Systemtheorie - eit.hs-karlsruhe.de · Fakultät für Elektro- und Informationstechnik, Manfred...
30
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann Systemtheorie Vorlesung 5: Eigenschaften zeitkontinuierlicher Systeme
Transcript of Systemtheorie - eit.hs-karlsruhe.de · Fakultät für Elektro- und Informationstechnik, Manfred...

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann
Systemtheorie
Vorlesung 5: Eigenschaften zeitkontinuierlicher Systeme

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 2
Zeitkontinuierliche Systeme im Zeitbereich
• Systemtheorie beschäftigt sich mit der Analyse und
Synthese von Systemen
• Sie erlaubt das Systemverhalten zu prognostizieren,
Stabilitätsaussagen zu treffen und die Kopplung
verschiedener Teilsysteme zu beschreiben
• Ein System kann ein oder mehrere Ein- und
Ausgangssignale aufweisen, die in dem
Eingangsvektor u bzw. dem Ausgangsvektor yzusammengefasst sind
• Eingangssignale u(t) werden von dem System nicht
beeinflusst, sie existieren auch ohne das System
und das System hat keine Rückwirkung auf sie,
Beispiel ideale Spannungsquelle
• Dynamische Systeme verfügen über
Energiespeicher
Einführung
System mit
Anfangsbedingung ( )y t
y(0)
( )u t

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 3
Zeitkontinuierliche Systeme im Zeitbereich
• Anregung durch die Eingangssignale u(t) führt zu
einer Änderung der in dem System gespeicherten
Energie
• In der Systemtheorie wird davon gesprochen, dass
sich damit der Zustand des Systems geändert wird,
Beispiel ist die in einem Kondensator gespeicherte
elektrische Energie oder der Zustand des
Kondensators
• Ausgangssignale y(t) ergeben sich aus dem aktuellen
Systemzustand und den aktuellen Eingangssignalen
• Ausgangssignal wird auch Reaktion des Systems
oder Systemantwort genannt
• Viele Systeme lassen sich mit linearen
Differentialgleichungen mit konstanten Koeffizienten
beschreiben, Diskussion einiger Beispiele
Einführung
System mit
Anfangsbedingung ( )y t
y(0)
( )u t

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 4
Zeitkontinuierliche Systeme im Zeitbereich
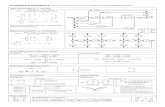
• Beschreibung eines einfaches Netzwerk
bestehend aus einer Spannungsquelle uE, einem
Widerstand R und einer Kapazität C
• Beschreibung linearer elektrischer Systeme erfolgt
über Bauelemente-Gleichungen für die beteiligten
Bauelemente R, L und C, ideale Quellen und
Bilanzgleichungen
• Maschengleichung
• Knotengleichung
Beschreibung von Systemen mit Differentialgleichungen – Beispiel RC-Glied
( )M
m
m 1
i t 0=
=
( )N
n
n 1
u t 0=
=
C
( )i t
( )Eu t
R
( )Au t

