Vermessungskunde für Baupoliere - geoweb.atgeoweb.at/_download/wifi_baupolier.pdf · Das...
103
Vermessungskunde für Baupoliere Dipl.-Ing. Manfred Huber Version 1.1
Transcript of Vermessungskunde für Baupoliere - geoweb.atgeoweb.at/_download/wifi_baupolier.pdf · Das...
Vermessungskunde für Baupoliere
Dipl.-Ing. Manfred Huber Version 1.1
VERMESSUNGSKUNDE FÜR BAUPOLIERE
2
Impressum
Hersteller: Wirtschaftsförderungsinstitut der Wirtschaftskammer Niederösterreich (WIFI Niederösterreich) Für den Inhalt verantwortlich: WIFI Niederösterreich, Institutsleitung 3100 St. Pölten, Mariazeller Straße 97 Version 1.1, al le Rechte vorbehalten Das Werk einschließlich aller seiner Teile ist urheberrechtlich geschützt. Jede Verwertung ohne Zustimmung des Wirtschaftsförderungsinstitutes der Wirtschaftskammer Österreich ist unzulässig. Das gilt insbesondere für Fotokopien, Vervielfältigungen, Übersetzungen, Mikroverfilmungen und die Einspeicherung und Verarbeitung in elektronischen Systemen. Soweit im Folgenden personenbezogene Bezeichnungen nur in männlicher Form angeführt sind, beziehen sie sich auf Frauen oder Männer in gleicher Weise. Bei der Anwendung auf bestimmte Personen wird die jeweils geschlechtsspezifische Form verwendet.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
3
Inhalt
Einführung ........................................................................................................................ 6
Eintei lung der Vermessungskunde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Aufgaben der Vermessungskunde . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Ziel d ieser Veransta ltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
Grundlagen .......................................................................................................................... 7
Maßzahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Winkelmaße . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Altgradmaß ..................................................................................................................................... 7 Neugradmaß ................................................................................................................................... 8 Bogenmaß ...................................................................................................................................... 8 Umrechnungen ............................................................................................................................... 9
Maßstab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Steigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Fehlerarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 Grobe Fehler ................................................................................................................................. 11 Systematische Fehler ................................................................................................................... 11 Zufällige Fehler ............................................................................................................................. 11
Mathemat ische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12 Pythagoräische Lehrsatz .............................................................................................................. 12 Winkelfunktionen........................................................................................................................... 12 Sinussatz und Cosinussatz ........................................................................................................... 12 Auflösung quadratischer Gleichungen .......................................................................................... 13
Auf lösung schiefwinkel iger Dreiecke . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 Zwei Winkel und eingeschlossene Seite gegeben ....................................................................... 14 Zwei Seiten und eingeschlossener Winkel gegeben .................................................................... 14 Zwei Seiten und gegenüberliegender Winkel gegeben ................................................................ 15 Drei Seiten gegeben ..................................................................................................................... 16
Streckenmessung ..............................................................................................................17
Messmitte l . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17 Maßband ....................................................................................................................................... 17 Elektrooptische Messgeräte ......................................................................................................... 17
Messmethoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 Direkte Streckenmessung ............................................................................................................. 20 Indirekte Streckenmessung .......................................................................................................... 21
Genauigkeit der Streckenmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 Elektro-optische Distanzmesser ................................................................................................... 24 Maßband ....................................................................................................................................... 25 Lasergeräte (Leica Disto A5) ........................................................................................................ 27 Geometrieprobleme bei reflektorloser Distanzmessung............................................................... 27
Winkelmessung ..................................................................................................................28
Der Theodol i t . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 Aufbau ........................................................................................................................................... 28 Achssystem des Theodoliten ........................................................................................................ 31 Zentriervorrichtung ........................................................................................................................ 31 Ablesevorrichtungen ..................................................................................................................... 32
VERMESSUNGSKUNDE FÜR BAUPOLIERE
4
Aufs te l len eines Theodol i ten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
Hor izonta lwinkelmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
Vert ika lwinkelmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
Ausgewählte Beispie le der Winkelmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36 Trigonometrische Höhenmessung ................................................................................................ 36 Turmhöhenbestimmung ................................................................................................................ 37
Genauigkeit der Winkelmessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 Horizontalwinkel ............................................................................................................................ 39 Vertikalwinkelmessung ................................................................................................................. 39
Koordinatenrechnung ........................................................................................................40
Def in i t ionen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40 Koordinatensystem ....................................................................................................................... 40 Richtungswinkel ............................................................................................................................ 41 Koordinatendifferenzen ................................................................................................................. 41
Erste Hauptaufgabe der Koordinatenrechnung (= Lageaufnahme) . . . . . . . . . . . . . . . . . . . . . 42
Zweite Hauptaufgabe der Koordinatenrechnung (= Absteckung) . . . . . . . . . . . . . . . . . . . . . . . 43
Orient ierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
Beispie l e iner Aufnahme .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
Beispie l e iner Absteckung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Koordinatensysteme .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47 Amtliches Gauß-Krüger-System ................................................................................................... 47 Lokales System ............................................................................................................................. 48
Bogenabsteckung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 Aufgabenstellung .......................................................................................................................... 49 Lösung mit Orthogonalverfahren (Winkelprisma, Maßband) ........................................................ 50 Lösung mit Polarverfahren (Theodolit, Maßband) ........................................................................ 51
Nivellement .........................................................................................................................52
Höhensysteme .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 Absolute Höhen ............................................................................................................................ 52 Relative Höhen ............................................................................................................................. 53
Messmitte l . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 Nivelliergerät ................................................................................................................................. 53 Lasergerät ..................................................................................................................................... 54 Zubehör ......................................................................................................................................... 56
Messmethoden . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 Ablesung ....................................................................................................................................... 57 Liniennivellement durch Hin- und Rückmessung ......................................................................... 58 Liniennivellement mit 2 Festpunkten ............................................................................................ 60 Liniennivellement mit Seitpunkten ................................................................................................ 61 Flächennivellement ....................................................................................................................... 62 Höhenschichtenlinien .................................................................................................................... 63 Längs- und Querprofile ................................................................................................................. 65
Genauigkeit eines L iniennivel lements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
Prüfverfahren für Nivel l iergeräte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68 Ziellinie .......................................................................................................................................... 68 Dosenlibelle .................................................................................................................................. 68

VERMESSUNGSKUNDE FÜR BAUPOLIERE
5
Lagemessung .....................................................................................................................69
Aufnahmever fahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69 Orthogonalverfahren ..................................................................................................................... 69 Polaraufnahme .............................................................................................................................. 71 Polygonzug ................................................................................................................................... 71
Zwangszentr ierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
Spezie l le Aufgaben der Lagemessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75 Vorwärtseinschneiden .................................................................................................................. 75 Bogenschnitt ................................................................................................................................. 77 Geradenschnitt .............................................................................................................................. 78 Freie Stationierung........................................................................................................................ 79
Genauigkeit der Lagemessung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80 Orthogonalverfahren ..................................................................................................................... 80 Polarverfahren .............................................................................................................................. 80
Flächenrechnung ...............................................................................................................81
Flächenrechnung mit Maßzahlen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
Flächenrechnung mit Koordinaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
Flächenrechnung mit Winkeln und Sei ten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
Massenbestimmung ...........................................................................................................85
Kataster ...............................................................................................................................87
Ents tehung und Aufgabe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Bestandte i le des Katasters . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Grundsteuerkataster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
Grenzkataster . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
Spezielle Kapitel der Bauordnung .....................................................................................89
Niederöster re ich . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
Wien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
Auszug aus der Koordinatendatenbank ...........................................................................95
Topographien .....................................................................................................................96
Topographie-Übersicht ......................................................................................................98
Katastralmappe ..................................................................................................................99
Höhenfestpunkte in Wien ................................................................................................ 100
Optischer Theodolit ......................................................................................................... 101
Quellen- und Literaturverzeichnis ................................................................................... 103
Angaben zum Autor ......................................................................................................... 103

VERMESSUNGSKUNDE FÜR BAUPOLIERE
6
1. Einführung 1.1 Einteilung der Vermessungskunde Die Vermessungskunde wird in zwei unterschiedliche Bereiche unterteilt:
Die Höhere Vermessungskunde befasst sich mit der globalen Erdmessung und mit der Grundlagenmessung ganzer Staaten (= Landesvermessung), wobei die Erd-krümmung berücksichtigt werden muss. Dabei müssen Refraktion (= Lichtbrechung), meteorologische Daten wie Druck, Temperatur und Luftfeuchtigkeit sowie das Schwerefeld der Erde in die Berechnungen einbezogen werden.
Die Niedere Vermessungskunde umfasst Vermessungen in kleineren Gebieten, wobei der Ausschnitt der Erdober-fläche als Ebene betrachtet wird. Dieser Bereich umfasst die Vermessung der Erdoberfläche in ihrer Detailform und die Ingenieurgeodäsie (= Absteckung sowie Überwachung von Hoch- und Tiefbauten)
1.2 Aufgaben der Vermessungskunde Die Vermessungskunde befasst sich vorwiegend: a. mit der Vermessung und Berechnung von Teilen der Erdoberfläche und ihrer Darstellung
in Karten und Plänen (= Aufnahme) b. mit der Übertragung von graphischen oder rechnerischen Daten aus Plänen oder Karten
in die Natur (= Absteckung)
1.3 Ziel dieser Veranstaltung Die Teilnehmer sollen folgende Punkte beherrschen: 1. richtiger Umgang mit den Vermessungsgeräten (Aufstellung, Ablesung, Pflege) 2. Lage- und Höhenbestimmung 3. Absteckung 4. Flächen- und Massenbestimmung
VERMESSUNGSKUNDE FÜR BAUPOLIERE
7
2. Grundlagen
2.1 Maßzahlen
Längenmaß
Einheit: das Meter, Einheitszeichen [m]
Ableitungen: 1 m = 10 dm = 100 cm
1000 m = 1 km Flächenmaß
Einheit: der Quadratmeter, Einheitszeichen [m²]
Ableitungen: 1 m² = 100 dm² = 10.000 cm²
1 km² = 100 ha = 10.000 a = 1.000.000 m² Raummaß
Einheit: Kubikmeter, Einheitszeichen [m³]
Ableitungen: 1 m³ = 1.000 dm² = 1.000.000 cm²
1 dm² = 1 l
2.2 Winkelmaße Hier gibt es keine festgesetzt, internationale Einheit — es bestehen mehrere Möglichkeiten: 2.2.1 Altgradmaß
Das Altgradmaß wird in Grad [ ° ], Minuten [ ' ] und Sekunden [ '' ] unterteilt, wobei folgendes gilt:
1 ° = 60 ' = 3600 ''
Vollkreis: 360 °
Bei der rechnerischen Verwendung des Altgradmaßes müssen die Minuten und Sekunden in Nachkommastellen umgerechnet werden:
Beispiel 678,127
3600
12
60
471272174127
VERMESSUNGSKUNDE FÜR BAUPOLIERE
8
2.2.2 Neugradmaß
Dieses Maß wird in Gon [g], Neuminuten [c] und Neusekunden [cc] unterteilt, unterscheidet sich aber vom Altgradmaß insofern, dass es eine Zehnerteilung besitzt. Dadurch entfällt eine Umrechnung wie beim Altgradmaß.
cccg 100001001
Vollkreis: 400g
Dieses Winkelmaß wird vorwiegend in der Vermessungskunde verwendet.
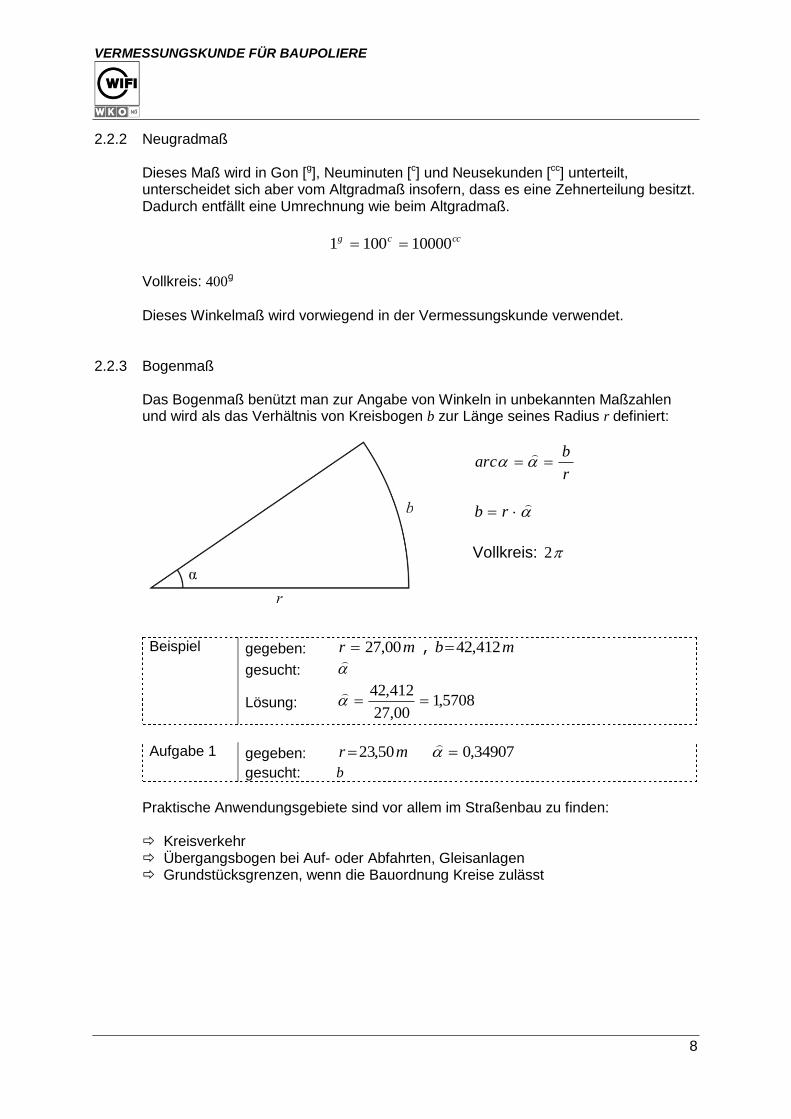
2.2.3 Bogenmaß
Das Bogenmaß benützt man zur Angabe von Winkeln in unbekannten Maßzahlen und wird als das Verhältnis von Kreisbogen b zur Länge seines Radius r definiert:
r
barc
rb
Vollkreis: 2
Beispiel gegeben: mr 00,27 , mb 412,42
gesucht:
Lösung: 5708,1
00,27
412,42
Aufgabe 1 gegeben: mr 50,23 34907,0
gesucht: b
Praktische Anwendungsgebiete sind vor allem im Straßenbau zu finden:
Kreisverkehr Übergangsbogen bei Auf- oder Abfahrten, Gleisanlagen Grundstücksgrenzen, wenn die Bauordnung Kreise zulässt
VERMESSUNGSKUNDE FÜR BAUPOLIERE
9
2.2.4 Umrechnungen Die Umwandlung von einem Gradmaß zu einem anderen Gradmaß erfolgt am einfachsten über den Vollkreis:
Altgrad Neugrad g
g
8,18360
4001717
Altgrad Bogenmaß 296706,0360
21717
Aufgabe 2 Berechne die Bogenlänge b, wenn der Radius r = 20,00 m beträgt und ein Winkel von 28°,648 eingeschlossen wird.
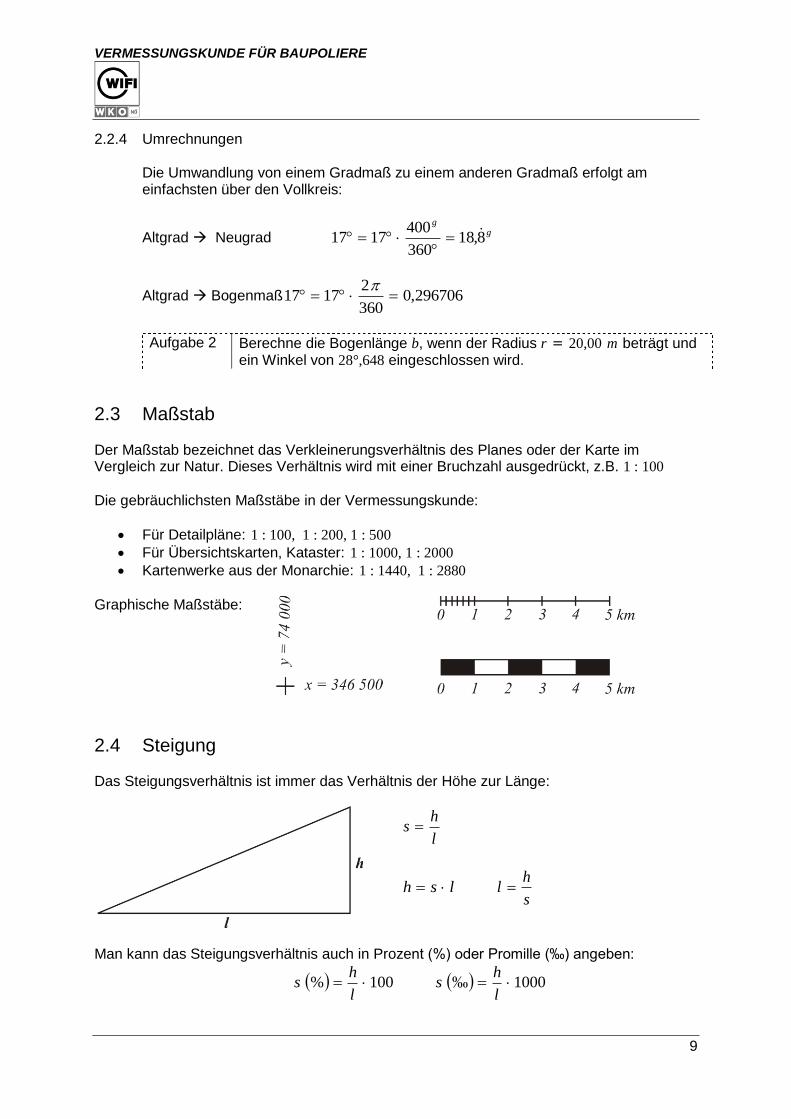
2.3 Maßstab Der Maßstab bezeichnet das Verkleinerungsverhältnis des Planes oder der Karte im Vergleich zur Natur. Dieses Verhältnis wird mit einer Bruchzahl ausgedrückt, z.B. 1 : 100 Die gebräuchlichsten Maßstäbe in der Vermessungskunde:
Für Detailpläne: 1 : 100, 1 : 200, 1 : 500
Für Übersichtskarten, Kataster: 1 : 1000, 1 : 2000
Kartenwerke aus der Monarchie: 1 : 1440, 1 : 2880 Graphische Maßstäbe:
2.4 Steigung
Das Steigungsverhältnis ist immer das Verhältnis der Höhe zur Länge:
l
hs
lsh s
hl
Man kann das Steigungsverhältnis auch in Prozent (%) oder Promille (‰) angeben:
100% l
hs 1000‰
l
hs
VERMESSUNGSKUNDE FÜR BAUPOLIERE
10
Umformungen: 100
lsh
s
hl
100
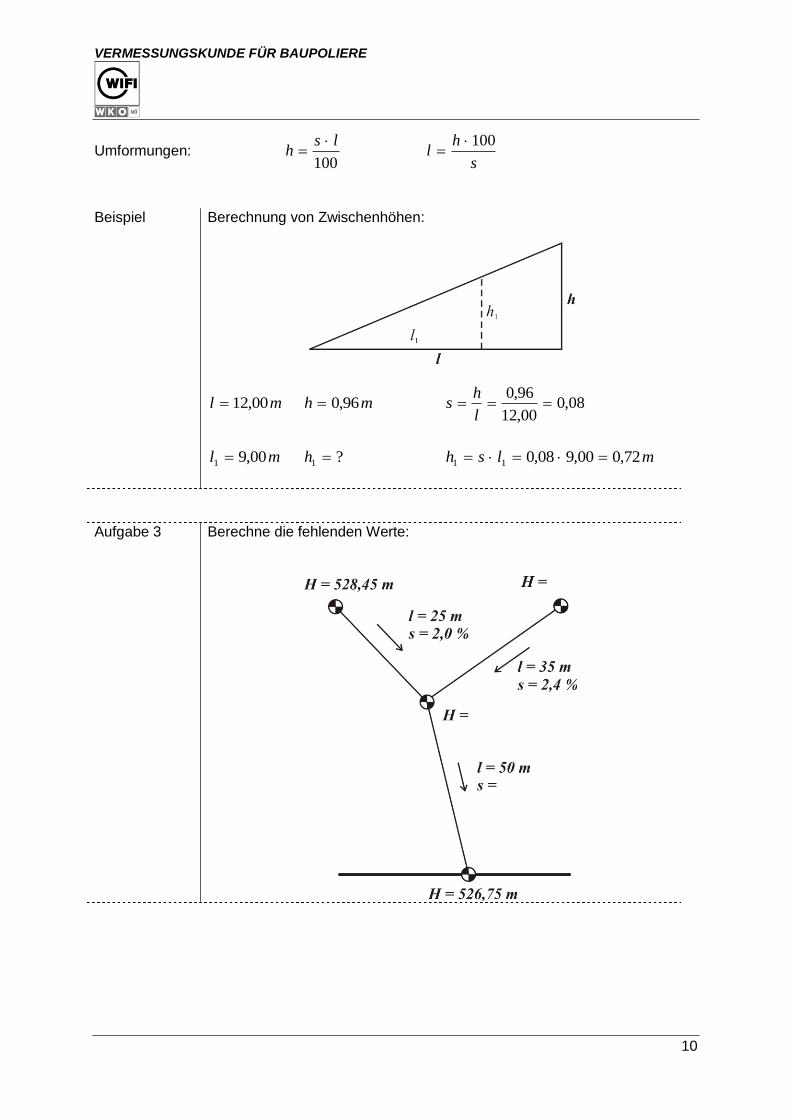
Beispiel Berechnung von Zwischenhöhen:
ml 00,12 mh 96,0 08,0
00,12
96,0
l
hs
ml 00,91 ?1 h mlsh 72,000,908,011
Aufgabe 3 Berechne die fehlenden Werte:
VERMESSUNGSKUNDE FÜR BAUPOLIERE
11
2.5 Fehlerarten
Alle Messungen müssen mit einer bestimmten Genauigkeit ausgeführt werden. Da völlig fehlerfreie Messungen nicht möglich sind, werden die Messungen mehrmals wiederholt. Die Messfehler, die dabei entstehen können, unterteilt man in drei Gruppen: 2.5.1 Grobe Fehler
Sie treten durch eine Fehlleistung des Beobachters auf und liegen im Allgemeinen weit über der Messgenauigkeit. Sie werden durch Kontrollmessungen aufgedeckt und können durch entsprechende Sorgfalt des Beobachters vermieden werden.
Beispiel: Ablesefehler, Ziffernsturz
2.5.2 Systematische Fehler
Diese Fehler verfälschen das Messergebnis stets in eine Richtung (positiv oder negativ) und sind von einem oder mehreren Parametern abhängig (z.B. Temperatur, Luftdruck, Instrumentenjustierung,…) Sie lassen sich durch die Wahl geeigneter Meßmethoden, durch sorgfältige Eichung der Messgeräte sowie durch Verwendung entsprechender mathematischer Formeln weitgehend ausschalten. Beispiel: Streckenmessung mit Stahlmaßband ― es entsteht auf Grund eines
Temperaturunterschiedes eine Längenänderung 2.5.3 Zufällige Fehler
Das sind alle nicht groben und nicht systematischen Fehler. Sie sind zufallsbedingt, d.h. sie treten als positive und negative Zahl auf und variieren sehr unregelmäßig im Betrag. Sie werden u.a. hervorgerufen durch die begrenzte Schärfe der menschlichen Sinne und der Unvollkommenheit der Messinstrumente. Beispiel: Lattenablesung beim Nivellement (Schätzen der mm)
VERMESSUNGSKUNDE FÜR BAUPOLIERE
12
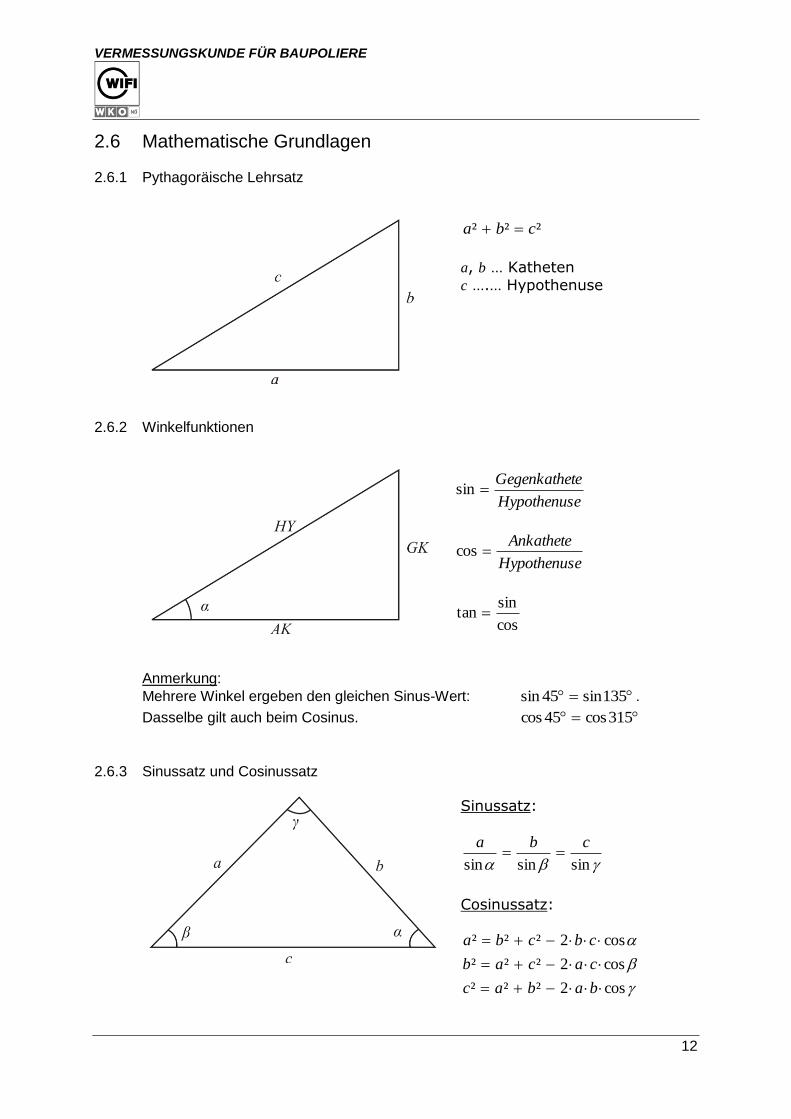
2.6 Mathematische Grundlagen 2.6.1 Pythagoräische Lehrsatz
²²² cba
a, b … Katheten
c ….… Hypothenuse
2.6.2 Winkelfunktionen
eHypothenus
teGegenkathesin
eHypothenus
Ankathetecos
cos
sintan
Anmerkung:
Mehrere Winkel ergeben den gleichen Sinus-Wert: 135sin45sin .
Dasselbe gilt auch beim Cosinus. 315cos45cos
2.6.3 Sinussatz und Cosinussatz
Sinussatz:
sinsinsin
cba
Cosinussatz:
cos2²²²
cos2²²²
cos2²²²
babac
cacab
cbcba
VERMESSUNGSKUNDE FÜR BAUPOLIERE
13
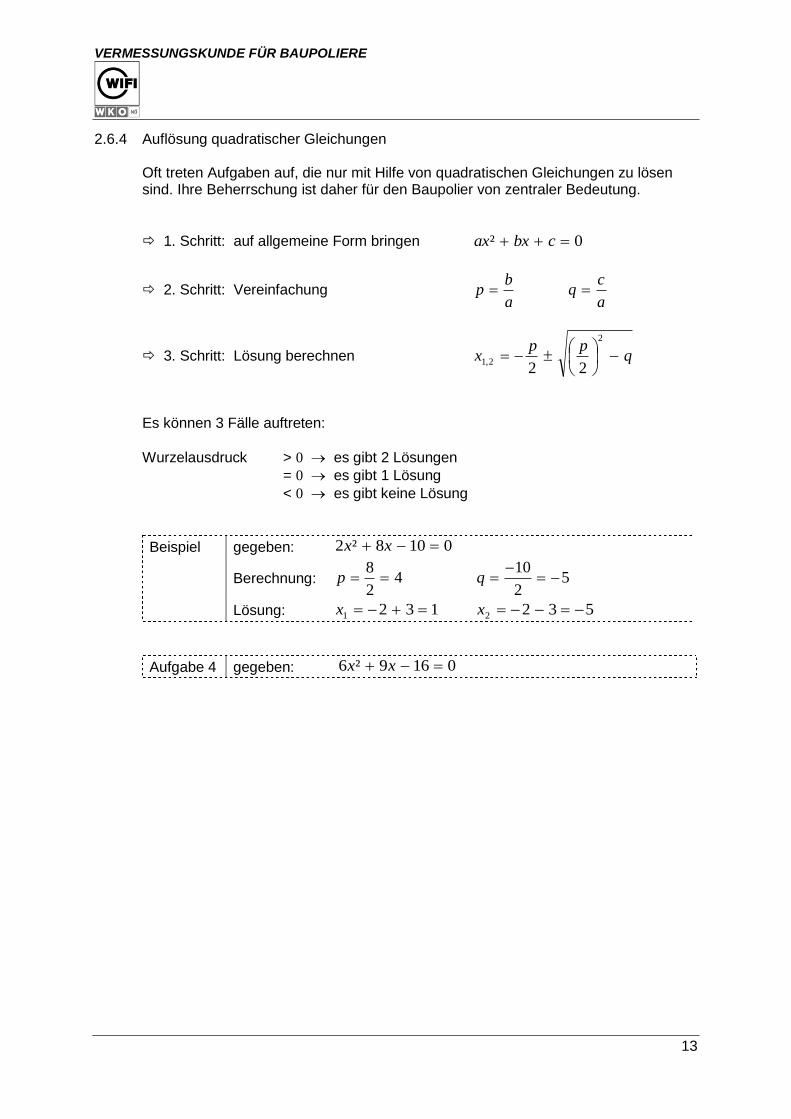
2.6.4 Auflösung quadratischer Gleichungen
Oft treten Aufgaben auf, die nur mit Hilfe von quadratischen Gleichungen zu lösen sind. Ihre Beherrschung ist daher für den Baupolier von zentraler Bedeutung.
1. Schritt: auf allgemeine Form bringen 0² cbxax
2. Schritt: Vereinfachung a
bp
a
cq
3. Schritt: Lösung berechnen qpp
x
2
2,122
Es können 3 Fälle auftreten:
Wurzelausdruck > 0 es gibt 2 Lösungen
= 0 es gibt 1 Lösung
< 0 es gibt keine Lösung
Beispiel gegeben: 0108²2 xx
Berechnung: 42
8p 5
2
10
q
Lösung: 1321 x 5322 x
Aufgabe 4 gegeben: 0169²6 xx
VERMESSUNGSKUNDE FÜR BAUPOLIERE
14
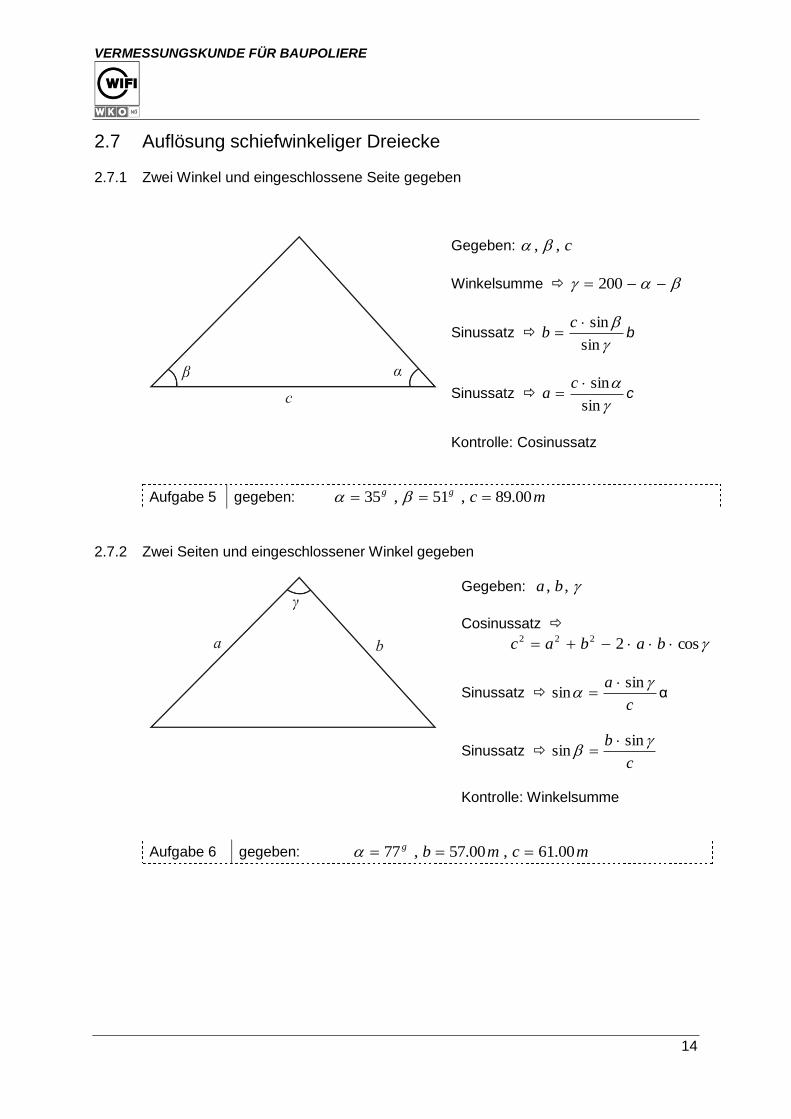
2.7 Auflösung schiefwinkeliger Dreiecke
2.7.1 Zwei Winkel und eingeschlossene Seite gegeben
Gegeben: c,,
Winkelsumme 200
Sinussatz
sin
sin
cb b
Sinussatz
sin
sin
ca c
Kontrolle: Cosinussatz
Aufgabe 5 gegeben: mcgg 00.89,51,35
2.7.2 Zwei Seiten und eingeschlossener Winkel gegeben
Gegeben: ,, ba
Cosinussatz
cos2222 babac
Sinussatz c
a
sinsin
α
Sinussatz c
b
sinsin
Kontrolle: Winkelsumme
Aufgabe 6 gegeben: mcmbg 00.61,00.57,77
VERMESSUNGSKUNDE FÜR BAUPOLIERE
15
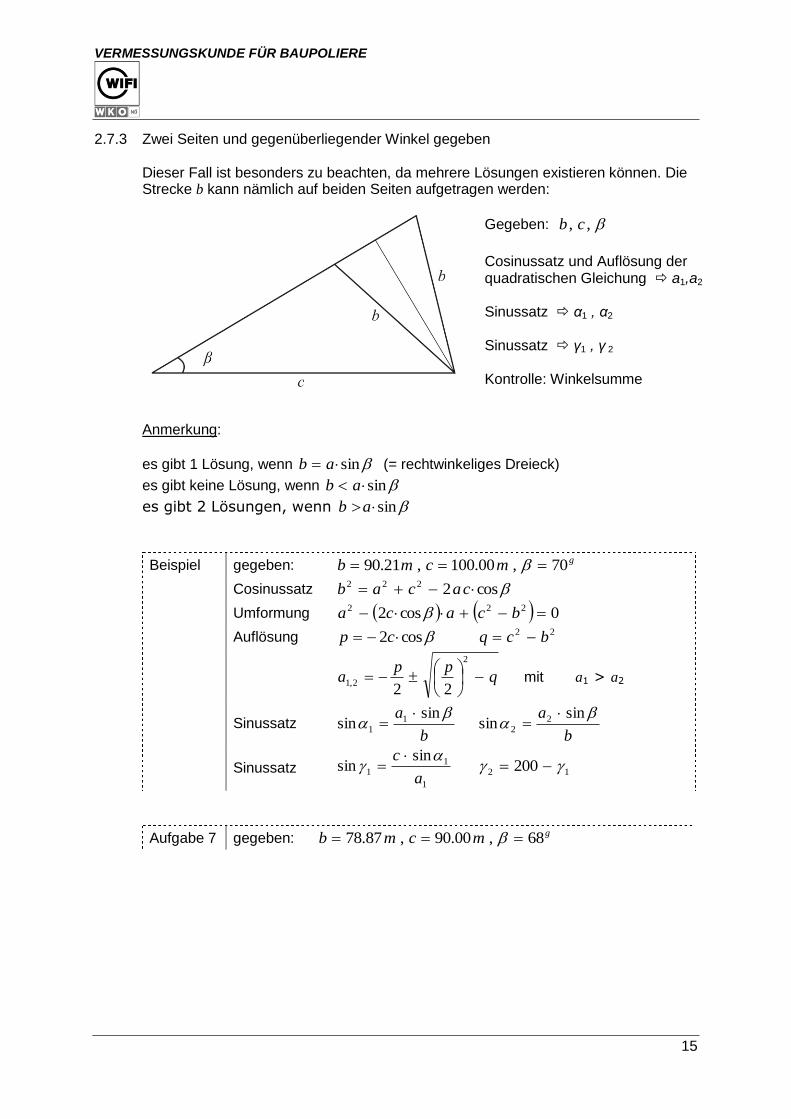
2.7.3 Zwei Seiten und gegenüberliegender Winkel gegeben
Dieser Fall ist besonders zu beachten, da mehrere Lösungen existieren können. Die Strecke b kann nämlich auf beiden Seiten aufgetragen werden:
Gegeben: ,, cb
Cosinussatz und Auflösung der quadratischen Gleichung a1,a2
Sinussatz α1 , α2
Sinussatz γ1 , γ 2 Kontrolle: Winkelsumme
Anmerkung:
es gibt 1 Lösung, wenn sin ab (= rechtwinkeliges Dreieck)
es gibt keine Lösung, wenn sin ab
es gibt 2 Lösungen, wenn sinab
Beispiel gegeben: gmcmb 70,00.100,21.90
Cosinussatz cos2222 cacab
Umformung 0cos2 222 bcaca
Auflösung cos2 cp 22 bcq
qpp
a
2
2,122
mit a1 > a2
Sinussatz
b
a
sinsin 1
1
b
a
sinsin 2
2
Sinussatz
1
11
sinsin
a
c
12 200
Aufgabe 7 gegeben: gmcmb 68,00.90,87.78
VERMESSUNGSKUNDE FÜR BAUPOLIERE
16
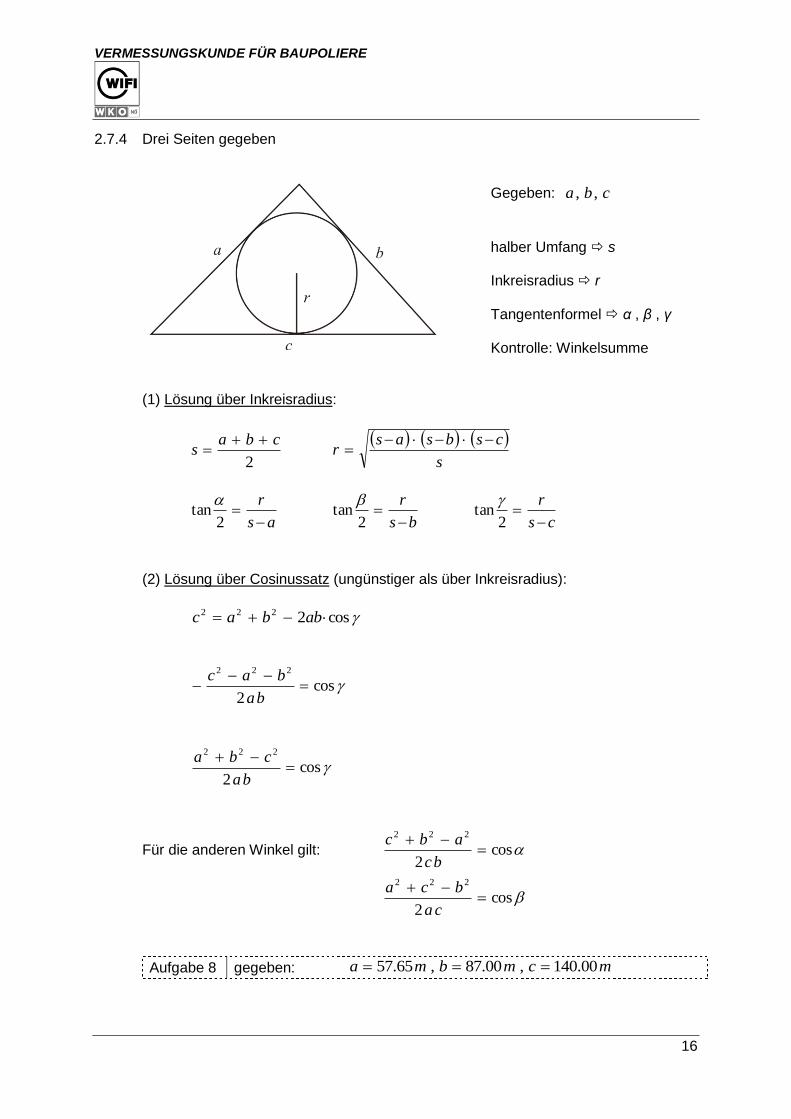
2.7.4 Drei Seiten gegeben
Gegeben: cba ,,
halber Umfang s Inkreisradius r Tangentenformel α , β , γ Kontrolle: Winkelsumme
(1) Lösung über Inkreisradius:
2
cbas
s
csbsasr
as
r
2tan
bs
r
2tan
cs
r
2tan
(2) Lösung über Cosinussatz (ungünstiger als über Inkreisradius):
cos2222 abbac
cos2
222
ba
bac
cos2
222
ba
cba
Für die anderen Winkel gilt: cos2
222
bc
abc
cos2
222
ca
bca
Aufgabe 8 gegeben: mcmbma 00.140,00.87,65.57
VERMESSUNGSKUNDE FÜR BAUPOLIERE
17
3. Streckenmessung
3.1 Messmittel 3.1.1 Maßband
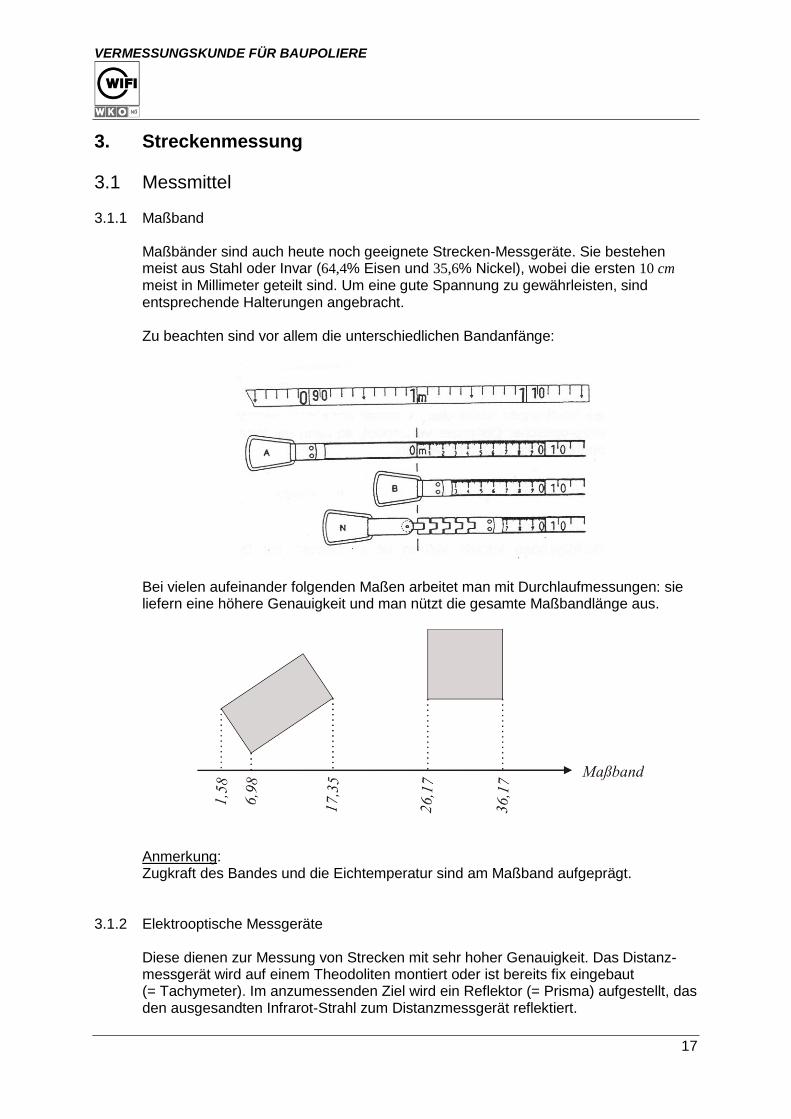
Maßbänder sind auch heute noch geeignete Strecken-Messgeräte. Sie bestehen meist aus Stahl oder Invar (64,4% Eisen und 35,6% Nickel), wobei die ersten 10 cm meist in Millimeter geteilt sind. Um eine gute Spannung zu gewährleisten, sind entsprechende Halterungen angebracht. Zu beachten sind vor allem die unterschiedlichen Bandanfänge:
Bei vielen aufeinander folgenden Maßen arbeitet man mit Durchlaufmessungen: sie liefern eine höhere Genauigkeit und man nützt die gesamte Maßbandlänge aus.
Anmerkung: Zugkraft des Bandes und die Eichtemperatur sind am Maßband aufgeprägt.
3.1.2 Elektrooptische Messgeräte
Diese dienen zur Messung von Strecken mit sehr hoher Genauigkeit. Das Distanz-messgerät wird auf einem Theodoliten montiert oder ist bereits fix eingebaut (= Tachymeter). Im anzumessenden Ziel wird ein Reflektor (= Prisma) aufgestellt, das den ausgesandten Infrarot-Strahl zum Distanzmessgerät reflektiert.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
18
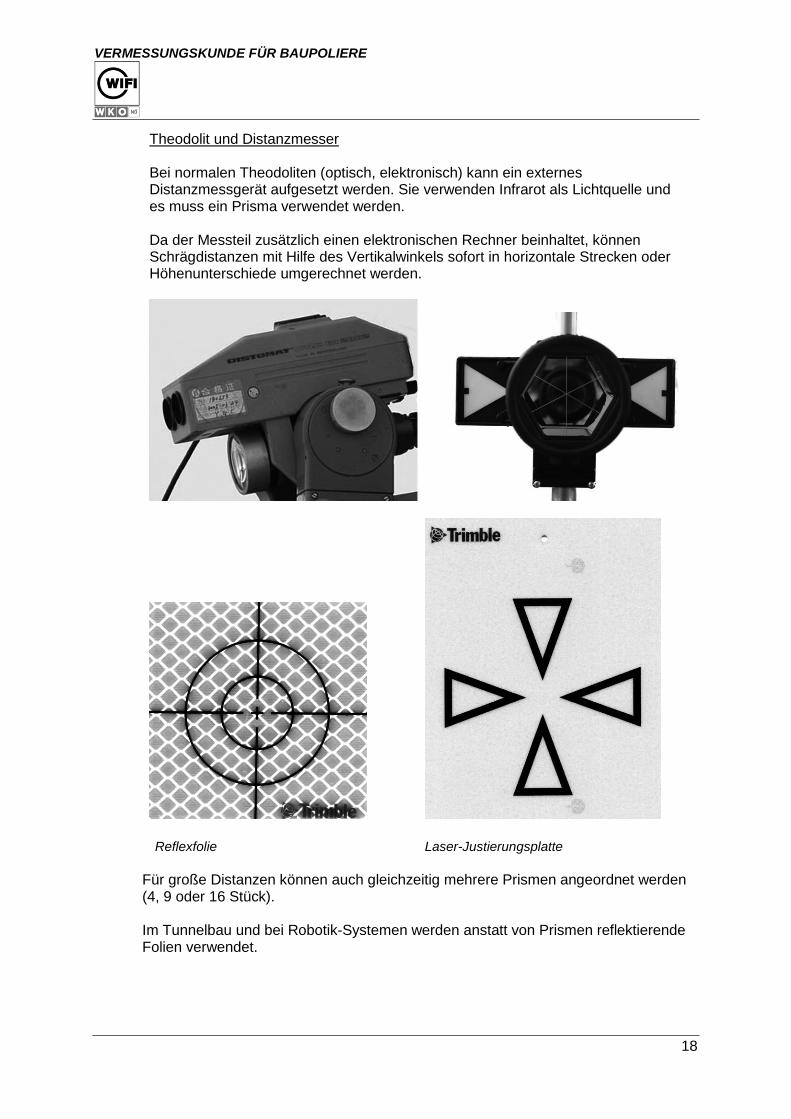
Theodolit und Distanzmesser Bei normalen Theodoliten (optisch, elektronisch) kann ein externes Distanzmessgerät aufgesetzt werden. Sie verwenden Infrarot als Lichtquelle und es muss ein Prisma verwendet werden. Da der Messteil zusätzlich einen elektronischen Rechner beinhaltet, können Schrägdistanzen mit Hilfe des Vertikalwinkels sofort in horizontale Strecken oder Höhenunterschiede umgerechnet werden.
Reflexfolie
Laser-Justierungsplatte
Für große Distanzen können auch gleichzeitig mehrere Prismen angeordnet werden (4, 9 oder 16 Stück). Im Tunnelbau und bei Robotik-Systemen werden anstatt von Prismen reflektierende Folien verwendet.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
19
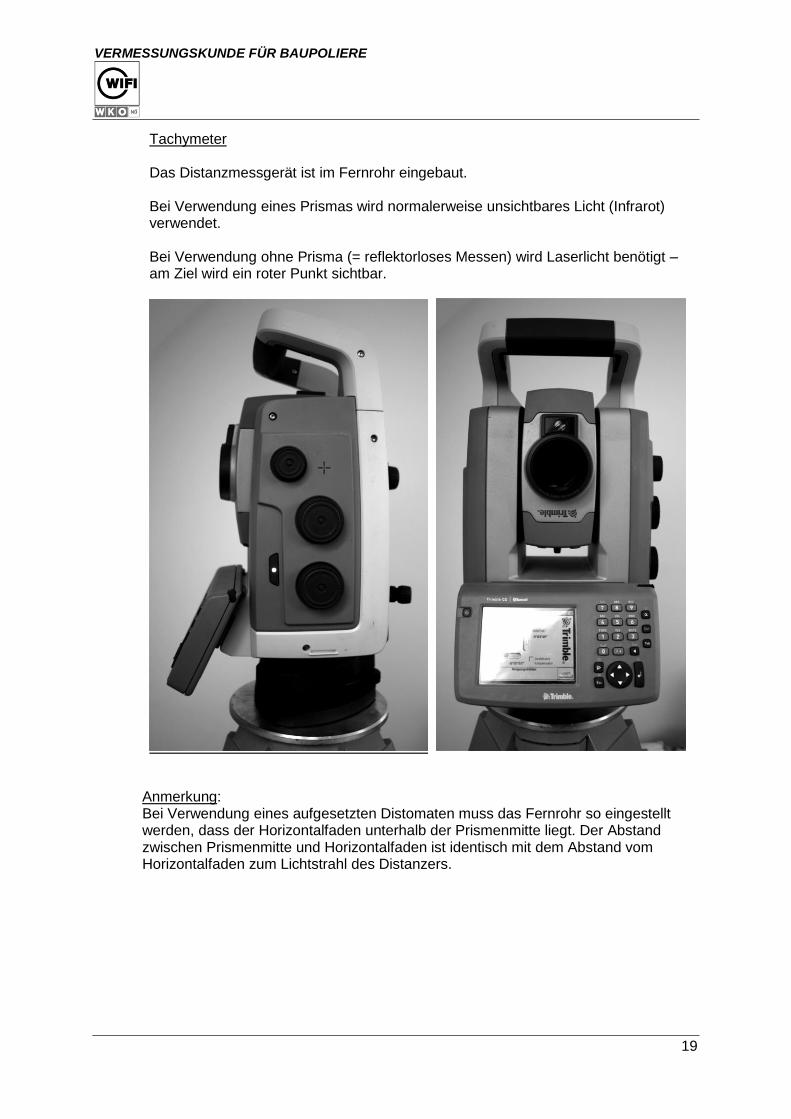
Tachymeter Das Distanzmessgerät ist im Fernrohr eingebaut. Bei Verwendung eines Prismas wird normalerweise unsichtbares Licht (Infrarot) verwendet. Bei Verwendung ohne Prisma (= reflektorloses Messen) wird Laserlicht benötigt – am Ziel wird ein roter Punkt sichtbar.
Anmerkung: Bei Verwendung eines aufgesetzten Distomaten muss das Fernrohr so eingestellt werden, dass der Horizontalfaden unterhalb der Prismenmitte liegt. Der Abstand zwischen Prismenmitte und Horizontalfaden ist identisch mit dem Abstand vom Horizontalfaden zum Lichtstrahl des Distanzers.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
20
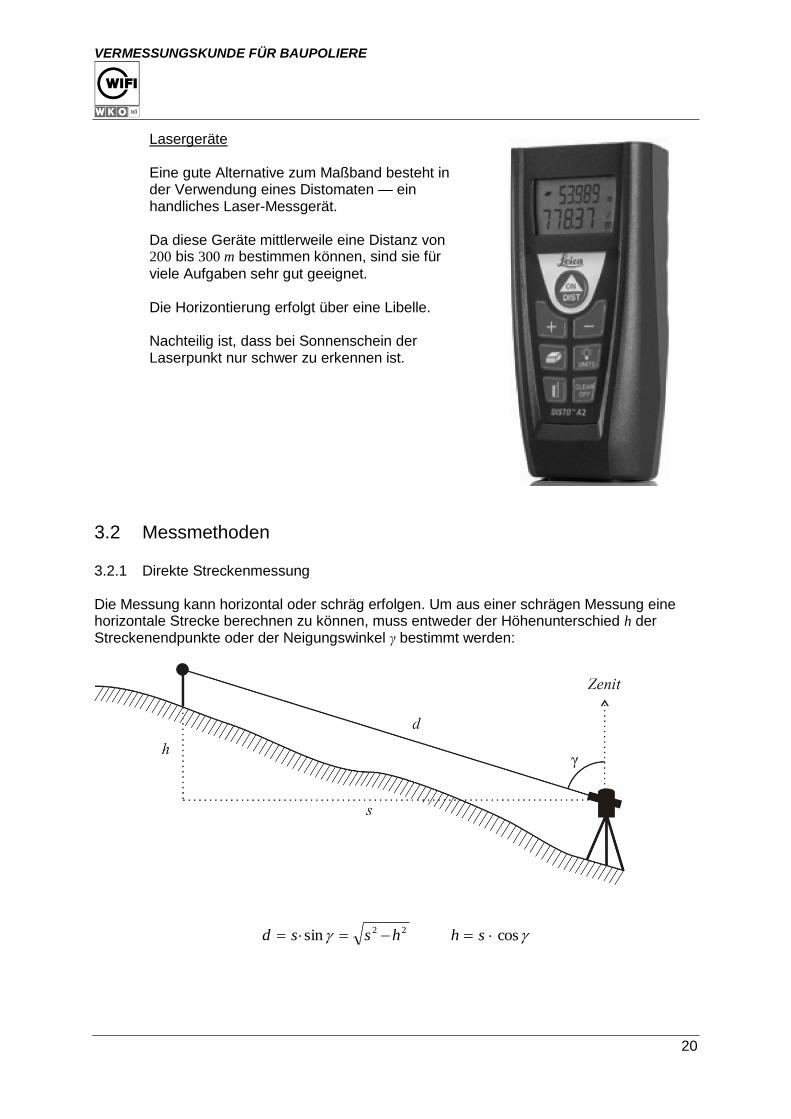
Lasergeräte Eine gute Alternative zum Maßband besteht in der Verwendung eines Distomaten — ein handliches Laser-Messgerät. Da diese Geräte mittlerweile eine Distanz von 200 bis 300 m bestimmen können, sind sie für
viele Aufgaben sehr gut geeignet. Die Horizontierung erfolgt über eine Libelle. Nachteilig ist, dass bei Sonnenschein der Laserpunkt nur schwer zu erkennen ist.
3.2 Messmethoden 3.2.1 Direkte Streckenmessung Die Messung kann horizontal oder schräg erfolgen. Um aus einer schrägen Messung eine horizontale Strecke berechnen zu können, muss entweder der Höhenunterschied h der Streckenendpunkte oder der Neigungswinkel γ bestimmt werden:
22sin hssd cos sh
VERMESSUNGSKUNDE FÜR BAUPOLIERE
21
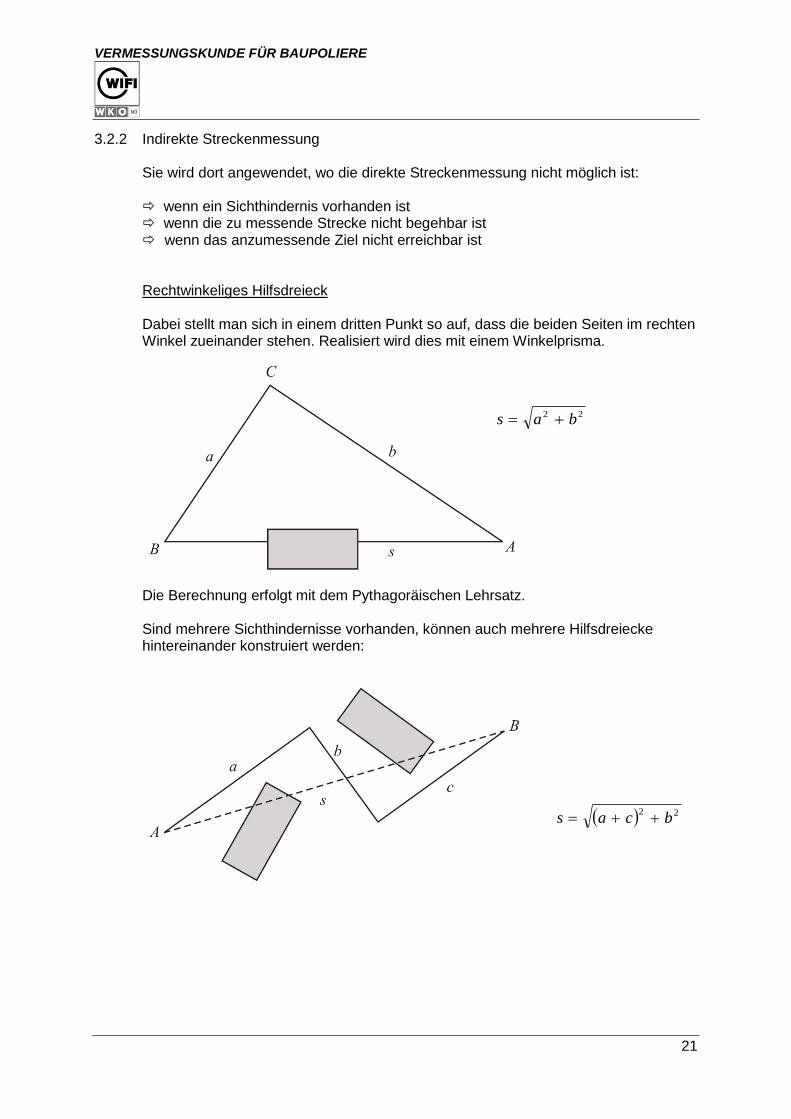
3.2.2 Indirekte Streckenmessung
Sie wird dort angewendet, wo die direkte Streckenmessung nicht möglich ist: wenn ein Sichthindernis vorhanden ist wenn die zu messende Strecke nicht begehbar ist wenn das anzumessende Ziel nicht erreichbar ist Rechtwinkeliges Hilfsdreieck Dabei stellt man sich in einem dritten Punkt so auf, dass die beiden Seiten im rechten Winkel zueinander stehen. Realisiert wird dies mit einem Winkelprisma.
Die Berechnung erfolgt mit dem Pythagoräischen Lehrsatz. Sind mehrere Sichthindernisse vorhanden, können auch mehrere Hilfsdreiecke hintereinander konstruiert werden:
22 bas
22bcas

