > 0 ist
1
2π
ˆ p
−p
ˆ ∞−∞
e iξ(t−τ)f(τ) dτ dξ = [Fubini] =1
2π
ˆ ∞−∞
ˆ p
−pe iξ(t−τ)f(τ) dξ dτ
=1
π
ˆ ∞−∞
f(τ)sin p(t− τ)
t− τdτ =
ˆ ∞0
f(t+ τ) + f(t− τ)
τ
sin pτ
πdτ
und da´ ∞−∞
sin ττ dτ = π
2 =´ ∞−∞
sin pττ dτ , folgt mit dem Riemannschen Lemma
ˆ ∞0
f(t+ τ)
τ
sin pτ
πdτ − f(t+)
2=
ˆ ∞0
f(t+ τ)− f(t+)
τ
sin pτ
πdτ p→∞−→ 0 ,
denn limτ↓0f(t+τ)−f(t+)
τ = f ′(t+) . Analog zeigt manˆ ∞
0
f(t+ τ)
τ
sin pτ
πdτ − f(t−)
2
p→∞−→ 0 .
Für eine Funktion f : R→ C setzen wir
f : R→ C : t 7→ f(t) := f(−t) .
Korollar 11.5 (Umkehrsatz)Ist f : R→ C absolut integrierbar und stückweise C1 , so ist F [f ] Fourier-transformierbarund erfüllt f in t ∈ R die Mittelwerteigenschaft, d. h. f(t) = f(t+)+f(t−)
2 , so gilt
F−1 [F [f ]] (t) = f(t)
und insbesondere istF [F [f ]] (t) = 2πf(t) .
Beweis. Für eine Fourier-transformierbare Funktion g : R→ C ist
F [g](t) =
ˆ ∞−∞
e−iξtg(ξ) dξ = 2πF−1[g](−t)
und mit g = F [f ] erhalten wir somit
F [F [f ]] (t) = 2πF−1 [F [f ]] (−t) = 2πf(−t) = 2πf(t) .
Beispiel 11.6 (Fourier-Transformierte der Delta-Distribution)Wir betrachten die durch
dh : R→ R : t 7→ hχ[− 12h, 12h ] für h > 0

124 11. Integraltransformationen
gegebene Dirac-Folge, es gilt also
dhh→∞−→ δ in D′(R) .
Setzen wir F [δ] := limh→∞F [dh] , so erhalten wir
F [δ](ξ) = limh→∞
ˆ 12h
− 12h
he−iξt dt = limh→∞
sin ξ2hξ
2h
= 1
für ξ ∈ R . Damit gilt F [δ] = 1 und wir schließen
F [1] = F ([F [δ]]) = limh→∞
F [F [dh]] = limh→∞
2πdh = 2πδ ,
also ist F [1] = 2πδ .
Lemma 11.7 (Verschiebungssatz)Ist f : R→ C Fourier-transformierbar und α ∈ R , so gilt
F[t 7→ e iαtf(t)
](ξ) = F [f ](ξ − α) für alle ξ ∈ R .
Beweis. Die Aussage folgt unmittelbar aus
F[t 7→ e−iαtf(t)
](ξ) =
ˆ ∞−∞
e it(ξ−α)f(t) dt .
Beispiel 11.8 (Fourier-Transformierte der Cosinus-Funktion)Da die Fourier-Transformation C-linear ist, erhalten wir mit dem Verschiebungssatz
F [cos] = 12
(F[t 7→ e it
]+ F
[t 7→ e−it
])= πδ1 + πδ−1 .
Satz 11.9 (Fourier-Transformierte der Ableitung)Es sei f : R → C stetig und stückweise differenzierbar sowie absolut integrierbar. Ist f ′
Fourier-transformierbar, so gilt
F [f ′](ξ) = iξF [f ](ξ) für ξ ∈ R .
Beweis. Da f stetig und absolut integrierbar ist, gilt
limt→∞
f(t) = limt→−∞
f(t) = 0 .
Daher führt partielle Integration auf
F [f ′](ξ) =
ˆ ∞−∞
e−iξtf ′(t) dt = e−iξtf(t)∣∣∣t=∞t=−∞
+ iξˆ ∞−∞
e−iξtf(t) dt = iξF [f ](ξ) .

