3 Projektierung - SEW-EURODRIVE · GSE2004 31 3 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20...
26
26 GSE2004 3 Weiterführende Dokumentation Projektierung 3 Projektierung 3.1 Weiterführende Dokumentation Ergänzend zu den Informationen in diesem Katalog bietet Ihnen SEW-EURODRIVE umfassende Dokumentation über das gesamte Themengebiet der elektrischen An- triebstechnik. Dies sind vor allem die Druckschriften der Reihe "Praxis der Antriebstech- nik" und die Handbücher und Kataloge zu den elektronisch geregelten Antrieben. Des Weiteren finden Sie auf der Homepage von SEW-EURODRIVE (http://www.sew- eurodrive.de) eine große Auswahl unserer Dokumentationen in verschiedenen Spra- chen zum Download. Nachfolgend wird die für die Projektierung interessante weiterfüh- rende Dokumentation aufgelistet. Diese Druckschriften können Sie bei SEW- EURODRIVE bestellen. Praxis der Antriebstechnik • Antriebe projektieren. • Geregelte Drehstromantriebe. • Servo-Antriebe. • EMV in der Antriebstechnik. • Explosionsgeschützte Antriebe gemäß EU-Richtlinie 94/9/EG. Elektronik-Doku- mentation • Systemhandbuch MOVIDRIVE ® MD_60A. • Systemhandbuch MOVIDRIVE ® MDX60/61B. • Systemhandbuch MOVIDRIVE ® compact. Mechanische Bremsen • Handbuch "Bremsen und Zubehör".
Transcript of 3 Projektierung - SEW-EURODRIVE · GSE2004 31 3 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20...
26 GSE2004
3 Weiterführende DokumentationProjektierung
3 Projektierung
3.1 Weiterführende Dokumentation
Ergänzend zu den Informationen in diesem Katalog bietet Ihnen SEW-EURODRIVEumfassende Dokumentation über das gesamte Themengebiet der elektrischen An-triebstechnik. Dies sind vor allem die Druckschriften der Reihe "Praxis der Antriebstech-nik" und die Handbücher und Kataloge zu den elektronisch geregelten Antrieben. DesWeiteren finden Sie auf der Homepage von SEW-EURODRIVE (http://www.sew-eurodrive.de) eine große Auswahl unserer Dokumentationen in verschiedenen Spra-chen zum Download. Nachfolgend wird die für die Projektierung interessante weiterfüh-rende Dokumentation aufgelistet. Diese Druckschriften können Sie bei SEW-EURODRIVE bestellen.
Praxis der Antriebstechnik
• Antriebe projektieren.
• Geregelte Drehstromantriebe.
• Servo-Antriebe.
• EMV in der Antriebstechnik.
• Explosionsgeschützte Antriebe gemäß EU-Richtlinie 94/9/EG.
Elektronik-Doku-mentation
• Systemhandbuch MOVIDRIVE® MD_60A.
• Systemhandbuch MOVIDRIVE® MDX60/61B.
• Systemhandbuch MOVIDRIVE® compact.
Mechanische Bremsen
• Handbuch "Bremsen und Zubehör".
GSE2004 27
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Daten zur Antriebs- und GetriebeauslegungProjektierung
3.2 Daten zur Antriebs- und Getriebeauslegung
Damit die Komponenten für Ihren Antrieb eindeutig festgelegt werden können, müssenbestimmte Daten bekannt sein. Diese sind:
Daten für die Antriebsauslegung Ihr Eintrag
i Getriebeübersetzung
ϕ Verdrehspiel [ ’ ]
ηG Wirkungsgrad Getriebe
na max Maximale Abtriebsdrehzahl [min-1]
nam Mittlere Abtriebsdrehzahl des Getriebes [min-1]
ne Eintriebsdrehzahl [min-1]
nem Mittlere Eintriebsdrehzahl [min-1]
JG Massenträgheitsmoment des Getriebes [kgm2]
Jext Massenträgheitsmoment (extern) reduziert auf die Motorwelle [kgm2]
JMot Massenträgheitsmoment des Motors [kgm2]
JLast Massenträgheitsmoment der Last [kgm2]
k Massenträgheitsverhältnis Jext / JMot
M1...Mn Abtriebsmoment im Zeitabschnitt t1 bis tn [Nm]
MDYN Dynamisches Grenzmoment des Servomotors [Nm]
Ma max Maximales Abtriebsdrehmoment [Nm]
Me max Maximales Eintriebsdrehmoment [Nm]
Mmax Maximales Abtriebsdrehmoment des zu projektierenden Antriebs
[Nm]
Ma (t) Beschleunigungs- und Bremsmoment [Nm]
Meff effektiver Drehmomentbedarf (bezogen auf den Motor) [Nm]
PBr Bremsleistung [W]
PBr_peak Spitzenbremsleistung [W]
PBr_tn Bremsleistung im Abschnitt tn [W]
t1...tn Zeitabschnitt 1 bis n [min]
tz Zykluszeit [s]
FAx Axialkraft (Zug und Druck) an der Abtriebswelle [N]
FR Vorhandene Querkraft an der Abtriebswelle [N]
FRa Zulässige Querkraft an der Abtriebswelle. Es wird Kraftangriff an Wellen-mitte vorausgesetzt. Falls nicht, bitte genauen Angriffspunkt mit Angriffswinkel und Drehrichtung der Welle zur Nachrechnung angeben
[N]
FRxL Zulässige Querkraft an der Stelle x nach der Lagerlebensdauer [N]
FRxW Zulässige Querkraft an der Stelle x nach der Wellenfestigkeit [N]
x Abstand des Querkraftangriffs vom Wellenbund [mm]
a, b, c, f Getriebekonstanten bzgl. der Querkraftumrechnung
S.., ..%ED Betriebsart und relative Einschaltdauer ED, ersatzweise kann auch das genaue Belastungsspiel angegeben werden
-
Geforderte Positioniergenauigkeit und Drehzahlbereich
R-, F-, K-, S- Geforderte Getriebeart und Bauform -
M1 - M6 Bauform (→ Kap. Bauformen) -
IP.. Geforderte Schutzart -
ϑ Umg Umgebungstemperatur [°C]
H Aufstellhöhe [m ü. NN]

28 GSE2004
3 Daten zur Antriebs- und GetriebeauslegungProjektierung
Ermittlung der Applikations-daten
Zur Auslegung des Antriebs werden zunächst die Daten der anzutreibenden Maschine(Masse, Drehzahl, Stellbereich usw.) benötigt.
Mit diesen Daten werden die erforderliche Leistung, das Drehmoment und die Drehzahlbestimmt. Hilfestellung gibt die SEW-Druckschrift "Praxis der Antriebstechnik / Antriebeprojektieren" oder die SEW-Projektierungssoftware PRODRIVE®.
GSE2004 29
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsablaufProjektierung
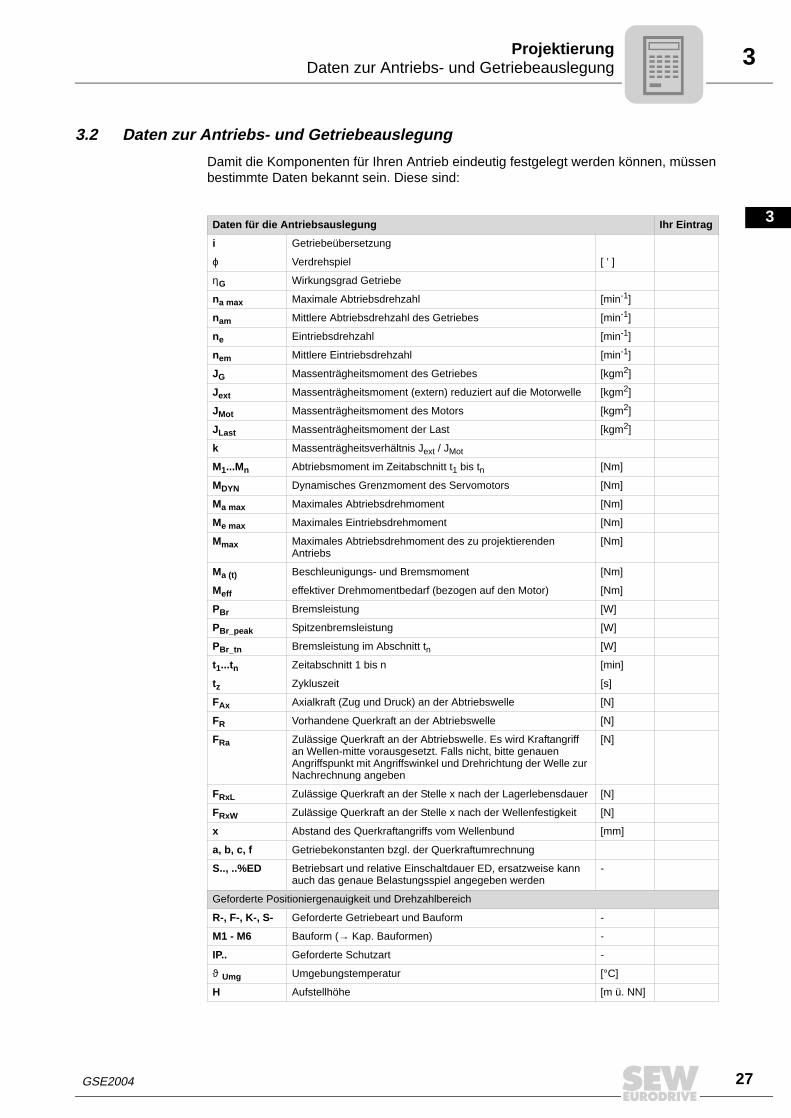
3.3 Projektierungsablauf
Beispiel Das folgende Ablaufdiagramm zeigt schematisch die Vorgehensweise bei der Projektie-rung eines Positionierantriebes. Der Antrieb besteht aus einem Getriebemotor, der voneinem Umrichter gespeist wird.
Notwendige Informationen über die anzutreibende Maschine– technische Daten und Umgebungsbedingungen,– Positioniergenauigkeit,– Drehzahl-Stellbereich,– Berechnung des Fahrzyklus.
↓
Berechnung der relevanten Applikationsdaten– Fahrdiagramm– Drehzahlen,– statische, dynamische Drehmomente,– generatorische Leistung.
↓
Getriebeauswahl– Festlegung von Getriebegröße, Getriebeübersetzung und Getriebeausführung,– Überprüfung der Positioniergenauigkeit,– Überprüfung der Getriebebelastung (Ma max ≥ Ma (t)).– Überprüfung der Eintriebsdrehzahl (Planschverluste)
↓
Motorauswahl– maximales Drehmoment,– bei dynamischen Antrieben: effektives Drehmoment bei mittlerer Drehzahl,– maximale Drehzahl,– dynamische und thermische Drehmomentkurven beachten,– Auswahl des richtigen Gebers,– Motorausstattung (Bremse, Steckverbinder, TF-Auswahl usw.).
↓
Auswahl des Umrichters– Motor-Umrichter-Zuordnung,– Dauerstrom und Spitzenstrom bei stromgeführten Umrichtern.
↓
Auswahl des Bremswiderstandes– anhand der berechneten generatorischen Leistung, ED und Spitzenbremsleistung.
↓
Optionen– EMV-Maßnahmen,– Bedienung/Kommunikation,– Zusatzfunktionen.
↓
Prüfen, ob alle Anforderungen erfüllt werden.

30 GSE2004
3 Projektierung GetriebeProjektierung
3.4 Projektierung Getriebe
Eigenschaften der Getriebe
Der Wirkungsgrad der Getriebe wird hauptsächlich durch die Verzahnungs- und Lager-reibung bestimmt. Beachten Sie, dass der Anlaufwirkungsgrad eines Getriebes immerkleiner ist als der Wirkungsgrad bei Betriebsdrehzahl. Besonders ausgeprägt ist dies beiSchnecken-Winkelgetriebemotoren.
R-, F-, K-Getriebe Bei Stirnrad-, Flach- und Kegelradgetrieben liegt der Wirkungsgrad je nach Anzahl derVerzahnungsstufen zwischen 94 % (3-stufig) und 98 % (1-stufig).
S-Getriebe Die Verzahnungen der Schneckengetriebe verursachen einen hohen Gleitreibungsan-teil. Aus diesem Grund können diese Getriebe höhere Verzahnungsverluste und somitniedrigere Wirkungsgrade als die R-, F- oder K-Getriebe aufweisen.
Dies ist abhängig von folgenden Faktoren:
• Übersetzung der Schneckenstufe,
• Eintriebsdrehzahl,
• Getriebetemperatur.