VERMESSUNGSKUNDE FÜR BAUPOLIERE
22
Ähnliches Hilfsdreieck
Zwei Dreiecke ABC und DEF sind ähnlich, wenn die Verhältnisse der
Seitenlängen gleich sind:
':':':: cbacba oder ':':': ccbbaa
Die Winkel sind identisch! 1. Fall: beide Endpunkte sind begehbar, die Strecke s kann nicht gemessen werden
a. in Punkt B aufstellen und einen rechten Winkel abstecken Punkt C
b. Strecke von B nach C beliebig verlängern Punkt D
c. rechten Winkel in Punkt D so abstecken, dass neuer Punkt E in der Flucht von A
und C liegt
d. die Strecken a, a' und s' messen
Die Lösung ergibt sich aus den Seitenverhältnissen: ''
sa
as
VERMESSUNGSKUNDE FÜR BAUPOLIERE
23
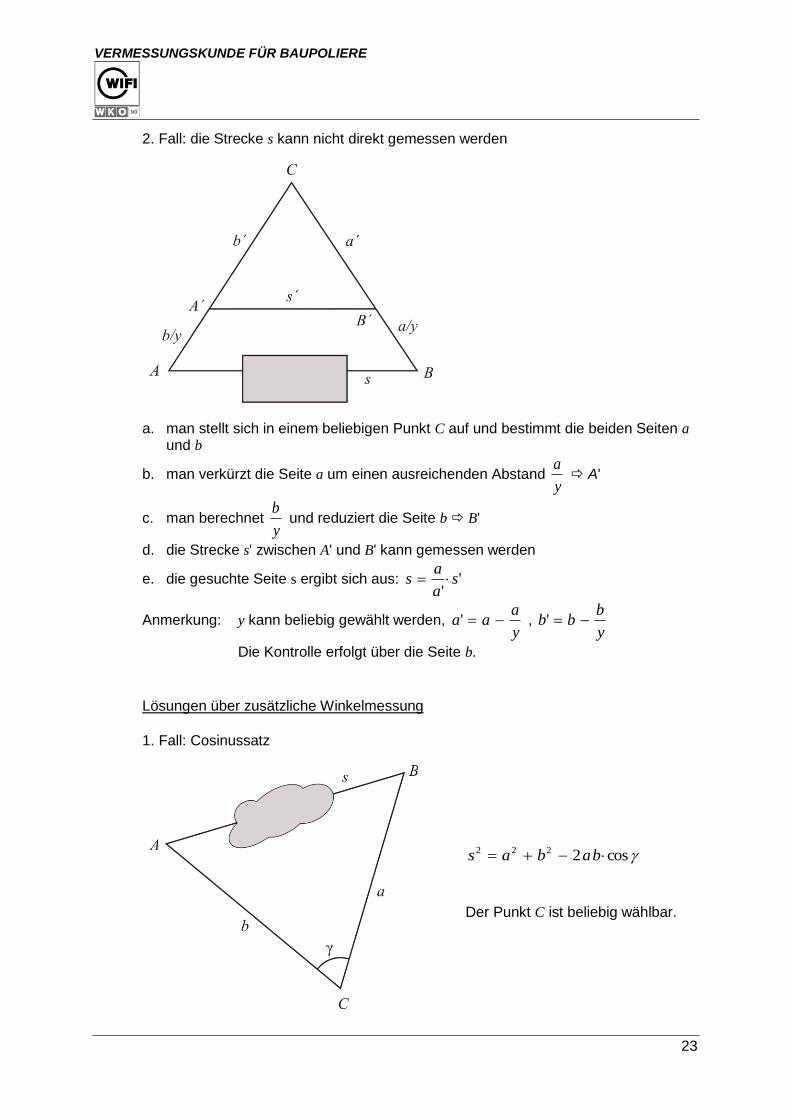
2. Fall: die Strecke s kann nicht direkt gemessen werden
a. man stellt sich in einem beliebigen Punkt C auf und bestimmt die beiden Seiten a und b
b. man verkürzt die Seite a um einen ausreichenden Abstand y
a A'
c. man berechnet y
b und reduziert die Seite b B'
d. die Strecke s' zwischen A' und B' kann gemessen werden
e. die gesuchte Seite s ergibt sich aus: ''
sa
as
Anmerkung: y kann beliebig gewählt werden, y
aaa ' ,
y
bbb '
Die Kontrolle erfolgt über die Seite b.
Lösungen über zusätzliche Winkelmessung
1. Fall: Cosinussatz
cos2222 babas
Der Punkt C ist beliebig wählbar.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
24
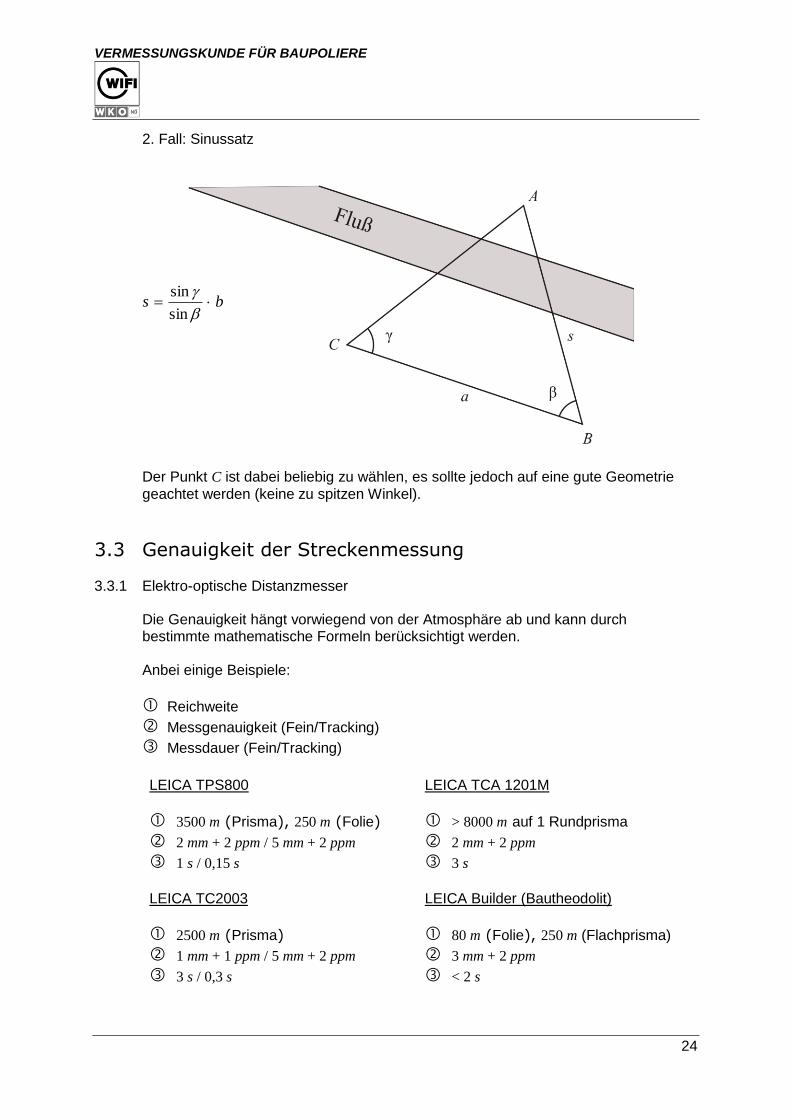
2. Fall: Sinussatz
Der Punkt C ist dabei beliebig zu wählen, es sollte jedoch auf eine gute Geometrie
geachtet werden (keine zu spitzen Winkel).
3.3 Genauigkeit der Streckenmessung 3.3.1 Elektro-optische Distanzmesser
Die Genauigkeit hängt vorwiegend von der Atmosphäre ab und kann durch bestimmte mathematische Formeln berücksichtigt werden. Anbei einige Beispiele:
Reichweite
Messgenauigkeit (Fein/Tracking)
Messdauer (Fein/Tracking)
LEICA TPS800
LEICA TCA 1201M
3500 m (Prisma), 250 m (Folie) > 8000 m auf 1 Rundprisma
2 mm + 2 ppm / 5 mm + 2 ppm 2 mm + 2 ppm
1 s / 0,15 s 3 s
LEICA TC2003
LEICA Builder (Bautheodolit)
2500 m (Prisma) 80 m (Folie), 250 m (Flachprisma)
1 mm + 1 ppm / 5 mm + 2 ppm 3 mm + 2 ppm
3 s / 0,3 s < 2 s
bs
sin
sin