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 5
Zeitkontinuierliche Systeme im Zeitbereich
Beschreibung von Systemen mit Differentialgleichungen – Beispiel RC-Glied
Bauelement Bauelemente-Gleichungen
Widerstand
Kapazität
Induktivität
( ) ( )R Ru t R i t= ( ) ( )R R
1i t u t
R=
( ) ( )t
C C
1u t i d
C−
= ( ) CC
dui t C
dt=
( ) LL
diu t L
dt= ( ) ( )
t
L L
1i t u d
L−
=
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 6
Zeitkontinuierliche Systeme im Zeitbereich
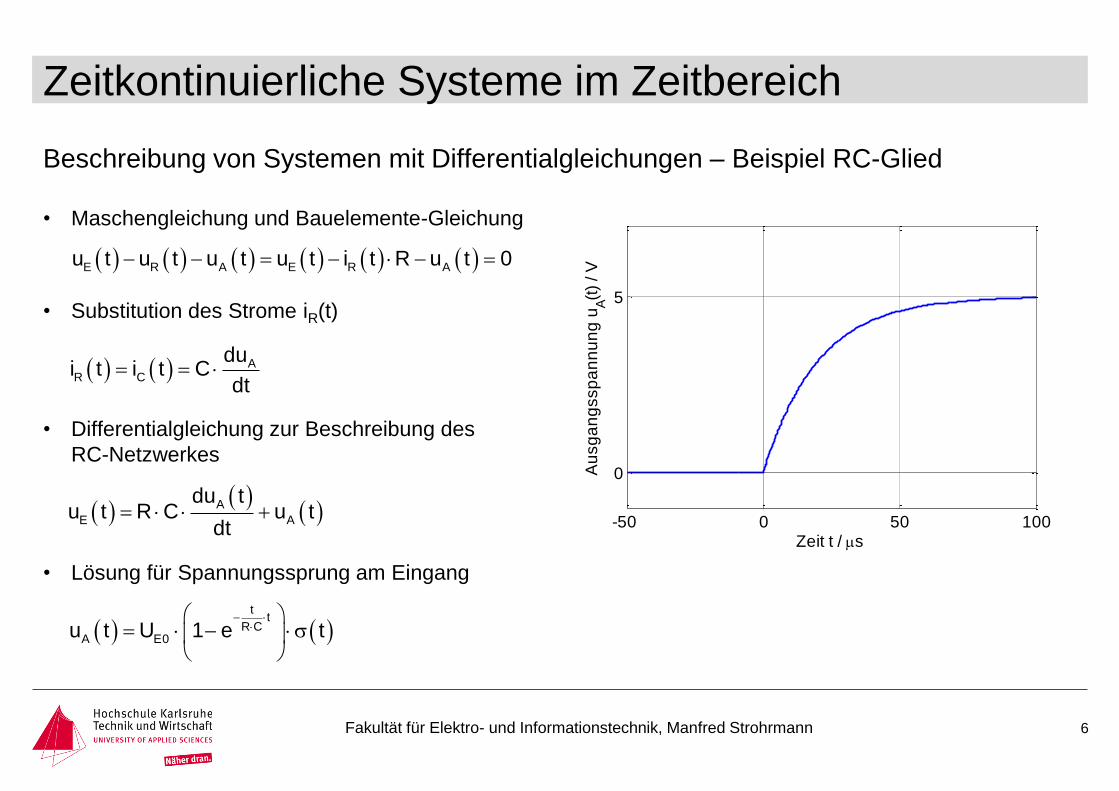
• Maschengleichung und Bauelemente-Gleichung
• Substitution des Strome iR(t)
• Differentialgleichung zur Beschreibung des
RC-Netzwerkes
• Lösung für Spannungssprung am Eingang
Beschreibung von Systemen mit Differentialgleichungen – Beispiel RC-Glied
( ) ( ) ( ) ( ) ( ) ( )E R A E R Au t u t u t u t i t R u t 0− − = − − =
( ) ( ) AR C
dui t i t C
dt= =
( )( )
( )A
E A
du tu t R C u t
dt= +
( ) ( )t
tR C
A E0u t U 1 e t−
= −
-50 0 50 100
0
5
Zeit t / s
Au
sg
an
gssp
an
nu
ng
u A(t
) / V

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 7
Zeitkontinuierliche Systeme im Zeitbereich
• Behälter mit Volumen V und Oberfläche A ist mit
Wasser gefüllt
• Wärmeaustausch mit der Umgebung findet nur als
Wärmeleitung über die Oberfläche A statt
• Bis zu dem Zeitpunkt t = 0 entspricht die
Wassertemperatur (0) der Umgebungs-
temperatur U
• Zum Zeitpunkt t = 0 wird ein Tauchsieder in das
Wasser getaucht, der eine konstante elektrische
Leistung pEL umsetzt
• Temperatur des Wassers wird sich solange
erhöhen, bis sich ein Gleichgewicht zwischen der
zugeführten Leistung pEL und des über die Fläche
A abgeführten Wärmestroms pA einstellt
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
Betriebs-
strom
IBetriebs-
spannung
U
Umgebungstemperatur U
Wasser-
temperatur
Heiz-
widerstand
R