11. Integraltransformationen 125
Beispiel 11.10 (Differentialgleichung und Fourier-Transformation)Für α > 0 und f : R → R : t 7→ H(t)e−αt , wobei H die Heaviside-Funktion bezeichnet ,ist
F [f ](ξ) =
ˆ ∞0
e−t(α+iξ) dt =1
α+ iξ.
Nun betrachten wir die skalare Differentialgleichung
y′ + y = H(t)e−t .
Wir bestimmen eine Lösung auf (0,∞) und setzen daher auf (−∞, 0) durch Null fort.Anwendung der Fourier-Transformation führt auf
(iξ + 1)F [y](ξ) =1
1 + iξfür ξ ∈ R .
Wir wenden die inverse Fourier-Transformation an und erhalten
F−1
[ξ 7→ 1
(1 + iξ)2
](t) = F−1
[ξ 7→ i
ddξ
1
1 + iξ
](t)
= tF−1F[ξ 7→ H(ξ)e−ξ
](t) = tH(t)e−t .
Somit isty(t) = te−t für t > 0 .
Dies liefert auf (0,∞) eine klassische Lösung der Differentialgleichung.
11.2 Laplace-Transformation
Definition 11.11 (Laplace-Transformation)Eine Funktion f : [0,∞) → C heißt in s > 0 Laplace-transformierbar, falls das unei-gentliche Integral
L[f ](s) :=
ˆ ∞0
e−stf(t) dt
existiert. Man nennt dann L[f ](s) Laplace-Transformierte von f in s .
Satz 11.12 (Existenz- und Eindeutigkeitsatz der Laplace-Transformation)Die Funktion f : [0,∞)→ C sei stückweise C1 und höchstens von exponentiellem Wachs-tum, d. h.
∃α > 0 ∃M ≥ 0 ∀ t > 0: |f(t)| ≤Meαt . (11.1)
Dann gilt:
(1) f ist auf (α,∞) Laplace-transformierbar

126 11. Integraltransformationen
(2) L[f ] ist stetig auf (α,∞)
(3) lims→∞ L[f ](s) = 0
(4) f ist auf (α,∞) eindeutig (bis auf die Unstetigkeitsstellen) durch L[f ] bestimmt
Beweis. Für s < α istˆ ∞
0
∣∣e−stf(t)∣∣ dt ≤M ˆ ∞
0e (α−s)t dt =
M
s− α
und somit L[f ](s) absolut konvergent. Damit bleibt lediglich (4) zu zeigen. Es sei z :=s+ iξ mit s > α und ξ ∈ R . Wir setzen f(t) := 0 für t < 0 und erhalten
L[f ](z) =
ˆ ∞−∞
e−iξte−stf(t) dt = F[t 7→ e−stf(t)
](ξ) .
Folglich gilt
e−suf(u+) + f(u−)
2= F−1F
[t 7→ e−stf(t)
](u) für u > α .
Beispiel 11.13 (Berechnung einer Laplace-Transformierten)Für z = α+ iβ ∈ C betrachten wir die Funktion
f : R→ C : t 7→ ezt
und bestimmen in s > α die Laplace-Transformierte:
L[s](z) =
ˆ ∞0
e (z−s)t dt =1
s− z.
Damit haben wir folgende Laplace-Transformierte bestimmt:
. L[1](s) = 1s für s > 0
. L[t 7→ eαt](s) = 1s−α für s > α
. L[t 7→ cos(βt)](s) = ss2+β2 für s > 0
. L[t 7→ sin(βt)](s) = βs2+β2 für s > 0
Satz 11.14 (Laplace-Transformierte der Ableitung)Es sei f : [0,∞)→ C auf (0,∞) differenzierbar und höchstens von exponentiellen Wachs-tum, vgl. (11.1). Ist f ′ in s > α Laplace-transformierbar, so gilt
L[f ′](s) = sL[f ](s)− f(0+) .

11. Integraltransformationen 127
Beweis. Für s > α ist
L[f ′](s) =
ˆ ∞0
e−stf ′(t) dt = e−stf(t)∣∣∣∞t=0
+
ˆ ∞0
e−stf(t) dt = −f(0+) + sL[f ](s) .
Satz 11.15 (Ableitung der Laplace-Transformation)
ddsL[f ](s) = −L[t 7→ tf(t)](s) für s > α .
Beweis. Aufgrund der gleichmäßigen Konvergenz des uneigentlichen Integrals in s gilt
ddsL[f ](s) = −
ˆ ∞0
e−sttf(t) dt = −L[t 7→ tf(t)](s) .
Beispiel 11.16 (Lösen eines AWPs durch Laplace-Transformation)Wir wenden die Laplace-Transformation auf das Anfangswertproblem
y′ + y = e−t , y(0) = 1
an und erhalten(1 + s)L[y](s)− y(0) =
1
1 + sfür s > 0 .
Für s > 0 gilt daher
L[y](s) =1
(1 + s)2+
1
1 + s=
= − ddsL[t 7→ e−t
](s) + L
[t 7→ e−t
](s) = L
[t 7→ (t+ 1)e−t
](s) ,
also isty(t) = (t+ 1)e−t für t > 0 .


