„Regelung“ - EAL Lehrstuhl für Elektrische ... · Institute for Electrical Drive Systems &...
39
„Regelung“ (Spezialthemen) Referenten: Prof. Dr.‐Ing. Hans‐Georg Herzog ([email protected]) Prof. Dr.‐Ing. Ralph Kennel ([email protected]) Technische Universität München Arcisstraße 21 80333 München
Transcript of „Regelung“ - EAL Lehrstuhl für Elektrische ... · Institute for Electrical Drive Systems &...
„Regelung“(Spezialthemen)
Referenten:Prof. Dr.‐Ing. Hans‐Georg Herzog
([email protected])Prof. Dr.‐Ing. Ralph Kennel
([email protected])Technische Universität München
Arcisstraße 2180333 München
„Regelung“
Feldorientierte Regelung
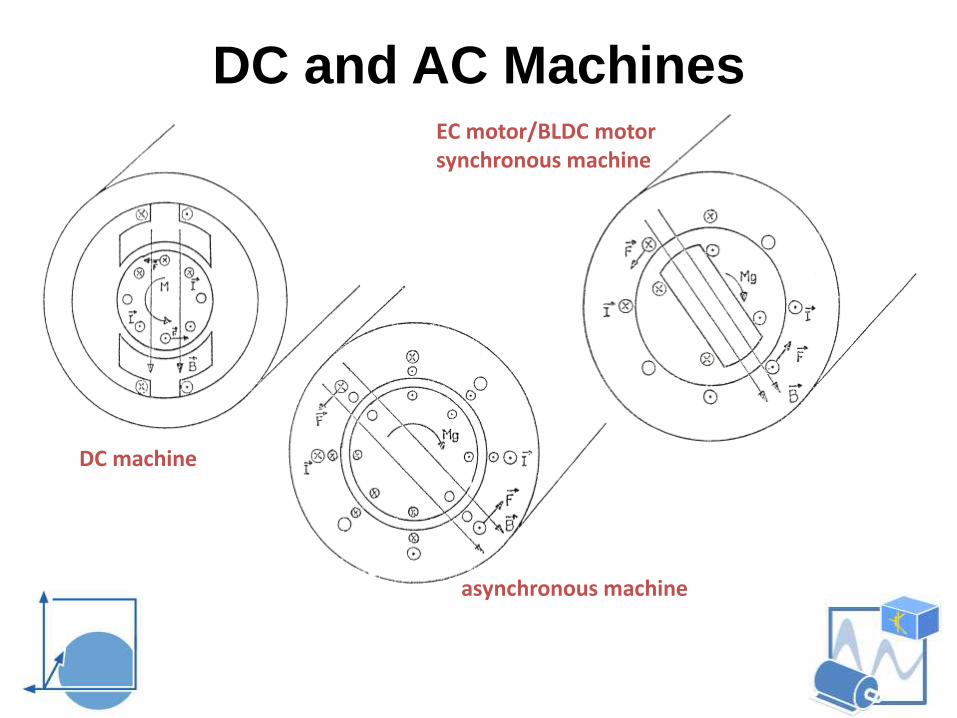
DC and AC Machines
DC machine
asynchronous machine
EC motor/BLDC motorsynchronous machine
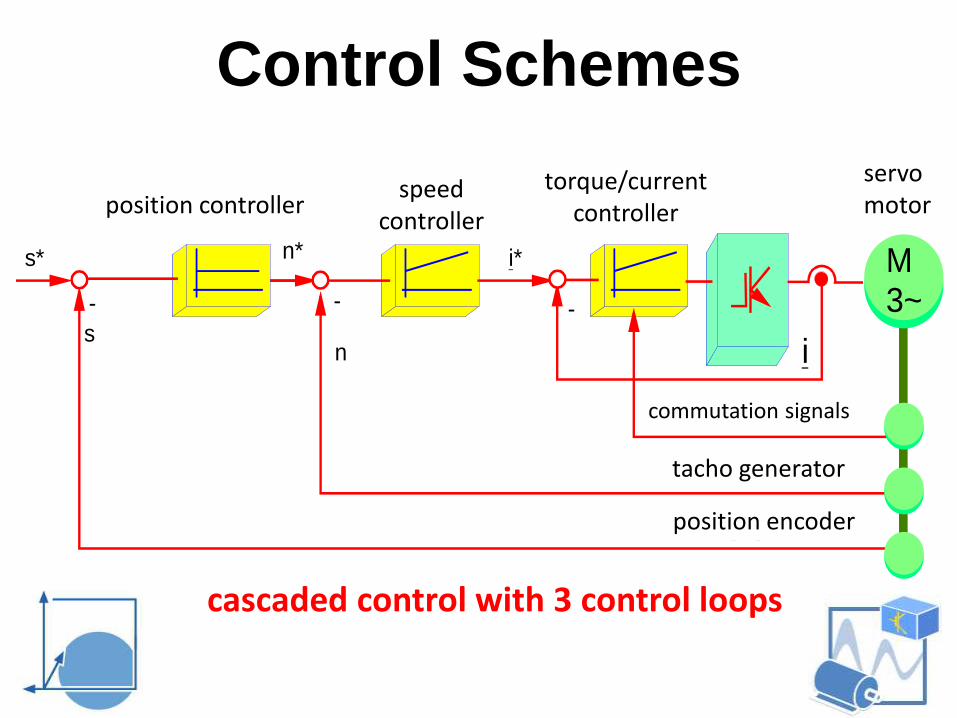
Control Schemes
- --
Drehzahl-regelung
Drehmoment-/StromRegelung
M3~
i
Lageregelung
Lagegeber
Tacho
Kommutierungssignale
s*
s
n* i*
n
position controllerspeed
controller
torque/currentcontroller
commutation signals
tacho generator
position encoder
servomotor
cascaded control with 3 control loops
-
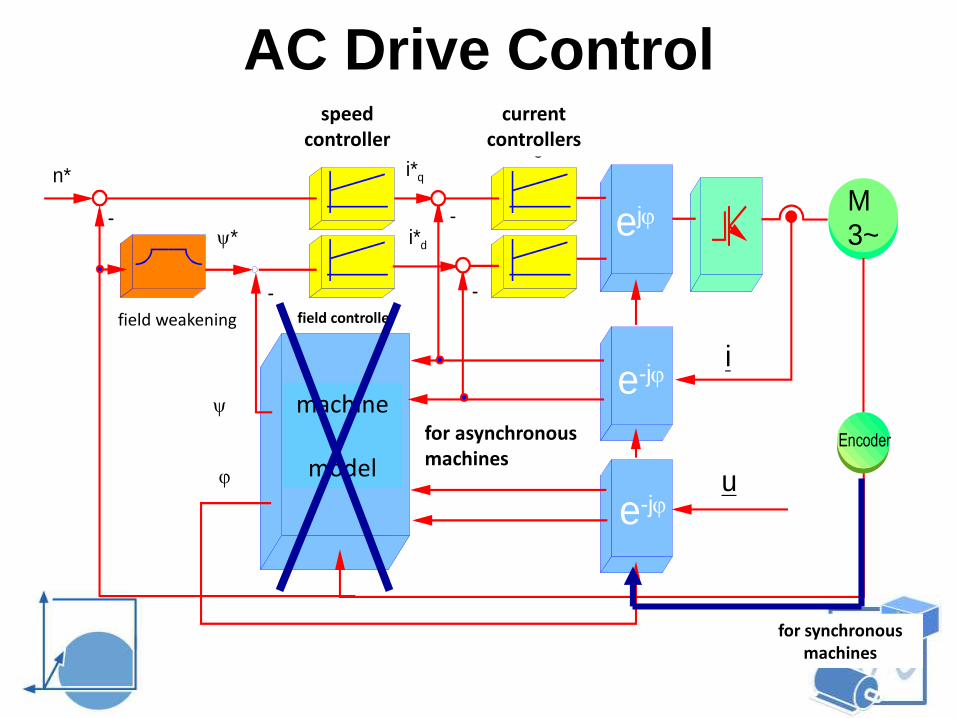
Feldschwächung
- -
-
M-Regler Strom-Regler
Feld-Regler
Ma-schinen-modell
ej
e-j
e-j
M3~
i
u
Encoder
n* i*q
i*d*
for asynchronousmachines
field weakening field controller
speedcontroller
currentcontrollers
machine
model
for synchronousmachines
AC Drive Control
„Regelung“
dq0-Transformation
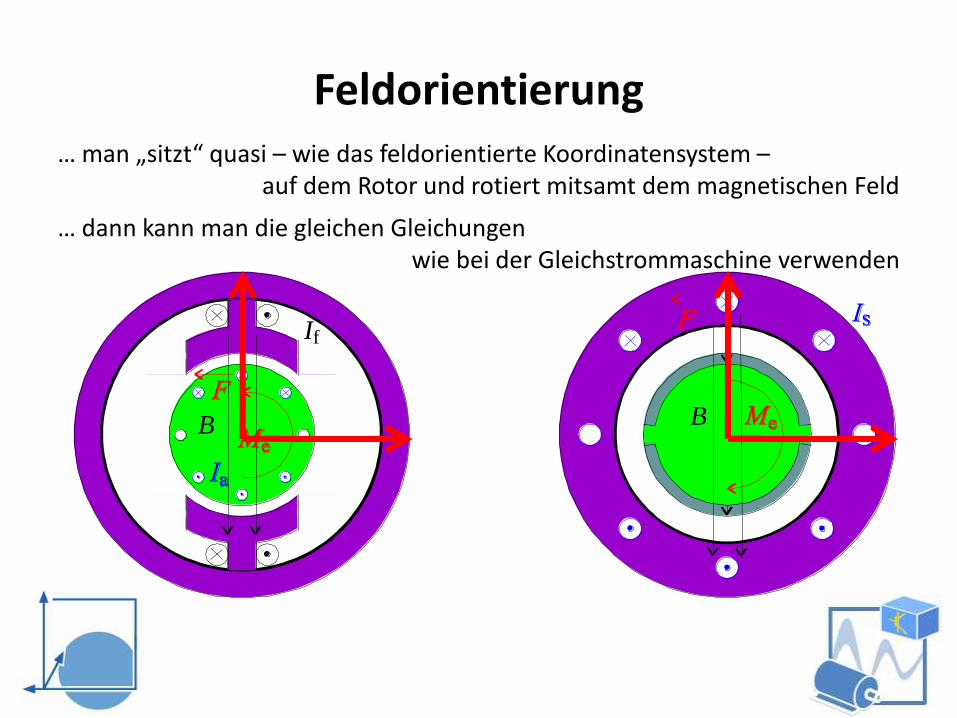
Feldorientierung… man „sitzt“ quasi – wie das feldorientierte Koordinatensystem –
auf dem Rotor und rotiert mitsamt dem magnetischen Feld