VERMESSUNGSKUNDE FÜR BAUPOLIERE
25
3.3.2 Maßband
Der klassischen Fehler sind Durchhang, Schrägmessung und Temperatur (bei Stahlmaßbändern). Weitere Fehlerquellen sind Anhalte-, Ablesefehler und Schreibfehler.
Durchhang
Bestimmung von Radius R
222 shRR
h
shR
2
22
Bestimmung von Winkel α
R
ssin
Bestimmung der Bogenlänge d
2 Rd
Richtwerte
Strecke Durchhang Fehler
15 m 0,075 m (= 0,5%) 1 mm
15 m 0,15 m (= 1%) 4 mm
15 m 0,30 m (= 2%) 16 mm
30 m 0,15 m (= 0,5%) 2 mm
30 m 0,30 m (= 1%) 8 mm
30 m 0,60 m (= 2%) 32 mm
Temperaturausdehnung
Berechnung der Ausdehnung f
Ttdf 0000115,0
α .... Ausdehnungskoeffizient t .... Temperatur bei Messung T .... Eichtemperatur d .... abgelesene Strecke
VERMESSUNGSKUNDE FÜR BAUPOLIERE
26
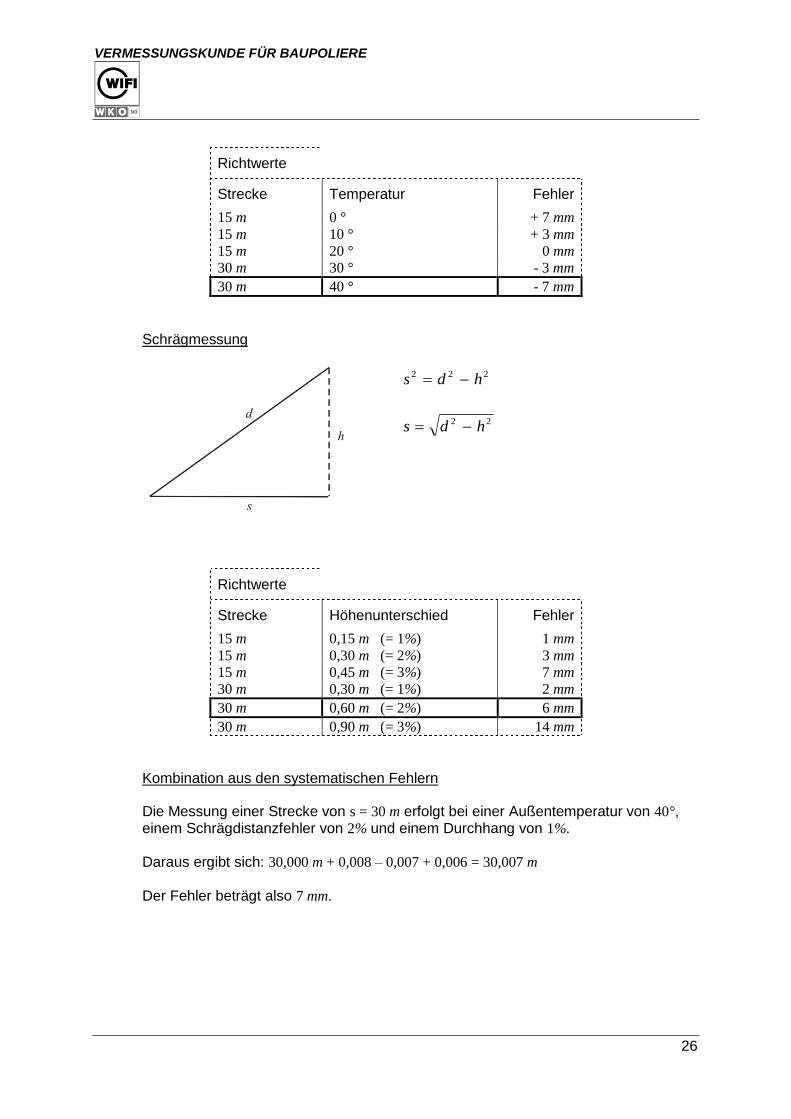
Richtwerte
Strecke Temperatur Fehler
15 m 0 ° + 7 mm
15 m 10 ° + 3 mm
15 m 20 ° 0 mm
30 m 30 ° - 3 mm
30 m 40 ° - 7 mm
Schrägmessung
222 hds
22 hds
Richtwerte
Strecke Höhenunterschied Fehler
15 m 0,15 m (= 1%) 1 mm
15 m 0,30 m (= 2%) 3 mm
15 m 0,45 m (= 3%) 7 mm
30 m 0,30 m (= 1%) 2 mm
30 m 0,60 m (= 2%) 6 mm
30 m 0,90 m (= 3%) 14 mm
Kombination aus den systematischen Fehlern Die Messung einer Strecke von s = 30 m erfolgt bei einer Außentemperatur von 40°, einem Schrägdistanzfehler von 2% und einem Durchhang von 1%.
Daraus ergibt sich: 30,000 m + 0,008 – 0,007 + 0,006 = 30,007 m
Der Fehler beträgt also 7 mm.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
27
3.3.3 Lasergeräte (Leica Disto A5)
Reichweite 0,05 – 200 m
(bei größeren Entfernungen müssen Zieltafeln verwendet werden)
Messgenauigkeit 2 mm (bis 30 m Entfernung)
Durchmesser Laserpunkt auf 10 m 6 mm
auf 30 m 50 mm
auf 100 m 60 mm Lasertyp Laserklasse II, 635 nm, < 1 mW
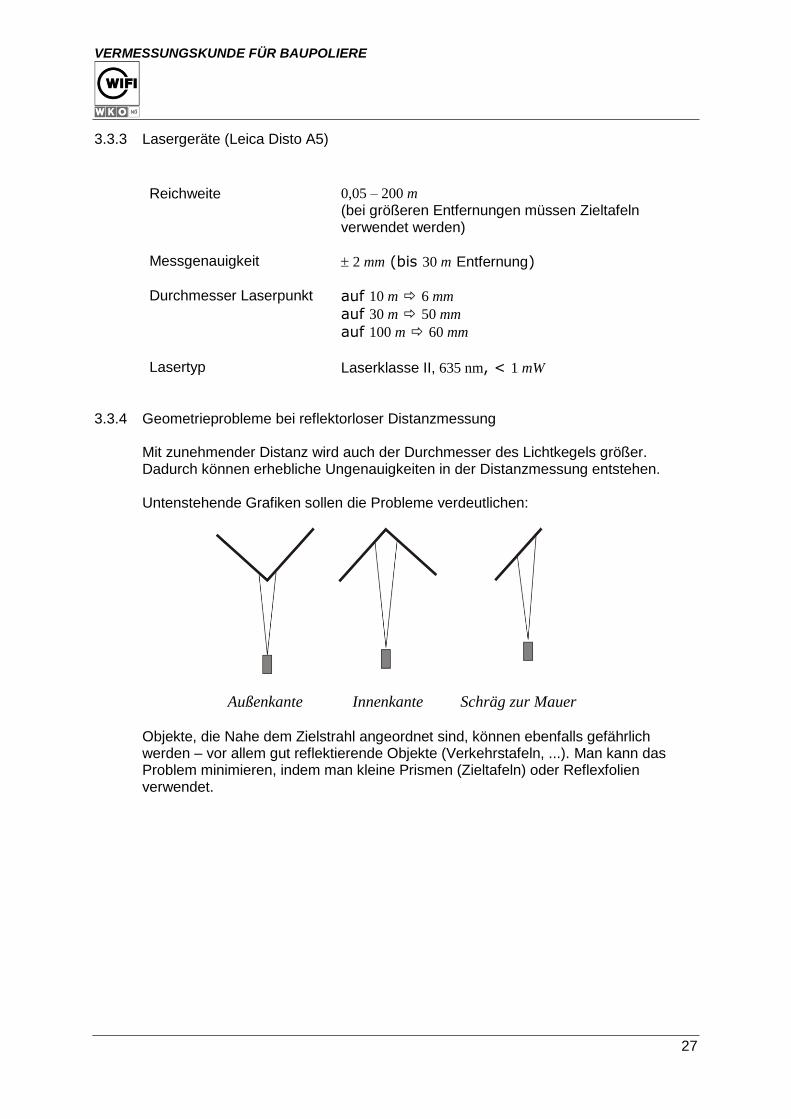
3.3.4 Geometrieprobleme bei reflektorloser Distanzmessung
Mit zunehmender Distanz wird auch der Durchmesser des Lichtkegels größer. Dadurch können erhebliche Ungenauigkeiten in der Distanzmessung entstehen. Untenstehende Grafiken sollen die Probleme verdeutlichen:
Außenkante
Innenkante
Schräg zur Mauer
Objekte, die Nahe dem Zielstrahl angeordnet sind, können ebenfalls gefährlich werden – vor allem gut reflektierende Objekte (Verkehrstafeln, ...). Man kann das Problem minimieren, indem man kleine Prismen (Zieltafeln) oder Reflexfolien verwendet.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
28
4. Winkelmessung
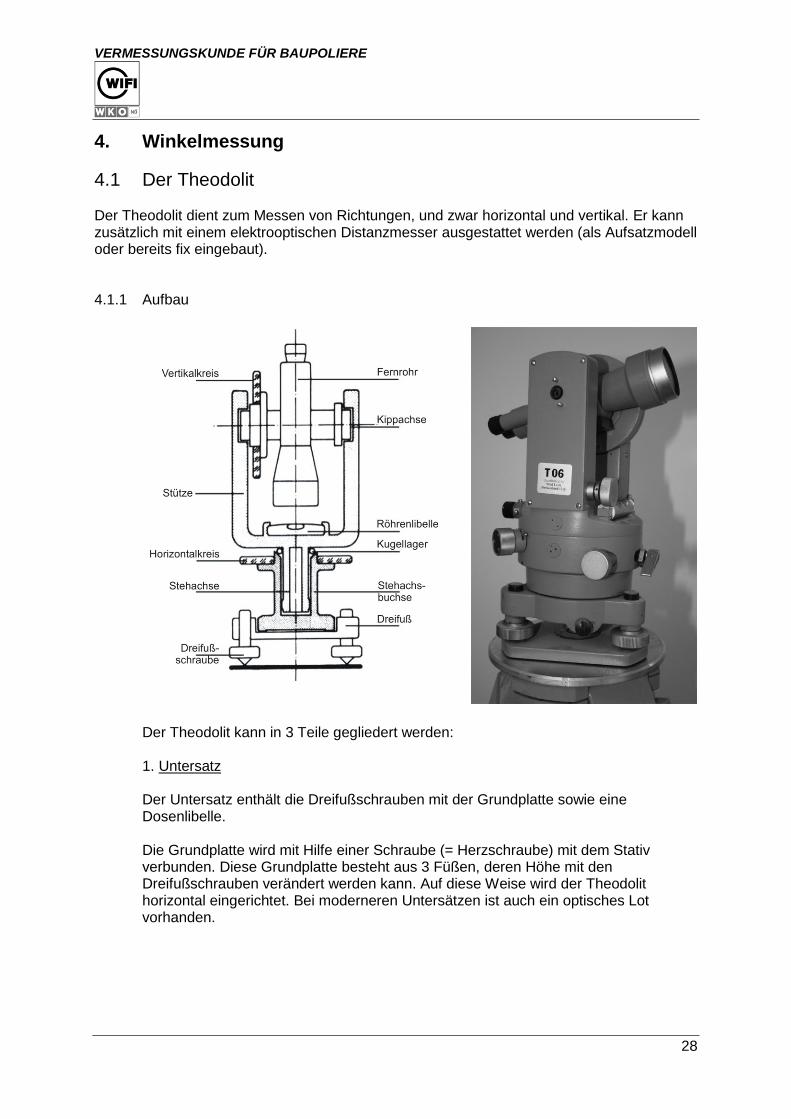
4.1 Der Theodolit Der Theodolit dient zum Messen von Richtungen, und zwar horizontal und vertikal. Er kann zusätzlich mit einem elektrooptischen Distanzmesser ausgestattet werden (als Aufsatzmodell oder bereits fix eingebaut). 4.1.1 Aufbau
Der Theodolit kann in 3 Teile gegliedert werden: 1. Untersatz Der Untersatz enthält die Dreifußschrauben mit der Grundplatte sowie eine Dosenlibelle. Die Grundplatte wird mit Hilfe einer Schraube (= Herzschraube) mit dem Stativ verbunden. Diese Grundplatte besteht aus 3 Füßen, deren Höhe mit den Dreifußschrauben verändert werden kann. Auf diese Weise wird der Theodolit horizontal eingerichtet. Bei moderneren Untersätzen ist auch ein optisches Lot vorhanden.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
29
Für das grobe Dosenlibelle vorgesehen. Das ist ein zylindrisch zugeschmolzener Glaskörper mit einem kugelförmig geschliffenem Deckglas. Dieser Körper ist bis auf eine kleine Luftblase mit Alkohol oder Äther gefüllt.
2. Unterbau
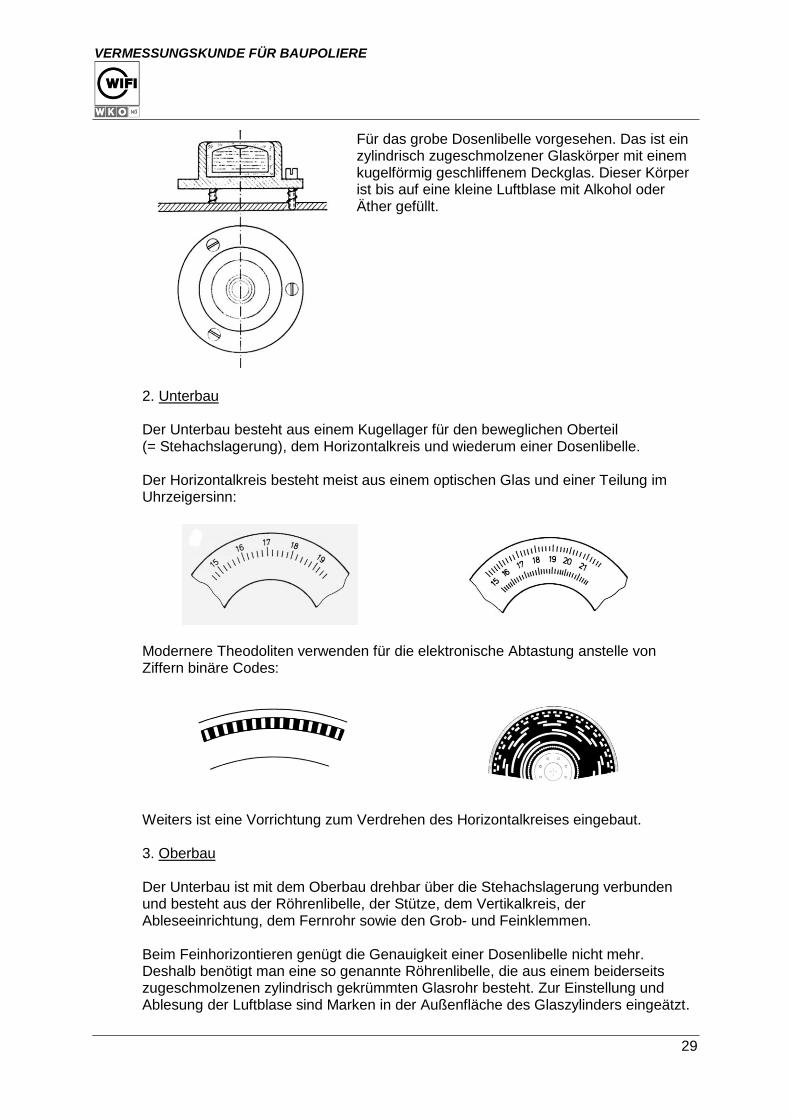
Der Unterbau besteht aus einem Kugellager für den beweglichen Oberteil (= Stehachslagerung), dem Horizontalkreis und wiederum einer Dosenlibelle. Der Horizontalkreis besteht meist aus einem optischen Glas und einer Teilung im Uhrzeigersinn:
Modernere Theodoliten verwenden für die elektronische Abtastung anstelle von Ziffern binäre Codes:
Weiters ist eine Vorrichtung zum Verdrehen des Horizontalkreises eingebaut.
3. Oberbau
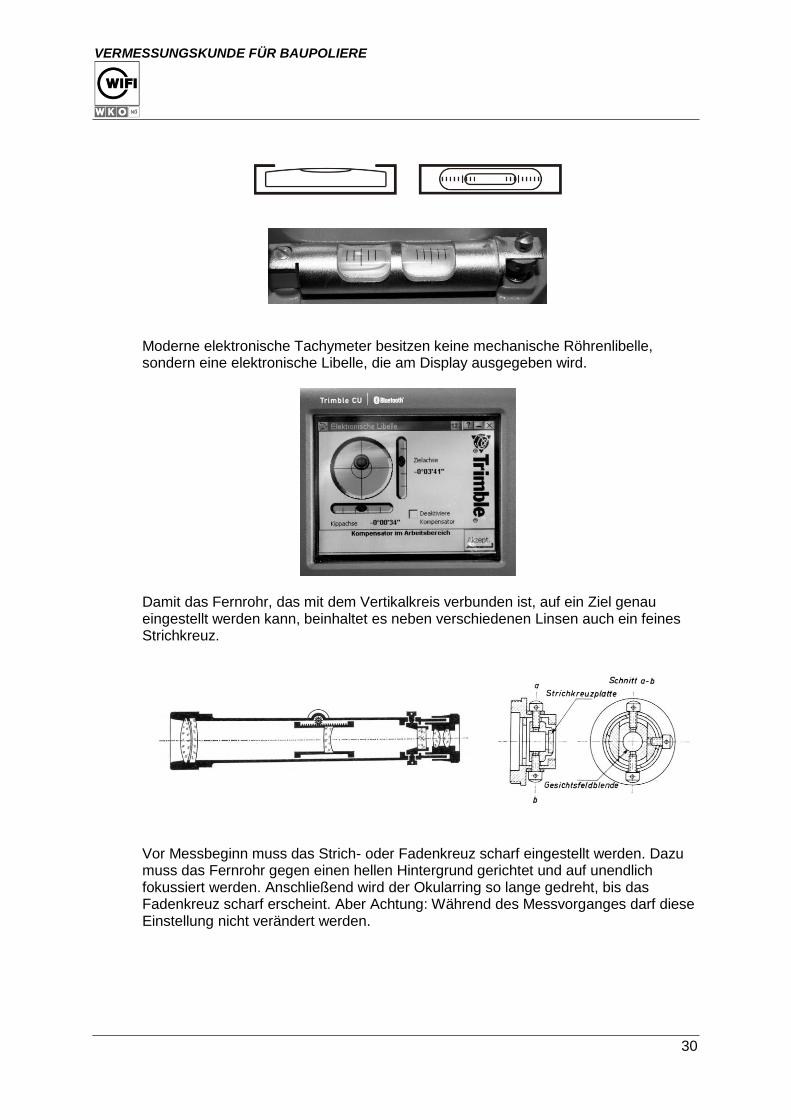
Der Unterbau ist mit dem Oberbau drehbar über die Stehachslagerung verbunden und besteht aus der Röhrenlibelle, der Stütze, dem Vertikalkreis, der Ableseeinrichtung, dem Fernrohr sowie den Grob- und Feinklemmen. Beim Feinhorizontieren genügt die Genauigkeit einer Dosenlibelle nicht mehr. Deshalb benötigt man eine so genannte Röhrenlibelle, die aus einem beiderseits zugeschmolzenen zylindrisch gekrümmten Glasrohr besteht. Zur Einstellung und Ablesung der Luftblase sind Marken in der Außenfläche des Glaszylinders eingeätzt.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
30
Moderne elektronische Tachymeter besitzen keine mechanische Röhrenlibelle, sondern eine elektronische Libelle, die am Display ausgegeben wird.
Damit das Fernrohr, das mit dem Vertikalkreis verbunden ist, auf ein Ziel genau eingestellt werden kann, beinhaltet es neben verschiedenen Linsen auch ein feines Strichkreuz.
Vor Messbeginn muss das Strich- oder Fadenkreuz scharf eingestellt werden. Dazu muss das Fernrohr gegen einen hellen Hintergrund gerichtet und auf unendlich fokussiert werden. Anschließend wird der Okularring so lange gedreht, bis das Fadenkreuz scharf erscheint. Aber Achtung: Während des Messvorganges darf diese Einstellung nicht verändert werden.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
31
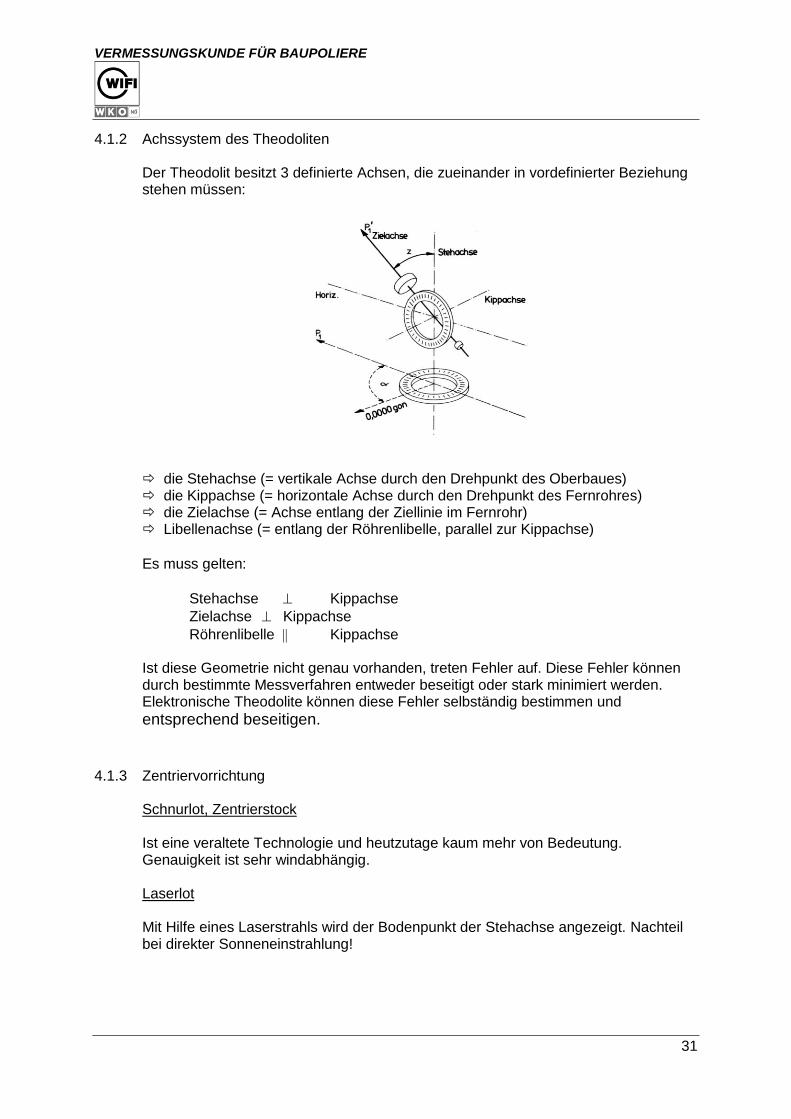
4.1.2 Achssystem des Theodoliten
Der Theodolit besitzt 3 definierte Achsen, die zueinander in vordefinierter Beziehung stehen müssen:
die Stehachse (= vertikale Achse durch den Drehpunkt des Oberbaues) die Kippachse (= horizontale Achse durch den Drehpunkt des Fernrohres) die Zielachse (= Achse entlang der Ziellinie im Fernrohr) Libellenachse (= entlang der Röhrenlibelle, parallel zur Kippachse)
Es muss gelten:
Stehachse Kippachse
Zielachse Kippachse
Röhrenlibelle Kippachse Ist diese Geometrie nicht genau vorhanden, treten Fehler auf. Diese Fehler können durch bestimmte Messverfahren entweder beseitigt oder stark minimiert werden. Elektronische Theodolite können diese Fehler selbständig bestimmen und entsprechend beseitigen.
4.1.3 Zentriervorrichtung
Schnurlot, Zentrierstock Ist eine veraltete Technologie und heutzutage kaum mehr von Bedeutung. Genauigkeit ist sehr windabhängig. Laserlot Mit Hilfe eines Laserstrahls wird der Bodenpunkt der Stehachse angezeigt. Nachteil bei direkter Sonneneinstrahlung!
VERMESSUNGSKUNDE FÜR BAUPOLIERE
32
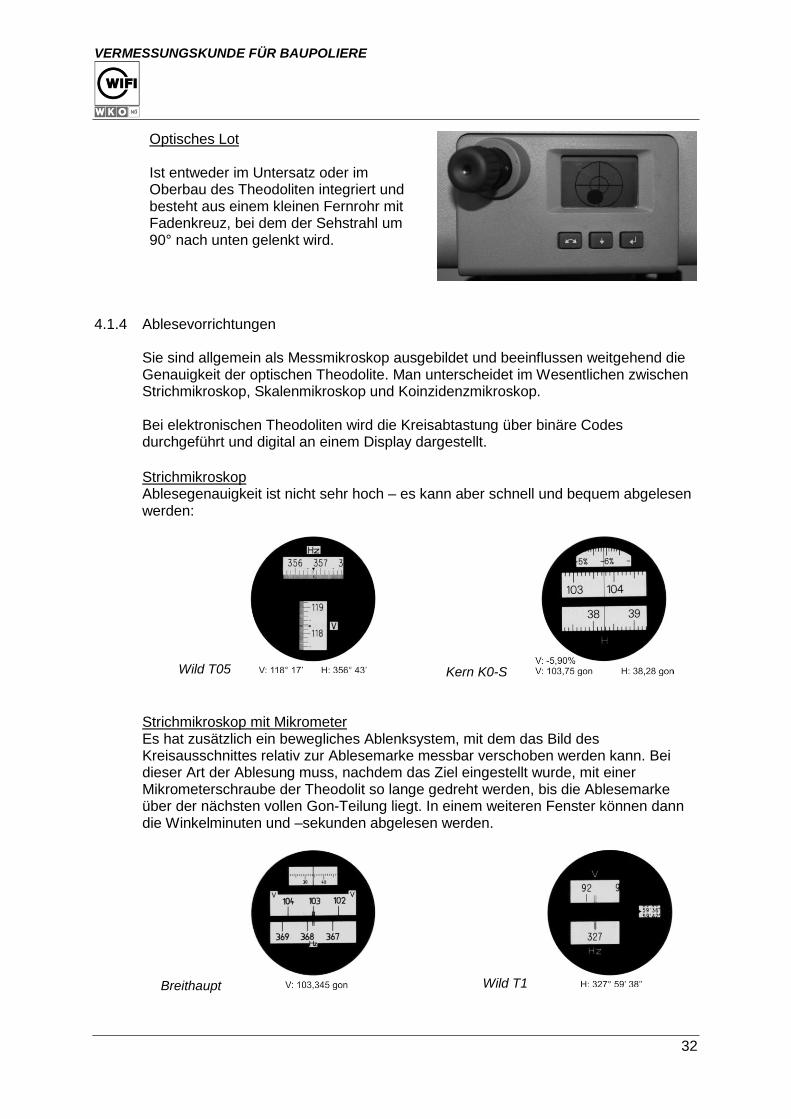
Optisches Lot Ist entweder im Untersatz oder im Oberbau des Theodoliten integriert und besteht aus einem kleinen Fernrohr mit Fadenkreuz, bei dem der Sehstrahl um 90° nach unten gelenkt wird.
4.1.4 Ablesevorrichtungen
Sie sind allgemein als Messmikroskop ausgebildet und beeinflussen weitgehend die Genauigkeit der optischen Theodolite. Man unterscheidet im Wesentlichen zwischen Strichmikroskop, Skalenmikroskop und Koinzidenzmikroskop. Bei elektronischen Theodoliten wird die Kreisabtastung über binäre Codes durchgeführt und digital an einem Display dargestellt.
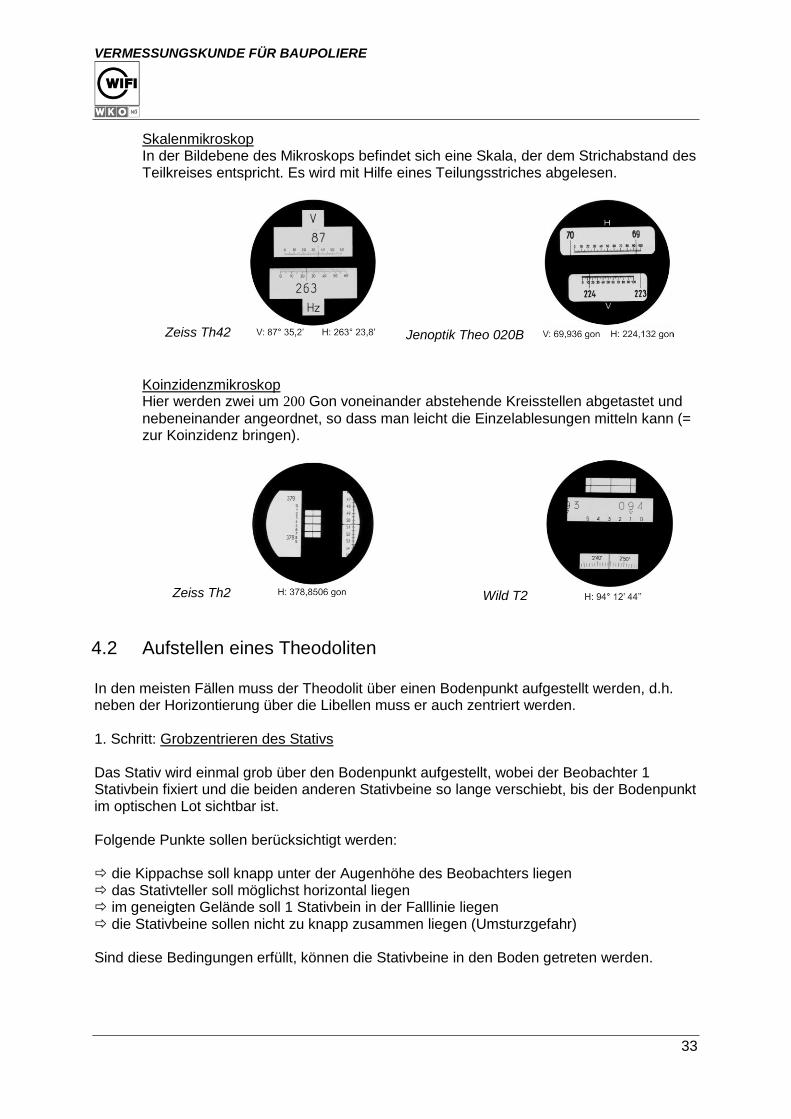
Strichmikroskop Ablesegenauigkeit ist nicht sehr hoch – es kann aber schnell und bequem abgelesen werden:
Wild T05 Kern K0-S
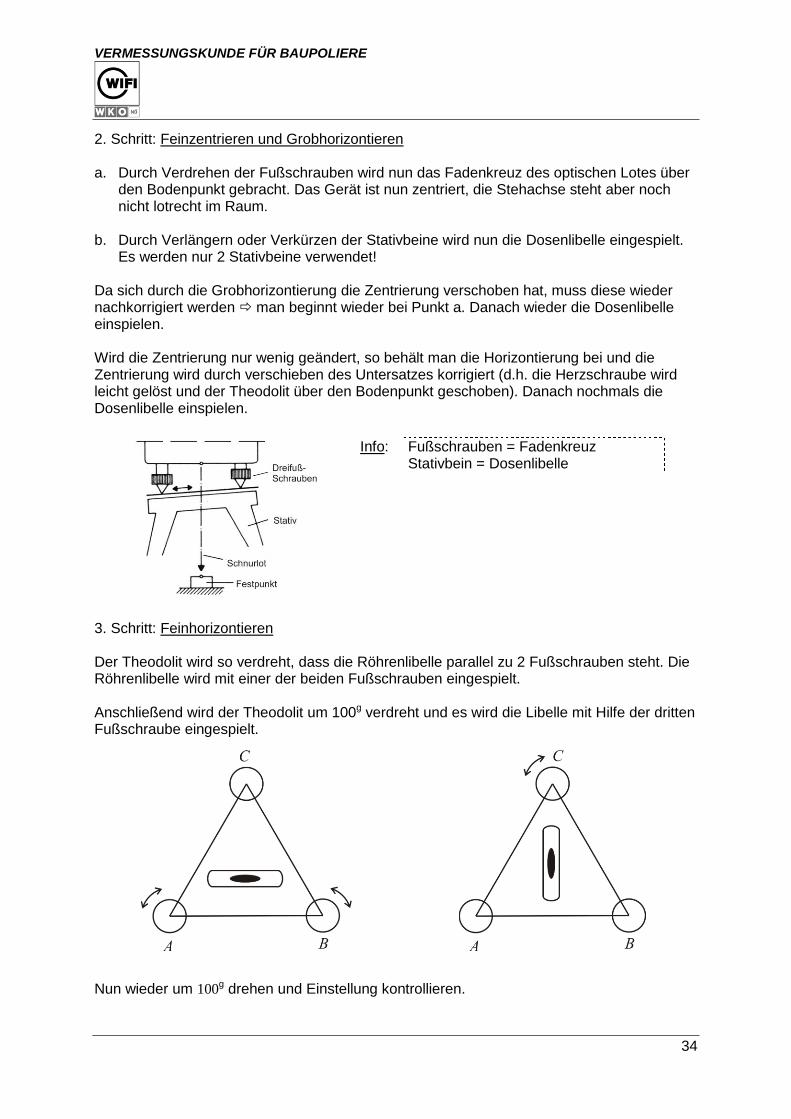
Strichmikroskop mit Mikrometer Es hat zusätzlich ein bewegliches Ablenksystem, mit dem das Bild des Kreisausschnittes relativ zur Ablesemarke messbar verschoben werden kann. Bei dieser Art der Ablesung muss, nachdem das Ziel eingestellt wurde, mit einer Mikrometerschraube der Theodolit so lange gedreht werden, bis die Ablesemarke über der nächsten vollen Gon-Teilung liegt. In einem weiteren Fenster können dann die Winkelminuten und –sekunden abgelesen werden.
Breithaupt Wild T1
VERMESSUNGSKUNDE FÜR BAUPOLIERE
33
Skalenmikroskop In der Bildebene des Mikroskops befindet sich eine Skala, der dem Strichabstand des Teilkreises entspricht. Es wird mit Hilfe eines Teilungsstriches abgelesen.
Zeiss Th42 Jenoptik Theo 020B
Koinzidenzmikroskop Hier werden zwei um 200 Gon voneinander abstehende Kreisstellen abgetastet und
nebeneinander angeordnet, so dass man leicht die Einzelablesungen mitteln kann (= zur Koinzidenz bringen).
Zeiss Th2 Wild T2
4.2 Aufstellen eines Theodoliten In den meisten Fällen muss der Theodolit über einen Bodenpunkt aufgestellt werden, d.h. neben der Horizontierung über die Libellen muss er auch zentriert werden. 1. Schritt: Grobzentrieren des Stativs Das Stativ wird einmal grob über den Bodenpunkt aufgestellt, wobei der Beobachter 1 Stativbein fixiert und die beiden anderen Stativbeine so lange verschiebt, bis der Bodenpunkt im optischen Lot sichtbar ist. Folgende Punkte sollen berücksichtigt werden: die Kippachse soll knapp unter der Augenhöhe des Beobachters liegen das Stativteller soll möglichst horizontal liegen im geneigten Gelände soll 1 Stativbein in der Falllinie liegen die Stativbeine sollen nicht zu knapp zusammen liegen (Umsturzgefahr) Sind diese Bedingungen erfüllt, können die Stativbeine in den Boden getreten werden.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
34
2. Schritt: Feinzentrieren und Grobhorizontieren a. Durch Verdrehen der Fußschrauben wird nun das Fadenkreuz des optischen Lotes über
den Bodenpunkt gebracht. Das Gerät ist nun zentriert, die Stehachse steht aber noch nicht lotrecht im Raum.
b. Durch Verlängern oder Verkürzen der Stativbeine wird nun die Dosenlibelle eingespielt.
Es werden nur 2 Stativbeine verwendet! Da sich durch die Grobhorizontierung die Zentrierung verschoben hat, muss diese wieder nachkorrigiert werden man beginnt wieder bei Punkt a. Danach wieder die Dosenlibelle einspielen. Wird die Zentrierung nur wenig geändert, so behält man die Horizontierung bei und die Zentrierung wird durch verschieben des Untersatzes korrigiert (d.h. die Herzschraube wird leicht gelöst und der Theodolit über den Bodenpunkt geschoben). Danach nochmals die Dosenlibelle einspielen.
Info: Fußschrauben = Fadenkreuz Stativbein = Dosenlibelle
3. Schritt: Feinhorizontieren Der Theodolit wird so verdreht, dass die Röhrenlibelle parallel zu 2 Fußschrauben steht. Die Röhrenlibelle wird mit einer der beiden Fußschrauben eingespielt. Anschließend wird der Theodolit um 100g verdreht und es wird die Libelle mit Hilfe der dritten Fußschraube eingespielt.
Nun wieder um 100
g drehen und Einstellung kontrollieren.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
35
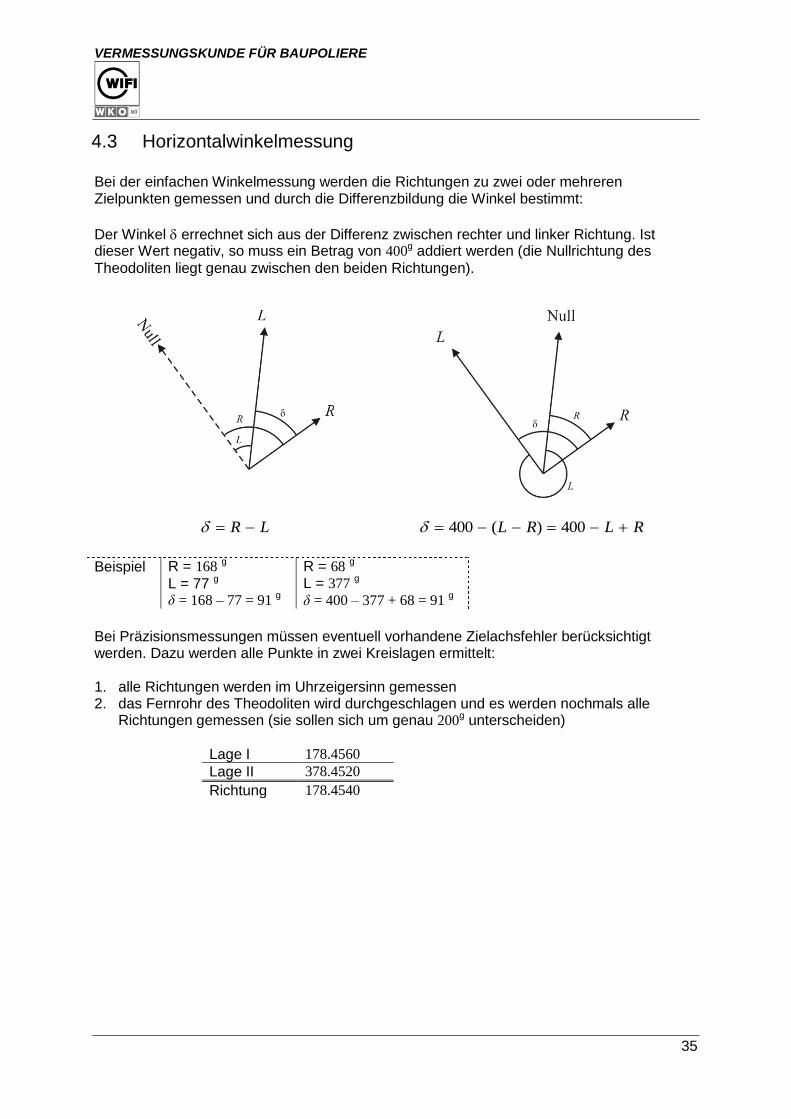
4.3 Horizontalwinkelmessung
Bei der einfachen Winkelmessung werden die Richtungen zu zwei oder mehreren Zielpunkten gemessen und durch die Differenzbildung die Winkel bestimmt:
Der Winkel errechnet sich aus der Differenz zwischen rechter und linker Richtung. Ist dieser Wert negativ, so muss ein Betrag von 400
g addiert werden (die Nullrichtung des
Theodoliten liegt genau zwischen den beiden Richtungen).
LR
RLRL 400)(400
Beispiel R = 168 g
L = 77 g δ = 168 – 77 = 91
g
R = 68 g L = 377 g δ = 400 – 377 + 68 = 91
g
Bei Präzisionsmessungen müssen eventuell vorhandene Zielachsfehler berücksichtigt werden. Dazu werden alle Punkte in zwei Kreislagen ermittelt: 1. alle Richtungen werden im Uhrzeigersinn gemessen 2. das Fernrohr des Theodoliten wird durchgeschlagen und es werden nochmals alle
Richtungen gemessen (sie sollen sich um genau 200g unterscheiden)
Lage I 178.4560
Lage II 378.4520
Richtung 178.4540
VERMESSUNGSKUNDE FÜR BAUPOLIERE
36
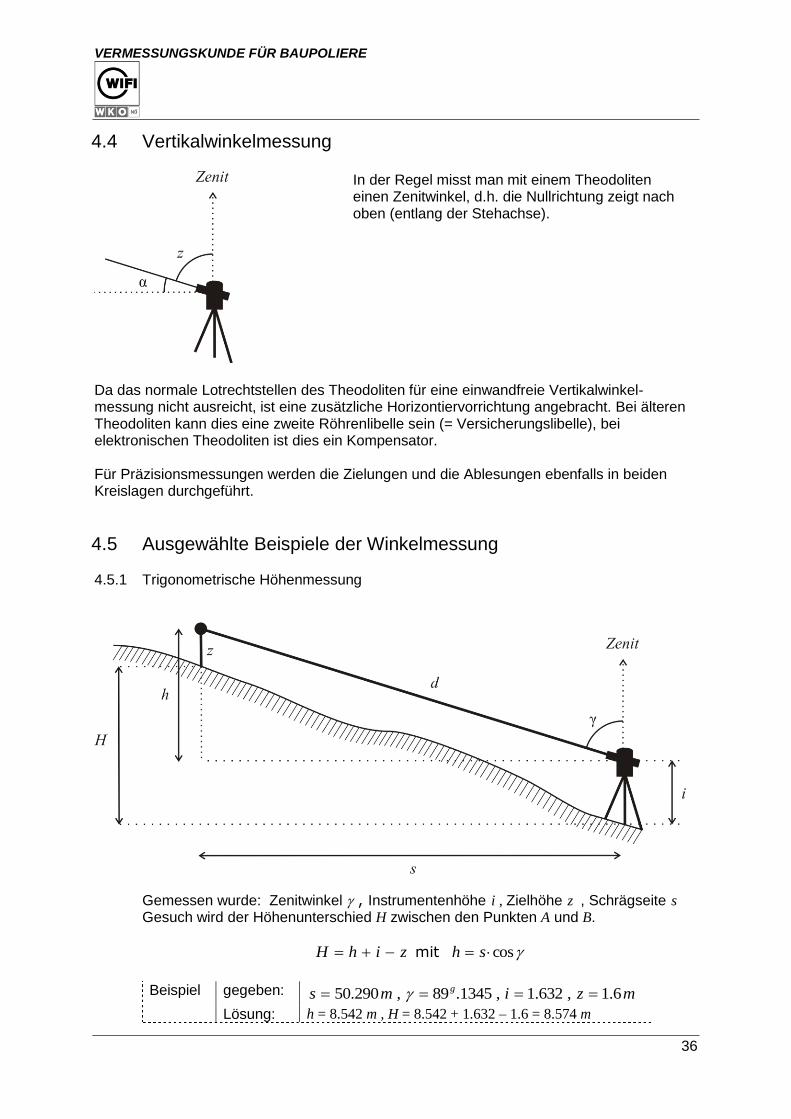
4.4 Vertikalwinkelmessung
In der Regel misst man mit einem Theodoliten einen Zenitwinkel, d.h. die Nullrichtung zeigt nach oben (entlang der Stehachse).
Da das normale Lotrechtstellen des Theodoliten für eine einwandfreie Vertikalwinkel-messung nicht ausreicht, ist eine zusätzliche Horizontiervorrichtung angebracht. Bei älteren Theodoliten kann dies eine zweite Röhrenlibelle sein (= Versicherungslibelle), bei elektronischen Theodoliten ist dies ein Kompensator. Für Präzisionsmessungen werden die Zielungen und die Ablesungen ebenfalls in beiden Kreislagen durchgeführt.
4.5 Ausgewählte Beispiele der Winkelmessung 4.5.1 Trigonometrische Höhenmessung
Gemessen wurde: Zenitwinkel , Instrumentenhöhe i , Zielhöhe z , Schrägseite s Gesuch wird der Höhenunterschied H zwischen den Punkten A und B.
zihH mit cos sh
Beispiel gegeben: mzims g 6.1,632.1,1345.89,290.50
Lösung: h = 8.542 m , H = 8.542 + 1.632 – 1.6 = 8.574 m
VERMESSUNGSKUNDE FÜR BAUPOLIERE
37
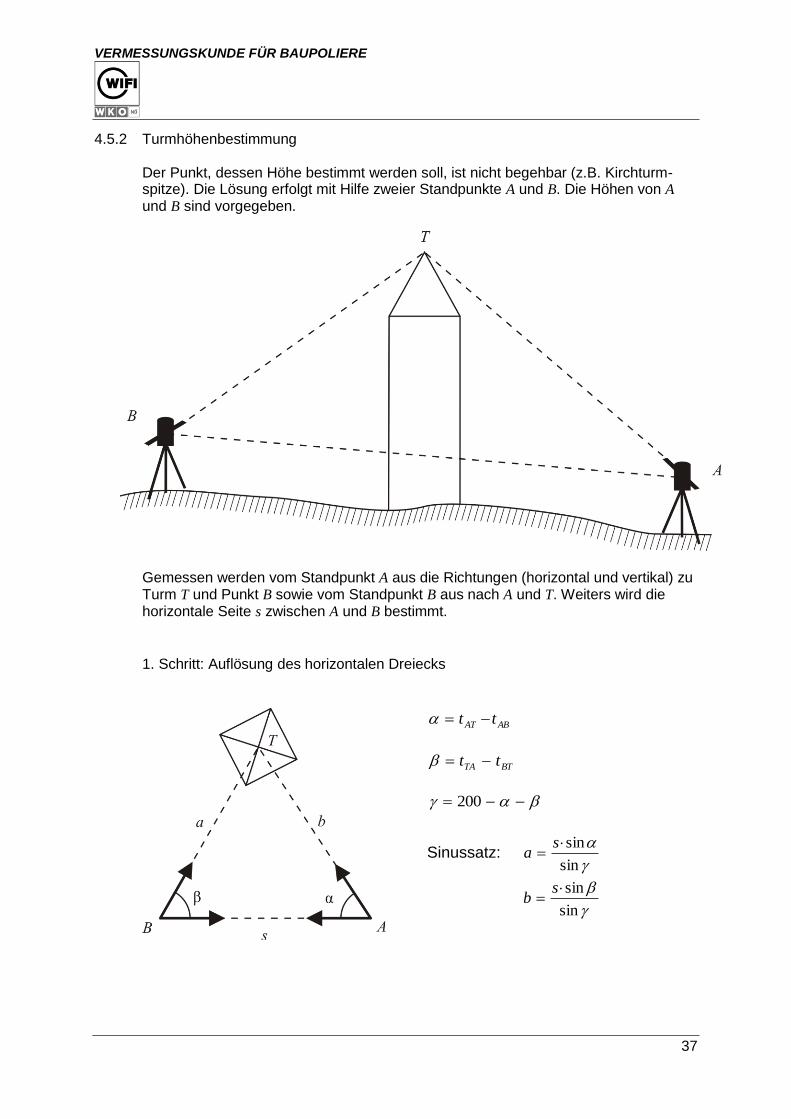
4.5.2 Turmhöhenbestimmung
Der Punkt, dessen Höhe bestimmt werden soll, ist nicht begehbar (z.B. Kirchturm-spitze). Die Lösung erfolgt mit Hilfe zweier Standpunkte A und B. Die Höhen von A und B sind vorgegeben.
Gemessen werden vom Standpunkt A aus die Richtungen (horizontal und vertikal) zu Turm T und Punkt B sowie vom Standpunkt B aus nach A und T. Weiters wird die horizontale Seite s zwischen A und B bestimmt.
1. Schritt: Auflösung des horizontalen Dreiecks
ABAT tt
BTTA tt
200
Sinussatz:
sin
sin
sa
sin
sin
sb