Die SEW-Schneckengetriebe sind als Stirnrad-Schnecke konzipiert und haben deshalbeinen deutlich besseren Wirkungsgrad als reine Schneckengetriebe. Bei sehr großenÜbersetzungen der Schneckenstufe kann der Wirkungsgrad η < 0,5 werden.
Selbsthemmung Bei rücktreibenden Drehmomenten an Schneckengetrieben gilt der Wirkungsgradη’ = 2 - 1/η, also deutlich geringer als der Vorwärtswirkungsgrad η. Ist der Vorwärtswir-kungsgrad η ≤ 0,5, kann das Schneckengetriebe selbsthemmend sein. Soll die Brems-wirkung der Selbsthemmung technisch genutzt werden, bitten wir um Rückfrage beiSEW-EURODRIVE.
Einlaufphase Bei neuen Schneckengetrieben sind die Zahnflanken noch nicht vollständig geglättet.Deshalb ist während der Einlaufphase der Reibungswinkel größer und somit der Wir-kungsgrad niedriger als im späteren Betrieb. Dieser Effekt verstärkt sich mit größer wer-dender Übersetzung. Folgende Werte müssen während der Einlaufphase vom listen-mäßig angegebenen Wirkungsgrad abgezogen werden:
Die Einlaufphase dauert üblicherweise 24 Stunden. Die Schneckengetriebe erreichendie listenmäßig angegebenen Nennwirkungsgrade, wenn:
• das Getriebe vollständig eingelaufen ist,
• das Getriebe die Nenntemperatur erreicht hat,
• der vorgeschriebene Getriebeschmierstoff eingefüllt ist,
• das Getriebe im Nennlastbereich arbeitet.
Gangzahl i-Bereich η−Reduzierung
2-gängig ca. 20 ... 75 ca. 6 %
5-gängig ca. 6 ... 25 ca. 3 %
GSE2004 31
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Projektierung GetriebeProjektierung
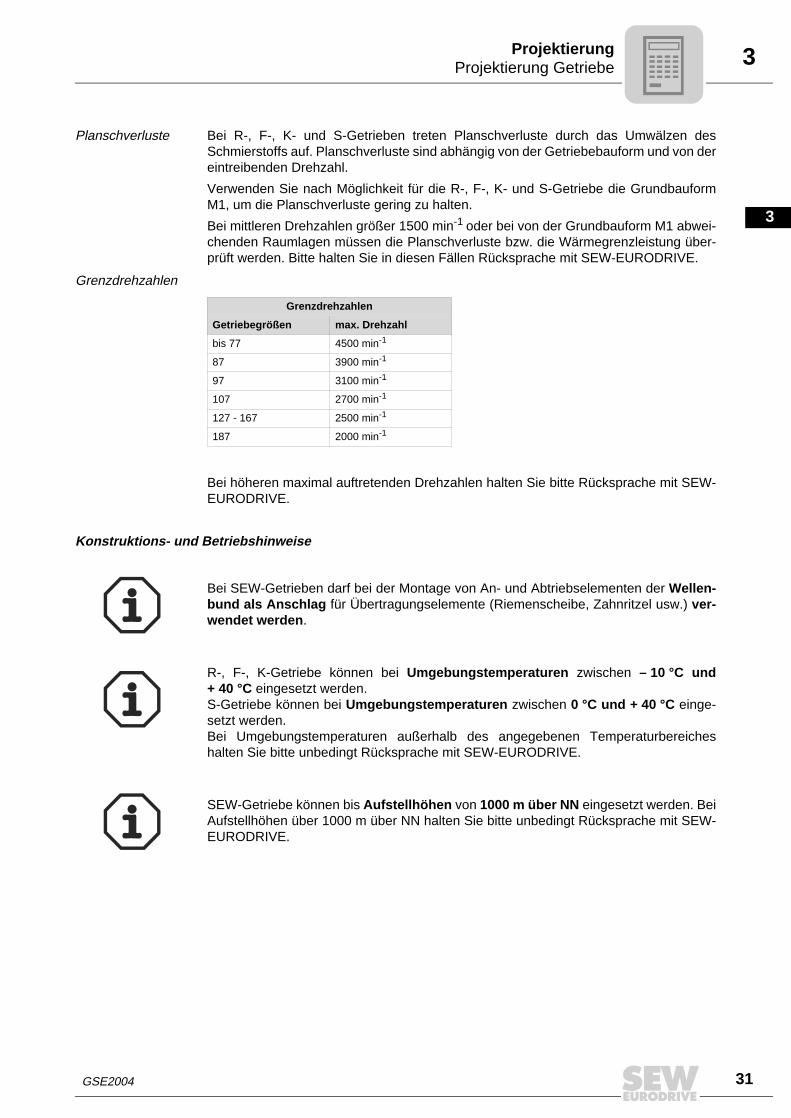
Planschverluste Bei R-, F-, K- und S-Getrieben treten Planschverluste durch das Umwälzen desSchmierstoffs auf. Planschverluste sind abhängig von der Getriebebauform und von dereintreibenden Drehzahl.
Verwenden Sie nach Möglichkeit für die R-, F-, K- und S-Getriebe die GrundbauformM1, um die Planschverluste gering zu halten.
Bei mittleren Drehzahlen größer 1500 min-1 oder bei von der Grundbauform M1 abwei-chenden Raumlagen müssen die Planschverluste bzw. die Wärmegrenzleistung über-prüft werden. Bitte halten Sie in diesen Fällen Rücksprache mit SEW-EURODRIVE.
Grenzdrehzahlen
Bei höheren maximal auftretenden Drehzahlen halten Sie bitte Rücksprache mit SEW-EURODRIVE.
Konstruktions- und Betriebshinweise
Grenzdrehzahlen
Getriebegrößen max. Drehzahl
bis 77 4500 min-1
87 3900 min-1
97 3100 min-1
107 2700 min-1
127 - 167 2500 min-1
187 2000 min-1
Bei SEW-Getrieben darf bei der Montage von An- und Abtriebselementen der Wellen-bund als Anschlag für Übertragungselemente (Riemenscheibe, Zahnritzel usw.) ver-wendet werden.
R-, F-, K-Getriebe können bei Umgebungstemperaturen zwischen – 10 °C und+ 40 °C eingesetzt werden. S-Getriebe können bei Umgebungstemperaturen zwischen 0 °C und + 40 °C einge-setzt werden.Bei Umgebungstemperaturen außerhalb des angegebenen Temperaturbereicheshalten Sie bitte unbedingt Rücksprache mit SEW-EURODRIVE.
SEW-Getriebe können bis Aufstellhöhen von 1000 m über NN eingesetzt werden. BeiAufstellhöhen über 1000 m über NN halten Sie bitte unbedingt Rücksprache mit SEW-EURODRIVE.
32 GSE2004
3 Quer- und AxialkräfteProjektierung
3.5 Quer- und Axialkräfte
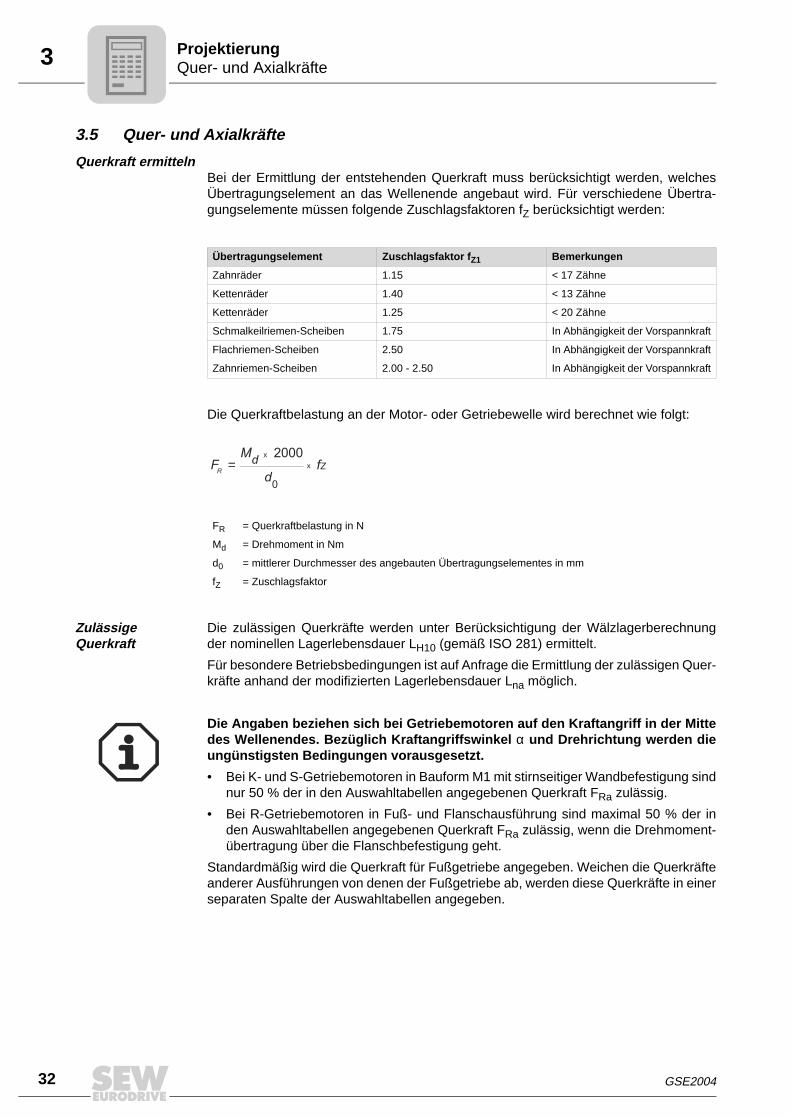
Querkraft ermittelnBei der Ermittlung der entstehenden Querkraft muss berücksichtigt werden, welchesÜbertragungselement an das Wellenende angebaut wird. Für verschiedene Übertra-gungselemente müssen folgende Zuschlagsfaktoren fZ berücksichtigt werden:
Die Querkraftbelastung an der Motor- oder Getriebewelle wird berechnet wie folgt:
Zulässige Querkraft
Die zulässigen Querkräfte werden unter Berücksichtigung der Wälzlagerberechnungder nominellen Lagerlebensdauer LH10 (gemäß ISO 281) ermittelt.
Für besondere Betriebsbedingungen ist auf Anfrage die Ermittlung der zulässigen Quer-kräfte anhand der modifizierten Lagerlebensdauer Lna möglich.
Standardmäßig wird die Querkraft für Fußgetriebe angegeben. Weichen die Querkräfteanderer Ausführungen von denen der Fußgetriebe ab, werden diese Querkräfte in einerseparaten Spalte der Auswahltabellen angegeben.
Übertragungselement Zuschlagsfaktor fZ1 Bemerkungen
Zahnräder 1.15 < 17 Zähne
Kettenräder 1.40 < 13 Zähne
Kettenräder 1.25 < 20 Zähne
Schmalkeilriemen-Scheiben 1.75 In Abhängigkeit der Vorspannkraft
Flachriemen-Scheiben 2.50 In Abhängigkeit der Vorspannkraft
Zahnriemen-Scheiben 2.00 - 2.50 In Abhängigkeit der Vorspannkraft
FM
df
R
dZ=
2000
0
FR = Querkraftbelastung in N
Md = Drehmoment in Nm
d0 = mittlerer Durchmesser des angebauten Übertragungselementes in mm
fZ = Zuschlagsfaktor
Die Angaben beziehen sich bei Getriebemotoren auf den Kraftangriff in der Mittedes Wellenendes. Bezüglich Kraftangriffswinkel α und Drehrichtung werden dieungünstigsten Bedingungen vorausgesetzt.
• Bei K- und S-Getriebemotoren in Bauform M1 mit stirnseitiger Wandbefestigung sindnur 50 % der in den Auswahltabellen angegebenen Querkraft FRa zulässig.
• Bei R-Getriebemotoren in Fuß- und Flanschausführung sind maximal 50 % der inden Auswahltabellen angegebenen Querkraft FRa zulässig, wenn die Drehmoment-übertragung über die Flanschbefestigung geht.

GSE2004 33
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Quer- und AxialkräfteProjektierung
Höhere zulässige Querkräfte
Die genaue Berücksichtigung des Kraftangriffswinkels α und der Drehrichtung kanneine höhere Querkraftbelastung zulassen. Des Weiteren können durch den Einbau vonverstärkten Lagern, vor allem bei R-, F- und K-Getrieben, höhere Belastungen der Ab-triebswelle zugelassen werden. Bitte halten Sie in diesem Fall Rücksprache mit SEW-EURODRIVE.