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 8
Zeitkontinuierliche Systeme im Zeitbereich
• Temperaturdifferenz an einer Fläche A mit der
Wärmeübergangszahl führt zu einem
Wärmestrom pA
• Beschreibung ist vergleichbar zum Ohmschen
Gesetz, elektrische Spannung entspricht die
Temperaturdifferenz , elektrischer Strom
entspricht dem Wärmestrom pA
• Definition des thermischen Widerstandes RTH
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
( ) ( ) ( )U A
1t t p t
A = − =
( )( )TH
A
t 1R
p t A
= =
Betriebs-
strom
IBetriebs-
spannung
U
Umgebungstemperatur U
Wasser-
temperatur
Heiz-
widerstand
R

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 9
Zeitkontinuierliche Systeme im Zeitbereich
• Wärmekapazität Cth ist definiert als der Quotient
aus zugeführter Energie dEC und der damit
verbundenen Temperaturänderung d
• Darstellung in Integralform führt zur
Temperaturänderung des Wassers
• Wissen der elektrischen Schaltungstechnik kann
auf thermische Anwendungen übertragen werden
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
( )( )
C
TH
dE tC
d t=
( ) ( )t
C
TH
1t p d
C−
=
Betriebs-
strom
IBetriebs-
spannung
U
Umgebungstemperatur U
Wasser-
temperatur
Heiz-
widerstand
R

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 10
Zeitkontinuierliche Systeme im Zeitbereich
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
Bauelement Bauelemente-Gleichungen
Wärmewiderstand
Wärmekapazität
( ) ( ) ( )TH A A
1t R p t p t
A = =
( ) ( )Ap t A t=
( ) ( )t
C
TH
1t p d
C−
= ( )C TH
dp t C
dt
=

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 11
Zeitkontinuierliche Systeme im Zeitbereich
• Für die Bilanzen gelten sinngemäß die gleichen
Beziehungen wie bei den elektrischen Größen
• Maschenregel der Temperaturdifferenzen lautet
• Knotengleichung entspricht die Leistungsbilanz
• Verknüpfung der elektrischen und thermischen
Größen über eine Leistungsbilanz erstellt
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
( )N
n
n 1
t 0=
=
( )M
m
m 1
p t 0=
=
( ) ( ) ( )C EL Ap t p t p t= −
Betriebs-
strom
IBetriebs-
spannung
U
Umgebungstemperatur U
Wasser-
temperatur
Heiz-
widerstand
R
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 12
Zeitkontinuierliche Systeme im Zeitbereich
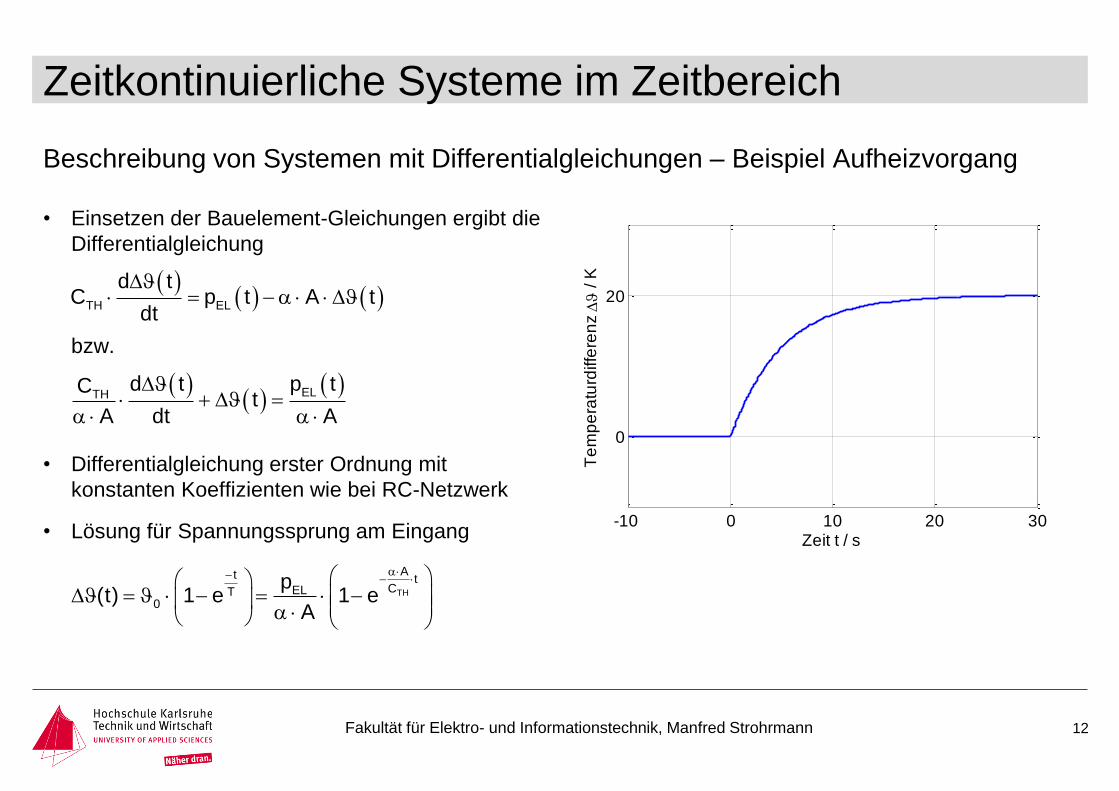
• Einsetzen der Bauelement-Gleichungen ergibt die
Differentialgleichung
bzw.
• Differentialgleichung erster Ordnung mit
konstanten Koeffizienten wie bei RC-Netzwerk
• Lösung für Spannungssprung am Eingang
Beschreibung von Systemen mit Differentialgleichungen – Beispiel Aufheizvorgang
( )( ) ( )TH EL
d tC p t A t
dt
= −
( )( )
( )ELTHd t p tC
tA dt A
+ =
TH
At tCELT
0
p(t) 1 e 1 e
A
− − = − = −
-10 0 10 20 30
0
20
Zeit t / s
Te
mp
era
turd
iffe
ren
z
/ K