VERMESSUNGSKUNDE FÜR BAUPOLIERE
38
2. Schritt: Auflösung des vertikalen Dreiecks im Punkt A
AT
Av
bh
tan
AAAT hiHH
3. Schritt: Auflösung des vertikalen Dreiecks im Punkt B (= Kontrolle)
BT
Bv
ah
tan
BBBT hiHH
Aufgabe 9 gegeben ist folgendes Messprotokoll:
von nach Hz (= t) Vz s i
A B 280,000 - 67,234 1,635
A T 320,000 59,108
B A 30,000 - 67,234 1,573
B T 360,000 53,736
VERMESSUNGSKUNDE FÜR BAUPOLIERE
39
4.6 Genauigkeit der Winkelmessung
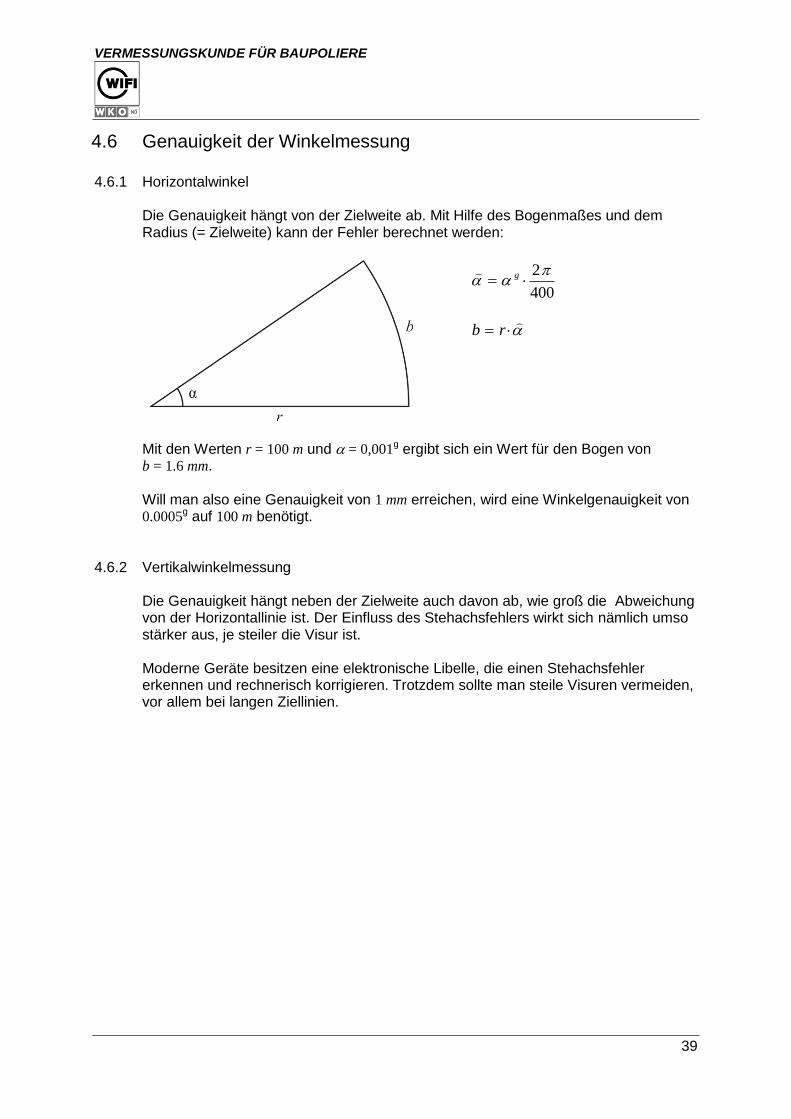
4.6.1 Horizontalwinkel
Die Genauigkeit hängt von der Zielweite ab. Mit Hilfe des Bogenmaßes und dem Radius (= Zielweite) kann der Fehler berechnet werden:
400
2 g
rb
Mit den Werten r = 100 m und = 0,001
g ergibt sich ein Wert für den Bogen von b = 1.6 mm.
Will man also eine Genauigkeit von 1 mm erreichen, wird eine Winkelgenauigkeit von 0.0005
g auf 100 m benötigt.
4.6.2 Vertikalwinkelmessung
Die Genauigkeit hängt neben der Zielweite auch davon ab, wie groß die Abweichung von der Horizontallinie ist. Der Einfluss des Stehachsfehlers wirkt sich nämlich umso stärker aus, je steiler die Visur ist. Moderne Geräte besitzen eine elektronische Libelle, die einen Stehachsfehler erkennen und rechnerisch korrigieren. Trotzdem sollte man steile Visuren vermeiden, vor allem bei langen Ziellinien.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
40
5. Koordinatenrechnung
5.1 Definitionen 5.1.1 Koordinatensystem
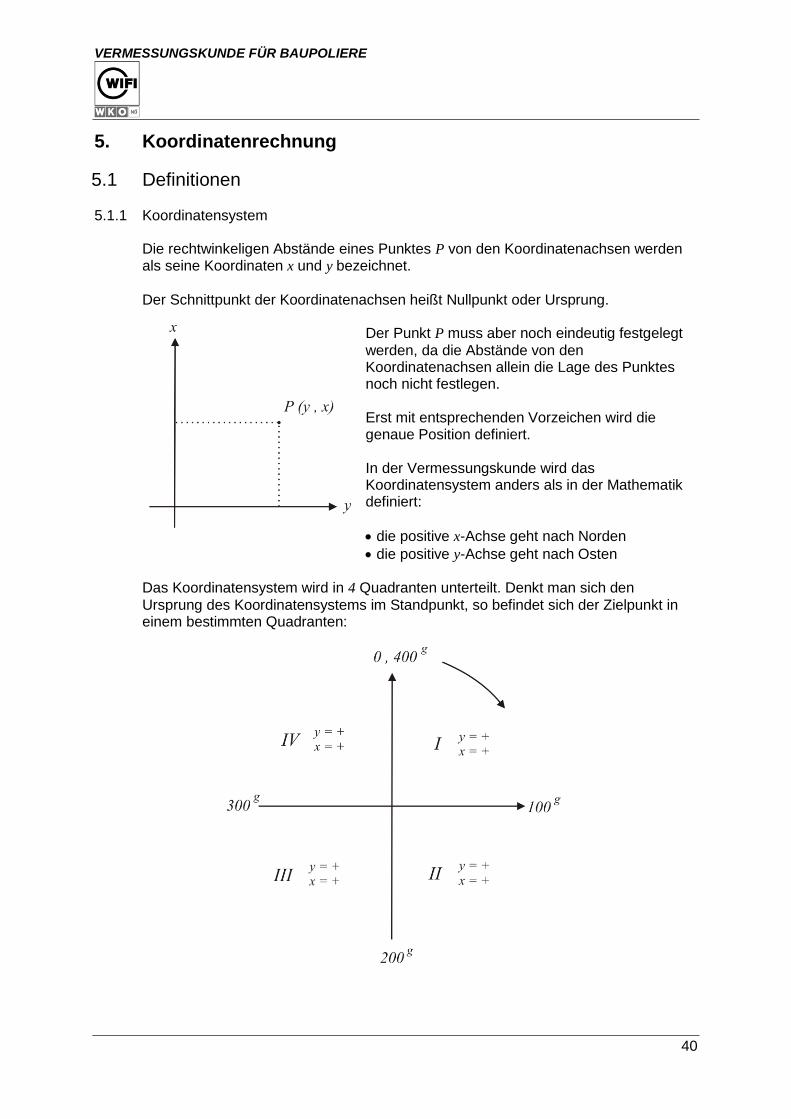
Die rechtwinkeligen Abstände eines Punktes P von den Koordinatenachsen werden als seine Koordinaten x und y bezeichnet.
Der Schnittpunkt der Koordinatenachsen heißt Nullpunkt oder Ursprung.
Der Punkt P muss aber noch eindeutig festgelegt
werden, da die Abstände von den Koordinatenachsen allein die Lage des Punktes noch nicht festlegen. Erst mit entsprechenden Vorzeichen wird die genaue Position definiert. In der Vermessungskunde wird das Koordinatensystem anders als in der Mathematik definiert:
die positive x-Achse geht nach Norden
die positive y-Achse geht nach Osten
Das Koordinatensystem wird in 4 Quadranten unterteilt. Denkt man sich den
Ursprung des Koordinatensystems im Standpunkt, so befindet sich der Zielpunkt in einem bestimmten Quadranten:
VERMESSUNGSKUNDE FÜR BAUPOLIERE
41
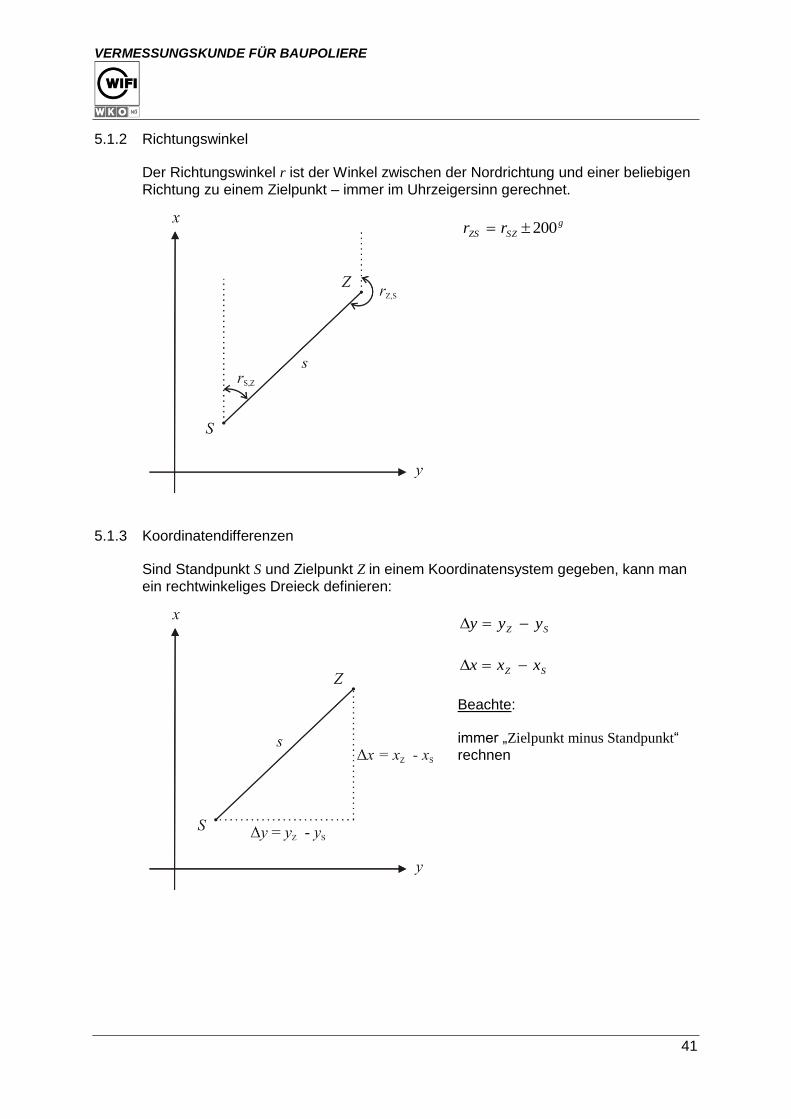
5.1.2 Richtungswinkel
Der Richtungswinkel r ist der Winkel zwischen der Nordrichtung und einer beliebigen
Richtung zu einem Zielpunkt – immer im Uhrzeigersinn gerechnet.
g
SZZS rr 200
5.1.3 Koordinatendifferenzen
Sind Standpunkt S und Zielpunkt Z in einem Koordinatensystem gegeben, kann man
ein rechtwinkeliges Dreieck definieren:
SZ yyy
SZ xxx
Beachte: immer „Zielpunkt minus Standpunkt―
rechnen

VERMESSUNGSKUNDE FÜR BAUPOLIERE
42
Winkeldefinitionen:
s
xr
cossin
s
yr
sincos
5.2 Erste Hauptaufgabe der Koordinatenrechnung (= Lageaufnahme)
Von einem gegebenen Standpunkt S (yS , xS) wird ein Richtungswinkel r und eine Seite s gemessen. Gesucht werden die Koordinaten des Zielpunktes Z.
Lösung:
rsyy SZ sin
rsxx SZ cos
Aufgabe 10 gegeben: Punkt S: mxmy 00,20,00.50
gemessen: s = 100 m, r = 40,000 g
gesucht: Koordinaten von Punkt Z
VERMESSUNGSKUNDE FÜR BAUPOLIERE
43
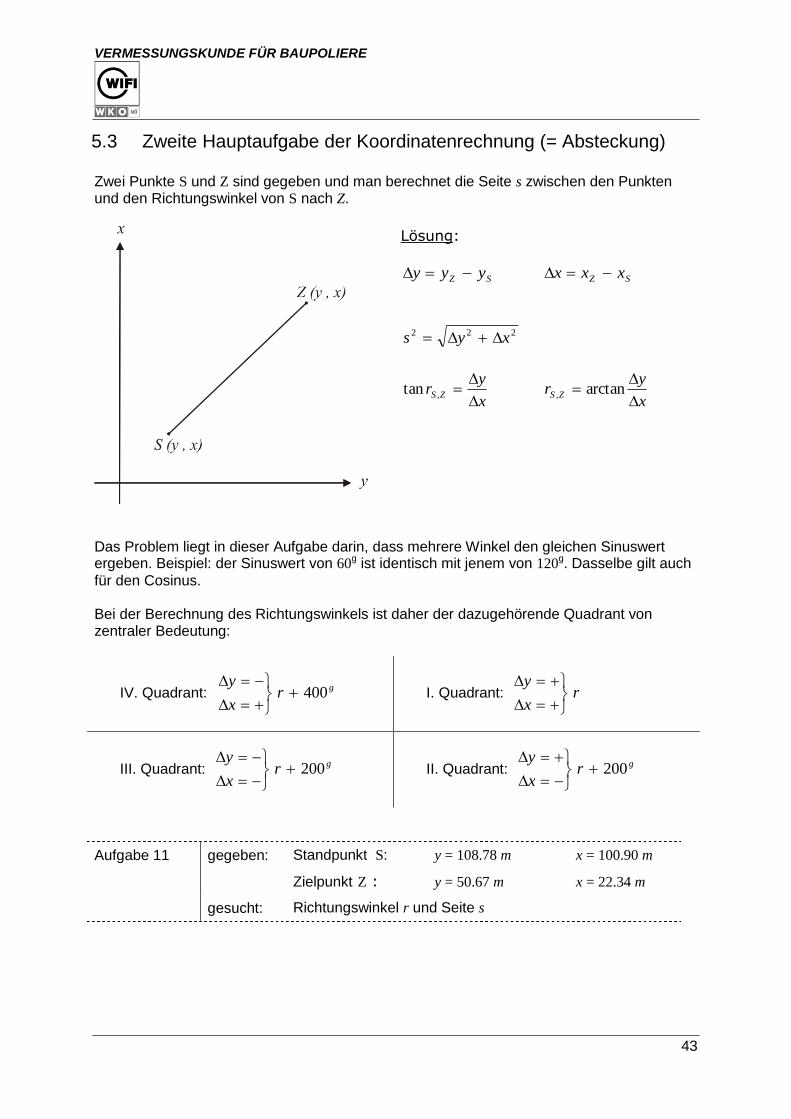
5.3 Zweite Hauptaufgabe der Koordinatenrechnung (= Absteckung)
Zwei Punkte S und Z sind gegeben und man berechnet die Seite s zwischen den Punkten und den Richtungswinkel von S nach Z.
Lösung:
SZ yyy SZ xxx
222 xys
x
yr ZS
,tan
x
yr ZS
arctan,
Das Problem liegt in dieser Aufgabe darin, dass mehrere Winkel den gleichen Sinuswert ergeben. Beispiel: der Sinuswert von 60
g ist identisch mit jenem von 120g. Dasselbe gilt auch
für den Cosinus. Bei der Berechnung des Richtungswinkels ist daher der dazugehörende Quadrant von zentraler Bedeutung:
IV. Quadrant: gr
x
y400
I. Quadrant: r
x
y
III. Quadrant: gr
x
y200
II. Quadrant:
grx
y200
Aufgabe 11 gegeben: Standpunkt S: y = 108.78 m x = 100.90 m
Zielpunkt Z : y = 50.67 m x = 22.34 m
gesucht: Richtungswinkel r und Seite s
VERMESSUNGSKUNDE FÜR BAUPOLIERE
44
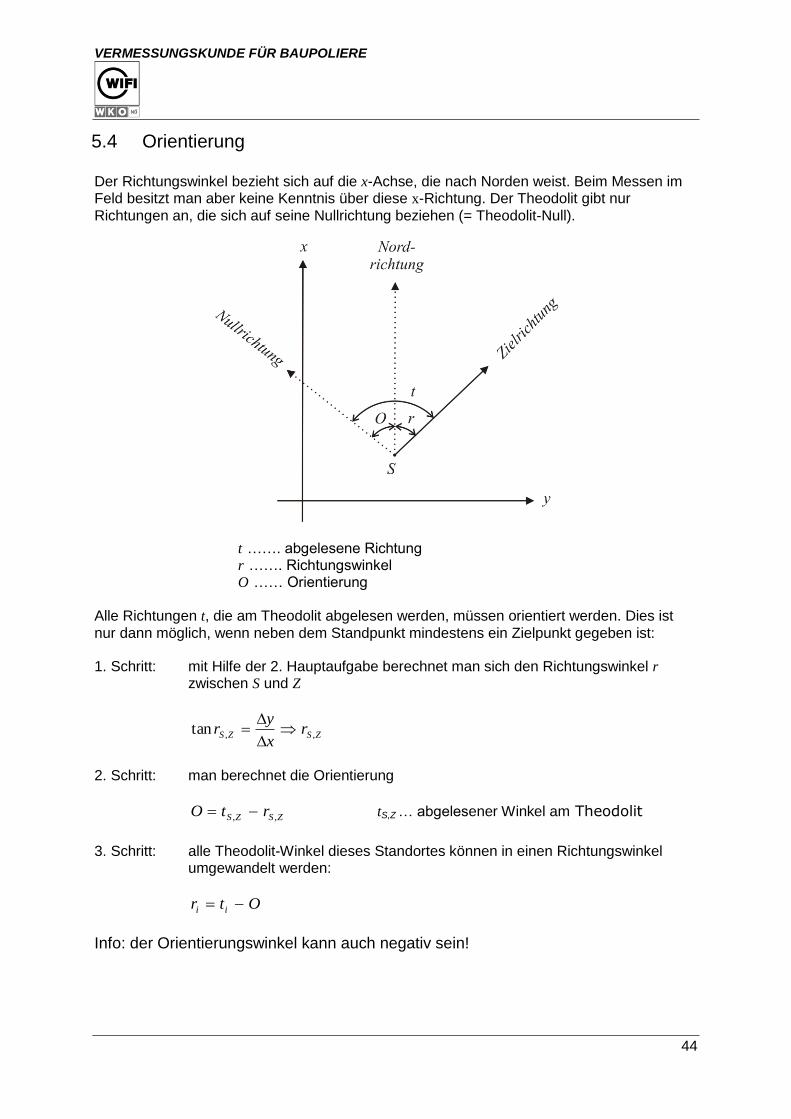
5.4 Orientierung
Der Richtungswinkel bezieht sich auf die x-Achse, die nach Norden weist. Beim Messen im Feld besitzt man aber keine Kenntnis über diese x-Richtung. Der Theodolit gibt nur
Richtungen an, die sich auf seine Nullrichtung beziehen (= Theodolit-Null).
t ……. abgelesene Richtung r ……. Richtungswinkel O …… Orientierung
Alle Richtungen t, die am Theodolit abgelesen werden, müssen orientiert werden. Dies ist
nur dann möglich, wenn neben dem Standpunkt mindestens ein Zielpunkt gegeben ist: 1. Schritt: mit Hilfe der 2. Hauptaufgabe berechnet man sich den Richtungswinkel r
zwischen S und Z
ZSZS rx
yr ,,tan
2. Schritt: man berechnet die Orientierung
ZSZS rtO ,, tS,Z … abgelesener Winkel am Theodolit
3. Schritt: alle Theodolit-Winkel dieses Standortes können in einen Richtungswinkel
umgewandelt werden:
Otr ii
Info: der Orientierungswinkel kann auch negativ sein!
VERMESSUNGSKUNDE FÜR BAUPOLIERE
45
5.5 Beispiel einer Aufnahme
Gegeben: Kirchturmspitze K y = 51.33 m x = 399.00 m Standpunkt 501 y = 206.44 m x = 209.10 m
Gemessen: Horizontalwinkel am Theodolit nach K : t = 125.444
nach 527 : t = 226.000 Seite s zwischen 501 und 527: s = 76.88 m
Gesucht: Koordinaten von Punkt 527
1. Schritt: Berechnung des Richtungswinkels zwischen 501 und K
11.155y 90.189x
81679831.090.189
11.155tan ,501
Kr
398.3564006021.43,501 Kr
2. Schritt: Berechnung der Orientierung
grtO 954.230398.356444.125
3. Schritt: Berechnung des Richtungswinkels nach Punkt 527
gOtr 954.56954.456)954.230(000.226527,501527,501
4. Schritt: Berechnung der Koordinaten (1. Hauptaufgabe)
my 40.266954.56sin88.7644.206527
mx 21.257954.56cos88.7610.209527
VERMESSUNGSKUNDE FÜR BAUPOLIERE
46
5.6 Beispiel einer Absteckung Gegeben: Kirchturmspitze K y = 51.33 m x = 399.00 m
Standpunkt 501 y = 206.44 m x = 209.10 m
Absteckpunkt 527 y = 266.40 m x = 257.21 m
Gesucht: Der Punkt 527 soll in die Natur übertragen werden.
1. Schritt: siehe Beispiel 5.5 398.356,501 Kr
2. Schritt: siehe Beispiel 5.5 gO 954.230
3. Schritt: Berechnung des Richtungswinkels und Seite nach 527
my 96.59 11.48x gr 953.56527,501
mxys 88.7622
4. Schritt: Berechnung des Theodolitwinkel
grOt 999.225400953.56954.230527,501527,501
5. Schritt: Absteckung
Man stellt den berechneten Theodolitwinkel t501,527 ein und steckt in dieser Richtung mit Hilfe eines Helfers die Strecke s ab.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
47
5.7 Koordinatensysteme
5.7.1 Amtliches Gauß-Krüger-System
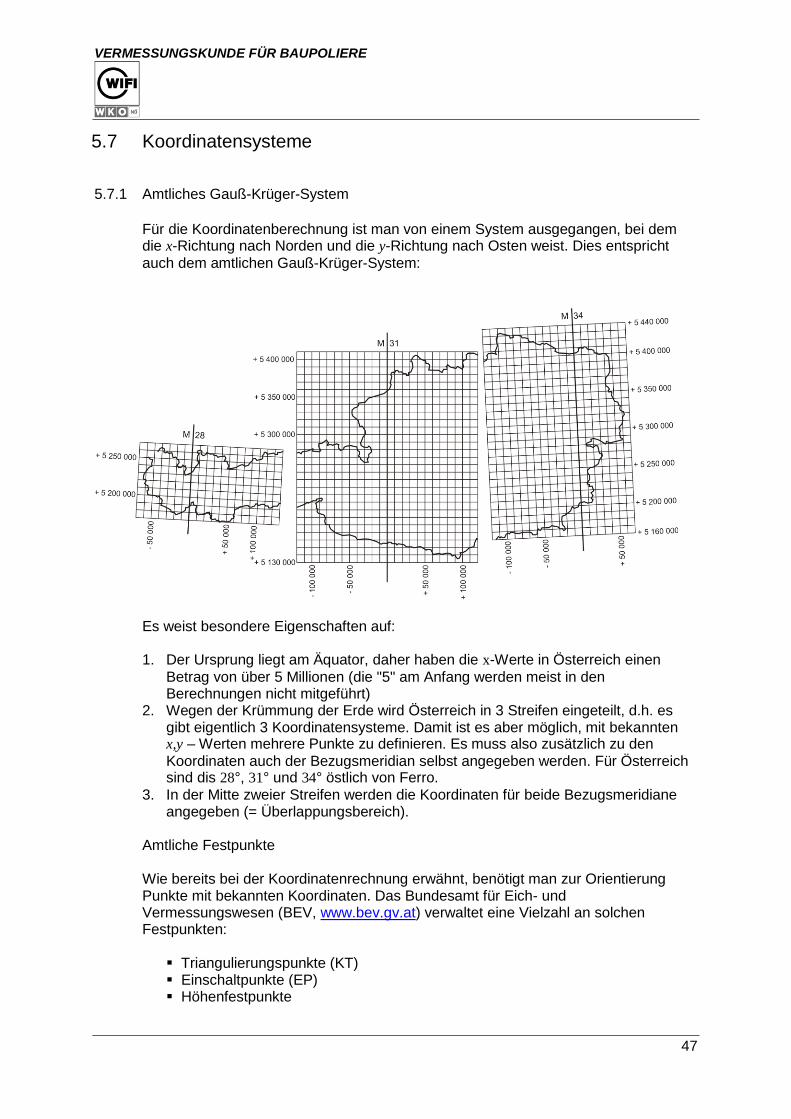
Für die Koordinatenberechnung ist man von einem System ausgegangen, bei dem die x-Richtung nach Norden und die y-Richtung nach Osten weist. Dies entspricht
auch dem amtlichen Gauß-Krüger-System:
Es weist besondere Eigenschaften auf: 1. Der Ursprung liegt am Äquator, daher haben die x-Werte in Österreich einen
Betrag von über 5 Millionen (die "5" am Anfang werden meist in den Berechnungen nicht mitgeführt)
2. Wegen der Krümmung der Erde wird Österreich in 3 Streifen eingeteilt, d.h. es gibt eigentlich 3 Koordinatensysteme. Damit ist es aber möglich, mit bekannten x,y – Werten mehrere Punkte zu definieren. Es muss also zusätzlich zu den
Koordinaten auch der Bezugsmeridian selbst angegeben werden. Für Österreich sind dis 28°, 31° und 34° östlich von Ferro.
3. In der Mitte zweier Streifen werden die Koordinaten für beide Bezugsmeridiane angegeben (= Überlappungsbereich).
Amtliche Festpunkte Wie bereits bei der Koordinatenrechnung erwähnt, benötigt man zur Orientierung Punkte mit bekannten Koordinaten. Das Bundesamt für Eich- und Vermessungswesen (BEV, www.bev.gv.at) verwaltet eine Vielzahl an solchen Festpunkten: Triangulierungspunkte (KT) Einschaltpunkte (EP) Höhenfestpunkte

VERMESSUNGSKUNDE FÜR BAUPOLIERE
48
Die Informationen über solche Punkte sind von jedem Vermessungsamt zu beziehen. Sie enthalten neben den Koordinaten und administrativen Aufgaben auch eine topographische Darstellung.
Wichtig bei solchen Festpunkten ist, dass sie nicht leicht verändert werden können. Es wird daher großer Wert auf die Stabilisierung gelegt.
5.7.2 Lokales System
Nicht immer ist es von Vorteil, das amtliche Koordinatensystem zu benutzen, da deren Genauigkeit nicht immer den Ansprüchen genügt oder man keinen Bezug zum amtlichen System benötigt. Gerade im Bauwesen, wo sehr hohe Genauigkeiten erforderlich sind (Tunnel- und Brückenbau, Gleisbau), verwendet man ein lokales System, das durch zwei oder mehrere Punkte definiert ist:
Punkt P1 ist der Ursprung
die Strecke 21PP ist die x-Achse
VERMESSUNGSKUNDE FÜR BAUPOLIERE
49
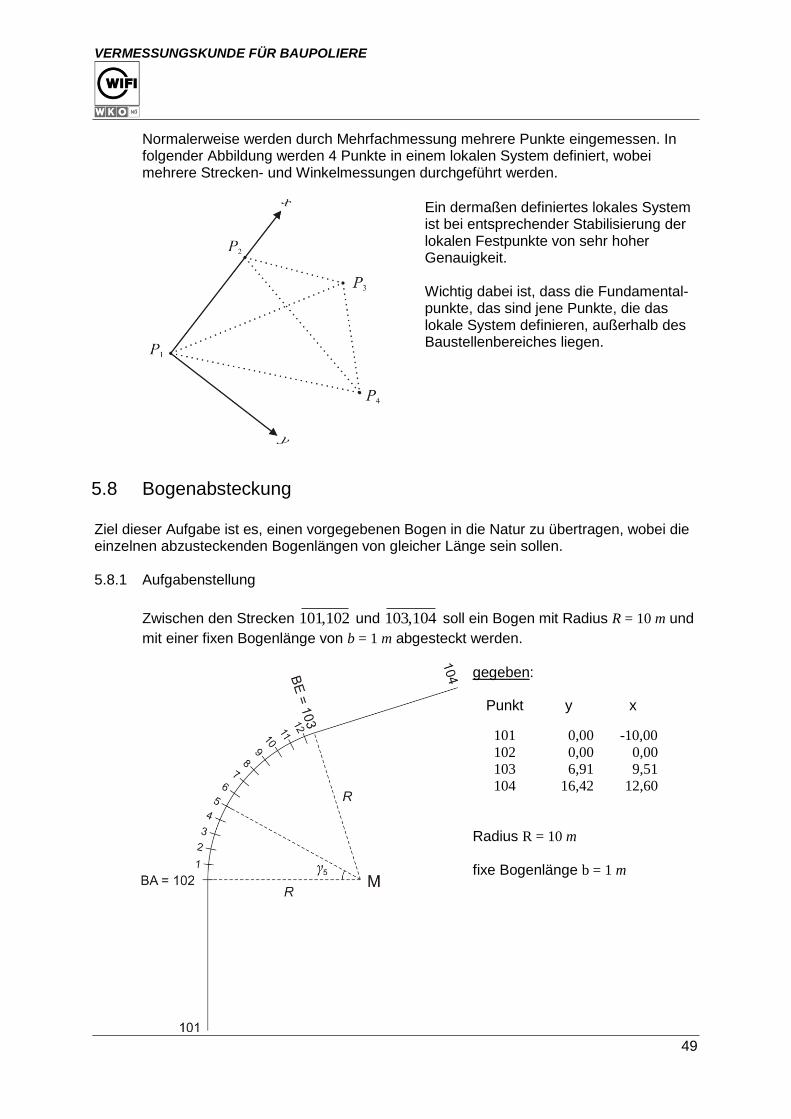
Normalerweise werden durch Mehrfachmessung mehrere Punkte eingemessen. In folgender Abbildung werden 4 Punkte in einem lokalen System definiert, wobei mehrere Strecken- und Winkelmessungen durchgeführt werden.
Ein dermaßen definiertes lokales System ist bei entsprechender Stabilisierung der lokalen Festpunkte von sehr hoher Genauigkeit. Wichtig dabei ist, dass die Fundamental-punkte, das sind jene Punkte, die das lokale System definieren, außerhalb des Baustellenbereiches liegen.
5.8 Bogenabsteckung
Ziel dieser Aufgabe ist es, einen vorgegebenen Bogen in die Natur zu übertragen, wobei die einzelnen abzusteckenden Bogenlängen von gleicher Länge sein sollen. 5.8.1 Aufgabenstellung
Zwischen den Strecken 102,101 und 104,103 soll ein Bogen mit Radius R = 10 m und
mit einer fixen Bogenlänge von b = 1 m abgesteckt werden.
gegeben:
Radius R = 10 m fixe Bogenlänge b = 1 m
Punkt y x
101 0,00 -10,00
102 0,00 0,00
103 6,91 9,51
104 16,42 12,60
VERMESSUNGSKUNDE FÜR BAUPOLIERE
50
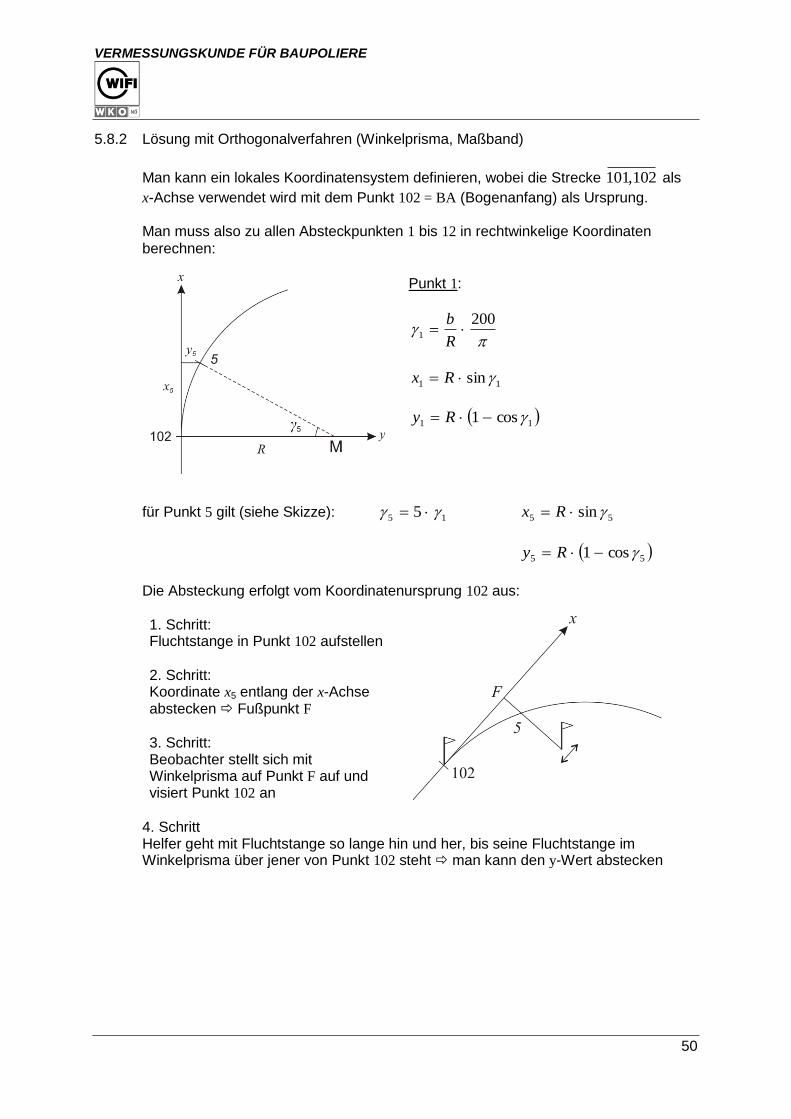
5.8.2 Lösung mit Orthogonalverfahren (Winkelprisma, Maßband)
Man kann ein lokales Koordinatensystem definieren, wobei die Strecke 102,101 als
x-Achse verwendet wird mit dem Punkt 102 = BA (Bogenanfang) als Ursprung.
Man muss also zu allen Absteckpunkten 1 bis 12 in rechtwinkelige Koordinaten
berechnen:
Punkt 1:
2001
R
b
11 sin Rx
11 cos1 Ry
für Punkt 5 gilt (siehe Skizze): 15 5 55 sin Rx
55 cos1 Ry
Die Absteckung erfolgt vom Koordinatenursprung 102 aus: 1. Schritt: Fluchtstange in Punkt 102 aufstellen
2. Schritt: Koordinate x5 entlang der x-Achse abstecken Fußpunkt F 3. Schritt: Beobachter stellt sich mit Winkelprisma auf Punkt F auf und visiert Punkt 102 an
4. Schritt Helfer geht mit Fluchtstange so lange hin und her, bis seine Fluchtstange im Winkelprisma über jener von Punkt 102 steht man kann den y-Wert abstecken

VERMESSUNGSKUNDE FÜR BAUPOLIERE
51
5.8.3 Lösung mit Polarverfahren (Theodolit, Maßband)
Von unserem lokalen Koordinatensystem aus kann man mit einem bekannten Richtungswinkel r und der Sehnenlänge s jeden Punkt des Kreises abstecken.
Punkt 1:
200
21
R
br 11 sin2 rRs
für Punkt 5 gilt (siehe Skizze):
15 5 rr 55 sin2 rRs
1. Schritt Theodolit in Punkt 102 aufstellen 2. Schritt Orientierung durchführen 200
g am Theodolit einstellen, Horizontalkreis-schraube öffnen und Punkt 101 anvisieren; Schraube wieder schließen.
3. Schritt Richtungswinkel r1 für 1. Absteckpunkt einstellen und Länge s1 abstecken. Dieser
Schritt wird für alle Absteckpunkte durchgeführt.