Anhang A
Lebesgue-Integral
Da in diesem Abschnitt die Konstruktion des Lebesgue-Integrals lediglich umrissen wirdund daher insbesondere die Theorie ohne Beweise auskommen muss, wird für eine aus-führliche Darstellung auf [Hel13a, Kapitel 3] verwiesen.
Wir nennen eine Teilmenge Q ⊂ Rd einen Quader, falls es beschränkte und nicht leereIntervalle I1, . . . , Id gibt, sodass
Q = I1 × . . .× Id .
Das Volumen von Q ist dann durch
λ(Q) := |I1| · . . . · |Id|
gegeben, wobei |Ii| die Länge des Intervalls Ii für i = 1 . . . , d bezeichnet.
Eine Funktion f : Rd → R heißt Treppenfunktion, falls es Quader Q1, . . . , Qn undα1, . . . , αn ∈ R gibt, sodass
f =n∑i=1
αiχQi .
Für A ⊂ Rd ist hierbei die charakteristische Funktion χA für x ∈ Rd durch
χA(x) :=
1 , x ∈ A ,0 , x /∈ A ,
gegeben. Für die Menge aller Treppenfunktion schreiben wir E .
Die Konstruktion des Lebesgue-Integrals erfolgt nun in drei Schritten.
Erster Schritt: Integral von Treppenfunktionen
Das Integral einer Treppenfuktion f ∈ E mit f =∑n
i=1 αiχQi definieren wir durchˆRnf(x) dλ(x) :=
ˆf dλ :=
n∑i=1
αiλ(Qi) .
Dieses ist wohldefiniert, hängt also nicht von der Darstellung der Treppenfunktion ab.Für f, g ∈ E und α ∈ R gilt außerdem
129

130 A. Lebesgue-Integral
(1)´
(f + αg) dλ =´f dλ+ α
´g dλ , (Linearität)
(2)∣∣´ f dλ∣∣ ≤ ´ |f | dλ , (Dreiecksungleichung)
(3) f ≤ g ⇒´f dλ ≤
´g dλ . (Monotonie)
Zweiter Schritt: Integral nicht-negativer Funktionen
Wir setzen nun
L+ :=f : Rd → [0,∞] : ∃ fn∞n=1 ∈ EN mit f1 ≤ f2 ≤ . . . und f = lim
n→∞fn
und für f ∈ L+ weiters ˆ
f dλ := limn→∞
ˆfn dλ ,
wobei fn∞n=1 ∈ EN eine Folge mit f1 ≤ f2 ≤ . . . und f = limn→∞ fn ist. Das dadurchdefinierte Integral auf L+ ist wohldefiniert, hängt also nicht von der Wahl der approxi-mierenden Folge von Treppenfunktionen ab, und stimmt mit jenem auf E überein. Auchdie Linearität und die Monotonie übertragen sich unmittelbar.
Dritter Schritt: Integral Lebesgue-integrierbarer Funktionen
Wir erweitern nun den Bildbereich auf R := R ∪ −∞,∞ und zerlegen eine Funktionf : Rd → R in ihren positiven und negativen Anteil
f+ := maxf, 0 und f− := max−f, 0 .
Es ist also f = f+ − f− und |f | = f+ + f− .
Definition A.1 (Lebesgue-Integrierbarkeit und Lebesgue-Integral)Wir nennen f : Rd → R Lebesgue-integrierbar, falls f+, f− ∈ L+ und
´|f | dλ <∞ .
Außerdem definieren wir
L1 :=f : Rd → R Lebesgue-integrierbar
und für f ∈ L1 setzen wir
ˆf dλ :=
ˆf+ dλ−
ˆf− dλ . (Lebesgue-Integral)
Satz A.2 (Eigenschaften des Lebesgue-Integrals)Für f, g ∈ L1 und α ∈ R gilt
(1)´
(f + αg) dλ =´f dλ+ α
´g dλ , (Linearität)