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 13
Zeitkontinuierliche Systeme im Zeitbereich
• Beispiel Feder-Masse-Dämpfer-System
• Äußere Kraft FE greift an einem Körper der Masse
m an und bewegt den Körper, der Bewegung
stehen die Trägheits-, Dämpfungs- und
Rückstellkraft der Feder entgegen
• Berechnung der Auslenkung x bei einer
sprungförmig aufgebrachten Kraft FE
• Wie bei dem elektrischen System lassen sich die
mechanischen Bauelemente isoliert beschreiben
• Bilanzen werden zur Verknüpfung der
unterschiedlichen Größen verwendet
Beschreibung von Systemen mit Differentialgleichungen – Feder-Masse-System
Feder
c
Dämpfer
D
Masse m
Fixpunkt
Äußere
Kraft
FE
Auslenkung
x
FE
FD FM FC

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 14
Zeitkontinuierliche Systeme im Zeitbereich
Beschreibung von Systemen mit Differentialgleichungen – Feder-Masse-System
Bauelement Bauelemente-Gleichung
Feder mit Federkonstante c
Masse m
Viskose Reibung / Dämpfer D
Gleitreibung keine Invertierung möglich
( ) ( ) ( )t
CF t c v d c x t−
= = ( ) CdF1v t
c dt=
( ) ( )M
dvF t m a t m
dt= = ( ) ( )
t
M
1v t F d
m−
=
( ) ( )D
dxF t D v t D
dt= = ( ) ( )D
1v t F t
D=
( ) ( ) ( )( )G NF t F t sgn v t=