VERMESSUNGSKUNDE FÜR BAUPOLIERE
52
6. Nivellement 6.1 Höhensysteme Unter einem Nivellement versteht man die Bestimmung der Höhe eines Punktes mit Hilfe horizontaler Zielstrahlen. Ausgangspunkt ist dabei immer ein Bezugspunkt bzw. eine Bezugsebene mit bekannter Höhe:
Die Höhe eines beliebigen Punktes ist sein vertikaler Abstand von dieser Bezugsebene. 6.1.1 Absolute Höhen
Sie beziehen sich in Österreich auf das amtliche Höhenfestpunktnetz, das wiederum vom durchschnittlichen Meeresspiegel bei Triest abgeleitet ist. Seit 2005 wird das Höhensystem von Triest nach Amsterdam verlegt.
Als Stabilisierung von Höhenfestpunkten werden u.a. verwendet: horizontale Höhenbolzen (meist an Hauswänden) vertikale Höhenbolzen (meist auf Brücken und gemauerten Zäunen) KT-Steine Bolzen, Rohre, Nägel für lokale Höhenpunkte Topographien für absolute Höhen liegen normalerweise am Gemeindeamt auf, da der Bürgermeister 1. Bauinstanz ist. Sonderfall Wien: In Wien gibt es neben dem amtlichen System auch noch das so genannte Wiener Null. Das ist das amtliche System der Gemeinde (Magistrat) und wird vom Adria-Pegel abgeleitet, indem ein bestimmter Wert von 156,680 m abgezogen wird.
Achtung: Andere Einrichtungen wie Kanal und Wasser verwenden kein Wiener Null. Im Zweifelsfall sollte man sich vorher erkundigen, welches Höhensystem benötigt wird.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
53
6.1.2 Relative Höhen
Darunter versteht man Höhen, die von einem privaten Bezugspunkt abgeleitet sind. Für diesen Punkt kann eine beliebige Höhe angenommen werden. Für die Stabilisierung muss beachtet werden, dass keine Verschiebung zugelassen wird, daher soll die Bezugshöhe außerhalb des Baustellenbereiches stabilisiert werden. Bei Kleinbauten werden oft die Höhen von Kanaldeckel, Gehsteigoberkanten und dgl. als Ausgangshöhe verwendet. Hier werden Höhen insbesondere für die Bauklasse verwendet.
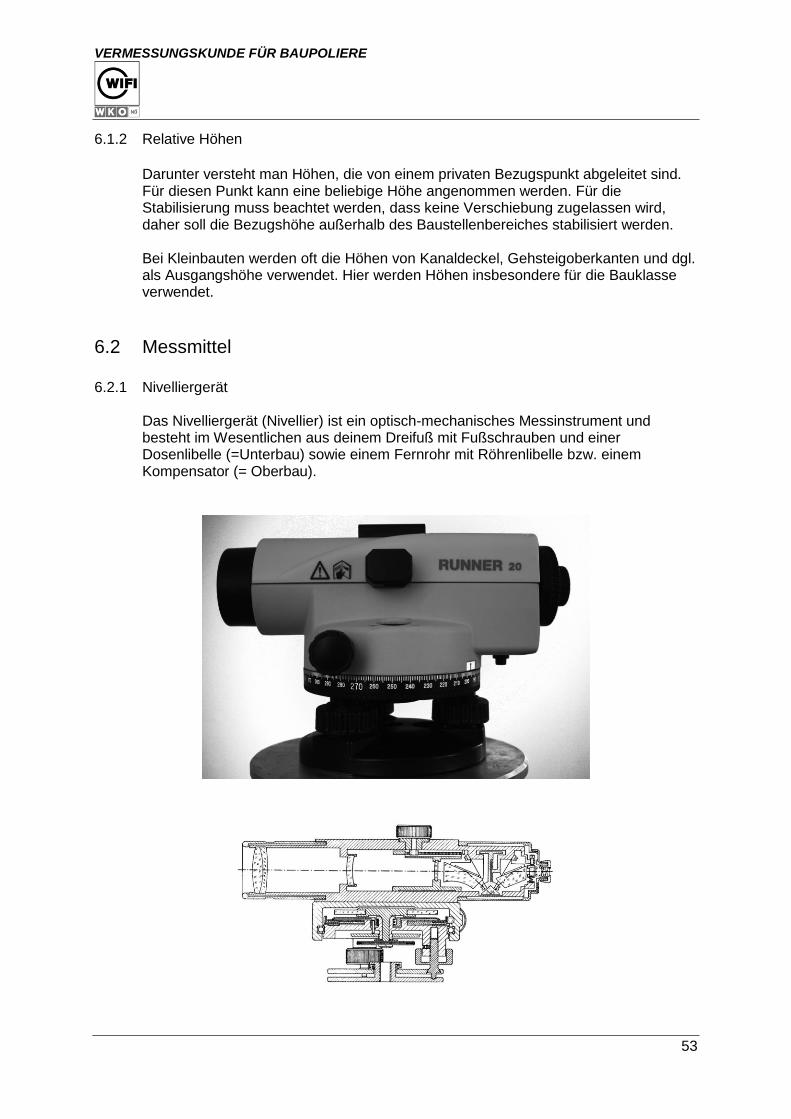
6.2 Messmittel 6.2.1 Nivelliergerät
Das Nivelliergerät (Nivellier) ist ein optisch-mechanisches Messinstrument und besteht im Wesentlichen aus deinem Dreifuß mit Fußschrauben und einer Dosenlibelle (=Unterbau) sowie einem Fernrohr mit Röhrenlibelle bzw. einem Kompensator (= Oberbau).
VERMESSUNGSKUNDE FÜR BAUPOLIERE
54
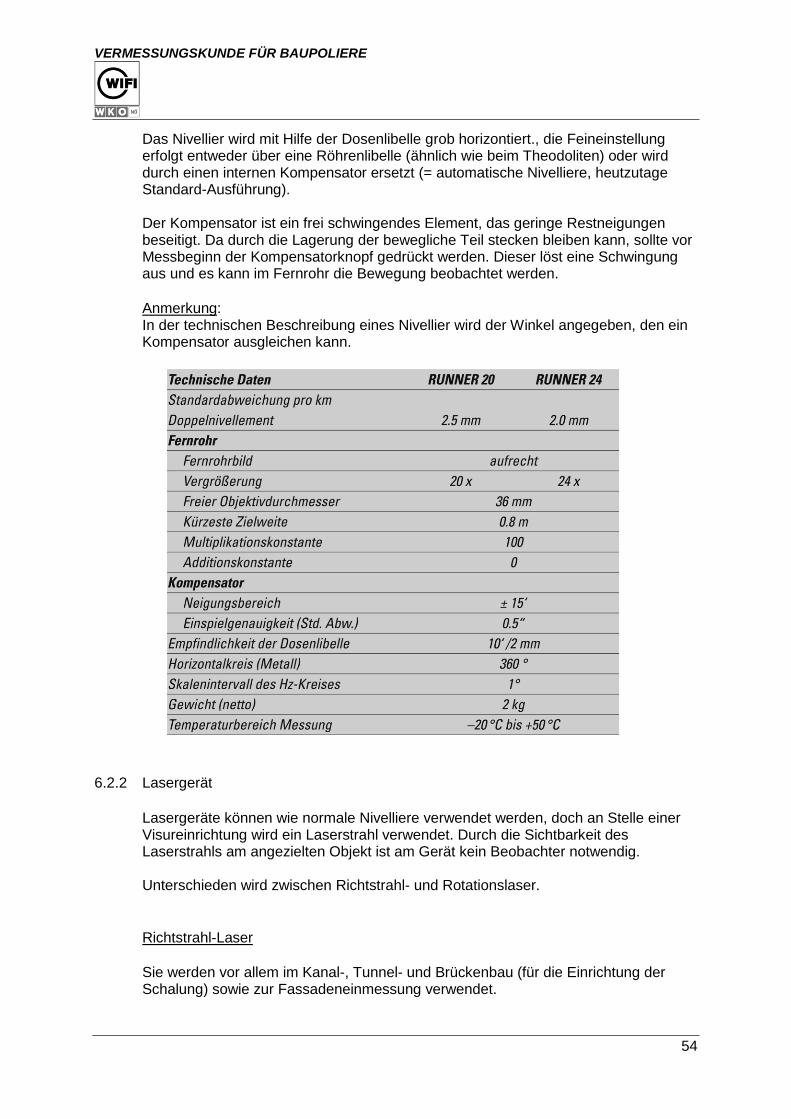
Das Nivellier wird mit Hilfe der Dosenlibelle grob horizontiert., die Feineinstellung erfolgt entweder über eine Röhrenlibelle (ähnlich wie beim Theodoliten) oder wird durch einen internen Kompensator ersetzt (= automatische Nivelliere, heutzutage Standard-Ausführung). Der Kompensator ist ein frei schwingendes Element, das geringe Restneigungen beseitigt. Da durch die Lagerung der bewegliche Teil stecken bleiben kann, sollte vor Messbeginn der Kompensatorknopf gedrückt werden. Dieser löst eine Schwingung aus und es kann im Fernrohr die Bewegung beobachtet werden.
Anmerkung: In der technischen Beschreibung eines Nivellier wird der Winkel angegeben, den ein Kompensator ausgleichen kann.
6.2.2 Lasergerät
Lasergeräte können wie normale Nivelliere verwendet werden, doch an Stelle einer Visureinrichtung wird ein Laserstrahl verwendet. Durch die Sichtbarkeit des Laserstrahls am angezielten Objekt ist am Gerät kein Beobachter notwendig. Unterschieden wird zwischen Richtstrahl- und Rotationslaser.
Richtstrahl-Laser
Sie werden vor allem im Kanal-, Tunnel- und Brückenbau (für die Einrichtung der Schalung) sowie zur Fassadeneinmessung verwendet.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
55
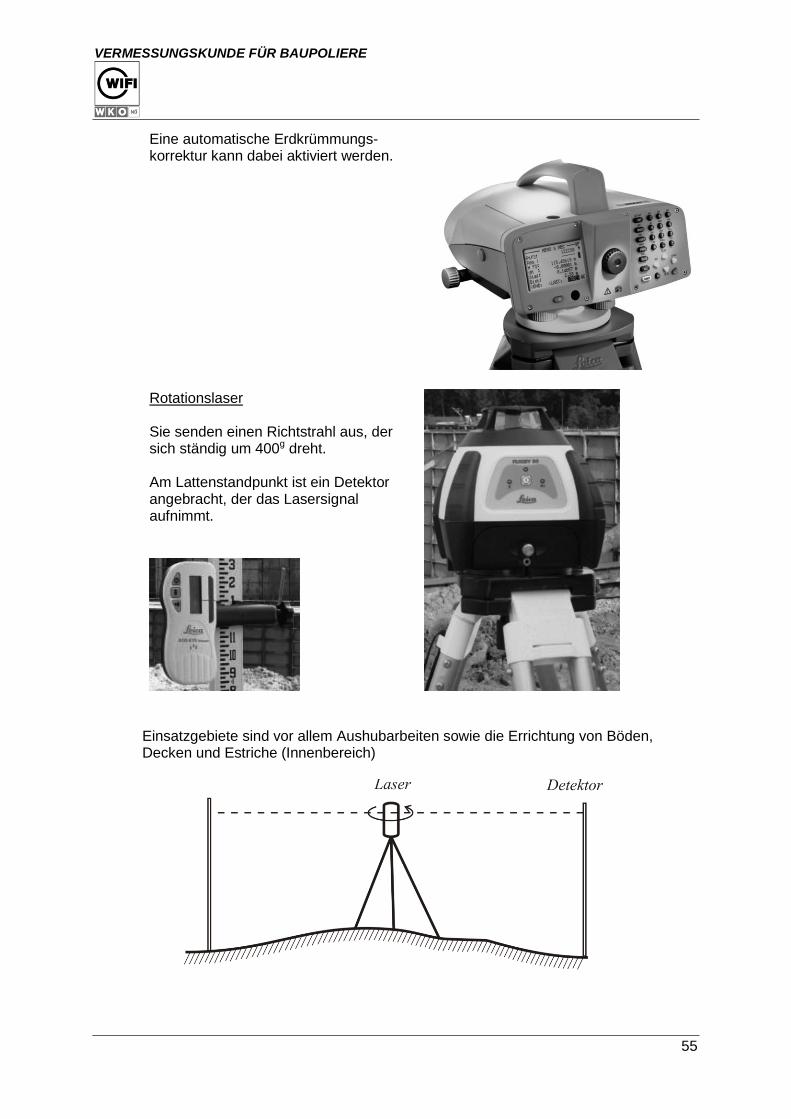
Eine automatische Erdkrümmungs-korrektur kann dabei aktiviert werden.
Rotationslaser Sie senden einen Richtstrahl aus, der sich ständig um 400g dreht. Am Lattenstandpunkt ist ein Detektor angebracht, der das Lasersignal aufnimmt.
Einsatzgebiete sind vor allem Aushubarbeiten sowie die Errichtung von Böden, Decken und Estriche (Innenbereich)

VERMESSUNGSKUNDE FÜR BAUPOLIERE
56
6.2.3 Zubehör
Nivellierlatten Die Genauigkeit des Nivellements hängt auch von den verwendeten Latten ab. Da die meisten Materialien temperaturabhängig sind, kann sich die Länge der Latten verändern. Außerdem kann die aufgebrachte Skala bereits bei der Herstellung Unregelmäßigkeiten aufweisen. Aus diesem Grund werden für Präzisions-messungen Latten mit zwei voneinander unabhängigen Skalen verwendet.
Für digitale Nivelliere gibt es Latten, die automatisch einen Wert identifizieren, wenn der Laser auf die Latte trifft. Der Beobachter muss keine Messwerte ablesen, da der entsprechende Lattenwert mit Hilfe des Lasers zum Nivellier transferiert und gespeichert wird.
Anmerkung: Vergleichbar mit einer Scanner-Kassa im Supermarkt.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
57
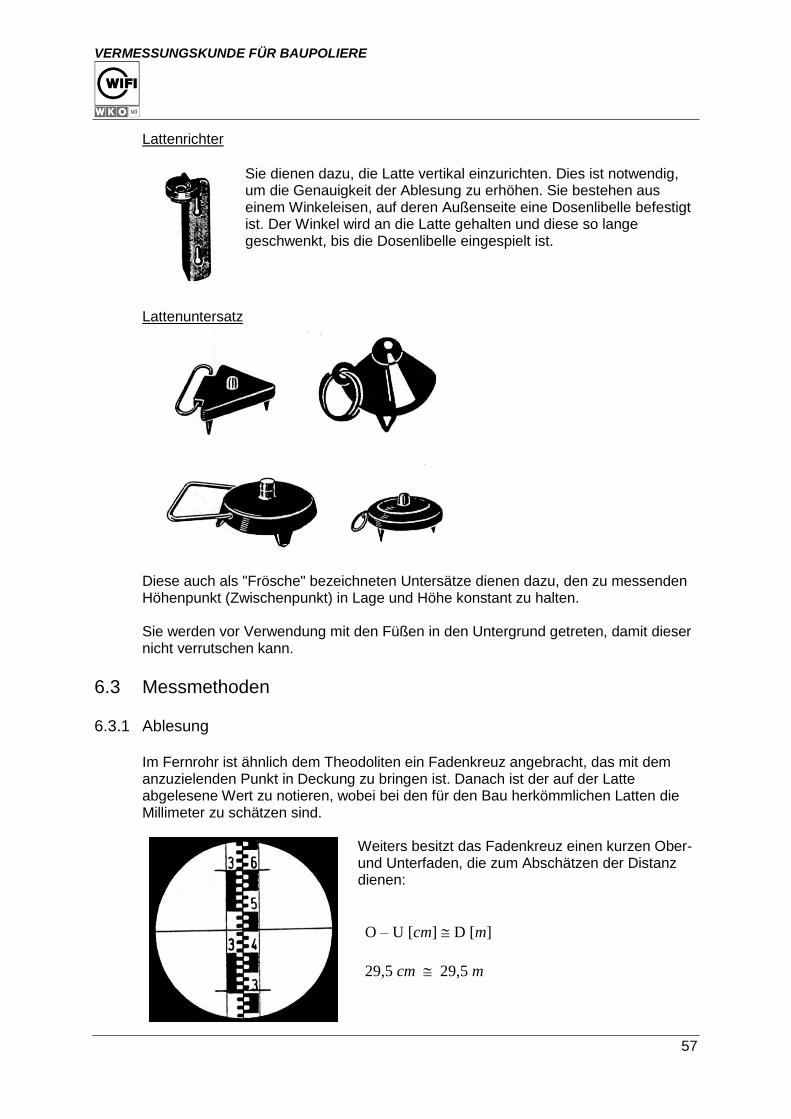
Lattenrichter
Sie dienen dazu, die Latte vertikal einzurichten. Dies ist notwendig, um die Genauigkeit der Ablesung zu erhöhen. Sie bestehen aus einem Winkeleisen, auf deren Außenseite eine Dosenlibelle befestigt ist. Der Winkel wird an die Latte gehalten und diese so lange geschwenkt, bis die Dosenlibelle eingespielt ist.
Lattenuntersatz
Diese auch als "Frösche" bezeichneten Untersätze dienen dazu, den zu messenden Höhenpunkt (Zwischenpunkt) in Lage und Höhe konstant zu halten. Sie werden vor Verwendung mit den Füßen in den Untergrund getreten, damit dieser nicht verrutschen kann.
6.3 Messmethoden 6.3.1 Ablesung
Im Fernrohr ist ähnlich dem Theodoliten ein Fadenkreuz angebracht, das mit dem anzuzielenden Punkt in Deckung zu bringen ist. Danach ist der auf der Latte abgelesene Wert zu notieren, wobei bei den für den Bau herkömmlichen Latten die Millimeter zu schätzen sind.
Weiters besitzt das Fadenkreuz einen kurzen Ober- und Unterfaden, die zum Abschätzen der Distanz dienen:
O – U [cm] D [m]
29,5 cm 29,5 m
VERMESSUNGSKUNDE FÜR BAUPOLIERE
58
6.3.2 Liniennivellement durch Hin- und Rückmessung
Unter einem Liniennivellement versteht man die Messung des Höhenunter-schiedes zwischen zwei oder mehreren Punkten bzw. die Übertragung der Höhe eines Punktes auf andere Punkte.
Lattenstandpunkte = Standpunkte, die eine Höhe bekommen sollen.
Nivellierstandpunkte = Standpunkte, in denen der Nivellier steht und von dem die
Lattenwerte abgelesen werden. Er soll immer in der Mitte der beiden Latten stehen und die beiden Zielstrahlen sollen annähernd in einer Geraden liegen.
Siehe auch Kapitel "Genauigkeit des Nivelliers".
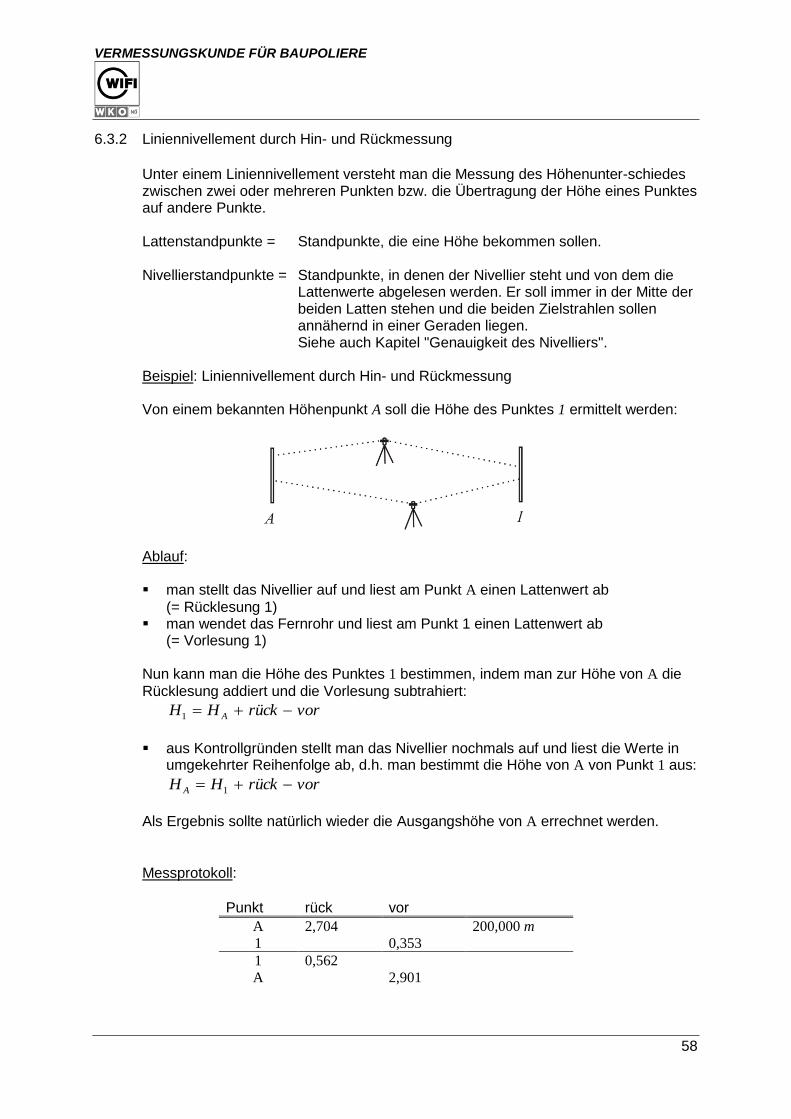
Beispiel: Liniennivellement durch Hin- und Rückmessung
Von einem bekannten Höhenpunkt A soll die Höhe des Punktes 1 ermittelt werden:
Ablauf: man stellt das Nivellier auf und liest am Punkt A einen Lattenwert ab
(= Rücklesung 1) man wendet das Fernrohr und liest am Punkt 1 einen Lattenwert ab (= Vorlesung 1) Nun kann man die Höhe des Punktes 1 bestimmen, indem man zur Höhe von A die
Rücklesung addiert und die Vorlesung subtrahiert:
vorrückHH A 1
aus Kontrollgründen stellt man das Nivellier nochmals auf und liest die Werte in
umgekehrter Reihenfolge ab, d.h. man bestimmt die Höhe von A von Punkt 1 aus:
vorrückHH A 1
Als Ergebnis sollte natürlich wieder die Ausgangshöhe von A errechnet werden.
Messprotokoll:
Punkt rück vor
A 2,704 200,000 m
1 0,353
1 0,562
A 2,901
VERMESSUNGSKUNDE FÜR BAUPOLIERE
59
Berechnung:
Man bildet zuerst die Summe aller Rück- und aller Vorlesungen:
266,3562,0704,2rück 254,3901,2353,0vor
Diese beiden Werte sollten 0 sein (der Höhenunterschied zwischen beiden Punkten
ändert sich ja nicht). Der Gesamtfehler ergibt sich also aus der Differenz:
mvorrückf 012,0254,3266,3
Dieser Gesamtfehler hat im Grunde keine Aussagekraft, da dieser Wert sehr groß werden kann, je länger die Nivellierstrecke ist. Daher wird dieser Gesamtfehler durch die Anzahl n der Nivellierstandpunkte dividiert und man erhält die Genauigkeit eines
Standpunktes:
mn
ff S 006,0
2
012,0
Nun kann die Höhe des Punktes 1 endgültig berechnet werden, indem man den Standpunktfehler berücksichtigt:
mfvrHH SA 345,202006,0353,0704,2000,200111
Kontrolliert wird die Berechnung durch die Bestimmung der Höhe von A vom Punkt 1
aus:
mfvrHH SA 000,200006,0901,2562,0345,202221
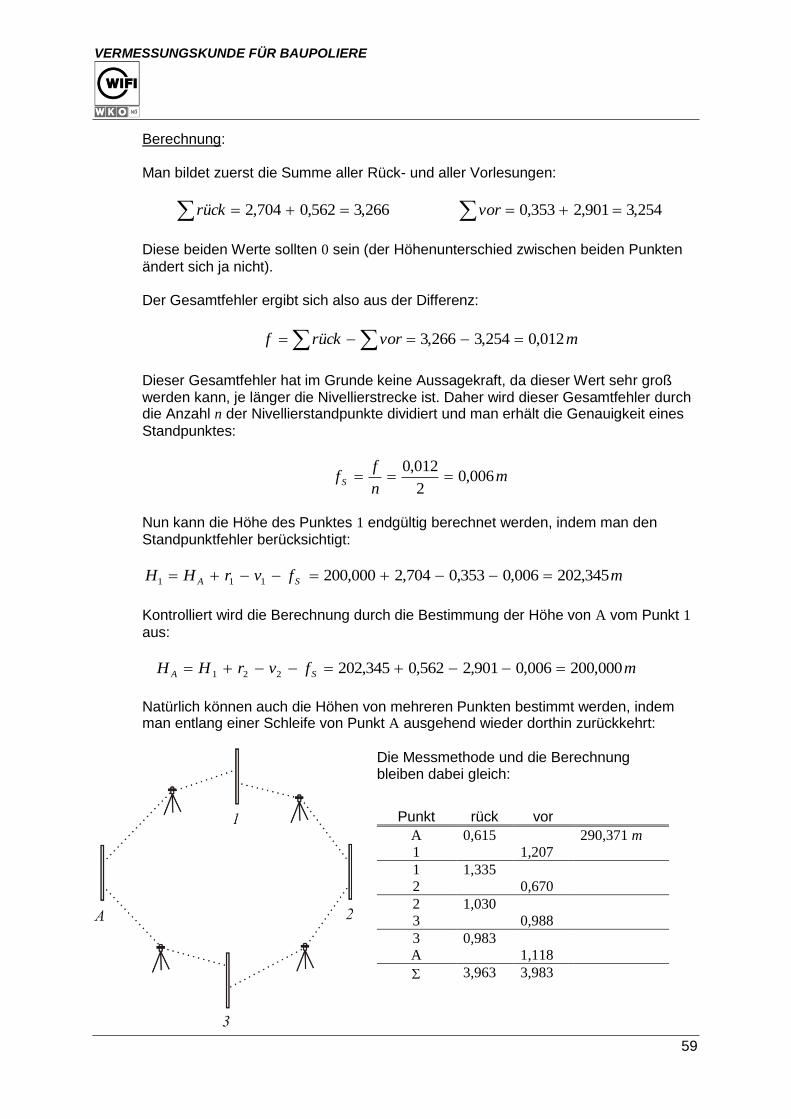
Natürlich können auch die Höhen von mehreren Punkten bestimmt werden, indem man entlang einer Schleife von Punkt A ausgehend wieder dorthin zurückkehrt:
Die Messmethode und die Berechnung bleiben dabei gleich:
Punkt rück vor
A 0,615 290,371 m
1 1,207
1 1,335
2 0,670
2 1,030
3 0,988
3 0,983
A 1,118
3,963 3,983
VERMESSUNGSKUNDE FÜR BAUPOLIERE
60
mf 020,0983,3963,3 mf S 005,04
020,0
Berechnung der Höhen:
mfvrHH SA 784,289)005,0(207,1615,0371,290111
mH 454,290005,0670,0335,1784,2892
mH 501,290005,0988,0030,1454,2903
Kontrolle: mH A 371,290005,0118,1983,0501,290
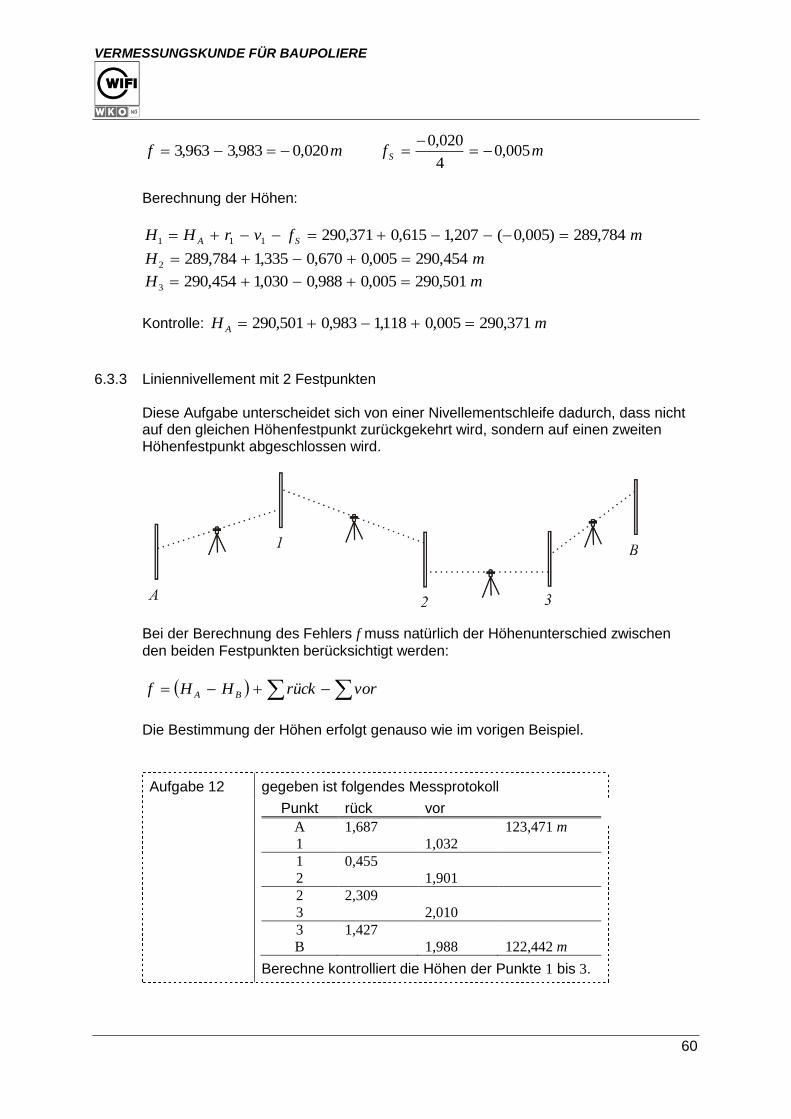
6.3.3 Liniennivellement mit 2 Festpunkten
Diese Aufgabe unterscheidet sich von einer Nivellementschleife dadurch, dass nicht auf den gleichen Höhenfestpunkt zurückgekehrt wird, sondern auf einen zweiten Höhenfestpunkt abgeschlossen wird.
Bei der Berechnung des Fehlers f muss natürlich der Höhenunterschied zwischen
den beiden Festpunkten berücksichtigt werden:
vorrückHHf BA
Die Bestimmung der Höhen erfolgt genauso wie im vorigen Beispiel.
Aufgabe 12 gegeben ist folgendes Messprotokoll
Punkt rück vor
A 1,687 123,471 m
1 1,032
1 0,455
2 1,901
2 2,309
3 2,010
3 1,427
B 1,988 122,442 m
Berechne kontrolliert die Höhen der Punkte 1 bis 3.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
61
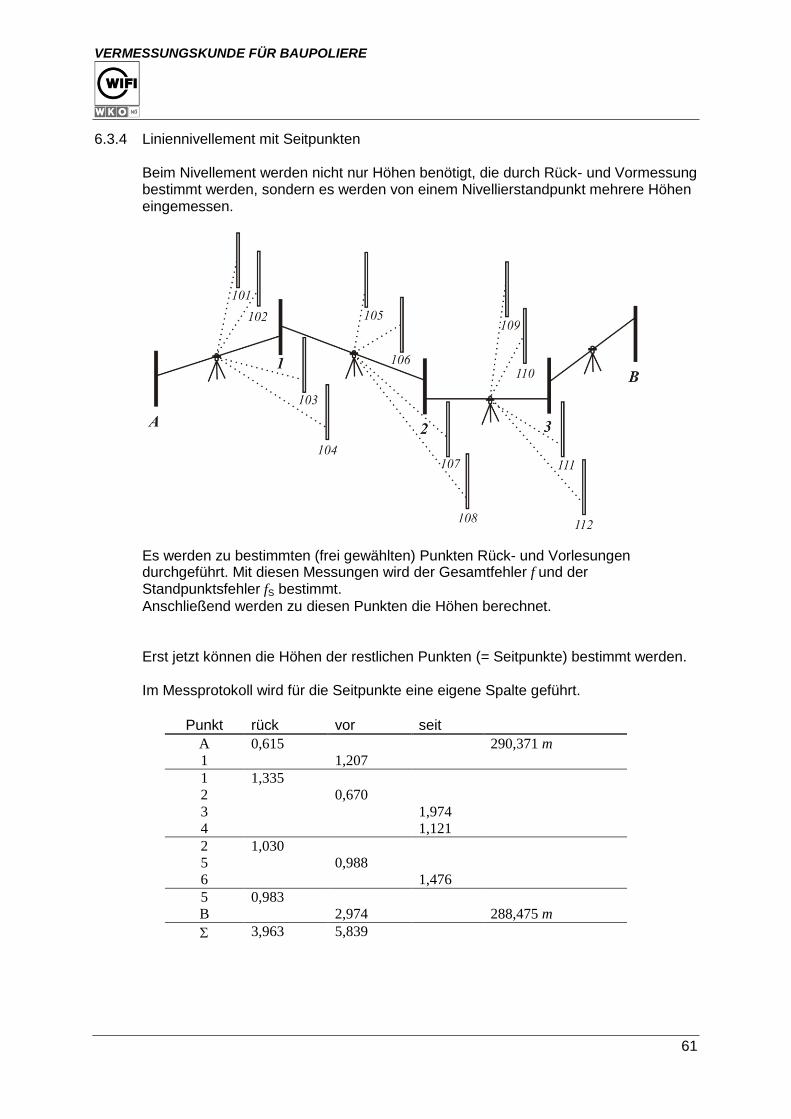
6.3.4 Liniennivellement mit Seitpunkten
Beim Nivellement werden nicht nur Höhen benötigt, die durch Rück- und Vormessung bestimmt werden, sondern es werden von einem Nivellierstandpunkt mehrere Höhen eingemessen.
Es werden zu bestimmten (frei gewählten) Punkten Rück- und Vorlesungen durchgeführt. Mit diesen Messungen wird der Gesamtfehler f und der Standpunktsfehler fS bestimmt.
Anschließend werden zu diesen Punkten die Höhen berechnet.
Erst jetzt können die Höhen der restlichen Punkten (= Seitpunkte) bestimmt werden. Im Messprotokoll wird für die Seitpunkte eine eigene Spalte geführt.
Punkt rück vor seit
A 0,615 290,371 m
1 1,207
1 1,335
2 0,670
3 1,974
4 1,121
2 1,030
5 0,988
6 1,476
5 0,983
B 2,974 288,475 m
3,963 5,839
VERMESSUNGSKUNDE FÜR BAUPOLIERE
62
Zuerst werden die Punkte 1, 2 und 5 bestimmt:
mf 020,0839,5963,3475,288371,290
mf S 005,04
020,0
mfvrHH SA 774,289005,0207,1615,0371,290111
mH 434,290005,0670,0335,1774,2892
mH 471,290005,0988,0030,1434,2905
Kontrolle: mHB 475,288005,0974,2983,0471,290
Jetzt können auch die Seitpunkte höhenmäßig bestimmt werden:
Die Punkte 3 und 4 wurden innerhalb einer Rückvisur zu Punkt 1 gemessen, daher wird auch die Höhe von 1 verwendet:
msrHH 035,289974,1335,1774,2893213
msrHH 888,289121,1335,1774,2894214
Punkt 6 wurde zur Rückvisur nach Punkt 2 gemessen, also wird hier die Höhen von Punkt 2 verwendet:
msrHH 988,289476,1030,1434,2906326
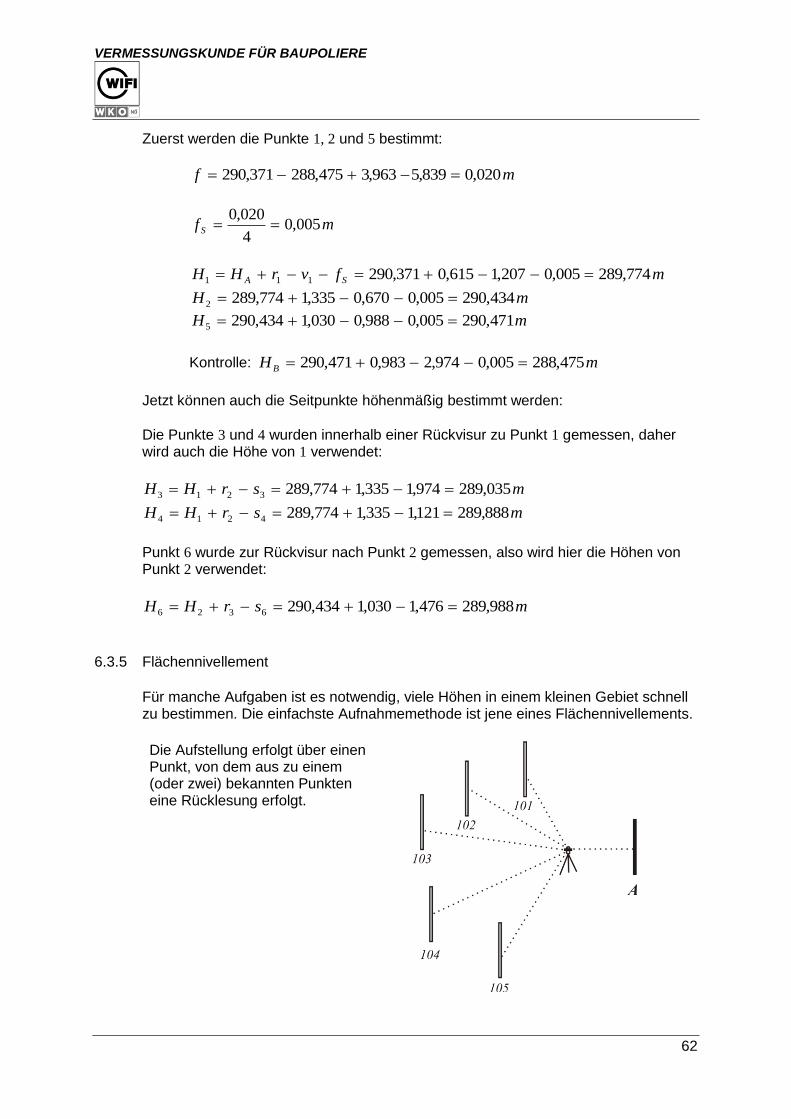
6.3.5 Flächennivellement
Für manche Aufgaben ist es notwendig, viele Höhen in einem kleinen Gebiet schnell zu bestimmen. Die einfachste Aufnahmemethode ist jene eines Flächennivellements.
Die Aufstellung erfolgt über einen Punkt, von dem aus zu einem (oder zwei) bekannten Punkten eine Rücklesung erfolgt.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
63
Eine Kontrolle wie bei einem Liniennivellement ist hier nicht möglich. Trotzdem können zumindest einige Punkte kontrolliert werden: durch eine zweite Aufstellung werden ein paar ausgewählte Punkte nochmals
eingemessen durch die Aufstellung eines zweiten Gerätes werden mehrere Punkte gleichzeitig
gemessen (= aufwändigeres Verfahren) Ein detaillierter Lageplan, in dem die Höhen eingetragen werden, dient meist als Grundlage für das Flächennivellement.
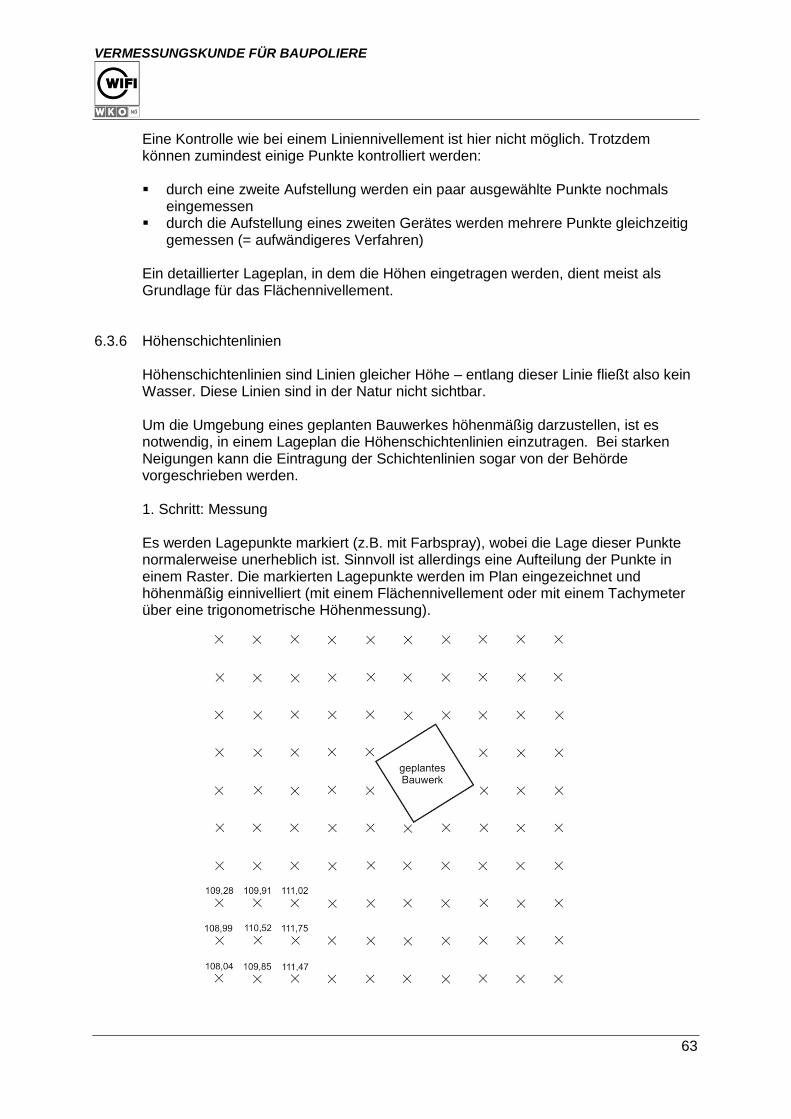
6.3.6 Höhenschichtenlinien
Höhenschichtenlinien sind Linien gleicher Höhe – entlang dieser Linie fließt also kein Wasser. Diese Linien sind in der Natur nicht sichtbar. Um die Umgebung eines geplanten Bauwerkes höhenmäßig darzustellen, ist es notwendig, in einem Lageplan die Höhenschichtenlinien einzutragen. Bei starken Neigungen kann die Eintragung der Schichtenlinien sogar von der Behörde vorgeschrieben werden.
1. Schritt: Messung Es werden Lagepunkte markiert (z.B. mit Farbspray), wobei die Lage dieser Punkte normalerweise unerheblich ist. Sinnvoll ist allerdings eine Aufteilung der Punkte in einem Raster. Die markierten Lagepunkte werden im Plan eingezeichnet und höhenmäßig einnivelliert (mit einem Flächennivellement oder mit einem Tachymeter über eine trigonometrische Höhenmessung).