A. Lebesgue-Integral 131
(2)∣∣´ f dλ∣∣ ≤ ´ |f | dλ , (Dreiecksungleichung)
(3) f ≤ g ⇒´f dλ ≤
´g dλ . (Monotonie)
Bemerkung. Ist f : R→ R absolut Riemann-integrierbar, so ist f ∈ L1 und es giltˆ ∞−∞
f(x) dx =
ˆR
f(x) dλ(x) .
Eine Menge A ⊂ Rd heißt Lebesgue-messbar, falls χA ∈ L+ . Für eine Lebesgue-messbare Menge A ⊂ Rd setzen wir
λ(A) :=
ˆχA dλ .
Dies definiert das sogenannte Lebesgue-Maß λ auf der Menge der Lebesgue-messbarenMengen. Man nennt eine Lebesgue-messbare Menge A ⊂ Rd Lebesgue-Nullmenge,falls λ(A) = 0 .
Sind f, g ∈ L1 oder f, g ∈ L+ und istx ∈ Rd : f(x) 6= g(x)
eine Lebesgue-Nullmenge,
so gilt ˆf dλ =
ˆg dλ .
Bemerkung. Man kann zeigen, dass jede offene und auch jede abgeschlossene MengeLebesgue-messbar ist.
Es sei A ⊂ Rd Lebesgue-messbar und f : A→ R . Wir setzen
fχA(x) :=
f(x) , x ∈ A ,0 , x /∈ A ,
für x ∈ Rd und nennen f integrierbar (auf A), falls fχA ∈ L1 . Im Fall der Integrierbarkeitschreiben wir f ∈ L1(A) und setzen
ˆAf dλ :=
ˆRdfχA dλ .
Analog definieren wir L+(A) .
Lemma A.3 (Riemann-Integral und Lebesgue-Integral)Eine Riemann-integrierbare Funktion f : [a, b]→ R ist Lebesgue-integrierbar und es gilt
ˆ b
af(x) dx =
ˆ[a,b]
f(x) dλ(x) .

132 A. Lebesgue-Integral
Bemerkung. Für f ∈ L1(A) oder f ∈ L+(A) schreiben wir auchˆAf(x) dx :=
ˆAf(x) dλ(x) .
Satz A.4 (Satz von Fubini1)Es seien A1 ⊂ Rd und A2 ⊂ Rm Lebesgue-messbare Mengen. Ist f ∈ L+(A1 × A2) oderf ∈ L1(A1 ×A2) , so giltˆ
A1×A2
f(x, y) dλ(x, y) =
ˆA1
(ˆA2
f(x, y) dλ(y)
)dλ(x) =
=
ˆA2
(ˆA1
f(x, y) dλ(x)
)dλ(y) .
Bemerkung.
. Für f ∈ L+(A1 ×A2) nennt man obigen Satz auch Satz von Fubini-Tonelli.
. Die IntegraleˆA1
(ˆA2
f(x, y) dλ(y)
)dλ(x) und
ˆA2
(ˆA1
f(x, y) dλ(x)
)dλ(y)
werden iterierte Integrale genannt.
. Eine wesentliche Aussage des Satzes von Fubini ist, dass die bei den iteriertenIntegralen auftretenden Integranden in L1(A1) bzw. L1(A2) oder entsprechend inL+(A1) bzw. L+(A2) liegen.
Beispiel A.5 (Volumsberechnung)Wir wollen das Volumen V unter der durch z = xy gegeben Fläche über dem Bereich
A :=
(x, y) ∈ R2 : 0 ≤ x ≤ 1 , x ≤ y ≤ ex
berechnen. Es ist
V =
ˆAxy dλ(x, y) =
ˆ 1
x=0
ˆ ex
y=xxy dy dx =
ˆ 1
x=0xy2
2
∣∣∣∣exy=x
dx =e2
8.
Satz A.6 (Transformationssatz)Es seien U, V ⊂ Rd offen und ψ : U → V ein Diffeomorphismus sowie f : V → R eineFunktion. Dann gilt
f ∈ L1(V ) ⇐⇒ (f ψ) ·∣∣detψ′
∣∣ ∈ L1(U)
und im Fall der Integrierbarkeit istˆUf (ψ(x))
∣∣detψ′(x)∣∣ dλ(x) =
ˆψ(U)
f(y) dλ(y) .
1Guido Fubini, 1879–1943, italienischer Mathematiker

Anhang B
Inverse und implizite Funktionen
In diesem Abschnitt widmen wir uns nun den folgeden beiden Fragen:
. Kann eine Funktion lokal invertiert werden?
. Lässt sich eine implizite Gleichung nach bestimmten Variablen auflösen?
B.0.1 Lokale Umkehrbarkeit
Definition B.1 (Diffeomorphismus)Es seien U, V ⊂ Rd offen. Dann heißt f : U → V Diffeomorphimus, falls
. f bijektiv ist,
. f ∈ C1(U ;V ) ,
. f−1 ∈ C1(V ;U) .
Satz B.2 (Neumann-Reihe)Es sei A ∈ Rd×d mit ‖A‖ < 1 . Dann ist I −A invertierbar und
(I −A)−1 =∞∑n=0
An . (Neumann-Reihe)
Beweis. Die Reihe∑∞
n=0 ‖A‖n ist eine konvergente Majorante für∑∞
n=0An , daher kon-
vergiert∑∞
n=0An =: B absolut. Da
B(I −A) = limN→∞
N∑n=0
(An −An+1) = limN→∞
(I −AN+1) = I ,
ist I −A invertierbar und (I −A)−1 = B .
Bemerkung. Die Abbildung
inv : GLd(R)→ GLd(R) : A 7→ A−1
ist stetig , denn für A ∈ GLd(R) ist
inv(A) = (detA)−1 adj(A) .
133