Definition des Kraftangriffes
Der Kraftangriff wird gemäß dem folgenden Bild definiert:
Zulässige Axial-kräfte
Liegt keine Querkraftbelastung vor, ist als Axialkraft FA (Zug oder Druck) 50% der Quer-kraft gemäß Auswahltabellen zulässig. Dies gilt für folgende Getriebemotoren:
• Stirnradgetriebemotoren mit Ausnahme von R..137... bis R..167...
• Flach- und Kegelradgetriebemotoren mit Vollwelle mit Ausnahme von F97...
• Schneckengetriebemotoren mit Vollwelle.
02355DXXBild 1: Definition des Kraftangriffs
FX = zulässige Querkraft an der Stelle x [N]
FA = zulässige Axialkraft [N]
α α
0° 0°
X
FX
FA
Bitte halten Sie Rücksprache mit SEW-EURODRIVE bei allen anderen Getriebeausfüh-rungen und wenn wesentlich stärkere Axialkräfte oder kombinierte Belastungen ausQuerkraft und Axialkraft auftreten.
34 GSE2004
3 Quer- und AxialkräfteProjektierung
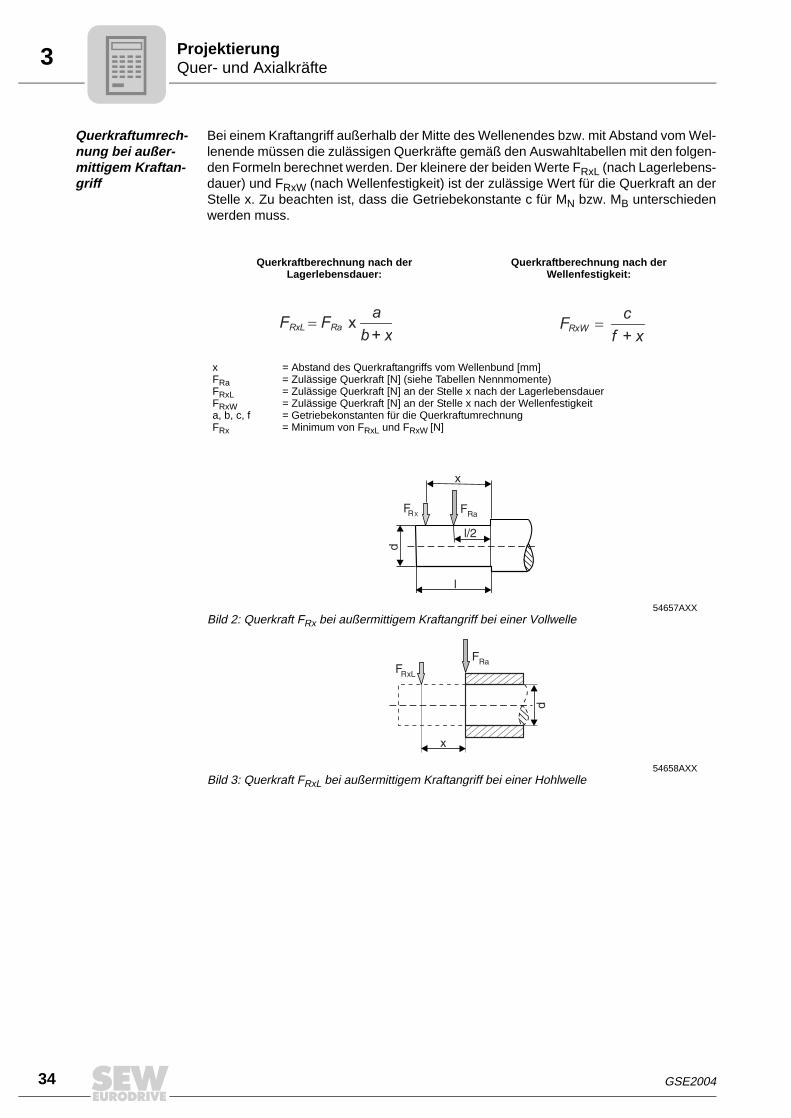
Querkraftumrech-nung bei außer-mittigem Kraftan-griff
Bei einem Kraftangriff außerhalb der Mitte des Wellenendes bzw. mit Abstand vom Wel-lenende müssen die zulässigen Querkräfte gemäß den Auswahltabellen mit den folgen-den Formeln berechnet werden. Der kleinere der beiden Werte FRxL (nach Lagerlebens-dauer) und FRxW (nach Wellenfestigkeit) ist der zulässige Wert für die Querkraft an derStelle x. Zu beachten ist, dass die Getriebekonstante c für MN bzw. MB unterschiedenwerden muss.
Querkraftberechnung nach derLagerlebensdauer:
Querkraftberechnung nach derWellenfestigkeit:
xFRaFRxLFRxWa, b, c, fFRx
= Abstand des Querkraftangriffs vom Wellenbund [mm]= Zulässige Querkraft [N] (siehe Tabellen Nennmomente)= Zulässige Querkraft [N] an der Stelle x nach der Lagerlebensdauer= Zulässige Querkraft [N] an der Stelle x nach der Wellenfestigkeit= Getriebekonstanten für die Querkraftumrechnung= Minimum von FRxL und FRxW [N]
54657AXXBild 2: Querkraft FRx bei außermittigem Kraftangriff bei einer Vollwelle
54658AXXBild 3: Querkraft FRxL bei außermittigem Kraftangriff bei einer Hohlwelle
x b
aFF RaRxL
+ x =
x f
c F RxW
+ =
GSE2004 35
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Quer- und AxialkräfteProjektierung
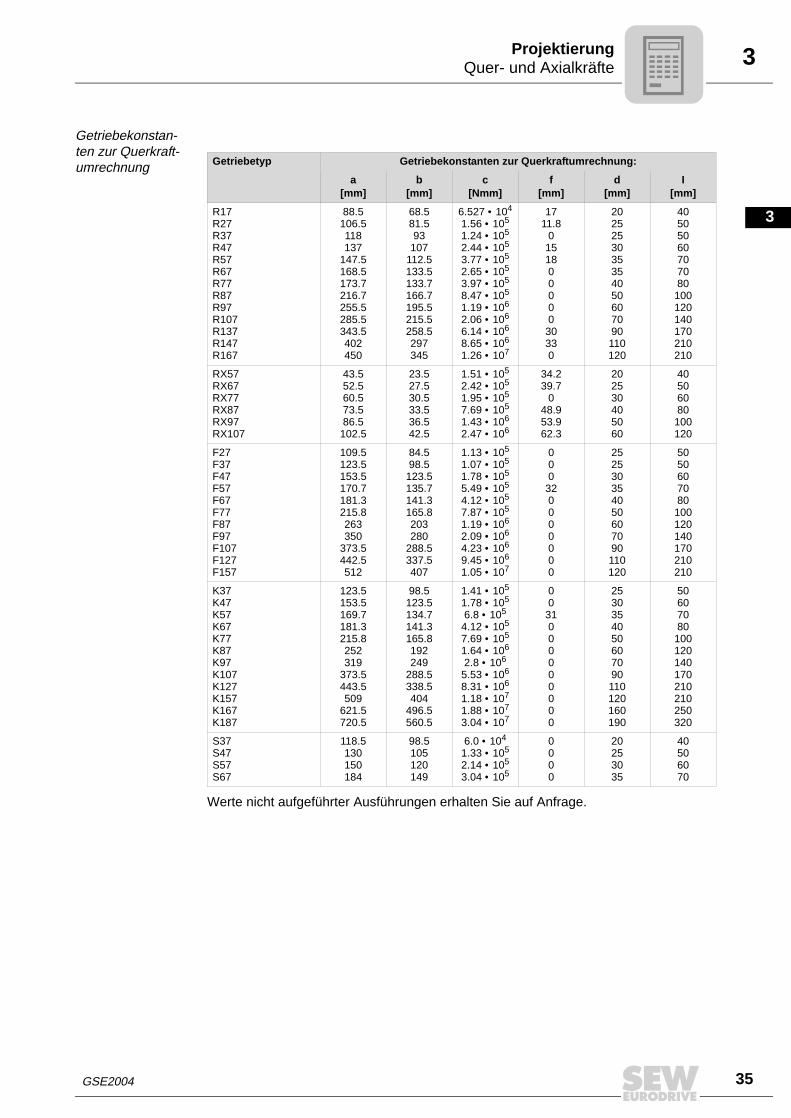
Getriebekonstan-ten zur Querkraft-umrechnung
Werte nicht aufgeführter Ausführungen erhalten Sie auf Anfrage.
Getriebetyp Getriebekonstanten zur Querkraftumrechnung:
a[mm]
b[mm]
c[Nmm]
f[mm]
d[mm]
I[mm]
R17R27R37R47R57R67R77R87R97R107R137R147R167
88.5106.5118137
147.5168.5173.7216.7255.5285.5343.5402450
68.581.593
107112.5133.5133.7166.7195.5215.5258.5297345
6.527 • 104
1.56 • 105
1.24 • 105
2.44 • 105
3.77 • 105
2.65 • 105
3.97 • 105
8.47 • 105
1.19 • 106
2.06 • 106
6.14 • 106
8.65 • 106
1.26 • 107
1711.8
0151800000
30330
2025253035354050607090110120
40505060707080
100120140170210210
RX57RX67RX77RX87RX97RX107
43.552.560.573.586.5
102.5
23.527.530.533.536.542.5
1.51 • 105
2.42 • 105
1.95 • 105
7.69 • 105
1.43 • 106
2.47 • 106
34.239.7
048.953.962.3
202530405060
40506080
100120
F27F37F47F57F67F77F87F97F107F127F157
109.5123.5153.5170.7181.3215.8263350
373.5442.5512
84.598.5
123.5135.7141.3165.8203280
288.5337.5407
1.13 • 105
1.07 • 105
1.78 • 105
5.49 • 105
4.12 • 105
7.87 • 105
1.19 • 106
2.09 • 106
4.23 • 106
9.45 • 106
1.05 • 107
000
320000000
252530354050607090110120
5050607080
100120140170210210
K37K47K57K67K77K87K97K107K127K157K167K187
123.5153.5169.7181.3215.8252319
373.5443.5509
621.5720.5
98.5123.5134.7141.3165.8192249
288.5338.5404
496.5560.5
1.41 • 105
1.78 • 105
6.8 • 105
4.12 • 105
7.69 • 105
1.64 • 106
2.8 • 106
5.53 • 106
8.31 • 106
1.18 • 107
1.88 • 107
3.04 • 107
00
31000000000
2530354050607090110120160190
50607080
100120140170210210250320
S37S47S57S67
118.5130150184
98.5105120149
6.0 • 104
1.33 • 105
2.14 • 105
3.04 • 105
0000
20253035
40506070
36 GSE2004
3 Projektierung ServomotorProjektierung
3.6 Projektierung Servomotor
Eigenschaften von synchronen und asynchronen Servomotoren
Synchrone Servomotoren
Synchrone Servomotoren sind permanenterregte Synchronmaschinen. Eigenschaftender SEW-Sychronservomotoren sind:
• Stillstandsmoment von 1 bis 68 Nm, mit Fremdlüfter bis 95 Nm.
• Hohe Dynamik (Nennmoment / Massenträgheitsmoment des Motors).
• Hohe Schutzart (IP65).
• Robustes Gebersystem (Resolver).
• Das optimale Gebersystem mit Sinus-, Cosinusgeber ermöglicht einen sehr hohenStellbereich bis zu 1:5000.
• Kleine Drehzahlen können mit einem optimalen Gebersystem mit hoher Genauigkeitgefahren werden.
• Hohe Drehzahlen bis 6000 min-1 ohne Feldschwächbetrieb stellbar.
• Hohes Dauerdrehmoment bei kleinen Drehzahlen und bei Stillstand ohne Fremd-lüfter.
• Hohe Überlastbarkeit.
• NeFeB-Magnete, Permanentmagnete mit hoher magnetischer Felddichte.
Asynchrone Servomotoren
Asynchrone Servomotoren sind dynamische Drehstrom-Asynchronmaschinen mit denEigenschaften:
• Motor-Nennmomente von 2.5 bis 200 Nm.
• Anwendungen mit sehr hohem Lastträgheitsmoment können realisiert werden.
• Das Gebersystem ermöglicht einen sehr hohen Stellbereich (bis 1:5000).
• Kleine Drehzahlen unter 1 min-1 können mit hoher Genauigkeit gefahren werden.