VERMESSUNGSKUNDE FÜR BAUPOLIERE
64
2. Schritt: Interpolation Jetzt werden ganze Höhenkoten bestimmt, indem man zwischen 2 bekannten Werten den Längenunterschied Δl zu einem bekannten Höhenunterschied Δh bestimmt und
in der Karte einzeichnet (siehe auch Kapitel Steigung). Als Beispiel werden jene 9 Höhenkoten links unten der Skizze verwendet.
Verwendet werden jene Koten, zwischen denen ein voller Linienwert – in unserem Fall der Wert 110 m – liegen. Daraus ergeben sich die Interpolationen zwischen:
horizontal
47,11185,109
52,11099,108
02,11191,109
vertikal
85,10952,110
52,11091,109
diagonal
75,11185,109
52,11004,108
75,11191,109
52,11028,109
Als Beispiel dient hier die erste horizontale Interpolation:
h = 111,02 – 109,91 = 1,11 m
l = 3 m (= Rasterweite)
37,000,3
11,1
l
hs
Berechnung von Zwischenhöhen:
Δh = 110,00 – 109,91 = 0,09 m = Ergänzung auf gesuchte Kote
ms
hl 24,0
37,0
09,0
= berechneter Längenabstand
VERMESSUNGSKUNDE FÜR BAUPOLIERE
65
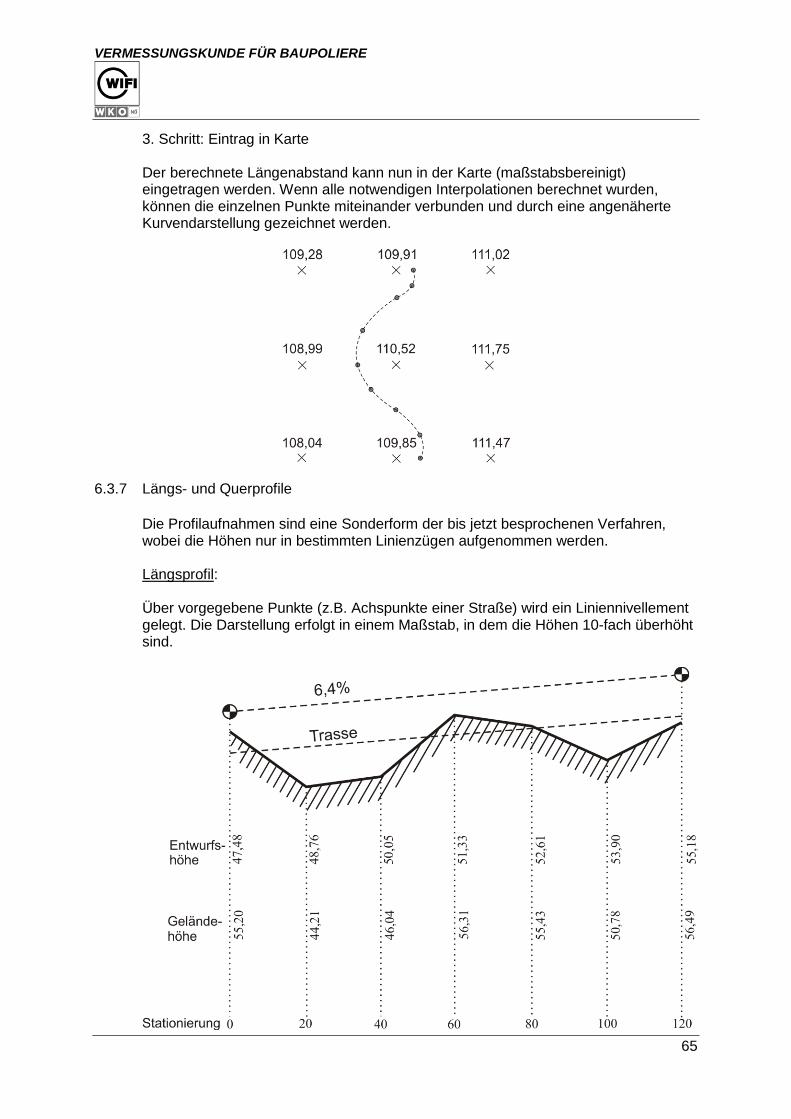
3. Schritt: Eintrag in Karte Der berechnete Längenabstand kann nun in der Karte (maßstabsbereinigt) eingetragen werden. Wenn alle notwendigen Interpolationen berechnet wurden, können die einzelnen Punkte miteinander verbunden und durch eine angenäherte Kurvendarstellung gezeichnet werden.
6.3.7 Längs- und Querprofile
Die Profilaufnahmen sind eine Sonderform der bis jetzt besprochenen Verfahren, wobei die Höhen nur in bestimmten Linienzügen aufgenommen werden. Längsprofil: Über vorgegebene Punkte (z.B. Achspunkte einer Straße) wird ein Liniennivellement gelegt. Die Darstellung erfolgt in einem Maßstab, in dem die Höhen 10-fach überhöht sind.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
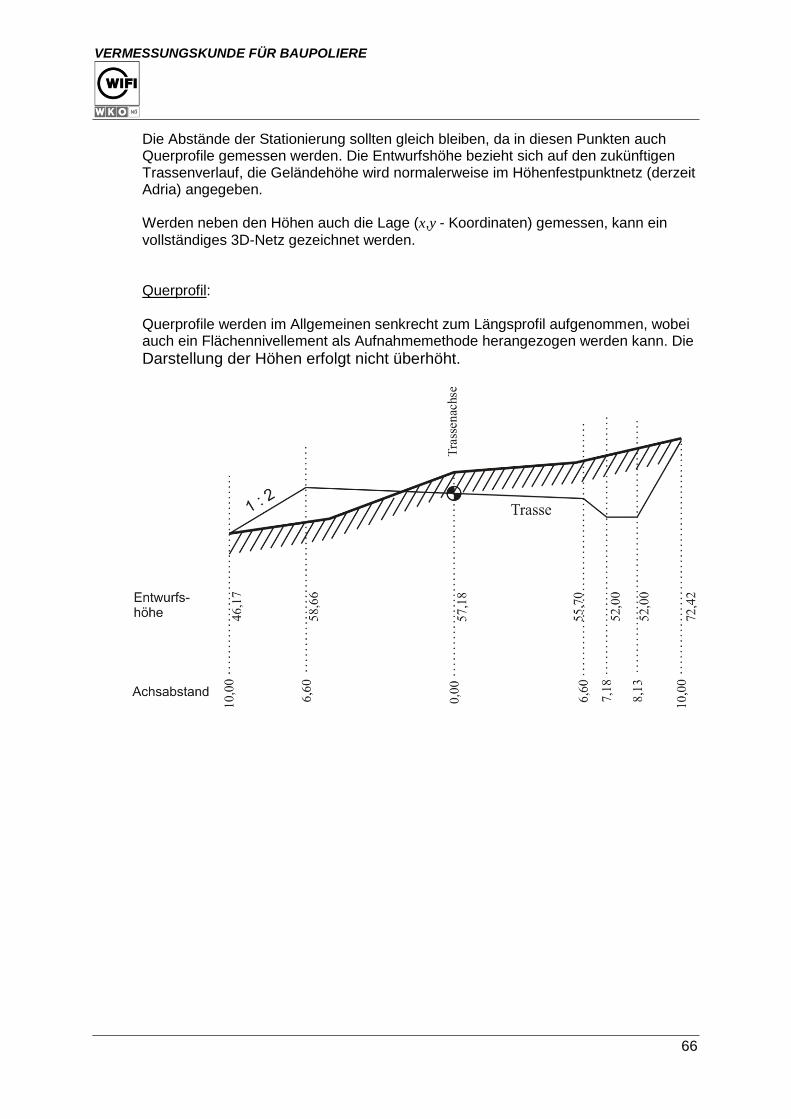
66
Die Abstände der Stationierung sollten gleich bleiben, da in diesen Punkten auch Querprofile gemessen werden. Die Entwurfshöhe bezieht sich auf den zukünftigen Trassenverlauf, die Geländehöhe wird normalerweise im Höhenfestpunktnetz (derzeit Adria) angegeben. Werden neben den Höhen auch die Lage (x,y - Koordinaten) gemessen, kann ein
vollständiges 3D-Netz gezeichnet werden.
Querprofil: Querprofile werden im Allgemeinen senkrecht zum Längsprofil aufgenommen, wobei auch ein Flächennivellement als Aufnahmemethode herangezogen werden kann. Die Darstellung der Höhen erfolgt nicht überhöht.

VERMESSUNGSKUNDE FÜR BAUPOLIERE
67
6.4 Genauigkeit eines Liniennivellements Die Genauigkeit hängt von der Aufstellung und Justierung des Nivelliers, der verwendeten Geräte und der Genauigkeit der Ablesung ab. Prinzipiell sollte man mit dem Nivellier in der Mitte zweier Lattenstandpunkte stehen, da sich dadurch auftretende Aufstellungsfehler eliminieren:
Fehler f tritt auf beiden Seiten auf – er
verschwindet bei der Differenzbildung
Fehler f ist unterschiedlich – nach der
Differenzbildung bleibt ein Restbetrag
12 fff übrig.
Weiters soll die Latte vertikal gehalten werden. Schrägstellungen quer zur Visur können vom Beobachter gesehen werden, in Visurrichtung aber nicht. Hier werden die Ablesungen verfälscht. Die Hin- und Rückvisur sollte annähernd auf einer Geraden liegen.
Abb.: falsche Messanordnung Abb.: richtige Messanordnung
VERMESSUNGSKUNDE FÜR BAUPOLIERE
68
6.5 Prüfverfahren für Nivelliergeräte 6.5.1 Ziellinie
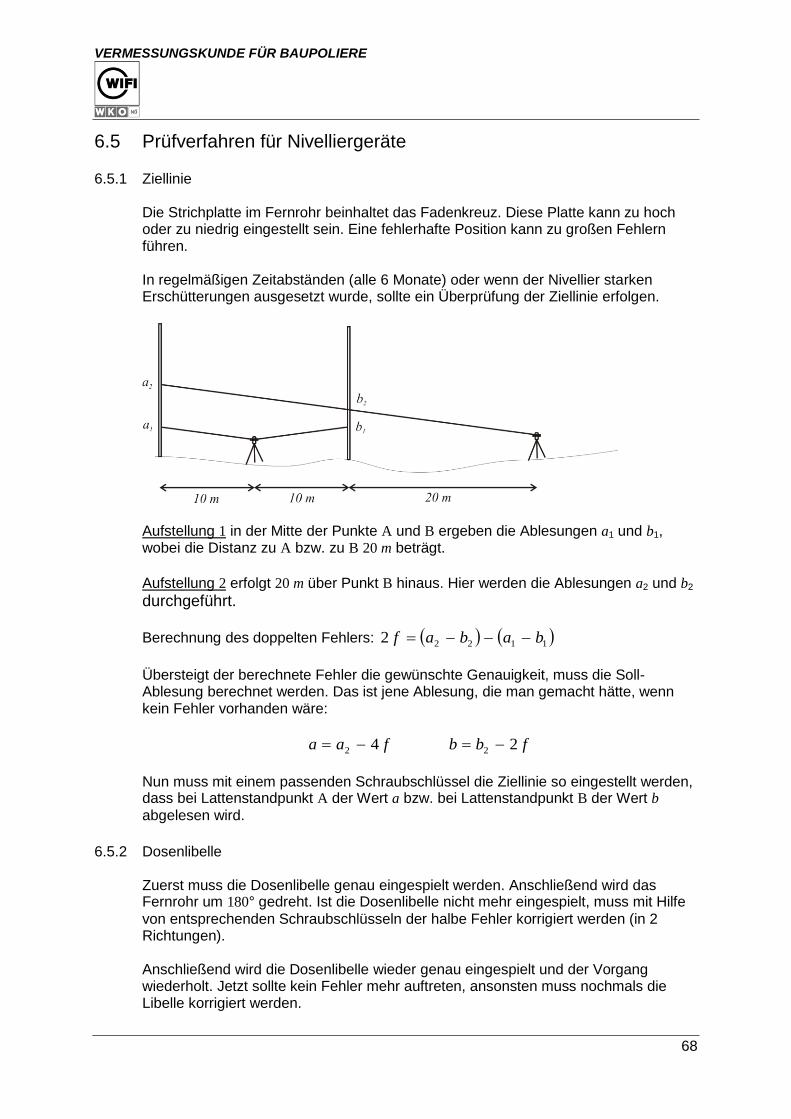
Die Strichplatte im Fernrohr beinhaltet das Fadenkreuz. Diese Platte kann zu hoch oder zu niedrig eingestellt sein. Eine fehlerhafte Position kann zu großen Fehlern führen. In regelmäßigen Zeitabständen (alle 6 Monate) oder wenn der Nivellier starken Erschütterungen ausgesetzt wurde, sollte ein Überprüfung der Ziellinie erfolgen.
Aufstellung 1 in der Mitte der Punkte A und B ergeben die Ablesungen a1 und b1, wobei die Distanz zu A bzw. zu B 20 m beträgt.
Aufstellung 2 erfolgt 20 m über Punkt B hinaus. Hier werden die Ablesungen a2 und b2 durchgeführt.
Berechnung des doppelten Fehlers: 11222 babaf
Übersteigt der berechnete Fehler die gewünschte Genauigkeit, muss die Soll-Ablesung berechnet werden. Das ist jene Ablesung, die man gemacht hätte, wenn kein Fehler vorhanden wäre:
faa 42 fbb 22
Nun muss mit einem passenden Schraubschlüssel die Ziellinie so eingestellt werden, dass bei Lattenstandpunkt A der Wert a bzw. bei Lattenstandpunkt B der Wert b
abgelesen wird.
6.5.2 Dosenlibelle
Zuerst muss die Dosenlibelle genau eingespielt werden. Anschließend wird das Fernrohr um 180° gedreht. Ist die Dosenlibelle nicht mehr eingespielt, muss mit Hilfe
von entsprechenden Schraubschlüsseln der halbe Fehler korrigiert werden (in 2 Richtungen). Anschließend wird die Dosenlibelle wieder genau eingespielt und der Vorgang wiederholt. Jetzt sollte kein Fehler mehr auftreten, ansonsten muss nochmals die Libelle korrigiert werden.
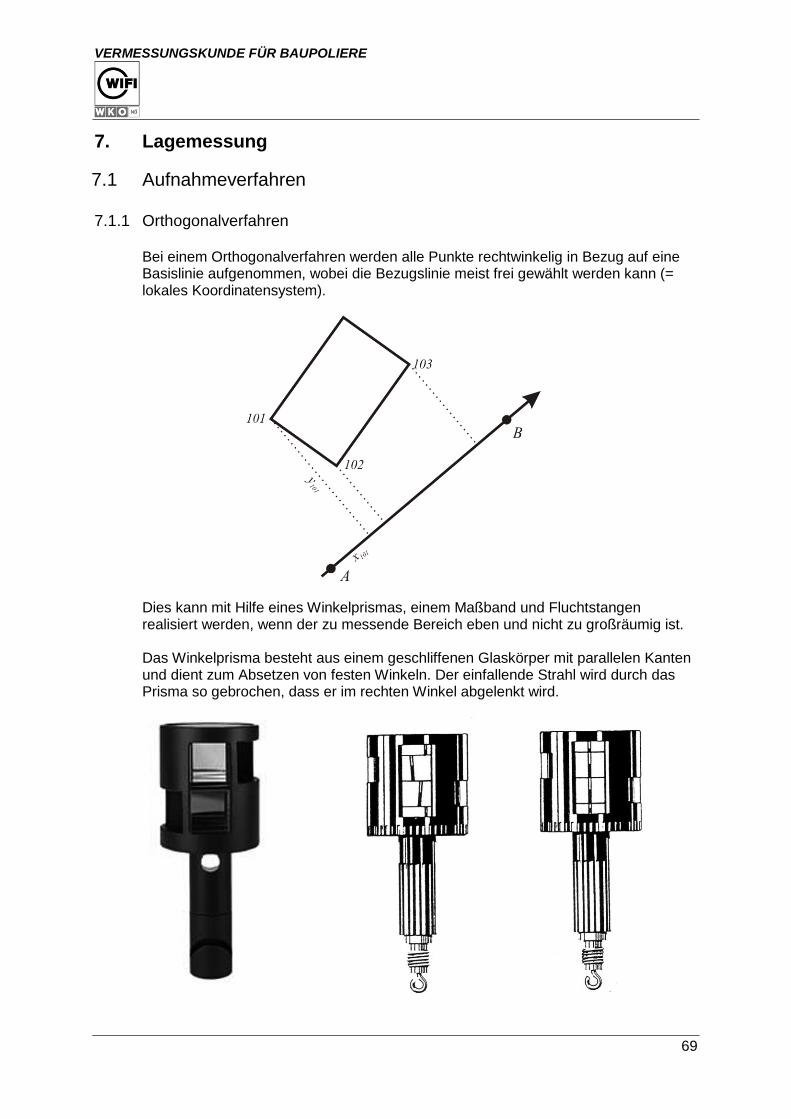
VERMESSUNGSKUNDE FÜR BAUPOLIERE
69
7. Lagemessung
7.1 Aufnahmeverfahren 7.1.1 Orthogonalverfahren
Bei einem Orthogonalverfahren werden alle Punkte rechtwinkelig in Bezug auf eine Basislinie aufgenommen, wobei die Bezugslinie meist frei gewählt werden kann (= lokales Koordinatensystem).
Dies kann mit Hilfe eines Winkelprismas, einem Maßband und Fluchtstangen realisiert werden, wenn der zu messende Bereich eben und nicht zu großräumig ist. Das Winkelprisma besteht aus einem geschliffenen Glaskörper mit parallelen Kanten und dient zum Absetzen von festen Winkeln. Der einfallende Strahl wird durch das Prisma so gebrochen, dass er im rechten Winkel abgelenkt wird.
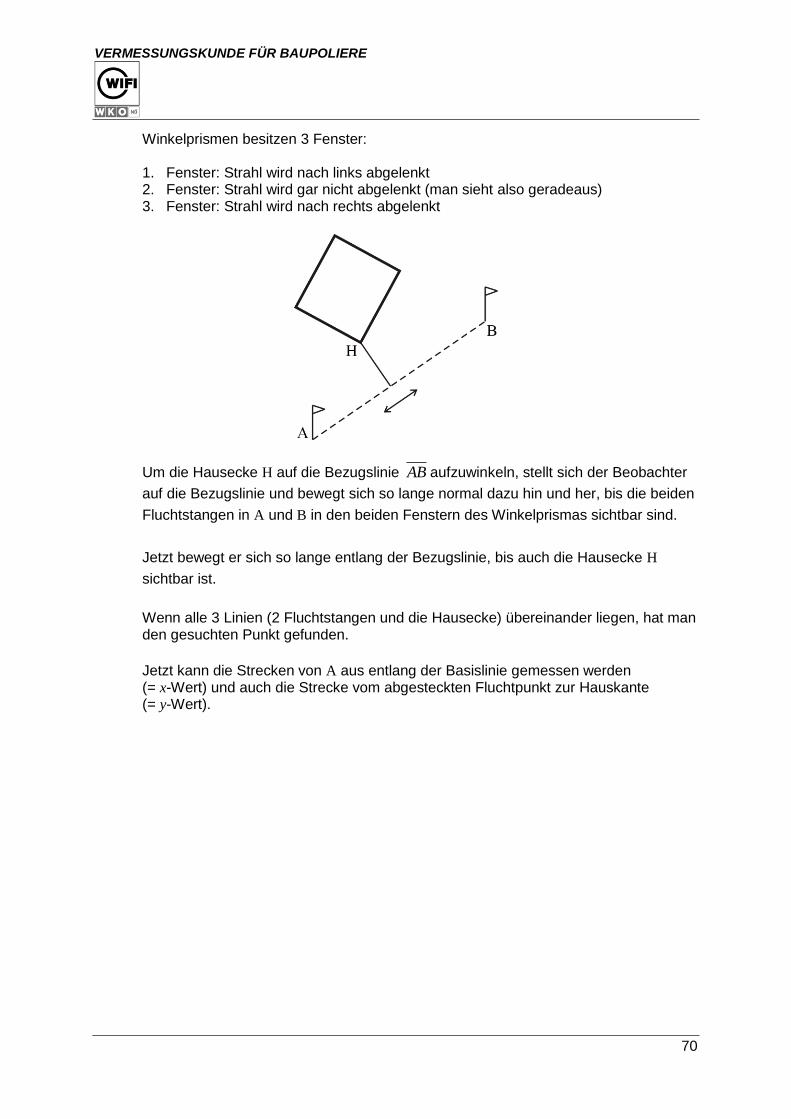
VERMESSUNGSKUNDE FÜR BAUPOLIERE
70
Winkelprismen besitzen 3 Fenster: 1. Fenster: Strahl wird nach links abgelenkt 2. Fenster: Strahl wird gar nicht abgelenkt (man sieht also geradeaus) 3. Fenster: Strahl wird nach rechts abgelenkt
Um die Hausecke H auf die Bezugslinie AB aufzuwinkeln, stellt sich der Beobachter
auf die Bezugslinie und bewegt sich so lange normal dazu hin und her, bis die beiden
Fluchtstangen in A und B in den beiden Fenstern des Winkelprismas sichtbar sind.
Jetzt bewegt er sich so lange entlang der Bezugslinie, bis auch die Hausecke H
sichtbar ist.
Wenn alle 3 Linien (2 Fluchtstangen und die Hausecke) übereinander liegen, hat man den gesuchten Punkt gefunden.
Jetzt kann die Strecken von A aus entlang der Basislinie gemessen werden (= x-Wert) und auch die Strecke vom abgesteckten Fluchtpunkt zur Hauskante (= y-Wert).
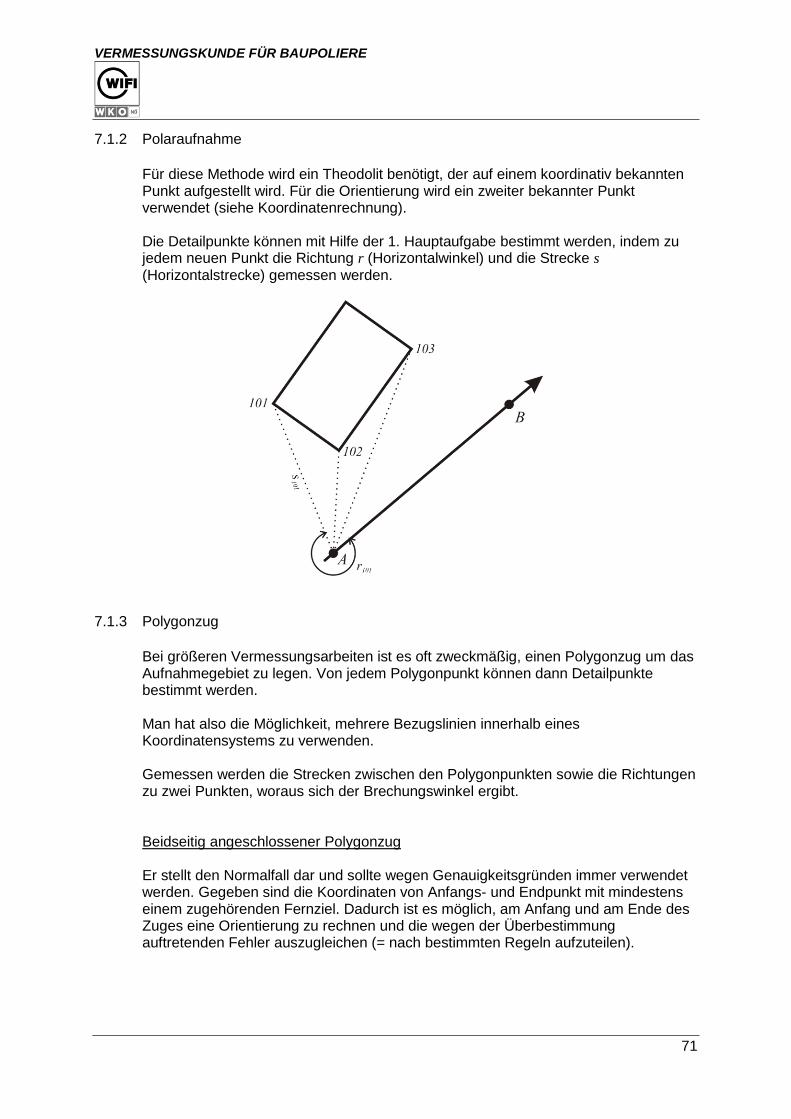
VERMESSUNGSKUNDE FÜR BAUPOLIERE
71
7.1.2 Polaraufnahme
Für diese Methode wird ein Theodolit benötigt, der auf einem koordinativ bekannten Punkt aufgestellt wird. Für die Orientierung wird ein zweiter bekannter Punkt verwendet (siehe Koordinatenrechnung). Die Detailpunkte können mit Hilfe der 1. Hauptaufgabe bestimmt werden, indem zu jedem neuen Punkt die Richtung r (Horizontalwinkel) und die Strecke s (Horizontalstrecke) gemessen werden.
7.1.3 Polygonzug
Bei größeren Vermessungsarbeiten ist es oft zweckmäßig, einen Polygonzug um das Aufnahmegebiet zu legen. Von jedem Polygonpunkt können dann Detailpunkte bestimmt werden. Man hat also die Möglichkeit, mehrere Bezugslinien innerhalb eines Koordinatensystems zu verwenden. Gemessen werden die Strecken zwischen den Polygonpunkten sowie die Richtungen zu zwei Punkten, woraus sich der Brechungswinkel ergibt. Beidseitig angeschlossener Polygonzug Er stellt den Normalfall dar und sollte wegen Genauigkeitsgründen immer verwendet werden. Gegeben sind die Koordinaten von Anfangs- und Endpunkt mit mindestens einem zugehörenden Fernziel. Dadurch ist es möglich, am Anfang und am Ende des Zuges eine Orientierung zu rechnen und die wegen der Überbestimmung auftretenden Fehler auszugleichen (= nach bestimmten Regeln aufzuteilen).
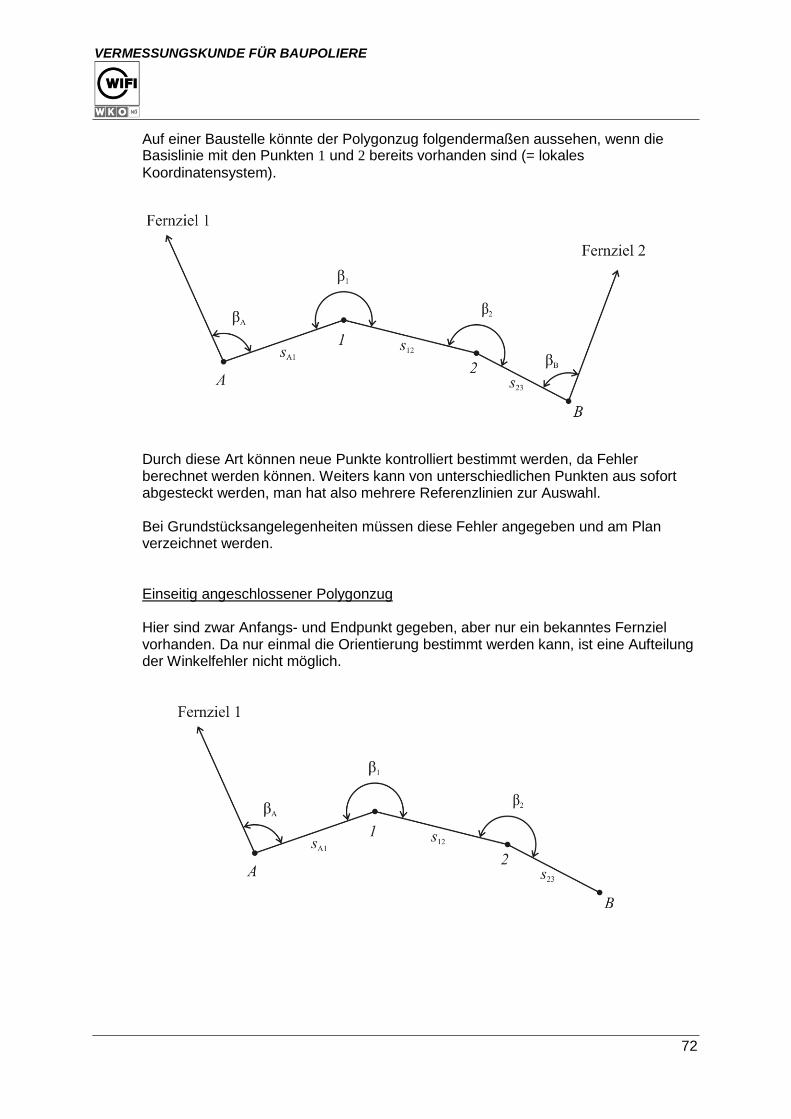
VERMESSUNGSKUNDE FÜR BAUPOLIERE
72
Auf einer Baustelle könnte der Polygonzug folgendermaßen aussehen, wenn die Basislinie mit den Punkten 1 und 2 bereits vorhanden sind (= lokales
Koordinatensystem).
Durch diese Art können neue Punkte kontrolliert bestimmt werden, da Fehler berechnet werden können. Weiters kann von unterschiedlichen Punkten aus sofort abgesteckt werden, man hat also mehrere Referenzlinien zur Auswahl. Bei Grundstücksangelegenheiten müssen diese Fehler angegeben und am Plan verzeichnet werden.
Einseitig angeschlossener Polygonzug Hier sind zwar Anfangs- und Endpunkt gegeben, aber nur ein bekanntes Fernziel vorhanden. Da nur einmal die Orientierung bestimmt werden kann, ist eine Aufteilung der Winkelfehler nicht möglich.
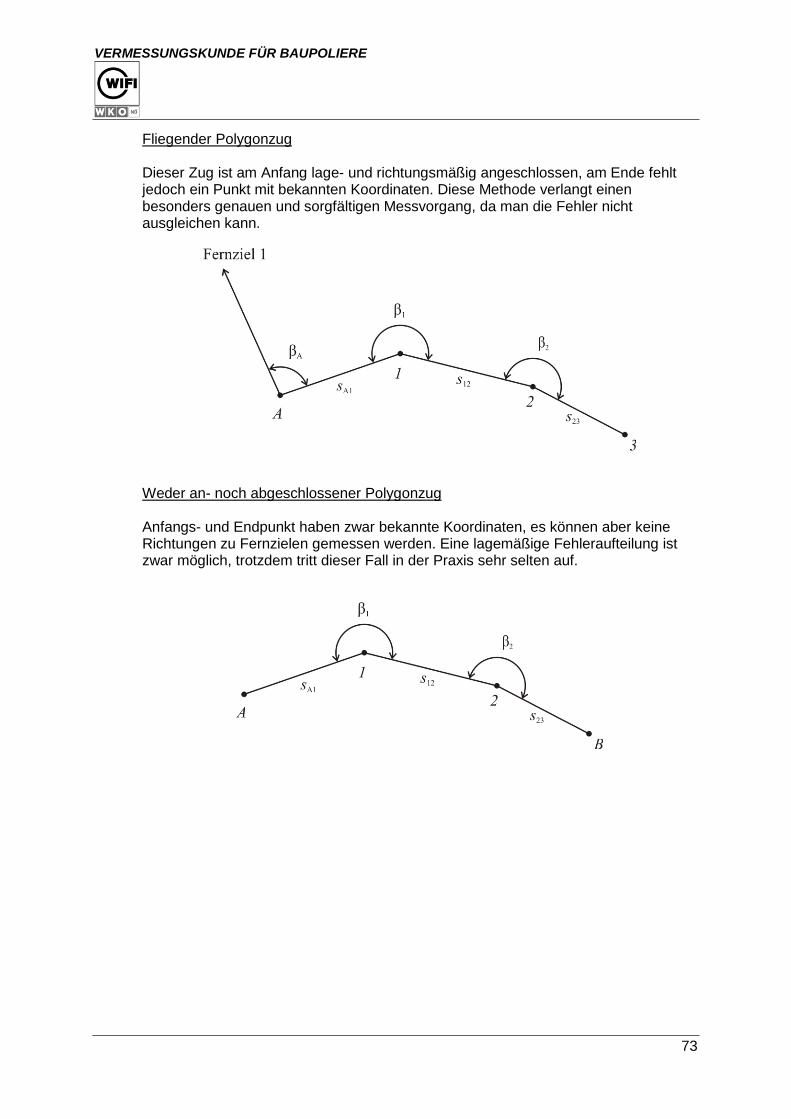
VERMESSUNGSKUNDE FÜR BAUPOLIERE
73
Fliegender Polygonzug Dieser Zug ist am Anfang lage- und richtungsmäßig angeschlossen, am Ende fehlt jedoch ein Punkt mit bekannten Koordinaten. Diese Methode verlangt einen besonders genauen und sorgfältigen Messvorgang, da man die Fehler nicht ausgleichen kann.
Weder an- noch abgeschlossener Polygonzug Anfangs- und Endpunkt haben zwar bekannte Koordinaten, es können aber keine Richtungen zu Fernzielen gemessen werden. Eine lagemäßige Fehleraufteilung ist zwar möglich, trotzdem tritt dieser Fall in der Praxis sehr selten auf.
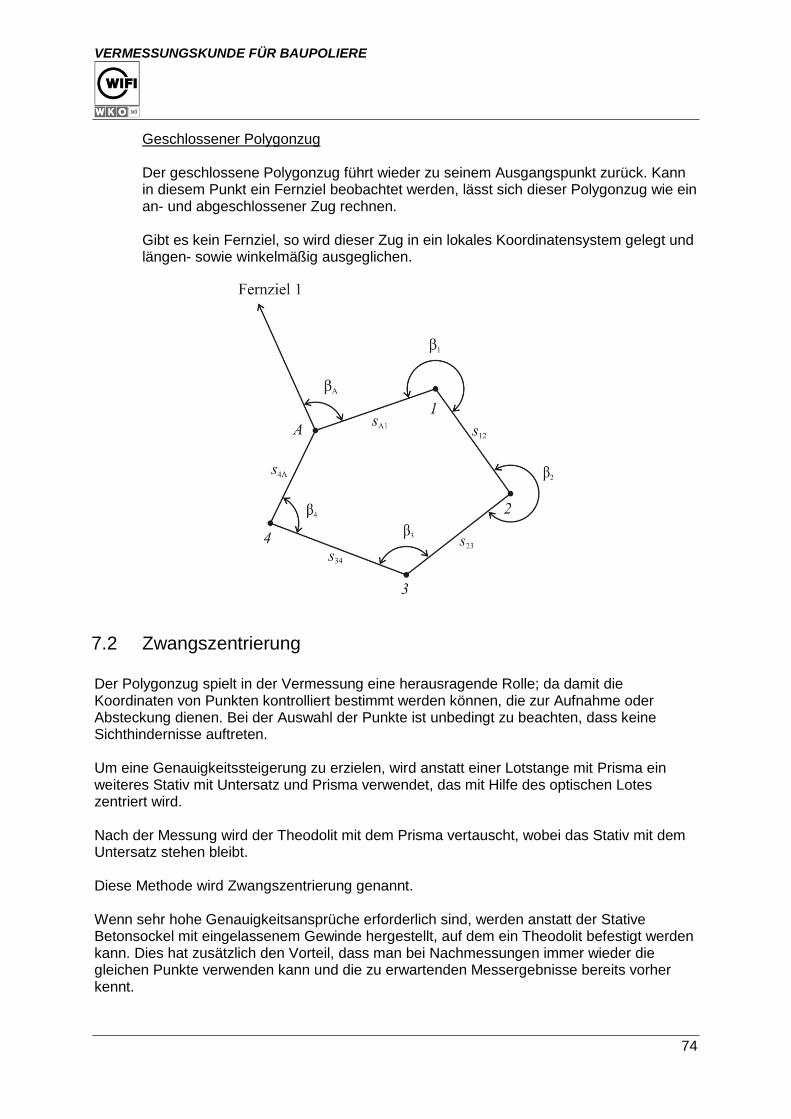
VERMESSUNGSKUNDE FÜR BAUPOLIERE
74
Geschlossener Polygonzug Der geschlossene Polygonzug führt wieder zu seinem Ausgangspunkt zurück. Kann in diesem Punkt ein Fernziel beobachtet werden, lässt sich dieser Polygonzug wie ein an- und abgeschlossener Zug rechnen. Gibt es kein Fernziel, so wird dieser Zug in ein lokales Koordinatensystem gelegt und längen- sowie winkelmäßig ausgeglichen.
7.2 Zwangszentrierung Der Polygonzug spielt in der Vermessung eine herausragende Rolle; da damit die Koordinaten von Punkten kontrolliert bestimmt werden können, die zur Aufnahme oder Absteckung dienen. Bei der Auswahl der Punkte ist unbedingt zu beachten, dass keine Sichthindernisse auftreten. Um eine Genauigkeitssteigerung zu erzielen, wird anstatt einer Lotstange mit Prisma ein weiteres Stativ mit Untersatz und Prisma verwendet, das mit Hilfe des optischen Lotes zentriert wird. Nach der Messung wird der Theodolit mit dem Prisma vertauscht, wobei das Stativ mit dem Untersatz stehen bleibt. Diese Methode wird Zwangszentrierung genannt. Wenn sehr hohe Genauigkeitsansprüche erforderlich sind, werden anstatt der Stative Betonsockel mit eingelassenem Gewinde hergestellt, auf dem ein Theodolit befestigt werden kann. Dies hat zusätzlich den Vorteil, dass man bei Nachmessungen immer wieder die gleichen Punkte verwenden kann und die zu erwartenden Messergebnisse bereits vorher kennt.