134 B. Inverse und implizite Funktionen
Satz B.3 (Satz über inverse Funktionen)Es sei D ⊂ Rd offen und f ∈ C1(D;Rd) sowie ξ ∈ D . Gilt det f ′(ξ) 6= 0 , so ist f inξ lokal diffeomorph, d. h. es gibt offene Umgebungen U ⊂ D von ξ und V ⊂ Rd vonη := f(ξ) , sodass
f : U → V ein Diffeomorphismus ist.
Des Weiteren gilt∀ y ∈ V :
(f−1
)′(y) =
[f ′(f−1(y)
)]−1.
Beweis. Wir gehen in fünf Schritten vor.

B. Inverse und implizite Funktionen 135
Schritt 1: (Vereinfachende Annahmen)
. Betrachte die Abbildung
f : D → Rd : x 7→[f ′(ξ)
]−1f(x) .
Dann ist f ′(ξ) = I . Es sei also o. B. d.A. f ′(ξ) = I .
. Setze D := x ∈ Rd : x+ ξ ∈ D und
f(x) := f(x+ ξ)− f(ξ) für x ∈ D .
Dann ist f ∈ C1(D;Rd) , f(0) = 0 und f ′(0) = I . Es sei also o. B. d.A. ξ = 0 ,f(0) = 0 und f ′(0) = I .
Schritt 2: (Lokale Bijektion)
Aufgrund der Stetigkeit von f ′ existiert ein r > 0 mit
∀x ∈ B2r(0) : ‖ f ′(0)︸ ︷︷ ︸=I
−f ′(x)‖ ≤ 12 .
Betrachte zu y ∈ Rd die Abbildung
gy : B2r(0)→ Rd : x 7→ x− f(x) + y .
Für x ∈ B2r(0) ist ‖g′0(x)‖ ≤ 12 und
g0(x) = g0(tx)∣∣∣1t=0
=
ˆ 1
0g′0(tx)x dt .
Damit folgt
‖g0(x)‖ ≤ˆ 1
0‖g′0(tx)‖‖x‖ dt ≤ ‖x‖2 .
und für y ∈ Br(0) somit
‖gy(x)‖ = ‖g0(x) + y‖ ≤ ‖g0(x)‖+ ‖y‖ ≤ 2r ,
also gy(B2r(0)
)⊂ B2r(0) . Für x1, x2 ∈ B2r(0) gilt
gy(x1)− gy(x2) = g0 (x2 + t(x1 − x2))∣∣∣1t=0
=
ˆ 1
0g′0 (x1 + t(x1 − x2)) (x1 − x2) dt
und daher ist‖gy(x1)− gy(x2)‖ ≤ 1
2‖x1 − x2‖ .

136 B. Inverse und implizite Funktionen
Also ist gy : B2r(0)→ B2r(0) eine Kontraktion für alle y ∈ Br(0) und somit gilt
∀ y ∈ Br(0) ∃!x ∈ B2r(0) : f(x) = y .
Setze nun V := Br(0) und U := f−1(V ) ∩ B2r(0) und beachte für y ∈ Br(0) undx ∈ B2r(0) mit x = gy(x) , dass
‖x‖ = ‖gy(x)‖ ≤ ‖g0(x)‖+ ‖y‖ < 2r ,
also x ∈ B2r(0) . Folglich ist f : U → V bijektiv.
Schritt 3: (Stetigkeit der Inversen)
Für alle x ∈ U giltx = x− f(x) + f(x) = g0(x) + f(x) .
Es seien y1, y2 ∈ V und x1 := f−1(y1) , x2 := f−1(y2) . Dann ist
‖x1 − x2‖ ≤ ‖g0(x1)− g0(x2)‖+ ‖f(x1)− f(x2)‖ ≤ 12‖x1 − x2‖+ ‖f(x1)− f(x2)‖
und somit‖f−1(y1)− f−1(y2)‖ ≤ 2‖y1 − y2‖ .
Also ist f−1 : V → U Lipschitz-stetig und daher insbesondere stetig.
Schritt 4: (Differenzierbarkeit der Inversen)
Für y ∈ V setzen wir x := f−1(y) . Da f ′(x) = I − g′0(x) und ‖g′0(x)‖ ≤ 12 < 1 , ist f ′(x)
invertierbar. Es sei y0 ∈ V und x0 := f−1(y0) . Wir zeigen, dass f−1 in y0 differenzierbarist und (
f−1)′
(y0) =[f ′(x0)
]−1.
Aufgrund der Differenzierbarkeit von f ist
f(x)− f(x0) = f ′(x0)(x− x0) + o(‖x− x0‖) für x→ x0 .
Damit erhalten wir∥∥∥f−1(y)− f−1(y0)−[f ′(x0)
]−1(y − y0)
∥∥∥ =∥∥∥x− x0 −
[f ′(x0)
]−1(f(x)− f(x0))
∥∥∥ =
= o(‖x− x0‖) .
Da ‖x− x0‖ ≤ 2‖y − y0‖ , folgt∥∥∥f−1(y)− f−1(y0)− [f ′(x0)]−1 (y − y0)∥∥∥
‖y − y0‖≤ o(‖x− x0‖)‖x− x0‖