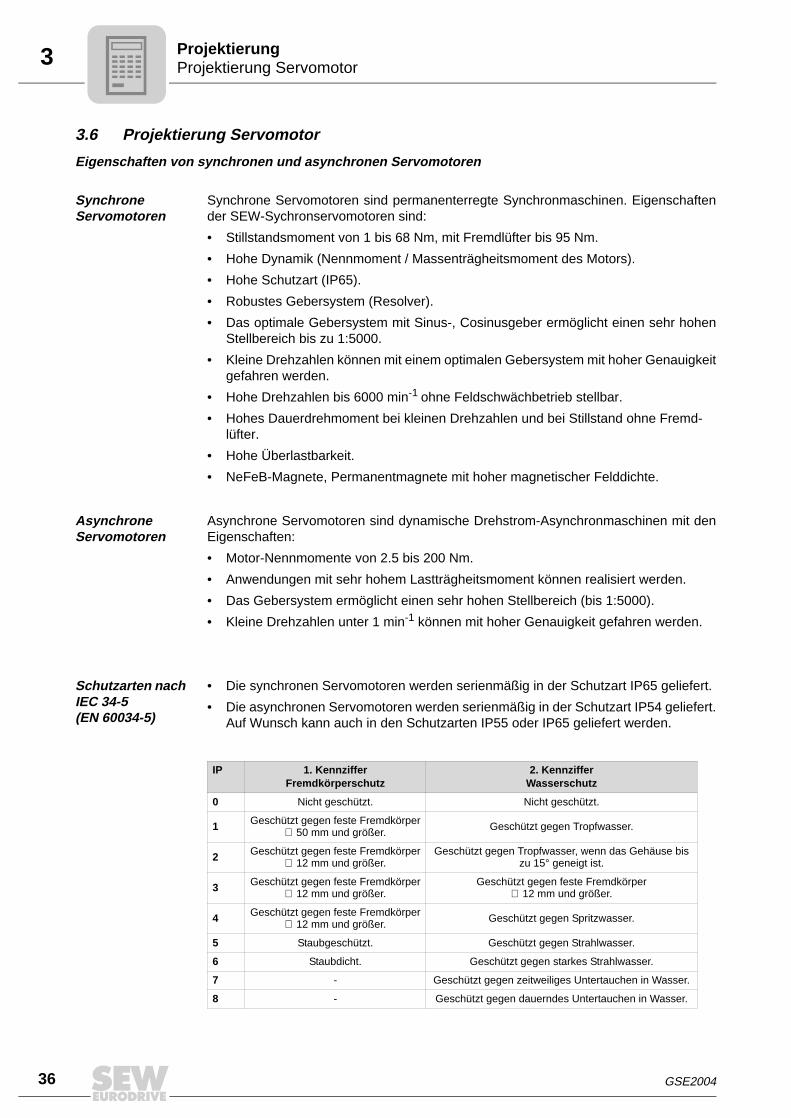
Schutzarten nach IEC 34-5 (EN 60034-5)
• Die synchronen Servomotoren werden serienmäßig in der Schutzart IP65 geliefert.
• Die asynchronen Servomotoren werden serienmäßig in der Schutzart IP54 geliefert.Auf Wunsch kann auch in den Schutzarten IP55 oder IP65 geliefert werden.
IP 1. KennzifferFremdkörperschutz
2. KennzifferWasserschutz
0 Nicht geschützt. Nicht geschützt.
1 Geschützt gegen feste Fremdkörper∅ 50 mm und größer. Geschützt gegen Tropfwasser.
2 Geschützt gegen feste Fremdkörper∅ 12 mm und größer.
Geschützt gegen Tropfwasser, wenn das Gehäuse bis zu 15° geneigt ist.
3 Geschützt gegen feste Fremdkörper∅ 12 mm und größer.
Geschützt gegen feste Fremdkörper∅ 12 mm und größer.
4 Geschützt gegen feste Fremdkörper∅ 12 mm und größer. Geschützt gegen Spritzwasser.
5 Staubgeschützt. Geschützt gegen Strahlwasser.
6 Staubdicht. Geschützt gegen starkes Strahlwasser.
7 - Geschützt gegen zeitweiliges Untertauchen in Wasser.
8 - Geschützt gegen dauerndes Untertauchen in Wasser.
GSE2004 37
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
Projektierung ServomotorProjektierung
Anwendungen
Beschleunigung größer 5 m/s²
Der Rotor des synchronen Servomotors ist besonders trägheitsarm ausgeführt. DieserMotor ist die optimale Wahl bei sehr dynamischen Anwendungen. Bei Beschleunigun-gen größer 5 m/s² ist der synchrone Servomotor in der Regel die technisch und wirt-schaftlich beste Lösung.
Große Massen genau positionieren
Sollte das Massenträgheitsverhältnis Jext / JMot mit dem trägheitsarmen Rotor dessynchronen Servomotors ungünstig groß ausfallen (k > 10...15), kann in vielen Fällenein asynchroner Servomotor mit einem höheren Massenträgheitsmoment JMot diebessere Lösung darstellen.
Große Motor-drehmomente
Werden Servomotoren mit Nennmomenten > 95 Nm benötigt, so stehen asynchroneSEW-Servomotoren zur Verfügung.
Sehr geringe Motordrehzahlen
Anwendungen bei denen extrem geringe Motordrehzahlen < 2.0 min-1 gefordert wer-den, sind optimal mit dem asynchronen Servomotor zu lösen. Das verwendete Geber-system (Sinusgeber) ermöglicht eine sehr hohe Auflösung der Istdrehzahl.
Ein Fremdlüfter ist erforderlich, wenn lange Zeit Drehzahlen < 500 min-1 gefahrenwerden. Hierbei ist auch die Belastung und die Zeit zu berücksichtigen.
Getriebe-Motor-Zuordnung
Zulässige Kombinationen von Motor und Getriebe sind in den Kombinationsübersichtendurch grau hinterlegte Felder hervorgehoben.
Endliche Über-setzungen i
Für Positionierungsaufgaben in einer Drehrichtung und Synchronisierung sind Getriebemit ganzer oder endlicher Übersetzung vorzuziehen, um die Summierung von Run-dungsfehlern zu vermeiden. Getriebe mit endlicher Übersetzung sind in den Kombinati-onsübersichten mit einem * nach der Übersetzung i gekennzeichnet und mit zwei Nach-kommastellen angegeben.
Hinweise zur Auswahl von Servomotoren
Um die thermische und die dynamische Belastung des Motors zu ermitteln, richtet sichdie Projektierung eines Servomotors nach folgenden Anforderungen:
• Berechnung des effektiven Arbeitspunktes zur Überprüfung der thermischen Aus-lastung des Motors.
• Berechnung des maximalen Arbeitspunktes zur Bestimmung der Motor - Umrich-ter Kombination.
• Bestimmung des Massenträgheitsverhältnis Jext / JMot zur Überprüfung der Stabi-lität der Drehzahlregelung.
– Jext = Massenträgheitsmoment, reduziert auf die Motorwelle.– JMot = Massenträgheitsmoment des Motors.
38 GSE2004
3 Projektierung ServomotorProjektierung
Vorgehensweise
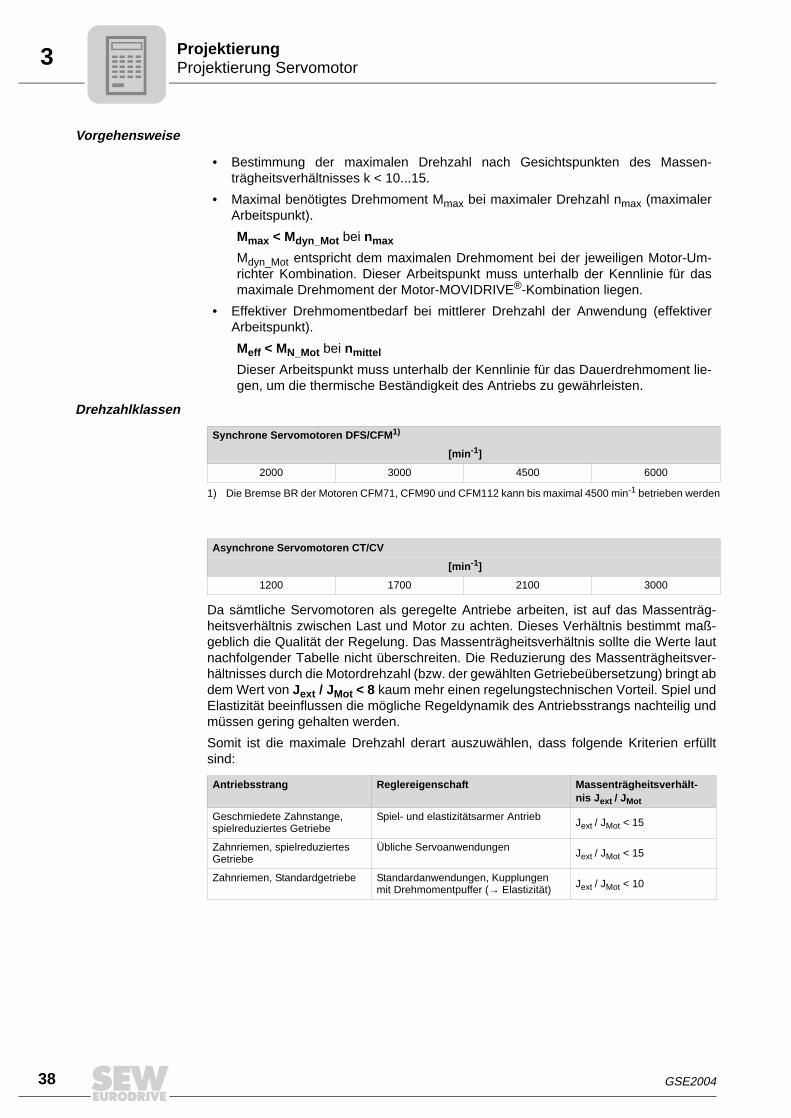
Drehzahlklassen
Da sämtliche Servomotoren als geregelte Antriebe arbeiten, ist auf das Massenträg-heitsverhältnis zwischen Last und Motor zu achten. Dieses Verhältnis bestimmt maß-geblich die Qualität der Regelung. Das Massenträgheitsverhältnis sollte die Werte lautnachfolgender Tabelle nicht überschreiten. Die Reduzierung des Massenträgheitsver-hältnisses durch die Motordrehzahl (bzw. der gewählten Getriebeübersetzung) bringt abdem Wert von Jext / JMot < 8 kaum mehr einen regelungstechnischen Vorteil. Spiel undElastizität beeinflussen die mögliche Regeldynamik des Antriebsstrangs nachteilig undmüssen gering gehalten werden.
Somit ist die maximale Drehzahl derart auszuwählen, dass folgende Kriterien erfülltsind:
• Bestimmung der maximalen Drehzahl nach Gesichtspunkten des Massen-trägheitsverhältnisses k < 10...15.
• Maximal benötigtes Drehmoment Mmax bei maximaler Drehzahl nmax (maximalerArbeitspunkt).
Mmax < Mdyn_Mot bei nmax
Mdyn_Mot entspricht dem maximalen Drehmoment bei der jeweiligen Motor-Um-richter Kombination. Dieser Arbeitspunkt muss unterhalb der Kennlinie für dasmaximale Drehmoment der Motor-MOVIDRIVE®-Kombination liegen.
• Effektiver Drehmomentbedarf bei mittlerer Drehzahl der Anwendung (effektiverArbeitspunkt).
Meff < MN_Mot bei nmittel
Dieser Arbeitspunkt muss unterhalb der Kennlinie für das Dauerdrehmoment lie-gen, um die thermische Beständigkeit des Antriebs zu gewährleisten.