VERMESSUNGSKUNDE FÜR BAUPOLIERE
75
7.3 Spezielle Aufgaben der Lagemessung 7.3.1 Vorwärtseinschneiden
Einfacher Vorwärtsschnitt
2. Hauptaufgabe: AB yyy AB xxx 22 xysAB
ABAN tt BNBA tt 200
Sinussatz:
sin
sin AB
A
ss
sin
sin AB
B
ss
Koordinaten: sin AAN syy cos AAN sxx
Kontrolle: 200sinBBN syy
Aufgabe 13 gegeben: Punkt A y = 328,76 m x = 1207,85 m
Punkt B y = 925,04 m x = 954,33 m
gemessen : von nach t
A N 371,9726
A B 317,4753
B N 87,5253
B A 116,4553
Gemessen: Richtung von A nach B und 1 Richtung von B nach A und 1 Strecke von A nach B Gesucht: Koordinaten von N
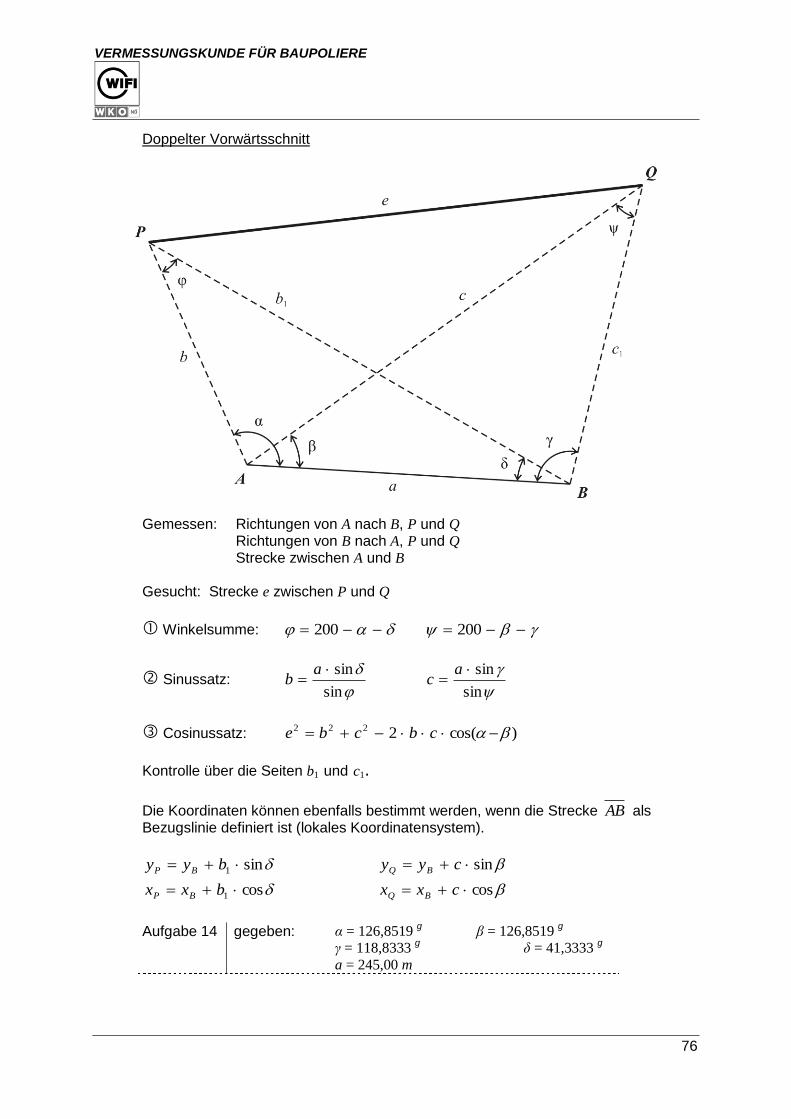
VERMESSUNGSKUNDE FÜR BAUPOLIERE
76
Doppelter Vorwärtsschnitt
Gemessen: Richtungen von A nach B, P und Q Richtungen von B nach A, P und Q Strecke zwischen A und B
Gesucht: Strecke e zwischen P und Q
Winkelsumme: 200 200
Sinussatz:
sin
sin
ab
sin
sin
ac
Cosinussatz: )cos(2222 cbcbe
Kontrolle über die Seiten b1 und c1.
Die Koordinaten können ebenfalls bestimmt werden, wenn die Strecke AB als Bezugslinie definiert ist (lokales Koordinatensystem).
sin1 byy BP sin cyy BQ
cos1 bxx BP cos cxx BQ
Aufgabe 14 gegeben: α = 126,8519
g β = 126,8519
g
γ = 118,8333 g
δ = 41,3333 g
a = 245,00 m
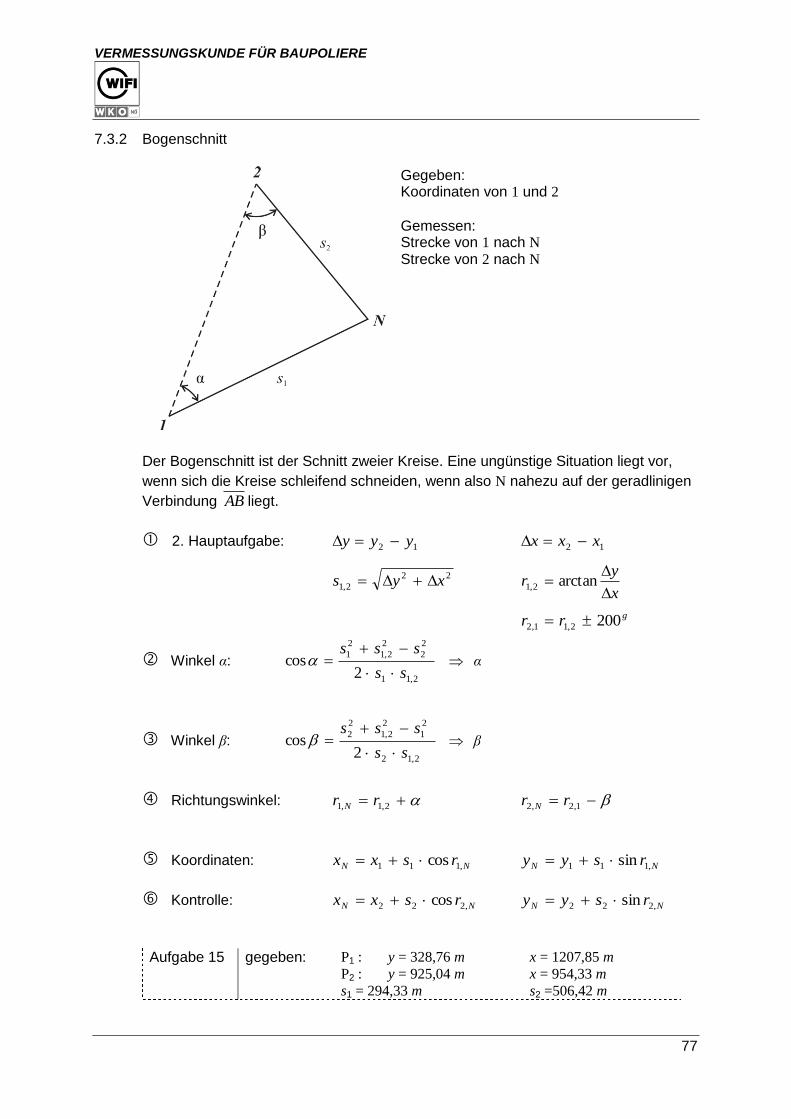
VERMESSUNGSKUNDE FÜR BAUPOLIERE
77
7.3.2 Bogenschnitt
Gegeben: Koordinaten von 1 und 2
Gemessen: Strecke von 1 nach N Strecke von 2 nach N
Der Bogenschnitt ist der Schnitt zweier Kreise. Eine ungünstige Situation liegt vor,
wenn sich die Kreise schleifend schneiden, wenn also N nahezu auf der geradlinigen
Verbindung AB liegt.
2. Hauptaufgabe: 12 yyy 12 xxx
22
2,1 xys x
yr
arctan2,1
grr 2002,11,2
Winkel α: 2,11
2
2
2
2,1
2
1
2cos
ss
sss
α
Winkel β: 2,12
2
1
2
2,1
2
2
2cos
ss
sss
β
Richtungswinkel: 2,1,1 rr N 1,2,2 rr N
Koordinaten: NN rsxx ,111 cos NN rsyy ,111 sin
Kontrolle: NN rsxx ,222 cos NN rsyy ,222 sin
Aufgabe 15 gegeben: P1 : y = 328,76 m x = 1207,85 m
P2 : y = 925,04 m x = 954,33 m s1 = 294,33 m s2 =506,42 m

VERMESSUNGSKUNDE FÜR BAUPOLIERE
78
7.3.3 Geradenschnitt Gegeben: Koordinaten der Punkte 1 bis 4
Gesucht: Koordinaten von N
2. Hauptaufgabe zwischen 1 und 3
13 yyy 13 xxx x
yr
arctan3,1
2. Hauptaufgabe zwischen 1 und 2
12 yyy 12 xxx x
yr
arctan2,1
22
2,1 xys
2. Hauptaufgabe zwischen 2und 4
24 yyy 24 xxx x
yr
arctan4,2
Winkel α , β: grr 2002,11,2 3,12,1 rr 1,24,2 rr
Seiten
sin
sin2,1
sa
sin
sin2,1
sb
Koordinaten 3,11 sin rbyyN 3,11 cos rbxxN
Kontrolle 4,22 sin rayyN 4,22 cos raxxN
Aufgabe 16 gegeben: P1 : y = 38,29 m x = 12,09 m
P2 : y = 101,17 m x = 1,01 m P3 : y = 120,04 m x = 88,16 m
P4 : y = 40,88 m x = 95,15 m

VERMESSUNGSKUNDE FÜR BAUPOLIERE
79
7.3.4 Freie Stationierung Gegeben: Koordinaten der Punkte 1 und 2
Gemessen: Richtungen und Seiten von S nach 1 und 2
Gesucht: Koordinaten von Standpunkt S
Berechnung der Strecke s1,2 aus Koordinaten
12 yyy 12 xxx 22
2,1 xys
Berechnung der Strecke s1,2 aus gemessenen Werten (Cosinussatz)
cos2 21
2
2
2
12,1 sssss
Maßstabsfaktor bestimmen 2,1
2,1
s
sm
Richtungswinkel zwischen 1 und 2 bestimmen
x
yr
arctan2,1 grr 2002,11,2
Winkel α und β berechnen (Sinussatz)
2,1
2 sinsin
s
s
2,1
1 sinsin
s
s
Richtungswinkel zu Standpunkt bestimmen 2,1,1 rr S 2002,1,2 rr S
Koordinaten von Standpunkt S
SS rsmyy ,111 sin SS rsmxx ,111 cos
SS rsmyy ,222 sin SS rsmxx ,222 cos (Kontrolle)
Aufgabe 17
Punkt y x von nach t s 1 38,29 72,09 S 1 121,387 63,04
2 101,17 51,01 S 2 186,486 71,63
VERMESSUNGSKUNDE FÜR BAUPOLIERE
80
7.4 Genauigkeit der Lagemessung 7.4.1 Orthogonalverfahren
Mit Hilfe von Winkelprisma und Maßband kann ein gutes Ergebnis mit einer Genauigkeit von 1-2 cm erzielt werden, wenn das Gelände eben und die Abstände
nicht zu weit sind. Für grobe Absteckungsarbeiten sowie für die Flächenbestimmung ist dieses Verfahren hervorragend geeignet. Leider muss dabei das Gelände ziemlich eben sein und die einzelnen Abstände dürfen nicht zu groß sein, da man sonst die Fluchtstangen nicht mehr erkennen kann.
7.4.2 Polarverfahren
Mit Hilfe von Theodolit und elektrooptischen Distanzmesser ist es die schnellste Methode mit einer Genauigkeit von 1-2 mm.
Bei Verwendung einer Zwangszentrierung und einer Winkelmessung in 2 Lagen kann eine Genauigkeit auf unter 1 mm gedrückt werden.
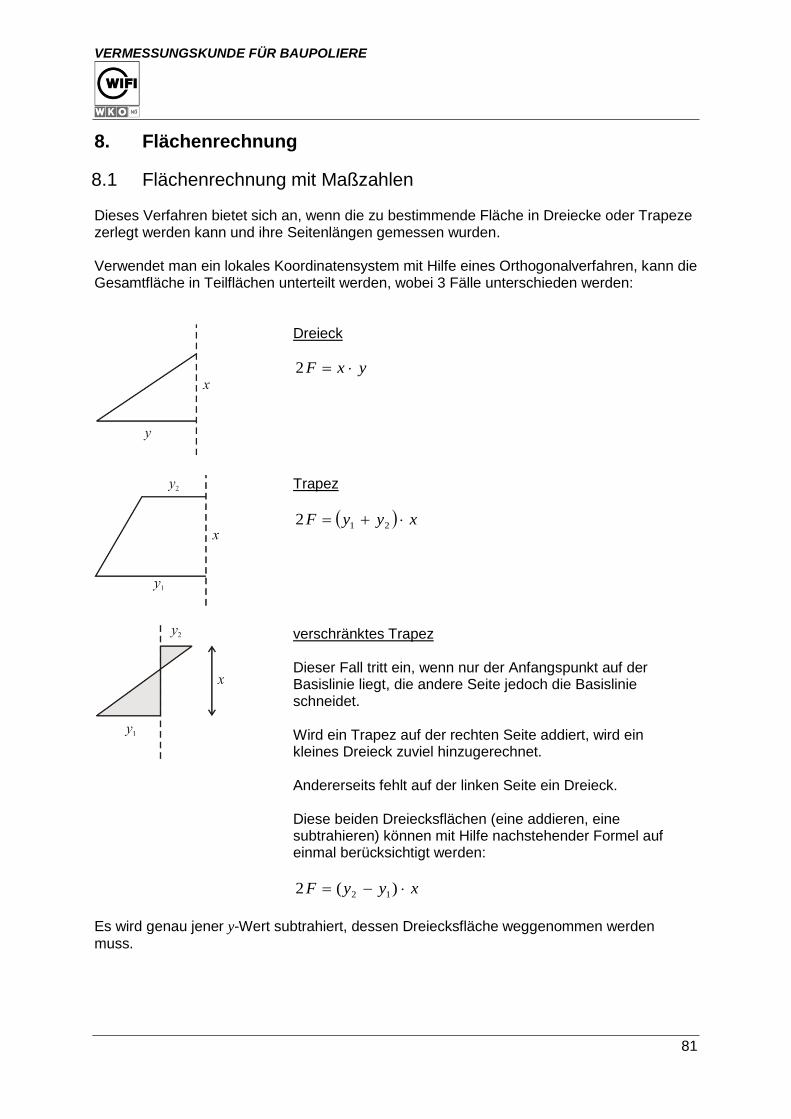
VERMESSUNGSKUNDE FÜR BAUPOLIERE
81
8. Flächenrechnung
8.1 Flächenrechnung mit Maßzahlen Dieses Verfahren bietet sich an, wenn die zu bestimmende Fläche in Dreiecke oder Trapeze zerlegt werden kann und ihre Seitenlängen gemessen wurden. Verwendet man ein lokales Koordinatensystem mit Hilfe eines Orthogonalverfahren, kann die Gesamtfläche in Teilflächen unterteilt werden, wobei 3 Fälle unterschieden werden:
Dreieck
yxF 2
Trapez
xyyF 212
verschränktes Trapez Dieser Fall tritt ein, wenn nur der Anfangspunkt auf der Basislinie liegt, die andere Seite jedoch die Basislinie schneidet. Wird ein Trapez auf der rechten Seite addiert, wird ein kleines Dreieck zuviel hinzugerechnet. Andererseits fehlt auf der linken Seite ein Dreieck. Diese beiden Dreiecksflächen (eine addieren, eine subtrahieren) können mit Hilfe nachstehender Formel auf einmal berücksichtigt werden:
xyyF )(2 12
Es wird genau jener y-Wert subtrahiert, dessen Dreiecksfläche weggenommen werden
muss.

VERMESSUNGSKUNDE FÜR BAUPOLIERE
82
Achtung: Das Ergebnis kann auch negativ sein (wenn das abzuziehende Dreieck größer als das zu addierende Dreieck ist). Anmerkung: In der Praxis wird man von jeder Teilfläche die doppelte Fläche bestimmen, am Ende alle Teilflächen addieren und das Ergebnis halbieren. Dadurch spart man sich die Divisionen
durch 2 und erhält eine Genauigkeitssteigerung auf Grund von Rundungsfehlern.
Aufgabe 18 gegeben: Skizze mit eingetragenen Maßzahlen gesucht: Die Fläche zwischen den Punkten 1 und 6 Hinweis: Die Maßzahlen entlang der Basislinie sind Laufmaße.
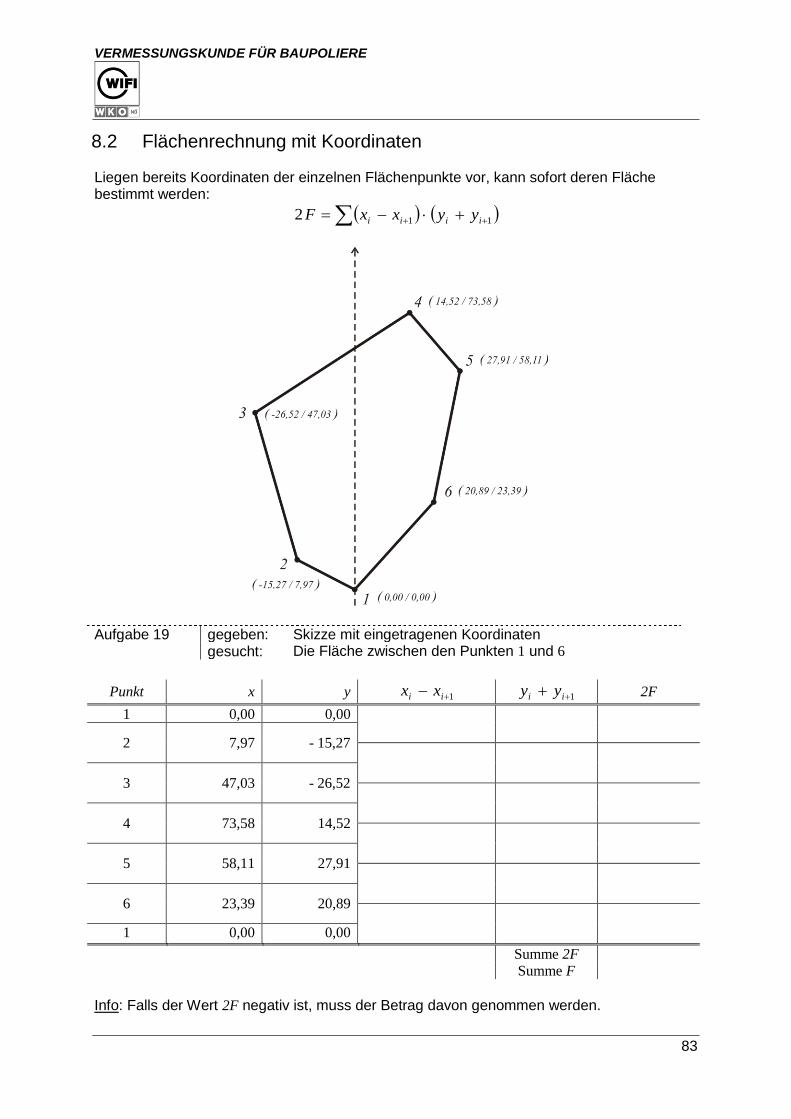
VERMESSUNGSKUNDE FÜR BAUPOLIERE
83
8.2 Flächenrechnung mit Koordinaten
Liegen bereits Koordinaten der einzelnen Flächenpunkte vor, kann sofort deren Fläche bestimmt werden:
112 iiii yyxxF
Aufgabe 19 gegeben: Skizze mit eingetragenen Koordinaten gesucht: Die Fläche zwischen den Punkten 1 und 6
Punkt x y 1 ii xx 1 ii yy 2F
1 0,00 0,00
2 7,97 - 15,27
3 47,03 - 26,52
4 73,58 14,52
5 58,11 27,91
6 23,39 20,89
1 0,00 0,00
Summe 2F
Summe F
Info: Falls der Wert 2F negativ ist, muss der Betrag davon genommen werden.
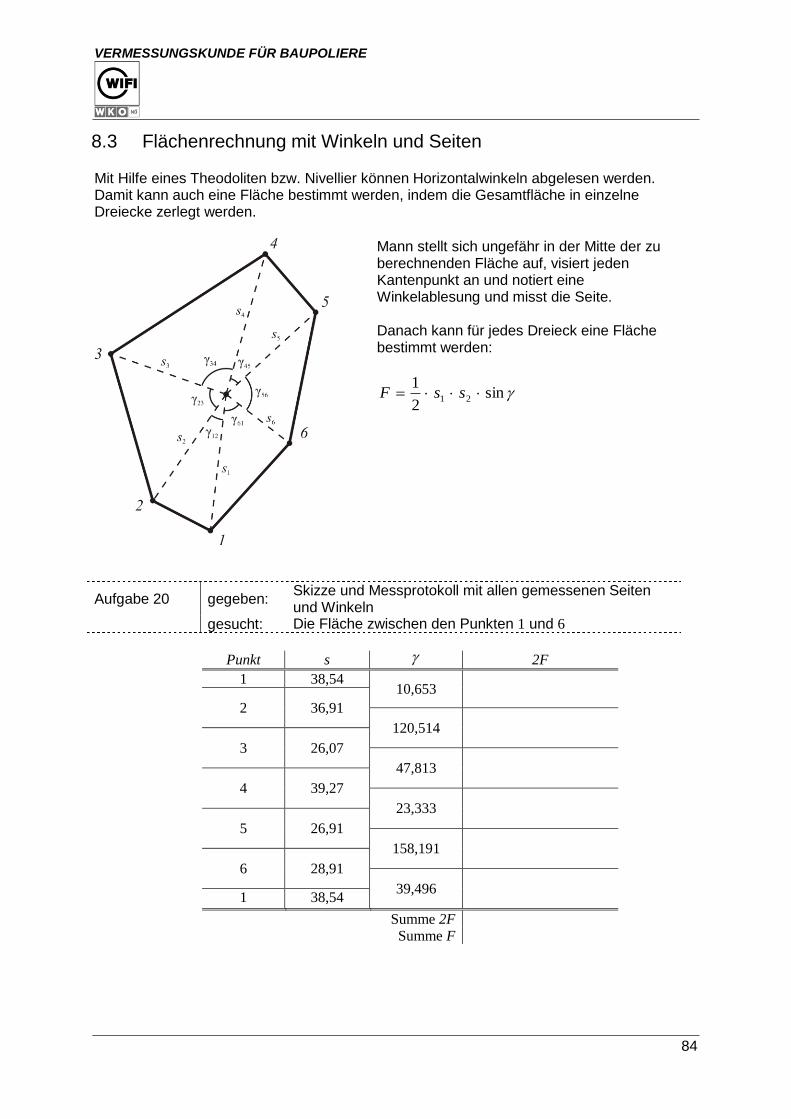
VERMESSUNGSKUNDE FÜR BAUPOLIERE
84
8.3 Flächenrechnung mit Winkeln und Seiten Mit Hilfe eines Theodoliten bzw. Nivellier können Horizontalwinkeln abgelesen werden. Damit kann auch eine Fläche bestimmt werden, indem die Gesamtfläche in einzelne Dreiecke zerlegt werden.
Mann stellt sich ungefähr in der Mitte der zu berechnenden Fläche auf, visiert jeden Kantenpunkt an und notiert eine Winkelablesung und misst die Seite. Danach kann für jedes Dreieck eine Fläche bestimmt werden:
sin2
121 ssF
Aufgabe 20 gegeben: Skizze und Messprotokoll mit allen gemessenen Seiten und Winkeln
gesucht: Die Fläche zwischen den Punkten 1 und 6
Punkt s 2F
1 38,54 10,653
2 36,91
120,514
3 26,07
47,813
4 39,27
23,333
5 26,91
158,191
6 28,91
39,496 1 38,54
Summe 2F
Summe F

VERMESSUNGSKUNDE FÜR BAUPOLIERE
85
9. Massenbestimmung Normalerweise wird man bei der Massenbestimmung auf regelmäßige Körper zurückgreifen und damit näherungsweise die Kubatur bestimmen. Mit ein wenig Erfahrung wird diese Art gut funktionieren. Hat man aber eine sehr unregelmäßige Struktur zu bestimmen, wird man mit regelmäßigen Körpern nicht mehr weiterkommen. In diesem Fall legt man sich einen Raster über das Gebiet, indem man mit Farbe deren Rasterpunkte markiert. Die Abstände des Rasters sind entsprechend zu wählen und können innerhalb des Rasters variieren.
Anschließend werden die Rasterpunkte einnivelliert - die Rasterweite ist individuell festgelegt und variiert:
H1 = 101,17 H5 = 107,31 H9 = 106,27 H13 = 105,87 H17 = 100,31
H2 = 101,34 H6 = 108,00 H10 = 107,51 H14 = 105,01 H18 = 100,07
H3 = 102,00 H7 = 107,87 H11 = 106,99 H15 = 106,04 H19 = 100,91
H4 = 101,87 H8 = 107,33 H12 = 107,45 H16 = 105,69 H20 = 101,03

VERMESSUNGSKUNDE FÜR BAUPOLIERE
86
Jetzt werden die einzelnen Quader volumsmäßig bestimmt, indem man den Mittelwert der 4 Höhenwerte verwendet. Es soll dabei das Volumen über 100 m über Adria bestimmt werden.
Quader A: 6521 HHHHH A 410 AA HV
Dies wird für alle Quader berechnet und am Ende werden alle Teil-Massen addiert. Anmerkung: Wenn man einfach alle Höhen mittelt und dies mit der Gesamtlänge und der Gesamtbreite multipliziert, erhält man eine viel zu große Kubatur.
Auswahl des Rasters: Entlang von Linien, die sich in der Steigung nicht ändern, benötigt maan keine Rastergrenzen. Sie sind nur dort relevant, wo starke Änderungen (Böschungskanten) vorhanden sind.
Aufgabe 21 gegeben: Skizze mit gegebenen Höhenpunkten gesucht: Jene Masse, die über 100 m ü.A. liegt