B. Inverse und implizite Funktionen 137
für x→ x0 . Die Stetigkeit von f−1 : V → U impliziert x→ x0 für y → y0 , also ist f−1
in y0 differenzierbar und (f−1
)′(y0) =
[f ′(f−1(y0)
)]−1.
Schritt 5: (Stetige Differenzierbarkeit der Inversen)
Für y ∈ V ist (f−1
)′(y) =
(inv f ′ f−1
)(y) .
Da inv , f ′ und f−1 : V → U stetig sind, ist f−1 ∈ C1(V ;U) .
B.0.2 Lokale Auflösbarkeit
Definition B.4 (Partielle Differentiale)Es sei D ⊂ Rd+k offen und f : D → Rk differenzierbar. Wir definieren ∂xf = ∂(x1,...,xd)fund ∂yf = ∂(y1,...,yk)f durch
f ′(x, y) = [∂xf(x, y), ∂yf(x, y)] für (x, y) ∈ D .
Satz B.5 (Satz über implizite Funktionen)Es sei D ⊂ Rd+k offen und f ∈ C1(D;Rk) sowie (ξ, η) ∈ D mit
f(ξ, η) = 0 und det ∂yf(ξ, η) 6= 0 .
Dann gibt es offene Umgebungen U ⊂ Rd von ξ und V ⊂ Rk von η mit U × V ⊂ D undeine Funktion g ∈ C1(U ;V ) , sodass
Γ(g) = (x, g(x)) : x ∈ U = (x, y) ∈ U × V : f(x, y) = 0 = f−1(0) ∩ (U × V ) .
Beweis. Betrachte die Funktion
F : D → Rd+k : (x, y) 7→[
xf(x, y)
].
Für die Funktionaldeterminante gilt
detF ′(ξ, η) = det
[Id 0
∂xf(ξ, η) ∂yf(ξ, η)
]= det ∂yf(ξ, η) 6= 0 .
Daher gibt es nach dem Satz über inverse Funktionen offene Umgebungen U ⊂ Dvon (ξ, η) und V ⊂ Rd+k von F (ξ, η) = (ξ, 0) , sodass F : U → V ein Diffeomorphismusist. Für (x, y) ∈ U ist
F (x, y) = (x, 0) ⇐⇒ (x, y) = F−1(x, 0) .

138 B. Inverse und implizite Funktionen
Zu gegebenem x nahe bei ξ ist durch (x, y) = F−1(x, 0) demnach y eindeutig bestimmt.Definiere durch g(x) := y die Funktion g in einer Umgebung von ξ . Die Funktion g iststetig differenzierbar, denn
(x, g(x)) = F−1(x, 0)
und F−1 ist stetig partiell differenzierbar. Aufgrund der Stetigkeit von g existieren offeneUmgebungen U von ξ und V von η = g(ξ) mit U × V ⊂ U und (x, g(x)) ∈ U × V füralle x ∈ U . Dann ist g ∈ C1(U ;V ) die gesuchte Funktion, denn für (x, y) ∈ U × V ist
f(x, y) = 0 ⇐⇒ F (x, y) = (x, 0) ⇐⇒ (x, y) = (x, g(x)) ⇐⇒ y = g(x) .
Bemerkung. Es sei x ∈ U . Differenziert man
f(x, g(x)) = 0
nach der Kettenregel, so erhält man
∂xf(x, g(x)) + ∂yf(x, g(x))g′(x) = 0 .
Folglich istg′(ξ) = − [∂yf(ξ, η)]−1 ∂xf(ξ, η) .