Synchrone Servomotoren DFS/CFM1)
1) Die Bremse BR der Motoren CFM71, CFM90 und CFM112 kann bis maximal 4500 min-1 betrieben werden
[min-1]
2000 3000 4500 6000
Asynchrone Servomotoren CT/CV
[min-1]
1200 1700 2100 3000
Antriebsstrang Reglereigenschaft Massenträgheitsverhält-nis Jext / JMot
Geschmiedete Zahnstange, spielreduziertes Getriebe
Spiel- und elastizitätsarmer Antrieb Jext / JMot < 15
Zahnriemen, spielreduziertes Getriebe
Übliche Servoanwendungen Jext / JMot < 15
Zahnriemen, Standardgetriebe Standardanwendungen, Kupplungen mit Drehmomentpuffer (→ Elastizität) Jext / JMot < 10
GSE2004 39
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
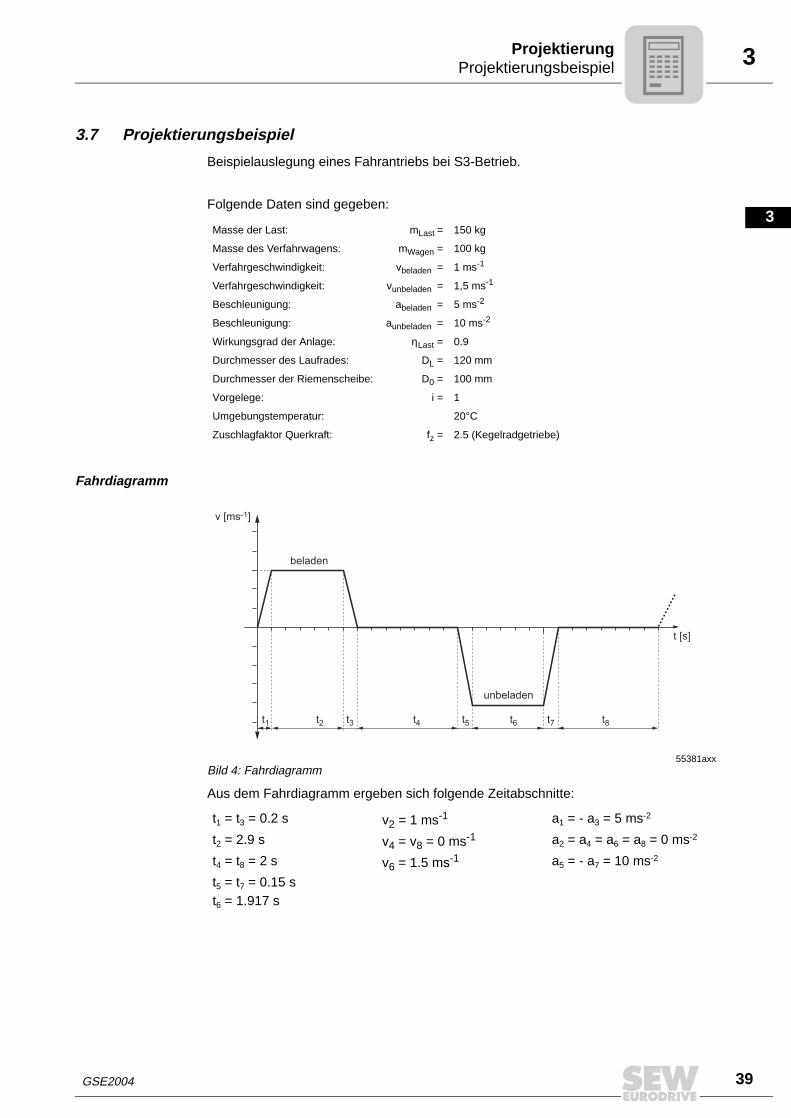
3.7 Projektierungsbeispiel
Beispielauslegung eines Fahrantriebs bei S3-Betrieb.
Folgende Daten sind gegeben:
Fahrdiagramm
Aus dem Fahrdiagramm ergeben sich folgende Zeitabschnitte:
Masse der Last: mLast = 150 kg
Masse des Verfahrwagens: mWagen = 100 kg
Verfahrgeschwindigkeit: vbeladen = 1 ms-1
Verfahrgeschwindigkeit: vunbeladen = 1,5 ms-1
Beschleunigung: abeladen = 5 ms-2
Beschleunigung: aunbeladen = 10 ms-2
Wirkungsgrad der Anlage: ηLast = 0.9
Durchmesser des Laufrades: DL = 120 mm
Durchmesser der Riemenscheibe: D0 = 100 mm
Vorgelege: i = 1
Umgebungstemperatur: 20°C
Zuschlagfaktor Querkraft: fz = 2.5 (Kegelradgetriebe)
55381axxBild 4: Fahrdiagramm
t1 = t3 = 0.2 s v2 = 1 ms-1 a1 = - a3 = 5 ms-2
t2 = 2.9 s v4 = v8 = 0 ms-1 a2 = a4 = a6 = a8 = 0 ms-2
t4 = t8 = 2 s v6 = 1.5 ms-1 a5 = - a7 = 10 ms-2
t5 = t7 = 0.15 st6 = 1.917 s
t [s]
t5t4t3t2t1 t6 t7 t8
v [ms-1]
beladen
unbeladen
40 GSE2004
3 ProjektierungsbeispielProjektierung
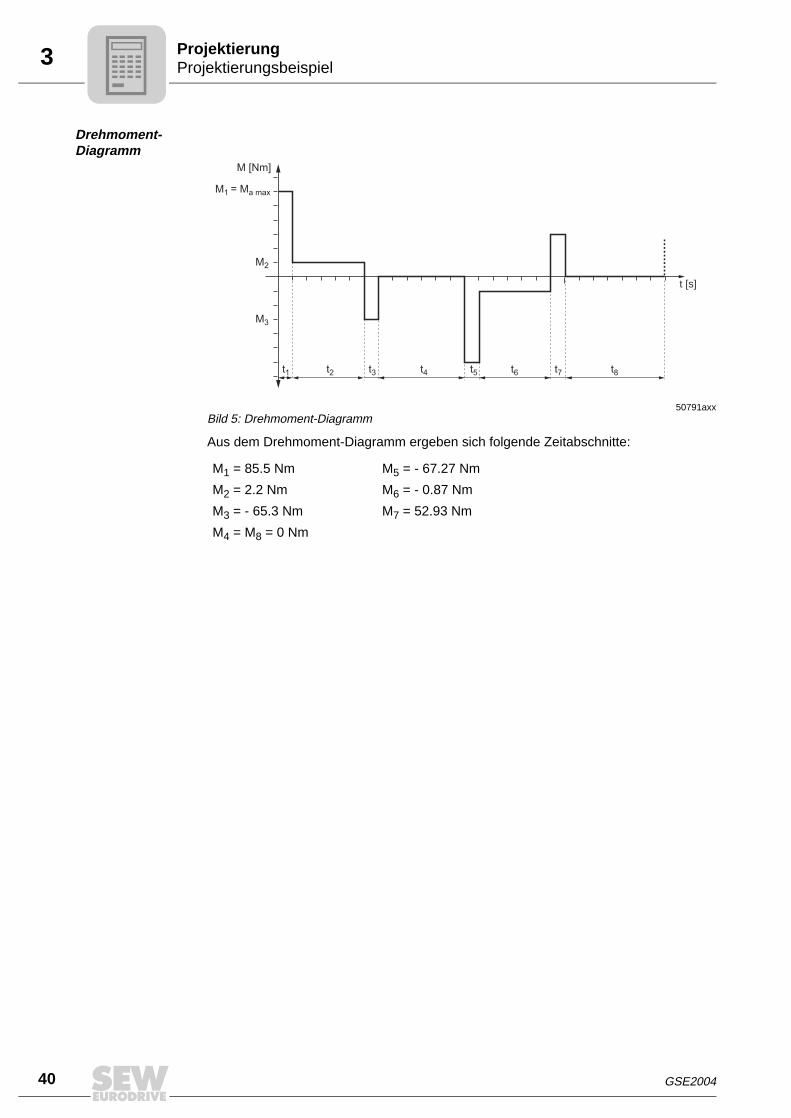
Drehmoment-Diagramm
Aus dem Drehmoment-Diagramm ergeben sich folgende Zeitabschnitte:
50791axxBild 5: Drehmoment-Diagramm
M1 = 85.5 Nm M5 = - 67.27 Nm
M2 = 2.2 Nm M6 = - 0.87 Nm
M3 = - 65.3 Nm M7 = 52.93 Nm
M4 = M8 = 0 Nm
t [s]
t5t4t3t2t1 t6 t7 t8
M1 = Ma max
M2
M3
M [Nm]
GSE2004 41
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
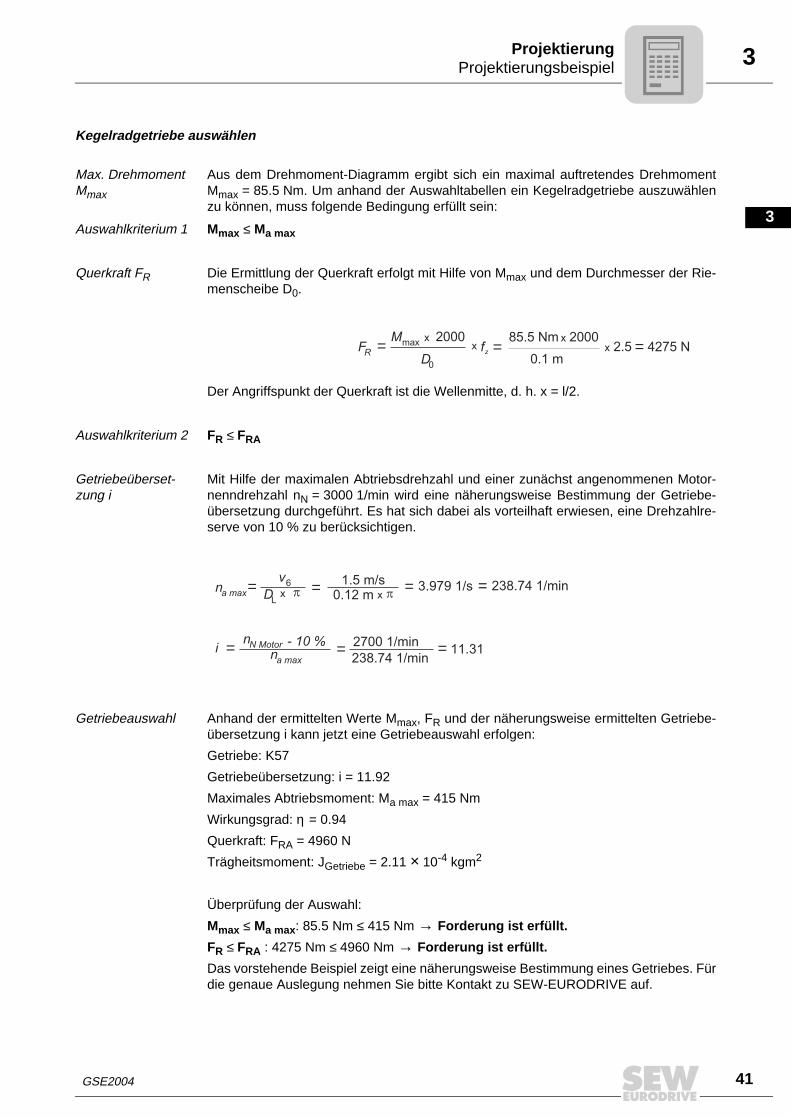
Kegelradgetriebe auswählen
Max. Drehmoment Mmax
Aus dem Drehmoment-Diagramm ergibt sich ein maximal auftretendes DrehmomentMmax = 85.5 Nm. Um anhand der Auswahltabellen ein Kegelradgetriebe auszuwählenzu können, muss folgende Bedingung erfüllt sein:
Auswahlkriterium 1 Mmax ≤ Ma max
Querkraft FR Die Ermittlung der Querkraft erfolgt mit Hilfe von Mmax und dem Durchmesser der Rie-menscheibe D0.
Der Angriffspunkt der Querkraft ist die Wellenmitte, d. h. x = l/2.
Auswahlkriterium 2 FR ≤ FRA
Getriebeüberset-zung i
Mit Hilfe der maximalen Abtriebsdrehzahl und einer zunächst angenommenen Motor-nenndrehzahl nN = 3000 1/min wird eine näherungsweise Bestimmung der Getriebe-übersetzung durchgeführt. Es hat sich dabei als vorteilhaft erwiesen, eine Drehzahlre-serve von 10 % zu berücksichtigen.
Getriebeauswahl Anhand der ermittelten Werte Mmax, FR und der näherungsweise ermittelten Getriebe-übersetzung i kann jetzt eine Getriebeauswahl erfolgen:
Getriebe: K57
Getriebeübersetzung: i = 11.92
Maximales Abtriebsmoment: Ma max = 415 Nm
Wirkungsgrad: η = 0.94
Querkraft: FRA = 4960 N
Trägheitsmoment: JGetriebe = 2.11 × 10-4 kgm2
Überprüfung der Auswahl:
Mmax ≤ Ma max: 85.5 Nm ≤ 415 Nm → Forderung ist erfüllt.
FR ≤ FRA : 4275 Nm ≤ 4960 Nm → Forderung ist erfüllt.
Das vorstehende Beispiel zeigt eine näherungsweise Bestimmung eines Getriebes. Fürdie genaue Auslegung nehmen Sie bitte Kontakt zu SEW-EURODRIVE auf.