VERMESSUNGSKUNDE FÜR BAUPOLIERE
87
10. Kataster
10.1 Entstehung und Aufgabe Ursprünglich wurde der Kataster zur Besteuerung von Grund und Boden von Maria Theresia eingeführt. Im Laufe der Zeit hat sich die Aufgabe geändert – heutzutage ist die Sicherung des Grundeigentums zentraler Punkt. Die Führung des Katasters obliegt den einzelnen Vermessungsämtern, die bestimmte Katastralgemeinden verwalten.
10.2 Bestandteile des Katasters Der Kataster besteht aus dem technischen Operat und dem Grundstücksverzeichnis, das wiederum mit dem Grundbuch gekoppelt ist. Technisches Operat 1. alle technischen Unterlagen zur Lagebestimmung der Festpunkte und der Grenzen der
Grundstücke, d.h. alle Punkte des Festpunktfeldes der Landesvermessung und das Koordinatenverzeichnis über alle Grenzpunkte im Landeskoordinatensystem
2. alle technischen Unterlagen für die Ersichtlichmachungen (= Abgrenzung der verschiedenen Benützungsabschnitte, Flächeninhalte, dieser Benützungsabschnitte, …). Sie sind nur in graphischer Genauigkeit gegeben.
3. die Katastralmappe (= Plan der Grundstücke inkl. Ihren Benützungsarten, Riednamen, Straßennamen, …)
Grundstücksverzeichnis Enthält die Grundstücksnummer, Benützungsarten, Gesamtflächenausmaß, Einlagezahl des Grundbuches (EZ), Blattnummer der Katastralmappe, Widmung, Veränderungshinweise (geben Aufschluss über Grundbuchsbeschlüsse) sowie Eintragungen des Grundbuches über den Eigentümer.
10.3 Grundsteuerkataster Er dient lediglich zur Veranschaulichung der Grundstückslage – ohne Rechtskraft der Grundgrenzen. Im Zweifelsfall wird allerdings die Lage als tatsächliche Grenze herangezogen.
Die Genauigkeit der Grundsteuerkatasters beträgt rund cm5 , in Sonderfällen sogar
darüber.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
88
10.4 Grenzkataster Seine eingetragenen Grundgrenzen sind über Koordinaten festgelegt und rechtsgültig. Es kann zu keinen Grenzstreitigkeiten führen, da die Grenze jederzeit wiederhergestellt werden kann. Eine Ersitzung ist ebenfalls nicht möglich. Um ein Grundstück in den Grenzkataster zu bringen, ist eine Grenzverhandlung mit allen betroffenen Grundeigentümern notwendig, die die einzelnen Grenzpunkte festlegen und dafür ihre Zustimmungserklärung abgeben. Die vereinbarten Grenzpunkte werden vom Geometer am selben Tag koordinativ festgelegt und an das Festpunktfeld angeschlossen. Ein Grundstück im Grenzkataster ist ersichtlich, indem im Kataster die Grundstücksnummern strichliert unterstrichen sind bzw. im Grundbuch ein "G" vor der Grundstücksnummer vorangestellt wird.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
89
11. Spezielle Kapitel der Bauordnung
11.1 Niederösterreich Zuständigkeit (§2)
Die Baubehörde in 1. Instanz ist der Bürgermeister (der Magistrat), in 2. Instanz der Gemeinderat (Stadtsenat). Erstreckt sich ein Bauwerk auf das Gebiet mehrerer Gemeinden, ist Baubehörde 1. Instanz die Bezirkshauptmannschaft und in 2. Instanz die Landesregierung. Bei bundeseigenen, öffentlichen Zwecken dienenden Gebäuden ist Baubehörde 1. Instanz die Bezirkshauptmannschaft (Magistrat) und in 2. Instanz der Landeshauptmann.
Fluchtlinien Baufluchtlinie Abgrenzung innerhalb eines Grundstückes, über die
grundsätzlich nicht hinausgebaut werden darf. Straßenfluchtlinie Grenze zwischen öffentlichen Verkehrsflächen und anderen
Grundflächen Bauklassen (§70)
Die Bebauungshöhe ist in 9 Bauklassen unterteilt:
Bauklasse I bis 5 m
Bauklasse II 5 – 8 m
Bauklasse III 8 – 11 m
Bauklasse IV 11 – 14 m
Bauklasse V 14 – 17 m
Bauklasse VI 17 – 20 m
Bauklasse VII 20 – 23 m
Bauklasse VIII 23 – 25 m
Bauklasse IX über 25 m
Höhe der Bauwerke (§53)
Die Gebäudehöhe ist nach der mittleren Höhe der Gebäudefront zu bemessen. Für Gebäude oder Gebäudeteile mit versetzten Außenwandteilen ist die Gebäudehöhe für jeden Wandteil einzeln zu ermitteln. Die Gebäudefront wird nach unten, bei Gebäudefronten an der Straßenfluchtlinie durch den Verschnitt mit dem Straßenniveau in dieser Linie, ansonsten mit der bestehenden oder bewilligten Höhenlage des Geländes und nach oben durch den Verschnitt mit der Dachhaut oder mit dem oberen Abschluss der Gebäudefront begrenzt. Bei der Ermittlung der Gebäudehöhe ist eine Gebäudefront gegen eine Verkehrsfläche ab einer Frontlänge von 30 m und einem Niveauunterschied von 3 m vom höchsten Niveau aus beginnend in Frontabschnitte mit höchstens 3 m Niveauunterschied zu unterteilen. Die Gebäudehöhe ist dann für jeden Frontabschnitt gesondert zu berechnen.
VERMESSUNGSKUNDE FÜR BAUPOLIERE
90
Bauwich (§50)
Unter Bauwich versteht man den vorgeschriebenen Mindestabstand eines Gebäudes zu den Grundstücksgrenzen (seitlicher und hinterer Bauwich) oder zur Straßenfluchtlinie (vorderer Bauwich). Der seitliche Bauwich beträgt die halbe Gebäudehöhe, mindestens aber 3 m.
Vorbauten (§52)
Unter bestimmten Umständen darf über die Grundstücksgrenze hinaus überbaut werden, die als so genannte Vorbauten genau definiert sind: Keller, Grundmauern und Fundamente bis 20 cm Gebäudesockel bis 20 cm und bis zu einer Höhe von 2 m
Stufen innerhalb des Sockelvorsprunges zu Bauwerk gehörenden Ver- und Entsorgungsleitungen Licht-, Luft- und Putzschächte sowie Einbringöffnungen bis 1 m
vorstehende Bauteile, die der Gliederung und Gestaltung der Schauseiten, der Anbringung von vorgehängten Fassaden sowie Heizungs- und Klimaanlagen dienen, bis 15 cm
Wärmeschutzverkleidungen bis 10 cm Hauptgesimse und Dachvorsprünge bis 1 m Balkone, Erker, Sonnenblenden (Markisen) und Schutzdächer bis 1,50 m
(wenn ihre Länge höchstens ein Drittel der Gebäudefront und ihr Abstand von Nachbargrundstücksgrenzen mindestens 3 m beträgt)
Werbezeichen bis 1,50 m
Grundabtretung für Verkehrsflächen (§12)
Die Eigentümer sind verpflichtet, Grundflächen, die zwischen den Straßenfluchtlinien liegen und nicht mit dem Gebäudeteil bebaut sind, in das öffentliche Gut der Gemeinde abzutreten, wenn die Änderungen von Grundstücksgrenzen oder die Herstellung von Einfriedungen
angezeigt wird eine Baubewilligung im Bauland für einen Neu- oder Zubau eines Gebäudes für die Herstellung einer Einfriedung gegen öffentliche Verkehrsflächen für die Herstellung einer Abstellanlage für Kraftfahrzeuge
auf bisher unbebauten Grundstücken erteilt wird. Sie ist frei von in Geld ablösbaren Lasten und geräumt von baulichen Anlagen, Gehölzen und Materialien zu übergeben. Die grundbücherliche Durchführung ist von dem zur Grundabtretung verpflichteten Eigentümer zu veranlassen. Es gibt keine Entschädigung, wenn an beiden Seiten der Verkehrsfläche Bauland angrenzt bis zur Mitte der
Verkehrsfläche, höchstens aber 7 m
nur an einer Seite Bauland angrenzt bis zur ganzen Breite der Verkehrsfläche, höchstens 14 m

VERMESSUNGSKUNDE FÜR BAUPOLIERE
91
Entschädigung gibt es, wenn über oben genanntes Ausmaß abzutreten ist oder wenn eine Straßenfluchtlinie neu festgelegt und zuvor schon im vollen, damals gesetzmäßigen Ausmaß für dieselbe Verkehrsfläche abgetreten wurde, nunmehr zusätzlich abzutreten ist.
Grenzverlegung (§13)
Wenn zwei Gebäude an einer Grundstücksgrenze eine gemeinsame Wand aufweisen und eines dieser Gebäude abgebrochen wird, hat die Baubehörde die Verlegung der Grundstücksgrenze zwischen den beiden Gebäuden zu verfügen. Die bisher gemeinsame Wand muss damit zur Gänze zu dem bestehen bleibenden Gebäude gehören. Dafür ist eine Entschädigung zu leisten.
11.2 Wien Fluchtlinien (§5) Baulinien
das sind die Grenzen der im Bauland gelegenen öffentlichen Verkehrsflächen (Wege, Gassen, Straßen und Plätze) gegen alle übrigen Grundflächen des anliegenden Baulandes
Straßenfluchtlinien das sind die Grenzen der im Grünland oder Sondergebiet gelegenen öffentlichen Verkehrsflächen gegen alle übrigen Grundflächen des anliegenden Grünlandes oder Sondergebietes
Verkehrsfluchtlinien das sind die Grenzen des Verkehrsverbandes gegen alle übrigen Widmungsgebiete oder die Grenzen von öffentlichen Verkehrsflächen im Bauland, Grünland oder in Sondergebieten, an die die Rechte und Pflichten aus den Baulinien und Straßenfluchtlinien nicht geknüpft sind
Grenzfluchtlinien das sind die Grenzen zwischen den Grundflächen für öffentliche Zwecke einerseits und allen anderen Grundflächen andererseits, soweit diese Grenzen nicht als Baulinien, Straßenfluchtlinien oder Verkehrsfluchtlinien bezeichnet sind
Baufluchtlinien das sind die Grenzen, über die mit einem Gebäude oder Gebäudeteil mit Ausnahme der zulässigen Vorbauten nicht vorgerückt werden darf
Grenzlinien das sind die Grenzen zwischen verschiedenen Widmungsgebieten oder zwischen Grundflächen desselben Widmungsgebietes mit unterschiedlicher Bebauungs- oder Nutzungsbestimmungen, soweit diese Grenze nicht mit einer anderen Fluchtlinie zusammenfallen

VERMESSUNGSKUNDE FÜR BAUPOLIERE
92
Bauklassen (§75)
Die Bebauungshöhe ist in 6 Bauklassen unterteilt:
Bauklasse I 2,5 - 9 m
Bauklasse II 2,5 – 12 m
Bauklasse III 9 – 16 m
Bauklasse IV 12 – 21 m
Bauklasse V 16 – 26 m
Bauklasse VI über 26 m
In Bauklasse VI hat der Bebauungsplan die einzuhaltenden Gebäudehöhen innerhalb von zwei Grenzmaßen festzusetzen. Die tatsächliche zulässige Gebäudehöhe kann durch vorgegebene Fluchtlinien noch beschränkt werden.
Gebäudehöhe und Gebäudeumrisse (§81)
Bei Gebäuden an der Baulinie, Straßenfluchtlinie oder Verkehrsfluchtlinie gilt bis zu einer Gebäudetiefe von 15 m als Gebäudehöhe der lotrechte Abstand von der festgesetzten Höhenlage der Verkehrsfläche bis zur obersten Schnittlinie der zulässigen Außenwandfläche der Straßenfront mit der Oberfläche des Daches. Zur Straßenfront gerichtete Giebelflächen zählen bei der Ermittlung der Gebäudehöhe mit. Bei den über eine Gebäudetiefe von 15 m hinausragenden Teilen von Gebäuden an der Baulinie, Straßenfluchtlinie oder Verkehrsfluchtlinie sowie bei allen nicht an diesen Fluchtlinien gelegenen Gebäuden darf die Summe der Flächeninhalte aller Gebäudefronten nicht größer als das Produkt aus der Summe der Längen aller Gebäudefronten und der höchsten zulässigen Gebäudehöhe sein. Ist im Bebauungsplan die Gebäudehöhe als absolute Höhe über Wiener Null festgesetzt, darf keine oberste Schnittlinie einer Außenwandfläche mit der Oberfläche des Daches über dieser absoluten Höhe liegen. Die der Dachform entsprechenden Giebelflächen bleiben außer Betracht, und der oberste Abschluss des Daches darf keinesfalls höher als 7,5 m über der zulässigen Gebäudehöhe liegen, sofern der Bebauungsplan nicht anderes
bestimmt. Vorbauten (§83)
Bauteile vor der Baulinie oder Straßenfluchtlinie Keller- und Grundmauern bis 20 cm Gebäudesockel bis 20 cm (bis einer maximalen Höhe von 2 m) Schauseitenverkleidungen bis 7 cm vorstehende Bauelemente zur architektonischen Ausgestaltung der Schauseiten bis
15 cm Hauptgesimse und Dachvorsprünge bis 1 m die dem Gebäude dienenden Zu- und Ableitungen
VERMESSUNGSKUNDE FÜR BAUPOLIERE
93
Bekanntgabe der Bebauungsbestimmungen (§9)
Die Bekanntgabe der Bebauungsbestimmungen ist in folgenden Fällen zu beantragen: für jeden Neu-, Zu- oder Umbau sowie bei Herstellung einer fundierten Einfriedung im
Bereich einer Baulinie, Straßenfluchtlinie, Verkehrsfluchtlinie oder Grenzfluchtlinie bei bewilligungspflichtigen Grundabteilungen bei Umlegungen und Grenzberichtigungen Dem Antrag ist ein Lage- und Höhenplan in zwei Gleichstücken anzuschließen. Dieser Plan muss die betroffenen Grundstücke und die anrainenden Grundstücke soweit darstellen, dass die planlich richtige Eintragung der Fluchtlinien und Höhenlagen zusammen mit den übrigen Bebauungsbestimmungen möglich ist. Die Höhen müssen von im Höhenfestpunktverzeichnis der Stadt Wien enthaltenen Festpunkten abgeleitet sein. Erkennt die Behörde, dass die Grundstücke selbständig bebaut werden können und eine Änderung der Grenzen der anrainenden Grundstücke nach den Bestimmungen dieses Gesetzes nicht notwendig ist, sind die Bebauungsbestimmungen ohne weiteres Verfahren bekannt zu geben. In allen anderen Fällen hat die Behörde unter Beiziehung des Antragstellers, aller Miteigentümer und der Anrainer eine mündliche Verhandlung durchzuführen und einen Vorschlag über etwa einzubeziehende oder abzutretende Grundflächen zu erstatten. Die Bekanntgabe der Bebauungsbestimmungen gilt auf die Dauer eines Jahres
Grundabtretungen zu Verkehrsflächen bei Abteilungen im Bauland (§17)
Bei Abteilungen einer Grundfläche auf Bauplätzen, Baulosen oder Teile von solchen sind die nach Maßgabe der Baulinien zu den Verkehrsflächen entfallenden Grundflächen bei beiderseitiger Bebauungsmöglichkeit bis zur Achse der Verkehrsflächen bei einseitiger Bebauungsmöglichkeit bis zur ganzen Breite der Verkehrsfläche in beiden Fällen aber nur bis zu 20 m, senkrecht zur Baulinie und von dieser aus gemessen, gleichzeitig mit der grundbücherlichen Durchführung satz- und lastenfrei in das öffentliche Gut zu übertragen. Bei Bruchpunkten und bei Eckbildungen erstrecken sich diese Verpflichtungen auch auf die zwischen den Senkrechten gelegenen Grundflächen
Enteignungen (§38)
Eine Enteignung ist nur dann zulässig, wenn der Enteignungsgegner die Einräumung der angestrebten Rechte ablehnt oder dafür ein offenbar übermäßiges Entgelt fordert oder wenn er nicht in der Lage ist, die Ausübung der angestrebten Rechte zu gewährleisten. Die Nichtäußerung zu einem gestellten Anbot gilt als Ablehnung. Eine Enteignung ist zulässig zur Herstellung von Verkehrsflächen und zur Anlage öffentlicher
Aufschließungsleitungen zur Ausführung von Bauvorhaben oder Anlagen auf Grundflächen für öffentliche
Zwecke
VERMESSUNGSKUNDE FÜR BAUPOLIERE
94
zur Erhaltung, Ausgestaltung oder Herstellung der allgemeinen Zugänglichkeit des Wald- und Wiesengürtels
zur Vermeidung des Zurückbleibens von nach den Bebauungs-bestimmungen selbständig nicht bebaubaren Grundflächen im Bauland
zur bauordnungsgemäßen Bebauung von Liegenschaften Ist die Grundfläche, die zum Zweck der Ergänzung einer nach den Bestimmungen des Bebauungsplanes selbständig nicht bebaubaren Grundfläche enteignet werden soll, die wertvollere, so hat der Eigentümer dieser Grundfläche das Recht, die Enteignung seiner Grundfläche dadurch abzuwehren, dass er die Enteignung der weniger wertvollen Grundfläche zu seinen Gunsten beantragt. Bei gleichem Wert hat derjenige den Vorzug, der zuerst den Antrag gestellt hat.
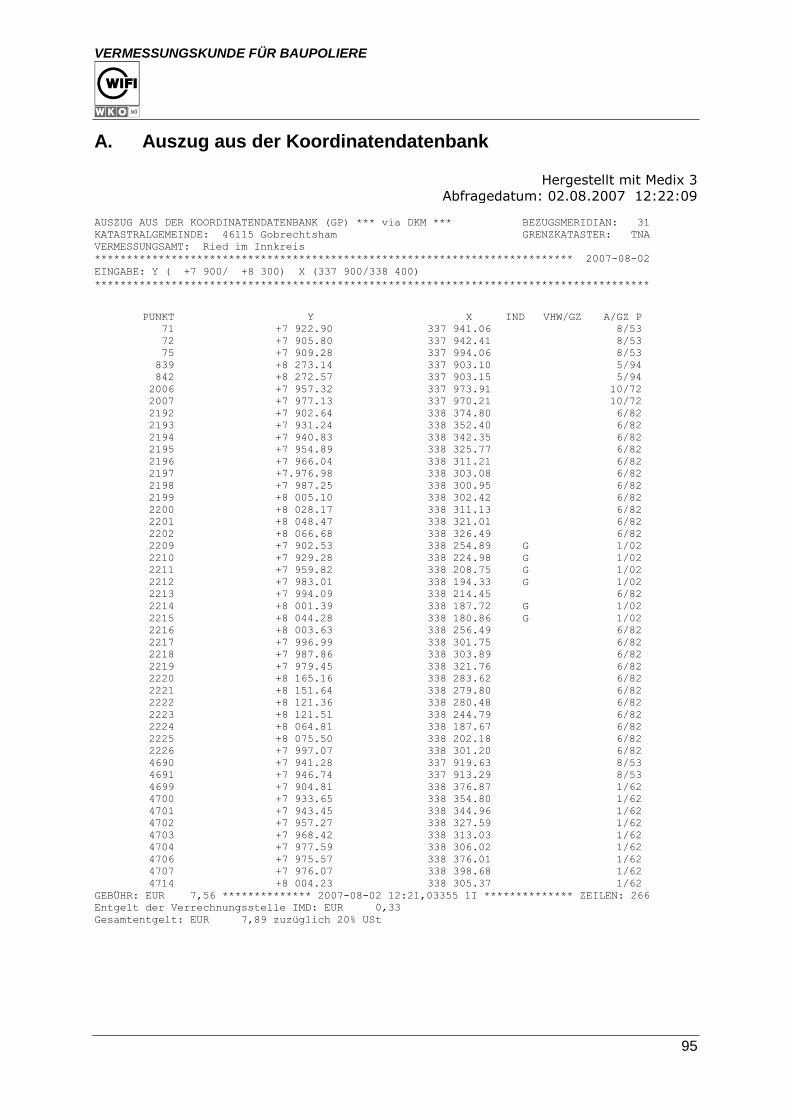
VERMESSUNGSKUNDE FÜR BAUPOLIERE
95
A. Auszug aus der Koordinatendatenbank
Hergestellt mit Medix 3
Abfragedatum: 02.08.2007 12:22:09 AUSZUG AUS DER KOORDINATENDATENBANK (GP) *** via DKM ***
KATASTRALGEMEINDE: 46115 Gobrechtsham
VERMESSUNGSAMT: Ried im Innkreis
BEZUGSMERIDIAN: 31
GRENZKATASTER: TNA
*************************************************************************** 2007-08-02 EINGABE: Y ( +7 900/ +8 300) X (337 900/338 400) ***************************************************************************************
PUNKT Y X IND VHW/GZ A/GZ P
71 +7 922.90 337 941.06 8/53
72 +7 905.80 337 942.41 8/53
75 +7 909.28 337 994.06 8/53
839 +8 273.14 337 903.10 5/94
842 +8 272.57 337 903.15 5/94
2006 +7 957.32 337 973.91 10/72
2007 +7 977.13 337 970.21 10/72
2192 +7 902.64 338 374.80 6/82
2193 +7 931.24 338 352.40 6/82
2194 +7 940.83 338 342.35 6/82
2195 +7 954.89 338 325.77 6/82
2196 +7 966.04 338 311.21 6/82
2197 +7.976.98 338 303.08 6/82
2198 +7 987.25 338 300.95 6/82
2199 +8 005.10 338 302.42 6/82
2200 +8 028.17 338 311.13 6/82
2201 +8 048.47 338 321.01 6/82
2202 +8 066.68 338 326.49 6/82
2209 +7 902.53 338 254.89 G 1/02
2210 +7 929.28 338 224.98 G 1/02
2211 +7 959.82 338 208.75 G 1/02
2212 +7 983.01 338 194.33 G 1/02
2213 +7 994.09 338 214.45 6/82
2214 +8 001.39 338 187.72 G 1/02
2215 +8 044.28 338 180.86 G 1/02
2216 +8 003.63 338 256.49 6/82
2217 +7 996.99 338 301.75 6/82
2218 +7 987.86 338 303.89 6/82
2219 +7 979.45 338 321.76 6/82
2220 +8 165.16 338 283.62 6/82
2221 +8 151.64 338 279.80 6/82
2222 +8 121.36 338 280.48 6/82
2223 +8 121.51 338 244.79 6/82
2224 +8 064.81 338 187.67 6/82
2225 +8 075.50 338 202.18 6/82
2226 +7 997.07 338 301.20 6/82
4690 +7 941.28 337 919.63 8/53
4691 +7 946.74 337 913.29 8/53
4699 +7 904.81 338 376.87 1/62
4700 +7 933.65 338 354.80 1/62
4701 +7 943.45 338 344.96 1/62
4702 +7 957.27 338 327.59 1/62
4703 +7 968.42 338 313.03 1/62
4704 +7 977.59 338 306.02 1/62
4706 +7 975.57 338 376.01 1/62
4707 +7 976.07 338 398.68 1/62
4714 +8 004.23 338 305.37 1/62
GEBÜHR: EUR 7,56 ************** 2007-08-02 12:21,03355 1I ************** ZEILEN: 266 Entgelt der Verrechnungsstelle IMD: EUR 0,33
Gesamtentgelt: EUR 7,89 zuzüglich 20% USt

VERMESSUNGSKUNDE FÜR BAUPOLIERE
96
B. Topographien
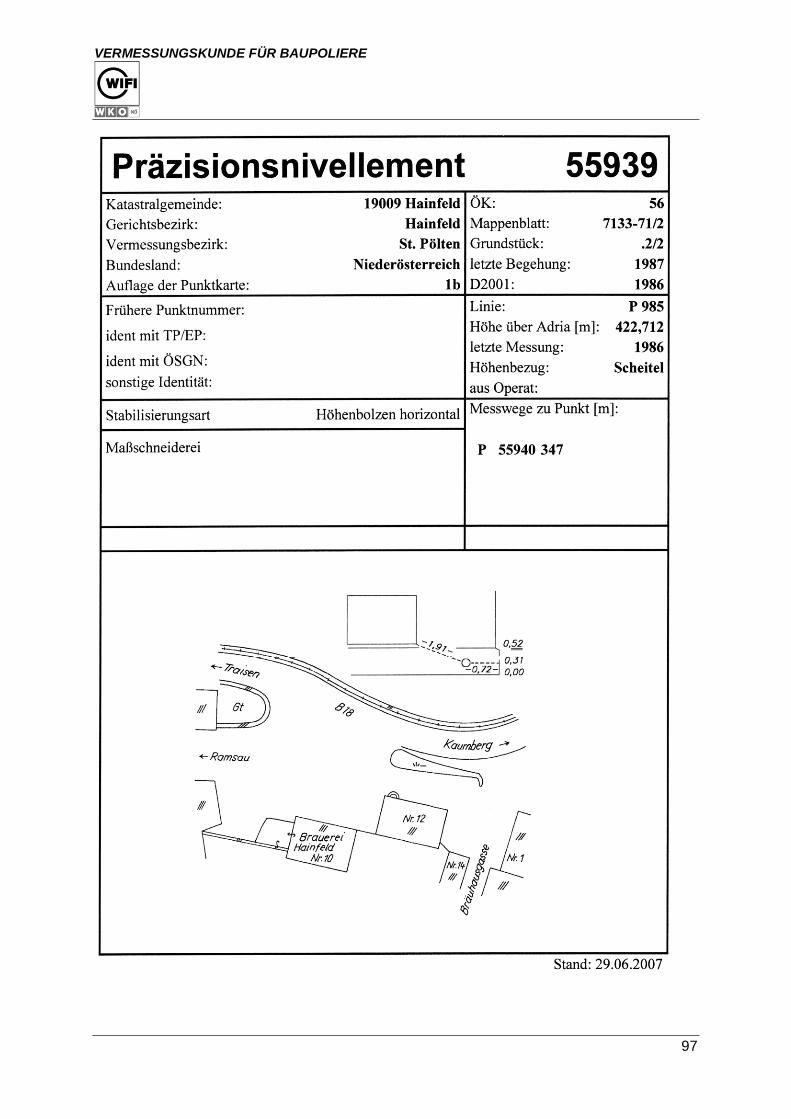
VERMESSUNGSKUNDE FÜR BAUPOLIERE
97
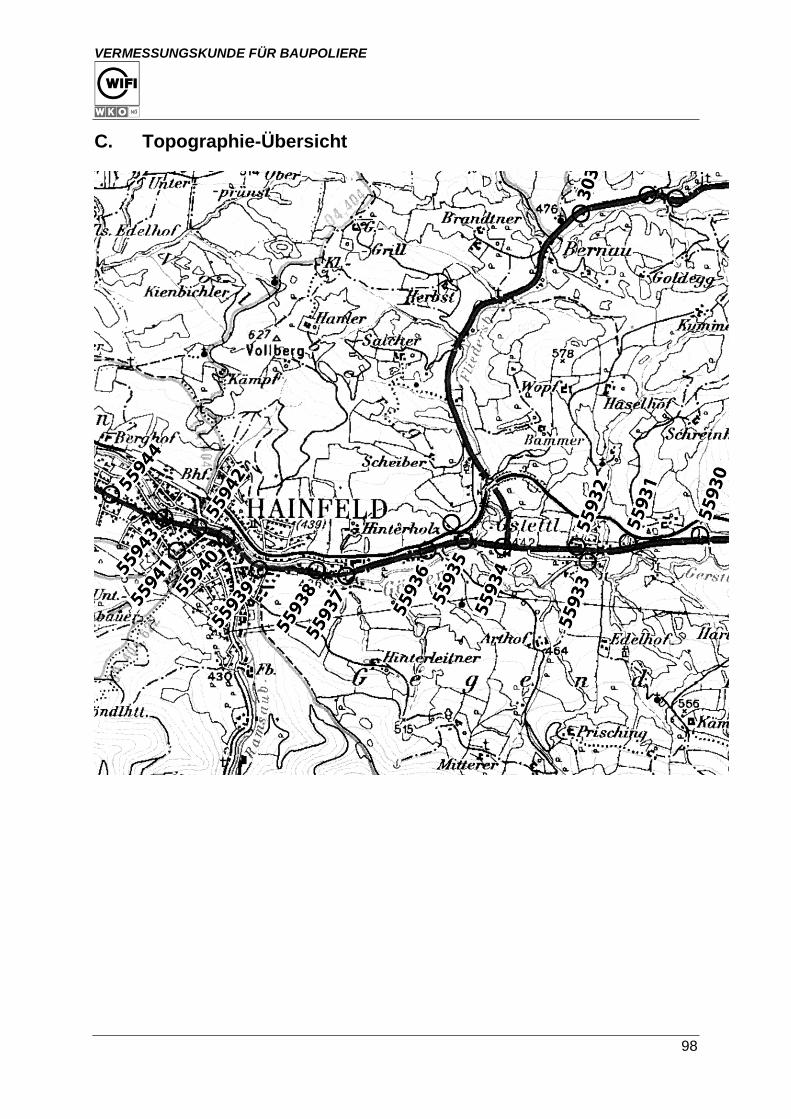
VERMESSUNGSKUNDE FÜR BAUPOLIERE
98
C. Topographie-Übersicht
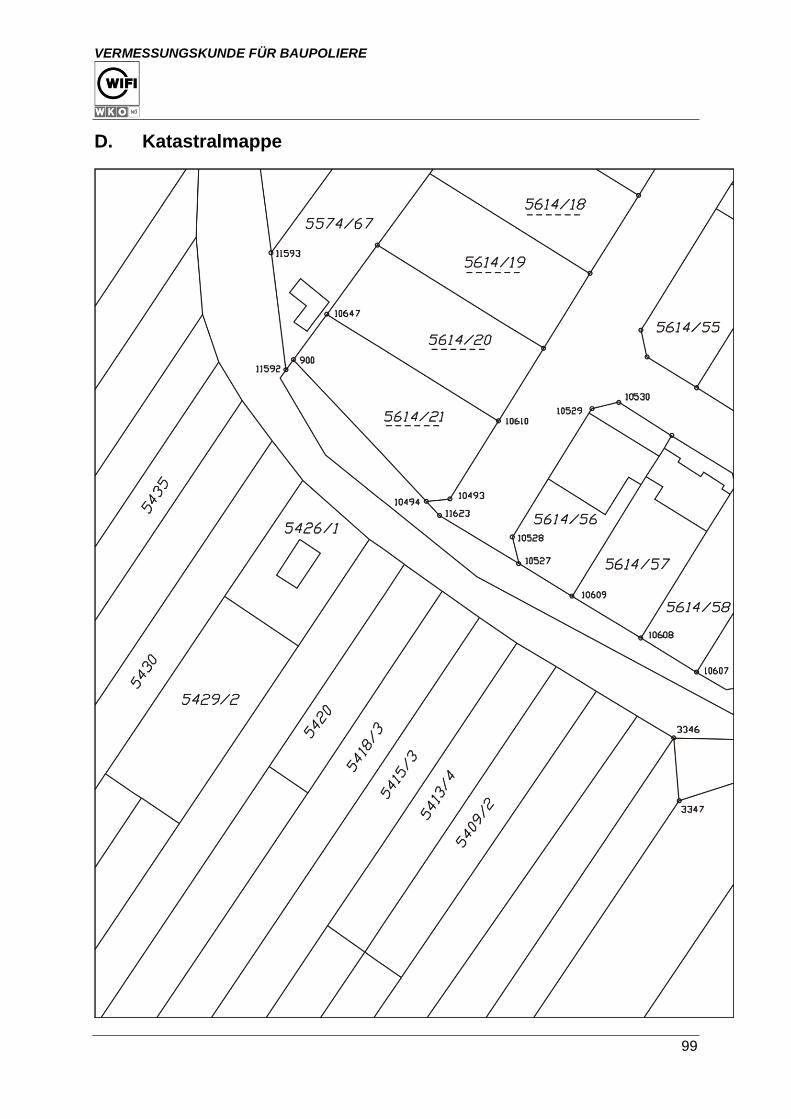
VERMESSUNGSKUNDE FÜR BAUPOLIERE
99
D. Katastralmappe

VERMESSUNGSKUNDE FÜR BAUPOLIERE
100
E. Höhenfestpunkte in Wien Adresse: https://www.wien.gv.at/M41_HFP/internet
Suchergebnis: Punktliste für Zug 187
Punkt Adresse Kartenblatt MZK 1:1000
Höhe (Wiener Null)
Art Zug-Nummer
DFN 19, Grinzinger Allee 28 101091 54,868 m B 187 233
DFQ 19, Huschkagasse 1 101092 69,525 m N 233 187
DOQ 19, Delugstraße 2 100091 61,609 m N 187
DOR 19, Ettingshausengasse 10 100092 97,058 m K 187
JOE 19, An den langen Lüssen 3 101092 73,215 m N 187
JOF 19, An den langen Lüssen 13 101092 79,827 m N 187
JOG 19, An den langen Lüssen 19 100092 85,251 m N 187
JOH 19, Wenckebachgasse 29 100092 84,170 m N 187
JOI 19, Aslangasse 21 100092 83,284 m N 187
JOJ 19, Aslangasse 55 100092 87,020 m N 187
JOK 19, Aslangasse 87 100092 90,151 m N 187
JOL 19, Ettingshausengasse 1 100092 96,918 m N 187
JOM 19, Stefan-Esders-Platz 100092 90,389 m N 187
JON 19, Stefan-Esders-Platz 6 100091 82,458 m B 190 187
JOP 19, Kaasgrabengasse 52 100091 72,341 m N 187
JOR 19, Leopold-Steiner-Gasse 30 100091 67,514 m K 187
JOS 19, Delugstraße 20 100091 71,240 m K 187
JOU 19, Paradisgasse 67 101091 56,378 m N 187
JOV 19, Paradisgasse 65 101091 54,425 m N 187
MXH 19, Kaasgrabengasse 19 100091 66,622 m N 187
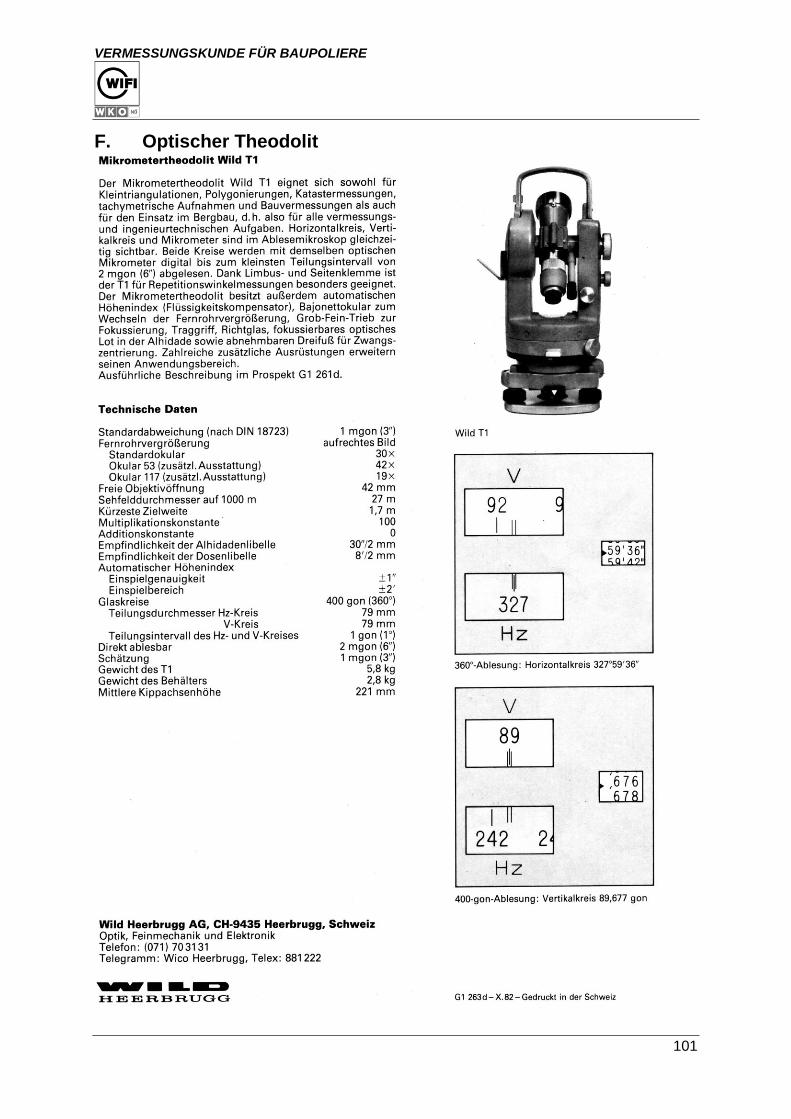
VERMESSUNGSKUNDE FÜR BAUPOLIERE
101
F. Optischer Theodolit

VERMESSUNGSKUNDE FÜR BAUPOLIERE
102
VERMESSUNGSKUNDE FÜR BAUPOLIERE
103
G. Quellen- und Literaturverzeichnis
Großmann Walter, Heribert Kahmen: Vermessungskunde I. Verlag deGruyter, Berlin 1985 Großmann Walter, Heribert Kahmen: Vermessungskunde II. Verlag deGruyter, Berlin 1985 Firmenprospekte der Firma Leica, Trimble Austrian Map, Bundesamt für Eich- und Vermessungswesen
H. Angaben zum Autor Dipl.-Ing. Manfred Huber Raimundgasse 22, Haus 2 2331 Vösendorf eMail: [email protected] Internet: www.geoweb.at









![von Hochschulgebäuden Glossar - TU Dortmund · - Rampenlänge berechnen: ... Steigungsverhältnis von Treppenstufen: Steigungsverhältnis = Stufenhöhe/Auftrittsbreite = 17/29 [34]](https://static.fdokument.com/doc/165x107/5ba0e83009d3f2bb6a8b49bd/von-hochschulgebaeuden-glossar-tu-rampenlaenge-berechnen-steigungsverhaeltnis.jpg)