B
If
B
… dann kann man die gleichen Gleichungenwie bei der Gleichstrommaschine verwenden
e.g. Induction motor stator – steady state -
3 phases, alternating current, alternating flux
rotating field
Simplest representation = 2 coils with dc current
rotating with field
This is exactly what a phasor diagram does –
magnitude and angle, synchronously rotating
FeldorientierungPark‘sche Gleichungen
Source : Prof. Alan Jack – University of Newcastle upon Tyne
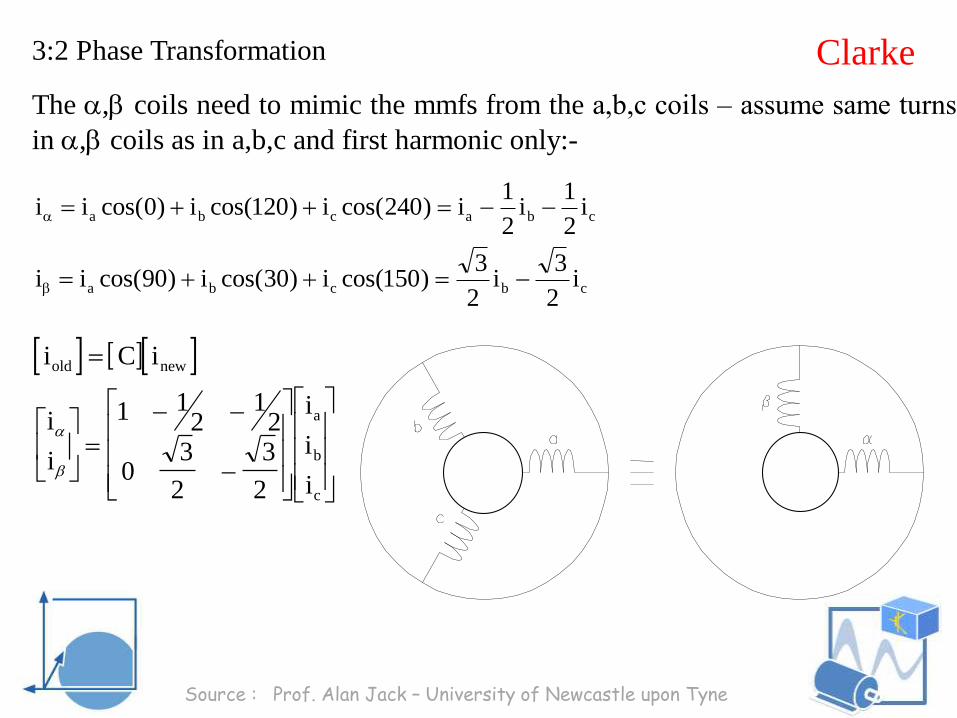
3:2 Phase Transformation
The , coils need to mimic the mmfs from the a,b,c coils – assume same turns
in , coils as in a,b,c and first harmonic only:-
cbcba
cbacba
i2
3i
2
3)150cos(i)30cos(i)90cos(ii
i2
1i
2
1i)240cos(i)120cos(i)0cos(ii
i C i
i
i
i
i
i
old new
a
b
c
1 12
12
03
2
3
2
Source : Prof. Alan Jack – University of Newcastle upon Tyne
Clarke
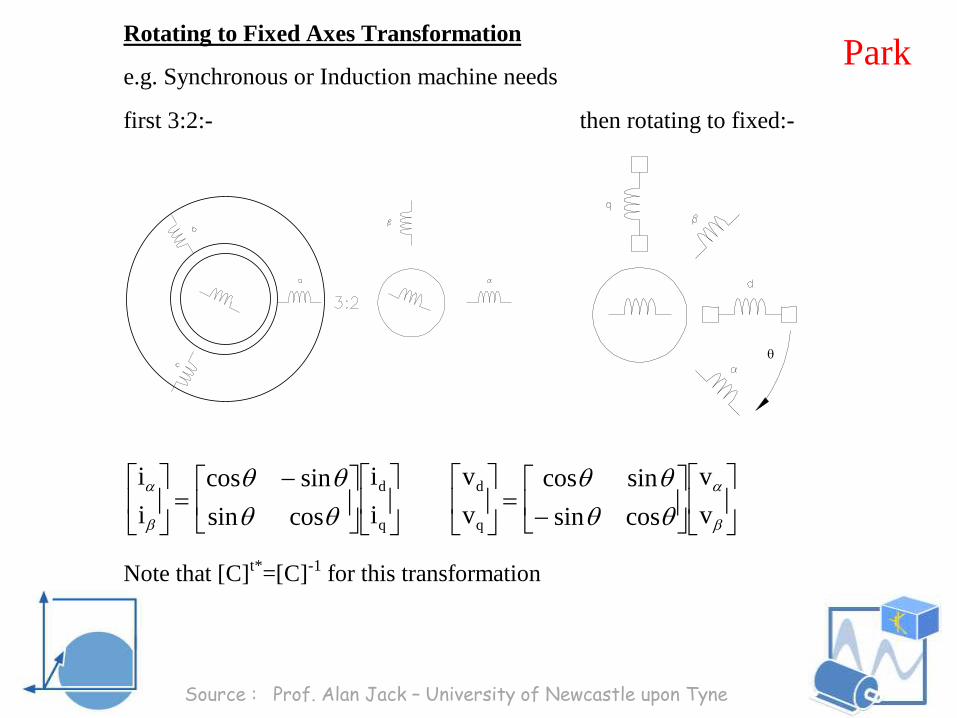
Rotating to Fixed Axes Transformation
e.g. Synchronous or Induction machine needs
first 3:2:- then rotating to fixed:-
i
i
i
i
v
v
v
v
d
q
d
q
cos sin
sin cos
cos sin
sin cos
Note that [C]t*=[C]-1 for this transformation
Source : Prof. Alan Jack – University of Newcastle upon Tyne
Park
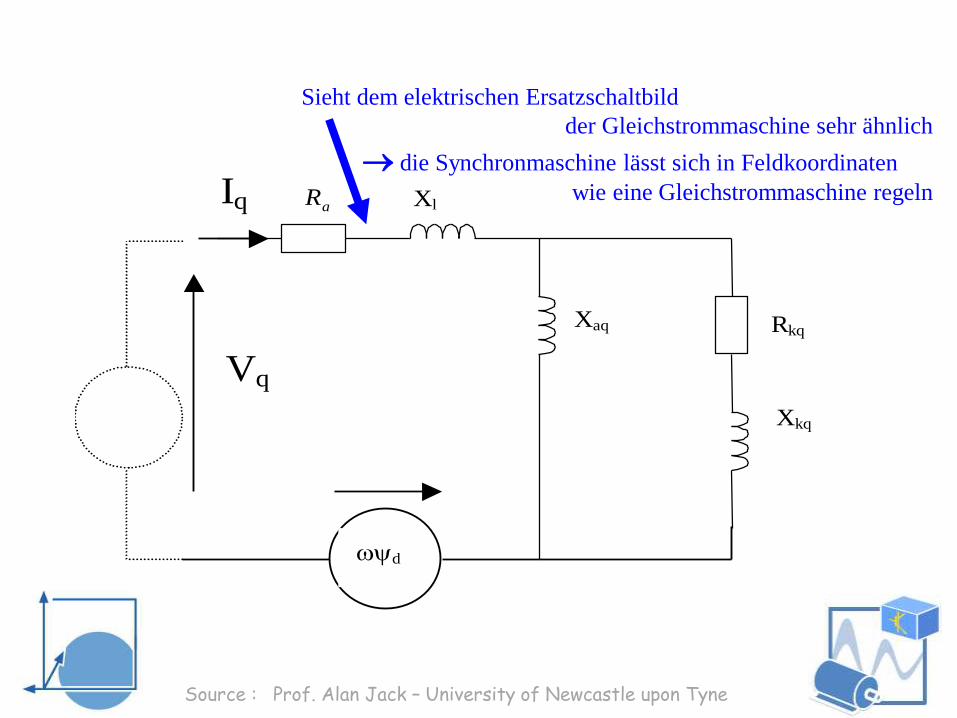
Rkq
d
Xaq
XlIq Ra
Vq
Xkq
q axis
Sieht dem elektrischen Ersatzschaltbild
der Gleichstrommaschine sehr ähnlich
die Synchronmaschine lässt sich in Feldkoordinaten
wie eine Gleichstrommaschine regeln
Source : Prof. Alan Jack – University of Newcastle upon Tyne
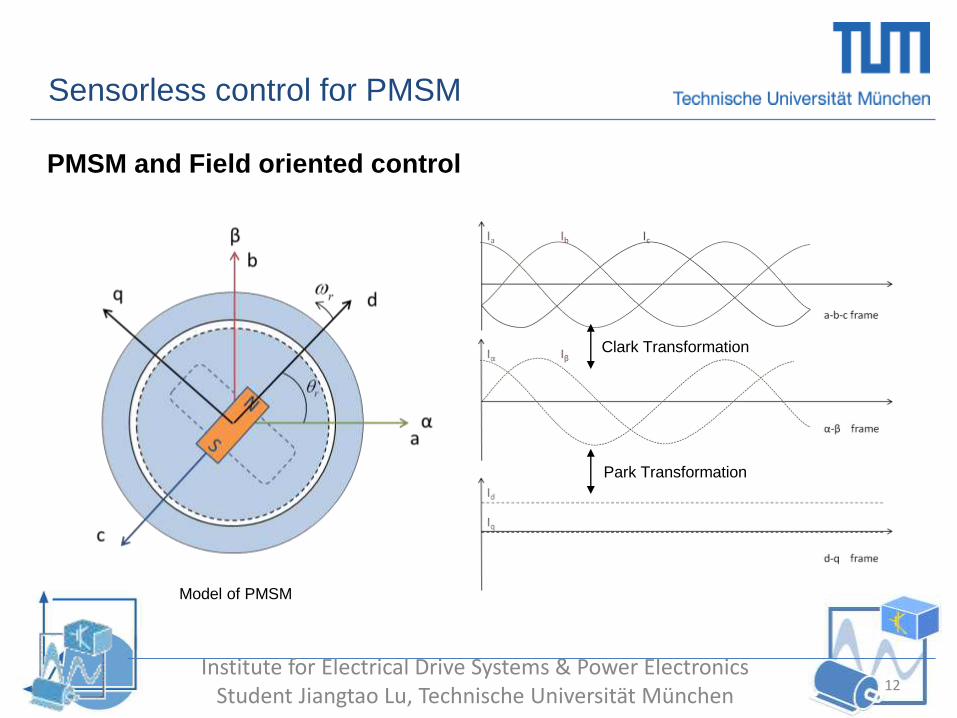
Sensorless control for PMSM
PMSM and Field oriented control
Model of PMSM
Clark Transformation