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 15
Zeitkontinuierliche Systeme im Zeitbereich
• Maschenregel entspricht die Kräftesumme
• Masse, Feder und Dämpfer sind starr miteinander
gekoppelt, ihre Auslenkung x für Masse, Feder und
Dämpfer ist damit identisch
• Kräftebilanz ergibt unter Berücksichtigung der
unterschiedlichen Kraftrichtungen
• Darstellung als Differentialgleichung
Beschreibung von Systemen mit Differentialgleichungen – Feder-Masse-System
( )N
n
n 1
F t 0=
=
( ) ( )2
E 2
d x dxF t m D c x t
dt dt= + +
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
E M D C
E
0 F t F t F t F t
F t m a t D v t c x t
= − − −
= − − −
Feder
c
Dämpfer
D
Masse m
Fixpunkt
Äußere
Kraft
FE
Auslenkung
x
FE
FD FM FC
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 16
Zeitkontinuierliche Systeme im Zeitbereich
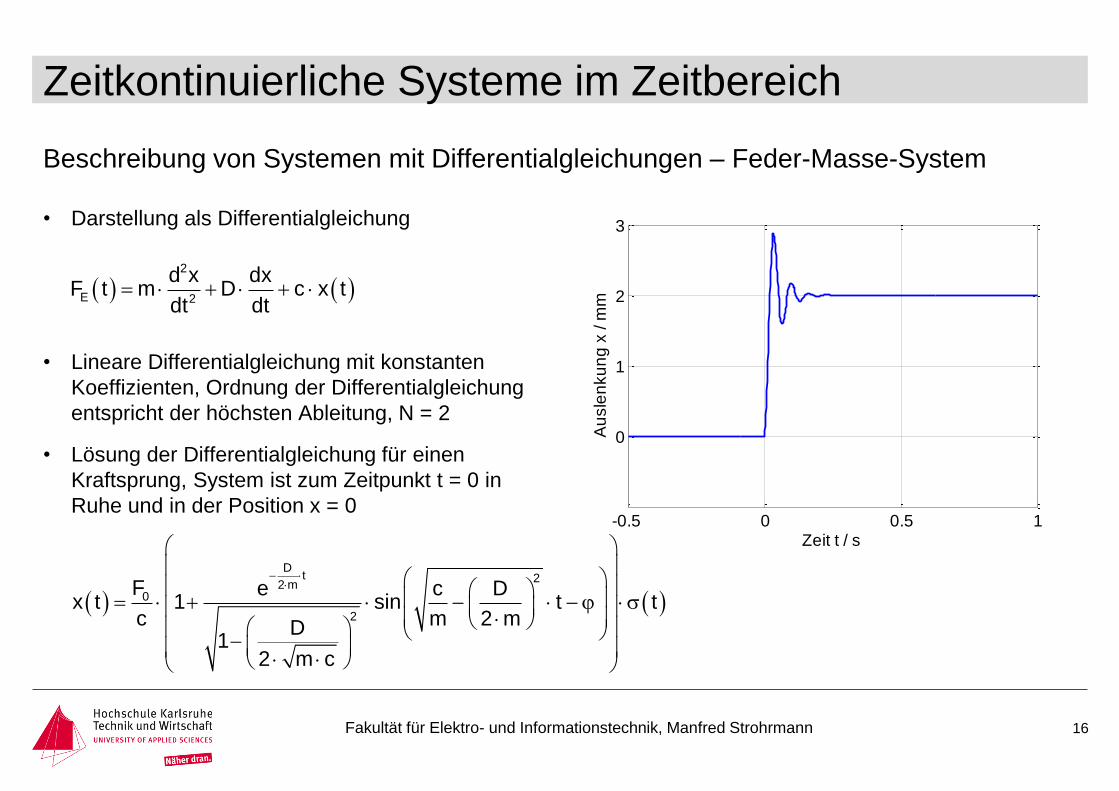
• Darstellung als Differentialgleichung
• Lineare Differentialgleichung mit konstanten
Koeffizienten, Ordnung der Differentialgleichung
entspricht der höchsten Ableitung, N = 2
• Lösung der Differentialgleichung für einen
Kraftsprung, System ist zum Zeitpunkt t = 0 in
Ruhe und in der Position x = 0
Beschreibung von Systemen mit Differentialgleichungen – Feder-Masse-System
( ) ( )2
E 2
d x dxF t m D c x t
dt dt= + +
( ) ( )
Dt 2
2 m0
2
F e c Dx t 1 sin t t
c m 2 mD1
2 m c
−
= + − − −
-0.5 0 0.5 1
0
1
2
3
Zeit t / s
Au
sle
nku
ng
x / m
m
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 17
Zeitkontinuierliche Systeme im Zeitbereich
• Beispiele für unterschiedliche Systeme beschrieben
• Mathematische Modellierung führt bei diesen Beispielen zu linearen Differentialgleichungen mit konstanten
Koeffizienten
• Für die effiziente Beschreibung von Systemen ist es wichtig, grundlegende Eigenschaften von Systemen
erkennen und diskutieren zu können
• Lineare Differentialgleichungen mit konstanten Koeffizienten beschreiben lineare, zeitinvariante Systeme
(LTI-Systeme), deshalb werden die zugehörigen Systemeigenschaften Linearität und Zeitinvarianz
diskutiert
• Kausalität von System ist wesentliche Voraussetzung für die Realisierbarkeit von Systemen
• Insbesondere bei geregelten System spielt die Stabilität eine entscheidende Rolle, sie wird anhand
physikalischer Modelle eingeführt
Eigenschaften von Systemen – Überblick