FM
DfR z= x xmax 2000 85.5 Nm 2000
0.1 m0
4275 N x = x 2.5 =
nv
Da max= 6
L x =π x π
1.5 m/s0.12 m
= 3.979 1/s = 238.74 1/min
na max= =
nN Motor - 10 %i
2700 1/min
238.74 1/min= 11.31

42 GSE2004
3 ProjektierungsbeispielProjektierung
Motor auswählen
Mit dem maximalen Abtriebsmoment kann nun unter Berücksichtigung des Getriebewir-kungsgrades das maximale eintreibende Moment Me max bestimmt werden.
Mit Hilfe dieses maximalen eintreibenden Momentes wird eine vorläufige Motorauswahlgetroffen, die jedoch noch überprüft werden muss:
Vorläufige Motor-auswahl
⇒ CM71S/BR
nN = 3000 min-1
M0 = 5 Nm
I0 = 3.3 A
JMot = 6.65 × 10-4 kgm2
Brechnung der ein-treibenden Dreh-zahl
M
i= max
85.5 Nm
11.92 Me max
η xGetriebe
x 0.94= = 7.63 Nm
v
D= 1
1 m/s
0.12 m na1
π x x= =L π
2.6526 1/s = 159.156 1/min
n=ne1 xa1 =159.156 1/min i x 11.92 = 1897.13 1/min
=na5 na max
n=ne5 xa5 = 238.74 1/mini x 11.92 = 2845.78 1/min

GSE2004 43
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
Bestimmung des Massenträgheits-verhältnisses "k"
Forderung k ≤ 10 - 15
Überprüfen der Forderung: 9,84 ≤ 10 - 15 → Forderung ist erfüllt.
Bestimmung der Motormomente
Zusätzlich zum eintreibenden Moment muss der Motor noch ein bestimmtes Momentaufbringen, um sich selbst und das Getriebe zu beschleunigen.
Abschnitt t1 Das vom Motor aufzubringende Moment in Abschnitt 1 berechnet sich wie folgt:
Abschnitt t2 Das vom Motor aufzubringende Moment in Abschnitt 2 berechnet sich wie folgt:
=Jext 91.2 x mv
nMotor( ) x + JGetriebe
2
=Jext 91.2 x 250 kg1 m/s
1897.13 1/min( ) x + 2.11 x102
-4 = 6.545913 x10-3
kgm 2kgm 2
=kJ
JMot
ext = 6.545913 x10-3
6.65 x10-4 = 9.84
kgm 2
kgm 2
Das Massenträgheitsverhältnis "k" hat einen maßgeblichen Einfluß auf alle Regeleigen-schaften.
=M1 Mot x n
9.55 JMot
e1
x t
6.65 x10-4 x
9.55 x 0.2 s1897.13 1/min = 0.87 Nmkgm2
JGetriebe+( )
M1 Mot = + 2.11 x10-4
kgm2( )
=Mt1 Me max + M 1= 7.63 Nm + 0.87 Nm = 8.5 Nm
M
i= 2 2.2 Nm
11.92 Mt2
η xGetriebe
x 0.94= = 0.196 Nm
44 GSE2004
3 ProjektierungsbeispielProjektierung
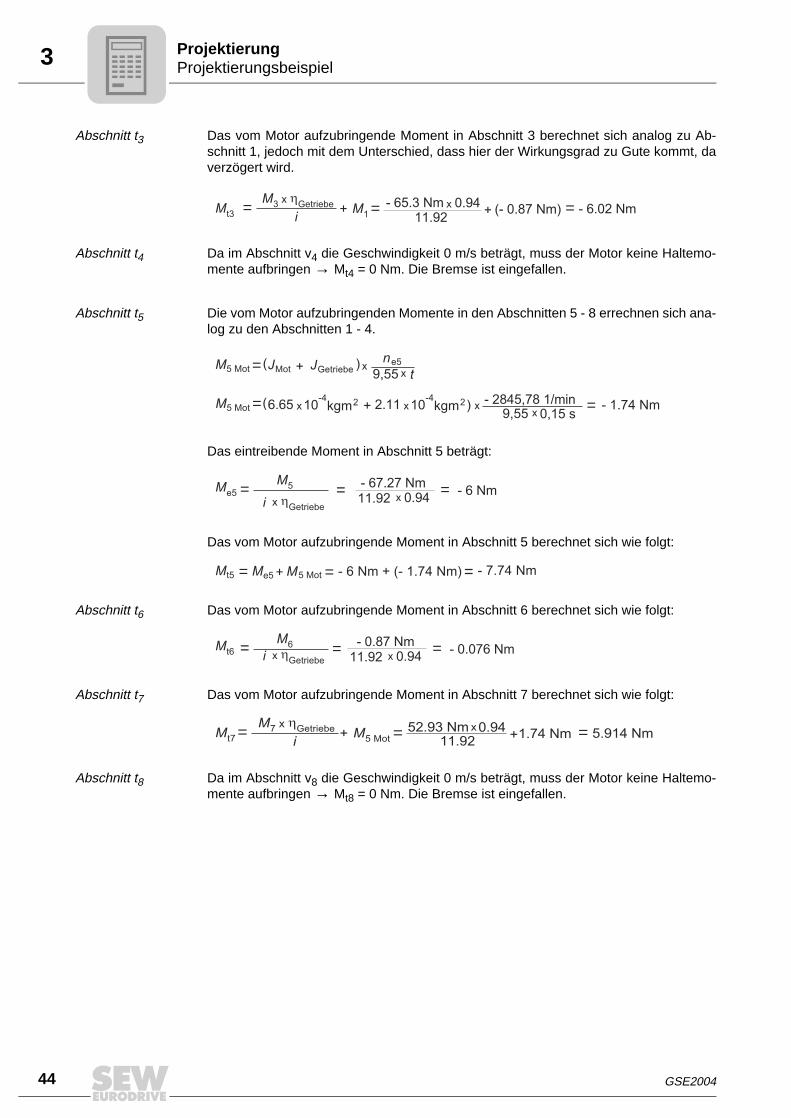
Abschnitt t3 Das vom Motor aufzubringende Moment in Abschnitt 3 berechnet sich analog zu Ab-schnitt 1, jedoch mit dem Unterschied, dass hier der Wirkungsgrad zu Gute kommt, daverzögert wird.
Abschnitt t4 Da im Abschnitt v4 die Geschwindigkeit 0 m/s beträgt, muss der Motor keine Haltemo-mente aufbringen → Mt4 = 0 Nm. Die Bremse ist eingefallen.
Abschnitt t5 Die vom Motor aufzubringenden Momente in den Abschnitten 5 - 8 errechnen sich ana-log zu den Abschnitten 1 - 4.
Das eintreibende Moment in Abschnitt 5 beträgt:
Das vom Motor aufzubringende Moment in Abschnitt 5 berechnet sich wie folgt:
Abschnitt t6 Das vom Motor aufzubringende Moment in Abschnitt 6 berechnet sich wie folgt:
Abschnitt t7 Das vom Motor aufzubringende Moment in Abschnitt 7 berechnet sich wie folgt:
Abschnitt t8 Da im Abschnitt v8 die Geschwindigkeit 0 m/s beträgt, muss der Motor keine Haltemo-mente aufbringen → Mt8 = 0 Nm. Die Bremse ist eingefallen.
M
i= 3 - 65.3 Nm
11.92 Mt3
η xGetriebe x 0.94= = - 6.02 Nm+ M1 + (- 0.87 Nm)
=M5 Mot x n
9,55 JMot
e5
x t
6.65 x10-4 x
9,55 x 0,15 s- 2845,78 1/min = - 1.74 Nmkgm2
JGetriebe+( )
M5 Mot = + 2.11 x10-4
kgm2( )
M
i= 5 - 67.27 Nm
11.92 Me5
η xGetriebe
x 0.94= = - 6 Nm
=Mt5 Me5 + M5 Mot = - 6 Nm + (- 1.74 Nm) = - 7.74 Nm
M
i= 6 - 0.87 Nm
11.92 Mt6 η x
Getriebe x 0.94= = - 0.076 Nm
M
i= 7 52.93 Nm
11.92 Mt7
η xGetriebe x 0.94= = 5.914 Nm+ M5 Mot +1.74 Nm
GSE2004 45
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
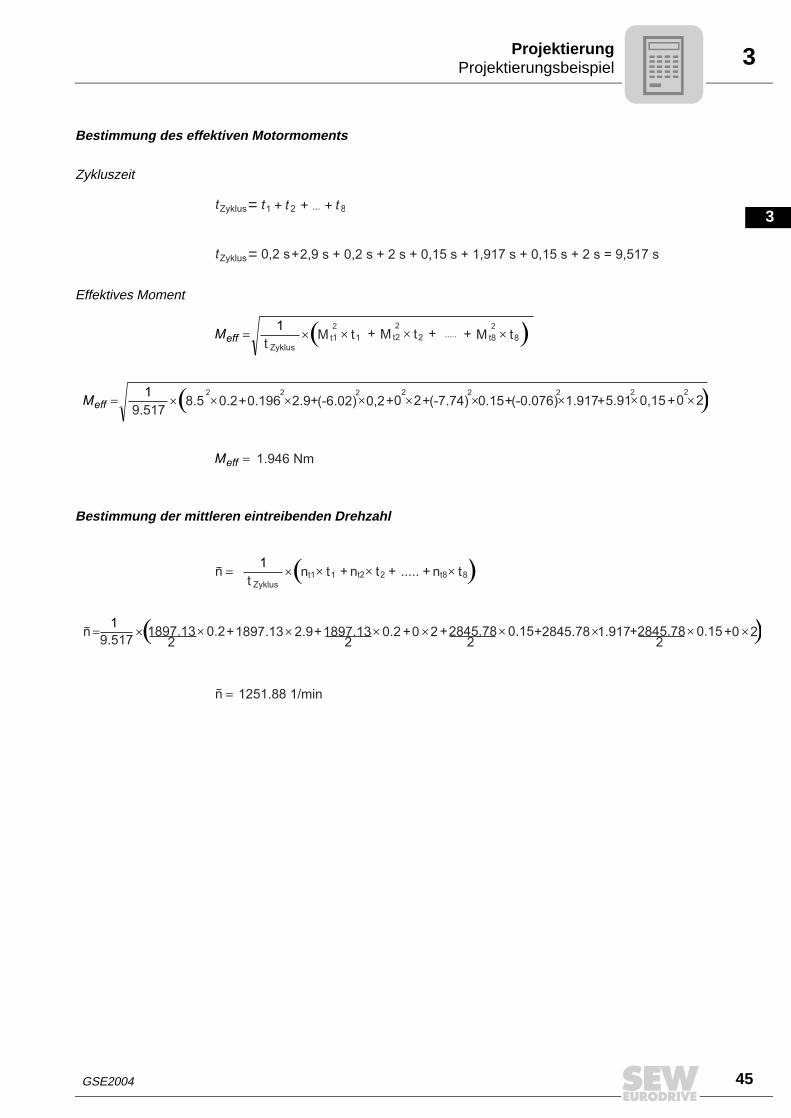
Bestimmung des effektiven Motormoments
Zykluszeit
Effektives Moment
Bestimmung der mittleren eintreibenden Drehzahl
=tZyklus t1 + t 2 + ... + t 8
=tZyklus 0,2 s +2,9 s + 0,2 s + 2 s + 0,15 s + 1,917 s + 0,15 s + 2 s = 9,517 s
tM
2
tZyklus
t1 1 + M2
tt2 2 + ..... + M2
tt8 8
9.5178.5
2
0.1962
0.2 2.9 (-6.02)2
0,2 02
2 (-7.74)2
0.15 (-0.076)2
1.917 5.912
0,15 02
2+ + + + + + +
1.946 Nm
tn t
Zyklust1 1 +n n tt2 2 + ..... + n tt8 8
n9.517
1897.13 0.2+1897.13 2.9+1897.13 0.2 +0 2 +2845.78 1.917+2845.78 0.15+0 2+2845.78 0.152222
n 1251.88 1/min
46 GSE2004
3 ProjektierungsbeispielProjektierung
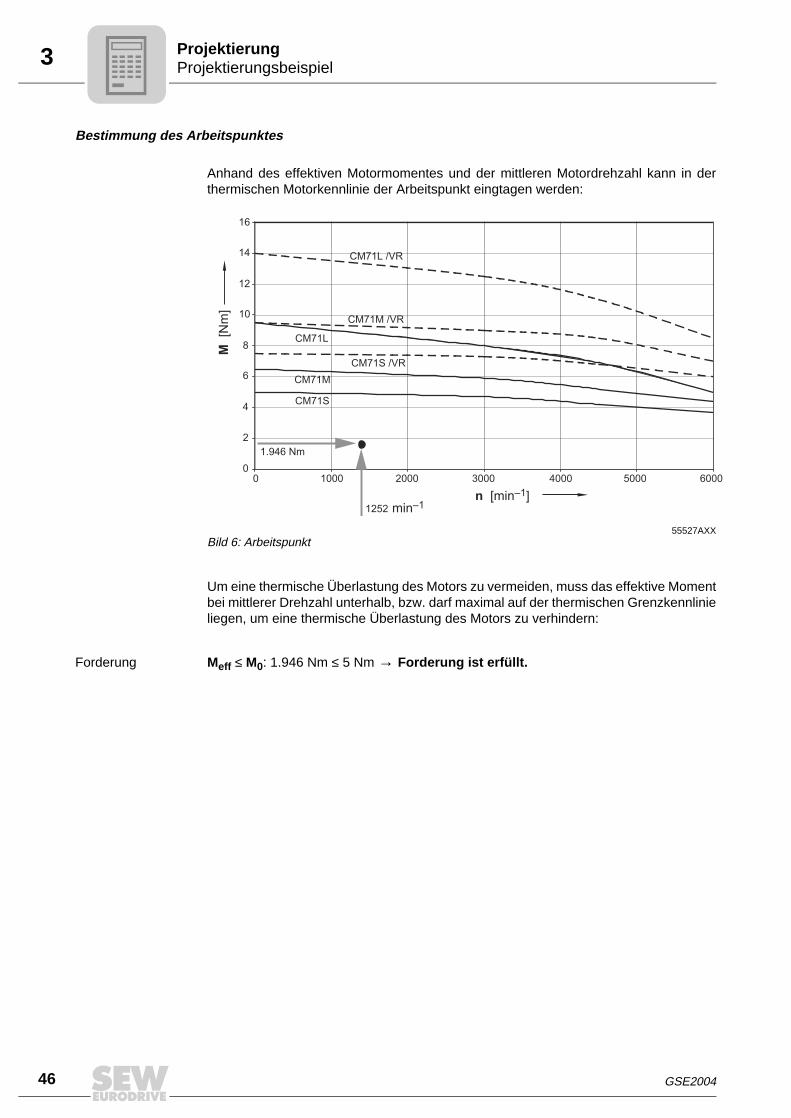
Bestimmung des Arbeitspunktes
Anhand des effektiven Motormomentes und der mittleren Motordrehzahl kann in derthermischen Motorkennlinie der Arbeitspunkt eingtagen werden:
Um eine thermische Überlastung des Motors zu vermeiden, muss das effektive Momentbei mittlerer Drehzahl unterhalb, bzw. darf maximal auf der thermischen Grenzkennlinieliegen, um eine thermische Überlastung des Motors zu verhindern:
Forderung Meff ≤ M0: 1.946 Nm ≤ 5 Nm → Forderung ist erfüllt.