Park Transformation
Institute for Electrical Drive Systems & Power Electronics Student Jiangtao Lu, Technische Universität München
12
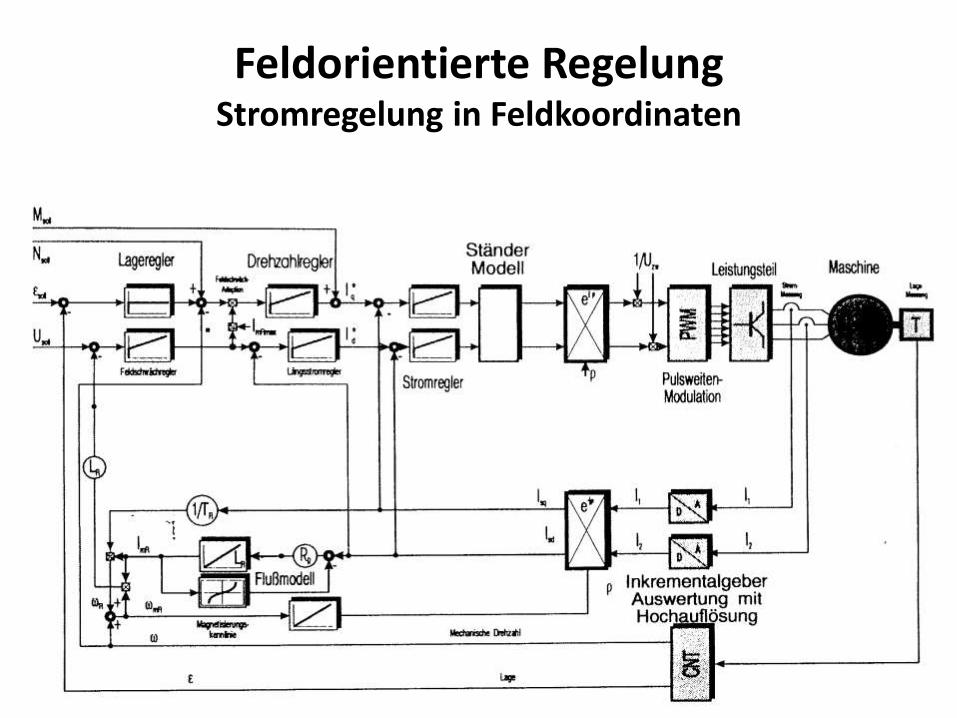
Feldorientierte RegelungStromregelung in Feldkoordinaten
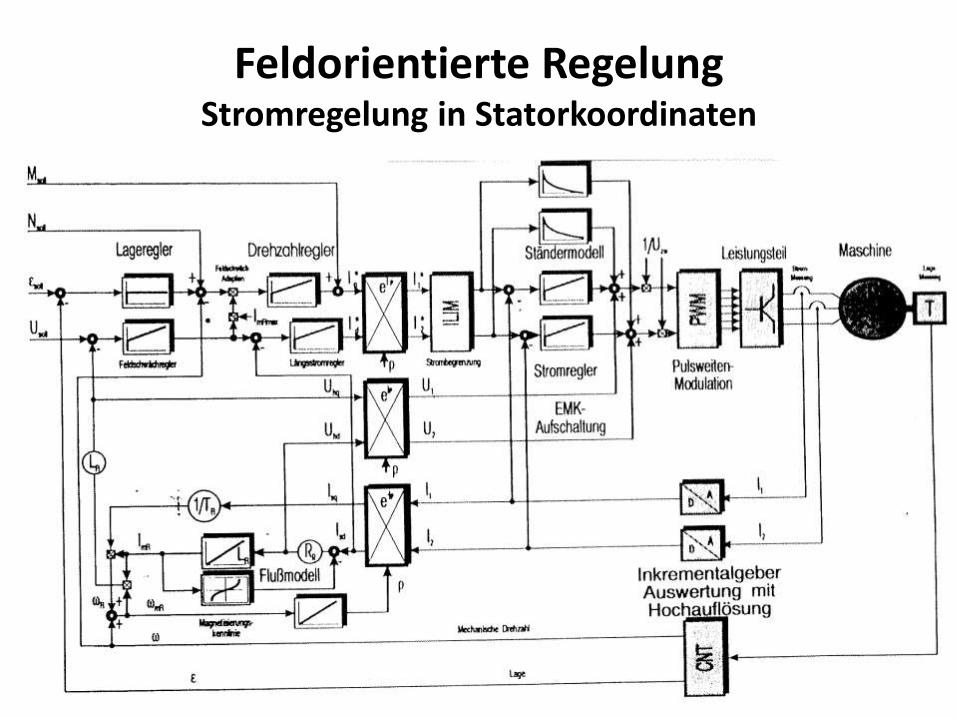
Feldorientierte RegelungStromregelung in Statorkoordinaten
„Regelung“(Spezialthemen)
Geberlose Regelung

Konzepte für elektrische Antriebe mit geberloser Regelung
werden seit einigen Jahr(zehnt)en untersuch
und auf Fachkonferenzen sowie in Fachzeitschriften veröffentlicht
- die Akzeptanz in der Industrie ist jedoch eher verhalten
Warum ?neue Konzepte sind für Industrieanwendungen nur dann interessant,
wenn sie nicht mit höheren Kosten oder höherem Aufwand verbunden sind !!
Was bedeutet dasfür Industrial-Antriebe mit geberloser Regelung ?
keine zusätzlichen oder leistungsfähigeren Prozessoren / Mikrocontroller
keine zusätzliche Hardware oder zusätzliche Sensoren (z. B. Spannungssensoren)
kein erhöhter Inbetriebnahmeaufwand durch Parameter-Einstellungen
aktuell haben sich die Erwartungen/Anforderungen der Industrie leicht gewandelt !
Was wird heute erwartet
von sensor-/geberlosen Regelungen für elektrische Antriebe ?
durchgängiges Konzept für den kompletten Drehzahlregelbereich
geringe bzw. gar keine Zusatzgeräusche
einzustellende Parameter werden nicht mehr als großes Problem betrachtet !
Konzepte für elektrische Antriebe mit geberloser Regelung
werden seit einigen Jahr(zehnt)en untersuch
und auf Fachkonferenzen sowie in Fachzeitschriften veröffentlicht
- die Akzeptanz in der Industrie ist jedoch eher verhalten
Warum ?