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 18
Zeitkontinuierliche Systeme im Zeitbereich
• Für den Linearitätsnachweis eines Systems müssen die Systemantworten y1(t) und y2(t) auf die linear
unabhängigen Eingangssignale u1(t) und u2(t) bekannt sein
• Ein System ist linear, wenn es auf eine Linearkombination von Eingangssignalen
mit derselben Linearkombination der entsprechenden Kombination von Ausgangssignalen reagiert
• Nachweis der Linearität erfolgt über Einsetzen der Gleichungen in die Differentialgleichung
• Bei linearen Systemen kann das Superpositionsprinzip angewendet werden
Eigenschaften von Systemen – Linearität
( ) ( ) ( )1 1 2 2u t u t u t= +
( ) ( ) ( )1 1 2 2y t y t y t= +

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 19
Zeitkontinuierliche Systeme im Zeitbereich
Eigenschaften von Systemen – Linearität
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l u 1
(t)
Eingangssignal u1
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l u
2(t
)
Eingangssignal u2
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l u
(t)
Eingangssignal u = u1 + u
2
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l y 1
(t)
Ausgangssignal y1
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l y 2
(t)
Ausgangssignal y2
-50 0 50 100 150 200
0
5
Zeit t / µs
Sig
na
l y(t
)
Ausgangssignal y = y1 + y
2

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 20
Zeitkontinuierliche Systeme im Zeitbereich
• RC-Glied wird über die Differentialgleichung
beschrieben
• Prüfung des Systems auf Linearität
• Worauf ist die Linearität des Systems
zurückzuführen?
Beispiel: Eigenschaften von Systemen – Linearität
( )( )
( )A
E A
du tu t R C u t
dt= +
C
( )i t
( )Eu t
R
( )Au t

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 21
Zeitkontinuierliche Systeme im Zeitbereich
• Ein Spannungsteiler wird über die Gleichung
beschrieben. Handelt es sich um ein lineares System?
• Der Zusammenhang zwischen Spannung und Strom an einer Induktivität wird über die Gleichung
beschrieben. Handelt es sich bei der Induktivität um ein lineares System?
Übungsaufgaben: Eigenschaften von Systemen – Linearität
( ) LL
diu t L
dt=
( ) ( )2R2 0
1 2
Ru t u t
R R=
+

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 22
Zeitkontinuierliche Systeme im Zeitbereich
• Strom durch eine Diode wird über die Schottkly-
Gleichung beschrieben
• System ein kein lineares System
• Nichtlineares Verhalten des Diodenstrom iD als
Funktion der Diodenspannung uD wird in einem
Arbeitspunkt mit der Spannung u0 und dem Strom
i0 linearisiert werden
Eigenschaften von Systemen – Linearisierung im Arbeitspunkt
( )( )D
T
u t
n U
D si t I e 1 = −
00
Eingangsspannung uD
Au
sg
an
gsstr
om
i D
u0
i0
Diodenkennlinie
Linearisierung im Arbeitspunkt

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 23
Zeitkontinuierliche Systeme im Zeitbereich
• In dem Arbeitspunkt wird durch Ableitung der
Shockley-Gleichung die Steigung der Tangente
bestimmt
• Systemverhalten im Arbeitspunkt ergibt sich dann
aus der Geradengleichung
• Lineare Näherung für das nichtlineare System
Diode im Arbeitspunkt (u0|i0), Linearisierung nur
für sehr kleine Werte uD ausreichend präzise
Eigenschaften von Systemen – Linearisierung im Arbeitspunkt
00
Eingangsspannung uD
Au
sg
an
gsstr
om
i D
u0
i0
Diodenkennlinie
Linearisierung im Arbeitspunkt
( )D 0
T T
D 0D 0
u t u
n U n Us sD
D T Tu u u u
I Idim e e
du n U n U
= =
= = =
( ) ( )( )
( )( ) ( )
0
T
u
n UsD D 0 D 0
T
D 0 D
Ii i t i e u t u
n U
m u t u m u t
= − = −
= − =