Anhang C
Integration in Kugelkoordinaten
Es sei d ∈ N mit d ≥ 3 und Ω := (0, 2π)× (0, π)d−2 . Dann ist
ψ : Ω→ Rd : (ϕ, ϑ1, . . . , ϑd−2) 7→
cosϕ sinϑ1 sinϑ2 · . . . · sinϑd−2
sinϕ sinϑ1 sinϑ2 · . . . · sinϑd−2
cosϑ1 sinϑ2 · . . . · sinϑd−2
. . .cosϑd−3 sinϑd−2
cosϑd−2
eine Einbettung mit ψ(Ω) = Sd−1 \ N für eine Nullmenge N ⊂ Sd−1 . Wir setzen nunϑ := (ϑ1, . . . , ϑd−2) für (ϕ, ϑ1, . . . , ϑd−2) ∈ Ω . Man kann zeigen, etwa mit Induktion, dass√
gψ(ϕ, ϑ) = sinϑ1 sin2 ϑ2 · . . . · sind−2 ϑd−2 .
Das Oberflächenmaß σ auf Sd−1 ist also durch
dσ = sinϑ1 sin2 ϑ2 · . . . · sind−2 ϑd−2 dλ(ϕ, ϑ)
gegeben. Setzt man nun
Ψ(r, ϕ, ϑ) := rψ(ϕ, ϑ) für (r, ϕ, ϑ) ∈ (0,∞)× Ω ,
so gilt ∣∣det Ψ′(r, ϕ, ϑ)∣∣ = rd−1
√gψ(ϕ, ϑ)
und daher erhält man für f ∈ L1 nach dem Transformationssatz und dem Satzvon Fubiniˆ
Rdf(x) dλ(x) =
[x = rω
]=
ˆ[0,∞)
ˆSd−1
f(rω) rd−1 dσ(ω) dλ(r) .
Man spricht hierbei von einer Transformation in d-dimensionale Kugelkoordinaten.Dies kann verwendet werden, um für R > 0 zu zeigen, dass
σ(RSd−1
)= Rd−1 2πd/2
Γ(d/2)und λ (BR(0)) =
Rdπd/2
Γ(d/2 + 1),
wobei BR(0) =x ∈ Rd : ‖x‖2 < 1
.
139


Index
abgeschlossene Menge, 21Ableitung, 38Abschluss, 22Abstand, 17, 82Äquivalenz von Normen, 18allgmeine Lösung, 81Anfangsbedingung, 66Anfangswertproblem, 66Anfangszeit, 66Approximationssatz von Fejér, 109autonomes System, 86
Banachscher Fixpunktsatz, 27begleitendes Zweibein, 31Beschleunigungsvektor, 30Besselsche Ungleichung, 118Bogenlänge, 34
Cauchy-Folge, 21Cauchy-Produkt, 98Cauchy-Schwarz-Ungleichung, 19Cesàro-Mittel, 108charakteristische Funktion, 129charakteristisches Polynom, 97Cosinus-Sinus-Darstellung, 109
Darstellungssatz, 109Definitheit, 47Diffeomorphismus, 133Differential, 38Differentialgleichung in expliziter Form,
66Differentialgleichung in impliziter Form,
66Differentialgleichung mit trennbaren Va-
riablen, 69
Dirichlet-Kern, 107Dirichletsches Lemma, 115
Einparameter-Gruppe, 87einseitige Ableitung, 114euklidische Norm, 20Euler-Verfahren, 74
Feinheit, 1Fejér-Kern, 107Fejér-Polynom, 108Fixpunktiteration, 27Fixpunktsatz, 27Fourier-Koeffizient, 106Fourier-Reihe, 106Fundamentalsystem, 90
geometrische Darstellung, 67Geschwindigkeitsvektor, 29Globaler Existenz- und Eindeutigkeits-
satz, 80Gradient, 42Grenzwert, 24
höhere totale Ableitungen, 44Hölder-Ungleichung, 18Hauptsatz der Differential- und Integral-
rechnung, 2homogenes lineares System, 89
inhomogenes lineares System, 89Inneres, 22Integralkurve, 67Isoklinen, 67isolierte Extrema, 46iteriertes Integral, 132
Jacobi-Matrix, 38
141