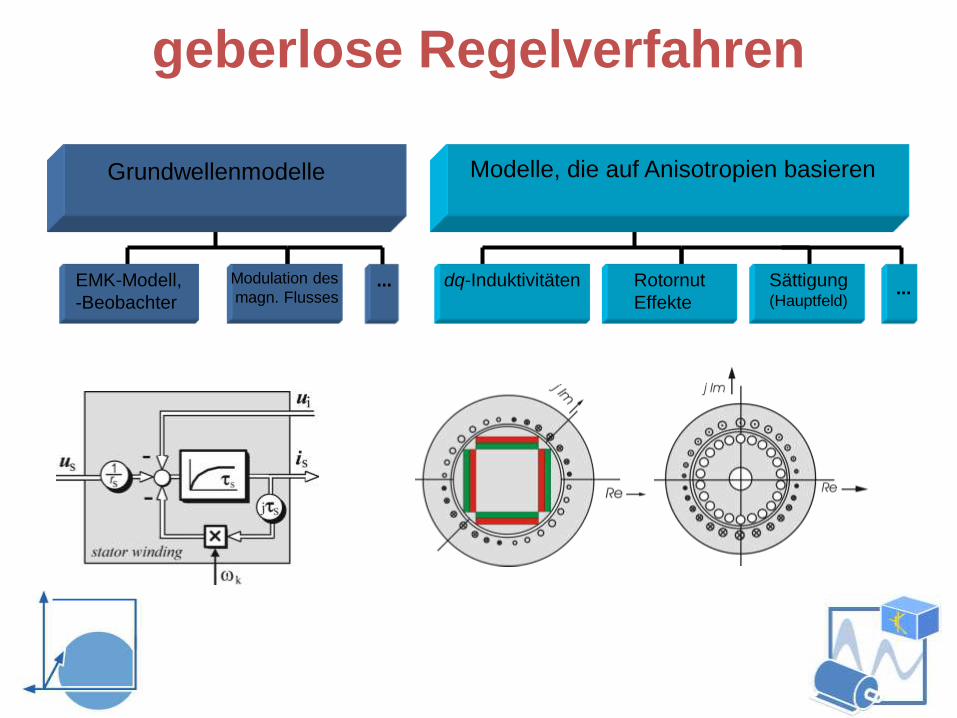
geberlose Regelverfahren
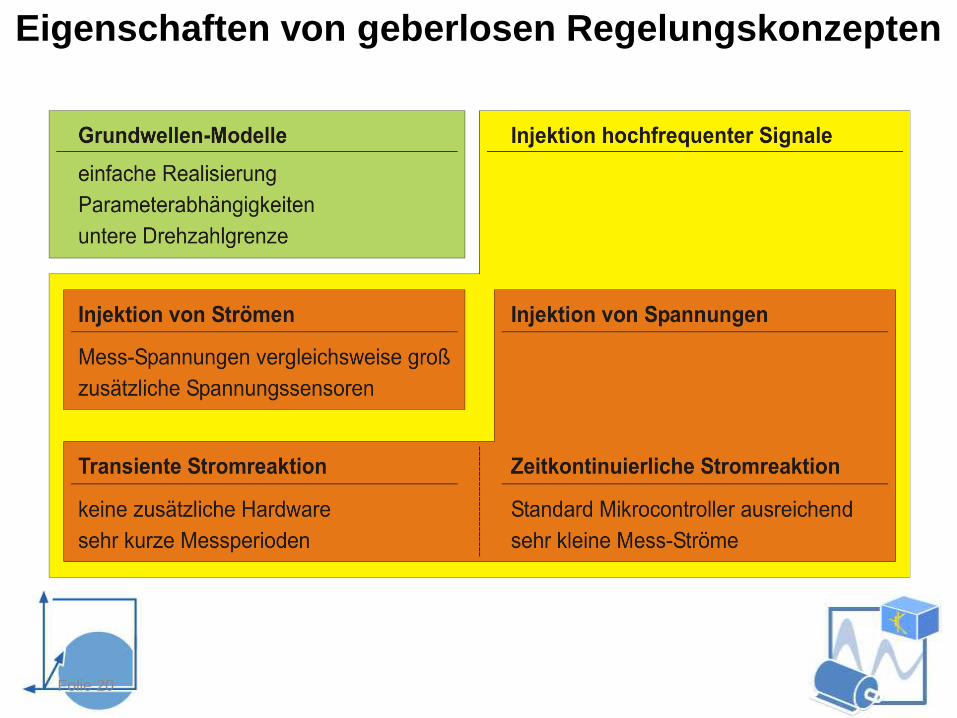
Grundwellenmodelle Modelle, die auf Anisotropien basieren
EMK-Modell,
-Beobachter
dq-Induktivitäten ...Sättigung(Hauptfeld)
... Rotornut
Effekte
Modulation des
magn. Flusses
Page 19
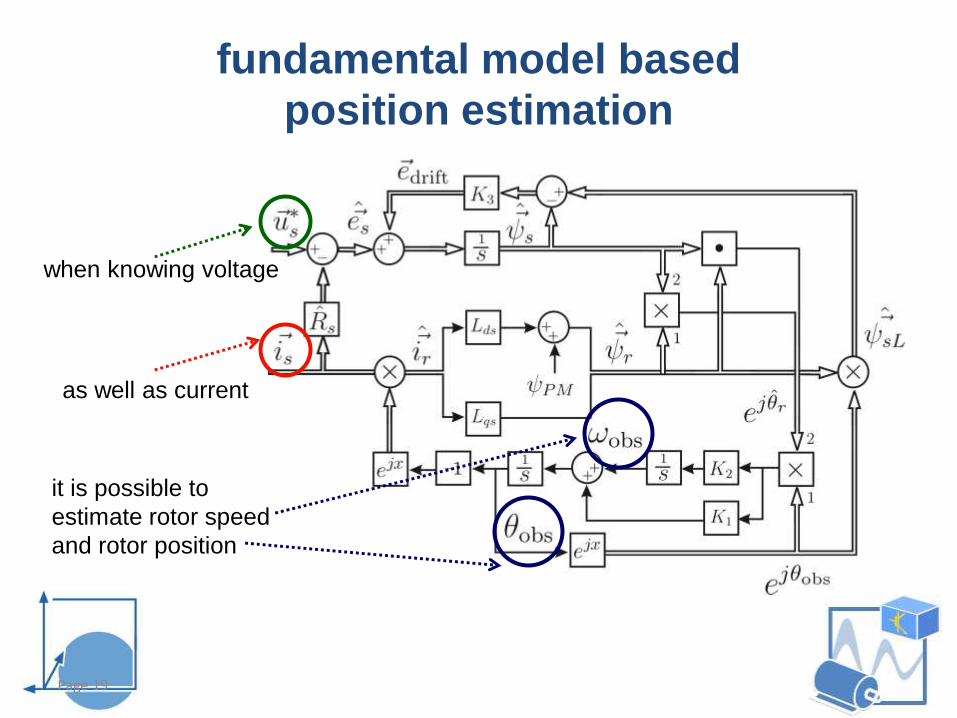
fundamental model based
position estimation
when knowing voltage
as well as current
it is possible to
estimate rotor speed
and rotor position
Folie 20
Eigenschaften von geberlosen Regelungskonzepten
Page 21
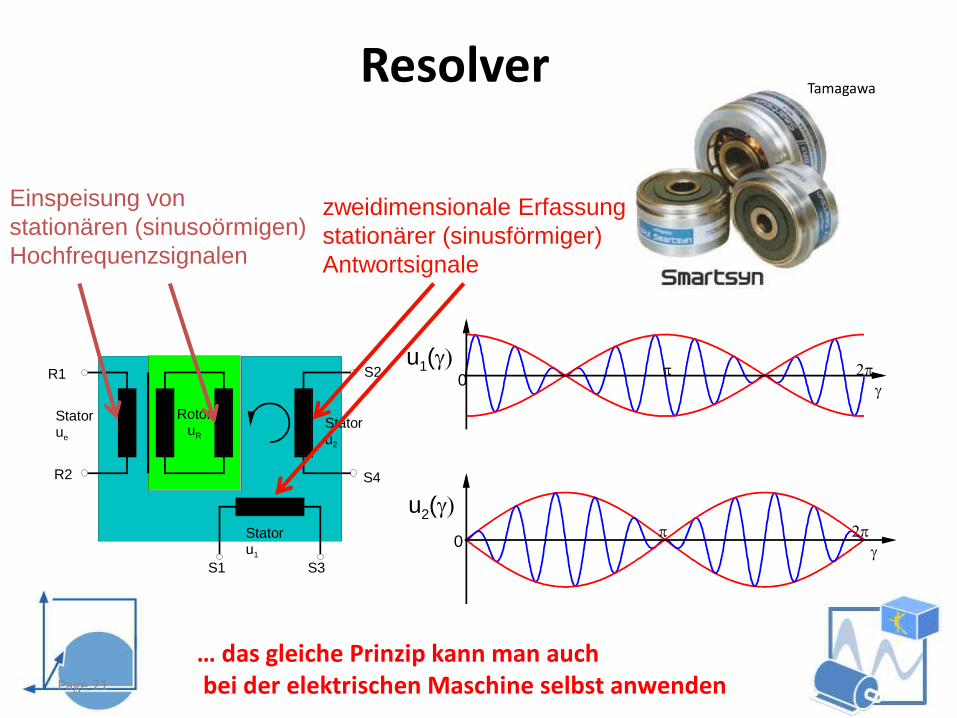
Resolver
Statorue
RotoruR
Statoru2
Statoru1
R1
R2
S1 S3
S4
S2
u2(
0
u1(
0
Tamagawa
Einspeisung von
stationären (sinusoörmigen)
Hochfrequenzsignalen
zweidimensionale Erfassung
stationärer (sinusförmiger)
Antwortsignale
… das gleiche Prinzip kann man auchbei der elektrischen Maschine selbst anwenden
Folie 22
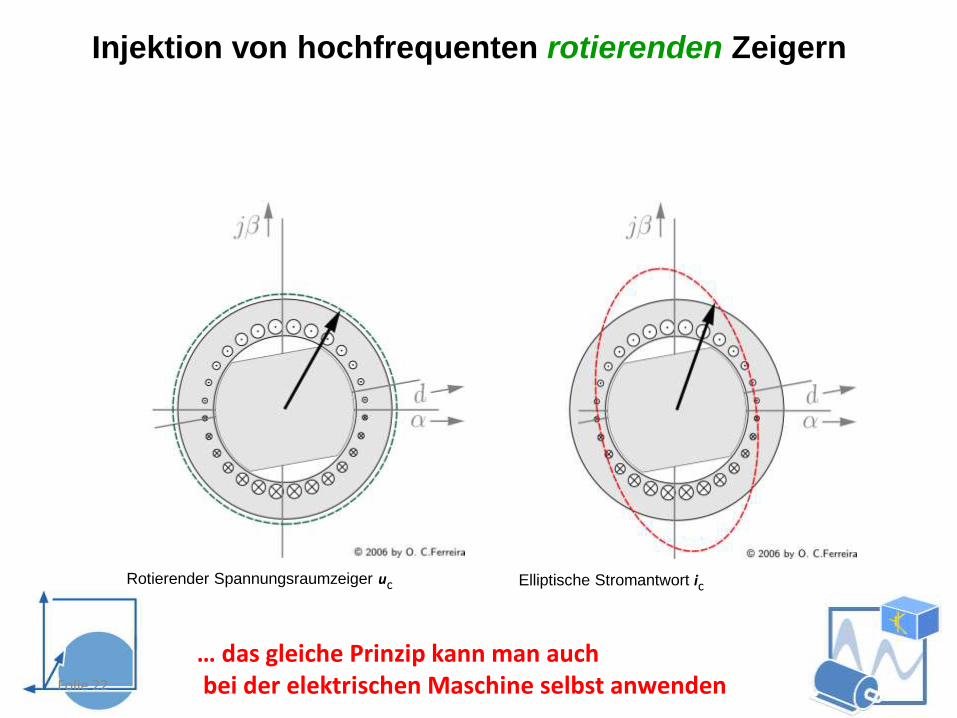
Injektion von hochfrequenten rotierenden Zeigern
Rotierender Spannungsraumzeiger uc Elliptische Stromantwort ic