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 24
Zeitkontinuierliche Systeme im Zeitbereich
• System reagiert auf ein Eingangssignal x(t) mit einer Systemantwort y(t)
• Ist das System zeitinvariant, so reagiert das System auf das verzögerte Eingangssignal u(t - t0) mit dem
Ausgangsignal y(t - t0)
• Zeitinvariante Systeme reagieren also unabhängig vom Startzeitpunkt der Beobachtung auf gleiche
Eingangssignale mit gleichen Ausgangssignalen
• Differentialgleichungen mit konstanten Koeffizienten beschreiben zeitinvariante Systeme, ändern sich die
Koeffizienten der Differentialgleichung als Funktion der Zeit t, verändert sich das System mit der Zeit, es
ist zeitvariant
• Zeitinvarianz ist oft nur näherungsweise erfüllt ist, wenn Änderungsprozesse viel langsamer sind als die
Signaländerungen der Schaltung, wird das System als zeitinvariant betrachtet, Beispiel RLC-Schaltung
Eigenschaften von Systemen – Zeitinvarianz

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 25
Zeitkontinuierliche Systeme im Zeitbereich
Eigenschaften von Systemen – Zeitinvarianz
-0.5 0 0.5 1
0
0.2
Zeit t / s
Kra
ft F
E1(t
) / N
Eingangssignal
-0.5 0 0.5 1
0
0.2
Zeit t / s
Kra
ft F
E2(t
) / N
Verschobenes Eingangssignal
-0.5 0 0.5 1
0
1
2
3
Zeit t / s
Au
sle
nku
ng
x 1
(t)
/ m
m
Ausgangssignal
-0.5 0 0.5 1
0
1
2
3
Zeit t / s
Au
sle
nku
ng
x 2
(t)
/ m
m
Verschobenes Ausgangssignal

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 26
Zeitkontinuierliche Systeme im Zeitbereich
• Systeme, die sowohl
– linear, als auch
– zeitinvariant
sind, werden als LTI-Systeme bezeichnet
• Für LTI-Systeme sind vergleichsweise
anschauliche und einfach zu interpretierende
Lösungs- und Interpretationsmethoden im Zeit-,
Bild- und Frequenzbereich vorhanden
• Darstellungen in diesem Skript beschränken sich
bis auf wenige Ausnahmen auf LTI-Systeme
• Systeme, die mit einer linearen Differential-
gleichung mit konstanten Koeffizienten
beschrieben werden können, erfüllen die
Bedingungen nach Linearität und Zeitinvarianz
Eigenschaften von Systemen – Lineare, zeitinvariante Systeme
LTI
System
1 1 2 2y (t) y (t) +
( )0y t t−( )0u t t−
1 1 2 2u (t) u (t) +