55527AXXBild 6: Arbeitspunkt
0
2
4
6
8
10
0 1000 2000 3000 4000 5000 6000
CM71L
CM71M
CM71S
CM71L /VR
CM71M /VR
CM71S /VR
12
14
16M
[N
m]
n [min–1]1252 min–1
1.946 Nm
GSE2004 47
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
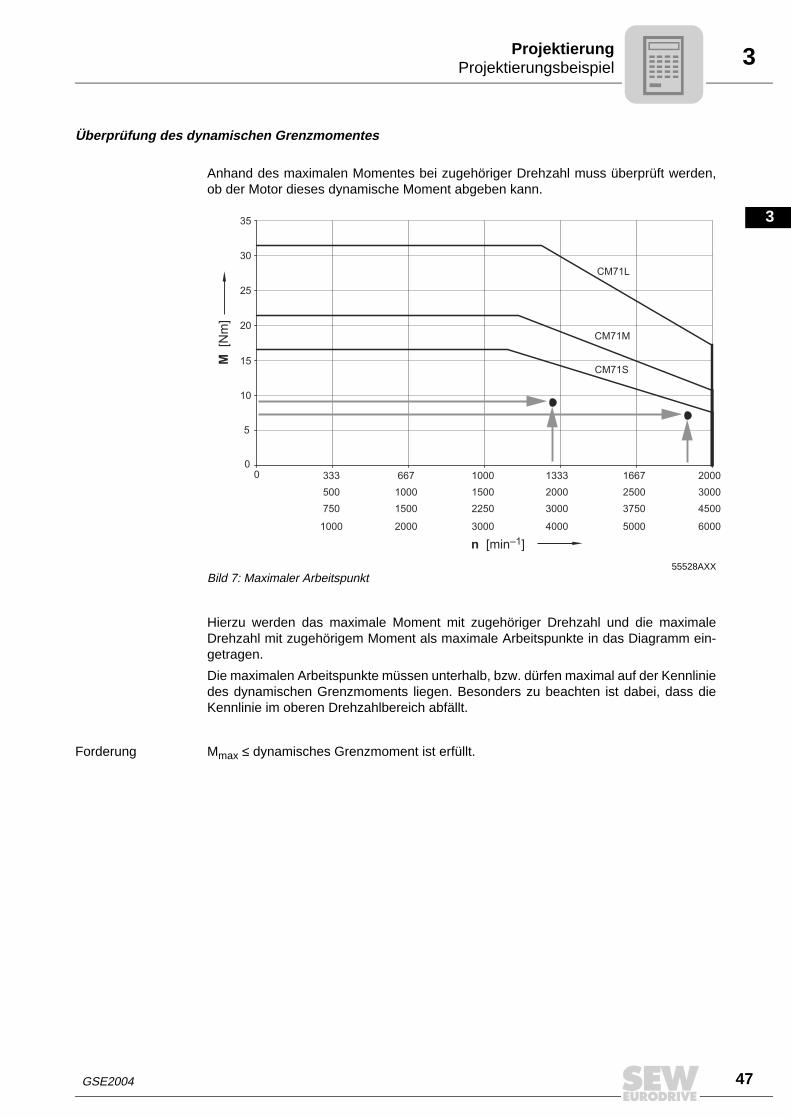
Überprüfung des dynamischen Grenzmomentes
Anhand des maximalen Momentes bei zugehöriger Drehzahl muss überprüft werden,ob der Motor dieses dynamische Moment abgeben kann.
Hierzu werden das maximale Moment mit zugehöriger Drehzahl und die maximaleDrehzahl mit zugehörigem Moment als maximale Arbeitspunkte in das Diagramm ein-getragen.
Die maximalen Arbeitspunkte müssen unterhalb, bzw. dürfen maximal auf der Kennliniedes dynamischen Grenzmoments liegen. Besonders zu beachten ist dabei, dass dieKennlinie im oberen Drehzahlbereich abfällt.
Forderung Mmax ≤ dynamisches Grenzmoment ist erfüllt.
55528AXXBild 7: Maximaler Arbeitspunkt
0
5
10
15
20
25
30
35
0
CM71L
CM71M
CM71S
1000
1500
2250
3000
2000
3000
4500
6000
333
500
750
1000
667
1000
1500
2000
1333
2000
3000
4000
1667
2500
3750
5000
M [N
m]
n [min–1]
48 GSE2004
3 ProjektierungsbeispielProjektierung
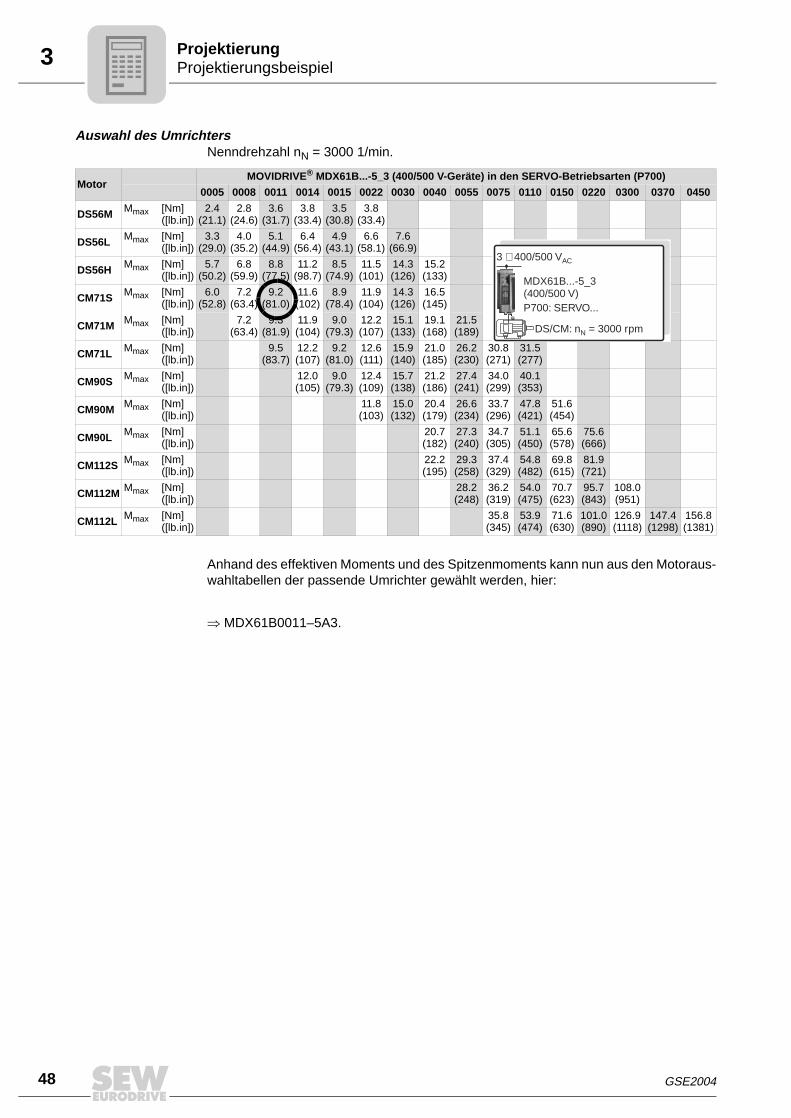
Auswahl des UmrichtersNenndrehzahl nN = 3000 1/min.
Anhand des effektiven Moments und des Spitzenmoments kann nun aus den Motoraus-wahltabellen der passende Umrichter gewählt werden, hier:
⇒ MDX61B0011–5A3.
MotorMOVIDRIVE® MDX61B...-5_3 (400/500 V-Geräte) in den SERVO-Betriebsarten (P700)
0005 0008 0011 0014 0015 0022 0030 0040 0055 0075 0110 0150 0220 0300 0370 0450
DS56M Mmax [Nm]([lb.in])
2.4(21.1)
2.8(24.6)
3.6(31.7)
3.8(33.4)
3.5(30.8)
3.8(33.4)
DS56L Mmax [Nm]([lb.in])
3.3(29.0)
4.0(35.2)
5.1(44.9)
6.4(56.4)
4.9(43.1)
6.6(58.1)
7.6(66.9)
DS56H Mmax [Nm]([lb.in])
5.7(50.2)
6.8(59.9)
8.8(77.5)
11.2(98.7)
8.5(74.9)
11.5(101)
14.3(126)
15.2(133)
CM71S Mmax [Nm]([lb.in])
6.0(52.8)
7.2(63.4)
9.2(81.0)
11.6(102)
8.9(78.4)
11.9(104)
14.3(126)
16.5(145)
CM71M Mmax [Nm]([lb.in])
7.2(63.4)
9.3(81.9)
11.9(104)
9.0(79.3)
12.2(107)
15.1(133)
19.1(168)
21.5(189)
CM71L Mmax [Nm]([lb.in])
9.5(83.7)
12.2(107)
9.2(81.0)
12.6(111)
15.9(140)
21.0(185)
26.2(230)
30.8(271)
31.5(277)
CM90S Mmax [Nm]([lb.in])
12.0(105)
9.0(79.3)
12.4(109)
15.7(138)
21.2(186)
27.4(241)
34.0(299)
40.1(353)
CM90M Mmax [Nm]([lb.in])
11.8(103)
15.0(132)
20.4(179)
26.6(234)
33.7(296)
47.8(421)
51.6(454)
CM90L Mmax [Nm]([lb.in])
20.7(182)
27.3(240)
34.7(305)
51.1(450)
65.6(578)
75.6(666)
CM112S Mmax [Nm]([lb.in])
22.2(195)
29.3(258)
37.4(329)
54.8(482)
69.8(615)
81.9(721)
CM112M Mmax [Nm]([lb.in])
28.2(248)
36.2(319)
54.0(475)
70.7(623)
95.7(843)
108.0(951)
CM112L Mmax [Nm]([lb.in])
35.8(345)
53.9(474)
71.6(630)
101.0(890)
126.9(1118)
147.4(1298)
156.8(1381)
P700: SERVO...