142 Index
Jordan-Kästchen, 96Jordansche Normalform, 96
Kettenregel, 41Kompaktheit, 23Konvergenz einer Folge, 21Konvergenz im quadratischen Mittel, 118Konvergenz von Fourier-Reihen im qua-
dratischen Mittel, 118Konvexe Menge, 42Kozyklus-Eigenschaft, 82Kugelkoordinaten, 139Kurve, 30
Lagrange-Funktion, 50Lagrange-Multiplikatorenregel, 50Lebesgue-Integral, 129, 130Lebesgue-integrierbar, 130Lebesgue-Maß, 131Lebesgue-messbar, 131Lebesgue-Nullmenge, 131Leibniz-Reihe, 110linear beschränkt, 83lineare Differentialgleichungen erster Ord-
nung, 71lineares System, 89Lipschitz-stetig, 26Lokale Extrema, 46Losungskurve, 67Losungsportrait, 67
Matrixexponentialfunktion, 93maximale Lösung, 81maximales Lösungsintervall, 81Metrik, 17Minkowski-Ungleichung, 19Mittelwertsatz, 41
Nebenbedingung, 50Neumann-Reihe, 133Newton-Verfahren, 49nilpotente Matrix, 93
Niveaumenge, 43Norm, 17Normaleneinheitsvektor, 31normierter Raum, 17
offene Kugel, 21offene Menge, 21Operatornorm, 26Ordnung, 65
p-Norm, 18parameterabhängige Resolvente, 101Parameterwechsel, 30Parametrisierung nach der Bogenlänge,
34Parsevalsche Gleichung, 118Partialbruchzerlegung des Cotangens, 113partiell differenzierbar, 35partielle Ableitung, 35partielle Differentiale, 137partielle Integration, 2partikulare Losung, 90Periode, 105periodische Funktion, 105Phasenportrat, 87Picard-Iterierte, 73Potenzreihenansatz, 100punktweise Konvergenz nach Dirichlet, 114
Rand, 22Randpunkt, 22Randverhalten der maximalen Lösung, 82Reduktion auf ein System erster Ordnung,
66regulär, 30rektifizierbar, 32Resolvente, 90Richtungsableitung, 42Richtungsfeld, 67Riemann-Integral, 1Riemann-Lebesgue-Lemma, 114Riemann-Summe, 1

Index 143
Riemannsches Lemma, 115
Satz über implizite Funktionen, 137Satz über inverse Funktionen, 134Satz vom Minimum und Maximum, 25Satz von der gleichmäßigen Stetigkeit, 25Satz von Fubini, 132Satz von Heine-Borel, 23Satz von Schwarz, 36Schrankensatz, 42Spaltensummennorm, 27Spektralnorm, 27stückweise stetig differenzierbar, 117stetig differenzierbar, 40Stetige Abhängigkeit von den Daten, 84Stetigkeit, 24Substitutionsregel, 3Superpositionsprinzip, 89System gewöhnlicher Differentialgleichun-
gen, 65
Tangenteneinheitsvektor, 30Tangentialvektor, 29Taylor-Formel, 44Taylor-Polynom, 44Topologie, 22Totale Differenzierbarkeit, 38Trajektorie, 87trennbare Variablen, 69Treppenfunktion, 115, 129trigonometrisches Polynom, 105
Überdeckungssatz, 23Umgebung, 21Umgekehrte Dreiecksungleichung, 17Umparametrisierung, 30
Variation der Konstanten, 71, 91Variationsgleichung, 101vektorwertig, 37Verbindungsstrecke, 41vollständiges Vektorfeld, 87
Wärmeleitungsgleichung, 111Weg, 29Wellengleichung, 36Wohlgestelltheit, 84Wronski-Determinante, 92
Zeilensummennorm, 27Zerlegung, 1zweimal partiell differenzierbar, 36


Literaturverzeichnis
[Arn01] Arnold, V.: Gewöhnliche Differentialgleichungen. Zweite Auflage. Springer,2001
[Aul10] Aulbach, B.: Gewöhnliche Differenzialgleichungen. Zweite Auflage. SpektrumAkademischer Verlag, 2010
[For11] Forster, O.: Analysis 2. Neunte Auflage. Vieweg+Teubner, 2011
[Hel13a] Hell, T.: Einführung in die Stochastik. Skriptum zu den Vorlesungen Stochas-tik 1 und Statistik. Universität Innsbruck, 2013
[Hel13b] Hell, T.: Analysis 2. Skriptum zur Vorlesung. Universität Innsbruck, Som-mersemester 2013
[Hel17] Hell, T.: Analysis 1. Skriptum zur Vorlesung. Universität Innsbruck, Winter-semester 2016/2017
[Heu09] Heuser, H.: Gewöhnliche Differentialgleichungen. Sechste Auflage. View-eg+Teubner, 2009
[Kir11] Kirchner, G.: Gewöhnliche Differentialgleichungen. Skriptum zur Vorlesung.Universität Innsbruck, Wintersemester 2010/2011
[MV01] Meyberg, K. ; Vachenauer, P.: Höhere Mathematik 2. Vierte Auflage.Springer, 2001
[SS03] Stein, E.M. ; Shakarchi, R.: Complex analysis. Princeton University Press,2003
[Wal00] Walter, W.: Gewöhnliche Differentialgleichungen. Siebte Auflage. Springer,2000
145