… das gleiche Prinzip kann man auchbei der elektrischen Maschine selbst anwenden

Folie 23
Lageinformation in hochfrequenten rotierenden Zeigern
• Maschine reagiert auf
rotierenden Spannungszeiger mit
elliptischer Stromantwort
• Ellipse ist mit der Rotoranisotropie
oder
mit der Sättigungsanisotropie
korreliert
• Lageinformation bzgl. des Rotors
ist im hochfrequenten Strom
enthalten Elliptische Stromantwort ic (rotierend)
B
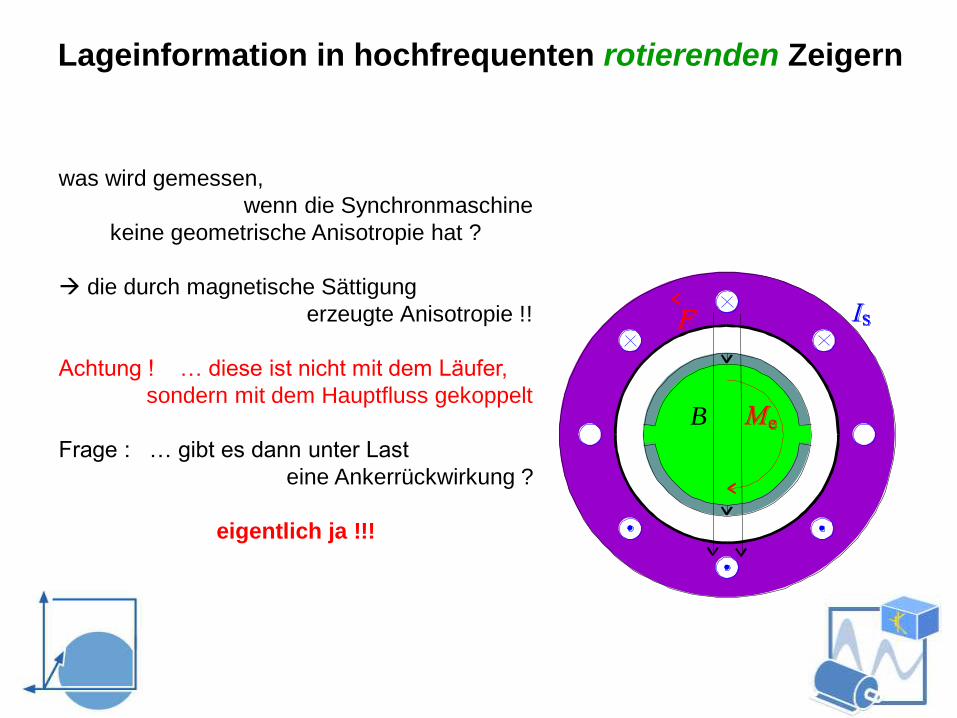
Lageinformation in hochfrequenten rotierenden Zeigern
was wird gemessen,
wenn die Synchronmaschine
keine geometrische Anisotropie hat ?
die durch magnetische Sättigung
erzeugte Anisotropie !!
Achtung ! … diese ist nicht mit dem Läufer,
sondern mit dem Hauptfluss gekoppelt
Frage : … gibt es dann unter Last
eine Ankerrückwirkung ?
eigentlich ja !!!
Folie 25
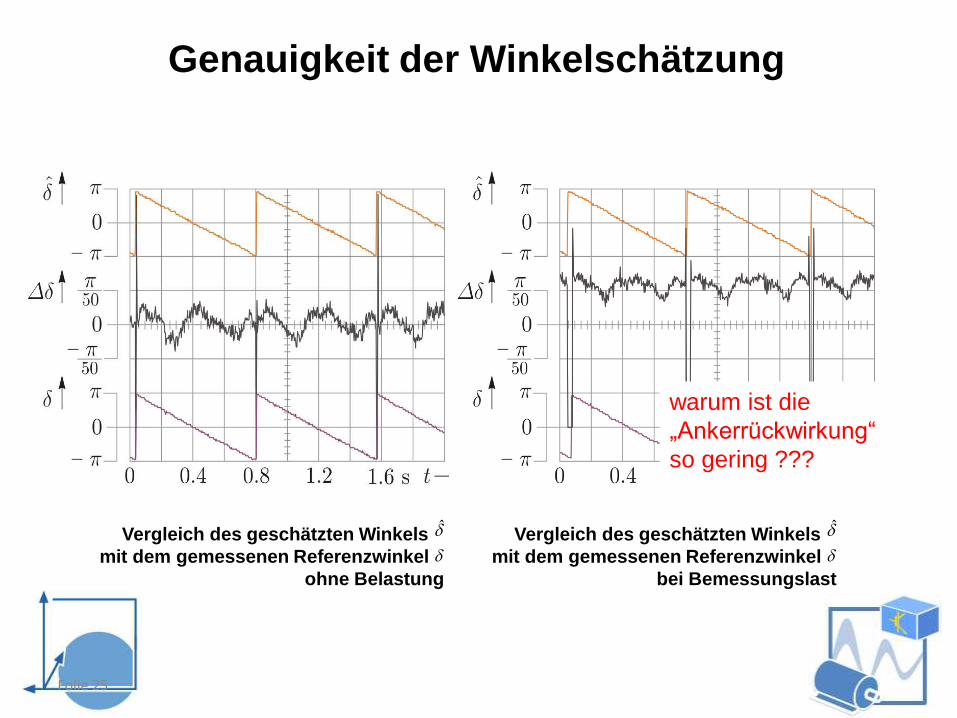
Vergleich des geschätzten Winkels
mit dem gemessenen Referenzwinkel
ohne Belastung
Vergleich des geschätzten Winkels
mit dem gemessenen Referenzwinkel
bei Bemessungslast
warum ist die
„Ankerrückwirkung“
so gering ???