3 400/500 V AC
DS/CM: n = 3000 rpmN
MDX61B...-5_3(400/500 V)
GSE2004 49
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
ProjektierungsbeispielProjektierung
Bestimmung des zugehörigen Bremswiderstandes
Für die Projektierung des passenden Bremswiderstands müssen aus den Fahrabschnit-ten, in denen der Motor generatorisch arbeitet, folgende Werte ermittelt werden:
• Spitzenbremsleistung.
• Mittlere Bremsleistung.
Spitzenbremsleis-tung
Mittlere Bremsleis-tung im Abschnitt t3
Mittlere Bremsleis-tung im Abschnitt t7
Effektive Brems-leistung
PBr_t1 = PBr_t2 = PBr_t4 = PBr_t6 = PBr_t8 = 0 kW
7 5 5.914 Nm 2845.78 1/min 1.76 kW
6.02 Nm1897.13 1/min
2 0.6 kW
5.914 Nm2845.78 1/min
2 0.88 kW7
77
P_t t3 + P
_t t23 7
tZyklus
0.6 kW 0,2 s + 0.88 kW 0,15 s
9,517 s0.0265 kW
50 GSE2004
3 ProjektierungsbeispielProjektierung
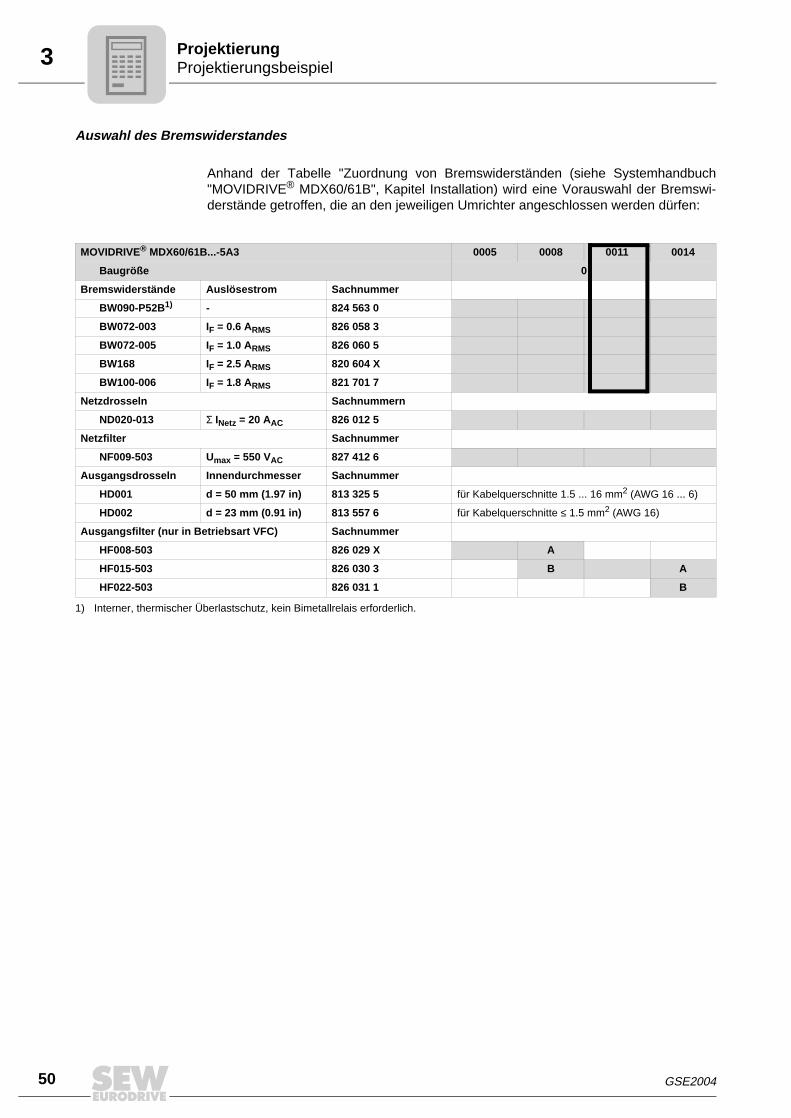
Auswahl des Bremswiderstandes
Anhand der Tabelle "Zuordnung von Bremswiderständen (siehe Systemhandbuch"MOVIDRIVE® MDX60/61B", Kapitel Installation) wird eine Vorauswahl der Bremswi-derstände getroffen, die an den jeweiligen Umrichter angeschlossen werden dürfen:
MOVIDRIVE® MDX60/61B...-5A3 0005 0008 0011 0014
Baugröße 0
Bremswiderstände Auslösestrom Sachnummer
BW090-P52B1) - 824 563 0
BW072-003 IF = 0.6 ARMS 826 058 3
BW072-005 IF = 1.0 ARMS 826 060 5
BW168 IF = 2.5 ARMS 820 604 X
BW100-006 IF = 1.8 ARMS 821 701 7
Netzdrosseln Sachnummern
ND020-013 Σ INetz = 20 AAC 826 012 5
Netzfilter Sachnummer
NF009-503 Umax = 550 VAC 827 412 6
Ausgangsdrosseln Innendurchmesser Sachnummer
HD001 d = 50 mm (1.97 in) 813 325 5 für Kabelquerschnitte 1.5 ... 16 mm2 (AWG 16 ... 6)
HD002 d = 23 mm (0.91 in) 813 557 6 für Kabelquerschnitte ≤ 1.5 mm2 (AWG 16)
Ausgangsfilter (nur in Betriebsart VFC) Sachnummer
HF008-503 826 029 X A
HF015-503 826 030 3 B A
HF022-503 826 031 1 B
1) Interner, thermischer Überlastschutz, kein Bimetallrelais erforderlich.
GSE2004 51
3
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
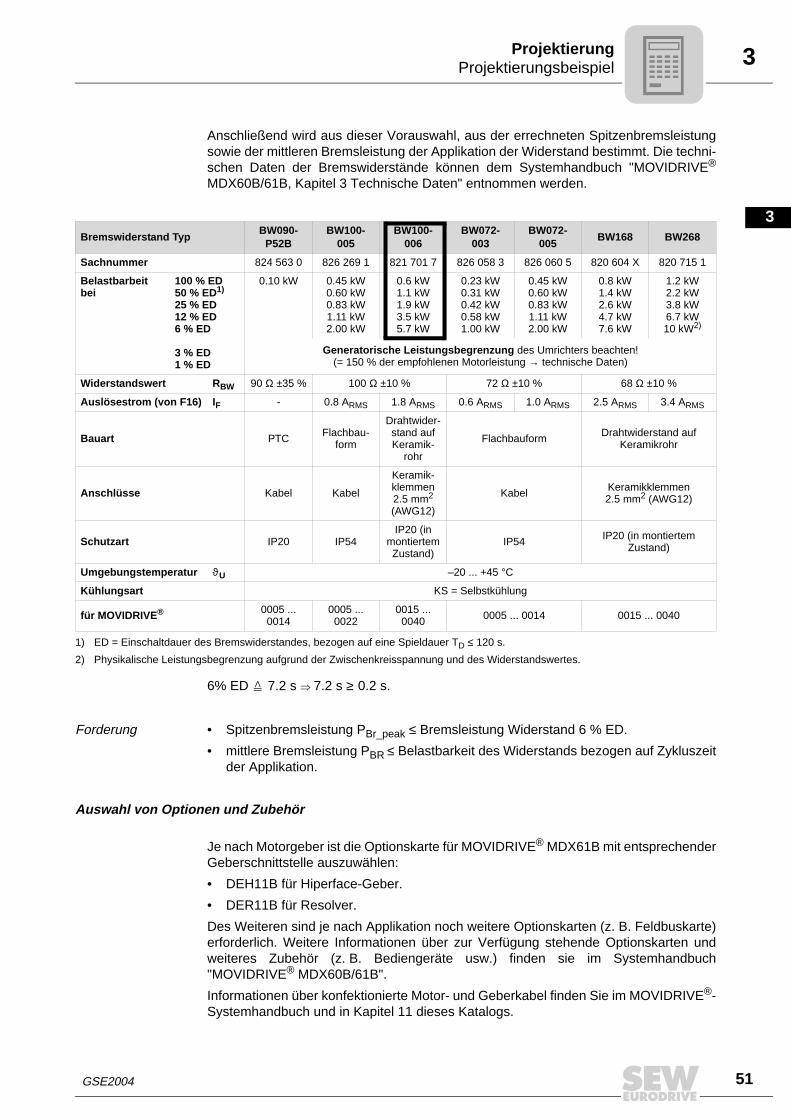
ProjektierungsbeispielProjektierung
Anschließend wird aus dieser Vorauswahl, aus der errechneten Spitzenbremsleistungsowie der mittleren Bremsleistung der Applikation der Widerstand bestimmt. Die techni-schen Daten der Bremswiderstände können dem Systemhandbuch "MOVIDRIVE®
MDX60B/61B, Kapitel 3 Technische Daten" entnommen werden.
6% ED 7.2 s ⇒ 7.2 s ≥ 0.2 s.
Forderung • Spitzenbremsleistung PBr_peak ≤ Bremsleistung Widerstand 6 % ED.
• mittlere Bremsleistung PBR ≤ Belastbarkeit des Widerstands bezogen auf Zykluszeitder Applikation.
Auswahl von Optionen und Zubehör
Je nach Motorgeber ist die Optionskarte für MOVIDRIVE® MDX61B mit entsprechenderGeberschnittstelle auszuwählen:
• DEH11B für Hiperface-Geber.
• DER11B für Resolver.
Des Weiteren sind je nach Applikation noch weitere Optionskarten (z. B. Feldbuskarte)erforderlich. Weitere Informationen über zur Verfügung stehende Optionskarten undweiteres Zubehör (z. B. Bediengeräte usw.) finden sie im Systemhandbuch"MOVIDRIVE® MDX60B/61B".
Informationen über konfektionierte Motor- und Geberkabel finden Sie im MOVIDRIVE®-Systemhandbuch und in Kapitel 11 dieses Katalogs.
Bremswiderstand TypBW090-
P52BBW100-
005BW100-
006BW072-
003BW072-
005BW168 BW268
Sachnummer 824 563 0 826 269 1 821 701 7 826 058 3 826 060 5 820 604 X 820 715 1
Belastbarbeit 100 % EDbei 50 % ED1)
25 % ED12 % ED6 % ED
3 % ED1 % ED
0.10 kW 0.45 kW0.60 kW0.83 kW1.11 kW2.00 kW
0.6 kW1.1 kW1.9 kW3.5 kW5.7 kW
0.23 kW0.31 kW0.42 kW0.58 kW1.00 kW
0.45 kW0.60 kW0.83 kW1.11 kW2.00 kW
0.8 kW1.4 kW2.6 kW4.7 kW7.6 kW
1.2 kW2.2 kW3.8 kW6.7 kW10 kW2)
Generatorische Leistungsbegrenzung des Umrichters beachten!(= 150 % der empfohlenen Motorleistung → technische Daten)
Widerstandswert RBW 90 Ω ±35 % 100 Ω ±10 % 72 Ω ±10 % 68 Ω ±10 %
Auslösestrom (von F16) IF - 0.8 ARMS 1.8 ARMS 0.6 ARMS 1.0 ARMS 2.5 ARMS 3.4 ARMS
Bauart PTC Flachbau-form
Drahtwider-stand auf Keramik-
rohr
Flachbauform Drahtwiderstand auf Keramikrohr
Anschlüsse Kabel Kabel
Keramik-klemmen 2.5 mm2 (AWG12)
Kabel Keramikklemmen 2.5 mm2 (AWG12)
Schutzart IP20 IP54IP20 (in
montiertem Zustand)
IP54 IP20 (in montiertem Zustand)
Umgebungstemperatur ϑU –20 ... +45 °C
Kühlungsart KS = Selbstkühlung
für MOVIDRIVE® 0005 ... 0014
0005 ... 0022
0015 ... 0040 0005 ... 0014 0015 ... 0040
1) ED = Einschaltdauer des Bremswiderstandes, bezogen auf eine Spieldauer TD ≤ 120 s.
2) Physikalische Leistungsbegrenzung aufgrund der Zwischenkreisspannung und des Widerstandswertes.