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 27
Zeitkontinuierliche Systeme im Zeitbereich
Eigenschaften von Systemen – Fallbeispiel zur Stabilität
0Auslenkung x
Fall a: Asymptotisch stabiles System
x0 0
Auslenkung x
Fall b: Grenzstabiles System
x0 0
Auslenkung x
Fall c: Instabiles System
x0
0
Zeit t
Au
sle
nku
ng
x(t
) x0
0
Zeit t
Au
sle
nku
ng
x(t
) x0
0
Zeit t
Au
sle
nku
ng
x(t
) x0
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 28
Zeitkontinuierliche Systeme im Zeitbereich
• Aus dem Beispiel ergibt sich eine physikalische Stabilitätsdefinition: Ein System ist
– asymptotisch stabil, wenn es nach einer Anregung mit endlicher Energie wieder seine Ruheposition
erreicht
– grenzstabil, wenn es nach Anregung mit endlicher Energie zu einem konstanten Ausgangswert
konvergiert
– instabil, wenn es auf eine Anregung endlicher Energie mit divergierendem Ausgangssignal reagiert
• Stabilitätsdefinition ist anschaulich, jedoch praktisch schlecht auszuwerten
• Stabilitätsbegriff und der entsprechende mathematische Nachweis wird erneut aufgegriffen bei der
Diskussion der
– charakteristischen Gleichung
– Impulsantwort
– Faltungsintegrals
Eigenschaften von Systemen – Stabilität
Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 29
Zeitkontinuierliche Systeme im Zeitbereich
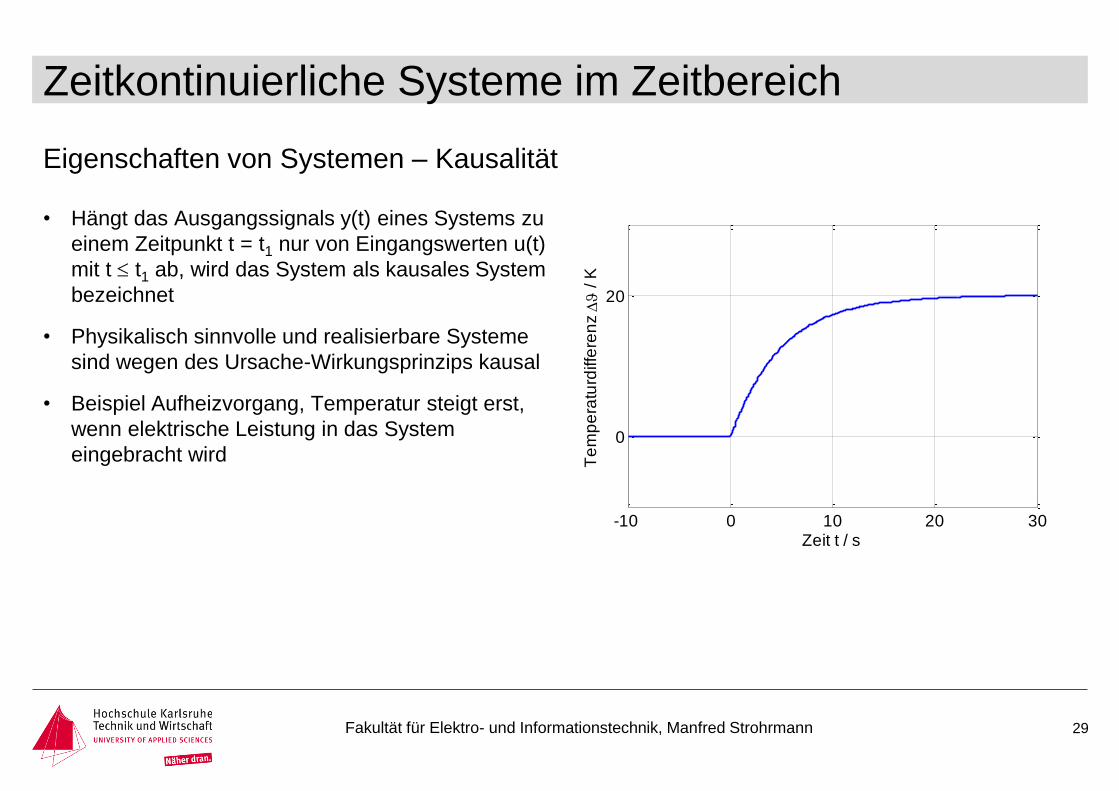
• Hängt das Ausgangssignals y(t) eines Systems zu
einem Zeitpunkt t = t1 nur von Eingangswerten u(t)
mit t t1 ab, wird das System als kausales System
bezeichnet
• Physikalisch sinnvolle und realisierbare Systeme
sind wegen des Ursache-Wirkungsprinzips kausal
• Beispiel Aufheizvorgang, Temperatur steigt erst,
wenn elektrische Leistung in das System
eingebracht wird
Eigenschaften von Systemen – Kausalität
-10 0 10 20 30
0
20
Zeit t / s
Te
mp
era
turd
iffe
ren
z
/ K

Fakultät für Elektro- und Informationstechnik, Manfred Strohrmann 30
Zeitkontinuierliche Systeme im Zeitbereich
Eigenschaften von Systemen – Zusammenfassung
Eigenschaft Bedeutung
Linearität
Eingangssignal
Ausgangssignalen
ZeitinvarianzSystem reagiert auf Eingangssignal u(t - t0)
mit Ausgangsignal y(t - t0)
StabilitätSystem erreicht nach einer Anregung mit
endlicher Energie wieder seine Ruheposition
KausalitätSystem reagiert auf ein Eingangssignal
erst nach Beginn der Anregung
( ) ( ) ( )1 1 2 2u t u t u t= +
( ) ( ) ( )1 1 2 2y t y t y t= +