Genauigkeit der Winkelschätzung
Folie 26
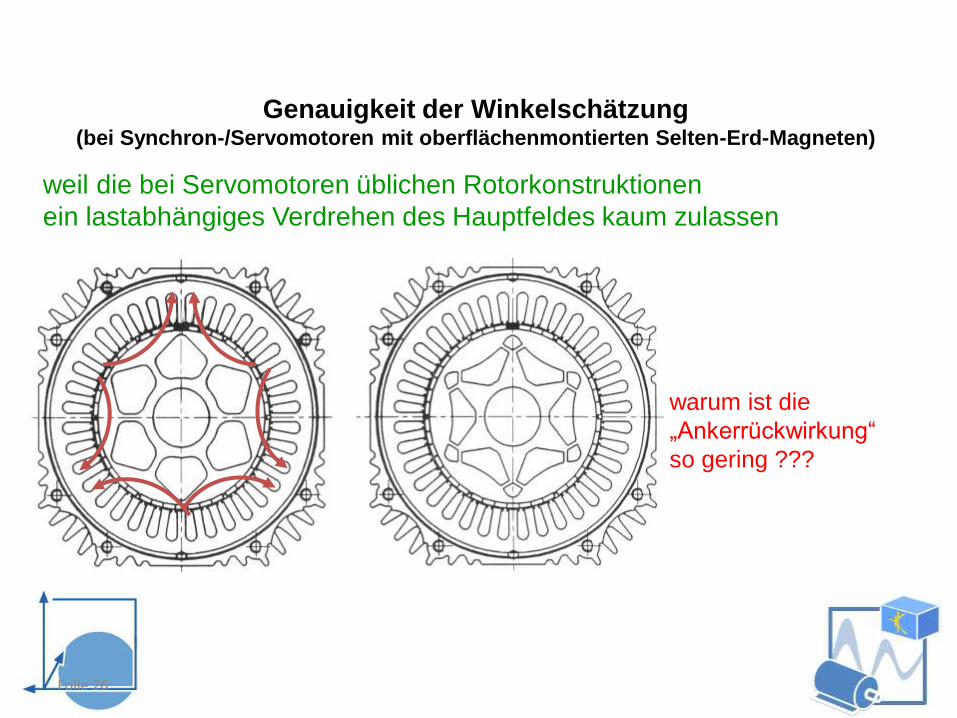
Genauigkeit der Winkelschätzung(bei Synchron-/Servomotoren mit oberflächenmontierten Selten-Erd-Magneten)
warum ist die
„Ankerrückwirkung“
so gering ???
weil die bei Servomotoren üblichen Rotorkonstruktionen
ein lastabhängiges Verdrehen des Hauptfeldes kaum zulassen
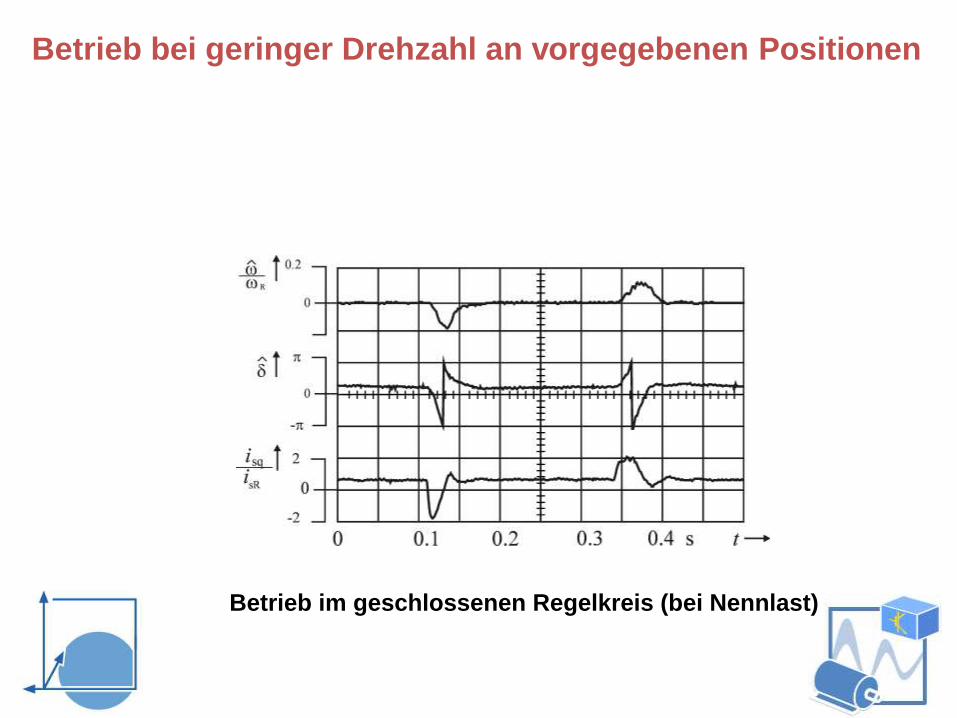
Betrieb im geschlossenen Regelkreis (bei Nennlast)
Betrieb bei geringer Drehzahl an vorgegebenen Positionen
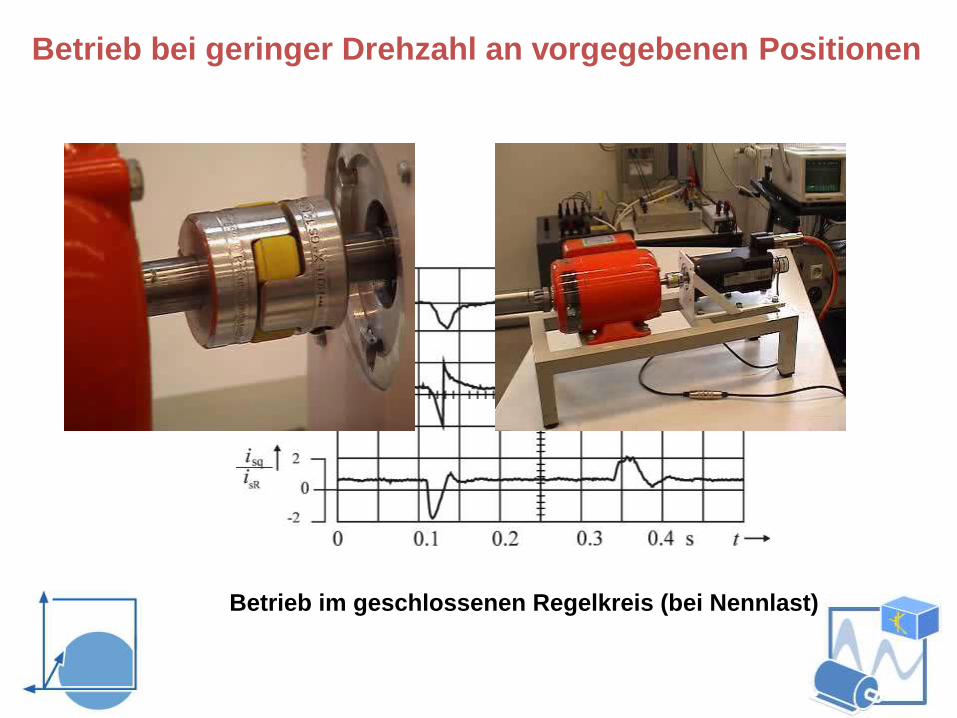
Betrieb im geschlossenen Regelkreis (bei Nennlast)
Betrieb bei geringer Drehzahl an vorgegebenen Positionen
Page 29
Conclusion
• The sensorless control scheme presented here
does not need additional voltage measurement devices
- neither on the machine/motor side nor on the line side
no additional or more powerful processors / controllers
no additional hardware or additional sensors (e. g. voltage sensors)
no increased installation effort with respect to parameter adjustments
• The proposed estimation method is simple
and therefore suitable for usual microcontrollers
• The phase tracking method
is very robust to variations of the system parameters
„Regelung“(Spezialthemen)
MTPA-Regelung ("Maximum Torque per Ampere“)
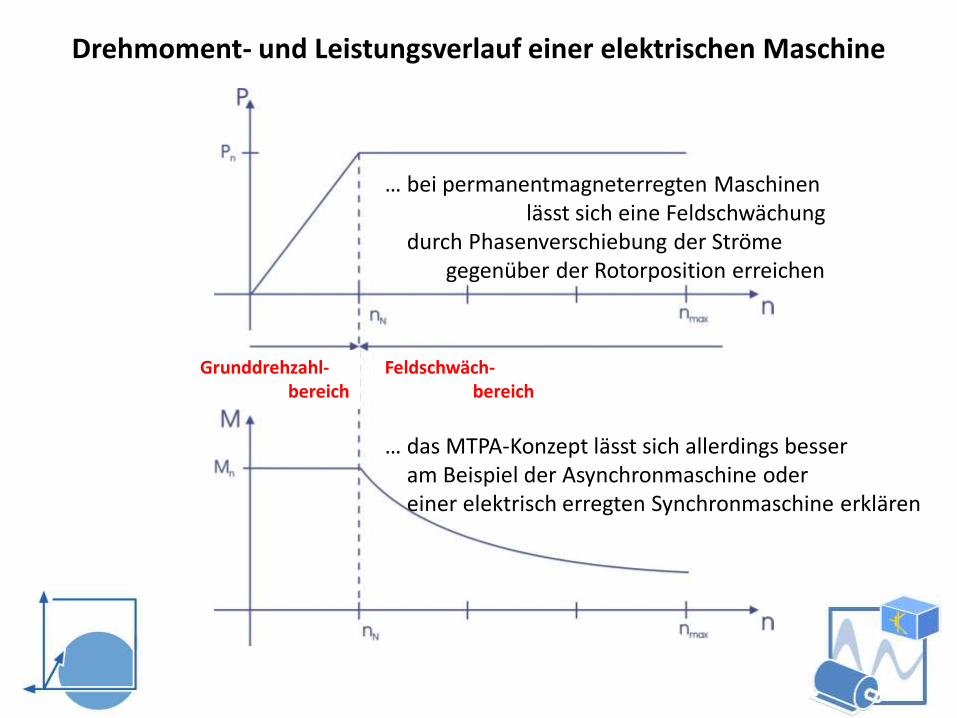
Drehmoment- und Leistungsverlauf einer elektrischen Maschine
Grunddrehzahl-bereich
Feldschwäch-bereich
… das MTPA-Konzept lässt sich allerdings besseram Beispiel der Asynchronmaschine odereiner elektrisch erregten Synchronmaschine erklären
… bei permanentmagneterregten Maschinenlässt sich eine Feldschwächung
durch Phasenverschiebung der Strömegegenüber der Rotorposition erreichen
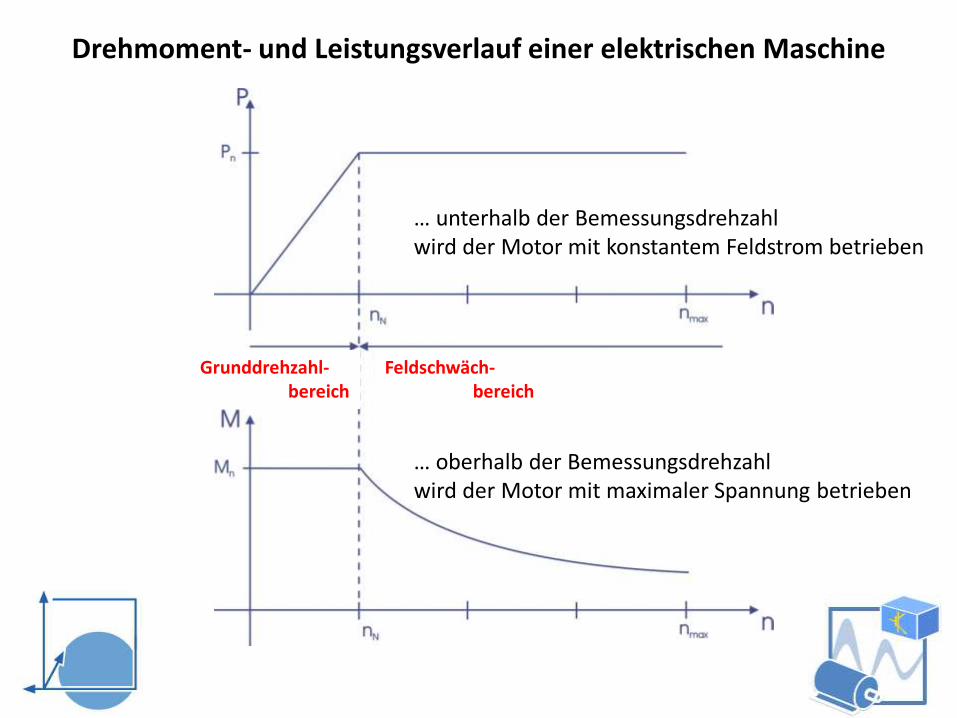
Drehmoment- und Leistungsverlauf einer elektrischen Maschine
Grunddrehzahl-bereich
Feldschwäch-bereich
… oberhalb der Bemessungsdrehzahlwird der Motor mit maximaler Spannung betrieben
… unterhalb der Bemessungsdrehzahlwird der Motor mit konstantem Feldstrom betrieben
MTPA-Regelung
… unterhalb der Bemessungsdrehzahlwird der Motor mit konstantem Feldstrom betrieben
… im Teillastbereich wird klar : der volle Feldstrom wäre nicht notwendig
… das gleiche Drehmomentkönnte auch mit einem Bruchteil des Feldstroms
eingestellt werden
… bei geringerem Gesamtstrom höherer Wirkungsgrad
Nachteile
• geringerer Feldstrom
geringere Dynamik
• optimaler Feldstrom
stark arbeitspunktabhängig
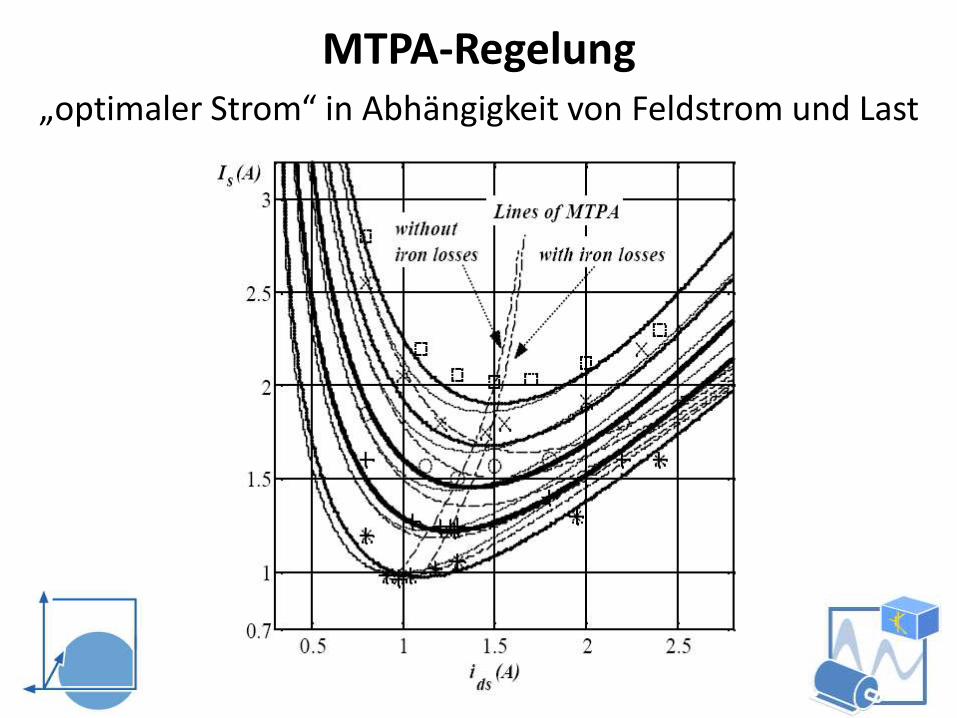
MTPA-Regelung„optimaler Strom“ in Abhängigkeit von Feldstrom und Last
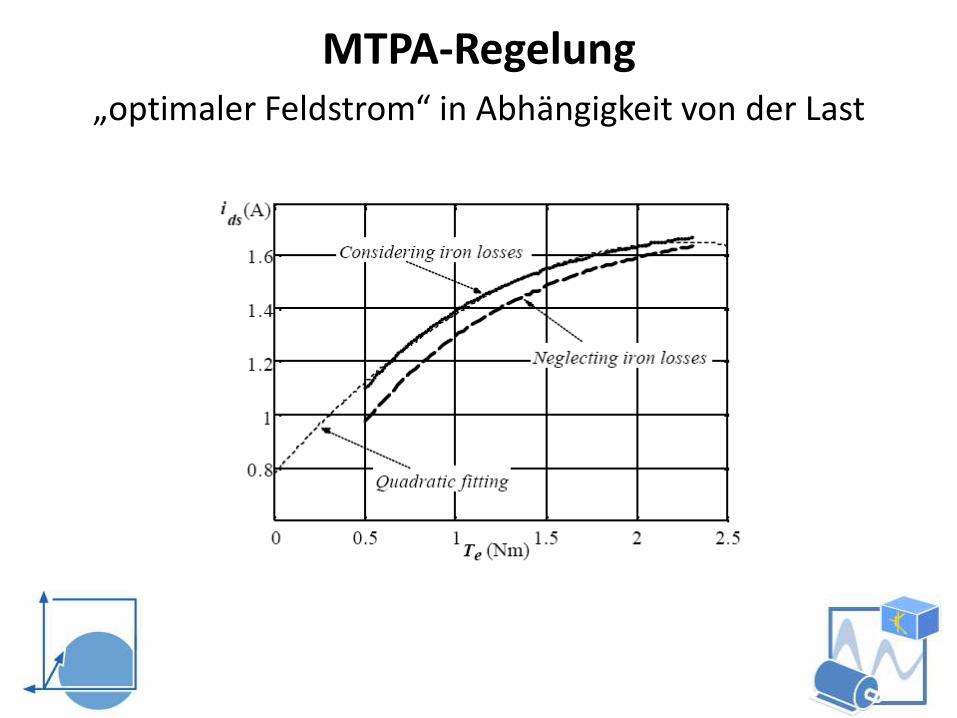
MTPA-Regelung„optimaler Feldstrom“ in Abhängigkeit von der Last
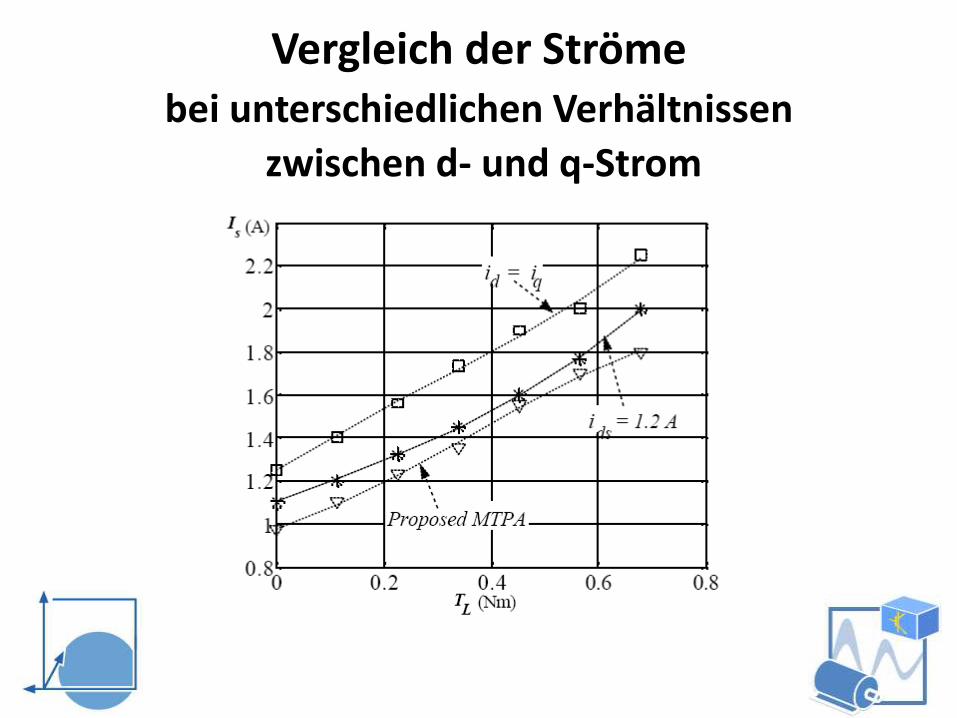
Vergleich der Strömebei unterschiedlichen Verhältnissen
zwischen d- und q-Strom
08.12.2016 37
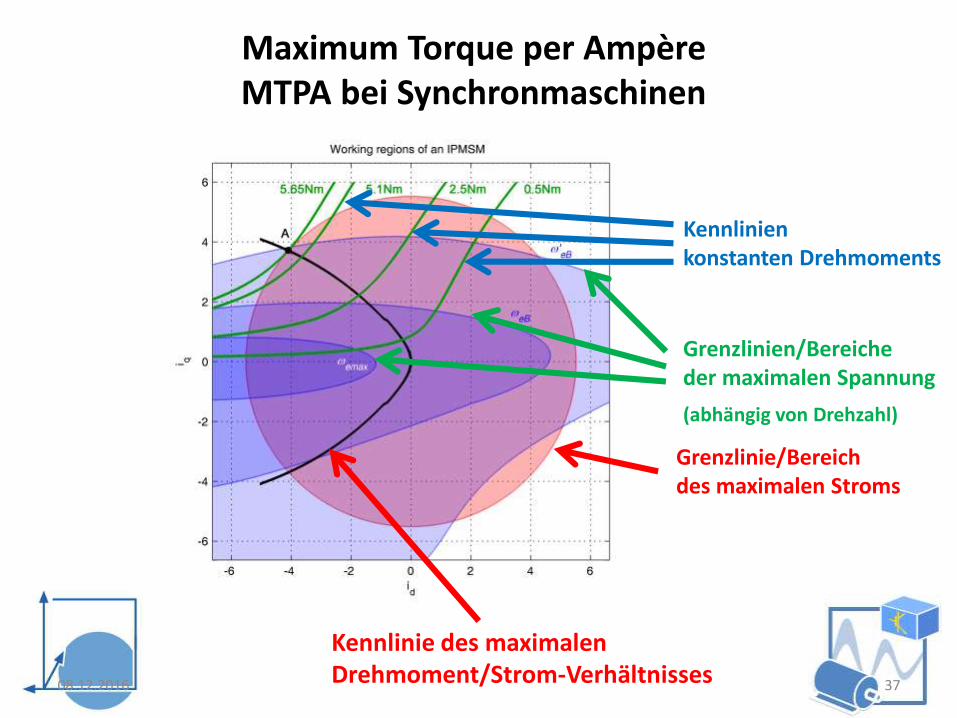
Maximum Torque per AmpèreMTPA bei Synchronmaschinen
Grenzlinie/Bereichdes maximalen Stroms
Grenzlinien/Bereicheder maximalen Spannung
(abhängig von Drehzahl)
Kennlinienkonstanten Drehmoments
Kennlinie des maximalenDrehmoment/Strom-Verhältnisses
08.12.2016 38
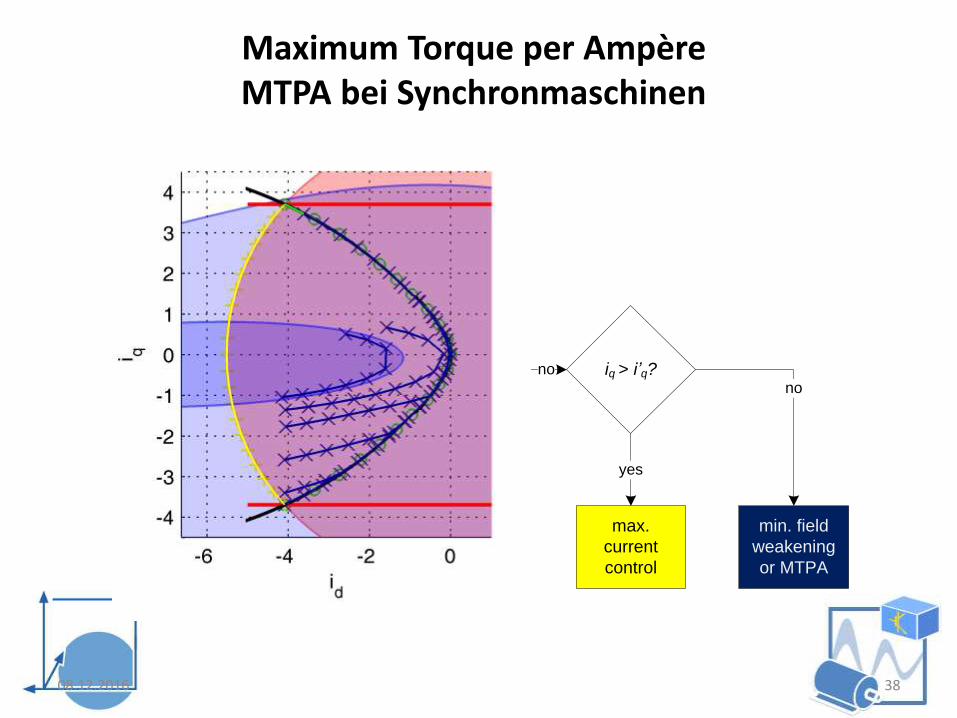
Read ωe
and iq
ωe< ω’eB?
MTPA
control
yes
max.
current
control
iq > i’q?no
yes
min. field
weakening
or MTPA
no
Maximum Torque per AmpèreMTPA bei Synchronmaschinen
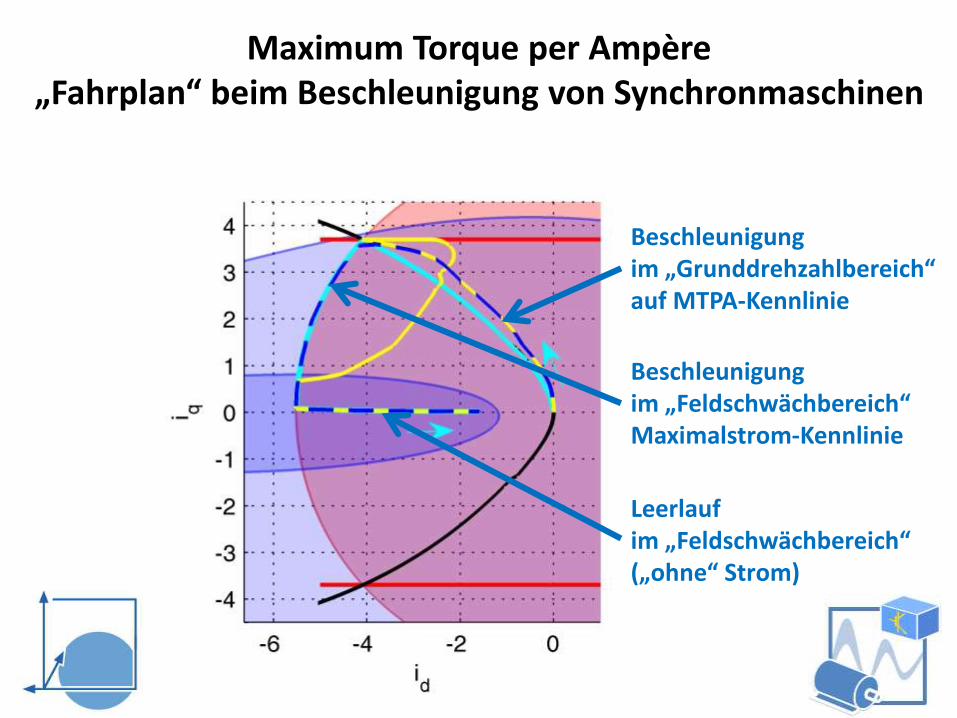
Maximum Torque per Ampère„Fahrplan“ beim Beschleunigung von Synchronmaschinen
Beschleunigung im „Grunddrehzahlbereich“auf MTPA-Kennlinie
Beschleunigung im „Feldschwächbereich“Maximalstrom-Kennlinie
Leerlauf im „Feldschwächbereich“(„ohne“ Strom)